
パルス状の気体スラグおよび大域的曝気による膜洗浄
本出願の態様および実施形態は、流体を処理するためのシステムおよび方法ならびに流体の処理に使用される膜モジュールの洗浄のためのシステムおよび方法への手引きである。膜ろ過システムおよび膜ろ過システムを動作させる方法が、本明細書において開示される。膜ろ過システムが、供給物タンクに配置された複数の膜モジュールを備え、少なくとも1つの膜モジュールが、この膜モジュールの下部ヘッダの下方に配置された気体スラグ発生装置を有しており、この気体スラグ発生装置が、この少なくとも1つの膜モジュールの膜の表面に沿って気体スラグをもたらすように構成および配置されている。さらに膜ろ過システムは、気体スラグ発生装置へ気体を供給する曝気システムとは独立に動作するように構成され、供給物タンクを巡る流体の大域的循環流を生じさせるように構成および配置された大域的曝気システムを備える。
【発明の詳細な説明】
【技術分野】
【0001】
本開示は、膜ろ過システムに関し、さらに詳しくは、そのようなシステムにおいて使用される膜を、気体スラグ(gas slugs)による洗浄と、膜が沈められた供給物容器における供給物の大域的曝気との併用によって、効果的に洗浄するために利用される装置および方法に関する。
【背景技術】
【0002】
汚水の処理における膜の重要性が、急速に高まっている。膜プロセスを汚水の効果的な三次処理として使用することができ、良質な廃水をもたらすことができることが、今や広く知られている。しかしながら、資本および運転コストが、法外に高くなる可能性がある。膜モジュールが大型の供給物タンクに沈められ、ろ液が膜のろ液側に加えられる吸引または重力送りによって集められる浸漬式膜プロセスの出現により、生物学的プロセスおよび物理学的プロセスを1つの段へ組み合わせる膜バイオリアクタが、より小型、効率的、かつ経済的になることが期待される。その万能性ゆえに、膜バイオリアクタのサイズは、家庭用(浄化槽システムなど)から地域共同体および大規模汚水処理までに及ぶことができる。
【0003】
膜ろ過プロセスの成功は、効果的かつ効率的な膜洗浄方法の採用に大きく依存する。一般的に使用される物理的な洗浄方法として、透過液または気体あるいはそれらの組合せを使用するバックウォッシュ(バックパルス、バックフラッシュ)や、液中の気泡の形態の気体を使用する膜表面のスクラブ洗浄(scrubbing)またはスカーリング(scouring)が挙げられる。典型的には、気体スカーリングシステムにおいては、気体が、通常はブロアによって膜モジュールが沈められている液体系へ気泡を形成すべく注入される。次いで、そのようにして形成された気泡が上方へ移動して膜の表面をスクラブし、膜の表面に形成された付着物を取り除く。生じるせん断力は、初期の気泡の速度、気泡のサイズ、および気泡によって加えられる結果としての力に大きく依存する。スクラブの効果を向上させるために、より多くの気体を供給することができる。しかしながら、この方法は、大量のエネルギーを消費する。さらには、固形物の濃度が高い環境においては、気体流通システムが、脱水された固形物によって徐々に詰まる可能性があり、あるいは気体の流れが誤って停止した場合に単純に詰まる可能性がある。
【0004】
さらに、固形物の濃度が高い環境においては、清浄なろ液が膜を通過し、固形物を多く含む保持液(retentate)が残されるろ過の際に、膜の表面の付近の固形物の濃度の分極が顕著になり、膜を通過する透過液の流れの抵抗が大きくなる可能性がある。これらの問題の一部は、膜の洗浄に二相(気体−液体)の流れを使用することによって対処されている。
【0005】
周期的な仕方で気泡を供給する周期的曝気システムが、エネルギーの消費を減らしつつ、依然として膜の表面を効果的にスクラブするための充分な気体を供給するとされている。そのような周期的な動作をもたらすために、そのようなシステムは、通常は、複雑なバルブ機構および制御装置を必要とし、必要とされる複雑なバルブおよび切替えの機構について、初期のシステムのコストおよび継続的な保守のコストが高くなる傾向にある。さらに、周期の頻度が、大規模なシステムにおいて機能する機械的なバルブによって制限される。さらに、周期的曝気は、膜の表面の回復において効果的ではないことが明らかになっている。
【発明の概要】
【発明が解決しようとする課題】
【0006】
本明細書に開示される態様および実施形態は、従来技術の欠点を克服し、少なくとも従来技術の欠点の一部を改善し、あるいは少なくとも公衆に有用な代案を提供しようと試みる。
【課題を解決するための手段】
【0007】
本開示の一態様により、膜ろ過システムが提供される。膜ろ過システムが、供給物タンクに配置された複数の膜モジュールを備え、該複数の膜モジュールのうちの少なくとも1つが、該膜モジュールの下部ヘッダの下方に配置された気体スラグ発生装置を有しており、該気体スラグ発生装置が、該少なくとも1つの膜モジュール内の膜の表面に沿って気体スラグをもたらすように構成および配置されている。さらに膜ろ過システムは、気体スラグ発生装置へ気体を供給する曝気システムとは独立に動作するように構成され、供給物タンクを巡る流体の大域的循環流を生じさせるように構成および配置された大域的曝気システムを備える。
【0008】
いくつかの実施形態においては、このシステムが、複数の膜モジュールからの透過液の流れを監視するように構成された流量センサと、流量センサに連絡し、流量が第1の量よりも多い旨を示す流量センサからの信号の受信に応答して、大域的曝気システムを作動させ、流量が第2の量よりも少ない旨を示す流量センサからの信号の受信に応答して、大域的曝気システムを停止させるように構成されたコントローラとをさらに備える。
【0009】
いくつかの実施形態においては、複数の膜モジュールがラックに配置され、大域的曝気システムが、膜モジュールのラックの間に気体を届けるように構成された気体拡散器を備えおり、いくつかの実施形態においては、気体拡散器が、同じラック内の隣り合う膜モジュールの間に気体を届けるように構成されている。
【0010】
いくつかの実施形態においては、気体拡散器が、膜モジュールの下方に気体を届けるように構成されている。
【0011】
いくつかの実施形態においては、コントローラが、流量が1平方メートルのろ過膜表面積につき約25リットル/時を超える場合に、大域的曝気システムを作動させるように構成されており、いくつかの実施形態においては、コントローラが、流量が1平方メートルのろ過膜表面積につき約25リットル/時を下回る場合に、大域的曝気システムを停止させるように構成されている。
【0012】
いくつかの実施形態においては、本システムが、膜モジュールのうちの少なくとも1つの膜モジュールの膜をまたぐ圧力を監視するように構成された膜横断圧力センサと、膜横断圧力センサに連絡し、膜をまたぐ圧力が第1の大きさよりも大きい旨を示す膜横断圧力センサからの信号の受信に応答して、大域的曝気システムを作動させ、膜をまたぐ圧力が第2の大きさよりも小さい旨を示す膜横断圧力センサからの信号の受信に応答して、大域的曝気システムを停止させるように構成されたコントローラとをさらに備える。
【0013】
いくつかの実施形態においては、本システムが、供給物タンクへの供給物の流量を監視するように構成された供給物流量センサと、供給物流量センサに連絡し、供給物の流量が第1の量よりも多い旨を示す供給物流量センサからの信号の受信に応答して、大域的曝気システムを作動させ、供給物の流量が第2の量よりも少ない旨を示す供給物流量センサからの信号の受信に応答して、大域的曝気システムを停止させるように構成されたコントローラとをさらに備える。
【0014】
いくつかの実施形態においては、本システムが、選択された時刻に大域的曝気システムを作動および停止させるように構成されたタイマをさらに備える。
【0015】
本開示の別の態様によれば、ろ過の方法が提供される。本方法は、複数の膜モジュールが内部に配置されているろ過容器であって、各々の膜モジュールに該膜モジュールの下端の下方に配置された気体スラグ発生装置が組み合わせられているろ過容器へ、液体媒体を流すステップと、複数の膜モジュールから透過液を取り出すステップと、各々の気体スラグ発生装置に組み合わせられた膜モジュールへ該気体スラグ発生装置から気体スラグを周期的に届け、気体スラグを各々の膜モジュール内の膜の表面に沿って通過させ、膜の表面から付着物を除去するステップと、膜モジュールからの透過液の流れ、膜モジュールが沈められているろ過容器への供給物の流れ、および少なくとも1つの膜モジュールの膜をまたぐ膜横断圧力のうちの少なくとも1つから導出される信号に応答して、ろ過容器を巡る大域的循環流を開始および停止させるステップとを含んでいる。
【0016】
いくつかの実施形態においては、複数の膜モジュールの各々への気体スラグの送出の間の時間期間が、無作為に決定される。
【0017】
いくつかの実施形態においては、本方法が、各々の気体スラグ発生装置に基本的に一定の気体の供給をもたらすステップをさらに含んでいる。
【0018】
いくつかの実施形態においては、供給物の大域的循環流の開始が、気体スラグ発生装置とは独立に動作する曝気システムへの気体の導入を含んでいる。
【0019】
いくつかの実施形態においては、気体スラグ発生装置および曝気システムに、共通の供給源からの気体が供給される。
【0020】
いくつかの実施形態においては、供給物の大域的循環流の開始が、気体のパルス状の流れの開始をさらに含んでいる。
【0021】
いくつかの実施形態においては、供給物の大域的循環流の開始が、複数の膜モジュールのうちの隣同士の膜モジュールの間への気体の導入を含んでいる。
【0022】
いくつかの実施形態においては、気体スラグの体積が無作為である。
【0023】
いくつかの実施形態においては、第1の膜モジュールへの気体スラグの放出のタイミングが、第2の膜モジュールへの気体スラグの放出のタイミングとは独立である。
【0024】
添付の図面は、必ずしも比例尺で描かれていない。図面において、種々の図に描かれている同一またはほぼ同一の構成要素の各々は、同様の符号によって示されている。分かりやすくするために、すべての図においてすべての構成要素に符号が付されているわけではない。
【図面の簡単な説明】
【0025】
【図1】本発明の一実施形態による膜モジュールの簡単な概略の側面断面図である。
【図2】パルス作動段階における図1のモジュールを示している。
【図3】パルス状の二相気体/液体流の段階の完了後の図1のモジュールを示している。
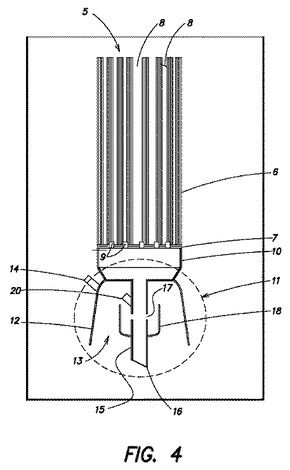
【図4】本発明の第2の実施形態による膜モジュールの簡単な概略の側面断面図である。
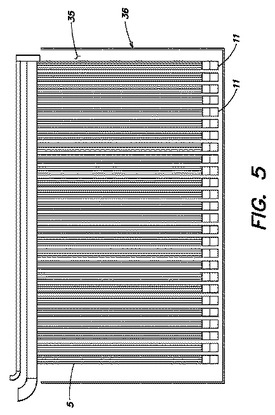
【図5】図1の実施形態に示したタイプの膜モジュールのアレイの簡単な概略の側面断面図である。
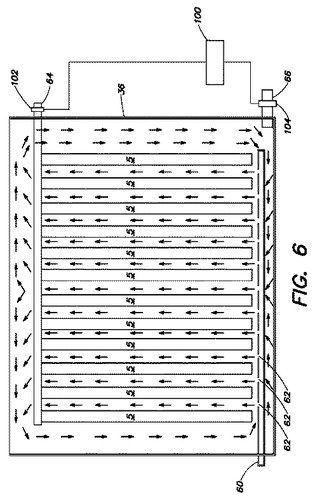
【図6】図1の実施形態に示した形式の膜モジュールのアレイの別の実施形態の簡単な概略の側面断面図である。
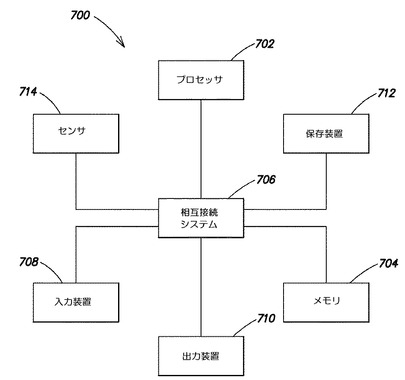
【図7】1つ以上の実施形態において利用することができるコンピュータ化された制御システムを示している。
【図8】図1の実施形態に示したタイプの膜モジュールのアレイの部分切断の等角投影図である。
【図9】図8の膜モジュールのアレイの一部分の簡単な概略の側面断面図である。
【図10】本発明の第3の実施形態による水処理システムの簡単な概略の側面断面図である。
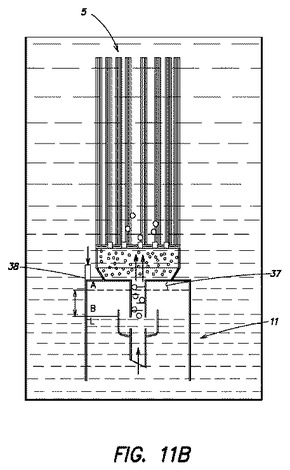
【図11A】膜モジュールの簡単な概略の側面断面図であり、気体スラグ発生装置の内部の液体の動作時の水位を示している。
【図11B】膜モジュールの簡単な概略の側面断面図であり、気体スラグ発生装置の内部の液体の動作時の水位を示している。
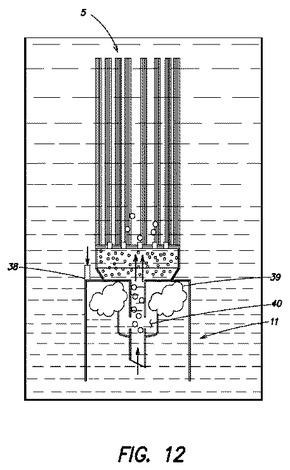
【図12】図1の実施形態に示したタイプの膜モジュールの簡単な概略の側面断面図であり、気体スラグ発生装置におけるスラッジの蓄積を示している。
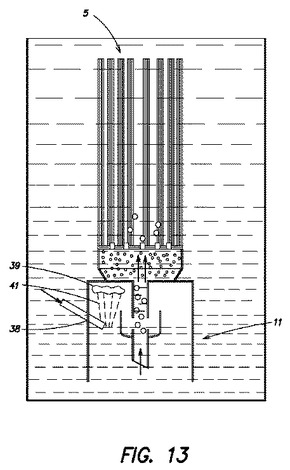
【図13】スラッジ除去プロセスの一実施形態を示している膜モジュールの簡単な概略の側面断面図である。
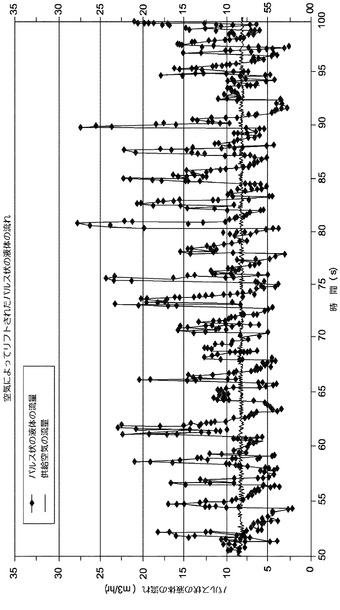
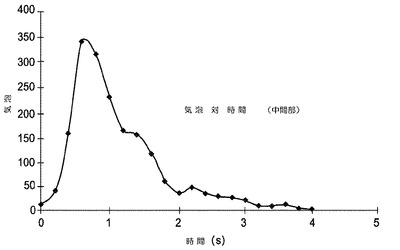
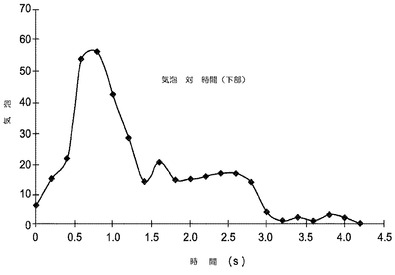
【図14】一実施例によるパルス状の液体の流れのパターンおよび供給空気の流量の時間に対するグラフである。
【図15】時間に対する膜透過率のグラフであり、気体リフト装置および本明細書に開示の実施形態による気体スラグ発生装置を使用して洗浄効率を比較している。
【図16】管内の気体の流れの種々の形態の概略図を示している。
【図17A】管を通って移動する気体スラグの側面図を示している。
【図17B】管を通って移動する気体スラグの側面図を示している。
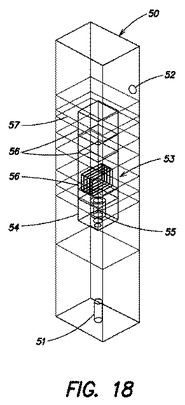
【図18】スラグ流の特徴を実証するための実施例において使用される試験用の膜モジュールの概略等角投影図を示している。
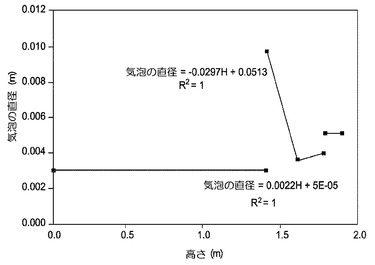
【図19】図18の試験モジュールにおける高さに対する気泡の直径のグラフを示している。
【図20】図18の試験装置の膜ファイバを通って移動する気体スラグの側面の写真である。
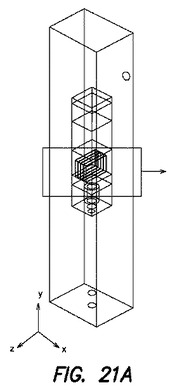
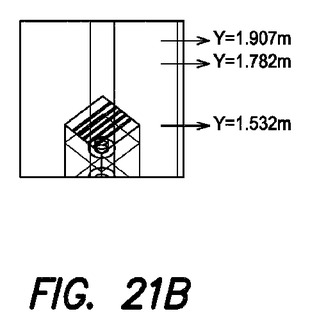
【図21A】図18の試験装置および3つの異なる高さ(Y)の位置での実験および計算結果の比較が行われる試験モジュールのガラス壁から20mmの平面を示している。
【図21B】図18の試験装置および3つの異なる高さ(Y)の位置での実験および計算結果の比較が行われる試験モジュールのガラス壁から20mmの平面を示している。
【図22A】スラグ流の例において、シミュレーションおよび実験による水の速度の値の時間に対するグラフを示している。
【図22B】スラグ流の例において、シミュレーションおよび実験による水の速度の値の時間に対するグラフを示している。
【図22C】スラグ流の例において、シミュレーションおよび実験による水の速度の値の時間に対するグラフを示している。
【図23A】気体/液体流のパルスの際の図18の試験装置内の種々の高さにおける気泡のサイズ分布のグラフを示している。
【図23B】気体/液体流のパルスの際の図18の試験装置内の種々の高さにおける気泡のサイズ分布のグラフを示している。
【図23C】気体/液体流のパルスの際の図18の試験装置内の種々の高さにおける気泡のサイズ分布のグラフを示している。
【図24A】気体/液体流のパルスの際の図18の試験装置内の種々の高さにおける気泡のサイズの時間に対するグラフを示している。
【図24B】気体/液体流のパルスの際の図18の試験装置内の種々の高さにおける気泡のサイズの時間に対するグラフを示している。
【図24C】気体/液体流のパルスの際の図18の試験装置内の種々の高さにおける気泡のサイズの時間に対するグラフを示している。
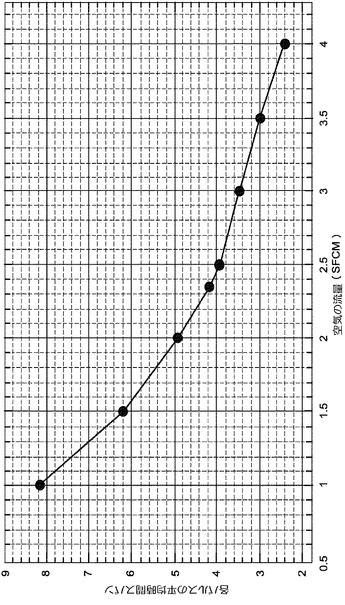
【図25】図18の装置における気体液体流の各々のパルスの平均時間スパンの空気の流量に対するグラフを示している。
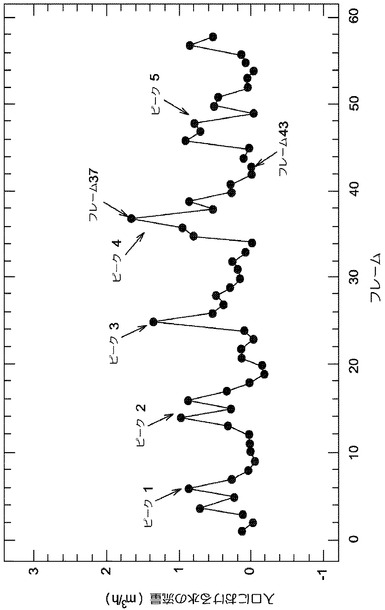
【図26】気体リフト装置への入口水量について、観察期間中のカメラフレームによる時間に対するグラフを示している。
【発明を実施するための形態】
【0026】
本発明の適用は、以下の説明に記載され、あるいは図面に示される構成の詳細および構成要素の配置に限られない。本発明について、他の実施形態も可能であり、本発明を、さまざまな方法で実施または実行することが可能である。さらに、本明細書において使用される表現および用語は、説明を目的とするものであり、本発明を限定するものとして解釈されてはならない。本明細書において、「・・・を備える(including)」、「・・・から構成される(comprising)」、「・・・を有する(having)」、「・・・を含む(containing)」、「・・・を必要とする(involving)」、およびこれらの変種の使用は、「・・・」に挙げられるアイテムおよびその均等物を含み、さらに追加のアイテムを含むことを意味する。
【0027】
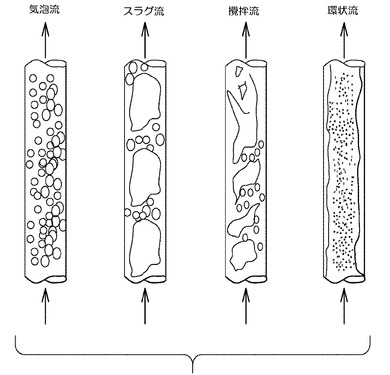
本明細書に開示される種々の態様および実施形態によれば、供給物タンクまたは容器において液体媒体をろ過する方法が提供される。液体媒体として、例えば水、汚水、溶媒、産業における流出液、人間の消費活動のために準備されるべき流体、あるいは分離が望まれる成分を含んでいる種々の液状の廃棄物の流れの形態を挙げることができる。本明細書に開示される種々の態様および実施形態には、液体媒体に沈められた膜モジュールを洗浄するための装置および方法が含まれる。いくつかの態様において、膜モジュールに、膜モジュール内の膜の表面を通過する気体のスラグを含んでいる無作為に生成される間欠的またはパルス状の流体の流れがもたらされ、膜から付着物を取り除くとともに、固形物の濃度の分極を減少させる。「気体スラグの流れ」の意味するところ、および他の種類の二相気体液体流が、図16に示されている。膜モジュールをこすり洗うべくもたらされる気体スラグと同時に、供給物タンクの全体にわたる供給液体の大域的循環を生じさせるように構成された大域的曝気のシステムが用意される。
【0028】
図面を参照すると、図1〜図3が、一実施形態による膜モジュールの構成が示されている。
【0029】
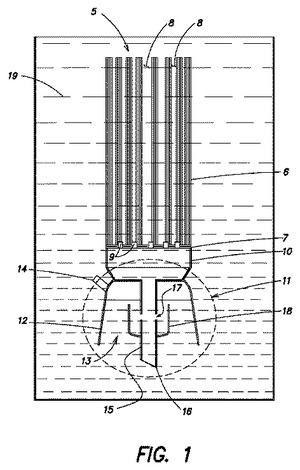
膜モジュール5は、下部ポッティングヘッド7に取り付けられ、かつこれから延びている複数の透過性の中空ファイバ膜の束6を備えている。この実施形態においては、束が、束6の間に空間8をもたらすように分けられている。モジュール5において、任意の所望の膜の配置を使用できることを、理解できる。下部ポッティングヘッド7の下方に配置された分配チャンバ10からの流体の流れを通すことができるよう、下部ポッティングヘッド7にいくつかの開口9が設けられている。
【0030】
気体スラグ発生装置11が、分配チャンバ10の下方に設けられ、分配チャンバ10に流体連通している。気体スラグ発生装置11は、下端13が開いた逆さの気体収集チャンバ12と、上端の付近の気体導入ポート14とを備えている。中央のライザ管15が、気体収集チャンバ12を貫いて延び、分配チャンバ10の底部へ流体接続している一方で、下端16において開いている。ライザ管15は、その全長の途中に1つ以上の開口17を備えている。管状のトラフ18が、開口17の下方の位置においてライザ管15から上方へ、およびこれの周囲に延びている。いくつかの実施形態においては、気体スラグ発生装置が、各々の膜モジュールについて設けられているのではなく、他の実施形態においては、複数の膜モジュールに、同じ気体スラグ発生装置から気体スラグが供給される。
【0031】
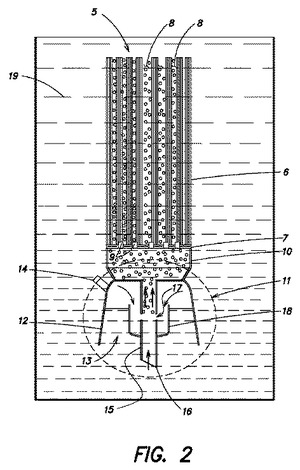
使用時、モジュール5が、液体の供給物19に沈められ、加圧気体の供給源が、基本的に連続的に気体導入ポート14へ適用される。本明細書において使用されるとき、「基本的に連続的」または「基本的に一定」の流れは、流量に生じうる時折の瞬間的な中断または減少を除き、モジュールが動作しているあいだ連続的である流れを意味する。気体が、逆さの気体収集チャンバ12の供給液体19を、開口17の高さに達するまで徐々に置き換える。この時点で、図2に示されているように、気体が開口17を横切る液体のシールを破り、開口17を通り、中央のライザ管15を通って上方へ殺到し、分配チャンバ10を通って膜モジュール5の底部へ流れる気体スラグを生成する。いくつかの実施形態においては、気体の急激な殺到により、ライザ管15の底部の開口16を通って液体も吸い込まれ、高速な二相気体/液体流がもたらされる。次いで、気体スラグおよび/または二相気体/液体パルスが、開口9を通って流れ、膜6の表面をこすり洗う。トラフ18が、開口17の即座の再シーリングを防止し、初期のパルスの後の短い期間にわたる気体/液体混合物の連続的な流れを可能にする。
【0032】
いくつかの実施形態によれば、気体の初期の殺到が、液体の移動の2つの段階、排出および吸引をもたらす。排出段階は、気体スラグがライザ管15へ最初に放出されるときに生じ、気体および液体をライザ管15を通って急激に排出し、次いで膜モジュール5を通って排出して、膜の表面に効果的な洗浄作用を生み出す強力な浮力を生成する。排出段階に、吸引段階またはサイフォン段階が続き、吸引段階またはサイフォン段階においては、ライザ管15から出る急激な気体の流れゆえに、密度の差に起因した圧力の一時的な低下が生じ、結果として液体がライザ管15の底部16を通って吸い込まれる。したがって、初期の急激な二相気体/液体流に、やはり開口17を通ってさらなる気体を吸い込みうる減少した液体の流れが続く。他の実施形態においては、気体スラグが、吸引段階またはサイフォン段階を伴わずに生成される。
【0033】
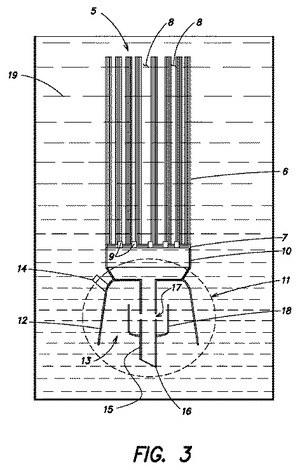
次いで、気体収集チャンバ12が、図3に示されるとおり供給液体で再び満たされ、プロセスが再び始まり、結果として、さらなる気体スラグのパルスまたはモジュール5内の膜6の二相気体/液体による洗浄が生じる。プロセスの比較的制御されていない性質ゆえに、パルスの頻度および継続時間は、一般に無作為である。
【0034】
図4が、図1〜図3の実施形態のさらなる変形例を示している。この実施形態においては、間欠的なパルス状の気体スラグまたは二相気体/液体流によって補われる一定の気体/液体の流れをモジュール5を通って生じさせるために、パルス状の気体スラグまたはパルス状の二相気体/液体流に加えて、気体の定常状態の供給が、ポート20においてライザ管15の上部または下部へ送り込まれる混成の構成がもたらされている。
【0035】
図5が、図1〜図3の実施形態に関して説明したタイプのモジュール35および気体スラグ発生装置11のアレイを示している。モジュール5が、供給物タンク36に配置されている。動作時、各々の気体スラグ発生装置11によって生成される気泡のパルスが、各々のモジュール5について無作為に生じ、供給物タンク36内にパルス状の気泡の発生の全体として無作為な分布を生じさせる。これにより、供給物タンク36内の液体供給物について、不断でありながら無作為または無秩序に変化する攪拌が生じる。各々の気体スラグ発生装置によって放出される一連の気体スラグは、本明細書において、周期的に生じるものとして説明される。本明細書において使用されるとき、「周期的」に生成される気体パルスまたは「周期的」に放出される気体パルスという用語は、一定の速度での気体パルスの生成または放出という意味に限られない。「周期的」な生成または放出は、無作為な時間間隔で生じる生成または放出の事象も包含する。
【0036】
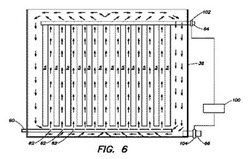
供給物タンク36におけるパルス状の気泡の発生の全体として無作為な分布が、いくつかの実施形態において、供給物タンク36を巡る供給液体の大域的循環を乱すことが観測されている。供給液体の大域的循環の乱れは、パルス状の気泡が気体スラグの形態である実施形態において、特に顕著である可能性がある。いくつかの実施形態においては、供給物が、膜モジュール35のアレイを通って上方へ供給物タンクを通って循環し、次いで膜モジュールのアレイの周囲を下方へ、供給物タンクの壁の近傍を循環することが好ましい。この大域的循環の流れが、図6において矢印によって示されている。図6が、膜ろ過装置の実施形態の一部分の断面であり、供給物の流れが、実際には図示されている壁ならびにこの断面図には表わされていない他の壁に沿って下方へ循環すると考えられることに、注意すべきである。いくつかの実施形態においては、供給物中の粒子状物質および/または他の汚染物質が、この循環の流れが生じない場合と比べて、より一様に供給物タンクの全体に分布するよう、この大域的循環の供給の流れを維持することが望ましい。他の実施形態においては、供給物タンクにおける粒子状物質および/または他の汚染物質のより良好な分布を促進するために、既存の供給物の循環流の速度を高めることが望ましい。いくつかの実施形態においては、供給物の大域的循環流が、膜ファイバ表面の近傍からの粒子および/または他の汚染物質の除去を促進する。いくつかの実施形態においては、供給物の大域的循環流を維持することが、より重要になる。より高い運転率(透過液の流束がより大きい)においては、より低い運転率と比べ、粒子が膜ファイバの表面の近傍により早期に蓄積する傾向になる可能性があり、したがって供給物の大域的循環流などの機構について、これらの粒子を除去および/または再分散させるべく作動することが、さらに望まれる。
【0037】
図6に示されているように、いくつかの実施形態においては、多数の曝気開口62を有する曝気管60などの気体拡散器を、膜モジュール5のアレイの下方において供給物タンク36に設けることができる。図6に示されるように、曝気開口は、図示の膜モジュールのラックにおいて、隣り合う膜モジュールの下方かつこれらの間に設けられている。別の実施形態においては、曝気開口を、図6に示されているように曝気管60の上側にではなく、下側に設けてもよい。さらに、別の実施形態においては、曝気管が必ずしも膜モジュールの下方に位置せず、膜モジュールの下端の上方に位置してもよい。図6においては、膜モジュール5のラックが1つだけ示されているが、いくつかの実施形態において、膜モジュール5の複数のラック(例えば、各々が16個のモジュールから構成される20個のラック)が、ラックの各ペアの間に曝気管60を備えつつ、供給物タンク36から供給物をろ過するために利用される膜モジュールアレイ35を構成してもよいことに、注意すべきである。
【0038】
空気などの気体を、ブロアまたは加圧されたタンク(図示せず)などの外部の供給源から曝気管60へ供給することができる。曝気管60のための気体の供給源は、気体スラグ発生装置11のための気体の供給源と同じであってもよい。いくつかの実施形態においては、バルブおよび/または流量コントローラ(図示せず)が、気体スラグ発生装置11への気体の不断または基本的に不断の流れを維持しつつ、必要なときに曝気管60へ気体を供給するために利用される。他の実施形態においては、曝気管60および気体スラグ発生装置11に、異なる気体および/または異なる供給源からの気体が供給される。いくつかの実施形態においては、曝気管60に、膜モジュール5の周囲を上方へ、および/または膜モジュール5を通って上方へ流れる気泡を生み出し、図6に矢印によって示されている供給物タンク36を通る供給物の大域的循環流の流速を誘起し、あるいは高めるために、気体の不断の流れが供給される。他の実施形態においては、曝気管60への気体の流れが、曝気管60への曝気が有効にされるときにパルス状にされる。いくつかの実施形態においては、曝気管60への気体の流れを、30分間にわたってオンにし、30分間にわたってオフにすることができ、いくつかの実施形態においては、この気体の流れのパルス化を、例えば1分間のオンおよび1分間のオフの頻度など、より高い頻度で実行することができる。曝気管への気体の供給のオンおよびオフの時間は、必ずしも同じである必要はない。
【0039】
高い運転率の期間の間だけ曝気管60が曝気用の気体を供給することが望まれる他の実施形態においては、流量センサ102を、ろ過モジュールから取り出される透過液の流量を測定するために、透過液の取出口64に設けることができる。流量センサ102は、ろ液の取出管64に配置されたパドルホイール式のセンサ、磁気式の流量センサ、光学式の流量センサ、または当技術分野において公知の任意の他の形態の流量センサを備えることができる。流量センサ102へ接続されたコントローラ100を、透過液の流れが第1のしきい値レベルまたは規定のしきい値レベルを超えている期間の間のみ曝気管60へ気体が供給されるように構成することができる。他の実施形態においては、コントローラ100が、先の大域的曝気サイクルの後に所定の量の透過液が系から取り出された後で、大域的曝気システムを作動させる(曝気管60へ気体を供給する)ように構成される。いくつかの実施形態においては、コントローラ100が、上述のように、曝気管60への気体の供給が開始されるときに、曝気管60への気体の供給をパルス状にすることができる。
【0040】
他の実施形態においては、供給物導入管66において供給物の流れを測定する流量センサ104を、いつ曝気管60への気体の供給を開始させるかを判断するための流量センサ102に加え、あるいはそのような流量センサ102に代えて、使用することができる。供給物タンクへの供給物の入力が通常よりも多い期間において、コントローラ100を、流量センサ104が供給物の流れが第1のしきい値レベルまたは特定のしきい値レベルを超えていることを知らせているときに、曝気管への気体の流れを開始させるように構成することができる。同様の方法で、コントローラ100は、透過液および/または供給物の流量が第2のレベルまたは所定のレベルを下回って低下した旨を知らせる信号をセンサ102および/または104の一方または両方から受信したことに応答して、曝気管60への気体の流れを終了させることができる。
【0041】
都市下水の処理施設など、いくつかの実施形態においては、供給物の流量が、一日のうちの時刻によって変化する可能性がある。例えば、深夜および早朝など、下水の発生が少ない時間の間は、供給物タンク36への供給物の流入量が少ない可能性がある。昼前または夕方の時間など、下水の発生が多い時間の間は、供給物タンク36への供給物の流入量がより多くなる可能性がある。ろ過システムを、相応に制御することができる。例えば、特定の時刻に曝気管60への気体の供給を開始および/または停止させるために、タイマを使用することができる。これらの時刻は、平日ならびに週末および/または休日の間で異なってもよい。他の実施形態においては、タイマを、大域的曝気システムの先の作動後に規定の時間期間が過ぎた後で、曝気管60への気体の供給を開始させるために利用することができる。さらなる実施形態においては、タイマを、膜の洗浄またはバックウォッシュサイクルなどといった別の事象の発生後に規定の時間期間が過ぎた後、あるいは規定の回数のバックウォッシュサイクルまたは他の事象が生じた後に、曝気管60への気体の供給を開始させるために利用することができる。またさらなる実施形態においては、タイマを、例えば学習期間のあいだ大域的曝気システムがどのような条件(例えば、透過液の流量、供給物の流量、膜横断圧力、および/または一日のうちの時刻など)のもとで作動および/または停止させられるのかを監視する人工知能を利用する制御システムなど、インテリジェント制御システムに組み合わせることができる。次いで、学習期間の完了後に、コントローラおよび/またはタイマは、学習した条件の検出に応答して、大域的曝気システムを自立的に作動および/または停止させることができる。
【0042】
いくつかの実施形態においては、「通常」の透過液の流量を、1時間当たりに1平方メートルのろ過膜の面積につき約25リットルと定めることができる(一般に「lmh」と称される単位)。いくつかの実施形態においては、流束がこの「通常」の流量を超える場合に曝気管60へ気体を供給することができる。いくつかの実施形態においては、曝気管60への気体の供給を開始するためのしきい値となる透過液の流束のレベルを、約30lmhに設定することができる。他の実施形態においては、このしきい値レベルを、40lmhなど、より高く設定することができる。いくつかの実施形態においては、供給物タンクへの供給物の同様の流量(例えば、25lmh、30lmh、または40lmh)を、曝気管60への気体の流れを作動させるためのしきい値レベルとして使用することができる。いくつかの実施形態においては、曝気管60への気体の流れを、透過液の流量が「通常」に戻ったときに中断することができる。他の実施形態においては、曝気管60への気体の流れを、透過液の流量および/または供給物の供給速度が作動しきい値レベルを規定のレベルだけ下回って低下した場合に中断することができる。例えば、いくつかの実施形態においては、曝気管60への気体の流れを、透過液の流量または供給物の供給速度が、気体の供給を作動させた流量から5lmhを超えて低下した場合に中断させることができ、他の実施形態においては、透過液の流量が作動しきい値レベルを10lmhを超えて低下した場合に中断させることができる。他の実施形態においては、透過液または供給物の一方または両方の流れが、基準レベル(「通常」のレベルなど)に対して指定の割合を超えて増加した場合に、気体を曝気管60へ供給することができる。例えば、大域的曝気システムを、透過液または供給物の一方または両方の流れが基準レベルから25%を超えて増加した場合に、他の実施形態においては50%を超えて増加した場合に、作動させることができる。大域的曝気システムを、透過液または供給物の一方または両方の流れが基準レベルへ戻り、他の実施形態においては所定の割合(例えば、基準レベルを超えること5%または10%)へ戻った場合に、停止させることができる。さまざまな設定点を、例えばろ過システムのサイズ、処理される流体の種類に応じ、あるいは曝気管60への気体の供給と、例えば透過液および/または供給物の流量を多くした条件のもとで動作するときの膜モジュールについて予想されるバックウォッシュの必要性の高まりとの間のエネルギーの妥協の計算にもとづいて、設定することが可能である。
【0043】
他の実施形態においては、膜横断圧力などといった他のパラメータを、曝気管60への気体の流れの開始または停止を生じさせるために利用することができる。供給物のろ過が進むにつれて時間とともに、粒子の濃度の高まりが、ろ過モジュールの周囲において生じる可能性がある。この粒子の蓄積により、膜モジュールにおいて膜の一部が詰まり、所定の量の透過液の流れを得るために必要な膜横断圧力が高くなる可能性がある。いくつかの実施形態においては、1つ以上の膜横断圧力センサが、膜モジュールのうちの1つ以上の膜モジュールの膜ファイバのうちの1つ以上の膜ファイバの膜横断圧力を監視し、膜横断圧力が規定の設定点を超える場合にコントローラ100へ信号をもたらすように構成される。この膜横断圧力センサからの信号に応答して、コントローラが、曝気管60への気体の流れを開始させる。曝気管60からの気体の流れが、容器を巡る供給物の大域的循環を誘起または増加させ、膜モジュールの周囲から粒子を除去し、あるいは再分散させ、観察される膜横断圧力を低下させる。曝気管60への空気の流れを開始または停止させるための所望の設定点を、絶対レベルまたは相対レベルに設定することができ、例えば膜の洗浄および/またはバックウォッシュサイクルの後のろ過において観察される膜横断圧力(基準レベル)を上回る割合として定められるレベルなどに設定することができる。例えば、曝気管60への気体の流れを開始させるための設定点が、一実施形態においては、基準レベルを上回ること約20%に設定され、他の実施形態においては、この設定点が、例えば基準レベルを上回ること約50%など、より高いレベルに設定される。一例においては、曝気管60への気体の流れが、膜横断圧力が基準レベルを上回ること約10%へ戻ったときに中断され、他の例では、膜横断圧力が基準レベルを上回ること約25%へ戻ったときに中断される。他の実施形態においては、曝気管60への気体の流れを開始または停止させるための他の設定点を、例えば曝気管60への気体の流れの供給と、特定の膜横断圧力のレベルにおいて効率的な動作を可能にすべく充分な吸引または圧力を供給することに関係するコストとの間のエネルギーコストの妥協点の調査に応じて使用することができる。
【0044】
いくつかの実施形態においては、曝気管60から供給される気体が、膜モジュールを貫通することがなく、あるいは膜モジュールの膜ファイバに触れることがない。これは、曝気管60から供給される気体にとって、膜モジュールの間の空間を上方へ流れるときの方が、モジュールを通って流れるときよりも、流れの抵抗が少ないがために生じると考えられる。いくつかの実施形態においては、曝気管60から供給される気体が、供給物タンク36を巡る供給物の大域的循環流の誘起または強化のためだけに利用される。これは、特に、膜ファイバが膜モジュールの管内に少なくとも部分的または完全に囲まれている実施形態に当てはまることができる。他の実施形態においては、曝気管60から供給される気体が、膜モジュールの膜ファイバの表面に接触し、膜ファイバの表面をこすり洗うために、気体スラグ発生装置11からの気体スラグによってもたらされるエネルギーに加えてエネルギーをもたらす。
【0045】
(作動時に)曝気管60へ供給される気体の量は、いくつかの実施形態においては、気体スラグ発生装置11へ供給される気体の流れに比肩することができる。他の実施形態においては、作動時の曝気管60への気体の流れが、気体スラグ発生装置への気体の流れを超えてもよく、あるいは他の実施形態においては、気体スラグ発生装置への気体の流れよりも少なくてもよい。例えば、一実施形態においては、気体スラグ発生装置11への気体の流れが、モジュールごとに1時間につき約4立方メートルであってもよく、作動時の1つ以上の曝気管60を備える曝気システムへの気体の流れが、モジュールごとに1時間につき約3立方メートルであってもよい。
【0046】
いくつかの実施形態においては、気体スラグ発生装置11および曝気管60の両方を利用するろ過システムによって使用されるエネルギーの量が、同じ量の透過液を生じるが、曝気管60を存在させずに気体スラグ発生装置11によって動作する同等のろ過システムによって使用されるエネルギーの量よりも少なくてもよい。曝気管は、上述のように、ろ過タンクを巡る供給物の大域的循環を強化でき、膜モジュールの近傍から高濃度の粒子を除去することができる。したがって、曝気管60を備えるシステムにおいては、曝気管60を持たないシステムと比べて、膜からの同等の量の粒子の除去をもたらすために、気体スラグ発生装置によって供給されるべき気体が少ないと考えられる。曝気管60を備えているいくつかの実施形態においては、曝気管60を持たないシステムと同等の膜洗浄を達成するために気体スラグ発生装置11へ供給される必要がある気体の量を、約25%減らすことができる。例えば、気体スラグ発生装置11によって動作しているシステムに曝気管60を追加することで、気体スラグ発生装置へ供給される気体を、モジュールごとに1時間につき約4立方メートルから、モジュールごとに1時間につき約3立方メートルへ減らすことができ、同じ量の膜洗浄を達成することができる。
【0047】
曝気管60への気体の流れの開始および中断をもたらすために、別の実施形態においては、コントローラ100が、膜ろ過システム内の種々のセンサからのパラメータを監視することができる。コントローラ100を、多数の形態のいずれかにて具現化することができる。監視コンピュータまたはコントローラが、センサ102および104などのセンサからフィードバックを受け取ることができ、いくつかの実施形態においては、供給物タンク36、気体スラグ発生装置11、あるいは供給物供給配管、透過液配管、またはろ過システムに関連する他の配管の圧力、膜横断圧力、温度、pH、化学的濃度、または液体の水位のセンサなどといった追加のセンサからフィードバックを受け取ることができる。いくつかの実施形態においては、監視コンピュータまたはコントローラ100が、運転員のための出力を生成し、他の実施形態においては、これらのセンサからのフィードバックにもとづいてろ過システムの処理パラメータを自動的に調節する。例えば、1つ以上の膜モジュール5、1つ以上の気体スラグ発生器11、および/または1つ以上の曝気管60への気体の流量を、コントローラ100によって調節することができる。
【0048】
一例においては、本明細書に開示のシステムの実施形態のためのコンピュータ化されたコントローラ100が、図7に例示的に示されるとおりの1つ以上のコンピュータシステム700を使用して実現される。コンピュータシステム700は、例えばIntel社のPENTIUM(登録商標)またはCore(商標)プロセッサ、Motorola社のPowerPC(登録商標)プロセッサ、Sun社のUltraSPARC(登録商標)プロセッサ、Hewlett−Packard社のPA−RISC(登録商標)プロセッサ、または任意の他の種類のプロセッサ、あるいはこれらの組合せにもとづくコンピュータなど、汎用のコンピュータであってもよい。あるいは、コンピュータシステムが、例えば特定用途向け集積回路(ASIC)または廃水処理設備用として特に意図されたコントローラなど、特別にプログラムされた専用のハードウェアを備えてもよい。
【0049】
コンピュータシステム700は、典型的には1つ以上のメモリ装置704へ接続された1つ以上のプロセッサ702を備えることができ、メモリ装置704は、例えばディスクドライブ記憶装置、フラッシュメモリ装置、RAMメモリ装置、またはデータを保存するための他の装置のうちの任意の1つ以上を備えることができる。メモリ704は、典型的には、コントローラおよび/またはコンピュータシステム700の動作の際にプログラムおよびデータを保存するために使用される。例えば、メモリ704を、或る時間期間にわたって種々のセンサの任意のいずれかから測定されたパラメータに関する履歴データならびに現在のセンサ測定データを保存するために使用することができる。本発明の実施形態を実行するプログラミングコードなどのソフトウェアを、ハードドライブまたはフラッシュメモリなどのコンピュータにとって読取りおよび/または書込みが可能な不揮発性の記録媒体に保存することができ、次いでメモリ704へコピーし、その後にプロセッサ702によって実行することができる。そのようなプログラミングコードを、例えばJava(登録商標)、Visual Basic、C、C#、またはC++、Fortran、Pascal、Eiffel、Basic、COBOL、あるいはこれらの種々の組合せのいずれかなど、複数のプログラミング言語のいずれかで記述することができる。
【0050】
コンピュータシステム700の構成要素を、1つ以上のバス(例えば、同じ装置内に統合された構成部品の間)および/またはネットワーク(例えば、分離した個別の装置に存在する構成要素の間)を含むことができる相互接続機構706によって接続することができる。相互接続機構は、典型的には、システム700の構成要素間の通信(例えば、データおよび/またはインストラクション)の交換を可能にする。
【0051】
さらに、コンピュータシステム700は、例えばキーボード、マウス、トラックボール、マイクロホン、またはタッチ式画面などの1つ以上の入力装置708と、例えば印刷装置、表示画面、またはスピーカなどの1つ以上の出力装置710とを含むことができる。コンピュータシステム700を、上述のように、例えば本明細書に記載のろ過システムの実施形態の任意の1つ以上の部位に位置する流束、流量、圧力、温度、pH、化学的濃度、または液体の水位のセンサを含むことができる1つ以上のセンサ714へ、電子的または他の方法で結び付けることができる。さらに、コンピュータシステム700は、コンピュータシステム700を(システム700の構成要素のうちの1つ以上によって形成できるネットワークに加え、あるいはそのようなネットワークに代えて)通信ネットワークへ接続することができる1つ以上のインターフェイス(図示せず)を含むことができる。この通信ネットワークは、いくつかの実施形態において、ろ過システムのプロセス制御システムの一部を形成する。
【0052】
1つ以上の実施形態によれば、通信ネットワークを介してコンピュータシステム700と通信すべく、1つ以上の出力装置710が別のコンピュータシステムまたは構成要素に組み合わせられる。そのような構成により、或るセンサを別のセンサから大きく離して配置することができ、あるいは任意のシステムを任意のサブシステムおよび/またはコントローラから大きく離して配置することができ、依然としてそれらの間でデータの提供を行うことができる。
【0053】
コンピュータシステム700を、例として、本発明の種々の態様を実施することができる一種のコンピュータシステムとして示したが、本発明の種々の実施形態が例示的に示したとおりのソフトウェアまたはコンピュータシステムにおける実施に限られないことを、理解すべきである。実際、コントローラあるいはコントローラの構成要素または一部分が、例えば汎用のコンピュータシステムにて実現されるのではなく、専用のシステムまたは専用のプログラマブル・ロジック・コントローラ(PLC)として実現されても、分散型の制御システムにおいて実現されてもよい。さらに、制御システムの1つ以上の特徴または態様を、ソフトウェア、ハードウェア、またはファームウェア、あるいはこれらの任意の組合せにて実現することができることを、理解すべきである。例えば、コンピュータシステム700において実行できるアルゴリズムの1つ以上の部分を、1つ以上のネットワークを介して通信することができる分離したコンピュータにおいて実行してもよい。
【0054】
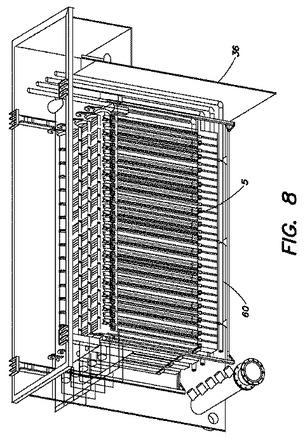
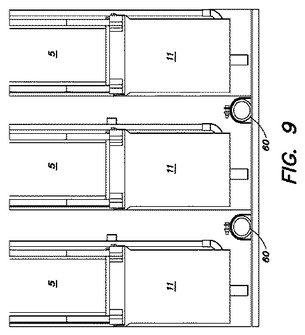
図8および図9が、本開示による膜ろ過システムの別の実施形態を示している。図8は、供給物タンク36に取り付けられた膜モジュール5の複数のラックを含んでいる膜モジュールのバンクの等角投影図である。供給物タンクの壁は、膜モジュールのバンクを示すために切り取られている。図9は、図8の膜モジュールのバンクの一部分について、曝気管60の軸に垂直な断面を示している。これらの図において、曝気管60が、膜モジュールのバンクにおける隣同士の膜モジュールラックの間の下方かつ実質的に真ん中に位置していることを、見て取ることができる。いくつかの実施形態においては、曝気管60が、外側の膜モジュールラック(供給物タンクの壁に最も近い膜モジュールラック)と供給物タンクの壁との間にも設けられており、したがって外側の膜ラックが、この膜モジュールラックの縦方向の軸の両側に曝気管60を有している。
【0055】
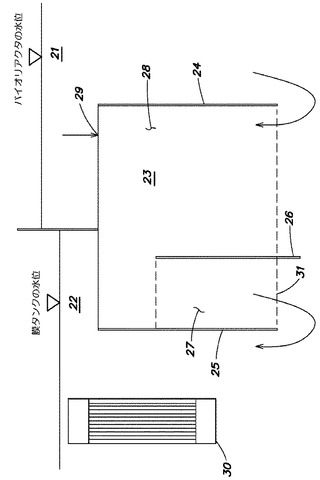
図10は、膜バイオリアクタを使用する水処理システムにおいて本発明を使用するための構成を示している。この実施形態においては、パルス状の気体スラグまたはパルス状の二相気体/液体流が、バイオリアクタタンク21と膜タンク22との間にもたらされる。タンクが、バイオリアクタ21に配置された1つの垂直に延びる壁24と、膜タンク22に配置された第2の垂直に延びる壁25とを有している逆さの気体収集チャンバ23によって接続されている。バイオリアクタタンク21の水位の下方における壁24の延在は、膜タンク22の水位の下方における壁25の延在と比べ、より低い深さまでである。図10の例では、この深さの差が、2つのタンクの水面の高さが異なることによってもたらされている。気体収集チャンバ23が、2つの区画27および28を定めるべくバイオリアクタタンク21と膜タンク22との間の接続壁26によって仕切られている。気体(典型的には、空気)が、ポート29を介して気体収集チャンバ23へ供給される。膜ろ過モジュールまたは膜ろ過装置30が、垂直壁25の下端よりも上方で膜タンク22内に位置している。
【0056】
使用時、加圧された気体がポート29を通って気体収集チャンバ23へ供給され、結果としてチャンバ23内の供給液体の水位が、壁25の下端31に達するまで低下する。この段階で、気体が区画27から壁25を過ぎて急激に逃げ出し、気泡として膜タンク22を通って上昇し、膜モジュール30を通過する二相気体/液体流を生じる。他の実施形態においては、膜モジュール30を通過する二相気体/液体流に代え、あるいはそのような二相気体/液体流に加えて、気体スラグが生成される。気体の急激な流れは、気体収集チャンバ23の区画28内の気体の圧力の急激な低下も生じさせ、結果としてさらなる供給液体がバイオリアクタタンク21から膜タンク22へサイフォン作用によって送り込まれる。ポート29を通過する気体の流れを、気体の供給源(図示せず)へ接続されたバルブ(図示せず)によって制御することができる。バルブを、上述のコントローラ100などのコントローラ装置によって動作させることができる。
【0057】
上述の実施形態において説明したパルス状の気体の流れおよび/または気体スラグの発生装置が、種々の公知の膜の構成において洗浄装置として使用することが可能であり、あるいは種々の公知の膜の構成における洗浄装置と併せて使用することが可能であり、上述した特定の構成に限られないことを、理解できる。気体スラグ発生装置を、膜モジュールまたはモジュールのアセンブリに直接接続することができる。他の実施形態においては、気体スラグ発生装置と、気体スラグ発生装置によって気体スラグが供給される膜モジュールとの間に、すき間を設けることができる。いくつかの実施形態においては、気体(典型的には、空気)が、気体スラグ発生装置へ連続的に供給され、パルス状の二相気体/液体流および/または一連の気体スラグが、膜の洗浄および表面の回復のために生成される。パルス状の流れが、いくつかの実施形態においては気体の連続的な供給を使用して気体スラグ発生装置によって生成されるが、非連続的な気体の供給が使用される場合にも、一連の気体スラグおよび/またはパルス状の二相気体/液体流を生成できる(ただし、パルスのパターンは異なる)ことを、理解できる。
【0058】
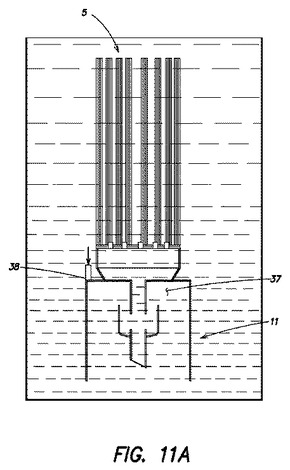
いくつかの応用において、気体スラグ発生装置11の内部の液体のレベルが、図11Aおよび図11Bに示されるようにレベルAおよびBの間を変動することが、明らかになっている。気体スラグ発生装置11の内部の上端付近に、気体のポケットの形成に起因して液相が到達できない空間37が残される可能性がある。そのような気体スラグ発生装置11が、膜バイオリアクタなどにおいて固形分の多い環境において運転されるとき、浮きかす(scum)および/または脱水されたスラッジ39が、気体スラグ発生装置11の上端の空間37に次第に蓄積する可能性があり、これが最終的に気体の流路40を詰まらせ、気体スラグの発生および/または二相気体/液体流のパルス化の減少につながり、あるいは気体スラグまたはパルス化効果が皆無になる可能性がある。図12が、そのような筋書きを示している。
【0059】
この作用を克服するために、いくつかの方法が特定されている。一方法は、動作時に達する液体の上方の水位(図11Aおよび図11BにおけるレベルA)よりも下方の点に気体注入点38を配置することである。液体のレベルが気体注入点38および上方に達するとき、気体が液体の噴霧41を生じさせ、これが気体スラグ発生装置11の上端付近に存在しうる浮きかすまたはスラッジの蓄積を分解する。図13が、そのような作用を概略的に示している。噴霧41の強さは、気体の注入の位置38および気体の速度に関係する。この方法は、気体スラグ発生装置11の内部のスラッジの長期の蓄積を防止することができる。
【0060】
他の方法は、動作時に液体の水位が気体スラグ発生装置11の内部の上端の空間37に達することができるよう、気体スラグ発生装置11の内部の気体を定期的に排出することである。この場合、気体の注入は、気体ポケット37のすべてまたはほぼすべてを排気できるように、気体スラグ発生装置11の内部の最も高い点またはその付近であってもよい。図11Aに示した気体の接続点38が、一例である。スラッジの質に応じて、気体スラグ発生装置の内部に恒久的に乾いた環境が生じることがないように、排気をさまざまな頻度で定期的に実行することができる。
【0061】
気体スラグ発生装置11の動作において、図11Aの液体のレベルAは、気体の流量に応じて変化する可能性がある。気体の流量が多いほど、気体スラグ発生装置11の内部における気体ポケットの形成は少ない。したがって、使用可能な他の方法は、乾いたスラッジを分解すべく動作の最中に気体スラグ発生装置11へはるかに大量の空気の流れを定期的に注入することである。装置の設計に応じて、この作用に必要な気体の流量は、通常は、通常動作の気体の流量のおよそ30%増し、またはそれ以上である。このより大きな気体の流量を、例えば乾いたスラッジを分解するために短時間のきわめて大量の気体の流れを一時的に生じさせるために選択されたタンクへ他の膜タンクから気体を融通するなど、何らかのプラントの操作にて達成することができる。あるいは、待機のブロア(図示せず)を、より多くの気体の流れを短い時間のあいだ供給するために定期的に使用することができる。
【0062】
上述の方法を、長期にわたって安定な動作を得、気体スラグ発生装置11の内部の浮きかす/スラッジの蓄積を除くために、個別または組合せの形態にて適用することができる。
【実施例】
【0063】
気体スラグ発生装置を、1.6mの全長および38m2の膜表面積を有する中空ファイバ膜で構成された膜モジュールに接続した。気体によって持ち上げられるパルス状の液体の流量を監視するために、パドルホイール流量計を、ライザ管の下端に配置した。図14が、7.8m3/hrでの一定の気体の流れの供給におけるパルス状の液体の流量のスナップショットを示している。スナップショットが、モジュールに進入する液体の流れが、高低の間の無作為または無秩序なパターンを有することを示している。低い液体の流量から高い液体の流量への頻度は、約1〜4.5秒の範囲にあった。モジュールへ放出された実際の気体の流量は、液体と混ざり合っているがゆえに測定しなかったが、流れのパターンは、液体の流れと同様になり、無秩序な性質で高低の間の範囲にわたると予想された。
【0064】
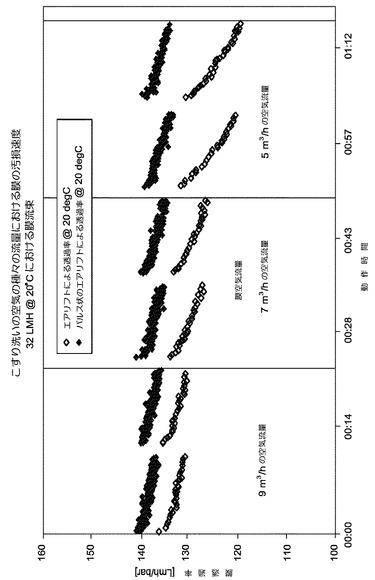
気体スラグ発生装置および通常のエアリフト(airlift)装置による膜洗浄効果の比較を、膜バイオリアクタにおいて実行した。膜ろ過のサイクルは、12分間のろ過およびその後の1分間の休息とした。各々の空気の流量において、2回の繰り返しサイクルを試験した。2組の試験の間の唯一の相違は、モジュールに接続された装置であり、すなわち通常の気体リフト装置に対する気体スラグ発生装置である。膜洗浄効率を、ろ過の最中の透水性の低下に従って評価した。図15が、2つの異なる装置における透水性の推移を、種々の空気の流量について示している。これらのグラフから、気体スラグ発生装置においては、時間につれての透水性が通常の気体リフトポンプと比べてより安定しているため、膜が汚れる速度が低いことが明らかである。
【0065】
さらなる比較を、典型的な周期的曝気の構成および本発明の気体スラグ発生装置の性能の間で実行した。空気の流量を、気体スラグ発生装置については3m3/hとし、周期的曝気については6m3/hとした。10秒間のオン/10秒間のオフおよび3秒間のオン/3秒間のオフの周期的曝気の周期を試験した。10秒間のオン/10秒間のオフの周期的曝気は、バルブの最速の開放および閉鎖が10秒である大規模プラントの実際の動作を模擬するために選択された。3秒間のオン/3秒間のオフの周期的曝気は、気体スラグ発生装置の動作の範囲内の頻度に似せるために選択された。性能を、約30lmhの正規化された流束において、30分という長いろ過サイクルも含めて試験した。
【0066】
下記の表1に、パルス状のエアリフト動作および2つの異なる頻度の周期的曝気動作の両方についての試験結果をまとめた。パルス状のエアリフト動作における短いろ過サイクルおよび長いろ過サイクルの間の透水性の低下は、周期的曝気動作に比べてはるかに少なかった。高頻度の周期的曝気は、膜の性能をわずかに向上させるが、パルス状のエアリフト動作は、さらに安定な膜の透水性を保ち、パルス状のエアリフトの構成による洗浄プロセスがより効果的であることを裏付けた。
【0067】
【表1】

【0068】
上述の実施例は、パルス状の流れを生成する装置によって効果的な膜洗浄方法を実行できることを実証している。パルス状の流れの生成装置への気体の連続的供給によって、膜を効果的に洗浄するための無作為または無秩序な流れのパターンが生成される。流れの各々のサイクルのパターンが、計測時間/頻度、大小の流量の強度、および流れの変化の推移において、他のサイクルのパターンとは異なる。各々のサイクルにおいて、流れが、無秩序な様相で或る値から他の値へ連続的に変化する。
【0069】
上述の実施形態は、一連の気体スラグおよび/またはパルス状の気体/液体の流れを使用しているが、本発明は、気体、気泡、および液体を含む他の無作為にパルス状にされた流体の流れを使用する場合にも有効であることを、理解できる。
【0070】
気体スラグの流れおよび/または二相気体/液体のスラグの流れを使用して達成される膜スクラブは、特に膜バイオリアクタ(MBR)処理システムに適用できるが、そのようなスラグ流を、膜に対する洗浄効果を生み出すために気体および/または二相気体/液体流を必要とするさまざまな用途に使用できることを、理解できる。したがって、本明細書に開示の実施形態は、MBRシステムへの適用に限られない。同様に、MBRの用途は、系における生物学的作用を促進するために、酸素を含む気体(典型的には、空気)の使用を必要とすることが多い一方で、他の膜の用途は、洗浄をもたらすために空気以外の他の気体を使用してもよい。したがって、使用される気体の種類は厳密には重要ではない。
【0071】
MER流体処理は、生物学的酸化の膜分離との組合せプロセスである。この技術は、産業および家庭の汚水処理に採用されている。他のいくつかの流体処理技術と比べて、MBRは、より小さな専有面積、廃水の多収量および高い純度、より高い有機物負荷、およびより少ないスラッジの発生などの利点を有している。生産性および効率をさらに高めつつ安定な運転性能を維持するために、濃縮物の分極およびそれに続く膜の汚損を制御することが望まれる。有効であることが示されている技法として、乱流促進装置、波形の膜表面、パルス状の流れ、および渦の生成が挙げられる。しかしながら、気泡の注入が、中空ファイバ膜モジュールにおいて濃縮物の分極を軽減して透過の流束を向上させる安価かつ効果的な方法であることが実証されている。さらに、膜バイオリアクタのプロセスにおいて、気泡を酸素の供給として他の目的にも使用することができる。
【0072】
気体スラグ発生装置への空気および液体の流量ならびに液体の性質に応じて、空気および液体の混合物は、流れのパターンの幅広いスペクトルをとることができる。いくつかの異なる流れのパターンが、図16に示されている。加えられる空気の流量が比較的少ないMBRにおいては、気体スラグ流(栓流(plug flow)としても知られる)が望ましいことが明らかになっている。これらの空気−液体の二相流の系においては、少数の機構が流束の増加に貢献することが特定されている。
a)MBRシステムにおける透過の流束への流体力学的条件およびシステムの構成の影響についての実験的研究が、二相(空気および液体)クロスフロー(cross flow)における透過の流束が、単相(液体のみ)クロスフローのそれよりも20〜60%高いことを示している。より強い表面のクロスフローを有することが、より高い速度において活性化されたスラッジを維持することができるとともに、膜の表面を常にこすり洗うことができ、結果としてより高いろ過速度および膜のより低い汚損の可能性につながるがゆえに望ましい。
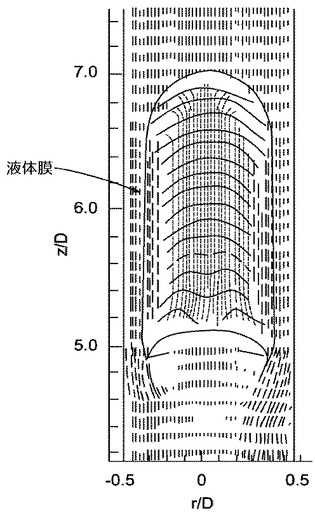
b)気体スラグの気泡が、ケーキ相の分解を助け、その後に膜表面の付近での局所的混合を促進する二次流(または、後流(wake)領域)を生成する。加えて、スラグ流が、図17Aに示されるようにスラグと管壁との間を流れる安定した環状の液体膜をさらに生成する。液体膜は、物質移動を促進するせん断の高い領域になることがある。
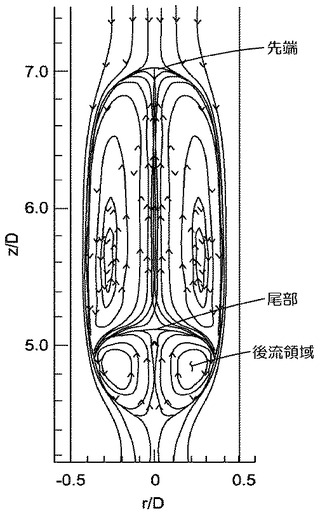
c)移動するスラグが、図17Bに最もよく見られるように、スラグの周囲の液体に、先端においてより高く、尾部においてより低い圧力のパルス状の圧力をもたらす。これは、膜の表面の付近の濃度境界層の開始の不安定および妨害を生じさせることがある。
【0073】
MBRシステムにおけるスラグ流の有効性を実証するために、スラグ流パターンのもとでの二相(水−空気)MBRシステムの流体力学的挙動を検討すべく、数値的研究および実験的研究の両方を使用して検討を行った。粒子画像速度測定法(PIV)を実験のために採用し、計算流体力学(CFD)を数値ツールとして選択した。
【0074】
実験的測定
実験装置が、図18に最もよく示されている。矩形のタンク50は、透明な材料から製作されている。タンク50の底部に水インジェクタ51を設け、上端付近にオーバフロー出口52を設けた。ファイバ膜モジュール53を、タンク50内に配置した。モジュール53の下端に、スカート54および上述の実施形態に従って製作した気体スラグ発生装置55を設けた。モジュール53への流体の流れおよびモジュール53からの流体の流れを可能にするために、多孔性ゾーン56をモジュールに設けた。ファイバ膜を、ポッティング材料57に入れた。
【0075】
気体スラグ流の状況を生み出すために、上述した新規な気体スラグ発生装置55を、二相気体/液体流が生成するように使用した。この構成は、適切に制御された時間間隔で空気のスラグを生成することができた。
【0076】
実験的測定を、図18に示した試験装置を使用して実行した。測定のうちの1組は、PIVを用いた流れの場の測定であり、別の組の測定は、高速度カメラによって測定された気泡サイズの分布およびそれらの軌跡である。前者の測定を、CFDモデルの洗練のための信頼できる正確な流れのデータをもたらすために実行し、後者を、CFDモデリングのための入力パラメータとして役立てた。
【0077】
CCDカメラおよび高出力レーザで構成される典型的なPIV実験装置を使用した。二連のパルス状レーザを、流れを横切る光のシートを照明するために使用した。同時に、流れの場に、レーザ光を散乱させ、トラッキング点として機能するように、粒子を散布した。2つのフレームを素早い連続にて撮影することができるCCDカメラを、光のシートの平面に対して直角に配置した。試験装置の横窓を介して行われる測定の際に、レーザから第1のパルスで流れに照射し、粒子から散乱した光を、カメラによって第1のフレームとして取得した。制御された時間間隔の後で、レーザの第2のパルスで流れに再び照射した。粒子によって散乱させられた光を、カメラによって第2のフレームとして取得した。移動した個々の粒子の変位を、取得した2つのフレームから計算した。カメラの露光の間の時間により、流れ速度を評価した。
【0078】
気泡のサイズを測定するために、高速度カメラを使用した。このカメラは、17μmの画素を有しており、低い解像度においては最大で毎秒250,000フレーム取得することができる。
【0079】
数値モデリング
実験的観測を再現するために、CFDモデルが、オイラー多相モデル(Eulerian multiphase model)を多孔質媒体の枠組みに一体化させ、垂直方向のろ過流束の測定値を取り入れた。スラグ流の検討のための過渡シミュレーションを実行した。
【0080】
モデルの構成および動作条件
実験プロトタイプにもとづき、対応するCFDモデルの構成を、図21Aに示したとおりに生成した。図18のモデルの構成にもとづく過渡シミュレーションを、二相気体/液体スラグ流の現象を再現するために実行した。実験から、4m3/hrという空気によるこすり洗いの流量のもとで、1つの空気スラグを生成するために4.2秒(3.8秒が空気の蓄積段階であり、0.4秒が空気のパルス化段階である)を要することが知られている。空気スラグの発生のプロセスをシミュレートするために、質量およびモーメントのソース項の時間依存性のステップ関数を、過渡シミュレーションに使用した。質量源は、14.62kg/m3sという値を有し、モーメント源は、8.27N/m3であり、これらは表2に挙げた動作条件から計算された。条件は、シミュレーションおよび実験の両方について同じである。
【0081】
【表2】
【0082】
数学的方程式
膜バイオリアクタユニットにおける流体の分布をシミュレートするために、流体力学に大きな影響を有する要素を考慮に入れた。実験において使用したMBRシステムは、スラグ流の状況を使用して運転され、二相の状態、すなわち水および気泡がもたらされる膜分離装置を備えていた。膜分離装置は、流れの循環に対して抵抗を発生させるファイバ束を含んでいる。さらに、膜におけるろ過を生じさせるために真空ポンプを使用した。これらの特徴は、相互依存の関係にあり、以下の枠組みを取り入れることによってCFDモデルへ因数化された。
i.オイラー多相モデルが、二相の混合の挙動を説明するために適用される。
ii.垂直方向のろ過流束の理論モデル。
iii.水の循環に対する膜モジュールの抵抗を考慮するための多孔質媒体のモデル。
iv.実験的に測定された気泡の直径の推移。
【0083】
オイラー多相モデル
オイラー多相モデルにおいては、質量、モーメント、および乱流動力学の少数組の結合基本保存方程式が、水および空気の流れの場および濃度分布をシミュレートするために適用される。
【0084】
a.質量連続の式
式(1)が、相qについての非定常な質量連続の式を示している。
【数1】
ここで、tは時間(s)であり、αは流体の体積率であり、
【数2】
は相qの速度(m/s)であり、mpqは相pからqへの質量移動(kg/s)を特徴付け、mqpはq番目からp番目の相への質量移動を特徴付け、Sqはソース(source)またはシンク(sink)の項である。
【0085】
b.モーメント保存の式
相qについての非定常のモーメントの釣り合いが、
【数3】
を与え、ここで
【数4】
がq番目の相の応力−ひずみテンソル(Pa)(式(3)を参照)であり、
【数5】
が相間の相互作用力であり、pがすべての相によって共有される圧力(Pa)であり、gが重力(m2/s)であり、
【数6】
が相間の速度である。
【数7】
ここで、μqおよびλqはそれぞれ相qのせん断およびバルク粘度(kg/ms)である。
【0086】
c.実現可能なκ−ε混合物乱流モデル
実現可能なκ−ε混合物乱流モデルを記述するκ(単位質量当たりの乱流運動エネルギー(m2/s2))およびε(乱流運動エネルギー消散速度(m2/s3))の式は、以下のとおりである。
【数8】
【数9】
ここで、Gb,mは浮力に起因する乱流運動エネルギーの発生であり、Gk,mは平均速度勾配に起因する乱流運動エネルギーの発生であり、vは動粘度(m2/s)である。
【0087】
混合物の密度ρm(kg/m3)および速度
【数10】
が、
【数11】
から計算され、乱流粘度μt,mが、
【数12】
から計算される。
【0088】
これらの式において、C2およびClεは定数であり、σκおよびσεはそれぞれκおよびεについての乱流プラントル数である。
【0089】
垂直方向のろ過流束
吸引ポンプがオンである実験において、透過の流束がファイバの管腔を移動する際の圧力低下ゆえ、ろ過の流束は垂直方向に依存し、膜横断圧力がファイバの上部においてより大きく、ファイバの下部においてより小さい。この現象を反映するために、垂直方向のろ過流束がファイバを横切る圧力差から計算される。式(6)
ろ過流速=0.0046*H*H−0.0012*H+0.013(6)が、垂直方向に依存するろ過流束を示しており、ここでろ過流束の単位はkg/sであり、Hは高さ(単位はメートル)である。垂直方向に依存するろ過流束は、式(1)の体積質量シンクSqとして含まれる。この質量シンクは、繊維に沿った垂直方向に依存するろ過流束を表わすために多孔質領域に加えられる。
【0090】
多孔質媒体モデル
多孔質媒体モデルは、多孔質領域として定められるモデルの領域に流れの抵抗を取り入れる(図21Aおよび図21Bを参照)。換言すると、多孔質媒体モデルは、多孔質領域における圧力損失をシミュレートするために、支配モーメント方程式に追加の体積ベースのモーメントシンクを適用する。この検討において、以下のモデルが流れの抵抗を表わすために使用される。
【数13】
ここで、Siはi番目(x、y、またはz)のモーメントの式についてのソース項であり、DおよびKは所定の行列である。式(7)における第1の項は、粘度が支配的である損失を表わし、第2の項は慣性損失の項である。これらの抵抗は、MBRにおいて使用されるファイバ束と同様の管バンクの仮定にもとづいて計算される。
【0091】
実験的に測定された気泡の直径の推移
実験とシミュレーションとの間のより良好な比較のために、変化する気泡サイズを適用した。気泡サイズの推移を、図19に示されるとおり、高速度カメラによる実験から割り出した。しかしながら、実験の限界ゆえに、スラグ流の状況については、気泡の直径をY=1.4mからY=1.8mまで測定した。Y=1.4mよりも下方については、気泡の直径を3mmと仮定し、Y=1.8mよりも上方については、気泡の直径を5mmと仮定した。
【0092】
図20に示されるとおり、スラグ流の状況は、上述の曝気装置を使用して生成される。この流れの状況下で、PIV測定およびCFDシミュレーションの両方を実行し、結果を、図21Bに示されるとおりのガラス壁から20mmの切断面に沿った3つの異なる位置において抽出した。
【0093】
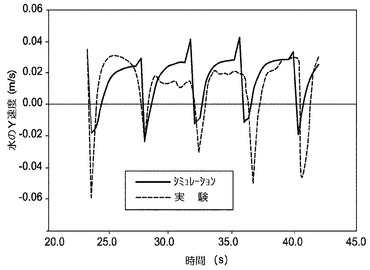
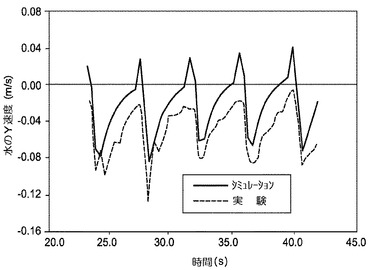
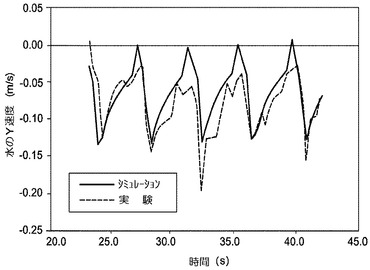
図22A〜図22Cは、それぞれ壁から20mmの平面に沿ったY=1.532m、Y=1.782m、およびY=1.907mの位置における水のY速度成分について、シミュレーションによる値と実験的測定による値との間の比較を示している。図22A〜図22Cにおいて、実線が、シミュレーション結果を表わしており、破線が、実験から得た測定値を表わしている。実験およびシミュレーションの両方が、5サイクルの空気スラグ生成を示している。各々のサイクルが、Y=1.532mおよびY=1.782mについて、下方への流れの速度と、その後の上方への速度とを示している。Y=1.907mについては、より強い下方への流れの速度の後に、弱い下方への流れの速度が続いている。全体として、実験の不確定性およびシミュレーションの仮定の範囲において、これら3つの位置におけるシミュレーションと実験との間の比較は、かなり良好であると考えられる。
【0094】
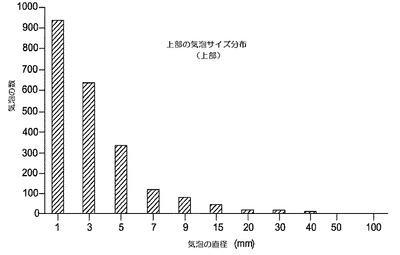
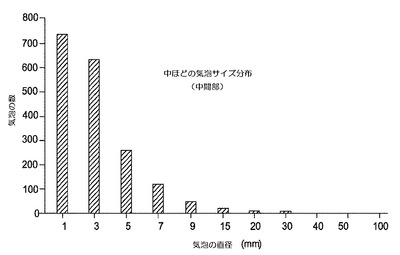
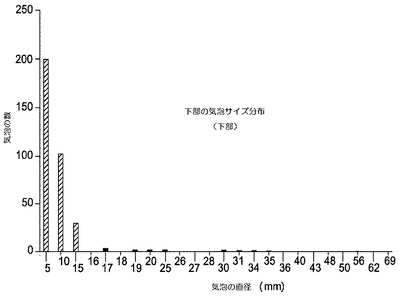
図23A〜図23Cは、気体スラグの発生中に試験装置の上部、中ほど、および下部で測定された気泡のサイズ分布のグラフを示している。
【0095】
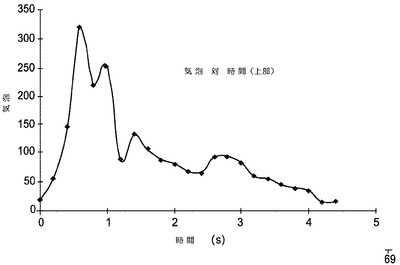
図24A〜図24Cは、気体スラグの発生中に試験装置の上部、中間部、および下部で測定された気泡の数の時間に対するグラフを示している。
【0096】
図25は、気体の流量に対する空気/気体スラグの各々のパルスの平均時間スパンのグラフを示している。
【0097】
図26は、曝気装置への入口水流について、曝気装置内の気体スラグ流によって生成されるパルスのグラフを示している。フレームが、高速度カメラによって取得された測定を示している。入口の水流または液体の流れが、気体スラグの発生によって急激に増加し、その後に次の気体スラグが生成されるまで、より少ない流量またはゼロの流量へ再び減少することが、理解できる。
【0098】
この検討から、スラグ流の状況のもとでの動作が、気泡流の状況のもとでの動作と比べていくつかの利点を有することが、実験およびシミュレーションから観測される。
a)スラグ流は、時間依存性のプロセスである。気体/空気スラグの発生中に、膜ファイバの周囲の液体が流れの不安定を呈する。これは、膜の表面の付近の濃度境界層の強まりおよび粒子の蓄積を乱すことができる。
b)さらに、流れの不安定がファイバの振動も強める。これは、束におけるファイバの運動が、膜の表面のケーキ層を破壊することができるファイバ同士の衝突など、いくつかの効果を有することができるため望ましい。
c)スラグ流が、スラグと管壁との間を流れる安定した環状の液体膜を生じさせる。液体膜は、管壁からのケーキ層の除去を助ける高せん断領域となることができる。
d)気体/空気スラグは、これまでに利用されている曝気の気泡よりもサイズが大きく、したがってより強力かつより長い後流領域を生成でき、これが質量移動の境界層を乱し、膜の表面の付近の局所的な混合を促進することができる。
e)スラグ流の状況のもとでの動作は、典型的な気泡流の曝気システムと比べ、供給すべき空気が少ない。例えば、いくつかの実施形態において、スラグ流の曝気システムが、モジュール1つにつき約4m3/hrの気体を使用して動作すると考えられる一方で、同様の曝気のレベルを生じるように動作する典型的な気泡流の状況は、モジュール1つにつき7m3/hrの気体で動作すると考えられる。気体/空気の消費が少ないことは、エネルギーの利用が少ないことにつながり、したがって運転コストの低減につながる。
【0099】
本明細書に記載のとおりの大域的曝気システムを、気体スラグ流での膜モジュールの洗浄をもたらすための上述の装置と併せて利用することが、またさらなる利点をもたらすと予想される。
【0100】
タンク全体における粒子濃度の非一様性を、本明細書に記載のとおりの大域的循環システムを使用することによって大きく軽減できることが、試験によって示されている。大域的循環システムが、膜モジュールおよびラック間の空間に上向き流の領域を確立し、タンクの周囲に下向き流の領域を確立する。良好に制御された流れの場を有することによって、粒子が供給物タンクの全体により一様に分散する。
【0101】
上述のとおりのスラグ流による膜洗浄を利用して動作するろ過モジュールを備えるろ過容器または供給物容器における粒子の分布の一様性の向上は、そのようなろ過容器を備えるろ過システムについて、より少ないエネルギーでの動作をもたらすと予想される。これは、気体スラグ流による膜の洗浄に併せて大域的曝気を使用することで、蓄積した固形分の膜モジュールからのさらなる再分散が、気体スラグ流による洗浄だけを単独で使用して達成されるよりもさらにもたらされるからである。これにより、膜のスラグ流による洗浄においては、同じ量の膜洗浄を達成するために使用すべき気体が少なくて済む。例えば、上述したように、モジュール1つにつき4m3/hrを使用する気体スラグ流による洗浄機構を利用するろ過システムにおいて、気体スラグ洗浄機構の気体の消費を、大域的曝気のシステムと組み合わせて動作させた場合に、モジュール1つにつき3m3/hrまたはそれ以下に減らすことができると予想される。加えて、膜モジュールの近傍からの固形物の除去によって、バックウォッシュまたは他の洗浄作業の間のモジュールの運転可能時間が長くなると考えられる。気体スラグ流による膜の洗浄にて動作するろ過システムに大域的曝気のシステムを追加することによって、エネルギーの節約は、気体スラグ流による膜洗浄だけを備えるシステムと比べて、少なくとも約10%またはそれ以上に達しうる。
【0102】
本発明の少なくとも1つの実施形態のいくつかの態様を説明したが、当業者であれば種々の変更、変形、および改善を容易に行うことができることを、理解すべきである。そのような変更、変形、および改善は、本開示の一部となるべきものであり、添付の特許請求の範囲によって定められるとおりの本発明の技術的範囲に包含される。したがって、以上の説明および図面は、あくまでも例にすぎない。
【技術分野】
【0001】
本開示は、膜ろ過システムに関し、さらに詳しくは、そのようなシステムにおいて使用される膜を、気体スラグ(gas slugs)による洗浄と、膜が沈められた供給物容器における供給物の大域的曝気との併用によって、効果的に洗浄するために利用される装置および方法に関する。
【背景技術】
【0002】
汚水の処理における膜の重要性が、急速に高まっている。膜プロセスを汚水の効果的な三次処理として使用することができ、良質な廃水をもたらすことができることが、今や広く知られている。しかしながら、資本および運転コストが、法外に高くなる可能性がある。膜モジュールが大型の供給物タンクに沈められ、ろ液が膜のろ液側に加えられる吸引または重力送りによって集められる浸漬式膜プロセスの出現により、生物学的プロセスおよび物理学的プロセスを1つの段へ組み合わせる膜バイオリアクタが、より小型、効率的、かつ経済的になることが期待される。その万能性ゆえに、膜バイオリアクタのサイズは、家庭用(浄化槽システムなど)から地域共同体および大規模汚水処理までに及ぶことができる。
【0003】
膜ろ過プロセスの成功は、効果的かつ効率的な膜洗浄方法の採用に大きく依存する。一般的に使用される物理的な洗浄方法として、透過液または気体あるいはそれらの組合せを使用するバックウォッシュ(バックパルス、バックフラッシュ)や、液中の気泡の形態の気体を使用する膜表面のスクラブ洗浄(scrubbing)またはスカーリング(scouring)が挙げられる。典型的には、気体スカーリングシステムにおいては、気体が、通常はブロアによって膜モジュールが沈められている液体系へ気泡を形成すべく注入される。次いで、そのようにして形成された気泡が上方へ移動して膜の表面をスクラブし、膜の表面に形成された付着物を取り除く。生じるせん断力は、初期の気泡の速度、気泡のサイズ、および気泡によって加えられる結果としての力に大きく依存する。スクラブの効果を向上させるために、より多くの気体を供給することができる。しかしながら、この方法は、大量のエネルギーを消費する。さらには、固形物の濃度が高い環境においては、気体流通システムが、脱水された固形物によって徐々に詰まる可能性があり、あるいは気体の流れが誤って停止した場合に単純に詰まる可能性がある。
【0004】
さらに、固形物の濃度が高い環境においては、清浄なろ液が膜を通過し、固形物を多く含む保持液(retentate)が残されるろ過の際に、膜の表面の付近の固形物の濃度の分極が顕著になり、膜を通過する透過液の流れの抵抗が大きくなる可能性がある。これらの問題の一部は、膜の洗浄に二相(気体−液体)の流れを使用することによって対処されている。
【0005】
周期的な仕方で気泡を供給する周期的曝気システムが、エネルギーの消費を減らしつつ、依然として膜の表面を効果的にスクラブするための充分な気体を供給するとされている。そのような周期的な動作をもたらすために、そのようなシステムは、通常は、複雑なバルブ機構および制御装置を必要とし、必要とされる複雑なバルブおよび切替えの機構について、初期のシステムのコストおよび継続的な保守のコストが高くなる傾向にある。さらに、周期の頻度が、大規模なシステムにおいて機能する機械的なバルブによって制限される。さらに、周期的曝気は、膜の表面の回復において効果的ではないことが明らかになっている。
【発明の概要】
【発明が解決しようとする課題】
【0006】
本明細書に開示される態様および実施形態は、従来技術の欠点を克服し、少なくとも従来技術の欠点の一部を改善し、あるいは少なくとも公衆に有用な代案を提供しようと試みる。
【課題を解決するための手段】
【0007】
本開示の一態様により、膜ろ過システムが提供される。膜ろ過システムが、供給物タンクに配置された複数の膜モジュールを備え、該複数の膜モジュールのうちの少なくとも1つが、該膜モジュールの下部ヘッダの下方に配置された気体スラグ発生装置を有しており、該気体スラグ発生装置が、該少なくとも1つの膜モジュール内の膜の表面に沿って気体スラグをもたらすように構成および配置されている。さらに膜ろ過システムは、気体スラグ発生装置へ気体を供給する曝気システムとは独立に動作するように構成され、供給物タンクを巡る流体の大域的循環流を生じさせるように構成および配置された大域的曝気システムを備える。
【0008】
いくつかの実施形態においては、このシステムが、複数の膜モジュールからの透過液の流れを監視するように構成された流量センサと、流量センサに連絡し、流量が第1の量よりも多い旨を示す流量センサからの信号の受信に応答して、大域的曝気システムを作動させ、流量が第2の量よりも少ない旨を示す流量センサからの信号の受信に応答して、大域的曝気システムを停止させるように構成されたコントローラとをさらに備える。
【0009】
いくつかの実施形態においては、複数の膜モジュールがラックに配置され、大域的曝気システムが、膜モジュールのラックの間に気体を届けるように構成された気体拡散器を備えおり、いくつかの実施形態においては、気体拡散器が、同じラック内の隣り合う膜モジュールの間に気体を届けるように構成されている。
【0010】
いくつかの実施形態においては、気体拡散器が、膜モジュールの下方に気体を届けるように構成されている。
【0011】
いくつかの実施形態においては、コントローラが、流量が1平方メートルのろ過膜表面積につき約25リットル/時を超える場合に、大域的曝気システムを作動させるように構成されており、いくつかの実施形態においては、コントローラが、流量が1平方メートルのろ過膜表面積につき約25リットル/時を下回る場合に、大域的曝気システムを停止させるように構成されている。
【0012】
いくつかの実施形態においては、本システムが、膜モジュールのうちの少なくとも1つの膜モジュールの膜をまたぐ圧力を監視するように構成された膜横断圧力センサと、膜横断圧力センサに連絡し、膜をまたぐ圧力が第1の大きさよりも大きい旨を示す膜横断圧力センサからの信号の受信に応答して、大域的曝気システムを作動させ、膜をまたぐ圧力が第2の大きさよりも小さい旨を示す膜横断圧力センサからの信号の受信に応答して、大域的曝気システムを停止させるように構成されたコントローラとをさらに備える。
【0013】
いくつかの実施形態においては、本システムが、供給物タンクへの供給物の流量を監視するように構成された供給物流量センサと、供給物流量センサに連絡し、供給物の流量が第1の量よりも多い旨を示す供給物流量センサからの信号の受信に応答して、大域的曝気システムを作動させ、供給物の流量が第2の量よりも少ない旨を示す供給物流量センサからの信号の受信に応答して、大域的曝気システムを停止させるように構成されたコントローラとをさらに備える。
【0014】
いくつかの実施形態においては、本システムが、選択された時刻に大域的曝気システムを作動および停止させるように構成されたタイマをさらに備える。
【0015】
本開示の別の態様によれば、ろ過の方法が提供される。本方法は、複数の膜モジュールが内部に配置されているろ過容器であって、各々の膜モジュールに該膜モジュールの下端の下方に配置された気体スラグ発生装置が組み合わせられているろ過容器へ、液体媒体を流すステップと、複数の膜モジュールから透過液を取り出すステップと、各々の気体スラグ発生装置に組み合わせられた膜モジュールへ該気体スラグ発生装置から気体スラグを周期的に届け、気体スラグを各々の膜モジュール内の膜の表面に沿って通過させ、膜の表面から付着物を除去するステップと、膜モジュールからの透過液の流れ、膜モジュールが沈められているろ過容器への供給物の流れ、および少なくとも1つの膜モジュールの膜をまたぐ膜横断圧力のうちの少なくとも1つから導出される信号に応答して、ろ過容器を巡る大域的循環流を開始および停止させるステップとを含んでいる。
【0016】
いくつかの実施形態においては、複数の膜モジュールの各々への気体スラグの送出の間の時間期間が、無作為に決定される。
【0017】
いくつかの実施形態においては、本方法が、各々の気体スラグ発生装置に基本的に一定の気体の供給をもたらすステップをさらに含んでいる。
【0018】
いくつかの実施形態においては、供給物の大域的循環流の開始が、気体スラグ発生装置とは独立に動作する曝気システムへの気体の導入を含んでいる。
【0019】
いくつかの実施形態においては、気体スラグ発生装置および曝気システムに、共通の供給源からの気体が供給される。
【0020】
いくつかの実施形態においては、供給物の大域的循環流の開始が、気体のパルス状の流れの開始をさらに含んでいる。
【0021】
いくつかの実施形態においては、供給物の大域的循環流の開始が、複数の膜モジュールのうちの隣同士の膜モジュールの間への気体の導入を含んでいる。
【0022】
いくつかの実施形態においては、気体スラグの体積が無作為である。
【0023】
いくつかの実施形態においては、第1の膜モジュールへの気体スラグの放出のタイミングが、第2の膜モジュールへの気体スラグの放出のタイミングとは独立である。
【0024】
添付の図面は、必ずしも比例尺で描かれていない。図面において、種々の図に描かれている同一またはほぼ同一の構成要素の各々は、同様の符号によって示されている。分かりやすくするために、すべての図においてすべての構成要素に符号が付されているわけではない。
【図面の簡単な説明】
【0025】
【図1】本発明の一実施形態による膜モジュールの簡単な概略の側面断面図である。
【図2】パルス作動段階における図1のモジュールを示している。
【図3】パルス状の二相気体/液体流の段階の完了後の図1のモジュールを示している。
【図4】本発明の第2の実施形態による膜モジュールの簡単な概略の側面断面図である。
【図5】図1の実施形態に示したタイプの膜モジュールのアレイの簡単な概略の側面断面図である。
【図6】図1の実施形態に示した形式の膜モジュールのアレイの別の実施形態の簡単な概略の側面断面図である。
【図7】1つ以上の実施形態において利用することができるコンピュータ化された制御システムを示している。
【図8】図1の実施形態に示したタイプの膜モジュールのアレイの部分切断の等角投影図である。
【図9】図8の膜モジュールのアレイの一部分の簡単な概略の側面断面図である。
【図10】本発明の第3の実施形態による水処理システムの簡単な概略の側面断面図である。
【図11A】膜モジュールの簡単な概略の側面断面図であり、気体スラグ発生装置の内部の液体の動作時の水位を示している。
【図11B】膜モジュールの簡単な概略の側面断面図であり、気体スラグ発生装置の内部の液体の動作時の水位を示している。
【図12】図1の実施形態に示したタイプの膜モジュールの簡単な概略の側面断面図であり、気体スラグ発生装置におけるスラッジの蓄積を示している。
【図13】スラッジ除去プロセスの一実施形態を示している膜モジュールの簡単な概略の側面断面図である。
【図14】一実施例によるパルス状の液体の流れのパターンおよび供給空気の流量の時間に対するグラフである。
【図15】時間に対する膜透過率のグラフであり、気体リフト装置および本明細書に開示の実施形態による気体スラグ発生装置を使用して洗浄効率を比較している。
【図16】管内の気体の流れの種々の形態の概略図を示している。
【図17A】管を通って移動する気体スラグの側面図を示している。
【図17B】管を通って移動する気体スラグの側面図を示している。
【図18】スラグ流の特徴を実証するための実施例において使用される試験用の膜モジュールの概略等角投影図を示している。
【図19】図18の試験モジュールにおける高さに対する気泡の直径のグラフを示している。
【図20】図18の試験装置の膜ファイバを通って移動する気体スラグの側面の写真である。
【図21A】図18の試験装置および3つの異なる高さ(Y)の位置での実験および計算結果の比較が行われる試験モジュールのガラス壁から20mmの平面を示している。
【図21B】図18の試験装置および3つの異なる高さ(Y)の位置での実験および計算結果の比較が行われる試験モジュールのガラス壁から20mmの平面を示している。
【図22A】スラグ流の例において、シミュレーションおよび実験による水の速度の値の時間に対するグラフを示している。
【図22B】スラグ流の例において、シミュレーションおよび実験による水の速度の値の時間に対するグラフを示している。
【図22C】スラグ流の例において、シミュレーションおよび実験による水の速度の値の時間に対するグラフを示している。
【図23A】気体/液体流のパルスの際の図18の試験装置内の種々の高さにおける気泡のサイズ分布のグラフを示している。
【図23B】気体/液体流のパルスの際の図18の試験装置内の種々の高さにおける気泡のサイズ分布のグラフを示している。
【図23C】気体/液体流のパルスの際の図18の試験装置内の種々の高さにおける気泡のサイズ分布のグラフを示している。
【図24A】気体/液体流のパルスの際の図18の試験装置内の種々の高さにおける気泡のサイズの時間に対するグラフを示している。
【図24B】気体/液体流のパルスの際の図18の試験装置内の種々の高さにおける気泡のサイズの時間に対するグラフを示している。
【図24C】気体/液体流のパルスの際の図18の試験装置内の種々の高さにおける気泡のサイズの時間に対するグラフを示している。
【図25】図18の装置における気体液体流の各々のパルスの平均時間スパンの空気の流量に対するグラフを示している。
【図26】気体リフト装置への入口水量について、観察期間中のカメラフレームによる時間に対するグラフを示している。
【発明を実施するための形態】
【0026】
本発明の適用は、以下の説明に記載され、あるいは図面に示される構成の詳細および構成要素の配置に限られない。本発明について、他の実施形態も可能であり、本発明を、さまざまな方法で実施または実行することが可能である。さらに、本明細書において使用される表現および用語は、説明を目的とするものであり、本発明を限定するものとして解釈されてはならない。本明細書において、「・・・を備える(including)」、「・・・から構成される(comprising)」、「・・・を有する(having)」、「・・・を含む(containing)」、「・・・を必要とする(involving)」、およびこれらの変種の使用は、「・・・」に挙げられるアイテムおよびその均等物を含み、さらに追加のアイテムを含むことを意味する。
【0027】
本明細書に開示される種々の態様および実施形態によれば、供給物タンクまたは容器において液体媒体をろ過する方法が提供される。液体媒体として、例えば水、汚水、溶媒、産業における流出液、人間の消費活動のために準備されるべき流体、あるいは分離が望まれる成分を含んでいる種々の液状の廃棄物の流れの形態を挙げることができる。本明細書に開示される種々の態様および実施形態には、液体媒体に沈められた膜モジュールを洗浄するための装置および方法が含まれる。いくつかの態様において、膜モジュールに、膜モジュール内の膜の表面を通過する気体のスラグを含んでいる無作為に生成される間欠的またはパルス状の流体の流れがもたらされ、膜から付着物を取り除くとともに、固形物の濃度の分極を減少させる。「気体スラグの流れ」の意味するところ、および他の種類の二相気体液体流が、図16に示されている。膜モジュールをこすり洗うべくもたらされる気体スラグと同時に、供給物タンクの全体にわたる供給液体の大域的循環を生じさせるように構成された大域的曝気のシステムが用意される。
【0028】
図面を参照すると、図1〜図3が、一実施形態による膜モジュールの構成が示されている。
【0029】
膜モジュール5は、下部ポッティングヘッド7に取り付けられ、かつこれから延びている複数の透過性の中空ファイバ膜の束6を備えている。この実施形態においては、束が、束6の間に空間8をもたらすように分けられている。モジュール5において、任意の所望の膜の配置を使用できることを、理解できる。下部ポッティングヘッド7の下方に配置された分配チャンバ10からの流体の流れを通すことができるよう、下部ポッティングヘッド7にいくつかの開口9が設けられている。
【0030】
気体スラグ発生装置11が、分配チャンバ10の下方に設けられ、分配チャンバ10に流体連通している。気体スラグ発生装置11は、下端13が開いた逆さの気体収集チャンバ12と、上端の付近の気体導入ポート14とを備えている。中央のライザ管15が、気体収集チャンバ12を貫いて延び、分配チャンバ10の底部へ流体接続している一方で、下端16において開いている。ライザ管15は、その全長の途中に1つ以上の開口17を備えている。管状のトラフ18が、開口17の下方の位置においてライザ管15から上方へ、およびこれの周囲に延びている。いくつかの実施形態においては、気体スラグ発生装置が、各々の膜モジュールについて設けられているのではなく、他の実施形態においては、複数の膜モジュールに、同じ気体スラグ発生装置から気体スラグが供給される。
【0031】
使用時、モジュール5が、液体の供給物19に沈められ、加圧気体の供給源が、基本的に連続的に気体導入ポート14へ適用される。本明細書において使用されるとき、「基本的に連続的」または「基本的に一定」の流れは、流量に生じうる時折の瞬間的な中断または減少を除き、モジュールが動作しているあいだ連続的である流れを意味する。気体が、逆さの気体収集チャンバ12の供給液体19を、開口17の高さに達するまで徐々に置き換える。この時点で、図2に示されているように、気体が開口17を横切る液体のシールを破り、開口17を通り、中央のライザ管15を通って上方へ殺到し、分配チャンバ10を通って膜モジュール5の底部へ流れる気体スラグを生成する。いくつかの実施形態においては、気体の急激な殺到により、ライザ管15の底部の開口16を通って液体も吸い込まれ、高速な二相気体/液体流がもたらされる。次いで、気体スラグおよび/または二相気体/液体パルスが、開口9を通って流れ、膜6の表面をこすり洗う。トラフ18が、開口17の即座の再シーリングを防止し、初期のパルスの後の短い期間にわたる気体/液体混合物の連続的な流れを可能にする。
【0032】
いくつかの実施形態によれば、気体の初期の殺到が、液体の移動の2つの段階、排出および吸引をもたらす。排出段階は、気体スラグがライザ管15へ最初に放出されるときに生じ、気体および液体をライザ管15を通って急激に排出し、次いで膜モジュール5を通って排出して、膜の表面に効果的な洗浄作用を生み出す強力な浮力を生成する。排出段階に、吸引段階またはサイフォン段階が続き、吸引段階またはサイフォン段階においては、ライザ管15から出る急激な気体の流れゆえに、密度の差に起因した圧力の一時的な低下が生じ、結果として液体がライザ管15の底部16を通って吸い込まれる。したがって、初期の急激な二相気体/液体流に、やはり開口17を通ってさらなる気体を吸い込みうる減少した液体の流れが続く。他の実施形態においては、気体スラグが、吸引段階またはサイフォン段階を伴わずに生成される。
【0033】
次いで、気体収集チャンバ12が、図3に示されるとおり供給液体で再び満たされ、プロセスが再び始まり、結果として、さらなる気体スラグのパルスまたはモジュール5内の膜6の二相気体/液体による洗浄が生じる。プロセスの比較的制御されていない性質ゆえに、パルスの頻度および継続時間は、一般に無作為である。
【0034】
図4が、図1〜図3の実施形態のさらなる変形例を示している。この実施形態においては、間欠的なパルス状の気体スラグまたは二相気体/液体流によって補われる一定の気体/液体の流れをモジュール5を通って生じさせるために、パルス状の気体スラグまたはパルス状の二相気体/液体流に加えて、気体の定常状態の供給が、ポート20においてライザ管15の上部または下部へ送り込まれる混成の構成がもたらされている。
【0035】
図5が、図1〜図3の実施形態に関して説明したタイプのモジュール35および気体スラグ発生装置11のアレイを示している。モジュール5が、供給物タンク36に配置されている。動作時、各々の気体スラグ発生装置11によって生成される気泡のパルスが、各々のモジュール5について無作為に生じ、供給物タンク36内にパルス状の気泡の発生の全体として無作為な分布を生じさせる。これにより、供給物タンク36内の液体供給物について、不断でありながら無作為または無秩序に変化する攪拌が生じる。各々の気体スラグ発生装置によって放出される一連の気体スラグは、本明細書において、周期的に生じるものとして説明される。本明細書において使用されるとき、「周期的」に生成される気体パルスまたは「周期的」に放出される気体パルスという用語は、一定の速度での気体パルスの生成または放出という意味に限られない。「周期的」な生成または放出は、無作為な時間間隔で生じる生成または放出の事象も包含する。
【0036】
供給物タンク36におけるパルス状の気泡の発生の全体として無作為な分布が、いくつかの実施形態において、供給物タンク36を巡る供給液体の大域的循環を乱すことが観測されている。供給液体の大域的循環の乱れは、パルス状の気泡が気体スラグの形態である実施形態において、特に顕著である可能性がある。いくつかの実施形態においては、供給物が、膜モジュール35のアレイを通って上方へ供給物タンクを通って循環し、次いで膜モジュールのアレイの周囲を下方へ、供給物タンクの壁の近傍を循環することが好ましい。この大域的循環の流れが、図6において矢印によって示されている。図6が、膜ろ過装置の実施形態の一部分の断面であり、供給物の流れが、実際には図示されている壁ならびにこの断面図には表わされていない他の壁に沿って下方へ循環すると考えられることに、注意すべきである。いくつかの実施形態においては、供給物中の粒子状物質および/または他の汚染物質が、この循環の流れが生じない場合と比べて、より一様に供給物タンクの全体に分布するよう、この大域的循環の供給の流れを維持することが望ましい。他の実施形態においては、供給物タンクにおける粒子状物質および/または他の汚染物質のより良好な分布を促進するために、既存の供給物の循環流の速度を高めることが望ましい。いくつかの実施形態においては、供給物の大域的循環流が、膜ファイバ表面の近傍からの粒子および/または他の汚染物質の除去を促進する。いくつかの実施形態においては、供給物の大域的循環流を維持することが、より重要になる。より高い運転率(透過液の流束がより大きい)においては、より低い運転率と比べ、粒子が膜ファイバの表面の近傍により早期に蓄積する傾向になる可能性があり、したがって供給物の大域的循環流などの機構について、これらの粒子を除去および/または再分散させるべく作動することが、さらに望まれる。
【0037】
図6に示されているように、いくつかの実施形態においては、多数の曝気開口62を有する曝気管60などの気体拡散器を、膜モジュール5のアレイの下方において供給物タンク36に設けることができる。図6に示されるように、曝気開口は、図示の膜モジュールのラックにおいて、隣り合う膜モジュールの下方かつこれらの間に設けられている。別の実施形態においては、曝気開口を、図6に示されているように曝気管60の上側にではなく、下側に設けてもよい。さらに、別の実施形態においては、曝気管が必ずしも膜モジュールの下方に位置せず、膜モジュールの下端の上方に位置してもよい。図6においては、膜モジュール5のラックが1つだけ示されているが、いくつかの実施形態において、膜モジュール5の複数のラック(例えば、各々が16個のモジュールから構成される20個のラック)が、ラックの各ペアの間に曝気管60を備えつつ、供給物タンク36から供給物をろ過するために利用される膜モジュールアレイ35を構成してもよいことに、注意すべきである。
【0038】
空気などの気体を、ブロアまたは加圧されたタンク(図示せず)などの外部の供給源から曝気管60へ供給することができる。曝気管60のための気体の供給源は、気体スラグ発生装置11のための気体の供給源と同じであってもよい。いくつかの実施形態においては、バルブおよび/または流量コントローラ(図示せず)が、気体スラグ発生装置11への気体の不断または基本的に不断の流れを維持しつつ、必要なときに曝気管60へ気体を供給するために利用される。他の実施形態においては、曝気管60および気体スラグ発生装置11に、異なる気体および/または異なる供給源からの気体が供給される。いくつかの実施形態においては、曝気管60に、膜モジュール5の周囲を上方へ、および/または膜モジュール5を通って上方へ流れる気泡を生み出し、図6に矢印によって示されている供給物タンク36を通る供給物の大域的循環流の流速を誘起し、あるいは高めるために、気体の不断の流れが供給される。他の実施形態においては、曝気管60への気体の流れが、曝気管60への曝気が有効にされるときにパルス状にされる。いくつかの実施形態においては、曝気管60への気体の流れを、30分間にわたってオンにし、30分間にわたってオフにすることができ、いくつかの実施形態においては、この気体の流れのパルス化を、例えば1分間のオンおよび1分間のオフの頻度など、より高い頻度で実行することができる。曝気管への気体の供給のオンおよびオフの時間は、必ずしも同じである必要はない。
【0039】
高い運転率の期間の間だけ曝気管60が曝気用の気体を供給することが望まれる他の実施形態においては、流量センサ102を、ろ過モジュールから取り出される透過液の流量を測定するために、透過液の取出口64に設けることができる。流量センサ102は、ろ液の取出管64に配置されたパドルホイール式のセンサ、磁気式の流量センサ、光学式の流量センサ、または当技術分野において公知の任意の他の形態の流量センサを備えることができる。流量センサ102へ接続されたコントローラ100を、透過液の流れが第1のしきい値レベルまたは規定のしきい値レベルを超えている期間の間のみ曝気管60へ気体が供給されるように構成することができる。他の実施形態においては、コントローラ100が、先の大域的曝気サイクルの後に所定の量の透過液が系から取り出された後で、大域的曝気システムを作動させる(曝気管60へ気体を供給する)ように構成される。いくつかの実施形態においては、コントローラ100が、上述のように、曝気管60への気体の供給が開始されるときに、曝気管60への気体の供給をパルス状にすることができる。
【0040】
他の実施形態においては、供給物導入管66において供給物の流れを測定する流量センサ104を、いつ曝気管60への気体の供給を開始させるかを判断するための流量センサ102に加え、あるいはそのような流量センサ102に代えて、使用することができる。供給物タンクへの供給物の入力が通常よりも多い期間において、コントローラ100を、流量センサ104が供給物の流れが第1のしきい値レベルまたは特定のしきい値レベルを超えていることを知らせているときに、曝気管への気体の流れを開始させるように構成することができる。同様の方法で、コントローラ100は、透過液および/または供給物の流量が第2のレベルまたは所定のレベルを下回って低下した旨を知らせる信号をセンサ102および/または104の一方または両方から受信したことに応答して、曝気管60への気体の流れを終了させることができる。
【0041】
都市下水の処理施設など、いくつかの実施形態においては、供給物の流量が、一日のうちの時刻によって変化する可能性がある。例えば、深夜および早朝など、下水の発生が少ない時間の間は、供給物タンク36への供給物の流入量が少ない可能性がある。昼前または夕方の時間など、下水の発生が多い時間の間は、供給物タンク36への供給物の流入量がより多くなる可能性がある。ろ過システムを、相応に制御することができる。例えば、特定の時刻に曝気管60への気体の供給を開始および/または停止させるために、タイマを使用することができる。これらの時刻は、平日ならびに週末および/または休日の間で異なってもよい。他の実施形態においては、タイマを、大域的曝気システムの先の作動後に規定の時間期間が過ぎた後で、曝気管60への気体の供給を開始させるために利用することができる。さらなる実施形態においては、タイマを、膜の洗浄またはバックウォッシュサイクルなどといった別の事象の発生後に規定の時間期間が過ぎた後、あるいは規定の回数のバックウォッシュサイクルまたは他の事象が生じた後に、曝気管60への気体の供給を開始させるために利用することができる。またさらなる実施形態においては、タイマを、例えば学習期間のあいだ大域的曝気システムがどのような条件(例えば、透過液の流量、供給物の流量、膜横断圧力、および/または一日のうちの時刻など)のもとで作動および/または停止させられるのかを監視する人工知能を利用する制御システムなど、インテリジェント制御システムに組み合わせることができる。次いで、学習期間の完了後に、コントローラおよび/またはタイマは、学習した条件の検出に応答して、大域的曝気システムを自立的に作動および/または停止させることができる。
【0042】
いくつかの実施形態においては、「通常」の透過液の流量を、1時間当たりに1平方メートルのろ過膜の面積につき約25リットルと定めることができる(一般に「lmh」と称される単位)。いくつかの実施形態においては、流束がこの「通常」の流量を超える場合に曝気管60へ気体を供給することができる。いくつかの実施形態においては、曝気管60への気体の供給を開始するためのしきい値となる透過液の流束のレベルを、約30lmhに設定することができる。他の実施形態においては、このしきい値レベルを、40lmhなど、より高く設定することができる。いくつかの実施形態においては、供給物タンクへの供給物の同様の流量(例えば、25lmh、30lmh、または40lmh)を、曝気管60への気体の流れを作動させるためのしきい値レベルとして使用することができる。いくつかの実施形態においては、曝気管60への気体の流れを、透過液の流量が「通常」に戻ったときに中断することができる。他の実施形態においては、曝気管60への気体の流れを、透過液の流量および/または供給物の供給速度が作動しきい値レベルを規定のレベルだけ下回って低下した場合に中断することができる。例えば、いくつかの実施形態においては、曝気管60への気体の流れを、透過液の流量または供給物の供給速度が、気体の供給を作動させた流量から5lmhを超えて低下した場合に中断させることができ、他の実施形態においては、透過液の流量が作動しきい値レベルを10lmhを超えて低下した場合に中断させることができる。他の実施形態においては、透過液または供給物の一方または両方の流れが、基準レベル(「通常」のレベルなど)に対して指定の割合を超えて増加した場合に、気体を曝気管60へ供給することができる。例えば、大域的曝気システムを、透過液または供給物の一方または両方の流れが基準レベルから25%を超えて増加した場合に、他の実施形態においては50%を超えて増加した場合に、作動させることができる。大域的曝気システムを、透過液または供給物の一方または両方の流れが基準レベルへ戻り、他の実施形態においては所定の割合(例えば、基準レベルを超えること5%または10%)へ戻った場合に、停止させることができる。さまざまな設定点を、例えばろ過システムのサイズ、処理される流体の種類に応じ、あるいは曝気管60への気体の供給と、例えば透過液および/または供給物の流量を多くした条件のもとで動作するときの膜モジュールについて予想されるバックウォッシュの必要性の高まりとの間のエネルギーの妥協の計算にもとづいて、設定することが可能である。
【0043】
他の実施形態においては、膜横断圧力などといった他のパラメータを、曝気管60への気体の流れの開始または停止を生じさせるために利用することができる。供給物のろ過が進むにつれて時間とともに、粒子の濃度の高まりが、ろ過モジュールの周囲において生じる可能性がある。この粒子の蓄積により、膜モジュールにおいて膜の一部が詰まり、所定の量の透過液の流れを得るために必要な膜横断圧力が高くなる可能性がある。いくつかの実施形態においては、1つ以上の膜横断圧力センサが、膜モジュールのうちの1つ以上の膜モジュールの膜ファイバのうちの1つ以上の膜ファイバの膜横断圧力を監視し、膜横断圧力が規定の設定点を超える場合にコントローラ100へ信号をもたらすように構成される。この膜横断圧力センサからの信号に応答して、コントローラが、曝気管60への気体の流れを開始させる。曝気管60からの気体の流れが、容器を巡る供給物の大域的循環を誘起または増加させ、膜モジュールの周囲から粒子を除去し、あるいは再分散させ、観察される膜横断圧力を低下させる。曝気管60への空気の流れを開始または停止させるための所望の設定点を、絶対レベルまたは相対レベルに設定することができ、例えば膜の洗浄および/またはバックウォッシュサイクルの後のろ過において観察される膜横断圧力(基準レベル)を上回る割合として定められるレベルなどに設定することができる。例えば、曝気管60への気体の流れを開始させるための設定点が、一実施形態においては、基準レベルを上回ること約20%に設定され、他の実施形態においては、この設定点が、例えば基準レベルを上回ること約50%など、より高いレベルに設定される。一例においては、曝気管60への気体の流れが、膜横断圧力が基準レベルを上回ること約10%へ戻ったときに中断され、他の例では、膜横断圧力が基準レベルを上回ること約25%へ戻ったときに中断される。他の実施形態においては、曝気管60への気体の流れを開始または停止させるための他の設定点を、例えば曝気管60への気体の流れの供給と、特定の膜横断圧力のレベルにおいて効率的な動作を可能にすべく充分な吸引または圧力を供給することに関係するコストとの間のエネルギーコストの妥協点の調査に応じて使用することができる。
【0044】
いくつかの実施形態においては、曝気管60から供給される気体が、膜モジュールを貫通することがなく、あるいは膜モジュールの膜ファイバに触れることがない。これは、曝気管60から供給される気体にとって、膜モジュールの間の空間を上方へ流れるときの方が、モジュールを通って流れるときよりも、流れの抵抗が少ないがために生じると考えられる。いくつかの実施形態においては、曝気管60から供給される気体が、供給物タンク36を巡る供給物の大域的循環流の誘起または強化のためだけに利用される。これは、特に、膜ファイバが膜モジュールの管内に少なくとも部分的または完全に囲まれている実施形態に当てはまることができる。他の実施形態においては、曝気管60から供給される気体が、膜モジュールの膜ファイバの表面に接触し、膜ファイバの表面をこすり洗うために、気体スラグ発生装置11からの気体スラグによってもたらされるエネルギーに加えてエネルギーをもたらす。
【0045】
(作動時に)曝気管60へ供給される気体の量は、いくつかの実施形態においては、気体スラグ発生装置11へ供給される気体の流れに比肩することができる。他の実施形態においては、作動時の曝気管60への気体の流れが、気体スラグ発生装置への気体の流れを超えてもよく、あるいは他の実施形態においては、気体スラグ発生装置への気体の流れよりも少なくてもよい。例えば、一実施形態においては、気体スラグ発生装置11への気体の流れが、モジュールごとに1時間につき約4立方メートルであってもよく、作動時の1つ以上の曝気管60を備える曝気システムへの気体の流れが、モジュールごとに1時間につき約3立方メートルであってもよい。
【0046】
いくつかの実施形態においては、気体スラグ発生装置11および曝気管60の両方を利用するろ過システムによって使用されるエネルギーの量が、同じ量の透過液を生じるが、曝気管60を存在させずに気体スラグ発生装置11によって動作する同等のろ過システムによって使用されるエネルギーの量よりも少なくてもよい。曝気管は、上述のように、ろ過タンクを巡る供給物の大域的循環を強化でき、膜モジュールの近傍から高濃度の粒子を除去することができる。したがって、曝気管60を備えるシステムにおいては、曝気管60を持たないシステムと比べて、膜からの同等の量の粒子の除去をもたらすために、気体スラグ発生装置によって供給されるべき気体が少ないと考えられる。曝気管60を備えているいくつかの実施形態においては、曝気管60を持たないシステムと同等の膜洗浄を達成するために気体スラグ発生装置11へ供給される必要がある気体の量を、約25%減らすことができる。例えば、気体スラグ発生装置11によって動作しているシステムに曝気管60を追加することで、気体スラグ発生装置へ供給される気体を、モジュールごとに1時間につき約4立方メートルから、モジュールごとに1時間につき約3立方メートルへ減らすことができ、同じ量の膜洗浄を達成することができる。
【0047】
曝気管60への気体の流れの開始および中断をもたらすために、別の実施形態においては、コントローラ100が、膜ろ過システム内の種々のセンサからのパラメータを監視することができる。コントローラ100を、多数の形態のいずれかにて具現化することができる。監視コンピュータまたはコントローラが、センサ102および104などのセンサからフィードバックを受け取ることができ、いくつかの実施形態においては、供給物タンク36、気体スラグ発生装置11、あるいは供給物供給配管、透過液配管、またはろ過システムに関連する他の配管の圧力、膜横断圧力、温度、pH、化学的濃度、または液体の水位のセンサなどといった追加のセンサからフィードバックを受け取ることができる。いくつかの実施形態においては、監視コンピュータまたはコントローラ100が、運転員のための出力を生成し、他の実施形態においては、これらのセンサからのフィードバックにもとづいてろ過システムの処理パラメータを自動的に調節する。例えば、1つ以上の膜モジュール5、1つ以上の気体スラグ発生器11、および/または1つ以上の曝気管60への気体の流量を、コントローラ100によって調節することができる。
【0048】
一例においては、本明細書に開示のシステムの実施形態のためのコンピュータ化されたコントローラ100が、図7に例示的に示されるとおりの1つ以上のコンピュータシステム700を使用して実現される。コンピュータシステム700は、例えばIntel社のPENTIUM(登録商標)またはCore(商標)プロセッサ、Motorola社のPowerPC(登録商標)プロセッサ、Sun社のUltraSPARC(登録商標)プロセッサ、Hewlett−Packard社のPA−RISC(登録商標)プロセッサ、または任意の他の種類のプロセッサ、あるいはこれらの組合せにもとづくコンピュータなど、汎用のコンピュータであってもよい。あるいは、コンピュータシステムが、例えば特定用途向け集積回路(ASIC)または廃水処理設備用として特に意図されたコントローラなど、特別にプログラムされた専用のハードウェアを備えてもよい。
【0049】
コンピュータシステム700は、典型的には1つ以上のメモリ装置704へ接続された1つ以上のプロセッサ702を備えることができ、メモリ装置704は、例えばディスクドライブ記憶装置、フラッシュメモリ装置、RAMメモリ装置、またはデータを保存するための他の装置のうちの任意の1つ以上を備えることができる。メモリ704は、典型的には、コントローラおよび/またはコンピュータシステム700の動作の際にプログラムおよびデータを保存するために使用される。例えば、メモリ704を、或る時間期間にわたって種々のセンサの任意のいずれかから測定されたパラメータに関する履歴データならびに現在のセンサ測定データを保存するために使用することができる。本発明の実施形態を実行するプログラミングコードなどのソフトウェアを、ハードドライブまたはフラッシュメモリなどのコンピュータにとって読取りおよび/または書込みが可能な不揮発性の記録媒体に保存することができ、次いでメモリ704へコピーし、その後にプロセッサ702によって実行することができる。そのようなプログラミングコードを、例えばJava(登録商標)、Visual Basic、C、C#、またはC++、Fortran、Pascal、Eiffel、Basic、COBOL、あるいはこれらの種々の組合せのいずれかなど、複数のプログラミング言語のいずれかで記述することができる。
【0050】
コンピュータシステム700の構成要素を、1つ以上のバス(例えば、同じ装置内に統合された構成部品の間)および/またはネットワーク(例えば、分離した個別の装置に存在する構成要素の間)を含むことができる相互接続機構706によって接続することができる。相互接続機構は、典型的には、システム700の構成要素間の通信(例えば、データおよび/またはインストラクション)の交換を可能にする。
【0051】
さらに、コンピュータシステム700は、例えばキーボード、マウス、トラックボール、マイクロホン、またはタッチ式画面などの1つ以上の入力装置708と、例えば印刷装置、表示画面、またはスピーカなどの1つ以上の出力装置710とを含むことができる。コンピュータシステム700を、上述のように、例えば本明細書に記載のろ過システムの実施形態の任意の1つ以上の部位に位置する流束、流量、圧力、温度、pH、化学的濃度、または液体の水位のセンサを含むことができる1つ以上のセンサ714へ、電子的または他の方法で結び付けることができる。さらに、コンピュータシステム700は、コンピュータシステム700を(システム700の構成要素のうちの1つ以上によって形成できるネットワークに加え、あるいはそのようなネットワークに代えて)通信ネットワークへ接続することができる1つ以上のインターフェイス(図示せず)を含むことができる。この通信ネットワークは、いくつかの実施形態において、ろ過システムのプロセス制御システムの一部を形成する。
【0052】
1つ以上の実施形態によれば、通信ネットワークを介してコンピュータシステム700と通信すべく、1つ以上の出力装置710が別のコンピュータシステムまたは構成要素に組み合わせられる。そのような構成により、或るセンサを別のセンサから大きく離して配置することができ、あるいは任意のシステムを任意のサブシステムおよび/またはコントローラから大きく離して配置することができ、依然としてそれらの間でデータの提供を行うことができる。
【0053】
コンピュータシステム700を、例として、本発明の種々の態様を実施することができる一種のコンピュータシステムとして示したが、本発明の種々の実施形態が例示的に示したとおりのソフトウェアまたはコンピュータシステムにおける実施に限られないことを、理解すべきである。実際、コントローラあるいはコントローラの構成要素または一部分が、例えば汎用のコンピュータシステムにて実現されるのではなく、専用のシステムまたは専用のプログラマブル・ロジック・コントローラ(PLC)として実現されても、分散型の制御システムにおいて実現されてもよい。さらに、制御システムの1つ以上の特徴または態様を、ソフトウェア、ハードウェア、またはファームウェア、あるいはこれらの任意の組合せにて実現することができることを、理解すべきである。例えば、コンピュータシステム700において実行できるアルゴリズムの1つ以上の部分を、1つ以上のネットワークを介して通信することができる分離したコンピュータにおいて実行してもよい。
【0054】
図8および図9が、本開示による膜ろ過システムの別の実施形態を示している。図8は、供給物タンク36に取り付けられた膜モジュール5の複数のラックを含んでいる膜モジュールのバンクの等角投影図である。供給物タンクの壁は、膜モジュールのバンクを示すために切り取られている。図9は、図8の膜モジュールのバンクの一部分について、曝気管60の軸に垂直な断面を示している。これらの図において、曝気管60が、膜モジュールのバンクにおける隣同士の膜モジュールラックの間の下方かつ実質的に真ん中に位置していることを、見て取ることができる。いくつかの実施形態においては、曝気管60が、外側の膜モジュールラック(供給物タンクの壁に最も近い膜モジュールラック)と供給物タンクの壁との間にも設けられており、したがって外側の膜ラックが、この膜モジュールラックの縦方向の軸の両側に曝気管60を有している。
【0055】
図10は、膜バイオリアクタを使用する水処理システムにおいて本発明を使用するための構成を示している。この実施形態においては、パルス状の気体スラグまたはパルス状の二相気体/液体流が、バイオリアクタタンク21と膜タンク22との間にもたらされる。タンクが、バイオリアクタ21に配置された1つの垂直に延びる壁24と、膜タンク22に配置された第2の垂直に延びる壁25とを有している逆さの気体収集チャンバ23によって接続されている。バイオリアクタタンク21の水位の下方における壁24の延在は、膜タンク22の水位の下方における壁25の延在と比べ、より低い深さまでである。図10の例では、この深さの差が、2つのタンクの水面の高さが異なることによってもたらされている。気体収集チャンバ23が、2つの区画27および28を定めるべくバイオリアクタタンク21と膜タンク22との間の接続壁26によって仕切られている。気体(典型的には、空気)が、ポート29を介して気体収集チャンバ23へ供給される。膜ろ過モジュールまたは膜ろ過装置30が、垂直壁25の下端よりも上方で膜タンク22内に位置している。
【0056】
使用時、加圧された気体がポート29を通って気体収集チャンバ23へ供給され、結果としてチャンバ23内の供給液体の水位が、壁25の下端31に達するまで低下する。この段階で、気体が区画27から壁25を過ぎて急激に逃げ出し、気泡として膜タンク22を通って上昇し、膜モジュール30を通過する二相気体/液体流を生じる。他の実施形態においては、膜モジュール30を通過する二相気体/液体流に代え、あるいはそのような二相気体/液体流に加えて、気体スラグが生成される。気体の急激な流れは、気体収集チャンバ23の区画28内の気体の圧力の急激な低下も生じさせ、結果としてさらなる供給液体がバイオリアクタタンク21から膜タンク22へサイフォン作用によって送り込まれる。ポート29を通過する気体の流れを、気体の供給源(図示せず)へ接続されたバルブ(図示せず)によって制御することができる。バルブを、上述のコントローラ100などのコントローラ装置によって動作させることができる。
【0057】
上述の実施形態において説明したパルス状の気体の流れおよび/または気体スラグの発生装置が、種々の公知の膜の構成において洗浄装置として使用することが可能であり、あるいは種々の公知の膜の構成における洗浄装置と併せて使用することが可能であり、上述した特定の構成に限られないことを、理解できる。気体スラグ発生装置を、膜モジュールまたはモジュールのアセンブリに直接接続することができる。他の実施形態においては、気体スラグ発生装置と、気体スラグ発生装置によって気体スラグが供給される膜モジュールとの間に、すき間を設けることができる。いくつかの実施形態においては、気体(典型的には、空気)が、気体スラグ発生装置へ連続的に供給され、パルス状の二相気体/液体流および/または一連の気体スラグが、膜の洗浄および表面の回復のために生成される。パルス状の流れが、いくつかの実施形態においては気体の連続的な供給を使用して気体スラグ発生装置によって生成されるが、非連続的な気体の供給が使用される場合にも、一連の気体スラグおよび/またはパルス状の二相気体/液体流を生成できる(ただし、パルスのパターンは異なる)ことを、理解できる。
【0058】
いくつかの応用において、気体スラグ発生装置11の内部の液体のレベルが、図11Aおよび図11Bに示されるようにレベルAおよびBの間を変動することが、明らかになっている。気体スラグ発生装置11の内部の上端付近に、気体のポケットの形成に起因して液相が到達できない空間37が残される可能性がある。そのような気体スラグ発生装置11が、膜バイオリアクタなどにおいて固形分の多い環境において運転されるとき、浮きかす(scum)および/または脱水されたスラッジ39が、気体スラグ発生装置11の上端の空間37に次第に蓄積する可能性があり、これが最終的に気体の流路40を詰まらせ、気体スラグの発生および/または二相気体/液体流のパルス化の減少につながり、あるいは気体スラグまたはパルス化効果が皆無になる可能性がある。図12が、そのような筋書きを示している。
【0059】
この作用を克服するために、いくつかの方法が特定されている。一方法は、動作時に達する液体の上方の水位(図11Aおよび図11BにおけるレベルA)よりも下方の点に気体注入点38を配置することである。液体のレベルが気体注入点38および上方に達するとき、気体が液体の噴霧41を生じさせ、これが気体スラグ発生装置11の上端付近に存在しうる浮きかすまたはスラッジの蓄積を分解する。図13が、そのような作用を概略的に示している。噴霧41の強さは、気体の注入の位置38および気体の速度に関係する。この方法は、気体スラグ発生装置11の内部のスラッジの長期の蓄積を防止することができる。
【0060】
他の方法は、動作時に液体の水位が気体スラグ発生装置11の内部の上端の空間37に達することができるよう、気体スラグ発生装置11の内部の気体を定期的に排出することである。この場合、気体の注入は、気体ポケット37のすべてまたはほぼすべてを排気できるように、気体スラグ発生装置11の内部の最も高い点またはその付近であってもよい。図11Aに示した気体の接続点38が、一例である。スラッジの質に応じて、気体スラグ発生装置の内部に恒久的に乾いた環境が生じることがないように、排気をさまざまな頻度で定期的に実行することができる。
【0061】
気体スラグ発生装置11の動作において、図11Aの液体のレベルAは、気体の流量に応じて変化する可能性がある。気体の流量が多いほど、気体スラグ発生装置11の内部における気体ポケットの形成は少ない。したがって、使用可能な他の方法は、乾いたスラッジを分解すべく動作の最中に気体スラグ発生装置11へはるかに大量の空気の流れを定期的に注入することである。装置の設計に応じて、この作用に必要な気体の流量は、通常は、通常動作の気体の流量のおよそ30%増し、またはそれ以上である。このより大きな気体の流量を、例えば乾いたスラッジを分解するために短時間のきわめて大量の気体の流れを一時的に生じさせるために選択されたタンクへ他の膜タンクから気体を融通するなど、何らかのプラントの操作にて達成することができる。あるいは、待機のブロア(図示せず)を、より多くの気体の流れを短い時間のあいだ供給するために定期的に使用することができる。
【0062】
上述の方法を、長期にわたって安定な動作を得、気体スラグ発生装置11の内部の浮きかす/スラッジの蓄積を除くために、個別または組合せの形態にて適用することができる。
【実施例】
【0063】
気体スラグ発生装置を、1.6mの全長および38m2の膜表面積を有する中空ファイバ膜で構成された膜モジュールに接続した。気体によって持ち上げられるパルス状の液体の流量を監視するために、パドルホイール流量計を、ライザ管の下端に配置した。図14が、7.8m3/hrでの一定の気体の流れの供給におけるパルス状の液体の流量のスナップショットを示している。スナップショットが、モジュールに進入する液体の流れが、高低の間の無作為または無秩序なパターンを有することを示している。低い液体の流量から高い液体の流量への頻度は、約1〜4.5秒の範囲にあった。モジュールへ放出された実際の気体の流量は、液体と混ざり合っているがゆえに測定しなかったが、流れのパターンは、液体の流れと同様になり、無秩序な性質で高低の間の範囲にわたると予想された。
【0064】
気体スラグ発生装置および通常のエアリフト(airlift)装置による膜洗浄効果の比較を、膜バイオリアクタにおいて実行した。膜ろ過のサイクルは、12分間のろ過およびその後の1分間の休息とした。各々の空気の流量において、2回の繰り返しサイクルを試験した。2組の試験の間の唯一の相違は、モジュールに接続された装置であり、すなわち通常の気体リフト装置に対する気体スラグ発生装置である。膜洗浄効率を、ろ過の最中の透水性の低下に従って評価した。図15が、2つの異なる装置における透水性の推移を、種々の空気の流量について示している。これらのグラフから、気体スラグ発生装置においては、時間につれての透水性が通常の気体リフトポンプと比べてより安定しているため、膜が汚れる速度が低いことが明らかである。
【0065】
さらなる比較を、典型的な周期的曝気の構成および本発明の気体スラグ発生装置の性能の間で実行した。空気の流量を、気体スラグ発生装置については3m3/hとし、周期的曝気については6m3/hとした。10秒間のオン/10秒間のオフおよび3秒間のオン/3秒間のオフの周期的曝気の周期を試験した。10秒間のオン/10秒間のオフの周期的曝気は、バルブの最速の開放および閉鎖が10秒である大規模プラントの実際の動作を模擬するために選択された。3秒間のオン/3秒間のオフの周期的曝気は、気体スラグ発生装置の動作の範囲内の頻度に似せるために選択された。性能を、約30lmhの正規化された流束において、30分という長いろ過サイクルも含めて試験した。
【0066】
下記の表1に、パルス状のエアリフト動作および2つの異なる頻度の周期的曝気動作の両方についての試験結果をまとめた。パルス状のエアリフト動作における短いろ過サイクルおよび長いろ過サイクルの間の透水性の低下は、周期的曝気動作に比べてはるかに少なかった。高頻度の周期的曝気は、膜の性能をわずかに向上させるが、パルス状のエアリフト動作は、さらに安定な膜の透水性を保ち、パルス状のエアリフトの構成による洗浄プロセスがより効果的であることを裏付けた。
【0067】
【表1】
【0068】
上述の実施例は、パルス状の流れを生成する装置によって効果的な膜洗浄方法を実行できることを実証している。パルス状の流れの生成装置への気体の連続的供給によって、膜を効果的に洗浄するための無作為または無秩序な流れのパターンが生成される。流れの各々のサイクルのパターンが、計測時間/頻度、大小の流量の強度、および流れの変化の推移において、他のサイクルのパターンとは異なる。各々のサイクルにおいて、流れが、無秩序な様相で或る値から他の値へ連続的に変化する。
【0069】
上述の実施形態は、一連の気体スラグおよび/またはパルス状の気体/液体の流れを使用しているが、本発明は、気体、気泡、および液体を含む他の無作為にパルス状にされた流体の流れを使用する場合にも有効であることを、理解できる。
【0070】
気体スラグの流れおよび/または二相気体/液体のスラグの流れを使用して達成される膜スクラブは、特に膜バイオリアクタ(MBR)処理システムに適用できるが、そのようなスラグ流を、膜に対する洗浄効果を生み出すために気体および/または二相気体/液体流を必要とするさまざまな用途に使用できることを、理解できる。したがって、本明細書に開示の実施形態は、MBRシステムへの適用に限られない。同様に、MBRの用途は、系における生物学的作用を促進するために、酸素を含む気体(典型的には、空気)の使用を必要とすることが多い一方で、他の膜の用途は、洗浄をもたらすために空気以外の他の気体を使用してもよい。したがって、使用される気体の種類は厳密には重要ではない。
【0071】
MER流体処理は、生物学的酸化の膜分離との組合せプロセスである。この技術は、産業および家庭の汚水処理に採用されている。他のいくつかの流体処理技術と比べて、MBRは、より小さな専有面積、廃水の多収量および高い純度、より高い有機物負荷、およびより少ないスラッジの発生などの利点を有している。生産性および効率をさらに高めつつ安定な運転性能を維持するために、濃縮物の分極およびそれに続く膜の汚損を制御することが望まれる。有効であることが示されている技法として、乱流促進装置、波形の膜表面、パルス状の流れ、および渦の生成が挙げられる。しかしながら、気泡の注入が、中空ファイバ膜モジュールにおいて濃縮物の分極を軽減して透過の流束を向上させる安価かつ効果的な方法であることが実証されている。さらに、膜バイオリアクタのプロセスにおいて、気泡を酸素の供給として他の目的にも使用することができる。
【0072】
気体スラグ発生装置への空気および液体の流量ならびに液体の性質に応じて、空気および液体の混合物は、流れのパターンの幅広いスペクトルをとることができる。いくつかの異なる流れのパターンが、図16に示されている。加えられる空気の流量が比較的少ないMBRにおいては、気体スラグ流(栓流(plug flow)としても知られる)が望ましいことが明らかになっている。これらの空気−液体の二相流の系においては、少数の機構が流束の増加に貢献することが特定されている。
a)MBRシステムにおける透過の流束への流体力学的条件およびシステムの構成の影響についての実験的研究が、二相(空気および液体)クロスフロー(cross flow)における透過の流束が、単相(液体のみ)クロスフローのそれよりも20〜60%高いことを示している。より強い表面のクロスフローを有することが、より高い速度において活性化されたスラッジを維持することができるとともに、膜の表面を常にこすり洗うことができ、結果としてより高いろ過速度および膜のより低い汚損の可能性につながるがゆえに望ましい。
b)気体スラグの気泡が、ケーキ相の分解を助け、その後に膜表面の付近での局所的混合を促進する二次流(または、後流(wake)領域)を生成する。加えて、スラグ流が、図17Aに示されるようにスラグと管壁との間を流れる安定した環状の液体膜をさらに生成する。液体膜は、物質移動を促進するせん断の高い領域になることがある。
c)移動するスラグが、図17Bに最もよく見られるように、スラグの周囲の液体に、先端においてより高く、尾部においてより低い圧力のパルス状の圧力をもたらす。これは、膜の表面の付近の濃度境界層の開始の不安定および妨害を生じさせることがある。
【0073】
MBRシステムにおけるスラグ流の有効性を実証するために、スラグ流パターンのもとでの二相(水−空気)MBRシステムの流体力学的挙動を検討すべく、数値的研究および実験的研究の両方を使用して検討を行った。粒子画像速度測定法(PIV)を実験のために採用し、計算流体力学(CFD)を数値ツールとして選択した。
【0074】
実験的測定
実験装置が、図18に最もよく示されている。矩形のタンク50は、透明な材料から製作されている。タンク50の底部に水インジェクタ51を設け、上端付近にオーバフロー出口52を設けた。ファイバ膜モジュール53を、タンク50内に配置した。モジュール53の下端に、スカート54および上述の実施形態に従って製作した気体スラグ発生装置55を設けた。モジュール53への流体の流れおよびモジュール53からの流体の流れを可能にするために、多孔性ゾーン56をモジュールに設けた。ファイバ膜を、ポッティング材料57に入れた。
【0075】
気体スラグ流の状況を生み出すために、上述した新規な気体スラグ発生装置55を、二相気体/液体流が生成するように使用した。この構成は、適切に制御された時間間隔で空気のスラグを生成することができた。
【0076】
実験的測定を、図18に示した試験装置を使用して実行した。測定のうちの1組は、PIVを用いた流れの場の測定であり、別の組の測定は、高速度カメラによって測定された気泡サイズの分布およびそれらの軌跡である。前者の測定を、CFDモデルの洗練のための信頼できる正確な流れのデータをもたらすために実行し、後者を、CFDモデリングのための入力パラメータとして役立てた。
【0077】
CCDカメラおよび高出力レーザで構成される典型的なPIV実験装置を使用した。二連のパルス状レーザを、流れを横切る光のシートを照明するために使用した。同時に、流れの場に、レーザ光を散乱させ、トラッキング点として機能するように、粒子を散布した。2つのフレームを素早い連続にて撮影することができるCCDカメラを、光のシートの平面に対して直角に配置した。試験装置の横窓を介して行われる測定の際に、レーザから第1のパルスで流れに照射し、粒子から散乱した光を、カメラによって第1のフレームとして取得した。制御された時間間隔の後で、レーザの第2のパルスで流れに再び照射した。粒子によって散乱させられた光を、カメラによって第2のフレームとして取得した。移動した個々の粒子の変位を、取得した2つのフレームから計算した。カメラの露光の間の時間により、流れ速度を評価した。
【0078】
気泡のサイズを測定するために、高速度カメラを使用した。このカメラは、17μmの画素を有しており、低い解像度においては最大で毎秒250,000フレーム取得することができる。
【0079】
数値モデリング
実験的観測を再現するために、CFDモデルが、オイラー多相モデル(Eulerian multiphase model)を多孔質媒体の枠組みに一体化させ、垂直方向のろ過流束の測定値を取り入れた。スラグ流の検討のための過渡シミュレーションを実行した。
【0080】
モデルの構成および動作条件
実験プロトタイプにもとづき、対応するCFDモデルの構成を、図21Aに示したとおりに生成した。図18のモデルの構成にもとづく過渡シミュレーションを、二相気体/液体スラグ流の現象を再現するために実行した。実験から、4m3/hrという空気によるこすり洗いの流量のもとで、1つの空気スラグを生成するために4.2秒(3.8秒が空気の蓄積段階であり、0.4秒が空気のパルス化段階である)を要することが知られている。空気スラグの発生のプロセスをシミュレートするために、質量およびモーメントのソース項の時間依存性のステップ関数を、過渡シミュレーションに使用した。質量源は、14.62kg/m3sという値を有し、モーメント源は、8.27N/m3であり、これらは表2に挙げた動作条件から計算された。条件は、シミュレーションおよび実験の両方について同じである。
【0081】
【表2】
【0082】
数学的方程式
膜バイオリアクタユニットにおける流体の分布をシミュレートするために、流体力学に大きな影響を有する要素を考慮に入れた。実験において使用したMBRシステムは、スラグ流の状況を使用して運転され、二相の状態、すなわち水および気泡がもたらされる膜分離装置を備えていた。膜分離装置は、流れの循環に対して抵抗を発生させるファイバ束を含んでいる。さらに、膜におけるろ過を生じさせるために真空ポンプを使用した。これらの特徴は、相互依存の関係にあり、以下の枠組みを取り入れることによってCFDモデルへ因数化された。
i.オイラー多相モデルが、二相の混合の挙動を説明するために適用される。
ii.垂直方向のろ過流束の理論モデル。
iii.水の循環に対する膜モジュールの抵抗を考慮するための多孔質媒体のモデル。
iv.実験的に測定された気泡の直径の推移。
【0083】
オイラー多相モデル
オイラー多相モデルにおいては、質量、モーメント、および乱流動力学の少数組の結合基本保存方程式が、水および空気の流れの場および濃度分布をシミュレートするために適用される。
【0084】
a.質量連続の式
式(1)が、相qについての非定常な質量連続の式を示している。
【数1】
ここで、tは時間(s)であり、αは流体の体積率であり、
【数2】
は相qの速度(m/s)であり、mpqは相pからqへの質量移動(kg/s)を特徴付け、mqpはq番目からp番目の相への質量移動を特徴付け、Sqはソース(source)またはシンク(sink)の項である。
【0085】
b.モーメント保存の式
相qについての非定常のモーメントの釣り合いが、
【数3】
を与え、ここで
【数4】
がq番目の相の応力−ひずみテンソル(Pa)(式(3)を参照)であり、
【数5】
が相間の相互作用力であり、pがすべての相によって共有される圧力(Pa)であり、gが重力(m2/s)であり、
【数6】
が相間の速度である。
【数7】
ここで、μqおよびλqはそれぞれ相qのせん断およびバルク粘度(kg/ms)である。
【0086】
c.実現可能なκ−ε混合物乱流モデル
実現可能なκ−ε混合物乱流モデルを記述するκ(単位質量当たりの乱流運動エネルギー(m2/s2))およびε(乱流運動エネルギー消散速度(m2/s3))の式は、以下のとおりである。
【数8】
【数9】
ここで、Gb,mは浮力に起因する乱流運動エネルギーの発生であり、Gk,mは平均速度勾配に起因する乱流運動エネルギーの発生であり、vは動粘度(m2/s)である。
【0087】
混合物の密度ρm(kg/m3)および速度
【数10】
が、
【数11】
から計算され、乱流粘度μt,mが、
【数12】
から計算される。
【0088】
これらの式において、C2およびClεは定数であり、σκおよびσεはそれぞれκおよびεについての乱流プラントル数である。
【0089】
垂直方向のろ過流束
吸引ポンプがオンである実験において、透過の流束がファイバの管腔を移動する際の圧力低下ゆえ、ろ過の流束は垂直方向に依存し、膜横断圧力がファイバの上部においてより大きく、ファイバの下部においてより小さい。この現象を反映するために、垂直方向のろ過流束がファイバを横切る圧力差から計算される。式(6)
ろ過流速=0.0046*H*H−0.0012*H+0.013(6)が、垂直方向に依存するろ過流束を示しており、ここでろ過流束の単位はkg/sであり、Hは高さ(単位はメートル)である。垂直方向に依存するろ過流束は、式(1)の体積質量シンクSqとして含まれる。この質量シンクは、繊維に沿った垂直方向に依存するろ過流束を表わすために多孔質領域に加えられる。
【0090】
多孔質媒体モデル
多孔質媒体モデルは、多孔質領域として定められるモデルの領域に流れの抵抗を取り入れる(図21Aおよび図21Bを参照)。換言すると、多孔質媒体モデルは、多孔質領域における圧力損失をシミュレートするために、支配モーメント方程式に追加の体積ベースのモーメントシンクを適用する。この検討において、以下のモデルが流れの抵抗を表わすために使用される。
【数13】
ここで、Siはi番目(x、y、またはz)のモーメントの式についてのソース項であり、DおよびKは所定の行列である。式(7)における第1の項は、粘度が支配的である損失を表わし、第2の項は慣性損失の項である。これらの抵抗は、MBRにおいて使用されるファイバ束と同様の管バンクの仮定にもとづいて計算される。
【0091】
実験的に測定された気泡の直径の推移
実験とシミュレーションとの間のより良好な比較のために、変化する気泡サイズを適用した。気泡サイズの推移を、図19に示されるとおり、高速度カメラによる実験から割り出した。しかしながら、実験の限界ゆえに、スラグ流の状況については、気泡の直径をY=1.4mからY=1.8mまで測定した。Y=1.4mよりも下方については、気泡の直径を3mmと仮定し、Y=1.8mよりも上方については、気泡の直径を5mmと仮定した。
【0092】
図20に示されるとおり、スラグ流の状況は、上述の曝気装置を使用して生成される。この流れの状況下で、PIV測定およびCFDシミュレーションの両方を実行し、結果を、図21Bに示されるとおりのガラス壁から20mmの切断面に沿った3つの異なる位置において抽出した。
【0093】
図22A〜図22Cは、それぞれ壁から20mmの平面に沿ったY=1.532m、Y=1.782m、およびY=1.907mの位置における水のY速度成分について、シミュレーションによる値と実験的測定による値との間の比較を示している。図22A〜図22Cにおいて、実線が、シミュレーション結果を表わしており、破線が、実験から得た測定値を表わしている。実験およびシミュレーションの両方が、5サイクルの空気スラグ生成を示している。各々のサイクルが、Y=1.532mおよびY=1.782mについて、下方への流れの速度と、その後の上方への速度とを示している。Y=1.907mについては、より強い下方への流れの速度の後に、弱い下方への流れの速度が続いている。全体として、実験の不確定性およびシミュレーションの仮定の範囲において、これら3つの位置におけるシミュレーションと実験との間の比較は、かなり良好であると考えられる。
【0094】
図23A〜図23Cは、気体スラグの発生中に試験装置の上部、中ほど、および下部で測定された気泡のサイズ分布のグラフを示している。
【0095】
図24A〜図24Cは、気体スラグの発生中に試験装置の上部、中間部、および下部で測定された気泡の数の時間に対するグラフを示している。
【0096】
図25は、気体の流量に対する空気/気体スラグの各々のパルスの平均時間スパンのグラフを示している。
【0097】
図26は、曝気装置への入口水流について、曝気装置内の気体スラグ流によって生成されるパルスのグラフを示している。フレームが、高速度カメラによって取得された測定を示している。入口の水流または液体の流れが、気体スラグの発生によって急激に増加し、その後に次の気体スラグが生成されるまで、より少ない流量またはゼロの流量へ再び減少することが、理解できる。
【0098】
この検討から、スラグ流の状況のもとでの動作が、気泡流の状況のもとでの動作と比べていくつかの利点を有することが、実験およびシミュレーションから観測される。
a)スラグ流は、時間依存性のプロセスである。気体/空気スラグの発生中に、膜ファイバの周囲の液体が流れの不安定を呈する。これは、膜の表面の付近の濃度境界層の強まりおよび粒子の蓄積を乱すことができる。
b)さらに、流れの不安定がファイバの振動も強める。これは、束におけるファイバの運動が、膜の表面のケーキ層を破壊することができるファイバ同士の衝突など、いくつかの効果を有することができるため望ましい。
c)スラグ流が、スラグと管壁との間を流れる安定した環状の液体膜を生じさせる。液体膜は、管壁からのケーキ層の除去を助ける高せん断領域となることができる。
d)気体/空気スラグは、これまでに利用されている曝気の気泡よりもサイズが大きく、したがってより強力かつより長い後流領域を生成でき、これが質量移動の境界層を乱し、膜の表面の付近の局所的な混合を促進することができる。
e)スラグ流の状況のもとでの動作は、典型的な気泡流の曝気システムと比べ、供給すべき空気が少ない。例えば、いくつかの実施形態において、スラグ流の曝気システムが、モジュール1つにつき約4m3/hrの気体を使用して動作すると考えられる一方で、同様の曝気のレベルを生じるように動作する典型的な気泡流の状況は、モジュール1つにつき7m3/hrの気体で動作すると考えられる。気体/空気の消費が少ないことは、エネルギーの利用が少ないことにつながり、したがって運転コストの低減につながる。
【0099】
本明細書に記載のとおりの大域的曝気システムを、気体スラグ流での膜モジュールの洗浄をもたらすための上述の装置と併せて利用することが、またさらなる利点をもたらすと予想される。
【0100】
タンク全体における粒子濃度の非一様性を、本明細書に記載のとおりの大域的循環システムを使用することによって大きく軽減できることが、試験によって示されている。大域的循環システムが、膜モジュールおよびラック間の空間に上向き流の領域を確立し、タンクの周囲に下向き流の領域を確立する。良好に制御された流れの場を有することによって、粒子が供給物タンクの全体により一様に分散する。
【0101】
上述のとおりのスラグ流による膜洗浄を利用して動作するろ過モジュールを備えるろ過容器または供給物容器における粒子の分布の一様性の向上は、そのようなろ過容器を備えるろ過システムについて、より少ないエネルギーでの動作をもたらすと予想される。これは、気体スラグ流による膜の洗浄に併せて大域的曝気を使用することで、蓄積した固形分の膜モジュールからのさらなる再分散が、気体スラグ流による洗浄だけを単独で使用して達成されるよりもさらにもたらされるからである。これにより、膜のスラグ流による洗浄においては、同じ量の膜洗浄を達成するために使用すべき気体が少なくて済む。例えば、上述したように、モジュール1つにつき4m3/hrを使用する気体スラグ流による洗浄機構を利用するろ過システムにおいて、気体スラグ洗浄機構の気体の消費を、大域的曝気のシステムと組み合わせて動作させた場合に、モジュール1つにつき3m3/hrまたはそれ以下に減らすことができると予想される。加えて、膜モジュールの近傍からの固形物の除去によって、バックウォッシュまたは他の洗浄作業の間のモジュールの運転可能時間が長くなると考えられる。気体スラグ流による膜の洗浄にて動作するろ過システムに大域的曝気のシステムを追加することによって、エネルギーの節約は、気体スラグ流による膜洗浄だけを備えるシステムと比べて、少なくとも約10%またはそれ以上に達しうる。
【0102】
本発明の少なくとも1つの実施形態のいくつかの態様を説明したが、当業者であれば種々の変更、変形、および改善を容易に行うことができることを、理解すべきである。そのような変更、変形、および改善は、本開示の一部となるべきものであり、添付の特許請求の範囲によって定められるとおりの本発明の技術的範囲に包含される。したがって、以上の説明および図面は、あくまでも例にすぎない。
【特許請求の範囲】
【請求項1】
供給物タンクに配置された複数の膜モジュールであり、前記複数の膜モジュールのうちの少なくとも1つが、前記膜モジュールの下部ヘッダの下方に配置された気体スラグ発生装置を有しており、前記気体スラグ発生装置が、前記少なくとも1つの膜モジュールの膜の表面に沿って気体スラグが発生するように構成および配置されている複数の膜モジュールと、
前記気体スラグ発生装置へ気体を供給する曝気システムとは独立に動作するように構成され、前記供給物タンク内で流体の大域的循環流を生じさせるように構成および配置された大域的曝気システムと、
を備えている膜ろ過システム。
【請求項2】
前記複数の膜モジュールからの透過液の流れを監視するように構成された流量センサと、
前記流量センサに接続されており、流量が第1の量よりも多い旨を示す前記流量センサからの信号の受信に応答して、前記大域的曝気システムを作動させ、流量が第2の量よりも少ない旨を示す前記流量センサからの信号の受信に応答して、前記大域的曝気システムを停止させるように構成されたコントローラと
をさらに備えている請求項1に記載の膜ろ過システム。
【請求項3】
前記複数の膜モジュールがラックに配置され、前記大域的曝気システムが、前記膜モジュールのラックの間に気体を放出するように構成された気体拡散器を備えている請求項2に記載の膜ろ過システム。
【請求項4】
前記気体拡散器が、同じラック内の隣り合う膜モジュールの間に気体を届けるように構成されている請求項3に記載の膜ろ過システム。
【請求項5】
前記気体拡散器が、前記膜モジュールの下方に気体を放出するように構成されている請求項4に記載の膜ろ過システム。
【請求項6】
前記コントローラが、前記流量が1平方メートルのろ過膜表面積につき約25リットル/時を超える場合に、前記大域的曝気システムを作動させるように構成されている請求項2に記載の膜ろ過システム。
【請求項7】
前記コントローラが、前記流量が1平方メートルのろ過膜表面積につき約25リットル/時を下回る場合に、前記大域的曝気システムを停止させるように構成されている請求項2に記載の膜ろ過システム。
【請求項8】
前記膜モジュールのうちの少なくとも1つの膜モジュールの膜をまたぐ圧力を監視するように構成された膜横断圧力センサと、
前記膜横断圧力センサに連絡し、膜をまたぐ圧力が第1の大きさよりも大きい旨を示す前記膜横断圧力センサからの信号の受信に応答して、前記大域的曝気システムを作動させ、膜をまたぐ圧力が第2の大きさよりも小さい旨を示す前記膜横断圧力センサからの信号の受信に応答して、前記大域的曝気システムを停止させるように構成されたコントローラと
をさらに備えている請求項1に記載の膜ろ過システム。
【請求項9】
前記供給物タンクへの供給物の流量を監視するように構成された供給物流量センサと、
前記供給物流量センサに連絡し、供給物の流量が第1の量よりも多い旨を示す前記供給物流量センサからの信号の受信に応答して、前記大域的曝気システムを作動させ、供給物の流量が第2の量よりも少ない旨を示す前記供給物流量センサからの信号の受信に応答して、前記大域的曝気システムを停止させるように構成されたコントローラと
をさらに備えている請求項1に記載の膜ろ過システム。
【請求項10】
選択された時刻に前記大域的曝気システムを作動および停止させるように構成されたタイマをさらに備えている請求項1に記載の膜ろ過システム。
【請求項11】
複数の膜モジュールが内部に配置されているろ過容器であり、各々の膜モジュールに前記膜モジュールの下端の下方に配置された気体スラグ発生装置が組み合わせられているろ過容器へ、液体媒体を流すステップと、
前記複数の膜モジュールから透過液を取り出すステップと、
各々の気体スラグ発生装置に組み合わせられた膜モジュールへ前記気体スラグ発生装置から気体スラグを周期的に放出し、前記気体スラグを各々の膜モジュール内の膜の表面に沿って通過させ、膜の表面から付着物を除去するステップと、
膜モジュールからの透過液の流れ、膜モジュールが沈められているろ過容器への供給物の流れ、および少なくとも1つの膜モジュールの膜をまたぐ膜横断圧力のうちの少なくとも1つから導出される信号に応答して、前記ろ過容器内の大域的循環流を開始および停止させるステップと
を含んでいるろ過の方法。
【請求項12】
前記複数の膜モジュールの各々への気体スラグの放出の間の時間期間が、無作為に決定される請求項11に記載の方法。
【請求項13】
各々の気体スラグ発生装置に基本的に一定の気体の供給をもたらすステップをさらに含んでいる請求項12に記載の方法。
【請求項14】
供給物の大域的循環流の開始が、前記気体スラグ発生装置とは独立に動作する曝気システムへの気体の供給を含んでいる請求項13に記載の方法。
【請求項15】
前記気体スラグ発生装置および前記曝気システムに、共通の供給源からの気体が供給される請求項14に記載の方法。
【請求項16】
前記供給物の大域的循環流の開始が、気体のパルス状の流れの開始をさらに含んでいる請求項14に記載の方法。
【請求項17】
供給物の大域的循環流の開始が、前記複数の膜モジュールのうちの隣同士の膜モジュールの間への気体の供給を含んでいる請求項11に記載の方法。
【請求項18】
気体スラグの体積が無作為である請求項11に記載の方法。
【請求項19】
第1の膜モジュールへの気体スラグの放出のタイミングが、第2の膜モジュールへの気体スラグの放出のタイミングとは独立である請求項11に記載の方法。
【請求項1】
供給物タンクに配置された複数の膜モジュールであり、前記複数の膜モジュールのうちの少なくとも1つが、前記膜モジュールの下部ヘッダの下方に配置された気体スラグ発生装置を有しており、前記気体スラグ発生装置が、前記少なくとも1つの膜モジュールの膜の表面に沿って気体スラグが発生するように構成および配置されている複数の膜モジュールと、
前記気体スラグ発生装置へ気体を供給する曝気システムとは独立に動作するように構成され、前記供給物タンク内で流体の大域的循環流を生じさせるように構成および配置された大域的曝気システムと、
を備えている膜ろ過システム。
【請求項2】
前記複数の膜モジュールからの透過液の流れを監視するように構成された流量センサと、
前記流量センサに接続されており、流量が第1の量よりも多い旨を示す前記流量センサからの信号の受信に応答して、前記大域的曝気システムを作動させ、流量が第2の量よりも少ない旨を示す前記流量センサからの信号の受信に応答して、前記大域的曝気システムを停止させるように構成されたコントローラと
をさらに備えている請求項1に記載の膜ろ過システム。
【請求項3】
前記複数の膜モジュールがラックに配置され、前記大域的曝気システムが、前記膜モジュールのラックの間に気体を放出するように構成された気体拡散器を備えている請求項2に記載の膜ろ過システム。
【請求項4】
前記気体拡散器が、同じラック内の隣り合う膜モジュールの間に気体を届けるように構成されている請求項3に記載の膜ろ過システム。
【請求項5】
前記気体拡散器が、前記膜モジュールの下方に気体を放出するように構成されている請求項4に記載の膜ろ過システム。
【請求項6】
前記コントローラが、前記流量が1平方メートルのろ過膜表面積につき約25リットル/時を超える場合に、前記大域的曝気システムを作動させるように構成されている請求項2に記載の膜ろ過システム。
【請求項7】
前記コントローラが、前記流量が1平方メートルのろ過膜表面積につき約25リットル/時を下回る場合に、前記大域的曝気システムを停止させるように構成されている請求項2に記載の膜ろ過システム。
【請求項8】
前記膜モジュールのうちの少なくとも1つの膜モジュールの膜をまたぐ圧力を監視するように構成された膜横断圧力センサと、
前記膜横断圧力センサに連絡し、膜をまたぐ圧力が第1の大きさよりも大きい旨を示す前記膜横断圧力センサからの信号の受信に応答して、前記大域的曝気システムを作動させ、膜をまたぐ圧力が第2の大きさよりも小さい旨を示す前記膜横断圧力センサからの信号の受信に応答して、前記大域的曝気システムを停止させるように構成されたコントローラと
をさらに備えている請求項1に記載の膜ろ過システム。
【請求項9】
前記供給物タンクへの供給物の流量を監視するように構成された供給物流量センサと、
前記供給物流量センサに連絡し、供給物の流量が第1の量よりも多い旨を示す前記供給物流量センサからの信号の受信に応答して、前記大域的曝気システムを作動させ、供給物の流量が第2の量よりも少ない旨を示す前記供給物流量センサからの信号の受信に応答して、前記大域的曝気システムを停止させるように構成されたコントローラと
をさらに備えている請求項1に記載の膜ろ過システム。
【請求項10】
選択された時刻に前記大域的曝気システムを作動および停止させるように構成されたタイマをさらに備えている請求項1に記載の膜ろ過システム。
【請求項11】
複数の膜モジュールが内部に配置されているろ過容器であり、各々の膜モジュールに前記膜モジュールの下端の下方に配置された気体スラグ発生装置が組み合わせられているろ過容器へ、液体媒体を流すステップと、
前記複数の膜モジュールから透過液を取り出すステップと、
各々の気体スラグ発生装置に組み合わせられた膜モジュールへ前記気体スラグ発生装置から気体スラグを周期的に放出し、前記気体スラグを各々の膜モジュール内の膜の表面に沿って通過させ、膜の表面から付着物を除去するステップと、
膜モジュールからの透過液の流れ、膜モジュールが沈められているろ過容器への供給物の流れ、および少なくとも1つの膜モジュールの膜をまたぐ膜横断圧力のうちの少なくとも1つから導出される信号に応答して、前記ろ過容器内の大域的循環流を開始および停止させるステップと
を含んでいるろ過の方法。
【請求項12】
前記複数の膜モジュールの各々への気体スラグの放出の間の時間期間が、無作為に決定される請求項11に記載の方法。
【請求項13】
各々の気体スラグ発生装置に基本的に一定の気体の供給をもたらすステップをさらに含んでいる請求項12に記載の方法。
【請求項14】
供給物の大域的循環流の開始が、前記気体スラグ発生装置とは独立に動作する曝気システムへの気体の供給を含んでいる請求項13に記載の方法。
【請求項15】
前記気体スラグ発生装置および前記曝気システムに、共通の供給源からの気体が供給される請求項14に記載の方法。
【請求項16】
前記供給物の大域的循環流の開始が、気体のパルス状の流れの開始をさらに含んでいる請求項14に記載の方法。
【請求項17】
供給物の大域的循環流の開始が、前記複数の膜モジュールのうちの隣同士の膜モジュールの間への気体の供給を含んでいる請求項11に記載の方法。
【請求項18】
気体スラグの体積が無作為である請求項11に記載の方法。
【請求項19】
第1の膜モジュールへの気体スラグの放出のタイミングが、第2の膜モジュールへの気体スラグの放出のタイミングとは独立である請求項11に記載の方法。
【図1】

【図2】
【図3】
【図4】
【図5】
【図6】
【図7】
【図8】
【図9】
【図10】
【図11A】
【図11B】
【図12】
【図13】
【図14】
【図15】
【図16】
【図17A】
【図17B】
【図18】
【図19】
【図20】
【図21A】
【図21B】
【図22A】
【図22B】
【図22C】
【図23A】
【図23B】
【図23C】
【図24A】
【図24B】
【図24C】
【図25】
【図26】
【図2】
【図3】
【図4】
【図5】
【図6】
【図7】
【図8】
【図9】
【図10】
【図11A】
【図11B】
【図12】
【図13】
【図14】
【図15】
【図16】
【図17A】
【図17B】
【図18】
【図19】
【図20】
【図21A】
【図21B】
【図22A】
【図22B】
【図22C】
【図23A】
【図23B】
【図23C】
【図24A】
【図24B】
【図24C】
【図25】
【図26】
【公表番号】特表2012−528717(P2012−528717A)
【公表日】平成24年11月15日(2012.11.15)
【国際特許分類】
【出願番号】特願2012−514072(P2012−514072)
【出願日】平成22年6月2日(2010.6.2)
【国際出願番号】PCT/US2010/037038
【国際公開番号】WO2010/141560
【国際公開日】平成22年12月9日(2010.12.9)
【出願人】(510002268)シーメンス インダストリー インコーポレイテッド (21)
【氏名又は名称原語表記】Siemens Industry, Inc.
【住所又は居所原語表記】3333 Old Milton Parkway, Alpharetta, GA 30005−4437, United States of America
【Fターム(参考)】
【公表日】平成24年11月15日(2012.11.15)
【国際特許分類】
【出願日】平成22年6月2日(2010.6.2)
【国際出願番号】PCT/US2010/037038
【国際公開番号】WO2010/141560
【国際公開日】平成22年12月9日(2010.12.9)
【出願人】(510002268)シーメンス インダストリー インコーポレイテッド (21)
【氏名又は名称原語表記】Siemens Industry, Inc.
【住所又は居所原語表記】3333 Old Milton Parkway, Alpharetta, GA 30005−4437, United States of America
【Fターム(参考)】
[ Back to top ]