
ピエゾアクチュエータ駆動方法、ピエゾアクチュエータ制御回路、及び防振制御回路
【課題】ピエゾアクチュエータの駆動において、異音が生じることがある。
【解決手段】パルス生成回路26は、ピエゾ素子14に印加する駆動パルスとして、レンズ8を所定のステップ幅変位させるデューティ比を有した変位用パルスと、レンズ8を現在位置に停留させるデューティ比を有した停留用パルスとを選択的に生成することができる。パルス生成回路26は、サーボ制御周期内での複数回連続する駆動パルスの発生を制御し、所要変位量の残余量が所定の閾値以上である場合、変位用パルスを発生させ、一方、前記残余量が前記閾値未満となった場合、次のサーボ制御周期の開始まで停留用パルスを持続的に発生させる。
【解決手段】パルス生成回路26は、ピエゾ素子14に印加する駆動パルスとして、レンズ8を所定のステップ幅変位させるデューティ比を有した変位用パルスと、レンズ8を現在位置に停留させるデューティ比を有した停留用パルスとを選択的に生成することができる。パルス生成回路26は、サーボ制御周期内での複数回連続する駆動パルスの発生を制御し、所要変位量の残余量が所定の閾値以上である場合、変位用パルスを発生させ、一方、前記残余量が前記閾値未満となった場合、次のサーボ制御周期の開始まで停留用パルスを持続的に発生させる。
【発明の詳細な説明】
【技術分野】
【0001】
本発明は、ピエゾ素子を用いたインパクト駆動型のアクチュエータに対する駆動パルスを生成する駆動方法及び制御回路、並びに撮像装置の手ぶれ補正を行う防振制御回路に関する。
【背景技術】
【0002】
従来より、ピエゾ素子の電歪効果を利用するピエゾアクチュエータが提案され、超小型のアクチュエータとして、期待されている(非特許文献1参照)。このピエゾアクチュエータは、例えば、カメラの手ぶれ補正やオートフォーカスなどに採用されている。
【0003】
インパクト駆動型のピエゾアクチュエータは、移動対象物を摩擦保持し、ピエゾ素子(圧電素子)により伸縮される駆動軸を有する。駆動回路は、駆動軸の伸張時と収縮時との速度が異なる、すなわち、ゆっくり伸ばし急に引く、またはその反対となるような電圧信号を生成してピエゾ素子に印加する。駆動軸の急速移動時には、移動対象物は慣性のため駆動軸に対して滑り、基本的にその位置に留まる。一方、駆動軸を緩やかに移動させれば、静止摩擦力により移動対象物は駆動軸と共に変位する。この伸縮動作により移動対象物を駆動軸に対して特定の方向に変位させることができる。
【0004】
この変位は、原理的に、立ち上がり時間と立ち下がり時間とが異なる鋸波形の電圧信号をピエゾ素子に印加することで実現できる。しかし、駆動回路から出力される駆動信号の波形としては必ずしも鋸波形である必要はなく、方形波の信号、すなわちパルス信号であっても、周波数やデューティ比を調節することで上述の変位を得ることが可能であることが知られている。移動対象物の移動速度は、駆動パルスの周波数及びデューティ比に依存し、例えば、デューティ比を逆とすることで移動方向を変えることができる。
【0005】
また、特許文献1は、駆動開始時には駆動パルス信号をピエゾ素子へ印加する時間を徐々に増加させて駆動速度が徐々に増加するように制御し、一方、駆動パルス信号をピエゾ素子へ印加する時間を徐々に減少させて駆動速度が徐々に減少するように制御する駆動装置を開示している。
【先行技術文献】
【特許文献】
【0006】
【特許文献1】特許第3358418号公報
【非特許文献】
【0007】
【非特許文献1】KONICAMINOLTA TECHNOLOGY REPORT VOL.1 (2004),p.23-26
【発明の概要】
【発明が解決しようとする課題】
【0008】
従来は、移動対象物を変位させる必要のない期間は、ピエゾ素子に印加する駆動パルスの発生を停止し、変位の必要が生じた場合に駆動パルスの発生を開始していた。
【0009】
しかし、この駆動方法では、ピエゾアクチュエータが駆動時に異音を生じることがあるという問題があった。具体的には、この異音は、駆動パルスを複数回発生可能な周期をサーボ制御周期に設定したピエゾアクチュエータの駆動時に観測された。この駆動方法では、サーボ制御周期の途中までの駆動パルスで駆動対象物の変位が所要変位量に到達すると、当該サーボ制御周期の残りの期間は駆動パルスの発生が停止される。そして、次のサーボ制御周期開始時に駆動対象物の変位が必要となっていれば駆動パルスの発生が再開される。駆動パルスの周波数は、例えば100kHz程度の高い周波数であり可聴域を超えている。そのため、異音は、駆動パルス自体によるものではなく、サーボ制御周期に応じた駆動対象物の移動・停止の繰り返しによるものであることが疑われる。
【0010】
この移動・停止時の異音の発生は、駆動開始時や停止時に駆動速度を徐々に変化させることで、低減できる可能性がある。しかし、駆動速度を徐々に変化させるために、駆動パルス信号のパルス幅又は印加電圧を徐々に変化させる制御が必要となり、制御が複雑となるおそれがある。
【0011】
本発明は上記問題点を解決するためになされたものであり、インパクト駆動型のピエゾアクチュエータにおいて異音の発生が簡易な制御で抑制される駆動方法及びピエゾアクチュエータ制御回路、並びにピエゾアクチュエータにおける異音が抑制された防振制御回路を提供することを目的とする。
【課題を解決するための手段】
【0012】
本発明は、ピエゾアクチュエータに駆動パルスを供給し、当該駆動パルスに同期して駆動対象物を1ステップずつ変位させるピエゾアクチュエータ駆動方法において、前記駆動対象物を現在位置に停留させるデューティ比を有した停留用パルスを前記駆動パルスとして供給する停留駆動を、前記駆動対象物の変位開始に先行して行い、当該停留駆動に引き続いて、前記駆動対象物の変位が生じるデューティ比を有した変位用パルスを前記駆動パルスとして供給開始して前記駆動対象物を変位させる。
【発明の効果】
【0013】
本発明によれば、駆動対象物を変位開始させるときに、停留動作が行われており、その状態から変位が開始される。停留駆動では、ピエゾアクチュエータは駆動対象物を停止位置に留めつつ伸縮される。つまり、駆動対象物はマクロ的には停止状態であるが、ミクロ的には停止位置の近傍で細かく振動している状態であり、その振動状態では駆動対象物は動摩擦力によってピエゾアクチュエータに摩擦保持されると推察される。動摩擦力は静止摩擦力よりも小さく、そのため、本発明によれば、駆動対象物の変位が停止状態から滑らかに開始され得る。本発明ではこのような作用から異音の発生が抑制される。また、当該異音の発生抑制のために必要となる駆動パルスは基本的に、停留用パルスと変位用パルスとの2種類であり、駆動開始時にさらに細かく駆動パルスのデューティ比を変化させる必要がなく制御が簡単であり、また制御回路も簡素な構成とすることができる。
【図面の簡単な説明】
【0014】
【図1】本発明の実施形態に係る、ピエゾアクチュエータを用いた手ぶれ補正システムの概略のブロック構成図である。
【図2】パルス生成回路を説明する概略の機能ブロック図である。
【図3】パルス生成回路による駆動パルスの生成処理を示す概略のフロー図である。
【図4】駆動パルスの信号波形を模式的に示すタイミング図である。
【図5】ピエゾアクチュエータを用いたサーボ制御の一例を説明する模式的なタイミング図である。
【発明を実施するための形態】
【0015】
以下、本発明の実施の形態(以下実施形態という)について、図面に基づいて説明する。本実施形態は、カメラに関して本発明を実施したものであり、当該カメラにおいて、ピエゾアクチュエータは手ぶれ補正機構に用いられる。
【0016】
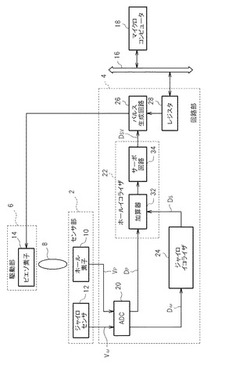
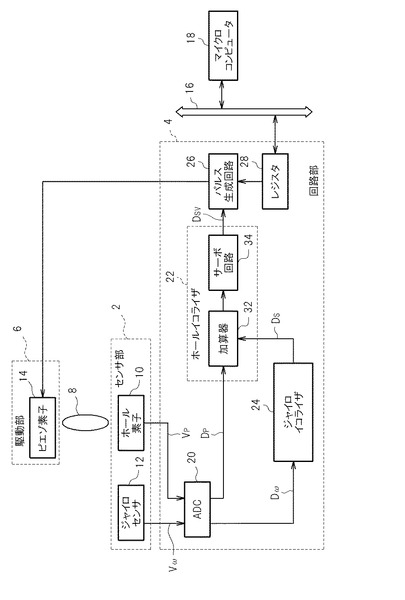
図1は、本カメラにおけるピエゾアクチュエータを用いた手ぶれ補正システムの概略のブロック構成図である。本手ぶれ補正システムは、センサ部2、回路部4、及び駆動部6を含んで構成され、回路部4は手ぶれ補正の制御を行う防振制御回路である。手ぶれ補正システムにはいくつかの方式があるが、例えば、本システムは、撮像素子(図示せず)の受光面に光学像を形成するレンズ8の位置を制御する方式とすることができる。
【0017】
センサ部2は、ホール素子10とジャイロセンサ12とからなる。ホール素子10は、レンズ8の位置を検出するために設けられたセンサであり、レンズ8に固定された磁石の磁場に基づいて、レンズ8との距離に応じた電圧信号VPを発生して回路部4へ出力する。光軸に垂直な平面(x−y平面)内でのレンズ8の2次元的な位置(PX,PY)を検出するために、ホール素子10はx方向、y方向それぞれに対応して設けられ、信号VPとしてx方向についての信号VPXとy方向についての信号VPYが得られる。
【0018】
ジャイロセンサ12は、カメラの振動を検出するために設けられたセンサであり、カメラの角速度ωに応じた電気信号Vωを回路部4へ出力する。ジャイロセンサ12も2つ設けられ、x軸の回りでの角速度成分ωX及びy軸の回りでの角速度成分ωYそれぞれを検知し、信号Vωとして、ωXに応じた信号VωXとωYに応じた信号VωYとを出力する。
【0019】
駆動部6は、上述したインパクト駆動型のピエゾアクチュエータであり、ピエゾ素子14を用いて構成される。ピエゾ素子14は、回路部4が生成する駆動パルス信号を印加されて伸縮し駆動軸を進退させ、駆動軸に摩擦保持されたレンズ8を駆動軸に沿った方向に変位させる。x−y平面内での2次元変位を実現するために、ピエゾ素子14及び駆動軸を含むアクチュエータは一対設けられ、x方向、y方向それぞれの変位を可能とする。
【0020】
回路部4は、システムバス16等を介してマイクロコンピュータ18に接続される。回路部4は、A/D変換器(ADC:Analog-to-Digital Converter)20、ホールイコライザ22、ジャイロイコライザ24、パルス生成回路26、及びレジスタ28を含んで構成される。回路部4は、ロジック回路で構成され、例えば、ASIC(Application Specific Integrated Circuit)として構成される。
【0021】
ADC20は、ホール素子10、ジャイロセンサ12の出力信号をそれぞれ入力される。ADC20は、2つのホール素子10が出力する電圧信号VPX,VPYと、2つのジャイロセンサ12が出力する電圧信号VωX,VωYとを、時分割でデジタルデータDPX,DPY,DωX,DωYに変換する。各信号のA/D変換は、サーボ制御周期毎に周期的に行われる。
【0022】
ホール素子10の出力に基づいて生成された位置データDPX,DPYは、ホールイコライザ22に入力される。一方、ジャイロセンサ12の出力に基づいて生成された角速度データDωX,DωYは、ジャイロイコライザ24に入力される。
【0023】
ジャイロイコライザ24は、サーボ制御周期毎に所定のサンプリング期間にわたり入力される角速度DωX,DωYを積分処理して、x軸、y軸それぞれの回りでのカメラの揺動角度θX,θYに応じたデータDθX,DθYを生成する。ジャイロイコライザ24は、これらデータDθX,DθYに基づいて、x方向、y方向それぞれに対する手振れ量に応じた振動量データDSX,DSYを生成し出力する。
【0024】
ホールイコライザ22は、加算器32及びサーボ回路34を有する。加算器32は、ADC20から入力される位置データDPX,DPYと、ジャイロイコライザ24からの振動量データDSX,DSYとをx、y各方向別に合成する。サーボ回路34は、加算器32の出力データDAX,DAYから、レンズ8の所要変位量であるサーボデータDSVX,DSVYを算出する。
【0025】
パルス生成回路26は、ホールイコライザ22から出力されるサーボデータDSVX,DSVYに基づいて、ピエゾ素子14を駆動するパルスを生成する。生成された駆動パルス信号はピエゾ素子14の駆動に十分な電圧に増幅され、ピエゾ素子14に印加される。パルス生成回路26は、DSVX,DSVYの絶対値が減少する方向に駆動部6が駆動されるようにパルスを生成する。これにより、本システムを搭載したカメラは、撮像期間にて、手振れに応じてレンズ8を移動させ、当該手振れによる撮像素子上での被写体像の変位を補償し、高画質な画像信号を得ることができる。
【0026】
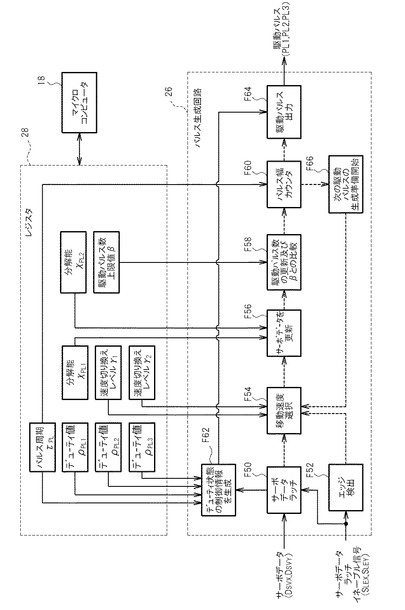
図2は、パルス生成回路26を説明する概略の機能ブロック図である。レジスタ28は、パルス生成回路26での処理に用いられる各種のユーザ設定パラメータを保持する。レジスタ28の書き込み動作や読み出し動作は、マイクロコンピュータ18がシステムバス16を介して行うことができ、ユーザはマイクロコンピュータ18に所定のプログラムを実行させることにより、レジスタ28に対する所望の操作を行うことができる。
【0027】
ここで、パルス生成回路26は、デューティ比が異なる3種類の駆動パルスPL1,PL2,PL3を生成することができる。例えば、レジスタ28は、1周期の駆動パルスPL1,PL2,PL3を定めるパラメータとして、PL1,PL2,PL3のパルス周期τPL及び、PL1,PL2,PL3それぞれのデューティ値ρPL1,ρPL2,ρPL3を設定される。τPLは例えば、パルス生成回路26に供給される高速の基準クロックCLKの周期数で定義できる。また、ρPL1,ρPL2,ρPL3は例えば、レンズ8をx,y軸の正方向に変位させる場合のPL1,PL2,PL3のH(High)レベル期間に含まれるクロックCLKの周期数で定義できる。これらの設定に基づき、パルス生成回路26は例えば、PL1により正方向の変位をさせる場合にはデューティ比(ρPL1/τPL)のパルスを生成し、負方向の変位をさせる場合には、Hレベル及びL(Low)レベルの時間幅が正方向変位時とは逆転したパルスを生成する。PL2についても同様に、正逆それぞれのデューティが定められる。これら駆動パルスPL1,PL2がレンズ8を変位させるための変位用パルスであるのに対して、駆動パルスPL3は、レンズ8を現在の位置に留めることができる停留用パルスとして設定される。そのため、PL3は、レンズ8の変位方向の正逆の区別を要さず、一つのデューティで定義することができる。PL3のデューティ比(ρPL3/τPL)は基本的に50%に設定することができる。
【0028】
PL1,PL2,PL3の生成はサーボデータの大小に応じて切り換えられる。レジスタ28は、その大小判定の閾値として、速度切り換えレベルγ1,γ2を予め格納される。
【0029】
PL1,PL2が生成される場合、その周期毎に、レンズ8は1ステップずつ変位する。その変位ステップ幅は、レンズ8の位置制御の分解能となる。このステップ幅については、事前の測定等により予定値を求めることができ、その予定値が、PL1,PL2の分解能χPL1,χPL2としてレジスタ28に予め格納される。レジスタ28に格納される分解能χPL1,χPL2は、速度切り換えレベルγ1,γ2と同じビット数で表現されるデジタルデータである。ここではPL1はPL2より高速にレンズ8を移動可能にデューティ値ρPL1,ρPL2を設定され、この速度差に対応して、χPL1>χPL2>0となる。
【0030】
また、レジスタ28には、サーボ制御周期内で発生できる駆動パルスの数の上限値βを予め設定することもできる。
【0031】
このようにレジスタ28には各種のパラメータが予め格納される。これらパラメータは、x軸用とy軸用として別々に設定可能に構成することができる。パルス生成回路26は、これら各種パラメータを用いて動作する。
【0032】
パルス生成回路26には、サーボ制御周期に同期して生成されるサーボデータラッチイネーブル信号SLEが入力される。信号SLEが立ち上がると、パルス生成回路26はサーボ回路34が出力するサーボデータをラッチする動作を行う(F50)。なお、回路部4はx方向のサーボ制御とy方向のサーボ制御とを時分割で行うので、信号SLEとして、x方向についての信号SLEXと及びy方向についての信号SLEYとが互いにタイミングをずらして別々に生成される。そして、例えば、回路部4はx方向に関してホール素子10、ジャイロセンサ12の出力を取り込み、サーボデータDSVXを生成すると共にSLEXを出力する。一方、回路部4はy方向に関してホール素子10、ジャイロセンサ12の出力を取り込み、サーボデータDSVYを生成すると共にSLEYを出力する。
【0033】
パルス生成回路26は、信号SLEX,SLEYそれぞれの立ち下がりのエッジを検出すると(F52)、ピエゾ素子14に対する駆動パルスの生成動作F54〜F64を開始する。
【0034】
パルス生成回路26は、サーボデータDSVX,DSVYの絶対値を所定の速度切り換えレベルγ1,γ2と比較し、その比較結果に応じてPL1,PL2,PL3のいずれを生成するかを定め、移動速度を選択する(F54)。選択されたパルスの種類は速度フラグFSPに設定される。
【0035】
パルス生成回路26は、駆動パルスPL1,PL2によるレンズ8の変位に応じてサーボデータDSVX,DSVYを更新し、当該サーボデータDSVX,DSVYを0に近づけるように駆動パルスの生成を制御する。具体的には、パルス生成回路26は、処理F54で選択された駆動パルスがPL1,PL2のいずれかである場合、当該選択された駆動パルスに対応する分解能(χPL1又はχPL2)を用いて、サーボデータを駆動パルス生成後の値に更新する(F56)。なお、処理F54で選択され駆動パルスがPL3の場合には、サーボデータDSVX,DSVYは現在の値に維持される。
【0036】
パルス生成回路26は現在のサーボ制御周期内での時間の経過を監視し、現在のサーボ制御周期にて次の駆動パルスを生成する余地がなくなるまで駆動パルスを生成し続ける。例えば、サーボ制御周期内での時間経過は、当該サーボ制御周期内での駆動パルスの生成数に基づいて把握することができる。この場合、パルス生成回路26は駆動パルスの生成数をカウントし、生成数nPLをその上限値βと比較して、これから生成しようとする駆動パルスが現在のサーボ制御周期での最後のものであるか否かを判定する(F58)。
【0037】
パルス幅カウンタは、1周期の駆動パルスの生成開始に連動して、基準クロックCLKのカウントを開始する(F60)。そのカウント値nCLKに基づいて駆動パルスの生成等におけるタイミング制御が行われる。
【0038】
ラッチされたサーボデータの符号により、レンズ8を移動すべき方向の正負が検知される。そして、当該符号と、レジスタ28に格納されているパルス周期τPL及びデューティ値(ρPL1,ρPL2,ρPL3)とから、1周期の駆動パルスのデューティ状態の制御情報として、H,Lレベルの長さ、又はH,Lレベルの切り換えタイミングが基準クロックCLKの周期数で求められる(F62)。パルス生成回路26は、PL1,PL2,PL3のうち速度フラグFSPで指定されるものについてのデューティ状態の制御情報と、基準クロックCLKのカウント値nCLKとに基づいて、駆動パルスを生成し出力する(F64)。
【0039】
なお、現在出力中の駆動パルスの周期の終了(nCLK=τPL)に連続して次の駆動パルスの周期が開始できるように、nCLKがτPLに達する少し前に、駆動パルスの生成準備が開始される(F66)。
【0040】
ASICで構成されたパルス生成回路26の動作は基本的に予め作り込まれる一方、ユーザは、レジスタ28に格納する各種パラメータの調整により、それぞれの目的に応じたアクチュエータの動作を実現可能である。この構成によれば、ピエゾアクチュエータの制御用のファームウェアを用いてマイクロコンピュータがアクチュエータの動作を制御する従来のやり方に比べ、マイクロコンピュータの負担を減らして簡易にピエゾアクチュエータを利用できる。
【0041】
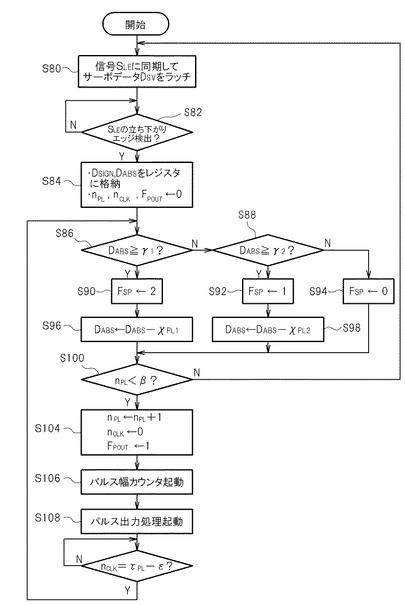
図3は、パルス生成回路26による駆動パルスの生成処理を示す概略のフロー図である。サーボデータラッチイネーブル信号SLEに同期して、サーボデータDSV(DSVX,DSVY)がラッチされる(S80,図2のF50)。パルス生成回路26はSLEの立ち下がりを検出すると(S82,図2のF52)、DSVの符号ビットの値DSIGN及びDSVの絶対値DABSをレジスタに格納する(S84)。また、出力済みの駆動パルス数についてのカウント値nPL、パルス幅カウンタのカウント値nCLK及びパルス出力フラグFPOUTを0にリセットする(S84)。
【0042】
パルス生成回路26は、サーボデータの絶対値DABSを速度切り換えレベルγ1と比較し、DABS≧γ1である場合には、PL2より大きな変位(粗動)を実現するPL1を選択する(S86)。一方、γ1>DABS≧γ2である場合には、PL1より小さな変位(微動)を実現するPL2を選択し、γ2>DABSである場合には、レンズ8を現在の位置に停留させるPL3を選択する(S88)。具体的には、この選択に応じて速度フラグFSPが設定され、DABS≧γ1の場合にはFSP=2(S90)、γ1>DABS≧γ2の場合にはFSP=1(S92)、γ2>DABSの場合にはFSP=0(S94)がそれぞれ設定される(図2のF54)。
【0043】
FSP=2の場合は、PL1を生成することを前提として、その生成後のDABSを求める。具体的には、現在のDABSからχPL1を減算した値でDABSを更新する(S96,図2のF56)。なお、更新後のDABSが0未満となり、目標位置を行き過ぎることを回避するために、γ1はγ1≧χPL1なる範囲で設定される。
【0044】
FSP=1の場合は、PL2を生成することを前提として、その生成後のDABSを求める。具体的には、現在のDABSからχPL2を減算した値でDABSを更新する(S98,図2のF56)。なお、γ2は、更新後のDABSが0未満となり目標位置を行き過ぎた位置でレンズ8が停止することを回避する場合には、γ2≧χPL2なる範囲で設定される。この場合、γ2=χPL2に設定すれば、レンズ8の停止位置と目標位置との距離Δは0≦Δ≦χPL2−1となり、レンズ8の停止位置を目標位置に最も好適に近づけることが可能である。一方、レンズ8が目標位置を行き過ぎることを問題にしなければ、χPL2が奇数の場合にはγ2を(χPL2+1)/2まで、またχPL2が偶数の場合にはγ2をχPL2/2まで下げることによって、Δの上限をχPL2/2程度まで低減できる。
【0045】
FSP=0の場合はPL3が生成される。PL3の生成は、その前後でDABSを変化させない(図2のF56)。
【0046】
PL1,PL2,PL3の中から上記比較処理(S86,S88)により選択された駆動パルスは、その生成後の距離Δの点では生成する余地がある。次に、当該選択された駆動パルスを生成しても駆動パルス数の上限値βを超えないかが判定される(S100,図2のF58)。具体的には、現時点の出力済みパルスのカウント値nPLが上限値βに達している、すなわちnPL≧βであれば、現在のサーボ制御周期での処理を終了し、次のサーボ制御周期の開始を待つ(S80)。
【0047】
一方、nPL<βであれば、比較処理(S86,S88)により選択された駆動パルスを出力する処理に移行する。パルス出力処理の開始に際し、出力済みパルスのカウント値nPLを1増加・更新し、パルス幅カウンタのカウント値nCLKを0にリセットする(S104)。また、パルス出力フラグFPOUTを1にセットする(S104)。しかる後、パルス幅カウンタを起動する(S106)。また、パルス出力フラグFPOUTが1にセットされたことに連動して、パルス出力処理が起動される(S108)。パルス生成回路26は、これらパルス幅カウンタの動作及びパルス出力処理それぞれを、駆動パルスを生成するまでの上述の準備処理S86〜S100と並列して実行可能に構成され、パルス幅カウンタの値nCLKがカウント終了直前の値(τPL−ε)になると(S110)、現在の駆動パルスの生成を継続しつつ、次の駆動パルスについての準備処理S86〜S100が開始される(S110,図2のF66)。εは準備処理S86〜S100に要する時間に応じて設定され、例えば、2程度に設定される。なお、パルス幅カウンタは、上述したように、基準クロックCLKをカウントする。
【0048】
パルス出力処理では、符号ビット値DSIGN、速度フラグFSP、デューティ値ρPL1,ρPL2,ρPL3、パルス周期τPLから駆動パルスのデューティ状態の制御情報が生成される(図2のF62)。このデューティを定める制御情報とnCLKとに基づいて、パルス生成回路26は出力電圧のHレベル、Lレベル相互の切り換えを行い、駆動パルスを生成し出力する。
【0049】
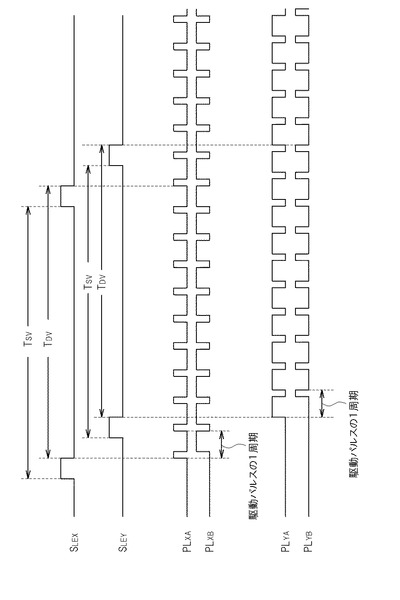
図4は、駆動パルスの信号波形を模式的に示すタイミング図である。図4において、横方向が時間軸であり、サーボデータラッチイネーブル信号SLEX,SLEY、x方向のピエゾアクチュエータに対する駆動パルスPLXA,PLXB、y方向のピエゾアクチュエータに対する駆動パルスPLYA,PLYBが縦方向に並べて表されている。ここで、PLXA及びPLXBはx方向アクチュエータのピエゾ素子14の両極性それぞれに印加されるパルスであり、基本的には互いに相補的な波形である。同様に、PLYA及びPLYBはy方向アクチュエータのピエゾ素子14の両極性それぞれに印加されるパルスである。例えば、x方向に関して、サーボ制御周期TSVは、SLEXの立ち上がりタイミングの間隔であり、当該サーボ制御周期での制御に基づく駆動パルスPLXA,PLXBは、SLEXの立ち下がりタイミングの間隔TDV内にて生成される。このTDVにて生成可能な駆動パルス数の最大値がβで指定される。すなわち、βは、基準クロックCLKの1周期の長さをTCLKとすると、β≦TDV/(TCLK・τPL)を満たすように設定される。
【0050】
図4は、βをβ=TDV/(TCLK・τPL)に設定した状態を示している。このように設定すれば、或るサーボ制御周期に対応した駆動パルスの最後の周期が終わると同時に、次のサーボ制御周期に対応した駆動パルスの最初の周期が始まる。すなわち、ピエゾ素子14には常に一定の周期で駆動パルスが印加され、サーボ制御周期の境界部分でのレンズ8に対する駆動の円滑性が向上し、ひいては駆動部6又はレンズ8が発するノイズの低減が図れる。
【0051】
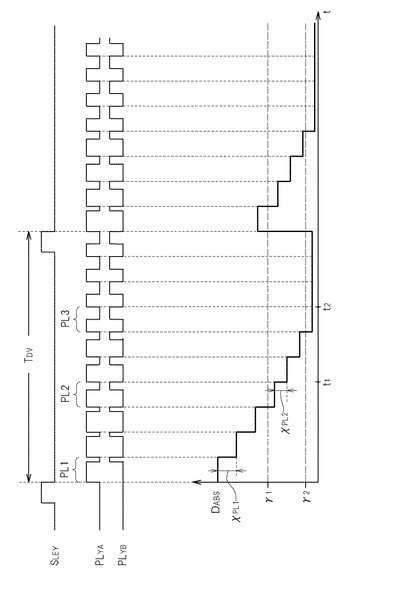
図5は、ピエゾアクチュエータを用いたサーボ制御の一例を説明する模式的なタイミング図である。図5において、横方向が時間軸であり、サーボデータラッチイネーブル信号SLEY、駆動パルスPLYA,PLYB、及びサーボデータDSVYの絶対値DABSが縦方向に並べて表されている。この例は、SLEYの立ち下がりにてラッチされたDSVYの絶対値が速度切り換えレベルγ1を超える大きな値である場合である。駆動パルスを発生する毎にDABSは所定ステップ幅ずつ減少し、レンズ8の目標位置に対応する0に徐々に近づく。駆動開始時にはDABSがγ1より大きく、処理S86にて駆動パルスPL1の生成が選択される。これにより比較的大きなステップ幅でレンズ8は変位する。このステップ幅は基本的に分解能χPL1としてレジスタ28に設定した想定値に相当し、DABSはχPL1だけ減じた値に更新される。駆動パルスPL1の生成は、DABSがγ1より大きい間、繰り返される。
【0052】
DABSがγ1未満となると、処理S86,S88にて駆動パルスPL2の生成が選択され、レンズ8はPL1より小さいステップ幅で変位する(時刻t1)。PL2によるステップ幅は基本的に分解能χPL2としてレジスタ28に設定した想定値に相当し、DABSはχPL2だけ減じた値に更新される。
【0053】
DABSがγ2未満となると、処理S86,S88にて駆動パルスPL3の生成が選択され、レンズ8は現在の位置に停留される(時刻t2)。停留用パルスであるPL3の生成は、次のサーボ制御周期の開始まで持続される。すなわち、次のサーボ制御周期でのレンズ8の変位開始に先行して、停留用パルスPL3を駆動パルスとしてピエゾ素子14に供給する停留駆動が行われ、次のサーボ制御周期での変位用パルスPL1又はPL2の供給は当該停留駆動に引き続いて行われる。停留駆動では、レンズ8は現在の位置にて微少な振動を行いつつ、その位置に留まっている。この状態からレンズ8を変位させる際に、レンズ8とこれを摩擦保持する駆動軸との間に働く摩擦力は、動摩擦力となる。これに対して、変位用パルスの生成に先行して停留用パルスを発生させない従来の駆動方法では、変位開始時に静止摩擦力が作用する。動摩擦力は静止摩擦力よりも小さいので、本発明による駆動方法では、変位開始を従来より滑らかに行うことができ、このことがノイズを低減していると解される。
【0054】
なお、上述のように、パルス生成回路26は、PL1により大きなステップ幅でレンズ8を変位させる粗動動作と、PL2により小さなステップ幅でレンズ8を変位させる微動動作とを切り換えることができる。これにより、DABSが大きい場合でも粗動動作によって、サーボ制御周期に応じた期間TDV内での限られた駆動パルス数で、レンズ8を速やかに目標位置に近づけることができる。一方、微動動作によれば、目標位置へ近づく速度は下がる反面、好適な位置精度を実現することが可能となる。
【0055】
特に、上述したように、DABSを0へ漸次近づける過程にて、DABSが大きい範囲では粗動を行い、DABSが小さい範囲では微動を行うように切り換えることにより、目標位置への到達時間の短縮と、到達位置の精度の確保との両立が可能となる。
【0056】
本発明は、レンズ8の代わりに撮像素子をピエゾアクチュエータで変位させる手振れ補正システムに用いることもできる。また、上述の実施形態は手振れ補正システムに関するものであったが、本発明はオートフォーカス等の他のサーボ制御システムに用いられるピエゾアクチュエータを駆動する回路に一般に適用可能である。
【0057】
また、上述の実施形態は、サーボ制御周期毎の駆動対象物を変位させる期間の相互間に生じる駆動対象物の停止期間に停留用パルスを持続的に発生させる例を示した。しかし、停留用パルスを当該停止期間の全体ではなく、変位用パルスの生成の直前の一部の期間だけにて発生させてもノイズ抑制が図れる。また、本発明の駆動方法はサーボ制御以外の駆動においても適用することができる。
【0058】
上述の実施形態では、駆動部6はピエゾ素子14を用いたピエゾアクチュエータとしたが、駆動部6は、ピエゾ素子14に代えて、電気信号に応じて伸縮するという、ピエゾ素子と同様の機能を有した他の電気機械変換素子を用いて構成することもできる。本発明は、そのような電気機械変換素子を用いたアクチュエータの駆動方法、制御回路にも適用することができ、上述の実施形態で説明したような異音発生の抑制を図ることができる。
【符号の説明】
【0059】
2 センサ部、4 回路部、6 駆動部、8 レンズ、10 ホール素子、12 ジャイロセンサ、14 ピエゾ素子、16 システムバス、18 マイクロコンピュータ、20 ADC、22 ホールイコライザ、24 ジャイロイコライザ、26 パルス生成回路、28 レジスタ、32 加算器、34 サーボ回路。
【技術分野】
【0001】
本発明は、ピエゾ素子を用いたインパクト駆動型のアクチュエータに対する駆動パルスを生成する駆動方法及び制御回路、並びに撮像装置の手ぶれ補正を行う防振制御回路に関する。
【背景技術】
【0002】
従来より、ピエゾ素子の電歪効果を利用するピエゾアクチュエータが提案され、超小型のアクチュエータとして、期待されている(非特許文献1参照)。このピエゾアクチュエータは、例えば、カメラの手ぶれ補正やオートフォーカスなどに採用されている。
【0003】
インパクト駆動型のピエゾアクチュエータは、移動対象物を摩擦保持し、ピエゾ素子(圧電素子)により伸縮される駆動軸を有する。駆動回路は、駆動軸の伸張時と収縮時との速度が異なる、すなわち、ゆっくり伸ばし急に引く、またはその反対となるような電圧信号を生成してピエゾ素子に印加する。駆動軸の急速移動時には、移動対象物は慣性のため駆動軸に対して滑り、基本的にその位置に留まる。一方、駆動軸を緩やかに移動させれば、静止摩擦力により移動対象物は駆動軸と共に変位する。この伸縮動作により移動対象物を駆動軸に対して特定の方向に変位させることができる。
【0004】
この変位は、原理的に、立ち上がり時間と立ち下がり時間とが異なる鋸波形の電圧信号をピエゾ素子に印加することで実現できる。しかし、駆動回路から出力される駆動信号の波形としては必ずしも鋸波形である必要はなく、方形波の信号、すなわちパルス信号であっても、周波数やデューティ比を調節することで上述の変位を得ることが可能であることが知られている。移動対象物の移動速度は、駆動パルスの周波数及びデューティ比に依存し、例えば、デューティ比を逆とすることで移動方向を変えることができる。
【0005】
また、特許文献1は、駆動開始時には駆動パルス信号をピエゾ素子へ印加する時間を徐々に増加させて駆動速度が徐々に増加するように制御し、一方、駆動パルス信号をピエゾ素子へ印加する時間を徐々に減少させて駆動速度が徐々に減少するように制御する駆動装置を開示している。
【先行技術文献】
【特許文献】
【0006】
【特許文献1】特許第3358418号公報
【非特許文献】
【0007】
【非特許文献1】KONICAMINOLTA TECHNOLOGY REPORT VOL.1 (2004),p.23-26
【発明の概要】
【発明が解決しようとする課題】
【0008】
従来は、移動対象物を変位させる必要のない期間は、ピエゾ素子に印加する駆動パルスの発生を停止し、変位の必要が生じた場合に駆動パルスの発生を開始していた。
【0009】
しかし、この駆動方法では、ピエゾアクチュエータが駆動時に異音を生じることがあるという問題があった。具体的には、この異音は、駆動パルスを複数回発生可能な周期をサーボ制御周期に設定したピエゾアクチュエータの駆動時に観測された。この駆動方法では、サーボ制御周期の途中までの駆動パルスで駆動対象物の変位が所要変位量に到達すると、当該サーボ制御周期の残りの期間は駆動パルスの発生が停止される。そして、次のサーボ制御周期開始時に駆動対象物の変位が必要となっていれば駆動パルスの発生が再開される。駆動パルスの周波数は、例えば100kHz程度の高い周波数であり可聴域を超えている。そのため、異音は、駆動パルス自体によるものではなく、サーボ制御周期に応じた駆動対象物の移動・停止の繰り返しによるものであることが疑われる。
【0010】
この移動・停止時の異音の発生は、駆動開始時や停止時に駆動速度を徐々に変化させることで、低減できる可能性がある。しかし、駆動速度を徐々に変化させるために、駆動パルス信号のパルス幅又は印加電圧を徐々に変化させる制御が必要となり、制御が複雑となるおそれがある。
【0011】
本発明は上記問題点を解決するためになされたものであり、インパクト駆動型のピエゾアクチュエータにおいて異音の発生が簡易な制御で抑制される駆動方法及びピエゾアクチュエータ制御回路、並びにピエゾアクチュエータにおける異音が抑制された防振制御回路を提供することを目的とする。
【課題を解決するための手段】
【0012】
本発明は、ピエゾアクチュエータに駆動パルスを供給し、当該駆動パルスに同期して駆動対象物を1ステップずつ変位させるピエゾアクチュエータ駆動方法において、前記駆動対象物を現在位置に停留させるデューティ比を有した停留用パルスを前記駆動パルスとして供給する停留駆動を、前記駆動対象物の変位開始に先行して行い、当該停留駆動に引き続いて、前記駆動対象物の変位が生じるデューティ比を有した変位用パルスを前記駆動パルスとして供給開始して前記駆動対象物を変位させる。
【発明の効果】
【0013】
本発明によれば、駆動対象物を変位開始させるときに、停留動作が行われており、その状態から変位が開始される。停留駆動では、ピエゾアクチュエータは駆動対象物を停止位置に留めつつ伸縮される。つまり、駆動対象物はマクロ的には停止状態であるが、ミクロ的には停止位置の近傍で細かく振動している状態であり、その振動状態では駆動対象物は動摩擦力によってピエゾアクチュエータに摩擦保持されると推察される。動摩擦力は静止摩擦力よりも小さく、そのため、本発明によれば、駆動対象物の変位が停止状態から滑らかに開始され得る。本発明ではこのような作用から異音の発生が抑制される。また、当該異音の発生抑制のために必要となる駆動パルスは基本的に、停留用パルスと変位用パルスとの2種類であり、駆動開始時にさらに細かく駆動パルスのデューティ比を変化させる必要がなく制御が簡単であり、また制御回路も簡素な構成とすることができる。
【図面の簡単な説明】
【0014】
【図1】本発明の実施形態に係る、ピエゾアクチュエータを用いた手ぶれ補正システムの概略のブロック構成図である。
【図2】パルス生成回路を説明する概略の機能ブロック図である。
【図3】パルス生成回路による駆動パルスの生成処理を示す概略のフロー図である。
【図4】駆動パルスの信号波形を模式的に示すタイミング図である。
【図5】ピエゾアクチュエータを用いたサーボ制御の一例を説明する模式的なタイミング図である。
【発明を実施するための形態】
【0015】
以下、本発明の実施の形態(以下実施形態という)について、図面に基づいて説明する。本実施形態は、カメラに関して本発明を実施したものであり、当該カメラにおいて、ピエゾアクチュエータは手ぶれ補正機構に用いられる。
【0016】
図1は、本カメラにおけるピエゾアクチュエータを用いた手ぶれ補正システムの概略のブロック構成図である。本手ぶれ補正システムは、センサ部2、回路部4、及び駆動部6を含んで構成され、回路部4は手ぶれ補正の制御を行う防振制御回路である。手ぶれ補正システムにはいくつかの方式があるが、例えば、本システムは、撮像素子(図示せず)の受光面に光学像を形成するレンズ8の位置を制御する方式とすることができる。
【0017】
センサ部2は、ホール素子10とジャイロセンサ12とからなる。ホール素子10は、レンズ8の位置を検出するために設けられたセンサであり、レンズ8に固定された磁石の磁場に基づいて、レンズ8との距離に応じた電圧信号VPを発生して回路部4へ出力する。光軸に垂直な平面(x−y平面)内でのレンズ8の2次元的な位置(PX,PY)を検出するために、ホール素子10はx方向、y方向それぞれに対応して設けられ、信号VPとしてx方向についての信号VPXとy方向についての信号VPYが得られる。
【0018】
ジャイロセンサ12は、カメラの振動を検出するために設けられたセンサであり、カメラの角速度ωに応じた電気信号Vωを回路部4へ出力する。ジャイロセンサ12も2つ設けられ、x軸の回りでの角速度成分ωX及びy軸の回りでの角速度成分ωYそれぞれを検知し、信号Vωとして、ωXに応じた信号VωXとωYに応じた信号VωYとを出力する。
【0019】
駆動部6は、上述したインパクト駆動型のピエゾアクチュエータであり、ピエゾ素子14を用いて構成される。ピエゾ素子14は、回路部4が生成する駆動パルス信号を印加されて伸縮し駆動軸を進退させ、駆動軸に摩擦保持されたレンズ8を駆動軸に沿った方向に変位させる。x−y平面内での2次元変位を実現するために、ピエゾ素子14及び駆動軸を含むアクチュエータは一対設けられ、x方向、y方向それぞれの変位を可能とする。
【0020】
回路部4は、システムバス16等を介してマイクロコンピュータ18に接続される。回路部4は、A/D変換器(ADC:Analog-to-Digital Converter)20、ホールイコライザ22、ジャイロイコライザ24、パルス生成回路26、及びレジスタ28を含んで構成される。回路部4は、ロジック回路で構成され、例えば、ASIC(Application Specific Integrated Circuit)として構成される。
【0021】
ADC20は、ホール素子10、ジャイロセンサ12の出力信号をそれぞれ入力される。ADC20は、2つのホール素子10が出力する電圧信号VPX,VPYと、2つのジャイロセンサ12が出力する電圧信号VωX,VωYとを、時分割でデジタルデータDPX,DPY,DωX,DωYに変換する。各信号のA/D変換は、サーボ制御周期毎に周期的に行われる。
【0022】
ホール素子10の出力に基づいて生成された位置データDPX,DPYは、ホールイコライザ22に入力される。一方、ジャイロセンサ12の出力に基づいて生成された角速度データDωX,DωYは、ジャイロイコライザ24に入力される。
【0023】
ジャイロイコライザ24は、サーボ制御周期毎に所定のサンプリング期間にわたり入力される角速度DωX,DωYを積分処理して、x軸、y軸それぞれの回りでのカメラの揺動角度θX,θYに応じたデータDθX,DθYを生成する。ジャイロイコライザ24は、これらデータDθX,DθYに基づいて、x方向、y方向それぞれに対する手振れ量に応じた振動量データDSX,DSYを生成し出力する。
【0024】
ホールイコライザ22は、加算器32及びサーボ回路34を有する。加算器32は、ADC20から入力される位置データDPX,DPYと、ジャイロイコライザ24からの振動量データDSX,DSYとをx、y各方向別に合成する。サーボ回路34は、加算器32の出力データDAX,DAYから、レンズ8の所要変位量であるサーボデータDSVX,DSVYを算出する。
【0025】
パルス生成回路26は、ホールイコライザ22から出力されるサーボデータDSVX,DSVYに基づいて、ピエゾ素子14を駆動するパルスを生成する。生成された駆動パルス信号はピエゾ素子14の駆動に十分な電圧に増幅され、ピエゾ素子14に印加される。パルス生成回路26は、DSVX,DSVYの絶対値が減少する方向に駆動部6が駆動されるようにパルスを生成する。これにより、本システムを搭載したカメラは、撮像期間にて、手振れに応じてレンズ8を移動させ、当該手振れによる撮像素子上での被写体像の変位を補償し、高画質な画像信号を得ることができる。
【0026】
図2は、パルス生成回路26を説明する概略の機能ブロック図である。レジスタ28は、パルス生成回路26での処理に用いられる各種のユーザ設定パラメータを保持する。レジスタ28の書き込み動作や読み出し動作は、マイクロコンピュータ18がシステムバス16を介して行うことができ、ユーザはマイクロコンピュータ18に所定のプログラムを実行させることにより、レジスタ28に対する所望の操作を行うことができる。
【0027】
ここで、パルス生成回路26は、デューティ比が異なる3種類の駆動パルスPL1,PL2,PL3を生成することができる。例えば、レジスタ28は、1周期の駆動パルスPL1,PL2,PL3を定めるパラメータとして、PL1,PL2,PL3のパルス周期τPL及び、PL1,PL2,PL3それぞれのデューティ値ρPL1,ρPL2,ρPL3を設定される。τPLは例えば、パルス生成回路26に供給される高速の基準クロックCLKの周期数で定義できる。また、ρPL1,ρPL2,ρPL3は例えば、レンズ8をx,y軸の正方向に変位させる場合のPL1,PL2,PL3のH(High)レベル期間に含まれるクロックCLKの周期数で定義できる。これらの設定に基づき、パルス生成回路26は例えば、PL1により正方向の変位をさせる場合にはデューティ比(ρPL1/τPL)のパルスを生成し、負方向の変位をさせる場合には、Hレベル及びL(Low)レベルの時間幅が正方向変位時とは逆転したパルスを生成する。PL2についても同様に、正逆それぞれのデューティが定められる。これら駆動パルスPL1,PL2がレンズ8を変位させるための変位用パルスであるのに対して、駆動パルスPL3は、レンズ8を現在の位置に留めることができる停留用パルスとして設定される。そのため、PL3は、レンズ8の変位方向の正逆の区別を要さず、一つのデューティで定義することができる。PL3のデューティ比(ρPL3/τPL)は基本的に50%に設定することができる。
【0028】
PL1,PL2,PL3の生成はサーボデータの大小に応じて切り換えられる。レジスタ28は、その大小判定の閾値として、速度切り換えレベルγ1,γ2を予め格納される。
【0029】
PL1,PL2が生成される場合、その周期毎に、レンズ8は1ステップずつ変位する。その変位ステップ幅は、レンズ8の位置制御の分解能となる。このステップ幅については、事前の測定等により予定値を求めることができ、その予定値が、PL1,PL2の分解能χPL1,χPL2としてレジスタ28に予め格納される。レジスタ28に格納される分解能χPL1,χPL2は、速度切り換えレベルγ1,γ2と同じビット数で表現されるデジタルデータである。ここではPL1はPL2より高速にレンズ8を移動可能にデューティ値ρPL1,ρPL2を設定され、この速度差に対応して、χPL1>χPL2>0となる。
【0030】
また、レジスタ28には、サーボ制御周期内で発生できる駆動パルスの数の上限値βを予め設定することもできる。
【0031】
このようにレジスタ28には各種のパラメータが予め格納される。これらパラメータは、x軸用とy軸用として別々に設定可能に構成することができる。パルス生成回路26は、これら各種パラメータを用いて動作する。
【0032】
パルス生成回路26には、サーボ制御周期に同期して生成されるサーボデータラッチイネーブル信号SLEが入力される。信号SLEが立ち上がると、パルス生成回路26はサーボ回路34が出力するサーボデータをラッチする動作を行う(F50)。なお、回路部4はx方向のサーボ制御とy方向のサーボ制御とを時分割で行うので、信号SLEとして、x方向についての信号SLEXと及びy方向についての信号SLEYとが互いにタイミングをずらして別々に生成される。そして、例えば、回路部4はx方向に関してホール素子10、ジャイロセンサ12の出力を取り込み、サーボデータDSVXを生成すると共にSLEXを出力する。一方、回路部4はy方向に関してホール素子10、ジャイロセンサ12の出力を取り込み、サーボデータDSVYを生成すると共にSLEYを出力する。
【0033】
パルス生成回路26は、信号SLEX,SLEYそれぞれの立ち下がりのエッジを検出すると(F52)、ピエゾ素子14に対する駆動パルスの生成動作F54〜F64を開始する。
【0034】
パルス生成回路26は、サーボデータDSVX,DSVYの絶対値を所定の速度切り換えレベルγ1,γ2と比較し、その比較結果に応じてPL1,PL2,PL3のいずれを生成するかを定め、移動速度を選択する(F54)。選択されたパルスの種類は速度フラグFSPに設定される。
【0035】
パルス生成回路26は、駆動パルスPL1,PL2によるレンズ8の変位に応じてサーボデータDSVX,DSVYを更新し、当該サーボデータDSVX,DSVYを0に近づけるように駆動パルスの生成を制御する。具体的には、パルス生成回路26は、処理F54で選択された駆動パルスがPL1,PL2のいずれかである場合、当該選択された駆動パルスに対応する分解能(χPL1又はχPL2)を用いて、サーボデータを駆動パルス生成後の値に更新する(F56)。なお、処理F54で選択され駆動パルスがPL3の場合には、サーボデータDSVX,DSVYは現在の値に維持される。
【0036】
パルス生成回路26は現在のサーボ制御周期内での時間の経過を監視し、現在のサーボ制御周期にて次の駆動パルスを生成する余地がなくなるまで駆動パルスを生成し続ける。例えば、サーボ制御周期内での時間経過は、当該サーボ制御周期内での駆動パルスの生成数に基づいて把握することができる。この場合、パルス生成回路26は駆動パルスの生成数をカウントし、生成数nPLをその上限値βと比較して、これから生成しようとする駆動パルスが現在のサーボ制御周期での最後のものであるか否かを判定する(F58)。
【0037】
パルス幅カウンタは、1周期の駆動パルスの生成開始に連動して、基準クロックCLKのカウントを開始する(F60)。そのカウント値nCLKに基づいて駆動パルスの生成等におけるタイミング制御が行われる。
【0038】
ラッチされたサーボデータの符号により、レンズ8を移動すべき方向の正負が検知される。そして、当該符号と、レジスタ28に格納されているパルス周期τPL及びデューティ値(ρPL1,ρPL2,ρPL3)とから、1周期の駆動パルスのデューティ状態の制御情報として、H,Lレベルの長さ、又はH,Lレベルの切り換えタイミングが基準クロックCLKの周期数で求められる(F62)。パルス生成回路26は、PL1,PL2,PL3のうち速度フラグFSPで指定されるものについてのデューティ状態の制御情報と、基準クロックCLKのカウント値nCLKとに基づいて、駆動パルスを生成し出力する(F64)。
【0039】
なお、現在出力中の駆動パルスの周期の終了(nCLK=τPL)に連続して次の駆動パルスの周期が開始できるように、nCLKがτPLに達する少し前に、駆動パルスの生成準備が開始される(F66)。
【0040】
ASICで構成されたパルス生成回路26の動作は基本的に予め作り込まれる一方、ユーザは、レジスタ28に格納する各種パラメータの調整により、それぞれの目的に応じたアクチュエータの動作を実現可能である。この構成によれば、ピエゾアクチュエータの制御用のファームウェアを用いてマイクロコンピュータがアクチュエータの動作を制御する従来のやり方に比べ、マイクロコンピュータの負担を減らして簡易にピエゾアクチュエータを利用できる。
【0041】
図3は、パルス生成回路26による駆動パルスの生成処理を示す概略のフロー図である。サーボデータラッチイネーブル信号SLEに同期して、サーボデータDSV(DSVX,DSVY)がラッチされる(S80,図2のF50)。パルス生成回路26はSLEの立ち下がりを検出すると(S82,図2のF52)、DSVの符号ビットの値DSIGN及びDSVの絶対値DABSをレジスタに格納する(S84)。また、出力済みの駆動パルス数についてのカウント値nPL、パルス幅カウンタのカウント値nCLK及びパルス出力フラグFPOUTを0にリセットする(S84)。
【0042】
パルス生成回路26は、サーボデータの絶対値DABSを速度切り換えレベルγ1と比較し、DABS≧γ1である場合には、PL2より大きな変位(粗動)を実現するPL1を選択する(S86)。一方、γ1>DABS≧γ2である場合には、PL1より小さな変位(微動)を実現するPL2を選択し、γ2>DABSである場合には、レンズ8を現在の位置に停留させるPL3を選択する(S88)。具体的には、この選択に応じて速度フラグFSPが設定され、DABS≧γ1の場合にはFSP=2(S90)、γ1>DABS≧γ2の場合にはFSP=1(S92)、γ2>DABSの場合にはFSP=0(S94)がそれぞれ設定される(図2のF54)。
【0043】
FSP=2の場合は、PL1を生成することを前提として、その生成後のDABSを求める。具体的には、現在のDABSからχPL1を減算した値でDABSを更新する(S96,図2のF56)。なお、更新後のDABSが0未満となり、目標位置を行き過ぎることを回避するために、γ1はγ1≧χPL1なる範囲で設定される。
【0044】
FSP=1の場合は、PL2を生成することを前提として、その生成後のDABSを求める。具体的には、現在のDABSからχPL2を減算した値でDABSを更新する(S98,図2のF56)。なお、γ2は、更新後のDABSが0未満となり目標位置を行き過ぎた位置でレンズ8が停止することを回避する場合には、γ2≧χPL2なる範囲で設定される。この場合、γ2=χPL2に設定すれば、レンズ8の停止位置と目標位置との距離Δは0≦Δ≦χPL2−1となり、レンズ8の停止位置を目標位置に最も好適に近づけることが可能である。一方、レンズ8が目標位置を行き過ぎることを問題にしなければ、χPL2が奇数の場合にはγ2を(χPL2+1)/2まで、またχPL2が偶数の場合にはγ2をχPL2/2まで下げることによって、Δの上限をχPL2/2程度まで低減できる。
【0045】
FSP=0の場合はPL3が生成される。PL3の生成は、その前後でDABSを変化させない(図2のF56)。
【0046】
PL1,PL2,PL3の中から上記比較処理(S86,S88)により選択された駆動パルスは、その生成後の距離Δの点では生成する余地がある。次に、当該選択された駆動パルスを生成しても駆動パルス数の上限値βを超えないかが判定される(S100,図2のF58)。具体的には、現時点の出力済みパルスのカウント値nPLが上限値βに達している、すなわちnPL≧βであれば、現在のサーボ制御周期での処理を終了し、次のサーボ制御周期の開始を待つ(S80)。
【0047】
一方、nPL<βであれば、比較処理(S86,S88)により選択された駆動パルスを出力する処理に移行する。パルス出力処理の開始に際し、出力済みパルスのカウント値nPLを1増加・更新し、パルス幅カウンタのカウント値nCLKを0にリセットする(S104)。また、パルス出力フラグFPOUTを1にセットする(S104)。しかる後、パルス幅カウンタを起動する(S106)。また、パルス出力フラグFPOUTが1にセットされたことに連動して、パルス出力処理が起動される(S108)。パルス生成回路26は、これらパルス幅カウンタの動作及びパルス出力処理それぞれを、駆動パルスを生成するまでの上述の準備処理S86〜S100と並列して実行可能に構成され、パルス幅カウンタの値nCLKがカウント終了直前の値(τPL−ε)になると(S110)、現在の駆動パルスの生成を継続しつつ、次の駆動パルスについての準備処理S86〜S100が開始される(S110,図2のF66)。εは準備処理S86〜S100に要する時間に応じて設定され、例えば、2程度に設定される。なお、パルス幅カウンタは、上述したように、基準クロックCLKをカウントする。
【0048】
パルス出力処理では、符号ビット値DSIGN、速度フラグFSP、デューティ値ρPL1,ρPL2,ρPL3、パルス周期τPLから駆動パルスのデューティ状態の制御情報が生成される(図2のF62)。このデューティを定める制御情報とnCLKとに基づいて、パルス生成回路26は出力電圧のHレベル、Lレベル相互の切り換えを行い、駆動パルスを生成し出力する。
【0049】
図4は、駆動パルスの信号波形を模式的に示すタイミング図である。図4において、横方向が時間軸であり、サーボデータラッチイネーブル信号SLEX,SLEY、x方向のピエゾアクチュエータに対する駆動パルスPLXA,PLXB、y方向のピエゾアクチュエータに対する駆動パルスPLYA,PLYBが縦方向に並べて表されている。ここで、PLXA及びPLXBはx方向アクチュエータのピエゾ素子14の両極性それぞれに印加されるパルスであり、基本的には互いに相補的な波形である。同様に、PLYA及びPLYBはy方向アクチュエータのピエゾ素子14の両極性それぞれに印加されるパルスである。例えば、x方向に関して、サーボ制御周期TSVは、SLEXの立ち上がりタイミングの間隔であり、当該サーボ制御周期での制御に基づく駆動パルスPLXA,PLXBは、SLEXの立ち下がりタイミングの間隔TDV内にて生成される。このTDVにて生成可能な駆動パルス数の最大値がβで指定される。すなわち、βは、基準クロックCLKの1周期の長さをTCLKとすると、β≦TDV/(TCLK・τPL)を満たすように設定される。
【0050】
図4は、βをβ=TDV/(TCLK・τPL)に設定した状態を示している。このように設定すれば、或るサーボ制御周期に対応した駆動パルスの最後の周期が終わると同時に、次のサーボ制御周期に対応した駆動パルスの最初の周期が始まる。すなわち、ピエゾ素子14には常に一定の周期で駆動パルスが印加され、サーボ制御周期の境界部分でのレンズ8に対する駆動の円滑性が向上し、ひいては駆動部6又はレンズ8が発するノイズの低減が図れる。
【0051】
図5は、ピエゾアクチュエータを用いたサーボ制御の一例を説明する模式的なタイミング図である。図5において、横方向が時間軸であり、サーボデータラッチイネーブル信号SLEY、駆動パルスPLYA,PLYB、及びサーボデータDSVYの絶対値DABSが縦方向に並べて表されている。この例は、SLEYの立ち下がりにてラッチされたDSVYの絶対値が速度切り換えレベルγ1を超える大きな値である場合である。駆動パルスを発生する毎にDABSは所定ステップ幅ずつ減少し、レンズ8の目標位置に対応する0に徐々に近づく。駆動開始時にはDABSがγ1より大きく、処理S86にて駆動パルスPL1の生成が選択される。これにより比較的大きなステップ幅でレンズ8は変位する。このステップ幅は基本的に分解能χPL1としてレジスタ28に設定した想定値に相当し、DABSはχPL1だけ減じた値に更新される。駆動パルスPL1の生成は、DABSがγ1より大きい間、繰り返される。
【0052】
DABSがγ1未満となると、処理S86,S88にて駆動パルスPL2の生成が選択され、レンズ8はPL1より小さいステップ幅で変位する(時刻t1)。PL2によるステップ幅は基本的に分解能χPL2としてレジスタ28に設定した想定値に相当し、DABSはχPL2だけ減じた値に更新される。
【0053】
DABSがγ2未満となると、処理S86,S88にて駆動パルスPL3の生成が選択され、レンズ8は現在の位置に停留される(時刻t2)。停留用パルスであるPL3の生成は、次のサーボ制御周期の開始まで持続される。すなわち、次のサーボ制御周期でのレンズ8の変位開始に先行して、停留用パルスPL3を駆動パルスとしてピエゾ素子14に供給する停留駆動が行われ、次のサーボ制御周期での変位用パルスPL1又はPL2の供給は当該停留駆動に引き続いて行われる。停留駆動では、レンズ8は現在の位置にて微少な振動を行いつつ、その位置に留まっている。この状態からレンズ8を変位させる際に、レンズ8とこれを摩擦保持する駆動軸との間に働く摩擦力は、動摩擦力となる。これに対して、変位用パルスの生成に先行して停留用パルスを発生させない従来の駆動方法では、変位開始時に静止摩擦力が作用する。動摩擦力は静止摩擦力よりも小さいので、本発明による駆動方法では、変位開始を従来より滑らかに行うことができ、このことがノイズを低減していると解される。
【0054】
なお、上述のように、パルス生成回路26は、PL1により大きなステップ幅でレンズ8を変位させる粗動動作と、PL2により小さなステップ幅でレンズ8を変位させる微動動作とを切り換えることができる。これにより、DABSが大きい場合でも粗動動作によって、サーボ制御周期に応じた期間TDV内での限られた駆動パルス数で、レンズ8を速やかに目標位置に近づけることができる。一方、微動動作によれば、目標位置へ近づく速度は下がる反面、好適な位置精度を実現することが可能となる。
【0055】
特に、上述したように、DABSを0へ漸次近づける過程にて、DABSが大きい範囲では粗動を行い、DABSが小さい範囲では微動を行うように切り換えることにより、目標位置への到達時間の短縮と、到達位置の精度の確保との両立が可能となる。
【0056】
本発明は、レンズ8の代わりに撮像素子をピエゾアクチュエータで変位させる手振れ補正システムに用いることもできる。また、上述の実施形態は手振れ補正システムに関するものであったが、本発明はオートフォーカス等の他のサーボ制御システムに用いられるピエゾアクチュエータを駆動する回路に一般に適用可能である。
【0057】
また、上述の実施形態は、サーボ制御周期毎の駆動対象物を変位させる期間の相互間に生じる駆動対象物の停止期間に停留用パルスを持続的に発生させる例を示した。しかし、停留用パルスを当該停止期間の全体ではなく、変位用パルスの生成の直前の一部の期間だけにて発生させてもノイズ抑制が図れる。また、本発明の駆動方法はサーボ制御以外の駆動においても適用することができる。
【0058】
上述の実施形態では、駆動部6はピエゾ素子14を用いたピエゾアクチュエータとしたが、駆動部6は、ピエゾ素子14に代えて、電気信号に応じて伸縮するという、ピエゾ素子と同様の機能を有した他の電気機械変換素子を用いて構成することもできる。本発明は、そのような電気機械変換素子を用いたアクチュエータの駆動方法、制御回路にも適用することができ、上述の実施形態で説明したような異音発生の抑制を図ることができる。
【符号の説明】
【0059】
2 センサ部、4 回路部、6 駆動部、8 レンズ、10 ホール素子、12 ジャイロセンサ、14 ピエゾ素子、16 システムバス、18 マイクロコンピュータ、20 ADC、22 ホールイコライザ、24 ジャイロイコライザ、26 パルス生成回路、28 レジスタ、32 加算器、34 サーボ回路。
【特許請求の範囲】
【請求項1】
ピエゾアクチュエータに駆動パルスを供給し、当該駆動パルスに同期して駆動対象物を1ステップずつ変位させるピエゾアクチュエータ駆動方法において、
前記駆動対象物を現在位置に停留させるデューティ比を有した停留用パルスを前記駆動パルスとして供給する停留駆動を、前記駆動対象物の変位開始に先行して行い、
当該停留駆動に引き続いて、前記駆動対象物の変位が生じるデューティ比を有した変位用パルスを前記駆動パルスとして供給開始して前記駆動対象物を変位させること、
を特徴とするピエゾアクチュエータ駆動方法。
【請求項2】
所定のサーボ制御周期毎に得られる駆動対象物の所要変位量に基づいてピエゾアクチュエータによる前記駆動対象物の変位を制御するピエゾアクチュエータ制御回路において、
前記ピエゾアクチュエータのピエゾ素子に印加する駆動パルスとして、前記駆動対象物を所定のステップ幅変位させるデューティ比を有した変位用パルスと、前記駆動対象物を現在位置に停留させるデューティ比を有した停留用パルスとを選択的に生成して前記ピエゾアクチュエータへ出力する駆動パルス生成部と、
前記所要変位量の残余量が所定の閾値以上である場合、前記変位用パルスを発生させ、一方、前記残余量が前記閾値未満である場合、前記停留用パルスを発生させる制御部と、
を有することを特徴とするピエゾアクチュエータ制御回路。
【請求項3】
請求項2に記載のピエゾアクチュエータ制御回路において、
前記ステップ幅の予定値を記憶するステップ幅記憶部を更に備え、
前記制御部は、前記サーボ制御周期内での複数回連続する前記駆動パルスの発生を制御し、前記所要変位量の残余量が所定の閾値以上である場合、前記変位用パルスを発生させ、かつ前記予定値に基づいて前記残余量を更新し、一方、前記残余量が前記閾値未満となった場合、次の前記サーボ制御周期の開始まで前記停留用パルスを持続的に発生させること、を特徴とするピエゾアクチュエータ制御回路。
【請求項4】
請求項2に記載のピエゾアクチュエータ制御回路において、
前記停留用パルスは、デューティ比が50%であること、を特徴とするピエゾアクチュエータ制御回路。
【請求項5】
撮像装置の振動を検出するセンサの出力信号に基づいて、前記振動による前記撮像装置の変位量に応じた振動補償信号を生成する振動補償信号生成部と、
前記振動による撮影画像のずれを補償するための駆動対象物の駆動位置を検出するセンサの出力信号、及び前記振動補償信号に基づいて、所定のサーボ制御周期毎に前記駆動対象物の所要変位量を求める所要変位量決定部と、
前記所要変位量に基づいてピエゾアクチュエータによる前記駆動対象物の変位を制御するピエゾアクチュエータ制御回路と、を備えた防振制御回路であって、
前記ピエゾアクチュエータ制御回路は、
前記ピエゾアクチュエータのピエゾ素子に印加する駆動パルスとして、前記駆動対象物を所定のステップ幅変位させるデューティ比を有した変位用パルスと、前記駆動対象物を現在位置に停留させるデューティ比を有した停留用パルスとを選択的に生成して前記ピエゾアクチュエータへ出力する駆動パルス生成部と、
前記所要変位量の残余量が所定の閾値以上である場合、前記変位用パルスを発生させ、一方、前記残余量が前記閾値未満である場合、前記停留用パルスを発生させる制御部と、
を有することを特徴とする防振制御回路。
【請求項6】
請求項5に記載の防振制御回路において、
前記ステップ幅の予定値を記憶するステップ幅記憶部を更に備え、
前記制御部は、前記サーボ制御周期内での複数回連続する前記駆動パルスの発生を制御し、前記所要変位量の残余量が所定の閾値以上である場合、前記変位用パルスを発生させ、かつ前記予定値に基づいて前記残余量を更新し、一方、前記残余量が前記閾値未満となった場合、次の前記サーボ制御周期の開始まで前記停留用パルスを持続的に発生させること、を特徴とする防振制御回路。
【請求項7】
請求項5に記載の防振制御回路において、
前記停留用パルスは、デューティ比が50%であること、を特徴とする防振制御回路。
【請求項1】
ピエゾアクチュエータに駆動パルスを供給し、当該駆動パルスに同期して駆動対象物を1ステップずつ変位させるピエゾアクチュエータ駆動方法において、
前記駆動対象物を現在位置に停留させるデューティ比を有した停留用パルスを前記駆動パルスとして供給する停留駆動を、前記駆動対象物の変位開始に先行して行い、
当該停留駆動に引き続いて、前記駆動対象物の変位が生じるデューティ比を有した変位用パルスを前記駆動パルスとして供給開始して前記駆動対象物を変位させること、
を特徴とするピエゾアクチュエータ駆動方法。
【請求項2】
所定のサーボ制御周期毎に得られる駆動対象物の所要変位量に基づいてピエゾアクチュエータによる前記駆動対象物の変位を制御するピエゾアクチュエータ制御回路において、
前記ピエゾアクチュエータのピエゾ素子に印加する駆動パルスとして、前記駆動対象物を所定のステップ幅変位させるデューティ比を有した変位用パルスと、前記駆動対象物を現在位置に停留させるデューティ比を有した停留用パルスとを選択的に生成して前記ピエゾアクチュエータへ出力する駆動パルス生成部と、
前記所要変位量の残余量が所定の閾値以上である場合、前記変位用パルスを発生させ、一方、前記残余量が前記閾値未満である場合、前記停留用パルスを発生させる制御部と、
を有することを特徴とするピエゾアクチュエータ制御回路。
【請求項3】
請求項2に記載のピエゾアクチュエータ制御回路において、
前記ステップ幅の予定値を記憶するステップ幅記憶部を更に備え、
前記制御部は、前記サーボ制御周期内での複数回連続する前記駆動パルスの発生を制御し、前記所要変位量の残余量が所定の閾値以上である場合、前記変位用パルスを発生させ、かつ前記予定値に基づいて前記残余量を更新し、一方、前記残余量が前記閾値未満となった場合、次の前記サーボ制御周期の開始まで前記停留用パルスを持続的に発生させること、を特徴とするピエゾアクチュエータ制御回路。
【請求項4】
請求項2に記載のピエゾアクチュエータ制御回路において、
前記停留用パルスは、デューティ比が50%であること、を特徴とするピエゾアクチュエータ制御回路。
【請求項5】
撮像装置の振動を検出するセンサの出力信号に基づいて、前記振動による前記撮像装置の変位量に応じた振動補償信号を生成する振動補償信号生成部と、
前記振動による撮影画像のずれを補償するための駆動対象物の駆動位置を検出するセンサの出力信号、及び前記振動補償信号に基づいて、所定のサーボ制御周期毎に前記駆動対象物の所要変位量を求める所要変位量決定部と、
前記所要変位量に基づいてピエゾアクチュエータによる前記駆動対象物の変位を制御するピエゾアクチュエータ制御回路と、を備えた防振制御回路であって、
前記ピエゾアクチュエータ制御回路は、
前記ピエゾアクチュエータのピエゾ素子に印加する駆動パルスとして、前記駆動対象物を所定のステップ幅変位させるデューティ比を有した変位用パルスと、前記駆動対象物を現在位置に停留させるデューティ比を有した停留用パルスとを選択的に生成して前記ピエゾアクチュエータへ出力する駆動パルス生成部と、
前記所要変位量の残余量が所定の閾値以上である場合、前記変位用パルスを発生させ、一方、前記残余量が前記閾値未満である場合、前記停留用パルスを発生させる制御部と、
を有することを特徴とする防振制御回路。
【請求項6】
請求項5に記載の防振制御回路において、
前記ステップ幅の予定値を記憶するステップ幅記憶部を更に備え、
前記制御部は、前記サーボ制御周期内での複数回連続する前記駆動パルスの発生を制御し、前記所要変位量の残余量が所定の閾値以上である場合、前記変位用パルスを発生させ、かつ前記予定値に基づいて前記残余量を更新し、一方、前記残余量が前記閾値未満となった場合、次の前記サーボ制御周期の開始まで前記停留用パルスを持続的に発生させること、を特徴とする防振制御回路。
【請求項7】
請求項5に記載の防振制御回路において、
前記停留用パルスは、デューティ比が50%であること、を特徴とする防振制御回路。
【図1】


【図2】
【図3】
【図4】
【図5】
【図2】
【図3】
【図4】
【図5】
【公開番号】特開2010−259224(P2010−259224A)
【公開日】平成22年11月11日(2010.11.11)
【国際特許分類】
【出願番号】特願2009−106591(P2009−106591)
【出願日】平成21年4月24日(2009.4.24)
【出願人】(000001889)三洋電機株式会社 (18,308)
【出願人】(506227884)三洋半導体株式会社 (1,155)
【出願人】(000005430)フジノン株式会社 (2,231)
【Fターム(参考)】
【公開日】平成22年11月11日(2010.11.11)
【国際特許分類】
【出願日】平成21年4月24日(2009.4.24)
【出願人】(000001889)三洋電機株式会社 (18,308)
【出願人】(506227884)三洋半導体株式会社 (1,155)
【出願人】(000005430)フジノン株式会社 (2,231)
【Fターム(参考)】
[ Back to top ]