
パルスレーダ装置、パルスレーダ装置制御方法およびその制御用プログラム
【課題】1方向のみ観測するレーダ装置を用いて3次元レーダ装置の機能を実現する。
【解決手段】それぞれ異なる位置に設置され、重複する空間に発信電波を発信するように配置された空中線部を有するパルスレーダ10およびパルスレーダ20が目標物に係る信号の検出時刻、距離および視線方向速度を算定して目標物データとしてそれぞれ出力し、この各目標物データを時刻補正部40が同一時刻のデータとして補正し、時刻補正された目標物データおよび各パルスレーダの空中線部の位置座標データに基づいて目標座標算定部50が目標物の高度情報を含む3次元情報を算定する。
【解決手段】それぞれ異なる位置に設置され、重複する空間に発信電波を発信するように配置された空中線部を有するパルスレーダ10およびパルスレーダ20が目標物に係る信号の検出時刻、距離および視線方向速度を算定して目標物データとしてそれぞれ出力し、この各目標物データを時刻補正部40が同一時刻のデータとして補正し、時刻補正された目標物データおよび各パルスレーダの空中線部の位置座標データに基づいて目標座標算定部50が目標物の高度情報を含む3次元情報を算定する。
【発明の詳細な説明】
【技術分野】
【0001】
本発明は、パルスレーダ装置に関し、特に目標物の距離およびドップラ周波数に基づいて目標の3次元情報を算定するパルスレーダ装置に関する。
【背景技術】
【0002】
レーダ装置は、一般に空間に電波を発射して、目標物からの反射信号を受信することにより、目標物の存在を探知し、その位置、運動状況などを観測するものである。この種のレーダ装置においては、電波は空中線から空間に発信され、目標物に当たって反射した後、再び空中線で受けて受信機へレーダ受信信号として伝送される。
【0003】
前述のレーダ受信信号を所定のサンプリング間隔でA/D(アナログ/ディジタル)変換し、サンプリング点毎のディジタル受信信号の振幅値と予め設定されたしきい値とを比較し、このしきい値以上のディジタル受信信号を目標信号と判定して目標信号を検出する。
【0004】
また、電波を発信した時刻と前述の目標信号を検出した時刻との差分を求めることにより目標の距離情報を得ることができ、この処理を測距処理と言う。
【0005】
上述の目標物の探知および目標物との距離情報の測定がレーダ装置の基本機能であり、最も簡単な構成である。この構成のレーダ装置では目標物との距離情報しか得ることができない。このため、航空機等を監視するレーダ装置では、前述の空中線を所定の回転速度で水平方向に回転するように制御し、空中線が電波を発信する方位を変化させたときの方位の異なるレーダ受信信号を得て、方位測角処理を行うことによって目標物の方位情報を得ることができるようになっている。
【0006】
また、前述のように空中線を機械的に回転させるのではなく、電子的にビームの方向を変化させるフェーズドアレイ空中線とよばれる空中線も存在する。さらに、レーダは、観測したい空間に一通り電波発射することをスキャンと呼び、スキャン動作を繰り返し行うことによって、目標物情報を所定の間隔で連続して取得することができる。
【0007】
このように、目標物の距離情報および方位情報という2次元の位置情報を得るレーダ装置は、一般に2次元レーダ装置と呼ばれる。これに対して、距離情報および方位情報に、高度情報を加えた3次元の位置情報を得るレーダ装置は3次元レーダ装置と呼ばれる。この3次元レーダ装置は、一般に仰角の異なる複数の電波を発射して、同じ目標物から反射信号を受信して仰角の異なる受信信号の振幅差や位相差に基づいて仰角測角処理を行うことにより、目標物の高度情報を得ることができる。
【0008】
ここで、前述の3次元レーダ装置の場合は、方位や仰角の異なる複数の方向に電波を発射および受信することから空中線や送受信器等のH/W(ハードウェア)が、単純に1方向に電波を送受信して距離情報を得るだけのレーダ装置に比べて複雑且つ大規模になり、高価となってしまう。また、2次元レーダ装置も3次元レーダ装置ほどではないが、やはり単純に1方向に電波を送受信して距離情報を得るだけのレーダ装置に比べて複雑且つ大規模になり、高価になってしまう。
【0009】
これに対して、従来より具体的に知られている上記技術分野の内容としては、特許文献1乃至特許文献3がある。
【0010】
特許文献1乃至特許文献3には、距離情報、方位情報および高度情報といった位置情報を得ることができる3次元レーダ装置の機能を、安価なレーダ装置で実現するように構成されたレーダ装置が開示されている。
【0011】
特許文献1に開示された技術は、レーダ装置が対象とする航空機等の目標物は、等高度等速直線運動をしていることが多いことを利用している。これは、高度変更など運動を変化させると等高度等速直線運動をしている場合に比べて、より多くの燃料を消費するため、目標物が目的地点までは基本的に等高度等速直線運動をすると想定できるためである。等高度等速直線運動していることを仮定することにより、仰角の異なる複数の電波を同時に発信・受信することなく高度情報を推定することができるというものである。これには、2次元レーダ装置において、2スキャン分の目標物の距離情報、方位角情報およびドップラ情報を計測することにより、高度情報を推定し3次元レーダ装置の機能を実現している。
【0012】
また、 特許文献2に開示された技術を図5を参照して説明する。空中線部101は、駆動制御部108によって制御された方向に電波を発信し目標物からの反射電波を受信し、受信した信号を送受信部102に出力する。送受信器部102は、送信する電波の元となる送信信号を空中線部101に出力し、さらに、受信した高周波信号を検波し、A/D(アナログ/ディジタル)変換してディジタル受信信号としてパルスドップラ処理部103へ出力する。
【0013】
パルスドップラ処理部103は、同一方向に発信した複数の送信パルス毎に得られるディジタル受信信号間の相関処理であるパルスドップラ処理を行う。パルスドップラ処理は、レーダ装置において探知性能を向上させる目的で同一方向に複数の送信パルスを照射する場合に一般的に行われる処理である。
【0014】
目標検出部104は、前述のパルスドップラ処理されたディジタル受信信号を予め設定されたしきい値と比較し、ディジタル受信信号がしきい値以上であれば、このディジタル受信信号を目標信号として判定し、目標信号を検出する。
【0015】
距離計測部105は、送信電波を発信した時刻と目標信号を検出した時刻との差分により目標物との距離を算出し出力する。方位角計測部109は、目標信号検出時のビーム送信角度や受信信号の振幅等から目標の方位角を計測し出力する。
【0016】
ドップラ計測部106は、目標のドップラ周波数に基づいて目標の視線方向速度を算出する。遅延部110A乃至110Cは、計測された目標の距離、方位角および視線方向速度の値を一定期間遅延させて出力する。推定高度算出部111は、計測された距離、方位角、視線方向速度および前述の遅延部110A乃至110Cによって遅延された所定時間前の距離、方位角、視線方向速度の合計6つ入力信号に基づいて以下の式を用いて推定高度を算出する。この算出式は特許文献2の(18)式において示されている。
【0017】
さらに、特許文献3には、異なる地点に設置された2つの受信手段によって受信した目標物の反射電波をそれぞれ画像として生成した電波反射情報を、お互いに関連づけることによって目標の3次元座標を取得するレーダ装置が開示されている。
【先行技術文献】
【特許文献】
【0018】
【特許文献1】特開2009−14655
【特許文献2】特開2009−244194
【特許文献3】特開2006−3348
【発明の概要】
【発明が解決しようとする課題】
【0019】
しかしながら、特許文献1乃至2に開示されたレーダ装置は、目標物の高度の算出式において目標物の方位角情報を使用するためレーダ装置として2次元レーダを使用しており、ハードウェアが1方向のみ観測する簡単なレーダ装置に比べて複雑で大規模となり高価となってしまうという不都合があった。
【0020】
さらに、特許文献3に開示されたレーダ装置は、目標の電波反射情報を画像として生成する装置を受信手段毎に用意しなければならず、ハードウェアが複雑且つ高価になってしまうという不都合があった。
【0021】
〔発明の目的〕
本発明は、上記関連技術の有する不都合を改善し、方位角情報を使用せず1方向のみを観測する簡単なレーダ装置を使用して目標物の高度情報を含む3次元情報の算定を行うことを可能としたパルスレーダ装置を提供すること、その目的とする。
【課題を解決するための手段】
【0022】
上記目的を達成するため、本発明に係るパルスレーダ装置は、一方向のみ観測可能な一方と他方のパルスレーダを異なった位置から同一空間を重複して探索するように配設し、この各パルスレーダが、飛行中の目標物に対して発信した電波およびその反射電波に基づいて前記目標物との距離情報及び当該目標物にかかるドップラ情報を得ると共に、これらの各情報に基づいて前記目標物の検出時刻、目標物との距離および視線方向速度を算定し目標物データとして出力する機能を備えており、前記各パルスレーダから出力される目標物データを入力すると共にこれを同一時刻の目標物データに補正する時刻補正部を備えると共に、この時刻補正部によって補正された前記各パルスレーダからの目標物データおよび前記各パルスレーダの位置座標データとに基づいて、前記目標物の高度情報を含む3次元座標を算定する目標座標算定部を備えていることを特徴とする。
【0023】
また、本発明に係るパルスレーダ装置制御方法は、空間を飛行中の目標物に対して発信した発信電波および当該目標物から得られる反射電波に基づいて前記目標物との距離情報および前記目標物にかかるドップラ情報を得ると共に、一のパルスレーダが当該距離情報およびドップラ情報に基づいて前記目標物の検出時間、距離、及び視線方向速度を算定し目標物データとして出力し、この一のパルスレーダとは異なった位置に配置され且つ当該一のパルスレーダと同じ機能を備えた他のパルスレーダが、前記一のパルスレーダと重複する空間に対して前記一のパルスレーダと同様に発信電波を発信し、前記各パルスレーダから出力される前記各目標物データを入力すると共に、時刻補正部がこれを同一時刻の目標物データに補正し、この時刻補正部によって補正された前記各パルスレーダで得られた目標物データおよび前記各パルスレーダの位置座標データとに基づいて、目標座標算定部が前記目標物の高度情報を含む3次元座標を算定する構成としたことを特徴とする。
【0024】
更に、本発明に係るパルスレーダ装置制御用プログラムは、空間を飛行中の目標物に対して発信した発信電波および当該目標物から得られる反射電波に基づいて前記目標物との距離情報および前記目標物にかかるドップラ情報を得ると共に、当該距離情報およびドップラ情報に基づいて前記目標物の検出時間、距離、及び視線方向速度を算定し目標物データとして出力するレーダ機能、前記レーダ機能を有した2組のパルスレーダによって出力される前記目標物データをそれぞれ入力すると共にこれを同一時刻の目標物データに補正する時刻補正機能、および前記時刻補正機能によって補正された前記各パルスレーダで得られた目標物データと前記各パルスレーダの位置座標データとに基づいて、前記目標物の高度情報を含む3次元座標を算定する目標座標算定機能、をコンピュータに実現させるようにしたことを特徴とする。
【発明の効果】
【0025】
本発明は上述したように構成したので、これによると、1方向のみ観測する簡単なレーダ装置によって捕捉される目標物に係る距離情報およびドップラ情報から、目標物の高度情報を含む3次元情報を得ることができるという優れたパルスレーダ装置、パルスレーダ装置制御方法およびパルスレーダ装置制御用プログラムを提供することができる。
【図面の簡単な説明】
【0026】
【図1】本発明に係るパルスレーダ装置の第1実施形態を示すブロック図である。
【図2】図1に開示したブロック図におけるレーダ装置と目標の位置関係を説明する説明図である。
【図3】本発明に係るパルスレーダ装置の第2実施形態を示すブロック図である。
【図4】本発明に係るパルスレーダ装置の第3実施形態を示すブロック図である。
【図5】従来におけるレーダ装置の形態を示すブロック図である。
【発明を実施するための形態】
【0027】
〔第1実施形態〕
以下、本発明に係るパルスレーダ装置の第1実施形態を、図1に基づいて説明する。
【0028】
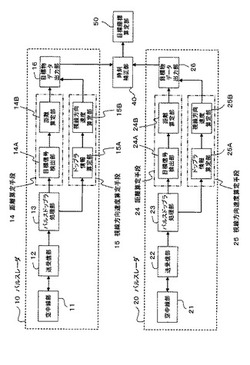
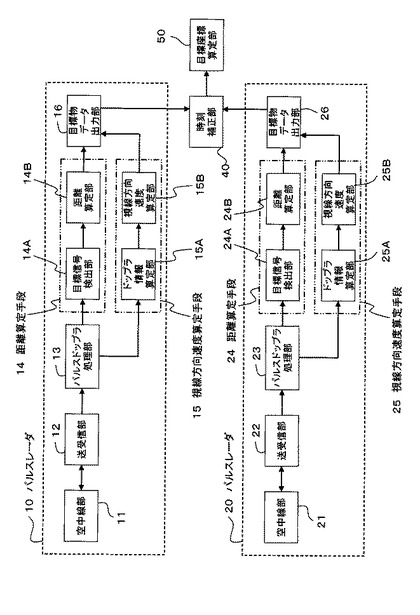
まず、図1に示す実施形態は、一方向のみ観測可能なパルスレーダ10およびパルスレーダ20を異なった位置から同一空間を重複して探索するように配設し、この各パルスレーダが空間を飛行中の目標物(図示しない)に対して発信した発信電波および当該目標物から得られる反射電波に基づいて前記目標物との距離情報および前記目標物にかかるドップラ情報を得ると共に、当該距離情報およびドップラ情報に基づいて前記目標物の検出時刻、前記目標物との距離、及び視線方向速度を算定し目標物データとして出力する機能を備えている。
【0029】
前述のパルスレーダ10は、所定の方向に発信電波を発信し目標物からの反射電波を受信する空中線部11と、送信パルスを発生し前述の発信電波として空中線部11へ出力すると共に空中線部11が受信した高周波信号を検波しA/D(アナログ/ディジタル)変換してディジタル受信信号として伝送する送受信部12と、この送受信部12から出力されたディジタル受信信号に対して複数の送信パルス毎に得られるディジタル受信信号間の相関処理であるパルスドップラ処理を行うパルスドップラ処理部13とを備えている。
【0030】
これにより、送受信部12で発生した送信パルスは発信電波として空中線部11へ出力され、空中線部11から発信された発信電波は空間を飛行中の目標物に反射し、この反射電波を空中線部11が受信して送受信部12がA/D変換しディジタル受信信号として出力し、このディジタル受信信号をパルスドップラ処理部13がパルスドップラ処理することができる。
【0031】
ここで、前述のパルスドップラ処理とは、パルスレーダ装置において探知性能を向上させる目的で同一方向に複数の送信パルスを照射する場合に一般的に行われる処理である。
【0032】
また、パルスレーダ10は、前述のパルスドップラ処理部13によってパルスドップラ処理されたディジタル受信信号に基づいて前記目標物に係る信号の検出および前記目標物との距離を計測する距離算定手段14と、前述のパルスドップラ処理部13によってパルスドップラ処理されたディジタル受信信号に基づいて前記目標物の視線方向速度を算定する視線方向速度算定手段15と、距離算定手段14によって前記目標物に係る信号を検出した時刻、目標物との距離および視線方向速度算定手段15によって算定された目標物の視線方向速度を収集して一つの目標物データを算定する目標物データ出力部16とを備えている。
【0033】
ここで、前述の距離算定手段14は、前述のパルスドップラ処理部13でパルスドップラ処理されたディジタル受信信号と予め設定されたしきい値とを比較してしきい値以上である場合には、前述のディジタル受信信号を目標物に係る信号と判定して目標物を検出する目標信号検出部14Aと、前述の送受信部12が送信パルスを発生し発信電波として空中線部11から電波を発信した時刻と目標信号検出部14Aによって目標物に係る信号を検出した時刻との差分により目標物との距離を算定する距離算定部14Bとを備えている。
【0034】
これにより、目標検出部14は、目標とは無関係の不要なノイズを排除し目標物に係る信号のみ検出し、この目標物に係る信号を検出した時刻と前述の送受信部12から出力された発信電波が空中線部11によって発信された時刻との差分をとることにより距離算定部14Bが、目標物との距離を算定することができる。
【0035】
また、視線方向速度算定手段15は、前述のパルスドップラ処理部13によってパルスドップラ処理されたディジタル受信信号に基づいて目標物のドップラ周波数を算定し出力するドップラ情報算定部15Aと、このドップラ情報算定部15Aによって出力されたドップラ周波数に基づいて目標物の視線方向速度を算定する視線方向速度算定部15Bとを備えている。
【0036】
これにより、パルスドップラ処理されたディジタル受信信号に基づいて、ドップラ情報算定部15Aが目標のドップラ周波数を算定し、このドップラ周波数に基づいて視線方向速度算定部15Bが目標物の視線方向速度を算定することができる。
【0037】
前述のとおり、パルスレーダ20は、パルスレーダ10と同じ機能を備えており、本実施形態ではパルスレーダ10と同じ構成のもの使うものとする。このため、パルスレーダ20は、空中線部21と、送受信部22と、パルスドップラ処理部23と、目標信号検出部24Aおよび距離計測部24Bによって構成される距離算定手段14と、ドップラ情報算定部25Aおよび視線方向速度算定部25Bによって構成される視線方向速度算定手段15と、目標物データ出力部26とを備えている。
【0038】
また、パルスレーダ20の空中線部21は、パルスレーダ10の空中線部11と位置が異なり且つ重複する空間を照射するように設置されている。
このようにパルスレーダ10の空中線部11およびパルスレーダ20の空中線部21を設置することにより、異なる位置から同じ目標に対して電波を発信することが可能となる。
【0039】
さらに、パルスレーダ10の目標物データ出力部16およびパルスレーダ20の目標物データ出力部26からそれぞれ出力される目標物データを同一時刻の目標物データに補正する時刻補正部40と、この時刻補正部40で補正されたパルスレーダ10およびパルスレーダ20で受信した目標物データと前述の各パルスレーダの設置された位置座標データとに基づいて目標の高度情報を含む3次元座標を算定する目標座標算定部50とが、パルスレーダ10およびパルスレーダ20に併設されている。
【0040】
ここで、前述の時刻補正部40は、時刻を補正する方法として検出時刻の近い目標物データを選択して、内挿計算等により、同一の時刻での距離および視線速度をそれぞれ算定する。
【0041】
これにより、1方向のみ観測するレーダ装置によって得られる目標の距離およびドップラ情報に基づいて、目標の高度情報を含む3次元座標を算定することができる。
【0042】
〔全体的な動作〕
次に、パルスレーダ装置の全体的な動作について図1乃至図2に基づいて説明する。
【0043】
図1において、まず最初にパルスレーダ10についての説明をする。図1の送受信部12は、送信する電波の元となる送信パルスを発生し、発信電波として空中線部11に出力する(送信信号発生工程)。空中線部11は、この送受信部12から出力された発信電波を所定の方向に発信すると共に当該発信電波が空間を飛行中の目標物によって反射された反射電波を受信し、この反射電波を反射信号として送受信器12に出力する(電波送受信工程)。
【0044】
続いて、送受信部12は、空中線部11から出力された反射電波の高周波信号を検波し、A/D(アナログ/ディジタル)変換してディジタル受信信号としてパルスドップラ処理部13へ出力する(受信信号検波工程)。パルスドップラ処理部13は、送受信部12から出力されたディジタル受信信号に対して、複数の送信パルス毎に得られるディジタル受信信号間の相関処理であるパルスドップラ処理を行い、このパルスドップラ処理を行った後のディジタル受信信号を目標信号検出部14Aおよびドップラ情報算定部15Aに出力する(パルスドップラ処理工程)。
【0045】
目標信号検出部14Aは、パルスドップラ処理部13から出力されたパルスドップラ処理後のディジタル受信信号と予め設定されたしきい値とを比較して、受信したディジタル受信信号が前述のしきい値以上のディジタル受信信号であった場合に、このディジタル受信信号を目標物に係る信号と判定して目標物を検出し、距離算定部14Bに出力する(目標信号検出工程)。
【0046】
距離算定部14Bは、空中線部11から電波を発信した時刻と目標信号検出部14Aで目標物に係る信号を検出した時刻との差分により目標物との距離を算定し、この算定した距離情報を目標物データ出力部16に出力する(距離算定工程)。
【0047】
ドップラ情報算定部15Aは、前述のパルスドップラ処理部13から出力されたパルスドップラ処理されたディジタル受信信号に基づいて目標のドップラ周波数を算定し、この算定したドップラ周波数情報を視線方向速度算定部15Bに出力する(ドップラ周波数計測工程)。
【0048】
視線方向速度算定部15Bは、ドップラ情報算定部15Aから出力されたドップラ周波数情報に基づいて目標の視線方向速度を算定し、この算定した視線方向速度情報を目標物データ出力部16に出力する(視線方向速度算定工程)。
【0049】
前述の距離算定部14Bによって算定した目標物との距離および、視線方向速度算定部15Bによって算定した目標の視線方向速度により、目標物の距離情報および速度情報を得ることができる。
【0050】
目標物データ出力部16は、前述の目標信号検出部14Aで検出した目標物に係る信号の検出時刻、距離計測部14Bで算定した目標物との距離情報、および視線方向速度算定部15Bで算定した目標物の視線方向速度情報を収集して一つの目標物データを生成し、この目標物データを時刻補正部40に出力する(データ出力工程)。
【0051】
一方、パルスレーダ20に備えられた空中線部21、送受信部22、パルスドップラ処理部23、目標信号検出部24Aおよび距離計測部24Bによって構成される距離算定手段24、ドップラ情報算定部25Aおよび視線方向速度算定部25Bによって構成される視線方向速度算定手段25、および目標物データ出力部26についても、上述のパルスレーダ10に備えられた各部と同じ動作をするものとする。
【0052】
時刻補正部40は、パルスレーダ10の目標物データ出力部16およびパルスレーダ20の目標物データ出力部26から出力される目標物データを同一時刻のデータに補正し、この補正した目標物データを目標座標算定部50に出力する(時刻補正工程)。
【0053】
目標座標算定部50は、時刻補正部40によって同一時刻に補正されたパルスレーダ10およびパルスレーダ20からそれぞれ出力された目標物データと、パルスレーダ10の空中線部11およびパルスレーダ20の空中線部21の設置された位置座標データとに基づいて高度情報を含む目標物の3次元座標を算定する(目標座標算定工程)。
【0054】
続いて、前述の目標座標算定部50が目標物の3次元座標を算定する方法について、図2および以下に示す数式に基づいて詳細に説明する。
【0055】
図2は本発明のレーダ装置と目標物30との位置関係を説明する模式図である。ここで、前提条件として目標物30は等高度等速直線運動をしているものとする。本方式のレーダ装置における計測値は検出時刻T、距離R、視線速度Rvであり、2つの空中線部に対応するパルスレーダ10およびパルスレーダ20がそれぞれ計測する。
【0056】
また、3次元座標計算においては、これらの2回分の計測値を使用する。パルスレーダ10の空中線部11の座標を(x1,y1,z1)とし、パルスレーダ20の空中線部21の座標を(x2,y2,z2)とする。1回目および2回目にスキャンした時の目標物30の座標を(x,y,z)、(x’,y’,z)とする。ここで、zは高度を示すものであり、目標物30は等高度等速直線運動をしているためzは変化しないものとする。目標物30’は、2スキャン目の際の目標物30の位置を示す。
【0057】
前述の計測値をR1,R2,R1v,R2v,VR1,VR2であり、ここで、添字1、2はパルスレーダ10または20の計測値であることを示し、「’」は2スキャン目の計測値であることを示す。また、1回目と2回目の時刻差をΔtとする。
【0058】
ここで、未知のパラメータは3次元直交座標上の目標物の真の座標A1(x,y,z)と、A2(x’,y’,z)と、目標物30の速度(xv,yv,0)である。これら8つの未知のパラメータの間には、以下の関係式が成り立つため、目標物の3次元座標(x,y,z)を算定することができる。
【0059】
各パラメータの間に成立する関係式を以下に示す。
(x−x1)2+(y−y1)2+(z−z1)2=R12 ・・・(1)
(x−x1)・xv+(y−y1)・yv=R1・R1v ・・・(2)
(x−x2)2+(y−y2)2+(z−z2)2=R22 ・・・(3)
(x−x2)・xv+(y−y2)・yv=R2・R2v ・・・(4)
(x’−x1)2+(y’−y1)2+(z’−z2)2=R1’2 ・・・(5)
(x’−x1)・xv+(y’−y1)・yv=R1’・R1v’ ・・・(6)
(x’−x2)2+(y’−y2)2+(z’−z2)2=R2’2 ・・・(7)
(x’−x2)・xv+(y’−y2)・yv=R2’・R2v’ ・・・(8)
x’=x+xv・Δt ・・・(9)
y’=y+yv・Δt ・・・(10)
まず、xvが次式を解くことにより求められる。
(B12+C12)・xv2−2B1・D1・xv+D12−A1・C12=0
・・・(11)
ここで、
A1=(R1’・R1v’−R1・R1v)/Δt ・・・(12)
B1=x2−x1 ・・・(13)
C1=y2−y1 ・・・(14)
D1=R1・R1v−R2・R2v ・・・(15)
ここで、(11)式は、2次方程式であるため、解が2通り得られるが、2通りの解に対応して後段の計算を並行して行い、電波を照射する空間外の座標として求められる解を除去することで単一の解が得られる。
また、yvは次式により求められる。
yv=(D1−B1)・xv/C ・・・(16)
次に、x,y,zを次式により求める。なお、簡略化のために座標系をz1=z2=0とする。
x=(C2・B3−C3・B2)/(A2・B3−A3・B2) ・・・(17)
y=(C2−A2・x)/B2 ・・・(18)
z=√{R12−(x−x1)2+(y−y1)2} ・・・(19)
ここで、
A2=xv ・・・(20)
B2=yv ・・・(21)
C2=R1・R1v+x1・xv+y1・yv ・・・(22)
A3=2・(x2−x1) ・・・(23)
B3=2・(y2−y1) ・・・(24)
C3=R12−R12−x12−y12+x22+y22 ・・・(25)
である。(17)〜(19)式により目標物の3次元座標を算定することができる。
【0060】
ここで、上記の計算式において、目標物の方位角情報を使用していないので、1方向のみ観測し、目標物の距離およびドップラ情報のみ得ることのできる単純なレーダ装置で、目標物の高度情報を含む3次元座標を算定する3次元レーダ装置の機能を実現することが可能となる。
【0061】
また、算定した目標物の3次元座標は、図示しない形で目標座標算定部50と接続された表示手段上に数値として表示しても、数値情報を図形として表示してもよいものとする。
【0062】
ここで、上述した第1実施形態における動作にあって、上記工程で実行される各実行内容をプログラム化し、これをコンピュータに機能させるように構成してもよい。なお、この場合、本プログラムは、非一時的な記録媒体、例えば、DVD、CD、フラッシュメモリなどに記録されてもよい。その場合、本プログラムは、記録媒体からコンピュータによって読み出され、実行される。
【0063】
(第1実施形態の効果)
以上のように、本第1実施形態では、空中線部の位置が異なり且つ当該空中線部から発信される電波の範囲が重複するように設置されたパルスレーダ10およびパルスレーダ20が目標物に係る信号の検出時刻、目標との距離および目標の視線方向速度を算定して目標物データとして出力し、この目標物データを同一時刻のデータに時刻補正部40が補正し、この補正されたそれぞれの目標物データおよびパルスレーダ10の空中線部11とパルスレーダ20の空中線部21のそれぞれの座標位置データに基づいて、目標座標算定部が目標物の高度情報を含む3次元座標を算定する。これによって目標物の距離情報およびドップラ情報のみで目標物の高度の算定を可能とし、電波の発信方向を変えない単純なハードウェアのレーダ装置で目標物の3次元情報を得ることが可能となる。
【0064】
〔第2実施形態〕
次に、本発明の第2実施形態を図3に基づいて説明する。
ここで、前述した第1実施形態と同一の構成要素については、同一の符号を用いるものとする。
【0065】
上記図1に開示した第1実施形態にあっては、パルスレーダ10の目標物データ出力部16およびパルスレーダ20の目標物データ出力部26で生成された目標物データの検出時刻を、時刻補正部40で補正する場合を例示した。
【0066】
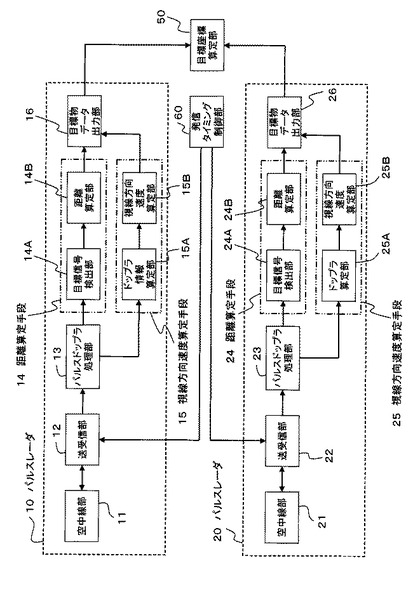
これに対し、本第2実施形態では、図3に示すように、前述の時刻補正部40による時刻の補正に代えて、パルスレーダ10とパルスレーダ20とが同期をとって電波の発信を行い、時刻補正部40による時刻補正をせずに同一時刻の目標物に係る信号を検出できるように発信タイミング制御部60を備えたことを特徴とする。
【0067】
発信タイミング制御部60は、パルスレーダ10の送受信部12およびパルスレーダ20の送受信部22に対して、それぞれの送受信部がお互いに異なる周波数で同時に発信電波を発信するように制御するタイミング制御信号を出力する。
【0068】
パルスレーダ10の送受信部12は、前述のタイミング制御信号を受信すると発信電波を空中線部11に発信する。一方、パルスレーダ20の送受信部22も前述送受信部12と同様にタイミング制御信号を受信すると発信電波を空中線部21に発信する。
【0069】
このタイミング制御信号により、送受信部12および送受信部22がそれぞれ異なる周波数で発信電波を発信するタイミングを制御でき、それぞれの送受信部が同時に発信電波を発信することが可能となる。
【0070】
また、目標物データ出力部16および28は、それぞれ前述の目標物データを目標座標算定部50に対して出力する。これは、前述の発信タイミング制御部60によって予め同期がとられた送信パルスが出力されるため、時刻の補正をせずに目標物の3次元座標を算定することができるためである。
【0071】
これにより、パルスレーダ10およびパルスレーダ20の各パルスレーダが同一時刻の目標物に係る信号を検出し目標物データを発生させることができるため、上述のように時刻補正を行うことなく目標の3次元座標を算定することが可能となる。
【0072】
〔第2実施形態の動作〕
まず、発信タイミング制御部60は、パルスレーダ10の送受信部12およびパルスレーダ20の送受信部22のそれぞれに対して、それぞれ異なる周波数で同時に発信電波の発信を行うように制御するタイミング制御信号を出力する。
【0073】
パルスレーダ10の送受信部12は、前述のタイミング制御信号を受けて発信電波を出力し空中線部11から発信する。発信電波を発信した後の動作については、第1実施形態と同様に、目標物からの反射電波を空中線部11で受信し、この受信電波を送受信部12に出力し、送受信部12でA/D変換を行ってディジタル受信信号としてパルスドップラ処理部13に出力する。
【0074】
パルスドップラ処理部13は、前述のディジタル受信信号に対してパルスドップラ処理を行い、このパルスドップラ処理後のディジタル受信信号を目標信号検出部14Aおよびドップラ情報算定部15Aに対して出力する
【0075】
目標信号検出部14Aは、前述のディジタル受信信号と予め設定されたしきい値を比較し、しきい値以上のディジタル受信信号を目標物に係る信号として検出し、距離算定部14Bに出力する。距離算定部14Bは、電波を発信した時刻と目標物に係る信号を検出した時刻との差分により目標物との距離を算定し目標物データ出力部16に出力する。
【0076】
一方、ドップラ情報算定部15Aは、前述のパルスドップラ処理されたディジタル受信信号に基づいて目標のドップラ周波数を算定し、視線方向速度算定部15Bに出力する。視線方向速度算定部15Bは、前述の目標のドップラ周波数に基づいて目標の視線方向速度を算定し目標物データ出力部16に出力する。
【0077】
目標物データ出力部16は、目標信号検出部14Aで検出した時刻と距離算定部14Bで算定した目標との距離と視線方向速度算定部15Bで算定した目標の視線方向速度を収集し一つの目標物データを出力する。
【0078】
また、パルスレーダ20についても、上述のパルスレーダ10の各部と同様の動作をするものとする。
【0079】
目標座標算定部50は、パルスレーダ10の目標物データ出力部16およびパルスレーダ20の目標物データ出力部26のそれぞれから出力された目標物データに基づいて、目標の高度情報を含む3次元座標を算定する。この算定方法については、第1実施形態の数式(17)乃至(19)に示すとおりである。
【0080】
(第2実施形態の効果)
このように、パルスレーダ10およびパルスレーダ20に対して、それぞれ異なる周波数で同時に発信電波を出力するように制御するタイミング制御信号を出力する発信タイミング制御部60を備えたことにより、各パルスレーダが同一時刻の目標を検出し、目標物データを算定することができる。このため、時刻補正を行うことなく、目標物の3次元座標を算定することが可能となる。さらに、この場合は時刻補正による誤差が発生しないため、3次元座標の算定結果の誤差が低減される。また、片方のパルスレーダのみパルス送信を行い、受信動作は両方のパルスレーダで行うことで目標物の3次元情報を算定することも可能である。
その他の構成およびその作用効果については、前述した第1実施形態と同じである。
【0081】
〔第3実施形態〕
次に、本発明の第2実施形態を図4に基づいて説明する。
ここで、前述した第1実施形態と同一の構成要素については、同一の符号を用いるものとする。
【0082】
上記図1に開示した第1実施形態にあっては、2組のパルスレーダであるパルスレーダ10およびパルスレーダ20を使用して目標物データの3次元座標を算定する場合を例示した。
【0083】
これに対し、本第3実施形態では、図4に示すように、広範囲の目標物に係る信号を検出するため、N(≧3)組のパルスレーダを備えており、それぞれのパルスレーダはパルスレーダ選択部70に対して目標物データを出力するように構成されている。
【0084】
さらに、パルスレーダ選択部70は、前述の各パルスレーダから出力された目標物データについて、電波を照射する範囲が重複する目標物データを選択して時刻補正部40に出力する。これは、前述のN組の各パルスレーダの設置された座標位置データおよび、各パルスレーダから発信される電波の範囲が予め設定されているため、パルスレーダ選択部70は、重複する目標物データを選択することができるためである。
また、その他の構成については、第1実施形態と同一となっている。
【0085】
〔第3実施形態の動作〕
複数のパルスレーダから目標物データを受信したパルスレーダ選択部70は、電波照射範囲の重複する目標物データを選択して時刻補正部40に出力する。
【0086】
時刻補正部40は、パルスレーダ選択部70から出力された目標物データを同一時刻のデータとして補正を行い、この時刻補正された目標物データを目標座標算定部50に出力する。
【0087】
目標座標算定部50は、前述の時刻補正された目標物データに基づいて目標の3次元座標を算定する。この方法は、第1実施形態の算定式(17)乃至(19)を用いることで算定することができる。
【0088】
ここで、各パルスレーダが発信電波を照射する範囲は、各パルスレーダの空中線部が設置された位置座標データによって予め特定できるため、重複する目標物データを選択することができる。
【0089】
(第3実施形態の効果)
このように、広範囲に設置された3組以上のパルスレーダから出力される目標物データを、パルスレーダ選択部70によって電波発信範囲が重複する目標物データを選択することによって、高価な3次元レーダ装置を使わずに、必要な範囲に安価なレーダを複数配置することで3次元レーダ装置の機能を実現することが可能となる。また、3組以上のパルスレーダが重複する範囲においては、本第1実施形態の算定式に加えて3点測量も併用することで、座標の計測制度を向上させることも可能である。
その他の構成およびその作用効果については、前述した第1実施形態と同じである。
【0090】
上述した実施形態については、その新規な技術的内容の要点をまとめると、以下の付記のようになる。
尚、上記実施形態の一部又は全部は、新規な技術として以下のようにまとめられるが、本発明は必ずしもこれに限定されるものではない。
【0091】
(付記1)一方向のみ観測可能な一方と他方のパルスレーダを異なった位置から同一空間を重複して探索するように配設し、
この各パルスレーダが、飛行中の目標物に対して発信した電波およびその反射電波に基づいて前記目標物との距離情報及び当該目標物にかかるドップラ情報を得ると共に、これらの各情報に基づいて前記目標物の検出時刻、目標物との距離および視線方向速度を算定し目標物データとして出力する機能を備えており、
前記各パルスレーダから出力される目標物データを入力すると共にこれを同一時刻の目標物データに補正する時刻補正部を備えると共に、
この時刻補正部によって補正された前記各パルスレーダからの目標物データおよび前記各パルスレーダの位置座標データとに基づいて、前記目標物の高度情報を含む3次元情報を算定する目標座標算定部を備えていることを特徴とするパルスレーダ装置。
【0092】
(付記2)付記1に記載のパルスレーダ装置において、
前記各パルスレーダは、
空中線を介して所定方向に電波を発信すると共に目標物からの反射波を受信しA/D変換しディジタル受信信号として出力する送受信部と、このディジタル受信信号に対して複数の送信パルス毎に得られるディジタル受信信号間の相関処理であるパルスドップラ処理を行うパルスドップラ処理部と、前記パルスドップラ処理された前記ディジタル受信信号に基づいて前記目標物を特定すると共に当該目標物との距離を算定する距離算定手段と、前記パルスドップラ処理された前記ディジタル受信信号に基づいて前記目標物の視線方向速度を算定する視線方向速度算定手段とを有し、
前記距離算定手段によって前記目標物が特定された時刻情報、前記算定された目標物との距離情報、および前記視線方向速度算定手段によって算定された前記目標物の視線方向速度、を収集し目標物データとして出力する目標物データ出力部を備えていることを特徴としたパルスレーダ装置。
【0093】
(付記3)付記2に記載のパルスレーダ装置において、
前記距離算定手段は、前記パルスドップラ処理された前記ディジタル受信信号と予め設定されたしきい値とを比較し前記ディジタル受信信号が前記しきい値以上であった場合に前記ディジタル受信信号を前記目標物に係る信号として判定して目標物を検出する目標信号検出部と、前記送受信部が前記発信電波を発信した時刻と前記目標物を検出した時刻との差分により前記目標物との距離を算定する距離算定部とを備えていることを特徴とするパルスレーダ装置。
【0094】
(付記4)付記2に記載のパルスレーダ装置において、
前記視線方向速度算定手段は、前記パルスドップラされた前記ディジタル受信信号に基づいて前記目標のドップラ周波数を算定し出力するドップラ情報算定部と、前記目標のドップラ周波数に基づいて前記目標の視線方向速度を算定する視線方向速度算定部とを備えていることを特徴とするパルスレーダ装置。
【0095】
(付記5)付記2乃至4のいずれか一つに記載のパルスレーダ装置において、
前記時刻補正部に代えて、前記各レーダセンサの送受信部に対して、それぞれが異なる周波数で同時に前記発信電波を発信させるように制御するタイミング制御信号を出力する発信タイミング制御部を備えていることを特徴とするパルスレーダ装置。
【0096】
(付記6)付記5に記載のパルスレーダ装置において、
前記一および他のレーダ装置に備えられた前記送受信部は、いずれか一方の送受信部から前記発信電波を発信すると共にそれぞれの送受信部で前記反射波を受信することを特徴とするパルスレーダ装置。
【0097】
(付記7)付記1乃至4のいずれか一つに記載のパルスレーダ装置において、
前記パルスレーダを3組以上設置し、前記各パルスレーダの目標物データ出力部からそれぞれ出力される前記目標物データの内の電波照射範囲が重複する目標物データを選択して前記時刻補正部に出力するパルスレーダ選択部を備えていることを特徴とするパルスレーダ装置。
【0098】
(付記8)付記7に記載のパルスレーダ装置において、
前記目標座標算定部は、前記パルスレーダ選択部によって3組以上の前記目標物データが選択された場合には、3点測量を併用して前記目標物の高度情報を含む3次元情報を算定することを特徴とするパルスレーダ装置。
【0099】
(付記9)空間を飛行中の目標物に対して発信した発信電波および当該目標物から得られる反射電波に基づいて前記目標物との距離情報および前記目標物にかかるドップラ情報を得ると共に、一のパルスレーダが当該距離情報およびドップラ情報に基づいて前記目標物の検出時間、距離、及び視線方向速度を算定し目標物データとして出力し、
この一のパルスレーダとは異なった位置に配置され且つ当該一のパルスレーダと同じ機能を備えた他のパルスレーダが、前記一のパルスレーダと重複する空間に対して前記一のパルスレーダと同様に発信電波を発信し、
前記各パルスレーダから出力される前記各目標物データを入力すると共に、時刻補正部がこれを同一時刻の目標物データに補正し、
この時刻補正部によって補正された前記各パルスレーダで得られた目標物データおよび前記各パルスレーダの位置座標データとに基づいて、目標座標算定部が前記目標物の高度情報を含む3次元情報を算定する構成としたことを特徴とするパルスレーダ装置制御方法。
【0100】
(付記10)空間を飛行中の目標物に対して発信した発信電波および当該目標物から得られる反射電波に基づいて前記目標物との距離情報および前記目標物にかかるドップラ情報を得ると共に、当該距離情報およびドップラ情報に基づいて前記目標物の検出時間、距離、及び視線方向速度を算定し目標物データとして出力するレーダ機能、
前記レーダ機能を有した2組のパルスレーダによって出力される前記目標物データをそれぞれ入力すると共にこれを同一時刻の目標物データに補正する時刻補正機能、
および前記時刻補正機能によって補正された前記各パルスレーダで得られた目標物データと前記各パルスレーダの位置座標データとに基づいて、前記目標物の高度情報を含む3次元情報を算定する目標座標算定機能、
をコンピュータに実現させるようにしたことを特徴とするパルスレーダ装置制御用プログラム。
【産業上の利用可能性】
【0101】
本発明は、等高度等速直線運動をする目標物に対して、異なる位置に設置され且つ重複する空間に電波を発信する空中線部を備えたパルスレーダを2組用いて、これらのパルスレーダによってそれぞれ得られる目標物に係る信号の検出時刻、目標物との距離および目標物の視線方向速度を算定し、目標物データとして出力する。この目標物データを同一時刻のデータとして補正し、この時刻補正したそれぞれの目標物データおよび各パルスレーダの位置座標データに基づいて目標物の高度情報を含む3次元情報を算定する。これにより、電波の発信方向を変えない単純なハードウェアの空中線を備えるレーダ装置においても目標物の3次元情報を得ることが可能なため、高価で大規模な3次元レーダ装置の機能を比較的安価なレーダ装置で実現することが可能となる。
【符号の説明】
【0102】
10 パルスレーダ(一のパルスレーダ)
11 空中線部
12 送受信部
13 パルスドップラ処理部
14 距離算定手段
14A 目標信号検出部
14B 距離算定部
15 視線方向速度算定手段
15A ドップラ情報算定部
15B 視線方向速度算定部
16 目標物データ出力部
20 パルスレーダ(他のパルスレーダ)
40 時刻補正部
50 目標座標算定部
60 発信タイミング制御部
70 パルスレーダ選択部
【技術分野】
【0001】
本発明は、パルスレーダ装置に関し、特に目標物の距離およびドップラ周波数に基づいて目標の3次元情報を算定するパルスレーダ装置に関する。
【背景技術】
【0002】
レーダ装置は、一般に空間に電波を発射して、目標物からの反射信号を受信することにより、目標物の存在を探知し、その位置、運動状況などを観測するものである。この種のレーダ装置においては、電波は空中線から空間に発信され、目標物に当たって反射した後、再び空中線で受けて受信機へレーダ受信信号として伝送される。
【0003】
前述のレーダ受信信号を所定のサンプリング間隔でA/D(アナログ/ディジタル)変換し、サンプリング点毎のディジタル受信信号の振幅値と予め設定されたしきい値とを比較し、このしきい値以上のディジタル受信信号を目標信号と判定して目標信号を検出する。
【0004】
また、電波を発信した時刻と前述の目標信号を検出した時刻との差分を求めることにより目標の距離情報を得ることができ、この処理を測距処理と言う。
【0005】
上述の目標物の探知および目標物との距離情報の測定がレーダ装置の基本機能であり、最も簡単な構成である。この構成のレーダ装置では目標物との距離情報しか得ることができない。このため、航空機等を監視するレーダ装置では、前述の空中線を所定の回転速度で水平方向に回転するように制御し、空中線が電波を発信する方位を変化させたときの方位の異なるレーダ受信信号を得て、方位測角処理を行うことによって目標物の方位情報を得ることができるようになっている。
【0006】
また、前述のように空中線を機械的に回転させるのではなく、電子的にビームの方向を変化させるフェーズドアレイ空中線とよばれる空中線も存在する。さらに、レーダは、観測したい空間に一通り電波発射することをスキャンと呼び、スキャン動作を繰り返し行うことによって、目標物情報を所定の間隔で連続して取得することができる。
【0007】
このように、目標物の距離情報および方位情報という2次元の位置情報を得るレーダ装置は、一般に2次元レーダ装置と呼ばれる。これに対して、距離情報および方位情報に、高度情報を加えた3次元の位置情報を得るレーダ装置は3次元レーダ装置と呼ばれる。この3次元レーダ装置は、一般に仰角の異なる複数の電波を発射して、同じ目標物から反射信号を受信して仰角の異なる受信信号の振幅差や位相差に基づいて仰角測角処理を行うことにより、目標物の高度情報を得ることができる。
【0008】
ここで、前述の3次元レーダ装置の場合は、方位や仰角の異なる複数の方向に電波を発射および受信することから空中線や送受信器等のH/W(ハードウェア)が、単純に1方向に電波を送受信して距離情報を得るだけのレーダ装置に比べて複雑且つ大規模になり、高価となってしまう。また、2次元レーダ装置も3次元レーダ装置ほどではないが、やはり単純に1方向に電波を送受信して距離情報を得るだけのレーダ装置に比べて複雑且つ大規模になり、高価になってしまう。
【0009】
これに対して、従来より具体的に知られている上記技術分野の内容としては、特許文献1乃至特許文献3がある。
【0010】
特許文献1乃至特許文献3には、距離情報、方位情報および高度情報といった位置情報を得ることができる3次元レーダ装置の機能を、安価なレーダ装置で実現するように構成されたレーダ装置が開示されている。
【0011】
特許文献1に開示された技術は、レーダ装置が対象とする航空機等の目標物は、等高度等速直線運動をしていることが多いことを利用している。これは、高度変更など運動を変化させると等高度等速直線運動をしている場合に比べて、より多くの燃料を消費するため、目標物が目的地点までは基本的に等高度等速直線運動をすると想定できるためである。等高度等速直線運動していることを仮定することにより、仰角の異なる複数の電波を同時に発信・受信することなく高度情報を推定することができるというものである。これには、2次元レーダ装置において、2スキャン分の目標物の距離情報、方位角情報およびドップラ情報を計測することにより、高度情報を推定し3次元レーダ装置の機能を実現している。
【0012】
また、 特許文献2に開示された技術を図5を参照して説明する。空中線部101は、駆動制御部108によって制御された方向に電波を発信し目標物からの反射電波を受信し、受信した信号を送受信部102に出力する。送受信器部102は、送信する電波の元となる送信信号を空中線部101に出力し、さらに、受信した高周波信号を検波し、A/D(アナログ/ディジタル)変換してディジタル受信信号としてパルスドップラ処理部103へ出力する。
【0013】
パルスドップラ処理部103は、同一方向に発信した複数の送信パルス毎に得られるディジタル受信信号間の相関処理であるパルスドップラ処理を行う。パルスドップラ処理は、レーダ装置において探知性能を向上させる目的で同一方向に複数の送信パルスを照射する場合に一般的に行われる処理である。
【0014】
目標検出部104は、前述のパルスドップラ処理されたディジタル受信信号を予め設定されたしきい値と比較し、ディジタル受信信号がしきい値以上であれば、このディジタル受信信号を目標信号として判定し、目標信号を検出する。
【0015】
距離計測部105は、送信電波を発信した時刻と目標信号を検出した時刻との差分により目標物との距離を算出し出力する。方位角計測部109は、目標信号検出時のビーム送信角度や受信信号の振幅等から目標の方位角を計測し出力する。
【0016】
ドップラ計測部106は、目標のドップラ周波数に基づいて目標の視線方向速度を算出する。遅延部110A乃至110Cは、計測された目標の距離、方位角および視線方向速度の値を一定期間遅延させて出力する。推定高度算出部111は、計測された距離、方位角、視線方向速度および前述の遅延部110A乃至110Cによって遅延された所定時間前の距離、方位角、視線方向速度の合計6つ入力信号に基づいて以下の式を用いて推定高度を算出する。この算出式は特許文献2の(18)式において示されている。
【0017】
さらに、特許文献3には、異なる地点に設置された2つの受信手段によって受信した目標物の反射電波をそれぞれ画像として生成した電波反射情報を、お互いに関連づけることによって目標の3次元座標を取得するレーダ装置が開示されている。
【先行技術文献】
【特許文献】
【0018】
【特許文献1】特開2009−14655
【特許文献2】特開2009−244194
【特許文献3】特開2006−3348
【発明の概要】
【発明が解決しようとする課題】
【0019】
しかしながら、特許文献1乃至2に開示されたレーダ装置は、目標物の高度の算出式において目標物の方位角情報を使用するためレーダ装置として2次元レーダを使用しており、ハードウェアが1方向のみ観測する簡単なレーダ装置に比べて複雑で大規模となり高価となってしまうという不都合があった。
【0020】
さらに、特許文献3に開示されたレーダ装置は、目標の電波反射情報を画像として生成する装置を受信手段毎に用意しなければならず、ハードウェアが複雑且つ高価になってしまうという不都合があった。
【0021】
〔発明の目的〕
本発明は、上記関連技術の有する不都合を改善し、方位角情報を使用せず1方向のみを観測する簡単なレーダ装置を使用して目標物の高度情報を含む3次元情報の算定を行うことを可能としたパルスレーダ装置を提供すること、その目的とする。
【課題を解決するための手段】
【0022】
上記目的を達成するため、本発明に係るパルスレーダ装置は、一方向のみ観測可能な一方と他方のパルスレーダを異なった位置から同一空間を重複して探索するように配設し、この各パルスレーダが、飛行中の目標物に対して発信した電波およびその反射電波に基づいて前記目標物との距離情報及び当該目標物にかかるドップラ情報を得ると共に、これらの各情報に基づいて前記目標物の検出時刻、目標物との距離および視線方向速度を算定し目標物データとして出力する機能を備えており、前記各パルスレーダから出力される目標物データを入力すると共にこれを同一時刻の目標物データに補正する時刻補正部を備えると共に、この時刻補正部によって補正された前記各パルスレーダからの目標物データおよび前記各パルスレーダの位置座標データとに基づいて、前記目標物の高度情報を含む3次元座標を算定する目標座標算定部を備えていることを特徴とする。
【0023】
また、本発明に係るパルスレーダ装置制御方法は、空間を飛行中の目標物に対して発信した発信電波および当該目標物から得られる反射電波に基づいて前記目標物との距離情報および前記目標物にかかるドップラ情報を得ると共に、一のパルスレーダが当該距離情報およびドップラ情報に基づいて前記目標物の検出時間、距離、及び視線方向速度を算定し目標物データとして出力し、この一のパルスレーダとは異なった位置に配置され且つ当該一のパルスレーダと同じ機能を備えた他のパルスレーダが、前記一のパルスレーダと重複する空間に対して前記一のパルスレーダと同様に発信電波を発信し、前記各パルスレーダから出力される前記各目標物データを入力すると共に、時刻補正部がこれを同一時刻の目標物データに補正し、この時刻補正部によって補正された前記各パルスレーダで得られた目標物データおよび前記各パルスレーダの位置座標データとに基づいて、目標座標算定部が前記目標物の高度情報を含む3次元座標を算定する構成としたことを特徴とする。
【0024】
更に、本発明に係るパルスレーダ装置制御用プログラムは、空間を飛行中の目標物に対して発信した発信電波および当該目標物から得られる反射電波に基づいて前記目標物との距離情報および前記目標物にかかるドップラ情報を得ると共に、当該距離情報およびドップラ情報に基づいて前記目標物の検出時間、距離、及び視線方向速度を算定し目標物データとして出力するレーダ機能、前記レーダ機能を有した2組のパルスレーダによって出力される前記目標物データをそれぞれ入力すると共にこれを同一時刻の目標物データに補正する時刻補正機能、および前記時刻補正機能によって補正された前記各パルスレーダで得られた目標物データと前記各パルスレーダの位置座標データとに基づいて、前記目標物の高度情報を含む3次元座標を算定する目標座標算定機能、をコンピュータに実現させるようにしたことを特徴とする。
【発明の効果】
【0025】
本発明は上述したように構成したので、これによると、1方向のみ観測する簡単なレーダ装置によって捕捉される目標物に係る距離情報およびドップラ情報から、目標物の高度情報を含む3次元情報を得ることができるという優れたパルスレーダ装置、パルスレーダ装置制御方法およびパルスレーダ装置制御用プログラムを提供することができる。
【図面の簡単な説明】
【0026】
【図1】本発明に係るパルスレーダ装置の第1実施形態を示すブロック図である。
【図2】図1に開示したブロック図におけるレーダ装置と目標の位置関係を説明する説明図である。
【図3】本発明に係るパルスレーダ装置の第2実施形態を示すブロック図である。
【図4】本発明に係るパルスレーダ装置の第3実施形態を示すブロック図である。
【図5】従来におけるレーダ装置の形態を示すブロック図である。
【発明を実施するための形態】
【0027】
〔第1実施形態〕
以下、本発明に係るパルスレーダ装置の第1実施形態を、図1に基づいて説明する。
【0028】
まず、図1に示す実施形態は、一方向のみ観測可能なパルスレーダ10およびパルスレーダ20を異なった位置から同一空間を重複して探索するように配設し、この各パルスレーダが空間を飛行中の目標物(図示しない)に対して発信した発信電波および当該目標物から得られる反射電波に基づいて前記目標物との距離情報および前記目標物にかかるドップラ情報を得ると共に、当該距離情報およびドップラ情報に基づいて前記目標物の検出時刻、前記目標物との距離、及び視線方向速度を算定し目標物データとして出力する機能を備えている。
【0029】
前述のパルスレーダ10は、所定の方向に発信電波を発信し目標物からの反射電波を受信する空中線部11と、送信パルスを発生し前述の発信電波として空中線部11へ出力すると共に空中線部11が受信した高周波信号を検波しA/D(アナログ/ディジタル)変換してディジタル受信信号として伝送する送受信部12と、この送受信部12から出力されたディジタル受信信号に対して複数の送信パルス毎に得られるディジタル受信信号間の相関処理であるパルスドップラ処理を行うパルスドップラ処理部13とを備えている。
【0030】
これにより、送受信部12で発生した送信パルスは発信電波として空中線部11へ出力され、空中線部11から発信された発信電波は空間を飛行中の目標物に反射し、この反射電波を空中線部11が受信して送受信部12がA/D変換しディジタル受信信号として出力し、このディジタル受信信号をパルスドップラ処理部13がパルスドップラ処理することができる。
【0031】
ここで、前述のパルスドップラ処理とは、パルスレーダ装置において探知性能を向上させる目的で同一方向に複数の送信パルスを照射する場合に一般的に行われる処理である。
【0032】
また、パルスレーダ10は、前述のパルスドップラ処理部13によってパルスドップラ処理されたディジタル受信信号に基づいて前記目標物に係る信号の検出および前記目標物との距離を計測する距離算定手段14と、前述のパルスドップラ処理部13によってパルスドップラ処理されたディジタル受信信号に基づいて前記目標物の視線方向速度を算定する視線方向速度算定手段15と、距離算定手段14によって前記目標物に係る信号を検出した時刻、目標物との距離および視線方向速度算定手段15によって算定された目標物の視線方向速度を収集して一つの目標物データを算定する目標物データ出力部16とを備えている。
【0033】
ここで、前述の距離算定手段14は、前述のパルスドップラ処理部13でパルスドップラ処理されたディジタル受信信号と予め設定されたしきい値とを比較してしきい値以上である場合には、前述のディジタル受信信号を目標物に係る信号と判定して目標物を検出する目標信号検出部14Aと、前述の送受信部12が送信パルスを発生し発信電波として空中線部11から電波を発信した時刻と目標信号検出部14Aによって目標物に係る信号を検出した時刻との差分により目標物との距離を算定する距離算定部14Bとを備えている。
【0034】
これにより、目標検出部14は、目標とは無関係の不要なノイズを排除し目標物に係る信号のみ検出し、この目標物に係る信号を検出した時刻と前述の送受信部12から出力された発信電波が空中線部11によって発信された時刻との差分をとることにより距離算定部14Bが、目標物との距離を算定することができる。
【0035】
また、視線方向速度算定手段15は、前述のパルスドップラ処理部13によってパルスドップラ処理されたディジタル受信信号に基づいて目標物のドップラ周波数を算定し出力するドップラ情報算定部15Aと、このドップラ情報算定部15Aによって出力されたドップラ周波数に基づいて目標物の視線方向速度を算定する視線方向速度算定部15Bとを備えている。
【0036】
これにより、パルスドップラ処理されたディジタル受信信号に基づいて、ドップラ情報算定部15Aが目標のドップラ周波数を算定し、このドップラ周波数に基づいて視線方向速度算定部15Bが目標物の視線方向速度を算定することができる。
【0037】
前述のとおり、パルスレーダ20は、パルスレーダ10と同じ機能を備えており、本実施形態ではパルスレーダ10と同じ構成のもの使うものとする。このため、パルスレーダ20は、空中線部21と、送受信部22と、パルスドップラ処理部23と、目標信号検出部24Aおよび距離計測部24Bによって構成される距離算定手段14と、ドップラ情報算定部25Aおよび視線方向速度算定部25Bによって構成される視線方向速度算定手段15と、目標物データ出力部26とを備えている。
【0038】
また、パルスレーダ20の空中線部21は、パルスレーダ10の空中線部11と位置が異なり且つ重複する空間を照射するように設置されている。
このようにパルスレーダ10の空中線部11およびパルスレーダ20の空中線部21を設置することにより、異なる位置から同じ目標に対して電波を発信することが可能となる。
【0039】
さらに、パルスレーダ10の目標物データ出力部16およびパルスレーダ20の目標物データ出力部26からそれぞれ出力される目標物データを同一時刻の目標物データに補正する時刻補正部40と、この時刻補正部40で補正されたパルスレーダ10およびパルスレーダ20で受信した目標物データと前述の各パルスレーダの設置された位置座標データとに基づいて目標の高度情報を含む3次元座標を算定する目標座標算定部50とが、パルスレーダ10およびパルスレーダ20に併設されている。
【0040】
ここで、前述の時刻補正部40は、時刻を補正する方法として検出時刻の近い目標物データを選択して、内挿計算等により、同一の時刻での距離および視線速度をそれぞれ算定する。
【0041】
これにより、1方向のみ観測するレーダ装置によって得られる目標の距離およびドップラ情報に基づいて、目標の高度情報を含む3次元座標を算定することができる。
【0042】
〔全体的な動作〕
次に、パルスレーダ装置の全体的な動作について図1乃至図2に基づいて説明する。
【0043】
図1において、まず最初にパルスレーダ10についての説明をする。図1の送受信部12は、送信する電波の元となる送信パルスを発生し、発信電波として空中線部11に出力する(送信信号発生工程)。空中線部11は、この送受信部12から出力された発信電波を所定の方向に発信すると共に当該発信電波が空間を飛行中の目標物によって反射された反射電波を受信し、この反射電波を反射信号として送受信器12に出力する(電波送受信工程)。
【0044】
続いて、送受信部12は、空中線部11から出力された反射電波の高周波信号を検波し、A/D(アナログ/ディジタル)変換してディジタル受信信号としてパルスドップラ処理部13へ出力する(受信信号検波工程)。パルスドップラ処理部13は、送受信部12から出力されたディジタル受信信号に対して、複数の送信パルス毎に得られるディジタル受信信号間の相関処理であるパルスドップラ処理を行い、このパルスドップラ処理を行った後のディジタル受信信号を目標信号検出部14Aおよびドップラ情報算定部15Aに出力する(パルスドップラ処理工程)。
【0045】
目標信号検出部14Aは、パルスドップラ処理部13から出力されたパルスドップラ処理後のディジタル受信信号と予め設定されたしきい値とを比較して、受信したディジタル受信信号が前述のしきい値以上のディジタル受信信号であった場合に、このディジタル受信信号を目標物に係る信号と判定して目標物を検出し、距離算定部14Bに出力する(目標信号検出工程)。
【0046】
距離算定部14Bは、空中線部11から電波を発信した時刻と目標信号検出部14Aで目標物に係る信号を検出した時刻との差分により目標物との距離を算定し、この算定した距離情報を目標物データ出力部16に出力する(距離算定工程)。
【0047】
ドップラ情報算定部15Aは、前述のパルスドップラ処理部13から出力されたパルスドップラ処理されたディジタル受信信号に基づいて目標のドップラ周波数を算定し、この算定したドップラ周波数情報を視線方向速度算定部15Bに出力する(ドップラ周波数計測工程)。
【0048】
視線方向速度算定部15Bは、ドップラ情報算定部15Aから出力されたドップラ周波数情報に基づいて目標の視線方向速度を算定し、この算定した視線方向速度情報を目標物データ出力部16に出力する(視線方向速度算定工程)。
【0049】
前述の距離算定部14Bによって算定した目標物との距離および、視線方向速度算定部15Bによって算定した目標の視線方向速度により、目標物の距離情報および速度情報を得ることができる。
【0050】
目標物データ出力部16は、前述の目標信号検出部14Aで検出した目標物に係る信号の検出時刻、距離計測部14Bで算定した目標物との距離情報、および視線方向速度算定部15Bで算定した目標物の視線方向速度情報を収集して一つの目標物データを生成し、この目標物データを時刻補正部40に出力する(データ出力工程)。
【0051】
一方、パルスレーダ20に備えられた空中線部21、送受信部22、パルスドップラ処理部23、目標信号検出部24Aおよび距離計測部24Bによって構成される距離算定手段24、ドップラ情報算定部25Aおよび視線方向速度算定部25Bによって構成される視線方向速度算定手段25、および目標物データ出力部26についても、上述のパルスレーダ10に備えられた各部と同じ動作をするものとする。
【0052】
時刻補正部40は、パルスレーダ10の目標物データ出力部16およびパルスレーダ20の目標物データ出力部26から出力される目標物データを同一時刻のデータに補正し、この補正した目標物データを目標座標算定部50に出力する(時刻補正工程)。
【0053】
目標座標算定部50は、時刻補正部40によって同一時刻に補正されたパルスレーダ10およびパルスレーダ20からそれぞれ出力された目標物データと、パルスレーダ10の空中線部11およびパルスレーダ20の空中線部21の設置された位置座標データとに基づいて高度情報を含む目標物の3次元座標を算定する(目標座標算定工程)。
【0054】
続いて、前述の目標座標算定部50が目標物の3次元座標を算定する方法について、図2および以下に示す数式に基づいて詳細に説明する。
【0055】
図2は本発明のレーダ装置と目標物30との位置関係を説明する模式図である。ここで、前提条件として目標物30は等高度等速直線運動をしているものとする。本方式のレーダ装置における計測値は検出時刻T、距離R、視線速度Rvであり、2つの空中線部に対応するパルスレーダ10およびパルスレーダ20がそれぞれ計測する。
【0056】
また、3次元座標計算においては、これらの2回分の計測値を使用する。パルスレーダ10の空中線部11の座標を(x1,y1,z1)とし、パルスレーダ20の空中線部21の座標を(x2,y2,z2)とする。1回目および2回目にスキャンした時の目標物30の座標を(x,y,z)、(x’,y’,z)とする。ここで、zは高度を示すものであり、目標物30は等高度等速直線運動をしているためzは変化しないものとする。目標物30’は、2スキャン目の際の目標物30の位置を示す。
【0057】
前述の計測値をR1,R2,R1v,R2v,VR1,VR2であり、ここで、添字1、2はパルスレーダ10または20の計測値であることを示し、「’」は2スキャン目の計測値であることを示す。また、1回目と2回目の時刻差をΔtとする。
【0058】
ここで、未知のパラメータは3次元直交座標上の目標物の真の座標A1(x,y,z)と、A2(x’,y’,z)と、目標物30の速度(xv,yv,0)である。これら8つの未知のパラメータの間には、以下の関係式が成り立つため、目標物の3次元座標(x,y,z)を算定することができる。
【0059】
各パラメータの間に成立する関係式を以下に示す。
(x−x1)2+(y−y1)2+(z−z1)2=R12 ・・・(1)
(x−x1)・xv+(y−y1)・yv=R1・R1v ・・・(2)
(x−x2)2+(y−y2)2+(z−z2)2=R22 ・・・(3)
(x−x2)・xv+(y−y2)・yv=R2・R2v ・・・(4)
(x’−x1)2+(y’−y1)2+(z’−z2)2=R1’2 ・・・(5)
(x’−x1)・xv+(y’−y1)・yv=R1’・R1v’ ・・・(6)
(x’−x2)2+(y’−y2)2+(z’−z2)2=R2’2 ・・・(7)
(x’−x2)・xv+(y’−y2)・yv=R2’・R2v’ ・・・(8)
x’=x+xv・Δt ・・・(9)
y’=y+yv・Δt ・・・(10)
まず、xvが次式を解くことにより求められる。
(B12+C12)・xv2−2B1・D1・xv+D12−A1・C12=0
・・・(11)
ここで、
A1=(R1’・R1v’−R1・R1v)/Δt ・・・(12)
B1=x2−x1 ・・・(13)
C1=y2−y1 ・・・(14)
D1=R1・R1v−R2・R2v ・・・(15)
ここで、(11)式は、2次方程式であるため、解が2通り得られるが、2通りの解に対応して後段の計算を並行して行い、電波を照射する空間外の座標として求められる解を除去することで単一の解が得られる。
また、yvは次式により求められる。
yv=(D1−B1)・xv/C ・・・(16)
次に、x,y,zを次式により求める。なお、簡略化のために座標系をz1=z2=0とする。
x=(C2・B3−C3・B2)/(A2・B3−A3・B2) ・・・(17)
y=(C2−A2・x)/B2 ・・・(18)
z=√{R12−(x−x1)2+(y−y1)2} ・・・(19)
ここで、
A2=xv ・・・(20)
B2=yv ・・・(21)
C2=R1・R1v+x1・xv+y1・yv ・・・(22)
A3=2・(x2−x1) ・・・(23)
B3=2・(y2−y1) ・・・(24)
C3=R12−R12−x12−y12+x22+y22 ・・・(25)
である。(17)〜(19)式により目標物の3次元座標を算定することができる。
【0060】
ここで、上記の計算式において、目標物の方位角情報を使用していないので、1方向のみ観測し、目標物の距離およびドップラ情報のみ得ることのできる単純なレーダ装置で、目標物の高度情報を含む3次元座標を算定する3次元レーダ装置の機能を実現することが可能となる。
【0061】
また、算定した目標物の3次元座標は、図示しない形で目標座標算定部50と接続された表示手段上に数値として表示しても、数値情報を図形として表示してもよいものとする。
【0062】
ここで、上述した第1実施形態における動作にあって、上記工程で実行される各実行内容をプログラム化し、これをコンピュータに機能させるように構成してもよい。なお、この場合、本プログラムは、非一時的な記録媒体、例えば、DVD、CD、フラッシュメモリなどに記録されてもよい。その場合、本プログラムは、記録媒体からコンピュータによって読み出され、実行される。
【0063】
(第1実施形態の効果)
以上のように、本第1実施形態では、空中線部の位置が異なり且つ当該空中線部から発信される電波の範囲が重複するように設置されたパルスレーダ10およびパルスレーダ20が目標物に係る信号の検出時刻、目標との距離および目標の視線方向速度を算定して目標物データとして出力し、この目標物データを同一時刻のデータに時刻補正部40が補正し、この補正されたそれぞれの目標物データおよびパルスレーダ10の空中線部11とパルスレーダ20の空中線部21のそれぞれの座標位置データに基づいて、目標座標算定部が目標物の高度情報を含む3次元座標を算定する。これによって目標物の距離情報およびドップラ情報のみで目標物の高度の算定を可能とし、電波の発信方向を変えない単純なハードウェアのレーダ装置で目標物の3次元情報を得ることが可能となる。
【0064】
〔第2実施形態〕
次に、本発明の第2実施形態を図3に基づいて説明する。
ここで、前述した第1実施形態と同一の構成要素については、同一の符号を用いるものとする。
【0065】
上記図1に開示した第1実施形態にあっては、パルスレーダ10の目標物データ出力部16およびパルスレーダ20の目標物データ出力部26で生成された目標物データの検出時刻を、時刻補正部40で補正する場合を例示した。
【0066】
これに対し、本第2実施形態では、図3に示すように、前述の時刻補正部40による時刻の補正に代えて、パルスレーダ10とパルスレーダ20とが同期をとって電波の発信を行い、時刻補正部40による時刻補正をせずに同一時刻の目標物に係る信号を検出できるように発信タイミング制御部60を備えたことを特徴とする。
【0067】
発信タイミング制御部60は、パルスレーダ10の送受信部12およびパルスレーダ20の送受信部22に対して、それぞれの送受信部がお互いに異なる周波数で同時に発信電波を発信するように制御するタイミング制御信号を出力する。
【0068】
パルスレーダ10の送受信部12は、前述のタイミング制御信号を受信すると発信電波を空中線部11に発信する。一方、パルスレーダ20の送受信部22も前述送受信部12と同様にタイミング制御信号を受信すると発信電波を空中線部21に発信する。
【0069】
このタイミング制御信号により、送受信部12および送受信部22がそれぞれ異なる周波数で発信電波を発信するタイミングを制御でき、それぞれの送受信部が同時に発信電波を発信することが可能となる。
【0070】
また、目標物データ出力部16および28は、それぞれ前述の目標物データを目標座標算定部50に対して出力する。これは、前述の発信タイミング制御部60によって予め同期がとられた送信パルスが出力されるため、時刻の補正をせずに目標物の3次元座標を算定することができるためである。
【0071】
これにより、パルスレーダ10およびパルスレーダ20の各パルスレーダが同一時刻の目標物に係る信号を検出し目標物データを発生させることができるため、上述のように時刻補正を行うことなく目標の3次元座標を算定することが可能となる。
【0072】
〔第2実施形態の動作〕
まず、発信タイミング制御部60は、パルスレーダ10の送受信部12およびパルスレーダ20の送受信部22のそれぞれに対して、それぞれ異なる周波数で同時に発信電波の発信を行うように制御するタイミング制御信号を出力する。
【0073】
パルスレーダ10の送受信部12は、前述のタイミング制御信号を受けて発信電波を出力し空中線部11から発信する。発信電波を発信した後の動作については、第1実施形態と同様に、目標物からの反射電波を空中線部11で受信し、この受信電波を送受信部12に出力し、送受信部12でA/D変換を行ってディジタル受信信号としてパルスドップラ処理部13に出力する。
【0074】
パルスドップラ処理部13は、前述のディジタル受信信号に対してパルスドップラ処理を行い、このパルスドップラ処理後のディジタル受信信号を目標信号検出部14Aおよびドップラ情報算定部15Aに対して出力する
【0075】
目標信号検出部14Aは、前述のディジタル受信信号と予め設定されたしきい値を比較し、しきい値以上のディジタル受信信号を目標物に係る信号として検出し、距離算定部14Bに出力する。距離算定部14Bは、電波を発信した時刻と目標物に係る信号を検出した時刻との差分により目標物との距離を算定し目標物データ出力部16に出力する。
【0076】
一方、ドップラ情報算定部15Aは、前述のパルスドップラ処理されたディジタル受信信号に基づいて目標のドップラ周波数を算定し、視線方向速度算定部15Bに出力する。視線方向速度算定部15Bは、前述の目標のドップラ周波数に基づいて目標の視線方向速度を算定し目標物データ出力部16に出力する。
【0077】
目標物データ出力部16は、目標信号検出部14Aで検出した時刻と距離算定部14Bで算定した目標との距離と視線方向速度算定部15Bで算定した目標の視線方向速度を収集し一つの目標物データを出力する。
【0078】
また、パルスレーダ20についても、上述のパルスレーダ10の各部と同様の動作をするものとする。
【0079】
目標座標算定部50は、パルスレーダ10の目標物データ出力部16およびパルスレーダ20の目標物データ出力部26のそれぞれから出力された目標物データに基づいて、目標の高度情報を含む3次元座標を算定する。この算定方法については、第1実施形態の数式(17)乃至(19)に示すとおりである。
【0080】
(第2実施形態の効果)
このように、パルスレーダ10およびパルスレーダ20に対して、それぞれ異なる周波数で同時に発信電波を出力するように制御するタイミング制御信号を出力する発信タイミング制御部60を備えたことにより、各パルスレーダが同一時刻の目標を検出し、目標物データを算定することができる。このため、時刻補正を行うことなく、目標物の3次元座標を算定することが可能となる。さらに、この場合は時刻補正による誤差が発生しないため、3次元座標の算定結果の誤差が低減される。また、片方のパルスレーダのみパルス送信を行い、受信動作は両方のパルスレーダで行うことで目標物の3次元情報を算定することも可能である。
その他の構成およびその作用効果については、前述した第1実施形態と同じである。
【0081】
〔第3実施形態〕
次に、本発明の第2実施形態を図4に基づいて説明する。
ここで、前述した第1実施形態と同一の構成要素については、同一の符号を用いるものとする。
【0082】
上記図1に開示した第1実施形態にあっては、2組のパルスレーダであるパルスレーダ10およびパルスレーダ20を使用して目標物データの3次元座標を算定する場合を例示した。
【0083】
これに対し、本第3実施形態では、図4に示すように、広範囲の目標物に係る信号を検出するため、N(≧3)組のパルスレーダを備えており、それぞれのパルスレーダはパルスレーダ選択部70に対して目標物データを出力するように構成されている。
【0084】
さらに、パルスレーダ選択部70は、前述の各パルスレーダから出力された目標物データについて、電波を照射する範囲が重複する目標物データを選択して時刻補正部40に出力する。これは、前述のN組の各パルスレーダの設置された座標位置データおよび、各パルスレーダから発信される電波の範囲が予め設定されているため、パルスレーダ選択部70は、重複する目標物データを選択することができるためである。
また、その他の構成については、第1実施形態と同一となっている。
【0085】
〔第3実施形態の動作〕
複数のパルスレーダから目標物データを受信したパルスレーダ選択部70は、電波照射範囲の重複する目標物データを選択して時刻補正部40に出力する。
【0086】
時刻補正部40は、パルスレーダ選択部70から出力された目標物データを同一時刻のデータとして補正を行い、この時刻補正された目標物データを目標座標算定部50に出力する。
【0087】
目標座標算定部50は、前述の時刻補正された目標物データに基づいて目標の3次元座標を算定する。この方法は、第1実施形態の算定式(17)乃至(19)を用いることで算定することができる。
【0088】
ここで、各パルスレーダが発信電波を照射する範囲は、各パルスレーダの空中線部が設置された位置座標データによって予め特定できるため、重複する目標物データを選択することができる。
【0089】
(第3実施形態の効果)
このように、広範囲に設置された3組以上のパルスレーダから出力される目標物データを、パルスレーダ選択部70によって電波発信範囲が重複する目標物データを選択することによって、高価な3次元レーダ装置を使わずに、必要な範囲に安価なレーダを複数配置することで3次元レーダ装置の機能を実現することが可能となる。また、3組以上のパルスレーダが重複する範囲においては、本第1実施形態の算定式に加えて3点測量も併用することで、座標の計測制度を向上させることも可能である。
その他の構成およびその作用効果については、前述した第1実施形態と同じである。
【0090】
上述した実施形態については、その新規な技術的内容の要点をまとめると、以下の付記のようになる。
尚、上記実施形態の一部又は全部は、新規な技術として以下のようにまとめられるが、本発明は必ずしもこれに限定されるものではない。
【0091】
(付記1)一方向のみ観測可能な一方と他方のパルスレーダを異なった位置から同一空間を重複して探索するように配設し、
この各パルスレーダが、飛行中の目標物に対して発信した電波およびその反射電波に基づいて前記目標物との距離情報及び当該目標物にかかるドップラ情報を得ると共に、これらの各情報に基づいて前記目標物の検出時刻、目標物との距離および視線方向速度を算定し目標物データとして出力する機能を備えており、
前記各パルスレーダから出力される目標物データを入力すると共にこれを同一時刻の目標物データに補正する時刻補正部を備えると共に、
この時刻補正部によって補正された前記各パルスレーダからの目標物データおよび前記各パルスレーダの位置座標データとに基づいて、前記目標物の高度情報を含む3次元情報を算定する目標座標算定部を備えていることを特徴とするパルスレーダ装置。
【0092】
(付記2)付記1に記載のパルスレーダ装置において、
前記各パルスレーダは、
空中線を介して所定方向に電波を発信すると共に目標物からの反射波を受信しA/D変換しディジタル受信信号として出力する送受信部と、このディジタル受信信号に対して複数の送信パルス毎に得られるディジタル受信信号間の相関処理であるパルスドップラ処理を行うパルスドップラ処理部と、前記パルスドップラ処理された前記ディジタル受信信号に基づいて前記目標物を特定すると共に当該目標物との距離を算定する距離算定手段と、前記パルスドップラ処理された前記ディジタル受信信号に基づいて前記目標物の視線方向速度を算定する視線方向速度算定手段とを有し、
前記距離算定手段によって前記目標物が特定された時刻情報、前記算定された目標物との距離情報、および前記視線方向速度算定手段によって算定された前記目標物の視線方向速度、を収集し目標物データとして出力する目標物データ出力部を備えていることを特徴としたパルスレーダ装置。
【0093】
(付記3)付記2に記載のパルスレーダ装置において、
前記距離算定手段は、前記パルスドップラ処理された前記ディジタル受信信号と予め設定されたしきい値とを比較し前記ディジタル受信信号が前記しきい値以上であった場合に前記ディジタル受信信号を前記目標物に係る信号として判定して目標物を検出する目標信号検出部と、前記送受信部が前記発信電波を発信した時刻と前記目標物を検出した時刻との差分により前記目標物との距離を算定する距離算定部とを備えていることを特徴とするパルスレーダ装置。
【0094】
(付記4)付記2に記載のパルスレーダ装置において、
前記視線方向速度算定手段は、前記パルスドップラされた前記ディジタル受信信号に基づいて前記目標のドップラ周波数を算定し出力するドップラ情報算定部と、前記目標のドップラ周波数に基づいて前記目標の視線方向速度を算定する視線方向速度算定部とを備えていることを特徴とするパルスレーダ装置。
【0095】
(付記5)付記2乃至4のいずれか一つに記載のパルスレーダ装置において、
前記時刻補正部に代えて、前記各レーダセンサの送受信部に対して、それぞれが異なる周波数で同時に前記発信電波を発信させるように制御するタイミング制御信号を出力する発信タイミング制御部を備えていることを特徴とするパルスレーダ装置。
【0096】
(付記6)付記5に記載のパルスレーダ装置において、
前記一および他のレーダ装置に備えられた前記送受信部は、いずれか一方の送受信部から前記発信電波を発信すると共にそれぞれの送受信部で前記反射波を受信することを特徴とするパルスレーダ装置。
【0097】
(付記7)付記1乃至4のいずれか一つに記載のパルスレーダ装置において、
前記パルスレーダを3組以上設置し、前記各パルスレーダの目標物データ出力部からそれぞれ出力される前記目標物データの内の電波照射範囲が重複する目標物データを選択して前記時刻補正部に出力するパルスレーダ選択部を備えていることを特徴とするパルスレーダ装置。
【0098】
(付記8)付記7に記載のパルスレーダ装置において、
前記目標座標算定部は、前記パルスレーダ選択部によって3組以上の前記目標物データが選択された場合には、3点測量を併用して前記目標物の高度情報を含む3次元情報を算定することを特徴とするパルスレーダ装置。
【0099】
(付記9)空間を飛行中の目標物に対して発信した発信電波および当該目標物から得られる反射電波に基づいて前記目標物との距離情報および前記目標物にかかるドップラ情報を得ると共に、一のパルスレーダが当該距離情報およびドップラ情報に基づいて前記目標物の検出時間、距離、及び視線方向速度を算定し目標物データとして出力し、
この一のパルスレーダとは異なった位置に配置され且つ当該一のパルスレーダと同じ機能を備えた他のパルスレーダが、前記一のパルスレーダと重複する空間に対して前記一のパルスレーダと同様に発信電波を発信し、
前記各パルスレーダから出力される前記各目標物データを入力すると共に、時刻補正部がこれを同一時刻の目標物データに補正し、
この時刻補正部によって補正された前記各パルスレーダで得られた目標物データおよび前記各パルスレーダの位置座標データとに基づいて、目標座標算定部が前記目標物の高度情報を含む3次元情報を算定する構成としたことを特徴とするパルスレーダ装置制御方法。
【0100】
(付記10)空間を飛行中の目標物に対して発信した発信電波および当該目標物から得られる反射電波に基づいて前記目標物との距離情報および前記目標物にかかるドップラ情報を得ると共に、当該距離情報およびドップラ情報に基づいて前記目標物の検出時間、距離、及び視線方向速度を算定し目標物データとして出力するレーダ機能、
前記レーダ機能を有した2組のパルスレーダによって出力される前記目標物データをそれぞれ入力すると共にこれを同一時刻の目標物データに補正する時刻補正機能、
および前記時刻補正機能によって補正された前記各パルスレーダで得られた目標物データと前記各パルスレーダの位置座標データとに基づいて、前記目標物の高度情報を含む3次元情報を算定する目標座標算定機能、
をコンピュータに実現させるようにしたことを特徴とするパルスレーダ装置制御用プログラム。
【産業上の利用可能性】
【0101】
本発明は、等高度等速直線運動をする目標物に対して、異なる位置に設置され且つ重複する空間に電波を発信する空中線部を備えたパルスレーダを2組用いて、これらのパルスレーダによってそれぞれ得られる目標物に係る信号の検出時刻、目標物との距離および目標物の視線方向速度を算定し、目標物データとして出力する。この目標物データを同一時刻のデータとして補正し、この時刻補正したそれぞれの目標物データおよび各パルスレーダの位置座標データに基づいて目標物の高度情報を含む3次元情報を算定する。これにより、電波の発信方向を変えない単純なハードウェアの空中線を備えるレーダ装置においても目標物の3次元情報を得ることが可能なため、高価で大規模な3次元レーダ装置の機能を比較的安価なレーダ装置で実現することが可能となる。
【符号の説明】
【0102】
10 パルスレーダ(一のパルスレーダ)
11 空中線部
12 送受信部
13 パルスドップラ処理部
14 距離算定手段
14A 目標信号検出部
14B 距離算定部
15 視線方向速度算定手段
15A ドップラ情報算定部
15B 視線方向速度算定部
16 目標物データ出力部
20 パルスレーダ(他のパルスレーダ)
40 時刻補正部
50 目標座標算定部
60 発信タイミング制御部
70 パルスレーダ選択部
【特許請求の範囲】
【請求項1】
一方向のみ観測可能な一方と他方のパルスレーダを異なった位置から同一空間を重複して探索するように配設し、
この各パルスレーダが、飛行中の目標物に対して発信した電波およびその反射電波に基づいて前記目標物との距離情報及び当該目標物にかかるドップラ情報を得ると共に、これらの各情報に基づいて前記目標物の検出時刻、目標物との距離および視線方向速度を算定し目標物データとして出力する機能を備えており、
前記各パルスレーダから出力される目標物データを入力すると共にこれを同一時刻の目標物データに補正する時刻補正部を備えると共に、
この時刻補正部によって補正された前記各パルスレーダからの目標物データおよび前記各パルスレーダの位置座標データとに基づいて、前記目標物の高度情報を含む3次元情報を算定する目標座標算定部を備えていることを特徴とするパルスレーダ装置。
【請求項2】
請求項1に記載のパルスレーダ装置において、
前記各パルスレーダは、
空中線を介して所定方向に電波を発信すると共に目標物からの反射波を受信しA/D変換しディジタル受信信号として出力する送受信部と、このディジタル受信信号に対して複数の送信パルス毎に得られるディジタル受信信号間の相関処理であるパルスドップラ処理を行うパルスドップラ処理部と、前記パルスドップラ処理された前記ディジタル受信信号に基づいて前記目標物を特定すると共に当該目標物との距離を算定する距離算定手段と、前記パルスドップラ処理された前記ディジタル受信信号に基づいて前記目標物の視線方向速度を算定する視線方向速度算定手段とを有し、
前記距離算定手段によって前記目標物が特定された時刻情報、前記算定された目標物との距離情報、および前記視線方向速度算定手段によって算定された前記目標物の視線方向速度、を収集し目標物データとして出力する目標物データ出力部を備えていることを特徴としたパルスレーダ装置。
【請求項3】
請求項2に記載のパルスレーダ装置において、
前記距離算定手段は、前記パルスドップラ処理された前記ディジタル受信信号と予め設定されたしきい値とを比較し前記ディジタル受信信号が前記しきい値以上であった場合に前記ディジタル受信信号を前記目標物に係る信号として判定して目標物を検出する目標信号検出部と、前記送受信部が前記発信電波を発信した時刻と前記目標物を検出した時刻との差分により前記目標物との距離を算定する距離算定部とを備えていることを特徴とするパルスレーダ装置。
【請求項4】
請求項2に記載のパルスレーダ装置において、
前記視線方向速度算定手段は、前記パルスドップラされた前記ディジタル受信信号に基づいて前記目標のドップラ周波数を算定し出力するドップラ情報算定部と、前記目標のドップラ周波数に基づいて前記目標の視線方向速度を算定する視線方向速度算定部とを備えていることを特徴とするパルスレーダ装置。
【請求項5】
請求項2乃至4のいずれか一つに記載のパルスレーダ装置において、
前記時刻補正部に代えて、前記各レーダセンサの送受信部に対して、それぞれが異なる周波数で同時に前記発信電波を発信させるように制御するタイミング制御信号を出力する発信タイミング制御部を備えていることを特徴とするパルスレーダ装置。
【請求項6】
請求項5に記載のパルスレーダ装置において、
前記一および他のレーダ装置に備えられた前記送受信部は、いずれか一方の送受信部から前記発信電波を発信すると共にそれぞれの送受信部で前記反射波を受信することを特徴とするパルスレーダ装置。
【請求項7】
請求項1乃至4のいずれか一つに記載のパルスレーダ装置において、
前記パルスレーダを3組以上設置し、前記各パルスレーダの目標物データ出力部からそれぞれ出力される前記目標物データの内の電波照射範囲が重複する目標物データを選択して前記時刻補正部に出力するパルスレーダ選択部を備えていることを特徴とするパルスレーダ装置。
【請求項8】
請求項7に記載のパルスレーダ装置において、
前記目標座標算定部は、前記パルスレーダ選択部によって3組以上の前記目標物データが選択された場合には、3点測量を併用して前記目標物の高度情報を含む3次元情報を算定することを特徴とするパルスレーダ装置。
【請求項9】
空間を飛行中の目標物に対して発信した発信電波および当該目標物から得られる反射電波に基づいて前記目標物との距離情報および前記目標物にかかるドップラ情報を得ると共に、一のパルスレーダが当該距離情報およびドップラ情報に基づいて前記目標物の検出時間、距離、及び視線方向速度を算定し目標物データとして出力し、
この一のパルスレーダとは異なった位置に配置され且つ当該一のパルスレーダと同じ機能を備えた他のパルスレーダが、前記一のパルスレーダと重複する空間に対して前記一のパルスレーダと同様に発信電波を発信し、
前記各パルスレーダから出力される前記各目標物データを入力すると共に、時刻補正部がこれを同一時刻の目標物データに補正し、
この時刻補正部によって補正された前記各パルスレーダで得られた目標物データおよび前記各パルスレーダの位置座標データとに基づいて、目標座標算定部が前記目標物の高度情報を含む3次元情報を算定する構成としたことを特徴とするパルスレーダ装置制御方法。
【請求項10】
空間を飛行中の目標物に対して発信した発信電波および当該目標物から得られる反射電波に基づいて前記目標物との距離情報および前記目標物にかかるドップラ情報を得ると共に、当該距離情報およびドップラ情報に基づいて前記目標物の検出時間、距離、及び視線方向速度を算定し目標物データとして出力するレーダ機能、
前記レーダ機能を有した2組のパルスレーダによって出力される前記目標物データをそれぞれ入力すると共にこれを同一時刻の目標物データに補正する時刻補正機能、
および前記時刻補正機能によって補正された前記各パルスレーダで得られた目標物データと前記各パルスレーダの位置座標データとに基づいて、前記目標物の高度情報を含む3次元情報を算定する目標座標算定機能、
をコンピュータに実現させるようにしたことを特徴とするパルスレーダ装置制御用プログラム。
【請求項1】
一方向のみ観測可能な一方と他方のパルスレーダを異なった位置から同一空間を重複して探索するように配設し、
この各パルスレーダが、飛行中の目標物に対して発信した電波およびその反射電波に基づいて前記目標物との距離情報及び当該目標物にかかるドップラ情報を得ると共に、これらの各情報に基づいて前記目標物の検出時刻、目標物との距離および視線方向速度を算定し目標物データとして出力する機能を備えており、
前記各パルスレーダから出力される目標物データを入力すると共にこれを同一時刻の目標物データに補正する時刻補正部を備えると共に、
この時刻補正部によって補正された前記各パルスレーダからの目標物データおよび前記各パルスレーダの位置座標データとに基づいて、前記目標物の高度情報を含む3次元情報を算定する目標座標算定部を備えていることを特徴とするパルスレーダ装置。
【請求項2】
請求項1に記載のパルスレーダ装置において、
前記各パルスレーダは、
空中線を介して所定方向に電波を発信すると共に目標物からの反射波を受信しA/D変換しディジタル受信信号として出力する送受信部と、このディジタル受信信号に対して複数の送信パルス毎に得られるディジタル受信信号間の相関処理であるパルスドップラ処理を行うパルスドップラ処理部と、前記パルスドップラ処理された前記ディジタル受信信号に基づいて前記目標物を特定すると共に当該目標物との距離を算定する距離算定手段と、前記パルスドップラ処理された前記ディジタル受信信号に基づいて前記目標物の視線方向速度を算定する視線方向速度算定手段とを有し、
前記距離算定手段によって前記目標物が特定された時刻情報、前記算定された目標物との距離情報、および前記視線方向速度算定手段によって算定された前記目標物の視線方向速度、を収集し目標物データとして出力する目標物データ出力部を備えていることを特徴としたパルスレーダ装置。
【請求項3】
請求項2に記載のパルスレーダ装置において、
前記距離算定手段は、前記パルスドップラ処理された前記ディジタル受信信号と予め設定されたしきい値とを比較し前記ディジタル受信信号が前記しきい値以上であった場合に前記ディジタル受信信号を前記目標物に係る信号として判定して目標物を検出する目標信号検出部と、前記送受信部が前記発信電波を発信した時刻と前記目標物を検出した時刻との差分により前記目標物との距離を算定する距離算定部とを備えていることを特徴とするパルスレーダ装置。
【請求項4】
請求項2に記載のパルスレーダ装置において、
前記視線方向速度算定手段は、前記パルスドップラされた前記ディジタル受信信号に基づいて前記目標のドップラ周波数を算定し出力するドップラ情報算定部と、前記目標のドップラ周波数に基づいて前記目標の視線方向速度を算定する視線方向速度算定部とを備えていることを特徴とするパルスレーダ装置。
【請求項5】
請求項2乃至4のいずれか一つに記載のパルスレーダ装置において、
前記時刻補正部に代えて、前記各レーダセンサの送受信部に対して、それぞれが異なる周波数で同時に前記発信電波を発信させるように制御するタイミング制御信号を出力する発信タイミング制御部を備えていることを特徴とするパルスレーダ装置。
【請求項6】
請求項5に記載のパルスレーダ装置において、
前記一および他のレーダ装置に備えられた前記送受信部は、いずれか一方の送受信部から前記発信電波を発信すると共にそれぞれの送受信部で前記反射波を受信することを特徴とするパルスレーダ装置。
【請求項7】
請求項1乃至4のいずれか一つに記載のパルスレーダ装置において、
前記パルスレーダを3組以上設置し、前記各パルスレーダの目標物データ出力部からそれぞれ出力される前記目標物データの内の電波照射範囲が重複する目標物データを選択して前記時刻補正部に出力するパルスレーダ選択部を備えていることを特徴とするパルスレーダ装置。
【請求項8】
請求項7に記載のパルスレーダ装置において、
前記目標座標算定部は、前記パルスレーダ選択部によって3組以上の前記目標物データが選択された場合には、3点測量を併用して前記目標物の高度情報を含む3次元情報を算定することを特徴とするパルスレーダ装置。
【請求項9】
空間を飛行中の目標物に対して発信した発信電波および当該目標物から得られる反射電波に基づいて前記目標物との距離情報および前記目標物にかかるドップラ情報を得ると共に、一のパルスレーダが当該距離情報およびドップラ情報に基づいて前記目標物の検出時間、距離、及び視線方向速度を算定し目標物データとして出力し、
この一のパルスレーダとは異なった位置に配置され且つ当該一のパルスレーダと同じ機能を備えた他のパルスレーダが、前記一のパルスレーダと重複する空間に対して前記一のパルスレーダと同様に発信電波を発信し、
前記各パルスレーダから出力される前記各目標物データを入力すると共に、時刻補正部がこれを同一時刻の目標物データに補正し、
この時刻補正部によって補正された前記各パルスレーダで得られた目標物データおよび前記各パルスレーダの位置座標データとに基づいて、目標座標算定部が前記目標物の高度情報を含む3次元情報を算定する構成としたことを特徴とするパルスレーダ装置制御方法。
【請求項10】
空間を飛行中の目標物に対して発信した発信電波および当該目標物から得られる反射電波に基づいて前記目標物との距離情報および前記目標物にかかるドップラ情報を得ると共に、当該距離情報およびドップラ情報に基づいて前記目標物の検出時間、距離、及び視線方向速度を算定し目標物データとして出力するレーダ機能、
前記レーダ機能を有した2組のパルスレーダによって出力される前記目標物データをそれぞれ入力すると共にこれを同一時刻の目標物データに補正する時刻補正機能、
および前記時刻補正機能によって補正された前記各パルスレーダで得られた目標物データと前記各パルスレーダの位置座標データとに基づいて、前記目標物の高度情報を含む3次元情報を算定する目標座標算定機能、
をコンピュータに実現させるようにしたことを特徴とするパルスレーダ装置制御用プログラム。
【図1】


【図2】

【図3】
【図4】

【図5】

【図2】
【図3】
【図4】
【図5】
【公開番号】特開2012−88163(P2012−88163A)
【公開日】平成24年5月10日(2012.5.10)
【国際特許分類】
【出願番号】特願2010−234787(P2010−234787)
【出願日】平成22年10月19日(2010.10.19)
【出願人】(000004237)日本電気株式会社 (19,353)
【Fターム(参考)】
【公開日】平成24年5月10日(2012.5.10)
【国際特許分類】
【出願日】平成22年10月19日(2010.10.19)
【出願人】(000004237)日本電気株式会社 (19,353)
【Fターム(参考)】
[ Back to top ]