
パターン検査方法、パターン検査装置およびプログラム
【課題】再計測に際して電子線照射による影響を最小限にし、計測対象パターンの形状を正確に計測する。
【解決手段】既に電子線を照射した領域外へ計測位置を自動的に移動させる。
【解決手段】既に電子線を照射した領域外へ計測位置を自動的に移動させる。
【発明の詳細な説明】
【技術分野】
【0001】
本発明は、パターン検査方法、パターン検査装置およびプログラムに関し、例えば荷電粒子線を用いた半導体パターンの計測・検査を対象とする。
【背景技術】
【0002】
走査型電子顕微鏡を用いて半導体パターンを自動計測する場合、計測の途中で、例えば自動焦点処理やパターン認識処理に失敗し、結果として計測値が異常値となることがある。このような場合、計測値がある範囲を超えたときに計測エラーと判断して自動的に再計測するようにすれば、オペレータの手を煩わせることなく自動計測を継続することが可能である。
【0003】
しかしながら、計測エラーが発生した測定点をそのまま再計測してしまうと電子線を2度照射することになるので、ArFエキシマレーザ露光装置用レジストやlow−k材質などの電子線照射によるダメージ(保護基の脱離などによる体積収縮)が大きい材質のパターンを計測する場合には顕著に問題となる。また、電子線照射によるダメージが無い材質の場合でもチャージアップによるコントラスト変動や電子線照射によるコンタミネーションによりパターンの形状が変動するので、パターンを正確に計測することができなくなる。
【特許文献1】特開平05−264253号公報
【特許文献2】特開平09−027525号公報
【発明の開示】
【発明が解決しようとする課題】
【0004】
本発明の目的は、再計測に際して荷電粒子線の照射によるパターン形状の変動を最小限にし、パターンを正確に検査することにある。
【課題を解決するための手段】
【0005】
本発明は、以下の手段により上記課題の解決を図る。
【0006】
即ち、本発明によれば、
荷電粒子線を生成して被検査パターンが形成された試料に照射する手順と、
前記荷電粒子線の照射により前記試料から放出される二次荷電粒子、反射荷電粒子および後方散乱荷電粒子の少なくともいずれかを検出し、前記試料の表面の状態を表す第1の二次元像を取得する手順と、
予め用意された参照画像を用いて前記第1の二次元像内で前記参照画像に類似するパターンを検出し、その位置情報を前記被検査パターンの位置情報として記憶する手順と、
検出されたパターンの位置から所定の方向へ所定の距離だけ計測位置を移動して前記荷電粒子線の焦点合わせを行う手順と、
前記所定の方向とは逆の方向へ前記所定の距離だけ計測位置を移動して前記荷電粒子線を照射し、前記第1の二次元像よりも高倍率の第2の二次元像を取得して前記検出されたパターンを計測する初回計測手順と、
前記被検査パターンについての再計測を行う場合に、前記試料上で既に荷電粒子線を照射した領域以外の領域へ計測位置を自動的に移動させる再計測手順と、
を備えるパターン検査方法が提供される。
【0007】
また、本発明によれば、
荷電粒子線を生成して試料上の被検査パターンに照射する荷電粒子線照射手段と、
前記荷電粒子線の焦点位置を調整する焦点位置調整手段と、
前記試料上の所望の位置に前記荷電粒子線が照射するように前記試料と前記荷電粒子線との相対的位置関係を調整する照射位置制御手段と、
前記荷電粒子線の照射により前記試料から放出される二次荷電粒子、反射荷電粒子および後方散乱荷電粒子の少なくともいずれかを検出し、前記試料の表面の状態を表す第1の二次元像のデータを出力する検出手段と、
予め用意された参照画像を用いて前記第1の二次元像内で前記参照画像に類似するパターンを検出し、その位置情報を前記被検査パターンの位置情報として出力するパターン認識手段と、
検出されたパターンの位置から所定の方向へ所定の距離だけ計測位置を移動して前記荷電粒子線の焦点合わせを行い、前記所定の方向とは逆の方向へ前記所定の距離だけ計測位置を移動して前記荷電粒子線を照射させ、前記第1の二次元像よりも高倍率の第2の二次元像を取得して前記検出されたパターンを計測し、前記被検査パターンについての再計測を行う場合に、前記試料上で既に荷電粒子線を照射した領域以外の領域へ計測位置を自動的に移動させる制御手段と、
を備えるパターン検査装置が提供される。
【発明の効果】
【0008】
本発明によれば、再計測に際して荷電粒子線照射によるパターン形状の変動を最小限にし、パターンを正確に検査することができる。
【発明を実施するための最良の形態】
【0009】
以下、本発明の実施の形態のいくつかについて図面を参照しながら説明する。なお、以下では、荷電粒子線として電子ビームを用いる場合について説明するが、本発明はこれに限ることなく、例えばイオンビームを用いる場合にも適用可能である。
【0010】
(1)パターン検査装置
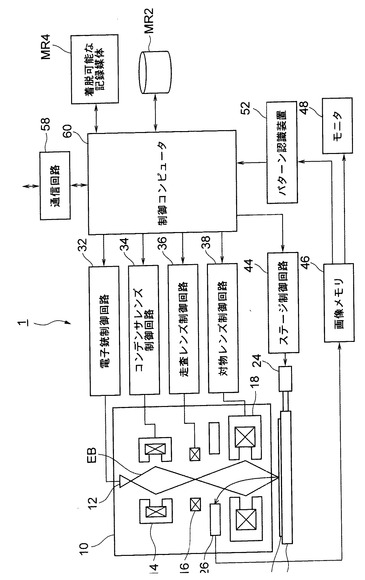
図1は、本発明に係るパターン検査装置の実施の一形態の概略構成を示すブロック図である。同図に示すパターン検査装置1は、集束された電子ビームEBを走査することにより半導体パターンの寸法を測定する走査型電子顕微鏡である。
【0011】
パターン検査装置1は、電子ビーム鏡筒10と、各種電子光学系制御回路32,34,36,38と、被検査パターンが形成された試料であるウェーハWを支持するX−Yステージ22と、モータ24と、ステージ制御回路44と、検出器26と、画像メモリ46と、パターン認識装置52と、モニタ48と、制御コンピュータ60と、通信回路58と、予め装置に内蔵された、または着脱可能な各種記録媒体MR2,MR4とを備える。
【0012】
制御コンピュータ60は、記録媒体MR2,MR4の他、各種電子光学系制御回路32,34,36,38、ステージ制御回路44、パターン認識装置42に接続され、これらの回路等を介して装置全体を制御するとともに、記録媒体MR2に格納されたレシピファイルに基づいて後述するパターン検査を実行する。
【0013】
本実施形態において、記録媒体MR2,MR4は、後述するパターン検査方法の一連の手順を記述したレシピファイルと測定条件ファイルとをそれぞれ格納する。これらのファイルは、予めこれらの記録媒体に格納される他、専用回線または公衆回線に接続された通信回路58と制御コンピュータ60とを介して外部の記録媒体その他の装置から測定の都度取り込んでこれらの記録媒体に格納することもできる。
【0014】
記録媒体MR4には、被検査パターンに関する設計データと、パターン検出用の、後述する参照画像とが格納される。
【0015】
電子ビーム鏡筒10は、電子銃12と、コンデンサレンズ14と、走査レンズ16と、対物レンズ18とを含む。電子銃12は、電子銃制御回路32を介して制御コンピュータ60に接続され、電子銃制御回路32から制御信号を受けて電子ビームEBを生成し、ウェーハWに照射する。コンデンサレンズ14は、コンデンサレンズ制御回路34を介して制御コンピュータ60に接続され、コンデンサレンズ制御回路34からの制御信号を受けて磁界または電界を励磁し、適切なビーム径となるように電子ビームEBを集束させる。対物レンズ18は、対物レンズ制御回路38を介して制御コンピュータ60に接続され、対物レンズ制御回路38からの制御信号により磁界または電界を励磁し、電子ビームEBがウェーハW上にジャストフォーカスで照射するように電子ビームを再度集束させる。本実施形態において、対物レンズ18および対物レンズ制御回路38は、例えば焦点位置調整手段に対応する。走査レンズ16は、走査レンズ制御回路36を介して制御コンピュータ60に接続され、走査レンズ制御回路36から制御信号を受けて、電子ビームEBを偏向するための電界または磁界を励起し、これにより、ウェーハWを電子ビームEBで二次元的に走査する。モータ24は、X−Yステージ22に接続されるとともに、ステージ制御回路44を介して制御コンピュータ60に接続され、ステージ制御回路44から制御信号を受けて動作し、X−Yステージ22をX−Y平面内で移動させる。本実施形態において、走査レンズ16および走査レンズ制御回路36並びにX−Yステージ22、モータ24およびステージ制御回路44は、例えば照射位置制御手段に対応する。
【0016】
検出器26は、電子ビームEBの照射によってウェーハWから発生する二次電子、反射電子および後方散乱電子の少なくともいずれかを検出する。検出器26は画像メモリ46に接続される。検出器26の出力信号は、ウェーハWの表面の状態を表わす二次元像を構成し、この二次元像のデータが画像メモリ46に送られて格納される。
【0017】
画像メモリ46は、パターン認識装置52およびモニタ48に接続される。検出器26からの二次元像のデータは、画像メモリ46からモニタ48に出力され、二次元像が表示されてウェーハ表面の観察に供されるとともに、パターン認識装置52にも出力される。
【0018】
パターン認識装置52は、記録媒体MR4から制御コンピュータ60により取り出されて送られた参照画像を用いて、画像メモリ46から供給された二次元像との間でパターン認識を行い、パターン認識ができた場合に、検出されたパターンの位置情報を制御コンピュータ60へ供給する。
【0019】
図1に示すパターン検査装置1の動作を、本発明に係るパターン検査方法の実施の形態として以下に説明する。
【0020】
(2)パターン検査方法
(i)第1の実施の形態
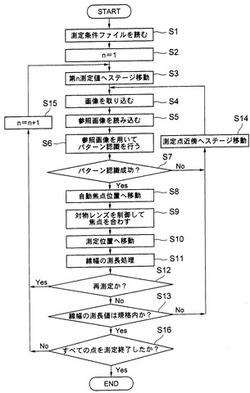
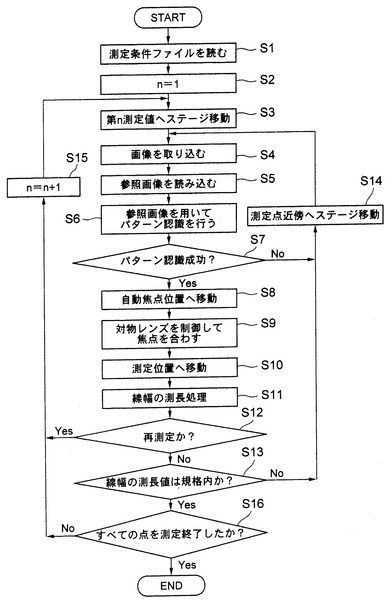
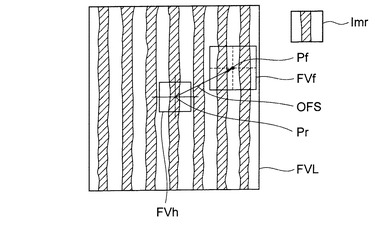
図2は、本発明に係るパターン検査方法の第1の実施の形態の概略手順を示すフローチャートであり、図3は、自動測長の説明図である。本実施形態は図3に示すラインアンドスペースパターンのように単純な繰り返しパターンの検査に適した方法を提供する。
【0021】
まず、記録媒体MR2,MR4から測定条件ファイルを読み出し、測定点1〜n(nは自然数)の各位置座標、パターン認識に用いる合否判定用の閾値、参照画像、オフセット等の測定条件を読み込む(ステップS1)。
【0022】
次に、制御コンピュータ60に内蔵されたカウンタ(図示せず)のカウントnを1にセットし(ステップS2)、読み込んだ第1測定点の位置情報をもとにX−Yステージ22を駆動し、第1測定点が観察視野の中心に位置するようウェーハWを移動させる(ステップS3)。その位置で電子線EBを照射し、低倍率、例えば15kX、観察視野10μmの二次元像を取得して画像メモリ46に取り込む(ステップS4)。図3に示す二次元像FVLはこのようにして得られた二次元像の一例である。この二次元像は、本実施形態において、例えば第1の二次元像に対応する。
【0023】
図1に示すパターン検査装置1においてステージ停止精度は±2μmであるため、上記ステップS3によるX−Yステージ22の操作だけでは、測定点および自動焦点合わせを行う位置を精密に決めることはできない。そこで、測定点については、参照画像を用いた位置検索を実行する。
【0024】
より具体的には、例えば図3に示す参照画像Imrを読み込み(ステップS5)、先に画像メモリ46に取り込んだ画像FVL中で参照画像Imrと一致する箇所Prをパターン認識装置52により検索する(ステップS6)。観察視野中に参照画像Imrと一致する箇所Prがある場合、より具体的には、パターンの一致度が閾値を越えた場合には、パターン認識に成功したことになり(ステップS7)、その場合は、続いて走査レンズ16による電子線EBの走査原点を変更し、パターン認識ができた箇所から所定の方向に所定の距離だけ(図3のオフセットOFS)離隔した、観察視野FVh外の位置Pfにある自動焦点用のパターンへ電子線EBを移動し(ステップS8)、対物レンズ18の励磁電流を制御して自動焦点用の視野FVf内で自動焦点合わせを行う(ステップS9)。このオフセットOFSの方向及び量(距離)は、測定条件の一つとして予め設定される。このように、測定と焦点合わせとを別々の位置で行う理由は、電子線EBの照射によるダメージを一箇所に集中させないためである。この一方、パターン認識に失敗した場合には、X−Yステージ22の駆動により現在の測定点の近傍の位置へウェーハWを移動させ(ステップS14)、後述する再測定のシーケンスへ移行する。
【0025】
自動焦点合わせを終えると、その位置から上述した所定の方向とは逆の方向へ上述した所定の距離と同一の距離だけ離隔した測定用の位置Prへ電子線EBを移動し(ステップS10)、高倍率の二次元像を取得してパターンの線幅の測長を行う(ステップS11)。このときの二次元像は、本実施形態において、例えば第2の二次元像に対応する。上記ステップS8とS10の手順における電子線EBの移動は、走査レンズ制御回路36により電気的に制御されるので、約10nmの精度で移動可能である。
【0026】
次に、測定が正しく実行されたかどうかを判断するために、線幅の測長値が規格内にあるかどうかを判定する(ステップS13)。測長値が規格内にあれば、測定すべき測定点が残っているかどうかを判定し(ステップS16)、未だ測定すべき点が残っている場合には、カウンタ(図示せず)のカウントを一つだけ進め(ステップS15)、ステップS3に戻って上述した操作を反復する。
【0027】
この一方、測長値が規格外である場合には、パターン認識の合否判定(ステップS7)、電子線EBの移動処理(ステップS8,S10)、自動焦点合わせ処理(ステップS9)および線幅測定処理(ステップS11)の少なくともいずれかの手順においてエラーが発生したことが考えられるため、測定点を移動させる処理(ステップS14)を経て再測定シーケンスへ移行する。
【0028】
再測定のシーケンスについて図4をも参照しながら説明する。再測定を行う場合には、電子線EBが重複して照射されることを回避しなければならない。従って、図4に示すように、最初の測定で電子線EBを照射した範囲、即ち、低倍率で二次元像FVLを取得したときの視野外で再測定用の位置MPrを決定する。再測定の結果、測長値が規格外である場合は、パターン認識の合否判定(ステップS7)、電子線EBの移動処理(ステップS8,S10)、自動焦点合わせ処理(ステップS9)および線幅測定処理(ステップS11)のいずれのエラーでもなく、被検査パターンの寸法そのものが規格外であると考えられる。従って、再測定(ステップS12)の場合は、測長値が規格内にあるかどうかの判定を行うことなく、カウンタ(図示せず)のカウントを進めるステップS15の手順へ進む。なお、本実施形態では再測定は一回までとしたが、測定時間に余裕があれば、何回行ってもよい。
【0029】
このように、本実施形態によれば、エラー等により再計測が必要になった場合でも、既に荷電粒子線を照射した領域外へ計測位置を自動的に移動させるので、荷電粒子線によるパターン形状の変動を最小限にし、測定対象パターンを正確に計測することが可能になる。
【0030】
(ii)第2の実施の形態
本実施形態は、ロジック回路のようなランダムパターンの特定箇所を測定する場合に適した検査方法を提供するものである。被検査パターンがランダムパターンである場合、再測定点は1回目の測定で電子線を照射した範囲以外ならどこでもよいわけでは決してなく、第1回目の測定をしたパターンと同一の形状を有するパターンでなければならない。そこで、本実施形態では被検査パターンの設計データに基づいて再測定をする位置を予め複数個決定しておき、再測定点の候補として測定レシピに組み込んでおく。これにより、被検査パターンが複雑なパターンであっても、荷電粒子線によるパターン形状の変動を最小限にして正確な計測を実現することが可能になる。再測定の際にはこれらの候補から再測定点が選択される。これらの候補はパターン認識の手法を用いて自動的に決定してもよいし、設計データに基づいてオペレータが決定してもよい。
【0031】
(iii)第3の実施の形態
上述した第2の実施の形態では再測定点の位置を設計データに基づいて予め決定していたが、これに限ることなく、上述したパターン認識の手法を用いて、再測定が必要になる度毎に第1回目の測定点の周辺を再測定点として探索してもよい。
【0032】
(4)プログラム
上述したパターン検査方法の一連の手順は、コンピュータに実行させるプログラムとしてフレキシブルディスクやCD−ROM等の記録媒体に、例えば上述したレシピファイルの形態で収納し、コンピュータに読込ませて実行させても良い。これにより、本発明に係るパターン検査方法を走査型電子顕微鏡に接続される制御コンピュータを用いて実現することができる。記録媒体は、磁気ディスクや光ディスク等の携帯可能なものに限定されず、ハードディスク装置やメモリなどの固定型の記録媒体でも良い。また、上述したパターン検査方法の一連の手順を組込んだプログラムをインターネット等の通信回線(無線通信を含む)を介して頒布しても良い。さらに、上述したパターン検査方法の一連の手順を組込んだプログラムを暗号化したり、変調をかけたり、圧縮した状態で、インターネット等の有線回線や無線回線を介して、または記録媒体に収納して頒布しても良い。
【0033】
(5)半導体装置の製造方法
上述した実施の形態のパターン検査方法を半導体装置の製造工程に用いれば、既に荷電粒子線を照射した領域外への計測位置の移動がオペレータの熟練度に依存することなく自動的に実行され、かつ、荷電粒子線の再度の照射によるパターン形状の変動の問題が解消されるので、被検査パターンを迅速かつ正確に計測することができる。これにより、例えば高い精度および高速での寸法測定が可能になるので、高いスループットおよび歩留まりで半導体装置を製造することができる。
【図面の簡単な説明】
【0034】
【図1】本発明に係るパターン検査装置の実施の一形態の概略構成を示すブロック図である。
【図2】本発明に係るパターン検査方法の実施の一形態の概略手順を示すフローチャートである。
【図3】自動測長の説明図である。
【図4】測定点の近傍への視野移動を説明する図である。
【符号の説明】
【0035】
1 パターン検査装置
12 電子銃
14 コンデンサレンズ
16 走査レンズ
18 対物レンズ
22 ステージ
24 モータ
26 検出器
32 電子銃制御回路
34 コンデンサレンズ制御回路
36 走査レンズ制御回路
38 対物レンズ制御回路
44 ステージ制御回路
46 画像メモリ
48 モニタ
52 パターン認識装置
58 通信回路
60 制御コンピュータ
FVf 自動焦点視野
FVh 観察視野
FVL 低倍率画像
Imr 参照画像
OFS オフセット量
Pf 自動焦点位置
Pr パターン認識位置
MR2 記録媒体
MR4 着脱可能な記録媒体
W ウェーハ
【技術分野】
【0001】
本発明は、パターン検査方法、パターン検査装置およびプログラムに関し、例えば荷電粒子線を用いた半導体パターンの計測・検査を対象とする。
【背景技術】
【0002】
走査型電子顕微鏡を用いて半導体パターンを自動計測する場合、計測の途中で、例えば自動焦点処理やパターン認識処理に失敗し、結果として計測値が異常値となることがある。このような場合、計測値がある範囲を超えたときに計測エラーと判断して自動的に再計測するようにすれば、オペレータの手を煩わせることなく自動計測を継続することが可能である。
【0003】
しかしながら、計測エラーが発生した測定点をそのまま再計測してしまうと電子線を2度照射することになるので、ArFエキシマレーザ露光装置用レジストやlow−k材質などの電子線照射によるダメージ(保護基の脱離などによる体積収縮)が大きい材質のパターンを計測する場合には顕著に問題となる。また、電子線照射によるダメージが無い材質の場合でもチャージアップによるコントラスト変動や電子線照射によるコンタミネーションによりパターンの形状が変動するので、パターンを正確に計測することができなくなる。
【特許文献1】特開平05−264253号公報
【特許文献2】特開平09−027525号公報
【発明の開示】
【発明が解決しようとする課題】
【0004】
本発明の目的は、再計測に際して荷電粒子線の照射によるパターン形状の変動を最小限にし、パターンを正確に検査することにある。
【課題を解決するための手段】
【0005】
本発明は、以下の手段により上記課題の解決を図る。
【0006】
即ち、本発明によれば、
荷電粒子線を生成して被検査パターンが形成された試料に照射する手順と、
前記荷電粒子線の照射により前記試料から放出される二次荷電粒子、反射荷電粒子および後方散乱荷電粒子の少なくともいずれかを検出し、前記試料の表面の状態を表す第1の二次元像を取得する手順と、
予め用意された参照画像を用いて前記第1の二次元像内で前記参照画像に類似するパターンを検出し、その位置情報を前記被検査パターンの位置情報として記憶する手順と、
検出されたパターンの位置から所定の方向へ所定の距離だけ計測位置を移動して前記荷電粒子線の焦点合わせを行う手順と、
前記所定の方向とは逆の方向へ前記所定の距離だけ計測位置を移動して前記荷電粒子線を照射し、前記第1の二次元像よりも高倍率の第2の二次元像を取得して前記検出されたパターンを計測する初回計測手順と、
前記被検査パターンについての再計測を行う場合に、前記試料上で既に荷電粒子線を照射した領域以外の領域へ計測位置を自動的に移動させる再計測手順と、
を備えるパターン検査方法が提供される。
【0007】
また、本発明によれば、
荷電粒子線を生成して試料上の被検査パターンに照射する荷電粒子線照射手段と、
前記荷電粒子線の焦点位置を調整する焦点位置調整手段と、
前記試料上の所望の位置に前記荷電粒子線が照射するように前記試料と前記荷電粒子線との相対的位置関係を調整する照射位置制御手段と、
前記荷電粒子線の照射により前記試料から放出される二次荷電粒子、反射荷電粒子および後方散乱荷電粒子の少なくともいずれかを検出し、前記試料の表面の状態を表す第1の二次元像のデータを出力する検出手段と、
予め用意された参照画像を用いて前記第1の二次元像内で前記参照画像に類似するパターンを検出し、その位置情報を前記被検査パターンの位置情報として出力するパターン認識手段と、
検出されたパターンの位置から所定の方向へ所定の距離だけ計測位置を移動して前記荷電粒子線の焦点合わせを行い、前記所定の方向とは逆の方向へ前記所定の距離だけ計測位置を移動して前記荷電粒子線を照射させ、前記第1の二次元像よりも高倍率の第2の二次元像を取得して前記検出されたパターンを計測し、前記被検査パターンについての再計測を行う場合に、前記試料上で既に荷電粒子線を照射した領域以外の領域へ計測位置を自動的に移動させる制御手段と、
を備えるパターン検査装置が提供される。
【発明の効果】
【0008】
本発明によれば、再計測に際して荷電粒子線照射によるパターン形状の変動を最小限にし、パターンを正確に検査することができる。
【発明を実施するための最良の形態】
【0009】
以下、本発明の実施の形態のいくつかについて図面を参照しながら説明する。なお、以下では、荷電粒子線として電子ビームを用いる場合について説明するが、本発明はこれに限ることなく、例えばイオンビームを用いる場合にも適用可能である。
【0010】
(1)パターン検査装置
図1は、本発明に係るパターン検査装置の実施の一形態の概略構成を示すブロック図である。同図に示すパターン検査装置1は、集束された電子ビームEBを走査することにより半導体パターンの寸法を測定する走査型電子顕微鏡である。
【0011】
パターン検査装置1は、電子ビーム鏡筒10と、各種電子光学系制御回路32,34,36,38と、被検査パターンが形成された試料であるウェーハWを支持するX−Yステージ22と、モータ24と、ステージ制御回路44と、検出器26と、画像メモリ46と、パターン認識装置52と、モニタ48と、制御コンピュータ60と、通信回路58と、予め装置に内蔵された、または着脱可能な各種記録媒体MR2,MR4とを備える。
【0012】
制御コンピュータ60は、記録媒体MR2,MR4の他、各種電子光学系制御回路32,34,36,38、ステージ制御回路44、パターン認識装置42に接続され、これらの回路等を介して装置全体を制御するとともに、記録媒体MR2に格納されたレシピファイルに基づいて後述するパターン検査を実行する。
【0013】
本実施形態において、記録媒体MR2,MR4は、後述するパターン検査方法の一連の手順を記述したレシピファイルと測定条件ファイルとをそれぞれ格納する。これらのファイルは、予めこれらの記録媒体に格納される他、専用回線または公衆回線に接続された通信回路58と制御コンピュータ60とを介して外部の記録媒体その他の装置から測定の都度取り込んでこれらの記録媒体に格納することもできる。
【0014】
記録媒体MR4には、被検査パターンに関する設計データと、パターン検出用の、後述する参照画像とが格納される。
【0015】
電子ビーム鏡筒10は、電子銃12と、コンデンサレンズ14と、走査レンズ16と、対物レンズ18とを含む。電子銃12は、電子銃制御回路32を介して制御コンピュータ60に接続され、電子銃制御回路32から制御信号を受けて電子ビームEBを生成し、ウェーハWに照射する。コンデンサレンズ14は、コンデンサレンズ制御回路34を介して制御コンピュータ60に接続され、コンデンサレンズ制御回路34からの制御信号を受けて磁界または電界を励磁し、適切なビーム径となるように電子ビームEBを集束させる。対物レンズ18は、対物レンズ制御回路38を介して制御コンピュータ60に接続され、対物レンズ制御回路38からの制御信号により磁界または電界を励磁し、電子ビームEBがウェーハW上にジャストフォーカスで照射するように電子ビームを再度集束させる。本実施形態において、対物レンズ18および対物レンズ制御回路38は、例えば焦点位置調整手段に対応する。走査レンズ16は、走査レンズ制御回路36を介して制御コンピュータ60に接続され、走査レンズ制御回路36から制御信号を受けて、電子ビームEBを偏向するための電界または磁界を励起し、これにより、ウェーハWを電子ビームEBで二次元的に走査する。モータ24は、X−Yステージ22に接続されるとともに、ステージ制御回路44を介して制御コンピュータ60に接続され、ステージ制御回路44から制御信号を受けて動作し、X−Yステージ22をX−Y平面内で移動させる。本実施形態において、走査レンズ16および走査レンズ制御回路36並びにX−Yステージ22、モータ24およびステージ制御回路44は、例えば照射位置制御手段に対応する。
【0016】
検出器26は、電子ビームEBの照射によってウェーハWから発生する二次電子、反射電子および後方散乱電子の少なくともいずれかを検出する。検出器26は画像メモリ46に接続される。検出器26の出力信号は、ウェーハWの表面の状態を表わす二次元像を構成し、この二次元像のデータが画像メモリ46に送られて格納される。
【0017】
画像メモリ46は、パターン認識装置52およびモニタ48に接続される。検出器26からの二次元像のデータは、画像メモリ46からモニタ48に出力され、二次元像が表示されてウェーハ表面の観察に供されるとともに、パターン認識装置52にも出力される。
【0018】
パターン認識装置52は、記録媒体MR4から制御コンピュータ60により取り出されて送られた参照画像を用いて、画像メモリ46から供給された二次元像との間でパターン認識を行い、パターン認識ができた場合に、検出されたパターンの位置情報を制御コンピュータ60へ供給する。
【0019】
図1に示すパターン検査装置1の動作を、本発明に係るパターン検査方法の実施の形態として以下に説明する。
【0020】
(2)パターン検査方法
(i)第1の実施の形態
図2は、本発明に係るパターン検査方法の第1の実施の形態の概略手順を示すフローチャートであり、図3は、自動測長の説明図である。本実施形態は図3に示すラインアンドスペースパターンのように単純な繰り返しパターンの検査に適した方法を提供する。
【0021】
まず、記録媒体MR2,MR4から測定条件ファイルを読み出し、測定点1〜n(nは自然数)の各位置座標、パターン認識に用いる合否判定用の閾値、参照画像、オフセット等の測定条件を読み込む(ステップS1)。
【0022】
次に、制御コンピュータ60に内蔵されたカウンタ(図示せず)のカウントnを1にセットし(ステップS2)、読み込んだ第1測定点の位置情報をもとにX−Yステージ22を駆動し、第1測定点が観察視野の中心に位置するようウェーハWを移動させる(ステップS3)。その位置で電子線EBを照射し、低倍率、例えば15kX、観察視野10μmの二次元像を取得して画像メモリ46に取り込む(ステップS4)。図3に示す二次元像FVLはこのようにして得られた二次元像の一例である。この二次元像は、本実施形態において、例えば第1の二次元像に対応する。
【0023】
図1に示すパターン検査装置1においてステージ停止精度は±2μmであるため、上記ステップS3によるX−Yステージ22の操作だけでは、測定点および自動焦点合わせを行う位置を精密に決めることはできない。そこで、測定点については、参照画像を用いた位置検索を実行する。
【0024】
より具体的には、例えば図3に示す参照画像Imrを読み込み(ステップS5)、先に画像メモリ46に取り込んだ画像FVL中で参照画像Imrと一致する箇所Prをパターン認識装置52により検索する(ステップS6)。観察視野中に参照画像Imrと一致する箇所Prがある場合、より具体的には、パターンの一致度が閾値を越えた場合には、パターン認識に成功したことになり(ステップS7)、その場合は、続いて走査レンズ16による電子線EBの走査原点を変更し、パターン認識ができた箇所から所定の方向に所定の距離だけ(図3のオフセットOFS)離隔した、観察視野FVh外の位置Pfにある自動焦点用のパターンへ電子線EBを移動し(ステップS8)、対物レンズ18の励磁電流を制御して自動焦点用の視野FVf内で自動焦点合わせを行う(ステップS9)。このオフセットOFSの方向及び量(距離)は、測定条件の一つとして予め設定される。このように、測定と焦点合わせとを別々の位置で行う理由は、電子線EBの照射によるダメージを一箇所に集中させないためである。この一方、パターン認識に失敗した場合には、X−Yステージ22の駆動により現在の測定点の近傍の位置へウェーハWを移動させ(ステップS14)、後述する再測定のシーケンスへ移行する。
【0025】
自動焦点合わせを終えると、その位置から上述した所定の方向とは逆の方向へ上述した所定の距離と同一の距離だけ離隔した測定用の位置Prへ電子線EBを移動し(ステップS10)、高倍率の二次元像を取得してパターンの線幅の測長を行う(ステップS11)。このときの二次元像は、本実施形態において、例えば第2の二次元像に対応する。上記ステップS8とS10の手順における電子線EBの移動は、走査レンズ制御回路36により電気的に制御されるので、約10nmの精度で移動可能である。
【0026】
次に、測定が正しく実行されたかどうかを判断するために、線幅の測長値が規格内にあるかどうかを判定する(ステップS13)。測長値が規格内にあれば、測定すべき測定点が残っているかどうかを判定し(ステップS16)、未だ測定すべき点が残っている場合には、カウンタ(図示せず)のカウントを一つだけ進め(ステップS15)、ステップS3に戻って上述した操作を反復する。
【0027】
この一方、測長値が規格外である場合には、パターン認識の合否判定(ステップS7)、電子線EBの移動処理(ステップS8,S10)、自動焦点合わせ処理(ステップS9)および線幅測定処理(ステップS11)の少なくともいずれかの手順においてエラーが発生したことが考えられるため、測定点を移動させる処理(ステップS14)を経て再測定シーケンスへ移行する。
【0028】
再測定のシーケンスについて図4をも参照しながら説明する。再測定を行う場合には、電子線EBが重複して照射されることを回避しなければならない。従って、図4に示すように、最初の測定で電子線EBを照射した範囲、即ち、低倍率で二次元像FVLを取得したときの視野外で再測定用の位置MPrを決定する。再測定の結果、測長値が規格外である場合は、パターン認識の合否判定(ステップS7)、電子線EBの移動処理(ステップS8,S10)、自動焦点合わせ処理(ステップS9)および線幅測定処理(ステップS11)のいずれのエラーでもなく、被検査パターンの寸法そのものが規格外であると考えられる。従って、再測定(ステップS12)の場合は、測長値が規格内にあるかどうかの判定を行うことなく、カウンタ(図示せず)のカウントを進めるステップS15の手順へ進む。なお、本実施形態では再測定は一回までとしたが、測定時間に余裕があれば、何回行ってもよい。
【0029】
このように、本実施形態によれば、エラー等により再計測が必要になった場合でも、既に荷電粒子線を照射した領域外へ計測位置を自動的に移動させるので、荷電粒子線によるパターン形状の変動を最小限にし、測定対象パターンを正確に計測することが可能になる。
【0030】
(ii)第2の実施の形態
本実施形態は、ロジック回路のようなランダムパターンの特定箇所を測定する場合に適した検査方法を提供するものである。被検査パターンがランダムパターンである場合、再測定点は1回目の測定で電子線を照射した範囲以外ならどこでもよいわけでは決してなく、第1回目の測定をしたパターンと同一の形状を有するパターンでなければならない。そこで、本実施形態では被検査パターンの設計データに基づいて再測定をする位置を予め複数個決定しておき、再測定点の候補として測定レシピに組み込んでおく。これにより、被検査パターンが複雑なパターンであっても、荷電粒子線によるパターン形状の変動を最小限にして正確な計測を実現することが可能になる。再測定の際にはこれらの候補から再測定点が選択される。これらの候補はパターン認識の手法を用いて自動的に決定してもよいし、設計データに基づいてオペレータが決定してもよい。
【0031】
(iii)第3の実施の形態
上述した第2の実施の形態では再測定点の位置を設計データに基づいて予め決定していたが、これに限ることなく、上述したパターン認識の手法を用いて、再測定が必要になる度毎に第1回目の測定点の周辺を再測定点として探索してもよい。
【0032】
(4)プログラム
上述したパターン検査方法の一連の手順は、コンピュータに実行させるプログラムとしてフレキシブルディスクやCD−ROM等の記録媒体に、例えば上述したレシピファイルの形態で収納し、コンピュータに読込ませて実行させても良い。これにより、本発明に係るパターン検査方法を走査型電子顕微鏡に接続される制御コンピュータを用いて実現することができる。記録媒体は、磁気ディスクや光ディスク等の携帯可能なものに限定されず、ハードディスク装置やメモリなどの固定型の記録媒体でも良い。また、上述したパターン検査方法の一連の手順を組込んだプログラムをインターネット等の通信回線(無線通信を含む)を介して頒布しても良い。さらに、上述したパターン検査方法の一連の手順を組込んだプログラムを暗号化したり、変調をかけたり、圧縮した状態で、インターネット等の有線回線や無線回線を介して、または記録媒体に収納して頒布しても良い。
【0033】
(5)半導体装置の製造方法
上述した実施の形態のパターン検査方法を半導体装置の製造工程に用いれば、既に荷電粒子線を照射した領域外への計測位置の移動がオペレータの熟練度に依存することなく自動的に実行され、かつ、荷電粒子線の再度の照射によるパターン形状の変動の問題が解消されるので、被検査パターンを迅速かつ正確に計測することができる。これにより、例えば高い精度および高速での寸法測定が可能になるので、高いスループットおよび歩留まりで半導体装置を製造することができる。
【図面の簡単な説明】
【0034】
【図1】本発明に係るパターン検査装置の実施の一形態の概略構成を示すブロック図である。
【図2】本発明に係るパターン検査方法の実施の一形態の概略手順を示すフローチャートである。
【図3】自動測長の説明図である。
【図4】測定点の近傍への視野移動を説明する図である。
【符号の説明】
【0035】
1 パターン検査装置
12 電子銃
14 コンデンサレンズ
16 走査レンズ
18 対物レンズ
22 ステージ
24 モータ
26 検出器
32 電子銃制御回路
34 コンデンサレンズ制御回路
36 走査レンズ制御回路
38 対物レンズ制御回路
44 ステージ制御回路
46 画像メモリ
48 モニタ
52 パターン認識装置
58 通信回路
60 制御コンピュータ
FVf 自動焦点視野
FVh 観察視野
FVL 低倍率画像
Imr 参照画像
OFS オフセット量
Pf 自動焦点位置
Pr パターン認識位置
MR2 記録媒体
MR4 着脱可能な記録媒体
W ウェーハ
【特許請求の範囲】
【請求項1】
荷電粒子線を生成して被検査パターンが形成された試料に照射する手順と、
前記荷電粒子線の照射により前記試料から放出される二次荷電粒子、反射荷電粒子および後方散乱荷電粒子の少なくともいずれかを検出し、前記試料の表面の状態を表す第1の二次元像を取得する手順と、
予め用意された参照画像を用いて前記第1の二次元像内で前記参照画像に類似するパターンを検出し、その位置情報を前記被検査パターンの位置情報として記憶する手順と、
検出されたパターンの位置から所定の方向へ所定の距離だけ計測位置を移動して前記荷電粒子線の焦点合わせを行う手順と、
前記所定の方向とは逆の方向へ前記所定の距離だけ計測位置を移動して前記荷電粒子線を照射し、前記第1の二次元像よりも高倍率の第2の二次元像を取得して前記検出されたパターンを計測する初回計測手順と、
前記被検査パターンについての再計測を行う場合に、前記試料上で既に荷電粒子線を照射した領域以外の領域へ計測位置を自動的に移動させる再計測手順と、
を備えるパターン検査方法。
【請求項2】
前記被検査パターンの設計データに基づいて再計測用の計測位置として複数の候補を予め決定する手順をさらに備え、
前記再計測を行う場合の計測位置は、前記複数の候補から選択されることを特徴とする請求項1に記載のパターン検査方法。
【請求項3】
前記再計測手順は、前記参照画像を用いることにより、前記初回計測手順により計測されたパターン以外の他のパターンを前記第1の二次元像に対応する領域以外の領域で検出する手順を含み、
前記再計測を行う場合の計測位置は、検出された前記他のパターンの位置である、ことを特徴とする請求項1に記載のパターン検査方法。
【請求項4】
荷電粒子線を生成して被検査パターンが形成された試料に照射する荷電粒子線照射手段と、前記荷電粒子線の焦点位置を調整する焦点位置調整手段と、前記試料上の所望の位置に前記荷電粒子線が照射するように前記試料と前記荷電粒子線との相対的位置関係を調整する照射位置制御手段と、前記荷電粒子線の照射により前記試料から放出される二次荷電粒子、反射荷電粒子および後方散乱荷電粒子の少なくともいずれかを検出し、前記試料の表面の状態を表す二次元像のデータを出力する検出手段と、前記二次元像内で前記被検査パターンを検出するパターン認識手段と、を備える荷電粒子線装置に接続されるコンピュータに、請求項1乃至3のいずれかに記載のパターン検査方法を実行させるプログラム。
【請求項5】
荷電粒子線を生成して試料上の被検査パターンに照射する荷電粒子線照射手段と、
前記荷電粒子線の焦点位置を調整する焦点位置調整手段と、
前記試料上の所望の位置に前記荷電粒子線が照射するように前記試料と前記荷電粒子線との相対的位置関係を調整する照射位置制御手段と、
前記荷電粒子線の照射により前記試料から放出される二次荷電粒子、反射荷電粒子および後方散乱荷電粒子の少なくともいずれかを検出し、前記試料の表面の状態を表す第1の二次元像のデータを出力する検出手段と、
予め用意された参照画像を用いて前記第1の二次元像内で前記参照画像に類似するパターンを検出し、その位置情報を前記被検査パターンの位置情報として出力するパターン認識手段と、
検出されたパターンの位置から所定の方向へ所定の距離だけ計測位置を移動して前記荷電粒子線の焦点合わせを行い、前記所定の方向とは逆の方向へ前記所定の距離だけ計測位置を移動して前記荷電粒子線を照射させ、前記第1の二次元像よりも高倍率の第2の二次元像を取得して前記検出されたパターンを計測し、前記被検査パターンについての再計測を行う場合に、前記試料上で既に荷電粒子線を照射した領域以外の領域へ計測位置を自動的に移動させる制御手段と、
を備えるパターン検査装置。
【請求項1】
荷電粒子線を生成して被検査パターンが形成された試料に照射する手順と、
前記荷電粒子線の照射により前記試料から放出される二次荷電粒子、反射荷電粒子および後方散乱荷電粒子の少なくともいずれかを検出し、前記試料の表面の状態を表す第1の二次元像を取得する手順と、
予め用意された参照画像を用いて前記第1の二次元像内で前記参照画像に類似するパターンを検出し、その位置情報を前記被検査パターンの位置情報として記憶する手順と、
検出されたパターンの位置から所定の方向へ所定の距離だけ計測位置を移動して前記荷電粒子線の焦点合わせを行う手順と、
前記所定の方向とは逆の方向へ前記所定の距離だけ計測位置を移動して前記荷電粒子線を照射し、前記第1の二次元像よりも高倍率の第2の二次元像を取得して前記検出されたパターンを計測する初回計測手順と、
前記被検査パターンについての再計測を行う場合に、前記試料上で既に荷電粒子線を照射した領域以外の領域へ計測位置を自動的に移動させる再計測手順と、
を備えるパターン検査方法。
【請求項2】
前記被検査パターンの設計データに基づいて再計測用の計測位置として複数の候補を予め決定する手順をさらに備え、
前記再計測を行う場合の計測位置は、前記複数の候補から選択されることを特徴とする請求項1に記載のパターン検査方法。
【請求項3】
前記再計測手順は、前記参照画像を用いることにより、前記初回計測手順により計測されたパターン以外の他のパターンを前記第1の二次元像に対応する領域以外の領域で検出する手順を含み、
前記再計測を行う場合の計測位置は、検出された前記他のパターンの位置である、ことを特徴とする請求項1に記載のパターン検査方法。
【請求項4】
荷電粒子線を生成して被検査パターンが形成された試料に照射する荷電粒子線照射手段と、前記荷電粒子線の焦点位置を調整する焦点位置調整手段と、前記試料上の所望の位置に前記荷電粒子線が照射するように前記試料と前記荷電粒子線との相対的位置関係を調整する照射位置制御手段と、前記荷電粒子線の照射により前記試料から放出される二次荷電粒子、反射荷電粒子および後方散乱荷電粒子の少なくともいずれかを検出し、前記試料の表面の状態を表す二次元像のデータを出力する検出手段と、前記二次元像内で前記被検査パターンを検出するパターン認識手段と、を備える荷電粒子線装置に接続されるコンピュータに、請求項1乃至3のいずれかに記載のパターン検査方法を実行させるプログラム。
【請求項5】
荷電粒子線を生成して試料上の被検査パターンに照射する荷電粒子線照射手段と、
前記荷電粒子線の焦点位置を調整する焦点位置調整手段と、
前記試料上の所望の位置に前記荷電粒子線が照射するように前記試料と前記荷電粒子線との相対的位置関係を調整する照射位置制御手段と、
前記荷電粒子線の照射により前記試料から放出される二次荷電粒子、反射荷電粒子および後方散乱荷電粒子の少なくともいずれかを検出し、前記試料の表面の状態を表す第1の二次元像のデータを出力する検出手段と、
予め用意された参照画像を用いて前記第1の二次元像内で前記参照画像に類似するパターンを検出し、その位置情報を前記被検査パターンの位置情報として出力するパターン認識手段と、
検出されたパターンの位置から所定の方向へ所定の距離だけ計測位置を移動して前記荷電粒子線の焦点合わせを行い、前記所定の方向とは逆の方向へ前記所定の距離だけ計測位置を移動して前記荷電粒子線を照射させ、前記第1の二次元像よりも高倍率の第2の二次元像を取得して前記検出されたパターンを計測し、前記被検査パターンについての再計測を行う場合に、前記試料上で既に荷電粒子線を照射した領域以外の領域へ計測位置を自動的に移動させる制御手段と、
を備えるパターン検査装置。
【図1】


【図2】
【図3】
【図4】

【図2】
【図3】
【図4】
【公開番号】特開2007−212288(P2007−212288A)
【公開日】平成19年8月23日(2007.8.23)
【国際特許分類】
【出願番号】特願2006−32433(P2006−32433)
【出願日】平成18年2月9日(2006.2.9)
【出願人】(000003078)株式会社東芝 (54,554)
【Fターム(参考)】
【公開日】平成19年8月23日(2007.8.23)
【国際特許分類】
【出願日】平成18年2月9日(2006.2.9)
【出願人】(000003078)株式会社東芝 (54,554)
【Fターム(参考)】
[ Back to top ]