
パラレルリンク機構およびパラレルリンク機構を備えた真空成膜装置
【課題】真空成膜用の基板等の運動を適切に制御できるパラレルリンク機構およびパラレルリンク機構を備えた真空成膜装置を提供する。
【解決手段】リンク部120は、アクチュエータ45Aが配された伸縮装置45と、支柱46と、を含み、伸縮装置45が、一対の板部材49、48間において並列に配されて、伸縮装置45のそれぞれが、アクチュエータ45Aの駆動力により軸方向に伸縮可能に構成され、支柱46は、両板部材49、48間において伸縮装置45と並列に配されて、アクチュエータ45Aの駆動力を一対の板部材49、48を介して伝達することにより軸方向に伸縮可能に構成される。板部材49は、伸縮装置45の一方の軸端に継手41A、41B、41Cを介して連結され、支柱の一方の軸端に継手43を介して連結される。板部材48は、伸縮装置45の他方の軸端に継手40A、40B、40Cを介して連結され、支柱46の他方の軸端に固定される。
【解決手段】リンク部120は、アクチュエータ45Aが配された伸縮装置45と、支柱46と、を含み、伸縮装置45が、一対の板部材49、48間において並列に配されて、伸縮装置45のそれぞれが、アクチュエータ45Aの駆動力により軸方向に伸縮可能に構成され、支柱46は、両板部材49、48間において伸縮装置45と並列に配されて、アクチュエータ45Aの駆動力を一対の板部材49、48を介して伝達することにより軸方向に伸縮可能に構成される。板部材49は、伸縮装置45の一方の軸端に継手41A、41B、41Cを介して連結され、支柱の一方の軸端に継手43を介して連結される。板部材48は、伸縮装置45の他方の軸端に継手40A、40B、40Cを介して連結され、支柱46の他方の軸端に固定される。
【発明の詳細な説明】
【技術分野】
【0001】
本発明は、パラレルリンク機構およびパラレルリンク機構を備えた真空成膜装置に関する。
【背景技術】
【0002】
パラレルリンク機構は、移動ロボットの姿勢制御機構としては一般的に知られており(例えば、特許文献1参照)、シリアルリンク機構に比べて、高剛性、軽量であるとされている。そこで、このようなパラレルリンク機構の利点を活かして、ロボットの姿勢制御以外の技術分野でも上述のパラレルリンク機構を用いる例が提案されている。
【0003】
例えば、特許文献2および特許文献3では、露光装置などのテーブルの位置決めにパラレルリンク機構を用い、これにより、テーブルの高精度位置決めを行えると記載されている。
【特許文献1】特開平8−11081号公報
【特許文献2】特開平11−274031号公報
【特許文献3】特開2005−284447号公報
【発明の開示】
【発明が解決しようとする課題】
【0004】
スパッタリング装置などの真空成膜装置では、基板やターゲットなどの真空成膜用の部品(以下、必要に応じて「基板等」という)の回転、移動または傾き変更を適切に行える保持装置を配設する場合がある。そして、このような保持装置を用いると、基板に形成される薄膜の膜厚分布の均一化やカバレッジ向上が容易になる。
【0005】
そこで、真空成膜装置の基板等の保持装置に上述のパラレルリンク機構を組み込むと、基板等を高精度に運動制御できるので都合がよいが、真空成膜装置の基板等の運動制御の実情に照らしてパラレルリンク機構を適切に設計する必要があるので、特許文献1〜3記載の技術をそのまま転用することが困難であると考えられる。
【0006】
例えば、シートプラズマ方式のスパッタリング装置の基板等の保持装置に上述のパラレルリンク機構を組み込む場合、基板およびターゲット間の距離(つまり、基板とシートプラズマとの距離やターゲットとシートプラズマとの距離)は、スパッタリングの性能に直接的な影響を与えるので、これらの距離を簡易かつ高精度に変更できる方が好ましい。
【0007】
しかしながら、特許文献1記載の駆動装置では、拘束リンクによりベースプレートおよびエンドイフェクタ間の距離が拘束されているので、両者の距離を変更できない構造になっている。
【0008】
また、スパッタリング装置の基板等の保持装置では、基板等の中心周りの回転や並進を拘束して基板等の傾きを自在に変更できる方が、後述する様々な理由から好ましい。
【0009】
しかしながら、特許文献2および特許文献3記載の技術については、パラレルリンク機構のテーブルの位置決めに主眼が置かれており、上述の基板等の運動を意図したリンク部の設計(例えば、基板等の運動自由度の適切な設計)において、これらの技術は参酌に値しない。
【0010】
本発明は、このような事情に鑑みてなされたものであり、真空成膜用の基板等の運動を適切に制御できるパラレルリンク機構およびこのようなパラレルリンク機構を備えた真空成膜装置を提供することを目的とする。
【課題を解決するための手段】
【0011】
上記課題を解決するため、本発明は、
真空成膜用の部品を搭載可能な第1板部材と、
前記第1板部材と間隔をあけて配された第2板部材と、
前記第1板部材および第2板部材間の連結に用いるリンク部と、を備え、
前記リンク部は、アクチュエータが配された伸縮装置と、ガイド部材からなる支柱と、を含み、
複数の前記伸縮装置は、前記第1板部材および第2板部材間において並列に配されて、前記アクチュエータの駆動力により軸方向に伸縮可能に構成され、
前記支柱は、前記第1板部材および第2板部材間において前記伸縮装置と並列に配されて、前記アクチュエータの駆動力を前記第1板部材および第2板部材を介して伝達することにより軸方向に伸縮可能に構成され、
前記第1板部材は、前記複数の伸縮装置の一方の軸端に第1継手を介して連結されるとともに、前記支柱の一方の軸端に第2継手を介して連結され、
前記第2板部材は、前記複数の伸縮装置の他方の軸端に第3継手を介して連結されるとともに、前記支柱の他方の軸端に固定されている、パラレルリンク機構を提供する。
【0012】
以上のパラレルリンク機構により、簡易な小型のアクチュエータを用いても、各アクチュエータの出力が、第1板部材に対して並列的に作用するので、パラレルリンク機構全体としては大きな出力を発生できる。
【0013】
また、第1板部材に様々な方向の作用力を与えた場合であっても、各伸縮装置のピストンに曲げ応力がほとんど付与されず、引っ張り応力又は圧縮応力のみが作用する。
【0014】
つまり、このようなパラレルリンク機構には、各伸縮装置を簡易(軽量)に構成しても、使用目的に対して充分な剛性を確保し易いという特徴がある。
【0015】
よって、シートプラズマ方式のスパッタリング装置などの真空成膜装置の基板等を簡易かつ高精度に運動制御させるには、これらの基板等の駆動系としてパラレルリンク機構を用いると都合がよい。
【0016】
本発明のパラレルリンク機構では、前記第1継手および前記第3継手のうちのいずれか一方の継手が3自由度継手であってもよく、その他方の継手および前記第2継手が回転2自由度継手であってもよい。
【0017】
なお、前記3自由度継手の一例はボールジョイントであり、前記回転2自由度継手の一例はユニバーサルジョイントである。
【0018】
以上の構成により、第1板部材のXY方向周りの回転および第1板部材のZ方向の移動という3自由度の運動が可能である。一方、第2板部材を、例えば、真空成膜室の壁に固定すると、支柱はその軸周りに回転できないので、第1板部材のZ方向周りの回転が適切に拘束される。また、第1板部材のXY方向の並進も適切に拘束される。
【0019】
よって、基板等の駆動系としてパラレルリンク機構を用いると、基板等をZ方向に高精度に移動できる。この場合、全ての伸縮装置のピストンを同一方向に同一ストロークで伸縮させ、第1板部材をZ方向に動かすとよい。
【0020】
これにより、例えば、シートプラズマ方式のスパッタリング装置のターゲットおよび基板間距離を簡易かつ高精度に変更でき、その結果、ターゲットとシートプラズマとの間、および、基板とシートプラズマとの間における好適な距離を簡易かつ高精度に設定できる。
【0021】
また、基板等の駆動系としてパラレルリンク機構を用いると、基板等をZ方向の周りに回転させずに、基板等を第2板部材に対して様々な方向に傾けることができる。この場合、各伸縮装置のピストンの伸縮動作を適宜、組合せて、第1板部材をZ方向に動かすとよい。
【0022】
従って、基板に形成される薄膜の膜厚分布の均一化やカバレッジ向上に有利に作用する。
【0023】
また、基板等のZ方向周りの回転に起因する様々な不都合も回避できる。例えば、基板等のZ方向周りの回転による回転摺動部での回転シール構造の複雑化や回転摺動部でのゴミ発生などを回避できる。更に、基板等への電気配線、冷媒導入配管および冷媒排出配管などの配設も簡易に行える。
【0024】
また、本発明のパラレルリンク機構では、前記伸縮装置の一方の軸端を、前記第1板部材の所定の点を中心とする円周上に離れて配し、前記伸縮装置の他方の軸端を、前記第2板部材の所定の点を中心とする円周上に離れて配し、前記支柱の一方の軸端を、前記第1板部材の所定の点上に配し、前記支柱の他方の軸端を、前記第2板部材の所定の点上に配してもよい。
【0025】
以上の構成により、制御装置が各伸縮装置に対し適宜の揺動制御を行うと、第1板部材の周方向において第1板部材の揺動が均一になるので、このような第1板部材に基板等を搭載すると、基板上に形成される薄膜の膜厚分布の均一化やカバレッジの向上に有利に作用する。
【0026】
また、本発明は、上述のいずれかに記載のパラレルリンク機構が真空成膜室に配され、
前記第1板部材は、前記真空成膜室内において前記伸縮装置および前記支柱の伸縮動作により移動制御され、
前記第2板部材は、前記真空成膜室の壁に固定されている、真空成膜装置も提供する。
【0027】
このようにして、伸縮型のパラレルリンク機構を基板等の保持装置に用いる真空成膜装置を得ることができる。
【0028】
また、本発明の真空成膜装置では、前記真空成膜室内が減圧状態において、前記アクチュエータの周囲を大気圧に保てる気密機構を備えてもよい。
【0029】
ここで、前記気密機構の一例は、前記アクチュエータを内部に配した状態で、前記第1板部材および前記第2板部材に接続されたベローズである。
【0030】
以上の構成により、アクチュエータがベローズの内部に配されて、ベローズによって真空成膜室の成膜空間とアクチュエータの周囲との間が気密に仕切られているので、真空成膜室の成膜空間を減圧してもアクチュエータを真空対応に構成しなくて済み好都合である。
【0031】
なお、前記ベローズを、単一の前記アクチュエータ毎に配してもよい。
【0032】
以上の構成により、第1板部材における大気圧と成膜空間の内圧との間の差圧が作用する面積を小さくできるので、伸縮装置に用いる簡易なアクチュエータを選定できる。
【発明の効果】
【0033】
本発明によれば、真空成膜用の基板等の運動を適切に制御できるパラレルリンク機構およびこのようなパラレルリンク機構を備えた真空成膜装置が得られる。
【発明を実施するための最良の形態】
【0034】
以下、本発明の好ましい実施形態について図面を参照しながら説明する。
【0035】
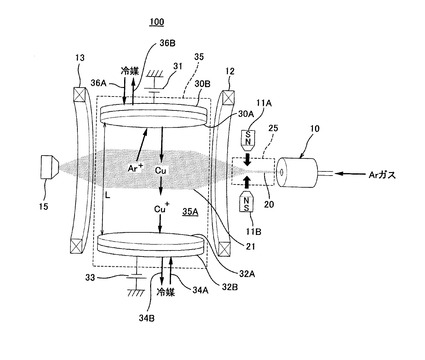
図1は、本発明の実施形態によるスパッタリング装置(真空成膜装置)の一構成例を模式的に示した図である。
【0036】
なお、ここでは、シートプラズマによってスパッタリングプロセスを行えるスパッタリング装置100が図示されているが、これはあくまで一例に過ぎない。本明細書に記載の技術は、マグネトロンスパッタリング装置や真空蒸着装置であっても適用できる。
【0037】
本実施形態のスパッタリング装置100は、放電プラズマ輸送の方向から見て順番に、放電プラズマを高密度に生成するプラズマガン10と、プラズマ輸送の方向を中心軸とした円筒状の非磁性(例えばステンレス製やガラス製)のシートプラズマ変形室25と、プラズマ輸送の方向と直交する方向を中心軸とした円筒状の非磁性(例えばステンレス製)の真空成膜室35と、を備える。
【0038】
なお、詳細な図示を省略しているが、これらの各部10、25、35は、プラズマを輸送する通路を介して互いに気密状態を保って連通されている。
【0039】
まず、プラズマガン10の内部構成およびシートプラズマ変形室25の周辺構成について概説する。
【0040】
スパッタリング装置100のプラズマガン10は、公知の圧力勾配型ガンであり、カソードユニットおよび中間電極(何れも図示せず)を内蔵している。また、プラズマガン10には、放電により電離される放電ガス(ここでは、アルゴンガス)をプラズマガン10内の放電空間に導くことができる放電ガス供給手段(図示せず)も併設されている。
【0041】
以上の構成により、上述のプラズマガン10では、プラズマガン電源(図示せず)を用いてカソードユニットおよびアノード15間に低電圧かつ大電流のアーク放電を発生できる。
【0042】
このようにして、放電プラズマの輸送中心に対して略等密度な分布の円柱状のアーク放電プラズマ(以下、「円柱プラズマ20」という)がプラズマガン10の放電空間に形成され、この円柱プラズマ20が、図1に示すように、プラズマガン10からシートプラズマ変形室25に引き出される。
【0043】
また、シートプラズマ変形室25では、図1に示すように、一対の角形の棒磁石11A、11B(永久磁石;磁界発生手段の対)が、シートプラズマ変形室25のプラズマ輸送空間を挟むよう、所定の間隔を隔てて配設されている。本実施形態では、これらの棒磁石11A、11BのN極同士が対向している。
【0044】
以上の構成により、棒磁石11A、11Bによって形成される磁石磁界に基づいて、円柱プラズマ20は、その輸送方向の輸送中心を含む平面に沿って拡がるシート状のプラズマ(以下、「シートプラズマ21」という)に変形され、このシートプラズマ21が、シートプラズマ変形室25から真空成膜室35に引き出される。なお、このようなシートプラズマ21の形成法自体は公知なので、ここでは、詳細な説明は省略する。
【0045】
次に、スパッタリング装置100の真空成膜室35の内部構成について述べる。
【0046】
真空成膜室35は、例えば、シートプラズマ21中のAr+の衝突エネルギによりターゲット30Aの材料(例えば銅)をスパッタリング粒子として叩き出すスパッタリングプロセス用の成膜チャンバに相当する。
【0047】
この真空成膜室35は、減圧可能な成膜空間35Aを有し、この成膜空間35Aは、バルブにより開閉可能な排気口からターボポンプなどの真空ポンプ(図示せず)により真空排気される。
【0048】
これにより、この成膜空間35Aはスパッタリングプロセス可能なレベルの真空度にまで速やかに減圧される。
【0049】
本実施形態では、円板状のターゲット30Aは、円板状のターゲットホルダ30Bに装着された状態において、パラレルリンク機構110(図2参照;詳細は後述)により成膜空間35Aを上下(真空成膜室35の中心軸方向)に移動できるとともに、成膜空間35Aの所定の位置において様々な方向に揺動できるように構成されている。
【0050】
同様に、円板状の基板32Aは、円板状の基板ホルダ32Bに装着された状態において、パラレルリンク機構110(図2参照;詳細は後述)により成膜空間35Aを上下(真空成膜室35の中心軸方向)に移動できるとともに、成膜空間35Aの所定の位置において様々な方向に揺動できるように構成されている。
【0051】
このようにして、ターゲット30Aおよび基板32Aが、シートプラズマ21の厚み方向に一定の好適な間隔L(以下、必要に応じて「T/S距離L」と略す)を隔てるようにして、このシートプラズマ21を挟み、成膜空間35Aにおいて互いに対向して配置されている。
【0052】
更に、ターゲット30Aは、図1に示すように、スパッタリングプロセスにおいて、直流のバイアス電源31によりバイアス電圧(マイナス電圧)が印加されている。
【0053】
これにより、シートプラズマ21中のAr+がターゲット30Aに向かって引き付けられ、Ar+とターゲット30Aとの間の衝突エネルギによりターゲット30Aから放出されるスパッタ粒子(例えば、Cu粒子)が、ターゲット30Aから基板32Aに向かって叩き出される。
【0054】
また、基板32Aは、図1に示すように、スパッタリングプロセスにおいて、直流のバイアス電源33によりバイアス電圧(マイナス電圧)が印加されている。
【0055】
これにより、シートプラズマ21によって電離されたスパッタ粒子(例えば、Cu+イオン)が、基板32Aに向かって加速され、この基板32Aに対して付着強度を高めて堆積される。
【0056】
更に、ターゲット30Aおよび基板32Aは、図1に示すように、スパッタリングプロセスにおいて、冷媒導入配管34A、36Aおよび冷媒排出配管34B、36Bによって循環される冷媒(例えば、水)によって冷却される場合もある。
【0057】
次に、スパッタリング装置100の真空成膜室35の周辺の構成を説明する。
【0058】
真空成膜室35のプラズマガン10と反対側の側方には、アノード15が配置され、真空成膜室35の側壁とアノード15との間には、シートプラズマ21の通過用の通路(図示せず)が設けられている。
【0059】
このようなアノード15は、プラズマガン10のカソードユニットとの間で所定の基準電位が与えられ、これにより、アノード15は、カソードユニットおよびアノード15の間のアーク放電に基づくシートプラズマ21中の荷電粒子(特に電子)を回収する役割を有している。
【0060】
また、図1に示すように、電磁コイル12、13(空心コイル)が、互いに対をなして、真空成膜室35の成膜空間35Aを挟み、異極同士(ここでは、電磁コイル12はN極、電磁コイル13はS極)を向かい合わせて配置されている。
【0061】
電磁コイル12は、棒磁石11A、11Bと真空成膜室35との間のプラズマ輸送方向の適所に配置され、電磁コイル13は、真空成膜室35とアノード15との間のプラズマ輸送方向の適所に配置されている。
【0062】
このような電磁コイル12、13の対により作られるコイル磁界(例えば10G〜300G程度)により、シートプラズマ21は、その拡がり方向の拡散を適切に抑えるように整形される。
【0063】
次に、本実施形態の特徴部である基板32Aやターゲット30Aの運動制御に用いるパラレルリンク機構110の一構成例について図面を参照しながら詳しく述べる。
【0064】
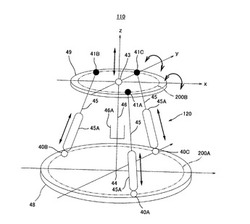
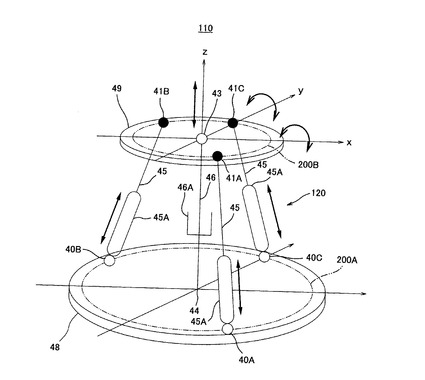
図2は、本実施形態のパラレルリンク機構の概念構成図である。但し、図2において、以下の説明の便宜上、出力板49の中央部を垂直に上下に延びる方向を「Z方向」とし、この「Z方向」に垂直な出力板49の面内の2つの方向を「X方向」および「Y方向」としている。
【0065】
なお、パラレルリンク機構とは、一般的に、互いに離隔して対向配置された一対の板部材(ここでは、図2のベース板48および出力板49)を、複数の作動装置(ここでは、図2のアクチュエータ45)によって並列的に連結した機械構造をいう。
【0066】
図2に示すように、パラレルリンク機構110は、真空成膜用のターゲット30Aや基板32A(図1参照)を搭載可能な円板状の出力板49(第1板部材)と、この出力板49と間隔をあけて、適宜の固定部に配される円板状のベース板48(第2板部材)と、これらのベース板48および出力板49間の連結に用いるリンク部120と、を備える。
【0067】
なお、後述のとおり、上述のベース板48が真空成膜室35の壁38(図5参照)に固定される固定板部材に相当してもよい。また、上述の出力板49がターゲットホルダ30Bや基板ホルダ32Bを載せる可動板部材、或いは、ターゲットホルダ30Bや基板ホルダ32B自体となる可動板部材に相当してもよい。
【0068】
リンク部120は、図2に示すように、アクチュエータ45A(作動装置)が配された複数(3個)の伸縮装置45と、直動ガイド46A(ガイド部材)からなる支柱46と、を備える。
【0069】
伸縮装置45は、ベース板48および出力板49間において並列に配されている。そして、伸縮装置45のそれぞれが、アクチュエータ45Aの駆動力により軸方向に伸縮できるように構成されている。詳しくは、3個の伸縮装置45は、図2に示すように、各伸縮装置45のピストンの両軸端がそれぞれ、ベース板48および出力板49の中央部を中心とする仮想の円周200A、200B上に120°離れて接続された棒状の形態をなしており、伸縮装置45のそれぞれに配されたアクチュエータ45Aの駆動力により、各伸縮装置45のピストンのストローク長が独立的に変更できる構造となっている。
【0070】
このような伸縮装置45として、エアーシリンダ、油圧シリンダ、モータおよびボールねじからなる電動シリンダなどを用いることができるが、出力板49の運動制御を高精度に行うには電動シリンダを使用する方が好ましい。
【0071】
一方、支柱46(直動ガイド46A)は、ベース板48および出力板49間において伸縮装置45と並列に配されており、アクチュエータ45Aの駆動力をベース板48および出力板49を介して伝達することにより軸方向に伸縮できるように構成されている。詳しくは、1個の支柱46は、図2に示すように、支柱46の両軸端がそれぞれ、ベース板48および出力板49の中央部に接続された棒状の形態をなしており、各伸縮装置45のアクチュエータ45Aの駆動力を、ベース板48や出力板49を介して伝達することにより、支柱46の長さが受動的に変更できる構造となっている。
【0072】
このような支柱46として、ボールスプラインやLMガイド(登録商標)などを用いることができる。
【0073】
以上のようにして、パラレルリンク機構110は、伸縮型のパラレルメカニズムを構成している。
【0074】
また、本実施形態では、上述のベース板48は、伸縮装置45のピストンのそれぞれの一方の軸端に、軸周りの回転を拘束して2方向に回転角度を変えることができる継手40A、40B、40C(図2の白丸印を参照;以下、必要に応じて、「回転2自由度継手40A、40B、40C」という)を介して連結されている。
【0075】
また、ベース板48は、支柱46の一方の軸端に適宜の固定手段44を介して固定されている。
【0076】
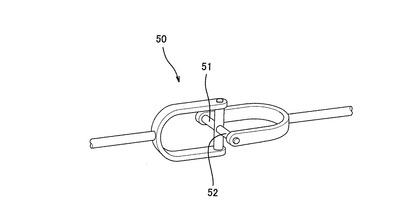
なお、このような回転2自由度継手40A、40B、40Cとして、図3に例示する如く、互いに回転自在に直交する一対の回転軸51、52を備えるユニバーサルジョイント50などを用いるとよい。
【0077】
一方、出力板49は、伸縮装置45のピストンのそれぞれの他方の軸端に、回転2自由度継手に更に軸周りの回転を行える継手41A、41B、41C(図2の黒丸印を参照;以下、必要に応じて、「3自由度継手41A、41B、41C」という)を介して連結されている。
【0078】
また、出力板49は、支柱46の他方の軸端に、継手40A、40B、40Cと同じ類の回転2自由度継手43を介して連結されている。
【0079】
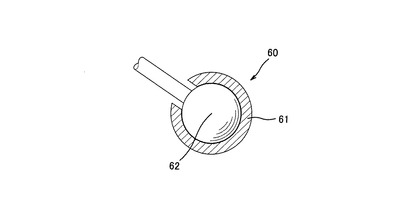
なお、このような3自由度継手41A、41B、41Cとして、図4に例示する如く、球面座61および球面座61により支持される球体62を備えるボールジョイント60を用いてもよく、回転2自由度継手とスイベルジョイントとを組合せたジョイントを用いてもよい。
【0080】
以上の構成により、出力板49のX方向およびY方向(以下、必要に応じて「XY方向」と略す)の周りの回転が可能になる。また、上述のとおり、支柱46の一方の軸端がベース板48に固定されているので、ベース板48を、例えば、真空成膜室35の壁38に固定すると、出力板49のZ方向周りの回転が適切に拘束される。そして、本実施形態の伸縮型のパラレルリンク機構110では、アクチュエータ45Aの駆動力に基づく伸縮装置45の伸縮を独立に制御することにより、出力板49が、その動作範囲内において、ベース板48に対して様々な方向に相対的に運動させることができる。
【0081】
これにより、簡易な小型のアクチュエータ45Aを用いても、各アクチュエータ45Aの出力が、出力板49に対して並列的に作用するので、パラレルリンク機構110全体としては大きな出力を発生できる。また、出力板49に様々な方向の作用力を与えた場合であっても、各伸縮装置45のピストンに曲げ応力がほとんど付与されず、引っ張り応力又は圧縮応力のみが作用する。つまり、このようなパラレルリンク機構110には、各伸縮装置45を簡易(軽量)に構成しても、使用目的に対して充分な剛性を確保し易いという特徴がある。
【0082】
よって、スパッタリング装置100のターゲット30Aや基板32Aを簡易かつ高精度に運動制御させるには、これらのターゲット30Aや基板32Aの駆動系としてパラレルリンク機構110を用いると都合がよい。
【0083】
例えば、ターゲット30Aや基板32Aに接続された配線や配管などから何等かの外力が与えられても、パラレルリンク機構110におけるターゲット30Aや基板32Aの位置ずれが発生し難い。また、パラレルリンク機構110は、スパッタリング装置100の真空ポンプ系などから伝わる振動の影響も受け難い。
【0084】
特に、本実施形態では、パラレルリンク機構110の各伸縮装置45および支柱46の継手構成により、出力板49のXY方向周りの回転および出力板49のZ方向の移動という3自由度の運動が可能である。一方、ベース板49を、例えば、真空成膜室35の壁38に固定すると(図5参照)、上述のとおり、支柱46はその軸周りに回転できないので、出力板49のZ方向周りの回転が適切に拘束される。また、出力板49のXY方向の並進も適切に拘束される。
【0085】
よって、ターゲット30Aや基板32Aの駆動系としてパラレルリンク機構110を用いると、ターゲット30Aや基板32AをZ方向に高精度に移動できる。この場合、全ての(ここでは、3個の)伸縮装置45のピストンを同一方向に同一ストロークで伸縮させ、出力板49をZ方向に動かすとよい。
【0086】
これにより、シートプラズマ方式のスパッタリング装置100のT/S距離L(図1参照)を簡易かつ高精度に変更でき、その結果、ターゲット30Aとシートプラズマ21との間、および、基板32Aとシートプラズマ21との間における好適な距離を簡易かつ高精度に設定できる。
【0087】
また、ターゲット30Aや基板32Aの駆動系としてパラレルリンク機構110を用いると、上述のとおり、ターゲット30Aや基板32Aをベース板48に対して様々な方向に傾けることができる。この場合、3個の伸縮装置45のピストンの伸縮動作を適宜、組合せて(例えば、1個の伸縮装置45のピストンのストロークを伸ばし、2個の伸縮装置45のピストンのストロークを縮めるなど)、出力板49をZ方向に動かすとよい。
【0088】
なお、このような3個の伸縮装置45のピストンの具体的な伸縮動作例については後述する。
【0089】
これにより、ターゲット30Aや基板32Aの傾きを自在に変更できるので、基板32A上に形成された薄膜の膜厚分布の均一化やカバレッジ向上に有利に作用する。
【0090】
更に、ターゲット30Aや基板32Aの駆動系としてパラレルリンク機構110を用いると、ターゲット30Aや基板32AがZ方向周りに回転しないので、ターゲット30Aや基板32Aの回転による様々な不都合が回避される。
【0091】
例えば、ターゲット30Aや基板32AのZ方向周りの回転させる回転軸の導入には、必然的に回転摺動部でのOリングシールや磁気流体シールなどの回転シール構造が必要であるが、前者はリークが発生し易く、後者は価格が高価になる。また、上述の回転シール構造は、構造上、ゴミ発生源になり易い。
【0092】
これに対して、本実施形態のパラレルリンク機構110では、このような回転軸および回転シール構造を無くすことができる。
【0093】
また、ターゲット30Aや基板32AはZ方向周りには固定されているので、ターゲット30Aや基板32Aへの電気配線、冷媒導入配管34A、36Aおよび冷媒排出配管34B、36Bの配設を簡易に行えるという利点もある。
【0094】
なお、本実施形態では、継手40A、40B、40Cを回転2自由度継手とし、継手41A、41B、41Cを3自由度継手としているが、これらの継手の種類を互いに反対してもよい。
【0095】
但し、継手40A、40B、40Cおよび継手41A、41B、41Cの両者を回転2自由度継手で構成すると、出力板49の拘束が強くなり過ぎて、出力板49のスムーズな動作を阻害する場合がある。逆に、継手40A、40B、40Cおよび継手41A、41B、41Cの両者を3自由度継手で構成すると、伸縮装置45の軸周りの回転が可能になるので、出力板49の安定な動作を阻害する場合がある。つまり、伸縮装置45の継手として、回転2自由度継手と3自由度継手との組合せが最適であると考えられる。
【0096】
次に、真空成膜室35内にパラレルリンク機構110Aを組み込んだ構成例について図面を参照しながら説明する。
【0097】
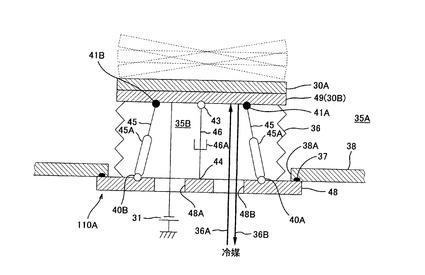
図5は、図2のパラレルリンク機構を備えるスパッタリング装置の要部を示した断面図である。
【0098】
図5では、図2の出力板49が、ターゲットホルダ30Bの機能を兼ねている例が図示されているが、別体のターゲットホルダ30Bが出力板49により支持される構造に改変してもよい。
【0099】
なお、図2のパラレルリンク機構110を基板32Aの運動制御に用いる場合でも、図5のパラレルリンク機構110Aと同様に構成できるので、この場合のスパッタリング装置の構成の図示および説明は省略する。
【0100】
図5に示すように、真空成膜室35の壁38に形成された開口38Aから真空成膜室35内に、図2に示したパラレルリンク機構110Aが挿入されている。この開口38Aは、パラレルリンク機構110Aのベース板48が真空成膜室25の壁38に当接できる程度の大きさに形成されている。
【0101】
これにより、ベース板48と壁38との間に真空シール37を配することができ、その結果、真空成膜室35の成膜空間35Aを適切に減圧できる。
【0102】
また、図5に示すように、金属ベローズ36(気密機構)が、ターゲットホルダ30Bおよびベース板48間の空間35Bの全域を囲みターゲットホルダ30Bおよびベース板48に接続されている。
【0103】
これにより、真空成膜室35の成膜空間35Aが減圧状態において、各アクチュエータ45Aの周囲が大気圧に保たれる。
【0104】
つまり、3個のアクチュエータ45Aが円筒状の金属ベローズ36の内部に配されて、金属ベローズ36によって成膜空間35Aとアクチュエータ45Aの周囲(空間35B)との間が気密に仕切られているので、真空成膜室35の成膜空間35Aを減圧してもアクチュエータ45Aを真空対応に構成しなくて済み好都合である。
【0105】
なお、ここで、バイアス電源31からの電気配線をターゲット30Aに接続させるには、図5に示すように、金属ベローズ36によって囲まれたベース板48の適所に電気配線を通せる程度の大きさの簡易な開口48Aを形成すればよい。
【0106】
この場合、ターゲット30Aとターゲットホルダ30B(出力板49)との間に、両者間の絶縁を取る絶縁フランジ(図示せず)を介在させてターゲット30Aをターゲットホルダ30Bに固定すると、真空成膜室35の壁38や金属ベローズ36を適切に接地できる。
【0107】
また、冷媒導入配管36Aおよび冷媒排出配管36Bをターゲットホルダ30Bに接続させるには、図5に示すように、金属ベローズ36によって囲まれたベース板48の適所に冷媒導入配管36Aおよび冷媒排出配管36Bを通せる程度の大きさの簡易な開口48Bを形成すればよい。
【0108】
なお、本実施形態では、ターゲットホルダ30B(出力板49)に適宜の冷媒通路(図示せず)が形成され、これにより、このターゲットホルダ30Bが、ターゲット30Aの冷却部品の機能を兼ねている例が示されている。但し、このような冷媒通路が形成された別体の冷却部品(図示せず)を、ターゲット30Aとターゲットホルダ30Bとの間に介在させてもよい。
【0109】
次に、本実施形態のスパッタリング装置100の動作例(特に、パラレルリンク機構110Aによる伸縮装置45の伸縮動作例)について述べる。
【0110】
まず、スパッタリング装置100の真空成膜室35内にターゲット30Aおよび基板32Aをセットした後、スパッタリング装置100の内部を、シートプラズマ21を形成可能な所定の圧力にまで真空排気する。
【0111】
次いで、スパッタリング装置100のプラズマガン電源からプラズマガン10に電力を供給することよってシートプラズマ21を形成する。すると、シートプラズマ21を用いたスパッタリングプロセスを開始できる。
【0112】
そして、スパッタリングプロセスの開始時において、図示しない制御装置が、パラレルリンク機構110Aを用いて、ターゲット30Aや基板32Aを搭載した出力板49を、以下の如く動かす。
【0113】
まず、制御装置は、パラレルリンク機構110Aの3個の伸縮装置45のピストンを同一方向に、かつ同一ストロークで伸縮させて、ターゲット30Aおよび基板32Aがシートプラズマ21の厚み方向に一定の好適な位置に到達するまで出力板49を動かす。
【0114】
この状態で、制御装置は、3個の伸縮装置45のピストンの伸縮動作を図6および図7に例示するように制御する。
【0115】
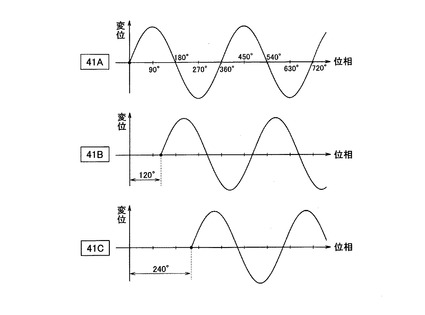
図6は、本発明の実施形態のパラレルリンク機構に用いる伸縮装置のピストンおよび出力板間における継手のZ方向変位と位相との関係を表した図である。
【0116】
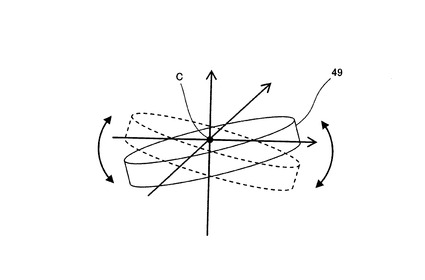
図6に示すように、制御装置は、3個の伸縮装置45のピストンの軸端(継手41A、41B、41C)のZ方向変位が正弦波になるように、パラレルリンク機構110Aの動作を制御する。各継手41A、41B、41Cの変位である正弦波では、継手41Aと継手41Bとの間の位相が120°ずれ、継手41Bと継手41Cとの間の位相が120°ずれている。このように位相をずらすと、出力板49の揺動中心Cを中心として、図7に示す如く出力板49を揺動させることができる。
【0117】
そして、このような出力板49の揺動動作は、円板状の出力板49が水平面に対して所定の傾斜角で傾斜し、その傾斜面が上述の正弦波の周期で、出力板49の中心を通る鉛直線を中心に回転する運動に他ならない。従って、出力板49の周方向において出力板49の揺動が均一になるので、このような出力板49に基板32Aなどを搭載すると、基板32A上に形成される薄膜の膜厚分布の均一化やカバレッジの向上に有利に作用する。
【0118】
以上のとおり、本実施形態のパラレルリンク機構110は、真空成膜用のターゲット30Aや基板32Aを搭載可能な円板状の出力板49と、この出力板49と間隔をあけて、適宜の固定部に固定される円板状のベース板48と、これらのベース48および出力板49間の連結に用いるリンク部120と、を備える。
【0119】
そして、このリンク部120は、アクチュエータ45Aが配された3個の伸縮装置45と、直動ガイド46Aからなる支柱46と、を備える。
【0120】
また、伸縮装置45は、ベース板48および出力板49間において並列に配されており、伸縮装置45のそれぞれが、アクチュエータ45Aの駆動力により軸方向に伸縮できるように構成されている。
【0121】
一方、支柱46は、ベース板48および出力板49間において伸縮装置45と並列に配されており、アクチュエータ45Aの駆動力をベース板48および出力板49を介して伝達することにより軸方向に伸縮できるように構成されている。
【0122】
このようにして、パラレルリンク機構110は、伸縮型のパラレルメカニズムを構成している。
【0123】
また、本実施形態では、上述のベース板48は、各伸縮装置45のそれぞれの一方の軸端に、ベース板48の中央部を中心とする円周200A上に120°離れて位置する回転2自由度継手40A、40B、40C(例えば、ユニバーサルジョイント50)を介して連結されている。
【0124】
また、ベース板48は、支柱46の一方の軸端にも、ベース板48の中央部に位置する固定手段44を介して固定されている。
【0125】
更に、上述の出力板49は、各伸縮装置45のそれぞれの他方の軸端に、出力板49の中央部を中心とする円周200B上に120°離れて位置する3自由度継手41A、41B、41C(例えば、ボールジョイント60)を介して連結されている。
【0126】
また、出力板49は、支柱46の他方の軸端にも、出力板49の中央部に位置する回転2自由度継手43(例えば、ユニバーサルジョイント50)を介して連結されている。
【0127】
以上の構成により、パラレルリンク機構110の出力板49のXY方向周りの回転、および、出力板49のZ方向の移動という3自由度の運動が可能になる。一方、ベース板48を、例えば、真空成膜室35の壁38に固定すると、支柱46はその軸周りに回転できないので、出力板49のZ方向周りの回転が適切に拘束される。また、出力板49のXY方向の並進も適切に拘束される。
【0128】
このため、スパッタリング装置100のターゲット30Aや基板32Aの駆動系としてパラレルリンク機構110Aを用いると、ターゲット30Aや基板32AをZ方向に簡易かつ高精度に移動できる。従って、シートプラズマを用いたスパッタリング装置100では、スパッタリング装置100のT/S距離Lを簡易かつ高精度に変更できる。
【0129】
また、スパッタリング装置100のターゲット30Aや基板32Aの駆動系としてパラレルリンク機構110Aを用いると、ターゲット30Aや基板32AをZ方向の周りに回転させずに、ターゲット30Aや基板32Aをベース板48に対して様々な方向に傾けることもできる。
【0130】
従って、基板32Aに形成される薄膜の膜厚分布の均一化やカバレッジ向上に有利に作用する。
【0131】
また、基板32AなどのZ方向周りの回転に起因する様々な不都合も回避できる。
【0132】
例えば、ターゲット30Aや基板32AのZ方向周りの回転による回転摺動部での回転シール構造の複雑化や回転摺動部でのゴミ発生などを回避できる。更に、ターゲット30Aや基板32Aへの電気配線、冷媒導入配管34A、36Aおよび冷媒排出配管34B、36Bなどの配設も簡易に行える。
(変形例)
本実施形態(図5)では、大口径の金属ベローズ36の内部に、全ての(3個の)アクチュエータ45Aが配設されている。この場合、空間35Bの大気圧P0と成膜空間35Aの内圧P1との間の差圧(P0−P1)が、出力板49(ターゲットホルダ30B)の裏面の略全域に作用する。
【0133】
すると、伸縮装置45におけるアクチュエータ45Aの選定条件として、ターゲットホルダ30Bを適切に動かせるよう、上述の差圧(P0−P1)によるターゲットホルダ30Bへの作用力に打ち勝てる程、強力な駆動力を発生できる駆動系を選ぶ必要がある。
【0134】
例えば、仮に28インチ相当のターゲットホルダ30Bの全体が大気圧に曝されると、約4000kgfの大気圧荷重がターゲットホルダ30Bに加わる。そして、このような過大な荷重が、伸縮装置45に用いる簡易なアクチュエータ45Aの選定の障害となる場合がある。なお、空間35Bを若干減圧気味に構成することも可能であるが、このような構造を取る場合、真空対応のアクチュエータを用いる必要があるので、却って、駆動系の簡素化が図れなくなる場合もある。
【0135】
そこで、以上の問題に適切に対処するには、単一のアクチュエータ45Aを格納するのに必要かつ充分に小口径の金属ベローズ(図示は省略)を、単一のアクチュエータ45A毎に配するとよい。
【0136】
以上の構成により、ターゲットホルダ30Bにおける上述の差圧(P0−P1)が作用する面積が充分に小さくなるので、伸縮装置45に用いる簡易なアクチュエータ45Aを選定できる。
【産業上の利用可能性】
【0137】
本発明によれば、真空成膜用の基板等の運動を適切に制御できるパラレルリンク機構が得られる。よって、本発明のパラレルリンク機構は、例えば、真空成膜装置の基板等の駆動系として利用できる。
【図面の簡単な説明】
【0138】
【図1】本発明の実施形態によるスパッタリング装置(真空成膜装置)の一構成例を模式的に示した図である。
【図2】本発明の実施形態のパラレルリンク機構の概念構成図である。
【図3】回転2自由度継手の一例を示した図である。
【図4】3自由度継手の一例を示した図である。
【図5】図2のパラレルリンク機構をターゲットの運動制御に用いたスパッタリング装置の要部を示した断面図である。
【図6】本発明の実施形態のパラレルリンク機構に用いる伸縮装置のピストンおよび出力板間における継手のZ方向変位と位相との関係を表した図である。
【図7】本発明の実施形態のパラレルリンク機構による出力板の揺動の様子を示した図である。
【符号の説明】
【0139】
10 プラズマガン
11A、11B 棒磁石
12、13 電磁コイル
15 アノード
20 円柱プラズマ
21 シートプラズマ
25 シートプラズマ変形室
30A ターゲット
30B ターゲットホルダ
31、33 バイアス電源
32A 基板
32B 基板ホルダ
34A、36A 冷媒導入配管
34B、36B 冷媒排出配管
35 真空成膜室
35A 成膜空間
35B 大気空間
36 金属ベローズ
37 真空シール
38 真空成膜室の壁
38A 壁の開口
40A、40B、40C、43 継手(回転2自由度継手)
41A、41B、41C 継手(3自由度継手)
44 固定手段
45 伸縮装置
45A アクチュエータ
46 支柱
46A 直動ガイド
48 ベース板
48A、48B ベース板の開口
49 出力板
50 ユニバーサルジョイント
51、52 ユニバーサルジョイントの回転軸
60 ボールジョイント
61 ボールジョイントの球面座
62 ボールジョイントの球体
100 スパッタリング装置
110、110A パラレルリンク機構
120 パラレルリンク機構のリンク部
200A ベース板上の仮想の円周
200B 出力板上の仮想の円周
【技術分野】
【0001】
本発明は、パラレルリンク機構およびパラレルリンク機構を備えた真空成膜装置に関する。
【背景技術】
【0002】
パラレルリンク機構は、移動ロボットの姿勢制御機構としては一般的に知られており(例えば、特許文献1参照)、シリアルリンク機構に比べて、高剛性、軽量であるとされている。そこで、このようなパラレルリンク機構の利点を活かして、ロボットの姿勢制御以外の技術分野でも上述のパラレルリンク機構を用いる例が提案されている。
【0003】
例えば、特許文献2および特許文献3では、露光装置などのテーブルの位置決めにパラレルリンク機構を用い、これにより、テーブルの高精度位置決めを行えると記載されている。
【特許文献1】特開平8−11081号公報
【特許文献2】特開平11−274031号公報
【特許文献3】特開2005−284447号公報
【発明の開示】
【発明が解決しようとする課題】
【0004】
スパッタリング装置などの真空成膜装置では、基板やターゲットなどの真空成膜用の部品(以下、必要に応じて「基板等」という)の回転、移動または傾き変更を適切に行える保持装置を配設する場合がある。そして、このような保持装置を用いると、基板に形成される薄膜の膜厚分布の均一化やカバレッジ向上が容易になる。
【0005】
そこで、真空成膜装置の基板等の保持装置に上述のパラレルリンク機構を組み込むと、基板等を高精度に運動制御できるので都合がよいが、真空成膜装置の基板等の運動制御の実情に照らしてパラレルリンク機構を適切に設計する必要があるので、特許文献1〜3記載の技術をそのまま転用することが困難であると考えられる。
【0006】
例えば、シートプラズマ方式のスパッタリング装置の基板等の保持装置に上述のパラレルリンク機構を組み込む場合、基板およびターゲット間の距離(つまり、基板とシートプラズマとの距離やターゲットとシートプラズマとの距離)は、スパッタリングの性能に直接的な影響を与えるので、これらの距離を簡易かつ高精度に変更できる方が好ましい。
【0007】
しかしながら、特許文献1記載の駆動装置では、拘束リンクによりベースプレートおよびエンドイフェクタ間の距離が拘束されているので、両者の距離を変更できない構造になっている。
【0008】
また、スパッタリング装置の基板等の保持装置では、基板等の中心周りの回転や並進を拘束して基板等の傾きを自在に変更できる方が、後述する様々な理由から好ましい。
【0009】
しかしながら、特許文献2および特許文献3記載の技術については、パラレルリンク機構のテーブルの位置決めに主眼が置かれており、上述の基板等の運動を意図したリンク部の設計(例えば、基板等の運動自由度の適切な設計)において、これらの技術は参酌に値しない。
【0010】
本発明は、このような事情に鑑みてなされたものであり、真空成膜用の基板等の運動を適切に制御できるパラレルリンク機構およびこのようなパラレルリンク機構を備えた真空成膜装置を提供することを目的とする。
【課題を解決するための手段】
【0011】
上記課題を解決するため、本発明は、
真空成膜用の部品を搭載可能な第1板部材と、
前記第1板部材と間隔をあけて配された第2板部材と、
前記第1板部材および第2板部材間の連結に用いるリンク部と、を備え、
前記リンク部は、アクチュエータが配された伸縮装置と、ガイド部材からなる支柱と、を含み、
複数の前記伸縮装置は、前記第1板部材および第2板部材間において並列に配されて、前記アクチュエータの駆動力により軸方向に伸縮可能に構成され、
前記支柱は、前記第1板部材および第2板部材間において前記伸縮装置と並列に配されて、前記アクチュエータの駆動力を前記第1板部材および第2板部材を介して伝達することにより軸方向に伸縮可能に構成され、
前記第1板部材は、前記複数の伸縮装置の一方の軸端に第1継手を介して連結されるとともに、前記支柱の一方の軸端に第2継手を介して連結され、
前記第2板部材は、前記複数の伸縮装置の他方の軸端に第3継手を介して連結されるとともに、前記支柱の他方の軸端に固定されている、パラレルリンク機構を提供する。
【0012】
以上のパラレルリンク機構により、簡易な小型のアクチュエータを用いても、各アクチュエータの出力が、第1板部材に対して並列的に作用するので、パラレルリンク機構全体としては大きな出力を発生できる。
【0013】
また、第1板部材に様々な方向の作用力を与えた場合であっても、各伸縮装置のピストンに曲げ応力がほとんど付与されず、引っ張り応力又は圧縮応力のみが作用する。
【0014】
つまり、このようなパラレルリンク機構には、各伸縮装置を簡易(軽量)に構成しても、使用目的に対して充分な剛性を確保し易いという特徴がある。
【0015】
よって、シートプラズマ方式のスパッタリング装置などの真空成膜装置の基板等を簡易かつ高精度に運動制御させるには、これらの基板等の駆動系としてパラレルリンク機構を用いると都合がよい。
【0016】
本発明のパラレルリンク機構では、前記第1継手および前記第3継手のうちのいずれか一方の継手が3自由度継手であってもよく、その他方の継手および前記第2継手が回転2自由度継手であってもよい。
【0017】
なお、前記3自由度継手の一例はボールジョイントであり、前記回転2自由度継手の一例はユニバーサルジョイントである。
【0018】
以上の構成により、第1板部材のXY方向周りの回転および第1板部材のZ方向の移動という3自由度の運動が可能である。一方、第2板部材を、例えば、真空成膜室の壁に固定すると、支柱はその軸周りに回転できないので、第1板部材のZ方向周りの回転が適切に拘束される。また、第1板部材のXY方向の並進も適切に拘束される。
【0019】
よって、基板等の駆動系としてパラレルリンク機構を用いると、基板等をZ方向に高精度に移動できる。この場合、全ての伸縮装置のピストンを同一方向に同一ストロークで伸縮させ、第1板部材をZ方向に動かすとよい。
【0020】
これにより、例えば、シートプラズマ方式のスパッタリング装置のターゲットおよび基板間距離を簡易かつ高精度に変更でき、その結果、ターゲットとシートプラズマとの間、および、基板とシートプラズマとの間における好適な距離を簡易かつ高精度に設定できる。
【0021】
また、基板等の駆動系としてパラレルリンク機構を用いると、基板等をZ方向の周りに回転させずに、基板等を第2板部材に対して様々な方向に傾けることができる。この場合、各伸縮装置のピストンの伸縮動作を適宜、組合せて、第1板部材をZ方向に動かすとよい。
【0022】
従って、基板に形成される薄膜の膜厚分布の均一化やカバレッジ向上に有利に作用する。
【0023】
また、基板等のZ方向周りの回転に起因する様々な不都合も回避できる。例えば、基板等のZ方向周りの回転による回転摺動部での回転シール構造の複雑化や回転摺動部でのゴミ発生などを回避できる。更に、基板等への電気配線、冷媒導入配管および冷媒排出配管などの配設も簡易に行える。
【0024】
また、本発明のパラレルリンク機構では、前記伸縮装置の一方の軸端を、前記第1板部材の所定の点を中心とする円周上に離れて配し、前記伸縮装置の他方の軸端を、前記第2板部材の所定の点を中心とする円周上に離れて配し、前記支柱の一方の軸端を、前記第1板部材の所定の点上に配し、前記支柱の他方の軸端を、前記第2板部材の所定の点上に配してもよい。
【0025】
以上の構成により、制御装置が各伸縮装置に対し適宜の揺動制御を行うと、第1板部材の周方向において第1板部材の揺動が均一になるので、このような第1板部材に基板等を搭載すると、基板上に形成される薄膜の膜厚分布の均一化やカバレッジの向上に有利に作用する。
【0026】
また、本発明は、上述のいずれかに記載のパラレルリンク機構が真空成膜室に配され、
前記第1板部材は、前記真空成膜室内において前記伸縮装置および前記支柱の伸縮動作により移動制御され、
前記第2板部材は、前記真空成膜室の壁に固定されている、真空成膜装置も提供する。
【0027】
このようにして、伸縮型のパラレルリンク機構を基板等の保持装置に用いる真空成膜装置を得ることができる。
【0028】
また、本発明の真空成膜装置では、前記真空成膜室内が減圧状態において、前記アクチュエータの周囲を大気圧に保てる気密機構を備えてもよい。
【0029】
ここで、前記気密機構の一例は、前記アクチュエータを内部に配した状態で、前記第1板部材および前記第2板部材に接続されたベローズである。
【0030】
以上の構成により、アクチュエータがベローズの内部に配されて、ベローズによって真空成膜室の成膜空間とアクチュエータの周囲との間が気密に仕切られているので、真空成膜室の成膜空間を減圧してもアクチュエータを真空対応に構成しなくて済み好都合である。
【0031】
なお、前記ベローズを、単一の前記アクチュエータ毎に配してもよい。
【0032】
以上の構成により、第1板部材における大気圧と成膜空間の内圧との間の差圧が作用する面積を小さくできるので、伸縮装置に用いる簡易なアクチュエータを選定できる。
【発明の効果】
【0033】
本発明によれば、真空成膜用の基板等の運動を適切に制御できるパラレルリンク機構およびこのようなパラレルリンク機構を備えた真空成膜装置が得られる。
【発明を実施するための最良の形態】
【0034】
以下、本発明の好ましい実施形態について図面を参照しながら説明する。
【0035】
図1は、本発明の実施形態によるスパッタリング装置(真空成膜装置)の一構成例を模式的に示した図である。
【0036】
なお、ここでは、シートプラズマによってスパッタリングプロセスを行えるスパッタリング装置100が図示されているが、これはあくまで一例に過ぎない。本明細書に記載の技術は、マグネトロンスパッタリング装置や真空蒸着装置であっても適用できる。
【0037】
本実施形態のスパッタリング装置100は、放電プラズマ輸送の方向から見て順番に、放電プラズマを高密度に生成するプラズマガン10と、プラズマ輸送の方向を中心軸とした円筒状の非磁性(例えばステンレス製やガラス製)のシートプラズマ変形室25と、プラズマ輸送の方向と直交する方向を中心軸とした円筒状の非磁性(例えばステンレス製)の真空成膜室35と、を備える。
【0038】
なお、詳細な図示を省略しているが、これらの各部10、25、35は、プラズマを輸送する通路を介して互いに気密状態を保って連通されている。
【0039】
まず、プラズマガン10の内部構成およびシートプラズマ変形室25の周辺構成について概説する。
【0040】
スパッタリング装置100のプラズマガン10は、公知の圧力勾配型ガンであり、カソードユニットおよび中間電極(何れも図示せず)を内蔵している。また、プラズマガン10には、放電により電離される放電ガス(ここでは、アルゴンガス)をプラズマガン10内の放電空間に導くことができる放電ガス供給手段(図示せず)も併設されている。
【0041】
以上の構成により、上述のプラズマガン10では、プラズマガン電源(図示せず)を用いてカソードユニットおよびアノード15間に低電圧かつ大電流のアーク放電を発生できる。
【0042】
このようにして、放電プラズマの輸送中心に対して略等密度な分布の円柱状のアーク放電プラズマ(以下、「円柱プラズマ20」という)がプラズマガン10の放電空間に形成され、この円柱プラズマ20が、図1に示すように、プラズマガン10からシートプラズマ変形室25に引き出される。
【0043】
また、シートプラズマ変形室25では、図1に示すように、一対の角形の棒磁石11A、11B(永久磁石;磁界発生手段の対)が、シートプラズマ変形室25のプラズマ輸送空間を挟むよう、所定の間隔を隔てて配設されている。本実施形態では、これらの棒磁石11A、11BのN極同士が対向している。
【0044】
以上の構成により、棒磁石11A、11Bによって形成される磁石磁界に基づいて、円柱プラズマ20は、その輸送方向の輸送中心を含む平面に沿って拡がるシート状のプラズマ(以下、「シートプラズマ21」という)に変形され、このシートプラズマ21が、シートプラズマ変形室25から真空成膜室35に引き出される。なお、このようなシートプラズマ21の形成法自体は公知なので、ここでは、詳細な説明は省略する。
【0045】
次に、スパッタリング装置100の真空成膜室35の内部構成について述べる。
【0046】
真空成膜室35は、例えば、シートプラズマ21中のAr+の衝突エネルギによりターゲット30Aの材料(例えば銅)をスパッタリング粒子として叩き出すスパッタリングプロセス用の成膜チャンバに相当する。
【0047】
この真空成膜室35は、減圧可能な成膜空間35Aを有し、この成膜空間35Aは、バルブにより開閉可能な排気口からターボポンプなどの真空ポンプ(図示せず)により真空排気される。
【0048】
これにより、この成膜空間35Aはスパッタリングプロセス可能なレベルの真空度にまで速やかに減圧される。
【0049】
本実施形態では、円板状のターゲット30Aは、円板状のターゲットホルダ30Bに装着された状態において、パラレルリンク機構110(図2参照;詳細は後述)により成膜空間35Aを上下(真空成膜室35の中心軸方向)に移動できるとともに、成膜空間35Aの所定の位置において様々な方向に揺動できるように構成されている。
【0050】
同様に、円板状の基板32Aは、円板状の基板ホルダ32Bに装着された状態において、パラレルリンク機構110(図2参照;詳細は後述)により成膜空間35Aを上下(真空成膜室35の中心軸方向)に移動できるとともに、成膜空間35Aの所定の位置において様々な方向に揺動できるように構成されている。
【0051】
このようにして、ターゲット30Aおよび基板32Aが、シートプラズマ21の厚み方向に一定の好適な間隔L(以下、必要に応じて「T/S距離L」と略す)を隔てるようにして、このシートプラズマ21を挟み、成膜空間35Aにおいて互いに対向して配置されている。
【0052】
更に、ターゲット30Aは、図1に示すように、スパッタリングプロセスにおいて、直流のバイアス電源31によりバイアス電圧(マイナス電圧)が印加されている。
【0053】
これにより、シートプラズマ21中のAr+がターゲット30Aに向かって引き付けられ、Ar+とターゲット30Aとの間の衝突エネルギによりターゲット30Aから放出されるスパッタ粒子(例えば、Cu粒子)が、ターゲット30Aから基板32Aに向かって叩き出される。
【0054】
また、基板32Aは、図1に示すように、スパッタリングプロセスにおいて、直流のバイアス電源33によりバイアス電圧(マイナス電圧)が印加されている。
【0055】
これにより、シートプラズマ21によって電離されたスパッタ粒子(例えば、Cu+イオン)が、基板32Aに向かって加速され、この基板32Aに対して付着強度を高めて堆積される。
【0056】
更に、ターゲット30Aおよび基板32Aは、図1に示すように、スパッタリングプロセスにおいて、冷媒導入配管34A、36Aおよび冷媒排出配管34B、36Bによって循環される冷媒(例えば、水)によって冷却される場合もある。
【0057】
次に、スパッタリング装置100の真空成膜室35の周辺の構成を説明する。
【0058】
真空成膜室35のプラズマガン10と反対側の側方には、アノード15が配置され、真空成膜室35の側壁とアノード15との間には、シートプラズマ21の通過用の通路(図示せず)が設けられている。
【0059】
このようなアノード15は、プラズマガン10のカソードユニットとの間で所定の基準電位が与えられ、これにより、アノード15は、カソードユニットおよびアノード15の間のアーク放電に基づくシートプラズマ21中の荷電粒子(特に電子)を回収する役割を有している。
【0060】
また、図1に示すように、電磁コイル12、13(空心コイル)が、互いに対をなして、真空成膜室35の成膜空間35Aを挟み、異極同士(ここでは、電磁コイル12はN極、電磁コイル13はS極)を向かい合わせて配置されている。
【0061】
電磁コイル12は、棒磁石11A、11Bと真空成膜室35との間のプラズマ輸送方向の適所に配置され、電磁コイル13は、真空成膜室35とアノード15との間のプラズマ輸送方向の適所に配置されている。
【0062】
このような電磁コイル12、13の対により作られるコイル磁界(例えば10G〜300G程度)により、シートプラズマ21は、その拡がり方向の拡散を適切に抑えるように整形される。
【0063】
次に、本実施形態の特徴部である基板32Aやターゲット30Aの運動制御に用いるパラレルリンク機構110の一構成例について図面を参照しながら詳しく述べる。
【0064】
図2は、本実施形態のパラレルリンク機構の概念構成図である。但し、図2において、以下の説明の便宜上、出力板49の中央部を垂直に上下に延びる方向を「Z方向」とし、この「Z方向」に垂直な出力板49の面内の2つの方向を「X方向」および「Y方向」としている。
【0065】
なお、パラレルリンク機構とは、一般的に、互いに離隔して対向配置された一対の板部材(ここでは、図2のベース板48および出力板49)を、複数の作動装置(ここでは、図2のアクチュエータ45)によって並列的に連結した機械構造をいう。
【0066】
図2に示すように、パラレルリンク機構110は、真空成膜用のターゲット30Aや基板32A(図1参照)を搭載可能な円板状の出力板49(第1板部材)と、この出力板49と間隔をあけて、適宜の固定部に配される円板状のベース板48(第2板部材)と、これらのベース板48および出力板49間の連結に用いるリンク部120と、を備える。
【0067】
なお、後述のとおり、上述のベース板48が真空成膜室35の壁38(図5参照)に固定される固定板部材に相当してもよい。また、上述の出力板49がターゲットホルダ30Bや基板ホルダ32Bを載せる可動板部材、或いは、ターゲットホルダ30Bや基板ホルダ32B自体となる可動板部材に相当してもよい。
【0068】
リンク部120は、図2に示すように、アクチュエータ45A(作動装置)が配された複数(3個)の伸縮装置45と、直動ガイド46A(ガイド部材)からなる支柱46と、を備える。
【0069】
伸縮装置45は、ベース板48および出力板49間において並列に配されている。そして、伸縮装置45のそれぞれが、アクチュエータ45Aの駆動力により軸方向に伸縮できるように構成されている。詳しくは、3個の伸縮装置45は、図2に示すように、各伸縮装置45のピストンの両軸端がそれぞれ、ベース板48および出力板49の中央部を中心とする仮想の円周200A、200B上に120°離れて接続された棒状の形態をなしており、伸縮装置45のそれぞれに配されたアクチュエータ45Aの駆動力により、各伸縮装置45のピストンのストローク長が独立的に変更できる構造となっている。
【0070】
このような伸縮装置45として、エアーシリンダ、油圧シリンダ、モータおよびボールねじからなる電動シリンダなどを用いることができるが、出力板49の運動制御を高精度に行うには電動シリンダを使用する方が好ましい。
【0071】
一方、支柱46(直動ガイド46A)は、ベース板48および出力板49間において伸縮装置45と並列に配されており、アクチュエータ45Aの駆動力をベース板48および出力板49を介して伝達することにより軸方向に伸縮できるように構成されている。詳しくは、1個の支柱46は、図2に示すように、支柱46の両軸端がそれぞれ、ベース板48および出力板49の中央部に接続された棒状の形態をなしており、各伸縮装置45のアクチュエータ45Aの駆動力を、ベース板48や出力板49を介して伝達することにより、支柱46の長さが受動的に変更できる構造となっている。
【0072】
このような支柱46として、ボールスプラインやLMガイド(登録商標)などを用いることができる。
【0073】
以上のようにして、パラレルリンク機構110は、伸縮型のパラレルメカニズムを構成している。
【0074】
また、本実施形態では、上述のベース板48は、伸縮装置45のピストンのそれぞれの一方の軸端に、軸周りの回転を拘束して2方向に回転角度を変えることができる継手40A、40B、40C(図2の白丸印を参照;以下、必要に応じて、「回転2自由度継手40A、40B、40C」という)を介して連結されている。
【0075】
また、ベース板48は、支柱46の一方の軸端に適宜の固定手段44を介して固定されている。
【0076】
なお、このような回転2自由度継手40A、40B、40Cとして、図3に例示する如く、互いに回転自在に直交する一対の回転軸51、52を備えるユニバーサルジョイント50などを用いるとよい。
【0077】
一方、出力板49は、伸縮装置45のピストンのそれぞれの他方の軸端に、回転2自由度継手に更に軸周りの回転を行える継手41A、41B、41C(図2の黒丸印を参照;以下、必要に応じて、「3自由度継手41A、41B、41C」という)を介して連結されている。
【0078】
また、出力板49は、支柱46の他方の軸端に、継手40A、40B、40Cと同じ類の回転2自由度継手43を介して連結されている。
【0079】
なお、このような3自由度継手41A、41B、41Cとして、図4に例示する如く、球面座61および球面座61により支持される球体62を備えるボールジョイント60を用いてもよく、回転2自由度継手とスイベルジョイントとを組合せたジョイントを用いてもよい。
【0080】
以上の構成により、出力板49のX方向およびY方向(以下、必要に応じて「XY方向」と略す)の周りの回転が可能になる。また、上述のとおり、支柱46の一方の軸端がベース板48に固定されているので、ベース板48を、例えば、真空成膜室35の壁38に固定すると、出力板49のZ方向周りの回転が適切に拘束される。そして、本実施形態の伸縮型のパラレルリンク機構110では、アクチュエータ45Aの駆動力に基づく伸縮装置45の伸縮を独立に制御することにより、出力板49が、その動作範囲内において、ベース板48に対して様々な方向に相対的に運動させることができる。
【0081】
これにより、簡易な小型のアクチュエータ45Aを用いても、各アクチュエータ45Aの出力が、出力板49に対して並列的に作用するので、パラレルリンク機構110全体としては大きな出力を発生できる。また、出力板49に様々な方向の作用力を与えた場合であっても、各伸縮装置45のピストンに曲げ応力がほとんど付与されず、引っ張り応力又は圧縮応力のみが作用する。つまり、このようなパラレルリンク機構110には、各伸縮装置45を簡易(軽量)に構成しても、使用目的に対して充分な剛性を確保し易いという特徴がある。
【0082】
よって、スパッタリング装置100のターゲット30Aや基板32Aを簡易かつ高精度に運動制御させるには、これらのターゲット30Aや基板32Aの駆動系としてパラレルリンク機構110を用いると都合がよい。
【0083】
例えば、ターゲット30Aや基板32Aに接続された配線や配管などから何等かの外力が与えられても、パラレルリンク機構110におけるターゲット30Aや基板32Aの位置ずれが発生し難い。また、パラレルリンク機構110は、スパッタリング装置100の真空ポンプ系などから伝わる振動の影響も受け難い。
【0084】
特に、本実施形態では、パラレルリンク機構110の各伸縮装置45および支柱46の継手構成により、出力板49のXY方向周りの回転および出力板49のZ方向の移動という3自由度の運動が可能である。一方、ベース板49を、例えば、真空成膜室35の壁38に固定すると(図5参照)、上述のとおり、支柱46はその軸周りに回転できないので、出力板49のZ方向周りの回転が適切に拘束される。また、出力板49のXY方向の並進も適切に拘束される。
【0085】
よって、ターゲット30Aや基板32Aの駆動系としてパラレルリンク機構110を用いると、ターゲット30Aや基板32AをZ方向に高精度に移動できる。この場合、全ての(ここでは、3個の)伸縮装置45のピストンを同一方向に同一ストロークで伸縮させ、出力板49をZ方向に動かすとよい。
【0086】
これにより、シートプラズマ方式のスパッタリング装置100のT/S距離L(図1参照)を簡易かつ高精度に変更でき、その結果、ターゲット30Aとシートプラズマ21との間、および、基板32Aとシートプラズマ21との間における好適な距離を簡易かつ高精度に設定できる。
【0087】
また、ターゲット30Aや基板32Aの駆動系としてパラレルリンク機構110を用いると、上述のとおり、ターゲット30Aや基板32Aをベース板48に対して様々な方向に傾けることができる。この場合、3個の伸縮装置45のピストンの伸縮動作を適宜、組合せて(例えば、1個の伸縮装置45のピストンのストロークを伸ばし、2個の伸縮装置45のピストンのストロークを縮めるなど)、出力板49をZ方向に動かすとよい。
【0088】
なお、このような3個の伸縮装置45のピストンの具体的な伸縮動作例については後述する。
【0089】
これにより、ターゲット30Aや基板32Aの傾きを自在に変更できるので、基板32A上に形成された薄膜の膜厚分布の均一化やカバレッジ向上に有利に作用する。
【0090】
更に、ターゲット30Aや基板32Aの駆動系としてパラレルリンク機構110を用いると、ターゲット30Aや基板32AがZ方向周りに回転しないので、ターゲット30Aや基板32Aの回転による様々な不都合が回避される。
【0091】
例えば、ターゲット30Aや基板32AのZ方向周りの回転させる回転軸の導入には、必然的に回転摺動部でのOリングシールや磁気流体シールなどの回転シール構造が必要であるが、前者はリークが発生し易く、後者は価格が高価になる。また、上述の回転シール構造は、構造上、ゴミ発生源になり易い。
【0092】
これに対して、本実施形態のパラレルリンク機構110では、このような回転軸および回転シール構造を無くすことができる。
【0093】
また、ターゲット30Aや基板32AはZ方向周りには固定されているので、ターゲット30Aや基板32Aへの電気配線、冷媒導入配管34A、36Aおよび冷媒排出配管34B、36Bの配設を簡易に行えるという利点もある。
【0094】
なお、本実施形態では、継手40A、40B、40Cを回転2自由度継手とし、継手41A、41B、41Cを3自由度継手としているが、これらの継手の種類を互いに反対してもよい。
【0095】
但し、継手40A、40B、40Cおよび継手41A、41B、41Cの両者を回転2自由度継手で構成すると、出力板49の拘束が強くなり過ぎて、出力板49のスムーズな動作を阻害する場合がある。逆に、継手40A、40B、40Cおよび継手41A、41B、41Cの両者を3自由度継手で構成すると、伸縮装置45の軸周りの回転が可能になるので、出力板49の安定な動作を阻害する場合がある。つまり、伸縮装置45の継手として、回転2自由度継手と3自由度継手との組合せが最適であると考えられる。
【0096】
次に、真空成膜室35内にパラレルリンク機構110Aを組み込んだ構成例について図面を参照しながら説明する。
【0097】
図5は、図2のパラレルリンク機構を備えるスパッタリング装置の要部を示した断面図である。
【0098】
図5では、図2の出力板49が、ターゲットホルダ30Bの機能を兼ねている例が図示されているが、別体のターゲットホルダ30Bが出力板49により支持される構造に改変してもよい。
【0099】
なお、図2のパラレルリンク機構110を基板32Aの運動制御に用いる場合でも、図5のパラレルリンク機構110Aと同様に構成できるので、この場合のスパッタリング装置の構成の図示および説明は省略する。
【0100】
図5に示すように、真空成膜室35の壁38に形成された開口38Aから真空成膜室35内に、図2に示したパラレルリンク機構110Aが挿入されている。この開口38Aは、パラレルリンク機構110Aのベース板48が真空成膜室25の壁38に当接できる程度の大きさに形成されている。
【0101】
これにより、ベース板48と壁38との間に真空シール37を配することができ、その結果、真空成膜室35の成膜空間35Aを適切に減圧できる。
【0102】
また、図5に示すように、金属ベローズ36(気密機構)が、ターゲットホルダ30Bおよびベース板48間の空間35Bの全域を囲みターゲットホルダ30Bおよびベース板48に接続されている。
【0103】
これにより、真空成膜室35の成膜空間35Aが減圧状態において、各アクチュエータ45Aの周囲が大気圧に保たれる。
【0104】
つまり、3個のアクチュエータ45Aが円筒状の金属ベローズ36の内部に配されて、金属ベローズ36によって成膜空間35Aとアクチュエータ45Aの周囲(空間35B)との間が気密に仕切られているので、真空成膜室35の成膜空間35Aを減圧してもアクチュエータ45Aを真空対応に構成しなくて済み好都合である。
【0105】
なお、ここで、バイアス電源31からの電気配線をターゲット30Aに接続させるには、図5に示すように、金属ベローズ36によって囲まれたベース板48の適所に電気配線を通せる程度の大きさの簡易な開口48Aを形成すればよい。
【0106】
この場合、ターゲット30Aとターゲットホルダ30B(出力板49)との間に、両者間の絶縁を取る絶縁フランジ(図示せず)を介在させてターゲット30Aをターゲットホルダ30Bに固定すると、真空成膜室35の壁38や金属ベローズ36を適切に接地できる。
【0107】
また、冷媒導入配管36Aおよび冷媒排出配管36Bをターゲットホルダ30Bに接続させるには、図5に示すように、金属ベローズ36によって囲まれたベース板48の適所に冷媒導入配管36Aおよび冷媒排出配管36Bを通せる程度の大きさの簡易な開口48Bを形成すればよい。
【0108】
なお、本実施形態では、ターゲットホルダ30B(出力板49)に適宜の冷媒通路(図示せず)が形成され、これにより、このターゲットホルダ30Bが、ターゲット30Aの冷却部品の機能を兼ねている例が示されている。但し、このような冷媒通路が形成された別体の冷却部品(図示せず)を、ターゲット30Aとターゲットホルダ30Bとの間に介在させてもよい。
【0109】
次に、本実施形態のスパッタリング装置100の動作例(特に、パラレルリンク機構110Aによる伸縮装置45の伸縮動作例)について述べる。
【0110】
まず、スパッタリング装置100の真空成膜室35内にターゲット30Aおよび基板32Aをセットした後、スパッタリング装置100の内部を、シートプラズマ21を形成可能な所定の圧力にまで真空排気する。
【0111】
次いで、スパッタリング装置100のプラズマガン電源からプラズマガン10に電力を供給することよってシートプラズマ21を形成する。すると、シートプラズマ21を用いたスパッタリングプロセスを開始できる。
【0112】
そして、スパッタリングプロセスの開始時において、図示しない制御装置が、パラレルリンク機構110Aを用いて、ターゲット30Aや基板32Aを搭載した出力板49を、以下の如く動かす。
【0113】
まず、制御装置は、パラレルリンク機構110Aの3個の伸縮装置45のピストンを同一方向に、かつ同一ストロークで伸縮させて、ターゲット30Aおよび基板32Aがシートプラズマ21の厚み方向に一定の好適な位置に到達するまで出力板49を動かす。
【0114】
この状態で、制御装置は、3個の伸縮装置45のピストンの伸縮動作を図6および図7に例示するように制御する。
【0115】
図6は、本発明の実施形態のパラレルリンク機構に用いる伸縮装置のピストンおよび出力板間における継手のZ方向変位と位相との関係を表した図である。
【0116】
図6に示すように、制御装置は、3個の伸縮装置45のピストンの軸端(継手41A、41B、41C)のZ方向変位が正弦波になるように、パラレルリンク機構110Aの動作を制御する。各継手41A、41B、41Cの変位である正弦波では、継手41Aと継手41Bとの間の位相が120°ずれ、継手41Bと継手41Cとの間の位相が120°ずれている。このように位相をずらすと、出力板49の揺動中心Cを中心として、図7に示す如く出力板49を揺動させることができる。
【0117】
そして、このような出力板49の揺動動作は、円板状の出力板49が水平面に対して所定の傾斜角で傾斜し、その傾斜面が上述の正弦波の周期で、出力板49の中心を通る鉛直線を中心に回転する運動に他ならない。従って、出力板49の周方向において出力板49の揺動が均一になるので、このような出力板49に基板32Aなどを搭載すると、基板32A上に形成される薄膜の膜厚分布の均一化やカバレッジの向上に有利に作用する。
【0118】
以上のとおり、本実施形態のパラレルリンク機構110は、真空成膜用のターゲット30Aや基板32Aを搭載可能な円板状の出力板49と、この出力板49と間隔をあけて、適宜の固定部に固定される円板状のベース板48と、これらのベース48および出力板49間の連結に用いるリンク部120と、を備える。
【0119】
そして、このリンク部120は、アクチュエータ45Aが配された3個の伸縮装置45と、直動ガイド46Aからなる支柱46と、を備える。
【0120】
また、伸縮装置45は、ベース板48および出力板49間において並列に配されており、伸縮装置45のそれぞれが、アクチュエータ45Aの駆動力により軸方向に伸縮できるように構成されている。
【0121】
一方、支柱46は、ベース板48および出力板49間において伸縮装置45と並列に配されており、アクチュエータ45Aの駆動力をベース板48および出力板49を介して伝達することにより軸方向に伸縮できるように構成されている。
【0122】
このようにして、パラレルリンク機構110は、伸縮型のパラレルメカニズムを構成している。
【0123】
また、本実施形態では、上述のベース板48は、各伸縮装置45のそれぞれの一方の軸端に、ベース板48の中央部を中心とする円周200A上に120°離れて位置する回転2自由度継手40A、40B、40C(例えば、ユニバーサルジョイント50)を介して連結されている。
【0124】
また、ベース板48は、支柱46の一方の軸端にも、ベース板48の中央部に位置する固定手段44を介して固定されている。
【0125】
更に、上述の出力板49は、各伸縮装置45のそれぞれの他方の軸端に、出力板49の中央部を中心とする円周200B上に120°離れて位置する3自由度継手41A、41B、41C(例えば、ボールジョイント60)を介して連結されている。
【0126】
また、出力板49は、支柱46の他方の軸端にも、出力板49の中央部に位置する回転2自由度継手43(例えば、ユニバーサルジョイント50)を介して連結されている。
【0127】
以上の構成により、パラレルリンク機構110の出力板49のXY方向周りの回転、および、出力板49のZ方向の移動という3自由度の運動が可能になる。一方、ベース板48を、例えば、真空成膜室35の壁38に固定すると、支柱46はその軸周りに回転できないので、出力板49のZ方向周りの回転が適切に拘束される。また、出力板49のXY方向の並進も適切に拘束される。
【0128】
このため、スパッタリング装置100のターゲット30Aや基板32Aの駆動系としてパラレルリンク機構110Aを用いると、ターゲット30Aや基板32AをZ方向に簡易かつ高精度に移動できる。従って、シートプラズマを用いたスパッタリング装置100では、スパッタリング装置100のT/S距離Lを簡易かつ高精度に変更できる。
【0129】
また、スパッタリング装置100のターゲット30Aや基板32Aの駆動系としてパラレルリンク機構110Aを用いると、ターゲット30Aや基板32AをZ方向の周りに回転させずに、ターゲット30Aや基板32Aをベース板48に対して様々な方向に傾けることもできる。
【0130】
従って、基板32Aに形成される薄膜の膜厚分布の均一化やカバレッジ向上に有利に作用する。
【0131】
また、基板32AなどのZ方向周りの回転に起因する様々な不都合も回避できる。
【0132】
例えば、ターゲット30Aや基板32AのZ方向周りの回転による回転摺動部での回転シール構造の複雑化や回転摺動部でのゴミ発生などを回避できる。更に、ターゲット30Aや基板32Aへの電気配線、冷媒導入配管34A、36Aおよび冷媒排出配管34B、36Bなどの配設も簡易に行える。
(変形例)
本実施形態(図5)では、大口径の金属ベローズ36の内部に、全ての(3個の)アクチュエータ45Aが配設されている。この場合、空間35Bの大気圧P0と成膜空間35Aの内圧P1との間の差圧(P0−P1)が、出力板49(ターゲットホルダ30B)の裏面の略全域に作用する。
【0133】
すると、伸縮装置45におけるアクチュエータ45Aの選定条件として、ターゲットホルダ30Bを適切に動かせるよう、上述の差圧(P0−P1)によるターゲットホルダ30Bへの作用力に打ち勝てる程、強力な駆動力を発生できる駆動系を選ぶ必要がある。
【0134】
例えば、仮に28インチ相当のターゲットホルダ30Bの全体が大気圧に曝されると、約4000kgfの大気圧荷重がターゲットホルダ30Bに加わる。そして、このような過大な荷重が、伸縮装置45に用いる簡易なアクチュエータ45Aの選定の障害となる場合がある。なお、空間35Bを若干減圧気味に構成することも可能であるが、このような構造を取る場合、真空対応のアクチュエータを用いる必要があるので、却って、駆動系の簡素化が図れなくなる場合もある。
【0135】
そこで、以上の問題に適切に対処するには、単一のアクチュエータ45Aを格納するのに必要かつ充分に小口径の金属ベローズ(図示は省略)を、単一のアクチュエータ45A毎に配するとよい。
【0136】
以上の構成により、ターゲットホルダ30Bにおける上述の差圧(P0−P1)が作用する面積が充分に小さくなるので、伸縮装置45に用いる簡易なアクチュエータ45Aを選定できる。
【産業上の利用可能性】
【0137】
本発明によれば、真空成膜用の基板等の運動を適切に制御できるパラレルリンク機構が得られる。よって、本発明のパラレルリンク機構は、例えば、真空成膜装置の基板等の駆動系として利用できる。
【図面の簡単な説明】
【0138】
【図1】本発明の実施形態によるスパッタリング装置(真空成膜装置)の一構成例を模式的に示した図である。
【図2】本発明の実施形態のパラレルリンク機構の概念構成図である。
【図3】回転2自由度継手の一例を示した図である。
【図4】3自由度継手の一例を示した図である。
【図5】図2のパラレルリンク機構をターゲットの運動制御に用いたスパッタリング装置の要部を示した断面図である。
【図6】本発明の実施形態のパラレルリンク機構に用いる伸縮装置のピストンおよび出力板間における継手のZ方向変位と位相との関係を表した図である。
【図7】本発明の実施形態のパラレルリンク機構による出力板の揺動の様子を示した図である。
【符号の説明】
【0139】
10 プラズマガン
11A、11B 棒磁石
12、13 電磁コイル
15 アノード
20 円柱プラズマ
21 シートプラズマ
25 シートプラズマ変形室
30A ターゲット
30B ターゲットホルダ
31、33 バイアス電源
32A 基板
32B 基板ホルダ
34A、36A 冷媒導入配管
34B、36B 冷媒排出配管
35 真空成膜室
35A 成膜空間
35B 大気空間
36 金属ベローズ
37 真空シール
38 真空成膜室の壁
38A 壁の開口
40A、40B、40C、43 継手(回転2自由度継手)
41A、41B、41C 継手(3自由度継手)
44 固定手段
45 伸縮装置
45A アクチュエータ
46 支柱
46A 直動ガイド
48 ベース板
48A、48B ベース板の開口
49 出力板
50 ユニバーサルジョイント
51、52 ユニバーサルジョイントの回転軸
60 ボールジョイント
61 ボールジョイントの球面座
62 ボールジョイントの球体
100 スパッタリング装置
110、110A パラレルリンク機構
120 パラレルリンク機構のリンク部
200A ベース板上の仮想の円周
200B 出力板上の仮想の円周
【特許請求の範囲】
【請求項1】
真空成膜用の部品を搭載可能な第1板部材と、
前記第1板部材と間隔をあけて配された第2板部材と、
前記第1板部材および第2板部材間の連結に用いるリンク部と、を備え、
前記リンク部は、アクチュエータが配された伸縮装置と、ガイド部材からなる支柱と、を含み、
複数の前記伸縮装置は、前記第1板部材および第2板部材間において並列に配されて、前記アクチュエータの駆動力により軸方向に伸縮可能に構成され、
前記支柱は、前記第1板部材および第2板部材間において前記伸縮装置と並列に配されて、前記アクチュエータの駆動力を前記第1板部材および第2板部材を介して伝達することにより軸方向に伸縮可能に構成され、
前記第1板部材は、前記複数の伸縮装置の一方の軸端に第1継手を介して連結されるとともに、前記支柱の一方の軸端に第2継手を介して連結され、
前記第2板部材は、前記複数の伸縮装置の他方の軸端に第3継手を介して連結されるとともに、前記支柱の他方の軸端に固定されている、パラレルリンク機構。
【請求項2】
前記第1継手および前記第3継手のうちのいずれか一方の継手が3自由度継手であり、その他方の継手および前記第2継手が回転2自由度継手である請求項1記載のパラレルリンク機構。
【請求項3】
前記3自由度継手はボールジョイントであり、前記回転2自由度継手はユニバーサルジョイントである請求項2記載のパラレルリンク機構。
【請求項4】
前記伸縮装置の一方の軸端は、前記第1板部材の所定の点を中心とする円周上に離れて配され、
前記伸縮装置の他方の軸端は、前記第2板部材の所定の点を中心とする円周上に離れて配され、
前記支柱の一方の軸端は、前記第1板部材の所定の点上に配され、
前記支柱の他方の軸端は、前記第2板部材の所定の点上に配されている、請求項3記載のパラレルリンク機構。
【請求項5】
請求項1ないし請求項4のいずれかに記載のパラレルリンク機構が真空成膜室に配され、
前記第1板部材は、前記真空成膜室内において前記伸縮装置および前記支柱の伸縮動作により移動制御され、
前記第2板部材は、前記真空成膜室の壁に固定されている、真空成膜装置。
【請求項6】
前記真空成膜室内が減圧状態において、前記アクチュエータの周囲を大気圧に保てる気密機構を備えた請求項5記載の真空成膜装置。
【請求項7】
前記気密機構は、前記アクチュエータを内部に配した状態で、前記第1板部材および前記第2板部材に接続されたベローズである請求項6記載の真空成膜装置。
【請求項8】
前記ベローズが、単一の前記アクチュエータ毎に配されている、請求項7記載の真空成膜装置。
【請求項1】
真空成膜用の部品を搭載可能な第1板部材と、
前記第1板部材と間隔をあけて配された第2板部材と、
前記第1板部材および第2板部材間の連結に用いるリンク部と、を備え、
前記リンク部は、アクチュエータが配された伸縮装置と、ガイド部材からなる支柱と、を含み、
複数の前記伸縮装置は、前記第1板部材および第2板部材間において並列に配されて、前記アクチュエータの駆動力により軸方向に伸縮可能に構成され、
前記支柱は、前記第1板部材および第2板部材間において前記伸縮装置と並列に配されて、前記アクチュエータの駆動力を前記第1板部材および第2板部材を介して伝達することにより軸方向に伸縮可能に構成され、
前記第1板部材は、前記複数の伸縮装置の一方の軸端に第1継手を介して連結されるとともに、前記支柱の一方の軸端に第2継手を介して連結され、
前記第2板部材は、前記複数の伸縮装置の他方の軸端に第3継手を介して連結されるとともに、前記支柱の他方の軸端に固定されている、パラレルリンク機構。
【請求項2】
前記第1継手および前記第3継手のうちのいずれか一方の継手が3自由度継手であり、その他方の継手および前記第2継手が回転2自由度継手である請求項1記載のパラレルリンク機構。
【請求項3】
前記3自由度継手はボールジョイントであり、前記回転2自由度継手はユニバーサルジョイントである請求項2記載のパラレルリンク機構。
【請求項4】
前記伸縮装置の一方の軸端は、前記第1板部材の所定の点を中心とする円周上に離れて配され、
前記伸縮装置の他方の軸端は、前記第2板部材の所定の点を中心とする円周上に離れて配され、
前記支柱の一方の軸端は、前記第1板部材の所定の点上に配され、
前記支柱の他方の軸端は、前記第2板部材の所定の点上に配されている、請求項3記載のパラレルリンク機構。
【請求項5】
請求項1ないし請求項4のいずれかに記載のパラレルリンク機構が真空成膜室に配され、
前記第1板部材は、前記真空成膜室内において前記伸縮装置および前記支柱の伸縮動作により移動制御され、
前記第2板部材は、前記真空成膜室の壁に固定されている、真空成膜装置。
【請求項6】
前記真空成膜室内が減圧状態において、前記アクチュエータの周囲を大気圧に保てる気密機構を備えた請求項5記載の真空成膜装置。
【請求項7】
前記気密機構は、前記アクチュエータを内部に配した状態で、前記第1板部材および前記第2板部材に接続されたベローズである請求項6記載の真空成膜装置。
【請求項8】
前記ベローズが、単一の前記アクチュエータ毎に配されている、請求項7記載の真空成膜装置。
【図1】


【図2】
【図3】
【図4】
【図5】
【図6】
【図7】
【図2】
【図3】
【図4】
【図5】
【図6】
【図7】
【公開番号】特開2010−65300(P2010−65300A)
【公開日】平成22年3月25日(2010.3.25)
【国際特許分類】
【出願番号】特願2008−234426(P2008−234426)
【出願日】平成20年9月12日(2008.9.12)
【出願人】(000002358)新明和工業株式会社 (919)
【Fターム(参考)】
【公開日】平成22年3月25日(2010.3.25)
【国際特許分類】
【出願日】平成20年9月12日(2008.9.12)
【出願人】(000002358)新明和工業株式会社 (919)
【Fターム(参考)】
[ Back to top ]