
ピペットチップ供給装置、検体分析装置及びピペットチップ供給方法
【課題】分注ノズルへのピペットチップの供給に遅滞が生じるのを抑制する。
【解決手段】複数のピペットチップAを貯留するチップ貯留部20と、ピペットチップAを保持可能なチップ保持部42を複数有したホルダ41を備え当該ホルダ41を移動可能なチップ搬送部40と、チップ貯留部20に貯留されているピペットチップAをホルダ41のチップ保持部42に供給するチップ供給部21とを備えている。チップ搬送部40は、チップ供給部21により供給されたピペットチップAを複数のチップ保持部42のそれぞれに保持させ、ピペットチップAを保持した複数のチップ保持部42のうち何れか1つを、分注ノズル5aがピペットチップAを装着するチップ装着位置に位置づけるようにホルダ41を移動させることにより、分注ノズル5aにピペットチップAを供給する。
【解決手段】複数のピペットチップAを貯留するチップ貯留部20と、ピペットチップAを保持可能なチップ保持部42を複数有したホルダ41を備え当該ホルダ41を移動可能なチップ搬送部40と、チップ貯留部20に貯留されているピペットチップAをホルダ41のチップ保持部42に供給するチップ供給部21とを備えている。チップ搬送部40は、チップ供給部21により供給されたピペットチップAを複数のチップ保持部42のそれぞれに保持させ、ピペットチップAを保持した複数のチップ保持部42のうち何れか1つを、分注ノズル5aがピペットチップAを装着するチップ装着位置に位置づけるようにホルダ41を移動させることにより、分注ノズル5aにピペットチップAを供給する。
【発明の詳細な説明】
【技術分野】
【0001】
本発明は、ピペットチップ供給装置、検体分析装置及びピペットチップ供給方法に関する。
【背景技術】
【0002】
従来、血液や尿等の検体の分注にピペットチップが使用されており、このピペットチップを分注ノズルに自動供給するチップ供給装置が知られている(例えば特許文献1参照)。
特許文献1には、ユーザにより投入された複数のピペットチップを収容するチップ補給部と、チップ補給部から取り出されたピペットチップを1つずつに仕分ける仕分機構部と、仕分機構部により1つずつに仕分けられた単一のピペットチップを保持し、この単一のピペットチップを検体分注アームが有する分注ノズルによる装着位置に搬送するチップ搬送部とを備えたチップ供給装置が開示されている。
【先行技術文献】
【特許文献】
【0003】
【特許文献1】特開2009−74916号公報
【発明の概要】
【発明が解決しようとする課題】
【0004】
しかしながら、特許文献1に記載のチップ供給装置では、例えば仕分機構部によるピペットチップの仕分け動作が円滑に行われずに時間がかかった場合、チップ補給部に収容されているピペットチップを円滑にチップ搬送部に送ることができず、分注ノズルへのピペットチップの供給に遅滞が生じるおそれがある。このような場合には、検体の分注動作を中断する必要があり、自動分析装置による検体の処理能力が低下するおそれがある。
【0005】
そこで、本発明は、分注ノズルへのピペットチップの供給に遅滞が生じるのを抑制することができるピペットチップ供給装置、検体分析装置及びピペットチップ供給方法を提供する。
【課題を解決するための手段】
【0006】
(1)本発明のピペットチップ供給装置は、複数のピペットチップを貯留するチップ貯留部と、ピペットチップを保持可能なチップ保持部を複数有したホルダを備え、当該ホルダを移動可能なチップ搬送部と、前記チップ貯留部に貯留されているピペットチップを前記ホルダのチップ保持部に供給するチップ供給部と、を備え、前記チップ搬送部は、前記チップ供給部により供給されたピペットチップを複数のチップ保持部のそれぞれに保持させ、ピペットチップを保持した複数のチップ保持部のうち何れか1つを、分注ノズルがピペットチップを装着するチップ装着位置に位置づけるように前記ホルダを移動させることにより、前記分注ノズルにピペットチップを供給する。
【0007】
これにより、予め複数のチップ保持部にピペットチップを保持させておくことができる。このため、チップ保持部へのピペットチップの供給が円滑に行われない事態が生じた場合であっても、ピペットチップがチップ供給部によって供給されるのを待つことなく、分注ノズルによるピペットチップの装着位置にピペットチップを供給することができる。このため、分注ノズルへのピペットチップの供給に遅滞が生じることを抑制することができる。
【0008】
(2)また、前記チップ供給部は、前記チップ貯留部に貯留されているピペットチップを所定のチップ受取位置に供給し、前記チップ搬送部は、複数のチップ保持部のそれぞれを前記チップ受取位置に位置づけるように前記ホルダを移動させて、各チップ保持部にピペットチップを保持させることが好ましい。
この構成では、各チップ保持部をチップ受取位置に位置合わせしてピペットチップを各チップ保持部に保持させるので、チップ供給部は所定のチップ受取位置にピペットチップを供給するだけでよく、チップ供給部の構成を簡略化させることができる。
【0009】
(3)また、前記チップ搬送部は、前記分注ノズルへのピペットチップの供給が必要な時まで、ピペットチップを保持していないチップ保持部を前記チップ受取位置へ位置づけるよう前記ホルダを移動させることが好ましい。
これにより、できるだけ多くのピペットチップをホルダに保持させておくことができるので、分注ノズルへのピペットチップの供給に遅滞が生じることをより効果的に抑制することができる。
【0010】
(4)また、前記チップ搬送部は、前記ホルダの複数のチップ保持部のいずれかにピペットチップが保持されている場合に、前記分注ノズルへのピペットチップへの供給が必要になると、ピペットチップを保持していないチップ保持部があっても、ピペットチップを保持しているチップ保持部を前記チップ装着位置に位置づけるように前記ホルダを移動させることが好ましい。
これにより、分注ノズルへのピペットチップの供給に遅滞が生じることをより確実に防止することができる。
【0011】
(5)また、前記チップ搬送部は、所定時間毎に、ピペットチップを保持した何れか1つのチップ保持部を前記チップ装着位置に位置づけるように前記ホルダを移動させることが好ましい。
これにより、分注ノズルにピペットチップを装着させる周期を維持させることができ、検体の処理能力が低下することを抑制できる。
【0012】
(6)また、前記チップ搬送部は、前記複数のチップ保持部に所定の順番でピペットチップが保持されるように前記ホルダを移動させることが好ましい。
これにより、ホルダの各チップ保持部をチップ受取位置に位置合わせする際の制御を簡略化させることができる。
【0013】
(7)また、前記チップ搬送部は、前記チップ受取位置と前記チップ装着位置との間で前記ホルダを移動させるよう構成され、前記複数のチップ保持部は、前記チップ受取位置と前記チップ装着位置との間の前記ホルダの移動方向に並んで前記ホルダに配置されているのが好ましい。
これにより、複数のチップ保持部のそれぞれを、より容易にチップ受取位置およびチップ装着位置に位置合わせすることができる。
【0014】
(8)また、前記チップ供給部は、ピペットチップを1つずつ前記チップ受取位置に供給する第1供給部と、前記チップ貯留部のピペットチップを前記第1供給部へ供給する第2供給部とを有し、前記ホルダが前記チップ装着位置に向けて移動を開始してから前記チップ受取位置に戻ってくるまでの間に、前記第1供給部へのピペットチップの供給を完了するように前記第2供給部を制御する制御部を更に備えているのが好ましい。
これにより、ホルダがチップ受取位置に戻ってくる前に、第1供給部にピペットチップを送り終えることができるので、ホルダがチップ受取位置に戻ってきた後、第1供給部により、ホルダにピペットチップを迅速に供給することができる。
【0015】
(9)また、前記(8)のピペットチップ供給装置において、前記第1供給部には、ピペットチップを落下させることで前記チップ受取位置にピペットチップを供給する落下口と、この落下口の直前位置でピペットチップを保持する待機位置とが設定され、前記制御部は、前記ホルダが前記チップ装着位置に向けて移動を開始してから前記チップ受取位置に戻ってくるまでの間に、前記第2供給部から前記第1供給部に供給されたピペットチップを前記待機位置まで移送するよう前記第1供給部を制御するのが好ましい。
この場合、ホルダがチップ受取位置に戻ってくると、待機位置で待機させておいたピペットチップを落下口から落下させ、ホルダに当該ピペットチップを迅速に移送させることができる。
【0016】
(10)また、前記ホルダのチップ保持部にピペットチップが保持されたことを検知するためのチップ検知部を更に備えることが好ましい。
これにより、ピペットチップが保持されていないチップ保持部をより確実に特定することができる。
【0017】
(11)また、前記チップ搬送部は、前記複数のチップ保持部を均等な頻度で前記チップ装着位置に位置づけて前記分注ノズルにピペットチップを供給することが好ましい。
これにより、ホルダにおいて、複数保持されているピペットチップのうち、特定のピペットチップが、いつまでも分注ノズルに装着されないでホルダに残ってしまうのを防ぐことができる。
【0018】
(12)また、前記チップ貯留部は、複数のピペットチップを、ピペットチップの長手方向がばらばらな状態で貯留するように構成されていることが好ましい。
これにより、ユーザは、複数のピペットチップを、その長手方向を考慮することなく投入すればよく、ユーザにとって使いやすい装置となるとともに、チップ貯留部からピペットチップをホルダに供給する動作に不具合が生じたとしても、ホルダには予め複数のピペットチップが保持されているので、分注ノズルへのピペットチップの供給に遅滞が生じることを抑制することができる。
【0019】
(13)また、前記ピペットチップ供給装置は、前記複数のチップ保持部それぞれにおけるピペットチップの有無を示す保持情報を記憶する記憶部と、チップ保持部におけるピペットチップの有無の状態が変化する度に前記保持情報を更新し、更新された保持情報に基づいて、前記チップ供給部及び前記チップ搬送部を制御する制御部とを更に備えているのが好ましい。
これによれば、各チップ保持部におけるピペットチップの保持状況に応じて、柔軟にチップ供給部およびチップ搬送部を制御することができる。
【0020】
(14)また、本発明の検体分析装置は、複数のピペットチップを貯留するチップ貯留部と、ピペットチップを保持可能なチップ保持部を複数有したホルダを備え、当該ホルダを移動可能なチップ搬送部と、前記チップ貯留部に貯留されているピペットチップを前記ホルダのチップ保持部に供給するチップ供給部と、検体を分注するための分注ノズルを有し、チップ装着位置に位置するピペットチップを前記分注ノズルに装着して検体の分注を行う検体分注部と、を備え、前記チップ搬送部は、前記チップ供給部により供給されたピペットチップを複数のチップ保持部のそれぞれに保持させ、ピペットチップを保持した複数のチップ保持部のうち何れか1つを前記チップ装着位置に位置づけるように前記ホルダを移動させる。
【0021】
これにより、予め複数のチップ保持部にピペットチップを保持させておくことができるため、チップ保持部へのピペットチップの供給が円滑に行われない事態が生じた場合であっても、ピペットチップがチップ供給部によって供給されるのを待つことなく、分注ノズルによるピペットチップの装着位置にピペットチップを供給することができる。このため、分注ノズルへのピペットチップの供給に遅滞が生じることを抑制することができ、分注ノズルによる検体の分注を遅滞なく行うことが可能となる。
【0022】
(15)本発明は、ピペットチップを保持可能なチップ保持部を複数有したホルダを用いて、ピペットチップを分注ノズルへ供給するピペットチップ供給方法であって、複数のピペットチップが貯留されているチップ貯留部内のピペットチップを前記ホルダの複数のチップ保持部のそれぞれに保持させる工程と、前記分注ノズルがピペットチップを装着するチップ装着位置に、ピペットチップを保持している複数のチップ保持部のうち何れか1つを位置づけるよう前記ホルダを移動させることにより、前記分注ノズルにピペットチップを供給する工程とを含む。
【0023】
これにより、予め複数のチップ保持部にピペットチップを保持させておくことができるため、チップ保持部へのピペットチップの供給が円滑に行われない事態が生じた場合であっても、ピペットチップが供給されるのを待つことなく、分注ノズルによるピペットチップの装着位置にピペットチップを供給することができる。このため、分注ノズルへのピペットチップの供給に遅滞が生じることを抑制することができる。
【発明の効果】
【0024】
本発明によれば、複数のチップ保持部にピペットチップを予め保持させておくことができるので、チップ保持部へのピペットチップの供給が円滑に行われない事態が生じた場合であっても、ピペットチップの供給を待つことなく、分注ノズルにピペットチップを供給することができる。このため、分注ノズルへのピペットチップの供給に遅滞が生じることを抑制することができる。
【図面の簡単な説明】
【0025】
【図1】本発明の検体分析装置の全体構成を示す斜視図である。
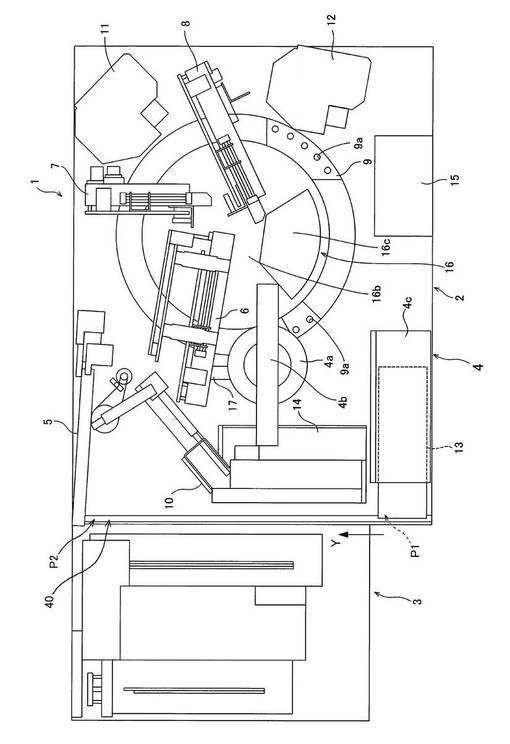
【図2】検体分析装置の平面図である。
【図3】ピペットチップの説明図である。
【図4】ピペットチップ供給装置の斜視図である。
【図5】ピペットチップ供給装置の一部の斜視図である。
【図6】チップ移送機構部の平面図である。
【図7】第1位置におけるホルダの位置を説明する説明図である。
【図8】チップ搬送部の搬送駆動部の説明図である。
【図9】第1押し上げ部材の動作を説明するフロー図である。
【図10】第2押し上げ部材の動作を説明するフロー図である。
【図11】チップ移送機構部の動作を説明するフロー図である。
【図12】第2位置におけるホルダの位置を説明する説明図である。
【図13】記憶部に記憶されているデータベースの説明図である。
【図14】チップ搬送部の初期化時の処理を説明するフロー図である。
【図15】通常運転時の処理を説明するフロー図である。
【図16】分注ノズルへのチップ供給処理を説明するフロー図である。
【図17】制御装置の構成を示すブロック図である。
【発明を実施するための形態】
【0026】
以下、本発明の実施の形態を図面に基づいて説明する。
〔1. 検体分析装置の全体構成について〕
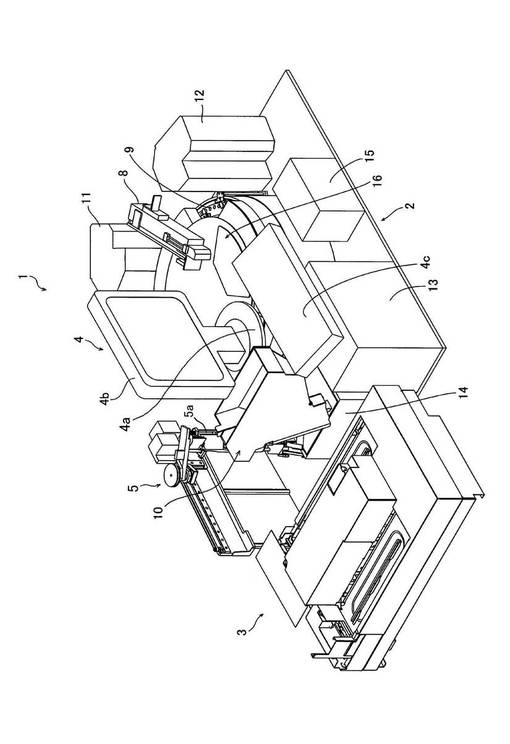
本発明の検体分析装置1は、例えば、測定対象である血液等の検体に含まれる抗原や抗体などを定量測定または定性測定する装置である。この検体分析装置1は、図1と図2とに示すように、測定機構部2と、この測定機構部2に隣接して配置された検体搬送部3と、測定機構部2に電気的に接続された制御装置4とを備えている。
【0027】
検体搬送部3は、検体を収容した図示しない複数の試験管を保持したラックを搬送可能であり、検体を収容した試験管を検体分注アーム5による検体吸引位置まで搬送する。
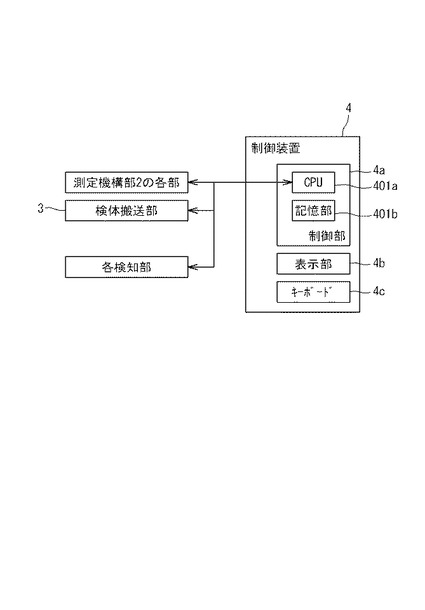
制御装置4は、パーソナルコンピュータからなり、制御部4aと、表示部(モニタ)4bと、キーボード4cとを有している。制御部4aは、図17に示すように、CPU401a、記憶部401b等を含み、測定機構部2の各部および検体搬送部3に動作開始信号を送信するとともに、測定機構部2で得られた検体の情報を分析処理する機能を有している。記憶部401bは、ROM,RAM,ハードディスク等からなり、CPU401aによる処理に使用されるコンピュータプログラム、データ等を格納している。また、CPU401aは、後述する各検知部からの検出信号を受信するように構成されている。また、表示部4bは、各種の情報を表示することができ、制御部4aで得られた分析結果や、ユーザへの報知情報等を表示する。
【0028】
測定機構部2は、検体分注アーム(検体分注部)5と、ピペットチップ供給装置13とを備えている。また、本実施形態の測定機構部2は、R1試薬分注アーム6と、R2試薬分注アーム7と、R3試薬分注アーム8と、反応部9と、キュベット供給部10と、1次BF分離部11と、2次BF分離部12と、分析部14、R4/R5試薬供給部15と、試薬設置部16とを備えている。
【0029】
ピペットチップ供給装置13は、ユーザによって投入された複数のピペットチップAを第1位置P1へと供給する機能を有している。第1位置P1は、検体分注アーム5が有している分注ノズル5aによるチップ装着のための準備位置である。さらに、ピペットチップ供給装置13が備えているチップ搬送部40(図4参照)は、第1位置P1に供給されたピペットチップAを第2位置P2へ搬送する。第2位置P2は、検体分注アーム5(分注ノズル5a)がピペットチップを装着する位置である。
なお、第1位置P1には、落下させたピペットチップAを受け取るホルダ41(図4参照)が待機しており、前記チップ搬送部40は、このホルダ41を第2位置P2へと移動させ、ピペットチップAを第2位置P2へ搬送する。
【0030】
検体分注アーム5は、ピペットチップA(図3参照)を装着すると共に、検体を分注するための分注ノズル(吸引ノズル)5aを有している。チップ装着用の第2位置P2において、ピペットチップAは、検体分注アーム5が有する分注ノズル5aの先端に取り付けられる。
検体分注アーム5は、第2位置P2にある前記ホルダ41に保持されているピペットチップAを1つずつ分注ノズル5aに装着して検体の分注を行う。検体分注アーム5は、分注ノズル5aを下降させ、第2位置P2に位置するピペットチップAの基端に設けられた開口17a(図3参照)内に分注ノズル5aを嵌入させることにより、分注ノズル5aの先端にピペットチップAを装着する。その後、検体分注アーム5は、検体搬送部3により検体吸引位置に搬送された試験管内の検体を吸引し、R1試薬分注アーム6によりR1試薬(捕捉抗体)が分注された検体吐出位置のキュベットに検体を分注(吐出)する。
【0031】
その後、R2試薬分注アーム7がキュベットにR2試薬(磁性粒子)を分注し、キュベット内の検体に含まれる抗原に結合した捕捉抗体に磁性粒子を結合させる。結合(Bound)した抗原、捕捉抗体および磁性粒子の複合体は1次BF分離部11の磁気により捕集され、未反応(Free)の捕捉抗体を含むR1試薬がキュベットから除去される。次に、R3試薬分注アーム8がキュベットにR3試薬(標識抗体)を分注し、キュベット内の抗原に標識抗体を結合させる。結合した磁性粒子、抗原および標識抗体の複合体は2次BF分離部12の磁気により捕集され、未反応の標識抗体を含むR3試薬がキュベットから除去される。キュベット内にさらにR4試薬(分散液)およびR5試薬(発光基質)が分注された後、キュベットは分析部14に移送される。
【0032】
分析部14は、検体分注アーム5により分注された検体を分析する機能を有している。本実施形態では、所定の処理が行なわれた検体の抗原に結合する標識抗体と発光基質との反応過程で生じる光を、光電子増倍管(Photo Multiplier Tube)で取得することにより、その検体に含まれる抗原の量を測定する。
【0033】
〔2. ピペットチップAについて〕
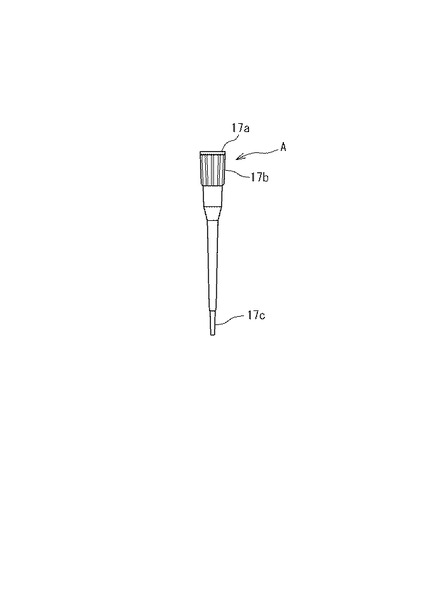
図3は、ピペットチップAの側面図である。ピペットチップAは、ピペットチップA内の検体を吐出するための開口を先端17cに有するとともに、基端に開口17aを有している。また、胴部17bは開口17aと通じている中空の筒部であり、先端17cは開口17a(胴部17b)よりも細い先細り形状である。
【0034】
〔3. ピペットチップ供給装置13について〕
〔3.1 全体構成〕
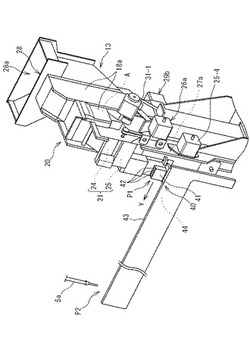
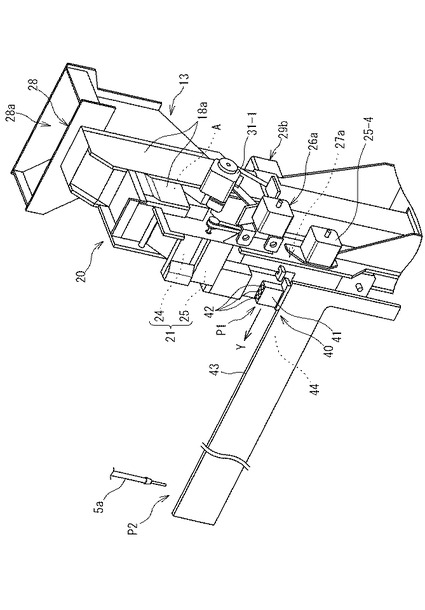
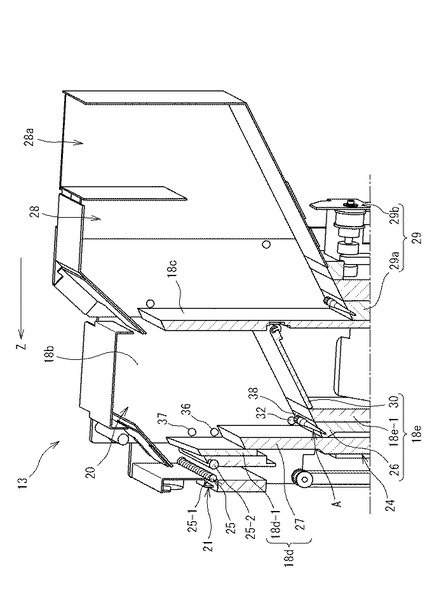
図4は、ピペットチップ供給装置13の斜視図である。図5は、ピペットチップ供給装置13の一部の斜視図であり、内部構造を説明するために、側壁の一部18a(図4参照)を取り外した状態として示している。ピペットチップ供給装置13は、ユーザにより投入口28aを介して複数のピペットチップAが投入されるチップ投入部28と、ピペットチップAを複数貯留するチップ貯留部20と、チップ投入部28に貯留されているピペットチップAをチップ貯留部20に搬入するためのチップ搬入部29と、チップ貯留部20に貯留されているピペットチップAを1つずつ当該チップ貯留部20外の第1位置P1に供給するチップ供給部21と、第1位置P1に供給されたピペットチップAを保持可能なチップ保持部(保持孔)42を複数有したホルダ41を備えているチップ搬送部40とを備えている。チップ搬送部40は、第1位置P1と、分注ノズル5aがピペットチップを1つずつ装着する第2位置P2との間を、ホルダ41を移動させることにより、分注ノズル5aにピペットチップAを供給する機能を有している。
【0035】
なお、後に説明するが、チップ供給部21は、チップ移送機構部25(第1供給部)とチップ押し上げ機構部(第2供給部)24とを有している。
また、このピペットチップ供給装置13では、チップ投入部28からピペットチップAをチップ貯留部20へ送り出す方向(図5の矢印Zの方向)を、前後方向の前方とし、この前後方向に直交する水平方向を左右方向としている。そして、チップ貯留部20におけるこの左右方向をチップ貯留部20の幅方向とする。
【0036】
図5に示すように、チップ貯留部20は、右側の側壁18bと、左側の側壁18a(図5では省略されている側壁)と、後壁18cと、前壁18dと、底部18eとで囲まれた空間を有し、この空間において、複数のピペットチップAを貯留することができる。このチップ貯留部20は、複数のピペットチップAを、ピペットチップAの長手方向がばらばらな状態で(様々な方向を向いて自由な状態として)貯留可能である。つまり、1本ずつ並べて貯留するものではない。
【0037】
なお、底部18eの上面は、チップ排出部23の前記排出板30の上面と、側壁18a,18bと共に装置に固定された状態にある固定底部材18e−1の上面と、下限位置にある第1押し上げ部材26の上面38とによって構成されている。第1押し上げ部材26は、後に説明するが上下方向に移動可能な部材である。そして、前壁18dは、第2押し上げ部材27と、装置に固定された状態にある固定壁部材18d−1とによって構成されている。第2押し上げ部材27は、後に説明するが上下方向に移動可能な部材である。
【0038】
チップ投入部28は、前記後壁18cを挟んでチップ貯留部20に隣接している。チップ投入部28は、複数のピペットチップAがユーザによって投入される部分であり、チップ貯留部20よりも容積が大きく、チップ貯留部20よりもピペットチップAの貯留容量が大きい。ピペットチップAが投入される投入口28aは、チップ投入部28の上部に設けられている。
【0039】
チップ搬入部29は、上下方向に移動可能な板状の搬入用押し上げ部材29aと、この搬入用押し上げ部材29aを上下駆動する搬入駆動部29bとを有している。搬入用押し上げ部材29aの上面は、チップ投入部28の底面の一部を構成しており、複数のピペットチップAをその上面に載せることができ、チップ投入部28の底面は、チップ貯留部20側へ向かって低くなるように傾斜している。このため、チップ投入部28に投入されたピペットチップAは、搬入用押し上げ部材29aの上面へ自重によって載ることができる。
そして、搬入駆動部29bを駆動させ搬入用押し上げ部材29aを上昇させることで、その上面に載っているピペットチップAは、後壁18cを超えてチップ貯留部20へ搬入される。搬入駆動部29bの駆動は、制御装置4からの制御信号に基づく。
【0040】
チップ押し上げ機構部24は、上記のとおり、チップ移送機構部25と共に、チップ貯留部20内に貯留されているピペットチップAを1つずつチップ貯留部20外の第1位置P1に供給するための機能を有している。
チップ押し上げ機構部24は、上下方向に移動可能な前記第1押し上げ部材26と、この第1押し上げ部材26を上下駆動する第1押し上げ駆動部26a(図4参照)とを有している。第1押し上げ部材26は、上下方向に長い矩形板状の部材であり、その幅方向が、チップ貯留部20の幅方向に沿って設けられている。そして、単一のピペットチップAを、その長手方向をチップ貯留部20の幅方向に向けた状態として載せる上面38を有している。このため、チップ貯留部20に貯留されていたピペットチップAを、その長手方向をチップ貯留部20の幅方向に一致させた状態として、上面38に載せて上方に押し上げることができる。なお、この際、ピペットチップAは、第2押し上げ部材27の鉛直面に沿って(ガイドされて)上昇する。
【0041】
さらに、チップ押し上げ機構部24は、第1押し上げ部材26によって所定高さまで押し上げられたピペットチップAを受け取って上面に載せてさらに上方に押し上げるために、上下方向に移動可能な第2押し上げ部材27と、この第2押し上げ部材27を上下駆動する第2押し上げ駆動部27a(図4参照)とを有している。第2押し上げ部材27は、上下方向に長い矩形板状の部材であり、その幅方向が、チップ貯留部20の幅方向に沿って設けられている。そして、第2押し上げ部材27は、単一のピペットチップAを、その長手方向をチップ貯留部20の幅方向に向けた状態として載せる上面を有している。このため、ピペットチップAを、その長手方向をチップ貯留部20の幅方向に一致させた状態として、上面に載せて上方に押し上げることができる。なお、この第2押し上げ部材27の上面には一本のピペットチップAのみが載ることができ、このピペットチップAは、固定壁部材18d−1の鉛直面に沿って(ガイドされて)上昇する。
【0042】
また、上記のとおり、単一のピペットチップAは、その長手方向がチップ貯留部20の左右の幅方向と一致して、底部18eのうちの第1押し上げ部材26の上面38に載った状態となる(図5参照)。そして、最も降下した状態にある第1押し上げ部材26の上面38は、前記排出板30の上面と同一平面を成し、第2押し上げ部材27側に向かって下方に傾斜している。
そして、第1押し上げ駆動部26aの駆動により、第1押し上げ部材26が上昇すると、単一のピペットチップAを押し上げ、下限位置にある第2押し上げ部材27の上面の高さ(第1押し上げ部材26の上限位置)に到達すると、当該ピペットチップAは、自重により、前記第2押し上げ部材27の上面に乗り移る。第2押し上げ部材27の上面は、第1押し上げ部材26の上面38と同様に傾斜している。
【0043】
そして、第2押し上げ駆動部27aの駆動により、第2押し上げ部材27が上限位置まで上昇すると、その上面に載っていたピペットチップAは、前記固定壁部材18d−1を超えて、チップ移送機構部25側へ供給される。なお、第1及び第2押し上げ駆動部の駆動は、前記制御装置4のCPU401aからの制御信号に基づく。
【0044】
また、チップ貯留部20には、下限位置にある第2押し上げ部材27の上面に存在しているピペットチップAを検知する検知部36が設けられている。この検知部36は、光学センサであり、発光素子から受光素子への光がピペットチップによって遮られることで、下限位置にある第2押し上げ部材27の上面に存在しているピペットチップAを検知することができる。
さらに、チップ貯留部20には、第2押し上げ部材27の上面にピペットチップAが複数(2個)存在していることを検知するための検知部37が設けられている。この検知部37は、光学センサであり、第2押し上げ部材27の上昇途中の所定位置(複数のピペットチップが第2押し上げ部材27に載っている場合にのみ発光素子から受光素子への光がピペットチップによって遮られる位置)でピペットチップを検知することで、第2押し上げ部材27の上面にピペットチップAが複数(2個)存在していることを検知することができる。
なお、これらピペットチップAの存在は、検知部36,37からの信号を受けた前記制御装置4のCPU401aによって判定することができる。
【0045】
また、図5に示しているように、ピペットチップ供給装置13は、第1押し上げ部材26の上面38に載っている単一のピペットチップAを検知する検知部32を備えている。検知部32は、光学センサであり、発光素子から受光素子への光がピペットチップによって遮られることで、ピペットチップAの存在を検知することができる。なお、存在しているか否かの判定は、検知部32からの信号を受けた前記制御装置4のCPU401aが実行することができる。
【0046】
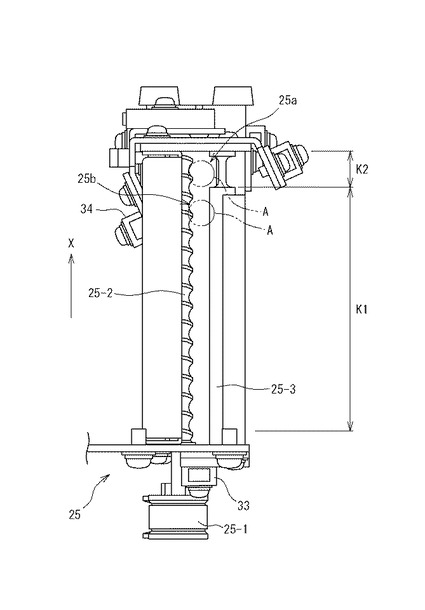
チップ移送機構部25は、前記チップ押し上げ機構部24によって供給されたピペットチップAを1つずつチップ貯留部20外の第1位置P1(図4参照)に供給するための機能を有している。このために、図6に示すように、チップ移送機構部25には、ピペットチップAを落下させ、第1位置P1にピペットチップAを供給するための落下口25aが設けられている。さらに、チップ移送機構部25には、この落下口25aの直前位置であって第1位置P1の上方でピペットチップAを保持する待機位置25bが設定されている。
【0047】
具体的に説明すると、チップ移送機構部25は、図6に示すように、プーリ25−1と、このプーリ25−1によって回転する回転軸25−2と、この回転軸25−2と前後方向に間隔を有して平行に設けられた左右方向に長いガイド部材25−3と、プーリ25−1を回転させるモータ25−4(図4参照)とを有している。回転軸25−2には、螺旋状の溝が形成されている。
【0048】
上記のとおり、第2押し上げ部材27(図5参照)の上昇により、その上面に載っていたピペットチップAが固定壁部材18d−1を超えると、当該ピペットチップAは、回転軸25−2とガイド部材25−3との間に落下する。すると、ピペットチップAの重心は胴部17bよりも先端17c側に位置するため、先端17cが下向きに垂れ下がった状態となって、胴部17bが回転軸25−2とガイド部材25−3との間で支持され、ピペットチップAは回転軸25−2の螺旋溝に嵌った状態となる。
【0049】
そして、プーリ25−1を回転させると、螺旋溝に沿ってピペットチップAは、左右方向の一方側(図6では上側)に移動することができる(矢印X)。回転軸25−2とガイド部材25−3との間は、ピペットチップAの胴部17bよりも狭い第1領域K1と、胴部17bよりも広い第2領域K2とを有し、ピペットチップAが第2領域K2に到達すると、当該ピペットチップAは自重により第1位置P1(図4参照)へと落下することができる。つまり、この第2領域K2に、前記落下口25aが形成されている。
【0050】
また、このチップ移送機構部25には、検知部33及び検知部34が設けられている。検知部33及び検知部34は、前記検知部32と同様に光学センサであり、発光素子から受光素子への光がピペットチップによって遮られることで、ピペットチップAの存在を検知することができる。
検知部33は、回転軸25−2とガイド部材25−3との間に存在するピペットチップAを検知する。
【0051】
検知部34は、第1領域K1のうちの第2領域K2の直前位置に存在しているピペットチップAを検知する。なお、ピペットチップAが存在しているか否かの判定は、検知部33,34からの信号を受けた前記制御装置4のCPU401aが実行することができる。そして、第1領域K1のうちの、落下口25aの直前の位置、つまり、検知部34がピペットチップAを検知する位置が、ピペットチップAを保持する前記待機位置25bとなる。
【0052】
以上より、チップ移送機構部(第1供給部)25は、ピペットチップAを1つずつ第1位置に供給することができる。そして、チップ押し上げ機構部(第2供給部)24は、チップ貯留部20に貯留されているピペットチップAを1つずつチップ移送機構部(第1供給部)25へと送ることができる。
【0053】
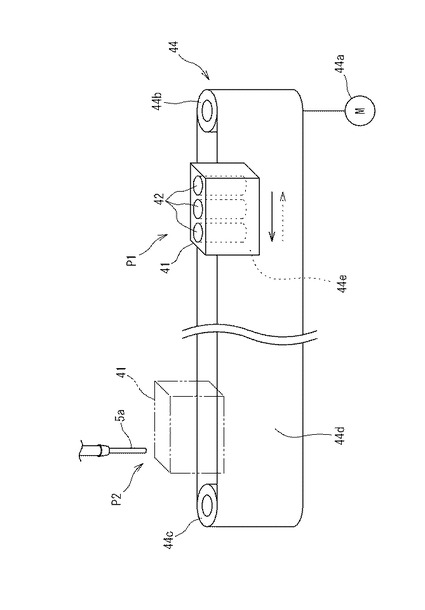
図4に示すように、チップ搬送部40は、ピペットチップAを保持可能なチップ保持部(保持孔)42を複数(本実施形態では3つ)有したホルダ41と、このホルダ41を第2位置P2へ誘導するガイド部材43と、ホルダ41をガイド部材43に沿って移動させる搬送駆動部44とを備えている。
【0054】
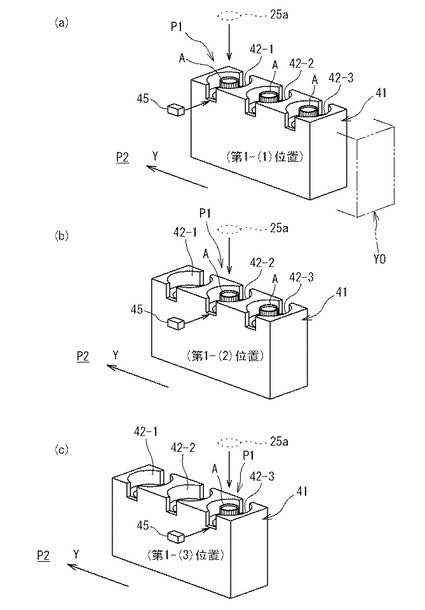
ホルダ41は、上方に開口しピペットチップAを先端部17c側から挿入させる孔部を3つ有した部材であり、この孔部それぞれが単一のピペットチップAを保持する前記チップ保持部42である。図7(a)に示すように、第1位置P1において、チップ保持部42は、上方に位置する前記落下口25aから落下したピペットチップAを挿入した状態として保持することができる。
【0055】
図4に示すように、ガイド部材43は、第1位置P1から第2位置P2へと直線的に延びているガイドレールであり、ホルダ41はこのガイド部材43に沿ってガイドされ水平移動する。図4において、ホルダ41の移動方向が、矢印Y方向である。そして、本実施形態では、図7(a)に示すように、ホルダ41の移動方向(矢印Y方向)に並んで、3つのチップ保持部42がホルダ41に設けられている。
【0056】
搬送駆動部44は、図8に示すように、正逆回転可能なモータ(ステッピングモータ)44aと、第1位置P1側に設けられモータ44aによって回転する駆動プーリ44bと、駆動プーリ44bと矢印Y方向に水平方向に離れて第2位置P2側設けられた従動プーリ44cと、両プーリ44b,44c間に架けられたベルト44dと、ベルト44dとホルダ41とを連結固定している連結部材44eとを有している。
モータ44aは減速器部(図示せず)を有しており、一方向に回転すると、ベルト44dは一方向(図8の実線の矢印)に回転する。これにより、第1位置P1に存在するホルダ41を第2位置P2へ移動させる。これに対して、モータ44aが他方向に回転すると、ベルト44dは他方向(図8の破線の矢印)に回転する。これにより、第2位置P2に存在するホルダ41を第1位置P1へ移動させる。モータ44aの駆動は、前記制御装置4のCPU401aからの制御信号に基づく。
【0057】
以上より、チップ搬送部40は、チップ移送機構部25からピペットチップAが1つずつ供給される第1位置P1と、分注ノズル5aがピペットチップを1つずつ装着する第2位置P2との間を、ホルダ41を移動させることができ、このチップ搬送部40により、分注ノズル5aにピペットチップAを供給することが可能となる。
【0058】
また、ピペットチップ供給装置13には、図7(a)に示すように、第1位置P1に位置しているチップ保持部42に保持されたピペットチップAを検知するためのチップ検知部45が設けられている。
チップ検知部45は、発光素子及び受光素子を有する光学センサであり、発光素子から受光素子への光が、チップ保持部42に保持された状態にあるピペットチップによって遮られることで、チップ保持部42にピペットチップAが存在していることを検知することができる。
【0059】
本実施形態では、ホルダ41には3つのチップ保持部42が形成されているが、これらチップ保持部42に保持されるピペットチップAを、単一のチップ検知部45によって検知する。
このために、第1位置P1では、前記搬送駆動部44によって、ホルダ41はチップ保持部42と同数(3つ)の異なる位置(複数の位置)に変位可能である。すなわち、ホルダ41は、図7(a)の第1−(1)位置、図7(b)の第1−(2)位置、及び、図7(c)の第1−(3)位置に変位可能である。この位置制御は、搬送駆動部44(ステッピングモータ44a)及び制御装置4のCPU401aにより実行される。
【0060】
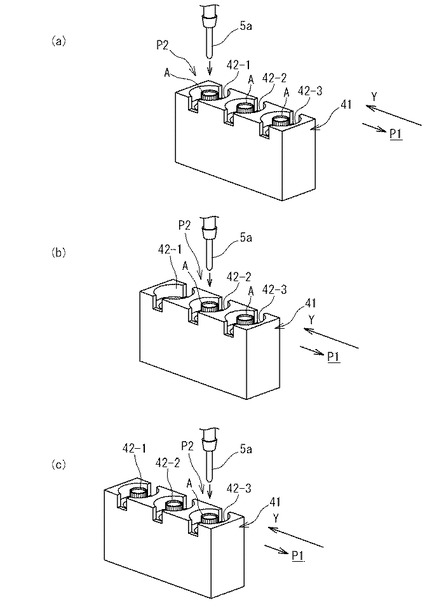
ホルダ41が第1−(1)位置に存在する状態で(図7(a))、最も第2位置P2側のチップ保持部42−1が落下口25aの直下に位置する。ホルダ41が第1−(2)位置に存在する状態で(図7(b))、その隣りのチップ保持部42−2が落下口25aの直下に位置する。そして、ホルダ41が第1−(3)位置に存在する状態で(図7(c))、さらに隣りの(最も第2位置P2から離れた)チップ保持部42−3が落下口25aの直下に位置する。
すなわち、3つのチップ保持部42のうち1つのチップ保持部42が第1位置P1に位置合わせされることで、ピペットチップAのチップ保持部42への受け渡しが実行可能となる。
【0061】
また、3つのチップ保持部42は、第1位置P1と第2位置P2との間のホルダ41の移動方向(Y方向)と平行な方向に並んでホルダ41に配置されているので、ホルダ41を移動させるためのガイド部材43及び搬送駆動部44を、前記位置合わせを行うための機構に兼用することができる。
【0062】
そして、チップ検知部45の発光素子及び受光素子は、落下口25aの直下位置(第1位置P1)を跨ぐ位置であって、ホルダ41のチップ保持部42が保持するピペットチップAの一部(胴部17b:図3参照)を挟む位置に配置されている。
以上より、チップ検知部45の発光素子と受光素子との間をホルダ41が通過することで、どのチップ保持部42にピペットチップAが保持されているかを、単一のチップ検知部45によって検知する。そして、制御装置4のCPU401aは、チップ検知部45による検知結果に基づいて、ピペットチップAが保持されていないチップ保持部42が存在するか否かを判断することができる。
なお、図7(a)において、第1−(1)位置よりも、第2位置P2から離れる方向に、ホルダ41の原点位置Y0が存在し、ホルダ41はこの原点位置Y0から各位置へ移動することができる。
【0063】
〔4. ピペットチップの供給方法について〕
以上のように構成されたピペットチップ供給装置13によって実行されるピペットチップの供給方法について説明する。なお、以下の供給方法において、特に主体が記載されていない処理は、制御装置4のCPU401aが行う処理である。なお、ここでは、ピペットチップAをチップ投入部28に投入してから、第2位置P2において、検体分注アーム5の分注ノズル5aがピペットチップAを装着するまでを説明する。なお、分注ノズル5aが第2位置P2においてピペットチップを1つずつ装着するサイクルタイムT0は一定に設定されており、これにより、分注ノズル5aによるピペットチップAの装着後に実行される検体の分析処理が滞るのを防止している。
【0064】
〔4.1 第1位置P1までのピペットチップAの供給動作〕
図5において、ユーザによって、チップ投入部28に多数のピペットチップAが投入され、当該チップ投入部28にピペットチップAが貯留されると、搬入押し上げ部材29aが上昇し、その上面に載っているピペットチップAがチップ貯留部20に搬入される。この搬入は所定のタイミングで繰り返し実行され、チップ貯留部20には、チップ投入部28よりも少ない複数本のピペットチップAが貯留された状態となる。単一のピペットチップAは、傾斜面を成すチップ貯留部20の底面によって、第1押し上げ部材26の上面38に転がり落ちる。
【0065】
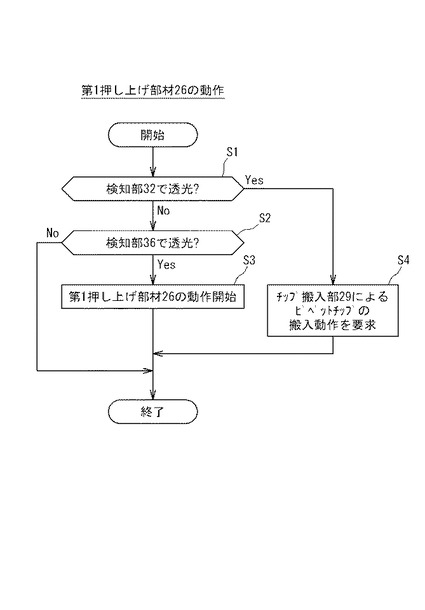
図9は、第1押し上げ部材26の動作を説明するフロー図である。はじめ第1押し上げ部材26は下限位置にある(図5の状態)。この状態で、制御装置4のCPU401aは、検知部32からの検出信号に基づき、下限位置にある第1押し上げ部材26の上面38にピペットチップAが存在しているか否かを判定する(図9のステップS1)。
検知部32の発光素子および受光素子間で遮光状態であり、ピペットチップAが存在していると判定された場合(ステップS1でNoの場合)、CPU401aは、検知部36からの検出信号に基づき、下限位置にある第2押し上げ部材27の上面にピペットチップAが存在しているか否かを判定する(ステップS2)。
【0066】
このステップS2において、検知部36の発光素子および受光素子間で透光状態であり、第2押し上げ部材27の上面にピペットチップAが存在していないと判定された場合(ステップS2でYesの場合)、第1押し上げ部材26の動作が開始される(ステップS3)。一方、ステップS2において、検知部36の発光素子および受光素子間で遮光状態であり、第2押し上げ部材27の上にピペットチップAが存在していると判定された場合(ステップS2でNoの場合)、第1押し上げ部材26の上昇動作は行わず、待機状態となる。
なお、ステップS1において、下限位置にある第1押し上げ部材26の上面38にピペットチップAが存在していない場合、チップ貯留部20にはピペットチップAが無くなっていると考えられるので、チップ搬入部29によるピペットチップAの搬入動作の要求が行われ(ステップS4)、搬入押し上げ部材29aが上昇し、その上面に載っているピペットチップAがチップ貯留部20に搬入される。
【0067】
第1押し上げ部材26の上にピペットチップAが載った状態にあり、第1押し上げ部材26の上昇動作が開始され、第1押し上げ部材26を上限位置まで上昇させると前記ピペットチップAは、第2押し上げ部材27上に転がって乗り移る。
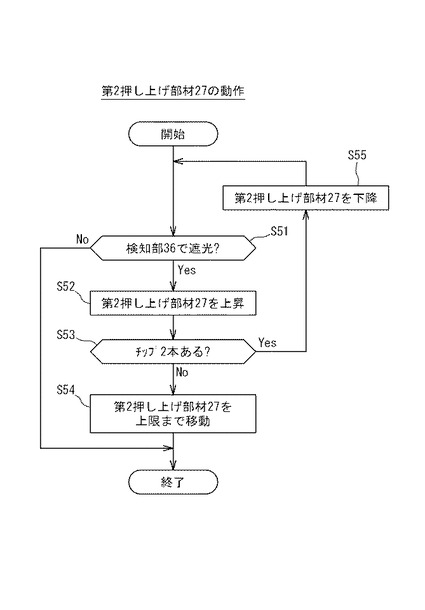
そして、第2押し上げ部材27の動作が開始される。図10は、第2押し上げ部材27の動作を説明するフロー図である。まず、CPU401aは、検知部36からの検出信号に基づいて、下限位置にある第2押し上げ部材27の上面にピペットチップAが存在しているか否かを判定する(ステップS51)。検知部36の発光素子および受光素子間で遮光状態であり、ピペットチップAが存在していると判定された場合(ステップS51でYesの場合)、第2押し上げ部材27を上昇させる(ステップS52)。
【0068】
そして、CPU401aは、第2押し上げ部材27の上昇途中で、検知部37からの検出信号に基づき、第2押し上げ部材27の上面にピペットチップAが複数(2個)存在しているかを判定する(ステップS53)。これは、複数のピペットチップAがまとめて、次のチップ移送機構部25へ供給されてしまうのを防ぐためである。
【0069】
ピペットチップAが複数存在していると判定されると(ステップS53でYes)、第2押し上げ部材27を下限まで降下させ(ステップS55)、ステップS51に戻る。このように第2押し上げ部材27を降下させることで、上のピペットチップAをチップ貯留部20の底部に落下させ、単一のピペットチップAのみが第2押し上げ部材27上に載った状態とさせる。
これに対して、ピペットチップAが複数存在していないと判定されると(ステップS53でNo)、第2押し上げ部材27を上限まで上昇させ(ステップS54)、ピペットチップAを、固定壁部材18d−1を超えてチップ移送機構部25側へ供給する。
【0070】
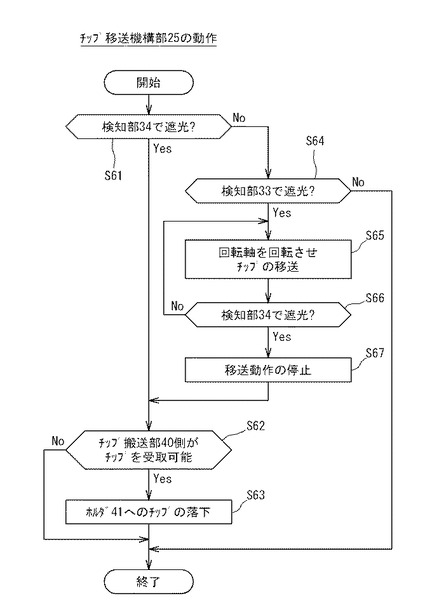
次に、チップ移送機構部25の動作を説明する。図11は、チップ移送機構部25の動作を説明するフロー図である。まず、CPU401aは、検知部34(図6参照)からの検出信号に基づき、第1位置P1(図4参照)に落下可能となる第2領域K2の直前位置(待機位置25b)にピペットチップAが存在しているか否かを判定する(ステップS61)。検知部34が遮光状態にあり、ピペットチップAが存在していると判定された場合(ステップS61でYes)、前記チップ搬送部40がピペットチップAを受け取り可能な状態にあるか否かの判定を行う(ステップS62)。図4に示す第1位置P1にホルダ41が待機し、ホルダ41が受け取り可能な状態であれば、チップ搬送部40側からのピペットチップの要求が行われている。この場合に、CPU401aはチップ搬送部40がピペットチップAを受け取り可能な状態にあると判定する(ステップS62でYes)。受け取り可能な状態にある場合、図6のチップ移送機構部25の回転軸25−2を回転させて、待機位置25bに存在していたピペットチップAを落下口25aから落下させ、ホルダ41がこれを受け取る(ステップS63)。
【0071】
ステップS61において、ピペットチップAが存在していないと判定すると(ステップS61でNo)、CPU401aは、検知部33(図6参照)からの検出信号に基づき、ピペットチップAが回転軸25−2とガイド部材25−3との間に存在しているか否かを判定する(ステップS64)。
検知部33が遮光状態にあり、ピペットチップAが存在していると判定された場合(ステップS64でYes)、CPU401aは、回転軸25−2を回転させ、そのピペットチップAを落下口25aへ向かって移送する(ステップS65)。そして、検知部34によってピペットチップAの存在が検知されると(ステップS66でYes)、つまり、待機位置25bまで、ピペットチップAが移送されると、CPU401aは回転軸25−2の回転を停止して移送を停止させる(ステップS67)。そして、ステップS62に処理を移行し、以下、同様の処理を行う。
【0072】
このように、CPU401aは、チップ移送機構部25を制御して、落下口25aの直前位置となる待機位置25bでピペットチップを待機させる。これにより、ホルダ41が第1位置P1に戻ってくると、待機させておいたピペットチップAを落下口25aから落下させ、第1位置P1に存在しているホルダ41に、ピペットチップAを迅速に移送することができる。
【0073】
〔4.2 チップ搬送部40による供給動作〕
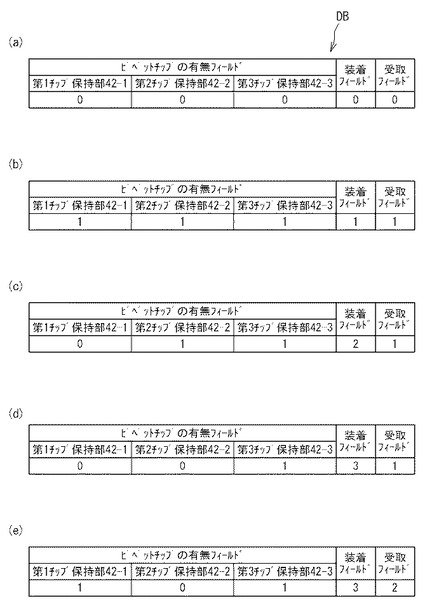
次に、チップ搬送部40の動作について説明する。図13は、制御部4aの記憶部401bに記憶されているデータベースDBの説明図であり、CPU401aは、このデータベースDBに記憶された情報に基づいてチップ搬送部40の制御を実行する。
【0074】
図13に示すように、データベースDBには、左端から「ピペットチップの有無フィールド」、「装着フィールド」及び「受取フィールド」が設定されている。「ピペットチップの有無フィールド」には、ホルダ41(図7参照)の左端の第1チップ保持部42−1、中央の第2第1チップ保持部42−2及び右端の第3チップ保持部42−3それぞれにピペットチップAが保持されているか否かを示す保持情報が記憶される。保持情報としては「0」又は「1」が記憶され、「0」はピペットチップAが保持されていないことを示し、「1」はピペットチップAが保持されていることを示す。そして、CPU401aはチップ検知部45の検知結果に基づいて各チップ保持部42におけるピペットチップAの有無を判定し、チップ保持部42におけるピペットチップAの有無の状態が変化する度に、前記保持情報を更新する。
【0075】
データベースDBの「装着フィールド」には、第2位置P2への位置合わせの対象となるチップ保持部の番号が入力される。つまり、「装着フィールド」には、次に分注ノズル5aに装着されるピペットチップを保持しているチップ保持部42の番号が入力される。
「受取フィールド」には、第1位置P1への位置合わせの対象となるチップ保持部の番号が入力される。つまり、「受取フィールド」には、落下口25aから落下されたピペットチップを次に受け取るチップ保持部42の番号が入力される。
【0076】
「装着フィールド」及び「受取フィールド」に関して、初期値は「0」であり、「1」は、ホルダ41(図7参照)の左端の第1チップ保持部42−1が位置合わせの対象となることを意味している。「2」は中央の第2第1チップ保持部42−2が、「3」は右端の第3チップ保持部42−3が、位置合わせの対象となることを意味している。
【0077】
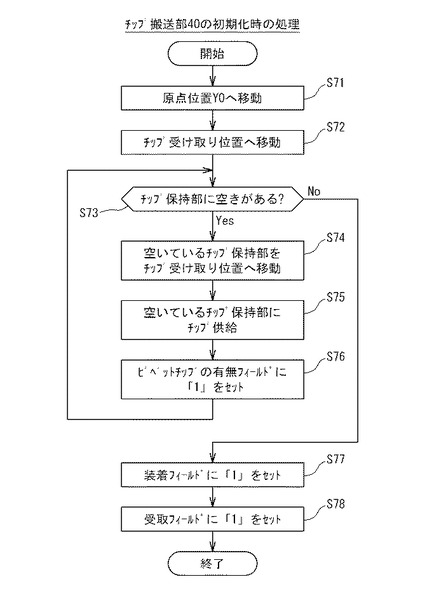
〔4.2.1 初期化時のチップ搬送部40の動作〕
図14は、チップ搬送部40の初期化時の処理の流れを説明するフロー図である。この処理は、検体分析装置1の電源がONされた際に実行されるものである。なお、以下の説明では、電源投入時に全てのチップ保持部42が空いている場合を前提にして説明する。
【0078】
電源がONされると、CPU401aは、ホルダ41を、第1位置P1の原点位置Y0(図7(a)参照)へ一旦移動させ(図14のステップS71)、その後、落下口25aからピペットチップAを受け取り可能となるチップ受け取り位置(第1位置P1)へ移動させる(ステップS72)。このステップS72では、CPU401aは、ホルダ41の各チップ保持部42を、左端の第1チップ保持部42−1、中央の第2チップ保持部42−2及び第3チップ保持部42−3の順で、落下口25aの直下位置であるチップ受け取り位置(第1位置P1)へそれぞれ移動させる。そして、CPU401aは、チップ検知部45の検知結果に基づいて、各チップ保持部が空いているか否かを判定する(ステップS73)。
【0079】
そして、CPU401aは、空いているチップ保持部42があれば、搬送駆動部44によってホルダ41を移動させ、空いているチップ保持部42を、チップ受け取り位置(第1位置P1)へ移動させ(ステップS74)、チップ供給部21によって、空いているチップ保持部42にピペットチップAを供給し(ステップS75)、前記データベースDBの「ピペットチップの有無フィールド」のうち、ピペットチップAが供給されたチップ保持部42の項目に「1」をセットする(ステップS76)。ステップS73〜S76を繰り返すことにより、全てのチップ保持部42がピペットチップAを保持した状態となる。
【0080】
3つのチップ保持部42それぞれにピペットチップAが保持された状態となると(ステップS73でNo)、データベースDBの装着フィールドに「1」をセットし(ステップS77)、データベースDBの受取フィールドに「1」をセットする。以上より、初期化時の処理が終了する。終了した際のデータベースDBは、図13(b)に示す状態となる。
【0081】
〔4.2.2 分析処理時のチップ搬送部40の動作〕
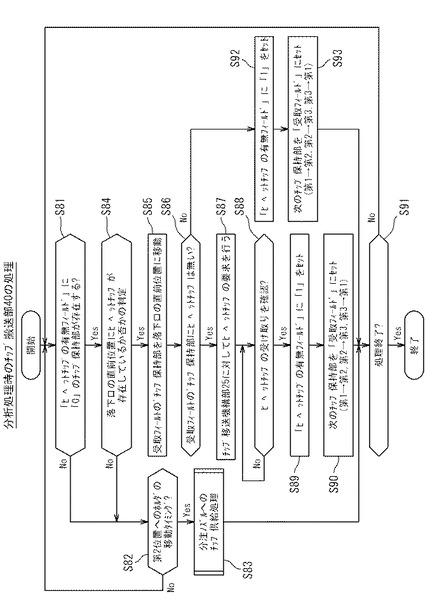
次に、検体分析装置1が通常動作(分析処理)を行っている間のチップ搬送部40の動作について説明する。図15は、通常動作(分析処理)時のチップ搬送部の処理の流れを示すフロー図である。
【0082】
<(1) 図15のフロー(1回目)>
まず、CPU401aは、図13(b)のデータベースDBの「ピペットチップの有無フィールド」において「0」のチップ保持部42が存在するか否かを判定する(図15のステップS81)。前記初期化時の処理により、ステップS81では「No」となり、CPU401aは、第2位置P2へのホルダ41の移動タイミングであるか否かを判定する(ステップS82)。
【0083】
ここで、本実施形態では、上記のとおり、分注ノズル5aが第2位置P2においてピペットチップを1つずつ装着するサイクルタイムT0は一定に設定されている。そこで、この分注ノズル5aによるピペットチップの装着を、一定のサイクルタイムT0で実行させるために、チップ搬送部40では、CPU401aの制御によって、サイクルタイムT0に合わせた所定時間毎に(サイクルタイムT1で)、ホルダ41を第1位置P1から第2位置P2に移動させ、ピペットチップA(ホルダ41)を第2位置P2に待機させる。
ステップS82では、現時点が含まれるサイクルタイムT1の終了時刻よりも所定時間(数秒)前の時刻に達すると、第2位置P2への移動タイミングであると判定される。
【0084】
そして、このステップS82において「Yes」である場合、CPU401aは、検体分注アーム5(分注ノズル5a)へのチップ供給処理を実行する(ステップS83)。
【0085】
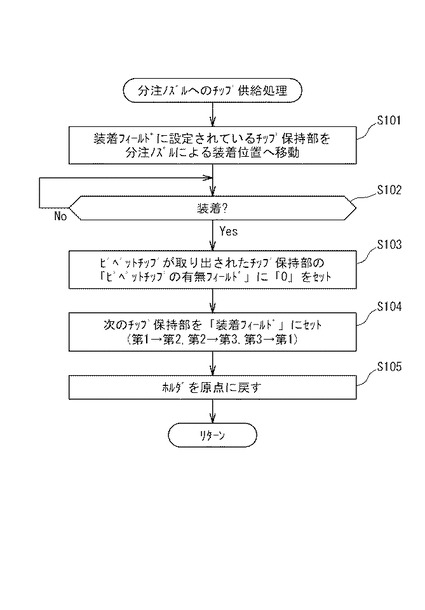
図16は、ステップS83におけるチップ供給処理の詳細を示すフロー図である。まず、CPU401aは、データベースDBの「装着フィールド」に設定されているチップ保持部を、分注ノズル5aによる装着位置(第2位置P2)へ移動させる(図16のステップS101)。つまり、現時点のデータベースDBの状態を示す図13(b)によれば、第1チップ保持部42−1が第2位置P2への位置合わせの対象であり、当該第1チップ保持部42−1を第2位置P2へ移動させる。この時のホルダ41と第2位置P2との位置関係を図12(a)に示す。この後、CPU401aは、第1チップ保持部42−1に保持されているピペットチップAが分注ノズル5aに装着されたか否かを判断し(ステップS102)、ピペットチップAが分注ノズル5aに装着されたと判断すると、ステップS103に処理を移行する。なお、分注ノズル5aには、ピペットチップが装着されたことを検知するためのセンサが内蔵されており、CPU401aは、このセンサの検知信号に基づいてピペットチップAが装着されたか否かを判断する。
【0086】
そして、CPU401aは、ピペットチップAが取り出された第1チップ保持部42−1の「ピペットチップの有無フィールド」に「0」をセットし(ステップS103)、ついで、CPU401aは、次の第2チップ保持部42−2を「装着フィールド」にセットする(ステップS104)。なお、ステップS104では、第1チップ保持部42−1→第2チップ保持部42−2→第3チップ保持部42−3→第1チップ保持部42−1の順番で、「装着フィールド」に入力される。これにより、ホルダ41に保持されたピペットチップAが均等な頻度で分注ノズル5aに装着されることになり、特定のピペットチップAが長い時間ホルダ41に残ってしまうことを防ぐことができる。そのため、特定のピペットチップAに埃などが付着し、分析結果に悪影響が生じることを抑制することができる。次に、CPU401aは、ホルダ41を第1位置P1側にある原点位置Y0(図7参照)に戻す(ステップS105)。この処理を終えた段階におけるデータベースDBを図13(c)に示す。CPU401aは図15のステップS83に処理を戻し、ステップS91に移行する。そして、CPU401aは、チップ搬送部40の処理終了の指示がなければ(ステップS91でNo)、ステップS81に処理を戻す。
【0087】
<(2) 図15のフロー(2回目)>
CPU401aは、再度、データベースDBの「ピペットチップの有無フィールド」に「0」のチップ保持部が存在するか否かを判定する(ステップS81)。現時点のデータベースDBは図13(c)に示す状態であるため、ステップS81では「Yes」となり、CPU401aは、チップ移送機構部25における検知部34の検知結果に基づいて、落下口25aの直前位置(待機位置25b)にピペットチップAが存在しているか否かを判定する(ステップS84)。
【0088】
ステップS84において「No」の場合、CPU401aは、第2位置P2へのホルダ41の移動タイミングであるか否かを判定し(ステップS82)、第2位置P2への移動タイミングであれば(ステップS82のYes)、分注ノズルへのチップ供給処理を実行する(ステップS83)。すなわち、第1チップ保持部42−1が空の状態のまま、第2位置P2へホルダ41を移動させる。
【0089】
このように、ピペットチップAを保持していないチップ保持部42(本実施形態では第1チップ保持部42−1)がホルダ41に存在している場合であっても、CPU401aは、分注ノズル5aがピペットチップを1つずつ装着するサイクルタイムT0に合わせた所定時間毎に(前記サイクルタイムT1で)、ホルダ41を第1位置P1から第2位置P2に移動させる。これにより、定期的に分注ノズル5aにピペットチップを装着させることができ、検体の処理能力が低下することを抑制することができる。
【0090】
そして、CPU401aは、図16のステップS101において、現時点のデータベースDB(図13(c))の「装着フィールド」に設定されている第2チップ保持部42−2を第2位置P2へ移動させる。この時のホルダ41と第2位置P2との位置関係を図12(b)に示す。この後、第2チップ保持部42−2に保持されていたピペットチップAが分注ノズル5aに装着され、当該第2チップ保持部42−2も空の状態となる。
【0091】
現時点でのこの図16の処理が行われている間に(ホルダ41が第1位置P1へ戻る前に)、チップ移送機構部25による図11の処理によって、落下口25aの直前位置(待機位置25b)にピペットチップAが待機した状態となる。これにより、ホルダ41が第1位置P1に戻ってくると、チップ移送機構部25により、ホルダ41にピペットチップAを迅速に供給することができる。
【0092】
そして、ステップS101、S102の後、ピペットチップが取り出された第2チップ保持部42−2の「ピペットチップの有無フィールド」に「0」をセットし(ステップS103)、第2チップ保持部42−2の次の順番である第3チップ保持部42−3を「装着フィールド」にセットする(ステップS104)。そして、ホルダ41を原点位置Y0に戻す(ステップS105)。この処理を終えた段階におけるデータベースDBを、図13(d)に示す。そして、CPU401aは、チップ搬送部40の処理終了の指示がなければ(ステップS91でNo)、ステップS81に処理を戻す。
【0093】
<(3) 図15のフロー(3回目)>
CPU401aは、再度、データベースDBの「ピペットチップの有無フィールド」に「0」のチップ保持部が存在するか否かを判定する(ステップS81)。現時点でのデータベースDBは図13(d)に示す状態であるため、ステップS81では「Yes」となり、CPU401aは、落下口25aの直前位置(待機位置25b)にピペットチップAが存在しているか否かを判定する(ステップS84)。
現時点においては、落下口25aの直前位置(待機位置25b)にピペットチップAが待機した状態となっているため、CPU401aはステップS84において「Yes」と判定し、図13(d)のデータベースDBの「受取フィールド」の第1チップ保持部42−1を、落下口25aの直下位置(第1位置P1)へ移動させる(ステップS85)。
【0094】
そして、CPU401aは、チップ検知部45の検知結果に基づいて、「受取フィールド」のチップ保持部42(現時点では第1チップ保持部42−1)にピペットチップAがあるか否かを判定する(ステップS86)。ピペットチップAがないと判定すると(ステップS86でYes)、CPU401aは、チップ移送機構部25に対してピペットチップAの要求を行う(ステップS87)。これにより、落下口25aからピペットチップAが第1位置P1へ落下する。なお、ステップS86において、「受取フィールド」のチップ保持部42(現時点では第1チップ保持部42−1)にピペットチップAがあると判定すると、CPU401aは、第1チップ保持部42−1の「ピペットチップの有無フィールド」に「1」をセットし(ステップS92)、次のチップ保持部である第2チップ保持部42−2を「受取フィールド」にセットする(ステップS93)。
【0095】
ステップS87の後、CPU401aは、チップ検知部45の検知結果に基づいて、第1チップ保持部42−1がピペットチップAを受け取ったか否かを判定し(ステップS88)、受け取ったことを確認すると(ステップS88でYes)、第1チップ保持部42−1の「ピペットチップの有無フィールド」に「1」をセットする(ステップS89)。そして、CPU401aは、「受取フィールド」を、次の順番である第2チップ保持部42−2に更新する(ステップS90)。この処理を終えた段階におけるデータベースDBを、図13(e)に示す。そして、CPU401aは、チップ搬送部40の処理終了の指示がなければ(ステップS91でNo)、ステップS81に処理を戻す。
【0096】
CPU401aは、ステップS91において処理終了の指示があると判定するまで、以上の処理を繰り返し、処理終了の指示があれば(ステップS91でYes)、処理を終了する。なお、第3チップ保持部42−3を第2位置P2に移動させた場合には、ホルダ41と第2位置P2との位置関係は図12(c)のようになる。
【0097】
このような本実施形態に係るピペットチップ供給装置13によれば、ホルダ41に予め複数のピペットチップを保持させておくことができるので、チップ貯留部20に貯留されていたピペットチップAの第1位置P1への供給が、チップ供給部21によって円滑に行われない事態が生じた場合であっても、ピペットチップAがチップ供給部21によって第1位置P1に供給されるのを待つことなく、分注ノズル5aにピペットチップAを供給することができる。例えば、ホルダ41が第1位置P1に存在している間に、予め複数のチップ保持部42にピペットチップAを保持させておくことができるため、後にチップ供給部21によるピペットチップの供給に遅れが生じた場合であっても、ピペットチップAが第1位置P1に供給されるのを待つことなく、分注ノズル5aにピペットチップAを供給することができる。
【0098】
すなわち、仮に、ホルダ41に単一のチップ保持部42しか設けられていない場合、チップ保持部42が空となって第1位置P1に戻ってきても、ピペットチップAの供給が行われるまで待機しなければならず、新たなピペットチップAを補充してからでないと、第2位置P2へと出発できないが、本実施形態に係るピペットチップ供給装置13によれば、予め複数のチップ保持部42にピペットチップAを保持させておくことで、新たなピペットチップAを補充する前であっても、ホルダ41を第2位置P2へと出発させることが可能となる。
このため、分注ノズル5aへのピペットチップAの供給に遅滞が生じることを抑制することができ、分注ノズル5aによる検体の分注を次々に行うことが可能となる。
【0099】
そのため、本実施形態のように、ユーザが複数のピペットチップAをその長手方向を考慮することなく投入するチップ供給装置13を採用し、それに起因して第1位置P1へのピペットチップAの供給が円滑に行われない事態が生じた場合であっても、分注ノズル5aへのピペットチップAの供給に遅滞が生じることを抑制することができる。これにより、ユーザにとって使いやすい装置を実現することができる。
【0100】
本発明のピペットチップ供給装置13及び検体分析装置は、図示する形態に限らず本発明の範囲内において他の形態のものであってもよい。
前記実施形態では、チップ保持部42が3つである場合を説明したが、複数であればよく2つでもよく、4つ以上であってもよい。
また、前記実施形態では、各チップ保持部42に均等な頻度でピペットチップAを供給し、各チップ保持部42を均等な頻度で分注ノズル5aに装着させているが、特定の(例えば第2位置P2側の)チップ保持部42に優先してピペットチップAを供給してもよく、また、特定の(例えば第2位置P2側の)チップ保持部42に保持されたピペットチップAを優先して分注ノズル5aに装着させてもよい。
【0101】
また、チップ検知部45は、チップ受取位置(第1位置P1)に配置されている場合を説明したが、他の位置に配置されてもよい。例えば、チップ受取位置(第1位置P1)とチップ装着位置(第2位置P2)との間に配置されてもよい。
また、ピペットチップAを落下口25aから落下させてチップ保持部42に移送しているが、これ以外であってもよく、図示しないがチャック部材によってピペットチップを把持してチップ保持部に移送してもよい。
【0102】
さらに、チップ移送機構部25では、図6に示すように、螺旋状の溝が形成されている回転軸25−2によってピペットチップAを落下口25aへと移送しているが、これ以外であってもよく、図示しないが2つのベルト部材によってピペットチップを挟みながら移動させることで、ピペットチップを落下口25aに移送してもよい。
また、本実施形態では、ユーザにより投入されたピペットチップAを押し上げ部材26,27の上下動によってチップ移送機構部25まで移送しているが、これ以外であってもよく、図示しないがドラム式のチップ移送装置を利用してもよい。
【0103】
また、本実施形態では、所定時間(サイクルタイムT1)毎にホルダ41を第1位置P1から第2位置P2に移送して、ホルダ41に保持されたピペットチップAを分注ノズル5aに供給しているが、所定時間毎にホルダ41を第2位置P2に移送しなくてもよい。例えば、各検体の測定の所要時間が各検体の測定項目に応じて異なる場合に、CPU401aが各検体の測定が完了したことを検出する毎に、ホルダ41を第1位置P1から第2位置P2に移送してもよい。
【0104】
また、本実施形態では、第1位置P1と第2位置P2とを結ぶ直線上でホルダ41を移動させているが、本発明はこれに限られない。例えば、第1位置P1と第2位置P2とを結ぶ直線から外れた位置に中継地点を設け、この中継地点から第1位置P1と第2位置P2とにホルダ41を移動させてもよい。
【0105】
また、本実施形態では、検体中の抗原や抗体を測定する免疫分析装置のピペットチップ供給装置に本発明を適用した例を示したが、ピペットチップを使用する検体分析装置であればよく、例えば遺伝子増幅検出装置などのピペットチップ供給装置に本発明を適用してもよい。
【符号の説明】
【0106】
1 検体分析装置
4 制御装置
5 検体分注アーム
5a 分注ノズル
13 ピペットチップ供給装置
20 チップ貯留部
21 チップ供給部
24 チップ押し上げ機構部
25 チップ移送機構部
25a 落下口
25b 待機位置
40 チップ搬送部
41 ホルダ
42 チップ保持部
45 チップ検知部
A ピペットチップ
P1 第1位置
P2 第2位置
【技術分野】
【0001】
本発明は、ピペットチップ供給装置、検体分析装置及びピペットチップ供給方法に関する。
【背景技術】
【0002】
従来、血液や尿等の検体の分注にピペットチップが使用されており、このピペットチップを分注ノズルに自動供給するチップ供給装置が知られている(例えば特許文献1参照)。
特許文献1には、ユーザにより投入された複数のピペットチップを収容するチップ補給部と、チップ補給部から取り出されたピペットチップを1つずつに仕分ける仕分機構部と、仕分機構部により1つずつに仕分けられた単一のピペットチップを保持し、この単一のピペットチップを検体分注アームが有する分注ノズルによる装着位置に搬送するチップ搬送部とを備えたチップ供給装置が開示されている。
【先行技術文献】
【特許文献】
【0003】
【特許文献1】特開2009−74916号公報
【発明の概要】
【発明が解決しようとする課題】
【0004】
しかしながら、特許文献1に記載のチップ供給装置では、例えば仕分機構部によるピペットチップの仕分け動作が円滑に行われずに時間がかかった場合、チップ補給部に収容されているピペットチップを円滑にチップ搬送部に送ることができず、分注ノズルへのピペットチップの供給に遅滞が生じるおそれがある。このような場合には、検体の分注動作を中断する必要があり、自動分析装置による検体の処理能力が低下するおそれがある。
【0005】
そこで、本発明は、分注ノズルへのピペットチップの供給に遅滞が生じるのを抑制することができるピペットチップ供給装置、検体分析装置及びピペットチップ供給方法を提供する。
【課題を解決するための手段】
【0006】
(1)本発明のピペットチップ供給装置は、複数のピペットチップを貯留するチップ貯留部と、ピペットチップを保持可能なチップ保持部を複数有したホルダを備え、当該ホルダを移動可能なチップ搬送部と、前記チップ貯留部に貯留されているピペットチップを前記ホルダのチップ保持部に供給するチップ供給部と、を備え、前記チップ搬送部は、前記チップ供給部により供給されたピペットチップを複数のチップ保持部のそれぞれに保持させ、ピペットチップを保持した複数のチップ保持部のうち何れか1つを、分注ノズルがピペットチップを装着するチップ装着位置に位置づけるように前記ホルダを移動させることにより、前記分注ノズルにピペットチップを供給する。
【0007】
これにより、予め複数のチップ保持部にピペットチップを保持させておくことができる。このため、チップ保持部へのピペットチップの供給が円滑に行われない事態が生じた場合であっても、ピペットチップがチップ供給部によって供給されるのを待つことなく、分注ノズルによるピペットチップの装着位置にピペットチップを供給することができる。このため、分注ノズルへのピペットチップの供給に遅滞が生じることを抑制することができる。
【0008】
(2)また、前記チップ供給部は、前記チップ貯留部に貯留されているピペットチップを所定のチップ受取位置に供給し、前記チップ搬送部は、複数のチップ保持部のそれぞれを前記チップ受取位置に位置づけるように前記ホルダを移動させて、各チップ保持部にピペットチップを保持させることが好ましい。
この構成では、各チップ保持部をチップ受取位置に位置合わせしてピペットチップを各チップ保持部に保持させるので、チップ供給部は所定のチップ受取位置にピペットチップを供給するだけでよく、チップ供給部の構成を簡略化させることができる。
【0009】
(3)また、前記チップ搬送部は、前記分注ノズルへのピペットチップの供給が必要な時まで、ピペットチップを保持していないチップ保持部を前記チップ受取位置へ位置づけるよう前記ホルダを移動させることが好ましい。
これにより、できるだけ多くのピペットチップをホルダに保持させておくことができるので、分注ノズルへのピペットチップの供給に遅滞が生じることをより効果的に抑制することができる。
【0010】
(4)また、前記チップ搬送部は、前記ホルダの複数のチップ保持部のいずれかにピペットチップが保持されている場合に、前記分注ノズルへのピペットチップへの供給が必要になると、ピペットチップを保持していないチップ保持部があっても、ピペットチップを保持しているチップ保持部を前記チップ装着位置に位置づけるように前記ホルダを移動させることが好ましい。
これにより、分注ノズルへのピペットチップの供給に遅滞が生じることをより確実に防止することができる。
【0011】
(5)また、前記チップ搬送部は、所定時間毎に、ピペットチップを保持した何れか1つのチップ保持部を前記チップ装着位置に位置づけるように前記ホルダを移動させることが好ましい。
これにより、分注ノズルにピペットチップを装着させる周期を維持させることができ、検体の処理能力が低下することを抑制できる。
【0012】
(6)また、前記チップ搬送部は、前記複数のチップ保持部に所定の順番でピペットチップが保持されるように前記ホルダを移動させることが好ましい。
これにより、ホルダの各チップ保持部をチップ受取位置に位置合わせする際の制御を簡略化させることができる。
【0013】
(7)また、前記チップ搬送部は、前記チップ受取位置と前記チップ装着位置との間で前記ホルダを移動させるよう構成され、前記複数のチップ保持部は、前記チップ受取位置と前記チップ装着位置との間の前記ホルダの移動方向に並んで前記ホルダに配置されているのが好ましい。
これにより、複数のチップ保持部のそれぞれを、より容易にチップ受取位置およびチップ装着位置に位置合わせすることができる。
【0014】
(8)また、前記チップ供給部は、ピペットチップを1つずつ前記チップ受取位置に供給する第1供給部と、前記チップ貯留部のピペットチップを前記第1供給部へ供給する第2供給部とを有し、前記ホルダが前記チップ装着位置に向けて移動を開始してから前記チップ受取位置に戻ってくるまでの間に、前記第1供給部へのピペットチップの供給を完了するように前記第2供給部を制御する制御部を更に備えているのが好ましい。
これにより、ホルダがチップ受取位置に戻ってくる前に、第1供給部にピペットチップを送り終えることができるので、ホルダがチップ受取位置に戻ってきた後、第1供給部により、ホルダにピペットチップを迅速に供給することができる。
【0015】
(9)また、前記(8)のピペットチップ供給装置において、前記第1供給部には、ピペットチップを落下させることで前記チップ受取位置にピペットチップを供給する落下口と、この落下口の直前位置でピペットチップを保持する待機位置とが設定され、前記制御部は、前記ホルダが前記チップ装着位置に向けて移動を開始してから前記チップ受取位置に戻ってくるまでの間に、前記第2供給部から前記第1供給部に供給されたピペットチップを前記待機位置まで移送するよう前記第1供給部を制御するのが好ましい。
この場合、ホルダがチップ受取位置に戻ってくると、待機位置で待機させておいたピペットチップを落下口から落下させ、ホルダに当該ピペットチップを迅速に移送させることができる。
【0016】
(10)また、前記ホルダのチップ保持部にピペットチップが保持されたことを検知するためのチップ検知部を更に備えることが好ましい。
これにより、ピペットチップが保持されていないチップ保持部をより確実に特定することができる。
【0017】
(11)また、前記チップ搬送部は、前記複数のチップ保持部を均等な頻度で前記チップ装着位置に位置づけて前記分注ノズルにピペットチップを供給することが好ましい。
これにより、ホルダにおいて、複数保持されているピペットチップのうち、特定のピペットチップが、いつまでも分注ノズルに装着されないでホルダに残ってしまうのを防ぐことができる。
【0018】
(12)また、前記チップ貯留部は、複数のピペットチップを、ピペットチップの長手方向がばらばらな状態で貯留するように構成されていることが好ましい。
これにより、ユーザは、複数のピペットチップを、その長手方向を考慮することなく投入すればよく、ユーザにとって使いやすい装置となるとともに、チップ貯留部からピペットチップをホルダに供給する動作に不具合が生じたとしても、ホルダには予め複数のピペットチップが保持されているので、分注ノズルへのピペットチップの供給に遅滞が生じることを抑制することができる。
【0019】
(13)また、前記ピペットチップ供給装置は、前記複数のチップ保持部それぞれにおけるピペットチップの有無を示す保持情報を記憶する記憶部と、チップ保持部におけるピペットチップの有無の状態が変化する度に前記保持情報を更新し、更新された保持情報に基づいて、前記チップ供給部及び前記チップ搬送部を制御する制御部とを更に備えているのが好ましい。
これによれば、各チップ保持部におけるピペットチップの保持状況に応じて、柔軟にチップ供給部およびチップ搬送部を制御することができる。
【0020】
(14)また、本発明の検体分析装置は、複数のピペットチップを貯留するチップ貯留部と、ピペットチップを保持可能なチップ保持部を複数有したホルダを備え、当該ホルダを移動可能なチップ搬送部と、前記チップ貯留部に貯留されているピペットチップを前記ホルダのチップ保持部に供給するチップ供給部と、検体を分注するための分注ノズルを有し、チップ装着位置に位置するピペットチップを前記分注ノズルに装着して検体の分注を行う検体分注部と、を備え、前記チップ搬送部は、前記チップ供給部により供給されたピペットチップを複数のチップ保持部のそれぞれに保持させ、ピペットチップを保持した複数のチップ保持部のうち何れか1つを前記チップ装着位置に位置づけるように前記ホルダを移動させる。
【0021】
これにより、予め複数のチップ保持部にピペットチップを保持させておくことができるため、チップ保持部へのピペットチップの供給が円滑に行われない事態が生じた場合であっても、ピペットチップがチップ供給部によって供給されるのを待つことなく、分注ノズルによるピペットチップの装着位置にピペットチップを供給することができる。このため、分注ノズルへのピペットチップの供給に遅滞が生じることを抑制することができ、分注ノズルによる検体の分注を遅滞なく行うことが可能となる。
【0022】
(15)本発明は、ピペットチップを保持可能なチップ保持部を複数有したホルダを用いて、ピペットチップを分注ノズルへ供給するピペットチップ供給方法であって、複数のピペットチップが貯留されているチップ貯留部内のピペットチップを前記ホルダの複数のチップ保持部のそれぞれに保持させる工程と、前記分注ノズルがピペットチップを装着するチップ装着位置に、ピペットチップを保持している複数のチップ保持部のうち何れか1つを位置づけるよう前記ホルダを移動させることにより、前記分注ノズルにピペットチップを供給する工程とを含む。
【0023】
これにより、予め複数のチップ保持部にピペットチップを保持させておくことができるため、チップ保持部へのピペットチップの供給が円滑に行われない事態が生じた場合であっても、ピペットチップが供給されるのを待つことなく、分注ノズルによるピペットチップの装着位置にピペットチップを供給することができる。このため、分注ノズルへのピペットチップの供給に遅滞が生じることを抑制することができる。
【発明の効果】
【0024】
本発明によれば、複数のチップ保持部にピペットチップを予め保持させておくことができるので、チップ保持部へのピペットチップの供給が円滑に行われない事態が生じた場合であっても、ピペットチップの供給を待つことなく、分注ノズルにピペットチップを供給することができる。このため、分注ノズルへのピペットチップの供給に遅滞が生じることを抑制することができる。
【図面の簡単な説明】
【0025】
【図1】本発明の検体分析装置の全体構成を示す斜視図である。
【図2】検体分析装置の平面図である。
【図3】ピペットチップの説明図である。
【図4】ピペットチップ供給装置の斜視図である。
【図5】ピペットチップ供給装置の一部の斜視図である。
【図6】チップ移送機構部の平面図である。
【図7】第1位置におけるホルダの位置を説明する説明図である。
【図8】チップ搬送部の搬送駆動部の説明図である。
【図9】第1押し上げ部材の動作を説明するフロー図である。
【図10】第2押し上げ部材の動作を説明するフロー図である。
【図11】チップ移送機構部の動作を説明するフロー図である。
【図12】第2位置におけるホルダの位置を説明する説明図である。
【図13】記憶部に記憶されているデータベースの説明図である。
【図14】チップ搬送部の初期化時の処理を説明するフロー図である。
【図15】通常運転時の処理を説明するフロー図である。
【図16】分注ノズルへのチップ供給処理を説明するフロー図である。
【図17】制御装置の構成を示すブロック図である。
【発明を実施するための形態】
【0026】
以下、本発明の実施の形態を図面に基づいて説明する。
〔1. 検体分析装置の全体構成について〕
本発明の検体分析装置1は、例えば、測定対象である血液等の検体に含まれる抗原や抗体などを定量測定または定性測定する装置である。この検体分析装置1は、図1と図2とに示すように、測定機構部2と、この測定機構部2に隣接して配置された検体搬送部3と、測定機構部2に電気的に接続された制御装置4とを備えている。
【0027】
検体搬送部3は、検体を収容した図示しない複数の試験管を保持したラックを搬送可能であり、検体を収容した試験管を検体分注アーム5による検体吸引位置まで搬送する。
制御装置4は、パーソナルコンピュータからなり、制御部4aと、表示部(モニタ)4bと、キーボード4cとを有している。制御部4aは、図17に示すように、CPU401a、記憶部401b等を含み、測定機構部2の各部および検体搬送部3に動作開始信号を送信するとともに、測定機構部2で得られた検体の情報を分析処理する機能を有している。記憶部401bは、ROM,RAM,ハードディスク等からなり、CPU401aによる処理に使用されるコンピュータプログラム、データ等を格納している。また、CPU401aは、後述する各検知部からの検出信号を受信するように構成されている。また、表示部4bは、各種の情報を表示することができ、制御部4aで得られた分析結果や、ユーザへの報知情報等を表示する。
【0028】
測定機構部2は、検体分注アーム(検体分注部)5と、ピペットチップ供給装置13とを備えている。また、本実施形態の測定機構部2は、R1試薬分注アーム6と、R2試薬分注アーム7と、R3試薬分注アーム8と、反応部9と、キュベット供給部10と、1次BF分離部11と、2次BF分離部12と、分析部14、R4/R5試薬供給部15と、試薬設置部16とを備えている。
【0029】
ピペットチップ供給装置13は、ユーザによって投入された複数のピペットチップAを第1位置P1へと供給する機能を有している。第1位置P1は、検体分注アーム5が有している分注ノズル5aによるチップ装着のための準備位置である。さらに、ピペットチップ供給装置13が備えているチップ搬送部40(図4参照)は、第1位置P1に供給されたピペットチップAを第2位置P2へ搬送する。第2位置P2は、検体分注アーム5(分注ノズル5a)がピペットチップを装着する位置である。
なお、第1位置P1には、落下させたピペットチップAを受け取るホルダ41(図4参照)が待機しており、前記チップ搬送部40は、このホルダ41を第2位置P2へと移動させ、ピペットチップAを第2位置P2へ搬送する。
【0030】
検体分注アーム5は、ピペットチップA(図3参照)を装着すると共に、検体を分注するための分注ノズル(吸引ノズル)5aを有している。チップ装着用の第2位置P2において、ピペットチップAは、検体分注アーム5が有する分注ノズル5aの先端に取り付けられる。
検体分注アーム5は、第2位置P2にある前記ホルダ41に保持されているピペットチップAを1つずつ分注ノズル5aに装着して検体の分注を行う。検体分注アーム5は、分注ノズル5aを下降させ、第2位置P2に位置するピペットチップAの基端に設けられた開口17a(図3参照)内に分注ノズル5aを嵌入させることにより、分注ノズル5aの先端にピペットチップAを装着する。その後、検体分注アーム5は、検体搬送部3により検体吸引位置に搬送された試験管内の検体を吸引し、R1試薬分注アーム6によりR1試薬(捕捉抗体)が分注された検体吐出位置のキュベットに検体を分注(吐出)する。
【0031】
その後、R2試薬分注アーム7がキュベットにR2試薬(磁性粒子)を分注し、キュベット内の検体に含まれる抗原に結合した捕捉抗体に磁性粒子を結合させる。結合(Bound)した抗原、捕捉抗体および磁性粒子の複合体は1次BF分離部11の磁気により捕集され、未反応(Free)の捕捉抗体を含むR1試薬がキュベットから除去される。次に、R3試薬分注アーム8がキュベットにR3試薬(標識抗体)を分注し、キュベット内の抗原に標識抗体を結合させる。結合した磁性粒子、抗原および標識抗体の複合体は2次BF分離部12の磁気により捕集され、未反応の標識抗体を含むR3試薬がキュベットから除去される。キュベット内にさらにR4試薬(分散液)およびR5試薬(発光基質)が分注された後、キュベットは分析部14に移送される。
【0032】
分析部14は、検体分注アーム5により分注された検体を分析する機能を有している。本実施形態では、所定の処理が行なわれた検体の抗原に結合する標識抗体と発光基質との反応過程で生じる光を、光電子増倍管(Photo Multiplier Tube)で取得することにより、その検体に含まれる抗原の量を測定する。
【0033】
〔2. ピペットチップAについて〕
図3は、ピペットチップAの側面図である。ピペットチップAは、ピペットチップA内の検体を吐出するための開口を先端17cに有するとともに、基端に開口17aを有している。また、胴部17bは開口17aと通じている中空の筒部であり、先端17cは開口17a(胴部17b)よりも細い先細り形状である。
【0034】
〔3. ピペットチップ供給装置13について〕
〔3.1 全体構成〕
図4は、ピペットチップ供給装置13の斜視図である。図5は、ピペットチップ供給装置13の一部の斜視図であり、内部構造を説明するために、側壁の一部18a(図4参照)を取り外した状態として示している。ピペットチップ供給装置13は、ユーザにより投入口28aを介して複数のピペットチップAが投入されるチップ投入部28と、ピペットチップAを複数貯留するチップ貯留部20と、チップ投入部28に貯留されているピペットチップAをチップ貯留部20に搬入するためのチップ搬入部29と、チップ貯留部20に貯留されているピペットチップAを1つずつ当該チップ貯留部20外の第1位置P1に供給するチップ供給部21と、第1位置P1に供給されたピペットチップAを保持可能なチップ保持部(保持孔)42を複数有したホルダ41を備えているチップ搬送部40とを備えている。チップ搬送部40は、第1位置P1と、分注ノズル5aがピペットチップを1つずつ装着する第2位置P2との間を、ホルダ41を移動させることにより、分注ノズル5aにピペットチップAを供給する機能を有している。
【0035】
なお、後に説明するが、チップ供給部21は、チップ移送機構部25(第1供給部)とチップ押し上げ機構部(第2供給部)24とを有している。
また、このピペットチップ供給装置13では、チップ投入部28からピペットチップAをチップ貯留部20へ送り出す方向(図5の矢印Zの方向)を、前後方向の前方とし、この前後方向に直交する水平方向を左右方向としている。そして、チップ貯留部20におけるこの左右方向をチップ貯留部20の幅方向とする。
【0036】
図5に示すように、チップ貯留部20は、右側の側壁18bと、左側の側壁18a(図5では省略されている側壁)と、後壁18cと、前壁18dと、底部18eとで囲まれた空間を有し、この空間において、複数のピペットチップAを貯留することができる。このチップ貯留部20は、複数のピペットチップAを、ピペットチップAの長手方向がばらばらな状態で(様々な方向を向いて自由な状態として)貯留可能である。つまり、1本ずつ並べて貯留するものではない。
【0037】
なお、底部18eの上面は、チップ排出部23の前記排出板30の上面と、側壁18a,18bと共に装置に固定された状態にある固定底部材18e−1の上面と、下限位置にある第1押し上げ部材26の上面38とによって構成されている。第1押し上げ部材26は、後に説明するが上下方向に移動可能な部材である。そして、前壁18dは、第2押し上げ部材27と、装置に固定された状態にある固定壁部材18d−1とによって構成されている。第2押し上げ部材27は、後に説明するが上下方向に移動可能な部材である。
【0038】
チップ投入部28は、前記後壁18cを挟んでチップ貯留部20に隣接している。チップ投入部28は、複数のピペットチップAがユーザによって投入される部分であり、チップ貯留部20よりも容積が大きく、チップ貯留部20よりもピペットチップAの貯留容量が大きい。ピペットチップAが投入される投入口28aは、チップ投入部28の上部に設けられている。
【0039】
チップ搬入部29は、上下方向に移動可能な板状の搬入用押し上げ部材29aと、この搬入用押し上げ部材29aを上下駆動する搬入駆動部29bとを有している。搬入用押し上げ部材29aの上面は、チップ投入部28の底面の一部を構成しており、複数のピペットチップAをその上面に載せることができ、チップ投入部28の底面は、チップ貯留部20側へ向かって低くなるように傾斜している。このため、チップ投入部28に投入されたピペットチップAは、搬入用押し上げ部材29aの上面へ自重によって載ることができる。
そして、搬入駆動部29bを駆動させ搬入用押し上げ部材29aを上昇させることで、その上面に載っているピペットチップAは、後壁18cを超えてチップ貯留部20へ搬入される。搬入駆動部29bの駆動は、制御装置4からの制御信号に基づく。
【0040】
チップ押し上げ機構部24は、上記のとおり、チップ移送機構部25と共に、チップ貯留部20内に貯留されているピペットチップAを1つずつチップ貯留部20外の第1位置P1に供給するための機能を有している。
チップ押し上げ機構部24は、上下方向に移動可能な前記第1押し上げ部材26と、この第1押し上げ部材26を上下駆動する第1押し上げ駆動部26a(図4参照)とを有している。第1押し上げ部材26は、上下方向に長い矩形板状の部材であり、その幅方向が、チップ貯留部20の幅方向に沿って設けられている。そして、単一のピペットチップAを、その長手方向をチップ貯留部20の幅方向に向けた状態として載せる上面38を有している。このため、チップ貯留部20に貯留されていたピペットチップAを、その長手方向をチップ貯留部20の幅方向に一致させた状態として、上面38に載せて上方に押し上げることができる。なお、この際、ピペットチップAは、第2押し上げ部材27の鉛直面に沿って(ガイドされて)上昇する。
【0041】
さらに、チップ押し上げ機構部24は、第1押し上げ部材26によって所定高さまで押し上げられたピペットチップAを受け取って上面に載せてさらに上方に押し上げるために、上下方向に移動可能な第2押し上げ部材27と、この第2押し上げ部材27を上下駆動する第2押し上げ駆動部27a(図4参照)とを有している。第2押し上げ部材27は、上下方向に長い矩形板状の部材であり、その幅方向が、チップ貯留部20の幅方向に沿って設けられている。そして、第2押し上げ部材27は、単一のピペットチップAを、その長手方向をチップ貯留部20の幅方向に向けた状態として載せる上面を有している。このため、ピペットチップAを、その長手方向をチップ貯留部20の幅方向に一致させた状態として、上面に載せて上方に押し上げることができる。なお、この第2押し上げ部材27の上面には一本のピペットチップAのみが載ることができ、このピペットチップAは、固定壁部材18d−1の鉛直面に沿って(ガイドされて)上昇する。
【0042】
また、上記のとおり、単一のピペットチップAは、その長手方向がチップ貯留部20の左右の幅方向と一致して、底部18eのうちの第1押し上げ部材26の上面38に載った状態となる(図5参照)。そして、最も降下した状態にある第1押し上げ部材26の上面38は、前記排出板30の上面と同一平面を成し、第2押し上げ部材27側に向かって下方に傾斜している。
そして、第1押し上げ駆動部26aの駆動により、第1押し上げ部材26が上昇すると、単一のピペットチップAを押し上げ、下限位置にある第2押し上げ部材27の上面の高さ(第1押し上げ部材26の上限位置)に到達すると、当該ピペットチップAは、自重により、前記第2押し上げ部材27の上面に乗り移る。第2押し上げ部材27の上面は、第1押し上げ部材26の上面38と同様に傾斜している。
【0043】
そして、第2押し上げ駆動部27aの駆動により、第2押し上げ部材27が上限位置まで上昇すると、その上面に載っていたピペットチップAは、前記固定壁部材18d−1を超えて、チップ移送機構部25側へ供給される。なお、第1及び第2押し上げ駆動部の駆動は、前記制御装置4のCPU401aからの制御信号に基づく。
【0044】
また、チップ貯留部20には、下限位置にある第2押し上げ部材27の上面に存在しているピペットチップAを検知する検知部36が設けられている。この検知部36は、光学センサであり、発光素子から受光素子への光がピペットチップによって遮られることで、下限位置にある第2押し上げ部材27の上面に存在しているピペットチップAを検知することができる。
さらに、チップ貯留部20には、第2押し上げ部材27の上面にピペットチップAが複数(2個)存在していることを検知するための検知部37が設けられている。この検知部37は、光学センサであり、第2押し上げ部材27の上昇途中の所定位置(複数のピペットチップが第2押し上げ部材27に載っている場合にのみ発光素子から受光素子への光がピペットチップによって遮られる位置)でピペットチップを検知することで、第2押し上げ部材27の上面にピペットチップAが複数(2個)存在していることを検知することができる。
なお、これらピペットチップAの存在は、検知部36,37からの信号を受けた前記制御装置4のCPU401aによって判定することができる。
【0045】
また、図5に示しているように、ピペットチップ供給装置13は、第1押し上げ部材26の上面38に載っている単一のピペットチップAを検知する検知部32を備えている。検知部32は、光学センサであり、発光素子から受光素子への光がピペットチップによって遮られることで、ピペットチップAの存在を検知することができる。なお、存在しているか否かの判定は、検知部32からの信号を受けた前記制御装置4のCPU401aが実行することができる。
【0046】
チップ移送機構部25は、前記チップ押し上げ機構部24によって供給されたピペットチップAを1つずつチップ貯留部20外の第1位置P1(図4参照)に供給するための機能を有している。このために、図6に示すように、チップ移送機構部25には、ピペットチップAを落下させ、第1位置P1にピペットチップAを供給するための落下口25aが設けられている。さらに、チップ移送機構部25には、この落下口25aの直前位置であって第1位置P1の上方でピペットチップAを保持する待機位置25bが設定されている。
【0047】
具体的に説明すると、チップ移送機構部25は、図6に示すように、プーリ25−1と、このプーリ25−1によって回転する回転軸25−2と、この回転軸25−2と前後方向に間隔を有して平行に設けられた左右方向に長いガイド部材25−3と、プーリ25−1を回転させるモータ25−4(図4参照)とを有している。回転軸25−2には、螺旋状の溝が形成されている。
【0048】
上記のとおり、第2押し上げ部材27(図5参照)の上昇により、その上面に載っていたピペットチップAが固定壁部材18d−1を超えると、当該ピペットチップAは、回転軸25−2とガイド部材25−3との間に落下する。すると、ピペットチップAの重心は胴部17bよりも先端17c側に位置するため、先端17cが下向きに垂れ下がった状態となって、胴部17bが回転軸25−2とガイド部材25−3との間で支持され、ピペットチップAは回転軸25−2の螺旋溝に嵌った状態となる。
【0049】
そして、プーリ25−1を回転させると、螺旋溝に沿ってピペットチップAは、左右方向の一方側(図6では上側)に移動することができる(矢印X)。回転軸25−2とガイド部材25−3との間は、ピペットチップAの胴部17bよりも狭い第1領域K1と、胴部17bよりも広い第2領域K2とを有し、ピペットチップAが第2領域K2に到達すると、当該ピペットチップAは自重により第1位置P1(図4参照)へと落下することができる。つまり、この第2領域K2に、前記落下口25aが形成されている。
【0050】
また、このチップ移送機構部25には、検知部33及び検知部34が設けられている。検知部33及び検知部34は、前記検知部32と同様に光学センサであり、発光素子から受光素子への光がピペットチップによって遮られることで、ピペットチップAの存在を検知することができる。
検知部33は、回転軸25−2とガイド部材25−3との間に存在するピペットチップAを検知する。
【0051】
検知部34は、第1領域K1のうちの第2領域K2の直前位置に存在しているピペットチップAを検知する。なお、ピペットチップAが存在しているか否かの判定は、検知部33,34からの信号を受けた前記制御装置4のCPU401aが実行することができる。そして、第1領域K1のうちの、落下口25aの直前の位置、つまり、検知部34がピペットチップAを検知する位置が、ピペットチップAを保持する前記待機位置25bとなる。
【0052】
以上より、チップ移送機構部(第1供給部)25は、ピペットチップAを1つずつ第1位置に供給することができる。そして、チップ押し上げ機構部(第2供給部)24は、チップ貯留部20に貯留されているピペットチップAを1つずつチップ移送機構部(第1供給部)25へと送ることができる。
【0053】
図4に示すように、チップ搬送部40は、ピペットチップAを保持可能なチップ保持部(保持孔)42を複数(本実施形態では3つ)有したホルダ41と、このホルダ41を第2位置P2へ誘導するガイド部材43と、ホルダ41をガイド部材43に沿って移動させる搬送駆動部44とを備えている。
【0054】
ホルダ41は、上方に開口しピペットチップAを先端部17c側から挿入させる孔部を3つ有した部材であり、この孔部それぞれが単一のピペットチップAを保持する前記チップ保持部42である。図7(a)に示すように、第1位置P1において、チップ保持部42は、上方に位置する前記落下口25aから落下したピペットチップAを挿入した状態として保持することができる。
【0055】
図4に示すように、ガイド部材43は、第1位置P1から第2位置P2へと直線的に延びているガイドレールであり、ホルダ41はこのガイド部材43に沿ってガイドされ水平移動する。図4において、ホルダ41の移動方向が、矢印Y方向である。そして、本実施形態では、図7(a)に示すように、ホルダ41の移動方向(矢印Y方向)に並んで、3つのチップ保持部42がホルダ41に設けられている。
【0056】
搬送駆動部44は、図8に示すように、正逆回転可能なモータ(ステッピングモータ)44aと、第1位置P1側に設けられモータ44aによって回転する駆動プーリ44bと、駆動プーリ44bと矢印Y方向に水平方向に離れて第2位置P2側設けられた従動プーリ44cと、両プーリ44b,44c間に架けられたベルト44dと、ベルト44dとホルダ41とを連結固定している連結部材44eとを有している。
モータ44aは減速器部(図示せず)を有しており、一方向に回転すると、ベルト44dは一方向(図8の実線の矢印)に回転する。これにより、第1位置P1に存在するホルダ41を第2位置P2へ移動させる。これに対して、モータ44aが他方向に回転すると、ベルト44dは他方向(図8の破線の矢印)に回転する。これにより、第2位置P2に存在するホルダ41を第1位置P1へ移動させる。モータ44aの駆動は、前記制御装置4のCPU401aからの制御信号に基づく。
【0057】
以上より、チップ搬送部40は、チップ移送機構部25からピペットチップAが1つずつ供給される第1位置P1と、分注ノズル5aがピペットチップを1つずつ装着する第2位置P2との間を、ホルダ41を移動させることができ、このチップ搬送部40により、分注ノズル5aにピペットチップAを供給することが可能となる。
【0058】
また、ピペットチップ供給装置13には、図7(a)に示すように、第1位置P1に位置しているチップ保持部42に保持されたピペットチップAを検知するためのチップ検知部45が設けられている。
チップ検知部45は、発光素子及び受光素子を有する光学センサであり、発光素子から受光素子への光が、チップ保持部42に保持された状態にあるピペットチップによって遮られることで、チップ保持部42にピペットチップAが存在していることを検知することができる。
【0059】
本実施形態では、ホルダ41には3つのチップ保持部42が形成されているが、これらチップ保持部42に保持されるピペットチップAを、単一のチップ検知部45によって検知する。
このために、第1位置P1では、前記搬送駆動部44によって、ホルダ41はチップ保持部42と同数(3つ)の異なる位置(複数の位置)に変位可能である。すなわち、ホルダ41は、図7(a)の第1−(1)位置、図7(b)の第1−(2)位置、及び、図7(c)の第1−(3)位置に変位可能である。この位置制御は、搬送駆動部44(ステッピングモータ44a)及び制御装置4のCPU401aにより実行される。
【0060】
ホルダ41が第1−(1)位置に存在する状態で(図7(a))、最も第2位置P2側のチップ保持部42−1が落下口25aの直下に位置する。ホルダ41が第1−(2)位置に存在する状態で(図7(b))、その隣りのチップ保持部42−2が落下口25aの直下に位置する。そして、ホルダ41が第1−(3)位置に存在する状態で(図7(c))、さらに隣りの(最も第2位置P2から離れた)チップ保持部42−3が落下口25aの直下に位置する。
すなわち、3つのチップ保持部42のうち1つのチップ保持部42が第1位置P1に位置合わせされることで、ピペットチップAのチップ保持部42への受け渡しが実行可能となる。
【0061】
また、3つのチップ保持部42は、第1位置P1と第2位置P2との間のホルダ41の移動方向(Y方向)と平行な方向に並んでホルダ41に配置されているので、ホルダ41を移動させるためのガイド部材43及び搬送駆動部44を、前記位置合わせを行うための機構に兼用することができる。
【0062】
そして、チップ検知部45の発光素子及び受光素子は、落下口25aの直下位置(第1位置P1)を跨ぐ位置であって、ホルダ41のチップ保持部42が保持するピペットチップAの一部(胴部17b:図3参照)を挟む位置に配置されている。
以上より、チップ検知部45の発光素子と受光素子との間をホルダ41が通過することで、どのチップ保持部42にピペットチップAが保持されているかを、単一のチップ検知部45によって検知する。そして、制御装置4のCPU401aは、チップ検知部45による検知結果に基づいて、ピペットチップAが保持されていないチップ保持部42が存在するか否かを判断することができる。
なお、図7(a)において、第1−(1)位置よりも、第2位置P2から離れる方向に、ホルダ41の原点位置Y0が存在し、ホルダ41はこの原点位置Y0から各位置へ移動することができる。
【0063】
〔4. ピペットチップの供給方法について〕
以上のように構成されたピペットチップ供給装置13によって実行されるピペットチップの供給方法について説明する。なお、以下の供給方法において、特に主体が記載されていない処理は、制御装置4のCPU401aが行う処理である。なお、ここでは、ピペットチップAをチップ投入部28に投入してから、第2位置P2において、検体分注アーム5の分注ノズル5aがピペットチップAを装着するまでを説明する。なお、分注ノズル5aが第2位置P2においてピペットチップを1つずつ装着するサイクルタイムT0は一定に設定されており、これにより、分注ノズル5aによるピペットチップAの装着後に実行される検体の分析処理が滞るのを防止している。
【0064】
〔4.1 第1位置P1までのピペットチップAの供給動作〕
図5において、ユーザによって、チップ投入部28に多数のピペットチップAが投入され、当該チップ投入部28にピペットチップAが貯留されると、搬入押し上げ部材29aが上昇し、その上面に載っているピペットチップAがチップ貯留部20に搬入される。この搬入は所定のタイミングで繰り返し実行され、チップ貯留部20には、チップ投入部28よりも少ない複数本のピペットチップAが貯留された状態となる。単一のピペットチップAは、傾斜面を成すチップ貯留部20の底面によって、第1押し上げ部材26の上面38に転がり落ちる。
【0065】
図9は、第1押し上げ部材26の動作を説明するフロー図である。はじめ第1押し上げ部材26は下限位置にある(図5の状態)。この状態で、制御装置4のCPU401aは、検知部32からの検出信号に基づき、下限位置にある第1押し上げ部材26の上面38にピペットチップAが存在しているか否かを判定する(図9のステップS1)。
検知部32の発光素子および受光素子間で遮光状態であり、ピペットチップAが存在していると判定された場合(ステップS1でNoの場合)、CPU401aは、検知部36からの検出信号に基づき、下限位置にある第2押し上げ部材27の上面にピペットチップAが存在しているか否かを判定する(ステップS2)。
【0066】
このステップS2において、検知部36の発光素子および受光素子間で透光状態であり、第2押し上げ部材27の上面にピペットチップAが存在していないと判定された場合(ステップS2でYesの場合)、第1押し上げ部材26の動作が開始される(ステップS3)。一方、ステップS2において、検知部36の発光素子および受光素子間で遮光状態であり、第2押し上げ部材27の上にピペットチップAが存在していると判定された場合(ステップS2でNoの場合)、第1押し上げ部材26の上昇動作は行わず、待機状態となる。
なお、ステップS1において、下限位置にある第1押し上げ部材26の上面38にピペットチップAが存在していない場合、チップ貯留部20にはピペットチップAが無くなっていると考えられるので、チップ搬入部29によるピペットチップAの搬入動作の要求が行われ(ステップS4)、搬入押し上げ部材29aが上昇し、その上面に載っているピペットチップAがチップ貯留部20に搬入される。
【0067】
第1押し上げ部材26の上にピペットチップAが載った状態にあり、第1押し上げ部材26の上昇動作が開始され、第1押し上げ部材26を上限位置まで上昇させると前記ピペットチップAは、第2押し上げ部材27上に転がって乗り移る。
そして、第2押し上げ部材27の動作が開始される。図10は、第2押し上げ部材27の動作を説明するフロー図である。まず、CPU401aは、検知部36からの検出信号に基づいて、下限位置にある第2押し上げ部材27の上面にピペットチップAが存在しているか否かを判定する(ステップS51)。検知部36の発光素子および受光素子間で遮光状態であり、ピペットチップAが存在していると判定された場合(ステップS51でYesの場合)、第2押し上げ部材27を上昇させる(ステップS52)。
【0068】
そして、CPU401aは、第2押し上げ部材27の上昇途中で、検知部37からの検出信号に基づき、第2押し上げ部材27の上面にピペットチップAが複数(2個)存在しているかを判定する(ステップS53)。これは、複数のピペットチップAがまとめて、次のチップ移送機構部25へ供給されてしまうのを防ぐためである。
【0069】
ピペットチップAが複数存在していると判定されると(ステップS53でYes)、第2押し上げ部材27を下限まで降下させ(ステップS55)、ステップS51に戻る。このように第2押し上げ部材27を降下させることで、上のピペットチップAをチップ貯留部20の底部に落下させ、単一のピペットチップAのみが第2押し上げ部材27上に載った状態とさせる。
これに対して、ピペットチップAが複数存在していないと判定されると(ステップS53でNo)、第2押し上げ部材27を上限まで上昇させ(ステップS54)、ピペットチップAを、固定壁部材18d−1を超えてチップ移送機構部25側へ供給する。
【0070】
次に、チップ移送機構部25の動作を説明する。図11は、チップ移送機構部25の動作を説明するフロー図である。まず、CPU401aは、検知部34(図6参照)からの検出信号に基づき、第1位置P1(図4参照)に落下可能となる第2領域K2の直前位置(待機位置25b)にピペットチップAが存在しているか否かを判定する(ステップS61)。検知部34が遮光状態にあり、ピペットチップAが存在していると判定された場合(ステップS61でYes)、前記チップ搬送部40がピペットチップAを受け取り可能な状態にあるか否かの判定を行う(ステップS62)。図4に示す第1位置P1にホルダ41が待機し、ホルダ41が受け取り可能な状態であれば、チップ搬送部40側からのピペットチップの要求が行われている。この場合に、CPU401aはチップ搬送部40がピペットチップAを受け取り可能な状態にあると判定する(ステップS62でYes)。受け取り可能な状態にある場合、図6のチップ移送機構部25の回転軸25−2を回転させて、待機位置25bに存在していたピペットチップAを落下口25aから落下させ、ホルダ41がこれを受け取る(ステップS63)。
【0071】
ステップS61において、ピペットチップAが存在していないと判定すると(ステップS61でNo)、CPU401aは、検知部33(図6参照)からの検出信号に基づき、ピペットチップAが回転軸25−2とガイド部材25−3との間に存在しているか否かを判定する(ステップS64)。
検知部33が遮光状態にあり、ピペットチップAが存在していると判定された場合(ステップS64でYes)、CPU401aは、回転軸25−2を回転させ、そのピペットチップAを落下口25aへ向かって移送する(ステップS65)。そして、検知部34によってピペットチップAの存在が検知されると(ステップS66でYes)、つまり、待機位置25bまで、ピペットチップAが移送されると、CPU401aは回転軸25−2の回転を停止して移送を停止させる(ステップS67)。そして、ステップS62に処理を移行し、以下、同様の処理を行う。
【0072】
このように、CPU401aは、チップ移送機構部25を制御して、落下口25aの直前位置となる待機位置25bでピペットチップを待機させる。これにより、ホルダ41が第1位置P1に戻ってくると、待機させておいたピペットチップAを落下口25aから落下させ、第1位置P1に存在しているホルダ41に、ピペットチップAを迅速に移送することができる。
【0073】
〔4.2 チップ搬送部40による供給動作〕
次に、チップ搬送部40の動作について説明する。図13は、制御部4aの記憶部401bに記憶されているデータベースDBの説明図であり、CPU401aは、このデータベースDBに記憶された情報に基づいてチップ搬送部40の制御を実行する。
【0074】
図13に示すように、データベースDBには、左端から「ピペットチップの有無フィールド」、「装着フィールド」及び「受取フィールド」が設定されている。「ピペットチップの有無フィールド」には、ホルダ41(図7参照)の左端の第1チップ保持部42−1、中央の第2第1チップ保持部42−2及び右端の第3チップ保持部42−3それぞれにピペットチップAが保持されているか否かを示す保持情報が記憶される。保持情報としては「0」又は「1」が記憶され、「0」はピペットチップAが保持されていないことを示し、「1」はピペットチップAが保持されていることを示す。そして、CPU401aはチップ検知部45の検知結果に基づいて各チップ保持部42におけるピペットチップAの有無を判定し、チップ保持部42におけるピペットチップAの有無の状態が変化する度に、前記保持情報を更新する。
【0075】
データベースDBの「装着フィールド」には、第2位置P2への位置合わせの対象となるチップ保持部の番号が入力される。つまり、「装着フィールド」には、次に分注ノズル5aに装着されるピペットチップを保持しているチップ保持部42の番号が入力される。
「受取フィールド」には、第1位置P1への位置合わせの対象となるチップ保持部の番号が入力される。つまり、「受取フィールド」には、落下口25aから落下されたピペットチップを次に受け取るチップ保持部42の番号が入力される。
【0076】
「装着フィールド」及び「受取フィールド」に関して、初期値は「0」であり、「1」は、ホルダ41(図7参照)の左端の第1チップ保持部42−1が位置合わせの対象となることを意味している。「2」は中央の第2第1チップ保持部42−2が、「3」は右端の第3チップ保持部42−3が、位置合わせの対象となることを意味している。
【0077】
〔4.2.1 初期化時のチップ搬送部40の動作〕
図14は、チップ搬送部40の初期化時の処理の流れを説明するフロー図である。この処理は、検体分析装置1の電源がONされた際に実行されるものである。なお、以下の説明では、電源投入時に全てのチップ保持部42が空いている場合を前提にして説明する。
【0078】
電源がONされると、CPU401aは、ホルダ41を、第1位置P1の原点位置Y0(図7(a)参照)へ一旦移動させ(図14のステップS71)、その後、落下口25aからピペットチップAを受け取り可能となるチップ受け取り位置(第1位置P1)へ移動させる(ステップS72)。このステップS72では、CPU401aは、ホルダ41の各チップ保持部42を、左端の第1チップ保持部42−1、中央の第2チップ保持部42−2及び第3チップ保持部42−3の順で、落下口25aの直下位置であるチップ受け取り位置(第1位置P1)へそれぞれ移動させる。そして、CPU401aは、チップ検知部45の検知結果に基づいて、各チップ保持部が空いているか否かを判定する(ステップS73)。
【0079】
そして、CPU401aは、空いているチップ保持部42があれば、搬送駆動部44によってホルダ41を移動させ、空いているチップ保持部42を、チップ受け取り位置(第1位置P1)へ移動させ(ステップS74)、チップ供給部21によって、空いているチップ保持部42にピペットチップAを供給し(ステップS75)、前記データベースDBの「ピペットチップの有無フィールド」のうち、ピペットチップAが供給されたチップ保持部42の項目に「1」をセットする(ステップS76)。ステップS73〜S76を繰り返すことにより、全てのチップ保持部42がピペットチップAを保持した状態となる。
【0080】
3つのチップ保持部42それぞれにピペットチップAが保持された状態となると(ステップS73でNo)、データベースDBの装着フィールドに「1」をセットし(ステップS77)、データベースDBの受取フィールドに「1」をセットする。以上より、初期化時の処理が終了する。終了した際のデータベースDBは、図13(b)に示す状態となる。
【0081】
〔4.2.2 分析処理時のチップ搬送部40の動作〕
次に、検体分析装置1が通常動作(分析処理)を行っている間のチップ搬送部40の動作について説明する。図15は、通常動作(分析処理)時のチップ搬送部の処理の流れを示すフロー図である。
【0082】
<(1) 図15のフロー(1回目)>
まず、CPU401aは、図13(b)のデータベースDBの「ピペットチップの有無フィールド」において「0」のチップ保持部42が存在するか否かを判定する(図15のステップS81)。前記初期化時の処理により、ステップS81では「No」となり、CPU401aは、第2位置P2へのホルダ41の移動タイミングであるか否かを判定する(ステップS82)。
【0083】
ここで、本実施形態では、上記のとおり、分注ノズル5aが第2位置P2においてピペットチップを1つずつ装着するサイクルタイムT0は一定に設定されている。そこで、この分注ノズル5aによるピペットチップの装着を、一定のサイクルタイムT0で実行させるために、チップ搬送部40では、CPU401aの制御によって、サイクルタイムT0に合わせた所定時間毎に(サイクルタイムT1で)、ホルダ41を第1位置P1から第2位置P2に移動させ、ピペットチップA(ホルダ41)を第2位置P2に待機させる。
ステップS82では、現時点が含まれるサイクルタイムT1の終了時刻よりも所定時間(数秒)前の時刻に達すると、第2位置P2への移動タイミングであると判定される。
【0084】
そして、このステップS82において「Yes」である場合、CPU401aは、検体分注アーム5(分注ノズル5a)へのチップ供給処理を実行する(ステップS83)。
【0085】
図16は、ステップS83におけるチップ供給処理の詳細を示すフロー図である。まず、CPU401aは、データベースDBの「装着フィールド」に設定されているチップ保持部を、分注ノズル5aによる装着位置(第2位置P2)へ移動させる(図16のステップS101)。つまり、現時点のデータベースDBの状態を示す図13(b)によれば、第1チップ保持部42−1が第2位置P2への位置合わせの対象であり、当該第1チップ保持部42−1を第2位置P2へ移動させる。この時のホルダ41と第2位置P2との位置関係を図12(a)に示す。この後、CPU401aは、第1チップ保持部42−1に保持されているピペットチップAが分注ノズル5aに装着されたか否かを判断し(ステップS102)、ピペットチップAが分注ノズル5aに装着されたと判断すると、ステップS103に処理を移行する。なお、分注ノズル5aには、ピペットチップが装着されたことを検知するためのセンサが内蔵されており、CPU401aは、このセンサの検知信号に基づいてピペットチップAが装着されたか否かを判断する。
【0086】
そして、CPU401aは、ピペットチップAが取り出された第1チップ保持部42−1の「ピペットチップの有無フィールド」に「0」をセットし(ステップS103)、ついで、CPU401aは、次の第2チップ保持部42−2を「装着フィールド」にセットする(ステップS104)。なお、ステップS104では、第1チップ保持部42−1→第2チップ保持部42−2→第3チップ保持部42−3→第1チップ保持部42−1の順番で、「装着フィールド」に入力される。これにより、ホルダ41に保持されたピペットチップAが均等な頻度で分注ノズル5aに装着されることになり、特定のピペットチップAが長い時間ホルダ41に残ってしまうことを防ぐことができる。そのため、特定のピペットチップAに埃などが付着し、分析結果に悪影響が生じることを抑制することができる。次に、CPU401aは、ホルダ41を第1位置P1側にある原点位置Y0(図7参照)に戻す(ステップS105)。この処理を終えた段階におけるデータベースDBを図13(c)に示す。CPU401aは図15のステップS83に処理を戻し、ステップS91に移行する。そして、CPU401aは、チップ搬送部40の処理終了の指示がなければ(ステップS91でNo)、ステップS81に処理を戻す。
【0087】
<(2) 図15のフロー(2回目)>
CPU401aは、再度、データベースDBの「ピペットチップの有無フィールド」に「0」のチップ保持部が存在するか否かを判定する(ステップS81)。現時点のデータベースDBは図13(c)に示す状態であるため、ステップS81では「Yes」となり、CPU401aは、チップ移送機構部25における検知部34の検知結果に基づいて、落下口25aの直前位置(待機位置25b)にピペットチップAが存在しているか否かを判定する(ステップS84)。
【0088】
ステップS84において「No」の場合、CPU401aは、第2位置P2へのホルダ41の移動タイミングであるか否かを判定し(ステップS82)、第2位置P2への移動タイミングであれば(ステップS82のYes)、分注ノズルへのチップ供給処理を実行する(ステップS83)。すなわち、第1チップ保持部42−1が空の状態のまま、第2位置P2へホルダ41を移動させる。
【0089】
このように、ピペットチップAを保持していないチップ保持部42(本実施形態では第1チップ保持部42−1)がホルダ41に存在している場合であっても、CPU401aは、分注ノズル5aがピペットチップを1つずつ装着するサイクルタイムT0に合わせた所定時間毎に(前記サイクルタイムT1で)、ホルダ41を第1位置P1から第2位置P2に移動させる。これにより、定期的に分注ノズル5aにピペットチップを装着させることができ、検体の処理能力が低下することを抑制することができる。
【0090】
そして、CPU401aは、図16のステップS101において、現時点のデータベースDB(図13(c))の「装着フィールド」に設定されている第2チップ保持部42−2を第2位置P2へ移動させる。この時のホルダ41と第2位置P2との位置関係を図12(b)に示す。この後、第2チップ保持部42−2に保持されていたピペットチップAが分注ノズル5aに装着され、当該第2チップ保持部42−2も空の状態となる。
【0091】
現時点でのこの図16の処理が行われている間に(ホルダ41が第1位置P1へ戻る前に)、チップ移送機構部25による図11の処理によって、落下口25aの直前位置(待機位置25b)にピペットチップAが待機した状態となる。これにより、ホルダ41が第1位置P1に戻ってくると、チップ移送機構部25により、ホルダ41にピペットチップAを迅速に供給することができる。
【0092】
そして、ステップS101、S102の後、ピペットチップが取り出された第2チップ保持部42−2の「ピペットチップの有無フィールド」に「0」をセットし(ステップS103)、第2チップ保持部42−2の次の順番である第3チップ保持部42−3を「装着フィールド」にセットする(ステップS104)。そして、ホルダ41を原点位置Y0に戻す(ステップS105)。この処理を終えた段階におけるデータベースDBを、図13(d)に示す。そして、CPU401aは、チップ搬送部40の処理終了の指示がなければ(ステップS91でNo)、ステップS81に処理を戻す。
【0093】
<(3) 図15のフロー(3回目)>
CPU401aは、再度、データベースDBの「ピペットチップの有無フィールド」に「0」のチップ保持部が存在するか否かを判定する(ステップS81)。現時点でのデータベースDBは図13(d)に示す状態であるため、ステップS81では「Yes」となり、CPU401aは、落下口25aの直前位置(待機位置25b)にピペットチップAが存在しているか否かを判定する(ステップS84)。
現時点においては、落下口25aの直前位置(待機位置25b)にピペットチップAが待機した状態となっているため、CPU401aはステップS84において「Yes」と判定し、図13(d)のデータベースDBの「受取フィールド」の第1チップ保持部42−1を、落下口25aの直下位置(第1位置P1)へ移動させる(ステップS85)。
【0094】
そして、CPU401aは、チップ検知部45の検知結果に基づいて、「受取フィールド」のチップ保持部42(現時点では第1チップ保持部42−1)にピペットチップAがあるか否かを判定する(ステップS86)。ピペットチップAがないと判定すると(ステップS86でYes)、CPU401aは、チップ移送機構部25に対してピペットチップAの要求を行う(ステップS87)。これにより、落下口25aからピペットチップAが第1位置P1へ落下する。なお、ステップS86において、「受取フィールド」のチップ保持部42(現時点では第1チップ保持部42−1)にピペットチップAがあると判定すると、CPU401aは、第1チップ保持部42−1の「ピペットチップの有無フィールド」に「1」をセットし(ステップS92)、次のチップ保持部である第2チップ保持部42−2を「受取フィールド」にセットする(ステップS93)。
【0095】
ステップS87の後、CPU401aは、チップ検知部45の検知結果に基づいて、第1チップ保持部42−1がピペットチップAを受け取ったか否かを判定し(ステップS88)、受け取ったことを確認すると(ステップS88でYes)、第1チップ保持部42−1の「ピペットチップの有無フィールド」に「1」をセットする(ステップS89)。そして、CPU401aは、「受取フィールド」を、次の順番である第2チップ保持部42−2に更新する(ステップS90)。この処理を終えた段階におけるデータベースDBを、図13(e)に示す。そして、CPU401aは、チップ搬送部40の処理終了の指示がなければ(ステップS91でNo)、ステップS81に処理を戻す。
【0096】
CPU401aは、ステップS91において処理終了の指示があると判定するまで、以上の処理を繰り返し、処理終了の指示があれば(ステップS91でYes)、処理を終了する。なお、第3チップ保持部42−3を第2位置P2に移動させた場合には、ホルダ41と第2位置P2との位置関係は図12(c)のようになる。
【0097】
このような本実施形態に係るピペットチップ供給装置13によれば、ホルダ41に予め複数のピペットチップを保持させておくことができるので、チップ貯留部20に貯留されていたピペットチップAの第1位置P1への供給が、チップ供給部21によって円滑に行われない事態が生じた場合であっても、ピペットチップAがチップ供給部21によって第1位置P1に供給されるのを待つことなく、分注ノズル5aにピペットチップAを供給することができる。例えば、ホルダ41が第1位置P1に存在している間に、予め複数のチップ保持部42にピペットチップAを保持させておくことができるため、後にチップ供給部21によるピペットチップの供給に遅れが生じた場合であっても、ピペットチップAが第1位置P1に供給されるのを待つことなく、分注ノズル5aにピペットチップAを供給することができる。
【0098】
すなわち、仮に、ホルダ41に単一のチップ保持部42しか設けられていない場合、チップ保持部42が空となって第1位置P1に戻ってきても、ピペットチップAの供給が行われるまで待機しなければならず、新たなピペットチップAを補充してからでないと、第2位置P2へと出発できないが、本実施形態に係るピペットチップ供給装置13によれば、予め複数のチップ保持部42にピペットチップAを保持させておくことで、新たなピペットチップAを補充する前であっても、ホルダ41を第2位置P2へと出発させることが可能となる。
このため、分注ノズル5aへのピペットチップAの供給に遅滞が生じることを抑制することができ、分注ノズル5aによる検体の分注を次々に行うことが可能となる。
【0099】
そのため、本実施形態のように、ユーザが複数のピペットチップAをその長手方向を考慮することなく投入するチップ供給装置13を採用し、それに起因して第1位置P1へのピペットチップAの供給が円滑に行われない事態が生じた場合であっても、分注ノズル5aへのピペットチップAの供給に遅滞が生じることを抑制することができる。これにより、ユーザにとって使いやすい装置を実現することができる。
【0100】
本発明のピペットチップ供給装置13及び検体分析装置は、図示する形態に限らず本発明の範囲内において他の形態のものであってもよい。
前記実施形態では、チップ保持部42が3つである場合を説明したが、複数であればよく2つでもよく、4つ以上であってもよい。
また、前記実施形態では、各チップ保持部42に均等な頻度でピペットチップAを供給し、各チップ保持部42を均等な頻度で分注ノズル5aに装着させているが、特定の(例えば第2位置P2側の)チップ保持部42に優先してピペットチップAを供給してもよく、また、特定の(例えば第2位置P2側の)チップ保持部42に保持されたピペットチップAを優先して分注ノズル5aに装着させてもよい。
【0101】
また、チップ検知部45は、チップ受取位置(第1位置P1)に配置されている場合を説明したが、他の位置に配置されてもよい。例えば、チップ受取位置(第1位置P1)とチップ装着位置(第2位置P2)との間に配置されてもよい。
また、ピペットチップAを落下口25aから落下させてチップ保持部42に移送しているが、これ以外であってもよく、図示しないがチャック部材によってピペットチップを把持してチップ保持部に移送してもよい。
【0102】
さらに、チップ移送機構部25では、図6に示すように、螺旋状の溝が形成されている回転軸25−2によってピペットチップAを落下口25aへと移送しているが、これ以外であってもよく、図示しないが2つのベルト部材によってピペットチップを挟みながら移動させることで、ピペットチップを落下口25aに移送してもよい。
また、本実施形態では、ユーザにより投入されたピペットチップAを押し上げ部材26,27の上下動によってチップ移送機構部25まで移送しているが、これ以外であってもよく、図示しないがドラム式のチップ移送装置を利用してもよい。
【0103】
また、本実施形態では、所定時間(サイクルタイムT1)毎にホルダ41を第1位置P1から第2位置P2に移送して、ホルダ41に保持されたピペットチップAを分注ノズル5aに供給しているが、所定時間毎にホルダ41を第2位置P2に移送しなくてもよい。例えば、各検体の測定の所要時間が各検体の測定項目に応じて異なる場合に、CPU401aが各検体の測定が完了したことを検出する毎に、ホルダ41を第1位置P1から第2位置P2に移送してもよい。
【0104】
また、本実施形態では、第1位置P1と第2位置P2とを結ぶ直線上でホルダ41を移動させているが、本発明はこれに限られない。例えば、第1位置P1と第2位置P2とを結ぶ直線から外れた位置に中継地点を設け、この中継地点から第1位置P1と第2位置P2とにホルダ41を移動させてもよい。
【0105】
また、本実施形態では、検体中の抗原や抗体を測定する免疫分析装置のピペットチップ供給装置に本発明を適用した例を示したが、ピペットチップを使用する検体分析装置であればよく、例えば遺伝子増幅検出装置などのピペットチップ供給装置に本発明を適用してもよい。
【符号の説明】
【0106】
1 検体分析装置
4 制御装置
5 検体分注アーム
5a 分注ノズル
13 ピペットチップ供給装置
20 チップ貯留部
21 チップ供給部
24 チップ押し上げ機構部
25 チップ移送機構部
25a 落下口
25b 待機位置
40 チップ搬送部
41 ホルダ
42 チップ保持部
45 チップ検知部
A ピペットチップ
P1 第1位置
P2 第2位置
【特許請求の範囲】
【請求項1】
複数のピペットチップを貯留するチップ貯留部と、
ピペットチップを保持可能なチップ保持部を複数有したホルダを備え、当該ホルダを移動可能なチップ搬送部と、
前記チップ貯留部に貯留されているピペットチップを前記ホルダのチップ保持部に供給するチップ供給部と、を備え、
前記チップ搬送部は、前記チップ供給部により供給されたピペットチップを複数のチップ保持部のそれぞれに保持させ、ピペットチップを保持した複数のチップ保持部のうち何れか1つを、分注ノズルがピペットチップを装着するチップ装着位置に位置づけるように前記ホルダを移動させることにより、前記分注ノズルにピペットチップを供給する、
ピペットチップ供給装置。
【請求項2】
前記チップ供給部は、前記チップ貯留部に貯留されているピペットチップを所定のチップ受取位置に供給し、
前記チップ搬送部は、複数のチップ保持部のそれぞれを前記チップ受取位置に位置づけるように前記ホルダを移動させて、各チップ保持部にピペットチップを保持させる、請求項1に記載のピペットチップ供給装置。
【請求項3】
前記チップ搬送部は、前記分注ノズルへのピペットチップの供給が必要な時まで、ピペットチップを保持していないチップ保持部を前記チップ受取位置へ位置づけるよう前記ホルダを移動させる、請求項2に記載のピペットチップ供給装置。
【請求項4】
前記チップ搬送部は、前記ホルダの複数のチップ保持部のいずれかにピペットチップが保持されている場合に、前記分注ノズルへのピペットチップの供給が必要になると、ピペットチップを保持していないチップ保持部があっても、ピペットチップを保持しているチップ保持部を前記チップ装着位置に位置づけるように前記ホルダを移動させる、請求項3に記載のピペットチップ供給装置。
【請求項5】
前記チップ搬送部は、所定時間毎に、ピペットチップを保持した何れか1つのチップ保持部を前記チップ装着位置に位置づけるように前記ホルダを移動させる、請求項4に記載のピペットチップ供給装置。
【請求項6】
前記チップ搬送部は、前記複数のチップ保持部に所定の順番でピペットチップが保持されるように、前記ホルダを移動させる、請求項2〜5のいずれか1項に記載のピペットチップ供給装置。
【請求項7】
前記チップ搬送部は、前記チップ受取位置と前記チップ装着位置との間で前記ホルダを移動させるよう構成され、
前記複数のチップ保持部は、前記チップ受取位置と前記チップ装着位置との間の前記ホルダの移動方向に並んで前記ホルダに配置されている、請求項2〜6のいずれか1項に記載のピペットチップ供給装置。
【請求項8】
前記チップ供給部は、ピペットチップを1つずつ前記チップ受取位置に供給する第1供給部と、前記チップ貯留部のピペットチップを前記第1供給部へ供給する第2供給部と、を有し、
前記ホルダが前記チップ装着位置に向けて移動を開始してから前記チップ受取位置に戻ってくるまでの間に、前記第1供給部へのピペットチップの供給を完了するように前記第2供給部を制御する制御部を更に備えている、請求項2〜7のいずれか1項に記載のピペットチップ供給装置。
【請求項9】
前記第1供給部には、ピペットチップを落下させることで前記チップ受取位置にピペットチップを供給する落下口と、この落下口の直前位置でピペットチップを保持する待機位置と、が設定され、
前記制御部は、前記ホルダが前記チップ装着位置に向けて移動を開始してから前記チップ受取位置に戻ってくるまでの間に、前記第2供給部から前記第1供給部に供給されたピペットチップを前記待機位置まで移送するよう前記第1供給部を制御する、請求項8に記載のピペットチップ供給装置。
【請求項10】
前記ホルダのチップ保持部にピペットチップが保持されたことを検知するためのチップ検知部を更に備える、請求項1〜9のいずれか1項に記載のピペットチップ供給装置。
【請求項11】
前記チップ搬送部は、前記複数のチップ保持部を均等な頻度で前記チップ装着位置に位置づけて前記分注ノズルにピペットチップを供給する、請求項1〜10のいずれか1項に記載のピペットチップ供給装置。
【請求項12】
前記チップ貯留部は、複数のピペットチップを、ピペットチップの長手方向がばらばらな状態で貯留するように構成されている、請求項1〜11のいずれか一項に記載のピペットチップ供給装置。
【請求項13】
前記複数のチップ保持部それぞれにおけるピペットチップの有無を示す保持情報を記憶する記憶部と、
チップ保持部におけるピペットチップの有無の状態が変化する度に前記保持情報を更新し、更新された保持情報に基づいて、前記チップ供給部及び前記チップ搬送部を制御する制御部と、を更に備えている、請求項1〜12のいずれか1項に記載のピペットチップ供給装置。
【請求項14】
複数のピペットチップを貯留するチップ貯留部と、
ピペットチップを保持可能なチップ保持部を複数有したホルダを備え、当該ホルダを移動可能なチップ搬送部と、
前記チップ貯留部に貯留されているピペットチップを前記ホルダのチップ保持部に供給するチップ供給部と、
検体を分注するための分注ノズルを有し、チップ装着位置に位置するピペットチップを前記分注ノズルに装着して検体の分注を行う検体分注部と、を備え、
前記チップ搬送部は、前記チップ供給部により供給されたピペットチップを複数のチップ保持部のそれぞれに保持させ、ピペットチップを保持した複数のチップ保持部のうち何れか1つを前記チップ装着位置に位置づけるように前記ホルダを移動させる、
検体分析装置。
【請求項15】
ピペットチップを保持可能なチップ保持部を複数有したホルダを用いて、ピペットチップを分注ノズルへ供給するピペットチップ供給方法であって、
複数のピペットチップが貯留されているチップ貯留部内のピペットチップを前記ホルダの複数のチップ保持部のそれぞれに保持させる工程と、
前記分注ノズルがピペットチップを装着するチップ装着位置に、ピペットチップを保持している複数のチップ保持部のうち何れか1つを位置づけるよう前記ホルダを移動させることにより、前記分注ノズルにピペットチップを供給する工程と、
を含むピペットチップ供給方法。
【請求項1】
複数のピペットチップを貯留するチップ貯留部と、
ピペットチップを保持可能なチップ保持部を複数有したホルダを備え、当該ホルダを移動可能なチップ搬送部と、
前記チップ貯留部に貯留されているピペットチップを前記ホルダのチップ保持部に供給するチップ供給部と、を備え、
前記チップ搬送部は、前記チップ供給部により供給されたピペットチップを複数のチップ保持部のそれぞれに保持させ、ピペットチップを保持した複数のチップ保持部のうち何れか1つを、分注ノズルがピペットチップを装着するチップ装着位置に位置づけるように前記ホルダを移動させることにより、前記分注ノズルにピペットチップを供給する、
ピペットチップ供給装置。
【請求項2】
前記チップ供給部は、前記チップ貯留部に貯留されているピペットチップを所定のチップ受取位置に供給し、
前記チップ搬送部は、複数のチップ保持部のそれぞれを前記チップ受取位置に位置づけるように前記ホルダを移動させて、各チップ保持部にピペットチップを保持させる、請求項1に記載のピペットチップ供給装置。
【請求項3】
前記チップ搬送部は、前記分注ノズルへのピペットチップの供給が必要な時まで、ピペットチップを保持していないチップ保持部を前記チップ受取位置へ位置づけるよう前記ホルダを移動させる、請求項2に記載のピペットチップ供給装置。
【請求項4】
前記チップ搬送部は、前記ホルダの複数のチップ保持部のいずれかにピペットチップが保持されている場合に、前記分注ノズルへのピペットチップの供給が必要になると、ピペットチップを保持していないチップ保持部があっても、ピペットチップを保持しているチップ保持部を前記チップ装着位置に位置づけるように前記ホルダを移動させる、請求項3に記載のピペットチップ供給装置。
【請求項5】
前記チップ搬送部は、所定時間毎に、ピペットチップを保持した何れか1つのチップ保持部を前記チップ装着位置に位置づけるように前記ホルダを移動させる、請求項4に記載のピペットチップ供給装置。
【請求項6】
前記チップ搬送部は、前記複数のチップ保持部に所定の順番でピペットチップが保持されるように、前記ホルダを移動させる、請求項2〜5のいずれか1項に記載のピペットチップ供給装置。
【請求項7】
前記チップ搬送部は、前記チップ受取位置と前記チップ装着位置との間で前記ホルダを移動させるよう構成され、
前記複数のチップ保持部は、前記チップ受取位置と前記チップ装着位置との間の前記ホルダの移動方向に並んで前記ホルダに配置されている、請求項2〜6のいずれか1項に記載のピペットチップ供給装置。
【請求項8】
前記チップ供給部は、ピペットチップを1つずつ前記チップ受取位置に供給する第1供給部と、前記チップ貯留部のピペットチップを前記第1供給部へ供給する第2供給部と、を有し、
前記ホルダが前記チップ装着位置に向けて移動を開始してから前記チップ受取位置に戻ってくるまでの間に、前記第1供給部へのピペットチップの供給を完了するように前記第2供給部を制御する制御部を更に備えている、請求項2〜7のいずれか1項に記載のピペットチップ供給装置。
【請求項9】
前記第1供給部には、ピペットチップを落下させることで前記チップ受取位置にピペットチップを供給する落下口と、この落下口の直前位置でピペットチップを保持する待機位置と、が設定され、
前記制御部は、前記ホルダが前記チップ装着位置に向けて移動を開始してから前記チップ受取位置に戻ってくるまでの間に、前記第2供給部から前記第1供給部に供給されたピペットチップを前記待機位置まで移送するよう前記第1供給部を制御する、請求項8に記載のピペットチップ供給装置。
【請求項10】
前記ホルダのチップ保持部にピペットチップが保持されたことを検知するためのチップ検知部を更に備える、請求項1〜9のいずれか1項に記載のピペットチップ供給装置。
【請求項11】
前記チップ搬送部は、前記複数のチップ保持部を均等な頻度で前記チップ装着位置に位置づけて前記分注ノズルにピペットチップを供給する、請求項1〜10のいずれか1項に記載のピペットチップ供給装置。
【請求項12】
前記チップ貯留部は、複数のピペットチップを、ピペットチップの長手方向がばらばらな状態で貯留するように構成されている、請求項1〜11のいずれか一項に記載のピペットチップ供給装置。
【請求項13】
前記複数のチップ保持部それぞれにおけるピペットチップの有無を示す保持情報を記憶する記憶部と、
チップ保持部におけるピペットチップの有無の状態が変化する度に前記保持情報を更新し、更新された保持情報に基づいて、前記チップ供給部及び前記チップ搬送部を制御する制御部と、を更に備えている、請求項1〜12のいずれか1項に記載のピペットチップ供給装置。
【請求項14】
複数のピペットチップを貯留するチップ貯留部と、
ピペットチップを保持可能なチップ保持部を複数有したホルダを備え、当該ホルダを移動可能なチップ搬送部と、
前記チップ貯留部に貯留されているピペットチップを前記ホルダのチップ保持部に供給するチップ供給部と、
検体を分注するための分注ノズルを有し、チップ装着位置に位置するピペットチップを前記分注ノズルに装着して検体の分注を行う検体分注部と、を備え、
前記チップ搬送部は、前記チップ供給部により供給されたピペットチップを複数のチップ保持部のそれぞれに保持させ、ピペットチップを保持した複数のチップ保持部のうち何れか1つを前記チップ装着位置に位置づけるように前記ホルダを移動させる、
検体分析装置。
【請求項15】
ピペットチップを保持可能なチップ保持部を複数有したホルダを用いて、ピペットチップを分注ノズルへ供給するピペットチップ供給方法であって、
複数のピペットチップが貯留されているチップ貯留部内のピペットチップを前記ホルダの複数のチップ保持部のそれぞれに保持させる工程と、
前記分注ノズルがピペットチップを装着するチップ装着位置に、ピペットチップを保持している複数のチップ保持部のうち何れか1つを位置づけるよう前記ホルダを移動させることにより、前記分注ノズルにピペットチップを供給する工程と、
を含むピペットチップ供給方法。
【図3】


【図4】
【図5】
【図6】
【図7】
【図8】
【図9】
【図10】
【図11】
【図12】
【図13】
【図14】
【図15】
【図16】
【図17】
【図1】
【図2】
【図4】
【図5】
【図6】
【図7】
【図8】
【図9】
【図10】
【図11】
【図12】
【図13】
【図14】
【図15】
【図16】
【図17】
【図1】
【図2】
【公開番号】特開2012−159423(P2012−159423A)
【公開日】平成24年8月23日(2012.8.23)
【国際特許分類】
【出願番号】特願2011−19938(P2011−19938)
【出願日】平成23年2月1日(2011.2.1)
【出願人】(390014960)シスメックス株式会社 (810)
【Fターム(参考)】
【公開日】平成24年8月23日(2012.8.23)
【国際特許分類】
【出願日】平成23年2月1日(2011.2.1)
【出願人】(390014960)シスメックス株式会社 (810)
【Fターム(参考)】
[ Back to top ]