
パターン測定装置
【課題】本発明は、複数の露光工程を有する製造プロセスにて形成されたギャップの種類の特定を、高いスループットにて実現することを目的とする。
【解決手段】上記目的を達成するための一態様として、荷電粒子ビームの走査に基づいて検出される信号から、複数のパターンが配列されたパターンの一端側に関する特徴量と、当該パターンの他端側に関する特徴量を抽出し、当該2つの特徴量の比較に基づいて、前記複数のパターン間のスペースの種類を判定するパターン測定装置、及びコンピュータープログラムを提案する。
【解決手段】上記目的を達成するための一態様として、荷電粒子ビームの走査に基づいて検出される信号から、複数のパターンが配列されたパターンの一端側に関する特徴量と、当該パターンの他端側に関する特徴量を抽出し、当該2つの特徴量の比較に基づいて、前記複数のパターン間のスペースの種類を判定するパターン測定装置、及びコンピュータープログラムを提案する。
【発明の詳細な説明】
【技術分野】
【0001】
本発明は、試料に対する荷電粒子線の照射によって得られる信号に基づいて、パターン寸法を測定するパターン測定装置に係り、特に、二重露光(ダブルパターニング)によって形成されるパターンの測定に好適なパターン測定装置に関する。
【背景技術】
【0002】
半導体素子の製造装置の1つであるステッパ(縮小投影露光装置)は、レジストが塗布された半導体ウェーハ上に、フォトマスクやレチクル等に形成されたパターンを、投影レンズにより縮小して投影する装置である。
【0003】
昨今、形成されるパターンの微細化に伴い、走査電子顕微鏡等によって、形成されたパターンを測定、或いは検査し、その出来映えを評価する手法が、半導体の測定検査の主流となりつつある。走査電子顕微鏡は、電子ビームを試料上に走査することによって、試料から放出される電子を検出し、画像化する装置である。即ち、二次電子の放出量がほぼ同じの2つの領域は、ほぼ同じ輝度で表現されることになるため、その識別が困難になる可能性がある。また、電子顕微鏡画像にノイズが混入すると、やはり上記識別が困難となる場合がある。特に、昨今のパターンの高集積化に伴い、識別が困難なパターンが散見されるようになってきた。特許文献1,2には、ラインアンドスペースパターンのラインパターンとスペースを識別する手法が開示されている。具体的には、特許文献1には、垂直な二つの斜面によって形成された凸部と一種類の凹部によって構成されたラインパターンにおいて凸部と凹部を判定する方法が開示されている。特許文献2には、理想光軸に対し、ビームを傾斜して照射することによって得られる2つの隣接したプロファイルのピーク幅の比較に基づいて、当該2つのピークに挟まれた部位がラインパターンであるか、スペースであるかを判定する手法が説明されている。
【0004】
また、パターンの二次元画像だけでは判断が困難であっても、試料の深さ方向を含む三次元構造をモニタすることによって、パターンの種類を特定することができる。特許文献3には、パターンの三次元構造を観察するための方法として試料に対し異なる2方向から観察した画像を合成してパターンの三次元構造を推定する方法が開示されている。特許文献4には、試料上のパターンに対し斜めからビームを照射して、パターンの上面と底面の寸法を別々に計測をする方法が開示されている。
【0005】
非特許文献1,2、及び3には、半導体プロセスにおいて、露光とエッチングを2回繰り返して微細パターンを形成する手法が説明されている。
【先行技術文献】
【特許文献】
【0006】
【特許文献1】特開2004−251674号公報
【特許文献2】特開2003−90719号公報
【特許文献3】特開平5−41195号公報
【特許文献4】特開平5−175496号公報
【非特許文献】
【0007】
【非特許文献1】J.Finders、M.Dusa et al.、“Double patterning for 32nm and below: an update、”Proc. of SPIE Vol. 6924 692408-1-12
【非特許文献2】A. Miller、M. Maenhoudt et al、“Comparison of LFLE and LELE Manufacturability、”5th International Symposium on Immersion Lithography Extensions、September 2008
【非特許文献3】K. Lucas、C. Cork1 et al、“Interactions of double patterning technology with wafer processing、OPC and design flows、”Proc. of SPIE Vol. 6924 692403-1-12
【発明の概要】
【発明が解決しようとする課題】
【0008】
近年、半導体試料上に形成されるパターンの微細化要求に伴い当該要求を満たす一つの方法として自己整合型ダブルパターニング(Self Aligned Double Patterning:以下SADPと呼ぶ)と呼ばれるパターン形成方法が開発されており、今後歩留まり向上に向けたプロセス間でのパターン寸法計測が必要となることが予測される。
【0009】
SADPによって形成される複数のパターンの間には、異なる工程にて形成されたギャップが交互に形成される。各工程におけるプロセス管理等を適正に行うためには、当該ギャップの種類を特定した上で、測定を行う必要がある。特許文献1,2にはラインパターン(凸部)及びスペース(凹部)を識別する手法についての説明はあるものの、同じ凹部に異なる種類が存在することや、それを識別する手法については何も説明されていない。また、特許文献3,4に開示されているように、試料断面をモニタすることで、ギャップを識別することも考えられるが、ビームの傾斜や、画像を複数取得する手間があり、検査,測定時間の増加につながり、結果として単位時間当たりに検査,測定が可能な試料数が少なくなる。
【0010】
以下に、SADPのような複数の露光工程を有する製造プロセスにて形成されたギャップの種類の特定を、高いスループットにて実現することを目的とするパターン測定装置を説明する。
【課題を解決するための手段】
【0011】
上記目的を達成するための一態様として、荷電粒子ビームの走査に基づいて検出される信号から、複数のパターンが配列されたパターンの一端側に関する特徴量と、当該パターンの他端側に関する特徴量を抽出し、当該2つの特徴量の比較に基づいて、前記複数のパターン間のスペースの種類を判定するパターン測定装置を提案する。
【0012】
また、上記目的を達成するための他の態様として、荷電粒子ビームの走査に基づいて検出される信号から、複数のパターンが配列されたパターンのプロファイルを形成し、当該プロファイルの信号値が所定値以上の部分を抽出し、当該部分のプロファイルと、予め記憶されたプロファイルを比較し、一致度が所定の値以上であるか否かを判定し、当該判定に基づいて、前記複数のパターン間のスペース部の種類を判定するパターン測定装置を提案する。
【発明の効果】
【0013】
上記構成によれば、SADPのような複数の露光工程を有する製造プロセスにて形成されたギャップの種類の判定を、高いスループットを維持しつつ実現することが可能となる。
【図面の簡単な説明】
【0014】
【図1】走査電子顕微鏡の概略構成図。
【図2】SADPの処理工程を説明する図。
【図3】SADPによって形成されたパターンの断面図、電子顕微鏡像、及び二次電子プロファイルの一例を説明する図。
【図4】二次電子プロファイルに基づいて、ギャップの種類を判別する手法の一例を説明する図。
【図5】二次電子プロファイルに基づいて、ギャップの種類を判別する手法の他の一例を説明する図。
【図6】スペーサープロファイルの微分プロファイルの一例を説明する図。
【図7】スペーサーの線幅が小さくなったパターンに対するギャップ判別方法を説明する図。
【図8】スペーサーの線幅が小さくなったパターンに対するギャップ判別工程を説明するフローチャート。
【図9】波形マッチングを用いたギャップの判別工程を説明するフローチャート。
【図10】波形マッチングによるギャップの判別法を説明する図。
【図11】ギャップ判別時の誤判定を訂正する手法を説明する図。
【図12】コアギャップとスペーサーギャップの測定結果を電子顕微鏡画像上に表示した表示例を説明する図。
【図13】SADPによって形成されたパターンの断面図、電子顕微鏡像、及び二次電子プロファイルの他の一例を説明する図。
【図14】ビーム走査領域(Field Of View)内の複数の領域にて取得された二次電子プロファイルから、エッジのゆらぎを求める手法を説明する図。
【図15】複数の特徴量を用いて、ギャップの種類を判別する手法を説明する図。
【図16】モデルパターンを用いたギャップの判定工程を説明するフローチャート。
【図17】判定対象となるパターンと同一試料上にてモデルパターンを作成し、当該モデルパターンのプロファイルから得られる特徴量を用いて、ギャップ判定を行う工程を説明するフローチャート。
【図18】モデルパターンの登録工程を説明するフローチャート。
【図19】半導体チップのレイアウト例とモデルパターンの説明図。
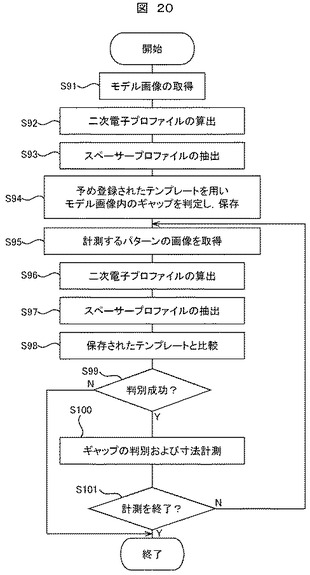
【図20】判定対象となるパターンと同一試料上にてモデルパターンを作成し、当該モデルパターンと判定対象パターンのプロファイルのプロファイル比較に基づいて、ギャップ判定を行う工程を説明するフローチャート。
【図21】2つのモデルパターンの登録工程を説明するフローチャート。
【図22】2つのモデルパターンを用いたギャップ判定を行う場合のモデルパターン設定法を説明する図。
【図23】予め登録された2つのモデルパターンを用いてギャップ判定とパターン計測を行う工程を説明するフローチャート。
【発明を実施するための形態】
【0015】
SADPは、従来の露光装置が到達できる露光限界以下の非常に狭いピッチで配置されたラインとスペースが繰り返すパターンを作成する技術である。
【0016】
実際には、試料上に第一マスク層を形成し当該マスク層をエッチングすることで形成される第一マスクパターンと、第一マスクパターン上に第二マスク層を形成し当該マスク層をエッチングすることで第一マスクパターンの側壁にのみ形成される第二マスクパターン(以下スペーサーと呼ぶ)と、に対し、第一マスクパターンをエッチングによって除去し、試料上に残留するスペーサーをマスクとして試料をエッチングし試料上にラインパターンを形成する。このため、スペーサーの寸法が試料に形成されるラインパターンの寸法を決定する。したがって、SADPを用いてパターンを形成する場合、スペーサーの寸法を計測し、スペーサーの寸法を決定するプロセスへ計測結果をフィードバックし、当該計測結果を基にスペーサーの寸法を正確に制御することは非常に重要である。
【0017】
また、スペーサーは、傾斜の異なる二つの側面(第一の側面,第二の側面)と当該側面をつなぐ上面によって構成されている。スペーサーの側面には、スペーサーの第一の側面に隣接し、第一マスクパターンをエッチングにより除去することによって形成された第一の凹部(以下コアギャップと呼ぶ)と、スペーサーの第二の側面に隣接し、第二マスクパターンをエッチングにより加工することによって形成された第二の凹部(以下スペーサーギャップと呼ぶ)がある。コアギャップとスペーサーギャップは異なるプロセスによって形成されており、コアギャップの寸法とスペーサーギャップの寸法はそれぞれ別々のプロセスが制御している。これらのギャップの寸法はラインパターン形成時にラインパターン間の寸法を決定するため、当該パターンの寸法を制御するには、スペーサーとコアギャップ,スペーサーギャップをそれぞれ別々に計測し、それぞれの寸法を制御しているプロセスに寸法値をフィードバックし、当該寸法値を基にプロセスの実施条件を変更する必要がある。
【0018】
以上より、スペーサー,コアギャップ,スペーサーギャップを別々に計測するためには、それぞれを判別する機能が必要となる。
【0019】
一般的に試料上へ形成されるラインパターンは、一定の間隔でラインが並んだ構造となるためSADPにより形成されるコアギャップとスペーサーギャップの寸法は同一になるよう制御される。したがって、試料に対し垂直に荷電粒子線を入射させる観察方法では、撮像した画像から当該ギャップを判別するのは困難である。また、SADPにより形成されるパターン寸法は30〜20nm程度の非常の微細なものとなるため、ウェーハを計測したい位置に移動させる二次元可動ステージの停止位置精度がパターン寸法より大きい場合、計測範囲がずれる可能性があり、計測点の画像を撮像するたびにスペーサー,コアギャップ,スペーサーギャップを別々に認識することが必要となる。
【0020】
後述するように、SADPプロセスにおいては、マスクパターンのコアギャップとスペーサーギャップの断面形状が異なるため、これらの形状の違いを検知することができれば、二種類のギャップの判別が可能となる。
【0021】
半導体デバイスを測定,検査する装置では、試料上に形成された多数のパターン等を高速に測定,検査することが望まれる。よって、ギャップ判定も高速化が求められる。
【0022】
以下に説明する実施例では、試料上に形成されたスペーサーと二種類のギャップを含むパターンに対し垂直方向から荷電粒子線を走査し、当該走査箇所から放出される荷電粒子を検出することにより当該荷電粒子強度のプロファイルを導出し、当該プロファイルから算出される特徴値に基づいて、隣接する断面形状の異なる二種類のギャップを判別し寸法を計測する手法を説明する。
【0023】
二種類のギャップを判別するために、スペーサーを形成する第一の側面と第二の側面の形状が異なる点を利用する。この形状の差は、ギャップを形成するプロセスに依存しており、形状を比較することでギャップを形成したプロセス、すなわちスペーサーに隣接するギャップの種別を判別することが可能である。スペーサー側面の形状は、荷電粒子線強度のプロファイルにおいて信号の高さや当該プロファイルの裾部の傾き及び裾部の長さに相違点として現れる。
【0024】
具体的には、傾斜が急峻な場合、当該プロファイルのピーク高さは高く裾部の傾きは急峻になり、裾部の長さは短くなる。逆に、傾斜が緩やかな場合、当該プロファイルのピーク高さは低く裾部の傾きは緩やかになり、裾部の長さは長くなる。これらの情報を基に、傾斜が急峻な側面に隣接するギャップをコアギャップ、傾斜が緩やかな側面に隣接するギャップをスペーサーギャップと判定する。これをすべてのスペーサーに対して実行することで、計測範囲内のギャップを判別し、必要なパターン寸法の計測を可能とする。SADP以外のダブルパターンニング方式についても、異なるプロセスステップにより隣接して形成される、2組のパターン間の断面形状が異なる場合には、これらの断面形状の違いは荷電粒子線強度のプロファイルの違いとして現れるため、同様に2組のパターンを判定し、それぞれのパターンの寸法計測を可能とする。
【0025】
上述のような手法により、SADPにより形成されたスペーサーと二種類のギャップを含むパターンに対し、スループットを低下させること無く、断面形状の異なる二種類のギャップを判別して、寸法を連続して自動的に計測することが可能となる。
【0026】
以下に図面を用いて、荷電粒子線走査によって得られる信号に基づいて、複数のパターン間に形成されるスペース部(ギャップ)の種類を判定可能なパターン測定装置を説明する。なお、以下の実施例では、走査電子顕微鏡(Scanning Electron Microscope:SEM)によって取得される信号に基づいて、パターンの測定を行う装置について説明するが、SEMに替えて、集束イオンビーム(Focused Ion Beam)装置を適用することも可能である。但し、微細化が進むパターンを高精度に測定するためには、極めて高い倍率が要求されるため、一般的に分解能の面でFIB装置に勝るSEMを用いることが望ましい。
【0027】
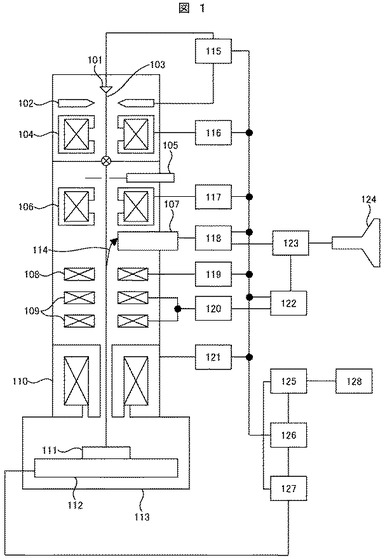
図1は走査電子顕微鏡の概略構成図である。全体制御部125はユーザーインターフェース128から作業者によって入力された電子の加速電圧,試料111の情報,観察位置情報などを基に、電子光学系制御装置126,ステージ制御装置127を介して、装置全体の制御を行っている。
【0028】
試料111は図示されない試料搬送装置を介して、試料交換室を経由した後試料室113にあるステージ112上に固定される。
【0029】
電子光学系制御装置126は全体制御部125からの命令に従い高電圧制御装置115,第一コンデンサレンズ制御部116,第二コンデンサレンズ制御部117,二次電子信号増幅器118,アライメント制御部119,偏向信号制御部122,対物レンズ制御部121を制御している。
【0030】
引出電極102により電子源101から引き出された一次電子線103は第一コンデンサレンズ104,第二コンデンサレンズ106,対物レンズ110により収束され試料111上に照射される。途中電子線は絞り105を通過し、アライメントコイル108によりその軌道を調整され、また、偏向信号制御部120を介して偏向信号制御部122から信号を受けた偏向コイル109により試料上を二次元的に走査される。試料111への一次電子線103の照射に起因して、試料111から放出される二次電子114は二次電子検出器107により捕捉され、二次電子信号増幅器118を介して二次電子像表示装置124の輝度信号として使用される。
【0031】
二次電子像表示装置124の偏向信号と、偏向コイルの偏向信号とは同期しているため、二次電子像表示装置124上には試料111上のパターン形状が忠実に再現される。
【0032】
また、パターンの寸法計測に使用する画像を作成するため、二次電子信号増幅器118から出力される信号を画像処理プロセッサ123内でAD変換し、デジタル画像データを作成する。さらにデジタル画像データから二次電子プロファイルを作成する。
【0033】
作成された二次電子プロファイルから計測する範囲を、手動、もしくは一定のアルゴリズムに基づいて自動選択し、選択範囲の画素数を算出する。一次電子線103により走査された観察領域の実寸法と当該観察領域に対応する画素数から試料上での実寸法を計測する。
【0034】
なお、本実施例では、パターン測定装置の一例として、二次電子等の信号に基づいて、以下に説明するようなギャップ判定を行う画像処理プロセッサ(判定部)を含むコンピューターが、走査電子顕微鏡装置の一部として構成された装置を例示するが、これに限られることはない。例えば、走査電子顕微鏡によって取得された信号に基づく情報(二次電子信号,二次電子の検出に基づく信号波形情報,二次元画像信号、或いは画像から抽出されたパターンエッジの輪郭線情報等)を取得するためのインターフェースと、上記画像処理プロセッサに相当する演算装置を備えた外部の測定装置にて、後述するようなギャップ判定を行うようにしても良い。後述する処理を行うプログラムを記憶媒体に登録しておき、走査電子顕微鏡等に必要な信号を供給するプロセッサにて、当該プログラムを実行するようにしても良い。即ち、以下の説明は走査電子顕微鏡等のパターン測定装置にて実行可能なプログラム、或いはプログラムプロダクトとしての説明でもある。
【0035】
以下に、走査電子顕微鏡の計測対象であるSADPの概略を示す。
【0036】
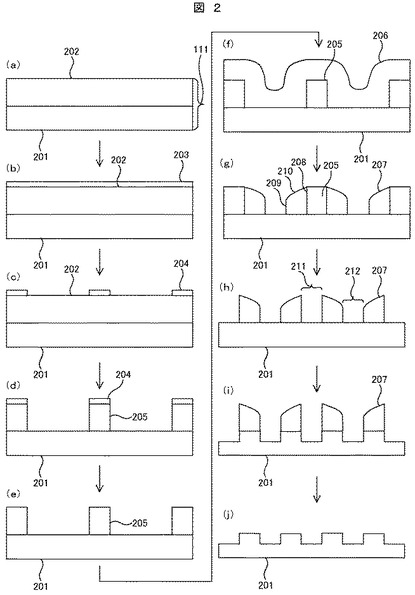
図2にSADPの基本的なプロセスを示す。SADPでは、試料111においてパターンを形成する試料201上に第一マスク層202を形成し(図2(a))、当該マスク層上にフォトレジスト膜203を形成する(図2(b))。当該フォトレジスト膜203にパターンを露光し現像処理を行ってフォトレジスト膜203にフォトレジストパターン204を形成する(図2(c))。当該フォトレジストパターン204をマスクとして第一マスク層202をエッチングし、第一マスクパターン205を形成する(図2(d))。
【0037】
次に、第一マスクパターンの205上のフォトレジストパターン204を除去し(図2(e))、第一マスクパターン205の全面に第二マスク層206を形成する(図2(f))。その後、第一マスクパターン205の側壁のみに第二マスク層206の一部が残るようにエッチング条件を制御して第二マスク層206をエッチングする(図2(g))。このようにして形成された第二マスク層の残留構造物がスペーサー207である。
【0038】
スペーサー207は、第一マスクパターン205との接触部に形成される試料表面に対し垂直な側面208と、側面208に比べてわずかに傾いた反対側の側面209、および側面208から側面209へわずかに傾いた上面210に囲まれた形状を有している。側面209と上面210は、第一マスクパターン205の形状に沿って形成された第二マスク層206をエッチングして形成されるため、第一マスクパターンを中心としてなだらかに傾斜した斜面となる。
【0039】
続いて、第一マスクパターン205をエッチングによって除去すると、試料上にスペーサー207のみが残った状態となる(図2(h))。最後にこのスペーサーをマスクとして試料をエッチングし(図2(i))、ラインパターンを形成する(図2(j))。
【0040】
上記のプロセスより、最終的に試料201に形成されるパターンの寸法はスペーサーの寸法によって決定され、当該パターンのピッチ寸法はスペーサー間の凹部の寸法とスペーサーの寸法の和によって決定される。しかし、スペーサー間の凹部は、第一マスクパターン205をエッチングによって除去することで形成されるコアギャップ211と、第二マスク層206形成後の当該マスク層へのエッチングによって形成されるスペーサーギャップ212の二種類で構成されているため、コアギャップとスペーサーギャップの寸法に差が生じた場合、試料上へ形成されるラインパターンのピッチ寸法が一定にならなくなってしまう。したがって、コアギャップの寸法を制御するためには、第一マスクパターン205を形成するためのフォトレジストを露光するプロセス(図2(c))へ、スペーサーギャップの寸法を制御するためには、第二マスク層206を形成する成膜プロセス(図2(f))あるいは第二マスク層206をエッチングするプロセス(図2(g))へ、それぞれの寸法値を別々に計測し、当該プロセスへ寸法値をフィードバックして、当該寸法値を基にプロセスの実施条件を変更する必要がある。
【0041】
以下、前記走査型電子顕微鏡を用いて、SADPにより試料上に形成されたコアギャップとスペーサーギャップを判別し、当該ギャップの寸法を計測する方法について説明する。
【0042】
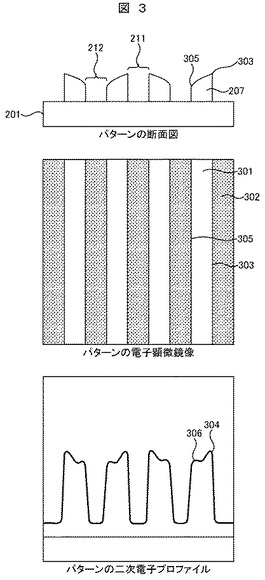
図3に試料上に形成されたスペーサーと二種類のギャップを含むパターンの電子顕微鏡像、当該電子顕微鏡像に対応するパターンの断面図、当該電子顕微鏡像から作成した二次電子プロファイルを示す。
【0043】
当該電子顕微鏡像において、輝度が高く白く見える部分301と、輝度が低く黒く見える部分302がある。電子顕微鏡像の輝度は試料から放出される二次電子量に依存しており、二次電子量が多いほど輝度が高くなるといった特徴がある。このような特徴を利用することにより、電子顕微鏡画像においては、パターンの断面形状の違いが画像の輝度の違いとして現れる。本実施例では、このような電子顕微鏡画像の特徴を利用して、パターンのコアギャップとスペーサーギャップをその形状の違いを利用して判別する。
【0044】
電子顕微鏡像から作成した二次電子プロファイルは、スペーサーに相当する部分で高くなり、ギャップに相当する部分で低くなる。加えて、スペーサーとコアギャップとの境界部分、およびスペーサーギャップとの境界部分に、二次電子プロファイルのピークが出現する。これは、試料表面に対し、角度の異なるエッジ部分を電子線で走査した場合、エッジ効果により平面よりも二次電子の放出量が増大するためであり、エッジの傾斜が急峻であるほど放出される二次電子量も多くなる。
【0045】
スペーサー211が有する2つのエッジの内、コアギャップ211に隣接するエッジ303の方が、スペーサーギャップ212に隣接するエッジ305と比較して、鋭利に形成される。したがって、エッジ303から放出される電子の検出に基づいて形成されるコアピーク304と、エッジ305から放出される電子の検出に基づいて形成されるスペーサーピーク306を比較すると、コアピーク304の方が相対的に高くなる。
【0046】
即ち、コアギャップ211とスペーサー207の境界部分では、相対的に高いコアピーク304が出現し、スペーサーギャップ212とスペーサー207の境界部分では、相対的に低いスペーサーピーク306が出現する。
【0047】
ここで、ギャップ判定方法の具体的な説明の前に、他のダブルパターンニングプロセスについて説明しておく。
【0048】
図2ではダブルパターニングプロセスの一つであるSADPプロセスを例にとって説明したが、この他にも、非特許文献1および非特許文献2に開示されているように、露光とエッチングを2回繰り返して微細パターンを形成する手法(Litho-Etch-Litho-Etch:以下LELEと呼ぶ)や、1組目のパターンを露光したあと、フリーズと呼ばれる処理により1組目のレジストパターンを保持したまま、2組目の露光を行う手法(Litho-Freeze-Litho-Etch:以下LFLEと呼ぶ)など、様々な手法が提案されている。SADP以外のダブルパターニングプロセスの共通点として、高密度部分の隣接するパターンを2つのマスクに分割し、これらを2回別々に露光するという特徴がある。
【0049】
隣接するパターンは別々の露光プロセスを経て形成されるため、パターン寸法管理およびその制御には、隣接するパターンが形成されたのはどちらの露光プロセスであるか判別する必要がある。すなわち、SADPにおけるコアギャップとスペーサーギャップとの代わりに、隣接するラインパターンの判別が必要となるのである。また、換言すれば、コアギャップに隣接するパターンエッジと、スペーサーギャップに隣接するパターンエッジは、当該エッジが形成された製造プロセスが異なるため、その製造プロセスによってもたらされる特徴を捉えれば、両者の識別が可能となる。
【0050】
本実施例における、電子顕微鏡の信号波形の違いに基づいて、パターンの断面形状の違いを判別する方法は、このような一般的なダブルパターンニングプロセスにも適用することができる。例えば、非特許文献3に開示されているように、LELEプロセスにおいては、はじめに露光,エッチングにより形成された一組目のパターンの影響により、二組目の露光時の下地平坦性が低下し、露光が困難になる例が示されている。このように、LELEプロセスにおいては、1組目の露光と2組目の露光では、その難易度が異なり、その結果として形成されるパターン形状は形成プロセスに依存して変化してしまう。また、LFLEプロセスにおいても、1組目の露光パターンにはフリーズ処理が施され、さらに2度目の露光処理によっても再度光が照射されるなど、異なる処理が加わるため、2度目の露光パターンとは異なる形状を持つ可能性が高い。どちらのプロセスにおいても、2度目の露光時は下地に1度目の露光の影響があるため、反射防止が不十分になってしまう。このため、単に断面形状が変化するだけでなく、パターン形状や寸法のばらつきが比較的大きくなる。すなわちラインエッジラフネス(Line Edge Roughness:以下LERと呼ぶ)の大きさが1度目と2度目の露光パターンで異なることになる。また、先述のパターン形状に依存した画像輝度の変化のみならず、電子顕微鏡画像の明るさは材料の違いによっても変化する。LELEプロセスでは、最終パターン形成のためのマスク材料が2組のパターン間で異なる。LFLEプロセスにおいてもフリージング処理により2組のパターン間で材料の特性が変化する。
【0051】
また、SADPのギャップについても、コアギャップとスペーサーギャップではギャップ形成のエッチング工程が異なるため、表面のダメージ状態などが変化する可能性が高い。このような場合には、材料特性の違いによっても電子顕微鏡画像の輝度が変化する。このように、どのダブルパターンニングプロセスにおいても、異なるプロセスステップにより隣接して形成される、2組のパターン間の形状の違いやそのばらつき,材料の違いなどが生じるため、これらを電子顕微鏡画像により判別できれば、形成プロセス毎のパターン寸法評価が可能となり、製造プロセスの適切な管理および制御が可能となる。以下の実施例では、SADPプロセスを経て形成されたパターンの判別方法について詳細に述べるが、当該手法の応用により、他のダブルパターンニングプロセスにも適用が可能である。
【実施例1】
【0052】
以下、具体的なギャップ判定方法について説明する。ギャップの判定方法は大きく分けて二つあるが、第一の方法として、二つのギャップ形状の違いによって発生する二次電子プロファイルの形状の違いに着目し、当該プロファイルから算出された特徴値に基づいて判別を行う方法を示す。
【0053】
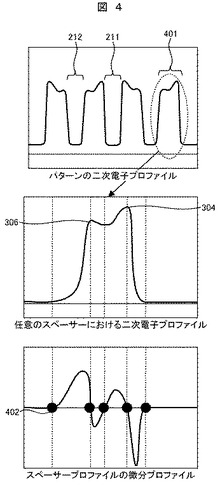
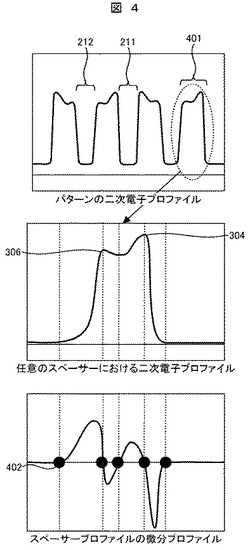
図4にスペーサーと二種類のギャップを含むパターンの二次電子プロファイルと、当該プロファイルから抽出した任意のスペーサーにおける二次電子プロファイル、および当該プロファイルに対して微分処理を行った微分プロファイルを示す。
【0054】
まず、当該パターンの二次電子プロファイルからスペーサーに相当する部分(以下スペーサープロファイル401と呼ぶ)を抽出する。スペーサープロファイル401の検出には、予め設定された閾値以上の二次電子量をもつ領域を抜き出す処理を行う。スペーサーは計測範囲内に複数含まれているため、当該処理により抜き出された複数の領域を一つ一つの別のスペーサーとして認識する。なおこの閾値は、二次電子プロファイルからスペーサーとギャップ部分を分離するために行うプロセスであるため任意に設定可能であるが、一般的に当該パターンの二次電子プロファイルにおける最大値と最小値の中間程度でよい。
【0055】
次に、抜き出された一つのスペーサープロファイル401に対してスペーサーのエッジに対応するピークを抽出する。ピークの抽出には、スペーサープロファイル401の微分プロファイルを用いる方法を説明する。スペーサープロファイルに対して微分プロファイルを作成し、微分プロファイルの値が0となる点402を抽出する。この時抽出された点のうちスペーサープロファイルの値が最も大きい点をコアピーク304、2番目に大きい点をスペーサーピーク306とすればよい。
【0056】
上記の処理をすべてのスペーサープロファイル401に対して実行した後、隣接するスペーサープロファイルにおいてコアピーク304同士が隣り合う領域をコアギャップ211、スペーサーピーク306同士が隣り合う領域をスペーサーギャップ212と判定する。
【0057】
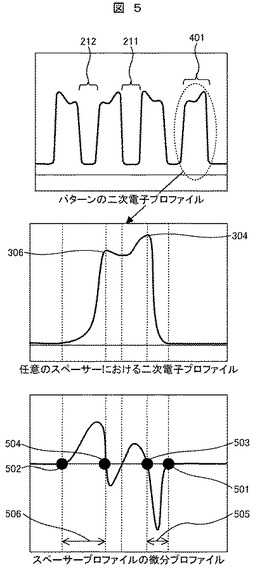
前記以外の判別方法として、スペーサープロファイル401の裾部の傾斜を利用する判別も可能である。図5にスペーサーと二種類のギャップを含むパターンの二次電子プロファイルと、当該プロファイルから抽出した任意のスペーサープロファイル、および当該プロファイルに対して微分処理を行った微分プロファイルを示す。
【0058】
当該判別方法は、スペーサーを形成する二つの側面の傾斜が異なる点に注目し、傾斜が緩やかな側面ではスペーサープロファイルの裾部が長くなり、傾斜が急峻である側面ではスペーサープロファイルの裾部が短くなる特徴を利用している。具体的にはスペーサープロファイルの立ち上がりからコアピーク304、およびスペーサーピーク306に達するまでの距離を比較することで判別を行う。
【0059】
まず前記手法と同様に当該パターンの二次電子プロファイルから任意のスペーサープロファイル401を抽出した後、当該プロファイルの微分プロファイルを作成し、当該微分プロファイルからスペーサープロファイル401の左右の立ち上がり点501,502を抽出する。立ち上がり点の抽出には、微分プロファイルの端点からプロファイルの中央に向かって微分プロファイルの値を調べた時、値が0から大きくずれる点を求めればよい。
【0060】
次に、当該立ち上がり点501,502からスペーサープロファイルの内側に向かって初めて微分プロファイルの値が0となる点503,504を抽出する。点503,504の位置は、図5より明らかなようにそれぞれコアピーク304およびスペーサーピーク306に相当する。
【0061】
ここで、点501と点503の二点間距離505と点502と点504の二点間距離506をそれぞれ求める。得られた二点間距離を比較すると、値の大きい二点間距離505の側面に隣接したギャップがスペーサーギャップ212、値の小さな二点間距離506の側面に隣接したギャップがコアギャップ211と判別できる。
【0062】
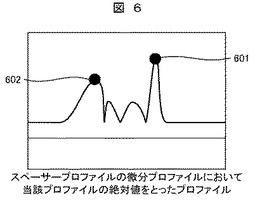
また、単にペーサープロファイルの裾部の傾斜を利用することも可能である。これは、スペーサーを形成する二つの側面の傾斜が異なる点に注目し、傾斜が緩やかな側面ではスペーサープロファイルの傾きが緩やかになるため微分プロファイルの絶対値が小さくなり、逆に傾斜が急峻な側面ではスペーサープロファイルの傾きが急峻になるため微分プロファイルの絶対値が大きくなることを利用している。
【0063】
図6に図5記載の微分プロファイルの絶対値をとったプロファイルを示す。
【0064】
まず、前記手法と同様に、スペーサーと二種類のギャップを含むパターンの二次電子プロファイルから任意のスペーサープロファイル401を抽出した後、当該プロファイルの微分プロファイルを作成し、当該微分プロファイルの絶対値をとった微分プロファイルを作成する。次に、当該プロファイルの左右の裾部から中心に向かって一つ目のピーク601,602のピーク高さを比較する。ピーク高さが高い方601に隣接するギャップをコアギャップ、ピーク高さが低い方602に隣接するギャップをスペーサーギャップとして判定する。
【0065】
なお、本明細書では二次電子プロファイルからピークを抽出する方法として、微分プロファイルを用いた方法について説明したが、その他の方法でピークを抽出できる方法であれば適用可能である。
【0066】
一方、より寸法の小さなスペーサーにおいては、図4に示したようなスペーサープロファイルを示さない場合がある。
【0067】
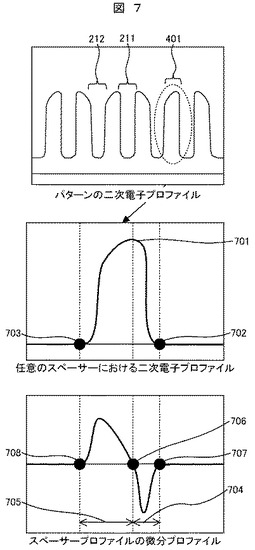
図7にスペーサーの寸法が図4に示したスペーサーより小さくなった場合の当該パターンの断面図および二次電子プロファイルを示す。
【0068】
SADPを用いてより微細なパターンを形成した場合、スペーサーの寸法も比例して小さくなる。スペーサーの寸法が小さくなるとコアピークとスペーサーピークが接近するため、コアピークの裾部にスペーサーピークが隠れ、スペーサーピークがピークとして検出できなくなることが予測される。もしくは、形成するスペーサーの寸法が小さくなることで、コアギャップ側とスペーサーギャップ側でのスペーサーの側面形状の差が小さくなり、コアピークとスペーサーピークの明確な差が検出できなくなることも予測される。
【0069】
この場合、前記の手法によりギャップの判定を実施すると、コアギャップとスペーサーギャップを検出することができなくなる。したがって、当該エラーを回避する処理をギャップの判別シーケンスに加える必要がある。
【0070】
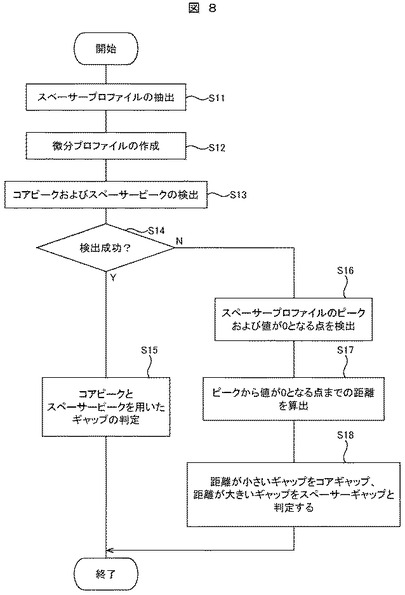
図8に当該エラーの回避処理を加えたフローチャートを示す。
【0071】
計測点から得られた二次電子プロファイルに対し、前記のギャップ判別方法にて述べたコアピークとスペーサーピークの検出処理を行い(S11,S12,S13)、S14にてコアピークとスペーサーピークの検出に成功したかどうかを判定する。図7に示したような二次電子プロファイルではピークが一つしか検出されないためS14の判定処理で通常のギャップ判定処理(S15)ではなくS16の処理へ移動する。S16では、スペーサープロファイル上のピークを一つとしてピーク701を検出する。当該ピーク701は、コアピークとスペーサーピークの和であるため、当該ピーク701の位置は必ず本来のコアギャップに近い位置に存在する。
【0072】
したがって、S17で当該ピーク701の位置から、スペーサープロファイルの立ち上がり点702,703までの二点間距離704,705をそれぞれ算出し、S18で両者を比較して、二点間距離の短いほうをコアギャップ、間隔の長いほうをスペーサーギャップとして判定する。前記手法においては二次電子プロファイルから微分プロファイルを作成して、ピーク701,点702,点703に相当する当該微分プロファイルの値が0となる点706,707,708を算出して、点706と点707間の二点間距離704と点706と点708間の二点間距離705を比較することも可能である。もしくは、隣接するスペーサープロファイル401間でピーク701間の距離を算出し、距離が小さいギャップをコアギャップ211、距離が大きいギャップをスペーサーギャップ212と判定するようにしてもよい。
【0073】
また、前述したLERがスペーサーの左右エッジで異なることを利用した判別方法や、コアギャップとスペーサーギャップの底部の深さが異なることを利用した判別方法を用いることでもコアギャップとスペーサーギャップを判別することが可能である。これらの手法については後述する実施例2において詳細に説明する。
【0074】
以上のように、一のギャップ判定法が適正ではないと判断された場合に、他のギャップ判定法に切り替えるようなアルゴリズムの適用によって、以下のような効果も期待できる。
【0075】
例えば、製造プロセスの予期せぬ変動にも対応することが可能である。更なる効果として、半導体デバイスの製造工程での歩留確保には、製造プロセスの安定性,再現性が重要であり、上記判定法の切り替えを要すること自体が、プロセスの変動を検知したこととなる。この切り替えのフラグをプロセスQC(quality Check)に利用し、工程のチェックを実施し、製造工程の異常の拡散を防止することが可能である。
【0076】
上述のようにスペーサー間に形成されるギャップの判定手法として、当該スペーサー部から放出される電子に基づいて形成されるプロファイルを用いると共に、当該プロファイルの一端(一方のエッジ)側の特徴量(ピーク高さ,ピークとボトム(ピークの立ち上がり点)間の距離,微分プロファイルのピーク高さ,微分プロファイルのピークとボトム間の距離等に関する情報)と、他端(他方のエッジ)側の特徴量との比較を行うことによって、高精度にギャップ種類の判定を行うことが可能となる。また、2つの特徴量は、2点間の絶対的な距離だけではなく、例えば、画像上の2点間の画素数や、その他、距離の程度を示す何等かの値に置き換えることもできる。また、2つの特徴量を直接比較するのではなく、所定の基準値を設けておき、当該基準値にどの程度近似、或いは離間しているかを判定することによって、2つの特徴量の比較を行うようにしても良い。
【0077】
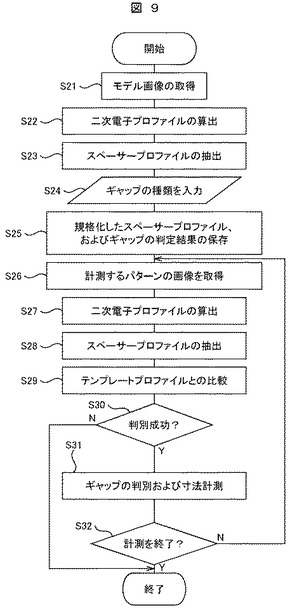
次に第二のギャップ判定方法として、プロファイルマッチングを用いて判別する方法について説明する。プロファイルマッチングによる判別方法は、判定の基準となるパターンの二次電子プロファイルを事前に登録しておき、計測点のパターンから得られた二次電子プロファイルとの類似度を算出することでギャップの判別を行う方法である。図9に判定方法のフローチャートを示す。
【0078】
まず、作業者の操作によりコアギャップとスペーサーギャップの位置が既知であり、かつ判別を実施したいパターンと同一の構造をもつパターンの電子顕微鏡像を撮像する(S21)。当該画像から二次電子プロファイルを算出し(S22)、当該プロファイルの値が一定の閾値以上の領域をスペーサー、それ以外の部分をギャップとして自動認識し、スペーサープロファイルを抽出する(S23)。
【0079】
抽出されたスペーサープロファイルは、二つのギャップ部と一つのスペーサー部に領域を区分けされ、図1の二次電子像表示装置124上に表示される。
【0080】
その後、S24にて作業者に対しどのギャップがコアギャップとスペーサーギャップに該当するか入力を求め、ギャップの種別を決定する。S25にて当該スペーサープロファイルを最大値と最小値を用いて規格化し、当該プロファイルに隣接するギャップの種別と共にモデル情報として登録する。このモデル登録は、S26以降でギャップ判別処理が行われる計測対象パターンと同一のウェーハ上のパターンを用いてもよいし、代表となるウェーハで取得したものを計測対象全てのウェーハに繰り返し用いてもよい。対象ウェーハ毎に登録する場合には、パターンの出来映えがモデルと計測対象で同程度であるため、判別がより正確に行える利点があるが、作業者による初期入力が必要となってしまう。この入力を不要としたより効率のよい手法については、実施例3にて説明する。以上の登録したモデル情報を基に計測を実施する。
【0081】
S26において計測点のパターンを撮像し、二次電子プロファイルを算出して(S27)、一定の閾値以上の領域をスペーサー、それ以外の部分をギャップとして自動認識し、スペーサープロファイルを抽出する(S28)。S29では算出したスペーサープロファイルを規格化して、登録されたモデルのスペーサープロファイルと比較を行いギャップの判別を実施する。
【0082】
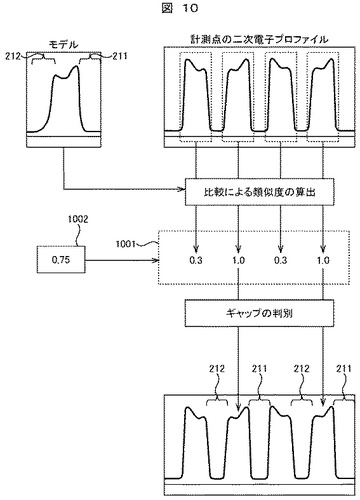
図10にギャップ判別方法の詳細を示す。まず、計測点から得られたそれぞれのスペーサープロファイルとモデルのスペーサープロファイルがどの程度一致しているかを示す類似度1001を算出する。ここで、スペーサーはプロセスの都合上左右向きの異なるスペーサーが交互の配列しているため、モデルのスペーサープロファイルと向きが一致しているスペーサーは類似度が高く、反対に向きが逆のスペーサーは類似度が低くなる。したがって、モデルのスペーサープロファイルと向きが一致するスペーサーのみ抽出可能となる類似度の閾値1002を設定して、当該閾値以上の類似度を有するスペーサーに対してのみモデル情報に基づくギャップの判別を実施する。前記に述べたようにコアギャップとスペーサーギャップは交互に配列しているため、以上の処理により全てのギャップに対してギャップの種別を確定することができる。
【0083】
また、このモデル情報を用いた判別方法では、第一のギャップ判別方法に用いた特徴値をモデル情報として判別を実施することも可能である。
【0084】
前記記載のギャップ判別方法では、一次電子線で走査された計測領域中に存在するすべてのスペーサープロファイルに対して判別を実施しギャップの種別を確定する方法について説明したが、SADP特有のスペーサー,コアギャップ,スペーサーギャップの配列に関する規則性を利用することで判別を実施するスペーサープロファイルの数を低減することも可能である。
【0085】
これは、スペーサーと二種類のギャップを含むパターンにおいて必ずコアギャップとスペーサーギャップが交互に並んで形成される点に注目し、最低隣接する二つのスペーサープロファイルについて判別を行うことで当該二つのスペーサー間に位置するギャップの種類が特定でき、当該ギャップを基準として他の全てのギャップについても種類を確定することができるためである。本手法により、判別処理の回数を軽減することが可能であり、結果としてスループットの向上が期待できる。しかし、判別を実施するスペーサーの個数を少なくした場合、当該スペーサーの形状がくずれていると判別が失敗もしくは誤判定をする可能性が高くなるため、判別に実施するスペーサーの個数は作業者が任意に設定可能とするのがよい。
【0086】
また、複数のスペーサープロファイルに対して判別を実施した場合、いくつかのスペーサープロファイルは判別に失敗したり、誤った判別結果を出力することが考えられる。この場合、得られた個々の判別結果を集計して前記規則性からエラーとなったギャップでの判別結果を訂正することが可能である。
【0087】
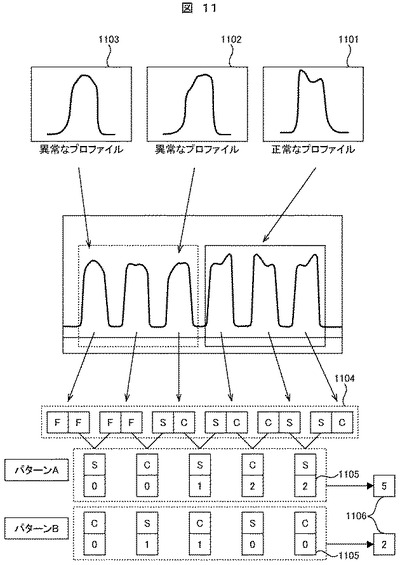
図11にギャップ判定時の誤り訂正手法について示す。図11に示す計測点の二次電子プロファイルには、正常な判別が可能なプロファイル1101,誤判定となりやすいプロファイル1102,判別が失敗となりやすいプロファイル1103が含まれている。
【0088】
まず当該二次電子プロファイルに対し、前記手法によりスペーサープロファイルの抽出を行い、スペーサープロファイルごとに当該スペーサープロファイルの左右のギャップについて判別を行う。判別結果1104のSはスペーサーギャップ、Cはコアギャップ、Fは判別不可能と判定されたことを示している。ここでSADPにより形成されたコアギャップとスペーサーギャップは、常に交互に配列しているため、ギャップの並び方としてはパターンAとパターンBのどちらかとなる。パターンAは最も左側のギャップがスペーサーギャップであり、パターンBはコアギャップとなっている。
【0089】
次にこの二種類のパターンを各スペーサープロファイルの判別結果と比較した時の各ギャップにおける評価値1105を算出する。評価値の算出方法は、一つのギャップに対して当該ギャップの両側のスペーサーから得られた判別結果を基に、判別結果が一致していれば+1、判別結果が相反もしくは判別失敗により結果がない場合は0として算出する。例えば、両側のスペーサーから得られた結果が選択パターンと一致していれば+2、片方だけ一致していれば+1となる。全てのスペーサープロファイルに対し評価値を算出した後、全てのスペーサープロファイルの評価値を合計した総合評価値1106を算出し、当該総合評価値が高いパターンをギャップの判定結果とする。
【0090】
図11の場合パターンAがギャップの判定結果となり、当該判定結果を基に判別に失敗したギャップや誤判定をしていたギャップの判別結果を訂正する。
【0091】
また、総合評価値を算出した段階において、総合評価値のパターンAとパターンBの差が一定値以下となった場合、すなわち誤判定もしくは判別失敗となるスペーサーの割合が一定値以上となった場合は、当該計測点での判別結果をエラーと出力し、本計測点でのパターン寸法計測は実施せず、次の処理に移動するようにしておくとよい。これは、誤判定や判別失敗となるスペーサーが多くなった場合、出力された判別結果自体の確実性が低くなるためである。
【0092】
ギャップの判別、および計測が終了すると、図1の二次電子像表示装置124上に撮像した電子顕微鏡像とギャップの判定結果およびギャップごとの測長値を表示する。
【0093】
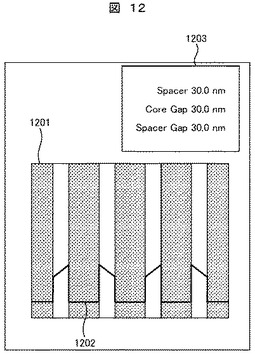
表示例を図12に示す。電子顕微鏡像1201の下部の曲線1202は、ギャップ判定により判定されたパターンの断面模式図を表示している。また、電子顕微鏡像1201の右上の数字1203は、計測された複数のスペーサー,コアギャップ,スペーサーギャップのそれぞれの平均値を表示している。
【0094】
以上の構成により、荷電粒子線によって走査された範囲のスペーサーと二種類のギャップを含むパターンに対し、垂直方向からの画像のみからギャップの判別を行うことが容易となる。また、半導体検査装置の自動測定に組み込む場合においても、ギャップの判別処理によりスループットを低下させること無く、検査・計測を実施することが可能である。
【実施例2】
【0095】
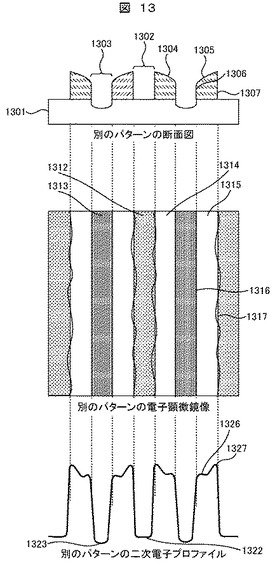
図13に図3で説明したパターンとは別のパターン例を示す。試料上に形成されたパターンの電子断面図、当該電子顕微鏡像に対応するパターンの断面図、当該電子顕微鏡像から作成した二次電子プロファイルを示す。図3との違いはスペーサーギャップ1303とコアギャップ1302の深さに差があることであり、本例ではスペーサーギャップ1303の方がコアギャップ1302より深くエッチングされている。スペーサーギャップ1303とコアギャップ1302は図2で示したように別々のプロセスのエッチングで形成されるため、このような違いが現れやすいと考えられる。これら違いは電子顕微鏡像では輝度の違いとなって観察され、例えばスペーサーギャップ部1313が暗く、コアギャップ部1312の方が明るくなる。二次電子プロファイルでは波形のボトム部の深さの違いとなり、スペーサーギャップ部分のプロファイル1323の方がコアギャップ部分のプロファイル1322より深くなる。これらの違いを検出することでスペーサーギャップ側1326とコアギャップ側1327が決定でき、注目しているパターンの左右(1304,1305)を判定することができる。
【0096】
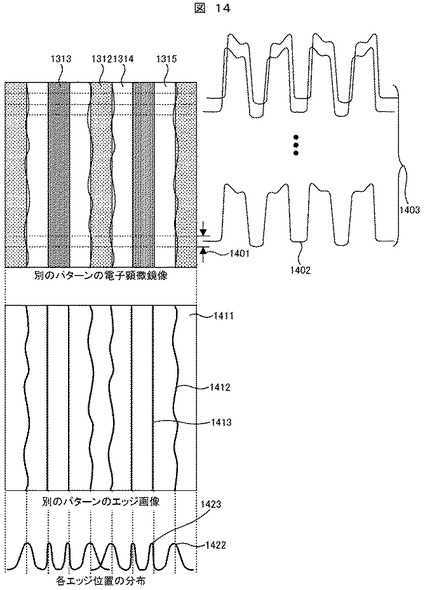
スペーサーギャップ1303とコアギャップ1302が別々のプロセスのエッチングで形成されることによる別の違いとしてラインエッジラフネスの違いがある。コアギャップ側はコアギャップ形成時のラインエッジラフネスがそのまま残ってしまうがスペーサーギャップ側はエッチングによって形成されるためラインエッジラフネスが少ないと考えられる。この違いを用いて左右のパターンを判定する方法を、図14を用いて説明する。なお、ここではスペーサーギャップ側のラインエッジラフネス1316を左ラインエッジラフネスと呼び、コアギャップ側のラインエッジラフネス1317を右ラインエッジラフネスと呼ぶ。
【0097】
パターンの電子顕微鏡像から二次電子プロファイルを作成する際に投影する任意の領域1401ごと二次電子プロファイル1402を複数作成する。これら複数の二次電子プロファイル1403すべてのラインエッジを検出する。ラインエッジの検出は例えばそれぞれのパターンの二次電子プロファイルの最大値と最小値の中間となる位置のように決定することができる。すべての領域で検出したエッジをプロットしたエッジ画像1411はコアギャップ側のラインエッジ1412とスペーサー側のラインエッジ1413が2本おきに交互に並ぶ。次にそれぞれのエッジにおけるラインエッジ位置の分布を求める。コアギャップ側とスペーサー側のラインエッジラフネスの違いはコアギャップ側のラインエッジ位置の分布1422とスペーサー側のラインエッジ位置の分布1423の違いで判別できる。
【0098】
エッジ位置の分布情報は、図14の紙面縦方向(Y方向)における異なる複数のエッジ位置において取得される横方向(X方向)のエッジ位置情報の取得に基づいて、取得することが可能である。例えば、横軸をエッジ位置情報(X方向)、縦軸に信号の出現頻度としたグラフを作成し、当該グラフ上に表現されるエッジ位置分布情報に基づいて、ギャップ判定を行うことが考えられる。この場合には、分布曲線の半値幅を、第1のギャップ部と第2のギャップ部との間で比較し、半値幅が大きい方を、コアギャップ側のエッジとして判定(半値幅が小さい方を、スペーサーギャップ側のエッジとして判定)する。
【0099】
このほかにも一般的な線分のゆらぎを評価する手法に基づいて、ラフネスを評価し、相対的にゆらぎの大きな線分側に位置するギャップを、コアギャップ(ゆらぎの小さな線分側に位置するギャップをスペーサーギャップ)と判定するようにしても良い。
【0100】
また、異なるY方向位置にて、輝度プロファイルを形成し、所定の明るさを持つ部分を繋ぎ合せるようにして輪郭線を形成し、当該輪郭線のゆらぎを評価するようにしても良い。更に、輪郭線のベクトルデータを、GDSやOASIS形式のような半導体デバイスの設計データと同じ形式で保存することも可能である。
【0101】
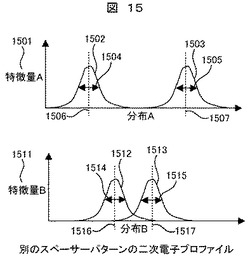
以上、左右のパターンを区別するための特徴を複数提案した。これらの複数の特徴量はそれぞれ単独で判定に使うこともできるし、組み合わせて使うことも可能である。組み合わせて使う利点は顧客ごとにパターン作成のプロセスが違うため、どの特徴量が左右のスペーサーを認識するのに有利か判断できないためである。図15では複数の特徴量を判定に使う際の方法を説明するために、まず2つの特徴量A(1501)と特徴量B(1511)を考える。例えば2つの特徴量としては二次電子プロファイルにおける左右エッジの高さの違いやコアギャップとスペーサーギャップの深さの違いである。
【0102】
ここでは説明のため特徴量A(1501)を左右エッジの高さの違い、特徴量B(1511)をコアギャップとスペーサーギャップの深さの違いとする。特徴量Aにおいて分布1502はスペーサーギャップ側のエッジ高さの分布(平均値1506,分散1504)を示しており、分布1503はコアギャップ側のエッジ高さの分布(平均値1507,分散1505)とする。同様に特徴量Bにおいて分布1513はスペーサーギャップの深さの分布(平均値1517,分散1515)を示しており、分布1512はコアギャップの深さの分布(平均値1516,分散1514)とする。特徴量を用いて分類するには2つの分布が離れている方が判定は確からしく、またばらつきは狭いほどよい。ここで距離はそれぞれの分布の平均値1507から平均値1506を引いたものとする。特徴量Aと特徴量Bを比較するとばらつきは同等であるが距離が大きい特徴量Aの方がよいと判定する。
【0103】
2つ以上の特徴量を使用する場合も基本的には同じである。それぞれの特徴量はパターンを登録する際に数字データとして記憶しておき、パターン検出実行時に使用することもできる。
【0104】
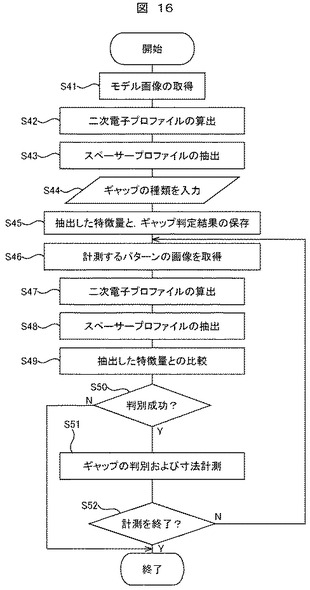
図9の実施例のシーケンスを本実施例に置き換えたシーケンスのフローを図16に示す。図9の実施例ではテンプレートマッチングでギャップ判定を行う例を示したが、本実施例ではモデル画像から抽出した特徴量を比較し、ギャップ判定を行う(S45)。それ以外は図9のシーケンスと同様に、モデル画像を取得し(S41)、画像から二次電子プロファイルの算出(S42)とスペーサープロファイルの抽出(S43)を行い、作業者によってギャップ種類の入力(S43)を行い、特徴量の比較による判定結果を保存したのち、実際に計測するパターンの画像を取得し(S46)、モデル画像同様に二次電子プロファイルの算出(S47)とスペーサープロファイルの抽出(S48)を保存された特徴量との比較(S49)を行い、ギャップ判別(S50)が成功すれば、判別結果をもとに、ギャップ種別ごとに別々に寸法計測を行う(S51)。他に計測点があれば、新たに計測するパターンの画像取得を行い、S46〜S51のシーケンスを計測点数分繰り返す(S52)。
【実施例3】
【0105】
図9におけるモデル画像の取得を計測対象ウェーハ毎に自動で行う方法について、図17を用いて説明する。
【0106】
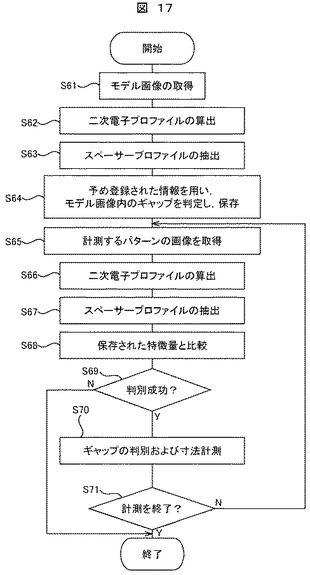
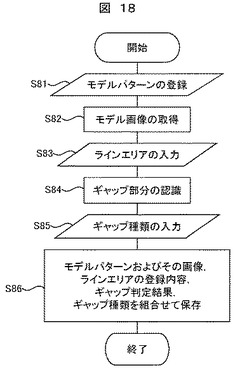
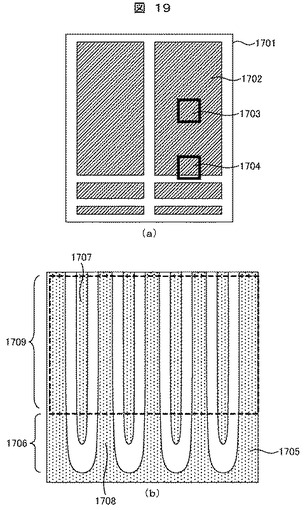
図9の実施例では作業者により2種類のギャップの判別を行い、その結果に基づいて計測パターンのギャップ判別を行った。これに対し、新たな実施の形態では、ギャップ判別が確実に行えるパターン部分を予めモデルパターンとして登録しておき、計測時には、登録されたモデルパターンを用いてギャップ判別用のモデル画像を取得する。計測時には予め登録された情報に基づいて計測対象パターンと同じウェーハ上のパターンでモデルパターンの画像をモデル画像として取得し(S61)、二次電子プロファイルの算出(S62)とスペーサープロファイルの抽出(S63)を行い、モデル画像のギャップ判別(S64)を自動で行う。以降は、計測するパターンの画像を取得(S65)し、計測パターン画像中で二次電子プロファイルの算出(S66)とスペーサープロファイルの抽出(S67)を行った後、モデル画像のプロファイルの特徴を利用して計測対象画像のパターン判別(S68)を行う。ギャップ判別(S69)が成功すれば、判別結果をもとに、ギャップ種別ごとに別々に寸法計測を行う(S70)。他に計測点があれば、新たに計測するパターンの画像取得(S65)を行い、S66〜S70のシーケンスを計測点数分繰り返す(S71)。図18に示すフローは、モデルパターン登録の手順である。はじめに、計測レシピ(自動計測のための手順を装置のタスクリストとして記録したファイル)作成時に計測対象パターン近傍で、ギャップ種類が確実に判別できるレイアウト部分をモデルパターンとして登録する(S81)。次に、指定されたモデルパターンの電子顕微鏡画像をモデル画像として計測時と同じ条件で撮像する(S82)。このモデルパターンの一例を図19に示す。図19(a)は半導体ウェーハ上に形成されるチップ1701のレイアウトの例であり、ハッチング部分は比較的パターン密度の高い部分である。特に、メモリ部分など、本発明が対象とするような微細な繰り返しパターンが形成される部分をセル部1702と呼ぶ。セル部中央1703では、隣接するマスクパターンのギャップ部分がコアギャップなのかスペーサーギャップなのか判別することが困難な部分である。
【0107】
これに対し、図19(b)に示すように、SADPプロセスの場合には、セル部の端部1704ではコアギャップ部分1707はマスクパターンにより囲まれて閉じており、コアギャップ1707とスペーサーギャップ1708の判別を容易にかつ確実に行うことができる。
【0108】
本実施例におけるパターン判別方法では、このセル端部1704のようにパターン判別が確実に行える部分をモデルパターンとして登録し、モデルパターンの画像をモデル画像として登録する。図19(b)はモデルパターン部の電子顕微鏡画像1705の例である。
【0109】
次に、このモデル画像に対して、実際に計測を行うパターンと同じ構造である部分、本実施例の場合には図19(b)に点線で囲ったラインパターン部分1709を登録しておく(S83)。次に選択したラインパターン部分の画像内で、画像特徴量を用いてギャップ部分を認識させる(S84)。ギャップ部分の認識結果をモデル画像上に表示し、表示されたギャップ部分のギャップ種類を操作者にGUIを用いて登録させる(S85)。
【0110】
最後にこれら登録された情報、すなわち、モデルパターンおよびそのモデル画像,ラインエリア,ギャップ判定結果、ギャップ種類をまとめて計測レシピに保存する(S86)。このモデルパターン登録は同じ品種・工程のウェーハ計測に対して一度だけ行えばよい。本実施の形態によるパターン判別に用いる、モデルパターンでの画像取得は、計測箇所の位置決めに用いることが可能であり、位置決めのための画像と併用すれば、スループットを低下させることなく実現が可能である。
【0111】
これらの処理により、計測レシピと共に保存されるモデル画像のラインパターン部分は、図9の実施例のモデル画像と等価なものとなる。そこで、計測時には、計測対象パターンの画像を取得(S65)する前に、その近傍でモデルパターンの画像を取得し(S61)、事前にレシピに記録された情報を用いて、モデルパターン画像内のスペーサーの種類を判定する(S64)。事前に登録されているモデルパターンでは、そのレイアウトによって確実にスペーサーの種類判別が可能であるため、モデル画像内のラインパターン部分1709に含まれるパターンの種類も確実に判別できる。特に、モデル画像内のラインパターン部分以外の部分1706にはスペーサー種類の判別に役立つ情報が含まれているため、予め指定したこのラインパターン以外の部分1706を用いたマッチングを行えば、このスペーサー種別判断は容易に実現できる。このようにして得られたモデル画像のラインパターン部分1709は、スペーサー種別が判別されている計測画像と同等のものであるため、この部分の画像をモデル画像として、図17のステップS62〜S71を行うことで、計測対象パターンの種類を確実に判別することが可能となる。本実施例で用いるライン部画像は計測対象パターンと異なる部分の画像となるが、同じ設計レイアウト、すなわち計測対象箇所と同じ形状になるよう形成されるパターンであるため、その違いは結果にほとんど影響しない。
【0112】
本実施の形態により、同じサンプル上のパターンでギャップ判別を行う場合には、モデル画像と計測画像のパターンの出来映えが同程度であるため、高精度な判別が可能となる利点がある。なお、図18の実施例では、モデルパターンの登録やギャップ部分の認識は作業者によってなされる例を示したが、これらの手続きは設計データを利用して、そのレイアウトの一意性などを評価して行うことももちろん可能である。例えば設計データを用いた測定レシピ作成を行う場合、設計データ上でモデルパターンを登録し、モデル画像を取得する前に、設計データ上で、図19(b)におけるラインエリア1709とそれ以外のエリア1706を予め登録しておく。計測時には、登録されたモデルパターンにおいて画像を取得し、登録された情報をもとにラインエリア1709とその他のエリア1706を自動設定し、以降は図17に従って、計測を行う。これにより、レシピ作成にかける時間を短縮することができ、計測時に作業者が行う作業を軽減することができる。また、図17では特徴量を用いたギャップ判定を例にとって説明したが、図18において保存した画像やプロファイルをテンプレートと比較することにより、ギャップを判別することも可能である。図20にフローを示す。
【0113】
予め登録された情報に基づいて計測対象パターンと同じウェーハ上のパターンでモデルパターンの画像をモデル画像として取得し(S91)、二次電子プロファイルの算出(S92)とスペーサープロファイルの抽出(S93)を行い、モデル画像のギャップ判別(S94)を自動で行う。以降は、計測するパターンの画像を取得(S95)し、計測パターン画像中で二次電子プロファイルの算出(S96)とスペーサープロファイルの抽出(S97)を行った後、モデル画像のプロファイルの特徴を利用して計測対象画像のパターン判別(S98)を行う。ギャップ判別(S99)が成功すれば、判別結果をもとに、ギャップ種別ごとに別々に寸法計測を行う(S100)。他に計測点があれば、新たに計測するパターンの画像取得(S95)を行い、S66〜S70のシーケンスを計測点数分繰り返す(S101)。
【実施例4】
【0114】
実施例3では、図19のセル部中央1703を所望の計測パターンとしており、同じセルの端部1704を用いてコアギャップ1707とスペーサーギャップ1708の判別を行う例を示した。しかし、実際の半導体パターンにおいては、セル中央部1703とセル端部1704の出来映え(寸法,ラインエッジラフネス,パターン側壁傾斜角度など、形状の違い)が同じとは限らない。一般的に、セル部1702のような場所では、セル中央部1703ではパターンの出来映えが安定するのに対し、セル端部1704では形状に差が生じやすい。そのため、セル端部1703を用いて判定したコアギャップ,スペーサーギャップの判定基準は、判定精度が低下し、セル中央部1703でのギャップ種類判定時において誤判定を生じる場合がある。また、セル中央部1703とセル端部1704での形状の違いが大きい場合、セル端部1704で作成した判定基準が、セル中央部1703では当てはまらないケースが起こりうる。これに対し、新たな実施例の形態では、ギャップ種類の区別に用いる画像取得ステップを2段階設けることにより、誤判定を防ぐ。フローを、図21に示す。
【0115】
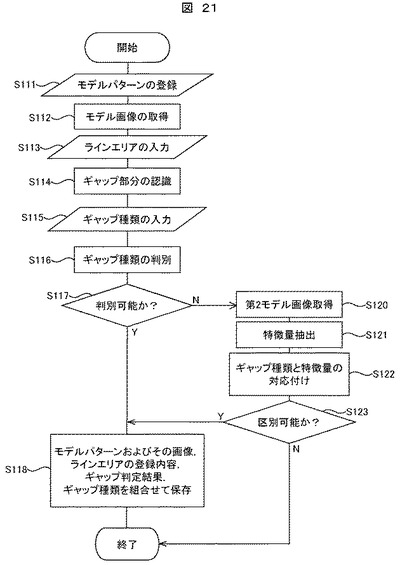
図21に示すフローは、図18に示したモデルパターン登録手順に、後述する誤判定抑制シーケンス(S120,S121)を追加したフローである。まず、モデルパターンを登録し(S111)、モデル画像を取得し(S112)、ラインエリアを入力し(S113)、ギャップ部分の認識を行い(S114)、ギャップ種類を作業者が入力し(S115)、ギャップ種類を区別するための特徴量を抽出してギャップ種類の判別を行う(S116)。しかしここで図19(b)に示すラインパターン1709の形状にばらつきがあり、あるいは2種類のギャップの形状に差異がほとんどみられずに、得られた特徴量からは2種類のギャップを区別することが困難と判断(S117)した場合、追加シーケンス(S120〜S122、後述)を実行する。
【0116】
なお、ギャップ部分の認識方法の一例としては、図19に示したように予め指定したラインパターン以外の部分1706を用いたマッチングを行えば、このギャップ種類の区別は容易に実現できる。ギャップの区別が可能か否かの判定には、テンプレートとの一致度を数値として表し、その値に閾値を設けることで、それ以下の場合を困難と判断できる。つぎに、第2モデル画像取得(S120)について、図22を用いて説明する。なお、図21にて取得するモデル画像(S112)を以降第1モデル画像と呼ぶ。
【0117】
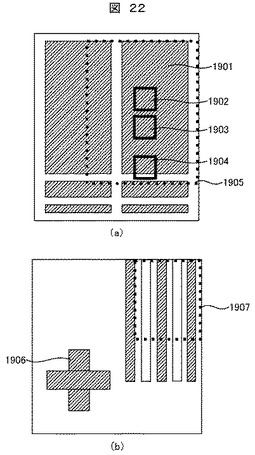
図22(a)1901は、半導体ウェーハ上に形成されるチップ内のセル部を表す。第2モデル画像とは、計測時に正確なギャップ種類の判別を行うためのモデル画像で、第1モデル画像取得位置1904よりも計測位置1902に近い位置で、両方の位置から電子線偏向によって、正確に距離が検知できる範囲内1905に移動した場所で、計測パターンの形状と一致する形状のパターンが存在する場所1903を作業者が指定し、計測時と同じ条件で撮像した画像である。ここで、正確に位置を検出するためには、ライン1本分以内の視野ずれの精度が求められる。すなわち、ここで求められる電子線偏向の精度は、完成したラインパターンの1/2ピッチ分以内である。
【0118】
第1モデル画像と第2モデル画像は、電子線の偏向精度に依存した正確な位置情報を持っているので、第1モデル画像中で判別されたコアギャップとスペーサーギャップの区別は、その位置により、第2モデル画像中でも判別可能である。したがってギャップ部分の認識は第1モデル画像で行い、第2モデル画像では、ギャップ種類判別のための特徴量抽出を行う。第2モデル画像中のラインエリアで、第1モデル画像中で行ったギャップの認識結果から、ギャップの種類を自動的に判別し、各ギャップを区別するための特徴量の抽出を行い(S121)、ギャップ種別と特徴量の対応付けを行い(S122)、第2モデル画像を用いてギャップ種類が判別可能であることを確認する(S123)。得られたギャップ認識結果とギャップ種類区別の結果は計測レシピに保存され(S118)、図23に示す計測シーケンス実行時に用いられる。なお、第2モデル画像で特徴量抽出とギャップ区別が困難な場合、本シーケンスを終了する。
【0119】
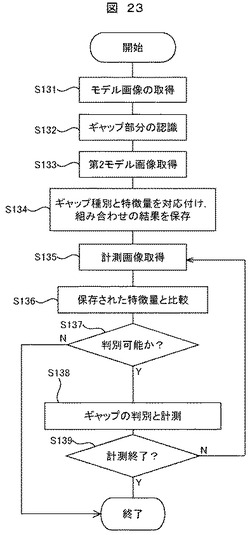
図23のシーケンスでは、計測用のウェーハ上で、図21にて予め登録された第1モデルにて画像を取得し(S131)、ギャップ種別の判別を行い(S132)、第2モデルの画像を取得し(S133)、特徴量を抽出してギャップ種別と特徴量の対応付けを行い(S134)、計測画像を取得し(S135)、保存された特徴量と比較し(S136)、ギャップ判別を行い(S137)、判別結果に従って、種別毎に分けて計測を行う(S138)。S135〜S138のシーケンスを測定点数分繰り返す(S139)。なお、図22では特徴量によるギャップ判別(S124)を例にとって説明したが、図20同様、ギャップ種別と特徴量の対応付け(S134)を、ギャップ種別とテンプレートマッチングを用いたギャップ判別結果との対応付けに置き換えることも可能である。
【0120】
SADP以外のDPパターンの場合には、ライン端部の形状ではラインパターンの種別判別ができない。このような場合、周辺のパターンを用いれば、第3の実施例同様にラインパターンの判別が可能である。この場合、第1画像の条件としては、画像が確実にセル内の最も外側のライン上で撮像されている、またはパターン上のどこを撮像したか保証できる必要がある。例えば、図22(b)のように、セル端部(破線で囲んだ1907)が入るように第1モデル画像を取得する。セル端部1907のラインパターン種類は、この部分の設計データから容易に確認可能であり、図21のシーケンスに従い、作業者によってラインパターン種類を入力することができる(S95)。またライン端部の出来映えが悪く、ラインが消失する可能性がある場合などを想定して、ラインパターン以外に特徴的なパターン1906を同一視野内にて撮像することで、位置決め精度がより高くなる。なお、ギャップ判別には設計データを用いても良い。
【0121】
また、上述のギャップ判別は、半導体の製造プロセスが成熟すると、パターンの断面形状差が小さくなり、判別が困難になる可能性がある。このような場合には、第4の実施例で示した2段階のモデル画像取得を用いて対応することが可能となる。先述のように、第2のモデル画像取得部分と計測対象部分のパターンの出来映えは同程度であることが期待される。このため、形状が同じであっても寸法が異なる場合、コアギャップとスペーサーギャップ間の寸法差も、これら2つのパターンの間で同程度となる。このため、画像特徴量として、コアおよびスペーサーギャップの寸法を用いれば、第2の実施例の断面形状による判別と同様に、寸法差による判別が可能となる。パターンの形状も寸法も差がない場合には正しく判別できないが、この場合は、パターンが均一にできている良好な状態であるため、その旨結果を出力すればよい。
【0122】
上記の全ての実施例はSADPのマスク形状の判定を例にとって説明したが、図2(j)の最終パターンエッチ後においても、図2(h)のマスク形状の違いにより、コアギャップとスペーサーギャップのパターン側壁形状が変化するため、同様の手続きでパターン判別が可能である。また、上述したギャップ判定法は、他のダブルパターンニングプロセスに適用しても、同様に2組のパターンの判別が可能となる。ひいては、その結果に基づいたパターン寸法計測,プロセス管理・制御を実現することが可能となる。
【符号の説明】
【0123】
101 電子源
102 引出電極
103 一次電子線
104 第一コンデンサレンズ
105 絞り
106 第二コンデンサレンズ
107 二次電子検出器
108 アライメントコイル
109 偏向コイル
110 対物レンズ
111 試料
112 ステージ
113 試料室
114 二次電子
115 高電圧制御装置
116 第一コンデンサレンズ制御部
117 第二コンデンサレンズ制御部
118 二次電子信号増幅器
119 アライメント制御部
120,122 偏向信号制御部
121 対物レンズ制御部
123 画像処理プロセッサ
124 二次電子像表示装置
125 全体制御部
126 電子光学系制御装置
127 ステージ制御装置
128 ユーザーインターフェース
【技術分野】
【0001】
本発明は、試料に対する荷電粒子線の照射によって得られる信号に基づいて、パターン寸法を測定するパターン測定装置に係り、特に、二重露光(ダブルパターニング)によって形成されるパターンの測定に好適なパターン測定装置に関する。
【背景技術】
【0002】
半導体素子の製造装置の1つであるステッパ(縮小投影露光装置)は、レジストが塗布された半導体ウェーハ上に、フォトマスクやレチクル等に形成されたパターンを、投影レンズにより縮小して投影する装置である。
【0003】
昨今、形成されるパターンの微細化に伴い、走査電子顕微鏡等によって、形成されたパターンを測定、或いは検査し、その出来映えを評価する手法が、半導体の測定検査の主流となりつつある。走査電子顕微鏡は、電子ビームを試料上に走査することによって、試料から放出される電子を検出し、画像化する装置である。即ち、二次電子の放出量がほぼ同じの2つの領域は、ほぼ同じ輝度で表現されることになるため、その識別が困難になる可能性がある。また、電子顕微鏡画像にノイズが混入すると、やはり上記識別が困難となる場合がある。特に、昨今のパターンの高集積化に伴い、識別が困難なパターンが散見されるようになってきた。特許文献1,2には、ラインアンドスペースパターンのラインパターンとスペースを識別する手法が開示されている。具体的には、特許文献1には、垂直な二つの斜面によって形成された凸部と一種類の凹部によって構成されたラインパターンにおいて凸部と凹部を判定する方法が開示されている。特許文献2には、理想光軸に対し、ビームを傾斜して照射することによって得られる2つの隣接したプロファイルのピーク幅の比較に基づいて、当該2つのピークに挟まれた部位がラインパターンであるか、スペースであるかを判定する手法が説明されている。
【0004】
また、パターンの二次元画像だけでは判断が困難であっても、試料の深さ方向を含む三次元構造をモニタすることによって、パターンの種類を特定することができる。特許文献3には、パターンの三次元構造を観察するための方法として試料に対し異なる2方向から観察した画像を合成してパターンの三次元構造を推定する方法が開示されている。特許文献4には、試料上のパターンに対し斜めからビームを照射して、パターンの上面と底面の寸法を別々に計測をする方法が開示されている。
【0005】
非特許文献1,2、及び3には、半導体プロセスにおいて、露光とエッチングを2回繰り返して微細パターンを形成する手法が説明されている。
【先行技術文献】
【特許文献】
【0006】
【特許文献1】特開2004−251674号公報
【特許文献2】特開2003−90719号公報
【特許文献3】特開平5−41195号公報
【特許文献4】特開平5−175496号公報
【非特許文献】
【0007】
【非特許文献1】J.Finders、M.Dusa et al.、“Double patterning for 32nm and below: an update、”Proc. of SPIE Vol. 6924 692408-1-12
【非特許文献2】A. Miller、M. Maenhoudt et al、“Comparison of LFLE and LELE Manufacturability、”5th International Symposium on Immersion Lithography Extensions、September 2008
【非特許文献3】K. Lucas、C. Cork1 et al、“Interactions of double patterning technology with wafer processing、OPC and design flows、”Proc. of SPIE Vol. 6924 692403-1-12
【発明の概要】
【発明が解決しようとする課題】
【0008】
近年、半導体試料上に形成されるパターンの微細化要求に伴い当該要求を満たす一つの方法として自己整合型ダブルパターニング(Self Aligned Double Patterning:以下SADPと呼ぶ)と呼ばれるパターン形成方法が開発されており、今後歩留まり向上に向けたプロセス間でのパターン寸法計測が必要となることが予測される。
【0009】
SADPによって形成される複数のパターンの間には、異なる工程にて形成されたギャップが交互に形成される。各工程におけるプロセス管理等を適正に行うためには、当該ギャップの種類を特定した上で、測定を行う必要がある。特許文献1,2にはラインパターン(凸部)及びスペース(凹部)を識別する手法についての説明はあるものの、同じ凹部に異なる種類が存在することや、それを識別する手法については何も説明されていない。また、特許文献3,4に開示されているように、試料断面をモニタすることで、ギャップを識別することも考えられるが、ビームの傾斜や、画像を複数取得する手間があり、検査,測定時間の増加につながり、結果として単位時間当たりに検査,測定が可能な試料数が少なくなる。
【0010】
以下に、SADPのような複数の露光工程を有する製造プロセスにて形成されたギャップの種類の特定を、高いスループットにて実現することを目的とするパターン測定装置を説明する。
【課題を解決するための手段】
【0011】
上記目的を達成するための一態様として、荷電粒子ビームの走査に基づいて検出される信号から、複数のパターンが配列されたパターンの一端側に関する特徴量と、当該パターンの他端側に関する特徴量を抽出し、当該2つの特徴量の比較に基づいて、前記複数のパターン間のスペースの種類を判定するパターン測定装置を提案する。
【0012】
また、上記目的を達成するための他の態様として、荷電粒子ビームの走査に基づいて検出される信号から、複数のパターンが配列されたパターンのプロファイルを形成し、当該プロファイルの信号値が所定値以上の部分を抽出し、当該部分のプロファイルと、予め記憶されたプロファイルを比較し、一致度が所定の値以上であるか否かを判定し、当該判定に基づいて、前記複数のパターン間のスペース部の種類を判定するパターン測定装置を提案する。
【発明の効果】
【0013】
上記構成によれば、SADPのような複数の露光工程を有する製造プロセスにて形成されたギャップの種類の判定を、高いスループットを維持しつつ実現することが可能となる。
【図面の簡単な説明】
【0014】
【図1】走査電子顕微鏡の概略構成図。
【図2】SADPの処理工程を説明する図。
【図3】SADPによって形成されたパターンの断面図、電子顕微鏡像、及び二次電子プロファイルの一例を説明する図。
【図4】二次電子プロファイルに基づいて、ギャップの種類を判別する手法の一例を説明する図。
【図5】二次電子プロファイルに基づいて、ギャップの種類を判別する手法の他の一例を説明する図。
【図6】スペーサープロファイルの微分プロファイルの一例を説明する図。
【図7】スペーサーの線幅が小さくなったパターンに対するギャップ判別方法を説明する図。
【図8】スペーサーの線幅が小さくなったパターンに対するギャップ判別工程を説明するフローチャート。
【図9】波形マッチングを用いたギャップの判別工程を説明するフローチャート。
【図10】波形マッチングによるギャップの判別法を説明する図。
【図11】ギャップ判別時の誤判定を訂正する手法を説明する図。
【図12】コアギャップとスペーサーギャップの測定結果を電子顕微鏡画像上に表示した表示例を説明する図。
【図13】SADPによって形成されたパターンの断面図、電子顕微鏡像、及び二次電子プロファイルの他の一例を説明する図。
【図14】ビーム走査領域(Field Of View)内の複数の領域にて取得された二次電子プロファイルから、エッジのゆらぎを求める手法を説明する図。
【図15】複数の特徴量を用いて、ギャップの種類を判別する手法を説明する図。
【図16】モデルパターンを用いたギャップの判定工程を説明するフローチャート。
【図17】判定対象となるパターンと同一試料上にてモデルパターンを作成し、当該モデルパターンのプロファイルから得られる特徴量を用いて、ギャップ判定を行う工程を説明するフローチャート。
【図18】モデルパターンの登録工程を説明するフローチャート。
【図19】半導体チップのレイアウト例とモデルパターンの説明図。
【図20】判定対象となるパターンと同一試料上にてモデルパターンを作成し、当該モデルパターンと判定対象パターンのプロファイルのプロファイル比較に基づいて、ギャップ判定を行う工程を説明するフローチャート。
【図21】2つのモデルパターンの登録工程を説明するフローチャート。
【図22】2つのモデルパターンを用いたギャップ判定を行う場合のモデルパターン設定法を説明する図。
【図23】予め登録された2つのモデルパターンを用いてギャップ判定とパターン計測を行う工程を説明するフローチャート。
【発明を実施するための形態】
【0015】
SADPは、従来の露光装置が到達できる露光限界以下の非常に狭いピッチで配置されたラインとスペースが繰り返すパターンを作成する技術である。
【0016】
実際には、試料上に第一マスク層を形成し当該マスク層をエッチングすることで形成される第一マスクパターンと、第一マスクパターン上に第二マスク層を形成し当該マスク層をエッチングすることで第一マスクパターンの側壁にのみ形成される第二マスクパターン(以下スペーサーと呼ぶ)と、に対し、第一マスクパターンをエッチングによって除去し、試料上に残留するスペーサーをマスクとして試料をエッチングし試料上にラインパターンを形成する。このため、スペーサーの寸法が試料に形成されるラインパターンの寸法を決定する。したがって、SADPを用いてパターンを形成する場合、スペーサーの寸法を計測し、スペーサーの寸法を決定するプロセスへ計測結果をフィードバックし、当該計測結果を基にスペーサーの寸法を正確に制御することは非常に重要である。
【0017】
また、スペーサーは、傾斜の異なる二つの側面(第一の側面,第二の側面)と当該側面をつなぐ上面によって構成されている。スペーサーの側面には、スペーサーの第一の側面に隣接し、第一マスクパターンをエッチングにより除去することによって形成された第一の凹部(以下コアギャップと呼ぶ)と、スペーサーの第二の側面に隣接し、第二マスクパターンをエッチングにより加工することによって形成された第二の凹部(以下スペーサーギャップと呼ぶ)がある。コアギャップとスペーサーギャップは異なるプロセスによって形成されており、コアギャップの寸法とスペーサーギャップの寸法はそれぞれ別々のプロセスが制御している。これらのギャップの寸法はラインパターン形成時にラインパターン間の寸法を決定するため、当該パターンの寸法を制御するには、スペーサーとコアギャップ,スペーサーギャップをそれぞれ別々に計測し、それぞれの寸法を制御しているプロセスに寸法値をフィードバックし、当該寸法値を基にプロセスの実施条件を変更する必要がある。
【0018】
以上より、スペーサー,コアギャップ,スペーサーギャップを別々に計測するためには、それぞれを判別する機能が必要となる。
【0019】
一般的に試料上へ形成されるラインパターンは、一定の間隔でラインが並んだ構造となるためSADPにより形成されるコアギャップとスペーサーギャップの寸法は同一になるよう制御される。したがって、試料に対し垂直に荷電粒子線を入射させる観察方法では、撮像した画像から当該ギャップを判別するのは困難である。また、SADPにより形成されるパターン寸法は30〜20nm程度の非常の微細なものとなるため、ウェーハを計測したい位置に移動させる二次元可動ステージの停止位置精度がパターン寸法より大きい場合、計測範囲がずれる可能性があり、計測点の画像を撮像するたびにスペーサー,コアギャップ,スペーサーギャップを別々に認識することが必要となる。
【0020】
後述するように、SADPプロセスにおいては、マスクパターンのコアギャップとスペーサーギャップの断面形状が異なるため、これらの形状の違いを検知することができれば、二種類のギャップの判別が可能となる。
【0021】
半導体デバイスを測定,検査する装置では、試料上に形成された多数のパターン等を高速に測定,検査することが望まれる。よって、ギャップ判定も高速化が求められる。
【0022】
以下に説明する実施例では、試料上に形成されたスペーサーと二種類のギャップを含むパターンに対し垂直方向から荷電粒子線を走査し、当該走査箇所から放出される荷電粒子を検出することにより当該荷電粒子強度のプロファイルを導出し、当該プロファイルから算出される特徴値に基づいて、隣接する断面形状の異なる二種類のギャップを判別し寸法を計測する手法を説明する。
【0023】
二種類のギャップを判別するために、スペーサーを形成する第一の側面と第二の側面の形状が異なる点を利用する。この形状の差は、ギャップを形成するプロセスに依存しており、形状を比較することでギャップを形成したプロセス、すなわちスペーサーに隣接するギャップの種別を判別することが可能である。スペーサー側面の形状は、荷電粒子線強度のプロファイルにおいて信号の高さや当該プロファイルの裾部の傾き及び裾部の長さに相違点として現れる。
【0024】
具体的には、傾斜が急峻な場合、当該プロファイルのピーク高さは高く裾部の傾きは急峻になり、裾部の長さは短くなる。逆に、傾斜が緩やかな場合、当該プロファイルのピーク高さは低く裾部の傾きは緩やかになり、裾部の長さは長くなる。これらの情報を基に、傾斜が急峻な側面に隣接するギャップをコアギャップ、傾斜が緩やかな側面に隣接するギャップをスペーサーギャップと判定する。これをすべてのスペーサーに対して実行することで、計測範囲内のギャップを判別し、必要なパターン寸法の計測を可能とする。SADP以外のダブルパターンニング方式についても、異なるプロセスステップにより隣接して形成される、2組のパターン間の断面形状が異なる場合には、これらの断面形状の違いは荷電粒子線強度のプロファイルの違いとして現れるため、同様に2組のパターンを判定し、それぞれのパターンの寸法計測を可能とする。
【0025】
上述のような手法により、SADPにより形成されたスペーサーと二種類のギャップを含むパターンに対し、スループットを低下させること無く、断面形状の異なる二種類のギャップを判別して、寸法を連続して自動的に計測することが可能となる。
【0026】
以下に図面を用いて、荷電粒子線走査によって得られる信号に基づいて、複数のパターン間に形成されるスペース部(ギャップ)の種類を判定可能なパターン測定装置を説明する。なお、以下の実施例では、走査電子顕微鏡(Scanning Electron Microscope:SEM)によって取得される信号に基づいて、パターンの測定を行う装置について説明するが、SEMに替えて、集束イオンビーム(Focused Ion Beam)装置を適用することも可能である。但し、微細化が進むパターンを高精度に測定するためには、極めて高い倍率が要求されるため、一般的に分解能の面でFIB装置に勝るSEMを用いることが望ましい。
【0027】
図1は走査電子顕微鏡の概略構成図である。全体制御部125はユーザーインターフェース128から作業者によって入力された電子の加速電圧,試料111の情報,観察位置情報などを基に、電子光学系制御装置126,ステージ制御装置127を介して、装置全体の制御を行っている。
【0028】
試料111は図示されない試料搬送装置を介して、試料交換室を経由した後試料室113にあるステージ112上に固定される。
【0029】
電子光学系制御装置126は全体制御部125からの命令に従い高電圧制御装置115,第一コンデンサレンズ制御部116,第二コンデンサレンズ制御部117,二次電子信号増幅器118,アライメント制御部119,偏向信号制御部122,対物レンズ制御部121を制御している。
【0030】
引出電極102により電子源101から引き出された一次電子線103は第一コンデンサレンズ104,第二コンデンサレンズ106,対物レンズ110により収束され試料111上に照射される。途中電子線は絞り105を通過し、アライメントコイル108によりその軌道を調整され、また、偏向信号制御部120を介して偏向信号制御部122から信号を受けた偏向コイル109により試料上を二次元的に走査される。試料111への一次電子線103の照射に起因して、試料111から放出される二次電子114は二次電子検出器107により捕捉され、二次電子信号増幅器118を介して二次電子像表示装置124の輝度信号として使用される。
【0031】
二次電子像表示装置124の偏向信号と、偏向コイルの偏向信号とは同期しているため、二次電子像表示装置124上には試料111上のパターン形状が忠実に再現される。
【0032】
また、パターンの寸法計測に使用する画像を作成するため、二次電子信号増幅器118から出力される信号を画像処理プロセッサ123内でAD変換し、デジタル画像データを作成する。さらにデジタル画像データから二次電子プロファイルを作成する。
【0033】
作成された二次電子プロファイルから計測する範囲を、手動、もしくは一定のアルゴリズムに基づいて自動選択し、選択範囲の画素数を算出する。一次電子線103により走査された観察領域の実寸法と当該観察領域に対応する画素数から試料上での実寸法を計測する。
【0034】
なお、本実施例では、パターン測定装置の一例として、二次電子等の信号に基づいて、以下に説明するようなギャップ判定を行う画像処理プロセッサ(判定部)を含むコンピューターが、走査電子顕微鏡装置の一部として構成された装置を例示するが、これに限られることはない。例えば、走査電子顕微鏡によって取得された信号に基づく情報(二次電子信号,二次電子の検出に基づく信号波形情報,二次元画像信号、或いは画像から抽出されたパターンエッジの輪郭線情報等)を取得するためのインターフェースと、上記画像処理プロセッサに相当する演算装置を備えた外部の測定装置にて、後述するようなギャップ判定を行うようにしても良い。後述する処理を行うプログラムを記憶媒体に登録しておき、走査電子顕微鏡等に必要な信号を供給するプロセッサにて、当該プログラムを実行するようにしても良い。即ち、以下の説明は走査電子顕微鏡等のパターン測定装置にて実行可能なプログラム、或いはプログラムプロダクトとしての説明でもある。
【0035】
以下に、走査電子顕微鏡の計測対象であるSADPの概略を示す。
【0036】
図2にSADPの基本的なプロセスを示す。SADPでは、試料111においてパターンを形成する試料201上に第一マスク層202を形成し(図2(a))、当該マスク層上にフォトレジスト膜203を形成する(図2(b))。当該フォトレジスト膜203にパターンを露光し現像処理を行ってフォトレジスト膜203にフォトレジストパターン204を形成する(図2(c))。当該フォトレジストパターン204をマスクとして第一マスク層202をエッチングし、第一マスクパターン205を形成する(図2(d))。
【0037】
次に、第一マスクパターンの205上のフォトレジストパターン204を除去し(図2(e))、第一マスクパターン205の全面に第二マスク層206を形成する(図2(f))。その後、第一マスクパターン205の側壁のみに第二マスク層206の一部が残るようにエッチング条件を制御して第二マスク層206をエッチングする(図2(g))。このようにして形成された第二マスク層の残留構造物がスペーサー207である。
【0038】
スペーサー207は、第一マスクパターン205との接触部に形成される試料表面に対し垂直な側面208と、側面208に比べてわずかに傾いた反対側の側面209、および側面208から側面209へわずかに傾いた上面210に囲まれた形状を有している。側面209と上面210は、第一マスクパターン205の形状に沿って形成された第二マスク層206をエッチングして形成されるため、第一マスクパターンを中心としてなだらかに傾斜した斜面となる。
【0039】
続いて、第一マスクパターン205をエッチングによって除去すると、試料上にスペーサー207のみが残った状態となる(図2(h))。最後にこのスペーサーをマスクとして試料をエッチングし(図2(i))、ラインパターンを形成する(図2(j))。
【0040】
上記のプロセスより、最終的に試料201に形成されるパターンの寸法はスペーサーの寸法によって決定され、当該パターンのピッチ寸法はスペーサー間の凹部の寸法とスペーサーの寸法の和によって決定される。しかし、スペーサー間の凹部は、第一マスクパターン205をエッチングによって除去することで形成されるコアギャップ211と、第二マスク層206形成後の当該マスク層へのエッチングによって形成されるスペーサーギャップ212の二種類で構成されているため、コアギャップとスペーサーギャップの寸法に差が生じた場合、試料上へ形成されるラインパターンのピッチ寸法が一定にならなくなってしまう。したがって、コアギャップの寸法を制御するためには、第一マスクパターン205を形成するためのフォトレジストを露光するプロセス(図2(c))へ、スペーサーギャップの寸法を制御するためには、第二マスク層206を形成する成膜プロセス(図2(f))あるいは第二マスク層206をエッチングするプロセス(図2(g))へ、それぞれの寸法値を別々に計測し、当該プロセスへ寸法値をフィードバックして、当該寸法値を基にプロセスの実施条件を変更する必要がある。
【0041】
以下、前記走査型電子顕微鏡を用いて、SADPにより試料上に形成されたコアギャップとスペーサーギャップを判別し、当該ギャップの寸法を計測する方法について説明する。
【0042】
図3に試料上に形成されたスペーサーと二種類のギャップを含むパターンの電子顕微鏡像、当該電子顕微鏡像に対応するパターンの断面図、当該電子顕微鏡像から作成した二次電子プロファイルを示す。
【0043】
当該電子顕微鏡像において、輝度が高く白く見える部分301と、輝度が低く黒く見える部分302がある。電子顕微鏡像の輝度は試料から放出される二次電子量に依存しており、二次電子量が多いほど輝度が高くなるといった特徴がある。このような特徴を利用することにより、電子顕微鏡画像においては、パターンの断面形状の違いが画像の輝度の違いとして現れる。本実施例では、このような電子顕微鏡画像の特徴を利用して、パターンのコアギャップとスペーサーギャップをその形状の違いを利用して判別する。
【0044】
電子顕微鏡像から作成した二次電子プロファイルは、スペーサーに相当する部分で高くなり、ギャップに相当する部分で低くなる。加えて、スペーサーとコアギャップとの境界部分、およびスペーサーギャップとの境界部分に、二次電子プロファイルのピークが出現する。これは、試料表面に対し、角度の異なるエッジ部分を電子線で走査した場合、エッジ効果により平面よりも二次電子の放出量が増大するためであり、エッジの傾斜が急峻であるほど放出される二次電子量も多くなる。
【0045】
スペーサー211が有する2つのエッジの内、コアギャップ211に隣接するエッジ303の方が、スペーサーギャップ212に隣接するエッジ305と比較して、鋭利に形成される。したがって、エッジ303から放出される電子の検出に基づいて形成されるコアピーク304と、エッジ305から放出される電子の検出に基づいて形成されるスペーサーピーク306を比較すると、コアピーク304の方が相対的に高くなる。
【0046】
即ち、コアギャップ211とスペーサー207の境界部分では、相対的に高いコアピーク304が出現し、スペーサーギャップ212とスペーサー207の境界部分では、相対的に低いスペーサーピーク306が出現する。
【0047】
ここで、ギャップ判定方法の具体的な説明の前に、他のダブルパターンニングプロセスについて説明しておく。
【0048】
図2ではダブルパターニングプロセスの一つであるSADPプロセスを例にとって説明したが、この他にも、非特許文献1および非特許文献2に開示されているように、露光とエッチングを2回繰り返して微細パターンを形成する手法(Litho-Etch-Litho-Etch:以下LELEと呼ぶ)や、1組目のパターンを露光したあと、フリーズと呼ばれる処理により1組目のレジストパターンを保持したまま、2組目の露光を行う手法(Litho-Freeze-Litho-Etch:以下LFLEと呼ぶ)など、様々な手法が提案されている。SADP以外のダブルパターニングプロセスの共通点として、高密度部分の隣接するパターンを2つのマスクに分割し、これらを2回別々に露光するという特徴がある。
【0049】
隣接するパターンは別々の露光プロセスを経て形成されるため、パターン寸法管理およびその制御には、隣接するパターンが形成されたのはどちらの露光プロセスであるか判別する必要がある。すなわち、SADPにおけるコアギャップとスペーサーギャップとの代わりに、隣接するラインパターンの判別が必要となるのである。また、換言すれば、コアギャップに隣接するパターンエッジと、スペーサーギャップに隣接するパターンエッジは、当該エッジが形成された製造プロセスが異なるため、その製造プロセスによってもたらされる特徴を捉えれば、両者の識別が可能となる。
【0050】
本実施例における、電子顕微鏡の信号波形の違いに基づいて、パターンの断面形状の違いを判別する方法は、このような一般的なダブルパターンニングプロセスにも適用することができる。例えば、非特許文献3に開示されているように、LELEプロセスにおいては、はじめに露光,エッチングにより形成された一組目のパターンの影響により、二組目の露光時の下地平坦性が低下し、露光が困難になる例が示されている。このように、LELEプロセスにおいては、1組目の露光と2組目の露光では、その難易度が異なり、その結果として形成されるパターン形状は形成プロセスに依存して変化してしまう。また、LFLEプロセスにおいても、1組目の露光パターンにはフリーズ処理が施され、さらに2度目の露光処理によっても再度光が照射されるなど、異なる処理が加わるため、2度目の露光パターンとは異なる形状を持つ可能性が高い。どちらのプロセスにおいても、2度目の露光時は下地に1度目の露光の影響があるため、反射防止が不十分になってしまう。このため、単に断面形状が変化するだけでなく、パターン形状や寸法のばらつきが比較的大きくなる。すなわちラインエッジラフネス(Line Edge Roughness:以下LERと呼ぶ)の大きさが1度目と2度目の露光パターンで異なることになる。また、先述のパターン形状に依存した画像輝度の変化のみならず、電子顕微鏡画像の明るさは材料の違いによっても変化する。LELEプロセスでは、最終パターン形成のためのマスク材料が2組のパターン間で異なる。LFLEプロセスにおいてもフリージング処理により2組のパターン間で材料の特性が変化する。
【0051】
また、SADPのギャップについても、コアギャップとスペーサーギャップではギャップ形成のエッチング工程が異なるため、表面のダメージ状態などが変化する可能性が高い。このような場合には、材料特性の違いによっても電子顕微鏡画像の輝度が変化する。このように、どのダブルパターンニングプロセスにおいても、異なるプロセスステップにより隣接して形成される、2組のパターン間の形状の違いやそのばらつき,材料の違いなどが生じるため、これらを電子顕微鏡画像により判別できれば、形成プロセス毎のパターン寸法評価が可能となり、製造プロセスの適切な管理および制御が可能となる。以下の実施例では、SADPプロセスを経て形成されたパターンの判別方法について詳細に述べるが、当該手法の応用により、他のダブルパターンニングプロセスにも適用が可能である。
【実施例1】
【0052】
以下、具体的なギャップ判定方法について説明する。ギャップの判定方法は大きく分けて二つあるが、第一の方法として、二つのギャップ形状の違いによって発生する二次電子プロファイルの形状の違いに着目し、当該プロファイルから算出された特徴値に基づいて判別を行う方法を示す。
【0053】
図4にスペーサーと二種類のギャップを含むパターンの二次電子プロファイルと、当該プロファイルから抽出した任意のスペーサーにおける二次電子プロファイル、および当該プロファイルに対して微分処理を行った微分プロファイルを示す。
【0054】
まず、当該パターンの二次電子プロファイルからスペーサーに相当する部分(以下スペーサープロファイル401と呼ぶ)を抽出する。スペーサープロファイル401の検出には、予め設定された閾値以上の二次電子量をもつ領域を抜き出す処理を行う。スペーサーは計測範囲内に複数含まれているため、当該処理により抜き出された複数の領域を一つ一つの別のスペーサーとして認識する。なおこの閾値は、二次電子プロファイルからスペーサーとギャップ部分を分離するために行うプロセスであるため任意に設定可能であるが、一般的に当該パターンの二次電子プロファイルにおける最大値と最小値の中間程度でよい。
【0055】
次に、抜き出された一つのスペーサープロファイル401に対してスペーサーのエッジに対応するピークを抽出する。ピークの抽出には、スペーサープロファイル401の微分プロファイルを用いる方法を説明する。スペーサープロファイルに対して微分プロファイルを作成し、微分プロファイルの値が0となる点402を抽出する。この時抽出された点のうちスペーサープロファイルの値が最も大きい点をコアピーク304、2番目に大きい点をスペーサーピーク306とすればよい。
【0056】
上記の処理をすべてのスペーサープロファイル401に対して実行した後、隣接するスペーサープロファイルにおいてコアピーク304同士が隣り合う領域をコアギャップ211、スペーサーピーク306同士が隣り合う領域をスペーサーギャップ212と判定する。
【0057】
前記以外の判別方法として、スペーサープロファイル401の裾部の傾斜を利用する判別も可能である。図5にスペーサーと二種類のギャップを含むパターンの二次電子プロファイルと、当該プロファイルから抽出した任意のスペーサープロファイル、および当該プロファイルに対して微分処理を行った微分プロファイルを示す。
【0058】
当該判別方法は、スペーサーを形成する二つの側面の傾斜が異なる点に注目し、傾斜が緩やかな側面ではスペーサープロファイルの裾部が長くなり、傾斜が急峻である側面ではスペーサープロファイルの裾部が短くなる特徴を利用している。具体的にはスペーサープロファイルの立ち上がりからコアピーク304、およびスペーサーピーク306に達するまでの距離を比較することで判別を行う。
【0059】
まず前記手法と同様に当該パターンの二次電子プロファイルから任意のスペーサープロファイル401を抽出した後、当該プロファイルの微分プロファイルを作成し、当該微分プロファイルからスペーサープロファイル401の左右の立ち上がり点501,502を抽出する。立ち上がり点の抽出には、微分プロファイルの端点からプロファイルの中央に向かって微分プロファイルの値を調べた時、値が0から大きくずれる点を求めればよい。
【0060】
次に、当該立ち上がり点501,502からスペーサープロファイルの内側に向かって初めて微分プロファイルの値が0となる点503,504を抽出する。点503,504の位置は、図5より明らかなようにそれぞれコアピーク304およびスペーサーピーク306に相当する。
【0061】
ここで、点501と点503の二点間距離505と点502と点504の二点間距離506をそれぞれ求める。得られた二点間距離を比較すると、値の大きい二点間距離505の側面に隣接したギャップがスペーサーギャップ212、値の小さな二点間距離506の側面に隣接したギャップがコアギャップ211と判別できる。
【0062】
また、単にペーサープロファイルの裾部の傾斜を利用することも可能である。これは、スペーサーを形成する二つの側面の傾斜が異なる点に注目し、傾斜が緩やかな側面ではスペーサープロファイルの傾きが緩やかになるため微分プロファイルの絶対値が小さくなり、逆に傾斜が急峻な側面ではスペーサープロファイルの傾きが急峻になるため微分プロファイルの絶対値が大きくなることを利用している。
【0063】
図6に図5記載の微分プロファイルの絶対値をとったプロファイルを示す。
【0064】
まず、前記手法と同様に、スペーサーと二種類のギャップを含むパターンの二次電子プロファイルから任意のスペーサープロファイル401を抽出した後、当該プロファイルの微分プロファイルを作成し、当該微分プロファイルの絶対値をとった微分プロファイルを作成する。次に、当該プロファイルの左右の裾部から中心に向かって一つ目のピーク601,602のピーク高さを比較する。ピーク高さが高い方601に隣接するギャップをコアギャップ、ピーク高さが低い方602に隣接するギャップをスペーサーギャップとして判定する。
【0065】
なお、本明細書では二次電子プロファイルからピークを抽出する方法として、微分プロファイルを用いた方法について説明したが、その他の方法でピークを抽出できる方法であれば適用可能である。
【0066】
一方、より寸法の小さなスペーサーにおいては、図4に示したようなスペーサープロファイルを示さない場合がある。
【0067】
図7にスペーサーの寸法が図4に示したスペーサーより小さくなった場合の当該パターンの断面図および二次電子プロファイルを示す。
【0068】
SADPを用いてより微細なパターンを形成した場合、スペーサーの寸法も比例して小さくなる。スペーサーの寸法が小さくなるとコアピークとスペーサーピークが接近するため、コアピークの裾部にスペーサーピークが隠れ、スペーサーピークがピークとして検出できなくなることが予測される。もしくは、形成するスペーサーの寸法が小さくなることで、コアギャップ側とスペーサーギャップ側でのスペーサーの側面形状の差が小さくなり、コアピークとスペーサーピークの明確な差が検出できなくなることも予測される。
【0069】
この場合、前記の手法によりギャップの判定を実施すると、コアギャップとスペーサーギャップを検出することができなくなる。したがって、当該エラーを回避する処理をギャップの判別シーケンスに加える必要がある。
【0070】
図8に当該エラーの回避処理を加えたフローチャートを示す。
【0071】
計測点から得られた二次電子プロファイルに対し、前記のギャップ判別方法にて述べたコアピークとスペーサーピークの検出処理を行い(S11,S12,S13)、S14にてコアピークとスペーサーピークの検出に成功したかどうかを判定する。図7に示したような二次電子プロファイルではピークが一つしか検出されないためS14の判定処理で通常のギャップ判定処理(S15)ではなくS16の処理へ移動する。S16では、スペーサープロファイル上のピークを一つとしてピーク701を検出する。当該ピーク701は、コアピークとスペーサーピークの和であるため、当該ピーク701の位置は必ず本来のコアギャップに近い位置に存在する。
【0072】
したがって、S17で当該ピーク701の位置から、スペーサープロファイルの立ち上がり点702,703までの二点間距離704,705をそれぞれ算出し、S18で両者を比較して、二点間距離の短いほうをコアギャップ、間隔の長いほうをスペーサーギャップとして判定する。前記手法においては二次電子プロファイルから微分プロファイルを作成して、ピーク701,点702,点703に相当する当該微分プロファイルの値が0となる点706,707,708を算出して、点706と点707間の二点間距離704と点706と点708間の二点間距離705を比較することも可能である。もしくは、隣接するスペーサープロファイル401間でピーク701間の距離を算出し、距離が小さいギャップをコアギャップ211、距離が大きいギャップをスペーサーギャップ212と判定するようにしてもよい。
【0073】
また、前述したLERがスペーサーの左右エッジで異なることを利用した判別方法や、コアギャップとスペーサーギャップの底部の深さが異なることを利用した判別方法を用いることでもコアギャップとスペーサーギャップを判別することが可能である。これらの手法については後述する実施例2において詳細に説明する。
【0074】
以上のように、一のギャップ判定法が適正ではないと判断された場合に、他のギャップ判定法に切り替えるようなアルゴリズムの適用によって、以下のような効果も期待できる。
【0075】
例えば、製造プロセスの予期せぬ変動にも対応することが可能である。更なる効果として、半導体デバイスの製造工程での歩留確保には、製造プロセスの安定性,再現性が重要であり、上記判定法の切り替えを要すること自体が、プロセスの変動を検知したこととなる。この切り替えのフラグをプロセスQC(quality Check)に利用し、工程のチェックを実施し、製造工程の異常の拡散を防止することが可能である。
【0076】
上述のようにスペーサー間に形成されるギャップの判定手法として、当該スペーサー部から放出される電子に基づいて形成されるプロファイルを用いると共に、当該プロファイルの一端(一方のエッジ)側の特徴量(ピーク高さ,ピークとボトム(ピークの立ち上がり点)間の距離,微分プロファイルのピーク高さ,微分プロファイルのピークとボトム間の距離等に関する情報)と、他端(他方のエッジ)側の特徴量との比較を行うことによって、高精度にギャップ種類の判定を行うことが可能となる。また、2つの特徴量は、2点間の絶対的な距離だけではなく、例えば、画像上の2点間の画素数や、その他、距離の程度を示す何等かの値に置き換えることもできる。また、2つの特徴量を直接比較するのではなく、所定の基準値を設けておき、当該基準値にどの程度近似、或いは離間しているかを判定することによって、2つの特徴量の比較を行うようにしても良い。
【0077】
次に第二のギャップ判定方法として、プロファイルマッチングを用いて判別する方法について説明する。プロファイルマッチングによる判別方法は、判定の基準となるパターンの二次電子プロファイルを事前に登録しておき、計測点のパターンから得られた二次電子プロファイルとの類似度を算出することでギャップの判別を行う方法である。図9に判定方法のフローチャートを示す。
【0078】
まず、作業者の操作によりコアギャップとスペーサーギャップの位置が既知であり、かつ判別を実施したいパターンと同一の構造をもつパターンの電子顕微鏡像を撮像する(S21)。当該画像から二次電子プロファイルを算出し(S22)、当該プロファイルの値が一定の閾値以上の領域をスペーサー、それ以外の部分をギャップとして自動認識し、スペーサープロファイルを抽出する(S23)。
【0079】
抽出されたスペーサープロファイルは、二つのギャップ部と一つのスペーサー部に領域を区分けされ、図1の二次電子像表示装置124上に表示される。
【0080】
その後、S24にて作業者に対しどのギャップがコアギャップとスペーサーギャップに該当するか入力を求め、ギャップの種別を決定する。S25にて当該スペーサープロファイルを最大値と最小値を用いて規格化し、当該プロファイルに隣接するギャップの種別と共にモデル情報として登録する。このモデル登録は、S26以降でギャップ判別処理が行われる計測対象パターンと同一のウェーハ上のパターンを用いてもよいし、代表となるウェーハで取得したものを計測対象全てのウェーハに繰り返し用いてもよい。対象ウェーハ毎に登録する場合には、パターンの出来映えがモデルと計測対象で同程度であるため、判別がより正確に行える利点があるが、作業者による初期入力が必要となってしまう。この入力を不要としたより効率のよい手法については、実施例3にて説明する。以上の登録したモデル情報を基に計測を実施する。
【0081】
S26において計測点のパターンを撮像し、二次電子プロファイルを算出して(S27)、一定の閾値以上の領域をスペーサー、それ以外の部分をギャップとして自動認識し、スペーサープロファイルを抽出する(S28)。S29では算出したスペーサープロファイルを規格化して、登録されたモデルのスペーサープロファイルと比較を行いギャップの判別を実施する。
【0082】
図10にギャップ判別方法の詳細を示す。まず、計測点から得られたそれぞれのスペーサープロファイルとモデルのスペーサープロファイルがどの程度一致しているかを示す類似度1001を算出する。ここで、スペーサーはプロセスの都合上左右向きの異なるスペーサーが交互の配列しているため、モデルのスペーサープロファイルと向きが一致しているスペーサーは類似度が高く、反対に向きが逆のスペーサーは類似度が低くなる。したがって、モデルのスペーサープロファイルと向きが一致するスペーサーのみ抽出可能となる類似度の閾値1002を設定して、当該閾値以上の類似度を有するスペーサーに対してのみモデル情報に基づくギャップの判別を実施する。前記に述べたようにコアギャップとスペーサーギャップは交互に配列しているため、以上の処理により全てのギャップに対してギャップの種別を確定することができる。
【0083】
また、このモデル情報を用いた判別方法では、第一のギャップ判別方法に用いた特徴値をモデル情報として判別を実施することも可能である。
【0084】
前記記載のギャップ判別方法では、一次電子線で走査された計測領域中に存在するすべてのスペーサープロファイルに対して判別を実施しギャップの種別を確定する方法について説明したが、SADP特有のスペーサー,コアギャップ,スペーサーギャップの配列に関する規則性を利用することで判別を実施するスペーサープロファイルの数を低減することも可能である。
【0085】
これは、スペーサーと二種類のギャップを含むパターンにおいて必ずコアギャップとスペーサーギャップが交互に並んで形成される点に注目し、最低隣接する二つのスペーサープロファイルについて判別を行うことで当該二つのスペーサー間に位置するギャップの種類が特定でき、当該ギャップを基準として他の全てのギャップについても種類を確定することができるためである。本手法により、判別処理の回数を軽減することが可能であり、結果としてスループットの向上が期待できる。しかし、判別を実施するスペーサーの個数を少なくした場合、当該スペーサーの形状がくずれていると判別が失敗もしくは誤判定をする可能性が高くなるため、判別に実施するスペーサーの個数は作業者が任意に設定可能とするのがよい。
【0086】
また、複数のスペーサープロファイルに対して判別を実施した場合、いくつかのスペーサープロファイルは判別に失敗したり、誤った判別結果を出力することが考えられる。この場合、得られた個々の判別結果を集計して前記規則性からエラーとなったギャップでの判別結果を訂正することが可能である。
【0087】
図11にギャップ判定時の誤り訂正手法について示す。図11に示す計測点の二次電子プロファイルには、正常な判別が可能なプロファイル1101,誤判定となりやすいプロファイル1102,判別が失敗となりやすいプロファイル1103が含まれている。
【0088】
まず当該二次電子プロファイルに対し、前記手法によりスペーサープロファイルの抽出を行い、スペーサープロファイルごとに当該スペーサープロファイルの左右のギャップについて判別を行う。判別結果1104のSはスペーサーギャップ、Cはコアギャップ、Fは判別不可能と判定されたことを示している。ここでSADPにより形成されたコアギャップとスペーサーギャップは、常に交互に配列しているため、ギャップの並び方としてはパターンAとパターンBのどちらかとなる。パターンAは最も左側のギャップがスペーサーギャップであり、パターンBはコアギャップとなっている。
【0089】
次にこの二種類のパターンを各スペーサープロファイルの判別結果と比較した時の各ギャップにおける評価値1105を算出する。評価値の算出方法は、一つのギャップに対して当該ギャップの両側のスペーサーから得られた判別結果を基に、判別結果が一致していれば+1、判別結果が相反もしくは判別失敗により結果がない場合は0として算出する。例えば、両側のスペーサーから得られた結果が選択パターンと一致していれば+2、片方だけ一致していれば+1となる。全てのスペーサープロファイルに対し評価値を算出した後、全てのスペーサープロファイルの評価値を合計した総合評価値1106を算出し、当該総合評価値が高いパターンをギャップの判定結果とする。
【0090】
図11の場合パターンAがギャップの判定結果となり、当該判定結果を基に判別に失敗したギャップや誤判定をしていたギャップの判別結果を訂正する。
【0091】
また、総合評価値を算出した段階において、総合評価値のパターンAとパターンBの差が一定値以下となった場合、すなわち誤判定もしくは判別失敗となるスペーサーの割合が一定値以上となった場合は、当該計測点での判別結果をエラーと出力し、本計測点でのパターン寸法計測は実施せず、次の処理に移動するようにしておくとよい。これは、誤判定や判別失敗となるスペーサーが多くなった場合、出力された判別結果自体の確実性が低くなるためである。
【0092】
ギャップの判別、および計測が終了すると、図1の二次電子像表示装置124上に撮像した電子顕微鏡像とギャップの判定結果およびギャップごとの測長値を表示する。
【0093】
表示例を図12に示す。電子顕微鏡像1201の下部の曲線1202は、ギャップ判定により判定されたパターンの断面模式図を表示している。また、電子顕微鏡像1201の右上の数字1203は、計測された複数のスペーサー,コアギャップ,スペーサーギャップのそれぞれの平均値を表示している。
【0094】
以上の構成により、荷電粒子線によって走査された範囲のスペーサーと二種類のギャップを含むパターンに対し、垂直方向からの画像のみからギャップの判別を行うことが容易となる。また、半導体検査装置の自動測定に組み込む場合においても、ギャップの判別処理によりスループットを低下させること無く、検査・計測を実施することが可能である。
【実施例2】
【0095】
図13に図3で説明したパターンとは別のパターン例を示す。試料上に形成されたパターンの電子断面図、当該電子顕微鏡像に対応するパターンの断面図、当該電子顕微鏡像から作成した二次電子プロファイルを示す。図3との違いはスペーサーギャップ1303とコアギャップ1302の深さに差があることであり、本例ではスペーサーギャップ1303の方がコアギャップ1302より深くエッチングされている。スペーサーギャップ1303とコアギャップ1302は図2で示したように別々のプロセスのエッチングで形成されるため、このような違いが現れやすいと考えられる。これら違いは電子顕微鏡像では輝度の違いとなって観察され、例えばスペーサーギャップ部1313が暗く、コアギャップ部1312の方が明るくなる。二次電子プロファイルでは波形のボトム部の深さの違いとなり、スペーサーギャップ部分のプロファイル1323の方がコアギャップ部分のプロファイル1322より深くなる。これらの違いを検出することでスペーサーギャップ側1326とコアギャップ側1327が決定でき、注目しているパターンの左右(1304,1305)を判定することができる。
【0096】
スペーサーギャップ1303とコアギャップ1302が別々のプロセスのエッチングで形成されることによる別の違いとしてラインエッジラフネスの違いがある。コアギャップ側はコアギャップ形成時のラインエッジラフネスがそのまま残ってしまうがスペーサーギャップ側はエッチングによって形成されるためラインエッジラフネスが少ないと考えられる。この違いを用いて左右のパターンを判定する方法を、図14を用いて説明する。なお、ここではスペーサーギャップ側のラインエッジラフネス1316を左ラインエッジラフネスと呼び、コアギャップ側のラインエッジラフネス1317を右ラインエッジラフネスと呼ぶ。
【0097】
パターンの電子顕微鏡像から二次電子プロファイルを作成する際に投影する任意の領域1401ごと二次電子プロファイル1402を複数作成する。これら複数の二次電子プロファイル1403すべてのラインエッジを検出する。ラインエッジの検出は例えばそれぞれのパターンの二次電子プロファイルの最大値と最小値の中間となる位置のように決定することができる。すべての領域で検出したエッジをプロットしたエッジ画像1411はコアギャップ側のラインエッジ1412とスペーサー側のラインエッジ1413が2本おきに交互に並ぶ。次にそれぞれのエッジにおけるラインエッジ位置の分布を求める。コアギャップ側とスペーサー側のラインエッジラフネスの違いはコアギャップ側のラインエッジ位置の分布1422とスペーサー側のラインエッジ位置の分布1423の違いで判別できる。
【0098】
エッジ位置の分布情報は、図14の紙面縦方向(Y方向)における異なる複数のエッジ位置において取得される横方向(X方向)のエッジ位置情報の取得に基づいて、取得することが可能である。例えば、横軸をエッジ位置情報(X方向)、縦軸に信号の出現頻度としたグラフを作成し、当該グラフ上に表現されるエッジ位置分布情報に基づいて、ギャップ判定を行うことが考えられる。この場合には、分布曲線の半値幅を、第1のギャップ部と第2のギャップ部との間で比較し、半値幅が大きい方を、コアギャップ側のエッジとして判定(半値幅が小さい方を、スペーサーギャップ側のエッジとして判定)する。
【0099】
このほかにも一般的な線分のゆらぎを評価する手法に基づいて、ラフネスを評価し、相対的にゆらぎの大きな線分側に位置するギャップを、コアギャップ(ゆらぎの小さな線分側に位置するギャップをスペーサーギャップ)と判定するようにしても良い。
【0100】
また、異なるY方向位置にて、輝度プロファイルを形成し、所定の明るさを持つ部分を繋ぎ合せるようにして輪郭線を形成し、当該輪郭線のゆらぎを評価するようにしても良い。更に、輪郭線のベクトルデータを、GDSやOASIS形式のような半導体デバイスの設計データと同じ形式で保存することも可能である。
【0101】
以上、左右のパターンを区別するための特徴を複数提案した。これらの複数の特徴量はそれぞれ単独で判定に使うこともできるし、組み合わせて使うことも可能である。組み合わせて使う利点は顧客ごとにパターン作成のプロセスが違うため、どの特徴量が左右のスペーサーを認識するのに有利か判断できないためである。図15では複数の特徴量を判定に使う際の方法を説明するために、まず2つの特徴量A(1501)と特徴量B(1511)を考える。例えば2つの特徴量としては二次電子プロファイルにおける左右エッジの高さの違いやコアギャップとスペーサーギャップの深さの違いである。
【0102】
ここでは説明のため特徴量A(1501)を左右エッジの高さの違い、特徴量B(1511)をコアギャップとスペーサーギャップの深さの違いとする。特徴量Aにおいて分布1502はスペーサーギャップ側のエッジ高さの分布(平均値1506,分散1504)を示しており、分布1503はコアギャップ側のエッジ高さの分布(平均値1507,分散1505)とする。同様に特徴量Bにおいて分布1513はスペーサーギャップの深さの分布(平均値1517,分散1515)を示しており、分布1512はコアギャップの深さの分布(平均値1516,分散1514)とする。特徴量を用いて分類するには2つの分布が離れている方が判定は確からしく、またばらつきは狭いほどよい。ここで距離はそれぞれの分布の平均値1507から平均値1506を引いたものとする。特徴量Aと特徴量Bを比較するとばらつきは同等であるが距離が大きい特徴量Aの方がよいと判定する。
【0103】
2つ以上の特徴量を使用する場合も基本的には同じである。それぞれの特徴量はパターンを登録する際に数字データとして記憶しておき、パターン検出実行時に使用することもできる。
【0104】
図9の実施例のシーケンスを本実施例に置き換えたシーケンスのフローを図16に示す。図9の実施例ではテンプレートマッチングでギャップ判定を行う例を示したが、本実施例ではモデル画像から抽出した特徴量を比較し、ギャップ判定を行う(S45)。それ以外は図9のシーケンスと同様に、モデル画像を取得し(S41)、画像から二次電子プロファイルの算出(S42)とスペーサープロファイルの抽出(S43)を行い、作業者によってギャップ種類の入力(S43)を行い、特徴量の比較による判定結果を保存したのち、実際に計測するパターンの画像を取得し(S46)、モデル画像同様に二次電子プロファイルの算出(S47)とスペーサープロファイルの抽出(S48)を保存された特徴量との比較(S49)を行い、ギャップ判別(S50)が成功すれば、判別結果をもとに、ギャップ種別ごとに別々に寸法計測を行う(S51)。他に計測点があれば、新たに計測するパターンの画像取得を行い、S46〜S51のシーケンスを計測点数分繰り返す(S52)。
【実施例3】
【0105】
図9におけるモデル画像の取得を計測対象ウェーハ毎に自動で行う方法について、図17を用いて説明する。
【0106】
図9の実施例では作業者により2種類のギャップの判別を行い、その結果に基づいて計測パターンのギャップ判別を行った。これに対し、新たな実施の形態では、ギャップ判別が確実に行えるパターン部分を予めモデルパターンとして登録しておき、計測時には、登録されたモデルパターンを用いてギャップ判別用のモデル画像を取得する。計測時には予め登録された情報に基づいて計測対象パターンと同じウェーハ上のパターンでモデルパターンの画像をモデル画像として取得し(S61)、二次電子プロファイルの算出(S62)とスペーサープロファイルの抽出(S63)を行い、モデル画像のギャップ判別(S64)を自動で行う。以降は、計測するパターンの画像を取得(S65)し、計測パターン画像中で二次電子プロファイルの算出(S66)とスペーサープロファイルの抽出(S67)を行った後、モデル画像のプロファイルの特徴を利用して計測対象画像のパターン判別(S68)を行う。ギャップ判別(S69)が成功すれば、判別結果をもとに、ギャップ種別ごとに別々に寸法計測を行う(S70)。他に計測点があれば、新たに計測するパターンの画像取得(S65)を行い、S66〜S70のシーケンスを計測点数分繰り返す(S71)。図18に示すフローは、モデルパターン登録の手順である。はじめに、計測レシピ(自動計測のための手順を装置のタスクリストとして記録したファイル)作成時に計測対象パターン近傍で、ギャップ種類が確実に判別できるレイアウト部分をモデルパターンとして登録する(S81)。次に、指定されたモデルパターンの電子顕微鏡画像をモデル画像として計測時と同じ条件で撮像する(S82)。このモデルパターンの一例を図19に示す。図19(a)は半導体ウェーハ上に形成されるチップ1701のレイアウトの例であり、ハッチング部分は比較的パターン密度の高い部分である。特に、メモリ部分など、本発明が対象とするような微細な繰り返しパターンが形成される部分をセル部1702と呼ぶ。セル部中央1703では、隣接するマスクパターンのギャップ部分がコアギャップなのかスペーサーギャップなのか判別することが困難な部分である。
【0107】
これに対し、図19(b)に示すように、SADPプロセスの場合には、セル部の端部1704ではコアギャップ部分1707はマスクパターンにより囲まれて閉じており、コアギャップ1707とスペーサーギャップ1708の判別を容易にかつ確実に行うことができる。
【0108】
本実施例におけるパターン判別方法では、このセル端部1704のようにパターン判別が確実に行える部分をモデルパターンとして登録し、モデルパターンの画像をモデル画像として登録する。図19(b)はモデルパターン部の電子顕微鏡画像1705の例である。
【0109】
次に、このモデル画像に対して、実際に計測を行うパターンと同じ構造である部分、本実施例の場合には図19(b)に点線で囲ったラインパターン部分1709を登録しておく(S83)。次に選択したラインパターン部分の画像内で、画像特徴量を用いてギャップ部分を認識させる(S84)。ギャップ部分の認識結果をモデル画像上に表示し、表示されたギャップ部分のギャップ種類を操作者にGUIを用いて登録させる(S85)。
【0110】
最後にこれら登録された情報、すなわち、モデルパターンおよびそのモデル画像,ラインエリア,ギャップ判定結果、ギャップ種類をまとめて計測レシピに保存する(S86)。このモデルパターン登録は同じ品種・工程のウェーハ計測に対して一度だけ行えばよい。本実施の形態によるパターン判別に用いる、モデルパターンでの画像取得は、計測箇所の位置決めに用いることが可能であり、位置決めのための画像と併用すれば、スループットを低下させることなく実現が可能である。
【0111】
これらの処理により、計測レシピと共に保存されるモデル画像のラインパターン部分は、図9の実施例のモデル画像と等価なものとなる。そこで、計測時には、計測対象パターンの画像を取得(S65)する前に、その近傍でモデルパターンの画像を取得し(S61)、事前にレシピに記録された情報を用いて、モデルパターン画像内のスペーサーの種類を判定する(S64)。事前に登録されているモデルパターンでは、そのレイアウトによって確実にスペーサーの種類判別が可能であるため、モデル画像内のラインパターン部分1709に含まれるパターンの種類も確実に判別できる。特に、モデル画像内のラインパターン部分以外の部分1706にはスペーサー種類の判別に役立つ情報が含まれているため、予め指定したこのラインパターン以外の部分1706を用いたマッチングを行えば、このスペーサー種別判断は容易に実現できる。このようにして得られたモデル画像のラインパターン部分1709は、スペーサー種別が判別されている計測画像と同等のものであるため、この部分の画像をモデル画像として、図17のステップS62〜S71を行うことで、計測対象パターンの種類を確実に判別することが可能となる。本実施例で用いるライン部画像は計測対象パターンと異なる部分の画像となるが、同じ設計レイアウト、すなわち計測対象箇所と同じ形状になるよう形成されるパターンであるため、その違いは結果にほとんど影響しない。
【0112】
本実施の形態により、同じサンプル上のパターンでギャップ判別を行う場合には、モデル画像と計測画像のパターンの出来映えが同程度であるため、高精度な判別が可能となる利点がある。なお、図18の実施例では、モデルパターンの登録やギャップ部分の認識は作業者によってなされる例を示したが、これらの手続きは設計データを利用して、そのレイアウトの一意性などを評価して行うことももちろん可能である。例えば設計データを用いた測定レシピ作成を行う場合、設計データ上でモデルパターンを登録し、モデル画像を取得する前に、設計データ上で、図19(b)におけるラインエリア1709とそれ以外のエリア1706を予め登録しておく。計測時には、登録されたモデルパターンにおいて画像を取得し、登録された情報をもとにラインエリア1709とその他のエリア1706を自動設定し、以降は図17に従って、計測を行う。これにより、レシピ作成にかける時間を短縮することができ、計測時に作業者が行う作業を軽減することができる。また、図17では特徴量を用いたギャップ判定を例にとって説明したが、図18において保存した画像やプロファイルをテンプレートと比較することにより、ギャップを判別することも可能である。図20にフローを示す。
【0113】
予め登録された情報に基づいて計測対象パターンと同じウェーハ上のパターンでモデルパターンの画像をモデル画像として取得し(S91)、二次電子プロファイルの算出(S92)とスペーサープロファイルの抽出(S93)を行い、モデル画像のギャップ判別(S94)を自動で行う。以降は、計測するパターンの画像を取得(S95)し、計測パターン画像中で二次電子プロファイルの算出(S96)とスペーサープロファイルの抽出(S97)を行った後、モデル画像のプロファイルの特徴を利用して計測対象画像のパターン判別(S98)を行う。ギャップ判別(S99)が成功すれば、判別結果をもとに、ギャップ種別ごとに別々に寸法計測を行う(S100)。他に計測点があれば、新たに計測するパターンの画像取得(S95)を行い、S66〜S70のシーケンスを計測点数分繰り返す(S101)。
【実施例4】
【0114】
実施例3では、図19のセル部中央1703を所望の計測パターンとしており、同じセルの端部1704を用いてコアギャップ1707とスペーサーギャップ1708の判別を行う例を示した。しかし、実際の半導体パターンにおいては、セル中央部1703とセル端部1704の出来映え(寸法,ラインエッジラフネス,パターン側壁傾斜角度など、形状の違い)が同じとは限らない。一般的に、セル部1702のような場所では、セル中央部1703ではパターンの出来映えが安定するのに対し、セル端部1704では形状に差が生じやすい。そのため、セル端部1703を用いて判定したコアギャップ,スペーサーギャップの判定基準は、判定精度が低下し、セル中央部1703でのギャップ種類判定時において誤判定を生じる場合がある。また、セル中央部1703とセル端部1704での形状の違いが大きい場合、セル端部1704で作成した判定基準が、セル中央部1703では当てはまらないケースが起こりうる。これに対し、新たな実施例の形態では、ギャップ種類の区別に用いる画像取得ステップを2段階設けることにより、誤判定を防ぐ。フローを、図21に示す。
【0115】
図21に示すフローは、図18に示したモデルパターン登録手順に、後述する誤判定抑制シーケンス(S120,S121)を追加したフローである。まず、モデルパターンを登録し(S111)、モデル画像を取得し(S112)、ラインエリアを入力し(S113)、ギャップ部分の認識を行い(S114)、ギャップ種類を作業者が入力し(S115)、ギャップ種類を区別するための特徴量を抽出してギャップ種類の判別を行う(S116)。しかしここで図19(b)に示すラインパターン1709の形状にばらつきがあり、あるいは2種類のギャップの形状に差異がほとんどみられずに、得られた特徴量からは2種類のギャップを区別することが困難と判断(S117)した場合、追加シーケンス(S120〜S122、後述)を実行する。
【0116】
なお、ギャップ部分の認識方法の一例としては、図19に示したように予め指定したラインパターン以外の部分1706を用いたマッチングを行えば、このギャップ種類の区別は容易に実現できる。ギャップの区別が可能か否かの判定には、テンプレートとの一致度を数値として表し、その値に閾値を設けることで、それ以下の場合を困難と判断できる。つぎに、第2モデル画像取得(S120)について、図22を用いて説明する。なお、図21にて取得するモデル画像(S112)を以降第1モデル画像と呼ぶ。
【0117】
図22(a)1901は、半導体ウェーハ上に形成されるチップ内のセル部を表す。第2モデル画像とは、計測時に正確なギャップ種類の判別を行うためのモデル画像で、第1モデル画像取得位置1904よりも計測位置1902に近い位置で、両方の位置から電子線偏向によって、正確に距離が検知できる範囲内1905に移動した場所で、計測パターンの形状と一致する形状のパターンが存在する場所1903を作業者が指定し、計測時と同じ条件で撮像した画像である。ここで、正確に位置を検出するためには、ライン1本分以内の視野ずれの精度が求められる。すなわち、ここで求められる電子線偏向の精度は、完成したラインパターンの1/2ピッチ分以内である。
【0118】
第1モデル画像と第2モデル画像は、電子線の偏向精度に依存した正確な位置情報を持っているので、第1モデル画像中で判別されたコアギャップとスペーサーギャップの区別は、その位置により、第2モデル画像中でも判別可能である。したがってギャップ部分の認識は第1モデル画像で行い、第2モデル画像では、ギャップ種類判別のための特徴量抽出を行う。第2モデル画像中のラインエリアで、第1モデル画像中で行ったギャップの認識結果から、ギャップの種類を自動的に判別し、各ギャップを区別するための特徴量の抽出を行い(S121)、ギャップ種別と特徴量の対応付けを行い(S122)、第2モデル画像を用いてギャップ種類が判別可能であることを確認する(S123)。得られたギャップ認識結果とギャップ種類区別の結果は計測レシピに保存され(S118)、図23に示す計測シーケンス実行時に用いられる。なお、第2モデル画像で特徴量抽出とギャップ区別が困難な場合、本シーケンスを終了する。
【0119】
図23のシーケンスでは、計測用のウェーハ上で、図21にて予め登録された第1モデルにて画像を取得し(S131)、ギャップ種別の判別を行い(S132)、第2モデルの画像を取得し(S133)、特徴量を抽出してギャップ種別と特徴量の対応付けを行い(S134)、計測画像を取得し(S135)、保存された特徴量と比較し(S136)、ギャップ判別を行い(S137)、判別結果に従って、種別毎に分けて計測を行う(S138)。S135〜S138のシーケンスを測定点数分繰り返す(S139)。なお、図22では特徴量によるギャップ判別(S124)を例にとって説明したが、図20同様、ギャップ種別と特徴量の対応付け(S134)を、ギャップ種別とテンプレートマッチングを用いたギャップ判別結果との対応付けに置き換えることも可能である。
【0120】
SADP以外のDPパターンの場合には、ライン端部の形状ではラインパターンの種別判別ができない。このような場合、周辺のパターンを用いれば、第3の実施例同様にラインパターンの判別が可能である。この場合、第1画像の条件としては、画像が確実にセル内の最も外側のライン上で撮像されている、またはパターン上のどこを撮像したか保証できる必要がある。例えば、図22(b)のように、セル端部(破線で囲んだ1907)が入るように第1モデル画像を取得する。セル端部1907のラインパターン種類は、この部分の設計データから容易に確認可能であり、図21のシーケンスに従い、作業者によってラインパターン種類を入力することができる(S95)。またライン端部の出来映えが悪く、ラインが消失する可能性がある場合などを想定して、ラインパターン以外に特徴的なパターン1906を同一視野内にて撮像することで、位置決め精度がより高くなる。なお、ギャップ判別には設計データを用いても良い。
【0121】
また、上述のギャップ判別は、半導体の製造プロセスが成熟すると、パターンの断面形状差が小さくなり、判別が困難になる可能性がある。このような場合には、第4の実施例で示した2段階のモデル画像取得を用いて対応することが可能となる。先述のように、第2のモデル画像取得部分と計測対象部分のパターンの出来映えは同程度であることが期待される。このため、形状が同じであっても寸法が異なる場合、コアギャップとスペーサーギャップ間の寸法差も、これら2つのパターンの間で同程度となる。このため、画像特徴量として、コアおよびスペーサーギャップの寸法を用いれば、第2の実施例の断面形状による判別と同様に、寸法差による判別が可能となる。パターンの形状も寸法も差がない場合には正しく判別できないが、この場合は、パターンが均一にできている良好な状態であるため、その旨結果を出力すればよい。
【0122】
上記の全ての実施例はSADPのマスク形状の判定を例にとって説明したが、図2(j)の最終パターンエッチ後においても、図2(h)のマスク形状の違いにより、コアギャップとスペーサーギャップのパターン側壁形状が変化するため、同様の手続きでパターン判別が可能である。また、上述したギャップ判定法は、他のダブルパターンニングプロセスに適用しても、同様に2組のパターンの判別が可能となる。ひいては、その結果に基づいたパターン寸法計測,プロセス管理・制御を実現することが可能となる。
【符号の説明】
【0123】
101 電子源
102 引出電極
103 一次電子線
104 第一コンデンサレンズ
105 絞り
106 第二コンデンサレンズ
107 二次電子検出器
108 アライメントコイル
109 偏向コイル
110 対物レンズ
111 試料
112 ステージ
113 試料室
114 二次電子
115 高電圧制御装置
116 第一コンデンサレンズ制御部
117 第二コンデンサレンズ制御部
118 二次電子信号増幅器
119 アライメント制御部
120,122 偏向信号制御部
121 対物レンズ制御部
123 画像処理プロセッサ
124 二次電子像表示装置
125 全体制御部
126 電子光学系制御装置
127 ステージ制御装置
128 ユーザーインターフェース
【特許請求の範囲】
【請求項1】
試料に対する荷電粒子線の走査に基づいて得られる信号を用いて、複数のパターンが配列されたパターンを測定するパターン測定装置において、
前記荷電粒子線の走査に基づいて得られる信号から、複数のパターンが配列されたパターンの一端側に関する特徴量と、当該パターンの他端側に関する特徴量を抽出し、当該2つの特徴量の比較に基づいて、前記複数のパターン間のギャップの種類を判定する判定装置を備えたことを特徴とするパターン測定装置。
【請求項2】
請求項1において、
前記パターンは、自己整合型ダブルパターニングによって形成されるものであって、前記ギャップには、コアギャップとスペーサーギャップが含まれることを特徴とするパターン測定装置。
【請求項3】
請求項1において、
前記パターンの一端のエッジと、他端のエッジは異なる製造工程にて形成されるものであることを特徴とするパターン測定装置。
【請求項4】
請求項1において、
前記特徴量は、前記信号に基づいて形成される前記パターンの波形のピーク高さに関するものであって、前記判定装置は、前記一端、或いは他端のピークが高い側に位置するギャップをコアギャップと判定することを特徴とするパターン測定装置。
【請求項5】
請求項1において、
前記特徴量は、前記信号に基づいて形成される前記パターンの波形のピーク高さに関するものであって、前記判定装置は、前記一端、或いは他端のピークが低い側に位置するギャップをスペーサーギャップと判定することを特徴とするパターン測定装置。
【請求項6】
請求項1において、
前記特徴量は、前記信号に基づいて形成される前記パターンの波形のピーク点と当該ピークの立ち上がり点との距離に関するものであって、前記判定装置は、前記一端、或いは他端の前記距離が小さい側に位置するギャップをコアギャップと判定することを特徴とするパターン測定装置。
【請求項7】
請求項1において、
前記特徴量は、前記信号に基づいて形成される前記パターンの波形のピーク点と当該ピークの立ち上がり点との距離に関するものであって、前記判定装置は、前記一端、或いは他端の前記距離が大きい側に位置するギャップをスペーサーギャップと判定することを特徴とするパターン測定装置。
【請求項8】
請求項1において、
前記特徴量は、前記信号に基づいて形成される波形の微分波形に関するものであって、前記判定装置は、前記一端、或いは他端の前記微分波形のピークが高い側に位置するギャップをコアギャップと判定することを特徴とするパターン測定装置。
【請求項9】
請求項1において、
前記特徴量は、前記信号に基づいて形成される波形の微分波形に関するものであって、前記判定装置は、前記一端、或いは他端の前記微分波形のピークが低い側に位置するギャップをスペーサーギャップと判定することを特徴とするパターン測定装置。
【請求項10】
請求項1において、
前記特徴量は、前記信号に基づいて形成される波形の微分波形に関するものであって、前記判定装置は、前記一端、或いは他端の前記微分波形のピークの立ち上がり点間の距離が短い側に位置するギャップをコアギャップと判定することを特徴とするパターン測定装置。
【請求項11】
請求項1において、
前記特徴量は、前記信号に基づいて形成される波形の微分波形に関するものであって、前記判定装置は、前記一端、或いは他端の前記微分波形のピークの立ち上がり点間の距離が長い側に位置するギャップをスペーサーギャップと判定することを特徴とするパターン測定装置。
【請求項12】
請求項1において、
前記特徴量は、前記スペースに相当する部分の明るさに関するものであって、前記判定装置は、2種のスペースに相当する部分の内、明るい方をコアギャップと判定することを特徴とするパターン測定装置。
【請求項13】
請求項1において、
前記特徴量は、前記スペースに相当する部分の明るさに関するものであって、前記判定装置は、2種のスペースに相当する部分の内、暗い方をスペーサーギャップと判定することを特徴とするパターン測定装置。
【請求項14】
請求項1において、
前記特徴量は、前記パターンのエッジ部分のゆらぎに関するものであって、前記判定装置は、当該ゆらぎの程度が大きい側に位置するギャップを、コアギャップと判定することを特徴とするパターン測定装置。
【請求項15】
請求項1において、
前記特徴量は、前記パターンのエッジ部分のゆらぎに関するものであって、前記判定装置は、当該ゆらぎの程度が小さい側に位置するギャップを、スペーサーギャップと判定することを特徴とするパターン測定装置。
【請求項16】
試料に対する荷電粒子線の走査に基づいて得られる信号を用いて、複数のパターンが配列されたパターンを測定するパターン測定装置において、
前記荷電粒子線の走査に基づいて得られる信号から、前記パターンに相当する位置の波形プロファイルを形成し、当該波形プロファイルの信号値が所定値以上の部分を抽出し、当該部分の波形プロファイルと、予め記憶された波形プロファイルを比較し、一致度が所定値以上であるか、否かを判定し、当該判定に基づいて、前記複数のパターン間のギャップの種類を判定する判定装置を備えたことを特徴とするパターン測定装置。
【請求項17】
請求項16において、
前記パターンは、自己整合型ダブルパターニングによって形成されるものであって、前記スペースには、コアギャップとスペーサーギャップが含まれることを特徴とするパターン測定装置。
【請求項18】
請求項16において、
前記パターンの一端のエッジと、他端のエッジは異なる製造工程にて形成されるものであることを特徴とするパターン測定装置。
【請求項19】
請求項16において、
前記判定装置は、波形プロファイルの信号値が所定値以上の部分を複数抽出し、当該複数部分のプロファイルの配列に基づいて、前記パターン間のギャップの種類を判定することを特徴とするパターン測定装置。
【請求項20】
請求項16において、
前記予め記憶された波形プロファイルは、高さの異なる2つのピークを持ち、前記判定装置は、前記一致度の判定に基づいて、高い方のピーク側に位置するギャップをコアギャップと判定することを特徴とするパターン測定装置。
【請求項21】
請求項16において、
前記予め記憶された波形プロファイルは、高さの異なる2つのピークを持ち、前記判定装置は、前記一致度の判定に基づいて、低い方のピーク側に位置するギャップをスペーサーギャップと判定することを特徴とするパターン測定装置。
【請求項22】
荷電粒子線を試料上に走査することによって得られる信号に基づいて、試料上のパターンを測定する荷電粒子線装置に接続されるコンピューターに、前記信号から、前記試料上の部位の種類を判定させるコンピュータープログラムにおいて、
当該プログラムは、前記コンピューターに、前記荷電粒子線の走査に基づいて得られる信号から、複数のパターンが配列されたパターンの一端側に関する特徴量と、当該パターンの他端側に関する特徴量を抽出させ、当該2つの特徴量の比較に基づいて、前記複数のパターン間のギャップの種類を判定させることを特徴とするコンピュータープログラム。
【請求項23】
荷電粒子線を試料上に走査することによって得られる信号に基づいて、試料上のパターンを測定する荷電粒子線装置に接続されるコンピューターに、前記信号から、前記試料上の部位の種類を判定させるコンピュータープログラムにおいて、
当該プログラムは、前記コンピューターに、前記荷電粒子線の走査に基づいて得られる信号から、前記パターンに相当する位置の波形プロファイルを形成させ、当該波形プロファイルの信号値が所定値以上の部分を抽出させ、当該部分の波形プロファイルと、予め記憶された波形プロファイルを比較させ、一致度が所定値以上であるか、否かを判定させ、当該判定に基づいて、前記複数のパターン間のギャップの種類を判定させることを特徴とするコンピュータープログラム。
【請求項1】
試料に対する荷電粒子線の走査に基づいて得られる信号を用いて、複数のパターンが配列されたパターンを測定するパターン測定装置において、
前記荷電粒子線の走査に基づいて得られる信号から、複数のパターンが配列されたパターンの一端側に関する特徴量と、当該パターンの他端側に関する特徴量を抽出し、当該2つの特徴量の比較に基づいて、前記複数のパターン間のギャップの種類を判定する判定装置を備えたことを特徴とするパターン測定装置。
【請求項2】
請求項1において、
前記パターンは、自己整合型ダブルパターニングによって形成されるものであって、前記ギャップには、コアギャップとスペーサーギャップが含まれることを特徴とするパターン測定装置。
【請求項3】
請求項1において、
前記パターンの一端のエッジと、他端のエッジは異なる製造工程にて形成されるものであることを特徴とするパターン測定装置。
【請求項4】
請求項1において、
前記特徴量は、前記信号に基づいて形成される前記パターンの波形のピーク高さに関するものであって、前記判定装置は、前記一端、或いは他端のピークが高い側に位置するギャップをコアギャップと判定することを特徴とするパターン測定装置。
【請求項5】
請求項1において、
前記特徴量は、前記信号に基づいて形成される前記パターンの波形のピーク高さに関するものであって、前記判定装置は、前記一端、或いは他端のピークが低い側に位置するギャップをスペーサーギャップと判定することを特徴とするパターン測定装置。
【請求項6】
請求項1において、
前記特徴量は、前記信号に基づいて形成される前記パターンの波形のピーク点と当該ピークの立ち上がり点との距離に関するものであって、前記判定装置は、前記一端、或いは他端の前記距離が小さい側に位置するギャップをコアギャップと判定することを特徴とするパターン測定装置。
【請求項7】
請求項1において、
前記特徴量は、前記信号に基づいて形成される前記パターンの波形のピーク点と当該ピークの立ち上がり点との距離に関するものであって、前記判定装置は、前記一端、或いは他端の前記距離が大きい側に位置するギャップをスペーサーギャップと判定することを特徴とするパターン測定装置。
【請求項8】
請求項1において、
前記特徴量は、前記信号に基づいて形成される波形の微分波形に関するものであって、前記判定装置は、前記一端、或いは他端の前記微分波形のピークが高い側に位置するギャップをコアギャップと判定することを特徴とするパターン測定装置。
【請求項9】
請求項1において、
前記特徴量は、前記信号に基づいて形成される波形の微分波形に関するものであって、前記判定装置は、前記一端、或いは他端の前記微分波形のピークが低い側に位置するギャップをスペーサーギャップと判定することを特徴とするパターン測定装置。
【請求項10】
請求項1において、
前記特徴量は、前記信号に基づいて形成される波形の微分波形に関するものであって、前記判定装置は、前記一端、或いは他端の前記微分波形のピークの立ち上がり点間の距離が短い側に位置するギャップをコアギャップと判定することを特徴とするパターン測定装置。
【請求項11】
請求項1において、
前記特徴量は、前記信号に基づいて形成される波形の微分波形に関するものであって、前記判定装置は、前記一端、或いは他端の前記微分波形のピークの立ち上がり点間の距離が長い側に位置するギャップをスペーサーギャップと判定することを特徴とするパターン測定装置。
【請求項12】
請求項1において、
前記特徴量は、前記スペースに相当する部分の明るさに関するものであって、前記判定装置は、2種のスペースに相当する部分の内、明るい方をコアギャップと判定することを特徴とするパターン測定装置。
【請求項13】
請求項1において、
前記特徴量は、前記スペースに相当する部分の明るさに関するものであって、前記判定装置は、2種のスペースに相当する部分の内、暗い方をスペーサーギャップと判定することを特徴とするパターン測定装置。
【請求項14】
請求項1において、
前記特徴量は、前記パターンのエッジ部分のゆらぎに関するものであって、前記判定装置は、当該ゆらぎの程度が大きい側に位置するギャップを、コアギャップと判定することを特徴とするパターン測定装置。
【請求項15】
請求項1において、
前記特徴量は、前記パターンのエッジ部分のゆらぎに関するものであって、前記判定装置は、当該ゆらぎの程度が小さい側に位置するギャップを、スペーサーギャップと判定することを特徴とするパターン測定装置。
【請求項16】
試料に対する荷電粒子線の走査に基づいて得られる信号を用いて、複数のパターンが配列されたパターンを測定するパターン測定装置において、
前記荷電粒子線の走査に基づいて得られる信号から、前記パターンに相当する位置の波形プロファイルを形成し、当該波形プロファイルの信号値が所定値以上の部分を抽出し、当該部分の波形プロファイルと、予め記憶された波形プロファイルを比較し、一致度が所定値以上であるか、否かを判定し、当該判定に基づいて、前記複数のパターン間のギャップの種類を判定する判定装置を備えたことを特徴とするパターン測定装置。
【請求項17】
請求項16において、
前記パターンは、自己整合型ダブルパターニングによって形成されるものであって、前記スペースには、コアギャップとスペーサーギャップが含まれることを特徴とするパターン測定装置。
【請求項18】
請求項16において、
前記パターンの一端のエッジと、他端のエッジは異なる製造工程にて形成されるものであることを特徴とするパターン測定装置。
【請求項19】
請求項16において、
前記判定装置は、波形プロファイルの信号値が所定値以上の部分を複数抽出し、当該複数部分のプロファイルの配列に基づいて、前記パターン間のギャップの種類を判定することを特徴とするパターン測定装置。
【請求項20】
請求項16において、
前記予め記憶された波形プロファイルは、高さの異なる2つのピークを持ち、前記判定装置は、前記一致度の判定に基づいて、高い方のピーク側に位置するギャップをコアギャップと判定することを特徴とするパターン測定装置。
【請求項21】
請求項16において、
前記予め記憶された波形プロファイルは、高さの異なる2つのピークを持ち、前記判定装置は、前記一致度の判定に基づいて、低い方のピーク側に位置するギャップをスペーサーギャップと判定することを特徴とするパターン測定装置。
【請求項22】
荷電粒子線を試料上に走査することによって得られる信号に基づいて、試料上のパターンを測定する荷電粒子線装置に接続されるコンピューターに、前記信号から、前記試料上の部位の種類を判定させるコンピュータープログラムにおいて、
当該プログラムは、前記コンピューターに、前記荷電粒子線の走査に基づいて得られる信号から、複数のパターンが配列されたパターンの一端側に関する特徴量と、当該パターンの他端側に関する特徴量を抽出させ、当該2つの特徴量の比較に基づいて、前記複数のパターン間のギャップの種類を判定させることを特徴とするコンピュータープログラム。
【請求項23】
荷電粒子線を試料上に走査することによって得られる信号に基づいて、試料上のパターンを測定する荷電粒子線装置に接続されるコンピューターに、前記信号から、前記試料上の部位の種類を判定させるコンピュータープログラムにおいて、
当該プログラムは、前記コンピューターに、前記荷電粒子線の走査に基づいて得られる信号から、前記パターンに相当する位置の波形プロファイルを形成させ、当該波形プロファイルの信号値が所定値以上の部分を抽出させ、当該部分の波形プロファイルと、予め記憶された波形プロファイルを比較させ、一致度が所定値以上であるか、否かを判定させ、当該判定に基づいて、前記複数のパターン間のギャップの種類を判定させることを特徴とするコンピュータープログラム。
【図1】


【図2】
【図3】
【図4】
【図5】
【図6】
【図7】
【図8】
【図9】
【図10】
【図11】
【図12】
【図13】
【図14】
【図15】
【図16】
【図17】
【図18】
【図19】
【図20】
【図21】
【図22】
【図23】
【図2】
【図3】
【図4】
【図5】
【図6】
【図7】
【図8】
【図9】
【図10】
【図11】
【図12】
【図13】
【図14】
【図15】
【図16】
【図17】
【図18】
【図19】
【図20】
【図21】
【図22】
【図23】
【公開番号】特開2010−249587(P2010−249587A)
【公開日】平成22年11月4日(2010.11.4)
【国際特許分類】
【出願番号】特願2009−97572(P2009−97572)
【出願日】平成21年4月14日(2009.4.14)
【出願人】(501387839)株式会社日立ハイテクノロジーズ (4,325)
【Fターム(参考)】
【公開日】平成22年11月4日(2010.11.4)
【国際特許分類】
【出願日】平成21年4月14日(2009.4.14)
【出願人】(501387839)株式会社日立ハイテクノロジーズ (4,325)
【Fターム(参考)】
[ Back to top ]