
パンタグラフ型集電装置の検査装置及びパンタグラフ型集電装置の検査方法
【課題】本発明は、安価にてすり板の正確な摩耗量や荒損位置を測定できるパンタグラフ型集電装置の検査装置を提供することにある。
【解決手段】本発明は、停止中の電車1のすり板4の表面に、ビームを連続的に照射してすり板4の表面形状データ33を取得し、この取得された表面形状データ33と予め取得しておいた設計データとを比較してすり板4の摩耗量を求めるようにしたのである。
このようにビームをすり板4の表面に連続的に照射して測定することで、正確な摩耗量や荒損位置を測定することが可能となり、しかも高価なビームセンサ10を複数用いる必要がなくなるので、すり板4の正確な荒損や荒損位置を安価に測定できるパンタグラフ型集電装置の検査装置を得ることができる。
【解決手段】本発明は、停止中の電車1のすり板4の表面に、ビームを連続的に照射してすり板4の表面形状データ33を取得し、この取得された表面形状データ33と予め取得しておいた設計データとを比較してすり板4の摩耗量を求めるようにしたのである。
このようにビームをすり板4の表面に連続的に照射して測定することで、正確な摩耗量や荒損位置を測定することが可能となり、しかも高価なビームセンサ10を複数用いる必要がなくなるので、すり板4の正確な荒損や荒損位置を安価に測定できるパンタグラフ型集電装置の検査装置を得ることができる。
【発明の詳細な説明】
【技術分野】
【0001】
本発明はパンタグラフ型集電装置に係り、特に、パンタグラフに支持されたすり板を含む舟体の荒損の有無を測定するパンタグラフ型集電装置の検査装置に関する。
【背景技術】
【0002】
従来のパンタグラフ型集電装置の検査装置は、例えば特許文献1に開示のように、すり板の長手方向に対向して複数の一次元画像センサを配列し、これによってすり板の形状情報を取得して、すり板の荒損を検出していた。
【0003】
【特許文献1】特開平8−33105号公報
【発明の開示】
【発明が解決しようとする課題】
【0004】
上記従来の技術によれば、大まかな荒損は検出できるものの、複数の一次元画像センサを隙間なく配列したとしても、隣接一次元画像センサ間に僅かに測定不可領域が存在してしまうので、正確な摩耗量や荒損位置を測定できない問題がある。
【0005】
そこで、一次元画像センサに代わり、例えば、ラインレーザセンサやプロファイルレーザセンサ等の二次元画像センサを用いることも考えられる。しかしながら、現状では二次元画像センサは極めて高価格であり、このようなセンサを複数用いた場合、検査装置の性能が検査装置の製造費用に見合わず現実的ではないと云った新たな問題が生じていた。
【0006】
本発明の目的は、安価にてすり板の正確な摩耗量や荒損位置を測定できるパンタグラフ型集電装置の検査装置を提供することにある。
【課題を解決するための手段】
【0007】
本発明は上記目的を達成するために、電車を規定位置に誘導する電車誘導手段と、規定位置に設置され電車のパンタグラフに支持されたすり板の表面を連続的に測定するビームセンサと、このビームセンサの前記すり板に対する位置を移動制御するセンサ駆動機構と、前記ビームセンサからの出力信号に基づいて前記すり板の表面形状データを作成する情報処理端末手段とを備え、この情報処理端末手段を、作成された前記表面形状データと予め格納された設計データとを比較して前記すり板の摩耗量を求めるように構成すると共に、前記センサ駆動機構へ前記ビームセンサの移動指示を行うように構成したのである。
【発明の効果】
【0008】
以上説明したように、ビームセンサによりすり板の表面を連続的に測定することで、正確な摩耗量や荒損位置を測定することが可能となり、しかも高価な二次元画像センサを複数用いる必要がないので、すり板の正確な荒損や荒損位置を安価に測定できるパンタグラフ型集電装置の検査装置を得ることができる。
【発明を実施するための最良の形態】
【0009】
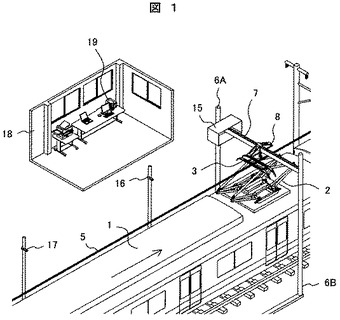
以下、本発明によるパンタグラフ型集電装置の検査装置の一実施の形態を図1〜図3に基づいて説明する。
【0010】
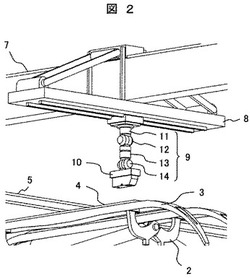
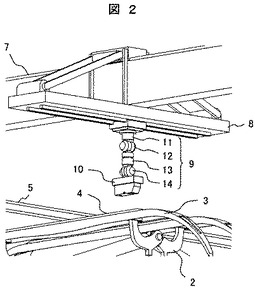
電車1の屋根にはパンタグラフ2が支持されており、このパンタグラフ2の頂上部には、図2に示すように、舟体3が支持され、さらにこの舟体3の頂面にすり板4が固定されている。このすり板4を含む舟体3は、その長手方向を架線5と直交する方向に延在されている。
【0011】
上記構成の電車1が矢印方向に誘導されて入線する機場内において、すり板4の摩耗を測定する位置の近傍には、電車1の幅方向両側に対向する位置に立設された検査用架台6A,6Bと、これらか第6A,6Bに跨って水平に支持されたX軸スライダ7と、このX軸スライダ7を案内として移動するY軸スライダ8と、このY軸スライダ8に位置制御機構9を介して垂下支持されたビームセンサ10と、X軸スライダ7の一端側に取り付けられたセンサ収納箱15と、機場内に入線した電車1に対し徐行を指示する徐行指示用トリガセンサ16と、機場内に入線して徐行した電車1に対して停止指示をする停止指示用トリガセンサ17とを有し、さらに、機場内に設置された検査事務室18と、この検査事務室18内に設置された情報処理端末手段19とを備えている。
【0012】
前記徐行指示用トリガセンサ16と停止指示用トリガセンサ17とは、夫々パンタグラフ2が近傍を通過すると信号を発信するように構成されている。そして発信された信号は、電車1の運転席、あるいは図示しない機場内に設けられた自動的な運転速度制御機構部へ伝達される。その信号が徐行指示用トリガセンサ16からの信号であれば、入線中の電車1を規定の徐行速度となるように減速させ、停止指示用トリガセンサ17からの信号であれば、電車1をその場に停車させる。
【0013】
このように、徐行指示用トリガセンサ16と停止指示用トリガセンサ17は、電車1がすり板4の摩耗を測定する位置からオーバランして測定ができなくなる距離まで移動してしまうのを防止するものである。したがって、徐行指示用トリガセンサ16と停止指示用トリガセンサ17とが本発明による電車誘導手段となる。
【0014】
前記センサ収納箱15は、すり板4の検査を実施しない場合に、Y軸スライダ8に位置制御機構9を介して支持されたビームセンサ10をX軸スライダ7に沿って移動させて収納して保護するものである。尚、詳細な図示は省略しているが、位置制御機構9とビームセンサ10とを密閉状態で収納するために、センサ収納箱15の開口部には蓋が設けられている。
【0015】
一方、前記位置制御機構9やY軸スライダ8は、必要に応じてX軸スライダ7に対して着脱可能に構成されており、例えばエレベータ機構を用いてセンサ収納箱15に収納したまま作業者の手の届く高さまで下降させ、位置制御機構9やビームセンサ10の保守点検や調整を行えるようにすることも可能である。
【0016】
前記情報処理端末手段19は、Y軸スライダ8の駆動制御、位置制御機構9の駆動制御、ビームセンサ10からの信号の処理(すり板4の表面形状データの記憶、記憶された表面形状データのモニタへの立体的な展開、表面形状データの管理や評価)を行う。
【0017】
尚、Y軸スライダ8の駆動制御及び位置制御機構9の駆動制御とは、X軸スライダ7、Y軸スライダ8、位置制御機構9に設けたエンコーダやリニアスケール、距離センサ等(いずれも図示は省略)の位置読み取り機構に対する位置情報の呼び出しや書き込みを行って駆動指示することであり、また、それらが適正に実施されているかを判定する状態監視も行っている。ここで、X軸スライダ7、Y軸スライダ8、位置制御機構9が本発明によるセンサ駆動機構となる。
【0018】
また、表面形状データの管理とは、記憶された表面形状データや比較処理の結果に対し、該当するすり板4や舟体3の固有ID、すり板4や舟体3が搭載された電車1単体の固有ID、電車1の車両編成の固有IDを付与し、過去の測定記録の参照を容易にすることである。
【0019】
ところで、情報処理端末手段19は、図示しない上位の情報処理端末手段ないし図示しない同位の他の情報処理端末手段とネットワークにて接続されている。情報処理端末手段19を含む情報処理端末手段は、必要に応じて相互に駆動指示、取得した表面形状データ、すり板4や舟体3の設計データの呼び出しや書き込みが可能な構成となっている。
【0020】
前記位置制御機構9は、Y軸スライダ8に垂下された高さ調節機構11と、この下に連結された正面傾斜角調節機構12と、その下に連結された捻り角調節機構13と、その下に連結された側面傾斜角調節機構14とを備えており、側面傾斜角調節機構14の下にビームセンサ10が連結されている。
【0021】
X軸スライダ7は、舟体3の長手方向の一端から他端までの距離以上を測定できる長さを有している。Y軸スライダ8は、X軸スライダ7に沿って舟体3の長手方向に平行移動し、ビームセンサ10を舟体3の長手方向に対し直行する方向に移動させる。
【0022】
このように構成された位置制御機構9は、ビームセンサ10の姿勢を制御し、高さ調節機構11の後退位置は、Y軸スライダ8を移動させてもビームセンサ10がすり板4は勿論のこと架線5と干渉しない位置である。そして、位置制御機構9によってビームセンサ10を三次元的に移動させ、すり板4を含む舟体3の上面全域を測定するようにしている。尚、高さ調節機構11は、油圧シリンダ機構を用いて構成したものであるが、これに限らず、例えば多段スライド機構やパンタグラフ機構によって構成しても良い。
【0023】
ところで、ビームセンサ10は、図3に示すように、例えばレーザビームを連続的に照射するビーム投光部20と、その反射光を受けるビーム受光部21とを有する。尚、図3において、R1は照射ビームの光軸、R2は反射ビームの光軸、R3は照射ビーム拡散状態、Zaは測定不可範囲、Zbは測定可能範囲、Yaは測定最小幅、Ybは測定最大幅である。
【0024】
このようなビームセンサ10は、例えば、ラインレーザセンサやプロファイルレーザセンサ等からなり、図2に示すように、位置制御機構9の垂下端部に1つ設置される。そして、ビーム投光部20から扇状に拡散するレーザビームを規定の周波数で発振する。ビーム受光部21は測定対象物に投影された線状のレーザビームを規定の発振周波数情報(例えば256Hz)にしたがい1周期ごとに読取り、任意の分割数(例えば1024分割)で三次元座標点群に即時変換して出力する。情報処理端末手段19は、出力された三次元座標点群を入力し記憶部に順次格納する。これら三次元座標点群が、すり板4を含む舟体3の上面の形状を構成した表面形状データとなる。
【0025】
情報処理端末手段19の記憶部には、目標分解能情報、云い代えれば測定精度(例えば単位面積当りの三次元座標点数)が設定されて格納されている。上述の任意の分割数は、ビームセンサ10の測定最小幅Yaや測定最大幅Ybにおいても同一である。したがって、目標分解能情報を高く設定した場合は、ビームセンサ10とすり板4を含む舟体3との距離を接近させると共に、Y軸スライダ8のX軸スライダ7上の移動速度及び位置制御機構9のY軸スライダ8上の移動速度を遅くして、ビームセンサ10によるレーザビームの移動を遅くする。逆に、目標分解能情報を低く設定する場合には、ビームセンサ10とすり板4を含む舟体3との距離を離反させると共に、Y軸スライダ8のX軸スライダ7上の移動速度及び位置制御機構9のY軸スライダ8上の移動速度を速くして、ビームセンサ10によるレーザビームの移動を速くする。このように目標分解能情報を調節することで、例えば仮に舟体3が湾曲変形している場合に、舟体3の部位によってはビームセンサ10との距離の変化して三次元座標点群の分解能の相違が生じ、測定誤差を生じるのを防止することができる。
【0026】
上述のような動作を実現するために、測定する前に、情報処理端末手段19に格納された前回周期での三次元座標点群のZ成分情報と、そのときの高さ調節機構11の高さ情報を参照する。これらの情報及び目標分解能情報、レーザ発振周波数情報、任意の分割数情報、測定不可範囲Za、測定可能範囲Zb、測定最小幅Ya、測定最大幅Ybから高さ調節機構11の高さ情報、Y軸スライダ8のX軸スライダ7上の移動速度及び位置制御機構9のY軸スライダ8上の移動速度を決定あるいは更新する。これらの動作は測定中に継続して行う。
【0027】
すり板4を含む舟体3の測定は、上述の決定あるいは更新した各種情報に基づき、ビームセンサ10を移動させ、すり板4を含む舟体3にレーザビームを連続照射して行う。その際、すり板4を含む舟体3の表面は、常に、ビームセンサ10の測定可能範囲Zb内に位置させる。このように、すり板4を含む舟体3の測定は、その場での最適な測定条件を求めながら行う。尚、目標解像度情報は、測定においてこの数値を下回ることがないような所謂目安であり、測定過程中に測定データに局部的に目標解像度情報を上回る部位が生じることがあるが、この部位は、後述するように、間引き処理される。
【0028】
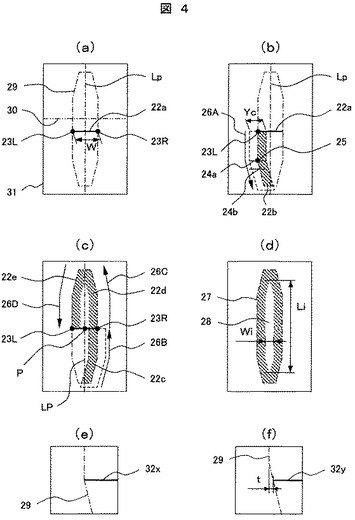
図4は、すり板4を含む舟体3の測定過程の上面模式図である。図4において、22a〜22eは表面形状データ、23L,23Rは幅分布端点、24a,24bはビーム照射イメージ、25は輪郭変化点、26A〜26Dは移動経路情報、27は輪郭表面形状データ、28は内表面形状データ、29は舟体3の輪郭イメージ、30は架線5の輪郭イメージ、Wは測定された舟体3の幅分布、Pは表面形状データ22aの中心点、Lpは中心点Pを通る垂線、Ycは測定可能なビーム照射イメージ24a,24bの長さ、tは離れ位置、Wiは測定を必要とする幅、Liは測定を必要とする長さ、31は情報処理端末手段19の仮想的な記憶領域を示す。
【0029】
次に、電車1を入線させてすり板4を含む舟体3を測定する手順を説明する。電車1の入線により停止指示用トリガセンサ17が作動すると、電車1に停止指示を発信し、同時に、発信した旨を情報処理端末手段19に通知する。通知を受け取った情報処理端末手段19は、電車1が測定位置に完全に停止するまでの規定時間経過後に測定開始の指示を発信する。
【0030】
まず、測定開始位置を特定するため、Y軸スライダ8をX軸スライダ7に沿って移動させビームセンサ10からの照射ビームの光軸R1の直下に架線5が存在しない任意の位置に停止させる。尚、測定開始位置は、可能なら舟体3の長手方向中心近傍で上面が湾曲していない面上が望ましい。次に、ビームセンサ10を測定開始状態に保持し、ビームセンサ10をY軸スライダ8の一端から他端まで移動させる。ここで、測定開始状態とは、ビームセンサ10からの三次元座標点群情報を情報処理端末手段19が受け取って処理することが可能な状態のことである。この動作で取得できる表面形状データは、図4(a)に示すような幅分布Wを有する線状の三次元座標点群22aとなる。ここで、情報処理端末手段19は、表面形状データ22aから幅分布Wの一端を形成する三次元座標点群を幅分布端点23Lとし,幅分布Wの他端を形成する三次元座標点群を幅分布端点23Rと定義する。
【0031】
そして、情報処理端末手段19が三次元座標点群22aを取得できた場合、ビームセンサ10を高さ調節機構11によって目標解像度情報を満たす高さに調節する。この時のビーム照射イメージ24aは長さYcとなり、測定最小幅Yaと測定最大幅Ybの範囲内となる。尚、上記動作の前に、ビームセンサ10の測定可能範囲Zb内にすり板4を含む舟体3が存在するようにしておく。
【0032】
次に、すり板4を含む舟体3の表面形状データの輪郭を取得する。この動作は、本実施の形態においては大別して二つの工程、詳細には四つの測定手順から構成される。
【0033】
第1の工程の測定手順1について図4(b)に基づいて説明する。この手順では測定開始位置から図中左下部の輪郭の表面形状データ22bを取得する。まず、幅分布端点23Lにビームセンサ10からの照射ビームの光軸R1を一致させた後、ビームセンサ10を図中下方に移動させながら連続して測定を行う。そして、反射ビームが受光されなくなってビームセンサ10からの出力がなくなった、云い代えれば照射ビームの光軸R1の直下にすり板4を含む舟体3が存在しなくなった時点で測定手順1は終了となる。測定手順1で取得した三次元座標点群は表面形状データ22bとして情報処理端末手段19の記憶部に格納され、測定手順1のビームセンサ10の移動経路も移動経路情報26Aとして格納される。ここで、移動経路とは、X軸スライダ7をX方向成分、Y軸スライダ8をY方向成分、高さ調節機構11をZ方向成分として、例えば、1/10秒毎あるいはビームセンサ10の発信周波数毎のように、規定カウント毎にその位置情報を収集したビームセンサ10の移動情報郡である。そして、位置情報の収集は、X軸スライダ7、Y軸スライダ8、高さ調節機構11が有する図示しない位置読取り機構から呼び出すようにしてもよく、また、各位置読取り機構から呼び出す時点での情報処理端末手段19からの駆動指示値を用いてもよい。
【0034】
測定中、図4(b)において、ビームセンサ10は照射ビームの光軸R1と舟体3の輪郭が一致するように制御される。輪郭変化の認識は、情報処理端末手段19がビームセンサ10から受け取った今回周期の三次元座標点群の分布と前回周期の三次元座標点群の分布との比較によって行われる。前回周期の三次元座標点群の分布と一致するように、情報処理端末手段19はY軸スライダ8を駆使してビームセンサ10を微調整する。
【0035】
ビームセンサ10の微調整について図4(e),(f)を用いて説明する。図4(e)は、ビームセンサ10の照射ビームの光軸R1が図4(b)の輪郭変化点25に到達した際に取得された理想的な三次元座標点群32xを抜粋した模式図である。図4(f)は、ビームセンサ10の照射ビームの光軸R1が図4(b)の輪郭変化点25をオーバランして移動した際に取得された三次元座標点群32yを抜粋した模式図である。ここで、情報処理端末手段19において、図4(f)の離れ位置tを検出し、Y軸スライダ8の移動補正値を算出し、図4(e)の状態に近づけるように微調整するのである。
【0036】
また、前回周期での三次元座標点群と今回周期での三次元座標点群との比較において、離れ位置tが検出されずにそれらの密度が変化する場合がある。これっは、舟体3とビームセンサ10との距離が変化したことに起因するものであり、その場合には前述のように、ビームセンサ10の高さを調節すればよい。
【0037】
次に、第2の工程の測定手順2を図4(c)に基づいて説明する。ここでは、測定手順1での測定終了位置から図4(c)の右下部の輪郭の表面形状データ22cを取得する。三次元座標点群22aから一次直線を抽出し、この一次直線と垂直に交わり、中心点Pを通る線を垂線Lpと定義する。そして、測定手順1で取得した移動経路情報26Aを呼び出し、垂線Lpに対して線対称となる新たな移動経路情報26Bを作成する。新たな移動経路情報26Bにおける測定開始位置は、測定手順1の移動経路情報26Aの測定終了位置となる。測定手順2による測定は、新たな移動経路情報26Bをビームセンサ10の照射ビームの光軸R1がトレースすることで行われる。このために、測定するすり板4を含む舟体3は左右対称物であることが前提となっており、実際のすり板4を含む舟体3は左右対称に形成されている。ビームセンサ10の照射ビームの光軸R1が新たな移動経路情報26Bの測定終了位置、または幅分布端点23Rに到達した時点で測定手順2は終了となる。当然ながら、測定手順2で取得した三次元座標点群は表面形状データ22cとして情報処理端末手段19の記憶部に格納される。
【0038】
さらに、図4(c)を用いて第1の工程に該当する測定手順3について説明する。ここでは、測定手順2の測定終了位置から図4(c)の右上部の輪郭の表面形状データ22dを取得する。X軸スライダ7とY軸スライダ8の移動方向が測定手順1と逆となる点を除いて基本的には測定手順1と同様な測定を行う。そして、反射ビームが受光されなくなってビームセンサ10からの出力がなくなった、云い代えれば照射ビームの光軸R1の直下にすり板4を含む舟体3が存在しなくなった時点で測定手順3は終了となる。測定手順3で取得した三次元座標点群は表面形状データ22dとして情報処理端末手段19の記憶部に格納され、測定手順1のビームセンサ10の移動経路も移動経路情報26Cとして格納される。
【0039】
その後に行われる第2の工程に該当する測定手順4について、同じ図4(c)を用いて説明する。
【0040】
ここでは、測定手順3の測定終了位置から図4(c)の左上部の輪郭の表面形状データ22eを取得する。X軸スライダ7とY軸スライダ8の移動方向が測定手順2と逆となる点を除いて基本的には測定手順2と同様な測定を行う。測定手順2で求めた垂線Lpと、測定手順3における移動経路情報26Cを呼び出し、この垂線Lpに対して線対称となる新たな移動経路情報26Dを作成する。ビームセンサ10の照射ビームの光軸R1が、この新たな移動経路情報26Dの測定終了位置あるいは幅分布端点23Lに達した時点で測定手順4は終了となる。そして、測定手順4で取得した三次元座標点群は表面形状データ22eとして情報処理端末手段19の記憶部に格納される。
【0041】
以上の測定手順1〜4をもってすり板4を含む舟体3の輪郭の表面形状データ22b〜22eの取得は終了し、これら表面形状データ22b〜22eを情報処理端末手段19の記憶部から呼び出して座標を合わせて連続した表面形状データ、云い代えれば輪郭表面形状データ27とする。
【0042】
このように、すり板4を含む舟体3の輪郭の測定は、ビームセンサ10の照射ビームを連続照射して行って移動経路を記録しつつ測定する第1の工程と、記録した移動経路を参照しつつ測定する第2の工程からなる。第1の工程において、ビームセンサ10の移動速度は、すり板4を含む舟体3の上面の状態を絶えず監視しビームセンサ10の高さ距離を適正に保つ所謂倣い動作が含まれるために、比較的低速度に抑えらている。そこで、第1の工程での測定時に取得した移動経路情報を参照することにより、第2の工程では移動情報が明確になり、高速度でビームセンサ10を移動させることが可能となり、測定を速やかに行うことが可能となる。
【0043】
つづいて、すり板4を含む舟体3の内側の表面形状データ28の取得を行う。既に取得した輪郭の表面形状データ27に基づいて、情報処理端末手段19によって、三次元座標点群が分布していない領域を探索し、改めて測定を必要とする幅Wiと長さLiを求め、この幅Wiと長さLiに対して必要とするビーム照射走査回数を求める。ここで、測定を必要とする長さLiをX軸スライダ7の走査移動範囲とし、測定は、輪郭の表面形状データ27を測定したときと同じように、X軸スライダ7とY軸スライダ8の移動速度及び高さ調節機構11の高さ情報を決定して更新しつつ行う。これによって取得された三次元座標点群を内表面形状データ28とする。
【0044】
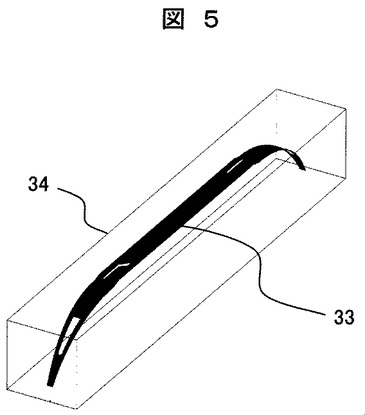
図5は、上記手順で取得された三次元座標点群の模式図である。図5において、33は輪郭の表面形状データ27と内側の表面形状データ28とを合成した完全な表面形状データであり、34は情報処理端末手段19における仮想的な記憶領域を示す。
【0045】
ここで完全な表面形状データ33は、輪郭の表面形状データ27と内側の表面形状データ28とを取得する際に重複してビームセンサ10を走査させた部位が存在し、この部位は三次元座標点群が密集する。そこで、必要に応じて、情報処理端末手段19では、完全な表面形状データ33に対して次のような処理を行う。まず、重複して密集した三次元座標点群の間引き処理である。具体的には、前述した目標解像度情報を呼び出し、完全な表面形状データ33の全域を走査し、目標解像度以上となる部位に対して不必要な三次元座標点群を削除してノイズ除去処理を行う。一定量離散した三次元座標点群に対しては、測定ノイズとみなし、完全な表面形状データ33から削除する。さらに、ここで、架線5に該当する三次元座標点群に対しても削除する。
【0046】
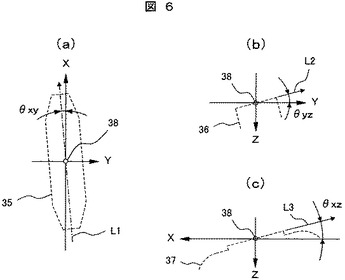
次に、図6に基づいて位置合わせ補正について説明する。図6において、35は完全な表面形状データ33のXY成分、θxyはXY成分35の傾き角度、L1はXY成分35(舟体3の長手方向)の近似中心線、36は完全な表面形状データ33のYZ成分、θyzはYZ成分36の傾き角度、L2はYZ成分36(電車1の進行方向)の近似中心線、37は完全な表面形状データ33のXZ成分、θxzはXZ成分37の傾き角度、L3はXZ成分37(舟体3の厚み方向)の近似中心線、38は補正原点を示す。
【0047】
完全な表面形状データ33は、情報処理端末手段19によって固有IDを付与され、同種の表面形状データと共に記憶部に格納されている。ところで、記憶部から呼び出されて記憶領域34に立体的に構築された完全な表面形状データ33は、設計データと同じ姿勢であるとは限らない。したがって、完全な表面形状データ33を設計データと異なる姿勢で位置合わせを行えば、大きな差異が生じて正確な測定が困難となるので、事前に、完全な表面形状データ33の角度を補正して、二つのデータが同じ姿勢にする必要がある。
【0048】
そこで、既に取得され記憶部に格納された設計データは、傾き角度θxy,θyz,θxzが共に0度に補正されていると仮定して完全な表面形状データ33の傾き角度θxy,θyz,θxzの補正について説明する。
【0049】
まず、XY成分35の傾き角度θxyの補正は、図6(a)に示すように、完全な表面形状データ33のXY成分35から有限長の一次直線式(2通り存在)を算出する。XY成分35の広がりが大きい、即ち、舟体3の長手方向の直線をXY成分35の近似中心線L1とする。そして近似中心線L1と、図5の記憶領域34に予め設定しておいたX方向法線とから、XY成分35の傾き角度θxyを算出し、完全な表面形状データ33を全ての三次元座標点群に対して補正原点38を回転中心として回転させて傾き角度θxyを0度となるように補正する。
【0050】
YZ成分36の傾き角度θyzの補正については、図6(b)に示すように、上述の有限長の一次直線式の算出方を再度実行し、YZ成分36の広がりが小さい方の直線を+Z方向〜−Z方向に延伸させて平面化し、この平面に完全な表面形状データ33のYZ成分36を投影する。YZ成分36から有限長の一次直線式を算出し、YZ成分36の広がりが大きい、即ち、電車1の進行方向の直線をYZ成分36の近似中心線L2とする。そして近似中心線L2と、図5の記憶領域34に予め設定しておいたY方向法線とから、YZ成分36の傾き角度θyzを算出し、完全な表面形状データ33を全ての三次元座標点群に対して補正原点38を回転中心として回転させて傾き角度θyzを0度となるように補正する。尚、記憶領域34のX,Y,Z方向の応戦は、記憶部に格納してあるどの表面形状データを呼び出しても、同じ条件で適用される。また、補正原点38は、近似中心線L1,L2,L3が交差する位置に設定する。
【0051】
次に、XZ成分37の傾き角度θxzの補正は、図6(c)に示すように、XY成分35の近似中心線L1を+Z方向〜−Z方向に延伸させて平面化し、この平面に完全な表面形状データ33のXZ成分37を投影する。XZ成分37から有限長の一次直線式を算出し、XZ成分37の広がりが大きい、即ち舟体3の長手方向の直線をXZ成分37の近似中心線L3とする。そして近似中心線L3と、図5の記憶領域34に予め設定しておいたX方向法線とから、XZ成分37の傾き角度θxzを算出し、完全な表面形状データ33を全ての三次元座標点群に対して補正原点38を回転中心として回転させて傾き角度θxzを0度となるように補正する。
【0052】
上述のようにして傾き角度θxy,θyz,θxzの角度補正値を算出した後、完全な表面形状データ33に対応させ、対応前の表面形状データ33と置換して情報処理端末手段19の記憶部に格納する。尚、対応前の表面形状データ33と置換せずに、算出した傾き角度θxy,θyz,θxzの角度補正値を情報処理端末手段19の記憶部に格納しておき、後述する評価時に対応前の表面形状データ33と置換するようにしてもよい。
【0053】
次に、立体的な位置合わせのための微調整について説明する。角度補正によって設計データと完全な表面形状データ33とはほぼ同じ姿勢になった後、両データのX,Y,Z方向を一致させる。設計データを模範(固定)として角度補正した完全な表面形状データ33を三次元移動させ、両データの分布の誤差和が最小となる組合せをX,Y,Z方向夫々の補正値として取得し立体的な位置合わせの微調整を終了する。ここで、微調整終了時に、完全な表面形状データ33を実際に三次元移動させた情報も入れ替えの際に適用すると良い。
【0054】
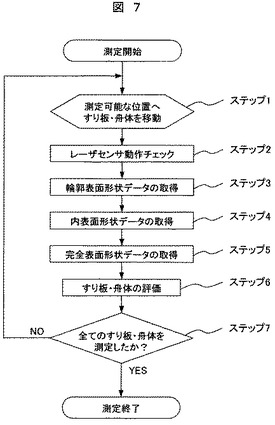
次に、本実施の形態によるパンタグラフ型集電装置の検査装置によるすり板4を含む舟体3の測定手順を、図7に示すフローにしたがって説明する。
【0055】
測定開始時に、電車1を機場内の検査位置に規定速度で運転させ、徐行指示用トリガセンサ16及び停止指示用トリガセンサ17からの信号に基づいて電車1を徐行させた後停止させる。これにより、すり板4を含む舟体3は、測定可能な位置に移動する(ステップ1)。続いて、ビームセンサ10の動作チェックを行う(ステップ2)。尚、このビームセンサ10の動作チェックは、ステップ1の前やステップ1と平行に行うようにしてもよい。
【0056】
その後、すり板4を含む舟体3の輪郭表面形状データ27を取得する(ステップ3)と共に、内表面形状データ28を取得し(ステップ4)、これらから最終的に完全な表面形状データ33を取得する(ステップ5)。
【0057】
一般的に、架線5と接触するすり板4あるいは舟体3の摩耗の傾向において、特に舟体3の幅方向、即ち、電車1の進行方向に置ける摩耗はほぼ均一となっている。そして、電車1は、営業運転時に上り運転と下り運転を頻繁に繰り返すことから、すり板4あるいは舟体3の摩耗は幅方向端部に集中する傾向にある。したがって、すり板4あるいは舟体3の幅方向端部を含む輪郭表面形状データ27を取得すれば、内表面形状データ28の摩耗量を推定可能である。そのような場合には、ステップ4を省略することも可能である。
【0058】
次に、ステップ5で取得された完全な表面形状データ33と、情報処理端末手段19の記憶部に予め格納されていた当該すり板4あるいは舟体3の設計データとに基づいて、すり板4あるいは舟体3の摩耗状態の評価を行う(ステップ6)。
【0059】
すり板4あるいは舟体3の摩耗状態の評価は、完全な表面形状データ33と設計データとの立体的な位置合わせを行い、その差分情報から得られるすり板4あるいは舟体3の摩耗量の度合いと荒損の有無である。これらの評価結果は、評価終了後に完全な表面形状データ33に関連付けられる。尚、設計データは、すり板4あるいは舟体3の三次元CADデータを用い、望ましくは、電車1のパンタグラフ2にすり板4を含む舟体3を最初に搭載した際に、本検査装置で測定して作成した完全な表面形状データである。
【0060】
荒損の有無の評価は、基本的に、上述の差分情報に特異的な特徴を完全な表面形状データ33から探索することであり、例えば、次の要領で行う。即ち、検査対象となるすり板4を含む舟体3における前回測定時に摩耗量と今回測定時の摩耗量、そして、その間の電車1の営業運転時間から、運転時間当りの摩耗量を算出する。ここで、今回測定時の完全な表面形状データ33から、電車1の営業運転時間に見合った摩耗量を超過する差分情報の有無を探索し、超過する差分情報が探索された場合、情報処理端末手段19ではその部位を荒損と判断して作業者に実物の確認を行わせ、修繕や交換を促す。また、別の要領としては、完全な表面形状データ33から、情報処理端末手段19に予め登録しておいた例えば、実際の荒損の表面形状データや荒損の輪郭を人工的に再現した三次元座標点群等の荒損パターンと類似する部位を探索し、その部位を荒損と判断してもよい。また、荒損の有無の最終的な判断は、必要に応じて作業者が行うようにしてもよい。具体的には、図1において、Y軸スライダ8の長手方向端部にすり板4を含む舟体3の長手方向に向いた撮影手段を設け、情報処理端末手段19で荒損と判断した完全な表面形状データ33の特定箇所(三次元座標点群)の代表点の三次元座標から、その代表点を取得した際のX軸スライダ7の位置情報を割り出し、荒損の有無の評価後に、X軸スライダ7をその位置に移動させ、撮影手段による撮影結果を作業者が確認し、作業者の判断を荒損の有無の最終的な評価とするのである。
【0061】
続いて、搭載位置の異なる未測定のすり板4を含む舟体3の有無を確認し(ステップ7)、未測定のすり板4を含む舟体3が存在すれば、ステップ1に戻って電車1を所定距離移動させ、未測定のすり板4を含む舟体3についてステップ2〜6を実施し、全てのすり板4を含む舟体3を測定した時点で測定を終了させる。
【0062】
ところで、すり板4を含む舟体3の荒損の評価は、検査装置での全てのすり板4を含む舟体3の測定が終了した時点で、まとめて行ってもよく、また、夫々のすり板4を含む舟体3の測定が終了した時点でその都度行うようにしてもよい。
【0063】
ところで、上記すり板4を含む舟体3の測定手順のうち、ステップ3〜5が本発明による表面形状データを作成する工程に該当し、ステップ6が本発明による表面形状データと予め取得しておいた設計データとを比較してすり板を含む舟体の摩耗量を求める工程に該当する。
【0064】
以上説明したように本実施の形態によれば、停止中の電車のパンタグラフに支持されたすり板の表面に、ビームを連続的に照射して前記すり板の表面形状データを作成し、これを予め取得しておいた設計データとを比較して前記すり板の摩耗量を求めるようにしたので、ビームセンサを複数設ける必要なく、その結果、すり板の磨耗量や荒損位置を安価にて正確に測定できるパンタグラフ型集電装置の検査装置を得ることができる。
【図面の簡単な説明】
【0065】
【図1】本発明によるパンタグラフ型集電装置の検査装置の周辺を示す斜視図。
【図2】舟体に対するセンサ駆動機構を示す斜視図。
【図3】ビームセンサを示す斜視図。
【図4】すり板を含む舟体の測定手順を示す上面模式図。
【図5】測定終了時のすり板を含む舟体の表面形状データの模式図。
【図6】測定終了時のすり板を含む舟体の表面形状データの位置合わせ角度補正の概念図。
【図7】すり板を含む舟体の測定手順を示すフロー図。
【符号の説明】
【0066】
1…電車、2…パンタグラフ、3…舟体、4…すり板、5…架線、6A,6B…検査用架台、7…X軸スライダ、8…Y軸スライダ、9…位置制御機構、10…ビームセンサ、11…高さ調節機構、12…正面傾斜角調節機構、13…捻り角調節機構、14…側面傾斜角調節機構、15…センサ収納箱、16…徐行指示用トリガセンサ、17…停止指示用トリガセンサ、18…検査事務室、19…情報処理端末手段、20…ビーム投光部、21…ビーム受光部、22a〜22e…表面形状データ、23L,23R…幅分布端点、24a,24b…ビーム照射イメージ、25…輪郭変化点、26A〜26D…移動経路情報、27…輪郭表面形状データ、28…内表面形状データ、29,30…輪郭イメージ、31…記憶領域、32x,32y…三次元座標点群、33…表面形状データ、34…記憶領域、35…XY成分、36…YZ成分、37…XZ成分、38…補正原点。
【技術分野】
【0001】
本発明はパンタグラフ型集電装置に係り、特に、パンタグラフに支持されたすり板を含む舟体の荒損の有無を測定するパンタグラフ型集電装置の検査装置に関する。
【背景技術】
【0002】
従来のパンタグラフ型集電装置の検査装置は、例えば特許文献1に開示のように、すり板の長手方向に対向して複数の一次元画像センサを配列し、これによってすり板の形状情報を取得して、すり板の荒損を検出していた。
【0003】
【特許文献1】特開平8−33105号公報
【発明の開示】
【発明が解決しようとする課題】
【0004】
上記従来の技術によれば、大まかな荒損は検出できるものの、複数の一次元画像センサを隙間なく配列したとしても、隣接一次元画像センサ間に僅かに測定不可領域が存在してしまうので、正確な摩耗量や荒損位置を測定できない問題がある。
【0005】
そこで、一次元画像センサに代わり、例えば、ラインレーザセンサやプロファイルレーザセンサ等の二次元画像センサを用いることも考えられる。しかしながら、現状では二次元画像センサは極めて高価格であり、このようなセンサを複数用いた場合、検査装置の性能が検査装置の製造費用に見合わず現実的ではないと云った新たな問題が生じていた。
【0006】
本発明の目的は、安価にてすり板の正確な摩耗量や荒損位置を測定できるパンタグラフ型集電装置の検査装置を提供することにある。
【課題を解決するための手段】
【0007】
本発明は上記目的を達成するために、電車を規定位置に誘導する電車誘導手段と、規定位置に設置され電車のパンタグラフに支持されたすり板の表面を連続的に測定するビームセンサと、このビームセンサの前記すり板に対する位置を移動制御するセンサ駆動機構と、前記ビームセンサからの出力信号に基づいて前記すり板の表面形状データを作成する情報処理端末手段とを備え、この情報処理端末手段を、作成された前記表面形状データと予め格納された設計データとを比較して前記すり板の摩耗量を求めるように構成すると共に、前記センサ駆動機構へ前記ビームセンサの移動指示を行うように構成したのである。
【発明の効果】
【0008】
以上説明したように、ビームセンサによりすり板の表面を連続的に測定することで、正確な摩耗量や荒損位置を測定することが可能となり、しかも高価な二次元画像センサを複数用いる必要がないので、すり板の正確な荒損や荒損位置を安価に測定できるパンタグラフ型集電装置の検査装置を得ることができる。
【発明を実施するための最良の形態】
【0009】
以下、本発明によるパンタグラフ型集電装置の検査装置の一実施の形態を図1〜図3に基づいて説明する。
【0010】
電車1の屋根にはパンタグラフ2が支持されており、このパンタグラフ2の頂上部には、図2に示すように、舟体3が支持され、さらにこの舟体3の頂面にすり板4が固定されている。このすり板4を含む舟体3は、その長手方向を架線5と直交する方向に延在されている。
【0011】
上記構成の電車1が矢印方向に誘導されて入線する機場内において、すり板4の摩耗を測定する位置の近傍には、電車1の幅方向両側に対向する位置に立設された検査用架台6A,6Bと、これらか第6A,6Bに跨って水平に支持されたX軸スライダ7と、このX軸スライダ7を案内として移動するY軸スライダ8と、このY軸スライダ8に位置制御機構9を介して垂下支持されたビームセンサ10と、X軸スライダ7の一端側に取り付けられたセンサ収納箱15と、機場内に入線した電車1に対し徐行を指示する徐行指示用トリガセンサ16と、機場内に入線して徐行した電車1に対して停止指示をする停止指示用トリガセンサ17とを有し、さらに、機場内に設置された検査事務室18と、この検査事務室18内に設置された情報処理端末手段19とを備えている。
【0012】
前記徐行指示用トリガセンサ16と停止指示用トリガセンサ17とは、夫々パンタグラフ2が近傍を通過すると信号を発信するように構成されている。そして発信された信号は、電車1の運転席、あるいは図示しない機場内に設けられた自動的な運転速度制御機構部へ伝達される。その信号が徐行指示用トリガセンサ16からの信号であれば、入線中の電車1を規定の徐行速度となるように減速させ、停止指示用トリガセンサ17からの信号であれば、電車1をその場に停車させる。
【0013】
このように、徐行指示用トリガセンサ16と停止指示用トリガセンサ17は、電車1がすり板4の摩耗を測定する位置からオーバランして測定ができなくなる距離まで移動してしまうのを防止するものである。したがって、徐行指示用トリガセンサ16と停止指示用トリガセンサ17とが本発明による電車誘導手段となる。
【0014】
前記センサ収納箱15は、すり板4の検査を実施しない場合に、Y軸スライダ8に位置制御機構9を介して支持されたビームセンサ10をX軸スライダ7に沿って移動させて収納して保護するものである。尚、詳細な図示は省略しているが、位置制御機構9とビームセンサ10とを密閉状態で収納するために、センサ収納箱15の開口部には蓋が設けられている。
【0015】
一方、前記位置制御機構9やY軸スライダ8は、必要に応じてX軸スライダ7に対して着脱可能に構成されており、例えばエレベータ機構を用いてセンサ収納箱15に収納したまま作業者の手の届く高さまで下降させ、位置制御機構9やビームセンサ10の保守点検や調整を行えるようにすることも可能である。
【0016】
前記情報処理端末手段19は、Y軸スライダ8の駆動制御、位置制御機構9の駆動制御、ビームセンサ10からの信号の処理(すり板4の表面形状データの記憶、記憶された表面形状データのモニタへの立体的な展開、表面形状データの管理や評価)を行う。
【0017】
尚、Y軸スライダ8の駆動制御及び位置制御機構9の駆動制御とは、X軸スライダ7、Y軸スライダ8、位置制御機構9に設けたエンコーダやリニアスケール、距離センサ等(いずれも図示は省略)の位置読み取り機構に対する位置情報の呼び出しや書き込みを行って駆動指示することであり、また、それらが適正に実施されているかを判定する状態監視も行っている。ここで、X軸スライダ7、Y軸スライダ8、位置制御機構9が本発明によるセンサ駆動機構となる。
【0018】
また、表面形状データの管理とは、記憶された表面形状データや比較処理の結果に対し、該当するすり板4や舟体3の固有ID、すり板4や舟体3が搭載された電車1単体の固有ID、電車1の車両編成の固有IDを付与し、過去の測定記録の参照を容易にすることである。
【0019】
ところで、情報処理端末手段19は、図示しない上位の情報処理端末手段ないし図示しない同位の他の情報処理端末手段とネットワークにて接続されている。情報処理端末手段19を含む情報処理端末手段は、必要に応じて相互に駆動指示、取得した表面形状データ、すり板4や舟体3の設計データの呼び出しや書き込みが可能な構成となっている。
【0020】
前記位置制御機構9は、Y軸スライダ8に垂下された高さ調節機構11と、この下に連結された正面傾斜角調節機構12と、その下に連結された捻り角調節機構13と、その下に連結された側面傾斜角調節機構14とを備えており、側面傾斜角調節機構14の下にビームセンサ10が連結されている。
【0021】
X軸スライダ7は、舟体3の長手方向の一端から他端までの距離以上を測定できる長さを有している。Y軸スライダ8は、X軸スライダ7に沿って舟体3の長手方向に平行移動し、ビームセンサ10を舟体3の長手方向に対し直行する方向に移動させる。
【0022】
このように構成された位置制御機構9は、ビームセンサ10の姿勢を制御し、高さ調節機構11の後退位置は、Y軸スライダ8を移動させてもビームセンサ10がすり板4は勿論のこと架線5と干渉しない位置である。そして、位置制御機構9によってビームセンサ10を三次元的に移動させ、すり板4を含む舟体3の上面全域を測定するようにしている。尚、高さ調節機構11は、油圧シリンダ機構を用いて構成したものであるが、これに限らず、例えば多段スライド機構やパンタグラフ機構によって構成しても良い。
【0023】
ところで、ビームセンサ10は、図3に示すように、例えばレーザビームを連続的に照射するビーム投光部20と、その反射光を受けるビーム受光部21とを有する。尚、図3において、R1は照射ビームの光軸、R2は反射ビームの光軸、R3は照射ビーム拡散状態、Zaは測定不可範囲、Zbは測定可能範囲、Yaは測定最小幅、Ybは測定最大幅である。
【0024】
このようなビームセンサ10は、例えば、ラインレーザセンサやプロファイルレーザセンサ等からなり、図2に示すように、位置制御機構9の垂下端部に1つ設置される。そして、ビーム投光部20から扇状に拡散するレーザビームを規定の周波数で発振する。ビーム受光部21は測定対象物に投影された線状のレーザビームを規定の発振周波数情報(例えば256Hz)にしたがい1周期ごとに読取り、任意の分割数(例えば1024分割)で三次元座標点群に即時変換して出力する。情報処理端末手段19は、出力された三次元座標点群を入力し記憶部に順次格納する。これら三次元座標点群が、すり板4を含む舟体3の上面の形状を構成した表面形状データとなる。
【0025】
情報処理端末手段19の記憶部には、目標分解能情報、云い代えれば測定精度(例えば単位面積当りの三次元座標点数)が設定されて格納されている。上述の任意の分割数は、ビームセンサ10の測定最小幅Yaや測定最大幅Ybにおいても同一である。したがって、目標分解能情報を高く設定した場合は、ビームセンサ10とすり板4を含む舟体3との距離を接近させると共に、Y軸スライダ8のX軸スライダ7上の移動速度及び位置制御機構9のY軸スライダ8上の移動速度を遅くして、ビームセンサ10によるレーザビームの移動を遅くする。逆に、目標分解能情報を低く設定する場合には、ビームセンサ10とすり板4を含む舟体3との距離を離反させると共に、Y軸スライダ8のX軸スライダ7上の移動速度及び位置制御機構9のY軸スライダ8上の移動速度を速くして、ビームセンサ10によるレーザビームの移動を速くする。このように目標分解能情報を調節することで、例えば仮に舟体3が湾曲変形している場合に、舟体3の部位によってはビームセンサ10との距離の変化して三次元座標点群の分解能の相違が生じ、測定誤差を生じるのを防止することができる。
【0026】
上述のような動作を実現するために、測定する前に、情報処理端末手段19に格納された前回周期での三次元座標点群のZ成分情報と、そのときの高さ調節機構11の高さ情報を参照する。これらの情報及び目標分解能情報、レーザ発振周波数情報、任意の分割数情報、測定不可範囲Za、測定可能範囲Zb、測定最小幅Ya、測定最大幅Ybから高さ調節機構11の高さ情報、Y軸スライダ8のX軸スライダ7上の移動速度及び位置制御機構9のY軸スライダ8上の移動速度を決定あるいは更新する。これらの動作は測定中に継続して行う。
【0027】
すり板4を含む舟体3の測定は、上述の決定あるいは更新した各種情報に基づき、ビームセンサ10を移動させ、すり板4を含む舟体3にレーザビームを連続照射して行う。その際、すり板4を含む舟体3の表面は、常に、ビームセンサ10の測定可能範囲Zb内に位置させる。このように、すり板4を含む舟体3の測定は、その場での最適な測定条件を求めながら行う。尚、目標解像度情報は、測定においてこの数値を下回ることがないような所謂目安であり、測定過程中に測定データに局部的に目標解像度情報を上回る部位が生じることがあるが、この部位は、後述するように、間引き処理される。
【0028】
図4は、すり板4を含む舟体3の測定過程の上面模式図である。図4において、22a〜22eは表面形状データ、23L,23Rは幅分布端点、24a,24bはビーム照射イメージ、25は輪郭変化点、26A〜26Dは移動経路情報、27は輪郭表面形状データ、28は内表面形状データ、29は舟体3の輪郭イメージ、30は架線5の輪郭イメージ、Wは測定された舟体3の幅分布、Pは表面形状データ22aの中心点、Lpは中心点Pを通る垂線、Ycは測定可能なビーム照射イメージ24a,24bの長さ、tは離れ位置、Wiは測定を必要とする幅、Liは測定を必要とする長さ、31は情報処理端末手段19の仮想的な記憶領域を示す。
【0029】
次に、電車1を入線させてすり板4を含む舟体3を測定する手順を説明する。電車1の入線により停止指示用トリガセンサ17が作動すると、電車1に停止指示を発信し、同時に、発信した旨を情報処理端末手段19に通知する。通知を受け取った情報処理端末手段19は、電車1が測定位置に完全に停止するまでの規定時間経過後に測定開始の指示を発信する。
【0030】
まず、測定開始位置を特定するため、Y軸スライダ8をX軸スライダ7に沿って移動させビームセンサ10からの照射ビームの光軸R1の直下に架線5が存在しない任意の位置に停止させる。尚、測定開始位置は、可能なら舟体3の長手方向中心近傍で上面が湾曲していない面上が望ましい。次に、ビームセンサ10を測定開始状態に保持し、ビームセンサ10をY軸スライダ8の一端から他端まで移動させる。ここで、測定開始状態とは、ビームセンサ10からの三次元座標点群情報を情報処理端末手段19が受け取って処理することが可能な状態のことである。この動作で取得できる表面形状データは、図4(a)に示すような幅分布Wを有する線状の三次元座標点群22aとなる。ここで、情報処理端末手段19は、表面形状データ22aから幅分布Wの一端を形成する三次元座標点群を幅分布端点23Lとし,幅分布Wの他端を形成する三次元座標点群を幅分布端点23Rと定義する。
【0031】
そして、情報処理端末手段19が三次元座標点群22aを取得できた場合、ビームセンサ10を高さ調節機構11によって目標解像度情報を満たす高さに調節する。この時のビーム照射イメージ24aは長さYcとなり、測定最小幅Yaと測定最大幅Ybの範囲内となる。尚、上記動作の前に、ビームセンサ10の測定可能範囲Zb内にすり板4を含む舟体3が存在するようにしておく。
【0032】
次に、すり板4を含む舟体3の表面形状データの輪郭を取得する。この動作は、本実施の形態においては大別して二つの工程、詳細には四つの測定手順から構成される。
【0033】
第1の工程の測定手順1について図4(b)に基づいて説明する。この手順では測定開始位置から図中左下部の輪郭の表面形状データ22bを取得する。まず、幅分布端点23Lにビームセンサ10からの照射ビームの光軸R1を一致させた後、ビームセンサ10を図中下方に移動させながら連続して測定を行う。そして、反射ビームが受光されなくなってビームセンサ10からの出力がなくなった、云い代えれば照射ビームの光軸R1の直下にすり板4を含む舟体3が存在しなくなった時点で測定手順1は終了となる。測定手順1で取得した三次元座標点群は表面形状データ22bとして情報処理端末手段19の記憶部に格納され、測定手順1のビームセンサ10の移動経路も移動経路情報26Aとして格納される。ここで、移動経路とは、X軸スライダ7をX方向成分、Y軸スライダ8をY方向成分、高さ調節機構11をZ方向成分として、例えば、1/10秒毎あるいはビームセンサ10の発信周波数毎のように、規定カウント毎にその位置情報を収集したビームセンサ10の移動情報郡である。そして、位置情報の収集は、X軸スライダ7、Y軸スライダ8、高さ調節機構11が有する図示しない位置読取り機構から呼び出すようにしてもよく、また、各位置読取り機構から呼び出す時点での情報処理端末手段19からの駆動指示値を用いてもよい。
【0034】
測定中、図4(b)において、ビームセンサ10は照射ビームの光軸R1と舟体3の輪郭が一致するように制御される。輪郭変化の認識は、情報処理端末手段19がビームセンサ10から受け取った今回周期の三次元座標点群の分布と前回周期の三次元座標点群の分布との比較によって行われる。前回周期の三次元座標点群の分布と一致するように、情報処理端末手段19はY軸スライダ8を駆使してビームセンサ10を微調整する。
【0035】
ビームセンサ10の微調整について図4(e),(f)を用いて説明する。図4(e)は、ビームセンサ10の照射ビームの光軸R1が図4(b)の輪郭変化点25に到達した際に取得された理想的な三次元座標点群32xを抜粋した模式図である。図4(f)は、ビームセンサ10の照射ビームの光軸R1が図4(b)の輪郭変化点25をオーバランして移動した際に取得された三次元座標点群32yを抜粋した模式図である。ここで、情報処理端末手段19において、図4(f)の離れ位置tを検出し、Y軸スライダ8の移動補正値を算出し、図4(e)の状態に近づけるように微調整するのである。
【0036】
また、前回周期での三次元座標点群と今回周期での三次元座標点群との比較において、離れ位置tが検出されずにそれらの密度が変化する場合がある。これっは、舟体3とビームセンサ10との距離が変化したことに起因するものであり、その場合には前述のように、ビームセンサ10の高さを調節すればよい。
【0037】
次に、第2の工程の測定手順2を図4(c)に基づいて説明する。ここでは、測定手順1での測定終了位置から図4(c)の右下部の輪郭の表面形状データ22cを取得する。三次元座標点群22aから一次直線を抽出し、この一次直線と垂直に交わり、中心点Pを通る線を垂線Lpと定義する。そして、測定手順1で取得した移動経路情報26Aを呼び出し、垂線Lpに対して線対称となる新たな移動経路情報26Bを作成する。新たな移動経路情報26Bにおける測定開始位置は、測定手順1の移動経路情報26Aの測定終了位置となる。測定手順2による測定は、新たな移動経路情報26Bをビームセンサ10の照射ビームの光軸R1がトレースすることで行われる。このために、測定するすり板4を含む舟体3は左右対称物であることが前提となっており、実際のすり板4を含む舟体3は左右対称に形成されている。ビームセンサ10の照射ビームの光軸R1が新たな移動経路情報26Bの測定終了位置、または幅分布端点23Rに到達した時点で測定手順2は終了となる。当然ながら、測定手順2で取得した三次元座標点群は表面形状データ22cとして情報処理端末手段19の記憶部に格納される。
【0038】
さらに、図4(c)を用いて第1の工程に該当する測定手順3について説明する。ここでは、測定手順2の測定終了位置から図4(c)の右上部の輪郭の表面形状データ22dを取得する。X軸スライダ7とY軸スライダ8の移動方向が測定手順1と逆となる点を除いて基本的には測定手順1と同様な測定を行う。そして、反射ビームが受光されなくなってビームセンサ10からの出力がなくなった、云い代えれば照射ビームの光軸R1の直下にすり板4を含む舟体3が存在しなくなった時点で測定手順3は終了となる。測定手順3で取得した三次元座標点群は表面形状データ22dとして情報処理端末手段19の記憶部に格納され、測定手順1のビームセンサ10の移動経路も移動経路情報26Cとして格納される。
【0039】
その後に行われる第2の工程に該当する測定手順4について、同じ図4(c)を用いて説明する。
【0040】
ここでは、測定手順3の測定終了位置から図4(c)の左上部の輪郭の表面形状データ22eを取得する。X軸スライダ7とY軸スライダ8の移動方向が測定手順2と逆となる点を除いて基本的には測定手順2と同様な測定を行う。測定手順2で求めた垂線Lpと、測定手順3における移動経路情報26Cを呼び出し、この垂線Lpに対して線対称となる新たな移動経路情報26Dを作成する。ビームセンサ10の照射ビームの光軸R1が、この新たな移動経路情報26Dの測定終了位置あるいは幅分布端点23Lに達した時点で測定手順4は終了となる。そして、測定手順4で取得した三次元座標点群は表面形状データ22eとして情報処理端末手段19の記憶部に格納される。
【0041】
以上の測定手順1〜4をもってすり板4を含む舟体3の輪郭の表面形状データ22b〜22eの取得は終了し、これら表面形状データ22b〜22eを情報処理端末手段19の記憶部から呼び出して座標を合わせて連続した表面形状データ、云い代えれば輪郭表面形状データ27とする。
【0042】
このように、すり板4を含む舟体3の輪郭の測定は、ビームセンサ10の照射ビームを連続照射して行って移動経路を記録しつつ測定する第1の工程と、記録した移動経路を参照しつつ測定する第2の工程からなる。第1の工程において、ビームセンサ10の移動速度は、すり板4を含む舟体3の上面の状態を絶えず監視しビームセンサ10の高さ距離を適正に保つ所謂倣い動作が含まれるために、比較的低速度に抑えらている。そこで、第1の工程での測定時に取得した移動経路情報を参照することにより、第2の工程では移動情報が明確になり、高速度でビームセンサ10を移動させることが可能となり、測定を速やかに行うことが可能となる。
【0043】
つづいて、すり板4を含む舟体3の内側の表面形状データ28の取得を行う。既に取得した輪郭の表面形状データ27に基づいて、情報処理端末手段19によって、三次元座標点群が分布していない領域を探索し、改めて測定を必要とする幅Wiと長さLiを求め、この幅Wiと長さLiに対して必要とするビーム照射走査回数を求める。ここで、測定を必要とする長さLiをX軸スライダ7の走査移動範囲とし、測定は、輪郭の表面形状データ27を測定したときと同じように、X軸スライダ7とY軸スライダ8の移動速度及び高さ調節機構11の高さ情報を決定して更新しつつ行う。これによって取得された三次元座標点群を内表面形状データ28とする。
【0044】
図5は、上記手順で取得された三次元座標点群の模式図である。図5において、33は輪郭の表面形状データ27と内側の表面形状データ28とを合成した完全な表面形状データであり、34は情報処理端末手段19における仮想的な記憶領域を示す。
【0045】
ここで完全な表面形状データ33は、輪郭の表面形状データ27と内側の表面形状データ28とを取得する際に重複してビームセンサ10を走査させた部位が存在し、この部位は三次元座標点群が密集する。そこで、必要に応じて、情報処理端末手段19では、完全な表面形状データ33に対して次のような処理を行う。まず、重複して密集した三次元座標点群の間引き処理である。具体的には、前述した目標解像度情報を呼び出し、完全な表面形状データ33の全域を走査し、目標解像度以上となる部位に対して不必要な三次元座標点群を削除してノイズ除去処理を行う。一定量離散した三次元座標点群に対しては、測定ノイズとみなし、完全な表面形状データ33から削除する。さらに、ここで、架線5に該当する三次元座標点群に対しても削除する。
【0046】
次に、図6に基づいて位置合わせ補正について説明する。図6において、35は完全な表面形状データ33のXY成分、θxyはXY成分35の傾き角度、L1はXY成分35(舟体3の長手方向)の近似中心線、36は完全な表面形状データ33のYZ成分、θyzはYZ成分36の傾き角度、L2はYZ成分36(電車1の進行方向)の近似中心線、37は完全な表面形状データ33のXZ成分、θxzはXZ成分37の傾き角度、L3はXZ成分37(舟体3の厚み方向)の近似中心線、38は補正原点を示す。
【0047】
完全な表面形状データ33は、情報処理端末手段19によって固有IDを付与され、同種の表面形状データと共に記憶部に格納されている。ところで、記憶部から呼び出されて記憶領域34に立体的に構築された完全な表面形状データ33は、設計データと同じ姿勢であるとは限らない。したがって、完全な表面形状データ33を設計データと異なる姿勢で位置合わせを行えば、大きな差異が生じて正確な測定が困難となるので、事前に、完全な表面形状データ33の角度を補正して、二つのデータが同じ姿勢にする必要がある。
【0048】
そこで、既に取得され記憶部に格納された設計データは、傾き角度θxy,θyz,θxzが共に0度に補正されていると仮定して完全な表面形状データ33の傾き角度θxy,θyz,θxzの補正について説明する。
【0049】
まず、XY成分35の傾き角度θxyの補正は、図6(a)に示すように、完全な表面形状データ33のXY成分35から有限長の一次直線式(2通り存在)を算出する。XY成分35の広がりが大きい、即ち、舟体3の長手方向の直線をXY成分35の近似中心線L1とする。そして近似中心線L1と、図5の記憶領域34に予め設定しておいたX方向法線とから、XY成分35の傾き角度θxyを算出し、完全な表面形状データ33を全ての三次元座標点群に対して補正原点38を回転中心として回転させて傾き角度θxyを0度となるように補正する。
【0050】
YZ成分36の傾き角度θyzの補正については、図6(b)に示すように、上述の有限長の一次直線式の算出方を再度実行し、YZ成分36の広がりが小さい方の直線を+Z方向〜−Z方向に延伸させて平面化し、この平面に完全な表面形状データ33のYZ成分36を投影する。YZ成分36から有限長の一次直線式を算出し、YZ成分36の広がりが大きい、即ち、電車1の進行方向の直線をYZ成分36の近似中心線L2とする。そして近似中心線L2と、図5の記憶領域34に予め設定しておいたY方向法線とから、YZ成分36の傾き角度θyzを算出し、完全な表面形状データ33を全ての三次元座標点群に対して補正原点38を回転中心として回転させて傾き角度θyzを0度となるように補正する。尚、記憶領域34のX,Y,Z方向の応戦は、記憶部に格納してあるどの表面形状データを呼び出しても、同じ条件で適用される。また、補正原点38は、近似中心線L1,L2,L3が交差する位置に設定する。
【0051】
次に、XZ成分37の傾き角度θxzの補正は、図6(c)に示すように、XY成分35の近似中心線L1を+Z方向〜−Z方向に延伸させて平面化し、この平面に完全な表面形状データ33のXZ成分37を投影する。XZ成分37から有限長の一次直線式を算出し、XZ成分37の広がりが大きい、即ち舟体3の長手方向の直線をXZ成分37の近似中心線L3とする。そして近似中心線L3と、図5の記憶領域34に予め設定しておいたX方向法線とから、XZ成分37の傾き角度θxzを算出し、完全な表面形状データ33を全ての三次元座標点群に対して補正原点38を回転中心として回転させて傾き角度θxzを0度となるように補正する。
【0052】
上述のようにして傾き角度θxy,θyz,θxzの角度補正値を算出した後、完全な表面形状データ33に対応させ、対応前の表面形状データ33と置換して情報処理端末手段19の記憶部に格納する。尚、対応前の表面形状データ33と置換せずに、算出した傾き角度θxy,θyz,θxzの角度補正値を情報処理端末手段19の記憶部に格納しておき、後述する評価時に対応前の表面形状データ33と置換するようにしてもよい。
【0053】
次に、立体的な位置合わせのための微調整について説明する。角度補正によって設計データと完全な表面形状データ33とはほぼ同じ姿勢になった後、両データのX,Y,Z方向を一致させる。設計データを模範(固定)として角度補正した完全な表面形状データ33を三次元移動させ、両データの分布の誤差和が最小となる組合せをX,Y,Z方向夫々の補正値として取得し立体的な位置合わせの微調整を終了する。ここで、微調整終了時に、完全な表面形状データ33を実際に三次元移動させた情報も入れ替えの際に適用すると良い。
【0054】
次に、本実施の形態によるパンタグラフ型集電装置の検査装置によるすり板4を含む舟体3の測定手順を、図7に示すフローにしたがって説明する。
【0055】
測定開始時に、電車1を機場内の検査位置に規定速度で運転させ、徐行指示用トリガセンサ16及び停止指示用トリガセンサ17からの信号に基づいて電車1を徐行させた後停止させる。これにより、すり板4を含む舟体3は、測定可能な位置に移動する(ステップ1)。続いて、ビームセンサ10の動作チェックを行う(ステップ2)。尚、このビームセンサ10の動作チェックは、ステップ1の前やステップ1と平行に行うようにしてもよい。
【0056】
その後、すり板4を含む舟体3の輪郭表面形状データ27を取得する(ステップ3)と共に、内表面形状データ28を取得し(ステップ4)、これらから最終的に完全な表面形状データ33を取得する(ステップ5)。
【0057】
一般的に、架線5と接触するすり板4あるいは舟体3の摩耗の傾向において、特に舟体3の幅方向、即ち、電車1の進行方向に置ける摩耗はほぼ均一となっている。そして、電車1は、営業運転時に上り運転と下り運転を頻繁に繰り返すことから、すり板4あるいは舟体3の摩耗は幅方向端部に集中する傾向にある。したがって、すり板4あるいは舟体3の幅方向端部を含む輪郭表面形状データ27を取得すれば、内表面形状データ28の摩耗量を推定可能である。そのような場合には、ステップ4を省略することも可能である。
【0058】
次に、ステップ5で取得された完全な表面形状データ33と、情報処理端末手段19の記憶部に予め格納されていた当該すり板4あるいは舟体3の設計データとに基づいて、すり板4あるいは舟体3の摩耗状態の評価を行う(ステップ6)。
【0059】
すり板4あるいは舟体3の摩耗状態の評価は、完全な表面形状データ33と設計データとの立体的な位置合わせを行い、その差分情報から得られるすり板4あるいは舟体3の摩耗量の度合いと荒損の有無である。これらの評価結果は、評価終了後に完全な表面形状データ33に関連付けられる。尚、設計データは、すり板4あるいは舟体3の三次元CADデータを用い、望ましくは、電車1のパンタグラフ2にすり板4を含む舟体3を最初に搭載した際に、本検査装置で測定して作成した完全な表面形状データである。
【0060】
荒損の有無の評価は、基本的に、上述の差分情報に特異的な特徴を完全な表面形状データ33から探索することであり、例えば、次の要領で行う。即ち、検査対象となるすり板4を含む舟体3における前回測定時に摩耗量と今回測定時の摩耗量、そして、その間の電車1の営業運転時間から、運転時間当りの摩耗量を算出する。ここで、今回測定時の完全な表面形状データ33から、電車1の営業運転時間に見合った摩耗量を超過する差分情報の有無を探索し、超過する差分情報が探索された場合、情報処理端末手段19ではその部位を荒損と判断して作業者に実物の確認を行わせ、修繕や交換を促す。また、別の要領としては、完全な表面形状データ33から、情報処理端末手段19に予め登録しておいた例えば、実際の荒損の表面形状データや荒損の輪郭を人工的に再現した三次元座標点群等の荒損パターンと類似する部位を探索し、その部位を荒損と判断してもよい。また、荒損の有無の最終的な判断は、必要に応じて作業者が行うようにしてもよい。具体的には、図1において、Y軸スライダ8の長手方向端部にすり板4を含む舟体3の長手方向に向いた撮影手段を設け、情報処理端末手段19で荒損と判断した完全な表面形状データ33の特定箇所(三次元座標点群)の代表点の三次元座標から、その代表点を取得した際のX軸スライダ7の位置情報を割り出し、荒損の有無の評価後に、X軸スライダ7をその位置に移動させ、撮影手段による撮影結果を作業者が確認し、作業者の判断を荒損の有無の最終的な評価とするのである。
【0061】
続いて、搭載位置の異なる未測定のすり板4を含む舟体3の有無を確認し(ステップ7)、未測定のすり板4を含む舟体3が存在すれば、ステップ1に戻って電車1を所定距離移動させ、未測定のすり板4を含む舟体3についてステップ2〜6を実施し、全てのすり板4を含む舟体3を測定した時点で測定を終了させる。
【0062】
ところで、すり板4を含む舟体3の荒損の評価は、検査装置での全てのすり板4を含む舟体3の測定が終了した時点で、まとめて行ってもよく、また、夫々のすり板4を含む舟体3の測定が終了した時点でその都度行うようにしてもよい。
【0063】
ところで、上記すり板4を含む舟体3の測定手順のうち、ステップ3〜5が本発明による表面形状データを作成する工程に該当し、ステップ6が本発明による表面形状データと予め取得しておいた設計データとを比較してすり板を含む舟体の摩耗量を求める工程に該当する。
【0064】
以上説明したように本実施の形態によれば、停止中の電車のパンタグラフに支持されたすり板の表面に、ビームを連続的に照射して前記すり板の表面形状データを作成し、これを予め取得しておいた設計データとを比較して前記すり板の摩耗量を求めるようにしたので、ビームセンサを複数設ける必要なく、その結果、すり板の磨耗量や荒損位置を安価にて正確に測定できるパンタグラフ型集電装置の検査装置を得ることができる。
【図面の簡単な説明】
【0065】
【図1】本発明によるパンタグラフ型集電装置の検査装置の周辺を示す斜視図。
【図2】舟体に対するセンサ駆動機構を示す斜視図。
【図3】ビームセンサを示す斜視図。
【図4】すり板を含む舟体の測定手順を示す上面模式図。
【図5】測定終了時のすり板を含む舟体の表面形状データの模式図。
【図6】測定終了時のすり板を含む舟体の表面形状データの位置合わせ角度補正の概念図。
【図7】すり板を含む舟体の測定手順を示すフロー図。
【符号の説明】
【0066】
1…電車、2…パンタグラフ、3…舟体、4…すり板、5…架線、6A,6B…検査用架台、7…X軸スライダ、8…Y軸スライダ、9…位置制御機構、10…ビームセンサ、11…高さ調節機構、12…正面傾斜角調節機構、13…捻り角調節機構、14…側面傾斜角調節機構、15…センサ収納箱、16…徐行指示用トリガセンサ、17…停止指示用トリガセンサ、18…検査事務室、19…情報処理端末手段、20…ビーム投光部、21…ビーム受光部、22a〜22e…表面形状データ、23L,23R…幅分布端点、24a,24b…ビーム照射イメージ、25…輪郭変化点、26A〜26D…移動経路情報、27…輪郭表面形状データ、28…内表面形状データ、29,30…輪郭イメージ、31…記憶領域、32x,32y…三次元座標点群、33…表面形状データ、34…記憶領域、35…XY成分、36…YZ成分、37…XZ成分、38…補正原点。
【特許請求の範囲】
【請求項1】
電車を規定位置に誘導する電車誘導手段と、規定位置に設置され電車のパンタグラフに支持されたすり板の表面を連続的に測定するビームセンサと、このビームセンサの前記すり板に対する位置を移動制御するセンサ駆動機構と、前記ビームセンサからの出力信号に基づいて前記すり板の表面形状データを作成する情報処理端末手段とを備え、この情報処理端末手段は、作成された前記表面形状データと予め格納された設計データとを比較して前記すり板の摩耗量を求めるように構成されていると共に、前記センサ駆動機構へ前記ビームセンサの移動指示を行うように構成されていることを特徴とするパンタグラフ型集電装置の検査装置。
【請求項2】
前記ビームセンサは、前記すり板を含む舟体の表面を測定し、前記情報処理端末手段は、前記ビームセンサからの出力に基づいて前記すり板を含む舟体の表面形状データを作成して予め格納された設計データと比較することを特徴とする請求項1記載のパンタグラフ型集電装置の検査装置。
【請求項3】
前記情報処理端末手段は、前記ビームセンサで前記すり板を含む舟体の輪郭の一部を移動経路情報を取得しつつ測定すると共に、取得した移動経路情報に基づいて前記すり板の輪郭の残る部分を測定するように前記センサ駆動機構に駆動指示を行うように構成されていることを特徴とする請求項2記載のパンタグラフ型集電装置の検査装置。
【請求項4】
前記情報処理端末手段は、前記ビームセンサで前記すり板を含む舟体の輪郭を移動経路情報を取得しつつ測定すると共に、取得した移動経路情報に基づいて前記輪郭の内側を測定するように前記センサ駆動機構に駆動指示を行うように構成されていることを特徴とする請求項2記載のパンタグラフ型集電装置の検査装置。
【請求項5】
停止中の電車のパンタグラフに支持されたすり板を含む舟体の表面に、ビームを連続的に照射して前記すり板を含む舟体の表面形状データを作成する工程と、作成された前記表面形状データと予め取得しておいた設計データとを比較して前記すり板を含む舟体の摩耗量を求める工程とを有するパンタグラフ型集電装置の検査方法。
【請求項1】
電車を規定位置に誘導する電車誘導手段と、規定位置に設置され電車のパンタグラフに支持されたすり板の表面を連続的に測定するビームセンサと、このビームセンサの前記すり板に対する位置を移動制御するセンサ駆動機構と、前記ビームセンサからの出力信号に基づいて前記すり板の表面形状データを作成する情報処理端末手段とを備え、この情報処理端末手段は、作成された前記表面形状データと予め格納された設計データとを比較して前記すり板の摩耗量を求めるように構成されていると共に、前記センサ駆動機構へ前記ビームセンサの移動指示を行うように構成されていることを特徴とするパンタグラフ型集電装置の検査装置。
【請求項2】
前記ビームセンサは、前記すり板を含む舟体の表面を測定し、前記情報処理端末手段は、前記ビームセンサからの出力に基づいて前記すり板を含む舟体の表面形状データを作成して予め格納された設計データと比較することを特徴とする請求項1記載のパンタグラフ型集電装置の検査装置。
【請求項3】
前記情報処理端末手段は、前記ビームセンサで前記すり板を含む舟体の輪郭の一部を移動経路情報を取得しつつ測定すると共に、取得した移動経路情報に基づいて前記すり板の輪郭の残る部分を測定するように前記センサ駆動機構に駆動指示を行うように構成されていることを特徴とする請求項2記載のパンタグラフ型集電装置の検査装置。
【請求項4】
前記情報処理端末手段は、前記ビームセンサで前記すり板を含む舟体の輪郭を移動経路情報を取得しつつ測定すると共に、取得した移動経路情報に基づいて前記輪郭の内側を測定するように前記センサ駆動機構に駆動指示を行うように構成されていることを特徴とする請求項2記載のパンタグラフ型集電装置の検査装置。
【請求項5】
停止中の電車のパンタグラフに支持されたすり板を含む舟体の表面に、ビームを連続的に照射して前記すり板を含む舟体の表面形状データを作成する工程と、作成された前記表面形状データと予め取得しておいた設計データとを比較して前記すり板を含む舟体の摩耗量を求める工程とを有するパンタグラフ型集電装置の検査方法。
【図1】


【図2】
【図3】

【図4】
【図5】
【図6】
【図7】
【図2】
【図3】
【図4】
【図5】
【図6】
【図7】
【公開番号】特開2010−136563(P2010−136563A)
【公開日】平成22年6月17日(2010.6.17)
【国際特許分類】
【出願番号】特願2008−311681(P2008−311681)
【出願日】平成20年12月8日(2008.12.8)
【出願人】(390010973)日立交通テクノロジー株式会社 (20)
【Fターム(参考)】
【公開日】平成22年6月17日(2010.6.17)
【国際特許分類】
【出願日】平成20年12月8日(2008.12.8)
【出願人】(390010973)日立交通テクノロジー株式会社 (20)
【Fターム(参考)】
[ Back to top ]