
フォークリフトの作業補助システム
【課題】荷置き又は荷取りを行う作業範囲全体を確認することで、効率よく且つ安全に作業を行うことができ、しかも人件費の低減が図れる。
【解決手段】コンベア4に設けられているIDタグ5と、フォークリフト2に設けられているリーダ6と、コンベア4の荷置き位置Tを上方から撮影する作業監視カメラ7と、フォークリフト2の運転室2aに設けられた車載モニター8とを備えている。IDタグ5とリーダ6とが交信状態であるときに、IDタグ5に対応した作業監視カメラ7を起動させ、IDタグ5の識別情報をリーダ6で読み取って車載モニター8を起動させると共に、交信したIDタグ5に対応する作業監視カメラ7を特定して作業監視カメラ7の映像を受信し、車載モニター8に映像を映し出すようにした。
【解決手段】コンベア4に設けられているIDタグ5と、フォークリフト2に設けられているリーダ6と、コンベア4の荷置き位置Tを上方から撮影する作業監視カメラ7と、フォークリフト2の運転室2aに設けられた車載モニター8とを備えている。IDタグ5とリーダ6とが交信状態であるときに、IDタグ5に対応した作業監視カメラ7を起動させ、IDタグ5の識別情報をリーダ6で読み取って車載モニター8を起動させると共に、交信したIDタグ5に対応する作業監視カメラ7を特定して作業監視カメラ7の映像を受信し、車載モニター8に映像を映し出すようにした。
【発明の詳細な説明】
【技術分野】
【0001】
本発明は、フォークリフトにおける荷取り又は荷置き作業を補助するフォークリフトの作業補助システムに関する。
【背景技術】
【0002】
従来、フォークリフトで高さ寸法の高い荷物を運搬する場合、その荷物がフォークリフトの運転室から前方の視界を遮ることになるため、後退走行させながら運転しているのが一般的である。しかし、後退運転時は、正面のハンドルに対して運転者は体を後ろ側に反らせた体勢となり、運転しにくいうえ作業の安全性が低下していた。
そこで、このような問題に対応するために、運転者の前方の視界を補助する技術が例えば特許文献1に開示されている。
特許文献1は、フォークリフトの荷物を保持するフォークの取付け部付近に小型カメラを搭載したものであって、荷物によって前方の視界が悪くなる場合にそのカメラの映像を運転室内に設置された表示装置に映し出し、運転者はその映像を確認しながら前進走行を行うようにしたものである。
【特許文献1】特開2003−212494号公報
【発明の開示】
【発明が解決しようとする課題】
【0003】
しかしながら、特許文献1は、カメラはフォークリフトのフォークの取付け部付近に設けられているため、荷物を保持した際には、その荷物によってカメラの撮影範囲が狭くなり、作業範囲全体を確認できるように表示装置に映し出すことができないといった欠点があった。そのため、とくに上述したように高さ寸法のある荷物を荷台に荷置きする作業においては、荷台と荷物との取り合いがカメラだけでは確認しにくく、不安全であると共に、より慎重な作業となることから作業効率が低下するといった問題があった。さらに、そのような場合には、フォークリフトの運転者とは別に補助誘導員を配置する必要もあり、人件費が増大することになっていた。
【0004】
本発明は、上述する問題点に鑑みてなされたもので、荷置き又は荷取りを行う作業範囲全体を確認することで、効率よく且つ安全に作業を行うことができ、しかも人件費の低減が図れるフォークリフトの作業補助システムを提供することを目的とする。
【課題を解決するための手段】
【0005】
上記目的を達成するため、本発明に係るフォークリフトの作業補助システムは、荷台上の作業位置で、フォークリフトによって荷物を荷置き又は荷取りする作業を行う際のフォークリフトの作業補助システムであって、荷台又は荷台の近傍に設けられているIDタグと、フォークリフトに設けられているリーダと、荷台の作業位置を上方から撮影する作業監視カメラと、フォークリフトの運転室に設けられた表示装置とを備え、IDタグに、荷台と作業監視カメラとを関連付けた識別情報を記録させ、IDタグとリーダとが交信状態であるときに、IDタグに対応した作業監視カメラを起動させ、IDタグの識別情報をリーダで読み取ることで、起動中の作業監視カメラの映像を表示装置に映し出すように構成されていることを特徴としている。
本発明では、荷台の作業位置で荷置き又は荷取り作業を行う場合に、作業を行う荷台又は荷台の近傍に設けられたIDタグとリーダとが交信状態になることで、その荷台の上方の作業監視カメラが起動する。それと共に、リーダによって読み取った識別情報から起動した作業監視カメラを特定し、その作業監視カメラによる撮影中の映像を受信することで、自動的にフォークリフトの運転室の表示装置に映し出すことができる。これにより、フォークリフトの運転者は、作業位置の映像を確認しながら、効率よく荷置き作業を行うことができる。
【0006】
また、本発明に係るフォークリフトの作業補助システムでは、リーダによって交信可能な第二のIDタグがIDタグの近傍に設けられ、リーダが第二のIDタグと交信状態であることを、フォークリフトの運転者に通知することが好ましい。
本発明では、リーダが第二のIDタグと交信状態を通知されたときに、運転者は、例えばフォークリフトの荷物を上昇させるようにすることで、荷台の作業位置で荷物を荷置き又は荷取り作業する前に確実に荷物を所定の上昇位置に上昇させておくことができる。つまり、荷物を下降させた状態で荷台に近づけることによる衝突などを防止することができ、安全性を向上させることができる。
【発明の効果】
【0007】
本発明のフォークリフトの作業補助システムによれば、荷置き又は荷取り作業を行う場合に、その作業位置の全体を上方から撮影した映像をフォークリフトの運転室に設けた表示装置に自動的に映し出すことができる。これにより、荷物でフォークリフトの前方の視界が遮られる場合であっても、運転者は表示装置の映像を確認しながら荷置き又は荷取り作業を行えるため、安全性を向上させることができると共に、所定の荷置き位置に荷物をスムーズに移動できるなど作業効率を向上させることができる。
また、本作業補助システムでは、荷置き又は荷取り作業を行う必要時のみに作業監視カメラ及び表示装置が起動し、作業時以外にはそれらの電源が切断されることから、使用電気量の無駄を少なくすることができ、コストの低減を図ることができる。
しかも、運転者だけでも作業全体の状態を確認できることから、従来のように補助誘導員を配置する必要がなくなり、人件費の低減を図ることができる。
【発明を実施するための最良の形態】
【0008】
以下、本発明の実施の形態によるフォークリフトの作業補助システムについて、図1及び図2に基づいて説明する。
図1は本発明の実施の形態によるフォークリフトの作業補助システムを説明する全体概要図、図2は作業補助システムにおける画像通信のフローチャートである。
【0009】
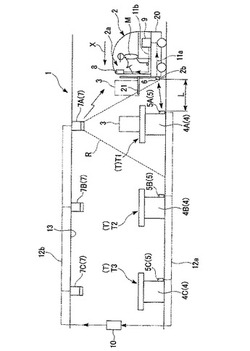
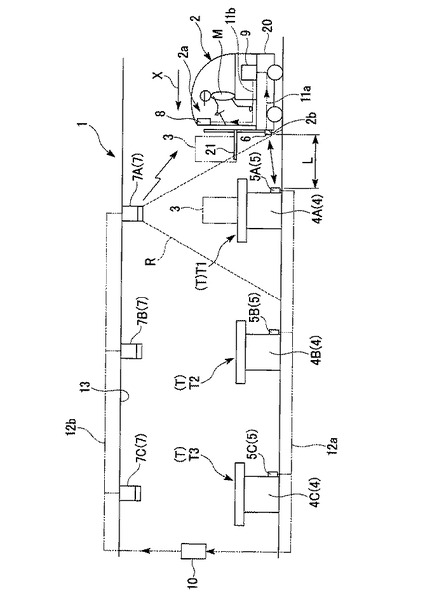
図1に示すように、本実施の形態によるフォークリフト2の作業補助システム1は、荷物3をコンベア4(荷台)上に荷置きする運搬作業に適用される。このコンベア4は、長手方向(図1の紙面に対して直交する方向)に荷物3を移送するものであって、第一コンベア4A、第二コンベア4B、第三コンベア4Cが夫々所定の位置に配置されている。また、各コンベア4A、4B、4Cにおける荷物3の載置箇所(この位置を荷置き位置Tとする)は固定位置とされる。
ここで、フォークリフト2は、車両本体20に運転室2aを備え、車両本体20の前面に荷物3を載せたパレット(図示省略)を挿入させて保持するフォーク21が設けられている。このフォーク21は、上下方向に昇降可能に設けられている。
【0010】
作業補助システム1は、各コンベア4A、4B、4Cに取り付けられているIDタグ5(第一〜第三IDタグ5A、5B、5C)と、フォークリフト2の車両本体20の前面下部2bに固定されているリーダ6と、各コンベア4A、4B、4Cの荷置き位置T(第一〜第三荷置き位置T1、T2、T3)の上方に設けられて所定範囲を上方から撮影する作業監視カメラ7(第一〜第三作業監視カメラ7A、7B、7C)と、フォークリフト2の運転室2aに設けられている車載モニター8(表示装置)とを備えている。なお、荷置き位置Tは、本発明の「作業位置」に相当する。
そして、作業監視カメラ7A、7B、7Cは、夫々が各コンベア4A、4B、4Cの荷置き位置T1、T2、T3を所定の撮影範囲Rをもって上方から見渡せるような位置、例えば図1に示す作業フロアの天井部13に固定されている。
【0011】
IDタグ5には、リーダ6と電波を介して交信可能とするアンテナ(図示省略)と、ICチップ(図示省略)とが内蔵されている。このICチップには、IDタグ5が取り付けられているコンベア4及びこのコンベア4の上方に配置されている作業監視カメラ7を関連付けた識別情報が記録されている。そして、IDタグ5は、リーダ6と交信状態にあるとき、そのリーダ6から一定時間電波を受けると、これを電流に変換してICチップを動作させ、識別情報をリーダ6に送信する。このように、IDタグ5は、リーダ6から電波を受け取れることから、電池が不要のものを採用することができる。なお、IDタグ5には、リーダ6との非接触距離(交信可能な距離)として、例えば1cm〜200cm程度のものを使用することができる。
【0012】
リーダ6は、読み込み機能を有するIDタグリーダとされ、IDタグ5との通信に必要な信号処理部を備えた構成をなしている。このリーダ6では、その内部に備えられているアンテナ(図示省略)からIDタグ5に一定時間電波を送ることができると共に、IDタグ5の識別情報を受信することができる。なお、リーダ6は、IDタグ5より受信した識別情報や交信記録などのデータを書き込みできる機能を有するIDタグリーダライタとしてもよい。
【0013】
また、フォークリフト2には、IDタグ5と交信したリーダ6と車載モニター8とを制御する第一コントローラ9が設けられている。そして、これらリーダ6、第一コントローラ9および車載モニター8は、例えば第一制御線11a、11bなどによって接続されている。
この第一コントローラ9は、リーダ6がIDタグ5と交信したとき、IDタグ5の識別情報からIDタグ5に対応した作業監視カメラ7を自動的に選択し、その作業監視カメラ7の周波数(電波)と一致するように制御するものである。これにより、作業監視カメラ7の映像を、フォークリフト2の車載モニター8に映し出すことができる。
【0014】
また、本作業補助システム1には、各IDタグ5と各作業監視カメラ7とを制御する第二コントローラ10が設けられている。そして、これら各IDタグ5、各作業監視カメラ7および第二コントローラ10は、例えば第二制御線12a、12bなどによって接続されている。
この第二コントローラ10は、リーダ6と交信状態となったIDタグ5を検知しときに、そのIDタグ5の識別情報からIDタグ5に対応する作業監視カメラ7を自動的に選択し、その作業監視カメラ7の電源を起動させ、識別されたコンベア4の荷置き位置を上方から撮影するように制御するものである。
【0015】
そして、作業監視カメラ7は、常時作動した状態ではなく、例えば第一IDタグ5Aがリーダ6と交信状態になり、第二コントローラ10を介して制御指令があったときに、第一IDタグ5Aの上部に設置されている第一作業監視カメラ7Aが起動し、第一IDタグ5Aが取り付けられている第一コンベア4Aの第一荷置き位置T1を撮影するものである。また、各作業監視カメラ7は、その起動中において、夫々が異なる周波数の電波によって撮影した映像を外部に向けて発信させている。
【0016】
車載モニター8は、上述したようにフォークリフト2の運転室2a内で、運転者Mが見やすい位置に設置されている。そして、この車載モニター8は、受信機能を有するアンテナ(図示省略)を備えており、荷置き位置Tを撮影中の作業監視カメラ7の周波数と同一の周波数となるように後述する第一コントローラ9によって制御して作業監視カメラ7の映像を受信することで、その映像を車載モニター8に映し出すことができる。
【0017】
次に、本フォークリフト2の作業補助システム1の動作フローについて図2を用いるとともに、図1を参照しながら説明する。
この動作フローは、荷物3を積んだフォークリフト2が所定のコンベア4に荷置きする運搬作業を行うときに、コンベア4に近づきながら前進(図1に示すX方向)させる動作を動作フローのスタートとし、車載モニター8に映像を映し出すまでの一連の動作フローを示している。なお、ここでは、第一コンベア4Aの第一荷置き位置T1に荷物3を荷置きする場合について説明する。
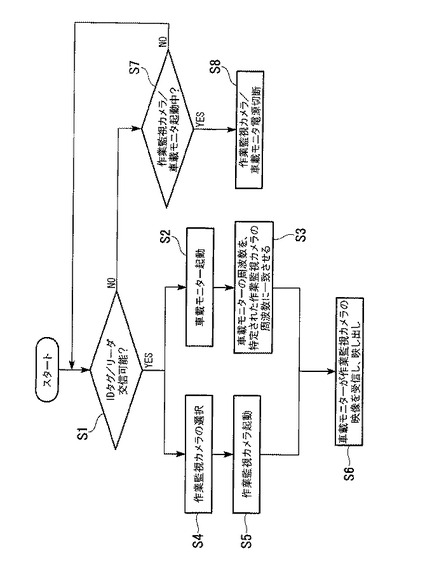
本作業補助システム1では、先ず、フォークリフト2が荷置き位置T1に近づき、リーダ6が第一IDタグ5Aとの交信可能距離Lに入ったとき、ステップS1で第一コンベア4Aに取り付けられているIDタグ5Aとリーダ6とが交信状態となり(ステップS1:YES)、次にステップS2及びステップS4の夫々に進む。
【0018】
ステップS2では、リーダ6が交信状態となったことを受けて、第一コントローラ9の制御指令により車載モニター8の電源が起動する。続いて、ステップS3では、リーダ6によって読み取った第一IDタグ5Aの識別情報から、第一コンベア4A及び第一作業監視カメラ7Aを特定し、その第一作業監視カメラ7Aが発信する周波数に、車載モニター8の周波数を一致させるように第一コントローラ9によって制御される。
【0019】
一方、ステップS4では、第二コントローラ10が交信した第一IDタグ5Aの電気信号を検知することで、その第一IDタグ5Aが識別され、この第一IDタグ5Aに対応する第一作業監視カメラ7A、すなわち第一IDタグ5Aが取り付けられている第一コンベア4Aの上方に配設されている第一作業監視カメラ7Aが選択される。
次いで、ステップS4からステップS5に進み、ステップS5では、第二コントローラ10から制御指令を受けて選択された作業監視カメラ7Aが起動し、所定の撮影範囲Rをもって撮影される。
【0020】
そして、ステップS3及びステップS5に続いてステップS6で、第一作業監視カメラ7Aの映像を車載モニター8が受信することで、車載モニター8にその映像が映し出される。これにより、フォークリフト2の運転者Mは、この車載モニター8に映し出される第一荷置き位置T1の映像を確認しながら、効率よく荷置き作業を行うことができ、運搬作業が補助されることになる。
【0021】
また、上記ステップS1でIDタグ5とリーダ6とが交信状態となっていない場合(ステップS1:NO)には、ステップS7に進み、第一作業監視カメラ7A及び車載モニター8の起動状態が確認される。その結果、第一作業監視カメラ7A及び車載モニター8の少なくともどちらか一方が起動している場合(ステップS7:YES)には、ステップS8に進み、起動している第一作業監視カメラ7及び車載モニター8の電源が切断される。つまり、荷置き作業の終了後は、フォークリフト2がコンベア4から移動し、リーダ6がIDタグ5との交信可能距離Lから外れて交信状態が解除され、第一コントローラ9によってその車載モニター8の電源を切断するように制御指令が出されてその電源が落とされる。
また、第二コントローラ10から作業監視カメラ7の電源を切断するように制御指令が出されてその電源が落とされる。このように、本IDタグ5とリーダ6とが交信状態であるときにかぎり、自動的に作業監視カメラ7が作動し、同時に車載モニター8にその映像が映し出されることになる。
【0022】
一方、ステップS7で両者7A、8が起動してない場合(ステップS7:NO)には、再び動作フローのスタートに戻ることになる。
なお、動作フローの説明では、第一コンベア4Aに荷物3を荷置きする場合について説明したが、第二コンベア4Bや第三コンベア4Cに荷物3を荷置きする作業の場合も同様の動作フローにより荷置き作業における作業補助がなされる。
【0023】
上述した本実施の形態によるフォークリフトの作業補助システムでは、荷置き又は荷取り作業を行う場合に、その作業位置(荷取り位置T)の全体をその上方から撮影した映像をフォークリフト2の運転室2aに設けた車載モニター8に自動的に映し出すことができる。これにより、荷物3でフォークリフト2の前方の視界が遮られる場合であっても、運転者Mは車載モニター8の映像を確認しながら荷置き又は荷取り作業を行えるため、安全性を向上させることができると共に、所定の荷置き位置Tに荷物3をスムーズに移動できるなど作業効率を向上させることができる。
また、本作業補助システムでは、荷置き作業を行う必要時のみに作業監視カメラ7及び車載モニター8が起動し、作業時以外にはそれらの電源が切断されることから、使用電気量の無駄を少なくすることができ、コストの低減を図ることができる。
しかも、運転者Mだけでも作業全体の状態を確認できることから、従来のように補助誘導員を配置する必要がなくなり、人件費の低減を図ることができる。
【0024】
次に、本発明の実施の形態の第一及び第二変形例について、図3及び図4に基づいて説明するが、上述の実施の形態と同一又は同様な部材、部分には同一の符号を用いて説明を省略し、実施の形態と異なる構成について説明する。
図3は実施の形態の第一変形例によるフォークリフトの作業補助システムを説明する概要図である。
図3に示すように、第一変形例によるフォークリフトの作業補助システム1では、IDタグ5(5A、5B、5C)の取り付け位置を各コンベア4A、4B、4Cの近傍の床面14に取り付けたものである。この場合、作業監視カメラ7や車載モニター8が起動するときのフォークリフト2の位置が、上述したコンベア4にIDタグ5を取り付けた実施の形態と比較して手前(ベルコン4から遠ざかる方向)の位置となり、実施の形態より早い段階で、車載モニター8に映像が映し出されることになる。すなわち、床面14へのIDタグ5の設置を変更することで、車載モニター8に映像を映すタイミングを調整することができる。そして、位置作業補助システム1の作用及び効果については実施の形態と同様である。
【0025】
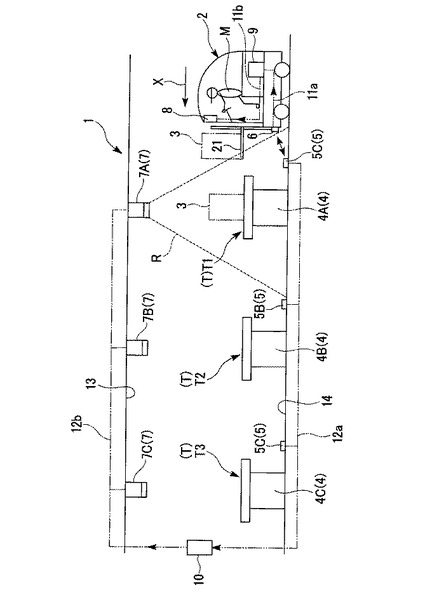
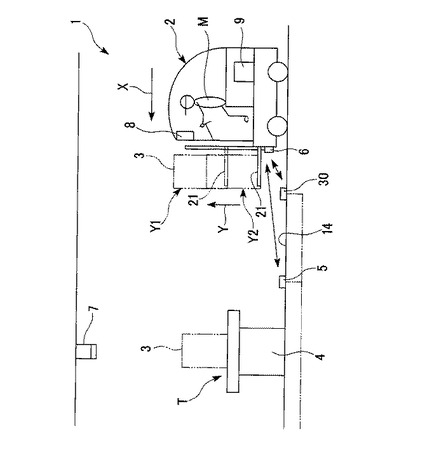
また、図4は実施の形態の第二変形例によるフォークリフトの作業補助システムを説明する概要図である。
図4に示すように、第二変形例によるフォークリフトの作業補助システムでは、第一変形例のIDタグ5に加え、第二のIDタグ30をそのIDタグ5の近傍の床面14に設けたものである。この第二のIDタグ30に内蔵されるICチップ(図示省略)には、とくに識別情報が記録されていないものでよい。
この場合、フォークリフト2が第二のIDタグ30に近づいてリーダ6が第二のIDタグ30と交信状態になるとき、この交信状態であることの通知情報を運転者Mに通知させるように第一コントローラ9によって制御される。このときの通知情報の発信方法としては、例えば音声、警報、或いは車載モニター8に表示させるなどの方法がある。そして、運転者Mがこの通知情報を受けたときに、フォークリフト2のフォーク21の位置を矢印Y方向に上昇させる操作を行うことで、コンベア4に荷置きする前に確実にフォーク21(荷物3)を所定の上昇位置Y1に上昇させておくことができる。つまり、荷物3を下降位置Y2の状態でコンベア4に近づけることによる衝突などを防止することができ、より安全性を向上させることができる。
なお、第二のIDタグ30の設置位置は、図4に示すようにコンベア4に対してIDタグ5より遠い位置であることに限定されることはなく、任意に設定することができる。
【0026】
以上、本発明の実施の形態、第一及び第二変形例によるフォークリフトの作業補助システムについて説明したが、本発明は上記の実施の形態、第一及び第二変形例に限定されるものではなく、その趣旨を逸脱しない範囲で適宜変更可能である。
例えば、本実施の形態、第一及び第二変形例では、第一〜第三コンベア4A、4B、4Cの3台としているが、コンベア4の台数はこれに限定されず、単数或いは3台以外の複数とすることが可能である。そして、荷台はコンベア4であることに限定されることはない。
また、本実施の形態、第一及び第二変形例では、荷置き作業に適用しているが、荷取り作業時にも適用することができる。この荷取り作業時にも、同様の動作フローにより、フォークリフト2内の車載モニター8に荷取り作業位置の映像を映し出し、運転者Mはその映像を確認しながら作業を行うことができる。
さらに、IDタグ5の取り付け位置は、とくに限定されることはなく、運転者Mが車載モニター8を見ながら作業を行う範囲で作業監視カメラ7や車載モニター8が起動していればよいものとされる。但し、コンベア4から離れた位置にIDタグ5を設置してしまうと、例えば、コンベア4上に荷置きする作業以外でコンベア4付近を走行した場合などでも、リーダ6がIDタグ5と交信してしまうことになり誤作動を起こすことになり得ることから、なるべくコンベア4に近傍にIDタグ5を設置することが好ましいとされる。
【図面の簡単な説明】
【0027】
【図1】本発明の実施の形態によるフォークリフトの作業補助システムを説明する全体概要図である。
【図2】作業補助システムにおける画像通信のフローチャートである。
【図3】実施の形態の第一変形例によるフォークリフトの作業補助システムを説明する概要図である。
【図4】実施の形態の第二変形例によるフォークリフトの作業補助システムを説明する概要図である。
【符号の説明】
【0028】
1 作業補助システム
2 フォークリフト
3 荷物
4 コンベア
5 IDタグ
6 リーダ
7 作業監視カメラ
8 車載モニター(表示装置)
9 第一コントローラ
10 第二コントローラ
30 第二のIDタグ
T 荷置き位置
R 撮影範囲
【技術分野】
【0001】
本発明は、フォークリフトにおける荷取り又は荷置き作業を補助するフォークリフトの作業補助システムに関する。
【背景技術】
【0002】
従来、フォークリフトで高さ寸法の高い荷物を運搬する場合、その荷物がフォークリフトの運転室から前方の視界を遮ることになるため、後退走行させながら運転しているのが一般的である。しかし、後退運転時は、正面のハンドルに対して運転者は体を後ろ側に反らせた体勢となり、運転しにくいうえ作業の安全性が低下していた。
そこで、このような問題に対応するために、運転者の前方の視界を補助する技術が例えば特許文献1に開示されている。
特許文献1は、フォークリフトの荷物を保持するフォークの取付け部付近に小型カメラを搭載したものであって、荷物によって前方の視界が悪くなる場合にそのカメラの映像を運転室内に設置された表示装置に映し出し、運転者はその映像を確認しながら前進走行を行うようにしたものである。
【特許文献1】特開2003−212494号公報
【発明の開示】
【発明が解決しようとする課題】
【0003】
しかしながら、特許文献1は、カメラはフォークリフトのフォークの取付け部付近に設けられているため、荷物を保持した際には、その荷物によってカメラの撮影範囲が狭くなり、作業範囲全体を確認できるように表示装置に映し出すことができないといった欠点があった。そのため、とくに上述したように高さ寸法のある荷物を荷台に荷置きする作業においては、荷台と荷物との取り合いがカメラだけでは確認しにくく、不安全であると共に、より慎重な作業となることから作業効率が低下するといった問題があった。さらに、そのような場合には、フォークリフトの運転者とは別に補助誘導員を配置する必要もあり、人件費が増大することになっていた。
【0004】
本発明は、上述する問題点に鑑みてなされたもので、荷置き又は荷取りを行う作業範囲全体を確認することで、効率よく且つ安全に作業を行うことができ、しかも人件費の低減が図れるフォークリフトの作業補助システムを提供することを目的とする。
【課題を解決するための手段】
【0005】
上記目的を達成するため、本発明に係るフォークリフトの作業補助システムは、荷台上の作業位置で、フォークリフトによって荷物を荷置き又は荷取りする作業を行う際のフォークリフトの作業補助システムであって、荷台又は荷台の近傍に設けられているIDタグと、フォークリフトに設けられているリーダと、荷台の作業位置を上方から撮影する作業監視カメラと、フォークリフトの運転室に設けられた表示装置とを備え、IDタグに、荷台と作業監視カメラとを関連付けた識別情報を記録させ、IDタグとリーダとが交信状態であるときに、IDタグに対応した作業監視カメラを起動させ、IDタグの識別情報をリーダで読み取ることで、起動中の作業監視カメラの映像を表示装置に映し出すように構成されていることを特徴としている。
本発明では、荷台の作業位置で荷置き又は荷取り作業を行う場合に、作業を行う荷台又は荷台の近傍に設けられたIDタグとリーダとが交信状態になることで、その荷台の上方の作業監視カメラが起動する。それと共に、リーダによって読み取った識別情報から起動した作業監視カメラを特定し、その作業監視カメラによる撮影中の映像を受信することで、自動的にフォークリフトの運転室の表示装置に映し出すことができる。これにより、フォークリフトの運転者は、作業位置の映像を確認しながら、効率よく荷置き作業を行うことができる。
【0006】
また、本発明に係るフォークリフトの作業補助システムでは、リーダによって交信可能な第二のIDタグがIDタグの近傍に設けられ、リーダが第二のIDタグと交信状態であることを、フォークリフトの運転者に通知することが好ましい。
本発明では、リーダが第二のIDタグと交信状態を通知されたときに、運転者は、例えばフォークリフトの荷物を上昇させるようにすることで、荷台の作業位置で荷物を荷置き又は荷取り作業する前に確実に荷物を所定の上昇位置に上昇させておくことができる。つまり、荷物を下降させた状態で荷台に近づけることによる衝突などを防止することができ、安全性を向上させることができる。
【発明の効果】
【0007】
本発明のフォークリフトの作業補助システムによれば、荷置き又は荷取り作業を行う場合に、その作業位置の全体を上方から撮影した映像をフォークリフトの運転室に設けた表示装置に自動的に映し出すことができる。これにより、荷物でフォークリフトの前方の視界が遮られる場合であっても、運転者は表示装置の映像を確認しながら荷置き又は荷取り作業を行えるため、安全性を向上させることができると共に、所定の荷置き位置に荷物をスムーズに移動できるなど作業効率を向上させることができる。
また、本作業補助システムでは、荷置き又は荷取り作業を行う必要時のみに作業監視カメラ及び表示装置が起動し、作業時以外にはそれらの電源が切断されることから、使用電気量の無駄を少なくすることができ、コストの低減を図ることができる。
しかも、運転者だけでも作業全体の状態を確認できることから、従来のように補助誘導員を配置する必要がなくなり、人件費の低減を図ることができる。
【発明を実施するための最良の形態】
【0008】
以下、本発明の実施の形態によるフォークリフトの作業補助システムについて、図1及び図2に基づいて説明する。
図1は本発明の実施の形態によるフォークリフトの作業補助システムを説明する全体概要図、図2は作業補助システムにおける画像通信のフローチャートである。
【0009】
図1に示すように、本実施の形態によるフォークリフト2の作業補助システム1は、荷物3をコンベア4(荷台)上に荷置きする運搬作業に適用される。このコンベア4は、長手方向(図1の紙面に対して直交する方向)に荷物3を移送するものであって、第一コンベア4A、第二コンベア4B、第三コンベア4Cが夫々所定の位置に配置されている。また、各コンベア4A、4B、4Cにおける荷物3の載置箇所(この位置を荷置き位置Tとする)は固定位置とされる。
ここで、フォークリフト2は、車両本体20に運転室2aを備え、車両本体20の前面に荷物3を載せたパレット(図示省略)を挿入させて保持するフォーク21が設けられている。このフォーク21は、上下方向に昇降可能に設けられている。
【0010】
作業補助システム1は、各コンベア4A、4B、4Cに取り付けられているIDタグ5(第一〜第三IDタグ5A、5B、5C)と、フォークリフト2の車両本体20の前面下部2bに固定されているリーダ6と、各コンベア4A、4B、4Cの荷置き位置T(第一〜第三荷置き位置T1、T2、T3)の上方に設けられて所定範囲を上方から撮影する作業監視カメラ7(第一〜第三作業監視カメラ7A、7B、7C)と、フォークリフト2の運転室2aに設けられている車載モニター8(表示装置)とを備えている。なお、荷置き位置Tは、本発明の「作業位置」に相当する。
そして、作業監視カメラ7A、7B、7Cは、夫々が各コンベア4A、4B、4Cの荷置き位置T1、T2、T3を所定の撮影範囲Rをもって上方から見渡せるような位置、例えば図1に示す作業フロアの天井部13に固定されている。
【0011】
IDタグ5には、リーダ6と電波を介して交信可能とするアンテナ(図示省略)と、ICチップ(図示省略)とが内蔵されている。このICチップには、IDタグ5が取り付けられているコンベア4及びこのコンベア4の上方に配置されている作業監視カメラ7を関連付けた識別情報が記録されている。そして、IDタグ5は、リーダ6と交信状態にあるとき、そのリーダ6から一定時間電波を受けると、これを電流に変換してICチップを動作させ、識別情報をリーダ6に送信する。このように、IDタグ5は、リーダ6から電波を受け取れることから、電池が不要のものを採用することができる。なお、IDタグ5には、リーダ6との非接触距離(交信可能な距離)として、例えば1cm〜200cm程度のものを使用することができる。
【0012】
リーダ6は、読み込み機能を有するIDタグリーダとされ、IDタグ5との通信に必要な信号処理部を備えた構成をなしている。このリーダ6では、その内部に備えられているアンテナ(図示省略)からIDタグ5に一定時間電波を送ることができると共に、IDタグ5の識別情報を受信することができる。なお、リーダ6は、IDタグ5より受信した識別情報や交信記録などのデータを書き込みできる機能を有するIDタグリーダライタとしてもよい。
【0013】
また、フォークリフト2には、IDタグ5と交信したリーダ6と車載モニター8とを制御する第一コントローラ9が設けられている。そして、これらリーダ6、第一コントローラ9および車載モニター8は、例えば第一制御線11a、11bなどによって接続されている。
この第一コントローラ9は、リーダ6がIDタグ5と交信したとき、IDタグ5の識別情報からIDタグ5に対応した作業監視カメラ7を自動的に選択し、その作業監視カメラ7の周波数(電波)と一致するように制御するものである。これにより、作業監視カメラ7の映像を、フォークリフト2の車載モニター8に映し出すことができる。
【0014】
また、本作業補助システム1には、各IDタグ5と各作業監視カメラ7とを制御する第二コントローラ10が設けられている。そして、これら各IDタグ5、各作業監視カメラ7および第二コントローラ10は、例えば第二制御線12a、12bなどによって接続されている。
この第二コントローラ10は、リーダ6と交信状態となったIDタグ5を検知しときに、そのIDタグ5の識別情報からIDタグ5に対応する作業監視カメラ7を自動的に選択し、その作業監視カメラ7の電源を起動させ、識別されたコンベア4の荷置き位置を上方から撮影するように制御するものである。
【0015】
そして、作業監視カメラ7は、常時作動した状態ではなく、例えば第一IDタグ5Aがリーダ6と交信状態になり、第二コントローラ10を介して制御指令があったときに、第一IDタグ5Aの上部に設置されている第一作業監視カメラ7Aが起動し、第一IDタグ5Aが取り付けられている第一コンベア4Aの第一荷置き位置T1を撮影するものである。また、各作業監視カメラ7は、その起動中において、夫々が異なる周波数の電波によって撮影した映像を外部に向けて発信させている。
【0016】
車載モニター8は、上述したようにフォークリフト2の運転室2a内で、運転者Mが見やすい位置に設置されている。そして、この車載モニター8は、受信機能を有するアンテナ(図示省略)を備えており、荷置き位置Tを撮影中の作業監視カメラ7の周波数と同一の周波数となるように後述する第一コントローラ9によって制御して作業監視カメラ7の映像を受信することで、その映像を車載モニター8に映し出すことができる。
【0017】
次に、本フォークリフト2の作業補助システム1の動作フローについて図2を用いるとともに、図1を参照しながら説明する。
この動作フローは、荷物3を積んだフォークリフト2が所定のコンベア4に荷置きする運搬作業を行うときに、コンベア4に近づきながら前進(図1に示すX方向)させる動作を動作フローのスタートとし、車載モニター8に映像を映し出すまでの一連の動作フローを示している。なお、ここでは、第一コンベア4Aの第一荷置き位置T1に荷物3を荷置きする場合について説明する。
本作業補助システム1では、先ず、フォークリフト2が荷置き位置T1に近づき、リーダ6が第一IDタグ5Aとの交信可能距離Lに入ったとき、ステップS1で第一コンベア4Aに取り付けられているIDタグ5Aとリーダ6とが交信状態となり(ステップS1:YES)、次にステップS2及びステップS4の夫々に進む。
【0018】
ステップS2では、リーダ6が交信状態となったことを受けて、第一コントローラ9の制御指令により車載モニター8の電源が起動する。続いて、ステップS3では、リーダ6によって読み取った第一IDタグ5Aの識別情報から、第一コンベア4A及び第一作業監視カメラ7Aを特定し、その第一作業監視カメラ7Aが発信する周波数に、車載モニター8の周波数を一致させるように第一コントローラ9によって制御される。
【0019】
一方、ステップS4では、第二コントローラ10が交信した第一IDタグ5Aの電気信号を検知することで、その第一IDタグ5Aが識別され、この第一IDタグ5Aに対応する第一作業監視カメラ7A、すなわち第一IDタグ5Aが取り付けられている第一コンベア4Aの上方に配設されている第一作業監視カメラ7Aが選択される。
次いで、ステップS4からステップS5に進み、ステップS5では、第二コントローラ10から制御指令を受けて選択された作業監視カメラ7Aが起動し、所定の撮影範囲Rをもって撮影される。
【0020】
そして、ステップS3及びステップS5に続いてステップS6で、第一作業監視カメラ7Aの映像を車載モニター8が受信することで、車載モニター8にその映像が映し出される。これにより、フォークリフト2の運転者Mは、この車載モニター8に映し出される第一荷置き位置T1の映像を確認しながら、効率よく荷置き作業を行うことができ、運搬作業が補助されることになる。
【0021】
また、上記ステップS1でIDタグ5とリーダ6とが交信状態となっていない場合(ステップS1:NO)には、ステップS7に進み、第一作業監視カメラ7A及び車載モニター8の起動状態が確認される。その結果、第一作業監視カメラ7A及び車載モニター8の少なくともどちらか一方が起動している場合(ステップS7:YES)には、ステップS8に進み、起動している第一作業監視カメラ7及び車載モニター8の電源が切断される。つまり、荷置き作業の終了後は、フォークリフト2がコンベア4から移動し、リーダ6がIDタグ5との交信可能距離Lから外れて交信状態が解除され、第一コントローラ9によってその車載モニター8の電源を切断するように制御指令が出されてその電源が落とされる。
また、第二コントローラ10から作業監視カメラ7の電源を切断するように制御指令が出されてその電源が落とされる。このように、本IDタグ5とリーダ6とが交信状態であるときにかぎり、自動的に作業監視カメラ7が作動し、同時に車載モニター8にその映像が映し出されることになる。
【0022】
一方、ステップS7で両者7A、8が起動してない場合(ステップS7:NO)には、再び動作フローのスタートに戻ることになる。
なお、動作フローの説明では、第一コンベア4Aに荷物3を荷置きする場合について説明したが、第二コンベア4Bや第三コンベア4Cに荷物3を荷置きする作業の場合も同様の動作フローにより荷置き作業における作業補助がなされる。
【0023】
上述した本実施の形態によるフォークリフトの作業補助システムでは、荷置き又は荷取り作業を行う場合に、その作業位置(荷取り位置T)の全体をその上方から撮影した映像をフォークリフト2の運転室2aに設けた車載モニター8に自動的に映し出すことができる。これにより、荷物3でフォークリフト2の前方の視界が遮られる場合であっても、運転者Mは車載モニター8の映像を確認しながら荷置き又は荷取り作業を行えるため、安全性を向上させることができると共に、所定の荷置き位置Tに荷物3をスムーズに移動できるなど作業効率を向上させることができる。
また、本作業補助システムでは、荷置き作業を行う必要時のみに作業監視カメラ7及び車載モニター8が起動し、作業時以外にはそれらの電源が切断されることから、使用電気量の無駄を少なくすることができ、コストの低減を図ることができる。
しかも、運転者Mだけでも作業全体の状態を確認できることから、従来のように補助誘導員を配置する必要がなくなり、人件費の低減を図ることができる。
【0024】
次に、本発明の実施の形態の第一及び第二変形例について、図3及び図4に基づいて説明するが、上述の実施の形態と同一又は同様な部材、部分には同一の符号を用いて説明を省略し、実施の形態と異なる構成について説明する。
図3は実施の形態の第一変形例によるフォークリフトの作業補助システムを説明する概要図である。
図3に示すように、第一変形例によるフォークリフトの作業補助システム1では、IDタグ5(5A、5B、5C)の取り付け位置を各コンベア4A、4B、4Cの近傍の床面14に取り付けたものである。この場合、作業監視カメラ7や車載モニター8が起動するときのフォークリフト2の位置が、上述したコンベア4にIDタグ5を取り付けた実施の形態と比較して手前(ベルコン4から遠ざかる方向)の位置となり、実施の形態より早い段階で、車載モニター8に映像が映し出されることになる。すなわち、床面14へのIDタグ5の設置を変更することで、車載モニター8に映像を映すタイミングを調整することができる。そして、位置作業補助システム1の作用及び効果については実施の形態と同様である。
【0025】
また、図4は実施の形態の第二変形例によるフォークリフトの作業補助システムを説明する概要図である。
図4に示すように、第二変形例によるフォークリフトの作業補助システムでは、第一変形例のIDタグ5に加え、第二のIDタグ30をそのIDタグ5の近傍の床面14に設けたものである。この第二のIDタグ30に内蔵されるICチップ(図示省略)には、とくに識別情報が記録されていないものでよい。
この場合、フォークリフト2が第二のIDタグ30に近づいてリーダ6が第二のIDタグ30と交信状態になるとき、この交信状態であることの通知情報を運転者Mに通知させるように第一コントローラ9によって制御される。このときの通知情報の発信方法としては、例えば音声、警報、或いは車載モニター8に表示させるなどの方法がある。そして、運転者Mがこの通知情報を受けたときに、フォークリフト2のフォーク21の位置を矢印Y方向に上昇させる操作を行うことで、コンベア4に荷置きする前に確実にフォーク21(荷物3)を所定の上昇位置Y1に上昇させておくことができる。つまり、荷物3を下降位置Y2の状態でコンベア4に近づけることによる衝突などを防止することができ、より安全性を向上させることができる。
なお、第二のIDタグ30の設置位置は、図4に示すようにコンベア4に対してIDタグ5より遠い位置であることに限定されることはなく、任意に設定することができる。
【0026】
以上、本発明の実施の形態、第一及び第二変形例によるフォークリフトの作業補助システムについて説明したが、本発明は上記の実施の形態、第一及び第二変形例に限定されるものではなく、その趣旨を逸脱しない範囲で適宜変更可能である。
例えば、本実施の形態、第一及び第二変形例では、第一〜第三コンベア4A、4B、4Cの3台としているが、コンベア4の台数はこれに限定されず、単数或いは3台以外の複数とすることが可能である。そして、荷台はコンベア4であることに限定されることはない。
また、本実施の形態、第一及び第二変形例では、荷置き作業に適用しているが、荷取り作業時にも適用することができる。この荷取り作業時にも、同様の動作フローにより、フォークリフト2内の車載モニター8に荷取り作業位置の映像を映し出し、運転者Mはその映像を確認しながら作業を行うことができる。
さらに、IDタグ5の取り付け位置は、とくに限定されることはなく、運転者Mが車載モニター8を見ながら作業を行う範囲で作業監視カメラ7や車載モニター8が起動していればよいものとされる。但し、コンベア4から離れた位置にIDタグ5を設置してしまうと、例えば、コンベア4上に荷置きする作業以外でコンベア4付近を走行した場合などでも、リーダ6がIDタグ5と交信してしまうことになり誤作動を起こすことになり得ることから、なるべくコンベア4に近傍にIDタグ5を設置することが好ましいとされる。
【図面の簡単な説明】
【0027】
【図1】本発明の実施の形態によるフォークリフトの作業補助システムを説明する全体概要図である。
【図2】作業補助システムにおける画像通信のフローチャートである。
【図3】実施の形態の第一変形例によるフォークリフトの作業補助システムを説明する概要図である。
【図4】実施の形態の第二変形例によるフォークリフトの作業補助システムを説明する概要図である。
【符号の説明】
【0028】
1 作業補助システム
2 フォークリフト
3 荷物
4 コンベア
5 IDタグ
6 リーダ
7 作業監視カメラ
8 車載モニター(表示装置)
9 第一コントローラ
10 第二コントローラ
30 第二のIDタグ
T 荷置き位置
R 撮影範囲
【特許請求の範囲】
【請求項1】
荷台上の作業位置で、フォークリフトによって荷物を荷置き又は荷取りする作業を行う際のフォークリフトの作業補助システムであって、
前記荷台又は前記荷台の近傍に設けられているIDタグと、
前記フォークリフトに設けられているリーダと、
前記荷台の前記作業位置を上方から撮影する作業監視カメラと、
前記フォークリフトの運転室に設けられた表示装置と、
を備え、
前記IDタグに、前記荷台と前記作業監視カメラとを関連付けた識別情報を記録させ、
前記IDタグと前記リーダとが交信状態であるときに、該IDタグに対応した前記作業監視カメラを起動させ、
前記IDタグの前記識別情報を前記リーダで読み取ることで、前記起動中の前記作業監視カメラの映像を前記表示装置に映し出すように構成されていることを特徴とするフォークリフトの作業補助システム。
【請求項2】
前記リーダによって交信可能な第二のIDタグが前記IDタグの近傍に設けられ、
前記リーダが前記第二のIDタグと前記交信状態であることを、前記フォークリフトの運転者に通知するようにしたことを特徴とする請求項1に記載のフォークリフトの作業補助システム。
【請求項1】
荷台上の作業位置で、フォークリフトによって荷物を荷置き又は荷取りする作業を行う際のフォークリフトの作業補助システムであって、
前記荷台又は前記荷台の近傍に設けられているIDタグと、
前記フォークリフトに設けられているリーダと、
前記荷台の前記作業位置を上方から撮影する作業監視カメラと、
前記フォークリフトの運転室に設けられた表示装置と、
を備え、
前記IDタグに、前記荷台と前記作業監視カメラとを関連付けた識別情報を記録させ、
前記IDタグと前記リーダとが交信状態であるときに、該IDタグに対応した前記作業監視カメラを起動させ、
前記IDタグの前記識別情報を前記リーダで読み取ることで、前記起動中の前記作業監視カメラの映像を前記表示装置に映し出すように構成されていることを特徴とするフォークリフトの作業補助システム。
【請求項2】
前記リーダによって交信可能な第二のIDタグが前記IDタグの近傍に設けられ、
前記リーダが前記第二のIDタグと前記交信状態であることを、前記フォークリフトの運転者に通知するようにしたことを特徴とする請求項1に記載のフォークリフトの作業補助システム。
【図1】


【図2】
【図3】
【図4】
【図2】
【図3】
【図4】
【公開番号】特開2007−320734(P2007−320734A)
【公開日】平成19年12月13日(2007.12.13)
【国際特許分類】
【出願番号】特願2006−154548(P2006−154548)
【出願日】平成18年6月2日(2006.6.2)
【出願人】(000002299)清水建設株式会社 (2,433)
【Fターム(参考)】
【公開日】平成19年12月13日(2007.12.13)
【国際特許分類】
【出願日】平成18年6月2日(2006.6.2)
【出願人】(000002299)清水建設株式会社 (2,433)
【Fターム(参考)】
[ Back to top ]