
ピペット装置
【課題】揮発性の高い液体を吸引しても、液漏れしないピペット装置を提供する。
【解決手段】吸引した液体を保持する液体保持部と、前記液体を吸引、保持、又は排出するための気体を保持する気体保持部と、前記気体の圧力を検出する圧力センサーと、前記気体の圧力を調整する調整器と、を含み、前記調整器は、前記圧力センサーにより検出された前記気体の圧力に基づいて前記液体保持部から前記液体が漏れないように前記気体の圧力を調整する。
【解決手段】吸引した液体を保持する液体保持部と、前記液体を吸引、保持、又は排出するための気体を保持する気体保持部と、前記気体の圧力を検出する圧力センサーと、前記気体の圧力を調整する調整器と、を含み、前記調整器は、前記圧力センサーにより検出された前記気体の圧力に基づいて前記液体保持部から前記液体が漏れないように前記気体の圧力を調整する。
【発明の詳細な説明】
【技術分野】
【0001】
本発明は、液体を吸引、保持または排出する機構を備えたピペット装置に関する。
【背景技術】
【0002】
従来から、生物学、医学、化学分野等において液体を正確に採取、除去または分取する作業においてピペットが幅広く利用されており、ピペット内部の圧力変化を利用して液体を吸ったり、排出したりするものが一般に広く利用されている。具体的なピペット操作としては、ピペット内部の圧力を減圧することで液体を吸引し、圧力一定に保つことで吸引した液体を装置内に保持し、加圧により液体を排出する一連の動作を伴う。この圧力変化は手動で行なうもの、あるいは電動で変化可能なものが公知である。例えば、手動で圧力を変化させるものとしては、例えば特許文献1に開示されており、電動ピペットとしては、例えば特許文献2に開示されている。
【先行技術文献】
【特許文献】
【0003】
【特許文献1】米国特許第3827305号明細書
【特許文献2】米国特許第5214968号明細書
【発明の概要】
【発明が解決しようとする課題】
【0004】
前述の通り、吸引した液体を保持するにはピペット装置内の圧力を一定に保つ必要がある。したがって、公知のピペット装置内部は気密性の高い構造が用いられている。しかしながら、メタノールやクロロホルムなど有機溶媒に代表される揮発性の高い液体を吸引後保持した場合、しばしば液体の揮発に起因するピペット内部の圧力上昇により、液体が排出されるという課題があった。このような液体の漏れは、ピペット装置の正確な分取を妨げ、操作結果に重大な悪影響を及ぼす。このような揮発性の高い液体を扱う場合、一般に、一度揮発性の高い液体を吸い込む予備吸引を行なっておき、あらかじめピペット装置内部に揮発した気体を充満させておき、次の吸引後の液体保持時に揮発を抑制することで対処していた。しかし、このような操作は、ピペット装置の操作を煩雑にし、また、揮発性の液体を扱うたびにこのような煩雑な操作を実施しなければならず、使用者の操作性を損ね、長時間、かつ頻繁に繰り返し操作を行う場合には作業効率を低下させ、疲労を増大させるという課題があった。
【課題を解決するための手段】
【0005】
本発明の一態様は、揮発性の高い液体を扱う場合においても、使用者の意図しない液漏れを、通常のピペット操作を行っても防止できるピペット装置を提供するものであり、以下の形態または適用例として実現することが可能である。
【0006】
[適用例1]本適用例に係るピペット装置は、液体を吸引、保持、又は排出するピペット装置であって、吸引した液体を保持する液体保持部と、前記液体を吸引、保持、又は排出するための気体を保持する気体保持部と、前記気体の圧力を検出する圧力センサーと、前記気体の圧力を調整する調整器と、を含み、前記調整器は、前記圧力センサーにより検出された前記気体の圧力に基づいて前記液体保持部から前記液体が漏れないように前記気体の圧力を調整することを特徴とする。
【0007】
[適用例2]上記適用例に記載のピペット装置において、前記圧力センサーは前記気体保持部の内部に配置されることを特徴とする。
【0008】
[適用例3]上記適用例に記載のピペット装置において、前記調整器は電動モーターであることを特徴とする請求項1又は2に記載のピペット装置。
【0009】
[適用例4]上記適用例に記載のピペット装置において、前記圧力センサー及び前記調整器を制御する制御回路を更に含むことを特徴とする。
【0010】
[適用例5]上記適用例に記載のピペット装置において、スライドさせることにより前記気体保持部の容積を変化させる第1の部材と、前記第1の部材をスライドさせるために指で操作するための第2の部材と、を更に含むことを特徴とする。
【0011】
[適用例6]上記適用例4に記載のピペット装置において、前記第2の部材の上に配置されるスイッチを更に含み、前記スイッチが押されている状態で前記制御回路が動作することを特徴とする。
【0012】
上記適用例によれば、揮発性の高い液体を手動式ピペットで吸引し、チップ内に保持する場合であっても、チップホルダー内の圧力は、圧力センサーにて検出され、その検出結果に基づいて電動モーターを動作させることによって一定に維持されるため、使用者の意図しない液漏れが生じることはないピペット装置が実現される。
【図面の簡単な説明】
【0013】
【図1】実施例の手動式ピペットを説明するための図。
【図2】実施例の手動式ピペットが備えるプロセッサーの動作を示すフローチャート。
【図3】実施例の手動式ピペットの動作を示し、(a)は使用していない状態を示す図、(b)は液体を吸引する前段階を示す図。
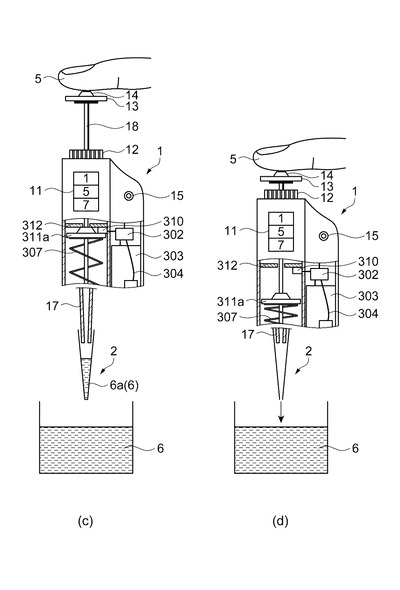
【図4】実施例の手動式ピペットの動作を示し、(c)は液体を吸引し引き上げた状態を示す図、(d)は保持されていた液体を排出した状態を示す図。
【発明を実施するための形態】
【0014】
以下実施例により本発明をさらに具体的に説明する。但し本発明はこの実施例に限定されるものではない。
【実施例】
【0015】
以下、本発明の一実施例としての手動式ピペット装置について図面を参照しながら説明する。
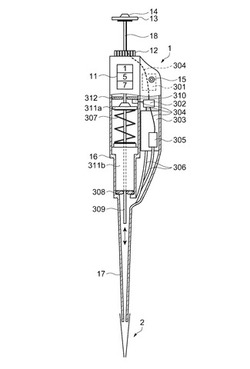
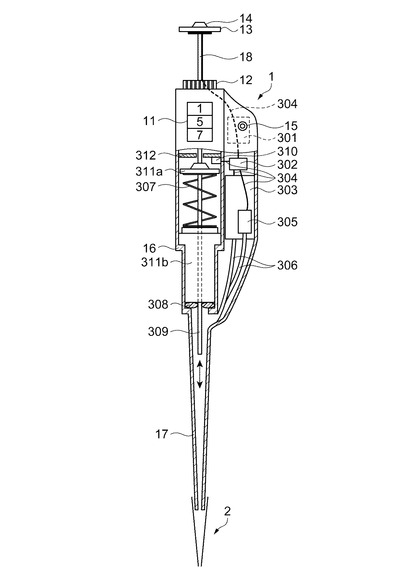
まず、図1を用いて手動式ピペットの構成を説明する。手動式ピペット1は、ボディーケース16と、気体保持部としてのチップホルダー17と、第2の部材としてのノブ13とを備えている。ボディーケース16は、中空の構造であり、使用者が直接触れる部位であるため、耐食性に優れた公知材料、例えばプラスチック等にて成形されることが好ましい。
なお、以下の説明における上方とは、図1に示す手動式ピペット1のノブ13が設けられている方向を示し、下方とは、前述の上方とは逆方向、すなわち手動式ピペット1のチップホルダー17が設けられている方向を示している。
【0016】
ボディーケース16の下方に連結されたチップホルダー17は、中空の構造を有し、端部に液体保持部としてのチップ2が脱着可能な構造で備えられており、吸引した液体を保持することができる。第1の部材としてのスライドシャフト18は、上端がノブ13と接続しており、下端はボディーケース16の内部に挿入され、上方バネ支持部311aに接触している。また、上方バネ支持部311aは、ピストンロッド309と接続している。よって、ノブ13を、後述する使用者の指5(図3参照)で下方に押し込むことにより、スライドシャフト18や上方バネ支持部311aを介してピストンロッド309が下方に移動する。
【0017】
この時、上方バネ支持部311aと、上方バネ支持部311aの下方に位置する下方バネ支持部311bと、の間に接続されたバネ307が収縮するので、ノブ13を押していた指5を離すと、バネ307によって生じる反発力によりピストンロッド309は上方へ移動する。バネ307が延びきる前に、上方バネ支持部311aが、上方バネ支持部311aの上方に備えられた支持部312に接触し保持されるので、ノブ13を押し込まない場合、上方バネ支持部311aは支持部312に接触した位置に保定される。
【0018】
このような指5を使ったノブ13の押し離し操作により、気体が入っているチップホルダー17内の容積に変化が生じ、チップ2の先端から液体を吸引、排出することができる。
なお、正確な液量の吸引にはチップホルダー17内の気密性の確保が重要であるため、Oリング308を下方バネ支持部311bの下端に備えており、ピストンロッド309の上下運動によっても下方バネ支持部311bの下端付近からの気体の流出入を防いでいる。
【0019】
容量設定部12は、回転式の構造でボディーケース16の上端に備えられており、スライドシャフト18の可動範囲を設定することができる。設定した液体吸引量は、容量設定部12の下方で、尚且つボディーケース16の上部である目盛り表示部11に表示される。この目盛り表示部11に連動した容量設定部12の機能は当業者の間では公知であるため詳細な説明は割愛する。
【0020】
調整器としての電動モーター303および圧力センサー305は、それぞれに接続されたチューブ306を介してチップホルダー17の中空構造内(チップホルダー17内)に通じている。
電動モーター303は、ポンプ機能を有する構造であり、チップ2内の液体を吸引、保持、又は排出するために、チップホルダー17内の気体の圧力を調整し、加圧、減圧、維持することができる。ポンプ機能としては公知の技術である、例えばステッピングモーター、DCモーター、ボイスコイルモーター、ピエゾモーターなどを利用することができる。
圧力センサー305は、チップホルダー17内の圧力変化を検出するセンサーであり、公知の技術を用いたセンサーを用いることができる。
【0021】
制御回路としてのプロセッサー302は、電動モーター303と、圧力センサー305と、スイッチ14と、ノブ位置検出部310とに、それぞれ配線304を介して接続されており、動作制御ならびに信号検出を行なう。ノブ位置検出部310は公知の接触センサー、タッチセンサーを利用することができる。また、ノブ位置検出部310と上方バネ支持部311aの接触部分に電極を配置させ、接触による通電をプロセッサー302が検出できるような機構とすることもできる。
【0022】
いずれにしても、ノブ位置検出部310はノブ13が指5によって押されているか否かを検出できる構造が好ましい。
吸引によりチップ2に揮発性の高い液体を保持した状態において、揮発性の高い液体の揮発によって、チップホルダー17内が加圧されても、圧力センサー305が微小な圧力変化を検出し、プロセッサー302の制御のもと、電動モーター303を駆動させ、チップホルダー17内の加圧状態を解消するための減圧動作を行うので、結果的にチップホルダー17内の圧力変化が生じない。この結果、使用者の意図に反する吐出(液漏れ)が生じない。
【0023】
バッテリー301は、プロセッサー302と、電動モーター303とに電力を供給する。バッテリー301は、充電接続部15から外部電源(図示しない)と接続でき、充電が可能である。
【0024】
なお、前述の実施例の構成では、電動モーター303および圧力センサー305が、ボディーケース16内に設けられた構成で説明したが、これに限らない。電動モーター303および圧力センサー305の少なくとも一方が、チップホルダー17の中空構造内に設けられている構成でもよい。
【0025】
以下、図2、図3および図4を参照して、手動式ピペットの使用例を示し、動作について具体的に説明する。図2はプロセッサー302の動作を示すフローチャートである。図3、および図4は使用者が液体6の吸引、保持および排出する一連の操作と関係させて手動式ピペット1の動作を示した概略図である。
【0026】
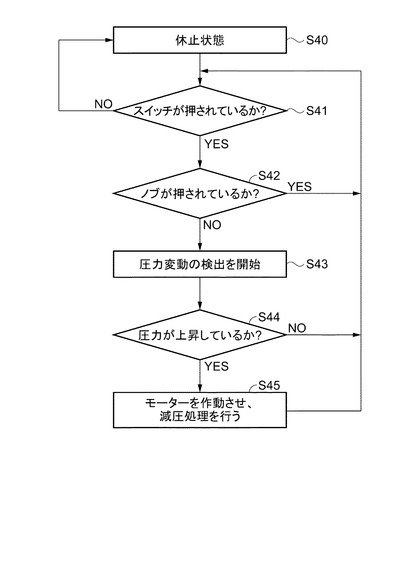
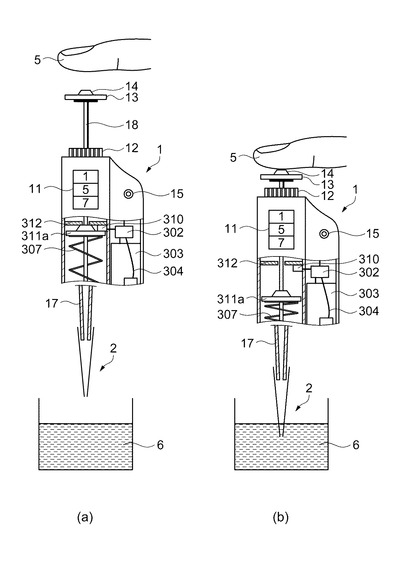
図3(a)は使用者が手動式ピペット1を使用していない状態を示す(ステップS40)。
この時、プロセッサー302はスイッチ14が押されているか判定する(ステップS41)。図3(a)に示す状態ではスイッチ14が押されていないので、手動式ピペット1は使用されていない休止状態となる(ステップS40)。
【0027】
図3(b)は、液体を吸引する前段階として、指5によりノブ13及びスイッチ14を押し込み、容器内の液体6にチップ2を浸した状態を示す。
この時、スイッチ14は押されている(ステップS41;YES)ので、プロセッサー302はノブ13が押されているかを判定する(ステップS42)。ノブ13が押されているか否かは、ノブ位置検出部310と上方バネ支持部311aの接触により判定される。図3(b)の状態では、ノブ位置検出部310と上方バネ支持部311aの非接触によりノブ13が押されている(ステップS42;YES)と判定されステップS41に戻り、プロセッサー302は判定を繰り返し何の動作も示さない。
【0028】
続いて、図4(c)は、ノブ13を元の位置まで戻したことで、液体6a(6)を吸引し、チップ2を容器内の液体6から引き上げた状態を示す。なお、図4(c)では、吸引された液体6には、符号6aを付し区分している。この時、スイッチ14は押されている(ステップS41;YES)が、ノブ13は押されていない(ステップS42;NO)と判定されるため、圧力センサー305によるチップホルダー17内の圧力変動の検出が開始される(ステップS43)。
【0029】
次に、圧力が増加しているかをプロセッサー302が判定し(ステップS44)、揮発性の高い液体を吸引した場合などにおいて、圧力の上昇が検出されれば(ステップS44;YES)、電動モーター303を作動させ、チップホルダー17内の加圧分だけ減圧処理を行う(ステップS45)。
また、圧力の上昇が検出されなければ(ステップS44;NO)ステップS41に戻る。
【0030】
この動作は中空構造内に圧力の変動が生じた際には逐一行なわれるので、結果的にチップホルダー17内の圧力変化は実質ゼロとなり、チップ2に吸引して保持されている液体6aの液漏れを防止することが出来る。一方、揮発性が高くない液体、例えば純水を扱った場合、圧力センサー305に圧力変動は検出されないので、電動モーター303が動作することはない。
【0031】
図4(d)は、指5によりノブ13及びスイッチ14を押し込み、チップ2に保持していた液体6aを排出した状態を示す。この排出過程では、ノブ13は押されていると判定される(ステップS42;YES)ため、圧力の検出は行なわれず、電動モーター303は作動しない。
【0032】
以上に示す構成によれば、液体6をチップ2に保持したい場合にのみ、チップホルダー17内の圧力変化を圧力センサー305が検出し、揮発性の高い液体の保持時における圧力上昇を電動モーター303の動作により対処できるため、揮発性の高い液体がチップ2の先端より漏れ出すことはない。
【0033】
また、手動式ピペット1の未使用時、液体吸引時および排出時には圧力センサー305および電動モーター303は動作しないので、使用者の操作に支障をきたすことはない。
なお、本発明の構成は、前述の実施例にのみ限定されるものではなく、本発明の要旨を逸脱しない範囲内において種々変更を加えてもよい。
【0034】
以上説明したように、本実施例によれば、揮発性の高い液体を手動式ピペット1で吸引し、チップ2内に保持する場合であっても、チップホルダー17内の圧力は、圧力センサー305および電動モーター303の動作によって一定に維持されるため、使用者の意図しない吐出が生じることはない。
【0035】
また、スイッチ14、ノブ位置検出部310およびプロセッサー302によって、未使用時、液体吸引時および液体吐出時には前記圧力維持効果は生じないので、余分な電力を消費することはなく、さらに、操作時の支障になることもない。以上の作用により、手動式ピペット1の使用者は揮発性の高い液体を扱う場合においても、操作性および正確性を損ねることなくピペット装置を使用することが可能となる。
【符号の説明】
【0036】
1…手動式ピペット、2…チップ、5…指、6…液体、11…目盛り表示部、12…容量設定部、13…ノブ、14…スイッチ、15…充電接続部、16…ボディーケース、17…チップホルダー、18…スライドシャフト、301…バッテリー、302…プロセッサー、303…電動モーター、304…配線、305…圧力センサー、306…チューブ、307…バネ、308…Oリング、309…ピストンロッド、310…ノブ位置検出部、311a…上方バネ支持部、311b…下方バネ支持部、312…支持部。
【技術分野】
【0001】
本発明は、液体を吸引、保持または排出する機構を備えたピペット装置に関する。
【背景技術】
【0002】
従来から、生物学、医学、化学分野等において液体を正確に採取、除去または分取する作業においてピペットが幅広く利用されており、ピペット内部の圧力変化を利用して液体を吸ったり、排出したりするものが一般に広く利用されている。具体的なピペット操作としては、ピペット内部の圧力を減圧することで液体を吸引し、圧力一定に保つことで吸引した液体を装置内に保持し、加圧により液体を排出する一連の動作を伴う。この圧力変化は手動で行なうもの、あるいは電動で変化可能なものが公知である。例えば、手動で圧力を変化させるものとしては、例えば特許文献1に開示されており、電動ピペットとしては、例えば特許文献2に開示されている。
【先行技術文献】
【特許文献】
【0003】
【特許文献1】米国特許第3827305号明細書
【特許文献2】米国特許第5214968号明細書
【発明の概要】
【発明が解決しようとする課題】
【0004】
前述の通り、吸引した液体を保持するにはピペット装置内の圧力を一定に保つ必要がある。したがって、公知のピペット装置内部は気密性の高い構造が用いられている。しかしながら、メタノールやクロロホルムなど有機溶媒に代表される揮発性の高い液体を吸引後保持した場合、しばしば液体の揮発に起因するピペット内部の圧力上昇により、液体が排出されるという課題があった。このような液体の漏れは、ピペット装置の正確な分取を妨げ、操作結果に重大な悪影響を及ぼす。このような揮発性の高い液体を扱う場合、一般に、一度揮発性の高い液体を吸い込む予備吸引を行なっておき、あらかじめピペット装置内部に揮発した気体を充満させておき、次の吸引後の液体保持時に揮発を抑制することで対処していた。しかし、このような操作は、ピペット装置の操作を煩雑にし、また、揮発性の液体を扱うたびにこのような煩雑な操作を実施しなければならず、使用者の操作性を損ね、長時間、かつ頻繁に繰り返し操作を行う場合には作業効率を低下させ、疲労を増大させるという課題があった。
【課題を解決するための手段】
【0005】
本発明の一態様は、揮発性の高い液体を扱う場合においても、使用者の意図しない液漏れを、通常のピペット操作を行っても防止できるピペット装置を提供するものであり、以下の形態または適用例として実現することが可能である。
【0006】
[適用例1]本適用例に係るピペット装置は、液体を吸引、保持、又は排出するピペット装置であって、吸引した液体を保持する液体保持部と、前記液体を吸引、保持、又は排出するための気体を保持する気体保持部と、前記気体の圧力を検出する圧力センサーと、前記気体の圧力を調整する調整器と、を含み、前記調整器は、前記圧力センサーにより検出された前記気体の圧力に基づいて前記液体保持部から前記液体が漏れないように前記気体の圧力を調整することを特徴とする。
【0007】
[適用例2]上記適用例に記載のピペット装置において、前記圧力センサーは前記気体保持部の内部に配置されることを特徴とする。
【0008】
[適用例3]上記適用例に記載のピペット装置において、前記調整器は電動モーターであることを特徴とする請求項1又は2に記載のピペット装置。
【0009】
[適用例4]上記適用例に記載のピペット装置において、前記圧力センサー及び前記調整器を制御する制御回路を更に含むことを特徴とする。
【0010】
[適用例5]上記適用例に記載のピペット装置において、スライドさせることにより前記気体保持部の容積を変化させる第1の部材と、前記第1の部材をスライドさせるために指で操作するための第2の部材と、を更に含むことを特徴とする。
【0011】
[適用例6]上記適用例4に記載のピペット装置において、前記第2の部材の上に配置されるスイッチを更に含み、前記スイッチが押されている状態で前記制御回路が動作することを特徴とする。
【0012】
上記適用例によれば、揮発性の高い液体を手動式ピペットで吸引し、チップ内に保持する場合であっても、チップホルダー内の圧力は、圧力センサーにて検出され、その検出結果に基づいて電動モーターを動作させることによって一定に維持されるため、使用者の意図しない液漏れが生じることはないピペット装置が実現される。
【図面の簡単な説明】
【0013】
【図1】実施例の手動式ピペットを説明するための図。
【図2】実施例の手動式ピペットが備えるプロセッサーの動作を示すフローチャート。
【図3】実施例の手動式ピペットの動作を示し、(a)は使用していない状態を示す図、(b)は液体を吸引する前段階を示す図。
【図4】実施例の手動式ピペットの動作を示し、(c)は液体を吸引し引き上げた状態を示す図、(d)は保持されていた液体を排出した状態を示す図。
【発明を実施するための形態】
【0014】
以下実施例により本発明をさらに具体的に説明する。但し本発明はこの実施例に限定されるものではない。
【実施例】
【0015】
以下、本発明の一実施例としての手動式ピペット装置について図面を参照しながら説明する。
まず、図1を用いて手動式ピペットの構成を説明する。手動式ピペット1は、ボディーケース16と、気体保持部としてのチップホルダー17と、第2の部材としてのノブ13とを備えている。ボディーケース16は、中空の構造であり、使用者が直接触れる部位であるため、耐食性に優れた公知材料、例えばプラスチック等にて成形されることが好ましい。
なお、以下の説明における上方とは、図1に示す手動式ピペット1のノブ13が設けられている方向を示し、下方とは、前述の上方とは逆方向、すなわち手動式ピペット1のチップホルダー17が設けられている方向を示している。
【0016】
ボディーケース16の下方に連結されたチップホルダー17は、中空の構造を有し、端部に液体保持部としてのチップ2が脱着可能な構造で備えられており、吸引した液体を保持することができる。第1の部材としてのスライドシャフト18は、上端がノブ13と接続しており、下端はボディーケース16の内部に挿入され、上方バネ支持部311aに接触している。また、上方バネ支持部311aは、ピストンロッド309と接続している。よって、ノブ13を、後述する使用者の指5(図3参照)で下方に押し込むことにより、スライドシャフト18や上方バネ支持部311aを介してピストンロッド309が下方に移動する。
【0017】
この時、上方バネ支持部311aと、上方バネ支持部311aの下方に位置する下方バネ支持部311bと、の間に接続されたバネ307が収縮するので、ノブ13を押していた指5を離すと、バネ307によって生じる反発力によりピストンロッド309は上方へ移動する。バネ307が延びきる前に、上方バネ支持部311aが、上方バネ支持部311aの上方に備えられた支持部312に接触し保持されるので、ノブ13を押し込まない場合、上方バネ支持部311aは支持部312に接触した位置に保定される。
【0018】
このような指5を使ったノブ13の押し離し操作により、気体が入っているチップホルダー17内の容積に変化が生じ、チップ2の先端から液体を吸引、排出することができる。
なお、正確な液量の吸引にはチップホルダー17内の気密性の確保が重要であるため、Oリング308を下方バネ支持部311bの下端に備えており、ピストンロッド309の上下運動によっても下方バネ支持部311bの下端付近からの気体の流出入を防いでいる。
【0019】
容量設定部12は、回転式の構造でボディーケース16の上端に備えられており、スライドシャフト18の可動範囲を設定することができる。設定した液体吸引量は、容量設定部12の下方で、尚且つボディーケース16の上部である目盛り表示部11に表示される。この目盛り表示部11に連動した容量設定部12の機能は当業者の間では公知であるため詳細な説明は割愛する。
【0020】
調整器としての電動モーター303および圧力センサー305は、それぞれに接続されたチューブ306を介してチップホルダー17の中空構造内(チップホルダー17内)に通じている。
電動モーター303は、ポンプ機能を有する構造であり、チップ2内の液体を吸引、保持、又は排出するために、チップホルダー17内の気体の圧力を調整し、加圧、減圧、維持することができる。ポンプ機能としては公知の技術である、例えばステッピングモーター、DCモーター、ボイスコイルモーター、ピエゾモーターなどを利用することができる。
圧力センサー305は、チップホルダー17内の圧力変化を検出するセンサーであり、公知の技術を用いたセンサーを用いることができる。
【0021】
制御回路としてのプロセッサー302は、電動モーター303と、圧力センサー305と、スイッチ14と、ノブ位置検出部310とに、それぞれ配線304を介して接続されており、動作制御ならびに信号検出を行なう。ノブ位置検出部310は公知の接触センサー、タッチセンサーを利用することができる。また、ノブ位置検出部310と上方バネ支持部311aの接触部分に電極を配置させ、接触による通電をプロセッサー302が検出できるような機構とすることもできる。
【0022】
いずれにしても、ノブ位置検出部310はノブ13が指5によって押されているか否かを検出できる構造が好ましい。
吸引によりチップ2に揮発性の高い液体を保持した状態において、揮発性の高い液体の揮発によって、チップホルダー17内が加圧されても、圧力センサー305が微小な圧力変化を検出し、プロセッサー302の制御のもと、電動モーター303を駆動させ、チップホルダー17内の加圧状態を解消するための減圧動作を行うので、結果的にチップホルダー17内の圧力変化が生じない。この結果、使用者の意図に反する吐出(液漏れ)が生じない。
【0023】
バッテリー301は、プロセッサー302と、電動モーター303とに電力を供給する。バッテリー301は、充電接続部15から外部電源(図示しない)と接続でき、充電が可能である。
【0024】
なお、前述の実施例の構成では、電動モーター303および圧力センサー305が、ボディーケース16内に設けられた構成で説明したが、これに限らない。電動モーター303および圧力センサー305の少なくとも一方が、チップホルダー17の中空構造内に設けられている構成でもよい。
【0025】
以下、図2、図3および図4を参照して、手動式ピペットの使用例を示し、動作について具体的に説明する。図2はプロセッサー302の動作を示すフローチャートである。図3、および図4は使用者が液体6の吸引、保持および排出する一連の操作と関係させて手動式ピペット1の動作を示した概略図である。
【0026】
図3(a)は使用者が手動式ピペット1を使用していない状態を示す(ステップS40)。
この時、プロセッサー302はスイッチ14が押されているか判定する(ステップS41)。図3(a)に示す状態ではスイッチ14が押されていないので、手動式ピペット1は使用されていない休止状態となる(ステップS40)。
【0027】
図3(b)は、液体を吸引する前段階として、指5によりノブ13及びスイッチ14を押し込み、容器内の液体6にチップ2を浸した状態を示す。
この時、スイッチ14は押されている(ステップS41;YES)ので、プロセッサー302はノブ13が押されているかを判定する(ステップS42)。ノブ13が押されているか否かは、ノブ位置検出部310と上方バネ支持部311aの接触により判定される。図3(b)の状態では、ノブ位置検出部310と上方バネ支持部311aの非接触によりノブ13が押されている(ステップS42;YES)と判定されステップS41に戻り、プロセッサー302は判定を繰り返し何の動作も示さない。
【0028】
続いて、図4(c)は、ノブ13を元の位置まで戻したことで、液体6a(6)を吸引し、チップ2を容器内の液体6から引き上げた状態を示す。なお、図4(c)では、吸引された液体6には、符号6aを付し区分している。この時、スイッチ14は押されている(ステップS41;YES)が、ノブ13は押されていない(ステップS42;NO)と判定されるため、圧力センサー305によるチップホルダー17内の圧力変動の検出が開始される(ステップS43)。
【0029】
次に、圧力が増加しているかをプロセッサー302が判定し(ステップS44)、揮発性の高い液体を吸引した場合などにおいて、圧力の上昇が検出されれば(ステップS44;YES)、電動モーター303を作動させ、チップホルダー17内の加圧分だけ減圧処理を行う(ステップS45)。
また、圧力の上昇が検出されなければ(ステップS44;NO)ステップS41に戻る。
【0030】
この動作は中空構造内に圧力の変動が生じた際には逐一行なわれるので、結果的にチップホルダー17内の圧力変化は実質ゼロとなり、チップ2に吸引して保持されている液体6aの液漏れを防止することが出来る。一方、揮発性が高くない液体、例えば純水を扱った場合、圧力センサー305に圧力変動は検出されないので、電動モーター303が動作することはない。
【0031】
図4(d)は、指5によりノブ13及びスイッチ14を押し込み、チップ2に保持していた液体6aを排出した状態を示す。この排出過程では、ノブ13は押されていると判定される(ステップS42;YES)ため、圧力の検出は行なわれず、電動モーター303は作動しない。
【0032】
以上に示す構成によれば、液体6をチップ2に保持したい場合にのみ、チップホルダー17内の圧力変化を圧力センサー305が検出し、揮発性の高い液体の保持時における圧力上昇を電動モーター303の動作により対処できるため、揮発性の高い液体がチップ2の先端より漏れ出すことはない。
【0033】
また、手動式ピペット1の未使用時、液体吸引時および排出時には圧力センサー305および電動モーター303は動作しないので、使用者の操作に支障をきたすことはない。
なお、本発明の構成は、前述の実施例にのみ限定されるものではなく、本発明の要旨を逸脱しない範囲内において種々変更を加えてもよい。
【0034】
以上説明したように、本実施例によれば、揮発性の高い液体を手動式ピペット1で吸引し、チップ2内に保持する場合であっても、チップホルダー17内の圧力は、圧力センサー305および電動モーター303の動作によって一定に維持されるため、使用者の意図しない吐出が生じることはない。
【0035】
また、スイッチ14、ノブ位置検出部310およびプロセッサー302によって、未使用時、液体吸引時および液体吐出時には前記圧力維持効果は生じないので、余分な電力を消費することはなく、さらに、操作時の支障になることもない。以上の作用により、手動式ピペット1の使用者は揮発性の高い液体を扱う場合においても、操作性および正確性を損ねることなくピペット装置を使用することが可能となる。
【符号の説明】
【0036】
1…手動式ピペット、2…チップ、5…指、6…液体、11…目盛り表示部、12…容量設定部、13…ノブ、14…スイッチ、15…充電接続部、16…ボディーケース、17…チップホルダー、18…スライドシャフト、301…バッテリー、302…プロセッサー、303…電動モーター、304…配線、305…圧力センサー、306…チューブ、307…バネ、308…Oリング、309…ピストンロッド、310…ノブ位置検出部、311a…上方バネ支持部、311b…下方バネ支持部、312…支持部。
【特許請求の範囲】
【請求項1】
液体を吸引、保持、又は排出するピペット装置であって、
吸引した前記液体を保持する液体保持部と、
前記液体を吸引、保持、又は排出するための気体を保持する気体保持部と、
前記気体の圧力を検出する圧力センサーと、
前記気体の圧力を調整する調整器と、
を含み、
前記調整器は、前記圧力センサーにより検出された前記気体の圧力に基づいて前記液体保持部から前記液体が漏れないように前記気体の圧力を調整することを特徴とするピペット装置。
【請求項2】
前記圧力センサーは前記気体保持部の内部に配置されることを特徴とする請求項1に記載のピペット装置。
【請求項3】
前記調整器は電動モーターであることを特徴とする請求項1又は2に記載のピペット装置。
【請求項4】
前記圧力センサー及び前記調整器を制御する制御回路を更に含むことを特徴とする請求項1乃至3のいずれか一項に記載のピペット装置。
【請求項5】
スライドさせることにより前記気体保持部の容積を変化させる第1の部材と、
前記第1の部材をスライドさせるために指で操作するための第2の部材と、
を更に含むことを特徴とする請求項1乃至4のいずれか一項に記載のピペット装置。
【請求項6】
前記第2の部材の上に配置されるスイッチを更に含み、
前記スイッチが押されている状態で前記制御回路が動作することを特徴とする請求項5に記載のピペット装置。
【請求項1】
液体を吸引、保持、又は排出するピペット装置であって、
吸引した前記液体を保持する液体保持部と、
前記液体を吸引、保持、又は排出するための気体を保持する気体保持部と、
前記気体の圧力を検出する圧力センサーと、
前記気体の圧力を調整する調整器と、
を含み、
前記調整器は、前記圧力センサーにより検出された前記気体の圧力に基づいて前記液体保持部から前記液体が漏れないように前記気体の圧力を調整することを特徴とするピペット装置。
【請求項2】
前記圧力センサーは前記気体保持部の内部に配置されることを特徴とする請求項1に記載のピペット装置。
【請求項3】
前記調整器は電動モーターであることを特徴とする請求項1又は2に記載のピペット装置。
【請求項4】
前記圧力センサー及び前記調整器を制御する制御回路を更に含むことを特徴とする請求項1乃至3のいずれか一項に記載のピペット装置。
【請求項5】
スライドさせることにより前記気体保持部の容積を変化させる第1の部材と、
前記第1の部材をスライドさせるために指で操作するための第2の部材と、
を更に含むことを特徴とする請求項1乃至4のいずれか一項に記載のピペット装置。
【請求項6】
前記第2の部材の上に配置されるスイッチを更に含み、
前記スイッチが押されている状態で前記制御回路が動作することを特徴とする請求項5に記載のピペット装置。
【図1】


【図2】
【図3】
【図4】
【図2】
【図3】
【図4】
【公開番号】特開2011−224439(P2011−224439A)
【公開日】平成23年11月10日(2011.11.10)
【国際特許分類】
【出願番号】特願2010−94772(P2010−94772)
【出願日】平成22年4月16日(2010.4.16)
【出願人】(000002369)セイコーエプソン株式会社 (51,324)
【Fターム(参考)】
【公開日】平成23年11月10日(2011.11.10)
【国際特許分類】
【出願日】平成22年4月16日(2010.4.16)
【出願人】(000002369)セイコーエプソン株式会社 (51,324)
【Fターム(参考)】
[ Back to top ]