
パッシブレーダシステムおよびパッシブレーダ方法
【課題】長時間積分時にも評価関数Pの先鋭度が劣化せず、低S/N環境下やステルス目標など低RCSの移動目標に対しても、検出・標定精度を高める。
【解決手段】散乱波を受信して時系列データを生成する第1の受信系と、直接波を受信して時系列データを生成する第2の受信系と、両時系列データに基づく相互相関を演算し、移動目標に対する到来時間差およびドップラ周波数差を観測情報として特定する相互相関演算手段(16)と、観測情報と測角値情報とを用いて、移動目標の位置を得る目標標定手段(17)とを備えるパッシブレーダ装置(10)を異なる位置に複数台配置し、各パッシブレーダ装置は、相互の観測情報を送受信する通信手段(18)と、すべてのパッシブレーダ装置で特定されたそれぞれの観測情報に基づいて、移動目標の瞬時速度ベクトルを推定する瞬時速度ベクトル推定手段(19)とをさらに備える。
【解決手段】散乱波を受信して時系列データを生成する第1の受信系と、直接波を受信して時系列データを生成する第2の受信系と、両時系列データに基づく相互相関を演算し、移動目標に対する到来時間差およびドップラ周波数差を観測情報として特定する相互相関演算手段(16)と、観測情報と測角値情報とを用いて、移動目標の位置を得る目標標定手段(17)とを備えるパッシブレーダ装置(10)を異なる位置に複数台配置し、各パッシブレーダ装置は、相互の観測情報を送受信する通信手段(18)と、すべてのパッシブレーダ装置で特定されたそれぞれの観測情報に基づいて、移動目標の瞬時速度ベクトルを推定する瞬時速度ベクトル推定手段(19)とをさらに備える。
【発明の詳細な説明】
【技術分野】
【0001】
本発明は、自らは電波を送信せず、自己の周辺に既に存在する電波(既存の電波)が移動目標に当たることで生成される散乱波を受信し、一方で、既に存在する電波の電波源から直接到来する直接波を受信し、散乱波と直接波の到来時間差、およびドップラ周波数差、さらに自己のアレーアンテナによる測角値を元に、移動目標の位置を標定するパッシブレーダシステムおよびパッシブレーダ方法に関するものである。
【背景技術】
【0002】
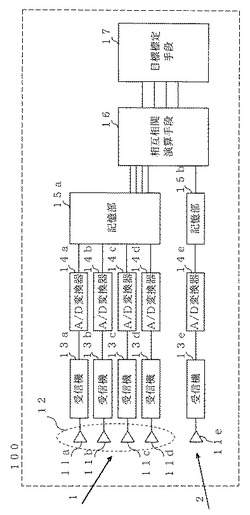
図10は、従来のパッシブレーダ装置の内部構成図である(例えば、特許文献1参照)。図10における従来のパッシブレーダ装置100は、第1のアンテナ11a〜11d、第2のアンテナ11e、第1の受信機13a〜13d、第2の受信機13e、第1のA/D変換器14a〜14d、第2のA/D変換器14e、第1の記憶部15a、第2の記憶部15b、相互相関演算手段16、および目標標定手段17を備えている。また、第1のアンテナ11a〜11dにより、アレーアンテナ12が構成されている。
【0003】
パッシブレーダ装置100は、散乱波1と直接波2を受信する。そして、散乱波1は、第1のアンテナ11a〜11dを有するアレーアンテナ12を介して第1の受信機13a〜13dで受信され、第1のA/D変換器14a〜14dによりA/D変換され、アレーアンテナ12に含まれる第1のアンテナ11a〜11dの番号(素子番号)に対応付けられて第1の記憶部15aに記憶される。
【0004】
一方、直接波2は、第2のアンテナ11eを介して第2の受信機13eで受信され、第2のA/D変換器14eによりA/D変換され、第2の記憶部15bに記憶される。ここで、第2のアンテナ11e、第2の受信機13e、第2のA/D変換器14eは、それぞれ、第1のアンテナ11a〜11d、第1の受信機13a〜13d、第1のA/D変換器14a〜14dと同一機能を有するものである。
【0005】
次に、従来のパッシブレーダ装置の一般的な目標標定原理について説明する。
散乱波1は、電波源が送出した電波が目標に当たることで、パッシブレーダ装置100に到来する。従って、電波源から直接パッシブレーダ装置100に到来する直接波よりも、同じ波形諸元を持っているが、到来時間が遅れている。
【0006】
また、目標が移動している場合には、移動目標に当たった電波は、目標の移動速度に応じて周波数がシフトする。これをドップラ周波数差と呼ぶ。パッシブレーダ装置100内の相互相関演算手段16は、記憶部15aに記憶された散乱波1の時系列データと、記憶部15bに記憶された直接波2の時系列データを用いて、次式(1)の評価関数に関する演算を行う。
【0007】
【数1】

【0008】
ここで、上式(1)内の各記号は、以下のものを意味する。
s(t):散乱波受信信号
d(t):直接波受信信号
t:A/D変換器のサンプル番号
T:1回の観測フレームに用いるデータサンプル数
P:評価関数
τ:散乱波受信信号s(t)と直接波受信信号d(t)との到来時間差
Δf:散乱波受信信号s(t)と直接波受信信号d(t)のドップラ周波数差
【0009】
このように、到来時間差をτとすると、s(t)×d(t−τ)で、評価関数は最大値をとる。同時に、散乱波1のドップラ周波数差を補正するために、上式(1)では、exp(−j2πΔft)により補正をかけている。なお、この場合の観測時間t=1〜Tの間、移動目標は、ある定点に留まっているという仮定をおいている。
【0010】
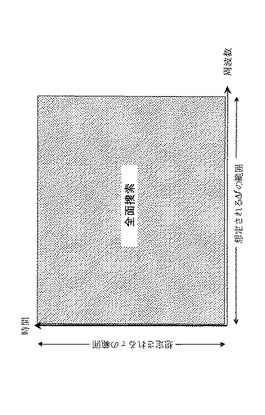
図11は、従来のパッシブレーダ装置の相互相関演算手段16における評価関数の捜索範囲を示した説明図である。相互相関演算手段16は、上式(1)の評価関数に関し、想定される到来時間差τの範囲、ドップラ周波数差Δfの範囲で走査するため、図11に示すように、2次元の全面捜索が必要となる。この結果、多大な演算量を処理しなければならない。
【0011】
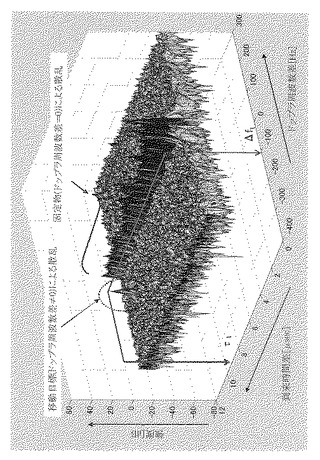
図12は、従来のパッシブレーダ装置の相互相関演算手段16における評価関数の演算結果の一例を3次元グラフとして示した説明図である。図12に示すように、まずは、ドップラ周波数差=0の反応が多く見られる。これは、山や人工建造物などの固定物による反射によるものであり、移動目標を標定対象とするレーダ装置から見ると障害物(固定クラッタ)に相当する。
【0012】
注目すべきは、図12中の点線の楕円で囲んだ部分に、ドップラ周波数差=0でないピークが見られる点である。これは、標定対象としている移動目標による反応であり、このピーク位置から、移動目標に対する到来時間差τ1、およびドップラ周波数差Δf1を得ることができる。
【0013】
次に、目標標定手段17の動作について説明する。図13は、従来のパッシブレーダシステムの運用イメージ図であり、具体的には、1台のパッシブレーダ装置100内の目標標定手段17による移動目標30の標定方法を図解したものである。目標標定手段17は、相互相関演算手段16で得られた到来時間差τ1から目標の存在する候補を生成する。
【0014】
ここで、説明を簡略化するために、この問題を2次元平面で考えることとする。一般に、電波源20とパッシブレーダ装置100の位置が既知であるため、到来時間差がτ1となる候補は、電波源20とパッシブレーダ装置100の位置を焦点とする楕円上に限定される。この楕円を等距離楕円という。
【0015】
そして、最終的に、パッシブレーダ装置100に備わるアレーアンテナ12による測角値から、散乱波1の到来方向を求めることで、等距離楕円と到来方向との交点が移動目標30の推定位置として特定される。
【先行技術文献】
【特許文献】
【0016】
【特許文献1】特開2008−134256号公報
【発明の概要】
【発明が解決しようとする課題】
【0017】
しかしながら、従来技術には、以下のような課題がある。
従来のパッシブレーダ装置では、相互相関演算手段16が出力するドップラ周波数差Δf1の情報は、先の図12において、移動目標を固定クラッタから分離するためだけに使用されている。そして、移動目標の速度諸元(移動速度、方向など)は、複数観測フレームにおける位置の変化率(特許文献1の表3における速度の計算式に該当)からしか求めていない。したがって、従来技術で求めていた移動目標の速度諸元は、複数フレームにおける位置から導出した平均移動ベクトルであり、瞬時速度ベクトルを求めることはできない。
【0018】
一般に、パッシブレーダ装置が運用される際の電波源は、FM放送波、アナログテレビジョン放送波、デジタルテレビジョン放送波、携帯電話基地局電波など、全周のユーザ(視聴者)に対して公平に電波が到達するように、電波源の送信アンテナは、無指向性であることがほとんどである。この場合、送信電力がある値に規定されているため、そのエネルギーが全周に分散する。
【0019】
従って、ある特定の方向や領域に対して、自己に備わるアンテナの特性を変化させることで、送信エネルギーを集中して送信可能なレーダ装置(狭義には、モノスタティックレーダ装置と呼ぶ)のような、電力集中作用(送信アンテナ指向性利得)を得ることができない。
【0020】
このため、パッシブレーダ装置では、自己が送信エネルギーを集中して送信可能なレーダ装置に比較して、ある特定の方向や領域に存在する移動目標からの反射電力が極めて低く、長時間の観測データを用いて積分利得を稼ぐ方法が不可欠である。
【0021】
一方、長時間の観測データを得て、効率的な積分利得を得るためには、移動目標の瞬時速度ベクトル(その瞬間の移動速度と方向)を推定する必要がある。なぜならば、移動目標は、1回の観測フレームデータt=1〜Tではある定点に留まっているという仮定をおいていても、これを複数の観測フレーム(すなわち、長時間観測)で行えば、この仮定が成立しなくなるためである。
【0022】
つまり、最初の観測フレームから最後の観測フレームにかけて、移動目標の位置は、変化している。例えば、300m/secの速度で移動している民間航空機の場合、1msecの観測フレームに対しての位置の変化は、0.3mである。
【0023】
しかしながら、この観測フレームを1000回繰返し、全体で1秒間観測したことと等価とした場合には、観測の最初と最後での移動目標の位置変化は、300mに増大してしまう。パッシブレーダ装置100内のA/D変換器14の変換速度が100MHzとすると、1レンジビンは、1/(100×106)×光速≒3mである。このことから、1msecの単一観測フレームでは、1つのレンジ内に収まるが、1秒の全体観測では、実に約100レンジビン移動することになる。これをレンジウォークと呼ぶ。
【0024】
次に、レンジウォークが存在するとなぜ不都合なのかを説明する。
1秒間の観測時系列データを用いて、上式(1)から評価関数Pを求めるとする。このとき、移動目標は、同じ位置に存在し続けているわけではないので、散乱波s(t)の到来時間差τ1は、刻々と変化している。
【0025】
それに対し、直接波d(t−τ)をかけて得られる評価関数Pの値は、観測開始時のτ1(1)から終了時のτ1(T)まで分散してしまい、t=1〜Tの積分効果が弱まることになる。この結果、先の図12ではピークとして得られた移動目標の反応が、低いピーク、もしくはなだらかな丘状になってしまう。
【0026】
このことは、観測した環境のS/N比や移動目標の散乱断面積(RCS:Radar Cross Section)によっては、図12のフロアノイズに埋もれてしまう可能性があり、移動目標の検出ができなくなってしまうという問題を意味している。
【0027】
本発明は、前記のような課題を解決するためになされたものであり、長時間積分時にも評価関数Pの先鋭度が劣化せず、低S/N環境下やステルス目標など低RCSの移動目標に対しても、検出・標定精度を高めることのできるパッシブレーダシステムおよびパッシブレーダ方法を得ることを目的とする。
【課題を解決するための手段】
【0028】
本発明に係るパッシブレーダシステムは、自らは電波を放射することなく、自己の周辺空間内における既存の電波が移動目標に当たって生成される散乱波を受信する第1のアンテナと、複数の第1のアンテナから構成されるアレーアンテナと、アレーアンテナの各素子に対して個別に備わり、アレーアンテナの受信信号から所望の周波数帯域の信号を取り出す複数の第1の受信機と、複数の第1の受信機の出力信号のそれぞれをデジタルデータに変換する複数の第1のA/D変換器と、複数の第1のA/D変換器が出力する時系列データがアレーアンテナの素子番号と対応付けられて記憶される第1の記憶部と、既存の電波を送出する電波源からの直接波を受信する第2のアンテナと、第2のアンテナの受信信号から所望の周波数帯域の信号を取り出す第2の受信機と、第2の受信機の出力信号をデジタルデータに変換する第2のA/D変換器と、第2のA/D変換器が出力する時系列データが記憶される第2の記憶部と、第1の記憶部から読み出した素子数分の時系列データに、第2の記憶部から読み出した同時刻の時系列データを、時間と周波数の2変数として想定される範囲内を全面捜索して相互相関を演算し、移動目標に対する到来時間差およびドップラ周波数差を観測情報として特定する相互相関演算手段と、相互相関演算手段が出力する観測情報と、アレーアンテナによる測角値情報とを用いて、移動目標の位置・高度・角度といった未知諸元を得る目標標定手段とを備えるパッシブレーダ装置を異なる位置に複数台配置してなるパッシブレーダシステムであって、複数台のパッシブレーダ装置のそれぞれは、自己の相互相関演算手段で特定した観測情報を他のパッシブレーダ装置に送信するとともに、他のパッシブレーダ装置の相互相関演算手段で特定された観測情報を受信する通信手段と、すべてのパッシブレーダ装置で特定されたそれぞれの観測情報に基づいて、移動目標の瞬時速度ベクトルを推定する瞬時速度ベクトル推定手段とをさらに備えるものである。
【0029】
また、本発明に係るパッシブレーダ方法は、自らは電波を放射することなく、自己の周辺空間内における既存の電波が移動目標に当たって生成される散乱波をアレーアンテナを介して受信し、既存の電波を送出する電波源からの直接波をアンテナを介して受信し、散乱波と直接波とに基づいて相互相関演算処理を行うことで移動目標に対する到来時間差およびドップラ周波数差を観測情報として特定し、特定した観測情報と、アレーアンテナによる測角値情報とを用いて、移動目標の位置・高度・角度といった未知諸元を算出するパッシブレーダ装置を複数台用いたパッシブレーダ方法であって、他のパッシブレーダ装置による相互相関演算処理で特定された観測情報を、通信手段を介して取得するステップと、自己のパッシブレーダ装置による相互相関演算処理で特定された観測情報を含むすべてのパッシブレーダ装置で特定されたそれぞれの観測情報に基づいて、移動目標の瞬時速度ベクトルを推定するステップとを備えるものである。
【発明の効果】
【0030】
本発明に係るパッシブレーダシステムおよびパッシブレーダ方法によれば、2台以上の複数のパッシブレーダ装置による観測情報に基づいて、移動目標の瞬時速度ベクトルを推定しながら積分を行うことで、長時間積分時にも評価関数Pの先鋭度が劣化せず、低S/N環境下やステルス目標など低RCSの移動目標に対しても、検出・標定精度を高めることのできるパッシブレーダシステムおよびパッシブレーダ方法を得ることができる。
【図面の簡単な説明】
【0031】
【図1】本発明の実施の形態1のパッシブレーダシステムの運用イメージ図である。
【図2】本発明の実施の形態1のパッシブレーダ装置の内部構成を示す図である。
【図3】移動目標の瞬時速度ベクトルvのベクトルBへの射影を説明する図である。
【図4】本発明の実施の形態1のパッシブレーダシステムにおけるそれぞれの構成要素の配置、角度を定義する図である。
【図5】本発明の実施の形態2のパッシブレーダシステムの運用イメージ図である。
【図6】本発明の実施の形態3のパッシブレーダシステムにおける積分利得改善を説明する図である。
【図7】本発明の実施の形態3のパッシブレーダシステムにおける積分利得改善を、複数の観測フレームに対して行うことを説明する図である。
【図8】本発明の実施の形態4のパッシブレーダ装置の相互相関演算手段の実行内容を図11と対比させて説明する図である。
【図9】本発明の実施の形態5のパッシブレーダ装置の内部構成を示す図である。
【図10】従来のパッシブレーダ装置の内部構成を示す図である。
【図11】従来のパッシブレーダ装置の相互相関演算手段の実行内容をイメージ化した図である。
【図12】従来のパッシブレーダ装置の相互相関演算手段による演算結果出力例である。
【図13】従来のパッシブレーダシステムの運用イメージ図である。
【発明を実施するための形態】
【0032】
以下、本発明のパッシブレーダシステムおよびパッシブレーダ方法の好適な実施の形態につき図面を用いて説明する。
【0033】
実施の形態1.
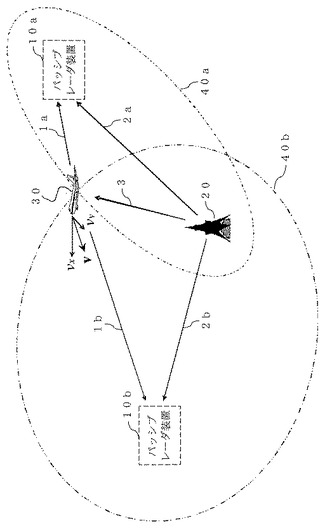
図1は、本発明の実施の形態1におけるパッシブレーダシステムの運用イメージ図である。図1に示すパッシブレーダシステムでは、2台のパッシブレーダ装置10a、10b、電波送信源20、および移動目標30を備えて構成された場合を例示している。従来のパッシブレーダシステムを示した図13の構成と比較すると、本実施の形態1のパッシブレーダシステムを示した図1の構成は、2台のパッシブレーダ装置10a、10bを備えている点が異なっており、この構成により、移動目標30の瞬時速度ベクトルvを求めることができる点を技術的特徴としている。
【0034】
1台目のパッシブレーダ装置10aは、電波送信源20から送信された電波3が移動目標30により散乱して到来する散乱波1aと、電波送信源20から直接到来する直接波2aとを受信する。一方、2台目のパッシブレーダ装置10bは、電波送信源20から送信された電波3が移動目標30により散乱して到来する散乱波1bと、電波送信源20から直接到来する直接波2bとを受信する。
【0035】
1台目のパッシブレーダ装置10a内の相互相関演算手段16aは、従来技術で説明したように、散乱波1aと直接波2aの到来時間差τ1から得られる等距離楕円40aを算出する。同様に、2台目のパッシブレーダ装置10b内の相互相関演算手段16bも、散乱波1bと直接波2bの到来時間差τ2から得られる等距離楕円40bを算出する。
【0036】
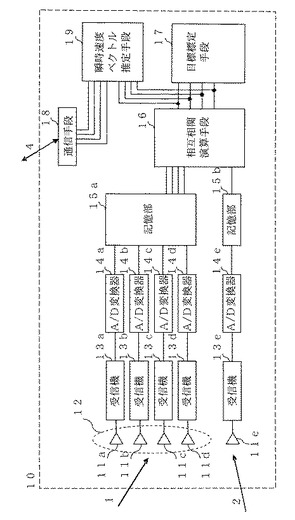
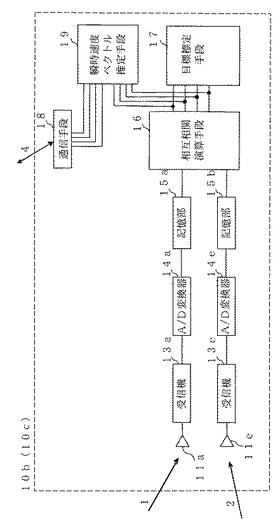
図2は、本発明の実施の形態1におけるパッシブレーダ装置の内部構成図であり、図1に示した1台目のパッシブレーダ装置10aおよび2台目のパッシブレーダ装置10bに共通の構成を示している。
【0037】
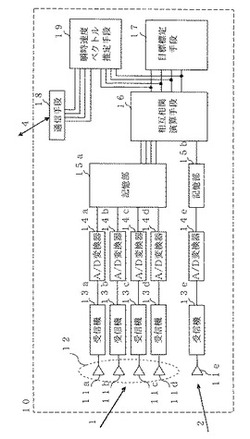
図2における本実施の形態1のパッシブレーダ装置10は、第1のアンテナ11a〜11d、第2のアンテナ11e、第1の受信機13a〜13d、第2の受信機13e、第1のA/D変換器14a〜14d、第2のA/D変換器14e、第1の記憶部15a、第2の記憶部15b、相互相関演算手段16、目標標定手段17、通信手段18、および瞬時速度ベクトル推定手段19を備えている。また、第1のアンテナ11a〜11dにより、アレーアンテナ12が構成されている。
【0038】
従来のパッシブレーダ装置を示した図10の構成と比較すると、本実施の形態1のパッシブレーダ装置を示した図2の構成は、通信手段18および瞬時速度ベクトル推定手段19をさらに備えている点が異なっている。そして、この構成により、移動目標30の瞬時速度ベクトルvを求めることができる点を技術的特徴としている。そこで、このような異なる構成を中心に、以下に説明する。
【0039】
通信手段18は、1台目のパッシブレーダ装置10aおよび2台目のパッシブレーダ装置10b間で互いの観測情報4を通信する手段である。ここで、1台目のパッシブレーダ装置10a内の通信手段18aと、2台目のパッシブレーダ装置10b内の通信手段18bとの間でやり取りされる観測情報4とは、双方のパッシブレーダ装置10a、10b内の相互相関演算手段16a、16bで検出された到来時間差τm、およびドップラ周波数差Δfmの情報(mはパッシブレーダ装置の個体番号を表し、ここではm=1、2)に相当する。
【0040】
また、瞬時速度ベクトル推定手段19は、双方のパッシブレーダ装置10a、10bでやりとりした観測情報である到来時間差τm、およびドップラ周波数差Δfmを用いて、移動目標30の瞬時速度ベクトルvを推定する。
【0041】
次に、瞬時速度ベクトルの推定動作について、詳細に説明する。
従来のパッシブレーダ装置100が移動目標30の位置を標定する原理は、すでに背景技術で述べたとおりである。しかしながら、従来技術では、パッシブレーダ装置100の相互相関演算手段16で検出された移動目標30に対する到来時間差τ1とドップラ周波数差Δf1のうち、到来時間差τ1については等距離楕円40を生成するために使用される。
【0042】
その一方で、ドップラ周波数差Δf1については、評価関数Pの演算結果を表す先の図12において、固定クラッタから0以外のドップラ周波数差を持つ移動目標30を分離するためにしか使用されていない。そして、移動目標30の速度諸元に関しては、複数観測フレーム間の位置変化率から求めた平均移動ベクトルのみしか得られなかった。これに対して、本発明では、到来時間差τとドップラ周波数差Δfの両方を活用して、瞬時速度ベクトルを求めている。
【0043】
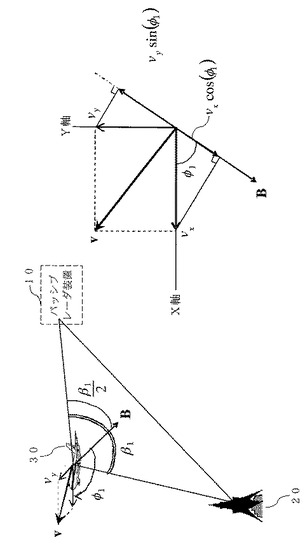
図3は、移動目標の瞬時速度ベクトルvのベクトルBへの射影に関する説明図である。図3に示すように、パッシブレーダ装置10、電波送信源20、および移動目標30の位置が分かれば、パッシブレーダ装置10内の相互相関演算手段16で検出されるドップラ周波数差Δf1は、それぞれの位置関係を用いて、下式(2)で表すことができる。
【0044】
【数2】
【0045】
ここで、上式(2)内の各記号は、以下のものを意味する。
vx、vy:移動目標30の瞬時速度ベクトルvのX軸、Y軸要素
λ:電波送信源20の送信波長
β1:移動目標30、電波送信源20、パッシブレーダ装置10で形成される三角形の、移動目標30に対する頂点の角度
φ1:ベクトルBとX軸のなす角度
また、ベクトルBは、一般に、Bistatic Bisectorと呼ばれる。
【0046】
図3の右側には、位置関係、角度関係が分かりやすいように、デフォルメされたベクトル図が記載されている。1台目のパッシブレーダ装置10aで観測されるドップラ周波数差Δf1は、移動目標30の瞬時速度ベクトルvの各要素vx、vyの、ベクトルBへの射影(ベクトルvとベクトルBの内積)として得られる。
【0047】
今、ここで必要なのは、移動目標30の瞬時速度ベクトルvを求めることである。上式(2)において、λは既知である。また、相互相関演算手段16で検出された到来時間差τ1による等距離楕円40と、アレーアンテナ12の測角値から、移動目標30の位置も分かる。従って、電波送信源20とパッシブレーダ装置10の位置を事前に測っておけば、β1は、計算により求められることとなる。
【0048】
β1が得られれば、X軸とのなす角φ1も求まる。さらに、ドップラ周波数差Δf1も、相互相関演算手段16から得られている。そうすると、未知変数は、瞬時速度ベクトルvの要素vx、vyの2つである。2つの未知変数に対して、上式(2)の方程式1つのみでは、解くことができない。
【0049】
そこで、本発明のパッシブレーダシステムは、先の図1に示したように、2台のパッシブレーダ装置10a、10bを使用して、観測情報量を増やすことで、移動目標30の瞬時速度ベクトルvを推定しながら積分を行うことを可能にしている。
【0050】
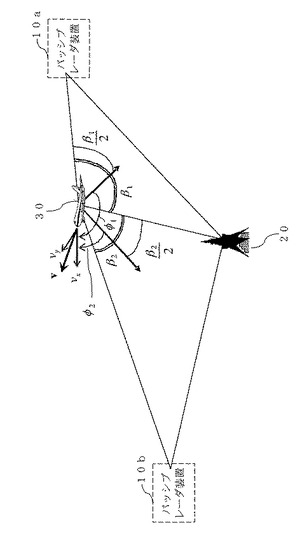
図4は、本発明の実施の形態1のパッシブレーダシステムにおけるそれぞれの構成要素の配置、角度を定義する図である。より具体的には、1台目のパッシブレーダ装置10aと2台目のパッシブレーダ装置10b、および電波送信源20、移動目標30のそれぞれの位置関係、角度関係を示した図である。
【0051】
まず、1台目のパッシブレーダ装置10aで、上式(2)の観測方程式を得る。同様に、2台目のパッシブレーダ装置10bでも、図4の関係から、下式(3)の観測方程式を得る。
【0052】
【数3】
【0053】
なお、上式(3)においても、λは既知である。また、相互相関演算手段16bで検出された到来時間差τ2による等距離楕円40bと、アレーアンテナ12bの測角値から、移動目標30の位置も分かる。従って、電波送信源20とパッシブレーダ装置10bの位置を事前に測っておけば、β2は、計算により求められることとなる。
【0054】
β2が得られれば、X軸とのなす角φ2も求まる。さらに、ドップラ周波数差Δf2も、相互相関演算手段16bから得られている。この結果、未知変数vx、vyの2つに対し、方程式の数は、上式(2)と上式(3)の2つであるため、変数を一意に解くことができる。このようにして、移動目標30の瞬時速度ベクトルvを得ることができる。
【0055】
ただし、上式(2)(3)の2つの方程式を連立させるには、双方のパッシブレーダ装置10a、10bの間で、相互相関演算手段16a、16bが検出した到来時間差τmおよびドップラ周波数差Δfmの情報を共有しなければならない(mはパッシブレーダ装置の個体番号で、ここではm=1、2)。そのために、本発明の2台のパッシブレーダ装置10a、10bは、先の図2に示したように、観測情報4を相互にやりとりするための通信手段18を備えている。
【0056】
以上のように、実施の形態1によれば、2台のパッシブレーダ装置による観測情報に基づいて、移動目標の瞬時速度ベクトルを推定することができる。この結果、長時間積分時にも評価関数Pの先鋭度が劣化せず、低S/N環境下やステルス目標など低RCSの移動目標に対しても、検出・標定精度を高めることのできるパッシブレーダシステムおよびパッシブレーダ方法を得ることができる。
【0057】
実施の形態2.
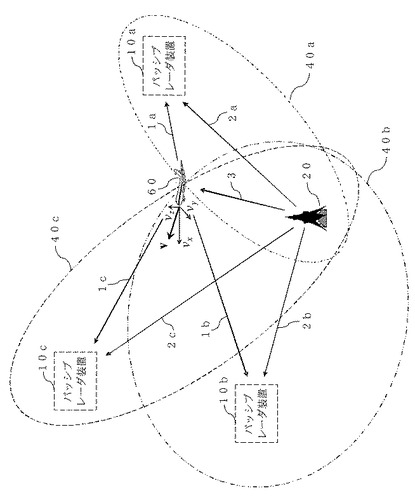
図5は、本発明の実施の形態1におけるパッシブレーダシステムの運用イメージ図である。図5に示すパッシブレーダシステムでは、3台のパッシブレーダ装置10a、10b、10c、電波送信源20、および移動目標30を備えて構成された場合を例示している。先の実施の形態1のパッシブレーダシステムを示した図1の構成と比較すると、本実施の形態2のパッシブレーダシステムを示した図5の構成は、3台目のパッシブレーダ装置10cをさらに備えている点が異なっており、瞬時速度ベクトルの推定精度の向上を図っている。
【0058】
本実施の形態2における3台のパッシブレーダ装置10a、10b、10cは、全て同一の構成をしており、その内部構成は、先の実施の形態1における図2と同じである。なお、先の実施の形態1では、説明を簡略化するため、移動目標30、電波送信源20、パッシブレーダ装置10a、10bは、すべて同一平面上にあると仮定した。しかしながら、実際には、移動目標30は、陸地に設置される電波送信源20とパッシブレーダ装置10a、10bとは通常異なり、ある特定の高度を飛行している。
【0059】
そこで、本実施の形態2は、3台のパッシブレーダ装置10a、10b、10cを備えることで、先の実施の形態1をより現実的な3次元問題に拡張することができ、以下に詳細に説明する。
【0060】
まず、1台目のパッシブレーダ装置10a内の相互相関演算手段16aで検出される移動目標30のドップラ周波数差Δf1は、2次元問題に特化した上式(2)から、下式(4)のように変化する。
【0061】
【数4】
【0062】
ここで、ψ1は仰角である。なお、相互相関演算手段16aで出力される到来時間差τ1に基づき生成される等距離楕円40aは、3次元問題で考えると、立体的な楕円面になる。これに対しては、アレーアンテナ12aを平面アレーにするなどして水平角と仰角の両方を測角可能にしておくことで、3次元曲面上でも移動目標30の位置を特定することが可能となる。
【0063】
同様に、2台目のパッシブレーダ装置10b、3台目のパッシブレーダ装置10cにおいても、下式(5)、(6)の観測方程式が得られる。
【0064】
【数5】
【0065】
上式(4)〜(6)において、λは既知である。また、先の実施の形態1と同様の方法で、φm、βm、ψmは求めることができる(mはパッシブレーダ装置の個体番号を表し、ここではm=1、2、3)。よって、未知変数は、瞬時速度ベクトルvの要素vx、vy、vzの3つである。
【0066】
3つの未知変数に対して、方程式の数は、上式(4)〜(6)の3であるため、変数を一意に解くことが可能である。したがって、3次元に拡張した場合でも、3台のパッシブレーダ装置10a、10b、10cを備え、相互に観測情報をやりとりすることで、移動目標30の瞬時速度ベクトルvを推定することができる。
【0067】
以上のように、実施の形態2によれば、3台のパッシブレーダ装置による観測情報に基づいて、移動目標の瞬時速度ベクトルを推定することができる。この結果、3次元に拡張した場合においても、長時間積分時にも評価関数Pの先鋭度が劣化せず、低S/N環境下やステルス目標など低RCSの移動目標に対しても、検出・標定精度を高めることのできるパッシブレーダシステムおよびパッシブレーダ方法を得ることができる。
【0068】
実施の形態3.
本実施の形態3では、第N観測フレームの観測情報に基づいて、第(N+1)観測フレームの観測情報を推定し、情報量を増やすことで、移動目標の検出・標定精度を高める方法について説明する。なお、本実施の形態3におけるパッシブレーダシステムの構成は、先の実施の形態2における図5の構成と同一である。
【0069】
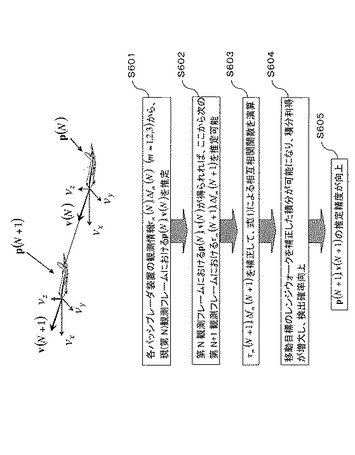
次に、本実施の形態3におけるパッシブレーダシステムの一連動作について、フローチャートを用いて説明する。図6は、本発明の実施の形態3のパッシブレーダシステムにおける積分利得改善に関する説明図である。
【0070】
先の実施の形態2で説明したように、3台のパッシブレーダ装置10a、10b、10cにおける第N観測フレームの観測情報である到来時間差τm(N)、およびドップラ周波数差Δfm(N)を用いて、移動目標30の位置p(N)と、瞬時速度ベクトルv(N)を推定することができる(ステップS601)。
【0071】
したがって、p(N)とv(N)を用いて、次の観測フレーム(現観測フレームから次の観測フレームまでのタイムラグは既知であるとする)における移動目標30の位置p(N+1)を推定することができる。さらに、電波送信源20、および3台のパッシブレーダ装置10a、10b、10cの位置が既知であり、次フレームにおける移動目標30の位置p(N+1)が推定できれば、幾何学的計算により第(N+1)観測フレームにおける到来時間差τm(N+1)、およびドップラ周波数差Δfm(N+1)を推定することができる(ステップS602)。
【0072】
ただし、このタイムラグは、非常に長いものではなく、かつ、タイムラグ中に移動目標30の瞬時速度ベクトルが急変することはないと仮定する。実際、タイムラグが1msec程度以内であれば、民間航空機や戦闘機クラスの航空機でも、かなりの急旋回や上昇下降を行わない限り、この仮定は成立する。
【0073】
受信環境によって散乱波のS/N比が劣化する、あるいはステルス性能を持つ低RCS目標の検出・標定に対しては、長時間積分により積分利得を稼ぐことが不可欠であることを前述した。ここでは、第N観測フレームと第(N+1)観測フレームの2つの観測フレームを用いることで、移動目標30に対する評価関数Pのピークの先鋭度を2倍にすることを目的とする。
【0074】
予測した位置p(N+1)が数レンジビンに及ぶものだとすると、第(N+1)観測フレームで検出される到来時間差τm(N+1)、およびドップラ周波数差Δfm(N+1)は、第N観測フレームで検出される到来時間差τm(N)、およびドップラ周波数差Δfm(N)と異なる。この結果、ピークが2つに割れてしまい、先鋭度が劣化することとなる。
【0075】
そこで、予測した位置p(N+1)を用いて、先のステップS602で推定した第(N+1)観測フレームに対する到来時間差τm(N+1)、およびドップラ周波数差Δfm(N+1)を、第N観測フレームに対する到来時間差τm(N)、およびドップラ周波数差Δfm(N)に一致させる補正を行う。これは、つまり、移動目標30の位置の変位(レンジウォーク)を相殺することを意味する。具体的には、上式(1)の演算で、下式(7)のような操作を行う(ステップS603)。
【0076】
【数6】
【0077】
ここで、上式(7)内の各記号は、以下のものを意味する。
PN+1:第(N+1)観測フレームの評価関数
【0078】
このように、第(N+1)観測フレームに対する相互相関演算を補正し、第N観測フレームと第(N+1)観測フレームのデータを連続データとして用いることで、移動目標のレンジウォークを補正した積分が可能となる(ステップS604)。この結果、積分利得を2倍とし、評価関数Pの先鋭度を2倍に高めることができ、移動目標30の検出確率と測位精度の向上を図ることができる(ステップS605)。
【0079】
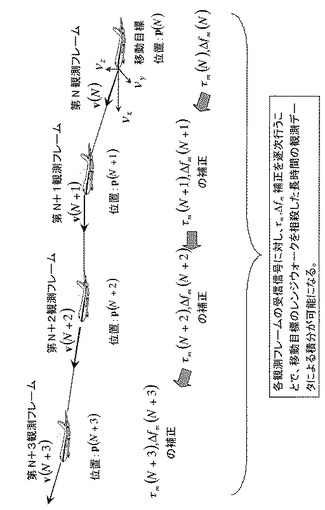
図7は、本発明の実施の形態3のパッシブレーダシステムにおける積分利得改善を、複数の観測フレームに対して行った場合の説明図である。この図7は、先の図6による2フレーム間の処理を4フレームに渡って発展させたものである。具体的には、この図7は、第N観測フレームから第(N+3)観測フレームまでのデータを連続データとして扱い、積分利得を4倍にして評価関数の先鋭度を4倍にするためのイメージ図を示している。
【0080】
実施している操作は、先の図6のフローチャートに記載したものと同じであり、各観測フレーム毎に、到来時間差τm(N)、およびドップラ周波数差Δfm(N)の補正を行いながら、相互相関演算を行うというものである。
【0081】
以上のように、実施の形態3によれば、複数の観測フレームに渡って移動目標がレンジウォークを行う状況下でも、その観測フレームにおける移動目標の瞬時速度ベクトルvを用いて補正を行うことで、長時間の観測データによる積分が可能となる。
【0082】
実施の形態4.
本実施の形態4では、相互相関演算手段16による演算負荷の低減策について説明する。なお、本実施の形態4におけるシステム全体の構成は、先の実施の形態2における図5の構成と同一である。また、各パッシブレーダ装置10a、10b、10cの内部構成も先の図2と同じである。
【0083】
次に、相互相関演算手段16による演算負荷の低減に関する具体的な方策について説明する。従来のパッシブレーダ装置100の相互相関演算手段16では、先の図11に示したとおり、想定される到来時間差τ、およびドップラ周波数差Δfの範囲内を2次元全面捜索して、移動目標30による到来時間差τ1とドップラ周波数差Δf1を検出していた。
【0084】
このような2次元全面捜索は、非常に高い演算負荷を持ち、パッシブレーダ装置100全体の装置規模の増大、およびリアクションタイム(観測データを得てから答えが出るまでの時間)の低下を招くといった問題があった。
【0085】
移動目標30の瞬時速度ベクトルvを推定可能としても、これらの問題を持ち越したままでは、パッシブレーダシステム全体としてのコストインパクトが大きい。従って、相互相関演算に関する演算負荷を改善し、装置の小型化、低価格化を実現することが重要となる。
【0086】
本実施の形態4におけるパッシブレーダシステムでは、1台目のパッシブレーダ装置10a単体で、第N観測フレームに対する移動目標30の位置p(N)が推定可能である。2台目のパッシブレーダ装置10b単体、および3台目のパッシブレーダ装置10c単体でも、移動目標30の位置p(N)が得られる。しかしながら、パッシブレーダ装置10b、10cで得られる位置p(N)は、システム構築上のバックアップともいえるし、1台目のパッシブレーダ装置10aの位置推定精度を検証するためのものともいえる。しかし、同時に冗長であるともいえる。
【0087】
そこで、2台目のパッシブレーダ装置10bおよび3台目のパッシブレーダ装置10cの設置位置は、既知であるとすると、1台目のパッシブレーダ装置10aが標定した移動目標30の位置p(N)と、2台目のパッシブレーダ装置10bおよび3台目のパッシブレーダ装置10cの相対位置関係は、幾何学的計算により求めることが可能である。
【0088】
そうすると、2台目のパッシブレーダ装置10bおよび3台目のパッシブレーダ装置10cのそれぞれと移動目標30との距離も分かる。従って、到来時間差τ2、τ3は、2台目のパッシブレーダ装置10bの相互相関演算手段16b、および3台目のパッシブレーダ装置10cの相互相関演算手段16cで捜索しなくても、分かってしまう。
【0089】
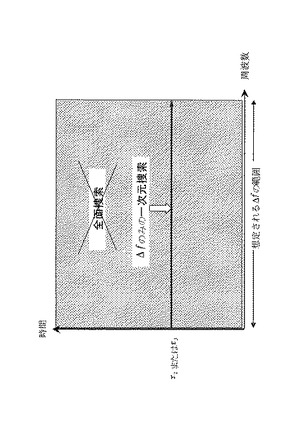
図8は、本発明の実施の形態4の2台目以降のパッシブレーダ装置の相互相関演算手段16の実行内容をイメージ化した図であり、従来の図11と対比される図である。図8に示したように、2台目のパッシブレーダ装置10b内の相互相関演算手段16bおよび3台目のパッシブレーダ装置10c内の相互相関演算手段16cでは、到来時間差τ、ドップラ周波数差Δfの2次元全面捜索だった通常の相互相関演算を、時間方向はτ2またはτ3の固定値として、Δfだけの1次元探索に抑えることができる。
【0090】
したがって、2台目のパッシブレーダ装置10bおよび3台目のパッシブレーダ装置10cの相互相関演算手段16b、16cは、演算負荷を低く抑えることができる。この結果、演算装置の小型・軽量化、および演算時間短縮化によるリアクションタイムの向上を実現できる。
【0091】
以上のように、実施の形態4によれば、複数台のパッシブレーダ装置を用いる場合に、1台目のパッシブレーダ装置以外は、相互相関演算を1次元探索に抑えることで、演算装置の小型・軽量化、および演算時間短縮化によるリアクションタイムの向上を図ったパッシブレーダシステムおよびパッシブレーダ方法を得ることができる。
【0092】
実施の形態5.
先の実施の形態4では、相互相関演算手段16の演算負荷の軽減策について説明した。これに対して、本実施の形態5では、3台のパッシブレーダ装置を用いる場合を例に、1台目のパッシブレーダ装置に対して、2台目、3台目のパッシブレーダ装置のハードウェア構成を簡素化することで、装置規模を削減し、小型軽量化・低消費電力化・可搬性向上を図る場合について説明する。
【0093】
なお、本実施の形態5におけるシステム全体の構成は、先の実施の形態2における図5の構成と同一である。また、1台目のパッシブレーダ装置10aの内部構成は、先の図2と同じである。
【0094】
図9は、本発明の実施の形態5における2台目以降のパッシブレーダ装置の内部構成図である。図9における本実施の形態5の2台目以降のパッシブレーダ装置10b(10c)は、第1のアンテナ11a、第2のアンテナ11e、第1の受信機13a、第2の受信機13e、第1のA/D変換器14a、第2のA/D変換器14e、第1の記憶部15a、第2の記憶部15b、相互相関演算手段16、目標標定手段17、通信手段18、および瞬時速度ベクトル推定手段19を備えている。
【0095】
1台目のパッシブレーダ装置10aを示した図2の内部構成と比較すると、2台目以降のパッシブレーダ装置10b、10cを示した図9の内部構成は、第1のアンテナ11b〜10d、第1の受信機13b〜13d、第1のA/D変換器14b〜14dを備えておらず、散乱波1に対する受信系が1系統で構成されている点が異なっている。
【0096】
次に、2台目以降のパッシブレーダ装置10b、10cの構成の簡素化について、説明する。
本発明のパッシブレーダシステムでは、1台目のパッシブレーダ装置10a単体で第N観測フレームに対する移動目標30の位置p(N)が推定可能である。2台目のパッシブレーダ装置10b単体、3台目のパッシブレーダ装置10c単体でも移動目標30の位置p(N)が得られる。しかしながら、パッシブレーダ装置10b、10cで得られる位置p(N)は、システム構築上のバックアップともいえるし、1台目のパッシブレーダ装置10aの位置推定精度を検証するためのものともいえる。しかし、同時に冗長であるともいえる。
【0097】
つまり、1台目のパッシブレーダ装置10a単体で、立体の等距離楕円面と水平角、仰角の測角値により移動目標30の位置p(N)を推定できるのであれば、2台目のパッシブレーダ装置10bおよび3台目のパッシブレーダ装置10cでは、アレーアンテナ12による測角機能は、冗長である。
【0098】
2台目のパッシブレーダ装置10b、3台目のパッシブレーダ装置10cの設置目的は、上式(5)、(6)のドップラ周波数差に関する観測方程式を得ることであり、これに特化すれば、測角機能は不要になり、アレーアンテナ12は、不要である。つまり、第1のアンテナ11は、1素子(第1のアンテナ11a)のみでよい。これは、第1のアンテナ11に続く、第1の受信機13、第1のA/D変換器14の台数削減、さらに、第1の記憶部15aの記憶容量の抑圧効果も同時にもたらす。
【0099】
以上のように、実施の形態5によれば、複数台のパッシブレーダ装置を用いる場合に、2台目以降のパッシブレーダ装置をドップラ周波数差に関する観測方程式を得ることに特化させることで、構成を簡素化することができる。この結果、移動目標の位置p(N)、瞬時速度ベクトルv(N)を推定可能としながら、2台目以降のパッシブレーダ装置の装置規模を削減し、小型軽量化・低消費電力化・可搬性向上を図ったパッシブレーダシステムおよびパッシブレーダ方法を得ることができる。
【0100】
なお、本発明のパッシブレーダシステムが対象とする、自己の周辺に既に存在する電波としては、FM放送波、アナログテレビジョン放送波、デジタルテレビジョン放送波、携帯電話基地局電波、衛星放送波、HF(短波)放送波、既知のレーダ装置、およびこれ以外にも利用可能な電波のいずれか、または複数を組み合わせて使用することが可能である。
【0101】
ただし、使用する電波の周波数帯に対してアンテナ装置の大きさが変わり、受信機の通過/阻止帯域が変わり、A/D変換器の変換速度が変わる。これらは、すべてパッシブレーダシステムとして、周囲環境の電波のうちS/N比が高いなどの条件、設置面積、可搬性などの運用面での選定根拠となる。しかし、基本動作原理は、すべて同一であるため、本発明のパッシブレーダシステムは、どの電波に対しても有効に動作する。
【0102】
また、本発明のパッシブレーダシステムでは、測角手法について特に言明していないが、モノパルス測角、DBF(Digital Beam Forming)、および、MUSIC(Multiple Signal Classification)、ESPRIT(Estimation of Signal Parameters via Rotational Invariance Techniques)、最尤法などの超分解能測角法を用いてもよい。
【符号の説明】
【0103】
10、10a、10b、10c パッシブレーダ装置、11 アンテナ、11a〜11d 第1のアンテナ、11e 第2のアンテナ、12、12a、12b アレーアンテナ、13 受信機、13a〜13d 第1の受信機、13e 第2の受信機、14 A/D変換器、14a〜14d 第1のA/D変換器、14e 第2のA/D変換器、15 記憶部、15a 第1の記憶部、15b 第2の記憶部、16、16a、16b、16c 相互相関演算手段、17 目標標定手段、18 通信装置、19 瞬時速度ベクトル推定装置、20 電波送信源(電波源)、30 移動目標。
【技術分野】
【0001】
本発明は、自らは電波を送信せず、自己の周辺に既に存在する電波(既存の電波)が移動目標に当たることで生成される散乱波を受信し、一方で、既に存在する電波の電波源から直接到来する直接波を受信し、散乱波と直接波の到来時間差、およびドップラ周波数差、さらに自己のアレーアンテナによる測角値を元に、移動目標の位置を標定するパッシブレーダシステムおよびパッシブレーダ方法に関するものである。
【背景技術】
【0002】
図10は、従来のパッシブレーダ装置の内部構成図である(例えば、特許文献1参照)。図10における従来のパッシブレーダ装置100は、第1のアンテナ11a〜11d、第2のアンテナ11e、第1の受信機13a〜13d、第2の受信機13e、第1のA/D変換器14a〜14d、第2のA/D変換器14e、第1の記憶部15a、第2の記憶部15b、相互相関演算手段16、および目標標定手段17を備えている。また、第1のアンテナ11a〜11dにより、アレーアンテナ12が構成されている。
【0003】
パッシブレーダ装置100は、散乱波1と直接波2を受信する。そして、散乱波1は、第1のアンテナ11a〜11dを有するアレーアンテナ12を介して第1の受信機13a〜13dで受信され、第1のA/D変換器14a〜14dによりA/D変換され、アレーアンテナ12に含まれる第1のアンテナ11a〜11dの番号(素子番号)に対応付けられて第1の記憶部15aに記憶される。
【0004】
一方、直接波2は、第2のアンテナ11eを介して第2の受信機13eで受信され、第2のA/D変換器14eによりA/D変換され、第2の記憶部15bに記憶される。ここで、第2のアンテナ11e、第2の受信機13e、第2のA/D変換器14eは、それぞれ、第1のアンテナ11a〜11d、第1の受信機13a〜13d、第1のA/D変換器14a〜14dと同一機能を有するものである。
【0005】
次に、従来のパッシブレーダ装置の一般的な目標標定原理について説明する。
散乱波1は、電波源が送出した電波が目標に当たることで、パッシブレーダ装置100に到来する。従って、電波源から直接パッシブレーダ装置100に到来する直接波よりも、同じ波形諸元を持っているが、到来時間が遅れている。
【0006】
また、目標が移動している場合には、移動目標に当たった電波は、目標の移動速度に応じて周波数がシフトする。これをドップラ周波数差と呼ぶ。パッシブレーダ装置100内の相互相関演算手段16は、記憶部15aに記憶された散乱波1の時系列データと、記憶部15bに記憶された直接波2の時系列データを用いて、次式(1)の評価関数に関する演算を行う。
【0007】
【数1】
【0008】
ここで、上式(1)内の各記号は、以下のものを意味する。
s(t):散乱波受信信号
d(t):直接波受信信号
t:A/D変換器のサンプル番号
T:1回の観測フレームに用いるデータサンプル数
P:評価関数
τ:散乱波受信信号s(t)と直接波受信信号d(t)との到来時間差
Δf:散乱波受信信号s(t)と直接波受信信号d(t)のドップラ周波数差
【0009】
このように、到来時間差をτとすると、s(t)×d(t−τ)で、評価関数は最大値をとる。同時に、散乱波1のドップラ周波数差を補正するために、上式(1)では、exp(−j2πΔft)により補正をかけている。なお、この場合の観測時間t=1〜Tの間、移動目標は、ある定点に留まっているという仮定をおいている。
【0010】
図11は、従来のパッシブレーダ装置の相互相関演算手段16における評価関数の捜索範囲を示した説明図である。相互相関演算手段16は、上式(1)の評価関数に関し、想定される到来時間差τの範囲、ドップラ周波数差Δfの範囲で走査するため、図11に示すように、2次元の全面捜索が必要となる。この結果、多大な演算量を処理しなければならない。
【0011】
図12は、従来のパッシブレーダ装置の相互相関演算手段16における評価関数の演算結果の一例を3次元グラフとして示した説明図である。図12に示すように、まずは、ドップラ周波数差=0の反応が多く見られる。これは、山や人工建造物などの固定物による反射によるものであり、移動目標を標定対象とするレーダ装置から見ると障害物(固定クラッタ)に相当する。
【0012】
注目すべきは、図12中の点線の楕円で囲んだ部分に、ドップラ周波数差=0でないピークが見られる点である。これは、標定対象としている移動目標による反応であり、このピーク位置から、移動目標に対する到来時間差τ1、およびドップラ周波数差Δf1を得ることができる。
【0013】
次に、目標標定手段17の動作について説明する。図13は、従来のパッシブレーダシステムの運用イメージ図であり、具体的には、1台のパッシブレーダ装置100内の目標標定手段17による移動目標30の標定方法を図解したものである。目標標定手段17は、相互相関演算手段16で得られた到来時間差τ1から目標の存在する候補を生成する。
【0014】
ここで、説明を簡略化するために、この問題を2次元平面で考えることとする。一般に、電波源20とパッシブレーダ装置100の位置が既知であるため、到来時間差がτ1となる候補は、電波源20とパッシブレーダ装置100の位置を焦点とする楕円上に限定される。この楕円を等距離楕円という。
【0015】
そして、最終的に、パッシブレーダ装置100に備わるアレーアンテナ12による測角値から、散乱波1の到来方向を求めることで、等距離楕円と到来方向との交点が移動目標30の推定位置として特定される。
【先行技術文献】
【特許文献】
【0016】
【特許文献1】特開2008−134256号公報
【発明の概要】
【発明が解決しようとする課題】
【0017】
しかしながら、従来技術には、以下のような課題がある。
従来のパッシブレーダ装置では、相互相関演算手段16が出力するドップラ周波数差Δf1の情報は、先の図12において、移動目標を固定クラッタから分離するためだけに使用されている。そして、移動目標の速度諸元(移動速度、方向など)は、複数観測フレームにおける位置の変化率(特許文献1の表3における速度の計算式に該当)からしか求めていない。したがって、従来技術で求めていた移動目標の速度諸元は、複数フレームにおける位置から導出した平均移動ベクトルであり、瞬時速度ベクトルを求めることはできない。
【0018】
一般に、パッシブレーダ装置が運用される際の電波源は、FM放送波、アナログテレビジョン放送波、デジタルテレビジョン放送波、携帯電話基地局電波など、全周のユーザ(視聴者)に対して公平に電波が到達するように、電波源の送信アンテナは、無指向性であることがほとんどである。この場合、送信電力がある値に規定されているため、そのエネルギーが全周に分散する。
【0019】
従って、ある特定の方向や領域に対して、自己に備わるアンテナの特性を変化させることで、送信エネルギーを集中して送信可能なレーダ装置(狭義には、モノスタティックレーダ装置と呼ぶ)のような、電力集中作用(送信アンテナ指向性利得)を得ることができない。
【0020】
このため、パッシブレーダ装置では、自己が送信エネルギーを集中して送信可能なレーダ装置に比較して、ある特定の方向や領域に存在する移動目標からの反射電力が極めて低く、長時間の観測データを用いて積分利得を稼ぐ方法が不可欠である。
【0021】
一方、長時間の観測データを得て、効率的な積分利得を得るためには、移動目標の瞬時速度ベクトル(その瞬間の移動速度と方向)を推定する必要がある。なぜならば、移動目標は、1回の観測フレームデータt=1〜Tではある定点に留まっているという仮定をおいていても、これを複数の観測フレーム(すなわち、長時間観測)で行えば、この仮定が成立しなくなるためである。
【0022】
つまり、最初の観測フレームから最後の観測フレームにかけて、移動目標の位置は、変化している。例えば、300m/secの速度で移動している民間航空機の場合、1msecの観測フレームに対しての位置の変化は、0.3mである。
【0023】
しかしながら、この観測フレームを1000回繰返し、全体で1秒間観測したことと等価とした場合には、観測の最初と最後での移動目標の位置変化は、300mに増大してしまう。パッシブレーダ装置100内のA/D変換器14の変換速度が100MHzとすると、1レンジビンは、1/(100×106)×光速≒3mである。このことから、1msecの単一観測フレームでは、1つのレンジ内に収まるが、1秒の全体観測では、実に約100レンジビン移動することになる。これをレンジウォークと呼ぶ。
【0024】
次に、レンジウォークが存在するとなぜ不都合なのかを説明する。
1秒間の観測時系列データを用いて、上式(1)から評価関数Pを求めるとする。このとき、移動目標は、同じ位置に存在し続けているわけではないので、散乱波s(t)の到来時間差τ1は、刻々と変化している。
【0025】
それに対し、直接波d(t−τ)をかけて得られる評価関数Pの値は、観測開始時のτ1(1)から終了時のτ1(T)まで分散してしまい、t=1〜Tの積分効果が弱まることになる。この結果、先の図12ではピークとして得られた移動目標の反応が、低いピーク、もしくはなだらかな丘状になってしまう。
【0026】
このことは、観測した環境のS/N比や移動目標の散乱断面積(RCS:Radar Cross Section)によっては、図12のフロアノイズに埋もれてしまう可能性があり、移動目標の検出ができなくなってしまうという問題を意味している。
【0027】
本発明は、前記のような課題を解決するためになされたものであり、長時間積分時にも評価関数Pの先鋭度が劣化せず、低S/N環境下やステルス目標など低RCSの移動目標に対しても、検出・標定精度を高めることのできるパッシブレーダシステムおよびパッシブレーダ方法を得ることを目的とする。
【課題を解決するための手段】
【0028】
本発明に係るパッシブレーダシステムは、自らは電波を放射することなく、自己の周辺空間内における既存の電波が移動目標に当たって生成される散乱波を受信する第1のアンテナと、複数の第1のアンテナから構成されるアレーアンテナと、アレーアンテナの各素子に対して個別に備わり、アレーアンテナの受信信号から所望の周波数帯域の信号を取り出す複数の第1の受信機と、複数の第1の受信機の出力信号のそれぞれをデジタルデータに変換する複数の第1のA/D変換器と、複数の第1のA/D変換器が出力する時系列データがアレーアンテナの素子番号と対応付けられて記憶される第1の記憶部と、既存の電波を送出する電波源からの直接波を受信する第2のアンテナと、第2のアンテナの受信信号から所望の周波数帯域の信号を取り出す第2の受信機と、第2の受信機の出力信号をデジタルデータに変換する第2のA/D変換器と、第2のA/D変換器が出力する時系列データが記憶される第2の記憶部と、第1の記憶部から読み出した素子数分の時系列データに、第2の記憶部から読み出した同時刻の時系列データを、時間と周波数の2変数として想定される範囲内を全面捜索して相互相関を演算し、移動目標に対する到来時間差およびドップラ周波数差を観測情報として特定する相互相関演算手段と、相互相関演算手段が出力する観測情報と、アレーアンテナによる測角値情報とを用いて、移動目標の位置・高度・角度といった未知諸元を得る目標標定手段とを備えるパッシブレーダ装置を異なる位置に複数台配置してなるパッシブレーダシステムであって、複数台のパッシブレーダ装置のそれぞれは、自己の相互相関演算手段で特定した観測情報を他のパッシブレーダ装置に送信するとともに、他のパッシブレーダ装置の相互相関演算手段で特定された観測情報を受信する通信手段と、すべてのパッシブレーダ装置で特定されたそれぞれの観測情報に基づいて、移動目標の瞬時速度ベクトルを推定する瞬時速度ベクトル推定手段とをさらに備えるものである。
【0029】
また、本発明に係るパッシブレーダ方法は、自らは電波を放射することなく、自己の周辺空間内における既存の電波が移動目標に当たって生成される散乱波をアレーアンテナを介して受信し、既存の電波を送出する電波源からの直接波をアンテナを介して受信し、散乱波と直接波とに基づいて相互相関演算処理を行うことで移動目標に対する到来時間差およびドップラ周波数差を観測情報として特定し、特定した観測情報と、アレーアンテナによる測角値情報とを用いて、移動目標の位置・高度・角度といった未知諸元を算出するパッシブレーダ装置を複数台用いたパッシブレーダ方法であって、他のパッシブレーダ装置による相互相関演算処理で特定された観測情報を、通信手段を介して取得するステップと、自己のパッシブレーダ装置による相互相関演算処理で特定された観測情報を含むすべてのパッシブレーダ装置で特定されたそれぞれの観測情報に基づいて、移動目標の瞬時速度ベクトルを推定するステップとを備えるものである。
【発明の効果】
【0030】
本発明に係るパッシブレーダシステムおよびパッシブレーダ方法によれば、2台以上の複数のパッシブレーダ装置による観測情報に基づいて、移動目標の瞬時速度ベクトルを推定しながら積分を行うことで、長時間積分時にも評価関数Pの先鋭度が劣化せず、低S/N環境下やステルス目標など低RCSの移動目標に対しても、検出・標定精度を高めることのできるパッシブレーダシステムおよびパッシブレーダ方法を得ることができる。
【図面の簡単な説明】
【0031】
【図1】本発明の実施の形態1のパッシブレーダシステムの運用イメージ図である。
【図2】本発明の実施の形態1のパッシブレーダ装置の内部構成を示す図である。
【図3】移動目標の瞬時速度ベクトルvのベクトルBへの射影を説明する図である。
【図4】本発明の実施の形態1のパッシブレーダシステムにおけるそれぞれの構成要素の配置、角度を定義する図である。
【図5】本発明の実施の形態2のパッシブレーダシステムの運用イメージ図である。
【図6】本発明の実施の形態3のパッシブレーダシステムにおける積分利得改善を説明する図である。
【図7】本発明の実施の形態3のパッシブレーダシステムにおける積分利得改善を、複数の観測フレームに対して行うことを説明する図である。
【図8】本発明の実施の形態4のパッシブレーダ装置の相互相関演算手段の実行内容を図11と対比させて説明する図である。
【図9】本発明の実施の形態5のパッシブレーダ装置の内部構成を示す図である。
【図10】従来のパッシブレーダ装置の内部構成を示す図である。
【図11】従来のパッシブレーダ装置の相互相関演算手段の実行内容をイメージ化した図である。
【図12】従来のパッシブレーダ装置の相互相関演算手段による演算結果出力例である。
【図13】従来のパッシブレーダシステムの運用イメージ図である。
【発明を実施するための形態】
【0032】
以下、本発明のパッシブレーダシステムおよびパッシブレーダ方法の好適な実施の形態につき図面を用いて説明する。
【0033】
実施の形態1.
図1は、本発明の実施の形態1におけるパッシブレーダシステムの運用イメージ図である。図1に示すパッシブレーダシステムでは、2台のパッシブレーダ装置10a、10b、電波送信源20、および移動目標30を備えて構成された場合を例示している。従来のパッシブレーダシステムを示した図13の構成と比較すると、本実施の形態1のパッシブレーダシステムを示した図1の構成は、2台のパッシブレーダ装置10a、10bを備えている点が異なっており、この構成により、移動目標30の瞬時速度ベクトルvを求めることができる点を技術的特徴としている。
【0034】
1台目のパッシブレーダ装置10aは、電波送信源20から送信された電波3が移動目標30により散乱して到来する散乱波1aと、電波送信源20から直接到来する直接波2aとを受信する。一方、2台目のパッシブレーダ装置10bは、電波送信源20から送信された電波3が移動目標30により散乱して到来する散乱波1bと、電波送信源20から直接到来する直接波2bとを受信する。
【0035】
1台目のパッシブレーダ装置10a内の相互相関演算手段16aは、従来技術で説明したように、散乱波1aと直接波2aの到来時間差τ1から得られる等距離楕円40aを算出する。同様に、2台目のパッシブレーダ装置10b内の相互相関演算手段16bも、散乱波1bと直接波2bの到来時間差τ2から得られる等距離楕円40bを算出する。
【0036】
図2は、本発明の実施の形態1におけるパッシブレーダ装置の内部構成図であり、図1に示した1台目のパッシブレーダ装置10aおよび2台目のパッシブレーダ装置10bに共通の構成を示している。
【0037】
図2における本実施の形態1のパッシブレーダ装置10は、第1のアンテナ11a〜11d、第2のアンテナ11e、第1の受信機13a〜13d、第2の受信機13e、第1のA/D変換器14a〜14d、第2のA/D変換器14e、第1の記憶部15a、第2の記憶部15b、相互相関演算手段16、目標標定手段17、通信手段18、および瞬時速度ベクトル推定手段19を備えている。また、第1のアンテナ11a〜11dにより、アレーアンテナ12が構成されている。
【0038】
従来のパッシブレーダ装置を示した図10の構成と比較すると、本実施の形態1のパッシブレーダ装置を示した図2の構成は、通信手段18および瞬時速度ベクトル推定手段19をさらに備えている点が異なっている。そして、この構成により、移動目標30の瞬時速度ベクトルvを求めることができる点を技術的特徴としている。そこで、このような異なる構成を中心に、以下に説明する。
【0039】
通信手段18は、1台目のパッシブレーダ装置10aおよび2台目のパッシブレーダ装置10b間で互いの観測情報4を通信する手段である。ここで、1台目のパッシブレーダ装置10a内の通信手段18aと、2台目のパッシブレーダ装置10b内の通信手段18bとの間でやり取りされる観測情報4とは、双方のパッシブレーダ装置10a、10b内の相互相関演算手段16a、16bで検出された到来時間差τm、およびドップラ周波数差Δfmの情報(mはパッシブレーダ装置の個体番号を表し、ここではm=1、2)に相当する。
【0040】
また、瞬時速度ベクトル推定手段19は、双方のパッシブレーダ装置10a、10bでやりとりした観測情報である到来時間差τm、およびドップラ周波数差Δfmを用いて、移動目標30の瞬時速度ベクトルvを推定する。
【0041】
次に、瞬時速度ベクトルの推定動作について、詳細に説明する。
従来のパッシブレーダ装置100が移動目標30の位置を標定する原理は、すでに背景技術で述べたとおりである。しかしながら、従来技術では、パッシブレーダ装置100の相互相関演算手段16で検出された移動目標30に対する到来時間差τ1とドップラ周波数差Δf1のうち、到来時間差τ1については等距離楕円40を生成するために使用される。
【0042】
その一方で、ドップラ周波数差Δf1については、評価関数Pの演算結果を表す先の図12において、固定クラッタから0以外のドップラ周波数差を持つ移動目標30を分離するためにしか使用されていない。そして、移動目標30の速度諸元に関しては、複数観測フレーム間の位置変化率から求めた平均移動ベクトルのみしか得られなかった。これに対して、本発明では、到来時間差τとドップラ周波数差Δfの両方を活用して、瞬時速度ベクトルを求めている。
【0043】
図3は、移動目標の瞬時速度ベクトルvのベクトルBへの射影に関する説明図である。図3に示すように、パッシブレーダ装置10、電波送信源20、および移動目標30の位置が分かれば、パッシブレーダ装置10内の相互相関演算手段16で検出されるドップラ周波数差Δf1は、それぞれの位置関係を用いて、下式(2)で表すことができる。
【0044】
【数2】
【0045】
ここで、上式(2)内の各記号は、以下のものを意味する。
vx、vy:移動目標30の瞬時速度ベクトルvのX軸、Y軸要素
λ:電波送信源20の送信波長
β1:移動目標30、電波送信源20、パッシブレーダ装置10で形成される三角形の、移動目標30に対する頂点の角度
φ1:ベクトルBとX軸のなす角度
また、ベクトルBは、一般に、Bistatic Bisectorと呼ばれる。
【0046】
図3の右側には、位置関係、角度関係が分かりやすいように、デフォルメされたベクトル図が記載されている。1台目のパッシブレーダ装置10aで観測されるドップラ周波数差Δf1は、移動目標30の瞬時速度ベクトルvの各要素vx、vyの、ベクトルBへの射影(ベクトルvとベクトルBの内積)として得られる。
【0047】
今、ここで必要なのは、移動目標30の瞬時速度ベクトルvを求めることである。上式(2)において、λは既知である。また、相互相関演算手段16で検出された到来時間差τ1による等距離楕円40と、アレーアンテナ12の測角値から、移動目標30の位置も分かる。従って、電波送信源20とパッシブレーダ装置10の位置を事前に測っておけば、β1は、計算により求められることとなる。
【0048】
β1が得られれば、X軸とのなす角φ1も求まる。さらに、ドップラ周波数差Δf1も、相互相関演算手段16から得られている。そうすると、未知変数は、瞬時速度ベクトルvの要素vx、vyの2つである。2つの未知変数に対して、上式(2)の方程式1つのみでは、解くことができない。
【0049】
そこで、本発明のパッシブレーダシステムは、先の図1に示したように、2台のパッシブレーダ装置10a、10bを使用して、観測情報量を増やすことで、移動目標30の瞬時速度ベクトルvを推定しながら積分を行うことを可能にしている。
【0050】
図4は、本発明の実施の形態1のパッシブレーダシステムにおけるそれぞれの構成要素の配置、角度を定義する図である。より具体的には、1台目のパッシブレーダ装置10aと2台目のパッシブレーダ装置10b、および電波送信源20、移動目標30のそれぞれの位置関係、角度関係を示した図である。
【0051】
まず、1台目のパッシブレーダ装置10aで、上式(2)の観測方程式を得る。同様に、2台目のパッシブレーダ装置10bでも、図4の関係から、下式(3)の観測方程式を得る。
【0052】
【数3】
【0053】
なお、上式(3)においても、λは既知である。また、相互相関演算手段16bで検出された到来時間差τ2による等距離楕円40bと、アレーアンテナ12bの測角値から、移動目標30の位置も分かる。従って、電波送信源20とパッシブレーダ装置10bの位置を事前に測っておけば、β2は、計算により求められることとなる。
【0054】
β2が得られれば、X軸とのなす角φ2も求まる。さらに、ドップラ周波数差Δf2も、相互相関演算手段16bから得られている。この結果、未知変数vx、vyの2つに対し、方程式の数は、上式(2)と上式(3)の2つであるため、変数を一意に解くことができる。このようにして、移動目標30の瞬時速度ベクトルvを得ることができる。
【0055】
ただし、上式(2)(3)の2つの方程式を連立させるには、双方のパッシブレーダ装置10a、10bの間で、相互相関演算手段16a、16bが検出した到来時間差τmおよびドップラ周波数差Δfmの情報を共有しなければならない(mはパッシブレーダ装置の個体番号で、ここではm=1、2)。そのために、本発明の2台のパッシブレーダ装置10a、10bは、先の図2に示したように、観測情報4を相互にやりとりするための通信手段18を備えている。
【0056】
以上のように、実施の形態1によれば、2台のパッシブレーダ装置による観測情報に基づいて、移動目標の瞬時速度ベクトルを推定することができる。この結果、長時間積分時にも評価関数Pの先鋭度が劣化せず、低S/N環境下やステルス目標など低RCSの移動目標に対しても、検出・標定精度を高めることのできるパッシブレーダシステムおよびパッシブレーダ方法を得ることができる。
【0057】
実施の形態2.
図5は、本発明の実施の形態1におけるパッシブレーダシステムの運用イメージ図である。図5に示すパッシブレーダシステムでは、3台のパッシブレーダ装置10a、10b、10c、電波送信源20、および移動目標30を備えて構成された場合を例示している。先の実施の形態1のパッシブレーダシステムを示した図1の構成と比較すると、本実施の形態2のパッシブレーダシステムを示した図5の構成は、3台目のパッシブレーダ装置10cをさらに備えている点が異なっており、瞬時速度ベクトルの推定精度の向上を図っている。
【0058】
本実施の形態2における3台のパッシブレーダ装置10a、10b、10cは、全て同一の構成をしており、その内部構成は、先の実施の形態1における図2と同じである。なお、先の実施の形態1では、説明を簡略化するため、移動目標30、電波送信源20、パッシブレーダ装置10a、10bは、すべて同一平面上にあると仮定した。しかしながら、実際には、移動目標30は、陸地に設置される電波送信源20とパッシブレーダ装置10a、10bとは通常異なり、ある特定の高度を飛行している。
【0059】
そこで、本実施の形態2は、3台のパッシブレーダ装置10a、10b、10cを備えることで、先の実施の形態1をより現実的な3次元問題に拡張することができ、以下に詳細に説明する。
【0060】
まず、1台目のパッシブレーダ装置10a内の相互相関演算手段16aで検出される移動目標30のドップラ周波数差Δf1は、2次元問題に特化した上式(2)から、下式(4)のように変化する。
【0061】
【数4】
【0062】
ここで、ψ1は仰角である。なお、相互相関演算手段16aで出力される到来時間差τ1に基づき生成される等距離楕円40aは、3次元問題で考えると、立体的な楕円面になる。これに対しては、アレーアンテナ12aを平面アレーにするなどして水平角と仰角の両方を測角可能にしておくことで、3次元曲面上でも移動目標30の位置を特定することが可能となる。
【0063】
同様に、2台目のパッシブレーダ装置10b、3台目のパッシブレーダ装置10cにおいても、下式(5)、(6)の観測方程式が得られる。
【0064】
【数5】
【0065】
上式(4)〜(6)において、λは既知である。また、先の実施の形態1と同様の方法で、φm、βm、ψmは求めることができる(mはパッシブレーダ装置の個体番号を表し、ここではm=1、2、3)。よって、未知変数は、瞬時速度ベクトルvの要素vx、vy、vzの3つである。
【0066】
3つの未知変数に対して、方程式の数は、上式(4)〜(6)の3であるため、変数を一意に解くことが可能である。したがって、3次元に拡張した場合でも、3台のパッシブレーダ装置10a、10b、10cを備え、相互に観測情報をやりとりすることで、移動目標30の瞬時速度ベクトルvを推定することができる。
【0067】
以上のように、実施の形態2によれば、3台のパッシブレーダ装置による観測情報に基づいて、移動目標の瞬時速度ベクトルを推定することができる。この結果、3次元に拡張した場合においても、長時間積分時にも評価関数Pの先鋭度が劣化せず、低S/N環境下やステルス目標など低RCSの移動目標に対しても、検出・標定精度を高めることのできるパッシブレーダシステムおよびパッシブレーダ方法を得ることができる。
【0068】
実施の形態3.
本実施の形態3では、第N観測フレームの観測情報に基づいて、第(N+1)観測フレームの観測情報を推定し、情報量を増やすことで、移動目標の検出・標定精度を高める方法について説明する。なお、本実施の形態3におけるパッシブレーダシステムの構成は、先の実施の形態2における図5の構成と同一である。
【0069】
次に、本実施の形態3におけるパッシブレーダシステムの一連動作について、フローチャートを用いて説明する。図6は、本発明の実施の形態3のパッシブレーダシステムにおける積分利得改善に関する説明図である。
【0070】
先の実施の形態2で説明したように、3台のパッシブレーダ装置10a、10b、10cにおける第N観測フレームの観測情報である到来時間差τm(N)、およびドップラ周波数差Δfm(N)を用いて、移動目標30の位置p(N)と、瞬時速度ベクトルv(N)を推定することができる(ステップS601)。
【0071】
したがって、p(N)とv(N)を用いて、次の観測フレーム(現観測フレームから次の観測フレームまでのタイムラグは既知であるとする)における移動目標30の位置p(N+1)を推定することができる。さらに、電波送信源20、および3台のパッシブレーダ装置10a、10b、10cの位置が既知であり、次フレームにおける移動目標30の位置p(N+1)が推定できれば、幾何学的計算により第(N+1)観測フレームにおける到来時間差τm(N+1)、およびドップラ周波数差Δfm(N+1)を推定することができる(ステップS602)。
【0072】
ただし、このタイムラグは、非常に長いものではなく、かつ、タイムラグ中に移動目標30の瞬時速度ベクトルが急変することはないと仮定する。実際、タイムラグが1msec程度以内であれば、民間航空機や戦闘機クラスの航空機でも、かなりの急旋回や上昇下降を行わない限り、この仮定は成立する。
【0073】
受信環境によって散乱波のS/N比が劣化する、あるいはステルス性能を持つ低RCS目標の検出・標定に対しては、長時間積分により積分利得を稼ぐことが不可欠であることを前述した。ここでは、第N観測フレームと第(N+1)観測フレームの2つの観測フレームを用いることで、移動目標30に対する評価関数Pのピークの先鋭度を2倍にすることを目的とする。
【0074】
予測した位置p(N+1)が数レンジビンに及ぶものだとすると、第(N+1)観測フレームで検出される到来時間差τm(N+1)、およびドップラ周波数差Δfm(N+1)は、第N観測フレームで検出される到来時間差τm(N)、およびドップラ周波数差Δfm(N)と異なる。この結果、ピークが2つに割れてしまい、先鋭度が劣化することとなる。
【0075】
そこで、予測した位置p(N+1)を用いて、先のステップS602で推定した第(N+1)観測フレームに対する到来時間差τm(N+1)、およびドップラ周波数差Δfm(N+1)を、第N観測フレームに対する到来時間差τm(N)、およびドップラ周波数差Δfm(N)に一致させる補正を行う。これは、つまり、移動目標30の位置の変位(レンジウォーク)を相殺することを意味する。具体的には、上式(1)の演算で、下式(7)のような操作を行う(ステップS603)。
【0076】
【数6】
【0077】
ここで、上式(7)内の各記号は、以下のものを意味する。
PN+1:第(N+1)観測フレームの評価関数
【0078】
このように、第(N+1)観測フレームに対する相互相関演算を補正し、第N観測フレームと第(N+1)観測フレームのデータを連続データとして用いることで、移動目標のレンジウォークを補正した積分が可能となる(ステップS604)。この結果、積分利得を2倍とし、評価関数Pの先鋭度を2倍に高めることができ、移動目標30の検出確率と測位精度の向上を図ることができる(ステップS605)。
【0079】
図7は、本発明の実施の形態3のパッシブレーダシステムにおける積分利得改善を、複数の観測フレームに対して行った場合の説明図である。この図7は、先の図6による2フレーム間の処理を4フレームに渡って発展させたものである。具体的には、この図7は、第N観測フレームから第(N+3)観測フレームまでのデータを連続データとして扱い、積分利得を4倍にして評価関数の先鋭度を4倍にするためのイメージ図を示している。
【0080】
実施している操作は、先の図6のフローチャートに記載したものと同じであり、各観測フレーム毎に、到来時間差τm(N)、およびドップラ周波数差Δfm(N)の補正を行いながら、相互相関演算を行うというものである。
【0081】
以上のように、実施の形態3によれば、複数の観測フレームに渡って移動目標がレンジウォークを行う状況下でも、その観測フレームにおける移動目標の瞬時速度ベクトルvを用いて補正を行うことで、長時間の観測データによる積分が可能となる。
【0082】
実施の形態4.
本実施の形態4では、相互相関演算手段16による演算負荷の低減策について説明する。なお、本実施の形態4におけるシステム全体の構成は、先の実施の形態2における図5の構成と同一である。また、各パッシブレーダ装置10a、10b、10cの内部構成も先の図2と同じである。
【0083】
次に、相互相関演算手段16による演算負荷の低減に関する具体的な方策について説明する。従来のパッシブレーダ装置100の相互相関演算手段16では、先の図11に示したとおり、想定される到来時間差τ、およびドップラ周波数差Δfの範囲内を2次元全面捜索して、移動目標30による到来時間差τ1とドップラ周波数差Δf1を検出していた。
【0084】
このような2次元全面捜索は、非常に高い演算負荷を持ち、パッシブレーダ装置100全体の装置規模の増大、およびリアクションタイム(観測データを得てから答えが出るまでの時間)の低下を招くといった問題があった。
【0085】
移動目標30の瞬時速度ベクトルvを推定可能としても、これらの問題を持ち越したままでは、パッシブレーダシステム全体としてのコストインパクトが大きい。従って、相互相関演算に関する演算負荷を改善し、装置の小型化、低価格化を実現することが重要となる。
【0086】
本実施の形態4におけるパッシブレーダシステムでは、1台目のパッシブレーダ装置10a単体で、第N観測フレームに対する移動目標30の位置p(N)が推定可能である。2台目のパッシブレーダ装置10b単体、および3台目のパッシブレーダ装置10c単体でも、移動目標30の位置p(N)が得られる。しかしながら、パッシブレーダ装置10b、10cで得られる位置p(N)は、システム構築上のバックアップともいえるし、1台目のパッシブレーダ装置10aの位置推定精度を検証するためのものともいえる。しかし、同時に冗長であるともいえる。
【0087】
そこで、2台目のパッシブレーダ装置10bおよび3台目のパッシブレーダ装置10cの設置位置は、既知であるとすると、1台目のパッシブレーダ装置10aが標定した移動目標30の位置p(N)と、2台目のパッシブレーダ装置10bおよび3台目のパッシブレーダ装置10cの相対位置関係は、幾何学的計算により求めることが可能である。
【0088】
そうすると、2台目のパッシブレーダ装置10bおよび3台目のパッシブレーダ装置10cのそれぞれと移動目標30との距離も分かる。従って、到来時間差τ2、τ3は、2台目のパッシブレーダ装置10bの相互相関演算手段16b、および3台目のパッシブレーダ装置10cの相互相関演算手段16cで捜索しなくても、分かってしまう。
【0089】
図8は、本発明の実施の形態4の2台目以降のパッシブレーダ装置の相互相関演算手段16の実行内容をイメージ化した図であり、従来の図11と対比される図である。図8に示したように、2台目のパッシブレーダ装置10b内の相互相関演算手段16bおよび3台目のパッシブレーダ装置10c内の相互相関演算手段16cでは、到来時間差τ、ドップラ周波数差Δfの2次元全面捜索だった通常の相互相関演算を、時間方向はτ2またはτ3の固定値として、Δfだけの1次元探索に抑えることができる。
【0090】
したがって、2台目のパッシブレーダ装置10bおよび3台目のパッシブレーダ装置10cの相互相関演算手段16b、16cは、演算負荷を低く抑えることができる。この結果、演算装置の小型・軽量化、および演算時間短縮化によるリアクションタイムの向上を実現できる。
【0091】
以上のように、実施の形態4によれば、複数台のパッシブレーダ装置を用いる場合に、1台目のパッシブレーダ装置以外は、相互相関演算を1次元探索に抑えることで、演算装置の小型・軽量化、および演算時間短縮化によるリアクションタイムの向上を図ったパッシブレーダシステムおよびパッシブレーダ方法を得ることができる。
【0092】
実施の形態5.
先の実施の形態4では、相互相関演算手段16の演算負荷の軽減策について説明した。これに対して、本実施の形態5では、3台のパッシブレーダ装置を用いる場合を例に、1台目のパッシブレーダ装置に対して、2台目、3台目のパッシブレーダ装置のハードウェア構成を簡素化することで、装置規模を削減し、小型軽量化・低消費電力化・可搬性向上を図る場合について説明する。
【0093】
なお、本実施の形態5におけるシステム全体の構成は、先の実施の形態2における図5の構成と同一である。また、1台目のパッシブレーダ装置10aの内部構成は、先の図2と同じである。
【0094】
図9は、本発明の実施の形態5における2台目以降のパッシブレーダ装置の内部構成図である。図9における本実施の形態5の2台目以降のパッシブレーダ装置10b(10c)は、第1のアンテナ11a、第2のアンテナ11e、第1の受信機13a、第2の受信機13e、第1のA/D変換器14a、第2のA/D変換器14e、第1の記憶部15a、第2の記憶部15b、相互相関演算手段16、目標標定手段17、通信手段18、および瞬時速度ベクトル推定手段19を備えている。
【0095】
1台目のパッシブレーダ装置10aを示した図2の内部構成と比較すると、2台目以降のパッシブレーダ装置10b、10cを示した図9の内部構成は、第1のアンテナ11b〜10d、第1の受信機13b〜13d、第1のA/D変換器14b〜14dを備えておらず、散乱波1に対する受信系が1系統で構成されている点が異なっている。
【0096】
次に、2台目以降のパッシブレーダ装置10b、10cの構成の簡素化について、説明する。
本発明のパッシブレーダシステムでは、1台目のパッシブレーダ装置10a単体で第N観測フレームに対する移動目標30の位置p(N)が推定可能である。2台目のパッシブレーダ装置10b単体、3台目のパッシブレーダ装置10c単体でも移動目標30の位置p(N)が得られる。しかしながら、パッシブレーダ装置10b、10cで得られる位置p(N)は、システム構築上のバックアップともいえるし、1台目のパッシブレーダ装置10aの位置推定精度を検証するためのものともいえる。しかし、同時に冗長であるともいえる。
【0097】
つまり、1台目のパッシブレーダ装置10a単体で、立体の等距離楕円面と水平角、仰角の測角値により移動目標30の位置p(N)を推定できるのであれば、2台目のパッシブレーダ装置10bおよび3台目のパッシブレーダ装置10cでは、アレーアンテナ12による測角機能は、冗長である。
【0098】
2台目のパッシブレーダ装置10b、3台目のパッシブレーダ装置10cの設置目的は、上式(5)、(6)のドップラ周波数差に関する観測方程式を得ることであり、これに特化すれば、測角機能は不要になり、アレーアンテナ12は、不要である。つまり、第1のアンテナ11は、1素子(第1のアンテナ11a)のみでよい。これは、第1のアンテナ11に続く、第1の受信機13、第1のA/D変換器14の台数削減、さらに、第1の記憶部15aの記憶容量の抑圧効果も同時にもたらす。
【0099】
以上のように、実施の形態5によれば、複数台のパッシブレーダ装置を用いる場合に、2台目以降のパッシブレーダ装置をドップラ周波数差に関する観測方程式を得ることに特化させることで、構成を簡素化することができる。この結果、移動目標の位置p(N)、瞬時速度ベクトルv(N)を推定可能としながら、2台目以降のパッシブレーダ装置の装置規模を削減し、小型軽量化・低消費電力化・可搬性向上を図ったパッシブレーダシステムおよびパッシブレーダ方法を得ることができる。
【0100】
なお、本発明のパッシブレーダシステムが対象とする、自己の周辺に既に存在する電波としては、FM放送波、アナログテレビジョン放送波、デジタルテレビジョン放送波、携帯電話基地局電波、衛星放送波、HF(短波)放送波、既知のレーダ装置、およびこれ以外にも利用可能な電波のいずれか、または複数を組み合わせて使用することが可能である。
【0101】
ただし、使用する電波の周波数帯に対してアンテナ装置の大きさが変わり、受信機の通過/阻止帯域が変わり、A/D変換器の変換速度が変わる。これらは、すべてパッシブレーダシステムとして、周囲環境の電波のうちS/N比が高いなどの条件、設置面積、可搬性などの運用面での選定根拠となる。しかし、基本動作原理は、すべて同一であるため、本発明のパッシブレーダシステムは、どの電波に対しても有効に動作する。
【0102】
また、本発明のパッシブレーダシステムでは、測角手法について特に言明していないが、モノパルス測角、DBF(Digital Beam Forming)、および、MUSIC(Multiple Signal Classification)、ESPRIT(Estimation of Signal Parameters via Rotational Invariance Techniques)、最尤法などの超分解能測角法を用いてもよい。
【符号の説明】
【0103】
10、10a、10b、10c パッシブレーダ装置、11 アンテナ、11a〜11d 第1のアンテナ、11e 第2のアンテナ、12、12a、12b アレーアンテナ、13 受信機、13a〜13d 第1の受信機、13e 第2の受信機、14 A/D変換器、14a〜14d 第1のA/D変換器、14e 第2のA/D変換器、15 記憶部、15a 第1の記憶部、15b 第2の記憶部、16、16a、16b、16c 相互相関演算手段、17 目標標定手段、18 通信装置、19 瞬時速度ベクトル推定装置、20 電波送信源(電波源)、30 移動目標。
【特許請求の範囲】
【請求項1】
自らは電波を放射することなく、自己の周辺空間内における既存の電波が移動目標に当たって生成される散乱波を受信する第1のアンテナと、
複数の前記第1のアンテナから構成されるアレーアンテナと、
前記アレーアンテナの各素子に対して個別に備わり、前記アレーアンテナの受信信号から所望の周波数帯域の信号を取り出す複数の第1の受信機と、
前記複数の第1の受信機の出力信号のそれぞれをデジタルデータに変換する複数の第1のA/D変換器と、
前記複数の第1のA/D変換器が出力する時系列データが前記アレーアンテナの素子番号と対応付けられて記憶される第1の記憶部と、
前記既存の電波を送出する電波源からの直接波を受信する第2のアンテナと、
前記第2のアンテナの受信信号から所望の周波数帯域の信号を取り出す第2の受信機と、
前記第2の受信機の出力信号をデジタルデータに変換する第2のA/D変換器と、
前記第2のA/D変換器が出力する時系列データが記憶される第2の記憶部と、
前記第1の記憶部から読み出した素子数分の時系列データに、前記第2の記憶部から読み出した同時刻の時系列データを、時間と周波数の2変数として想定される範囲内を全面捜索して相互相関を演算し、移動目標に対する到来時間差およびドップラ周波数差を観測情報として特定する相互相関演算手段と、
前記相互相関演算手段が出力する前記観測情報と、前記アレーアンテナによる測角値情報とを用いて、前記移動目標の位置・高度・角度といった未知諸元を得る目標標定手段と
を備えるパッシブレーダ装置を異なる位置に複数台配置してなるパッシブレーダシステムであって、
複数台の前記パッシブレーダ装置のそれぞれは、自己の相互相関演算手段で特定した観測情報を他のパッシブレーダ装置に送信するとともに、前記他のパッシブレーダ装置の相互相関演算手段で特定された観測情報を受信する通信手段と、
すべてのパッシブレーダ装置で特定されたそれぞれの観測情報に基づいて、前記移動目標の瞬時速度ベクトルを推定する瞬時速度ベクトル推定手段と
をさらに備えることを特徴とするパッシブレーダシステム。
【請求項2】
請求項1に記載のパッシブレーダシステムにおいて、
前記パッシブレーダシステムは、2台のパッシブレーダ装置で構成され、
前記2台のパッシブレーダ装置の少なくとも1台の瞬時速度ベクトル推定手段は、自己の相互相関演算手段で特定された観測情報と、他の1台の相互相関演算手段で特定された観測情報とに基づいて、前記移動目標の2次元瞬時速度ベクトルを推定する
ことを特徴とするパッシブレーダシステム。
【請求項3】
請求項1に記載のパッシブレーダシステムにおいて、
前記パッシブレーダシステムは、3台のパッシブレーダ装置で構成され、
前記3台のパッシブレーダ装置の少なくとも1台の瞬時速度ベクトル推定手段は、自己の相互相関演算手段で特定された観測情報と、他の2台の相互相関演算手段で特定された観測情報とに基づいて、前記移動目標の3次元瞬時速度ベクトルを推定する
ことを特徴とするパッシブレーダシステム。
【請求項4】
請求項1ないし3のいずれか1項に記載のパッシブレーダシステムにおいて、
前記相互相関演算手段は、前記瞬時速度ベクトル推定手段により推定された前記瞬時速度ベクトルを用いて、次の観測フレームにおける前記移動目標の存在位置を予測し、予測した前記存在位置における前記移動目標に対する到来時間差およびドップラ周波数差を第2の観測情報として算出し、算出した前記第2の観測情報を現在の観測フレームに対して特定された前記観測情報に一致させるような補正処理を行い、前記補正処理後の第2の観測情報を前記次の観測フレームにおける観測情報として特定することで、フレーム間に渡る長時間の相互相関演算を行ったと等価な観測情報を取得する
ことを特徴とするパッシブレーダシステム。
【請求項5】
請求項4に記載のパッシブレーダシステムにおいて、
前記相互相関演算手段は、3以上の複数の観測フレームに渡って、前記補正処理を繰り返すことで、前記3以上の複数の観測フレーム間に渡る長時間の相互相関演算を行ったと等価な観測情報を取得する
ことを特徴とするパッシブレーダシステム。
【請求項6】
請求項1ないし5のいずれか1項に記載のパッシブレーダシステムにおいて、
2台目以降のパッシブレーダ装置内の通信手段は、1台目のパッシブレーダ装置内の通信手段を介して前記1台目のパッシブレーダ装置内の前記目標標定手段で得られた前記未知諸元を取得し、
前記2台目以降のパッシブレーダ装置内の相互相関演算手段は、取得した前記未知諸元および各パッシブレーダ装置の相対位置関係から前記移動目標に対する到来時間差を固定値として求め、周波数の1変数として想定される範囲内を一次元捜索して相互相関を演算し、移動目標に対するドップラ周波数差を求めることで、前記観測情報を特定する
ことを特徴とするパッシブレーダシステム。
【請求項7】
請求項1ないし6のいずれか1項に記載のパッシブレーダシステムにおいて、
2台目以降のパッシブレーダ装置は、前記第1のアンテナの素子数を1素子のみとして構成され、
前記2台目以降のパッシブレーダ装置内の目標標定手段は、前記測角値情報に基づく前記未知諸元を算出しない
ことを特徴とするパッシブレーダシステム。
【請求項8】
請求項1ないし7のいずれか1項に記載のパッシブレーダシステムにおいて、
前記自己の周辺空間内における既存の電波は、FM放送波、アナログテレビジョン放送波、デジタルテレビジョン放送波、携帯電話通信波、衛星放送波、HF(短波)放送波、および既知のレーダ送信波の内の1つ、または2以上の組み合わせが用いられる
ことを特徴とするパッシブレーダシステム。
【請求項9】
請求項1ないし8のいずれか1項に記載のパッシブレーダシステムにおいて、
前記アレーアンテナによる測角方式として、MUSIC、ESPRIT、あるいは最尤推定による超分解能測角法を適用する
ことを特徴とするパッシブレーダシステム。
【請求項10】
自らは電波を放射することなく、自己の周辺空間内における既存の電波が移動目標に当たって生成される散乱波をアレーアンテナを介して受信し、前記既存の電波を送出する電波源からの直接波をアンテナを介して受信し、前記散乱波と前記直接波とに基づいて相互相関演算処理を行うことで移動目標に対する到来時間差およびドップラ周波数差を観測情報として特定し、特定した前記観測情報と、前記アレーアンテナによる測角値情報とを用いて、前記移動目標の位置・高度・角度といった未知諸元を算出するパッシブレーダ装置を複数台用いたパッシブレーダ方法であって、
他のパッシブレーダ装置による相互相関演算処理で特定された観測情報を、通信手段を介して取得するステップと、
自己のパッシブレーダ装置による相互相関演算処理で特定された観測情報を含むすべてのパッシブレーダ装置で特定されたそれぞれの観測情報に基づいて、前記移動目標の瞬時速度ベクトルを推定するステップと
を備えることを特徴とするパッシブレーダ方法。
【請求項1】
自らは電波を放射することなく、自己の周辺空間内における既存の電波が移動目標に当たって生成される散乱波を受信する第1のアンテナと、
複数の前記第1のアンテナから構成されるアレーアンテナと、
前記アレーアンテナの各素子に対して個別に備わり、前記アレーアンテナの受信信号から所望の周波数帯域の信号を取り出す複数の第1の受信機と、
前記複数の第1の受信機の出力信号のそれぞれをデジタルデータに変換する複数の第1のA/D変換器と、
前記複数の第1のA/D変換器が出力する時系列データが前記アレーアンテナの素子番号と対応付けられて記憶される第1の記憶部と、
前記既存の電波を送出する電波源からの直接波を受信する第2のアンテナと、
前記第2のアンテナの受信信号から所望の周波数帯域の信号を取り出す第2の受信機と、
前記第2の受信機の出力信号をデジタルデータに変換する第2のA/D変換器と、
前記第2のA/D変換器が出力する時系列データが記憶される第2の記憶部と、
前記第1の記憶部から読み出した素子数分の時系列データに、前記第2の記憶部から読み出した同時刻の時系列データを、時間と周波数の2変数として想定される範囲内を全面捜索して相互相関を演算し、移動目標に対する到来時間差およびドップラ周波数差を観測情報として特定する相互相関演算手段と、
前記相互相関演算手段が出力する前記観測情報と、前記アレーアンテナによる測角値情報とを用いて、前記移動目標の位置・高度・角度といった未知諸元を得る目標標定手段と
を備えるパッシブレーダ装置を異なる位置に複数台配置してなるパッシブレーダシステムであって、
複数台の前記パッシブレーダ装置のそれぞれは、自己の相互相関演算手段で特定した観測情報を他のパッシブレーダ装置に送信するとともに、前記他のパッシブレーダ装置の相互相関演算手段で特定された観測情報を受信する通信手段と、
すべてのパッシブレーダ装置で特定されたそれぞれの観測情報に基づいて、前記移動目標の瞬時速度ベクトルを推定する瞬時速度ベクトル推定手段と
をさらに備えることを特徴とするパッシブレーダシステム。
【請求項2】
請求項1に記載のパッシブレーダシステムにおいて、
前記パッシブレーダシステムは、2台のパッシブレーダ装置で構成され、
前記2台のパッシブレーダ装置の少なくとも1台の瞬時速度ベクトル推定手段は、自己の相互相関演算手段で特定された観測情報と、他の1台の相互相関演算手段で特定された観測情報とに基づいて、前記移動目標の2次元瞬時速度ベクトルを推定する
ことを特徴とするパッシブレーダシステム。
【請求項3】
請求項1に記載のパッシブレーダシステムにおいて、
前記パッシブレーダシステムは、3台のパッシブレーダ装置で構成され、
前記3台のパッシブレーダ装置の少なくとも1台の瞬時速度ベクトル推定手段は、自己の相互相関演算手段で特定された観測情報と、他の2台の相互相関演算手段で特定された観測情報とに基づいて、前記移動目標の3次元瞬時速度ベクトルを推定する
ことを特徴とするパッシブレーダシステム。
【請求項4】
請求項1ないし3のいずれか1項に記載のパッシブレーダシステムにおいて、
前記相互相関演算手段は、前記瞬時速度ベクトル推定手段により推定された前記瞬時速度ベクトルを用いて、次の観測フレームにおける前記移動目標の存在位置を予測し、予測した前記存在位置における前記移動目標に対する到来時間差およびドップラ周波数差を第2の観測情報として算出し、算出した前記第2の観測情報を現在の観測フレームに対して特定された前記観測情報に一致させるような補正処理を行い、前記補正処理後の第2の観測情報を前記次の観測フレームにおける観測情報として特定することで、フレーム間に渡る長時間の相互相関演算を行ったと等価な観測情報を取得する
ことを特徴とするパッシブレーダシステム。
【請求項5】
請求項4に記載のパッシブレーダシステムにおいて、
前記相互相関演算手段は、3以上の複数の観測フレームに渡って、前記補正処理を繰り返すことで、前記3以上の複数の観測フレーム間に渡る長時間の相互相関演算を行ったと等価な観測情報を取得する
ことを特徴とするパッシブレーダシステム。
【請求項6】
請求項1ないし5のいずれか1項に記載のパッシブレーダシステムにおいて、
2台目以降のパッシブレーダ装置内の通信手段は、1台目のパッシブレーダ装置内の通信手段を介して前記1台目のパッシブレーダ装置内の前記目標標定手段で得られた前記未知諸元を取得し、
前記2台目以降のパッシブレーダ装置内の相互相関演算手段は、取得した前記未知諸元および各パッシブレーダ装置の相対位置関係から前記移動目標に対する到来時間差を固定値として求め、周波数の1変数として想定される範囲内を一次元捜索して相互相関を演算し、移動目標に対するドップラ周波数差を求めることで、前記観測情報を特定する
ことを特徴とするパッシブレーダシステム。
【請求項7】
請求項1ないし6のいずれか1項に記載のパッシブレーダシステムにおいて、
2台目以降のパッシブレーダ装置は、前記第1のアンテナの素子数を1素子のみとして構成され、
前記2台目以降のパッシブレーダ装置内の目標標定手段は、前記測角値情報に基づく前記未知諸元を算出しない
ことを特徴とするパッシブレーダシステム。
【請求項8】
請求項1ないし7のいずれか1項に記載のパッシブレーダシステムにおいて、
前記自己の周辺空間内における既存の電波は、FM放送波、アナログテレビジョン放送波、デジタルテレビジョン放送波、携帯電話通信波、衛星放送波、HF(短波)放送波、および既知のレーダ送信波の内の1つ、または2以上の組み合わせが用いられる
ことを特徴とするパッシブレーダシステム。
【請求項9】
請求項1ないし8のいずれか1項に記載のパッシブレーダシステムにおいて、
前記アレーアンテナによる測角方式として、MUSIC、ESPRIT、あるいは最尤推定による超分解能測角法を適用する
ことを特徴とするパッシブレーダシステム。
【請求項10】
自らは電波を放射することなく、自己の周辺空間内における既存の電波が移動目標に当たって生成される散乱波をアレーアンテナを介して受信し、前記既存の電波を送出する電波源からの直接波をアンテナを介して受信し、前記散乱波と前記直接波とに基づいて相互相関演算処理を行うことで移動目標に対する到来時間差およびドップラ周波数差を観測情報として特定し、特定した前記観測情報と、前記アレーアンテナによる測角値情報とを用いて、前記移動目標の位置・高度・角度といった未知諸元を算出するパッシブレーダ装置を複数台用いたパッシブレーダ方法であって、
他のパッシブレーダ装置による相互相関演算処理で特定された観測情報を、通信手段を介して取得するステップと、
自己のパッシブレーダ装置による相互相関演算処理で特定された観測情報を含むすべてのパッシブレーダ装置で特定されたそれぞれの観測情報に基づいて、前記移動目標の瞬時速度ベクトルを推定するステップと
を備えることを特徴とするパッシブレーダ方法。
【図1】

【図2】
【図3】
【図4】
【図5】
【図6】
【図7】
【図8】
【図9】
【図10】
【図11】
【図12】
【図13】

【図2】
【図3】
【図4】
【図5】
【図6】
【図7】
【図8】
【図9】
【図10】
【図11】
【図12】
【図13】
【公開番号】特開2011−242182(P2011−242182A)
【公開日】平成23年12月1日(2011.12.1)
【国際特許分類】
【出願番号】特願2010−112738(P2010−112738)
【出願日】平成22年5月17日(2010.5.17)
【出願人】(000006013)三菱電機株式会社 (33,312)
【Fターム(参考)】
【公開日】平成23年12月1日(2011.12.1)
【国際特許分類】
【出願日】平成22年5月17日(2010.5.17)
【出願人】(000006013)三菱電機株式会社 (33,312)
【Fターム(参考)】
[ Back to top ]