
パルス化された質量流量搬送システム及び方法
所望の質量の気体を搬送するシステムであって、チャンバと、前記チャンバへの気体フローを制御する第1の弁と、前記チャンバからの気体フローを制御する第2の弁と、前記チャンバ内部の圧力の測定値を提供する圧力トランスデューサと、このシステムから搬送される所望の質量の気体を提供する入力装置と、前記第1及び第2の弁と前記圧力トランスデューサと前記入力装置とに接続されたコントローラであって、前記所望の質量の気体を前記入力装置を介して受け取り、前記第2の弁を閉鎖し、前記第1の弁を開放し、前記圧力トランスデューサからチャンバ圧力測定値を受け取り、前記チャンバ内部の圧力が所定のレベルに到達すると前記入口弁を閉鎖し、所定の待機期間を待機して前記チャンバ内部の気体が平衡状態に近づくことを可能にし、時刻t0において出口弁を開放し、放出された気体の質量が前記所望の質量と等しくなる時刻t*において前記出口弁を閉鎖するようにプログラムされているコントローラと、を含む。

【発明の詳細な説明】
【技術分野】
【0001】
本発明は、広くは、半導体製造機器に関し、詳しくは、半導体プロセス・チャンバに正確な量のプロセス気体を搬送するシステム及び方法に関する。更に詳しくは、本発明は、パルス化された質量流量の前駆気体を半導体プロセス・チャンバの中へ搬送するシステム及び方法に関する。
【背景技術】
【0002】
半導体デバイスの製造又は製作では、多くの場合、ほぼ1ダースほどの種類の気体を注意深く同期させ正確に測定してプロセス・チャンバの中へ搬送することが必要である。製造プロセスでは、様々な方法が用いられ、半導体デバイスが洗浄され、研磨され、酸化され、マスクされ、エッチングがなされ、ドーピングがなされ、メタライゼーションがなされ、というような多くの離散的な処理ステップが要求されうる。このようなシーケンスで用いられるステップと物質とが、すべて、特定のデバイスの製造に関係するのである。
【0003】
デバイスのサイズが90nm未満のレベルまで連続的に縮小されていくと、半導体ロードマップは、様々な応用例に原子相堆積(atomic layer deposition = ALD)が必要になる。このALDは、銅の相互接続に対するバリアの堆積、タングステン核化層の作成、導電性が高い誘電体の作成などに用いられ得る。ALDプロセスでは、2以上の前駆気体が、真空によって維持されたプロセス・チャンバの中でウエハの表面を流れるのである。この2以上の前駆気体は、交互の態様で、すなわちパルス化された態様で流れ、それによって、これらの気体は、ウエハ表面上の場所又は機能的なグループと反応することができる。利用可能な場所のすべてが前駆気体の1つ(例えば、気体A)から飽和状態にあるときには、反応は停止し、排出気体を用いて、過剰な前駆気体の分子をプロセス・チャンバから排出する。次の前駆気体(すなわち、気体B)がウエハ表面に流れると、このプロセスが反復される。前駆気体Aの1パルス、排出気体、前駆気体Bの1パルス、排出気体、というサイクルが定義される。このシーケンスは、最終的な厚さに到達するまで反復される。このようなシーケンシャルで自己規定的な表面反応は、結果的に、サイクルごとに、積層された膜の単一層を生じさせる。
【0004】
プロセス・チャンバへの前駆気体のパルスは、通常は、所定の時間の間だけ単純に開放されてプロセス・チャンバの中へ所望の量の前駆気体を搬送するオン/オフ型の弁を用いて制御される。あるいは、トランスデューサと制御弁と制御及び信号処理電子装置とで構成されている質量流量コントローラを用いて、短い時間の間に、気体の質量や量ではなくて、反復可能な気体流率(フロー・レート)を搬送する。両方の場合共に、プロセス・チャンバの中へ流れ込む物質の量(質量)は、実際には測定されない。
【0005】
依然として必要とされているのは、半導体プロセス・チャンバの中への前駆気体のパルス化された質量流量を測定し搬送する新規で改善されたシステム及び方法である。好ましくは、このシステム及び方法は、プロセス・チャンバの中へ流れ込む物質の量(質量)を実際に測定する。更に。このシステム及び方法は、ALDプロセスなどの半導体製造プロセスにおいて用いることができる気相質量の高度に反復可能で正確な量を提供することが好ましい。
【発明の開示】
【0006】
本発明は、所望の質量の気体を搬送するシステムを提供する。このシステムは、チャンバと、前記チャンバへの気体フローを制御する第1の弁と、前記チャンバからの気体フローを制御する第2の弁と、前記チャンバ内部の圧力の測定値を提供する圧力トランスデューサと、このシステムから搬送される所望の質量の気体を提供する入力装置と、前記第1及び第2の弁と前記圧力トランスデューサと前記入力装置とに接続されたコントローラと、を含む。このコントローラは、前記所望の質量の気体を前記入力装置を介して受け取り、前記第2の弁を閉鎖し、前記第1の弁を開放し、前記圧力トランスデューサからチャンバ圧力測定値を受け取り、前記チャンバ内部の圧力が所定のレベルに到達すると前記入口弁を閉鎖するようにプログラムされている。
【0007】
このコントローラは、更に、所定の待機期間を待機して前記チャンバ内部の気体が平衡状態に近づくことを可能にし、時刻t0において出口弁を開放し、放出された気体の質量が前記所望の質量と等しくなる時刻t*において前記出口弁を閉鎖するようにプログラムされている。
【0008】
本発明のある側面によると、前記放出された質量Δmは、
【0009】
【数7】
【0010】
によって表され、ただし、m(t0)は時刻t0における搬送チャンバ内部の気体の質量であり、m(t*)は時刻t*における搬送チャンバ内部の気体の質量であり、Vは搬送チャンバの体積であり、Rは普遍気体定数(8.3145J/molK)であり、P(t0)は時刻t0におけるチャンバ内部の圧力であり、P(t*)は時刻t*におけるチャンバの中の圧力であり、T(t0)は時刻t0におけるチャンバの中の温度であり、T(t*)は時刻t*におけるチャンバの中の温度である。
【0011】
本発明の別の側面によると、このシステムは、前記搬送チャンバに固定され前記コントローラに接続された温度プローブを更に含んでおり、前記温度プローブはT(t0)及びT(t*)を前記コントローラに直接に提供する。
【0012】
本発明の追加的な側面によると、このシステムは、前記搬送チャンバの壁に固定され前記コントローラに接続された温度プローブを更に含んでいる。T(t0)及びT(t*)は、
【0013】
【数8】
【0014】
を用いて計算される。ここで、ρSTPは標準状態(STP)における気体密度であり、ρは前記気体の密度に等しく、Vは前記チャンバの体積であり、Qoutは前記搬送チャンバからの気体フローであり、Tは絶対温度に等しく、γは比熱であり、Nuはヌセルト数であり、κは気体の熱伝導率であり、Cνは一定圧力における気体の比熱であり、lは前記搬送チャンバの特性長であり、TWは前記温度プローブによって提供されるチャンバの壁の温度である。
【0015】
本発明の更なる側面によると、前記搬送チャンバからの気体フローは、
【0016】
【数9】
【0017】
を用いて計算されることを特徴とするシステム。
他の側面及び効果の中では、本発明は、パルス化された質量流量の前駆気体(precursor gases)を半導体処理チャンバの中へ搬送する新規で改善されたシステム及び方法を提供する。本発明による質量流量搬送システム及び方法は、実際、プロセス・チャンバの中へ流れ込む物質の量(質量)を測定する。更に、このシステム及び方法は、原子層堆積(ALD)プロセスなど、半導体製造プロセスにおいて用いられる気相質量の高度に反復可能で正確な数量を提供する。
【0018】
本発明の追加的な側面及び効果は、この技術分野の当業者にとっては、本発明の実施例が例示的に示され説明されている以下の詳細な説明から明らかとなる。理解されるであろうように、本発明は、以下で示され説明される以外の異なる実施例として実現することが可能であり、この発明から逸脱することなく、その詳細を様々な態様で修正することが可能である。従って、添付の図面や以下の詳細な説明は、その性質上説明に過ぎず、何ら制限的なものではない。
【0019】
以下では添付の図面を参照するのであるが、同じ参照番号及び符号を有している要素は、複数の図面を通じて同じ要素を意味する。
【発明を実施するための最良の形態】
【0020】
図1には質量流量(マスフロー)システム10が示され、図2には質量流量を搬送する方法100の実施例が示されている。システム10及び方法100は、特に、汚染物を含まず正確に計量された量のプロセス気体を半導体プロセス・チャンバへ搬送するためのものである。質量流量搬送システム10及び方法100は、プロセス・チャンバの中へ流れる物質の量(質量)を実際に測定する。更に、このシステム及び方法は、原子層堆積(ALD)プロセスなどの半導体製造プロセスにおいて用いられる気相質量の高度に反復可能で正確な量を提供する。しかし、本発明によるシステム10及び方法100を説明する前に、背景的な情報を提供するため、まず、ALD装置の例について説明する。
【0021】
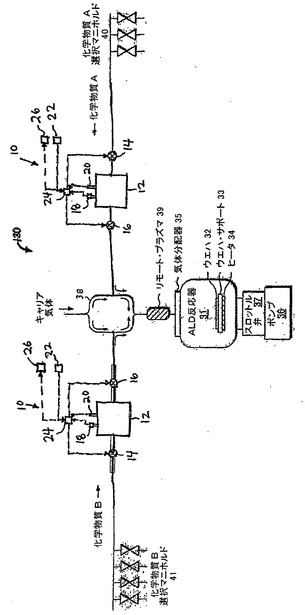
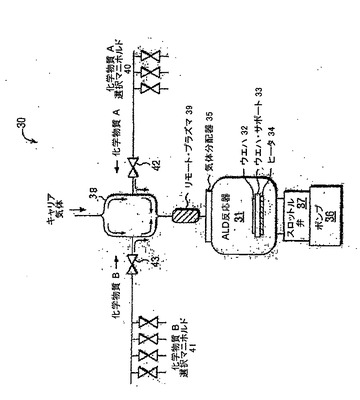
図7は、従来技術に従って構築されたALDシステム30の実施例の概略的な図解である。システム30は、半導体ウエハすなわち基板32のハウジングとなるプロセス・チャンバ31を含む。典型的には、ウエハ32はサポート(又は、チャック)33の上に配置され、ヒータ34がこのチャックに結合され、チャック33とウエハ32とをプラズマ蒸着のために加熱する。プロセス気体が、チャンバ31の一端に配置された気体分配器35を介してチャンバ31の中に導かれる。真空ポンプ36とスロットル弁37とが他端に配置され、ウエハ表面全体に気体フローが引き込まれ、プロセス・チャンバ内部の圧力が調整される。
【0022】
システム30は、また、様々なプロセス気体を混合する混合マニホルド38と、プラズマを形成するプラズマ形成領域39とを含む。気体を混合しプラズマを形成するために様々な化学的気相成長法(CVD)が用いられる。これには、この技術分野で知られている適用技術も含まれる。遠隔的に形成されたプラズマは、気体分配器35の中に導かれ、更に、プラズマ・チャンバ31の中に導かれる。
【0023】
混合マニホルド38は、気体と化学物質とを導入するために2つの入口を有する。キャリア気体が導かれ、流れは混合マニホルド38において分割される。キャリア気体は、典型的には窒素などの不活性気体である。混合マニホルド38も、化学物質のための2つの入口を有する。図7に示された例示的な図解では、化学物質Aと化学物質Bとが、キャリア気体と混合される様子が示されている。化学物質Aはプロセス・チャンバ31に含まれる半導体ウエハ32に対してALDを行うための第1の前駆気体、化学物質Bは第2の前駆気体に関係する。化学物質選択マニホルド40及び41は、調整された複数の弁を含むが、前駆気体A及びBとして用いることができる化学物質の選択を行う。オン/オフ型の弁42及び43は、それぞれが、前駆気体A及びBの混合マニホルド38への導入を調整する。
【0024】
いったんウエハ32がプロセス・チャンバ31の中に配置されると、チャンバ環境は所望のパラメータを満足する状態にされる。例えば、ALDを実行するために、半導体ウエハ32の温度を上昇させる。キャリア気体のフローがオンにされることにより、ポンプ36によって生じた真空によって気体が引き寄せられるにしたがって、キャリア気体の一定の調整されたフローが存在するようになる。ALDを実行する際には、弁42が開放され、第1の前駆気体がキャリア気体フローの中に導かれる。予め選択された時間の後で、弁42は閉鎖され、キャリア気体が、プロセス・チャンバ31からの残っている反応性核種をすべて取り除く。次に、弁43が開放され、第2の前駆気体をキャリア気体フローに中へ導く。再び別の予め選択された時間が経過した後で、弁43は閉鎖され、キャリア気体が、プロセス・チャンバ31からの反応性核種を取り除く。2つの化学物質A及びBは、キャリア気体のフローの中へ交互に導かれ、半導体ウエハ32に対してALDのサイクルを実行する。
【0025】
このようにして、プロセス・チャンバ31の中への前駆気体のパルスは、単純に所定の時間の間だけ開放され所望の量の前駆気体をプロセス・チャンバ31の中へ搬送するオン/オフ型の弁42及び43を用いることによって、制御される。あるいは、トランスデューサと制御弁と制御及び信号処理電子装置とで構成される質量流量(マスフロー)コントローラをオン/オフ型の弁42及び43の代わりに用いて、反復可能な気体フロー・レートを掲示された時間の間だけプロセス・チャンバ31に搬送することも可能である。両方の場合とも、プロセス・チャンバの中に流れ込む物質の量(質量)は、実際には測定されない。その代わりに、フロー・レートが制御されることにより質量流量が評価されるのである。しかし、本発明による質量流量搬送システム10及び方法100は、フロー・レートを制御して質量流量を評価するのではなく、プロセス・チャンバの中に流れ込む物質の量(質量)を実際に測定する。
【0026】
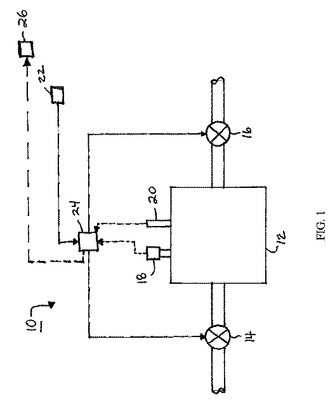
図1を参照すると、本発明による質量流量搬送システム10は、搬送チャンバ12と、チャンバ12の中への質量流量を制御する第1の弁14と、チャンバ12からの質量流量を制御する第2の弁とを含む。本発明のある実施例によると、第1及び第2の弁14及び16は、オン/オフ型の弁で構成され、少なくとも第2のすなわち出口弁16は、例えば、約1ないし5ミリ秒の比較的高速の応答時間を有する。
【0027】
質量流量搬送システム10は、更に、チャンバ12内部の圧力の測定値を提供する圧力トランスデューサ18と、チャンバ12の表面上又は内部の温度の測定値を提供する温度センサ20とを有する。圧力トランスデューサ18は、また、例えば、約1ないし5ミリ秒の比較的高速の応答時間を有する。本発明のある実施例によると、温度センサ20は、チャンバ12の壁と接触しており、この壁の温度の測定値を提供する。
【0028】
本発明による搬送システム10と共に用いられる適切な圧力トランスデューサ19の例は、この出願の出願人である米国マサチューセッツ州アンドーバー(Andover)所在のMKSインスツルメンツ社(http//www.mksinst.com)から入手可能なバラトロン(Baratron)(登録商標)ブランドの圧力トランスデューサである。適切な弁14及び16はもまた出願人から入手可能である。
【0029】
質量流量搬送システム10の入力装置22は、所望の質量流量を(人間であるオペレータから直接に、又は、ウエハ処理用のコンピュータ・コントローラを介して間接に)受け取り、コンピュータ・コントローラ(すなわち、コンピュータの処理ユニットであるCPU)24が、圧力トランスデューサ18と温度センサ20と弁14及び16と入力装置22とに接続されている。入力装置22は、他の処理命令を入力するのにも用いることができる。出力装置26は、コントローラ24に接続されており、システム10によって搬送される質量に関する指示を提供する(人間であるオペレータから直接に、又は、ウエハ処理用のコンピュータ・コントローラを介して間接に)。入力及び出力装置22及び26は、キーボード及びモニタを備えたパーソナル・コンピュータなど、単一のユニットの中に組み入れることができる。
【0030】
図2に示されているように、図1の質量流量搬送システム10を2つ含むALDシステム130を提供することができる。ALDシステム130は、図7の従来技術によるALDシステム30と類似しており、類似する要素には、同じ参照番号が付されている。図2のALDシステム130は、前駆気体A及びBを混合マニホルド38の中へ導く態様をそれぞれが調整する図1の質量流量システム10を2つ含んでいる。
【0031】
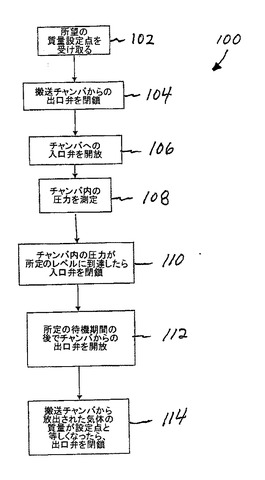
本発明のある実施例によると、図1の質量流量システム10のコントローラ24は、図3の方法100を実行する。図1及び図3を参照すると、コントローラ24は、図3の102に示されているように入力装置22を介して所望の質量流量(すなわち、設定点)を受け取り、図3の104で示されているように出口弁16を閉鎖し、図3の106に示されているように第1の弁すなわちチャンバ12への入口弁14を開放し、図3の108に示されているように圧力トランスデューサ18を用いてチャンバ内部の圧力を測定し、図3の110に示されているようにチャンバ12内部の圧力が所定のレベルに達したら入口弁14を閉鎖する。ここで言う所定のレベルの圧力とは、ユーザが定義することができるし、入力装置22を介して提供することができる。所定のレベルの圧力とは、例えば、200torrである。
【0032】
チャンバ12内部の気体が平衡状態に近づいていく所定の待機期間の後で、出口弁16が開放され、図3の112に示されているように、チャンバ12からある質量の気体が放出される。所定の待機期間は、ユーザが定義することができるし、入力装置22を介して提供することができる。所定の待機期間は、例えば、3秒である。出口弁16は、次に、図3の114に示されるように、放出された気体の質量がユーザが定義した所望の質量流量と等しくなったときに閉鎖される。出口弁16は、非常に短い時間だけ開放状態にある(例えば、100から500ミリ秒)。コントローラ24は、次に、出力装置26に放出された気体の質量を提供する。
【0033】
圧力が高い応用例の場合には、システム10の搬送チャンバ12内部の気体の温度は、温度プローブ20を用いて測定することができる。しかし、圧力が低く温度変化が高速である場合には、プローブを用いて温度を測定するのでは、正確な読み取り値を得るには十分な速度が備わっていない。圧力が低く温度変化が高速であるような場合には、気体温度を評価するリアルタイムの物理モデルが、以下で示すように用いられる。
【0034】
理想気体法則に基づく搬送チャンバ12の中の全質量mは、次の通りである。
【0035】
【数10】
【0036】
数式10では、ρは密度、Vは体積、Pは絶対圧力、Tは絶対温度、そして、Rは普遍気体定数(8.3145J/molK)である。
搬送チャンバ12内部の密度変化は、次の通りである。
【0037】
【数11】
【0038】
数式11では、Qoutは搬送チャンバ12からのフロー、ρSTPは標準温度及び圧力(STP)条件での気体密度である。
搬送チャンバ12内部での温度変化は次の通りである。
【0039】
【数12】
【0040】
数式12では、γは比熱であり、Nuはヌセルト(Nusslets)数であり、κは気体の熱伝導率であり、Cνは一定圧力における気体の比熱であり、lは前記搬送チャンバの特性長であり、TWは前記温度プローブ20によって提供されるチャンバ12の壁の温度である。
【0041】
出口フローQoutは、次の通りに評価される。
【0042】
【数13】
【0043】
チャンバ12から搬送された全質量Δmを計算するには、図1の温度プローブ20を用いるのではなく、数式13を数式12のQoutに代入し、時刻tにおけるチャンバ12の内部における気体温度T(t)を計算する。圧力トランスデューサ18が、時刻tにおけるチャンバ12内部の圧力P(t)を提供する。
【0044】
時刻t0から時刻t*までにチャンバ12から搬送された全質量Δmは、次のように計算される。
【0045】
【数14】
【0046】
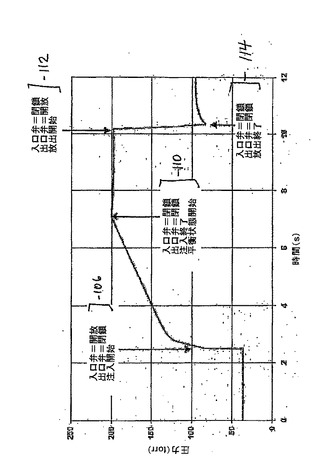
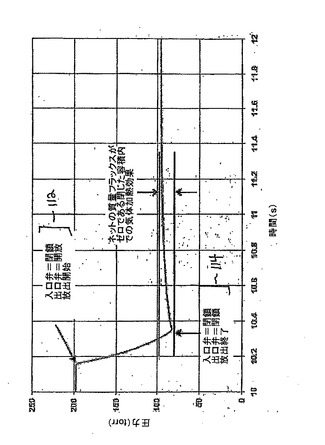
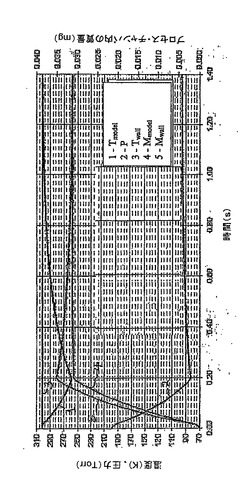
図4は、時間を横軸として、図3の方法100が実行された場合の、図1のシステム10のチャンバ12内部の圧力P(t)のグラフである。図5は、時間を横軸として、図3の方法100が完了したときの、図1のシステム10のチャンバ12内部の圧力のグラフであり、チャンバの圧力P(t)が僅かに上昇し、出口弁16が閉鎖されると安定化する様子を示している。図6は、時間を横軸にとり、図3の方法100が実行された場合の、図1のシステム10のチャンバ12内部の計算された及び実際の状態を示すグラフである。特に、図6のグラフは、数式12を用いて計算された計算されたすなわちモデル温度Tmodelと、圧力トランスデューサ18によって提供されたチャンバ12内部の実際の圧力Pと、温度プローブ20によって提供されたチャンバ12の壁の実際の温度Twallと、数式14を用いて計算された搬送チャンバ12から搬送された気体の質量Mmodelと、数式12によって提供されたモデル温度Tmodelと、数式14を用いて計算され温度プローブ20によって壁の温度Twallが提供された場合の搬送チャンバ12から搬送された気体の質量Mwallと、を含む。
【0047】
これ以外の側面及び効果の中で、本発明は、半導体処理チャンバの中へパルス化された質量流量の前駆気体を搬送する新規で改善されたシステム及び方法を提供する。本発明による質量流量搬送システム及び方法は、プロセス・チャンバの中に流れ込む物質の量(質量)を実際に測定する。更に、本発明によるシステム及び方法は、ALDプロセスなどの半導体製造プロセスにおいて用いられる気相の質量の高度の反復可能で正確な量を提供する。
【0048】
この明細書で以上説明されている実施例は、限定を意味するものではなく、特許請求の範囲に記載されたより広い開示からその精神において逸脱することなく、この技術分野の当業者によって様々な修正、組合せ及び置換が可能である。
【図面の簡単な説明】
【0049】
【図1】本発明に従って構築されたパルス化された質量流量搬送システムの実施例の概略的な図解である。
【図2】図1のパルス化された質量流量搬送システムを2つ含むALDシステムの例示的な実施例の概略的な図解である。
【図3】本発明によるパルス化された質量流量を搬送する方法の実施例を図解する流れ図であって、この方法は、図1のパルス化された質量流量搬送システムを動作させるのに用いることができる。
【図4】図3の方法を動作させた際の、横軸を時間とする図1のシステムのチャンバ内部の圧力のグラフである。
【図5】図3の方法を完了した後の、横軸を時間とする図1のシステムのチャンバ内部の圧力のグラフである。
【図6】図3の方法を動作させた際の、横軸を時間とする図1のシステムのチャンバ内部の実際の圧力、温度及び質量と、モデル化された温度及び質量とのグラフである。
【図7】従来技術によって構築されたALDシステムの実施例の概略的な図解である。
【技術分野】
【0001】
本発明は、広くは、半導体製造機器に関し、詳しくは、半導体プロセス・チャンバに正確な量のプロセス気体を搬送するシステム及び方法に関する。更に詳しくは、本発明は、パルス化された質量流量の前駆気体を半導体プロセス・チャンバの中へ搬送するシステム及び方法に関する。
【背景技術】
【0002】
半導体デバイスの製造又は製作では、多くの場合、ほぼ1ダースほどの種類の気体を注意深く同期させ正確に測定してプロセス・チャンバの中へ搬送することが必要である。製造プロセスでは、様々な方法が用いられ、半導体デバイスが洗浄され、研磨され、酸化され、マスクされ、エッチングがなされ、ドーピングがなされ、メタライゼーションがなされ、というような多くの離散的な処理ステップが要求されうる。このようなシーケンスで用いられるステップと物質とが、すべて、特定のデバイスの製造に関係するのである。
【0003】
デバイスのサイズが90nm未満のレベルまで連続的に縮小されていくと、半導体ロードマップは、様々な応用例に原子相堆積(atomic layer deposition = ALD)が必要になる。このALDは、銅の相互接続に対するバリアの堆積、タングステン核化層の作成、導電性が高い誘電体の作成などに用いられ得る。ALDプロセスでは、2以上の前駆気体が、真空によって維持されたプロセス・チャンバの中でウエハの表面を流れるのである。この2以上の前駆気体は、交互の態様で、すなわちパルス化された態様で流れ、それによって、これらの気体は、ウエハ表面上の場所又は機能的なグループと反応することができる。利用可能な場所のすべてが前駆気体の1つ(例えば、気体A)から飽和状態にあるときには、反応は停止し、排出気体を用いて、過剰な前駆気体の分子をプロセス・チャンバから排出する。次の前駆気体(すなわち、気体B)がウエハ表面に流れると、このプロセスが反復される。前駆気体Aの1パルス、排出気体、前駆気体Bの1パルス、排出気体、というサイクルが定義される。このシーケンスは、最終的な厚さに到達するまで反復される。このようなシーケンシャルで自己規定的な表面反応は、結果的に、サイクルごとに、積層された膜の単一層を生じさせる。
【0004】
プロセス・チャンバへの前駆気体のパルスは、通常は、所定の時間の間だけ単純に開放されてプロセス・チャンバの中へ所望の量の前駆気体を搬送するオン/オフ型の弁を用いて制御される。あるいは、トランスデューサと制御弁と制御及び信号処理電子装置とで構成されている質量流量コントローラを用いて、短い時間の間に、気体の質量や量ではなくて、反復可能な気体流率(フロー・レート)を搬送する。両方の場合共に、プロセス・チャンバの中へ流れ込む物質の量(質量)は、実際には測定されない。
【0005】
依然として必要とされているのは、半導体プロセス・チャンバの中への前駆気体のパルス化された質量流量を測定し搬送する新規で改善されたシステム及び方法である。好ましくは、このシステム及び方法は、プロセス・チャンバの中へ流れ込む物質の量(質量)を実際に測定する。更に。このシステム及び方法は、ALDプロセスなどの半導体製造プロセスにおいて用いることができる気相質量の高度に反復可能で正確な量を提供することが好ましい。
【発明の開示】
【0006】
本発明は、所望の質量の気体を搬送するシステムを提供する。このシステムは、チャンバと、前記チャンバへの気体フローを制御する第1の弁と、前記チャンバからの気体フローを制御する第2の弁と、前記チャンバ内部の圧力の測定値を提供する圧力トランスデューサと、このシステムから搬送される所望の質量の気体を提供する入力装置と、前記第1及び第2の弁と前記圧力トランスデューサと前記入力装置とに接続されたコントローラと、を含む。このコントローラは、前記所望の質量の気体を前記入力装置を介して受け取り、前記第2の弁を閉鎖し、前記第1の弁を開放し、前記圧力トランスデューサからチャンバ圧力測定値を受け取り、前記チャンバ内部の圧力が所定のレベルに到達すると前記入口弁を閉鎖するようにプログラムされている。
【0007】
このコントローラは、更に、所定の待機期間を待機して前記チャンバ内部の気体が平衡状態に近づくことを可能にし、時刻t0において出口弁を開放し、放出された気体の質量が前記所望の質量と等しくなる時刻t*において前記出口弁を閉鎖するようにプログラムされている。
【0008】
本発明のある側面によると、前記放出された質量Δmは、
【0009】
【数7】
【0010】
によって表され、ただし、m(t0)は時刻t0における搬送チャンバ内部の気体の質量であり、m(t*)は時刻t*における搬送チャンバ内部の気体の質量であり、Vは搬送チャンバの体積であり、Rは普遍気体定数(8.3145J/molK)であり、P(t0)は時刻t0におけるチャンバ内部の圧力であり、P(t*)は時刻t*におけるチャンバの中の圧力であり、T(t0)は時刻t0におけるチャンバの中の温度であり、T(t*)は時刻t*におけるチャンバの中の温度である。
【0011】
本発明の別の側面によると、このシステムは、前記搬送チャンバに固定され前記コントローラに接続された温度プローブを更に含んでおり、前記温度プローブはT(t0)及びT(t*)を前記コントローラに直接に提供する。
【0012】
本発明の追加的な側面によると、このシステムは、前記搬送チャンバの壁に固定され前記コントローラに接続された温度プローブを更に含んでいる。T(t0)及びT(t*)は、
【0013】
【数8】
【0014】
を用いて計算される。ここで、ρSTPは標準状態(STP)における気体密度であり、ρは前記気体の密度に等しく、Vは前記チャンバの体積であり、Qoutは前記搬送チャンバからの気体フローであり、Tは絶対温度に等しく、γは比熱であり、Nuはヌセルト数であり、κは気体の熱伝導率であり、Cνは一定圧力における気体の比熱であり、lは前記搬送チャンバの特性長であり、TWは前記温度プローブによって提供されるチャンバの壁の温度である。
【0015】
本発明の更なる側面によると、前記搬送チャンバからの気体フローは、
【0016】
【数9】
【0017】
を用いて計算されることを特徴とするシステム。
他の側面及び効果の中では、本発明は、パルス化された質量流量の前駆気体(precursor gases)を半導体処理チャンバの中へ搬送する新規で改善されたシステム及び方法を提供する。本発明による質量流量搬送システム及び方法は、実際、プロセス・チャンバの中へ流れ込む物質の量(質量)を測定する。更に、このシステム及び方法は、原子層堆積(ALD)プロセスなど、半導体製造プロセスにおいて用いられる気相質量の高度に反復可能で正確な数量を提供する。
【0018】
本発明の追加的な側面及び効果は、この技術分野の当業者にとっては、本発明の実施例が例示的に示され説明されている以下の詳細な説明から明らかとなる。理解されるであろうように、本発明は、以下で示され説明される以外の異なる実施例として実現することが可能であり、この発明から逸脱することなく、その詳細を様々な態様で修正することが可能である。従って、添付の図面や以下の詳細な説明は、その性質上説明に過ぎず、何ら制限的なものではない。
【0019】
以下では添付の図面を参照するのであるが、同じ参照番号及び符号を有している要素は、複数の図面を通じて同じ要素を意味する。
【発明を実施するための最良の形態】
【0020】
図1には質量流量(マスフロー)システム10が示され、図2には質量流量を搬送する方法100の実施例が示されている。システム10及び方法100は、特に、汚染物を含まず正確に計量された量のプロセス気体を半導体プロセス・チャンバへ搬送するためのものである。質量流量搬送システム10及び方法100は、プロセス・チャンバの中へ流れる物質の量(質量)を実際に測定する。更に、このシステム及び方法は、原子層堆積(ALD)プロセスなどの半導体製造プロセスにおいて用いられる気相質量の高度に反復可能で正確な量を提供する。しかし、本発明によるシステム10及び方法100を説明する前に、背景的な情報を提供するため、まず、ALD装置の例について説明する。
【0021】
図7は、従来技術に従って構築されたALDシステム30の実施例の概略的な図解である。システム30は、半導体ウエハすなわち基板32のハウジングとなるプロセス・チャンバ31を含む。典型的には、ウエハ32はサポート(又は、チャック)33の上に配置され、ヒータ34がこのチャックに結合され、チャック33とウエハ32とをプラズマ蒸着のために加熱する。プロセス気体が、チャンバ31の一端に配置された気体分配器35を介してチャンバ31の中に導かれる。真空ポンプ36とスロットル弁37とが他端に配置され、ウエハ表面全体に気体フローが引き込まれ、プロセス・チャンバ内部の圧力が調整される。
【0022】
システム30は、また、様々なプロセス気体を混合する混合マニホルド38と、プラズマを形成するプラズマ形成領域39とを含む。気体を混合しプラズマを形成するために様々な化学的気相成長法(CVD)が用いられる。これには、この技術分野で知られている適用技術も含まれる。遠隔的に形成されたプラズマは、気体分配器35の中に導かれ、更に、プラズマ・チャンバ31の中に導かれる。
【0023】
混合マニホルド38は、気体と化学物質とを導入するために2つの入口を有する。キャリア気体が導かれ、流れは混合マニホルド38において分割される。キャリア気体は、典型的には窒素などの不活性気体である。混合マニホルド38も、化学物質のための2つの入口を有する。図7に示された例示的な図解では、化学物質Aと化学物質Bとが、キャリア気体と混合される様子が示されている。化学物質Aはプロセス・チャンバ31に含まれる半導体ウエハ32に対してALDを行うための第1の前駆気体、化学物質Bは第2の前駆気体に関係する。化学物質選択マニホルド40及び41は、調整された複数の弁を含むが、前駆気体A及びBとして用いることができる化学物質の選択を行う。オン/オフ型の弁42及び43は、それぞれが、前駆気体A及びBの混合マニホルド38への導入を調整する。
【0024】
いったんウエハ32がプロセス・チャンバ31の中に配置されると、チャンバ環境は所望のパラメータを満足する状態にされる。例えば、ALDを実行するために、半導体ウエハ32の温度を上昇させる。キャリア気体のフローがオンにされることにより、ポンプ36によって生じた真空によって気体が引き寄せられるにしたがって、キャリア気体の一定の調整されたフローが存在するようになる。ALDを実行する際には、弁42が開放され、第1の前駆気体がキャリア気体フローの中に導かれる。予め選択された時間の後で、弁42は閉鎖され、キャリア気体が、プロセス・チャンバ31からの残っている反応性核種をすべて取り除く。次に、弁43が開放され、第2の前駆気体をキャリア気体フローに中へ導く。再び別の予め選択された時間が経過した後で、弁43は閉鎖され、キャリア気体が、プロセス・チャンバ31からの反応性核種を取り除く。2つの化学物質A及びBは、キャリア気体のフローの中へ交互に導かれ、半導体ウエハ32に対してALDのサイクルを実行する。
【0025】
このようにして、プロセス・チャンバ31の中への前駆気体のパルスは、単純に所定の時間の間だけ開放され所望の量の前駆気体をプロセス・チャンバ31の中へ搬送するオン/オフ型の弁42及び43を用いることによって、制御される。あるいは、トランスデューサと制御弁と制御及び信号処理電子装置とで構成される質量流量(マスフロー)コントローラをオン/オフ型の弁42及び43の代わりに用いて、反復可能な気体フロー・レートを掲示された時間の間だけプロセス・チャンバ31に搬送することも可能である。両方の場合とも、プロセス・チャンバの中に流れ込む物質の量(質量)は、実際には測定されない。その代わりに、フロー・レートが制御されることにより質量流量が評価されるのである。しかし、本発明による質量流量搬送システム10及び方法100は、フロー・レートを制御して質量流量を評価するのではなく、プロセス・チャンバの中に流れ込む物質の量(質量)を実際に測定する。
【0026】
図1を参照すると、本発明による質量流量搬送システム10は、搬送チャンバ12と、チャンバ12の中への質量流量を制御する第1の弁14と、チャンバ12からの質量流量を制御する第2の弁とを含む。本発明のある実施例によると、第1及び第2の弁14及び16は、オン/オフ型の弁で構成され、少なくとも第2のすなわち出口弁16は、例えば、約1ないし5ミリ秒の比較的高速の応答時間を有する。
【0027】
質量流量搬送システム10は、更に、チャンバ12内部の圧力の測定値を提供する圧力トランスデューサ18と、チャンバ12の表面上又は内部の温度の測定値を提供する温度センサ20とを有する。圧力トランスデューサ18は、また、例えば、約1ないし5ミリ秒の比較的高速の応答時間を有する。本発明のある実施例によると、温度センサ20は、チャンバ12の壁と接触しており、この壁の温度の測定値を提供する。
【0028】
本発明による搬送システム10と共に用いられる適切な圧力トランスデューサ19の例は、この出願の出願人である米国マサチューセッツ州アンドーバー(Andover)所在のMKSインスツルメンツ社(http//www.mksinst.com)から入手可能なバラトロン(Baratron)(登録商標)ブランドの圧力トランスデューサである。適切な弁14及び16はもまた出願人から入手可能である。
【0029】
質量流量搬送システム10の入力装置22は、所望の質量流量を(人間であるオペレータから直接に、又は、ウエハ処理用のコンピュータ・コントローラを介して間接に)受け取り、コンピュータ・コントローラ(すなわち、コンピュータの処理ユニットであるCPU)24が、圧力トランスデューサ18と温度センサ20と弁14及び16と入力装置22とに接続されている。入力装置22は、他の処理命令を入力するのにも用いることができる。出力装置26は、コントローラ24に接続されており、システム10によって搬送される質量に関する指示を提供する(人間であるオペレータから直接に、又は、ウエハ処理用のコンピュータ・コントローラを介して間接に)。入力及び出力装置22及び26は、キーボード及びモニタを備えたパーソナル・コンピュータなど、単一のユニットの中に組み入れることができる。
【0030】
図2に示されているように、図1の質量流量搬送システム10を2つ含むALDシステム130を提供することができる。ALDシステム130は、図7の従来技術によるALDシステム30と類似しており、類似する要素には、同じ参照番号が付されている。図2のALDシステム130は、前駆気体A及びBを混合マニホルド38の中へ導く態様をそれぞれが調整する図1の質量流量システム10を2つ含んでいる。
【0031】
本発明のある実施例によると、図1の質量流量システム10のコントローラ24は、図3の方法100を実行する。図1及び図3を参照すると、コントローラ24は、図3の102に示されているように入力装置22を介して所望の質量流量(すなわち、設定点)を受け取り、図3の104で示されているように出口弁16を閉鎖し、図3の106に示されているように第1の弁すなわちチャンバ12への入口弁14を開放し、図3の108に示されているように圧力トランスデューサ18を用いてチャンバ内部の圧力を測定し、図3の110に示されているようにチャンバ12内部の圧力が所定のレベルに達したら入口弁14を閉鎖する。ここで言う所定のレベルの圧力とは、ユーザが定義することができるし、入力装置22を介して提供することができる。所定のレベルの圧力とは、例えば、200torrである。
【0032】
チャンバ12内部の気体が平衡状態に近づいていく所定の待機期間の後で、出口弁16が開放され、図3の112に示されているように、チャンバ12からある質量の気体が放出される。所定の待機期間は、ユーザが定義することができるし、入力装置22を介して提供することができる。所定の待機期間は、例えば、3秒である。出口弁16は、次に、図3の114に示されるように、放出された気体の質量がユーザが定義した所望の質量流量と等しくなったときに閉鎖される。出口弁16は、非常に短い時間だけ開放状態にある(例えば、100から500ミリ秒)。コントローラ24は、次に、出力装置26に放出された気体の質量を提供する。
【0033】
圧力が高い応用例の場合には、システム10の搬送チャンバ12内部の気体の温度は、温度プローブ20を用いて測定することができる。しかし、圧力が低く温度変化が高速である場合には、プローブを用いて温度を測定するのでは、正確な読み取り値を得るには十分な速度が備わっていない。圧力が低く温度変化が高速であるような場合には、気体温度を評価するリアルタイムの物理モデルが、以下で示すように用いられる。
【0034】
理想気体法則に基づく搬送チャンバ12の中の全質量mは、次の通りである。
【0035】
【数10】
【0036】
数式10では、ρは密度、Vは体積、Pは絶対圧力、Tは絶対温度、そして、Rは普遍気体定数(8.3145J/molK)である。
搬送チャンバ12内部の密度変化は、次の通りである。
【0037】
【数11】
【0038】
数式11では、Qoutは搬送チャンバ12からのフロー、ρSTPは標準温度及び圧力(STP)条件での気体密度である。
搬送チャンバ12内部での温度変化は次の通りである。
【0039】
【数12】
【0040】
数式12では、γは比熱であり、Nuはヌセルト(Nusslets)数であり、κは気体の熱伝導率であり、Cνは一定圧力における気体の比熱であり、lは前記搬送チャンバの特性長であり、TWは前記温度プローブ20によって提供されるチャンバ12の壁の温度である。
【0041】
出口フローQoutは、次の通りに評価される。
【0042】
【数13】
【0043】
チャンバ12から搬送された全質量Δmを計算するには、図1の温度プローブ20を用いるのではなく、数式13を数式12のQoutに代入し、時刻tにおけるチャンバ12の内部における気体温度T(t)を計算する。圧力トランスデューサ18が、時刻tにおけるチャンバ12内部の圧力P(t)を提供する。
【0044】
時刻t0から時刻t*までにチャンバ12から搬送された全質量Δmは、次のように計算される。
【0045】
【数14】
【0046】
図4は、時間を横軸として、図3の方法100が実行された場合の、図1のシステム10のチャンバ12内部の圧力P(t)のグラフである。図5は、時間を横軸として、図3の方法100が完了したときの、図1のシステム10のチャンバ12内部の圧力のグラフであり、チャンバの圧力P(t)が僅かに上昇し、出口弁16が閉鎖されると安定化する様子を示している。図6は、時間を横軸にとり、図3の方法100が実行された場合の、図1のシステム10のチャンバ12内部の計算された及び実際の状態を示すグラフである。特に、図6のグラフは、数式12を用いて計算された計算されたすなわちモデル温度Tmodelと、圧力トランスデューサ18によって提供されたチャンバ12内部の実際の圧力Pと、温度プローブ20によって提供されたチャンバ12の壁の実際の温度Twallと、数式14を用いて計算された搬送チャンバ12から搬送された気体の質量Mmodelと、数式12によって提供されたモデル温度Tmodelと、数式14を用いて計算され温度プローブ20によって壁の温度Twallが提供された場合の搬送チャンバ12から搬送された気体の質量Mwallと、を含む。
【0047】
これ以外の側面及び効果の中で、本発明は、半導体処理チャンバの中へパルス化された質量流量の前駆気体を搬送する新規で改善されたシステム及び方法を提供する。本発明による質量流量搬送システム及び方法は、プロセス・チャンバの中に流れ込む物質の量(質量)を実際に測定する。更に、本発明によるシステム及び方法は、ALDプロセスなどの半導体製造プロセスにおいて用いられる気相の質量の高度の反復可能で正確な量を提供する。
【0048】
この明細書で以上説明されている実施例は、限定を意味するものではなく、特許請求の範囲に記載されたより広い開示からその精神において逸脱することなく、この技術分野の当業者によって様々な修正、組合せ及び置換が可能である。
【図面の簡単な説明】
【0049】
【図1】本発明に従って構築されたパルス化された質量流量搬送システムの実施例の概略的な図解である。
【図2】図1のパルス化された質量流量搬送システムを2つ含むALDシステムの例示的な実施例の概略的な図解である。
【図3】本発明によるパルス化された質量流量を搬送する方法の実施例を図解する流れ図であって、この方法は、図1のパルス化された質量流量搬送システムを動作させるのに用いることができる。
【図4】図3の方法を動作させた際の、横軸を時間とする図1のシステムのチャンバ内部の圧力のグラフである。
【図5】図3の方法を完了した後の、横軸を時間とする図1のシステムのチャンバ内部の圧力のグラフである。
【図6】図3の方法を動作させた際の、横軸を時間とする図1のシステムのチャンバ内部の実際の圧力、温度及び質量と、モデル化された温度及び質量とのグラフである。
【図7】従来技術によって構築されたALDシステムの実施例の概略的な図解である。
【特許請求の範囲】
【請求項1】
所望の質量の気体を搬送するシステムであって、
チャンバと、
前記チャンバへの気体フローを制御する第1の弁と、
前記チャンバからの気体フローを制御する第2の弁と、
前記チャンバ内部の圧力の測定値を提供する圧力トランスデューサと、
このシステムから搬送される所望の質量の気体を提供する入力装置と、
前記第1及び第2の弁と前記圧力トランスデューサと前記入力装置とに接続されたコントローラであって、前記所望の質量の気体を前記入力装置を介して受け取り、前記第2の弁を閉鎖し、前記第1の弁を開放し、前記圧力トランスデューサからチャンバ圧力測定値を受け取り、前記チャンバ内部の圧力が所定のレベルに到達すると前記入口弁を閉鎖し、所定の待機期間を待機して前記チャンバ内部の気体が平衡状態に近づくことを可能にし、時刻t0において出口弁を開放し、放出された気体の質量が前記所望の質量と等しくなる時刻t*において前記出口弁を閉鎖するようにプログラムされているコントローラと、
を含むことを特徴とするシステム。
【請求項2】
請求項1記載のシステムにおいて、前記放出された質量Δmは、
【数1】
によって表され、ただし、m(t0)は時刻t0における搬送チャンバ内部の気体の質量であり、m(t*)は時刻t*における搬送チャンバ内部の気体の質量であり、Vは搬送チャンバの体積であり、Rは普遍気体定数(8.3145J/molK)であり、P(t0)は時刻t0におけるチャンバ内部の圧力であり、P(t*)は時刻t*におけるチャンバの中の圧力であり、T(t0)は時刻t0におけるチャンバの中の温度であり、T(t*)は時刻t*におけるチャンバの中の温度であることを特徴とするシステム。
【請求項3】
請求項2記載のシステムにおいて、前記搬送チャンバに固定され前記コントローラに接続された温度プローブを更に含んでおり、前記温度プローブはT(t0)及びT(t*)を前記コントローラに直接に提供することを特徴とするシステム。
【請求項4】
請求項3記載のシステムにおいて、前記搬送チャンバに固定され前記コントローラに接続された温度プローブを更に含んでおり、T(t0)及びT(t*)は、
【数2】
を用いて計算され、ρSTPは標準状態(STP)における気体密度であり、ρは前記気体の密度に等しく、Vは前記チャンバの体積であり、Qoutは前記搬送チャンバからの気体フローであり、Tは絶対温度に等しく、γは比熱であり、Nuはヌセルト数であり、κは気体の熱伝導率であり、Cνは一定圧力における気体の比熱であり、lは前記搬送チャンバの特性長であり、TWは前記温度プローブによって提供されるチャンバの壁の温度であることを特徴とするシステム。
【請求項5】
請求項4記載のシステムにおいて、前記搬送チャンバからの気体フローは、
【数3】
を用いて計算されることを特徴とするシステム。
【請求項6】
請求項1記載のシステムにおいて、前記所定のレベルの圧力は前記入力装置を介して提供されることを特徴とするシステム。
【請求項7】
請求項1記載のシステムにおいて、前記所定の待機期間は前記入力装置を介して提供されることを特徴とするシステム。
【請求項8】
請求項1記載のシステムにおいて、前記コントローラに接続された出力装置を更に備えており、前記コントローラは前記出力装置に放出された気体の質量を提供するようにプログラムされていることを特徴とするシステム。
【請求項9】
請求項1記載のシステムにおいて、前記第2の弁を介して前記搬送チャンバに接続されたプロセス・チャンバを更に含むことを特徴とするシステム。
【請求項10】
請求項1記載のシステムにおいて、前記圧力トランスデューサは約1から5ミリ秒の応答時間を有することを特徴とするシステム。
【請求項11】
請求項1記載のシステムにおいて、前記第2の弁は約1から5ミリ秒の応答時間を有することを特徴とするシステム。
【請求項12】
所望の質量の気体を搬送する方法であって、
チャンバを提供するステップと、
前記チャンバから搬送される所望の質量の気体を受け取るステップと、
前記チャンバからの気体フローを阻止するステップと、
前記チャンバへの気体フローを許容するステップと、
前記チャンバへの圧力を測定するステップと、
前記チャンバ内部の圧力が所定のレベルに到達したら前記チャンバへの更なる気体フローを阻止するステップと、
所定の待機期間を待機して前記チャンバ内部の気体が平衡状態に近づくことを可能にするステップと、
時刻t0において前記チャンバからの気体フローを許容するステップと、
放出された気体の質量が前記所望の質量と等しくなる時刻t*において前記チャンバからの気体フローを停止するステップと、
を含むことを特徴とする方法。
【請求項13】
請求項12記載の方法において、前記放出された質量Δmは、
【数4】
によって表され、ただし、m(t0)は時刻t0における搬送チャンバ内部の気体の質量であり、m(t*)は時刻t*における搬送チャンバ内部の気体の質量であり、Vは搬送チャンバの体積であり、Rは普遍気体定数(8.3145J/molK)であり、P(t0)は時刻t0におけるチャンバ内部の圧力であり、P(t*)は時刻t*におけるチャンバの中の圧力であり、T(t0)は時刻t0におけるチャンバの中の温度であり、T(t*)は時刻t*におけるチャンバの中の温度であることを特徴とする方法。
【請求項14】
請求項13記載の方法において、前記搬送チャンバの壁の温度を測定するステップを更に含み、前記壁の温度測定はT(t0)及びT(t*)を前記コントローラに直接に提供することを特徴とする方法。
【請求項15】
請求項13記載の方法において、前記搬送チャンバの壁の温度を測定するステップを更に含み、T(t0)及びT(t*)は、
【数5】
を用いて計算され、ρSTPは標準状態(STP)における気体密度であり、ρは前記気体の密度に等しく、Vは前記チャンバの体積であり、Qoutは前記搬送チャンバからの気体フローであり、Tは絶対温度に等しく、γは比熱であり、Nuはヌセルト数であり、κは気体の熱伝導率であり、Cνは一定圧力における気体の比熱であり、lは前記搬送チャンバの特性長であり、TWは前記温度プローブによって提供されるチャンバの壁の温度であることを特徴とする方法。
【請求項16】
請求項15記載の方法において、前記搬送チャンバからの気体フローは、
【数6】
を用いて計算されることを特徴とする方法。
【請求項17】
請求項12記載の方法において、前記所定のレベルの圧力は前記入力装置を介して受け取られることを特徴とする方法。
【請求項18】
請求項12記載の方法において、前記所定の待機期間は前記入力装置を介して受け取られることを特徴とする方法。
【請求項19】
請求項12記載の方法において、前記出力装置に放出された気体の質量を提供するステップを更に含むことを特徴とする方法。
【請求項20】
請求項12記載の方法において、プロセス・チャンバを前記搬送チャンバに接続し前記搬送チャンバから放出された質量の気体を受け取るステップを更に含むことを特徴とする方法。
【請求項1】
所望の質量の気体を搬送するシステムであって、
チャンバと、
前記チャンバへの気体フローを制御する第1の弁と、
前記チャンバからの気体フローを制御する第2の弁と、
前記チャンバ内部の圧力の測定値を提供する圧力トランスデューサと、
このシステムから搬送される所望の質量の気体を提供する入力装置と、
前記第1及び第2の弁と前記圧力トランスデューサと前記入力装置とに接続されたコントローラであって、前記所望の質量の気体を前記入力装置を介して受け取り、前記第2の弁を閉鎖し、前記第1の弁を開放し、前記圧力トランスデューサからチャンバ圧力測定値を受け取り、前記チャンバ内部の圧力が所定のレベルに到達すると前記入口弁を閉鎖し、所定の待機期間を待機して前記チャンバ内部の気体が平衡状態に近づくことを可能にし、時刻t0において出口弁を開放し、放出された気体の質量が前記所望の質量と等しくなる時刻t*において前記出口弁を閉鎖するようにプログラムされているコントローラと、
を含むことを特徴とするシステム。
【請求項2】
請求項1記載のシステムにおいて、前記放出された質量Δmは、
【数1】
によって表され、ただし、m(t0)は時刻t0における搬送チャンバ内部の気体の質量であり、m(t*)は時刻t*における搬送チャンバ内部の気体の質量であり、Vは搬送チャンバの体積であり、Rは普遍気体定数(8.3145J/molK)であり、P(t0)は時刻t0におけるチャンバ内部の圧力であり、P(t*)は時刻t*におけるチャンバの中の圧力であり、T(t0)は時刻t0におけるチャンバの中の温度であり、T(t*)は時刻t*におけるチャンバの中の温度であることを特徴とするシステム。
【請求項3】
請求項2記載のシステムにおいて、前記搬送チャンバに固定され前記コントローラに接続された温度プローブを更に含んでおり、前記温度プローブはT(t0)及びT(t*)を前記コントローラに直接に提供することを特徴とするシステム。
【請求項4】
請求項3記載のシステムにおいて、前記搬送チャンバに固定され前記コントローラに接続された温度プローブを更に含んでおり、T(t0)及びT(t*)は、
【数2】
を用いて計算され、ρSTPは標準状態(STP)における気体密度であり、ρは前記気体の密度に等しく、Vは前記チャンバの体積であり、Qoutは前記搬送チャンバからの気体フローであり、Tは絶対温度に等しく、γは比熱であり、Nuはヌセルト数であり、κは気体の熱伝導率であり、Cνは一定圧力における気体の比熱であり、lは前記搬送チャンバの特性長であり、TWは前記温度プローブによって提供されるチャンバの壁の温度であることを特徴とするシステム。
【請求項5】
請求項4記載のシステムにおいて、前記搬送チャンバからの気体フローは、
【数3】
を用いて計算されることを特徴とするシステム。
【請求項6】
請求項1記載のシステムにおいて、前記所定のレベルの圧力は前記入力装置を介して提供されることを特徴とするシステム。
【請求項7】
請求項1記載のシステムにおいて、前記所定の待機期間は前記入力装置を介して提供されることを特徴とするシステム。
【請求項8】
請求項1記載のシステムにおいて、前記コントローラに接続された出力装置を更に備えており、前記コントローラは前記出力装置に放出された気体の質量を提供するようにプログラムされていることを特徴とするシステム。
【請求項9】
請求項1記載のシステムにおいて、前記第2の弁を介して前記搬送チャンバに接続されたプロセス・チャンバを更に含むことを特徴とするシステム。
【請求項10】
請求項1記載のシステムにおいて、前記圧力トランスデューサは約1から5ミリ秒の応答時間を有することを特徴とするシステム。
【請求項11】
請求項1記載のシステムにおいて、前記第2の弁は約1から5ミリ秒の応答時間を有することを特徴とするシステム。
【請求項12】
所望の質量の気体を搬送する方法であって、
チャンバを提供するステップと、
前記チャンバから搬送される所望の質量の気体を受け取るステップと、
前記チャンバからの気体フローを阻止するステップと、
前記チャンバへの気体フローを許容するステップと、
前記チャンバへの圧力を測定するステップと、
前記チャンバ内部の圧力が所定のレベルに到達したら前記チャンバへの更なる気体フローを阻止するステップと、
所定の待機期間を待機して前記チャンバ内部の気体が平衡状態に近づくことを可能にするステップと、
時刻t0において前記チャンバからの気体フローを許容するステップと、
放出された気体の質量が前記所望の質量と等しくなる時刻t*において前記チャンバからの気体フローを停止するステップと、
を含むことを特徴とする方法。
【請求項13】
請求項12記載の方法において、前記放出された質量Δmは、
【数4】
によって表され、ただし、m(t0)は時刻t0における搬送チャンバ内部の気体の質量であり、m(t*)は時刻t*における搬送チャンバ内部の気体の質量であり、Vは搬送チャンバの体積であり、Rは普遍気体定数(8.3145J/molK)であり、P(t0)は時刻t0におけるチャンバ内部の圧力であり、P(t*)は時刻t*におけるチャンバの中の圧力であり、T(t0)は時刻t0におけるチャンバの中の温度であり、T(t*)は時刻t*におけるチャンバの中の温度であることを特徴とする方法。
【請求項14】
請求項13記載の方法において、前記搬送チャンバの壁の温度を測定するステップを更に含み、前記壁の温度測定はT(t0)及びT(t*)を前記コントローラに直接に提供することを特徴とする方法。
【請求項15】
請求項13記載の方法において、前記搬送チャンバの壁の温度を測定するステップを更に含み、T(t0)及びT(t*)は、
【数5】
を用いて計算され、ρSTPは標準状態(STP)における気体密度であり、ρは前記気体の密度に等しく、Vは前記チャンバの体積であり、Qoutは前記搬送チャンバからの気体フローであり、Tは絶対温度に等しく、γは比熱であり、Nuはヌセルト数であり、κは気体の熱伝導率であり、Cνは一定圧力における気体の比熱であり、lは前記搬送チャンバの特性長であり、TWは前記温度プローブによって提供されるチャンバの壁の温度であることを特徴とする方法。
【請求項16】
請求項15記載の方法において、前記搬送チャンバからの気体フローは、
【数6】
を用いて計算されることを特徴とする方法。
【請求項17】
請求項12記載の方法において、前記所定のレベルの圧力は前記入力装置を介して受け取られることを特徴とする方法。
【請求項18】
請求項12記載の方法において、前記所定の待機期間は前記入力装置を介して受け取られることを特徴とする方法。
【請求項19】
請求項12記載の方法において、前記出力装置に放出された気体の質量を提供するステップを更に含むことを特徴とする方法。
【請求項20】
請求項12記載の方法において、プロセス・チャンバを前記搬送チャンバに接続し前記搬送チャンバから放出された質量の気体を受け取るステップを更に含むことを特徴とする方法。
【図1】

【図2】
【図3】
【図4】
【図5】
【図6】
【図7】
【図2】
【図3】
【図4】
【図5】
【図6】
【図7】
【公表番号】特表2007−535617(P2007−535617A)
【公表日】平成19年12月6日(2007.12.6)
【国際特許分類】
【出願番号】特願2007−508338(P2007−508338)
【出願日】平成17年2月23日(2005.2.23)
【国際出願番号】PCT/US2005/005690
【国際公開番号】WO2005/103328
【国際公開日】平成17年11月3日(2005.11.3)
【出願人】(592053963)エム ケー エス インストルメンツ インコーポレーテッド (114)
【氏名又は名称原語表記】MKS INSTRUMENTS,INCORPORATED
【Fターム(参考)】
【公表日】平成19年12月6日(2007.12.6)
【国際特許分類】
【出願日】平成17年2月23日(2005.2.23)
【国際出願番号】PCT/US2005/005690
【国際公開番号】WO2005/103328
【国際公開日】平成17年11月3日(2005.11.3)
【出願人】(592053963)エム ケー エス インストルメンツ インコーポレーテッド (114)
【氏名又は名称原語表記】MKS INSTRUMENTS,INCORPORATED
【Fターム(参考)】
[ Back to top ]