
フォースフィードバックを有する操作装置
本発明は、操作装置、特にシフトバイワイヤ式に操作される変速機のための操作装置に関する。操作装置は、支承箇所(3,4)で回動可能又は旋回可能に支承される、位置センサ装置(9)を備える操作要素(1)と、フォースフィードバックを発生させる装置とを備える。フォースフィードバック装置は、操作要素(1)に作用する調節可能な反力要素(2)を備え、反力要素(2)は、制御可能に可変の粘度を有する流体を有する。本発明に係る操作装置は、反力要素(2)が、操作要素(1)の支承箇所(3,4)の、流体で満たされた支承ギャップ(5)により形成されていることを特徴とする。本発明は、フォースフィードバック装置の反力要素を例えば操作レバーのジョイントに省スペースに組み込むことを可能にする。フォースフィードバックを有する操作装置のコスト、構造的な手間及び所要スペースは、本発明により決定的に削減される。機械的な操作レバーの感覚のリアルなエミュレーションが実現可能である。

【発明の詳細な説明】
【技術分野】
【0001】
本発明は、請求項1の上位概念部に記載の、変速機(Gangwechselgetriebe)、例えばシフトバイワイヤ操作を行う自動変速機又は手動変速機のための操作装置、つまり、操作装置、特にシフトバイワイヤ式の変速機のシフト段を選択するための操作装置であって、ソケットハウジングと、少なくとも1つの支承箇所で回動可能又は旋回可能に支承される、位置センサ装置を備える機械的な操作要素、特に操作レバーと、フォースフィードバック装置とを備え、該フォースフィードバック装置が、前記操作レバーに作用する調節可能な反力要素を備え、該反力要素が、制御可能に可変の粘度を有する流体を有する形式のものに関する。
【0002】
自動車の変速機は、一般に、運転者の手の届く範囲に配置された操作装置によりシフトあるいは制御される。通常、このために、シフトレバー又はセレクトレバー等の操作要素が使用され、例えば自動車のフロントシート間、又はコックピットのその他の領域内に配置されている。
【0003】
その際、人間工学及び安全上の理由から特に、運転者に対して、場合によっては生じ得る目下許容できないシフト状態か、又は要求されたシフト動作の経過が、適当なシフト抵抗又はロックの形で、操作レバーにおいてハプティック(haptisch)に、つまり感覚的あるいは触覚的に明瞭に知覚可能に通知されることが要求される。このようにしてのみ、運転者が、例えば、回転数及び速度に依存したシンクロロック(Synchronsperre)を有するフルシンクロ型の機械式の手動変速機から、あるいは係止機構及びシフトロックを有する自動変速機の従来慣用の操作から知るように、しかも慣れるように、感覚的なシフト操作を実現することができる。
【0004】
それゆえ、いずれにしても、運転者に対して、変速機操作の際に、変速機の目下のシフト状態若しくは運転状態又はシフト完了についての触覚を介した明確なフィードバックが伝達されることが必要である。
【0005】
しかし、変速機の電気的な操作又はシフトバイワイヤ式の操作の場合、機械的な連結が、もはや、パッセンジャルーム内の操作レバーと、エンジンルーム内の自動車変速機との間に存在しない。むしろ、操作装置から自動車変速機へのシフト命令の伝達は、シフトバイワイヤ式の変速機の場合、電気的又は電子的な信号と、引き続いて行われる、変速機におけるシフト命令の、大抵の場合、電気液圧式の変換とによってなされる。しかし、変速機のアクチュエータと操作レバーとの間に機械的な接続がないことは、変速機状態、場合によっては生じ得る変速機シフトロック又は許容できないシフト命令が、もはや直接、かつ運転者にとって知覚可能に操作レバーの状態に反映され得ないことにつながる。
【0006】
これにより、運転者は、シフトバイワイヤ式に制御される変速機では、シフトレバー位置、走行段あるいはシフト命令が、目下の走行状態において場合によっては許容できず、ひいては選択されるべきではないことを、操作レバーにおいて知覚可能にロックされる所定のシフト位置に基づいて、問題なく認識することはできない。シフトバイワイヤ式の操作の場合は、変速機による運転者のシフト命令の実際の実行を、操作レバーに反映しない。それというのも、運転者は、シフト操作の経過あるいは完了をこれにより、例えば係止機構及び変速機シンクロロックを有する機械式に操作される手動変速機から慣れているようには、感覚的に知覚可能に認識することができないからである。
【0007】
これにより、操作したい変速機の状態に基づいて、かつ自動車におけるその他の状態因子、例えばエンジン回転数、車両速度、クラッチ位置等に基づいて、シフトバイワイヤ式に制御される変速機において必要な感覚的なフィードバックを実現するために、操作レバーの運動を変速機状態に応じてアクティブに制御して制限するか、遅延するか、又は完全に阻止することが必要である。
【0008】
こうしてのみ、運転者に対して、操作レバーを握った際に、シフトバイワイヤ式に制御される変速機においても感覚的に知覚可能に、例えば、運転者のシフト希望が、自動車の目下の速度に基づいて又は変速機の目下の運転状態に基づいて許容できず、これによりロックされていることを伝えることができる。これにより、シフトバイワイヤ式の変速機により目下実現不能な、変速機電子ユニットにより認識され、それにより操作装置から変速機に伝達されないシフト命令が、操作レバーにおいてそれにもかかわらず入れられてしまうことも回避される。
【0009】
さらに、操作レバーにおけるこのような動作機構は、運転者がシフトバイワイヤ式に制御される変速機においても、シフトレバーにおける個々のギヤ段のシフトが特に回転数あるいは速度に基づいて知覚可能に操作レバーにおける相応の反力変化を生じる、機械式に操作される変速機、例えば伝達リンク機構を備える手動変速機と同様の感覚的なフィードバックを受けることが望ましい場合に必要である。
【0010】
例えばドイツ連邦共和国特許出願公開第19848191号明細書に記載されているように、従来技術では、運転者による操作要素の操作時に、変速機におけるその都度の状態変化に付随して生じる操作要素における反力をシミュレートすることができるように制御装置により制御される、電子式に制御可能な力発生要素あるいは運動ダンパを、操作要素に設けることによって、変速機のための操作要素において相応の感覚を実現することが試みられている。
【0011】
しかし、この従来技術から公知の、電子式に制御可能な運動ダンパを備える操作装置は、この刊行物の思想に基づく運動ダンパが、付加的な構成群として、操作レバーの領域内あるいは操作装置のハウジング内に格納されなければならない点で不都合である。このことは、付加的な構造的な手間に至り、かつ別個の組付けスペースを必要とする。この組付けスペースは、現代の自動車変速機のためのますます小型化する傾向にある操作装置において、しばしば提供することができない。加えて、この刊行物においてやはり公知の戻し力発生は、この刊行物の思想によれば、アクチュエータ又は駆動装置を必要とする。アクチュエータ又は駆動装置は、かなりのエネルギ消費及び付加的な所要スペースを必然的に伴う。
【0012】
これらの背景から、本発明の課題は、従来技術の上述の欠点を解決した、ハプティックエミュレーション(Haptikemulation)のための、特に変速機の電気的あるいは電子的なシフトバイワイヤ式の操作のためのフォースフィードバック装置を備える操作装置を提供することである。操作装置は、特に、省スペース、簡単な構造、ひいては安価であることが望ましい。さらに、機械的に係止される操作レバーの感覚の、信頼の置けるリアルなエミュレーションが可能であることが望ましい。
【0013】
この課題は、請求項1に記載の特徴を備える操作装置、つまり、操作装置、特にシフトバイワイヤ式の変速機のシフト段を選択するための操作装置であって、ソケットハウジングと、少なくとも1つの支承箇所で回動可能又は旋回可能に支承される、位置センサ装置を備える機械的な操作要素、特に操作レバーと、フォースフィードバック装置とを備え、該フォースフィードバック装置が、前記操作レバーに作用する調節可能な反力要素を備え、該反力要素が、制御可能に可変の粘度を有する流体を有する形式のものにおいて、前記反力要素が、前記操作要素の前記支承箇所の、前記流体で満たされた支承ギャップにより形成されていることを特徴とする、操作装置により解決される。
【0014】
有利な態様は、従属請求項に係る発明である。好ましくは、前記支承箇所が、ジョイントボール及びボールシェルを備えるボールジョイントにより形成されている。好ましくは、前記ジョイントボールが、前記操作要素に結合されており、前記ボールシェルが、当該操作装置の前記ソケットハウジングに結合されている。好ましくは、前記制御可能に可変の粘度を有する流体が、MR流体であり、前記支承箇所の領域に、該支承箇所の前記支承ギャップ内に磁界を発生させるためのコイル装置が配置されている。好ましくは、前記支承箇所が、ボールジョイントにより形成されており、前記コイル装置が、互いに略垂直な磁界方向を有する、互いに独立的に制御可能な少なくとも2つの磁界を形成するために設けられている。好ましくは、前記フォースフィードバック装置が、アクチュエータを備える。好ましくは、前記調節可能な反力要素が、制御特性マップに基づいて、反力を発生させるために設けられており、前記アクチュエータが、特性マップに基づいて、前記操作レバーを作動させるために設けられている。好ましくは、前記アクチュエータが、電気的なサーボギヤモータである。前記反力要素及び/又は前記アクチュエータが、振動を発生させるために設けられている。
【0015】
それ自体まず公知の形式で、本発明に係る操作装置は、ソケットハウジング及び操作要素、例えば操作レバーを備え、操作要素は、ソケットハウジングに配置される支承箇所を中心として回動可能あるいは旋回可能である。さらに、やはり自体公知の形式で、操作装置は、フォースフィードバック装置を備え、フォースフィードバック装置は、操作レバーに作用する、電子制御されて調節可能な、反力を形成するためのエレメントを備える。この反力要素は、制御可能に可変の粘度を有する流体を含む。
【0016】
ただし、本発明に係る操作装置は、反力要素が、操作要素の支承箇所の、流体で満たされた支承ギャップにより形成されていることを特徴としている。
【0017】
こうして、従来技術では制御可能なダンパ装置の形態で別体の構成部分として必要な反力要素を省略することができるか、あるいは反力要素の機能を、極端に省スペースにジョイント内、例えば操作レバーのジョイント内に組み込むことができる。これにより、フォースフィードバックを有する操作装置のためのコスト、構造的な手間及び必要とされる組付けスペースは、本発明において決定的に削減される。
【0018】
本発明は、まず、反力要素をなすために必要な、流体で満たされた支承ギャップが実現可能である限り、操作要素のジョイントが構造的にどのように形成されているか、又は操作装置のソケット内にどのように配置されているかにかかわらず実現される。本発明の特に有利な態様では、操作要素の支承箇所が、しかし、ジョイントボール及びボールシェルを備えるボールジョイントにより形成されている。流体で満たされた支承ギャップは、ジョイントボール及びボールシェルの表面により規定されている。有利には、ボールジョイントのジョイントボールが、操作要素に結合されており、ボールシェルが、操作装置のソケットハウジングに結合されている。
【0019】
この態様は、操作要素のための原理的に任意の運動あるいは切換パターンが実現可能であるという特別な利点を有する。換言すれば、このように操作要素のボールジョイントに組み込まれた唯一の反力要素だけで、機械的な操作レバーの感覚が、一方向の操作方向に沿ってだけでなく(一次元)、任意の操作方向に沿って(二次元)シミュレートされる。
【0020】
こうして、特に変速機のためのシフトレバーあるいはセレクトレバーの分野のために、このような操作要素において任意のシフトパターンが純粋にソフトウエア側で実現可能であるか、あるいはその感覚を自由にプログラミング可能にエミュレート可能である。これにより、1つの同じ操作装置が、選択的に、並んで配置された複数のシフトゲートを備える従来慣用の変速機操作の感覚か、又は主として1つのシフトゲートに沿って配置されるセレクトレバー位置を有する自動変速機のセレクトレバーの感覚を、運転者に提供することができる。これにより、運転者の好みで、操作要素は、純粋にソフトウエア側で、例えば手動変速機と自動変速機との間を行き来するように切り換えられてもよい。例えばティップ操作/ステップ切換又は無段の切換のような別の任意の切換パターンもこうして実現される。
【0021】
このためには、リアルタイムで、操作要素あるいはセレクトレバーの位置及びその都度の運動方向を求め、これらの両値に基づいて反力要素、つまり流体で満たされたボールジョイントを、操作者に機械的なシフトゲートの印象あるいは操作要素の適当に制限された可動性の印象が生じるように制御するだけでよい。操作者が操作要素を、許容された一方向に沿って(つまり、例えば従来慣用の変速機操作のシミュレートされたシフトゲートの1つに沿って)動かしているときは、ボールジョイントは、反力が形成されないか、又は形成されても僅かにすぎないように制御される。他方、許容された方向に対して横方向の運動が開始すると、ボールジョイントは、制御により即座に適当により高い反力がボールジョイント内に惹起されるように制御される。また、(シミュレートされた)シフトゲートの1つに沿った許容され得る運動中、機械的なシフトレバーあるいはセレクトレバーの係止のシミュレーションは、操作者に操作要素の運動の際に種々異なる係止段あるいは係止位置が感覚的に伝達されるように行われることができる。こうして、例えば自動車の自動変速機における走行状態に基づいたセレクトレバーロックも、このために特に機械的なロック装置をセレクトレバーの領域に設ける必要なしに、フレキシブルに実現される。
【0022】
操作要素の許容できない運動を、操作要素のロックあるいは操作要素のジョイント内での強い反力の形成により回避する代わりに、反力要素は、許容できない運動の開始時に操作要素の知覚可能な脈動がなされるように制御されてもよい。こうして、これにより、操作者の操作希望が目下のシステム状態において実行不能であるか、又は操作者が操作要素を許容できない方向に動かそうとしたことが、操作者に感覚的に知覚可能に伝達される。
【0023】
本発明は、まず、どのように、かつどの物理的効果により、流体の粘度の変化がなされるかにかかわらず実現される。こうして、例えば、印加される電界に基づいてその粘度を変化させることが可能なER流体を使用することが可能であるが、これに限定されるものではない。
【0024】
本発明の特に有利な態様では、しかし、MR流体が使用される。この場合、ボールジョイントの領域には、ボールジョイントの支承ギャップ内に磁界を発生させるためのコイル装置が配置されている。MR流体及びコイル装置の使用は、所望される可変の反力形成が、磁気レオロジー原理(magnetorheologisches Prinzip)に基づいて、特に簡単かつ高信頼性になされる点で有利である。
【0025】
本発明の別の有利な態様では、支承箇所が(既に上述したように)やはりボールジョイントにより形成されている。その際、コイル装置はしかし、互いに無関係に制御可能な少なくとも2つの磁界を形成するように調整されている。互いに無関係に制御可能な両磁界は、実質的に互いに直交する磁界方向を有する。ボールジョイントとして形成された反力要素と、互いに無関係に制御可能な、それぞれ異なる空間方向に沿って配向された2つの磁界との組み合わせは、こうしてそれぞれ異なる運動方向のためのそれぞれ異なる反力が同時に形成される点で有利である。こうして、操作要素あるいはセレクトレバーは、例えば、(バーチャルな)シフトゲートに沿ってスムーズに案内され得る一方で、同時に、シフトゲートに対して横方向の側方運動は、レバーに作用する相応の、より高い側方の反力によって阻止され得る。
【0026】
それぞれ異なる運動方向のための、互いに独立的に制御可能な複数の磁界を使用する代わりに、許容できない方向(つまり、例えばシフトゲートに対して横方向)に沿った操作要素の可動性は、その代わりに、純粋に機械的に、例えばシフトゲートによって阻止されてもよい。この場合、反力要素は、主として典型的な係止パターンあるいは切換力変化を形成するために、及び場合によっては目下許容できないレバー位置を阻止するために役立つ。
【0027】
本発明の別の有利な態様では、操作装置は、フォースフィードバック装置がさらにアクチュエータを備えることを特徴としている。このことは、こうして反力が操作要素において形成されるだけでなく、操作要素が付加的にアクティブにアクチュエータにより可動とされる点で有利である。後者は、特に、操作者が操作要素を、(バーチャルに)係止される位置のいずれにも相当しない位置で解放したときや、操作要素が、例えば自動Pによってパークロックが自動的に入れられた場合に、変速機の変更されたシフト状態に移行されるべきときに重要である。
【0028】
その際、フォースフィードバック装置の調節可能な反力要素は、例えば制御特性マップの使用下で、有利には、操作者の手により加えられた力に抗して反力を発生させるように調整されている。これに対してアクチュエータは、やはり制御特性マップに基づいて、有利には専ら操作レバーを作動させるように調整されている。これにより、こうして、力発生要素とアクチュエータとの間での規定された役割分担がなされ、操作要素における反力は、専ら力発生要素により形成され、操作要素の作動は、専らアクチュエータにより形成される。
【0029】
これにより、アクチュエータは、フォースフィードバックの意味で、冒頭で述べた従来技術とは異なり、(反力形成が本発明では反力要素によりレバー支承部において行われるので)反力形成のために使用されず、専ら、操作レバー(広範な力自由度の場合)をアクティブに作動させるために役立つ。
【0030】
こうして、機械的な操作レバーの感覚は、極めてリアルに、かつ実質的に完全にシミュレートされ、かつ模倣される。特に、調節可能な力発生要素とアクチュエータとを組み合わせたことにより、操作要素の機械的な係止の感覚も完全にリアルに、このような機械的な係止機構が実際には存在していなくても模倣可能である。その際、調節可能な力発生要素は、特に、操作要素の係止のリアルな反力(あるいは車両変速機の反力)の形成を担当する一方、アクチュエータは、特に、操作レバーが解放されると直ちに、あるいは操作者により言及すべきほどの力がもはや操作レバーに加えられなくなると直ちに、操作レバーの、バーチャルな係止ゲートの凹部へのリアルな跳ね戻しを担当する。
【0031】
このことは、操作レバーの作動及びハプティックエミュレーションのための最小のエネルギ消費が達成されると同時に、アクチュエータが最小に寸法設定され得る点においても有利である。それというのも、従来技術とは異なり、アクチュエータが本発明では操作レバーの運動を発生させるためだけに使用され、操作レバーにおける言及すべきほどの反力を発生させるためには使用されず、操作者により加えられる操作力に抗するすべての反力が、実質的に、制御可能な力発生要素によってのみ形成可能であるからである。
【0032】
しかし、操作者が言及すべきほどの操作力をもはやレバーに及ぼさなくなるか、あるいはレバーを解放すると直ちに、制御及び格納された特性マップによって、力発生要素からアクチュエータへの制御の適当な即座の切換をなすことができ、アクチュエータによって、変速機あるいは操作装置の(実際にはまったく存在しない)係止ゲートの直近の凹部内への、操作レバーの復帰をシミュレートすることができる。バーチャルな係止ゲートの凹部内への操作レバーの復帰時に場合によっては必要なブレーキ力の発生、及び操作レバーの停止状態まで必要な運動減衰は、その際、相応に、再び力発生要素によって請け負われることができる。
【0033】
これにより、例えば、係止の固さだけでなく、係止凹部の数及び係止凹部相互の間隔を自由に可変に、詳細に言えばソフトウエアだけにより、あるいは反力要素及びアクチュエータの制御のための適当な特性マップの選択により設定可能な可変の係止を、操作レバーに装備することも可能である。
【0034】
例えば、係止点の数も、係止点の間隔及び固さも、ソフトウエア側でそれぞれの使用者あるいは運転者の好みに関して設定可能である。係止の力‐ストローク‐曲線も、例えば手動変速機又は自動変速機のためのセレクトレバー感覚の特性も、こうして純粋にソフトウエア側で自由にプログラミング可能に構成される。その際、格納された特性マップによって、反力を発生させるための力発生要素の適当な制御がなされる(使用者の手が力をレバーに加えている間)か、又はアクチュエータの適当な制御がなされる(使用者の手が言及すべきほどの力をもはやレバーに加えなくなると直ちに。これによりレバーはその係止位置に復帰する)。
【0035】
こうして、それどころか、運転者に希望又は好みに応じて、あるときには、機械的に操作される手動変速機の感覚を提供し、またあるときには、自動変速機又は無段のシフトの感覚を提供することが可能である。
【0036】
しかし、反力要素による力発生は、アクチュエータにより、アクティブに動作支援されてもよい。これにより、このような場合、アクチュエータは、操作要素の自動の運動(つまり、例えばセレクトレバーの、係止位置へのリアルな復帰)を担当するとともに、反力発生、例えば係止の感覚的なシミュレーションの支援、又は現在許容できないセレクトレバー位置が阻止されなければならない場合の支援を担当する。
【0037】
本発明は、どのようにアクチュエータが構造的に形成され、かつ配置されるかにかかわらずに実現される。しかし、別の有利な態様では、操作装置のアクチュエータが、電気的なサーボギヤモータ又はサーボリニアアクチュエータである。これにより、省スペース、頑強かつ安価な構造が達成される。アクチュエータは、係止ゲートの(バーチャルな)凹部内への操作レバーの運動あるいは戻し案内だけを担当する一方、反力の発生の役割は、専ら、制御される力発生要素によって請け負われることができるので、従来技術とは異なり、比較的小型かつ軽量のアクチュエータを使用することが可能である。
【0038】
本発明の別の有利な態様では、反力要素及び/又はアクチュエータが、振動を発生させるように調整されている。こうして、知覚可能な振動が操作要素に、アクティブな振動の形態でアクチュエータにより導入されるか、又は許容できない運動の導入を操作者が試みると直ちに、パッシブな脈動として、反力要素の、急速に周期的に変動する減衰特性の形態で導入される。これにより、操作者又は運転者に、例えば、自動車の目下の走行状態又は自動車変速機の目下の運転状態では許容できないシフト動作を実施しようとした場合に警告を行うことができる。
【0039】
以下、本発明について、実施の形態を示すにすぎない図面を参照しながら詳細に説明する。
【図面の簡単な説明】
【0040】
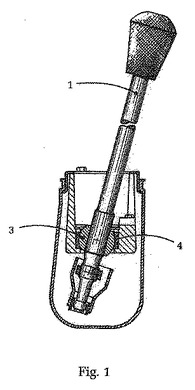
【図1】従来技術に係るボールジョイントを備える操作レバーの概略的な部分断面図である。
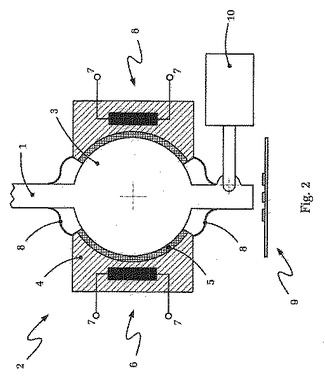
【図2】調節可能な力発生要素及びアクチュエータを備える本発明に係る操作装置の一実施の形態の作用原理の概略的な断面図である。
【0041】
図1に、まず、従来技術に係るボールジョイントを備える公知の操作レバー1を示す。特に、操作レバー1が、ジョイントボール3及びボールシェル4を備えるボールジョイントを有していることが看取される。操作レバー1は、これにより、操作レバー1の運動領域内で、さしあたり、ボールジョイントを中心として全方向に旋回可能である。
【0042】
図2は、著しく概略的な原理図で、本発明に係る操作装置の、図1に示したボールジョイントにさしあたり原理的に対応したボールジョイントを示す。
【0043】
図2には、まず、やはり、本図においては一部のみ(操作レバー1の下側の領域又はジョイント領域)を示した操作レバー1が看取される。操作レバー1は、やはり、ボールジョイントの形態で形成された支承部によって、操作装置の、(本図には図示されていない)ソケットに結合されている。図2に示したボールジョイントは、まず、操作レバー1に配置されたジョイントボール3と、(図示されていない)ソケットに結合されるボールシェル4とを備える。
【0044】
さらに、図2の図示は、本発明において、制御可能な反力要素2と、さらには操作レバー1に作用するアクチュエータ10とを含む。ジョイントボール3の外側の表面と、ボールシェル4の内側の表面との間には、本実施の形態では、ボールジョイントの支承ギャップ5が存在する。支承ギャップ5は、図2に示した実施の形態では、MR流体5で満たされている。MR流体5は、流体5の粘度が流体5に作用する磁界強度に基づいて変化可能であるように形成されている。
【0045】
MR流体5の粘度の変化のために必要な磁界を形成するために、ジョイントボール3と同様に、磁界の広がりを妨げないように有利にはプラスチックから製造されているボールシェル4の領域に、マグネットコイル装置6が配置されている。これにより、マグネットコイル装置6の端子7に電流を導入することによって、広範に可変の磁界が、支承ギャップあるいは流体5の領域内に形成される。こうして、ボールジョイントの機械的な減衰・緩衝は、例えばソフトウエア側の制御により、流体5がマグネットコイル装置6の磁界によって低粘度(ジョイントボール3あるいは操作レバー1の軽快な可動性)と、高粘度又は略固体(ジョイントボール3の高い運動抵抗又は操作レバー1のロック)との間で調節されることによって、広範に可変にかつリアルタイムに制御可能である。
【0046】
MR流体5を保護するために、ボールジョイントの、操作レバー1の両貫通部の領域には、それぞれ、弾性的なシールブーツ8が設けられている。さらに、操作装置の制御電子装置によって操作レバー1の現在の位置を求めるために、センサ装置が設けられている。センサ装置は、図2には、基板9として概略的に示されている。
【0047】
操作装置の、図2に示した実施の形態では、MR流体5により形成される反力要素2に対して付加的に、アクチュエータ10も設けられている。アクチュエータ10は、操作レバー1の、ソフトウエア制御されるアクティブな作動のために役立つ。アクチュエータ10により、操作レバー1は、例えば自動P、つまり車両を離れる際に自動的に作動するパークロックの場合に、特に自動的に所定のレバー位置へと移行可能である。
【0048】
さらにアクチュエータ10は、セレクトレバーの係止の感覚あるいは触覚を特にリアルに模倣することを助成するために使用される。その際、MR流体5によってボールジョイント3,4内に形成される反力要素2は、操作時に機械的な係止を形成する反力をシミュレートするために役立つのに対し、アクチュエータ10は、操作レバー1を離したときの、係止のそれぞれのセンター位置への操作レバー1のリアルな復帰をシミュレートする。
【0049】
これにより、反力要素2は、係止装置により生じるか又は伝動装置あるいは変速機内に生じる反力のシミュレーションを担当し、場合によっては、許容できない切換命令あるいはシフト命令の際の操作レバー1のロック、又は操作レバーの許容できない運動の際の適当な脈動の発生までを担当している。これに対してアクチュエータ10は、有利には、操作者又は運転者が言及すべき程の力を操作レバー1に加えることなく、操作レバー1を動かす必要があるときに初めて作動する。このことは、特に、レバー1が放されてはいても、まだ正確には(バーチャルな)係止位置にないような場合に該当する。この場合、アクチュエータ10は、操作装置の制御電子装置によって、操作レバー1がアクチュエータ10により、対応するバーチャルな係止位置の中央に戻されるように制御される。こうして、操作者又は運転者に対して、機械的な係止が実際には全く存在していないにもかかわらず、機械的に係止される操作レバーの挙動が正確に提供される。
【0050】
さらにアクチュエータ10は、特定の理由から操作レバー1の切換位置あるいはシフト位置と、伝動装置あるいは変速機内の実際の切換状態あるいはシフト状態との間の不一致が発生したような場合に、操作レバー1を正しい切換位置あるいはシフト位置へと移動させるためにも使用可能である。この状況は、例えば、運転者がパークロックを手動でかけることを忘れて、例えばイグニッションキーを引き抜いた際又は自動車を離れた際に、トランスミッション内で自動Pにより自動的にパークロックが入れられた場合に発生し得る。この場合、操作レバー1は、アクチュエータ10によって自動的にパークロック位置へと移動する。その結果、運転者にしてみれば、セレクトレバー位置は、自動車に戻ってきたとき、セレクトレバーが運転者によって以前に走行段位置のままにされたとしても、トランスミッション内で自動的に入れられたパークロックと再び一致していることになる。
【0051】
単安定性(monostabil)の操作レバーの感覚を表現するためにも、図2に示した実施の形態は適している。この場合、力発生要素2とアクチュエータ10とからなる組み合わせは、一方では、やはり、操作装置又は伝動装置若しくは変速機内での係止、場合によっては切換ロック若しくはシフトロック又は切換抵抗若しくはシフト抵抗のリアルなシミュレーションのために役立つ。他方、アクチュエータ10は、この場合、操作レバー1をニュートラル位置から変位させ、手を放した後に、再びニュートラル位置へ戻すためにも使用可能である。このことは、機械的な単安定性の操作レバーの挙動に相当する。
【0052】
これにより、まとめられて1つの共通の制御電子装置によって制御される両要素、つまり反力要素2とアクチュエータ10とは、純粋にソフトウエア側で、ほぼ任意のセレクトレバー係止又は切換パターン若しくはシフトパターンを最大限リアルに模倣することを可能とする。
【0053】
これにより、結果として、本発明によって、機械的な係止が一切存在しないにもかかわらず、運転者に対して機械的に係止される操作レバーの挙動を提供することを、僅かな構造的な手間で可能にする、フォースフィードバックを有する操作装置、特にシフトバイワイヤ式に操作される変速機のための、フォースフィードバックを有する操作装置が提供されることが明らかである。加えて、バーチャルな係止は、係止点の数及び間隔に関して並びに係止の固さに関して自由に制御可能に変更可能である。また、知覚可能な脈動が、フィードバックとして操作要素に導入可能である。これにより、変速機のための操作装置の感覚及び運動特性を純粋にソフトウエア側で広範に変更し、かつ利用者の好みに適合させることができる。それどころか、操作装置の感覚の、例えばオートマチックセレクトレバーと古典的な手動変速機のためのシフトレバーとの間での、純粋にソフトウエア制御される切換が実現される。
【0054】
これにより、本発明は、特に自動車のトランスミッション操作の分野における要求の多い用途において、組付けスペース及びコストの効率、人間工学並びに操作快適性の改良に関して、多大な貢献を果たし、かつこれにより、手間のかかる機械的なコンポーネントをソフトウエアに代替する過程での、大幅な、明確な一歩をなしている。
【符号の説明】
【0055】
1 操作レバー
2 反力要素
3 ジョイントボール
4 ボールシェル
5 支承ギャップ、MR流体
6 マグネットコイル装置
7 電気的な端子
8 シールブーツ
9 位置センサ装置
10 アクチュエータ
【技術分野】
【0001】
本発明は、請求項1の上位概念部に記載の、変速機(Gangwechselgetriebe)、例えばシフトバイワイヤ操作を行う自動変速機又は手動変速機のための操作装置、つまり、操作装置、特にシフトバイワイヤ式の変速機のシフト段を選択するための操作装置であって、ソケットハウジングと、少なくとも1つの支承箇所で回動可能又は旋回可能に支承される、位置センサ装置を備える機械的な操作要素、特に操作レバーと、フォースフィードバック装置とを備え、該フォースフィードバック装置が、前記操作レバーに作用する調節可能な反力要素を備え、該反力要素が、制御可能に可変の粘度を有する流体を有する形式のものに関する。
【0002】
自動車の変速機は、一般に、運転者の手の届く範囲に配置された操作装置によりシフトあるいは制御される。通常、このために、シフトレバー又はセレクトレバー等の操作要素が使用され、例えば自動車のフロントシート間、又はコックピットのその他の領域内に配置されている。
【0003】
その際、人間工学及び安全上の理由から特に、運転者に対して、場合によっては生じ得る目下許容できないシフト状態か、又は要求されたシフト動作の経過が、適当なシフト抵抗又はロックの形で、操作レバーにおいてハプティック(haptisch)に、つまり感覚的あるいは触覚的に明瞭に知覚可能に通知されることが要求される。このようにしてのみ、運転者が、例えば、回転数及び速度に依存したシンクロロック(Synchronsperre)を有するフルシンクロ型の機械式の手動変速機から、あるいは係止機構及びシフトロックを有する自動変速機の従来慣用の操作から知るように、しかも慣れるように、感覚的なシフト操作を実現することができる。
【0004】
それゆえ、いずれにしても、運転者に対して、変速機操作の際に、変速機の目下のシフト状態若しくは運転状態又はシフト完了についての触覚を介した明確なフィードバックが伝達されることが必要である。
【0005】
しかし、変速機の電気的な操作又はシフトバイワイヤ式の操作の場合、機械的な連結が、もはや、パッセンジャルーム内の操作レバーと、エンジンルーム内の自動車変速機との間に存在しない。むしろ、操作装置から自動車変速機へのシフト命令の伝達は、シフトバイワイヤ式の変速機の場合、電気的又は電子的な信号と、引き続いて行われる、変速機におけるシフト命令の、大抵の場合、電気液圧式の変換とによってなされる。しかし、変速機のアクチュエータと操作レバーとの間に機械的な接続がないことは、変速機状態、場合によっては生じ得る変速機シフトロック又は許容できないシフト命令が、もはや直接、かつ運転者にとって知覚可能に操作レバーの状態に反映され得ないことにつながる。
【0006】
これにより、運転者は、シフトバイワイヤ式に制御される変速機では、シフトレバー位置、走行段あるいはシフト命令が、目下の走行状態において場合によっては許容できず、ひいては選択されるべきではないことを、操作レバーにおいて知覚可能にロックされる所定のシフト位置に基づいて、問題なく認識することはできない。シフトバイワイヤ式の操作の場合は、変速機による運転者のシフト命令の実際の実行を、操作レバーに反映しない。それというのも、運転者は、シフト操作の経過あるいは完了をこれにより、例えば係止機構及び変速機シンクロロックを有する機械式に操作される手動変速機から慣れているようには、感覚的に知覚可能に認識することができないからである。
【0007】
これにより、操作したい変速機の状態に基づいて、かつ自動車におけるその他の状態因子、例えばエンジン回転数、車両速度、クラッチ位置等に基づいて、シフトバイワイヤ式に制御される変速機において必要な感覚的なフィードバックを実現するために、操作レバーの運動を変速機状態に応じてアクティブに制御して制限するか、遅延するか、又は完全に阻止することが必要である。
【0008】
こうしてのみ、運転者に対して、操作レバーを握った際に、シフトバイワイヤ式に制御される変速機においても感覚的に知覚可能に、例えば、運転者のシフト希望が、自動車の目下の速度に基づいて又は変速機の目下の運転状態に基づいて許容できず、これによりロックされていることを伝えることができる。これにより、シフトバイワイヤ式の変速機により目下実現不能な、変速機電子ユニットにより認識され、それにより操作装置から変速機に伝達されないシフト命令が、操作レバーにおいてそれにもかかわらず入れられてしまうことも回避される。
【0009】
さらに、操作レバーにおけるこのような動作機構は、運転者がシフトバイワイヤ式に制御される変速機においても、シフトレバーにおける個々のギヤ段のシフトが特に回転数あるいは速度に基づいて知覚可能に操作レバーにおける相応の反力変化を生じる、機械式に操作される変速機、例えば伝達リンク機構を備える手動変速機と同様の感覚的なフィードバックを受けることが望ましい場合に必要である。
【0010】
例えばドイツ連邦共和国特許出願公開第19848191号明細書に記載されているように、従来技術では、運転者による操作要素の操作時に、変速機におけるその都度の状態変化に付随して生じる操作要素における反力をシミュレートすることができるように制御装置により制御される、電子式に制御可能な力発生要素あるいは運動ダンパを、操作要素に設けることによって、変速機のための操作要素において相応の感覚を実現することが試みられている。
【0011】
しかし、この従来技術から公知の、電子式に制御可能な運動ダンパを備える操作装置は、この刊行物の思想に基づく運動ダンパが、付加的な構成群として、操作レバーの領域内あるいは操作装置のハウジング内に格納されなければならない点で不都合である。このことは、付加的な構造的な手間に至り、かつ別個の組付けスペースを必要とする。この組付けスペースは、現代の自動車変速機のためのますます小型化する傾向にある操作装置において、しばしば提供することができない。加えて、この刊行物においてやはり公知の戻し力発生は、この刊行物の思想によれば、アクチュエータ又は駆動装置を必要とする。アクチュエータ又は駆動装置は、かなりのエネルギ消費及び付加的な所要スペースを必然的に伴う。
【0012】
これらの背景から、本発明の課題は、従来技術の上述の欠点を解決した、ハプティックエミュレーション(Haptikemulation)のための、特に変速機の電気的あるいは電子的なシフトバイワイヤ式の操作のためのフォースフィードバック装置を備える操作装置を提供することである。操作装置は、特に、省スペース、簡単な構造、ひいては安価であることが望ましい。さらに、機械的に係止される操作レバーの感覚の、信頼の置けるリアルなエミュレーションが可能であることが望ましい。
【0013】
この課題は、請求項1に記載の特徴を備える操作装置、つまり、操作装置、特にシフトバイワイヤ式の変速機のシフト段を選択するための操作装置であって、ソケットハウジングと、少なくとも1つの支承箇所で回動可能又は旋回可能に支承される、位置センサ装置を備える機械的な操作要素、特に操作レバーと、フォースフィードバック装置とを備え、該フォースフィードバック装置が、前記操作レバーに作用する調節可能な反力要素を備え、該反力要素が、制御可能に可変の粘度を有する流体を有する形式のものにおいて、前記反力要素が、前記操作要素の前記支承箇所の、前記流体で満たされた支承ギャップにより形成されていることを特徴とする、操作装置により解決される。
【0014】
有利な態様は、従属請求項に係る発明である。好ましくは、前記支承箇所が、ジョイントボール及びボールシェルを備えるボールジョイントにより形成されている。好ましくは、前記ジョイントボールが、前記操作要素に結合されており、前記ボールシェルが、当該操作装置の前記ソケットハウジングに結合されている。好ましくは、前記制御可能に可変の粘度を有する流体が、MR流体であり、前記支承箇所の領域に、該支承箇所の前記支承ギャップ内に磁界を発生させるためのコイル装置が配置されている。好ましくは、前記支承箇所が、ボールジョイントにより形成されており、前記コイル装置が、互いに略垂直な磁界方向を有する、互いに独立的に制御可能な少なくとも2つの磁界を形成するために設けられている。好ましくは、前記フォースフィードバック装置が、アクチュエータを備える。好ましくは、前記調節可能な反力要素が、制御特性マップに基づいて、反力を発生させるために設けられており、前記アクチュエータが、特性マップに基づいて、前記操作レバーを作動させるために設けられている。好ましくは、前記アクチュエータが、電気的なサーボギヤモータである。前記反力要素及び/又は前記アクチュエータが、振動を発生させるために設けられている。
【0015】
それ自体まず公知の形式で、本発明に係る操作装置は、ソケットハウジング及び操作要素、例えば操作レバーを備え、操作要素は、ソケットハウジングに配置される支承箇所を中心として回動可能あるいは旋回可能である。さらに、やはり自体公知の形式で、操作装置は、フォースフィードバック装置を備え、フォースフィードバック装置は、操作レバーに作用する、電子制御されて調節可能な、反力を形成するためのエレメントを備える。この反力要素は、制御可能に可変の粘度を有する流体を含む。
【0016】
ただし、本発明に係る操作装置は、反力要素が、操作要素の支承箇所の、流体で満たされた支承ギャップにより形成されていることを特徴としている。
【0017】
こうして、従来技術では制御可能なダンパ装置の形態で別体の構成部分として必要な反力要素を省略することができるか、あるいは反力要素の機能を、極端に省スペースにジョイント内、例えば操作レバーのジョイント内に組み込むことができる。これにより、フォースフィードバックを有する操作装置のためのコスト、構造的な手間及び必要とされる組付けスペースは、本発明において決定的に削減される。
【0018】
本発明は、まず、反力要素をなすために必要な、流体で満たされた支承ギャップが実現可能である限り、操作要素のジョイントが構造的にどのように形成されているか、又は操作装置のソケット内にどのように配置されているかにかかわらず実現される。本発明の特に有利な態様では、操作要素の支承箇所が、しかし、ジョイントボール及びボールシェルを備えるボールジョイントにより形成されている。流体で満たされた支承ギャップは、ジョイントボール及びボールシェルの表面により規定されている。有利には、ボールジョイントのジョイントボールが、操作要素に結合されており、ボールシェルが、操作装置のソケットハウジングに結合されている。
【0019】
この態様は、操作要素のための原理的に任意の運動あるいは切換パターンが実現可能であるという特別な利点を有する。換言すれば、このように操作要素のボールジョイントに組み込まれた唯一の反力要素だけで、機械的な操作レバーの感覚が、一方向の操作方向に沿ってだけでなく(一次元)、任意の操作方向に沿って(二次元)シミュレートされる。
【0020】
こうして、特に変速機のためのシフトレバーあるいはセレクトレバーの分野のために、このような操作要素において任意のシフトパターンが純粋にソフトウエア側で実現可能であるか、あるいはその感覚を自由にプログラミング可能にエミュレート可能である。これにより、1つの同じ操作装置が、選択的に、並んで配置された複数のシフトゲートを備える従来慣用の変速機操作の感覚か、又は主として1つのシフトゲートに沿って配置されるセレクトレバー位置を有する自動変速機のセレクトレバーの感覚を、運転者に提供することができる。これにより、運転者の好みで、操作要素は、純粋にソフトウエア側で、例えば手動変速機と自動変速機との間を行き来するように切り換えられてもよい。例えばティップ操作/ステップ切換又は無段の切換のような別の任意の切換パターンもこうして実現される。
【0021】
このためには、リアルタイムで、操作要素あるいはセレクトレバーの位置及びその都度の運動方向を求め、これらの両値に基づいて反力要素、つまり流体で満たされたボールジョイントを、操作者に機械的なシフトゲートの印象あるいは操作要素の適当に制限された可動性の印象が生じるように制御するだけでよい。操作者が操作要素を、許容された一方向に沿って(つまり、例えば従来慣用の変速機操作のシミュレートされたシフトゲートの1つに沿って)動かしているときは、ボールジョイントは、反力が形成されないか、又は形成されても僅かにすぎないように制御される。他方、許容された方向に対して横方向の運動が開始すると、ボールジョイントは、制御により即座に適当により高い反力がボールジョイント内に惹起されるように制御される。また、(シミュレートされた)シフトゲートの1つに沿った許容され得る運動中、機械的なシフトレバーあるいはセレクトレバーの係止のシミュレーションは、操作者に操作要素の運動の際に種々異なる係止段あるいは係止位置が感覚的に伝達されるように行われることができる。こうして、例えば自動車の自動変速機における走行状態に基づいたセレクトレバーロックも、このために特に機械的なロック装置をセレクトレバーの領域に設ける必要なしに、フレキシブルに実現される。
【0022】
操作要素の許容できない運動を、操作要素のロックあるいは操作要素のジョイント内での強い反力の形成により回避する代わりに、反力要素は、許容できない運動の開始時に操作要素の知覚可能な脈動がなされるように制御されてもよい。こうして、これにより、操作者の操作希望が目下のシステム状態において実行不能であるか、又は操作者が操作要素を許容できない方向に動かそうとしたことが、操作者に感覚的に知覚可能に伝達される。
【0023】
本発明は、まず、どのように、かつどの物理的効果により、流体の粘度の変化がなされるかにかかわらず実現される。こうして、例えば、印加される電界に基づいてその粘度を変化させることが可能なER流体を使用することが可能であるが、これに限定されるものではない。
【0024】
本発明の特に有利な態様では、しかし、MR流体が使用される。この場合、ボールジョイントの領域には、ボールジョイントの支承ギャップ内に磁界を発生させるためのコイル装置が配置されている。MR流体及びコイル装置の使用は、所望される可変の反力形成が、磁気レオロジー原理(magnetorheologisches Prinzip)に基づいて、特に簡単かつ高信頼性になされる点で有利である。
【0025】
本発明の別の有利な態様では、支承箇所が(既に上述したように)やはりボールジョイントにより形成されている。その際、コイル装置はしかし、互いに無関係に制御可能な少なくとも2つの磁界を形成するように調整されている。互いに無関係に制御可能な両磁界は、実質的に互いに直交する磁界方向を有する。ボールジョイントとして形成された反力要素と、互いに無関係に制御可能な、それぞれ異なる空間方向に沿って配向された2つの磁界との組み合わせは、こうしてそれぞれ異なる運動方向のためのそれぞれ異なる反力が同時に形成される点で有利である。こうして、操作要素あるいはセレクトレバーは、例えば、(バーチャルな)シフトゲートに沿ってスムーズに案内され得る一方で、同時に、シフトゲートに対して横方向の側方運動は、レバーに作用する相応の、より高い側方の反力によって阻止され得る。
【0026】
それぞれ異なる運動方向のための、互いに独立的に制御可能な複数の磁界を使用する代わりに、許容できない方向(つまり、例えばシフトゲートに対して横方向)に沿った操作要素の可動性は、その代わりに、純粋に機械的に、例えばシフトゲートによって阻止されてもよい。この場合、反力要素は、主として典型的な係止パターンあるいは切換力変化を形成するために、及び場合によっては目下許容できないレバー位置を阻止するために役立つ。
【0027】
本発明の別の有利な態様では、操作装置は、フォースフィードバック装置がさらにアクチュエータを備えることを特徴としている。このことは、こうして反力が操作要素において形成されるだけでなく、操作要素が付加的にアクティブにアクチュエータにより可動とされる点で有利である。後者は、特に、操作者が操作要素を、(バーチャルに)係止される位置のいずれにも相当しない位置で解放したときや、操作要素が、例えば自動Pによってパークロックが自動的に入れられた場合に、変速機の変更されたシフト状態に移行されるべきときに重要である。
【0028】
その際、フォースフィードバック装置の調節可能な反力要素は、例えば制御特性マップの使用下で、有利には、操作者の手により加えられた力に抗して反力を発生させるように調整されている。これに対してアクチュエータは、やはり制御特性マップに基づいて、有利には専ら操作レバーを作動させるように調整されている。これにより、こうして、力発生要素とアクチュエータとの間での規定された役割分担がなされ、操作要素における反力は、専ら力発生要素により形成され、操作要素の作動は、専らアクチュエータにより形成される。
【0029】
これにより、アクチュエータは、フォースフィードバックの意味で、冒頭で述べた従来技術とは異なり、(反力形成が本発明では反力要素によりレバー支承部において行われるので)反力形成のために使用されず、専ら、操作レバー(広範な力自由度の場合)をアクティブに作動させるために役立つ。
【0030】
こうして、機械的な操作レバーの感覚は、極めてリアルに、かつ実質的に完全にシミュレートされ、かつ模倣される。特に、調節可能な力発生要素とアクチュエータとを組み合わせたことにより、操作要素の機械的な係止の感覚も完全にリアルに、このような機械的な係止機構が実際には存在していなくても模倣可能である。その際、調節可能な力発生要素は、特に、操作要素の係止のリアルな反力(あるいは車両変速機の反力)の形成を担当する一方、アクチュエータは、特に、操作レバーが解放されると直ちに、あるいは操作者により言及すべきほどの力がもはや操作レバーに加えられなくなると直ちに、操作レバーの、バーチャルな係止ゲートの凹部へのリアルな跳ね戻しを担当する。
【0031】
このことは、操作レバーの作動及びハプティックエミュレーションのための最小のエネルギ消費が達成されると同時に、アクチュエータが最小に寸法設定され得る点においても有利である。それというのも、従来技術とは異なり、アクチュエータが本発明では操作レバーの運動を発生させるためだけに使用され、操作レバーにおける言及すべきほどの反力を発生させるためには使用されず、操作者により加えられる操作力に抗するすべての反力が、実質的に、制御可能な力発生要素によってのみ形成可能であるからである。
【0032】
しかし、操作者が言及すべきほどの操作力をもはやレバーに及ぼさなくなるか、あるいはレバーを解放すると直ちに、制御及び格納された特性マップによって、力発生要素からアクチュエータへの制御の適当な即座の切換をなすことができ、アクチュエータによって、変速機あるいは操作装置の(実際にはまったく存在しない)係止ゲートの直近の凹部内への、操作レバーの復帰をシミュレートすることができる。バーチャルな係止ゲートの凹部内への操作レバーの復帰時に場合によっては必要なブレーキ力の発生、及び操作レバーの停止状態まで必要な運動減衰は、その際、相応に、再び力発生要素によって請け負われることができる。
【0033】
これにより、例えば、係止の固さだけでなく、係止凹部の数及び係止凹部相互の間隔を自由に可変に、詳細に言えばソフトウエアだけにより、あるいは反力要素及びアクチュエータの制御のための適当な特性マップの選択により設定可能な可変の係止を、操作レバーに装備することも可能である。
【0034】
例えば、係止点の数も、係止点の間隔及び固さも、ソフトウエア側でそれぞれの使用者あるいは運転者の好みに関して設定可能である。係止の力‐ストローク‐曲線も、例えば手動変速機又は自動変速機のためのセレクトレバー感覚の特性も、こうして純粋にソフトウエア側で自由にプログラミング可能に構成される。その際、格納された特性マップによって、反力を発生させるための力発生要素の適当な制御がなされる(使用者の手が力をレバーに加えている間)か、又はアクチュエータの適当な制御がなされる(使用者の手が言及すべきほどの力をもはやレバーに加えなくなると直ちに。これによりレバーはその係止位置に復帰する)。
【0035】
こうして、それどころか、運転者に希望又は好みに応じて、あるときには、機械的に操作される手動変速機の感覚を提供し、またあるときには、自動変速機又は無段のシフトの感覚を提供することが可能である。
【0036】
しかし、反力要素による力発生は、アクチュエータにより、アクティブに動作支援されてもよい。これにより、このような場合、アクチュエータは、操作要素の自動の運動(つまり、例えばセレクトレバーの、係止位置へのリアルな復帰)を担当するとともに、反力発生、例えば係止の感覚的なシミュレーションの支援、又は現在許容できないセレクトレバー位置が阻止されなければならない場合の支援を担当する。
【0037】
本発明は、どのようにアクチュエータが構造的に形成され、かつ配置されるかにかかわらずに実現される。しかし、別の有利な態様では、操作装置のアクチュエータが、電気的なサーボギヤモータ又はサーボリニアアクチュエータである。これにより、省スペース、頑強かつ安価な構造が達成される。アクチュエータは、係止ゲートの(バーチャルな)凹部内への操作レバーの運動あるいは戻し案内だけを担当する一方、反力の発生の役割は、専ら、制御される力発生要素によって請け負われることができるので、従来技術とは異なり、比較的小型かつ軽量のアクチュエータを使用することが可能である。
【0038】
本発明の別の有利な態様では、反力要素及び/又はアクチュエータが、振動を発生させるように調整されている。こうして、知覚可能な振動が操作要素に、アクティブな振動の形態でアクチュエータにより導入されるか、又は許容できない運動の導入を操作者が試みると直ちに、パッシブな脈動として、反力要素の、急速に周期的に変動する減衰特性の形態で導入される。これにより、操作者又は運転者に、例えば、自動車の目下の走行状態又は自動車変速機の目下の運転状態では許容できないシフト動作を実施しようとした場合に警告を行うことができる。
【0039】
以下、本発明について、実施の形態を示すにすぎない図面を参照しながら詳細に説明する。
【図面の簡単な説明】
【0040】
【図1】従来技術に係るボールジョイントを備える操作レバーの概略的な部分断面図である。
【図2】調節可能な力発生要素及びアクチュエータを備える本発明に係る操作装置の一実施の形態の作用原理の概略的な断面図である。
【0041】
図1に、まず、従来技術に係るボールジョイントを備える公知の操作レバー1を示す。特に、操作レバー1が、ジョイントボール3及びボールシェル4を備えるボールジョイントを有していることが看取される。操作レバー1は、これにより、操作レバー1の運動領域内で、さしあたり、ボールジョイントを中心として全方向に旋回可能である。
【0042】
図2は、著しく概略的な原理図で、本発明に係る操作装置の、図1に示したボールジョイントにさしあたり原理的に対応したボールジョイントを示す。
【0043】
図2には、まず、やはり、本図においては一部のみ(操作レバー1の下側の領域又はジョイント領域)を示した操作レバー1が看取される。操作レバー1は、やはり、ボールジョイントの形態で形成された支承部によって、操作装置の、(本図には図示されていない)ソケットに結合されている。図2に示したボールジョイントは、まず、操作レバー1に配置されたジョイントボール3と、(図示されていない)ソケットに結合されるボールシェル4とを備える。
【0044】
さらに、図2の図示は、本発明において、制御可能な反力要素2と、さらには操作レバー1に作用するアクチュエータ10とを含む。ジョイントボール3の外側の表面と、ボールシェル4の内側の表面との間には、本実施の形態では、ボールジョイントの支承ギャップ5が存在する。支承ギャップ5は、図2に示した実施の形態では、MR流体5で満たされている。MR流体5は、流体5の粘度が流体5に作用する磁界強度に基づいて変化可能であるように形成されている。
【0045】
MR流体5の粘度の変化のために必要な磁界を形成するために、ジョイントボール3と同様に、磁界の広がりを妨げないように有利にはプラスチックから製造されているボールシェル4の領域に、マグネットコイル装置6が配置されている。これにより、マグネットコイル装置6の端子7に電流を導入することによって、広範に可変の磁界が、支承ギャップあるいは流体5の領域内に形成される。こうして、ボールジョイントの機械的な減衰・緩衝は、例えばソフトウエア側の制御により、流体5がマグネットコイル装置6の磁界によって低粘度(ジョイントボール3あるいは操作レバー1の軽快な可動性)と、高粘度又は略固体(ジョイントボール3の高い運動抵抗又は操作レバー1のロック)との間で調節されることによって、広範に可変にかつリアルタイムに制御可能である。
【0046】
MR流体5を保護するために、ボールジョイントの、操作レバー1の両貫通部の領域には、それぞれ、弾性的なシールブーツ8が設けられている。さらに、操作装置の制御電子装置によって操作レバー1の現在の位置を求めるために、センサ装置が設けられている。センサ装置は、図2には、基板9として概略的に示されている。
【0047】
操作装置の、図2に示した実施の形態では、MR流体5により形成される反力要素2に対して付加的に、アクチュエータ10も設けられている。アクチュエータ10は、操作レバー1の、ソフトウエア制御されるアクティブな作動のために役立つ。アクチュエータ10により、操作レバー1は、例えば自動P、つまり車両を離れる際に自動的に作動するパークロックの場合に、特に自動的に所定のレバー位置へと移行可能である。
【0048】
さらにアクチュエータ10は、セレクトレバーの係止の感覚あるいは触覚を特にリアルに模倣することを助成するために使用される。その際、MR流体5によってボールジョイント3,4内に形成される反力要素2は、操作時に機械的な係止を形成する反力をシミュレートするために役立つのに対し、アクチュエータ10は、操作レバー1を離したときの、係止のそれぞれのセンター位置への操作レバー1のリアルな復帰をシミュレートする。
【0049】
これにより、反力要素2は、係止装置により生じるか又は伝動装置あるいは変速機内に生じる反力のシミュレーションを担当し、場合によっては、許容できない切換命令あるいはシフト命令の際の操作レバー1のロック、又は操作レバーの許容できない運動の際の適当な脈動の発生までを担当している。これに対してアクチュエータ10は、有利には、操作者又は運転者が言及すべき程の力を操作レバー1に加えることなく、操作レバー1を動かす必要があるときに初めて作動する。このことは、特に、レバー1が放されてはいても、まだ正確には(バーチャルな)係止位置にないような場合に該当する。この場合、アクチュエータ10は、操作装置の制御電子装置によって、操作レバー1がアクチュエータ10により、対応するバーチャルな係止位置の中央に戻されるように制御される。こうして、操作者又は運転者に対して、機械的な係止が実際には全く存在していないにもかかわらず、機械的に係止される操作レバーの挙動が正確に提供される。
【0050】
さらにアクチュエータ10は、特定の理由から操作レバー1の切換位置あるいはシフト位置と、伝動装置あるいは変速機内の実際の切換状態あるいはシフト状態との間の不一致が発生したような場合に、操作レバー1を正しい切換位置あるいはシフト位置へと移動させるためにも使用可能である。この状況は、例えば、運転者がパークロックを手動でかけることを忘れて、例えばイグニッションキーを引き抜いた際又は自動車を離れた際に、トランスミッション内で自動Pにより自動的にパークロックが入れられた場合に発生し得る。この場合、操作レバー1は、アクチュエータ10によって自動的にパークロック位置へと移動する。その結果、運転者にしてみれば、セレクトレバー位置は、自動車に戻ってきたとき、セレクトレバーが運転者によって以前に走行段位置のままにされたとしても、トランスミッション内で自動的に入れられたパークロックと再び一致していることになる。
【0051】
単安定性(monostabil)の操作レバーの感覚を表現するためにも、図2に示した実施の形態は適している。この場合、力発生要素2とアクチュエータ10とからなる組み合わせは、一方では、やはり、操作装置又は伝動装置若しくは変速機内での係止、場合によっては切換ロック若しくはシフトロック又は切換抵抗若しくはシフト抵抗のリアルなシミュレーションのために役立つ。他方、アクチュエータ10は、この場合、操作レバー1をニュートラル位置から変位させ、手を放した後に、再びニュートラル位置へ戻すためにも使用可能である。このことは、機械的な単安定性の操作レバーの挙動に相当する。
【0052】
これにより、まとめられて1つの共通の制御電子装置によって制御される両要素、つまり反力要素2とアクチュエータ10とは、純粋にソフトウエア側で、ほぼ任意のセレクトレバー係止又は切換パターン若しくはシフトパターンを最大限リアルに模倣することを可能とする。
【0053】
これにより、結果として、本発明によって、機械的な係止が一切存在しないにもかかわらず、運転者に対して機械的に係止される操作レバーの挙動を提供することを、僅かな構造的な手間で可能にする、フォースフィードバックを有する操作装置、特にシフトバイワイヤ式に操作される変速機のための、フォースフィードバックを有する操作装置が提供されることが明らかである。加えて、バーチャルな係止は、係止点の数及び間隔に関して並びに係止の固さに関して自由に制御可能に変更可能である。また、知覚可能な脈動が、フィードバックとして操作要素に導入可能である。これにより、変速機のための操作装置の感覚及び運動特性を純粋にソフトウエア側で広範に変更し、かつ利用者の好みに適合させることができる。それどころか、操作装置の感覚の、例えばオートマチックセレクトレバーと古典的な手動変速機のためのシフトレバーとの間での、純粋にソフトウエア制御される切換が実現される。
【0054】
これにより、本発明は、特に自動車のトランスミッション操作の分野における要求の多い用途において、組付けスペース及びコストの効率、人間工学並びに操作快適性の改良に関して、多大な貢献を果たし、かつこれにより、手間のかかる機械的なコンポーネントをソフトウエアに代替する過程での、大幅な、明確な一歩をなしている。
【符号の説明】
【0055】
1 操作レバー
2 反力要素
3 ジョイントボール
4 ボールシェル
5 支承ギャップ、MR流体
6 マグネットコイル装置
7 電気的な端子
8 シールブーツ
9 位置センサ装置
10 アクチュエータ
【特許請求の範囲】
【請求項1】
操作装置、特にシフトバイワイヤ式の変速機のシフト段を選択するための操作装置であって、ソケットハウジングと、少なくとも1つの支承箇所(3,4)で回動可能又は旋回可能に支承される、位置センサ装置(9)を備える機械的な操作要素(1)、特に操作レバー(1)と、フォースフィードバック装置とを備え、該フォースフィードバック装置が、前記操作レバー(1)に作用する調節可能な反力要素(2)を備え、該反力要素(2)が、制御可能に可変の粘度を有する流体(5)を有する形式のものにおいて、
前記反力要素(2)が、前記操作要素(1)の前記支承箇所(3,4)の、前記流体で満たされた支承ギャップ(5)により形成されていることを特徴とする、操作装置。
【請求項2】
前記支承箇所が、ジョイントボール(3)及びボールシェル(4)を備えるボールジョイントにより形成されている、請求項1記載の操作装置。
【請求項3】
前記ジョイントボール(3)が、前記操作要素(1)に結合されており、前記ボールシェル(4)が、当該操作装置の前記ソケットハウジングに結合されている、請求項2記載の操作装置。
【請求項4】
前記制御可能に可変の粘度を有する流体(5)が、MR流体であり、前記支承箇所(3,4)の領域に、該支承箇所(3,4)の前記支承ギャップ(5)内に磁界を発生させるためのコイル装置(6)が配置されている、請求項1から3までのいずれか1項記載の操作装置。
【請求項5】
前記支承箇所が、ボールジョイント(3,4)により形成されており、前記コイル装置(6)が、互いに略垂直な磁界方向を有する、互いに独立的に制御可能な少なくとも2つの磁界を形成するために設けられている、請求項4記載の操作装置。
【請求項6】
前記フォースフィードバック装置が、アクチュエータ(10)を備える、請求項1から5までのいずれか1項記載の操作装置。
【請求項7】
前記調節可能な反力要素(2)が、制御特性マップに基づいて、反力を発生させるために設けられており、前記アクチュエータ(10)が、特性マップに基づいて、前記操作レバー(1)を作動させるために設けられている、請求項6記載の操作装置。
【請求項8】
前記アクチュエータ(10)が、電気的なサーボギヤモータである、請求項6又は7記載の操作装置。
【請求項9】
前記反力要素(2)及び/又は前記アクチュエータ(10)が、振動を発生させるために設けられている、請求項6から8までのいずれか1項記載の操作装置。
【請求項1】
操作装置、特にシフトバイワイヤ式の変速機のシフト段を選択するための操作装置であって、ソケットハウジングと、少なくとも1つの支承箇所(3,4)で回動可能又は旋回可能に支承される、位置センサ装置(9)を備える機械的な操作要素(1)、特に操作レバー(1)と、フォースフィードバック装置とを備え、該フォースフィードバック装置が、前記操作レバー(1)に作用する調節可能な反力要素(2)を備え、該反力要素(2)が、制御可能に可変の粘度を有する流体(5)を有する形式のものにおいて、
前記反力要素(2)が、前記操作要素(1)の前記支承箇所(3,4)の、前記流体で満たされた支承ギャップ(5)により形成されていることを特徴とする、操作装置。
【請求項2】
前記支承箇所が、ジョイントボール(3)及びボールシェル(4)を備えるボールジョイントにより形成されている、請求項1記載の操作装置。
【請求項3】
前記ジョイントボール(3)が、前記操作要素(1)に結合されており、前記ボールシェル(4)が、当該操作装置の前記ソケットハウジングに結合されている、請求項2記載の操作装置。
【請求項4】
前記制御可能に可変の粘度を有する流体(5)が、MR流体であり、前記支承箇所(3,4)の領域に、該支承箇所(3,4)の前記支承ギャップ(5)内に磁界を発生させるためのコイル装置(6)が配置されている、請求項1から3までのいずれか1項記載の操作装置。
【請求項5】
前記支承箇所が、ボールジョイント(3,4)により形成されており、前記コイル装置(6)が、互いに略垂直な磁界方向を有する、互いに独立的に制御可能な少なくとも2つの磁界を形成するために設けられている、請求項4記載の操作装置。
【請求項6】
前記フォースフィードバック装置が、アクチュエータ(10)を備える、請求項1から5までのいずれか1項記載の操作装置。
【請求項7】
前記調節可能な反力要素(2)が、制御特性マップに基づいて、反力を発生させるために設けられており、前記アクチュエータ(10)が、特性マップに基づいて、前記操作レバー(1)を作動させるために設けられている、請求項6記載の操作装置。
【請求項8】
前記アクチュエータ(10)が、電気的なサーボギヤモータである、請求項6又は7記載の操作装置。
【請求項9】
前記反力要素(2)及び/又は前記アクチュエータ(10)が、振動を発生させるために設けられている、請求項6から8までのいずれか1項記載の操作装置。
【図1】

【図2】
【図2】
【公表番号】特表2011−522309(P2011−522309A)
【公表日】平成23年7月28日(2011.7.28)
【国際特許分類】
【出願番号】特願2011−508794(P2011−508794)
【出願日】平成21年4月8日(2009.4.8)
【国際出願番号】PCT/DE2009/050020
【国際公開番号】WO2009/138079
【国際公開日】平成21年11月19日(2009.11.19)
【出願人】(506054589)ツェットエフ フリードリヒスハーフェン アクチエンゲゼルシャフト (151)
【氏名又は名称原語表記】ZF Friedrichshafen AG
【住所又は居所原語表記】D−88038 Friedrichshafen,Germany
【Fターム(参考)】
【公表日】平成23年7月28日(2011.7.28)
【国際特許分類】
【出願日】平成21年4月8日(2009.4.8)
【国際出願番号】PCT/DE2009/050020
【国際公開番号】WO2009/138079
【国際公開日】平成21年11月19日(2009.11.19)
【出願人】(506054589)ツェットエフ フリードリヒスハーフェン アクチエンゲゼルシャフト (151)
【氏名又は名称原語表記】ZF Friedrichshafen AG
【住所又は居所原語表記】D−88038 Friedrichshafen,Germany
【Fターム(参考)】
[ Back to top ]