
フライト通過式回転体を有する汚泥掻き寄せ機
【課題】汚水処理設備における沈澱池や沈殿槽などに設置されて無端チェーンに取り付けてあるフライトを通過させることができるフライト通過式回転体を設けた汚泥掻き寄せ機に関する。
【解決手段】 フライト通過式回転体が、回転体と、フライト通過時にフライトを検知して前記回転体の制動を解除して回転させ、フライト通過後に回転を停止させる制動部とを有しており、前記回転体は、その中心位置から放射状に伸びる複数のフォーク部と、該フォーク部間に形成されて通過するフライトを収納可能な空間部とを有し、前記各フォーク部の先端に前記フライトと衝合するフライト衝合部と、無端チェーンと接して無端チェーンに上から衝合するチェーン衝合部とを備えていることを特徴とする汚泥掻き寄せ機。
【解決手段】 フライト通過式回転体が、回転体と、フライト通過時にフライトを検知して前記回転体の制動を解除して回転させ、フライト通過後に回転を停止させる制動部とを有しており、前記回転体は、その中心位置から放射状に伸びる複数のフォーク部と、該フォーク部間に形成されて通過するフライトを収納可能な空間部とを有し、前記各フォーク部の先端に前記フライトと衝合するフライト衝合部と、無端チェーンと接して無端チェーンに上から衝合するチェーン衝合部とを備えていることを特徴とする汚泥掻き寄せ機。
【発明の詳細な説明】
【技術分野】
【0001】
この発明は、汚水処理設備における沈澱池や沈殿槽などに設置された無端チェーン上に取り付けてあるフライトを通過させることができるフライト通過式回転体を有する汚泥掻き寄せ機に関する。
【背景技術】
【0002】
従来、例えば、汚泥掻き寄せ機の汚泥掻き寄せ具(フライト)を回動方向に間隔を隔てて取り付けてある無端チェーンが、横軸芯周りで回転する駆動回転体と従動回転体とに亘って回動自在に巻き掛けられた汚泥掻き寄せ機において、特開2009−241022号の汚泥掻き寄せ機では、前記無端チェーンの前記回転体に対する非巻き掛け部分を、その回動径路の外周側から内周側に向けて押圧することにより、その無端チェーンに張力を付与している。
上記構成では、チェーン衝合部を無端チェーンの上に押し付けるため、フライトを無端チェーンの上に配置する汚泥掻き寄せ機に適用することが困難であり、側方に配置する構造が採られていた。
しかし、その構造ではフライトがチェーンの左右分断されるために十分な汚泥の掻き寄せが行えないなどの不具合があった。
そこで、フライトを左右に分断せずに取り付けた無端チェーンに対して、無端チェーンの上から接触することができると共にフライトは通過させることができる装置の開発が待たれていた。
【先行技術文献】
【特許文献】
【0003】
【特許文献1】実開昭61−102204号公報
【特許文献2】特開2009−241022号
【発明の概要】
【発明が解決しようとする課題】
【0004】
この発明は、上記事情に鑑みて創案されたものであって、その第1の課題は、
無端チェーンの上から衝合しながらフライトを通過させることができる汚泥掻き寄せ機のフライト通過式回転体を提供することにある。
このフライト通過式回転体は、従動用スプロケットの無端チェーンの巻き掛け部分では上部に設けて無端チェーンの脱輪防止用として用いることができ、また、無端チェーンの非巻き掛け部分では押圧装置と組み合わせることで緊張装置として用いることができる。
この発明の別の課題は、緊張装置に位置検出レバーを一体に設けることで、チェーンの伸び状態が水を抜くことなく確認することができ、また位置検出レバーを動かすことで汚泥掻き寄せ機を逆転しうる装置を提供することにある。
【課題を解決するための手段】
【0005】
この発明は、上記課題を解決するために、請求項1の発明では、
汚泥処理設備内に設けられた駆動回転体と従動回転体との間に掛け渡されて搬送方向に回転する無端チェーンがその搬送方向に汚泥掻き寄せ用のフライトを間隔を隔てて多数有している汚泥掻き寄せ機において、
無端チェーンと従動回転体との巻き掛け部分または従動回転体と離間した非巻き掛け部分で無端チェーンに上から接するようにフライト通過式回転体が配置されており、
該フライト通過式回転体が、回転体と、フライト通過時にフライトを検知して前記回転体の制動を解除して回転させ、フライト通過後に回転を停止させる制動部とを有しており、
前記回転体は、その中心位置から放射状に伸びる複数のフォーク部と、該フォーク部間に形成されて通過するフライトを収納可能な空間部とを有し、
前記各フォーク部の先端に前記フライトと衝合するフライト衝合部と、無端チェーンと接して無端チェーンに上から衝合するチェーン衝合部とを備えていることを特徴とする。
請求項2の発明では、
無端チェーンの非巻き掛け部分で無端チェーンの上に回転体が接しており、
該回転体は、無端チェーンの搬送方向の上流側の所定位置で上部が枢着され下流側に下降傾斜する揺動部材に軸支されており、少なくとも回転体の自重によりチェーン衝合部が前記非巻き掛け部分の無端チェーンに張りを与えるようになっていることを特徴とする。
請求項3の発明では、
チェーン衝合部が、断面が円弧形状からなって無端チェーンと摺動可能な衝合片部と、該衝合片部の先端に軸支され無端チェーンと接して回転可能な衝合回転部とからなっており、
回転体が制動位置にあると、1つの衝合回転部が無端チェーンと接しており、回転体の回転時には前記衝合回転部を軸支する衝合片部が無端チェーンと接してなることを特徴とする。
請求項4の発明では、
前記衝合片部が、衝合する無端チェーンの左右側方を規制する側方規制部を有していることを特徴とする。
請求項5の発明では、
前記制動部が、通過するフライトの先端と衝合して回転する検出部と、該検出部と一体に連動して回転体の制動位置乃至制動解除位置に変位する制動部本体と、該制動部本体と一体に連動しフライト通過時に元の位置に戻る復帰用ウエイト部とからなっていることを特徴とする。
請求項5の発明では、
揺動部材の回転軸と一体に連動する位置検知レバーをその先端が所定姿勢で突出するように設けてなることを特徴とする。
【発明の効果】
【0006】
上記構成からなっているので以下の効果を奏することができる。
(1)無端チェーンのみの通過時には、緊張装置の回転体を回転させることなくチェーン衝合部による押圧で無端チェーンを緊張させ、フライトの通過時にはフライトを空間部に収納して回転体の回転により通過させることができるので、フライトの取付位置や取付高さ・取付ピッチに関係なく無端チェーンを押圧することができる。
(2)チェーン衝合部を衝合片部と衝合回転部とで形成することにより、回転体が制動される無端チェーンの通過時には衝合回転部が無端チェーンと接して回転し、フライトの通過時には衝合片部が無端チェーンと接することで、押圧時における無端チェーンの摩耗を減少させることができる。
(3)衝合片部に側方規制部を設けることで、緊張装置に無端チェーンの外れ防止機能を持たせることができる。
(4)緊張装置の揺動部材の回転軸と一体に先端が水上に突出するように位置検知レバーを設けることで、無端チェーンの伸びにより回転体が変位し、これに伴い揺動部材が回転し、該揺動部材の回転と一体に連動して位置検知レバーが傾動するので、チェーンの伸び状態が水を抜くことなく確認することができる。
(5)位置検知レバーは緊張装置と一体に連動するので、汚泥掻き寄せ機の逆転に際しては位置検知レバーを動かすことで無端チェーンを逆転させることができる。
【図面の簡単な説明】
【0007】
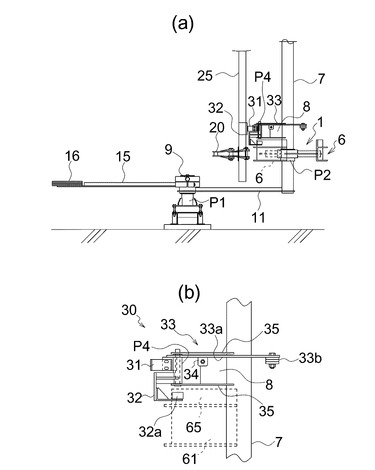
【図1】沈殿池に設置した汚泥掻き寄せ機の概略図である。
【図2】汚泥掻き寄せ機の制動部を省略した緊張装置の側面図である。
【図3】同正面図である。
【図4】(a)は同正面図、(b)は制動部の拡大図である。
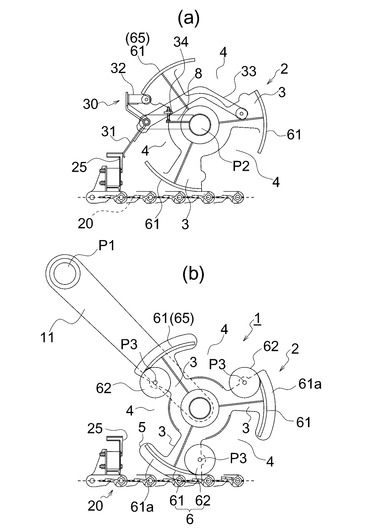
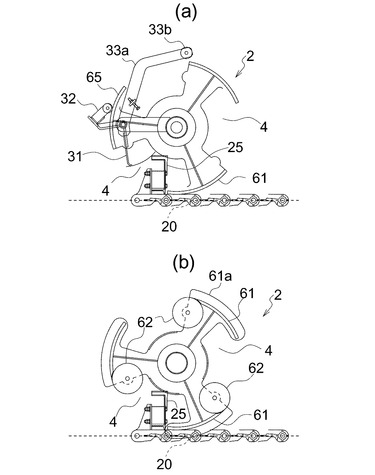
【図5】(a)はフライトが検出部に接した状態の回転体の側面図、(b)は制動部を省略した状態の側面図である。
【図6】(a)はチェーン衝合部の制動が解除され、フライトがフライト衝合部と接した状態の側面図、(b)は制動部を省略した状態の側面図である。
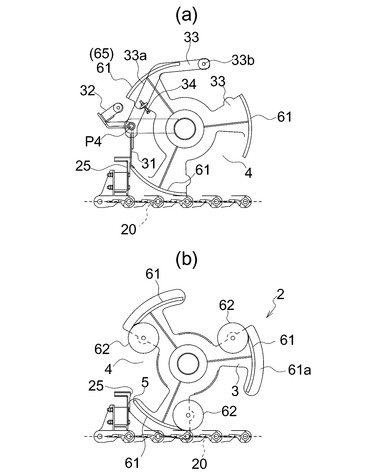
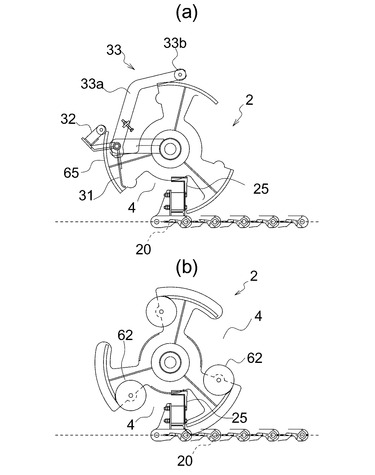
【図7】(a)はフライトから検出部が離れる直前の側面図、(b)は制動部を省略した状態の側面図である。
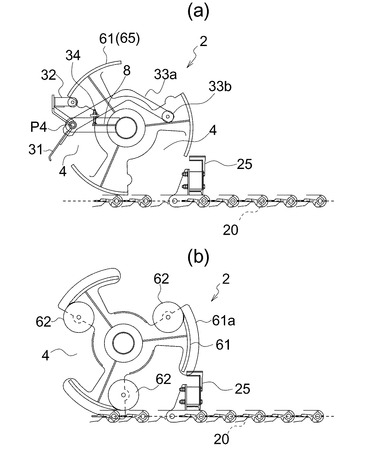
【図8】(a)はフライトから検出部が離れた状態の側面図、(b)は制動部を省略した状態の側面図である。
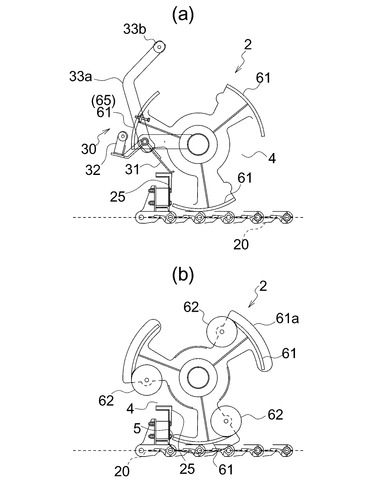
【図9】(a)はフライトが回転体を押し進む状態の側面図、(b)は制動部を省略した状態の側面図である。
【図10】(a)はフライトが回転体を通過し、回転体が制動された状態の側面図、(b)は制動部を省略した状態の側面図である。
【図11】従動スプロケットに回転体を組み合わせた状態の側面図である。
【0008】
以下に、この発明の汚泥掻き寄せ機の好適実施例について図面を参照しながら説明する。
【実施例1】
【0009】
図1〜図4に示す沈殿池や沈殿槽10Aなどに設置される汚泥掻き寄せ機10は、フライト25を牽引方向に間隔を隔てて取り付けてある無端チェーン20としての左右一対の無端チェーン20のそれぞれが、駆動スプロケットS1と複数の従動スプロケットS2とに回動自在に掛け渡された公知構成からなっている。
本実施例で無端チェーン20は、牽引方向で隣り合うリンクプレート21どうしを、板面が駆動スプロケットの径方向に沿う姿勢で、連結ピン22で枢着してなる合成樹脂製チェーンで構成されており、リンクプレート21の側縁部で牽引方向の内周面側に、駆動スプロケットに設けた係合ピンを係合させるノッチ23が形成された公知構成からなっている。
ここで合成樹脂製チェーンは、図示のノッチチェーンに限らず、その他公知のチェーンに適用することができる。
【0010】
実施例1では、スプロケット間における無端チェーン20の非巻き掛け部分で、無端チェーン20の搬送路の外周側から内周側に向けて押圧して無端チェーン20の該当個所に張力を付与する緊張装置1が設けられている。
【0011】
該緊張装置1は、フライト通過式回転体に押圧手段を組み合わせた構成からなっており、図2に示すように、沈殿池10Aなどの内部の所定位置でスプロケットの回転軸と略平行に軸支された枢軸P1によって上端が軸支された揺動部材11と、該揺動部材11の下端で軸7に枢着P2された回転体2とを有している。
前記揺動部材11は、無端チェーン20の搬送方向の上流側の上方の所定位置で上部が枢軸P1により枢着され下流側に下降傾斜した状態で、下端に回転体2を枢軸P2により枢着している。
これにより、回転体2は、少なくとも自重により、無端チェーン20の上流側に向かって付勢されるので、下流側に向う無端チェーン20を上から押し付けることができる。
【0012】
上記押付力を高めるために揺動部材11の回転軸P1に一体にアーム15を設け先端に錘部16を付加した加圧手段17を設けてもよい。
図2では、前記アーム15は枢軸P1から回転体2と同じ下流方向に水平に延びており、先端の錘部16は増減して重さを調整可能としている。
これにより回転体2の自重だけでなく、錘部16の重さを増減して、無端チェーン20の張力を調整することができる。
【0013】
図示例の場合、前記枢軸P1に一体に連動する位置検知レバー9を設けてもよい。
即ち、無端チェーン20の非巻き掛け部分上に回転体2を設置した状態で、前記位置検知レバー9が水面上に所定姿勢、例えば先端が垂直に突出するようにセットする。
位置検知レバー9は図1のように屈曲したレバーや図2のように直線状のレバーなどであってもよい。
これにより、無端チェーン20が撓んで下流側に向かって下降すると、付勢された回転体2が傾動変位し、前記位置検知レバー9は枢軸P1の回転と一体に連動して回転体2の変位した角度だけ傾斜した姿勢に変位するので、位置検知レバー9の傾斜角度を調べるだけで、沈殿池や槽10Aの中の水を抜くことなく外側から無端チェーン20の伸びの状態を測定することができる。
【0014】
また、上記位置検知レバー9は、回転体2と一体に連動して傾動するので、無端チェーン20を逆回転させる場合には外部から位置検知レバー9を逆向きに傾けることで回転体2を無端チェーン20上から離間させて、逆進するフライト25を通過させることもできる。
【0015】
前記緊張装置1は、図2及び図5に明瞭なように、前記揺動部材11に軸支された回転体2と、該回転体2をフライト25の通過時に回転させ、フライトの通過後に回転を停止させる制動部30と、回転体2を無端チェーン20側に付勢する加圧手段17とを設けている。
前記回転体2は、その回転中心となる枢軸P2位置から放射状に伸びる複数(図示例では3つ)のフォーク部3と、該フォーク部3間に形成されて通過するフライト25を収納可能な空間部4とを有している。
【0016】
前記各フォーク部3の先端には、前記フライトと衝合するフライト衝合部5と、無端チェーン20と接するチェーン衝合部6が設けられている。
チェーン衝合部6は、本実施例の場合、無端チェーン20と摺動可能な円弧状のプレートからなる衝合片部61と、該衝合片部61の先端に軸支P3されて無端チェーン20と接して回転可能なローラ状の衝合回転部62とからなっている。
ここで、前記衝合片部61には、左右側方にサイドプレート61aが一体に形成されており、衝合片部61と共に断面チャンネル状に形成して、無端チェーン20を上方と左右側方で規制しうるようになっているので、進行中のチェーンの姿勢を正しくガイドすることができる。
また、本実施例では一方のサイドプレート61aの外側に衝合片部61から延出するガイド片65を一体に設けており、後述の制動部本体32と衝合しうるようになっている。
【0017】
ここで、回転体2が静止した制動位置(図10参照)にあると、下端に配置された衝合片部61の先端(衝合片部61と無端チェーン20の搬送方向下流側)にある1つの衝合回転部62が最下位置となって無端チェーン20と接しており、自転しながら搬送される無端チェーン20を順次押圧している。
回転体2の制動解除時には前記回転体2が回転して前記衝合回転部62を軸支する円弧状の衝合片部61が順次に無端チェーン20のリンクプレート21に衝合して、押圧する(図5〜9参照)。
【0018】
上記回転体2は、フライト25の通過時に回転体2の制動部30の制動を解除し、回転体2に設けられた空間部4内にフライト25を収納し、フライト25の先端を前記衝合片部61の後端のフライト衝合部5と衝合させて回転体2を回転させ、フライト25の通過時には前記制動部30により回転体2を制動するようになっている。
【0019】
制動部30は、本実施例の場合、図4(b)に示すように通過するフライト25の先端と衝合して回転する検出部31と、該検出部31と一体に連動して回転体2の制動位置乃至制動解除位置に変位する制動部本体32と、該制動部本体32と一体に連動しフライト25通過時に元の位置に戻る付勢部33とからなっている。
【0020】
即ち、回転体2を枢着P2して固定された軸7に回転体2と並んで平行に延びる一対のアーム35の基端を固定しており、該アーム間には枢軸P4が掛け渡されている。
そして、前記枢軸P4には、制動部30の制動姿勢にて、無端チェーン20の上流方向に向かって下向きに傾斜して、先端が進行してくるフライト25と衝合可能な位置に設定されている。
【0021】
また、制動部本体32は、前記検出部31と並んで上方へ突出し、側面視で略く字状に折れ曲がっており、先端にローラ32aを有しており、制動時には回転体2の一部、本実施例では衝合片部61と一体に形成されたガイド片65の先端と衝合して回転体2を制動し、制動解除時にはガイド片65の先端から外方へ一旦外れてガイド片65の先端を通過させ、次いで付勢部33の付勢で復帰した制動部本体32はガイド片65の外周面に前記ローラ32aが接して回転し、ガイド片65が通過すると空間部4内に入り込んで、次の衝合片部61に形成されたガイド片65の先端と衝合して回転体2を制動する。
【0022】
付勢部33は、基端が枢軸P4と一体に連動するように固定されており、無端チェーン20の下流方向へ延びてへ字状に曲成されたレバー片33aからなっており、後端に錘33bを取り付けており、前記検出部31と制動部本体32に付勢力を付与している。
また、レバー片33aの中途位置にはストッパ34が固定されている。
そして、前記一対のアーム35間には、その中途位置から軸7まで水平に延びる支持板8が固定されており、制動部30が制動姿勢に復帰すると前記ストッパ34の下端が衝合して、前記付勢力に抗して制動部30を制動姿勢に保持することができるようになっている。
【0023】
従って、制動部30は、図5に示すように検出部31が、進行中のフライト25と接すると、フライト25に加わる無端チェーン20の牽引力で傾動し、これと一体に制動部本体32及び付勢部33を制動位置から図6に示す制動解除方向へ変位させる。
この際に、制動部本体32は、チェーン衝合部6の回転軌跡の外側へと傾動し、付勢部33も回転体2の外部上方へと漸次傾動して制動部本体32による回転体2との制動を解除する。
【0024】
制動が解除されると、前記フライト25は回転体2と接しその空間部4内に入り込みフライト25の先端がフライト衝合部5と接し(図6参照)、フライト25の進行する力で回転体2を回転させる(図7参照)。
フライト25による回転体2の回転時には、前記制動部本体32の先端のローラ32aが回転する衝合片部61の外周面と接して回転しうるようになっている(図7、図8参照)。
【0025】
フライト25が回転体2を通過して前記フライト衝合部5と接触しなくなると前記制動部本体32と接していた衝合片部61も通過し、前記付勢部33の自重により前記検出部31及び制動部本体32が元の位置まで復帰し、前記ストッパ34の下端が支持板8と衝合して制動部30を制動姿勢に保持する(図10参照)。
【0026】
この発明では、制動部の一例として機構的な構成としたが、例えば付勢部に弾性部材を用いるなどの他の機構を用いてもよい。
また、制動部は、フライト25の位置を検出する接触又は非接触センサを設けておき、該センサがフライト25の侵入を検出すると回転体2に設けた公知の自動制動装置のアクチュエータを作動させて制動解除を行い、またセンサがフライト25の通過を検出すると自動制動装置のアクチュエータを作動させて制動を行う構成としてもよい。
【0027】
次に、チェーン衝合部6としては、衝合回転部62を設けずに、衝合片部61だけを設けてもよい。
この場合、無端チェーン20のみの通過時には無端チェーン20は衝合片部61に摺動しながら通過することになるが、その他の構成は前記実施例と同じである。
【0028】
また、衝合片部61には、その左右側方にサイドプレート61aが一体に形成されているので、衝合片部61は、無端チェーン20の上面と接し、また左右の側方への動きをサイドプレート61aで規制することができるので、スプロケットから無端チェーン20が脱輪することを防止することもできる。
【実施例2】
【0029】
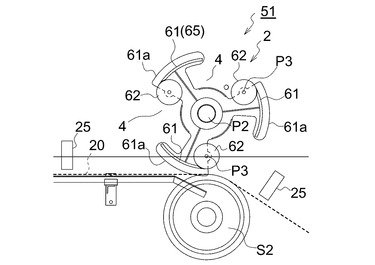
上記実施例1では、フライト通過式回転体を、無端チェーンの非巻き掛け部分に設けた緊張装置1に適用した場合を例示したが、無端チェーンの従動スプロケットへの巻き掛け部分に設けて脱輪防止装置51としてもよい。
脱輪防止装置51は、回転体2と制動部30とからなっている。
回転体2と制動部30は、実施例1と同様であるが、揺動部材や錘などの押圧のための手段は設けられていない。
【0030】
即ち、回転体2は、従動スプロケットS2の上方で、無端チェーン20が通過可能な隙間をあけた状態で両者の軸線が平行となる固定位置に配置されて、回転可能となっている。
なお、制動部30は図11には図示していないが、実施例1と同一構成であるので実施例1の説明で援用する。
これによって、従動用スプロケットにより方向転回する無端チェーンは衝合片部61に形成された左右一対のサイドプレート61aによって側方からも規制されて脱輪を防止することができ、またフライト25は空間部4に入り込ませて通過させることができる。
【0031】
その他、この発明は前記実施例に限定されるものではなく、要するにこの発明の要旨を変更しない範囲で種々設計変更しうること勿論である。
【符号の説明】
【0032】
1 緊張装置
2 回転体
3 フォーク部
4 空間部
5 フライト衝合部
6 チェーン衝合部
8 支持板
9 位置検知レバー
10 汚泥掻き寄せ機
11 揺動部材
20 無端チェーン
21 リンクプレート
22 連結ピン
25 フライト
30 制動部
31 検出部
32 制動部本体
33 付勢部
33a アーム
33b カウンターウエイト
34 ストッパ
61 衝合片部
62 衝合回転部
65 ガイド片
【技術分野】
【0001】
この発明は、汚水処理設備における沈澱池や沈殿槽などに設置された無端チェーン上に取り付けてあるフライトを通過させることができるフライト通過式回転体を有する汚泥掻き寄せ機に関する。
【背景技術】
【0002】
従来、例えば、汚泥掻き寄せ機の汚泥掻き寄せ具(フライト)を回動方向に間隔を隔てて取り付けてある無端チェーンが、横軸芯周りで回転する駆動回転体と従動回転体とに亘って回動自在に巻き掛けられた汚泥掻き寄せ機において、特開2009−241022号の汚泥掻き寄せ機では、前記無端チェーンの前記回転体に対する非巻き掛け部分を、その回動径路の外周側から内周側に向けて押圧することにより、その無端チェーンに張力を付与している。
上記構成では、チェーン衝合部を無端チェーンの上に押し付けるため、フライトを無端チェーンの上に配置する汚泥掻き寄せ機に適用することが困難であり、側方に配置する構造が採られていた。
しかし、その構造ではフライトがチェーンの左右分断されるために十分な汚泥の掻き寄せが行えないなどの不具合があった。
そこで、フライトを左右に分断せずに取り付けた無端チェーンに対して、無端チェーンの上から接触することができると共にフライトは通過させることができる装置の開発が待たれていた。
【先行技術文献】
【特許文献】
【0003】
【特許文献1】実開昭61−102204号公報
【特許文献2】特開2009−241022号
【発明の概要】
【発明が解決しようとする課題】
【0004】
この発明は、上記事情に鑑みて創案されたものであって、その第1の課題は、
無端チェーンの上から衝合しながらフライトを通過させることができる汚泥掻き寄せ機のフライト通過式回転体を提供することにある。
このフライト通過式回転体は、従動用スプロケットの無端チェーンの巻き掛け部分では上部に設けて無端チェーンの脱輪防止用として用いることができ、また、無端チェーンの非巻き掛け部分では押圧装置と組み合わせることで緊張装置として用いることができる。
この発明の別の課題は、緊張装置に位置検出レバーを一体に設けることで、チェーンの伸び状態が水を抜くことなく確認することができ、また位置検出レバーを動かすことで汚泥掻き寄せ機を逆転しうる装置を提供することにある。
【課題を解決するための手段】
【0005】
この発明は、上記課題を解決するために、請求項1の発明では、
汚泥処理設備内に設けられた駆動回転体と従動回転体との間に掛け渡されて搬送方向に回転する無端チェーンがその搬送方向に汚泥掻き寄せ用のフライトを間隔を隔てて多数有している汚泥掻き寄せ機において、
無端チェーンと従動回転体との巻き掛け部分または従動回転体と離間した非巻き掛け部分で無端チェーンに上から接するようにフライト通過式回転体が配置されており、
該フライト通過式回転体が、回転体と、フライト通過時にフライトを検知して前記回転体の制動を解除して回転させ、フライト通過後に回転を停止させる制動部とを有しており、
前記回転体は、その中心位置から放射状に伸びる複数のフォーク部と、該フォーク部間に形成されて通過するフライトを収納可能な空間部とを有し、
前記各フォーク部の先端に前記フライトと衝合するフライト衝合部と、無端チェーンと接して無端チェーンに上から衝合するチェーン衝合部とを備えていることを特徴とする。
請求項2の発明では、
無端チェーンの非巻き掛け部分で無端チェーンの上に回転体が接しており、
該回転体は、無端チェーンの搬送方向の上流側の所定位置で上部が枢着され下流側に下降傾斜する揺動部材に軸支されており、少なくとも回転体の自重によりチェーン衝合部が前記非巻き掛け部分の無端チェーンに張りを与えるようになっていることを特徴とする。
請求項3の発明では、
チェーン衝合部が、断面が円弧形状からなって無端チェーンと摺動可能な衝合片部と、該衝合片部の先端に軸支され無端チェーンと接して回転可能な衝合回転部とからなっており、
回転体が制動位置にあると、1つの衝合回転部が無端チェーンと接しており、回転体の回転時には前記衝合回転部を軸支する衝合片部が無端チェーンと接してなることを特徴とする。
請求項4の発明では、
前記衝合片部が、衝合する無端チェーンの左右側方を規制する側方規制部を有していることを特徴とする。
請求項5の発明では、
前記制動部が、通過するフライトの先端と衝合して回転する検出部と、該検出部と一体に連動して回転体の制動位置乃至制動解除位置に変位する制動部本体と、該制動部本体と一体に連動しフライト通過時に元の位置に戻る復帰用ウエイト部とからなっていることを特徴とする。
請求項5の発明では、
揺動部材の回転軸と一体に連動する位置検知レバーをその先端が所定姿勢で突出するように設けてなることを特徴とする。
【発明の効果】
【0006】
上記構成からなっているので以下の効果を奏することができる。
(1)無端チェーンのみの通過時には、緊張装置の回転体を回転させることなくチェーン衝合部による押圧で無端チェーンを緊張させ、フライトの通過時にはフライトを空間部に収納して回転体の回転により通過させることができるので、フライトの取付位置や取付高さ・取付ピッチに関係なく無端チェーンを押圧することができる。
(2)チェーン衝合部を衝合片部と衝合回転部とで形成することにより、回転体が制動される無端チェーンの通過時には衝合回転部が無端チェーンと接して回転し、フライトの通過時には衝合片部が無端チェーンと接することで、押圧時における無端チェーンの摩耗を減少させることができる。
(3)衝合片部に側方規制部を設けることで、緊張装置に無端チェーンの外れ防止機能を持たせることができる。
(4)緊張装置の揺動部材の回転軸と一体に先端が水上に突出するように位置検知レバーを設けることで、無端チェーンの伸びにより回転体が変位し、これに伴い揺動部材が回転し、該揺動部材の回転と一体に連動して位置検知レバーが傾動するので、チェーンの伸び状態が水を抜くことなく確認することができる。
(5)位置検知レバーは緊張装置と一体に連動するので、汚泥掻き寄せ機の逆転に際しては位置検知レバーを動かすことで無端チェーンを逆転させることができる。
【図面の簡単な説明】
【0007】
【図1】沈殿池に設置した汚泥掻き寄せ機の概略図である。
【図2】汚泥掻き寄せ機の制動部を省略した緊張装置の側面図である。
【図3】同正面図である。
【図4】(a)は同正面図、(b)は制動部の拡大図である。
【図5】(a)はフライトが検出部に接した状態の回転体の側面図、(b)は制動部を省略した状態の側面図である。
【図6】(a)はチェーン衝合部の制動が解除され、フライトがフライト衝合部と接した状態の側面図、(b)は制動部を省略した状態の側面図である。
【図7】(a)はフライトから検出部が離れる直前の側面図、(b)は制動部を省略した状態の側面図である。
【図8】(a)はフライトから検出部が離れた状態の側面図、(b)は制動部を省略した状態の側面図である。
【図9】(a)はフライトが回転体を押し進む状態の側面図、(b)は制動部を省略した状態の側面図である。
【図10】(a)はフライトが回転体を通過し、回転体が制動された状態の側面図、(b)は制動部を省略した状態の側面図である。
【図11】従動スプロケットに回転体を組み合わせた状態の側面図である。
【0008】
以下に、この発明の汚泥掻き寄せ機の好適実施例について図面を参照しながら説明する。
【実施例1】
【0009】
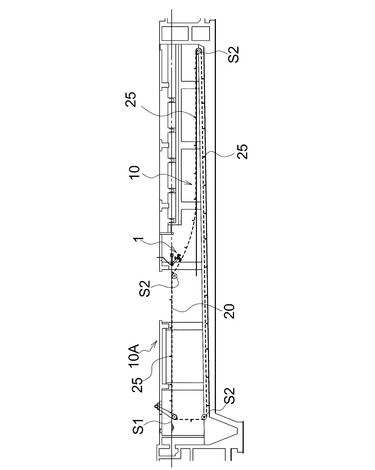
図1〜図4に示す沈殿池や沈殿槽10Aなどに設置される汚泥掻き寄せ機10は、フライト25を牽引方向に間隔を隔てて取り付けてある無端チェーン20としての左右一対の無端チェーン20のそれぞれが、駆動スプロケットS1と複数の従動スプロケットS2とに回動自在に掛け渡された公知構成からなっている。
本実施例で無端チェーン20は、牽引方向で隣り合うリンクプレート21どうしを、板面が駆動スプロケットの径方向に沿う姿勢で、連結ピン22で枢着してなる合成樹脂製チェーンで構成されており、リンクプレート21の側縁部で牽引方向の内周面側に、駆動スプロケットに設けた係合ピンを係合させるノッチ23が形成された公知構成からなっている。
ここで合成樹脂製チェーンは、図示のノッチチェーンに限らず、その他公知のチェーンに適用することができる。
【0010】
実施例1では、スプロケット間における無端チェーン20の非巻き掛け部分で、無端チェーン20の搬送路の外周側から内周側に向けて押圧して無端チェーン20の該当個所に張力を付与する緊張装置1が設けられている。
【0011】
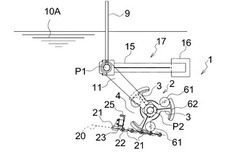
該緊張装置1は、フライト通過式回転体に押圧手段を組み合わせた構成からなっており、図2に示すように、沈殿池10Aなどの内部の所定位置でスプロケットの回転軸と略平行に軸支された枢軸P1によって上端が軸支された揺動部材11と、該揺動部材11の下端で軸7に枢着P2された回転体2とを有している。
前記揺動部材11は、無端チェーン20の搬送方向の上流側の上方の所定位置で上部が枢軸P1により枢着され下流側に下降傾斜した状態で、下端に回転体2を枢軸P2により枢着している。
これにより、回転体2は、少なくとも自重により、無端チェーン20の上流側に向かって付勢されるので、下流側に向う無端チェーン20を上から押し付けることができる。
【0012】
上記押付力を高めるために揺動部材11の回転軸P1に一体にアーム15を設け先端に錘部16を付加した加圧手段17を設けてもよい。
図2では、前記アーム15は枢軸P1から回転体2と同じ下流方向に水平に延びており、先端の錘部16は増減して重さを調整可能としている。
これにより回転体2の自重だけでなく、錘部16の重さを増減して、無端チェーン20の張力を調整することができる。
【0013】
図示例の場合、前記枢軸P1に一体に連動する位置検知レバー9を設けてもよい。
即ち、無端チェーン20の非巻き掛け部分上に回転体2を設置した状態で、前記位置検知レバー9が水面上に所定姿勢、例えば先端が垂直に突出するようにセットする。
位置検知レバー9は図1のように屈曲したレバーや図2のように直線状のレバーなどであってもよい。
これにより、無端チェーン20が撓んで下流側に向かって下降すると、付勢された回転体2が傾動変位し、前記位置検知レバー9は枢軸P1の回転と一体に連動して回転体2の変位した角度だけ傾斜した姿勢に変位するので、位置検知レバー9の傾斜角度を調べるだけで、沈殿池や槽10Aの中の水を抜くことなく外側から無端チェーン20の伸びの状態を測定することができる。
【0014】
また、上記位置検知レバー9は、回転体2と一体に連動して傾動するので、無端チェーン20を逆回転させる場合には外部から位置検知レバー9を逆向きに傾けることで回転体2を無端チェーン20上から離間させて、逆進するフライト25を通過させることもできる。
【0015】
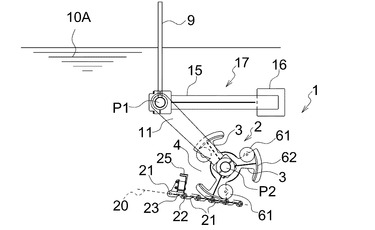
前記緊張装置1は、図2及び図5に明瞭なように、前記揺動部材11に軸支された回転体2と、該回転体2をフライト25の通過時に回転させ、フライトの通過後に回転を停止させる制動部30と、回転体2を無端チェーン20側に付勢する加圧手段17とを設けている。
前記回転体2は、その回転中心となる枢軸P2位置から放射状に伸びる複数(図示例では3つ)のフォーク部3と、該フォーク部3間に形成されて通過するフライト25を収納可能な空間部4とを有している。
【0016】
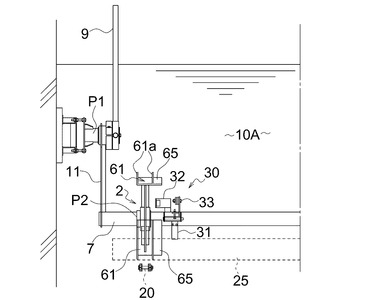
前記各フォーク部3の先端には、前記フライトと衝合するフライト衝合部5と、無端チェーン20と接するチェーン衝合部6が設けられている。
チェーン衝合部6は、本実施例の場合、無端チェーン20と摺動可能な円弧状のプレートからなる衝合片部61と、該衝合片部61の先端に軸支P3されて無端チェーン20と接して回転可能なローラ状の衝合回転部62とからなっている。
ここで、前記衝合片部61には、左右側方にサイドプレート61aが一体に形成されており、衝合片部61と共に断面チャンネル状に形成して、無端チェーン20を上方と左右側方で規制しうるようになっているので、進行中のチェーンの姿勢を正しくガイドすることができる。
また、本実施例では一方のサイドプレート61aの外側に衝合片部61から延出するガイド片65を一体に設けており、後述の制動部本体32と衝合しうるようになっている。
【0017】
ここで、回転体2が静止した制動位置(図10参照)にあると、下端に配置された衝合片部61の先端(衝合片部61と無端チェーン20の搬送方向下流側)にある1つの衝合回転部62が最下位置となって無端チェーン20と接しており、自転しながら搬送される無端チェーン20を順次押圧している。
回転体2の制動解除時には前記回転体2が回転して前記衝合回転部62を軸支する円弧状の衝合片部61が順次に無端チェーン20のリンクプレート21に衝合して、押圧する(図5〜9参照)。
【0018】
上記回転体2は、フライト25の通過時に回転体2の制動部30の制動を解除し、回転体2に設けられた空間部4内にフライト25を収納し、フライト25の先端を前記衝合片部61の後端のフライト衝合部5と衝合させて回転体2を回転させ、フライト25の通過時には前記制動部30により回転体2を制動するようになっている。
【0019】
制動部30は、本実施例の場合、図4(b)に示すように通過するフライト25の先端と衝合して回転する検出部31と、該検出部31と一体に連動して回転体2の制動位置乃至制動解除位置に変位する制動部本体32と、該制動部本体32と一体に連動しフライト25通過時に元の位置に戻る付勢部33とからなっている。
【0020】
即ち、回転体2を枢着P2して固定された軸7に回転体2と並んで平行に延びる一対のアーム35の基端を固定しており、該アーム間には枢軸P4が掛け渡されている。
そして、前記枢軸P4には、制動部30の制動姿勢にて、無端チェーン20の上流方向に向かって下向きに傾斜して、先端が進行してくるフライト25と衝合可能な位置に設定されている。
【0021】
また、制動部本体32は、前記検出部31と並んで上方へ突出し、側面視で略く字状に折れ曲がっており、先端にローラ32aを有しており、制動時には回転体2の一部、本実施例では衝合片部61と一体に形成されたガイド片65の先端と衝合して回転体2を制動し、制動解除時にはガイド片65の先端から外方へ一旦外れてガイド片65の先端を通過させ、次いで付勢部33の付勢で復帰した制動部本体32はガイド片65の外周面に前記ローラ32aが接して回転し、ガイド片65が通過すると空間部4内に入り込んで、次の衝合片部61に形成されたガイド片65の先端と衝合して回転体2を制動する。
【0022】
付勢部33は、基端が枢軸P4と一体に連動するように固定されており、無端チェーン20の下流方向へ延びてへ字状に曲成されたレバー片33aからなっており、後端に錘33bを取り付けており、前記検出部31と制動部本体32に付勢力を付与している。
また、レバー片33aの中途位置にはストッパ34が固定されている。
そして、前記一対のアーム35間には、その中途位置から軸7まで水平に延びる支持板8が固定されており、制動部30が制動姿勢に復帰すると前記ストッパ34の下端が衝合して、前記付勢力に抗して制動部30を制動姿勢に保持することができるようになっている。
【0023】
従って、制動部30は、図5に示すように検出部31が、進行中のフライト25と接すると、フライト25に加わる無端チェーン20の牽引力で傾動し、これと一体に制動部本体32及び付勢部33を制動位置から図6に示す制動解除方向へ変位させる。
この際に、制動部本体32は、チェーン衝合部6の回転軌跡の外側へと傾動し、付勢部33も回転体2の外部上方へと漸次傾動して制動部本体32による回転体2との制動を解除する。
【0024】
制動が解除されると、前記フライト25は回転体2と接しその空間部4内に入り込みフライト25の先端がフライト衝合部5と接し(図6参照)、フライト25の進行する力で回転体2を回転させる(図7参照)。
フライト25による回転体2の回転時には、前記制動部本体32の先端のローラ32aが回転する衝合片部61の外周面と接して回転しうるようになっている(図7、図8参照)。
【0025】
フライト25が回転体2を通過して前記フライト衝合部5と接触しなくなると前記制動部本体32と接していた衝合片部61も通過し、前記付勢部33の自重により前記検出部31及び制動部本体32が元の位置まで復帰し、前記ストッパ34の下端が支持板8と衝合して制動部30を制動姿勢に保持する(図10参照)。
【0026】
この発明では、制動部の一例として機構的な構成としたが、例えば付勢部に弾性部材を用いるなどの他の機構を用いてもよい。
また、制動部は、フライト25の位置を検出する接触又は非接触センサを設けておき、該センサがフライト25の侵入を検出すると回転体2に設けた公知の自動制動装置のアクチュエータを作動させて制動解除を行い、またセンサがフライト25の通過を検出すると自動制動装置のアクチュエータを作動させて制動を行う構成としてもよい。
【0027】
次に、チェーン衝合部6としては、衝合回転部62を設けずに、衝合片部61だけを設けてもよい。
この場合、無端チェーン20のみの通過時には無端チェーン20は衝合片部61に摺動しながら通過することになるが、その他の構成は前記実施例と同じである。
【0028】
また、衝合片部61には、その左右側方にサイドプレート61aが一体に形成されているので、衝合片部61は、無端チェーン20の上面と接し、また左右の側方への動きをサイドプレート61aで規制することができるので、スプロケットから無端チェーン20が脱輪することを防止することもできる。
【実施例2】
【0029】
上記実施例1では、フライト通過式回転体を、無端チェーンの非巻き掛け部分に設けた緊張装置1に適用した場合を例示したが、無端チェーンの従動スプロケットへの巻き掛け部分に設けて脱輪防止装置51としてもよい。
脱輪防止装置51は、回転体2と制動部30とからなっている。
回転体2と制動部30は、実施例1と同様であるが、揺動部材や錘などの押圧のための手段は設けられていない。
【0030】
即ち、回転体2は、従動スプロケットS2の上方で、無端チェーン20が通過可能な隙間をあけた状態で両者の軸線が平行となる固定位置に配置されて、回転可能となっている。
なお、制動部30は図11には図示していないが、実施例1と同一構成であるので実施例1の説明で援用する。
これによって、従動用スプロケットにより方向転回する無端チェーンは衝合片部61に形成された左右一対のサイドプレート61aによって側方からも規制されて脱輪を防止することができ、またフライト25は空間部4に入り込ませて通過させることができる。
【0031】
その他、この発明は前記実施例に限定されるものではなく、要するにこの発明の要旨を変更しない範囲で種々設計変更しうること勿論である。
【符号の説明】
【0032】
1 緊張装置
2 回転体
3 フォーク部
4 空間部
5 フライト衝合部
6 チェーン衝合部
8 支持板
9 位置検知レバー
10 汚泥掻き寄せ機
11 揺動部材
20 無端チェーン
21 リンクプレート
22 連結ピン
25 フライト
30 制動部
31 検出部
32 制動部本体
33 付勢部
33a アーム
33b カウンターウエイト
34 ストッパ
61 衝合片部
62 衝合回転部
65 ガイド片
【特許請求の範囲】
【請求項1】
汚泥処理設備内に設けられた駆動回転体と従動回転体との間に掛け渡されて搬送方向に回転する無端チェーンがその搬送方向に汚泥掻き寄せ用のフライトを間隔を隔てて多数有している汚泥掻き寄せ機において、
無端チェーンと従動回転体との巻き掛け部分または従動回転体と離間した非巻き掛け部分で無端チェーンに上から接するようにフライト通過式回転体が配置されており、
該フライト通過式回転体が、回転体と、フライト通過時にフライトを検知して前記回転体の制動を解除して回転させ、フライト通過後に回転を停止させる制動部とを有しており、
前記回転体は、その中心位置から放射状に伸びる複数のフォーク部と、該フォーク部間に形成されて通過するフライトを収納可能な空間部とを有し、
前記各フォーク部の先端に前記フライトと衝合するフライト衝合部と、無端チェーンと接して無端チェーンに上から衝合するチェーン衝合部とを備えていることを特徴とする汚泥掻き寄せ機。
【請求項2】
無端チェーンの非巻き掛け部分で無端チェーンの上に回転体が接しており、
該回転体は、無端チェーンの搬送方向の上流側の所定位置で上部が枢着され下流側に下降傾斜する揺動部材に軸支されており、少なくとも回転体の自重によりチェーン衝合部が前記非巻き掛け部分の無端チェーンに張りを与えるようになっていることを特徴とする請求項1に記載の汚泥掻き寄せ機。
【請求項3】
チェーン衝合部が、断面が円弧形状からなって無端チェーンと摺動可能な衝合片部と、該衝合片部の先端に軸支され無端チェーンと接して回転可能な衝合回転部とからなっており、
回転体が制動位置にあると、1つの衝合回転部が無端チェーンと接しており、回転体の回転時には前記衝合回転部を軸支する衝合片部が無端チェーンと接してなることを特徴とする請求項1又は2に記載の汚泥掻き寄せ機。
【請求項4】
衝合片部が、衝合する無端チェーンの左右側方を規制する側方規制部を有していることを特徴とする請求項1から3のいずれに記載の汚泥掻き寄せ機。
【請求項5】
制動部が、通過するフライトの先端と衝合して回転する検出部と、該検出部と一体に連動して回転体の制動位置乃至制動解除位置に変位する制動部本体と、該制動部本体と一体に連動しフライト通過時に元の位置に戻る復帰用ウエイト部とからなっていることを特徴とする請求項1から4のいずれかに記載の汚泥掻き寄せ機。
【請求項6】
揺動部材の回転軸と一体に連動する位置検知レバーをその先端が所定姿勢で突出するように設けてなることを特徴とする請求項2から5のいずれかに記載の汚泥掻き寄せ機。
【請求項1】
汚泥処理設備内に設けられた駆動回転体と従動回転体との間に掛け渡されて搬送方向に回転する無端チェーンがその搬送方向に汚泥掻き寄せ用のフライトを間隔を隔てて多数有している汚泥掻き寄せ機において、
無端チェーンと従動回転体との巻き掛け部分または従動回転体と離間した非巻き掛け部分で無端チェーンに上から接するようにフライト通過式回転体が配置されており、
該フライト通過式回転体が、回転体と、フライト通過時にフライトを検知して前記回転体の制動を解除して回転させ、フライト通過後に回転を停止させる制動部とを有しており、
前記回転体は、その中心位置から放射状に伸びる複数のフォーク部と、該フォーク部間に形成されて通過するフライトを収納可能な空間部とを有し、
前記各フォーク部の先端に前記フライトと衝合するフライト衝合部と、無端チェーンと接して無端チェーンに上から衝合するチェーン衝合部とを備えていることを特徴とする汚泥掻き寄せ機。
【請求項2】
無端チェーンの非巻き掛け部分で無端チェーンの上に回転体が接しており、
該回転体は、無端チェーンの搬送方向の上流側の所定位置で上部が枢着され下流側に下降傾斜する揺動部材に軸支されており、少なくとも回転体の自重によりチェーン衝合部が前記非巻き掛け部分の無端チェーンに張りを与えるようになっていることを特徴とする請求項1に記載の汚泥掻き寄せ機。
【請求項3】
チェーン衝合部が、断面が円弧形状からなって無端チェーンと摺動可能な衝合片部と、該衝合片部の先端に軸支され無端チェーンと接して回転可能な衝合回転部とからなっており、
回転体が制動位置にあると、1つの衝合回転部が無端チェーンと接しており、回転体の回転時には前記衝合回転部を軸支する衝合片部が無端チェーンと接してなることを特徴とする請求項1又は2に記載の汚泥掻き寄せ機。
【請求項4】
衝合片部が、衝合する無端チェーンの左右側方を規制する側方規制部を有していることを特徴とする請求項1から3のいずれに記載の汚泥掻き寄せ機。
【請求項5】
制動部が、通過するフライトの先端と衝合して回転する検出部と、該検出部と一体に連動して回転体の制動位置乃至制動解除位置に変位する制動部本体と、該制動部本体と一体に連動しフライト通過時に元の位置に戻る復帰用ウエイト部とからなっていることを特徴とする請求項1から4のいずれかに記載の汚泥掻き寄せ機。
【請求項6】
揺動部材の回転軸と一体に連動する位置検知レバーをその先端が所定姿勢で突出するように設けてなることを特徴とする請求項2から5のいずれかに記載の汚泥掻き寄せ機。
【図1】


【図2】
【図3】
【図4】
【図5】
【図6】
【図7】
【図8】
【図9】
【図10】
【図11】
【図2】
【図3】
【図4】
【図5】
【図6】
【図7】
【図8】
【図9】
【図10】
【図11】
【公開番号】特開2013−22571(P2013−22571A)
【公開日】平成25年2月4日(2013.2.4)
【国際特許分類】
【出願番号】特願2011−162651(P2011−162651)
【出願日】平成23年7月25日(2011.7.25)
【特許番号】特許第5108971号(P5108971)
【特許公報発行日】平成24年12月26日(2012.12.26)
【出願人】(301003702)アサヒ機装株式会社 (8)
【公開日】平成25年2月4日(2013.2.4)
【国際特許分類】
【出願日】平成23年7月25日(2011.7.25)
【特許番号】特許第5108971号(P5108971)
【特許公報発行日】平成24年12月26日(2012.12.26)
【出願人】(301003702)アサヒ機装株式会社 (8)
[ Back to top ]