
ビジョン検査システム及びこれを用いる被検査体の検査方法
本発明は多様な被検査体を検査するためのビジョン検査システム及びこれを用いる被検査体の検査方法を開示する。本発明のシステムは、定盤、第1移送装置、カメラ、第2移送装置及びコンピュータで構成される。第1移送装置は、定盤の上面に設置され、被検査体が置かれるテーブルを持ち、定盤の第1位置と第2位置の間でテーブルを直線運動させる。カメラは、定盤の上方に被検査体の画像を撮影して画像データを獲得するように配置されている。第2移送装置は、定盤の上面に、第1位置と第2位置の間でカメラを直線運動させるように設置されている。コンピュータは、第1移送装置の作動を制御して、第1位置から第2位置にテーブルを移送させるとともに、第2移送装置の作動を制御して、第2位置から第1位置にカメラを移送させる。

【発明の詳細な説明】
【技術分野】
【0001】
本発明はビジョン検査システム及びこれを用いる被検査体の検査方法に係り、より詳しくは多様な被検査体の画像データを獲得して検査するためのビジョン検査システム及びこれを用いる被検査体の検査方法に関するものである。
【背景技術】
【0002】
ビジョン検査システムは、多様な物体の画像を撮影して画像データを獲得するカメラと、カメラから入力される画像データを画像処理プログラム(Image Processing Program)によって処理するコンピュータとから構成されている。ビジョン検査システムは、物体の識別、検査、測定、良品及び不良品の選別などの多様な分野に応用されている。
【0003】
アメリカ特許第7030351号及びアメリカ特許出願公開第2003/0197925A1号などの多くの特許文献にビジョン検査システムが開示されている。この特許文献らのビジョン検査システムは、ワークピースステージ(Workpiece Stage)、カメラステージ、コントローラー、カメラ、及びコンピュータから構成されている。ワークピースステージは、被検査体のローディング(Loading)、アンローディング(Unloading)、ポジショニング(Positioning)のために、X軸及びY軸方向に直線運動できるように構成されている。カメラステージはワークピースステージの上方に設置されており、カメラのポジショニングとフォーカシング(Focusing)のために、X軸、Y軸及びZ軸方向への直線運動とZ軸を中心とする回転運動ができるように構成されている。コントローラーは、コンピュータと接続され、ワークピースステージとカメラステージの作動を制御する。
【0004】
しかし、前記特許文献のビジョン検査システムは、被検査体とカメラのなかでいずれか一つを固定し、他の一つを運動させながら画像データを獲得しているため、エラーが大きく発生する問題がある。被検査体が固定されており、カメラが移送と停止を繰り返しながら被検査体の画像を撮影する場合、カメラの移送と停止によってビジョン検査システムの振動が大きく発生し、画像データのエラーが大きくなる。また、固定されている被検査体に対して、カメラが移送と停止を繰り返しながら被検査体を撮影しなければならないため、時間が多大にかかる欠点がある。
【0005】
一方、カメラが固定されており、固定されているカメラに対して被検査体を移送しながら画像データを獲得する場合には、被検査体の移送時に発生する振動によって画像データの信頼性が大きく低下し、時間が多大にかかる問題がある。特に、TFT−LCD(Thin Film Transistor−Liquid Crystal Display)、PDP(Plasma Display Panel)、EL(Electro Luminescent)などのフラットディスプレイ(Flat Display)を構成するガラス基板(Glass Substrate)、セル(Cell)、モジュール(Module)などのように大きな被検査体の精密検査及び測定には適しない問題がある。
【発明の開示】
【発明が解決しようとする課題】
【0006】
本発明は前記のような従来技術の多様な問題点を解決するためになされたもので、本発明の目的は、被検査体とカメラが互いに近付く方向に同時に移送して画像データを獲得することにより、システム全体に作用するトルク(Torque)を最小化して、画像データの信頼性を格段に向上させることができるビジョン検査システム及びこれを用いる被検査体の検査方法を提供することにある。
【0007】
本発明の他の目的は、被検査体の検査に必要な時間を減らすことができるビジョン検査システム及びこれを用いる被検査体の検査方法を提供することにある。
【課題を解決するための手段】
【0008】
本発明の一面によれば、上面両側に第1位置と第2位置がそれぞれ設けられている定盤と;前記定盤の上面に設置され、被検査体が置かれるテーブルを持ち、前記第1位置と第2位置の間で前記テーブルを直線運動させる第1移送手段と;前記定盤の上方に、前記被検査体の画像を撮影して画像データを出力するように配置されるカメラと;前記定盤の上面に設置され、前記第1位置と第2位置の間で前記カメラを直線運動させる第2移送手段と;前記第1移送手段、前記カメラ及び前記第2移送手段と接続され、前記第1移送手段の作動を制御して、前記第1位置から前記第2位置に前記テーブルを移送させるとともに、前記第2移送手段の作動を制御して前記第2位置から前記第1位置に前記カメラを移送させるように構成され、前記カメラから入力される画像データを処理する画像処理プログラムが組み込まれているコンピュータと;を含んでなる、ビジョン検査システムが提供される。
【0009】
本発明の他の面によれば、上面両側に第1位置と第2位置がそれぞれ設けられている定盤と、前記定盤の上面に設置され、前記第1位置と第2位置の間で直線運動することができるテーブルを持つ第1移送手段と、前記定盤の上方に配置される一つ以上のカメラと、前記定盤の上面に設置され、前記第1位置と第2位置の間で前記カメラを直線運動させることができる第2移送手段と、前記カメラから入力される画像データを処理するコンピュータとを含んでなるビジョン検査システムによって被検査体を検査する方法において、第1移送手段の作動によって前記第1位置に前記テーブルを位置させる段階と;前記第1位置に位置している前記テーブルに前記被検査体をロードする段階と;前記第2移送手段の作動によって前記第2位置に前記カメラを位置させる段階と;前記第1移送手段の作動によって前記第1位置から前記第2位置に前記テーブルを移送させるとともに、前記第2移送手段の作動によって前記第2位置から前記第1位置に前記カメラを移送させる段階と;前記カメラによって前記被検査体の画像を撮影して前記被検査体の画像データを獲得する段階と;前記カメラから入力される画像データを前記コンピュータによって処理する段階とを含んでなる、ビジョン検査システムを用いる被検査体の検査方法が提供される。
【発明の効果】
【0010】
以上説明した本発明によるビジョン検査システム及びこれを用いる被検査体の検査方法によって、カメラのシステム全体に作用するトルクが最小化し、画像データの信頼性が大きく向上しながらも、被検査体の検査に必要な時間が格段に減少する効果がある。
【0011】
本発明の前記及び他の目的及び特徴は添付図面を参照する以降の好適な実施例の説明から明らかに理解可能である。
【発明を実施するための最良の形態】
【0012】
以下、本発明によるビジョン検査システム及びこれを用いる被検査体の検査方法の好適な実施例を添付図面に基づいて詳細に説明する。
【0013】
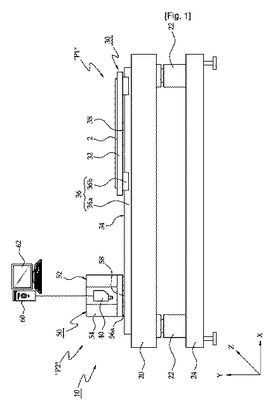
まず、図1及び図2を参照すれば、本発明のビジョン検査システム10は、フラットディスプレイを構成するガラス基板、セル、モジュールなどの多様な被検査体2の欠陷を検査及び測定することができる。本発明のビジョン検査システム10は、被検査体2の正確な検査及び測定のために、上面が精密で平滑に仕上げされている定盤20を備える。定盤20の上面両側には、第1位置(P1)と第2位置(P2)が設けられている。図1及び図2には、第1位置(P1)と第2位置(P2)が定盤20のX軸方向に沿って配置されているものが示されているが、第1位置(P1)と第2位置(P2)は定盤20のY軸方向に沿って配置されることもできる。定盤20は、振動及び衝撃を吸収する複数のベースアイソレーター(Base Isolator)22によって安定して支持されており、アイソレーター22はベース(24)の上面に装着されている。
【0014】
定盤20の上面には、第1位置(P1)と第2位置(P2)との間で被検査体2を移送させることができる第1移送装置30が設置されている。第1移送装置30は、テーブル32とリニアアクチュエータ(Linear Actuator)34から構成されている。テーブル32は、定盤20の第1位置(P1)と第2位置(P2)との間で移動できるように、定盤20の上方に配置されている。被検査体2はテーブル32の上面に置かれている。
【0015】
リニアアクチュエータ34は、定盤20の上面とテーブル32の下面との間に装着されている。テーブル32は、リニアアクチュエータ34の作動によって、第1位置(P1)と第2位置(P2)との間で直線運動する。リニアアクチュエータ34は、定盤20の上面とテーブル32の下面との間に装着されている一対のリニアモーションガイド(Linear Motion Guide)36と、リニアモーションガイド36の間でテーブル32と連結されるように装着されているリニアモーター(Linear Motor)38とから構成されている。リニアモーションガイド36は、定盤20の上面の第1位置(P1)と第2位置(P2)を通して固定されているガイドレール36aと、ガイドレール36aに沿ってスライドするように装着されており、テーブル32の下面に固定されている複数のスライダー36bとから構成されている。テーブル32は、リニアモーター38の駆動及びリニアモーションガイド36の案内によって、第1位置(P1)と第2位置(P2)の間で直線運動する。
【0016】
リニアアクチュエータ34は、サーボモーター(Servo Motor)、リードスクリュー(Lead Screw)、ボールナット(Ball Nut)及び一対のリニアモーションガイドから構成されてもよい。第1移送装置30は、定盤20のX軸及びY軸方向に沿ってテーブル32を直線往復運動させるX軸及びY軸リニアアクチュエータを持つ直角座標ロボットで構成されてもよい。また、第1移送装置30は、定盤20のX軸、Y軸及びZ軸方向に沿ってテーブル32を直線往復運動させ、X軸、Y軸及びZ軸の中でいずれか一つの軸を基準に回転及び傾動(Tilting)させることができる多軸ロボットで構成されてもよい。直角座標ロボットや多軸ロボットの作動によって、テーブル32に置かれている被検査体2の正確なポジショニングが可能である。
【0017】
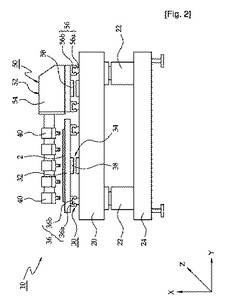
定盤20の上部には、第1位置(P1)と第2位置(P2)の間で運動する一つ以上のカメラ40が配置されており、カメラ40は被検査体2の画像を撮影し、その画像データを出力する。カメラ40は、CCDカメラ(Charge Coupled Device Camera)で構成できる。図2には五つのカメラ40が定盤20のY軸方向に沿って配置されているのが示されているが、カメラ40の数及び位置は必要によって適切に変更することができる。
【0018】
図1〜図3を参照すれば、本発明のビジョン検査システム10は、定盤20の上面に、第2位置(P2)から第1位置(P1)に向けてカメラ40を移送させるように設置されている第2移送装置50を備えている。第2移送装置50は、被検査体2の移送方向と反対方向にカメラ40を移送させることができるリニアアクチュエータ52で構成されている。リニアアクチュエータ52は、キャリッジ(Carriage)54、一対のリニアモーションガイド56及びリニアモーター58で構成されている。
【0019】
キャリッジ54は、定盤20の上部に、第1位置(P1)と第2位置(P2)の間で運動できるように配置されており、キャリッジ54にはカメラ40が装着されている。リニアモーションガイド56は、定盤20の上面とキャリッジ54の下面との間に互いに平行に装着され、キャリッジ54の移送を直線運動に案内する。リニアモーター58は、リニアモーションガイド56の間でリニアモーションガイド56らに沿ってキャリッジ54を移送するように装着されている。リニアモーションガイド56は、定盤20の上面に第1位置(P1)と第2位置(P2)を通るように固定されているガイドレール56aと、ガイドレール56aに沿ってスライドするように装着され、キャリッジ54の下面に固定されている複数のスライダー56bとから構成されている。第2移送装置50のリニアアクチュエータ52は、第1移送装置30のリニアアクチュエータ34と同様に、直角座標ロボットまたは多軸ロボットで構成可能である。また、カメラ40は、微細なポジショニングとフォーカシングのために、ステージに装着され、ステージはキャリッジ54に装着されてもよい。
【0020】
図1を参照すれば、本発明のビジョン検査システム10は、第1移送装置30のリニアモーター38、カメラ40、及び第2移送装置50のリニアモーター58と接続されているコンピュータ60を備えている。コンピュータ60は、第1移送装置30、カメラ40及び第2移送装置50の作動を制御する。コンピュータ60は、第1移送装置30の作動を制御して、テーブル32に搭載されている被検査体2を第1位置(P1)から第2位置(P2)に移動させるとともに、第2移送装置50の作動を制御して、キャリッジ54に装着されているカメラ40を第2位置(P2)から第1位置(P1)に移送させる。コンピュータ60は、カメラ40から入力される画像データを画像処理プログラムによって処理し、その結果として獲得される被検査体2の画像データをモニター62などの出力装置に出力する。
【0021】
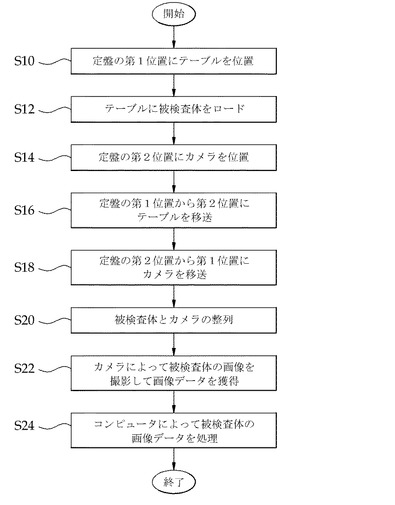
以下、このような構成を有する本発明のビジョン検査システムによる被検査体の検査方法を図6に基づいて説明する。
【0022】
図1及び図2を一緒に参照すれば、リニアアクチュエータ34の作動によって定盤20の第1位置(P1)にテーブル32を位置させ(S10)、テーブル32上に被検査体2をロードする(S12)。被検査体2のローディング及びアンローディングはトランスファーフィーダー(Transfer Feeder)、ハンドラー(Handler)、コンベヤー(Conveyor)などによって実施できる。
【0023】
ついで、リニアアクチュエータ52の作動によって定盤20の第2位置(P2)にカメラ40を位置させる(S14)。被検査体2のローディングとカメラ40の位置付けが完了すれば、コンピュータ60は第1移送装置30の作動を制御して、第1位置(P1)から第2位置(P2)に向けてテーブル32を移送させる(S16)。コンピュータ60の制御によってリニアアクチュエータ34のリニアモーター38が駆動され、リニアモーター38の駆動によってテーブル32は第1位置(P1)から第2位置(P2)に移送される。リニアモーションガイド36はテーブル32の移送を直線運動に案内する。
【0024】
第1移送装置30の作動によるテーブル32の移送と同時に、コンピュータ60は、第2移送装置50の作動を制御して、第2位置(P2)から第1位置(P1)に向けてキャリッジ54を移送させる(S18)。コンピュータ60の制御によってリニアアクチュエータ52のリニアモーター58が駆動されれば、リニアモーター58の駆動によって、キャリッジ54は第2位置(P2)から第1位置(P1)に移送される。リニアモーションガイド56はキャリッジ54の移送を直線運動に案内する。したがって、カメラ40は被検査体2の移送方向と反対方向に移送されるので、被検査体2とカメラ40は互いに接近することになる。
【0025】
コンピュータ60は、第1移送装置30のテーブル32に置かれている被検査体2と、第2移送装置50のキャリッジ54に装着されているカメラ40とが互いに整列するように、第1移送装置30と第2移送装置50の作動を制御する(S20)。カメラ40が被検査体2の検査位置に整列すれば、コンピュータ60の制御によって、第1移送装置30のリニアモーター38と第2移送装置50のリニアモーター58が停止される。
【0026】
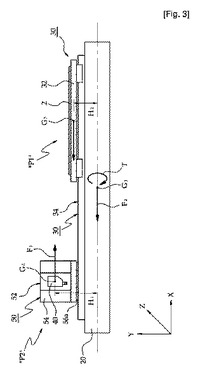
図3を参照すれば、定盤20の上面で移送されてから停止するまで減速するか、あるいは停止した状態から加速するときの第2移送装置50の質量中心(G2)に作用する力(F1)は、
(数学式1)
F1 = m1 × a1
である。ここで、m1は第2移送装置50の質量、a1は第2移送装置50の加速度である。力(F1)の反作用によって、ビジョン検査システム10の質量中心(G1)に反作用力(F2)と反作用トルク(T)が作用する。
【0027】
定盤20の回転がベースアイソレーター22の作動によって起こらないと仮定する場合、第1移送装置30の作動によって被検査体2が第1位置(P1)から第2位置(P2)に移送される。被検査体2の移送と並行し、第2移送装置50の作動によって被検査体2の移送と反対方向にカメラ40が移送されれば、第1移送放置30と第2移送装置50が互いに反対方向に移送されることによって、ビジョン検査システム10に作用する反作用力と反作用トルクが相殺される。この結果、ビジョン検査システム10の質量中心(G1)に作用する力とトルクが減少する。
【0028】
ビジョン検査システム10の質量中心(G1)に作用するトルクを最小化することができる第2移送装置50の加速度(a1)とテーブル32の加速度(a2)の比は数学式2によって求められる。
【0029】
(数学式2)
m1×a1×h1=m2×a2×h2
【0030】
ここで、h1はビジョン検査システム10の質量中心(G1)から第2移送装置50の質量中心(G2)までの高さである。m2はテーブル32の質量、h2はビジョン検査システム10の質量中心(G1)からテーブル32の質量中心(G3)までの高さである。テーブル32の加速度(a2)と第2移送装置50の加速度(a1)がa1:a2の比に従えば、ビジョン検査システム10の質量中心(G1)に作用するトルクは最小化する。
【0031】
ビジョン検査システム10のトルクが、被検査体2の移送方向と反対方向にカメラ40がa1:a2の比で移送することによって減少するかを調べるために、ビジョン検査システム10によって、実施例と比較例の実験をそれぞれ実施した。実施例の実験においては、被検査体2とカメラ40が互いに接近するように、被検査体2の移送方向と反対方向にカメラ40をa1:a2の比で移送した。比較例の実験は、被検査体2の固定状態でカメラ40のみを移送した。
【0032】
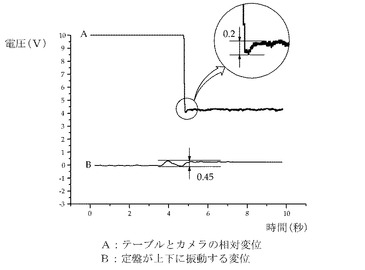
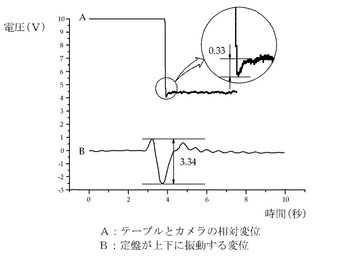
実施例と比較例のそれぞれの実験において、テーブル32とカメラ40の相対変位はキャパシタンスセンサー(Capacitance Sensor)で測定し、定盤20が上下に振動する変位はレーザー変位センサー(Laser Displacement Sensor)で測定した。実施例の実験によって得られる結果は図4のグラフで表し、比較例の実験によって得られる結果は図5のグラフで表した。
【0033】
図4のグラフを見れば、実施例の実験において、テーブル32とカメラ40の相対変位に対する電圧差は0.2Vに実測され、定盤20が上下に振動する変位に対する電圧差は0.45Vに実測された。図5のグラフを見れば、比較例の実験において、テーブル32とカメラ40の相対変位に対する電圧差は0.33Vに実測され、定盤20が上下に振動する変位に対する電圧差は3.34Vに実測された。
【0034】
実施例の実験は、比較例の実験に比べ、定盤20が上下に振動する変位の電圧差が2.89Vだけ小さく、テーブル32とカメラ40の相対変位に対する電圧差が0.25Vだけ小さいことが分かる。結果として、実施例の実験は、比較例の実験に比べ、定盤20、テーブル32及びカメラ40の振動が大きく減少することが分かる。
【0035】
一方、被検査体2とカメラ40が検査位置に停止すれば、カメラ40は、被検査体2の画像を撮影して被検査体2の画像データを獲得する(S22)。本発明のビジョン検査システム10は、テーブル32とキャリッジ54が互いに接近する方向に移送して、定盤20、テーブル32及びカメラ40の振動が減少するので、カメラ40によって獲得される画像データの信頼性が大きく向上する。また、テーブル32とキャリッジ54が互いに接近する方向に移送することによって、キャリッジ54のみを移送するときより、被検査体2の検査時間が大きく減少する。
【0036】
最後に、コンピュータ60は、カメラ40から入力される被検査体2の画像データを画像処理プログラムによって処理する(S24)。コンピュータ60の画像データの処理によって被検査体2の欠点を検査して、良品と不良品を選別し、モニター62に被検査体2の検査結果を表示する。被検査体2の検査が完了すれば、コンピュータ60は、第1移送装置30と第2移送装置50の作動を制御してテーブル32とキャリッジ54を復帰させる。
【0037】
以上説明した実施例は本発明の好適な実施例を説明したものに過ぎなく、本発明の権利範囲は前述した実施例に限定されなく、本発明の技術的思想と特許請求範囲内で当業者によって多様な変更、変形または置換が可能であろう。
【産業上の利用可能性】
【0038】
以上説明したように、本発明によるビジョン検査システム及びこれを用いる被検査体の検査方法によれば、第1移送装置と第2移送装置のそれぞれの作動によって、被検査体とカメラが互いに接近する方向に同時に移送されて画像データを獲得するので、カメラのシステム全体に作用するトルクが最小化して振動の発生が防止され、画像データの信頼性が大きく向上する。また、被検査体の検査に必要な時間が格段に減少する効果がある。
【図面の簡単な説明】
【0039】
【図1】図1は本発明によるビジョン検査システムの構成を示す正面図である。
【図2】図2は本発明によるビジョン検査システムの構成を示す側面図である。
【図3】図3は本発明によるビジョン検査システムの作動を説明するために概略的に示す正面図である。
【図4】図4は本発明によるビジョン検査システムにおいて、テーブルとカメラを互いに近付く方向に移送させて測定したテーブルとカメラの相対変位と定盤が上下に振動する変位を示すグラフである。
【図5】図5は本発明によるビジョン検査システムにおいて、テーブルを固定したままでカメラを移送して測定したテーブルとカメラの相対変位と定盤が上下に振動する変位を示すグラフである。
【図6】図6は本発明による被検査体の検査方法を説明するために示すフローチャートである。
【技術分野】
【0001】
本発明はビジョン検査システム及びこれを用いる被検査体の検査方法に係り、より詳しくは多様な被検査体の画像データを獲得して検査するためのビジョン検査システム及びこれを用いる被検査体の検査方法に関するものである。
【背景技術】
【0002】
ビジョン検査システムは、多様な物体の画像を撮影して画像データを獲得するカメラと、カメラから入力される画像データを画像処理プログラム(Image Processing Program)によって処理するコンピュータとから構成されている。ビジョン検査システムは、物体の識別、検査、測定、良品及び不良品の選別などの多様な分野に応用されている。
【0003】
アメリカ特許第7030351号及びアメリカ特許出願公開第2003/0197925A1号などの多くの特許文献にビジョン検査システムが開示されている。この特許文献らのビジョン検査システムは、ワークピースステージ(Workpiece Stage)、カメラステージ、コントローラー、カメラ、及びコンピュータから構成されている。ワークピースステージは、被検査体のローディング(Loading)、アンローディング(Unloading)、ポジショニング(Positioning)のために、X軸及びY軸方向に直線運動できるように構成されている。カメラステージはワークピースステージの上方に設置されており、カメラのポジショニングとフォーカシング(Focusing)のために、X軸、Y軸及びZ軸方向への直線運動とZ軸を中心とする回転運動ができるように構成されている。コントローラーは、コンピュータと接続され、ワークピースステージとカメラステージの作動を制御する。
【0004】
しかし、前記特許文献のビジョン検査システムは、被検査体とカメラのなかでいずれか一つを固定し、他の一つを運動させながら画像データを獲得しているため、エラーが大きく発生する問題がある。被検査体が固定されており、カメラが移送と停止を繰り返しながら被検査体の画像を撮影する場合、カメラの移送と停止によってビジョン検査システムの振動が大きく発生し、画像データのエラーが大きくなる。また、固定されている被検査体に対して、カメラが移送と停止を繰り返しながら被検査体を撮影しなければならないため、時間が多大にかかる欠点がある。
【0005】
一方、カメラが固定されており、固定されているカメラに対して被検査体を移送しながら画像データを獲得する場合には、被検査体の移送時に発生する振動によって画像データの信頼性が大きく低下し、時間が多大にかかる問題がある。特に、TFT−LCD(Thin Film Transistor−Liquid Crystal Display)、PDP(Plasma Display Panel)、EL(Electro Luminescent)などのフラットディスプレイ(Flat Display)を構成するガラス基板(Glass Substrate)、セル(Cell)、モジュール(Module)などのように大きな被検査体の精密検査及び測定には適しない問題がある。
【発明の開示】
【発明が解決しようとする課題】
【0006】
本発明は前記のような従来技術の多様な問題点を解決するためになされたもので、本発明の目的は、被検査体とカメラが互いに近付く方向に同時に移送して画像データを獲得することにより、システム全体に作用するトルク(Torque)を最小化して、画像データの信頼性を格段に向上させることができるビジョン検査システム及びこれを用いる被検査体の検査方法を提供することにある。
【0007】
本発明の他の目的は、被検査体の検査に必要な時間を減らすことができるビジョン検査システム及びこれを用いる被検査体の検査方法を提供することにある。
【課題を解決するための手段】
【0008】
本発明の一面によれば、上面両側に第1位置と第2位置がそれぞれ設けられている定盤と;前記定盤の上面に設置され、被検査体が置かれるテーブルを持ち、前記第1位置と第2位置の間で前記テーブルを直線運動させる第1移送手段と;前記定盤の上方に、前記被検査体の画像を撮影して画像データを出力するように配置されるカメラと;前記定盤の上面に設置され、前記第1位置と第2位置の間で前記カメラを直線運動させる第2移送手段と;前記第1移送手段、前記カメラ及び前記第2移送手段と接続され、前記第1移送手段の作動を制御して、前記第1位置から前記第2位置に前記テーブルを移送させるとともに、前記第2移送手段の作動を制御して前記第2位置から前記第1位置に前記カメラを移送させるように構成され、前記カメラから入力される画像データを処理する画像処理プログラムが組み込まれているコンピュータと;を含んでなる、ビジョン検査システムが提供される。
【0009】
本発明の他の面によれば、上面両側に第1位置と第2位置がそれぞれ設けられている定盤と、前記定盤の上面に設置され、前記第1位置と第2位置の間で直線運動することができるテーブルを持つ第1移送手段と、前記定盤の上方に配置される一つ以上のカメラと、前記定盤の上面に設置され、前記第1位置と第2位置の間で前記カメラを直線運動させることができる第2移送手段と、前記カメラから入力される画像データを処理するコンピュータとを含んでなるビジョン検査システムによって被検査体を検査する方法において、第1移送手段の作動によって前記第1位置に前記テーブルを位置させる段階と;前記第1位置に位置している前記テーブルに前記被検査体をロードする段階と;前記第2移送手段の作動によって前記第2位置に前記カメラを位置させる段階と;前記第1移送手段の作動によって前記第1位置から前記第2位置に前記テーブルを移送させるとともに、前記第2移送手段の作動によって前記第2位置から前記第1位置に前記カメラを移送させる段階と;前記カメラによって前記被検査体の画像を撮影して前記被検査体の画像データを獲得する段階と;前記カメラから入力される画像データを前記コンピュータによって処理する段階とを含んでなる、ビジョン検査システムを用いる被検査体の検査方法が提供される。
【発明の効果】
【0010】
以上説明した本発明によるビジョン検査システム及びこれを用いる被検査体の検査方法によって、カメラのシステム全体に作用するトルクが最小化し、画像データの信頼性が大きく向上しながらも、被検査体の検査に必要な時間が格段に減少する効果がある。
【0011】
本発明の前記及び他の目的及び特徴は添付図面を参照する以降の好適な実施例の説明から明らかに理解可能である。
【発明を実施するための最良の形態】
【0012】
以下、本発明によるビジョン検査システム及びこれを用いる被検査体の検査方法の好適な実施例を添付図面に基づいて詳細に説明する。
【0013】
まず、図1及び図2を参照すれば、本発明のビジョン検査システム10は、フラットディスプレイを構成するガラス基板、セル、モジュールなどの多様な被検査体2の欠陷を検査及び測定することができる。本発明のビジョン検査システム10は、被検査体2の正確な検査及び測定のために、上面が精密で平滑に仕上げされている定盤20を備える。定盤20の上面両側には、第1位置(P1)と第2位置(P2)が設けられている。図1及び図2には、第1位置(P1)と第2位置(P2)が定盤20のX軸方向に沿って配置されているものが示されているが、第1位置(P1)と第2位置(P2)は定盤20のY軸方向に沿って配置されることもできる。定盤20は、振動及び衝撃を吸収する複数のベースアイソレーター(Base Isolator)22によって安定して支持されており、アイソレーター22はベース(24)の上面に装着されている。
【0014】
定盤20の上面には、第1位置(P1)と第2位置(P2)との間で被検査体2を移送させることができる第1移送装置30が設置されている。第1移送装置30は、テーブル32とリニアアクチュエータ(Linear Actuator)34から構成されている。テーブル32は、定盤20の第1位置(P1)と第2位置(P2)との間で移動できるように、定盤20の上方に配置されている。被検査体2はテーブル32の上面に置かれている。
【0015】
リニアアクチュエータ34は、定盤20の上面とテーブル32の下面との間に装着されている。テーブル32は、リニアアクチュエータ34の作動によって、第1位置(P1)と第2位置(P2)との間で直線運動する。リニアアクチュエータ34は、定盤20の上面とテーブル32の下面との間に装着されている一対のリニアモーションガイド(Linear Motion Guide)36と、リニアモーションガイド36の間でテーブル32と連結されるように装着されているリニアモーター(Linear Motor)38とから構成されている。リニアモーションガイド36は、定盤20の上面の第1位置(P1)と第2位置(P2)を通して固定されているガイドレール36aと、ガイドレール36aに沿ってスライドするように装着されており、テーブル32の下面に固定されている複数のスライダー36bとから構成されている。テーブル32は、リニアモーター38の駆動及びリニアモーションガイド36の案内によって、第1位置(P1)と第2位置(P2)の間で直線運動する。
【0016】
リニアアクチュエータ34は、サーボモーター(Servo Motor)、リードスクリュー(Lead Screw)、ボールナット(Ball Nut)及び一対のリニアモーションガイドから構成されてもよい。第1移送装置30は、定盤20のX軸及びY軸方向に沿ってテーブル32を直線往復運動させるX軸及びY軸リニアアクチュエータを持つ直角座標ロボットで構成されてもよい。また、第1移送装置30は、定盤20のX軸、Y軸及びZ軸方向に沿ってテーブル32を直線往復運動させ、X軸、Y軸及びZ軸の中でいずれか一つの軸を基準に回転及び傾動(Tilting)させることができる多軸ロボットで構成されてもよい。直角座標ロボットや多軸ロボットの作動によって、テーブル32に置かれている被検査体2の正確なポジショニングが可能である。
【0017】
定盤20の上部には、第1位置(P1)と第2位置(P2)の間で運動する一つ以上のカメラ40が配置されており、カメラ40は被検査体2の画像を撮影し、その画像データを出力する。カメラ40は、CCDカメラ(Charge Coupled Device Camera)で構成できる。図2には五つのカメラ40が定盤20のY軸方向に沿って配置されているのが示されているが、カメラ40の数及び位置は必要によって適切に変更することができる。
【0018】
図1〜図3を参照すれば、本発明のビジョン検査システム10は、定盤20の上面に、第2位置(P2)から第1位置(P1)に向けてカメラ40を移送させるように設置されている第2移送装置50を備えている。第2移送装置50は、被検査体2の移送方向と反対方向にカメラ40を移送させることができるリニアアクチュエータ52で構成されている。リニアアクチュエータ52は、キャリッジ(Carriage)54、一対のリニアモーションガイド56及びリニアモーター58で構成されている。
【0019】
キャリッジ54は、定盤20の上部に、第1位置(P1)と第2位置(P2)の間で運動できるように配置されており、キャリッジ54にはカメラ40が装着されている。リニアモーションガイド56は、定盤20の上面とキャリッジ54の下面との間に互いに平行に装着され、キャリッジ54の移送を直線運動に案内する。リニアモーター58は、リニアモーションガイド56の間でリニアモーションガイド56らに沿ってキャリッジ54を移送するように装着されている。リニアモーションガイド56は、定盤20の上面に第1位置(P1)と第2位置(P2)を通るように固定されているガイドレール56aと、ガイドレール56aに沿ってスライドするように装着され、キャリッジ54の下面に固定されている複数のスライダー56bとから構成されている。第2移送装置50のリニアアクチュエータ52は、第1移送装置30のリニアアクチュエータ34と同様に、直角座標ロボットまたは多軸ロボットで構成可能である。また、カメラ40は、微細なポジショニングとフォーカシングのために、ステージに装着され、ステージはキャリッジ54に装着されてもよい。
【0020】
図1を参照すれば、本発明のビジョン検査システム10は、第1移送装置30のリニアモーター38、カメラ40、及び第2移送装置50のリニアモーター58と接続されているコンピュータ60を備えている。コンピュータ60は、第1移送装置30、カメラ40及び第2移送装置50の作動を制御する。コンピュータ60は、第1移送装置30の作動を制御して、テーブル32に搭載されている被検査体2を第1位置(P1)から第2位置(P2)に移動させるとともに、第2移送装置50の作動を制御して、キャリッジ54に装着されているカメラ40を第2位置(P2)から第1位置(P1)に移送させる。コンピュータ60は、カメラ40から入力される画像データを画像処理プログラムによって処理し、その結果として獲得される被検査体2の画像データをモニター62などの出力装置に出力する。
【0021】
以下、このような構成を有する本発明のビジョン検査システムによる被検査体の検査方法を図6に基づいて説明する。
【0022】
図1及び図2を一緒に参照すれば、リニアアクチュエータ34の作動によって定盤20の第1位置(P1)にテーブル32を位置させ(S10)、テーブル32上に被検査体2をロードする(S12)。被検査体2のローディング及びアンローディングはトランスファーフィーダー(Transfer Feeder)、ハンドラー(Handler)、コンベヤー(Conveyor)などによって実施できる。
【0023】
ついで、リニアアクチュエータ52の作動によって定盤20の第2位置(P2)にカメラ40を位置させる(S14)。被検査体2のローディングとカメラ40の位置付けが完了すれば、コンピュータ60は第1移送装置30の作動を制御して、第1位置(P1)から第2位置(P2)に向けてテーブル32を移送させる(S16)。コンピュータ60の制御によってリニアアクチュエータ34のリニアモーター38が駆動され、リニアモーター38の駆動によってテーブル32は第1位置(P1)から第2位置(P2)に移送される。リニアモーションガイド36はテーブル32の移送を直線運動に案内する。
【0024】
第1移送装置30の作動によるテーブル32の移送と同時に、コンピュータ60は、第2移送装置50の作動を制御して、第2位置(P2)から第1位置(P1)に向けてキャリッジ54を移送させる(S18)。コンピュータ60の制御によってリニアアクチュエータ52のリニアモーター58が駆動されれば、リニアモーター58の駆動によって、キャリッジ54は第2位置(P2)から第1位置(P1)に移送される。リニアモーションガイド56はキャリッジ54の移送を直線運動に案内する。したがって、カメラ40は被検査体2の移送方向と反対方向に移送されるので、被検査体2とカメラ40は互いに接近することになる。
【0025】
コンピュータ60は、第1移送装置30のテーブル32に置かれている被検査体2と、第2移送装置50のキャリッジ54に装着されているカメラ40とが互いに整列するように、第1移送装置30と第2移送装置50の作動を制御する(S20)。カメラ40が被検査体2の検査位置に整列すれば、コンピュータ60の制御によって、第1移送装置30のリニアモーター38と第2移送装置50のリニアモーター58が停止される。
【0026】
図3を参照すれば、定盤20の上面で移送されてから停止するまで減速するか、あるいは停止した状態から加速するときの第2移送装置50の質量中心(G2)に作用する力(F1)は、
(数学式1)
F1 = m1 × a1
である。ここで、m1は第2移送装置50の質量、a1は第2移送装置50の加速度である。力(F1)の反作用によって、ビジョン検査システム10の質量中心(G1)に反作用力(F2)と反作用トルク(T)が作用する。
【0027】
定盤20の回転がベースアイソレーター22の作動によって起こらないと仮定する場合、第1移送装置30の作動によって被検査体2が第1位置(P1)から第2位置(P2)に移送される。被検査体2の移送と並行し、第2移送装置50の作動によって被検査体2の移送と反対方向にカメラ40が移送されれば、第1移送放置30と第2移送装置50が互いに反対方向に移送されることによって、ビジョン検査システム10に作用する反作用力と反作用トルクが相殺される。この結果、ビジョン検査システム10の質量中心(G1)に作用する力とトルクが減少する。
【0028】
ビジョン検査システム10の質量中心(G1)に作用するトルクを最小化することができる第2移送装置50の加速度(a1)とテーブル32の加速度(a2)の比は数学式2によって求められる。
【0029】
(数学式2)
m1×a1×h1=m2×a2×h2
【0030】
ここで、h1はビジョン検査システム10の質量中心(G1)から第2移送装置50の質量中心(G2)までの高さである。m2はテーブル32の質量、h2はビジョン検査システム10の質量中心(G1)からテーブル32の質量中心(G3)までの高さである。テーブル32の加速度(a2)と第2移送装置50の加速度(a1)がa1:a2の比に従えば、ビジョン検査システム10の質量中心(G1)に作用するトルクは最小化する。
【0031】
ビジョン検査システム10のトルクが、被検査体2の移送方向と反対方向にカメラ40がa1:a2の比で移送することによって減少するかを調べるために、ビジョン検査システム10によって、実施例と比較例の実験をそれぞれ実施した。実施例の実験においては、被検査体2とカメラ40が互いに接近するように、被検査体2の移送方向と反対方向にカメラ40をa1:a2の比で移送した。比較例の実験は、被検査体2の固定状態でカメラ40のみを移送した。
【0032】
実施例と比較例のそれぞれの実験において、テーブル32とカメラ40の相対変位はキャパシタンスセンサー(Capacitance Sensor)で測定し、定盤20が上下に振動する変位はレーザー変位センサー(Laser Displacement Sensor)で測定した。実施例の実験によって得られる結果は図4のグラフで表し、比較例の実験によって得られる結果は図5のグラフで表した。
【0033】
図4のグラフを見れば、実施例の実験において、テーブル32とカメラ40の相対変位に対する電圧差は0.2Vに実測され、定盤20が上下に振動する変位に対する電圧差は0.45Vに実測された。図5のグラフを見れば、比較例の実験において、テーブル32とカメラ40の相対変位に対する電圧差は0.33Vに実測され、定盤20が上下に振動する変位に対する電圧差は3.34Vに実測された。
【0034】
実施例の実験は、比較例の実験に比べ、定盤20が上下に振動する変位の電圧差が2.89Vだけ小さく、テーブル32とカメラ40の相対変位に対する電圧差が0.25Vだけ小さいことが分かる。結果として、実施例の実験は、比較例の実験に比べ、定盤20、テーブル32及びカメラ40の振動が大きく減少することが分かる。
【0035】
一方、被検査体2とカメラ40が検査位置に停止すれば、カメラ40は、被検査体2の画像を撮影して被検査体2の画像データを獲得する(S22)。本発明のビジョン検査システム10は、テーブル32とキャリッジ54が互いに接近する方向に移送して、定盤20、テーブル32及びカメラ40の振動が減少するので、カメラ40によって獲得される画像データの信頼性が大きく向上する。また、テーブル32とキャリッジ54が互いに接近する方向に移送することによって、キャリッジ54のみを移送するときより、被検査体2の検査時間が大きく減少する。
【0036】
最後に、コンピュータ60は、カメラ40から入力される被検査体2の画像データを画像処理プログラムによって処理する(S24)。コンピュータ60の画像データの処理によって被検査体2の欠点を検査して、良品と不良品を選別し、モニター62に被検査体2の検査結果を表示する。被検査体2の検査が完了すれば、コンピュータ60は、第1移送装置30と第2移送装置50の作動を制御してテーブル32とキャリッジ54を復帰させる。
【0037】
以上説明した実施例は本発明の好適な実施例を説明したものに過ぎなく、本発明の権利範囲は前述した実施例に限定されなく、本発明の技術的思想と特許請求範囲内で当業者によって多様な変更、変形または置換が可能であろう。
【産業上の利用可能性】
【0038】
以上説明したように、本発明によるビジョン検査システム及びこれを用いる被検査体の検査方法によれば、第1移送装置と第2移送装置のそれぞれの作動によって、被検査体とカメラが互いに接近する方向に同時に移送されて画像データを獲得するので、カメラのシステム全体に作用するトルクが最小化して振動の発生が防止され、画像データの信頼性が大きく向上する。また、被検査体の検査に必要な時間が格段に減少する効果がある。
【図面の簡単な説明】
【0039】
【図1】図1は本発明によるビジョン検査システムの構成を示す正面図である。
【図2】図2は本発明によるビジョン検査システムの構成を示す側面図である。
【図3】図3は本発明によるビジョン検査システムの作動を説明するために概略的に示す正面図である。
【図4】図4は本発明によるビジョン検査システムにおいて、テーブルとカメラを互いに近付く方向に移送させて測定したテーブルとカメラの相対変位と定盤が上下に振動する変位を示すグラフである。
【図5】図5は本発明によるビジョン検査システムにおいて、テーブルを固定したままでカメラを移送して測定したテーブルとカメラの相対変位と定盤が上下に振動する変位を示すグラフである。
【図6】図6は本発明による被検査体の検査方法を説明するために示すフローチャートである。
【特許請求の範囲】
【請求項1】
上面両側に第1位置と第2位置がそれぞれ設けられている定盤と;
前記定盤の上面に設置され、被検査体が置かれるテーブルを持ち、前記第1位置と第2位置の間で前記テーブルを直線運動させる第1移送手段と;
前記定盤の上方に、前記被検査体の画像を撮影して画像データを出力するように配置されるカメラと;
前記定盤の上面に設置され、前記第1位置と第2位置の間で前記カメラを直線運動させる第2移送手段と;
前記第1移送手段、前記カメラ及び前記第2移送手段と接続され、前記第1移送手段の作動を制御して、前記第1位置から前記第2位置に前記テーブルを移送させるとともに、前記第2移送手段の作動を制御して前記第2位置から前記第1位置に前記カメラを移送させるように構成され、前記カメラから入力される画像データを処理する画像処理プログラムが組み込まれているコンピュータと;を含んでなる、ビジョン検査システム。
【請求項2】
前記第1移送手段は、
前記定盤の上面に、前記第1位置と第2位置の間で、前記テーブルの移送を直線運動に案内するように装着される一対のリニアモーションガイドと;
前記リニアモーションガイドの間に装着され、前記リニアモーションガイドに沿って前記テーブルを移送するように前記テーブルに連結されているリニアモーターと;を含んでなる、請求項1に記載のビジョン検査システム。
【請求項3】
前記第2移送手段は、
前記定盤の上方に、前記第1位置と前記第2位置の間で運動するように配置され、前記カメラが装着されているキャリッジと;
前記定盤の上面に、前記第1位置と第2位置の間で前記キャリッジの移送を直線運動に案内するように装着される一対のリニアモーションガイドと;
前記リニアモーションガイドの間に装着され、前記リニアモーションガイドに沿って前記キャリッジを移送するように前記キャリッジに連結されているリニアモーターと;を含んでなる、請求項2に記載のビジョン検査システム。
【請求項4】
前記定盤を支持する複数のベースアイソレーターをさらに含む、請求項1ないし3のいずれか1項に記載のビジョン検査システム。
【請求項5】
上面両側に第1位置と第2位置がそれぞれ設けられている定盤と、前記定盤の上面に設置され、前記第1位置と第2位置の間で直線運動することができるテーブルを持つ第1移送手段と、前記定盤の上方に配置される一つ以上のカメラと、前記定盤の上面に設置され、前記第1位置と第2位置の間で前記カメラを直線運動させることができる第2移送手段と、前記カメラから入力される画像データを処理するコンピュータとを含んでなるビジョン検査システムによって被検査体を検査する方法において、
第1移送手段の作動によって前記第1位置に前記テーブルを位置させる段階と;
前記第1位置に位置している前記テーブルに前記被検査体をロードする段階と;
前記第2移送手段の作動によって前記第2位置に前記カメラを位置させる段階と;
前記第1移送手段の作動によって前記第1位置から前記第2位置に前記テーブルを移送させるとともに、前記第2移送手段の作動によって前記第2位置から前記第1位置に前記カメラを移送させる段階と;
前記カメラによって前記被検査体の画像を撮影して前記被検査体の画像データを獲得する段階と;
前記カメラから入力される画像データを前記コンピュータによって処理する段階とを含んでなる、ビジョン検査システムを用いる被検査体の検査方法。
【請求項6】
前記被検査体の画像データを獲得する段階において、前記被検査体の画像を前記カメラで撮影するとき、前記被検査体と前記カメラが互いに整列するように停止させる、請求項5に記載のビジョン検査システムを用いる被検査体の検査方法。
【請求項1】
上面両側に第1位置と第2位置がそれぞれ設けられている定盤と;
前記定盤の上面に設置され、被検査体が置かれるテーブルを持ち、前記第1位置と第2位置の間で前記テーブルを直線運動させる第1移送手段と;
前記定盤の上方に、前記被検査体の画像を撮影して画像データを出力するように配置されるカメラと;
前記定盤の上面に設置され、前記第1位置と第2位置の間で前記カメラを直線運動させる第2移送手段と;
前記第1移送手段、前記カメラ及び前記第2移送手段と接続され、前記第1移送手段の作動を制御して、前記第1位置から前記第2位置に前記テーブルを移送させるとともに、前記第2移送手段の作動を制御して前記第2位置から前記第1位置に前記カメラを移送させるように構成され、前記カメラから入力される画像データを処理する画像処理プログラムが組み込まれているコンピュータと;を含んでなる、ビジョン検査システム。
【請求項2】
前記第1移送手段は、
前記定盤の上面に、前記第1位置と第2位置の間で、前記テーブルの移送を直線運動に案内するように装着される一対のリニアモーションガイドと;
前記リニアモーションガイドの間に装着され、前記リニアモーションガイドに沿って前記テーブルを移送するように前記テーブルに連結されているリニアモーターと;を含んでなる、請求項1に記載のビジョン検査システム。
【請求項3】
前記第2移送手段は、
前記定盤の上方に、前記第1位置と前記第2位置の間で運動するように配置され、前記カメラが装着されているキャリッジと;
前記定盤の上面に、前記第1位置と第2位置の間で前記キャリッジの移送を直線運動に案内するように装着される一対のリニアモーションガイドと;
前記リニアモーションガイドの間に装着され、前記リニアモーションガイドに沿って前記キャリッジを移送するように前記キャリッジに連結されているリニアモーターと;を含んでなる、請求項2に記載のビジョン検査システム。
【請求項4】
前記定盤を支持する複数のベースアイソレーターをさらに含む、請求項1ないし3のいずれか1項に記載のビジョン検査システム。
【請求項5】
上面両側に第1位置と第2位置がそれぞれ設けられている定盤と、前記定盤の上面に設置され、前記第1位置と第2位置の間で直線運動することができるテーブルを持つ第1移送手段と、前記定盤の上方に配置される一つ以上のカメラと、前記定盤の上面に設置され、前記第1位置と第2位置の間で前記カメラを直線運動させることができる第2移送手段と、前記カメラから入力される画像データを処理するコンピュータとを含んでなるビジョン検査システムによって被検査体を検査する方法において、
第1移送手段の作動によって前記第1位置に前記テーブルを位置させる段階と;
前記第1位置に位置している前記テーブルに前記被検査体をロードする段階と;
前記第2移送手段の作動によって前記第2位置に前記カメラを位置させる段階と;
前記第1移送手段の作動によって前記第1位置から前記第2位置に前記テーブルを移送させるとともに、前記第2移送手段の作動によって前記第2位置から前記第1位置に前記カメラを移送させる段階と;
前記カメラによって前記被検査体の画像を撮影して前記被検査体の画像データを獲得する段階と;
前記カメラから入力される画像データを前記コンピュータによって処理する段階とを含んでなる、ビジョン検査システムを用いる被検査体の検査方法。
【請求項6】
前記被検査体の画像データを獲得する段階において、前記被検査体の画像を前記カメラで撮影するとき、前記被検査体と前記カメラが互いに整列するように停止させる、請求項5に記載のビジョン検査システムを用いる被検査体の検査方法。
【図1】

【図2】
【図3】
【図4】
【図5】
【図6】
【図2】
【図3】
【図4】
【図5】
【図6】
【公表番号】特表2009−531718(P2009−531718A)
【公表日】平成21年9月3日(2009.9.3)
【国際特許分類】
【出願番号】特願2009−506426(P2009−506426)
【出願日】平成19年7月10日(2007.7.10)
【国際出願番号】PCT/KR2007/003337
【国際公開番号】WO2008/117907
【国際公開日】平成20年10月2日(2008.10.2)
【出願人】(507185277)エスエヌユー プレシジョン カンパニー リミテッド (3)
【Fターム(参考)】
【公表日】平成21年9月3日(2009.9.3)
【国際特許分類】
【出願日】平成19年7月10日(2007.7.10)
【国際出願番号】PCT/KR2007/003337
【国際公開番号】WO2008/117907
【国際公開日】平成20年10月2日(2008.10.2)
【出願人】(507185277)エスエヌユー プレシジョン カンパニー リミテッド (3)
【Fターム(参考)】
[ Back to top ]