
パワーアシスト装置、自動搭載装置、およびそれらの制御方法
【課題】パワーアシスト装置および自動搭載装置によってワークを搬送している途中に、パワーアシスト装置等が停止してその後再起動する際にワークや組み付け対象物が破損することを防止するために、パワーアシスト装置等によってワークを搬送している途中に、パワーアシスト装置等が停止してその後再起動しても、ワークが組み付け対象物等と接触することがないパワーアシスト装置、自動搭載装置、およびそれらの制御方法を提供する。
【解決手段】ウィンドウ19とボディ20が接近状態にあると判定される場合には、状態信号が、運転状態から停止状態に移行した時点から、パワーアシスト装置用制御装置8によって、ボディ20に対するウィンドウ19の組み付けが完了した旨の判定処理が成される時点までは、パワーアシスト装置用制御装置8によって、パワーアシスト装置2からコンベア15に対して、停止要求信号を継続して発信する。
【解決手段】ウィンドウ19とボディ20が接近状態にあると判定される場合には、状態信号が、運転状態から停止状態に移行した時点から、パワーアシスト装置用制御装置8によって、ボディ20に対するウィンドウ19の組み付けが完了した旨の判定処理が成される時点までは、パワーアシスト装置用制御装置8によって、パワーアシスト装置2からコンベア15に対して、停止要求信号を継続して発信する。
【発明の詳細な説明】
【技術分野】
【0001】
本発明は、パワーアシスト装置および自動搭載装置の技術に関し、より詳しくは、停止後に再起動するタイミングを制御するパワーアシスト装置、自動搭載装置、およびそれらの制御方法の技術に関する。
【背景技術】
【0002】
従来、工業製品の製造現場等において、作業者による重量物(ワーク)の搬送を補助する装置としてパワーアシスト装置や自動搭載装置が用いられている。
ワークの組み付け作業は、ワークの搬送と位置決めから成り立つ作業であるが、作業者とパワーアシスト装置でワークを協調搬送することにより、ワークの搬送に必要な力はパワーアシスト装置に負担させることができ、ワークの位置決めについてもパワーアシスト装置にティーチングすることで効率よく位置決めをすることができる。また、自動搭載装置によって、ワークの搬送や組み付けを自動的に行うことも可能である。つまり、パワーアシスト装置や自動搭載装置を用いるねらいは、作業者の労力軽減を図るとともに、作業性の向上を図ることにある。
【0003】
しかしながら従来、パワーアシスト装置や自動搭載装置によってワークを搬送する場合、ワークの組み付け対象物を搬送するコンベア、パワーアシスト装置および自動搭載装置が急停止したり、または急に再起動(急発進)したりすることがあり、この急停止および再起動の際に生じる振動によって、ワークと組み付け対象物が接触してワークや組み付け対象物の破損を招くことがあった。
【0004】
具体的に述べると、例えばコンベアで搬送される自動車のボディ(組み付け対象物)にウィンドウガラス(ワーク)をはめ込んで組み付ける作業では、コンベアが急停止もしくは再起動(急発進)した時に、ボディとウィンドウガラスが接触してしまう。すると、ウィンドウガラス表面に塗布された接着剤がボディに付着し、付着した接着剤のふき取りが必要となる。さらに、ボディに付着してしまった分だけ接着剤の量が減るため、そのまま所定位置に接着を行っても接着面に隙間ができてしまい、水漏れ等が発生する原因となる等の問題が発生する。
【0005】
このような問題が発生する理由としては、(1)ボディを搬送するコンベアは、非常時には即停止しなくてはならないので、急速停止となり、衝撃が大きい。(2)ボディを搬送するコンベアの進行に同期してパワーアシスト装置や自動搭載装置が進行しているため、コンベア急停止時の衝撃で、パワーアシスト装置や自動搭載装置も振動する。(3)パワーアシスト装置では、ボディを搬送するコンベアの進行に同期して作業者もコンベアに乗って進行しているため、コンベアが急停止する際に発生する衝撃は作業者が把持する操作ハンドルにも加わる。(4)パワーアシスト装置では、コンベアの停止を作業者が認識してから、実際にデッドマンスイッチを離して、アクチュエータのブレーキが作用するまでには、タイムラグがある、等が挙げられる。つまり、コンベア、パワーアシスト装置および自動搭載装置が急停止したりまたは急に再起動(急発進)したりする際に発生する振動は、複数の衝撃が重なり合って発生しているため、振動を防止することが困難な状況であった。
【0006】
そこで、このような振動の発生を防止するための技術が種々開発されており、例えば、以下の特許文献1に示す技術がある。
係る従来技術では、アシスト搬送状態ではON状態とされているデッドマンスイッチがOFF状態に操作されると、アシスト搬送用のアクチュエータを構成するモータへの電源供給を停止するが、このとき、デッドマンスイッチがOFF状態に操作された時点t1から遅延時間tdが経過した時点で、モータ出力軸の回転を規制するブレーキ機構を作動させるようにしている。尚、遅延時間tdは、モータ出力軸のフリーラン時間に比して長い時間に設定するようにしている。
このような構成とすることにより、モータ出力軸が未だ回転している途中でブレーキ機構が作動して、アシスト搬送を急停止させることが無いため、アシスト搬送停止時に発生する振動を防止するようにしている。
【0007】
しかしながら係る従来技術では、アシスト搬送状態から急停止する際に発生する振動を防止することはできるが、アシスト搬送状態が停止状態から再起動する際に発生する振動を防止することはできず、このため、パワーアシスト装置や自動搭載装置が停止状態から再起動する際に生じるワークや組み付け対象物の破損を防止することができなかった。
【特許文献1】特開2005−28491号公報
【発明の開示】
【発明が解決しようとする課題】
【0008】
本発明は、係る現状を鑑みて成されたものであり、パワーアシスト装置および自動搭載装置によってワークを搬送している途中に、パワーアシスト装置および自動搭載装置が停止してその後再起動する際にワークや組み付け対象物が破損することを防止するために、パワーアシスト装置および自動搭載装置によってワークを搬送している途中に、パワーアシスト装置および自動搭載装置が停止してその後再起動しても、ワークが組み付け対象物等と接触することがないパワーアシスト装置、自動搭載装置、およびそれらの制御方法を提供することを課題としている。
【課題を解決するための手段】
【0009】
本発明の解決しようとする課題は以上の如くであり、次にこの課題を解決するための手段を説明する。
【0010】
即ち、請求項1においては、ワークを保持するワーク保持装置と、該ワーク保持装置を支持するロボットアームと、該ロボットアームを支持し、前記ワーク保持装置によって保持される前記ワークを所定方向に搬送する走行部と、該走行部の進行を制御するパワーアシスト装置用制御装置と、を備え、前記パワーアシスト装置用制御装置には、前記ワークの組み付け対象物を搬送するコンベアから、該コンベアの運転状態または停止状態を示す状態信号と、前記コンベアの進行状態を示す同期信号と、が入力され、前記パワーアシスト装置用制御装置によって、前記同期信号に基づいて、前記コンベアの進行に同期させて、前記走行部の進行を制御するパワーアシスト装置であって、前記パワーアシスト装置用制御装置によって、前記ワークと前記組み付け対象物が接近状態にあると判定される場合には、前記状態信号が、運転状態から停止状態に移行した時点から、前記組み付け対象物に対する前記ワークの組み付けが完了した旨の判定処理が成される時点までは、前記パワーアシスト装置用制御装置によって、前記パワーアシスト装置から前記コンベアに対して、停止要求信号を継続して発信するものである。
【0011】
請求項2においては、ワークを保持するワーク保持装置と、該ワーク保持装置を支持するロボットアームと、該ロボットアームを支持し、前記ワーク保持装置によって保持される前記ワークを所定方向に搬送する走行部と、該走行部の進行を制御するパワーアシスト装置用制御装置と、を備え、前記パワーアシスト装置用制御装置には、前記ワークの組み付け対象物を搬送するコンベアから、該コンベアの運転状態または停止状態を示す状態信号と、前記コンベアの進行状態を示す同期信号と、が入力され、前記パワーアシスト装置用制御装置によって、前記同期信号に基づいて、前記コンベアの進行に同期させて、前記走行部の進行を制御するパワーアシスト装置であって、前記パワーアシスト装置用制御装置によって、前記ワークと前記組み付け対象物が接近状態にあると判定される場合には、前記状態信号が、運転状態から停止状態に一旦移行して、その後、再度運転状態に移行した時点から、前記組み付け対象物に対する前記ワークの組み付けが完了した旨の判定処理が成される時点までは、前記パワーアシスト装置用制御装置によって、前記パワーアシスト装置から前記コンベアに対して、停止要求信号を継続して発信するものである。
【0012】
請求項3においては、ワークを保持するワーク保持装置と、該ワーク保持装置を支持するロボットアームと、該ロボットアームを支持し、前記ワーク保持装置によって保持される前記ワークを所定方向に搬送する走行部と、該走行部の進行を制御する自動搭載装置用制御装置と、を備え、前記自動搭載装置用制御装置には、前記ワークの組み付け対象物を搬送するコンベアから、該コンベアの運転状態または停止状態を示す状態信号と、前記コンベアの進行状態を示す同期信号と、が入力され、前記自動搭載装置用制御装置によって、前記同期信号に基づいて、前記コンベアの進行に同期させて、前記走行部の進行を制御する自動搭載装置であって、前記自動搭載装置用制御装置によって、前記ワークと前記組み付け対象物が接近状態にあると判定される場合には、前記状態信号が、運転状態から停止状態に移行した時点から、前記組み付け対象物に対する前記ワークの組み付けが完了した旨の判定処理が成される時点までは、前記自動搭載装置用制御装置によって、前記自動搭載装置から前記コンベアに対して、停止要求信号を継続して発信するものである。
【0013】
請求項4においては、ワークを保持するワーク保持装置と、該ワーク保持装置を支持するロボットアームと、該ロボットアームを支持し、前記ワーク保持装置によって保持される前記ワークを所定方向に搬送する走行部と、該走行部の進行を制御する自動搭載装置用制御装置と、を備え、前記自動搭載装置用制御装置には、前記ワークの組み付け対象物を搬送するコンベアから、該コンベアの運転状態または停止状態を示す状態信号と、前記コンベアの進行状態を示す同期信号と、が入力され、前記自動搭載装置用制御装置によって、前記同期信号に基づいて、前記コンベアの進行に同期させて、前記走行部の進行を制御する自動搭載装置であって、前記自動搭載装置用制御装置によって、前記ワークと前記組み付け対象物が接近状態にあると判定される場合には、前記状態信号が、運転状態から停止状態に一旦移行して、その後、再度運転状態に移行した時点から、前記組み付け対象物に対する前記ワークの組み付けが完了した旨の判定処理が成される時点までは、前記自動搭載装置用制御装置によって、前記自動搭載装置から前記コンベアに対して、停止要求信号を継続して発信するものである。
【0014】
請求項5においては、ワークを保持するワーク保持装置と、該ワーク保持装置を支持するロボットアームと、該ロボットアームを支持し、前記ワーク保持装置によって保持される前記ワークを所定方向に搬送する走行部と、該走行部の進行を制御するパワーアシスト装置用制御装置と、を備え、前記パワーアシスト装置用制御装置には、前記ワークの組み付け対象物を搬送するコンベアから、該コンベアの運転状態または停止状態を示す状態信号と、前記コンベアの進行状態を示す同期信号と、が入力され、前記パワーアシスト装置用制御装置によって、前記同期信号に基づいて、前記コンベアの進行に同期させて、前記走行部の進行を制御するパワーアシスト装置の制御方法であって、前記パワーアシスト装置用制御装置によって、前記ワークと前記組み付け対象物が接近状態にあると判定される場合には、前記状態信号が、運転状態から停止状態に移行した時点から、前記組み付け対象物に対する前記ワークの組み付けが完了した旨の判定処理が成される時点までは、前記パワーアシスト装置用制御装置によって、前記パワーアシスト装置から前記コンベアに対して、停止要求信号を継続して発信して、前記コンベアの停止状態を継続させることによって、前記パワーアシスト装置の停止状態を維持するものである。
【0015】
請求項6においては、ワークを保持するワーク保持装置と、該ワーク保持装置を支持するロボットアームと、該ロボットアームを支持し、前記ワーク保持装置によって保持される前記ワークを所定方向に搬送する走行部と、該走行部の進行を制御するパワーアシスト装置用制御装置と、を備え、前記パワーアシスト装置用制御装置には、前記ワークの組み付け対象物を搬送するコンベアから、該コンベアの運転状態または停止状態を示す状態信号と、前記コンベアの進行状態を示す同期信号と、が入力され、前記パワーアシスト装置用制御装置によって、前記同期信号に基づいて、前記コンベアの進行に同期させて、前記走行部の進行を制御するパワーアシスト装置の制御方法であって、前記パワーアシスト装置用制御装置によって、前記ワークと前記組み付け対象物が接近状態にあると判定される場合には、前記状態信号が、運転状態から停止状態に一旦移行して、その後、再度運転状態に移行した時点から、前記組み付け対象物に対する前記ワークの組み付けが完了した旨の判定処理が成される時点までは、前記パワーアシスト装置用制御装置によって、前記パワーアシスト装置から前記コンベアに対して、停止要求信号を継続して発信して、前記コンベアの停止状態を継続させることによって、前記パワーアシスト装置の停止状態を維持するものである。
【0016】
請求項7においては、ワークを保持するワーク保持装置と、該ワーク保持装置を支持するロボットアームと、該ロボットアームを支持し、前記ワーク保持装置によって保持される前記ワークを所定方向に搬送する走行部と、該走行部の進行を制御する自動搭載装置用制御装置と、を備え、前記自動搭載装置用制御装置には、前記ワークの組み付け対象物を搬送するコンベアから、該コンベアの運転状態または停止状態を示す状態信号と、前記コンベアの進行状態を示す同期信号と、が入力され、前記自動搭載装置用制御装置によって、前記同期信号に基づいて、前記コンベアの進行に同期させて、前記走行部の進行を制御する自動搭載装置の制御方法であって、前記自動搭載装置用制御装置によって、前記ワークと前記組み付け対象物が接近状態にあると判定される場合には、前記状態信号が、運転状態から停止状態に移行した時点から、前記組み付け対象物に対する前記ワークの組み付けが完了した旨の判定処理が成される時点までは、前記自動搭載装置用制御装置によって、前記自動搭載装置から前記コンベアに対して、停止要求信号を継続して発信して、前記コンベアの停止状態を継続させることによって、前記自動搭載装置の停止状態を維持するものである。
【0017】
請求項8においては、ワークを保持するワーク保持装置と、該ワーク保持装置を支持するロボットアームと、該ロボットアームを支持し、前記ワーク保持装置によって保持される前記ワークを所定方向に搬送する走行部と、該走行部の進行を制御する自動搭載装置用制御装置と、を備え、前記自動搭載装置用制御装置には、前記ワークの組み付け対象物を搬送するコンベアから、該コンベアの運転状態または停止状態を示す状態信号と、前記コンベアの進行状態を示す同期信号と、が入力され、前記自動搭載装置用制御装置によって、前記同期信号に基づいて、前記コンベアの進行に同期させて、前記走行部の進行を制御する自動搭載装置の制御方法であって、前記自動搭載装置用制御装置によって、前記ワークと前記組み付け対象物が接近状態にあると判定される場合には、前記状態信号が、運転状態から停止状態に一旦移行して、その後、再度運転状態に移行した時点から、前記組み付け対象物に対する前記ワークの組み付けが完了した旨の判定処理が成される時点までは、前記自動搭載装置用制御装置によって、前記自動搭載装置から前記コンベアに対して、停止要求信号を継続して発信して、前記コンベアの停止状態を継続させることによって、前記自動搭載装置の停止状態を維持するものである。
【発明の効果】
【0018】
本発明の効果として、以下に示すような効果を奏する。
【0019】
請求項1においては、ワークと組み付け対象物が接触する可能性がある状態では、コンベアを常に停止状態とすることができる。これにより、パワーアシスト装置やコンベアが再起動する際に生じる振動によって、ワークと組み付け対象物が接触することが防止できる。
【0020】
請求項2においては、ワークと組み付け対象物が接触する可能性がある状態では、コンベアを常に停止状態とすることができる。これにより、パワーアシスト装置やコンベアが再起動する際に生じる振動によって、ワークと組み付け対象物が接触することが防止できる。また、パワーアシスト装置によるワークの搬送状態に起因して、コンベアが停止状態となる期間を短縮することができる。
【0021】
請求項3においては、ワークと組み付け対象物が接触する可能性がある状態では、コンベアを常に停止状態とすることができる。これにより、自動搭載装置やコンベアが再起動する際に生じる振動によって、ワークと組み付け対象物が接触することが防止できる。
【0022】
請求項4においては、ワークと組み付け対象物が接触する可能性がある状態では、コンベアを常に停止状態とすることができる。これにより、自動搭載装置やコンベアが再起動する際に生じる振動によって、ワークと組み付け対象物が接触することが防止できる。また、自動搭載装置によるワークの搬送状態に起因して、コンベアが停止状態となる期間を短縮することができる。
【0023】
請求項5においては、ワークと組み付け対象物が接触する可能性がある状態では、コンベアを常に停止状態とすることができる。これにより、パワーアシスト装置やコンベアが再起動する際に生じる振動によって、ワークと組み付け対象物が接触することが防止できる。
【0024】
請求項6においては、ワークと組み付け対象物が接触する可能性がある状態では、コンベアを常に停止状態とすることができる。これにより、パワーアシスト装置やコンベアが再起動する際に生じる振動によって、ワークと組み付け対象物が接触することが防止できる。また、パワーアシスト装置によるワークの搬送状態に起因して、コンベアが停止状態となる期間を短縮することができる。
【0025】
請求項7においては、ワークと組み付け対象物が接触する可能性がある状態では、コンベアを常に停止状態とすることができる。これにより、自動搭載装置やコンベアが再起動する際に生じる振動によって、ワークと組み付け対象物が接触することが防止できる。
【0026】
請求項8においては、ワークと組み付け対象物が接触する可能性がある状態では、コンベアを常に停止状態とすることができる。これにより、自動搭載装置やコンベアが再起動する際に生じる振動によって、ワークと組み付け対象物が接触することが防止できる。また、自動搭載装置によるワークの搬送状態に起因して、コンベアが停止状態となる期間を短縮することができる。
【発明を実施するための最良の形態】
【0027】
次に、発明の実施の形態を説明する。
まず、本発明を適用する生産ラインの一実施例に係るパワーアシスト装置2を備えた生産ライン1の全体構成について、図1〜図3を用いて説明する。図1は本発明の適用に係るパワーアシスト装置を備えた生産ラインの全体構成を示す模式図、図2は本発明の適用に係るパワーアシスト装置を備えた生産ラインの機器構成を示すブロック図、図3は本発明の一実施例に係る対象エリアの設定状況を示す模式図である。
尚、本実施例では、本発明を理解に供しやすくするため、搬送対象物であるワークたるウィンドウガラス19(以下ウィンドウ19と記載する)を、図1に示すXYZ座標系のX方向に向けてワークたるウィンドウ19と組み付け対象物である自動車のボディ20を搬送しながら、ボディ20にウィンドウ19を組み付ける作業を例示して説明する。また、説明の便宜上、X方向を生産ライン1の進行方向(前方)としている。
【0028】
図1に示す如く、本発明を適用する生産ラインの一実施例である生産ライン1は、パワーアシスト装置2およびコンベア15等により構成されており、コンベア15上の台車15aに載置された状態で搬送される組み付け対象物たる自動車のボディ20に対して、作業者18がパワーアシスト装置2によって協調搬送するワークたるウィンドウ19の組み付け作業が実施される工程部分である。
【0029】
そして、作業者18は、ウィンドウ19をロボットアーム3で保持してパワーアシスト装置2によって協調搬送しつつ、ボディ20の搬送手段であるコンベア15上に自らも乗った状態で、組立ライン(生産ライン1)上を定速で搬送される自動車のボディ20の窓枠20aに対して、ウィンドウ19を位置決めして組み付ける作業を行うものである。
【0030】
図1に示す如く、パワーアシスト装置2は、ロボットアーム3、フリージョイント4、ウィンドウ保持装置5、操作ハンドル6、走行部14等により構成している。
ロボットアーム3は、複数の関節3a・3a・・・(本実施例では4箇所)を介して各リンク3b・3b・・・(本実施例では4箇所)を連結して、側面視パンタグラフ状の閉ループリンク機構を構成しており、該リンク機構に設けられたアクチュエータ11(図2に図示)を駆動源としてリンク機構を駆動することにより、ロボットアーム3の先端部3cを3次元的に変位可能な構成としている。また、ロボットアーム3の先端部3cにはフリージョイント4を介してウィンドウ19を吸着保持するウィンドウ保持装置5を連結している。
【0031】
尚、本実施例においては、側面視パンタグラフ状のロボットアーム3を具備したパワーアシスト装置2を例示しているが、パワーアシスト装置2を構成するロボットアームとしては、マニピュレータ型の多関節型ロボット等を採用することも可能であり、パワーアシスト装置2を構成するロボットアームの種類を特に限定するものではない。
【0032】
フリージョイント4は、ロボットアーム3に対して、ウィンドウ保持装置5を3次元的に揺動可能に連結する継手部材であり、これにより、ウィンドウ保持装置5に吸着保持されるウィンドウ19が3次元的に揺動可能な構成としている。
【0033】
ウィンドウ保持装置5は、該ウィンドウ保持装置5の枠組みであるフレーム5aと、該フレーム5aの左右両側(詳しくは、ライン進行方向であるX方向に対して左右両側)にそれぞれ張り出した作業者18が把持してウィンドウ保持装置5を操作するための操作ハンドル6・6を備えている。
【0034】
また、ウィンドウ保持装置5は、複数の吸盤9・9・・・(本実施例では4箇所)を備えており、この複数の吸盤9・9・・・によってウィンドウ19を吸着保持できる構成としている。さらに詳述すると、フレーム5aの下端には、ウィンドウ19の表面(つまり、ウィンドウ19をボディ20に組み付けたときにボディ20の外側になる面)を吸着する複数の吸盤9・9・・・が組み付けられており、ウィンドウ保持装置5にウィンドウ19を保持させる場合、吸盤9・9・・・をウィンドウ19表面に密着させて、図示しないポンプ等によって吸盤9・9・・・内の空気を排出する。このようにウィンドウ保持装置5は、吸盤9・9・・・による吸着作用によってウィンドウ19を保持する構成としている。
【0035】
一方、ウィンドウ保持装置5からウィンドウ19を開放する場合には、ポンプによる空気の排出を停止して、吸盤9・9・・・とウィンドウ19との間に空気を流入させることによって、吸盤9・9・・・によるウィンドウ19の吸着作用を解除し、これにより、ウィンドウ19をウィンドウ保持装置5から開放する構成としている。
【0036】
さらに、吸盤9・9・・・には、接圧センサ9a・9a・・・を内蔵する構成としており、ウィンドウ保持装置5によって保持されるウィンドウ19が組み付け個所に押圧される際の押圧力を、各接圧センサ9a・9a・・・によって検知する構成としている。そして、この検知した圧力の情報が後述するパワーアシスト装置用制御装置8の演算部8aに入力され、所定の閾値を超えた場合に、パワーアシスト装置用制御装置8によって、ウィンドウ19が組み付け箇所に対して十分に押し込まれた(即ち、組み付けが完了した)旨の判定処理がなされるようにしている。
【0037】
尚、本実施例では、各接圧センサ9a・9a・・・によって検知した圧力の情報に基づいて判定処理がなされる構成を示しているが、本発明に係るパワーアシスト装置2による判定処理の方法はこれに限定するものではなく、例えば、作業者が組み付け状態を確認した上で、作業者の判断で組み付け完了スイッチを押圧することによって、組み付け完了信号を出力し、この組み付け完了信号を受けて、パワーアシスト装置用制御装置8によって、組み付けが完了した旨の判定処理がなされるようにすることも可能である。
【0038】
操作ハンドル6は、平面視略U字状の把持部であり、ウィンドウ保持装置5の二方向の端部に配置されている。また、一方の操作ハンドル6(作業者18が主に操作を行う側)がフレーム5aと接続される基部には力センサ7を配設している。さらに、この一方の操作ハンドル6の一端にはデッドマンスイッチ6aを配設している。
【0039】
力センサ7は、操作ハンドル6がウィンドウ保持装置5のフレーム5aと接続される基部に配置されて、作業者18が操作ハンドル6を操作する際に生じる操作力(大きさおよび向き)を検出するセンサである。力センサ7としては、例えば、6分力ロードセルを採用することができ、XYZ方向の各軸方向に作用する操作力や、XYZ方向の各軸回りに作用する操作力を検出することができる。
【0040】
そして、力センサ7によって検出された作業者18の操作力(大きさおよび向き)に基づいて、パワーアシスト装置用制御装置8の演算部8aによって演算し、作業者18の所望する操作を検知する構成としている。
尚、本実施例では力センサ7を一方の操作ハンドル6のみに配設する構成を例示しているが、特に限定するものではなく、他方の操作ハンドル6近傍にも力センサ7を配設する構成とすることも可能である。
【0041】
このような構成とすることにより、作業者18が操作ハンドル6を所望する方向に操作することによって、ウィンドウ保持装置5に保持されるウィンドウ19を所望する方向にアシスト搬送したり、作業者18は窓枠20aに対するウィンドウ19の位置決めを行ったりすることができる。
【0042】
また、デッドマンスイッチ6aは安全性確保のために、作業者18がデッドマンスイッチ6aを押している間(デッドマンスイッチ6aをONしている間)だけロボットアーム3のアクチュエータ11に電源供給が行われてアクチュエータ11が駆動し、作業者18がデッドマンスイッチ6aを離している間(デッドマンスイッチ6aをOFFしている間)は、電源供給が停止されてアクチュエータ11の駆動が行われないように構成されている。デッドマンスイッチ6aはパワーアシスト装置用制御装置8に接続されている。
尚、本実施例ではデッドマンスイッチ6aを一方の操作ハンドル6にのみ配設した構成を例示しているが、特に限定するものではなく、作業性等を考慮してデッドマンスイッチ6aを他方の操作ハンドル6にも配設する構成としてもよい。
【0043】
また、ロボットアーム3の各関節3a・3a・・・及びフリージョイント4には、各リンク3b・3b・・・の位置を角度として検出する角度検出手段であるエンコーダ(図示せず)が配置されている。該エンコーダによる検出値はパワーアシスト装置用制御装置8へ送られる。パワーアシスト装置用制御装置8は、送られたエンコーダの検出値から、ウィンドウ19の位置及びウィンドウ19の姿勢を求めることができる。
【0044】
走行部14は、生産ライン1に設けられたレール14aに沿って走行することができるパワーアシスト装置2の走行駆動部分であり、該走行部14によって前述したロボットアーム3を支持している。
これにより、パワーアシスト装置2によって保持されるウィンドウ19を、レール14aに沿って搬送することができるようにしている。
【0045】
ここで、パワーアシスト装置用制御装置8に接続される機器の構成について説明する。
図2に示す如く、パワーアシスト装置用制御装置8には、ロボットアーム3、フリージョイント4、ウィンドウ保持装置5、デッドマンスイッチ6a、力センサ7、接圧センサ9a、アクチュエータ11、走行部14及び後述するコンベア15を制御するコンベア用制御装置16等が接続されている。
【0046】
パワーアシスト装置2の各部の動作はパワーアシスト装置用制御装置8によって制御される。前記力センサ7で検出された操作力と操作力の向き、前記エンコーダ(図示せず)に基づくウィンドウ保持装置5(ウィンドウ19)の位置情報等に基づいて、演算部8aにおいて作業者18の意図(本実施例ではウィンドウ19を組み付けるために所定方向に動かしたい意図)をリアルタイムで推定する。そして、パワーアシスト装置用制御装置8は、アクチュエータ11を制御し、後述する作業者18に加えられた操作力の向きに応じて決定されるアシスト力を発生させる。
【0047】
また、パワーアシスト装置用制御装置8は、図示しない中央演算処理装置(CPU)や記憶装置(ハードディスク装置、RAMやROM)やインターフェース等からなり、記憶装置には、作業者18により操作ハンドル6に加えられた操作力とその向きとの関係からロボットアーム3をどのような条件で駆動制御するかを判断するための各種情報等が記憶されている。
【0048】
次に、本発明を適用する生産ラインの一実施例に係る自動搭載装置22を備えた生産ライン21の全体構成について、図16を用いて説明する。図16は本発明の適用に係る自動搭載装置を備えた生産ラインの全体構成を示す模式図である。
尚、本実施例では、本発明を理解に供しやすくするため、搬送対象物であるワークたるウィンドウ19を、図16に示すXYZ座標系のX方向に向けてワークたるウィンドウ19と組み付け対象物である自動車のボディ20を搬送しながら、ボディ20にウィンドウ19を組み付ける作業を例示して説明する。また、説明の便宜上、X方向を生産ライン21の進行方向(前方)としている。
【0049】
図16に示す如く、本発明を適用する生産ラインの一実施例である生産ライン21は、自動搭載装置22およびコンベア15等により構成されており、コンベア15上の台車15aに載置された状態で搬送される組み付け対象物たる自動車のボディ20に対して、自動搭載装置22によって自動的に搬送されるワークたるウィンドウ19の組み付け作業が実施される工程部分である。
【0050】
そして、ウィンドウ19をロボットアーム23で保持して自動搭載装置22によって自動的に搬送しつつ、ボディ20の搬送手段であるコンベア15上に載置され、組立ライン(生産ライン21)上を定速で搬送される自動車のボディ20の窓枠20aに対して、ウィンドウ19を位置決めして組み付ける作業を行うものである。
【0051】
図16に示す如く、自動搭載装置22は、ロボットアーム23、ジョイント24、ウィンドウ保持装置25、走行部34等により構成している。
ロボットアーム23は、複数の関節23a・23a・・・(本実施例では4箇所)を介して各リンク23b・23b・・・(本実施例では4箇所)を連結して、側面視パンタグラフ状の閉ループリンク機構を構成しており、該リンク機構に設けられたアクチュエータ31(図17に図示)を駆動源としてリンク機構を駆動することにより、ロボットアーム23の先端部23cを3次元的に変位可能な構成としている。また、ロボットアーム23の先端部23cにはジョイント24を介してウィンドウ19を吸着保持するウィンドウ保持装置25を連結している。
【0052】
尚、本実施例においては、側面視パンタグラフ状のロボットアーム23を具備した自動搭載装置22を例示しているが、自動搭載装置22を構成するロボットアームとしては、マニピュレータ型の多関節型ロボット等を採用することも可能であり、自動搭載装置22を構成するロボットアームの種類を特に限定するものではない。
【0053】
ジョイント24は、ロボットアーム23に対して、ウィンドウ保持装置25を3次元的に揺動可能に連結する継手部材であり、これにより、ウィンドウ保持装置25に吸着保持されるウィンドウ19が3次元的に揺動可能な構成としている。
【0054】
ウィンドウ保持装置25は、該ウィンドウ保持装置25の枠組みであるフレーム25aを備えている。
また、ウィンドウ保持装置25は、複数の吸盤29・29・・・(本実施例では4箇所)を備えており、この複数の吸盤29・29・・・によってウィンドウ19を吸着保持できる構成としている。さらに詳述すると、フレーム25aの下端には、ウィンドウ19の表面(つまり、ウィンドウ19をボディ20に組み付けたときにボディ20の外側になる面)を吸着する複数の吸盤29・29・・・が組み付けられており、ウィンドウ保持装置25にウィンドウ19を保持させる場合、吸盤29・29・・・をウィンドウ19表面に密着させて、図示しないポンプ等によって吸盤29・29・・・内の空気を排出する。このようにウィンドウ保持装置25は、吸盤29・29・・・による吸着作用によってウィンドウ19を保持する構成としている。
【0055】
一方、ウィンドウ保持装置25からウィンドウ19を開放する場合には、ポンプによる空気の排出を停止して、吸盤29・29・・・とウィンドウ19との間に空気を流入させることによって、吸盤29・29・・・によるウィンドウ19の吸着作用を解除し、これにより、ウィンドウ19をウィンドウ保持装置25から開放する構成としている。
【0056】
さらに、吸盤29・29・・・には、接圧センサ29a・29a・・・を内蔵する構成としており、ウィンドウ保持装置25によって保持されるウィンドウ19が組み付け個所に押圧される際の押圧力を、各接圧センサ29a・29a・・・によって検知する構成としている。そして、この検知した圧力の情報が後述する自動搭載装置用制御装置28の演算部28aに入力され、所定の閾値を超えた場合に、自動搭載装置用制御装置28によって、ウィンドウ19が組み付け箇所に対して十分に押し込まれた(即ち、組み付けが完了した)旨の判定処理がなされるようにしている。
【0057】
また、ロボットアーム23の各関節23a・23a・・・及びジョイント24には、各リンク23b・23b・・・の位置を角度として検出する角度検出手段であるエンコーダ(図示せず)が配置されている。該エンコーダによる検出値は自動搭載装置用制御装置28へ送られる。自動搭載装置用制御装置28は、送られたエンコーダの検出値から、ウィンドウ19の位置及びウィンドウ19の姿勢を求めることができる。
【0058】
走行部34は、生産ライン21に設けられたレール34aに沿って走行することができる自動搭載装置22の走行駆動部分であり、該走行部34によって前述したロボットアーム23を支持している。
これにより、自動搭載装置22によって保持されるウィンドウ19を、レール34aに沿って搬送することができるようにしている。
【0059】
ここで、自動搭載装置用制御装置28に接続される機器の構成について、図17を用いて説明する。図17は本発明の適用に係る自動搭載装置を備えた生産ラインの機器構成を示すブロック図である。
図17に示す如く、自動搭載装置22は、自動搭載装置用制御装置28を備えている。そして、自動搭載装置用制御装置28には、ロボットアーム23、ジョイント24、ウィンドウ保持装置25、接圧センサ29a、アクチュエータ31、走行部34及び後述するコンベア15を制御するコンベア用制御装置16等が接続されている。
【0060】
自動搭載装置22の各部の動作は自動搭載装置用制御装置28によって制御される。自動搭載装置用制御装置28に予め記憶されたマップ情報や、前記エンコーダ(図示せず)に基づくウィンドウ保持装置25(ウィンドウ19)の位置情報、および接圧センサ29aによる検知結果等に基づいて、演算部28aにおいて、ロボットアーム23、ジョイント24、ウィンドウ保持装置25、アクチュエータ31に対する指令値を演算し、自動的に前記各部23・24・25・31の動作を制御する。
【0061】
また、自動搭載装置用制御装置28は、図示しない中央演算処理装置(CPU)や記憶装置(ハードディスク装置、RAMやROM)やインターフェース等からなり、記憶装置には、前記各部23・24・25・31をどのような条件で駆動制御するかを判断するためのマップ情報等の各種情報が記憶されている。
【0062】
次に、組み付け対象物たるボディ20の搬送手段であるコンベア15の全体構成について説明する。
図1に示す如く、コンベア15は、ボディ20を台車15aに載置して所定速度で生産ライン1に沿って、X方向に進行させる装置である。また、ボディ20を定速で生産ライン1に沿って進行させながら、作業者18がコンベア15上に乗ってボディ20の所定箇所に各種部品の組み付け作業を行う(本実施例ではウィンドウ19の組み付け作業を行う)。コンベア15は、図示しない駆動手段により駆動されており、コンベア15の動作を制御するコンベア用制御装置16を具備している。コンベア用制御装置16は、コンベア15の運転(移動)、停止、または速度調整等のコンベア15の搬送に関する制御を行うことができる。
【0063】
コンベア15は、作業者がボディ20に部品を組み付ける作業時(通常時)において、一定の速度で進行しており、このコンベア15上に載置されたボディ20も同じく一定の速度で生産ライン1を進行する。パワーアシスト装置2の作業者18は、コンベア15上に乗った状態で、操作ハンドル6を操作しながら、パワーアシスト装置2による補助(アシスト力)を受けながら、ロボットアーム3を用いてウィンドウ19をボディ20の窓枠20aに組み付ける作業を行う。
【0064】
次に、パワーアシスト装置2の搬送制御方法について説明する。
図1に示す如く、前述したように、作業者18が、コンベア15上でウィンドウ保持装置5によって保持されるウィンドウ19をパワーアシスト装置2によって協調搬送して、ボディ20の窓枠20aに移動させて、該窓枠20aに、ウィンドウ19の組付け作業を行う場合、パワーアシスト装置2の走行手段たる走行部14の進行状態は、コンベア15の進行状態に同期させる構成としている。
【0065】
さらに詳述すると、コンベア15は、コンベア15の走行輪の回転状態を検知するエンコーダ10を備えており、このエンコーダ10によって検知されるコンベア15の進行状態を示す信号(即ち、コンベア15の進行方向や進行距離等の情報を含む信号、以下同期信号と記載する)が、パワーアシスト装置2の動作を制御するパワーアシスト装置用制御装置8に入力される構成としている。
そして、走行部14の進行を同期信号に従って制御することにより、コンベア15とパワーアシスト装置2の進行を同期させるようにしている。
【0066】
尚、通常の搬送状態では、ボディ20はコンベア15上にある載置箇所(台車15a)に載せられて定速でX方向に前進するとともに、このコンベア15上のボディ20の進行に同期してパワーアシスト装置2全体を同じ方向に進行させる。即ち、ボディ20の動作に同期して、ウィンドウ19を保持するロボットアーム3を支持している走行部14を進行させるようにしている。
【0067】
次に、本発明の一実施例に係るパワーアシスト装置2の制御方法について説明する。
図2に示す如く、本発明の一実施例に係るパワーアシスト装置2(正確には、パワーアシスト装置用制御装置8)からは、コンベア15(正確には、コンベア用制御装置16)に対して、停止要求信号を発信することが可能な構成としている。そして、コンベア15は、この停止要求信号が入力されている間は、停止状態を維持する構成としている。
【0068】
また、コンベア15には、パワーアシスト装置2から発信される停止要求信号のみならず、その他の工程設備17(以後、他工程設備17と記載する)から発信される停止要求信号も入力されており、このため、コンベア15は、自工程(即ち、生産ライン1)の状況のみならず、他工程の状況に応じて急停止される場合もあり、また、他工程からの停止要求信号がなくなったときには、急に再起動される場合があるものである。
【0069】
他工程からの停止要求信号がなくなって、コンベア15が急に再起動されるとき、このコンベア15の急な再起動に同期してパワーアシスト装置2も再起動するため、この際に、パワーアシスト装置2およびコンベア15には振動が生じてしまう。本発明が解決しようとする課題は、この振動が発生する際に、パワーアシスト装置2によって搬送されているウィンドウ19が、ボディ20と接触して破損したり、また、ウィンドウ19に塗布されている接着剤12がボディ20に付着してしまう等の不具合を防止することにあり、以下に示すような方法によって、この課題の解決を図っている。
【0070】
まず、本発明の一実施例に係るパワーアシスト装置2の制御方法では、ウィンドウ19とボディ20が接近状態にある場合には、パワーアシスト装置2からコンベア15に対して停止要求信号を発信するようにしている。
【0071】
ここで、ウィンドウ19とボディ20が接近状態であるか否かの判断は、例えば、図3に示す如く、ボディ20の周囲に対象エリアAを設定しておき、パワーアシスト装置用制御装置8によって、アクチュエータ11から入力される信号に基づいてパワーアシスト装置2の姿勢およびウィンドウ19の位置を判断し、ウィンドウ19が対象エリアAに位置する場合に、ウィンドウ19とボディ20が接近状態であると判断する方法を採用することができる。
【0072】
この対象エリアAは、パワーアシスト装置2およびコンベア15に振動が生じた場合に、ウィンドウ19とボディ20が接触する可能性があるエリアを基準とし、さらにそのエリアに一定の余裕(安全率)を加味して定めることができる。
尚、ウィンドウ19とボディ20が接近状態であるか否かの判断方法は、パワーアシスト装置2とボディ20の実際の距離を測定するセンサを設けて、該センサにより実測された距離が設定した閾値以下となる場合に接近状態であると判断する等のその他の種々の判断方法を採用することが可能であり、本発明に適用するウィンドウ19とボディ20の接近状態を判断する方法を、本実施例に示す方法に限定するものではない。
【0073】
つまり、本発明の一実施例に係るパワーアシスト装置2の制御方法では、パワーアシスト装置2およびコンベア15が再起動して振動が生じると、ウィンドウ19とボディ20が接触する可能性があると判断される場合には、パワーアシスト装置2からコンベア15に対して停止要求信号を発信して、コンベア15を停止状態に維持するようにして、パワーアシスト装置2自身も停止状態を維持するようにしている。また言い換えると、本発明の一実施例に係るパワーアシスト装置2は、パワーアシスト装置2およびコンベア15が再起動して振動が生じると、ウィンドウ19とボディ20とが接触する可能性があると判断される場合には、パワーアシスト装置2からコンベア15に対して停止要求信号を発信し続けるようにしている。
【0074】
尚、自動搭載装置22の搬送制御方法は、前述したパワーアシスト装置2の搬送制御方法と同様であり、通常の搬送状態では、ボディ20はコンベア15上にある載置箇所(台車15a)に載せられて定速でX方向に前進するとともに、このコンベア15上のボディ20の進行に同期して自動搭載装置22全体を同じ方向に進行させる。即ち、ボディ20の動作に同期して、ウィンドウ19を保持するロボットアーム23を支持している走行部34を進行させるようにしている。
【0075】
次に、本発明の一実施例に係る自動搭載装置22の制御方法について説明する。
図16に示す如く、本発明の一実施例に係る自動搭載装置22(正確には、自動搭載装置用制御装置28)からは、コンベア15(正確には、コンベア用制御装置16)に対して、停止要求信号を発信することが可能な構成としている。そして、コンベア15は、この停止要求信号が入力されている間は、停止状態を維持する構成としている。
【0076】
また、コンベア15には、自動搭載装置22から発信される停止要求信号のみならず、他工程設備17から発信される停止要求信号も入力されており、このため、コンベア15は、自工程(即ち、生産ライン21)の状況のみならず、他工程の状況に応じて急停止される場合もあり、また、他工程からの停止要求信号がなくなったときには、急に再起動される場合があるものである。
【0077】
他工程からの停止要求信号がなくなって、コンベア15が急に再起動されるとき、このコンベア15の急な再起動に同期して自動搭載装置22も再起動するため、この際に、自動搭載装置22およびコンベア15には振動が生じてしまう。本発明が解決しようとする課題は、この振動が発生する際に、自動搭載装置22によって搬送されているウィンドウ19が、ボディ20と接触して破損したり、また、ウィンドウ19に塗布されている接着剤12がボディ20に付着してしまう等の不具合を防止することにあり、以下に示すような方法によって、この課題の解決を図っている。
【0078】
まず、本発明の一実施例に係る自動搭載装置22の制御方法では、ウィンドウ19とボディ20が接近状態にある場合には、自動搭載装置22からコンベア15に対して停止要求信号を発信するようにしている。
【0079】
ここで、ウィンドウ19とボディ20が接近状態であるか否かの判断は、例えば、図3に示す生産ライン1の場合と同様に、ボディ20の周囲に対象エリアAを設定しておき、自動搭載装置用制御装置28によって、アクチュエータ31から入力される信号に基づいて自動搭載装置22の姿勢およびウィンドウ19の位置を判断し、ウィンドウ19が対象エリアAに位置する場合に、ウィンドウ19とボディ20が接近状態であると判断する方法を採用することができる。
【0080】
この対象エリアAは、自動搭載装置22およびコンベア15に振動が生じた場合に、ウィンドウ19とボディ20が接触する可能性があるエリアを基準とし、さらにそのエリアに一定の余裕(安全率)を加味して定めることができる。
尚、ウィンドウ19とボディ20が接近状態であるか否かの判断方法は、自動搭載装置22とボディ20の実際の距離を測定するセンサを設けて、該センサにより実測された距離が設定した閾値以下となる場合に接近状態であると判断する等のその他の種々の判断方法を採用することが可能であり、本発明に適用するウィンドウ19とボディ20の接近状態を判断する方法を、本実施例に示す方法に限定するものではない。
【0081】
つまり、本発明の一実施例に係る自動搭載装置22の制御方法では、自動搭載装置22およびコンベア15が再起動して振動が生じると、ウィンドウ19とボディ20が接触する可能性があると判断される場合には、自動搭載装置22からコンベア15に対して停止要求信号を発信して、コンベア15を停止状態に維持するようにして、自動搭載装置22自身も停止状態を維持するようにしている。また言い換えると、本発明の一実施例に係る自動搭載装置22は、自動搭載装置22およびコンベア15が再起動して振動が生じると、ウィンドウ19とボディ20とが接触する可能性があると判断される場合には、自動搭載装置22からコンベア15に対して停止要求信号を発信し続けるようにしている。
【0082】
次に、本発明の第一実施例に係るパワーアシスト装置2によるウィンドウ19の組み付け作業の状況について、図4〜図11を用いて説明する。図4は本発明の第一実施例に係るパワーアシスト装置の制御方法を示す制御フロー図、図5は本発明の第一実施例に係るパワーアシスト装置の制御状態を示すタイミングチャート図、図6は本発明の第一実施例および第二実施例に係るパワーアシスト装置の制御状態(ワーク離間状態)を示す模式図、図7は本発明の第一実施例に係るパワーアシスト装置の制御状態(ワーク接近状態その1)を示す模式図、図8は本発明の第一実施例に係るパワーアシスト装置の制御状態(ワーク接近状態その2)を示す模式図、図9は本発明の第一実施例および第二実施例に係るパワーアシスト装置の制御状態(ワーク組み付け完了時)を示す模式図、図10はウィンドウの組み付け完了状態を示す模式図、図11は本発明の第一実施例および第二実施例に係るパワーアシスト装置の制御状態(制御終了後)を示す模式図である。以下では、図4に示す制御フロー図に沿って説明を進める。尚、ウィンドウ19の搬送および位置決めには、作業者18の操作が関与するものであるが、説明の便宜上、図6〜図9、図11、図14、図15では、操作ハンドル6、力センサ7、作業者18等の図示を省略している。また、本発明の第一実施例では、パワーアシスト装置2によるウィンドウ19の組み付け作業を例示して説明を行うが、本説明中のパワーアシスト装置2に対応する記載内容を自動搭載装置22に対応する記載内容に置き換えることが可能である。つまり、パワーアシスト装置2によるウィンドウ19の組み付け作業と自動搭載装置22によるウィンドウ19の組み付け作業は共通しているため、ここでは、自動搭載装置22によるウィンドウ19の組み付け作業の説明は割愛する。
【0083】
図4および図6に示す如く、生産ライン1にウィンドウ19およびボディ20が導入されると、本発明の第一実施例に係るパワーアシスト装置2の制御方法が開始され、コンベア15の進行に対してパワーアシスト装置2の進行を同期させながら、コンベア15によってボディ20が搬送され、パワーアシスト装置2によってウィンドウ19が搬送される(STEP−1)。
【0084】
同期搬送が開始されると、まずパワーアシスト装置2が接近状態になっているか否か(即ち、ウィンドウ19が前述した対象エリアAに包含されているか否か)をパワーアシスト装置用制御装置8によって判定するようにしている。そして、図6に示す如く、パワーアシスト装置2が接近状態でなければ同期搬送を継続し、図7に示す如く、パワーアシスト装置2が接近状態であれば、次の判定(STEP−3)に移行するようにしている(STEP−2)。
【0085】
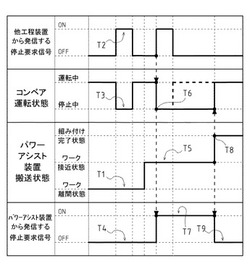
ここで、図6に示す如く、パワーアシスト装置2が接近状態でない場合(即ち、図5中に示す状態T1)には、コンベア用制御装置16に対して他工程設備17から発信された停止要求信号を受けて(即ち、図5中に示す状態T2)、コンベア15が停止する(即ち、図5中に示す状態T3)が、パワーアシスト装置2(正確には、パワーアシスト装置用制御装置8)は、コンベア15が停止状態である旨の状態信号を受けたとしても、パワーアシスト装置用制御装置8から停止要求信号を発信することはない(即ち、図5中に示す状態T4)。
【0086】
つまり、パワーアシスト装置2が接近状態でなければ、ウィンドウ19とボディ20とが接触する可能性がないため、パワーアシスト装置2側から積極的にコンベア15を停止させることはない。
【0087】
次に、図7に示す如く、パワーアシスト装置2が接近状態である場合には、コンベア15の運転状態による判定を行うようにしている(STEP−3)。ここで、コンベア15が運転状態であれば、同期搬送を継続するようにしており、コンベア15が停止状態であれば、パワーアシスト装置2(正確には、パワーアシスト装置用制御装置8)からコンベア15(正確には、コンベア用制御装置16)に対して停止要求信号を発信して(STEP−4)、次の判定(STEP−5)に移行するようにしている。
【0088】
ここで、図7に示す如く、パワーアシスト装置2が接近状態である場合(即ち、図5中に示す状態T5)には、パワーアシスト装置用制御装置8は、コンベア15が停止している旨の状態信号を受けると(即ち、図5中に示す状態T6)、パワーアシスト装置用制御装置8からコンベア用制御装置16に対して停止要求信号を発信するようにしている(即ち、図5中に示す状態T7)。
【0089】
またこの場合、図8に示す如く、他工程設備17からの停止要求信号がない場合であっても、パワーアシスト装置2側からコンベア15に継続して停止要求信号を発信し続けるようにしている。
【0090】
つまり、パワーアシスト装置2が接近状態である場合、パワーアシスト装置2およびコンベア15の再起動によって振動が生じると、ウィンドウ19とボディ20とが接触する可能性があるため、パワーアシスト装置2が接近状態であれば、パワーアシスト装置2側から積極的にコンベア15を停止させるように停止要求信号を発信することにより、パワーアシスト装置2およびコンベア15を再起動させないようにしている。
【0091】
次に、パワーアシスト装置2(正確には、パワーアシスト装置用制御装置8)からコンベア15(正確には、コンベア用制御装置16)に対して停止要求信号を発信している期間は、窓枠20aに対するウィンドウ19の組み付けが完了したか否かの判定を行うようにしている(STEP−5)。ここで、ウィンドウ19の組み付けが完了していなければ、パワーアシスト装置2(正確には、パワーアシスト装置用制御装置8)からコンベア15(正確には、コンベア用制御装置16)に対して停止要求信号を発信し続けるようにしている。また、ウィンドウ19の組み付けが完了すれば、停止要求信号の発信を停止して(STEP−6)、次の判定(STEP−7)に移行するようにしている。
【0092】
つまり、図9に示す如く、接圧センサ9a・9a・・・が検知する圧力に基づいて、パワーアシスト装置用制御装置8によってウィンドウ19の組み付けが完了した旨の判定処理がなされると(即ち、図5中に示す状態T8)、パワーアシスト装置用制御装置8からコンベア用制御装置16に対して発信していた停止要求信号を停止するようにしている(即ち、図5中に示す状態T9)。
【0093】
尚、ウィンドウ19の組み付け状態は、図10に示す如く、ウィンドウ19の上端部に設置されたアップストッパ19aの上部近傍に接着剤12が塗布された状態で、アップストッパ19aをボディ20の窓枠20a上部に設けられたアップストッパ19aの係合穴に挿入して、接着剤12を押し潰しながらウィンドウ19を組み付けるようにしており、一旦ウィンドウ19が組み付けられた後であれば、ウィンドウ19が振動しても、ウィンドウ19がズレる等の問題は発生しない。
【0094】
次に、図11に示す如く、停止要求信号の発信が停止されると、コンベア15(正確には、コンベア用制御装置16)に対する運転要求状態による判定を行うようにしている(STEP−7)。ここで、他工程設備17から停止要求信号が発信されている場合には、搬送停止状態を維持しつつ(STEP−8)、運転要求状態による判定を継続する。また、他工程設備17からの停止要求信号がない場合には、同期搬送を終了して(STEP−9)、次の組み付け作業に備えるとともに、本発明に係るパワーアシスト装置2の制御方法による一連のウィンドウ19の組み付け作業を終了するようにしている。
【0095】
尚、一連のウィンドウ19の組み付け作業が完了してパワーアシスト装置2およびコンベア15が再起動する際には振動が生じるが、ウィンドウ19は既に図10に示すように組み付けられているため、このとき発生する振動が問題となることはない。
また本発明は、前述した作業者18による操作が介在して半自動的に作動するパワーアシスト装置2を備える生産ライン1だけでなく、作業者による操作が介在せず自動的に搬送対象物(例えば、ウィンドウ19)を搬送し、組み付け対象物(例えば、ボディ20)に対して搬送対象物を自動的に組付ける自動搭載装置22を備える生産ライン21についても適用することが可能である。
【0096】
即ち、本発明の第一実施例に係るパワーアシスト装置2は、ワークたるウィンドウ19を保持するウィンドウ保持装置5と、ウィンドウ保持装置5を支持するロボットアーム3と、ロボットアーム3を支持し、ウィンドウ保持装置5によって保持されるウィンドウ19を所定方向に搬送する走行部14と、走行部14の進行を制御するパワーアシスト装置用制御装置8と、を備え、パワーアシスト装置用制御装置8には、ウィンドウ19の組み付け対象物たるボディ20を搬送するコンベア15から、コンベア15の運転状態または停止状態を示す状態信号と、コンベア15の進行状態を示す同期信号と、が入力され、パワーアシスト装置用制御装置8によって、前記同期信号に基づいて、コンベア15の進行に同期させて、走行部14の進行を制御するパワーアシスト装置2であって、パワーアシスト装置用制御装置8によって、ウィンドウ19とボディ20が接近状態にあると判定される場合には、前記状態信号が、運転状態から停止状態に移行した時点から、パワーアシスト装置用制御装置8によって、ボディ20に対するウィンドウ19の組み付けが完了した旨の判定処理が成される時点までは、パワーアシスト装置用制御装置8によって、パワーアシスト装置2からコンベア15(正確には、コンベア用制御装置16)に対して、停止要求信号を継続して発信する構成としている。
【0097】
また、本発明の第一実施例に係る自動搭載装置22は、ワークたるウィンドウ19を保持するウィンドウ保持装置25と、ウィンドウ保持装置25を支持するロボットアーム23と、ロボットアーム23を支持し、ウィンドウ保持装置25によって保持されるウィンドウ19を所定方向に搬送する走行部34と、走行部34の進行を制御する自動搭載装置用制御装置28と、を備え、自動搭載装置用制御装置28には、ウィンドウ19の組み付け対象物たるボディ20を搬送するコンベア15から、コンベア15の運転状態または停止状態を示す状態信号と、コンベア15の進行状態を示す同期信号と、が入力され、自動搭載装置用制御装置28によって、前記同期信号に基づいて、コンベア15の進行に同期させて、走行部34の進行を制御する自動搭載装置22であって、自動搭載装置用制御装置28によって、ウィンドウ19とボディ20が接近状態にあると判定される場合には、前記状態信号が、運転状態から停止状態に移行した時点から、自動搭載装置用制御装置28によって、ボディ20に対するウィンドウ19の組み付けが完了した旨の判定処理が成される時点までは、自動搭載装置用制御装置28によって、自動搭載装置22からコンベア15(正確には、コンベア用制御装置16)に対して、停止要求信号を継続して発信する構成としている。
【0098】
また、本発明の第一実施例に係るパワーアシスト装置2の制御方法は、ワークたるウィンドウ19を保持するウィンドウ保持装置5と、ウィンドウ保持装置5を支持するロボットアーム3と、ロボットアーム3を支持し、ウィンドウ保持装置5によって保持されるウィンドウ19を所定方向に搬送する走行部14と、走行部14の進行を制御するパワーアシスト装置用制御装置8と、を備え、パワーアシスト装置用制御装置8には、ウィンドウ19の組み付け対象物たるボディ20を搬送するコンベア15から、コンベア15の運転状態または停止状態を示す状態信号と、コンベア15の進行状態を示す同期信号と、が入力され、パワーアシスト装置用制御装置8によって、前記同期信号に基づいて、コンベア15の進行に同期させて、走行部14の進行を制御するパワーアシスト装置2の制御方法であって、パワーアシスト装置用制御装置8によって、ウィンドウ19とボディ20が接近状態にあると判定される場合には、前記状態信号が、運転状態から停止状態に移行した時点から、パワーアシスト装置用制御装置8によって、ボディ20に対するウィンドウ19の組み付けが完了した旨の判定処理が成される時点までは、パワーアシスト装置用制御装置8によって、パワーアシスト装置2からコンベア15(正確には、コンベア用制御装置16)に対して、停止要求信号を継続して発信して、コンベア15の停止状態を継続させることによって、パワーアシスト装置2の停止状態を維持するようにしている。
【0099】
また、本発明の第一実施例に係る自動搭載装置22の制御方法は、ワークたるウィンドウ19を保持するウィンドウ保持装置25と、ウィンドウ保持装置25を支持するロボットアーム23と、ロボットアーム23を支持し、ウィンドウ保持装置25によって保持されるウィンドウ19を所定方向に搬送する走行部34と、走行部34の進行を制御する自動搭載装置用制御装置28と、を備え、自動搭載装置用制御装置28には、ウィンドウ19の組み付け対象物たるボディ20を搬送するコンベア15から、コンベア15の運転状態または停止状態を示す状態信号と、コンベア15の進行状態を示す同期信号と、が入力され、自動搭載装置用制御装置28によって、前記同期信号に基づいて、コンベア15の進行に同期させて、走行部34の進行を制御する自動搭載装置22の制御方法であって、自動搭載装置用制御装置28によって、ウィンドウ19とボディ20が接近状態にあると判定される場合には、前記状態信号が、運転状態から停止状態に移行した時点から、自動搭載装置用制御装置28によって、ボディ20に対するウィンドウ19の組み付けが完了した旨の判定処理が成される時点までは、自動搭載装置用制御装置28によって、自動搭載装置22からコンベア15(正確には、コンベア用制御装置16)に対して、停止要求信号を継続して発信して、コンベア15の停止状態を継続させることによって、自動搭載装置22の停止状態を維持するようにしている。
【0100】
このような構成とすることにより、ウィンドウ19とボディ20が接触する可能性がある状態では、コンベア15を常に停止状態とすることができるのである。またこれにより、パワーアシスト装置2、あるいは、自動搭載装置22や、コンベア15が再起動する際に生じる振動によって、ウィンドウ19とボディ20が接触することが防止できるのである。
【0101】
次に、本発明の第二実施例に係るパワーアシスト装置2によるウィンドウ19の組み付け作業の状況について、図6、図9、図11および図12〜図15を用いて説明する。図12は本発明の第二実施例に係るパワーアシスト装置の制御方法を示す制御フロー図、図13は本発明の第二実施例に係るパワーアシスト装置の制御状態を示すタイミングチャート図、図14は本発明の第二実施例に係るパワーアシスト装置の制御状態(ワーク接近状態その1)を示す模式図、図15は本発明の第二実施例に係るパワーアシスト装置の制御状態(ワーク接近状態その2)を示す模式図である。以下では、図12に示す制御フロー図に沿って説明を進める。尚、図6、図9、図11については、前述した第一実施例と共通で用いるようにしている。また、本発明の第二実施例では、パワーアシスト装置2によるウィンドウ19の組み付け作業を例示して説明を行うが、本説明中のパワーアシスト装置2に対応する記載内容を自動搭載装置22に対応する記載内容に置き換えることが可能である。つまり、パワーアシスト装置2によるウィンドウ19の組み付け作業と自動搭載装置22によるウィンドウ19の組み付け作業は共通しているため、ここでは、自動搭載装置22によるウィンドウ19の組み付け作業の説明は割愛する。
【0102】
図6および図12に示す如く、前述した第一実施例と同様に、生産ライン1にウィンドウ19およびボディ20が導入されると、本発明の第二実施例に係るパワーアシスト装置2の制御方法が開始され、コンベア15の進行に対してパワーアシスト装置2の進行を同期させながら、コンベア15によってボディ20が搬送され、パワーアシスト装置2によってウィンドウ19が搬送される(STEP−1)。
【0103】
同期搬送が開始されると、まずパワーアシスト装置2が接近状態になっているか否か(即ち、ウィンドウ19が前述した対象エリアAに包含されているか否か)を判定するようにしている。そして、図6に示す如く、パワーアシスト装置2が接近状態でなければ同期搬送を継続し、図7に示す如く、パワーアシスト装置2が接近状態であれば、次の判定(STEP−3)に移行するようにしている(STEP−2)。
【0104】
ここで、図6に示す如く、パワーアシスト装置2が接近状態でなければ(即ち、図13中に示す状態T1)、コンベア用制御装置16に対して他工程設備17から発信された停止要求信号(即ち、図13中に示す状態T2)を受けて、コンベア15が停止する(即ち、図13中に示す状態T3)が、パワーアシスト装置2(正確には、パワーアシスト装置用制御装置8)は、コンベア15が停止状態である旨の状態信号を受けたとしても、パワーアシスト装置用制御装置8から停止要求信号を発信することはない(即ち、図13中に示す状態T4)。
【0105】
次に、図12に示す如く、コンベア15の運転状態による判定を行うようにしている(STEP−3)。ここで、コンベア15が運転状態であれば、同期搬送を継続するようにしており、コンベア15が停止状態であれば、次の判定(STEP−4)に移行するようにしている。
【0106】
次に、コンベア15が一旦停止状態になった後に、再度コンベア15の運転状態による判定を行うようにしている(STEP−4)。ここで、図14に示す如く、他工程設備17から発信される停止要求信号によってコンベア15が停止状態であれば、パワーアシスト装置用制御装置8からコンベア用制御装置16に対して停止要求信号を発信せずに、停止状態を維持するようにしている(STEP−5)。
【0107】
また、図15に示す如く、他工程設備17から発信される停止要求信号がなくなって、コンベア15が運転状態に移行しようとするときに、パワーアシスト装置用制御装置8からコンベア用制御装置16に対して停止要求信号を発信するようにしている(STEP−6)。
【0108】
つまり、図14に示す如く、本発明の第二実施例に係るパワーアシスト装置2の制御方法では、パワーアシスト装置2が接近状態であっても(即ち、図13中に示す状態T5)、他工程設備17からの停止要求信号が発信されており(即ち、図13中に示す状態T6)、これによってコンベア15が停止している場合には(即ち、図13中に示す状態T7)、パワーアシスト装置用制御装置8からコンベア用制御装置16に対して停止要求信号を発信しないようにしている(即ち、図13中に示す状態T8)。
【0109】
そして、図15に示す如く、パワーアシスト装置2が接近状態であって(即ち、図13中に示す状態T9)、他工程設備17からの停止要求信号がなくなったとき(即ち、図13中に示す状態T10)、これを受けて(より詳しくは、コンベア15が運転を再開しようとする状態信号を検知して)初めてパワーアシスト装置用制御装置8からコンベア用制御装置16に対して停止要求信号を発信するようにしている(即ち、図13中に示す状態T11)。これにより、第一実施例の場合に比して、パワーアシスト装置2側からコンベア15側に停止要求信号を発信する期間を短縮させることができる。
【0110】
次に、パワーアシスト装置2(正確には、パワーアシスト装置用制御装置8)からコンベア15(正確には、コンベア用制御装置16)に対して停止要求信号を発信している期間は、窓枠20aに対するウィンドウ19の組み付けが完了したか否かの判定を行うようにしている(STEP−7)。ここで、ウィンドウ19の組み付けが完了していなければ、パワーアシスト装置2(正確には、パワーアシスト装置用制御装置8)からコンベア15(正確には、コンベア用制御装置16)に対して停止要求信号を発信し続けるようにしている。また、ウィンドウ19の組み付けが完了すれば、停止要求信号の発信を停止して(STEP−8)、次の判定(STEP−9)に移行するようにしている。
【0111】
つまり、図9に示す如く、接圧センサ9a・9a・・・が検知する圧力に基づいて、パワーアシスト装置用制御装置8によってウィンドウ19の組み付けが完了した旨の判定処理がなされると(即ち、図13中に示す状態T12)、パワーアシスト装置用制御装置8からコンベア用制御装置16に対して発信していた停止要求信号を停止するようにしている(即ち、図13中に示す状態T13)。
【0112】
次に、パワーアシスト装置用制御装置8から発信される停止要求信号が停止されると、コンベア15(正確には、コンベア用制御装置16)に対する運転要求状態による判定を行うようにしている(STEP−9)。ここで、他工程設備17から停止要求信号が発信されている場合には、搬送停止状態を維持しつつ(STEP−10)、運転要求状態による判定を継続する。また、他工程設備17からの停止要求信号がない場合には、同期搬送を終了して(STEP−11)、次の組み付け作業に備えるとともに、本発明に係るパワーアシスト装置2の制御方法による一連のウィンドウ19の組み付け作業を終了するようにしている。
【0113】
尚、本発明は、前述した作業者18による操作が介在して半自動的に作動するパワーアシスト装置2を備える生産ライン1だけでなく、作業者による操作が介在せず自動的に搬送対象物(例えば、ウィンドウ19)を搬送し、組み付け対象物(例えば、ボディ20)に対して搬送対象物を自動的に組付ける自動搭載装置22を備える生産ライン21についても適用することが可能である。
【0114】
即ち、本発明の第二実施例に係るパワーアシスト装置2は、ワークたるウィンドウ19を保持するウィンドウ保持装置5と、ウィンドウ保持装置5を支持するロボットアーム3と、ロボットアーム3を支持し、ウィンドウ保持装置5によって保持されるウィンドウ19を所定方向に搬送する走行部14と、走行部14の進行を制御するパワーアシスト装置用制御装置8と、を備え、パワーアシスト装置用制御装置8には、ウィンドウ19の組み付け対象物たるボディ20を搬送するコンベア15から、コンベア15の運転状態または停止状態を示す状態信号と、コンベア15の進行状態を示す同期信号と、が入力され、パワーアシスト装置用制御装置8によって、前記同期信号に基づいて、コンベア15の進行に同期させて、走行部14の進行を制御するパワーアシスト装置2であって、パワーアシスト装置用制御装置8によって、ウィンドウ19とボディ20が接近状態にあると判定される場合には、前記状態信号が、運転状態から停止状態に一旦移行して、その後、再度運転状態に移行した時点から、パワーアシスト装置用制御装置8によって、ボディ20に対するウィンドウ19の組み付けが完了した旨の判定処理が成される時点までは、パワーアシスト装置用制御装置8によって、パワーアシスト装置2からコンベア15(正確には、コンベア用制御装置16)に対して、停止要求信号を継続して発信する構成としている。
【0115】
また、本発明の第二実施例に係る自動搭載装置22は、ワークたるウィンドウ19を保持するウィンドウ保持装置25と、ウィンドウ保持装置25を支持するロボットアーム23と、ロボットアーム23を支持し、ウィンドウ保持装置25によって保持されるウィンドウ19を所定方向に搬送する走行部34と、走行部34の進行を制御する自動搭載装置用制御装置28と、を備え、自動搭載装置用制御装置28には、ウィンドウ19の組み付け対象物たるボディ20を搬送するコンベア15から、コンベア15の運転状態または停止状態を示す状態信号と、コンベア15の進行状態を示す同期信号と、が入力され、自動搭載装置用制御装置28によって、前記同期信号に基づいて、コンベア15の進行に同期させて、走行部34の進行を制御する自動搭載装置22であって、自動搭載装置用制御装置28によって、ウィンドウ19とボディ20が接近状態にあると判定される場合には、前記状態信号が、運転状態から停止状態に一旦移行して、その後、再度運転状態に移行した時点から、自動搭載装置用制御装置28によって、ボディ20に対するウィンドウ19の組み付けが完了した旨の判定処理が成される時点までは、自動搭載装置用制御装置28によって、自動搭載装置22からコンベア15(正確には、コンベア用制御装置16)に対して、停止要求信号を継続して発信する構成としている。
【0116】
また、本発明の第二実施例に係るパワーアシスト装置2の制御方法は、ワークたるウィンドウ19を保持するウィンドウ保持装置5と、ウィンドウ保持装置5を支持するロボットアーム3と、ロボットアーム3を支持し、ウィンドウ保持装置5によって保持されるウィンドウ19を所定方向に搬送する走行部14と、走行部14の進行を制御するパワーアシスト装置用制御装置8と、を備え、パワーアシスト装置用制御装置8には、ウィンドウ19の組み付け対象物たるボディ20を搬送するコンベア15から、コンベア15の運転状態または停止状態を示す状態信号と、コンベア15の進行状態を示す同期信号と、が入力され、パワーアシスト装置用制御装置8によって、前記同期信号に基づいて、コンベア15の進行に同期させて、走行部14の進行を制御するパワーアシスト装置2の制御方法であって、パワーアシスト装置用制御装置8によって、ウィンドウ19とボディ20が接近状態にあると判定される場合には、前記状態信号が、運転状態から停止状態に一旦移行して、その後、再度運転状態に移行した時点から、パワーアシスト装置用制御装置8によって、ボディ20に対するウィンドウ19の組み付けが完了した旨の判定処理が成される時点までは、パワーアシスト装置用制御装置8によって、パワーアシスト装置2からコンベア15(正確には、コンベア用制御装置16)に対して、停止要求信号を継続して発信して、コンベア15の停止状態を継続させることによって、パワーアシスト装置2の停止状態を維持するようにしている。
【0117】
また、本発明の第二実施例に係る自動搭載装置22の制御方法は、ワークたるウィンドウ19を保持するウィンドウ保持装置25と、ウィンドウ保持装置25を支持するロボットアーム23と、ロボットアーム23を支持し、ウィンドウ保持装置25によって保持されるウィンドウ19を所定方向に搬送する走行部34と、走行部34の進行を制御する自動搭載装置用制御装置28と、を備え、自動搭載装置用制御装置28には、ウィンドウ19の組み付け対象物たるボディ20を搬送するコンベア15から、コンベア15の運転状態または停止状態を示す状態信号と、コンベア15の進行状態を示す同期信号と、が入力され、自動搭載装置用制御装置28によって、前記同期信号に基づいて、コンベア15の進行に同期させて、走行部34の進行を制御する自動搭載装置22の制御方法であって、自動搭載装置用制御装置28によって、ウィンドウ19とボディ20が接近状態にあると判定される場合には、前記状態信号が、運転状態から停止状態に一旦移行して、その後、再度運転状態に移行した時点から、自動搭載装置用制御装置28によって、ボディ20に対するウィンドウ19の組み付けが完了した旨の判定処理が成される時点までは、自動搭載装置用制御装置28によって、自動搭載装置22からコンベア15(正確には、コンベア用制御装置16)に対して、停止要求信号を継続して発信して、コンベア15の停止状態を継続させることによって、自動搭載装置22の停止状態を維持するようにしている。
【0118】
このような構成とすることにより、ウィンドウ19とボディ20が接触する可能性がある状態では、コンベア15を常に停止状態とすることができるのである。またこれにより、パワーアシスト装置2、あるいは、自動搭載装置22や、コンベア15が再起動する際に生じる振動によって、ウィンドウ19とボディ20が接触することが防止できるのである。またこの場合、パワーアシスト装置2、あるいは、自動搭載装置22によるウィンドウ19の搬送状態に起因して、コンベア15が停止状態となる期間を短縮することができるのである。
【図面の簡単な説明】
【0119】
【図1】本発明の適用に係るパワーアシスト装置を備えた生産ラインの全体構成を示す模式図。
【図2】本発明の適用に係るパワーアシスト装置を備えた生産ラインの機器構成を示すブロック図。
【図3】本発明の一実施例に係る対象エリアの設定状況を示す模式図。
【図4】本発明の第一実施例に係るパワーアシスト装置の制御方法を示す制御フロー図。
【図5】本発明の第一実施例に係るパワーアシスト装置の制御状態を示すタイミングチャート図。
【図6】本発明の第一実施例および第二実施例に係るパワーアシスト装置の制御状態(ワーク離間状態)を示す模式図。
【図7】本発明の第一実施例に係るパワーアシスト装置の制御状態(ワーク接近状態その1)を示す模式図。
【図8】本発明の第一実施例に係るパワーアシスト装置の制御状態(ワーク接近状態その2)を示す模式図。
【図9】本発明の第一実施例および第二実施例に係るパワーアシスト装置の制御状態(ワーク組み付け完了時)を示す模式図。
【図10】ウィンドウの組み付け完了状態を示す模式図。
【図11】本発明の第一実施例および第二実施例に係るパワーアシスト装置の制御状態(制御終了後)を示す模式図。
【図12】本発明の第二実施例に係るパワーアシスト装置の制御方法を示す制御フロー図。
【図13】本発明の第二実施例に係るパワーアシスト装置の制御状態を示すタイミングチャート図。
【図14】本発明の第二実施例に係るパワーアシスト装置の制御状態(ワーク接近状態その1)を示す模式図。
【図15】本発明の第二実施例に係るパワーアシスト装置の制御状態(ワーク接近状態その2)を示す模式図。
【図16】本発明の適用に係る自動搭載装置を備えた生産ラインの全体構成を示す模式図。
【図17】本発明の適用に係る自動搭載装置を備えた生産ラインの機器構成を示すブロック図。
【符号の説明】
【0120】
1 生産ライン
2 パワーアシスト装置
3 ロボットアーム
5 ウィンドウ保持装置
8 パワーアシスト装置用制御装置
14 走行部
15 コンベア
16 コンベア用制御装置
20 ボディ
【技術分野】
【0001】
本発明は、パワーアシスト装置および自動搭載装置の技術に関し、より詳しくは、停止後に再起動するタイミングを制御するパワーアシスト装置、自動搭載装置、およびそれらの制御方法の技術に関する。
【背景技術】
【0002】
従来、工業製品の製造現場等において、作業者による重量物(ワーク)の搬送を補助する装置としてパワーアシスト装置や自動搭載装置が用いられている。
ワークの組み付け作業は、ワークの搬送と位置決めから成り立つ作業であるが、作業者とパワーアシスト装置でワークを協調搬送することにより、ワークの搬送に必要な力はパワーアシスト装置に負担させることができ、ワークの位置決めについてもパワーアシスト装置にティーチングすることで効率よく位置決めをすることができる。また、自動搭載装置によって、ワークの搬送や組み付けを自動的に行うことも可能である。つまり、パワーアシスト装置や自動搭載装置を用いるねらいは、作業者の労力軽減を図るとともに、作業性の向上を図ることにある。
【0003】
しかしながら従来、パワーアシスト装置や自動搭載装置によってワークを搬送する場合、ワークの組み付け対象物を搬送するコンベア、パワーアシスト装置および自動搭載装置が急停止したり、または急に再起動(急発進)したりすることがあり、この急停止および再起動の際に生じる振動によって、ワークと組み付け対象物が接触してワークや組み付け対象物の破損を招くことがあった。
【0004】
具体的に述べると、例えばコンベアで搬送される自動車のボディ(組み付け対象物)にウィンドウガラス(ワーク)をはめ込んで組み付ける作業では、コンベアが急停止もしくは再起動(急発進)した時に、ボディとウィンドウガラスが接触してしまう。すると、ウィンドウガラス表面に塗布された接着剤がボディに付着し、付着した接着剤のふき取りが必要となる。さらに、ボディに付着してしまった分だけ接着剤の量が減るため、そのまま所定位置に接着を行っても接着面に隙間ができてしまい、水漏れ等が発生する原因となる等の問題が発生する。
【0005】
このような問題が発生する理由としては、(1)ボディを搬送するコンベアは、非常時には即停止しなくてはならないので、急速停止となり、衝撃が大きい。(2)ボディを搬送するコンベアの進行に同期してパワーアシスト装置や自動搭載装置が進行しているため、コンベア急停止時の衝撃で、パワーアシスト装置や自動搭載装置も振動する。(3)パワーアシスト装置では、ボディを搬送するコンベアの進行に同期して作業者もコンベアに乗って進行しているため、コンベアが急停止する際に発生する衝撃は作業者が把持する操作ハンドルにも加わる。(4)パワーアシスト装置では、コンベアの停止を作業者が認識してから、実際にデッドマンスイッチを離して、アクチュエータのブレーキが作用するまでには、タイムラグがある、等が挙げられる。つまり、コンベア、パワーアシスト装置および自動搭載装置が急停止したりまたは急に再起動(急発進)したりする際に発生する振動は、複数の衝撃が重なり合って発生しているため、振動を防止することが困難な状況であった。
【0006】
そこで、このような振動の発生を防止するための技術が種々開発されており、例えば、以下の特許文献1に示す技術がある。
係る従来技術では、アシスト搬送状態ではON状態とされているデッドマンスイッチがOFF状態に操作されると、アシスト搬送用のアクチュエータを構成するモータへの電源供給を停止するが、このとき、デッドマンスイッチがOFF状態に操作された時点t1から遅延時間tdが経過した時点で、モータ出力軸の回転を規制するブレーキ機構を作動させるようにしている。尚、遅延時間tdは、モータ出力軸のフリーラン時間に比して長い時間に設定するようにしている。
このような構成とすることにより、モータ出力軸が未だ回転している途中でブレーキ機構が作動して、アシスト搬送を急停止させることが無いため、アシスト搬送停止時に発生する振動を防止するようにしている。
【0007】
しかしながら係る従来技術では、アシスト搬送状態から急停止する際に発生する振動を防止することはできるが、アシスト搬送状態が停止状態から再起動する際に発生する振動を防止することはできず、このため、パワーアシスト装置や自動搭載装置が停止状態から再起動する際に生じるワークや組み付け対象物の破損を防止することができなかった。
【特許文献1】特開2005−28491号公報
【発明の開示】
【発明が解決しようとする課題】
【0008】
本発明は、係る現状を鑑みて成されたものであり、パワーアシスト装置および自動搭載装置によってワークを搬送している途中に、パワーアシスト装置および自動搭載装置が停止してその後再起動する際にワークや組み付け対象物が破損することを防止するために、パワーアシスト装置および自動搭載装置によってワークを搬送している途中に、パワーアシスト装置および自動搭載装置が停止してその後再起動しても、ワークが組み付け対象物等と接触することがないパワーアシスト装置、自動搭載装置、およびそれらの制御方法を提供することを課題としている。
【課題を解決するための手段】
【0009】
本発明の解決しようとする課題は以上の如くであり、次にこの課題を解決するための手段を説明する。
【0010】
即ち、請求項1においては、ワークを保持するワーク保持装置と、該ワーク保持装置を支持するロボットアームと、該ロボットアームを支持し、前記ワーク保持装置によって保持される前記ワークを所定方向に搬送する走行部と、該走行部の進行を制御するパワーアシスト装置用制御装置と、を備え、前記パワーアシスト装置用制御装置には、前記ワークの組み付け対象物を搬送するコンベアから、該コンベアの運転状態または停止状態を示す状態信号と、前記コンベアの進行状態を示す同期信号と、が入力され、前記パワーアシスト装置用制御装置によって、前記同期信号に基づいて、前記コンベアの進行に同期させて、前記走行部の進行を制御するパワーアシスト装置であって、前記パワーアシスト装置用制御装置によって、前記ワークと前記組み付け対象物が接近状態にあると判定される場合には、前記状態信号が、運転状態から停止状態に移行した時点から、前記組み付け対象物に対する前記ワークの組み付けが完了した旨の判定処理が成される時点までは、前記パワーアシスト装置用制御装置によって、前記パワーアシスト装置から前記コンベアに対して、停止要求信号を継続して発信するものである。
【0011】
請求項2においては、ワークを保持するワーク保持装置と、該ワーク保持装置を支持するロボットアームと、該ロボットアームを支持し、前記ワーク保持装置によって保持される前記ワークを所定方向に搬送する走行部と、該走行部の進行を制御するパワーアシスト装置用制御装置と、を備え、前記パワーアシスト装置用制御装置には、前記ワークの組み付け対象物を搬送するコンベアから、該コンベアの運転状態または停止状態を示す状態信号と、前記コンベアの進行状態を示す同期信号と、が入力され、前記パワーアシスト装置用制御装置によって、前記同期信号に基づいて、前記コンベアの進行に同期させて、前記走行部の進行を制御するパワーアシスト装置であって、前記パワーアシスト装置用制御装置によって、前記ワークと前記組み付け対象物が接近状態にあると判定される場合には、前記状態信号が、運転状態から停止状態に一旦移行して、その後、再度運転状態に移行した時点から、前記組み付け対象物に対する前記ワークの組み付けが完了した旨の判定処理が成される時点までは、前記パワーアシスト装置用制御装置によって、前記パワーアシスト装置から前記コンベアに対して、停止要求信号を継続して発信するものである。
【0012】
請求項3においては、ワークを保持するワーク保持装置と、該ワーク保持装置を支持するロボットアームと、該ロボットアームを支持し、前記ワーク保持装置によって保持される前記ワークを所定方向に搬送する走行部と、該走行部の進行を制御する自動搭載装置用制御装置と、を備え、前記自動搭載装置用制御装置には、前記ワークの組み付け対象物を搬送するコンベアから、該コンベアの運転状態または停止状態を示す状態信号と、前記コンベアの進行状態を示す同期信号と、が入力され、前記自動搭載装置用制御装置によって、前記同期信号に基づいて、前記コンベアの進行に同期させて、前記走行部の進行を制御する自動搭載装置であって、前記自動搭載装置用制御装置によって、前記ワークと前記組み付け対象物が接近状態にあると判定される場合には、前記状態信号が、運転状態から停止状態に移行した時点から、前記組み付け対象物に対する前記ワークの組み付けが完了した旨の判定処理が成される時点までは、前記自動搭載装置用制御装置によって、前記自動搭載装置から前記コンベアに対して、停止要求信号を継続して発信するものである。
【0013】
請求項4においては、ワークを保持するワーク保持装置と、該ワーク保持装置を支持するロボットアームと、該ロボットアームを支持し、前記ワーク保持装置によって保持される前記ワークを所定方向に搬送する走行部と、該走行部の進行を制御する自動搭載装置用制御装置と、を備え、前記自動搭載装置用制御装置には、前記ワークの組み付け対象物を搬送するコンベアから、該コンベアの運転状態または停止状態を示す状態信号と、前記コンベアの進行状態を示す同期信号と、が入力され、前記自動搭載装置用制御装置によって、前記同期信号に基づいて、前記コンベアの進行に同期させて、前記走行部の進行を制御する自動搭載装置であって、前記自動搭載装置用制御装置によって、前記ワークと前記組み付け対象物が接近状態にあると判定される場合には、前記状態信号が、運転状態から停止状態に一旦移行して、その後、再度運転状態に移行した時点から、前記組み付け対象物に対する前記ワークの組み付けが完了した旨の判定処理が成される時点までは、前記自動搭載装置用制御装置によって、前記自動搭載装置から前記コンベアに対して、停止要求信号を継続して発信するものである。
【0014】
請求項5においては、ワークを保持するワーク保持装置と、該ワーク保持装置を支持するロボットアームと、該ロボットアームを支持し、前記ワーク保持装置によって保持される前記ワークを所定方向に搬送する走行部と、該走行部の進行を制御するパワーアシスト装置用制御装置と、を備え、前記パワーアシスト装置用制御装置には、前記ワークの組み付け対象物を搬送するコンベアから、該コンベアの運転状態または停止状態を示す状態信号と、前記コンベアの進行状態を示す同期信号と、が入力され、前記パワーアシスト装置用制御装置によって、前記同期信号に基づいて、前記コンベアの進行に同期させて、前記走行部の進行を制御するパワーアシスト装置の制御方法であって、前記パワーアシスト装置用制御装置によって、前記ワークと前記組み付け対象物が接近状態にあると判定される場合には、前記状態信号が、運転状態から停止状態に移行した時点から、前記組み付け対象物に対する前記ワークの組み付けが完了した旨の判定処理が成される時点までは、前記パワーアシスト装置用制御装置によって、前記パワーアシスト装置から前記コンベアに対して、停止要求信号を継続して発信して、前記コンベアの停止状態を継続させることによって、前記パワーアシスト装置の停止状態を維持するものである。
【0015】
請求項6においては、ワークを保持するワーク保持装置と、該ワーク保持装置を支持するロボットアームと、該ロボットアームを支持し、前記ワーク保持装置によって保持される前記ワークを所定方向に搬送する走行部と、該走行部の進行を制御するパワーアシスト装置用制御装置と、を備え、前記パワーアシスト装置用制御装置には、前記ワークの組み付け対象物を搬送するコンベアから、該コンベアの運転状態または停止状態を示す状態信号と、前記コンベアの進行状態を示す同期信号と、が入力され、前記パワーアシスト装置用制御装置によって、前記同期信号に基づいて、前記コンベアの進行に同期させて、前記走行部の進行を制御するパワーアシスト装置の制御方法であって、前記パワーアシスト装置用制御装置によって、前記ワークと前記組み付け対象物が接近状態にあると判定される場合には、前記状態信号が、運転状態から停止状態に一旦移行して、その後、再度運転状態に移行した時点から、前記組み付け対象物に対する前記ワークの組み付けが完了した旨の判定処理が成される時点までは、前記パワーアシスト装置用制御装置によって、前記パワーアシスト装置から前記コンベアに対して、停止要求信号を継続して発信して、前記コンベアの停止状態を継続させることによって、前記パワーアシスト装置の停止状態を維持するものである。
【0016】
請求項7においては、ワークを保持するワーク保持装置と、該ワーク保持装置を支持するロボットアームと、該ロボットアームを支持し、前記ワーク保持装置によって保持される前記ワークを所定方向に搬送する走行部と、該走行部の進行を制御する自動搭載装置用制御装置と、を備え、前記自動搭載装置用制御装置には、前記ワークの組み付け対象物を搬送するコンベアから、該コンベアの運転状態または停止状態を示す状態信号と、前記コンベアの進行状態を示す同期信号と、が入力され、前記自動搭載装置用制御装置によって、前記同期信号に基づいて、前記コンベアの進行に同期させて、前記走行部の進行を制御する自動搭載装置の制御方法であって、前記自動搭載装置用制御装置によって、前記ワークと前記組み付け対象物が接近状態にあると判定される場合には、前記状態信号が、運転状態から停止状態に移行した時点から、前記組み付け対象物に対する前記ワークの組み付けが完了した旨の判定処理が成される時点までは、前記自動搭載装置用制御装置によって、前記自動搭載装置から前記コンベアに対して、停止要求信号を継続して発信して、前記コンベアの停止状態を継続させることによって、前記自動搭載装置の停止状態を維持するものである。
【0017】
請求項8においては、ワークを保持するワーク保持装置と、該ワーク保持装置を支持するロボットアームと、該ロボットアームを支持し、前記ワーク保持装置によって保持される前記ワークを所定方向に搬送する走行部と、該走行部の進行を制御する自動搭載装置用制御装置と、を備え、前記自動搭載装置用制御装置には、前記ワークの組み付け対象物を搬送するコンベアから、該コンベアの運転状態または停止状態を示す状態信号と、前記コンベアの進行状態を示す同期信号と、が入力され、前記自動搭載装置用制御装置によって、前記同期信号に基づいて、前記コンベアの進行に同期させて、前記走行部の進行を制御する自動搭載装置の制御方法であって、前記自動搭載装置用制御装置によって、前記ワークと前記組み付け対象物が接近状態にあると判定される場合には、前記状態信号が、運転状態から停止状態に一旦移行して、その後、再度運転状態に移行した時点から、前記組み付け対象物に対する前記ワークの組み付けが完了した旨の判定処理が成される時点までは、前記自動搭載装置用制御装置によって、前記自動搭載装置から前記コンベアに対して、停止要求信号を継続して発信して、前記コンベアの停止状態を継続させることによって、前記自動搭載装置の停止状態を維持するものである。
【発明の効果】
【0018】
本発明の効果として、以下に示すような効果を奏する。
【0019】
請求項1においては、ワークと組み付け対象物が接触する可能性がある状態では、コンベアを常に停止状態とすることができる。これにより、パワーアシスト装置やコンベアが再起動する際に生じる振動によって、ワークと組み付け対象物が接触することが防止できる。
【0020】
請求項2においては、ワークと組み付け対象物が接触する可能性がある状態では、コンベアを常に停止状態とすることができる。これにより、パワーアシスト装置やコンベアが再起動する際に生じる振動によって、ワークと組み付け対象物が接触することが防止できる。また、パワーアシスト装置によるワークの搬送状態に起因して、コンベアが停止状態となる期間を短縮することができる。
【0021】
請求項3においては、ワークと組み付け対象物が接触する可能性がある状態では、コンベアを常に停止状態とすることができる。これにより、自動搭載装置やコンベアが再起動する際に生じる振動によって、ワークと組み付け対象物が接触することが防止できる。
【0022】
請求項4においては、ワークと組み付け対象物が接触する可能性がある状態では、コンベアを常に停止状態とすることができる。これにより、自動搭載装置やコンベアが再起動する際に生じる振動によって、ワークと組み付け対象物が接触することが防止できる。また、自動搭載装置によるワークの搬送状態に起因して、コンベアが停止状態となる期間を短縮することができる。
【0023】
請求項5においては、ワークと組み付け対象物が接触する可能性がある状態では、コンベアを常に停止状態とすることができる。これにより、パワーアシスト装置やコンベアが再起動する際に生じる振動によって、ワークと組み付け対象物が接触することが防止できる。
【0024】
請求項6においては、ワークと組み付け対象物が接触する可能性がある状態では、コンベアを常に停止状態とすることができる。これにより、パワーアシスト装置やコンベアが再起動する際に生じる振動によって、ワークと組み付け対象物が接触することが防止できる。また、パワーアシスト装置によるワークの搬送状態に起因して、コンベアが停止状態となる期間を短縮することができる。
【0025】
請求項7においては、ワークと組み付け対象物が接触する可能性がある状態では、コンベアを常に停止状態とすることができる。これにより、自動搭載装置やコンベアが再起動する際に生じる振動によって、ワークと組み付け対象物が接触することが防止できる。
【0026】
請求項8においては、ワークと組み付け対象物が接触する可能性がある状態では、コンベアを常に停止状態とすることができる。これにより、自動搭載装置やコンベアが再起動する際に生じる振動によって、ワークと組み付け対象物が接触することが防止できる。また、自動搭載装置によるワークの搬送状態に起因して、コンベアが停止状態となる期間を短縮することができる。
【発明を実施するための最良の形態】
【0027】
次に、発明の実施の形態を説明する。
まず、本発明を適用する生産ラインの一実施例に係るパワーアシスト装置2を備えた生産ライン1の全体構成について、図1〜図3を用いて説明する。図1は本発明の適用に係るパワーアシスト装置を備えた生産ラインの全体構成を示す模式図、図2は本発明の適用に係るパワーアシスト装置を備えた生産ラインの機器構成を示すブロック図、図3は本発明の一実施例に係る対象エリアの設定状況を示す模式図である。
尚、本実施例では、本発明を理解に供しやすくするため、搬送対象物であるワークたるウィンドウガラス19(以下ウィンドウ19と記載する)を、図1に示すXYZ座標系のX方向に向けてワークたるウィンドウ19と組み付け対象物である自動車のボディ20を搬送しながら、ボディ20にウィンドウ19を組み付ける作業を例示して説明する。また、説明の便宜上、X方向を生産ライン1の進行方向(前方)としている。
【0028】
図1に示す如く、本発明を適用する生産ラインの一実施例である生産ライン1は、パワーアシスト装置2およびコンベア15等により構成されており、コンベア15上の台車15aに載置された状態で搬送される組み付け対象物たる自動車のボディ20に対して、作業者18がパワーアシスト装置2によって協調搬送するワークたるウィンドウ19の組み付け作業が実施される工程部分である。
【0029】
そして、作業者18は、ウィンドウ19をロボットアーム3で保持してパワーアシスト装置2によって協調搬送しつつ、ボディ20の搬送手段であるコンベア15上に自らも乗った状態で、組立ライン(生産ライン1)上を定速で搬送される自動車のボディ20の窓枠20aに対して、ウィンドウ19を位置決めして組み付ける作業を行うものである。
【0030】
図1に示す如く、パワーアシスト装置2は、ロボットアーム3、フリージョイント4、ウィンドウ保持装置5、操作ハンドル6、走行部14等により構成している。
ロボットアーム3は、複数の関節3a・3a・・・(本実施例では4箇所)を介して各リンク3b・3b・・・(本実施例では4箇所)を連結して、側面視パンタグラフ状の閉ループリンク機構を構成しており、該リンク機構に設けられたアクチュエータ11(図2に図示)を駆動源としてリンク機構を駆動することにより、ロボットアーム3の先端部3cを3次元的に変位可能な構成としている。また、ロボットアーム3の先端部3cにはフリージョイント4を介してウィンドウ19を吸着保持するウィンドウ保持装置5を連結している。
【0031】
尚、本実施例においては、側面視パンタグラフ状のロボットアーム3を具備したパワーアシスト装置2を例示しているが、パワーアシスト装置2を構成するロボットアームとしては、マニピュレータ型の多関節型ロボット等を採用することも可能であり、パワーアシスト装置2を構成するロボットアームの種類を特に限定するものではない。
【0032】
フリージョイント4は、ロボットアーム3に対して、ウィンドウ保持装置5を3次元的に揺動可能に連結する継手部材であり、これにより、ウィンドウ保持装置5に吸着保持されるウィンドウ19が3次元的に揺動可能な構成としている。
【0033】
ウィンドウ保持装置5は、該ウィンドウ保持装置5の枠組みであるフレーム5aと、該フレーム5aの左右両側(詳しくは、ライン進行方向であるX方向に対して左右両側)にそれぞれ張り出した作業者18が把持してウィンドウ保持装置5を操作するための操作ハンドル6・6を備えている。
【0034】
また、ウィンドウ保持装置5は、複数の吸盤9・9・・・(本実施例では4箇所)を備えており、この複数の吸盤9・9・・・によってウィンドウ19を吸着保持できる構成としている。さらに詳述すると、フレーム5aの下端には、ウィンドウ19の表面(つまり、ウィンドウ19をボディ20に組み付けたときにボディ20の外側になる面)を吸着する複数の吸盤9・9・・・が組み付けられており、ウィンドウ保持装置5にウィンドウ19を保持させる場合、吸盤9・9・・・をウィンドウ19表面に密着させて、図示しないポンプ等によって吸盤9・9・・・内の空気を排出する。このようにウィンドウ保持装置5は、吸盤9・9・・・による吸着作用によってウィンドウ19を保持する構成としている。
【0035】
一方、ウィンドウ保持装置5からウィンドウ19を開放する場合には、ポンプによる空気の排出を停止して、吸盤9・9・・・とウィンドウ19との間に空気を流入させることによって、吸盤9・9・・・によるウィンドウ19の吸着作用を解除し、これにより、ウィンドウ19をウィンドウ保持装置5から開放する構成としている。
【0036】
さらに、吸盤9・9・・・には、接圧センサ9a・9a・・・を内蔵する構成としており、ウィンドウ保持装置5によって保持されるウィンドウ19が組み付け個所に押圧される際の押圧力を、各接圧センサ9a・9a・・・によって検知する構成としている。そして、この検知した圧力の情報が後述するパワーアシスト装置用制御装置8の演算部8aに入力され、所定の閾値を超えた場合に、パワーアシスト装置用制御装置8によって、ウィンドウ19が組み付け箇所に対して十分に押し込まれた(即ち、組み付けが完了した)旨の判定処理がなされるようにしている。
【0037】
尚、本実施例では、各接圧センサ9a・9a・・・によって検知した圧力の情報に基づいて判定処理がなされる構成を示しているが、本発明に係るパワーアシスト装置2による判定処理の方法はこれに限定するものではなく、例えば、作業者が組み付け状態を確認した上で、作業者の判断で組み付け完了スイッチを押圧することによって、組み付け完了信号を出力し、この組み付け完了信号を受けて、パワーアシスト装置用制御装置8によって、組み付けが完了した旨の判定処理がなされるようにすることも可能である。
【0038】
操作ハンドル6は、平面視略U字状の把持部であり、ウィンドウ保持装置5の二方向の端部に配置されている。また、一方の操作ハンドル6(作業者18が主に操作を行う側)がフレーム5aと接続される基部には力センサ7を配設している。さらに、この一方の操作ハンドル6の一端にはデッドマンスイッチ6aを配設している。
【0039】
力センサ7は、操作ハンドル6がウィンドウ保持装置5のフレーム5aと接続される基部に配置されて、作業者18が操作ハンドル6を操作する際に生じる操作力(大きさおよび向き)を検出するセンサである。力センサ7としては、例えば、6分力ロードセルを採用することができ、XYZ方向の各軸方向に作用する操作力や、XYZ方向の各軸回りに作用する操作力を検出することができる。
【0040】
そして、力センサ7によって検出された作業者18の操作力(大きさおよび向き)に基づいて、パワーアシスト装置用制御装置8の演算部8aによって演算し、作業者18の所望する操作を検知する構成としている。
尚、本実施例では力センサ7を一方の操作ハンドル6のみに配設する構成を例示しているが、特に限定するものではなく、他方の操作ハンドル6近傍にも力センサ7を配設する構成とすることも可能である。
【0041】
このような構成とすることにより、作業者18が操作ハンドル6を所望する方向に操作することによって、ウィンドウ保持装置5に保持されるウィンドウ19を所望する方向にアシスト搬送したり、作業者18は窓枠20aに対するウィンドウ19の位置決めを行ったりすることができる。
【0042】
また、デッドマンスイッチ6aは安全性確保のために、作業者18がデッドマンスイッチ6aを押している間(デッドマンスイッチ6aをONしている間)だけロボットアーム3のアクチュエータ11に電源供給が行われてアクチュエータ11が駆動し、作業者18がデッドマンスイッチ6aを離している間(デッドマンスイッチ6aをOFFしている間)は、電源供給が停止されてアクチュエータ11の駆動が行われないように構成されている。デッドマンスイッチ6aはパワーアシスト装置用制御装置8に接続されている。
尚、本実施例ではデッドマンスイッチ6aを一方の操作ハンドル6にのみ配設した構成を例示しているが、特に限定するものではなく、作業性等を考慮してデッドマンスイッチ6aを他方の操作ハンドル6にも配設する構成としてもよい。
【0043】
また、ロボットアーム3の各関節3a・3a・・・及びフリージョイント4には、各リンク3b・3b・・・の位置を角度として検出する角度検出手段であるエンコーダ(図示せず)が配置されている。該エンコーダによる検出値はパワーアシスト装置用制御装置8へ送られる。パワーアシスト装置用制御装置8は、送られたエンコーダの検出値から、ウィンドウ19の位置及びウィンドウ19の姿勢を求めることができる。
【0044】
走行部14は、生産ライン1に設けられたレール14aに沿って走行することができるパワーアシスト装置2の走行駆動部分であり、該走行部14によって前述したロボットアーム3を支持している。
これにより、パワーアシスト装置2によって保持されるウィンドウ19を、レール14aに沿って搬送することができるようにしている。
【0045】
ここで、パワーアシスト装置用制御装置8に接続される機器の構成について説明する。
図2に示す如く、パワーアシスト装置用制御装置8には、ロボットアーム3、フリージョイント4、ウィンドウ保持装置5、デッドマンスイッチ6a、力センサ7、接圧センサ9a、アクチュエータ11、走行部14及び後述するコンベア15を制御するコンベア用制御装置16等が接続されている。
【0046】
パワーアシスト装置2の各部の動作はパワーアシスト装置用制御装置8によって制御される。前記力センサ7で検出された操作力と操作力の向き、前記エンコーダ(図示せず)に基づくウィンドウ保持装置5(ウィンドウ19)の位置情報等に基づいて、演算部8aにおいて作業者18の意図(本実施例ではウィンドウ19を組み付けるために所定方向に動かしたい意図)をリアルタイムで推定する。そして、パワーアシスト装置用制御装置8は、アクチュエータ11を制御し、後述する作業者18に加えられた操作力の向きに応じて決定されるアシスト力を発生させる。
【0047】
また、パワーアシスト装置用制御装置8は、図示しない中央演算処理装置(CPU)や記憶装置(ハードディスク装置、RAMやROM)やインターフェース等からなり、記憶装置には、作業者18により操作ハンドル6に加えられた操作力とその向きとの関係からロボットアーム3をどのような条件で駆動制御するかを判断するための各種情報等が記憶されている。
【0048】
次に、本発明を適用する生産ラインの一実施例に係る自動搭載装置22を備えた生産ライン21の全体構成について、図16を用いて説明する。図16は本発明の適用に係る自動搭載装置を備えた生産ラインの全体構成を示す模式図である。
尚、本実施例では、本発明を理解に供しやすくするため、搬送対象物であるワークたるウィンドウ19を、図16に示すXYZ座標系のX方向に向けてワークたるウィンドウ19と組み付け対象物である自動車のボディ20を搬送しながら、ボディ20にウィンドウ19を組み付ける作業を例示して説明する。また、説明の便宜上、X方向を生産ライン21の進行方向(前方)としている。
【0049】
図16に示す如く、本発明を適用する生産ラインの一実施例である生産ライン21は、自動搭載装置22およびコンベア15等により構成されており、コンベア15上の台車15aに載置された状態で搬送される組み付け対象物たる自動車のボディ20に対して、自動搭載装置22によって自動的に搬送されるワークたるウィンドウ19の組み付け作業が実施される工程部分である。
【0050】
そして、ウィンドウ19をロボットアーム23で保持して自動搭載装置22によって自動的に搬送しつつ、ボディ20の搬送手段であるコンベア15上に載置され、組立ライン(生産ライン21)上を定速で搬送される自動車のボディ20の窓枠20aに対して、ウィンドウ19を位置決めして組み付ける作業を行うものである。
【0051】
図16に示す如く、自動搭載装置22は、ロボットアーム23、ジョイント24、ウィンドウ保持装置25、走行部34等により構成している。
ロボットアーム23は、複数の関節23a・23a・・・(本実施例では4箇所)を介して各リンク23b・23b・・・(本実施例では4箇所)を連結して、側面視パンタグラフ状の閉ループリンク機構を構成しており、該リンク機構に設けられたアクチュエータ31(図17に図示)を駆動源としてリンク機構を駆動することにより、ロボットアーム23の先端部23cを3次元的に変位可能な構成としている。また、ロボットアーム23の先端部23cにはジョイント24を介してウィンドウ19を吸着保持するウィンドウ保持装置25を連結している。
【0052】
尚、本実施例においては、側面視パンタグラフ状のロボットアーム23を具備した自動搭載装置22を例示しているが、自動搭載装置22を構成するロボットアームとしては、マニピュレータ型の多関節型ロボット等を採用することも可能であり、自動搭載装置22を構成するロボットアームの種類を特に限定するものではない。
【0053】
ジョイント24は、ロボットアーム23に対して、ウィンドウ保持装置25を3次元的に揺動可能に連結する継手部材であり、これにより、ウィンドウ保持装置25に吸着保持されるウィンドウ19が3次元的に揺動可能な構成としている。
【0054】
ウィンドウ保持装置25は、該ウィンドウ保持装置25の枠組みであるフレーム25aを備えている。
また、ウィンドウ保持装置25は、複数の吸盤29・29・・・(本実施例では4箇所)を備えており、この複数の吸盤29・29・・・によってウィンドウ19を吸着保持できる構成としている。さらに詳述すると、フレーム25aの下端には、ウィンドウ19の表面(つまり、ウィンドウ19をボディ20に組み付けたときにボディ20の外側になる面)を吸着する複数の吸盤29・29・・・が組み付けられており、ウィンドウ保持装置25にウィンドウ19を保持させる場合、吸盤29・29・・・をウィンドウ19表面に密着させて、図示しないポンプ等によって吸盤29・29・・・内の空気を排出する。このようにウィンドウ保持装置25は、吸盤29・29・・・による吸着作用によってウィンドウ19を保持する構成としている。
【0055】
一方、ウィンドウ保持装置25からウィンドウ19を開放する場合には、ポンプによる空気の排出を停止して、吸盤29・29・・・とウィンドウ19との間に空気を流入させることによって、吸盤29・29・・・によるウィンドウ19の吸着作用を解除し、これにより、ウィンドウ19をウィンドウ保持装置25から開放する構成としている。
【0056】
さらに、吸盤29・29・・・には、接圧センサ29a・29a・・・を内蔵する構成としており、ウィンドウ保持装置25によって保持されるウィンドウ19が組み付け個所に押圧される際の押圧力を、各接圧センサ29a・29a・・・によって検知する構成としている。そして、この検知した圧力の情報が後述する自動搭載装置用制御装置28の演算部28aに入力され、所定の閾値を超えた場合に、自動搭載装置用制御装置28によって、ウィンドウ19が組み付け箇所に対して十分に押し込まれた(即ち、組み付けが完了した)旨の判定処理がなされるようにしている。
【0057】
また、ロボットアーム23の各関節23a・23a・・・及びジョイント24には、各リンク23b・23b・・・の位置を角度として検出する角度検出手段であるエンコーダ(図示せず)が配置されている。該エンコーダによる検出値は自動搭載装置用制御装置28へ送られる。自動搭載装置用制御装置28は、送られたエンコーダの検出値から、ウィンドウ19の位置及びウィンドウ19の姿勢を求めることができる。
【0058】
走行部34は、生産ライン21に設けられたレール34aに沿って走行することができる自動搭載装置22の走行駆動部分であり、該走行部34によって前述したロボットアーム23を支持している。
これにより、自動搭載装置22によって保持されるウィンドウ19を、レール34aに沿って搬送することができるようにしている。
【0059】
ここで、自動搭載装置用制御装置28に接続される機器の構成について、図17を用いて説明する。図17は本発明の適用に係る自動搭載装置を備えた生産ラインの機器構成を示すブロック図である。
図17に示す如く、自動搭載装置22は、自動搭載装置用制御装置28を備えている。そして、自動搭載装置用制御装置28には、ロボットアーム23、ジョイント24、ウィンドウ保持装置25、接圧センサ29a、アクチュエータ31、走行部34及び後述するコンベア15を制御するコンベア用制御装置16等が接続されている。
【0060】
自動搭載装置22の各部の動作は自動搭載装置用制御装置28によって制御される。自動搭載装置用制御装置28に予め記憶されたマップ情報や、前記エンコーダ(図示せず)に基づくウィンドウ保持装置25(ウィンドウ19)の位置情報、および接圧センサ29aによる検知結果等に基づいて、演算部28aにおいて、ロボットアーム23、ジョイント24、ウィンドウ保持装置25、アクチュエータ31に対する指令値を演算し、自動的に前記各部23・24・25・31の動作を制御する。
【0061】
また、自動搭載装置用制御装置28は、図示しない中央演算処理装置(CPU)や記憶装置(ハードディスク装置、RAMやROM)やインターフェース等からなり、記憶装置には、前記各部23・24・25・31をどのような条件で駆動制御するかを判断するためのマップ情報等の各種情報が記憶されている。
【0062】
次に、組み付け対象物たるボディ20の搬送手段であるコンベア15の全体構成について説明する。
図1に示す如く、コンベア15は、ボディ20を台車15aに載置して所定速度で生産ライン1に沿って、X方向に進行させる装置である。また、ボディ20を定速で生産ライン1に沿って進行させながら、作業者18がコンベア15上に乗ってボディ20の所定箇所に各種部品の組み付け作業を行う(本実施例ではウィンドウ19の組み付け作業を行う)。コンベア15は、図示しない駆動手段により駆動されており、コンベア15の動作を制御するコンベア用制御装置16を具備している。コンベア用制御装置16は、コンベア15の運転(移動)、停止、または速度調整等のコンベア15の搬送に関する制御を行うことができる。
【0063】
コンベア15は、作業者がボディ20に部品を組み付ける作業時(通常時)において、一定の速度で進行しており、このコンベア15上に載置されたボディ20も同じく一定の速度で生産ライン1を進行する。パワーアシスト装置2の作業者18は、コンベア15上に乗った状態で、操作ハンドル6を操作しながら、パワーアシスト装置2による補助(アシスト力)を受けながら、ロボットアーム3を用いてウィンドウ19をボディ20の窓枠20aに組み付ける作業を行う。
【0064】
次に、パワーアシスト装置2の搬送制御方法について説明する。
図1に示す如く、前述したように、作業者18が、コンベア15上でウィンドウ保持装置5によって保持されるウィンドウ19をパワーアシスト装置2によって協調搬送して、ボディ20の窓枠20aに移動させて、該窓枠20aに、ウィンドウ19の組付け作業を行う場合、パワーアシスト装置2の走行手段たる走行部14の進行状態は、コンベア15の進行状態に同期させる構成としている。
【0065】
さらに詳述すると、コンベア15は、コンベア15の走行輪の回転状態を検知するエンコーダ10を備えており、このエンコーダ10によって検知されるコンベア15の進行状態を示す信号(即ち、コンベア15の進行方向や進行距離等の情報を含む信号、以下同期信号と記載する)が、パワーアシスト装置2の動作を制御するパワーアシスト装置用制御装置8に入力される構成としている。
そして、走行部14の進行を同期信号に従って制御することにより、コンベア15とパワーアシスト装置2の進行を同期させるようにしている。
【0066】
尚、通常の搬送状態では、ボディ20はコンベア15上にある載置箇所(台車15a)に載せられて定速でX方向に前進するとともに、このコンベア15上のボディ20の進行に同期してパワーアシスト装置2全体を同じ方向に進行させる。即ち、ボディ20の動作に同期して、ウィンドウ19を保持するロボットアーム3を支持している走行部14を進行させるようにしている。
【0067】
次に、本発明の一実施例に係るパワーアシスト装置2の制御方法について説明する。
図2に示す如く、本発明の一実施例に係るパワーアシスト装置2(正確には、パワーアシスト装置用制御装置8)からは、コンベア15(正確には、コンベア用制御装置16)に対して、停止要求信号を発信することが可能な構成としている。そして、コンベア15は、この停止要求信号が入力されている間は、停止状態を維持する構成としている。
【0068】
また、コンベア15には、パワーアシスト装置2から発信される停止要求信号のみならず、その他の工程設備17(以後、他工程設備17と記載する)から発信される停止要求信号も入力されており、このため、コンベア15は、自工程(即ち、生産ライン1)の状況のみならず、他工程の状況に応じて急停止される場合もあり、また、他工程からの停止要求信号がなくなったときには、急に再起動される場合があるものである。
【0069】
他工程からの停止要求信号がなくなって、コンベア15が急に再起動されるとき、このコンベア15の急な再起動に同期してパワーアシスト装置2も再起動するため、この際に、パワーアシスト装置2およびコンベア15には振動が生じてしまう。本発明が解決しようとする課題は、この振動が発生する際に、パワーアシスト装置2によって搬送されているウィンドウ19が、ボディ20と接触して破損したり、また、ウィンドウ19に塗布されている接着剤12がボディ20に付着してしまう等の不具合を防止することにあり、以下に示すような方法によって、この課題の解決を図っている。
【0070】
まず、本発明の一実施例に係るパワーアシスト装置2の制御方法では、ウィンドウ19とボディ20が接近状態にある場合には、パワーアシスト装置2からコンベア15に対して停止要求信号を発信するようにしている。
【0071】
ここで、ウィンドウ19とボディ20が接近状態であるか否かの判断は、例えば、図3に示す如く、ボディ20の周囲に対象エリアAを設定しておき、パワーアシスト装置用制御装置8によって、アクチュエータ11から入力される信号に基づいてパワーアシスト装置2の姿勢およびウィンドウ19の位置を判断し、ウィンドウ19が対象エリアAに位置する場合に、ウィンドウ19とボディ20が接近状態であると判断する方法を採用することができる。
【0072】
この対象エリアAは、パワーアシスト装置2およびコンベア15に振動が生じた場合に、ウィンドウ19とボディ20が接触する可能性があるエリアを基準とし、さらにそのエリアに一定の余裕(安全率)を加味して定めることができる。
尚、ウィンドウ19とボディ20が接近状態であるか否かの判断方法は、パワーアシスト装置2とボディ20の実際の距離を測定するセンサを設けて、該センサにより実測された距離が設定した閾値以下となる場合に接近状態であると判断する等のその他の種々の判断方法を採用することが可能であり、本発明に適用するウィンドウ19とボディ20の接近状態を判断する方法を、本実施例に示す方法に限定するものではない。
【0073】
つまり、本発明の一実施例に係るパワーアシスト装置2の制御方法では、パワーアシスト装置2およびコンベア15が再起動して振動が生じると、ウィンドウ19とボディ20が接触する可能性があると判断される場合には、パワーアシスト装置2からコンベア15に対して停止要求信号を発信して、コンベア15を停止状態に維持するようにして、パワーアシスト装置2自身も停止状態を維持するようにしている。また言い換えると、本発明の一実施例に係るパワーアシスト装置2は、パワーアシスト装置2およびコンベア15が再起動して振動が生じると、ウィンドウ19とボディ20とが接触する可能性があると判断される場合には、パワーアシスト装置2からコンベア15に対して停止要求信号を発信し続けるようにしている。
【0074】
尚、自動搭載装置22の搬送制御方法は、前述したパワーアシスト装置2の搬送制御方法と同様であり、通常の搬送状態では、ボディ20はコンベア15上にある載置箇所(台車15a)に載せられて定速でX方向に前進するとともに、このコンベア15上のボディ20の進行に同期して自動搭載装置22全体を同じ方向に進行させる。即ち、ボディ20の動作に同期して、ウィンドウ19を保持するロボットアーム23を支持している走行部34を進行させるようにしている。
【0075】
次に、本発明の一実施例に係る自動搭載装置22の制御方法について説明する。
図16に示す如く、本発明の一実施例に係る自動搭載装置22(正確には、自動搭載装置用制御装置28)からは、コンベア15(正確には、コンベア用制御装置16)に対して、停止要求信号を発信することが可能な構成としている。そして、コンベア15は、この停止要求信号が入力されている間は、停止状態を維持する構成としている。
【0076】
また、コンベア15には、自動搭載装置22から発信される停止要求信号のみならず、他工程設備17から発信される停止要求信号も入力されており、このため、コンベア15は、自工程(即ち、生産ライン21)の状況のみならず、他工程の状況に応じて急停止される場合もあり、また、他工程からの停止要求信号がなくなったときには、急に再起動される場合があるものである。
【0077】
他工程からの停止要求信号がなくなって、コンベア15が急に再起動されるとき、このコンベア15の急な再起動に同期して自動搭載装置22も再起動するため、この際に、自動搭載装置22およびコンベア15には振動が生じてしまう。本発明が解決しようとする課題は、この振動が発生する際に、自動搭載装置22によって搬送されているウィンドウ19が、ボディ20と接触して破損したり、また、ウィンドウ19に塗布されている接着剤12がボディ20に付着してしまう等の不具合を防止することにあり、以下に示すような方法によって、この課題の解決を図っている。
【0078】
まず、本発明の一実施例に係る自動搭載装置22の制御方法では、ウィンドウ19とボディ20が接近状態にある場合には、自動搭載装置22からコンベア15に対して停止要求信号を発信するようにしている。
【0079】
ここで、ウィンドウ19とボディ20が接近状態であるか否かの判断は、例えば、図3に示す生産ライン1の場合と同様に、ボディ20の周囲に対象エリアAを設定しておき、自動搭載装置用制御装置28によって、アクチュエータ31から入力される信号に基づいて自動搭載装置22の姿勢およびウィンドウ19の位置を判断し、ウィンドウ19が対象エリアAに位置する場合に、ウィンドウ19とボディ20が接近状態であると判断する方法を採用することができる。
【0080】
この対象エリアAは、自動搭載装置22およびコンベア15に振動が生じた場合に、ウィンドウ19とボディ20が接触する可能性があるエリアを基準とし、さらにそのエリアに一定の余裕(安全率)を加味して定めることができる。
尚、ウィンドウ19とボディ20が接近状態であるか否かの判断方法は、自動搭載装置22とボディ20の実際の距離を測定するセンサを設けて、該センサにより実測された距離が設定した閾値以下となる場合に接近状態であると判断する等のその他の種々の判断方法を採用することが可能であり、本発明に適用するウィンドウ19とボディ20の接近状態を判断する方法を、本実施例に示す方法に限定するものではない。
【0081】
つまり、本発明の一実施例に係る自動搭載装置22の制御方法では、自動搭載装置22およびコンベア15が再起動して振動が生じると、ウィンドウ19とボディ20が接触する可能性があると判断される場合には、自動搭載装置22からコンベア15に対して停止要求信号を発信して、コンベア15を停止状態に維持するようにして、自動搭載装置22自身も停止状態を維持するようにしている。また言い換えると、本発明の一実施例に係る自動搭載装置22は、自動搭載装置22およびコンベア15が再起動して振動が生じると、ウィンドウ19とボディ20とが接触する可能性があると判断される場合には、自動搭載装置22からコンベア15に対して停止要求信号を発信し続けるようにしている。
【0082】
次に、本発明の第一実施例に係るパワーアシスト装置2によるウィンドウ19の組み付け作業の状況について、図4〜図11を用いて説明する。図4は本発明の第一実施例に係るパワーアシスト装置の制御方法を示す制御フロー図、図5は本発明の第一実施例に係るパワーアシスト装置の制御状態を示すタイミングチャート図、図6は本発明の第一実施例および第二実施例に係るパワーアシスト装置の制御状態(ワーク離間状態)を示す模式図、図7は本発明の第一実施例に係るパワーアシスト装置の制御状態(ワーク接近状態その1)を示す模式図、図8は本発明の第一実施例に係るパワーアシスト装置の制御状態(ワーク接近状態その2)を示す模式図、図9は本発明の第一実施例および第二実施例に係るパワーアシスト装置の制御状態(ワーク組み付け完了時)を示す模式図、図10はウィンドウの組み付け完了状態を示す模式図、図11は本発明の第一実施例および第二実施例に係るパワーアシスト装置の制御状態(制御終了後)を示す模式図である。以下では、図4に示す制御フロー図に沿って説明を進める。尚、ウィンドウ19の搬送および位置決めには、作業者18の操作が関与するものであるが、説明の便宜上、図6〜図9、図11、図14、図15では、操作ハンドル6、力センサ7、作業者18等の図示を省略している。また、本発明の第一実施例では、パワーアシスト装置2によるウィンドウ19の組み付け作業を例示して説明を行うが、本説明中のパワーアシスト装置2に対応する記載内容を自動搭載装置22に対応する記載内容に置き換えることが可能である。つまり、パワーアシスト装置2によるウィンドウ19の組み付け作業と自動搭載装置22によるウィンドウ19の組み付け作業は共通しているため、ここでは、自動搭載装置22によるウィンドウ19の組み付け作業の説明は割愛する。
【0083】
図4および図6に示す如く、生産ライン1にウィンドウ19およびボディ20が導入されると、本発明の第一実施例に係るパワーアシスト装置2の制御方法が開始され、コンベア15の進行に対してパワーアシスト装置2の進行を同期させながら、コンベア15によってボディ20が搬送され、パワーアシスト装置2によってウィンドウ19が搬送される(STEP−1)。
【0084】
同期搬送が開始されると、まずパワーアシスト装置2が接近状態になっているか否か(即ち、ウィンドウ19が前述した対象エリアAに包含されているか否か)をパワーアシスト装置用制御装置8によって判定するようにしている。そして、図6に示す如く、パワーアシスト装置2が接近状態でなければ同期搬送を継続し、図7に示す如く、パワーアシスト装置2が接近状態であれば、次の判定(STEP−3)に移行するようにしている(STEP−2)。
【0085】
ここで、図6に示す如く、パワーアシスト装置2が接近状態でない場合(即ち、図5中に示す状態T1)には、コンベア用制御装置16に対して他工程設備17から発信された停止要求信号を受けて(即ち、図5中に示す状態T2)、コンベア15が停止する(即ち、図5中に示す状態T3)が、パワーアシスト装置2(正確には、パワーアシスト装置用制御装置8)は、コンベア15が停止状態である旨の状態信号を受けたとしても、パワーアシスト装置用制御装置8から停止要求信号を発信することはない(即ち、図5中に示す状態T4)。
【0086】
つまり、パワーアシスト装置2が接近状態でなければ、ウィンドウ19とボディ20とが接触する可能性がないため、パワーアシスト装置2側から積極的にコンベア15を停止させることはない。
【0087】
次に、図7に示す如く、パワーアシスト装置2が接近状態である場合には、コンベア15の運転状態による判定を行うようにしている(STEP−3)。ここで、コンベア15が運転状態であれば、同期搬送を継続するようにしており、コンベア15が停止状態であれば、パワーアシスト装置2(正確には、パワーアシスト装置用制御装置8)からコンベア15(正確には、コンベア用制御装置16)に対して停止要求信号を発信して(STEP−4)、次の判定(STEP−5)に移行するようにしている。
【0088】
ここで、図7に示す如く、パワーアシスト装置2が接近状態である場合(即ち、図5中に示す状態T5)には、パワーアシスト装置用制御装置8は、コンベア15が停止している旨の状態信号を受けると(即ち、図5中に示す状態T6)、パワーアシスト装置用制御装置8からコンベア用制御装置16に対して停止要求信号を発信するようにしている(即ち、図5中に示す状態T7)。
【0089】
またこの場合、図8に示す如く、他工程設備17からの停止要求信号がない場合であっても、パワーアシスト装置2側からコンベア15に継続して停止要求信号を発信し続けるようにしている。
【0090】
つまり、パワーアシスト装置2が接近状態である場合、パワーアシスト装置2およびコンベア15の再起動によって振動が生じると、ウィンドウ19とボディ20とが接触する可能性があるため、パワーアシスト装置2が接近状態であれば、パワーアシスト装置2側から積極的にコンベア15を停止させるように停止要求信号を発信することにより、パワーアシスト装置2およびコンベア15を再起動させないようにしている。
【0091】
次に、パワーアシスト装置2(正確には、パワーアシスト装置用制御装置8)からコンベア15(正確には、コンベア用制御装置16)に対して停止要求信号を発信している期間は、窓枠20aに対するウィンドウ19の組み付けが完了したか否かの判定を行うようにしている(STEP−5)。ここで、ウィンドウ19の組み付けが完了していなければ、パワーアシスト装置2(正確には、パワーアシスト装置用制御装置8)からコンベア15(正確には、コンベア用制御装置16)に対して停止要求信号を発信し続けるようにしている。また、ウィンドウ19の組み付けが完了すれば、停止要求信号の発信を停止して(STEP−6)、次の判定(STEP−7)に移行するようにしている。
【0092】
つまり、図9に示す如く、接圧センサ9a・9a・・・が検知する圧力に基づいて、パワーアシスト装置用制御装置8によってウィンドウ19の組み付けが完了した旨の判定処理がなされると(即ち、図5中に示す状態T8)、パワーアシスト装置用制御装置8からコンベア用制御装置16に対して発信していた停止要求信号を停止するようにしている(即ち、図5中に示す状態T9)。
【0093】
尚、ウィンドウ19の組み付け状態は、図10に示す如く、ウィンドウ19の上端部に設置されたアップストッパ19aの上部近傍に接着剤12が塗布された状態で、アップストッパ19aをボディ20の窓枠20a上部に設けられたアップストッパ19aの係合穴に挿入して、接着剤12を押し潰しながらウィンドウ19を組み付けるようにしており、一旦ウィンドウ19が組み付けられた後であれば、ウィンドウ19が振動しても、ウィンドウ19がズレる等の問題は発生しない。
【0094】
次に、図11に示す如く、停止要求信号の発信が停止されると、コンベア15(正確には、コンベア用制御装置16)に対する運転要求状態による判定を行うようにしている(STEP−7)。ここで、他工程設備17から停止要求信号が発信されている場合には、搬送停止状態を維持しつつ(STEP−8)、運転要求状態による判定を継続する。また、他工程設備17からの停止要求信号がない場合には、同期搬送を終了して(STEP−9)、次の組み付け作業に備えるとともに、本発明に係るパワーアシスト装置2の制御方法による一連のウィンドウ19の組み付け作業を終了するようにしている。
【0095】
尚、一連のウィンドウ19の組み付け作業が完了してパワーアシスト装置2およびコンベア15が再起動する際には振動が生じるが、ウィンドウ19は既に図10に示すように組み付けられているため、このとき発生する振動が問題となることはない。
また本発明は、前述した作業者18による操作が介在して半自動的に作動するパワーアシスト装置2を備える生産ライン1だけでなく、作業者による操作が介在せず自動的に搬送対象物(例えば、ウィンドウ19)を搬送し、組み付け対象物(例えば、ボディ20)に対して搬送対象物を自動的に組付ける自動搭載装置22を備える生産ライン21についても適用することが可能である。
【0096】
即ち、本発明の第一実施例に係るパワーアシスト装置2は、ワークたるウィンドウ19を保持するウィンドウ保持装置5と、ウィンドウ保持装置5を支持するロボットアーム3と、ロボットアーム3を支持し、ウィンドウ保持装置5によって保持されるウィンドウ19を所定方向に搬送する走行部14と、走行部14の進行を制御するパワーアシスト装置用制御装置8と、を備え、パワーアシスト装置用制御装置8には、ウィンドウ19の組み付け対象物たるボディ20を搬送するコンベア15から、コンベア15の運転状態または停止状態を示す状態信号と、コンベア15の進行状態を示す同期信号と、が入力され、パワーアシスト装置用制御装置8によって、前記同期信号に基づいて、コンベア15の進行に同期させて、走行部14の進行を制御するパワーアシスト装置2であって、パワーアシスト装置用制御装置8によって、ウィンドウ19とボディ20が接近状態にあると判定される場合には、前記状態信号が、運転状態から停止状態に移行した時点から、パワーアシスト装置用制御装置8によって、ボディ20に対するウィンドウ19の組み付けが完了した旨の判定処理が成される時点までは、パワーアシスト装置用制御装置8によって、パワーアシスト装置2からコンベア15(正確には、コンベア用制御装置16)に対して、停止要求信号を継続して発信する構成としている。
【0097】
また、本発明の第一実施例に係る自動搭載装置22は、ワークたるウィンドウ19を保持するウィンドウ保持装置25と、ウィンドウ保持装置25を支持するロボットアーム23と、ロボットアーム23を支持し、ウィンドウ保持装置25によって保持されるウィンドウ19を所定方向に搬送する走行部34と、走行部34の進行を制御する自動搭載装置用制御装置28と、を備え、自動搭載装置用制御装置28には、ウィンドウ19の組み付け対象物たるボディ20を搬送するコンベア15から、コンベア15の運転状態または停止状態を示す状態信号と、コンベア15の進行状態を示す同期信号と、が入力され、自動搭載装置用制御装置28によって、前記同期信号に基づいて、コンベア15の進行に同期させて、走行部34の進行を制御する自動搭載装置22であって、自動搭載装置用制御装置28によって、ウィンドウ19とボディ20が接近状態にあると判定される場合には、前記状態信号が、運転状態から停止状態に移行した時点から、自動搭載装置用制御装置28によって、ボディ20に対するウィンドウ19の組み付けが完了した旨の判定処理が成される時点までは、自動搭載装置用制御装置28によって、自動搭載装置22からコンベア15(正確には、コンベア用制御装置16)に対して、停止要求信号を継続して発信する構成としている。
【0098】
また、本発明の第一実施例に係るパワーアシスト装置2の制御方法は、ワークたるウィンドウ19を保持するウィンドウ保持装置5と、ウィンドウ保持装置5を支持するロボットアーム3と、ロボットアーム3を支持し、ウィンドウ保持装置5によって保持されるウィンドウ19を所定方向に搬送する走行部14と、走行部14の進行を制御するパワーアシスト装置用制御装置8と、を備え、パワーアシスト装置用制御装置8には、ウィンドウ19の組み付け対象物たるボディ20を搬送するコンベア15から、コンベア15の運転状態または停止状態を示す状態信号と、コンベア15の進行状態を示す同期信号と、が入力され、パワーアシスト装置用制御装置8によって、前記同期信号に基づいて、コンベア15の進行に同期させて、走行部14の進行を制御するパワーアシスト装置2の制御方法であって、パワーアシスト装置用制御装置8によって、ウィンドウ19とボディ20が接近状態にあると判定される場合には、前記状態信号が、運転状態から停止状態に移行した時点から、パワーアシスト装置用制御装置8によって、ボディ20に対するウィンドウ19の組み付けが完了した旨の判定処理が成される時点までは、パワーアシスト装置用制御装置8によって、パワーアシスト装置2からコンベア15(正確には、コンベア用制御装置16)に対して、停止要求信号を継続して発信して、コンベア15の停止状態を継続させることによって、パワーアシスト装置2の停止状態を維持するようにしている。
【0099】
また、本発明の第一実施例に係る自動搭載装置22の制御方法は、ワークたるウィンドウ19を保持するウィンドウ保持装置25と、ウィンドウ保持装置25を支持するロボットアーム23と、ロボットアーム23を支持し、ウィンドウ保持装置25によって保持されるウィンドウ19を所定方向に搬送する走行部34と、走行部34の進行を制御する自動搭載装置用制御装置28と、を備え、自動搭載装置用制御装置28には、ウィンドウ19の組み付け対象物たるボディ20を搬送するコンベア15から、コンベア15の運転状態または停止状態を示す状態信号と、コンベア15の進行状態を示す同期信号と、が入力され、自動搭載装置用制御装置28によって、前記同期信号に基づいて、コンベア15の進行に同期させて、走行部34の進行を制御する自動搭載装置22の制御方法であって、自動搭載装置用制御装置28によって、ウィンドウ19とボディ20が接近状態にあると判定される場合には、前記状態信号が、運転状態から停止状態に移行した時点から、自動搭載装置用制御装置28によって、ボディ20に対するウィンドウ19の組み付けが完了した旨の判定処理が成される時点までは、自動搭載装置用制御装置28によって、自動搭載装置22からコンベア15(正確には、コンベア用制御装置16)に対して、停止要求信号を継続して発信して、コンベア15の停止状態を継続させることによって、自動搭載装置22の停止状態を維持するようにしている。
【0100】
このような構成とすることにより、ウィンドウ19とボディ20が接触する可能性がある状態では、コンベア15を常に停止状態とすることができるのである。またこれにより、パワーアシスト装置2、あるいは、自動搭載装置22や、コンベア15が再起動する際に生じる振動によって、ウィンドウ19とボディ20が接触することが防止できるのである。
【0101】
次に、本発明の第二実施例に係るパワーアシスト装置2によるウィンドウ19の組み付け作業の状況について、図6、図9、図11および図12〜図15を用いて説明する。図12は本発明の第二実施例に係るパワーアシスト装置の制御方法を示す制御フロー図、図13は本発明の第二実施例に係るパワーアシスト装置の制御状態を示すタイミングチャート図、図14は本発明の第二実施例に係るパワーアシスト装置の制御状態(ワーク接近状態その1)を示す模式図、図15は本発明の第二実施例に係るパワーアシスト装置の制御状態(ワーク接近状態その2)を示す模式図である。以下では、図12に示す制御フロー図に沿って説明を進める。尚、図6、図9、図11については、前述した第一実施例と共通で用いるようにしている。また、本発明の第二実施例では、パワーアシスト装置2によるウィンドウ19の組み付け作業を例示して説明を行うが、本説明中のパワーアシスト装置2に対応する記載内容を自動搭載装置22に対応する記載内容に置き換えることが可能である。つまり、パワーアシスト装置2によるウィンドウ19の組み付け作業と自動搭載装置22によるウィンドウ19の組み付け作業は共通しているため、ここでは、自動搭載装置22によるウィンドウ19の組み付け作業の説明は割愛する。
【0102】
図6および図12に示す如く、前述した第一実施例と同様に、生産ライン1にウィンドウ19およびボディ20が導入されると、本発明の第二実施例に係るパワーアシスト装置2の制御方法が開始され、コンベア15の進行に対してパワーアシスト装置2の進行を同期させながら、コンベア15によってボディ20が搬送され、パワーアシスト装置2によってウィンドウ19が搬送される(STEP−1)。
【0103】
同期搬送が開始されると、まずパワーアシスト装置2が接近状態になっているか否か(即ち、ウィンドウ19が前述した対象エリアAに包含されているか否か)を判定するようにしている。そして、図6に示す如く、パワーアシスト装置2が接近状態でなければ同期搬送を継続し、図7に示す如く、パワーアシスト装置2が接近状態であれば、次の判定(STEP−3)に移行するようにしている(STEP−2)。
【0104】
ここで、図6に示す如く、パワーアシスト装置2が接近状態でなければ(即ち、図13中に示す状態T1)、コンベア用制御装置16に対して他工程設備17から発信された停止要求信号(即ち、図13中に示す状態T2)を受けて、コンベア15が停止する(即ち、図13中に示す状態T3)が、パワーアシスト装置2(正確には、パワーアシスト装置用制御装置8)は、コンベア15が停止状態である旨の状態信号を受けたとしても、パワーアシスト装置用制御装置8から停止要求信号を発信することはない(即ち、図13中に示す状態T4)。
【0105】
次に、図12に示す如く、コンベア15の運転状態による判定を行うようにしている(STEP−3)。ここで、コンベア15が運転状態であれば、同期搬送を継続するようにしており、コンベア15が停止状態であれば、次の判定(STEP−4)に移行するようにしている。
【0106】
次に、コンベア15が一旦停止状態になった後に、再度コンベア15の運転状態による判定を行うようにしている(STEP−4)。ここで、図14に示す如く、他工程設備17から発信される停止要求信号によってコンベア15が停止状態であれば、パワーアシスト装置用制御装置8からコンベア用制御装置16に対して停止要求信号を発信せずに、停止状態を維持するようにしている(STEP−5)。
【0107】
また、図15に示す如く、他工程設備17から発信される停止要求信号がなくなって、コンベア15が運転状態に移行しようとするときに、パワーアシスト装置用制御装置8からコンベア用制御装置16に対して停止要求信号を発信するようにしている(STEP−6)。
【0108】
つまり、図14に示す如く、本発明の第二実施例に係るパワーアシスト装置2の制御方法では、パワーアシスト装置2が接近状態であっても(即ち、図13中に示す状態T5)、他工程設備17からの停止要求信号が発信されており(即ち、図13中に示す状態T6)、これによってコンベア15が停止している場合には(即ち、図13中に示す状態T7)、パワーアシスト装置用制御装置8からコンベア用制御装置16に対して停止要求信号を発信しないようにしている(即ち、図13中に示す状態T8)。
【0109】
そして、図15に示す如く、パワーアシスト装置2が接近状態であって(即ち、図13中に示す状態T9)、他工程設備17からの停止要求信号がなくなったとき(即ち、図13中に示す状態T10)、これを受けて(より詳しくは、コンベア15が運転を再開しようとする状態信号を検知して)初めてパワーアシスト装置用制御装置8からコンベア用制御装置16に対して停止要求信号を発信するようにしている(即ち、図13中に示す状態T11)。これにより、第一実施例の場合に比して、パワーアシスト装置2側からコンベア15側に停止要求信号を発信する期間を短縮させることができる。
【0110】
次に、パワーアシスト装置2(正確には、パワーアシスト装置用制御装置8)からコンベア15(正確には、コンベア用制御装置16)に対して停止要求信号を発信している期間は、窓枠20aに対するウィンドウ19の組み付けが完了したか否かの判定を行うようにしている(STEP−7)。ここで、ウィンドウ19の組み付けが完了していなければ、パワーアシスト装置2(正確には、パワーアシスト装置用制御装置8)からコンベア15(正確には、コンベア用制御装置16)に対して停止要求信号を発信し続けるようにしている。また、ウィンドウ19の組み付けが完了すれば、停止要求信号の発信を停止して(STEP−8)、次の判定(STEP−9)に移行するようにしている。
【0111】
つまり、図9に示す如く、接圧センサ9a・9a・・・が検知する圧力に基づいて、パワーアシスト装置用制御装置8によってウィンドウ19の組み付けが完了した旨の判定処理がなされると(即ち、図13中に示す状態T12)、パワーアシスト装置用制御装置8からコンベア用制御装置16に対して発信していた停止要求信号を停止するようにしている(即ち、図13中に示す状態T13)。
【0112】
次に、パワーアシスト装置用制御装置8から発信される停止要求信号が停止されると、コンベア15(正確には、コンベア用制御装置16)に対する運転要求状態による判定を行うようにしている(STEP−9)。ここで、他工程設備17から停止要求信号が発信されている場合には、搬送停止状態を維持しつつ(STEP−10)、運転要求状態による判定を継続する。また、他工程設備17からの停止要求信号がない場合には、同期搬送を終了して(STEP−11)、次の組み付け作業に備えるとともに、本発明に係るパワーアシスト装置2の制御方法による一連のウィンドウ19の組み付け作業を終了するようにしている。
【0113】
尚、本発明は、前述した作業者18による操作が介在して半自動的に作動するパワーアシスト装置2を備える生産ライン1だけでなく、作業者による操作が介在せず自動的に搬送対象物(例えば、ウィンドウ19)を搬送し、組み付け対象物(例えば、ボディ20)に対して搬送対象物を自動的に組付ける自動搭載装置22を備える生産ライン21についても適用することが可能である。
【0114】
即ち、本発明の第二実施例に係るパワーアシスト装置2は、ワークたるウィンドウ19を保持するウィンドウ保持装置5と、ウィンドウ保持装置5を支持するロボットアーム3と、ロボットアーム3を支持し、ウィンドウ保持装置5によって保持されるウィンドウ19を所定方向に搬送する走行部14と、走行部14の進行を制御するパワーアシスト装置用制御装置8と、を備え、パワーアシスト装置用制御装置8には、ウィンドウ19の組み付け対象物たるボディ20を搬送するコンベア15から、コンベア15の運転状態または停止状態を示す状態信号と、コンベア15の進行状態を示す同期信号と、が入力され、パワーアシスト装置用制御装置8によって、前記同期信号に基づいて、コンベア15の進行に同期させて、走行部14の進行を制御するパワーアシスト装置2であって、パワーアシスト装置用制御装置8によって、ウィンドウ19とボディ20が接近状態にあると判定される場合には、前記状態信号が、運転状態から停止状態に一旦移行して、その後、再度運転状態に移行した時点から、パワーアシスト装置用制御装置8によって、ボディ20に対するウィンドウ19の組み付けが完了した旨の判定処理が成される時点までは、パワーアシスト装置用制御装置8によって、パワーアシスト装置2からコンベア15(正確には、コンベア用制御装置16)に対して、停止要求信号を継続して発信する構成としている。
【0115】
また、本発明の第二実施例に係る自動搭載装置22は、ワークたるウィンドウ19を保持するウィンドウ保持装置25と、ウィンドウ保持装置25を支持するロボットアーム23と、ロボットアーム23を支持し、ウィンドウ保持装置25によって保持されるウィンドウ19を所定方向に搬送する走行部34と、走行部34の進行を制御する自動搭載装置用制御装置28と、を備え、自動搭載装置用制御装置28には、ウィンドウ19の組み付け対象物たるボディ20を搬送するコンベア15から、コンベア15の運転状態または停止状態を示す状態信号と、コンベア15の進行状態を示す同期信号と、が入力され、自動搭載装置用制御装置28によって、前記同期信号に基づいて、コンベア15の進行に同期させて、走行部34の進行を制御する自動搭載装置22であって、自動搭載装置用制御装置28によって、ウィンドウ19とボディ20が接近状態にあると判定される場合には、前記状態信号が、運転状態から停止状態に一旦移行して、その後、再度運転状態に移行した時点から、自動搭載装置用制御装置28によって、ボディ20に対するウィンドウ19の組み付けが完了した旨の判定処理が成される時点までは、自動搭載装置用制御装置28によって、自動搭載装置22からコンベア15(正確には、コンベア用制御装置16)に対して、停止要求信号を継続して発信する構成としている。
【0116】
また、本発明の第二実施例に係るパワーアシスト装置2の制御方法は、ワークたるウィンドウ19を保持するウィンドウ保持装置5と、ウィンドウ保持装置5を支持するロボットアーム3と、ロボットアーム3を支持し、ウィンドウ保持装置5によって保持されるウィンドウ19を所定方向に搬送する走行部14と、走行部14の進行を制御するパワーアシスト装置用制御装置8と、を備え、パワーアシスト装置用制御装置8には、ウィンドウ19の組み付け対象物たるボディ20を搬送するコンベア15から、コンベア15の運転状態または停止状態を示す状態信号と、コンベア15の進行状態を示す同期信号と、が入力され、パワーアシスト装置用制御装置8によって、前記同期信号に基づいて、コンベア15の進行に同期させて、走行部14の進行を制御するパワーアシスト装置2の制御方法であって、パワーアシスト装置用制御装置8によって、ウィンドウ19とボディ20が接近状態にあると判定される場合には、前記状態信号が、運転状態から停止状態に一旦移行して、その後、再度運転状態に移行した時点から、パワーアシスト装置用制御装置8によって、ボディ20に対するウィンドウ19の組み付けが完了した旨の判定処理が成される時点までは、パワーアシスト装置用制御装置8によって、パワーアシスト装置2からコンベア15(正確には、コンベア用制御装置16)に対して、停止要求信号を継続して発信して、コンベア15の停止状態を継続させることによって、パワーアシスト装置2の停止状態を維持するようにしている。
【0117】
また、本発明の第二実施例に係る自動搭載装置22の制御方法は、ワークたるウィンドウ19を保持するウィンドウ保持装置25と、ウィンドウ保持装置25を支持するロボットアーム23と、ロボットアーム23を支持し、ウィンドウ保持装置25によって保持されるウィンドウ19を所定方向に搬送する走行部34と、走行部34の進行を制御する自動搭載装置用制御装置28と、を備え、自動搭載装置用制御装置28には、ウィンドウ19の組み付け対象物たるボディ20を搬送するコンベア15から、コンベア15の運転状態または停止状態を示す状態信号と、コンベア15の進行状態を示す同期信号と、が入力され、自動搭載装置用制御装置28によって、前記同期信号に基づいて、コンベア15の進行に同期させて、走行部34の進行を制御する自動搭載装置22の制御方法であって、自動搭載装置用制御装置28によって、ウィンドウ19とボディ20が接近状態にあると判定される場合には、前記状態信号が、運転状態から停止状態に一旦移行して、その後、再度運転状態に移行した時点から、自動搭載装置用制御装置28によって、ボディ20に対するウィンドウ19の組み付けが完了した旨の判定処理が成される時点までは、自動搭載装置用制御装置28によって、自動搭載装置22からコンベア15(正確には、コンベア用制御装置16)に対して、停止要求信号を継続して発信して、コンベア15の停止状態を継続させることによって、自動搭載装置22の停止状態を維持するようにしている。
【0118】
このような構成とすることにより、ウィンドウ19とボディ20が接触する可能性がある状態では、コンベア15を常に停止状態とすることができるのである。またこれにより、パワーアシスト装置2、あるいは、自動搭載装置22や、コンベア15が再起動する際に生じる振動によって、ウィンドウ19とボディ20が接触することが防止できるのである。またこの場合、パワーアシスト装置2、あるいは、自動搭載装置22によるウィンドウ19の搬送状態に起因して、コンベア15が停止状態となる期間を短縮することができるのである。
【図面の簡単な説明】
【0119】
【図1】本発明の適用に係るパワーアシスト装置を備えた生産ラインの全体構成を示す模式図。
【図2】本発明の適用に係るパワーアシスト装置を備えた生産ラインの機器構成を示すブロック図。
【図3】本発明の一実施例に係る対象エリアの設定状況を示す模式図。
【図4】本発明の第一実施例に係るパワーアシスト装置の制御方法を示す制御フロー図。
【図5】本発明の第一実施例に係るパワーアシスト装置の制御状態を示すタイミングチャート図。
【図6】本発明の第一実施例および第二実施例に係るパワーアシスト装置の制御状態(ワーク離間状態)を示す模式図。
【図7】本発明の第一実施例に係るパワーアシスト装置の制御状態(ワーク接近状態その1)を示す模式図。
【図8】本発明の第一実施例に係るパワーアシスト装置の制御状態(ワーク接近状態その2)を示す模式図。
【図9】本発明の第一実施例および第二実施例に係るパワーアシスト装置の制御状態(ワーク組み付け完了時)を示す模式図。
【図10】ウィンドウの組み付け完了状態を示す模式図。
【図11】本発明の第一実施例および第二実施例に係るパワーアシスト装置の制御状態(制御終了後)を示す模式図。
【図12】本発明の第二実施例に係るパワーアシスト装置の制御方法を示す制御フロー図。
【図13】本発明の第二実施例に係るパワーアシスト装置の制御状態を示すタイミングチャート図。
【図14】本発明の第二実施例に係るパワーアシスト装置の制御状態(ワーク接近状態その1)を示す模式図。
【図15】本発明の第二実施例に係るパワーアシスト装置の制御状態(ワーク接近状態その2)を示す模式図。
【図16】本発明の適用に係る自動搭載装置を備えた生産ラインの全体構成を示す模式図。
【図17】本発明の適用に係る自動搭載装置を備えた生産ラインの機器構成を示すブロック図。
【符号の説明】
【0120】
1 生産ライン
2 パワーアシスト装置
3 ロボットアーム
5 ウィンドウ保持装置
8 パワーアシスト装置用制御装置
14 走行部
15 コンベア
16 コンベア用制御装置
20 ボディ
【特許請求の範囲】
【請求項1】
ワークを保持するワーク保持装置と、
該ワーク保持装置を支持するロボットアームと、
該ロボットアームを支持し、前記ワーク保持装置によって保持される前記ワークを所定方向に搬送する走行部と、
該走行部の進行を制御するパワーアシスト装置用制御装置と、
を備え、
前記パワーアシスト装置用制御装置には、
前記ワークの組み付け対象物を搬送するコンベアから、
該コンベアの運転状態または停止状態を示す状態信号と、
前記コンベアの進行状態を示す同期信号と、
が入力され、
前記パワーアシスト装置用制御装置によって、
前記同期信号に基づいて、
前記コンベアの進行に同期させて、
前記走行部の進行を制御するパワーアシスト装置であって、
前記パワーアシスト装置用制御装置によって、
前記ワークと前記組み付け対象物が接近状態にあると判定される場合には、
前記状態信号が、
運転状態から停止状態に移行した時点から、
前記組み付け対象物に対する前記ワークの組み付けが完了した旨の判定処理が成される時点までは、
前記パワーアシスト装置用制御装置によって、
前記パワーアシスト装置から前記コンベアに対して、
停止要求信号を継続して発信する、
ことを特徴とするパワーアシスト装置。
【請求項2】
ワークを保持するワーク保持装置と、
該ワーク保持装置を支持するロボットアームと、
該ロボットアームを支持し、前記ワーク保持装置によって保持される前記ワークを所定方向に搬送する走行部と、
該走行部の進行を制御するパワーアシスト装置用制御装置と、
を備え、
前記パワーアシスト装置用制御装置には、
前記ワークの組み付け対象物を搬送するコンベアから、
該コンベアの運転状態または停止状態を示す状態信号と、
前記コンベアの進行状態を示す同期信号と、
が入力され、
前記パワーアシスト装置用制御装置によって、
前記同期信号に基づいて、
前記コンベアの進行に同期させて、
前記走行部の進行を制御するパワーアシスト装置であって、
前記パワーアシスト装置用制御装置によって、
前記ワークと前記組み付け対象物が接近状態にあると判定される場合には、
前記状態信号が、
運転状態から停止状態に一旦移行して、
その後、再度運転状態に移行した時点から、
前記組み付け対象物に対する前記ワークの組み付けが完了した旨の判定処理が成される時点までは、
前記パワーアシスト装置用制御装置によって、
前記パワーアシスト装置から前記コンベアに対して、
停止要求信号を継続して発信する、
ことを特徴とするパワーアシスト装置。
【請求項3】
ワークを保持するワーク保持装置と、
該ワーク保持装置を支持するロボットアームと、
該ロボットアームを支持し、前記ワーク保持装置によって保持される前記ワークを所定方向に搬送する走行部と、
該走行部の進行を制御する自動搭載装置用制御装置と、
を備え、
前記自動搭載装置用制御装置には、
前記ワークの組み付け対象物を搬送するコンベアから、
該コンベアの運転状態または停止状態を示す状態信号と、
前記コンベアの進行状態を示す同期信号と、
が入力され、
前記自動搭載装置用制御装置によって、
前記同期信号に基づいて、
前記コンベアの進行に同期させて、
前記走行部の進行を制御する自動搭載装置であって、
前記自動搭載装置用制御装置によって、
前記ワークと前記組み付け対象物が接近状態にあると判定される場合には、
前記状態信号が、
運転状態から停止状態に移行した時点から、
前記組み付け対象物に対する前記ワークの組み付けが完了した旨の判定処理が成される時点までは、
前記自動搭載装置用制御装置によって、
前記自動搭載装置から前記コンベアに対して、
停止要求信号を継続して発信する、
ことを特徴とする自動搭載装置。
【請求項4】
ワークを保持するワーク保持装置と、
該ワーク保持装置を支持するロボットアームと、
該ロボットアームを支持し、前記ワーク保持装置によって保持される前記ワークを所定方向に搬送する走行部と、
該走行部の進行を制御する自動搭載装置用制御装置と、
を備え、
前記自動搭載装置用制御装置には、
前記ワークの組み付け対象物を搬送するコンベアから、
該コンベアの運転状態または停止状態を示す状態信号と、
前記コンベアの進行状態を示す同期信号と、
が入力され、
前記自動搭載装置用制御装置によって、
前記同期信号に基づいて、
前記コンベアの進行に同期させて、
前記走行部の進行を制御する自動搭載装置であって、
前記自動搭載装置用制御装置によって、
前記ワークと前記組み付け対象物が接近状態にあると判定される場合には、
前記状態信号が、
運転状態から停止状態に一旦移行して、
その後、再度運転状態に移行した時点から、
前記組み付け対象物に対する前記ワークの組み付けが完了した旨の判定処理が成される時点までは、
前記自動搭載装置用制御装置によって、
前記自動搭載装置から前記コンベアに対して、
停止要求信号を継続して発信する、
ことを特徴とする自動搭載装置。
【請求項5】
ワークを保持するワーク保持装置と、
該ワーク保持装置を支持するロボットアームと、
該ロボットアームを支持し、前記ワーク保持装置によって保持される前記ワークを所定方向に搬送する走行部と、
該走行部の進行を制御するパワーアシスト装置用制御装置と、
を備え、
前記パワーアシスト装置用制御装置には、
前記ワークの組み付け対象物を搬送するコンベアから、
該コンベアの運転状態または停止状態を示す状態信号と、
前記コンベアの進行状態を示す同期信号と、
が入力され、
前記パワーアシスト装置用制御装置によって、
前記同期信号に基づいて、
前記コンベアの進行に同期させて、
前記走行部の進行を制御するパワーアシスト装置の制御方法であって、
前記パワーアシスト装置用制御装置によって、
前記ワークと前記組み付け対象物が接近状態にあると判定される場合には、
前記状態信号が、
運転状態から停止状態に移行した時点から、
前記組み付け対象物に対する前記ワークの組み付けが完了した旨の判定処理が成される時点までは、
前記パワーアシスト装置用制御装置によって、
前記パワーアシスト装置から前記コンベアに対して、
停止要求信号を継続して発信して、
前記コンベアの停止状態を継続させることによって、
前記パワーアシスト装置の停止状態を維持する、
ことを特徴とするパワーアシスト装置の制御方法。
【請求項6】
ワークを保持するワーク保持装置と、
該ワーク保持装置を支持するロボットアームと、
該ロボットアームを支持し、前記ワーク保持装置によって保持される前記ワークを所定方向に搬送する走行部と、
該走行部の進行を制御するパワーアシスト装置用制御装置と、
を備え、
前記パワーアシスト装置用制御装置には、
前記ワークの組み付け対象物を搬送するコンベアから、
該コンベアの運転状態または停止状態を示す状態信号と、
前記コンベアの進行状態を示す同期信号と、
が入力され、
前記パワーアシスト装置用制御装置によって、
前記同期信号に基づいて、
前記コンベアの進行に同期させて、
前記走行部の進行を制御するパワーアシスト装置の制御方法であって、
前記パワーアシスト装置用制御装置によって、
前記ワークと前記組み付け対象物が接近状態にあると判定される場合には、
前記状態信号が、
運転状態から停止状態に一旦移行して、
その後、再度運転状態に移行した時点から、
前記組み付け対象物に対する前記ワークの組み付けが完了した旨の判定処理が成される時点までは、
前記パワーアシスト装置用制御装置によって、
前記パワーアシスト装置から前記コンベアに対して、
停止要求信号を継続して発信して、
前記コンベアの停止状態を継続させることによって、
前記パワーアシスト装置の停止状態を維持する、
ことを特徴とするパワーアシスト装置の制御方法。
【請求項7】
ワークを保持するワーク保持装置と、
該ワーク保持装置を支持するロボットアームと、
該ロボットアームを支持し、前記ワーク保持装置によって保持される前記ワークを所定方向に搬送する走行部と、
該走行部の進行を制御する自動搭載装置用制御装置と、
を備え、
前記自動搭載装置用制御装置には、
前記ワークの組み付け対象物を搬送するコンベアから、
該コンベアの運転状態または停止状態を示す状態信号と、
前記コンベアの進行状態を示す同期信号と、
が入力され、
前記自動搭載装置用制御装置によって、
前記同期信号に基づいて、
前記コンベアの進行に同期させて、
前記走行部の進行を制御する自動搭載装置の制御方法であって、
前記自動搭載装置用制御装置によって、
前記ワークと前記組み付け対象物が接近状態にあると判定される場合には、
前記状態信号が、
運転状態から停止状態に移行した時点から、
前記組み付け対象物に対する前記ワークの組み付けが完了した旨の判定処理が成される時点までは、
前記自動搭載装置用制御装置によって、
前記自動搭載装置から前記コンベアに対して、
停止要求信号を継続して発信して、
前記コンベアの停止状態を継続させることによって、
前記自動搭載装置の停止状態を維持する、
ことを特徴とする自動搭載装置の制御方法。
【請求項8】
ワークを保持するワーク保持装置と、
該ワーク保持装置を支持するロボットアームと、
該ロボットアームを支持し、前記ワーク保持装置によって保持される前記ワークを所定方向に搬送する走行部と、
該走行部の進行を制御する自動搭載装置用制御装置と、
を備え、
前記自動搭載装置用制御装置には、
前記ワークの組み付け対象物を搬送するコンベアから、
該コンベアの運転状態または停止状態を示す状態信号と、
前記コンベアの進行状態を示す同期信号と、
が入力され、
前記自動搭載装置用制御装置によって、
前記同期信号に基づいて、
前記コンベアの進行に同期させて、
前記走行部の進行を制御する自動搭載装置の制御方法であって、
前記自動搭載装置用制御装置によって、
前記ワークと前記組み付け対象物が接近状態にあると判定される場合には、
前記状態信号が、
運転状態から停止状態に一旦移行して、
その後、再度運転状態に移行した時点から、
前記組み付け対象物に対する前記ワークの組み付けが完了した旨の判定処理が成される時点までは、
前記自動搭載装置用制御装置によって、
前記自動搭載装置から前記コンベアに対して、
停止要求信号を継続して発信して、
前記コンベアの停止状態を継続させることによって、
前記自動搭載装置の停止状態を維持する、
ことを特徴とする自動搭載装置の制御方法。
【請求項1】
ワークを保持するワーク保持装置と、
該ワーク保持装置を支持するロボットアームと、
該ロボットアームを支持し、前記ワーク保持装置によって保持される前記ワークを所定方向に搬送する走行部と、
該走行部の進行を制御するパワーアシスト装置用制御装置と、
を備え、
前記パワーアシスト装置用制御装置には、
前記ワークの組み付け対象物を搬送するコンベアから、
該コンベアの運転状態または停止状態を示す状態信号と、
前記コンベアの進行状態を示す同期信号と、
が入力され、
前記パワーアシスト装置用制御装置によって、
前記同期信号に基づいて、
前記コンベアの進行に同期させて、
前記走行部の進行を制御するパワーアシスト装置であって、
前記パワーアシスト装置用制御装置によって、
前記ワークと前記組み付け対象物が接近状態にあると判定される場合には、
前記状態信号が、
運転状態から停止状態に移行した時点から、
前記組み付け対象物に対する前記ワークの組み付けが完了した旨の判定処理が成される時点までは、
前記パワーアシスト装置用制御装置によって、
前記パワーアシスト装置から前記コンベアに対して、
停止要求信号を継続して発信する、
ことを特徴とするパワーアシスト装置。
【請求項2】
ワークを保持するワーク保持装置と、
該ワーク保持装置を支持するロボットアームと、
該ロボットアームを支持し、前記ワーク保持装置によって保持される前記ワークを所定方向に搬送する走行部と、
該走行部の進行を制御するパワーアシスト装置用制御装置と、
を備え、
前記パワーアシスト装置用制御装置には、
前記ワークの組み付け対象物を搬送するコンベアから、
該コンベアの運転状態または停止状態を示す状態信号と、
前記コンベアの進行状態を示す同期信号と、
が入力され、
前記パワーアシスト装置用制御装置によって、
前記同期信号に基づいて、
前記コンベアの進行に同期させて、
前記走行部の進行を制御するパワーアシスト装置であって、
前記パワーアシスト装置用制御装置によって、
前記ワークと前記組み付け対象物が接近状態にあると判定される場合には、
前記状態信号が、
運転状態から停止状態に一旦移行して、
その後、再度運転状態に移行した時点から、
前記組み付け対象物に対する前記ワークの組み付けが完了した旨の判定処理が成される時点までは、
前記パワーアシスト装置用制御装置によって、
前記パワーアシスト装置から前記コンベアに対して、
停止要求信号を継続して発信する、
ことを特徴とするパワーアシスト装置。
【請求項3】
ワークを保持するワーク保持装置と、
該ワーク保持装置を支持するロボットアームと、
該ロボットアームを支持し、前記ワーク保持装置によって保持される前記ワークを所定方向に搬送する走行部と、
該走行部の進行を制御する自動搭載装置用制御装置と、
を備え、
前記自動搭載装置用制御装置には、
前記ワークの組み付け対象物を搬送するコンベアから、
該コンベアの運転状態または停止状態を示す状態信号と、
前記コンベアの進行状態を示す同期信号と、
が入力され、
前記自動搭載装置用制御装置によって、
前記同期信号に基づいて、
前記コンベアの進行に同期させて、
前記走行部の進行を制御する自動搭載装置であって、
前記自動搭載装置用制御装置によって、
前記ワークと前記組み付け対象物が接近状態にあると判定される場合には、
前記状態信号が、
運転状態から停止状態に移行した時点から、
前記組み付け対象物に対する前記ワークの組み付けが完了した旨の判定処理が成される時点までは、
前記自動搭載装置用制御装置によって、
前記自動搭載装置から前記コンベアに対して、
停止要求信号を継続して発信する、
ことを特徴とする自動搭載装置。
【請求項4】
ワークを保持するワーク保持装置と、
該ワーク保持装置を支持するロボットアームと、
該ロボットアームを支持し、前記ワーク保持装置によって保持される前記ワークを所定方向に搬送する走行部と、
該走行部の進行を制御する自動搭載装置用制御装置と、
を備え、
前記自動搭載装置用制御装置には、
前記ワークの組み付け対象物を搬送するコンベアから、
該コンベアの運転状態または停止状態を示す状態信号と、
前記コンベアの進行状態を示す同期信号と、
が入力され、
前記自動搭載装置用制御装置によって、
前記同期信号に基づいて、
前記コンベアの進行に同期させて、
前記走行部の進行を制御する自動搭載装置であって、
前記自動搭載装置用制御装置によって、
前記ワークと前記組み付け対象物が接近状態にあると判定される場合には、
前記状態信号が、
運転状態から停止状態に一旦移行して、
その後、再度運転状態に移行した時点から、
前記組み付け対象物に対する前記ワークの組み付けが完了した旨の判定処理が成される時点までは、
前記自動搭載装置用制御装置によって、
前記自動搭載装置から前記コンベアに対して、
停止要求信号を継続して発信する、
ことを特徴とする自動搭載装置。
【請求項5】
ワークを保持するワーク保持装置と、
該ワーク保持装置を支持するロボットアームと、
該ロボットアームを支持し、前記ワーク保持装置によって保持される前記ワークを所定方向に搬送する走行部と、
該走行部の進行を制御するパワーアシスト装置用制御装置と、
を備え、
前記パワーアシスト装置用制御装置には、
前記ワークの組み付け対象物を搬送するコンベアから、
該コンベアの運転状態または停止状態を示す状態信号と、
前記コンベアの進行状態を示す同期信号と、
が入力され、
前記パワーアシスト装置用制御装置によって、
前記同期信号に基づいて、
前記コンベアの進行に同期させて、
前記走行部の進行を制御するパワーアシスト装置の制御方法であって、
前記パワーアシスト装置用制御装置によって、
前記ワークと前記組み付け対象物が接近状態にあると判定される場合には、
前記状態信号が、
運転状態から停止状態に移行した時点から、
前記組み付け対象物に対する前記ワークの組み付けが完了した旨の判定処理が成される時点までは、
前記パワーアシスト装置用制御装置によって、
前記パワーアシスト装置から前記コンベアに対して、
停止要求信号を継続して発信して、
前記コンベアの停止状態を継続させることによって、
前記パワーアシスト装置の停止状態を維持する、
ことを特徴とするパワーアシスト装置の制御方法。
【請求項6】
ワークを保持するワーク保持装置と、
該ワーク保持装置を支持するロボットアームと、
該ロボットアームを支持し、前記ワーク保持装置によって保持される前記ワークを所定方向に搬送する走行部と、
該走行部の進行を制御するパワーアシスト装置用制御装置と、
を備え、
前記パワーアシスト装置用制御装置には、
前記ワークの組み付け対象物を搬送するコンベアから、
該コンベアの運転状態または停止状態を示す状態信号と、
前記コンベアの進行状態を示す同期信号と、
が入力され、
前記パワーアシスト装置用制御装置によって、
前記同期信号に基づいて、
前記コンベアの進行に同期させて、
前記走行部の進行を制御するパワーアシスト装置の制御方法であって、
前記パワーアシスト装置用制御装置によって、
前記ワークと前記組み付け対象物が接近状態にあると判定される場合には、
前記状態信号が、
運転状態から停止状態に一旦移行して、
その後、再度運転状態に移行した時点から、
前記組み付け対象物に対する前記ワークの組み付けが完了した旨の判定処理が成される時点までは、
前記パワーアシスト装置用制御装置によって、
前記パワーアシスト装置から前記コンベアに対して、
停止要求信号を継続して発信して、
前記コンベアの停止状態を継続させることによって、
前記パワーアシスト装置の停止状態を維持する、
ことを特徴とするパワーアシスト装置の制御方法。
【請求項7】
ワークを保持するワーク保持装置と、
該ワーク保持装置を支持するロボットアームと、
該ロボットアームを支持し、前記ワーク保持装置によって保持される前記ワークを所定方向に搬送する走行部と、
該走行部の進行を制御する自動搭載装置用制御装置と、
を備え、
前記自動搭載装置用制御装置には、
前記ワークの組み付け対象物を搬送するコンベアから、
該コンベアの運転状態または停止状態を示す状態信号と、
前記コンベアの進行状態を示す同期信号と、
が入力され、
前記自動搭載装置用制御装置によって、
前記同期信号に基づいて、
前記コンベアの進行に同期させて、
前記走行部の進行を制御する自動搭載装置の制御方法であって、
前記自動搭載装置用制御装置によって、
前記ワークと前記組み付け対象物が接近状態にあると判定される場合には、
前記状態信号が、
運転状態から停止状態に移行した時点から、
前記組み付け対象物に対する前記ワークの組み付けが完了した旨の判定処理が成される時点までは、
前記自動搭載装置用制御装置によって、
前記自動搭載装置から前記コンベアに対して、
停止要求信号を継続して発信して、
前記コンベアの停止状態を継続させることによって、
前記自動搭載装置の停止状態を維持する、
ことを特徴とする自動搭載装置の制御方法。
【請求項8】
ワークを保持するワーク保持装置と、
該ワーク保持装置を支持するロボットアームと、
該ロボットアームを支持し、前記ワーク保持装置によって保持される前記ワークを所定方向に搬送する走行部と、
該走行部の進行を制御する自動搭載装置用制御装置と、
を備え、
前記自動搭載装置用制御装置には、
前記ワークの組み付け対象物を搬送するコンベアから、
該コンベアの運転状態または停止状態を示す状態信号と、
前記コンベアの進行状態を示す同期信号と、
が入力され、
前記自動搭載装置用制御装置によって、
前記同期信号に基づいて、
前記コンベアの進行に同期させて、
前記走行部の進行を制御する自動搭載装置の制御方法であって、
前記自動搭載装置用制御装置によって、
前記ワークと前記組み付け対象物が接近状態にあると判定される場合には、
前記状態信号が、
運転状態から停止状態に一旦移行して、
その後、再度運転状態に移行した時点から、
前記組み付け対象物に対する前記ワークの組み付けが完了した旨の判定処理が成される時点までは、
前記自動搭載装置用制御装置によって、
前記自動搭載装置から前記コンベアに対して、
停止要求信号を継続して発信して、
前記コンベアの停止状態を継続させることによって、
前記自動搭載装置の停止状態を維持する、
ことを特徴とする自動搭載装置の制御方法。
【図1】


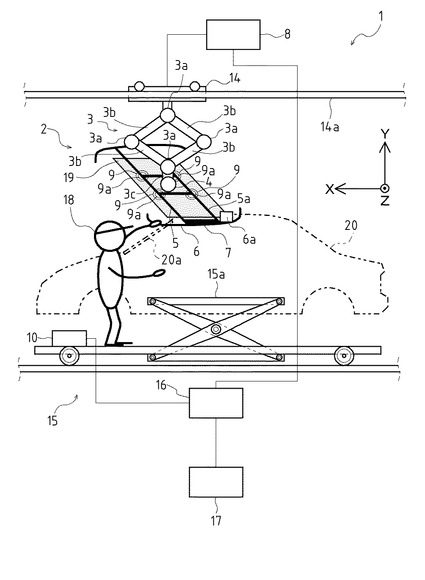
【図2】
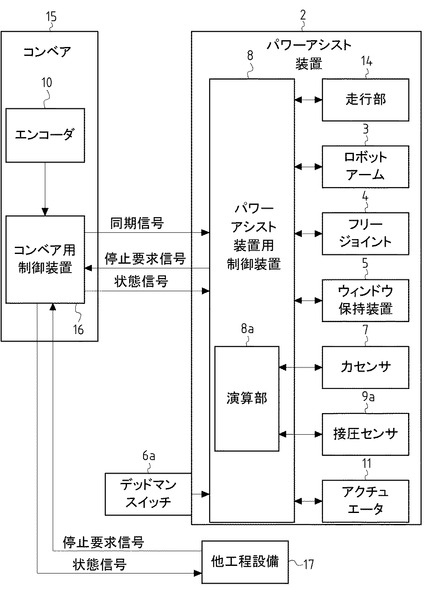
【図3】
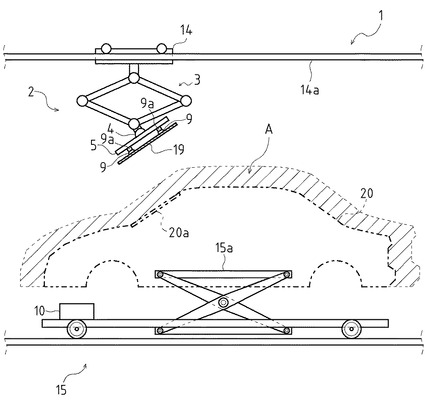
【図4】
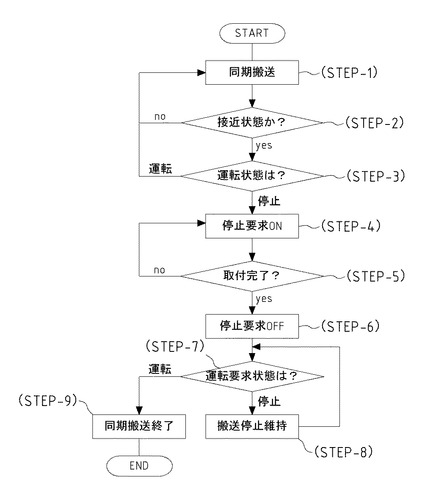
【図5】
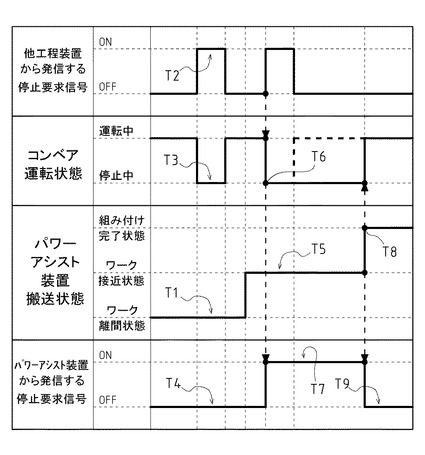
【図6】
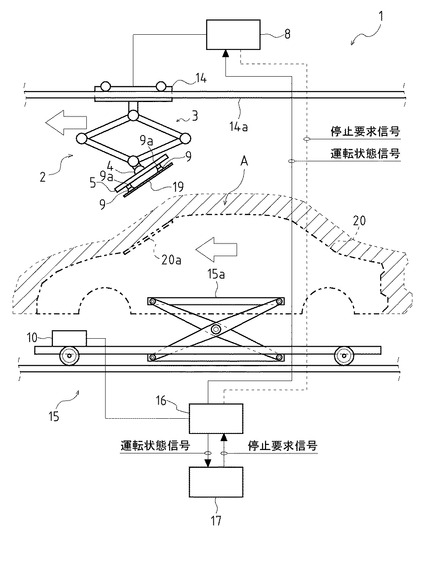
【図7】
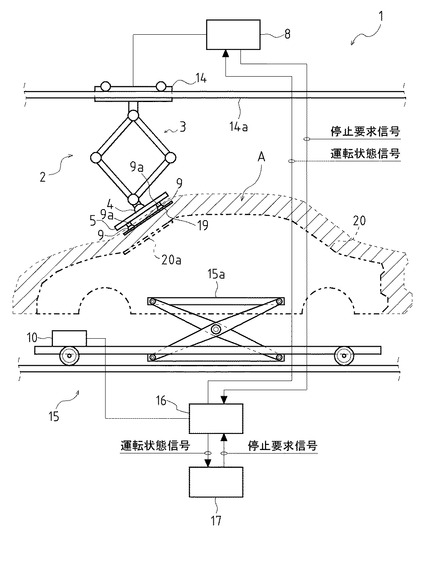
【図8】
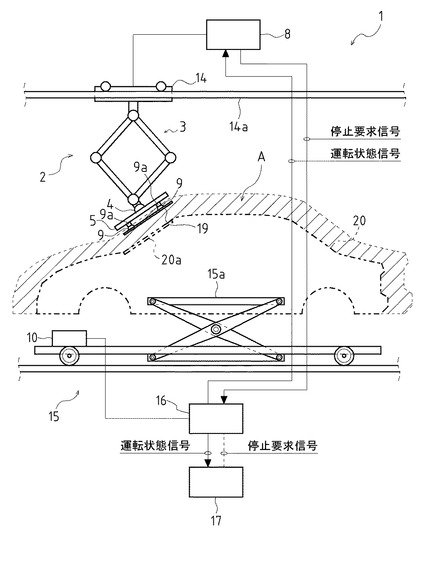
【図9】
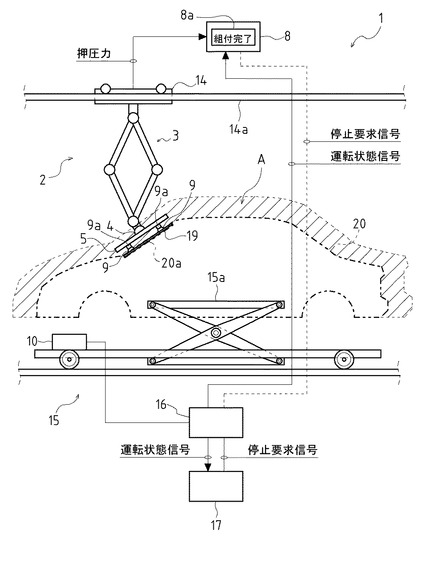
【図10】
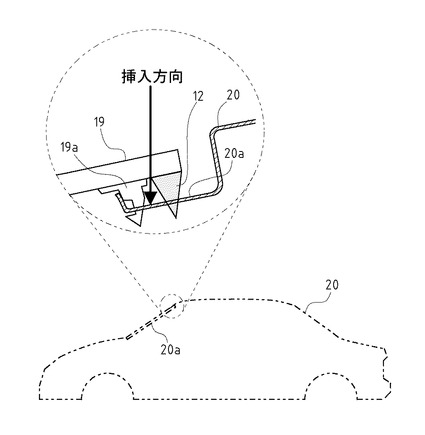
【図11】
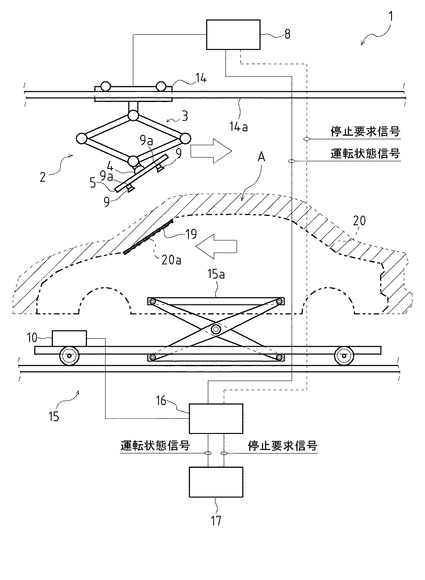
【図12】
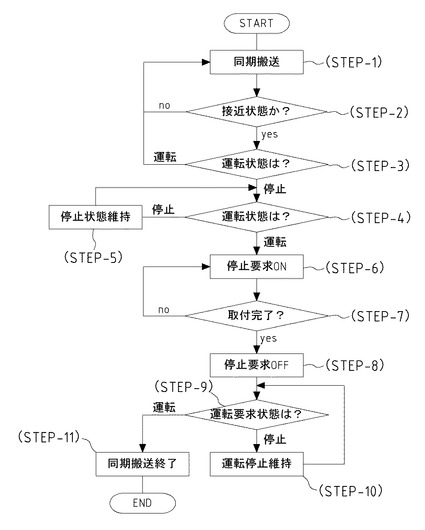
【図13】
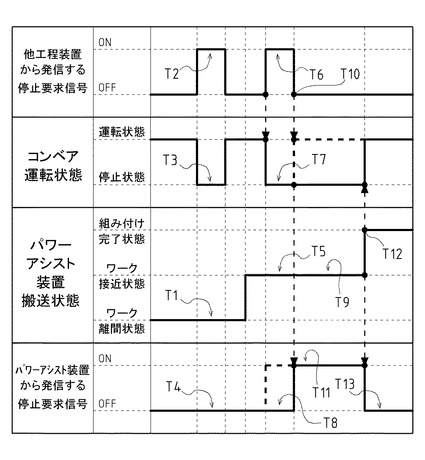
【図14】
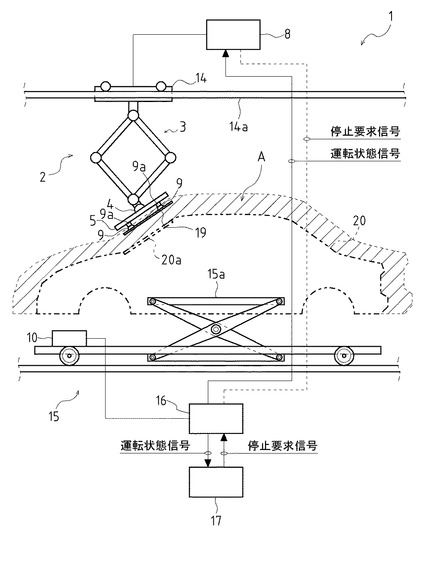
【図15】
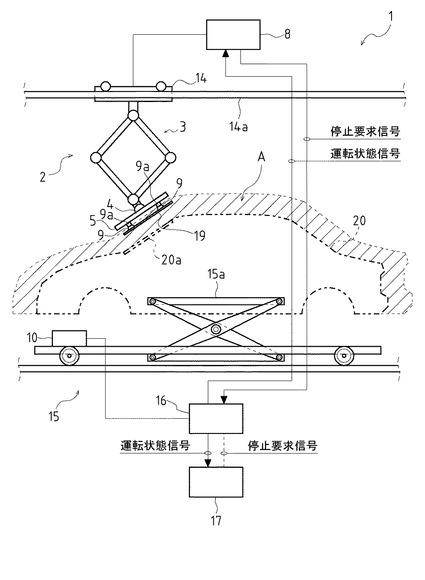
【図16】
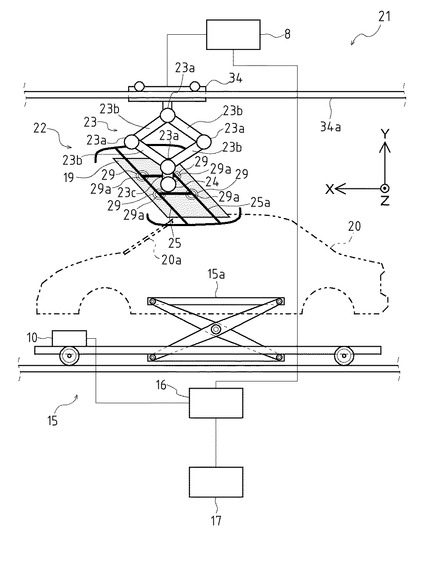
【図17】
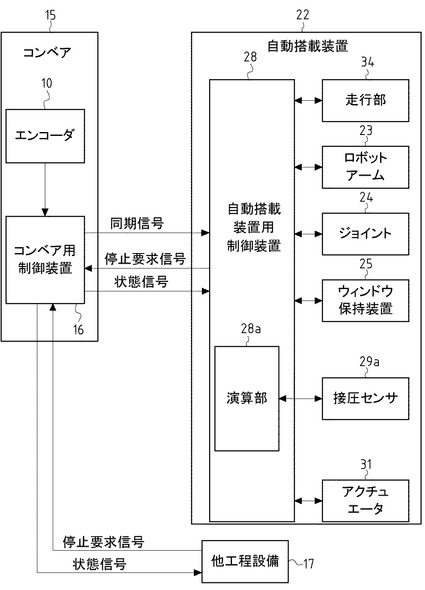
【図2】
【図3】
【図4】
【図5】
【図6】
【図7】
【図8】
【図9】
【図10】
【図11】
【図12】
【図13】
【図14】
【図15】
【図16】
【図17】
【公開番号】特開2010−58237(P2010−58237A)
【公開日】平成22年3月18日(2010.3.18)
【国際特許分類】
【出願番号】特願2008−227647(P2008−227647)
【出願日】平成20年9月4日(2008.9.4)
【出願人】(000003207)トヨタ自動車株式会社 (59,920)
【出願人】(594133456)株式会社アラキ製作所 (8)
【Fターム(参考)】
【公開日】平成22年3月18日(2010.3.18)
【国際特許分類】
【出願日】平成20年9月4日(2008.9.4)
【出願人】(000003207)トヨタ自動車株式会社 (59,920)
【出願人】(594133456)株式会社アラキ製作所 (8)
【Fターム(参考)】
[ Back to top ]