
フィルタの故障検出装置
【課題】本発明は、排気通路におけるフィルタとPMセンサとの間に選択還元型NOx触媒が設けられた構成において、PMセンサの出力値を用いたフィルタの故障検出の精度を向上させることを目的とする。
【解決手段】選択還元型NOx触媒より下流側の排気の亜酸化窒素濃度又は該排気中の亜酸化窒素量に基づいて、PMセンサに堆積したPMの酸化量を算出し、該PM酸化量に基づいて、フィルタが所定の状態であると仮定して算出されるPMセンサにおけるPM堆積量を補正する。そして、補正されたPMセンサにおけるPM堆積量が所定量以上であることを条件として、前記PMセンサの出力値に基づいて前記フィルタの故障を判定する。
【解決手段】選択還元型NOx触媒より下流側の排気の亜酸化窒素濃度又は該排気中の亜酸化窒素量に基づいて、PMセンサに堆積したPMの酸化量を算出し、該PM酸化量に基づいて、フィルタが所定の状態であると仮定して算出されるPMセンサにおけるPM堆積量を補正する。そして、補正されたPMセンサにおけるPM堆積量が所定量以上であることを条件として、前記PMセンサの出力値に基づいて前記フィルタの故障を判定する。
【発明の詳細な説明】
【技術分野】
【0001】
本発明は、内燃機関の排気通路に設けられ排気中の粒子状物質を捕集するフィルタの故障を検出するフィルタの故障検出装置に関する。
【背景技術】
【0002】
内燃機関の排気通路に、排気中の粒子状物質(Particulate Matter:以下、PMと称する)を捕集するフィルタを設ける場合がある。このような場合に、フィルタより下流側の排気通路にPMセンサを設け、該PMセンサの出力値に基づいてフィルタの故障を検出する技術が知られている。また、内燃機関の排気通路に、アンモニア(NH3)を還元剤として排気中のNOxを還元する選択還元型NOx触媒を設ける場合がある。
【0003】
特許文献1には、内燃機関の排気通路において、フィルタより下流側に選択還元型NOx触媒を設けた構成が開示されている。また、この特許文献1には、フィルタに捕集されたPMを燃焼させるフィルタの強制再生時に、選択還元型NOx触媒内を流動する排気中のアンモニア濃度が排気中のNOxを還元するのに適した濃度になるように選択還元型NOx触媒の温度の上昇を設定勾配に保持する技術が開示されている。
【0004】
特許文献2には、内燃機関の排気通路に、フィルタ、尿素噴射弁、選択還元型NOx触媒、アンモニア検出手段、アンモニアスリップ防止触媒、および亜酸化窒素検出手段を上流側から順に設けた構成が開示されている。また、この特許文献2には、亜酸化窒素検出手段によって検出された亜酸化窒素濃度に応じて、尿素噴射弁から供給される尿素量を制御する技術が開示されている。
【0005】
特許文献3には、内燃機関の排気通路において、フィルタより下流側にPMセンサを設けた構成が開示されている。また、この特許文献3には、フィルタに捕集されたPMを燃焼除去するフィルタの再生時期に応じて、PMセンサのセンサ素子に付着したPMを燃焼除去するセンサ素子の再生を開始する技術が開示されている。
【先行技術文献】
【特許文献】
【0006】
【特許文献1】特開2010−261331号公報
【特許文献2】特開2011−122552号公報
【特許文献3】特開2011−089430号公報
【発明の概要】
【発明が解決しようとする課題】
【0007】
フィルタの故障検出のために該フィルタより下流側の排気通路に設けるPMセンサとして、自身に堆積したPM量に対応する信号を出力するPMセンサを用いる場合がある。フィルタにおいて溶損又は破損等の故障が発生すると、該フィルタに捕集されずに該フィルタをすり抜けるPMの量が増加する。その結果、フィルタより下流側に設けられたPMセンサにおけるPM堆積量が、フィルタが正常の場合に比べて多くなる。そのため、上記のようなPMセンサの出力値を用いてフィルタの故障を検出することができる。
【0008】
ここで、排気通路におけるフィルタとPMセンサとの間に選択還元型NOx触媒が設けられる場合がある。また、選択還元型NOx触媒においてアンモニアを還元剤としてNOxが還元される過程においては、亜酸化窒素(N2O)が生成される場合がある。そして、選択還元型NOx触媒において亜酸化窒素が生成されると、該選択還元型NOx触媒よ
り下流側に設けられたPMセンサに堆積しているPMが、該亜酸化窒素によって酸化される場合がある。PMセンサに堆積したPMが亜酸化窒素によって酸化されることで減少すると、該PMセンサの出力値が低下する。そのため、PMセンサの出力値を用いてフィルタの故障を高精度で検出するためには、亜酸化窒素によるPMの酸化を考慮する必要がある。
【0009】
本発明は、上記のような問題に鑑みてなされたものであって、排気通路におけるフィルタとPMセンサとの間に選択還元型NOx触媒が設けられた構成において、PMセンサの出力値を用いたフィルタの故障検出の精度を向上させることを目的とする。
【課題を解決するための手段】
【0010】
第一の発明に係るフィルタの故障検出装置は、
内燃機関の排気通路に設けられ排気中の粒子状物質を捕集するフィルタの故障を検出するフィルタの故障検出装置であって、
前記フィルタより下流側の排気通路に設けられ、自身に堆積した粒子状物質の量に対応した信号を出力するPMセンサと、
前記フィルタと前記PMセンサとの間の排気通路に設けられアンモニアを還元剤として排気中のNOxを還元する選択還元型NOx触媒と、
前記フィルタが所定の状態であると仮定した場合の前記PMセンサにおけるPM堆積量を推定する推定手段と、
前記選択還元型NOx触媒より下流側の排気の亜酸化窒素濃度又は該排気中の亜酸化窒素量を取得する取得手段と、
少なくとも、前記得手段によって取得された前記選択還元型NOx触媒より下流側の排気の亜酸化窒素濃度又は該排気中の亜酸化窒素量に基づいて、前記PMセンサに堆積したPMの酸化量を算出する酸化量算出手段と、
前記推定手段によって推定された前記PMセンサにおけるPM堆積量を、前記酸化量算出手段によって算出されたPMの酸化量に基づいて補正するPM堆積量補正手段と、
前記PM堆積量補正手段によって補正された前記PMセンサにおけるPM堆積量が所定量以上であることを条件として、前記PMセンサの出力値に基づいて前記フィルタの故障を判定する判定手段と、
を備える。
【0011】
PMセンサは、該PMセンサにおけるPM堆積量が非常に少ない段階では、該PM堆積量に対応した信号を出力しない。ここで、所定量とは、PMセンサの出力値が該PMセンサ自身におけるPM堆積量に対応した値となるPM堆積量の閾値以上の値である。
【0012】
本発明においては、推定手段によって、フィルタが所定の状態であると仮定した場合の前記PMセンサにおけるPM堆積量が推定される。ここで、所定の状態は、例えば、正常な状態でもよく、また、フィルタの故障のレベルが所定のレベルに達した状態であってもよい。
【0013】
さらに、本発明では、酸化量算出手段算手段によって、選択還元型NOx触媒より下流側の排気の亜酸化窒素濃度又は該排気中の亜酸化窒素量に基づいて、PMセンサに堆積したPMの酸化量が算出される。このとき、選択還元型NOx触媒より下流側の排気の亜酸化窒素濃度が高いほど又は該排気中の亜酸化窒素量が多いほど、PMの酸化量は大きい値として算出される。
【0014】
そして、PM堆積量補正手段によって、推定手段によって推定されたPMセンサにおけるPM堆積量から、酸化量算出手段によって算出されたPMの酸化量を減算することで、該PM堆積量が補正される。これにより、フィルタが所定の状態であると仮定した場合の
PMセンサにおけるPM堆積量を高精度で算出することが可能となる。そして、このPM堆積量の補正値が所定量以上であるときに、判定手段によって、PMセンサの出力値に基づいてフィルタの故障が判定される。
【0015】
本発明によれば、排気中の亜酸化窒素による酸化量を考慮して算出された、フィルタが所定の状態であると仮定した場合のPMセンサにおけるPM堆積量に基づいて、フィルタの故障判定を実行するタイミングが決定される。従って、PMセンサの出力値を用いたフィルタの故障検出の精度を向上させることができる。
【0016】
第二の発明に係るフィルタの故障検出装置は、
内燃機関の排気通路に設けられ排気中の粒子状物質を捕集するフィルタの故障を検出するフィルタの故障検出装置であって、
前記フィルタより下流側の排気通路に設けられ、自身に堆積した粒子状物質の量に対応した信号を出力するPMセンサと、
前記フィルタと前記PMセンサとの間の排気通路に設けられアンモニアを還元剤として排気中のNOxを還元する選択還元型NOx触媒と、
前記フィルタが所定の状態であると仮定した場合の前記PMセンサにおけるPM堆積量を推定する推定手段と、
前記選択還元型NOx触媒より下流側の排気の亜酸化窒素濃度又は該排気中の亜酸化窒素量を取得する取得手段と、
少なくとも、前記得手段によって取得された前記選択還元型NOx触媒より下流側の排気の亜酸化窒素濃度又は該排気中の亜酸化窒素量に基づいて、前記PMセンサに堆積したPMの酸化量を算出する酸化量算出手段と、
前記推定手段によって推定された前記PMセンサにおけるPM堆積量を、前記酸化量算出手段によって算出されたPMの酸化量に基づいて補正するPM堆積量補正手段と、
前記PMセンサの出力値と、前記PM堆積量補正手段によって補正された前記PMセンサにおけるPM堆積量に基づいて定められる閾値と、を比較することで、前記フィルタの故障を判定する判定手段と、
を備える。
【0017】
本発明においても、第一の発明と同様、推定手段によって、フィルタが所定の状態であると仮定した場合の前記PMセンサにおけるPM堆積量が推定される。 さらに、本発明では、PM堆積量補正手段によって、推定手段によって推定されたPMセンサにおけるPM堆積量から、酸化量算出手段によって算出されたPMの酸化量を減算することで、該PM堆積量が補正される。そして、判定手段によって、このPM堆積量の補正値に基づいて定められる閾値とPMセンサの出力値とを比較することで、前記フィルタの故障が判定される。
【0018】
本発明によれば、排気中の亜酸化窒素による酸化量を考慮して算出された、フィルタが所定の状態であると仮定した場合のPMセンサにおけるPM堆積量に基づいて故障判定の閾値が定められる。従って、PMセンサの出力値を用いたフィルタの故障検出の精度を向上させることができる。
【0019】
第三の発明に係るフィルタの故障検出装置は、
内燃機関の排気通路に設けられ排気中の粒子状物質を捕集するフィルタの故障を検出するフィルタの故障検出装置であって、
前記フィルタより下流側の排気通路に設けられ、自身に堆積した粒子状物質の量に対応した信号を出力するPMセンサと、
前記フィルタと前記PMセンサとの間の排気通路に設けられアンモニアを還元剤として排気中のNOxを還元する選択還元型NOx触媒と、
前記選択還元型NOx触媒より下流側の排気の亜酸化窒素濃度又は該排気中の亜酸化窒素量を取得する取得手段と、
少なくとも、前記取得手段によって取得された前記選択還元型NOx触媒より下流側の排気の亜酸化窒素濃度又は該排気中の亜酸化窒素量に基づいて、前記PMセンサに堆積したPMの酸化量を算出する酸化量算出手段と、
前記酸化量算出手段によって算出されたPMの酸化量に基づいて前記PMセンサの出力値を補正するセンサ出力補正手段と、
前記センサ出力補正手段によって補正された前記PMセンサの出力値と閾値とを比較することで、前記フィルタの故障を判定する判定手段と、
を備える。
【0020】
PMセンサに堆積したPMの酸化量が多いほど、PMセンサの出力値は小さくなる。その結果、フィルタをすり抜けてPMセンサに付着したPM量の積算値(即ち、PMの酸化がなかった場合のPMセンサにおけるPM堆積量)とPMセンサの出力値との乖離が大きくなる。
【0021】
そこで、本発明では、センサ出力補正手段によって、酸化量算出手段によって算出されたPMの酸化量に基づいてPMセンサの出力値が補正される。このとき、PMの酸化量が多いほど、PMセンサの出力値は増加補正される。これにより、フィルタをすり抜けてPMセンサに付着したPM量の積算値とPMセンサの出力値との乖離を小さくすることができる。
【0022】
そして、判定手段によって、補正されたPMセンサの出力値と閾値とを比較することで、フィルタの故障が判定される。つまり、補正後のPMセンサの出力値が閾値以上であれば、フィルタをすり抜けたPM量が過剰に多い、即ちフィルタが故障していると判定される。一方、補正後のPMセンサの出力値が閾値より小さければ、フィルタは正常であると判定される。
【0023】
本発明によれば、排気中の亜酸化窒素による酸化量を考慮して補正したPMセンサの出力値に基づいてフィルタの故障判定が行われる。従って、PMセンサの出力値を用いたフィルタの故障検出の精度を向上させることができる。
【0024】
第一、第二、又は第三の発明において、酸化量算出手段は、選択還元型NOx触媒より下流側の排気の亜酸化窒素濃度又は該排気中の亜酸化窒素量に加え、PMセンサの温度に基づいて、該PMセンサに堆積したPMの酸化量を算出してもよい。このとき、PMセンサの温度が高いほど、PMの酸化量は大きい値として算出される。
【0025】
これによれば、PMセンサに堆積したPMの酸化量をより高精度で算出することができる。その結果、第一及び第二の発明においては、フィルタが所定の状態であると仮定した場合のPMセンサにおけるPM堆積量をより高精度で算出することができる。また、第三の発明においては、フィルタをすり抜けてPMセンサに付着したPM量の積算値とPMセンサの出力値との乖離をより小さくすることができる。そのため、PMセンサの出力値を用いたフィルタの故障検出の精度をより向上させることができる。
【0026】
第一、第二、又は第三の発明に係るフィルタの故障検出装置は、PMセンサの温度が所定温度以上の状態が所定期間以上継続した場合は、判定手段によるフィルタの故障判定を禁止する禁止手段をさらに備えてもよい。
【0027】
ここで、所定温度とは、PMセンサに堆積したPMが酸化する温度の下限値以上の温度である。また、所定期間とは、PMセンサの温度が所定温度以上の状態が該所定期間以上
継続すると、PMセンサにおいて酸化されるPM量が増加し、そのばらつきが過剰に大きくなると判断できる期間である。PMセンサにおいて酸化されるPM量のばらつきが大きくなると、酸化量算出手段によってその量を高精度で算出することが困難となる。
【0028】
本発明では、PMセンサの温度が所定温度以上の状態が所定期間以上継続した場合、即ち、PMセンサにおいて酸化されるPM量が増加し、そのばらつきが過剰に大きくなった場合は、禁止手段によって、フィルタの故障判定が禁止される。これにより、フィルタの故障判定の精度の低下を抑制することができる。
【0029】
また、上述したように、選択還元型NOx触媒より下流側の排気の亜酸化窒素濃度が高いほど又は該排気中の亜酸化窒素量が多いほど、PMセンサに堆積したPMの酸化が促進され易くなる。そこで、上記の場合、フィルタの故障検出装置は、取得手段によって取得された選択還元型NOx触媒より下流側の排気の亜酸化窒素濃度又は該排気中の亜酸化窒素量に基づいて、前記所定温度又は前記所定期間の少なくともいずれかを設定する設定手段をさらに備えてもよい。このとき、選択還元型NOx触媒より下流側の排気の亜酸化窒素濃度が高いほど、また、該排気中の亜酸化窒素量が多いほど、所定温度がより低い温度に設定される。また、選択還元型NOx触媒より下流側の排気の亜酸化窒素濃度が高いほど、また、該排気中の亜酸化窒素量が多いほど、所定期間はより短い期間に設定される。
【0030】
これによれば、PMセンサにおいて酸化されるPM量を酸化量算出手段によって高精度で算出することが困難な状態で、PMセンサの故障判定が行われることを、より高い確率で抑制することができる。従って、PMセンサの出力値を用いたフィルタの故障検出の精度を向上させることができる。
【0031】
本発明において、前記所定温度を第一所定温度とした場合に、禁止手段は、PMセンサの温度を上昇させることで該PMセンサに堆積したPMを酸化させて除去するPM除去処理が完了してから、PMセンサの温度が第二所定温度より低くなるまでの間においても、推定手段によるPMセンサにおけるPM堆積量の推定を行わず、フィルタの故障判定を禁止してもよい。
【0032】
PM除去処理では、PMセンサがPMの酸化が可能な温度まで昇温される。そのため、PM除去処理の完了後も暫くの間はPMセンサの温度が、PMの酸化が可能なほど高い状態が継続する。ここで、第二所定温度は、PMの酸化が可能な温度の下限値以下の温度である。
【0033】
これによれば、PM除去処理の完了直後に、PMセンサに堆積したPMが酸化されている状態で、該PMセンサの出力値に基づいてフィルタの故障判定が行われることを抑制することができる。従って、PMセンサの出力値を用いたフィルタの故障検出の精度をより向上させることができる。
【0034】
第四の発明に係るフィルタの故障検出装置は、
内燃機関の排気通路に設けられ排気中の粒子状物質を捕集するフィルタの故障を検出するフィルタの故障検出装置であって、
前記フィルタより下流側の排気通路に設けられ、自身に堆積する粒子状物質に対応した信号を出力するPMセンサと、
前記フィルタと前記PMセンサとの間の排気通路に設けられアンモニアを還元剤として排気中のNOxを還元する選択還元型NOx触媒と、
前記フィルタが所定の状態であると仮定した場合の前記PMセンサにおけるPM堆積量を推定する推定手段と、
前記PMセンサの出力値と、前記推定手段によって推定された前記PMセンサにおける
PM堆積量と、を用いて前記フィルタの故障を判定する判定手段と、
前記PMセンサの温度が所定温度以上の状態が所定期間以上継続した場合は、前記フィルタの故障判定を禁止する禁止手段と、
前記選択還元型NOx触媒より下流側の排気の亜酸化窒素濃度又は該排気中の亜酸化窒素量を取得する取得手段と、
前記取得手段によって取得された前記選択還元型NOx触媒より下流側の排気の亜酸化窒素濃度又は該排気中の亜酸化窒素量に基づいて、前記所定温度又は前記所定期間の少なくともいずれかを設定する設定手段と、
を備える。
【0035】
ここで、所定温度とは、PMセンサに堆積したPMが酸化する温度の下限値以上の温度である。また、所定期間とは、PMセンサの温度が所定温度以上の状態が該所定期間以上継続すると、PMセンサにおいて酸化されることで減少するPM堆積量の減少量が大きくなり、その結果、フィルタをすり抜けてPMセンサに付着したPM量の積算値とPMセンサの出力値との乖離が過剰に大きくなると判断できる期間である。
【0036】
本発明では、PMセンサの温度が所定温度以上の状態が所定期間以上継続した場合、即ち、フィルタをすり抜けてPMセンサに付着したPM量の積算値とPMセンサの出力値との乖離が過剰に大きくなった場合は、禁止手段によって、フィルタの故障判定が禁止される。これにより、フィルタの故障判定の精度の低下を抑制することができる。
【0037】
また、本発明に係るフィルタの故障検出装置は、設定手段を備えている。そして、設定手段によって、選択還元型NOx触媒より下流側の排気の亜酸化窒素濃度又は該排気中の亜酸化窒素量に基づいて、前記所定温度又は前記所定期間の少なくともいずれかが設定される。このとき、選択還元型NOx触媒より下流側の排気の亜酸化窒素濃度が高いほど又は該排気中の亜酸化窒素量が多いほど、所定温度がより低い温度に設定される。また、選択還元型NOx触媒より下流側の排気の亜酸化窒素濃度が高いほど又は該排気中の亜酸化窒素量が多いほど、所定期間はより短い期間に設定される。
【0038】
本発明によれば、フィルタをすり抜けてPMセンサに付着したPM量の積算値とPMセンサの出力値との乖離が過剰に大きい状態で、PMセンサの出力値に基づいてフィルタの故障判定が行われることをより高い確率で抑制することができる。従って、PMセンサの出力値を用いたフィルタの故障検出の精度を向上させることができる。
【0039】
また、本発明においても、前記所定温度を第一所定温度とした場合に、禁止手段は、PM除去処理が完了してから、PMセンサの温度が第二所定温度より低くなるまでの間、推定手段によるPMセンサにおけるPM堆積量の推定を行わず、フィルタの故障判定を禁止してもよい。
【発明の効果】
【0040】
本発明によれば、排気通路におけるフィルタとPMセンサとの間に選択還元型NOx触媒が設けられた構成において、PMセンサの出力値を用いたフィルタの故障検出の精度を向上させることができる。
【図面の簡単な説明】
【0041】
【図1】実施例1に係る内燃機関の吸排気系の概略構成を示す図である。
【図2】実施例1に係るPMセンサの概略構成図である。
【図3】実施例1に係るPMセンサの出力値の推移を示したタイムチャートである。
【図4】実施例1に係る、フィルタをすり抜けたPM量の積算値とPMセンサの出力値との関係を示す第一の図である。
【図5】実施例1に係る、フィルタをすり抜けたPM量の積算値とPMセンサの出力値との関係を示す第二の図である。
【図6】実施例1に係る、フィルタをすり抜けたPM量の積算値とPMセンサの出力値との関係を示す第三の図である。
【図7】実施例1に係るフィルタの故障検出のフローを示すフローチャートである。
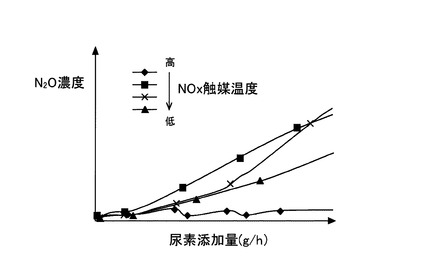
【図8】実施例1に係る、NOx触媒より下流側の排気の亜酸化窒素濃度と、添加弁からの尿素水の添加量及びNOx触媒の温度と、の関係を示す図である。
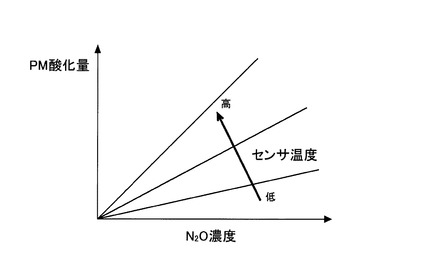
【図9】実施例1に係る、PMセンサに堆積したPMの酸化量と、PMセンサの温度及びNOx触媒より下流側の排気の亜酸化窒素濃度と、の関係を示す図である。
【図10】実施例2に係るフィルタの故障検出のフローを示すフローチャートである。
【図11】実施例3に係るフィルタの故障検出のフローの一部を示すフローチャートである。
【図12】実施例3に係るフィルタの故障検出のフローの他の一部を示すフローチャートである。
【図13】実施例4に係るフィルタの故障検出のフローの一部を示すフローチャートである。
【図14】実施例4に係るフィルタの故障検出のフローの他の一部を示すフローチャートである。
【発明を実施するための形態】
【0042】
以下、本発明の具体的な実施形態について図面に基づいて説明する。本実施例に記載されている構成部品の寸法、材質、形状、その相対配置等は、特に記載がない限りは発明の技術的範囲をそれらのみに限定する趣旨のものではない。
【0043】
<実施例1>
[吸排気系の概略構成]
図1は、本実施例に係る内燃機関の吸排気系の概略構成を示す図である。図1に示す内燃機関1は、車両駆動用のディーゼルエンジンである。ただし、本発明に係る内燃機関は、ディーゼルエンジンンに限られるものではなく、ガソリンエンジン等であってもよい。
【0044】
内燃機関1には、吸気通路2及び排気通路3が接続されている。また、内燃機関1の吸排気系にはターボチャージャ9が設けられている。ターボチャージャ9のコンプレッサ9aは吸気通路2に設けられており、ターボチャージャ9のタービン9bは排気通路3に設けられている。
【0045】
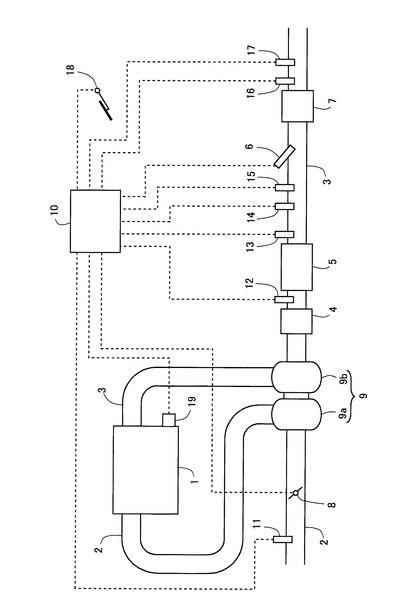
ターボチャージャ9のコンプレッサ9aより上流側の吸気通路2には、エアフローメータ11及びスロットル弁8が設けられている。エアフローメータ11は、吸気通路2を流通する吸気の量を検出する。スロットル弁8は、吸気通路2を流通する吸気の量を制御する。一方、ターボチャージャ9のタービン9bより下流側の排気通路3には、排気の流れ方向の上流側から順に、酸化触媒4、フィルタ5、添加弁6、選択還元型NOx触媒7(以下、NOx触媒7という。)が設けられている。
【0046】
酸化触媒4は、酸化能を有する触媒であればよく、例えば三元触媒であってもよい。また、酸化触媒4は、フィルタ5に担持されていてもよい。
【0047】
フィルタ5は、排気中のPMを捕集する。尚、フィルタ5には、触媒が担持されていてもよい。フィルタ5によってPMが捕集されることで、該フィルタ5にPMが徐々に堆積する。そして、フィルタ5の温度を強制的に上昇させる、所謂フィルタの再生処理を実行することで、該フィルタ5に堆積したPMを酸化させて除去することができる。例えば、
酸化触媒4にHCを供給することで、該HCの酸化熱によってフィルタ5の温度を上昇させることができる。また、酸化触媒4を備えずに、フィルタ5の温度を上昇させる他の装置を備えていてもよい。さらに、内燃機関1から高温のガスを排出させることでフィルタ5の温度を上昇させてもよい。
【0048】
添加弁6は、排気中に尿素水を添加する。添加弁6は、尿素水を添加する際には短い周期で尿素水の噴射と停止とを繰り返す。つまり、添加弁6は尿素水を周期的に添加する。添加弁6から尿素水として添加された尿素は、排気の熱で加水分解されアンモニア(NH3)となり、その一部又は全部がNOx触媒7に吸着する。尚、添加弁6は、尿素水以外のアンモニア由来化合物を添加するものであってもよい。
【0049】
NOx触媒7は、アンモニアを還元剤として排気中のNOxを還元する。例えば、NOx触媒7にアンモニアを予め吸着させておけば、NOx触媒7をNOxが通過するときに該アンモニアにより該NOxを還元させることができる。
【0050】
酸化触媒4より下流側且つフィルタ5より上流側の排気通路3には、第一排気温度センサ12が設けられている。フィルタ5より下流側且つ添加弁6より上流側の排気通路3には、第二排気温度センサ13、A/Fセンサ14、及びNOxセンサ15が設けられている。NOx触媒7よりも下流側の排気通路3には、PMセンサ16及び第三排気温度センサ17が設けられている。
【0051】
第一、第二、第三排気温度センサ12,13,17は排気の温度を検出する。A/Fセンサ14は排気の空燃比を検出する。NOxセンサ15は排気のNOx濃度を検出する。PMセンサ16は排気中のPM量を検出する。尚、PMセンサ16の詳細については後述する。また、これらセンサの全てが必須というわけではなく、必要に応じて設けることができる。
【0052】
内燃機関1には電子制御ユニット(ECU)10が併設されている。ECU10は内燃機関1の運転状態等を制御するユニットである。ECU10には、第一、第二、第三排気温度センサ12,13,17、A/Fセンサ14、NOxセンサ15、及びPMセンサ16の他、アクセル開度センサ18及びクランクポジションセンサ19が電気的に接続されている。アクセル開度センサ18は、内燃機関1を搭載した車両のアクセル開度を検出する。クランクポジションセンサ19は、内燃機関1のクランク角度を検出する。そして、各センサの出力信号がECU10に入力される。
【0053】
ECU10は、アクセル開度センサ18の出力値に基づいて内燃機関1の機関負荷を導出する。また、ECU10は、クランクポジションセンサ19の出力値に基づいて内燃機関1の機関回転速度を導出する。
【0054】
また、ECU10には、スロットル弁8、及び添加弁6が電気的に接続されている。そして、ECU10によって、これらの装置が制御される。
【0055】
また、ECU10は、フィルタ5におけるPM堆積量を推定する。そして、ECU10は、該推定されたPM堆積量が所定の再生開始の閾値以上となると、前記フィルタの再生処理を実施する。尚、内燃機関1が搭載されている車両の前回のフィルタの再生処理の実施完了からの走行距離が所定距離以上となったときにフィルタの再生処理を実行してもよい。また、規定期間が経過する毎にフィルタの再生処理を実施してもよい。
【0056】
[PMセンサ]
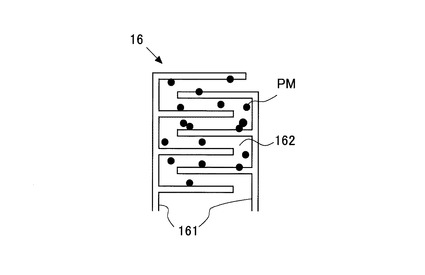
図2は、PMセンサ16の概略構成図である。PMセンサ16は、自身に堆積したPM
量に対応する電気信号を出力するセンサである。PMセンサ16は、一対の電極161と、該一対の電極161の間に設けられる絶縁体162と、を備えて構成されている。一対の電極161の間にPMが付着すると、該一対の電極161の間の電気抵抗が変化する。この電気抵抗の変化は、排気中のPM量と相関関係にあるため、該電気抵抗の変化に基づいて、排気中のPM量を検出することができる。このPM量は、単位時間当たりのPMの質量としてもよく、所定時間におけるPMの質量としてもよい。尚、PMセンサ16は、自身に堆積したPM量に対応する電気信号を出力するものであればよく、図2に示すような構成のものに限られるものではない。
【0057】
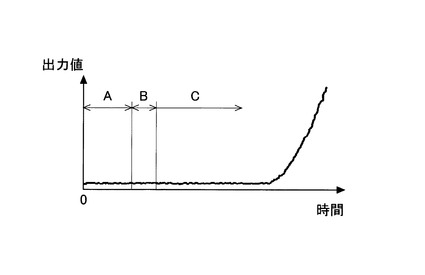
図3は、PMセンサ16の出力値の推移を示したタイムチャートである。尚、内燃機関1から排出される単位時間当たりのPM量が一定であるとすると、PMセンサ16におけるPM堆積量は時間の経過と共に一定の割合で増加する。内燃機関1の始動直後のAで示される期間は、排気通路3内で凝縮する水がPMセンサ16に付着する虞がある期間である。PMセンサ16に水が付着すると、該PMセンサ16の出力値が変化したり、PMセンサ16が故障したりするため、この期間ではPMセンサ16によるPM量の検出は行われない。
【0058】
Aで示される期間の後のBで示される期間では、前回の内燃機関1の運転時にPMセンサ16に堆積したPMを除去する処理(以下、PM除去処理という。)を行う。このPM除去処理は、PMセンサ16の温度を、PMが酸化する温度まで上昇させることにより行われる。このBで示される期間においても、PMセンサ16によるPM量の検出は行われない。
【0059】
そして、Bで示される期間の後のCで示される期間でPMの検出が行われる。ただし、Cで示される期間であっても、PMセンサ16にある程度の量のPMが堆積するまでは、PMセンサ16の出力値が増加しない。即ち、ある程度の量のPMが堆積することで、一対の電極161の間に電流が流れるようになってから出力値が増加を始める。その後は、PMセンサ16に堆積したPM量の増加に応じて、その出力値が増加していく。
【0060】
[フィルタの故障検出]
PMセンサ16は、フィルタ5よりも下流側に設けられている。そのため、PMセンサ16には、フィルタ5に捕集されずに、該フィルタ5をすり抜けたPMが付着する。従って、PMセンサ16におけるPM堆積量は、フィルタ5をすり抜けたPM量の積算値に対応した量となる。
【0061】
フィルタ5において溶損又は破損等の故障が発生すると、該フィルタ5に捕集されずに該フィルタ5をすり抜けるPMの量が増加する。その結果、フィルタ5より下流側に設けられたPMセンサ16に付着するPM量が増加するため、該PMセンサ16におけるPM堆積量が、フィルタ5が正常の場合に比べて多くなる。そこで、本実施例では、PMセンサ16の出力値を用いてフィルタ5の故障を検出する。
【0062】
フィルタ5の故障検出は、PM除去処理を実行することで、PMセンサ16に堆積したPMを一旦除去した後に行われる。ここで、上述したように、PMセンサ16に堆積したPMを除去した後は、PMセンサ16が正常であっても、PM堆積量がある程度の量に達しなければ、該PMセンサ16の出力値は、PM堆積量に対応した値とはならない。そのため、フィルタ5が正常であると仮定した場合のPMセンサ16におけるPM堆積量(以下、正常時PM堆積量と称する)の推定値が所定量以上であることを条件として、PMセンサ16の出力値に基づくフィルタ5の故障判定が行われる。
【0063】
ここで、所定量とは、PMセンサ16の出力値が該PMセンサ16におけるPM堆積量
に対応した値となるPM堆積量の閾値以上の値である。この所定量は、実験等に基づいて予め定められている。
【0064】
また、フィルタ5の故障判定は、正常時PM堆積量に基づいて定められる閾値と、PMセンサ16の出力値とを比較することで行われる。
【0065】
以下、本実施例に係る正常時PM堆積量の算出方法について説明する。PMセンサ16に付着するPM量は、内燃機関1から排出されるPMの量(以下、機関排出PM量と称する)が多いほど、多くなる。機関排出PM量は、内燃機関1の運転状態(機関回転速度及び機関負荷)に応じて変化する。
【0066】
また、機関排出PM量が同一であり、且つフィルタ5が正常であっても、フィルタ5に流入するPM量に対する該フィルタ5をすり抜けるPM量の割合(以下、フィルタすり抜け率と称する)は、フィルタ5におけるPM堆積量に応じて変化する。つまり、フィルタ5におけるPM堆積量が少ないほど、フィルタすり抜け率は高くなる。
【0067】
さらに、フィルタ5をすり抜けたPM量に対するPMセンサ16に付着するPM量の割合(以下、センサ付着率と称する)も、フィルタ5におけるPM堆積量及びフィルタ5を通過する排気の流量(流速)に応じて変化する。つまり、フィルタ5におけるPM堆積量が少ないほど、また、フィルタ5を通過する排気の流量が多いほど(該排気の流速が大きいほど)、PMセンサ16の周囲を流れる排気の流速が大きくなるため、センサ付着率は低くなる。
【0068】
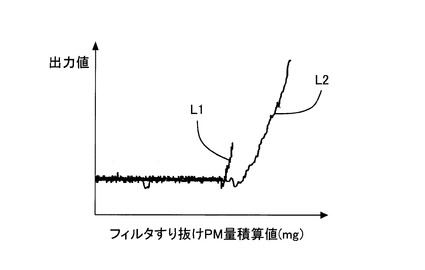
図4は、フィルタ5をすり抜けたPM量の積算値とPMセンサ16の出力値との関係を示す図である。図4において、L1は、吸気量が比較的少ない場合(即ち、排気の流量が比較的少ない場合)を示しており、L2は、吸気量が比較的多い場合(即ち、排気の流量が比較的多い場合)を示している。
【0069】
上述したように、排気の流量が多いほどセンサ付着率が低くなる。換言すれば、排気の流量が少ないほどセンサ付着率が高くなる。そのため、吸気量が比較的少ない場合は、吸気量が比較的多い場合に比べて、フィルタ5をすり抜けたPM量の積算値がより小さい段階で、PMセンサ16により多くのPMが堆積する。その結果、PMセンサ16は、図4に示すように、フィルタ5をすり抜けたPM量の積算値がより小さい段階で、自身に堆積したPM量に対応する電気信号を出力する。
【0070】
そこで、本実施例では、機関排出PM量、フィルタすり抜け率、及びセンサ付着率に基づいて、正常時PM堆積量を推定する。
【0071】
ただし、排気の温度が上昇し、PMセンサ16の温度が、PMの酸化が可能な温度(以下、PM酸化温度と称する)に達すると、PMセンサ16に堆積したPMが酸化される。PMセンサ16に堆積したPMが酸化されると、該PMセンサ16におけるPM堆積量が減少する。そのため、正常時PM堆積量を高い精度で算出するためには、PMセンサ16に堆積したPMの酸化量を考慮する必要がある。
【0072】
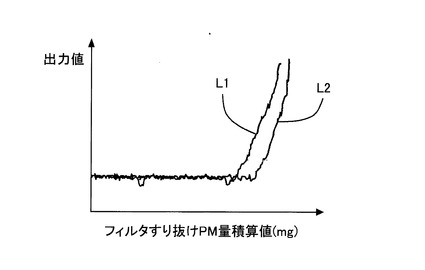
図5は、フィルタ5をすり抜けたPM量の積算値とPMセンサ16の出力値との関係を示す図である。図5において、L1は、PMセンサ16の周囲の排気温度(即ち、PMセンサ16の温度)がPM酸化温度より低い場合を示しており、L2は、PMセンサ16の周囲の排気温度がPM酸化温度以上の場合を示している。尚、L1で示す場合とL2で示す場合とで、内燃機関1の吸気量は同一(即ち、排気の流量は同一)とする。
【0073】
上述したように、PMセンサ16の温度がPM酸化温度以上となると、フィルタ5をすり抜けてPMセンサ16に一旦付着し堆積したPMが酸化される。そのため、図5に示すように、PMセンサ16の周囲の排気温度がPM酸化温度以上の場合は、PMセンサ16の周囲の排気温度がPM酸化温度より低い場合に比べて、フィルタ5をすり抜けたPM量の積算値がより大きくならないと、PMセンサ16が、自身に堆積したPM量に対応する電気信号を出力しない。
【0074】
さらに、本実施例においては、排気通路3におけるPMセンサ16より上流側にNOx触媒7が設けられている。NOx触媒7においてアンモニアを還元剤としてNOxが還元される過程では、亜酸化窒素(N2O)が生成される場合がある。そして、NOx触媒7において亜酸化窒素が生成されると、該NOx触媒7より下流側に設けられたPMセンサ16に堆積しているPMが、該亜酸化窒素によって酸化されることになる。つまり、NOx触媒7において生成される亜酸化窒素の量が多いほど、該NOx触媒7より下流側の排気中の亜酸化窒素量が多くなり、PMセンサ16に堆積したPMの酸化が促進される。
【0075】
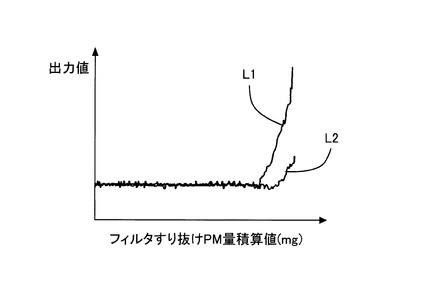
図6は、フィルタ5をすり抜けたPM量の積算値とPMセンサ16の出力値との関係を示す図である。図6において、L1は、添加弁6からの尿素水の添加が行われていない場合(即ち、NOx触媒7において、アンモニアを還元剤とするNOxの還元が行われず、亜酸化窒素が生成されていない場合)を示しており、L2は、添加弁6からの尿素水の添加が行われている場合(即ち、NOx触媒7において、アンモニアを還元剤とするNOxの還元が行われることで、亜酸化窒素が生成されている場合)を示している。
【0076】
上述したように、NOx触媒7において亜酸化窒素が生成されると、PMセンサ16に堆積したPMの酸化が促進される。そのため、図6に示すように、添加弁6からの尿素水の添加が行われている場合は、添加弁6からの尿素水の添加が行われていない場合に比べて、フィルタ5をすり抜けたPM量の積算値がより大きくならないと、PMセンサ16が、自身に堆積したPM量に対応する電気信号を出力しない。
【0077】
そこで、本実施例では、PMセンサ16の温度及びNOx触媒7より下流側の排気の亜酸化窒素濃度に基づいて、PMセンサ16に堆積したPMの酸化量を算出する。そして、上記のように推定された正常時PM堆積量の推定値を、該PMの酸化量に基づいて補正する。
【0078】
[フィルタの故障検出のフロー]
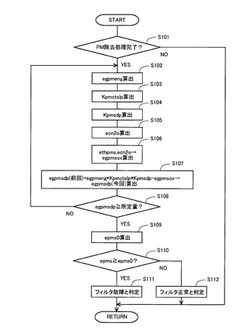
本実施例に係るフィルタの故障検出のフローについて、図7に示すフローチャートに基づいて説明する。本フローは、ECU10に予め記憶されており、ECU10によって所定の間隔で繰り返し実行される。
【0079】
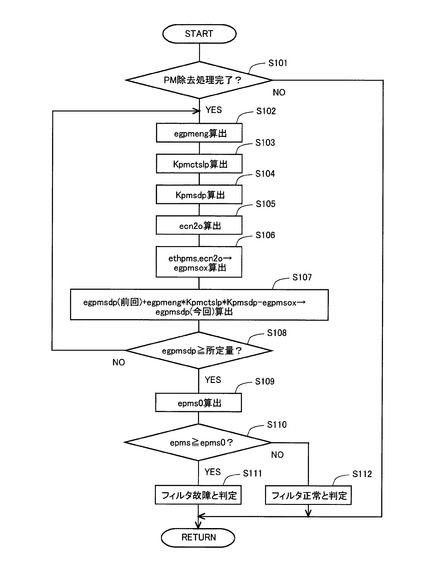
本フローでは、先ずステップS101において、PM除去処理が完了したか否かが判別される。ステップS101において否定判定された場合、本フローの実行は一旦終了される。一方、ステップS101において肯定判定された場合、次にステップS102の処理が実行される。
【0080】
ステップS102においては、機関排出PM量egpmengが算出される。機関排出PM量egpmengは、機関回転速度及び機関負荷に基づいて算出される。機関排出PM量egpmengと機関回転速度及び機関負荷との関係は、実験等に基づいて求めることができ、マップ又は関数としてECU10に予め記憶されている。ステップS102では、このマップ又は関数を用いて機関排出PM量egpmengが算出される。
【0081】
次に、ステップS103において、フィルタすり抜け率Kpmctslpが算出される
。フィルタすり抜け率Kpmctslpは、フィルタ5が正常であると仮定した場合のフィルタ5におけるPM堆積量に基づいて算出される。フィルタ5が正常であると仮定した場合のフィルタ5におけるPM堆積量は、内燃機関1の機関回転速度及び機関負荷やフィルタ5の温度等の履歴に基づいて算出することができる。フィルタすり抜け率Kpmctslpと、フィルタ5が正常であると仮定した場合のフィルタ5におけるPM堆積量との関係は、実験等に基づいて求めることができ、マップ又は関数としてECU10に予め記憶されている。ステップS103では、このマップ又は関数を用いてフィルタすり抜け率Kpmctslpが算出される。
【0082】
次に、ステップS104において、センサ付着率Kpmsdpが算出される。センサ付着率Kpmsdpも、フィルタ5が正常であると仮定した場合のフィルタ5におけるPM堆積量及びフィルタ5を通過する排気の流量に基づいて算出される。センサ付着率Kpmsdpと、フィルタ5が正常であると仮定した場合のフィルタ5におけるPM堆積量及びフィルタ5を通過する排気の流量との関係は、実験等に基づいて求めることができ、マップ又は関数としてECU10に予め記憶されている。ステップS104では、このマップ又は関数を用いてセンサ付着率Kpmsdpが算出される。
【0083】
次に、ステップS105において、NOx触媒7より下流側の排気の亜酸化窒素濃度ecn2oが算出される。NOx触媒7における亜酸化窒素の生成量は、添加弁6からの尿素水の添加量(即ち、NOx触媒7に還元剤として供給されるアンモニアの量)及びNOx触媒7の温度に応じて変化する。そのため、NOx触媒7より下流側の排気の亜酸化窒素濃度ecn2oは、添加弁6からの尿素水の添加量及びNOx触媒7の温度に基づいて求めることができる。
【0084】
図8は、NOx触媒7より下流側の排気の亜酸化窒素濃度と、添加弁6からの尿素水の添加量及びNOx触媒7の温度と、の関係を示す図である。本実施例では、このような、NOx触媒7より下流側の排気の亜酸化窒素濃度と、添加弁6からの尿素水の添加量及びNOx触媒7の温度と、の関係が、実験等に基づいて求められており、マップ又は関数としてECU10に予め記憶されている。ステップS105では、このマップ又は関数を用いて、NOx触媒7より下流側の排気の亜酸化窒素濃度ecn2oが算出される。
【0085】
次に、ステップS106において、PMセンサ16に堆積したPMの酸化量egpmsoxが算出される。PMセンサ16に堆積したPMの酸化量egpmsoxは、PMセンサ16の温度ethpms、及び、ステップS105で算出されたNOx触媒7より下流側の排気の亜酸化窒素濃度ecn2oに基づいて算出される。PMセンサ16の温度ethpmsとして、第三排気温度センサ17によって検出される排気温度を採用してもよい。また、PMセンサ16の温度を検出する温度センサを別途設けてもよい。
【0086】
図9は、PMセンサ16に堆積したPMの酸化量egpmsoxと、PMセンサ16の温度ethpms及びNOx触媒7より下流側の排気の亜酸化窒素濃度ecn2oと、の関係を示す図である。本実施例では、このような、PMセンサ16に堆積したPMの酸化量egpmsoxと、PMセンサ16の温度ethpms及びNOx触媒7より下流側の排気の亜酸化窒素濃度ecn2oと、の関係が、実験等に基づいて求められており、マップ又は関数としてECU10に予め記憶されている。ステップS106では、このマップ又は関数を用いて、PMセンサ16に堆積したPMの酸化量egpmsoxが算出される。従って、PMセンサ16の温度が高いほど、また、NOx触媒7より下流側の排気の亜酸化窒素濃度ecn2oが高いほど、PMセンサ16に堆積したPMの酸化量egpmsoxは大きい値として算出される。
【0087】
尚、NOx触媒7より下流側の排気の亜酸化窒素濃度ecn2oに代えて、該排気中の
亜酸化窒素量を算出し、該亜酸化窒素量を用いてPMセンサ16に堆積したPMの酸化量egpmsoxを算出してもよい。
【0088】
次に、ステップS107において、正常時PM堆積量egpmsdpが算出される。正常時PM堆積量egpmsdpは、該ステップS107の処理を前回実行した際に算出された正常時PM堆積量egpmsdpに、ステップS102で算出された機関排出PM量egpmengと、ステップS103で算出されたフィルタすり抜け率Kpmctslpと、ステップS104で算出されたセンサ付着率Kpmsdpと、を乗算した値を加算し、さらに、ステップS106で算出されたPMセンサ16に堆積したPMの酸化量egpmsoxを減算することで算出される。
【0089】
つまり、該ステップS107の処理を前回実行した際に算出された正常時PM堆積量egpmsdpに、機関排出PM量egpmengと、フィルタすり抜け率Kpmctslpと、センサ付着率Kpmsdpと、を乗算した値を加算することで、PMの酸化量を考慮する以前の正常時PM堆積量が算出される。そして、該PMの酸化量を考慮する以前の正常時PM堆積量が、PMの酸化量egpmsoxを減算することで補正される。
【0090】
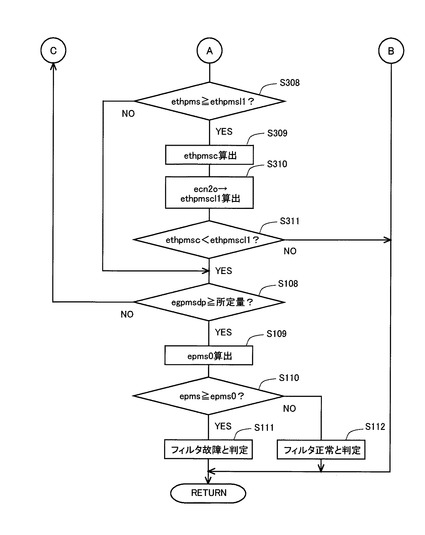
次に、ステップS108において、ステップS107で算出された現時点における正常時PM堆積量egpmsdpが所定量以上であるか否かが判別される。ステップS108において否定判定された場合、ステップS102からS107の処理が再度実行される。一方、ステップS108において肯定判定された場合、次にステップS109の処理が実行される。
【0091】
ステップS109においては、ステップS107で算出された現時点における正常時PM堆積量egpmsdpに基づいて、フィルタ5の故障判定の閾値epms0が算出される。該閾値epms0と正常時PM堆積量egpmsdpとの関係は、実験等に基づいて予め定められており、マップ又は関数としてECU10に予め記憶されている。ステップS109では、このマップ又は関数を用いて、閾値epms0が算出される。ここで、例えば、閾値epms0を、正常時PM堆積量egpmsdpに許容可能なマージンを加算した値としてもよい。また、正常時PM堆積量egpmsdpを閾値epms0としてもよい。正常時PM堆積量egpmsdpの値が大きいほど閾値epms0も大きい値として算出される。
【0092】
尚、ステップS107で算出される正常時PM堆積量egpmsdpが所定量以上のある一定量に達した時点でフィルタ5の故障判定を実施するようにしてもよい。この場合、閾値epms0は、その一定量に基づいて予め定められた一定の値となる。
【0093】
次に、ステップS110において、PMセンサ16の出力値epmsが、ステップS109で算出されたフィルタ5の故障判定の閾値epms0以上であるか否かが判別される。ステップS110において肯定判定された場合、PMセンサ16における実際のPM堆積量が正常時PM堆積量に比べて過剰に多いと判断できる。そのため、この場合、次にステップS111において、フィルタ5が故障していると判定される。一方、ステップS110において否定判定された場合、次にステップS112において、フィルタ5は正常であると判定される。
【0094】
上記のように、本実施例では、PMセンサ16の温度及びNOx触媒7より下流側の排気の亜酸化窒素濃度に基づいてPMセンサ16に堆積したPMの酸化量が算出される。そして、該PMの酸化量を考慮して算出された正常時PM堆積量に基づいて、フィルタの故障判定を実行するタイミングが決定される。さらに、該PMの酸化量を考慮して算出された正常時PM堆積量に基づいて、フィルタ5の故障判定の閾値が定められる。従って、フ
ィルタの故障検出の精度を向上させることができる。
【0095】
尚、PMセンサ16に堆積したPMの酸化量は、必ずしも、PMセンサ16の温度及びNOx触媒7より下流側の排気の亜酸化窒素濃度(又は、該排気中の亜酸化窒素量)の両方に基づいて算出しなくともよい。つまり、PMセンサ16の温度又はNOx触媒7より下流側の排気の亜酸化窒素濃度のいずれか一方のみに基づいて、PMセンサ16に堆積したPMの酸化量を算出してもよい。ただし、これらの値の両方に基づいて算出することで、PMの酸化量をより高精度で算出することができる。その結果、フィルタの故障検出の精度をより向上させることができる。
【0096】
また、本実施例においては、フィルタ5の故障判定の実行タイミング及びフィルタ5の故障判定の閾値を正常時PM堆積量に基づいて決定した。しかしながら、これらは、必ずしも正常時PM堆積量に基づいて決定される必要はない。つまり、フィルタ5の状態が、該フィルタ5の故障のレベルが所定のレベルに達した状態(以下、所定故障状態と称する)であると仮定して、PMセンサ16におけるPM堆積量を算出し、該PM堆積量に基づいて、フィルタ5の故障判定の実行タイミング及びフィルタ5の故障判定の閾値を決定してもよい。
【0097】
フィルタ5が正常な場合と、フィルタ5の状態が所定故障状態の場合とでは、フィルタすり抜け率が異なる。そこで、上記の場合、フィルタ5の状態が、フィルタ5の状態が所定故障状態であると仮定した場合のフィルタすり抜け率と、機関排出PM量と、センサ付着率とに基づいて、PMセンサ16におけるPM堆積量を推定する。
【0098】
そして、その推定値を、PMセンサ16に堆積したPMの酸化量に基づいて補正する。これにより、PMの酸化量を考慮した、フィルタ5の状態が所定故障状態であると仮定した場合のPMセンサ16におけるPM堆積量を算出することができる。
【0099】
尚、フィルタ5の状態が所定故障状態であると仮定した場合のフィルタすり抜け率は、フィルタ5におけるPM堆積量及びフィルタ5を通過する排気の流量(流速)に応じて変化する。フィルタ5の状態が所定故障状態である場合は、該フィルタ5におけるPM堆積量が多いほど、フィルタすり抜け率は高くなる。また、フィルタ5を通過する排気の流量が多いほど(該排気の流速が大きいほど)、フィルタすり抜け率は高くなる。このような、フィルタ5の状態が所定故障状態であると仮定した場合の、フィルタすり抜け率と、フィルタ5におけるPM堆積量及びフィルタ5を通過する排気の流量との関係は実験等に基づいて予め求めることができる。
【0100】
<実施例2>
本実施例に係る内燃機関の吸排気系の概略構成は、実施例1と同様である。また、本実施例においても、実施例1と同様、PMセンサ16の出力値を用いてフィルタ5の故障を検出する。以下、本実施例に係るフィルタの故障検出方法について、実施例1と異なる点についてのみ説明する。
【0101】
[フィルタの故障検出]
本実実施例においても、実施例1と同様、機関排出PM量、フィルタすり抜け率、及びセンサ付着率に基づいて正常時PM堆積量が推定される。ただし、実施例1とは異なり、このように推定された正常時PM堆積量が、PMセンサ16に堆積したPMの酸化量に基づいて補正はされない。それに代えて、本実施例では、PMセンサ16に堆積したPMの酸化量に基づいてPMセンサ16の出力値を補正する。
【0102】
ここで、PMセンサ16に堆積したPMの酸化量が多いほど、PMセンサ16の出力値
は小さくなる。その結果、フィルタ5をすり抜けてPMセンサ16に付着したPM量の積算値(即ち、PMの酸化がなかった場合のPMセンサ16におけるPM堆積量)とPMセンサ16の出力値との乖離が大きくなる。そこで、本実施例では、PMセンサ16に堆積したPMの酸化量が多いほど、PMセンサ16の出力値を増加補正する。これにより、フィルタ5をすり抜けてPMセンサ16に付着したPM量の積算値とPMセンサ16の出力値との乖離を小さくすることができる。そして、補正後のPMセンサ16の出力値と閾値とを比較することで、フィルタ5の故障を判定する。
【0103】
[フィルタの故障検出のフロー]
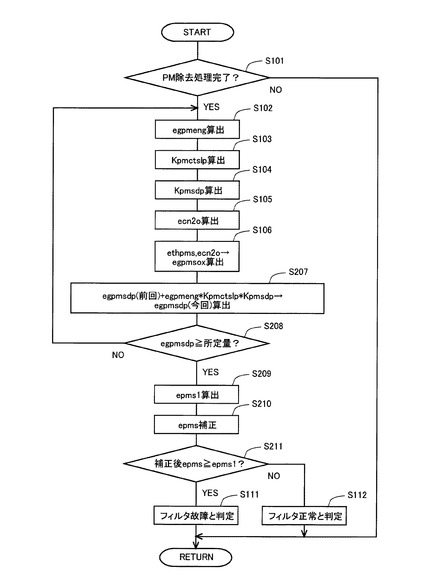
本実施例に係るフィルタの故障検出のフローについて、図10に示すフローチャートに基づいて説明する。本フローは、ECU10に予め記憶されており、ECU10によって所定の間隔で繰り返し実行される。尚、図7に示すフローにおけるステップと同様の処理が実行されるステップについては、同様の参照番号を付し、その説明を省略する。
【0104】
本フローでは、ステップS106の処理の次には、ステップS207の処理が実行される。ステップS207では、正常時PM堆積量egpmsdpが算出される。ここでは、正常時PM堆積量egpmsdpは、該ステップS207の処理を前回実行した際に算出された正常時PM堆積量egpmsdpに、ステップS102で算出された機関排出PM量egpmengと、ステップS103で算出されたフィルタすり抜け率Kpmctslpと、ステップS104で算出されたセンサ付着率Kpmsdpと、を乗算した値を加算することで算出される。つまり、PMセンサ16に堆積したPMの酸化量については考慮せずに、正常時PM堆積量egpmsdpが算出される。
【0105】
次に、ステップS208において、ステップS207で算出された現時点における正常時PM堆積量egpmsdpが所定量以上であるか否かが判別される。ステップS208において否定判定された場合、ステップS102からS207の処理が再度実行される。一方、ステップS108において肯定判定された場合、次にステップS209の処理が実行される。
【0106】
ステップ209においては、ステップS207で算出された現時点における正常時PM堆積量egpmsdpに基づいて、フィルタ5の故障判定の閾値epms1が算出される。該閾値epms1と正常時PM堆積量egpmsdpとの関係は、実験等に基づいて予め定められており、マップ又は関数としてECU10に予め記憶されている。ステップS209では、このマップ又は関数を用いて、閾値epms0が算出される。ここで、例えば、閾値epms1を、正常時PM堆積量egpmsdpに許容可能なマージンを加算した値としてもよい。また、正常時PM堆積量egpmsdpを閾値epms1としてもよい。正常時PM堆積量egpmsdpの値が大きいほど閾値epms1も大きい値として算出される。
【0107】
尚、ステップS207で算出される正常時PM堆積量egpmsdpが所定量以上のある一定量に達した時点でフィルタ5の故障判定を実施するようにしてもよい。この場合、閾値epms1は、その一定量に基づいて予め定められた一定の値となる。
【0108】
次に、ステップS210において、ステップS106で算出されたPMセンサ16に堆積したPMの酸化量egpmsoxに基づいてPMセンサ16の出力値epmsが補正される。このとき、PMの酸化量egpmsoxが多いほど、PMセンサ16の出力値epmsは増加補正される。PMの酸化量egpmsoxとPMセンサ16の出力値の補正量との関係は実験等に基づいて求められており、マップ又は関数としてECU10に予め記憶されている。ステップS210では、このマップ又は関数を用いて算出された補正量が加算されることで、PMセンサ16の出力値epmsが補正される。
【0109】
次に、ステップS211において、ステップS210において算出された補正後のPMセンサ16の出力値epmsが、ステップS209で算出されたフィルタ5の故障判定の閾値epms1以上であるか否かが判別される。ステップS211において肯定判定された場合、PMセンサ16における実際のPM堆積量が過剰に多いと判断できる。そのため、この場合、次にステップS111において、フィルタ5が故障していると判定される。一方、ステップS211において否定判定された場合、次にステップS112において、フィルタ5は正常であると判定される。
【0110】
上記ように、本実施例では、PMセンサ16に堆積したPMの酸化量を考慮して補正したPMセンサ16の出力値に基づいてフィルタ5の故障判定が行われる。従って、フィルタの故障検出の精度を向上させることができる。
【0111】
尚、本実施例においても、実施例1と同様、フィルタ5の故障判定の実行タイミング及びフィルタ5の故障判定の閾値は、必ずしも正常時PM堆積量に基づいて決定される必要はない。つまり、フィルタ5の状態が所定故障状態であると仮定して、PMセンサ16におけるPM堆積量を算出し、該PM堆積量に基づいてフィルタ5の故障判定の実行タイミング及びフィルタ5の故障判定の閾値を決定してもよい。
【0112】
<実施例3>
本実施例に係る内燃機関の吸排気系の概略構成は、実施例1と同様である。また、本実施例においても、実施例1と同様、PMセンサ16の出力値を用いてフィルタ5の故障を検出する。以下、本実施例に係るフィルタの故障検出方法について、実施例1と異なる点についてのみ説明する。
【0113】
[フィルタの故障検出]
PMセンサ16に堆積したPMの酸化量が増加すると、そのばらつきが大きくなり、その量を高精度で算出することが困難となる。その結果、正常時PM堆積量を高精度で算出することが困難となる。そこで、本実施例では、PMセンサにおいて酸化されるPM量が増加し、そのばらつきが過剰に大きくなった場合は、フィルタ5の故障判定が禁止される。
【0114】
具体的には、PMセンサ16の温度が第一所定温度以上の状態が所定期間以上継続した場合は、フィルタ5の故障判定が禁止される。ここで、第一所定温度とは、PMセンサ16に堆積したPMが酸化する温度の下限値以上の温度である。また、本実施例に係る所定期間とは、PMセンサ16の温度が所定温度以上の状態が該所定期間以上継続すると、PMセンサ16において酸化されるPM量が増加し、そのばらつきが過剰に大きくなると判断できる期間である。
【0115】
また、NOx触媒7においてアンモニアを還元剤としてNOxが還元される際に生成される亜酸化窒素の量が多いほど、即ち、NOx触媒7より下流側の排気の亜酸化窒素濃度が高いほど(又は、該排気中の亜酸化窒素量が多いほど)、PMセンサ16に堆積したPMの酸化が促進され易くなる。そこで、第一所定温度及び所定期間を、NOx触媒7より下流側の排気の亜酸化窒素濃度に基づいて設定する。つまり、NOx触媒7より下流側の排気の亜酸化窒素濃度が高いほど、所定温度をより低い温度に設定し、また、所定期間をより短い期間に設定する。
【0116】
さらに、本実施例では、PM除去処理の完了後、PMセンサ16の温度が第二所定温度より低くなるまでの間においても、正常時PM堆積量の推定が行われず、フィルタ5の故障判定が禁止される。PM除去処理の完了後も暫くの間はPMセンサ16の温度が、PM
の酸化が可能なほど高い状態が継続する。ここで、第二所定温度は、PMの酸化が可能な温度の下限値以下の温度である。つまり、PM除去処理の完了直後の、PMセンサ16に堆積したPMが酸化されている状態では、正常時PM堆積量の推定が行われない。
【0117】
[フィルタの故障検出のフロー]
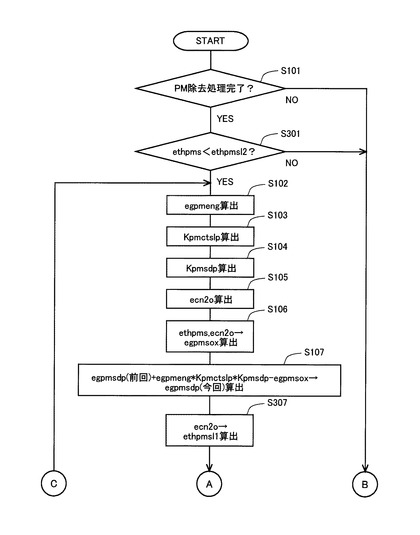
本実施例に係るフィルタの故障検出のフローについて、図11,12に示すフローチャートに基づいて説明する。本フローは、ECU10に予め記憶されており、ECU10によって所定の間隔で繰り返し実行される。尚、図7に示すフローにおけるステップと同様の処理が実行されるステップについては、同様の参照番号を付し、その説明を省略する。
【0118】
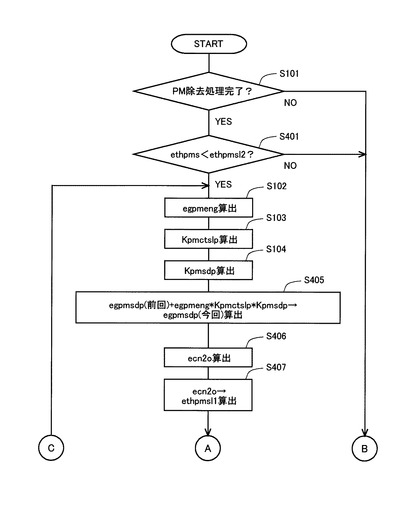
本フローでは、ステップS101において肯定判定された場合、次にステップS301の処理が実行される。ステップS301においては、PMセンサ16の温度ethpmsが第二所定温度ethpmsl2より低いか否かが判別される。第二所定温度ethpmsl2は、実験等に基づいて予め定められている。
【0119】
ステップS301において否定判定された場合、本フローの実行は一旦終了される。即ち、PM除去処理が完了してから、PMセンサ16の温度ethpmsが第二所定温度ethpmsl2より低くなるまでの間は、PMセンサ16におけるPM堆積量の推定は行われず、フィルタの故障判定は禁止される。一方、ステップS301において肯定判定された場合、次にステップS102からS107の処理が実行される。
【0120】
ステップS107の次には、ステップS307の処理が実行される。ステップS307においては、ステップS105で算出されたNOx触媒7より下流側の排気の亜酸化窒素濃度ecn2oに基づいて第一所定温度ethpmsl1が算出される。NOx触媒7より下流側の排気の亜酸化窒素濃度ecn2oと第一所定温度ethpmsl1との関係は、実験等に基づいて予め定められており、マップ又は関数としてECU10に予め記憶されている。ステップS307では、このマップ又は関数を用いて、第一所定温度ethpmsl1が算出される。上述したように、NOx触媒7より下流側の排気の亜酸化窒素濃度ecn2oが高いほど、第一所定温度ethpmsl1はより低い温度として算出される。
【0121】
尚、NOx触媒7より下流側の排気の亜酸化窒素濃度ecn2oに代えて、該排気中の亜酸化窒素量を算出し、該亜酸化窒素量を用いて第一所定温度ethpmsl1を算出してもよい。
【0122】
次に、ステップS308において、PMセンサ16の温度ethpmsが、ステップS307で算出された第一所定温度ethpmsl1以上であるか否かが判別される。ステップS308において、肯定判定された場合は、次にステップS309の処理が実行され、否定判定された場合は、次にステップS108の処理が実行される。
【0123】
ステップS309では、PMセンサ16の温度ethpmsが第一所定温度ethpmsl1以上である状態が継続している時間(以下、センサ高温継続時間と称する)ethpmscが算出される。
【0124】
次に、ステップS310において、ステップS105で算出されたNOx触媒7より下流側の排気の亜酸化窒素濃度ecn2oに基づいて所定期間ethpmscl1が算出される。NOx触媒7より下流側の排気の亜酸化窒素濃度ecn2oと所定期間ethpmscl1との関係は、実験等に基づいて予め定められており、マップ又は関数としてECU10に予め記憶されている。ステップS310では、このマップ又は関数を用いて、所定期間ethpmscl1が算出される。上述したように、NOx触媒7より下流側の排
気の亜酸化窒素濃度ecn2oが高いほど、所定期間ethpmscl1はより短い期間として算出される。
【0125】
尚、NOx触媒7より下流側の排気の亜酸化窒素濃度ecn2oに代えて、該排気中の亜酸化窒素量を算出し、該亜酸化窒素量を用いて所定期間ethpmscl1を算出してもよい。
【0126】
次に、ステップS311において、ステップS309で算出されたセンサ高温継続時間ethpmscが、ステップS310で算出された所定期間ethpmscl1より短いか否かが判別される。ステップS311において否定判定された場合、本フローの実行は一旦終了される。即ち、PMセンサ16の温度ethpmsが第一所定温度ethpmsl1以上の状態が所定期間ethpmscl1以上継続した場合は、PMセンサ16におけるPM堆積量の推定は停止され、フィルタ5の故障判定が禁止される。一方、ステップS311において肯定判定された場合、次にステップS108の処理が実行される。
【0127】
上記のように、本実施例では、PMセンサ16において酸化されるPM量が増加し、そのばらつきが過剰に大きくなった場合は、フィルタ5の故障判定が禁止される。また、PM除去処理の完了直後の、PMセンサ16に堆積したPMが酸化されている状態においても、フィルタ5の故障判定が禁止される。これにより、フィルタの故障判定の精度の低下を抑制することができる。
【0128】
また、本実施例では、第一所定温度及び所定期間が、NOx触媒7より下流側の排気の亜酸化窒素濃度ecn2o(又は、該排気中の亜酸化窒素量)に基づいて設定される。そのため、PMセンサ16において酸化されるPM量を高精度で算出することが困難な状態で、PMセンサ16の出力値に基づいてフィルタ5の故障判定が行われることをより高い確率で抑制することができる。従って、フィルタ5の故障検出の精度を向上させることができる。
【0129】
尚、必ずしも、第一所定温度及び所定期間の両方を、NOx触媒7より下流側の排気の亜酸化窒素濃度ecn2o(又は、該排気中の亜酸化窒素量)に基づいて設定しなくともよい。つまり、第一所定温度及び所定期間のいずれか一方を予め定められた一定値としてもよい。ただし、これらの値の両方を、NOx触媒7より下流側の排気の亜酸化窒素濃度ecn2o(又は、該排気中の亜酸化窒素量)に基づいて設定することで、フィルタ5の故障検出の精度をより向上させることができる。
【0130】
また、正常時PM堆積量に代えて、フィルタ5の状態が所定故障状態であると仮定した場合のPMセンサ16におけるPM堆積量の推定値に基づいて、フィルタ5の故障判定の実行タイミング及びフィルタ5の故障判定の閾値を決定する場合も、本実施例に係る故障判定禁止の条件を適用することができる。
【0131】
<実施例4>
本実施例に係る内燃機関の吸排気系の概略構成は、実施例1と同様である。また、本実施例においても、実施例1と同様、PMセンサ16の出力値を用いてフィルタ5の故障を検出する。以下、本実施例に係るフィルタの故障検出方法について、実施例1と異なる点についてのみ説明する。
【0132】
[フィルタの故障検出]
本実実施例においても、実施例1と同様、機関排出PM量、フィルタすり抜け率、及びセンサ付着率に基づいて正常時PM堆積量が推定される。ただし、実施例1とは異なり、このように推定された正常時PM堆積量が、PMセンサ16に堆積したPMの酸化量に基
づいて補正はされない。それに代えて、本実施例では、PMセンサ16において酸化されることで減少するPM堆積量の減少量が大きくなり、フィルタ5をすり抜けてPMセンサ16に付着したPM量の積算値とPMセンサ16の出力値との乖離が過剰に大きくなった場合は、正常時PM堆積量の推定が停止され、フィルタ5の故障判定が禁止される。
【0133】
具体的には、正常時PM堆積量を推定している時に、PMセンサ16の温度が第一所定温度以上の状態が所定期間以上継続した場合は、正常時PM堆積量の推定が停止され、フィルタ5の故障判定が禁止される。ここで、第一所定温度とは、実施例3と同様、PMセンサ16に堆積したPMが酸化する温度の下限値以上の温度である。また、本実施例に係る所定期間とは、PMセンサ16の温度が所定温度以上の状態が該所定期間以上継続すると、PMセンサ16において酸化されることで減少するPM堆積量の減少量が大きくなり、その結果、フィルタ5をすり抜けてPMセンサ16に付着したPM量の積算値とPMセンサ16の出力値との乖離が過剰に大きくなると判断できる期間である。
【0134】
尚、本実施例においても、第一所定温度及び所定期間は、NOx触媒7より下流側の排気の亜酸化窒素濃度に基づいて設定される。つまり、NOx触媒7より下流側の排気の亜酸化窒素濃度が高いほど、所定温度がより低い温度に設定され、また、所定期間がより短い期間に設定される。
【0135】
さらに、本実施例においても、PM除去処理の完了後、PMセンサ16の温度が第二所定温度より低くなるまでの間、正常時PM堆積量の推定が行われず、フィルタ5の故障判定が禁止される。
【0136】
[フィルタの故障検出のフロー]
本実施例に係るフィルタの故障検出のフローについて、図13,14に示すフローチャートに基づいて説明する。本フローは、ECU10に予め記憶されており、ECU10によって所定の間隔で繰り返し実行される。尚、図7に示すフローにおけるステップと同様の処理が実行されるステップについては、同様の参照番号を付し、その説明を省略する。
【0137】
本フローでは、ステップS101において肯定判定された場合、次にステップS401の処理が実行される。ステップS401での処理は、図11に示すフローにおけるステップS301と同様である。つまり、ステップS401においては、PMセンサ16の温度ethpmsが第二所定温度ethpmsl2より低いか否かが判別される。第二所定温度ethpmsl2は、実験等に基づいて予め定められている。
【0138】
ステップS401において否定判定された場合、本フローの実行は一旦終了される。即ち、PM除去処理が完了してから、PMセンサ16の温度ethpmsが第二所定温度ethpmsl2より低くなるまでの間は、PMセンサ16におけるPM堆積量の推定は行われず、フィルタの故障判定は禁止される。一方、ステップS401において肯定判定された場合、次にステップS102からS104の処理が実行される。
【0139】
ステップS104の次には、ステップS405の処理が実行される。ステップS405では、正常時PM堆積量egpmsdpが算出される。ここでは、正常時PM堆積量egpmsdpは、該ステップS405の処理を前回実行した際に算出された正常時PM堆積量egpmsdpに、ステップS102で算出された機関排出PM量egpmengと、ステップS103で算出されたフィルタすり抜け率Kpmctslpと、ステップS104で算出されたセンサ付着率Kpmsdpと、を乗算した値を加算することで算出される。つまり、PMセンサ16に堆積したPMの酸化量については考慮せずに、正常時PM堆積量egpmsdpが算出される。
【0140】
次に、ステップS406において、NOx触媒7より下流側の排気の亜酸化窒素濃度ecn2oが算出される。ステップS406においては、図7に示すフローのステップS105と同様の方法で亜酸化窒素濃度ecn2oが算出される。
【0141】
次に、ステップS407において、ステップS406で算出されたNOx触媒7より下流側の排気の亜酸化窒素濃度ecn2oに基づいて第一所定温度ethpmsl1が算出される。NOx触媒7より下流側の排気の亜酸化窒素濃度ecn2oと第一所定温度ethpmsl1との関係は、実験等に基づいて予め定められており、マップ又は関数としてECU10に予め記憶されている。ステップS407では、このマップ又は関数を用いて、第一所定温度ethpmsl1が算出される。上述したように、NOx触媒7より下流側の排気の亜酸化窒素濃度ecn2oが高いほど、第一所定温度ethpmsl1はより低い温度として算出される。
【0142】
尚、NOx触媒7より下流側の排気の亜酸化窒素濃度ecn2oに代えて、該排気中の亜酸化窒素量を算出し、該亜酸化窒素量を用いて第一所定温度ethpmsl1を算出してもよい。
【0143】
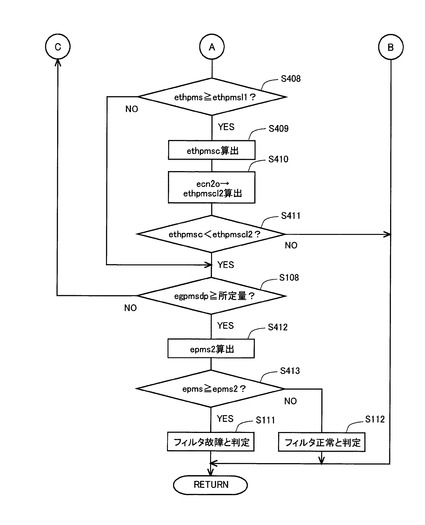
次に、ステップS408において、PMセンサ16の温度ethpmsが、ステップS407で算出された第一所定温度ethpmsl1以上であるか否かが判別される。ステップS408において、肯定判定された場合は、次にステップS409の処理が実行され、否定判定された場合は、次にステップS108の処理が実行される。
【0144】
ステップS409では、PMセンサ16の温度ethpmsが第一所定温度ethpmsl1以上である状態が継続している時間(センサ高温継続時間)ethpmscが算出される。
【0145】
次に、ステップS410において、ステップS406で算出されたNOx触媒7より下流側の排気の亜酸化窒素濃度ecn2oに基づいて所定期間ethpmscl2が算出される。NOx触媒7より下流側の排気の亜酸化窒素濃度ecn2oと所定期間ethpmscl2との関係は、実験等に基づいて予め定められており、マップ又は関数としてECU10に予め記憶されている。ステップS410では、このマップ又は関数を用いて、所定期間ethpmscl2が算出される。上述したように、NOx触媒7より下流側の排気の亜酸化窒素濃度ecn2oが高いほど、所定期間ethpmscl2はより短い期間として算出される。
【0146】
尚、NOx触媒7より下流側の排気の亜酸化窒素濃度ecn2oに代えて、該排気中の亜酸化窒素量を算出し、該亜酸化窒素量を用いて所定期間ethpmscl2を算出してもよい。
【0147】
次に、ステップS411において、ステップS409で算出されたセンサ高温継続時間ethpmscが、ステップS410で算出された所定期間ethpmscl2より短いか否かが判別される。ステップS411において否定判定された場合、本フローの実行は一旦終了される。即ち、PMセンサ16の温度ethpmsが第一所定温度ethpmsl1以上の状態が所定期間ethpmscl2以上継続した場合は、PMセンサ16におけるPM堆積量の推定は停止され、フィルタ5の故障判定が禁止される。一方、ステップ4311において肯定判定された場合、次にステップS108の処理が実行される。
【0148】
本フローでは、ステップS108において肯定判定された場合、次にステップS412の処理が実行される。ステップS412においては、ステップS405で算出された現時点における正常時PM堆積量egpmsdpに基づいて、フィルタ5の故障判定の閾値e
pms2が算出される。該閾値epms2と正常時PM堆積量egpmsdpとの関係は、実験等に基づいて予め定められており、マップ又は関数としてECU10に予め記憶されている。ステップS412では、このマップ又は関数を用いて、閾値epms2が算出される。ここで、例えば、閾値epms2を、正常時PM堆積量egpmsdpに許容可能なマージンを加算した値としてもよい。また、正常時PM堆積量egpmsdpを閾値epms2としてもよい。正常時PM堆積量egpmsdpの値が大きいほど閾値epms2も大きい値として算出される。
【0149】
尚、ステップS405で算出される正常時PM堆積量egpmsdpが所定量以上のある一定量に達した時点でフィルタ5の故障判定を実施するようにしてもよい。この場合、閾値epms2は、その一定量に基づいて予め定められた一定の値となる。
【0150】
次に、ステップS413において、PMセンサ16の出力値epmsが、ステップS412で算出されたフィルタ5の故障判定の閾値epms2以上であるか否かが判別される。ステップS413において肯定判定された場合、PMセンサ16における実際のPM堆積量が正常時PM堆積量に比べて過剰に多いと判断できる。そのため、この場合、次にステップS111において、フィルタ5が故障していると判定される。一方、ステップS413において否定判定された場合、次にステップS112において、フィルタ5は正常であると判定される。
【0151】
上記のように、本実施例では、PMセンサ16に堆積したPMが酸化されることで、フィルタ5をすり抜けてPMセンサ16に付着したPM量の積算値とPMセンサ16の出力値との乖離が過剰に大きくなった場合は、正常時PM堆積量の推定が停止され、フィルタ5の故障判定が禁止される。PM除去処理の完了直後の、PMセンサ16に堆積したPMが酸化されている状態においても、正常時PM堆積量の推定が行われず、フィルタ5の故障判定が禁止される。これにより、フィルタの故障判定の精度の低下を抑制することができる。
【0152】
また、本実施例では、第一所定温度及び所定期間が、NOx触媒7より下流側の排気の亜酸化窒素濃度ecn2o(又は、該排気中の亜酸化窒素量)に基づいて設定される。そのため、フィルタ5をすり抜けてPMセンサ16に付着したPM量の積算値とPMセンサの出力値との乖離が過剰に大きい状態で、PMセンサ16の出力値に基づいてフィルタ5の故障判定が行われることをより高い確率で抑制することができる。従って、フィルタ5の故障検出の精度を向上させることができる。
【0153】
尚、必ずしも、第一所定温度及び所定期間の両方を、NOx触媒7より下流側の排気の亜酸化窒素濃度ecn2o(又は、該排気中の亜酸化窒素量)に基づいて設定しなくともよい。つまり、第一所定温度及び所定期間のいずれか一方を予め定められた一定値としてもよい。ただし、これらの値の両方を、NOx触媒7より下流側の排気の亜酸化窒素濃度ecn2o(又は、該排気中の亜酸化窒素量)に基づいて設定することで、フィルタ5の故障検出の精度をより向上させることができる。
【0154】
また、正常時PM堆積量に代えて、フィルタ5の状態が所定故障状態であると仮定した場合のPMセンサ16におけるPM堆積量の推定する場合にも本実施例を適用することができる。この場合、機関排出PM量、フィルタ5の状態が所定故障状態であると仮定した場合のフィルタすり抜け率、及びセンサ付着率に基づいてPMセンサ16におけるPM堆積量が算出され、PMセンサ16に堆積したPMの酸化量は考慮されない。そして、PMセンサ16において酸化されることで減少するPM堆積量の減少量が大きくなり、フィルタ5をすり抜けてPMセンサ16に付着したPM量の積算値とPMセンサ16の出力値との乖離が過剰に大きくなった場合は、フィルタ5の状態が所定故障状態であると仮定した
場合のPMセンサ16におけるPM堆積量の推定が停止され、フィルタ5の故障判定が禁止される。
【0155】
上記実施例1から4は、可能な限り組み合わせることができる。例えば、実施例2のように、PMセンサ16に堆積したPMの酸化量に基づいてPMセンサ16の出力値を補正し、補正後のPMセンサ16の出力値と閾値とを比較することで、フィルタ5の故障を判定する場合においても、実施例3に係る故障判定禁止の条件を適用してもよい。
【符号の説明】
【0156】
1・・・内燃機関
2・・・吸気通路
3・・・排気通路
4・・・酸化触媒
5・・・フィルタ
6・・・添加弁
7・・・選択還元型NOx触媒(NOx触媒)
8・・・スロットル弁
9・・・ターボチャージャ
10・・ECU
11・・エアフローメータ
12・・第一排気温度センサ
13・・第二排気温度センサ
14・・A/Fセンサ
15・・NOxセンサ
16・・PMセンサ
17・・第三排気温度センサ
18・・アクセル開度センサ
19・・クランクポジションセンサ
【技術分野】
【0001】
本発明は、内燃機関の排気通路に設けられ排気中の粒子状物質を捕集するフィルタの故障を検出するフィルタの故障検出装置に関する。
【背景技術】
【0002】
内燃機関の排気通路に、排気中の粒子状物質(Particulate Matter:以下、PMと称する)を捕集するフィルタを設ける場合がある。このような場合に、フィルタより下流側の排気通路にPMセンサを設け、該PMセンサの出力値に基づいてフィルタの故障を検出する技術が知られている。また、内燃機関の排気通路に、アンモニア(NH3)を還元剤として排気中のNOxを還元する選択還元型NOx触媒を設ける場合がある。
【0003】
特許文献1には、内燃機関の排気通路において、フィルタより下流側に選択還元型NOx触媒を設けた構成が開示されている。また、この特許文献1には、フィルタに捕集されたPMを燃焼させるフィルタの強制再生時に、選択還元型NOx触媒内を流動する排気中のアンモニア濃度が排気中のNOxを還元するのに適した濃度になるように選択還元型NOx触媒の温度の上昇を設定勾配に保持する技術が開示されている。
【0004】
特許文献2には、内燃機関の排気通路に、フィルタ、尿素噴射弁、選択還元型NOx触媒、アンモニア検出手段、アンモニアスリップ防止触媒、および亜酸化窒素検出手段を上流側から順に設けた構成が開示されている。また、この特許文献2には、亜酸化窒素検出手段によって検出された亜酸化窒素濃度に応じて、尿素噴射弁から供給される尿素量を制御する技術が開示されている。
【0005】
特許文献3には、内燃機関の排気通路において、フィルタより下流側にPMセンサを設けた構成が開示されている。また、この特許文献3には、フィルタに捕集されたPMを燃焼除去するフィルタの再生時期に応じて、PMセンサのセンサ素子に付着したPMを燃焼除去するセンサ素子の再生を開始する技術が開示されている。
【先行技術文献】
【特許文献】
【0006】
【特許文献1】特開2010−261331号公報
【特許文献2】特開2011−122552号公報
【特許文献3】特開2011−089430号公報
【発明の概要】
【発明が解決しようとする課題】
【0007】
フィルタの故障検出のために該フィルタより下流側の排気通路に設けるPMセンサとして、自身に堆積したPM量に対応する信号を出力するPMセンサを用いる場合がある。フィルタにおいて溶損又は破損等の故障が発生すると、該フィルタに捕集されずに該フィルタをすり抜けるPMの量が増加する。その結果、フィルタより下流側に設けられたPMセンサにおけるPM堆積量が、フィルタが正常の場合に比べて多くなる。そのため、上記のようなPMセンサの出力値を用いてフィルタの故障を検出することができる。
【0008】
ここで、排気通路におけるフィルタとPMセンサとの間に選択還元型NOx触媒が設けられる場合がある。また、選択還元型NOx触媒においてアンモニアを還元剤としてNOxが還元される過程においては、亜酸化窒素(N2O)が生成される場合がある。そして、選択還元型NOx触媒において亜酸化窒素が生成されると、該選択還元型NOx触媒よ
り下流側に設けられたPMセンサに堆積しているPMが、該亜酸化窒素によって酸化される場合がある。PMセンサに堆積したPMが亜酸化窒素によって酸化されることで減少すると、該PMセンサの出力値が低下する。そのため、PMセンサの出力値を用いてフィルタの故障を高精度で検出するためには、亜酸化窒素によるPMの酸化を考慮する必要がある。
【0009】
本発明は、上記のような問題に鑑みてなされたものであって、排気通路におけるフィルタとPMセンサとの間に選択還元型NOx触媒が設けられた構成において、PMセンサの出力値を用いたフィルタの故障検出の精度を向上させることを目的とする。
【課題を解決するための手段】
【0010】
第一の発明に係るフィルタの故障検出装置は、
内燃機関の排気通路に設けられ排気中の粒子状物質を捕集するフィルタの故障を検出するフィルタの故障検出装置であって、
前記フィルタより下流側の排気通路に設けられ、自身に堆積した粒子状物質の量に対応した信号を出力するPMセンサと、
前記フィルタと前記PMセンサとの間の排気通路に設けられアンモニアを還元剤として排気中のNOxを還元する選択還元型NOx触媒と、
前記フィルタが所定の状態であると仮定した場合の前記PMセンサにおけるPM堆積量を推定する推定手段と、
前記選択還元型NOx触媒より下流側の排気の亜酸化窒素濃度又は該排気中の亜酸化窒素量を取得する取得手段と、
少なくとも、前記得手段によって取得された前記選択還元型NOx触媒より下流側の排気の亜酸化窒素濃度又は該排気中の亜酸化窒素量に基づいて、前記PMセンサに堆積したPMの酸化量を算出する酸化量算出手段と、
前記推定手段によって推定された前記PMセンサにおけるPM堆積量を、前記酸化量算出手段によって算出されたPMの酸化量に基づいて補正するPM堆積量補正手段と、
前記PM堆積量補正手段によって補正された前記PMセンサにおけるPM堆積量が所定量以上であることを条件として、前記PMセンサの出力値に基づいて前記フィルタの故障を判定する判定手段と、
を備える。
【0011】
PMセンサは、該PMセンサにおけるPM堆積量が非常に少ない段階では、該PM堆積量に対応した信号を出力しない。ここで、所定量とは、PMセンサの出力値が該PMセンサ自身におけるPM堆積量に対応した値となるPM堆積量の閾値以上の値である。
【0012】
本発明においては、推定手段によって、フィルタが所定の状態であると仮定した場合の前記PMセンサにおけるPM堆積量が推定される。ここで、所定の状態は、例えば、正常な状態でもよく、また、フィルタの故障のレベルが所定のレベルに達した状態であってもよい。
【0013】
さらに、本発明では、酸化量算出手段算手段によって、選択還元型NOx触媒より下流側の排気の亜酸化窒素濃度又は該排気中の亜酸化窒素量に基づいて、PMセンサに堆積したPMの酸化量が算出される。このとき、選択還元型NOx触媒より下流側の排気の亜酸化窒素濃度が高いほど又は該排気中の亜酸化窒素量が多いほど、PMの酸化量は大きい値として算出される。
【0014】
そして、PM堆積量補正手段によって、推定手段によって推定されたPMセンサにおけるPM堆積量から、酸化量算出手段によって算出されたPMの酸化量を減算することで、該PM堆積量が補正される。これにより、フィルタが所定の状態であると仮定した場合の
PMセンサにおけるPM堆積量を高精度で算出することが可能となる。そして、このPM堆積量の補正値が所定量以上であるときに、判定手段によって、PMセンサの出力値に基づいてフィルタの故障が判定される。
【0015】
本発明によれば、排気中の亜酸化窒素による酸化量を考慮して算出された、フィルタが所定の状態であると仮定した場合のPMセンサにおけるPM堆積量に基づいて、フィルタの故障判定を実行するタイミングが決定される。従って、PMセンサの出力値を用いたフィルタの故障検出の精度を向上させることができる。
【0016】
第二の発明に係るフィルタの故障検出装置は、
内燃機関の排気通路に設けられ排気中の粒子状物質を捕集するフィルタの故障を検出するフィルタの故障検出装置であって、
前記フィルタより下流側の排気通路に設けられ、自身に堆積した粒子状物質の量に対応した信号を出力するPMセンサと、
前記フィルタと前記PMセンサとの間の排気通路に設けられアンモニアを還元剤として排気中のNOxを還元する選択還元型NOx触媒と、
前記フィルタが所定の状態であると仮定した場合の前記PMセンサにおけるPM堆積量を推定する推定手段と、
前記選択還元型NOx触媒より下流側の排気の亜酸化窒素濃度又は該排気中の亜酸化窒素量を取得する取得手段と、
少なくとも、前記得手段によって取得された前記選択還元型NOx触媒より下流側の排気の亜酸化窒素濃度又は該排気中の亜酸化窒素量に基づいて、前記PMセンサに堆積したPMの酸化量を算出する酸化量算出手段と、
前記推定手段によって推定された前記PMセンサにおけるPM堆積量を、前記酸化量算出手段によって算出されたPMの酸化量に基づいて補正するPM堆積量補正手段と、
前記PMセンサの出力値と、前記PM堆積量補正手段によって補正された前記PMセンサにおけるPM堆積量に基づいて定められる閾値と、を比較することで、前記フィルタの故障を判定する判定手段と、
を備える。
【0017】
本発明においても、第一の発明と同様、推定手段によって、フィルタが所定の状態であると仮定した場合の前記PMセンサにおけるPM堆積量が推定される。 さらに、本発明では、PM堆積量補正手段によって、推定手段によって推定されたPMセンサにおけるPM堆積量から、酸化量算出手段によって算出されたPMの酸化量を減算することで、該PM堆積量が補正される。そして、判定手段によって、このPM堆積量の補正値に基づいて定められる閾値とPMセンサの出力値とを比較することで、前記フィルタの故障が判定される。
【0018】
本発明によれば、排気中の亜酸化窒素による酸化量を考慮して算出された、フィルタが所定の状態であると仮定した場合のPMセンサにおけるPM堆積量に基づいて故障判定の閾値が定められる。従って、PMセンサの出力値を用いたフィルタの故障検出の精度を向上させることができる。
【0019】
第三の発明に係るフィルタの故障検出装置は、
内燃機関の排気通路に設けられ排気中の粒子状物質を捕集するフィルタの故障を検出するフィルタの故障検出装置であって、
前記フィルタより下流側の排気通路に設けられ、自身に堆積した粒子状物質の量に対応した信号を出力するPMセンサと、
前記フィルタと前記PMセンサとの間の排気通路に設けられアンモニアを還元剤として排気中のNOxを還元する選択還元型NOx触媒と、
前記選択還元型NOx触媒より下流側の排気の亜酸化窒素濃度又は該排気中の亜酸化窒素量を取得する取得手段と、
少なくとも、前記取得手段によって取得された前記選択還元型NOx触媒より下流側の排気の亜酸化窒素濃度又は該排気中の亜酸化窒素量に基づいて、前記PMセンサに堆積したPMの酸化量を算出する酸化量算出手段と、
前記酸化量算出手段によって算出されたPMの酸化量に基づいて前記PMセンサの出力値を補正するセンサ出力補正手段と、
前記センサ出力補正手段によって補正された前記PMセンサの出力値と閾値とを比較することで、前記フィルタの故障を判定する判定手段と、
を備える。
【0020】
PMセンサに堆積したPMの酸化量が多いほど、PMセンサの出力値は小さくなる。その結果、フィルタをすり抜けてPMセンサに付着したPM量の積算値(即ち、PMの酸化がなかった場合のPMセンサにおけるPM堆積量)とPMセンサの出力値との乖離が大きくなる。
【0021】
そこで、本発明では、センサ出力補正手段によって、酸化量算出手段によって算出されたPMの酸化量に基づいてPMセンサの出力値が補正される。このとき、PMの酸化量が多いほど、PMセンサの出力値は増加補正される。これにより、フィルタをすり抜けてPMセンサに付着したPM量の積算値とPMセンサの出力値との乖離を小さくすることができる。
【0022】
そして、判定手段によって、補正されたPMセンサの出力値と閾値とを比較することで、フィルタの故障が判定される。つまり、補正後のPMセンサの出力値が閾値以上であれば、フィルタをすり抜けたPM量が過剰に多い、即ちフィルタが故障していると判定される。一方、補正後のPMセンサの出力値が閾値より小さければ、フィルタは正常であると判定される。
【0023】
本発明によれば、排気中の亜酸化窒素による酸化量を考慮して補正したPMセンサの出力値に基づいてフィルタの故障判定が行われる。従って、PMセンサの出力値を用いたフィルタの故障検出の精度を向上させることができる。
【0024】
第一、第二、又は第三の発明において、酸化量算出手段は、選択還元型NOx触媒より下流側の排気の亜酸化窒素濃度又は該排気中の亜酸化窒素量に加え、PMセンサの温度に基づいて、該PMセンサに堆積したPMの酸化量を算出してもよい。このとき、PMセンサの温度が高いほど、PMの酸化量は大きい値として算出される。
【0025】
これによれば、PMセンサに堆積したPMの酸化量をより高精度で算出することができる。その結果、第一及び第二の発明においては、フィルタが所定の状態であると仮定した場合のPMセンサにおけるPM堆積量をより高精度で算出することができる。また、第三の発明においては、フィルタをすり抜けてPMセンサに付着したPM量の積算値とPMセンサの出力値との乖離をより小さくすることができる。そのため、PMセンサの出力値を用いたフィルタの故障検出の精度をより向上させることができる。
【0026】
第一、第二、又は第三の発明に係るフィルタの故障検出装置は、PMセンサの温度が所定温度以上の状態が所定期間以上継続した場合は、判定手段によるフィルタの故障判定を禁止する禁止手段をさらに備えてもよい。
【0027】
ここで、所定温度とは、PMセンサに堆積したPMが酸化する温度の下限値以上の温度である。また、所定期間とは、PMセンサの温度が所定温度以上の状態が該所定期間以上
継続すると、PMセンサにおいて酸化されるPM量が増加し、そのばらつきが過剰に大きくなると判断できる期間である。PMセンサにおいて酸化されるPM量のばらつきが大きくなると、酸化量算出手段によってその量を高精度で算出することが困難となる。
【0028】
本発明では、PMセンサの温度が所定温度以上の状態が所定期間以上継続した場合、即ち、PMセンサにおいて酸化されるPM量が増加し、そのばらつきが過剰に大きくなった場合は、禁止手段によって、フィルタの故障判定が禁止される。これにより、フィルタの故障判定の精度の低下を抑制することができる。
【0029】
また、上述したように、選択還元型NOx触媒より下流側の排気の亜酸化窒素濃度が高いほど又は該排気中の亜酸化窒素量が多いほど、PMセンサに堆積したPMの酸化が促進され易くなる。そこで、上記の場合、フィルタの故障検出装置は、取得手段によって取得された選択還元型NOx触媒より下流側の排気の亜酸化窒素濃度又は該排気中の亜酸化窒素量に基づいて、前記所定温度又は前記所定期間の少なくともいずれかを設定する設定手段をさらに備えてもよい。このとき、選択還元型NOx触媒より下流側の排気の亜酸化窒素濃度が高いほど、また、該排気中の亜酸化窒素量が多いほど、所定温度がより低い温度に設定される。また、選択還元型NOx触媒より下流側の排気の亜酸化窒素濃度が高いほど、また、該排気中の亜酸化窒素量が多いほど、所定期間はより短い期間に設定される。
【0030】
これによれば、PMセンサにおいて酸化されるPM量を酸化量算出手段によって高精度で算出することが困難な状態で、PMセンサの故障判定が行われることを、より高い確率で抑制することができる。従って、PMセンサの出力値を用いたフィルタの故障検出の精度を向上させることができる。
【0031】
本発明において、前記所定温度を第一所定温度とした場合に、禁止手段は、PMセンサの温度を上昇させることで該PMセンサに堆積したPMを酸化させて除去するPM除去処理が完了してから、PMセンサの温度が第二所定温度より低くなるまでの間においても、推定手段によるPMセンサにおけるPM堆積量の推定を行わず、フィルタの故障判定を禁止してもよい。
【0032】
PM除去処理では、PMセンサがPMの酸化が可能な温度まで昇温される。そのため、PM除去処理の完了後も暫くの間はPMセンサの温度が、PMの酸化が可能なほど高い状態が継続する。ここで、第二所定温度は、PMの酸化が可能な温度の下限値以下の温度である。
【0033】
これによれば、PM除去処理の完了直後に、PMセンサに堆積したPMが酸化されている状態で、該PMセンサの出力値に基づいてフィルタの故障判定が行われることを抑制することができる。従って、PMセンサの出力値を用いたフィルタの故障検出の精度をより向上させることができる。
【0034】
第四の発明に係るフィルタの故障検出装置は、
内燃機関の排気通路に設けられ排気中の粒子状物質を捕集するフィルタの故障を検出するフィルタの故障検出装置であって、
前記フィルタより下流側の排気通路に設けられ、自身に堆積する粒子状物質に対応した信号を出力するPMセンサと、
前記フィルタと前記PMセンサとの間の排気通路に設けられアンモニアを還元剤として排気中のNOxを還元する選択還元型NOx触媒と、
前記フィルタが所定の状態であると仮定した場合の前記PMセンサにおけるPM堆積量を推定する推定手段と、
前記PMセンサの出力値と、前記推定手段によって推定された前記PMセンサにおける
PM堆積量と、を用いて前記フィルタの故障を判定する判定手段と、
前記PMセンサの温度が所定温度以上の状態が所定期間以上継続した場合は、前記フィルタの故障判定を禁止する禁止手段と、
前記選択還元型NOx触媒より下流側の排気の亜酸化窒素濃度又は該排気中の亜酸化窒素量を取得する取得手段と、
前記取得手段によって取得された前記選択還元型NOx触媒より下流側の排気の亜酸化窒素濃度又は該排気中の亜酸化窒素量に基づいて、前記所定温度又は前記所定期間の少なくともいずれかを設定する設定手段と、
を備える。
【0035】
ここで、所定温度とは、PMセンサに堆積したPMが酸化する温度の下限値以上の温度である。また、所定期間とは、PMセンサの温度が所定温度以上の状態が該所定期間以上継続すると、PMセンサにおいて酸化されることで減少するPM堆積量の減少量が大きくなり、その結果、フィルタをすり抜けてPMセンサに付着したPM量の積算値とPMセンサの出力値との乖離が過剰に大きくなると判断できる期間である。
【0036】
本発明では、PMセンサの温度が所定温度以上の状態が所定期間以上継続した場合、即ち、フィルタをすり抜けてPMセンサに付着したPM量の積算値とPMセンサの出力値との乖離が過剰に大きくなった場合は、禁止手段によって、フィルタの故障判定が禁止される。これにより、フィルタの故障判定の精度の低下を抑制することができる。
【0037】
また、本発明に係るフィルタの故障検出装置は、設定手段を備えている。そして、設定手段によって、選択還元型NOx触媒より下流側の排気の亜酸化窒素濃度又は該排気中の亜酸化窒素量に基づいて、前記所定温度又は前記所定期間の少なくともいずれかが設定される。このとき、選択還元型NOx触媒より下流側の排気の亜酸化窒素濃度が高いほど又は該排気中の亜酸化窒素量が多いほど、所定温度がより低い温度に設定される。また、選択還元型NOx触媒より下流側の排気の亜酸化窒素濃度が高いほど又は該排気中の亜酸化窒素量が多いほど、所定期間はより短い期間に設定される。
【0038】
本発明によれば、フィルタをすり抜けてPMセンサに付着したPM量の積算値とPMセンサの出力値との乖離が過剰に大きい状態で、PMセンサの出力値に基づいてフィルタの故障判定が行われることをより高い確率で抑制することができる。従って、PMセンサの出力値を用いたフィルタの故障検出の精度を向上させることができる。
【0039】
また、本発明においても、前記所定温度を第一所定温度とした場合に、禁止手段は、PM除去処理が完了してから、PMセンサの温度が第二所定温度より低くなるまでの間、推定手段によるPMセンサにおけるPM堆積量の推定を行わず、フィルタの故障判定を禁止してもよい。
【発明の効果】
【0040】
本発明によれば、排気通路におけるフィルタとPMセンサとの間に選択還元型NOx触媒が設けられた構成において、PMセンサの出力値を用いたフィルタの故障検出の精度を向上させることができる。
【図面の簡単な説明】
【0041】
【図1】実施例1に係る内燃機関の吸排気系の概略構成を示す図である。
【図2】実施例1に係るPMセンサの概略構成図である。
【図3】実施例1に係るPMセンサの出力値の推移を示したタイムチャートである。
【図4】実施例1に係る、フィルタをすり抜けたPM量の積算値とPMセンサの出力値との関係を示す第一の図である。
【図5】実施例1に係る、フィルタをすり抜けたPM量の積算値とPMセンサの出力値との関係を示す第二の図である。
【図6】実施例1に係る、フィルタをすり抜けたPM量の積算値とPMセンサの出力値との関係を示す第三の図である。
【図7】実施例1に係るフィルタの故障検出のフローを示すフローチャートである。
【図8】実施例1に係る、NOx触媒より下流側の排気の亜酸化窒素濃度と、添加弁からの尿素水の添加量及びNOx触媒の温度と、の関係を示す図である。
【図9】実施例1に係る、PMセンサに堆積したPMの酸化量と、PMセンサの温度及びNOx触媒より下流側の排気の亜酸化窒素濃度と、の関係を示す図である。
【図10】実施例2に係るフィルタの故障検出のフローを示すフローチャートである。
【図11】実施例3に係るフィルタの故障検出のフローの一部を示すフローチャートである。
【図12】実施例3に係るフィルタの故障検出のフローの他の一部を示すフローチャートである。
【図13】実施例4に係るフィルタの故障検出のフローの一部を示すフローチャートである。
【図14】実施例4に係るフィルタの故障検出のフローの他の一部を示すフローチャートである。
【発明を実施するための形態】
【0042】
以下、本発明の具体的な実施形態について図面に基づいて説明する。本実施例に記載されている構成部品の寸法、材質、形状、その相対配置等は、特に記載がない限りは発明の技術的範囲をそれらのみに限定する趣旨のものではない。
【0043】
<実施例1>
[吸排気系の概略構成]
図1は、本実施例に係る内燃機関の吸排気系の概略構成を示す図である。図1に示す内燃機関1は、車両駆動用のディーゼルエンジンである。ただし、本発明に係る内燃機関は、ディーゼルエンジンンに限られるものではなく、ガソリンエンジン等であってもよい。
【0044】
内燃機関1には、吸気通路2及び排気通路3が接続されている。また、内燃機関1の吸排気系にはターボチャージャ9が設けられている。ターボチャージャ9のコンプレッサ9aは吸気通路2に設けられており、ターボチャージャ9のタービン9bは排気通路3に設けられている。
【0045】
ターボチャージャ9のコンプレッサ9aより上流側の吸気通路2には、エアフローメータ11及びスロットル弁8が設けられている。エアフローメータ11は、吸気通路2を流通する吸気の量を検出する。スロットル弁8は、吸気通路2を流通する吸気の量を制御する。一方、ターボチャージャ9のタービン9bより下流側の排気通路3には、排気の流れ方向の上流側から順に、酸化触媒4、フィルタ5、添加弁6、選択還元型NOx触媒7(以下、NOx触媒7という。)が設けられている。
【0046】
酸化触媒4は、酸化能を有する触媒であればよく、例えば三元触媒であってもよい。また、酸化触媒4は、フィルタ5に担持されていてもよい。
【0047】
フィルタ5は、排気中のPMを捕集する。尚、フィルタ5には、触媒が担持されていてもよい。フィルタ5によってPMが捕集されることで、該フィルタ5にPMが徐々に堆積する。そして、フィルタ5の温度を強制的に上昇させる、所謂フィルタの再生処理を実行することで、該フィルタ5に堆積したPMを酸化させて除去することができる。例えば、
酸化触媒4にHCを供給することで、該HCの酸化熱によってフィルタ5の温度を上昇させることができる。また、酸化触媒4を備えずに、フィルタ5の温度を上昇させる他の装置を備えていてもよい。さらに、内燃機関1から高温のガスを排出させることでフィルタ5の温度を上昇させてもよい。
【0048】
添加弁6は、排気中に尿素水を添加する。添加弁6は、尿素水を添加する際には短い周期で尿素水の噴射と停止とを繰り返す。つまり、添加弁6は尿素水を周期的に添加する。添加弁6から尿素水として添加された尿素は、排気の熱で加水分解されアンモニア(NH3)となり、その一部又は全部がNOx触媒7に吸着する。尚、添加弁6は、尿素水以外のアンモニア由来化合物を添加するものであってもよい。
【0049】
NOx触媒7は、アンモニアを還元剤として排気中のNOxを還元する。例えば、NOx触媒7にアンモニアを予め吸着させておけば、NOx触媒7をNOxが通過するときに該アンモニアにより該NOxを還元させることができる。
【0050】
酸化触媒4より下流側且つフィルタ5より上流側の排気通路3には、第一排気温度センサ12が設けられている。フィルタ5より下流側且つ添加弁6より上流側の排気通路3には、第二排気温度センサ13、A/Fセンサ14、及びNOxセンサ15が設けられている。NOx触媒7よりも下流側の排気通路3には、PMセンサ16及び第三排気温度センサ17が設けられている。
【0051】
第一、第二、第三排気温度センサ12,13,17は排気の温度を検出する。A/Fセンサ14は排気の空燃比を検出する。NOxセンサ15は排気のNOx濃度を検出する。PMセンサ16は排気中のPM量を検出する。尚、PMセンサ16の詳細については後述する。また、これらセンサの全てが必須というわけではなく、必要に応じて設けることができる。
【0052】
内燃機関1には電子制御ユニット(ECU)10が併設されている。ECU10は内燃機関1の運転状態等を制御するユニットである。ECU10には、第一、第二、第三排気温度センサ12,13,17、A/Fセンサ14、NOxセンサ15、及びPMセンサ16の他、アクセル開度センサ18及びクランクポジションセンサ19が電気的に接続されている。アクセル開度センサ18は、内燃機関1を搭載した車両のアクセル開度を検出する。クランクポジションセンサ19は、内燃機関1のクランク角度を検出する。そして、各センサの出力信号がECU10に入力される。
【0053】
ECU10は、アクセル開度センサ18の出力値に基づいて内燃機関1の機関負荷を導出する。また、ECU10は、クランクポジションセンサ19の出力値に基づいて内燃機関1の機関回転速度を導出する。
【0054】
また、ECU10には、スロットル弁8、及び添加弁6が電気的に接続されている。そして、ECU10によって、これらの装置が制御される。
【0055】
また、ECU10は、フィルタ5におけるPM堆積量を推定する。そして、ECU10は、該推定されたPM堆積量が所定の再生開始の閾値以上となると、前記フィルタの再生処理を実施する。尚、内燃機関1が搭載されている車両の前回のフィルタの再生処理の実施完了からの走行距離が所定距離以上となったときにフィルタの再生処理を実行してもよい。また、規定期間が経過する毎にフィルタの再生処理を実施してもよい。
【0056】
[PMセンサ]
図2は、PMセンサ16の概略構成図である。PMセンサ16は、自身に堆積したPM
量に対応する電気信号を出力するセンサである。PMセンサ16は、一対の電極161と、該一対の電極161の間に設けられる絶縁体162と、を備えて構成されている。一対の電極161の間にPMが付着すると、該一対の電極161の間の電気抵抗が変化する。この電気抵抗の変化は、排気中のPM量と相関関係にあるため、該電気抵抗の変化に基づいて、排気中のPM量を検出することができる。このPM量は、単位時間当たりのPMの質量としてもよく、所定時間におけるPMの質量としてもよい。尚、PMセンサ16は、自身に堆積したPM量に対応する電気信号を出力するものであればよく、図2に示すような構成のものに限られるものではない。
【0057】
図3は、PMセンサ16の出力値の推移を示したタイムチャートである。尚、内燃機関1から排出される単位時間当たりのPM量が一定であるとすると、PMセンサ16におけるPM堆積量は時間の経過と共に一定の割合で増加する。内燃機関1の始動直後のAで示される期間は、排気通路3内で凝縮する水がPMセンサ16に付着する虞がある期間である。PMセンサ16に水が付着すると、該PMセンサ16の出力値が変化したり、PMセンサ16が故障したりするため、この期間ではPMセンサ16によるPM量の検出は行われない。
【0058】
Aで示される期間の後のBで示される期間では、前回の内燃機関1の運転時にPMセンサ16に堆積したPMを除去する処理(以下、PM除去処理という。)を行う。このPM除去処理は、PMセンサ16の温度を、PMが酸化する温度まで上昇させることにより行われる。このBで示される期間においても、PMセンサ16によるPM量の検出は行われない。
【0059】
そして、Bで示される期間の後のCで示される期間でPMの検出が行われる。ただし、Cで示される期間であっても、PMセンサ16にある程度の量のPMが堆積するまでは、PMセンサ16の出力値が増加しない。即ち、ある程度の量のPMが堆積することで、一対の電極161の間に電流が流れるようになってから出力値が増加を始める。その後は、PMセンサ16に堆積したPM量の増加に応じて、その出力値が増加していく。
【0060】
[フィルタの故障検出]
PMセンサ16は、フィルタ5よりも下流側に設けられている。そのため、PMセンサ16には、フィルタ5に捕集されずに、該フィルタ5をすり抜けたPMが付着する。従って、PMセンサ16におけるPM堆積量は、フィルタ5をすり抜けたPM量の積算値に対応した量となる。
【0061】
フィルタ5において溶損又は破損等の故障が発生すると、該フィルタ5に捕集されずに該フィルタ5をすり抜けるPMの量が増加する。その結果、フィルタ5より下流側に設けられたPMセンサ16に付着するPM量が増加するため、該PMセンサ16におけるPM堆積量が、フィルタ5が正常の場合に比べて多くなる。そこで、本実施例では、PMセンサ16の出力値を用いてフィルタ5の故障を検出する。
【0062】
フィルタ5の故障検出は、PM除去処理を実行することで、PMセンサ16に堆積したPMを一旦除去した後に行われる。ここで、上述したように、PMセンサ16に堆積したPMを除去した後は、PMセンサ16が正常であっても、PM堆積量がある程度の量に達しなければ、該PMセンサ16の出力値は、PM堆積量に対応した値とはならない。そのため、フィルタ5が正常であると仮定した場合のPMセンサ16におけるPM堆積量(以下、正常時PM堆積量と称する)の推定値が所定量以上であることを条件として、PMセンサ16の出力値に基づくフィルタ5の故障判定が行われる。
【0063】
ここで、所定量とは、PMセンサ16の出力値が該PMセンサ16におけるPM堆積量
に対応した値となるPM堆積量の閾値以上の値である。この所定量は、実験等に基づいて予め定められている。
【0064】
また、フィルタ5の故障判定は、正常時PM堆積量に基づいて定められる閾値と、PMセンサ16の出力値とを比較することで行われる。
【0065】
以下、本実施例に係る正常時PM堆積量の算出方法について説明する。PMセンサ16に付着するPM量は、内燃機関1から排出されるPMの量(以下、機関排出PM量と称する)が多いほど、多くなる。機関排出PM量は、内燃機関1の運転状態(機関回転速度及び機関負荷)に応じて変化する。
【0066】
また、機関排出PM量が同一であり、且つフィルタ5が正常であっても、フィルタ5に流入するPM量に対する該フィルタ5をすり抜けるPM量の割合(以下、フィルタすり抜け率と称する)は、フィルタ5におけるPM堆積量に応じて変化する。つまり、フィルタ5におけるPM堆積量が少ないほど、フィルタすり抜け率は高くなる。
【0067】
さらに、フィルタ5をすり抜けたPM量に対するPMセンサ16に付着するPM量の割合(以下、センサ付着率と称する)も、フィルタ5におけるPM堆積量及びフィルタ5を通過する排気の流量(流速)に応じて変化する。つまり、フィルタ5におけるPM堆積量が少ないほど、また、フィルタ5を通過する排気の流量が多いほど(該排気の流速が大きいほど)、PMセンサ16の周囲を流れる排気の流速が大きくなるため、センサ付着率は低くなる。
【0068】
図4は、フィルタ5をすり抜けたPM量の積算値とPMセンサ16の出力値との関係を示す図である。図4において、L1は、吸気量が比較的少ない場合(即ち、排気の流量が比較的少ない場合)を示しており、L2は、吸気量が比較的多い場合(即ち、排気の流量が比較的多い場合)を示している。
【0069】
上述したように、排気の流量が多いほどセンサ付着率が低くなる。換言すれば、排気の流量が少ないほどセンサ付着率が高くなる。そのため、吸気量が比較的少ない場合は、吸気量が比較的多い場合に比べて、フィルタ5をすり抜けたPM量の積算値がより小さい段階で、PMセンサ16により多くのPMが堆積する。その結果、PMセンサ16は、図4に示すように、フィルタ5をすり抜けたPM量の積算値がより小さい段階で、自身に堆積したPM量に対応する電気信号を出力する。
【0070】
そこで、本実施例では、機関排出PM量、フィルタすり抜け率、及びセンサ付着率に基づいて、正常時PM堆積量を推定する。
【0071】
ただし、排気の温度が上昇し、PMセンサ16の温度が、PMの酸化が可能な温度(以下、PM酸化温度と称する)に達すると、PMセンサ16に堆積したPMが酸化される。PMセンサ16に堆積したPMが酸化されると、該PMセンサ16におけるPM堆積量が減少する。そのため、正常時PM堆積量を高い精度で算出するためには、PMセンサ16に堆積したPMの酸化量を考慮する必要がある。
【0072】
図5は、フィルタ5をすり抜けたPM量の積算値とPMセンサ16の出力値との関係を示す図である。図5において、L1は、PMセンサ16の周囲の排気温度(即ち、PMセンサ16の温度)がPM酸化温度より低い場合を示しており、L2は、PMセンサ16の周囲の排気温度がPM酸化温度以上の場合を示している。尚、L1で示す場合とL2で示す場合とで、内燃機関1の吸気量は同一(即ち、排気の流量は同一)とする。
【0073】
上述したように、PMセンサ16の温度がPM酸化温度以上となると、フィルタ5をすり抜けてPMセンサ16に一旦付着し堆積したPMが酸化される。そのため、図5に示すように、PMセンサ16の周囲の排気温度がPM酸化温度以上の場合は、PMセンサ16の周囲の排気温度がPM酸化温度より低い場合に比べて、フィルタ5をすり抜けたPM量の積算値がより大きくならないと、PMセンサ16が、自身に堆積したPM量に対応する電気信号を出力しない。
【0074】
さらに、本実施例においては、排気通路3におけるPMセンサ16より上流側にNOx触媒7が設けられている。NOx触媒7においてアンモニアを還元剤としてNOxが還元される過程では、亜酸化窒素(N2O)が生成される場合がある。そして、NOx触媒7において亜酸化窒素が生成されると、該NOx触媒7より下流側に設けられたPMセンサ16に堆積しているPMが、該亜酸化窒素によって酸化されることになる。つまり、NOx触媒7において生成される亜酸化窒素の量が多いほど、該NOx触媒7より下流側の排気中の亜酸化窒素量が多くなり、PMセンサ16に堆積したPMの酸化が促進される。
【0075】
図6は、フィルタ5をすり抜けたPM量の積算値とPMセンサ16の出力値との関係を示す図である。図6において、L1は、添加弁6からの尿素水の添加が行われていない場合(即ち、NOx触媒7において、アンモニアを還元剤とするNOxの還元が行われず、亜酸化窒素が生成されていない場合)を示しており、L2は、添加弁6からの尿素水の添加が行われている場合(即ち、NOx触媒7において、アンモニアを還元剤とするNOxの還元が行われることで、亜酸化窒素が生成されている場合)を示している。
【0076】
上述したように、NOx触媒7において亜酸化窒素が生成されると、PMセンサ16に堆積したPMの酸化が促進される。そのため、図6に示すように、添加弁6からの尿素水の添加が行われている場合は、添加弁6からの尿素水の添加が行われていない場合に比べて、フィルタ5をすり抜けたPM量の積算値がより大きくならないと、PMセンサ16が、自身に堆積したPM量に対応する電気信号を出力しない。
【0077】
そこで、本実施例では、PMセンサ16の温度及びNOx触媒7より下流側の排気の亜酸化窒素濃度に基づいて、PMセンサ16に堆積したPMの酸化量を算出する。そして、上記のように推定された正常時PM堆積量の推定値を、該PMの酸化量に基づいて補正する。
【0078】
[フィルタの故障検出のフロー]
本実施例に係るフィルタの故障検出のフローについて、図7に示すフローチャートに基づいて説明する。本フローは、ECU10に予め記憶されており、ECU10によって所定の間隔で繰り返し実行される。
【0079】
本フローでは、先ずステップS101において、PM除去処理が完了したか否かが判別される。ステップS101において否定判定された場合、本フローの実行は一旦終了される。一方、ステップS101において肯定判定された場合、次にステップS102の処理が実行される。
【0080】
ステップS102においては、機関排出PM量egpmengが算出される。機関排出PM量egpmengは、機関回転速度及び機関負荷に基づいて算出される。機関排出PM量egpmengと機関回転速度及び機関負荷との関係は、実験等に基づいて求めることができ、マップ又は関数としてECU10に予め記憶されている。ステップS102では、このマップ又は関数を用いて機関排出PM量egpmengが算出される。
【0081】
次に、ステップS103において、フィルタすり抜け率Kpmctslpが算出される
。フィルタすり抜け率Kpmctslpは、フィルタ5が正常であると仮定した場合のフィルタ5におけるPM堆積量に基づいて算出される。フィルタ5が正常であると仮定した場合のフィルタ5におけるPM堆積量は、内燃機関1の機関回転速度及び機関負荷やフィルタ5の温度等の履歴に基づいて算出することができる。フィルタすり抜け率Kpmctslpと、フィルタ5が正常であると仮定した場合のフィルタ5におけるPM堆積量との関係は、実験等に基づいて求めることができ、マップ又は関数としてECU10に予め記憶されている。ステップS103では、このマップ又は関数を用いてフィルタすり抜け率Kpmctslpが算出される。
【0082】
次に、ステップS104において、センサ付着率Kpmsdpが算出される。センサ付着率Kpmsdpも、フィルタ5が正常であると仮定した場合のフィルタ5におけるPM堆積量及びフィルタ5を通過する排気の流量に基づいて算出される。センサ付着率Kpmsdpと、フィルタ5が正常であると仮定した場合のフィルタ5におけるPM堆積量及びフィルタ5を通過する排気の流量との関係は、実験等に基づいて求めることができ、マップ又は関数としてECU10に予め記憶されている。ステップS104では、このマップ又は関数を用いてセンサ付着率Kpmsdpが算出される。
【0083】
次に、ステップS105において、NOx触媒7より下流側の排気の亜酸化窒素濃度ecn2oが算出される。NOx触媒7における亜酸化窒素の生成量は、添加弁6からの尿素水の添加量(即ち、NOx触媒7に還元剤として供給されるアンモニアの量)及びNOx触媒7の温度に応じて変化する。そのため、NOx触媒7より下流側の排気の亜酸化窒素濃度ecn2oは、添加弁6からの尿素水の添加量及びNOx触媒7の温度に基づいて求めることができる。
【0084】
図8は、NOx触媒7より下流側の排気の亜酸化窒素濃度と、添加弁6からの尿素水の添加量及びNOx触媒7の温度と、の関係を示す図である。本実施例では、このような、NOx触媒7より下流側の排気の亜酸化窒素濃度と、添加弁6からの尿素水の添加量及びNOx触媒7の温度と、の関係が、実験等に基づいて求められており、マップ又は関数としてECU10に予め記憶されている。ステップS105では、このマップ又は関数を用いて、NOx触媒7より下流側の排気の亜酸化窒素濃度ecn2oが算出される。
【0085】
次に、ステップS106において、PMセンサ16に堆積したPMの酸化量egpmsoxが算出される。PMセンサ16に堆積したPMの酸化量egpmsoxは、PMセンサ16の温度ethpms、及び、ステップS105で算出されたNOx触媒7より下流側の排気の亜酸化窒素濃度ecn2oに基づいて算出される。PMセンサ16の温度ethpmsとして、第三排気温度センサ17によって検出される排気温度を採用してもよい。また、PMセンサ16の温度を検出する温度センサを別途設けてもよい。
【0086】
図9は、PMセンサ16に堆積したPMの酸化量egpmsoxと、PMセンサ16の温度ethpms及びNOx触媒7より下流側の排気の亜酸化窒素濃度ecn2oと、の関係を示す図である。本実施例では、このような、PMセンサ16に堆積したPMの酸化量egpmsoxと、PMセンサ16の温度ethpms及びNOx触媒7より下流側の排気の亜酸化窒素濃度ecn2oと、の関係が、実験等に基づいて求められており、マップ又は関数としてECU10に予め記憶されている。ステップS106では、このマップ又は関数を用いて、PMセンサ16に堆積したPMの酸化量egpmsoxが算出される。従って、PMセンサ16の温度が高いほど、また、NOx触媒7より下流側の排気の亜酸化窒素濃度ecn2oが高いほど、PMセンサ16に堆積したPMの酸化量egpmsoxは大きい値として算出される。
【0087】
尚、NOx触媒7より下流側の排気の亜酸化窒素濃度ecn2oに代えて、該排気中の
亜酸化窒素量を算出し、該亜酸化窒素量を用いてPMセンサ16に堆積したPMの酸化量egpmsoxを算出してもよい。
【0088】
次に、ステップS107において、正常時PM堆積量egpmsdpが算出される。正常時PM堆積量egpmsdpは、該ステップS107の処理を前回実行した際に算出された正常時PM堆積量egpmsdpに、ステップS102で算出された機関排出PM量egpmengと、ステップS103で算出されたフィルタすり抜け率Kpmctslpと、ステップS104で算出されたセンサ付着率Kpmsdpと、を乗算した値を加算し、さらに、ステップS106で算出されたPMセンサ16に堆積したPMの酸化量egpmsoxを減算することで算出される。
【0089】
つまり、該ステップS107の処理を前回実行した際に算出された正常時PM堆積量egpmsdpに、機関排出PM量egpmengと、フィルタすり抜け率Kpmctslpと、センサ付着率Kpmsdpと、を乗算した値を加算することで、PMの酸化量を考慮する以前の正常時PM堆積量が算出される。そして、該PMの酸化量を考慮する以前の正常時PM堆積量が、PMの酸化量egpmsoxを減算することで補正される。
【0090】
次に、ステップS108において、ステップS107で算出された現時点における正常時PM堆積量egpmsdpが所定量以上であるか否かが判別される。ステップS108において否定判定された場合、ステップS102からS107の処理が再度実行される。一方、ステップS108において肯定判定された場合、次にステップS109の処理が実行される。
【0091】
ステップS109においては、ステップS107で算出された現時点における正常時PM堆積量egpmsdpに基づいて、フィルタ5の故障判定の閾値epms0が算出される。該閾値epms0と正常時PM堆積量egpmsdpとの関係は、実験等に基づいて予め定められており、マップ又は関数としてECU10に予め記憶されている。ステップS109では、このマップ又は関数を用いて、閾値epms0が算出される。ここで、例えば、閾値epms0を、正常時PM堆積量egpmsdpに許容可能なマージンを加算した値としてもよい。また、正常時PM堆積量egpmsdpを閾値epms0としてもよい。正常時PM堆積量egpmsdpの値が大きいほど閾値epms0も大きい値として算出される。
【0092】
尚、ステップS107で算出される正常時PM堆積量egpmsdpが所定量以上のある一定量に達した時点でフィルタ5の故障判定を実施するようにしてもよい。この場合、閾値epms0は、その一定量に基づいて予め定められた一定の値となる。
【0093】
次に、ステップS110において、PMセンサ16の出力値epmsが、ステップS109で算出されたフィルタ5の故障判定の閾値epms0以上であるか否かが判別される。ステップS110において肯定判定された場合、PMセンサ16における実際のPM堆積量が正常時PM堆積量に比べて過剰に多いと判断できる。そのため、この場合、次にステップS111において、フィルタ5が故障していると判定される。一方、ステップS110において否定判定された場合、次にステップS112において、フィルタ5は正常であると判定される。
【0094】
上記のように、本実施例では、PMセンサ16の温度及びNOx触媒7より下流側の排気の亜酸化窒素濃度に基づいてPMセンサ16に堆積したPMの酸化量が算出される。そして、該PMの酸化量を考慮して算出された正常時PM堆積量に基づいて、フィルタの故障判定を実行するタイミングが決定される。さらに、該PMの酸化量を考慮して算出された正常時PM堆積量に基づいて、フィルタ5の故障判定の閾値が定められる。従って、フ
ィルタの故障検出の精度を向上させることができる。
【0095】
尚、PMセンサ16に堆積したPMの酸化量は、必ずしも、PMセンサ16の温度及びNOx触媒7より下流側の排気の亜酸化窒素濃度(又は、該排気中の亜酸化窒素量)の両方に基づいて算出しなくともよい。つまり、PMセンサ16の温度又はNOx触媒7より下流側の排気の亜酸化窒素濃度のいずれか一方のみに基づいて、PMセンサ16に堆積したPMの酸化量を算出してもよい。ただし、これらの値の両方に基づいて算出することで、PMの酸化量をより高精度で算出することができる。その結果、フィルタの故障検出の精度をより向上させることができる。
【0096】
また、本実施例においては、フィルタ5の故障判定の実行タイミング及びフィルタ5の故障判定の閾値を正常時PM堆積量に基づいて決定した。しかしながら、これらは、必ずしも正常時PM堆積量に基づいて決定される必要はない。つまり、フィルタ5の状態が、該フィルタ5の故障のレベルが所定のレベルに達した状態(以下、所定故障状態と称する)であると仮定して、PMセンサ16におけるPM堆積量を算出し、該PM堆積量に基づいて、フィルタ5の故障判定の実行タイミング及びフィルタ5の故障判定の閾値を決定してもよい。
【0097】
フィルタ5が正常な場合と、フィルタ5の状態が所定故障状態の場合とでは、フィルタすり抜け率が異なる。そこで、上記の場合、フィルタ5の状態が、フィルタ5の状態が所定故障状態であると仮定した場合のフィルタすり抜け率と、機関排出PM量と、センサ付着率とに基づいて、PMセンサ16におけるPM堆積量を推定する。
【0098】
そして、その推定値を、PMセンサ16に堆積したPMの酸化量に基づいて補正する。これにより、PMの酸化量を考慮した、フィルタ5の状態が所定故障状態であると仮定した場合のPMセンサ16におけるPM堆積量を算出することができる。
【0099】
尚、フィルタ5の状態が所定故障状態であると仮定した場合のフィルタすり抜け率は、フィルタ5におけるPM堆積量及びフィルタ5を通過する排気の流量(流速)に応じて変化する。フィルタ5の状態が所定故障状態である場合は、該フィルタ5におけるPM堆積量が多いほど、フィルタすり抜け率は高くなる。また、フィルタ5を通過する排気の流量が多いほど(該排気の流速が大きいほど)、フィルタすり抜け率は高くなる。このような、フィルタ5の状態が所定故障状態であると仮定した場合の、フィルタすり抜け率と、フィルタ5におけるPM堆積量及びフィルタ5を通過する排気の流量との関係は実験等に基づいて予め求めることができる。
【0100】
<実施例2>
本実施例に係る内燃機関の吸排気系の概略構成は、実施例1と同様である。また、本実施例においても、実施例1と同様、PMセンサ16の出力値を用いてフィルタ5の故障を検出する。以下、本実施例に係るフィルタの故障検出方法について、実施例1と異なる点についてのみ説明する。
【0101】
[フィルタの故障検出]
本実実施例においても、実施例1と同様、機関排出PM量、フィルタすり抜け率、及びセンサ付着率に基づいて正常時PM堆積量が推定される。ただし、実施例1とは異なり、このように推定された正常時PM堆積量が、PMセンサ16に堆積したPMの酸化量に基づいて補正はされない。それに代えて、本実施例では、PMセンサ16に堆積したPMの酸化量に基づいてPMセンサ16の出力値を補正する。
【0102】
ここで、PMセンサ16に堆積したPMの酸化量が多いほど、PMセンサ16の出力値
は小さくなる。その結果、フィルタ5をすり抜けてPMセンサ16に付着したPM量の積算値(即ち、PMの酸化がなかった場合のPMセンサ16におけるPM堆積量)とPMセンサ16の出力値との乖離が大きくなる。そこで、本実施例では、PMセンサ16に堆積したPMの酸化量が多いほど、PMセンサ16の出力値を増加補正する。これにより、フィルタ5をすり抜けてPMセンサ16に付着したPM量の積算値とPMセンサ16の出力値との乖離を小さくすることができる。そして、補正後のPMセンサ16の出力値と閾値とを比較することで、フィルタ5の故障を判定する。
【0103】
[フィルタの故障検出のフロー]
本実施例に係るフィルタの故障検出のフローについて、図10に示すフローチャートに基づいて説明する。本フローは、ECU10に予め記憶されており、ECU10によって所定の間隔で繰り返し実行される。尚、図7に示すフローにおけるステップと同様の処理が実行されるステップについては、同様の参照番号を付し、その説明を省略する。
【0104】
本フローでは、ステップS106の処理の次には、ステップS207の処理が実行される。ステップS207では、正常時PM堆積量egpmsdpが算出される。ここでは、正常時PM堆積量egpmsdpは、該ステップS207の処理を前回実行した際に算出された正常時PM堆積量egpmsdpに、ステップS102で算出された機関排出PM量egpmengと、ステップS103で算出されたフィルタすり抜け率Kpmctslpと、ステップS104で算出されたセンサ付着率Kpmsdpと、を乗算した値を加算することで算出される。つまり、PMセンサ16に堆積したPMの酸化量については考慮せずに、正常時PM堆積量egpmsdpが算出される。
【0105】
次に、ステップS208において、ステップS207で算出された現時点における正常時PM堆積量egpmsdpが所定量以上であるか否かが判別される。ステップS208において否定判定された場合、ステップS102からS207の処理が再度実行される。一方、ステップS108において肯定判定された場合、次にステップS209の処理が実行される。
【0106】
ステップ209においては、ステップS207で算出された現時点における正常時PM堆積量egpmsdpに基づいて、フィルタ5の故障判定の閾値epms1が算出される。該閾値epms1と正常時PM堆積量egpmsdpとの関係は、実験等に基づいて予め定められており、マップ又は関数としてECU10に予め記憶されている。ステップS209では、このマップ又は関数を用いて、閾値epms0が算出される。ここで、例えば、閾値epms1を、正常時PM堆積量egpmsdpに許容可能なマージンを加算した値としてもよい。また、正常時PM堆積量egpmsdpを閾値epms1としてもよい。正常時PM堆積量egpmsdpの値が大きいほど閾値epms1も大きい値として算出される。
【0107】
尚、ステップS207で算出される正常時PM堆積量egpmsdpが所定量以上のある一定量に達した時点でフィルタ5の故障判定を実施するようにしてもよい。この場合、閾値epms1は、その一定量に基づいて予め定められた一定の値となる。
【0108】
次に、ステップS210において、ステップS106で算出されたPMセンサ16に堆積したPMの酸化量egpmsoxに基づいてPMセンサ16の出力値epmsが補正される。このとき、PMの酸化量egpmsoxが多いほど、PMセンサ16の出力値epmsは増加補正される。PMの酸化量egpmsoxとPMセンサ16の出力値の補正量との関係は実験等に基づいて求められており、マップ又は関数としてECU10に予め記憶されている。ステップS210では、このマップ又は関数を用いて算出された補正量が加算されることで、PMセンサ16の出力値epmsが補正される。
【0109】
次に、ステップS211において、ステップS210において算出された補正後のPMセンサ16の出力値epmsが、ステップS209で算出されたフィルタ5の故障判定の閾値epms1以上であるか否かが判別される。ステップS211において肯定判定された場合、PMセンサ16における実際のPM堆積量が過剰に多いと判断できる。そのため、この場合、次にステップS111において、フィルタ5が故障していると判定される。一方、ステップS211において否定判定された場合、次にステップS112において、フィルタ5は正常であると判定される。
【0110】
上記ように、本実施例では、PMセンサ16に堆積したPMの酸化量を考慮して補正したPMセンサ16の出力値に基づいてフィルタ5の故障判定が行われる。従って、フィルタの故障検出の精度を向上させることができる。
【0111】
尚、本実施例においても、実施例1と同様、フィルタ5の故障判定の実行タイミング及びフィルタ5の故障判定の閾値は、必ずしも正常時PM堆積量に基づいて決定される必要はない。つまり、フィルタ5の状態が所定故障状態であると仮定して、PMセンサ16におけるPM堆積量を算出し、該PM堆積量に基づいてフィルタ5の故障判定の実行タイミング及びフィルタ5の故障判定の閾値を決定してもよい。
【0112】
<実施例3>
本実施例に係る内燃機関の吸排気系の概略構成は、実施例1と同様である。また、本実施例においても、実施例1と同様、PMセンサ16の出力値を用いてフィルタ5の故障を検出する。以下、本実施例に係るフィルタの故障検出方法について、実施例1と異なる点についてのみ説明する。
【0113】
[フィルタの故障検出]
PMセンサ16に堆積したPMの酸化量が増加すると、そのばらつきが大きくなり、その量を高精度で算出することが困難となる。その結果、正常時PM堆積量を高精度で算出することが困難となる。そこで、本実施例では、PMセンサにおいて酸化されるPM量が増加し、そのばらつきが過剰に大きくなった場合は、フィルタ5の故障判定が禁止される。
【0114】
具体的には、PMセンサ16の温度が第一所定温度以上の状態が所定期間以上継続した場合は、フィルタ5の故障判定が禁止される。ここで、第一所定温度とは、PMセンサ16に堆積したPMが酸化する温度の下限値以上の温度である。また、本実施例に係る所定期間とは、PMセンサ16の温度が所定温度以上の状態が該所定期間以上継続すると、PMセンサ16において酸化されるPM量が増加し、そのばらつきが過剰に大きくなると判断できる期間である。
【0115】
また、NOx触媒7においてアンモニアを還元剤としてNOxが還元される際に生成される亜酸化窒素の量が多いほど、即ち、NOx触媒7より下流側の排気の亜酸化窒素濃度が高いほど(又は、該排気中の亜酸化窒素量が多いほど)、PMセンサ16に堆積したPMの酸化が促進され易くなる。そこで、第一所定温度及び所定期間を、NOx触媒7より下流側の排気の亜酸化窒素濃度に基づいて設定する。つまり、NOx触媒7より下流側の排気の亜酸化窒素濃度が高いほど、所定温度をより低い温度に設定し、また、所定期間をより短い期間に設定する。
【0116】
さらに、本実施例では、PM除去処理の完了後、PMセンサ16の温度が第二所定温度より低くなるまでの間においても、正常時PM堆積量の推定が行われず、フィルタ5の故障判定が禁止される。PM除去処理の完了後も暫くの間はPMセンサ16の温度が、PM
の酸化が可能なほど高い状態が継続する。ここで、第二所定温度は、PMの酸化が可能な温度の下限値以下の温度である。つまり、PM除去処理の完了直後の、PMセンサ16に堆積したPMが酸化されている状態では、正常時PM堆積量の推定が行われない。
【0117】
[フィルタの故障検出のフロー]
本実施例に係るフィルタの故障検出のフローについて、図11,12に示すフローチャートに基づいて説明する。本フローは、ECU10に予め記憶されており、ECU10によって所定の間隔で繰り返し実行される。尚、図7に示すフローにおけるステップと同様の処理が実行されるステップについては、同様の参照番号を付し、その説明を省略する。
【0118】
本フローでは、ステップS101において肯定判定された場合、次にステップS301の処理が実行される。ステップS301においては、PMセンサ16の温度ethpmsが第二所定温度ethpmsl2より低いか否かが判別される。第二所定温度ethpmsl2は、実験等に基づいて予め定められている。
【0119】
ステップS301において否定判定された場合、本フローの実行は一旦終了される。即ち、PM除去処理が完了してから、PMセンサ16の温度ethpmsが第二所定温度ethpmsl2より低くなるまでの間は、PMセンサ16におけるPM堆積量の推定は行われず、フィルタの故障判定は禁止される。一方、ステップS301において肯定判定された場合、次にステップS102からS107の処理が実行される。
【0120】
ステップS107の次には、ステップS307の処理が実行される。ステップS307においては、ステップS105で算出されたNOx触媒7より下流側の排気の亜酸化窒素濃度ecn2oに基づいて第一所定温度ethpmsl1が算出される。NOx触媒7より下流側の排気の亜酸化窒素濃度ecn2oと第一所定温度ethpmsl1との関係は、実験等に基づいて予め定められており、マップ又は関数としてECU10に予め記憶されている。ステップS307では、このマップ又は関数を用いて、第一所定温度ethpmsl1が算出される。上述したように、NOx触媒7より下流側の排気の亜酸化窒素濃度ecn2oが高いほど、第一所定温度ethpmsl1はより低い温度として算出される。
【0121】
尚、NOx触媒7より下流側の排気の亜酸化窒素濃度ecn2oに代えて、該排気中の亜酸化窒素量を算出し、該亜酸化窒素量を用いて第一所定温度ethpmsl1を算出してもよい。
【0122】
次に、ステップS308において、PMセンサ16の温度ethpmsが、ステップS307で算出された第一所定温度ethpmsl1以上であるか否かが判別される。ステップS308において、肯定判定された場合は、次にステップS309の処理が実行され、否定判定された場合は、次にステップS108の処理が実行される。
【0123】
ステップS309では、PMセンサ16の温度ethpmsが第一所定温度ethpmsl1以上である状態が継続している時間(以下、センサ高温継続時間と称する)ethpmscが算出される。
【0124】
次に、ステップS310において、ステップS105で算出されたNOx触媒7より下流側の排気の亜酸化窒素濃度ecn2oに基づいて所定期間ethpmscl1が算出される。NOx触媒7より下流側の排気の亜酸化窒素濃度ecn2oと所定期間ethpmscl1との関係は、実験等に基づいて予め定められており、マップ又は関数としてECU10に予め記憶されている。ステップS310では、このマップ又は関数を用いて、所定期間ethpmscl1が算出される。上述したように、NOx触媒7より下流側の排
気の亜酸化窒素濃度ecn2oが高いほど、所定期間ethpmscl1はより短い期間として算出される。
【0125】
尚、NOx触媒7より下流側の排気の亜酸化窒素濃度ecn2oに代えて、該排気中の亜酸化窒素量を算出し、該亜酸化窒素量を用いて所定期間ethpmscl1を算出してもよい。
【0126】
次に、ステップS311において、ステップS309で算出されたセンサ高温継続時間ethpmscが、ステップS310で算出された所定期間ethpmscl1より短いか否かが判別される。ステップS311において否定判定された場合、本フローの実行は一旦終了される。即ち、PMセンサ16の温度ethpmsが第一所定温度ethpmsl1以上の状態が所定期間ethpmscl1以上継続した場合は、PMセンサ16におけるPM堆積量の推定は停止され、フィルタ5の故障判定が禁止される。一方、ステップS311において肯定判定された場合、次にステップS108の処理が実行される。
【0127】
上記のように、本実施例では、PMセンサ16において酸化されるPM量が増加し、そのばらつきが過剰に大きくなった場合は、フィルタ5の故障判定が禁止される。また、PM除去処理の完了直後の、PMセンサ16に堆積したPMが酸化されている状態においても、フィルタ5の故障判定が禁止される。これにより、フィルタの故障判定の精度の低下を抑制することができる。
【0128】
また、本実施例では、第一所定温度及び所定期間が、NOx触媒7より下流側の排気の亜酸化窒素濃度ecn2o(又は、該排気中の亜酸化窒素量)に基づいて設定される。そのため、PMセンサ16において酸化されるPM量を高精度で算出することが困難な状態で、PMセンサ16の出力値に基づいてフィルタ5の故障判定が行われることをより高い確率で抑制することができる。従って、フィルタ5の故障検出の精度を向上させることができる。
【0129】
尚、必ずしも、第一所定温度及び所定期間の両方を、NOx触媒7より下流側の排気の亜酸化窒素濃度ecn2o(又は、該排気中の亜酸化窒素量)に基づいて設定しなくともよい。つまり、第一所定温度及び所定期間のいずれか一方を予め定められた一定値としてもよい。ただし、これらの値の両方を、NOx触媒7より下流側の排気の亜酸化窒素濃度ecn2o(又は、該排気中の亜酸化窒素量)に基づいて設定することで、フィルタ5の故障検出の精度をより向上させることができる。
【0130】
また、正常時PM堆積量に代えて、フィルタ5の状態が所定故障状態であると仮定した場合のPMセンサ16におけるPM堆積量の推定値に基づいて、フィルタ5の故障判定の実行タイミング及びフィルタ5の故障判定の閾値を決定する場合も、本実施例に係る故障判定禁止の条件を適用することができる。
【0131】
<実施例4>
本実施例に係る内燃機関の吸排気系の概略構成は、実施例1と同様である。また、本実施例においても、実施例1と同様、PMセンサ16の出力値を用いてフィルタ5の故障を検出する。以下、本実施例に係るフィルタの故障検出方法について、実施例1と異なる点についてのみ説明する。
【0132】
[フィルタの故障検出]
本実実施例においても、実施例1と同様、機関排出PM量、フィルタすり抜け率、及びセンサ付着率に基づいて正常時PM堆積量が推定される。ただし、実施例1とは異なり、このように推定された正常時PM堆積量が、PMセンサ16に堆積したPMの酸化量に基
づいて補正はされない。それに代えて、本実施例では、PMセンサ16において酸化されることで減少するPM堆積量の減少量が大きくなり、フィルタ5をすり抜けてPMセンサ16に付着したPM量の積算値とPMセンサ16の出力値との乖離が過剰に大きくなった場合は、正常時PM堆積量の推定が停止され、フィルタ5の故障判定が禁止される。
【0133】
具体的には、正常時PM堆積量を推定している時に、PMセンサ16の温度が第一所定温度以上の状態が所定期間以上継続した場合は、正常時PM堆積量の推定が停止され、フィルタ5の故障判定が禁止される。ここで、第一所定温度とは、実施例3と同様、PMセンサ16に堆積したPMが酸化する温度の下限値以上の温度である。また、本実施例に係る所定期間とは、PMセンサ16の温度が所定温度以上の状態が該所定期間以上継続すると、PMセンサ16において酸化されることで減少するPM堆積量の減少量が大きくなり、その結果、フィルタ5をすり抜けてPMセンサ16に付着したPM量の積算値とPMセンサ16の出力値との乖離が過剰に大きくなると判断できる期間である。
【0134】
尚、本実施例においても、第一所定温度及び所定期間は、NOx触媒7より下流側の排気の亜酸化窒素濃度に基づいて設定される。つまり、NOx触媒7より下流側の排気の亜酸化窒素濃度が高いほど、所定温度がより低い温度に設定され、また、所定期間がより短い期間に設定される。
【0135】
さらに、本実施例においても、PM除去処理の完了後、PMセンサ16の温度が第二所定温度より低くなるまでの間、正常時PM堆積量の推定が行われず、フィルタ5の故障判定が禁止される。
【0136】
[フィルタの故障検出のフロー]
本実施例に係るフィルタの故障検出のフローについて、図13,14に示すフローチャートに基づいて説明する。本フローは、ECU10に予め記憶されており、ECU10によって所定の間隔で繰り返し実行される。尚、図7に示すフローにおけるステップと同様の処理が実行されるステップについては、同様の参照番号を付し、その説明を省略する。
【0137】
本フローでは、ステップS101において肯定判定された場合、次にステップS401の処理が実行される。ステップS401での処理は、図11に示すフローにおけるステップS301と同様である。つまり、ステップS401においては、PMセンサ16の温度ethpmsが第二所定温度ethpmsl2より低いか否かが判別される。第二所定温度ethpmsl2は、実験等に基づいて予め定められている。
【0138】
ステップS401において否定判定された場合、本フローの実行は一旦終了される。即ち、PM除去処理が完了してから、PMセンサ16の温度ethpmsが第二所定温度ethpmsl2より低くなるまでの間は、PMセンサ16におけるPM堆積量の推定は行われず、フィルタの故障判定は禁止される。一方、ステップS401において肯定判定された場合、次にステップS102からS104の処理が実行される。
【0139】
ステップS104の次には、ステップS405の処理が実行される。ステップS405では、正常時PM堆積量egpmsdpが算出される。ここでは、正常時PM堆積量egpmsdpは、該ステップS405の処理を前回実行した際に算出された正常時PM堆積量egpmsdpに、ステップS102で算出された機関排出PM量egpmengと、ステップS103で算出されたフィルタすり抜け率Kpmctslpと、ステップS104で算出されたセンサ付着率Kpmsdpと、を乗算した値を加算することで算出される。つまり、PMセンサ16に堆積したPMの酸化量については考慮せずに、正常時PM堆積量egpmsdpが算出される。
【0140】
次に、ステップS406において、NOx触媒7より下流側の排気の亜酸化窒素濃度ecn2oが算出される。ステップS406においては、図7に示すフローのステップS105と同様の方法で亜酸化窒素濃度ecn2oが算出される。
【0141】
次に、ステップS407において、ステップS406で算出されたNOx触媒7より下流側の排気の亜酸化窒素濃度ecn2oに基づいて第一所定温度ethpmsl1が算出される。NOx触媒7より下流側の排気の亜酸化窒素濃度ecn2oと第一所定温度ethpmsl1との関係は、実験等に基づいて予め定められており、マップ又は関数としてECU10に予め記憶されている。ステップS407では、このマップ又は関数を用いて、第一所定温度ethpmsl1が算出される。上述したように、NOx触媒7より下流側の排気の亜酸化窒素濃度ecn2oが高いほど、第一所定温度ethpmsl1はより低い温度として算出される。
【0142】
尚、NOx触媒7より下流側の排気の亜酸化窒素濃度ecn2oに代えて、該排気中の亜酸化窒素量を算出し、該亜酸化窒素量を用いて第一所定温度ethpmsl1を算出してもよい。
【0143】
次に、ステップS408において、PMセンサ16の温度ethpmsが、ステップS407で算出された第一所定温度ethpmsl1以上であるか否かが判別される。ステップS408において、肯定判定された場合は、次にステップS409の処理が実行され、否定判定された場合は、次にステップS108の処理が実行される。
【0144】
ステップS409では、PMセンサ16の温度ethpmsが第一所定温度ethpmsl1以上である状態が継続している時間(センサ高温継続時間)ethpmscが算出される。
【0145】
次に、ステップS410において、ステップS406で算出されたNOx触媒7より下流側の排気の亜酸化窒素濃度ecn2oに基づいて所定期間ethpmscl2が算出される。NOx触媒7より下流側の排気の亜酸化窒素濃度ecn2oと所定期間ethpmscl2との関係は、実験等に基づいて予め定められており、マップ又は関数としてECU10に予め記憶されている。ステップS410では、このマップ又は関数を用いて、所定期間ethpmscl2が算出される。上述したように、NOx触媒7より下流側の排気の亜酸化窒素濃度ecn2oが高いほど、所定期間ethpmscl2はより短い期間として算出される。
【0146】
尚、NOx触媒7より下流側の排気の亜酸化窒素濃度ecn2oに代えて、該排気中の亜酸化窒素量を算出し、該亜酸化窒素量を用いて所定期間ethpmscl2を算出してもよい。
【0147】
次に、ステップS411において、ステップS409で算出されたセンサ高温継続時間ethpmscが、ステップS410で算出された所定期間ethpmscl2より短いか否かが判別される。ステップS411において否定判定された場合、本フローの実行は一旦終了される。即ち、PMセンサ16の温度ethpmsが第一所定温度ethpmsl1以上の状態が所定期間ethpmscl2以上継続した場合は、PMセンサ16におけるPM堆積量の推定は停止され、フィルタ5の故障判定が禁止される。一方、ステップ4311において肯定判定された場合、次にステップS108の処理が実行される。
【0148】
本フローでは、ステップS108において肯定判定された場合、次にステップS412の処理が実行される。ステップS412においては、ステップS405で算出された現時点における正常時PM堆積量egpmsdpに基づいて、フィルタ5の故障判定の閾値e
pms2が算出される。該閾値epms2と正常時PM堆積量egpmsdpとの関係は、実験等に基づいて予め定められており、マップ又は関数としてECU10に予め記憶されている。ステップS412では、このマップ又は関数を用いて、閾値epms2が算出される。ここで、例えば、閾値epms2を、正常時PM堆積量egpmsdpに許容可能なマージンを加算した値としてもよい。また、正常時PM堆積量egpmsdpを閾値epms2としてもよい。正常時PM堆積量egpmsdpの値が大きいほど閾値epms2も大きい値として算出される。
【0149】
尚、ステップS405で算出される正常時PM堆積量egpmsdpが所定量以上のある一定量に達した時点でフィルタ5の故障判定を実施するようにしてもよい。この場合、閾値epms2は、その一定量に基づいて予め定められた一定の値となる。
【0150】
次に、ステップS413において、PMセンサ16の出力値epmsが、ステップS412で算出されたフィルタ5の故障判定の閾値epms2以上であるか否かが判別される。ステップS413において肯定判定された場合、PMセンサ16における実際のPM堆積量が正常時PM堆積量に比べて過剰に多いと判断できる。そのため、この場合、次にステップS111において、フィルタ5が故障していると判定される。一方、ステップS413において否定判定された場合、次にステップS112において、フィルタ5は正常であると判定される。
【0151】
上記のように、本実施例では、PMセンサ16に堆積したPMが酸化されることで、フィルタ5をすり抜けてPMセンサ16に付着したPM量の積算値とPMセンサ16の出力値との乖離が過剰に大きくなった場合は、正常時PM堆積量の推定が停止され、フィルタ5の故障判定が禁止される。PM除去処理の完了直後の、PMセンサ16に堆積したPMが酸化されている状態においても、正常時PM堆積量の推定が行われず、フィルタ5の故障判定が禁止される。これにより、フィルタの故障判定の精度の低下を抑制することができる。
【0152】
また、本実施例では、第一所定温度及び所定期間が、NOx触媒7より下流側の排気の亜酸化窒素濃度ecn2o(又は、該排気中の亜酸化窒素量)に基づいて設定される。そのため、フィルタ5をすり抜けてPMセンサ16に付着したPM量の積算値とPMセンサの出力値との乖離が過剰に大きい状態で、PMセンサ16の出力値に基づいてフィルタ5の故障判定が行われることをより高い確率で抑制することができる。従って、フィルタ5の故障検出の精度を向上させることができる。
【0153】
尚、必ずしも、第一所定温度及び所定期間の両方を、NOx触媒7より下流側の排気の亜酸化窒素濃度ecn2o(又は、該排気中の亜酸化窒素量)に基づいて設定しなくともよい。つまり、第一所定温度及び所定期間のいずれか一方を予め定められた一定値としてもよい。ただし、これらの値の両方を、NOx触媒7より下流側の排気の亜酸化窒素濃度ecn2o(又は、該排気中の亜酸化窒素量)に基づいて設定することで、フィルタ5の故障検出の精度をより向上させることができる。
【0154】
また、正常時PM堆積量に代えて、フィルタ5の状態が所定故障状態であると仮定した場合のPMセンサ16におけるPM堆積量の推定する場合にも本実施例を適用することができる。この場合、機関排出PM量、フィルタ5の状態が所定故障状態であると仮定した場合のフィルタすり抜け率、及びセンサ付着率に基づいてPMセンサ16におけるPM堆積量が算出され、PMセンサ16に堆積したPMの酸化量は考慮されない。そして、PMセンサ16において酸化されることで減少するPM堆積量の減少量が大きくなり、フィルタ5をすり抜けてPMセンサ16に付着したPM量の積算値とPMセンサ16の出力値との乖離が過剰に大きくなった場合は、フィルタ5の状態が所定故障状態であると仮定した
場合のPMセンサ16におけるPM堆積量の推定が停止され、フィルタ5の故障判定が禁止される。
【0155】
上記実施例1から4は、可能な限り組み合わせることができる。例えば、実施例2のように、PMセンサ16に堆積したPMの酸化量に基づいてPMセンサ16の出力値を補正し、補正後のPMセンサ16の出力値と閾値とを比較することで、フィルタ5の故障を判定する場合においても、実施例3に係る故障判定禁止の条件を適用してもよい。
【符号の説明】
【0156】
1・・・内燃機関
2・・・吸気通路
3・・・排気通路
4・・・酸化触媒
5・・・フィルタ
6・・・添加弁
7・・・選択還元型NOx触媒(NOx触媒)
8・・・スロットル弁
9・・・ターボチャージャ
10・・ECU
11・・エアフローメータ
12・・第一排気温度センサ
13・・第二排気温度センサ
14・・A/Fセンサ
15・・NOxセンサ
16・・PMセンサ
17・・第三排気温度センサ
18・・アクセル開度センサ
19・・クランクポジションセンサ
【特許請求の範囲】
【請求項1】
内燃機関の排気通路に設けられ排気中の粒子状物質を捕集するフィルタの故障を検出するフィルタの故障検出装置であって、
前記フィルタより下流側の排気通路に設けられ、自身に堆積した粒子状物質の量に対応した信号を出力するPMセンサと、
前記フィルタと前記PMセンサとの間の排気通路に設けられアンモニアを還元剤として排気中のNOxを還元する選択還元型NOx触媒と、
前記フィルタが所定の状態であると仮定した場合の前記PMセンサにおけるPM堆積量を推定する推定手段と、
前記選択還元型NOx触媒より下流側の排気の亜酸化窒素濃度又は該排気中の亜酸化窒素量を取得する取得手段と、
少なくとも、前記得手段によって取得された前記選択還元型NOx触媒より下流側の排気の亜酸化窒素濃度又は該排気中の亜酸化窒素量に基づいて、前記PMセンサに堆積したPMの酸化量を算出する酸化量算出手段と、
前記推定手段によって推定された前記PMセンサにおけるPM堆積量を、前記酸化量算出手段によって算出されたPMの酸化量に基づいて補正するPM堆積量補正手段と、
前記PM堆積量補正手段によって補正された前記PMセンサにおけるPM堆積量が所定量以上であることを条件として、前記PMセンサの出力値に基づいて前記フィルタの故障を判定する判定手段と、
を備えるフィルタの故障検出装置。
【請求項2】
内燃機関の排気通路に設けられ排気中の粒子状物質を捕集するフィルタの故障を検出するフィルタの故障検出装置であって、
前記フィルタより下流側の排気通路に設けられ、自身に堆積した粒子状物質の量に対応した信号を出力するPMセンサと、
前記フィルタと前記PMセンサとの間の排気通路に設けられアンモニアを還元剤として排気中のNOxを還元する選択還元型NOx触媒と、
前記フィルタが所定の状態であると仮定した場合の前記PMセンサにおけるPM堆積量を推定する推定手段と、
前記選択還元型NOx触媒より下流側の排気の亜酸化窒素濃度又は該排気中の亜酸化窒素量を取得する取得手段と、
少なくとも、前記得手段によって取得された前記選択還元型NOx触媒より下流側の排気の亜酸化窒素濃度又は該排気中の亜酸化窒素量に基づいて、前記PMセンサに堆積したPMの酸化量を算出する酸化量算出手段と、
前記推定手段によって推定された前記PMセンサにおけるPM堆積量を、前記酸化量算出手段によって算出されたPMの酸化量に基づいて補正するPM堆積量補正手段と、
前記PMセンサの出力値と、前記PM堆積量補正手段によって補正された前記PMセンサにおけるPM堆積量に基づいて定められる閾値と、を比較することで、前記フィルタの故障を判定する判定手段と、
を備えるフィルタの故障検出装置。
【請求項3】
内燃機関の排気通路に設けられ排気中の粒子状物質を捕集するフィルタの故障を検出するフィルタの故障検出装置であって、
前記フィルタより下流側の排気通路に設けられ、自身に堆積した粒子状物質の量に対応した信号を出力するPMセンサと、
前記フィルタと前記PMセンサとの間の排気通路に設けられアンモニアを還元剤として排気中のNOxを還元する選択還元型NOx触媒と、
前記選択還元型NOx触媒より下流側の排気の亜酸化窒素濃度又は該排気中の亜酸化窒素量を取得する取得手段と、
少なくとも、前記取得手段によって取得された前記選択還元型NOx触媒より下流側の排気の亜酸化窒素濃度又は該排気中の亜酸化窒素量に基づいて、前記PMセンサに堆積したPMの酸化量を算出する酸化量算出手段と、
前記酸化量算出手段によって算出されたPMの酸化量に基づいて前記PMセンサの出力値を補正するセンサ出力補正手段と、
前記センサ出力補正手段によって補正された前記PMセンサの出力値と閾値とを比較することで、前記フィルタの故障を判定する判定手段と、
を備えるフィルタの故障検出装置。
【請求項4】
前記酸化量算出手段が、前記選択還元型NOx触媒より下流側の排気の亜酸化窒素濃度又は該排気中の亜酸化窒素量に加え、前記PMセンサの温度に基づいて、前記PMセンサに堆積したPMの酸化量を算出する請求項1から3の何れか一項に記載のフィルタの故障検出装置。
【請求項5】
前記PMセンサの温度が所定温度以上の状態が所定期間以上継続した場合は、前記判定手段による前記フィルタの故障判定を禁止する禁止手段をさらに備える請求項1から4の何れか一項に記載のフィルタの故障検出装置。
【請求項6】
前記取得手段によって取得された前記選択還元型NOx触媒より下流側の排気の亜酸化窒素濃度又は該排気中の亜酸化窒素量に基づいて、前記所定温度又は前記所定期間の少なくともいずれかを設定する設定手段をさらに備える請求項5に記載のフィルタの故障検出装置。
【請求項7】
内燃機関の排気通路に設けられ排気中の粒子状物質を捕集するフィルタの故障を検出するフィルタの故障検出装置であって、
前記フィルタより下流側の排気通路に設けられ、自身に堆積する粒子状物質に対応した信号を出力するPMセンサと、
前記フィルタと前記PMセンサとの間の排気通路に設けられアンモニアを還元剤として排気中のNOxを還元する選択還元型NOx触媒と、
前記フィルタが所定の状態であると仮定した場合の前記PMセンサにおけるPM堆積量を推定する推定手段と、
前記PMセンサの出力値と、前記推定手段によって推定された前記PMセンサにおけるPM堆積量と、を用いて前記フィルタの故障を判定する判定手段と、
前記推定手段によって前記PMセンサにおけるPM堆積量を推定している時に、前記PMセンサの温度が所定温度以上の状態が所定期間以上継続した場合は、該推定手段による前記PMセンサにおけるPM堆積量の推定を停止し、前記フィルタの故障判定を禁止する禁止手段と、
前記選択還元型NOx触媒より下流側の排気の亜酸化窒素濃度又は該排気中の亜酸化窒素量を取得する取得手段と、
前記取得手段によって取得された前記選択還元型NOx触媒より下流側の排気の亜酸化窒素濃度又は該排気中の亜酸化窒素量に基づいて、前記所定温度又は前記所定期間の少なくともいずれかを設定する設定手段と、
を備えるフィルタの故障検出装置。
【請求項8】
前記所定温度を第一所定温度とし、
前記禁止手段が、前記PMセンサの温度を上昇させることで該PMセンサに堆積したPMを酸化させて除去するPM除去処理が完了してから、前記PMセンサの温度が第二所定温度より低くなるまでの間においては、該推定手段による前記PMセンサにおけるPM堆積量の推定を行わず、前記フィルタの故障判定を禁止する請求項5から7のいずれか一項に記載のフィルタの故障検出装置。
【請求項1】
内燃機関の排気通路に設けられ排気中の粒子状物質を捕集するフィルタの故障を検出するフィルタの故障検出装置であって、
前記フィルタより下流側の排気通路に設けられ、自身に堆積した粒子状物質の量に対応した信号を出力するPMセンサと、
前記フィルタと前記PMセンサとの間の排気通路に設けられアンモニアを還元剤として排気中のNOxを還元する選択還元型NOx触媒と、
前記フィルタが所定の状態であると仮定した場合の前記PMセンサにおけるPM堆積量を推定する推定手段と、
前記選択還元型NOx触媒より下流側の排気の亜酸化窒素濃度又は該排気中の亜酸化窒素量を取得する取得手段と、
少なくとも、前記得手段によって取得された前記選択還元型NOx触媒より下流側の排気の亜酸化窒素濃度又は該排気中の亜酸化窒素量に基づいて、前記PMセンサに堆積したPMの酸化量を算出する酸化量算出手段と、
前記推定手段によって推定された前記PMセンサにおけるPM堆積量を、前記酸化量算出手段によって算出されたPMの酸化量に基づいて補正するPM堆積量補正手段と、
前記PM堆積量補正手段によって補正された前記PMセンサにおけるPM堆積量が所定量以上であることを条件として、前記PMセンサの出力値に基づいて前記フィルタの故障を判定する判定手段と、
を備えるフィルタの故障検出装置。
【請求項2】
内燃機関の排気通路に設けられ排気中の粒子状物質を捕集するフィルタの故障を検出するフィルタの故障検出装置であって、
前記フィルタより下流側の排気通路に設けられ、自身に堆積した粒子状物質の量に対応した信号を出力するPMセンサと、
前記フィルタと前記PMセンサとの間の排気通路に設けられアンモニアを還元剤として排気中のNOxを還元する選択還元型NOx触媒と、
前記フィルタが所定の状態であると仮定した場合の前記PMセンサにおけるPM堆積量を推定する推定手段と、
前記選択還元型NOx触媒より下流側の排気の亜酸化窒素濃度又は該排気中の亜酸化窒素量を取得する取得手段と、
少なくとも、前記得手段によって取得された前記選択還元型NOx触媒より下流側の排気の亜酸化窒素濃度又は該排気中の亜酸化窒素量に基づいて、前記PMセンサに堆積したPMの酸化量を算出する酸化量算出手段と、
前記推定手段によって推定された前記PMセンサにおけるPM堆積量を、前記酸化量算出手段によって算出されたPMの酸化量に基づいて補正するPM堆積量補正手段と、
前記PMセンサの出力値と、前記PM堆積量補正手段によって補正された前記PMセンサにおけるPM堆積量に基づいて定められる閾値と、を比較することで、前記フィルタの故障を判定する判定手段と、
を備えるフィルタの故障検出装置。
【請求項3】
内燃機関の排気通路に設けられ排気中の粒子状物質を捕集するフィルタの故障を検出するフィルタの故障検出装置であって、
前記フィルタより下流側の排気通路に設けられ、自身に堆積した粒子状物質の量に対応した信号を出力するPMセンサと、
前記フィルタと前記PMセンサとの間の排気通路に設けられアンモニアを還元剤として排気中のNOxを還元する選択還元型NOx触媒と、
前記選択還元型NOx触媒より下流側の排気の亜酸化窒素濃度又は該排気中の亜酸化窒素量を取得する取得手段と、
少なくとも、前記取得手段によって取得された前記選択還元型NOx触媒より下流側の排気の亜酸化窒素濃度又は該排気中の亜酸化窒素量に基づいて、前記PMセンサに堆積したPMの酸化量を算出する酸化量算出手段と、
前記酸化量算出手段によって算出されたPMの酸化量に基づいて前記PMセンサの出力値を補正するセンサ出力補正手段と、
前記センサ出力補正手段によって補正された前記PMセンサの出力値と閾値とを比較することで、前記フィルタの故障を判定する判定手段と、
を備えるフィルタの故障検出装置。
【請求項4】
前記酸化量算出手段が、前記選択還元型NOx触媒より下流側の排気の亜酸化窒素濃度又は該排気中の亜酸化窒素量に加え、前記PMセンサの温度に基づいて、前記PMセンサに堆積したPMの酸化量を算出する請求項1から3の何れか一項に記載のフィルタの故障検出装置。
【請求項5】
前記PMセンサの温度が所定温度以上の状態が所定期間以上継続した場合は、前記判定手段による前記フィルタの故障判定を禁止する禁止手段をさらに備える請求項1から4の何れか一項に記載のフィルタの故障検出装置。
【請求項6】
前記取得手段によって取得された前記選択還元型NOx触媒より下流側の排気の亜酸化窒素濃度又は該排気中の亜酸化窒素量に基づいて、前記所定温度又は前記所定期間の少なくともいずれかを設定する設定手段をさらに備える請求項5に記載のフィルタの故障検出装置。
【請求項7】
内燃機関の排気通路に設けられ排気中の粒子状物質を捕集するフィルタの故障を検出するフィルタの故障検出装置であって、
前記フィルタより下流側の排気通路に設けられ、自身に堆積する粒子状物質に対応した信号を出力するPMセンサと、
前記フィルタと前記PMセンサとの間の排気通路に設けられアンモニアを還元剤として排気中のNOxを還元する選択還元型NOx触媒と、
前記フィルタが所定の状態であると仮定した場合の前記PMセンサにおけるPM堆積量を推定する推定手段と、
前記PMセンサの出力値と、前記推定手段によって推定された前記PMセンサにおけるPM堆積量と、を用いて前記フィルタの故障を判定する判定手段と、
前記推定手段によって前記PMセンサにおけるPM堆積量を推定している時に、前記PMセンサの温度が所定温度以上の状態が所定期間以上継続した場合は、該推定手段による前記PMセンサにおけるPM堆積量の推定を停止し、前記フィルタの故障判定を禁止する禁止手段と、
前記選択還元型NOx触媒より下流側の排気の亜酸化窒素濃度又は該排気中の亜酸化窒素量を取得する取得手段と、
前記取得手段によって取得された前記選択還元型NOx触媒より下流側の排気の亜酸化窒素濃度又は該排気中の亜酸化窒素量に基づいて、前記所定温度又は前記所定期間の少なくともいずれかを設定する設定手段と、
を備えるフィルタの故障検出装置。
【請求項8】
前記所定温度を第一所定温度とし、
前記禁止手段が、前記PMセンサの温度を上昇させることで該PMセンサに堆積したPMを酸化させて除去するPM除去処理が完了してから、前記PMセンサの温度が第二所定温度より低くなるまでの間においては、該推定手段による前記PMセンサにおけるPM堆積量の推定を行わず、前記フィルタの故障判定を禁止する請求項5から7のいずれか一項に記載のフィルタの故障検出装置。
【図1】


【図2】
【図3】
【図4】
【図5】
【図6】
【図7】
【図8】
【図9】
【図10】
【図11】
【図12】
【図13】
【図14】
【図2】
【図3】
【図4】
【図5】
【図6】
【図7】
【図8】
【図9】
【図10】
【図11】
【図12】
【図13】
【図14】
【公開番号】特開2013−108452(P2013−108452A)
【公開日】平成25年6月6日(2013.6.6)
【国際特許分類】
【出願番号】特願2011−255037(P2011−255037)
【出願日】平成23年11月22日(2011.11.22)
【出願人】(000003207)トヨタ自動車株式会社 (59,920)
【Fターム(参考)】
【公開日】平成25年6月6日(2013.6.6)
【国際特許分類】
【出願日】平成23年11月22日(2011.11.22)
【出願人】(000003207)トヨタ自動車株式会社 (59,920)
【Fターム(参考)】
[ Back to top ]