
ヒンジ構造
本発明は、第1の剛体と、第2の剛体と、第1の剛体および第2の剛体に連結され、第1の剛体および第2の剛体の、互いに対する実質的な二次元の回転を可能にする接合部材とを含む、ヒンジに関する。接合部材は、回転によって曲げることができるHPPE繊維を含む。

【発明の詳細な説明】
【発明の詳細な説明】
【0001】
本発明は、ヒンジに関し、特に、ポリエチレンを含むヒンジに関する。本発明は、また、そのようなヒンジを含む医療装置などの、そのようなヒンジを含む装置に関し、特に、そのようなヒンジを含む人工指関節に関する。
【0002】
人工関節などの医療製品では、典型的に、高分子と金属合金との組み合わせを利用する。金属合金は関節に用いられ、高分子は軟質ソケットとして用いられる。使用時、高分子部分は金属関節部分に対して摩耗し、時間の経過とともに高分子の超微粒子が体内に放たれる。これらの微粒子は、周囲骨の再吸収を引き起こすことが知られている。これが義肢部品の緩みにつながり、再置換術すら必要となる可能性もある。
【0003】
国際公開第2007/002409号パンフレットおよび米国特許出願公開第2007016193号明細書は、患者の脊椎の少なくとも2つの椎骨を柔軟に連結するためのインプラント装置を開示している。装置は部分的に折り畳まれた領域により連結される2つのロッドを含む。2つのロッドは椎弓根スクリューに連結され、それはさらに椎骨に連結される。装置の少なくとも一部は、チタン、ポリエーテルエーテルケトン、ポリエーテルケトンケトン、超高分子量ポリエチレンおよびポリメタクリル酸メチル(PMMA)からなる群から構成されうる。そのような装置は使用時に繰り返し曲げられるため、曲げ疲労に対して高い抵抗を有する必要がある。当業界においては、曲げ疲労抵抗を向上させた装置が必要とされている。
【0004】
本発明の目的は、機械的特性を向上させたヒンジを提供することである。
【0005】
本発明による目的は、第1の剛体と、第2の剛体と、第1の剛体および第2の剛体に連結され、第1の剛体および第2の剛体の、互いに対する実質的に二次元の回転を可能にする接合部材とを含むヒンジにより達成され、接合部材は回転により曲げることができる高性能ポリエチレン(HPPE)繊維を含む。
【0006】
本発明によれば、接合部材内のHPPE繊維は、第2の(第1の)剛体に対する第1の(第2の)剛体の動きにより曲げられる。第1の剛体および第2の剛体は回転軸を中心として互いに対して回転する。回転は、好ましくは、特定の固定角度内に限定されてもよい。回転角は任意の適切な手段により限定されてもよい。固定角度内のみの回転を可能にするため、接合部材の寸法および構造を第1および第2の剛体間の距離に対して選択してもよい。第1および第2の剛体は、さらなる回転を防ぐため互いに固定角度で単に接してもよい。接合部材は、それ自体が特定の程度までのみの変形を可能にする弾性を有してもよい。当業者は回転角度をどのように限定するかを理解しており、したがってそれは本明細書中に詳細に記載されない。
【0007】
国際公開第2007/002409号パンフレットおよび米国特許出願公開第2007016193号明細書で提案される超高分子量ポリエチレンは単に微粒子粉体を意味することを認識すべきである。開示には、超高分子量ポリエチレン出発物質が微粒子粉体以外のいずれかの形態となりうるという指示、教示または提案はない。例えば、記載されている唯一の繊維質材料は炭素繊維複合材である。UHMWPE粉体はHPPE繊維ではない。特に特性および処理が完全に異なる。
【0008】
接合部材内のHPPE繊維は、曲げ疲労に対して非常に高い抵抗を示す。ヒンジの最も重要な機能は、破断することなく多数回曲げることができることであるため、これは極めて有利である。
【0009】
本発明の文脈内において、ファイバは、不定の長さの細長い物体を意味し、幅および厚さよりもかなり長い長さ寸法を有すると理解される。用語ファイバは、したがってモノフィラメント、マルチフィラメント糸、リボン、ストリップまたはテープ等を含み、規則的なまたは不規則な断面を有しうる。用語ファイバは、また、上記いずれか1つの複数または組み合わせを含む。
【0010】
モノフィラメントまたはテープのようなファイバの形態を有するファイバは様々な繊度のものとすることができるが、一般に、10〜数千dtexの範囲、好ましくは100〜2500dtexの範囲、より好ましくは200〜2000dtexの繊度を有する。マルチフィラメント糸は、それぞれが一般に、0.2〜25dtexの範囲、好ましくは約0.5〜20dtexの繊度を有する複数のフィラメントを含む。マルチフィラメント糸の繊度はまた、例えば、10から数千dtexまで幅広く変化してもよいが、好ましくは、約200〜4000dtexの範囲内、より好ましくは300〜3000dtexである。
【0011】
本明細書中においてHPPEファイバは、ポリエチレンから作られ、かつ少なくとも1.5N/tex、好ましくは少なくとも2.0N/tex、より好ましくは少なくとも2.5N/texまたはさらには少なくとも3.0N/texのテナシティを有するファイバであると理解される。ファイバの引張強度、また単に強度、またはテナシティはASTM D885−85またはD2256−97を基にした公知の方法により求められる。HPPEファイバのテナシティの上限に根拠はないが、利用できるファイバは一般にテナシティが多くて約5〜6N/texのものである。HPPEファイバは、また、例えば、少なくとも75N/tex、好ましくは少なくとも100または少なくとも125N/texという高い引張係数を有する。HPPEファイバはまた高弾性率ポリエチレンファイバとも呼ばれる。
【0012】
HPPEファイバは超高分子量ポリエチレン(UHMWPE)の溶液を適切な溶剤内でゲルファイバに紡糸し、部分的または完全に溶剤を除去する前、間および/または後にファイバを延伸することにより作製でき、それはいわゆるゲル紡糸法による。UHMWPEの溶液のゲル紡糸は当業者に周知であり、欧州特許出願公開第0205960A号明細書、欧州特許出願公開第0213208A1号明細書、米国特許第4413110号明細書、英国特許出願公開第2042414A号明細書、欧州特許第0200547B1号明細書、欧州特許第0472114B)号明細書、国際公開第01/73173A1号パンフレットを含む多数の公報およびAdvanced Fiber Spinning Technology、Ed.T.Nakajima、Woodhead Publ. Ltd(1994)、ISBN1−855−73182−7、およびそれらに引用される参考文献内に記載されており、その全てを参照により本明細書中に組み込む。
【0013】
UHMWPEは、少なくとも5dl/g、好ましくは約8〜40dl/gの固有粘度(IV、デカリン中溶液を135℃で測定したもの)を有するポリエチレンであると理解される。固有粘度は、MnおよびMwのような実際のモル質量パラメータよりも簡易に求められるモル質量(分子量とも呼ばれる)の尺度である。IVとMwの間にはいくつかの経験的関係があるが、そのような関係はモル質量分布に依存する。式Mw=5.37*104[IV]1.37(欧州特許出願公開第0504954A1号明細書を参照)に基づくと、8dl/gのIVは約930kg/molのMwに等しくなる。好ましくは、UHMWPEは炭素原子100個当たりに1つ未満の分岐、好ましくは炭素原子300個当たりに1つ未満の分岐を有する線状ポリエチレンであり、1つの分岐または側鎖または鎖分岐が通常少なくとも10個の炭素原子を含む。線状ポリエチレンは、5モル%までのプロピレン、ブテン、ペンテン、4−メチルペンテンまたはオクテンのようなアルケンなどの1つまたは複数のコモノマーをさらに含んでもよい。
【0014】
HPPE繊維がゲル紡糸法により作製される場合、残留溶剤含有量は好ましくは多くて100ppmである。これはヒンジが医療用途で使用される場合に特に重要である。本明細書中において残留溶剤含有量とは、HPPE繊維を作製するのに使用され、最終繊維内に依然残っている溶剤の含有量を意味すると理解される。糸を作製する工程において、UHMwPEのゲル紡糸用として公知の溶剤であれば何でも使用することができる。
【0015】
テナシティなどの機械的特性はゲル紡糸法により作製されるHPPEファイバと比較するとより制限されるが、HPPE繊維は、高分子量を有するポリエチレンの溶融紡糸により作製することもできる。溶融紡糸されうるポリエチレンの分子量の上限はUHMWPEの分子量の範囲内とすることができるが、ゲル紡糸法の限度よりも低い。溶融紡糸されるHPPE繊維は、上に定義したようなUHMWPEよりも低い分子量を有するポリエチレンからも作製されうる。溶融紡糸法は、当技術分野において広く知られており、PE融液を形成するためPE組成物を加熱し、PE融液を押出し、固化したPEを得るため押出された融液を冷却し、固化したPEを少なくとも1回延伸することを含む。方法は、例えば、その内容を参照により本明細書中に組み込む、欧州特許出願公開第1445356A1号明細書および欧州特許出願公開第1743659A1号明細書に言及されている。
【0016】
一実施形態において、UHMWPEは少量、好ましくは炭素原子1000個当たり少なくとも0.2、または少なくとも0.3の、ペンダント側基のような比較的小さな基、好ましくはC1〜C4のアルキル基を含む。そのようなファイバは、高い強度およびクリープ抵抗という有利な組み合わせを示す。大きすぎる側基または多すぎる側基の量は、しかしながら、ファイバ作製の工程にマイナスに影響する。この理由のため、UHMWPEは、好ましくはメチルまたはエチル側基、より好ましくはメチル側基を含む。側基の量は炭素原子1000個当たり、好ましくは多くて20、より好ましくは多くて10、5または多くて3である。
【0017】
HPPEファイバは、少量、概して5質量%よりも少ない、好ましくは3質量%よりも少ない、酸化防止剤、熱安定剤、着色剤、流れ促進剤(flow promoter)等などの慣習的な添加物をさらに含んでもよい。UHMWPEは単一ポリマーグレードとすることができるが、例えば、IVまたはモル質量分布および/または型およびコモノマーまたは側基の数が異なる、2つ以上の異なるポリエチレングレードの混合物とすることもできる。
【0018】
本発明によるヒンジは、それぞれが互いに係合するため特別に適応させた形状を有する2つの部材を含む接合部を有する一般的な従来のヒンジの構造を必要としない。一般に、従来のヒンジの接合部は、円筒状の部分を有する第1の部材および管部分を有する第2の部材を含み、円筒状の部分は管部分の内部に受容され、かつ円筒状の部分は管部分の中心において回転軸を中心として回転する。従来のヒンジとは異なり、本発明によるヒンジの接合部材は回転により曲げられる1つの一体型の物体からなってもよく、これはヒンジがはるかに単純な構造を有するという重要な利点を付与する。接合部材が1つの一体型の物体であるとは、本明細書中では、接合部材が回転を可能にするため曲げられる1つの分離不可能な要素からなることを意味する。
【0019】
第1および第2の剛体は適切であれば、金属、セラミックおよび高分子およびそれらを組み合わせたものを含むいかなる材料で作られてもよい。剛体が剛体の回転運動により接合部材のHPPE繊維と接する実施形態には非金属材料が好適である。これは剛体が接合部材と研磨接触することに起因する接合部材のさらなる摩耗を考慮するものである。さらに、本発明による剛体の回転運動は剛体の大きなかつ制御可能な可動域につながる。
【0020】
第1の剛体および/または第2の剛体は、圧縮成形されたHPPE繊維を含むことが好ましい。圧縮成形されたHPPE繊維の少なくとも一部は剛体の表面に配置されることが好ましい。圧縮成形されたとは、本明細書中では、HPPE繊維が特定の形状に配置され、高温で高圧に晒されて少なくとも部分的に融解しあい、1つの物体を形成することを意味する。圧力および温度は、HPPE繊維のテナシティなどの機械的特性が大幅に低下しない範囲内で選択されることが好ましい。この実施形態は剛体が高い耐摩耗性を有するという利点を有する。また、この実施形態は、剛体を、医療用途における使用に好ましくない可能性のあるいかなる材料も使用することなく作製してもよいという重要な利点を有する。
【0021】
本発明の一実施形態によれば、接合部材はHPPE繊維を含む布帛を含む。当技術分野において織物または布とも呼ばれる布帛とは、本明細書中において、インターレース加工されたフィラメントまたは糸を含むシートのような構造であると理解され、前記布帛はその他の2つの寸法、すなわち軸方向寸法および横断寸法よりもかなり薄い厚さを有する。本発明の布帛は、当技術分野において公知のあらゆる構造のもの、例えば、織り、編み、組み、編込み、または不織またはそれらを組み合わせたものであってもよい。
【0022】
さらなる実施形態において、接合部材はHPPE繊維を含む糸を含む。糸とは、本明細書中において、その横断寸法がその長さよりもかなり短い、撚糸、撚合わせ、編組等による繊維から作られ、かつケーブルまたは組紐を含むあらゆる細長い物体を意味する。
【0023】
本発明の一実施形態によれば、HPPE繊維で作られた布帛または糸は第1および第2の剛体に直接連結される。これは、例えば、布帛の一部を第1および第2の剛体に植設することによりなされてもよい。本発明の1つの好適な実施形態によれば、HPPE繊維の少なくともいくらかが第1の剛体および/または第2の剛体内に延在する。剛体内に延在する接合部材内のHPPE繊維は、接合部材と剛体間の強固な連結を設ける。
【0024】
一方、HPPE繊維は、接合部材の曲げることができる部分内のみに使用されてもよい。これは費用の観点から有利となりうる。接合部材は、第1および第2の剛体に連結される、HPPE繊維以外のさらなる要素を含んでもよい。
【0025】
繊維の少なくともいくつかは、回転軸に対して略垂直な向きで配置されることが好ましい。これらの繊維は曲げ疲労に対してさらなる抵抗を付与する。
【0026】
好適な実施形態において、第1の剛体および/または第2の剛体は、樹脂に含浸させたHPPE繊維を含む。そのような実施形態は、非常に簡単な方法で作製されうるという利点を有する。繊維は不規則にまたは特定の向きまたは構造に配置されてもよく、かつ樹脂を、例えば、繊維上に樹脂を単に流し込むことにより添加してもよい。また、樹脂に繊維を添加してもよく、この実施形態において順序は重要でないことが理解されるであろう。当業者に周知のように、種々のタイプの複合製造工程を使用することができる。硬化後、樹脂を、ヒンジの回転軸が生成されることになる、少なくとも1つのHPPE繊維に交差する線で曲げてもよい。曲げまたは複数回の曲げの後、樹脂は最終的に破断する。樹脂の破断はHPPE繊維の破断をもたらさず、接合部材には曲げることができるHPPE繊維が設けられる。2つの部分に破断した樹脂は2つの剛体を設ける。一方、接合部材となる予定の繊維配列の一部は、樹脂を塗布することから除外してもよい。この場合、曲げの工程は必要なく、製造工程がより単純になりうる。樹脂は、生体適合性型の樹脂から選択されることが好ましい。2つの剛体間に繊維状の連結部を有する多くの幾何学的形状が可能である。
【0027】
剛体を、樹脂を使用せずにHPPE繊維から作製することもまた可能である。これは、例えば、上に言及したようなHPPE繊維の圧縮成形によりなされうる。HPPE繊維は、所望の形状、例えば、板状部材に配置されてもよく、板状部材は、対向する縁端間に延在する1つの領域以外は結束させてもよい。領域の両側の結束された部分は第1の物体および第2の剛体を設け、結束されていない領域は接合部材を設ける。
【0028】
さらなる実施形態において、接合部材は、HPPE繊維から形成される糸を含み、糸は互いに対する回転を可能にするよう第1の剛体と第2の剛体とを連結する。
【0029】
糸は、糸から作られた結節により第1および/または第2の剛体に取付けられてもよい。これは多くの方法で実施されてもよい。例えば、剛体には穴が設けられてもよく、穴を通って糸が貫通し、糸が剛体から外れるのを防ぐために結節が作られる。例えば、糸が穴を貫通した後、穴の直径よりも大きな結節を作ることにより、糸が穴を有する剛体から外れることを防止する。第1および第2の剛体の両方に穴が設けられてもよく、2つの穴を貫通する糸からループが形成されてもよい。各剛体には少なくとも2つの穴が設けられ、2つの穴を通って糸が貫通することが好ましい。これが剛体の回転運動の軸を限定することを可能にする。
【0030】
別の実施形態において、第1および/または第2の剛体は、その周りに結節が形成される突出部を含む。特に好適な実施形態において、第1および第2の剛体は一端において実質的にT形状を有し、第1および第2の剛体は、T形状の頭部が実質的に平行するような様式で配置され、第1および第2の剛体の頭部間の回転軸を中心とした回転を可能にするため、糸が頭部に巻回される。
【0031】
別の好適な実施形態において、第1の剛体および第2の剛体のそれぞれは、実質的にシートのような部分を有する。第1の剛体および第2の剛体はシートのような形状を有することが好ましい。シートのような部分は、第1の面および第1の面の逆側に第2の面を有する。第1の剛体の第1の面および第2の剛体の第1の面は同じ側にある。接合部材は、少なくとも第1の部材および第2の部材を含む。第1の部材および第2の部材は、連結されるか、または分離されてもよい。第1の部材は、第1の剛体の第1の側から第2の剛体の第2の側へ延在する。第2の部材は、第1の剛体の第2の側から第2の剛体の第1の側へ延在する。接合部材は、第1の剛体から一方の側から第2の剛体の他方の側に延在するさらなる部材を含んでもよいことが理解されるであろう。
【0032】
本発明はまた、本発明によるヒンジを含む医療装置に関する。接合部材は実質的にHPPE繊維からなることが好ましい。第1および第2の剛体は、実質的に外科用ステンレス鋼、または高分子、好ましくはポリオレフィン、より好ましくはポリエチレン、最も好ましくは粉体ベースまたは繊維ベースのUHMWPEなどの生体適合性材料からなることが好ましい。最も好適な実施形態において、医療装置は実質的にHPPE繊維からなる。例えば、第1および第2の剛体は圧縮成形されたHPPE繊維から作られてもよい。これらの剛体は、次いで、HPPE繊維により連結されてもよい。一方、HPPE繊維は、所望の形状に配置されてもよく、剛体になる予定の部分は、例えば、圧縮成形により結束されてもよい。残りの部分はその可撓性を維持し、接合部材を設ける。
【0033】
本発明は、また、本発明によるヒンジを備える人工関節に関する。
【0034】
本発明は、また、本発明によるヒンジを備える人工指関節に関する。人工指関節の第1および第2の剛体は、実質的にT形状を有していることが好ましい。第1および第2の剛体は、T形状の頭部が実質的に平行するような様式で配置される。HPPE繊維から形成される糸は、第1および第2の剛体の頭部間の回転軸を中心とする回転を可能にするため頭部に巻回される。
【0035】
本発明によるヒンジは、繰り返しの曲げを伴う種々の機械的な用途に使用することができる。例えば、本発明によるヒンジを含むロボットアームが特に有利である。特に、剛体の回転運動のための低摩耗と併せた、繰り返しの曲げを可能にする機能は本発明の主な利点である。ヒンジ構造の高い圧力においてさえも摩耗は低いままであることを認識すべきである。特に、医療用途においては、摩耗および関連する摩耗粒子の生成は重大な関心事であり、これは本発明により解決されうる。
【0036】
本発明は、また、本発明によるヒンジを含む容器に関する。容器は、容器本体およびヒンジによって容器本体に対して可動な扉を含む。容器本体および扉はそれぞれ第1の剛体および第2の剛体を含む。第1の剛体および第2の剛体は、樹脂に含浸させたHPPE繊維を含むことが好ましい。特に有利な実施形態において、容器は航空貨物容器である。航空貨物容器は、適切な方法で結束されたHPPE繊維の網状組織で作られた1つの一体型の本体で作製されてもよい。これは特に、従来の航空貨物容器において使用される別個のヒンジが必要なく、航空貨物容器の構造がより簡単かつ頑丈になることにつながるという点において有利である。
【0037】
以下、添付の図面を参照して本発明をさらに説明する。
【図面の簡単な説明】
【0038】
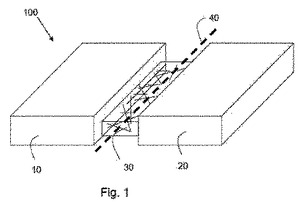
【図1】本発明のヒンジの実施形態の概略斜視図である。
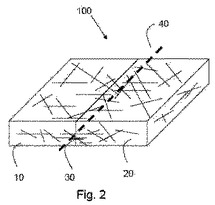
【図2】本発明のヒンジのさらなる実施形態の概略斜視図である。
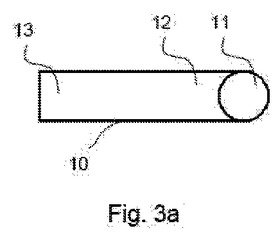
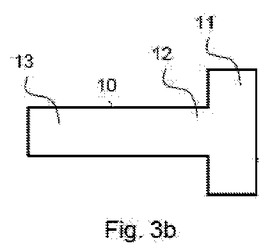
【図3a】図3aおよび3bは本発明によるヒンジの剛体の実施形態を示し、図3cから3eは本発明のヒンジのさらなる実施形態を示し、図3fから3hは本発明による剛体および制御された動きを伴うヒンジのさらなる実施形態を示す。
【図3b】図3aおよび3bは本発明によるヒンジの剛体の実施形態を示し、図3cから3eは本発明のヒンジのさらなる実施形態を示し、図3fから3hは本発明による剛体および制御された動きを伴うヒンジのさらなる実施形態を示す。
【図3c】図3aおよび3bは本発明によるヒンジの剛体の実施形態を示し、図3cから3eは本発明のヒンジのさらなる実施形態を示し、図3fから3hは本発明による剛体および制御された動きを伴うヒンジのさらなる実施形態を示す。
【図3d】図3aおよび3bは本発明によるヒンジの剛体の実施形態を示し、図3cから3eは本発明のヒンジのさらなる実施形態を示し、図3fから3hは本発明による剛体および制御された動きを伴うヒンジのさらなる実施形態を示す。
【図3e】図3aおよび3bは本発明によるヒンジの剛体の実施形態を示し、図3cから3eは本発明のヒンジのさらなる実施形態を示し、図3fから3hは本発明による剛体および制御された動きを伴うヒンジのさらなる実施形態を示す。
【図3f】図3aおよび3bは本発明によるヒンジの剛体の実施形態を示し、図3cから3eは本発明のヒンジのさらなる実施形態を示し、図3fから3hは本発明による剛体および制御された動きを伴うヒンジのさらなる実施形態を示す。
【図3g】図3aおよび3bは本発明によるヒンジの剛体の実施形態を示し、図3cから3eは本発明のヒンジのさらなる実施形態を示し、図3fから3hは本発明による剛体および制御された動きを伴うヒンジのさらなる実施形態を示す。
【図3h】図3aおよび3bは本発明によるヒンジの剛体の実施形態を示し、図3cから3eは本発明のヒンジのさらなる実施形態を示し、図3fから3hは本発明による剛体および制御された動きを伴うヒンジのさらなる実施形態を示す。
【図4】本発明のヒンジのさらなる実施形態の頂面図を概略的に示す。
【図5a】図5aおよび5bは本発明のヒンジの接合部材の実施形態の概略斜視図であり、図5cは本発明のヒンジのさらなる実施形態の概略斜視図である。
【図5b】図5aおよび5bは本発明のヒンジの接合部材の実施形態の概略斜視図であり、図5cは本発明のヒンジのさらなる実施形態の概略斜視図である。
【図5c】図5aおよび5bは本発明のヒンジの接合部材の実施形態の概略斜視図であり、図5cは本発明のヒンジのさらなる実施形態の概略斜視図である。
【図6a】図6aおよび6bは本発明の容器の実施形態を示す。
【図6b】図6aおよび6bは本発明の容器の実施形態を示す。
【0039】
実施形態の一致する要素には同じ参照符号が使用されていることに留意されたい。
【0040】
図1を参照すると、本発明によるヒンジ100の実施形態の斜視図が示される。ヒンジ100は、第1の剛体10および第2の剛体20を含む。接合部材30が第1および第2の剛体10および20を連結する。この実施形態において、接合部材30は布帛の形態の可撓性のあるシート状材料である。第1の剛体10と第2の剛体20との間の接合部材30の平面に実質的に平行して延在する回転軸40が画定される。接合部材30は、編み、織り等により一体構造に作製されたHPPE繊維を含む。この実施形態において、HPPE繊維は、一体構造を保全し、かつHPPE繊維を損傷から保護する別の可撓性のある物体に植設される。接合部材30の可撓性のある本体は、第1および第2の剛体10および20に連結される。
【0041】
この実施形態に対し、接合部材が実質的にHPPE繊維の網状組織からなる、すなわちHPPE繊維が別個の物体に植設されず、第1および第2の剛体10および20に直接連結される変形が可能であることが理解されるであろう。そのような場合において、HPPE繊維は、好ましくは第1および/または第2の剛体10および20内に、より好ましくは第1および第2の剛体10および20の両方に延在する。
【0042】
図2は、本発明によるヒンジ100のさらなる実施形態の斜視図を概略的に示すものである。ヒンジ100の第1の剛体10および第2の剛体20は、例えば、樹脂で作られる。HPPE繊維が第1および第2の剛体10および20内に植設される。回転軸40に沿って樹脂が破断され、第1および第2の剛体10および20間に境界が画定される。HPPE繊維の網状組織が接合部材30を提供する。
【0043】
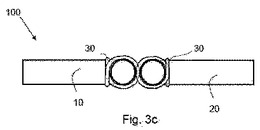
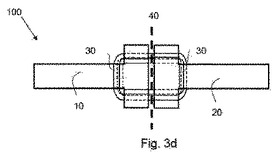
図3aおよび3bは、図3c〜3eに示されるような、本発明によるヒンジ100に使用される剛体10を示す。図3aおよび3bはそれぞれ剛体10の側面図および頂面図を示す。剛体10は上から見ると実質的にT形状である。剛体は、首部12を介して体部13に連結される頭部11を含む。図3cは、剛体10と実質的に同じ形状を有する剛体20に連結される、図3aおよび3bに示すような剛体10を含むヒンジ100の側面図を示す。連結はHPPE繊維から作られる糸または葯部材(組紐などの)を含む接合部材30により行われる。接合部材30は剛体10の頭部11および剛体20の頭部21に巻回される。図3dはヒンジ100の頂面図を示す。接合部材30を巻くことにより、回転軸40を中心とした回転が可能となる。図3eは、図3cと異なる回転位置におけるヒンジ100の側面図を示す。
【0044】
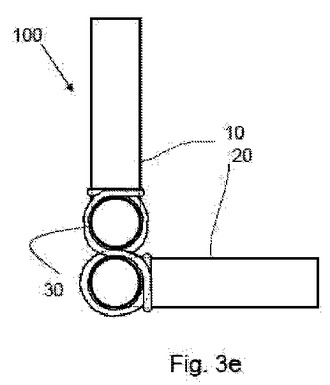
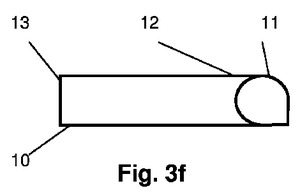
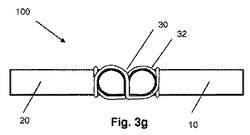
多くの用途において、本文書内の別の場所で記載するように、ヒンジの可動(回転)域を制御することが有利である。図3fは、可動域が限定される剛体10の一実施形態を示す。図3aの剛体10のように、物体は(図3bに示すような)T形状であることが好ましい。物体は、頭部11と、首部12と、体部13とを有する。図3gに示されるようなヒンジ構成で配置される場合、剛体10および20は互いに対して頭のフック部分で揃えられる。剛体の周りおよび間の、HPPE繊維を含む糸または組紐などのHPPE繊維部材32は、8の字のようなパターンで剛体10および20間の関係を維持する。この方法では、剛体10および20は下方に動く物体部分に一致する方向に回転することはできないが、図3hに示すように上方に容易に動いてもよい。図3gおよび3hに示される様式のヒンジ100では、回転は基本的に180°に限定される。そのような構成は、例えば、指関節に非常に有用である。当業者は、頭の形状を変えることにより、可動域を、したがって例えば、0から90°に、または−45から+45°に容易に調節してもよいことを理解するであろう。
【0045】
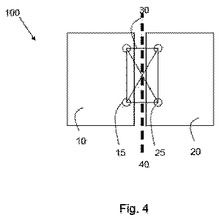
図4は、本発明によるヒンジ100のさらなる実施形態の頂面図を示す。第1および第2の剛体10および20はそれぞれが穴15および25を含む。HPPE繊維で作られた糸または他の物体が穴15と25とを連結し、回転軸40を中心とした回転が可能となるような方式で接合部材30を形成する。
【0046】
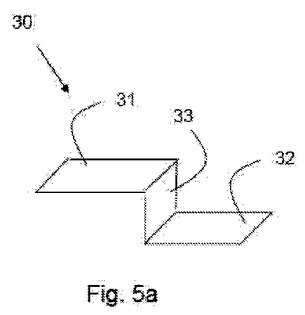
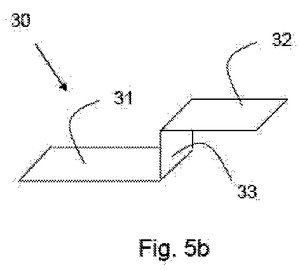
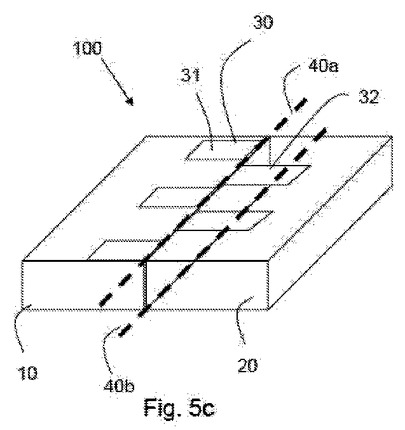
図5aおよび5bは、本発明のヒンジの接合部材の実施形態の概略斜視図である。HPPE繊維を含む接合部材30は、第1の部分31と、第2の部分32と、第1の部分31と第2の部分32とを連結する中間部分33とを含むシート状材料である。第1の部分31および第2の部分32は中間部分33に対して曲げることができ、接合部材30は、曲げることにより、図5aおよび5bに示される構成間で入れ替えてもよい。図5cは、図5aに示される構成を有する3つの接合部材30および図5bに示される構成を有する2つの接合部材30を含む本発明のヒンジ100のさらなる実施形態の概略斜視図である。第1の剛体10および第2の剛体20は両方とも第1の面および第1の面の逆側を向く第2の面を有するシート状材料の形状である。接合部材30の中間部分33は、第1および第2の剛体10および20の縁端間に挟まれる。3つの接合部材30において、第1の部分31は、第1の剛体10の第1の面の一部分上に延在し、第2の部分32は、第2の剛体10の第2の面の一部分上に延在する。2つの接合部材30において、第1の部分31は、第1の剛体10の第2の面の一部分上に延在し、第2の部分32は、第2の剛体10の第1の面の一部分上に延在する。第1の剛体10および第2の剛体20は、それによって互いに対して回転することが可能となる。第2の剛体20は、回転軸40aを中心として反時計回り方向に、および回転軸40bを中心として時計回り方向に回転することが可能となる。
【0047】
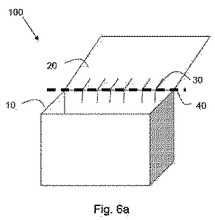
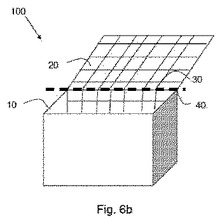
図6aおよび6bは、本発明の容器の実施形態を示す。図6aおよび6bは、容器本体10および扉20を含む容器の形態のヒンジ100を示す。図6aにおいて、容器本体10は、HPPE繊維の形態の接合部材30によって扉20に連結される。図6bにおいて、容器本体10および扉20は樹脂に含浸させたHPPE繊維の網状組織からなる。図2について記載された実施形態と同様、樹脂は破断し、第1および第2の剛体10および20間に境界が画定され、容器本体10に対する扉20の回転軸40が設けられる。HPPE繊維の網状組織は接合部材30を設ける。
【発明の詳細な説明】
【0001】
本発明は、ヒンジに関し、特に、ポリエチレンを含むヒンジに関する。本発明は、また、そのようなヒンジを含む医療装置などの、そのようなヒンジを含む装置に関し、特に、そのようなヒンジを含む人工指関節に関する。
【0002】
人工関節などの医療製品では、典型的に、高分子と金属合金との組み合わせを利用する。金属合金は関節に用いられ、高分子は軟質ソケットとして用いられる。使用時、高分子部分は金属関節部分に対して摩耗し、時間の経過とともに高分子の超微粒子が体内に放たれる。これらの微粒子は、周囲骨の再吸収を引き起こすことが知られている。これが義肢部品の緩みにつながり、再置換術すら必要となる可能性もある。
【0003】
国際公開第2007/002409号パンフレットおよび米国特許出願公開第2007016193号明細書は、患者の脊椎の少なくとも2つの椎骨を柔軟に連結するためのインプラント装置を開示している。装置は部分的に折り畳まれた領域により連結される2つのロッドを含む。2つのロッドは椎弓根スクリューに連結され、それはさらに椎骨に連結される。装置の少なくとも一部は、チタン、ポリエーテルエーテルケトン、ポリエーテルケトンケトン、超高分子量ポリエチレンおよびポリメタクリル酸メチル(PMMA)からなる群から構成されうる。そのような装置は使用時に繰り返し曲げられるため、曲げ疲労に対して高い抵抗を有する必要がある。当業界においては、曲げ疲労抵抗を向上させた装置が必要とされている。
【0004】
本発明の目的は、機械的特性を向上させたヒンジを提供することである。
【0005】
本発明による目的は、第1の剛体と、第2の剛体と、第1の剛体および第2の剛体に連結され、第1の剛体および第2の剛体の、互いに対する実質的に二次元の回転を可能にする接合部材とを含むヒンジにより達成され、接合部材は回転により曲げることができる高性能ポリエチレン(HPPE)繊維を含む。
【0006】
本発明によれば、接合部材内のHPPE繊維は、第2の(第1の)剛体に対する第1の(第2の)剛体の動きにより曲げられる。第1の剛体および第2の剛体は回転軸を中心として互いに対して回転する。回転は、好ましくは、特定の固定角度内に限定されてもよい。回転角は任意の適切な手段により限定されてもよい。固定角度内のみの回転を可能にするため、接合部材の寸法および構造を第1および第2の剛体間の距離に対して選択してもよい。第1および第2の剛体は、さらなる回転を防ぐため互いに固定角度で単に接してもよい。接合部材は、それ自体が特定の程度までのみの変形を可能にする弾性を有してもよい。当業者は回転角度をどのように限定するかを理解しており、したがってそれは本明細書中に詳細に記載されない。
【0007】
国際公開第2007/002409号パンフレットおよび米国特許出願公開第2007016193号明細書で提案される超高分子量ポリエチレンは単に微粒子粉体を意味することを認識すべきである。開示には、超高分子量ポリエチレン出発物質が微粒子粉体以外のいずれかの形態となりうるという指示、教示または提案はない。例えば、記載されている唯一の繊維質材料は炭素繊維複合材である。UHMWPE粉体はHPPE繊維ではない。特に特性および処理が完全に異なる。
【0008】
接合部材内のHPPE繊維は、曲げ疲労に対して非常に高い抵抗を示す。ヒンジの最も重要な機能は、破断することなく多数回曲げることができることであるため、これは極めて有利である。
【0009】
本発明の文脈内において、ファイバは、不定の長さの細長い物体を意味し、幅および厚さよりもかなり長い長さ寸法を有すると理解される。用語ファイバは、したがってモノフィラメント、マルチフィラメント糸、リボン、ストリップまたはテープ等を含み、規則的なまたは不規則な断面を有しうる。用語ファイバは、また、上記いずれか1つの複数または組み合わせを含む。
【0010】
モノフィラメントまたはテープのようなファイバの形態を有するファイバは様々な繊度のものとすることができるが、一般に、10〜数千dtexの範囲、好ましくは100〜2500dtexの範囲、より好ましくは200〜2000dtexの繊度を有する。マルチフィラメント糸は、それぞれが一般に、0.2〜25dtexの範囲、好ましくは約0.5〜20dtexの繊度を有する複数のフィラメントを含む。マルチフィラメント糸の繊度はまた、例えば、10から数千dtexまで幅広く変化してもよいが、好ましくは、約200〜4000dtexの範囲内、より好ましくは300〜3000dtexである。
【0011】
本明細書中においてHPPEファイバは、ポリエチレンから作られ、かつ少なくとも1.5N/tex、好ましくは少なくとも2.0N/tex、より好ましくは少なくとも2.5N/texまたはさらには少なくとも3.0N/texのテナシティを有するファイバであると理解される。ファイバの引張強度、また単に強度、またはテナシティはASTM D885−85またはD2256−97を基にした公知の方法により求められる。HPPEファイバのテナシティの上限に根拠はないが、利用できるファイバは一般にテナシティが多くて約5〜6N/texのものである。HPPEファイバは、また、例えば、少なくとも75N/tex、好ましくは少なくとも100または少なくとも125N/texという高い引張係数を有する。HPPEファイバはまた高弾性率ポリエチレンファイバとも呼ばれる。
【0012】
HPPEファイバは超高分子量ポリエチレン(UHMWPE)の溶液を適切な溶剤内でゲルファイバに紡糸し、部分的または完全に溶剤を除去する前、間および/または後にファイバを延伸することにより作製でき、それはいわゆるゲル紡糸法による。UHMWPEの溶液のゲル紡糸は当業者に周知であり、欧州特許出願公開第0205960A号明細書、欧州特許出願公開第0213208A1号明細書、米国特許第4413110号明細書、英国特許出願公開第2042414A号明細書、欧州特許第0200547B1号明細書、欧州特許第0472114B)号明細書、国際公開第01/73173A1号パンフレットを含む多数の公報およびAdvanced Fiber Spinning Technology、Ed.T.Nakajima、Woodhead Publ. Ltd(1994)、ISBN1−855−73182−7、およびそれらに引用される参考文献内に記載されており、その全てを参照により本明細書中に組み込む。
【0013】
UHMWPEは、少なくとも5dl/g、好ましくは約8〜40dl/gの固有粘度(IV、デカリン中溶液を135℃で測定したもの)を有するポリエチレンであると理解される。固有粘度は、MnおよびMwのような実際のモル質量パラメータよりも簡易に求められるモル質量(分子量とも呼ばれる)の尺度である。IVとMwの間にはいくつかの経験的関係があるが、そのような関係はモル質量分布に依存する。式Mw=5.37*104[IV]1.37(欧州特許出願公開第0504954A1号明細書を参照)に基づくと、8dl/gのIVは約930kg/molのMwに等しくなる。好ましくは、UHMWPEは炭素原子100個当たりに1つ未満の分岐、好ましくは炭素原子300個当たりに1つ未満の分岐を有する線状ポリエチレンであり、1つの分岐または側鎖または鎖分岐が通常少なくとも10個の炭素原子を含む。線状ポリエチレンは、5モル%までのプロピレン、ブテン、ペンテン、4−メチルペンテンまたはオクテンのようなアルケンなどの1つまたは複数のコモノマーをさらに含んでもよい。
【0014】
HPPE繊維がゲル紡糸法により作製される場合、残留溶剤含有量は好ましくは多くて100ppmである。これはヒンジが医療用途で使用される場合に特に重要である。本明細書中において残留溶剤含有量とは、HPPE繊維を作製するのに使用され、最終繊維内に依然残っている溶剤の含有量を意味すると理解される。糸を作製する工程において、UHMwPEのゲル紡糸用として公知の溶剤であれば何でも使用することができる。
【0015】
テナシティなどの機械的特性はゲル紡糸法により作製されるHPPEファイバと比較するとより制限されるが、HPPE繊維は、高分子量を有するポリエチレンの溶融紡糸により作製することもできる。溶融紡糸されうるポリエチレンの分子量の上限はUHMWPEの分子量の範囲内とすることができるが、ゲル紡糸法の限度よりも低い。溶融紡糸されるHPPE繊維は、上に定義したようなUHMWPEよりも低い分子量を有するポリエチレンからも作製されうる。溶融紡糸法は、当技術分野において広く知られており、PE融液を形成するためPE組成物を加熱し、PE融液を押出し、固化したPEを得るため押出された融液を冷却し、固化したPEを少なくとも1回延伸することを含む。方法は、例えば、その内容を参照により本明細書中に組み込む、欧州特許出願公開第1445356A1号明細書および欧州特許出願公開第1743659A1号明細書に言及されている。
【0016】
一実施形態において、UHMWPEは少量、好ましくは炭素原子1000個当たり少なくとも0.2、または少なくとも0.3の、ペンダント側基のような比較的小さな基、好ましくはC1〜C4のアルキル基を含む。そのようなファイバは、高い強度およびクリープ抵抗という有利な組み合わせを示す。大きすぎる側基または多すぎる側基の量は、しかしながら、ファイバ作製の工程にマイナスに影響する。この理由のため、UHMWPEは、好ましくはメチルまたはエチル側基、より好ましくはメチル側基を含む。側基の量は炭素原子1000個当たり、好ましくは多くて20、より好ましくは多くて10、5または多くて3である。
【0017】
HPPEファイバは、少量、概して5質量%よりも少ない、好ましくは3質量%よりも少ない、酸化防止剤、熱安定剤、着色剤、流れ促進剤(flow promoter)等などの慣習的な添加物をさらに含んでもよい。UHMWPEは単一ポリマーグレードとすることができるが、例えば、IVまたはモル質量分布および/または型およびコモノマーまたは側基の数が異なる、2つ以上の異なるポリエチレングレードの混合物とすることもできる。
【0018】
本発明によるヒンジは、それぞれが互いに係合するため特別に適応させた形状を有する2つの部材を含む接合部を有する一般的な従来のヒンジの構造を必要としない。一般に、従来のヒンジの接合部は、円筒状の部分を有する第1の部材および管部分を有する第2の部材を含み、円筒状の部分は管部分の内部に受容され、かつ円筒状の部分は管部分の中心において回転軸を中心として回転する。従来のヒンジとは異なり、本発明によるヒンジの接合部材は回転により曲げられる1つの一体型の物体からなってもよく、これはヒンジがはるかに単純な構造を有するという重要な利点を付与する。接合部材が1つの一体型の物体であるとは、本明細書中では、接合部材が回転を可能にするため曲げられる1つの分離不可能な要素からなることを意味する。
【0019】
第1および第2の剛体は適切であれば、金属、セラミックおよび高分子およびそれらを組み合わせたものを含むいかなる材料で作られてもよい。剛体が剛体の回転運動により接合部材のHPPE繊維と接する実施形態には非金属材料が好適である。これは剛体が接合部材と研磨接触することに起因する接合部材のさらなる摩耗を考慮するものである。さらに、本発明による剛体の回転運動は剛体の大きなかつ制御可能な可動域につながる。
【0020】
第1の剛体および/または第2の剛体は、圧縮成形されたHPPE繊維を含むことが好ましい。圧縮成形されたHPPE繊維の少なくとも一部は剛体の表面に配置されることが好ましい。圧縮成形されたとは、本明細書中では、HPPE繊維が特定の形状に配置され、高温で高圧に晒されて少なくとも部分的に融解しあい、1つの物体を形成することを意味する。圧力および温度は、HPPE繊維のテナシティなどの機械的特性が大幅に低下しない範囲内で選択されることが好ましい。この実施形態は剛体が高い耐摩耗性を有するという利点を有する。また、この実施形態は、剛体を、医療用途における使用に好ましくない可能性のあるいかなる材料も使用することなく作製してもよいという重要な利点を有する。
【0021】
本発明の一実施形態によれば、接合部材はHPPE繊維を含む布帛を含む。当技術分野において織物または布とも呼ばれる布帛とは、本明細書中において、インターレース加工されたフィラメントまたは糸を含むシートのような構造であると理解され、前記布帛はその他の2つの寸法、すなわち軸方向寸法および横断寸法よりもかなり薄い厚さを有する。本発明の布帛は、当技術分野において公知のあらゆる構造のもの、例えば、織り、編み、組み、編込み、または不織またはそれらを組み合わせたものであってもよい。
【0022】
さらなる実施形態において、接合部材はHPPE繊維を含む糸を含む。糸とは、本明細書中において、その横断寸法がその長さよりもかなり短い、撚糸、撚合わせ、編組等による繊維から作られ、かつケーブルまたは組紐を含むあらゆる細長い物体を意味する。
【0023】
本発明の一実施形態によれば、HPPE繊維で作られた布帛または糸は第1および第2の剛体に直接連結される。これは、例えば、布帛の一部を第1および第2の剛体に植設することによりなされてもよい。本発明の1つの好適な実施形態によれば、HPPE繊維の少なくともいくらかが第1の剛体および/または第2の剛体内に延在する。剛体内に延在する接合部材内のHPPE繊維は、接合部材と剛体間の強固な連結を設ける。
【0024】
一方、HPPE繊維は、接合部材の曲げることができる部分内のみに使用されてもよい。これは費用の観点から有利となりうる。接合部材は、第1および第2の剛体に連結される、HPPE繊維以外のさらなる要素を含んでもよい。
【0025】
繊維の少なくともいくつかは、回転軸に対して略垂直な向きで配置されることが好ましい。これらの繊維は曲げ疲労に対してさらなる抵抗を付与する。
【0026】
好適な実施形態において、第1の剛体および/または第2の剛体は、樹脂に含浸させたHPPE繊維を含む。そのような実施形態は、非常に簡単な方法で作製されうるという利点を有する。繊維は不規則にまたは特定の向きまたは構造に配置されてもよく、かつ樹脂を、例えば、繊維上に樹脂を単に流し込むことにより添加してもよい。また、樹脂に繊維を添加してもよく、この実施形態において順序は重要でないことが理解されるであろう。当業者に周知のように、種々のタイプの複合製造工程を使用することができる。硬化後、樹脂を、ヒンジの回転軸が生成されることになる、少なくとも1つのHPPE繊維に交差する線で曲げてもよい。曲げまたは複数回の曲げの後、樹脂は最終的に破断する。樹脂の破断はHPPE繊維の破断をもたらさず、接合部材には曲げることができるHPPE繊維が設けられる。2つの部分に破断した樹脂は2つの剛体を設ける。一方、接合部材となる予定の繊維配列の一部は、樹脂を塗布することから除外してもよい。この場合、曲げの工程は必要なく、製造工程がより単純になりうる。樹脂は、生体適合性型の樹脂から選択されることが好ましい。2つの剛体間に繊維状の連結部を有する多くの幾何学的形状が可能である。
【0027】
剛体を、樹脂を使用せずにHPPE繊維から作製することもまた可能である。これは、例えば、上に言及したようなHPPE繊維の圧縮成形によりなされうる。HPPE繊維は、所望の形状、例えば、板状部材に配置されてもよく、板状部材は、対向する縁端間に延在する1つの領域以外は結束させてもよい。領域の両側の結束された部分は第1の物体および第2の剛体を設け、結束されていない領域は接合部材を設ける。
【0028】
さらなる実施形態において、接合部材は、HPPE繊維から形成される糸を含み、糸は互いに対する回転を可能にするよう第1の剛体と第2の剛体とを連結する。
【0029】
糸は、糸から作られた結節により第1および/または第2の剛体に取付けられてもよい。これは多くの方法で実施されてもよい。例えば、剛体には穴が設けられてもよく、穴を通って糸が貫通し、糸が剛体から外れるのを防ぐために結節が作られる。例えば、糸が穴を貫通した後、穴の直径よりも大きな結節を作ることにより、糸が穴を有する剛体から外れることを防止する。第1および第2の剛体の両方に穴が設けられてもよく、2つの穴を貫通する糸からループが形成されてもよい。各剛体には少なくとも2つの穴が設けられ、2つの穴を通って糸が貫通することが好ましい。これが剛体の回転運動の軸を限定することを可能にする。
【0030】
別の実施形態において、第1および/または第2の剛体は、その周りに結節が形成される突出部を含む。特に好適な実施形態において、第1および第2の剛体は一端において実質的にT形状を有し、第1および第2の剛体は、T形状の頭部が実質的に平行するような様式で配置され、第1および第2の剛体の頭部間の回転軸を中心とした回転を可能にするため、糸が頭部に巻回される。
【0031】
別の好適な実施形態において、第1の剛体および第2の剛体のそれぞれは、実質的にシートのような部分を有する。第1の剛体および第2の剛体はシートのような形状を有することが好ましい。シートのような部分は、第1の面および第1の面の逆側に第2の面を有する。第1の剛体の第1の面および第2の剛体の第1の面は同じ側にある。接合部材は、少なくとも第1の部材および第2の部材を含む。第1の部材および第2の部材は、連結されるか、または分離されてもよい。第1の部材は、第1の剛体の第1の側から第2の剛体の第2の側へ延在する。第2の部材は、第1の剛体の第2の側から第2の剛体の第1の側へ延在する。接合部材は、第1の剛体から一方の側から第2の剛体の他方の側に延在するさらなる部材を含んでもよいことが理解されるであろう。
【0032】
本発明はまた、本発明によるヒンジを含む医療装置に関する。接合部材は実質的にHPPE繊維からなることが好ましい。第1および第2の剛体は、実質的に外科用ステンレス鋼、または高分子、好ましくはポリオレフィン、より好ましくはポリエチレン、最も好ましくは粉体ベースまたは繊維ベースのUHMWPEなどの生体適合性材料からなることが好ましい。最も好適な実施形態において、医療装置は実質的にHPPE繊維からなる。例えば、第1および第2の剛体は圧縮成形されたHPPE繊維から作られてもよい。これらの剛体は、次いで、HPPE繊維により連結されてもよい。一方、HPPE繊維は、所望の形状に配置されてもよく、剛体になる予定の部分は、例えば、圧縮成形により結束されてもよい。残りの部分はその可撓性を維持し、接合部材を設ける。
【0033】
本発明は、また、本発明によるヒンジを備える人工関節に関する。
【0034】
本発明は、また、本発明によるヒンジを備える人工指関節に関する。人工指関節の第1および第2の剛体は、実質的にT形状を有していることが好ましい。第1および第2の剛体は、T形状の頭部が実質的に平行するような様式で配置される。HPPE繊維から形成される糸は、第1および第2の剛体の頭部間の回転軸を中心とする回転を可能にするため頭部に巻回される。
【0035】
本発明によるヒンジは、繰り返しの曲げを伴う種々の機械的な用途に使用することができる。例えば、本発明によるヒンジを含むロボットアームが特に有利である。特に、剛体の回転運動のための低摩耗と併せた、繰り返しの曲げを可能にする機能は本発明の主な利点である。ヒンジ構造の高い圧力においてさえも摩耗は低いままであることを認識すべきである。特に、医療用途においては、摩耗および関連する摩耗粒子の生成は重大な関心事であり、これは本発明により解決されうる。
【0036】
本発明は、また、本発明によるヒンジを含む容器に関する。容器は、容器本体およびヒンジによって容器本体に対して可動な扉を含む。容器本体および扉はそれぞれ第1の剛体および第2の剛体を含む。第1の剛体および第2の剛体は、樹脂に含浸させたHPPE繊維を含むことが好ましい。特に有利な実施形態において、容器は航空貨物容器である。航空貨物容器は、適切な方法で結束されたHPPE繊維の網状組織で作られた1つの一体型の本体で作製されてもよい。これは特に、従来の航空貨物容器において使用される別個のヒンジが必要なく、航空貨物容器の構造がより簡単かつ頑丈になることにつながるという点において有利である。
【0037】
以下、添付の図面を参照して本発明をさらに説明する。
【図面の簡単な説明】
【0038】
【図1】本発明のヒンジの実施形態の概略斜視図である。
【図2】本発明のヒンジのさらなる実施形態の概略斜視図である。
【図3a】図3aおよび3bは本発明によるヒンジの剛体の実施形態を示し、図3cから3eは本発明のヒンジのさらなる実施形態を示し、図3fから3hは本発明による剛体および制御された動きを伴うヒンジのさらなる実施形態を示す。
【図3b】図3aおよび3bは本発明によるヒンジの剛体の実施形態を示し、図3cから3eは本発明のヒンジのさらなる実施形態を示し、図3fから3hは本発明による剛体および制御された動きを伴うヒンジのさらなる実施形態を示す。
【図3c】図3aおよび3bは本発明によるヒンジの剛体の実施形態を示し、図3cから3eは本発明のヒンジのさらなる実施形態を示し、図3fから3hは本発明による剛体および制御された動きを伴うヒンジのさらなる実施形態を示す。
【図3d】図3aおよび3bは本発明によるヒンジの剛体の実施形態を示し、図3cから3eは本発明のヒンジのさらなる実施形態を示し、図3fから3hは本発明による剛体および制御された動きを伴うヒンジのさらなる実施形態を示す。
【図3e】図3aおよび3bは本発明によるヒンジの剛体の実施形態を示し、図3cから3eは本発明のヒンジのさらなる実施形態を示し、図3fから3hは本発明による剛体および制御された動きを伴うヒンジのさらなる実施形態を示す。
【図3f】図3aおよび3bは本発明によるヒンジの剛体の実施形態を示し、図3cから3eは本発明のヒンジのさらなる実施形態を示し、図3fから3hは本発明による剛体および制御された動きを伴うヒンジのさらなる実施形態を示す。
【図3g】図3aおよび3bは本発明によるヒンジの剛体の実施形態を示し、図3cから3eは本発明のヒンジのさらなる実施形態を示し、図3fから3hは本発明による剛体および制御された動きを伴うヒンジのさらなる実施形態を示す。
【図3h】図3aおよび3bは本発明によるヒンジの剛体の実施形態を示し、図3cから3eは本発明のヒンジのさらなる実施形態を示し、図3fから3hは本発明による剛体および制御された動きを伴うヒンジのさらなる実施形態を示す。
【図4】本発明のヒンジのさらなる実施形態の頂面図を概略的に示す。
【図5a】図5aおよび5bは本発明のヒンジの接合部材の実施形態の概略斜視図であり、図5cは本発明のヒンジのさらなる実施形態の概略斜視図である。
【図5b】図5aおよび5bは本発明のヒンジの接合部材の実施形態の概略斜視図であり、図5cは本発明のヒンジのさらなる実施形態の概略斜視図である。
【図5c】図5aおよび5bは本発明のヒンジの接合部材の実施形態の概略斜視図であり、図5cは本発明のヒンジのさらなる実施形態の概略斜視図である。
【図6a】図6aおよび6bは本発明の容器の実施形態を示す。
【図6b】図6aおよび6bは本発明の容器の実施形態を示す。
【0039】
実施形態の一致する要素には同じ参照符号が使用されていることに留意されたい。
【0040】
図1を参照すると、本発明によるヒンジ100の実施形態の斜視図が示される。ヒンジ100は、第1の剛体10および第2の剛体20を含む。接合部材30が第1および第2の剛体10および20を連結する。この実施形態において、接合部材30は布帛の形態の可撓性のあるシート状材料である。第1の剛体10と第2の剛体20との間の接合部材30の平面に実質的に平行して延在する回転軸40が画定される。接合部材30は、編み、織り等により一体構造に作製されたHPPE繊維を含む。この実施形態において、HPPE繊維は、一体構造を保全し、かつHPPE繊維を損傷から保護する別の可撓性のある物体に植設される。接合部材30の可撓性のある本体は、第1および第2の剛体10および20に連結される。
【0041】
この実施形態に対し、接合部材が実質的にHPPE繊維の網状組織からなる、すなわちHPPE繊維が別個の物体に植設されず、第1および第2の剛体10および20に直接連結される変形が可能であることが理解されるであろう。そのような場合において、HPPE繊維は、好ましくは第1および/または第2の剛体10および20内に、より好ましくは第1および第2の剛体10および20の両方に延在する。
【0042】
図2は、本発明によるヒンジ100のさらなる実施形態の斜視図を概略的に示すものである。ヒンジ100の第1の剛体10および第2の剛体20は、例えば、樹脂で作られる。HPPE繊維が第1および第2の剛体10および20内に植設される。回転軸40に沿って樹脂が破断され、第1および第2の剛体10および20間に境界が画定される。HPPE繊維の網状組織が接合部材30を提供する。
【0043】
図3aおよび3bは、図3c〜3eに示されるような、本発明によるヒンジ100に使用される剛体10を示す。図3aおよび3bはそれぞれ剛体10の側面図および頂面図を示す。剛体10は上から見ると実質的にT形状である。剛体は、首部12を介して体部13に連結される頭部11を含む。図3cは、剛体10と実質的に同じ形状を有する剛体20に連結される、図3aおよび3bに示すような剛体10を含むヒンジ100の側面図を示す。連結はHPPE繊維から作られる糸または葯部材(組紐などの)を含む接合部材30により行われる。接合部材30は剛体10の頭部11および剛体20の頭部21に巻回される。図3dはヒンジ100の頂面図を示す。接合部材30を巻くことにより、回転軸40を中心とした回転が可能となる。図3eは、図3cと異なる回転位置におけるヒンジ100の側面図を示す。
【0044】
多くの用途において、本文書内の別の場所で記載するように、ヒンジの可動(回転)域を制御することが有利である。図3fは、可動域が限定される剛体10の一実施形態を示す。図3aの剛体10のように、物体は(図3bに示すような)T形状であることが好ましい。物体は、頭部11と、首部12と、体部13とを有する。図3gに示されるようなヒンジ構成で配置される場合、剛体10および20は互いに対して頭のフック部分で揃えられる。剛体の周りおよび間の、HPPE繊維を含む糸または組紐などのHPPE繊維部材32は、8の字のようなパターンで剛体10および20間の関係を維持する。この方法では、剛体10および20は下方に動く物体部分に一致する方向に回転することはできないが、図3hに示すように上方に容易に動いてもよい。図3gおよび3hに示される様式のヒンジ100では、回転は基本的に180°に限定される。そのような構成は、例えば、指関節に非常に有用である。当業者は、頭の形状を変えることにより、可動域を、したがって例えば、0から90°に、または−45から+45°に容易に調節してもよいことを理解するであろう。
【0045】
図4は、本発明によるヒンジ100のさらなる実施形態の頂面図を示す。第1および第2の剛体10および20はそれぞれが穴15および25を含む。HPPE繊維で作られた糸または他の物体が穴15と25とを連結し、回転軸40を中心とした回転が可能となるような方式で接合部材30を形成する。
【0046】
図5aおよび5bは、本発明のヒンジの接合部材の実施形態の概略斜視図である。HPPE繊維を含む接合部材30は、第1の部分31と、第2の部分32と、第1の部分31と第2の部分32とを連結する中間部分33とを含むシート状材料である。第1の部分31および第2の部分32は中間部分33に対して曲げることができ、接合部材30は、曲げることにより、図5aおよび5bに示される構成間で入れ替えてもよい。図5cは、図5aに示される構成を有する3つの接合部材30および図5bに示される構成を有する2つの接合部材30を含む本発明のヒンジ100のさらなる実施形態の概略斜視図である。第1の剛体10および第2の剛体20は両方とも第1の面および第1の面の逆側を向く第2の面を有するシート状材料の形状である。接合部材30の中間部分33は、第1および第2の剛体10および20の縁端間に挟まれる。3つの接合部材30において、第1の部分31は、第1の剛体10の第1の面の一部分上に延在し、第2の部分32は、第2の剛体10の第2の面の一部分上に延在する。2つの接合部材30において、第1の部分31は、第1の剛体10の第2の面の一部分上に延在し、第2の部分32は、第2の剛体10の第1の面の一部分上に延在する。第1の剛体10および第2の剛体20は、それによって互いに対して回転することが可能となる。第2の剛体20は、回転軸40aを中心として反時計回り方向に、および回転軸40bを中心として時計回り方向に回転することが可能となる。
【0047】
図6aおよび6bは、本発明の容器の実施形態を示す。図6aおよび6bは、容器本体10および扉20を含む容器の形態のヒンジ100を示す。図6aにおいて、容器本体10は、HPPE繊維の形態の接合部材30によって扉20に連結される。図6bにおいて、容器本体10および扉20は樹脂に含浸させたHPPE繊維の網状組織からなる。図2について記載された実施形態と同様、樹脂は破断し、第1および第2の剛体10および20間に境界が画定され、容器本体10に対する扉20の回転軸40が設けられる。HPPE繊維の網状組織は接合部材30を設ける。
【特許請求の範囲】
【請求項1】
第1の剛体(10)と、第2の剛体(20)と、前記第1の剛体および前記第2の剛体に連結され、前記第1の剛体および前記第2の剛体の、互いに対する実質的に二次元の回転を可能にする接合部材(30)と、を含み、前記接合部材は前記回転により曲げることができるHPPE繊維を含む、ヒンジ(100)。
【請求項2】
前記接合部材は一体型の物体からなる請求項1に記載のヒンジ。
【請求項3】
前記接合部材は前記HPPE繊維を含む布帛を含む請求項1または2に記載のヒンジ。
【請求項4】
前記接合部材は前記HPPE繊維を含む糸を含む請求項1または2に記載のヒンジ。
【請求項5】
前記HPPE繊維の少なくともいくつかは前記第1の剛体および/または前記第2の剛体内に延在する請求項1〜4のいずれか1項に記載のヒンジ。
【請求項6】
前記第1の剛体および/または前記第2の剛体は樹脂に含浸させた前記HPPE繊維を含む請求項1〜5のいずれか1項に記載のヒンジ。
【請求項7】
前記糸は、前記第1の剛体と前記第2の剛体とを、互いに対する前記回転を可能にするよう連結する請求項4に記載のヒンジ。
【請求項8】
前記糸は、前記糸から作られた結節により前記第1および/または前記第2の剛体に取付けられる請求項7に記載のヒンジ。
【請求項9】
前記第1および/または前記第2の剛体には穴(15、25)が設けられ、前記穴を介して前記糸が貫通し、かつ前記結節を形成する請求項7または8に記載のヒンジ。
【請求項10】
前記第1および前記第2の剛体は一端において実質的にT形状を有し、前記第1および前記第2の剛体は前記T形状の頭部(11)が実質的に平行するような方式で配置され、前記糸は前記頭部に巻回されて前記第1および前記第2の剛体の前記頭部間の回転軸を中心とする回転を可能にする、請求項7または8に記載のヒンジ。
【請求項11】
前記第1の剛体および前記第2の剛体のそれぞれは第1の面および第2の、逆側の面を有する実質的にシート状の部分を有し、前記第1の剛体の前記第1の面および前記第2の剛体の前記第1の面は同じ側にあり、前記接合部材は、前記第1の剛体の前記第1の側から前記第2の剛体の前記第2の側へ延在する第1の部材および前記第1の剛体の前記第2の側から前記第2の剛体の前記第1の側へ延在する第2の部材を含む、請求項1〜6のいずれか1項に記載のヒンジ。
【請求項12】
請求項1〜11のいずれか1項に記載のヒンジを含む医療装置。
【請求項13】
請求項1〜11のいずれか1項に記載のヒンジを含む人工指関節。
【請求項14】
容器本体と、請求項1〜11のいずれか1項に記載のヒンジによって可動な扉とを含む容器。
【請求項15】
請求項1〜11のいずれか1項に記載のヒンジの、医療装置および好ましくは医療用インプラントにおける使用。
【請求項1】
第1の剛体(10)と、第2の剛体(20)と、前記第1の剛体および前記第2の剛体に連結され、前記第1の剛体および前記第2の剛体の、互いに対する実質的に二次元の回転を可能にする接合部材(30)と、を含み、前記接合部材は前記回転により曲げることができるHPPE繊維を含む、ヒンジ(100)。
【請求項2】
前記接合部材は一体型の物体からなる請求項1に記載のヒンジ。
【請求項3】
前記接合部材は前記HPPE繊維を含む布帛を含む請求項1または2に記載のヒンジ。
【請求項4】
前記接合部材は前記HPPE繊維を含む糸を含む請求項1または2に記載のヒンジ。
【請求項5】
前記HPPE繊維の少なくともいくつかは前記第1の剛体および/または前記第2の剛体内に延在する請求項1〜4のいずれか1項に記載のヒンジ。
【請求項6】
前記第1の剛体および/または前記第2の剛体は樹脂に含浸させた前記HPPE繊維を含む請求項1〜5のいずれか1項に記載のヒンジ。
【請求項7】
前記糸は、前記第1の剛体と前記第2の剛体とを、互いに対する前記回転を可能にするよう連結する請求項4に記載のヒンジ。
【請求項8】
前記糸は、前記糸から作られた結節により前記第1および/または前記第2の剛体に取付けられる請求項7に記載のヒンジ。
【請求項9】
前記第1および/または前記第2の剛体には穴(15、25)が設けられ、前記穴を介して前記糸が貫通し、かつ前記結節を形成する請求項7または8に記載のヒンジ。
【請求項10】
前記第1および前記第2の剛体は一端において実質的にT形状を有し、前記第1および前記第2の剛体は前記T形状の頭部(11)が実質的に平行するような方式で配置され、前記糸は前記頭部に巻回されて前記第1および前記第2の剛体の前記頭部間の回転軸を中心とする回転を可能にする、請求項7または8に記載のヒンジ。
【請求項11】
前記第1の剛体および前記第2の剛体のそれぞれは第1の面および第2の、逆側の面を有する実質的にシート状の部分を有し、前記第1の剛体の前記第1の面および前記第2の剛体の前記第1の面は同じ側にあり、前記接合部材は、前記第1の剛体の前記第1の側から前記第2の剛体の前記第2の側へ延在する第1の部材および前記第1の剛体の前記第2の側から前記第2の剛体の前記第1の側へ延在する第2の部材を含む、請求項1〜6のいずれか1項に記載のヒンジ。
【請求項12】
請求項1〜11のいずれか1項に記載のヒンジを含む医療装置。
【請求項13】
請求項1〜11のいずれか1項に記載のヒンジを含む人工指関節。
【請求項14】
容器本体と、請求項1〜11のいずれか1項に記載のヒンジによって可動な扉とを含む容器。
【請求項15】
請求項1〜11のいずれか1項に記載のヒンジの、医療装置および好ましくは医療用インプラントにおける使用。
【図1】

【図2】
【図3a】
【図3b】
【図3c】
【図3d】
【図3e】
【図3f】
【図3g】
【図3h】

【図4】
【図5a】
【図5b】
【図5c】
【図6a】
【図6b】
【図2】
【図3a】
【図3b】
【図3c】
【図3d】
【図3e】
【図3f】
【図3g】
【図3h】
【図4】
【図5a】
【図5b】
【図5c】
【図6a】
【図6b】
【公表番号】特表2012−525551(P2012−525551A)
【公表日】平成24年10月22日(2012.10.22)
【国際特許分類】
【出願番号】特願2012−507767(P2012−507767)
【出願日】平成22年4月29日(2010.4.29)
【国際出願番号】PCT/EP2010/055808
【国際公開番号】WO2010/125145
【国際公開日】平成22年11月4日(2010.11.4)
【出願人】(503220392)ディーエスエム アイピー アセッツ ビー.ブイ. (873)
【Fターム(参考)】
【公表日】平成24年10月22日(2012.10.22)
【国際特許分類】
【出願日】平成22年4月29日(2010.4.29)
【国際出願番号】PCT/EP2010/055808
【国際公開番号】WO2010/125145
【国際公開日】平成22年11月4日(2010.11.4)
【出願人】(503220392)ディーエスエム アイピー アセッツ ビー.ブイ. (873)
【Fターム(参考)】
[ Back to top ]