
パターン配置方法並びにシリコンウェハ及び半導体デバイス

【課題】半導体リソグラフィにおいて、シリコンウェハに同一パターンを複数形成するときに破断を起こしにくいパターン配置方法及びパターニングされたシリコンウェハを提供すること。また、そのパターン配置方法が用いられた半導体デバイスを提供すること。
【解決手段】本発明によると、シリコンウェハに、第1の方向及び前記第1の方向に直交する第2の方向に平行に配置された複数のチップパターンを有し、前記複数のチップパターンは、前記第1の方向及び前記第2の方向に配置され、直線状に配置された一つ以上のパターンを含み、前記シリコンウェハのへき開面と前記シリコンウェハの前記パターンを配置する面とが直交する軸と、前記第1の方向とが、異なるように前記複数のチップパターンを配置することを特徴とするシリコンウェハが提供される。
【解決手段】本発明によると、シリコンウェハに、第1の方向及び前記第1の方向に直交する第2の方向に平行に配置された複数のチップパターンを有し、前記複数のチップパターンは、前記第1の方向及び前記第2の方向に配置され、直線状に配置された一つ以上のパターンを含み、前記シリコンウェハのへき開面と前記シリコンウェハの前記パターンを配置する面とが直交する軸と、前記第1の方向とが、異なるように前記複数のチップパターンを配置することを特徴とするシリコンウェハが提供される。
【発明の詳細な説明】
【技術分野】
【0001】
本発明は、半導体リソグラフィのパターニングに関する。特に、本発明は、シリコンウェハに同一パターンを複数形成するときのパターン配置方法に関する。また、本発明は、そのパターン配置方法が用いられた半導体デバイスに関する。
【背景技術】
【0002】
バルクMEMSの分野では、機能を発現させるためにシリコンウェハに深い穴や溝を形成する。このとき使用するシリコンウェハは、メモリやプロセッサ等の半導体向けに供給されているものを主として使用するため、(100)面方位のものを使用することが多い。
【0003】
(100)面方位のシリコンウェハに深い穴や溝を形成した場合、シリコンの特性上、キズ等があると破断しやすいという特徴がある。このようなシリコンウェハの破断しやすい性質を利用した例として、特許文献1にチップ分離溝をへき開面に沿って形成することでシリコンウェハの破断を容易にする技術が開示されている。しかし、このような破断のしやすさは、パターン形成したシリコンウェハにおいては、その取り扱い上のデメリットを有する。
【0004】
例えば、シリコンウェハ上に応力の高い材料を用いて成膜するような場合においてもシリコンウェハが破断することがある。このような破断は<110>方位のへき開面に生じる。
【0005】
例えば、特許文献2には、へき開面に対して割れやすいというシリコンウェハの性質に対して、2枚のシリコンウェハを互いのへき開面をずらして接合して補強する技術が開示されている。しかし、2枚のシリコンウェハの組合せは、デバイス全体としては強度を確保できるが、1枚のシリコンウェハにおいては十分な強度を確保できないため、上述のような成膜に用いる材料の応力に起因する破断を防ぐことはできない。
【0006】
特に、バルクMEMS分野においては、メモリなどの半導体素子に比して、シリコンウェハのへき開面に沿って深い穴や溝を有する同一パターンを複数形成することが多い。形成される穴や溝の深さは、数十μm〜数百μmにもなるため、シリコンウェハのへき開面に沿って破断が生じやすい。このため、シリコンウェハに同一パターンを複数形成するときに、破断を起こしにくいパターン配置方法が望まれる。
【先行技術文献】
【特許文献】
【0007】
【特許文献1】特開平8−139339号公報
【特許文献2】特開2004−349550号公報
【発明の概要】
【発明が解決しようとする課題】
【0008】
本発明は、半導体リソグラフィにおいて、シリコンウェハに同一パターンを複数形成するときに破断を起こしにくいパターン配置方法及びパターニングされたシリコンウェハを提供することを目的とする。また、そのパターン配置方法が用いられた半導体デバイスを提供する。
【課題を解決するための手段】
【0009】
本発明の一実施形態によると、シリコンウェハに、第1の方向及び前記第1の方向に直交する第2の方向に平行に配置された複数のチップパターンを有し、前記複数のチップパターンは、前記第1の方向及び前記第2の方向に配置され、直線状に配置された一つ以上のパターンを含み、前記シリコンウェハのへき開面と前記シリコンウェハの前記パターンを配置する面とが直交する軸と、前記第1の方向とが、異なるように前記複数のチップパターンを配置することを特徴とするシリコンウェハが提供される。
【0010】
前記直線状に配置された一つ以上のパターンは、複数の前記パターンが前記チップパターン内に断続的に形成されていることを含んでもよい。
【0011】
前記軸と第1の方向とのなす角度が第1の角度となるように前記複数のチップパターンを配置してもよい。
【0012】
前記軸と、前記複数のチップパターンの一部の前記第1の方向とのなす角度は、90度であってもよい。
【0013】
第1の方向及び前記第1の方向に直交する第2の方向にエッチングされ、直線状に断続的に配置された複数のパターンを含み、前記第1の方向及び前記第2の方向に平行に配置した複数のチップパターンを有し、前記第1の方向に平行に配置した前記複数のチップパターンは、前記第2の方向に第1の距離だけ互いに異なり、前記第2の方向に平行に配置した前記複数のチップパターンは、前記第1の方向に第2の距離互いに異なる配置であってもよい。
【0014】
前記シリコンウェハのへき開面と前記シリコンウェハの前記パターンを配置する面とが直交する軸と、前記第1の方向とは一致してもよい。
【0015】
本発明の一実施形態によると、第1の方向及び前記第1の方向に直交する第2の方向に広がり、直線状に断続的に配置された複数のパターンを含むレチクルを用いて、前記第1の方向及び前記第2の方向に平行に配置した複数のチップパターンをシリコンウェハ上に配置するステッパを用いたパターン配置方法において、前記シリコンウェハのへき開面と前記シリコンウェハの前記パターンを配置する面とが直交する軸と、前記第1の方向とが、異なるように、前記ステッパがレチクルと、前記レチクルと対向する前記シリコンウェハの位置を調整することを特徴とするパターン配置方法が提供される。
【0016】
前記ステッパはレチクルと、前記レチクルと対向する前記シリコンウェハの位置を調整することは、前記ステッパの光軸に対して前記シリコンウェハを回転することにより行ってもよい。
【0017】
前記ステッパはレチクルと、前記レチクルと対向する前記シリコンウェハの位置を調整することは、前記ステッパの光軸に対して前記レチクルを回転することにより行ってもよい。
【0018】
本発明の一実施形態によると、第1の方向及び前記第1の方向に直交する第2の方向に広がり、直線状に断続的に配置された複数のパターンを含むレチクルを用いて、前記第1の方向及び前記第2の方向に平行に配置した複数のチップパターンをシリコンウェハ上に配置するステッパを用いたパターン配置方法において、前記複数のチップパターンが前記第2の方向に第1の距離だけずらして配置されるように前記レチクル又は前記シリコンウェハを移動することにより行うパターン配置方法が提供される。
【0019】
また、本発明の一実施形態によると、支持部と、前記支持部に一端が支持された可撓部と、前記可撓部の他端に支持された錘部と、前記錘部の変位を検出する変位検出手段と、前記錘部と隣接して配置された開口部と、を備え、前記開口部からなる複数のパターンが、第1の方向及び前記第1の方向に直交する第2の方向に平行にシリコンウェハに形成されており、前記複数のパターンは、前記第1の方向及び前記第2の方向に配置され、直線状に配置された一つ以上のパターンを含み、前記シリコンウェハのへき開面と前記シリコンウェハの前記パターンが形成される面とが直交する軸と、前記第1の方向とが、異なるように前記複数のパターンを配置することを特徴とする半導体デバイスが提供される。
【0020】
また、本発明の一実施形態によると、支持部と、前記支持部に一端が支持された可撓部と、前記可撓部の他端に支持された錘部と、前記可撓部に位置し、前記錘部の変位を電気信号に変換して検出する応力電気変換手段と、前記錘部と隣接して配置された開口部と、を備え、前記開口部からなる複数のパターンが第1の方向及び前記第1の方向に直交する第2の方向に平行にシリコンウェハに形成されており、前記複数のパターンは、前記第1の方向及び前記第2の方向に配置され、直線状に配置された一つ以上のパターンを含み、前記シリコンウェハのへき開面と前記シリコンウェハの前記パターンが形成される面とが直交する軸と、前記第1の方向とが、異なるように前記複数のパターンを配置することを特徴とする半導体デバイスが提供される。
【0021】
また、本発明の一実施形態によると、支持部と、前記支持部に一端が支持された可撓部と、前記可撓部の他端に支持された錘部と、前記錘部の変位を検出する変位検出手段と、前記錘部と隣接して配置された開口部と、を備え、前記開口部からなる複数のパターンが、第1の方向及び前記第1の方向に直交する第2の方向に平行にシリコンウェハに形成されており、前記複数のパターンは、前記第1の方向及び前記第2の方向に配置され、直線状に配置された一つ以上のパターンを含み、前記第1の方向に平行に配置した前記複数のパターンは、前記第2の方向に第1の距離だけ互いに異なり、前記第2の方向に平行に配置した前記複数のパターンは、前記第1の方向に第2の距離互いに異なる配置であることを特徴とする半導体デバイスが提供される。
【0022】
また、本発明の一実施形態によると、支持部と、前記支持部に一端が支持された可撓部と、前記可撓部の他端に支持された錘部と、前記可撓部に位置し、前記錘部の変位を電気信号に変換して検出する応力電気変換手段と、前記錘部と隣接して配置された開口部と、を備え、前記開口部からなる複数のパターンが第1の方向及び前記第1の方向に直交する第2の方向に平行にシリコンウェハに形成されており、前記複数のパターンは、前記第1の方向及び前記第2の方向に配置され、直線状に配置された一つ以上のパターンを含み、前記第1の方向に平行に配置した前記複数のパターンは、前記第2の方向に第1の距離だけ互いに異なり、前記第2の方向に平行に配置した前記複数のパターンは、前記第1の方向に第2の距離互いに異なる配置であることを特徴とする半導体デバイスが提供される。
【0023】
前記シリコンウェハのへき開面と前記シリコンウェハの前記パターンを配置する面とが直交する軸と、前記第1の方向とは一致していてもよい。
【0024】
前記変位検出手段は固定電極と可動電極とを有し、前記錘部の変位を、前記固定電極と前記可動電極との静電容量変化として検出してもよい。
【0025】
前記応力電気変換手段は応力電気変換素子であり、前記応力電気変換素子はピエゾ抵抗素子又は圧電素子から選択されてもよい。
【発明の効果】
【0026】
本発明よれば、シリコンウェハに同一パターンを複数形成するときに意図しない破断を起こしにくいパターン配置方法及びパターニングされたシリコンウェハを提供することができる。
【図面の簡単な説明】
【0027】
【図1】一実施形態に係る本発明のパターンを配置したシリコンウェハ100の模式図。
【図2】一実施形態に係る本発明のステッパ500の模式図。
【図3】一実施形態に係る本発明のステッパ600の模式図。
【図4】一実施形態に係る本発明のパターンを配置したシリコンウェハ200の模式図。
【図5】一実施形態に係る本発明のパターンを配置したシリコンウェハ300の模式図。
【図6】実施例の実験方法を説明する模式図。
【図7】実施例のシリコンウェハの破断実験のシリコンウェハ断面の光学顕微鏡写真。
【図8】(a)は従来のパターンを配置したシリコンウェハ900の模式図であり、(b)は別の角度からシリコンウェハに形成したパターン配置を見た図である。
【図9】一実施形態に係る本発明の半導体加速度センサ1000の模式図である。
【図10】一実施形態に係る本発明の半導体加速度センサ1000の分解斜視図である。
【図11】一実施形態に係る本発明の半導体加速度センサ1000の製造工程を説明する図である。
【図12】一実施形態に係る本発明の半導体加速度センサ1000の製造工程を説明する図である。
【図13】一実施形態に係る本発明のパターン配置方法を適用した、開口部1170が形成されたSOI基板のシリコンウェハ1101側の面を示す図である。
【図14】一実施形態に係る本発明のパターン配置方法を適用可能な半導体加速度センサ2000の模式図である。
【図15】図14のA−A’断面における半導体加速度センサ2000の断面図である。
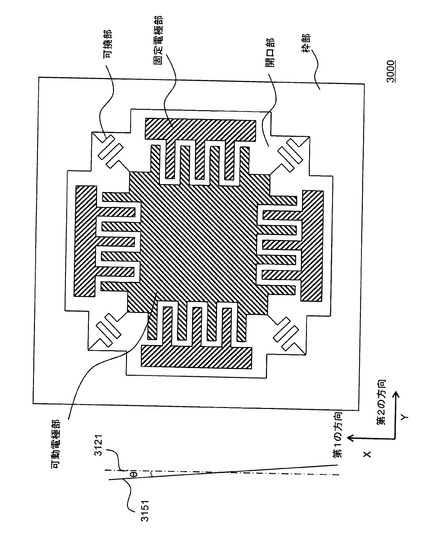
【図16】一実施形態に係る本発明のパターン配置方法を適用可能な2軸の静電容量型半導体加速度センサ3000の模式図である。
【発明を実施するための形態】
【0028】
以下、図面を参照して本発明に係るパターン配置方法及びパターニングされたシリコンウェハについて説明する。但し、本発明のパターン配置方法及びパターニングされたシリコンウェハは多くの異なる態様で実施することが可能であり、以下に示す実施の形態及び実施例の記載内容に限定して解釈されるものではない。なお、本実施の形態及び実施例で参照する図面において、同一部分又は同様な機能を有する部分には同一の符号を付し、その繰り返しの説明は省略する。
【0029】
(実施形態1)
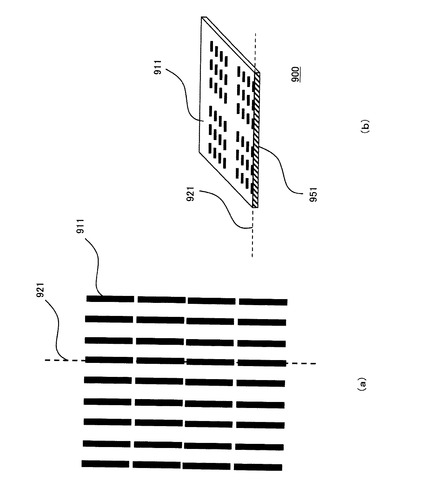
図8(a)は従来の半導体リソグラフィにおけるシリコンウェハに形成したパターン配置を示す図であり、図8(b)は別の角度から従来の半導体リソグラフィにおけるシリコンウェハに形成したパターン配置を見た図である。半導体リソグラフィにおいては、所望の電気特性を得るために、一般に面方位をあわせるようにしてパターンを配置する。例えば、(100)面方位のシリコンウェハ900に図8に示したような直線的なパターン911が連続して配置される場合、断続的に配置したパターン911を仮想的に直線として結んだ線921が<110>方位のへき開面951と一致すると、そのパターンに沿って破断しやすくなる。
【0030】
半導体素子を形成する場合においては、電気特性の要求のために、シリコンウェハの面方位をそろえて半導体リソグラフィによるパターン配置を行う。一方で、バルクMEMSにおいては、シリコンウェハにパターン形成して加工した構造体をセンサや機械構成要素のような力学的特性が要求される部品として用いるため、電気特性に対する要求は低く、面方位を必ずしもそろえる必要はない。そこで、本発明者らは、半導体リソグラフィよるパターン配置において、通常行われないシリコンウェハの面方位をずらす試みをあえて検討した。
【0031】
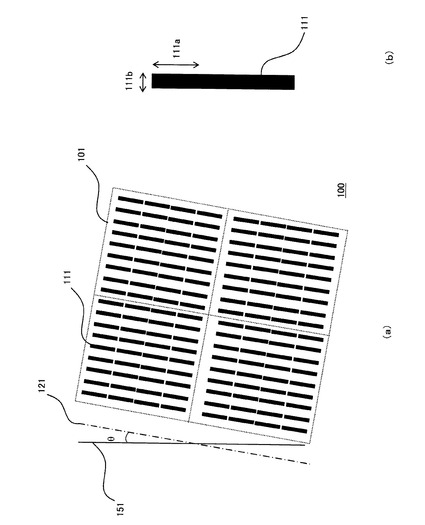
図1は、実施形態1の本発明に係るパターンを配置したシリコンウェハ100の模式図である。シリコンウェハ100は、所定の深さをもって第1の方向111a及び第2の方向111bにエッチングされたパターン111を直線状に断続的に配置したパターンを含むチップパターン101が第1の方向111aと第2の方向111bとに繰り返し配置されている。このような繰り返し配置としては、一つのチップパターン101における複数のパターン111が継ぎ目無く連続的に形成されて一つのパターンを形成していている場合も含む。つまり、チップパターン101において第1の方向111aに向かう直線パターンが第2の方向111bに1本以上配置されたチップパターンが、シリコンウェハ100の第1の方向111a及び第2の方向111bに断続的に複数形成される場合も含む。
【0032】
ここで、チップパターン101は、その領域内にパターン111が配置され、MEMSデバイスを形成するチップの1つを例示するものである。パターン111としては、例えば開口、孔、溝、櫛歯構造の櫛歯部、一方向に複数配列した流路、あるいはセンシングデバイスのビーム部等がこれに該当する。また、シリコンウェハ100は、ベアシリコンウェハやSOI(Silicon on Insulator)基板であってもよい。
【0033】
このとき、断続的に配置したパターン111を仮想的に直線として結んだ線121は、第1の方向111aと一致している。シリコンウェハのへき開面とシリコンウェハのパターンを配置する面とが直交する軸151と、第1の方向111aとが、異なるようにずらしてパターンを配置する。軸151と第1の方向111aとのなす角度をθとすると、角度θは3°以上87°以下であることが好ましい。本発明者は鋭意検討の結果、実施例で後述するように、θを3°以上ずらすことにより破断しにくくなることを見出した。また、角度θはへき開面151に対して時計回り、反時計回りのどちらにでも回転可能であることから、93°以上177°以下、183°以上267°以下及び273°以上357°以下の範囲に回転可能であることは明らかである。
【0034】
一般的なパターン配置工程においては、シリコンウェハが3°未満の微小なずれが生じることもある。しかし、後述する実施例で示すように、実施形態1の本発明に係るパターン配置方法及びパターニングされたシリコンウェハのように、破断を起こしにくいシリコンウェハを実現するには、このような微小なずれでは不十分である。
【0035】
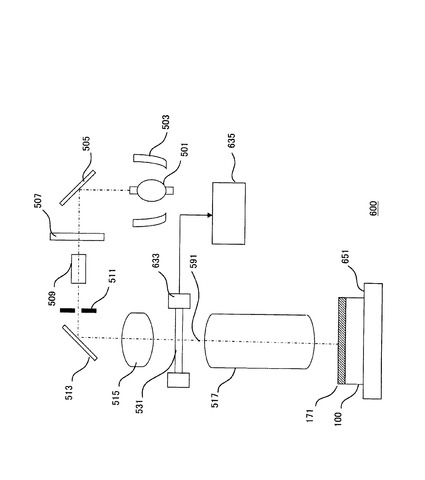
このように線121と軸151を角度θずらすためには、例えば、ステッパにおいて、シリコンウェハを角度θずらせば良い。図2は、実施形態1の本発明に係るステッパ500の模式図である。ステッパ500は、例えば、光源501、楕円鏡503、反射鏡505、波長選択フィルタ507、フライアイインテグレータ509、ブラインド511、反射鏡513、レンズ系515、投影光学系517、レチクル531、ステージ551及び駆動制御系555を有する。
【0036】
光源501から発する光は、楕円鏡503及び反射鏡505により波長選択フィルタ507に導かれ、波長選択フィルタ507により所望の波長に調整されてフライアイインテグレータ509で均一化される。均一化された光は、ブラインド511の開閉により、レチクル531へ照射される。レジスト171へパターンを露光する場合は、光は反射鏡513、レンズ系515を通してレチクル531に導かれ、レチクル531により遮られなかった光は、投影光学系517を通してシリコンウェハ100上のレジスト171に照射される。この投影露光によりレジストパターンが形成される。
【0037】
このとき、駆動制御系555が光軸(光路)591に対してステージ551を回転させることにより、線121とへき開面151のなす角度θを制御する。一般に、シリコンウェハ100には面方位を示すための切り欠き部であるオリエンテーションフラットやノッチがあるため、駆動制御系555は、これらをもとに面方位を認識して角度θを制御することができる。
【0038】
また、シリコンウェハ100にパターン配置を行う前までに、シリコンウェハ100のX線回折を測定することにより、シリコンウェハ100の面方位を確認して、シリコンウェハ100にアライメントマークをつけることにより、駆動制御系555にシリコンウェハ100の面方位を認識させるようにしてもよい。
【0039】
以上説明したように、本実施形態の本発明に係るパターン配置方法によると、パターン形成工程において、シリコンウェハの面方位を認識して配置するパターンの角度をあえてずらすことにより、破断しにくいパターニングされたシリコンウェハを提供する優れた効果を奏する。また、本実施形態の本発明に係るパターン配置方法は、比較的安価な(100)面方位のシリコンウェハを用いても破断しにくいパターニングされたシリコンウェハを提供することができ、このようなシリコンウェハは、その後の製造工程での取り扱いが従来よりも容易になる。このようなパターニングされたシリコンウェハの物理的性状は、特にバルクMEMSの分野においては有用である。
【0040】
(実施形態2)
実施形態1で説明したパターン配置方法を実現するためにステッパ500に替えて、本実施形態においては、レチクルを回転させる機構を有するステッパ600について説明する。
【0041】
図3は、実施形態2の本発明に係るステッパ600の模式図である。ステッパ600は、上述したステッパ500と同様に、例えば、光源501、楕円鏡503、反射鏡505、波長選択フィルタ507、フライアイインテグレータ509、ブラインド511、反射鏡513、レンズ系515、投影光学系517、レチクル531及びステージ551を有する。
【0042】
ステッパ600は、さらに、レチクル531を回転させるためのレチクルホルダ633、角度の制御を行う駆動制御系635及び固定式のステージ651を有する。
【0043】
光源501から発する光は、楕円鏡503及び反射鏡505により波長選択フィルタ507に導かれ、波長選択フィルタ507により所望の波長に調整されてフライアイインテグレータ509で均一化される。均一化された光は、ブラインド511の開閉により、レジスト171へ照射される。レジスト171へ照射する場合は、光は反射鏡513、レンズ系515を通してレチクル531に導かれ、レチクル531により遮られなかった光は、投影光学系517を通してシリコンウェハ100上のレジスト171に照射される。
【0044】
このとき、駆動制御系635が光軸(光路)591に対してレチクルホルダ633を回転させることにより、線121とへき開面151のなす角度θを制御する。一般に、シリコンウェハ100には面方位を示すための切り欠き部であるオリエンテーションフラットやノッチがあるため、駆動制御系635は、これらをもとに面方位を認識して角度θを制御することができる。
【0045】
また、実施形態1で説明したように、シリコンウェハ100(開口、孔、溝、櫛歯構造の櫛歯部、一方向に複数配列した流路、あるいはセンシングデバイスのビーム部等)のにパターン配置を行う前までに、シリコンウェハ100のX線回折を測定することにより、シリコンウェハ100の面方位を確認して、シリコンウェハ100にアライメントマークをつけることにより、駆動制御系635にシリコンウェハ100の面方位を認識させるようにしてもよい。
【0046】
ところで、本実施形態のように駆動制御系により光軸に対してレチクルホルダを回転させる方法においては、一般的なステッパでは、角度θを大きくとることはできない。そのようなステッパにおいては、比較的小さな角度での配置を行うこととなる。また、実施形態1及び2では、ステージまたはレチクルを回転する方法について説明したが、ステージ及びレチクルの両方を駆動制御系により回転するような方法でも制御可能であることは明らかである。
【0047】
以上説明したように、本実施形態の本発明に係るパターン配置方法によると、パターン形成工程において、シリコンウェハの面方位を認識して配置するパターンの角度をあえてずらすことにより、破断しにくいパターニングされたシリコンウェハを提供する優れた効果を奏する。また、本実施形態の本発明に係るパターン配置方法は、比較的安価な(100)面方位のシリコンウェハを用いても破断しにくいパターニングされたシリコンウェハを提供することができ、このようなシリコンウェハは、その後の製造工程での取り扱いが従来よりも容易になる。このようなパターニングされたシリコンウェハの物理的性状は、特にバルクMEMSの分野においては有用である。
【0048】
(実施形態3)
実施形態1では断続的に配置したパターン111を仮想的に直線として結んだ線121が、軸151と一致しないようにずらして配置する方法について説明したが、本実施形態においては、チップパターンの向きを交互に変える配置方法について説明する。
【0049】
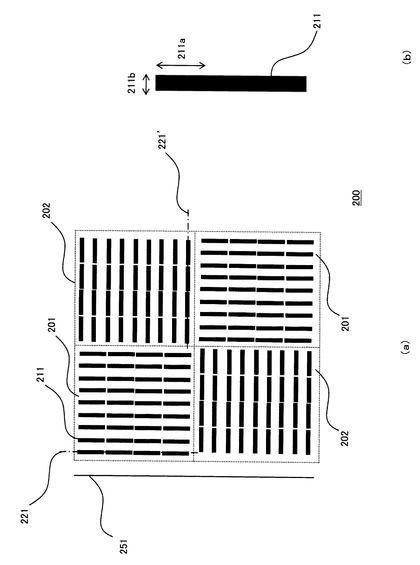
図4は、実施形態3の本発明に係るパターンを配置したシリコンウェハ200の模式図である。シリコンウェハ200は、例えば、所定の深さをもって第1の方向211a及び第2の方向211bにエッチングされたパターン(開口、孔、溝、櫛歯構造の櫛歯部、一方向に複数配列した流路、あるいはセンシングデバイスのビーム部等)211を直線状に断続的に配置したパターンを含むチップパターン201と、チップパターン201をシリコンウェハ200の平面上で90°回転したチップパターン202とが第1の方向211aと第2の方向211bに繰り返し配置されている。
【0050】
このとき、パターン201において断続的に配置したパターン211を仮想的に直線として結んだ線221は、第1の方向211aと一致している。また、パターン202において断続的に配置したパターン211を仮想的に直線として結んだ線221’は、第1の方向211aと一致せず、90°の角度を形成している。本実施形態においては、図4に示したようにチップパターン201に隣接するチップパターン202は、チップパターン201を90°回転した配置としている。このような市松模様の配置においては線221と線221’とが互いに直交するようになるため、シリコンウェハ200の全体にわたり連続して軸251と一致する仮想的な線221は生じない。よって、シリコンウェハの破断は起きにくくなる。
【0051】
本実施形態の本発明に係るパターン配置方法は、実施形態1及び2で説明したステッパにより実現することができる。つまり、駆動制御系が光軸に対してレチクルおよび/またはステージを回転することにより、チップパターンを順次回転させながら配置すればよい。本実施形態の本発明に係るパターン配置方法においては、実施形態2で説明したような一般的なステッパのレチクルの可動範囲の制限から、実施形態1で説明したステージを移動させる方法が好ましい。
【0052】
ところで、本実施形態の本発明に係るパターン配置方法としては、上述の方法の他、例えば、シリコンウェハ200にパターン202を形成するための領域を空けて、まずパターン201を市松模様のように形成し、その後シリコンウェハ200を90°回転させて、空けた領域にパターン202を形成するようにしてもよい。この場合、シリコンウェハ200の回転動作は1回であるため、作業効率が向上する。
【0053】
また、1枚のレチクルに上述のような市松模様の複数のチップパターンを配置することにより、アライナータイプのステッパを用いて、レチクルとステージを固定したままでも一括形成することが可能である。
【0054】
以上説明したように、本実施形態の本発明に係るパターン配置方法によると、パターン形成工程において、シリコンウェハの面方位を認識してチップパターンを市松模様に配置することにより、破断しにくいパターニングされたシリコンウェハを提供する優れた効果を奏する。また、本実施形態の本発明に係るパターン配置方法は、比較的安価な(100)面方位のシリコンウェハを用いても破断しにくいパターニングされたシリコンウェハを提供することができ、このようなシリコンウェハは、その後の製造工程での取り扱いが従来よりも容易になる。このようなパターニングされたシリコンウェハの物理的性状は、特にバルクMEMSの分野においては有用である。
【0055】
(実施形態4)
実施形態4では、さらに、隣接するチップパターンをシリコンウェハの水平面のX軸方向とY軸方向にわずかにずらして配置することにより、断続的に配置したパターンを仮想的に直線として結んだ線が、へき開面と一致しないように配置する方法について説明する。
【0056】
図5は、実施形態4の本発明に係るパターンを配置したシリコンウェハ300の模式図である。シリコンウェハ300は、所定の深さをもって第1の方向311a及び第2の方向311bにエッチングされたパターン311を直線状に断続的に配置したパターン(開口、孔、溝、櫛歯構造の櫛歯部、一方向に複数配列した流路、あるいはセンシングデバイスのビーム部等)を含むチップパターンが第1の方向311a及び第2の方向311bに繰り返し配置される。
【0057】
このとき、チップパターン301において断続的に配置したパターン311を仮想的に直線として結んだ線321と、チップパターン301を第1の方向311aへ平行にずらし且つ第2の方向311bに距離aだけずらしたチップパターン301’において断続的に配置したパターン311を仮想的に直線として結んだ線321’とは、一致しないようにずらして配置する。
【0058】
また、図5に示すように、チップパターン301を第2の方向にずらし且つ第1の方向311aに距離bだけずらしたチップパターン301’’を設けても良い。ここで、距離aは、第2の方向311bに隣接するパターン311どうしの間隔cより小さい距離であってもよい。また、距離bはパターン311の第1の方向311aの長さより小さい距離である。
【0059】
つまり、本実施形態においては、チップパターン301の線321とチップパターン301’の線321’とが距離aだけ第2の方向にずらして配置されている。このようにチップパターン301をずらすことにより、線321が隣接するチップパターンの線321’とは一致しなくなるため、シリコンウェハ300の全体にわたり連続性の高い、仮想的な線は生じない。このようなチップパターン301及び301’の配置は、線321と線321’との一致による破断を起きにくくする。
【0060】
さらに、シリコンウェハのへき開面とシリコンウェハのパターンを配置する面とが直交する軸351と、第1の方向311aとが一致する場合においても、チップパターン301の線321とチップパターン301’の線321’とが距離aだけ第2の方向にずらして配置されているので、破断を起きにくくすることができる。
【0061】
本実施形態の本発明に係るパターン配置方法は、実施形態1及び2で説明したステッパにより実現することができる。つまり、駆動制御系が光軸に対してレチクルおよび/またはステージをシリコンウェハ300の水平面に対して第1の方向311a及び第2の方向311bに移動することで、チップパターンを第1の方向311a及び第2の方向311bに順次ずらしながら配置すればよい。本実施形態の本発明に係るパターン配置方法においては、実施形態2で説明したような一般的なステッパのレチクルの可動範囲の制限から、実施形態1で説明したステージを移動させる方法が好ましい。
【0062】
また、1枚のレチクルに上述のような第1の方向311a及び第2の方向311bに順次ずらした複数のチップパターンを配置することにより、アライナータイプのステッパを用いて、レチクルとステージを固定したままでも一括形成することが可能である。
【0063】
以上説明したように、本実施形態の本発明に係るパターン配置方法によると、パターン形成工程において、シリコンウェハの面方位を認識してチップパターンをX軸方向とY軸方向に順次ずらした配置することにより、破断しにくいパターニングされたシリコンウェハを提供する優れた効果を奏する。また、本実施形態の本発明に係るパターン配置方法は、比較的安価な(100)面方位のシリコンウェハを用いても破断しにくいパターニングされたシリコンウェハを提供することができ、このようなシリコンウェハは、その後の製造工程での取り扱いが従来よりも容易になる。このようなパターニングされたシリコンウェハの物理的性状は、特にバルクMEMSの分野においては有用である。
【0064】
(実施形態5)
本実施形態においては、上述した本発明に係るパターン配置方法を半導体デバイスのシリコンウェハに適用する例について説明する。本実施形態においては、半導体デバイスの一例として、特に、加速度センサについて説明する。なお、本発明に係るパターン配置方法を適用可能な半導体デバイスは、加速度センサに限定されるものではない。また、加速度センサは、錘部の変位を検出する変位検出手段の違いから、ピエゾ抵抗型、圧電素子型及び静電容量型の3種類が主に知られている。変位検出手段として可撓部に配置した応力を電気信号に変換する応力変換素子を含む応力電気変換手段を有する加速度センサとしては、可撓部に設けたピエゾ抵抗の抵抗値変化として外力を検出するピエゾ抵抗型、可撓部に設けた圧電素子に生じる分極変化として外力を検出する圧電素子型があり、また、変位検出手段である固定電極と可動電極間の静電容量変化として外力を検出する静電容量型がある。本発明に係るパターン配置方法は如何なる加速度センサにも適用できる。
【0065】
(3軸半導体加速度センサの製造方法)
図9は、本実施形態に係る半導体加速度センサ1000の模式図である。半導体加速度センサ1000は、X軸方向の可撓部1110、Y軸方向の可撓部1120、X軸方向の可撓部1110とY軸方向の可撓部1120との交差部1150(錘支持部)、枠部1210及び錘部1310を有する。錘部1310と隣接して開口部1170が配置され、錘部1310と枠部1210とを離間させる。
【0066】
X軸方向の可撓部1110には、X軸方向の加速度を検出するために、ピエゾ抵抗素子Rx1、ピエゾ抵抗素子Rx2、ピエゾ抵抗素子Rx3及びピエゾ抵抗素子Rx4が形成され、配線1510により接続されて、X軸方向の加速度を検出するセンサ回路を形成する。また、X軸方向の可撓部1110には、Z軸方向の加速度を検出するために、ピエゾ抵抗素子Rz1、ピエゾ抵抗素子Rz2、ピエゾ抵抗素子Rz3及びピエゾ抵抗素子Rz4が形成され、配線1510により接続されて、Z軸方向の加速度を検出するセンサ回路を形成する。
【0067】
Y軸方向の可撓部1120には、Y軸方向の加速度を検出するために、ピエゾ抵抗素子Ry1、ピエゾ抵抗素子Ry2、ピエゾ抵抗素子Ry3及びピエゾ抵抗素子Ry4が形成され、配線1510により接続されて、Y軸方向の加速度を検出するセンサ回路を形成する。なお、Y軸方向の可撓部1120には、ダミー抵抗素子1910及びダミー抵抗素子1920を配置することで、X軸方向の可撓部1110とのバランスを取るようにしてもよい。
【0068】
交差部1150の下側には錘部1310が形成され、加速度に応じて錘部1310が揺れることで、X軸方向の可撓部1110及びY軸方向の可撓部1120を撓ませる。半導体加速度センサ1000は、この撓みをX軸方向の加速度を検出するセンサ回路、Y軸方向の加速度を検出するセンサ回路及びZ軸方向の加速度を検出するセンサ回路で検出することにより、3軸に対する加速度を検出することができる。
【0069】
X軸方向の可撓部1110及びY軸方向の可撓部1120は枠部1210により支えられ、枠部1210には、電源入力端子VDx、VDy及びVDzと低電位側の端子VGx、VGy及びVGzと、出力端子Vxout1、Vxout2、Vyout1、Vyout2、Vzout1及びVzout2とが配置される。
【0070】
なお、本実施形態においては、半導体加速度センサ1000がX軸方向の可撓部1110及びY軸方向の可撓部1120を有する例を示したが、本発明に係る半導体加速度センサ1000は梁状の可撓部の代わりにダイヤフラム状の可撓部としてもよい。すなわち、ダイヤフラムで錘部を支持し、X軸方向及びY軸方向の加速度を検出するピエゾ抵抗素子を、ダイヤフラムの上部表面に互いに直交する軸方向に配置してもよい。また、半導体加速度センサ1000はピエゾ抵抗素子が形成された半導体加速度センサとして説明したが、圧電素子を形成して加速度を検出するようにしてもよい。
【0071】
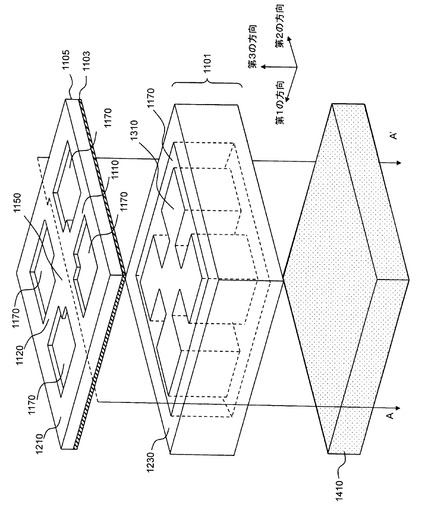
本実施形態に係る半導体加速度センサの製造方法を以下に述べる。図10は半導体加速度センサ1000の分解斜視図である。また、図11及び図12は、半導体加速度センサ1000の製造工程を図9及び図10のA−A’断面に沿う断面図で説明する図である。
【0072】
図10を参照すると、半導体加速度センサ1000は、シリコンウェハ1101上に形成したシリコン酸化膜1103、さらにその上にシリコン膜1105を積層したSOI基板を用いて加速度センサ本体1001を形成し、支持基板1410に接合する。シリコン膜1105及びシリコン酸化膜1103には、枠部1210と、枠部1210の内側に配置されたX軸方向の可撓部1110と、Y軸方向の可撓部1120と、X軸方向の可撓部1110とY軸方向の可撓部1120との交差部1150と、を形成する。また、シリコン膜1105及びシリコン酸化膜1103には、枠部1210、X軸方向の可撓部1110、Y軸方向の可撓部1120及び交差部1150に囲まれた開口部1170を形成する。
【0073】
シリコンウェハ1101には枠部1230及び錘部1310を形成し、錘部1310と隣接して配置された開口部1170により、錘部1310は枠部1230の内壁と離間して配置されている。交差部1150と錘部1310とはシリコン酸化膜1103を介して接合されている。本実施形態においては錘部1310が略クローバー形状を有するが、錘部1310の形状は、これに限定されるものではない。
【0074】
支持基板1410としては例えば、ガラス、金属、絶縁性樹脂、Si等の半導体である。接合方法として、陽極接合、直接接合、共晶接合、接着剤による接着などから適宜選択することができる。また、支持基板1410を設けずに、センサ本体を直接実装基板やパッケージ基板に搭載させることも可能である。
【0075】
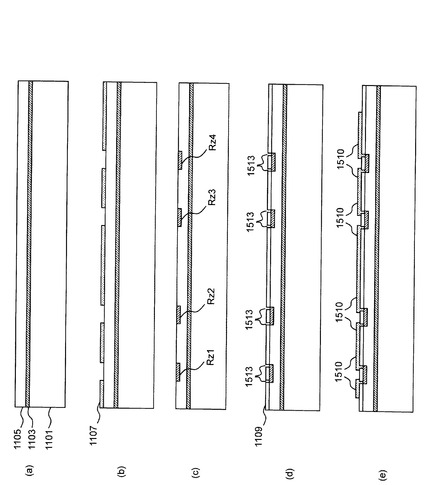
次に、半導体加速度センサ1000の製造工程を説明する。図11(a)に示したSOI基板は、SIMOX、貼り合せ法等により製造される。シリコン酸化膜1103は、後述の工程でエッチングストッパ層としても機能する。本実施形態においては、ピエゾ抵抗素子Rx1〜Rx4及びピエゾ抵抗素子Rz1〜Rz4をX軸方向の可撓部1110に、ピエゾ抵抗素子Ry1〜Ry4をY軸方向の可撓部1120にそれぞれ形成する。
【0076】
SOI基板のシリコン膜1105側に不純物拡散用のマスク1107を形成する(図11(b))。本実施形態においては、実施形態1〜4で説明したように、パターン形成工程において、シリコンウェハの面方位を認識して配置するパターンの角度をあえてずらしたり、チップパターンを市松模様に配置したり、チップパターンをX軸方向とY軸方向に順次ずらした配置したりするため、マスク1107はこれらのパターン配置方法により形成する。
【0077】
マスク1107の材料としては、例えばシリコン窒化膜(Si3N4)やシリコン酸化膜(SiO2)などを用いることができる。シリコン膜1105全面に熱酸化あるいはプラズマCVD法によりシリコン酸化膜を成膜した後、シリコン窒化膜を成膜し、シリコン窒化膜上にレジストパターン(図示せず)を形成し、シリコン窒化膜、シリコン酸化膜にピエゾ抵抗素子及び抵抗素子に対応する開口をRIE(Reactive Ion Etching)あるいはウェットエッチングにより形成する。
【0078】
各ピエゾ抵抗素子を熱拡散法やイオン注入法により形成する(図11(c))。例えば、熱拡散法を用いてシリコン膜1105にホウ素を拡散する場合、BBr3などを少なくともマスク1107が形成された面に曝し、不純物を堆積して不純物拡散層を形成する。
【0079】
次に、シリコン膜1105上に絶縁層1109を形成する(図11(d))。例えば、シリコン膜1105の表面に熱酸化あるいはプラズマCVD法などを用いて、SiO2の絶縁層を形成する。絶縁層1109上にレジストをマスクとしたRIEによってコンタクトホール1513を形成する。
【0080】
つづいて、コンタクトホール1513を介してピエゾ抵抗素子に接続するように配線1510を形成する(図11(e))。配線1510はAl,Al−Si,Al−Ndなどの金属材料をスパッタ法などにより成膜し、それをパターニングすることで得られる。なお、配線1510とピエゾ抵抗素子との間でオーミックコンタクトを形成するために、熱処理(380℃〜420℃)するのが好ましい。なお、配線1510上に保護膜を形成してもよい。電源入力端子VDx、VDy及びVDz、接地端子VGx、VGy及びVGz、出力端子Vxout1、Vxout2、Vyout1、Vyout2、Vzout1及びVzout2は、配線1510と同一の材料を用いて同一の工程で形成することができる。
【0081】
その後、シリコン膜1105をシリコン酸化膜1103の上面が露出するまでRIEなどによりエッチングを行い、開口部1170を設けて、枠部1210、X軸方向の可撓部1110、Y軸方向の可撓部1120及び交差部1150を形成する(図12(f))。また、錘部1310が下方(支持基板1410)へ変位するために必要な間隔のギャップを形成するために、マスクを用いて枠部1230の内枠に沿った開口部1170を形成する。ギャップは、例えば、5〜10μm程度である。
【0082】
さらに、枠部1230及び錘部1310を形成するために、シリコンウェハ1101の下面にマスクを形成する。このマスクを用いてシリコンウェハ1101をシリコン酸化膜1103の下面が露出するまでエッチングする。エッチングには、例えば、DRIE(Deep Reactive Ion Etching)を用いる。
【0083】
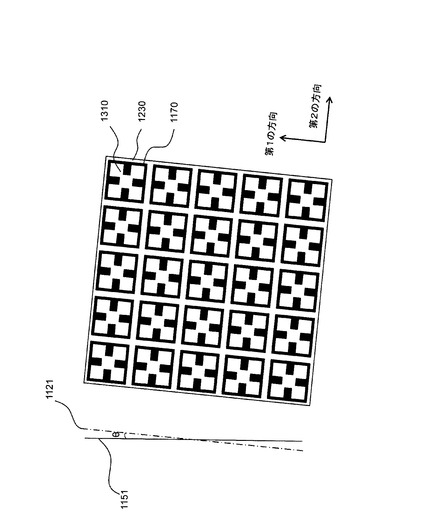
図13は、開口部1170が形成されたSOI基板のシリコンウェハ1101側の面を示す図である。上述の製造工程においては、複数の半導体加速度センサ1000を1枚のSOI基板に形成している。このため、シリコンウェハ1101には錘部1310、枠部1230が規則的に複数形成され、開口部1170が規則的に複数配置している。実施形態1〜4で説明したように、開口部1170が第1の方向及び第2の方向に平行に配置される場合、断続的に配置した開口部1170を仮想的に第1の方向の直線として結んだ線1021は、シリコンウェハのへき開面とシリコンウェハのパターンを配置する面とが直交する軸1051とは、異なるようにずらしてパターンを配置する。開口部1170の配置方法はこれに限定されるものではなく、実施形態2〜4で説明した方法で配置してもよい。
【0084】
その後、エッチングストッパとして用いた部分の不要なシリコン酸化膜1103をRIEあるいはウェットエッチングにより除去する。これにより、シリコン酸化膜1103は、枠部1210と枠部1230、交差部1150と錘部1310の間のみに存在するようになる(図12(f))。以上の工程でセンサ本体1001が製造される。
【0085】
最後に、センサ本体1001と支持基板1410とを接合する(図12(g))。支持基板1410とセンサ本体1001とは、直接接合、接着剤による接合等を用いて接合する。これによりセンサ本体1001と支持基板1410とが接合され、半導体加速度センサ1000が構成される。その後、シリコンウェハをダイシングして加速度センサを個片化する。以上は加速度センサの製造方法の一例であって、順序は、適宜に変更可能であり、上記の順序に限定されない。
【0086】
上述のようにシリコンウェハを深堀エッチングして形成する半導体加速度センサの製造工程においては、従来のような面方位をあわせるパターン配置方法では、断続的に配置したパターンを仮想的に直線として結んだ線が<110>方位のへき開面と一致すると、そのパターンに沿って破断しやすかった。本実施形態の本発明に係るパターン配置方法を用いることにより、半導体加速度センサは破断しにくくなり、扱いも容易で、歩留まりも高くすることができる。
【0087】
(静電容量型半導体加速度センサ)
また、本実施形態の本発明に係るパターン配置方法は、図14に示す櫛歯形状の電極を有する静電容量型の半導体加速度センサ2000の製造においては、より高い効果を発揮する。図15は、図14のA−A’断面に沿う断面図である。半導体加速度センサ2000は、支持部2230により支持された可撓部2220につながる可動部2200の両側に、第1の固定部2300と第2の固定部2400を配置して構成される。半導体加速度センサ1000の錘部1310に相当する可動部2200には可動電極2240が形成され、支持部2230の外側に固定電極2240が配置される。また、第1の固定部2300には、第1の固定電極2320が形成され、配線部2310を介して固定電極端子2311に接続される。同様に、第2の固定部2400には、第2の固定電極2420が形成され、配線部2410を介して固定電極端子2411に接続される。さらに、可動部2200と、第1の固定部2300及び第2の固定部2400との間には、可動部2200に隣接して配置された開口部2510が配置され、可動部2200と、第1の固定部2300及び第2の固定部2400とは離間して接触しない。また、可動部2200と、第1の固定部2300及び第2の固定部2400との外側には、枠部2500が配置される。
【0088】
半導体加速度センサ2000は、加速度に応じて可動電極2240が図14中のX方向へ変位し、可動電極2240と固定電極2320との間隔が変化することにより、両電極間の静電容量が変化し、この静電容量の変化に基づいて加速度を検出する。
【0089】
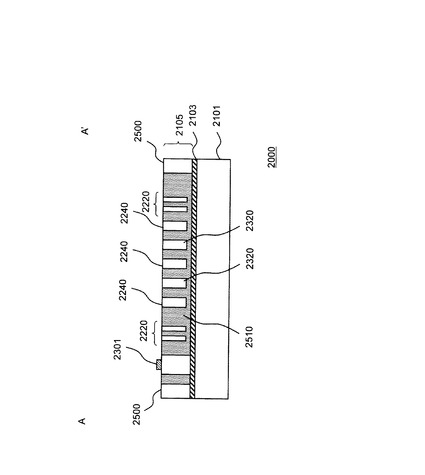
図15に示したように、半導体加速度センサ2000は、第1のシリコンウェハ2101と第2のシリコンウェハ2105とをシリコン酸化膜2103を介して貼り合わせたSOI基板にパターン形成することで製造できる。また、SOI基板を用いずに1枚のシリコンウェハを用いてもよい。半導体加速度センサ2000は、半導体加速度センサ1000よりも直線的な構造が連続して配置されるため、第2のシリコンウェハ2105が破断しやすい。したがって、半導体加速度センサ2000においては、可動電極2240及び固定電極2320に平行に配置される開口部2510が第2のシリコンウェハ2105に規則的に複数配置している。実施形態1〜4で説明したように、開口部2510が第1の方向及び第2の方向に平行に配置される場合、断続的に配置した開口部2510を仮想的に第1の方向の直線として結んだ線2021は、シリコンウェハのへき開面とシリコンウェハのパターンを配置する面とが直交する軸2051とは、異なるようにずらしてパターンを配置する。開口部2510の配置方法はこれに限定されるものではなく、実施形態2〜4で説明した方法で配置してもよい。
【0090】
このような構造の半導体加速度センサ2000の製造には、本実施形態の本発明に係るパターン配置方法を用いることにより、破断しにくくなり、扱いも容易で、歩留まりも高くすることができる。また、同様に、図16に示すような2軸の静電容量型半導体加速度センサ3000の製造にも本実施形態の本発明に係るパターン配置方法は有効である。つまり、可動電極及び固定電極に平行に配置される開口部が規則的に複数配置してなる仮想的な線3021がシリコンウェハのへき開面3051は、異なるようにずらしてパターンを配置する。
【実施例】
【0091】
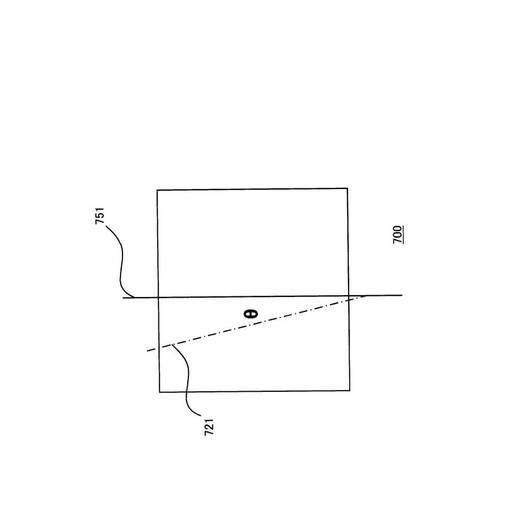
実施形態1で説明した軸と第1の方向とを角度θずらす実施形態おいて、角度θの有効範囲について検討を行った。図6は実施例の実験方法を説明する模式図である。シリコンウェハ700には、厚さ625μmの6インチベアシリコンウェハを用い、深さ50μm、幅100μm、長さ1cmの溝のパターンを直線状に断続的に複数配置した。このとき、断続的に配置したパターンを仮想的に直線として結んだ線721が、へき開面751に対して角度θずれるようにパターンを配置した。
【0092】
角度θを変えたシリコンウェハ700を複数作成して、それぞれ破断させた。へき開による破断が生じた場合には、シリコンウェハの破断面はへき開面と一致するため、結晶がはがれた凹凸の少ない断面となる。一方、へき開による破断でない場合には、シリコンウェハの破断面はへき開面と一致しないため、凹凸の多い断面となる。シリコンウェハ700の断面を走査型電子顕微鏡(SEM)により観察し、破断がへき開面によるものか否かを判定した。
【0093】
図7は、それぞれの角度でパターン配置したシリコンウェハの破断実験におけるシリコンウェハ断面の光学顕微鏡写真である。(a)は角度θを0°、(b)は0.5°、(c)は1.5°、(d)は3°、(e)は10°としたときのシリコンウェハの破断面である。表1は、その結果に対し、へき開による破断が生じたものを不良(×)とし、へき開による破断が生じなかったものを良(○)としたものである。
【0094】
【表1】

【0095】
表1に示したように、角度θを3°以上とした場合には、へき開による破断が生じなかった。シリコンウェハは、45°の角度で軸対称の結晶学的特性を有する。したがって、シリコンウェハに直線状に断続的にパターンを複数配置する場合に、断続的に配置したパターンを仮想的に直線として結んだ線をへき開面の軸に対して3°以上87°以下の範囲でずらすことにより、破断を起こしにくいシリコンウェハを提供することができる。
【符号の説明】
【0096】
100:シリコンウェハ、101:チップパターン、111:パターン、111a:第1の方向、111b:第2の方向、121:仮想的な線、151:へき開面、171:レジスト、200:シリコンウェハ、201:チップパターン、202:チップパターン、211:パターン、211a:第1の方向、211b:第2の方向、221:仮想的な線、221’:仮想的な線、251:へき開面、300:シリコンウェハ、301:チップパターン、301’:チップパターン、301’’:チップパターン、311:パターン、311a:第1の方向、311b:第2の方向、321:仮想的な線、351:へき開面、500:ステッパ、501:光源、503:楕円鏡、505:反射鏡、507:波長選択フィルタ、509:フライアイインテグレータ、511:ブラインド、513:反射鏡、515:レンズ系、517:投影光学系、531:レチクル、551:ステージ、555:駆動制御系、591:光軸、600:ステッパ、633:レチクルホルダ、635:駆動制御系、651:ステージ、700:シリコンウェハ、721:仮想的な線、751:へき開面、900:シリコンウェハ、911:パターン、921:仮想的な線、951:へき開面、1000:一実施形態に係る半導体加速度センサ、1001:加速度センサ本体、1021:仮想的な線、1051:へき開面、1101:シリコンウェハ、1103:シリコン酸化膜、1105:シリコン膜、1107:マスク、1109:絶縁層、1110:X軸方向の可撓部、1120:Y軸方向の可撓部、1150:交差部、1170:開口部、1210:枠部、1230:枠部、1310:錘部、1410:支持基板、1510:配線、1513:コンタクトホール、1910:ダミー抵抗素子、1920:ダミー抵抗素子、2000:一実施形態に係る半導体加速度センサ、2021:仮想的な線、2051:へき開面、2101:第1のシリコンウェハ、2103:シリコン酸化膜、2105:第2のシリコンウェハ、2200:可動部、2201:可動電極端子、2220:可撓部、2230:支持部、2240:可動電極、2300:第1の固定部、2310:配線部、2311:固定電極端子、2320:第1の固定電極、2400:第2の固定部、2410:配線部、2411:固定電極端子、2420:第2の固定電極、2500:枠部、2510:開口部、3000:一実施形態に係る半導体加速度センサ、3021:仮想的な線、3051:へき開面、Rx1:ピエゾ抵抗素子、Rx2:ピエゾ抵抗素子、Rx3:ピエゾ抵抗素子、Rx4:ピエゾ抵抗素子、Ry1:ピエゾ抵抗素子、Ry2:ピエゾ抵抗素子、Ry3:ピエゾ抵抗素子、Ry4:ピエゾ抵抗素子、Rz1:ピエゾ抵抗素子、Rz2:ピエゾ抵抗素子、Rz3:ピエゾ抵抗素子、Rz4:ピエゾ抵抗素子、VDx:電源入力端子、VGx:接地端子、Vxout1:出力端子、Vxout2:出力端子、VDy:電源入力端子、VGy:接地端子、Vyout1:出力端子、Vyout2:出力端子、VDz:電源入力端子、VGz:接地端子、Vzout1:出力端子、Vzout2:出力端子
【技術分野】
【0001】
本発明は、半導体リソグラフィのパターニングに関する。特に、本発明は、シリコンウェハに同一パターンを複数形成するときのパターン配置方法に関する。また、本発明は、そのパターン配置方法が用いられた半導体デバイスに関する。
【背景技術】
【0002】
バルクMEMSの分野では、機能を発現させるためにシリコンウェハに深い穴や溝を形成する。このとき使用するシリコンウェハは、メモリやプロセッサ等の半導体向けに供給されているものを主として使用するため、(100)面方位のものを使用することが多い。
【0003】
(100)面方位のシリコンウェハに深い穴や溝を形成した場合、シリコンの特性上、キズ等があると破断しやすいという特徴がある。このようなシリコンウェハの破断しやすい性質を利用した例として、特許文献1にチップ分離溝をへき開面に沿って形成することでシリコンウェハの破断を容易にする技術が開示されている。しかし、このような破断のしやすさは、パターン形成したシリコンウェハにおいては、その取り扱い上のデメリットを有する。
【0004】
例えば、シリコンウェハ上に応力の高い材料を用いて成膜するような場合においてもシリコンウェハが破断することがある。このような破断は<110>方位のへき開面に生じる。
【0005】
例えば、特許文献2には、へき開面に対して割れやすいというシリコンウェハの性質に対して、2枚のシリコンウェハを互いのへき開面をずらして接合して補強する技術が開示されている。しかし、2枚のシリコンウェハの組合せは、デバイス全体としては強度を確保できるが、1枚のシリコンウェハにおいては十分な強度を確保できないため、上述のような成膜に用いる材料の応力に起因する破断を防ぐことはできない。
【0006】
特に、バルクMEMS分野においては、メモリなどの半導体素子に比して、シリコンウェハのへき開面に沿って深い穴や溝を有する同一パターンを複数形成することが多い。形成される穴や溝の深さは、数十μm〜数百μmにもなるため、シリコンウェハのへき開面に沿って破断が生じやすい。このため、シリコンウェハに同一パターンを複数形成するときに、破断を起こしにくいパターン配置方法が望まれる。
【先行技術文献】
【特許文献】
【0007】
【特許文献1】特開平8−139339号公報
【特許文献2】特開2004−349550号公報
【発明の概要】
【発明が解決しようとする課題】
【0008】
本発明は、半導体リソグラフィにおいて、シリコンウェハに同一パターンを複数形成するときに破断を起こしにくいパターン配置方法及びパターニングされたシリコンウェハを提供することを目的とする。また、そのパターン配置方法が用いられた半導体デバイスを提供する。
【課題を解決するための手段】
【0009】
本発明の一実施形態によると、シリコンウェハに、第1の方向及び前記第1の方向に直交する第2の方向に平行に配置された複数のチップパターンを有し、前記複数のチップパターンは、前記第1の方向及び前記第2の方向に配置され、直線状に配置された一つ以上のパターンを含み、前記シリコンウェハのへき開面と前記シリコンウェハの前記パターンを配置する面とが直交する軸と、前記第1の方向とが、異なるように前記複数のチップパターンを配置することを特徴とするシリコンウェハが提供される。
【0010】
前記直線状に配置された一つ以上のパターンは、複数の前記パターンが前記チップパターン内に断続的に形成されていることを含んでもよい。
【0011】
前記軸と第1の方向とのなす角度が第1の角度となるように前記複数のチップパターンを配置してもよい。
【0012】
前記軸と、前記複数のチップパターンの一部の前記第1の方向とのなす角度は、90度であってもよい。
【0013】
第1の方向及び前記第1の方向に直交する第2の方向にエッチングされ、直線状に断続的に配置された複数のパターンを含み、前記第1の方向及び前記第2の方向に平行に配置した複数のチップパターンを有し、前記第1の方向に平行に配置した前記複数のチップパターンは、前記第2の方向に第1の距離だけ互いに異なり、前記第2の方向に平行に配置した前記複数のチップパターンは、前記第1の方向に第2の距離互いに異なる配置であってもよい。
【0014】
前記シリコンウェハのへき開面と前記シリコンウェハの前記パターンを配置する面とが直交する軸と、前記第1の方向とは一致してもよい。
【0015】
本発明の一実施形態によると、第1の方向及び前記第1の方向に直交する第2の方向に広がり、直線状に断続的に配置された複数のパターンを含むレチクルを用いて、前記第1の方向及び前記第2の方向に平行に配置した複数のチップパターンをシリコンウェハ上に配置するステッパを用いたパターン配置方法において、前記シリコンウェハのへき開面と前記シリコンウェハの前記パターンを配置する面とが直交する軸と、前記第1の方向とが、異なるように、前記ステッパがレチクルと、前記レチクルと対向する前記シリコンウェハの位置を調整することを特徴とするパターン配置方法が提供される。
【0016】
前記ステッパはレチクルと、前記レチクルと対向する前記シリコンウェハの位置を調整することは、前記ステッパの光軸に対して前記シリコンウェハを回転することにより行ってもよい。
【0017】
前記ステッパはレチクルと、前記レチクルと対向する前記シリコンウェハの位置を調整することは、前記ステッパの光軸に対して前記レチクルを回転することにより行ってもよい。
【0018】
本発明の一実施形態によると、第1の方向及び前記第1の方向に直交する第2の方向に広がり、直線状に断続的に配置された複数のパターンを含むレチクルを用いて、前記第1の方向及び前記第2の方向に平行に配置した複数のチップパターンをシリコンウェハ上に配置するステッパを用いたパターン配置方法において、前記複数のチップパターンが前記第2の方向に第1の距離だけずらして配置されるように前記レチクル又は前記シリコンウェハを移動することにより行うパターン配置方法が提供される。
【0019】
また、本発明の一実施形態によると、支持部と、前記支持部に一端が支持された可撓部と、前記可撓部の他端に支持された錘部と、前記錘部の変位を検出する変位検出手段と、前記錘部と隣接して配置された開口部と、を備え、前記開口部からなる複数のパターンが、第1の方向及び前記第1の方向に直交する第2の方向に平行にシリコンウェハに形成されており、前記複数のパターンは、前記第1の方向及び前記第2の方向に配置され、直線状に配置された一つ以上のパターンを含み、前記シリコンウェハのへき開面と前記シリコンウェハの前記パターンが形成される面とが直交する軸と、前記第1の方向とが、異なるように前記複数のパターンを配置することを特徴とする半導体デバイスが提供される。
【0020】
また、本発明の一実施形態によると、支持部と、前記支持部に一端が支持された可撓部と、前記可撓部の他端に支持された錘部と、前記可撓部に位置し、前記錘部の変位を電気信号に変換して検出する応力電気変換手段と、前記錘部と隣接して配置された開口部と、を備え、前記開口部からなる複数のパターンが第1の方向及び前記第1の方向に直交する第2の方向に平行にシリコンウェハに形成されており、前記複数のパターンは、前記第1の方向及び前記第2の方向に配置され、直線状に配置された一つ以上のパターンを含み、前記シリコンウェハのへき開面と前記シリコンウェハの前記パターンが形成される面とが直交する軸と、前記第1の方向とが、異なるように前記複数のパターンを配置することを特徴とする半導体デバイスが提供される。
【0021】
また、本発明の一実施形態によると、支持部と、前記支持部に一端が支持された可撓部と、前記可撓部の他端に支持された錘部と、前記錘部の変位を検出する変位検出手段と、前記錘部と隣接して配置された開口部と、を備え、前記開口部からなる複数のパターンが、第1の方向及び前記第1の方向に直交する第2の方向に平行にシリコンウェハに形成されており、前記複数のパターンは、前記第1の方向及び前記第2の方向に配置され、直線状に配置された一つ以上のパターンを含み、前記第1の方向に平行に配置した前記複数のパターンは、前記第2の方向に第1の距離だけ互いに異なり、前記第2の方向に平行に配置した前記複数のパターンは、前記第1の方向に第2の距離互いに異なる配置であることを特徴とする半導体デバイスが提供される。
【0022】
また、本発明の一実施形態によると、支持部と、前記支持部に一端が支持された可撓部と、前記可撓部の他端に支持された錘部と、前記可撓部に位置し、前記錘部の変位を電気信号に変換して検出する応力電気変換手段と、前記錘部と隣接して配置された開口部と、を備え、前記開口部からなる複数のパターンが第1の方向及び前記第1の方向に直交する第2の方向に平行にシリコンウェハに形成されており、前記複数のパターンは、前記第1の方向及び前記第2の方向に配置され、直線状に配置された一つ以上のパターンを含み、前記第1の方向に平行に配置した前記複数のパターンは、前記第2の方向に第1の距離だけ互いに異なり、前記第2の方向に平行に配置した前記複数のパターンは、前記第1の方向に第2の距離互いに異なる配置であることを特徴とする半導体デバイスが提供される。
【0023】
前記シリコンウェハのへき開面と前記シリコンウェハの前記パターンを配置する面とが直交する軸と、前記第1の方向とは一致していてもよい。
【0024】
前記変位検出手段は固定電極と可動電極とを有し、前記錘部の変位を、前記固定電極と前記可動電極との静電容量変化として検出してもよい。
【0025】
前記応力電気変換手段は応力電気変換素子であり、前記応力電気変換素子はピエゾ抵抗素子又は圧電素子から選択されてもよい。
【発明の効果】
【0026】
本発明よれば、シリコンウェハに同一パターンを複数形成するときに意図しない破断を起こしにくいパターン配置方法及びパターニングされたシリコンウェハを提供することができる。
【図面の簡単な説明】
【0027】
【図1】一実施形態に係る本発明のパターンを配置したシリコンウェハ100の模式図。
【図2】一実施形態に係る本発明のステッパ500の模式図。
【図3】一実施形態に係る本発明のステッパ600の模式図。
【図4】一実施形態に係る本発明のパターンを配置したシリコンウェハ200の模式図。
【図5】一実施形態に係る本発明のパターンを配置したシリコンウェハ300の模式図。
【図6】実施例の実験方法を説明する模式図。
【図7】実施例のシリコンウェハの破断実験のシリコンウェハ断面の光学顕微鏡写真。
【図8】(a)は従来のパターンを配置したシリコンウェハ900の模式図であり、(b)は別の角度からシリコンウェハに形成したパターン配置を見た図である。
【図9】一実施形態に係る本発明の半導体加速度センサ1000の模式図である。
【図10】一実施形態に係る本発明の半導体加速度センサ1000の分解斜視図である。
【図11】一実施形態に係る本発明の半導体加速度センサ1000の製造工程を説明する図である。
【図12】一実施形態に係る本発明の半導体加速度センサ1000の製造工程を説明する図である。
【図13】一実施形態に係る本発明のパターン配置方法を適用した、開口部1170が形成されたSOI基板のシリコンウェハ1101側の面を示す図である。
【図14】一実施形態に係る本発明のパターン配置方法を適用可能な半導体加速度センサ2000の模式図である。
【図15】図14のA−A’断面における半導体加速度センサ2000の断面図である。
【図16】一実施形態に係る本発明のパターン配置方法を適用可能な2軸の静電容量型半導体加速度センサ3000の模式図である。
【発明を実施するための形態】
【0028】
以下、図面を参照して本発明に係るパターン配置方法及びパターニングされたシリコンウェハについて説明する。但し、本発明のパターン配置方法及びパターニングされたシリコンウェハは多くの異なる態様で実施することが可能であり、以下に示す実施の形態及び実施例の記載内容に限定して解釈されるものではない。なお、本実施の形態及び実施例で参照する図面において、同一部分又は同様な機能を有する部分には同一の符号を付し、その繰り返しの説明は省略する。
【0029】
(実施形態1)
図8(a)は従来の半導体リソグラフィにおけるシリコンウェハに形成したパターン配置を示す図であり、図8(b)は別の角度から従来の半導体リソグラフィにおけるシリコンウェハに形成したパターン配置を見た図である。半導体リソグラフィにおいては、所望の電気特性を得るために、一般に面方位をあわせるようにしてパターンを配置する。例えば、(100)面方位のシリコンウェハ900に図8に示したような直線的なパターン911が連続して配置される場合、断続的に配置したパターン911を仮想的に直線として結んだ線921が<110>方位のへき開面951と一致すると、そのパターンに沿って破断しやすくなる。
【0030】
半導体素子を形成する場合においては、電気特性の要求のために、シリコンウェハの面方位をそろえて半導体リソグラフィによるパターン配置を行う。一方で、バルクMEMSにおいては、シリコンウェハにパターン形成して加工した構造体をセンサや機械構成要素のような力学的特性が要求される部品として用いるため、電気特性に対する要求は低く、面方位を必ずしもそろえる必要はない。そこで、本発明者らは、半導体リソグラフィよるパターン配置において、通常行われないシリコンウェハの面方位をずらす試みをあえて検討した。
【0031】
図1は、実施形態1の本発明に係るパターンを配置したシリコンウェハ100の模式図である。シリコンウェハ100は、所定の深さをもって第1の方向111a及び第2の方向111bにエッチングされたパターン111を直線状に断続的に配置したパターンを含むチップパターン101が第1の方向111aと第2の方向111bとに繰り返し配置されている。このような繰り返し配置としては、一つのチップパターン101における複数のパターン111が継ぎ目無く連続的に形成されて一つのパターンを形成していている場合も含む。つまり、チップパターン101において第1の方向111aに向かう直線パターンが第2の方向111bに1本以上配置されたチップパターンが、シリコンウェハ100の第1の方向111a及び第2の方向111bに断続的に複数形成される場合も含む。
【0032】
ここで、チップパターン101は、その領域内にパターン111が配置され、MEMSデバイスを形成するチップの1つを例示するものである。パターン111としては、例えば開口、孔、溝、櫛歯構造の櫛歯部、一方向に複数配列した流路、あるいはセンシングデバイスのビーム部等がこれに該当する。また、シリコンウェハ100は、ベアシリコンウェハやSOI(Silicon on Insulator)基板であってもよい。
【0033】
このとき、断続的に配置したパターン111を仮想的に直線として結んだ線121は、第1の方向111aと一致している。シリコンウェハのへき開面とシリコンウェハのパターンを配置する面とが直交する軸151と、第1の方向111aとが、異なるようにずらしてパターンを配置する。軸151と第1の方向111aとのなす角度をθとすると、角度θは3°以上87°以下であることが好ましい。本発明者は鋭意検討の結果、実施例で後述するように、θを3°以上ずらすことにより破断しにくくなることを見出した。また、角度θはへき開面151に対して時計回り、反時計回りのどちらにでも回転可能であることから、93°以上177°以下、183°以上267°以下及び273°以上357°以下の範囲に回転可能であることは明らかである。
【0034】
一般的なパターン配置工程においては、シリコンウェハが3°未満の微小なずれが生じることもある。しかし、後述する実施例で示すように、実施形態1の本発明に係るパターン配置方法及びパターニングされたシリコンウェハのように、破断を起こしにくいシリコンウェハを実現するには、このような微小なずれでは不十分である。
【0035】
このように線121と軸151を角度θずらすためには、例えば、ステッパにおいて、シリコンウェハを角度θずらせば良い。図2は、実施形態1の本発明に係るステッパ500の模式図である。ステッパ500は、例えば、光源501、楕円鏡503、反射鏡505、波長選択フィルタ507、フライアイインテグレータ509、ブラインド511、反射鏡513、レンズ系515、投影光学系517、レチクル531、ステージ551及び駆動制御系555を有する。
【0036】
光源501から発する光は、楕円鏡503及び反射鏡505により波長選択フィルタ507に導かれ、波長選択フィルタ507により所望の波長に調整されてフライアイインテグレータ509で均一化される。均一化された光は、ブラインド511の開閉により、レチクル531へ照射される。レジスト171へパターンを露光する場合は、光は反射鏡513、レンズ系515を通してレチクル531に導かれ、レチクル531により遮られなかった光は、投影光学系517を通してシリコンウェハ100上のレジスト171に照射される。この投影露光によりレジストパターンが形成される。
【0037】
このとき、駆動制御系555が光軸(光路)591に対してステージ551を回転させることにより、線121とへき開面151のなす角度θを制御する。一般に、シリコンウェハ100には面方位を示すための切り欠き部であるオリエンテーションフラットやノッチがあるため、駆動制御系555は、これらをもとに面方位を認識して角度θを制御することができる。
【0038】
また、シリコンウェハ100にパターン配置を行う前までに、シリコンウェハ100のX線回折を測定することにより、シリコンウェハ100の面方位を確認して、シリコンウェハ100にアライメントマークをつけることにより、駆動制御系555にシリコンウェハ100の面方位を認識させるようにしてもよい。
【0039】
以上説明したように、本実施形態の本発明に係るパターン配置方法によると、パターン形成工程において、シリコンウェハの面方位を認識して配置するパターンの角度をあえてずらすことにより、破断しにくいパターニングされたシリコンウェハを提供する優れた効果を奏する。また、本実施形態の本発明に係るパターン配置方法は、比較的安価な(100)面方位のシリコンウェハを用いても破断しにくいパターニングされたシリコンウェハを提供することができ、このようなシリコンウェハは、その後の製造工程での取り扱いが従来よりも容易になる。このようなパターニングされたシリコンウェハの物理的性状は、特にバルクMEMSの分野においては有用である。
【0040】
(実施形態2)
実施形態1で説明したパターン配置方法を実現するためにステッパ500に替えて、本実施形態においては、レチクルを回転させる機構を有するステッパ600について説明する。
【0041】
図3は、実施形態2の本発明に係るステッパ600の模式図である。ステッパ600は、上述したステッパ500と同様に、例えば、光源501、楕円鏡503、反射鏡505、波長選択フィルタ507、フライアイインテグレータ509、ブラインド511、反射鏡513、レンズ系515、投影光学系517、レチクル531及びステージ551を有する。
【0042】
ステッパ600は、さらに、レチクル531を回転させるためのレチクルホルダ633、角度の制御を行う駆動制御系635及び固定式のステージ651を有する。
【0043】
光源501から発する光は、楕円鏡503及び反射鏡505により波長選択フィルタ507に導かれ、波長選択フィルタ507により所望の波長に調整されてフライアイインテグレータ509で均一化される。均一化された光は、ブラインド511の開閉により、レジスト171へ照射される。レジスト171へ照射する場合は、光は反射鏡513、レンズ系515を通してレチクル531に導かれ、レチクル531により遮られなかった光は、投影光学系517を通してシリコンウェハ100上のレジスト171に照射される。
【0044】
このとき、駆動制御系635が光軸(光路)591に対してレチクルホルダ633を回転させることにより、線121とへき開面151のなす角度θを制御する。一般に、シリコンウェハ100には面方位を示すための切り欠き部であるオリエンテーションフラットやノッチがあるため、駆動制御系635は、これらをもとに面方位を認識して角度θを制御することができる。
【0045】
また、実施形態1で説明したように、シリコンウェハ100(開口、孔、溝、櫛歯構造の櫛歯部、一方向に複数配列した流路、あるいはセンシングデバイスのビーム部等)のにパターン配置を行う前までに、シリコンウェハ100のX線回折を測定することにより、シリコンウェハ100の面方位を確認して、シリコンウェハ100にアライメントマークをつけることにより、駆動制御系635にシリコンウェハ100の面方位を認識させるようにしてもよい。
【0046】
ところで、本実施形態のように駆動制御系により光軸に対してレチクルホルダを回転させる方法においては、一般的なステッパでは、角度θを大きくとることはできない。そのようなステッパにおいては、比較的小さな角度での配置を行うこととなる。また、実施形態1及び2では、ステージまたはレチクルを回転する方法について説明したが、ステージ及びレチクルの両方を駆動制御系により回転するような方法でも制御可能であることは明らかである。
【0047】
以上説明したように、本実施形態の本発明に係るパターン配置方法によると、パターン形成工程において、シリコンウェハの面方位を認識して配置するパターンの角度をあえてずらすことにより、破断しにくいパターニングされたシリコンウェハを提供する優れた効果を奏する。また、本実施形態の本発明に係るパターン配置方法は、比較的安価な(100)面方位のシリコンウェハを用いても破断しにくいパターニングされたシリコンウェハを提供することができ、このようなシリコンウェハは、その後の製造工程での取り扱いが従来よりも容易になる。このようなパターニングされたシリコンウェハの物理的性状は、特にバルクMEMSの分野においては有用である。
【0048】
(実施形態3)
実施形態1では断続的に配置したパターン111を仮想的に直線として結んだ線121が、軸151と一致しないようにずらして配置する方法について説明したが、本実施形態においては、チップパターンの向きを交互に変える配置方法について説明する。
【0049】
図4は、実施形態3の本発明に係るパターンを配置したシリコンウェハ200の模式図である。シリコンウェハ200は、例えば、所定の深さをもって第1の方向211a及び第2の方向211bにエッチングされたパターン(開口、孔、溝、櫛歯構造の櫛歯部、一方向に複数配列した流路、あるいはセンシングデバイスのビーム部等)211を直線状に断続的に配置したパターンを含むチップパターン201と、チップパターン201をシリコンウェハ200の平面上で90°回転したチップパターン202とが第1の方向211aと第2の方向211bに繰り返し配置されている。
【0050】
このとき、パターン201において断続的に配置したパターン211を仮想的に直線として結んだ線221は、第1の方向211aと一致している。また、パターン202において断続的に配置したパターン211を仮想的に直線として結んだ線221’は、第1の方向211aと一致せず、90°の角度を形成している。本実施形態においては、図4に示したようにチップパターン201に隣接するチップパターン202は、チップパターン201を90°回転した配置としている。このような市松模様の配置においては線221と線221’とが互いに直交するようになるため、シリコンウェハ200の全体にわたり連続して軸251と一致する仮想的な線221は生じない。よって、シリコンウェハの破断は起きにくくなる。
【0051】
本実施形態の本発明に係るパターン配置方法は、実施形態1及び2で説明したステッパにより実現することができる。つまり、駆動制御系が光軸に対してレチクルおよび/またはステージを回転することにより、チップパターンを順次回転させながら配置すればよい。本実施形態の本発明に係るパターン配置方法においては、実施形態2で説明したような一般的なステッパのレチクルの可動範囲の制限から、実施形態1で説明したステージを移動させる方法が好ましい。
【0052】
ところで、本実施形態の本発明に係るパターン配置方法としては、上述の方法の他、例えば、シリコンウェハ200にパターン202を形成するための領域を空けて、まずパターン201を市松模様のように形成し、その後シリコンウェハ200を90°回転させて、空けた領域にパターン202を形成するようにしてもよい。この場合、シリコンウェハ200の回転動作は1回であるため、作業効率が向上する。
【0053】
また、1枚のレチクルに上述のような市松模様の複数のチップパターンを配置することにより、アライナータイプのステッパを用いて、レチクルとステージを固定したままでも一括形成することが可能である。
【0054】
以上説明したように、本実施形態の本発明に係るパターン配置方法によると、パターン形成工程において、シリコンウェハの面方位を認識してチップパターンを市松模様に配置することにより、破断しにくいパターニングされたシリコンウェハを提供する優れた効果を奏する。また、本実施形態の本発明に係るパターン配置方法は、比較的安価な(100)面方位のシリコンウェハを用いても破断しにくいパターニングされたシリコンウェハを提供することができ、このようなシリコンウェハは、その後の製造工程での取り扱いが従来よりも容易になる。このようなパターニングされたシリコンウェハの物理的性状は、特にバルクMEMSの分野においては有用である。
【0055】
(実施形態4)
実施形態4では、さらに、隣接するチップパターンをシリコンウェハの水平面のX軸方向とY軸方向にわずかにずらして配置することにより、断続的に配置したパターンを仮想的に直線として結んだ線が、へき開面と一致しないように配置する方法について説明する。
【0056】
図5は、実施形態4の本発明に係るパターンを配置したシリコンウェハ300の模式図である。シリコンウェハ300は、所定の深さをもって第1の方向311a及び第2の方向311bにエッチングされたパターン311を直線状に断続的に配置したパターン(開口、孔、溝、櫛歯構造の櫛歯部、一方向に複数配列した流路、あるいはセンシングデバイスのビーム部等)を含むチップパターンが第1の方向311a及び第2の方向311bに繰り返し配置される。
【0057】
このとき、チップパターン301において断続的に配置したパターン311を仮想的に直線として結んだ線321と、チップパターン301を第1の方向311aへ平行にずらし且つ第2の方向311bに距離aだけずらしたチップパターン301’において断続的に配置したパターン311を仮想的に直線として結んだ線321’とは、一致しないようにずらして配置する。
【0058】
また、図5に示すように、チップパターン301を第2の方向にずらし且つ第1の方向311aに距離bだけずらしたチップパターン301’’を設けても良い。ここで、距離aは、第2の方向311bに隣接するパターン311どうしの間隔cより小さい距離であってもよい。また、距離bはパターン311の第1の方向311aの長さより小さい距離である。
【0059】
つまり、本実施形態においては、チップパターン301の線321とチップパターン301’の線321’とが距離aだけ第2の方向にずらして配置されている。このようにチップパターン301をずらすことにより、線321が隣接するチップパターンの線321’とは一致しなくなるため、シリコンウェハ300の全体にわたり連続性の高い、仮想的な線は生じない。このようなチップパターン301及び301’の配置は、線321と線321’との一致による破断を起きにくくする。
【0060】
さらに、シリコンウェハのへき開面とシリコンウェハのパターンを配置する面とが直交する軸351と、第1の方向311aとが一致する場合においても、チップパターン301の線321とチップパターン301’の線321’とが距離aだけ第2の方向にずらして配置されているので、破断を起きにくくすることができる。
【0061】
本実施形態の本発明に係るパターン配置方法は、実施形態1及び2で説明したステッパにより実現することができる。つまり、駆動制御系が光軸に対してレチクルおよび/またはステージをシリコンウェハ300の水平面に対して第1の方向311a及び第2の方向311bに移動することで、チップパターンを第1の方向311a及び第2の方向311bに順次ずらしながら配置すればよい。本実施形態の本発明に係るパターン配置方法においては、実施形態2で説明したような一般的なステッパのレチクルの可動範囲の制限から、実施形態1で説明したステージを移動させる方法が好ましい。
【0062】
また、1枚のレチクルに上述のような第1の方向311a及び第2の方向311bに順次ずらした複数のチップパターンを配置することにより、アライナータイプのステッパを用いて、レチクルとステージを固定したままでも一括形成することが可能である。
【0063】
以上説明したように、本実施形態の本発明に係るパターン配置方法によると、パターン形成工程において、シリコンウェハの面方位を認識してチップパターンをX軸方向とY軸方向に順次ずらした配置することにより、破断しにくいパターニングされたシリコンウェハを提供する優れた効果を奏する。また、本実施形態の本発明に係るパターン配置方法は、比較的安価な(100)面方位のシリコンウェハを用いても破断しにくいパターニングされたシリコンウェハを提供することができ、このようなシリコンウェハは、その後の製造工程での取り扱いが従来よりも容易になる。このようなパターニングされたシリコンウェハの物理的性状は、特にバルクMEMSの分野においては有用である。
【0064】
(実施形態5)
本実施形態においては、上述した本発明に係るパターン配置方法を半導体デバイスのシリコンウェハに適用する例について説明する。本実施形態においては、半導体デバイスの一例として、特に、加速度センサについて説明する。なお、本発明に係るパターン配置方法を適用可能な半導体デバイスは、加速度センサに限定されるものではない。また、加速度センサは、錘部の変位を検出する変位検出手段の違いから、ピエゾ抵抗型、圧電素子型及び静電容量型の3種類が主に知られている。変位検出手段として可撓部に配置した応力を電気信号に変換する応力変換素子を含む応力電気変換手段を有する加速度センサとしては、可撓部に設けたピエゾ抵抗の抵抗値変化として外力を検出するピエゾ抵抗型、可撓部に設けた圧電素子に生じる分極変化として外力を検出する圧電素子型があり、また、変位検出手段である固定電極と可動電極間の静電容量変化として外力を検出する静電容量型がある。本発明に係るパターン配置方法は如何なる加速度センサにも適用できる。
【0065】
(3軸半導体加速度センサの製造方法)
図9は、本実施形態に係る半導体加速度センサ1000の模式図である。半導体加速度センサ1000は、X軸方向の可撓部1110、Y軸方向の可撓部1120、X軸方向の可撓部1110とY軸方向の可撓部1120との交差部1150(錘支持部)、枠部1210及び錘部1310を有する。錘部1310と隣接して開口部1170が配置され、錘部1310と枠部1210とを離間させる。
【0066】
X軸方向の可撓部1110には、X軸方向の加速度を検出するために、ピエゾ抵抗素子Rx1、ピエゾ抵抗素子Rx2、ピエゾ抵抗素子Rx3及びピエゾ抵抗素子Rx4が形成され、配線1510により接続されて、X軸方向の加速度を検出するセンサ回路を形成する。また、X軸方向の可撓部1110には、Z軸方向の加速度を検出するために、ピエゾ抵抗素子Rz1、ピエゾ抵抗素子Rz2、ピエゾ抵抗素子Rz3及びピエゾ抵抗素子Rz4が形成され、配線1510により接続されて、Z軸方向の加速度を検出するセンサ回路を形成する。
【0067】
Y軸方向の可撓部1120には、Y軸方向の加速度を検出するために、ピエゾ抵抗素子Ry1、ピエゾ抵抗素子Ry2、ピエゾ抵抗素子Ry3及びピエゾ抵抗素子Ry4が形成され、配線1510により接続されて、Y軸方向の加速度を検出するセンサ回路を形成する。なお、Y軸方向の可撓部1120には、ダミー抵抗素子1910及びダミー抵抗素子1920を配置することで、X軸方向の可撓部1110とのバランスを取るようにしてもよい。
【0068】
交差部1150の下側には錘部1310が形成され、加速度に応じて錘部1310が揺れることで、X軸方向の可撓部1110及びY軸方向の可撓部1120を撓ませる。半導体加速度センサ1000は、この撓みをX軸方向の加速度を検出するセンサ回路、Y軸方向の加速度を検出するセンサ回路及びZ軸方向の加速度を検出するセンサ回路で検出することにより、3軸に対する加速度を検出することができる。
【0069】
X軸方向の可撓部1110及びY軸方向の可撓部1120は枠部1210により支えられ、枠部1210には、電源入力端子VDx、VDy及びVDzと低電位側の端子VGx、VGy及びVGzと、出力端子Vxout1、Vxout2、Vyout1、Vyout2、Vzout1及びVzout2とが配置される。
【0070】
なお、本実施形態においては、半導体加速度センサ1000がX軸方向の可撓部1110及びY軸方向の可撓部1120を有する例を示したが、本発明に係る半導体加速度センサ1000は梁状の可撓部の代わりにダイヤフラム状の可撓部としてもよい。すなわち、ダイヤフラムで錘部を支持し、X軸方向及びY軸方向の加速度を検出するピエゾ抵抗素子を、ダイヤフラムの上部表面に互いに直交する軸方向に配置してもよい。また、半導体加速度センサ1000はピエゾ抵抗素子が形成された半導体加速度センサとして説明したが、圧電素子を形成して加速度を検出するようにしてもよい。
【0071】
本実施形態に係る半導体加速度センサの製造方法を以下に述べる。図10は半導体加速度センサ1000の分解斜視図である。また、図11及び図12は、半導体加速度センサ1000の製造工程を図9及び図10のA−A’断面に沿う断面図で説明する図である。
【0072】
図10を参照すると、半導体加速度センサ1000は、シリコンウェハ1101上に形成したシリコン酸化膜1103、さらにその上にシリコン膜1105を積層したSOI基板を用いて加速度センサ本体1001を形成し、支持基板1410に接合する。シリコン膜1105及びシリコン酸化膜1103には、枠部1210と、枠部1210の内側に配置されたX軸方向の可撓部1110と、Y軸方向の可撓部1120と、X軸方向の可撓部1110とY軸方向の可撓部1120との交差部1150と、を形成する。また、シリコン膜1105及びシリコン酸化膜1103には、枠部1210、X軸方向の可撓部1110、Y軸方向の可撓部1120及び交差部1150に囲まれた開口部1170を形成する。
【0073】
シリコンウェハ1101には枠部1230及び錘部1310を形成し、錘部1310と隣接して配置された開口部1170により、錘部1310は枠部1230の内壁と離間して配置されている。交差部1150と錘部1310とはシリコン酸化膜1103を介して接合されている。本実施形態においては錘部1310が略クローバー形状を有するが、錘部1310の形状は、これに限定されるものではない。
【0074】
支持基板1410としては例えば、ガラス、金属、絶縁性樹脂、Si等の半導体である。接合方法として、陽極接合、直接接合、共晶接合、接着剤による接着などから適宜選択することができる。また、支持基板1410を設けずに、センサ本体を直接実装基板やパッケージ基板に搭載させることも可能である。
【0075】
次に、半導体加速度センサ1000の製造工程を説明する。図11(a)に示したSOI基板は、SIMOX、貼り合せ法等により製造される。シリコン酸化膜1103は、後述の工程でエッチングストッパ層としても機能する。本実施形態においては、ピエゾ抵抗素子Rx1〜Rx4及びピエゾ抵抗素子Rz1〜Rz4をX軸方向の可撓部1110に、ピエゾ抵抗素子Ry1〜Ry4をY軸方向の可撓部1120にそれぞれ形成する。
【0076】
SOI基板のシリコン膜1105側に不純物拡散用のマスク1107を形成する(図11(b))。本実施形態においては、実施形態1〜4で説明したように、パターン形成工程において、シリコンウェハの面方位を認識して配置するパターンの角度をあえてずらしたり、チップパターンを市松模様に配置したり、チップパターンをX軸方向とY軸方向に順次ずらした配置したりするため、マスク1107はこれらのパターン配置方法により形成する。
【0077】
マスク1107の材料としては、例えばシリコン窒化膜(Si3N4)やシリコン酸化膜(SiO2)などを用いることができる。シリコン膜1105全面に熱酸化あるいはプラズマCVD法によりシリコン酸化膜を成膜した後、シリコン窒化膜を成膜し、シリコン窒化膜上にレジストパターン(図示せず)を形成し、シリコン窒化膜、シリコン酸化膜にピエゾ抵抗素子及び抵抗素子に対応する開口をRIE(Reactive Ion Etching)あるいはウェットエッチングにより形成する。
【0078】
各ピエゾ抵抗素子を熱拡散法やイオン注入法により形成する(図11(c))。例えば、熱拡散法を用いてシリコン膜1105にホウ素を拡散する場合、BBr3などを少なくともマスク1107が形成された面に曝し、不純物を堆積して不純物拡散層を形成する。
【0079】
次に、シリコン膜1105上に絶縁層1109を形成する(図11(d))。例えば、シリコン膜1105の表面に熱酸化あるいはプラズマCVD法などを用いて、SiO2の絶縁層を形成する。絶縁層1109上にレジストをマスクとしたRIEによってコンタクトホール1513を形成する。
【0080】
つづいて、コンタクトホール1513を介してピエゾ抵抗素子に接続するように配線1510を形成する(図11(e))。配線1510はAl,Al−Si,Al−Ndなどの金属材料をスパッタ法などにより成膜し、それをパターニングすることで得られる。なお、配線1510とピエゾ抵抗素子との間でオーミックコンタクトを形成するために、熱処理(380℃〜420℃)するのが好ましい。なお、配線1510上に保護膜を形成してもよい。電源入力端子VDx、VDy及びVDz、接地端子VGx、VGy及びVGz、出力端子Vxout1、Vxout2、Vyout1、Vyout2、Vzout1及びVzout2は、配線1510と同一の材料を用いて同一の工程で形成することができる。
【0081】
その後、シリコン膜1105をシリコン酸化膜1103の上面が露出するまでRIEなどによりエッチングを行い、開口部1170を設けて、枠部1210、X軸方向の可撓部1110、Y軸方向の可撓部1120及び交差部1150を形成する(図12(f))。また、錘部1310が下方(支持基板1410)へ変位するために必要な間隔のギャップを形成するために、マスクを用いて枠部1230の内枠に沿った開口部1170を形成する。ギャップは、例えば、5〜10μm程度である。
【0082】
さらに、枠部1230及び錘部1310を形成するために、シリコンウェハ1101の下面にマスクを形成する。このマスクを用いてシリコンウェハ1101をシリコン酸化膜1103の下面が露出するまでエッチングする。エッチングには、例えば、DRIE(Deep Reactive Ion Etching)を用いる。
【0083】
図13は、開口部1170が形成されたSOI基板のシリコンウェハ1101側の面を示す図である。上述の製造工程においては、複数の半導体加速度センサ1000を1枚のSOI基板に形成している。このため、シリコンウェハ1101には錘部1310、枠部1230が規則的に複数形成され、開口部1170が規則的に複数配置している。実施形態1〜4で説明したように、開口部1170が第1の方向及び第2の方向に平行に配置される場合、断続的に配置した開口部1170を仮想的に第1の方向の直線として結んだ線1021は、シリコンウェハのへき開面とシリコンウェハのパターンを配置する面とが直交する軸1051とは、異なるようにずらしてパターンを配置する。開口部1170の配置方法はこれに限定されるものではなく、実施形態2〜4で説明した方法で配置してもよい。
【0084】
その後、エッチングストッパとして用いた部分の不要なシリコン酸化膜1103をRIEあるいはウェットエッチングにより除去する。これにより、シリコン酸化膜1103は、枠部1210と枠部1230、交差部1150と錘部1310の間のみに存在するようになる(図12(f))。以上の工程でセンサ本体1001が製造される。
【0085】
最後に、センサ本体1001と支持基板1410とを接合する(図12(g))。支持基板1410とセンサ本体1001とは、直接接合、接着剤による接合等を用いて接合する。これによりセンサ本体1001と支持基板1410とが接合され、半導体加速度センサ1000が構成される。その後、シリコンウェハをダイシングして加速度センサを個片化する。以上は加速度センサの製造方法の一例であって、順序は、適宜に変更可能であり、上記の順序に限定されない。
【0086】
上述のようにシリコンウェハを深堀エッチングして形成する半導体加速度センサの製造工程においては、従来のような面方位をあわせるパターン配置方法では、断続的に配置したパターンを仮想的に直線として結んだ線が<110>方位のへき開面と一致すると、そのパターンに沿って破断しやすかった。本実施形態の本発明に係るパターン配置方法を用いることにより、半導体加速度センサは破断しにくくなり、扱いも容易で、歩留まりも高くすることができる。
【0087】
(静電容量型半導体加速度センサ)
また、本実施形態の本発明に係るパターン配置方法は、図14に示す櫛歯形状の電極を有する静電容量型の半導体加速度センサ2000の製造においては、より高い効果を発揮する。図15は、図14のA−A’断面に沿う断面図である。半導体加速度センサ2000は、支持部2230により支持された可撓部2220につながる可動部2200の両側に、第1の固定部2300と第2の固定部2400を配置して構成される。半導体加速度センサ1000の錘部1310に相当する可動部2200には可動電極2240が形成され、支持部2230の外側に固定電極2240が配置される。また、第1の固定部2300には、第1の固定電極2320が形成され、配線部2310を介して固定電極端子2311に接続される。同様に、第2の固定部2400には、第2の固定電極2420が形成され、配線部2410を介して固定電極端子2411に接続される。さらに、可動部2200と、第1の固定部2300及び第2の固定部2400との間には、可動部2200に隣接して配置された開口部2510が配置され、可動部2200と、第1の固定部2300及び第2の固定部2400とは離間して接触しない。また、可動部2200と、第1の固定部2300及び第2の固定部2400との外側には、枠部2500が配置される。
【0088】
半導体加速度センサ2000は、加速度に応じて可動電極2240が図14中のX方向へ変位し、可動電極2240と固定電極2320との間隔が変化することにより、両電極間の静電容量が変化し、この静電容量の変化に基づいて加速度を検出する。
【0089】
図15に示したように、半導体加速度センサ2000は、第1のシリコンウェハ2101と第2のシリコンウェハ2105とをシリコン酸化膜2103を介して貼り合わせたSOI基板にパターン形成することで製造できる。また、SOI基板を用いずに1枚のシリコンウェハを用いてもよい。半導体加速度センサ2000は、半導体加速度センサ1000よりも直線的な構造が連続して配置されるため、第2のシリコンウェハ2105が破断しやすい。したがって、半導体加速度センサ2000においては、可動電極2240及び固定電極2320に平行に配置される開口部2510が第2のシリコンウェハ2105に規則的に複数配置している。実施形態1〜4で説明したように、開口部2510が第1の方向及び第2の方向に平行に配置される場合、断続的に配置した開口部2510を仮想的に第1の方向の直線として結んだ線2021は、シリコンウェハのへき開面とシリコンウェハのパターンを配置する面とが直交する軸2051とは、異なるようにずらしてパターンを配置する。開口部2510の配置方法はこれに限定されるものではなく、実施形態2〜4で説明した方法で配置してもよい。
【0090】
このような構造の半導体加速度センサ2000の製造には、本実施形態の本発明に係るパターン配置方法を用いることにより、破断しにくくなり、扱いも容易で、歩留まりも高くすることができる。また、同様に、図16に示すような2軸の静電容量型半導体加速度センサ3000の製造にも本実施形態の本発明に係るパターン配置方法は有効である。つまり、可動電極及び固定電極に平行に配置される開口部が規則的に複数配置してなる仮想的な線3021がシリコンウェハのへき開面3051は、異なるようにずらしてパターンを配置する。
【実施例】
【0091】
実施形態1で説明した軸と第1の方向とを角度θずらす実施形態おいて、角度θの有効範囲について検討を行った。図6は実施例の実験方法を説明する模式図である。シリコンウェハ700には、厚さ625μmの6インチベアシリコンウェハを用い、深さ50μm、幅100μm、長さ1cmの溝のパターンを直線状に断続的に複数配置した。このとき、断続的に配置したパターンを仮想的に直線として結んだ線721が、へき開面751に対して角度θずれるようにパターンを配置した。
【0092】
角度θを変えたシリコンウェハ700を複数作成して、それぞれ破断させた。へき開による破断が生じた場合には、シリコンウェハの破断面はへき開面と一致するため、結晶がはがれた凹凸の少ない断面となる。一方、へき開による破断でない場合には、シリコンウェハの破断面はへき開面と一致しないため、凹凸の多い断面となる。シリコンウェハ700の断面を走査型電子顕微鏡(SEM)により観察し、破断がへき開面によるものか否かを判定した。
【0093】
図7は、それぞれの角度でパターン配置したシリコンウェハの破断実験におけるシリコンウェハ断面の光学顕微鏡写真である。(a)は角度θを0°、(b)は0.5°、(c)は1.5°、(d)は3°、(e)は10°としたときのシリコンウェハの破断面である。表1は、その結果に対し、へき開による破断が生じたものを不良(×)とし、へき開による破断が生じなかったものを良(○)としたものである。
【0094】
【表1】
【0095】
表1に示したように、角度θを3°以上とした場合には、へき開による破断が生じなかった。シリコンウェハは、45°の角度で軸対称の結晶学的特性を有する。したがって、シリコンウェハに直線状に断続的にパターンを複数配置する場合に、断続的に配置したパターンを仮想的に直線として結んだ線をへき開面の軸に対して3°以上87°以下の範囲でずらすことにより、破断を起こしにくいシリコンウェハを提供することができる。
【符号の説明】
【0096】
100:シリコンウェハ、101:チップパターン、111:パターン、111a:第1の方向、111b:第2の方向、121:仮想的な線、151:へき開面、171:レジスト、200:シリコンウェハ、201:チップパターン、202:チップパターン、211:パターン、211a:第1の方向、211b:第2の方向、221:仮想的な線、221’:仮想的な線、251:へき開面、300:シリコンウェハ、301:チップパターン、301’:チップパターン、301’’:チップパターン、311:パターン、311a:第1の方向、311b:第2の方向、321:仮想的な線、351:へき開面、500:ステッパ、501:光源、503:楕円鏡、505:反射鏡、507:波長選択フィルタ、509:フライアイインテグレータ、511:ブラインド、513:反射鏡、515:レンズ系、517:投影光学系、531:レチクル、551:ステージ、555:駆動制御系、591:光軸、600:ステッパ、633:レチクルホルダ、635:駆動制御系、651:ステージ、700:シリコンウェハ、721:仮想的な線、751:へき開面、900:シリコンウェハ、911:パターン、921:仮想的な線、951:へき開面、1000:一実施形態に係る半導体加速度センサ、1001:加速度センサ本体、1021:仮想的な線、1051:へき開面、1101:シリコンウェハ、1103:シリコン酸化膜、1105:シリコン膜、1107:マスク、1109:絶縁層、1110:X軸方向の可撓部、1120:Y軸方向の可撓部、1150:交差部、1170:開口部、1210:枠部、1230:枠部、1310:錘部、1410:支持基板、1510:配線、1513:コンタクトホール、1910:ダミー抵抗素子、1920:ダミー抵抗素子、2000:一実施形態に係る半導体加速度センサ、2021:仮想的な線、2051:へき開面、2101:第1のシリコンウェハ、2103:シリコン酸化膜、2105:第2のシリコンウェハ、2200:可動部、2201:可動電極端子、2220:可撓部、2230:支持部、2240:可動電極、2300:第1の固定部、2310:配線部、2311:固定電極端子、2320:第1の固定電極、2400:第2の固定部、2410:配線部、2411:固定電極端子、2420:第2の固定電極、2500:枠部、2510:開口部、3000:一実施形態に係る半導体加速度センサ、3021:仮想的な線、3051:へき開面、Rx1:ピエゾ抵抗素子、Rx2:ピエゾ抵抗素子、Rx3:ピエゾ抵抗素子、Rx4:ピエゾ抵抗素子、Ry1:ピエゾ抵抗素子、Ry2:ピエゾ抵抗素子、Ry3:ピエゾ抵抗素子、Ry4:ピエゾ抵抗素子、Rz1:ピエゾ抵抗素子、Rz2:ピエゾ抵抗素子、Rz3:ピエゾ抵抗素子、Rz4:ピエゾ抵抗素子、VDx:電源入力端子、VGx:接地端子、Vxout1:出力端子、Vxout2:出力端子、VDy:電源入力端子、VGy:接地端子、Vyout1:出力端子、Vyout2:出力端子、VDz:電源入力端子、VGz:接地端子、Vzout1:出力端子、Vzout2:出力端子
【特許請求の範囲】
【請求項1】
複数のチップパターンを有するシリコンウェハであって、
第1の方向及び前記第1の方向に直交する第2の方向に平行に配置された複数のチップパターンを有し、
前記複数のチップパターンは、前記第1の方向及び前記第2の方向に配置され、直線状に配置された一つ以上のパターンを含み、
前記シリコンウェハのへき開面と前記シリコンウェハの前記パターンを配置する面とが直交する軸と、前記第1の方向とが、異なるように前記複数のチップパターンを配置することを特徴とするシリコンウェハ。
【請求項2】
前記直線状に配置された一つ以上のパターンは、複数の前記パターンが前記チップパターン内に断続的に形成されていることを含むことを特徴とする請求項1に記載のシリコンウェハ。
【請求項3】
前記軸と第1の方向とのなす角度が第1の角度となるように前記複数のチップパターンを配置することを特徴とする請求項1に記載のシリコンウェハ。
【請求項4】
前記軸と、前記複数のチップパターンの一部の前記第1の方向とのなす角度は、90度であることを特徴とする請求項1に記載のシリコンウェハ。
【請求項5】
第1の方向及び前記第1の方向に直交する第2の方向にエッチングされ、直線状に断続的に配置された複数のパターンを含み、前記第1の方向及び前記第2の方向に平行に配置した複数のチップパターンを有し、
前記第1の方向に平行に配置した前記複数のチップパターンは、前記第2の方向に第1の距離だけ互いに異なり、前記第2の方向に平行に配置した前記複数のチップパターンは、前記第1の方向に第2の距離互いに異なる配置である請求項1に記載のシリコンウェハ。
【請求項6】
前記シリコンウェハのへき開面と前記シリコンウェハの前記パターンを配置する面とが直交する軸と、前記第1の方向とは一致していることを特徴とする請求項5に記載のシリコンウェハ。
【請求項7】
第1の方向及び前記第1の方向に直交する第2の方向に広がり、直線状に断続的に配置された複数のパターンを含むレチクルを用いて、前記第1の方向及び前記第2の方向に平行に配置した複数のチップパターンをシリコンウェハ上に配置するステッパを用いたパターン配置方法において、
前記シリコンウェハのへき開面と前記シリコンウェハの前記パターンを配置する面とが直交する軸と、前記第1の方向とが、異なるように、前記ステッパがレチクルと、前記レチクルと対向する前記シリコンウェハの位置を調整することを特徴とするパターン配置方法。
【請求項8】
前記ステッパはレチクルと、前記レチクルと対向する前記シリコンウェハの位置を調整することは、前記ステッパの光軸に対して前記シリコンウェハを回転することにより行う請求項7に記載のパターン配置方法。
【請求項9】
前記ステッパはレチクルと、前記レチクルと対向する前記シリコンウェハの位置を調整することは、前記ステッパの光軸に対して前記レチクルを回転することにより行う請求項7に記載のパターン配置方法。
【請求項10】
第1の方向及び前記第1の方向に直交する第2の方向に広がり、直線状に断続的に配置された複数のパターンを含むレチクルを用いて、前記第1の方向及び前記第2の方向に平行に配置した複数のチップパターンをシリコンウェハ上に配置するステッパを用いたパターン配置方法において、
前記複数のチップパターンが前記第2の方向に第1の距離だけずらして配置されるように前記レチクル又は前記シリコンウェハを移動することにより行うパターン配置方法。
【請求項11】
支持部と、
前記支持部に一端が支持された可撓部と、
前記可撓部の他端に支持された錘部と、
前記錘部の変位を検出する変位検出手段と、
前記錘部と隣接して配置された開口部と、を備え、
前記開口部からなる複数のパターンが、第1の方向及び前記第1の方向に直交する第2の方向に平行にシリコンウェハに形成されており、
前記複数のパターンは、前記第1の方向及び前記第2の方向に配置され、直線状に配置された一つ以上のパターンを含み、
前記シリコンウェハのへき開面と前記シリコンウェハの前記パターンが形成される面とが直交する軸と、前記第1の方向とが、異なるように前記複数のパターンを配置することを特徴とする半導体デバイス。
【請求項12】
支持部と、
前記支持部に一端が支持された可撓部と、
前記可撓部の他端に支持された錘部と、
前記可撓部に位置し、前記錘部の変位を電気信号に変換して検出する応力電気変換手段と、
前記錘部と隣接して配置された開口部と、を備え、
前記開口部からなる複数のパターンが第1の方向及び前記第1の方向に直交する第2の方向に平行にシリコンウェハに形成されており、
前記複数のパターンは、前記第1の方向及び前記第2の方向に配置され、直線状に配置された一つ以上のパターンを含み、
前記シリコンウェハのへき開面と前記シリコンウェハの前記パターンが形成される面とが直交する軸と、前記第1の方向とが、異なるように前記複数のパターンを配置することを特徴とする半導体デバイス。
【請求項13】
支持部と、
前記支持部に一端が支持された可撓部と、
前記可撓部の他端に支持された錘部と、
前記錘部の変位を検出する変位検出手段と、
前記錘部と隣接して配置された開口部と、を備え、
前記開口部からなる複数のパターンが、第1の方向及び前記第1の方向に直交する第2の方向に平行にシリコンウェハに形成されており、
前記複数のパターンは、前記第1の方向及び前記第2の方向に配置され、直線状に配置された一つ以上のパターンを含み、
前記第1の方向に平行に配置した前記複数のパターンは、前記第2の方向に第1の距離だけ互いに異なり、前記第2の方向に平行に配置した前記複数のパターンは、前記第1の方向に第2の距離互いに異なる配置であることを特徴とする半導体デバイス。
【請求項14】
支持部と、
前記支持部に一端が支持された可撓部と、
前記可撓部の他端に支持された錘部と、
前記可撓部に位置し、前記錘部の変位を電気信号に変換して検出する応力電気変換手段と、
前記錘部と隣接して配置された開口部と、を備え、
前記開口部からなる複数のパターンが第1の方向及び前記第1の方向に直交する第2の方向に平行にシリコンウェハに形成されており、
前記複数のパターンは、前記第1の方向及び前記第2の方向に配置され、直線状に配置された一つ以上のパターンを含み、
前記第1の方向に平行に配置した前記複数のパターンは、前記第2の方向に第1の距離だけ互いに異なり、前記第2の方向に平行に配置した前記複数のパターンは、前記第1の方向に第2の距離互いに異なる配置であることを特徴とする半導体デバイス。
【請求項15】
前記シリコンウェハのへき開面と前記シリコンウェハの前記パターンを配置する面とが直交する軸と、前記第1の方向とは一致していることを特徴とする請求項13又は14に記載の半導体デバイス。
【請求項16】
前記変位検出手段は固定電極と可動電極とを有し、
前記錘部の変位を、前記固定電極と前記可動電極との静電容量変化として検出することを特徴とする請求項11、13又は15に記載の半導体デバイス。
【請求項17】
前記応力電気変換手段は応力電気変換素子であり、
前記応力電気変換素子はピエゾ抵抗素子又は圧電素子から選択されることを特徴とする請求項12、14又は15に記載の半導体デバイス。
【請求項1】
複数のチップパターンを有するシリコンウェハであって、
第1の方向及び前記第1の方向に直交する第2の方向に平行に配置された複数のチップパターンを有し、
前記複数のチップパターンは、前記第1の方向及び前記第2の方向に配置され、直線状に配置された一つ以上のパターンを含み、
前記シリコンウェハのへき開面と前記シリコンウェハの前記パターンを配置する面とが直交する軸と、前記第1の方向とが、異なるように前記複数のチップパターンを配置することを特徴とするシリコンウェハ。
【請求項2】
前記直線状に配置された一つ以上のパターンは、複数の前記パターンが前記チップパターン内に断続的に形成されていることを含むことを特徴とする請求項1に記載のシリコンウェハ。
【請求項3】
前記軸と第1の方向とのなす角度が第1の角度となるように前記複数のチップパターンを配置することを特徴とする請求項1に記載のシリコンウェハ。
【請求項4】
前記軸と、前記複数のチップパターンの一部の前記第1の方向とのなす角度は、90度であることを特徴とする請求項1に記載のシリコンウェハ。
【請求項5】
第1の方向及び前記第1の方向に直交する第2の方向にエッチングされ、直線状に断続的に配置された複数のパターンを含み、前記第1の方向及び前記第2の方向に平行に配置した複数のチップパターンを有し、
前記第1の方向に平行に配置した前記複数のチップパターンは、前記第2の方向に第1の距離だけ互いに異なり、前記第2の方向に平行に配置した前記複数のチップパターンは、前記第1の方向に第2の距離互いに異なる配置である請求項1に記載のシリコンウェハ。
【請求項6】
前記シリコンウェハのへき開面と前記シリコンウェハの前記パターンを配置する面とが直交する軸と、前記第1の方向とは一致していることを特徴とする請求項5に記載のシリコンウェハ。
【請求項7】
第1の方向及び前記第1の方向に直交する第2の方向に広がり、直線状に断続的に配置された複数のパターンを含むレチクルを用いて、前記第1の方向及び前記第2の方向に平行に配置した複数のチップパターンをシリコンウェハ上に配置するステッパを用いたパターン配置方法において、
前記シリコンウェハのへき開面と前記シリコンウェハの前記パターンを配置する面とが直交する軸と、前記第1の方向とが、異なるように、前記ステッパがレチクルと、前記レチクルと対向する前記シリコンウェハの位置を調整することを特徴とするパターン配置方法。
【請求項8】
前記ステッパはレチクルと、前記レチクルと対向する前記シリコンウェハの位置を調整することは、前記ステッパの光軸に対して前記シリコンウェハを回転することにより行う請求項7に記載のパターン配置方法。
【請求項9】
前記ステッパはレチクルと、前記レチクルと対向する前記シリコンウェハの位置を調整することは、前記ステッパの光軸に対して前記レチクルを回転することにより行う請求項7に記載のパターン配置方法。
【請求項10】
第1の方向及び前記第1の方向に直交する第2の方向に広がり、直線状に断続的に配置された複数のパターンを含むレチクルを用いて、前記第1の方向及び前記第2の方向に平行に配置した複数のチップパターンをシリコンウェハ上に配置するステッパを用いたパターン配置方法において、
前記複数のチップパターンが前記第2の方向に第1の距離だけずらして配置されるように前記レチクル又は前記シリコンウェハを移動することにより行うパターン配置方法。
【請求項11】
支持部と、
前記支持部に一端が支持された可撓部と、
前記可撓部の他端に支持された錘部と、
前記錘部の変位を検出する変位検出手段と、
前記錘部と隣接して配置された開口部と、を備え、
前記開口部からなる複数のパターンが、第1の方向及び前記第1の方向に直交する第2の方向に平行にシリコンウェハに形成されており、
前記複数のパターンは、前記第1の方向及び前記第2の方向に配置され、直線状に配置された一つ以上のパターンを含み、
前記シリコンウェハのへき開面と前記シリコンウェハの前記パターンが形成される面とが直交する軸と、前記第1の方向とが、異なるように前記複数のパターンを配置することを特徴とする半導体デバイス。
【請求項12】
支持部と、
前記支持部に一端が支持された可撓部と、
前記可撓部の他端に支持された錘部と、
前記可撓部に位置し、前記錘部の変位を電気信号に変換して検出する応力電気変換手段と、
前記錘部と隣接して配置された開口部と、を備え、
前記開口部からなる複数のパターンが第1の方向及び前記第1の方向に直交する第2の方向に平行にシリコンウェハに形成されており、
前記複数のパターンは、前記第1の方向及び前記第2の方向に配置され、直線状に配置された一つ以上のパターンを含み、
前記シリコンウェハのへき開面と前記シリコンウェハの前記パターンが形成される面とが直交する軸と、前記第1の方向とが、異なるように前記複数のパターンを配置することを特徴とする半導体デバイス。
【請求項13】
支持部と、
前記支持部に一端が支持された可撓部と、
前記可撓部の他端に支持された錘部と、
前記錘部の変位を検出する変位検出手段と、
前記錘部と隣接して配置された開口部と、を備え、
前記開口部からなる複数のパターンが、第1の方向及び前記第1の方向に直交する第2の方向に平行にシリコンウェハに形成されており、
前記複数のパターンは、前記第1の方向及び前記第2の方向に配置され、直線状に配置された一つ以上のパターンを含み、
前記第1の方向に平行に配置した前記複数のパターンは、前記第2の方向に第1の距離だけ互いに異なり、前記第2の方向に平行に配置した前記複数のパターンは、前記第1の方向に第2の距離互いに異なる配置であることを特徴とする半導体デバイス。
【請求項14】
支持部と、
前記支持部に一端が支持された可撓部と、
前記可撓部の他端に支持された錘部と、
前記可撓部に位置し、前記錘部の変位を電気信号に変換して検出する応力電気変換手段と、
前記錘部と隣接して配置された開口部と、を備え、
前記開口部からなる複数のパターンが第1の方向及び前記第1の方向に直交する第2の方向に平行にシリコンウェハに形成されており、
前記複数のパターンは、前記第1の方向及び前記第2の方向に配置され、直線状に配置された一つ以上のパターンを含み、
前記第1の方向に平行に配置した前記複数のパターンは、前記第2の方向に第1の距離だけ互いに異なり、前記第2の方向に平行に配置した前記複数のパターンは、前記第1の方向に第2の距離互いに異なる配置であることを特徴とする半導体デバイス。
【請求項15】
前記シリコンウェハのへき開面と前記シリコンウェハの前記パターンを配置する面とが直交する軸と、前記第1の方向とは一致していることを特徴とする請求項13又は14に記載の半導体デバイス。
【請求項16】
前記変位検出手段は固定電極と可動電極とを有し、
前記錘部の変位を、前記固定電極と前記可動電極との静電容量変化として検出することを特徴とする請求項11、13又は15に記載の半導体デバイス。
【請求項17】
前記応力電気変換手段は応力電気変換素子であり、
前記応力電気変換素子はピエゾ抵抗素子又は圧電素子から選択されることを特徴とする請求項12、14又は15に記載の半導体デバイス。
【図1】

【図2】

【図3】
【図4】
【図5】

【図8】
【図9】

【図10】
【図11】
【図12】

【図13】
【図14】

【図15】
【図16】
【図6】
【図7】

【図2】
【図3】
【図4】
【図5】
【図8】
【図9】
【図10】
【図11】
【図12】
【図13】
【図14】
【図15】
【図16】
【図6】
【図7】
【公開番号】特開2012−114392(P2012−114392A)
【公開日】平成24年6月14日(2012.6.14)
【国際特許分類】
【出願番号】特願2010−271618(P2010−271618)
【出願日】平成22年12月6日(2010.12.6)
【出願人】(000002897)大日本印刷株式会社 (14,506)
【Fターム(参考)】
【公開日】平成24年6月14日(2012.6.14)
【国際特許分類】
【出願日】平成22年12月6日(2010.12.6)
【出願人】(000002897)大日本印刷株式会社 (14,506)
【Fターム(参考)】
[ Back to top ]