
フィラガイドの位置調整機構
【課題】TIG溶接ロボットの周辺機器に干渉する虞がないフィラガイドの位置調整機構を提供する。
【解決手段】
位置調整機構20は、溶接ロボットの手首部に支持されるとともに、フィラワイヤを挿通する挿通孔22c,23bを有する支持部21と、支持部21に対して挿通孔22c,23bの軸心と同軸に配置され、該軸心に沿って移動調節自在に配置され、フィラガイド40を着脱自在に取着する可動部材28を備える。フィラガイド40の先端は、チップゲージ34が着脱自在である。作業者は、フィラガイド40のチップゲージ34の位置が、固定ゲージの先端位置に合致していない場合には、差分を解消するべくフィラガイド40を移動させる。
【解決手段】
位置調整機構20は、溶接ロボットの手首部に支持されるとともに、フィラワイヤを挿通する挿通孔22c,23bを有する支持部21と、支持部21に対して挿通孔22c,23bの軸心と同軸に配置され、該軸心に沿って移動調節自在に配置され、フィラガイド40を着脱自在に取着する可動部材28を備える。フィラガイド40の先端は、チップゲージ34が着脱自在である。作業者は、フィラガイド40のチップゲージ34の位置が、固定ゲージの先端位置に合致していない場合には、差分を解消するべくフィラガイド40を移動させる。
【発明の詳細な説明】
【技術分野】
【0001】
本発明は、フィラガイドの位置調整機構に関するものである。
【背景技術】
【0002】
従来、TIG溶接において、溶着金属量を確保するために、アークが発生して母材が溶融する近傍にフィラワイヤを供給して溶融金属量を増加させる方法がとられている。
これをロボットを用いて行う場合、ロボットの手首部に設けられたTIG溶接トーチの周辺にフィラガイドが配置され、フィラワイヤ送給装置から送給されたフィラワイヤは、その供給される位置と送給方向が前記フィラガイドにより機械的に調整される(特許文献1及び特許文献2参照)。
【0003】
ところで、フィラガイドは、経年変化によってさび等により消耗したり、ロボットの動作中に周辺機器と衝突して変形したり、又はフィラワイヤと母材との溶着により変形が生ずる場合があり、この場合には、フィラガイドを新しいものと交換している。
【0004】
特許文献3には、TIG溶接機において、フィラガイドの位置調整機構が開示されている。
【先行技術文献】
【特許文献】
【0005】
【特許文献1】特開2003−326364号公報
【特許文献2】特開平5−177355号公報
【特許文献3】特開昭61−172683号公報 (第2頁右下欄第16行〜第3頁左上欄第10行、第6図、第7図)
【発明の概要】
【発明が解決しようとする課題】
【0006】
しかし、交換した後の新しいフィラガイドの先端は、必ずしも交換前の正常時におけるフィラガイドの先端の位置に位置しているとは限らず、フィラガイドの先端の位置調整をする必要がある。なお、このフィラガイドの先端の位置が正確に調整されていない場合、フィラガイドから突出されるフィラワイヤの突出量、ひいては溶接品質に大きく影響するため、フィラガイドの交換時において、重要な作業である。
【0007】
公知のフィラガイドの位置調整機構は、例えば、特許文献3に記載のものがある。このフィラガイドの位置調整機構はロボットに取付けられるものではないが、この位置調整機構をTIG溶接ロボットに採用して、フィラガイドを交換後にこの位置調整機構により位置調節することも考えられる。
【0008】
ところが、特許文献3の位置調整機構をTIG溶接ロボットに採用した場合、この位置調整機構がフィラガイドの外側に大きく突出する構成であるため、ロボットが作動した際に、ロボットの周辺機器と干渉する虞がある。
【0009】
本発明の目的は、TIG溶接ロボットの周辺機器に干渉する虞がないフィラガイドの位置調整機構を提供することを目的とする。
【課題を解決するための手段】
【0010】
上記問題点を解決するために、請求項1に記載の発明は、ロボットの手首部に支持されるとともに、フィラワイヤを挿通する挿通孔を有する支持部と、前記支持部に対して前記挿通孔の軸心と同軸に配置され、該軸心に沿って移動調節自在に配置されるとともに、フィラガイドを着脱自在に取着する可動部とを備え、前記フィラガイドの先端は、チップゲージが着脱自在であることを特徴とするフィラガイドの位置調整機構を要旨としている。
【0011】
請求項2の発明は、請求項1において、前記可動部が、前記支持部に対し該支持部の軸心の回りで回動不能にかつ軸心方向に沿って移動調節自在に配置されていることを特徴とする。
【0012】
請求項3の発明は、請求項1又は請求項2において、前記可動部には、前記フィラガイドを該可動部の軸心の回りで回動調節自在に取着する取付部が設けられていることを特徴とする。
【0013】
請求項4の発明は、請求項2において、前記支持部に対し、操作部材が該支持部の軸心の回りで回動自在に設けられ、前記可動部が前記操作部材内に配置され、かつ該操作部材に対して螺合され、前記操作部材の回動操作により、前記可動部が前記支持部に対し該支持部の軸心の回りで回動不能にかつ軸心方向に沿って移動調節自在に配置されていることを特徴とする。
【発明の効果】
【0014】
請求項1の発明によれば、支持部に対して位置調整機構の可動部が該支持部の挿通孔の軸心に沿って移動調節自在に配置されるため、位置調整機構がフィラガイドの外側に大きく突出することがないため、TIG溶接ロボットの周辺機器に干渉する虞がないフィラガイドの位置調整機構を提供することができる。また、交換後のフィラガイドの位置調整を精確に行うことができる。
【0015】
請求項2の発明によれば、フィラガイドの交換時や位置調整時に、フィラガイドを取付けした可動部を支持部の軸心の回りで回動不能にかつ軸心方向に沿って移動調節することができる。
【0016】
請求項3の発明によれば、フィラガイドの交換時や位置調整時にフィラガイドを取付部により、可動部の軸心の回りで回動調節自在に取着することができる。
請求項4の発明によれば、操作部材を回動すると、可動部が支持部に対し該支持部の軸心の回りで回動不能にかつ軸心方向に沿って移動調節できる。
【図面の簡単な説明】
【0017】
【図1】本発明の一実施形態のフィラガイドの位置調整機構を備えたロボットの概略図。
【図2】同じくフィラガイドの位置調整機構の全体の断面図。
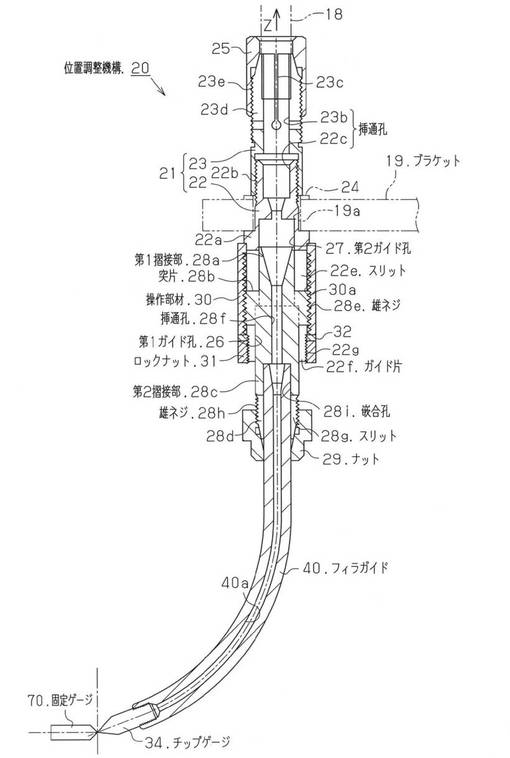
【図3】同じく位置調整時のフィラガイドの位置調整機構の全体の側面図。
【図4】同じく位置調整時のフィラガイドの位置調整機構の全体の断面図。
【図5】同じく位置調整時のフィラガイドの位置調整機構の全体の断面図。
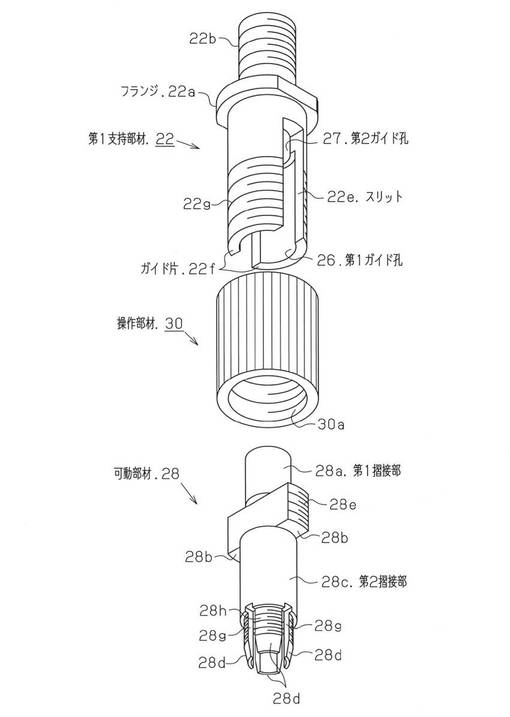
【図6】位置調整機構の主な部材の分解斜視図。
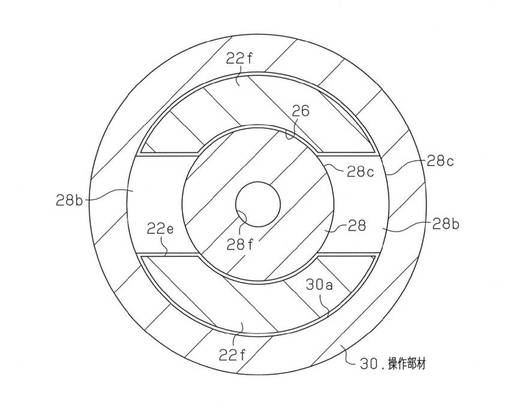
【図7】位置調整機構の横断面図。
【発明を実施するための形態】
【0018】
以下、本発明を具体化したフィラガイドの位置調整機構を備えたTIG溶接ロボット(以下、単に溶接ロボットという)の一実施形態を図1〜7を参照して説明する。
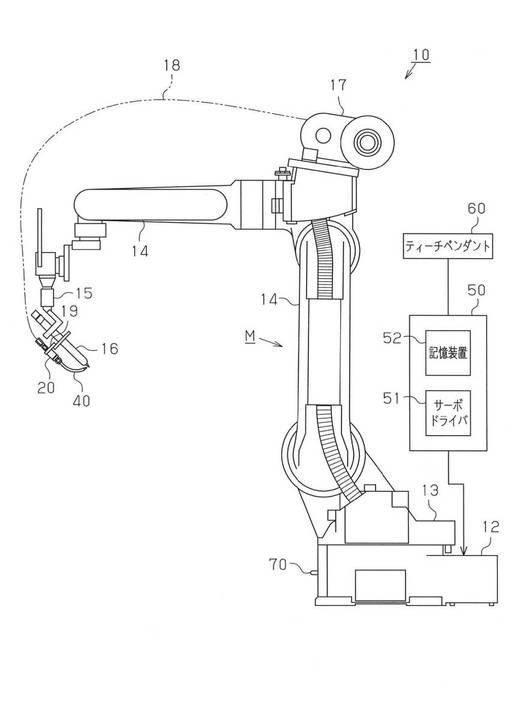
図1に示すように溶接ロボット10のマニピュレータMは、フロア等に固定されるベース部材12と、ベース部材12上に設けられた旋回台13と、旋回台13に対して複数の軸を介して連結された複数のアーム14とを備え、図示しないモータによって作動する。最も先端側に位置するアーム14の手首部15には、溶接トーチ16が設けられている。図1に示すように溶接ロボット10のベース部材12の一側面(図1において前面)には固定ゲージ70が設けられている。固定ゲージ70の先端は、図4、図5に示すように先端が尖っており、その尖った点が参照点となる。
【0019】
溶可材であるフィラワイヤを送給するワイヤ供給装置17はアーム14に設けられている。ワイヤ供給装置17から送給されたフィラワイヤは、コンジット18及び溶接トーチ16に対してブラケット19を介して取付された位置調整機構20及びフィラガイド40を通って溶接トーチ16の近傍まで供給される。
【0020】
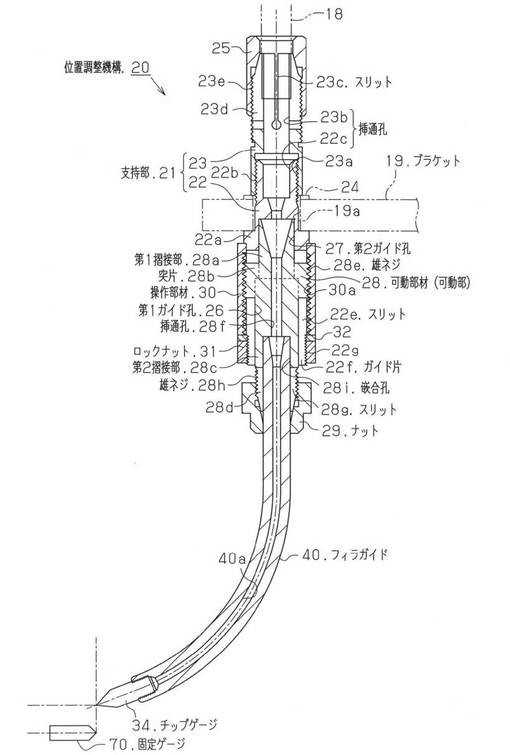
次に、位置調整機構20を図2〜図7を参照して説明する。
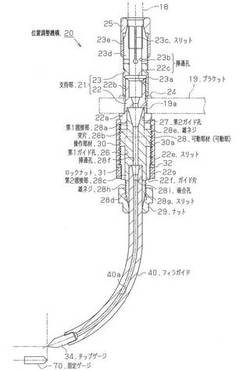
位置調整機構20は、ブラケット19に取着された支持部21と、支持部21に対してその軸心方向に移動自在に設けられ、フィラガイド40を着脱自在に取付けし、位置調節される可動部材28とを備えている。
【0021】
支持部21は、ブラケット19の取付孔19aに対して下方から貫通された筒状の第1支持部材22と、第1支持部材22の上端に取付けされた筒状の第2支持部材23とから構成されている。
【0022】
図2、図4、及び図5に示すように第1支持部材22は全体が略円筒状に形成されるとともに、略中央にフランジ22aが突設され、上下両部周面にはそれぞれ、雄ネジ22b,22gが設けられている。そして、第1支持部材22の上部は、ブラケット19の取付孔19aに対して下方から挿通されるとともに図2、図4、及び図5に示すようにブラケット19の下面に対してフランジ22aにて係止されている。
【0023】
又、第1支持部材22と第2支持部材23とは、第2支持部材23の下部に設けられた雌ネジ23aに雄ネジ22bが螺合されることにより、フランジ22aと第2支持部材23の下端がブラケット19を挟み込みして確固にブラケット19に対して固定されている。なお、第2支持部材23の下端面とブラケット19間には座金24が介在されている。第1支持部材22と第2支持部材23は、同軸に配置され、それぞれ軸心に沿ってフィラワイヤを挿通する挿通孔22c,23bが貫通して形成されている。なお、第1支持部材22と第2支持部材23の軸心と、挿通孔22c,23bの軸心とは同一である。
【0024】
第2支持部材23の上部は、上端面から複数のスリット23cが軸心方向に沿って切込みされることにより、複数の挟着片23dが設けられ、又、挟着片23dの外周面、すなわち、第2支持部材23の外周面には雄ネジ23eが形成されている。そして、コンジット18の一端が第2支持部材23の上部の挿通孔23bに嵌入されて、雄ネジ23eにナット25が螺合されることによりコンジット18の一端が挟着片23dにより挟着されている。
【0025】
一方、図2及び図6に示すように、第1支持部材22において、下端面から、軸心方向の中央部迄は第1ガイド孔26が、又、上部寄りの部位迄、すなわち、フランジ22aに略対応する部位迄は、第1ガイド孔26よりも小径の第2ガイド孔27が形成されている。第1ガイド孔26及び第2ガイド孔27は、挿通孔22cと同軸となるように配置され、相互に連通している。
【0026】
又、第1支持部材22の下端面から、複数のスリット22eが軸心方向に沿って切込されて、図6に示すように第1ガイド孔26と第2ガイド孔27の一部が外部と連通されている。そして、このように、第1支持部材22にはスリット22eを有することにより、複数のガイド片22fが設けられ、又、ガイド片22fの外周面に前記雄ネジ22gが形成されている。
【0027】
第1支持部材22の第1ガイド孔26及び第2ガイド孔27には、可動部としての可動部材28が前記両ガイド孔の軸心方向に沿って往復動自在に嵌合されている。
可動部材28は、図6に示すように上端から下端へ順に、筒状の第1摺接部28aと、扁平状をなす一対の突片28bと、筒状の第2摺接部28cと、下端へ行くほど外径が縮径するように形成された複数の挟着片28dを有する。第1摺接部28aは、図2、図4に示すように第2ガイド孔27に対してに対して軸心方向に摺動自在に嵌合されている。各突片28bはスリット22eに係入されてガイド片22fの切り欠き面に摺接可能となっているとともに、可動部材28に軸心回りの回転力が付与された際、可動部材28の軸心の回りの回動、すなわち、支持部21の軸心の回りの回動が不能となっている。又、突片28bの先端周面には雄ネジ28eが形成されている。又、第2摺接部28cは第1ガイド孔26に対して軸心方向に摺動自在に嵌合されている。
【0028】
可動部材28には軸心に沿って、フィラワイヤを挿通する挿通孔28fが形成され、挿通孔22cと同軸に配置されている。挿通孔28fの上端は、上方へ行くほど拡径されたテーパ面を有し、挿通孔22cを介して送給されたフィラワイヤをガイドするようになっている。
【0029】
図6に示すように複数の挟着片28dは、可動部材28の下端面から複数のスリット28gが軸心方向に沿って切込されることにより形成され、又、各挟着片28dの外周面には雄ネジ28hが形成されている。そして、フィラガイド40の基端が可動部材28下部の挿通孔28fに設けられた断面円形の嵌合孔28iに嵌入されて、雄ネジ28hにナット29が螺合されることによりフィラガイド40が挟着片28dにより挟着されている。又、ナット29を緩めることにより、フィラガイド40は挟着片28dから取り外すことが可能である。又、フィラガイド40基端の横断面の外形形状は円形に形成され、ナット29が緩められた状態では、嵌合孔28iに対してその軸心の回りで回転可能であり、回転位置の位置調整が可能である。嵌合孔28iは取付部に相当する。
【0030】
フィラガイド40の先端には、溶接作業時には、図2に示すようにフィラチップ33が着脱自在に螺着され、コンジット18、挿通孔23b、挿通孔22c、挿通孔28f、フィラガイド40の挿通孔40aを通過したフィラワイヤ(図示しない)がフィラチップ33を介して突出する。又、フィラガイド40の先端には、位置調節時には、チップゲージ34が着脱自在に螺着される。
【0031】
図2に示すように第1支持部材22に対して、筒状の操作部材30が第1支持部材22の軸心の回りで正逆回動自在に外嵌されるとともに、第1支持部材22の雄ネジ22gにはロックナット31が螺合されている。なお、ロックナット31と操作部材30間には座金32が介在されている。
【0032】
ロックナット31がロック方向に回動操作されて、操作部材30をロックナット31とフランジ22a間に締付けすると操作部材30は回動操作不能にロックされ、ロックナット31がアンロック方向に回動操作されると、操作部材30は回動操作可能なロック解除状態となる。
【0033】
操作部材30の内周面には雌ネジ30aが形成されていて、可動部材28の雄ネジ28eに螺合され、ロックナット31がロック解除されている際、操作部材30に対する正逆のいずれかの回動操作により、可動部材28を軸心方向において、移動調整可能となっている。
【0034】
溶接ロボット10の制御装置50は、ワークに対してアーク溶接を自動で行うように制御するものである。制御装置50は、マニピュレータMの図示しないモータを制御するサーボドライバ51と、ティーチペンダント60から教示された教示データを含む基準点生成プログラム等の各種制御プログラムを記憶する記憶装置52を備えている。制御装置50は、前記基準点生成プログラム等の各種制御プログラムに基づいて、マニピュレータMを制御して、溶接時における溶接トーチ16の位置、及び姿勢や、フィラガイド40の狙い位置、及び姿勢を変えることが可能である。
【0035】
次に本実施形態の作用を説明する。
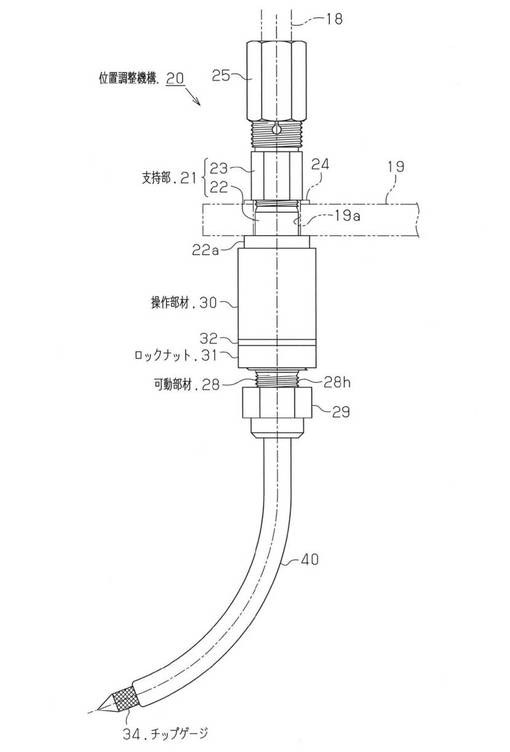
まず、作業者は最初に先端にチップゲージ34を取付けしたフィラガイド40を位置調整機構20に取付けする。そして、作業者は、ティーチペンダント60により、マニピュレータMの基準点へのアプローチの経路、姿勢等を教示しながらマニピュレータMを作動させて、図5に示すように、ロボット座標系のZ軸に可動部材28の軸心が沿うように配置するとともに、チップゲージ34の先端を固定ゲージ70の先端に合致させる。
【0036】
作業者は、この合致状態におけるフィラガイド40の位置を基準点とし、この基準点をティーチペンダント60により制御装置50に教示する。制御装置50は、ティーチペンダント60からの教示データに基づいて基準点を含んだ基準点生成プログラムを生成し、記憶装置52に記憶する。なお、この後、溶接作業を行う場合は、作業者はチップゲージ34をフィラガイド40から取り去り、フィラチップ33をフィラガイド40の先端に取付けする。
【0037】
次に、フィラガイド40を交換する場合について説明する。
位置調整機構20にフィラガイド40を新たに取付けする場合、ナット29を緩めて、古いフィラガイド40を位置調整機構20から取り外し、新しいフィラガイド40を可動部材28の嵌合孔28iに嵌合した状態で、ナット29を締付けする。そして、フィラガイド40の先端には、チップゲージ34を取付しておく。なお、チップゲージ34の取付けは、位置調整機構20にフィラガイド40を取付けする前に行っても良い。このときのチップゲージ34は、基準点生成プログラムを生成する際に使用した、チップゲージ34と同一仕様のチップゲージ34である。
【0038】
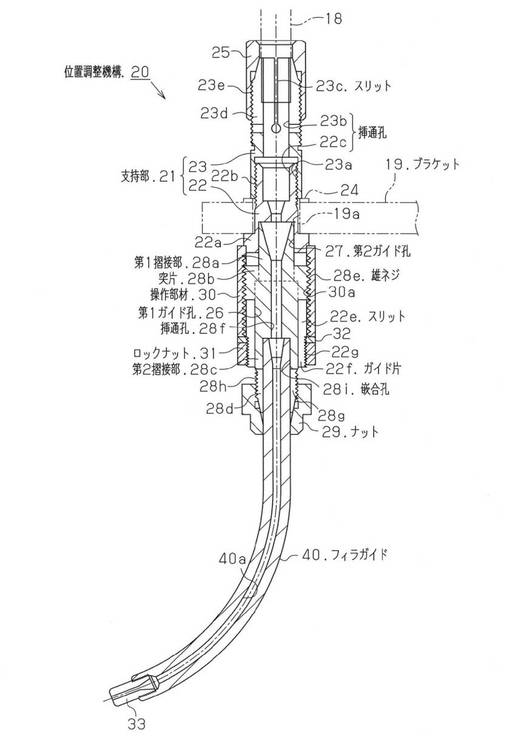
そして、次に、制御装置50により、記憶装置52に記憶して基準点生成プログラムを読み出させて実行させる。マニピュレータMは、この基準点生成プログラムに基づいて作動して、図4に示すようにロボット座標系のZ軸に可動部材28の軸心が沿うように位置調整機構20を配置する。
【0039】
この後、作業者は、フィラガイド40のチップゲージ34の位置が、固定ゲージ70の先端位置に合致していない場合には、ナット29を緩めて、Z軸方向における差分を解消するべくフィラガイド40を移動させた後、ナット29を締付けする。又、チップゲージ34の先端が固定ゲージ70の先端を指向していない場合には、このずれ、すなわち差分を解消するべく、作業者はナット29を緩めた状態で、フィラガイド40の回転位置を調整した後、ナット29を締付けする。ナット29の締付けにより、フィラガイド40は可動部材28に対して挟着片28dにより確固に取付される。
【0040】
なお、フィラガイド40の位置調整が必要なときについては、フィラガイド40の交換時と同様に行えばよいため、説明を省略する。
さて、上記のように構成された本実施形態の位置調整機構20は、下記の特徴がある。
【0041】
(1) 位置調整機構20は、溶接ロボット10の手首部15に支持されるとともに、フィラワイヤを挿通する挿通孔22c,23bを有する支持部21と、支持部21に対して挿通孔22c,23bの軸心と同軸に配置され、該軸心に沿って移動調節自在に配置され、フィラガイド40を着脱自在に取着する可動部材28(可動部)を備える。また、フィラガイドの先端は、チップゲージ34が着脱自在である。前記チップゲージの先端が固定ゲージの先端を指向していない場合には、このずれ、すなわち差分を解消するべく、支持部21に対して位置調整機構20の可動部材28が支持部21の挿通孔22c,23bの軸心に沿って移動調節自在に配置されるため、位置調整機構20がフィラガイド40の外側に大きく突出することがないため、TIG溶接ロボットの周辺機器に干渉する虞がない。
【0042】
(2) 位置調整機構20は、可動部材28(可動部)が、支持部21に対し該支持部21の軸心の回りで回動不能にかつ軸心方向に沿って移動調節自在に配置されている。この結果、フィラガイド40の交換時や位置調整時に、フィラガイド40を取付けした可動部材28を支持部21の軸心の回りで回動不能にかつ軸心方向に沿って移動調節することができる。
【0043】
(3) 本実施形態の位置調整機構20は、可動部材28(可動部)には、フィラガイド40を可動部材28の軸心の回りで回動調節自在に取着する嵌合孔28i(取付部)が設けられている。この結果、フィラガイド40の交換時や位置調整時にフィラガイド40を嵌合孔28iにより、可動部材28の軸心の回りで回動調節自在に取着することができる。
【0044】
(4) 本実施形態の位置調整機構20は、支持部21に対し、操作部材30が支持部21の軸心の回りで回動自在に設けられ、可動部材28が操作部材30内に配置されている。又、可動部材28は操作部材30に対して螺合され、操作部材30の回動操作により、支持部21に対し支持部21の軸心の回りで回動不能にかつ軸心方向に沿って移動調節自在に配置されている。この結果、操作部材30を回動すると、可動部材28が支持部21に対し該支持部21の軸心の回りで回動不能にかつ軸心方向に沿って移動調節できる。
【0045】
なお、本発明は前記実施形態に限定されるものではなく、下記のように構成してもよい。
○ 前記実施形態では支持部21を第1支持部材22と第2支持部材23とにより構成したが、この構成はブラケット19に対して、両部材を挟みつけるようにするために分離して構成したものである。ブラケット19に対する取付け構造は前記実施形態に限定されるものではないため、第1支持部材22と第2支持部材23とを一体に連結してもよい。例えば、第1支持部材22と第2支持部材23とを一体に連結した支持部をブラケット19に対して貫通させ、ブラケット19の上面から突出する支持部の部位の外周面にナットを螺合し、同ナットにより支持部を抜き出し不能に固定するようにしてもよい。
【0046】
○ 前記実施形態では、操作部材30を可動部材28の軸心の回りで回転するようにして可動部材28をその軸心方向に移動自在とした。
この構成に代えて、雄ネジ28eと雌ネジ30aとを省略し、操作部材30の代わりに、可動部材28を覆う筒状の覆い部材を操作部材30と同様に取付けし、覆い部材の側面には、ボルトを進退自在に螺合させて貫通させて、スリット22eを介して可動部材28に当接可能にするようにしてもよい。すなわち、このボルトが可動部材28に当接した状態で可動部材28の移動がロックされ、当接を解除するとロックが解除される。この結果、フィラガイド40の位置調整が可能となる。
【符号の説明】
【0047】
10…溶接ロボット(TIG溶接ロボット)、12…ベース部材、
13…旋回台、14…アーム、15…手首部、16…溶接トーチ、
20…位置調整機構、21…支持部、22…第1支持部材、
22a…フランジ、22c…挿通孔、23…第2支持部材、
23a…雌ネジ、23b…挿通孔、
26…第1ガイド孔、27…第2ガイド孔、
28…可動部材(可動部)、28a…第1摺接部、28b…突片、
28f…挿通孔、28g…スリット、28h…雄ネジ、28i…嵌合孔(取付部)、
30…操作部材、30a…雌ネジ、31…ロックナット
33…フィラチップ、34…チップゲージ、
40…フィラガイド、50…制御装置、
51…サーボドライバ、52…記憶装置、
M…マニピュレータ。
【技術分野】
【0001】
本発明は、フィラガイドの位置調整機構に関するものである。
【背景技術】
【0002】
従来、TIG溶接において、溶着金属量を確保するために、アークが発生して母材が溶融する近傍にフィラワイヤを供給して溶融金属量を増加させる方法がとられている。
これをロボットを用いて行う場合、ロボットの手首部に設けられたTIG溶接トーチの周辺にフィラガイドが配置され、フィラワイヤ送給装置から送給されたフィラワイヤは、その供給される位置と送給方向が前記フィラガイドにより機械的に調整される(特許文献1及び特許文献2参照)。
【0003】
ところで、フィラガイドは、経年変化によってさび等により消耗したり、ロボットの動作中に周辺機器と衝突して変形したり、又はフィラワイヤと母材との溶着により変形が生ずる場合があり、この場合には、フィラガイドを新しいものと交換している。
【0004】
特許文献3には、TIG溶接機において、フィラガイドの位置調整機構が開示されている。
【先行技術文献】
【特許文献】
【0005】
【特許文献1】特開2003−326364号公報
【特許文献2】特開平5−177355号公報
【特許文献3】特開昭61−172683号公報 (第2頁右下欄第16行〜第3頁左上欄第10行、第6図、第7図)
【発明の概要】
【発明が解決しようとする課題】
【0006】
しかし、交換した後の新しいフィラガイドの先端は、必ずしも交換前の正常時におけるフィラガイドの先端の位置に位置しているとは限らず、フィラガイドの先端の位置調整をする必要がある。なお、このフィラガイドの先端の位置が正確に調整されていない場合、フィラガイドから突出されるフィラワイヤの突出量、ひいては溶接品質に大きく影響するため、フィラガイドの交換時において、重要な作業である。
【0007】
公知のフィラガイドの位置調整機構は、例えば、特許文献3に記載のものがある。このフィラガイドの位置調整機構はロボットに取付けられるものではないが、この位置調整機構をTIG溶接ロボットに採用して、フィラガイドを交換後にこの位置調整機構により位置調節することも考えられる。
【0008】
ところが、特許文献3の位置調整機構をTIG溶接ロボットに採用した場合、この位置調整機構がフィラガイドの外側に大きく突出する構成であるため、ロボットが作動した際に、ロボットの周辺機器と干渉する虞がある。
【0009】
本発明の目的は、TIG溶接ロボットの周辺機器に干渉する虞がないフィラガイドの位置調整機構を提供することを目的とする。
【課題を解決するための手段】
【0010】
上記問題点を解決するために、請求項1に記載の発明は、ロボットの手首部に支持されるとともに、フィラワイヤを挿通する挿通孔を有する支持部と、前記支持部に対して前記挿通孔の軸心と同軸に配置され、該軸心に沿って移動調節自在に配置されるとともに、フィラガイドを着脱自在に取着する可動部とを備え、前記フィラガイドの先端は、チップゲージが着脱自在であることを特徴とするフィラガイドの位置調整機構を要旨としている。
【0011】
請求項2の発明は、請求項1において、前記可動部が、前記支持部に対し該支持部の軸心の回りで回動不能にかつ軸心方向に沿って移動調節自在に配置されていることを特徴とする。
【0012】
請求項3の発明は、請求項1又は請求項2において、前記可動部には、前記フィラガイドを該可動部の軸心の回りで回動調節自在に取着する取付部が設けられていることを特徴とする。
【0013】
請求項4の発明は、請求項2において、前記支持部に対し、操作部材が該支持部の軸心の回りで回動自在に設けられ、前記可動部が前記操作部材内に配置され、かつ該操作部材に対して螺合され、前記操作部材の回動操作により、前記可動部が前記支持部に対し該支持部の軸心の回りで回動不能にかつ軸心方向に沿って移動調節自在に配置されていることを特徴とする。
【発明の効果】
【0014】
請求項1の発明によれば、支持部に対して位置調整機構の可動部が該支持部の挿通孔の軸心に沿って移動調節自在に配置されるため、位置調整機構がフィラガイドの外側に大きく突出することがないため、TIG溶接ロボットの周辺機器に干渉する虞がないフィラガイドの位置調整機構を提供することができる。また、交換後のフィラガイドの位置調整を精確に行うことができる。
【0015】
請求項2の発明によれば、フィラガイドの交換時や位置調整時に、フィラガイドを取付けした可動部を支持部の軸心の回りで回動不能にかつ軸心方向に沿って移動調節することができる。
【0016】
請求項3の発明によれば、フィラガイドの交換時や位置調整時にフィラガイドを取付部により、可動部の軸心の回りで回動調節自在に取着することができる。
請求項4の発明によれば、操作部材を回動すると、可動部が支持部に対し該支持部の軸心の回りで回動不能にかつ軸心方向に沿って移動調節できる。
【図面の簡単な説明】
【0017】
【図1】本発明の一実施形態のフィラガイドの位置調整機構を備えたロボットの概略図。
【図2】同じくフィラガイドの位置調整機構の全体の断面図。
【図3】同じく位置調整時のフィラガイドの位置調整機構の全体の側面図。
【図4】同じく位置調整時のフィラガイドの位置調整機構の全体の断面図。
【図5】同じく位置調整時のフィラガイドの位置調整機構の全体の断面図。
【図6】位置調整機構の主な部材の分解斜視図。
【図7】位置調整機構の横断面図。
【発明を実施するための形態】
【0018】
以下、本発明を具体化したフィラガイドの位置調整機構を備えたTIG溶接ロボット(以下、単に溶接ロボットという)の一実施形態を図1〜7を参照して説明する。
図1に示すように溶接ロボット10のマニピュレータMは、フロア等に固定されるベース部材12と、ベース部材12上に設けられた旋回台13と、旋回台13に対して複数の軸を介して連結された複数のアーム14とを備え、図示しないモータによって作動する。最も先端側に位置するアーム14の手首部15には、溶接トーチ16が設けられている。図1に示すように溶接ロボット10のベース部材12の一側面(図1において前面)には固定ゲージ70が設けられている。固定ゲージ70の先端は、図4、図5に示すように先端が尖っており、その尖った点が参照点となる。
【0019】
溶可材であるフィラワイヤを送給するワイヤ供給装置17はアーム14に設けられている。ワイヤ供給装置17から送給されたフィラワイヤは、コンジット18及び溶接トーチ16に対してブラケット19を介して取付された位置調整機構20及びフィラガイド40を通って溶接トーチ16の近傍まで供給される。
【0020】
次に、位置調整機構20を図2〜図7を参照して説明する。
位置調整機構20は、ブラケット19に取着された支持部21と、支持部21に対してその軸心方向に移動自在に設けられ、フィラガイド40を着脱自在に取付けし、位置調節される可動部材28とを備えている。
【0021】
支持部21は、ブラケット19の取付孔19aに対して下方から貫通された筒状の第1支持部材22と、第1支持部材22の上端に取付けされた筒状の第2支持部材23とから構成されている。
【0022】
図2、図4、及び図5に示すように第1支持部材22は全体が略円筒状に形成されるとともに、略中央にフランジ22aが突設され、上下両部周面にはそれぞれ、雄ネジ22b,22gが設けられている。そして、第1支持部材22の上部は、ブラケット19の取付孔19aに対して下方から挿通されるとともに図2、図4、及び図5に示すようにブラケット19の下面に対してフランジ22aにて係止されている。
【0023】
又、第1支持部材22と第2支持部材23とは、第2支持部材23の下部に設けられた雌ネジ23aに雄ネジ22bが螺合されることにより、フランジ22aと第2支持部材23の下端がブラケット19を挟み込みして確固にブラケット19に対して固定されている。なお、第2支持部材23の下端面とブラケット19間には座金24が介在されている。第1支持部材22と第2支持部材23は、同軸に配置され、それぞれ軸心に沿ってフィラワイヤを挿通する挿通孔22c,23bが貫通して形成されている。なお、第1支持部材22と第2支持部材23の軸心と、挿通孔22c,23bの軸心とは同一である。
【0024】
第2支持部材23の上部は、上端面から複数のスリット23cが軸心方向に沿って切込みされることにより、複数の挟着片23dが設けられ、又、挟着片23dの外周面、すなわち、第2支持部材23の外周面には雄ネジ23eが形成されている。そして、コンジット18の一端が第2支持部材23の上部の挿通孔23bに嵌入されて、雄ネジ23eにナット25が螺合されることによりコンジット18の一端が挟着片23dにより挟着されている。
【0025】
一方、図2及び図6に示すように、第1支持部材22において、下端面から、軸心方向の中央部迄は第1ガイド孔26が、又、上部寄りの部位迄、すなわち、フランジ22aに略対応する部位迄は、第1ガイド孔26よりも小径の第2ガイド孔27が形成されている。第1ガイド孔26及び第2ガイド孔27は、挿通孔22cと同軸となるように配置され、相互に連通している。
【0026】
又、第1支持部材22の下端面から、複数のスリット22eが軸心方向に沿って切込されて、図6に示すように第1ガイド孔26と第2ガイド孔27の一部が外部と連通されている。そして、このように、第1支持部材22にはスリット22eを有することにより、複数のガイド片22fが設けられ、又、ガイド片22fの外周面に前記雄ネジ22gが形成されている。
【0027】
第1支持部材22の第1ガイド孔26及び第2ガイド孔27には、可動部としての可動部材28が前記両ガイド孔の軸心方向に沿って往復動自在に嵌合されている。
可動部材28は、図6に示すように上端から下端へ順に、筒状の第1摺接部28aと、扁平状をなす一対の突片28bと、筒状の第2摺接部28cと、下端へ行くほど外径が縮径するように形成された複数の挟着片28dを有する。第1摺接部28aは、図2、図4に示すように第2ガイド孔27に対してに対して軸心方向に摺動自在に嵌合されている。各突片28bはスリット22eに係入されてガイド片22fの切り欠き面に摺接可能となっているとともに、可動部材28に軸心回りの回転力が付与された際、可動部材28の軸心の回りの回動、すなわち、支持部21の軸心の回りの回動が不能となっている。又、突片28bの先端周面には雄ネジ28eが形成されている。又、第2摺接部28cは第1ガイド孔26に対して軸心方向に摺動自在に嵌合されている。
【0028】
可動部材28には軸心に沿って、フィラワイヤを挿通する挿通孔28fが形成され、挿通孔22cと同軸に配置されている。挿通孔28fの上端は、上方へ行くほど拡径されたテーパ面を有し、挿通孔22cを介して送給されたフィラワイヤをガイドするようになっている。
【0029】
図6に示すように複数の挟着片28dは、可動部材28の下端面から複数のスリット28gが軸心方向に沿って切込されることにより形成され、又、各挟着片28dの外周面には雄ネジ28hが形成されている。そして、フィラガイド40の基端が可動部材28下部の挿通孔28fに設けられた断面円形の嵌合孔28iに嵌入されて、雄ネジ28hにナット29が螺合されることによりフィラガイド40が挟着片28dにより挟着されている。又、ナット29を緩めることにより、フィラガイド40は挟着片28dから取り外すことが可能である。又、フィラガイド40基端の横断面の外形形状は円形に形成され、ナット29が緩められた状態では、嵌合孔28iに対してその軸心の回りで回転可能であり、回転位置の位置調整が可能である。嵌合孔28iは取付部に相当する。
【0030】
フィラガイド40の先端には、溶接作業時には、図2に示すようにフィラチップ33が着脱自在に螺着され、コンジット18、挿通孔23b、挿通孔22c、挿通孔28f、フィラガイド40の挿通孔40aを通過したフィラワイヤ(図示しない)がフィラチップ33を介して突出する。又、フィラガイド40の先端には、位置調節時には、チップゲージ34が着脱自在に螺着される。
【0031】
図2に示すように第1支持部材22に対して、筒状の操作部材30が第1支持部材22の軸心の回りで正逆回動自在に外嵌されるとともに、第1支持部材22の雄ネジ22gにはロックナット31が螺合されている。なお、ロックナット31と操作部材30間には座金32が介在されている。
【0032】
ロックナット31がロック方向に回動操作されて、操作部材30をロックナット31とフランジ22a間に締付けすると操作部材30は回動操作不能にロックされ、ロックナット31がアンロック方向に回動操作されると、操作部材30は回動操作可能なロック解除状態となる。
【0033】
操作部材30の内周面には雌ネジ30aが形成されていて、可動部材28の雄ネジ28eに螺合され、ロックナット31がロック解除されている際、操作部材30に対する正逆のいずれかの回動操作により、可動部材28を軸心方向において、移動調整可能となっている。
【0034】
溶接ロボット10の制御装置50は、ワークに対してアーク溶接を自動で行うように制御するものである。制御装置50は、マニピュレータMの図示しないモータを制御するサーボドライバ51と、ティーチペンダント60から教示された教示データを含む基準点生成プログラム等の各種制御プログラムを記憶する記憶装置52を備えている。制御装置50は、前記基準点生成プログラム等の各種制御プログラムに基づいて、マニピュレータMを制御して、溶接時における溶接トーチ16の位置、及び姿勢や、フィラガイド40の狙い位置、及び姿勢を変えることが可能である。
【0035】
次に本実施形態の作用を説明する。
まず、作業者は最初に先端にチップゲージ34を取付けしたフィラガイド40を位置調整機構20に取付けする。そして、作業者は、ティーチペンダント60により、マニピュレータMの基準点へのアプローチの経路、姿勢等を教示しながらマニピュレータMを作動させて、図5に示すように、ロボット座標系のZ軸に可動部材28の軸心が沿うように配置するとともに、チップゲージ34の先端を固定ゲージ70の先端に合致させる。
【0036】
作業者は、この合致状態におけるフィラガイド40の位置を基準点とし、この基準点をティーチペンダント60により制御装置50に教示する。制御装置50は、ティーチペンダント60からの教示データに基づいて基準点を含んだ基準点生成プログラムを生成し、記憶装置52に記憶する。なお、この後、溶接作業を行う場合は、作業者はチップゲージ34をフィラガイド40から取り去り、フィラチップ33をフィラガイド40の先端に取付けする。
【0037】
次に、フィラガイド40を交換する場合について説明する。
位置調整機構20にフィラガイド40を新たに取付けする場合、ナット29を緩めて、古いフィラガイド40を位置調整機構20から取り外し、新しいフィラガイド40を可動部材28の嵌合孔28iに嵌合した状態で、ナット29を締付けする。そして、フィラガイド40の先端には、チップゲージ34を取付しておく。なお、チップゲージ34の取付けは、位置調整機構20にフィラガイド40を取付けする前に行っても良い。このときのチップゲージ34は、基準点生成プログラムを生成する際に使用した、チップゲージ34と同一仕様のチップゲージ34である。
【0038】
そして、次に、制御装置50により、記憶装置52に記憶して基準点生成プログラムを読み出させて実行させる。マニピュレータMは、この基準点生成プログラムに基づいて作動して、図4に示すようにロボット座標系のZ軸に可動部材28の軸心が沿うように位置調整機構20を配置する。
【0039】
この後、作業者は、フィラガイド40のチップゲージ34の位置が、固定ゲージ70の先端位置に合致していない場合には、ナット29を緩めて、Z軸方向における差分を解消するべくフィラガイド40を移動させた後、ナット29を締付けする。又、チップゲージ34の先端が固定ゲージ70の先端を指向していない場合には、このずれ、すなわち差分を解消するべく、作業者はナット29を緩めた状態で、フィラガイド40の回転位置を調整した後、ナット29を締付けする。ナット29の締付けにより、フィラガイド40は可動部材28に対して挟着片28dにより確固に取付される。
【0040】
なお、フィラガイド40の位置調整が必要なときについては、フィラガイド40の交換時と同様に行えばよいため、説明を省略する。
さて、上記のように構成された本実施形態の位置調整機構20は、下記の特徴がある。
【0041】
(1) 位置調整機構20は、溶接ロボット10の手首部15に支持されるとともに、フィラワイヤを挿通する挿通孔22c,23bを有する支持部21と、支持部21に対して挿通孔22c,23bの軸心と同軸に配置され、該軸心に沿って移動調節自在に配置され、フィラガイド40を着脱自在に取着する可動部材28(可動部)を備える。また、フィラガイドの先端は、チップゲージ34が着脱自在である。前記チップゲージの先端が固定ゲージの先端を指向していない場合には、このずれ、すなわち差分を解消するべく、支持部21に対して位置調整機構20の可動部材28が支持部21の挿通孔22c,23bの軸心に沿って移動調節自在に配置されるため、位置調整機構20がフィラガイド40の外側に大きく突出することがないため、TIG溶接ロボットの周辺機器に干渉する虞がない。
【0042】
(2) 位置調整機構20は、可動部材28(可動部)が、支持部21に対し該支持部21の軸心の回りで回動不能にかつ軸心方向に沿って移動調節自在に配置されている。この結果、フィラガイド40の交換時や位置調整時に、フィラガイド40を取付けした可動部材28を支持部21の軸心の回りで回動不能にかつ軸心方向に沿って移動調節することができる。
【0043】
(3) 本実施形態の位置調整機構20は、可動部材28(可動部)には、フィラガイド40を可動部材28の軸心の回りで回動調節自在に取着する嵌合孔28i(取付部)が設けられている。この結果、フィラガイド40の交換時や位置調整時にフィラガイド40を嵌合孔28iにより、可動部材28の軸心の回りで回動調節自在に取着することができる。
【0044】
(4) 本実施形態の位置調整機構20は、支持部21に対し、操作部材30が支持部21の軸心の回りで回動自在に設けられ、可動部材28が操作部材30内に配置されている。又、可動部材28は操作部材30に対して螺合され、操作部材30の回動操作により、支持部21に対し支持部21の軸心の回りで回動不能にかつ軸心方向に沿って移動調節自在に配置されている。この結果、操作部材30を回動すると、可動部材28が支持部21に対し該支持部21の軸心の回りで回動不能にかつ軸心方向に沿って移動調節できる。
【0045】
なお、本発明は前記実施形態に限定されるものではなく、下記のように構成してもよい。
○ 前記実施形態では支持部21を第1支持部材22と第2支持部材23とにより構成したが、この構成はブラケット19に対して、両部材を挟みつけるようにするために分離して構成したものである。ブラケット19に対する取付け構造は前記実施形態に限定されるものではないため、第1支持部材22と第2支持部材23とを一体に連結してもよい。例えば、第1支持部材22と第2支持部材23とを一体に連結した支持部をブラケット19に対して貫通させ、ブラケット19の上面から突出する支持部の部位の外周面にナットを螺合し、同ナットにより支持部を抜き出し不能に固定するようにしてもよい。
【0046】
○ 前記実施形態では、操作部材30を可動部材28の軸心の回りで回転するようにして可動部材28をその軸心方向に移動自在とした。
この構成に代えて、雄ネジ28eと雌ネジ30aとを省略し、操作部材30の代わりに、可動部材28を覆う筒状の覆い部材を操作部材30と同様に取付けし、覆い部材の側面には、ボルトを進退自在に螺合させて貫通させて、スリット22eを介して可動部材28に当接可能にするようにしてもよい。すなわち、このボルトが可動部材28に当接した状態で可動部材28の移動がロックされ、当接を解除するとロックが解除される。この結果、フィラガイド40の位置調整が可能となる。
【符号の説明】
【0047】
10…溶接ロボット(TIG溶接ロボット)、12…ベース部材、
13…旋回台、14…アーム、15…手首部、16…溶接トーチ、
20…位置調整機構、21…支持部、22…第1支持部材、
22a…フランジ、22c…挿通孔、23…第2支持部材、
23a…雌ネジ、23b…挿通孔、
26…第1ガイド孔、27…第2ガイド孔、
28…可動部材(可動部)、28a…第1摺接部、28b…突片、
28f…挿通孔、28g…スリット、28h…雄ネジ、28i…嵌合孔(取付部)、
30…操作部材、30a…雌ネジ、31…ロックナット
33…フィラチップ、34…チップゲージ、
40…フィラガイド、50…制御装置、
51…サーボドライバ、52…記憶装置、
M…マニピュレータ。
【特許請求の範囲】
【請求項1】
ロボットの手首部に支持されるとともに、フィラワイヤを挿通する挿通孔を有する支持部と、
前記支持部に対して前記挿通孔の軸心と同軸に配置され、該軸心に沿って移動調節自在に配置されるとともに、フィラガイドを着脱自在に取着する可動部とを備え、
前記フィラガイドの先端は、チップゲージが着脱自在であることを特徴とするフィラガイドの位置調整機構。
【請求項2】
前記可動部が、前記支持部に対し該支持部の軸心の回りで回動不能にかつ軸心方向に沿って移動調節自在に配置されていることを特徴とする請求項1に記載のフィラガイドの位置調整機構。
【請求項3】
前記可動部には、前記フィラガイドを該可動部の軸心の回りで回動調節自在に取着する取付部が設けられていることを特徴とする請求項1又は請求項2に記載のフィラガイドの位置調整機構。
【請求項4】
前記支持部に対し、操作部材が該支持部の軸心の回りで回動自在に設けられ、
前記可動部が前記操作部材内に配置され、かつ該操作部材に対して螺合され、
前記操作部材の回動操作により、前記可動部が前記支持部に対し該支持部の軸心の回りで回動不能にかつ軸心方向に沿って移動調節自在に配置されていることを特徴とする請求項2に記載のフィラガイドの位置調整機構。
【請求項1】
ロボットの手首部に支持されるとともに、フィラワイヤを挿通する挿通孔を有する支持部と、
前記支持部に対して前記挿通孔の軸心と同軸に配置され、該軸心に沿って移動調節自在に配置されるとともに、フィラガイドを着脱自在に取着する可動部とを備え、
前記フィラガイドの先端は、チップゲージが着脱自在であることを特徴とするフィラガイドの位置調整機構。
【請求項2】
前記可動部が、前記支持部に対し該支持部の軸心の回りで回動不能にかつ軸心方向に沿って移動調節自在に配置されていることを特徴とする請求項1に記載のフィラガイドの位置調整機構。
【請求項3】
前記可動部には、前記フィラガイドを該可動部の軸心の回りで回動調節自在に取着する取付部が設けられていることを特徴とする請求項1又は請求項2に記載のフィラガイドの位置調整機構。
【請求項4】
前記支持部に対し、操作部材が該支持部の軸心の回りで回動自在に設けられ、
前記可動部が前記操作部材内に配置され、かつ該操作部材に対して螺合され、
前記操作部材の回動操作により、前記可動部が前記支持部に対し該支持部の軸心の回りで回動不能にかつ軸心方向に沿って移動調節自在に配置されていることを特徴とする請求項2に記載のフィラガイドの位置調整機構。
【図1】


【図2】
【図3】
【図4】
【図5】
【図6】
【図7】
【図2】
【図3】
【図4】
【図5】
【図6】
【図7】
【公開番号】特開2013−39623(P2013−39623A)
【公開日】平成25年2月28日(2013.2.28)
【国際特許分類】
【出願番号】特願2012−262157(P2012−262157)
【出願日】平成24年11月30日(2012.11.30)
【分割の表示】特願2007−283965(P2007−283965)の分割
【原出願日】平成19年10月31日(2007.10.31)
【出願人】(000000262)株式会社ダイヘン (990)
【Fターム(参考)】
【公開日】平成25年2月28日(2013.2.28)
【国際特許分類】
【出願日】平成24年11月30日(2012.11.30)
【分割の表示】特願2007−283965(P2007−283965)の分割
【原出願日】平成19年10月31日(2007.10.31)
【出願人】(000000262)株式会社ダイヘン (990)
【Fターム(参考)】
[ Back to top ]