
パターン計測装置、およびパターン計測方法
【課題】OPC model calibrationに要する計算時間を削減しつつ、精度を向上させる。
【解決手段】半導体の回路パターンのマスクエッジデータ、および回路パターンを撮像した画像データを記憶する記憶部と、画像データを入力として回路パターンのSEM(Scanning Electron Microscope)輪郭線を抽出し、マスクエッジデータと抽出したSEM輪郭線のデータ(SEM輪郭線データ)とに基づいて、露光シミュレーション部に予測SEM輪郭線のデータ(予測SEM輪郭線データ)を生成させるSEM輪郭線抽出部と、マスクエッジデータと、SEM輪郭線データと、予測輪郭線データとを入力として、SEM輪郭線データおよび予測SEM輪郭線データを、1次元形状の輪郭線と2次元形状の輪郭線とに分類する形状分類部と、SEM輪郭線データと予測SEM輪郭線データとを入力とし、1次元形状及び2次元形状の種類に応じて、SEM輪郭線データのサンプリングを行うSEM輪郭線サンプリング部と、を備える。
【解決手段】半導体の回路パターンのマスクエッジデータ、および回路パターンを撮像した画像データを記憶する記憶部と、画像データを入力として回路パターンのSEM(Scanning Electron Microscope)輪郭線を抽出し、マスクエッジデータと抽出したSEM輪郭線のデータ(SEM輪郭線データ)とに基づいて、露光シミュレーション部に予測SEM輪郭線のデータ(予測SEM輪郭線データ)を生成させるSEM輪郭線抽出部と、マスクエッジデータと、SEM輪郭線データと、予測輪郭線データとを入力として、SEM輪郭線データおよび予測SEM輪郭線データを、1次元形状の輪郭線と2次元形状の輪郭線とに分類する形状分類部と、SEM輪郭線データと予測SEM輪郭線データとを入力とし、1次元形状及び2次元形状の種類に応じて、SEM輪郭線データのサンプリングを行うSEM輪郭線サンプリング部と、を備える。
【発明の詳細な説明】
【技術分野】
【0001】
本発明は、測長装置および測長方法に関し、特に、電子顕微鏡画像の解析技術に関する。
【背景技術】
【0002】
半導体デバイスは急激な微細化を続けており、2000年代の初頭からナノメートルオーダに到達している。半導体デバイスを生産する際、製品の歩留まりを向上させるために、CD−SEM(Critical Dimension Scanning Electron Microscope、測長走査型電子顕微鏡)に代表される様々な計測装置を用いて、回路パターンの寸法や形状を計測し、回路パターンのマスクエッジデータとの差異を確認しながら製造が行われている。特に、回路パターンのフォトマスクをウェハに転写する工程(フォトリソグラフィ工程)においては、微細な回路パターンの形状を高精度に計測することが重要となる。
【0003】
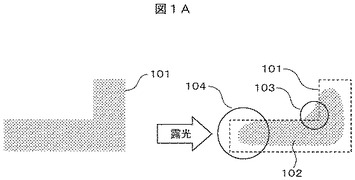
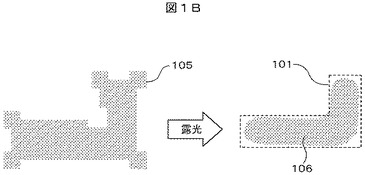
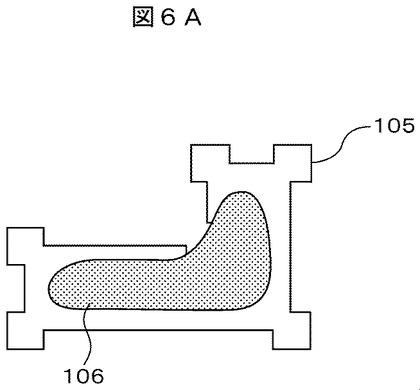
フォトリソグラフィ工程において、ナノメートルオーダの回路パターンを回路パターンのマスクエッジデータの通りに作成するためには、光近接効果(光の回折現象の影響)を考慮する必要がある。図1A左部に示すような単純なマスク形状101では、光近接効果により、例えば、図1A右部に示すように、ウェハ上に転写された回路パターンの形状102とマスク形状101のエッジ部の形状103との間で大きな差異が発生する。さらに、コーナ部の形状104は丸みのある形状となり、EOL(End−of−Line、ライン端)では後退が発生しすい傾向にある。そこで、図1B右部に示すような望ましいパターン形状106になるように、図1B左部に示すようなフォトマスクの形状をパターン形状105のように変化させる処理(OPC:Optical Proximity Correction)が導入されている。OPCは、配線幅の調整や、EOLやコーナなどに補正パターンを付与することで、転写パターンの形状を補正するフォトリソグラフィの解像度向上技術である。
【0004】
OPCをフォトマスクに適用する際には、転写モデルのパラメータを推定する必要がある。公知文献1(K. Lucas, “Optical Proximity Correction for Current and Future Nodes,” SPIE advanced lithography short course, SC990, 2010.)および公知文献2(S. Shen, et al.,“OPC model calibration based on circle−sampling theorem,” IEEE Solid−State and Integrated Circuit Technology, 2006.)によれば、一般には、レジスト等の影響により、光学モデルと実際に露光されたパターンには差異が生じてしまう。そこで、CD−SEMにより得られた転写パターンの測長結果をもとにして、転写モデルのパラメータ調整が行われている。公知文献2によると,この一連の処理はOPC model calibrationと呼ばれている。
【0005】
現在、新しいOPC model calibration手法の1つとして、回路パターンの直線部分についてはCD−SEMのCD値を用い、それ以外の部分についてはSEM輪郭線の2次元位置座標をcalibrationデータとして用いる手法(以降、この手法をcontour−based calibrationと称する)の実現が期待されている。公知文献3(P. Filitchkin, et al.,“Contour quality assessment for OPC model calibration,” Proceedings of SPIE, Vol.7272, pp.72722Q1-7,2009.)および公知文献4(T.Shibahara,et al.,“CD−gap−free Contour Extraction Technique for OPC Model Calibration,”Proceedings of SPIE,Vol.7971,2011.)によれば、contour−based calibrationを行うためには、従来からのCD測長値との差異(以降、この差異をCD−gapと称する)の少ないSEM輪郭線を計測する必要がある。
【0006】
さらに、OPC model calibrationにおいては、calibrationデータの解析に多大な時間を要するため、SEM輪郭線の2次元位置座標値を適切な間隔でサンプリングし、データ量を削減することにより、calibration時間の短縮を図る必要がある。しかしながら、このようなデータ量の削減処理を行った場合でも、OPC model calibrationには、高性能な計算機で数日の処理時間を要するという問題がある。
【0007】
また、仮に全てのSEM輪郭線データを用いてOPC model calibrationを行おうとすると、計算機の性能によっては、主記憶装置に膨大な計算データを格納できずに処理が行えない場合もある。いずれの問題にせよ、contour-based calibrationを行うためには、SEM輪郭線のデータ量を削減する必要がある。
【先行技術文献】
【特許文献】
【0008】
【特許文献1】特許第2008−164593号公報
【発明の概要】
【発明が解決しようとする課題】
【0009】
初めに、第1の課題について説明する。特許文献1において、第2のエッジ位置は多点検出したうえで曲線近似・連結等を行うところ(段落0283)において、エッジが求まる位置が削減される処理を行うことについては、示唆されていない。従って、contour-based calibrationを実行するためには、少なくとも計算時間を削減するためには、SEM輪郭線のサンプリングを行うことが課題となる。
【0010】
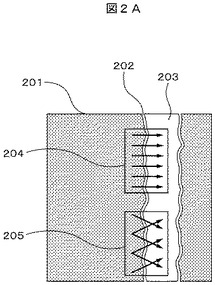
続いて、第2の課題について説明する。SEM輪郭線の位置座標を求める際、一般的には特許文献1に示されるように、例えば、図2Aに示すように、画像201からホワイトバンド202の中心位置を画像輪郭線として抽出し、画像輪郭線の法線方向204の向きに画像信号を抽出した後、SEM輪郭線を計測する処理が一般的である。しかし、OPCの調整工程などの設計段階や、量産段階の初期では、画像輪郭線が乱れる傾向にあるため、それに伴って、測長方向も必ずしも画像輪郭線の法線方向204のようには安定せず、例えば、乱れた画像輪郭線の法線方向205の向きに画像信号を抽出してしまう場合がある。
【0011】
さらに、公知文献3によれば、2次元のSEM輪郭線をOPC model calibrationに用いると、マスクパターンの1次元的な特徴(ライン幅やライン間幅など)については、転写精度が悪化するとの報告がある。この問題を解決するためには、公知文献4によると、CD−SEMにより取得されたCD値(以降、この値をCDCD−SEMと称する)と、SEM輪郭線から算出されたCD値(以降、この値をCDContourと称する)との間には、差異(以降、これをCD−gapと称する)を減少させることが重要である。
【0012】
従って、前記課題1と合わせて、OPC model calibrationの精度を向上させるためには、CD−gapを増加させずにSEM輪郭線のサンプリングを行うことが課題となる。
【課題を解決するための手段】
【0013】
上記の2つの課題を解決するため、本発明におけるパターン計測装置は、半導体の回路パターンのマスクエッジデータ、および前記回路パターンを撮像した画像データを記憶する記憶部と、前記画像データを入力として前記回路パターンのSEM輪郭線を抽出し、前記マスクエッジデータと抽出した前記SEM輪郭線のデータ(SEM輪郭線データ)とに基づいて、露光シミュレーション部に予測SEM輪郭線のデータ(予測SEM輪郭線データ)を生成させるSEM輪郭線抽出部と、前記マスクエッジデータと、前記SEM輪郭線データと、前記予測輪郭線データとを入力として、前記SEM輪郭線データおよび前記予測SEM輪郭線データを、1次元形状の輪郭線と2次元形状の輪郭線とに分類する形状分類部と、前記SEM輪郭線データと前記予測SEM輪郭線データとを入力とし、前記1次元形状及び前記2次元形状の種類に応じて、前記SEM輪郭線データのサンプリングを行うSEM輪郭線サンプリング部と、を備えることを特徴とする。
【0014】
また、本発明は、上記パターン計測装置で行われるパターン計測方法である。
【発明の効果】
【0015】
本発明によれば、OPC model calibrationに要する計算時間を削減しつつ、精度を向上させることができる。
【図面の簡単な説明】
【0016】
【図1A】フォトリソグラフィ工程におけるフォトマスクの形状と転写された回路パターンの形状との関係を示す図である(OPCなしの場合)。
【図1B】フォトリソグラフィ工程におけるフォトマスクの形状と転写された回路パターンの形状との関係を示す図である(OPCありの場合)。
【図1C】フォトリソグラフィ工程におけるフォトマスクの形状と転写された回路パターンの形状との関係を示す図である(SEM輪郭線のサンプリングを行った場合)。
【図2A】回路パターンの輪郭の位置を求めるための概要を示す図である(転写パターンの画像)。
【図2B】回路パターンの輪郭の位置を求めるための概要を示す図である(輝度プロファイルの解析手法の説明)。
【図3A】CD−gapを説明する図(ライン幅)。
【図3B】CD−gapを説明する図(ライン間幅)。
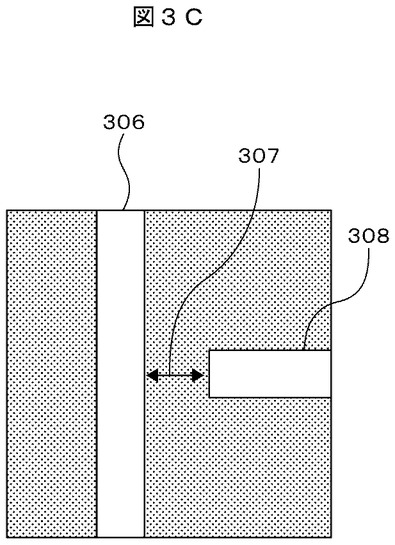
【図3C】CD−gapを説明する図(ラインとライン端の間の幅)。
【図4】本特許の実施形態におけるパターン計測処理フローの概要を示す図である。
【図5A】SEM輪郭線の形状分類と形状ごとのサンプリングを説明する図である。
【図5B】SEM輪郭線および予測SEM輪郭線における形状分類を説明する図(直線部におけるサンプリング)である。
【図5C】SEM輪郭線および予測SEM輪郭線における形状分類を説明する図(コーナ部におけるサンプリング)である。
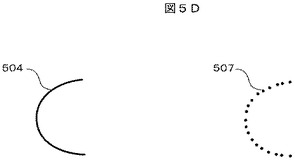
【図5D】SEM輪郭線および予測SEM輪郭線における形状分類を説明する図(EOL部におけるサンプリング)である。
【図6A】SEM輪郭線の形状分類を具体的に説明する図(マスクエッジとSEM輪郭線(もしくは、予測SEM輪郭線)の関係を示す図)である。
【図6B】SEM輪郭線の形状分類を具体的に説明する図(マスクエッジの形状を分類することを示す図)である。
【図6C】SEM輪郭線の形状分類を具体的に説明する図(マスクエッジの分類をSEM輪郭線(もしくは、予測SEM輪郭線)にマッピングすることを示す図)である。
【図6D】SEM輪郭線の形状分類を具体的に説明する図(分類されたSEM輪郭線(もしくは、予測SEM輪郭線)を示す図)である。
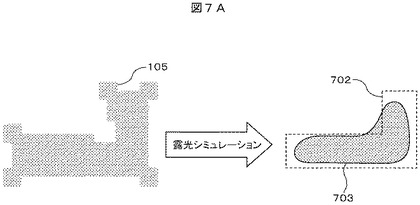
【図7A】露光シミュレータを用いて、マスクエッジから予測SEM輪郭線をシミュレーションしたことを表した図である。
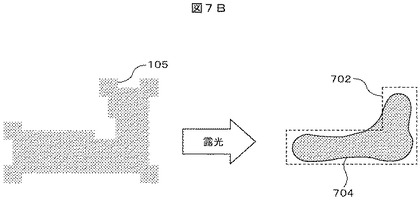
【図7B】は同一のマスクエッジから、実際に露光された回路パターンのSEM輪郭線を表した図である。
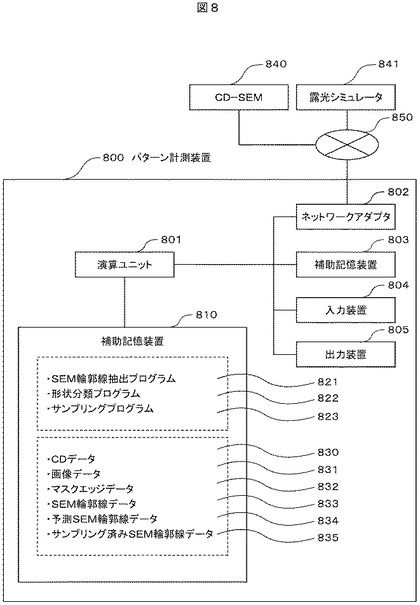
【図8】本特許における実施形態におけるパターン計測装置の構成の一例を示す図である。
【図9A】図4に示したS404におけるSEM輪郭線のサンプリング処理フローの概要を説明した図である(1次元形状部)。
【図9B】図4に示したS404におけるSEM輪郭線のサンプリング処理フローの概要を説明した図である(2次元形状部)。
【図10A】SEM輪郭線の1次元形状部におけるサンプリング処理を説明した図である。
【図10B】1次元形状部におけるサンプリング誤差の算出方法を説明した図である。
【図10C】1次元形状部におけるサンプリング誤差の算出方法を説明した図である。
【図10D】1次元形状部におけるサンプリング誤差の算出方法を説明した図である。
【図10E】1次元形状部におけるサンプリング誤差の算出方法を説明した図である。
【図10F】1次元形状部におけるサンプリング誤差の算出方法を説明した図である。
【図10G】1次元形状部におけるサンプリング誤差の算出方法を説明した図である。
【図11A】SEM輪郭線の2次元形状部におけるサンプリング処理を説明した図である。
【図11B】2次元形状部におけるサンプリング誤差の算出方法を説明した図である。
【図11C】2次元形状部におけるサンプリング誤差の算出方法を説明した図である。
【図11D】2次元形状部におけるサンプリング誤差の算出方法を説明した図である。
【図11E】2次元形状部におけるサンプリング誤差の算出方法を説明した図である。
【図11F】2次元形状部におけるサンプリング誤差の算出方法を説明した図である。
【図11G】2次元形状部におけるサンプリング誤差の算出方法を説明した図である。
【発明を実施するための形態】
【0017】
以下に添付図面を参照して、本発明にかかるパターン計測装置、およびパターン計測方法の実施の形態を詳細に説明する。
(実施形態)
はじめに、CD−gapの明確な定義を与える。CD−SEMにより取得されたCD値(つまり、CDCD−SEM)と、SEM輪郭線から算出されたCD値(つまり、CDContour)の差異をCD−gapとし、CD−gap=|CDCD−SEM−CDContour|と定義する。
【0018】
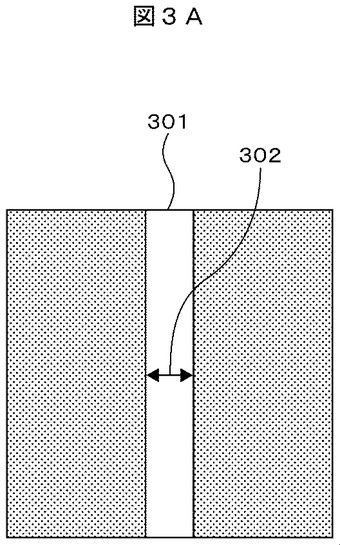
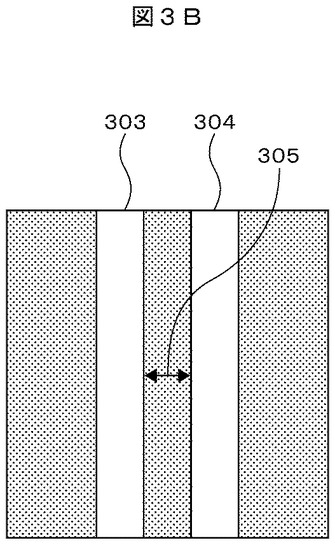
なお、CD値の例としては、図3Aに示すようなパターン301のライン幅302、図3Bに示すようなパターン303とパターン304とのライン間幅305、図3Cに示すようなパターン306のラインとパターン308のライン端との間の幅307、あるいは図3Dに示すようなパターン309のライン端とパターン310のライン端との間の幅310)がある。なお、図3A〜Dでは一次元(例えば、直線部)の場合のみ示しているが、2次元(例えば、コーナ部)の場合もこれと同様である。
【0019】
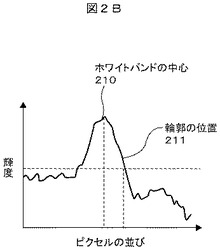
続いて、図2Aを用いて、CD−gapの発生要因について説明する。CD−SEMでは、画像201の水平座標方向(図2Aに示す符号204の方向)に2次電子輝度プロファイルを取得し、その輝度プロファイルを解析することにより回路パターンの寸法を測長している。その一方で、特許文献1に記載されているような既存のSEM輪郭線抽出手法においては、ホワイトバンド(図2Aに示す符号202)の法線方向(図2Aに示す符号204)に2次電子輝度プロファイルを取得し、その輝度プロファイルを解析することによりSEM輪郭線を抽出している。例えば、図2Bに示すように、輝度値のピークをホワイトバンドの中心210とし、そのホワイトバンドの中心210の周辺の画素のうち所定の輝度値以上となる画素位置を輪郭の位置211として定めている。しかしながら、OPC model calibration行程においては、転写パターンの画像エッジが乱れるため、輝度プロファイルのスキャン方向が安定しない傾向にある。公知文献4によれば、輝度プロファイルの取得方向の乱れにより、SEM輪郭線の抽出精度が低下し、CD−gapが発生すると結論づけられている。
【0020】
Contour−based calibrationにおいては、CD−SEMにより取得された1次元のCD値と、2次元のSEM輪郭線をcalibrationデータとして用いるため、同一箇所を測定した際に生じる矛盾、すなわち、CD−gapの存在はcalibration精度の低下につながる。従って、公知文献4に示されているようなCD−gapの抑制を考慮したSEM輪郭線抽出手法を用いることが必要不可欠な要素である。
【0021】
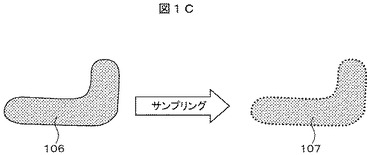
次に、図1Cを用いて、SEM輪郭線のサンプリングについて説明する。SEM画像から抽出された回路パターンのSEM輪郭線106を区分的に連続な曲線とする。SEM輪郭線106は、画像上で実数値の2次元位置座標値により表現される。このSEM輪郭線106を、107のように離散的な点の集合として標本化することを、本特許においては、SEM輪郭線のサンプリングと称する。なお、サンプリングを行う際に、SEM輪郭線輪郭線を構成する離散点の間隔は、不等間隔となる場合がある。また、SEM輪郭線106については、計算機上で取り扱うため、実用的に十分な分解能(例えば、1/100ピクセル程度)を持つ離散的な点の集合として保持しても良い。
【0022】
本特許における実施形態では、転写された回路パターンのSEM輪郭線の位置座標値を求めた後に、サンプリングを行う。本特許の実施形態では、SEM輪郭線の2次元位置座標を適切な間隔で離散化する際に、SEM輪郭線の形状に応じて、装置の使用者が指定した許容誤差(つまり、サンプリング誤差)が最小化となるようにサンプリングを実行する。
【0023】
なお、上述したように、SEM輪郭線の抽出精度の低下によるCD−gapの発生により、OPC model calibration精度の向上の観点からは、前記サンプリング処理についても、サンプリング誤差と共にCD−gapの低減を考慮して処理を行わなければならない。続いて、本実施の形態において行われるパターン計測処理について説明する。なお、各処理を行う主体であるパターン計測装置の具体的な構成については、図8を用いて後述する。
(主要処理)
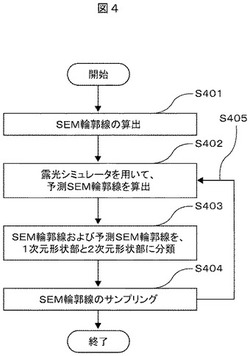
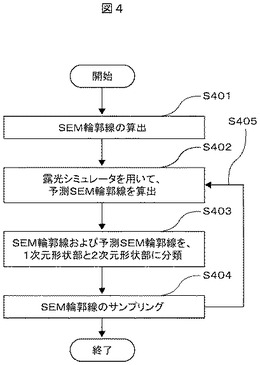
ここでは、図4を用いて簡単に本特許のパターン計測装置の主要な動作を説明する。はじめに、演算ユニット801(SEM輪郭線抽出プログラム821)は、SEM画像から回路パターンのSEM輪郭線の抽出を行う(S401)。
【0024】
なお、公知文献4に記載する手法を用いて、SEM輪郭線の抽出を行うことで、CD−gapが大きく低減され、Contour−based calibrationを精度良く実行することができる。
【0025】
次に、演算ユニット801(SEM輪郭線抽出プログラム821)は、露光シミュレータ841に対してSEM輪郭線を算出するための指示を出し、露光シミュレータ841は、マスクエッジからウェハ上のSEM輪郭線を算出する(S402)。この予測されたSEM輪郭線を予測SEM輪郭線(図7Aに示す符号703)と呼ぶ。
【0026】
なお、露光シミュレーションにより得られた予測SEM輪郭線の具体例については、公知文献2のFigure 7と、公知文献5(I. Kusnadi, et al., “Contour−based self−aligning calibration of OPC models,” Proceedings of SPIE, Vol. 7638, 76382M1-8, 2010.)のFigure 1に示されている。
【0027】
なお、1度目の処理では、一律にサンプリングされたSEM輪郭線を、前記露光シミュレータ841に入力しても良い。その場合、SEM輪郭線の予測精度が低く、不完全なシミュレーション結果となる。後述する処理では、この予測精度を向上させるための処理であり、予測SEM輪郭線と差異の大きなSEM輪郭線の2次元位置座標を、順次、サンプリング点として追加していく。
【0028】
また、公知文献6(高木 幹雄,他,“新編 画像解析ハンドブック,” 東京大学出版会,’2004.)第6章に記載されている区分近似関数による曲線近似手法を用いて、サンプリングされたSEM輪郭線を関数近似することで予測SEM輪郭線を算出し、露光シミュレータが出力する予測SEM輪郭線の代用としても良い。
【0029】
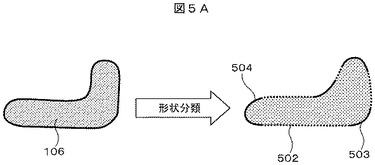
そして、演算ユニット801(形状分類プログラム822)は、SEM輪郭線および予測SEM輪郭線を構成する曲線(直線を含む)について、1次元形状部(直線部:図5 502)と2次元形状部(コーナ部:図5Aに示す符号503、EOL:図5 504)に分類する(S403)。この分類処理の具体的な内容については後述する。
【0030】
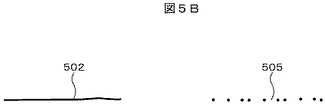
次に、演算ユニット801(サンプリングプログラム823)は、SEM輪郭線の形状の種類に応じて、SEM輪郭線のサンプリングを行う(S404)。具体的には、演算ユニット801(サンプリングプログラム823)は、1次元形状部に属するSEM輪郭線のサンプリングを行う場合には、後述する「(1次元形状部のSEM輪郭線サンプリング処理)」を実施する。その結果、図5B左部に示すように、直線部502のSEM輪郭線は、図5B右部の符号505のようにサンプリングされる。
【0031】
また、演算ユニット801(サンプリングプログラム823)は、2次元形状部に属するSEM輪郭線のサンプリングを行う場合には、後述する「(2次元形状部のSEM輪郭線サンプリング処理)」を実施する。その結果、図5C左部に示すように、コーナ部503のSEM輪郭線は、図5C右部の符号506のようにサンプリングされる。さらに、図5D左部に示すように、EOL部504のSEM輪郭線は、図5D右部の符号507のようにサンプリングされる。
【0032】
そして、演算ユニット801は、ユーザが許容するサンプリング誤差を満たすまで、S402からS404を繰り返す。なお、計算時間が限られている場合には、繰り返し処理を行わずに、処理を終了する。その場合でも、一律の間隔で、SEM輪郭線のサンプリングを行うよりは、OPC model calibrationの精度が向上する。
【0033】
以上、説明したように、本発明では、図4の処理を実行して、SEM輪郭線のサンプリングを行う。
(パターン計測装置の構成)
本特許の実施形態における処理を実行するパターン計測装置の構成について、図8を用いて説明する。
【0034】
図8に示すように、パターン計測装置800は、演算ユニット801、主記憶装置810、ネットワークアダプタ802、補助記憶装置803、入力装置804、および出力装置805を有して構成されている。パターン計測装置800は、ネットワーク850を介して、CD−SEM840からCDデータ830および画像データ831を受信可能に接続される。また、パターン計測装置800は、ネットワーク850を介して、露光シミュレータ841から予測SEM輪郭線データ834を受信可能に接続される。補助記憶装置803は、HDD(Hard Disk Drive)、SSD(Solid State Drive)等によって構成される。入力装置804は、トラックボール、キーボード、スキャナ、BD−RE D(Blu−ray Disc Recordable Drive [Blu−rayは登録商標])等によって構成される。出力装置805は、ディスプレイ、プリンタ、BD−RE D等によって構成される。
【0035】
演算ユニット801は、コンピュータのCPU(Central Processing Unit)であり、DRAM(Dynamic Random Access Memory)によって構成される主記憶装置810に展開されているプログラムを実行することによって、種々の機能を実現する。
【0036】
主記憶装置810には、SEM輪郭線抽出プログラム821、形状分類プログラム822、サンプリングプログラム823が記憶されている。また、主記憶装置810に記憶されているデータは、CDデータ830、画像データ831、マスクエッジデータ832、SEM輪郭線データ833、予測SEM輪郭線データ834、サンプリング済みSEM輪郭線データ835である。なお、主記憶装置810と補助記憶装置803との間では、プログラムおよびデータの一貫性が保持されるように送受信が行われ、種々のプログラムおよびデータが記憶される。
【0037】
主記憶装置810に記憶されている上述した各プログラムは、SEM輪郭線抽出部、形状分類部、サンプリング部の各機能を実現し、これらのソフトウェアプログラムは、例えば、上述した各部を含むモジュール構成となっており、実際のハードウェアとしては、CPU等の制御部がHDD等の記録装置からこれらのソフトウェアプログラムを読み出して実行することにより、上記各部が主記憶装置上にロードされ、SEM輪郭線抽出部、形状分類部、サンプリング部の各部が主記憶装置上に生成されるようになっている。
【0038】
また、上述したソフトウェアプログラムは、インストール可能な形式又は実行可能な形式のファイルでCD−ROM、フレキシブルディスク(FD)、CD−R、DVD(Digital Versatile Disc)等のコンピュータで読み取り可能な記録媒体に記録されて提供することも可能である。さらに、これらのソフトウェアプログラムを、ネットワーク経由でダウンロードさせて提供または配布するように構成してもよい。
【0039】
SEM輪郭線抽出プログラム821は、図4のステップS401を実行する。SEM輪郭線抽出プロラム821は、図4に示したS401の処理において、CDデータ830および画像データ831を、CD−SEM840からネットワーク850を介して取得し、取得したこれらのデータを補助記憶装置803に格納する。なお、画像データ831は、座標位置と、その座標位置における輝度値とで表され、ステップS401の実行時に、補助記憶装置803から主記憶装置810に複製される。そして、SEM輪郭線抽出プログラム821は、SEM輪郭線抽出処理を実行し、SEM輪郭線データ833を生成して、主記憶装置810または補助記憶装置803に記憶する。
【0040】
図4のステップS402において、SEM輪郭線抽出プログラム621からの指示により、露光シミュレータ841を操作する。露光シミュレータ841は、予め補助記憶装置803に記憶されているマスクエッジデータ832およびCDデータ830を読み出して主記憶装置810に複製し、マスクエッジデータ832から予測SEM輪郭線データ834をシミュレーションする処理を実行する。
【0041】
なお、主記憶装置810もしくは補助記憶装置803にサンプリング済みSEM輪郭線データ835が存在する場合には、露光シミュレーションの精度向上に利用することも可能である。
【0042】
そして最後に、SEM輪郭線抽出プログラム621は、予測SEM輪郭線データ834を、主記憶装置303または補助記憶装置603に記憶する。
【0043】
サンプリングプログラム823は、図4のステップS404を実行する。サンプリングプログラム823は、SEM輪郭線データ831と予測SEM輪郭線834を用いてサンプリング処理を実行し、サンプリング済SEM輪郭線データ835を生成し、主記憶装置810と補助記憶装置803に記憶する。サンプリングプログラム823が行う具体的な処理については、図9A、9Bを用いて後述する。
(輪郭線の分類)
はじめに、SEM輪郭線および予測SEM輪郭線を構成する曲線(直線を含む)について、1次元形状部(直線部:図5Bに示す符号502)と2次元形状部(コーナ部:図5Cに示す符号503とEOL:図5Dに示す符号504)に分類する処理について、具体的に説明する。
【0044】
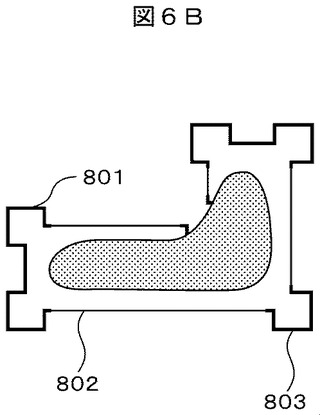
まず、形状分類プログラム822は、マスクエッジ(図6Aに示す符号105)を1次元形状部(直線部:図6Bに示す符号802)と、2次元形状部(コーナ部:図6Bに示す符号801とEOL:図6Bに示す符号803)に分解・分類する。その際、高知文献4に記載されている手法を用いても良いし、装置の使用者が予め区間を細かく指定しても良い。
【0045】
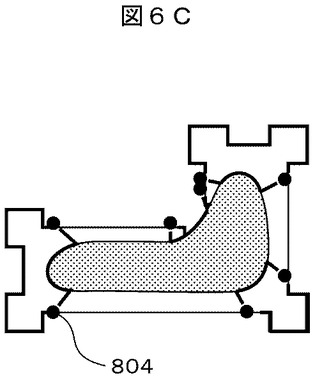
最後に、図6Cに示すように、マスクエッジとSEM輪郭線の対応関係を求める(この処理を、以降、マッピング処理と呼ぶ)。前記マッピング処理とは、マスクエッジを構成する曲線のある区間とそれに対応するSEM輪郭線の区間の対応関係を求める処理を指す。
【0046】
その際、公知文献4に記載されている手法を用いても良いし、ICP(Iterative Closest Point)法や特開2006−351888号公報に開示されている方法を用いることによって、対応関係を求めることにより、1次元形状部と2次元形状部の区間を指定しても良い。
【0047】
また、前記マッピング処理を予測SEM輪郭線(図7Aに示す符号703)についても、同様の手順で、1次元形状部と2次元形状部の区間の指定を実施する。
【0048】
なお、注意すべき事項として、SEM輪郭線の全区間を単一の基本形状としても良い。例えば、回路パターンの中で、コンタクトホールやviaホールの場合には、その形状が円や楕円となるため、全区間をコーナとしてサンプリングを行う。
【0049】
また、装置の使用者が、SEM輪郭線と予測SEM輪郭線に予め1次元形状部(直線部:図5Bに示した符号502)と2次元形状部(コーナ部:図5Cに示した符号503とEOL:図5Dに示した符号504)の区間を指定しても良い。その場合、上述した輪郭線の分類についての処理を省くことができる。
(SEM輪郭線サンプリング処理)
次に、図9A、9Bを用いて、SEM輪郭線サンプリングについて詳細に説明する。はじめに、1次元形状部(図5Bに示した符号502)のサンプリング処理から説明する。
(1次元形状部のSEM輪郭線サンプリング処理)
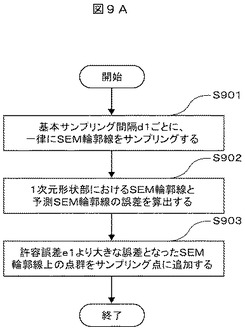
まず、S901では、サンプリングプログラム823は、基本サンプリング間隔d1 nmごとに、一律にSEM輪郭線をサンプリングする。なお、この処理を行わなくても構わないが、その場合には、あらかじめ指定された許容誤差の範囲内でサンプリングが実施される。
【0050】
そして、S902では、サンプリングプログラム823は、1次元形状部におけるSEM輪郭線と予測SEM輪郭線の誤差を算出する。1次元形状部における誤差は、ウェハ上のSEM輪郭線(図7Bに示す符号704)と予測SEM輪郭線(図7Aに示す符号703)とのユークリッド距離で与える。その際、距離の計算方法は、以下6種類((i)〜(vi))のいずれかを用いる。
【0051】
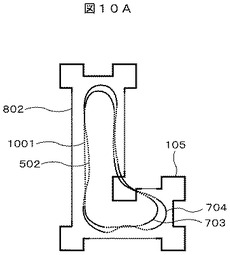
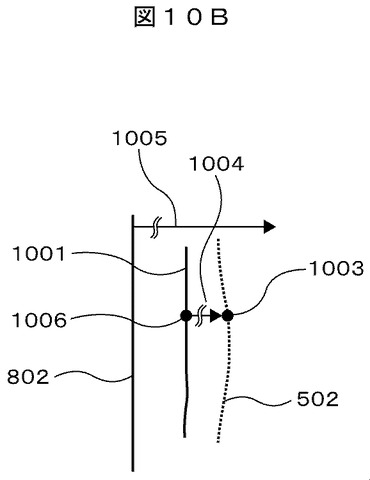
(i) 図10A、10Bを用いて説明すると、サンプリングプログラム823は、予測SEM輪郭線1001上の任意の1点(図10Bに示す符号1006)を基準とし、マスクエッジ802の法線(図10Bに示す符号1005)に対して平行な線(図10Bに示す符号1004)と、SEM輪郭線502とが交わる1点(図10Bに示す符号1003)を求め、その2点間のユークリッド距離を算出する。
【0052】
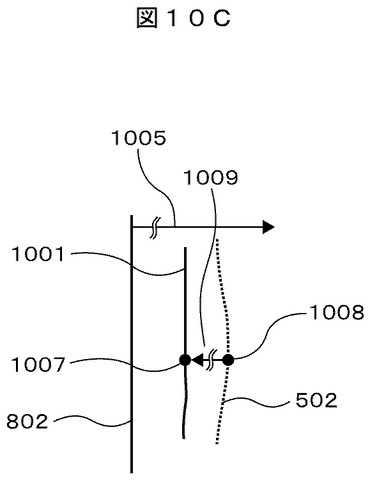
(ii) 図10A、10Cを用いて説明すると、サンプリングプログラム823は、SEM輪郭線502上の任意の1点(図10Cに示す符号1008)を基準とし、マスクエッジ802の法線(図10Cに示す符号1005)に対して平行な線(図10Cに示す符号1009)と、予測SEM輪郭線1001とが交わる1点(図10Cに示す符号1007)を求め、その2点間のユークリッド距離を算出する。
【0053】
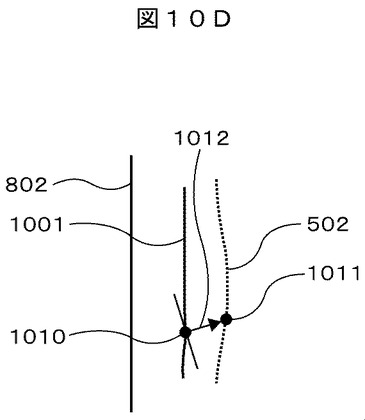
(iii) 図10A、10Dを用いて説明すると、サンプリングプログラム823は、予測SEM輪郭線1001上の任意の1点(図10Dに示す符号1010)を基準とし、その点における予測SEM輪郭線502の法線(図10Dに示す符号1012)と、SEM輪郭線502とが交わる1点(図10Dに示す符号1011)を求め、その2点間のユークリッド距離を算出する。
【0054】
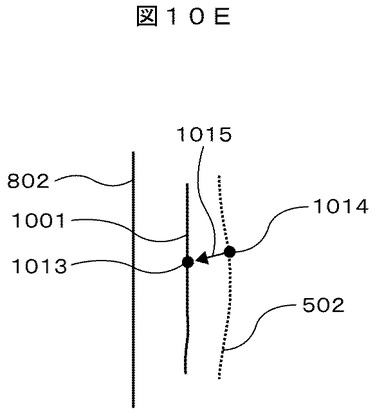
(iv) 図10A、10Eを用いて説明すると、サンプリングプログラム823は、SEM輪郭線502上の任意の1点(図10Eに示す符号1014)を基準とし、その点におけるSEM輪郭線502の法線(図10Eに示す符号1015)と、予測SEM輪郭線1001とが交わる1点(図10Eに示す符号1013)を求め、その2点間のユークリッド距離を算出する。
【0055】
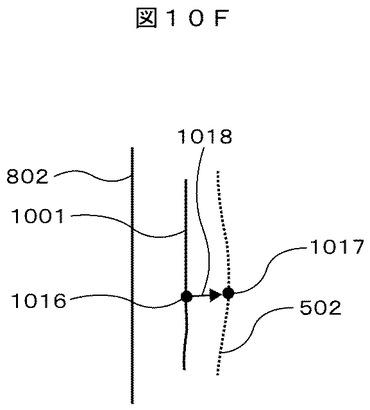
(v) 図10A、10Fを用いて説明すると、サンプリングプログラム823は、予測SEM輪郭線1001上の任意の1点(図10Fに示す符号1016)を基準とし、SEM輪郭線502までのユークリッド距離が最小となるSEM輪郭線502上の1点(図10Fに示す符号1017)を算出し、その2点間のユークリッド距離を算出する。
【0056】
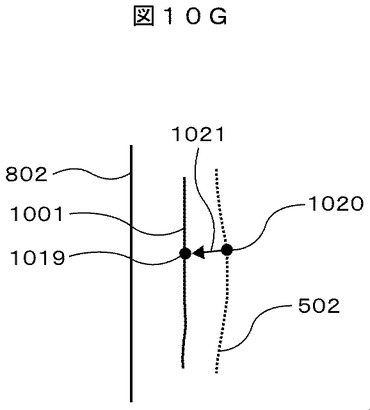
(vi) 図10A、10Gを用いて説明すると、サンプリングプログラム823は、SEM輪郭線502上の任意の1点(図10Gに示す符号1020)を基準とし、予測SEM輪郭線1001までのユークリッド距離が最小となる予測SEM輪郭線502上の1点(図10Gに示す符号1019)を算出し、その2点間のユークリッド距離を算出する。
【0057】
なお、CD−gapの低減度合いが、最も大きいのは(i)による距離の算出方法である。特に、公知文献4による手法を用いてSEM輪郭線を算出した場合には、マスクエッジの法線方向と2次電子プロファイルの取得方向が一致しているため、CD−gapを低く抑えたサンプリング結果を得ることができる。
【0058】
また、公知文献5のFigure 1に図示されているように、基準を予測SEM輪郭線上の点とするか、SEM輪郭線上の点とするかで、算出される誤差が異なる場合があることに留意する。
【0059】
なお、自明のことではあるが、SEM輪郭線と予測SEM輪郭線の間の誤差は、SEM輪郭線の全域に渡って算出することに注意する。
【0060】
なお、SEM輪郭線と予測SEM輪郭線の間の誤差をSEM輪郭線の全域に渡って算出する際に、基準となる側の輪郭線から基準点を選び出す間隔は、基本サンプリング間隔d1 nmよりも十分に密な間隔(例えば、d1/100 nm程度)とする。
【0061】
最後に、S903では、サンプリングプログラム823は、前記ステップS902により得られたSEM輪郭線を構成する各点の中で、1次元直線部形状部の許容誤差e1より大きな点をサンプリング点に追加する。
【0062】
その際、前記(i)、(iii)、(v)の場合には、基準が予測SEM輪郭線1001上の点であるから、求められたSEM輪郭線502上の対応点(図10Bに示す符号1003、図10Dに示す符号1011、図10Fに示す符号1017)がサンプリング点となる。
【0063】
また、前記(ii)、(iv)、(vi)の場合には、基準がSEM輪郭線502上の点であるから、その基準点(図10Cに示す符号1008、図10Eに示す符号1014、図10Gに示す符号1020)がそのままサンプリング点となる。
【0064】
いずれの手法の場合でも、SEM輪郭線上のサンプリング点の位置座標は、実数の分解能を有する。
(2次元形状部のSEM輪郭線サンプリング処理)
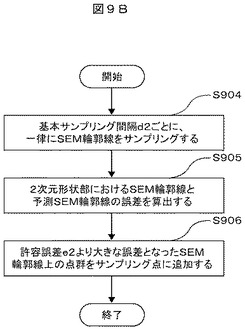
次に、2次元形状部のサンプリング処理について説明する。S904では、基本サンプリング間隔d2 nmごとに、一律にSEM輪郭線をサンプリングする。なお、このステップを飛ばしても構わない。その場合には、1次元形状部のSEM輪郭線サンプリング処理の場合と同様に、許容誤差の範囲内でサンプリングが実施される。
【0065】
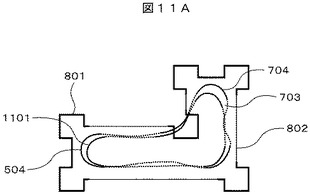
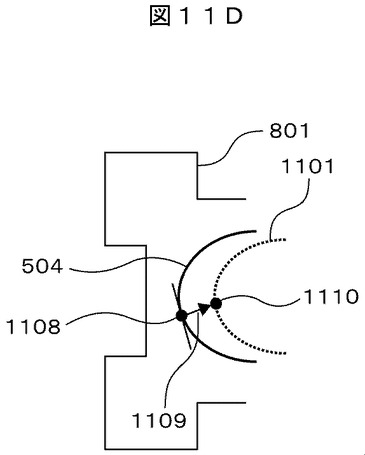
S905では、サンプリングプログラム823は、2次元形状部におけるSEM輪郭線と予測SEM輪郭線の誤差を算出する。2次元形状部における誤差は、ウェハ上のSEM輪郭線(図7Bに示す符号704)と予測SEM輪郭線(図7Aに示す符号703)とのユークリッド距離で与える。その際、距離の計算方法は、1次元形状部のSEM輪郭線サンプリング処理の場合と同様に、以下6種類((i)〜(vi))のいずれかを用いる。なお、図11A〜11Gを用いて、EOL部を例に説明するが、コーナ部についても同様に処理を行う。
【0066】
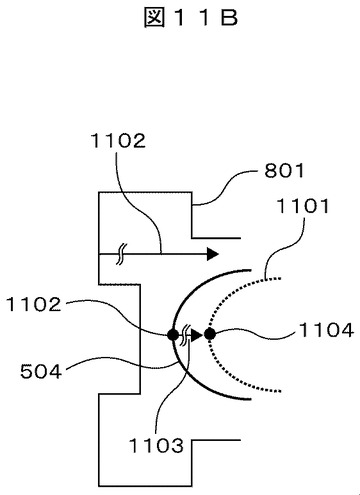
(i) 図11A、11Bを用いて説明すると、サンプリングプログラム823は、予測SEM輪郭線504上の任意の1点(図11Bに示す符号1102)を基準とし、マスクエッジ801の法線(図11Bに示す符号1102)に対して平行な線(図11Bに示す符号1103)と、SEM輪郭線1101とが交わる1点(図11Bに示す符号1104)を求め、その2点間のユークリッド距離を算出する。
【0067】
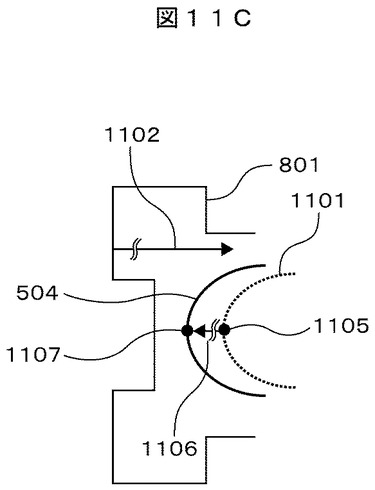
(ii) 図11A、11Cを用いて説明すると、サンプリングプログラム823は、SEM輪郭線1101上の任意の1点(図11Cに示す符号1105)を基準とし、マスクエッジ801の法線方向(図11Cに示す符号1102)に平行な線(図11Cに示す符号1106)と、予測SEM輪郭線504とが交わる1点(図11Cに示す符号1107)を求め、その2点間のユークリッド距離を算出する。
【0068】
(iii) 図11A、11Dを用いて説明すると、サンプリングプログラム823は、予測SEM輪郭線504上の任意の1点(図11Dに示す符号1108)を基準とし、その点における予測SEM輪郭線504の法線(図11Dに示す符号1109)と、SEM輪郭線1101とが交わる1点(図11Dに示す符号1110)を求め、その2点間のユークリッド距離を算出する。
【0069】
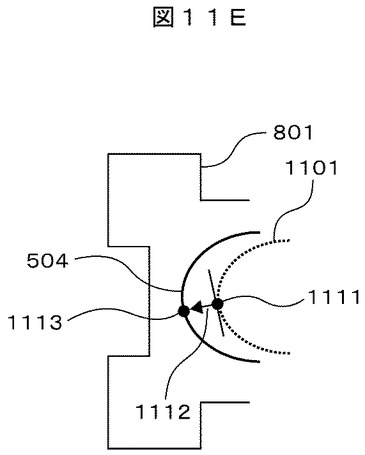
(iv) 図11A、11Eを用いて説明すると、サンプリングプログラム823は、SEM輪郭線1101上の任意の1点(図11Eに示す符号1111)を基準とし、その点におけるSEM輪郭線1101の法線(図11Eに示す符号1112)と、予測SEM輪郭線504とが交わる1点(図11Eに示す符号1113)を求め、その2点間のユークリッド距離を算出する。
【0070】
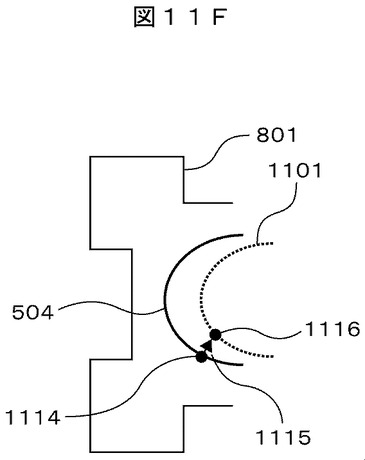
(v) 図11A、11Fを用いて説明すると、サンプリングプログラム823は、予測SEM輪郭線504上の任意の1点(図11Fに示す符号1114)を基準とし、その点におけるSEM輪郭線1101までのユークリッド距離が最小となるSEM輪郭線1101上の1点(図11Fに示す符号1116)を算出し、その2点間のユークリッド距離を算出する。
【0071】
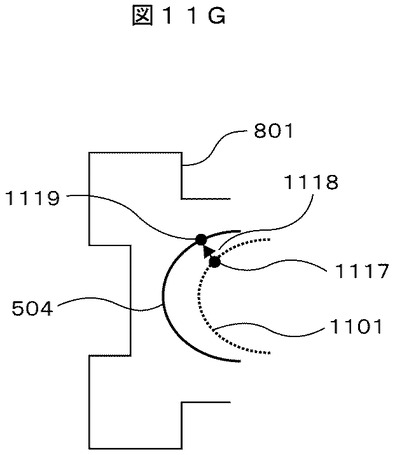
(vi) 図11A、11Gを用いて説明すると、サンプリングプログラム823は、SEM輪郭線1101上の任意の1点(図11Gに示す符号1117)を基準とし、その点における予測SEM輪郭線504までのユークリッド距離が最小となる予測SEM輪郭線504上の1点(図11Gに示す符号1119)を算出し、その2点間のユークリッド距離を算出する。
【0072】
ここで、2次元形状部がEOLの場合には、1次元形状部の場合と同様に、CD−gapの低減度合いが、最も大きいのは(i)による距離の算出方法となる。特に、公知文献4による手法を用いてSEM輪郭線を算出した場合には、マスクエッジの法線方向と2次電子プロファイルの取得方向が一致しているため、EOL部については、CD−gapを低く抑えたサンプリング結果を得ることができる。
【0073】
最後に、サンプリングプログラム823は、S906では、前記ステップS905により得られたSEM輪郭線を構成する各点の中で、2次元形状部の許容誤差e2より大きな点をサンプリング点に追加する。なお、コーナ部とEOL部については、基本サンプリング間隔と許容誤差を別々に定義しても良い。
【0074】
また、公知文献5のFigure 1に図示されているように、基準を予測SEM輪郭線上の点とするか、SEM輪郭線上の点とするかで、算出される誤差が異なる場合があることに留意する。
【0075】
なお、自明のことではあるが、SEM輪郭線と予測SEM輪郭線の間の誤差は、SEM輪郭線の全域に渡って算出することに注意する。
【0076】
なお、SEM輪郭線と予測SEM輪郭線の間の誤差を、SEM輪郭線の全域に渡って算出する際に、基準となる側の輪郭線から基準点を選び出す間隔は、基本サンプリング間隔d2 nmよりも十分に密な間隔(例えば、d2/100 nm程度)とする。
【0077】
その際、前記(i)、(iii)、(v)の場合には、基準が予測SEM輪郭線上の点であるから、求められたSEM輪郭線上の対応点(図11Bに示す符号1104、図11Dに示す符号1110、図11Fに示す符号1116)がサンプリング点となる。
【0078】
また、前記(ii)、(iv)、(vi)の場合には、基準がSEM輪郭線上の点であるから、その基準点(図11Cに示す符号1105、図11Eに示す符号1111、図11Gに示す符号1117)がそのままサンプリング点となる。
【0079】
いずれの手法の場合でも、SEM輪郭線上のサンプリング点の位置座標は、実数の分解能を有する。
【0080】
このように、主記憶装置810が半導体の回路パターンのマスクエッジデータ、および回路パターンを撮像した画像データを記憶し、SEM輪郭線抽出部(SEM輪郭線抽出プログラム821)が、画像データを入力として回路パターンのSEM(Scanning Electron Microscope)輪郭線を抽出し、前記マスクエッジデータと抽出したSEM輪郭線のデータ(SEM輪郭線データ)とに基づいて、露光シミュレータ841に予測SEM輪郭線のデータ(予測SEM輪郭線データ)を生成させ、形状分類部(形状分類プログラム822)が、マスクエッジデータと、SEM輪郭線データと、予測輪郭線データとを入力として、SEM輪郭線データおよび予測SEM輪郭線データを、1次元形状の輪郭線と2次元形状の輪郭線とに分類し、SEM輪郭線サンプリング部(SEM輪郭線サンプリングプログラム823)が、SEM輪郭線データと予測SEM輪郭線データとを入力とし、1次元形状及び2次元形状の種類に応じて、SEM輪郭線データのサンプリングを行うので、OPC model calibrationに要する計算時間を削減しつつ、その精度を向上させることが可能となる。
【符号の説明】
【0081】
800 パターン計測装置
801 演算ユニット
802 ネットワークアダプタ
803 補助記憶装置
804 入力装置
805 出力装置
810 主記憶装置
821 SEM輪郭線抽出プログラム
822 形状分類プログラム
823 サンプリングプログラム
830 CDデータ
831 画像データ
832 マスクエッジデータ
833 SEM輪郭線データ
834 予測SEM輪郭線データ
835 サンプリング済みSEM輪郭線データ
840 CD−SEM
841 露光シミュレータ
850 ネットワーク。
【技術分野】
【0001】
本発明は、測長装置および測長方法に関し、特に、電子顕微鏡画像の解析技術に関する。
【背景技術】
【0002】
半導体デバイスは急激な微細化を続けており、2000年代の初頭からナノメートルオーダに到達している。半導体デバイスを生産する際、製品の歩留まりを向上させるために、CD−SEM(Critical Dimension Scanning Electron Microscope、測長走査型電子顕微鏡)に代表される様々な計測装置を用いて、回路パターンの寸法や形状を計測し、回路パターンのマスクエッジデータとの差異を確認しながら製造が行われている。特に、回路パターンのフォトマスクをウェハに転写する工程(フォトリソグラフィ工程)においては、微細な回路パターンの形状を高精度に計測することが重要となる。
【0003】
フォトリソグラフィ工程において、ナノメートルオーダの回路パターンを回路パターンのマスクエッジデータの通りに作成するためには、光近接効果(光の回折現象の影響)を考慮する必要がある。図1A左部に示すような単純なマスク形状101では、光近接効果により、例えば、図1A右部に示すように、ウェハ上に転写された回路パターンの形状102とマスク形状101のエッジ部の形状103との間で大きな差異が発生する。さらに、コーナ部の形状104は丸みのある形状となり、EOL(End−of−Line、ライン端)では後退が発生しすい傾向にある。そこで、図1B右部に示すような望ましいパターン形状106になるように、図1B左部に示すようなフォトマスクの形状をパターン形状105のように変化させる処理(OPC:Optical Proximity Correction)が導入されている。OPCは、配線幅の調整や、EOLやコーナなどに補正パターンを付与することで、転写パターンの形状を補正するフォトリソグラフィの解像度向上技術である。
【0004】
OPCをフォトマスクに適用する際には、転写モデルのパラメータを推定する必要がある。公知文献1(K. Lucas, “Optical Proximity Correction for Current and Future Nodes,” SPIE advanced lithography short course, SC990, 2010.)および公知文献2(S. Shen, et al.,“OPC model calibration based on circle−sampling theorem,” IEEE Solid−State and Integrated Circuit Technology, 2006.)によれば、一般には、レジスト等の影響により、光学モデルと実際に露光されたパターンには差異が生じてしまう。そこで、CD−SEMにより得られた転写パターンの測長結果をもとにして、転写モデルのパラメータ調整が行われている。公知文献2によると,この一連の処理はOPC model calibrationと呼ばれている。
【0005】
現在、新しいOPC model calibration手法の1つとして、回路パターンの直線部分についてはCD−SEMのCD値を用い、それ以外の部分についてはSEM輪郭線の2次元位置座標をcalibrationデータとして用いる手法(以降、この手法をcontour−based calibrationと称する)の実現が期待されている。公知文献3(P. Filitchkin, et al.,“Contour quality assessment for OPC model calibration,” Proceedings of SPIE, Vol.7272, pp.72722Q1-7,2009.)および公知文献4(T.Shibahara,et al.,“CD−gap−free Contour Extraction Technique for OPC Model Calibration,”Proceedings of SPIE,Vol.7971,2011.)によれば、contour−based calibrationを行うためには、従来からのCD測長値との差異(以降、この差異をCD−gapと称する)の少ないSEM輪郭線を計測する必要がある。
【0006】
さらに、OPC model calibrationにおいては、calibrationデータの解析に多大な時間を要するため、SEM輪郭線の2次元位置座標値を適切な間隔でサンプリングし、データ量を削減することにより、calibration時間の短縮を図る必要がある。しかしながら、このようなデータ量の削減処理を行った場合でも、OPC model calibrationには、高性能な計算機で数日の処理時間を要するという問題がある。
【0007】
また、仮に全てのSEM輪郭線データを用いてOPC model calibrationを行おうとすると、計算機の性能によっては、主記憶装置に膨大な計算データを格納できずに処理が行えない場合もある。いずれの問題にせよ、contour-based calibrationを行うためには、SEM輪郭線のデータ量を削減する必要がある。
【先行技術文献】
【特許文献】
【0008】
【特許文献1】特許第2008−164593号公報
【発明の概要】
【発明が解決しようとする課題】
【0009】
初めに、第1の課題について説明する。特許文献1において、第2のエッジ位置は多点検出したうえで曲線近似・連結等を行うところ(段落0283)において、エッジが求まる位置が削減される処理を行うことについては、示唆されていない。従って、contour-based calibrationを実行するためには、少なくとも計算時間を削減するためには、SEM輪郭線のサンプリングを行うことが課題となる。
【0010】
続いて、第2の課題について説明する。SEM輪郭線の位置座標を求める際、一般的には特許文献1に示されるように、例えば、図2Aに示すように、画像201からホワイトバンド202の中心位置を画像輪郭線として抽出し、画像輪郭線の法線方向204の向きに画像信号を抽出した後、SEM輪郭線を計測する処理が一般的である。しかし、OPCの調整工程などの設計段階や、量産段階の初期では、画像輪郭線が乱れる傾向にあるため、それに伴って、測長方向も必ずしも画像輪郭線の法線方向204のようには安定せず、例えば、乱れた画像輪郭線の法線方向205の向きに画像信号を抽出してしまう場合がある。
【0011】
さらに、公知文献3によれば、2次元のSEM輪郭線をOPC model calibrationに用いると、マスクパターンの1次元的な特徴(ライン幅やライン間幅など)については、転写精度が悪化するとの報告がある。この問題を解決するためには、公知文献4によると、CD−SEMにより取得されたCD値(以降、この値をCDCD−SEMと称する)と、SEM輪郭線から算出されたCD値(以降、この値をCDContourと称する)との間には、差異(以降、これをCD−gapと称する)を減少させることが重要である。
【0012】
従って、前記課題1と合わせて、OPC model calibrationの精度を向上させるためには、CD−gapを増加させずにSEM輪郭線のサンプリングを行うことが課題となる。
【課題を解決するための手段】
【0013】
上記の2つの課題を解決するため、本発明におけるパターン計測装置は、半導体の回路パターンのマスクエッジデータ、および前記回路パターンを撮像した画像データを記憶する記憶部と、前記画像データを入力として前記回路パターンのSEM輪郭線を抽出し、前記マスクエッジデータと抽出した前記SEM輪郭線のデータ(SEM輪郭線データ)とに基づいて、露光シミュレーション部に予測SEM輪郭線のデータ(予測SEM輪郭線データ)を生成させるSEM輪郭線抽出部と、前記マスクエッジデータと、前記SEM輪郭線データと、前記予測輪郭線データとを入力として、前記SEM輪郭線データおよび前記予測SEM輪郭線データを、1次元形状の輪郭線と2次元形状の輪郭線とに分類する形状分類部と、前記SEM輪郭線データと前記予測SEM輪郭線データとを入力とし、前記1次元形状及び前記2次元形状の種類に応じて、前記SEM輪郭線データのサンプリングを行うSEM輪郭線サンプリング部と、を備えることを特徴とする。
【0014】
また、本発明は、上記パターン計測装置で行われるパターン計測方法である。
【発明の効果】
【0015】
本発明によれば、OPC model calibrationに要する計算時間を削減しつつ、精度を向上させることができる。
【図面の簡単な説明】
【0016】
【図1A】フォトリソグラフィ工程におけるフォトマスクの形状と転写された回路パターンの形状との関係を示す図である(OPCなしの場合)。
【図1B】フォトリソグラフィ工程におけるフォトマスクの形状と転写された回路パターンの形状との関係を示す図である(OPCありの場合)。
【図1C】フォトリソグラフィ工程におけるフォトマスクの形状と転写された回路パターンの形状との関係を示す図である(SEM輪郭線のサンプリングを行った場合)。
【図2A】回路パターンの輪郭の位置を求めるための概要を示す図である(転写パターンの画像)。
【図2B】回路パターンの輪郭の位置を求めるための概要を示す図である(輝度プロファイルの解析手法の説明)。
【図3A】CD−gapを説明する図(ライン幅)。
【図3B】CD−gapを説明する図(ライン間幅)。
【図3C】CD−gapを説明する図(ラインとライン端の間の幅)。
【図4】本特許の実施形態におけるパターン計測処理フローの概要を示す図である。
【図5A】SEM輪郭線の形状分類と形状ごとのサンプリングを説明する図である。
【図5B】SEM輪郭線および予測SEM輪郭線における形状分類を説明する図(直線部におけるサンプリング)である。
【図5C】SEM輪郭線および予測SEM輪郭線における形状分類を説明する図(コーナ部におけるサンプリング)である。
【図5D】SEM輪郭線および予測SEM輪郭線における形状分類を説明する図(EOL部におけるサンプリング)である。
【図6A】SEM輪郭線の形状分類を具体的に説明する図(マスクエッジとSEM輪郭線(もしくは、予測SEM輪郭線)の関係を示す図)である。
【図6B】SEM輪郭線の形状分類を具体的に説明する図(マスクエッジの形状を分類することを示す図)である。
【図6C】SEM輪郭線の形状分類を具体的に説明する図(マスクエッジの分類をSEM輪郭線(もしくは、予測SEM輪郭線)にマッピングすることを示す図)である。
【図6D】SEM輪郭線の形状分類を具体的に説明する図(分類されたSEM輪郭線(もしくは、予測SEM輪郭線)を示す図)である。
【図7A】露光シミュレータを用いて、マスクエッジから予測SEM輪郭線をシミュレーションしたことを表した図である。
【図7B】は同一のマスクエッジから、実際に露光された回路パターンのSEM輪郭線を表した図である。
【図8】本特許における実施形態におけるパターン計測装置の構成の一例を示す図である。
【図9A】図4に示したS404におけるSEM輪郭線のサンプリング処理フローの概要を説明した図である(1次元形状部)。
【図9B】図4に示したS404におけるSEM輪郭線のサンプリング処理フローの概要を説明した図である(2次元形状部)。
【図10A】SEM輪郭線の1次元形状部におけるサンプリング処理を説明した図である。
【図10B】1次元形状部におけるサンプリング誤差の算出方法を説明した図である。
【図10C】1次元形状部におけるサンプリング誤差の算出方法を説明した図である。
【図10D】1次元形状部におけるサンプリング誤差の算出方法を説明した図である。
【図10E】1次元形状部におけるサンプリング誤差の算出方法を説明した図である。
【図10F】1次元形状部におけるサンプリング誤差の算出方法を説明した図である。
【図10G】1次元形状部におけるサンプリング誤差の算出方法を説明した図である。
【図11A】SEM輪郭線の2次元形状部におけるサンプリング処理を説明した図である。
【図11B】2次元形状部におけるサンプリング誤差の算出方法を説明した図である。
【図11C】2次元形状部におけるサンプリング誤差の算出方法を説明した図である。
【図11D】2次元形状部におけるサンプリング誤差の算出方法を説明した図である。
【図11E】2次元形状部におけるサンプリング誤差の算出方法を説明した図である。
【図11F】2次元形状部におけるサンプリング誤差の算出方法を説明した図である。
【図11G】2次元形状部におけるサンプリング誤差の算出方法を説明した図である。
【発明を実施するための形態】
【0017】
以下に添付図面を参照して、本発明にかかるパターン計測装置、およびパターン計測方法の実施の形態を詳細に説明する。
(実施形態)
はじめに、CD−gapの明確な定義を与える。CD−SEMにより取得されたCD値(つまり、CDCD−SEM)と、SEM輪郭線から算出されたCD値(つまり、CDContour)の差異をCD−gapとし、CD−gap=|CDCD−SEM−CDContour|と定義する。
【0018】
なお、CD値の例としては、図3Aに示すようなパターン301のライン幅302、図3Bに示すようなパターン303とパターン304とのライン間幅305、図3Cに示すようなパターン306のラインとパターン308のライン端との間の幅307、あるいは図3Dに示すようなパターン309のライン端とパターン310のライン端との間の幅310)がある。なお、図3A〜Dでは一次元(例えば、直線部)の場合のみ示しているが、2次元(例えば、コーナ部)の場合もこれと同様である。
【0019】
続いて、図2Aを用いて、CD−gapの発生要因について説明する。CD−SEMでは、画像201の水平座標方向(図2Aに示す符号204の方向)に2次電子輝度プロファイルを取得し、その輝度プロファイルを解析することにより回路パターンの寸法を測長している。その一方で、特許文献1に記載されているような既存のSEM輪郭線抽出手法においては、ホワイトバンド(図2Aに示す符号202)の法線方向(図2Aに示す符号204)に2次電子輝度プロファイルを取得し、その輝度プロファイルを解析することによりSEM輪郭線を抽出している。例えば、図2Bに示すように、輝度値のピークをホワイトバンドの中心210とし、そのホワイトバンドの中心210の周辺の画素のうち所定の輝度値以上となる画素位置を輪郭の位置211として定めている。しかしながら、OPC model calibration行程においては、転写パターンの画像エッジが乱れるため、輝度プロファイルのスキャン方向が安定しない傾向にある。公知文献4によれば、輝度プロファイルの取得方向の乱れにより、SEM輪郭線の抽出精度が低下し、CD−gapが発生すると結論づけられている。
【0020】
Contour−based calibrationにおいては、CD−SEMにより取得された1次元のCD値と、2次元のSEM輪郭線をcalibrationデータとして用いるため、同一箇所を測定した際に生じる矛盾、すなわち、CD−gapの存在はcalibration精度の低下につながる。従って、公知文献4に示されているようなCD−gapの抑制を考慮したSEM輪郭線抽出手法を用いることが必要不可欠な要素である。
【0021】
次に、図1Cを用いて、SEM輪郭線のサンプリングについて説明する。SEM画像から抽出された回路パターンのSEM輪郭線106を区分的に連続な曲線とする。SEM輪郭線106は、画像上で実数値の2次元位置座標値により表現される。このSEM輪郭線106を、107のように離散的な点の集合として標本化することを、本特許においては、SEM輪郭線のサンプリングと称する。なお、サンプリングを行う際に、SEM輪郭線輪郭線を構成する離散点の間隔は、不等間隔となる場合がある。また、SEM輪郭線106については、計算機上で取り扱うため、実用的に十分な分解能(例えば、1/100ピクセル程度)を持つ離散的な点の集合として保持しても良い。
【0022】
本特許における実施形態では、転写された回路パターンのSEM輪郭線の位置座標値を求めた後に、サンプリングを行う。本特許の実施形態では、SEM輪郭線の2次元位置座標を適切な間隔で離散化する際に、SEM輪郭線の形状に応じて、装置の使用者が指定した許容誤差(つまり、サンプリング誤差)が最小化となるようにサンプリングを実行する。
【0023】
なお、上述したように、SEM輪郭線の抽出精度の低下によるCD−gapの発生により、OPC model calibration精度の向上の観点からは、前記サンプリング処理についても、サンプリング誤差と共にCD−gapの低減を考慮して処理を行わなければならない。続いて、本実施の形態において行われるパターン計測処理について説明する。なお、各処理を行う主体であるパターン計測装置の具体的な構成については、図8を用いて後述する。
(主要処理)
ここでは、図4を用いて簡単に本特許のパターン計測装置の主要な動作を説明する。はじめに、演算ユニット801(SEM輪郭線抽出プログラム821)は、SEM画像から回路パターンのSEM輪郭線の抽出を行う(S401)。
【0024】
なお、公知文献4に記載する手法を用いて、SEM輪郭線の抽出を行うことで、CD−gapが大きく低減され、Contour−based calibrationを精度良く実行することができる。
【0025】
次に、演算ユニット801(SEM輪郭線抽出プログラム821)は、露光シミュレータ841に対してSEM輪郭線を算出するための指示を出し、露光シミュレータ841は、マスクエッジからウェハ上のSEM輪郭線を算出する(S402)。この予測されたSEM輪郭線を予測SEM輪郭線(図7Aに示す符号703)と呼ぶ。
【0026】
なお、露光シミュレーションにより得られた予測SEM輪郭線の具体例については、公知文献2のFigure 7と、公知文献5(I. Kusnadi, et al., “Contour−based self−aligning calibration of OPC models,” Proceedings of SPIE, Vol. 7638, 76382M1-8, 2010.)のFigure 1に示されている。
【0027】
なお、1度目の処理では、一律にサンプリングされたSEM輪郭線を、前記露光シミュレータ841に入力しても良い。その場合、SEM輪郭線の予測精度が低く、不完全なシミュレーション結果となる。後述する処理では、この予測精度を向上させるための処理であり、予測SEM輪郭線と差異の大きなSEM輪郭線の2次元位置座標を、順次、サンプリング点として追加していく。
【0028】
また、公知文献6(高木 幹雄,他,“新編 画像解析ハンドブック,” 東京大学出版会,’2004.)第6章に記載されている区分近似関数による曲線近似手法を用いて、サンプリングされたSEM輪郭線を関数近似することで予測SEM輪郭線を算出し、露光シミュレータが出力する予測SEM輪郭線の代用としても良い。
【0029】
そして、演算ユニット801(形状分類プログラム822)は、SEM輪郭線および予測SEM輪郭線を構成する曲線(直線を含む)について、1次元形状部(直線部:図5 502)と2次元形状部(コーナ部:図5Aに示す符号503、EOL:図5 504)に分類する(S403)。この分類処理の具体的な内容については後述する。
【0030】
次に、演算ユニット801(サンプリングプログラム823)は、SEM輪郭線の形状の種類に応じて、SEM輪郭線のサンプリングを行う(S404)。具体的には、演算ユニット801(サンプリングプログラム823)は、1次元形状部に属するSEM輪郭線のサンプリングを行う場合には、後述する「(1次元形状部のSEM輪郭線サンプリング処理)」を実施する。その結果、図5B左部に示すように、直線部502のSEM輪郭線は、図5B右部の符号505のようにサンプリングされる。
【0031】
また、演算ユニット801(サンプリングプログラム823)は、2次元形状部に属するSEM輪郭線のサンプリングを行う場合には、後述する「(2次元形状部のSEM輪郭線サンプリング処理)」を実施する。その結果、図5C左部に示すように、コーナ部503のSEM輪郭線は、図5C右部の符号506のようにサンプリングされる。さらに、図5D左部に示すように、EOL部504のSEM輪郭線は、図5D右部の符号507のようにサンプリングされる。
【0032】
そして、演算ユニット801は、ユーザが許容するサンプリング誤差を満たすまで、S402からS404を繰り返す。なお、計算時間が限られている場合には、繰り返し処理を行わずに、処理を終了する。その場合でも、一律の間隔で、SEM輪郭線のサンプリングを行うよりは、OPC model calibrationの精度が向上する。
【0033】
以上、説明したように、本発明では、図4の処理を実行して、SEM輪郭線のサンプリングを行う。
(パターン計測装置の構成)
本特許の実施形態における処理を実行するパターン計測装置の構成について、図8を用いて説明する。
【0034】
図8に示すように、パターン計測装置800は、演算ユニット801、主記憶装置810、ネットワークアダプタ802、補助記憶装置803、入力装置804、および出力装置805を有して構成されている。パターン計測装置800は、ネットワーク850を介して、CD−SEM840からCDデータ830および画像データ831を受信可能に接続される。また、パターン計測装置800は、ネットワーク850を介して、露光シミュレータ841から予測SEM輪郭線データ834を受信可能に接続される。補助記憶装置803は、HDD(Hard Disk Drive)、SSD(Solid State Drive)等によって構成される。入力装置804は、トラックボール、キーボード、スキャナ、BD−RE D(Blu−ray Disc Recordable Drive [Blu−rayは登録商標])等によって構成される。出力装置805は、ディスプレイ、プリンタ、BD−RE D等によって構成される。
【0035】
演算ユニット801は、コンピュータのCPU(Central Processing Unit)であり、DRAM(Dynamic Random Access Memory)によって構成される主記憶装置810に展開されているプログラムを実行することによって、種々の機能を実現する。
【0036】
主記憶装置810には、SEM輪郭線抽出プログラム821、形状分類プログラム822、サンプリングプログラム823が記憶されている。また、主記憶装置810に記憶されているデータは、CDデータ830、画像データ831、マスクエッジデータ832、SEM輪郭線データ833、予測SEM輪郭線データ834、サンプリング済みSEM輪郭線データ835である。なお、主記憶装置810と補助記憶装置803との間では、プログラムおよびデータの一貫性が保持されるように送受信が行われ、種々のプログラムおよびデータが記憶される。
【0037】
主記憶装置810に記憶されている上述した各プログラムは、SEM輪郭線抽出部、形状分類部、サンプリング部の各機能を実現し、これらのソフトウェアプログラムは、例えば、上述した各部を含むモジュール構成となっており、実際のハードウェアとしては、CPU等の制御部がHDD等の記録装置からこれらのソフトウェアプログラムを読み出して実行することにより、上記各部が主記憶装置上にロードされ、SEM輪郭線抽出部、形状分類部、サンプリング部の各部が主記憶装置上に生成されるようになっている。
【0038】
また、上述したソフトウェアプログラムは、インストール可能な形式又は実行可能な形式のファイルでCD−ROM、フレキシブルディスク(FD)、CD−R、DVD(Digital Versatile Disc)等のコンピュータで読み取り可能な記録媒体に記録されて提供することも可能である。さらに、これらのソフトウェアプログラムを、ネットワーク経由でダウンロードさせて提供または配布するように構成してもよい。
【0039】
SEM輪郭線抽出プログラム821は、図4のステップS401を実行する。SEM輪郭線抽出プロラム821は、図4に示したS401の処理において、CDデータ830および画像データ831を、CD−SEM840からネットワーク850を介して取得し、取得したこれらのデータを補助記憶装置803に格納する。なお、画像データ831は、座標位置と、その座標位置における輝度値とで表され、ステップS401の実行時に、補助記憶装置803から主記憶装置810に複製される。そして、SEM輪郭線抽出プログラム821は、SEM輪郭線抽出処理を実行し、SEM輪郭線データ833を生成して、主記憶装置810または補助記憶装置803に記憶する。
【0040】
図4のステップS402において、SEM輪郭線抽出プログラム621からの指示により、露光シミュレータ841を操作する。露光シミュレータ841は、予め補助記憶装置803に記憶されているマスクエッジデータ832およびCDデータ830を読み出して主記憶装置810に複製し、マスクエッジデータ832から予測SEM輪郭線データ834をシミュレーションする処理を実行する。
【0041】
なお、主記憶装置810もしくは補助記憶装置803にサンプリング済みSEM輪郭線データ835が存在する場合には、露光シミュレーションの精度向上に利用することも可能である。
【0042】
そして最後に、SEM輪郭線抽出プログラム621は、予測SEM輪郭線データ834を、主記憶装置303または補助記憶装置603に記憶する。
【0043】
サンプリングプログラム823は、図4のステップS404を実行する。サンプリングプログラム823は、SEM輪郭線データ831と予測SEM輪郭線834を用いてサンプリング処理を実行し、サンプリング済SEM輪郭線データ835を生成し、主記憶装置810と補助記憶装置803に記憶する。サンプリングプログラム823が行う具体的な処理については、図9A、9Bを用いて後述する。
(輪郭線の分類)
はじめに、SEM輪郭線および予測SEM輪郭線を構成する曲線(直線を含む)について、1次元形状部(直線部:図5Bに示す符号502)と2次元形状部(コーナ部:図5Cに示す符号503とEOL:図5Dに示す符号504)に分類する処理について、具体的に説明する。
【0044】
まず、形状分類プログラム822は、マスクエッジ(図6Aに示す符号105)を1次元形状部(直線部:図6Bに示す符号802)と、2次元形状部(コーナ部:図6Bに示す符号801とEOL:図6Bに示す符号803)に分解・分類する。その際、高知文献4に記載されている手法を用いても良いし、装置の使用者が予め区間を細かく指定しても良い。
【0045】
最後に、図6Cに示すように、マスクエッジとSEM輪郭線の対応関係を求める(この処理を、以降、マッピング処理と呼ぶ)。前記マッピング処理とは、マスクエッジを構成する曲線のある区間とそれに対応するSEM輪郭線の区間の対応関係を求める処理を指す。
【0046】
その際、公知文献4に記載されている手法を用いても良いし、ICP(Iterative Closest Point)法や特開2006−351888号公報に開示されている方法を用いることによって、対応関係を求めることにより、1次元形状部と2次元形状部の区間を指定しても良い。
【0047】
また、前記マッピング処理を予測SEM輪郭線(図7Aに示す符号703)についても、同様の手順で、1次元形状部と2次元形状部の区間の指定を実施する。
【0048】
なお、注意すべき事項として、SEM輪郭線の全区間を単一の基本形状としても良い。例えば、回路パターンの中で、コンタクトホールやviaホールの場合には、その形状が円や楕円となるため、全区間をコーナとしてサンプリングを行う。
【0049】
また、装置の使用者が、SEM輪郭線と予測SEM輪郭線に予め1次元形状部(直線部:図5Bに示した符号502)と2次元形状部(コーナ部:図5Cに示した符号503とEOL:図5Dに示した符号504)の区間を指定しても良い。その場合、上述した輪郭線の分類についての処理を省くことができる。
(SEM輪郭線サンプリング処理)
次に、図9A、9Bを用いて、SEM輪郭線サンプリングについて詳細に説明する。はじめに、1次元形状部(図5Bに示した符号502)のサンプリング処理から説明する。
(1次元形状部のSEM輪郭線サンプリング処理)
まず、S901では、サンプリングプログラム823は、基本サンプリング間隔d1 nmごとに、一律にSEM輪郭線をサンプリングする。なお、この処理を行わなくても構わないが、その場合には、あらかじめ指定された許容誤差の範囲内でサンプリングが実施される。
【0050】
そして、S902では、サンプリングプログラム823は、1次元形状部におけるSEM輪郭線と予測SEM輪郭線の誤差を算出する。1次元形状部における誤差は、ウェハ上のSEM輪郭線(図7Bに示す符号704)と予測SEM輪郭線(図7Aに示す符号703)とのユークリッド距離で与える。その際、距離の計算方法は、以下6種類((i)〜(vi))のいずれかを用いる。
【0051】
(i) 図10A、10Bを用いて説明すると、サンプリングプログラム823は、予測SEM輪郭線1001上の任意の1点(図10Bに示す符号1006)を基準とし、マスクエッジ802の法線(図10Bに示す符号1005)に対して平行な線(図10Bに示す符号1004)と、SEM輪郭線502とが交わる1点(図10Bに示す符号1003)を求め、その2点間のユークリッド距離を算出する。
【0052】
(ii) 図10A、10Cを用いて説明すると、サンプリングプログラム823は、SEM輪郭線502上の任意の1点(図10Cに示す符号1008)を基準とし、マスクエッジ802の法線(図10Cに示す符号1005)に対して平行な線(図10Cに示す符号1009)と、予測SEM輪郭線1001とが交わる1点(図10Cに示す符号1007)を求め、その2点間のユークリッド距離を算出する。
【0053】
(iii) 図10A、10Dを用いて説明すると、サンプリングプログラム823は、予測SEM輪郭線1001上の任意の1点(図10Dに示す符号1010)を基準とし、その点における予測SEM輪郭線502の法線(図10Dに示す符号1012)と、SEM輪郭線502とが交わる1点(図10Dに示す符号1011)を求め、その2点間のユークリッド距離を算出する。
【0054】
(iv) 図10A、10Eを用いて説明すると、サンプリングプログラム823は、SEM輪郭線502上の任意の1点(図10Eに示す符号1014)を基準とし、その点におけるSEM輪郭線502の法線(図10Eに示す符号1015)と、予測SEM輪郭線1001とが交わる1点(図10Eに示す符号1013)を求め、その2点間のユークリッド距離を算出する。
【0055】
(v) 図10A、10Fを用いて説明すると、サンプリングプログラム823は、予測SEM輪郭線1001上の任意の1点(図10Fに示す符号1016)を基準とし、SEM輪郭線502までのユークリッド距離が最小となるSEM輪郭線502上の1点(図10Fに示す符号1017)を算出し、その2点間のユークリッド距離を算出する。
【0056】
(vi) 図10A、10Gを用いて説明すると、サンプリングプログラム823は、SEM輪郭線502上の任意の1点(図10Gに示す符号1020)を基準とし、予測SEM輪郭線1001までのユークリッド距離が最小となる予測SEM輪郭線502上の1点(図10Gに示す符号1019)を算出し、その2点間のユークリッド距離を算出する。
【0057】
なお、CD−gapの低減度合いが、最も大きいのは(i)による距離の算出方法である。特に、公知文献4による手法を用いてSEM輪郭線を算出した場合には、マスクエッジの法線方向と2次電子プロファイルの取得方向が一致しているため、CD−gapを低く抑えたサンプリング結果を得ることができる。
【0058】
また、公知文献5のFigure 1に図示されているように、基準を予測SEM輪郭線上の点とするか、SEM輪郭線上の点とするかで、算出される誤差が異なる場合があることに留意する。
【0059】
なお、自明のことではあるが、SEM輪郭線と予測SEM輪郭線の間の誤差は、SEM輪郭線の全域に渡って算出することに注意する。
【0060】
なお、SEM輪郭線と予測SEM輪郭線の間の誤差をSEM輪郭線の全域に渡って算出する際に、基準となる側の輪郭線から基準点を選び出す間隔は、基本サンプリング間隔d1 nmよりも十分に密な間隔(例えば、d1/100 nm程度)とする。
【0061】
最後に、S903では、サンプリングプログラム823は、前記ステップS902により得られたSEM輪郭線を構成する各点の中で、1次元直線部形状部の許容誤差e1より大きな点をサンプリング点に追加する。
【0062】
その際、前記(i)、(iii)、(v)の場合には、基準が予測SEM輪郭線1001上の点であるから、求められたSEM輪郭線502上の対応点(図10Bに示す符号1003、図10Dに示す符号1011、図10Fに示す符号1017)がサンプリング点となる。
【0063】
また、前記(ii)、(iv)、(vi)の場合には、基準がSEM輪郭線502上の点であるから、その基準点(図10Cに示す符号1008、図10Eに示す符号1014、図10Gに示す符号1020)がそのままサンプリング点となる。
【0064】
いずれの手法の場合でも、SEM輪郭線上のサンプリング点の位置座標は、実数の分解能を有する。
(2次元形状部のSEM輪郭線サンプリング処理)
次に、2次元形状部のサンプリング処理について説明する。S904では、基本サンプリング間隔d2 nmごとに、一律にSEM輪郭線をサンプリングする。なお、このステップを飛ばしても構わない。その場合には、1次元形状部のSEM輪郭線サンプリング処理の場合と同様に、許容誤差の範囲内でサンプリングが実施される。
【0065】
S905では、サンプリングプログラム823は、2次元形状部におけるSEM輪郭線と予測SEM輪郭線の誤差を算出する。2次元形状部における誤差は、ウェハ上のSEM輪郭線(図7Bに示す符号704)と予測SEM輪郭線(図7Aに示す符号703)とのユークリッド距離で与える。その際、距離の計算方法は、1次元形状部のSEM輪郭線サンプリング処理の場合と同様に、以下6種類((i)〜(vi))のいずれかを用いる。なお、図11A〜11Gを用いて、EOL部を例に説明するが、コーナ部についても同様に処理を行う。
【0066】
(i) 図11A、11Bを用いて説明すると、サンプリングプログラム823は、予測SEM輪郭線504上の任意の1点(図11Bに示す符号1102)を基準とし、マスクエッジ801の法線(図11Bに示す符号1102)に対して平行な線(図11Bに示す符号1103)と、SEM輪郭線1101とが交わる1点(図11Bに示す符号1104)を求め、その2点間のユークリッド距離を算出する。
【0067】
(ii) 図11A、11Cを用いて説明すると、サンプリングプログラム823は、SEM輪郭線1101上の任意の1点(図11Cに示す符号1105)を基準とし、マスクエッジ801の法線方向(図11Cに示す符号1102)に平行な線(図11Cに示す符号1106)と、予測SEM輪郭線504とが交わる1点(図11Cに示す符号1107)を求め、その2点間のユークリッド距離を算出する。
【0068】
(iii) 図11A、11Dを用いて説明すると、サンプリングプログラム823は、予測SEM輪郭線504上の任意の1点(図11Dに示す符号1108)を基準とし、その点における予測SEM輪郭線504の法線(図11Dに示す符号1109)と、SEM輪郭線1101とが交わる1点(図11Dに示す符号1110)を求め、その2点間のユークリッド距離を算出する。
【0069】
(iv) 図11A、11Eを用いて説明すると、サンプリングプログラム823は、SEM輪郭線1101上の任意の1点(図11Eに示す符号1111)を基準とし、その点におけるSEM輪郭線1101の法線(図11Eに示す符号1112)と、予測SEM輪郭線504とが交わる1点(図11Eに示す符号1113)を求め、その2点間のユークリッド距離を算出する。
【0070】
(v) 図11A、11Fを用いて説明すると、サンプリングプログラム823は、予測SEM輪郭線504上の任意の1点(図11Fに示す符号1114)を基準とし、その点におけるSEM輪郭線1101までのユークリッド距離が最小となるSEM輪郭線1101上の1点(図11Fに示す符号1116)を算出し、その2点間のユークリッド距離を算出する。
【0071】
(vi) 図11A、11Gを用いて説明すると、サンプリングプログラム823は、SEM輪郭線1101上の任意の1点(図11Gに示す符号1117)を基準とし、その点における予測SEM輪郭線504までのユークリッド距離が最小となる予測SEM輪郭線504上の1点(図11Gに示す符号1119)を算出し、その2点間のユークリッド距離を算出する。
【0072】
ここで、2次元形状部がEOLの場合には、1次元形状部の場合と同様に、CD−gapの低減度合いが、最も大きいのは(i)による距離の算出方法となる。特に、公知文献4による手法を用いてSEM輪郭線を算出した場合には、マスクエッジの法線方向と2次電子プロファイルの取得方向が一致しているため、EOL部については、CD−gapを低く抑えたサンプリング結果を得ることができる。
【0073】
最後に、サンプリングプログラム823は、S906では、前記ステップS905により得られたSEM輪郭線を構成する各点の中で、2次元形状部の許容誤差e2より大きな点をサンプリング点に追加する。なお、コーナ部とEOL部については、基本サンプリング間隔と許容誤差を別々に定義しても良い。
【0074】
また、公知文献5のFigure 1に図示されているように、基準を予測SEM輪郭線上の点とするか、SEM輪郭線上の点とするかで、算出される誤差が異なる場合があることに留意する。
【0075】
なお、自明のことではあるが、SEM輪郭線と予測SEM輪郭線の間の誤差は、SEM輪郭線の全域に渡って算出することに注意する。
【0076】
なお、SEM輪郭線と予測SEM輪郭線の間の誤差を、SEM輪郭線の全域に渡って算出する際に、基準となる側の輪郭線から基準点を選び出す間隔は、基本サンプリング間隔d2 nmよりも十分に密な間隔(例えば、d2/100 nm程度)とする。
【0077】
その際、前記(i)、(iii)、(v)の場合には、基準が予測SEM輪郭線上の点であるから、求められたSEM輪郭線上の対応点(図11Bに示す符号1104、図11Dに示す符号1110、図11Fに示す符号1116)がサンプリング点となる。
【0078】
また、前記(ii)、(iv)、(vi)の場合には、基準がSEM輪郭線上の点であるから、その基準点(図11Cに示す符号1105、図11Eに示す符号1111、図11Gに示す符号1117)がそのままサンプリング点となる。
【0079】
いずれの手法の場合でも、SEM輪郭線上のサンプリング点の位置座標は、実数の分解能を有する。
【0080】
このように、主記憶装置810が半導体の回路パターンのマスクエッジデータ、および回路パターンを撮像した画像データを記憶し、SEM輪郭線抽出部(SEM輪郭線抽出プログラム821)が、画像データを入力として回路パターンのSEM(Scanning Electron Microscope)輪郭線を抽出し、前記マスクエッジデータと抽出したSEM輪郭線のデータ(SEM輪郭線データ)とに基づいて、露光シミュレータ841に予測SEM輪郭線のデータ(予測SEM輪郭線データ)を生成させ、形状分類部(形状分類プログラム822)が、マスクエッジデータと、SEM輪郭線データと、予測輪郭線データとを入力として、SEM輪郭線データおよび予測SEM輪郭線データを、1次元形状の輪郭線と2次元形状の輪郭線とに分類し、SEM輪郭線サンプリング部(SEM輪郭線サンプリングプログラム823)が、SEM輪郭線データと予測SEM輪郭線データとを入力とし、1次元形状及び2次元形状の種類に応じて、SEM輪郭線データのサンプリングを行うので、OPC model calibrationに要する計算時間を削減しつつ、その精度を向上させることが可能となる。
【符号の説明】
【0081】
800 パターン計測装置
801 演算ユニット
802 ネットワークアダプタ
803 補助記憶装置
804 入力装置
805 出力装置
810 主記憶装置
821 SEM輪郭線抽出プログラム
822 形状分類プログラム
823 サンプリングプログラム
830 CDデータ
831 画像データ
832 マスクエッジデータ
833 SEM輪郭線データ
834 予測SEM輪郭線データ
835 サンプリング済みSEM輪郭線データ
840 CD−SEM
841 露光シミュレータ
850 ネットワーク。
【特許請求の範囲】
【請求項1】
半導体の回路パターンのマスクエッジデータ、および前記回路パターンを撮像した画像データを記憶する記憶部と、
前記画像データを入力として前記回路パターンのSEM(Scanning Electron Microscope)輪郭線を抽出し、前記マスクエッジデータと抽出した前記SEM輪郭線のデータ(SEM輪郭線データ)とに基づいて、露光シミュレーション部に予測SEM輪郭線のデータ(予測SEM輪郭線データ)を生成させるSEM輪郭線抽出部と、
前記マスクエッジデータと、前記SEM輪郭線データと、前記予測輪郭線データとを入力として、前記SEM輪郭線データおよび前記予測SEM輪郭線データを、1次元形状の輪郭線と2次元形状の輪郭線とに分類する形状分類部と、
前記SEM輪郭線データと前記予測SEM輪郭線データとを入力とし、前記1次元形状及び前記2次元形状の種類に応じて、前記SEM輪郭線データのサンプリングを行うSEM輪郭線サンプリング部と、
を備えることを特徴としたパターン計測装置。
【請求項2】
前記SEM輪郭線抽出部は、前記SEM輪郭線とSEMの測定値により取得された輪郭線との差であるCD(Critical dimension)ギャップが抑制された輪郭線を、前記回路パターンから抽出する、
ことを特徴とする請求項1に記載のパターン計測装置。
【請求項3】
前記SEM輪郭線サンプリング部は、前記予測SEM輪郭線上に位置する所定の点を基準とし、前記マスクエッジデータの法線に対して平行な線と、前記SEM輪郭線とが交わる点を求め、その2点間のユークリッド距離を算出することにより前記SEM輪郭線データのサンプリングをする、
ことを特徴とする請求項1または2に記載のパターン計測装置。
【請求項4】
前記SEM輪郭線サンプリング部は、前記SEM輪郭線上に位置する所定の点を基準とし、前記マスクエッジデータの法線方向に平行な線と、前記予測SEM輪郭線とが交わる点を求め、その2点間のユークリッド距離を算出することにより前記SEM輪郭線データのサンプリングをする、
ことを特徴とする請求項1または2に記載のパターン計測装置。
【請求項5】
前記SEM輪郭線サンプリング部は、前記予測SEM輪郭線上に位置する所定の点を基準とし、前記所定の点における予測SEM輪郭線の法線と、前記SEM輪郭線とが交わる点を求め、その2点間のユークリッド距離を算出することにより前記SEM輪郭線データのサンプリングをする、
ことを特徴とする請求項1または2に記載のパターン計測装置。
【請求項6】
前記SEM輪郭線サンプリング部は、前記SEM輪郭線上に位置する所定の点を基準とし、前記所定の点におけるSEM輪郭線の法線と、前記予測SEM輪郭線とが交わる点を求め、その2点間のユークリッド距離を算出することにより前記SEM輪郭線データのサンプリングをする、
ことを特徴とする請求項1または2に記載のパターン計測装置。
【請求項7】
前記SEM輪郭線サンプリング部は、前記予測SEM輪郭線上に位置する所定の点を基準とし、前記所定の点におけるSEM輪郭線までのユークリッド距離が最小となるSEM輪郭線上の点を算出し、その2点間のユークリッド距離を算出することにより前記SEM輪郭線データのサンプリングをする、
ことを特徴とする請求項1または2に記載のパターン計測装置。
【請求項8】
前記SEM輪郭線サンプリング部は、前記SEM輪郭線上に位置する所定の点を基準とし、前記所定の点における予測SEM輪郭線までのユークリッド距離が最小となる予測SEM輪郭線の点を算出し、その2点間のユークリッド距離を算出することにより前記SEM輪郭線データのサンプリングをする、
ことを特徴とする請求項1または2に記載のパターン計測装置。
【請求項9】
前記1次元形状の輪郭線には少なくとも直線部を含み、前記2次元形状の輪郭線には少なくともコーナ部およびEOL(End−of−Line)を含む、
ことを特徴とする請求項1〜8のいずれか1項に記載のパターン計測装置。
【請求項10】
半導体の回路パターンを撮像した画像データを入力として前記回路パターンのSEM輪郭線を抽出する抽出ステップと、
前記半導体の回路パターンのマスクエッジデータと抽出した前記SEM輪郭線のデータ(SEM輪郭線データ)とに基づいて、露光シミュレーション部に予測SEM輪郭線のデータ(予測SEM輪郭線データ)を生成させる生成ステップと、
前記マスクエッジデータと、前記SEM輪郭線データと、前記予測輪郭線データとを入力として、前記SEM輪郭線データおよび前記予測SEM輪郭線データを、1次元形状の輪郭線と2次元形状の輪郭線とに分類する形状分類ステップと、
前記SEM輪郭線データと前記予測SEM輪郭線データとを入力とし、前記1次元形状及び前記2次元形状の種類に応じて、前記SEM輪郭線データのサンプリングを行うSEM輪郭線サンプリングステップと、
を含むことを特徴としたパターン計測方法。
【請求項11】
前記抽出ステップにおいて、前記SEM輪郭線とSEMの測定値により取得された輪郭線との差であるCDギャップが抑制された輪郭線を、前記回路パターンから抽出する、
ことを特徴とする請求項10に記載のパターン計測方法。
【請求項1】
半導体の回路パターンのマスクエッジデータ、および前記回路パターンを撮像した画像データを記憶する記憶部と、
前記画像データを入力として前記回路パターンのSEM(Scanning Electron Microscope)輪郭線を抽出し、前記マスクエッジデータと抽出した前記SEM輪郭線のデータ(SEM輪郭線データ)とに基づいて、露光シミュレーション部に予測SEM輪郭線のデータ(予測SEM輪郭線データ)を生成させるSEM輪郭線抽出部と、
前記マスクエッジデータと、前記SEM輪郭線データと、前記予測輪郭線データとを入力として、前記SEM輪郭線データおよび前記予測SEM輪郭線データを、1次元形状の輪郭線と2次元形状の輪郭線とに分類する形状分類部と、
前記SEM輪郭線データと前記予測SEM輪郭線データとを入力とし、前記1次元形状及び前記2次元形状の種類に応じて、前記SEM輪郭線データのサンプリングを行うSEM輪郭線サンプリング部と、
を備えることを特徴としたパターン計測装置。
【請求項2】
前記SEM輪郭線抽出部は、前記SEM輪郭線とSEMの測定値により取得された輪郭線との差であるCD(Critical dimension)ギャップが抑制された輪郭線を、前記回路パターンから抽出する、
ことを特徴とする請求項1に記載のパターン計測装置。
【請求項3】
前記SEM輪郭線サンプリング部は、前記予測SEM輪郭線上に位置する所定の点を基準とし、前記マスクエッジデータの法線に対して平行な線と、前記SEM輪郭線とが交わる点を求め、その2点間のユークリッド距離を算出することにより前記SEM輪郭線データのサンプリングをする、
ことを特徴とする請求項1または2に記載のパターン計測装置。
【請求項4】
前記SEM輪郭線サンプリング部は、前記SEM輪郭線上に位置する所定の点を基準とし、前記マスクエッジデータの法線方向に平行な線と、前記予測SEM輪郭線とが交わる点を求め、その2点間のユークリッド距離を算出することにより前記SEM輪郭線データのサンプリングをする、
ことを特徴とする請求項1または2に記載のパターン計測装置。
【請求項5】
前記SEM輪郭線サンプリング部は、前記予測SEM輪郭線上に位置する所定の点を基準とし、前記所定の点における予測SEM輪郭線の法線と、前記SEM輪郭線とが交わる点を求め、その2点間のユークリッド距離を算出することにより前記SEM輪郭線データのサンプリングをする、
ことを特徴とする請求項1または2に記載のパターン計測装置。
【請求項6】
前記SEM輪郭線サンプリング部は、前記SEM輪郭線上に位置する所定の点を基準とし、前記所定の点におけるSEM輪郭線の法線と、前記予測SEM輪郭線とが交わる点を求め、その2点間のユークリッド距離を算出することにより前記SEM輪郭線データのサンプリングをする、
ことを特徴とする請求項1または2に記載のパターン計測装置。
【請求項7】
前記SEM輪郭線サンプリング部は、前記予測SEM輪郭線上に位置する所定の点を基準とし、前記所定の点におけるSEM輪郭線までのユークリッド距離が最小となるSEM輪郭線上の点を算出し、その2点間のユークリッド距離を算出することにより前記SEM輪郭線データのサンプリングをする、
ことを特徴とする請求項1または2に記載のパターン計測装置。
【請求項8】
前記SEM輪郭線サンプリング部は、前記SEM輪郭線上に位置する所定の点を基準とし、前記所定の点における予測SEM輪郭線までのユークリッド距離が最小となる予測SEM輪郭線の点を算出し、その2点間のユークリッド距離を算出することにより前記SEM輪郭線データのサンプリングをする、
ことを特徴とする請求項1または2に記載のパターン計測装置。
【請求項9】
前記1次元形状の輪郭線には少なくとも直線部を含み、前記2次元形状の輪郭線には少なくともコーナ部およびEOL(End−of−Line)を含む、
ことを特徴とする請求項1〜8のいずれか1項に記載のパターン計測装置。
【請求項10】
半導体の回路パターンを撮像した画像データを入力として前記回路パターンのSEM輪郭線を抽出する抽出ステップと、
前記半導体の回路パターンのマスクエッジデータと抽出した前記SEM輪郭線のデータ(SEM輪郭線データ)とに基づいて、露光シミュレーション部に予測SEM輪郭線のデータ(予測SEM輪郭線データ)を生成させる生成ステップと、
前記マスクエッジデータと、前記SEM輪郭線データと、前記予測輪郭線データとを入力として、前記SEM輪郭線データおよび前記予測SEM輪郭線データを、1次元形状の輪郭線と2次元形状の輪郭線とに分類する形状分類ステップと、
前記SEM輪郭線データと前記予測SEM輪郭線データとを入力とし、前記1次元形状及び前記2次元形状の種類に応じて、前記SEM輪郭線データのサンプリングを行うSEM輪郭線サンプリングステップと、
を含むことを特徴としたパターン計測方法。
【請求項11】
前記抽出ステップにおいて、前記SEM輪郭線とSEMの測定値により取得された輪郭線との差であるCDギャップが抑制された輪郭線を、前記回路パターンから抽出する、
ことを特徴とする請求項10に記載のパターン計測方法。
【図1A】


【図1B】
【図1C】
【図2A】
【図2B】
【図3A】
【図3B】
【図3C】
【図4】
【図5A】
【図5B】
【図5C】

【図5D】
【図6A】
【図6B】
【図6C】
【図6D】
【図7A】
【図7B】
【図8】
【図9A】
【図9B】
【図10A】
【図10B】
【図10C】
【図10D】
【図10E】
【図10F】
【図10G】
【図11A】
【図11B】
【図11C】
【図11D】
【図11E】
【図11F】
【図11G】
【図1B】
【図1C】
【図2A】
【図2B】
【図3A】
【図3B】
【図3C】
【図4】
【図5A】
【図5B】
【図5C】
【図5D】
【図6A】
【図6B】
【図6C】
【図6D】
【図7A】
【図7B】
【図8】
【図9A】
【図9B】
【図10A】
【図10B】
【図10C】
【図10D】
【図10E】
【図10F】
【図10G】
【図11A】
【図11B】
【図11C】
【図11D】
【図11E】
【図11F】
【図11G】
【公開番号】特開2013−57586(P2013−57586A)
【公開日】平成25年3月28日(2013.3.28)
【国際特許分類】
【出願番号】特願2011−195897(P2011−195897)
【出願日】平成23年9月8日(2011.9.8)
【出願人】(501387839)株式会社日立ハイテクノロジーズ (4,325)
【Fターム(参考)】
【公開日】平成25年3月28日(2013.3.28)
【国際特許分類】
【出願日】平成23年9月8日(2011.9.8)
【出願人】(501387839)株式会社日立ハイテクノロジーズ (4,325)
【Fターム(参考)】
[ Back to top ]