
パルスアーク溶接制御方法
【課題】 パルスアーク溶接において、磁気吹きによるビード外観の悪化を抑制する。
【解決手段】溶接ワイヤを送給すると共に、ピーク期間中のピーク電流及びベース期間中のベース電流の通電を1パルス周期として繰り返して溶接するパルスアーク溶接制御方法において、ベース期間中の溶接電圧の上昇によって、溶接線Ps−Pe上の磁気吹き発生区間A1−A2を判別して記憶するテスト溶接を行い、実施工時に、溶接線Ps−Pe上の記憶された磁気吹き発生区間A1−A2を溶接するときは溶接電流波形パラメータを自動的に変化させて磁気吹きの発生を抑制する。溶接電流波形パラメータの変化は、ベース電流を大きくすることである。これにより、磁気吹き発生区間A1−A2中はベース電流が増加されるので、アークの硬直性が強くなり、磁気吹きによるアークの偏向は抑制される。この結果、ビード外観が悪化することを防止することができる。
【解決手段】溶接ワイヤを送給すると共に、ピーク期間中のピーク電流及びベース期間中のベース電流の通電を1パルス周期として繰り返して溶接するパルスアーク溶接制御方法において、ベース期間中の溶接電圧の上昇によって、溶接線Ps−Pe上の磁気吹き発生区間A1−A2を判別して記憶するテスト溶接を行い、実施工時に、溶接線Ps−Pe上の記憶された磁気吹き発生区間A1−A2を溶接するときは溶接電流波形パラメータを自動的に変化させて磁気吹きの発生を抑制する。溶接電流波形パラメータの変化は、ベース電流を大きくすることである。これにより、磁気吹き発生区間A1−A2中はベース電流が増加されるので、アークの硬直性が強くなり、磁気吹きによるアークの偏向は抑制される。この結果、ビード外観が悪化することを防止することができる。
【発明の詳細な説明】
【技術分野】
【0001】
本発明は、磁気吹きによる溶接状態の不安定を抑制することができるパルスアーク溶接制御方法に関するものである。
【背景技術】
【0002】
消耗電極式パルスアーク溶接は、鉄鋼等の溶接に広く使用されている。このパルスアーク溶接では、ピーク期間中は臨界値以上の大電流値のピーク電流を通電し、ベース期間中は臨界値未満の小電流値のベース電流を通電し、これらの通電を1パルス周期として繰り返して溶接が行われる。パルスアーク溶接では、1パルス周期1溶滴移行状態となるので、溶滴移行状態が安定しているために、スパッタの発生が少なく、美しいビード外観を得ることができる。以下、このパルスアーク溶接について図面を参照して説明する。
【0003】
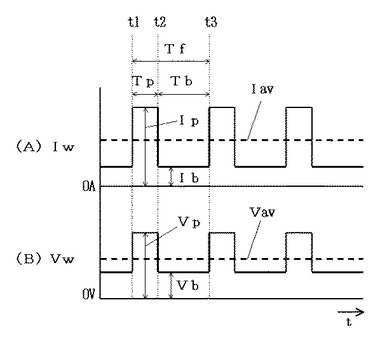
図5は、パルスアーク溶接における一般的な電流・電圧波形図である。同図(A)は溶接電流Iwの時間変化を示し、同図(B)は溶接電圧Vwの時間変化を示す。以下、同図を参照して説明する。
【0004】
時刻t1〜t2のピーク期間Tp中は、同図(A)に示すように、溶接ワイヤから溶滴を移行させるために臨界値以上の大電流値のピーク電流Ipが通電し、同図(B)に示すように、溶接ワイヤと母材との間にアーク長に比例したピーク電圧Vpが印加する。直径1.2mmの鉄鋼ワイヤの臨界値は、280A程度である。
【0005】
時刻t2〜t3のベース期間Tb中は、同図(A)に示すように、溶滴を形成しないようにするために臨界値未満の小電流値のベース電流Ibが通電し、同図(B)に示すように、ベース電圧Vbが印加する。時刻t1〜t3までの期間を1周期(パルス周期Tf)として繰り返して溶接が行われる。
【0006】
ところで、良好なパルスアーク溶接を行うためには、アーク長を適正値に維持することが重要である。アーク長を適正値に維持するために以下のようなアーク長制御(溶接電源の出力制御)が行われる。アーク長は、同図(B)で破線で示す溶接電圧平均値Vavと略比例関係にある。このために、溶接電圧平均値Vavを検出し、この検出値が適正アーク長に相当する溶接電圧設定値と等しくなるように同図(A)の破線で示す溶接電流平均値Iavを変化させる出力制御を行う。溶接電圧平均値Vavが溶接電圧設定値よりも大きいときはアーク長が適正値よりも長いときであるので、溶接電流平均値Iavを小さくしてワイヤ溶融速度を小さくしアーク長が短くなるようにする。他方、溶接電圧平均値Vavが溶接電圧設定値よりも小さいときはアーク長が適正値よりも短いときであるので、溶接電流平均値Iavを大きくしてワイヤ溶融速度を大きくしアーク長が長くなるようにする。上記の溶接電圧平均値Vavとしては、一般的に溶接電圧Vwをローパスフィルタを通した値(平均値、平滑値)が使用される。また、溶接電流平均値Iavを変化させる手段として、パルス周期Tfを変化させることが行われている。すなわち、溶接電圧平均値Vavが溶接電圧設定値と等しくなるようにパルス周期Tfをフィードバック制御(アーク長制御)している。このときに、ピーク期間Tp、ピーク電流Ip及びベース電流Ibは所定値に設定される。ピーク期間Tpは1.0〜1.5ms程度に設定され、ピーク電流Ipは500〜600A程度に設定され、ベース電流Ibは20〜60A程度に設定される。ピーク期間Tpとピーク電流Ipとの組合せはユニットパルス条件と呼ばれており、1パルス周期1溶滴移行状態になるように設定される。このアーク長制御の方式は、周波数変調制御と呼ばれる。
【0007】
パルスアーク溶接を含む消耗電極式アーク溶接においては、アーク及び母材を通電する溶接電流によってアーク周辺部に磁界が形成されて、この磁界からアークは力を受けて偏向する場合がある。このような状態を、一般的に磁気吹き又はアークブローと呼んでいる。磁気吹きが発生するかは、母材に通電する溶接電流によって形成される磁界の形態によって決まる。溶接している部分が母材の端部から離れているときには、磁界は対称形状に形成されることが多いために、アークは磁界から偏った力を受けることがないので、磁気吹きは発生しにくい。他方、溶接している部分が母材の端部に近いときは、磁界は非対称形状に形成されるために、アークは磁界から偏った力を受けることになり、磁気吹きが発生しやすくなる。したがって、母材の端部の近くとなることが多い溶接開始部分及び溶接終了部分では、磁気吹きが発生しやすい。消耗電極アークの中でも、短絡移行溶接では磁気吹きは発生しにくく、パルスアーク溶接では発生しやすい。これは、短絡移行溶接では、アーク長がパルスアーク溶接に比べて短いために、磁界からの影響を受けにくいためである。他方、パルスアーク溶接では、大電流値のピーク電流Ipが通電しているときは強い磁界が形成され、小電流値のベース電流Ibが通電しているときは弱い磁界が形成されている。パルスアーク溶接では、この磁界の強さの変化が大きいこと、かつ、ベース電流Ibが小さいので磁界から偏った力を受けると直ぐにアークが偏向すること、が原因となって磁気吹きが発生しやすい。したがって、パルスアーク溶接では、磁気吹きによるアークの偏向は、ベース期間Tb中に発生しやすい。
【0008】
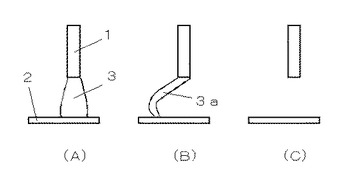
図6は、磁気吹きが発生したときのアーク状態を示す図である。同図(A)に示すように、溶接ワイヤ1と母材2との間に通常のアーク3が発生している。この状態で磁気吹きが発生すると、同図(B)に示すように、アーク3は磁界からの力によって大きく偏向し、アーク長が長くなる。さらに偏向が大きくなると、同図(C)に示すように、アークを維持することができなくなりアーク切れが発生する。パルスアーク溶接では、ピーク期間中は大電流が通電するのでアークの硬直性が強く、磁界からの力が作用してもアークはほとんど偏向しない。他方、ベース期間中は小電流が通電するのでアークの硬直性が弱く、磁界からの力によって大きく偏向する。したがって、磁気吹きが発生してアーク切れが生じるのは、ほとんどベース期間中である。磁気吹きによるアーク切れが多数回発生すると、アーク発生状態が不安定となり、スパッタの大量発生、ビード外観の悪化等が生じる。したがって、パルスアーク溶接においては、磁気吹きによるアーク切れを抑制することは良好な溶接品質を得るために重要である。
【0009】
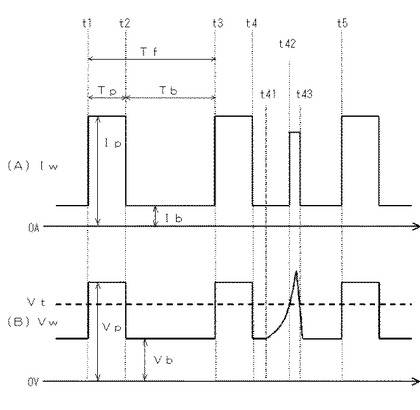
図7は、パルスアーク溶接において磁気吹きが発生したときの電流・電圧波形図である。同図(A)は溶接電流Iwの時間変化を示し、同図(B)は溶接電圧Vwの時間変化を示す。以下、同図を参照して説明する。
【0010】
時刻t1〜t2のピーク期間Tp中は、同図(A)に示すように、臨界値以上のピーク電流Ipが通電し、同図(B)に示すように、アーク長に略比例したピーク電圧Vpが印加する。時刻t2以降のベース期間Tb中は、同図(A)に示すように、臨界値未満のベース電流Ibが通電し、同図(B)に示すように、アーク長に略比例したベース電圧Vbが印加する。
【0011】
時刻t21において、磁気吹きが発生してアークが偏向すると、同図(B)に示すように、アークの偏向に伴ってアーク長が長くなり、ベース電圧Vbが次第に上昇して大きくなる。一方、同図(A)に示すように、ベース電流Ibは定電流制御されているので一定値のままである。時刻t3において、磁気吹きによるアークの偏向がさらに大きくなると、アーク長が非常に長くなるためにアークを維持することができなくなり、アーク切れが発生する。アーク切れが発生すると、同図(A)に示すように、溶接電流Iwは通電しなくなり、同図(B)に示すように、溶接電圧Vwは出力最大電圧の無負荷電圧となる。
【0012】
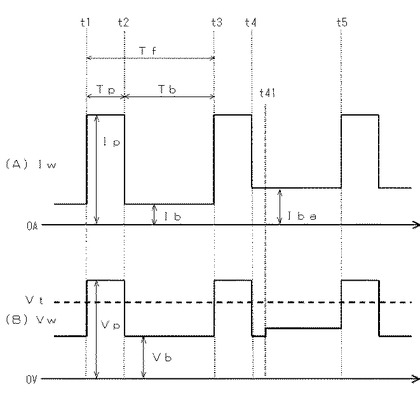
図8は、特許文献1に開示された磁気吹きによるアーク切れを防止するための磁気吹き対策制御を示す電流・電圧波形図である。同図(A)は溶接電流Iwの時間変化を示し、同図(B)は溶接電圧Vwの時間変化を示す。同図において時刻t1〜t3のパルス周期中は磁気吹きが発生していない安定した溶接状態のときを示しており、続く時刻t3〜t5のパルス周期中は磁気吹きが発生した溶接状態のときを示している。
【0013】
時刻t1〜t3のパルス周期中は、磁気吹きが発生していないために、安定した溶接状態にある。この期間中の動作については、上述した図5と同一であるので、説明は省略する。
【0014】
時刻t3〜t4のピーク期間Tp中は、同図(A)に示すように、ピーク電流Ipが通電し、同図(B)に示すように、ピーク電圧Vpが印加する。時刻t4からベース期間Tbが開始し、同図(A)に示すように、ベース電流Ibが通電し、同図(B)に示すように、通常値のベース電圧Vbが印加する。このベース期間Tb中の時刻t41において、磁気吹きが発生してアークが偏向したためにアーク長が長くなり、同図(B)に示すように、ベース電圧Vbが上昇して高くなる。そして、時刻t42において、ベース電圧Vbの値が、破線で示す予め定めた基準電圧値Vt以上になる。ベース電圧値Vbが上記の基準電圧値Vt以上になったことを判別すると、同図(A)に示すように、ベース電流Ibの値を通常値よりも増加させて200A以上にする。時刻t42〜t43の期間中は、ベース電圧値Vbが上記の基準電圧値Vt以上になっている。この期間中は、同図(A)に示すように、200A以上に増加されたベース電流が通電する。
【0015】
時刻t42〜t43の期間中は、ベース電流Ibの値が200A以上に増加するので、アークがワイヤ送給方向に発生する性質である硬直性が強くなるために、アークの偏向が正常な状態に戻されることになる。このために、同図(B)に示すように、時刻t43において、ベース電圧値Vbは上記の基準電圧値Vt未満になり、その後は急速に減少して通常値に戻る。したがって、磁気吹きは、時刻t41に発生して、時刻t43の直後に解消される。時刻t43において、同図(A)に示すように、ベース電流Ibの値は通常値に戻る。時刻t43〜t5の残りのベース期間Tb中は、同図(A)に示すように、ベース電流Ibの値は通常値のままであり、同図(B)に示すように、通常値のベース電圧値Vbが印加する。この期間のアークは、磁気吹きが発生していないので、安定した状態にある。
【0016】
上記において、基準電圧値Vtは、磁気吹きが発生していない状態でのベース電圧値Vbの変動を考慮して、溶接条件に応じて適正値に設定する。例えば、ベース電圧Vbの変動は、ピーク電圧値Vpまで及ぶことはないので、基準電圧値Vtをピーク電圧値Vpに近い値に設定する。また、ベース電圧Vbと基準電圧値Vtとの比較にあたって、ヒステリシスを持たせるようにしても良い。すなわち、ベース電圧Vbが通常値から上昇していくときの基準値を第1基準電圧値Vt1とし、ベース電圧Vbが一旦Vt1以上になりその後に下降するときの基準値を第2基準電圧値Vt2とするものである。このときに、Vt1>Vt2である。また、ベース電圧Vbの上昇率(微分値=dVw/dt)が基準値に達したことによって磁気吹きの発生を判別し、その後にベース電圧Vbの下降率が基準値に達したことによって磁気吹きの解消を判別するようにしても良い。ベース電圧Vbの上昇による従来から行われている種々の磁気吹きの発生の判別方法を使用することができる。上記の増加したベース電流値は、200〜500A程度の範囲で、アークの偏向を修正することができる値に実験によって設定される。
【0017】
このような磁気吹き対策制御を行うことによって、磁気吹きによるアーク切れを防止することができる。
【先行技術文献】
【特許文献】
【0018】
【特許文献1】特開2004−268081号公報
【発明の概要】
【発明が解決しようとする課題】
【0019】
上述した従来技術では、磁気吹きによるアークの偏向を判別してベース電流を200A以上に増加させることによって、アーク切れの発生を防止することができる。しかし、このような方法では、磁気吹きによってアークがある程度まで偏向してアーク長が長くなった状態を判別していることになる。このために、磁気吹きによってアークがある程度まで偏向した状態で溶接を行うことになるために、ビード外観が悪くなる場合が生じる。すなわち、従来技術では、磁気吹きによるアーク切れに伴うビード外観の著しい悪化を防止することができるが、ビード外観がある程度悪くなることは避けられなかった。
【0020】
そこで、本発明では、磁気吹きによるビード外観の悪化を防止することができるパルスアーク溶接制御方法を提供することを目的とする。
【課題を解決するための手段】
【0021】
上述した課題を解決するために、請求項1の発明は、溶接ワイヤを送給すると共に、ピーク期間中のピーク電流及びベース期間中のベース電流の通電を1パルス周期として繰り返して溶接するパルスアーク溶接制御方法において、
前記ベース期間中の溶接電圧の上昇によって、溶接線上の磁気吹き発生区間を判別して記憶するテスト溶接を行い、
実施工時に、溶接線上の前記記憶された磁気吹き発生区間を溶接するときは溶接電流波形パラメータを自動的に変化させて磁気吹きの発生を抑制する、
ことを特徴とするパルスアーク溶接制御方法である。
【0022】
請求項2の発明は、前記溶接電流波形パラメータの変化が、前記ベース電流を大きくすることである、
ことを特徴とする請求項1記載のパルスアーク溶接制御方法である。
【0023】
請求項3の発明は、前記溶接電流波形パラメータの変化が、前記ピーク電流及び/又は前記ピーク期間を小さくすることである、
ことを特徴とする請求項1記載のパルスアーク溶接制御方法である。
【発明の効果】
【0024】
本発明によれば、ベース期間中の溶接電圧の上昇によって、溶接線上の磁気吹き発生区間を判別して記憶するテスト溶接を行い、実施工時に、溶接線上の前記記憶された磁気吹き発生区間を溶接するときは溶接電流波形パラメータを自動的に変化させて磁気吹きの発生を抑制している。このために、磁気吹きによるアークの偏向を抑制することができるので、ビード外観を良好に保つことができる。
【図面の簡単な説明】
【0025】
【図1】本発明の実施の形態に係るパルスアーク溶接制御方法を説明するために、溶接対象となる溶接線Ps−Peを直線として示した図である。
【図2】本発明の実施の形態に係るパルスアーク溶接制御方法を示す電流・電圧波形図である。
【図3】本発明の実施の形態に係るパルスアーク溶接制御方法を示す図2とは異なる電流・電圧波形図である。
【図4】本発明の実施の形態に係るパルスアーク溶接制御方法を実施するための溶接装置のブロック図である。
【図5】従来技術におけるパルスアーク溶接の電流・電圧波形図である。
【図6】従来技術において磁気吹きが発生したときのアーク状態を示す図である。
【図7】従来技術の、パルスアーク溶接において磁気吹きが発生したときの電流・電圧波形図である。
【図8】従来技術における磁気吹きによるアーク切れを防止するための磁気吹き対策制御を示す電流・電圧波形図である。
【発明を実施するための形態】
【0026】
以下、図面を参照して本発明の実施の形態について説明する。
【0027】
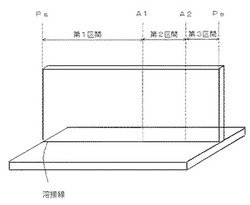
図1は、本発明の実施の形態に係るパルスアーク溶接制御方法を説明するために、溶接対象となる溶接線Ps−Peを直線として示した図である。同図において、左端Psは溶接開始位置を示し、右端Peは溶接終了位置を示す。この溶接線Ps−Peを、ロボットを使用して、図8で上述した磁気吹き対策制御を付加したパルスアーク溶接を行う。パルスアーク溶接は、テスト溶接と実施工溶接とに分けて行われる。
【0028】
(1)テスト溶接
図8で上述した磁気吹きによるアークの偏向を判別しながら溶接開始位置Psから溶接線に沿って溶接を開始する。溶接中に磁気吹きの発生を判別した場合は、溶接線上の位置を記憶する。同図においては、溶接線上のA1からA2の間の区間において磁気吹きの発生が判別されたとする。このA1−A2の区間を、磁気吹き発生区間と呼ぶことにする。したがって、同図においては、溶接線は3つの区間に分けられることになる。第1区間Ps−A1は磁気吹きが発生しなかった区間であり、第2区間A1−A2は磁気吹き発生区間であり、第3区間A2−Peは磁気吹きが発生しなかった区間である。すなわち、テスト溶接では、溶接線上の磁気吹き発生区間を判別して記憶する動作を行っている。磁気吹き発生の判別は、上述したように、ベース電圧が基準電圧値以上に上昇したことによって行うことができる。また、ベース電圧の上昇率が基準上昇率以上になったことによって行うこともできる。磁気吹きを判別したときは、上述したように、ベース電流を増加させてアーク切れを防止するようにしている。テスト溶接であるので、ベース電流の増加を行わないようにしても良い。。磁気吹き発生区間A1−A2は、磁気吹き発生を判別したパルス周期が連続している区間として判別することができる。同図では、磁気吹き発生区間が1つの場合であるが、複数の区間が存在する場合がある。また、磁気吹き発生区間の判別に裕度を持たせるために、磁気吹き発生区間の開始位置を、溶接中に最初に磁気吹きの発生が判別された位置よりも所定距離だけ前の位置(溶接開始位置Psを前方の限界とする)にしても良い。同様に、磁気吹き発生区間の終了位置を、溶接中に最後に磁気吹きの発生が判別された位置よりも所定距離だけ後の位置(溶接終了位置Peを後方の限界とする)にしても良い。上記の所定距離は、3〜10mm程度の範囲で実験によって適正値に設定される。また、磁気吹き発生区間を、単位パルス周期当たり基準周期以上に磁気吹きの発生が判別された区間としても良い。例えば、10パルス周期当たり5パルス周期において磁気吹き発生が判別された区間を磁気吹き発生区間とする。単位パルス周期は、10〜100程度の範囲で実験によって適正値に設定され、基準パルス回数は百分率で30〜100%程度の範囲で実験によって適正値に設定される。
【0029】
(2)実施工溶接
実施工に際しては、第1区間Ps−A1を溶接するときは溶接電流波形パラメータは通常値のままであり、第2区間である磁気吹き発生区間A1−A2を溶接するときは溶接電流波形パラメータは磁気吹きによってアークが偏向しない値に自動的に変化させ、第3区間A2−Peを溶接するときは溶接電流波形パラメータを通常値に戻す。溶接電流波形パラメータの変化は、以下の場合がある。
【0030】
a)溶接電流波形パラメータの変化が、ベース電流Ibを増加させることである。ベース電流Ibの通常値は、上述したように、20〜60A程度である。これを、磁気吹き発生区間では、1.5〜2.0倍程度増加させる。この増加したベース電流を磁気吹き対策ベース電流Ibaと呼ぶことにする。ベース電流Ibが増加すると、アークの硬直性が強くなるので、磁気吹きによるアークの偏向が生じにくくなる。この結果、アークが偏向しないので、ビード外観が悪くなることを抑制することができる。但し、ベース電流Ibを増加させると、溶滴移行状態がやや不安定になる場合が生じて、スパッタの発生がやや多くなる。しかし、従来技術のようにビード外観が悪くなるよりも、ややスパッタが増える方が溶接品質に与える影響は少ない。磁気吹き発生区間でない第1区間Ps−A1及び第3区間A2−Peでは、ベース電流Ibを通常値としているのは、このスパッタの増加を避けるためである。従来技術とは異なり磁気吹きによるアークの偏向がある程度進行してからベース電流Ibを増加させるのではなく、アークの偏向が生じる前にベース電流Ibを増加させているので、アークの偏向を前もって抑制することができる。したがって、ベース電流の増加値も、従来技術に比べて本実施の形態の方が相当に少なくて良い。このことも、ビード外観に与える影響を少なくしている。
【0031】
b)溶接電流波形パラメータの変化が、ピーク電流Ip及び/又はピーク期間Tpを小さくすることである。ピーク電流Ipの通常値は、上述したように、500〜600A程度であり、ピーク期間Tpの通常値は、上述したように、1.0〜1.5ms程度である。これを、磁気吹き発生区間では、10〜20%程度小さくする。この小さくしたピーク電流を磁気吹き対策ピーク電流Ipaと呼び、小さくしたピーク期間を磁気吹き対策ピーク期間Tpaと呼ぶことにする。このようにすると、上述した周波数変調制御によってベース期間Tbが短くなる。ベース期間Tbが短くなると、磁気吹きによってアークが少し偏向したときに次のピーク電流Ipの通電が開始されることになり、アークの偏向は修正される。この結果、アークの偏向が少なくなるので、ビード外観が悪くなることを抑制することができる。但し、ピーク電流Ip及び/又はピーク期間Tpを小さくすると、溶滴移行状態がやや不安定になる場合が生じて、スパッタの発生がやや多くなる。しかし、従来技術のようにビード外観が悪くなるよりも、ややスパッタが増える方が溶接品質に与える影響は少ない。磁気吹き発生区間でない第1区間Ps−A1及び第3区間A2−Peでは、ピーク電流Ip及びピーク期間Tpを通常値としているのは、このスパッタの増加を避けるためである。従来技術とは異なり磁気吹きによるアークの偏向がある程度進行してからベース電流Ibを増加させるのではなく、アークの偏向が生じる前にピーク電流Ip及び/又はピーク期間Tpを小さくしているので、アークの偏向を前もって抑制することができる。
【0032】
図2は、上述した本発明の実施の形態に係るパルスアーク溶接制御方法を示す電流・電圧波形図である。同図(A)は溶接電流Iwの時間変化を示し、同図(B)は溶接電圧Vwの時間変化を示す。同図において、時刻t3以前の期間は図1の第1区間Ps−A1に対応しており、時刻t3以降の期間は図1の第2区間(磁気吹き発生区間)A1−A2に対応している。したがって、時刻t3時点は、図1の位置A1に対応している。同図は、磁気吹き発生区間中は、上記a)に示すように、ベース電流Ibを通常値から増加させて、磁気吹き対策ベース電流Ibaを通電する場合である。また、同図は、上述した図8と対応しており、時刻t3以前の期間の動作は同一であるので説明は簡略化する。
【0033】
時刻t1〜t3のパルス周期中は、磁気吹きが発生していない区間にあるために、安定した溶接状態にある。時刻t1〜t2の通常値のピーク期間Tp中は、同図(A)に示すように、通常値のピーク電流Ipが通電し、同図(B)に示すように、ピーク電圧Vpが印加する。時刻t2〜t3のベース期間Tb中は、同図(A)に示すように、通常値のベース電流Ibが通電し、同図(B)に示すように、通常値のベース電圧Vbが印加する。
【0034】
時刻t3以降の期間は、テスト溶接によって磁気吹き発生区間として判別されている。時刻t3〜t4の通常値のピーク期間Tp中は、同図(A)に示すように、通常値のピーク電流Ipが通電し、同図(B)に示すように、ピーク電圧Vpが印加する。時刻t4からベース期間Tbが開始し、同図(A)に示すように、通常値よりも大きな磁気吹き対策ベース電流Ibaが通電する。また、時刻t4〜t41までの期間中は、同図(B)に示すように、通常値のベース電圧Vbが印加する。このベース期間Tb中の時刻t41において、磁気吹きが発生してアークに偏った力が作用するが、磁気吹き対策ベース電流Ibaが通電しているので、アークの偏向は溶接品質に影響を与えない程度の非常に小さいものである。この磁気吹きのために、時刻t41〜t5の期間中は、同図(B)に示すように、ベース電圧Vbが通常値よりも少しだけ大きくなる。このベース電圧Vbの上昇はわずかであるので、破線で示す基準電圧値Vtよりもかなり小さな値である。したがって、磁気吹きの発生が、判別されることはない。時刻t3〜t5の期間の動作が、磁気吹き発生区間A1−A2の間繰り返されることになる。そして、溶接位置が第3区間A2−Peに入ると、時刻t1〜t3の期間の動作に戻ることになる。
【0035】
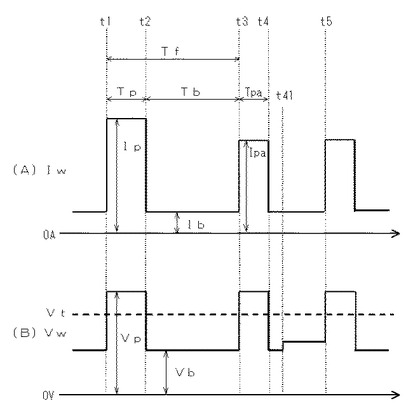
図3は、上述した本発明の実施の形態に係るパルスアーク溶接制御方法を示す図2とは異なる電流・電圧波形図である。同図(A)は溶接電流Iwの時間変化を示し、同図(B)は溶接電圧Vwの時間変化を示す。同図において、時刻t3以前の期間は図1の第1区間Ps−A1に対応しており、時刻t3以降の期間は図1の第2区間(磁気吹き発生区間)A1−A2に対応している。したがって、時刻t3時点は、図1の位置A1に対応している。同図は、図2とは異なり、磁気吹き発生区間中は、上記b)に示すように、ピーク電流Ipを通常値から小さくして磁気吹き対策ピーク電流Ipaに変化させ、ピーク期間Tpを通常値から小さくして磁気吹き対策ピーク期間Tpaに変化させる場合である。また、同図は、上述した図8と対応しており、時刻t3以前の期間の動作は同一であるので説明は簡略化する。
【0036】
時刻t1〜t3のパルス周期中は、磁気吹きが発生していない区間にあるために、安定した溶接状態にある。時刻t1〜t2の通常値のピーク期間Tp中は、同図(A)に示すように、通常値のピーク電流Ipが通電し、同図(B)に示すように、ピーク電圧Vpが印加する。時刻t2〜t3のベース期間Tb中は、同図(A)に示すように、通常値のベース電流Ibが通電し、同図(B)に示すように、通常値のベース電圧Vbが印加する。
【0037】
時刻t3以降の期間は、テスト溶接によって磁気吹き発生区間として判別されている。時刻t3〜t4の磁気吹き対策ピーク期間Tpa中は、同図(A)に示すように、磁気吹き対策ピーク電流Ipaが通電し、同図(B)に示すように、ピーク電圧Vpが印加する。時刻t4からベース期間Tbが開始し、同図(A)に示すように、通常値のベース電流Ibが通電する。また、時刻t4〜t41の期間中は、同図(B)に示すように、通常値のベース電圧Vbが印加する。時刻t4〜t5のベース期間の時間長さは、時刻t2〜t3のベース期間の時間長さよりも短くなっている。これは、ピーク電流及びピーク期間が小さくなっているために、上述した周波数変調制御によってベース期間が短くなるためである。このベース期間Tb中の時刻t41において、磁気吹きが発生してアークに偏った力が作用するが、ベース期間が短いためにその後直ぐに次の磁気吹き対策ピーク電流Ipaの通電が開始されて、アークの偏向はすこしだけ進行した状態で修正されることになる。この磁気吹きのために、時刻t41〜t5の期間中は、同図(B)に示すように、ベース電圧Vbが通常値よりも少しだけ大きくなる。このベース電圧Vbの上昇はわずかであるので、破線で示す基準電圧値Vtよりもかなり小さな値である。したがって、磁気吹きの発生が、判別されることはない。時刻t3〜t5の期間の動作が、磁気吹き発生区間A1−A2の間繰り返されることになる。そして、溶接位置が第3区間A2−Peに入ると、時刻t1〜t3の期間の動作に戻ることになる。ピーク電流及び/又はピーク期間を小さくすると、周波数変調制御によってベース期間が短くなるために、磁気吹きによるアークの偏向は初期状態ですぐに修正されることになり、溶接品質への影響を防止することができる。
【0038】
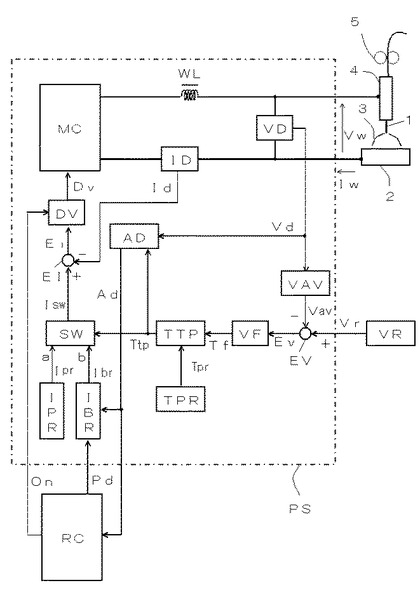
図4は、上述した本発明の実施の形態に係るパルスアーク溶接制御方法を実施するための溶接装置のブロック図である。溶接装置は、主に破線で囲まれた溶接電源PS、ロボット制御装置RC、ロボット(図示は省略)等から構成されている。以下、同図を参照して各ブロックについて説明する。
【0039】
溶接電源PSは、以下の各ブロックから構成されている。但し、溶接ワイヤ1を送給制御するための回路については、省略している。電源主回路MCは、3相200V等の交流商用電源(図示は省略)を入力として、後述する駆動信号Dvに従ってインバータ制御等の出力制御を行い、溶接に適した溶接電圧Vw及び溶接電流Iwを出力する。この電源主回路MCは、図示は省略するが、交流商用電源を整流する1次整流回路、整流された直流を平滑するコンデンサ、平滑された直流を駆動信号Dvに従って高周波交流に変換するインバータ回路、高周波交流を溶接に適した電圧値に降圧するインバータトランス、降圧された高周波交流を整流する2次整流回路から構成されている。リアクトルWLは、上記の電源主回路MCの+側出力と溶接トーチ4との間に挿入されており、電源主回路MCの出力を平滑する。溶接ワイヤ1は、ワイヤ送給機(図示は省略)の送給ロール5の回転によって溶接トーチ4内を通って送給されて、母材2との間にアーク3が発生する。ワイヤ送給機及び溶接トーチ4は、ロボットに搭載されている。
【0040】
電圧検出回路VDは、上記の溶接電圧Vwを検出して、電圧検出信号Vdを出力する。電圧平均化回路VAVは、この電圧検出信号Vdを平均化(ローパスフィルタを通す)して、電圧平均信号Vavを出力する。電圧設定回路VRは、所望値の電圧設定信号Vrを出力する。電圧誤差増幅回路EVは、上記の電圧設定信号Vrと上記の電圧平均信号Vavとの誤差を増幅して、電圧誤差増幅信号Evを出力する。V/FコンバータVFは、この電圧誤差増幅信号Evに応じた周波数で短時間Highレベルになるトリガ信号であるパルス周期信号Tfを出力する。このパルス周期信号Tfは、ピーク期間とベース期間とを1周期とする周波数を決定する信号である。ピーク期間設定回路TPRは、予め定めたピーク期間設定信号Tprを出力する。ピーク期間タイマ回路TTPは、このピーク期間設定信号Tpr及び上記のパルス周期信号Tfを入力として、パルス周期信号Tfが短時間Highレベルに変化するごとにピーク期間設定信号Tprによって定まる期間だけHighレベルとなり、その後は次にパルス周期信号TfがHighレベルになるまでLowレベルとなるピーク期間信号Ttpを出力する。したがって、このピーク期間信号Ttpは、ピーク期間中はHighレベルとなり、ベース期間中はLowレベルとなる信号である。
【0041】
磁気吹き発生判別回路ADは、上記の電圧検出信号Vd及び上記のピーク期間信号Ttpを入力として、ピーク期間信号TtpがLowレベル(ベース期間)のときの電圧検出信号Vdの値が予め定めた基準電圧値以上であるときのみHighレベルになる磁気吹き発生判別信号Adを出力する。すなわち、この磁気吹き発生判別信号Adは、ベース電圧が磁気吹きによるアークの偏向によって上昇したことを判別してHighレベルになる信号である。磁気吹きの発生を、上述したように、ベース電圧の上昇率が基準上昇率以上になってから、下降率が基準下降率以上になった期間として判別しても良い。
【0042】
ピーク電流設定回路IPRは、予め定めたピーク電流設定信号Iprを出力する。ベース電流設定回路IBRは、上記の磁気吹き発生判別信号Ad及び後述するロボット制御装置RCからの磁気吹き発生区間信号Pdを入力として、磁気吹き発生判別信号AdがHighレベルのときは予め定めた増加値のベース電流設定信号Ibrを出力し、磁気吹き発生判別信号AdがLowレベルでありかつ磁気吹き発生区間信号PdがLowレベル(非磁気吹き発生区間)のときは予め定めた通常値のベース電流設定信号Ibrを出力し、磁気吹き発生判別信号AdがLowレベルでありかつ磁気吹き発生区間信号PdがHighレベル(磁気吹き発生区間)のときは予め定めた磁気吹き対策ベース電流値のベース電流設定信号Ibrを出力する。切換回路SWは、上記のピーク期間信号TtpがHighレベルのときは上記のピーク電流設定信号Iprを電流切換設定信号Iswとして出力し、Lowレベルのときは上記のベース電流設定信号Ibrを電流切換設定信号Iswとして出力する。
【0043】
電流検出回路IDは、上記の溶接電流Iwを検出して、電流検出信号Idを出力する。電流誤差増幅回路EIは、上記の電流切換設定信号Iswと上記の電流検出信号Idとの誤差を増幅して、電流誤差増幅信号Eiを出力する。駆動回路DVは、この電流誤差増幅信号Ei及び後述するロボット制御装置RCからの起動信号Onを入力として、起動信号OnがHighレベルのときは電流誤差増幅信号Eiに基いてPWM変調制御を行ない上記のインバータ回路を駆動するための駆動信号Dvを出力し、起動信号OnがLowレベルのときは駆動信号Dvを出力しない。
【0044】
ロボット制御装置RCは、上記の磁気吹き発生判別信号Adを入力として、テスト溶接モード又は実施工溶接モードが選択されて、各モードのときに以下のような動作を行い、起動信号On及び磁気吹き発生区間信号Pdを出力する。
1)テスト溶接モードでは、図1で上述したように、溶接開始位置Psに溶接トーチを移動させた時点で起動信号OnをHighレベルにして出力する。その後は、作業プログラムに従って溶接線に沿って溶接を行う。この溶接中に、磁気吹き発生判別信号Adが1パルス周期中にHighレベルとなった区間を磁気吹き発生区間として記憶する。溶接トーチを溶接終了位置Peまで移動させた時点で、起動信号OnをLowレベルにして溶接を終了する。
2)実施工溶接モードでは、図1で上述したように、溶接開始位置Psに溶接トーチを移動させた時点で起動信号OnをHighレベルにして出力する。その後は、作業プログラムに従って溶接線に沿って溶接を行う。この溶接中に、溶接トーチの位置が記憶した磁気吹き発生区間にあるときは、磁気吹き発生区間信号PdをHighレベルにして出力する。溶接トーチを溶接終了位置Peまで移動させた時点で、起動信号OnをLowレベルにして溶接を終了する。
【0045】
テスト溶接及び実施工溶接のどちらの場合でも、磁気吹き発生判別信号AdがHighレベルになると、ベース電流を増加させて磁気吹きによるアークの偏向を修正するようにしている。しかし、実施工溶接では、磁気吹き発生区間にあるときには磁気吹き対策ベース電流が通電するので、磁気吹き発生判別信号AdがHighレベルになることはごく稀なケースである。
【0046】
同図は、磁気吹き発生区間信号PdがHighレベルのときに、ベース電流Ibを磁気吹き対策ベース電流Ibaに変化させる場合である。これ以外にも、上述したように、磁気吹き発生区間信号PdがHighレベルのときに、ピーク電流Ipを磁気吹き対策ピーク電流Ipaに変化させ、ピーク期間Tpを磁気吹き対策ピーク期間Tpaに変化させるようにしても良い。このようにする場合には、ロボット制御装置RCからの磁気吹き発生区間信号Pdを、ピーク電流設定回路IPR及びピーク期間設定回路TPRに入力して、その値を切り換えるようにすれば良い。
【0047】
上述した実施の形態によれば、ベース期間中の溶接電圧の上昇によって、溶接線上の磁気吹き発生区間を判別して記憶するテスト溶接を行い、実施工時に、溶接線上の前記記憶された磁気吹き発生区間を溶接するときは溶接電流波形パラメータを自動的に変化させて磁気吹きの発生を抑制している。このために、磁気吹きによるアークの偏向を抑制することができるので、ビード外観を良好に保つことができる。
【符号の説明】
【0048】
1 溶接ワイヤ
2 母材
3 アーク
4 溶接トーチ
5 送給ロール
A1−A2 磁気吹き発生区間
AD 磁気吹き発生判別回路
Ad 磁気吹き発生判別信号
DV 駆動回路
Dv 駆動信号
EI 電流誤差増幅回路
Ei 電流誤差増幅信号
EV 電圧誤差増幅回路
Ev 電圧誤差増幅信号
Iav 溶接電流平均値
Ib ベース電流
Iba 磁気吹き対策ベース電流
IBR ベース電流設定回路
Ibr ベース電流設定信号
ID 電流検出回路
Id 電流検出信号
Ip ピーク電流
Ipa 磁気吹き対策ピーク電流
IPR ピーク電流設定回路
Ipr ピーク電流設定信号
Isw 電流切換設定信号
Iw 溶接電流
MC 電源主回路
On 起動信号
Pd 磁気吹き発生区間信号
Pe 溶接終了位置
Ps 溶接開始位置
RC ロボット制御装置
SW 切換回路
Tb ベース期間
Tf パルス周期(信号)
Tp ピーク期間
Tpa 磁気吹き対策ピーク期間
TPR ピーク期間設定回路
Tpr ピーク期間設定信号
TTP ピーク期間タイマ回路
Ttp ピーク期間信号
VAV 電圧平均化回路
Vav 電圧平均信号/溶接電圧平均値
Vb ベース電圧
VD 電圧検出回路
Vd 電圧検出信号
VF V/Fコンバータ
Vp ピーク電圧
VR 電圧設定回路
Vr 電圧設定信号
Vt 基準電圧値
Vt1 第1基準電圧値
Vt2 第2基準電圧値
Vw 溶接電圧
WL リアクトル
【技術分野】
【0001】
本発明は、磁気吹きによる溶接状態の不安定を抑制することができるパルスアーク溶接制御方法に関するものである。
【背景技術】
【0002】
消耗電極式パルスアーク溶接は、鉄鋼等の溶接に広く使用されている。このパルスアーク溶接では、ピーク期間中は臨界値以上の大電流値のピーク電流を通電し、ベース期間中は臨界値未満の小電流値のベース電流を通電し、これらの通電を1パルス周期として繰り返して溶接が行われる。パルスアーク溶接では、1パルス周期1溶滴移行状態となるので、溶滴移行状態が安定しているために、スパッタの発生が少なく、美しいビード外観を得ることができる。以下、このパルスアーク溶接について図面を参照して説明する。
【0003】
図5は、パルスアーク溶接における一般的な電流・電圧波形図である。同図(A)は溶接電流Iwの時間変化を示し、同図(B)は溶接電圧Vwの時間変化を示す。以下、同図を参照して説明する。
【0004】
時刻t1〜t2のピーク期間Tp中は、同図(A)に示すように、溶接ワイヤから溶滴を移行させるために臨界値以上の大電流値のピーク電流Ipが通電し、同図(B)に示すように、溶接ワイヤと母材との間にアーク長に比例したピーク電圧Vpが印加する。直径1.2mmの鉄鋼ワイヤの臨界値は、280A程度である。
【0005】
時刻t2〜t3のベース期間Tb中は、同図(A)に示すように、溶滴を形成しないようにするために臨界値未満の小電流値のベース電流Ibが通電し、同図(B)に示すように、ベース電圧Vbが印加する。時刻t1〜t3までの期間を1周期(パルス周期Tf)として繰り返して溶接が行われる。
【0006】
ところで、良好なパルスアーク溶接を行うためには、アーク長を適正値に維持することが重要である。アーク長を適正値に維持するために以下のようなアーク長制御(溶接電源の出力制御)が行われる。アーク長は、同図(B)で破線で示す溶接電圧平均値Vavと略比例関係にある。このために、溶接電圧平均値Vavを検出し、この検出値が適正アーク長に相当する溶接電圧設定値と等しくなるように同図(A)の破線で示す溶接電流平均値Iavを変化させる出力制御を行う。溶接電圧平均値Vavが溶接電圧設定値よりも大きいときはアーク長が適正値よりも長いときであるので、溶接電流平均値Iavを小さくしてワイヤ溶融速度を小さくしアーク長が短くなるようにする。他方、溶接電圧平均値Vavが溶接電圧設定値よりも小さいときはアーク長が適正値よりも短いときであるので、溶接電流平均値Iavを大きくしてワイヤ溶融速度を大きくしアーク長が長くなるようにする。上記の溶接電圧平均値Vavとしては、一般的に溶接電圧Vwをローパスフィルタを通した値(平均値、平滑値)が使用される。また、溶接電流平均値Iavを変化させる手段として、パルス周期Tfを変化させることが行われている。すなわち、溶接電圧平均値Vavが溶接電圧設定値と等しくなるようにパルス周期Tfをフィードバック制御(アーク長制御)している。このときに、ピーク期間Tp、ピーク電流Ip及びベース電流Ibは所定値に設定される。ピーク期間Tpは1.0〜1.5ms程度に設定され、ピーク電流Ipは500〜600A程度に設定され、ベース電流Ibは20〜60A程度に設定される。ピーク期間Tpとピーク電流Ipとの組合せはユニットパルス条件と呼ばれており、1パルス周期1溶滴移行状態になるように設定される。このアーク長制御の方式は、周波数変調制御と呼ばれる。
【0007】
パルスアーク溶接を含む消耗電極式アーク溶接においては、アーク及び母材を通電する溶接電流によってアーク周辺部に磁界が形成されて、この磁界からアークは力を受けて偏向する場合がある。このような状態を、一般的に磁気吹き又はアークブローと呼んでいる。磁気吹きが発生するかは、母材に通電する溶接電流によって形成される磁界の形態によって決まる。溶接している部分が母材の端部から離れているときには、磁界は対称形状に形成されることが多いために、アークは磁界から偏った力を受けることがないので、磁気吹きは発生しにくい。他方、溶接している部分が母材の端部に近いときは、磁界は非対称形状に形成されるために、アークは磁界から偏った力を受けることになり、磁気吹きが発生しやすくなる。したがって、母材の端部の近くとなることが多い溶接開始部分及び溶接終了部分では、磁気吹きが発生しやすい。消耗電極アークの中でも、短絡移行溶接では磁気吹きは発生しにくく、パルスアーク溶接では発生しやすい。これは、短絡移行溶接では、アーク長がパルスアーク溶接に比べて短いために、磁界からの影響を受けにくいためである。他方、パルスアーク溶接では、大電流値のピーク電流Ipが通電しているときは強い磁界が形成され、小電流値のベース電流Ibが通電しているときは弱い磁界が形成されている。パルスアーク溶接では、この磁界の強さの変化が大きいこと、かつ、ベース電流Ibが小さいので磁界から偏った力を受けると直ぐにアークが偏向すること、が原因となって磁気吹きが発生しやすい。したがって、パルスアーク溶接では、磁気吹きによるアークの偏向は、ベース期間Tb中に発生しやすい。
【0008】
図6は、磁気吹きが発生したときのアーク状態を示す図である。同図(A)に示すように、溶接ワイヤ1と母材2との間に通常のアーク3が発生している。この状態で磁気吹きが発生すると、同図(B)に示すように、アーク3は磁界からの力によって大きく偏向し、アーク長が長くなる。さらに偏向が大きくなると、同図(C)に示すように、アークを維持することができなくなりアーク切れが発生する。パルスアーク溶接では、ピーク期間中は大電流が通電するのでアークの硬直性が強く、磁界からの力が作用してもアークはほとんど偏向しない。他方、ベース期間中は小電流が通電するのでアークの硬直性が弱く、磁界からの力によって大きく偏向する。したがって、磁気吹きが発生してアーク切れが生じるのは、ほとんどベース期間中である。磁気吹きによるアーク切れが多数回発生すると、アーク発生状態が不安定となり、スパッタの大量発生、ビード外観の悪化等が生じる。したがって、パルスアーク溶接においては、磁気吹きによるアーク切れを抑制することは良好な溶接品質を得るために重要である。
【0009】
図7は、パルスアーク溶接において磁気吹きが発生したときの電流・電圧波形図である。同図(A)は溶接電流Iwの時間変化を示し、同図(B)は溶接電圧Vwの時間変化を示す。以下、同図を参照して説明する。
【0010】
時刻t1〜t2のピーク期間Tp中は、同図(A)に示すように、臨界値以上のピーク電流Ipが通電し、同図(B)に示すように、アーク長に略比例したピーク電圧Vpが印加する。時刻t2以降のベース期間Tb中は、同図(A)に示すように、臨界値未満のベース電流Ibが通電し、同図(B)に示すように、アーク長に略比例したベース電圧Vbが印加する。
【0011】
時刻t21において、磁気吹きが発生してアークが偏向すると、同図(B)に示すように、アークの偏向に伴ってアーク長が長くなり、ベース電圧Vbが次第に上昇して大きくなる。一方、同図(A)に示すように、ベース電流Ibは定電流制御されているので一定値のままである。時刻t3において、磁気吹きによるアークの偏向がさらに大きくなると、アーク長が非常に長くなるためにアークを維持することができなくなり、アーク切れが発生する。アーク切れが発生すると、同図(A)に示すように、溶接電流Iwは通電しなくなり、同図(B)に示すように、溶接電圧Vwは出力最大電圧の無負荷電圧となる。
【0012】
図8は、特許文献1に開示された磁気吹きによるアーク切れを防止するための磁気吹き対策制御を示す電流・電圧波形図である。同図(A)は溶接電流Iwの時間変化を示し、同図(B)は溶接電圧Vwの時間変化を示す。同図において時刻t1〜t3のパルス周期中は磁気吹きが発生していない安定した溶接状態のときを示しており、続く時刻t3〜t5のパルス周期中は磁気吹きが発生した溶接状態のときを示している。
【0013】
時刻t1〜t3のパルス周期中は、磁気吹きが発生していないために、安定した溶接状態にある。この期間中の動作については、上述した図5と同一であるので、説明は省略する。
【0014】
時刻t3〜t4のピーク期間Tp中は、同図(A)に示すように、ピーク電流Ipが通電し、同図(B)に示すように、ピーク電圧Vpが印加する。時刻t4からベース期間Tbが開始し、同図(A)に示すように、ベース電流Ibが通電し、同図(B)に示すように、通常値のベース電圧Vbが印加する。このベース期間Tb中の時刻t41において、磁気吹きが発生してアークが偏向したためにアーク長が長くなり、同図(B)に示すように、ベース電圧Vbが上昇して高くなる。そして、時刻t42において、ベース電圧Vbの値が、破線で示す予め定めた基準電圧値Vt以上になる。ベース電圧値Vbが上記の基準電圧値Vt以上になったことを判別すると、同図(A)に示すように、ベース電流Ibの値を通常値よりも増加させて200A以上にする。時刻t42〜t43の期間中は、ベース電圧値Vbが上記の基準電圧値Vt以上になっている。この期間中は、同図(A)に示すように、200A以上に増加されたベース電流が通電する。
【0015】
時刻t42〜t43の期間中は、ベース電流Ibの値が200A以上に増加するので、アークがワイヤ送給方向に発生する性質である硬直性が強くなるために、アークの偏向が正常な状態に戻されることになる。このために、同図(B)に示すように、時刻t43において、ベース電圧値Vbは上記の基準電圧値Vt未満になり、その後は急速に減少して通常値に戻る。したがって、磁気吹きは、時刻t41に発生して、時刻t43の直後に解消される。時刻t43において、同図(A)に示すように、ベース電流Ibの値は通常値に戻る。時刻t43〜t5の残りのベース期間Tb中は、同図(A)に示すように、ベース電流Ibの値は通常値のままであり、同図(B)に示すように、通常値のベース電圧値Vbが印加する。この期間のアークは、磁気吹きが発生していないので、安定した状態にある。
【0016】
上記において、基準電圧値Vtは、磁気吹きが発生していない状態でのベース電圧値Vbの変動を考慮して、溶接条件に応じて適正値に設定する。例えば、ベース電圧Vbの変動は、ピーク電圧値Vpまで及ぶことはないので、基準電圧値Vtをピーク電圧値Vpに近い値に設定する。また、ベース電圧Vbと基準電圧値Vtとの比較にあたって、ヒステリシスを持たせるようにしても良い。すなわち、ベース電圧Vbが通常値から上昇していくときの基準値を第1基準電圧値Vt1とし、ベース電圧Vbが一旦Vt1以上になりその後に下降するときの基準値を第2基準電圧値Vt2とするものである。このときに、Vt1>Vt2である。また、ベース電圧Vbの上昇率(微分値=dVw/dt)が基準値に達したことによって磁気吹きの発生を判別し、その後にベース電圧Vbの下降率が基準値に達したことによって磁気吹きの解消を判別するようにしても良い。ベース電圧Vbの上昇による従来から行われている種々の磁気吹きの発生の判別方法を使用することができる。上記の増加したベース電流値は、200〜500A程度の範囲で、アークの偏向を修正することができる値に実験によって設定される。
【0017】
このような磁気吹き対策制御を行うことによって、磁気吹きによるアーク切れを防止することができる。
【先行技術文献】
【特許文献】
【0018】
【特許文献1】特開2004−268081号公報
【発明の概要】
【発明が解決しようとする課題】
【0019】
上述した従来技術では、磁気吹きによるアークの偏向を判別してベース電流を200A以上に増加させることによって、アーク切れの発生を防止することができる。しかし、このような方法では、磁気吹きによってアークがある程度まで偏向してアーク長が長くなった状態を判別していることになる。このために、磁気吹きによってアークがある程度まで偏向した状態で溶接を行うことになるために、ビード外観が悪くなる場合が生じる。すなわち、従来技術では、磁気吹きによるアーク切れに伴うビード外観の著しい悪化を防止することができるが、ビード外観がある程度悪くなることは避けられなかった。
【0020】
そこで、本発明では、磁気吹きによるビード外観の悪化を防止することができるパルスアーク溶接制御方法を提供することを目的とする。
【課題を解決するための手段】
【0021】
上述した課題を解決するために、請求項1の発明は、溶接ワイヤを送給すると共に、ピーク期間中のピーク電流及びベース期間中のベース電流の通電を1パルス周期として繰り返して溶接するパルスアーク溶接制御方法において、
前記ベース期間中の溶接電圧の上昇によって、溶接線上の磁気吹き発生区間を判別して記憶するテスト溶接を行い、
実施工時に、溶接線上の前記記憶された磁気吹き発生区間を溶接するときは溶接電流波形パラメータを自動的に変化させて磁気吹きの発生を抑制する、
ことを特徴とするパルスアーク溶接制御方法である。
【0022】
請求項2の発明は、前記溶接電流波形パラメータの変化が、前記ベース電流を大きくすることである、
ことを特徴とする請求項1記載のパルスアーク溶接制御方法である。
【0023】
請求項3の発明は、前記溶接電流波形パラメータの変化が、前記ピーク電流及び/又は前記ピーク期間を小さくすることである、
ことを特徴とする請求項1記載のパルスアーク溶接制御方法である。
【発明の効果】
【0024】
本発明によれば、ベース期間中の溶接電圧の上昇によって、溶接線上の磁気吹き発生区間を判別して記憶するテスト溶接を行い、実施工時に、溶接線上の前記記憶された磁気吹き発生区間を溶接するときは溶接電流波形パラメータを自動的に変化させて磁気吹きの発生を抑制している。このために、磁気吹きによるアークの偏向を抑制することができるので、ビード外観を良好に保つことができる。
【図面の簡単な説明】
【0025】
【図1】本発明の実施の形態に係るパルスアーク溶接制御方法を説明するために、溶接対象となる溶接線Ps−Peを直線として示した図である。
【図2】本発明の実施の形態に係るパルスアーク溶接制御方法を示す電流・電圧波形図である。
【図3】本発明の実施の形態に係るパルスアーク溶接制御方法を示す図2とは異なる電流・電圧波形図である。
【図4】本発明の実施の形態に係るパルスアーク溶接制御方法を実施するための溶接装置のブロック図である。
【図5】従来技術におけるパルスアーク溶接の電流・電圧波形図である。
【図6】従来技術において磁気吹きが発生したときのアーク状態を示す図である。
【図7】従来技術の、パルスアーク溶接において磁気吹きが発生したときの電流・電圧波形図である。
【図8】従来技術における磁気吹きによるアーク切れを防止するための磁気吹き対策制御を示す電流・電圧波形図である。
【発明を実施するための形態】
【0026】
以下、図面を参照して本発明の実施の形態について説明する。
【0027】
図1は、本発明の実施の形態に係るパルスアーク溶接制御方法を説明するために、溶接対象となる溶接線Ps−Peを直線として示した図である。同図において、左端Psは溶接開始位置を示し、右端Peは溶接終了位置を示す。この溶接線Ps−Peを、ロボットを使用して、図8で上述した磁気吹き対策制御を付加したパルスアーク溶接を行う。パルスアーク溶接は、テスト溶接と実施工溶接とに分けて行われる。
【0028】
(1)テスト溶接
図8で上述した磁気吹きによるアークの偏向を判別しながら溶接開始位置Psから溶接線に沿って溶接を開始する。溶接中に磁気吹きの発生を判別した場合は、溶接線上の位置を記憶する。同図においては、溶接線上のA1からA2の間の区間において磁気吹きの発生が判別されたとする。このA1−A2の区間を、磁気吹き発生区間と呼ぶことにする。したがって、同図においては、溶接線は3つの区間に分けられることになる。第1区間Ps−A1は磁気吹きが発生しなかった区間であり、第2区間A1−A2は磁気吹き発生区間であり、第3区間A2−Peは磁気吹きが発生しなかった区間である。すなわち、テスト溶接では、溶接線上の磁気吹き発生区間を判別して記憶する動作を行っている。磁気吹き発生の判別は、上述したように、ベース電圧が基準電圧値以上に上昇したことによって行うことができる。また、ベース電圧の上昇率が基準上昇率以上になったことによって行うこともできる。磁気吹きを判別したときは、上述したように、ベース電流を増加させてアーク切れを防止するようにしている。テスト溶接であるので、ベース電流の増加を行わないようにしても良い。。磁気吹き発生区間A1−A2は、磁気吹き発生を判別したパルス周期が連続している区間として判別することができる。同図では、磁気吹き発生区間が1つの場合であるが、複数の区間が存在する場合がある。また、磁気吹き発生区間の判別に裕度を持たせるために、磁気吹き発生区間の開始位置を、溶接中に最初に磁気吹きの発生が判別された位置よりも所定距離だけ前の位置(溶接開始位置Psを前方の限界とする)にしても良い。同様に、磁気吹き発生区間の終了位置を、溶接中に最後に磁気吹きの発生が判別された位置よりも所定距離だけ後の位置(溶接終了位置Peを後方の限界とする)にしても良い。上記の所定距離は、3〜10mm程度の範囲で実験によって適正値に設定される。また、磁気吹き発生区間を、単位パルス周期当たり基準周期以上に磁気吹きの発生が判別された区間としても良い。例えば、10パルス周期当たり5パルス周期において磁気吹き発生が判別された区間を磁気吹き発生区間とする。単位パルス周期は、10〜100程度の範囲で実験によって適正値に設定され、基準パルス回数は百分率で30〜100%程度の範囲で実験によって適正値に設定される。
【0029】
(2)実施工溶接
実施工に際しては、第1区間Ps−A1を溶接するときは溶接電流波形パラメータは通常値のままであり、第2区間である磁気吹き発生区間A1−A2を溶接するときは溶接電流波形パラメータは磁気吹きによってアークが偏向しない値に自動的に変化させ、第3区間A2−Peを溶接するときは溶接電流波形パラメータを通常値に戻す。溶接電流波形パラメータの変化は、以下の場合がある。
【0030】
a)溶接電流波形パラメータの変化が、ベース電流Ibを増加させることである。ベース電流Ibの通常値は、上述したように、20〜60A程度である。これを、磁気吹き発生区間では、1.5〜2.0倍程度増加させる。この増加したベース電流を磁気吹き対策ベース電流Ibaと呼ぶことにする。ベース電流Ibが増加すると、アークの硬直性が強くなるので、磁気吹きによるアークの偏向が生じにくくなる。この結果、アークが偏向しないので、ビード外観が悪くなることを抑制することができる。但し、ベース電流Ibを増加させると、溶滴移行状態がやや不安定になる場合が生じて、スパッタの発生がやや多くなる。しかし、従来技術のようにビード外観が悪くなるよりも、ややスパッタが増える方が溶接品質に与える影響は少ない。磁気吹き発生区間でない第1区間Ps−A1及び第3区間A2−Peでは、ベース電流Ibを通常値としているのは、このスパッタの増加を避けるためである。従来技術とは異なり磁気吹きによるアークの偏向がある程度進行してからベース電流Ibを増加させるのではなく、アークの偏向が生じる前にベース電流Ibを増加させているので、アークの偏向を前もって抑制することができる。したがって、ベース電流の増加値も、従来技術に比べて本実施の形態の方が相当に少なくて良い。このことも、ビード外観に与える影響を少なくしている。
【0031】
b)溶接電流波形パラメータの変化が、ピーク電流Ip及び/又はピーク期間Tpを小さくすることである。ピーク電流Ipの通常値は、上述したように、500〜600A程度であり、ピーク期間Tpの通常値は、上述したように、1.0〜1.5ms程度である。これを、磁気吹き発生区間では、10〜20%程度小さくする。この小さくしたピーク電流を磁気吹き対策ピーク電流Ipaと呼び、小さくしたピーク期間を磁気吹き対策ピーク期間Tpaと呼ぶことにする。このようにすると、上述した周波数変調制御によってベース期間Tbが短くなる。ベース期間Tbが短くなると、磁気吹きによってアークが少し偏向したときに次のピーク電流Ipの通電が開始されることになり、アークの偏向は修正される。この結果、アークの偏向が少なくなるので、ビード外観が悪くなることを抑制することができる。但し、ピーク電流Ip及び/又はピーク期間Tpを小さくすると、溶滴移行状態がやや不安定になる場合が生じて、スパッタの発生がやや多くなる。しかし、従来技術のようにビード外観が悪くなるよりも、ややスパッタが増える方が溶接品質に与える影響は少ない。磁気吹き発生区間でない第1区間Ps−A1及び第3区間A2−Peでは、ピーク電流Ip及びピーク期間Tpを通常値としているのは、このスパッタの増加を避けるためである。従来技術とは異なり磁気吹きによるアークの偏向がある程度進行してからベース電流Ibを増加させるのではなく、アークの偏向が生じる前にピーク電流Ip及び/又はピーク期間Tpを小さくしているので、アークの偏向を前もって抑制することができる。
【0032】
図2は、上述した本発明の実施の形態に係るパルスアーク溶接制御方法を示す電流・電圧波形図である。同図(A)は溶接電流Iwの時間変化を示し、同図(B)は溶接電圧Vwの時間変化を示す。同図において、時刻t3以前の期間は図1の第1区間Ps−A1に対応しており、時刻t3以降の期間は図1の第2区間(磁気吹き発生区間)A1−A2に対応している。したがって、時刻t3時点は、図1の位置A1に対応している。同図は、磁気吹き発生区間中は、上記a)に示すように、ベース電流Ibを通常値から増加させて、磁気吹き対策ベース電流Ibaを通電する場合である。また、同図は、上述した図8と対応しており、時刻t3以前の期間の動作は同一であるので説明は簡略化する。
【0033】
時刻t1〜t3のパルス周期中は、磁気吹きが発生していない区間にあるために、安定した溶接状態にある。時刻t1〜t2の通常値のピーク期間Tp中は、同図(A)に示すように、通常値のピーク電流Ipが通電し、同図(B)に示すように、ピーク電圧Vpが印加する。時刻t2〜t3のベース期間Tb中は、同図(A)に示すように、通常値のベース電流Ibが通電し、同図(B)に示すように、通常値のベース電圧Vbが印加する。
【0034】
時刻t3以降の期間は、テスト溶接によって磁気吹き発生区間として判別されている。時刻t3〜t4の通常値のピーク期間Tp中は、同図(A)に示すように、通常値のピーク電流Ipが通電し、同図(B)に示すように、ピーク電圧Vpが印加する。時刻t4からベース期間Tbが開始し、同図(A)に示すように、通常値よりも大きな磁気吹き対策ベース電流Ibaが通電する。また、時刻t4〜t41までの期間中は、同図(B)に示すように、通常値のベース電圧Vbが印加する。このベース期間Tb中の時刻t41において、磁気吹きが発生してアークに偏った力が作用するが、磁気吹き対策ベース電流Ibaが通電しているので、アークの偏向は溶接品質に影響を与えない程度の非常に小さいものである。この磁気吹きのために、時刻t41〜t5の期間中は、同図(B)に示すように、ベース電圧Vbが通常値よりも少しだけ大きくなる。このベース電圧Vbの上昇はわずかであるので、破線で示す基準電圧値Vtよりもかなり小さな値である。したがって、磁気吹きの発生が、判別されることはない。時刻t3〜t5の期間の動作が、磁気吹き発生区間A1−A2の間繰り返されることになる。そして、溶接位置が第3区間A2−Peに入ると、時刻t1〜t3の期間の動作に戻ることになる。
【0035】
図3は、上述した本発明の実施の形態に係るパルスアーク溶接制御方法を示す図2とは異なる電流・電圧波形図である。同図(A)は溶接電流Iwの時間変化を示し、同図(B)は溶接電圧Vwの時間変化を示す。同図において、時刻t3以前の期間は図1の第1区間Ps−A1に対応しており、時刻t3以降の期間は図1の第2区間(磁気吹き発生区間)A1−A2に対応している。したがって、時刻t3時点は、図1の位置A1に対応している。同図は、図2とは異なり、磁気吹き発生区間中は、上記b)に示すように、ピーク電流Ipを通常値から小さくして磁気吹き対策ピーク電流Ipaに変化させ、ピーク期間Tpを通常値から小さくして磁気吹き対策ピーク期間Tpaに変化させる場合である。また、同図は、上述した図8と対応しており、時刻t3以前の期間の動作は同一であるので説明は簡略化する。
【0036】
時刻t1〜t3のパルス周期中は、磁気吹きが発生していない区間にあるために、安定した溶接状態にある。時刻t1〜t2の通常値のピーク期間Tp中は、同図(A)に示すように、通常値のピーク電流Ipが通電し、同図(B)に示すように、ピーク電圧Vpが印加する。時刻t2〜t3のベース期間Tb中は、同図(A)に示すように、通常値のベース電流Ibが通電し、同図(B)に示すように、通常値のベース電圧Vbが印加する。
【0037】
時刻t3以降の期間は、テスト溶接によって磁気吹き発生区間として判別されている。時刻t3〜t4の磁気吹き対策ピーク期間Tpa中は、同図(A)に示すように、磁気吹き対策ピーク電流Ipaが通電し、同図(B)に示すように、ピーク電圧Vpが印加する。時刻t4からベース期間Tbが開始し、同図(A)に示すように、通常値のベース電流Ibが通電する。また、時刻t4〜t41の期間中は、同図(B)に示すように、通常値のベース電圧Vbが印加する。時刻t4〜t5のベース期間の時間長さは、時刻t2〜t3のベース期間の時間長さよりも短くなっている。これは、ピーク電流及びピーク期間が小さくなっているために、上述した周波数変調制御によってベース期間が短くなるためである。このベース期間Tb中の時刻t41において、磁気吹きが発生してアークに偏った力が作用するが、ベース期間が短いためにその後直ぐに次の磁気吹き対策ピーク電流Ipaの通電が開始されて、アークの偏向はすこしだけ進行した状態で修正されることになる。この磁気吹きのために、時刻t41〜t5の期間中は、同図(B)に示すように、ベース電圧Vbが通常値よりも少しだけ大きくなる。このベース電圧Vbの上昇はわずかであるので、破線で示す基準電圧値Vtよりもかなり小さな値である。したがって、磁気吹きの発生が、判別されることはない。時刻t3〜t5の期間の動作が、磁気吹き発生区間A1−A2の間繰り返されることになる。そして、溶接位置が第3区間A2−Peに入ると、時刻t1〜t3の期間の動作に戻ることになる。ピーク電流及び/又はピーク期間を小さくすると、周波数変調制御によってベース期間が短くなるために、磁気吹きによるアークの偏向は初期状態ですぐに修正されることになり、溶接品質への影響を防止することができる。
【0038】
図4は、上述した本発明の実施の形態に係るパルスアーク溶接制御方法を実施するための溶接装置のブロック図である。溶接装置は、主に破線で囲まれた溶接電源PS、ロボット制御装置RC、ロボット(図示は省略)等から構成されている。以下、同図を参照して各ブロックについて説明する。
【0039】
溶接電源PSは、以下の各ブロックから構成されている。但し、溶接ワイヤ1を送給制御するための回路については、省略している。電源主回路MCは、3相200V等の交流商用電源(図示は省略)を入力として、後述する駆動信号Dvに従ってインバータ制御等の出力制御を行い、溶接に適した溶接電圧Vw及び溶接電流Iwを出力する。この電源主回路MCは、図示は省略するが、交流商用電源を整流する1次整流回路、整流された直流を平滑するコンデンサ、平滑された直流を駆動信号Dvに従って高周波交流に変換するインバータ回路、高周波交流を溶接に適した電圧値に降圧するインバータトランス、降圧された高周波交流を整流する2次整流回路から構成されている。リアクトルWLは、上記の電源主回路MCの+側出力と溶接トーチ4との間に挿入されており、電源主回路MCの出力を平滑する。溶接ワイヤ1は、ワイヤ送給機(図示は省略)の送給ロール5の回転によって溶接トーチ4内を通って送給されて、母材2との間にアーク3が発生する。ワイヤ送給機及び溶接トーチ4は、ロボットに搭載されている。
【0040】
電圧検出回路VDは、上記の溶接電圧Vwを検出して、電圧検出信号Vdを出力する。電圧平均化回路VAVは、この電圧検出信号Vdを平均化(ローパスフィルタを通す)して、電圧平均信号Vavを出力する。電圧設定回路VRは、所望値の電圧設定信号Vrを出力する。電圧誤差増幅回路EVは、上記の電圧設定信号Vrと上記の電圧平均信号Vavとの誤差を増幅して、電圧誤差増幅信号Evを出力する。V/FコンバータVFは、この電圧誤差増幅信号Evに応じた周波数で短時間Highレベルになるトリガ信号であるパルス周期信号Tfを出力する。このパルス周期信号Tfは、ピーク期間とベース期間とを1周期とする周波数を決定する信号である。ピーク期間設定回路TPRは、予め定めたピーク期間設定信号Tprを出力する。ピーク期間タイマ回路TTPは、このピーク期間設定信号Tpr及び上記のパルス周期信号Tfを入力として、パルス周期信号Tfが短時間Highレベルに変化するごとにピーク期間設定信号Tprによって定まる期間だけHighレベルとなり、その後は次にパルス周期信号TfがHighレベルになるまでLowレベルとなるピーク期間信号Ttpを出力する。したがって、このピーク期間信号Ttpは、ピーク期間中はHighレベルとなり、ベース期間中はLowレベルとなる信号である。
【0041】
磁気吹き発生判別回路ADは、上記の電圧検出信号Vd及び上記のピーク期間信号Ttpを入力として、ピーク期間信号TtpがLowレベル(ベース期間)のときの電圧検出信号Vdの値が予め定めた基準電圧値以上であるときのみHighレベルになる磁気吹き発生判別信号Adを出力する。すなわち、この磁気吹き発生判別信号Adは、ベース電圧が磁気吹きによるアークの偏向によって上昇したことを判別してHighレベルになる信号である。磁気吹きの発生を、上述したように、ベース電圧の上昇率が基準上昇率以上になってから、下降率が基準下降率以上になった期間として判別しても良い。
【0042】
ピーク電流設定回路IPRは、予め定めたピーク電流設定信号Iprを出力する。ベース電流設定回路IBRは、上記の磁気吹き発生判別信号Ad及び後述するロボット制御装置RCからの磁気吹き発生区間信号Pdを入力として、磁気吹き発生判別信号AdがHighレベルのときは予め定めた増加値のベース電流設定信号Ibrを出力し、磁気吹き発生判別信号AdがLowレベルでありかつ磁気吹き発生区間信号PdがLowレベル(非磁気吹き発生区間)のときは予め定めた通常値のベース電流設定信号Ibrを出力し、磁気吹き発生判別信号AdがLowレベルでありかつ磁気吹き発生区間信号PdがHighレベル(磁気吹き発生区間)のときは予め定めた磁気吹き対策ベース電流値のベース電流設定信号Ibrを出力する。切換回路SWは、上記のピーク期間信号TtpがHighレベルのときは上記のピーク電流設定信号Iprを電流切換設定信号Iswとして出力し、Lowレベルのときは上記のベース電流設定信号Ibrを電流切換設定信号Iswとして出力する。
【0043】
電流検出回路IDは、上記の溶接電流Iwを検出して、電流検出信号Idを出力する。電流誤差増幅回路EIは、上記の電流切換設定信号Iswと上記の電流検出信号Idとの誤差を増幅して、電流誤差増幅信号Eiを出力する。駆動回路DVは、この電流誤差増幅信号Ei及び後述するロボット制御装置RCからの起動信号Onを入力として、起動信号OnがHighレベルのときは電流誤差増幅信号Eiに基いてPWM変調制御を行ない上記のインバータ回路を駆動するための駆動信号Dvを出力し、起動信号OnがLowレベルのときは駆動信号Dvを出力しない。
【0044】
ロボット制御装置RCは、上記の磁気吹き発生判別信号Adを入力として、テスト溶接モード又は実施工溶接モードが選択されて、各モードのときに以下のような動作を行い、起動信号On及び磁気吹き発生区間信号Pdを出力する。
1)テスト溶接モードでは、図1で上述したように、溶接開始位置Psに溶接トーチを移動させた時点で起動信号OnをHighレベルにして出力する。その後は、作業プログラムに従って溶接線に沿って溶接を行う。この溶接中に、磁気吹き発生判別信号Adが1パルス周期中にHighレベルとなった区間を磁気吹き発生区間として記憶する。溶接トーチを溶接終了位置Peまで移動させた時点で、起動信号OnをLowレベルにして溶接を終了する。
2)実施工溶接モードでは、図1で上述したように、溶接開始位置Psに溶接トーチを移動させた時点で起動信号OnをHighレベルにして出力する。その後は、作業プログラムに従って溶接線に沿って溶接を行う。この溶接中に、溶接トーチの位置が記憶した磁気吹き発生区間にあるときは、磁気吹き発生区間信号PdをHighレベルにして出力する。溶接トーチを溶接終了位置Peまで移動させた時点で、起動信号OnをLowレベルにして溶接を終了する。
【0045】
テスト溶接及び実施工溶接のどちらの場合でも、磁気吹き発生判別信号AdがHighレベルになると、ベース電流を増加させて磁気吹きによるアークの偏向を修正するようにしている。しかし、実施工溶接では、磁気吹き発生区間にあるときには磁気吹き対策ベース電流が通電するので、磁気吹き発生判別信号AdがHighレベルになることはごく稀なケースである。
【0046】
同図は、磁気吹き発生区間信号PdがHighレベルのときに、ベース電流Ibを磁気吹き対策ベース電流Ibaに変化させる場合である。これ以外にも、上述したように、磁気吹き発生区間信号PdがHighレベルのときに、ピーク電流Ipを磁気吹き対策ピーク電流Ipaに変化させ、ピーク期間Tpを磁気吹き対策ピーク期間Tpaに変化させるようにしても良い。このようにする場合には、ロボット制御装置RCからの磁気吹き発生区間信号Pdを、ピーク電流設定回路IPR及びピーク期間設定回路TPRに入力して、その値を切り換えるようにすれば良い。
【0047】
上述した実施の形態によれば、ベース期間中の溶接電圧の上昇によって、溶接線上の磁気吹き発生区間を判別して記憶するテスト溶接を行い、実施工時に、溶接線上の前記記憶された磁気吹き発生区間を溶接するときは溶接電流波形パラメータを自動的に変化させて磁気吹きの発生を抑制している。このために、磁気吹きによるアークの偏向を抑制することができるので、ビード外観を良好に保つことができる。
【符号の説明】
【0048】
1 溶接ワイヤ
2 母材
3 アーク
4 溶接トーチ
5 送給ロール
A1−A2 磁気吹き発生区間
AD 磁気吹き発生判別回路
Ad 磁気吹き発生判別信号
DV 駆動回路
Dv 駆動信号
EI 電流誤差増幅回路
Ei 電流誤差増幅信号
EV 電圧誤差増幅回路
Ev 電圧誤差増幅信号
Iav 溶接電流平均値
Ib ベース電流
Iba 磁気吹き対策ベース電流
IBR ベース電流設定回路
Ibr ベース電流設定信号
ID 電流検出回路
Id 電流検出信号
Ip ピーク電流
Ipa 磁気吹き対策ピーク電流
IPR ピーク電流設定回路
Ipr ピーク電流設定信号
Isw 電流切換設定信号
Iw 溶接電流
MC 電源主回路
On 起動信号
Pd 磁気吹き発生区間信号
Pe 溶接終了位置
Ps 溶接開始位置
RC ロボット制御装置
SW 切換回路
Tb ベース期間
Tf パルス周期(信号)
Tp ピーク期間
Tpa 磁気吹き対策ピーク期間
TPR ピーク期間設定回路
Tpr ピーク期間設定信号
TTP ピーク期間タイマ回路
Ttp ピーク期間信号
VAV 電圧平均化回路
Vav 電圧平均信号/溶接電圧平均値
Vb ベース電圧
VD 電圧検出回路
Vd 電圧検出信号
VF V/Fコンバータ
Vp ピーク電圧
VR 電圧設定回路
Vr 電圧設定信号
Vt 基準電圧値
Vt1 第1基準電圧値
Vt2 第2基準電圧値
Vw 溶接電圧
WL リアクトル
【特許請求の範囲】
【請求項1】
溶接ワイヤを送給すると共に、ピーク期間中のピーク電流及びベース期間中のベース電流の通電を1パルス周期として繰り返して溶接するパルスアーク溶接制御方法において、
前記ベース期間中の溶接電圧の上昇によって、溶接線上の磁気吹き発生区間を判別して記憶するテスト溶接を行い、
実施工時に、溶接線上の前記記憶された磁気吹き発生区間を溶接するときは溶接電流波形パラメータを自動的に変化させて磁気吹きの発生を抑制する、
ことを特徴とするパルスアーク溶接制御方法。
【請求項2】
前記溶接電流波形パラメータの変化が、前記ベース電流を大きくすることである、
ことを特徴とする請求項1記載のパルスアーク溶接制御方法。
【請求項3】
前記溶接電流波形パラメータの変化が、前記ピーク電流及び/又は前記ピーク期間を小さくすることである、
ことを特徴とする請求項1記載のパルスアーク溶接制御方法。
【請求項1】
溶接ワイヤを送給すると共に、ピーク期間中のピーク電流及びベース期間中のベース電流の通電を1パルス周期として繰り返して溶接するパルスアーク溶接制御方法において、
前記ベース期間中の溶接電圧の上昇によって、溶接線上の磁気吹き発生区間を判別して記憶するテスト溶接を行い、
実施工時に、溶接線上の前記記憶された磁気吹き発生区間を溶接するときは溶接電流波形パラメータを自動的に変化させて磁気吹きの発生を抑制する、
ことを特徴とするパルスアーク溶接制御方法。
【請求項2】
前記溶接電流波形パラメータの変化が、前記ベース電流を大きくすることである、
ことを特徴とする請求項1記載のパルスアーク溶接制御方法。
【請求項3】
前記溶接電流波形パラメータの変化が、前記ピーク電流及び/又は前記ピーク期間を小さくすることである、
ことを特徴とする請求項1記載のパルスアーク溶接制御方法。
【図1】



【図2】
【図3】
【図4】
【図5】
【図6】
【図7】

【図8】
【図2】
【図3】
【図4】
【図5】
【図6】
【図7】
【図8】
【公開番号】特開2012−110951(P2012−110951A)
【公開日】平成24年6月14日(2012.6.14)
【国際特許分類】
【出願番号】特願2010−263724(P2010−263724)
【出願日】平成22年11月26日(2010.11.26)
【出願人】(000000262)株式会社ダイヘン (990)
【Fターム(参考)】
【公開日】平成24年6月14日(2012.6.14)
【国際特許分類】
【出願日】平成22年11月26日(2010.11.26)
【出願人】(000000262)株式会社ダイヘン (990)
【Fターム(参考)】
[ Back to top ]