
ビデオ内視鏡
【課題】改良されたビデオ内視鏡システムを提供する。
【解決手段】ビデオ内視鏡システム10は、再使用可能な制御キャビネット50と、それに接続可能な内視鏡20とを含み、内視鏡20は、一人の患者に対して用い、その後廃棄することができる。内視鏡20は、照射機構と、イメージセンサと、1つまたはそれ以上のルーメンが内部に配置された細長いシャフト24とを含む。内視鏡20の遠位端の関節ジョイントにより、制御キャビネット50内のアクチュエータ、または、制御ハンドル内のアクチュエータによって遠位端を特定の方向に向けることが可能となる。フルイディクス制御、電気的制御、ナビゲーション制御、画像制御、表示制御およびデータ入力制御は、他のアクセサリと共に本システム内に統合されている。
【解決手段】ビデオ内視鏡システム10は、再使用可能な制御キャビネット50と、それに接続可能な内視鏡20とを含み、内視鏡20は、一人の患者に対して用い、その後廃棄することができる。内視鏡20は、照射機構と、イメージセンサと、1つまたはそれ以上のルーメンが内部に配置された細長いシャフト24とを含む。内視鏡20の遠位端の関節ジョイントにより、制御キャビネット50内のアクチュエータ、または、制御ハンドル内のアクチュエータによって遠位端を特定の方向に向けることが可能となる。フルイディクス制御、電気的制御、ナビゲーション制御、画像制御、表示制御およびデータ入力制御は、他のアクセサリと共に本システム内に統合されている。
【発明の詳細な説明】
【技術分野】
【0001】
発明の分野
本発明は、全体として医療機器に関し、詳細には、治療用内視鏡および診断用内視鏡に関する。
【背景技術】
【0002】
発明の背景
消化管および排出管ならびに気道、例えば結腸、食道、胃、尿道、膀胱、尿管、腎臓、肺、気管支、子宮および他の臓器系などの内部構造物の疾病の早期発見ならびに治療の一助としての定期的内視鏡検査から主要な公衆衛生上の利益がもたらされることは、充分に立証されている。そのような手技に用いられる従来のイメージング内視鏡は、照射光を外部光源から遠位先端へ導く光ファイバライトガイドを有する可撓性チューブを備え、該遠位先端において、光が検査対象領域(すなわち、組織、閉塞性物体)を照射する。ファイババンドルおよび遠位先端から出る光の拡散を調節するために、追加の光学部品が組み込まれていることが多い。対物レンズおよび内視鏡の近位端でカメラと通信する光ファイバイメージングライトガイド、または遠位端のイメージングカメラチップが、操作者に表示される画像を生成する。さらに、ほとんどの内視鏡は、生検鉗子、スネア、高周波療法用プローブ、および他のツールのような医療機器を通すことができる1つまたはそれ以上の作動チャネルを含む。
【0003】
複雑で曲がりくねった経路を通る内視鏡のナビゲーションは、患者に対する苦痛、副作用、リスク、または鎮静を最小限度に抑えながらの検査の成功に決定的な役割を果たす。この目的を達するために、現代の内視鏡は、内視鏡の遠位端を偏向させる手段を含んでおり、偏向または周囲組織上に加わる摩擦力を最小限度に抑えながら検査下の構造物の経路をたどり、標的の検査部位を調査する。遠位端の可撓性部分を近位の内視鏡ハンドルにある一組のコントロールノブに接続するために、自転車のブレーキケーブルに類似した制御ケーブルが、内視鏡本体の内部に担持されている。かさばり、いくぶん非直感的で、かつ摩擦に制限される可能性のあるそのような従来の制御システムの制限にもかかわらず、コントロールノブを操作することにより、操作者は、挿入中内視鏡を操向し、それを関心のある領域へ導くことができる。従来の内視鏡に関する一般的な操作者の苦情には、内視鏡の可撓性の制限、コラム強さの制限、および内視鏡の長さに沿った剛性の操作者による制御の制限が含まれる。
【0004】
例えば、従来の可撓性内視鏡は、25,000ドルの範囲の費用がかかり、関連するオペレータコンソールにはさらに多くの費用がかかる高価な医療機器である。内視鏡は、それが高価なピース部品を含んでおり、骨の折れる手作業による組み立てを必要とするために高価である。この費用のため、これらの内視鏡は、繰り返し行われる消毒に耐えるように構築され、多くの患者に使用される。従来の内視鏡は一般に、通常は再処理下で劣化しない金属およびプラスチックを含む強固な複合構造で構築されている。これらの材料構造は、内視鏡の可撓性を減少させ、かつ患者の安心を損なう可能性がある。さらに、従来の内視鏡は、使用中または消毒処置中の損傷の結果として高額な修理を必要とすることの多い、複雑で壊れやすい機器である。
【発明の概要】
【発明が解決しようとする課題】
【0005】
これらおよび他の問題を克服するのに、低コストの内視鏡の開発は、内視鏡を一回の手技に用いその後廃棄することを可能にし、下準備および洗浄の必要性を排除し、必要な内視鏡の総量を増加させることになろう。この量の増大は、製造業者が規模の経済を達成し、かつ現在の量で使用した場合には経済的ではなく、より大きい量(年間100,000ユニット)でのみ経済的な製造法を取り入れることを可能にするであろう。低コストの内視鏡は、無菌または消毒した状態で梱包しなければならず、かつ内視鏡の下準備なくして一回の手技に用い、その後廃棄することができなければならない。この内視鏡は、次の特徴のうちの1つまたはそれ以上を含まなければならない:より優れたナビゲーションおよびトラッキング、操作者との優れたインターフェース、管腔組織上への摩擦力の減少によるアクセスの向上、患者の安心の増大、従来の内視鏡を用いて現在得られるものより高い臨床上の生産性および患者処理能力、二次汚染のリスクの低下およびより多くの手技にわたる使用可能性。
【課題を解決するための手段】
【0006】
発明の概要
先行技術におけるこれらおよび他の問題に対処するために、本発明は、ビデオ内視鏡システムである。一態様では、本システムは、制御キャビネットと、内視鏡の向きを制御するいくつかの手動または電子式のアクチュエータと、内視鏡の遠位端でイメージセンサによって収集された画像を出現させるためのイメージングシステムとを含む。内視鏡は制御キャビネットと接続可能であり、患者を検査および/または治療するために用いられる。検査手順後、内視鏡は、制御キャビネットから取り外して廃棄することができ、従来の再使用可能な内視鏡につきものの洗浄および再滅菌のコストと労力を省くことができる。
【0007】
本発明の内視鏡は、可撓性の細長いチューブまたはシャフトと、光を検査部位上へ導く照射源とを含む。内視鏡の遠位端またはそれに隣接する位置にあるイメージセンサおよび対物レンズ組立体が反射光を捕捉し、照射された被写体の画像を生成する。センサによって生成された画像は、表示装置に伝送され、操作者によって閲覧される。一実施形態では、内視鏡の遠位端にあるイメージング組立体は、1つまたはそれ以上の発光ダイオード(LED)を格納する安価な大量生産可能な構成部品の組立体と、CMOS固体イメージセンサのようなイメージセンサと、低コスト(例えばプラスチック)のレンズ組立体とを含む。LEDは、熱交換器に熱結合することができ、LEDによって発生された全ての過剰熱を除去するために、空冷または液冷することができる。
【0008】
本発明の内視鏡は、いくつかの伸張性を有する制御ケーブルのような操向機構をも含んでおり、該制御ケーブルによって、内視鏡の遠位端を所望の方向に偏向させることが可能となる。本発明の一実施形態では、伸張性を有する制御ケーブルの近位端は、近位の制御ハンドル内に取り付けられた機械的制御機構(例えばノブ)に接続されている。別の実施形態では、ケーブルは、制御キャビネット内のアクチュエータと通信する。後者では、方向制御装置が電気制御信号を生成し、該電気制御信号が制御キャビネット内のプロセッサを介して送信され、制御キャビネットが制御信号を生成し、内視鏡の遠位端を操作者の所望する方向に向けるために、アクチュエータを駆動する。本発明の別の実施形態では、内視鏡の遠位端は、イメージセンサからの画像の分析に基づいて、自動的に操向される。ジョイスティックまたは他の方向制御装置は、組織壁に当たる力を反映するため、または内視鏡がループ状になる可能性があることを操作者に警告するために、触知性、触覚性または他の感覚フィードバックを含むことができる。遠位先端のハウジングには、部品が高度に集積されている。例えば、LED用の透明なウィンドウが遠位先端のハウジング内にインサート成形されており、二次ウィンドウシーリング作業を一切排除し、気密シールを確保している。
【0009】
本発明の一実施形態では、内視鏡は、内視鏡の遠位端を制御ケーブルで所望の方向に曲げることを可能にするいくつかの低コスト(例えば、機械形成部品、型打ち部品または成形部品)、容易に大量生産される構成部品からなる関節ジョイントを含む。本発明の一実施形態では、張力を加える力の開放時に内視鏡の遠位端がまっすぐになるように、関節ジョイントは、復元力を働かせる。
【0010】
本発明の別の実施形態では、内視鏡は、その長さに沿って剛性に変動があり、ほとんど誤前進(「ループ」)することなく、曲がりくねった弾性の解剖学的組織を通って、操作者が大幅に容易かつ正確に、またより高い精度で内視鏡をナビゲートすることができるように、遠位端を比較的撓みやすくさせ、それと同時に内視鏡のより近位の領域のコラム強さおよびトルク忠実度を増大させている。長さに沿った機械的特性(例えば、コラム強さ、曲げ係数または曲げ強度、ねじれ)の事前設定変動は、例えば、内視鏡のシャフトを構成する材料のデュロメータ定格または種類もしくは寸法を変えることによってもたらすことができる。操作者によって制御される可変の剛性は、ピンと張る、緩める、またはトルクを与えてシャフトの剛性を調節することができる制御ケーブルによって提供することができる。さらに別の実施形態では、関節ジョイントを構成する構成要素間のスペーシングは、関節ジョイントの長さに沿った剛性の変動を事前設定するように選択される。
【0011】
本発明のさらに別の実施形態では、内視鏡は、使用時には内視鏡の遠位端を露出させ、内視鏡が患者から除去された後は遠位端の上に延びる後退可能なスリーブで覆われている。
【0012】
本発明の別の実施形態では、内視鏡の表面は、内視鏡の摩擦係数を小さくするために、親水性被覆剤のような材料を含む。例えば、本機器の性能を高めるため、優先使用または汚染の判定の目安とするためあるいは治療剤を送達するために、他の被覆剤を用いてもよい。
例えば、本発明は以下を提供する。
(項目1)
遠位端および近位端を有し、1つまたはそれ以上のルーメンを内部に有するシャフトと、
画像信号を生成するための、上記遠位端に配置されるかまたはそこに隣接して配置されるイメージセンサと、
上記シャフトの上記遠位端を所望の方向に向けるために選択的に張力が加えられる、上記シャフトの上記遠位端に固定されるかまたはそこに隣接して固定される端部を有する1つまたはそれ以上の制御ケーブルと、
上記シャフトの上記遠位端を上記所望の方向に向けるために上記1つまたはそれ以上の制御ケーブルに選択的に張力を加える1つまたはそれ以上の手動で操作される制御装置を含む、上記シャフト上に配置されたハンドルと、
上記シャフト内の上記1つまたはそれ以上のルーメンに液体を選択的に送達する手段を含む、制御キャビネットに開放可能に固定可能な、上記シャフトの上記近位端に位置するコネクタと、
を備える、内視鏡。
(項目2)
上記シャフトの上記遠位端に位置するかまたはそこに隣接して位置する照射源
をさらに備える、項目1に記載の内視鏡。
(項目3)
上記シャフトの上記遠位端が患者の身体を通して見えるように、上記照射源が点滅光を発生させる、項目2に記載の内視鏡。
(項目4)
上記点滅光は、8ヘルツ〜14ヘルツの周波数を有する、項目3に記載の内視鏡。
(項目5)
上記照射源は、1つまたはそれ以上のLEDを含む、項目3に記載の内視鏡。
(項目6)
上記照射源は、光ファイバ照射ガイドを含む、項目3に記載の内視鏡。
(項目7)
上記イメージセンサは、ビデオモニタ上への表示用に、上記照射源によって照射された組織を表す画像信号を生成し、上記照射源が上記点滅光を発生させる際は、上記イメージセンサまたはビデオモニタは無効にされる、項目3に記載の内視鏡。
(項目8)
上記シャフトの上記遠位端において照射光を発生させる照射源と、
上記イメージセンサによって生成された画像信号が表示されるディスプレイと、
患者の身体を通して上記シャフトの上記遠位端を見るために、上記照射源をパルス化して点滅照射を発生させ上記照射源のパルス時にちらつきのない表示を生成するための制御装置と、
をさらに備える、項目1に記載の内視鏡。
(項目9)
上記表示は、静止画像を表示することによってちらつきがなくなっている、項目8に記載のシステム。
(項目10)
上記表示は、上記イメージセンサを無効にすることによってちらつきがなくなっている、項目8に記載のシステム。
(項目11)
上記表示は、上記ディスプレイの電源を切ることによってちらつきがなくなっている、項目8に記載のシステム。
(項目12)
上記表示は、上記イメージセンサからの画像信号を処理する電子機器を無効にすることによってちらつきがなくなっている、項目8に記載のシステム。
(項目13)
液体を上記シャフト内の上記1つまたはそれ以上のルーメンに選択的に送達する上記手段は、マニホルドを備える、項目1に記載のシステム。
(項目14)
上記近位コネクタは、
上記シャフト内の上記1つまたはそれ以上のルーメンに供給するための洗浄液を受け取るための液体コネクタ、
上記シャフト内の上記1つまたはそれ以上のルーメンに供給するための吹送空気/ガスを受け取るためのガスコネクタ、または
制御キャビネットからの電気信号を受け取り上記画像信号を上記制御キャビネットに送達するための電気コネクタ
のうちの1つまたはそれ以上をさらに備える、項目1に記載の内視鏡。
(項目15)
上記電気コネクタは、上記画像信号を直列伝送するために上記イメージセンサによって用いられる外部で生成されたクロック信号を受け取るためのコネクションをさらに含む、項目14に記載の内視鏡。
(項目16)
上記内視鏡は、温度センサを含み、上記電気コネクタは、上記温度センサからの信号を上記制御キャビネットに連結するためのコネクションをさらに含む、項目14に記載の内視鏡。
(項目17)
上記制御キャビネットは、処置時に用いられるツールを検出する検出器を含む、項目1に記載の内視鏡。
(項目18)
上記検出器は、バーコードリーダである、項目17に記載の内視鏡。
(項目19)
上記検出器は、RFIDタグリーダである、項目17に記載の内視鏡。
(項目20)
上記ルーメンのうちの1つは、作動チャネルであり、上記シャフトは、上記作動チャネルルーメンへの入口を含み、上記入口は、上記作動チャネルルーメンからのツールの除去時にセルフシールするセルフシール弁を含む、項目1に記載の内視鏡。
(項目21)
上記シャフト内の上記ルーメンのうちの1つまたはそれ以上は、摩擦を低減するためにつや消しされたチューブを備える、項目1に記載の内視鏡。
(項目22)
上記シャフトは、上記遠位端を所望の方向に選択的に曲げるための、上記シャフトの上記遠位端に隣接する関節ジョイントを含む、項目1に記載の内視鏡。
【図面の簡単な説明】
【0013】
本発明の前述の態様および付随する利点の多くは、それらが添付の図面と併せて以下の詳細な説明を参照することによってよりよく理解されるにつれて、より容易に分かるであろう。
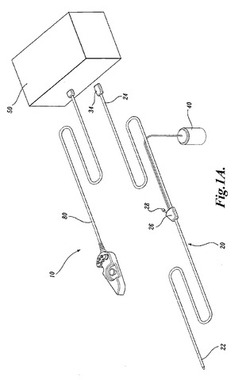
【図1−1】図1Aは、本発明の例示的な実施形態によるビデオ内視鏡システムの概略図である。
【図1−2】図1Bは、本発明の例示的な実施形態によるビデオ内視鏡システムの概略図である。
【図1−3】図1Cは、本発明のビデオ内視鏡の一実施形態のより詳細な図を示す。
【図1−4】図1Dは、本発明のビデオ内視鏡の一実施形態のより詳細な図を示す。
【図2】図2は、図1Aに示すビデオ内視鏡システムに用いられる内視鏡のさらなる詳細を示す。
【図3−1】図3Aは、本発明の一実施形態による内視鏡とインターフェースをとる制御キャビネットのブロック図である。
【図3−2】図3Bは、本発明の別の実施形態による内視鏡とインターフェースをとる制御キャビネットのブロック図である。
【図3−3】図3Cは、本発明の別の実施形態による制御キャビネットおよび内視鏡のブロック図である。
【図3−4】図3Dは、本発明の別の実施形態による制御キャビネット内の構成要素およびそれらの内視鏡へのインターフェースのより詳細なブロック図である。
【図3−5】図3Eは、本発明の別の実施形態による制御キャビネット内のカメラ制御カードと内視鏡の遠位先端の遠隔イメージセンサとの間のデータおよび制御信号の通信を示す。
【図3−6】図3Fは、図3Cに示すビデオ内視鏡のフルイディクスの図である。
【図3−7】図3Gおよび図3Hは、本発明の内視鏡の一実施形態で用いるための可撓性マニホルドを示す。
【図3−8】図3Gおよび図3Hは、本発明の内視鏡の一実施形態で用いるための可撓性マニホルドを示す。
【図4−1】図4Aは、内視鏡に接続するための制御キャビネット上のコネクタの一実施形態を示す。
【図4−2】図4B〜図4Dは、内視鏡の近位端を制御キャビネットに接続するためのコネクタの一実施形態を示す。
【図4−3】図4B〜図4Dは、内視鏡の近位端を制御キャビネットに接続するためのコネクタの一実施形態を示す。
【図4−4】図4B〜図4Dは、内視鏡の近位端を制御キャビネットに接続するためのコネクタの一実施形態を示す。
【図4−5】図4Eは、内視鏡に接続するためのコネクタを有する制御キャビネットの別の実施形態を示す。
【図4−6】図4Fは、本発明の一実施形態による制御キャビネットに係合する近位コネクタの表面を示す。
【図4−7】図4Gは、本発明の一実施形態による近位コネクタの内部を示す。
【図5−1】図5Aは、本発明のビデオ内視鏡と共に用いるためのハンドヘルドコントローラの一実施形態の詳細図である。
【図5−2】図5Bは、本発明の内視鏡と共に用いるための力フィードバック機構を含むジョイスティック型コントローラの一実施形態を示す。
【図5−3】図5Cは、図5Bに示す型のジョイスティックに力フィードバックを提供するための機構の一実施形態を示す。
【図5−4】図5Dおよび図5Eは、本発明のブレイクアウトボックスおよびハンドヘルドコントローラの別の実施形態を示す。
【図5−5】図5Dおよび図5Eは、本発明のブレイクアウトボックスおよびハンドヘルドコントローラの別の実施形態を示す。
【図5−6】図5F〜図5Iは、本発明の内視鏡と共に用いるための手動ハンドルの一実施形態を示す。
【図5−7】図5F〜図5Iは、本発明の内視鏡と共に用いるための手動ハンドルの一実施形態を示す。
【図5−8】図5F〜図5Iは、本発明の内視鏡と共に用いるための手動ハンドルの一実施形態を示す。
【図5−9】図5F〜図5Iは、本発明の内視鏡と共に用いるための手動ハンドルの一実施形態を示す。
【図6−1】図6Aは、本発明による内視鏡の遠位先端の一実施形態を示す。
【図6−2】図6B〜図6Iは、本発明の内視鏡と共に用いるためのイメージング組立体の一実施形態を示す。
【図6−3】図6B〜図6Iは、本発明の内視鏡と共に用いるためのイメージング組立体の一実施形態を示す。
【図6−4】図6B〜図6Iは、本発明の内視鏡と共に用いるためのイメージング組立体の一実施形態を示す。
【図6−5】図6B〜図6Iは、本発明の内視鏡と共に用いるためのイメージング組立体の一実施形態を示す。
【図6−6】図6B〜図6Iは、本発明の内視鏡と共に用いるためのイメージング組立体の一実施形態を示す。
【図6−7】図6B〜図6Iは、本発明の内視鏡と共に用いるためのイメージング組立体の一実施形態を示す。
【図6−8】図6B〜図6Iは、本発明の内視鏡と共に用いるためのイメージング組立体の一実施形態を示す。
【図6−9】図6B〜図6Iは、本発明の内視鏡と共に用いるためのイメージング組立体の一実施形態を示す。
【図6−10】図6Jは、本発明の一実施形態と共に用いるためのレンズ組立体を示す。
【図7】図7は、本発明の一実施形態による内視鏡の遠位先端内でいくつかの制御ケーブルを終了させるための一機構を示す。
【図8】図8は、本発明の一実施形態による内視鏡シャフトの壁内のルーメンに通された制御ケーブルを有する内視鏡を示す。
【図9】図9Aおよび図9Bは、本発明の一実施形態による制御ケーブルを内視鏡シャフトの中央ルーメンから関節ジョイント内の制御ケーブルルーメンへ導く遷移ガイドを示す。
【図10】図10Aおよび図10Bは、本発明の一実施形態による内視鏡のシャフト部分の構造を示す。
【図11】図11は、本発明の一実施形態による長さに沿って剛性が変動するシャフトを提供するための一機構を示す。
【図12】図12Aおよび図12Bは、本発明の一実施形態による関節ジョイントを作るために用いられる突き出しを示す。
【図13】図13は、本発明の一実施形態による関節ジョイントを示す。
【図14】図14および図15は、本発明の別の実施形態による関節ジョイントを形成するために用いられる異なるデュロメータの領域を有する突き出しを示す。
【図15】図14および図15は、本発明の別の実施形態による関節ジョイントを形成するために用いられる異なるデュロメータの領域を有する突き出しを示す。
【図16】図16Aおよび図16Bは、いくつかのボール部分およびソケット部分を含む本発明の一実施形態による関節ジョイントの別の実施形態を示す。
【図17】図17A〜図17Dは、関節ジョイントを構築するために用いられるボール部分およびソケット部分のさまざまな可能な構成を示す。
【図18】図18A〜図18Bは、本発明の別の実施形態によるいくつかの積み重なった円盤で形成された関節ジョイントを示す。
【図19】図19A〜図19Bは、本発明の別の実施形態による関節ジョイントを形成するために用いられる円盤を示す。
【図20】図20A〜図20Bは、本発明の別の実施形態による関節ジョイントを形成するために用いられる円盤を示す。
【図21】図21A〜図21Bは、本発明の別の実施形態による関節ジョイントを形成するために用いられる非円形セグメントを示す。
【図22】図22は、本発明の別の実施形態による関節ジョイントとして編み組み部材を有する内視鏡を示す。
【図23−1】図23は、制御ワイヤの端部を図22に示す編み組み関節ジョイントに固定するための1つの可能な手法を示す。図23A〜図23Xは、本発明の内視鏡に用いるための関節ジョイントの追加の実施形態を示す。
【図23−2】図23は、制御ワイヤの端部を図22に示す編み組み関節ジョイントに固定するための1つの可能な手法を示す。図23A〜図23Xは、本発明の内視鏡に用いるための関節ジョイントの追加の実施形態を示す。
【図23−3】図23は、制御ワイヤの端部を図22に示す編み組み関節ジョイントに固定するための1つの可能な手法を示す。図23A〜図23Xは、本発明の内視鏡に用いるための関節ジョイントの追加の実施形態を示す。
【図23−4】図23は、制御ワイヤの端部を図22に示す編み組み関節ジョイントに固定するための1つの可能な手法を示す。図23A〜図23Xは、本発明の内視鏡に用いるための関節ジョイントの追加の実施形態を示す。
【図23−5】図23は、制御ワイヤの端部を図22に示す編み組み関節ジョイントに固定するための1つの可能な手法を示す。図23A〜図23Xは、本発明の内視鏡に用いるための関節ジョイントの追加の実施形態を示す。
【図23−6】図23は、制御ワイヤの端部を図22に示す編み組み関節ジョイントに固定するための1つの可能な手法を示す。図23A〜図23Xは、本発明の内視鏡に用いるための関節ジョイントの追加の実施形態を示す。
【図23−7】図23は、制御ワイヤの端部を図22に示す編み組み関節ジョイントに固定するための1つの可能な手法を示す。図23A〜図23Xは、本発明の内視鏡に用いるための関節ジョイントの追加の実施形態を示す。
【図23−8】図23は、制御ワイヤの端部を図22に示す編み組み関節ジョイントに固定するための1つの可能な手法を示す。図23A〜図23Xは、本発明の内視鏡に用いるための関節ジョイントの追加の実施形態を示す。
【図23−9】図23は、制御ワイヤの端部を図22に示す編み組み関節ジョイントに固定するための1つの可能な手法を示す。図23A〜図23Xは、本発明の内視鏡に用いるための関節ジョイントの追加の実施形態を示す。
【図23−10】図23は、制御ワイヤの端部を図22に示す編み組み関節ジョイントに固定するための1つの可能な手法を示す。図23A〜図23Xは、本発明の内視鏡に用いるための関節ジョイントの追加の実施形態を示す。
【図23−11】図23は、制御ワイヤの端部を図22に示す編み組み関節ジョイントに固定するための1つの可能な手法を示す。図23A〜図23Xは、本発明の内視鏡に用いるための関節ジョイントの追加の実施形態を示す。
【図23−12】図23は、制御ワイヤの端部を図22に示す編み組み関節ジョイントに固定するための1つの可能な手法を示す。図23A〜図23Xは、本発明の内視鏡に用いるための関節ジョイントの追加の実施形態を示す。
【図23−13】図23は、制御ワイヤの端部を図22に示す編み組み関節ジョイントに固定するための1つの可能な手法を示す。図23A〜図23Xは、本発明の内視鏡に用いるための関節ジョイントの追加の実施形態を示す。
【図23−14】図23は、制御ワイヤの端部を図22に示す編み組み関節ジョイントに固定するための1つの可能な手法を示す。図23A〜図23Xは、本発明の内視鏡に用いるための関節ジョイントの追加の実施形態を示す。
【図23−15】図23は、制御ワイヤの端部を図22に示す編み組み関節ジョイントに固定するための1つの可能な手法を示す。図23A〜図23Xは、本発明の内視鏡に用いるための関節ジョイントの追加の実施形態を示す。図23は、制御ワイヤの端部を図22に示す編み組み関節ジョイントに固定するための1つの可能な手法を示す。図23A〜図23Xは、本発明の内視鏡に用いるための関節ジョイントの追加の実施形態を示す。
【図23−16】図23は、制御ワイヤの端部を図22に示す編み組み関節ジョイントに固定するための1つの可能な手法を示す。図23A〜図23Xは、本発明の内視鏡に用いるための関節ジョイントの追加の実施形態を示す。
【図23−17】図23は、制御ワイヤの端部を図22に示す編み組み関節ジョイントに固定するための1つの可能な手法を示す。図23A〜図23Xは、本発明の内視鏡に用いるための関節ジョイントの追加の実施形態を示す。
【図24】図24は、本発明の別の実施形態による1つまたはそれ以上のメモリ縮小ラップを有する内視鏡シャフトを示す。
【図25】図25は、本発明の別の実施形態による高デュロメータ材料の長手方向ストライプを含む内視鏡シャフトを示す。
【図26】図26〜図29は、本発明による内視鏡を回転させる把持機構の代替的実施形態を示す。
【図27】図26〜図29は、本発明による内視鏡を回転させる把持機構の代替的実施形態を示す。
【図28】図26〜図29は、本発明による内視鏡を回転させる把持機構の代替的実施形態を示す。
【図29】図26〜図29は、本発明による内視鏡を回転させる把持機構の代替的実施形態を示す。
【図30】図30Aおよび図30Bは、本発明の別の実施形態による内視鏡を選択的に被覆する後退可能なスリーブを示す。
【図31】図31は、本発明による内視鏡の受動放熱する遠位先端の一実施形態を示す。
【図32】図32および図33は、本発明による受動放熱する遠位先端の代替的実施形態を示す。
【図33】図32および図33は、本発明による受動放熱する遠位先端の代替的実施形態を示す。
【発明を実施するための形態】
【0014】
好ましい実施形態の詳細な説明
上に述べたように、本発明は、患者の体内に外科手術用機器を挿入することのみならず、患者の体内の解剖学的構造に操作者がアクセスし、観察することを可能にするビデオ内視鏡システムである。さらに、本内視鏡は、操作者が一回の手技で患者を治療するのを可能にする統合された診断機能および治療機能を含むことができる。本発明の内視鏡は、製造するのに十分に安価であることができ、これにより内視鏡を単回使用の使い捨て用品と見なすことができる。
【0015】
図1Aに示すように、本発明の一実施形態によるビデオ内視鏡システム10は、内視鏡20と、制御キャビネット50と、ハンドヘルドコントローラ80とを含む。内視鏡20は、患者の体腔内に進められる遠位先端22および制御キャビネット50に接続される近位端24を有する。以下にさらに説明するように、制御キャビネット50は、遠位先端22の向きを変えるために、内視鏡20内部の操向機構を制御するいくつかのアクチュエータを含む。医師または助手は、ハンドヘルドコントローラ80を用いて制御信号を入力し、該制御信号によって、内視鏡20の遠位先端22が動かされる。さらに、制御キャビネット50は、空気/ガス源および内視鏡20、薬物または造影剤を浄化するための水のようなフラッシング液へのコネクションを含むことができる。制御キャビネットは、制御キャビネットが他の制御キャビネット、コンピュータまたはインターネットと通信することを可能にするためのネットワークコネクション(図示せず)も含むことができる。希望するなら、1つまたはそれ以上の外部モニタ、PDA、プリンタ、ビデオ記録システム、記憶装置およびストレージエリアネットワーク、サーバ、および病院情報ネットワークまたは他の医療機器を、制御キャビネットに接続することができる。制御キャビネット50は、イメージセンサから受信した信号を処理および/または転送するためのイメージング電子回路、イメージセンサを制御する信号、および医師または技術者による閲覧のためのビデオディスプレイ(図示せず)用の患者データをも含む。
【0016】
図示の実施形態では、内視鏡20は、内視鏡の長さに沿ってほぼ中間に配置されたブレイクアウトボックス26をも含む。ブレイクアウトボックス26は、作動チャネルへの入口を提供し、内視鏡内部のルーメンから受け取った液体、残屑または検体を回収する真空回収ボトル40用の取り付け点を含むことができる。真空回収ボトル40は、ブレイクアウトボックス26上に配置された真空弁(図示せず)によって制御される。あるいは、この弁を、制御キャビネット50内に配置またはそれに接続し、ハンドヘルドコントローラ80(例えば図3D参照)から制御してもよい。
【0017】
希望するなら、ハンドヘルドコントローラ80をブレイクアウトボックス26内に固定するかまたは内蔵することができ、これによりこれら2つの装置を一体として動かすことができる。患者検査手技の完了時に、内視鏡20は、制御キャビネット50から取り外され、廃棄される。次いで、次の検査手技を行うために、新たな内視鏡20が制御キャビネット50に接続される。
【0018】
図1Aに示す実施形態は、内視鏡20およびハンドヘルドコントローラ80が制御キャビネット50の異なるコネクタに別個に接続される「並列」構成である。この並列構成は、一人の操作者が内視鏡を操作し、その間に別の操作者がハンドヘルドコントローラ80を操作することを可能にする。あるいは、一人の操作者が両方を制御することができるように、ハンドヘルドコントローラ80を内視鏡20に固定してもよい。図1Bに、本発明の「直列」構成を示す。ここでは、内視鏡20は、ハンドヘルドコントローラ80を通じて制御キャビネット50に接続されている。一実施形態では、このハンドヘルドコントローラは、従来の内視鏡に見られるものに類似した方法で遠位先端に接続された内視鏡内部の制御ケーブルを引っ張るかまたはゆるめる、1つまたはそれ以上の手動で駆動されるアクチュエータを含む。制御ケーブルに張力を加えることにより、操作者は、内視鏡の先端を選択的に配向することができる。さらに、ハンドルは、1つまたはそれ以上のスイッチを含んでおり、該スイッチによって制御キャビネット内の電子機器を起動し、イメージング機能を制御すると同時に、内視鏡に空気または液体を送達する。さらに別の実施形態では、ハンドルは、制御キャビネット内のアクチュエータに制御ケーブルを駆動させる操作者制御を含むことができる。
【0019】
図1Cおよび図1Dに、本発明のビデオ内視鏡システムの一実施形態をさらに詳細に示す。制御キャビネットは、容易にあちらこちらに移動できるように、ロック可能な車輪上に取り付けられている。さらに、制御キャビネットは、検査領域の画像および他の患者データを表示するためのビデオモニタを支持している。操作者は、キーボード、またはタッチセンサ、もしくはマルチポジションスイッチにより、患者ファイルおよび/または手技の記録にデータを入力することができる。内視鏡20は、制御キャビネット50に取り外し可能に固定されている。図示の実施形態では、ハンドヘルドコントローラは内視鏡の一部であり、本システムのさまざまな機能を起動するためのスイッチのみならず、遠位先端を動かすための手動アクチュエータも含んでいる。
【0020】
図2に、内視鏡20の一実施形態をさらに詳細に示す。内視鏡の近位端にシャフト24があり、これは、より低いねじれ剛性を有し、また内視鏡20を制御キャビネット(図示せず)に接続するコネクタ34を有する。ブレイクアウトボックス26より遠位では、シャフトはより高いねじれ剛性を有する。内視鏡20の遠位端に、光照射ポート、イメージセンサ、作動チャネル32への開口部および洗浄ポート(図示せず)を含む遠位先端22がある。遠位先端22より近位に関節ジョイント30があり、これにより、操向機構によって遠位先端22を所要の偏向範囲(180°またはそれ以上)にわたって方向づけることができるように、また遠位先端の周りの希望する任意の方向に曲がるように方向づけることができるように、シャフトの遠位部分に十分な可撓性が付与されている。すなわち、操作者は、曲がりまたは関節運動の量と曲がりの方向との両方を選択することができる。
【0021】
上に論じたように、本発明の一実施形態による内視鏡20は、内視鏡の遠位部分にトルクのより高いシャフトを有し、内視鏡の近位端にトルクのより低いシャフトを有する。内視鏡シャフトの長さに沿って配置されたブレイクアウトボックス26は、検診手技時に内視鏡遠位端の回転を付与するためのハンドルまたはグリッパとして用いることができる。シャフトのトルクが高い方の部分は、遠位先端近傍の位置で付与される回転運動を伝達し、内視鏡の遠位先端を誘導する。なお、内視鏡のトルクが低い方のシャフト部分は、操作の容易性のために意図的にトルクを伝達しないものであり、回転運動が加えられるとねじれることができ、またそのような回転を支援するために、1つまたはそれ以上の回転可能なカプラを含むことができる。
【0022】
使用時、操作者は、生検鉗子、スネア等のような医療機器を、ブレイクアウトボックス26上に見出される内視鏡の作動チャネル32への入口に挿入することができる。代替的実施形態では、医療機器を、内視鏡内に一体に形成してもよく、例えば内視鏡の外側上に固定してもよい。別の代替的実施形態では、作動チャネルルーメンへの入口を内視鏡の近位端のさらに近くに配置してもよく、内視鏡に沿って異なる位置に配置された入口を有する1つより多い作動チャネルを内視鏡が含んでもよい。
【0023】
図3Aは、制御キャビネット50の一実施形態の内部に含まれた主要な構成要素のブロック図である。上に述べたように、また図1Cおよび図1Dに示すように、制御キャビネット50は、それを検査手技に先立って患者の近傍に容易に配置することができるように、ロック可能な車輪上に取り付けられているのが好ましい。制御キャビネットは、交流電源または電池による電力源、および吹送ガス源ならびに洗浄液源に接続されている。制御キャビネット50の内部に、ハンドヘルドコントローラ80に接続され、それから制御信号を受信するコントローラインターフェース52がある。内視鏡の遠位先端の向きを変えるためには、ハンドヘルドコントローラ80内のディレクショナルスイッチから制御信号が受信される。制御信号がサーボモータコントローラ54に供給され、次いで、サーボモータコントローラ54が、サーボモータ56a、56b、56c、56dのようないくつかのアクチュエータを制御する。サーボモータ56a〜56dの各々が、内視鏡内の1つまたはそれ以上の制御ケーブルに接続されている。サーボモータ56a〜56dの動きによって制御ケーブルが引っ張られるかまたはゆるめられ、内視鏡20の遠位先端22の向きが変えられる。図3Aに示す実施形態は4つのサーボモータおよび制御ケーブルを示しているが、より少ないまたはより多いサーボモータおよび対応する制御ケーブルを用いて遠位先端を動かすことができることを理解されたい。例えば、いくつかの内視鏡は、3つの制御ケーブルおよび3つの関連するサーボモータまたは4つの制御ケーブルを有する2つのモータを用いることができる。同様に、手動ハンドルにコントロールノブまたは他の機構を備え、2つまたはそれ以上の制御ケーブルに張力を加えて内視鏡の先端を方向づけることができる。
【0024】
イメージング電子回路のサブシステム60は、近位コネクタ34(図示せず)および内視鏡の遠位端に位置する近位コネクタ34の関連電子回路を通じて遠位先端から伝送された信号を受信する。一実施形態では、画像データは、シリアル通信リンク内の遠位先端からもたらされ、その信号が再構成されて、フォーマット済み画像、この場合は640×480ピクセルの画像が生成される。このデシリアライゼーションによって画像が10ビット深度のピクセルのアレイに再構成されるが、他のビット深度を用いることもできよう。再構成された画像は、イメージャの個々のピクセルに対応するピクセルのアレイである。イメージャの各ピクセルは、通常、R、GまたはB(赤、緑、青)フィルタによってフィルタ処理される。減法カラーフィルタまたは周知のベイヤーパターンのような他のフィルタ処理方式も可能である。再構成された時点で、周知のデモザイク技術を用いてフルカラーの画像がデモザイクされ、完全な640x480x30ビット深度のRGBカラー画像が生み出される。その後、この画像は、Y−Cb−Cr−422、NTSC、PAL、S−ビデオ等のような他のビデオの標準フォーマットに変換することができる。
【0025】
イメージング電子回路のサブシステム60は、受信した画像を増強することができるか、またはズーム、色変更、オーバーレイの取り入れ、カラーバランス、ガンマ調整、強調表示等のようなビデオ効果を提供することができるか、もしくはビデオディスプレイ(図示せず)上への画像の表示に先立って、グラフィカルユーザインターフェースのような機能性を追加することができる。組織の画像は、イメージング電子回路のサブシステム60、および/または、以下にさらに詳細に論じるように、内視鏡の遠位先端を自動的に操向するためにサーボモータコントローラ54に供給される制御信号を生成するための別個の処理回路によって分析することもできる。イメージング電子回路のサブシステム60によって生成された画像は、医師による後の検索および分析のために、デジタルプリンタ上に印刷することも、ネットワークサーバに送ることも、フロッピディスク、CD、DVD等のようなコンピュータ可読媒体またはビデオテープに格納、保存することもできる。
【0026】
イメージング電子回路のサブシステム60は、イメージング内視鏡遠位端22のいくつかの発光ダイオード(LED)のような光源に電力をも提供する。イメージャ上への適切な露出を行うために、イメージャのゲインまたはLEDの強度を変更することができる。適切な露出を達成する1つの方法は、飽和ピクセル数を監視し、飽和ピクセル数が最低閾値を下回るように光源強度を調節することである。別の手法は、平均ピクセル出力が設定パーセンテージ、おそらくは50%となるように光源を調節することである。さらに別の手法は、TV産業またはビデオ産業に共通するAGCアルゴリズムを使用することである。適切な露出は、イメージャ自体のゲインおよび/または積分周期を変えることによって、単独に、または光源を調節することと併せて得ることもできる。希望するなら、イメージング電子回路のサブシステム60からの制御信号によってイメージャのパラメータを調節し、イメージャの総ゲイン、カラーバランス、および感度を調節することができる。
【0027】
LED光源は容易に調節可能であり、LEDへの電流、従ってLEDの光出力を調節することによって露出制御を行うことができる。LEDの出力は容易に制御することができるので、LEDへの電流を調節することによって光源を点滅させ、光源の可視性を高めることもできる。視覚認知の分野で周知であり日常的に体験するこの効果によって、身体を通過して外界に至る光を観察することにより、体内での遠位先端の位置を判断することが可能となる。これは、透視法と呼ばれる。LEDの出力を8Hz〜14Hzの周波数に実質的に調節することにより、先端の可視性は、少ない電力を用いて維持されるか、または同じ電力を用いて大幅に増強される。あるいは、LEDを、小型の白熱電球またはレーザのような固体素子に置き換えてもよい。
【0028】
照射源をパルス化することにより、X線透視法または他の外部イメージング手段なくして、内視鏡の遠位先端の位置を視覚的に検出することが可能となる。光源のパルス時にイメージセンサが作動している場合、対応するビデオディスプレイが点滅し、操作者の気を散らすかまたは遠位先端を見る力を妨げる可能性がある。従って、透視中は、遠位先端の可視性を高めるために、静止画像を表示するかイメージセンサもしくは画像処理プロセッサを無効にすることによって、ビデオディスプレイ上の点滅を防止するのが望ましい。内視鏡に外部光源を用いている場合、体内器官または所望の観察領域を照射するのに、制御キャビネットは、イメージング内視鏡20内部の光ファイバ照射ガイドに光を提供するレーザもしくはハロゲン照明源のような高輝度光源を含むことができる。ユーザが光源の起動または生成される光の強さの調節を希望する場合、ハンドヘルドコントローラ80から受信した信号によって、いずれかの電源58を制御することができる。
【0029】
最後に、制御キャビネット50は、患者の体腔に吹送するための吹送空気/ガスおよび体腔を洗いかつ/または内視鏡の遠位端にある光学組立体(レンズあるいはカバーウィンドウのような)の構成要素のうちの1つまたはそれ以上を洗浄するための洗浄液の送達を制御する弁70を含む。吹送空気/ガスおよび洗浄液は、内視鏡20の洗浄/吹送ルーメンに接続するコネクタ38を介して内視鏡に接続される。本発明の一実施形態では、洗浄・吹送機能は、同一のルーメンによって提供される。しかしながら、希望すれば、かつ内視鏡内に空間があれば、別個の洗浄ルーメンおよび吹送ルーメンを提供することもできることを理解されたい。さらに、追加のルーメンまたは洗浄ルーメンおよび吹送ルーメンを用いて、治療剤あるいは造影剤を患者に送達することができる。
【0030】
図3Bに、図3Aに示すキャビネットに類似した、制御キャビネット50Aの別の実施形態を示す。制御キャビネット50Aは、真空回収ボトル40に送達される真空を制御する真空弁71を含む。真空ライン73は、イメージング内視鏡20内部の真空ルーメンに接続している。真空弁71は、ハンドヘルドコントローラ80から制御される。液体送達用弁および真空用弁のバルビングおよび制御は、一緒に行うことも、別々に行うこともでき、また、キャビネットの内側または外側に配置しても、内視鏡等に沿って配置してもよい。
【0031】
図3Cに、本発明による内視鏡システムの別の実施形態を示す。内視鏡システム100は、内視鏡104の向きおよび機能を制御する働きをする制御キャビネット102を含む。制御キャビネット102は、内視鏡の動作を制御するために操作者が使用するジョイスティックのような入力装置からのコマンドを受信するコントローラインターフェース106を含む。入力装置の他の例には、音声制御装置、頭部搭載型制御装置、タッチパッド、トラックボール、薄膜スイッチ、足踏みスイッチ等が含まれる。ジョイスティックからのコマンドは、イメージングシステムおよびサーボ制御装置108の動作全体を制御するデジタルシグナルプロセッサのようなプログラマブルプロセッサに供給される。プロセッサおよびサーボ制御装置は、一対のサーボモータ110、112の動作を制御し、次いで、サーボモータ110、112が、内視鏡104内部の制御ケーブルを駆動する。遠位先端の向きは、ユーザ入力装置から受信した方向信号およびサーボモータ110、112の各々の位置およびトルクを測定するセンサから取得したフィードバック信号に応答して制御される。いくつかの例では、サーボモータ110、112は、手動または自動で制御されるクラッチ(図示せず)を通じて制御ケーブルに接続することができる。希望するなら、クラッチでサーボモータを制御ケーブルから外すことができる。
【0032】
本発明の一実施形態では、プロセッサおよびサーボ制御装置108は、ユーザ入力装置上のディレクショナルスイッチの位置の関数として遠位先端が動かされる速度を変える位置対速度制御を実行する。しかしながら、位置対位置または位置対力のような他の制御アルゴリズムも実行することができる。サーボ制御装置は、内視鏡内部の機器の位置を変える、またはそれらを関節運動させるのにも用いることができる。
【0033】
プロセッサおよびサーボ制御装置108によって実行することのできる別の機能は、ビデオディスプレイ上でユーザに示される、近似する先端の関節運動の図形表示を生成する機能である。プロセッサは、制御ケーブル短縮の長さを判定するサーボモータの位置およびケーブルを動かすのに要するトルクに関するフィードバック信号を受信する。これらの値から、内視鏡遠位先端の関節運動量の近似値が作成される。近似関節運動量および関節運動の方向は、イメージセンサから受信した画像、患者データおよび/またはビデオ内視鏡システムの他の運転パラメータと共に医師に表示される。
【0034】
プロセッサおよびサーボ制御装置108は、患者の体内で遠位先端を動かしながら自動制御下または操作者による半自動制御下でサーボモータ110、112を駆動することができる可変制動機能をも実行する。可変制動は、0とモータによって供給することができる最大トルクとの間の可変制動力を操作者またはプロセッサに選択させることによって達成することができる。医師が内視鏡を動かす際に、モータ上のトルクが検出され、可変制動閾値より大きいかまたはそれに等しいかが調べられる。そうである場合、プロセッサおよびサーボ制御装置108は、先端が新たな位置へ動かされるようにサーボモータ110、112の一方または両方を制御し、これによりモータからのトルク読み取り値が可変制動閾値より小さくなる。
【0035】
患者の解剖学的組織のデリケートな部分近傍のように、いくつかの例では、モータを逆駆動するのに圧力をほとんど要しないように、可変制動閾値は低い値に設定されることになる。他の例では、ナビゲーション等のために内視鏡の形状を維持することが望ましい場合、制動閾値を高く設定することができる。
【0036】
手動制御バージョンでは、可変摩擦ブレーキも用いることができる。ユーザは、従来のスコープに類似した手動制御装置上のレバーまたはダイヤルの位置を調節するのに必要なブレーキ力を選択することができる。一実施形態は、各軸用に別個のブレーキを含むことができるか、あるいは、1つのブレーキを両方の軸用に用いることができる。
【0037】
制御キャビネット102は、内視鏡104の遠位端にあるイメージセンサから受信した信号から画像を生成するイメージングサブシステム114をも含む。イメージングサブシステム114は、CMOSイメージセンサからのデジタルビデオ信号を非直列化し、デモザイク処理、ゲインコントロールおよびホワイトバランスのような必要なアルゴリズムを実行して、高品質のカラー画像を生成する。このシステムのゲインコントロールは、照射(LEDに供給される電流)の強度を調節することおよびCMOSイメージャによって信号に適用されるゲインを調節することによって行われる。イメージングサブシステム114は、受け入れ難い無線周波数感受性、放射および妨害、ならびに制御キャビネット102内部のいずれかの回路で電気的不全が発生した場合の受け入れがたい漏えい電流を防止するための絶縁回路をも含む。イメージングサブシステム114は、制御信号をイメージセンサに伝送するためおよびイメージセンサから画像信号を受信するための回路をも含む。本発明の一実施形態では、イメージングサブシステム114には、標準的なコンピュータハードウェアおよびコンピュータソフトウェアを使用することができるように、標準「PCI」回路ボードが備えられている。
【0038】
図3Cに示す実施形態では、内視鏡104は、回転接続124でブレイクアウトボックス122に接続された遠位シャフト部分120を有する。さらに、シャフトの近位部分126は、第2の回転接続128でブレイクアウトボックス122に接続されている。回転接続124、128により、操作者の手中にあるブレイクアウトボックス122をひねることなく、内視鏡の遠位端および近位端をブレイクアウトボックス122に対して回転させることが可能となる。
【0039】
図示の実施形態では、内視鏡104は、コネクタ130で制御キャビネット102に接続されている。コネクタ130の内部に、サーボモータ110、112のドライブシャフトと係合可能な一対のスプール132、134がある。各スプール132、134が、一対の制御ケーブルを反対方向に駆動する。一対の制御ケーブルが内視鏡の遠位先端を上下方向に駆動し、別の対の制御ケーブルが、内視鏡の遠位先端を左右方向に駆動する。あるいは、単一のワイヤが平面内の動きを制御するように、単一の制御ケーブルを1つのスプールに巻き付けてもよい。
【0040】
コネクタ130は、内視鏡104内部のさまざまなチューブまたはルーメンへの流体、空気および真空の供給を制御するマニホルド140をも含む。さらに、コネクタ130は、制御キャビネット102上の対応する電気コネクタとはまり合う電気コネクタ142を含む。コネクタ142は、照射用LEDに電力を転送すると共に、イメージセンサおよび熱センサを往復して信号を転送する。ポンプ145で内視鏡に水が供給される。ポンプ145は、近位コネクタ130内に延びる可撓性チューブを通じて水を動かす蠕動ポンプまたは隔離チャンバポンプとするのが好ましい。構成要素を駆動するポンプが内視鏡内部の水または他の流体と接触する必要がなく、その結果、濡れた構成要素を単回使用とすることが可能となるので、蠕動ポンプが好ましい。ポンプ145に接続されるかまたは近位コネクタに固定状態に取り付けられた水リザーバ150が水を供給し、検査領域を洗浄すると共に、照射用LEDを冷却する。LEDを冷却するために供給された水は、閉ループ内のリザーバ150に戻される。廃水または他の残屑は、回収ボトル160に注ぐ真空ラインで患者から除去される。回収ボトル160への真空の制御は、近位コネクタ130内部のピンチ弁によって行われる。
【0041】
図3Dに、本発明のビデオ内視鏡システムの一実施形態と共に用いるための制御キャビネットをさらに詳細に示す。制御キャビネット102の内部に、PCIデータバスによって関節運動・フルイディクスカード109、カメラカード111および画像処理カード114に接続されたマザーボード108がある。画像処理カード114は、EIDE接続で接続された画像処理カード114自体のハードドライブを有する。さらに、マザーボード108は、EIDE接続または類似のインターフェースで接続されたマザーボード108自体のハードドライブおよびDVDライタのようなデータ記憶装置を有する。関節運動・フルイディクスカード109が動力モータドライブに信号を提供し、次いで、該動力モータドライブがサーボモータ110、112を駆動し、シャフトエンコーダおよびトルクセンサからの信号を受信し、内視鏡の遠位先端を動かすのに要する力の量に関するフィードバックを提供する。ポンプおよび弁145も関節運動・フルイディクスカード109によって制御され、吹送空気/ガスならびに洗浄流体および真空を、近位コネクタ130を介して内視鏡104に供給する。
【0042】
内視鏡104内部のイメージセンサによって生成された検査領域の画像は、デジタルモニタ上に表示される。デジタルモニタは、操作者の閲覧用に患者の氏名、住所、日付、他の生理学的パラメータ、心拍数、血圧等、または先に取得した画像のような追加のデータをディスプレイ上に多重化することができるように、マルチプレクサを通じて駆動される。さらに、希望するなら、外部デジタルモニタを本システムに連結することもできる。
【0043】
マザーボード108は、イーサネット(登録商標)/USBまたは並列接続を介してプリンタとも、また従来のPS/2接続もしくはUSB接続によってキーボードともインターフェースをとる。ハンドヘルドコントローラは、RS−422接続を介して関節運動・フルイディクスカード109に接続されている。スピーカもマザーボード108に連結され、可聴警報またはステータス信号を操作者に提供する。
【0044】
制御キャビネット102は、マザーボード、ハードドライブ、ビデオカード、プロセッサ、メモリ等を含む標準型の市販の演算プラットフォームを用いて作製されるのが好ましい。本システム用の制御カード(カメラカード111、関節運動・フルイディクスカード198、および画像処理カード114)の各々は、マザーボードのPCIスロットに差し込まれる。マザーボードは、標準PC型コネクタ:シリアルポート、パラレルポート、イーサネット(登録商標)ポート、USBポート、マイク入力端子、音声出力端子等も備える。制御キャビネット上のLCD表示パネルのような2つのデジタルモニタは、マザーボードのAGPスロットにあるビデオカードに接続されている。基本的に、制御キャビネットは、汎用の演算プラットフォームを含む。これにより、検査情報を1つの集積システム内で電子的に捕捉することができる。この集積システム内で捕捉することができる検査情報の種類には、静止画像、ビデオクリップ、注釈目的の音声録音、音声認識用の音声入力、音声コマンドおよびGUIナビゲーション用の音声入力、画像に貼付されたテキストラベル、画像上の描画注釈、検査報告情報、患者退院情報、依頼医師宛ての手紙、患者に施された薬物療法、患者のバイタルサイン等が含まれる。検査報告は一般に、患者人口統計データ、検査に対する適応、実行された(複数の)手技、検査に用いられた(複数の)スコープ、検査に用いられた機器、手技テクニック、検査の範囲、合併症、視覚化、耐性、所見、診断、提言、手技コード、診断コード、実行された介入、収集された病理検体等のようなデータ要素に関する入力を含む。
【0045】
患者のバイタルサインは、電子インターフェースを介して記録されるのが好ましい。現在では、バイタルサインモニタによって、シリアルポート接続およびイーサネット(登録商標)接続を介したこの種類のデジタル情報交換が可能である。述べたように、一般に収集される情報は、収縮期血圧、拡張期血圧、平均動脈圧、血圧測定値からのパルス、EKGからの心拍数、酸素飽和度、および温度である。さらに、制御キャビネットは、EKG、呼吸、および酸素飽和度のような波形信号の表示を可能にする「波形」データの電子転送および表示用の手段を含むことができる。このデータは一般に、較正済みアナログ電圧出力として提供される。アナログデジタル変換器(図示せず)は、画面上への表示用に波形データをデジタル化するために用いられる。
【0046】
本システムは、キーボード、タッチスクリーンおよび内視鏡ハンドル上のマルチポジションGUIナビゲーション制御スイッチのようないくつかの方法で操作者が本システムをナビゲートするのを可能にする。検査前または検査中にこれらのナビゲーション手段のいずれかを用い、操作者(看護師、医師、または技術者)が検査関連情報を検査中に制御キャビネットに入力するのを可能にすることができる。所望の情報の全部が検査進行中に入力されない場合、本システムは、操作者が検査の終了時に検査記録を完了することを可能にする。
【0047】
制御キャビネットは、バーコードスキャナまたは無線ICタグ(RFID)スキャナも含むことができる。これは、内視鏡の作動チャネル内に挿入されるかまたは他の方法で手技の一部として用いられるツールの識別を可能にする。これは、検査時に実際に用いられた機器またはツールのトラッキングを可能にする。これは、スキャンされたものの使用についての関連情報を記録するようにとの、GUIを通じたユーザに対するインテリジェントプロンプトをも可能にする。例えば、看護師が、生検鉗子が作動チャネル内に挿入される前に、それをスキャンする。次いで、制御キャビネットのGUIが、挿入された種類の鉗子を用いて実施される一般的な介入に関して、ユーザに自動的に入力を促す。本システムはまた、病理学的要求事項に関する情報が自動的に入力されるように、(複数の)生検検体に関する情報(位置、説明、評価対象の病理)を入力するようにユーザに促す。本システムは、機器のデフォルト運転パラメータについてもユーザに促すことができる。
【0048】
図3Eに、カメラカード111から内視鏡の遠位先端にあるイメージセンサおよび関連装置へ伝送することができる信号を示す。カメラカード111は、絶縁型電力を受け取り、同期化と色空間補正、自動ゲイン制御、ホワイトバランスの初期設定、ピクセル修正インタレーサおよびフレームメモリ用の従来の回路を含む。回路は、低電圧差分信号伝達(LVDS)用に備えられている。カメラカード111は、LEDのような照射光源を駆動する増幅器を含む。カメラカード111は、内視鏡の遠位端にあるCMOSイメージセンサに連結されたLVDSクロックレシーバに、LVDSマスタークロック信号を提供する。内視鏡の遠位端にマスタークロックを含まないことによって、各内視鏡用のイメージング電子回路のコストがさらに削減される。カメラカード111は、162MbpsのLVDS信号伝達で伝送されたビデオ信号および同期信号を受信し、該ビデオ信号および同期信号が非直列化されて、オンボードプロセッサに提供される。さらに、カメラカードは、内視鏡の遠位端にあるサーミスタまたは他の温度センサから受信されたサーミスタ信号を受信する。カメラカードは、ディスプレイまたは他の装置に出力することができるNTSC/PALビデオ信号を生成する。さらに、このボードは、埋め込み型同期信号およびプログレッシブYUV信号を提供する。カメラカード111は、必要な場合更新することができるファームウェアを格納するためのカメラカード111自体のEPROM、およびビデオフレームを格納するためのフレームメモリを含む。
【0049】
図3Fは、図3Cおよび図3Dに示す内視鏡104の一実施形態のフルイディクス図である。上に述べたように、滅菌水または生理食塩水などの流体を収容するプラスチック流体リザーバのような給水装置150を用いて、蠕動ポンプ142で内視鏡に水が供給される。水は、LED照射源に連結された熱交換器に水を送達するチューブまたはルーメン162にポンプで注入される。熱交換器から戻る水は、チューブ164内に受け入れられ、流量計166を通過してリザーバ150に戻る。本発明のこの実施形態では、水は、熱交換器に持続的にポンプで通され、照射源が過熱するのを防止する。流量計166は、水が熱交換器にポンプで通されていない場合、信号を提供し、これにより、操作者は、患者から内視鏡を除去するように警告を受けることができ、かつ/またはLEDをオフにするかもしくはLEDの出力強度を低下して、患者への熱的危険性を防止することができる。さらに、流体リザーバは、電子センサ、可動フロート、ウィンドウ、警報装置等を含み、使用可能な冷却流体のレベル、および液体の追加供給を行うべきか否かを示すことができる。遠位先端内のサーミスタのような温度モニタは、潜在的な熱的危険性について警告することができる。
【0050】
冷却を施すことに加え、高圧洗浄を施して患者の管腔を洗浄するチューブ170、および内視鏡の遠位端にある結像レンズの前面から汚染物質を取り除くレンズ洗浄チューブ172に、水を選択的に注入することができる。必要であれば、水は、作動チャネルを洗浄するために内視鏡の作動チャネルチューブに接続されたチューブ174にも、選択的に注入することができる。チューブ170、172、174各々の内部の水の流れは、必要に応じて、ポンプで水をチューブに通すことができる関連する弁によって、選択的に制御される。必要に応じて、弁180は、内視鏡内の作動チャネルへの真空の印加を制御し、洗浄液、残屑、または他の汚染物質を患者から除去する。弁182は、本発明の一実施形態では内視鏡の遠位端にあるレンズ洗浄チューブ172と同じチューブである吹送ルーメンへの、空気または他の生体適合性ガスの供給を制御する。空気は、異なる圧力で空気を提供する、空気源またはガス源に並列接続されたレギュレータまたは電子制御レギュレータもしくはレギュレータのプログラム可能アレイと同一直線上に並ぶソレノイド弁184、186、188を用いて、さまざまな圧力下で患者に提供することができる。レンズ洗浄チューブ172に送達される圧力は、弁184、186、188の組み合わせを選択的に開放することによって調節することができる。内視鏡から空気送達機構内への空気または液体の何らかの逆流を防止するために、逆止弁またはアンチサイフォン弁189が空気供給ラインに沿って並んでいる。
【0051】
図3Gに、空気、水および/または真空を内視鏡内部の種々のチューブもしくはルーメンに導くマニホルド140の一実施形態を示す。本発明の一実施形態では、マニホルドは、ポリウレタンのような熱可塑性プラスチック材料の2枚のシートの形状をなしており、該シートは、それらの間に一連の通路またはチャネルを形成するために、RF溶接または他の方法で結合されている。ピンチ弁またはサイドクランプを真空ライン上に用いて、コネクタを制御キャビネットに接続または接続を解除する際の無制御真空を防止することができる。ピンチ弁は、通路またはチャネルの上に配置され、内視鏡内の異なるチューブへの流体、空気もしくは真空の送達を制御するために、選択的に開放または閉鎖される。一実施形態では、マニホルド140は、一側上に3つのコネクタを有し、他側上に3つのコネクタを有する。一側上で、コネクタ190は、水リザーバ150から水を受け取る。コネクタ192は遠位先端にある熱交換器からの水を水リザーバ150に戻すチューブに接続され、コネクタ194は、真空源に沿って配置された回収瓶160に接続されている。弁アクチュエータの構成要素を内視鏡内部の水または他の流体と接触させる必要がなく、かつ濡れた構成要素を単回使用とすることができるので、ピンチ弁が好ましい。さらに、ピンチ弁は、簡素な無弁の設計を提供する。
【0052】
図示の実施形態では、コネクタ196は、作動チャネルに接続され、作動チャネルに水を供給するかまたは真空を適用する。コネクタ198は、吹送チューブに接続されている。コネクタ200は、内視鏡内の高圧洗浄チューブに接続されている。コネクタ204および206は、LED照射源を冷却する熱交換器に水を供給しかつ熱交換器からの水を戻すチューブに接続されている。
【0053】
コネクタ190でマニホルドに入る水は、4つの異なる経路内を流れることができる。これらの経路のうちの3つを通る流体流は、マニホルド内の経路上方の位置208、210、212でマニホルド140をつまむソレノイド弁で選択的に制御される。本発明の一実施形態では、水は、LED照射源を冷却する熱交換器にポンプで常に通される。位置208、210、212にあるソレノイド弁を選択的に作動させることにより、内視鏡内の他のチューブに水を供給することができる。
【0054】
さらに、マニホルド140は、コネクタ194とコネクタ196との間の位置214にあるソレノイド弁が開放される際に真空によってマニホルド140がつぶれないようにコネクタ196とコネクタ194との間の通路を開放状態に保持する支持チューブまたは他のストロー状構造体を含む。必要に応じて、このチューブまたはストローは、液体を作動チャネルに流入させる少なくとも1つのせん孔(図示せず)をも含む。
【0055】
使用後、マニホルド140は、水および真空等を供給するチューブから取り外され、内視鏡の残部と共に廃棄される。可撓性のマニホルドバッグ140は、流体がビデオ内視鏡システム自体の非使い捨て部分と接触するのを防止しながら内視鏡に対する流体または空気の使用を制御するための安価な装置を形成する。
【0056】
図3Hに、可撓性マニホルド152の別の実施形態を示す。流体は、入口152aを通って、流体リザーバからマニホルド152に入る。流体は、チューブ系にポンプで注入され、流体経路は、一連のピンチ弁152bによって選択的に制御される。流体は、ボーラス洗浄用にライン152eを通って、レンズ洗浄用にライン152cを通って、またジェット洗浄用にライン152dを通って選択的に流れることができる。流体は、LEDを冷却するために、ライン152fを通って、遠位先端内の熱交換器へ持続的に流出する。流体は、ライン152hを通って熱交換器から戻り、そこから流量計(図示せず)を通って流れ、流体出口152jを通って流体リザーバに戻る。
【0057】
図4Aに、内視鏡検査の実施に先立って内視鏡の近位端を制御キャビネット250に固定するためのコネクタの一実施形態を示す。制御キャビネット250は、図3A、図3B、および図3Cに示す種類のサーボモータに連結されたいくつかのシャフト254を有する外部コネクタ252を含む。各シャフト254は、制御ケーブルが巻かれた対応するスプールに受け入れられるような形状を有する。内視鏡に空気、水および真空を提供するための吹送・洗浄弁256ならびに真空弁258へのコネクションも、コネクタ252に含まれている。
【0058】
図4Bおよび図4Cに、内視鏡20の近位端を制御キャビネット250に固定するのに用いられるコネクタ260の一実施形態を示す。コネクタ260は、いくつかの蝶ネジ262、形状がぴったりと合う閉鎖扉、または制御キャビネット250外側の外部コネクタ252にコネクタ260を容易に固定することができる他の簡易脱着機構を含む。図4Cに示すように、コネクタ260は、いくつかのスプール262を含み、該スプール262の周りに制御ケーブルが巻かれている。使用時に制御ケーブルがスプール上で束になるのを防止するために、各スプールにはねじ山または溝が付いているのが好ましい。シーブまたはフランジ265は、スプールの一部を取り囲み、制御ケーブルをスプールに接触させて溝内に保ち、かつコネクタ260内のスプールを支持するのに役立つことができる。本発明の一実施形態では、スプールは、スプールの対応するスロット内に嵌合するピンを有するブレーキ266によってコネクタ260が制御キャビネット250と係合していない時に回転しないように、またその結果ケーブルの巻きが解けないようになっている。コネクタ260が制御キャビネット250に取り付けられた時点で、スプールをサーボモータによって動かすことができるように、ブレーキ266がスプールから離脱される。クランプ267は、近位端を制御ケーブルを覆う外側ジャケット上に固定するために用いることができる。光源およびイメージセンサに対する電気的接続ならびに空気弁および送水弁への接続は、コネクタ260の両側面または、図4Aに示すように、各弁に係合するためのコネクタ260の後面に配置されている。
【0059】
図4Dに、スプライン穴でスプール262内に嵌合されたスプラインシャフト254の断面図を示す。シャフト254は、バネ258を内部に有する円筒256によって支持されており、これによりシャフトは、円筒256内で自由に動くことができる。円筒256は、直接またはクラッチを通じて、制御キャビネット内のサーボモータに連結されている。バネ258によってシャフト254が浮動することができ、これにより、コネクタが制御キャビネット250に取り付けられている時に、このシャフトは、スプール262のあわせ面により容易に位置が合い、係合することができる。
【0060】
スプール262内へのシャフト254の挿入時にブレーキ266が開放され、それにより、スプール262を円筒256の回転によって動かすことが可能となる。いくつかの例では、ブレーキ266を省くことができ、それにより、コネクタ260が制御キャビネット250と係合していない時に、スプール262が自由に回転することが可能となる。
【0061】
図4Eに、患者データおよび内視鏡から生成されたビデオ画像または静止画像を含むグラフィカルユーザインタフェースが提示されるディスプレイ282を有する、制御キャビネット280の別の実施形態を示す。コネクタ284が、内視鏡の近位端を接続するために、制御キャビネット280の外側に備えられている。コネクタ284は、制御キャビネット内のサーボモータに連結されたいくつかのシャフト286を含む。いくつかのピンチ弁288が備えられ、流体リザーバ、真空源、および空気源(図示せず)を内視鏡内のチューブに接続するマニホルドを通じて、空気、水および真空の流れを制御する。上に述べたように、内視鏡にポンプで液体を通すために、蠕動ポンプ290が備えられている。内視鏡の動作および配向に関するコマンドを操作者が入力することができるように、制御キャビネット280にジョイスティック型ハンドヘルドコントローラ292が接続されている。
【0062】
図4Fに、内視鏡を制御キャビネットに連結する近位コネクタ130の一実施形態の裏面を示す。近位コネクタは、制御キャビネット上の可動扉内に取り付けることができ、次いで可動扉が閉鎖され、コネクタ130が制御キャビネットに接続される。上に論じたように、コネクタ130は、電気コネクタを内部に有しており、該電気コネクタは、制御キャビネット上の対応する電気コネクタとはまり合い、上流のクロック信号を含むLVDS信号をイメージセンサに転送し、電力および接地を照射用LEDに転送し、イメージセンサ用に調整済み電力を転送する。内視鏡から戻り受信された電気信号は、サーミスタ信号、およびLVDSフォーマット済みの直列化ビデオデータならびに同期データを含む。水流入口296および水流出口298は、近位コネクタ内部のマニホルドに流体を供給する。
【0063】
図4Gに、図4Fに示す近位コネクタ130の断面図を示す。図に示すように、アンビル299A、299B、299C、299Dを有する一連の高くなったノブが、近位コネクタ130の片側に沿って配置されている。アンビル299A〜299C上の鋭い縁は、近位コネクタハウジング内部の可撓性マニホルドバッグの裏当てとなる働きをし、かつソレノイド弁がマニホルドをつまんで流れを制限するのを可能にする。高くなったノブおよびアンビル299Dは、近位コネクタハウジング内のマニホルド下方の真空チューブを支持し、ソレノイド弁がチューブをつまんで真空を制御するのを可能にする。
【0064】
図5Aに、本発明によるハンドヘルドコントローラ300の一実施形態上に配置された種々の制御機器を示す。ハンドヘルドコントローラ300は、本発明の並列の実施形態では、電気コード304で制御キャビネットに連結されたコントローラ本体302と、無線高周波チャネルと、赤外線または他の無線もしくは光のリンクとを含む。接続が電気ケーブルで作られる場合、電気ケーブル304とコントローラ本体302の接合部に張力緩和装置86が配置され、電気ケーブル304内部の電線の適切な撓みおよび曲がりを可能にする。直列の実施形態では、ハンドヘルドコントローラ300の制御キャビネットへの接続は、モーションコントローラおよびイメージングシステムに信号を伝送するためのワイヤと、吹送空気/ガスおよび洗浄液を搬送するためのルーメンとの両方を含むシースによって作られる。さらに、内視鏡の制御ケーブルは、ハンドヘルドコントローラ300を通じて動作制御キャビネット内のアクチュエータに接続されたケーブルに係合する。手動ハンドルで使用する場合、制御キャビネットへの接続は、イメージセンサ、照射用LEDを往復して信号を伝送するためのワイヤと、吹送空気/ガスならびに洗浄/冷却液を搬送するためのルーメンとを含むシースによって作られる。
【0065】
人間工学に基づく配列でハンドヘルドコントローラ300上に配置されているのは、いくつかの電気スイッチである。関節運動用のジョイスティック308または他のマルチポジション装置をいくつかの方向に動かすことができ、医師がイメージング内視鏡の遠位先端を所望の方向に向けるのを可能にしている。イメージング内視鏡を手動で誘導するのには、医師は、ビデオモニタ上の画像を観察しながら、またはX線透視法のような別の医療診断画像技術を用いて遠位先端の位置を見ることによって、ジョイスティック308を動かす。所望の方向にジョイスティック308を動かすことによって内視鏡の遠位先端を操向する際に、医師は、内視鏡を押す、引くおよび/またはひねって、遠位先端を所望の方向に誘導することができる。
【0066】
カメラボタン310は、内視鏡が配置されている体内腔または体内器官の画像を捕捉するために備えられている。収集された画像は、静止画像であっても、ビデオクリップであってもよい。画像は、表示または記録可能媒体への格納に先立って、コントラストを調節するかもしくは他の方法で増強することができる。
【0067】
洗浄ボタン312は、洗浄源を起動し、内視鏡の洗浄ルーメンを通じて、水のような液体を供給する。液体は、体腔の一領域のみならず、イメージセンサの正面にあるウィンドウおよび/または内視鏡の遠位端にある光源をも洗浄する役割を果たす。吹送ボタン314は、吹送源を起動し、内視鏡のルーメンを通じて空気/ガスを供給するために備えられている。吹送ガスの供給によって内視鏡の遠位先端周りの体腔の部分部分が膨らみ、これにより、医師は、内視鏡をより容易に前進させることができるか、または内視鏡前方の組織をよりよく見ることができる。
【0068】
本発明の一実施形態では、ハンドヘルドコントローラ300の本体302は、上に述べたように、ブレイクアウトボックスにハンドヘルドコントローラ300を固定するための蝶ネジ316のような着脱可能なジョイントも含む。ブレイクアウトボックス上の対応するソケットまたはネジ山のセットが蝶ネジ316を受け入れ、2つの部品を結合する。希望するなら、画像の記録または印刷、光度の調節、真空制御弁の起動、または遠位先端を上下左右に動かす制御ケーブルへの可変の制動抗力の付与等のような追加機能を起動するために、1つまたはそれ以上の追加ボタン318も備えることができる。
【0069】
図5Bに、操作者がコマンドを入力して制御キャビネットおよび内視鏡の動作を制御することができるハンドヘルドコントローラの別の実施形態を示す。コントローラ350は、ユーザが自分の親指および/または複数の指で動作を制御することができる人間工学的に成形されたハンドル352を含む。ジョイスティック354は、ユーザが自分の親指でジョイスティックを動かすことによって内視鏡を操向することができるように、コントローラ350の最上部に配置されている。いくつかの制御ボタン356をユーザの親指または複数の指で起動し、内視鏡内のルーメンへの吹送用空気もしくは水/真空の供給、照射源の強度調整等のような内視鏡の他の動作を制御することができる。コントローラ350は、ジョイスティック354を付勢するバネ362に可変の力を印加する力フィードバック機構360をも含む。フィードバック機構360によって印加される力は、内視鏡を操向するのに必要な力に比例して変化する。例えば、内視鏡は、組織壁に接触させて配置してもよく、内視鏡の長さに沿っていくつかのループを有してもよい。従って、ユーザは、フィードバック機構360によってバネ362上に加えられる力を変えることによって内視鏡を操向するのに必要な力の触覚表示を与えられることができる。
【0070】
上に述べたように、本発明の一実施形態では、サーボモータは、位置対速度制御アルゴリズムを実行する。このアルゴリズムによって、ジョイスティック354の位置が、遠位先端の所望の方向への位置の変化速度に変換される。従って、ユーザがジョイスティックを任意の方向に押した時に、力フィードバック機構360によってバネ362に印加される戻り力は、制御ケーブルを動かすのに必要な駆動モータのトルクの関数として変化することができ、またバネ上の力を変えることでも、バネがジョイスティックに印加する力が変る。バネがジョイスティックに印加する力はジョイスティックを通じてユーザに感じられ、ユーザによって命令されている方向に遠位先端を動かすために印加されている力のレベルの触覚表示をユーザに与える。
【0071】
図5Cに、ハンドヘルドコントローラ350の内部力フィードバック機構360を提供するための1つの機構を示す。ジョイスティックの内部に、モータ370に直接連結された第1のラック372およびプリテンションスプリング362に直接連結された第2のラック374を含むラックアンドピニオン機構を駆動するモータ370がある。モータ370の回転によって、第1のラック372を上方または下方に動かすねじ込み機構(図示せず)が駆動される。ピニオンギア376が、第1のラック372の長手方向の動きを第2のラック374の長手方向の動きに変換し、次いで、第2のラック374が、バネ362のプリテンションを調節する。図示の実施形態では、ハンドヘルドコントローラ350の長手方向軸線に対するジョイスティックの向きにより、2つのラックが必要である。しかしながら、ハンドヘルドコントローラ内でジョイスティックが異なる配向を有していた場合、他の構成も用いることができる。例えば、ユーザに迅速な力フィードバックを提供するために、リニアモータ駆動ジョイスティックを構成することもできよう。
【0072】
同様に、エラストマまたは曲げ構造体のような他の構造体および/または材料を用いて、バネを全体的に置き換えることができ、力をプラスチック材料の1つの領域に印加して、プラスチックがジョイスティックに接触して付勢する同様の力を生成することができる。同様に、さまざまなトルクモータを直接ジョイスティックに連結し、制御ケーブルの張力に従ってモータのトルクを調節し、ジョイスティックを通じて力を直接ユーザに伝えることができる。ジョイスティックの動きに直交するそれぞれの軸上で作動するモータと共に2つのモータを使用することにより、ジョイスティックの動きが可能なすべての方向に応答する力フィードバック信号を生成することができる。直接駆動モータのこの種の使用および配列は、遠位先端のフィードバック位置に対して同様に用いることができる。この配列では、トルク制御モータの代わりに、位置制御モータが用いられることになる。制御ケーブルの位置またはこれらのケーブルを駆動しているサーボモータの位置を用いて、遠位先端の近似位置が計算される。位置制御モータは、ジョイスティックの位置を遠位先端の計算位置に追従させるために駆動される。操作者が先端を動かそうと試みて、先端の動きが先端の環境によって阻止された場合、ジョイスティックに関する操作者の動きは、ジョイスティックの位置を先端の位置と対応させるために位置制御モータによって印加された力による抵抗を受けることになる。
【0073】
図示の実施形態は、ジョイスティック354を付勢するバネ362の圧縮を変えるためのモータおよびラックアンドピニオンギアシステムを開示しているが、油圧アクチュエータ、または磁気アクチュエータを用いることができることを理解されたい。あるいは、上に論じたように、熱可塑性プラスチック類のような疑似流体装置を用いてもよい。熱可塑性プラスチック材料を選択的に圧縮することにより、その弾性を変化させ、バネ362上に異なる圧力を印加するために用いることができる。
【0074】
別の実施形態では、ワイヤ上のすべての力がユーザにフィードバックされるわけではない。一実施形態では、本システムは、シャフトの抵抗対遠位先端の抵抗を区別し、遠位先端の抵抗のみがユーザにフィードバックされる。
【0075】
シャフト上の力対先端の力を区別するために、先端が異なる方向にディザーされる。抵抗が先端上にある場合、抵抗は、一方向においてのみ高くなければならない。抵抗がシャフト内のループによって生じている場合、抵抗は、あらゆる方向において等しくなければならない。プロセッサ内の力を比較し、かつ遠位先端を動かすのに必要な力を分離することにより、高い力が先端に蓄積するのを防止することができる。高いモータトルクは、ルーピングによる抵抗に打ち勝つためにのみ用いることができ、先端が抵抗に適合している場合、先端を曲げるのには用いられない。従って、より高い力が先端上に蓄積するのが防止され、先端が解剖学的組織に穴を開ける、または望ましくない状態で所定の位置にはまり込むリスクが低下する。
【0076】
図5Dおよび図5Eに、ブレイクアウトボックスおよびハンドヘルドコントローラの別の実施形態を示す。この実施形態では、ブレイクアウトボックス380は、遠位端382および近位端384を有する。このブレイクアウトボックスはそれがユーザの手に人間工学的にフィットするように、通常「バナナ形」である。さらに、ブレイクアウトボックス380の近位端384は、コントローラをユーザが手に持ち、手のひらが床に対して水平に向けられると、近位端が床に向かって下方を向くように配向されている。従って、ブレイクアウトボックスから延びる内視鏡シャフトの近位端は、医師の前腕から離れる方向に傾斜し、あまり邪魔にならない。
【0077】
ブレイクアウトボックス380は、上にキャップの付いた作動チャネル386への入口も含む。このキャップは、医師または看護師に体液もしくは他の汚染物質がかかる可能性を少なくするために、作動チャネルへの入口が医師の方を向かないように配置されている。キャップは、除去可能としても、ブレイクアウトボックスに組み込んでもよく、医師が装置の周りを効果的に封止して空気および流体の漏れを防止することを可能にするダックビルまたはチューイ−ボーアズ(tuey bohrs)を含むことができる。キャップを除去することにより、ユーザは、生検の受け入れ、薬物投与、または他の医学的手技を行うために、作動チャネルにツールを挿入することができる。
【0078】
ブレイクアウトボックス380に選択的に連結されているのは、ハンドヘルドコントローラは、ハンドヘルドコントローラ388である。内視鏡の遠位先端の向きを制御するディレクショナルスイッチ390を含む。ユーザが内視鏡の追加機能を起動するかまたはビデオ内視鏡システムの運転パラメータを変更することができるように、さらに別のボタンまたは制御装置392を備えてもよい。
【0079】
他の実施形態は、キャップを除去する必要がなくてもよい。キャップは、ダックビル弁からなることができ、該ダックビル弁は、装置を通過させるが、装置の除去が完了した時点で直ちにセルフシールする。これによって、キャップが除去されている間にボーラス洗浄を施しても絶対にユーザに液がかからないことが保証される。別の設計は、ダックビル弁上で堅く締まり、この装置を正確な位置に安定した状態で保持するねじぶたを含む。
【0080】
図5Dに示すように、ハンドヘルドコントローラ388は、オスとメスの結合機構396、398を協働させることによって、選択的にブレイクアウトボックス380に連結される。図示の実施形態では、結合機構は、対応するスロットに弾力的に受け入れられるタブを備える。しかしながら、他の付着機構も用いることができよう。
【0081】
図5F〜図5Iに、制御ケーブルに張力を加えて内視鏡の遠位先端を操向する回転ノブを含む手動ハンドルの一実施形態を示す。この手動ハンドルは、制御キャビネット内の電子機器に、吸引、送気、レンズ洗浄、ジェット洗浄または低圧洗浄およびボーラス洗浄のような本内視鏡システムのさまざまな機能を起動するよう指示するいくつかの電子スイッチを含む。ディスプレイ上のメニューをナビゲートするためのメニューボタンおよびマルチポジションスイッチのような追加のスイッチが、親指で起動するように備えられている。
【0082】
本発明の一実施形態では、いくつかの簡素なスイッチを用いて、水、空気、吸引、レンズ洗浄画像管理、およびグラフィカルユーザインターフェース(GUI)ナビゲーションを制御する。スイッチは、多数のワイヤで、ハンドル内の回路基板またはコネクタに配線されている。マイクロプロセッサは、少数のワイヤで、制御キャビネットにボタン信号を提供する。スイッチが反復使用または洗浄に耐える必要がないので、スイッチは、比較的安価とすることができる。さらに、スイッチのコストを増大させる可能性のあるデバウンシング等のような他の機能を、例えば、専用のハードウェアまたはソフトウェアによって制御装置内に備えることができる。
【0083】
本発明一実施形態では、ハンドル上のノブは、ランププルスイッチに一般的に用いられる型の「ビーズチェーン」を有するコントロールワイヤに連結されている。ビーズチェーンは、ノブに接続されたスプロケットに係合する。ノブを回転させるのに必要な力および先端を関節運動させるのに必要なノブの回転量は、スプロケットの大きさを調節することによって制御することができる。スプロケットが大きくなるほどノブを回転させるのにより多くの力を要することになるが、回転の必要量はより少なくなり、より高い力フィードバックを有することになる。より小さいスプロケットに要する力はより少なくなるが、より多く回転させることが必要となる。左/右軸上とは異なる大きさのスプロケットを上/下軸上に用いることが可能である。一実施形態では、操向ケーブルは、ビーズチェーンに直接接続されている。別の実施形態では、操向ケーブルをスプロケットに直接巻き付けることができる。別の実施形態では、(図51に示すような)、ビーズチェーンは、バネを用いて操向ケーブルに接続されている。バネの剛性は、内視鏡手技時に遠位シャフト内にループが生成される際に操向システム内に均一な張力を維持するように調節することができる。別の実施形態では、バネは、操向ケーブルが通り抜けるきつく巻かれたバネコイルの端部に配置することができる。このバネは、全ての使い捨て装置がユーザにとって確実に同じ感触を有し、かつ使用前の格納時に装置内で緩みが増すのを確実に防止するために用いることもできる。これにより、全ての装置がユーザに対しすぐに応答しかつスロップを有さないことが確実となる。
【0084】
固定止め具を、スプロケット上、ビーズチェーン上、プルケーブル上またはノブ上に配置し、ノブの回転を制限しかつ先端の過剰関節運動を回避することができる。
【0085】
作動チャネルへツールを挿入できるように、作動チャネルへの入口がノブの下に配置されている。作動チャネルポートは、手動制御装置のハウジングに固定してもよく、ハウジングの主軸に沿って平行移動させることができるようにしてもよい。作動チャネルを平行移動可能にすることは、遠位シャフト内にループが生成される時に作動チャネル上に張力が増大するのを防止することになる。
【0086】
手動制御装置のハウジングは、ボーデンケーブル、電気ケーブルおよびユーティリティチューブの余剰長用の空間を許容する。これにより、遠位シャフト内にループが生成される時にこれらの構成要素上で張力が増大するのが防止される。
【0087】
別の実施形態では、ハンドヘルドコントローラは、シャフトの遠位部分を把持する把持機構に取り付けることができる。従って、操作者は、医師が患者により近づくことができるように、シャフトの長さに沿ったさまざまな位置において、ハンドヘルドコントローラをシャフトに固定することができる。
【0088】
本内視鏡の開示された実施形態は通常、操作者が遠位先端の向きを制御することを要するが、本発明の内視鏡は、自動的に操向することもできる。イメージング電子回路によって受信された画像は、プログラムされたプロセッサで分析され、内視鏡の遠位先端の望ましい方向または向きが決定される。内視鏡が盲腸まで進められる結腸鏡検査の場合は、プロセッサは、結腸を膨らませるための吹送空気/ガスの送達を制御する。次いで、プロセッサは、通常内視鏡を進めるべき方向の標識となる暗い開口した管腔を求めて、結腸の画像を分析する。次いで、プロセッサは、そのような位置にある暗い領域の方向に遠位先端が向けられるように、サーボ制御装置に制御命令を供給する。
【0089】
別のモードでは、制御キャビネット内のプロセッサは、内視鏡の遠位先端を所定のパターンで動かす。例えば、内視鏡を後退させながら、疾病の存在の有無に対して体腔の全領域が走査されるように、遠位先端をらせん形探索パターンで動かすことができる。遠位先端の自動制御を利用することにより、医師は、検査を行って画像の解釈に完全に集中するのに、内視鏡を前進または後退させるだけでよい。
【0090】
以下にさらに説明するように、内視鏡は通常、遠位先端で終了するポリウレタンまたはポリエチレンのようなプラスチック材料で形成された1つまたはそれ以上のルーメンを有する中空のシャフトを備える。遠位先端およびシャフトの形状は通常は円筒形であるが、体腔への挿入を容易にするために、他の形状に作製してもよい。さらに、作動チャネル用のチューブは、関節ジョイントの領域をバネで支持し、ねじれを防止することができる。さらに、ルーメンは、金属ワイヤまたはポリマーもしくはガラス繊維あるいはテープをらせん形に巻いたラップで補強することができる。ルーメンは、その長さに沿って、円形、長円形、非対称等のようなさまざまな断面形状を有することができる。チューブの外側表面は、関節運動時にチューブが互いに対して摺動するのを支援するために、滑らかにすることができる。あるいは「つや消しチューブ」、を用いて、外側表面の摩擦係数を低下させてもよい。全てのチューブの内壁は、通常、滑らかである。作動チャネルの一実施形態は、円形ルーメンではなく、星形ルーメンを含む。これは、装置との接触領域を減らし、装置がより少ない力で通過するのを可能にする。図6Aに示すように、遠位先端400の一実施形態は、遠位部分402および近位部分404を有する円筒を備える。段のある肩領域を形成するために、近位部分404は、遠位部分402の直径より小さい直径を有する。肩の直径は、内視鏡のシャフト壁を肩領域上に取り付けて、遠位部分402と共に滑らかな外側表面を形成することができるように選択される。遠位先端400の遠位面は、カメラポート406、1つまたはそれ以上の照射ポート408、作動チャネルルーメン用アクセスポート410、および方向性フラッシュポート412を含むいくつかのポートを含む。
【0091】
カメラポート406内に取り付けられているのはイメージセンサ(図示せず)であり、該イメージセンサは、カメラポート406前方の被写体の像を表す電子信号を生成する、CMOSイメージングセンサまたは他の固体イメージング装置と、1つまたはそれ以上のガラスレンズもしくは高分子レンズとを備えるのが好ましい。このイメージセンサは、SVGA、SXGA、XGA、またはUXGA等のようなVGA解像度またはそれ以上の解像度を有する、低感光性、低ノイズのCMOSカラーイメージャであるのが好ましい。より低い解像度を希望するなら、1/2VGAセンサまたは1/4VGAセンサも用いることができる。従来のビデオシステムに対しては、リアルタイムビデオを達成するのに、25fpsから30fpsの最小フレームレートが必要である。本システムのビデオ出力はデジタル形式でコンソールに伝送されるのが望ましいが、PALまたはNTSC、もしくは高解像度ビデオフォーマットを含む任意の従来のデジタルまたはアナログのフォーマットであってもよい。
【0092】
照射ポート408は、1つまたはそれ以上のレンズ/ウィンドウおよび1つまたはそれ以上の発光ダイオード(LED)(図示せず)を収容する。LEDは、高輝度白色光源であってもよく、赤外線(IR)LED、赤色LED、緑色LED、青色LEDまたは紫外線LEDのような他の波長の光源を備えてもよい。着色LEDでは、任意の1つまたはそれ以上の個々の色での照射によって、異なるスペクトルバンドの画像を得ることができる。白色光画像は、着色LEDの同時照射または順次照射、および各照射波長での個々のカラー画像を組み合わせることによって得ることができる。代替案として、着色LEDの逐次照射を採用する場合、白黒のCMOSイメージャを用いることができる。LEDの代案として、光源を内視鏡の外部に置き、光ファイババンドルおよび従来の光源によって、照射光を照射ポートに送達してもよい。遠位先端に位置するLED源の代案は、例えば、1つまたは複数の白熱ランプ、または有機LED、フォトニッククリスタル、もしくはレーザ源を含むことができよう。
【0093】
アクセスポート410は、内視鏡の作動チャネルまたはルーメンの終端点である。一実施形態では、作動チャネルの近位端は、図2に示すように、ブレイクアウトボックス26で終了する。しかしながら、作動チャネルは、内視鏡の近位端のより近くで終了することもできる。
【0094】
方向性フラッシュポート412は、洗浄・吹送ルーメンを通じて供給された液体および空気を遠位先端400の正面を横切ってカメラポート406および/または照射ポート408の方向に導くキャップ414を含む。それにより、キャップ414は、内視鏡が配置されている内部体腔をよりよく観察することができるように、カメラポート406および照射ポート408をすすぎ、清浄にしかつ乾燥させる働きをする。さらに、フラッシング液は、内視鏡の遠位端を取り巻く組織の領域を清浄にする。
【0095】
図6B〜図6Iに、本発明による使い捨て内視鏡の遠位先端を形成するイメージング組立体の別の実施形態を示す。本イメージング組立体は、低コストで、安価な組み立て技法に適合し、かつより高価なイメージング機構に匹敵する機能を果たし、それによって、操作者は、内視鏡操作が患者の検査に違和感がないことに気付く。
【0096】
図6Bに示すように、内視鏡の遠位端は、前面にいくつかの開口部を有する遠位キャップを含む。開口部には、作動チャネル452への開口部と、患者から残屑または詰まらせている障害物を除去するために内視鏡を通じて液流を送達することができる低圧洗浄用の開口部454とが含まれる。レンズ洗浄・吹送ポートは、一体型のフラッシュキャップ456を含んでおり、該フラッシュキャップ456は、水をイメージセンサのレンズ全体に向け、吹送ガスを送達して、内視鏡が挿入されたルーメンを膨張させる。内視鏡の長手方向軸線から偏位しているのは、照射源を覆う一対のウィンドウまたはレンズ460および462によって取り囲まれたレンズポート458である。
【0097】
図6Cに最もよく示すように、イメージング組立体は、遠位キャップ450と、円筒形レンズ組立体470と、熱交換器480とを含む。熱交換器480は、円筒形レンズ組立体470をはめ込むことができる凹形のくぼみ482を有する半円形部分を備える。凹形のくぼみ482は、レンズ組立体470の位置を内視鏡の長手方向軸線に垂直な方向に保持し、それによって、レンズ組立体470が内視鏡の長手方向軸線に沿ってのみ動くことができるようにしている。熱交換器480の裏面に固定されたイメージセンサ490に焦点が合うようにレンズ組立体が配置された時点で、レンズ組立体は、接着剤で熱交換器内に固定される。これは、成形部品設計での精密な止め具またはランドの使用によって促進することができる。LEDを冷却するための流体またはガスの通過用に回路基板の背後にチャネルが形成されるように、一対のLED484、486が、熱交換器内に付けられた回路基板に接合されている。制御装置を往復して信号を送受信するための回路を含む回路基板または可撓性回路492が、イメージセンサ490の背後および熱交換器480の裏面に固定されている。レンズ組立体470、LED484、486、イメージセンサ490、および関連する回路492が熱交換器480内に固定された状態で、熱交換器組立体を遠位キャップ450の内部にはめ込むことができ、図6Dに示すようなイメージング組立体が完成する。
【0098】
図6Eは、遠位キャップ450の背面等角投影図である。遠位キャップ450は、ABSまたは他の生体適合性材料から精密成形されるのが好ましい。上に述べたように、遠位キャップ450の前面は、一体型のフラッシュキャップ456と、LEDの前方に配置された一対のウィンドウ460を含む。ウィンドウは、遠位キャップ450の残りでオーバーモールドされた、ポリカーボネートのような透明なプラスチック材料で作製されるのが好ましい。これも遠位キャップ450の内部にあるのは、近位に延び、それによって遠位キャップの円筒状内面を半円形のチューブに分割し、その中に半円形の熱交換器480組立体をはめ込むことができるようにしている平坦な表面470である。熱交換器480を遠位キャップ450に挿入することができる範囲を制限するために、突起472が遠位キャップ450の内側前面から延び、熱交換器480の前面と位置合わせされている。
【0099】
図6Fは、LEDの前面に配置されたウィンドウ460、462の断面図である。ウィンドウ460は、ウィンドウ460を遠位キャップ450の前面に固定する外方に延びるフランジ464と共に、光学的に透明なプラスチック材料で成形されるのが好ましい。ウィンドウの成形が完了した時点で、遠位キャップ450をウィンドウ460、462の上に成形し、それらを所定の位置に固定することができる。
【0100】
図6Gは、イメージング組立体の熱交換器480部分の前面等角投影図である。上に述べたように、熱交換器は、遠位キャップ450内部の平坦な表面470とはまり合う比較的平坦な底面500および丸い上面502を有する半円形部分である。熱交換器の内部は、冷却用の液体またはガスを通して照射用LEDから過剰熱を除去することができるチャネルを形成するために、全体として中空である。凹形のくぼみ482は、図6Cに示すように、円筒形のレンズ組立体470を受け入れるために、熱交換器の下部平面500内に形成されている。熱交換器480から後方に延びているのは、熱交換器480の内部に流体接続された穴を中に有する一対の脚506、508である。リップ512が熱交換器482の前面の内側表面の周りに延び、対応する形状の回路基板をはめ込んで接着固定することができる接合面を形成している。本発明のいくつかの実施形態では、熱交換器480はさらに、脚506、508の上に配置された追加の後方に延びるフィン514、516を含み、それによってそれらの間に、回路基板または他の構成要素を熱交換器に固定するためのスロットが形成されている。しかしながら、いくつかの実施形態では、フィン514、516は省いてもよい。
【0101】
図6Hは、熱交換器480の背面等角投影図である。上に述べたように、脚506、508の各々は、ルーメン520、522を含んでおり、それらにチューブをはめ込むことができ、液体またはガスが熱交換器の中空の半円形チャネル部分内を流れるように、チューブに冷却用の液体または気体通すことができる。さらに、熱交換器480は、遠位先端の温度を示す信号および制御装置内のプロセッサへの信号を伝送することができるサーミスタまたは他の温度感知装置用の逃げ526を含むことができる。あるいは、温度センサを遠位先端の本体内に配置することもできよう。
【0102】
図6Iに、熱交換器480の前面内にはまり込むように設計された半円形回路基板550を示す。具体的には、回路基板550は、図6Gに示すように、内側リップ512に当たった状態で熱交換器480の前面内に接着固定されている。回路基板は、高分子、金属またはセラミックもしくはそれらを組み合わせたもの、電気的に隔離する誘電体および回路レイヤのような、熱伝導性の基材を備える。回路基板550は、回路基板が熱交換器480内に取り付けられる時にレンズ組立体470をはめ込む凹形のくぼみ482のいずれかの側に配置された熱伝導性パッド556、558上に配置された一対のLEDに電流を送達するために用いられる、1つまたはそれ以上のトレース552およびボンディングパッド554を含む。
【0103】
本発明の一実施形態では、基材は、これらも銅で製造された伝導性パッド556、558を有する銅である。LEDは、ボンディングパッド554およびトレース552にワイヤボンディングされている。回路基板550の裏面は、脚506、508を介して熱交換器にポンプで通される冷却用の液体またはガスに直接さらされる金のような熱伝導性、非反応性の生体適合性材料を塗布されるのが好ましい。
【0104】
本発明の一実施形態では、LED484、486は、合わせて約60ルーメンの光を発生させるリン材料を塗布した大面積ダイ、高出力の青色光LEDであるのが好ましい。この実施形態は、レンズ組立体470の両側に配置された2つのLEDを示しているが、より少ないもしくはより多いLEDを用いることができ、かつ対応する変更をLEDの前方に配置されたウィンドウ460、462の形状に対して施すことができることを理解されたい。
【0105】
代案として、LEDによって発生された青色光にさらされると白色光を発生させるリン被覆剤を、ウィンドウ460、462の内側表面に塗布することができる。選択する特定のリン光体またはリン光体の組み合わせは、用いられるLEDのスペクトル特性によって決定することができる。1つのリン光体または複数のリン光体は、ウィンドウ460、462の裏面に塗布された、遠位先端450を紫外光源にさらすことによって硬化されるエポキシ系接着剤と混合することができる。接着剤へのリン被覆材の混入は、リン光体の均一な分布を促進し、かつ製造が容易である。あるいは、リン光体をウィンドウの高分子に吸収させても、それに直接混入することもできよう。
【0106】
レンズ組立体470の一実施形態は、名目fシータのひずみを有する140°の視界およびf/8の口径を提供する、画像鮮鋭度およびひずみ画像を制御するためのいくつかの非球面を含む、4要素プラスチックレンズ組立体を備える。レンズ組立体の個々のレンズおよびレンズの口径は、熱交換器480の円筒形の穴に挿入するためのプラスチック円筒に収容されている。レンズ組立体の前面は、キャップ450内のレンズポート458に接着封止されている。
【0107】
前述したように、結腸鏡検査用途には、受入れ可能なfシータのひずみを有する140度の対角全視界が好ましい。画像鮮鋭度は、約10mmの物体距離で、入射瞳と同心、被写体表面上で1ミリメートル当たり5線対の解像度を提案する、内視鏡に関するFDA指針書と一致しなければならない。これは、Micron, Inc.またはST Microelectronicsなどの会社によってCMOS技術もしくはCCD技術を用いて製造されているもののようなVGA(640×480)ピクセルのカラーイメージャの使用と一致する。
【0108】
イメージャチップの出力は、ワイヤ総数を減らして遠位先端からの信号を近位コネクタにもたらすために、シリアルデジタルフォーマットのものであるのが好ましい。近位端を遠位先端に接続するケーブルは、電源供給ライン、接地ライン、クロックライン、差分信号ライン、および制御信号ラインを含む。一般に、10本〜14本のワイヤが必要である。シリアライザをイメージャに組み込むことにより、高度にコンパクトな遠位先端を製造することができる。また、一体型シリアライザを有するイメージャのコストは、別個のイメージャとシリアライザおよびそれらの相互接続装置のコストに満たない。さらに、遠位先端からクロックを除去し、クロックをイメージング電子回路のサブシステム(60)上に配置することにより、関連する内視鏡のコストの削減と共に、遠位先端のサイズをさらに縮小することが可能となる。
【0109】
約4.5mmの対角フォーマットサイズを有するイメージャに関しては、140度の全視野をカバーするためには、レンズの焦点距離は1.8mmとなる。
【0110】
4要素プラスチックレンズ組立体470が、視野の1/2からのレイトレースと共に図6Jに描かれている。要素570、572、および576は、王冠様材料Ticona Topasのような同一のプラスチックから射出成形されている。要素574は、ポリスチレンから射出成形されている。必要な補正を達成するために、要素570および572の凹面は回転非球面で、要素576の両凸面は非球面である。十分な被写界深度を提供するために、レンズのF/#は、約8である。一番右の光学要素577は、イメージャセンサ490に組み込まれた保護用カバーガラスである。
【0111】
本発明の好ましい実施形態では、イメージャセンサ490は、640X480アクティブピクセルを有するVGA CMOSイメージセンサと、画像データをシリアル形式で制御キャビネットに伝送するオンチップシリアライザとを備える。そのようなCMOSイメージセンサは、アイダホ州ボイシ所在のMicron Electronicsから、型番MI−370として入手可能である。内視鏡の長さに沿ってシリアル画像データおよび制御信号を伝送するためには、データおよび制御信号は、適切なツイストマイクロ同軸ケーブルに沿い、低電圧差分信号(LVDS)プロトコルを用いて、デジタルで送信されるのが好ましい。
【0112】
画像組立体を構築するには、フラッシングポート456を含む遠位キャップ450が、LEDウィンドウ460、462の上にABSプラスチックで成形される。LED482、484を接合した回路基板550が、熱交換器480の内部に固定され、CMOSセンサ490および関連する電子機器492が、熱交換器480の裏面525の脚506、508の間に固定される。レンズ組立体470が凹形のくぼみ482に挿入され、所定の位置に接着される前に、イメージセンサ490上に光を集束するのに最適な位置に至るまで、長手方向に調節される。次いで、完成した熱交換器組立体を遠位先端450に挿入し、接着接合してイメージング組立体を完成することができる。次いで、残った低圧洗浄ボーラス洗浄チャネル454、レンズ洗浄・吹送チャネルおよび作動チャネル用のチューブが遠位先端内の対応するルーメンに固定され、内視鏡の遠位イメージング部分が完成する。
【0113】
部分的には所望の内視鏡パフォーマンス特性によって決定することができるが、構成要素、光学組立体内の構成要素の寸法および構成のバリエーションが企図される。例えば、視野、照射のレベル、遠位先端の運転温度等のような事項は、特定の構成のバランスおよびトレードオフに影響を及ぼす。例えば、円筒形レンズ組立体をイメージセンサに対して動かすことによって内視鏡に集束能力を付け加えるのが望ましいかもしれない。レンズ組立体に焦点を合わせることができれば、より小さいF#(すなわち、より速い)のレンズを用い、それによって必要な光の量を減少させることができる。必要な光がより少なくなれば、なんらかの過剰熱を照射源から除去するための能動冷却機構の必要性は、少なくなるかまたは排除される。あるいは、水冷式の熱交換器を照射源に熱結合されたヒートパイプに置き換えるか、もしくは内視鏡の空隙に熱伝導性の流体または他の物質を充填することが可能かもしれない。
【0114】
レンズ組立体をイメージセンサに対して動かさなければならない(逆の場合も同じ)距離が比較的小さい(例えば数百ミクロン)ために、磁気作動バイメタル部品、熱作動バイメタル部品、スクリュー式アドバンサ等のような簡素な機械的部品または電気的に作動する部品で集束機構を構築することができる。さらに、レンズ組立体が図6Cに示す種類の円筒形のくぼみ482または同等の構造内に収容される場合、レンズ組立体がイメージセンサと同一直線上に並ぶように拘束されるため、集束を簡素化することができる。
【0115】
図7に、図6Aに示すものに類似した内視鏡の遠位先端600の一実施形態をさらに詳細に示す。この実施形態では、先端部分600は、遠位先端600の外周沿いに配置されたいくつかの逆向きに開けた穴602を含む。逆向きに開けた穴602は、遠位先端を配向する制御ケーブル(図示せず)のスエージ加工を施すかまたはフランジをつけた端部を受け入れる。制御ケーブル上の張力によって、遠位先端600が、張力を加えている力の方向に引っ張られる。
【0116】
図8は、本発明の一実施形態による内視鏡650の縦方向の断面図である。遠位先端652は、関節ジョイント654の遠位先端において、接着固定、溶接または他の方法で中央ルーメンの内部に接合されている。関節ジョイント654の近位端に固定されているのは、シャフト656の遠位端である。上に論じたように、シャフト656は、内視鏡の近位端よりも剛性が高いか、ねじれ剛性が大きいか、または内視鏡の遠位端に向けてよりよくトルクを伝達することができるのが好ましい。
【0117】
内視鏡の遠位先端を動かす制御ケーブル658は、ステンレススチールのような非伸縮性材料または指向性の強いポリエチレンテレフタレート(PET)糸の紐で製造されているのが好ましい。制御ケーブル658は、シャフト656の中央ルーメン内に通してもよく、図8に示すように、シャフト656の壁内部に形成されたルーメンに通してもよい。制御ケーブル560は、関節ジョイント654の壁内部のガイドを通って延び、関節ジョイント654の遠位端または遠位先端部分602で終了する。本発明の現在好ましい実施形態では、制御ケーブルはボーデンケーブル(すなわち、外側シースと内側ケーブルとを備えるシステム)である。例えば、ボーデンケーブルは、HDPEのような滑らかなライナを有する外側ステンレススチールジャケットおよび/または摩擦を低減するためにシリコーンのような潤滑剤を塗布した内側ケーブルを備えることができる。あるいは、ケーブルは、シース用に用いることのできる非圧縮性プラスチックまたは金属のような、他の適切な金属もしくはプラスチック、および他の高弾性率素材を備えてもよい。外側ジャケットの遠位端は、関節ジョイント654の近位端に受け入れられ、該ジャケットの近位端は、手動制御装置または内視鏡を制御キャビネットに結合するコネクタ内に固定される。
【0118】
制御ケーブルをシャフト656の中央ルーメンに通す場合、ケーブルは、結合を防止するために、ステンレススチールまたはプラスチックのスパイラルラップ付きジャケット内に担持されるのが好ましく、図9Aおよび図9Bに示すもののような遷移ガイド670を用いて、制御ケーブルを関節ジョイントの近位端内に誘導することができる。遷移ガイド670は、シャフトの遠位端のルーメン内に固定された近位端672を有する。遷移ガイド670の中央本体部分674は、イメージング内視鏡の外径に等しい直径を有する。さらに、本体部分674は、近位端672の中央ルーメンから遷移ガイドの段のある遠位端676の外側表面まで延びるいくつかの斜めのルーメン678を含む。遠位端676は、関節ジョイント654の近位端内部に固定されている。従って、斜めに延びるルーメン678内の制御ケーブルは、カテーテルの外縁に誘導され、ケーブルは、そこからガイドまたは関節ジョイント654の制御ケーブルルーメンを通って延びる。
【0119】
図10Aおよび図10Bに、内視鏡を形成するために用いられるシャフトの一実施形態を示す。シャフト680は、押出スリーブ682を有し、押出スリーブ682は、組み込み型のワイヤまたは他のブレード684を含むことができる。存在する場合、ブレード684によって、シャフトのトルク特性を調整することができる。スリーブ682は、マンドレルの上にスリーブを配置することによって形成することができる。ブレード684がスリーブの上に配置され、マンドレルがコーティング材に浸漬されるかまたはそれを吹き付けられる。スリーブおよびコーティング材は、ペレセン、ポリウレタン、またはポリエチレン、ポリプロピレン、もしくはポリビニルアルコールのような定評のある他の生物医学的用途の材料で製造されるのが好ましい。現在好ましい実施形態では、スリーブ682は、0.507インチの外径および0.460インチの内径を有する黒色のペレセンで製造されている。ステンレススチールのブレードが組み込まれ、1インチ当たり23ピックを有する。さらに、芳香族ポリエステルウレタンテープの内側ラップで外側シャフトが完成される。シャフトの外側は、マサチューセッツ州ナティック所在のBoston Scientific Corporationから入手でき、引用により本明細書に組み込まれる、米国特許第5,702,754号および第6,048,620号に記載されたHYDROPASS(商標)親水性被覆剤のような親水性の滑らかな被覆剤を塗布することができる。
【0120】
Panduit Inc.から入手できるスパイラルワイヤラップのようなプラスチックスパイラルラップ686が、シャフト680の中央ルーメンに挿入されている。スパイラルラップ686は、シャフト680が患者の解剖学的組織の湾曲部に沿って曲がる際にシャフト680がつぶれるのを防止する。
【0121】
シャフト680の一実施形態では、スパイラルラップは、0.060インチの厚さおよび3/16インチのピッチを有する。スパイラルラップ686は、0.500インチの外径および0.380インチの内径を有し、シャフト680にねじ込められて締まりばめを形成している。しかしながら、異なるピッチを有する他の厚さのパイラルラップを用いて、ねじれが生じるのを防止すると同時に所望のコラム強さおよび曲がり率を提供することができることを理解されたい。
【0122】
金属ブレードが、関節ジョイントの上に配置されている。ブレードは、関節ジョイントにねじれ強さを提供すること、関節運動時にジョイントのリンクを整合させておくことおよび外側カバーがジョイントのリンク間にはさまれるのを防止することを含む、いくつかの機能を有する。好ましい設計では金属のブレードを用いるが、代替的に、PETのようなプラスチックブレードを用いてもよい。ブレードの特性(ブレードの角度、被覆%、1インチ当たりのピック#等のような)を調節し、低い関節運動力と一定した面内関節運動との間に必要なバランスを付与することができる。この設計の別の実施形態では、関節ジョイントの上に可変のブレードを用いて、ジョイントの曲がり円弧を制御することができる。関節ジョイントの近位リンク上のより密なブレードは、遠位リンクが最初に曲がり、従ってジョイント全体がより小さい曲がり円弧で曲がるのを促進する。外側のプラスチックカバーは、シャフトの関節ジョイント部分の上に取り付けられ、ブレードを有する関節ジョイント内のすき間を通って汚染物質がシャフトに入るのを防止する。
【0123】
上に論じたように、内視鏡シャフトの近位部分は、遠位部分よりも可撓性であるのが好ましい。シャフトの近位部分は、Panduit Inc.から入手できる型番CLTS
50F−Cのような波形のポリエチレンチューブで製造されるのが好ましい。
【0124】
図11に、シャフトの遠位部分のトルク忠実度を変更する一方法を示す。シャフト700は、内視鏡のブレイクアウトボックスの遠位端に向かう可撓性部分702およびブレイクアウトボックス(図示せず)により近接した剛性のより高い部分704を有する。内視鏡のより遠位の部分は、遠位先端に向かって可撓性を増し、逆に、近位に向かってトルク忠実度およびコラム強さが大きくなる。シャフトの遠位部分704のトルク忠実度特性を増大させるために、その部分のブレード706は、反対方向に巻き付けられた2つまたはそれ以上のブレードもしくはワイヤより線を含む。一実施形態では、ワイヤブレードは、14ピック〜16ピックのピッチを有する。しかしながら、より線の数およびそれらのスペーシングは、シャフトのトルク忠実度を使用目的に合わせるために、必要に応じて調節することができる。
【0125】
シャフト700のさらに遠位の端部702は、単一のワイヤスパイラル706を有し、ワイヤスパイラル706は、シャフト700の中央ルーメン内のプラスチックスパイラルラップと同じ方向に巻き付けられているのが好ましい。この場合もまた、シャフト702の近位端のトルク忠実度は、ワイヤ706のピッチおよび/または方向ならびにワイヤ706の可撓性を調節することによって変えることができる。
【0126】
理解されるように、シングルワイヤスパイラル706は、ある程度のトルク忠実度を提供するが、例えばループの解消のための操作を容易にするために、シャフトの遠位部分の二重ワイヤブレードと同じトルク忠実度を有する。さらに低いトルク忠実度を希望するなら、シングルワイヤスパイラル706をシャフトの遠位部分から省いてもよい。
【0127】
上に論じたように、イメージング内視鏡の遠位先端の操向を容易にするために、内視鏡は、関節ジョイントを含み、該関節ジョイントは、制御ケーブルによって、遠位先端がそれ自体を支えとして、すなわち180度の円弧上を逆戻りすることを可能にし、かつ遠位先端をその円周に沿った任意の所望の方向に曲がるように方向づけることができる。すなわち、操作者は、曲がりまたは関節運動の量と曲がりの方向との両方を選択することができる。図12Aおよび図12Bに示すように、本発明の一実施形態による関節ジョイント750は、中央ルーメン752および関節ジョイントの壁内に配置されたいくつかの制御ケーブルルーメン754を有する、可塑的に変形可能な材料の円筒から形成されている。希望するなら、制御ケーブルルーメンが円筒の中央ルーメン内に延びる突起を形成するように、円筒壁内の制御ケーブルルーメン間の間隔をよりまばらにしてもよい。制御ケーブルルーメン754は、3つの制御ケーブルが用いられる場合は120°離間して、または4つの制御ケーブが用いられる場合は90°離間して配向されるのが好ましい。
【0128】
関節ジョイントの曲がりを促進するために、円筒は、その長さに沿って形成されたいくつかの一体型ヒンジ760を含む。図13に見ることができるように、各一体型ヒンジ760は、円筒の両側に一対の対向するV字形の切り込み770を備え、ヒンジの湾曲可能な部分を形成する可撓性ウエブ772によって分離されている。4制御ケーブル用に設計された実施形態では、ジョイントの長さに沿った一体型ヒンジの各対は、隣接するヒンジに対して90度に配向されている。
【0129】
制御ケーブルの張力印加時点では、後退用制御ケーブルに沿って並ぶウエブ772を有する一体型ヒンジは曲がらない。制御ケーブルに沿って並んでいないウエブを有する一体型ヒンジが閉じられ、それによって、関節ジョイントが張力下の制御ケーブルの方向に曲がることになる。
【0130】
図13に示す関節ジョイント750の別の利点は、全ての制御ケーブルを同時に引くことによって内視鏡の遠位端を後退させることができる点である。これにより医師は、内視鏡の残りの長さを動かす必要なくして、体内の遠位先端を操作し、例えば、病巣を方形に切除することが可能となる。これは、生検材料の取得またはポリープのスネアリングのような外科的手技を実施する際に有益となることができる。
【0131】
関節ジョイントは、中央ルーメンおよび制御ケーブルルーメンを所定の位置に置いて円筒を押し出し、ナイフ、レーザ、フライスツール、ウォータージェット、または他の材料除去機構を用いて円筒チューブを切断し、一体型ヒンジを形成することによって形成することができる。あるいは、関節ジョイントは、一体型ヒンジジョイントを所定の位置に置いて成形することもできる。理解されるように、ヒンジを形成するV字形の切り込み角度は、均一でもよく、関節ジョイントの長さに沿って変化してもよい。同様に、隣接する一体型ヒンジ間の距離は、均一であってもよく、関節ジョイントの曲がり特性およびトルク忠実度特性を特定の用途に合わせるために、変化させてもよい。本発明の一実施形態では、各一体型ヒンジ760は、30°の閉鎖角を有し、これにより180°の動きを提供するのに6つのヒンジが必要となる。上に論じたように、関節ジョイント750の遠位端には、内視鏡の遠位先端部分を受け入れるために、逆向きに穴を開けることができる。同様に、関節ジョイント750の近位端は、内視鏡のシャフト部分の遠位端を受け入れるようになっている。図13に示す実施形態では、制御ケーブルルーメン754は、一体型ヒンジの最大間隔および各ヒンジのウエブ部分と整合されている。しかしながら、ヒンジ内での制御ケーブルの潜在的結合を減少させるために、制御ケーブルルーメン754をヒンジに対して偏位させるのが望ましいかもしれない。上に述べたように、関節ジョイントは、曲がるがつぶれない、医療用途に受け入れられる生体適合性材料で製造されなければならない。適した材料には、ポリウレタン、ポリエチレン、ポリプロピレン、または他の生体適合性高分子が含まれる。
【0132】
制御キャビネット内の作動機構によって制御ケーブルが引かれる際の制御ケーブルによる摩耗を防止するために、異なるデュロメータの領域を有する材料から関節ジョイントを製造するのが望ましいかもしれない。図14および図15に示すように、押し出しチューブ780から形成された円筒は、その円周沿いに高デュロメータ材料782と低デュロメータ材料784とが交互する帯域を有する。制御ケーブルを通すために用いられるルーメン786は、制御ケーブルに張力が印加・開放され、またルーメンに沿って移動する際の摩耗に抵抗するために、高デュロメータ材料782に形成されている。さらに、高デュロメータ材料は、制御ケーブルと周囲のルーメンとの間の摩擦をも軽減する。図15に、制御ケーブルが一体型ヒンジのウエブ部分772を貫通しないように、制御ケーブルルーメンが一体型ヒンジのウエブ部分の向きに対して偏位されている関節ジョイントを示す。
【0133】
図16Aおよび図16Bに、関節ジョイントの代替的実施形態を示す。この実施形態では、ジョイントは、数珠つなぎにされた一連のボールソケットコネクタを備える。図16Aに示すように、各コネクタが、ソケット部分800およびボール部分802を含む。ボール部分802は、隣接するコネクタのソケット部分800にはまり込んでいる。ルーメンがボール部分802を通って軸方向に延び、光源と、イメージセンサと、洗浄流体および吹送ガスを搬送するチューブとに接続するワイヤの通過を可能にしている。ボール部分およびソケット部分は、生体適合性高分子で成形されるのが好ましい。
【0134】
各ソケット部分は、図17Aに示すボール部分810のような完全に形成されたボール部分と共に形成することができる。あるいは、図17Bに示すように、ボール部分814のような部分的ボール部分をソケット部分816上に形成してもよい。制御ケーブルが移動する空間を提供するために、ボール部分は、ボール部分の中央および側部を通り抜ける、図17A、図17Bに示すようなスロット818を含むことができる。あるいは、図17Cおよび図17Dに示すように、いくつかのより小さいスロット820をボール部分の円周沿いに配置してもよい。スロットは、制御ケーブルが張力下で短くなることを可能にする。図17Dに示すようなボール部分とソケット部分の界接面にあるいくつかの穴822は、ソケット部分からボール部分内への制御ケーブルの通過を可能にする。
【0135】
関節ジョイントの別の実施形態では、関節ジョイントは、互いに隣接して配置され、互いに対して動く一連の積み重なった円盤で作られている。図18Aに示すように、円盤850は、一対の後方を向いたロッカー面またはカム854と一対の前方を向いたロッカー面またはカム856とを有する環状リング852を備える。カム854は、環状リング852の背面上に180°離間して配置され、前方を向いたカム856は、環状リング852の前方面上に180度離間して配置されている。図示の実施形態では、前方カム856は、後方カム854に対して90°に配向されている。環状リングの反対側の対向する各カムは、隣接する円盤のカムが平坦な部分のロックと係合することができるように、平坦なランド部分となっている。穴860は、制御ケーブルの通過用に、環状リングを通り、次にカムを通って開けられている。制御ケーブルがピンと張る時に、円盤がカム854、856の表面で揺動し、それによって関節ジョイントを所望の方向に曲げる。
【0136】
図18Bに、互いと係合して関節ジョイントを形成する一連の積み重なった円盤850a、850b、850cからなっている関節ジョイントを示す。いくつかの制御ケーブル870a、870b、870c、870dが円盤を貫通し、カム表面上で円盤を引っ張ってジョイントを所望の方向に動かすために用いられる。
【0137】
図19Aおよび図19Bに、図18Aおよび図18Bに示す関節ジョイントの代替的実施形態を示す。この実施形態では、関節ジョイントは、一連の積み重なった円盤880を備え、各円盤は、裏面に一対の凹形ポケット882、および前面に一対の対応する形状の凸形カム884を有する環状リングを備える。凹形ポケット882は、円盤のカムが隣接する円盤のポケットの内部にはまり込むように隣接する円盤を積み重ねることができるように、凸形カム884に対して90°に配向されている。対応する形状のカム884およびポケット882は、円盤が互いに対して回転するのを防止するのに役立つ。図19Bに示すように、いくつかの制御ケーブル890a、980b、890c、980dの通過用に穴またはルーメン886が環状リング880を通って形成されている。穴またはルーメン886は、カムおよびポケットの中央に配置することができる。しかしながら、希望するなら、制御ケーブル用の穴は、カムおよびポケットの位置から偏位させてもよい。円盤880は、隣接するカムとポケットとの間の摩擦を低減するポリウレタン、ポリプロピレン、またはポリエチレンのような、比較的スベスベした表面を有する生体適合性高分子から成形されるのが好ましい。
【0138】
図20Aおよび図20Bに、関節ジョイントのさらに別の代替的実施形態を示す。この実施形態では、関節ジョイントは、各々が環状リングを備える、円盤の積み重ねで形成されている。環状リングは、円盤が隣接する円盤に対して動かされる際に制御ケーブルがカム内でより自由に動くことを可能にする弓状スロット892が中に成形された、前方に延びるカムを有する。図20Bにもっともよく示すように、スロット892は、カムの外縁にある最大幅の点894から、スロットが環状リング880の反対側の縁まで延びる円筒状の穴898を形成する狭い点896まで、先細になっている。制御ワイヤ896は、隣接する円盤が回転する際に、弓状スロット892の広くなった部分内で自由に曲がることができる。
【0139】
図18〜図20に示す関節ジョイントの円盤は全体として形状が円形であるが、他の形状も用いることができることを理解されたい。図21Aおよび21Bに、全体として正方形の外形を有するいくつかの部分から形成された関節ジョイントを示す。図21Aに示すように、部分900は、この正方形部分の裏面の両側に外方に延びる一対のピン902を有する正方形バンドである。前面の両側に、裏面のピンに対して90°に配向され、隣接する部分の丸いピン902を受け入れるような大きさを有する、一対の対向する丸いくぼみ904がある。図示の実施形態では、制御ケーブルは、正方形部分900の各コーナに見出されるコーナブロック906内の穴またはルーメンに通される。図21Bに、共に固定された2つの隣接する正方形部分900a、900bを示す。図から見て取れるように、部分900bは、そのピンを中心に、隣接する部分900aに対して上または下に回転することができる。円形および正方形の関節部分を示してきたが、三角形または五角形等のような他のセグメント形状も関節ジョイントを形成するのに用いることができることを理解されたい。
【0140】
上に説明した関節ジョイントの実施形態では、ジョイントを構成する各円盤または各セグメントは、同じ材料で製造されるのが好ましい。しかしながら、ジョイントの長さに沿ってジョイントの可撓性およびトルク忠実度を変えるために、セグメントを製造する材料および/または物理的寸法もしくは隣接するセグメント間の間隔を変えることは可能である。
【0141】
一部の環境では、イメージング内視鏡の遠位先端の完全な180°の回転半径は必要ではないかもしれない。それらの環境では、相互接続された円盤またはセグメントで作られた関節ジョイントを、編み組みステントのような可撓性部材に置き換えることができる。図22に、関節ジョイントとして編み組みステント930を有するイメージング内視鏡925を示す。編み組みステント930は、遠位先端932と、可撓性シャフト936の遠位端とステント930の近位端を結合するコネクタ934との間に延びる。カバー938が、可撓性シャフト936と編み組みステント930の上に延びる。制御ケーブル(図示せず)は、可撓性シャフト936のルーメンを通って延び、遠位先端932が所望の方向に向くようにステント930を引っ張るのに用いられる。さらに、全ての制御ケーブルを同時に引っ張ることによって、内視鏡の遠位先端を後退させることが可能である。
【0142】
図23に、制御ケーブルの遠位端を編み組みステント930に固定する1つの方法を示す。制御ケーブル940a、940b、940c、940dは、ステント930のワイヤに通して編み込み、ステントを構成するワイヤの周りにループを形成することによって終了させることができる。あるいは、ケーブル940の端部を、ステントのワイヤにはんだ付けするかまたは接着固定してもよい。
【0143】
図23Aに、本発明の内視鏡と共に用いるための関節ジョイント1000のさらに別の代替的実施形態を示す。関節ジョイント1000は、一連の積み重なったリング1002a、1002b、1002c等で作られている。各リングは、内側ルーメンのサイズを最大化するために、深絞り鋼、またはリングが肉厚の薄い輪郭を有しながら剛性であることを可能にする他の金属で形成されるのが好ましい。リングの外周沿いに等間隔で配置されているのは、隣接するリングを結合するために用いられる短いバネ部分1006を受け入れる、内方に延びる凹形のくぼみ1004である。リング1002の両側にある2つのバネは、隣接するリングを結合するために用いられる。例えば、3つのリング1002a、1002b、および1002cが整列している場合、リング1002aとリング1002bは、リング上の0°および180°に位置するバネセグメントで結合され、一方で、リング1002Bは、リング沿いの90°および270°に位置する直角に位置合わせされたバネセグメントによってリング1002Cと結合される。一対のバネが、関節ジョイントの長手方向軸線から遠ざかる方向に曲がることができるが関節ジョイントの長手方向軸線の方向に関節ジョイントを圧縮する能力が限定されている可撓性ジョイントを形成するように、隣接するリング間にすき間が形成されている。各バネ1006は、接着剤、圧着、溶接、または他の固定機構を用いて、リング1002の凹形のくぼみ1004内に固定されている。
【0144】
図23Aに示す関節ジョイント1000は、制御ケーブルがバネセグメント1006の中央および関節ジョイントの外周上を通過し、それにより、各リング1002の中央開口部を通してチューブおよび他のケーブルを進めるために利用可能な空間の量が最大化され、かつ関節ジョイントを曲げるのに必要なトルクが最小化されるという利点を有する。
【0145】
図23Bに、図23Aに示す関節ジョイントの代替的実施形態を示す。この実施形態では、関節ジョイントは、各リングの内周上に配置されたバネと結合された、いくつかの深絞りまたは他の方法で形成された金属リング1008a、1008b、1008cを備える。各リングは、リングの両側に配置された一対のバネセグメントによって隣接するリングに接続されている。バネ1010は、接着剤で、または溶接によって、もしくは他の固定手段を用いてリング1008の内周に固定されている。図23Bに示す実施形態では、制御ケーブルは、バネセグメントに通され、関節ジョイントの長手方向軸線により近接して配置される。長手方向軸線により近接していることで、関節ジョイントを所望の方向に曲げるのに、制御ケーブル上により力を必要とする可能性がある。
【0146】
図23Cに、一連の積み重なった金属リング1012a、1012b、1012c等を備える、関節ジョイントの別の代替的実施形態を示す。各リング1012は、バネ1015で結合されており、バネ1015は、交互するきつく巻かれた部分1014とよりゆるく巻かれた部分1016とを有し、それによりバネの長さに沿ったバネの力を変化させている。ゆるく巻かれた部分1016は、関節ジョイントがその領域にたわみ込むことを可能にし、一方で、より密に巻かれた部分1014は、隣接するリングに対するヒンジ機構となる。リング1012の各々は、バネが通された型打ちした一対の内方または外方に延びるタブ1018をさらに含み、それによりバネを圧着、溶接、または他の方法で固定することのできる表面を形成している。図23Cに示す実施形態では、各リングは、完全に円筒状ではなく、隣接するリングが結合されている点から遠ざかる方向に延びる傾斜した前面および裏面1020を含む。リングの傾斜した面は、隣接するリング間の動きの増大を可能にし、隣接するリングが互いを通り越して摺動するのを防止する止め具ともなる。隣接するリング上の傾斜した面1020はそれにより、関節ジョイントがたわみ込むことのできるV字形の溝を形成している。
【0147】
図23Dに、図23Bに示す関節ジョイントに類似した、関節ジョイントの別の実施形態を示す。しかしながら、この実施形態では、関節ジョイントは、向かい合って配列された凹形の逃げ部1024と凸形の逃げ部を有するいくつかのリング1022a、1022b、1022cからなっており、該向かい合って配列された凹形の逃げ部1024と凸形の逃げ部は、交互するきつく巻かれたセグメントとゆるく巻かれたセグメントが1つのリングの外側および隣接するリングの内側を交互に通ることを可能にしている。向かい合って配列された凸形の逃げ部と凹形の逃げ部は、接着剤、溶接、または他の結合機構でバネをリングに固定することを可能にする。
【0148】
図23Eおよび23Fに、本発明による関節ジョイントのさらに別の実施形態を示す。この実施形態では、ジョイントは、交互に直角に配列されたバネセグメント1024の対によって結合された一連の積み重なったリンク1022a、1022b、1022c等で形成されている。リンクは、平坦な金属片を圧延および溶接することによって形成することができる。バネセグメント1024は、溶接、ろう付け、接着固定するか、または他の方法で各リングセグメントの内周に結合されている。リングおよびバネセグメントは、ステンレススチールまたは他の生体適合性材料で作製されるのが好ましい。バネは、レーザまたは他の切削工具で切断する前に、リングに固定することができる。あるいは、バネをセグメントに切断し、その後組立治具でリングに固定してもよい。ジョイントの長さに沿ってさまざまな剛性のバネを用い、ジョイントの弧の曲がりを制御することができる。
【0149】
図23Fに示すように、側面から見たときに、各リングは、平坦な区域1026を有する前面と、平坦な面1026から後方に傾斜した一対の傾斜区域1028とを有する。リングの裏面は類似した形状を有するが、傾斜面は、前側の傾斜面に対して90°に配向されている。各傾斜面は、ジョイントの長手方向軸線に垂直な線から14°の角度を有し、それにより隣接するリングが約28°曲がることを可能にしている。
【0150】
図23Gに、本発明による関節ジョイントのさらに別の代替的実施形態を示す。この実施形態では、関節ジョイント1030は、深絞りまたは型打ちした鋼もしくは別の金属によって形成された一連の金属リンク1032a、1032b、1032c等を備える。各リンクは、円形または八角形のように多辺形とすることができる略リング様構造1034を有する。さらに、各リンク1032は、外方に延びるタブ1038を端部に有する後方に延びる一対の脚1036を有する。脚1036の各々は、リンク1032の両側に配置されている。脚1036に対して90度の箇所に、リンク1032は、隣接するセグメントからのタブ1038を受け入れる、リンクの側壁に開けられた対応する穴1040を含む。さらに、セグメント1032は、制御ケーブルを保持するためのアイレットを備える、一体に形成されたワイヤガイド1042を含む。関節ジョイント内の隣接するリンクは、第1のリンク1032から隣接するリンクの対応する穴1040にタブ1038を挿入することによって共に固定されている。関節ジョイントを曲げるのに必要な力を増大させることなくねじれ強さを向上させるために、ブレードをリンクの連なりの上に配置することができる。ブレードは、関節ジョイントの上を通るカバーに組み込むことができる。
【0151】
図23Hに図23Eに示すものに似たリンクの代替的実施形態を示す。しかしながら、この実施形態では、リンク1050は、隣接するリンクをのタブを受け入れるために、丸い穴1040ではなく、蝶形の穴1052を有する。蝶形の穴1052は、対応する平坦なタブが隣接するリンクから回転することができる範囲を制限する働きをする。蝶形の穴1052を形成する弧の曲率を調整することにより、隣接するリンク間の回転の度合いを制御することができる。リンク1050は、深絞り金属および/または型打ち工程によって形成されるのが好ましい。
【0152】
図23Iに、一連の相互接続された金属リンク1060で形成された、本発明の関節ジョイントのさらに別の実施形態を示す。各リンク1060は、内方に延びるタブを各端部に有する一対の後方に延びる対向する脚1062を有する。タブは、隣接するリンクの対応する穴またはスロット内に延びる。しかしながら、この実施形態では、脚1062の各々上のタブは、さらに関節ジョイントの中央ルーメン内に延びる。各タブは、バネ1066が通過することができる穴1064をも含む。穴1064はそれにより、バネ1066によってタブ1062が隣接するリンクから離脱するのが防止されるため、隣接するリンク内のタブをロックする。
【0153】
図23Jに、一連の相互接続されたリンク1080a、1080b、1080c等からなる本発明の関節ジョイントのさらに別の実施形態を示す。各リンクは、その円周沿いに、リンクの一部分に沿って周方向に延びるスロットを形成し、続いてリンクの一部分を内方に曲げることによって形成された交互性のフープまたはアイレット1082を有する。スロットは、一対の内方に延びるアイレットがリンク前面の両側に形成され、前面のアイレットに対して90°に配向された一対のアイレットがリンクの裏面に形成されるように配列されている。アイレットがこのようにリンク1080a、1080b、1080c等内に形成された状態で、バネを、各アイレットの箇所でリンクに固定することができる。
【0154】
図23Kに、配列において図23Jに示す関節ジョイントに類似した、本発明の関節ジョイントの別の実施形態を示す。この実施形態では、関節ジョイントは、一連の金属リンク1100a、1100b、1100c等を備える。各リンクは、一対の向かい合わせに形成された、内方に延びるタブ1104を含み、タブ1104は円形に曲げられており、それにエラストマーチューブまたはバネ1106を通すことができる。チューブまたはバネ1106は、圧着、溶接によってリンク内に固定されるか、または他の方法でチューブ、バネ1106をタブ1104に固定している。
【0155】
図23Lに、本発明による関節ジョイントのさらに別の代替的実施形態を示す。この実施形態では、関節ジョイントは、一連の型打ちまたは深絞りした金属リンク1120a、1120b、1120c等を備える。各リンクは、その前面に一対の前方に延びるタブ1022を、リンクの裏面に一対の後方に延びるタブ1024を含む。前面および裏面のタブ1022ならびに1024は、互いに対して90度に配向されている。タブ1022、1024の各々は、整列したタブ同士を固定するために、固定機構を通すことのできる穴を含む。図23Mに示すように、固定機構は、一連の線バネ1040a、1040b等によって提供される。各バネは、関節ジョイントの整列した一対のタブの穴を通じて挿入された端部を有するワイヤを備える。次いでバネ1040は、関節ジョイントの内部ルーメンに沿って進み、リンクの別の対をつなぐ別の一組の整列したタブの穴を通って終了する第2の端部を有する。各バネは、制御ワイヤを中に保持するためのアイレットとして機能する、バネに巻き込まれたループをさらに含むことができる。
【0156】
図23N〜図23Pに、本発明の使い捨て内視鏡に用いるための関節ジョイント1200のさらに別の実施形態を示す。この実施形態では、関節ジョイントは、図23Nに示す種類の一連の積み重なった円盤を備える。各円盤1202は、前面1206および裏面1208を有する。円盤の周縁沿いに等間隔に配置されているのは、制御ケーブルが通過することのできる穴1210である。前面1206は、一対の向かい合って配列された平坦な部分1207を含み、平坦な部分1207は、円盤を二等分し、隣接する円盤の対応する平坦な表面に係合することのできる一対の表面を画定している。円盤の前面は、平坦な表面1207から遠ざかる方向に近位に角度を付けた2つの傾斜した部分をさらに含む。本発明の一実施形態では、この傾斜した部分は、円盤の長手方向軸線に垂直な線から約14°の角度が付けられている。同様に、裏面1208は、円盤の前面の平坦な表面1207に対して90°回転させた一対の平坦な表面から遠ざかる方向に遠位に角度を付けた、2つの傾斜した部分を含む。図23Pに示すように、関節ジョイント1200は、各円盤が平坦な表面で隣接する円盤と位置が合い、それによって傾斜した部分が関節ジョイントを貫通する制御ケーブルの張力下で閉鎖することのできるヒンジを形成するように、いくつかの円盤1202a、1202b、1202c等を積み重ねることによって作り出される。図23Pに示す実施形態では、七対の積み重なったセグメント1202があり、各対が、28°の曲がりを生成することができる。従って、図23Pに示す関節ジョイント1200は、上方向、下方向、左方向、または右方向に全体で196°曲がることができる。関節ジョイント1200の近位端に、関節ジョイントをシャフトの遠位端に結合する近位コネクタ1220がある。外側シース(図示せず)が積み重なった円盤1202の連なりを覆い、各円盤がずれるのを防止している。
【0157】
図23Qに、本発明の関節ジョイントに用いられる別の円盤を示す。各円盤1240は、図23Nおよび図23Mに示す円盤1202に類似している。この実施形態では、各セグメントは、一対の対向する平坦な表面1246から遠ざかる方向に傾斜する一対の傾斜面1242、1244を有する前面を有する。同様に、各セグメントの裏面上に、傾斜面が、前面上の傾斜面に対して直角に配列されている。隣接する円盤1240a、1240b同士は、一対の向かい合って配列されたバネセグメントによって固定され、該バネセグメントの端部は円盤の前面および裏面の平坦な表面部分内に形成された逃げ部または皿穴の中に配置されている。バネセグメントは、制御ケーブルを通すことのできるガイドとしても機能する。さらに、バネは、隣接するセグメントが互いに対して回転するか、そうでなければずれるのを防止する。
【0158】
図23Rに、本発明による関節ジョイントを形成するために用いることができるセグメントの別の代替的実施形態を示す。この実施形態では、関節ジョイントは、中央の円筒状軸1302と外側の円筒状縁1304とを有する一連のセグメント1300からなる。軸1302は、いくつかの外方に延びるスポーク1306によって外側の円筒1304に結合されている。各スポークは、軸近傍の中心点から外輪1304の中線に向かって下方に傾斜している。傾斜したスポーク1306は、スポークが互いに衝突することなく、隣接するセグメントが軸点で接触し、互いに対して回転することを可能にする。各スポークは、外縁近くにルーメン1312をさらに含み、それを通って制御ケーブルが進むことができる。セグメント1300の外縁1304は、交互に間隔を置いて配置された歯1308、1310を有し、該歯1308、1310は、1つのセグメントの歯が隣接するセグメントの逃げ部と位置が合うように周方向に配列されている。この設計により、関節運動時に内部のチューブがからまないことが保証される。
【0159】
図23Sに、互いに対して曲がって関節ジョイントを形成している一連のセグメント1300a、1300b、1300c等を示す。個々のセグメント1300の各々は、熱可塑性材料または金属で成形されるのが好ましい。
【0160】
図23Tに、本発明による関節ジョイントの別の代替的実施形態を示す。この実施形態では、関節ジョイントは、一連のセグメント1330a、1330b、1330c等で形成されている。各セグメントは、中央ピン1332、および、各セグメントの一端に、半径方向に延びる脚1334を備える。各脚1334の外縁に、制御ケーブルを通過させることのできる穴がある。中央ピンの端部は、脊柱のようにセグメントに接触して嵌合し、それにより各セグメント1332が隣接するセグメントに接触して揺動することを可能にしている。いくつかの実施形態では、セグメントをメッシュチューブで覆い、個々のセグメントの整合性を保持するのが望ましいかもしれない。
【0161】
図23Uに、本発明による隣接するリンクに結合されて関節ジョイントを形成するリンクの別の実施形態を示す。この実施形態では、リンクは、一対の向かい合って配列され、後方に延びるリング1352と、後方に延びるリング1352に対して90°に配向された一対の前方に延びるリング1354とを有する、金属の射出成形リングを備える。従って、隣接するリングは、1つのリンクの前方に延びるリングを隣接するリンクの後方に延びるリングに接触させて配置することによって整列される。各リング1352または1354は中に穴を含み、それにリベットを通してリング同士を固定することができる。リング1350の内周は、リンク内での制御ケーブルの動きを抑制するための、一対の一体型制御ケーブルガイド1356を含む。
【0162】
図23Vに、図23Tに示すリンク1350に類似したリンク1370の代替的実施形態を示す。この実施形態では、各リンクは、穴を中に有する一対の後方に延びるタブ1372と、一体に形成されたピン(図示せず)を内側表面上に有する一対の前方に延びるタブ1374とを含む。結合された時点で、内方に延びるピンを有するタブ1374が隣接するリンクの後方に延びるタブ1372内の穴にはまり込み、それにより隣接するリンクを別個のリベットで固定する必要性が排除される。リンク1370は、リンク1370内での制御ケーブルの動きを抑制するための、一対の向かい合って整列した制御ケーブルガイド1376をも含む。
【0163】
図23Wに、本発明による他のリンクと共に組み立てられて関節ジョイントを形成するリンクの別の代替的実施形態を示す。この実施形態では、リンク1390は、射出成形されたリングを備え、該リングは、その裏面上に一対の逆方向に向かい合った弓形のくぼみ1392を有し、リングの前面上に対応する形状の前方に延びる弓形のタブ1394を有する。前面上のタブ1394は、裏面上の弓形のくぼみ1392に対して直角に配列されている。弓形のタブ1394の各々の内側表面と位置合わせされているのは、リンク1390内での制御ケーブルの動きを抑制する、一体に形成された制御ケーブルルーメン1396である。
【0164】
リンク1390は熱可塑性材料で成形されているので、弓形のタブ1394は、隣接するリンクの弓形のくぼみ1392に圧入することができ、それにより、隣接するリンクが互いに対して前後に揺動することができるようにしている。
【0165】
いくつかの実施形態では、制御ケーブルからの張力の解放時に内視鏡がまっすぐになろうとするように、関節ジョイントは、復元力を働かせるよに設計されている。別の場合では、遠位先端の位置を特定の方向に維持するのが望ましいかもしれない。その場合、図24に示すような構成を用いることができる。ここでは、イメージング内視鏡のシャフトは、2つまたはそれ以上のプラスチックスパイラルラップ1452、1454、および1456をかぶせた内側スリーブ1450を含む。ラップ1452は、時計回り方向に巻かれ、ラップ1454は、ラップ1452の上に反時計回り方向に巻かれ、ラップ1456は、第1のラップ1452と同じ方向に巻かれている。交互に巻かれたラップの層間に摩擦が生成されるように、ラップは、比較的粗いプラスチック材料で形成されている。プラスチックラップに適した材料には、編み組みのポリエステルまたはポリウレタンのリボンが含まれる。いずれかの制御ケーブルによる内視鏡の張りと同時に、プラスチックスパイラルラップが互いに対して動くことになり、重なり合ったラップ間の摩擦が、内視鏡の向きを所望の方向に維持しようとする。内視鏡は、それが制御ケーブルによって異なる方向に引かれるまで、所望の方向に留まることになる。交互に巻かれたパイラルラップ1452、1454、1456を覆っているのは、ブレード1458である。ブレードは、互い違いの方向に巻かれた1つまたはそれ以上のプラスチック、ガラス繊維またはワイヤの細線で形成されている。外側スリーブ1460がブレード1458を覆ってシャフトを完成している。
【0166】
図25に、本発明による内視鏡に用いるためのシャフト構成の別の代替的実施形態を示す。このシャフトは、シース1470の円周沿いに交互する、高デュロメータ材料1472と低デュロメータ材料1474の帯を有するカバーシース1470を含む。高デュロメータ材料および低デュロメータ材料は、シャフトの長さに沿って延びる長手方向のストリップを形成する。シャフト1470の内部に、シャフト1470が患者の解剖学的組織内で曲げられる際にシャフト1470がつぶれるのを防止する、プラスチックスパイラルラップ1475がある。高デュロメータ材料は、シャフトのトルク忠実度特定を増大させる。低デュロメータ材料と比較した高デュロメータ材料ストリップの幅は、所望のトルク忠実度特性に応じて調節することができる。
【0167】
イメージング内視鏡による検査中、医師は、イメージング内視鏡を所望の方向に誘導するために、内視鏡をひねる必要があるかもしれない。内視鏡の外側表面には潤滑剤が好ましく塗布され、かつ内視鏡の外側表面が丸いために、内視鏡を回転させるために医師がシャフト上に適切なしっかりした足掛かりを維持するのは困難となる可能性がある。従って、本発明のイメージング内視鏡は、シャフトを回転させるかまたは長手方向に動かすために医師がシャフトをつかむのを支援する把持機構を含むことができる。シャフト把持装置の一実施形態を図26に示す。ここでは、グリッパ1500は、イメージング内視鏡20の長手方向軸に揃えられた一対の脚1502、1504を有するU字形部材を備える。脚1502、1504の遠位端に、2つの90°の曲がり1506、1508がある。グリッパ1500は、グリッパの湾曲した、曲がった部分に配置された穴1505を含み、該穴1505は、90°部分1506、1508の各々の穴のみならず、脚をも結合している。イメージング内視鏡は、これらの穴を通過し、これによりグリッパ1500が内視鏡のシャフト部分の長さに沿って摺動可能となる。グリッパを作るために用いられる材料のバネ性により、脚1502、1504は、内視鏡のシャフトから遠ざかる方向に付勢される。曲がった部分1506、1508にある対向する穴の摩擦のみが、グリッパ1500がシャフトの長さに沿って自由に摺動するのを防止する。脚1502、1504の内側表面上に、内視鏡のシャフト部分の外周に一致する形状の内側表面を有する一対のタッチパッド1510、1512がある。医師が脚1502、1504を半径方向内向きに押し出す際に、タッチパッド1510、1512がシャフトに係合し、これにより医師は、内視鏡を押すまたは引く、あるいは内視鏡を回転させることができる。脚1502、1504の解放時に、タッチパッド1510、1512はシャフトの表面から放れ、希望するなら、グリッパ1500をシャフトの長さに沿って別の位置に移動させることができる。
【0168】
図27に、同じ部品は同じ参照番号で示す図26のそれに類似するグリッパを示す。この実施形態では、グリッパは、脚1502、1504の外側表面上に配置された2つの半球形円盤1520、1522を含む。希望するなら、半球形の表面1520、1522は、シャフトをひねるのがより容易となるように、医師の手中にフィットし、グリッパからシャフトまでの半径方向距離を増大させるように設計される。
【0169】
図28に、シャフトグリッパのさらに別の代替的実施形態を示す。この例では、グリッパ1550は、イメージング内視鏡の長手方向軸に垂直に配向された一対の脚1552、1554を有するU字形の部材を備える。脚1552、1554は、内視鏡のシャフト部分の外径を受け入れるような形状を有するくぼんだ部分1556、1558を含む。脚を近づけて脚1554、1556を内視鏡のシャフトにしっかりと係合させることができるように、蝶ネジ1560が、脚の遠位端に配置されている。蝶ネジ1560の解放時に、脚1554、1552は、シャフトから遠ざかる方向に付勢され、これによりグリッパ1500を動かすことができる。シャフトは、シャフトの長手方向軸に対して脚1552、1554を回転させることによってひねることができる。
【0170】
図29に、図28に示すグリッパ1550の代替的実施形態を示す。この例では、グリッパ1580は、一対の脚1582、1584を有するU字形の部材を含む。各脚の遠位端に、シャフトの外径を受け入れるような形状を有するくぼみ1586、1588がある。シャフトは、くぼみ1586、1588内に配置され、蝶ねじが、脚1582、1584の端部とグリッパ1580のU字形の湾曲部との間に配置されている。蝶ねじ1590を締め付けることにより、脚がイメージング内視鏡20のシャフトに接触して圧縮され、それにより、グリッパ1580を動かすことによって医師が内視鏡を回転させることが可能となる。
【0171】
本発明の一実施形態では、内視鏡は、使用前には内視鏡の遠位端を清浄に保つ働きをし、内視鏡が使用された後では患者と接触した内視鏡の端部を覆う、可動スリーブを有する。
【0172】
図30Aおよび図30Bに、遠位先端にスポンジ1504を有する内視鏡1594の一実施形態を示す。このスポンジは、内視鏡の上にフィットし、かつはがしてスポンジに水または他の液体を含ませることができるピールオフラッパを有する。水は親水性被覆剤を活性化し、それにより内視鏡の遠位端の潤滑性が向上する。さらに、圧縮されたときのグリッパとしてのスポンジの機能により、医師が内視鏡を引きかつ/またはひねることが可能になる。
【0173】
引込み式スリーブ1598が内視鏡の遠位端の上に配置されており、後退させてプローブの潤滑された遠位先端を露出することができる。一実施形態では、スリーブ1598は、その遠位端をスポンジ1594に、その近位端をブレイクアウトボックスに固定されている。スポンジを近位方向に移動させることによってスリーブが後退され、これにより内視鏡を使用する準備が整う。手技後、スポンジ1594が遠位方向に移動され、スリーブが内視鏡の遠位端の上に延びる。スリーブを延ばした状態では、プローブ上のいかなる汚染物質も、患者、手技を実施する医師またはスタッフに接触する可能性は少ない。
【0174】
いくつかの例では、イメージング内視鏡の遠位端において放散される熱の量を制限することが望ましいかもしれない。発光ダイオードが用いられる場合、それらは、照射用の光を発生させる工程において熱を発生させる。同様に、イメージセンサは、動作中にいくらかの熱を発生させる。内視鏡遠位端の発熱量を制限しかつ/またはこれらの構成要素の寿命を向上させるためには、熱を放散することが必要である。そのようにするための1つの手法は、イメージング内視鏡の遠位先端に受動ヒートシンクを構築することである。図31に示すように、遠位先端1600は、キャップ1602と、生体適合性金属のような放熱材料で作製された放熱部分1604とを含む。放熱部分1604は、ほぼ放熱部分1604の直径に沿って延びる比較的平坦な基部1608を有する半円形の開口部1606を含む。平坦な基部1608は、LEDおよびイメージセンサのような電気部品を熱伝導性接着剤または他の熱伝導性材料で取り付けることができるパッドを形成する。熱を発生させる装置は、動作中に発生された熱を、放熱部分1604に転送することになる。遠位のカバー1602は、放熱部分1604の遠位端を覆い、イメージングカテーテルが患者の体内で動かされる際に身体を保護すると同時に、放熱部分1604が体内の組織に接触するのを防止する。内視鏡の遠位端に入る光を放熱部分1604の比較的平坦な基部1608に固定されたなんらかのイメージング電子回路に向けて曲げるためには、プリズム、レンズ、または他の光を曲げる装置が必要かもしれない。
【0175】
図32に、遠位先端がカバーを含まず、生体適合性金属のような放熱材料の単一片から成形されている、内視鏡の放熱遠位先端を示す。放熱部分1620はこの場合もまた、該部分の直径に沿って延び、熱を発生させる電子装置を上に取り付けることができる比較的平坦な表面1622を有する半円形の開口部を含む。半円形の開口部が放熱遠位先端1620の遠位端に形成された状態で、照射機構およびイメージセンサが平坦な表面1622に取り付けられる。照射機構およびイメージセンサまたはイメージセンサのレンズを洗浄するために、洗浄ポートは、水を半球形のカットアウトへ導くように配向されている。
【0176】
本発明のさらに別の実施形態では、内視鏡の遠位端のイメージング装置は、ルーメンを通じて内視鏡の端部に送られその後体外に放出される、空気または水によって冷却することができる。例えば、加圧下の空気は、イメージング電子回路近傍のオリフィスを通じて放出することができる。空気の膨張によってその温度が下がり、そこで空気がイメージング電子回路を冷却する。次いで、暖められた空気が、排出ルーメンを通じて内視鏡の近位端に押し進められる。あるいは、内視鏡は、遠位先端の熱交換器に水を送達する水送達ルーメンを含んでもよい。遠位先端内の電子部品によって暖められた水は、水返却ルーメン内に除去される。もう一つの選択肢として、量および温度が生理的に受け入れ可能であれば、空気または水を患者の管腔に直接放出することができる。
【0177】
図33に、図31に示す受動放熱遠位先端の代替的実施形態を示す。この例では、放熱遠位先端1640は、遠位先端の円周沿いに配置されたいくつかの帆立貝のようにカーブしたチャネル1642を有する。帆立貝のようにカーブしたチャネル1642は、放熱遠位先端の表面積を増大させ、それにより、先端が照射装置およびイメージング電子装置から熱を放散する能力がさらに増大する。
【0178】
本内視鏡システムは多くの用途を有するが、これは、結腸鏡検査を行うのに特に適している。一実施形態では、1/4インチのピッチを有する0.060内側スパイラルラップを有し、親水性被覆剤で被覆された10mm〜13mm直径の試作品が、従来の内視鏡の0.85と比較して0.15の摩擦係数を有することが分かった。さらに、本発明の内視鏡は、2インチのU字形湾曲部を押して通過させるのに0.5ポンドの力を要したが、従来の内視鏡は、そのような急な湾曲部を通過することはできなかった。従って、本発明は、結腸鏡検査を安価かつ軽量で行うことを可能にし、それにより、本発明の内視鏡の摩擦係数がより低くかつトラッカビリティがより優れているため、結腸鏡検査が患者にとってより快適なものとなる。
【0179】
結腸鏡検査を行うことに加え、本発明の内視鏡システムは、カニューレ、ガイドワイヤ、括約筋切開刀、結石回収バルーン、回収バスケット、拡張バルーン、ステント、細胞診ブラシ、結紮装置、電気止血装置、硬化療法針、スネアおよび生検鉗子を含む種々の外科手術用機器と共にも有用である。
【0180】
カニューレは、オッディ括約筋または乳頭にカニューレを挿入して胆管または膵管にアクセスするために、内視鏡システムと共に用いられる。ガイドワイヤは、内視鏡の作動チャネル沿いに下って送達し、外科手術用機器を関心のある領域に送達するためのレールとして用いることができる。括約筋切開刀は、ステントを配置する、または患者から結石を除去するために乳頭を切開するために用いられる。結石回収バルーンは、胆管から結石を引き出すためにガイドワイヤと共に用いられる。回収バスケットも、胆管または他の道から結石を除去するために用いられる。拡張バルーンは、胃腸管、尿路または肺管内の狭窄を広げるために用いられる。ステントは、GI管、尿路または肺管内の狭窄を広げるために用いられる。ステントは、金属またはプラスチック、自己拡張型または機械拡張型とすることができ、通常カテーテルの遠位端から送達される。細胞診ブラシは、細胞のサンプルを採取するために、ガイドワイヤの端部で用いられる。結紮装置は、食道内の静脈瘤を結紮するために用いられる。バンド結紮器は、弾性バンドを用いて静脈瘤を締め付ける。電気止血装置は、電流を用いてGI管内の出血組織を焼灼する。硬化療法針は、凝固液またはシール液を静脈瘤に注入するために用いられる。スネアは、GI管からポリープを取り除くために用いられ、生検鉗子は、組織のサンプルを採取するために用いられる。
【0181】
本発明の内視鏡システムを用いて行うことのできる特定の外科的手技の例には、膨張性薬剤の埋め込みによる逆流性食道炎(GERD)の治療、移植、フンドプリケーション、組織の瘢痕化、縫合、または下部食道括約筋(LES)の閉鎖を支援するための弁置換もしくは他の術式が含まれる。
【0182】
外科的手技の別の例は、患者が体重を減らすのを支援するための、移植片の配備または減量手術の実行、胃バイパスおよびひだ形成または組織ひだの生成による病的肥満の治療である。
【0183】
内視鏡的粘膜切除術(EMR)は、切除に先立って無茎性ポリープまたは扁平な病変に生理食塩水などを充填し、無茎性ポリープまたは扁平な病変を隆起させることによるそれらの除去を含む。本発明の内視鏡は、この手技を実施するのに役立つ針、スネアおよび生検鉗子を送達するために用いることができる。
【0184】
さらに、本発明のビデオ内視鏡システムは、GI管壁の一部を切除し、創傷をステープラまたはファスナで治癒させる全層切除(FTRD)を行うために用いることができる。最後に、本発明の内視鏡システムは、組織を殺すための硬化剤または体内組織の疾患を治療するための薬物送達剤の送達に用いることができる。
【0185】
本発明の好ましい実施形態を図に示し説明してきたが、本発明の範囲から逸脱することなく、さまざまな変更を行うことができることを理解されたい。例えば、開示した実施形態のいくつかはプルワイヤを用いて内視鏡の長さを圧縮するが、専用ワイヤのような別の機構を用いることもできることを理解されたい。あるいは、バネを用いて内視鏡を遠位方向に付勢し、ワイヤを用いてバネを圧縮し、それにより内視鏡の長さを短縮することができる。さらに、開示した実施形態は回転サーボモータを用いて制御ケーブルを駆動するが、リニアアクチュエータのような別のアクチュエータも用いることができる。同様に、好ましい実施形態に関連して論じた内視鏡は作動チャネルを含むが、このようなチャネルは省いてもよく、その結果現れたカテーテルは、スネア、RF焼灼用先端部等のような特殊用途ツールを所望の位置に送達するのに用いてもよいことを理解されたい。あるいは、カテーテルをイメージング用のみに用いることもできる。最後に、開示した構成要素は、ビデオ内視鏡に用いられているものとして説明されているが、多くの構成要素がそれ自体または他の医療機器において別の有用性を有することができることを理解されたい。従って、本発明の範囲は、以下の特許請求の範囲およびそれらの等価物から決定される。
【技術分野】
【0001】
発明の分野
本発明は、全体として医療機器に関し、詳細には、治療用内視鏡および診断用内視鏡に関する。
【背景技術】
【0002】
発明の背景
消化管および排出管ならびに気道、例えば結腸、食道、胃、尿道、膀胱、尿管、腎臓、肺、気管支、子宮および他の臓器系などの内部構造物の疾病の早期発見ならびに治療の一助としての定期的内視鏡検査から主要な公衆衛生上の利益がもたらされることは、充分に立証されている。そのような手技に用いられる従来のイメージング内視鏡は、照射光を外部光源から遠位先端へ導く光ファイバライトガイドを有する可撓性チューブを備え、該遠位先端において、光が検査対象領域(すなわち、組織、閉塞性物体)を照射する。ファイババンドルおよび遠位先端から出る光の拡散を調節するために、追加の光学部品が組み込まれていることが多い。対物レンズおよび内視鏡の近位端でカメラと通信する光ファイバイメージングライトガイド、または遠位端のイメージングカメラチップが、操作者に表示される画像を生成する。さらに、ほとんどの内視鏡は、生検鉗子、スネア、高周波療法用プローブ、および他のツールのような医療機器を通すことができる1つまたはそれ以上の作動チャネルを含む。
【0003】
複雑で曲がりくねった経路を通る内視鏡のナビゲーションは、患者に対する苦痛、副作用、リスク、または鎮静を最小限度に抑えながらの検査の成功に決定的な役割を果たす。この目的を達するために、現代の内視鏡は、内視鏡の遠位端を偏向させる手段を含んでおり、偏向または周囲組織上に加わる摩擦力を最小限度に抑えながら検査下の構造物の経路をたどり、標的の検査部位を調査する。遠位端の可撓性部分を近位の内視鏡ハンドルにある一組のコントロールノブに接続するために、自転車のブレーキケーブルに類似した制御ケーブルが、内視鏡本体の内部に担持されている。かさばり、いくぶん非直感的で、かつ摩擦に制限される可能性のあるそのような従来の制御システムの制限にもかかわらず、コントロールノブを操作することにより、操作者は、挿入中内視鏡を操向し、それを関心のある領域へ導くことができる。従来の内視鏡に関する一般的な操作者の苦情には、内視鏡の可撓性の制限、コラム強さの制限、および内視鏡の長さに沿った剛性の操作者による制御の制限が含まれる。
【0004】
例えば、従来の可撓性内視鏡は、25,000ドルの範囲の費用がかかり、関連するオペレータコンソールにはさらに多くの費用がかかる高価な医療機器である。内視鏡は、それが高価なピース部品を含んでおり、骨の折れる手作業による組み立てを必要とするために高価である。この費用のため、これらの内視鏡は、繰り返し行われる消毒に耐えるように構築され、多くの患者に使用される。従来の内視鏡は一般に、通常は再処理下で劣化しない金属およびプラスチックを含む強固な複合構造で構築されている。これらの材料構造は、内視鏡の可撓性を減少させ、かつ患者の安心を損なう可能性がある。さらに、従来の内視鏡は、使用中または消毒処置中の損傷の結果として高額な修理を必要とすることの多い、複雑で壊れやすい機器である。
【発明の概要】
【発明が解決しようとする課題】
【0005】
これらおよび他の問題を克服するのに、低コストの内視鏡の開発は、内視鏡を一回の手技に用いその後廃棄することを可能にし、下準備および洗浄の必要性を排除し、必要な内視鏡の総量を増加させることになろう。この量の増大は、製造業者が規模の経済を達成し、かつ現在の量で使用した場合には経済的ではなく、より大きい量(年間100,000ユニット)でのみ経済的な製造法を取り入れることを可能にするであろう。低コストの内視鏡は、無菌または消毒した状態で梱包しなければならず、かつ内視鏡の下準備なくして一回の手技に用い、その後廃棄することができなければならない。この内視鏡は、次の特徴のうちの1つまたはそれ以上を含まなければならない:より優れたナビゲーションおよびトラッキング、操作者との優れたインターフェース、管腔組織上への摩擦力の減少によるアクセスの向上、患者の安心の増大、従来の内視鏡を用いて現在得られるものより高い臨床上の生産性および患者処理能力、二次汚染のリスクの低下およびより多くの手技にわたる使用可能性。
【課題を解決するための手段】
【0006】
発明の概要
先行技術におけるこれらおよび他の問題に対処するために、本発明は、ビデオ内視鏡システムである。一態様では、本システムは、制御キャビネットと、内視鏡の向きを制御するいくつかの手動または電子式のアクチュエータと、内視鏡の遠位端でイメージセンサによって収集された画像を出現させるためのイメージングシステムとを含む。内視鏡は制御キャビネットと接続可能であり、患者を検査および/または治療するために用いられる。検査手順後、内視鏡は、制御キャビネットから取り外して廃棄することができ、従来の再使用可能な内視鏡につきものの洗浄および再滅菌のコストと労力を省くことができる。
【0007】
本発明の内視鏡は、可撓性の細長いチューブまたはシャフトと、光を検査部位上へ導く照射源とを含む。内視鏡の遠位端またはそれに隣接する位置にあるイメージセンサおよび対物レンズ組立体が反射光を捕捉し、照射された被写体の画像を生成する。センサによって生成された画像は、表示装置に伝送され、操作者によって閲覧される。一実施形態では、内視鏡の遠位端にあるイメージング組立体は、1つまたはそれ以上の発光ダイオード(LED)を格納する安価な大量生産可能な構成部品の組立体と、CMOS固体イメージセンサのようなイメージセンサと、低コスト(例えばプラスチック)のレンズ組立体とを含む。LEDは、熱交換器に熱結合することができ、LEDによって発生された全ての過剰熱を除去するために、空冷または液冷することができる。
【0008】
本発明の内視鏡は、いくつかの伸張性を有する制御ケーブルのような操向機構をも含んでおり、該制御ケーブルによって、内視鏡の遠位端を所望の方向に偏向させることが可能となる。本発明の一実施形態では、伸張性を有する制御ケーブルの近位端は、近位の制御ハンドル内に取り付けられた機械的制御機構(例えばノブ)に接続されている。別の実施形態では、ケーブルは、制御キャビネット内のアクチュエータと通信する。後者では、方向制御装置が電気制御信号を生成し、該電気制御信号が制御キャビネット内のプロセッサを介して送信され、制御キャビネットが制御信号を生成し、内視鏡の遠位端を操作者の所望する方向に向けるために、アクチュエータを駆動する。本発明の別の実施形態では、内視鏡の遠位端は、イメージセンサからの画像の分析に基づいて、自動的に操向される。ジョイスティックまたは他の方向制御装置は、組織壁に当たる力を反映するため、または内視鏡がループ状になる可能性があることを操作者に警告するために、触知性、触覚性または他の感覚フィードバックを含むことができる。遠位先端のハウジングには、部品が高度に集積されている。例えば、LED用の透明なウィンドウが遠位先端のハウジング内にインサート成形されており、二次ウィンドウシーリング作業を一切排除し、気密シールを確保している。
【0009】
本発明の一実施形態では、内視鏡は、内視鏡の遠位端を制御ケーブルで所望の方向に曲げることを可能にするいくつかの低コスト(例えば、機械形成部品、型打ち部品または成形部品)、容易に大量生産される構成部品からなる関節ジョイントを含む。本発明の一実施形態では、張力を加える力の開放時に内視鏡の遠位端がまっすぐになるように、関節ジョイントは、復元力を働かせる。
【0010】
本発明の別の実施形態では、内視鏡は、その長さに沿って剛性に変動があり、ほとんど誤前進(「ループ」)することなく、曲がりくねった弾性の解剖学的組織を通って、操作者が大幅に容易かつ正確に、またより高い精度で内視鏡をナビゲートすることができるように、遠位端を比較的撓みやすくさせ、それと同時に内視鏡のより近位の領域のコラム強さおよびトルク忠実度を増大させている。長さに沿った機械的特性(例えば、コラム強さ、曲げ係数または曲げ強度、ねじれ)の事前設定変動は、例えば、内視鏡のシャフトを構成する材料のデュロメータ定格または種類もしくは寸法を変えることによってもたらすことができる。操作者によって制御される可変の剛性は、ピンと張る、緩める、またはトルクを与えてシャフトの剛性を調節することができる制御ケーブルによって提供することができる。さらに別の実施形態では、関節ジョイントを構成する構成要素間のスペーシングは、関節ジョイントの長さに沿った剛性の変動を事前設定するように選択される。
【0011】
本発明のさらに別の実施形態では、内視鏡は、使用時には内視鏡の遠位端を露出させ、内視鏡が患者から除去された後は遠位端の上に延びる後退可能なスリーブで覆われている。
【0012】
本発明の別の実施形態では、内視鏡の表面は、内視鏡の摩擦係数を小さくするために、親水性被覆剤のような材料を含む。例えば、本機器の性能を高めるため、優先使用または汚染の判定の目安とするためあるいは治療剤を送達するために、他の被覆剤を用いてもよい。
例えば、本発明は以下を提供する。
(項目1)
遠位端および近位端を有し、1つまたはそれ以上のルーメンを内部に有するシャフトと、
画像信号を生成するための、上記遠位端に配置されるかまたはそこに隣接して配置されるイメージセンサと、
上記シャフトの上記遠位端を所望の方向に向けるために選択的に張力が加えられる、上記シャフトの上記遠位端に固定されるかまたはそこに隣接して固定される端部を有する1つまたはそれ以上の制御ケーブルと、
上記シャフトの上記遠位端を上記所望の方向に向けるために上記1つまたはそれ以上の制御ケーブルに選択的に張力を加える1つまたはそれ以上の手動で操作される制御装置を含む、上記シャフト上に配置されたハンドルと、
上記シャフト内の上記1つまたはそれ以上のルーメンに液体を選択的に送達する手段を含む、制御キャビネットに開放可能に固定可能な、上記シャフトの上記近位端に位置するコネクタと、
を備える、内視鏡。
(項目2)
上記シャフトの上記遠位端に位置するかまたはそこに隣接して位置する照射源
をさらに備える、項目1に記載の内視鏡。
(項目3)
上記シャフトの上記遠位端が患者の身体を通して見えるように、上記照射源が点滅光を発生させる、項目2に記載の内視鏡。
(項目4)
上記点滅光は、8ヘルツ〜14ヘルツの周波数を有する、項目3に記載の内視鏡。
(項目5)
上記照射源は、1つまたはそれ以上のLEDを含む、項目3に記載の内視鏡。
(項目6)
上記照射源は、光ファイバ照射ガイドを含む、項目3に記載の内視鏡。
(項目7)
上記イメージセンサは、ビデオモニタ上への表示用に、上記照射源によって照射された組織を表す画像信号を生成し、上記照射源が上記点滅光を発生させる際は、上記イメージセンサまたはビデオモニタは無効にされる、項目3に記載の内視鏡。
(項目8)
上記シャフトの上記遠位端において照射光を発生させる照射源と、
上記イメージセンサによって生成された画像信号が表示されるディスプレイと、
患者の身体を通して上記シャフトの上記遠位端を見るために、上記照射源をパルス化して点滅照射を発生させ上記照射源のパルス時にちらつきのない表示を生成するための制御装置と、
をさらに備える、項目1に記載の内視鏡。
(項目9)
上記表示は、静止画像を表示することによってちらつきがなくなっている、項目8に記載のシステム。
(項目10)
上記表示は、上記イメージセンサを無効にすることによってちらつきがなくなっている、項目8に記載のシステム。
(項目11)
上記表示は、上記ディスプレイの電源を切ることによってちらつきがなくなっている、項目8に記載のシステム。
(項目12)
上記表示は、上記イメージセンサからの画像信号を処理する電子機器を無効にすることによってちらつきがなくなっている、項目8に記載のシステム。
(項目13)
液体を上記シャフト内の上記1つまたはそれ以上のルーメンに選択的に送達する上記手段は、マニホルドを備える、項目1に記載のシステム。
(項目14)
上記近位コネクタは、
上記シャフト内の上記1つまたはそれ以上のルーメンに供給するための洗浄液を受け取るための液体コネクタ、
上記シャフト内の上記1つまたはそれ以上のルーメンに供給するための吹送空気/ガスを受け取るためのガスコネクタ、または
制御キャビネットからの電気信号を受け取り上記画像信号を上記制御キャビネットに送達するための電気コネクタ
のうちの1つまたはそれ以上をさらに備える、項目1に記載の内視鏡。
(項目15)
上記電気コネクタは、上記画像信号を直列伝送するために上記イメージセンサによって用いられる外部で生成されたクロック信号を受け取るためのコネクションをさらに含む、項目14に記載の内視鏡。
(項目16)
上記内視鏡は、温度センサを含み、上記電気コネクタは、上記温度センサからの信号を上記制御キャビネットに連結するためのコネクションをさらに含む、項目14に記載の内視鏡。
(項目17)
上記制御キャビネットは、処置時に用いられるツールを検出する検出器を含む、項目1に記載の内視鏡。
(項目18)
上記検出器は、バーコードリーダである、項目17に記載の内視鏡。
(項目19)
上記検出器は、RFIDタグリーダである、項目17に記載の内視鏡。
(項目20)
上記ルーメンのうちの1つは、作動チャネルであり、上記シャフトは、上記作動チャネルルーメンへの入口を含み、上記入口は、上記作動チャネルルーメンからのツールの除去時にセルフシールするセルフシール弁を含む、項目1に記載の内視鏡。
(項目21)
上記シャフト内の上記ルーメンのうちの1つまたはそれ以上は、摩擦を低減するためにつや消しされたチューブを備える、項目1に記載の内視鏡。
(項目22)
上記シャフトは、上記遠位端を所望の方向に選択的に曲げるための、上記シャフトの上記遠位端に隣接する関節ジョイントを含む、項目1に記載の内視鏡。
【図面の簡単な説明】
【0013】
本発明の前述の態様および付随する利点の多くは、それらが添付の図面と併せて以下の詳細な説明を参照することによってよりよく理解されるにつれて、より容易に分かるであろう。
【図1−1】図1Aは、本発明の例示的な実施形態によるビデオ内視鏡システムの概略図である。
【図1−2】図1Bは、本発明の例示的な実施形態によるビデオ内視鏡システムの概略図である。
【図1−3】図1Cは、本発明のビデオ内視鏡の一実施形態のより詳細な図を示す。
【図1−4】図1Dは、本発明のビデオ内視鏡の一実施形態のより詳細な図を示す。
【図2】図2は、図1Aに示すビデオ内視鏡システムに用いられる内視鏡のさらなる詳細を示す。
【図3−1】図3Aは、本発明の一実施形態による内視鏡とインターフェースをとる制御キャビネットのブロック図である。
【図3−2】図3Bは、本発明の別の実施形態による内視鏡とインターフェースをとる制御キャビネットのブロック図である。
【図3−3】図3Cは、本発明の別の実施形態による制御キャビネットおよび内視鏡のブロック図である。
【図3−4】図3Dは、本発明の別の実施形態による制御キャビネット内の構成要素およびそれらの内視鏡へのインターフェースのより詳細なブロック図である。
【図3−5】図3Eは、本発明の別の実施形態による制御キャビネット内のカメラ制御カードと内視鏡の遠位先端の遠隔イメージセンサとの間のデータおよび制御信号の通信を示す。
【図3−6】図3Fは、図3Cに示すビデオ内視鏡のフルイディクスの図である。
【図3−7】図3Gおよび図3Hは、本発明の内視鏡の一実施形態で用いるための可撓性マニホルドを示す。
【図3−8】図3Gおよび図3Hは、本発明の内視鏡の一実施形態で用いるための可撓性マニホルドを示す。
【図4−1】図4Aは、内視鏡に接続するための制御キャビネット上のコネクタの一実施形態を示す。
【図4−2】図4B〜図4Dは、内視鏡の近位端を制御キャビネットに接続するためのコネクタの一実施形態を示す。
【図4−3】図4B〜図4Dは、内視鏡の近位端を制御キャビネットに接続するためのコネクタの一実施形態を示す。
【図4−4】図4B〜図4Dは、内視鏡の近位端を制御キャビネットに接続するためのコネクタの一実施形態を示す。
【図4−5】図4Eは、内視鏡に接続するためのコネクタを有する制御キャビネットの別の実施形態を示す。
【図4−6】図4Fは、本発明の一実施形態による制御キャビネットに係合する近位コネクタの表面を示す。
【図4−7】図4Gは、本発明の一実施形態による近位コネクタの内部を示す。
【図5−1】図5Aは、本発明のビデオ内視鏡と共に用いるためのハンドヘルドコントローラの一実施形態の詳細図である。
【図5−2】図5Bは、本発明の内視鏡と共に用いるための力フィードバック機構を含むジョイスティック型コントローラの一実施形態を示す。
【図5−3】図5Cは、図5Bに示す型のジョイスティックに力フィードバックを提供するための機構の一実施形態を示す。
【図5−4】図5Dおよび図5Eは、本発明のブレイクアウトボックスおよびハンドヘルドコントローラの別の実施形態を示す。
【図5−5】図5Dおよび図5Eは、本発明のブレイクアウトボックスおよびハンドヘルドコントローラの別の実施形態を示す。
【図5−6】図5F〜図5Iは、本発明の内視鏡と共に用いるための手動ハンドルの一実施形態を示す。
【図5−7】図5F〜図5Iは、本発明の内視鏡と共に用いるための手動ハンドルの一実施形態を示す。
【図5−8】図5F〜図5Iは、本発明の内視鏡と共に用いるための手動ハンドルの一実施形態を示す。
【図5−9】図5F〜図5Iは、本発明の内視鏡と共に用いるための手動ハンドルの一実施形態を示す。
【図6−1】図6Aは、本発明による内視鏡の遠位先端の一実施形態を示す。
【図6−2】図6B〜図6Iは、本発明の内視鏡と共に用いるためのイメージング組立体の一実施形態を示す。
【図6−3】図6B〜図6Iは、本発明の内視鏡と共に用いるためのイメージング組立体の一実施形態を示す。
【図6−4】図6B〜図6Iは、本発明の内視鏡と共に用いるためのイメージング組立体の一実施形態を示す。
【図6−5】図6B〜図6Iは、本発明の内視鏡と共に用いるためのイメージング組立体の一実施形態を示す。
【図6−6】図6B〜図6Iは、本発明の内視鏡と共に用いるためのイメージング組立体の一実施形態を示す。
【図6−7】図6B〜図6Iは、本発明の内視鏡と共に用いるためのイメージング組立体の一実施形態を示す。
【図6−8】図6B〜図6Iは、本発明の内視鏡と共に用いるためのイメージング組立体の一実施形態を示す。
【図6−9】図6B〜図6Iは、本発明の内視鏡と共に用いるためのイメージング組立体の一実施形態を示す。
【図6−10】図6Jは、本発明の一実施形態と共に用いるためのレンズ組立体を示す。
【図7】図7は、本発明の一実施形態による内視鏡の遠位先端内でいくつかの制御ケーブルを終了させるための一機構を示す。
【図8】図8は、本発明の一実施形態による内視鏡シャフトの壁内のルーメンに通された制御ケーブルを有する内視鏡を示す。
【図9】図9Aおよび図9Bは、本発明の一実施形態による制御ケーブルを内視鏡シャフトの中央ルーメンから関節ジョイント内の制御ケーブルルーメンへ導く遷移ガイドを示す。
【図10】図10Aおよび図10Bは、本発明の一実施形態による内視鏡のシャフト部分の構造を示す。
【図11】図11は、本発明の一実施形態による長さに沿って剛性が変動するシャフトを提供するための一機構を示す。
【図12】図12Aおよび図12Bは、本発明の一実施形態による関節ジョイントを作るために用いられる突き出しを示す。
【図13】図13は、本発明の一実施形態による関節ジョイントを示す。
【図14】図14および図15は、本発明の別の実施形態による関節ジョイントを形成するために用いられる異なるデュロメータの領域を有する突き出しを示す。
【図15】図14および図15は、本発明の別の実施形態による関節ジョイントを形成するために用いられる異なるデュロメータの領域を有する突き出しを示す。
【図16】図16Aおよび図16Bは、いくつかのボール部分およびソケット部分を含む本発明の一実施形態による関節ジョイントの別の実施形態を示す。
【図17】図17A〜図17Dは、関節ジョイントを構築するために用いられるボール部分およびソケット部分のさまざまな可能な構成を示す。
【図18】図18A〜図18Bは、本発明の別の実施形態によるいくつかの積み重なった円盤で形成された関節ジョイントを示す。
【図19】図19A〜図19Bは、本発明の別の実施形態による関節ジョイントを形成するために用いられる円盤を示す。
【図20】図20A〜図20Bは、本発明の別の実施形態による関節ジョイントを形成するために用いられる円盤を示す。
【図21】図21A〜図21Bは、本発明の別の実施形態による関節ジョイントを形成するために用いられる非円形セグメントを示す。
【図22】図22は、本発明の別の実施形態による関節ジョイントとして編み組み部材を有する内視鏡を示す。
【図23−1】図23は、制御ワイヤの端部を図22に示す編み組み関節ジョイントに固定するための1つの可能な手法を示す。図23A〜図23Xは、本発明の内視鏡に用いるための関節ジョイントの追加の実施形態を示す。
【図23−2】図23は、制御ワイヤの端部を図22に示す編み組み関節ジョイントに固定するための1つの可能な手法を示す。図23A〜図23Xは、本発明の内視鏡に用いるための関節ジョイントの追加の実施形態を示す。
【図23−3】図23は、制御ワイヤの端部を図22に示す編み組み関節ジョイントに固定するための1つの可能な手法を示す。図23A〜図23Xは、本発明の内視鏡に用いるための関節ジョイントの追加の実施形態を示す。
【図23−4】図23は、制御ワイヤの端部を図22に示す編み組み関節ジョイントに固定するための1つの可能な手法を示す。図23A〜図23Xは、本発明の内視鏡に用いるための関節ジョイントの追加の実施形態を示す。
【図23−5】図23は、制御ワイヤの端部を図22に示す編み組み関節ジョイントに固定するための1つの可能な手法を示す。図23A〜図23Xは、本発明の内視鏡に用いるための関節ジョイントの追加の実施形態を示す。
【図23−6】図23は、制御ワイヤの端部を図22に示す編み組み関節ジョイントに固定するための1つの可能な手法を示す。図23A〜図23Xは、本発明の内視鏡に用いるための関節ジョイントの追加の実施形態を示す。
【図23−7】図23は、制御ワイヤの端部を図22に示す編み組み関節ジョイントに固定するための1つの可能な手法を示す。図23A〜図23Xは、本発明の内視鏡に用いるための関節ジョイントの追加の実施形態を示す。
【図23−8】図23は、制御ワイヤの端部を図22に示す編み組み関節ジョイントに固定するための1つの可能な手法を示す。図23A〜図23Xは、本発明の内視鏡に用いるための関節ジョイントの追加の実施形態を示す。
【図23−9】図23は、制御ワイヤの端部を図22に示す編み組み関節ジョイントに固定するための1つの可能な手法を示す。図23A〜図23Xは、本発明の内視鏡に用いるための関節ジョイントの追加の実施形態を示す。
【図23−10】図23は、制御ワイヤの端部を図22に示す編み組み関節ジョイントに固定するための1つの可能な手法を示す。図23A〜図23Xは、本発明の内視鏡に用いるための関節ジョイントの追加の実施形態を示す。
【図23−11】図23は、制御ワイヤの端部を図22に示す編み組み関節ジョイントに固定するための1つの可能な手法を示す。図23A〜図23Xは、本発明の内視鏡に用いるための関節ジョイントの追加の実施形態を示す。
【図23−12】図23は、制御ワイヤの端部を図22に示す編み組み関節ジョイントに固定するための1つの可能な手法を示す。図23A〜図23Xは、本発明の内視鏡に用いるための関節ジョイントの追加の実施形態を示す。
【図23−13】図23は、制御ワイヤの端部を図22に示す編み組み関節ジョイントに固定するための1つの可能な手法を示す。図23A〜図23Xは、本発明の内視鏡に用いるための関節ジョイントの追加の実施形態を示す。
【図23−14】図23は、制御ワイヤの端部を図22に示す編み組み関節ジョイントに固定するための1つの可能な手法を示す。図23A〜図23Xは、本発明の内視鏡に用いるための関節ジョイントの追加の実施形態を示す。
【図23−15】図23は、制御ワイヤの端部を図22に示す編み組み関節ジョイントに固定するための1つの可能な手法を示す。図23A〜図23Xは、本発明の内視鏡に用いるための関節ジョイントの追加の実施形態を示す。図23は、制御ワイヤの端部を図22に示す編み組み関節ジョイントに固定するための1つの可能な手法を示す。図23A〜図23Xは、本発明の内視鏡に用いるための関節ジョイントの追加の実施形態を示す。
【図23−16】図23は、制御ワイヤの端部を図22に示す編み組み関節ジョイントに固定するための1つの可能な手法を示す。図23A〜図23Xは、本発明の内視鏡に用いるための関節ジョイントの追加の実施形態を示す。
【図23−17】図23は、制御ワイヤの端部を図22に示す編み組み関節ジョイントに固定するための1つの可能な手法を示す。図23A〜図23Xは、本発明の内視鏡に用いるための関節ジョイントの追加の実施形態を示す。
【図24】図24は、本発明の別の実施形態による1つまたはそれ以上のメモリ縮小ラップを有する内視鏡シャフトを示す。
【図25】図25は、本発明の別の実施形態による高デュロメータ材料の長手方向ストライプを含む内視鏡シャフトを示す。
【図26】図26〜図29は、本発明による内視鏡を回転させる把持機構の代替的実施形態を示す。
【図27】図26〜図29は、本発明による内視鏡を回転させる把持機構の代替的実施形態を示す。
【図28】図26〜図29は、本発明による内視鏡を回転させる把持機構の代替的実施形態を示す。
【図29】図26〜図29は、本発明による内視鏡を回転させる把持機構の代替的実施形態を示す。
【図30】図30Aおよび図30Bは、本発明の別の実施形態による内視鏡を選択的に被覆する後退可能なスリーブを示す。
【図31】図31は、本発明による内視鏡の受動放熱する遠位先端の一実施形態を示す。
【図32】図32および図33は、本発明による受動放熱する遠位先端の代替的実施形態を示す。
【図33】図32および図33は、本発明による受動放熱する遠位先端の代替的実施形態を示す。
【発明を実施するための形態】
【0014】
好ましい実施形態の詳細な説明
上に述べたように、本発明は、患者の体内に外科手術用機器を挿入することのみならず、患者の体内の解剖学的構造に操作者がアクセスし、観察することを可能にするビデオ内視鏡システムである。さらに、本内視鏡は、操作者が一回の手技で患者を治療するのを可能にする統合された診断機能および治療機能を含むことができる。本発明の内視鏡は、製造するのに十分に安価であることができ、これにより内視鏡を単回使用の使い捨て用品と見なすことができる。
【0015】
図1Aに示すように、本発明の一実施形態によるビデオ内視鏡システム10は、内視鏡20と、制御キャビネット50と、ハンドヘルドコントローラ80とを含む。内視鏡20は、患者の体腔内に進められる遠位先端22および制御キャビネット50に接続される近位端24を有する。以下にさらに説明するように、制御キャビネット50は、遠位先端22の向きを変えるために、内視鏡20内部の操向機構を制御するいくつかのアクチュエータを含む。医師または助手は、ハンドヘルドコントローラ80を用いて制御信号を入力し、該制御信号によって、内視鏡20の遠位先端22が動かされる。さらに、制御キャビネット50は、空気/ガス源および内視鏡20、薬物または造影剤を浄化するための水のようなフラッシング液へのコネクションを含むことができる。制御キャビネットは、制御キャビネットが他の制御キャビネット、コンピュータまたはインターネットと通信することを可能にするためのネットワークコネクション(図示せず)も含むことができる。希望するなら、1つまたはそれ以上の外部モニタ、PDA、プリンタ、ビデオ記録システム、記憶装置およびストレージエリアネットワーク、サーバ、および病院情報ネットワークまたは他の医療機器を、制御キャビネットに接続することができる。制御キャビネット50は、イメージセンサから受信した信号を処理および/または転送するためのイメージング電子回路、イメージセンサを制御する信号、および医師または技術者による閲覧のためのビデオディスプレイ(図示せず)用の患者データをも含む。
【0016】
図示の実施形態では、内視鏡20は、内視鏡の長さに沿ってほぼ中間に配置されたブレイクアウトボックス26をも含む。ブレイクアウトボックス26は、作動チャネルへの入口を提供し、内視鏡内部のルーメンから受け取った液体、残屑または検体を回収する真空回収ボトル40用の取り付け点を含むことができる。真空回収ボトル40は、ブレイクアウトボックス26上に配置された真空弁(図示せず)によって制御される。あるいは、この弁を、制御キャビネット50内に配置またはそれに接続し、ハンドヘルドコントローラ80(例えば図3D参照)から制御してもよい。
【0017】
希望するなら、ハンドヘルドコントローラ80をブレイクアウトボックス26内に固定するかまたは内蔵することができ、これによりこれら2つの装置を一体として動かすことができる。患者検査手技の完了時に、内視鏡20は、制御キャビネット50から取り外され、廃棄される。次いで、次の検査手技を行うために、新たな内視鏡20が制御キャビネット50に接続される。
【0018】
図1Aに示す実施形態は、内視鏡20およびハンドヘルドコントローラ80が制御キャビネット50の異なるコネクタに別個に接続される「並列」構成である。この並列構成は、一人の操作者が内視鏡を操作し、その間に別の操作者がハンドヘルドコントローラ80を操作することを可能にする。あるいは、一人の操作者が両方を制御することができるように、ハンドヘルドコントローラ80を内視鏡20に固定してもよい。図1Bに、本発明の「直列」構成を示す。ここでは、内視鏡20は、ハンドヘルドコントローラ80を通じて制御キャビネット50に接続されている。一実施形態では、このハンドヘルドコントローラは、従来の内視鏡に見られるものに類似した方法で遠位先端に接続された内視鏡内部の制御ケーブルを引っ張るかまたはゆるめる、1つまたはそれ以上の手動で駆動されるアクチュエータを含む。制御ケーブルに張力を加えることにより、操作者は、内視鏡の先端を選択的に配向することができる。さらに、ハンドルは、1つまたはそれ以上のスイッチを含んでおり、該スイッチによって制御キャビネット内の電子機器を起動し、イメージング機能を制御すると同時に、内視鏡に空気または液体を送達する。さらに別の実施形態では、ハンドルは、制御キャビネット内のアクチュエータに制御ケーブルを駆動させる操作者制御を含むことができる。
【0019】
図1Cおよび図1Dに、本発明のビデオ内視鏡システムの一実施形態をさらに詳細に示す。制御キャビネットは、容易にあちらこちらに移動できるように、ロック可能な車輪上に取り付けられている。さらに、制御キャビネットは、検査領域の画像および他の患者データを表示するためのビデオモニタを支持している。操作者は、キーボード、またはタッチセンサ、もしくはマルチポジションスイッチにより、患者ファイルおよび/または手技の記録にデータを入力することができる。内視鏡20は、制御キャビネット50に取り外し可能に固定されている。図示の実施形態では、ハンドヘルドコントローラは内視鏡の一部であり、本システムのさまざまな機能を起動するためのスイッチのみならず、遠位先端を動かすための手動アクチュエータも含んでいる。
【0020】
図2に、内視鏡20の一実施形態をさらに詳細に示す。内視鏡の近位端にシャフト24があり、これは、より低いねじれ剛性を有し、また内視鏡20を制御キャビネット(図示せず)に接続するコネクタ34を有する。ブレイクアウトボックス26より遠位では、シャフトはより高いねじれ剛性を有する。内視鏡20の遠位端に、光照射ポート、イメージセンサ、作動チャネル32への開口部および洗浄ポート(図示せず)を含む遠位先端22がある。遠位先端22より近位に関節ジョイント30があり、これにより、操向機構によって遠位先端22を所要の偏向範囲(180°またはそれ以上)にわたって方向づけることができるように、また遠位先端の周りの希望する任意の方向に曲がるように方向づけることができるように、シャフトの遠位部分に十分な可撓性が付与されている。すなわち、操作者は、曲がりまたは関節運動の量と曲がりの方向との両方を選択することができる。
【0021】
上に論じたように、本発明の一実施形態による内視鏡20は、内視鏡の遠位部分にトルクのより高いシャフトを有し、内視鏡の近位端にトルクのより低いシャフトを有する。内視鏡シャフトの長さに沿って配置されたブレイクアウトボックス26は、検診手技時に内視鏡遠位端の回転を付与するためのハンドルまたはグリッパとして用いることができる。シャフトのトルクが高い方の部分は、遠位先端近傍の位置で付与される回転運動を伝達し、内視鏡の遠位先端を誘導する。なお、内視鏡のトルクが低い方のシャフト部分は、操作の容易性のために意図的にトルクを伝達しないものであり、回転運動が加えられるとねじれることができ、またそのような回転を支援するために、1つまたはそれ以上の回転可能なカプラを含むことができる。
【0022】
使用時、操作者は、生検鉗子、スネア等のような医療機器を、ブレイクアウトボックス26上に見出される内視鏡の作動チャネル32への入口に挿入することができる。代替的実施形態では、医療機器を、内視鏡内に一体に形成してもよく、例えば内視鏡の外側上に固定してもよい。別の代替的実施形態では、作動チャネルルーメンへの入口を内視鏡の近位端のさらに近くに配置してもよく、内視鏡に沿って異なる位置に配置された入口を有する1つより多い作動チャネルを内視鏡が含んでもよい。
【0023】
図3Aは、制御キャビネット50の一実施形態の内部に含まれた主要な構成要素のブロック図である。上に述べたように、また図1Cおよび図1Dに示すように、制御キャビネット50は、それを検査手技に先立って患者の近傍に容易に配置することができるように、ロック可能な車輪上に取り付けられているのが好ましい。制御キャビネットは、交流電源または電池による電力源、および吹送ガス源ならびに洗浄液源に接続されている。制御キャビネット50の内部に、ハンドヘルドコントローラ80に接続され、それから制御信号を受信するコントローラインターフェース52がある。内視鏡の遠位先端の向きを変えるためには、ハンドヘルドコントローラ80内のディレクショナルスイッチから制御信号が受信される。制御信号がサーボモータコントローラ54に供給され、次いで、サーボモータコントローラ54が、サーボモータ56a、56b、56c、56dのようないくつかのアクチュエータを制御する。サーボモータ56a〜56dの各々が、内視鏡内の1つまたはそれ以上の制御ケーブルに接続されている。サーボモータ56a〜56dの動きによって制御ケーブルが引っ張られるかまたはゆるめられ、内視鏡20の遠位先端22の向きが変えられる。図3Aに示す実施形態は4つのサーボモータおよび制御ケーブルを示しているが、より少ないまたはより多いサーボモータおよび対応する制御ケーブルを用いて遠位先端を動かすことができることを理解されたい。例えば、いくつかの内視鏡は、3つの制御ケーブルおよび3つの関連するサーボモータまたは4つの制御ケーブルを有する2つのモータを用いることができる。同様に、手動ハンドルにコントロールノブまたは他の機構を備え、2つまたはそれ以上の制御ケーブルに張力を加えて内視鏡の先端を方向づけることができる。
【0024】
イメージング電子回路のサブシステム60は、近位コネクタ34(図示せず)および内視鏡の遠位端に位置する近位コネクタ34の関連電子回路を通じて遠位先端から伝送された信号を受信する。一実施形態では、画像データは、シリアル通信リンク内の遠位先端からもたらされ、その信号が再構成されて、フォーマット済み画像、この場合は640×480ピクセルの画像が生成される。このデシリアライゼーションによって画像が10ビット深度のピクセルのアレイに再構成されるが、他のビット深度を用いることもできよう。再構成された画像は、イメージャの個々のピクセルに対応するピクセルのアレイである。イメージャの各ピクセルは、通常、R、GまたはB(赤、緑、青)フィルタによってフィルタ処理される。減法カラーフィルタまたは周知のベイヤーパターンのような他のフィルタ処理方式も可能である。再構成された時点で、周知のデモザイク技術を用いてフルカラーの画像がデモザイクされ、完全な640x480x30ビット深度のRGBカラー画像が生み出される。その後、この画像は、Y−Cb−Cr−422、NTSC、PAL、S−ビデオ等のような他のビデオの標準フォーマットに変換することができる。
【0025】
イメージング電子回路のサブシステム60は、受信した画像を増強することができるか、またはズーム、色変更、オーバーレイの取り入れ、カラーバランス、ガンマ調整、強調表示等のようなビデオ効果を提供することができるか、もしくはビデオディスプレイ(図示せず)上への画像の表示に先立って、グラフィカルユーザインターフェースのような機能性を追加することができる。組織の画像は、イメージング電子回路のサブシステム60、および/または、以下にさらに詳細に論じるように、内視鏡の遠位先端を自動的に操向するためにサーボモータコントローラ54に供給される制御信号を生成するための別個の処理回路によって分析することもできる。イメージング電子回路のサブシステム60によって生成された画像は、医師による後の検索および分析のために、デジタルプリンタ上に印刷することも、ネットワークサーバに送ることも、フロッピディスク、CD、DVD等のようなコンピュータ可読媒体またはビデオテープに格納、保存することもできる。
【0026】
イメージング電子回路のサブシステム60は、イメージング内視鏡遠位端22のいくつかの発光ダイオード(LED)のような光源に電力をも提供する。イメージャ上への適切な露出を行うために、イメージャのゲインまたはLEDの強度を変更することができる。適切な露出を達成する1つの方法は、飽和ピクセル数を監視し、飽和ピクセル数が最低閾値を下回るように光源強度を調節することである。別の手法は、平均ピクセル出力が設定パーセンテージ、おそらくは50%となるように光源を調節することである。さらに別の手法は、TV産業またはビデオ産業に共通するAGCアルゴリズムを使用することである。適切な露出は、イメージャ自体のゲインおよび/または積分周期を変えることによって、単独に、または光源を調節することと併せて得ることもできる。希望するなら、イメージング電子回路のサブシステム60からの制御信号によってイメージャのパラメータを調節し、イメージャの総ゲイン、カラーバランス、および感度を調節することができる。
【0027】
LED光源は容易に調節可能であり、LEDへの電流、従ってLEDの光出力を調節することによって露出制御を行うことができる。LEDの出力は容易に制御することができるので、LEDへの電流を調節することによって光源を点滅させ、光源の可視性を高めることもできる。視覚認知の分野で周知であり日常的に体験するこの効果によって、身体を通過して外界に至る光を観察することにより、体内での遠位先端の位置を判断することが可能となる。これは、透視法と呼ばれる。LEDの出力を8Hz〜14Hzの周波数に実質的に調節することにより、先端の可視性は、少ない電力を用いて維持されるか、または同じ電力を用いて大幅に増強される。あるいは、LEDを、小型の白熱電球またはレーザのような固体素子に置き換えてもよい。
【0028】
照射源をパルス化することにより、X線透視法または他の外部イメージング手段なくして、内視鏡の遠位先端の位置を視覚的に検出することが可能となる。光源のパルス時にイメージセンサが作動している場合、対応するビデオディスプレイが点滅し、操作者の気を散らすかまたは遠位先端を見る力を妨げる可能性がある。従って、透視中は、遠位先端の可視性を高めるために、静止画像を表示するかイメージセンサもしくは画像処理プロセッサを無効にすることによって、ビデオディスプレイ上の点滅を防止するのが望ましい。内視鏡に外部光源を用いている場合、体内器官または所望の観察領域を照射するのに、制御キャビネットは、イメージング内視鏡20内部の光ファイバ照射ガイドに光を提供するレーザもしくはハロゲン照明源のような高輝度光源を含むことができる。ユーザが光源の起動または生成される光の強さの調節を希望する場合、ハンドヘルドコントローラ80から受信した信号によって、いずれかの電源58を制御することができる。
【0029】
最後に、制御キャビネット50は、患者の体腔に吹送するための吹送空気/ガスおよび体腔を洗いかつ/または内視鏡の遠位端にある光学組立体(レンズあるいはカバーウィンドウのような)の構成要素のうちの1つまたはそれ以上を洗浄するための洗浄液の送達を制御する弁70を含む。吹送空気/ガスおよび洗浄液は、内視鏡20の洗浄/吹送ルーメンに接続するコネクタ38を介して内視鏡に接続される。本発明の一実施形態では、洗浄・吹送機能は、同一のルーメンによって提供される。しかしながら、希望すれば、かつ内視鏡内に空間があれば、別個の洗浄ルーメンおよび吹送ルーメンを提供することもできることを理解されたい。さらに、追加のルーメンまたは洗浄ルーメンおよび吹送ルーメンを用いて、治療剤あるいは造影剤を患者に送達することができる。
【0030】
図3Bに、図3Aに示すキャビネットに類似した、制御キャビネット50Aの別の実施形態を示す。制御キャビネット50Aは、真空回収ボトル40に送達される真空を制御する真空弁71を含む。真空ライン73は、イメージング内視鏡20内部の真空ルーメンに接続している。真空弁71は、ハンドヘルドコントローラ80から制御される。液体送達用弁および真空用弁のバルビングおよび制御は、一緒に行うことも、別々に行うこともでき、また、キャビネットの内側または外側に配置しても、内視鏡等に沿って配置してもよい。
【0031】
図3Cに、本発明による内視鏡システムの別の実施形態を示す。内視鏡システム100は、内視鏡104の向きおよび機能を制御する働きをする制御キャビネット102を含む。制御キャビネット102は、内視鏡の動作を制御するために操作者が使用するジョイスティックのような入力装置からのコマンドを受信するコントローラインターフェース106を含む。入力装置の他の例には、音声制御装置、頭部搭載型制御装置、タッチパッド、トラックボール、薄膜スイッチ、足踏みスイッチ等が含まれる。ジョイスティックからのコマンドは、イメージングシステムおよびサーボ制御装置108の動作全体を制御するデジタルシグナルプロセッサのようなプログラマブルプロセッサに供給される。プロセッサおよびサーボ制御装置は、一対のサーボモータ110、112の動作を制御し、次いで、サーボモータ110、112が、内視鏡104内部の制御ケーブルを駆動する。遠位先端の向きは、ユーザ入力装置から受信した方向信号およびサーボモータ110、112の各々の位置およびトルクを測定するセンサから取得したフィードバック信号に応答して制御される。いくつかの例では、サーボモータ110、112は、手動または自動で制御されるクラッチ(図示せず)を通じて制御ケーブルに接続することができる。希望するなら、クラッチでサーボモータを制御ケーブルから外すことができる。
【0032】
本発明の一実施形態では、プロセッサおよびサーボ制御装置108は、ユーザ入力装置上のディレクショナルスイッチの位置の関数として遠位先端が動かされる速度を変える位置対速度制御を実行する。しかしながら、位置対位置または位置対力のような他の制御アルゴリズムも実行することができる。サーボ制御装置は、内視鏡内部の機器の位置を変える、またはそれらを関節運動させるのにも用いることができる。
【0033】
プロセッサおよびサーボ制御装置108によって実行することのできる別の機能は、ビデオディスプレイ上でユーザに示される、近似する先端の関節運動の図形表示を生成する機能である。プロセッサは、制御ケーブル短縮の長さを判定するサーボモータの位置およびケーブルを動かすのに要するトルクに関するフィードバック信号を受信する。これらの値から、内視鏡遠位先端の関節運動量の近似値が作成される。近似関節運動量および関節運動の方向は、イメージセンサから受信した画像、患者データおよび/またはビデオ内視鏡システムの他の運転パラメータと共に医師に表示される。
【0034】
プロセッサおよびサーボ制御装置108は、患者の体内で遠位先端を動かしながら自動制御下または操作者による半自動制御下でサーボモータ110、112を駆動することができる可変制動機能をも実行する。可変制動は、0とモータによって供給することができる最大トルクとの間の可変制動力を操作者またはプロセッサに選択させることによって達成することができる。医師が内視鏡を動かす際に、モータ上のトルクが検出され、可変制動閾値より大きいかまたはそれに等しいかが調べられる。そうである場合、プロセッサおよびサーボ制御装置108は、先端が新たな位置へ動かされるようにサーボモータ110、112の一方または両方を制御し、これによりモータからのトルク読み取り値が可変制動閾値より小さくなる。
【0035】
患者の解剖学的組織のデリケートな部分近傍のように、いくつかの例では、モータを逆駆動するのに圧力をほとんど要しないように、可変制動閾値は低い値に設定されることになる。他の例では、ナビゲーション等のために内視鏡の形状を維持することが望ましい場合、制動閾値を高く設定することができる。
【0036】
手動制御バージョンでは、可変摩擦ブレーキも用いることができる。ユーザは、従来のスコープに類似した手動制御装置上のレバーまたはダイヤルの位置を調節するのに必要なブレーキ力を選択することができる。一実施形態は、各軸用に別個のブレーキを含むことができるか、あるいは、1つのブレーキを両方の軸用に用いることができる。
【0037】
制御キャビネット102は、内視鏡104の遠位端にあるイメージセンサから受信した信号から画像を生成するイメージングサブシステム114をも含む。イメージングサブシステム114は、CMOSイメージセンサからのデジタルビデオ信号を非直列化し、デモザイク処理、ゲインコントロールおよびホワイトバランスのような必要なアルゴリズムを実行して、高品質のカラー画像を生成する。このシステムのゲインコントロールは、照射(LEDに供給される電流)の強度を調節することおよびCMOSイメージャによって信号に適用されるゲインを調節することによって行われる。イメージングサブシステム114は、受け入れ難い無線周波数感受性、放射および妨害、ならびに制御キャビネット102内部のいずれかの回路で電気的不全が発生した場合の受け入れがたい漏えい電流を防止するための絶縁回路をも含む。イメージングサブシステム114は、制御信号をイメージセンサに伝送するためおよびイメージセンサから画像信号を受信するための回路をも含む。本発明の一実施形態では、イメージングサブシステム114には、標準的なコンピュータハードウェアおよびコンピュータソフトウェアを使用することができるように、標準「PCI」回路ボードが備えられている。
【0038】
図3Cに示す実施形態では、内視鏡104は、回転接続124でブレイクアウトボックス122に接続された遠位シャフト部分120を有する。さらに、シャフトの近位部分126は、第2の回転接続128でブレイクアウトボックス122に接続されている。回転接続124、128により、操作者の手中にあるブレイクアウトボックス122をひねることなく、内視鏡の遠位端および近位端をブレイクアウトボックス122に対して回転させることが可能となる。
【0039】
図示の実施形態では、内視鏡104は、コネクタ130で制御キャビネット102に接続されている。コネクタ130の内部に、サーボモータ110、112のドライブシャフトと係合可能な一対のスプール132、134がある。各スプール132、134が、一対の制御ケーブルを反対方向に駆動する。一対の制御ケーブルが内視鏡の遠位先端を上下方向に駆動し、別の対の制御ケーブルが、内視鏡の遠位先端を左右方向に駆動する。あるいは、単一のワイヤが平面内の動きを制御するように、単一の制御ケーブルを1つのスプールに巻き付けてもよい。
【0040】
コネクタ130は、内視鏡104内部のさまざまなチューブまたはルーメンへの流体、空気および真空の供給を制御するマニホルド140をも含む。さらに、コネクタ130は、制御キャビネット102上の対応する電気コネクタとはまり合う電気コネクタ142を含む。コネクタ142は、照射用LEDに電力を転送すると共に、イメージセンサおよび熱センサを往復して信号を転送する。ポンプ145で内視鏡に水が供給される。ポンプ145は、近位コネクタ130内に延びる可撓性チューブを通じて水を動かす蠕動ポンプまたは隔離チャンバポンプとするのが好ましい。構成要素を駆動するポンプが内視鏡内部の水または他の流体と接触する必要がなく、その結果、濡れた構成要素を単回使用とすることが可能となるので、蠕動ポンプが好ましい。ポンプ145に接続されるかまたは近位コネクタに固定状態に取り付けられた水リザーバ150が水を供給し、検査領域を洗浄すると共に、照射用LEDを冷却する。LEDを冷却するために供給された水は、閉ループ内のリザーバ150に戻される。廃水または他の残屑は、回収ボトル160に注ぐ真空ラインで患者から除去される。回収ボトル160への真空の制御は、近位コネクタ130内部のピンチ弁によって行われる。
【0041】
図3Dに、本発明のビデオ内視鏡システムの一実施形態と共に用いるための制御キャビネットをさらに詳細に示す。制御キャビネット102の内部に、PCIデータバスによって関節運動・フルイディクスカード109、カメラカード111および画像処理カード114に接続されたマザーボード108がある。画像処理カード114は、EIDE接続で接続された画像処理カード114自体のハードドライブを有する。さらに、マザーボード108は、EIDE接続または類似のインターフェースで接続されたマザーボード108自体のハードドライブおよびDVDライタのようなデータ記憶装置を有する。関節運動・フルイディクスカード109が動力モータドライブに信号を提供し、次いで、該動力モータドライブがサーボモータ110、112を駆動し、シャフトエンコーダおよびトルクセンサからの信号を受信し、内視鏡の遠位先端を動かすのに要する力の量に関するフィードバックを提供する。ポンプおよび弁145も関節運動・フルイディクスカード109によって制御され、吹送空気/ガスならびに洗浄流体および真空を、近位コネクタ130を介して内視鏡104に供給する。
【0042】
内視鏡104内部のイメージセンサによって生成された検査領域の画像は、デジタルモニタ上に表示される。デジタルモニタは、操作者の閲覧用に患者の氏名、住所、日付、他の生理学的パラメータ、心拍数、血圧等、または先に取得した画像のような追加のデータをディスプレイ上に多重化することができるように、マルチプレクサを通じて駆動される。さらに、希望するなら、外部デジタルモニタを本システムに連結することもできる。
【0043】
マザーボード108は、イーサネット(登録商標)/USBまたは並列接続を介してプリンタとも、また従来のPS/2接続もしくはUSB接続によってキーボードともインターフェースをとる。ハンドヘルドコントローラは、RS−422接続を介して関節運動・フルイディクスカード109に接続されている。スピーカもマザーボード108に連結され、可聴警報またはステータス信号を操作者に提供する。
【0044】
制御キャビネット102は、マザーボード、ハードドライブ、ビデオカード、プロセッサ、メモリ等を含む標準型の市販の演算プラットフォームを用いて作製されるのが好ましい。本システム用の制御カード(カメラカード111、関節運動・フルイディクスカード198、および画像処理カード114)の各々は、マザーボードのPCIスロットに差し込まれる。マザーボードは、標準PC型コネクタ:シリアルポート、パラレルポート、イーサネット(登録商標)ポート、USBポート、マイク入力端子、音声出力端子等も備える。制御キャビネット上のLCD表示パネルのような2つのデジタルモニタは、マザーボードのAGPスロットにあるビデオカードに接続されている。基本的に、制御キャビネットは、汎用の演算プラットフォームを含む。これにより、検査情報を1つの集積システム内で電子的に捕捉することができる。この集積システム内で捕捉することができる検査情報の種類には、静止画像、ビデオクリップ、注釈目的の音声録音、音声認識用の音声入力、音声コマンドおよびGUIナビゲーション用の音声入力、画像に貼付されたテキストラベル、画像上の描画注釈、検査報告情報、患者退院情報、依頼医師宛ての手紙、患者に施された薬物療法、患者のバイタルサイン等が含まれる。検査報告は一般に、患者人口統計データ、検査に対する適応、実行された(複数の)手技、検査に用いられた(複数の)スコープ、検査に用いられた機器、手技テクニック、検査の範囲、合併症、視覚化、耐性、所見、診断、提言、手技コード、診断コード、実行された介入、収集された病理検体等のようなデータ要素に関する入力を含む。
【0045】
患者のバイタルサインは、電子インターフェースを介して記録されるのが好ましい。現在では、バイタルサインモニタによって、シリアルポート接続およびイーサネット(登録商標)接続を介したこの種類のデジタル情報交換が可能である。述べたように、一般に収集される情報は、収縮期血圧、拡張期血圧、平均動脈圧、血圧測定値からのパルス、EKGからの心拍数、酸素飽和度、および温度である。さらに、制御キャビネットは、EKG、呼吸、および酸素飽和度のような波形信号の表示を可能にする「波形」データの電子転送および表示用の手段を含むことができる。このデータは一般に、較正済みアナログ電圧出力として提供される。アナログデジタル変換器(図示せず)は、画面上への表示用に波形データをデジタル化するために用いられる。
【0046】
本システムは、キーボード、タッチスクリーンおよび内視鏡ハンドル上のマルチポジションGUIナビゲーション制御スイッチのようないくつかの方法で操作者が本システムをナビゲートするのを可能にする。検査前または検査中にこれらのナビゲーション手段のいずれかを用い、操作者(看護師、医師、または技術者)が検査関連情報を検査中に制御キャビネットに入力するのを可能にすることができる。所望の情報の全部が検査進行中に入力されない場合、本システムは、操作者が検査の終了時に検査記録を完了することを可能にする。
【0047】
制御キャビネットは、バーコードスキャナまたは無線ICタグ(RFID)スキャナも含むことができる。これは、内視鏡の作動チャネル内に挿入されるかまたは他の方法で手技の一部として用いられるツールの識別を可能にする。これは、検査時に実際に用いられた機器またはツールのトラッキングを可能にする。これは、スキャンされたものの使用についての関連情報を記録するようにとの、GUIを通じたユーザに対するインテリジェントプロンプトをも可能にする。例えば、看護師が、生検鉗子が作動チャネル内に挿入される前に、それをスキャンする。次いで、制御キャビネットのGUIが、挿入された種類の鉗子を用いて実施される一般的な介入に関して、ユーザに自動的に入力を促す。本システムはまた、病理学的要求事項に関する情報が自動的に入力されるように、(複数の)生検検体に関する情報(位置、説明、評価対象の病理)を入力するようにユーザに促す。本システムは、機器のデフォルト運転パラメータについてもユーザに促すことができる。
【0048】
図3Eに、カメラカード111から内視鏡の遠位先端にあるイメージセンサおよび関連装置へ伝送することができる信号を示す。カメラカード111は、絶縁型電力を受け取り、同期化と色空間補正、自動ゲイン制御、ホワイトバランスの初期設定、ピクセル修正インタレーサおよびフレームメモリ用の従来の回路を含む。回路は、低電圧差分信号伝達(LVDS)用に備えられている。カメラカード111は、LEDのような照射光源を駆動する増幅器を含む。カメラカード111は、内視鏡の遠位端にあるCMOSイメージセンサに連結されたLVDSクロックレシーバに、LVDSマスタークロック信号を提供する。内視鏡の遠位端にマスタークロックを含まないことによって、各内視鏡用のイメージング電子回路のコストがさらに削減される。カメラカード111は、162MbpsのLVDS信号伝達で伝送されたビデオ信号および同期信号を受信し、該ビデオ信号および同期信号が非直列化されて、オンボードプロセッサに提供される。さらに、カメラカードは、内視鏡の遠位端にあるサーミスタまたは他の温度センサから受信されたサーミスタ信号を受信する。カメラカードは、ディスプレイまたは他の装置に出力することができるNTSC/PALビデオ信号を生成する。さらに、このボードは、埋め込み型同期信号およびプログレッシブYUV信号を提供する。カメラカード111は、必要な場合更新することができるファームウェアを格納するためのカメラカード111自体のEPROM、およびビデオフレームを格納するためのフレームメモリを含む。
【0049】
図3Fは、図3Cおよび図3Dに示す内視鏡104の一実施形態のフルイディクス図である。上に述べたように、滅菌水または生理食塩水などの流体を収容するプラスチック流体リザーバのような給水装置150を用いて、蠕動ポンプ142で内視鏡に水が供給される。水は、LED照射源に連結された熱交換器に水を送達するチューブまたはルーメン162にポンプで注入される。熱交換器から戻る水は、チューブ164内に受け入れられ、流量計166を通過してリザーバ150に戻る。本発明のこの実施形態では、水は、熱交換器に持続的にポンプで通され、照射源が過熱するのを防止する。流量計166は、水が熱交換器にポンプで通されていない場合、信号を提供し、これにより、操作者は、患者から内視鏡を除去するように警告を受けることができ、かつ/またはLEDをオフにするかもしくはLEDの出力強度を低下して、患者への熱的危険性を防止することができる。さらに、流体リザーバは、電子センサ、可動フロート、ウィンドウ、警報装置等を含み、使用可能な冷却流体のレベル、および液体の追加供給を行うべきか否かを示すことができる。遠位先端内のサーミスタのような温度モニタは、潜在的な熱的危険性について警告することができる。
【0050】
冷却を施すことに加え、高圧洗浄を施して患者の管腔を洗浄するチューブ170、および内視鏡の遠位端にある結像レンズの前面から汚染物質を取り除くレンズ洗浄チューブ172に、水を選択的に注入することができる。必要であれば、水は、作動チャネルを洗浄するために内視鏡の作動チャネルチューブに接続されたチューブ174にも、選択的に注入することができる。チューブ170、172、174各々の内部の水の流れは、必要に応じて、ポンプで水をチューブに通すことができる関連する弁によって、選択的に制御される。必要に応じて、弁180は、内視鏡内の作動チャネルへの真空の印加を制御し、洗浄液、残屑、または他の汚染物質を患者から除去する。弁182は、本発明の一実施形態では内視鏡の遠位端にあるレンズ洗浄チューブ172と同じチューブである吹送ルーメンへの、空気または他の生体適合性ガスの供給を制御する。空気は、異なる圧力で空気を提供する、空気源またはガス源に並列接続されたレギュレータまたは電子制御レギュレータもしくはレギュレータのプログラム可能アレイと同一直線上に並ぶソレノイド弁184、186、188を用いて、さまざまな圧力下で患者に提供することができる。レンズ洗浄チューブ172に送達される圧力は、弁184、186、188の組み合わせを選択的に開放することによって調節することができる。内視鏡から空気送達機構内への空気または液体の何らかの逆流を防止するために、逆止弁またはアンチサイフォン弁189が空気供給ラインに沿って並んでいる。
【0051】
図3Gに、空気、水および/または真空を内視鏡内部の種々のチューブもしくはルーメンに導くマニホルド140の一実施形態を示す。本発明の一実施形態では、マニホルドは、ポリウレタンのような熱可塑性プラスチック材料の2枚のシートの形状をなしており、該シートは、それらの間に一連の通路またはチャネルを形成するために、RF溶接または他の方法で結合されている。ピンチ弁またはサイドクランプを真空ライン上に用いて、コネクタを制御キャビネットに接続または接続を解除する際の無制御真空を防止することができる。ピンチ弁は、通路またはチャネルの上に配置され、内視鏡内の異なるチューブへの流体、空気もしくは真空の送達を制御するために、選択的に開放または閉鎖される。一実施形態では、マニホルド140は、一側上に3つのコネクタを有し、他側上に3つのコネクタを有する。一側上で、コネクタ190は、水リザーバ150から水を受け取る。コネクタ192は遠位先端にある熱交換器からの水を水リザーバ150に戻すチューブに接続され、コネクタ194は、真空源に沿って配置された回収瓶160に接続されている。弁アクチュエータの構成要素を内視鏡内部の水または他の流体と接触させる必要がなく、かつ濡れた構成要素を単回使用とすることができるので、ピンチ弁が好ましい。さらに、ピンチ弁は、簡素な無弁の設計を提供する。
【0052】
図示の実施形態では、コネクタ196は、作動チャネルに接続され、作動チャネルに水を供給するかまたは真空を適用する。コネクタ198は、吹送チューブに接続されている。コネクタ200は、内視鏡内の高圧洗浄チューブに接続されている。コネクタ204および206は、LED照射源を冷却する熱交換器に水を供給しかつ熱交換器からの水を戻すチューブに接続されている。
【0053】
コネクタ190でマニホルドに入る水は、4つの異なる経路内を流れることができる。これらの経路のうちの3つを通る流体流は、マニホルド内の経路上方の位置208、210、212でマニホルド140をつまむソレノイド弁で選択的に制御される。本発明の一実施形態では、水は、LED照射源を冷却する熱交換器にポンプで常に通される。位置208、210、212にあるソレノイド弁を選択的に作動させることにより、内視鏡内の他のチューブに水を供給することができる。
【0054】
さらに、マニホルド140は、コネクタ194とコネクタ196との間の位置214にあるソレノイド弁が開放される際に真空によってマニホルド140がつぶれないようにコネクタ196とコネクタ194との間の通路を開放状態に保持する支持チューブまたは他のストロー状構造体を含む。必要に応じて、このチューブまたはストローは、液体を作動チャネルに流入させる少なくとも1つのせん孔(図示せず)をも含む。
【0055】
使用後、マニホルド140は、水および真空等を供給するチューブから取り外され、内視鏡の残部と共に廃棄される。可撓性のマニホルドバッグ140は、流体がビデオ内視鏡システム自体の非使い捨て部分と接触するのを防止しながら内視鏡に対する流体または空気の使用を制御するための安価な装置を形成する。
【0056】
図3Hに、可撓性マニホルド152の別の実施形態を示す。流体は、入口152aを通って、流体リザーバからマニホルド152に入る。流体は、チューブ系にポンプで注入され、流体経路は、一連のピンチ弁152bによって選択的に制御される。流体は、ボーラス洗浄用にライン152eを通って、レンズ洗浄用にライン152cを通って、またジェット洗浄用にライン152dを通って選択的に流れることができる。流体は、LEDを冷却するために、ライン152fを通って、遠位先端内の熱交換器へ持続的に流出する。流体は、ライン152hを通って熱交換器から戻り、そこから流量計(図示せず)を通って流れ、流体出口152jを通って流体リザーバに戻る。
【0057】
図4Aに、内視鏡検査の実施に先立って内視鏡の近位端を制御キャビネット250に固定するためのコネクタの一実施形態を示す。制御キャビネット250は、図3A、図3B、および図3Cに示す種類のサーボモータに連結されたいくつかのシャフト254を有する外部コネクタ252を含む。各シャフト254は、制御ケーブルが巻かれた対応するスプールに受け入れられるような形状を有する。内視鏡に空気、水および真空を提供するための吹送・洗浄弁256ならびに真空弁258へのコネクションも、コネクタ252に含まれている。
【0058】
図4Bおよび図4Cに、内視鏡20の近位端を制御キャビネット250に固定するのに用いられるコネクタ260の一実施形態を示す。コネクタ260は、いくつかの蝶ネジ262、形状がぴったりと合う閉鎖扉、または制御キャビネット250外側の外部コネクタ252にコネクタ260を容易に固定することができる他の簡易脱着機構を含む。図4Cに示すように、コネクタ260は、いくつかのスプール262を含み、該スプール262の周りに制御ケーブルが巻かれている。使用時に制御ケーブルがスプール上で束になるのを防止するために、各スプールにはねじ山または溝が付いているのが好ましい。シーブまたはフランジ265は、スプールの一部を取り囲み、制御ケーブルをスプールに接触させて溝内に保ち、かつコネクタ260内のスプールを支持するのに役立つことができる。本発明の一実施形態では、スプールは、スプールの対応するスロット内に嵌合するピンを有するブレーキ266によってコネクタ260が制御キャビネット250と係合していない時に回転しないように、またその結果ケーブルの巻きが解けないようになっている。コネクタ260が制御キャビネット250に取り付けられた時点で、スプールをサーボモータによって動かすことができるように、ブレーキ266がスプールから離脱される。クランプ267は、近位端を制御ケーブルを覆う外側ジャケット上に固定するために用いることができる。光源およびイメージセンサに対する電気的接続ならびに空気弁および送水弁への接続は、コネクタ260の両側面または、図4Aに示すように、各弁に係合するためのコネクタ260の後面に配置されている。
【0059】
図4Dに、スプライン穴でスプール262内に嵌合されたスプラインシャフト254の断面図を示す。シャフト254は、バネ258を内部に有する円筒256によって支持されており、これによりシャフトは、円筒256内で自由に動くことができる。円筒256は、直接またはクラッチを通じて、制御キャビネット内のサーボモータに連結されている。バネ258によってシャフト254が浮動することができ、これにより、コネクタが制御キャビネット250に取り付けられている時に、このシャフトは、スプール262のあわせ面により容易に位置が合い、係合することができる。
【0060】
スプール262内へのシャフト254の挿入時にブレーキ266が開放され、それにより、スプール262を円筒256の回転によって動かすことが可能となる。いくつかの例では、ブレーキ266を省くことができ、それにより、コネクタ260が制御キャビネット250と係合していない時に、スプール262が自由に回転することが可能となる。
【0061】
図4Eに、患者データおよび内視鏡から生成されたビデオ画像または静止画像を含むグラフィカルユーザインタフェースが提示されるディスプレイ282を有する、制御キャビネット280の別の実施形態を示す。コネクタ284が、内視鏡の近位端を接続するために、制御キャビネット280の外側に備えられている。コネクタ284は、制御キャビネット内のサーボモータに連結されたいくつかのシャフト286を含む。いくつかのピンチ弁288が備えられ、流体リザーバ、真空源、および空気源(図示せず)を内視鏡内のチューブに接続するマニホルドを通じて、空気、水および真空の流れを制御する。上に述べたように、内視鏡にポンプで液体を通すために、蠕動ポンプ290が備えられている。内視鏡の動作および配向に関するコマンドを操作者が入力することができるように、制御キャビネット280にジョイスティック型ハンドヘルドコントローラ292が接続されている。
【0062】
図4Fに、内視鏡を制御キャビネットに連結する近位コネクタ130の一実施形態の裏面を示す。近位コネクタは、制御キャビネット上の可動扉内に取り付けることができ、次いで可動扉が閉鎖され、コネクタ130が制御キャビネットに接続される。上に論じたように、コネクタ130は、電気コネクタを内部に有しており、該電気コネクタは、制御キャビネット上の対応する電気コネクタとはまり合い、上流のクロック信号を含むLVDS信号をイメージセンサに転送し、電力および接地を照射用LEDに転送し、イメージセンサ用に調整済み電力を転送する。内視鏡から戻り受信された電気信号は、サーミスタ信号、およびLVDSフォーマット済みの直列化ビデオデータならびに同期データを含む。水流入口296および水流出口298は、近位コネクタ内部のマニホルドに流体を供給する。
【0063】
図4Gに、図4Fに示す近位コネクタ130の断面図を示す。図に示すように、アンビル299A、299B、299C、299Dを有する一連の高くなったノブが、近位コネクタ130の片側に沿って配置されている。アンビル299A〜299C上の鋭い縁は、近位コネクタハウジング内部の可撓性マニホルドバッグの裏当てとなる働きをし、かつソレノイド弁がマニホルドをつまんで流れを制限するのを可能にする。高くなったノブおよびアンビル299Dは、近位コネクタハウジング内のマニホルド下方の真空チューブを支持し、ソレノイド弁がチューブをつまんで真空を制御するのを可能にする。
【0064】
図5Aに、本発明によるハンドヘルドコントローラ300の一実施形態上に配置された種々の制御機器を示す。ハンドヘルドコントローラ300は、本発明の並列の実施形態では、電気コード304で制御キャビネットに連結されたコントローラ本体302と、無線高周波チャネルと、赤外線または他の無線もしくは光のリンクとを含む。接続が電気ケーブルで作られる場合、電気ケーブル304とコントローラ本体302の接合部に張力緩和装置86が配置され、電気ケーブル304内部の電線の適切な撓みおよび曲がりを可能にする。直列の実施形態では、ハンドヘルドコントローラ300の制御キャビネットへの接続は、モーションコントローラおよびイメージングシステムに信号を伝送するためのワイヤと、吹送空気/ガスおよび洗浄液を搬送するためのルーメンとの両方を含むシースによって作られる。さらに、内視鏡の制御ケーブルは、ハンドヘルドコントローラ300を通じて動作制御キャビネット内のアクチュエータに接続されたケーブルに係合する。手動ハンドルで使用する場合、制御キャビネットへの接続は、イメージセンサ、照射用LEDを往復して信号を伝送するためのワイヤと、吹送空気/ガスならびに洗浄/冷却液を搬送するためのルーメンとを含むシースによって作られる。
【0065】
人間工学に基づく配列でハンドヘルドコントローラ300上に配置されているのは、いくつかの電気スイッチである。関節運動用のジョイスティック308または他のマルチポジション装置をいくつかの方向に動かすことができ、医師がイメージング内視鏡の遠位先端を所望の方向に向けるのを可能にしている。イメージング内視鏡を手動で誘導するのには、医師は、ビデオモニタ上の画像を観察しながら、またはX線透視法のような別の医療診断画像技術を用いて遠位先端の位置を見ることによって、ジョイスティック308を動かす。所望の方向にジョイスティック308を動かすことによって内視鏡の遠位先端を操向する際に、医師は、内視鏡を押す、引くおよび/またはひねって、遠位先端を所望の方向に誘導することができる。
【0066】
カメラボタン310は、内視鏡が配置されている体内腔または体内器官の画像を捕捉するために備えられている。収集された画像は、静止画像であっても、ビデオクリップであってもよい。画像は、表示または記録可能媒体への格納に先立って、コントラストを調節するかもしくは他の方法で増強することができる。
【0067】
洗浄ボタン312は、洗浄源を起動し、内視鏡の洗浄ルーメンを通じて、水のような液体を供給する。液体は、体腔の一領域のみならず、イメージセンサの正面にあるウィンドウおよび/または内視鏡の遠位端にある光源をも洗浄する役割を果たす。吹送ボタン314は、吹送源を起動し、内視鏡のルーメンを通じて空気/ガスを供給するために備えられている。吹送ガスの供給によって内視鏡の遠位先端周りの体腔の部分部分が膨らみ、これにより、医師は、内視鏡をより容易に前進させることができるか、または内視鏡前方の組織をよりよく見ることができる。
【0068】
本発明の一実施形態では、ハンドヘルドコントローラ300の本体302は、上に述べたように、ブレイクアウトボックスにハンドヘルドコントローラ300を固定するための蝶ネジ316のような着脱可能なジョイントも含む。ブレイクアウトボックス上の対応するソケットまたはネジ山のセットが蝶ネジ316を受け入れ、2つの部品を結合する。希望するなら、画像の記録または印刷、光度の調節、真空制御弁の起動、または遠位先端を上下左右に動かす制御ケーブルへの可変の制動抗力の付与等のような追加機能を起動するために、1つまたはそれ以上の追加ボタン318も備えることができる。
【0069】
図5Bに、操作者がコマンドを入力して制御キャビネットおよび内視鏡の動作を制御することができるハンドヘルドコントローラの別の実施形態を示す。コントローラ350は、ユーザが自分の親指および/または複数の指で動作を制御することができる人間工学的に成形されたハンドル352を含む。ジョイスティック354は、ユーザが自分の親指でジョイスティックを動かすことによって内視鏡を操向することができるように、コントローラ350の最上部に配置されている。いくつかの制御ボタン356をユーザの親指または複数の指で起動し、内視鏡内のルーメンへの吹送用空気もしくは水/真空の供給、照射源の強度調整等のような内視鏡の他の動作を制御することができる。コントローラ350は、ジョイスティック354を付勢するバネ362に可変の力を印加する力フィードバック機構360をも含む。フィードバック機構360によって印加される力は、内視鏡を操向するのに必要な力に比例して変化する。例えば、内視鏡は、組織壁に接触させて配置してもよく、内視鏡の長さに沿っていくつかのループを有してもよい。従って、ユーザは、フィードバック機構360によってバネ362上に加えられる力を変えることによって内視鏡を操向するのに必要な力の触覚表示を与えられることができる。
【0070】
上に述べたように、本発明の一実施形態では、サーボモータは、位置対速度制御アルゴリズムを実行する。このアルゴリズムによって、ジョイスティック354の位置が、遠位先端の所望の方向への位置の変化速度に変換される。従って、ユーザがジョイスティックを任意の方向に押した時に、力フィードバック機構360によってバネ362に印加される戻り力は、制御ケーブルを動かすのに必要な駆動モータのトルクの関数として変化することができ、またバネ上の力を変えることでも、バネがジョイスティックに印加する力が変る。バネがジョイスティックに印加する力はジョイスティックを通じてユーザに感じられ、ユーザによって命令されている方向に遠位先端を動かすために印加されている力のレベルの触覚表示をユーザに与える。
【0071】
図5Cに、ハンドヘルドコントローラ350の内部力フィードバック機構360を提供するための1つの機構を示す。ジョイスティックの内部に、モータ370に直接連結された第1のラック372およびプリテンションスプリング362に直接連結された第2のラック374を含むラックアンドピニオン機構を駆動するモータ370がある。モータ370の回転によって、第1のラック372を上方または下方に動かすねじ込み機構(図示せず)が駆動される。ピニオンギア376が、第1のラック372の長手方向の動きを第2のラック374の長手方向の動きに変換し、次いで、第2のラック374が、バネ362のプリテンションを調節する。図示の実施形態では、ハンドヘルドコントローラ350の長手方向軸線に対するジョイスティックの向きにより、2つのラックが必要である。しかしながら、ハンドヘルドコントローラ内でジョイスティックが異なる配向を有していた場合、他の構成も用いることができる。例えば、ユーザに迅速な力フィードバックを提供するために、リニアモータ駆動ジョイスティックを構成することもできよう。
【0072】
同様に、エラストマまたは曲げ構造体のような他の構造体および/または材料を用いて、バネを全体的に置き換えることができ、力をプラスチック材料の1つの領域に印加して、プラスチックがジョイスティックに接触して付勢する同様の力を生成することができる。同様に、さまざまなトルクモータを直接ジョイスティックに連結し、制御ケーブルの張力に従ってモータのトルクを調節し、ジョイスティックを通じて力を直接ユーザに伝えることができる。ジョイスティックの動きに直交するそれぞれの軸上で作動するモータと共に2つのモータを使用することにより、ジョイスティックの動きが可能なすべての方向に応答する力フィードバック信号を生成することができる。直接駆動モータのこの種の使用および配列は、遠位先端のフィードバック位置に対して同様に用いることができる。この配列では、トルク制御モータの代わりに、位置制御モータが用いられることになる。制御ケーブルの位置またはこれらのケーブルを駆動しているサーボモータの位置を用いて、遠位先端の近似位置が計算される。位置制御モータは、ジョイスティックの位置を遠位先端の計算位置に追従させるために駆動される。操作者が先端を動かそうと試みて、先端の動きが先端の環境によって阻止された場合、ジョイスティックに関する操作者の動きは、ジョイスティックの位置を先端の位置と対応させるために位置制御モータによって印加された力による抵抗を受けることになる。
【0073】
図示の実施形態は、ジョイスティック354を付勢するバネ362の圧縮を変えるためのモータおよびラックアンドピニオンギアシステムを開示しているが、油圧アクチュエータ、または磁気アクチュエータを用いることができることを理解されたい。あるいは、上に論じたように、熱可塑性プラスチック類のような疑似流体装置を用いてもよい。熱可塑性プラスチック材料を選択的に圧縮することにより、その弾性を変化させ、バネ362上に異なる圧力を印加するために用いることができる。
【0074】
別の実施形態では、ワイヤ上のすべての力がユーザにフィードバックされるわけではない。一実施形態では、本システムは、シャフトの抵抗対遠位先端の抵抗を区別し、遠位先端の抵抗のみがユーザにフィードバックされる。
【0075】
シャフト上の力対先端の力を区別するために、先端が異なる方向にディザーされる。抵抗が先端上にある場合、抵抗は、一方向においてのみ高くなければならない。抵抗がシャフト内のループによって生じている場合、抵抗は、あらゆる方向において等しくなければならない。プロセッサ内の力を比較し、かつ遠位先端を動かすのに必要な力を分離することにより、高い力が先端に蓄積するのを防止することができる。高いモータトルクは、ルーピングによる抵抗に打ち勝つためにのみ用いることができ、先端が抵抗に適合している場合、先端を曲げるのには用いられない。従って、より高い力が先端上に蓄積するのが防止され、先端が解剖学的組織に穴を開ける、または望ましくない状態で所定の位置にはまり込むリスクが低下する。
【0076】
図5Dおよび図5Eに、ブレイクアウトボックスおよびハンドヘルドコントローラの別の実施形態を示す。この実施形態では、ブレイクアウトボックス380は、遠位端382および近位端384を有する。このブレイクアウトボックスはそれがユーザの手に人間工学的にフィットするように、通常「バナナ形」である。さらに、ブレイクアウトボックス380の近位端384は、コントローラをユーザが手に持ち、手のひらが床に対して水平に向けられると、近位端が床に向かって下方を向くように配向されている。従って、ブレイクアウトボックスから延びる内視鏡シャフトの近位端は、医師の前腕から離れる方向に傾斜し、あまり邪魔にならない。
【0077】
ブレイクアウトボックス380は、上にキャップの付いた作動チャネル386への入口も含む。このキャップは、医師または看護師に体液もしくは他の汚染物質がかかる可能性を少なくするために、作動チャネルへの入口が医師の方を向かないように配置されている。キャップは、除去可能としても、ブレイクアウトボックスに組み込んでもよく、医師が装置の周りを効果的に封止して空気および流体の漏れを防止することを可能にするダックビルまたはチューイ−ボーアズ(tuey bohrs)を含むことができる。キャップを除去することにより、ユーザは、生検の受け入れ、薬物投与、または他の医学的手技を行うために、作動チャネルにツールを挿入することができる。
【0078】
ブレイクアウトボックス380に選択的に連結されているのは、ハンドヘルドコントローラは、ハンドヘルドコントローラ388である。内視鏡の遠位先端の向きを制御するディレクショナルスイッチ390を含む。ユーザが内視鏡の追加機能を起動するかまたはビデオ内視鏡システムの運転パラメータを変更することができるように、さらに別のボタンまたは制御装置392を備えてもよい。
【0079】
他の実施形態は、キャップを除去する必要がなくてもよい。キャップは、ダックビル弁からなることができ、該ダックビル弁は、装置を通過させるが、装置の除去が完了した時点で直ちにセルフシールする。これによって、キャップが除去されている間にボーラス洗浄を施しても絶対にユーザに液がかからないことが保証される。別の設計は、ダックビル弁上で堅く締まり、この装置を正確な位置に安定した状態で保持するねじぶたを含む。
【0080】
図5Dに示すように、ハンドヘルドコントローラ388は、オスとメスの結合機構396、398を協働させることによって、選択的にブレイクアウトボックス380に連結される。図示の実施形態では、結合機構は、対応するスロットに弾力的に受け入れられるタブを備える。しかしながら、他の付着機構も用いることができよう。
【0081】
図5F〜図5Iに、制御ケーブルに張力を加えて内視鏡の遠位先端を操向する回転ノブを含む手動ハンドルの一実施形態を示す。この手動ハンドルは、制御キャビネット内の電子機器に、吸引、送気、レンズ洗浄、ジェット洗浄または低圧洗浄およびボーラス洗浄のような本内視鏡システムのさまざまな機能を起動するよう指示するいくつかの電子スイッチを含む。ディスプレイ上のメニューをナビゲートするためのメニューボタンおよびマルチポジションスイッチのような追加のスイッチが、親指で起動するように備えられている。
【0082】
本発明の一実施形態では、いくつかの簡素なスイッチを用いて、水、空気、吸引、レンズ洗浄画像管理、およびグラフィカルユーザインターフェース(GUI)ナビゲーションを制御する。スイッチは、多数のワイヤで、ハンドル内の回路基板またはコネクタに配線されている。マイクロプロセッサは、少数のワイヤで、制御キャビネットにボタン信号を提供する。スイッチが反復使用または洗浄に耐える必要がないので、スイッチは、比較的安価とすることができる。さらに、スイッチのコストを増大させる可能性のあるデバウンシング等のような他の機能を、例えば、専用のハードウェアまたはソフトウェアによって制御装置内に備えることができる。
【0083】
本発明一実施形態では、ハンドル上のノブは、ランププルスイッチに一般的に用いられる型の「ビーズチェーン」を有するコントロールワイヤに連結されている。ビーズチェーンは、ノブに接続されたスプロケットに係合する。ノブを回転させるのに必要な力および先端を関節運動させるのに必要なノブの回転量は、スプロケットの大きさを調節することによって制御することができる。スプロケットが大きくなるほどノブを回転させるのにより多くの力を要することになるが、回転の必要量はより少なくなり、より高い力フィードバックを有することになる。より小さいスプロケットに要する力はより少なくなるが、より多く回転させることが必要となる。左/右軸上とは異なる大きさのスプロケットを上/下軸上に用いることが可能である。一実施形態では、操向ケーブルは、ビーズチェーンに直接接続されている。別の実施形態では、操向ケーブルをスプロケットに直接巻き付けることができる。別の実施形態では、(図51に示すような)、ビーズチェーンは、バネを用いて操向ケーブルに接続されている。バネの剛性は、内視鏡手技時に遠位シャフト内にループが生成される際に操向システム内に均一な張力を維持するように調節することができる。別の実施形態では、バネは、操向ケーブルが通り抜けるきつく巻かれたバネコイルの端部に配置することができる。このバネは、全ての使い捨て装置がユーザにとって確実に同じ感触を有し、かつ使用前の格納時に装置内で緩みが増すのを確実に防止するために用いることもできる。これにより、全ての装置がユーザに対しすぐに応答しかつスロップを有さないことが確実となる。
【0084】
固定止め具を、スプロケット上、ビーズチェーン上、プルケーブル上またはノブ上に配置し、ノブの回転を制限しかつ先端の過剰関節運動を回避することができる。
【0085】
作動チャネルへツールを挿入できるように、作動チャネルへの入口がノブの下に配置されている。作動チャネルポートは、手動制御装置のハウジングに固定してもよく、ハウジングの主軸に沿って平行移動させることができるようにしてもよい。作動チャネルを平行移動可能にすることは、遠位シャフト内にループが生成される時に作動チャネル上に張力が増大するのを防止することになる。
【0086】
手動制御装置のハウジングは、ボーデンケーブル、電気ケーブルおよびユーティリティチューブの余剰長用の空間を許容する。これにより、遠位シャフト内にループが生成される時にこれらの構成要素上で張力が増大するのが防止される。
【0087】
別の実施形態では、ハンドヘルドコントローラは、シャフトの遠位部分を把持する把持機構に取り付けることができる。従って、操作者は、医師が患者により近づくことができるように、シャフトの長さに沿ったさまざまな位置において、ハンドヘルドコントローラをシャフトに固定することができる。
【0088】
本内視鏡の開示された実施形態は通常、操作者が遠位先端の向きを制御することを要するが、本発明の内視鏡は、自動的に操向することもできる。イメージング電子回路によって受信された画像は、プログラムされたプロセッサで分析され、内視鏡の遠位先端の望ましい方向または向きが決定される。内視鏡が盲腸まで進められる結腸鏡検査の場合は、プロセッサは、結腸を膨らませるための吹送空気/ガスの送達を制御する。次いで、プロセッサは、通常内視鏡を進めるべき方向の標識となる暗い開口した管腔を求めて、結腸の画像を分析する。次いで、プロセッサは、そのような位置にある暗い領域の方向に遠位先端が向けられるように、サーボ制御装置に制御命令を供給する。
【0089】
別のモードでは、制御キャビネット内のプロセッサは、内視鏡の遠位先端を所定のパターンで動かす。例えば、内視鏡を後退させながら、疾病の存在の有無に対して体腔の全領域が走査されるように、遠位先端をらせん形探索パターンで動かすことができる。遠位先端の自動制御を利用することにより、医師は、検査を行って画像の解釈に完全に集中するのに、内視鏡を前進または後退させるだけでよい。
【0090】
以下にさらに説明するように、内視鏡は通常、遠位先端で終了するポリウレタンまたはポリエチレンのようなプラスチック材料で形成された1つまたはそれ以上のルーメンを有する中空のシャフトを備える。遠位先端およびシャフトの形状は通常は円筒形であるが、体腔への挿入を容易にするために、他の形状に作製してもよい。さらに、作動チャネル用のチューブは、関節ジョイントの領域をバネで支持し、ねじれを防止することができる。さらに、ルーメンは、金属ワイヤまたはポリマーもしくはガラス繊維あるいはテープをらせん形に巻いたラップで補強することができる。ルーメンは、その長さに沿って、円形、長円形、非対称等のようなさまざまな断面形状を有することができる。チューブの外側表面は、関節運動時にチューブが互いに対して摺動するのを支援するために、滑らかにすることができる。あるいは「つや消しチューブ」、を用いて、外側表面の摩擦係数を低下させてもよい。全てのチューブの内壁は、通常、滑らかである。作動チャネルの一実施形態は、円形ルーメンではなく、星形ルーメンを含む。これは、装置との接触領域を減らし、装置がより少ない力で通過するのを可能にする。図6Aに示すように、遠位先端400の一実施形態は、遠位部分402および近位部分404を有する円筒を備える。段のある肩領域を形成するために、近位部分404は、遠位部分402の直径より小さい直径を有する。肩の直径は、内視鏡のシャフト壁を肩領域上に取り付けて、遠位部分402と共に滑らかな外側表面を形成することができるように選択される。遠位先端400の遠位面は、カメラポート406、1つまたはそれ以上の照射ポート408、作動チャネルルーメン用アクセスポート410、および方向性フラッシュポート412を含むいくつかのポートを含む。
【0091】
カメラポート406内に取り付けられているのはイメージセンサ(図示せず)であり、該イメージセンサは、カメラポート406前方の被写体の像を表す電子信号を生成する、CMOSイメージングセンサまたは他の固体イメージング装置と、1つまたはそれ以上のガラスレンズもしくは高分子レンズとを備えるのが好ましい。このイメージセンサは、SVGA、SXGA、XGA、またはUXGA等のようなVGA解像度またはそれ以上の解像度を有する、低感光性、低ノイズのCMOSカラーイメージャであるのが好ましい。より低い解像度を希望するなら、1/2VGAセンサまたは1/4VGAセンサも用いることができる。従来のビデオシステムに対しては、リアルタイムビデオを達成するのに、25fpsから30fpsの最小フレームレートが必要である。本システムのビデオ出力はデジタル形式でコンソールに伝送されるのが望ましいが、PALまたはNTSC、もしくは高解像度ビデオフォーマットを含む任意の従来のデジタルまたはアナログのフォーマットであってもよい。
【0092】
照射ポート408は、1つまたはそれ以上のレンズ/ウィンドウおよび1つまたはそれ以上の発光ダイオード(LED)(図示せず)を収容する。LEDは、高輝度白色光源であってもよく、赤外線(IR)LED、赤色LED、緑色LED、青色LEDまたは紫外線LEDのような他の波長の光源を備えてもよい。着色LEDでは、任意の1つまたはそれ以上の個々の色での照射によって、異なるスペクトルバンドの画像を得ることができる。白色光画像は、着色LEDの同時照射または順次照射、および各照射波長での個々のカラー画像を組み合わせることによって得ることができる。代替案として、着色LEDの逐次照射を採用する場合、白黒のCMOSイメージャを用いることができる。LEDの代案として、光源を内視鏡の外部に置き、光ファイババンドルおよび従来の光源によって、照射光を照射ポートに送達してもよい。遠位先端に位置するLED源の代案は、例えば、1つまたは複数の白熱ランプ、または有機LED、フォトニッククリスタル、もしくはレーザ源を含むことができよう。
【0093】
アクセスポート410は、内視鏡の作動チャネルまたはルーメンの終端点である。一実施形態では、作動チャネルの近位端は、図2に示すように、ブレイクアウトボックス26で終了する。しかしながら、作動チャネルは、内視鏡の近位端のより近くで終了することもできる。
【0094】
方向性フラッシュポート412は、洗浄・吹送ルーメンを通じて供給された液体および空気を遠位先端400の正面を横切ってカメラポート406および/または照射ポート408の方向に導くキャップ414を含む。それにより、キャップ414は、内視鏡が配置されている内部体腔をよりよく観察することができるように、カメラポート406および照射ポート408をすすぎ、清浄にしかつ乾燥させる働きをする。さらに、フラッシング液は、内視鏡の遠位端を取り巻く組織の領域を清浄にする。
【0095】
図6B〜図6Iに、本発明による使い捨て内視鏡の遠位先端を形成するイメージング組立体の別の実施形態を示す。本イメージング組立体は、低コストで、安価な組み立て技法に適合し、かつより高価なイメージング機構に匹敵する機能を果たし、それによって、操作者は、内視鏡操作が患者の検査に違和感がないことに気付く。
【0096】
図6Bに示すように、内視鏡の遠位端は、前面にいくつかの開口部を有する遠位キャップを含む。開口部には、作動チャネル452への開口部と、患者から残屑または詰まらせている障害物を除去するために内視鏡を通じて液流を送達することができる低圧洗浄用の開口部454とが含まれる。レンズ洗浄・吹送ポートは、一体型のフラッシュキャップ456を含んでおり、該フラッシュキャップ456は、水をイメージセンサのレンズ全体に向け、吹送ガスを送達して、内視鏡が挿入されたルーメンを膨張させる。内視鏡の長手方向軸線から偏位しているのは、照射源を覆う一対のウィンドウまたはレンズ460および462によって取り囲まれたレンズポート458である。
【0097】
図6Cに最もよく示すように、イメージング組立体は、遠位キャップ450と、円筒形レンズ組立体470と、熱交換器480とを含む。熱交換器480は、円筒形レンズ組立体470をはめ込むことができる凹形のくぼみ482を有する半円形部分を備える。凹形のくぼみ482は、レンズ組立体470の位置を内視鏡の長手方向軸線に垂直な方向に保持し、それによって、レンズ組立体470が内視鏡の長手方向軸線に沿ってのみ動くことができるようにしている。熱交換器480の裏面に固定されたイメージセンサ490に焦点が合うようにレンズ組立体が配置された時点で、レンズ組立体は、接着剤で熱交換器内に固定される。これは、成形部品設計での精密な止め具またはランドの使用によって促進することができる。LEDを冷却するための流体またはガスの通過用に回路基板の背後にチャネルが形成されるように、一対のLED484、486が、熱交換器内に付けられた回路基板に接合されている。制御装置を往復して信号を送受信するための回路を含む回路基板または可撓性回路492が、イメージセンサ490の背後および熱交換器480の裏面に固定されている。レンズ組立体470、LED484、486、イメージセンサ490、および関連する回路492が熱交換器480内に固定された状態で、熱交換器組立体を遠位キャップ450の内部にはめ込むことができ、図6Dに示すようなイメージング組立体が完成する。
【0098】
図6Eは、遠位キャップ450の背面等角投影図である。遠位キャップ450は、ABSまたは他の生体適合性材料から精密成形されるのが好ましい。上に述べたように、遠位キャップ450の前面は、一体型のフラッシュキャップ456と、LEDの前方に配置された一対のウィンドウ460を含む。ウィンドウは、遠位キャップ450の残りでオーバーモールドされた、ポリカーボネートのような透明なプラスチック材料で作製されるのが好ましい。これも遠位キャップ450の内部にあるのは、近位に延び、それによって遠位キャップの円筒状内面を半円形のチューブに分割し、その中に半円形の熱交換器480組立体をはめ込むことができるようにしている平坦な表面470である。熱交換器480を遠位キャップ450に挿入することができる範囲を制限するために、突起472が遠位キャップ450の内側前面から延び、熱交換器480の前面と位置合わせされている。
【0099】
図6Fは、LEDの前面に配置されたウィンドウ460、462の断面図である。ウィンドウ460は、ウィンドウ460を遠位キャップ450の前面に固定する外方に延びるフランジ464と共に、光学的に透明なプラスチック材料で成形されるのが好ましい。ウィンドウの成形が完了した時点で、遠位キャップ450をウィンドウ460、462の上に成形し、それらを所定の位置に固定することができる。
【0100】
図6Gは、イメージング組立体の熱交換器480部分の前面等角投影図である。上に述べたように、熱交換器は、遠位キャップ450内部の平坦な表面470とはまり合う比較的平坦な底面500および丸い上面502を有する半円形部分である。熱交換器の内部は、冷却用の液体またはガスを通して照射用LEDから過剰熱を除去することができるチャネルを形成するために、全体として中空である。凹形のくぼみ482は、図6Cに示すように、円筒形のレンズ組立体470を受け入れるために、熱交換器の下部平面500内に形成されている。熱交換器480から後方に延びているのは、熱交換器480の内部に流体接続された穴を中に有する一対の脚506、508である。リップ512が熱交換器482の前面の内側表面の周りに延び、対応する形状の回路基板をはめ込んで接着固定することができる接合面を形成している。本発明のいくつかの実施形態では、熱交換器480はさらに、脚506、508の上に配置された追加の後方に延びるフィン514、516を含み、それによってそれらの間に、回路基板または他の構成要素を熱交換器に固定するためのスロットが形成されている。しかしながら、いくつかの実施形態では、フィン514、516は省いてもよい。
【0101】
図6Hは、熱交換器480の背面等角投影図である。上に述べたように、脚506、508の各々は、ルーメン520、522を含んでおり、それらにチューブをはめ込むことができ、液体またはガスが熱交換器の中空の半円形チャネル部分内を流れるように、チューブに冷却用の液体または気体通すことができる。さらに、熱交換器480は、遠位先端の温度を示す信号および制御装置内のプロセッサへの信号を伝送することができるサーミスタまたは他の温度感知装置用の逃げ526を含むことができる。あるいは、温度センサを遠位先端の本体内に配置することもできよう。
【0102】
図6Iに、熱交換器480の前面内にはまり込むように設計された半円形回路基板550を示す。具体的には、回路基板550は、図6Gに示すように、内側リップ512に当たった状態で熱交換器480の前面内に接着固定されている。回路基板は、高分子、金属またはセラミックもしくはそれらを組み合わせたもの、電気的に隔離する誘電体および回路レイヤのような、熱伝導性の基材を備える。回路基板550は、回路基板が熱交換器480内に取り付けられる時にレンズ組立体470をはめ込む凹形のくぼみ482のいずれかの側に配置された熱伝導性パッド556、558上に配置された一対のLEDに電流を送達するために用いられる、1つまたはそれ以上のトレース552およびボンディングパッド554を含む。
【0103】
本発明の一実施形態では、基材は、これらも銅で製造された伝導性パッド556、558を有する銅である。LEDは、ボンディングパッド554およびトレース552にワイヤボンディングされている。回路基板550の裏面は、脚506、508を介して熱交換器にポンプで通される冷却用の液体またはガスに直接さらされる金のような熱伝導性、非反応性の生体適合性材料を塗布されるのが好ましい。
【0104】
本発明の一実施形態では、LED484、486は、合わせて約60ルーメンの光を発生させるリン材料を塗布した大面積ダイ、高出力の青色光LEDであるのが好ましい。この実施形態は、レンズ組立体470の両側に配置された2つのLEDを示しているが、より少ないもしくはより多いLEDを用いることができ、かつ対応する変更をLEDの前方に配置されたウィンドウ460、462の形状に対して施すことができることを理解されたい。
【0105】
代案として、LEDによって発生された青色光にさらされると白色光を発生させるリン被覆剤を、ウィンドウ460、462の内側表面に塗布することができる。選択する特定のリン光体またはリン光体の組み合わせは、用いられるLEDのスペクトル特性によって決定することができる。1つのリン光体または複数のリン光体は、ウィンドウ460、462の裏面に塗布された、遠位先端450を紫外光源にさらすことによって硬化されるエポキシ系接着剤と混合することができる。接着剤へのリン被覆材の混入は、リン光体の均一な分布を促進し、かつ製造が容易である。あるいは、リン光体をウィンドウの高分子に吸収させても、それに直接混入することもできよう。
【0106】
レンズ組立体470の一実施形態は、名目fシータのひずみを有する140°の視界およびf/8の口径を提供する、画像鮮鋭度およびひずみ画像を制御するためのいくつかの非球面を含む、4要素プラスチックレンズ組立体を備える。レンズ組立体の個々のレンズおよびレンズの口径は、熱交換器480の円筒形の穴に挿入するためのプラスチック円筒に収容されている。レンズ組立体の前面は、キャップ450内のレンズポート458に接着封止されている。
【0107】
前述したように、結腸鏡検査用途には、受入れ可能なfシータのひずみを有する140度の対角全視界が好ましい。画像鮮鋭度は、約10mmの物体距離で、入射瞳と同心、被写体表面上で1ミリメートル当たり5線対の解像度を提案する、内視鏡に関するFDA指針書と一致しなければならない。これは、Micron, Inc.またはST Microelectronicsなどの会社によってCMOS技術もしくはCCD技術を用いて製造されているもののようなVGA(640×480)ピクセルのカラーイメージャの使用と一致する。
【0108】
イメージャチップの出力は、ワイヤ総数を減らして遠位先端からの信号を近位コネクタにもたらすために、シリアルデジタルフォーマットのものであるのが好ましい。近位端を遠位先端に接続するケーブルは、電源供給ライン、接地ライン、クロックライン、差分信号ライン、および制御信号ラインを含む。一般に、10本〜14本のワイヤが必要である。シリアライザをイメージャに組み込むことにより、高度にコンパクトな遠位先端を製造することができる。また、一体型シリアライザを有するイメージャのコストは、別個のイメージャとシリアライザおよびそれらの相互接続装置のコストに満たない。さらに、遠位先端からクロックを除去し、クロックをイメージング電子回路のサブシステム(60)上に配置することにより、関連する内視鏡のコストの削減と共に、遠位先端のサイズをさらに縮小することが可能となる。
【0109】
約4.5mmの対角フォーマットサイズを有するイメージャに関しては、140度の全視野をカバーするためには、レンズの焦点距離は1.8mmとなる。
【0110】
4要素プラスチックレンズ組立体470が、視野の1/2からのレイトレースと共に図6Jに描かれている。要素570、572、および576は、王冠様材料Ticona Topasのような同一のプラスチックから射出成形されている。要素574は、ポリスチレンから射出成形されている。必要な補正を達成するために、要素570および572の凹面は回転非球面で、要素576の両凸面は非球面である。十分な被写界深度を提供するために、レンズのF/#は、約8である。一番右の光学要素577は、イメージャセンサ490に組み込まれた保護用カバーガラスである。
【0111】
本発明の好ましい実施形態では、イメージャセンサ490は、640X480アクティブピクセルを有するVGA CMOSイメージセンサと、画像データをシリアル形式で制御キャビネットに伝送するオンチップシリアライザとを備える。そのようなCMOSイメージセンサは、アイダホ州ボイシ所在のMicron Electronicsから、型番MI−370として入手可能である。内視鏡の長さに沿ってシリアル画像データおよび制御信号を伝送するためには、データおよび制御信号は、適切なツイストマイクロ同軸ケーブルに沿い、低電圧差分信号(LVDS)プロトコルを用いて、デジタルで送信されるのが好ましい。
【0112】
画像組立体を構築するには、フラッシングポート456を含む遠位キャップ450が、LEDウィンドウ460、462の上にABSプラスチックで成形される。LED482、484を接合した回路基板550が、熱交換器480の内部に固定され、CMOSセンサ490および関連する電子機器492が、熱交換器480の裏面525の脚506、508の間に固定される。レンズ組立体470が凹形のくぼみ482に挿入され、所定の位置に接着される前に、イメージセンサ490上に光を集束するのに最適な位置に至るまで、長手方向に調節される。次いで、完成した熱交換器組立体を遠位先端450に挿入し、接着接合してイメージング組立体を完成することができる。次いで、残った低圧洗浄ボーラス洗浄チャネル454、レンズ洗浄・吹送チャネルおよび作動チャネル用のチューブが遠位先端内の対応するルーメンに固定され、内視鏡の遠位イメージング部分が完成する。
【0113】
部分的には所望の内視鏡パフォーマンス特性によって決定することができるが、構成要素、光学組立体内の構成要素の寸法および構成のバリエーションが企図される。例えば、視野、照射のレベル、遠位先端の運転温度等のような事項は、特定の構成のバランスおよびトレードオフに影響を及ぼす。例えば、円筒形レンズ組立体をイメージセンサに対して動かすことによって内視鏡に集束能力を付け加えるのが望ましいかもしれない。レンズ組立体に焦点を合わせることができれば、より小さいF#(すなわち、より速い)のレンズを用い、それによって必要な光の量を減少させることができる。必要な光がより少なくなれば、なんらかの過剰熱を照射源から除去するための能動冷却機構の必要性は、少なくなるかまたは排除される。あるいは、水冷式の熱交換器を照射源に熱結合されたヒートパイプに置き換えるか、もしくは内視鏡の空隙に熱伝導性の流体または他の物質を充填することが可能かもしれない。
【0114】
レンズ組立体をイメージセンサに対して動かさなければならない(逆の場合も同じ)距離が比較的小さい(例えば数百ミクロン)ために、磁気作動バイメタル部品、熱作動バイメタル部品、スクリュー式アドバンサ等のような簡素な機械的部品または電気的に作動する部品で集束機構を構築することができる。さらに、レンズ組立体が図6Cに示す種類の円筒形のくぼみ482または同等の構造内に収容される場合、レンズ組立体がイメージセンサと同一直線上に並ぶように拘束されるため、集束を簡素化することができる。
【0115】
図7に、図6Aに示すものに類似した内視鏡の遠位先端600の一実施形態をさらに詳細に示す。この実施形態では、先端部分600は、遠位先端600の外周沿いに配置されたいくつかの逆向きに開けた穴602を含む。逆向きに開けた穴602は、遠位先端を配向する制御ケーブル(図示せず)のスエージ加工を施すかまたはフランジをつけた端部を受け入れる。制御ケーブル上の張力によって、遠位先端600が、張力を加えている力の方向に引っ張られる。
【0116】
図8は、本発明の一実施形態による内視鏡650の縦方向の断面図である。遠位先端652は、関節ジョイント654の遠位先端において、接着固定、溶接または他の方法で中央ルーメンの内部に接合されている。関節ジョイント654の近位端に固定されているのは、シャフト656の遠位端である。上に論じたように、シャフト656は、内視鏡の近位端よりも剛性が高いか、ねじれ剛性が大きいか、または内視鏡の遠位端に向けてよりよくトルクを伝達することができるのが好ましい。
【0117】
内視鏡の遠位先端を動かす制御ケーブル658は、ステンレススチールのような非伸縮性材料または指向性の強いポリエチレンテレフタレート(PET)糸の紐で製造されているのが好ましい。制御ケーブル658は、シャフト656の中央ルーメン内に通してもよく、図8に示すように、シャフト656の壁内部に形成されたルーメンに通してもよい。制御ケーブル560は、関節ジョイント654の壁内部のガイドを通って延び、関節ジョイント654の遠位端または遠位先端部分602で終了する。本発明の現在好ましい実施形態では、制御ケーブルはボーデンケーブル(すなわち、外側シースと内側ケーブルとを備えるシステム)である。例えば、ボーデンケーブルは、HDPEのような滑らかなライナを有する外側ステンレススチールジャケットおよび/または摩擦を低減するためにシリコーンのような潤滑剤を塗布した内側ケーブルを備えることができる。あるいは、ケーブルは、シース用に用いることのできる非圧縮性プラスチックまたは金属のような、他の適切な金属もしくはプラスチック、および他の高弾性率素材を備えてもよい。外側ジャケットの遠位端は、関節ジョイント654の近位端に受け入れられ、該ジャケットの近位端は、手動制御装置または内視鏡を制御キャビネットに結合するコネクタ内に固定される。
【0118】
制御ケーブルをシャフト656の中央ルーメンに通す場合、ケーブルは、結合を防止するために、ステンレススチールまたはプラスチックのスパイラルラップ付きジャケット内に担持されるのが好ましく、図9Aおよび図9Bに示すもののような遷移ガイド670を用いて、制御ケーブルを関節ジョイントの近位端内に誘導することができる。遷移ガイド670は、シャフトの遠位端のルーメン内に固定された近位端672を有する。遷移ガイド670の中央本体部分674は、イメージング内視鏡の外径に等しい直径を有する。さらに、本体部分674は、近位端672の中央ルーメンから遷移ガイドの段のある遠位端676の外側表面まで延びるいくつかの斜めのルーメン678を含む。遠位端676は、関節ジョイント654の近位端内部に固定されている。従って、斜めに延びるルーメン678内の制御ケーブルは、カテーテルの外縁に誘導され、ケーブルは、そこからガイドまたは関節ジョイント654の制御ケーブルルーメンを通って延びる。
【0119】
図10Aおよび図10Bに、内視鏡を形成するために用いられるシャフトの一実施形態を示す。シャフト680は、押出スリーブ682を有し、押出スリーブ682は、組み込み型のワイヤまたは他のブレード684を含むことができる。存在する場合、ブレード684によって、シャフトのトルク特性を調整することができる。スリーブ682は、マンドレルの上にスリーブを配置することによって形成することができる。ブレード684がスリーブの上に配置され、マンドレルがコーティング材に浸漬されるかまたはそれを吹き付けられる。スリーブおよびコーティング材は、ペレセン、ポリウレタン、またはポリエチレン、ポリプロピレン、もしくはポリビニルアルコールのような定評のある他の生物医学的用途の材料で製造されるのが好ましい。現在好ましい実施形態では、スリーブ682は、0.507インチの外径および0.460インチの内径を有する黒色のペレセンで製造されている。ステンレススチールのブレードが組み込まれ、1インチ当たり23ピックを有する。さらに、芳香族ポリエステルウレタンテープの内側ラップで外側シャフトが完成される。シャフトの外側は、マサチューセッツ州ナティック所在のBoston Scientific Corporationから入手でき、引用により本明細書に組み込まれる、米国特許第5,702,754号および第6,048,620号に記載されたHYDROPASS(商標)親水性被覆剤のような親水性の滑らかな被覆剤を塗布することができる。
【0120】
Panduit Inc.から入手できるスパイラルワイヤラップのようなプラスチックスパイラルラップ686が、シャフト680の中央ルーメンに挿入されている。スパイラルラップ686は、シャフト680が患者の解剖学的組織の湾曲部に沿って曲がる際にシャフト680がつぶれるのを防止する。
【0121】
シャフト680の一実施形態では、スパイラルラップは、0.060インチの厚さおよび3/16インチのピッチを有する。スパイラルラップ686は、0.500インチの外径および0.380インチの内径を有し、シャフト680にねじ込められて締まりばめを形成している。しかしながら、異なるピッチを有する他の厚さのパイラルラップを用いて、ねじれが生じるのを防止すると同時に所望のコラム強さおよび曲がり率を提供することができることを理解されたい。
【0122】
金属ブレードが、関節ジョイントの上に配置されている。ブレードは、関節ジョイントにねじれ強さを提供すること、関節運動時にジョイントのリンクを整合させておくことおよび外側カバーがジョイントのリンク間にはさまれるのを防止することを含む、いくつかの機能を有する。好ましい設計では金属のブレードを用いるが、代替的に、PETのようなプラスチックブレードを用いてもよい。ブレードの特性(ブレードの角度、被覆%、1インチ当たりのピック#等のような)を調節し、低い関節運動力と一定した面内関節運動との間に必要なバランスを付与することができる。この設計の別の実施形態では、関節ジョイントの上に可変のブレードを用いて、ジョイントの曲がり円弧を制御することができる。関節ジョイントの近位リンク上のより密なブレードは、遠位リンクが最初に曲がり、従ってジョイント全体がより小さい曲がり円弧で曲がるのを促進する。外側のプラスチックカバーは、シャフトの関節ジョイント部分の上に取り付けられ、ブレードを有する関節ジョイント内のすき間を通って汚染物質がシャフトに入るのを防止する。
【0123】
上に論じたように、内視鏡シャフトの近位部分は、遠位部分よりも可撓性であるのが好ましい。シャフトの近位部分は、Panduit Inc.から入手できる型番CLTS
50F−Cのような波形のポリエチレンチューブで製造されるのが好ましい。
【0124】
図11に、シャフトの遠位部分のトルク忠実度を変更する一方法を示す。シャフト700は、内視鏡のブレイクアウトボックスの遠位端に向かう可撓性部分702およびブレイクアウトボックス(図示せず)により近接した剛性のより高い部分704を有する。内視鏡のより遠位の部分は、遠位先端に向かって可撓性を増し、逆に、近位に向かってトルク忠実度およびコラム強さが大きくなる。シャフトの遠位部分704のトルク忠実度特性を増大させるために、その部分のブレード706は、反対方向に巻き付けられた2つまたはそれ以上のブレードもしくはワイヤより線を含む。一実施形態では、ワイヤブレードは、14ピック〜16ピックのピッチを有する。しかしながら、より線の数およびそれらのスペーシングは、シャフトのトルク忠実度を使用目的に合わせるために、必要に応じて調節することができる。
【0125】
シャフト700のさらに遠位の端部702は、単一のワイヤスパイラル706を有し、ワイヤスパイラル706は、シャフト700の中央ルーメン内のプラスチックスパイラルラップと同じ方向に巻き付けられているのが好ましい。この場合もまた、シャフト702の近位端のトルク忠実度は、ワイヤ706のピッチおよび/または方向ならびにワイヤ706の可撓性を調節することによって変えることができる。
【0126】
理解されるように、シングルワイヤスパイラル706は、ある程度のトルク忠実度を提供するが、例えばループの解消のための操作を容易にするために、シャフトの遠位部分の二重ワイヤブレードと同じトルク忠実度を有する。さらに低いトルク忠実度を希望するなら、シングルワイヤスパイラル706をシャフトの遠位部分から省いてもよい。
【0127】
上に論じたように、イメージング内視鏡の遠位先端の操向を容易にするために、内視鏡は、関節ジョイントを含み、該関節ジョイントは、制御ケーブルによって、遠位先端がそれ自体を支えとして、すなわち180度の円弧上を逆戻りすることを可能にし、かつ遠位先端をその円周に沿った任意の所望の方向に曲がるように方向づけることができる。すなわち、操作者は、曲がりまたは関節運動の量と曲がりの方向との両方を選択することができる。図12Aおよび図12Bに示すように、本発明の一実施形態による関節ジョイント750は、中央ルーメン752および関節ジョイントの壁内に配置されたいくつかの制御ケーブルルーメン754を有する、可塑的に変形可能な材料の円筒から形成されている。希望するなら、制御ケーブルルーメンが円筒の中央ルーメン内に延びる突起を形成するように、円筒壁内の制御ケーブルルーメン間の間隔をよりまばらにしてもよい。制御ケーブルルーメン754は、3つの制御ケーブルが用いられる場合は120°離間して、または4つの制御ケーブが用いられる場合は90°離間して配向されるのが好ましい。
【0128】
関節ジョイントの曲がりを促進するために、円筒は、その長さに沿って形成されたいくつかの一体型ヒンジ760を含む。図13に見ることができるように、各一体型ヒンジ760は、円筒の両側に一対の対向するV字形の切り込み770を備え、ヒンジの湾曲可能な部分を形成する可撓性ウエブ772によって分離されている。4制御ケーブル用に設計された実施形態では、ジョイントの長さに沿った一体型ヒンジの各対は、隣接するヒンジに対して90度に配向されている。
【0129】
制御ケーブルの張力印加時点では、後退用制御ケーブルに沿って並ぶウエブ772を有する一体型ヒンジは曲がらない。制御ケーブルに沿って並んでいないウエブを有する一体型ヒンジが閉じられ、それによって、関節ジョイントが張力下の制御ケーブルの方向に曲がることになる。
【0130】
図13に示す関節ジョイント750の別の利点は、全ての制御ケーブルを同時に引くことによって内視鏡の遠位端を後退させることができる点である。これにより医師は、内視鏡の残りの長さを動かす必要なくして、体内の遠位先端を操作し、例えば、病巣を方形に切除することが可能となる。これは、生検材料の取得またはポリープのスネアリングのような外科的手技を実施する際に有益となることができる。
【0131】
関節ジョイントは、中央ルーメンおよび制御ケーブルルーメンを所定の位置に置いて円筒を押し出し、ナイフ、レーザ、フライスツール、ウォータージェット、または他の材料除去機構を用いて円筒チューブを切断し、一体型ヒンジを形成することによって形成することができる。あるいは、関節ジョイントは、一体型ヒンジジョイントを所定の位置に置いて成形することもできる。理解されるように、ヒンジを形成するV字形の切り込み角度は、均一でもよく、関節ジョイントの長さに沿って変化してもよい。同様に、隣接する一体型ヒンジ間の距離は、均一であってもよく、関節ジョイントの曲がり特性およびトルク忠実度特性を特定の用途に合わせるために、変化させてもよい。本発明の一実施形態では、各一体型ヒンジ760は、30°の閉鎖角を有し、これにより180°の動きを提供するのに6つのヒンジが必要となる。上に論じたように、関節ジョイント750の遠位端には、内視鏡の遠位先端部分を受け入れるために、逆向きに穴を開けることができる。同様に、関節ジョイント750の近位端は、内視鏡のシャフト部分の遠位端を受け入れるようになっている。図13に示す実施形態では、制御ケーブルルーメン754は、一体型ヒンジの最大間隔および各ヒンジのウエブ部分と整合されている。しかしながら、ヒンジ内での制御ケーブルの潜在的結合を減少させるために、制御ケーブルルーメン754をヒンジに対して偏位させるのが望ましいかもしれない。上に述べたように、関節ジョイントは、曲がるがつぶれない、医療用途に受け入れられる生体適合性材料で製造されなければならない。適した材料には、ポリウレタン、ポリエチレン、ポリプロピレン、または他の生体適合性高分子が含まれる。
【0132】
制御キャビネット内の作動機構によって制御ケーブルが引かれる際の制御ケーブルによる摩耗を防止するために、異なるデュロメータの領域を有する材料から関節ジョイントを製造するのが望ましいかもしれない。図14および図15に示すように、押し出しチューブ780から形成された円筒は、その円周沿いに高デュロメータ材料782と低デュロメータ材料784とが交互する帯域を有する。制御ケーブルを通すために用いられるルーメン786は、制御ケーブルに張力が印加・開放され、またルーメンに沿って移動する際の摩耗に抵抗するために、高デュロメータ材料782に形成されている。さらに、高デュロメータ材料は、制御ケーブルと周囲のルーメンとの間の摩擦をも軽減する。図15に、制御ケーブルが一体型ヒンジのウエブ部分772を貫通しないように、制御ケーブルルーメンが一体型ヒンジのウエブ部分の向きに対して偏位されている関節ジョイントを示す。
【0133】
図16Aおよび図16Bに、関節ジョイントの代替的実施形態を示す。この実施形態では、ジョイントは、数珠つなぎにされた一連のボールソケットコネクタを備える。図16Aに示すように、各コネクタが、ソケット部分800およびボール部分802を含む。ボール部分802は、隣接するコネクタのソケット部分800にはまり込んでいる。ルーメンがボール部分802を通って軸方向に延び、光源と、イメージセンサと、洗浄流体および吹送ガスを搬送するチューブとに接続するワイヤの通過を可能にしている。ボール部分およびソケット部分は、生体適合性高分子で成形されるのが好ましい。
【0134】
各ソケット部分は、図17Aに示すボール部分810のような完全に形成されたボール部分と共に形成することができる。あるいは、図17Bに示すように、ボール部分814のような部分的ボール部分をソケット部分816上に形成してもよい。制御ケーブルが移動する空間を提供するために、ボール部分は、ボール部分の中央および側部を通り抜ける、図17A、図17Bに示すようなスロット818を含むことができる。あるいは、図17Cおよび図17Dに示すように、いくつかのより小さいスロット820をボール部分の円周沿いに配置してもよい。スロットは、制御ケーブルが張力下で短くなることを可能にする。図17Dに示すようなボール部分とソケット部分の界接面にあるいくつかの穴822は、ソケット部分からボール部分内への制御ケーブルの通過を可能にする。
【0135】
関節ジョイントの別の実施形態では、関節ジョイントは、互いに隣接して配置され、互いに対して動く一連の積み重なった円盤で作られている。図18Aに示すように、円盤850は、一対の後方を向いたロッカー面またはカム854と一対の前方を向いたロッカー面またはカム856とを有する環状リング852を備える。カム854は、環状リング852の背面上に180°離間して配置され、前方を向いたカム856は、環状リング852の前方面上に180度離間して配置されている。図示の実施形態では、前方カム856は、後方カム854に対して90°に配向されている。環状リングの反対側の対向する各カムは、隣接する円盤のカムが平坦な部分のロックと係合することができるように、平坦なランド部分となっている。穴860は、制御ケーブルの通過用に、環状リングを通り、次にカムを通って開けられている。制御ケーブルがピンと張る時に、円盤がカム854、856の表面で揺動し、それによって関節ジョイントを所望の方向に曲げる。
【0136】
図18Bに、互いと係合して関節ジョイントを形成する一連の積み重なった円盤850a、850b、850cからなっている関節ジョイントを示す。いくつかの制御ケーブル870a、870b、870c、870dが円盤を貫通し、カム表面上で円盤を引っ張ってジョイントを所望の方向に動かすために用いられる。
【0137】
図19Aおよび図19Bに、図18Aおよび図18Bに示す関節ジョイントの代替的実施形態を示す。この実施形態では、関節ジョイントは、一連の積み重なった円盤880を備え、各円盤は、裏面に一対の凹形ポケット882、および前面に一対の対応する形状の凸形カム884を有する環状リングを備える。凹形ポケット882は、円盤のカムが隣接する円盤のポケットの内部にはまり込むように隣接する円盤を積み重ねることができるように、凸形カム884に対して90°に配向されている。対応する形状のカム884およびポケット882は、円盤が互いに対して回転するのを防止するのに役立つ。図19Bに示すように、いくつかの制御ケーブル890a、980b、890c、980dの通過用に穴またはルーメン886が環状リング880を通って形成されている。穴またはルーメン886は、カムおよびポケットの中央に配置することができる。しかしながら、希望するなら、制御ケーブル用の穴は、カムおよびポケットの位置から偏位させてもよい。円盤880は、隣接するカムとポケットとの間の摩擦を低減するポリウレタン、ポリプロピレン、またはポリエチレンのような、比較的スベスベした表面を有する生体適合性高分子から成形されるのが好ましい。
【0138】
図20Aおよび図20Bに、関節ジョイントのさらに別の代替的実施形態を示す。この実施形態では、関節ジョイントは、各々が環状リングを備える、円盤の積み重ねで形成されている。環状リングは、円盤が隣接する円盤に対して動かされる際に制御ケーブルがカム内でより自由に動くことを可能にする弓状スロット892が中に成形された、前方に延びるカムを有する。図20Bにもっともよく示すように、スロット892は、カムの外縁にある最大幅の点894から、スロットが環状リング880の反対側の縁まで延びる円筒状の穴898を形成する狭い点896まで、先細になっている。制御ワイヤ896は、隣接する円盤が回転する際に、弓状スロット892の広くなった部分内で自由に曲がることができる。
【0139】
図18〜図20に示す関節ジョイントの円盤は全体として形状が円形であるが、他の形状も用いることができることを理解されたい。図21Aおよび21Bに、全体として正方形の外形を有するいくつかの部分から形成された関節ジョイントを示す。図21Aに示すように、部分900は、この正方形部分の裏面の両側に外方に延びる一対のピン902を有する正方形バンドである。前面の両側に、裏面のピンに対して90°に配向され、隣接する部分の丸いピン902を受け入れるような大きさを有する、一対の対向する丸いくぼみ904がある。図示の実施形態では、制御ケーブルは、正方形部分900の各コーナに見出されるコーナブロック906内の穴またはルーメンに通される。図21Bに、共に固定された2つの隣接する正方形部分900a、900bを示す。図から見て取れるように、部分900bは、そのピンを中心に、隣接する部分900aに対して上または下に回転することができる。円形および正方形の関節部分を示してきたが、三角形または五角形等のような他のセグメント形状も関節ジョイントを形成するのに用いることができることを理解されたい。
【0140】
上に説明した関節ジョイントの実施形態では、ジョイントを構成する各円盤または各セグメントは、同じ材料で製造されるのが好ましい。しかしながら、ジョイントの長さに沿ってジョイントの可撓性およびトルク忠実度を変えるために、セグメントを製造する材料および/または物理的寸法もしくは隣接するセグメント間の間隔を変えることは可能である。
【0141】
一部の環境では、イメージング内視鏡の遠位先端の完全な180°の回転半径は必要ではないかもしれない。それらの環境では、相互接続された円盤またはセグメントで作られた関節ジョイントを、編み組みステントのような可撓性部材に置き換えることができる。図22に、関節ジョイントとして編み組みステント930を有するイメージング内視鏡925を示す。編み組みステント930は、遠位先端932と、可撓性シャフト936の遠位端とステント930の近位端を結合するコネクタ934との間に延びる。カバー938が、可撓性シャフト936と編み組みステント930の上に延びる。制御ケーブル(図示せず)は、可撓性シャフト936のルーメンを通って延び、遠位先端932が所望の方向に向くようにステント930を引っ張るのに用いられる。さらに、全ての制御ケーブルを同時に引っ張ることによって、内視鏡の遠位先端を後退させることが可能である。
【0142】
図23に、制御ケーブルの遠位端を編み組みステント930に固定する1つの方法を示す。制御ケーブル940a、940b、940c、940dは、ステント930のワイヤに通して編み込み、ステントを構成するワイヤの周りにループを形成することによって終了させることができる。あるいは、ケーブル940の端部を、ステントのワイヤにはんだ付けするかまたは接着固定してもよい。
【0143】
図23Aに、本発明の内視鏡と共に用いるための関節ジョイント1000のさらに別の代替的実施形態を示す。関節ジョイント1000は、一連の積み重なったリング1002a、1002b、1002c等で作られている。各リングは、内側ルーメンのサイズを最大化するために、深絞り鋼、またはリングが肉厚の薄い輪郭を有しながら剛性であることを可能にする他の金属で形成されるのが好ましい。リングの外周沿いに等間隔で配置されているのは、隣接するリングを結合するために用いられる短いバネ部分1006を受け入れる、内方に延びる凹形のくぼみ1004である。リング1002の両側にある2つのバネは、隣接するリングを結合するために用いられる。例えば、3つのリング1002a、1002b、および1002cが整列している場合、リング1002aとリング1002bは、リング上の0°および180°に位置するバネセグメントで結合され、一方で、リング1002Bは、リング沿いの90°および270°に位置する直角に位置合わせされたバネセグメントによってリング1002Cと結合される。一対のバネが、関節ジョイントの長手方向軸線から遠ざかる方向に曲がることができるが関節ジョイントの長手方向軸線の方向に関節ジョイントを圧縮する能力が限定されている可撓性ジョイントを形成するように、隣接するリング間にすき間が形成されている。各バネ1006は、接着剤、圧着、溶接、または他の固定機構を用いて、リング1002の凹形のくぼみ1004内に固定されている。
【0144】
図23Aに示す関節ジョイント1000は、制御ケーブルがバネセグメント1006の中央および関節ジョイントの外周上を通過し、それにより、各リング1002の中央開口部を通してチューブおよび他のケーブルを進めるために利用可能な空間の量が最大化され、かつ関節ジョイントを曲げるのに必要なトルクが最小化されるという利点を有する。
【0145】
図23Bに、図23Aに示す関節ジョイントの代替的実施形態を示す。この実施形態では、関節ジョイントは、各リングの内周上に配置されたバネと結合された、いくつかの深絞りまたは他の方法で形成された金属リング1008a、1008b、1008cを備える。各リングは、リングの両側に配置された一対のバネセグメントによって隣接するリングに接続されている。バネ1010は、接着剤で、または溶接によって、もしくは他の固定手段を用いてリング1008の内周に固定されている。図23Bに示す実施形態では、制御ケーブルは、バネセグメントに通され、関節ジョイントの長手方向軸線により近接して配置される。長手方向軸線により近接していることで、関節ジョイントを所望の方向に曲げるのに、制御ケーブル上により力を必要とする可能性がある。
【0146】
図23Cに、一連の積み重なった金属リング1012a、1012b、1012c等を備える、関節ジョイントの別の代替的実施形態を示す。各リング1012は、バネ1015で結合されており、バネ1015は、交互するきつく巻かれた部分1014とよりゆるく巻かれた部分1016とを有し、それによりバネの長さに沿ったバネの力を変化させている。ゆるく巻かれた部分1016は、関節ジョイントがその領域にたわみ込むことを可能にし、一方で、より密に巻かれた部分1014は、隣接するリングに対するヒンジ機構となる。リング1012の各々は、バネが通された型打ちした一対の内方または外方に延びるタブ1018をさらに含み、それによりバネを圧着、溶接、または他の方法で固定することのできる表面を形成している。図23Cに示す実施形態では、各リングは、完全に円筒状ではなく、隣接するリングが結合されている点から遠ざかる方向に延びる傾斜した前面および裏面1020を含む。リングの傾斜した面は、隣接するリング間の動きの増大を可能にし、隣接するリングが互いを通り越して摺動するのを防止する止め具ともなる。隣接するリング上の傾斜した面1020はそれにより、関節ジョイントがたわみ込むことのできるV字形の溝を形成している。
【0147】
図23Dに、図23Bに示す関節ジョイントに類似した、関節ジョイントの別の実施形態を示す。しかしながら、この実施形態では、関節ジョイントは、向かい合って配列された凹形の逃げ部1024と凸形の逃げ部を有するいくつかのリング1022a、1022b、1022cからなっており、該向かい合って配列された凹形の逃げ部1024と凸形の逃げ部は、交互するきつく巻かれたセグメントとゆるく巻かれたセグメントが1つのリングの外側および隣接するリングの内側を交互に通ることを可能にしている。向かい合って配列された凸形の逃げ部と凹形の逃げ部は、接着剤、溶接、または他の結合機構でバネをリングに固定することを可能にする。
【0148】
図23Eおよび23Fに、本発明による関節ジョイントのさらに別の実施形態を示す。この実施形態では、ジョイントは、交互に直角に配列されたバネセグメント1024の対によって結合された一連の積み重なったリンク1022a、1022b、1022c等で形成されている。リンクは、平坦な金属片を圧延および溶接することによって形成することができる。バネセグメント1024は、溶接、ろう付け、接着固定するか、または他の方法で各リングセグメントの内周に結合されている。リングおよびバネセグメントは、ステンレススチールまたは他の生体適合性材料で作製されるのが好ましい。バネは、レーザまたは他の切削工具で切断する前に、リングに固定することができる。あるいは、バネをセグメントに切断し、その後組立治具でリングに固定してもよい。ジョイントの長さに沿ってさまざまな剛性のバネを用い、ジョイントの弧の曲がりを制御することができる。
【0149】
図23Fに示すように、側面から見たときに、各リングは、平坦な区域1026を有する前面と、平坦な面1026から後方に傾斜した一対の傾斜区域1028とを有する。リングの裏面は類似した形状を有するが、傾斜面は、前側の傾斜面に対して90°に配向されている。各傾斜面は、ジョイントの長手方向軸線に垂直な線から14°の角度を有し、それにより隣接するリングが約28°曲がることを可能にしている。
【0150】
図23Gに、本発明による関節ジョイントのさらに別の代替的実施形態を示す。この実施形態では、関節ジョイント1030は、深絞りまたは型打ちした鋼もしくは別の金属によって形成された一連の金属リンク1032a、1032b、1032c等を備える。各リンクは、円形または八角形のように多辺形とすることができる略リング様構造1034を有する。さらに、各リンク1032は、外方に延びるタブ1038を端部に有する後方に延びる一対の脚1036を有する。脚1036の各々は、リンク1032の両側に配置されている。脚1036に対して90度の箇所に、リンク1032は、隣接するセグメントからのタブ1038を受け入れる、リンクの側壁に開けられた対応する穴1040を含む。さらに、セグメント1032は、制御ケーブルを保持するためのアイレットを備える、一体に形成されたワイヤガイド1042を含む。関節ジョイント内の隣接するリンクは、第1のリンク1032から隣接するリンクの対応する穴1040にタブ1038を挿入することによって共に固定されている。関節ジョイントを曲げるのに必要な力を増大させることなくねじれ強さを向上させるために、ブレードをリンクの連なりの上に配置することができる。ブレードは、関節ジョイントの上を通るカバーに組み込むことができる。
【0151】
図23Hに図23Eに示すものに似たリンクの代替的実施形態を示す。しかしながら、この実施形態では、リンク1050は、隣接するリンクをのタブを受け入れるために、丸い穴1040ではなく、蝶形の穴1052を有する。蝶形の穴1052は、対応する平坦なタブが隣接するリンクから回転することができる範囲を制限する働きをする。蝶形の穴1052を形成する弧の曲率を調整することにより、隣接するリンク間の回転の度合いを制御することができる。リンク1050は、深絞り金属および/または型打ち工程によって形成されるのが好ましい。
【0152】
図23Iに、一連の相互接続された金属リンク1060で形成された、本発明の関節ジョイントのさらに別の実施形態を示す。各リンク1060は、内方に延びるタブを各端部に有する一対の後方に延びる対向する脚1062を有する。タブは、隣接するリンクの対応する穴またはスロット内に延びる。しかしながら、この実施形態では、脚1062の各々上のタブは、さらに関節ジョイントの中央ルーメン内に延びる。各タブは、バネ1066が通過することができる穴1064をも含む。穴1064はそれにより、バネ1066によってタブ1062が隣接するリンクから離脱するのが防止されるため、隣接するリンク内のタブをロックする。
【0153】
図23Jに、一連の相互接続されたリンク1080a、1080b、1080c等からなる本発明の関節ジョイントのさらに別の実施形態を示す。各リンクは、その円周沿いに、リンクの一部分に沿って周方向に延びるスロットを形成し、続いてリンクの一部分を内方に曲げることによって形成された交互性のフープまたはアイレット1082を有する。スロットは、一対の内方に延びるアイレットがリンク前面の両側に形成され、前面のアイレットに対して90°に配向された一対のアイレットがリンクの裏面に形成されるように配列されている。アイレットがこのようにリンク1080a、1080b、1080c等内に形成された状態で、バネを、各アイレットの箇所でリンクに固定することができる。
【0154】
図23Kに、配列において図23Jに示す関節ジョイントに類似した、本発明の関節ジョイントの別の実施形態を示す。この実施形態では、関節ジョイントは、一連の金属リンク1100a、1100b、1100c等を備える。各リンクは、一対の向かい合わせに形成された、内方に延びるタブ1104を含み、タブ1104は円形に曲げられており、それにエラストマーチューブまたはバネ1106を通すことができる。チューブまたはバネ1106は、圧着、溶接によってリンク内に固定されるか、または他の方法でチューブ、バネ1106をタブ1104に固定している。
【0155】
図23Lに、本発明による関節ジョイントのさらに別の代替的実施形態を示す。この実施形態では、関節ジョイントは、一連の型打ちまたは深絞りした金属リンク1120a、1120b、1120c等を備える。各リンクは、その前面に一対の前方に延びるタブ1022を、リンクの裏面に一対の後方に延びるタブ1024を含む。前面および裏面のタブ1022ならびに1024は、互いに対して90度に配向されている。タブ1022、1024の各々は、整列したタブ同士を固定するために、固定機構を通すことのできる穴を含む。図23Mに示すように、固定機構は、一連の線バネ1040a、1040b等によって提供される。各バネは、関節ジョイントの整列した一対のタブの穴を通じて挿入された端部を有するワイヤを備える。次いでバネ1040は、関節ジョイントの内部ルーメンに沿って進み、リンクの別の対をつなぐ別の一組の整列したタブの穴を通って終了する第2の端部を有する。各バネは、制御ワイヤを中に保持するためのアイレットとして機能する、バネに巻き込まれたループをさらに含むことができる。
【0156】
図23N〜図23Pに、本発明の使い捨て内視鏡に用いるための関節ジョイント1200のさらに別の実施形態を示す。この実施形態では、関節ジョイントは、図23Nに示す種類の一連の積み重なった円盤を備える。各円盤1202は、前面1206および裏面1208を有する。円盤の周縁沿いに等間隔に配置されているのは、制御ケーブルが通過することのできる穴1210である。前面1206は、一対の向かい合って配列された平坦な部分1207を含み、平坦な部分1207は、円盤を二等分し、隣接する円盤の対応する平坦な表面に係合することのできる一対の表面を画定している。円盤の前面は、平坦な表面1207から遠ざかる方向に近位に角度を付けた2つの傾斜した部分をさらに含む。本発明の一実施形態では、この傾斜した部分は、円盤の長手方向軸線に垂直な線から約14°の角度が付けられている。同様に、裏面1208は、円盤の前面の平坦な表面1207に対して90°回転させた一対の平坦な表面から遠ざかる方向に遠位に角度を付けた、2つの傾斜した部分を含む。図23Pに示すように、関節ジョイント1200は、各円盤が平坦な表面で隣接する円盤と位置が合い、それによって傾斜した部分が関節ジョイントを貫通する制御ケーブルの張力下で閉鎖することのできるヒンジを形成するように、いくつかの円盤1202a、1202b、1202c等を積み重ねることによって作り出される。図23Pに示す実施形態では、七対の積み重なったセグメント1202があり、各対が、28°の曲がりを生成することができる。従って、図23Pに示す関節ジョイント1200は、上方向、下方向、左方向、または右方向に全体で196°曲がることができる。関節ジョイント1200の近位端に、関節ジョイントをシャフトの遠位端に結合する近位コネクタ1220がある。外側シース(図示せず)が積み重なった円盤1202の連なりを覆い、各円盤がずれるのを防止している。
【0157】
図23Qに、本発明の関節ジョイントに用いられる別の円盤を示す。各円盤1240は、図23Nおよび図23Mに示す円盤1202に類似している。この実施形態では、各セグメントは、一対の対向する平坦な表面1246から遠ざかる方向に傾斜する一対の傾斜面1242、1244を有する前面を有する。同様に、各セグメントの裏面上に、傾斜面が、前面上の傾斜面に対して直角に配列されている。隣接する円盤1240a、1240b同士は、一対の向かい合って配列されたバネセグメントによって固定され、該バネセグメントの端部は円盤の前面および裏面の平坦な表面部分内に形成された逃げ部または皿穴の中に配置されている。バネセグメントは、制御ケーブルを通すことのできるガイドとしても機能する。さらに、バネは、隣接するセグメントが互いに対して回転するか、そうでなければずれるのを防止する。
【0158】
図23Rに、本発明による関節ジョイントを形成するために用いることができるセグメントの別の代替的実施形態を示す。この実施形態では、関節ジョイントは、中央の円筒状軸1302と外側の円筒状縁1304とを有する一連のセグメント1300からなる。軸1302は、いくつかの外方に延びるスポーク1306によって外側の円筒1304に結合されている。各スポークは、軸近傍の中心点から外輪1304の中線に向かって下方に傾斜している。傾斜したスポーク1306は、スポークが互いに衝突することなく、隣接するセグメントが軸点で接触し、互いに対して回転することを可能にする。各スポークは、外縁近くにルーメン1312をさらに含み、それを通って制御ケーブルが進むことができる。セグメント1300の外縁1304は、交互に間隔を置いて配置された歯1308、1310を有し、該歯1308、1310は、1つのセグメントの歯が隣接するセグメントの逃げ部と位置が合うように周方向に配列されている。この設計により、関節運動時に内部のチューブがからまないことが保証される。
【0159】
図23Sに、互いに対して曲がって関節ジョイントを形成している一連のセグメント1300a、1300b、1300c等を示す。個々のセグメント1300の各々は、熱可塑性材料または金属で成形されるのが好ましい。
【0160】
図23Tに、本発明による関節ジョイントの別の代替的実施形態を示す。この実施形態では、関節ジョイントは、一連のセグメント1330a、1330b、1330c等で形成されている。各セグメントは、中央ピン1332、および、各セグメントの一端に、半径方向に延びる脚1334を備える。各脚1334の外縁に、制御ケーブルを通過させることのできる穴がある。中央ピンの端部は、脊柱のようにセグメントに接触して嵌合し、それにより各セグメント1332が隣接するセグメントに接触して揺動することを可能にしている。いくつかの実施形態では、セグメントをメッシュチューブで覆い、個々のセグメントの整合性を保持するのが望ましいかもしれない。
【0161】
図23Uに、本発明による隣接するリンクに結合されて関節ジョイントを形成するリンクの別の実施形態を示す。この実施形態では、リンクは、一対の向かい合って配列され、後方に延びるリング1352と、後方に延びるリング1352に対して90°に配向された一対の前方に延びるリング1354とを有する、金属の射出成形リングを備える。従って、隣接するリングは、1つのリンクの前方に延びるリングを隣接するリンクの後方に延びるリングに接触させて配置することによって整列される。各リング1352または1354は中に穴を含み、それにリベットを通してリング同士を固定することができる。リング1350の内周は、リンク内での制御ケーブルの動きを抑制するための、一対の一体型制御ケーブルガイド1356を含む。
【0162】
図23Vに、図23Tに示すリンク1350に類似したリンク1370の代替的実施形態を示す。この実施形態では、各リンクは、穴を中に有する一対の後方に延びるタブ1372と、一体に形成されたピン(図示せず)を内側表面上に有する一対の前方に延びるタブ1374とを含む。結合された時点で、内方に延びるピンを有するタブ1374が隣接するリンクの後方に延びるタブ1372内の穴にはまり込み、それにより隣接するリンクを別個のリベットで固定する必要性が排除される。リンク1370は、リンク1370内での制御ケーブルの動きを抑制するための、一対の向かい合って整列した制御ケーブルガイド1376をも含む。
【0163】
図23Wに、本発明による他のリンクと共に組み立てられて関節ジョイントを形成するリンクの別の代替的実施形態を示す。この実施形態では、リンク1390は、射出成形されたリングを備え、該リングは、その裏面上に一対の逆方向に向かい合った弓形のくぼみ1392を有し、リングの前面上に対応する形状の前方に延びる弓形のタブ1394を有する。前面上のタブ1394は、裏面上の弓形のくぼみ1392に対して直角に配列されている。弓形のタブ1394の各々の内側表面と位置合わせされているのは、リンク1390内での制御ケーブルの動きを抑制する、一体に形成された制御ケーブルルーメン1396である。
【0164】
リンク1390は熱可塑性材料で成形されているので、弓形のタブ1394は、隣接するリンクの弓形のくぼみ1392に圧入することができ、それにより、隣接するリンクが互いに対して前後に揺動することができるようにしている。
【0165】
いくつかの実施形態では、制御ケーブルからの張力の解放時に内視鏡がまっすぐになろうとするように、関節ジョイントは、復元力を働かせるよに設計されている。別の場合では、遠位先端の位置を特定の方向に維持するのが望ましいかもしれない。その場合、図24に示すような構成を用いることができる。ここでは、イメージング内視鏡のシャフトは、2つまたはそれ以上のプラスチックスパイラルラップ1452、1454、および1456をかぶせた内側スリーブ1450を含む。ラップ1452は、時計回り方向に巻かれ、ラップ1454は、ラップ1452の上に反時計回り方向に巻かれ、ラップ1456は、第1のラップ1452と同じ方向に巻かれている。交互に巻かれたラップの層間に摩擦が生成されるように、ラップは、比較的粗いプラスチック材料で形成されている。プラスチックラップに適した材料には、編み組みのポリエステルまたはポリウレタンのリボンが含まれる。いずれかの制御ケーブルによる内視鏡の張りと同時に、プラスチックスパイラルラップが互いに対して動くことになり、重なり合ったラップ間の摩擦が、内視鏡の向きを所望の方向に維持しようとする。内視鏡は、それが制御ケーブルによって異なる方向に引かれるまで、所望の方向に留まることになる。交互に巻かれたパイラルラップ1452、1454、1456を覆っているのは、ブレード1458である。ブレードは、互い違いの方向に巻かれた1つまたはそれ以上のプラスチック、ガラス繊維またはワイヤの細線で形成されている。外側スリーブ1460がブレード1458を覆ってシャフトを完成している。
【0166】
図25に、本発明による内視鏡に用いるためのシャフト構成の別の代替的実施形態を示す。このシャフトは、シース1470の円周沿いに交互する、高デュロメータ材料1472と低デュロメータ材料1474の帯を有するカバーシース1470を含む。高デュロメータ材料および低デュロメータ材料は、シャフトの長さに沿って延びる長手方向のストリップを形成する。シャフト1470の内部に、シャフト1470が患者の解剖学的組織内で曲げられる際にシャフト1470がつぶれるのを防止する、プラスチックスパイラルラップ1475がある。高デュロメータ材料は、シャフトのトルク忠実度特定を増大させる。低デュロメータ材料と比較した高デュロメータ材料ストリップの幅は、所望のトルク忠実度特性に応じて調節することができる。
【0167】
イメージング内視鏡による検査中、医師は、イメージング内視鏡を所望の方向に誘導するために、内視鏡をひねる必要があるかもしれない。内視鏡の外側表面には潤滑剤が好ましく塗布され、かつ内視鏡の外側表面が丸いために、内視鏡を回転させるために医師がシャフト上に適切なしっかりした足掛かりを維持するのは困難となる可能性がある。従って、本発明のイメージング内視鏡は、シャフトを回転させるかまたは長手方向に動かすために医師がシャフトをつかむのを支援する把持機構を含むことができる。シャフト把持装置の一実施形態を図26に示す。ここでは、グリッパ1500は、イメージング内視鏡20の長手方向軸に揃えられた一対の脚1502、1504を有するU字形部材を備える。脚1502、1504の遠位端に、2つの90°の曲がり1506、1508がある。グリッパ1500は、グリッパの湾曲した、曲がった部分に配置された穴1505を含み、該穴1505は、90°部分1506、1508の各々の穴のみならず、脚をも結合している。イメージング内視鏡は、これらの穴を通過し、これによりグリッパ1500が内視鏡のシャフト部分の長さに沿って摺動可能となる。グリッパを作るために用いられる材料のバネ性により、脚1502、1504は、内視鏡のシャフトから遠ざかる方向に付勢される。曲がった部分1506、1508にある対向する穴の摩擦のみが、グリッパ1500がシャフトの長さに沿って自由に摺動するのを防止する。脚1502、1504の内側表面上に、内視鏡のシャフト部分の外周に一致する形状の内側表面を有する一対のタッチパッド1510、1512がある。医師が脚1502、1504を半径方向内向きに押し出す際に、タッチパッド1510、1512がシャフトに係合し、これにより医師は、内視鏡を押すまたは引く、あるいは内視鏡を回転させることができる。脚1502、1504の解放時に、タッチパッド1510、1512はシャフトの表面から放れ、希望するなら、グリッパ1500をシャフトの長さに沿って別の位置に移動させることができる。
【0168】
図27に、同じ部品は同じ参照番号で示す図26のそれに類似するグリッパを示す。この実施形態では、グリッパは、脚1502、1504の外側表面上に配置された2つの半球形円盤1520、1522を含む。希望するなら、半球形の表面1520、1522は、シャフトをひねるのがより容易となるように、医師の手中にフィットし、グリッパからシャフトまでの半径方向距離を増大させるように設計される。
【0169】
図28に、シャフトグリッパのさらに別の代替的実施形態を示す。この例では、グリッパ1550は、イメージング内視鏡の長手方向軸に垂直に配向された一対の脚1552、1554を有するU字形の部材を備える。脚1552、1554は、内視鏡のシャフト部分の外径を受け入れるような形状を有するくぼんだ部分1556、1558を含む。脚を近づけて脚1554、1556を内視鏡のシャフトにしっかりと係合させることができるように、蝶ネジ1560が、脚の遠位端に配置されている。蝶ネジ1560の解放時に、脚1554、1552は、シャフトから遠ざかる方向に付勢され、これによりグリッパ1500を動かすことができる。シャフトは、シャフトの長手方向軸に対して脚1552、1554を回転させることによってひねることができる。
【0170】
図29に、図28に示すグリッパ1550の代替的実施形態を示す。この例では、グリッパ1580は、一対の脚1582、1584を有するU字形の部材を含む。各脚の遠位端に、シャフトの外径を受け入れるような形状を有するくぼみ1586、1588がある。シャフトは、くぼみ1586、1588内に配置され、蝶ねじが、脚1582、1584の端部とグリッパ1580のU字形の湾曲部との間に配置されている。蝶ねじ1590を締め付けることにより、脚がイメージング内視鏡20のシャフトに接触して圧縮され、それにより、グリッパ1580を動かすことによって医師が内視鏡を回転させることが可能となる。
【0171】
本発明の一実施形態では、内視鏡は、使用前には内視鏡の遠位端を清浄に保つ働きをし、内視鏡が使用された後では患者と接触した内視鏡の端部を覆う、可動スリーブを有する。
【0172】
図30Aおよび図30Bに、遠位先端にスポンジ1504を有する内視鏡1594の一実施形態を示す。このスポンジは、内視鏡の上にフィットし、かつはがしてスポンジに水または他の液体を含ませることができるピールオフラッパを有する。水は親水性被覆剤を活性化し、それにより内視鏡の遠位端の潤滑性が向上する。さらに、圧縮されたときのグリッパとしてのスポンジの機能により、医師が内視鏡を引きかつ/またはひねることが可能になる。
【0173】
引込み式スリーブ1598が内視鏡の遠位端の上に配置されており、後退させてプローブの潤滑された遠位先端を露出することができる。一実施形態では、スリーブ1598は、その遠位端をスポンジ1594に、その近位端をブレイクアウトボックスに固定されている。スポンジを近位方向に移動させることによってスリーブが後退され、これにより内視鏡を使用する準備が整う。手技後、スポンジ1594が遠位方向に移動され、スリーブが内視鏡の遠位端の上に延びる。スリーブを延ばした状態では、プローブ上のいかなる汚染物質も、患者、手技を実施する医師またはスタッフに接触する可能性は少ない。
【0174】
いくつかの例では、イメージング内視鏡の遠位端において放散される熱の量を制限することが望ましいかもしれない。発光ダイオードが用いられる場合、それらは、照射用の光を発生させる工程において熱を発生させる。同様に、イメージセンサは、動作中にいくらかの熱を発生させる。内視鏡遠位端の発熱量を制限しかつ/またはこれらの構成要素の寿命を向上させるためには、熱を放散することが必要である。そのようにするための1つの手法は、イメージング内視鏡の遠位先端に受動ヒートシンクを構築することである。図31に示すように、遠位先端1600は、キャップ1602と、生体適合性金属のような放熱材料で作製された放熱部分1604とを含む。放熱部分1604は、ほぼ放熱部分1604の直径に沿って延びる比較的平坦な基部1608を有する半円形の開口部1606を含む。平坦な基部1608は、LEDおよびイメージセンサのような電気部品を熱伝導性接着剤または他の熱伝導性材料で取り付けることができるパッドを形成する。熱を発生させる装置は、動作中に発生された熱を、放熱部分1604に転送することになる。遠位のカバー1602は、放熱部分1604の遠位端を覆い、イメージングカテーテルが患者の体内で動かされる際に身体を保護すると同時に、放熱部分1604が体内の組織に接触するのを防止する。内視鏡の遠位端に入る光を放熱部分1604の比較的平坦な基部1608に固定されたなんらかのイメージング電子回路に向けて曲げるためには、プリズム、レンズ、または他の光を曲げる装置が必要かもしれない。
【0175】
図32に、遠位先端がカバーを含まず、生体適合性金属のような放熱材料の単一片から成形されている、内視鏡の放熱遠位先端を示す。放熱部分1620はこの場合もまた、該部分の直径に沿って延び、熱を発生させる電子装置を上に取り付けることができる比較的平坦な表面1622を有する半円形の開口部を含む。半円形の開口部が放熱遠位先端1620の遠位端に形成された状態で、照射機構およびイメージセンサが平坦な表面1622に取り付けられる。照射機構およびイメージセンサまたはイメージセンサのレンズを洗浄するために、洗浄ポートは、水を半球形のカットアウトへ導くように配向されている。
【0176】
本発明のさらに別の実施形態では、内視鏡の遠位端のイメージング装置は、ルーメンを通じて内視鏡の端部に送られその後体外に放出される、空気または水によって冷却することができる。例えば、加圧下の空気は、イメージング電子回路近傍のオリフィスを通じて放出することができる。空気の膨張によってその温度が下がり、そこで空気がイメージング電子回路を冷却する。次いで、暖められた空気が、排出ルーメンを通じて内視鏡の近位端に押し進められる。あるいは、内視鏡は、遠位先端の熱交換器に水を送達する水送達ルーメンを含んでもよい。遠位先端内の電子部品によって暖められた水は、水返却ルーメン内に除去される。もう一つの選択肢として、量および温度が生理的に受け入れ可能であれば、空気または水を患者の管腔に直接放出することができる。
【0177】
図33に、図31に示す受動放熱遠位先端の代替的実施形態を示す。この例では、放熱遠位先端1640は、遠位先端の円周沿いに配置されたいくつかの帆立貝のようにカーブしたチャネル1642を有する。帆立貝のようにカーブしたチャネル1642は、放熱遠位先端の表面積を増大させ、それにより、先端が照射装置およびイメージング電子装置から熱を放散する能力がさらに増大する。
【0178】
本内視鏡システムは多くの用途を有するが、これは、結腸鏡検査を行うのに特に適している。一実施形態では、1/4インチのピッチを有する0.060内側スパイラルラップを有し、親水性被覆剤で被覆された10mm〜13mm直径の試作品が、従来の内視鏡の0.85と比較して0.15の摩擦係数を有することが分かった。さらに、本発明の内視鏡は、2インチのU字形湾曲部を押して通過させるのに0.5ポンドの力を要したが、従来の内視鏡は、そのような急な湾曲部を通過することはできなかった。従って、本発明は、結腸鏡検査を安価かつ軽量で行うことを可能にし、それにより、本発明の内視鏡の摩擦係数がより低くかつトラッカビリティがより優れているため、結腸鏡検査が患者にとってより快適なものとなる。
【0179】
結腸鏡検査を行うことに加え、本発明の内視鏡システムは、カニューレ、ガイドワイヤ、括約筋切開刀、結石回収バルーン、回収バスケット、拡張バルーン、ステント、細胞診ブラシ、結紮装置、電気止血装置、硬化療法針、スネアおよび生検鉗子を含む種々の外科手術用機器と共にも有用である。
【0180】
カニューレは、オッディ括約筋または乳頭にカニューレを挿入して胆管または膵管にアクセスするために、内視鏡システムと共に用いられる。ガイドワイヤは、内視鏡の作動チャネル沿いに下って送達し、外科手術用機器を関心のある領域に送達するためのレールとして用いることができる。括約筋切開刀は、ステントを配置する、または患者から結石を除去するために乳頭を切開するために用いられる。結石回収バルーンは、胆管から結石を引き出すためにガイドワイヤと共に用いられる。回収バスケットも、胆管または他の道から結石を除去するために用いられる。拡張バルーンは、胃腸管、尿路または肺管内の狭窄を広げるために用いられる。ステントは、GI管、尿路または肺管内の狭窄を広げるために用いられる。ステントは、金属またはプラスチック、自己拡張型または機械拡張型とすることができ、通常カテーテルの遠位端から送達される。細胞診ブラシは、細胞のサンプルを採取するために、ガイドワイヤの端部で用いられる。結紮装置は、食道内の静脈瘤を結紮するために用いられる。バンド結紮器は、弾性バンドを用いて静脈瘤を締め付ける。電気止血装置は、電流を用いてGI管内の出血組織を焼灼する。硬化療法針は、凝固液またはシール液を静脈瘤に注入するために用いられる。スネアは、GI管からポリープを取り除くために用いられ、生検鉗子は、組織のサンプルを採取するために用いられる。
【0181】
本発明の内視鏡システムを用いて行うことのできる特定の外科的手技の例には、膨張性薬剤の埋め込みによる逆流性食道炎(GERD)の治療、移植、フンドプリケーション、組織の瘢痕化、縫合、または下部食道括約筋(LES)の閉鎖を支援するための弁置換もしくは他の術式が含まれる。
【0182】
外科的手技の別の例は、患者が体重を減らすのを支援するための、移植片の配備または減量手術の実行、胃バイパスおよびひだ形成または組織ひだの生成による病的肥満の治療である。
【0183】
内視鏡的粘膜切除術(EMR)は、切除に先立って無茎性ポリープまたは扁平な病変に生理食塩水などを充填し、無茎性ポリープまたは扁平な病変を隆起させることによるそれらの除去を含む。本発明の内視鏡は、この手技を実施するのに役立つ針、スネアおよび生検鉗子を送達するために用いることができる。
【0184】
さらに、本発明のビデオ内視鏡システムは、GI管壁の一部を切除し、創傷をステープラまたはファスナで治癒させる全層切除(FTRD)を行うために用いることができる。最後に、本発明の内視鏡システムは、組織を殺すための硬化剤または体内組織の疾患を治療するための薬物送達剤の送達に用いることができる。
【0185】
本発明の好ましい実施形態を図に示し説明してきたが、本発明の範囲から逸脱することなく、さまざまな変更を行うことができることを理解されたい。例えば、開示した実施形態のいくつかはプルワイヤを用いて内視鏡の長さを圧縮するが、専用ワイヤのような別の機構を用いることもできることを理解されたい。あるいは、バネを用いて内視鏡を遠位方向に付勢し、ワイヤを用いてバネを圧縮し、それにより内視鏡の長さを短縮することができる。さらに、開示した実施形態は回転サーボモータを用いて制御ケーブルを駆動するが、リニアアクチュエータのような別のアクチュエータも用いることができる。同様に、好ましい実施形態に関連して論じた内視鏡は作動チャネルを含むが、このようなチャネルは省いてもよく、その結果現れたカテーテルは、スネア、RF焼灼用先端部等のような特殊用途ツールを所望の位置に送達するのに用いてもよいことを理解されたい。あるいは、カテーテルをイメージング用のみに用いることもできる。最後に、開示した構成要素は、ビデオ内視鏡に用いられているものとして説明されているが、多くの構成要素がそれ自体または他の医療機器において別の有用性を有することができることを理解されたい。従って、本発明の範囲は、以下の特許請求の範囲およびそれらの等価物から決定される。
【特許請求の範囲】
【請求項1】
明細書に記載の発明。
【請求項1】
明細書に記載の発明。
【図1−1】


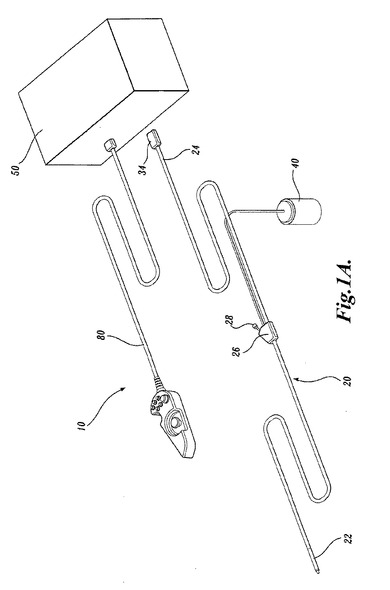
【図1−2】
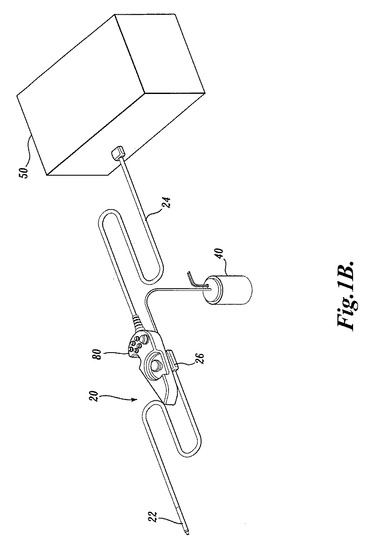
【図1−3】
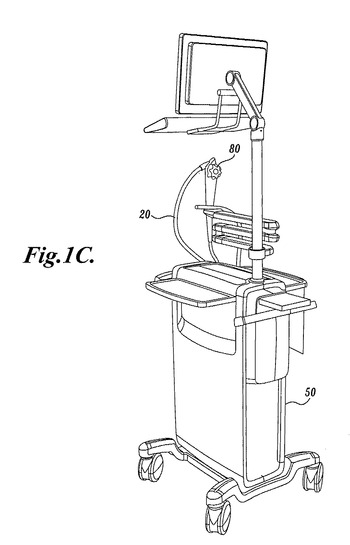
【図1−4】
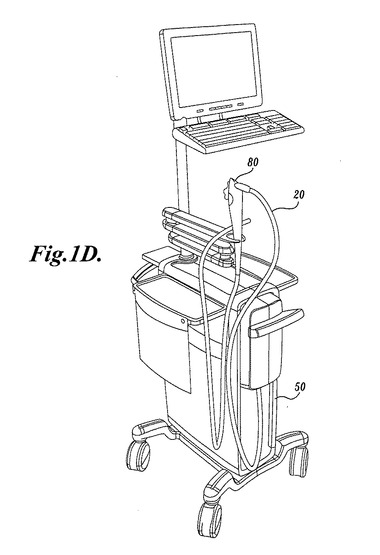
【図2】
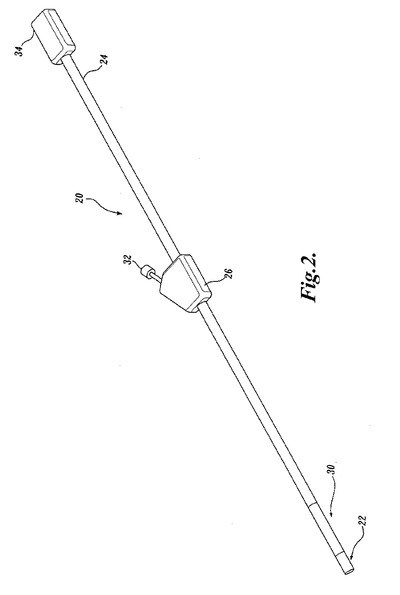
【図3−3】
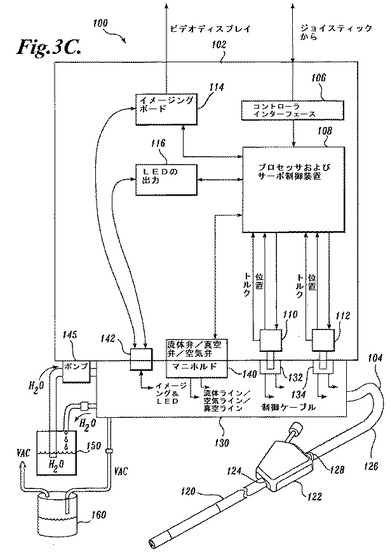
【図3−6】
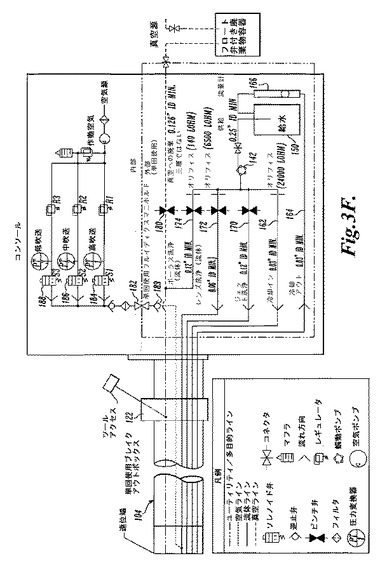
【図3−8】
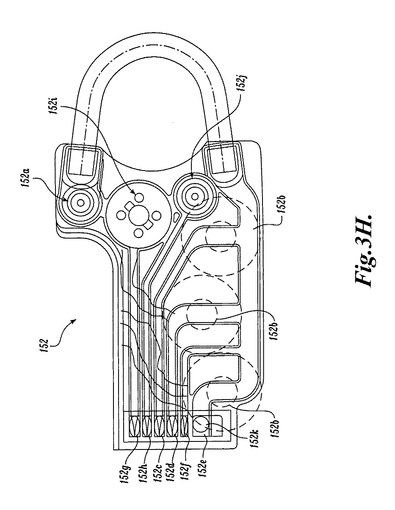
【図4−1】
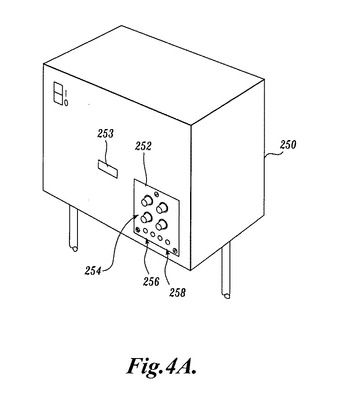
【図4−2】
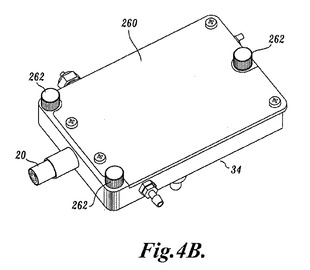
【図4−3】
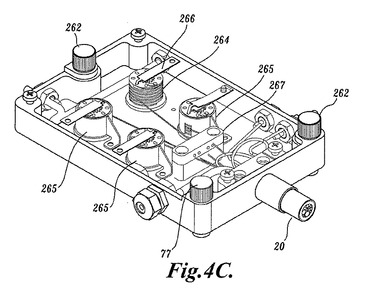
【図4−4】
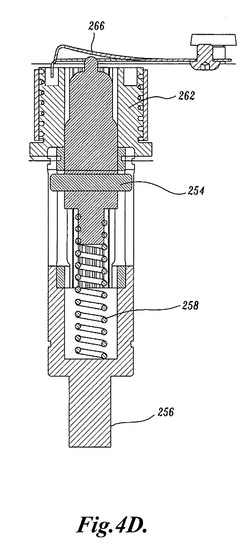
【図4−6】
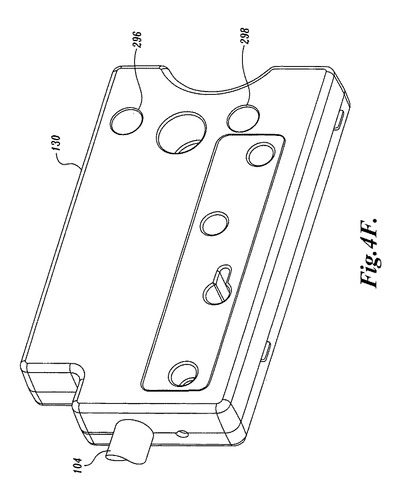
【図4−7】
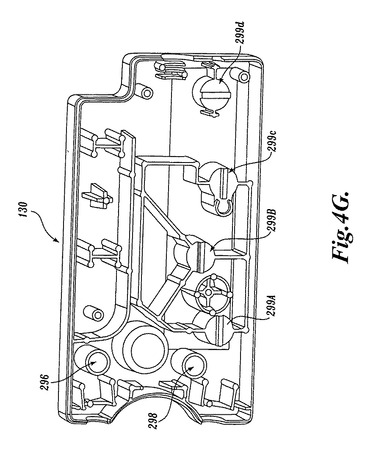
【図5−1】
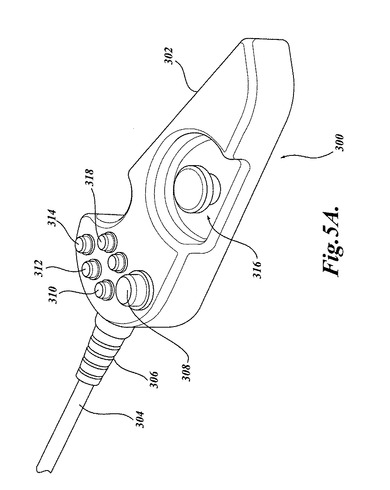
【図5−3】
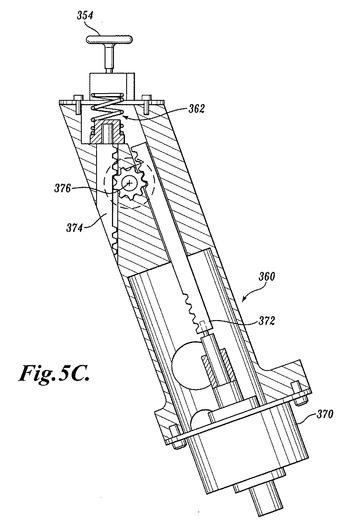
【図5−4】
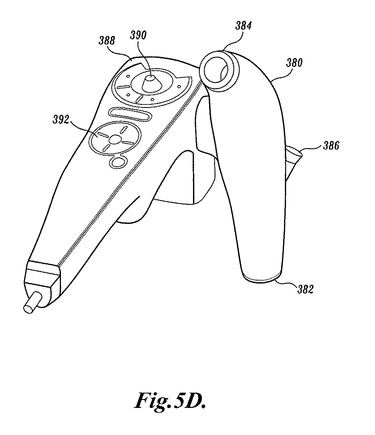
【図5−5】
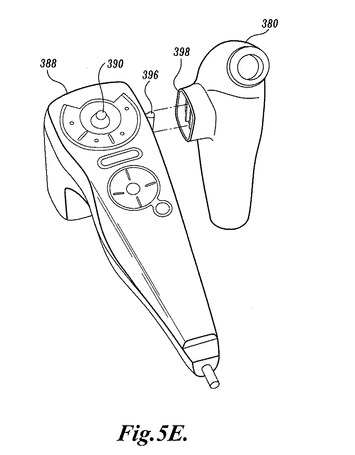
【図5−6】

【図5−7】
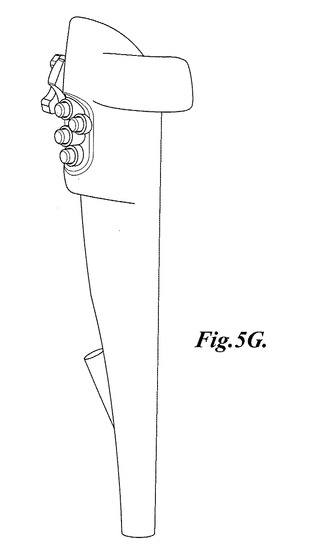
【図5−8】
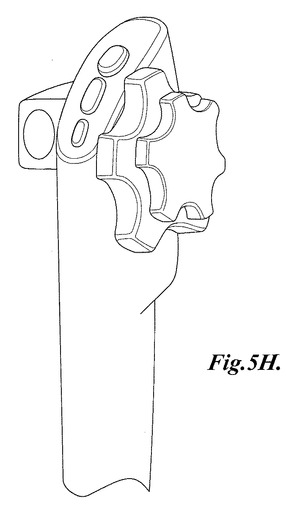
【図5−9】
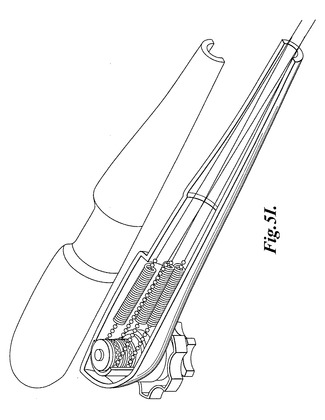
【図6−1】
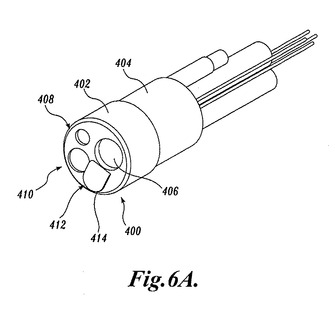
【図6−2】
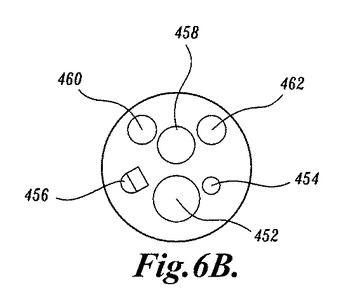
【図6−3】
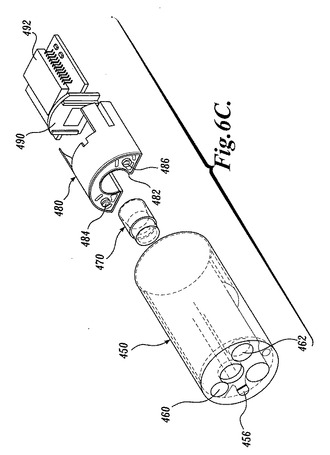
【図6−4】
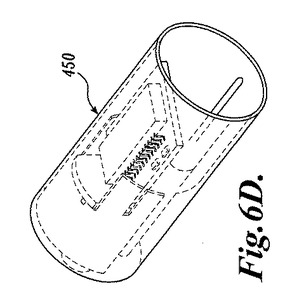
【図6−5】
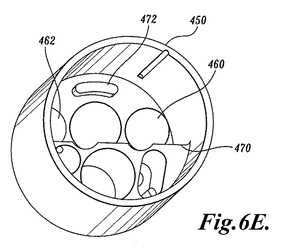
【図6−6】
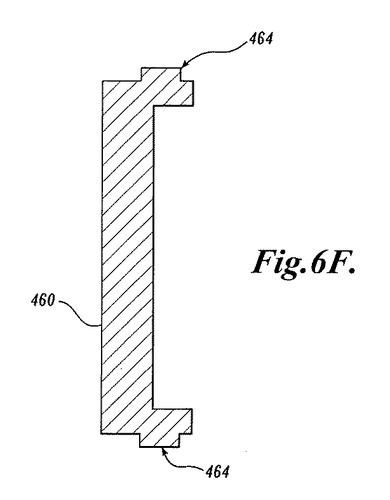
【図6−7】
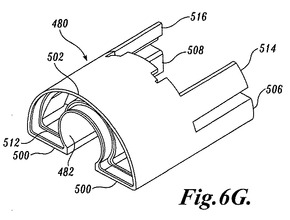
【図6−8】
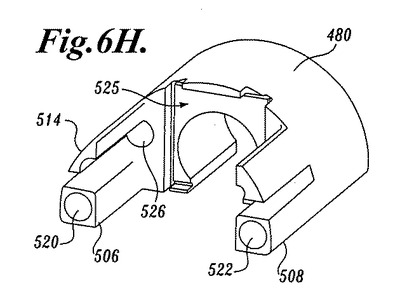
【図6−9】
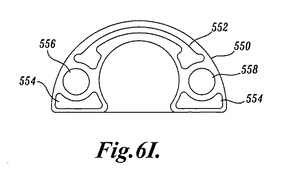
【図6−10】
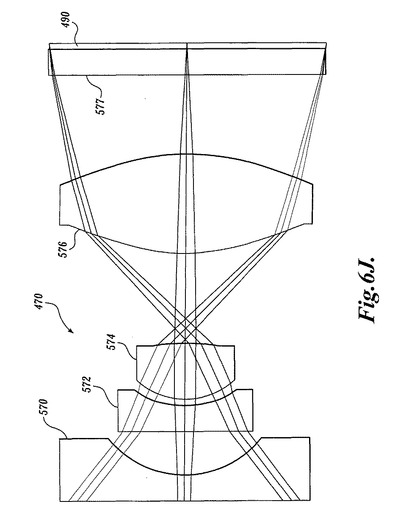
【図7】
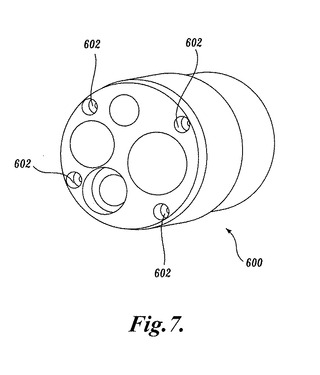
【図8】
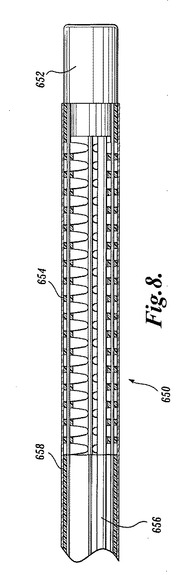
【図9】
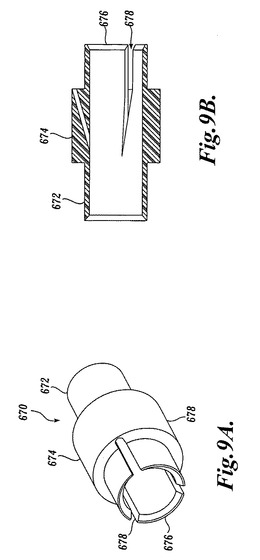
【図10】
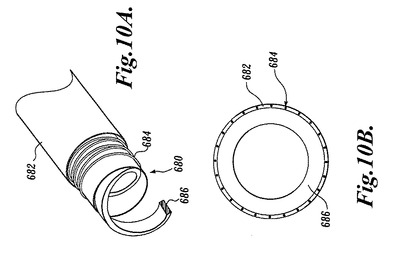
【図11】
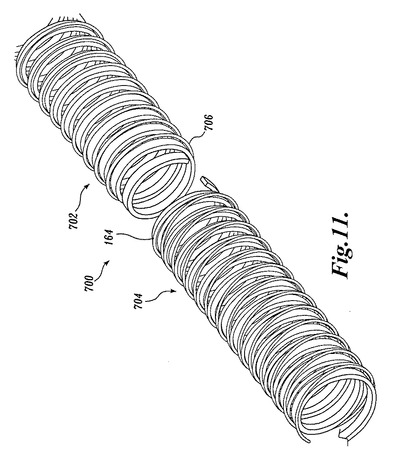
【図12】
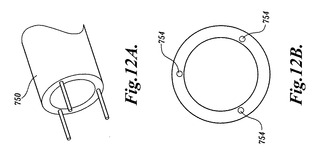
【図13】
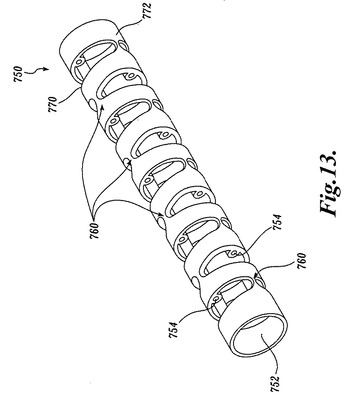
【図14】
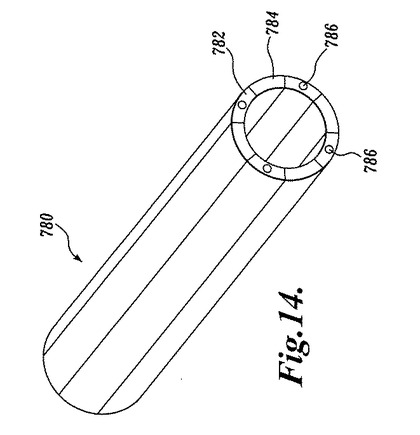
【図15】
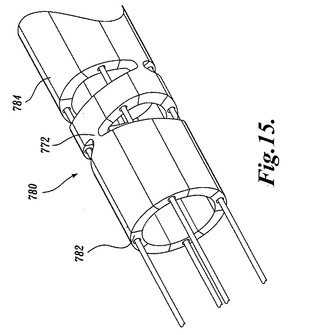
【図16】
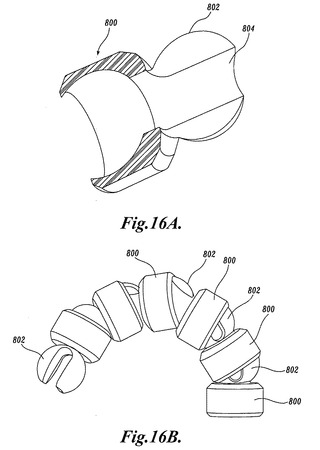
【図17】
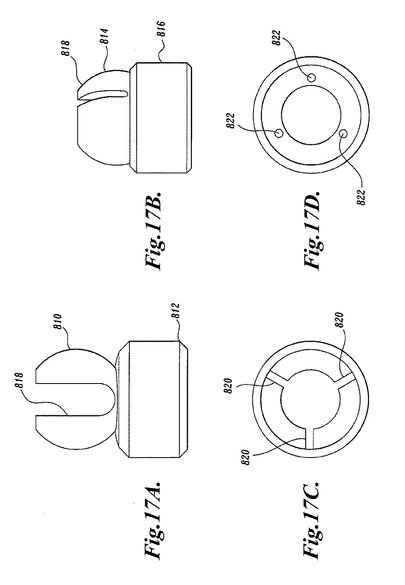
【図18】
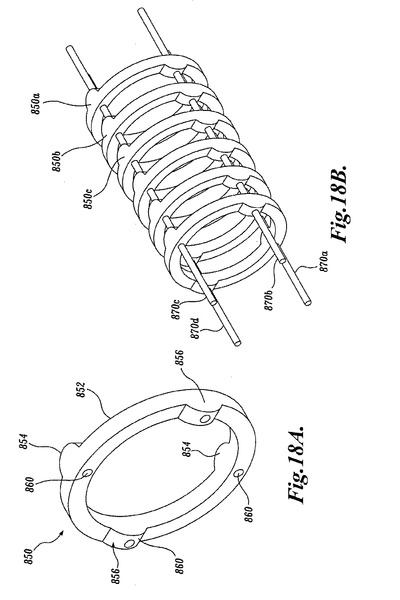
【図19】
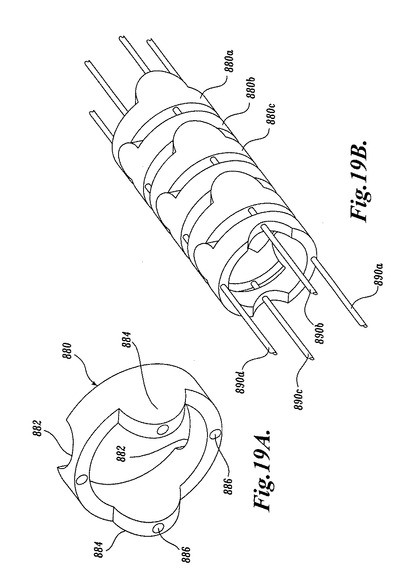
【図20】
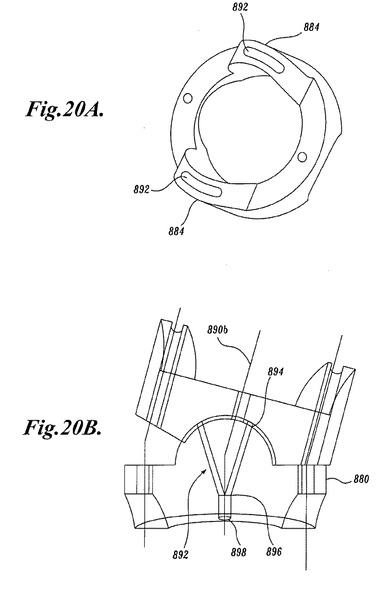
【図21】
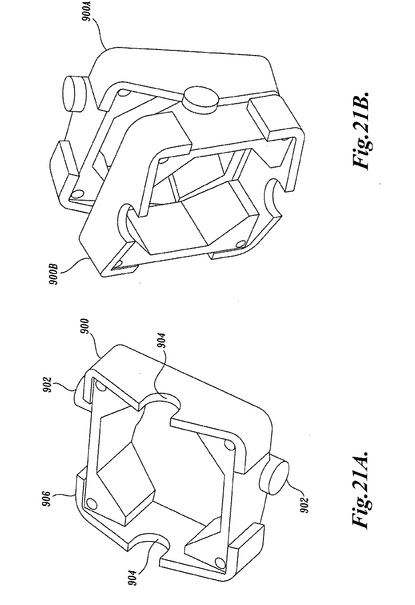
【図22】
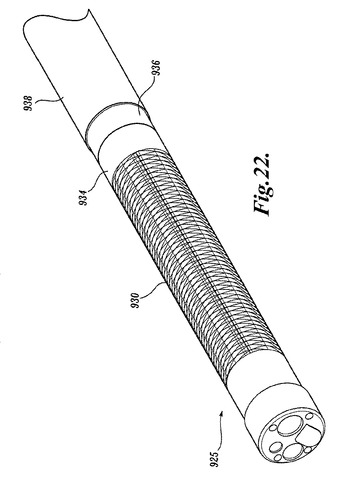
【図23−1】
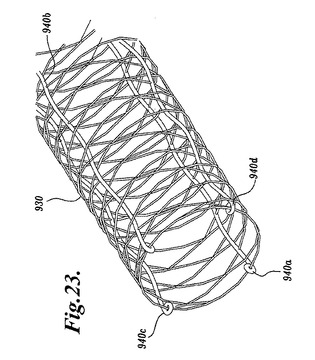
【図23−2】
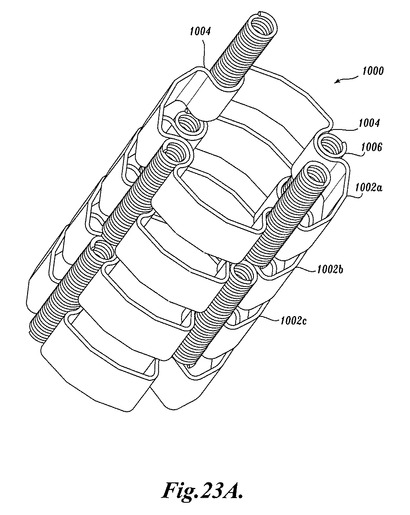
【図23−3】
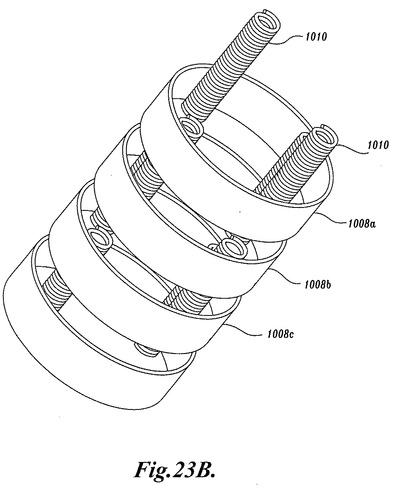
【図23−4】
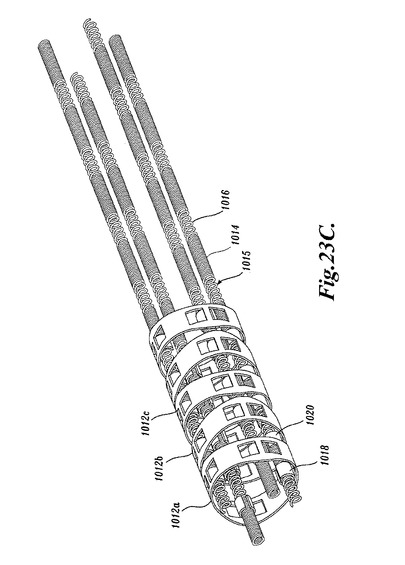
【図23−5】
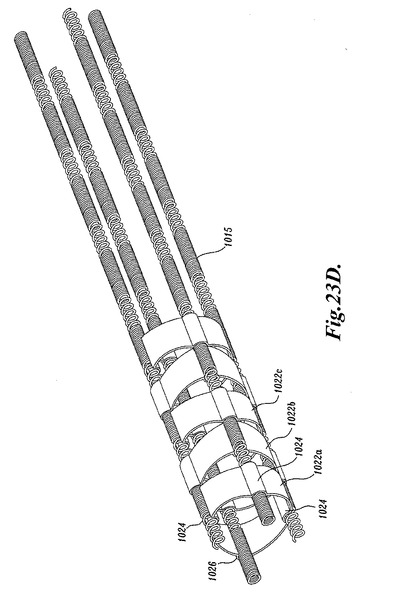
【図23−6】
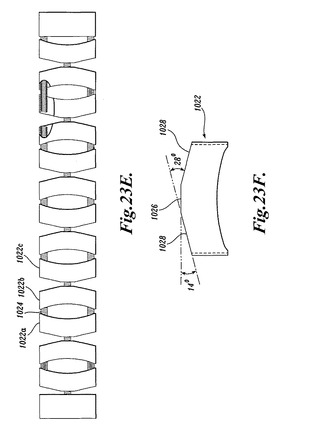
【図23−7】
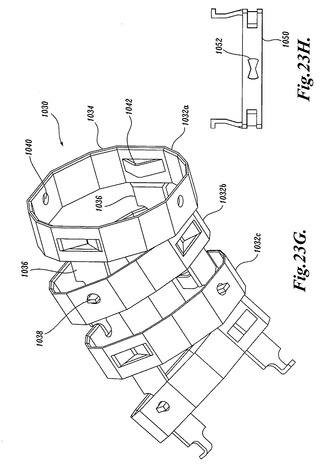
【図23−8】
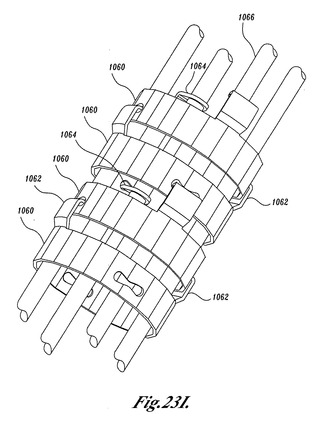
【図23−9】
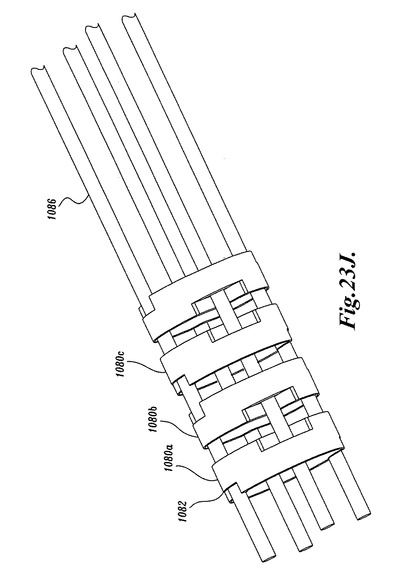
【図23−10】
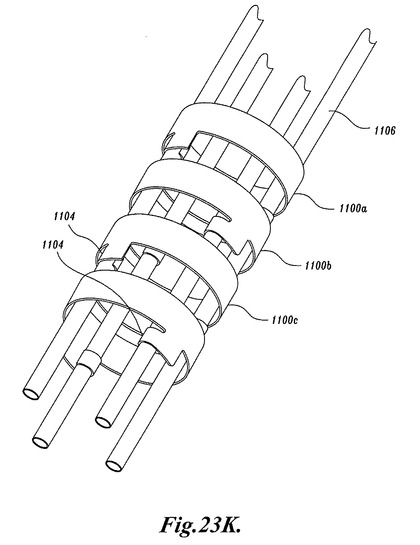
【図23−11】
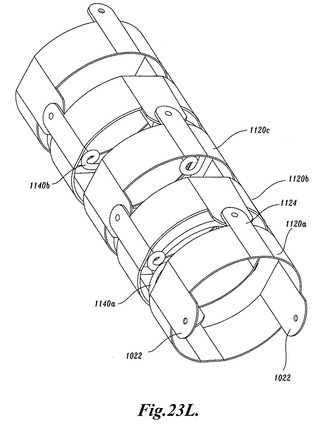
【図23−12】
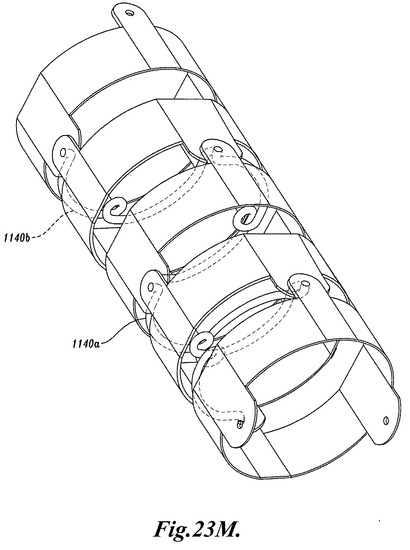
【図23−13】
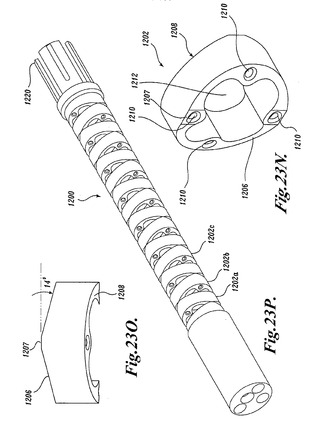
【図23−14】
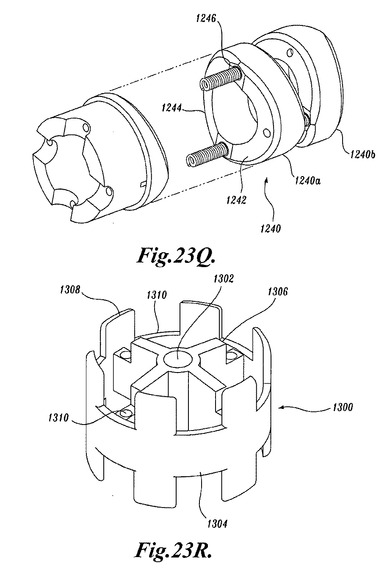
【図23−15】
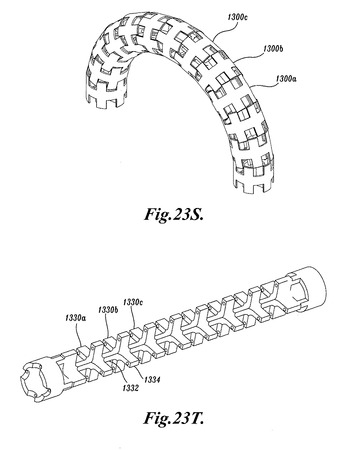
【図23−16】
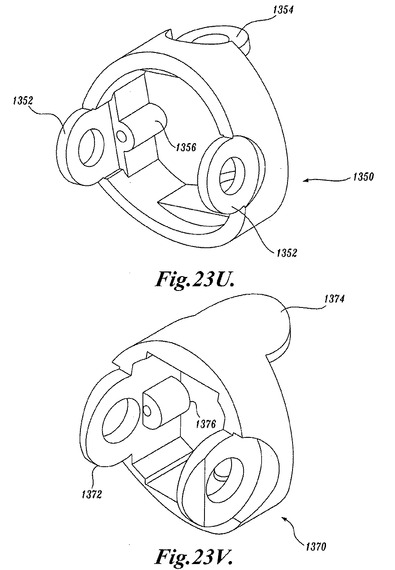
【図23−17】
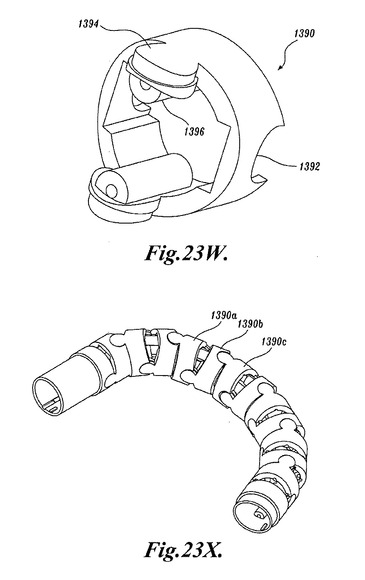
【図24】
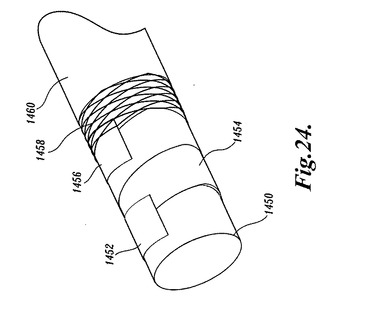
【図25】
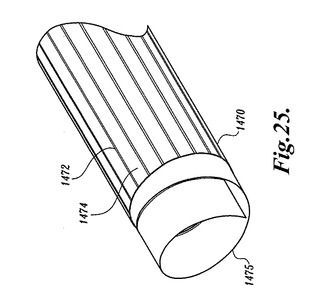
【図26】
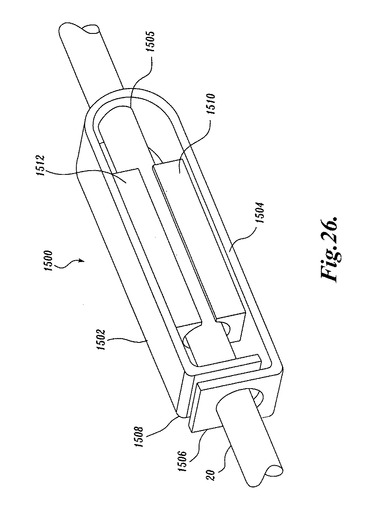
【図27】
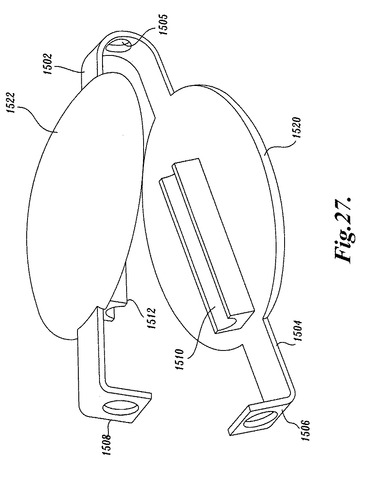
【図28】
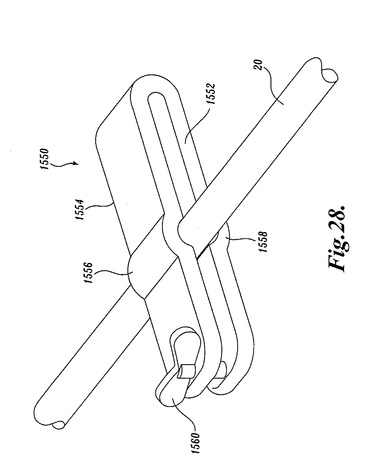
【図29】
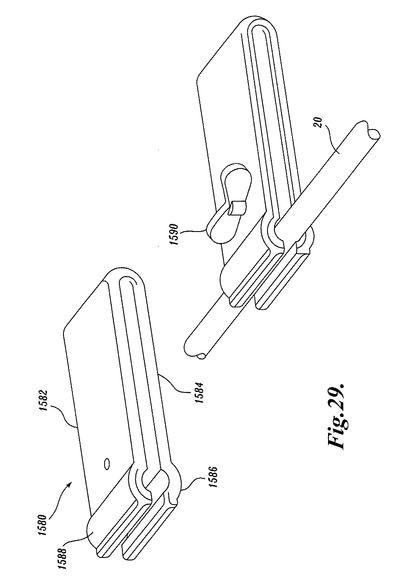
【図30】
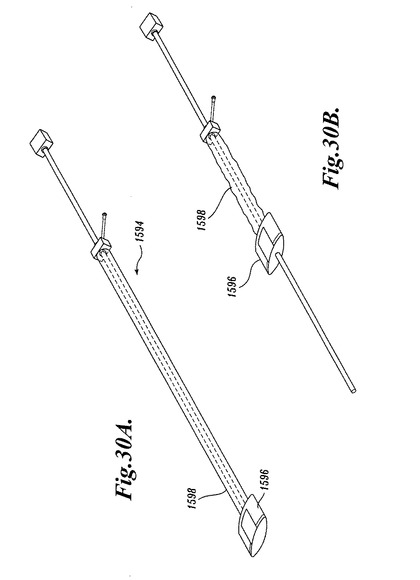
【図31】
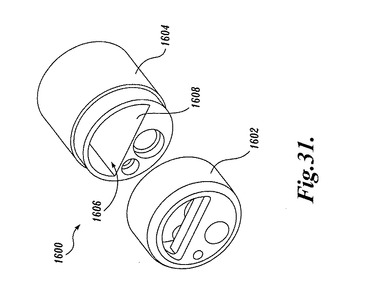
【図32】
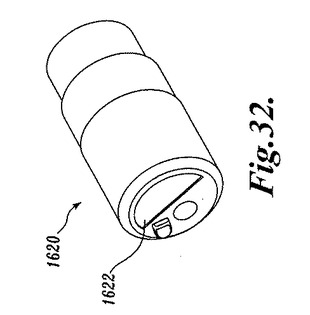
【図33】
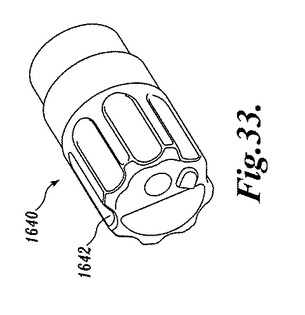
【図3−1】
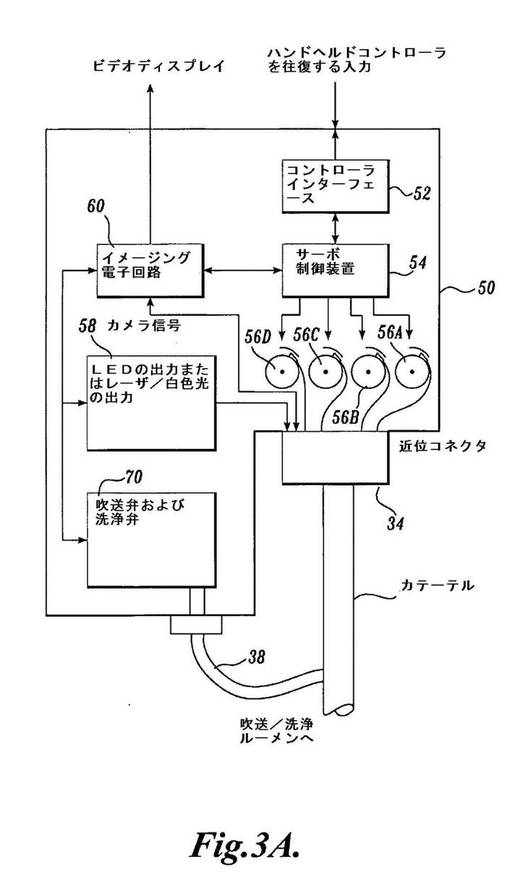
【図3−2】
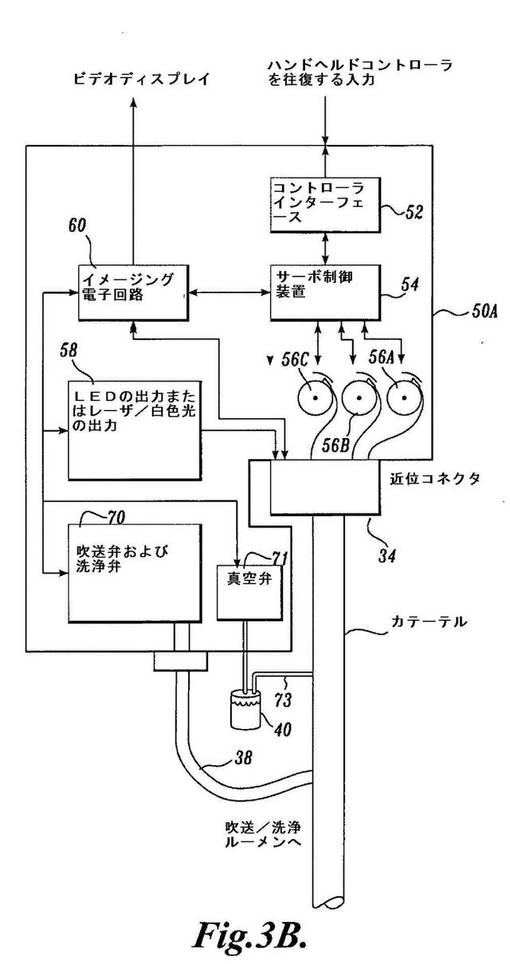
【図3−4】
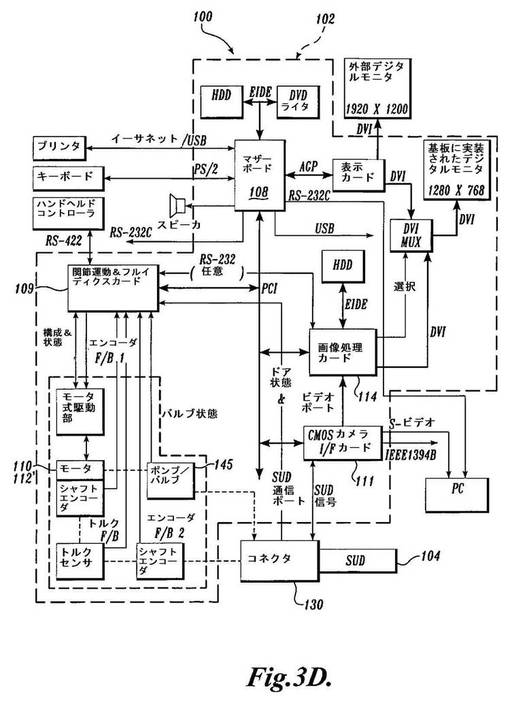
【図3−5】
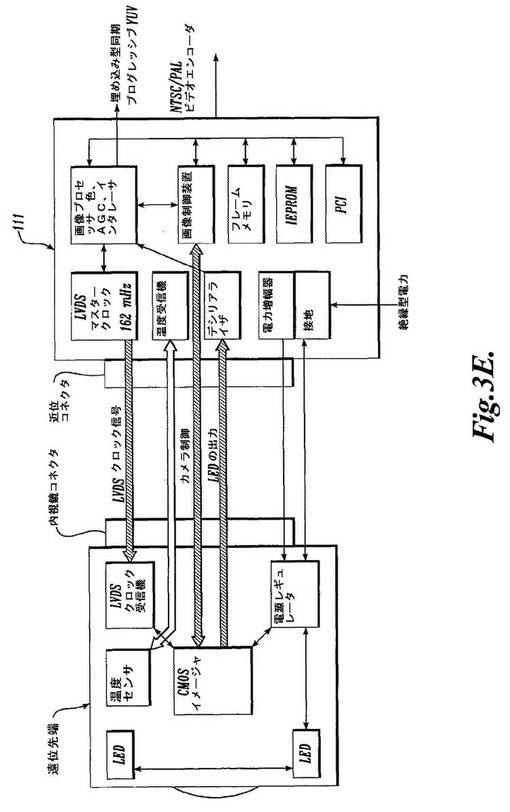
【図3−7】
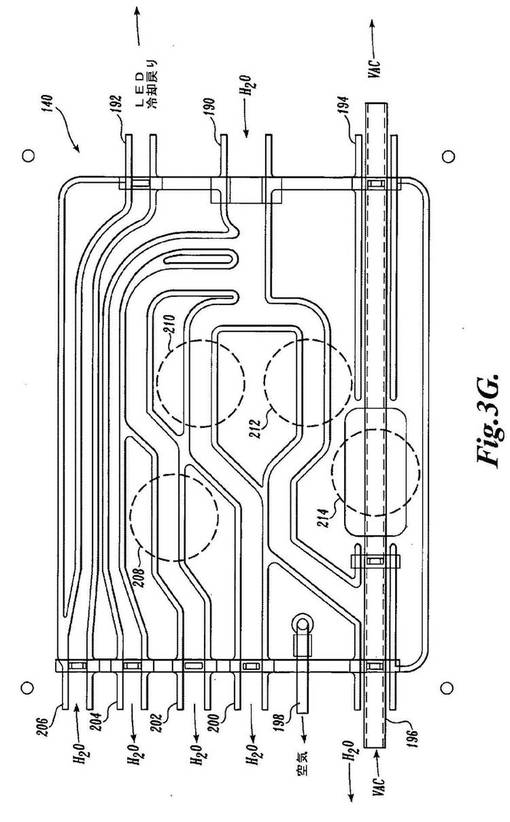
【図4−5】
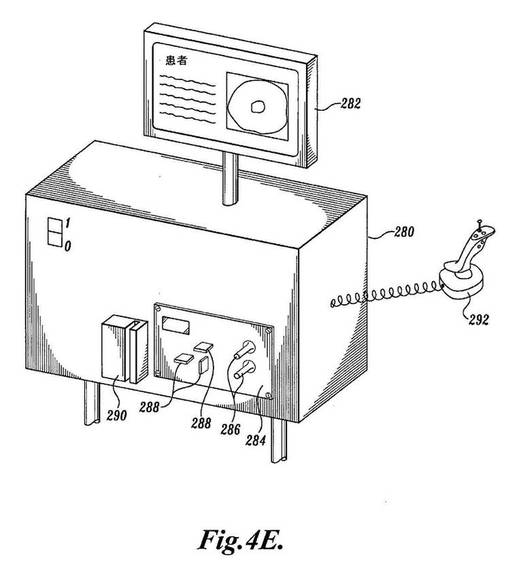
【図5−2】
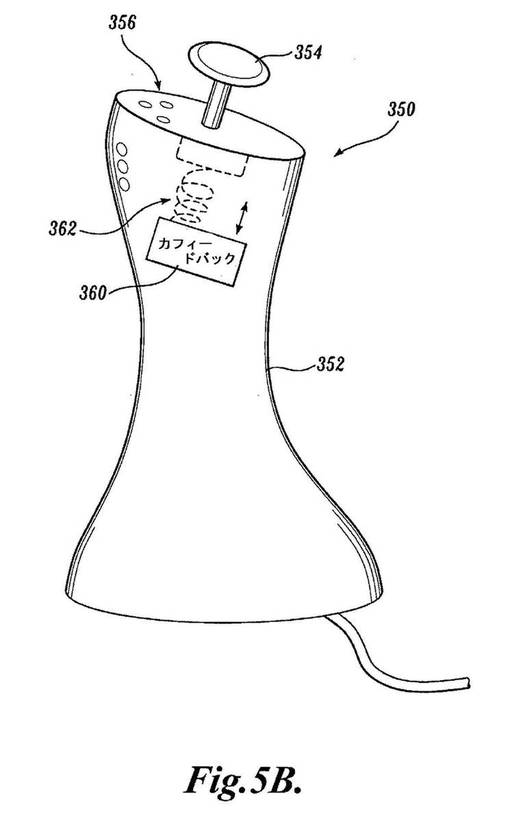
【図1−2】
【図1−3】
【図1−4】
【図2】
【図3−3】
【図3−6】
【図3−8】
【図4−1】
【図4−2】
【図4−3】
【図4−4】
【図4−6】
【図4−7】
【図5−1】
【図5−3】
【図5−4】
【図5−5】
【図5−6】
【図5−7】
【図5−8】
【図5−9】
【図6−1】
【図6−2】
【図6−3】
【図6−4】
【図6−5】
【図6−6】
【図6−7】
【図6−8】
【図6−9】
【図6−10】
【図7】
【図8】
【図9】
【図10】
【図11】
【図12】
【図13】
【図14】
【図15】
【図16】
【図17】
【図18】
【図19】
【図20】
【図21】
【図22】
【図23−1】
【図23−2】
【図23−3】
【図23−4】
【図23−5】
【図23−6】
【図23−7】
【図23−8】
【図23−9】
【図23−10】
【図23−11】
【図23−12】
【図23−13】
【図23−14】
【図23−15】
【図23−16】
【図23−17】
【図24】
【図25】
【図26】
【図27】
【図28】
【図29】
【図30】
【図31】
【図32】
【図33】
【図3−1】
【図3−2】
【図3−4】
【図3−5】
【図3−7】
【図4−5】
【図5−2】
【公開番号】特開2013−78608(P2013−78608A)
【公開日】平成25年5月2日(2013.5.2)
【国際特許分類】
【外国語出願】
【出願番号】特願2012−279050(P2012−279050)
【出願日】平成24年12月21日(2012.12.21)
【分割の表示】特願2007−534861(P2007−534861)の分割
【原出願日】平成17年9月30日(2005.9.30)
【出願人】(500332814)ボストン サイエンティフィック リミテッド (627)
【Fターム(参考)】
【公開日】平成25年5月2日(2013.5.2)
【国際特許分類】
【出願番号】特願2012−279050(P2012−279050)
【出願日】平成24年12月21日(2012.12.21)
【分割の表示】特願2007−534861(P2007−534861)の分割
【原出願日】平成17年9月30日(2005.9.30)
【出願人】(500332814)ボストン サイエンティフィック リミテッド (627)
【Fターム(参考)】
[ Back to top ]