
ピアツーピア通信を用いた位置決定

ピアツーピア通信を用いた位置決定のために、標的端末(120a)は、その位置を決定する際の補助を求めるリクエストをブロードキャストする(1)。少なくとも一つの測距端末(120b、120c、120n)が該リクエストを受信する。各測距端末(120b、120c、120n)は、該リクエストについての到達時間(TOA)の測定値および前記測距端末の位置と共に応答を送る(3)。二方向ピアツーピアについては、標的端末が、少なくとも一つの測距端末から少なくとも一つの応答を受信し、各応答についてのTOA測定値を入手し、前記リクエストについてのTOA測定値および前記応答についてのTOA測定値に基づいて各測距端末までの距離を推定し、前記推定された距離および各測距端末についての位置に基づいてそれ自身の位置推定値を計算する(4)。一方向ピアツーピアについては、ネットワークエンティティーが前記少なくとも一つの測距端末から少なくとも一つの応答を受信し、標的端末についての位置推定値を計算し、該位置推定値を前記標的端末へと送る。
【発明の詳細な説明】
【技術分野】
【0001】
本件開示は、一般には通信に関し、更に詳細に言えば、無線通信ネットワークにおいて位置決定を実行するための技術に関する。
【発明の背景】
【0002】
無線ユーザの位置を知ることが望まれることが多く、時にはそれが必要とされる。例えば、連邦通信委員会(FCC)により公表されたエンハンスト911(E911)無線サービスは、端末(例えば携帯電話)の位置が、該端末から911呼び出しが行われる毎に、公衆安全性応答点(PSAP)に提供されることを必要とする。FCC指令に加えて、種々の用途が端末の位置を使用して付加価値的特徴を提供し、また追加の収入を発生させる可能性がある。
【0003】
一般には、端末の位置の予測は、(1)充分な数の送信機、例えば三つ以上の送信機への端末からの距離または範囲、および(2)これら送信機の既知の位置に基づいて誘導されてよい。各送信機は、無線通信ネットワークにおける人工衛星またはベースステーションであってよい。各送信機までの距離および/または各送信機の位置は、当該送信機により送られる信号に基づいて確認することができる。
【0004】
多くの場合において、端末は、それ自身についての位置予測を計算するために必要とされる充分な数の信号を受信できない可能性がある。この必要な数の信号を受信できないことは、環境における障害物およびアーティファクト、並びに端末の制限された能力などに起因する可能性がある。何れにしても、これらの場合に端末の位置予測を誘導することが望まれる。
【0005】
従って、当該技術分野においては、人工衛星およびベースステーションから不十分な数の信号だけが利用可能であるときに、位置決定を行うための技術が必要とされている。
【概要】
【0006】
ここでは、ピアツーピア通信を用いて位置決定を行うための技術が記載される。これらの技術は、人工衛星およびベースステーションから不十分な数の信号しか利用可能でないときでも、端末についての位置予測を提供することができる。不十分な数の高品質の測定値が利用可能であるときは、この技術は、これらの測定値を増強するために使用されてよい。
【0007】
ピアツーピア通信を用いた位置決定の実施形態において、標的端末は、その位置を突き止めることを望み、その位置決定における補助を求めるリクエストをブロードキャストする。リクエストされた補助を提供できる少なくとも一つの測距端末(ranging terminal)が、標的端末からのリクエストを受信する。各々の測距端末は、標的端末のための位置予測を決定するために適した距離情報と共に応答を送る。例えば、各測距端末からの距離測定情報(ranging information)は、(1)標的端末により送られたリクエストについて当該測距端末によってなされた到着時間(TOA)測定、(2)測距端末の位置、(3)受信された信号強度指標(RSSI)、および/または(4)他の情報を含んでよい。各測距端末は、その応答を前記標的端末、またはネットワークエンティティー、例えば、標的端末のための位置推定値を計算できる位置決定エンティティー(PDE)もしくはサーバーモバイル位置決めセンター(SMLC)のような位置決めサーバへと送る。RSSI測定値は、送信電力と共に、送信機と受信機の間の距離(範囲)を推定するために使用されてよい。
【0008】
一実施形態において、前記標的端末は、前記少なくとも一つの測距端末から少なくとも一つの応答を受信する。前記標的端末は、各応答についてのTOA測定値を入手し、前記リクエストについてのTOA測定値および/または前記応答についてのTOA測定値に基づいて各測距端末までの距離を推定し、各測距端末についての推定された距離および位置に基づいてそれ自身についての位置推定値を計算する。もう一つの実施形態において、前記ネットワークエンティティーは、少なくとも一つの測距端末から少なくとも一つの応答を受信し、前記標的端末についての位置推定値を計算し、該位置推定値を前記標的端末に送る。
【0009】
本発明の種々の側面および実施形態について、以下で詳細に説明する。
【0010】
本発明の特徴および性質は、添付の図面と共に以下の詳細な説明を読むことにより更に明らかになるであろう。図において、同様の参照符号は全体を通して同一のものを特定する。
【詳細な説明】
【0011】
「例示的」の語は、ここでは「例、事例、または例示として働く」を意味するために使用される。「例示的」としてここに記載する何れかの実施形態または設計は、必ずしも他の実施形態または設計に対して好ましい、または有利であると解釈されるべきものではない。
【0012】
ここに記載する位置決定技術は、種々の無線通信ネットワーク、例えば無線広域ネットワーク(WWAN)、無線ローカルエリアネットワーク(WLAN)、無線パーソナルエリアネットワーク(WPAN)等のために使用されてよい。「ネットワーク」および「システム」の用語は、屡々、互換的に使用される。WWANは、コード分割多重アクセス(CDMA)ネットワーク、時間分割多重アクセス(TDMA)ネットワーク、周波数分割多重アクセス(FDMA)ネットワーク、直交周波数分割多重アクセス(OFDMA)ネットワーク、単一キャリア波周波数分割多重アクセス(SC-FDMA)ネットワークなどであってよい。CDMAネットワークは、cdma2000、広帯域CDMA(W−CDMA)等のような1以上の無線アクセス技術(RAT)を実施してよい。cdma2000は、IS−95、IS−2000、およびIS−856標準を含む。TDMAネットワークは、モバイル通信のためのグローバルシステム(GSM)、デジタルアドバンストモバイル電話システム(D−AMPS)、または他の幾つかのRATを組込んでよい。GSMおよびW−CDMAは、「第三世代パートナーシップ計画」(3GPP)と称する共同事業体からの文書に記載されている。cdma2000は、「第三世代パートナーシップ計画2」(3GPP2)と称する共同事業体からの文書に記載されている。3GPPおよび3GPP2の文書は好適に入手可能である。WLANは、IEEE802.11xネットワークであってよく、またWPANはBluetooth(登録商標)ネットワーク、IEEE802.15xまたは他のタイプのネットワークであってよい。当該技術はまた、WWAN、WLANおよび/またはWPANの何れかの組合せのために使用されてよい。
【0013】
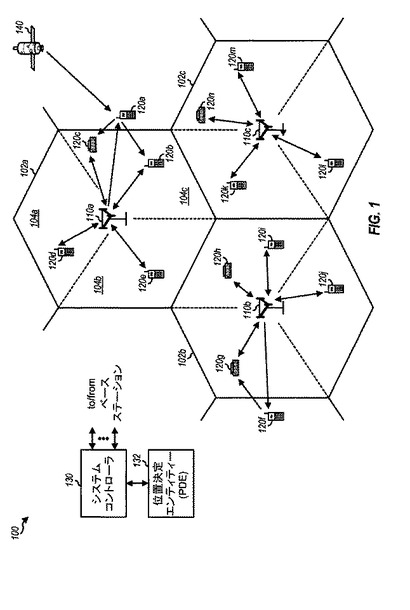
図1は、無線多重アクセス通信ネットワーク100を示している。ネットワーク100は、IS−2000、IS−95および/またはIS−856を組込んだcdma2000ネットワーク、またはwpcdmaを組込んだユニバーサルモバイル遠隔通信システム(UMTS)ネットワークのようなセルラーネットワークであってよい。ネットワーク100は、複数のベースステーション110を含んでおり、各ベースステーションは特定の地理学的エリア102についての通信範囲を提供する。ベースステーションは、一般には、複数の端末と通信する固定ステーションである。ベースステーションはまた、アクセスポイント、ノードB、ビーコン、または他の幾つかの用語で呼ばれてもよい。「セル」の用語は、この用語が使用される文脈に応じて、ベースステーションおよび/またはそのカバー領域を意味する。ベースステーションは、地形、障害物等のような種々の因子によって決定される異なったサイズおよび形状のカバーエリアを有してよい。システム能力を改善するために、ベースステーションカバーエリアは、複数の小さい領域、例えば三つの小領域104a、104bおよび104cに区分されてよい。各小領域は、各々のベース送信機サブシステム(BTS)によるサービスを受ける。「セクター」の用語は、この用語が使用される文脈に応じて、BTSおよび/またはそのカバー領域を意味することができる。セクターに分割されたセルについて、当該セルの全てのセクターのためのBTSは、典型的には該セルのための同じベースステーション内に配置される。
【0014】
ここに記載される技術は、セクターに分割されたネットワーク、並びにセクターに分割されないセルについて使用されてよい。明瞭化のために、以下での多くの記載は、セクターに分割されたセルラーネットワークについてのものである。単純化のために、以下での記載において、「ベースステーション」の用語は、一般には、セクターにサービスする固定ステーション並びにセルにサービスする固定ステーションを意味する。
【0015】
システムコントローラ130は、ベースステーション110に結合されて、これらベースステーションのための調整および制御を提供する。システムコントローラ130は、単一のネットワークエンティティーであってよく、または複数のネットワークエンティティーの集合であってもよい。例えば、システムコントローラ130は、ベースステーションコントローラ(BSC)、モバイルスイッチングセンター(MSC)、無線ネットワークコントローラ(RNC)、パケットデータサービスノード(PDSN)、および/または他の幾つかのネットワークエンティティーを含んでよい。位置決定エンティティー(PDE)132は、端末のための位置決定を支援する。例えば、PDE132は、距離測定(raging measurement)を行う端末によって使用される補助データを提供してよい。ここで使用する距離測定は、TOA測定、観察される時間差(OTD)測定、到着の時間差(TDOA)測定、角度または到着(AOA)測定、受信信号強度指標(RSSI)、往復遅延(TRD)等であってよい。これら種々のタイプの距離測定は当該技術において知られている。PDE132はまた、端末および/またはベースステーションにより与えられる距離測定に基づいて、端末のための位置推定を計算してよい。
【0016】
端末120は、典型的には、ネットワーク100の全体に亘って分布され、各端末は固定式または移動式であってよい。端末はまた、モバイルステーション、アクセス端末、ユーザ装置、または他の幾つかの技術用語で呼ばれてよい。端末は、無線装置、携帯電話、無線モデム、無線モジュール、パーソナルデジタルアシスタント(PDA)等であってよい。端末は、何れか所定の時点で、順方向および/または逆方向リンク上において、ゼロ、一つまたは複数のベースステーションと通信してよい。端末はまた、もう一つの端末とピアツーピアで通信してもよい。端末はまた、人工衛星140から信号を受信してよく、該衛星は全地球測位システム(GPS)、ガリレオ、および/または他の人工衛星測位もしくは通信システム由来のものであってよい。一般に、順方向および逆方向の両リンクについて受信信号の良好な品質を達成できるのであれば、端末はネットワーク100と直接通信してよい。もし、前記リンクの一方または両方について必要な受信信号品質が達成されないならば、端末は、少なくとも一つの他の端末とのピアツーピア通信を介して、ネットワーク100と間接的に通信してよい。
【0017】
ここでの説明において、ピアツーピア(PTP)端末とは、もう一つの端末とピアツーピアで通信できる端末である。標的端末は、その位置が決定されるPTP端末である。測距端末は、標的端末とピアツーピアで通信し、且つ標的端末のための位置決定を支援するPTP端末である。
【0018】
1.一方向および二方向のピアツーピア通信
ネットワークは、一方向および/または二方向のピアツーピア通信を支援する。一方向ピアツーピア通信の一実施形態において、PTP端末は一つのリンク(例えば逆方向リンク)上でのみもう一つのPTP端末とピアツーピアで通信し、更に他のリンク(例えば順方向リンク)上でネットワークと通信する。一方向ピアツーピア通信のもう一つの実施形態において、PTP端末は一つのリンク上だけでもう一つのPTP端末とピアツーピアで通信し、また順方向および逆方向リンクの両方でネットワークと通信してよい。二方向のピアツーピア通信については、PTP端末は、両方のリンク上でもう一つのPTP端末と通信する。標的端末は一方向または二方向のピアツーピア通信を使用して、位置推定値を得てよい。
【0019】
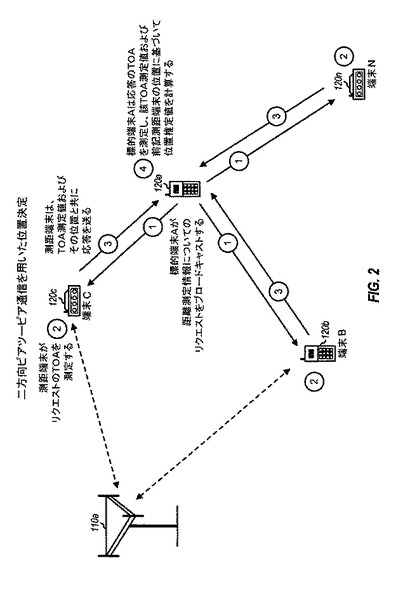
図2は、二方向のピアツーピア通信を用いた位置決定の一実施形態を示している。端末120a、120b、120cおよび120nはまた、それぞれ端末A、B、CおよびNとも称される。この実施形態の場合、標的端末Aはその位置を突き止めることを望み、またはそれ自身の位置決めにおける補助を望み、また距離測定情報についてのリクエストをブロードキャストする(ステップ1)。このリクエストは、該リクエストが、標的端末Aのタイミングに基づいて何時送られたかの指標を含んでいる。この指標は、以下で述べるように明示的または暗示的であってよい。測距端末B、CおよびNは、標的端末Aからのリクエストを受信する。各測距端末は、測距端末のタイミングに基づいて前記リクエストの到着時間(TOA)を測定する(ステップ2)。各測距端末は、次いで、標的端末Aに応答を送る(ステップ3)。一実施形態において、各測距端末からの応答は、(1)標的端末Aが送ったリクエストについて測距端末により行われたTOA測定、(2)測距端末の位置、(3)応答が何時送られたかの指標(明示的でも暗示的でもよい)を含んでいる。測距端末は、標的端末Aにおいてもう一つとの衝突を回避するために、それらの応答を異なるときに送ってよい(例えば、ランダムに選択されたフレームまたは時間スロットにおいて)。
【0020】
標的端末Aは、測距端末B、CおよびNからの応答を受信する。標的端末Aは、標的端末のタイミングに基づいて、各距離測定からの応答の到着時間を測定する(ステップ4)。次いで、標的端末Aは、(1)標的端末が送ったリクエストについて測距端末が行ったTOA測定、および(2)測距端末が送った応答について標的端末が行ったTOA測定に基づいて、各測距端末までの距離を推定する(これもステップ4)。次いで、標的端末Aは、測距端末B、CおよびNまでの推定距離、並びにこれら測距端末の位置に基づいて、それ自身についての位置推定値を誘導する(これもステップ4)。
【0021】
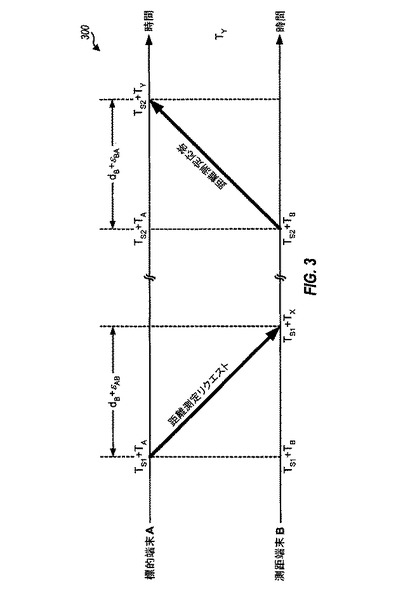
図3は、標的Aが送信した距離測定リクエストおよび測距端末Bが送信した応答についての、送信タイムラインを示している。各端末は、ネットワーク100の時間ベースであるシステム時間にロックされてよい時間ベースを維持する。各端末についての時間ベースは、ベースステーションから受信したパイロットによって決定され、また該パイロットにロックされてよい。各端末についての時間ベースは、ベースステーションと端末との間の伝播遅延に対応する量だけ、システム時間からオフセットしている可能性がある。図3に示した例では、標的端末AについてのタイミングオフセットはTAとして示され、測距端末BについてのタイミングオフセットはTBで示されている。
【0022】
ネットワーク100についての送信時間ラインは、各フレームが予め定められた持続時間、例えば10ミリ秒(ms)を有する複数のフレームに分割されてよい。絶対時間に関するタイミングオフセットの故に、与えられたフレームは、システム時間ではTS1において、標的端末についてはTS1+TAにおいて、測距端末Bについては時間TS1+TBにおいて開始されてよい。標的端末Aは、端末Aのタイミングに基づくフレームの開始点である時間TS1+TAにおいて、距離測定リクエスト(ranging request)を送ってよい。該リクエストが送られる時間は測距端末によって知られていてよく、また当該リクエスト中において暗示的に送られてよい。標的端末Aと測距端末Bとの間の距離はdBで示され、これは時間(秒)または距離(メータ)の単位で与えられてよい。測距端末Bは、前記リクエストが送られた時間TS1+TAからdB+εAB秒である時間TS1+TXにおいて前記リクエストを受信し、ここでのεABは測定エラーを表す。測距端末Bは、前記リクエストが受信された時間TS1+TX、および前記リクエストが送られた時間TS1+TBに基づいて、次のように前記リクエストのTOAを決定してよい:
TOAAB=(TS1+TX)−(TS1+TB)
=TX−TB=dB+TA−TB+εAB 式(1)
ここで、
TOAABは、標的端末Aによって測距端末Bに送られたリクエストについてのTAOであり、
TXおよびTBは、測距端末Bのタイミングに基づいており、
εABは、TOAABについての測定エラーであり、これは二つの端末の間の非ラインオブサイトの信号伝播に起因した過剰な遅延を含んでいる可能性がある。
【0023】
測距端末Bは、時間TS2+TBにおいて応答を送るが、これは端末Bのタイミングに基づいて応答が送られるフレームの開始時点である。応答が送られる時間は、標的端末によって知られてよく、また応答において暗示的に送られてよい。標的端末Aは、時間TS2+TYにおいて応答を受信するが、これは当該応答が送られた時間TS2+TBからdB+εBA秒であり、ここでのεBAは測定エラーを表す。標的端末Aは、応答が受信された時間TS2+TY、および当該応答が送られた時間TS2+TAに基づいて、次のようにして当該応答のTOAを決定してよい。
【0024】
TOABA=(TS2+TY)−(TS2+TA)
=TY−TA=dB+TB−TA+εBA 式(2)
ここで、
TOABAは、測距端末Bによって標的端末Aに送られた応答についてのTAOであり、
TYおよびTAは、標的端末Aのタイミングに基づいており、
εABは、TOABAについての測定エラーであり、これは二つの端末の間のラインオブサイトでない信号伝播に起因した過剰な遅延を含んでいる可能性がある。
【0025】
標的端末Aは、測距端末Bによって送られた応答からTOAABを入手し、また該応答に基づいてTOABAを測定する。次いで、標的端末Aは、端末AおよびBの間の距離を次のようにして推定してよい:
【数1】

【0026】
ここで、
【数2】
【0027】
は端末AおよびBの間の推定された距離である。式(3)は、端末AおよびBについてのタイミングオフセットTAおよびTBが、それぞれ推定された距離
【数3】
【0028】
において相殺されることを示している。しかし、推定された距離は、測定誤差および非ラインオブサイト遅延εABおよびεBAを含んでおり、これらは除去されない。
【0029】
図2に示された実施形態について、標的端末は、リクエストについてのTOA測定および測距端末からの応答についてのTOA測定に基づいて、各測距端末までの距離を推定する。もう一つの実施形態において、標的端末は、測距端末からの応答についてのTOA測定、および測距端末についてのタイミングオフセットを示す情報意に基づいて、各測距端末までの距離を推定する。標的端末についてのタイミングオフセットTAは、全ての測距端末からの応答についてのTOA測定において共通しており、特別のTOA測定を用いて説明されてよい。更にもう一つの実施形態において、各測距端末は、当該リクエストについてのそのTOA測定に基づいて標的端末までの距離を推定し、また該推定された距離を前記標的端末へと送信して戻す。一般に、標的端末と各測距端末の間の距離は、種々のエンティティー(例えば端末またはネットワークエンティティー)によって、また種々の測定および関連情報に基づいて推定されてよい。一例として、往復遅延測定が使用されてよく、この場合、RTDがTOAAB、TOABAおよびRxTxの合計に等しい。RxTxは、測距端末Bの内部遅延であり、当該リクエストが受信された時と当該応答が標的端末Aに戻し送信された時の間の時間に等しい:(TS2+TB)−(TS1+TX)。
【0030】
標的端末Aは、当該ネットワークの何処かに位置する如何なる数の測距端末から、如何なる数の応答を得てもよい。標的端末Aは、測距端末から受信された応答に基づいて、各測距端末までの距離を推定してよい。次いで、標的端末Aは、全ての測距端末についての位置推定値およびそれらの位置に基づいて、それ自身についての位置推定を誘導してよい。
【0031】
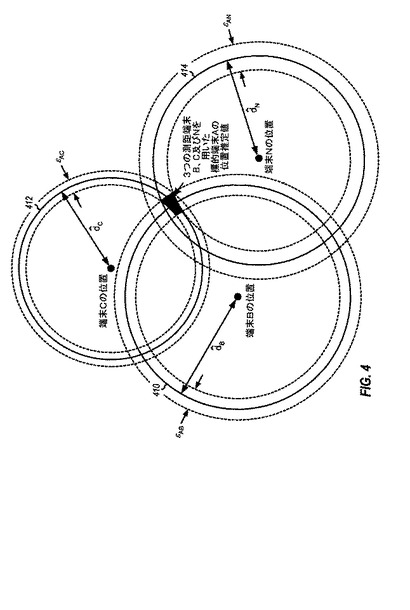
図4は、標的端末Aの位置推定値を決定するための実施形態を示している。各測距端末の位置は、二次元(2D)プロット上の点としてプロットされてよい。各測距端末iについて、実線での円は、(1)端末iの既知位置に配置された中心、および(2)表意的端末Aから端末iまでの推定された距離である
【数4】
【0032】
の半径を有するように描かれてよい。各測距端末iについての円は、εAiの幅を有しており、これは破線による二つの同心円によって表される。εAiは、端末iについての距離推定値
【数5】
【0033】
における補償されない残留誤差である。図4において、円410、412および414は、それぞれ測距端末B、CおよびNについて描かれている。
【0034】
一つの測距端末だけが利用可能であれば、測距端末の位置は、標的端末Aの位置推定値として提供されてよく、また該測距端末についての円は、エラー基準とも称される位置推定における不確実さとして提供されてよい。例えば、標的端末Aが測距端末Bから一つの応答だけを受信するならば、端末Bの位置は、端末Aについての位置推定値として与えられてよく、また円410内の面積は、位置推定における不確実さとして与えられてよい。
【0035】
二つの測距端末が利用可能であれば、これら二つの端末についての円は二つの点において交差し、これら二つの点のうちの何れが標的端末の位置であるかについての曖昧さが存在する。これら二つの点の間に線が引かれてよく、この線の中心点が、標的端末についての位置推定値として与えられてよい。二つの円の重なり面積は、位置推定における不確実さとして与えられてよい。
【0036】
三つの測距端末が利用可能であれば、これら三つの端末についての円は種々の点で交差する。三つの円の円周までの最小二乗平均距離である点が、標的端末の位置推定値として与えられる。平均二乗誤差の合計の平方根が、当該位置推定における不確実さとして与えられてよい。或いは、図4に示すように、三つの交差する円についての交差面積が、位置推定における不確実さとして与えられてよい。
【0037】
一般に、標的端末についての位置推定は、最小二乗平均(LMS)アルゴリズムまたは他の幾つかのアルゴリズムを使用して計算されてよい。LMSアルゴリズムは、位置推定値についての最終解に到達するために多くの反復を実行する。該LMSアルゴリズムおよび他のアルゴリズムは当該技術において既知である。
【0038】
図2に示されている実施形態において、標的端末は測距端末から距離測定情報を受信し、それ自身の位置推定値を計算する。もう一つの実施形態において、標的端末および/または測距端末は距離測定情報をPDE132に転送する。次いで、PDE132は標的敵端末についての位置推定値を計算し、必要であれば、該位置推定値を標的端末へと戻す。幾つかの他のネットワークエンティティーもまた、当該標的端末についての位置推定値を計算してもよい。もう一つの例において、この位置推定値は、ネットワークエンティティー、または標的端末の位置に興味のある端末へと提供される。
【0039】
図2に示された一つの実施形態において、標的端末は、測距端末が送った応答についてのアクノリッジメント(ACK)を送信しない。もう一つの実施形態において、標的端末は予め定められた時間だけ、測距端末からの応答を待ち、各応答についてアクノリッジメント(ACKK)を送信し、または全ての応答のために一つのACKをブロードキャストする。標的端末は、(1)応答のための不十分な送信電力、および/または(2)もう一つの測距端末が送信した応答との衝突のような種々の理由で、所定の測距端末が送信した応答を受信しなくてもよい。ACKが受信されなければ、測距端末はそれらの応答を再送信してもよい。全ての実施形態について、予め定められた時間内に如何なる測距端末からも応答が受信されなければ、標的端末は前記リクエストを再度ブロードキャストしてもよい。
【0040】
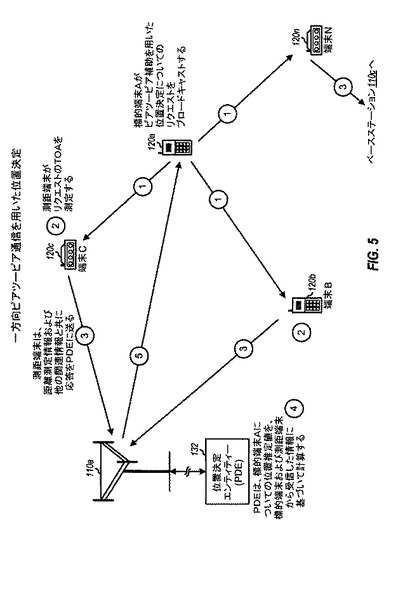
図5は、一方向のピアツーピア通信を用いた位置決定の一実施形態を示している。標的端末Aは、その位置を突き止めて、ピアツーピア補助を用いた位置決定のためのリクエストを送信することを望む(ステップ1)。このリクエストは、測距端末に対して、該リクエストのTOAを測定し、距離測定情報をPDE132へ転送することを要請する。このリクエストは、(1)標的端末Aの同定、および任意には、(2)標的端末Aのタイミングに基づいて当該リクエストが何時送信されたかの指示を含んでよい。例えば、当該リクエストはフレームの開始時に送信されてよく、またそこから標的端末Aがそのタイミングを得るベースステーションの同定を含んでよい。ベースステーション同定(BSID)は、標的端末AのタイミングオフセットTAを推定するために使用されてよい。この例において、標的端末Aのタイミングオフセットが所定のアプリケーションのために必要とされないときは、標的端末の位置は、TAについて明示的に解くことなく決定されてよい。標的端末Aはまた、BSID並びに標的端末Aがベースステーション、人工衛星および/または他の送信機について得てよい何らかの距離測定値を、PED132へと(ベースステーション110aを介して、または測距端末およびベースステーション110aを介して)送信してよい。
【0041】
測距端末B、CおよびNは、標的端末Aからのリクエストを受信する。各測距端末は、当該測距端末のタイミングに基づいて、例えば式(1)に示すようにして、当該リクエストのTOAを測定する(ステップ2)。次いで、各測距端末は、そのサービスを提供するベースステーションを介して、応答をPDE132へと送る(ステップ3)。各測距端末からの応答は、(1)測距端末の同定、(2)標的端末Aが送ったリクエストについて測距端末により行われたTOA測定、(3)測距端末の位置、(4)そこから測距端末がそのタイミング(測距端末についてのタイミングオフセットTiを推定するために使用してよい)を得るベースステーションのBSID、(5)、測距端末が、ベースステーション、人工衛星、および/または他の送信機について得てよい距離測定値、並びに(6)前記リクエスト中において送られる情報を含んでよい。測距端末はまた、そのタイミングオフセットを推定し、該推定されたタイミングオフセットをそのTOA測定値から除去し、補正されたTOA測定値をPDE132に提供してよい。測距端末はまた、PEDが測距端末の位置推定値を計算することを可能にするための情報を、PDE132に送ってよい。測距端末および標的端末からの生の測定値は、相対的な位置決定を向上させるために使用されてよい。例えば、標的端末の位置は、測距端末の位置に関して決定されてよい。
【0042】
PDE132は、測距端末からの応答を受信し、可能であれば標的端末Aから追加の距離測定情報を受信する。次いで、PDE132は、標的端末Aと各測距端末との間の距離を、(1)測距端末によりなされたTOA測定、および(2)入手可能であれば測距端末のタイミングおよび/または標的端末のタイミングに基づいて推定する(ステップ4)。PDE132は、そこから当該端末がそのタイミングを得るベースステーションのBSIDに基づいて、各端末についてのタイミングオフセットを推定してよい。PDE132は、次いで、TOA測定値から各端末についての予測されたタイミングオフセットを除去してよい。標的端末AについてのタイミングオフセットTAは、全てのピアツーピアのTOA測定に共通しており、余分なTOA測定は未知のタイミングオフセットTAを説明することができ、これは推定される必要はなく、測距端末によってなされるTOA測定からキャンセルされるであろう。未知のタイミングオフセットTAは、標的端末と参照ベースステーションとの間の距離を示す。従って、LMS、LLSFまたは他のアルゴリズムに基づいて位置を計算するときに、PDEはこの制約を加える。
【0043】
PDE132は、(1)標的端末Aと測距端末との間の推定された距離、(2)測距端末の位置、(3)他の送信機(もしあれば)について標的端末Aによってなされた距離測定値、(4)これら他の送信機の位置、および(5)測距端末B、CおよびN並びに任意に標的端末Aがそこからタイミングを誘導するベースステーションの位置に基づいて、標的端末Aについての位置推定を誘導する(これもステップ4)。次いで、必要であれば、PDE132はこの位置推定値を標的端末Aに送る(ステップ5)。PDE134は、該位置推定値をベースステーション110aに送り、これは次いで、図5に示すように該位置推定値を直接標的端末Aに送ってよい。或いは、ベースステーション110aは該位置推定値を1以上の測距端末へと送ってよく、これは次いで、該位置推定値を標的端末Aに転送してよい。
【0044】
図2および図5に示した実施形態について、標的端末についての位置推定値は、上記で述べたように、標的および/または測距端末によってなされたTOA測定値および測距端末の位置にのみ基づいて計算されてよい。TOA測定値は、マルチパス、タイミング安定性、および/または他の因子によるエラーを含む可能性がある。この測定エラーは、複数回の測定を実行することによって緩和されてよい。
【0045】
標的端末についての位置推定値は、測距端末の位置精度によって影響される。一実施形態において、標的端末は測距端末に対して、望ましい精度または不確実さで、それらの位置を提供するようにリクエストすることができる。測距端末は、次いで、それらの位置を望ましい不確実さの範囲内で決定し、それらの位置を標的端末に戻してよい。測距端末の位置およびこれら位置における不確実さは、標的端末についての位置推定値を計算するときに考慮されてよい。
【0046】
標的端末についての位置推定値の精度は、一般に、標的端末の距離測定を行う測距端末の数に伴って改善される。しかし、測距端末の密度が高いエリアにおいては、標的端末が送ったリクエストについての多すぎる応答が存在し得る。応答の数は、一定の距離の端末だけからの応答を要請することによって制御されてよい。一実施形態において、測距端末は、応答を提供するようにランダムに選択される。例えば、ハッシュ関数を使用して、これら端末についての独特の識別子に基づいてN番目の測距端末を選択してよく、ここでのNは如何なる整数値であってもよい。もう一つの実施形態においては、標的端末から予め定められた距離内にある測距端末が、応答を提供するために選択される。同様に、標的端末に対して最適の形状を送達し、または望ましい信号特性(例えばSNR、SIR、Ec/Io等)を有する測距端末が、距離測定のために選択されてよい。更にもう一つの実施形態においては、一以上の種類の測距端末が、応答を提供するために選択される。例えば、静止または固定された測距端末、交流電流(AC)によって電力供給される端末、および/または幾つかの他の種類の端末が、応答を提供するために選択されてよい。更にもう一つの実施形態において、測距端末は、特定の期間だけ待機した後に、それらの応答を送信する。各測距端末についての待機時間は、擬似ランダムな時間であってよい。核測距端末についての待機時間はまた、1以上の因子、例えば標的端末までの予測距離、および測距端末の位置の精度等に基づいて計算されてよい。各測距端末について、前記待機時間が切れる前に標的端末からACKが受信されれば、測距端末は応答を送らない。測距端末からの応答はまた、他の方法で制御されてもよい。
【0047】
一般に、標的端末についての位置推定値は、同じタイプもしくは異なるタイプの充分な数の送信機ついての距離測定値、およびこれら送信機の位置に基づいて計算されてよい。標的端末についての位置推定値は、(1)測距端末、ベースステーション、人工衛星、および/または他の送信機(例えばブロードキャストステーション、WLAN端末など)について、標的端末により行われた距離測定値、(2)標的端末について、測距端末、ベースステーション、および/または他の受信機によって行われた距離測定値、並びに(3)それらの何れかの組合せに基づいて計算されてよい。より高い信頼性を備えた距離測定(例えば、人工衛星についての測定値)には、位置推定値の計算においてより大きな重みが与えられてよい。
【0048】
標的端末は、無線ネットワークから補助データを得てよい。この補助データは、例えば問題の各ベースステーションの位置、人工衛星の位置を含む暦、ベースステーションおよび/または人工衛星についてのタイミング情報等を示してよい。標的端末はこの補助データを使用して、ベースステーションおよび人工衛星を選択し、これらについての距離測定を行い、またはそれ自身についての位置推定値を計算してよい。
【0049】
2.セクターに基づく、および地球全体に基づくメッセージ転送。
【0050】
例えば図2および図5に示すようなピアツーピア通信を用いた位置決定は、セクターに基づくスキームまたは地球全体に基づくスキームを用いて実行されてよい。セクターに基づくスキームについては、標的端末が、特定のセクター内にある測距端末へとリクエストを送信する。地球全体に基づくスキームでは、標的端末が、ネットワークにおける測距端末へとリクエストをブロードキャストする。セクターに基づくスキームおよび全地球に基づくスキームは、一方向および二方向のピアツーピア通信のために使用されてよい。
【0051】
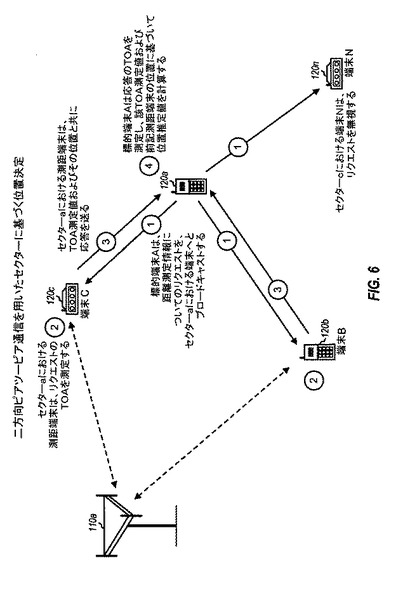
図6は、セクターに基づく二方向のピアツーピア通信を用いた位置決定の実施形態を示している。標的端末Aは、位置決定情報についてのリクエストを、指定されたセクターa(これは端末Aによって最も強く受信されるセクターであってよい)における端末へと送信する。該リクエストは、特定の擬似ランダム数(PN)のコード、特定のスクランブルコード、および/またはセクターaに割当てられた幾つかの他の独特の識別子を使用することによって、セクターaに送信されてよい。このセクターに基づくスキームについて、各測距端末は、そのセクターに送信されたリクエストを注意深く聞く。端末BおよびCはセクターaに位置しており、端末Aにより送信されたリクエストがセクターaについてのものであることを認識し、また該リクエストを処理する。端末Nは、セクターcに位置しており、端末Aにより送られたリクエストを受信せず、または該リクエストがもう一つのセクターへとブロードキャストされることを認識しない。何れの場合にも、端末Nは、端末Aからのリクエストを無視する。
【0052】
一実施形態において、標的端末Aは、そのリクエストを一つのセクター(例えば端末Aによって最も強く受信されるセクター)にのみ送信する。もう一つの実施形態において、標的端末Aは、例えば端末Aが充分な数の応答を受信するまで、そのリクエストを1以上のセクターへと送信する。例えば、標的端末Aは、最初に最も強く受信されるセクターへとリクエストを送信し、次いで、もし不十分な数の応答が受信されるならば、その次に強く受信されるセクターへと順次送信してよい。もう一つの例において、もし受信された距離測定の幾何学が、要求されるサービス品質の位置推定値を誘導するために不十分であれば、標的端末Aは、もう一つのセクター(異なるベースステーションに属してよい)における端末から追加の距離測定値をリクエストしてよい。標的端末の位置決定の目的で測距端末を選択するために、他の選択基準を使用してもよい。
【0053】
図2は、全地球に基づくに方向のピアツーピア通信を用いた位置決定の実施形態を示している。この実施形態について、標的端末Aは、例えばグローバルPNコードを使用して、ネットワークにおける測距端末へとリクエストをブロードキャストする。この実施形態について、各測距端末は、グローバルPNコードを使用してブロードキャストされたリクエストを注意深く聞く。セクターaおよびcにおける測距端末B,CおよびNは、標的端末Aからリクエストを受信し、上記で述べたようにして処理を実行する。
【0054】
一実施形態において、ネットワークは、セクターに基づくスキームまたは全地球に基づくスキームをサポートする。もう一つの実施形態において、ネットワークは、セクターに基づくスキームおよび全地球に基づくスキームの両方をサポートする。この実施例について、標的端末は、最初にセクターに基づく位置決定を試み、例えば最も強く受信されたセクターへとリクエストをブロードキャストしてよい。位置推定が計算され得ず、または十分に正確でない(例えばサービスの品質に合致しない)ならば、標的端末は全地球に基づく位置決定を試み、次いで例えばグローバルPNコードを使用して全てのセクターへとリクエストをブロードキャストしてよい。
【0055】
3.メッセージ送信
ネットワーク100は周波数分割二重化(FDD)を利用してよく、これは順方向リンクおよび逆方向リンクのために二つの別々の周波数帯域を割当てる。端末は典型的には、逆方向リンク上でベースステーションへと送信し、また順方向リンク上でベースステーションから受信するように設計される。二つのPTP端末は、一方のPTP端末が順方向リンク上で送信でき、または逆方向リンク上で受信できるならば、一方向ピアツーピアで通信することができる。二つのPTP端末は、両方のPTP端末が順方向リンク上で送信でき、両方のPTP端末が逆方向リンク上で受信でき、または一方のPTP端末が順方向リンク上で送信でき且つ逆方向リンク上で受信できるならば、二方向ピアツーピアで通信することができる。一実施形態において、標的端末は順方向リンク上でリクエストを送信する。標的端末は、他の端末への順方向リンク上で過剰な干渉を生じる可能性があり、ベースステーションから遠くにあるときは、その送信電力を低下させてよい。もう一つの実施形態において、標的端末は逆方向リンク上でリクエストを送信する。標的端末は、ベースステーションにおいて逆方向リンク上で過剰な干渉を生じる可能性があり、ベースステーションに近接して位置するときは、その送信電力を低下させてよい。一実施形態において、標的端末はオープンループの電力推定値を決定し、これはネットワークにおけるアクセスチャンネルについての送信電力である。標的端末は、次いで、オープンループ電力推定によって決定される電力レベル、例えばオープンループ電力推定値よりも低いXdBでリクエストを送信してよく、個々でのXは良好な特性を与えるように選択される。
【0056】
一実施形態において、標的端末は何時でもリクエストをブロードキャストしてよい。測距端末は、これらの測距端末が他の機能を実行しないときは、標的端末からのリクエストを連続的に注意深く聞いてよい。もう一つの実施形態において、標的端末は、指定された時間帯内にリクエストをブロードキャストしてよい。測距端末は、これら時間帯の間だけ、標的端末からのリクエストを注意深く聞いてよい。
【0057】
標的端末は、スロッテッドアロハ・ランダムアクセススキーム、搬送波感知多重アクセス(CAMA)スキーム等のような種々のランダムアクセススキームを使用して、リクエストをブロードキャストしてよい。一実施形態において、標的端末は、当該ネットワークにおいて利用可能なアクセスチャンネル上でリクエストをブロードキャストする。例えば、標的端末は、cdma2000における逆方向アクセスチャンネル(R−ACH)または逆方向エンハンストアクセスチャンネル(R−EACH)上でリクエストを送ってよい。測距端末は、ベースステーションと同様の方法でR−ACHまたはR−EACHを処理することによって、該リクエストを検出してよい。もう一つの実施形態において、標的端末は、ピアツーピア通信をサポートするために使用される物理的チャンネルである逆ピアエンハンストアクセスチャンネル(R−PEACH)上で、リクエストをブロードキャストする。R−PEACHは、1以上のメッセージフォーマットおよび1以上のデータレートをサポートしてよい。全ての実施形態について、標的端末は、他の端末への過剰な干渉を生じない電力レベルでリクエストを送信する。
【0058】
二方向ピアツーピアの実施形態において、測距端末は、R-PEACH、R−ACH、R-EACHまたは幾つかの他のチャンネルを介して、標的端末へと応答を送る。一方向ピアツーピアの実施形態において、測距端末は、R−ACH、R-EACHまたは幾つかの他のチャンネルを使用して、ベースステーションへと応答を送る
4.フロー図
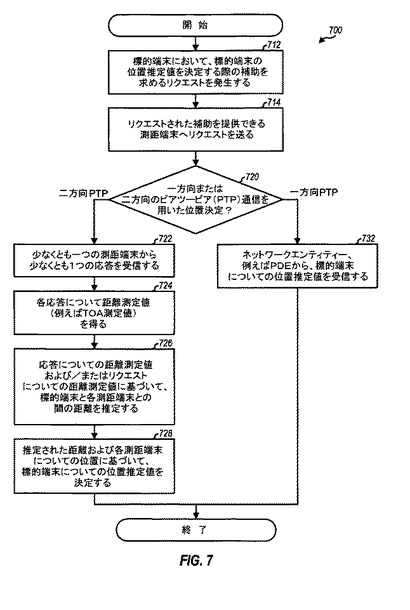
図7は、ピアツーピア通信を用いた位置決定のために、標的端末によって実行されるプロセス700の実施形態を示している。標的端末は、その位置を突き止めたいと望み、それ自身の位置推定値の決定における補助を求めるリクエストを発生する(ブロック712)。このリクエストは、(1)測距端末から距離測定情報を要請し、(2)測距端末に、標的端末のための距離測定情報を入手して、該距離測定情報を、標的端末の位置推定値を決定できるネットワークエンティティー(例えばPDE)へと転送するように要請し、または(3)位置決定に適した他の情報および/または補助を要請してよい。該リクエストはまた、標的端末の位置決定のためにネットワークエンティティーが使用し得る上記で述べた関連情報を含んでよい。次いで、標的端末は、リクエストされた補助を提供できる測距端末に対して、リクエストを送る(ブロック714)。該リクエストは、特定のセクター、セクター群、またはネットワークにおける全てのセクターに送られてよい。
【0059】
ブロック720において決定されるような、二方向のピアツーピア(PTP)通信を用いた位置決定については、標的端末は、少なくとも一つの測距端末から少なくとも一つの応答を受信する(ブロック722)。各測距端末からの応答は、測距端末の位置(または位置に関連し得る幾つかの同定情報)、および標的端末が送ったリクエストについて測距端末によりなされた距離測定値(例えばTOA測定値)を含んでよい。標的端末はまた、各測定値(例えばTOA測定値)を入手してよい(ブロック724)。次いで、標的端末は、(1)測距端末からの応答について該標的端末により行われた距離測定値、および/または(2)該標的端末が送ったリクエストについて測距端末が行った距離測定値に基づいて、標的端末と各測距端末の間の距離を推定してよい。標的端末は、次いで、推定された距離および各測距端末の位置に基づいて、それ自身の位置推定値を決定してよい(ブロック728)。一方向ピアツーピア通信を用いた位置決定については、ブロック720において決定されるように、標的端末は、それ自身のための位置推定値をネットワークエンティティーから単純に受信してよい(ブロック732)。
【0060】
単純化のために図7には示されていないが、標的端末は、他の送信機(ベースステーションおよび/または人工衛星であってよい)のための距離測定値を入手してよい。標的端末は、(1)これらの距離測定値を使用してそれ自身のための位置推定値を計算し、または(2)これら測定値を、標的端末のための位置推定値を計算するために使用するためにネットワークエンティティーへと転送してよい。加えて、測距端末はまた、ベースステーションおよび/または人工衛星であってよい他の送信機のための距離測定値を得てよく、これら距離測定値はまた、標的端末の位置推定値を決定するために使用されてよい。
【0061】
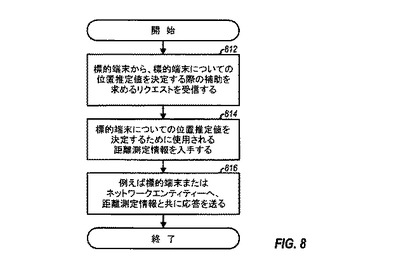
図8は、ピアツーピア通信を用いた位置決定をサポートするために、測距端末により実行されるプロセス800の実施形態を示している。測距端末は、標的端末から、標的端末の位置推定値を決定する際の補助を求めるリクエストを受信する(ブロック812)。測距端末は、標的端末の位置推定値を決定するのに適した距離測定情報を入手する(ブロック814)。例えば、測距端末は、標的端末からのリクエストについてのTOA測定値を入手してよく、当該リクエストについてのTOA測定値および距離測定情報としての測距端末の位置を提供してよい。或いは、測距端末は、標的端末からのリクエストについてのRSSI測定値を得てよく、またRSSI測定値および距離測定情報としての測距端末の位置を提供してよい。距離測定情報はまた、測距端末におけるタイミングオフセットを決定するために使用される他の情報(例えばBSID)を含んでよい。測距端末は、距離測定情報と共に、標的端末またはネットワークエンティティー(例えばPDE)へと応答を送る(ブロック816)。
【0062】
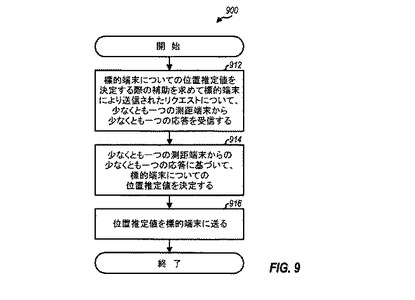
図9は、ピアツーピア通信を用いた位置決定をサポートするために、測距端末(例えばPDE)により実行されるプロセス900の実施形態を示している。ネットワークエンティティーは、標的端末の位置推定値を決定する際の補助について、標的端末により送られたリクエストについて、少なくとも一つの測距端末から少なくとも一つの応答を受信する(ブロック912)。各応答は、標的端末のための位置推定値を決定するために使用される距離測定情報を含んでいる。ネットワークエンティティーは、少なくとも一つの測距端末からの少なくとも一つの応答に基づいて、標的端末のための位置測定値を決定する(ブロック914)。例えば、該ネットワークエンティティーは、測距端末によってなされたTOA測定に基づいて、標的端末と各測距端末の間の距離を推定してよい。該ネットワークエンティティーは、各端末のタイミングオフセットを推定してよく、また各影響された測定からタイミングオフセットを除去してよい。該ネットワークエンティティーは、(1)標的端末と各測距端末との間の推定された距離、および(2)各測定端末の位置に基づいて、標的端末のための位置推定値を決定してよい。該ネットワークエンティティーはまた、標的端末および/または測距端末により受信された1以上の他の送信機についての1以上の追加の距離測定値を得てよく、また、これら追加の距離測定値に基づいて、標的端末のための位置推定値を決定してよい。何れの場合においても、当該ネットワークエンティティーは、必要であれが、この位置推定値を標的端末へと送る(ブロック916)。
【0063】
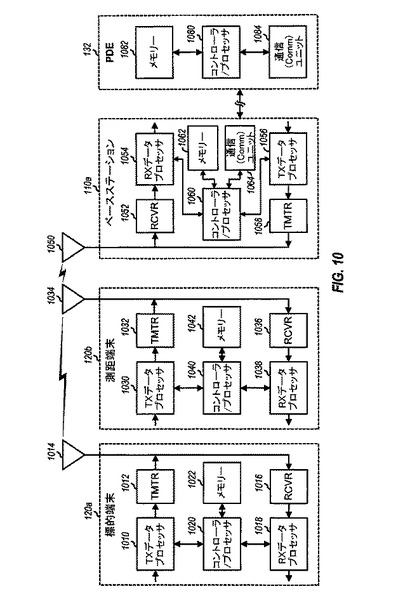
5.ブロック図
図10は、標的端末120a、測距端末120b、ベースステーション110a、およびPDE132のブロック図を示している。標的端末120aにおいて、コントローラ/プロセッサ1020は、ピアツーピア通信を用いた位置決定についてのリクエストを発する。送信(TX)データプロセッサ1010が該リクエストを受信し、リクエストメッセージを発生して、メッセージのために送られるべきデータビットを与える。送信機(TMTR)1020は、該データビットを調節し(例えばアナログに変換し、増幅し、フィルターし、また周波数アップコンバートする)、アンテナ1014を介して送信されるPTP信号を発生する。
【0064】
測距端末120bにおいて、アンテナ1034はPTP信号を標的端末120aから受信し、受信された信号を受信機(RCVR)1036に与える。受信機1036は、この受信された信号を調節し(例えばフィルターし、増幅し、周波数ダウンコンバートし、デジタル化する)て、データサンプルを提供する。受信(RX)データプロセッサ1038は、このデータサンプルを処理し(例えばスクランブルの除去、チャンネル化、復調、脱インターリーブ、およびデコード化)、標的端末120aによって送られたリクエストメッセージを回復させる。受信機1036および/またはRXデータプロセッサ1038は、更に、当該リクエストメッセージのTOAを決定してよい。TXデータプロセッサ1030は、当該リクエストについての応答メッセージを発生する。該応答メッセージは、上記のように、該応答が標的端末120aまたはPDE132の何れに送られるかに応じて、異なる情報を含んでよい。
【0065】
二方向ピアツーピア通信を用いた位置決定については、図2に示したように、送信機1032はPTP信号を発生し、該信号はアンテナ1034を介して標的端末120aへと送信される。標的端末120aにおいては、測距端末120bからのPTP信号がアンテナ1014により受信され、受信機1016により調節され、RXデータプロセッサ1018により処理されて、測距端末120bからの応答メッセージが回復される。受信機1016および/またはRXデータプロセッサ1018はまた、当該応答メッセージのTOAを決定してよい。コントローラ/プロセッサ1020は、測距端末120bおよび可能否他の測距端末までの距離を推定し、更に、標的端末120aについての位置推定値を計算する。
【0066】
一方向ピアツーピア通信を用いた位置決定については、図5に示すように、送信機1032がRL信号を発生し、該信号はアンテナ1034を介してベースステーション110aへと送信される。ベースステーション110aにおいては、測距端末120bからのRL信号がアンテナ1050により受信され、受信機1052により調節され、RXデータプロセッサ1054により処理されて、測距端末120bからの応答メッセージが回復される。通信(Comm)ユニット1064は、該応答メッセージをPDE132へと転送する。PDE132において、通信ユニット1084は全ての測距端末についての応答メッセージを受信する。コントローラ/プロセッサ1080は、標的端末120aについての位置推定値を計算し、該位置推定値をベースステーション110aへと転送する。ベースステーション110aにおいて、標的端末120aについての位置推定値および順方向リンク上で送られるべき他のデータは、TXデータプロセッサ1056によって処理され、送信機1058によって調節されてFL信号を発生し、該信号はアンテナ1050を介して送信される。標的端末120aにおいて、ベースステーション110aからのFL信号はアンテナ1014(図10では図示せず)によって受信され、受信機1061によって調節され、RXデータプロセッサ101によって処理されて、PED132により送られた位置推定値が回復される。該位置推定値は、PDE132からベースステーションへ、次いで測距端末120bへ、次いで標的端末120aへと送られてよい。
【0067】
コントローラ/プロセッサ1020、1040、1060および1080は、それぞれ、端末120aおよび120b、ベースステーション110a、並びにPDE132内の種々のユニットの動作を指令する。メモリー1022、1042、1062、および1082は、それぞれ、端末120aおよび120b、ベースステーション110a、並びにPDE132のためのデータおよびプログラムコードを保存する。
【0068】
明瞭化のために、上記の記述は、標的端末、測距端末、およびベースステーションが無線アクセス技術(RAT)を使用して通信すると仮定している。一般に、何れか一つまたは何れかの組合せのRATが、ピアツーピア通信をサポートするために使用されてよい。例えば、標的端末および測距端末は、第一のRATを使用して通信してよく、また測距端末およびベースステーションは、第二のRATを使用して通信してよい。各RATは、WWANまたはWLANまたはWPANのためのものであってよい。例えば、標的端末および測距端末は、IEEE802.11x、ブルートゥース(登録商標)、UWM、ZigBee等を使用して通信してよい。距離沿い区低端末およびベースステーションは、cdma200、W−CDMA、GSM、OFDM等を使用して通信してよい。標的端末および測距端末の各々は、一つまたは複数のRATをサポートしてよい。
【0069】
ここに記載する位置決定技術は、種々の手段によって実施されてよい。例えば、これら技術はハードウエア、ファームウエア、ソフトウエア、またはそれらの組合せにおいて実施されてよい。ハードウエア実施の場合、PTP端末、ベースステーション、またはネットワークエンティティーにおける処理ユニットは、1以上のアプリケーション特異的集積回路(ASIC)、デジタル信号プロセッサ(DSP)、デジタル信号処理装置(DSPD)、プログラム可能な論理装置(PLD)、フィールドプログラム可能なゲートアレイ(FPGA)、プロセッサ、コントローラ、マイクロコントローラ、マイクロプロセッサ、電子装置、ここに記載した機能を実行するように設計された他の電子ユニット、またはそれらの組合せの中に実装されてよい。
【0070】
ファームウエアおよび/またはソフトウエア実施の場合、当該技術は、ここ記載した機能を実行するモジュール(例えば手順、機能など)を用いて実施されてよい。ソフトウエアコードは、メモリー(例えば、図10におけるメモリー1022、1042、1062または1082)に保存されてよく、またプロセッサ(例えばプロセッサ1020、1040、1060、または1080)によって実行されてよい。
【0071】
見出しは、参照のため、および一定の章を見つけるための補助として含められるものである。これらの見出しは、ここに記載した概念の範囲を限定することを意図したものではなく、また、これらの概念は明細書全体を通して他の章においても適用可能である可能性がある。
【0072】
以上の開示された実施形態の説明は、当業者が本発明を製造または使用することを可能にするために提供される。これら実施形態に対する種々の変更は、当業者によい有為に明らかであろうし、ここに定義された一般原理は本発明の精神または範囲を逸脱することなく、他の実施形態にも適用されてよい。従って、本発明はここに示した実施形態に限定されることを意図したものではなく、ここに開示した原理および新規な特徴に一致した最も広い範囲が与えられるべきである。
【図面の簡単な説明】
【0073】
【図1】図1は、無線多重アクセス通信ネットワークを示す。
【図2】図2は、二方向のピアツーピア通信を用いた位置決定を示している。
【図3】図3は、距離測定リクエストおよび応答についての送信時系列チャートを示している
【図4】図4は、標的端末についての位置推定値の誘導を示している。
【図5】図5は、一方向ピアツーピア通信を用いた位置決定を示している。
【図6】図6は、セクターに基づく二方向ピアツーピア通信を用いた位置決定を示している。
【図7】図7は、標的端末により実行されるプロセスを示している。
【図8】図8は、測距端末により実行されるプロセスを示している。
【図9】図9は、PEDにより実行されるプロセスを示している。
【図10】図10は、標的端末、測距端末、ベースステーション、およびPDEのブロック図を示している。
【技術分野】
【0001】
本件開示は、一般には通信に関し、更に詳細に言えば、無線通信ネットワークにおいて位置決定を実行するための技術に関する。
【発明の背景】
【0002】
無線ユーザの位置を知ることが望まれることが多く、時にはそれが必要とされる。例えば、連邦通信委員会(FCC)により公表されたエンハンスト911(E911)無線サービスは、端末(例えば携帯電話)の位置が、該端末から911呼び出しが行われる毎に、公衆安全性応答点(PSAP)に提供されることを必要とする。FCC指令に加えて、種々の用途が端末の位置を使用して付加価値的特徴を提供し、また追加の収入を発生させる可能性がある。
【0003】
一般には、端末の位置の予測は、(1)充分な数の送信機、例えば三つ以上の送信機への端末からの距離または範囲、および(2)これら送信機の既知の位置に基づいて誘導されてよい。各送信機は、無線通信ネットワークにおける人工衛星またはベースステーションであってよい。各送信機までの距離および/または各送信機の位置は、当該送信機により送られる信号に基づいて確認することができる。
【0004】
多くの場合において、端末は、それ自身についての位置予測を計算するために必要とされる充分な数の信号を受信できない可能性がある。この必要な数の信号を受信できないことは、環境における障害物およびアーティファクト、並びに端末の制限された能力などに起因する可能性がある。何れにしても、これらの場合に端末の位置予測を誘導することが望まれる。
【0005】
従って、当該技術分野においては、人工衛星およびベースステーションから不十分な数の信号だけが利用可能であるときに、位置決定を行うための技術が必要とされている。
【概要】
【0006】
ここでは、ピアツーピア通信を用いて位置決定を行うための技術が記載される。これらの技術は、人工衛星およびベースステーションから不十分な数の信号しか利用可能でないときでも、端末についての位置予測を提供することができる。不十分な数の高品質の測定値が利用可能であるときは、この技術は、これらの測定値を増強するために使用されてよい。
【0007】
ピアツーピア通信を用いた位置決定の実施形態において、標的端末は、その位置を突き止めることを望み、その位置決定における補助を求めるリクエストをブロードキャストする。リクエストされた補助を提供できる少なくとも一つの測距端末(ranging terminal)が、標的端末からのリクエストを受信する。各々の測距端末は、標的端末のための位置予測を決定するために適した距離情報と共に応答を送る。例えば、各測距端末からの距離測定情報(ranging information)は、(1)標的端末により送られたリクエストについて当該測距端末によってなされた到着時間(TOA)測定、(2)測距端末の位置、(3)受信された信号強度指標(RSSI)、および/または(4)他の情報を含んでよい。各測距端末は、その応答を前記標的端末、またはネットワークエンティティー、例えば、標的端末のための位置推定値を計算できる位置決定エンティティー(PDE)もしくはサーバーモバイル位置決めセンター(SMLC)のような位置決めサーバへと送る。RSSI測定値は、送信電力と共に、送信機と受信機の間の距離(範囲)を推定するために使用されてよい。
【0008】
一実施形態において、前記標的端末は、前記少なくとも一つの測距端末から少なくとも一つの応答を受信する。前記標的端末は、各応答についてのTOA測定値を入手し、前記リクエストについてのTOA測定値および/または前記応答についてのTOA測定値に基づいて各測距端末までの距離を推定し、各測距端末についての推定された距離および位置に基づいてそれ自身についての位置推定値を計算する。もう一つの実施形態において、前記ネットワークエンティティーは、少なくとも一つの測距端末から少なくとも一つの応答を受信し、前記標的端末についての位置推定値を計算し、該位置推定値を前記標的端末に送る。
【0009】
本発明の種々の側面および実施形態について、以下で詳細に説明する。
【0010】
本発明の特徴および性質は、添付の図面と共に以下の詳細な説明を読むことにより更に明らかになるであろう。図において、同様の参照符号は全体を通して同一のものを特定する。
【詳細な説明】
【0011】
「例示的」の語は、ここでは「例、事例、または例示として働く」を意味するために使用される。「例示的」としてここに記載する何れかの実施形態または設計は、必ずしも他の実施形態または設計に対して好ましい、または有利であると解釈されるべきものではない。
【0012】
ここに記載する位置決定技術は、種々の無線通信ネットワーク、例えば無線広域ネットワーク(WWAN)、無線ローカルエリアネットワーク(WLAN)、無線パーソナルエリアネットワーク(WPAN)等のために使用されてよい。「ネットワーク」および「システム」の用語は、屡々、互換的に使用される。WWANは、コード分割多重アクセス(CDMA)ネットワーク、時間分割多重アクセス(TDMA)ネットワーク、周波数分割多重アクセス(FDMA)ネットワーク、直交周波数分割多重アクセス(OFDMA)ネットワーク、単一キャリア波周波数分割多重アクセス(SC-FDMA)ネットワークなどであってよい。CDMAネットワークは、cdma2000、広帯域CDMA(W−CDMA)等のような1以上の無線アクセス技術(RAT)を実施してよい。cdma2000は、IS−95、IS−2000、およびIS−856標準を含む。TDMAネットワークは、モバイル通信のためのグローバルシステム(GSM)、デジタルアドバンストモバイル電話システム(D−AMPS)、または他の幾つかのRATを組込んでよい。GSMおよびW−CDMAは、「第三世代パートナーシップ計画」(3GPP)と称する共同事業体からの文書に記載されている。cdma2000は、「第三世代パートナーシップ計画2」(3GPP2)と称する共同事業体からの文書に記載されている。3GPPおよび3GPP2の文書は好適に入手可能である。WLANは、IEEE802.11xネットワークであってよく、またWPANはBluetooth(登録商標)ネットワーク、IEEE802.15xまたは他のタイプのネットワークであってよい。当該技術はまた、WWAN、WLANおよび/またはWPANの何れかの組合せのために使用されてよい。
【0013】
図1は、無線多重アクセス通信ネットワーク100を示している。ネットワーク100は、IS−2000、IS−95および/またはIS−856を組込んだcdma2000ネットワーク、またはwpcdmaを組込んだユニバーサルモバイル遠隔通信システム(UMTS)ネットワークのようなセルラーネットワークであってよい。ネットワーク100は、複数のベースステーション110を含んでおり、各ベースステーションは特定の地理学的エリア102についての通信範囲を提供する。ベースステーションは、一般には、複数の端末と通信する固定ステーションである。ベースステーションはまた、アクセスポイント、ノードB、ビーコン、または他の幾つかの用語で呼ばれてもよい。「セル」の用語は、この用語が使用される文脈に応じて、ベースステーションおよび/またはそのカバー領域を意味する。ベースステーションは、地形、障害物等のような種々の因子によって決定される異なったサイズおよび形状のカバーエリアを有してよい。システム能力を改善するために、ベースステーションカバーエリアは、複数の小さい領域、例えば三つの小領域104a、104bおよび104cに区分されてよい。各小領域は、各々のベース送信機サブシステム(BTS)によるサービスを受ける。「セクター」の用語は、この用語が使用される文脈に応じて、BTSおよび/またはそのカバー領域を意味することができる。セクターに分割されたセルについて、当該セルの全てのセクターのためのBTSは、典型的には該セルのための同じベースステーション内に配置される。
【0014】
ここに記載される技術は、セクターに分割されたネットワーク、並びにセクターに分割されないセルについて使用されてよい。明瞭化のために、以下での多くの記載は、セクターに分割されたセルラーネットワークについてのものである。単純化のために、以下での記載において、「ベースステーション」の用語は、一般には、セクターにサービスする固定ステーション並びにセルにサービスする固定ステーションを意味する。
【0015】
システムコントローラ130は、ベースステーション110に結合されて、これらベースステーションのための調整および制御を提供する。システムコントローラ130は、単一のネットワークエンティティーであってよく、または複数のネットワークエンティティーの集合であってもよい。例えば、システムコントローラ130は、ベースステーションコントローラ(BSC)、モバイルスイッチングセンター(MSC)、無線ネットワークコントローラ(RNC)、パケットデータサービスノード(PDSN)、および/または他の幾つかのネットワークエンティティーを含んでよい。位置決定エンティティー(PDE)132は、端末のための位置決定を支援する。例えば、PDE132は、距離測定(raging measurement)を行う端末によって使用される補助データを提供してよい。ここで使用する距離測定は、TOA測定、観察される時間差(OTD)測定、到着の時間差(TDOA)測定、角度または到着(AOA)測定、受信信号強度指標(RSSI)、往復遅延(TRD)等であってよい。これら種々のタイプの距離測定は当該技術において知られている。PDE132はまた、端末および/またはベースステーションにより与えられる距離測定に基づいて、端末のための位置推定を計算してよい。
【0016】
端末120は、典型的には、ネットワーク100の全体に亘って分布され、各端末は固定式または移動式であってよい。端末はまた、モバイルステーション、アクセス端末、ユーザ装置、または他の幾つかの技術用語で呼ばれてよい。端末は、無線装置、携帯電話、無線モデム、無線モジュール、パーソナルデジタルアシスタント(PDA)等であってよい。端末は、何れか所定の時点で、順方向および/または逆方向リンク上において、ゼロ、一つまたは複数のベースステーションと通信してよい。端末はまた、もう一つの端末とピアツーピアで通信してもよい。端末はまた、人工衛星140から信号を受信してよく、該衛星は全地球測位システム(GPS)、ガリレオ、および/または他の人工衛星測位もしくは通信システム由来のものであってよい。一般に、順方向および逆方向の両リンクについて受信信号の良好な品質を達成できるのであれば、端末はネットワーク100と直接通信してよい。もし、前記リンクの一方または両方について必要な受信信号品質が達成されないならば、端末は、少なくとも一つの他の端末とのピアツーピア通信を介して、ネットワーク100と間接的に通信してよい。
【0017】
ここでの説明において、ピアツーピア(PTP)端末とは、もう一つの端末とピアツーピアで通信できる端末である。標的端末は、その位置が決定されるPTP端末である。測距端末は、標的端末とピアツーピアで通信し、且つ標的端末のための位置決定を支援するPTP端末である。
【0018】
1.一方向および二方向のピアツーピア通信
ネットワークは、一方向および/または二方向のピアツーピア通信を支援する。一方向ピアツーピア通信の一実施形態において、PTP端末は一つのリンク(例えば逆方向リンク)上でのみもう一つのPTP端末とピアツーピアで通信し、更に他のリンク(例えば順方向リンク)上でネットワークと通信する。一方向ピアツーピア通信のもう一つの実施形態において、PTP端末は一つのリンク上だけでもう一つのPTP端末とピアツーピアで通信し、また順方向および逆方向リンクの両方でネットワークと通信してよい。二方向のピアツーピア通信については、PTP端末は、両方のリンク上でもう一つのPTP端末と通信する。標的端末は一方向または二方向のピアツーピア通信を使用して、位置推定値を得てよい。
【0019】
図2は、二方向のピアツーピア通信を用いた位置決定の一実施形態を示している。端末120a、120b、120cおよび120nはまた、それぞれ端末A、B、CおよびNとも称される。この実施形態の場合、標的端末Aはその位置を突き止めることを望み、またはそれ自身の位置決めにおける補助を望み、また距離測定情報についてのリクエストをブロードキャストする(ステップ1)。このリクエストは、該リクエストが、標的端末Aのタイミングに基づいて何時送られたかの指標を含んでいる。この指標は、以下で述べるように明示的または暗示的であってよい。測距端末B、CおよびNは、標的端末Aからのリクエストを受信する。各測距端末は、測距端末のタイミングに基づいて前記リクエストの到着時間(TOA)を測定する(ステップ2)。各測距端末は、次いで、標的端末Aに応答を送る(ステップ3)。一実施形態において、各測距端末からの応答は、(1)標的端末Aが送ったリクエストについて測距端末により行われたTOA測定、(2)測距端末の位置、(3)応答が何時送られたかの指標(明示的でも暗示的でもよい)を含んでいる。測距端末は、標的端末Aにおいてもう一つとの衝突を回避するために、それらの応答を異なるときに送ってよい(例えば、ランダムに選択されたフレームまたは時間スロットにおいて)。
【0020】
標的端末Aは、測距端末B、CおよびNからの応答を受信する。標的端末Aは、標的端末のタイミングに基づいて、各距離測定からの応答の到着時間を測定する(ステップ4)。次いで、標的端末Aは、(1)標的端末が送ったリクエストについて測距端末が行ったTOA測定、および(2)測距端末が送った応答について標的端末が行ったTOA測定に基づいて、各測距端末までの距離を推定する(これもステップ4)。次いで、標的端末Aは、測距端末B、CおよびNまでの推定距離、並びにこれら測距端末の位置に基づいて、それ自身についての位置推定値を誘導する(これもステップ4)。
【0021】
図3は、標的Aが送信した距離測定リクエストおよび測距端末Bが送信した応答についての、送信タイムラインを示している。各端末は、ネットワーク100の時間ベースであるシステム時間にロックされてよい時間ベースを維持する。各端末についての時間ベースは、ベースステーションから受信したパイロットによって決定され、また該パイロットにロックされてよい。各端末についての時間ベースは、ベースステーションと端末との間の伝播遅延に対応する量だけ、システム時間からオフセットしている可能性がある。図3に示した例では、標的端末AについてのタイミングオフセットはTAとして示され、測距端末BについてのタイミングオフセットはTBで示されている。
【0022】
ネットワーク100についての送信時間ラインは、各フレームが予め定められた持続時間、例えば10ミリ秒(ms)を有する複数のフレームに分割されてよい。絶対時間に関するタイミングオフセットの故に、与えられたフレームは、システム時間ではTS1において、標的端末についてはTS1+TAにおいて、測距端末Bについては時間TS1+TBにおいて開始されてよい。標的端末Aは、端末Aのタイミングに基づくフレームの開始点である時間TS1+TAにおいて、距離測定リクエスト(ranging request)を送ってよい。該リクエストが送られる時間は測距端末によって知られていてよく、また当該リクエスト中において暗示的に送られてよい。標的端末Aと測距端末Bとの間の距離はdBで示され、これは時間(秒)または距離(メータ)の単位で与えられてよい。測距端末Bは、前記リクエストが送られた時間TS1+TAからdB+εAB秒である時間TS1+TXにおいて前記リクエストを受信し、ここでのεABは測定エラーを表す。測距端末Bは、前記リクエストが受信された時間TS1+TX、および前記リクエストが送られた時間TS1+TBに基づいて、次のように前記リクエストのTOAを決定してよい:
TOAAB=(TS1+TX)−(TS1+TB)
=TX−TB=dB+TA−TB+εAB 式(1)
ここで、
TOAABは、標的端末Aによって測距端末Bに送られたリクエストについてのTAOであり、
TXおよびTBは、測距端末Bのタイミングに基づいており、
εABは、TOAABについての測定エラーであり、これは二つの端末の間の非ラインオブサイトの信号伝播に起因した過剰な遅延を含んでいる可能性がある。
【0023】
測距端末Bは、時間TS2+TBにおいて応答を送るが、これは端末Bのタイミングに基づいて応答が送られるフレームの開始時点である。応答が送られる時間は、標的端末によって知られてよく、また応答において暗示的に送られてよい。標的端末Aは、時間TS2+TYにおいて応答を受信するが、これは当該応答が送られた時間TS2+TBからdB+εBA秒であり、ここでのεBAは測定エラーを表す。標的端末Aは、応答が受信された時間TS2+TY、および当該応答が送られた時間TS2+TAに基づいて、次のようにして当該応答のTOAを決定してよい。
【0024】
TOABA=(TS2+TY)−(TS2+TA)
=TY−TA=dB+TB−TA+εBA 式(2)
ここで、
TOABAは、測距端末Bによって標的端末Aに送られた応答についてのTAOであり、
TYおよびTAは、標的端末Aのタイミングに基づいており、
εABは、TOABAについての測定エラーであり、これは二つの端末の間のラインオブサイトでない信号伝播に起因した過剰な遅延を含んでいる可能性がある。
【0025】
標的端末Aは、測距端末Bによって送られた応答からTOAABを入手し、また該応答に基づいてTOABAを測定する。次いで、標的端末Aは、端末AおよびBの間の距離を次のようにして推定してよい:
【数1】
【0026】
ここで、
【数2】
【0027】
は端末AおよびBの間の推定された距離である。式(3)は、端末AおよびBについてのタイミングオフセットTAおよびTBが、それぞれ推定された距離
【数3】
【0028】
において相殺されることを示している。しかし、推定された距離は、測定誤差および非ラインオブサイト遅延εABおよびεBAを含んでおり、これらは除去されない。
【0029】
図2に示された実施形態について、標的端末は、リクエストについてのTOA測定および測距端末からの応答についてのTOA測定に基づいて、各測距端末までの距離を推定する。もう一つの実施形態において、標的端末は、測距端末からの応答についてのTOA測定、および測距端末についてのタイミングオフセットを示す情報意に基づいて、各測距端末までの距離を推定する。標的端末についてのタイミングオフセットTAは、全ての測距端末からの応答についてのTOA測定において共通しており、特別のTOA測定を用いて説明されてよい。更にもう一つの実施形態において、各測距端末は、当該リクエストについてのそのTOA測定に基づいて標的端末までの距離を推定し、また該推定された距離を前記標的端末へと送信して戻す。一般に、標的端末と各測距端末の間の距離は、種々のエンティティー(例えば端末またはネットワークエンティティー)によって、また種々の測定および関連情報に基づいて推定されてよい。一例として、往復遅延測定が使用されてよく、この場合、RTDがTOAAB、TOABAおよびRxTxの合計に等しい。RxTxは、測距端末Bの内部遅延であり、当該リクエストが受信された時と当該応答が標的端末Aに戻し送信された時の間の時間に等しい:(TS2+TB)−(TS1+TX)。
【0030】
標的端末Aは、当該ネットワークの何処かに位置する如何なる数の測距端末から、如何なる数の応答を得てもよい。標的端末Aは、測距端末から受信された応答に基づいて、各測距端末までの距離を推定してよい。次いで、標的端末Aは、全ての測距端末についての位置推定値およびそれらの位置に基づいて、それ自身についての位置推定を誘導してよい。
【0031】
図4は、標的端末Aの位置推定値を決定するための実施形態を示している。各測距端末の位置は、二次元(2D)プロット上の点としてプロットされてよい。各測距端末iについて、実線での円は、(1)端末iの既知位置に配置された中心、および(2)表意的端末Aから端末iまでの推定された距離である
【数4】
【0032】
の半径を有するように描かれてよい。各測距端末iについての円は、εAiの幅を有しており、これは破線による二つの同心円によって表される。εAiは、端末iについての距離推定値
【数5】
【0033】
における補償されない残留誤差である。図4において、円410、412および414は、それぞれ測距端末B、CおよびNについて描かれている。
【0034】
一つの測距端末だけが利用可能であれば、測距端末の位置は、標的端末Aの位置推定値として提供されてよく、また該測距端末についての円は、エラー基準とも称される位置推定における不確実さとして提供されてよい。例えば、標的端末Aが測距端末Bから一つの応答だけを受信するならば、端末Bの位置は、端末Aについての位置推定値として与えられてよく、また円410内の面積は、位置推定における不確実さとして与えられてよい。
【0035】
二つの測距端末が利用可能であれば、これら二つの端末についての円は二つの点において交差し、これら二つの点のうちの何れが標的端末の位置であるかについての曖昧さが存在する。これら二つの点の間に線が引かれてよく、この線の中心点が、標的端末についての位置推定値として与えられてよい。二つの円の重なり面積は、位置推定における不確実さとして与えられてよい。
【0036】
三つの測距端末が利用可能であれば、これら三つの端末についての円は種々の点で交差する。三つの円の円周までの最小二乗平均距離である点が、標的端末の位置推定値として与えられる。平均二乗誤差の合計の平方根が、当該位置推定における不確実さとして与えられてよい。或いは、図4に示すように、三つの交差する円についての交差面積が、位置推定における不確実さとして与えられてよい。
【0037】
一般に、標的端末についての位置推定は、最小二乗平均(LMS)アルゴリズムまたは他の幾つかのアルゴリズムを使用して計算されてよい。LMSアルゴリズムは、位置推定値についての最終解に到達するために多くの反復を実行する。該LMSアルゴリズムおよび他のアルゴリズムは当該技術において既知である。
【0038】
図2に示されている実施形態において、標的端末は測距端末から距離測定情報を受信し、それ自身の位置推定値を計算する。もう一つの実施形態において、標的端末および/または測距端末は距離測定情報をPDE132に転送する。次いで、PDE132は標的敵端末についての位置推定値を計算し、必要であれば、該位置推定値を標的端末へと戻す。幾つかの他のネットワークエンティティーもまた、当該標的端末についての位置推定値を計算してもよい。もう一つの例において、この位置推定値は、ネットワークエンティティー、または標的端末の位置に興味のある端末へと提供される。
【0039】
図2に示された一つの実施形態において、標的端末は、測距端末が送った応答についてのアクノリッジメント(ACK)を送信しない。もう一つの実施形態において、標的端末は予め定められた時間だけ、測距端末からの応答を待ち、各応答についてアクノリッジメント(ACKK)を送信し、または全ての応答のために一つのACKをブロードキャストする。標的端末は、(1)応答のための不十分な送信電力、および/または(2)もう一つの測距端末が送信した応答との衝突のような種々の理由で、所定の測距端末が送信した応答を受信しなくてもよい。ACKが受信されなければ、測距端末はそれらの応答を再送信してもよい。全ての実施形態について、予め定められた時間内に如何なる測距端末からも応答が受信されなければ、標的端末は前記リクエストを再度ブロードキャストしてもよい。
【0040】
図5は、一方向のピアツーピア通信を用いた位置決定の一実施形態を示している。標的端末Aは、その位置を突き止めて、ピアツーピア補助を用いた位置決定のためのリクエストを送信することを望む(ステップ1)。このリクエストは、測距端末に対して、該リクエストのTOAを測定し、距離測定情報をPDE132へ転送することを要請する。このリクエストは、(1)標的端末Aの同定、および任意には、(2)標的端末Aのタイミングに基づいて当該リクエストが何時送信されたかの指示を含んでよい。例えば、当該リクエストはフレームの開始時に送信されてよく、またそこから標的端末Aがそのタイミングを得るベースステーションの同定を含んでよい。ベースステーション同定(BSID)は、標的端末AのタイミングオフセットTAを推定するために使用されてよい。この例において、標的端末Aのタイミングオフセットが所定のアプリケーションのために必要とされないときは、標的端末の位置は、TAについて明示的に解くことなく決定されてよい。標的端末Aはまた、BSID並びに標的端末Aがベースステーション、人工衛星および/または他の送信機について得てよい何らかの距離測定値を、PED132へと(ベースステーション110aを介して、または測距端末およびベースステーション110aを介して)送信してよい。
【0041】
測距端末B、CおよびNは、標的端末Aからのリクエストを受信する。各測距端末は、当該測距端末のタイミングに基づいて、例えば式(1)に示すようにして、当該リクエストのTOAを測定する(ステップ2)。次いで、各測距端末は、そのサービスを提供するベースステーションを介して、応答をPDE132へと送る(ステップ3)。各測距端末からの応答は、(1)測距端末の同定、(2)標的端末Aが送ったリクエストについて測距端末により行われたTOA測定、(3)測距端末の位置、(4)そこから測距端末がそのタイミング(測距端末についてのタイミングオフセットTiを推定するために使用してよい)を得るベースステーションのBSID、(5)、測距端末が、ベースステーション、人工衛星、および/または他の送信機について得てよい距離測定値、並びに(6)前記リクエスト中において送られる情報を含んでよい。測距端末はまた、そのタイミングオフセットを推定し、該推定されたタイミングオフセットをそのTOA測定値から除去し、補正されたTOA測定値をPDE132に提供してよい。測距端末はまた、PEDが測距端末の位置推定値を計算することを可能にするための情報を、PDE132に送ってよい。測距端末および標的端末からの生の測定値は、相対的な位置決定を向上させるために使用されてよい。例えば、標的端末の位置は、測距端末の位置に関して決定されてよい。
【0042】
PDE132は、測距端末からの応答を受信し、可能であれば標的端末Aから追加の距離測定情報を受信する。次いで、PDE132は、標的端末Aと各測距端末との間の距離を、(1)測距端末によりなされたTOA測定、および(2)入手可能であれば測距端末のタイミングおよび/または標的端末のタイミングに基づいて推定する(ステップ4)。PDE132は、そこから当該端末がそのタイミングを得るベースステーションのBSIDに基づいて、各端末についてのタイミングオフセットを推定してよい。PDE132は、次いで、TOA測定値から各端末についての予測されたタイミングオフセットを除去してよい。標的端末AについてのタイミングオフセットTAは、全てのピアツーピアのTOA測定に共通しており、余分なTOA測定は未知のタイミングオフセットTAを説明することができ、これは推定される必要はなく、測距端末によってなされるTOA測定からキャンセルされるであろう。未知のタイミングオフセットTAは、標的端末と参照ベースステーションとの間の距離を示す。従って、LMS、LLSFまたは他のアルゴリズムに基づいて位置を計算するときに、PDEはこの制約を加える。
【0043】
PDE132は、(1)標的端末Aと測距端末との間の推定された距離、(2)測距端末の位置、(3)他の送信機(もしあれば)について標的端末Aによってなされた距離測定値、(4)これら他の送信機の位置、および(5)測距端末B、CおよびN並びに任意に標的端末Aがそこからタイミングを誘導するベースステーションの位置に基づいて、標的端末Aについての位置推定を誘導する(これもステップ4)。次いで、必要であれば、PDE132はこの位置推定値を標的端末Aに送る(ステップ5)。PDE134は、該位置推定値をベースステーション110aに送り、これは次いで、図5に示すように該位置推定値を直接標的端末Aに送ってよい。或いは、ベースステーション110aは該位置推定値を1以上の測距端末へと送ってよく、これは次いで、該位置推定値を標的端末Aに転送してよい。
【0044】
図2および図5に示した実施形態について、標的端末についての位置推定値は、上記で述べたように、標的および/または測距端末によってなされたTOA測定値および測距端末の位置にのみ基づいて計算されてよい。TOA測定値は、マルチパス、タイミング安定性、および/または他の因子によるエラーを含む可能性がある。この測定エラーは、複数回の測定を実行することによって緩和されてよい。
【0045】
標的端末についての位置推定値は、測距端末の位置精度によって影響される。一実施形態において、標的端末は測距端末に対して、望ましい精度または不確実さで、それらの位置を提供するようにリクエストすることができる。測距端末は、次いで、それらの位置を望ましい不確実さの範囲内で決定し、それらの位置を標的端末に戻してよい。測距端末の位置およびこれら位置における不確実さは、標的端末についての位置推定値を計算するときに考慮されてよい。
【0046】
標的端末についての位置推定値の精度は、一般に、標的端末の距離測定を行う測距端末の数に伴って改善される。しかし、測距端末の密度が高いエリアにおいては、標的端末が送ったリクエストについての多すぎる応答が存在し得る。応答の数は、一定の距離の端末だけからの応答を要請することによって制御されてよい。一実施形態において、測距端末は、応答を提供するようにランダムに選択される。例えば、ハッシュ関数を使用して、これら端末についての独特の識別子に基づいてN番目の測距端末を選択してよく、ここでのNは如何なる整数値であってもよい。もう一つの実施形態においては、標的端末から予め定められた距離内にある測距端末が、応答を提供するために選択される。同様に、標的端末に対して最適の形状を送達し、または望ましい信号特性(例えばSNR、SIR、Ec/Io等)を有する測距端末が、距離測定のために選択されてよい。更にもう一つの実施形態においては、一以上の種類の測距端末が、応答を提供するために選択される。例えば、静止または固定された測距端末、交流電流(AC)によって電力供給される端末、および/または幾つかの他の種類の端末が、応答を提供するために選択されてよい。更にもう一つの実施形態において、測距端末は、特定の期間だけ待機した後に、それらの応答を送信する。各測距端末についての待機時間は、擬似ランダムな時間であってよい。核測距端末についての待機時間はまた、1以上の因子、例えば標的端末までの予測距離、および測距端末の位置の精度等に基づいて計算されてよい。各測距端末について、前記待機時間が切れる前に標的端末からACKが受信されれば、測距端末は応答を送らない。測距端末からの応答はまた、他の方法で制御されてもよい。
【0047】
一般に、標的端末についての位置推定値は、同じタイプもしくは異なるタイプの充分な数の送信機ついての距離測定値、およびこれら送信機の位置に基づいて計算されてよい。標的端末についての位置推定値は、(1)測距端末、ベースステーション、人工衛星、および/または他の送信機(例えばブロードキャストステーション、WLAN端末など)について、標的端末により行われた距離測定値、(2)標的端末について、測距端末、ベースステーション、および/または他の受信機によって行われた距離測定値、並びに(3)それらの何れかの組合せに基づいて計算されてよい。より高い信頼性を備えた距離測定(例えば、人工衛星についての測定値)には、位置推定値の計算においてより大きな重みが与えられてよい。
【0048】
標的端末は、無線ネットワークから補助データを得てよい。この補助データは、例えば問題の各ベースステーションの位置、人工衛星の位置を含む暦、ベースステーションおよび/または人工衛星についてのタイミング情報等を示してよい。標的端末はこの補助データを使用して、ベースステーションおよび人工衛星を選択し、これらについての距離測定を行い、またはそれ自身についての位置推定値を計算してよい。
【0049】
2.セクターに基づく、および地球全体に基づくメッセージ転送。
【0050】
例えば図2および図5に示すようなピアツーピア通信を用いた位置決定は、セクターに基づくスキームまたは地球全体に基づくスキームを用いて実行されてよい。セクターに基づくスキームについては、標的端末が、特定のセクター内にある測距端末へとリクエストを送信する。地球全体に基づくスキームでは、標的端末が、ネットワークにおける測距端末へとリクエストをブロードキャストする。セクターに基づくスキームおよび全地球に基づくスキームは、一方向および二方向のピアツーピア通信のために使用されてよい。
【0051】
図6は、セクターに基づく二方向のピアツーピア通信を用いた位置決定の実施形態を示している。標的端末Aは、位置決定情報についてのリクエストを、指定されたセクターa(これは端末Aによって最も強く受信されるセクターであってよい)における端末へと送信する。該リクエストは、特定の擬似ランダム数(PN)のコード、特定のスクランブルコード、および/またはセクターaに割当てられた幾つかの他の独特の識別子を使用することによって、セクターaに送信されてよい。このセクターに基づくスキームについて、各測距端末は、そのセクターに送信されたリクエストを注意深く聞く。端末BおよびCはセクターaに位置しており、端末Aにより送信されたリクエストがセクターaについてのものであることを認識し、また該リクエストを処理する。端末Nは、セクターcに位置しており、端末Aにより送られたリクエストを受信せず、または該リクエストがもう一つのセクターへとブロードキャストされることを認識しない。何れの場合にも、端末Nは、端末Aからのリクエストを無視する。
【0052】
一実施形態において、標的端末Aは、そのリクエストを一つのセクター(例えば端末Aによって最も強く受信されるセクター)にのみ送信する。もう一つの実施形態において、標的端末Aは、例えば端末Aが充分な数の応答を受信するまで、そのリクエストを1以上のセクターへと送信する。例えば、標的端末Aは、最初に最も強く受信されるセクターへとリクエストを送信し、次いで、もし不十分な数の応答が受信されるならば、その次に強く受信されるセクターへと順次送信してよい。もう一つの例において、もし受信された距離測定の幾何学が、要求されるサービス品質の位置推定値を誘導するために不十分であれば、標的端末Aは、もう一つのセクター(異なるベースステーションに属してよい)における端末から追加の距離測定値をリクエストしてよい。標的端末の位置決定の目的で測距端末を選択するために、他の選択基準を使用してもよい。
【0053】
図2は、全地球に基づくに方向のピアツーピア通信を用いた位置決定の実施形態を示している。この実施形態について、標的端末Aは、例えばグローバルPNコードを使用して、ネットワークにおける測距端末へとリクエストをブロードキャストする。この実施形態について、各測距端末は、グローバルPNコードを使用してブロードキャストされたリクエストを注意深く聞く。セクターaおよびcにおける測距端末B,CおよびNは、標的端末Aからリクエストを受信し、上記で述べたようにして処理を実行する。
【0054】
一実施形態において、ネットワークは、セクターに基づくスキームまたは全地球に基づくスキームをサポートする。もう一つの実施形態において、ネットワークは、セクターに基づくスキームおよび全地球に基づくスキームの両方をサポートする。この実施例について、標的端末は、最初にセクターに基づく位置決定を試み、例えば最も強く受信されたセクターへとリクエストをブロードキャストしてよい。位置推定が計算され得ず、または十分に正確でない(例えばサービスの品質に合致しない)ならば、標的端末は全地球に基づく位置決定を試み、次いで例えばグローバルPNコードを使用して全てのセクターへとリクエストをブロードキャストしてよい。
【0055】
3.メッセージ送信
ネットワーク100は周波数分割二重化(FDD)を利用してよく、これは順方向リンクおよび逆方向リンクのために二つの別々の周波数帯域を割当てる。端末は典型的には、逆方向リンク上でベースステーションへと送信し、また順方向リンク上でベースステーションから受信するように設計される。二つのPTP端末は、一方のPTP端末が順方向リンク上で送信でき、または逆方向リンク上で受信できるならば、一方向ピアツーピアで通信することができる。二つのPTP端末は、両方のPTP端末が順方向リンク上で送信でき、両方のPTP端末が逆方向リンク上で受信でき、または一方のPTP端末が順方向リンク上で送信でき且つ逆方向リンク上で受信できるならば、二方向ピアツーピアで通信することができる。一実施形態において、標的端末は順方向リンク上でリクエストを送信する。標的端末は、他の端末への順方向リンク上で過剰な干渉を生じる可能性があり、ベースステーションから遠くにあるときは、その送信電力を低下させてよい。もう一つの実施形態において、標的端末は逆方向リンク上でリクエストを送信する。標的端末は、ベースステーションにおいて逆方向リンク上で過剰な干渉を生じる可能性があり、ベースステーションに近接して位置するときは、その送信電力を低下させてよい。一実施形態において、標的端末はオープンループの電力推定値を決定し、これはネットワークにおけるアクセスチャンネルについての送信電力である。標的端末は、次いで、オープンループ電力推定によって決定される電力レベル、例えばオープンループ電力推定値よりも低いXdBでリクエストを送信してよく、個々でのXは良好な特性を与えるように選択される。
【0056】
一実施形態において、標的端末は何時でもリクエストをブロードキャストしてよい。測距端末は、これらの測距端末が他の機能を実行しないときは、標的端末からのリクエストを連続的に注意深く聞いてよい。もう一つの実施形態において、標的端末は、指定された時間帯内にリクエストをブロードキャストしてよい。測距端末は、これら時間帯の間だけ、標的端末からのリクエストを注意深く聞いてよい。
【0057】
標的端末は、スロッテッドアロハ・ランダムアクセススキーム、搬送波感知多重アクセス(CAMA)スキーム等のような種々のランダムアクセススキームを使用して、リクエストをブロードキャストしてよい。一実施形態において、標的端末は、当該ネットワークにおいて利用可能なアクセスチャンネル上でリクエストをブロードキャストする。例えば、標的端末は、cdma2000における逆方向アクセスチャンネル(R−ACH)または逆方向エンハンストアクセスチャンネル(R−EACH)上でリクエストを送ってよい。測距端末は、ベースステーションと同様の方法でR−ACHまたはR−EACHを処理することによって、該リクエストを検出してよい。もう一つの実施形態において、標的端末は、ピアツーピア通信をサポートするために使用される物理的チャンネルである逆ピアエンハンストアクセスチャンネル(R−PEACH)上で、リクエストをブロードキャストする。R−PEACHは、1以上のメッセージフォーマットおよび1以上のデータレートをサポートしてよい。全ての実施形態について、標的端末は、他の端末への過剰な干渉を生じない電力レベルでリクエストを送信する。
【0058】
二方向ピアツーピアの実施形態において、測距端末は、R-PEACH、R−ACH、R-EACHまたは幾つかの他のチャンネルを介して、標的端末へと応答を送る。一方向ピアツーピアの実施形態において、測距端末は、R−ACH、R-EACHまたは幾つかの他のチャンネルを使用して、ベースステーションへと応答を送る
4.フロー図
図7は、ピアツーピア通信を用いた位置決定のために、標的端末によって実行されるプロセス700の実施形態を示している。標的端末は、その位置を突き止めたいと望み、それ自身の位置推定値の決定における補助を求めるリクエストを発生する(ブロック712)。このリクエストは、(1)測距端末から距離測定情報を要請し、(2)測距端末に、標的端末のための距離測定情報を入手して、該距離測定情報を、標的端末の位置推定値を決定できるネットワークエンティティー(例えばPDE)へと転送するように要請し、または(3)位置決定に適した他の情報および/または補助を要請してよい。該リクエストはまた、標的端末の位置決定のためにネットワークエンティティーが使用し得る上記で述べた関連情報を含んでよい。次いで、標的端末は、リクエストされた補助を提供できる測距端末に対して、リクエストを送る(ブロック714)。該リクエストは、特定のセクター、セクター群、またはネットワークにおける全てのセクターに送られてよい。
【0059】
ブロック720において決定されるような、二方向のピアツーピア(PTP)通信を用いた位置決定については、標的端末は、少なくとも一つの測距端末から少なくとも一つの応答を受信する(ブロック722)。各測距端末からの応答は、測距端末の位置(または位置に関連し得る幾つかの同定情報)、および標的端末が送ったリクエストについて測距端末によりなされた距離測定値(例えばTOA測定値)を含んでよい。標的端末はまた、各測定値(例えばTOA測定値)を入手してよい(ブロック724)。次いで、標的端末は、(1)測距端末からの応答について該標的端末により行われた距離測定値、および/または(2)該標的端末が送ったリクエストについて測距端末が行った距離測定値に基づいて、標的端末と各測距端末の間の距離を推定してよい。標的端末は、次いで、推定された距離および各測距端末の位置に基づいて、それ自身の位置推定値を決定してよい(ブロック728)。一方向ピアツーピア通信を用いた位置決定については、ブロック720において決定されるように、標的端末は、それ自身のための位置推定値をネットワークエンティティーから単純に受信してよい(ブロック732)。
【0060】
単純化のために図7には示されていないが、標的端末は、他の送信機(ベースステーションおよび/または人工衛星であってよい)のための距離測定値を入手してよい。標的端末は、(1)これらの距離測定値を使用してそれ自身のための位置推定値を計算し、または(2)これら測定値を、標的端末のための位置推定値を計算するために使用するためにネットワークエンティティーへと転送してよい。加えて、測距端末はまた、ベースステーションおよび/または人工衛星であってよい他の送信機のための距離測定値を得てよく、これら距離測定値はまた、標的端末の位置推定値を決定するために使用されてよい。
【0061】
図8は、ピアツーピア通信を用いた位置決定をサポートするために、測距端末により実行されるプロセス800の実施形態を示している。測距端末は、標的端末から、標的端末の位置推定値を決定する際の補助を求めるリクエストを受信する(ブロック812)。測距端末は、標的端末の位置推定値を決定するのに適した距離測定情報を入手する(ブロック814)。例えば、測距端末は、標的端末からのリクエストについてのTOA測定値を入手してよく、当該リクエストについてのTOA測定値および距離測定情報としての測距端末の位置を提供してよい。或いは、測距端末は、標的端末からのリクエストについてのRSSI測定値を得てよく、またRSSI測定値および距離測定情報としての測距端末の位置を提供してよい。距離測定情報はまた、測距端末におけるタイミングオフセットを決定するために使用される他の情報(例えばBSID)を含んでよい。測距端末は、距離測定情報と共に、標的端末またはネットワークエンティティー(例えばPDE)へと応答を送る(ブロック816)。
【0062】
図9は、ピアツーピア通信を用いた位置決定をサポートするために、測距端末(例えばPDE)により実行されるプロセス900の実施形態を示している。ネットワークエンティティーは、標的端末の位置推定値を決定する際の補助について、標的端末により送られたリクエストについて、少なくとも一つの測距端末から少なくとも一つの応答を受信する(ブロック912)。各応答は、標的端末のための位置推定値を決定するために使用される距離測定情報を含んでいる。ネットワークエンティティーは、少なくとも一つの測距端末からの少なくとも一つの応答に基づいて、標的端末のための位置測定値を決定する(ブロック914)。例えば、該ネットワークエンティティーは、測距端末によってなされたTOA測定に基づいて、標的端末と各測距端末の間の距離を推定してよい。該ネットワークエンティティーは、各端末のタイミングオフセットを推定してよく、また各影響された測定からタイミングオフセットを除去してよい。該ネットワークエンティティーは、(1)標的端末と各測距端末との間の推定された距離、および(2)各測定端末の位置に基づいて、標的端末のための位置推定値を決定してよい。該ネットワークエンティティーはまた、標的端末および/または測距端末により受信された1以上の他の送信機についての1以上の追加の距離測定値を得てよく、また、これら追加の距離測定値に基づいて、標的端末のための位置推定値を決定してよい。何れの場合においても、当該ネットワークエンティティーは、必要であれが、この位置推定値を標的端末へと送る(ブロック916)。
【0063】
5.ブロック図
図10は、標的端末120a、測距端末120b、ベースステーション110a、およびPDE132のブロック図を示している。標的端末120aにおいて、コントローラ/プロセッサ1020は、ピアツーピア通信を用いた位置決定についてのリクエストを発する。送信(TX)データプロセッサ1010が該リクエストを受信し、リクエストメッセージを発生して、メッセージのために送られるべきデータビットを与える。送信機(TMTR)1020は、該データビットを調節し(例えばアナログに変換し、増幅し、フィルターし、また周波数アップコンバートする)、アンテナ1014を介して送信されるPTP信号を発生する。
【0064】
測距端末120bにおいて、アンテナ1034はPTP信号を標的端末120aから受信し、受信された信号を受信機(RCVR)1036に与える。受信機1036は、この受信された信号を調節し(例えばフィルターし、増幅し、周波数ダウンコンバートし、デジタル化する)て、データサンプルを提供する。受信(RX)データプロセッサ1038は、このデータサンプルを処理し(例えばスクランブルの除去、チャンネル化、復調、脱インターリーブ、およびデコード化)、標的端末120aによって送られたリクエストメッセージを回復させる。受信機1036および/またはRXデータプロセッサ1038は、更に、当該リクエストメッセージのTOAを決定してよい。TXデータプロセッサ1030は、当該リクエストについての応答メッセージを発生する。該応答メッセージは、上記のように、該応答が標的端末120aまたはPDE132の何れに送られるかに応じて、異なる情報を含んでよい。
【0065】
二方向ピアツーピア通信を用いた位置決定については、図2に示したように、送信機1032はPTP信号を発生し、該信号はアンテナ1034を介して標的端末120aへと送信される。標的端末120aにおいては、測距端末120bからのPTP信号がアンテナ1014により受信され、受信機1016により調節され、RXデータプロセッサ1018により処理されて、測距端末120bからの応答メッセージが回復される。受信機1016および/またはRXデータプロセッサ1018はまた、当該応答メッセージのTOAを決定してよい。コントローラ/プロセッサ1020は、測距端末120bおよび可能否他の測距端末までの距離を推定し、更に、標的端末120aについての位置推定値を計算する。
【0066】
一方向ピアツーピア通信を用いた位置決定については、図5に示すように、送信機1032がRL信号を発生し、該信号はアンテナ1034を介してベースステーション110aへと送信される。ベースステーション110aにおいては、測距端末120bからのRL信号がアンテナ1050により受信され、受信機1052により調節され、RXデータプロセッサ1054により処理されて、測距端末120bからの応答メッセージが回復される。通信(Comm)ユニット1064は、該応答メッセージをPDE132へと転送する。PDE132において、通信ユニット1084は全ての測距端末についての応答メッセージを受信する。コントローラ/プロセッサ1080は、標的端末120aについての位置推定値を計算し、該位置推定値をベースステーション110aへと転送する。ベースステーション110aにおいて、標的端末120aについての位置推定値および順方向リンク上で送られるべき他のデータは、TXデータプロセッサ1056によって処理され、送信機1058によって調節されてFL信号を発生し、該信号はアンテナ1050を介して送信される。標的端末120aにおいて、ベースステーション110aからのFL信号はアンテナ1014(図10では図示せず)によって受信され、受信機1061によって調節され、RXデータプロセッサ101によって処理されて、PED132により送られた位置推定値が回復される。該位置推定値は、PDE132からベースステーションへ、次いで測距端末120bへ、次いで標的端末120aへと送られてよい。
【0067】
コントローラ/プロセッサ1020、1040、1060および1080は、それぞれ、端末120aおよび120b、ベースステーション110a、並びにPDE132内の種々のユニットの動作を指令する。メモリー1022、1042、1062、および1082は、それぞれ、端末120aおよび120b、ベースステーション110a、並びにPDE132のためのデータおよびプログラムコードを保存する。
【0068】
明瞭化のために、上記の記述は、標的端末、測距端末、およびベースステーションが無線アクセス技術(RAT)を使用して通信すると仮定している。一般に、何れか一つまたは何れかの組合せのRATが、ピアツーピア通信をサポートするために使用されてよい。例えば、標的端末および測距端末は、第一のRATを使用して通信してよく、また測距端末およびベースステーションは、第二のRATを使用して通信してよい。各RATは、WWANまたはWLANまたはWPANのためのものであってよい。例えば、標的端末および測距端末は、IEEE802.11x、ブルートゥース(登録商標)、UWM、ZigBee等を使用して通信してよい。距離沿い区低端末およびベースステーションは、cdma200、W−CDMA、GSM、OFDM等を使用して通信してよい。標的端末および測距端末の各々は、一つまたは複数のRATをサポートしてよい。
【0069】
ここに記載する位置決定技術は、種々の手段によって実施されてよい。例えば、これら技術はハードウエア、ファームウエア、ソフトウエア、またはそれらの組合せにおいて実施されてよい。ハードウエア実施の場合、PTP端末、ベースステーション、またはネットワークエンティティーにおける処理ユニットは、1以上のアプリケーション特異的集積回路(ASIC)、デジタル信号プロセッサ(DSP)、デジタル信号処理装置(DSPD)、プログラム可能な論理装置(PLD)、フィールドプログラム可能なゲートアレイ(FPGA)、プロセッサ、コントローラ、マイクロコントローラ、マイクロプロセッサ、電子装置、ここに記載した機能を実行するように設計された他の電子ユニット、またはそれらの組合せの中に実装されてよい。
【0070】
ファームウエアおよび/またはソフトウエア実施の場合、当該技術は、ここ記載した機能を実行するモジュール(例えば手順、機能など)を用いて実施されてよい。ソフトウエアコードは、メモリー(例えば、図10におけるメモリー1022、1042、1062または1082)に保存されてよく、またプロセッサ(例えばプロセッサ1020、1040、1060、または1080)によって実行されてよい。
【0071】
見出しは、参照のため、および一定の章を見つけるための補助として含められるものである。これらの見出しは、ここに記載した概念の範囲を限定することを意図したものではなく、また、これらの概念は明細書全体を通して他の章においても適用可能である可能性がある。
【0072】
以上の開示された実施形態の説明は、当業者が本発明を製造または使用することを可能にするために提供される。これら実施形態に対する種々の変更は、当業者によい有為に明らかであろうし、ここに定義された一般原理は本発明の精神または範囲を逸脱することなく、他の実施形態にも適用されてよい。従って、本発明はここに示した実施形態に限定されることを意図したものではなく、ここに開示した原理および新規な特徴に一致した最も広い範囲が与えられるべきである。
【図面の簡単な説明】
【0073】
【図1】図1は、無線多重アクセス通信ネットワークを示す。
【図2】図2は、二方向のピアツーピア通信を用いた位置決定を示している。
【図3】図3は、距離測定リクエストおよび応答についての送信時系列チャートを示している
【図4】図4は、標的端末についての位置推定値の誘導を示している。
【図5】図5は、一方向ピアツーピア通信を用いた位置決定を示している。
【図6】図6は、セクターに基づく二方向ピアツーピア通信を用いた位置決定を示している。
【図7】図7は、標的端末により実行されるプロセスを示している。
【図8】図8は、測距端末により実行されるプロセスを示している。
【図9】図9は、PEDにより実行されるプロセスを示している。
【図10】図10は、標的端末、測距端末、ベースステーション、およびPDEのブロック図を示している。
【特許請求の範囲】
【請求項1】
標的端末のための位置推定値を決定する際の補助を求めるリクエストを発生するように、該リクエストを送信するための無線ネットワークにおける少なくとも一つのセクターを選択するように、また少なくとも一つのセクターに位置し且つ前記補助を提供できる少なくとも一つの測距端末へと該リクエストを送信するように構成された、少なくとも一つのプロセッサと;
前記少なくとも一つのプロセッサに結合されたメモリーと
を具備してなる装置。
【請求項2】
請求項1に記載の装置であって、前記リクエストは、少なくとも一つの測距端末からの距離測定情報を要請し、前記位置推定値は前記距離測定情報に基づいて決定される装置。
【請求項3】
請求項1に記載の装置であって、前記少なくとも一つのプロセッサは、前記少なくとも一つの測距端末から少なくとも一つの応答を受信して、該少なくとも一つの応答に基づいて前記標的端末のための位置推定値を決定するように構成される装置。
【請求項4】
請求項1に記載の装置であって、前記少なくとも一つのプロセッサは、前記少なくとも一つの測距端末から少なくとも一つの応答を受信し、該少なくとも一つの応答の各々について距離測定値を入手し、前記測距端末からの応答についての距離測定値に基づいて、前記標的端末と核測距端末との間の距離を推定し、前記少なくとも一つの測距端末の各々についての推定された距離に基づいて、前記標的端末についての位置推定値を決定するように構成される装置。
【請求項5】
請求項1に記載の装置であって、前記少なくとも一つのプロセッサは、前記少なくとも一つの測距端末から少なくとも一つの応答を受信し、ここでの各測距端末からの応答は、測距端末の位置および前記リクエストについての距離測定値を含むように、また、各測距端末からの応答についての距離測定値を得るように、また前記リクエストについての距離測定値および前記測距端末からの応答についての距離測定値に基づいて、前記標的端末と各測距端末との間の距離を推定するように、また前記推定された距離および少なくとも一つの測距端末の各々についての位置に基づいて、前記標的端末についての位置推定値を決定するように構成される装置。
【請求項6】
請求項1に記載の装置であって、前記少なくとも一つのプロセッサは、無線ネットワークにおける特定のセクターへと前記リクエストを送るように構成される装置。
【請求項7】
請求項1に記載の装置であって、前記少なくとも一つのプロセッサは、無線ネットワークにおける全てのセクターへと前記リクエストを送るように構成される装置。
【請求項8】
請求項1に記載の装置であって、前記リクエストは、前記少なくとも一つの測距端末に対して、前記標的端末についての距離測定情報を得るように、また該距離測定情報を前記標的端末についての位置推定値を決定できるネットワークエンティティーに転送するように要請する装置。
【請求項9】
請求項8に記載の装置であって、前記少なくとも一つのプロセッサは、前記ネットワークエンティティーから前記標的端末についての位置推定値を受信するように構成される装置。
【請求項10】
請求項8に記載の装置であって、前記少なくとも一つのプロセッサは、前記標的端末におけるタイミングオフセットを示す情報を送るように構成される装置。
【請求項11】
請求項8に記載の装置であって、前記少なくとも一つのプロセッサは、該少なくとも一つのプロセッサが少なくとも一つの他の送信機についての少なくとも一つの距離測定値を入手し、該少なくとも一つの距離測定値を前記ネットワークエンティティーに送るように構成される装置。
【請求項12】
請求項1に記載の装置であって、前記少なくとも一つのプロセッサは、前記少なくとも一つの測距端末から少なくとも一つの応答を受信し、該少なくとも一つの応答の各々について距離測定値を入手し、少なくとも一つの他の送信機について少なくとも一つの追加の距離測定値を入手し、また前記少なくとも一つの応答についての前記少なくとも一つの距離測定値および前記少なくとも一つの他の相違新規についての少なくとも一つの追加の距離測定値に基づいて、前記標的端末についての位置推定値を決定するように構成される装置。
【請求項13】
請求項12に記載の装置であって、前記少なくとも一つのプロセッサは、無線ネットワークにおける少なくとも一つのベースステーションについて、少なくとも一つの追加の距離測定値を得るように構成される装置。
【請求項14】
請求項12に記載の装置であって、前記少なくとも一つのプロセッサは、人工衛星測位システムにおける少なくとも一つの人工衛星について、少なくとも一つの追加の距離測定値を得るように構成される装置。
【請求項15】
請求項1に記載の装置であって、前記標的端末および前記少なくとも一つの測距端末はセルラーネットワークの中にある装置。
【請求項16】
請求項1に記載の装置であって、前記少なくとも一つのプロセッサは、セルラーネットワークにおけるアクセスチャンネルについてのオープンループ電力推定を駆動し、前記オープンループ電力推定により決定された電力レベルで前記リクエストを送信するように構成される装置。
【請求項17】
標的端末において、該標的端末についての位置推定値を決定する際の補助を求めるリクエストを発生させることと;
前記リクエストを送るために、無線ネットワークにおける少なくとも一つのセクターを選択することと;
前記リクエストを、前記少なくとも一つのセクターに位置し且つ前記補助を提供できる、少なくとも一つの測距端末へ送ること
を含んでなる方法。
【請求項18】
請求項17に記載の方法であって:更に、
前記少なくとも一つの測距端末から少なくとも一つの応答を受信することと;
前記少なくとも一つの応答について、距離測定値を入手することと;
前記測距端末からの応答についての距離測定値に基づいて、前記標的端末と各測距端末との間の距離を推定することと;
前記少なくとも一つの測距端末の各々について、前記推定された距離に基づいて、前記標的端末についての位置推定値を決定すること
を含んでなる方法。
【請求項19】
請求項17に記載の方法であって:更に、
前記少なくとも一つの測距端末からの少なくとも一つの応答を受信し、ここでの各測距端末からの応答は、前記測距端末の位置および前記リクエストについて前記測距端末により行われた距離測定値を含むことと;
各測距端末からの応答について距離測定値を得ることと;
前記リクエストについて前記測距端末により行われた前記距離測定値および前記測距端末からの応答についての前記距離測定値に基づいて、前記標的端末と各測距端末との間の距離を推定することと;
前記推定された距離および前記少なくとも一つの測距端末の各々についての位置に基づいて、前記標的端末についての位置推定値を決定すること
を含んでなる方法。
【請求項20】
標的端末において、該標的端末の位置推定値を決定する際の補助を求めるリクエストを発生させるための手段と;
前記リクエストを送るために、無線ネットワークにおける少なくとも一つのセクターを選択するための手段と;
前記少なくとも一つのセクターに位置する少なくとも一つの測距端末へ、前記リクエストを送るための手段と
を具備してなる装置。
【請求項21】
請求項20に記載の装置であって:更に、
前記少なくとも一つの測距端末から少なくとも一つの応答を受信するための手段と;
前記少なくとも一つの応答について、距離測定値を入手するための手段と;
前記測距端末からの応答についての距離測定値に基づいて、前記標的端末と各測距端末との間の距離を推定するための手段と;
前記少なくとも一つの測距端末の各々について、前記推定された距離に基づいて、前記標的端末についての位置推定値を決定するための手段
を具備してなる装置。
【請求項22】
請求項20に記載の装置であって:更に、
前記少なくとも一つの測距端末からの少なくとも一つの応答を受信するための手段であって、ここでの各測距端末からの応答は、前記測距端末の位置および前記リクエストについて前記測距端末により行われた距離測定値を含む手段と;
各測距端末からの応答について距離測定値を得るための手段と;
前記リクエストについて前記測距端末により行われた前記距離測定値および前記測距端末からの応答についての前記距離測定値に基づいて、前記標的端末と各測距端末との間の距離を推定するための手段と;
前記推定された距離および前記少なくとも一つの測距端末の各々についての位置に基づいて、前記標的端末についての位置推定値を決定するための手段と
を具備してなる装置。
【請求項23】
標的端末についての位置推定値を決定する際の補助のためのリクエストを、標的端末から受信するように、前記標的端末についての位置推定値を決定するために適した距離測定情報を入手し、また距離測定情報と共に応答を送るように構成された少なくとも一つのプロセッサと;
前記少なくとも一つのプロセッサに結合されたメモリーと
を具備してなる装置。
【請求項24】
請求項23に記載の装置であって、前記少なくとも一つのプロセッサは、前記標的端末か受信したリクエストについての距離測定値を入手して、前記距離測定値および前記距離測定情報としての前記装置の位置を提供するように構成される装置。
【請求項25】
請求項23に記載の装置であって、前記少なくとも一つのプロセッサは、前記応答を前記標的端末へ送るように構成される装置。
【請求項26】
請求項23に記載の装置であって、前記少なくとも一つのプロセッサは、前記装置におけるタイミングオフセットを示す情報を送るように構成される装置。
【請求項27】
請求項23に記載の装置であって、前記少なくとも一つのプロセッサは、前記応答を、前記標的端末についての位置推定値を決定できるネットワークエンティティーに送るように構成される装置。
【請求項28】
測距端末において、標的端末のための位置推定値を決定する際の補助を求めるリクエストを受信することと;
前記標的端末についての位置推定値を決定するのに適した距離測定情報を入手することと;
前記距離測定情報と共に応答を送ること
を含んでなる方法。
【請求項29】
請求項28に記載の方法であって:前記距離測定情報を入手することが、
前記標的端末から受信されたリクエストについての距離測定値を入手することと;
前記距離測定値および前記測距端末の位置を、前記距離測定情報として提供すること
を含んでなる方法。
【請求項30】
測距端末において、標的端末のための位置推定値を決定する際の補助を求めるリクエストを受信するための手段と;
前記標的端末についての位置推定値を決定するのに適した距離測定情報を入手するための手段と;
前記距離測定情報と共に応答を送るための手段と
を具備してなる装置。
【請求項31】
請求項30に記載の装置であって:前記距離測定情報を入手するための手段が、
前記標的端末から受信されたリクエストについての距離測定値を入手するための手段と;
前記距離測定値および前記測距端末の位置を、前記距離測定情報として提供するための手段と
を具備してなる装置。
【請求項32】
標的端末のための位置推定値を決定する際の補助について、標的端末により送られたリクエストについて、少なくとも一つの測距端末から少なくとも一つの応答を受信するように構成され、また前記少なくとも一つの測距端末からの少なくとも一つの応答に基づいて、前記標的端末についての位置推定値を決定するように構成された少なくとも一つのプロセッサであって、ここでの各応答は、前記標的端末のための位置推定値を決定するのに適した距離測定情報を含んでいる少なくとも一つのプロセッサと;
該少なくとも一つのプロセッサに結合されたメモリーと
を具備してなる装置。
【請求項33】
請求項32に記載の装置であって、前記少なくとも一つのプロセッサは、前記位置推定値を前記標的端末へと送るように構成される装置。
【請求項34】
請求項32に記載の装置であって、各測距端末からの前記距離測定情報は、前記標的端末により送られたリクエストについて前記測距端末によりなされた距離測定値、および前記測距端末の位置を含んでなる装置。
【請求項35】
請求項34に記載の装置であって、前記少なくとも一つのプロセッサは、位置測距端末によりなされた前記位置測定値に基づいて、前記標的端末と各測距端末の間の距離を推定し、また前記推定された距離および前記少なくとも一つの測距端末の各々についての位置に基づいて、前記標的端末の位置推定値を決定するように構成される装置。
【請求項36】
請求項34に記載の装置であって、前記少なくとも一つのプロセッサは、測距端末によりなされた距離測定値から、各測距端末のタイミングオフセットを除去するように構成される装置。
【請求項37】
請求項34に記載の装置であって、前記少なくとも一つのプロセッサは、各測距端末によりなされた距離測定値から、標的端末のタイミングオフセットを除去するように構成される装置。
【請求項38】
請求項32に記載の装置であって、前記少なくとも一つのプロセッサは、前記標的端末により受信された少なくとも一つの送信機についての少なくとも一つの距離測定値を入手し、また更に前記少なくとも一つの距離測定値に基づいて、前記標的端末についての位置推定値を決定するように構成される装置。
【請求項39】
標的端末のための位置推定値を決定する際の補助として、標的端末により送られたリクエストについて、少なくとも一つの測距端末から少なくとも一つの応答を受信するための手段であって、各応答が前記標的端末のための位置推定値を決定するのに適した距離測定情報を含む手段と;
前記少なくとも一つの測距端末からの前記少なくとも一つの応答に基づいて、前記標的端末についての位置推定値を決定するための手段
を具備してなる装置。
【請求項40】
請求項39に記載の装置であって:前記標的端末についての位置推定値を決定するための手段が、
前記測距端末によりなされた距離測定値に基づいて、前記標的端末と各測距端末との間の距離を推定するための手段と;
前記推定された距離および前記少なくとも一つの測距端末の各々の位置に基づいて、前記標的端末についての位置推定値を決定するための手段と
を具備してなる装置。
【請求項1】
標的端末のための位置推定値を決定する際の補助を求めるリクエストを発生するように、該リクエストを送信するための無線ネットワークにおける少なくとも一つのセクターを選択するように、また少なくとも一つのセクターに位置し且つ前記補助を提供できる少なくとも一つの測距端末へと該リクエストを送信するように構成された、少なくとも一つのプロセッサと;
前記少なくとも一つのプロセッサに結合されたメモリーと
を具備してなる装置。
【請求項2】
請求項1に記載の装置であって、前記リクエストは、少なくとも一つの測距端末からの距離測定情報を要請し、前記位置推定値は前記距離測定情報に基づいて決定される装置。
【請求項3】
請求項1に記載の装置であって、前記少なくとも一つのプロセッサは、前記少なくとも一つの測距端末から少なくとも一つの応答を受信して、該少なくとも一つの応答に基づいて前記標的端末のための位置推定値を決定するように構成される装置。
【請求項4】
請求項1に記載の装置であって、前記少なくとも一つのプロセッサは、前記少なくとも一つの測距端末から少なくとも一つの応答を受信し、該少なくとも一つの応答の各々について距離測定値を入手し、前記測距端末からの応答についての距離測定値に基づいて、前記標的端末と核測距端末との間の距離を推定し、前記少なくとも一つの測距端末の各々についての推定された距離に基づいて、前記標的端末についての位置推定値を決定するように構成される装置。
【請求項5】
請求項1に記載の装置であって、前記少なくとも一つのプロセッサは、前記少なくとも一つの測距端末から少なくとも一つの応答を受信し、ここでの各測距端末からの応答は、測距端末の位置および前記リクエストについての距離測定値を含むように、また、各測距端末からの応答についての距離測定値を得るように、また前記リクエストについての距離測定値および前記測距端末からの応答についての距離測定値に基づいて、前記標的端末と各測距端末との間の距離を推定するように、また前記推定された距離および少なくとも一つの測距端末の各々についての位置に基づいて、前記標的端末についての位置推定値を決定するように構成される装置。
【請求項6】
請求項1に記載の装置であって、前記少なくとも一つのプロセッサは、無線ネットワークにおける特定のセクターへと前記リクエストを送るように構成される装置。
【請求項7】
請求項1に記載の装置であって、前記少なくとも一つのプロセッサは、無線ネットワークにおける全てのセクターへと前記リクエストを送るように構成される装置。
【請求項8】
請求項1に記載の装置であって、前記リクエストは、前記少なくとも一つの測距端末に対して、前記標的端末についての距離測定情報を得るように、また該距離測定情報を前記標的端末についての位置推定値を決定できるネットワークエンティティーに転送するように要請する装置。
【請求項9】
請求項8に記載の装置であって、前記少なくとも一つのプロセッサは、前記ネットワークエンティティーから前記標的端末についての位置推定値を受信するように構成される装置。
【請求項10】
請求項8に記載の装置であって、前記少なくとも一つのプロセッサは、前記標的端末におけるタイミングオフセットを示す情報を送るように構成される装置。
【請求項11】
請求項8に記載の装置であって、前記少なくとも一つのプロセッサは、該少なくとも一つのプロセッサが少なくとも一つの他の送信機についての少なくとも一つの距離測定値を入手し、該少なくとも一つの距離測定値を前記ネットワークエンティティーに送るように構成される装置。
【請求項12】
請求項1に記載の装置であって、前記少なくとも一つのプロセッサは、前記少なくとも一つの測距端末から少なくとも一つの応答を受信し、該少なくとも一つの応答の各々について距離測定値を入手し、少なくとも一つの他の送信機について少なくとも一つの追加の距離測定値を入手し、また前記少なくとも一つの応答についての前記少なくとも一つの距離測定値および前記少なくとも一つの他の相違新規についての少なくとも一つの追加の距離測定値に基づいて、前記標的端末についての位置推定値を決定するように構成される装置。
【請求項13】
請求項12に記載の装置であって、前記少なくとも一つのプロセッサは、無線ネットワークにおける少なくとも一つのベースステーションについて、少なくとも一つの追加の距離測定値を得るように構成される装置。
【請求項14】
請求項12に記載の装置であって、前記少なくとも一つのプロセッサは、人工衛星測位システムにおける少なくとも一つの人工衛星について、少なくとも一つの追加の距離測定値を得るように構成される装置。
【請求項15】
請求項1に記載の装置であって、前記標的端末および前記少なくとも一つの測距端末はセルラーネットワークの中にある装置。
【請求項16】
請求項1に記載の装置であって、前記少なくとも一つのプロセッサは、セルラーネットワークにおけるアクセスチャンネルについてのオープンループ電力推定を駆動し、前記オープンループ電力推定により決定された電力レベルで前記リクエストを送信するように構成される装置。
【請求項17】
標的端末において、該標的端末についての位置推定値を決定する際の補助を求めるリクエストを発生させることと;
前記リクエストを送るために、無線ネットワークにおける少なくとも一つのセクターを選択することと;
前記リクエストを、前記少なくとも一つのセクターに位置し且つ前記補助を提供できる、少なくとも一つの測距端末へ送ること
を含んでなる方法。
【請求項18】
請求項17に記載の方法であって:更に、
前記少なくとも一つの測距端末から少なくとも一つの応答を受信することと;
前記少なくとも一つの応答について、距離測定値を入手することと;
前記測距端末からの応答についての距離測定値に基づいて、前記標的端末と各測距端末との間の距離を推定することと;
前記少なくとも一つの測距端末の各々について、前記推定された距離に基づいて、前記標的端末についての位置推定値を決定すること
を含んでなる方法。
【請求項19】
請求項17に記載の方法であって:更に、
前記少なくとも一つの測距端末からの少なくとも一つの応答を受信し、ここでの各測距端末からの応答は、前記測距端末の位置および前記リクエストについて前記測距端末により行われた距離測定値を含むことと;
各測距端末からの応答について距離測定値を得ることと;
前記リクエストについて前記測距端末により行われた前記距離測定値および前記測距端末からの応答についての前記距離測定値に基づいて、前記標的端末と各測距端末との間の距離を推定することと;
前記推定された距離および前記少なくとも一つの測距端末の各々についての位置に基づいて、前記標的端末についての位置推定値を決定すること
を含んでなる方法。
【請求項20】
標的端末において、該標的端末の位置推定値を決定する際の補助を求めるリクエストを発生させるための手段と;
前記リクエストを送るために、無線ネットワークにおける少なくとも一つのセクターを選択するための手段と;
前記少なくとも一つのセクターに位置する少なくとも一つの測距端末へ、前記リクエストを送るための手段と
を具備してなる装置。
【請求項21】
請求項20に記載の装置であって:更に、
前記少なくとも一つの測距端末から少なくとも一つの応答を受信するための手段と;
前記少なくとも一つの応答について、距離測定値を入手するための手段と;
前記測距端末からの応答についての距離測定値に基づいて、前記標的端末と各測距端末との間の距離を推定するための手段と;
前記少なくとも一つの測距端末の各々について、前記推定された距離に基づいて、前記標的端末についての位置推定値を決定するための手段
を具備してなる装置。
【請求項22】
請求項20に記載の装置であって:更に、
前記少なくとも一つの測距端末からの少なくとも一つの応答を受信するための手段であって、ここでの各測距端末からの応答は、前記測距端末の位置および前記リクエストについて前記測距端末により行われた距離測定値を含む手段と;
各測距端末からの応答について距離測定値を得るための手段と;
前記リクエストについて前記測距端末により行われた前記距離測定値および前記測距端末からの応答についての前記距離測定値に基づいて、前記標的端末と各測距端末との間の距離を推定するための手段と;
前記推定された距離および前記少なくとも一つの測距端末の各々についての位置に基づいて、前記標的端末についての位置推定値を決定するための手段と
を具備してなる装置。
【請求項23】
標的端末についての位置推定値を決定する際の補助のためのリクエストを、標的端末から受信するように、前記標的端末についての位置推定値を決定するために適した距離測定情報を入手し、また距離測定情報と共に応答を送るように構成された少なくとも一つのプロセッサと;
前記少なくとも一つのプロセッサに結合されたメモリーと
を具備してなる装置。
【請求項24】
請求項23に記載の装置であって、前記少なくとも一つのプロセッサは、前記標的端末か受信したリクエストについての距離測定値を入手して、前記距離測定値および前記距離測定情報としての前記装置の位置を提供するように構成される装置。
【請求項25】
請求項23に記載の装置であって、前記少なくとも一つのプロセッサは、前記応答を前記標的端末へ送るように構成される装置。
【請求項26】
請求項23に記載の装置であって、前記少なくとも一つのプロセッサは、前記装置におけるタイミングオフセットを示す情報を送るように構成される装置。
【請求項27】
請求項23に記載の装置であって、前記少なくとも一つのプロセッサは、前記応答を、前記標的端末についての位置推定値を決定できるネットワークエンティティーに送るように構成される装置。
【請求項28】
測距端末において、標的端末のための位置推定値を決定する際の補助を求めるリクエストを受信することと;
前記標的端末についての位置推定値を決定するのに適した距離測定情報を入手することと;
前記距離測定情報と共に応答を送ること
を含んでなる方法。
【請求項29】
請求項28に記載の方法であって:前記距離測定情報を入手することが、
前記標的端末から受信されたリクエストについての距離測定値を入手することと;
前記距離測定値および前記測距端末の位置を、前記距離測定情報として提供すること
を含んでなる方法。
【請求項30】
測距端末において、標的端末のための位置推定値を決定する際の補助を求めるリクエストを受信するための手段と;
前記標的端末についての位置推定値を決定するのに適した距離測定情報を入手するための手段と;
前記距離測定情報と共に応答を送るための手段と
を具備してなる装置。
【請求項31】
請求項30に記載の装置であって:前記距離測定情報を入手するための手段が、
前記標的端末から受信されたリクエストについての距離測定値を入手するための手段と;
前記距離測定値および前記測距端末の位置を、前記距離測定情報として提供するための手段と
を具備してなる装置。
【請求項32】
標的端末のための位置推定値を決定する際の補助について、標的端末により送られたリクエストについて、少なくとも一つの測距端末から少なくとも一つの応答を受信するように構成され、また前記少なくとも一つの測距端末からの少なくとも一つの応答に基づいて、前記標的端末についての位置推定値を決定するように構成された少なくとも一つのプロセッサであって、ここでの各応答は、前記標的端末のための位置推定値を決定するのに適した距離測定情報を含んでいる少なくとも一つのプロセッサと;
該少なくとも一つのプロセッサに結合されたメモリーと
を具備してなる装置。
【請求項33】
請求項32に記載の装置であって、前記少なくとも一つのプロセッサは、前記位置推定値を前記標的端末へと送るように構成される装置。
【請求項34】
請求項32に記載の装置であって、各測距端末からの前記距離測定情報は、前記標的端末により送られたリクエストについて前記測距端末によりなされた距離測定値、および前記測距端末の位置を含んでなる装置。
【請求項35】
請求項34に記載の装置であって、前記少なくとも一つのプロセッサは、位置測距端末によりなされた前記位置測定値に基づいて、前記標的端末と各測距端末の間の距離を推定し、また前記推定された距離および前記少なくとも一つの測距端末の各々についての位置に基づいて、前記標的端末の位置推定値を決定するように構成される装置。
【請求項36】
請求項34に記載の装置であって、前記少なくとも一つのプロセッサは、測距端末によりなされた距離測定値から、各測距端末のタイミングオフセットを除去するように構成される装置。
【請求項37】
請求項34に記載の装置であって、前記少なくとも一つのプロセッサは、各測距端末によりなされた距離測定値から、標的端末のタイミングオフセットを除去するように構成される装置。
【請求項38】
請求項32に記載の装置であって、前記少なくとも一つのプロセッサは、前記標的端末により受信された少なくとも一つの送信機についての少なくとも一つの距離測定値を入手し、また更に前記少なくとも一つの距離測定値に基づいて、前記標的端末についての位置推定値を決定するように構成される装置。
【請求項39】
標的端末のための位置推定値を決定する際の補助として、標的端末により送られたリクエストについて、少なくとも一つの測距端末から少なくとも一つの応答を受信するための手段であって、各応答が前記標的端末のための位置推定値を決定するのに適した距離測定情報を含む手段と;
前記少なくとも一つの測距端末からの前記少なくとも一つの応答に基づいて、前記標的端末についての位置推定値を決定するための手段
を具備してなる装置。
【請求項40】
請求項39に記載の装置であって:前記標的端末についての位置推定値を決定するための手段が、
前記測距端末によりなされた距離測定値に基づいて、前記標的端末と各測距端末との間の距離を推定するための手段と;
前記推定された距離および前記少なくとも一つの測距端末の各々の位置に基づいて、前記標的端末についての位置推定値を決定するための手段と
を具備してなる装置。
【図1】

【図2】
【図3】
【図4】
【図5】
【図6】
【図7】
【図8】
【図9】
【図10】
【図2】
【図3】
【図4】
【図5】
【図6】
【図7】
【図8】
【図9】
【図10】
【公表番号】特表2009−528546(P2009−528546A)
【公表日】平成21年8月6日(2009.8.6)
【国際特許分類】
【出願番号】特願2008−557522(P2008−557522)
【出願日】平成19年3月2日(2007.3.2)
【国際出願番号】PCT/US2007/063226
【国際公開番号】WO2007/103821
【国際公開日】平成19年9月13日(2007.9.13)
【公序良俗違反の表示】
(特許庁注:以下のものは登録商標)
1.ZIGBEE
【出願人】(595020643)クゥアルコム・インコーポレイテッド (7,166)
【氏名又は名称原語表記】QUALCOMM INCORPORATED
【Fターム(参考)】
【公表日】平成21年8月6日(2009.8.6)
【国際特許分類】
【出願日】平成19年3月2日(2007.3.2)
【国際出願番号】PCT/US2007/063226
【国際公開番号】WO2007/103821
【国際公開日】平成19年9月13日(2007.9.13)
【公序良俗違反の表示】
(特許庁注:以下のものは登録商標)
1.ZIGBEE
【出願人】(595020643)クゥアルコム・インコーポレイテッド (7,166)
【氏名又は名称原語表記】QUALCOMM INCORPORATED
【Fターム(参考)】
[ Back to top ]