
フィルタプレス脱水装置
【課題】ろ布の蛇行を正しく検知して修正することができるフィルタプレス脱水装置を提供する。
【解決手段】前記蛇行修正機構30は、軸心が互いに平行姿勢に配置され、一方がろ布7の表面に接し、他方がろ布7の裏面に接する一対のガイドローラ31,32と、前記平行姿勢を保った状態で、ろ布7が走行方向に沿うように一対のガイドローラ31,32を偏向可能に支持するガイド機構33,34と、ろ布7の左右端部近傍にそれぞれ配置され、走行に伴ってろ布7の幅方向への偏位量を検知する一対のセンサ35,36と、一対のセンサ35,36に検知されたそれぞれの偏位量の差分に基づいて、ガイド機構33,34を駆動して一対のガイドローラ31,32を偏向する駆動機構とを備えている。
【解決手段】前記蛇行修正機構30は、軸心が互いに平行姿勢に配置され、一方がろ布7の表面に接し、他方がろ布7の裏面に接する一対のガイドローラ31,32と、前記平行姿勢を保った状態で、ろ布7が走行方向に沿うように一対のガイドローラ31,32を偏向可能に支持するガイド機構33,34と、ろ布7の左右端部近傍にそれぞれ配置され、走行に伴ってろ布7の幅方向への偏位量を検知する一対のセンサ35,36と、一対のセンサ35,36に検知されたそれぞれの偏位量の差分に基づいて、ガイド機構33,34を駆動して一対のガイドローラ31,32を偏向する駆動機構とを備えている。
【発明の詳細な説明】
【技術分野】
【0001】
本発明は、圧接状態と離隔状態との間で移動可能に支持される複数のろ板と、前記圧接状態で各ろ板に挟持され、ろ過室を形成する無端状のろ布と、前記離隔状態で前記ろ布を各ろ板と離隔して走行可能に支持する支持機構と、前記支持機構により支持されながら走行する前記ろ布の蛇行を修正する蛇行修正機構と、を備えているフィルタプレス脱水装置に関する。
【背景技術】
【0002】
従来、浄水場や下水処理場で発生する汚泥を脱水してろ液とケーキに分離する汚泥処理工程、或は、カーボン製品やチタン製品等の製造工程で必要となる固液分離工程等、様々な分野で固液分離のためにフィルタプレス脱水装置が用いられている。
【0003】
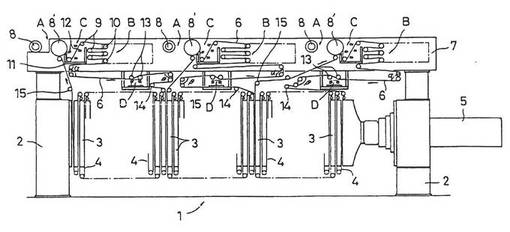
図5には、特許文献1に開示された従来のろ布走行式のフィルタプレス脱水装置が示されている。尚、該フィルタプレス脱水装置の各部を説明する符号は、本発明によるフィルタプレス脱水装置の各部を説明する符号とは関係ない。
【0004】
該ろ布走行式のフィルタプレス脱水装置は、基礎1に一組のスタンドフレーム2が一定距離隔てて設けられ、このスタンドフレーム2間に複数枚のろ板3が移動自在に並列に設けられ、各ろ板3間にろ布4が二重に介在され、油圧シリンダ5により各ろ板3を開閉板して二重のろ布4間内に圧入された汚泥等の原液を圧搾し、ケーキとろ液に分離するように構成されている。
【0005】
各ろ板3間に介在された各ろ布4は、それらを連結した無端状の複数本のろ布6で構成され、各ろ布6の走行経路に、ろ布6を走行させるろ布駆動装置A、ろ布6の適度に緊張させるろ布緊張装置B、ろ布4に洗浄水を噴射して洗浄するろ布洗浄装置C、ろ布6の蛇行を修正する2本のロール13から成るろ布蛇行修正装置Dが設けられ、圧搾工程1サイクル毎に各ろ布6を走行させて洗浄するようになっている。
【先行技術文献】
【特許文献】
【0006】
【特許文献1】実開昭61−5937号公報
【発明の概要】
【発明が解決しようとする課題】
【0007】
上述のような蛇行修正装置Dは、ろ布6の進行方向一端部を検出するアクチュエータを備え、検出したろ布6の前記一端部の蛇行量に応じてロール13を移動させて、ろ布6の蛇行を修正するように構成されていた。
【0008】
ろ布6は、圧搾工程のたびに繰り返しろ板3に非常に大きい圧力で挟持されるため経時的に伸びが発生する。例えば、新品のろ布に比べて、使用中のろ布は、その全長方向に5〜10%程度、幅方向に3〜7%程度の伸びが発生し、また、その伸びは均一ではない。
【0009】
ここで、全長方向の伸びは、ろ布緊張機構により吸収できるためろ布の走行に特に悪影響はないが、部分的に幅方向の伸びが発生しているような場合が問題となる。
【0010】
従来の蛇行修正装置Dのアクチュエータは、ろ布6の進行方向一端部を検出する構成のため、ろ布6が蛇行していないにもかかわらず、部分的に発生した幅方向の伸びをろ布の蛇行と誤検知し、それを修正するためにロール13を移動させるので、かえってろ布が蛇行してしまうような問題があった。
【0011】
本発明は、ろ布の蛇行を正しく検知して修正することができるフィルタプレス脱水装置を提供することを目的とする。
【課題を解決するための手段】
【0012】
上述の目的を達成するため、本発明によるフィルタプレス脱水装置の特徴構成は、特許請求の範囲の書類の請求項1に記載した通り、圧接状態と離隔状態との間で移動可能に支持される複数のろ板と、前記圧接状態で各ろ板に挟持され、ろ過室を形成する無端状のろ布と、前記離隔状態で前記ろ布を各ろ板と離隔して走行可能に支持する支持機構と、前記支持機構により支持されながら走行する前記ろ布の蛇行を修正する蛇行修正機構と、を備えているフィルタプレス脱水装置であって、前記蛇行修正機構は、前記ろ布の左右端部近傍にそれぞれ配置され、走行に伴って前記ろ布の幅方向への偏位量を検知する一対のセンサと、前記一対のセンサに検知されたそれぞれの偏位量の差分に基づいて駆動する駆動機構とを、備えている点にある。
【0013】
上述の構成によれば、一対のセンサに検知されたそれぞれの偏位量の差分に基づいてろ布の蛇行を修正するように駆動されるので、従来の蛇行修正装置のように、ろ布の進行方向一端部を検出する構成のために、ろ布が蛇行していないにもかかわらず、部分的に発生した幅方向の伸びをろ布の蛇行と誤検知するようなことなく、ろ布の伸びの存在に関わらず蛇行を検知して正しく修正できるようになった。
【0014】
同第二の特徴構成は、同請求項2に記載した通り、上述の第一特徴構成に加えて、前記蛇行修正機構は、軸心が互いに平行姿勢に配置され、一方が前記ろ布の表面に接し、他方が前記ろ布の裏面に接する一対のガイドローラと、前記平行姿勢を保った状態で、前記ろ布が走行方向に沿うように前記一対のガイドローラを偏向可能に支持するガイド機構とを備え、前記駆動機構は、前記一対のセンサに検知されたそれぞれの偏位量の差分に基づいて、前記ガイド機構を駆動して前記一対のガイドローラを偏向する点にある。
【0015】
上述の構成によれば、一対のセンサに検知されたそれぞれの偏位量の差分に基づいて、ガイド機構を駆動して一対のガイドローラを偏向するので、従来の蛇行修正装置のように、ろ布の進行方向一端部を検出する構成のために、ろ布が蛇行していないにもかかわらず、部分的に発生した幅方向の伸びをろ布の蛇行と誤検知するようなことなく、ろ布の伸びの存在に関わらず蛇行を検知して正しく修正できるようになった。
【0016】
また、一対のガイドローラは、軸心が互いに平行姿勢に配置され、一方が前記ろ布の表面に接し、他方が前記ろ布の裏面に接するように構成されており、ろ布に対して圧力をかけて挟み込んでいないので、ろ布に対して無理な力をかけることがなく、ろ布の蛇行を修正することができる。
【0017】
同第三の特徴構成は、同請求項3に記載した通り、上述の第一または第二特徴構成に加えて、前記駆動機構は、前記一対のガイドローラを偏向する前記ガイド機構に備えたシリンダ機構へ供給する流体供給量及び供給方向を制御する流体回路で構成され、前記センサは、前記ろ布の端部に接当するように付勢された接当部と、前記接当部の前記ろ布への接当状態に基づいて前記流体回路への加圧流体供給ポートを制御するアクチュエータとで構成されている点にある。
【0018】
上述の構成によれば、センサは、前記ろ布の端部に接当するように付勢された接当部と、前記接当部の前記ろ布への接当状態に基づいて流体回路への加圧流体供給ポートを制御するアクチュエータとで構成することで、駆動機構にモータや制御装置のような高価な部品を使うことなく、一対のガイドローラを偏向する前記ガイド機構に備えたシリンダ機構へ供給する流体供給量及び供給方向を制御する流体回路を安価に構成することができる。なお、流体は、保守の容易さの点から空気を用いることが好ましい。
【発明の効果】
【0019】
以上説明した通り、本発明によれば、ろ布の蛇行を正しく検知して修正することができるフィルタプレス脱水装置を提供することができるようになった。
【図面の簡単な説明】
【0020】
【図1】本発明によるフィルタプレス脱水装置の概略図
【図2】(a)は蛇行修正機構の概略図、(b)は蛇行修正機構の回路図
【図3】ろ布の蛇行修正の説明図であって、(a)はろ布が進行方向左方向に蛇行した場合の説明図、(b)はろ布が進行方向右方向に蛇行した場合の説明図
【図4】部分的な伸びが発生したろ布の場合の説明図
【図5】従来のフィルタプレス脱水装置の説明図
【発明を実施するための形態】
【0021】
以下に、本発明によるフィルタプレス脱水装置を説明する。
【0022】
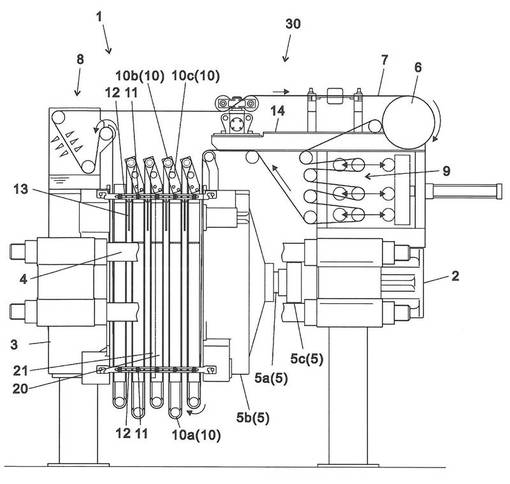
図1に示すように、フィルタプレス脱水装置1は、前フレーム2と、後フレーム3と、前フレーム2と後フレーム3との間に架設された一対のサイドフレーム4と、前フレーム2に設けられた上部フレーム14と、進退機構5と、駆動ローラ6と、無端状のろ布7と、洗浄機構8と、緊張機構9と、支持機構10と、口金13と、複数のろ板20と、ダイヤフラム21と、蛇行修正機構30とを備えている。
【0023】
各ろ板20は、前フレーム2に設置された進退機構5により圧接状態と、離隔状態との二状態の何れかにサイドフレーム4に沿って移動可能に支持されている。
【0024】
進退機構5はロッド5aの先端に押圧部材5bを備えた油圧シリンダ5cで構成されている。油圧シリンダ5cによりロッド5aを進出作動させると、押圧部材5bを介して各ろ板20は後フレーム3に向けて押圧された圧接状態に移行し、ロッド5aを引退作動させると、各ろ板20は前フレームに向けて移動し、例えば連結金具に形成されたリンク機構12で規定される距離だけ離隔された離隔状態に移行する。
【0025】
各ろ板20の間には、無端状のろ布7が配置されている。前フレーム2の上部にはろ布7を走行させるための駆動ローラ6が配置されている。駆動ローラ6は減速機構を介して駆動モータに駆動連結され、駆動ローラ6と減速機構と駆動モータによって駆動機構が構成されている。
【0026】
各ろ板20は、各ろ板20の離隔状態でろ布7を各ろ板20と離隔して走行可能に支持する支持機構10を備えている。
【0027】
支持機構10は、各ろ板20に固定されたブラケットに支持された下部ローラ10a及び上部ローラ10bを備え、ろ布7は両ローラ10a,10bにより隣接するろ板20間で上下方向に張設される。
【0028】
上部ローラ10bの近傍には、ろ板20が離隔状態でろ布7がろ板20及び後述するダイヤフラム21に接触しないように案内するガイドローラ10cが備えられている。
【0029】
各ろ板20には、配列方向に沿って一方の面にダイヤフラム21が取付けられている。進退機構5によってろ板20が圧接状態に移行したときに、当該ダイヤフラム21と隣接するろ板20の背面とで仕切られる空間にろ室が形成される。このとき、ろ布7は隣接するろ板20に挟持され前記ろ室内にろ過室を形成する。
【0030】
各ろ板20の間には口金13が設けられ、圧接状態で口金13によって各ろ板20の厚み方向に貫通形成された貫通孔が連通するように構成されている。そして、圧接状態で後フレーム3に備えた供給口から当該貫通孔に処理対象物が供給され、口金13に形成された分岐路を介して各ろ過室に処理対象物が充填される。
【0031】
各ろ板20の圧接状態で、各ろ板20下方に備えられた加圧水流路から加圧水を供給して、ろ板20に取付けられたダイヤフラム21をろ室側に膨らませて処理対象物を圧搾する圧搾工程が実行される。
【0032】
圧搾工程が終了すると、進退機構5が引退作動し、各ろ板20は離隔状態となる。この状態で、駆動ローラ6を駆動して、ろ布7を走行させる走行工程を実行する。
【0033】
ろ布7の洗浄が終了すると駆動ローラ6は停止する。その後、進退機構5が進出作動して、各ろ板20間には再度ろ過室が形成され、上述の圧搾工程が繰り返される。
【0034】
最左端のろ過板20から繰り出されたろ布7は、後フレーム3に備えた洗浄機構8によって洗浄され、上部フレーム14に設置された蛇行修正機構30によって幅方向の走行位置が修正され、適正な搬送姿勢に矯正された後に駆動ローラ6に掛け渡される。
【0035】
洗浄機構8は、走行工程で走行中のろ布7の表裏面に洗浄液を散布して、ろ布7に付着した脱水ケーキの残渣を洗い流すように構成されている。
【0036】
蛇行修正機構30は、ろ布7が正常な走行位置で駆動ローラ6に導かれるように支持機構10により支持されながら走行するろ布7の蛇行を修正する。
【0037】
駆動ローラ6で繰り出されたろ布7は、同じく前フレーム2に設置された緊張機構9によって所定の張力に調整された後に、各ろ板20に備えら得た支持機構10によってろ面が対向するように掛け渡され、前記離隔状態でろ布7を各ろ板20と離隔して走行可能に支持され、各ろ板20から繰り出された後に再び洗浄機構8に導かれるように配置されている。
【0038】
緊張機構9は、前フレーム2に固定された複数の固定ローラと、固定ローラに対して接近、離間する複数の移動ローラとを備え、移動ローラが固定ローラに対して接近、離間することによって、ろ布7に所定の張力が付与される。所定の張力とは、駆動ローラ6とろ布7がスリップせず安定走行可能な張力をいう。
【0039】
駆動ローラ6は、ろ布7の走行経路に沿って洗浄機構8の下流側に設置されているので、ろ布7は洗浄機構8で洗浄されてから駆動ローラ6に到達するので、駆動ローラ6に脱水ケーキの残渣が付着することがない。よって、当該残渣の駆動ローラ6への付着堆積に起因するろ布7の大きな蛇行や、皺の発生という不都合な事態の発生が未然に回避できるようになる。
【0040】
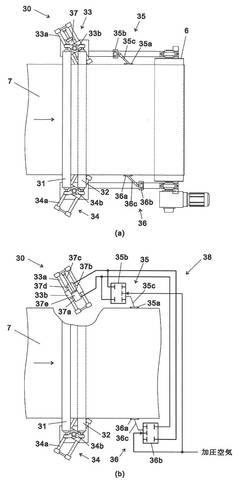
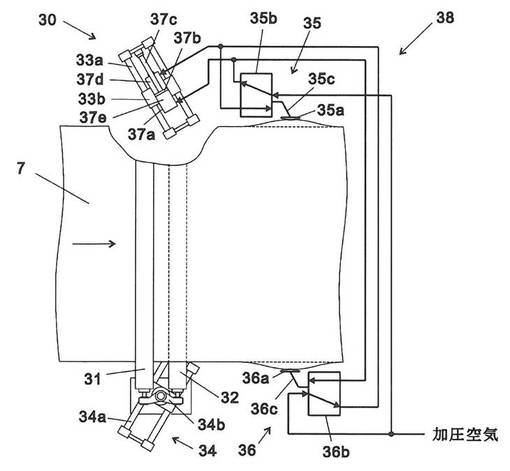
図2(a),(b)に示すように、蛇行修正機構30は、軸心が互いに平行姿勢に配置され、一方がろ布7の表面に接し、他方がろ布7の裏面に接する一対のガイドローラ31,32と、前記平行姿勢を保った状態で、ろ布7が走行方向に沿うようにガイドローラ31,32を偏向可能に支持するガイド機構33,34と、ろ布7の左右端部近傍にそれぞれ配置され、走行に伴ってろ布7の幅方向への偏位量を検知する一対のセンサ35,36と、センサ35,36に検知されたそれぞれの偏位量の差分に基づいて、ガイド機構33,34を駆動してガイドローラ31,32を偏向する駆動機構と、備えている。
【0041】
ガイド機構33,34は、ろ布の走行方向と鉛直な方向から、ろ布の走行方向の上流側から下流側にかけて、傾斜して配置されたガイドレール33a,34aと、ガイドレール33a,34aに沿って摺動するキャリア33b,34bとで構成されている。
【0042】
ガイドローラ31,32の両端部は夫々ガイド機構33,34のキャリア33b,34bに支持されている。
【0043】
ガイドレール33a,34aは、外側がろ布7の進行方向上流側に位置し、内側がろ布7の進行方向下流側に位置するように傾斜して配置されている。ガイドローラ31,32は、ろ布7の幅方向の走行位置が正常な状態であれば、ろ布の走行方向に対して水平方向に垂直な方向に配置される。
【0044】
キャリア33b,34bがガイドレール33a,34aに沿って摺動すると、ガイドローラ31,32は平行姿勢を保った状態でろ布7の走行方向に対して水平方向に垂直な方向から一端が上流側に、他端が下流側に傾斜する。
キャリア33b,34bがガイドレール33a,34aに沿って摺動すると、ガイドローラ31,32は平行姿勢を保った状態で、一端がろ布7の走行方向上流側に、他端がろ布7の走行方向下流側に傾斜する。
【0045】
前記駆動機構は、ガイド機構33に備えられたシリンダ機構37と、シリンダ機構37へ供給する流体供給量及び供給方向を制御する流体回路38で構成されている。尚、本実施形態では、流体が空気である場合について説明する。
【0046】
シリンダ機構37は、両端が封止された筒状のシリンダチューブ37aと、シリンダチューブ37a内に軸方向に摺動可能に保持されるピストン37bと、一端がピストン37bに連結されるとともに、他端がピストンチューブ37aの一端部から外側へ延出したピストンロッド37cとを備えて構成されている。
【0047】
シリンダチューブ37a内は、ピストン37bによって空気室37d,37eに区画されている。空気室37d,37eには、流体回路38から加圧空気が供給されるように構成されている。
【0048】
シリンダ機構37は、シリンダチューブ37a内におけるピストン37b前後の空気室37d,37eの圧力差によってピストン37bが軸方向に押動させられ、ピストンロッド37c先端部がシリンダチューブ37aから進退させられる。
【0049】
シリンダチューブ37aは、ガイド機構33のキャリア33bに固定され、ピストンロッド37cの先端部はガイドレール33aに固定されているので、シリンダチューブ37aからのシリンダチューブ37aから進退に伴って、キャリア33bはガイドレール33aに沿って移動させられる。
【0050】
センサ35,36は、ろ布7の端部に接当するように付勢された接当部35a,36aと、接当部35a,36aのろ布7への接当状態に基づいて流体回路への加圧流体供給ポート35b,36bを制御するアクチュエータ35c,36cとで構成されている。
【0051】
接当部35a,36aは、弾性体、例えばバネによってろ布7の幅方向中央へ向けて付勢されており、ろ布7が蛇行しても常に接当するように構成されている。また、アクチュエータ35c,36cの加圧流体供給ポート35b,36bの制御には、接当部35a,36aの僅かな動きによるチャタリングが発生しないように適度な遊びが設定されている。
【0052】
加圧流体供給ポート35b,36bは、夫々3位置4方向弁で構成され、加圧流体供給ポート35b,36bからシリンダ機構37のシリンダチューブ37aの空気室37d,37eとはエアチューブで接続されている。
【0053】
ろ布7が、予め定められた所定位置を走行しているときは、加圧流体供給ポート35a,36aは、ニュートラルの位置で停止するように設定されている。ニュートラルの位置では、加圧空気は空気室37d,37eへ供給されない。
【0054】
アクチュエータ35c,36cによってポートが切替えられると、加圧流体供給ポート35b,36bは、図示しない空気供給源から供給された加圧空気を、空気室37d,37eへ供給するように構成されている。
【0055】
空気室37d,37eの何れかに加圧空気が供給され、圧力差によってピストン37bが押動させられる。シリンダ機構37はガイド機構33のキャリアを摺動させるので、一対のガイドローラ31,32は平行姿勢を保った状態で移動する。
【0056】
このように構成された蛇行修正機構30による、ろ布7の蛇行の修正の様子について説明する。
【0057】
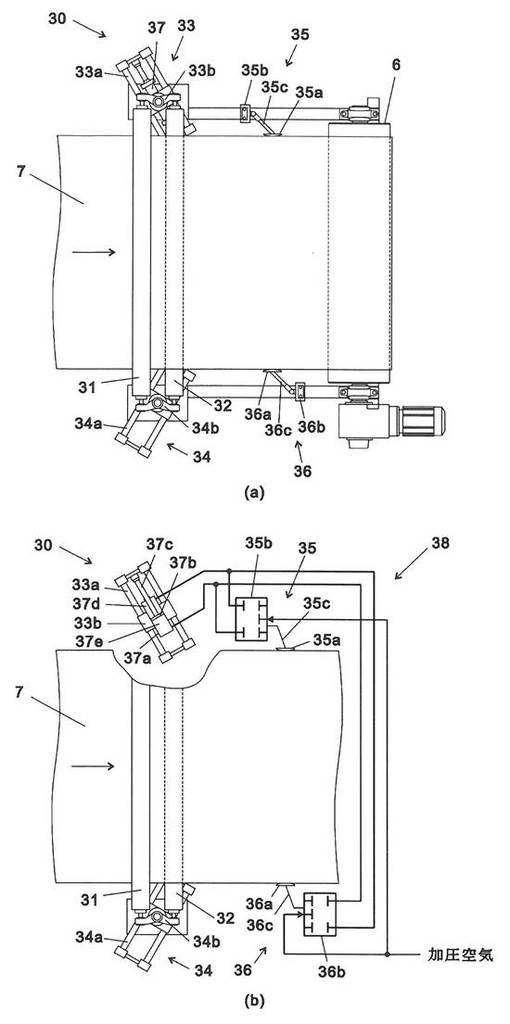
図3(a)に示すように、ろ布7が進行方向の左方向へと蛇行した場合は、ろ布7は接当部35aを押圧するので、アクチュエータ35cが作動させられ加圧流体供給ポート35bが切り替えられるとともに、接当部36aが付勢力によりろ布7に接当するまで移動するので、アクチュエータ36cが作動させられ加圧流体供給ポート36bが切り替えられる。
【0058】
加圧流体供給ポート35b,36bでは、空気供給源から供給される加圧空気を、空気室37eへと供給する経路が構成される。シリンダチューブ37aの空気室37e内の圧力が空気室37d内の圧力より大きくなり、ピストン37dは空気室37eを大きくする方向へと相対的に押動させられ、ピストンロッド37cがピストンチューブ37aから進出させられる。
【0059】
このとき、シリンダ機構37はガイド機構33のキャリア33bをガイドレール33aに沿って摺動させて、一対のガイドローラ31,32は平行姿勢を保った状態で傾きながら、ろ布7の進行方向の右方向へ移動させられる。なお、ガイド機構34のキャリア34bもガイドレール34aに沿って移動する。
【0060】
このように、進行方向の左方向へ蛇行したろ布7は、進行方向の右方向へと移動した一対のガイドローラ31,32にガイドされ蛇行が修正がされる。
【0061】
図3(b)に示すように、ろ布7が進行方向の右方向へと蛇行した場合は、ろ布7は接当部36aを押圧するので、アクチュエータ36cが作動させられ加圧流体供給ポート36bが切り替えられるとともに、接当部35aが付勢力によりろ布7に接当するまで移動するので、アクチュエータ35cが作動させられ加圧流体供給ポート35bが切り替えられる。
【0062】
加圧流体供給ポート35b,36bでは、空気供給源から供給される加圧空気を、空気室37dへと供給する経路が構成される。シリンダチューブ37aの空気室37d内の圧力が空気室37e内の圧力より大きくなり、ピストン37dは空気室37dを大きくする方向へと相対的に押動させられ、ピストンロッド37cがピストンチューブ37aに引退させられる。
【0063】
このとき、シリンダ機構37はガイド機構33のキャリア33bをガイドレール33aに沿って摺動させて、一対のガイドローラ31,32は平行姿勢を保った状態で傾きながら、ろ布7の進行方向の左方向へ移動させられる。なお、ガイド機構34のキャリア34bもガイドレール34aに沿って移動する。
【0064】
このように、進行方向の右方向へ蛇行したろ布7は、進行方向の左方向へと移動した一対のガイドローラ31,32にガイドされ蛇行が修正がされる。
【0065】
ろ布7は、圧搾工程のたびに繰り返しろ板20に非常に大きい圧力で挟持されるため経時的に伸びが発生する。例えば、新品のろ布に比べて、使用中のろ布は、その全長方向に5〜10%程度、幅方向に3〜7%程度の伸びが発生し、また、その伸びは均一ではない。
【0066】
ここで、全長方向の伸びは、ろ布緊張機構により吸収できるためろ布の走行に特に悪影響はないが、部分的に幅方向の伸びが発生しているような場合がある。
【0067】
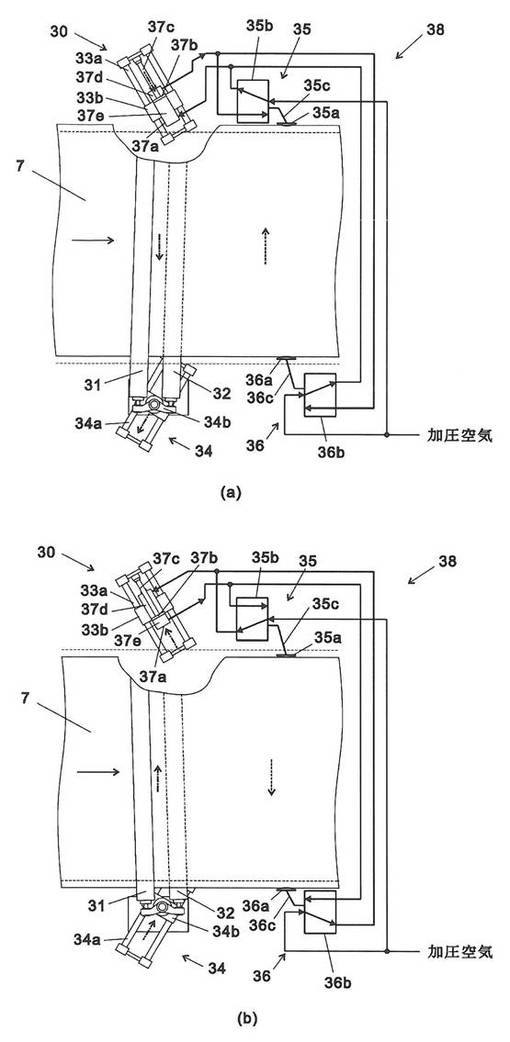
図4(a)には、部分的に幅方向の伸びが発生したろ布7を検知した様子が示されている。
【0068】
接当部35aは、ろ布7が進行方向の左方向へ蛇行した場合のように押圧され、アクチュエータ35cが作動させられ加圧流体供給ポート35bが切り替えられ、加圧流体供給ポート35bでは、空気供給源から供給される加圧空気を、空気室37eへと供給する経路が構成される。
【0069】
接当部36aは、ろ布7が進行方向の右方向へ蛇行した場合のように押圧され、アクチュエータ36cが作動させられ加圧流体供給ポート36bが切り替えられ、加圧流体供給ポート36bでは、空気供給源から供給される加圧空気を、空気室37dへと供給する経路が構成される。
【0070】
このとき、ろ布7の幅方向の伸びが、左右どちらも同じであれば、シリンダチューブ37aの空気室37e内の圧力と空気室37d内の圧力とが釣り合い、ピストン37dは移動しないため、ガイドローラ31,32は、ニュートラルの位置で停止したままの状態である。
【0071】
そして、部分的に幅方向に伸びが発生したろ布7が進行方向の左右の何れかの方向に蛇行した場合は、図3(a),図3(b)に基づいて説明した通り、ろ布7の蛇行は修正される。
【0072】
以上のように、センサ35,36は、それぞれの偏位量の差分に基づいて、ガイド機構33を駆動して一対のガイドローラ31,32を偏向するので、従来の蛇行修正装置のように、ろ布の進行方向一端部を検出する構成のために、ろ布が蛇行していないにもかかわらず、部分的に発生した幅方向の伸びをろ布の蛇行と誤検知するようなことなく、ろ布の伸びの存在に関わらず蛇行を検知して正しく修正できるようになった。
【0073】
上述した実施形態は、何れも本発明の一例であり、当該記載により本発明が限定されるものではなく、各部の具体的構成は本発明の作用効果が奏される範囲で適宜変更設計可能であることはいうまでもない。
【符号の説明】
【0074】
1:フィルタプレス脱水装置
2:前フレーム
3:後フレーム
4:サイドフレーム
5:進退機構
5a:ロッド
5b:押圧部材
5c:油圧シリンダ
6:駆動ローラ
7:ろ布
8:洗浄機構
9:緊張機構
10:支持機構
13:口金
14:上部フレーム
20:ろ板
21:ダイヤフラム
30:蛇行修正機構
31,32:ガイドローラ
33,34:ガイド機構
33a,34a:ガイドレール
33b,34b:キャリア
35,36:センサ
35a,36a:接当部
35b,36b:加圧流体供給ポート
35c,36c:アクチュエータ
37:シリンダ機構
37a:シリンダチューブ
37b:ピストン
37c:ピストンロッド
37d,37e:空気室
38:流体回路
【技術分野】
【0001】
本発明は、圧接状態と離隔状態との間で移動可能に支持される複数のろ板と、前記圧接状態で各ろ板に挟持され、ろ過室を形成する無端状のろ布と、前記離隔状態で前記ろ布を各ろ板と離隔して走行可能に支持する支持機構と、前記支持機構により支持されながら走行する前記ろ布の蛇行を修正する蛇行修正機構と、を備えているフィルタプレス脱水装置に関する。
【背景技術】
【0002】
従来、浄水場や下水処理場で発生する汚泥を脱水してろ液とケーキに分離する汚泥処理工程、或は、カーボン製品やチタン製品等の製造工程で必要となる固液分離工程等、様々な分野で固液分離のためにフィルタプレス脱水装置が用いられている。
【0003】
図5には、特許文献1に開示された従来のろ布走行式のフィルタプレス脱水装置が示されている。尚、該フィルタプレス脱水装置の各部を説明する符号は、本発明によるフィルタプレス脱水装置の各部を説明する符号とは関係ない。
【0004】
該ろ布走行式のフィルタプレス脱水装置は、基礎1に一組のスタンドフレーム2が一定距離隔てて設けられ、このスタンドフレーム2間に複数枚のろ板3が移動自在に並列に設けられ、各ろ板3間にろ布4が二重に介在され、油圧シリンダ5により各ろ板3を開閉板して二重のろ布4間内に圧入された汚泥等の原液を圧搾し、ケーキとろ液に分離するように構成されている。
【0005】
各ろ板3間に介在された各ろ布4は、それらを連結した無端状の複数本のろ布6で構成され、各ろ布6の走行経路に、ろ布6を走行させるろ布駆動装置A、ろ布6の適度に緊張させるろ布緊張装置B、ろ布4に洗浄水を噴射して洗浄するろ布洗浄装置C、ろ布6の蛇行を修正する2本のロール13から成るろ布蛇行修正装置Dが設けられ、圧搾工程1サイクル毎に各ろ布6を走行させて洗浄するようになっている。
【先行技術文献】
【特許文献】
【0006】
【特許文献1】実開昭61−5937号公報
【発明の概要】
【発明が解決しようとする課題】
【0007】
上述のような蛇行修正装置Dは、ろ布6の進行方向一端部を検出するアクチュエータを備え、検出したろ布6の前記一端部の蛇行量に応じてロール13を移動させて、ろ布6の蛇行を修正するように構成されていた。
【0008】
ろ布6は、圧搾工程のたびに繰り返しろ板3に非常に大きい圧力で挟持されるため経時的に伸びが発生する。例えば、新品のろ布に比べて、使用中のろ布は、その全長方向に5〜10%程度、幅方向に3〜7%程度の伸びが発生し、また、その伸びは均一ではない。
【0009】
ここで、全長方向の伸びは、ろ布緊張機構により吸収できるためろ布の走行に特に悪影響はないが、部分的に幅方向の伸びが発生しているような場合が問題となる。
【0010】
従来の蛇行修正装置Dのアクチュエータは、ろ布6の進行方向一端部を検出する構成のため、ろ布6が蛇行していないにもかかわらず、部分的に発生した幅方向の伸びをろ布の蛇行と誤検知し、それを修正するためにロール13を移動させるので、かえってろ布が蛇行してしまうような問題があった。
【0011】
本発明は、ろ布の蛇行を正しく検知して修正することができるフィルタプレス脱水装置を提供することを目的とする。
【課題を解決するための手段】
【0012】
上述の目的を達成するため、本発明によるフィルタプレス脱水装置の特徴構成は、特許請求の範囲の書類の請求項1に記載した通り、圧接状態と離隔状態との間で移動可能に支持される複数のろ板と、前記圧接状態で各ろ板に挟持され、ろ過室を形成する無端状のろ布と、前記離隔状態で前記ろ布を各ろ板と離隔して走行可能に支持する支持機構と、前記支持機構により支持されながら走行する前記ろ布の蛇行を修正する蛇行修正機構と、を備えているフィルタプレス脱水装置であって、前記蛇行修正機構は、前記ろ布の左右端部近傍にそれぞれ配置され、走行に伴って前記ろ布の幅方向への偏位量を検知する一対のセンサと、前記一対のセンサに検知されたそれぞれの偏位量の差分に基づいて駆動する駆動機構とを、備えている点にある。
【0013】
上述の構成によれば、一対のセンサに検知されたそれぞれの偏位量の差分に基づいてろ布の蛇行を修正するように駆動されるので、従来の蛇行修正装置のように、ろ布の進行方向一端部を検出する構成のために、ろ布が蛇行していないにもかかわらず、部分的に発生した幅方向の伸びをろ布の蛇行と誤検知するようなことなく、ろ布の伸びの存在に関わらず蛇行を検知して正しく修正できるようになった。
【0014】
同第二の特徴構成は、同請求項2に記載した通り、上述の第一特徴構成に加えて、前記蛇行修正機構は、軸心が互いに平行姿勢に配置され、一方が前記ろ布の表面に接し、他方が前記ろ布の裏面に接する一対のガイドローラと、前記平行姿勢を保った状態で、前記ろ布が走行方向に沿うように前記一対のガイドローラを偏向可能に支持するガイド機構とを備え、前記駆動機構は、前記一対のセンサに検知されたそれぞれの偏位量の差分に基づいて、前記ガイド機構を駆動して前記一対のガイドローラを偏向する点にある。
【0015】
上述の構成によれば、一対のセンサに検知されたそれぞれの偏位量の差分に基づいて、ガイド機構を駆動して一対のガイドローラを偏向するので、従来の蛇行修正装置のように、ろ布の進行方向一端部を検出する構成のために、ろ布が蛇行していないにもかかわらず、部分的に発生した幅方向の伸びをろ布の蛇行と誤検知するようなことなく、ろ布の伸びの存在に関わらず蛇行を検知して正しく修正できるようになった。
【0016】
また、一対のガイドローラは、軸心が互いに平行姿勢に配置され、一方が前記ろ布の表面に接し、他方が前記ろ布の裏面に接するように構成されており、ろ布に対して圧力をかけて挟み込んでいないので、ろ布に対して無理な力をかけることがなく、ろ布の蛇行を修正することができる。
【0017】
同第三の特徴構成は、同請求項3に記載した通り、上述の第一または第二特徴構成に加えて、前記駆動機構は、前記一対のガイドローラを偏向する前記ガイド機構に備えたシリンダ機構へ供給する流体供給量及び供給方向を制御する流体回路で構成され、前記センサは、前記ろ布の端部に接当するように付勢された接当部と、前記接当部の前記ろ布への接当状態に基づいて前記流体回路への加圧流体供給ポートを制御するアクチュエータとで構成されている点にある。
【0018】
上述の構成によれば、センサは、前記ろ布の端部に接当するように付勢された接当部と、前記接当部の前記ろ布への接当状態に基づいて流体回路への加圧流体供給ポートを制御するアクチュエータとで構成することで、駆動機構にモータや制御装置のような高価な部品を使うことなく、一対のガイドローラを偏向する前記ガイド機構に備えたシリンダ機構へ供給する流体供給量及び供給方向を制御する流体回路を安価に構成することができる。なお、流体は、保守の容易さの点から空気を用いることが好ましい。
【発明の効果】
【0019】
以上説明した通り、本発明によれば、ろ布の蛇行を正しく検知して修正することができるフィルタプレス脱水装置を提供することができるようになった。
【図面の簡単な説明】
【0020】
【図1】本発明によるフィルタプレス脱水装置の概略図
【図2】(a)は蛇行修正機構の概略図、(b)は蛇行修正機構の回路図
【図3】ろ布の蛇行修正の説明図であって、(a)はろ布が進行方向左方向に蛇行した場合の説明図、(b)はろ布が進行方向右方向に蛇行した場合の説明図
【図4】部分的な伸びが発生したろ布の場合の説明図
【図5】従来のフィルタプレス脱水装置の説明図
【発明を実施するための形態】
【0021】
以下に、本発明によるフィルタプレス脱水装置を説明する。
【0022】
図1に示すように、フィルタプレス脱水装置1は、前フレーム2と、後フレーム3と、前フレーム2と後フレーム3との間に架設された一対のサイドフレーム4と、前フレーム2に設けられた上部フレーム14と、進退機構5と、駆動ローラ6と、無端状のろ布7と、洗浄機構8と、緊張機構9と、支持機構10と、口金13と、複数のろ板20と、ダイヤフラム21と、蛇行修正機構30とを備えている。
【0023】
各ろ板20は、前フレーム2に設置された進退機構5により圧接状態と、離隔状態との二状態の何れかにサイドフレーム4に沿って移動可能に支持されている。
【0024】
進退機構5はロッド5aの先端に押圧部材5bを備えた油圧シリンダ5cで構成されている。油圧シリンダ5cによりロッド5aを進出作動させると、押圧部材5bを介して各ろ板20は後フレーム3に向けて押圧された圧接状態に移行し、ロッド5aを引退作動させると、各ろ板20は前フレームに向けて移動し、例えば連結金具に形成されたリンク機構12で規定される距離だけ離隔された離隔状態に移行する。
【0025】
各ろ板20の間には、無端状のろ布7が配置されている。前フレーム2の上部にはろ布7を走行させるための駆動ローラ6が配置されている。駆動ローラ6は減速機構を介して駆動モータに駆動連結され、駆動ローラ6と減速機構と駆動モータによって駆動機構が構成されている。
【0026】
各ろ板20は、各ろ板20の離隔状態でろ布7を各ろ板20と離隔して走行可能に支持する支持機構10を備えている。
【0027】
支持機構10は、各ろ板20に固定されたブラケットに支持された下部ローラ10a及び上部ローラ10bを備え、ろ布7は両ローラ10a,10bにより隣接するろ板20間で上下方向に張設される。
【0028】
上部ローラ10bの近傍には、ろ板20が離隔状態でろ布7がろ板20及び後述するダイヤフラム21に接触しないように案内するガイドローラ10cが備えられている。
【0029】
各ろ板20には、配列方向に沿って一方の面にダイヤフラム21が取付けられている。進退機構5によってろ板20が圧接状態に移行したときに、当該ダイヤフラム21と隣接するろ板20の背面とで仕切られる空間にろ室が形成される。このとき、ろ布7は隣接するろ板20に挟持され前記ろ室内にろ過室を形成する。
【0030】
各ろ板20の間には口金13が設けられ、圧接状態で口金13によって各ろ板20の厚み方向に貫通形成された貫通孔が連通するように構成されている。そして、圧接状態で後フレーム3に備えた供給口から当該貫通孔に処理対象物が供給され、口金13に形成された分岐路を介して各ろ過室に処理対象物が充填される。
【0031】
各ろ板20の圧接状態で、各ろ板20下方に備えられた加圧水流路から加圧水を供給して、ろ板20に取付けられたダイヤフラム21をろ室側に膨らませて処理対象物を圧搾する圧搾工程が実行される。
【0032】
圧搾工程が終了すると、進退機構5が引退作動し、各ろ板20は離隔状態となる。この状態で、駆動ローラ6を駆動して、ろ布7を走行させる走行工程を実行する。
【0033】
ろ布7の洗浄が終了すると駆動ローラ6は停止する。その後、進退機構5が進出作動して、各ろ板20間には再度ろ過室が形成され、上述の圧搾工程が繰り返される。
【0034】
最左端のろ過板20から繰り出されたろ布7は、後フレーム3に備えた洗浄機構8によって洗浄され、上部フレーム14に設置された蛇行修正機構30によって幅方向の走行位置が修正され、適正な搬送姿勢に矯正された後に駆動ローラ6に掛け渡される。
【0035】
洗浄機構8は、走行工程で走行中のろ布7の表裏面に洗浄液を散布して、ろ布7に付着した脱水ケーキの残渣を洗い流すように構成されている。
【0036】
蛇行修正機構30は、ろ布7が正常な走行位置で駆動ローラ6に導かれるように支持機構10により支持されながら走行するろ布7の蛇行を修正する。
【0037】
駆動ローラ6で繰り出されたろ布7は、同じく前フレーム2に設置された緊張機構9によって所定の張力に調整された後に、各ろ板20に備えら得た支持機構10によってろ面が対向するように掛け渡され、前記離隔状態でろ布7を各ろ板20と離隔して走行可能に支持され、各ろ板20から繰り出された後に再び洗浄機構8に導かれるように配置されている。
【0038】
緊張機構9は、前フレーム2に固定された複数の固定ローラと、固定ローラに対して接近、離間する複数の移動ローラとを備え、移動ローラが固定ローラに対して接近、離間することによって、ろ布7に所定の張力が付与される。所定の張力とは、駆動ローラ6とろ布7がスリップせず安定走行可能な張力をいう。
【0039】
駆動ローラ6は、ろ布7の走行経路に沿って洗浄機構8の下流側に設置されているので、ろ布7は洗浄機構8で洗浄されてから駆動ローラ6に到達するので、駆動ローラ6に脱水ケーキの残渣が付着することがない。よって、当該残渣の駆動ローラ6への付着堆積に起因するろ布7の大きな蛇行や、皺の発生という不都合な事態の発生が未然に回避できるようになる。
【0040】
図2(a),(b)に示すように、蛇行修正機構30は、軸心が互いに平行姿勢に配置され、一方がろ布7の表面に接し、他方がろ布7の裏面に接する一対のガイドローラ31,32と、前記平行姿勢を保った状態で、ろ布7が走行方向に沿うようにガイドローラ31,32を偏向可能に支持するガイド機構33,34と、ろ布7の左右端部近傍にそれぞれ配置され、走行に伴ってろ布7の幅方向への偏位量を検知する一対のセンサ35,36と、センサ35,36に検知されたそれぞれの偏位量の差分に基づいて、ガイド機構33,34を駆動してガイドローラ31,32を偏向する駆動機構と、備えている。
【0041】
ガイド機構33,34は、ろ布の走行方向と鉛直な方向から、ろ布の走行方向の上流側から下流側にかけて、傾斜して配置されたガイドレール33a,34aと、ガイドレール33a,34aに沿って摺動するキャリア33b,34bとで構成されている。
【0042】
ガイドローラ31,32の両端部は夫々ガイド機構33,34のキャリア33b,34bに支持されている。
【0043】
ガイドレール33a,34aは、外側がろ布7の進行方向上流側に位置し、内側がろ布7の進行方向下流側に位置するように傾斜して配置されている。ガイドローラ31,32は、ろ布7の幅方向の走行位置が正常な状態であれば、ろ布の走行方向に対して水平方向に垂直な方向に配置される。
【0044】
キャリア33b,34bがガイドレール33a,34aに沿って摺動すると、ガイドローラ31,32は平行姿勢を保った状態でろ布7の走行方向に対して水平方向に垂直な方向から一端が上流側に、他端が下流側に傾斜する。
キャリア33b,34bがガイドレール33a,34aに沿って摺動すると、ガイドローラ31,32は平行姿勢を保った状態で、一端がろ布7の走行方向上流側に、他端がろ布7の走行方向下流側に傾斜する。
【0045】
前記駆動機構は、ガイド機構33に備えられたシリンダ機構37と、シリンダ機構37へ供給する流体供給量及び供給方向を制御する流体回路38で構成されている。尚、本実施形態では、流体が空気である場合について説明する。
【0046】
シリンダ機構37は、両端が封止された筒状のシリンダチューブ37aと、シリンダチューブ37a内に軸方向に摺動可能に保持されるピストン37bと、一端がピストン37bに連結されるとともに、他端がピストンチューブ37aの一端部から外側へ延出したピストンロッド37cとを備えて構成されている。
【0047】
シリンダチューブ37a内は、ピストン37bによって空気室37d,37eに区画されている。空気室37d,37eには、流体回路38から加圧空気が供給されるように構成されている。
【0048】
シリンダ機構37は、シリンダチューブ37a内におけるピストン37b前後の空気室37d,37eの圧力差によってピストン37bが軸方向に押動させられ、ピストンロッド37c先端部がシリンダチューブ37aから進退させられる。
【0049】
シリンダチューブ37aは、ガイド機構33のキャリア33bに固定され、ピストンロッド37cの先端部はガイドレール33aに固定されているので、シリンダチューブ37aからのシリンダチューブ37aから進退に伴って、キャリア33bはガイドレール33aに沿って移動させられる。
【0050】
センサ35,36は、ろ布7の端部に接当するように付勢された接当部35a,36aと、接当部35a,36aのろ布7への接当状態に基づいて流体回路への加圧流体供給ポート35b,36bを制御するアクチュエータ35c,36cとで構成されている。
【0051】
接当部35a,36aは、弾性体、例えばバネによってろ布7の幅方向中央へ向けて付勢されており、ろ布7が蛇行しても常に接当するように構成されている。また、アクチュエータ35c,36cの加圧流体供給ポート35b,36bの制御には、接当部35a,36aの僅かな動きによるチャタリングが発生しないように適度な遊びが設定されている。
【0052】
加圧流体供給ポート35b,36bは、夫々3位置4方向弁で構成され、加圧流体供給ポート35b,36bからシリンダ機構37のシリンダチューブ37aの空気室37d,37eとはエアチューブで接続されている。
【0053】
ろ布7が、予め定められた所定位置を走行しているときは、加圧流体供給ポート35a,36aは、ニュートラルの位置で停止するように設定されている。ニュートラルの位置では、加圧空気は空気室37d,37eへ供給されない。
【0054】
アクチュエータ35c,36cによってポートが切替えられると、加圧流体供給ポート35b,36bは、図示しない空気供給源から供給された加圧空気を、空気室37d,37eへ供給するように構成されている。
【0055】
空気室37d,37eの何れかに加圧空気が供給され、圧力差によってピストン37bが押動させられる。シリンダ機構37はガイド機構33のキャリアを摺動させるので、一対のガイドローラ31,32は平行姿勢を保った状態で移動する。
【0056】
このように構成された蛇行修正機構30による、ろ布7の蛇行の修正の様子について説明する。
【0057】
図3(a)に示すように、ろ布7が進行方向の左方向へと蛇行した場合は、ろ布7は接当部35aを押圧するので、アクチュエータ35cが作動させられ加圧流体供給ポート35bが切り替えられるとともに、接当部36aが付勢力によりろ布7に接当するまで移動するので、アクチュエータ36cが作動させられ加圧流体供給ポート36bが切り替えられる。
【0058】
加圧流体供給ポート35b,36bでは、空気供給源から供給される加圧空気を、空気室37eへと供給する経路が構成される。シリンダチューブ37aの空気室37e内の圧力が空気室37d内の圧力より大きくなり、ピストン37dは空気室37eを大きくする方向へと相対的に押動させられ、ピストンロッド37cがピストンチューブ37aから進出させられる。
【0059】
このとき、シリンダ機構37はガイド機構33のキャリア33bをガイドレール33aに沿って摺動させて、一対のガイドローラ31,32は平行姿勢を保った状態で傾きながら、ろ布7の進行方向の右方向へ移動させられる。なお、ガイド機構34のキャリア34bもガイドレール34aに沿って移動する。
【0060】
このように、進行方向の左方向へ蛇行したろ布7は、進行方向の右方向へと移動した一対のガイドローラ31,32にガイドされ蛇行が修正がされる。
【0061】
図3(b)に示すように、ろ布7が進行方向の右方向へと蛇行した場合は、ろ布7は接当部36aを押圧するので、アクチュエータ36cが作動させられ加圧流体供給ポート36bが切り替えられるとともに、接当部35aが付勢力によりろ布7に接当するまで移動するので、アクチュエータ35cが作動させられ加圧流体供給ポート35bが切り替えられる。
【0062】
加圧流体供給ポート35b,36bでは、空気供給源から供給される加圧空気を、空気室37dへと供給する経路が構成される。シリンダチューブ37aの空気室37d内の圧力が空気室37e内の圧力より大きくなり、ピストン37dは空気室37dを大きくする方向へと相対的に押動させられ、ピストンロッド37cがピストンチューブ37aに引退させられる。
【0063】
このとき、シリンダ機構37はガイド機構33のキャリア33bをガイドレール33aに沿って摺動させて、一対のガイドローラ31,32は平行姿勢を保った状態で傾きながら、ろ布7の進行方向の左方向へ移動させられる。なお、ガイド機構34のキャリア34bもガイドレール34aに沿って移動する。
【0064】
このように、進行方向の右方向へ蛇行したろ布7は、進行方向の左方向へと移動した一対のガイドローラ31,32にガイドされ蛇行が修正がされる。
【0065】
ろ布7は、圧搾工程のたびに繰り返しろ板20に非常に大きい圧力で挟持されるため経時的に伸びが発生する。例えば、新品のろ布に比べて、使用中のろ布は、その全長方向に5〜10%程度、幅方向に3〜7%程度の伸びが発生し、また、その伸びは均一ではない。
【0066】
ここで、全長方向の伸びは、ろ布緊張機構により吸収できるためろ布の走行に特に悪影響はないが、部分的に幅方向の伸びが発生しているような場合がある。
【0067】
図4(a)には、部分的に幅方向の伸びが発生したろ布7を検知した様子が示されている。
【0068】
接当部35aは、ろ布7が進行方向の左方向へ蛇行した場合のように押圧され、アクチュエータ35cが作動させられ加圧流体供給ポート35bが切り替えられ、加圧流体供給ポート35bでは、空気供給源から供給される加圧空気を、空気室37eへと供給する経路が構成される。
【0069】
接当部36aは、ろ布7が進行方向の右方向へ蛇行した場合のように押圧され、アクチュエータ36cが作動させられ加圧流体供給ポート36bが切り替えられ、加圧流体供給ポート36bでは、空気供給源から供給される加圧空気を、空気室37dへと供給する経路が構成される。
【0070】
このとき、ろ布7の幅方向の伸びが、左右どちらも同じであれば、シリンダチューブ37aの空気室37e内の圧力と空気室37d内の圧力とが釣り合い、ピストン37dは移動しないため、ガイドローラ31,32は、ニュートラルの位置で停止したままの状態である。
【0071】
そして、部分的に幅方向に伸びが発生したろ布7が進行方向の左右の何れかの方向に蛇行した場合は、図3(a),図3(b)に基づいて説明した通り、ろ布7の蛇行は修正される。
【0072】
以上のように、センサ35,36は、それぞれの偏位量の差分に基づいて、ガイド機構33を駆動して一対のガイドローラ31,32を偏向するので、従来の蛇行修正装置のように、ろ布の進行方向一端部を検出する構成のために、ろ布が蛇行していないにもかかわらず、部分的に発生した幅方向の伸びをろ布の蛇行と誤検知するようなことなく、ろ布の伸びの存在に関わらず蛇行を検知して正しく修正できるようになった。
【0073】
上述した実施形態は、何れも本発明の一例であり、当該記載により本発明が限定されるものではなく、各部の具体的構成は本発明の作用効果が奏される範囲で適宜変更設計可能であることはいうまでもない。
【符号の説明】
【0074】
1:フィルタプレス脱水装置
2:前フレーム
3:後フレーム
4:サイドフレーム
5:進退機構
5a:ロッド
5b:押圧部材
5c:油圧シリンダ
6:駆動ローラ
7:ろ布
8:洗浄機構
9:緊張機構
10:支持機構
13:口金
14:上部フレーム
20:ろ板
21:ダイヤフラム
30:蛇行修正機構
31,32:ガイドローラ
33,34:ガイド機構
33a,34a:ガイドレール
33b,34b:キャリア
35,36:センサ
35a,36a:接当部
35b,36b:加圧流体供給ポート
35c,36c:アクチュエータ
37:シリンダ機構
37a:シリンダチューブ
37b:ピストン
37c:ピストンロッド
37d,37e:空気室
38:流体回路
【特許請求の範囲】
【請求項1】
圧接状態と離隔状態との間で移動可能に支持される複数のろ板と、
前記圧接状態で各ろ板に挟持され、ろ過室を形成する無端状のろ布と、
前記離隔状態で前記ろ布を各ろ板と離隔して走行可能に支持する支持機構と、
前記支持機構により支持されながら走行する前記ろ布の蛇行を修正する蛇行修正機構と、
を備えているフィルタプレス脱水装置であって、
前記蛇行修正機構は、
前記ろ布の左右端部近傍にそれぞれ配置され、走行に伴って前記ろ布の幅方向への偏位量を検知する一対のセンサと、
前記一対のセンサに検知されたそれぞれの偏位量の差分に基づいて駆動する駆動機構とを、
備えているフィルタプレス脱水装置。
【請求項2】
前記蛇行修正機構は、軸心が互いに平行姿勢に配置され、一方が前記ろ布の表面に接し、他方が前記ろ布の裏面に接する一対のガイドローラと、前記平行姿勢を保った状態で、前記ろ布が走行方向に沿うように前記一対のガイドローラを偏向可能に支持するガイド機構とを備え、
前記駆動機構は、前記一対のセンサに検知されたそれぞれの偏位量の差分に基づいて、前記ガイド機構を駆動して前記一対のガイドローラを偏向する請求項1記載のフィルタプレス脱水装置。
【請求項3】
前記駆動機構は、前記一対のガイドローラを偏向する前記ガイド機構に備えたシリンダ機構へ供給する流体供給量及び供給方向を制御する流体回路で構成され、
前記センサは、前記ろ布の端部に接当するように付勢された接当部と、前記接当部の前記ろ布への接当状態に基づいて前記流体回路への加圧流体供給ポートを制御するアクチュエータとで構成されている請求項1または2記載のフィルタプレス脱水装置。
【請求項1】
圧接状態と離隔状態との間で移動可能に支持される複数のろ板と、
前記圧接状態で各ろ板に挟持され、ろ過室を形成する無端状のろ布と、
前記離隔状態で前記ろ布を各ろ板と離隔して走行可能に支持する支持機構と、
前記支持機構により支持されながら走行する前記ろ布の蛇行を修正する蛇行修正機構と、
を備えているフィルタプレス脱水装置であって、
前記蛇行修正機構は、
前記ろ布の左右端部近傍にそれぞれ配置され、走行に伴って前記ろ布の幅方向への偏位量を検知する一対のセンサと、
前記一対のセンサに検知されたそれぞれの偏位量の差分に基づいて駆動する駆動機構とを、
備えているフィルタプレス脱水装置。
【請求項2】
前記蛇行修正機構は、軸心が互いに平行姿勢に配置され、一方が前記ろ布の表面に接し、他方が前記ろ布の裏面に接する一対のガイドローラと、前記平行姿勢を保った状態で、前記ろ布が走行方向に沿うように前記一対のガイドローラを偏向可能に支持するガイド機構とを備え、
前記駆動機構は、前記一対のセンサに検知されたそれぞれの偏位量の差分に基づいて、前記ガイド機構を駆動して前記一対のガイドローラを偏向する請求項1記載のフィルタプレス脱水装置。
【請求項3】
前記駆動機構は、前記一対のガイドローラを偏向する前記ガイド機構に備えたシリンダ機構へ供給する流体供給量及び供給方向を制御する流体回路で構成され、
前記センサは、前記ろ布の端部に接当するように付勢された接当部と、前記接当部の前記ろ布への接当状態に基づいて前記流体回路への加圧流体供給ポートを制御するアクチュエータとで構成されている請求項1または2記載のフィルタプレス脱水装置。
【図1】


【図2】
【図3】
【図4】
【図5】
【図2】
【図3】
【図4】
【図5】
【公開番号】特開2013−86052(P2013−86052A)
【公開日】平成25年5月13日(2013.5.13)
【国際特許分類】
【出願番号】特願2011−230726(P2011−230726)
【出願日】平成23年10月20日(2011.10.20)
【出願人】(000001052)株式会社クボタ (4,415)
【Fターム(参考)】
【公開日】平成25年5月13日(2013.5.13)
【国際特許分類】
【出願日】平成23年10月20日(2011.10.20)
【出願人】(000001052)株式会社クボタ (4,415)
【Fターム(参考)】
[ Back to top ]