
パターン形状選択方法、及びパターン測定装置
【課題】本発明は、実波形とライブラリとの比較に基づいて、形状を推定するに際し、適正な形状推定を行うことができるパターン形状選択方法、及び装置の提案を目的とする。
【解決手段】上記目的を達成するための一態様として、取得された波形をライブラリに参照することによって、パターンの形状を選択する方法、及び装置であって、試料に対する荷電粒子線の照射に基づいて、複数の波形取得条件にて波形情報を取得し、当該複数の波形情報を、複数のパターン形状毎に、異なる波形取得条件で取得された波形情報が記憶されたライブラリに参照することによって、前記ライブラリに記憶されたパターン形状を選択する方法、及び装置を提案する。
【解決手段】上記目的を達成するための一態様として、取得された波形をライブラリに参照することによって、パターンの形状を選択する方法、及び装置であって、試料に対する荷電粒子線の照射に基づいて、複数の波形取得条件にて波形情報を取得し、当該複数の波形情報を、複数のパターン形状毎に、異なる波形取得条件で取得された波形情報が記憶されたライブラリに参照することによって、前記ライブラリに記憶されたパターン形状を選択する方法、及び装置を提案する。
【発明の詳細な説明】
【技術分野】
【0001】
本発明は、試料上に形成されたパターンの寸法を測定する方法、及び装置に係り、特にパターンの形状の特定、或いは寸法測定を行うために取得される画像の取得条件を適正に選択する方法、及び装置に関する。
【背景技術】
【0002】
半導体ウェハの製造工程において、ウェハ上に多層に形成されるパターンの微細化が急速に進んでおり、それらのパターンが設計どおりにウェハ上に形成されているか否かを監視するプロセスモニタの重要性はますます増加している。中でもトランジスタゲート配線をはじめとする配線パターンは、その配線幅とデバイス動作特性に強い関連があり、その配線製造プロセスのモニタは特に重要である。
【0003】
数十ナノメートルオーダの微細配線の線幅を測定する測長ツールとしては、それらの配線を数十万倍の拡大倍率で撮像可能な線幅測定用の走査型電子顕微鏡(測長SEM(Critical dimension Scanning Electron Microscope))が従来から用いられている。このような走査型電子顕微鏡を用いた測長処理の一例が特許文献1に記載されている。特許文献1には、測定対象配線を撮像した画像内の局所領域から、配線の信号プロファイルを配線の長手方向に加算平均した投影プロファイルを作成し、このプロファイルにおいて検出した左右の配線エッジ間の距離として配線寸法を算出する手法が開示されている。
【0004】
しかし、非特許文献1(Fig1)に開示されているように、SEMの信号波形においては、その計測対象の形状が変化すると、それに応じて信号波形も変化することが知られている。半導体パターンの微細化に伴い、これら計測誤差がプロセスモニタに与える影響は大きくなりつつある。このような計測誤差を低減する手法が非特許文献1および非特許文献2に開示されている。この手法では、パターン形状とSEM信号波形の関係を予めシミュレーションにより計算しておき、その結果を利用して対象形状に依存しない高精度計測を実現している。
【0005】
具体的には、非特許文献1および非特許文献2に開示されている手法では、パターン形状とSEM信号波形の関係を予めSEMシミュレーションにより計算しておき、その結果を利用して対象形状に依存しない高精度計測を実現している。非特許文献1、及び非特許文献2には、パターン形状をパラメタにより数値化し、様々な形状のSEMシミュレーション結果をライブラリとして保存し、実波形と比較することで、形状および寸法の推定を正確に行う手法が開示されている。
【先行技術文献】
【特許文献】
【0006】
【特許文献1】特開平11−316115号公報
【非特許文献】
【0007】
【非特許文献1】J. S. Villarrubia, A. E. Vladar, J. R. Lowney, and M. T. Postek, “Scanning electron microscope analog of scatterometry,”Proc. SPIE 4689, pp. 304-312 (2002)
【非特許文献2】J. S. Villarrubia, A. E. Vladar, M. T. Postek, “A simulation study of repeatability and bias in the CD-SEM,” Proc. SPIE 5038, pp. 138-149, 2003.
【発明の概要】
【発明が解決しようとする課題】
【0008】
上述のような、ライブラリを利用すれば、走査電子顕微鏡に代表される荷電粒子線装置を用いて、得られた信号波形に基づく、パターン形状の推定が可能となるが、ライブラリに記憶された波形と、実測定に基づいて得られる波形との比較では、パターン形状が一意に求まらないことがある。また、或る波形取得条件によっては、異なるパターン形状であったとしても、波形の変化が殆どなく、その識別が困難であることがある。特許文献1はもとより、非特許文献1及び非特許文献2には、そのような課題、及びその解決手段については何等論じられていない。
【0009】
以下に、実波形とライブラリとの比較に基づいて、形状を推定するに際し、或る条件下ではパターン形状を推定することが困難であったとしても、適正な形状推定を行うことを目的としたパターン形状選択方法,測定方法及び荷電粒子線装置を説明する。また、他に荷電粒子線装置における最適な画像取得条件を選択し得る方法、及び装置について説明する。
【課題を解決するための手段】
【0010】
上記目的を達成するための一態様として、取得された波形をライブラリに参照することによって、パターンの形状を選択する方法、及び装置であって、試料に対する荷電粒子線の照射に基づいて、複数の波形取得条件にて波形情報を取得し、当該複数の波形情報を、複数のパターン形状毎に、異なる波形取得条件で取得された波形情報が記憶されたライブラリに参照することによって、前記ライブラリに記憶されたパターン形状を選択する方法、及び装置を提案する。
【発明の効果】
【0011】
上記態様によれば、複数の波形取得条件に基づいてパターン形状の選択ができるため、ある波形取得条件では識別が困難な場合であっても、一意にパターン形状の選択を行うことが可能となり、パターン形状推定を高精度に実現することが可能となる。
【図面の簡単な説明】
【0012】
【図1】パターン形状推定用ライブラリの作成工程と、ライブラリを参照してパターンの形状を推定する工程を説明するフローチャート。
【図2】電子の検出条件によって、取得される波形に変化が生じることを説明する説明図。
【図3】画像取得条件によって、信号波形に変化が生じることを説明する図。
【図4】走査電子顕微鏡の概要を説明する図。
【図5】ライブラリマッチングの工程を説明するフローチャート。
【図6】ライブラリ、及びライブラリマッチングの概要を説明する図。
【図7】ライブラリマッチングにおける総合不一致度算出の概要を説明する図。
【図8】ライブラリマッチングにおける不一致度算出結果の整合性評価の概要を説明する図。
【図9】ライブラリデータに基づいて、走査電子顕微鏡の画像取得条件を決定する工程と、ライブラリマッチングに基づいて、パターン形状を推定する工程を説明するフローチャート。
【図10】パターン形状と取得波形との関係を説明する図。
【発明を実施するための形態】
【0013】
以下の説明では、パターンの形状単位で波形を登録し、実測定に基づいて、パターン形状の推定、及び計測を行うことを、モデルベース計測あるいはライブラリマッチング手法と呼ぶ。この、ライブラリとのマッチング処理には、各種の非線形最適化手法を用いることができる。しかしながら、このような推定手法は解の安定性が得られない場合には、正しい結果を得ることは難しい。
【0014】
M. Tanaka, J. S. Villarrubia and A. E. Vladar, “Influence of Focus Variation on Linewidth Measurements,” Proc. SPIE 5752, pp.144-155(2005)、およびM. Tanaka, J. Meessen, C. Shishido et al., “CD bias reduction in CD-SEM linewidth measurements for advanced lithography,” Proc. SPIE 6922, pp. 69221T-1-11(2008)に説明されているように、ライブラリマッチングにおける解が一意にきまらない場合がある。
【0015】
また、パターン形状変化とSEM画像取得条件の組み合わせによっては、パターンの形状が変化しても、SEM画像があまり変化しない場合もある。例えば、パターン下部が上部よりも細くなるような場合には、直上からの観察画像にはあまり違いが現れない。このような場合には、当然ライブラリマッチングもうまくいかず、正しい計測結果を得ることはできない。
【0016】
このような課題を解決するには、計測したいパターン形状の変化に感度のあるSEM画像の取得が必要である。さらに、先述のように解が一意に決まらない場合には、何らかの情報を追加することで拘束条件を付加することが有効となる。そこで、以下に、複数の異なる取得条件でSEM画像を取得し、これらを組み合わせて用いることでライブラリマッチングの精度を向上する手法を説明する。異なる特性を持つ複数の画像(或いは波形)を組み合わせて用いることで、一つの条件のみの画像でマッチングを行う場合に比べて、より安定なマッチングが可能となる。
【0017】
第一の実施例では、異なる条件で取得されたSEM画像と、対応する条件で算出されたシミュレーション画像との不一致度を画像ごとに評価し、それらの平均処理により総合不一致度を算出して、総合不一致度が最小となるシミュレーションパターン形状を求め、対象パターンの形状と寸法を計測する。
【0018】
第二の実施例では、異なる条件で取得されたSEM画像と、対応する条件で算出されたシミュレーション画像との不一致度に基づいて、その不一致度が最小となるシミュレーションパターン形状を画像取得条件ごとに推定し、得られた複数の形状および寸法推定結果を総合して、対象パターンの形状と寸法を計測する方法を開示している。
【0019】
第3の実施例では、計測に用いるSEM装置が撮像可能な、異なる複数の画像条件のシミュレーション波形を評価して、形状変化に対して感度の高い画像取得条件を選定する方法を開示している。
【0020】
上記手法によれば、モデルベース計測手法におけるマッチング精度が向上でき、その結果モデルベース計測手法そのものの精度も向上する。また、これまで1種類の画像だけでは感度が得られず計測が困難であったパターン形状変化に対しても、計測感度が向上し、高精度な計測が可能となる。また、複数条件の画像を組み合わせることにより、形状推定結果の信頼性評価が可能となり、エラーの判定率が向上し、計測の信頼性が向上する。
【0021】
上記手法は、各種の荷電粒子線装置(SEM、イオン顕微鏡等)に適用可能であるが、以下の実施例では代表としてSEMを用いる場合を例にとって説明する。
【実施例1】
【0022】
第一の実施例では、複数の相異なる検出条件により得られるSEM画像を用いたパターン寸法計測方法の基本的な実施形態について、図1から図7を用いて説明する。
【0023】
図1にパターン寸法計測方法の手順を示す。本発明では、計測対象パターンのSEM画像を複数の異なる画像検出条件でそれぞれ取得する。得られた複数のSEM画像を、事前に作成された同じ検出条件で計算したシミュレーションライブラリと比較して計測対象パターンの形状および寸法を推定する。
【0024】
シミュレーションライブラリとは、パターンの形状を様々な値に設定して計算したSEMシミュレーション波形をその形状情報と関連付けて保存したものであり、これらのSEMシミュレーション波形の中から、実際のSEM画像信号波形に最も近い形状を持つ波形を選択するマッチング処理を行い、そのシミュレーション波形算出時のサンプル形状パラメタとマッチング位置から計測対象パターンの寸法および形状を推定する。画像取得条件が異なる場合、同じサンプルに対してもSEM画像は異なる性質を持つ。このため、ある1つの条件で取得した画像だけではSEM信号波形に違いが現れないようなパターン形状変化に対しても、他の条件で画像を取得すれば違いが得られることがある。
【0025】
例えば、パターン下部が上部よりも細くなるような場合には、直上からの観察画像では垂直な側壁との違いはあまり現れないが、斜め方向から取得したSEM画像であれば、その違いを検知することが可能となる。そこで、これら複数の異なる条件で取得した画像を組み合わせてマッチングを行うことで、従来の1枚の画像では感度の得られなかったようなパターン形状変化に対しても、その形状および寸法の推定を高感度に行うことが可能となる。このように、形状変化に対する感度の異なる画像を複数用いてマッチングすることで、高精度なパターン計測を実現する。
【0026】
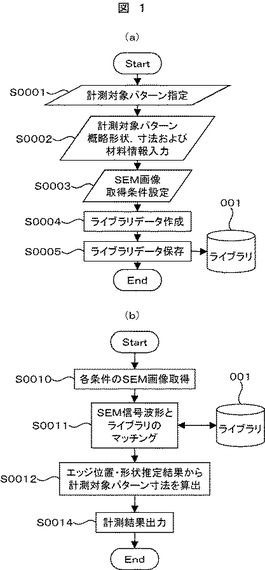
図1(a)はシミュレーションライブラリ作成と画像取得レシピ(自動画像取得のための手順を装置のタスクリストとして記録したファイル)作成の手順を示す。はじめに、計測対象パターンを指定する(ステップS0001)。パターンの指定は、実際にパターンをSEMで観察しながら行ってもいいし、パターンの設計データを用いて行ってもよい。次に、指定したパターンの計測に用いるシミュレーションライブラリを作成するために、操作者により計測対象パターンの概略形状,寸法および材料情報を入力する(ステップS0002)。これは、シミュレーションライブラリで作成するパターン形状の範囲やシミュレーション時の材料パラメタを設定するための入力情報であり、計測対象パターンの製造プロセスに応じて適切な値に設定しておく。パターンの材料や構造,目標および許容寸法などは設計時に決まっているため、計測対象パターンが決まれば、これらの値を設定することは容易である。これらの設計情報データにアクセスできる環境にあれば、操作者が介することなく、設計データに基づいて自動で設定することも可能である。あるいは、実際のパターンを従来の測長SEMや、AFMなどその他の計測手法で計測し、これらの計測結果から概略寸法を決定してももちろんよい。
【0027】
次に、実際の計測で用いるSEM画像の取得条件を設定する(ステップS0003)。ここで、SEM画像の取得条件とは、試料に照射される電子ビームのエネルギー(加速電圧)や電流量,照射の速度や照射回数,照射方向、また検出される電子のエネルギーや方向,試料ステージの傾斜角などを指す。画像取得条件設定の詳細については後述する。
【0028】
画像取得条件(波形取得条件)は主として、(1)走査電子顕微鏡の電子ビームの照射条件(電子ビームのエネルギー(試料への到達エネルギー),電子ビームの照射電流量,走査範囲(Field Of View:FOV)の大きさ(倍率)、ビームの傾斜(ステージの傾斜)等)、(2)電子の検出条件(検出器の種類,エネルギーフィルタリングの有無等)、(3)画像処理条件、(4)試料条件、及び(5)(1)〜(4)の2以上の組み合わせ等がある。この内、(4)の試料条件とは、例えば試料に対する予備帯電条件が挙げられる。走査電子顕微鏡にはプリドーズ、或いはプリチャージと呼ばれる予備帯電技術があるが、プリドーズ前の画像を条件Aの画像とし、電子ビームによる予備帯電を行った後に取得される画像を条件Bの画像とすることによって、異なる条件での複数の信号の取得が可能となる。
【0029】
また、試料への到達エネルギーを変化させることによって、試料から放出される二次電子放出効率δが変化し、画像の見え方も変化するため、試料への電子ビームの到達エネルギーの変化前後の波形をそれぞれ条件Aによって得られる波形、及び条件Bによって得られる波形とするようにしても良い。また、照射電流量や走査範囲を変更すると、電子ビーム照射による帯電の状態が変化することにより画像の見え方が変化するため、同様に、条件変更前の画像を条件A,変更後の画像を条件Bによるものとすればよい。
【0030】
パターンの材質やパターンの形状等に応じて、適当な波形取得条件を複数用意し、それに基づいてライブラリを形成することによって、正確なパターンの形状推定が可能となる。
【0031】
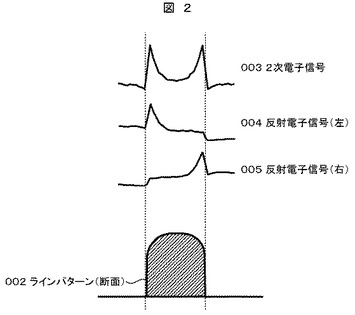
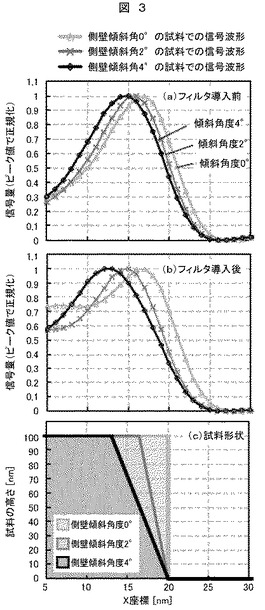
異なる条件で検出された画像の一例を図2および図3に示す。図2はある断面形状を持つラインパターン002のSEM信号波形を表したものである。試料表面への電子ビームの照射により発生する電子を、そのエネルギーや放出方向によって分けて検出した場合の信号波形を示している。003は比較的エネルギーの低い二次電子を検出した二次電子信号画像であり、パターンのエッジ部分で信号量が増加している。これに対し、試料の左右斜め上方に検出器を配置し、比較的エネルギーの高い反射電子を検出した波形がそれぞれ反射電子(左)004,反射電子(右)005である。反射電子信号は、検出器が配置されている側に放出された電子を多く検出するため、左側の検出器では左の側壁部分、右側の検出器では右の側壁部分の信号を多く検出する。このように、電子ビーム照射により発生する電子はそのエネルギーや方向により得られる信号波形が変化する。また図3は、発明者らが行ったシミュレーション検討の別の例である(M. Tanaka, J. Meessen, C. Shishido et al., “CD bias reduction in CD-SEM linewidth measurements for advanced lithography,” Proc. SPIE 6922, pp. 69221T-1-11(2008)に開示)。図3は、検出する電子のエネルギーを変えた場合の信号波形の変化を示しており、図3(c)に示すような相異なる3種類の側壁形状のパターンに対し、放出される全てのエネルギーの信号を検出した場合(a)と、エネルギーの高い電子のみを検出した場合(b)では、形状変化に対する信号波形の変化の仕方が異なることがわかる。これらのように、同じサンプルであっても、電子の検出条件が異なると得られるSEM信号波形が異なり、検出したい相違(例えば側壁傾斜角の違い)に対して異なった感度の画像を取得することが可能となる。
【0032】
図3,図4で示した電子の検出条件の他に、電子ビームのエネルギー(加速電圧)や電流量,照射の速度や照射回数,照射方向などが変わっても、それぞれの特性により得られる信号波形は変化する。図1のステップS0003では、このような画像取得条件を予め複数設定しておく。
【0033】
次に、ステップS0002で設定した計測対象パターンの概略形状,寸法および材料情報と、ステップS0003で設定したSEM画像取得条件の組み合わせについてSEM信号波形のシミュレーションを行い、シミュレーションライブラリのデータを作成する(ステップS0004)。これらのシミュレーション結果と画像取得条件,パターン形状情報を組み合わせてシミュレーションライブラリとしてデータを保存する(ステップS0005)。以上の手順により、計測に用いる複数のSEM画像取得のレシピと計測に用いるシミュレーションライブラリを生成する。
【0034】
なお、パターンの形状情報は、シミュレーションに基づいて取得する以外に、実際にパターンの断面画像をSEMによって取得し、当該画像情報に基づいて、形状情報を抽出するようにしても良いし、予めAFM(Atomic Force Microscope)のような装置によって、取得するようにしても良い。上記ライブラリは、複数の波形取得情報と、パターンの形状情報が関連付けて記憶されると共に、複数の波形取得条件で得られた波形間の比較によって、パターン形状が推定できるようになっていれば良く、パターン形状情報の由来は問わない。
【0035】
なお、このように実際のパターンを用いたライブラリを作成する場合には,できるだけ様々な形状あるいは寸法のパターンを用いることが望ましい。例えば、露光工程においてはFocus-Exposure Matrixと呼ばれるウェハを作成すればよい。これは、露光ショット毎に露光エネルギーと露光フォーカス条件を変化させたパターンを作成するもので、実際の製造プロセスで発生しうる様々な形状パターンを容易に作成することができる。エッチングパターンについても、Focus-Exposure Matrixをマスクとしてエッチングを行うことで、寸法や形状のバリエーションを増やすことができる。もちろん、エッチング時間やガスの流量などエッチング条件を変更してパターン形状を変化させてももちろんよい。
【0036】
次に、図1(b)を用いて、実際のパターン計測手順について説明する。まず、予めステップS0003で指定した複数の取得条件で、計測対象パターンのSEM画像を取得する。この画像取得は、はじめに計測対象パターンの形成された半導体ウェハを後述のSEM装置にロードし、事前にアライメント等を行って、所望の計測対象パターン位置の画像を取得する(ステップS0010)。次に複数の異なる画像取得条件で撮像したSEM画像のセットと、図1(a)に示した手順で作成したシミュレーションライブラリとのデータのマッチングを行う(ステップS0011)。
【0037】
それぞれのSEM画像と対応する取得条件のシミュレーション波形を比較し、その一致度が、総合的に最もよくなるシミュレーション結果を選択することで、計測対象パターンの形状およびエッジ位置を推定する。次に、SEM画像とライブラリのマッチング結果から、パターン形状およびユーザ所望のパターン寸法を算出する(ステップS0012)。ライブラリ内のシミュレーション波形では、波形とエッジ位置の関係が明らかであるから、SEM画像とシミュレーション波形のマッチング結果から、SEM画像内のパターンエッジ位置が正確に推定できる。このパターンエッジ位置の推定結果から正確な寸法の計測が実現できる。最後に計測結果を画面およびファイルに出力する(ステップS0013)。
【0038】
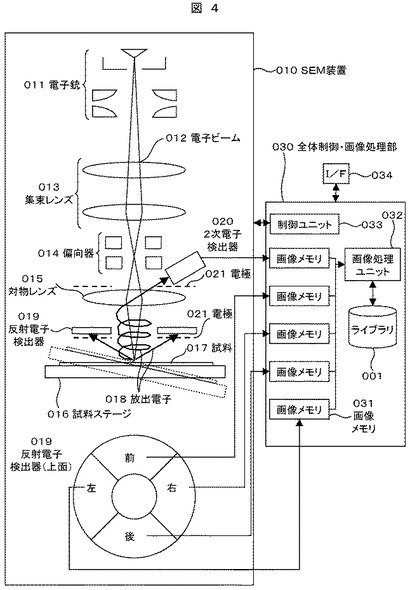
次に、図4を用いてパターン計測装置の実施形態について説明する。図4左側部分はパターン計測に用いるSEM画像を取得するための代表的なSEM装置010の例である。電子銃011から放出された一次電子ビーム012は集束レンズ013,対物レンズ015によって集束され、微少スポットとして試料017上に照射される。電子ビーム012が照射されると、照射された部分から試料の材質や形状に応じて二次電子や反射電子が放出される(電子018)。偏向器014を用いて一次電子ビーム012を二次元走査し、放出された電子018を反射電子検出器019あるいは二次電子検出器020で検出し電気信号に変換し、A/D変換器(図示せず)でディジタル信号に変換した二次元のディジタル画像をそれぞれ画像メモリ031に記憶する。図4下側に示すように、反射電子検出器019は前後左右に4分割されており、それぞれの方向に放出された電子を分けて検出することが可能である。また、反射電子検出器の下側や対物レンズの上側にはメッシュ上の電極021が配置されており、検出する電子のエネルギー幅を変化させることも可能である。これら異なる検出条件の画像信号は、1度の電子ビーム照射に対して同期して検出することが望ましい。
【0039】
1度の電子ビーム照射で同期して画像を検出した場合には、それら異なる検出条件の画像内では、同じ画素座標のデータは計測対象パターン上の同じ場所の画像となるため、検出条件の異なる複数の画像間の位置合わせが不要となる。また、図4のSEM装置は傾斜可能なステージを有しており、異なる方向からSEM画像を取得することも可能である。ステージ傾斜角が異なる画像は同時に取得することはできないため、このような場合には、画像間で位置合わせを行う。画像取得条件としては、図4に示した検出器の違いや試料ステージの違い以外にも、照射する電子ビームのエネルギーや電流量,照射方向などを変更してももちろんよいし、必ずしもこれら全ての機能を有する必要はない。
【0040】
SEM装置010は全体制御・画像処理部030内の制御ユニット033により制御され、取得された画像は、それぞれの画像取得条件とともに画像メモリ031に保存される。以下、単にSEM画像と表現する場合には、これら様々な条件で得られる画像の総称を示すものとする。これらのSEM画像は、ライブラリ001内に記憶されている各画像取得条件に対応したシミュレーション波形とのマッチング処理を行い、パターン形状の推定と寸法計測を行う。これらのマッチング処理は画像処理ユニット032で行われる。なお、これらのマッチング処理は、外部インターフェース034を通じて、一旦外部記憶装置(図示せず)に保存された後、外部計算機によって処理を行っても良い。外部計算機の記憶媒体には本実施例、及び以降の実施例にて説明する処理を行うためのプログラムが記憶されており、SEM等から伝達される信号に基づいて、説明される処理を計算機に行わせる。
【0041】
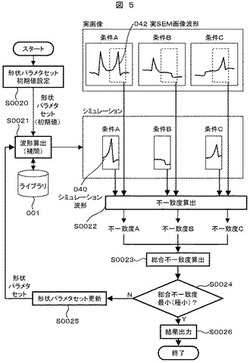
次に、異なる取得条件で得られた複数の画像および対応するシミュレーション波形のマッチング方法詳細について図5を用いて説明する。先述のとおり、ライブラリ001内では、SEMシミュレーション波形とその入力であるパターン形状パラメタが関連付けられて保存されており、形状パラメタを与えれば、その形状に対応するSEM信号波形のシミュレーション結果を得ることができる。本発明のパターン計測方法では、このシミュレーションライブラリを用いて、計測対象の実SEM画像の波形プロファイルとシミュレーションプロファイルの一致度を定量的に評価することで、マッチングを実現する。
【0042】
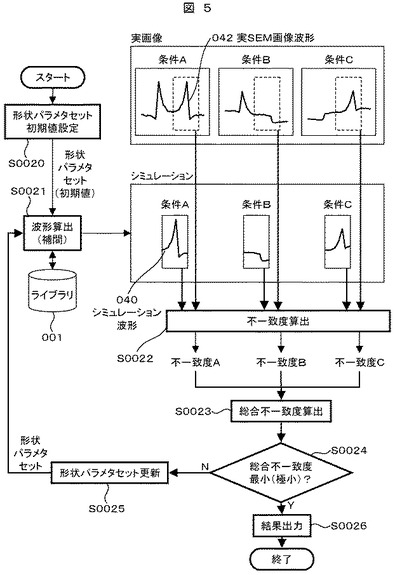
図5は波形マッチングの処理内容の詳細を示すフロー図である。事前にライブラリ作成(図1(a))と、各条件でのSEM画像取得S0010が行われている。はじめに、マッチングのための初期形状を設定する(S0020)。初期形状は、例えばライブラリ内の形状パラメタの平均値を設定すればよい。あるいは特許文献2に記載の画像特徴量を用いた初期値設定方法を用いてももちろんよい。
【0043】
次に、ライブラリ001を参照して、設定した形状パラメタセットの初期値に対する各取得条件でのシミュレーション波形040を算出する(S0021)。図5の例では、3種類の条件で取得した画像の例を示しているが、画像取得条件の種類は2種類でも4種類以上でも同様に計測可能であることは言うまでもない。ライブラリの詳細は図6を用いて後述する。次に、算出されたシミュレーション波形040と、SEM装置でそれぞれの条件で取得された計測対象パターンの実SEM信号波形041との不一致度を算出する。不一致度の算出は、まずそれぞれの条件毎に行い(S0022)、それらの結果の演算により総合不一致度を算出する(S0023)。
【0044】
不一致度の演算は各画像取得条件の不一致度の平均を用いればよい。各条件の波形の不一致度算出(S0022)は、例えば、断面形状042とシミュレーション波形040の信号値の差分を計算し、プロファイル全体での自乗和を実波形とシミュレーション波形の不一致度として算出することができる。次に、これらの不一致度を平均して、総合不一致度を算出する。この総合不一致度が最小、つまり一致度の最も高いシミュレーション波形セットをライブラリ内のデータを用いて算出することで、その波形シミュレーションセットの入力となった断面形状が、実際のパターン断面形状の推定結果となる。
【0045】
そこで、この総合不一致度が最小になったか否かを判定し(S0024)、最小でない場合には形状パラメタセットを更新し(S0025)、新しい形状について再度波形を算出(S0021)してマッチング処理(S0022〜S0024)を行い、総合不一致度が最小と判断されるまで処理を繰り返す。不一致度が最小となる形状パラメタが確定したら、結果を出力して(S0026)マッチング処理を終了する。
【0046】
ここで、総合不一致度の最小値となるように反復演算を行っているが、実際には最小値がどのような値になるか不明であり、パラメタ空間で極小値の判定をすることになる。これらのマッチングに関しては、Levenberg−Marquardt法など、一般的な非線形最適化手法を適用することで実現することができる。
【0047】
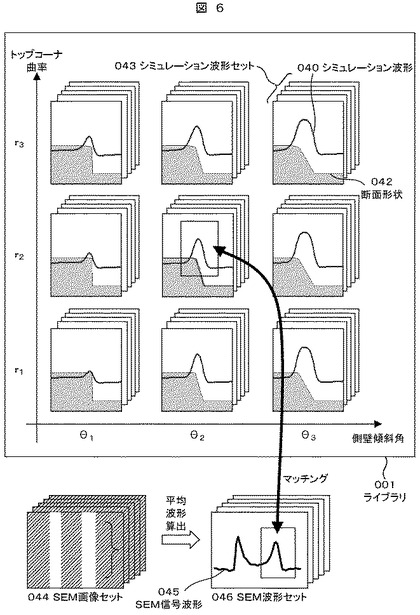
次に、ライブラリおよび不一致度算出のさらに詳細について、図6を用いて説明する。図6に示すように、ライブラリ001にはシミュレーションの断面形状042とそれに対応した各種取得条件でのSEMシミュレーション波形040がセット043で記録されている。図6では概念を説明するために、波形およびパターン断面形状を図示しているが、シミュレーションデータは数値データ列で、また、断面形状は形状パラメタを用いて表現して、ライブラリに保存する。図6は、パターンの側壁傾斜角θとトップコーナ曲率が主に変動するプロセスのパターンを計測する場合のライブラリの構成例である。変動する形状がプロセス管理に重要な計測対象形状であるので、これらを形状パラメタとして、事前に設定(ステップS0002)した形状範囲の複数の異なるパラメタでシミュレーションを行い、ライブラリを作成する。
【0048】
図6では、形状パラメタ空間の概念を説明するため、側壁傾斜角θとトップコーナ曲率Rの二つの形状パラメタをそれぞれx軸,y軸にとって示している。これらの形状パラメタの組み合わせによって決まるパターン断面形状でシミュレーションを行う。この例では簡単のため側壁傾斜角θおよびトップコーナ曲率Rが各々3種類の場合を示しているが、実際にはプロセス変動で生じうるパターン形状をカバーする範囲を、計測したい精度に見合う細かさでシミュレーションしておく。
【0049】
ここで、シミュレーションデータは形状パラメタに対して離散値となるが、シミュレーションデータ間の補間を行えば、シミュレーション結果のない形状パラメタでのシミュレーション波形も推定することが可能である。シミュレーション波形の補間については、例えば、J. S. Villarrubia, A. E. Vladar, J. R. Lowney, and M. T. Postek, “Edge Determination for Polycrystalline Silicon Lines on Gate Oxide,”Proc. SPIE 4344, pp. 147-156 (2001)に開示されている方法を用いればよい。
【0050】
また、図6の例では、簡単のため側壁傾斜角とトップコーナ曲率のみの例を表しているが、このほかにパターンのボトムコーナの曲率や隣接パターンとの距離などを変更したデータがライブラリに含まれていてももちろんよい(その場合には3次元以上の多次元空間となる)。
【0051】
ここで、シミュレーション波形040は、図6に示すように、左右エッジのうち片側のみ計算しておけばよい(図6では右エッジのみ算出している)。マッチング時には、マッチング対象のパターン方向によって必要に応じてシミュレーション信号を左右反転させればよい。ここで、SEMシミュレーションは図4で示したSEM装置010に対応する複数の条件で実施する。
【0052】
計測時には、SEM装置010で予め指定した複数のSEM画像を撮像し、SEM画像セット044を得る。次に、シミュレーション波形セット043と比較するために、SEM画像からSEM信号波形045を算出する。このとき、図5に示すようなライン状のパターンであれば、近接した画像データを平均処理して平均波形プロファイルを算出すれば、信号ノイズを除去することができ、安定な計測が可能となる。図5に示したように、各取得条件のSEM画像のセット044から対応する波形プロファイルのSEM波形セット046を算出した後、それぞれのSEM信号波形045と対応するシミュレーション波形043のマッチングを行い、実際のSEM波形と最も一致度の高いシミュレーション波形セットを選択する。
【0053】
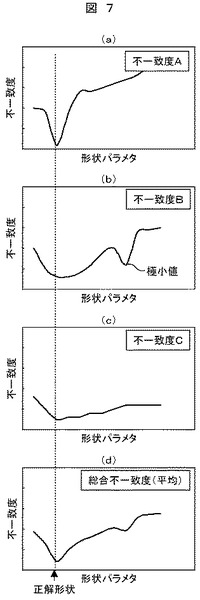
次に、図7を用いて、形状パラメタに対して不一致度が変化する様子の一例と、本発明の複数の異なる条件で取得した画像を用いることの利点について説明する。図5で示したように、実波形とシミュレーション波形の不一致度算出は、画像取得条件毎に行う。図7(a)(b)(c)は、3つの異なる画像取得条件での不一致度算出結果をそれぞれ示し、(d)はそれらの平均値、すなわち総合不一致度の例を示している。
【0054】
横軸は、シミュレーションライブラリ波形に関連付けられた形状パラメタであり、それぞれのシミュレーション波形に対して、ある形状をしたパターンのSEM信号波形をマッチングした際の不一致度算出結果が縦軸となっている。図7では、簡単のために1つの形状パラメタの例を示しているが、実際にはシミュレーションライブラリ作成時に用いた形状パラメタの種類だけ軸のある多次元空間となる(図6の例であれば、形状パラメタ2つの3次元空間となる)。この不一致度と形状パラメタの空間を以下、不一致度空間と呼ぶ。形状パラメタに対する不一致度の変化の仕方は、対象とする形状変化に対するSEM画像の感度によって決まる。パターン形状変化に対して画像が高い感度を持っていれば、パターン形状が一致した場合のみ不一致度が低くなる。その場合には、例えば、図7(a)に示したように、最小値をとる形状パラメタは1つだけであり、かつ正解周辺で不一致度が急激に減少する。このような不一致度空間の特性を持つSEM画像であれば、安定で正確な形状推定を行うことが可能だが、常にこのような良好な関係が得られるとは限らない。例えば、図7(b)の例では、正解以外にも極小値が存在しており、間違えた形状パラメタを解として選択してしまう可能性が高い。
【0055】
また、図7(c)の例では形状パラメタの変化に対して不一致度の変化が少なく、最小値周辺の変化がなだらかになっている。このような場合には、推定結果が安定しないおそれがある。この不一致度の特性は、画像取得条件と形状パラメタの種類の組み合わせによって変化するため、計測対象パターンの形状(正解形状)が変化すると、最適な特性を持つ画像の取得条件が変化してしまう恐れがある。そこで、本発明では、このように異なる特性を有するSEM画像を組み合わせることで、マッチング精度の低下を防ぐ。
【0056】
図7(d)に示すように、複数の画像により得られた不一致度を平均して総合不一致度を算出すると、不一致度空間の特性は(a)よりは劣化するが、(b)(c)よりは改善する。このように、上述のパターン計測方法では、異なる特性を持つ画像を組み合わせて用いることで、正解以外の局所解の影響を低減し、平均的に安定したマッチング結果を得ることが可能となる。その結果、安定で高精度なパターンの形状および寸法の計測が実現できる。
【0057】
以上、図1〜図6を用いて説明したように、上述のパターン計測方法では、SEMシミュレーション波形との比較を行うことにより、計測対象パターン内外での電子の散乱の影響や、パターンの断面形状の影響など、電子線照射に伴う物理現象を考慮した高精度な計測が可能となる。さらに、複数の異なる画像取得条件を用いることで、パターン形状変化に対するSEM画像の変化感度を総合的に向上させ、従来の一種類の条件で取得されたSEM画像では感度の得られなかったようなパターン形状変化に対しても高精度で安定な計測を実現することができる。
【0058】
なお、このマッチングにおけるそれぞれの不一致度算出過程において、不一致度に所定の判定しきい値を設定しておき、不一致度が一定値よりも大きい場合SEM画像が存在する場合には警告あるいはエラーと判定するステップを加えることもできる。エラー発生時には、不一致度の高かったSEM画像、その波形プロファイルとマッチング結果のシミュレーション波形を一緒に画面に表示すれば、操作者が異常を容易に判定できる。このようなエラー判定処理を加えることにより、より信頼性が高く安定な計測を実現することが可能となる。
【0059】
また、不一致度ではなく、一致度を基準とし、一致度が最大(極大)になるものを結果出力するようにしても良い。更に結果出力は最大,最小のものだけではなく、例えば、上位n個(nは2以上の自然数)の候補を出力するようにしても良いし、複数の候補から異なる推定法を用いて、形状を選択するようにしても良い。更に総合的な不一致度を検出する際にも、何等かの重要視すべき判断基準(波形取得条件)があるのであれば、他の比較対象に対して重み付けを行った上で、総合的な不一致度を判断するようにしても良い。
【実施例2】
【0060】
次に、第二の実施例とは異なるマッチング方法の例について説明する。第一の実施例では、各条件での不一致度の平均である総合不一致度を用いてマッチングを行った。第二の実施例として、別のマッチング方法を開示する。第二の実施例では、第一の実施例の総合不一致度で行ったのと同様のマッチング処理を、画像取得条件毎にそれぞれの不一致度のみで実施して、それら不一致度の画像間の整合性に基づいて、パターン形状および寸法を推定する。
【0061】
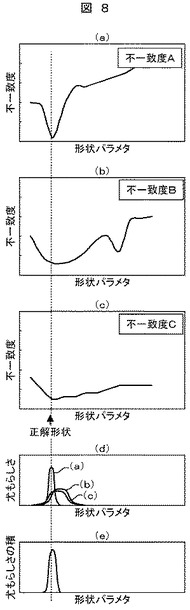
まず、それぞれの画像についてマッチングを行い、各画像取得条件の不一致度の最小値、最小値をとる形状パラメタセットと、最小値周辺における不一致度の各パラメタ方向の二次微分を算出する。形状パラメタ推定結果における不一致度の二次微分は、その点における不一致度変化の急峻さを示す。例えば、図8に示すような不一致度空間の場合は、(a)〜(c)の中では(a)が最も大きな二次微分の値を持つ。極小値周辺の不一致度の変化が急峻なほど、その形状パラメタが正解である確率が高く、変化がなだらかな場合には、その周辺も解である可能性が高い。
【0062】
そこで、第二の実施例では、極小値周辺の解の尤もらしさを、この二次微分の値に応じた分散を持つ正規分布で与える。図8(d)は各画像のマッチング結果の尤もらしさを算出した結果であり、極小値が急峻、すなわち二次微分が大きいほど小さな分散を持つ正規分布で尤もらしさを算出する。このようにして、各条件で取得された画像ごとに尤もらしさを算出し、これらの積(図8(e))の最大値をもつ形状パラメタを正解とすればよい。
【0063】
この第二の実施例で計算した場合に、尤もらしさの積が全てゼロになってしまうケースが考えられる。この場合には、正解ではない極小値が選ばれてしまい、各条件の結果に重複部分がなくなっているケースと考えられる。このような場合には、尤もらしさのピーク位置の近さを評価して、外れ値があれば、その取得条件の画像を除いて再度計算を行えばよい。あるいは、ピーク位置が外れた画像の不一致度が大きい場合には、重複部分がない旨の警告表示あるいはエラー処理を行うことも信頼性の高い計測の実現に有効である。また、二次微分を用いる別の方法として、尤もらしさの算出は行わず、二次微分が最大であった画像による推定結果を正解として用いてももちろんよい。
【0064】
このように、第一の実施例以外でも、SEM画像とシミュレーション波形の不一致度を、複数の相異なる取得条件のSEM画像でそれぞれ算出し、それらの整合性に基づいて総合的に用いてマッチングすることで、第一の実施例と同様の効果を得ることができる。
【実施例3】
【0065】
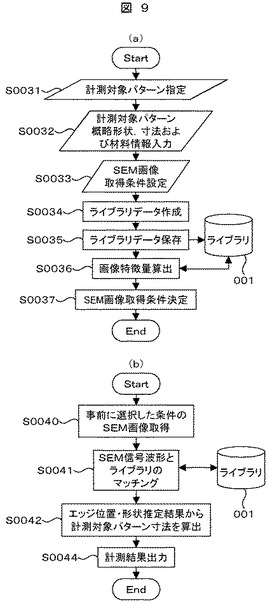
第一および第二の実施例では、複数の相異なる取得条件のSEM画像を総合的に用いてマッチングを行った。これに対し、第3の実施例では、予め様々な取得条件で行ったSEMシミュレーション波形を用いて、最適な画像取得条件を選択する方法を開示する。図9に処理フローを示す。はじめに、第一の実施例と同様に、操作者により計測対象パターンを指定(S0031)し、指定された計測対象パターンの概略形状,寸法および材料情報を入力する(S0032)。
【0066】
次に、計測に用いる画像取得条件を設定する(S0033)。なお、第3の実施例では、実際の計測時の画像取得条件はここで設定されたものの一部となるため、画像同時取得の可否などは気にせず、比較的多くの条件を設定してよい。次に、設定した画像取得条件に対応するシミュレーションを実施し、ライブラリデータを作成(S0034)、結果をパターン形状情報と関連付けてライブラリ001に保存する(S0035)。次に、形状および寸法計測に適切な画像取得条件を決定するための画像特徴量を、ライブラリ001内の各シミュレーション波形について算出する。画像特徴量とは、パターン形状の違いによって生じるSEM信号波形の変化を定量化するものである。パターン計測方法で用いる画像特徴量の一例を図10に示す。
【0067】
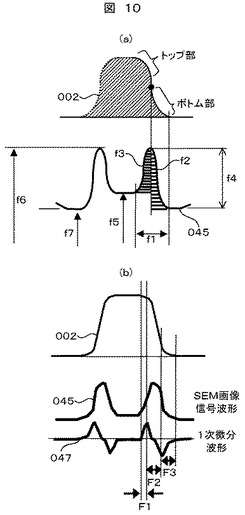
図10(a)において、特徴量f1はエッジピーク部分の幅である(以下ホワイトバンドと呼ぶ)。ホワイトバンド幅は、垂直上方からみた場合のエッジ部の見込み幅を反映する特徴量である。特徴量f2は、ホワイトバンド部において、ピーク位置より外側部の平均幅であり、ボトム部の曲率の大きさを反映する特徴量である。特徴量f3は、ホワイトバンド部において、ピーク位置より内側部の平均幅であり、トップ部の曲率の大きさを反映する特徴量である。
【0068】
特徴量f4は信号強度の大きさであり、図10が示すようにテーパ角の大きさを反映する特徴量である。また、絶対信号量の評価が可能なシステムであれば、ピーク部分の絶対信号量f6およびエッジ外側の最小絶対信号量f7なども用いることができる。f6は傾斜角効果により、テーパ角度に依存して変化する値であり、f7はスペースによって変化する。図10(b)は別の特徴量の例である。エッジピーク部の一次微分を用いて、一次微分が極値を持つ点とゼロになる点の間の距離を特徴量F1,F2,F3としている。F1はトップコーナの曲率に応じて変化する値であり、F2は側壁傾斜角、F3は裾引きに相関がある。
【0069】
以上のように、図10(a)(b)に示すような種々の画像特徴量はパターン形状に応じて変化することから、これらの画像特徴量が大きく変化する画像は、パターン形状変換に対する感度がよい画像ということになる。そこで、第3の実施例ではライブラリ内のSEMシミュレーション波形に対して画像特徴量を計算し、その結果から形状変化に感度のあるSEM画像取得条件を選択し、選択した条件で計測用の画像を取得する。
【0070】
SEM画像からパターン形状が安定に推定できる画像は、画像特徴量と形状パラメタが1対1で対応付けられるものが望ましい。そこで、ライブラリの形状パラメタ空間内で、算出された画像特徴量の最大値と最小値の差分が大きく、その変化が形状パラメタに対して単調増加/減少であるものを選択すればよい。単調性の評価は、例えば、形状パラメタに対する画像特徴量の変化の局値の有無などを評価指標とすればよい。このように、シミュレーション波形の画像特徴量の評価結果に基づいて、計測したい形状変化に対する感度の大きい画像取得条件を決定する(図9(a)S0037)。
【0071】
この画像取得条件は1つでも、複数でもよい。他と比べて特によい条件があれば1つの条件で十分であるし、それぞれ同程度であれば、画像取得の容易さなどを考慮して決めればよい。例えば、画像同時取得可否などの情報も併せて提示すれば、操作者が適切な条件を選択するのに役立つ。例えば、画像取得条件をいくつか選択すると、画像取得に必要な所要時間を表示するといった機能があればよい。
【0072】
計測時には、ステップS0037で選定した取得条件でSEM画像を取得し、後は第一の実施例と同様に、取得画像とライブラリのシミュレーション波形とのマッチング(S0041)を行い、マッチング結果から計測結果を算出(S0042)し、結果を出力(S0044)する。画像取得条件を1つだけ選定した場合には、シミュレーション波形との不一致度を用いて、普通にマッチング処理を行えばよい。
【0073】
このように、第3の実施例を用いれば、形状変化に感度の高い特性を持つSEM画像のみを選択して計測が行えるため、第一および第二の実施例と同様の高精度な計測を、より少ない画像取得で実現することが可能となる。これにより、画像取得にかかる時間の短縮ができ、また、計測時のデータ処理量も少なくなるため演算時間の短縮も可能となる。なお、第3の実施例では、画像取得条件の選定に画像特徴量を用いたが、図7に示したような不一致度特性を算出して選定を行ってもよい。このとき、全ての画像取得条件および形状パラメタについて計算を行うのは非常に多くの計算時間を必要とする。そこで、例えば、ライブラリ内の平均的な形状について、それ以外の形状の波形との不一致度を算出すれば、高速な処理が可能となる。
【実施例4】
【0074】
第3の実施例では、SEMシミュレーション波形の画像特徴量を用いて、画像取得条件の評価を行い、その結果に基づいて画像取得条件の選定を行った。この実施例3の画像取得条件の評価結果を用いることにより、実施例1の総合不一致度のマッチング感度を向上することが可能である。実施例1では総合不一致度をそれぞれの画像で算出した不一致度の平均で求めたが、この平均算出の際に、画像取得条件の評価結果に基づく重みを加えた加重平均を行うことで、感度の高い取得条件画像の情報を優先的に用いることが可能となり、ひいてはライブラリマッチングの精度およびパターン形状・寸法計測の精度を向上することが可能となる。
【0075】
例えば、トップコーナやボトムコーナの曲率のように表面の凹凸情報に高い感度を得たいのであれば、凹凸情報が豊富になる比較的低加速の電子ビームで取得した画像に大きな重みを与えればよい。また深い溝や穴構造底部の状態変化に対する計測感度を高くしたいのであれば、パターン底部の情報を反映しやすい、高エネルギーで放出された電子に大きな重みを与えればよい。
【0076】
上述のようなパターン計測技術は、電子顕微鏡あるいはそれに類似した荷電粒子線装置で画像取得およびシミュレーションが行える対象であれば適用が可能である。また、これまで半導体パターンの計測について説明を行ってきたが、MEMSや微細工業部品などにも適用することができる。
【符号の説明】
【0077】
001 ライブラリ
002 ラインパターン(断面)
003 二次電子信号
004 反射電子信号(左)
005 反射電子信号(右)
010 SEM装置
011 電子銃
012 電子ビーム
013 集束レンズ
014 偏向器
015 対物レンズ
016 試料ステージ
017 試料
018 電子
019 反射電子検出器
020 二次電子検出器
021 電極
030 全体制御・画像処理部
031 画像メモリ
032 画像処理ユニット
033 制御ユニット
034 外部インターフェース
040 シミュレーション波形
041 実SEM信号波形
042 断面形状
043 シミュレーション波形セット
044 SEM画像セット
045 SEM信号波形
046 SEM波形セット
047 SEM信号一次微分波形
【技術分野】
【0001】
本発明は、試料上に形成されたパターンの寸法を測定する方法、及び装置に係り、特にパターンの形状の特定、或いは寸法測定を行うために取得される画像の取得条件を適正に選択する方法、及び装置に関する。
【背景技術】
【0002】
半導体ウェハの製造工程において、ウェハ上に多層に形成されるパターンの微細化が急速に進んでおり、それらのパターンが設計どおりにウェハ上に形成されているか否かを監視するプロセスモニタの重要性はますます増加している。中でもトランジスタゲート配線をはじめとする配線パターンは、その配線幅とデバイス動作特性に強い関連があり、その配線製造プロセスのモニタは特に重要である。
【0003】
数十ナノメートルオーダの微細配線の線幅を測定する測長ツールとしては、それらの配線を数十万倍の拡大倍率で撮像可能な線幅測定用の走査型電子顕微鏡(測長SEM(Critical dimension Scanning Electron Microscope))が従来から用いられている。このような走査型電子顕微鏡を用いた測長処理の一例が特許文献1に記載されている。特許文献1には、測定対象配線を撮像した画像内の局所領域から、配線の信号プロファイルを配線の長手方向に加算平均した投影プロファイルを作成し、このプロファイルにおいて検出した左右の配線エッジ間の距離として配線寸法を算出する手法が開示されている。
【0004】
しかし、非特許文献1(Fig1)に開示されているように、SEMの信号波形においては、その計測対象の形状が変化すると、それに応じて信号波形も変化することが知られている。半導体パターンの微細化に伴い、これら計測誤差がプロセスモニタに与える影響は大きくなりつつある。このような計測誤差を低減する手法が非特許文献1および非特許文献2に開示されている。この手法では、パターン形状とSEM信号波形の関係を予めシミュレーションにより計算しておき、その結果を利用して対象形状に依存しない高精度計測を実現している。
【0005】
具体的には、非特許文献1および非特許文献2に開示されている手法では、パターン形状とSEM信号波形の関係を予めSEMシミュレーションにより計算しておき、その結果を利用して対象形状に依存しない高精度計測を実現している。非特許文献1、及び非特許文献2には、パターン形状をパラメタにより数値化し、様々な形状のSEMシミュレーション結果をライブラリとして保存し、実波形と比較することで、形状および寸法の推定を正確に行う手法が開示されている。
【先行技術文献】
【特許文献】
【0006】
【特許文献1】特開平11−316115号公報
【非特許文献】
【0007】
【非特許文献1】J. S. Villarrubia, A. E. Vladar, J. R. Lowney, and M. T. Postek, “Scanning electron microscope analog of scatterometry,”Proc. SPIE 4689, pp. 304-312 (2002)
【非特許文献2】J. S. Villarrubia, A. E. Vladar, M. T. Postek, “A simulation study of repeatability and bias in the CD-SEM,” Proc. SPIE 5038, pp. 138-149, 2003.
【発明の概要】
【発明が解決しようとする課題】
【0008】
上述のような、ライブラリを利用すれば、走査電子顕微鏡に代表される荷電粒子線装置を用いて、得られた信号波形に基づく、パターン形状の推定が可能となるが、ライブラリに記憶された波形と、実測定に基づいて得られる波形との比較では、パターン形状が一意に求まらないことがある。また、或る波形取得条件によっては、異なるパターン形状であったとしても、波形の変化が殆どなく、その識別が困難であることがある。特許文献1はもとより、非特許文献1及び非特許文献2には、そのような課題、及びその解決手段については何等論じられていない。
【0009】
以下に、実波形とライブラリとの比較に基づいて、形状を推定するに際し、或る条件下ではパターン形状を推定することが困難であったとしても、適正な形状推定を行うことを目的としたパターン形状選択方法,測定方法及び荷電粒子線装置を説明する。また、他に荷電粒子線装置における最適な画像取得条件を選択し得る方法、及び装置について説明する。
【課題を解決するための手段】
【0010】
上記目的を達成するための一態様として、取得された波形をライブラリに参照することによって、パターンの形状を選択する方法、及び装置であって、試料に対する荷電粒子線の照射に基づいて、複数の波形取得条件にて波形情報を取得し、当該複数の波形情報を、複数のパターン形状毎に、異なる波形取得条件で取得された波形情報が記憶されたライブラリに参照することによって、前記ライブラリに記憶されたパターン形状を選択する方法、及び装置を提案する。
【発明の効果】
【0011】
上記態様によれば、複数の波形取得条件に基づいてパターン形状の選択ができるため、ある波形取得条件では識別が困難な場合であっても、一意にパターン形状の選択を行うことが可能となり、パターン形状推定を高精度に実現することが可能となる。
【図面の簡単な説明】
【0012】
【図1】パターン形状推定用ライブラリの作成工程と、ライブラリを参照してパターンの形状を推定する工程を説明するフローチャート。
【図2】電子の検出条件によって、取得される波形に変化が生じることを説明する説明図。
【図3】画像取得条件によって、信号波形に変化が生じることを説明する図。
【図4】走査電子顕微鏡の概要を説明する図。
【図5】ライブラリマッチングの工程を説明するフローチャート。
【図6】ライブラリ、及びライブラリマッチングの概要を説明する図。
【図7】ライブラリマッチングにおける総合不一致度算出の概要を説明する図。
【図8】ライブラリマッチングにおける不一致度算出結果の整合性評価の概要を説明する図。
【図9】ライブラリデータに基づいて、走査電子顕微鏡の画像取得条件を決定する工程と、ライブラリマッチングに基づいて、パターン形状を推定する工程を説明するフローチャート。
【図10】パターン形状と取得波形との関係を説明する図。
【発明を実施するための形態】
【0013】
以下の説明では、パターンの形状単位で波形を登録し、実測定に基づいて、パターン形状の推定、及び計測を行うことを、モデルベース計測あるいはライブラリマッチング手法と呼ぶ。この、ライブラリとのマッチング処理には、各種の非線形最適化手法を用いることができる。しかしながら、このような推定手法は解の安定性が得られない場合には、正しい結果を得ることは難しい。
【0014】
M. Tanaka, J. S. Villarrubia and A. E. Vladar, “Influence of Focus Variation on Linewidth Measurements,” Proc. SPIE 5752, pp.144-155(2005)、およびM. Tanaka, J. Meessen, C. Shishido et al., “CD bias reduction in CD-SEM linewidth measurements for advanced lithography,” Proc. SPIE 6922, pp. 69221T-1-11(2008)に説明されているように、ライブラリマッチングにおける解が一意にきまらない場合がある。
【0015】
また、パターン形状変化とSEM画像取得条件の組み合わせによっては、パターンの形状が変化しても、SEM画像があまり変化しない場合もある。例えば、パターン下部が上部よりも細くなるような場合には、直上からの観察画像にはあまり違いが現れない。このような場合には、当然ライブラリマッチングもうまくいかず、正しい計測結果を得ることはできない。
【0016】
このような課題を解決するには、計測したいパターン形状の変化に感度のあるSEM画像の取得が必要である。さらに、先述のように解が一意に決まらない場合には、何らかの情報を追加することで拘束条件を付加することが有効となる。そこで、以下に、複数の異なる取得条件でSEM画像を取得し、これらを組み合わせて用いることでライブラリマッチングの精度を向上する手法を説明する。異なる特性を持つ複数の画像(或いは波形)を組み合わせて用いることで、一つの条件のみの画像でマッチングを行う場合に比べて、より安定なマッチングが可能となる。
【0017】
第一の実施例では、異なる条件で取得されたSEM画像と、対応する条件で算出されたシミュレーション画像との不一致度を画像ごとに評価し、それらの平均処理により総合不一致度を算出して、総合不一致度が最小となるシミュレーションパターン形状を求め、対象パターンの形状と寸法を計測する。
【0018】
第二の実施例では、異なる条件で取得されたSEM画像と、対応する条件で算出されたシミュレーション画像との不一致度に基づいて、その不一致度が最小となるシミュレーションパターン形状を画像取得条件ごとに推定し、得られた複数の形状および寸法推定結果を総合して、対象パターンの形状と寸法を計測する方法を開示している。
【0019】
第3の実施例では、計測に用いるSEM装置が撮像可能な、異なる複数の画像条件のシミュレーション波形を評価して、形状変化に対して感度の高い画像取得条件を選定する方法を開示している。
【0020】
上記手法によれば、モデルベース計測手法におけるマッチング精度が向上でき、その結果モデルベース計測手法そのものの精度も向上する。また、これまで1種類の画像だけでは感度が得られず計測が困難であったパターン形状変化に対しても、計測感度が向上し、高精度な計測が可能となる。また、複数条件の画像を組み合わせることにより、形状推定結果の信頼性評価が可能となり、エラーの判定率が向上し、計測の信頼性が向上する。
【0021】
上記手法は、各種の荷電粒子線装置(SEM、イオン顕微鏡等)に適用可能であるが、以下の実施例では代表としてSEMを用いる場合を例にとって説明する。
【実施例1】
【0022】
第一の実施例では、複数の相異なる検出条件により得られるSEM画像を用いたパターン寸法計測方法の基本的な実施形態について、図1から図7を用いて説明する。
【0023】
図1にパターン寸法計測方法の手順を示す。本発明では、計測対象パターンのSEM画像を複数の異なる画像検出条件でそれぞれ取得する。得られた複数のSEM画像を、事前に作成された同じ検出条件で計算したシミュレーションライブラリと比較して計測対象パターンの形状および寸法を推定する。
【0024】
シミュレーションライブラリとは、パターンの形状を様々な値に設定して計算したSEMシミュレーション波形をその形状情報と関連付けて保存したものであり、これらのSEMシミュレーション波形の中から、実際のSEM画像信号波形に最も近い形状を持つ波形を選択するマッチング処理を行い、そのシミュレーション波形算出時のサンプル形状パラメタとマッチング位置から計測対象パターンの寸法および形状を推定する。画像取得条件が異なる場合、同じサンプルに対してもSEM画像は異なる性質を持つ。このため、ある1つの条件で取得した画像だけではSEM信号波形に違いが現れないようなパターン形状変化に対しても、他の条件で画像を取得すれば違いが得られることがある。
【0025】
例えば、パターン下部が上部よりも細くなるような場合には、直上からの観察画像では垂直な側壁との違いはあまり現れないが、斜め方向から取得したSEM画像であれば、その違いを検知することが可能となる。そこで、これら複数の異なる条件で取得した画像を組み合わせてマッチングを行うことで、従来の1枚の画像では感度の得られなかったようなパターン形状変化に対しても、その形状および寸法の推定を高感度に行うことが可能となる。このように、形状変化に対する感度の異なる画像を複数用いてマッチングすることで、高精度なパターン計測を実現する。
【0026】
図1(a)はシミュレーションライブラリ作成と画像取得レシピ(自動画像取得のための手順を装置のタスクリストとして記録したファイル)作成の手順を示す。はじめに、計測対象パターンを指定する(ステップS0001)。パターンの指定は、実際にパターンをSEMで観察しながら行ってもいいし、パターンの設計データを用いて行ってもよい。次に、指定したパターンの計測に用いるシミュレーションライブラリを作成するために、操作者により計測対象パターンの概略形状,寸法および材料情報を入力する(ステップS0002)。これは、シミュレーションライブラリで作成するパターン形状の範囲やシミュレーション時の材料パラメタを設定するための入力情報であり、計測対象パターンの製造プロセスに応じて適切な値に設定しておく。パターンの材料や構造,目標および許容寸法などは設計時に決まっているため、計測対象パターンが決まれば、これらの値を設定することは容易である。これらの設計情報データにアクセスできる環境にあれば、操作者が介することなく、設計データに基づいて自動で設定することも可能である。あるいは、実際のパターンを従来の測長SEMや、AFMなどその他の計測手法で計測し、これらの計測結果から概略寸法を決定してももちろんよい。
【0027】
次に、実際の計測で用いるSEM画像の取得条件を設定する(ステップS0003)。ここで、SEM画像の取得条件とは、試料に照射される電子ビームのエネルギー(加速電圧)や電流量,照射の速度や照射回数,照射方向、また検出される電子のエネルギーや方向,試料ステージの傾斜角などを指す。画像取得条件設定の詳細については後述する。
【0028】
画像取得条件(波形取得条件)は主として、(1)走査電子顕微鏡の電子ビームの照射条件(電子ビームのエネルギー(試料への到達エネルギー),電子ビームの照射電流量,走査範囲(Field Of View:FOV)の大きさ(倍率)、ビームの傾斜(ステージの傾斜)等)、(2)電子の検出条件(検出器の種類,エネルギーフィルタリングの有無等)、(3)画像処理条件、(4)試料条件、及び(5)(1)〜(4)の2以上の組み合わせ等がある。この内、(4)の試料条件とは、例えば試料に対する予備帯電条件が挙げられる。走査電子顕微鏡にはプリドーズ、或いはプリチャージと呼ばれる予備帯電技術があるが、プリドーズ前の画像を条件Aの画像とし、電子ビームによる予備帯電を行った後に取得される画像を条件Bの画像とすることによって、異なる条件での複数の信号の取得が可能となる。
【0029】
また、試料への到達エネルギーを変化させることによって、試料から放出される二次電子放出効率δが変化し、画像の見え方も変化するため、試料への電子ビームの到達エネルギーの変化前後の波形をそれぞれ条件Aによって得られる波形、及び条件Bによって得られる波形とするようにしても良い。また、照射電流量や走査範囲を変更すると、電子ビーム照射による帯電の状態が変化することにより画像の見え方が変化するため、同様に、条件変更前の画像を条件A,変更後の画像を条件Bによるものとすればよい。
【0030】
パターンの材質やパターンの形状等に応じて、適当な波形取得条件を複数用意し、それに基づいてライブラリを形成することによって、正確なパターンの形状推定が可能となる。
【0031】
異なる条件で検出された画像の一例を図2および図3に示す。図2はある断面形状を持つラインパターン002のSEM信号波形を表したものである。試料表面への電子ビームの照射により発生する電子を、そのエネルギーや放出方向によって分けて検出した場合の信号波形を示している。003は比較的エネルギーの低い二次電子を検出した二次電子信号画像であり、パターンのエッジ部分で信号量が増加している。これに対し、試料の左右斜め上方に検出器を配置し、比較的エネルギーの高い反射電子を検出した波形がそれぞれ反射電子(左)004,反射電子(右)005である。反射電子信号は、検出器が配置されている側に放出された電子を多く検出するため、左側の検出器では左の側壁部分、右側の検出器では右の側壁部分の信号を多く検出する。このように、電子ビーム照射により発生する電子はそのエネルギーや方向により得られる信号波形が変化する。また図3は、発明者らが行ったシミュレーション検討の別の例である(M. Tanaka, J. Meessen, C. Shishido et al., “CD bias reduction in CD-SEM linewidth measurements for advanced lithography,” Proc. SPIE 6922, pp. 69221T-1-11(2008)に開示)。図3は、検出する電子のエネルギーを変えた場合の信号波形の変化を示しており、図3(c)に示すような相異なる3種類の側壁形状のパターンに対し、放出される全てのエネルギーの信号を検出した場合(a)と、エネルギーの高い電子のみを検出した場合(b)では、形状変化に対する信号波形の変化の仕方が異なることがわかる。これらのように、同じサンプルであっても、電子の検出条件が異なると得られるSEM信号波形が異なり、検出したい相違(例えば側壁傾斜角の違い)に対して異なった感度の画像を取得することが可能となる。
【0032】
図3,図4で示した電子の検出条件の他に、電子ビームのエネルギー(加速電圧)や電流量,照射の速度や照射回数,照射方向などが変わっても、それぞれの特性により得られる信号波形は変化する。図1のステップS0003では、このような画像取得条件を予め複数設定しておく。
【0033】
次に、ステップS0002で設定した計測対象パターンの概略形状,寸法および材料情報と、ステップS0003で設定したSEM画像取得条件の組み合わせについてSEM信号波形のシミュレーションを行い、シミュレーションライブラリのデータを作成する(ステップS0004)。これらのシミュレーション結果と画像取得条件,パターン形状情報を組み合わせてシミュレーションライブラリとしてデータを保存する(ステップS0005)。以上の手順により、計測に用いる複数のSEM画像取得のレシピと計測に用いるシミュレーションライブラリを生成する。
【0034】
なお、パターンの形状情報は、シミュレーションに基づいて取得する以外に、実際にパターンの断面画像をSEMによって取得し、当該画像情報に基づいて、形状情報を抽出するようにしても良いし、予めAFM(Atomic Force Microscope)のような装置によって、取得するようにしても良い。上記ライブラリは、複数の波形取得情報と、パターンの形状情報が関連付けて記憶されると共に、複数の波形取得条件で得られた波形間の比較によって、パターン形状が推定できるようになっていれば良く、パターン形状情報の由来は問わない。
【0035】
なお、このように実際のパターンを用いたライブラリを作成する場合には,できるだけ様々な形状あるいは寸法のパターンを用いることが望ましい。例えば、露光工程においてはFocus-Exposure Matrixと呼ばれるウェハを作成すればよい。これは、露光ショット毎に露光エネルギーと露光フォーカス条件を変化させたパターンを作成するもので、実際の製造プロセスで発生しうる様々な形状パターンを容易に作成することができる。エッチングパターンについても、Focus-Exposure Matrixをマスクとしてエッチングを行うことで、寸法や形状のバリエーションを増やすことができる。もちろん、エッチング時間やガスの流量などエッチング条件を変更してパターン形状を変化させてももちろんよい。
【0036】
次に、図1(b)を用いて、実際のパターン計測手順について説明する。まず、予めステップS0003で指定した複数の取得条件で、計測対象パターンのSEM画像を取得する。この画像取得は、はじめに計測対象パターンの形成された半導体ウェハを後述のSEM装置にロードし、事前にアライメント等を行って、所望の計測対象パターン位置の画像を取得する(ステップS0010)。次に複数の異なる画像取得条件で撮像したSEM画像のセットと、図1(a)に示した手順で作成したシミュレーションライブラリとのデータのマッチングを行う(ステップS0011)。
【0037】
それぞれのSEM画像と対応する取得条件のシミュレーション波形を比較し、その一致度が、総合的に最もよくなるシミュレーション結果を選択することで、計測対象パターンの形状およびエッジ位置を推定する。次に、SEM画像とライブラリのマッチング結果から、パターン形状およびユーザ所望のパターン寸法を算出する(ステップS0012)。ライブラリ内のシミュレーション波形では、波形とエッジ位置の関係が明らかであるから、SEM画像とシミュレーション波形のマッチング結果から、SEM画像内のパターンエッジ位置が正確に推定できる。このパターンエッジ位置の推定結果から正確な寸法の計測が実現できる。最後に計測結果を画面およびファイルに出力する(ステップS0013)。
【0038】
次に、図4を用いてパターン計測装置の実施形態について説明する。図4左側部分はパターン計測に用いるSEM画像を取得するための代表的なSEM装置010の例である。電子銃011から放出された一次電子ビーム012は集束レンズ013,対物レンズ015によって集束され、微少スポットとして試料017上に照射される。電子ビーム012が照射されると、照射された部分から試料の材質や形状に応じて二次電子や反射電子が放出される(電子018)。偏向器014を用いて一次電子ビーム012を二次元走査し、放出された電子018を反射電子検出器019あるいは二次電子検出器020で検出し電気信号に変換し、A/D変換器(図示せず)でディジタル信号に変換した二次元のディジタル画像をそれぞれ画像メモリ031に記憶する。図4下側に示すように、反射電子検出器019は前後左右に4分割されており、それぞれの方向に放出された電子を分けて検出することが可能である。また、反射電子検出器の下側や対物レンズの上側にはメッシュ上の電極021が配置されており、検出する電子のエネルギー幅を変化させることも可能である。これら異なる検出条件の画像信号は、1度の電子ビーム照射に対して同期して検出することが望ましい。
【0039】
1度の電子ビーム照射で同期して画像を検出した場合には、それら異なる検出条件の画像内では、同じ画素座標のデータは計測対象パターン上の同じ場所の画像となるため、検出条件の異なる複数の画像間の位置合わせが不要となる。また、図4のSEM装置は傾斜可能なステージを有しており、異なる方向からSEM画像を取得することも可能である。ステージ傾斜角が異なる画像は同時に取得することはできないため、このような場合には、画像間で位置合わせを行う。画像取得条件としては、図4に示した検出器の違いや試料ステージの違い以外にも、照射する電子ビームのエネルギーや電流量,照射方向などを変更してももちろんよいし、必ずしもこれら全ての機能を有する必要はない。
【0040】
SEM装置010は全体制御・画像処理部030内の制御ユニット033により制御され、取得された画像は、それぞれの画像取得条件とともに画像メモリ031に保存される。以下、単にSEM画像と表現する場合には、これら様々な条件で得られる画像の総称を示すものとする。これらのSEM画像は、ライブラリ001内に記憶されている各画像取得条件に対応したシミュレーション波形とのマッチング処理を行い、パターン形状の推定と寸法計測を行う。これらのマッチング処理は画像処理ユニット032で行われる。なお、これらのマッチング処理は、外部インターフェース034を通じて、一旦外部記憶装置(図示せず)に保存された後、外部計算機によって処理を行っても良い。外部計算機の記憶媒体には本実施例、及び以降の実施例にて説明する処理を行うためのプログラムが記憶されており、SEM等から伝達される信号に基づいて、説明される処理を計算機に行わせる。
【0041】
次に、異なる取得条件で得られた複数の画像および対応するシミュレーション波形のマッチング方法詳細について図5を用いて説明する。先述のとおり、ライブラリ001内では、SEMシミュレーション波形とその入力であるパターン形状パラメタが関連付けられて保存されており、形状パラメタを与えれば、その形状に対応するSEM信号波形のシミュレーション結果を得ることができる。本発明のパターン計測方法では、このシミュレーションライブラリを用いて、計測対象の実SEM画像の波形プロファイルとシミュレーションプロファイルの一致度を定量的に評価することで、マッチングを実現する。
【0042】
図5は波形マッチングの処理内容の詳細を示すフロー図である。事前にライブラリ作成(図1(a))と、各条件でのSEM画像取得S0010が行われている。はじめに、マッチングのための初期形状を設定する(S0020)。初期形状は、例えばライブラリ内の形状パラメタの平均値を設定すればよい。あるいは特許文献2に記載の画像特徴量を用いた初期値設定方法を用いてももちろんよい。
【0043】
次に、ライブラリ001を参照して、設定した形状パラメタセットの初期値に対する各取得条件でのシミュレーション波形040を算出する(S0021)。図5の例では、3種類の条件で取得した画像の例を示しているが、画像取得条件の種類は2種類でも4種類以上でも同様に計測可能であることは言うまでもない。ライブラリの詳細は図6を用いて後述する。次に、算出されたシミュレーション波形040と、SEM装置でそれぞれの条件で取得された計測対象パターンの実SEM信号波形041との不一致度を算出する。不一致度の算出は、まずそれぞれの条件毎に行い(S0022)、それらの結果の演算により総合不一致度を算出する(S0023)。
【0044】
不一致度の演算は各画像取得条件の不一致度の平均を用いればよい。各条件の波形の不一致度算出(S0022)は、例えば、断面形状042とシミュレーション波形040の信号値の差分を計算し、プロファイル全体での自乗和を実波形とシミュレーション波形の不一致度として算出することができる。次に、これらの不一致度を平均して、総合不一致度を算出する。この総合不一致度が最小、つまり一致度の最も高いシミュレーション波形セットをライブラリ内のデータを用いて算出することで、その波形シミュレーションセットの入力となった断面形状が、実際のパターン断面形状の推定結果となる。
【0045】
そこで、この総合不一致度が最小になったか否かを判定し(S0024)、最小でない場合には形状パラメタセットを更新し(S0025)、新しい形状について再度波形を算出(S0021)してマッチング処理(S0022〜S0024)を行い、総合不一致度が最小と判断されるまで処理を繰り返す。不一致度が最小となる形状パラメタが確定したら、結果を出力して(S0026)マッチング処理を終了する。
【0046】
ここで、総合不一致度の最小値となるように反復演算を行っているが、実際には最小値がどのような値になるか不明であり、パラメタ空間で極小値の判定をすることになる。これらのマッチングに関しては、Levenberg−Marquardt法など、一般的な非線形最適化手法を適用することで実現することができる。
【0047】
次に、ライブラリおよび不一致度算出のさらに詳細について、図6を用いて説明する。図6に示すように、ライブラリ001にはシミュレーションの断面形状042とそれに対応した各種取得条件でのSEMシミュレーション波形040がセット043で記録されている。図6では概念を説明するために、波形およびパターン断面形状を図示しているが、シミュレーションデータは数値データ列で、また、断面形状は形状パラメタを用いて表現して、ライブラリに保存する。図6は、パターンの側壁傾斜角θとトップコーナ曲率が主に変動するプロセスのパターンを計測する場合のライブラリの構成例である。変動する形状がプロセス管理に重要な計測対象形状であるので、これらを形状パラメタとして、事前に設定(ステップS0002)した形状範囲の複数の異なるパラメタでシミュレーションを行い、ライブラリを作成する。
【0048】
図6では、形状パラメタ空間の概念を説明するため、側壁傾斜角θとトップコーナ曲率Rの二つの形状パラメタをそれぞれx軸,y軸にとって示している。これらの形状パラメタの組み合わせによって決まるパターン断面形状でシミュレーションを行う。この例では簡単のため側壁傾斜角θおよびトップコーナ曲率Rが各々3種類の場合を示しているが、実際にはプロセス変動で生じうるパターン形状をカバーする範囲を、計測したい精度に見合う細かさでシミュレーションしておく。
【0049】
ここで、シミュレーションデータは形状パラメタに対して離散値となるが、シミュレーションデータ間の補間を行えば、シミュレーション結果のない形状パラメタでのシミュレーション波形も推定することが可能である。シミュレーション波形の補間については、例えば、J. S. Villarrubia, A. E. Vladar, J. R. Lowney, and M. T. Postek, “Edge Determination for Polycrystalline Silicon Lines on Gate Oxide,”Proc. SPIE 4344, pp. 147-156 (2001)に開示されている方法を用いればよい。
【0050】
また、図6の例では、簡単のため側壁傾斜角とトップコーナ曲率のみの例を表しているが、このほかにパターンのボトムコーナの曲率や隣接パターンとの距離などを変更したデータがライブラリに含まれていてももちろんよい(その場合には3次元以上の多次元空間となる)。
【0051】
ここで、シミュレーション波形040は、図6に示すように、左右エッジのうち片側のみ計算しておけばよい(図6では右エッジのみ算出している)。マッチング時には、マッチング対象のパターン方向によって必要に応じてシミュレーション信号を左右反転させればよい。ここで、SEMシミュレーションは図4で示したSEM装置010に対応する複数の条件で実施する。
【0052】
計測時には、SEM装置010で予め指定した複数のSEM画像を撮像し、SEM画像セット044を得る。次に、シミュレーション波形セット043と比較するために、SEM画像からSEM信号波形045を算出する。このとき、図5に示すようなライン状のパターンであれば、近接した画像データを平均処理して平均波形プロファイルを算出すれば、信号ノイズを除去することができ、安定な計測が可能となる。図5に示したように、各取得条件のSEM画像のセット044から対応する波形プロファイルのSEM波形セット046を算出した後、それぞれのSEM信号波形045と対応するシミュレーション波形043のマッチングを行い、実際のSEM波形と最も一致度の高いシミュレーション波形セットを選択する。
【0053】
次に、図7を用いて、形状パラメタに対して不一致度が変化する様子の一例と、本発明の複数の異なる条件で取得した画像を用いることの利点について説明する。図5で示したように、実波形とシミュレーション波形の不一致度算出は、画像取得条件毎に行う。図7(a)(b)(c)は、3つの異なる画像取得条件での不一致度算出結果をそれぞれ示し、(d)はそれらの平均値、すなわち総合不一致度の例を示している。
【0054】
横軸は、シミュレーションライブラリ波形に関連付けられた形状パラメタであり、それぞれのシミュレーション波形に対して、ある形状をしたパターンのSEM信号波形をマッチングした際の不一致度算出結果が縦軸となっている。図7では、簡単のために1つの形状パラメタの例を示しているが、実際にはシミュレーションライブラリ作成時に用いた形状パラメタの種類だけ軸のある多次元空間となる(図6の例であれば、形状パラメタ2つの3次元空間となる)。この不一致度と形状パラメタの空間を以下、不一致度空間と呼ぶ。形状パラメタに対する不一致度の変化の仕方は、対象とする形状変化に対するSEM画像の感度によって決まる。パターン形状変化に対して画像が高い感度を持っていれば、パターン形状が一致した場合のみ不一致度が低くなる。その場合には、例えば、図7(a)に示したように、最小値をとる形状パラメタは1つだけであり、かつ正解周辺で不一致度が急激に減少する。このような不一致度空間の特性を持つSEM画像であれば、安定で正確な形状推定を行うことが可能だが、常にこのような良好な関係が得られるとは限らない。例えば、図7(b)の例では、正解以外にも極小値が存在しており、間違えた形状パラメタを解として選択してしまう可能性が高い。
【0055】
また、図7(c)の例では形状パラメタの変化に対して不一致度の変化が少なく、最小値周辺の変化がなだらかになっている。このような場合には、推定結果が安定しないおそれがある。この不一致度の特性は、画像取得条件と形状パラメタの種類の組み合わせによって変化するため、計測対象パターンの形状(正解形状)が変化すると、最適な特性を持つ画像の取得条件が変化してしまう恐れがある。そこで、本発明では、このように異なる特性を有するSEM画像を組み合わせることで、マッチング精度の低下を防ぐ。
【0056】
図7(d)に示すように、複数の画像により得られた不一致度を平均して総合不一致度を算出すると、不一致度空間の特性は(a)よりは劣化するが、(b)(c)よりは改善する。このように、上述のパターン計測方法では、異なる特性を持つ画像を組み合わせて用いることで、正解以外の局所解の影響を低減し、平均的に安定したマッチング結果を得ることが可能となる。その結果、安定で高精度なパターンの形状および寸法の計測が実現できる。
【0057】
以上、図1〜図6を用いて説明したように、上述のパターン計測方法では、SEMシミュレーション波形との比較を行うことにより、計測対象パターン内外での電子の散乱の影響や、パターンの断面形状の影響など、電子線照射に伴う物理現象を考慮した高精度な計測が可能となる。さらに、複数の異なる画像取得条件を用いることで、パターン形状変化に対するSEM画像の変化感度を総合的に向上させ、従来の一種類の条件で取得されたSEM画像では感度の得られなかったようなパターン形状変化に対しても高精度で安定な計測を実現することができる。
【0058】
なお、このマッチングにおけるそれぞれの不一致度算出過程において、不一致度に所定の判定しきい値を設定しておき、不一致度が一定値よりも大きい場合SEM画像が存在する場合には警告あるいはエラーと判定するステップを加えることもできる。エラー発生時には、不一致度の高かったSEM画像、その波形プロファイルとマッチング結果のシミュレーション波形を一緒に画面に表示すれば、操作者が異常を容易に判定できる。このようなエラー判定処理を加えることにより、より信頼性が高く安定な計測を実現することが可能となる。
【0059】
また、不一致度ではなく、一致度を基準とし、一致度が最大(極大)になるものを結果出力するようにしても良い。更に結果出力は最大,最小のものだけではなく、例えば、上位n個(nは2以上の自然数)の候補を出力するようにしても良いし、複数の候補から異なる推定法を用いて、形状を選択するようにしても良い。更に総合的な不一致度を検出する際にも、何等かの重要視すべき判断基準(波形取得条件)があるのであれば、他の比較対象に対して重み付けを行った上で、総合的な不一致度を判断するようにしても良い。
【実施例2】
【0060】
次に、第二の実施例とは異なるマッチング方法の例について説明する。第一の実施例では、各条件での不一致度の平均である総合不一致度を用いてマッチングを行った。第二の実施例として、別のマッチング方法を開示する。第二の実施例では、第一の実施例の総合不一致度で行ったのと同様のマッチング処理を、画像取得条件毎にそれぞれの不一致度のみで実施して、それら不一致度の画像間の整合性に基づいて、パターン形状および寸法を推定する。
【0061】
まず、それぞれの画像についてマッチングを行い、各画像取得条件の不一致度の最小値、最小値をとる形状パラメタセットと、最小値周辺における不一致度の各パラメタ方向の二次微分を算出する。形状パラメタ推定結果における不一致度の二次微分は、その点における不一致度変化の急峻さを示す。例えば、図8に示すような不一致度空間の場合は、(a)〜(c)の中では(a)が最も大きな二次微分の値を持つ。極小値周辺の不一致度の変化が急峻なほど、その形状パラメタが正解である確率が高く、変化がなだらかな場合には、その周辺も解である可能性が高い。
【0062】
そこで、第二の実施例では、極小値周辺の解の尤もらしさを、この二次微分の値に応じた分散を持つ正規分布で与える。図8(d)は各画像のマッチング結果の尤もらしさを算出した結果であり、極小値が急峻、すなわち二次微分が大きいほど小さな分散を持つ正規分布で尤もらしさを算出する。このようにして、各条件で取得された画像ごとに尤もらしさを算出し、これらの積(図8(e))の最大値をもつ形状パラメタを正解とすればよい。
【0063】
この第二の実施例で計算した場合に、尤もらしさの積が全てゼロになってしまうケースが考えられる。この場合には、正解ではない極小値が選ばれてしまい、各条件の結果に重複部分がなくなっているケースと考えられる。このような場合には、尤もらしさのピーク位置の近さを評価して、外れ値があれば、その取得条件の画像を除いて再度計算を行えばよい。あるいは、ピーク位置が外れた画像の不一致度が大きい場合には、重複部分がない旨の警告表示あるいはエラー処理を行うことも信頼性の高い計測の実現に有効である。また、二次微分を用いる別の方法として、尤もらしさの算出は行わず、二次微分が最大であった画像による推定結果を正解として用いてももちろんよい。
【0064】
このように、第一の実施例以外でも、SEM画像とシミュレーション波形の不一致度を、複数の相異なる取得条件のSEM画像でそれぞれ算出し、それらの整合性に基づいて総合的に用いてマッチングすることで、第一の実施例と同様の効果を得ることができる。
【実施例3】
【0065】
第一および第二の実施例では、複数の相異なる取得条件のSEM画像を総合的に用いてマッチングを行った。これに対し、第3の実施例では、予め様々な取得条件で行ったSEMシミュレーション波形を用いて、最適な画像取得条件を選択する方法を開示する。図9に処理フローを示す。はじめに、第一の実施例と同様に、操作者により計測対象パターンを指定(S0031)し、指定された計測対象パターンの概略形状,寸法および材料情報を入力する(S0032)。
【0066】
次に、計測に用いる画像取得条件を設定する(S0033)。なお、第3の実施例では、実際の計測時の画像取得条件はここで設定されたものの一部となるため、画像同時取得の可否などは気にせず、比較的多くの条件を設定してよい。次に、設定した画像取得条件に対応するシミュレーションを実施し、ライブラリデータを作成(S0034)、結果をパターン形状情報と関連付けてライブラリ001に保存する(S0035)。次に、形状および寸法計測に適切な画像取得条件を決定するための画像特徴量を、ライブラリ001内の各シミュレーション波形について算出する。画像特徴量とは、パターン形状の違いによって生じるSEM信号波形の変化を定量化するものである。パターン計測方法で用いる画像特徴量の一例を図10に示す。
【0067】
図10(a)において、特徴量f1はエッジピーク部分の幅である(以下ホワイトバンドと呼ぶ)。ホワイトバンド幅は、垂直上方からみた場合のエッジ部の見込み幅を反映する特徴量である。特徴量f2は、ホワイトバンド部において、ピーク位置より外側部の平均幅であり、ボトム部の曲率の大きさを反映する特徴量である。特徴量f3は、ホワイトバンド部において、ピーク位置より内側部の平均幅であり、トップ部の曲率の大きさを反映する特徴量である。
【0068】
特徴量f4は信号強度の大きさであり、図10が示すようにテーパ角の大きさを反映する特徴量である。また、絶対信号量の評価が可能なシステムであれば、ピーク部分の絶対信号量f6およびエッジ外側の最小絶対信号量f7なども用いることができる。f6は傾斜角効果により、テーパ角度に依存して変化する値であり、f7はスペースによって変化する。図10(b)は別の特徴量の例である。エッジピーク部の一次微分を用いて、一次微分が極値を持つ点とゼロになる点の間の距離を特徴量F1,F2,F3としている。F1はトップコーナの曲率に応じて変化する値であり、F2は側壁傾斜角、F3は裾引きに相関がある。
【0069】
以上のように、図10(a)(b)に示すような種々の画像特徴量はパターン形状に応じて変化することから、これらの画像特徴量が大きく変化する画像は、パターン形状変換に対する感度がよい画像ということになる。そこで、第3の実施例ではライブラリ内のSEMシミュレーション波形に対して画像特徴量を計算し、その結果から形状変化に感度のあるSEM画像取得条件を選択し、選択した条件で計測用の画像を取得する。
【0070】
SEM画像からパターン形状が安定に推定できる画像は、画像特徴量と形状パラメタが1対1で対応付けられるものが望ましい。そこで、ライブラリの形状パラメタ空間内で、算出された画像特徴量の最大値と最小値の差分が大きく、その変化が形状パラメタに対して単調増加/減少であるものを選択すればよい。単調性の評価は、例えば、形状パラメタに対する画像特徴量の変化の局値の有無などを評価指標とすればよい。このように、シミュレーション波形の画像特徴量の評価結果に基づいて、計測したい形状変化に対する感度の大きい画像取得条件を決定する(図9(a)S0037)。
【0071】
この画像取得条件は1つでも、複数でもよい。他と比べて特によい条件があれば1つの条件で十分であるし、それぞれ同程度であれば、画像取得の容易さなどを考慮して決めればよい。例えば、画像同時取得可否などの情報も併せて提示すれば、操作者が適切な条件を選択するのに役立つ。例えば、画像取得条件をいくつか選択すると、画像取得に必要な所要時間を表示するといった機能があればよい。
【0072】
計測時には、ステップS0037で選定した取得条件でSEM画像を取得し、後は第一の実施例と同様に、取得画像とライブラリのシミュレーション波形とのマッチング(S0041)を行い、マッチング結果から計測結果を算出(S0042)し、結果を出力(S0044)する。画像取得条件を1つだけ選定した場合には、シミュレーション波形との不一致度を用いて、普通にマッチング処理を行えばよい。
【0073】
このように、第3の実施例を用いれば、形状変化に感度の高い特性を持つSEM画像のみを選択して計測が行えるため、第一および第二の実施例と同様の高精度な計測を、より少ない画像取得で実現することが可能となる。これにより、画像取得にかかる時間の短縮ができ、また、計測時のデータ処理量も少なくなるため演算時間の短縮も可能となる。なお、第3の実施例では、画像取得条件の選定に画像特徴量を用いたが、図7に示したような不一致度特性を算出して選定を行ってもよい。このとき、全ての画像取得条件および形状パラメタについて計算を行うのは非常に多くの計算時間を必要とする。そこで、例えば、ライブラリ内の平均的な形状について、それ以外の形状の波形との不一致度を算出すれば、高速な処理が可能となる。
【実施例4】
【0074】
第3の実施例では、SEMシミュレーション波形の画像特徴量を用いて、画像取得条件の評価を行い、その結果に基づいて画像取得条件の選定を行った。この実施例3の画像取得条件の評価結果を用いることにより、実施例1の総合不一致度のマッチング感度を向上することが可能である。実施例1では総合不一致度をそれぞれの画像で算出した不一致度の平均で求めたが、この平均算出の際に、画像取得条件の評価結果に基づく重みを加えた加重平均を行うことで、感度の高い取得条件画像の情報を優先的に用いることが可能となり、ひいてはライブラリマッチングの精度およびパターン形状・寸法計測の精度を向上することが可能となる。
【0075】
例えば、トップコーナやボトムコーナの曲率のように表面の凹凸情報に高い感度を得たいのであれば、凹凸情報が豊富になる比較的低加速の電子ビームで取得した画像に大きな重みを与えればよい。また深い溝や穴構造底部の状態変化に対する計測感度を高くしたいのであれば、パターン底部の情報を反映しやすい、高エネルギーで放出された電子に大きな重みを与えればよい。
【0076】
上述のようなパターン計測技術は、電子顕微鏡あるいはそれに類似した荷電粒子線装置で画像取得およびシミュレーションが行える対象であれば適用が可能である。また、これまで半導体パターンの計測について説明を行ってきたが、MEMSや微細工業部品などにも適用することができる。
【符号の説明】
【0077】
001 ライブラリ
002 ラインパターン(断面)
003 二次電子信号
004 反射電子信号(左)
005 反射電子信号(右)
010 SEM装置
011 電子銃
012 電子ビーム
013 集束レンズ
014 偏向器
015 対物レンズ
016 試料ステージ
017 試料
018 電子
019 反射電子検出器
020 二次電子検出器
021 電極
030 全体制御・画像処理部
031 画像メモリ
032 画像処理ユニット
033 制御ユニット
034 外部インターフェース
040 シミュレーション波形
041 実SEM信号波形
042 断面形状
043 シミュレーション波形セット
044 SEM画像セット
045 SEM信号波形
046 SEM波形セット
047 SEM信号一次微分波形
【特許請求の範囲】
【請求項1】
試料に対する荷電粒子線の走査に基づいて得られる波形情報を、複数のパターンの形状単位で波形情報が登録されたライブラリに参照して、パターンを選択するパターン形状選択方法であって、
試料に対する荷電粒子線の照射に基づいて、複数の波形取得条件による複数の波形情報を取得し、当該複数の波形情報を、複数のパターン形状毎に、異なる波形取得条件で取得された波形情報が記憶されたライブラリに参照することによって、前記ライブラリに記憶されたパターン形状情報を選択することを特徴とするパターン形状選択方法。
【請求項2】
請求項1において、
前記ライブラリは、前記パターンの形状情報と、複数の波形取得条件による複数の波形が関連付けて記憶されていることを特徴とするパターン形状選択方法。
【請求項3】
請求項2において、
前記複数の波形取得条件は、荷電粒子線の照射条件,荷電粒子の検出条件,荷電粒子検出に基づく画像処理条件,試料条件、或いはこれらの組み合わせであることを特徴とするパターン形状選択方法。
【請求項4】
請求項1において、
前記複数の波形情報をライブラリに参照するときに、当該ライブラリに記憶された複数の波形情報との総合的な一致度、或いは不一致度に基づいて、前記パターン形状情報を選択することを特徴とするパターン形状選択方法。
【請求項5】
請求項1において、
前記ライブラリに記憶されたパターン形状情報は、前記パターン形状を数値データでモデル化したものであることを特徴とするパターン形状選択方法。
【請求項6】
請求項5において、
前記ライブラリに記憶された波形情報は、前記モデル化されたパターン形状の数値データと、複数の波形取得条件を用いた電子顕微鏡シミュレーションに基づいて得られるものであることを特徴とするパターン形状選択方法。
【請求項7】
請求項6において、
前記モデル化された数値データを、前記パターンの計測範囲に対応した複数の異なる入力パラメタとして設定することを特徴とするパターン形状選択方法。
【請求項8】
請求項7において、
前記複数の波形情報をライブラリに参照するときに、前記波形形状の総合的な一致度、或いは不一致度が最小となる前記入力パラメタを求めることを特徴とするパターン形状選択方法。
【請求項9】
請求項8において、
前記複数の波形情報をライブラリに参照するときに、前記入力パラメタの整合性を判定することを特徴とするパターン形状選択方法。
【請求項10】
請求項8において、
前記入力パラメタに対するシミュレーション波形の変化の感度を評価し、前記波形取得条件のうち最も感度の高い条件を選定することを特徴とするパターン形状選択方法。
【請求項11】
試料から放出された荷電粒子に基づいて形成される波形情報と、パターン形状を関連付けて記憶するライブラリを参照して、パターン形状を選択するパターン測定装置において、
試料に対する荷電粒子線の照射に基づいて、複数の波形取得条件による複数の波形情報を取得し、当該複数の波形情報を、複数のパターン形状毎に、異なる波形取得条件で取得された波形情報が記憶されたライブラリに参照することによって、前記ライブラリに記憶されたパターン形状情報を選択する処理部を備えたことを特徴とするパターン測定装置。
【請求項12】
請求項11において、
前記ライブラリは、前記パターンの形状情報と、複数の波形取得条件による複数の波形が関連付けて記憶されていることを特徴とするパターン測定装置。
【請求項13】
請求項12において、
前記複数の波形取得条件は、荷電粒子線の照射条件,荷電粒子の検出条件,荷電粒子検出に基づく画像処理条件,試料条件、或いはこれらの組み合わせであることを特徴とするパターン測定装置。
【請求項14】
請求項11において、
前記複数の波形情報をライブラリに参照するときに、当該ライブラリに記憶された複数の波形情報との総合的な一致度、或いは不一致度に基づいて、前記パターン形状情報を選択することを特徴とするパターン測定装置。
【請求項1】
試料に対する荷電粒子線の走査に基づいて得られる波形情報を、複数のパターンの形状単位で波形情報が登録されたライブラリに参照して、パターンを選択するパターン形状選択方法であって、
試料に対する荷電粒子線の照射に基づいて、複数の波形取得条件による複数の波形情報を取得し、当該複数の波形情報を、複数のパターン形状毎に、異なる波形取得条件で取得された波形情報が記憶されたライブラリに参照することによって、前記ライブラリに記憶されたパターン形状情報を選択することを特徴とするパターン形状選択方法。
【請求項2】
請求項1において、
前記ライブラリは、前記パターンの形状情報と、複数の波形取得条件による複数の波形が関連付けて記憶されていることを特徴とするパターン形状選択方法。
【請求項3】
請求項2において、
前記複数の波形取得条件は、荷電粒子線の照射条件,荷電粒子の検出条件,荷電粒子検出に基づく画像処理条件,試料条件、或いはこれらの組み合わせであることを特徴とするパターン形状選択方法。
【請求項4】
請求項1において、
前記複数の波形情報をライブラリに参照するときに、当該ライブラリに記憶された複数の波形情報との総合的な一致度、或いは不一致度に基づいて、前記パターン形状情報を選択することを特徴とするパターン形状選択方法。
【請求項5】
請求項1において、
前記ライブラリに記憶されたパターン形状情報は、前記パターン形状を数値データでモデル化したものであることを特徴とするパターン形状選択方法。
【請求項6】
請求項5において、
前記ライブラリに記憶された波形情報は、前記モデル化されたパターン形状の数値データと、複数の波形取得条件を用いた電子顕微鏡シミュレーションに基づいて得られるものであることを特徴とするパターン形状選択方法。
【請求項7】
請求項6において、
前記モデル化された数値データを、前記パターンの計測範囲に対応した複数の異なる入力パラメタとして設定することを特徴とするパターン形状選択方法。
【請求項8】
請求項7において、
前記複数の波形情報をライブラリに参照するときに、前記波形形状の総合的な一致度、或いは不一致度が最小となる前記入力パラメタを求めることを特徴とするパターン形状選択方法。
【請求項9】
請求項8において、
前記複数の波形情報をライブラリに参照するときに、前記入力パラメタの整合性を判定することを特徴とするパターン形状選択方法。
【請求項10】
請求項8において、
前記入力パラメタに対するシミュレーション波形の変化の感度を評価し、前記波形取得条件のうち最も感度の高い条件を選定することを特徴とするパターン形状選択方法。
【請求項11】
試料から放出された荷電粒子に基づいて形成される波形情報と、パターン形状を関連付けて記憶するライブラリを参照して、パターン形状を選択するパターン測定装置において、
試料に対する荷電粒子線の照射に基づいて、複数の波形取得条件による複数の波形情報を取得し、当該複数の波形情報を、複数のパターン形状毎に、異なる波形取得条件で取得された波形情報が記憶されたライブラリに参照することによって、前記ライブラリに記憶されたパターン形状情報を選択する処理部を備えたことを特徴とするパターン測定装置。
【請求項12】
請求項11において、
前記ライブラリは、前記パターンの形状情報と、複数の波形取得条件による複数の波形が関連付けて記憶されていることを特徴とするパターン測定装置。
【請求項13】
請求項12において、
前記複数の波形取得条件は、荷電粒子線の照射条件,荷電粒子の検出条件,荷電粒子検出に基づく画像処理条件,試料条件、或いはこれらの組み合わせであることを特徴とするパターン測定装置。
【請求項14】
請求項11において、
前記複数の波形情報をライブラリに参照するときに、当該ライブラリに記憶された複数の波形情報との総合的な一致度、或いは不一致度に基づいて、前記パターン形状情報を選択することを特徴とするパターン測定装置。
【図1】


【図2】
【図3】
【図4】
【図5】
【図6】
【図7】
【図8】
【図9】
【図10】
【図2】
【図3】
【図4】
【図5】
【図6】
【図7】
【図8】
【図9】
【図10】
【公開番号】特開2011−33423(P2011−33423A)
【公開日】平成23年2月17日(2011.2.17)
【国際特許分類】
【出願番号】特願2009−178577(P2009−178577)
【出願日】平成21年7月31日(2009.7.31)
【出願人】(501387839)株式会社日立ハイテクノロジーズ (4,325)
【Fターム(参考)】
【公開日】平成23年2月17日(2011.2.17)
【国際特許分類】
【出願日】平成21年7月31日(2009.7.31)
【出願人】(501387839)株式会社日立ハイテクノロジーズ (4,325)
【Fターム(参考)】
[ Back to top ]