
フロアメンテナンスツール及びそのアクチュエータ
【課題】人間工学的に設計され、ユーザの効率を高めるフロアツールに使用されるバルブが求められている。
【解決手段】フロアツールであって、該フロアツールは、第1及び第2の反対側にある端部を備えている細長いハンドルと、細長いハンドルにおける第2の端部に結合された、モップヘッドと、フロアツールからの流体の流れを制御するために機能するバルブと、ハンドルにおける第1の端部に隣接して配置され、バルブに結合されているトリガとを備えるフロアツールにより解決する。
【解決手段】フロアツールであって、該フロアツールは、第1及び第2の反対側にある端部を備えている細長いハンドルと、細長いハンドルにおける第2の端部に結合された、モップヘッドと、フロアツールからの流体の流れを制御するために機能するバルブと、ハンドルにおける第1の端部に隣接して配置され、バルブに結合されているトリガとを備えるフロアツールにより解決する。
【発明の詳細な説明】
【技術分野】
【0001】
本発明は、広範囲のフロアをメンテナンスするためのツールおよびそのアクチュエータに関する。
【背景技術】
【0002】
多くの用途のために、広範囲のフロアメンテナンスツールが存在し、それらには、床面をクリーニングするもの、床面を磨くもの、床面に物質を塗布するもの、床面から物質を剥すもの、その他が含まれる。
【発明の概要】
【発明が解決しようとする課題】
【0003】
これらのツールは、何年も前から知られているけれども、大多数のそのようなツールは、人間工学的には設計されていない。多くの場合、フロアツールの設計において、人間工学に注意を払っていないため、ユーザは、作業を実行するために多くの時間と労力とを必要とされ、劣悪な仕事の品質と、低いユーザ効率とをもたらす結果となる。また、フロアツールを使用してユーザが実行しなければならない多くの作業(例えば、クリーニング溶液リザーバを充填し、クリーニング流体を小出しし、フロアツールの頭部を回転及び/又は並進させるなど)は、その性質上、繰り返され、又はフロアツールの寿命が来るまで、しばしば何回も実行される。従って、フロアツールにおける重要な設計パラメータは、ユーザがそのような作業を実行する容易さである。残念ながら、この設計パラメータは、従来のフロアツールにおいては、しばしば忘れられ又は無視されている。
【課題を解決するための手段】
【0004】
本発明は、第1の端部と、反対側の第2の端部とを備えた細長いハンドルと、細長いハンドルにおける第2の端部に結合されたモップヘッドを備え、フロアツールからの流体の流れを制御するバルブとを有するフロアツールに結合されるフロアツールの流体ディスペンサのためのアクチュータを提供することにある。
【0005】
本発明は、フロアツールであって、該フロアツールは、第1及び第2の反対側にある端部を備えている細長いハンドルと、細長いハンドルにおける第2の端部に結合された、モップヘッドと、フロアツールからの流体の流れを制御するために機能するバルブと、ハンドルにおける第1の端部に隣接して配置され、バルブに結合されているトリガとを備えるフロアツールを提供することにある。
【発明の効果】
【0006】
使用が容易で、人間工学的に設計され、及び/又は、ユーザの効率を高めるようなフロアツールが実現できる。
【0007】
本発明のその他の観点については、詳細な説明及び添付図面を考察することで明らかになるだろう。
【図面の簡単な説明】
【0008】
【図1】本発明の実施形態によるフロアツールを示した斜視図である。
【図1A】本発明の別の実施形態によるフロアツールを、動作時の位置について示した斜視図である。
【図1B】図1Aのフロアツールを示した側立面図である。
【図1C】図1Aのフロアツールを示した正面立面図である。
【図1D】図1Aのフロアツールの反対側を示した側立面図である。
【図1E】図1Aのフロアツールを示した後面図である。
【図2】図1のフロアツールにおける第1の部分を示した詳細図であって、ユーザが操作する制御部を示している。
【図3】図1及び図2のフロアツールを示した断面図であって、ユーザが操作する制御部を第1の位置において示している。
【図4】図2及び図3に示した、ユーザが操作する制御部の別の実施形態を示した断面図である。
【図4A】図4に示した、ユーザが操作する制御部の別の実施形態を示した断面図である。
【図5】本発明の別の実施形態による、ユーザが操作する制御部を示した図である。
【図6】本発明の別の実施形態による、ユーザが操作する制御部を示した図である。
【図7】本発明の別の実施形態による、ユーザが操作する制御部を示した図である。
【図8】本発明のさらに別の実施形態による、ユーザが操作する制御部を示した図である。
【図9】図1のフロアツールにおけるグリップ部分を詳細に示した斜視図である。
【図9A】図1及び図9に示した、グリップを示した分解斜視図である。
【図10】図1のフロアツールにおけるグリップ部分を、グリップを取り外して詳細に示した斜視図である。
【図11】図1のフロアツールにおける別の部分を詳細に示した斜視図であって、本発明の実施形態によるホルスターとリザーバとを示している。
【図11A】本発明の別の実施形態による、ホルスターとリザーバとを詳細に示した斜視図である。
【図11B】本発明のさらに別の実施形態による、ホルスターとリザーバとを詳細に示した斜視図である。
【図12】図11のホルスター及びリザーバを示した後部斜視図である。
【図12A】図11Bのホルスター及びリザーバを示した後部斜視図である。
【図13】本発明の別の実施形態による、ホルスターの詳細を示した斜視図である。
【図13A】リザーバを含む、図13のホルスターの詳細を示した斜視図である。
【図13B】図1A及び図13のホルスターとリザーバとを示した分解斜視図である。
【図13C】図13A及び図13Bのリザーバを示した斜視図である。
【図13D】図13Cのリザーバを示した斜視図である。
【図13E】図13Cのリザーバを示した側面図である。
【図14】図1のフロアツールにおける別の部分であって、フロアツールのバルブを示した斜視図である。
【図15】図14に示したフロアツールの部分を示した別の斜視図である。
【図16】図14及び図15に示したフロアツールの部分を示した別の斜視図である。
【図17】図14乃至図16のバルブを示した分解斜視図である。
【図18】図14乃至図16のフロアツールを詳細に示した立面図であって、バルブハウジングの部分を取り外して、バルブを開いた位置にして示している。
【図19】図18のフロアツールを詳細に示した立面図であって、バルブを閉じた位置にして示している。
【図20】図1Aのフロアツールにおける別の部分を示した斜視図であって、フロアツールのバルブを示している。
【図21】図20のフロアツールの部分を示した別の斜視図である。
【図22】図20及び図21のフロアツールの部分を示したさらに別の斜視図である。
【図23】図1A及び図20乃至図22のバルブを示した分解斜視図である。
【図24】図1A及び図20乃至図22のフロアツールを詳細に示した立面図であって、バルブハウジングの部分を取り外して、バルブを開いた位置にして示している。
【図25】図24のフロアツールを詳細に示した立面図であって、バルブを閉じた位置にして示している。
【図26】本発明の別の実施形態に従った、フロアツールを詳細に示した断面図であって、フロアツールのバルブを閉じた位置にて示している。
【図27】図1のフロアツールの別の部分を詳細に示した斜視図であって、フロアツールにおけるヘッドと、ハンドル−ヘッド間のジョイントを示している。
【図27A】図1Aのフロアツールの別の部分を詳細に示した斜視図であって、フロアツールにおけるヘッドと、ハンドル−ヘッド間のジョイントを示している。
【発明を実施するための形態】
【0009】
本発明の実施形態について詳細に説明する前に、本発明は、その用途を、以下の説明に明らかにされ又は以下の図面に例示された、構造及び構成要素の配置の詳細に限定されるものではないことを理解されたい。本発明は、別の実施形態、及び様々な方法で実施又は実行することが可能である。また、本願において用いられている表現及び用語は、説明を目的とするもので、限定としてみなされるべきでないことを理解されたい。本願における、“具備し”、“備え”、又は“有する”及びこれらのバリエーションは、列挙された項目及びその均等物、及び追加的な項目を包含することを意味する。別の具合に特定又は限定されない限り、“取付け”、“結合”、“支持”、及び“連結”の用語及びこれらのバリエーションは、広義に使用され、直接的及び間接的の両方の取付け、結合、支持、及び連結を包含する。さらに、“結合され”及び“連結され”とは、物理的又は機械的に結合又は連結されることに限られない。
【0010】
本明細書から理解されるように、本発明の1又は複数の観点は、手持ち式のフロアメンテナンスツールであって、ハンドルと、ハンドルに取り付けられたヘッドとを有している。そのようなツール又はその構成要素は、多くの異なる作業に使用することができ、例えば、表面のクリーニング(例えば、モップ)、表面への保護コーティングの塗布(例えば、ワックス)、表面からのコーティングの除去(例えば、剥離)などに使用される。簡単にする目的のため、本願において開示されるフロアメンテナンスツールは、一般的に使用される用語、すなわち、“モップ”に関して参照される。しかしながら、この用語は、特に別な具合に述べられない限り、本願に開示され及びクレームされる装置又は方法の機能を制限する意図ではないことを理解されたい。むしろ、この用語は、本発明の様々な実施形態を開示し及びクレームするときの、簡単さの目的のために、使用されている。本明細書及び特許請求の範囲に使用されている、“モップ”という用語は、フロアクリーニングの作業及び装置のみならず、その他のフロアメンテナンス作業、限定はしないが、ワックス塗布、剥離、バッフィングなどをも包含する。さらに、構成要素の名称に“モップ”という用語を有して本願に開示されている構成要素(例えば、“モップヘッド”、“モップパッド”など)は、用途をクリーニング作業に限定されるように解釈されるべきでない。
【0011】
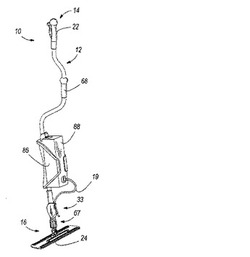
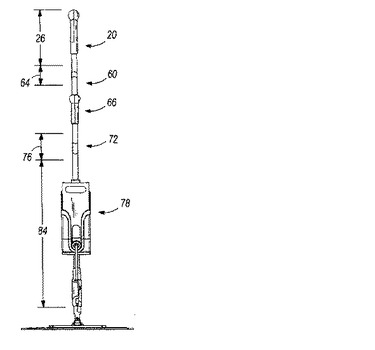
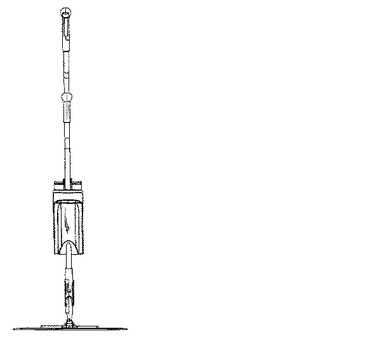
図1には、本発明の実施形態によるモップを示している。モップ10は、ハンドル12を具備し、モップ10の略長手長さに沿って延在している。ハンドル12は、一般的に、蛇状又はオーガの形状を有している。本願において使用されるように、“蛇状”又は“オーガ”という用語は、波打った形状を称しており、対称的又は規則的である必要はなく、同一又は異なる振幅及び長さの任意の数の波打ちを有し得る。また、波打ち形状におけるそれぞれの波は、長さ及び振幅において、対称的であるか、又は非対称的である。さらに、発明者らは、全体的に又は実質的に全体的に単一の平面に配置されるハンドル12が良好な性能の結果をもたらすことを発見したけれども、他の実施形態においては、ハンドル12は2以上の平面に配置されてもよい。これに関して、1又は複数の波打ちは、1又は複数の別の波打ちがある平面とは異なる平面に配置されてもよい。同様に、単一の波打ちは、実質的に全体的に単一の平面に配置され、又は1つを越える平面に配置される(すなわち、波打ちの部分は、互いに対して斜めになっている。)。
【0012】
図1に示したハンドル12は、第1の端部14と、第1の端部14とは反対側にある第2の端部16とを具備している。第2の端部16は、モップヘッド24に結合され、第1の端部は、ユーザによって把持される部分を具備し、ユーザは、モップヘッド24を床面又はその他の表面に沿って動かす。図1及び図1Bに最良に示されるように、長手軸線18は、ハンドル12における第1の端部14と第2の端部16との間を通って延在している。図示の実施形態及び他の実施形態において、長手軸線18は、ハンドル12の長さを定める箇所を通って延在する直線になっている。また、図示の実施形態及び他の実施形態において、長手軸線18は、モップヘッド24とハンドル12との間の結合によって形成された、放射状の中央位置を通って延在する直線であり、モップ10の通常の操作においてモップヘッド24とは反対側の端部にある、モップ10のハンドル12をユーザが把持する箇所によって形成される放射状の中央位置を通る。いくつかの実施形態においては、長手軸線は、使用中のハンドル12の回転軸線として形成される(例えば、ハンドルの第1の端部が、回転軸線から実質的に外れて延びる要素を有する。)。
【0013】
いくつかの実施形態においては、蛇状のハンドル12における(長手軸線18に対して平行な直線に沿って測定した)少なくとも大部分は、長手軸線18とは交差しない。例えば、図1B乃至図1Eに示した実施形態においては、ハンドルにおけるおよそ約16%だけが、長手軸線と交差し又は位置する。しかしながら、いくつかの実施形態においては、蛇状のハンドル12の少なくとも70%(長手軸線18に対して平行な直線に沿って測定する。)が、長手軸線18と交差しない。さらに別の実施形態においては、蛇状のハンドル12の少なくとも80%(長手軸線18に対して平行な直線に沿って測定する。)が、長手軸線18と交差しない。図1乃至図1Eに示した実施形態を参照すると、ハンドル10は、長手軸線18の箇所にて、開始及び終了し、両者の間の1つの位置にて、長手軸線18と交差している。
【0014】
図1乃至図1Cに示した実施形態におけるハンドル12は、単一の平面内にある(例えば、図1C及び図1E参照)。しかしながら、前述したように、ハンドル12の1又は複数の部分は、平面から外れて位置してもよい。例えば、いくつかの実施形態においては、蛇状のハンドル12における少なくとも大部分(長手軸線に対して平行な直線に沿って測定する。)は、平面内に位置する。他の実施形態においては、ハンドル12における少なくとも75%は、平面内に位置する。
【0015】
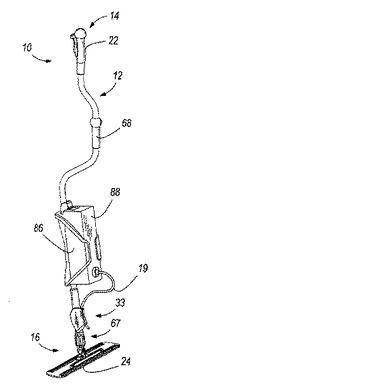
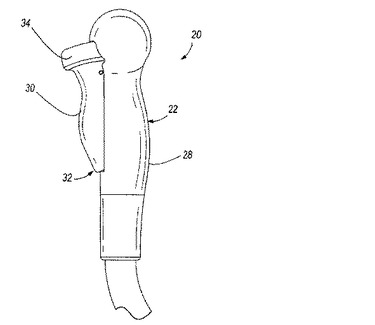
図1及び図1B乃至図1Eに示したモップ10は、一般的に、作業中には、図1Aに示したように向けられる。図示の実施形態における、モップ10のハンドル12は、モップヘッド12の端部を形成する、第1の略直線状の部分20を有している。この第1の部分20は、モップ10のユーザが、片手でハンドル12を保持できる位置を形成し、又はこの部分に対して、モップ10を使用するとき、ユーザが、ユーザの片手で押圧力を働かせる。図示の実施形態においては、第1の部分20には、グリップが設けられ、ユーザの手で握るために適合した曲線形状を有し、ユーザの手のひらの形状に少なくとも部分的に一致し、モップ10の操作中に、ユーザの手のひらが係合するために適合した、丸い終端部を有している。
【0016】
図1乃至図1Eに示した実施形態における、ハンドル12の第1の部分20は、長手軸線18に概略位置して、これに対して平行になっている。しかしながら、別の実施形態においては、第1の部分20は、長手軸線18に対して、約30度を越えない角度にて、傾斜して向けることもできる。他の実施形態においては、この角度は、約20度以下である。さらに別の実施形態においては、この角度は、約10度以下である。
【0017】
いくつかの実施形態において、第1の部分の長さ26(長手軸線18に対して平行な直線に沿って測定する。)は、少なくとも約5インチで、約20インチ以下であるが、他の実施形態においては、この長さ26は、約15インチ以下で、約8インチ以上であり、さらに別の実施形態においては、長さ26は、約12インチ以下で、約10インチ以上である。
【0018】
図示の通り、グリップ26は、ハンドル12における第1の部分30に結合されている。グリップの長さ26(長手軸線18に対して平行な直線に沿って測定する。)は、少なくとも約3インチで、約20インチ以下である。別の実施形態においては、この長さは、約13インチ以下で、約5インチ以上である。さらに別の実施形態においては、長さ26は、約10インチ以下で、約8インチ以上である。
【0019】
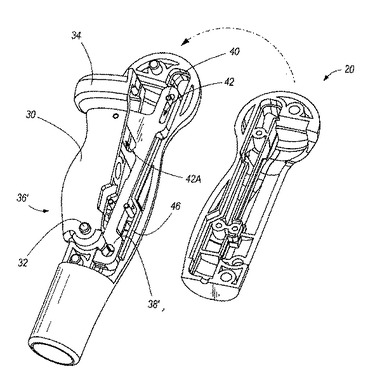
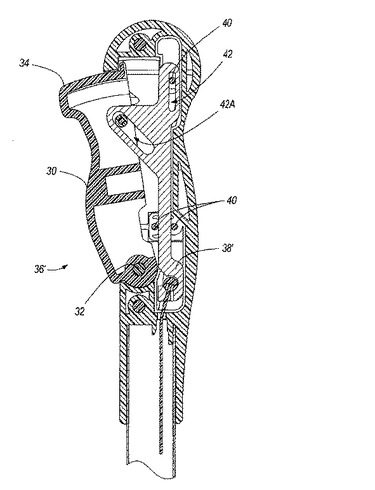
図1乃至図1Eに示した実施形態のそれぞれに図示したグリップ22は、軸線を中心としてピボット可能である部分30を具備しているが、いくつかの実施形態においては、この部分30は、トリガ34を形成し、トリガは、詳しくは後述するように、モップ10によって実行されるフロアメンテナンス作業のために、流体を小出しすべく、ユーザによってピボットされる。図2乃至図4に示すように、トリガ34は、軸線32を中心としてピボット可能であり、この軸線は、(図示の実施形態にて示すように)ピボットピンによって形成され、又は、トリガ34又はその他のグリップ部分における任意の他の適当な要素によって形成されるが、いくつかの実施形態においては、トリガ34は、トリガの反対側のピボット箇所32の端部に比べて、モップの第2の端部16に、より近く配置された、ピボット箇所32から離れるように延在する。別の言い方をすると、トリガ34は、モップ10の第2の端部16と、トリガ34の遠位端との間に配置された、軸線32を中心としてピボットする。ユーザは、ユーザらの手で、トリガ34を絞り(例えば、グリップ22における残りの部分に向けた方向に)、いくつかの実施形態においては、トリガ34は、ユーザは、ユーザの親指をトリガ34に置き1以上のその他の指をグリップ22の反対側に配置することで、トリガ34を操作し絞られる。流体の小出しが必要ではないときの、モップ作業の時には、ユーザは、彼又は彼女の手のひらを、グリップ22の頂部に配置し、グリップは、モップ10の動きを容易にするために、(前述したように)、丸められている。
【0020】
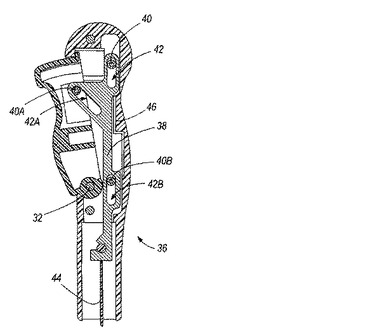
次に、図3を参照すると、トリガ34の動きは、前述したように、制御要素36の動きを生じさせ、制御要素は、ハンドル12における第1の部分20に略収容され又は別な具合に結合され、いくつかの実施形態においては、制御要素36は、摺動体、プーリー、ローラ、レバー、又は第1の部分20に対して可動であるその他の要素である。例えば、図3に示された制御要素36は、トリガ34の回転に応答する摺動体38であり、モップ10のバルブ33に対して接離するように、一般的な方向に移動する(詳しくは後述する)。原動力は、多数の異なる方法において、トリガ34の回転から、摺動体38のそのような動きへと伝達される。いくつかの実施形態においては、この力は、摺動体38の部分に対して、トリガ34の部分をカム接触させることで伝達される。他の実施形態においては、この力は、トリガ34又は摺動体38の部分を、摺動体38又はトリガ34の部分に沿って、それぞれ転動させることで伝達される。トリガ34のピボットによって、摺動体38を動かすには、さらに別の方法も可能であり、それらは、本発明の精神及び範囲内に含まれる。
【0021】
図3には、トリガ34のピボットの動きが、摺動体の摺動の動きを発生させるために使用される方法の一例が示されている。この実施形態においては、トリガ34の突起部又はトリガ34に結合された突起部が、摺動体38の開口部42Aの内部に受け入れられ、摺動体38を動かすために、開口部42Aの内面に沿って移動する。図3に示した突起部は、ピンと、ブッシングとの組40Aであったけれども、他の実施形態においては、ブッシングは使用されない。ブッシングは、トリガ34と摺動体38との間の摩擦を減らすために使用され、いくつかの実施形態においては、そのような摩擦をさらに減らすために、ピンを中心として回転可能になっている。開口部42Aは、任意のサイズ及び形状であって、トリガ34が絞られたとき、ピンとブッシングとの組40Aが、その中で動けるようになっている。変形例としては、ピンとブッシングとの組40Aは、摺動体38の(周囲の)外面に隣接して配置され、トリガ34が絞られたとき、トリガ34から摺動体38へ原動力を働かせるように移動し、さらに別の実施形態においては、ピンとブッシングとの組40Aと、開口部42Aとの位置は逆にされ(すなわち、ピンとブッシングとの組40Aは、代わりに、摺動体38に配置され、開口部42Aは、トリガ24に形成される。)、依然として、前述したのと同一の力伝達機能を実行する。
【0022】
いくつかの実施形態においては、摺動体38の動きは、摺動体38又はグリップ22の1又は複数の要素が、それぞれ、グリップ22又は摺動体38の表面に対して、カム接触又は転動することで制御される。この制御は、摺動体38の動きを安定化させることを助け、摺動体38が束縛されるのを防ぎ、又はその他の不都合な態様にて動くことを防ぐ。例えば、図3に示した摺動体38は、第1及び第2の間隔を隔てた開口部42,42Bを有し、これらのそれぞれは、グリップ22に結合された突起部(すなわち、ピンとブッシングとの組40,40B)をそれぞれ受け入れる。開口部42,42Bは、任意のサイズ及び形状であって、トリガ34が絞られたとき、ピンとブッシングとの組40,40Bの動きを許容するが、これらは、いくつかの実施形態においては、細長いスロットであり、他の実施形態においては、これらの突起部のうちいずれか又は両方が、代わりに、摺動体38の(周囲の)外面に沿ったロール又はカムである。また、別の実施形態においては、ピンとブッシングとの組40,40B及び開口部42,42Bにおけるいずれか又は両方は、逆にすることができる(例えば、ピンとブッシングとの組40,40Bは、摺動体38に取り付けられ、グリップ22の開口部42,42Bに延入している。)。
【0023】
図3に示した摺動体38は、ケーブル44に結合され、摺動体38をバルブ33(詳しくは後述する)に結合し、バルブ33を遠隔操作する。従って、前述したように、摺動体38を動かすことで、摺動体38は、ケーブル44を押し引きし、これにより、バルブ33を作動させる。図3に示した摺動体38は、ケーブル端部の取付具によって、ケーブル44に結合されるけれども、この結合は、任意のその他の適当な方法によって確立できる。別の実施形態においては、摺動体38は、他の方法によって、バルブ33に結合されて作動させ、例えば、1又は複数のバー、ロッド、又はその他のリンクであって、摺動体38とバルブ33との間に延在するもの、1又は複数の液圧ラインであって、液圧又は空気圧を伝達するもの、コード、ワイヤ、ロープ、又はその他の可撓性の細長い要素などである。さらに、電気装置を使用して、作動させることもできる。例えば、ソレノイドバルブ、蠕動式ポンプなどを切り替える電気スイッチが、いくつかの実施形態では使用される。
【0024】
図3に示した実施形態に対する変形例としては、摺動体38は、3つよりも少ないか、多くの開口部を有し、トリガ34からケーブル44にパワーを伝達し、前述したように、摺動体38の動きを安定させる。例えば、図4及び図4Aに示した実施形態においては、2つだけの開口部が利用され、この場合、1つだけの開口部42が、グリップ22に対して摺動体38の動きを安定化させるために使用されている。図4に示した摺動体38は、図4に示したものに比べて短く、摺動体38におけるそれぞれの開口部42,42Aの内部に受け入れられた、2つのピンとブッシングとの組40,40A(図4には、一方だけが示される)によって、動きが決定される。さらに、動きの安定性は、一般的に摺動体38のそばに配置される、ボス要素によって提供される。これらのボス要素は、グリップ22に設けたリブ46、グリップ22に結合され又はグリップ22にモールド成形又は別の方法で形成されたもの、摺動体38の動きの案内に適した任意の形状及びサイズを有するもの(例えば、ペグ、ピン(図4A)、壁、リブ、突起など)、及び、本願に開示された任意の実施形態において使用できるものである。上述した図2及び図3に示した実施形態と同様に、図4及び図4Aに示したトリガ34は、ユーザによって押されるトリガ34における終端部に比べて、ハンドル12における第2の端部16により近い、軸線32を中心としてピボット可能である。
【0025】
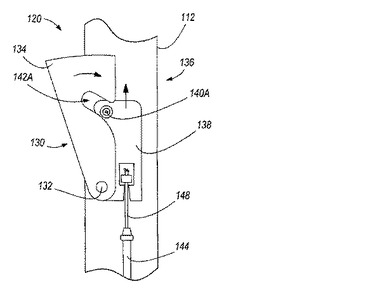
図5乃至図8は、本発明の異なる実施形態に従った、変形例による制御要素の実施形態を示している。従って、図5乃至図8の実施形態と、図3及び図4の実施形態との間の互いに一致しない特徴及び要素を除き、図5乃至図8の実施形態における特徴及び要素(及び特徴及び要素に対する変形例)について、より完全に説明するために、図3及び図4の実施形態における説明を参照する。図5乃至図8の実施形態における特徴及び要素であって、図3及び図4の実施形態における特徴及び要素に対応するものには、(例えば、112、212、312などのように)、参照符号を百番台にして付している。
【0026】
いくつかの実施形態におけるグリップ22は、前述した任意の方法において、トリガ34に結合された摺動体38を採用しているが、その動きは、同じく前述された突起部及び開口部よりむしろ、摺動体38及びグリップ22の相対的形状によって、別な具合に制御される。また、図5に示した制御要素136は、摺動体138を具備し、ピンとブッシングとの組140Aを支持している(図3に関連して説明した、トリガによって支持されるピンとブッシングとの組とは相違している。)。トリガ134に形成された開口部142Aは、ピンとブッシングとの組140Aを受入れ、摺動体138の動きの方向に対して斜めの方向に延在し、図3に関連して前述した、摺動体138の動きを発生させる。
【0027】
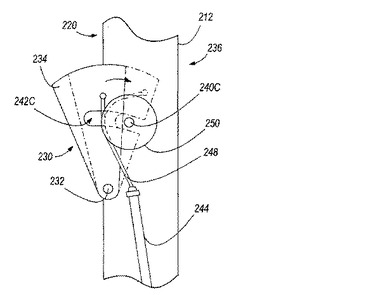
いくつかの実施形態においては、トリガが原動力を与える制御要素は摺動せず、代わりに、回転して、ケーブル(又はバルブ33に結合された他の要素)を操作する。例えば、図6に示した制御要素236は、プーリー250であって、ピンとブッシングとの組240Cに結合されて回転可能になっているけれども、ピンとブッシングとの組240Cは、代わりに、ピン又はその他の突起部によって置換されてもよい。ピンとブッシングとの組240Cは、トリガ234が絞られたときにトリガ234に形成された、開口部242Cに沿って移動する。図6に示した開口部242Cは、弓形の形状であり、その内部をピンとブッシングとの組240Cが自由に動けるようになっているけれども、必要に応じて、そのような動きを許容できる、任意のその他の開口部の形状及びサイズを使用することもできる。ケーブル248は、トリガ234に結合され、トリガ234が絞られたとき引っ張られて、少なくとも部分的に、プーリー250を中心として巻き付けられ、それにより、ケーブル248の操作を可能にしている。しかしながら、別の実施形態においては、バルブ33をトリガ234(上述)に結合する別の要素が、トリガ234による同様な操作のために結合される。
【0028】
引き続き、図6を参照すると、プーリー250は、トリガ234が絞られたときに、プーリーのまわりにケーブル248を引っ張るのに適した、任意のサイズ及び形状を有している。例えば、プーリー250は、一般的に丸くて(例えば、図6参照)、卵形、半円形、又は不規則な形状を有している。また、図6においては、プーリー250は、ピンとブッシングとの組240Cにおける、ブッシングと共に回転可能であるが、別の実施形態においては、プーリー250は、回転可能にはなっていない。いくつかの実施形態においては、ピンとブッシングとの組240Cは、開口部242Cの内面と嵌合係合するような形状であり、例えば、ピンとブッシングとの組240Cにある、及び開口部242Cの内面にある、歯車である。この係合は、トリガ234が絞られたとき、プーリー250の回転に、より制御を提供する。
【0029】
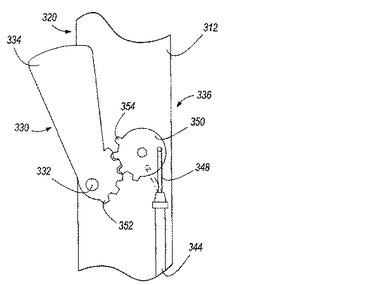
他の実施形態による制御要素336は、トリガ334の面に歯352を具備し、制御要素336の面の歯354と係合し、これは、歯車350の形態を呈している。図7には、そのような実施形態の一例を示している。トリガ334と、歯車350とには、4つの歯を示しているけれども、別の実施形態においては、別な数の歯を、これらの要素の一方又は両方に用いている。上述した別の実施形態と同様に、図7に示したトリガ334は、モップ10の第2の端部16と、ユーザによって絞られるトリガ34における遠位端との間に配置された、軸線332を中心としてピボットする。トリガ334が絞られると、歯車350は回転する。歯車350の偏心した位置にて、歯車350に結合された、ケーブル348(又は前述した他のリンク)における第1の端部は、歯車350が回転すると、歯車350によって押し引きされ、それにより、後述するように、バルブ33を操作する。
【0030】
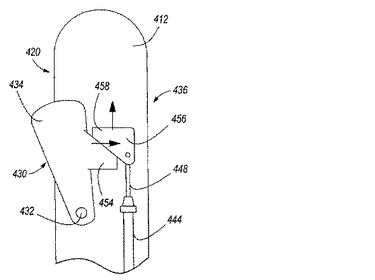
さらに別の実施形態による制御要素436は、1又は複数のカム面を具備し、トリガ434が絞られるときの、トリガ434の1又は複数のカム面の移動方向に対して傾斜して配置されている。図8には、そのような制御要素435の一例を示している。前述した例示的な実施形態と同様に、トリガ434は、モップ10の第2の端部16と、ユーザによって絞られるトリガ434の遠位端との間に配置された、軸線432を中心としてピボット可能になっている。トリガ434は、傾斜面又は斜面454を具備し、摺動体438の傾斜面又は斜面456に向けて一致して係合している(摺動体438は、このトリガと摺動体との関係に矛盾することのない、前述した任意の特徴を有し得る。)。トリガ434が、ユーザによって絞られ又は解放されると、斜面454,456は、互いに沿って摺動して、摺動体438をバルブ33に対して一般的に接離させ、それにより、摺動体438に結合されたケーブル448を押し引きさせ、バルブ33を操作する。
【0031】
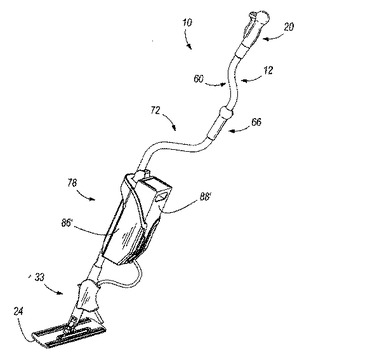
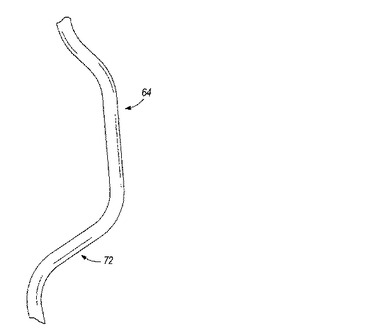
再び、図1、図1B、及び図1Cを参照すると、これらの図面には、ハンドル12における第2の部分60が示されており、第1の部分26から離れて延在し、長手軸線18から、角度62にて延在している。ハンドル12における第2の部分60は、第3の部分66に延在し、詳しくは後述するように、モップ10のユーザに第2のグリップを提供している。いくつかの実施形態においては、第2の部分60における少なくとも一部分(例えば、中間部分)は、実質的に直線状であり、長手軸線18に対して角度62を形成している。いくつかの実施形態においては、この角度62は、約15度以上で、約75度以下である。別の実施形態においては、この角度62は、約30度以上で、約60度以下である。さらに別の実施形態においては、この角度62は、約40度以上で、約50度以下である。
【0032】
第2の部分の長さ64(長手軸線18に対して平行な直線に沿って測定する。)は、いくつかの実施形態においては、少なくとも約1インチで、約8インチ以下である。別の実施形態においては、この長さ64は、約6インチ以下で、約2インチ以上である。さらに別の実施形態においては、約4.5インチ以下で、約3インチ以上である長さ64が使用される。
【0033】
前述したように、ハンドル12における第3の部分66は、図1、図1B、及び図1Cに示されるように、ユーザが第2の手で把持するための位置を提供する(第1の手は、前述したグリップ22を把持している。)。図1、図1B、及び図1Cに示した実施形態においては、第3の部分66は、オフセットしているが、第1の部分26に対して実質的に平行である方向に、第2の部分60から離れて延在している。しかしながら、別の実施形態においては、第3の部分66は、約30度以下の角度にて、長手軸線18に対して向けられている。別の実施形態においては、この角度は、約20度以下である。さらに別の実施形態においては、この角度は、約10度以下である。
【0034】
第3の部分66は、一般的に、ハンドル12の長手軸線18からオフセットしており、ユーザに対して、ハンドル12にトルクを働かせられる機械的な利点を提供し、それにより、モップ10をピボットさせる。第3の部分66は、詳しくは後述される、流体容器88,88’,88”の重心のオフセットに比べて、大きな量だけ、長手軸線からオフセットしている。図示の実施形態においては、オフセットは、約3インチである。しかしながら、いくつかの実施形態においては、オフセット67は、少なくとも約1インチであり、約7インチ以下である。別の実施形態においては、このオフセット67は、少なくとも約2インチであり、約5インチ以下である。さらに別の実施形態においては、このオフセット67は、少なくとも約2.5インチであり、約3.5インチ以下である。
【0035】
いくつかの実施形態においては、第3の部分の長さ(長手軸線18に対して平行な直線に沿って測定する。)は、少なくとも約4インチであり、約16インチ以下である。別の実施形態においては、この長さは、約12インチ以下で、約6インチ以上である。さらに別の実施形態においては、約10.5インチ以下で、約8インチ以上である第3の部分が使用される。
【0036】
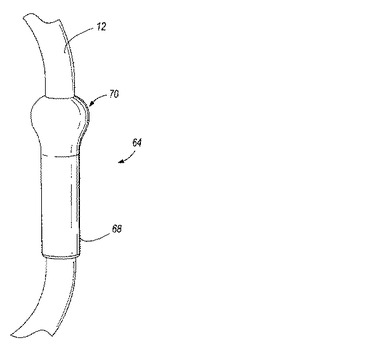
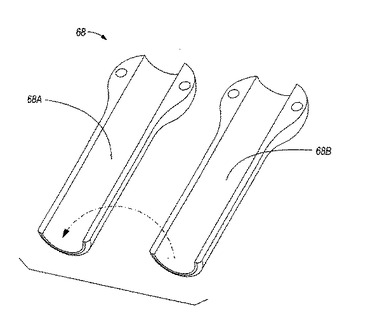
いくつかの実施形態においては、第3の部分66は、ユーザが把持するための、第2のグリップ68を具備している。図9及び図9Aには、第2のグリップ68の例を示している。第2のグリップ68は、ハンドル12に比べて、大きい直径を有している。図9及び図9Aに示した第2のグリップ68における上部部分は、グリップ68の残余の部分に比べて大きい直径をもった、隆起部70を具備している。第2のグリップ68のこの形状は、ユーザのために、改良された把持面を提供する。いくつかの実施形態においては、第2のグリップ68における任意の部分又はすべての部分が、粗いテクスチャ又はその他の類似の高摩擦表面を具備し、オペレータによる把持を容易にしている。また、あるいは、代わりに、第2のグリップ68は、円周方向の隆起又は出っ張り、又はその他の突起又は凹部を具備し、一般的にユーザの指に合致させる。第2のグリップ68には、他の形状及びテクスチャも可能であって、オペレータによる把持を容易にし、それらは、本発明の精神及び範囲に含まれると考えられる。
【0037】
第2のグリップ68は、ハンドル12と一体的であるか、又は、別個の部品であって、任意の適当な方法で、ハンドル12に取り付けられる。第2のグリップがハンドル12に取り付けられる別個の部品であるような実施形態においては、第2のグリップ68は、単一の部品であって、ハンドル12の製造中に、ハンドルの所望の位置に滑り降ろされる。変形例としては、第2のグリップ68は、多部品から構成され、任意の適当な方法、例えば、ねじ、ボルト、ピン、リベット、釘、無頭釘、ステープル、クランプ、留め金、及びその他の固定具、相互係合要素などを用いて、互いに結合される。例えば、図9及び図9Aに示した第2のグリップ68は、2つの半体68A,68Bを具備し、ねじ(図示せず)によって、ハンドル12のまわりに、互いに結合される。図9及び図9Aの実施形態における第2のグリップ68は、ハンドル12に対して回転不能になっているけれども、別の実施形態においては、第2のグリップ68は、ハンドル12に対して回転可能でもよい。
【0038】
図1、図1B、及び図1Cを再び参照すると、これらの図面に示されたハンドル12における第4の部分72は、ハンドル12における第3の部分66から延在し、長手軸線18と交差している。図示された第4の部分72は、ハンドル12の第5の部分78へと延びて、長手軸線18の反対側に一般的に配置されている。いくつかの実施形態においては、第4の部分72における少なくとも一部分(例えば、中間部分)は、実質的に直線状であり、長手軸線18に対して角度74を形成している。いくつかの実施形態においては、この角度74は、約30度以上で、約75度以下である。別の実施形態においては、この角度74は、約40度以上で、約70度以下である。さらに別の実施形態においては、この角度74は、約50度以上で、約60度以下である。
【0039】
いくつかの実施形態においては、少なくとも約2インチで、約16インチ以下である第4の部分の長さ76(長手軸線18に対して平行な直線に沿って測定する。)が使用される。別の実施形態においては、この長さ76は、約12インチ以下で、約3インチ以上である。さらに別の実施形態においては、約8インチ以下で、約4インチ以上である長さ76が使用される。
【0040】
図1、図1B、及び図1Cに示したモップハンドル12における第5の部分78は、第4の部分72とモップヘッド24との間に延在し、詳しくは後述される流体リザーバ(以下、容器88と称する)のために、取付位置を提供する。いくつかの実施形態においては、第5の部分78は、一般的に直線状であるけれども、第5の部分78は、別の実施形態においては、別の形状を有することができる。図1、図1B、及び図1Cに示したモップハンドル12における第5の部分78は、長手軸線18に対して角度82にて延在している。図示の通り、角度82は、約7.5度である。いくつかの実施形態においては、この角度82は、約5度以上で、約20度以下である。別の実施形態においては、この角度82は、約6度以上で、約15度以下である。さらに別の実施形態においては、この角度82は、約7度以上で、約10度以下である。
【0041】
図示の実施形態においては、第5の部分の長さ84(長手軸線18と平行な直線に沿って測定する。)は、約22.5インチである。しかしながら、いくつかの実施形態においては、この長さは、少なくとも約18インチであり、約35インチ以下である。別の実施形態においては、この長さ84は、約32インチ以下で、約20インチ以上である。さらに別の実施形態においては、約30インチ以下で、約22インチ以上である長さ84が使用される。
【0042】
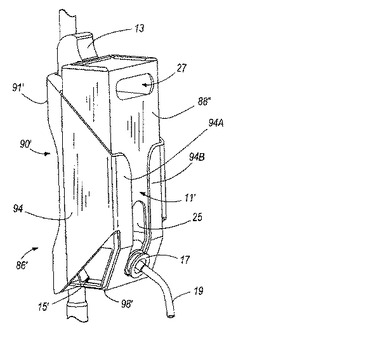
いくつかの実施形態においては、モップ10は、流体容器88を保持するために、ホルスター86を具備している。本明細書及び特許請求の範囲において使用されるように、“ホルスター”という用語は、任意の要素又は装置であって、箱、バッグ、ボトル、桶、又はその他の適当な容器に収容された大量の流体を支持し、又は支持すべく適合されたものを称する。図11乃至図13Aには、そのような容器88,88’,88”の例を示している。図示された容器88,88’,88”は、それぞれ、放出口17と、そこから延びる所定長さの導管19とを具備している。導管19は、容器88,88’,88”からの材料の流れを許容する。そのような材料は、例えば、液体、粉末、又はスラリーなど、任意の流動可能な形態を呈する。
【0043】
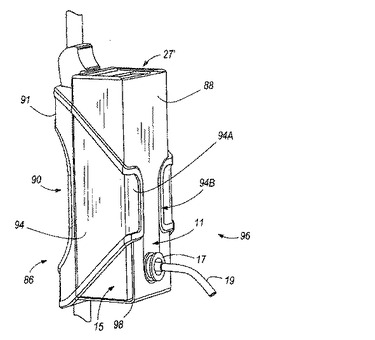
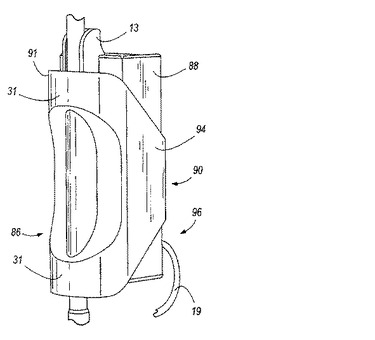
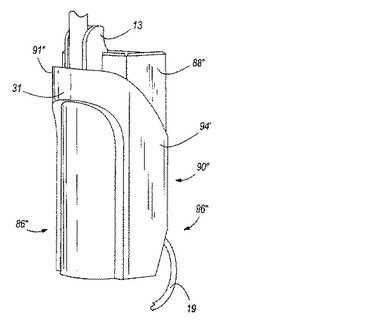
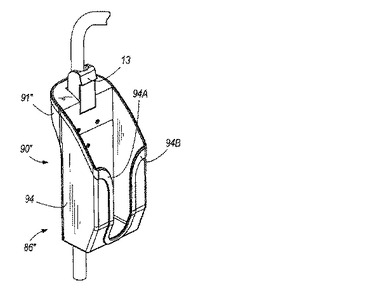
ホルスター86,86’,86”は、この機能を実行できる任意の材料から作られ、それらには、プラスチック、金属、及び複合材料が含まれる。いくつかの実施形態においては、ホルスター86,86’,86”は、実質的に全体的に容器を取り囲み、一方、別の実施形態においては、ホルスター86,86’,86”は、容器の一部分だけを取り囲む。ホルスター86,86’,86”は、流体の容器を支持するために適当な任意のサイズ及び形状である。図11乃至図13に示した実施形態においては、ホルスター86,86’,86”は、略立方体である容器を保持するために形成され、例えば、“バッグインボックス”又はその他の一般的に矩形状の容器88,88’,88”などが用いられる。図11、図11A、図12、及び図13に示した容器88とは異なり、図11B、図12B、及び図13Bに示した容器88’,88”は、それぞれテーパ付きの下部部分を有している。
【0044】
図11乃至図13に示した様々なホルスターの実施形態のそれぞれは、容器88,88’,88”のまわりに延びた、ホルスター本体90,90’,90”を具備している。ホルスター本体90,90’,90”は、ホルスター86,86’,86”の後部部分91,91’,91”にある、ハンドル12の第5の部分78に結合されている(図12及び図12A参照)。いくつかの実施形態においては、ホルスター86,86’,86”における後部部分91,91’,91”は、ハンドル12を受け入れるために、略円筒形の開口部を貫通させて有している。変形例としては、ホルスター86,86’,86”における後部部分91,91’,91”は、(スナップ嵌合の係合のように)、ハンドル12の第5の部分78を受け入れる凹部部分を具備するように形成されている。これらの及びその他の実施形態において、ホルスター86,86’,86”における後部部分91,91’,91”は、任意のタイプの1又は複数の固定具(図示せず)によって、ハンドル12における第5の部分に固定され、固定は、グルー、溶接、鑞付け、又は別の方法で、ハンドルの第5の部分78に任意の方法で接合され、又は任意のその他の方法で、ハンドル12の第5の部分78に、永久的に又は着脱可能に取り付けられる。いくつかの変形例による実施形態においては、ハンドル12及びホルスター86,86’,86”(又は、ホルスター86,86’,86”及びハンドル12)に設けた、合致する開口部と突起部とが、それぞれ、ホルスター86,86’,86”をハンドル12に結合する。また、それぞれの図示した実施形態におけるホルスター本体90,90’,90”は、ハンドル12に固定された単一の要素であるか、又は代わりに、ハンドル12のまわりに取り付けられた、2以上の部品である。
【0045】
いくつかの実施形態においては、裏板92は、ホルスター86,86’,86”と、容器88,88’,88”との間にて、ホルスター86,86’,86”の後部に結合される。前述したように、ホルスター86,86’,86”は、容器88,88’,88”を支持するのに適した任意の形状を有する。単なる例示としては、図11乃至図13に示した実施形態のそれぞれにおける、ホルスター本体90,90’,90”は、受け入れられる容器88,88’,88”の両側の後部部分91,91’,91”から延びた側部94を具備している。図示された側部94には、テーパが付けられ、2つのタブ部分94A,94Bに延び、ホルスター本体90,90’,90”の前方部分96,96’,96”にて、互いに向けて延びており、それにより、容器88,88’,88”を保持する。ホルスター本体90,90’,90”はさらに、底部部分98,98’,98”を具備し、ホルスター本体90,90’,90”の後部部分91から、前方部分96,96’,96”に向けて一般的に延在し、次に、上方へ延びて、タブ部分94A,94Bに結合される。変形例としては、底部部分98,98’,98”は、ホルスター86,86’,86”の側部94から延在し、ホルスター本体90,90’,90”における前方又は後方部分96,96’,96”,91,91’,91”に直接的に結合されることは、必ずしも必要ではない。
【0046】
いくつかの実施形態においては、ホルスター本体90,90’,90”は、ホルスター本体90,90’,90”における底部部分98,98’,98”と側部94及び/又はホルスター本体90,90’,90”における前方部分96,96’,96”との間に、1又は複数の開口部15を形成する形状になっている。開口部15は、少なくとも部分的に、ホルスター本体90,90’,90”の形状に応じて、任意の形状及びサイズを有する。別の実施形態においては、そのような開口部15は、ホルスター本体90,90’,90”におけるこれらの部分の間に存在しない。
【0047】
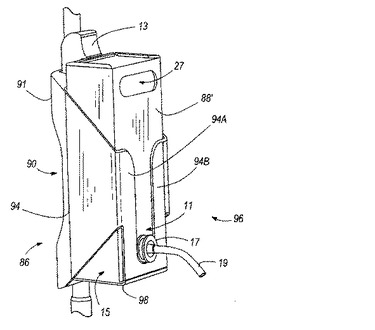
いくつかの実施形態においては、ホルスター本体90,90’,90”には、開口部11が設けられ、これを通して、容器88,88’,88”の部分、及び/又は、容器88,88’,88”から延びた導管19が通過する。例えば、図11乃至図13の実施形態に示したホルスター本体90,90’,90”は、この目的のために、前方部分96,96’,96”に、それぞれスロット11を有している。特に、それぞれの容器88,88’,88”の放出口17は、容器88,88’,88”がホルスター86,86’,86”に挿入されたとき、スロット11に受け入れられる。
【0048】
引き続き、図11乃至図13に示した実施形態を参照すると、それぞれのホルスター86,86’,86”には、ホルスター86,86’,86”の内部に容器88,88’,88”を保持するためにラッチが設けられている。ラッチ13は、この目的に適した任意の形態を呈することができ、図示の実施形態においては、ハンドル12に隣接して、ホルスター86,86’,86”に回転可能に結合された、レバーである。図示したラッチ13は、ラッチ13の部分が、ホルスター86,86’,86”内の容器88,88’,88”の部分にわたって延在する位置へ及び位置から回転可能であり、それにより、容器88,88’,88”が、最初にラッチ13を移動させることなく、取り外されることを阻止する。ホルスターから容器88,88’,88”を取り外すためには(例えば、モップ10によって運ばれる流体のタイプを変更する、又は空になった容器88,88’,88”を満タンの容器88,88’,88”と交換するなど)、ユーザは単に、ラッチ13をハンドル12に向けた方向に押圧し、ホルスター86,86’,86”から容器88,88’,88”を引き出せばよい。ラッチ13は、任意のタイプの1又は複数のばねによって、係止位置へ向けて付勢され、ばねは、例えば、捻ればねであって、ラッチ13のピボットに受け入れられ、ホルスター86,86’,86”内の容器88,88’,88”に向けた回転方向にラッチを付勢するもの、1又は複数の板ばね、拡張ばね、又は、ラッチ13をそのような方向に付勢するように配置された弾性帯、ラッチをそのような方向へ付勢すべく配置された1又は複数の磁石などである。
【0049】
いくつかの実施形態においては、容器88,88’,88”は、少なくとも1つの把持部分27を具備し、ユーザが容易に、容器88,88’,88”をホルスター86,86’,86”から取り外せるようにしている。把持部分27,27’の例は、図11、図11A、図11B、図13A、及び図13Bに示しており、流体のバッグ(図示せず)を取り囲む容器88,88’,88”における、硬質の又は半硬質の部分に設けた切欠として示される。その他の把持部分、例えば、その他の開口部、容器88,88’,88”から延びた突起部、バー、ノブ、又はハンドルを併用して又は代わりに使用できる。すべてのそのような場合において、把持部分27は、ユーザが、容器88,88’,88”を取り外し及び据え付けるのに適した、任意の形状及びサイズを有し、それらは、本発明の精神及び範囲に含まれる。
【0050】
いくつかの実施形態においては、空になった容器88,88’,88”は、ホルスター86,86’,86”から取り外されて廃棄され、一方、他の実施形態においては、空になった容器88,88’,88”は、取り外され、再充填されて、ホルスター86,86’,86”に再び配置される。
【0051】
いくつかの実施形態においては、ホルスター本体の底部端部に近接した1又は複数の壁には、テーパが付いている。図11B、図12B、及び図13B乃至図13Eには、このテーパ付きの特徴を例示している。これらの実施形態においては、ホルスター本体90’,90”に得られた漏斗形状の端部は、流体容器88’,88”におけるテーパ付き端部と、合致又は部分的に合致する。このテーパ付き形状は、容器88’,88”からの流体のより完全な排出を補助し、容器88’,88”からの流体流れを改善する。
【0052】
いくつかの実施形態においては、容器88,88’,88”は、1又は複数の窓25を有し、ユーザが、どのくらいの流体が、容器88,88’,88”に残っているのかを見えるようにしている。いくつかの実施形態においては、これらの窓は、容器88,88’,88”の底部部分に配置され又は延在し、容器88,88’,88”の放出口17に隣接した位置に設けられる。窓25は、放出口17又は導管19が延通する開口部11,11’に隣接して配置され、ユーザは、ホルスター86,86’,86”から容器88,88’を取り外すことなく、流体レベルを視認できる。いくつかの実施形態においては、容器88,88’,88”における下方部分は、透明又は半透明の材料から構成されて窓25を形成しているが、別の実施形態においては、容器88,88’,88”の全体が、透明又は半透明の材料から構成される。
【0053】
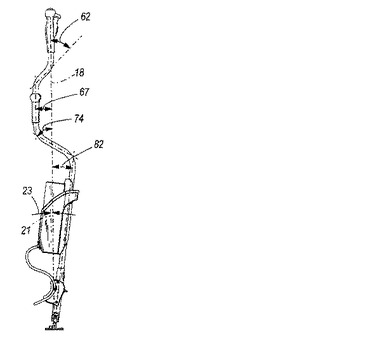
いくつかの実施形態においては、容器88,88’,88”の重心21は、モップの長手軸線18に対して実質的に整列され、使用中の容器の重量の影響を減らすのを助ける。しかしながら、容器88,88’,88”の向きに起因して、及び、使用中に容器が空になるという事実に起因して、この重心21は必ずしも常にモップの長手軸線18に整列されない。この性質に起因して、容器88,88’,88”の重心21は、良好な性能結果を得るために長手軸線18から約1.25インチ以下だけオフセットしているが、別の実施形態においては、容器88,88’,88”の重心21は、良好な性能結果を得るために長手軸線18から約1インチ以下だけオフセットしており、さらに別の実施形態においては、容器88,88’,88”の重心21は、良好な性能結果を得るために長手軸線18から約0.75インチ以下だけオフセットしている。上述した範囲は、容器がハンドルから延びる大きさに依存することに留意されたい。例えば、容器が2倍遠くに延びると、この範囲に比例して影響する。
【0054】
別の実施形態においては、容器88,88’,88”の重心21は、使用中の機械的な利点を得るために、長手軸線18から特に若干オフセットしている。特に、発明者らの発見によれば、容器88,88’,88”の重心21が、モップ10の長手軸線18から、距離23(図1B参照)だけオフセットしたとき、特に良好なツールの制御が可能になり、及び/又は、ツールを操作するユーザに必要な努力が特に小さくなる。これらのオフセット23は、いくぶん、長手軸線18とハンドル12の第5の部分との間の相対的角度に起因して存在している。容器88,88’,88”の重心21は、良好な性能結果を得るために、長手軸線18から、約0.1インチ以上で、約1.5インチ以下だけ、オフセットしている。別の実施形態においては、容器88,88’,88”の重心21は、良好な性能結果を得るために、長手軸線18から、約0.2インチ以上で、約1インチ以下だけ、オフセットしている。さらに別の実施形態においては、容器88,88’,88”の重心は、良好な性能結果を得るために、長手軸線18から、約035インチ以上で、約0.75インチ以下だけ、オフセットしている。
【0055】
容器86,86’,86”の重心21は、容器86,86’,86”の内部にある流体の量に基づいて、また、容器86,86’,86”の向きに基づいて、長手軸線に対して移動することを認識されたい(例えば、完全に満タンでない容器86,86’,86”において、容器86,86’,86”内の流体の位置は、ハンドル12の向きに基づいて変化し、それにより、容器86,86’,86”の重心21が変化する。)。しかしながら、いくつかの実施形態においては、前述したオフセットの範囲は、容器86,86’,86”の向き、又は容器86,86’,86”内にある流体の量にかかわりなく適用される。別の実施形態においては、前述したオフセットの範囲は、実質的に流体で満たされた容器86,86’,86”に、ハンドル12における任意の向きにおいて適用される。これらの及びその他の実施形態において、前述したオフセットの範囲は、ハンドル12の長手軸線18が、水平面に対して約40度以上で、約90度以下の角度(ハンドル12及び容器86,86’,86”の通常の操作向きの範囲である。)に向けられたとき、本願で開示したように、ツールハンドル12に結合された容器86,86’,86”に適用される。
【0056】
いくつかの実施形態においては、容器88,88’,88”は、ホルスター86,86’,86”の内部に受け入れられ、ホルスター86,86’,86”の頂部から、図示の実施形態に示したよりも大きな距離だけ延出している。そのような場合には、テーパ付きホルスター86’,86”にあっても、テーパ無しの容器88,88’,88”が使用される。また、このようなホルスター86,86’,86”に対する容器88,88’,88”の位置的関係は、モップ10と併用してオーバーサイズの容器88,88’,88”を使用することを許容するもので、それにより、ハンドル12によって、より多量の流体を運ぶことができる。いくつかの実施形態においては、容器88,88’,88”における全長の少なくとも5%が、ホルスター86,86’,86”の上縁を越えて延在しても、モップ10の操作に著しい影響を与えることはない。別の実施形態においては、容器88,88’,88”における全長の少なくとも10%が、ホルスター86,86’,86”の上縁を越えて延在しても、モップ10の操作に著しい影響を与えることはない。さらに別の実施形態においては、容器88,88’,88”における全長の少なくとも20%が、ホルスター86,86’,86”の上縁を越えて延在しても、モップ10の操作に著しい影響を与えることはない。
【0057】
図1、図1B、図1C、及び図11乃至図13Bに示すように、所定長さの導管19が、容器88,88’,88”の部分から延出して、ハンドル12とは反対側に面して、モップヘッド24に向いている。導管19は、バルブ33の内部に挿入され、導管19を通して容器88,88’,88”からの流体の流れを、選択的に開閉するように機能する。図1、図1B、及び図1Cに最良に示されるように、バルブ33は、ハンドル12の第5の部分78に沿って、ホルスター86とモップヘッド24との間の位置に配置される。
【0058】
次に、図14乃至図19及び図20乃至図25を参照すると、同様な構造を有する2つのバルブ組立体が示されている。それぞれの実施形態におけるバルブ33は、永久的に又は着脱可能に、ハンドル12に結合された弁体35を具備している。弁体35は、任意の所望の方法にて、一緒に結合された、任意の数の部品によって形成される。例えば、図14乃至図19に示した弁体35は、ハンドル12に受け入れられるべき形状及び寸法である管状部分と、ねじによって管状部分に固定されるカバー37とを具備している。変形例としては、カバー37は、例えば、ボルト、ピン、リベット、釘、無頭釘、ステープル、クランプ、留め金、及びその他の固定具、及び相互係合要素などを用いて、弁体35の残りに取り付けられる。別の実施形態においては、弁体35は、ハンドル12の取付けに適合した別の形状を有することもでき、それらには、限定はしないが、ハンドル12のまわりに互いに結合される2以上の部分を有する弁体(いくつかの場合には、クランプ構造である。)、弁体35及びハンドル12に、ねじ、ボルト、ピン、リベット、釘、無頭釘、ステープル、又はその他の固定具、又は相互係合要素などを用いて、ハンドル12の側部に固定されるように適合した弁体が含まれる。
【0059】
バルブ33はさらに、容器88,88’,88”からの導管を挿入可能なギャップを具備している。このギャップは、バルブの2つの部分の間に形成され、いくつかの実施形態においては、弁体35に設けた通路39の形態を呈する(より詳しくは、図14乃至図19に示した実施形態における、弁体35のカバー37である。)。カバー37における通路39は、一般的に細長くて弓形の形状であるけれども、通路39は、他の実施形態においては、必ずしも細長く又は弓形である必要はない。さらに、図14乃至図19及び図20乃至図25に示した実施形態における通路39は、開いた側部と、2つの対向する通路の側壁と、通路の底部とを有している。従って、通路39は、導管19を横方向に受け入れるように形成され、それにより、すべての周辺側部で閉じている開口部を通して、導管19をねじ止め又は供給する要求条件を解消する。これにより、ユーザは、導管19の自由端にアクセスせずに、導管19をバルブに据え付け、及びバルブから導管19を除去できる。
【0060】
いくつかの実施形態においては、図15及び図21に最良に示されるように、弁体35は、複数のタブ41又はその他の突起部を、通路39を部分的に横切るように延在させている。これらのタブは、いったん挿入された導管19を、通路39内に保持する助けとなる。また、いくつかの実施形態においては、導管19は、導管19のどの部分がバルブ33に挿入されるべきかを指示する目印を有する。
【0061】
引き続き、図14乃至図19及び図20乃至図25に示した実施形態を参照すると、いくつかの実施形態によるバルブ33は、さらにレバー43を具備している。図示の実施形態におけるレバー43は、通路39に隣接した箇所を中心としてピボットし、通路39から延在している。いくつかの実施形態においては、図18及び図19に例示的に最良に示されるように、レバー43は、バルブハウジング35から突き出た、レバー端部45を有している。レバー端部45は、バルブハウジングにおける開口部47に沿った弓形の経路を通って可動になっており、ユーザは、バルブ33の位置にて、バルブ33を作動させることができる。
【0062】
図18及び図19(及び図24及び図25)に示したレバー43は、導管を通して流れる流体を禁止しないためにレバー43が導管を挟持することがない、又はそのような流れを実質的に禁止するために導管を挟持して不十分な量にする、開いた位置(図18及び図24参照)と、レバー43が直接的又は間接的に導管19を挟持して導管を通る流れを禁止する、閉じた位置(図19及び図25参照)との間にて、ピボット可能になっている。いくつかの実施形態においては、レバー43は、不用意に流体が小出しにされるのを防ぐため、閉じた位置へ向けて、常時付勢されている。この付勢は、レバー43に結合された、多数の異なる付勢要素によって発生でき、それらには、限定はしないが、ばね、弾性帯、及び磁石が含まれる。例えば、図14乃至図19及び図20乃至図25に示した実施形態におけるレバー43は、レバー43がピボットする中心と同一であるピボットピンに受けられた、捻ればね49によって閉じた位置へ向けて付勢される。
【0063】
図14乃至図19及び図20乃至図25に示した実施形態におけるレバー43は、捻ればね49の付勢力又は(使用されるならば)他の付勢機構の付勢力を越える力を発生させることで、開いた位置へ動かされる。いくつかの実施形態においては、レバー43は、前述したように、ケーブル44に又はその他の要素であって、トリガ34へ延びて結合される要素に、結合されている。従って、前述した任意の実施形態に従ったトリガ34を絞ることで、ケーブル44は押し引きされ、それにより、レバー43のピボット運動を発生させる。
【0064】
図26には、本発明の別の実施形態による別のバルブを示しており、前述したのと一般的に同一であるギャップ及び挟持レバーの特徴を使用して作動する。さらに別の実施形態においては、バルブ33における他の要素が作動したときに、導管19を挟持する(例えば、トリガ34に結合され及び/又はバルブ33の箇所にてユーザアクセス可能な位置へ延びた、ケーブル44又はその他の要素による。)。これらの要素には、限定はしないが、導管19に対して挟持関係に出入りする回転可能な偏心カム、導管19に対して挟持関係に出入りする可動部分を有する摺動体などが含まれる。
【0065】
図示の実施形態において、導管19が横方向に挿入可能なギャップは、弁体35の壁に設けた通路によって形成されていたけれども、このギャップは別の要素によっても形成できることに留意されたい。単なる例示としては、ギャップは、弁体35と、前述したように作動可能である、ローラ、カム、又はレバーとの間に形成される。
【0066】
いくつかの実施形態においては、モップヘッド24は、ハンドル12における第5の部分78に、ピボット可能に結合される。結合は、1つ、2つ、又は3つの自由度を形成し、使用されるピボット可能な結合のタイプに、少なくとも部分的に依存する。例えば、いくつかの実施形態によるモップ10は、2つの異なる軸線を中心としてモップヘッドのピボット運動を許容する、ピボットジョイントが採用される。例えば、図27及び図27Aを参照すると、第1のピボットジョイント53は、矢印55に示すように、ハンドル12を第1の方向にピボットさせることができ、一方、第2のピボットジョイント57は、矢印59に示すように、ハンドル12を第2の方向にピボットさせることができる。これらのピボットジョイント53,57は、自在継手と同様な方法において、一緒に働く。このタイプのジョイントを使用することで、モップヘッド24は、第1及び第2の矢印55,59に沿った任意の広範囲の位置に、ハンドル12を用いて、床面に沿って推進できる。
【0067】
いくつかの実施形態においては、ジョイント67は、第1及び第2のピボットジョイント53,57を具備している。第2のピボットジョイント57は、モップヘッド24にピボット可能に結合され、一方、第1のピボットジョイント53は、第2のピボットジョイント57にピボット可能に結合される。第1のピボットジョイント53は、外側部分にねじを具備し、ハンドル12が第1のピボットジョイント53の内部に挿入され、第1のピボットジョイント53にカラー65を螺着させることで第1のピボットジョイント53に固定されるが、別の実施形態においては、ハンドル12は、第1のピボットジョイント53に圧入され、ハンドル12と第1のピボットジョイント53との間のねじ結合によって第1のピボットジョイント53に直接的に結合され、第1のピボットジョイント53にピン止め又はクランプされ、又は、任意のその他の方法で固定される。さらに別の実施形態においては、1又は複数の固定具を使用しても、ハンドル12を第1のピボットジョイント53に結合できる。
【0068】
図27Aのジョイント67は、図27に示したジョイントと実質的に同様に構成され動作するけれども、ジョイント67は、実質的に異なる方法によってハンドルに結合されている。特に、ジョイント67は、バルブ組立体と一体的に形成されている。従って、ジョイント67と、バルブ組立体とは、一元的なサブアセンブリを形成し、ハンドルに結合されている。ハンドルは、前述した任意の方法で又は当業者に知られている代替的な方法で、このサブアセンブリと結合される。
【0069】
使用に際しては、ユーザは、第1の手で、第1のグリップ22を把持し、第2の手で、第2のグリップ68を把持して、図1Aに示した向きにする。容器88,88’,88”の重心と、モップ24の長手軸線18との間にオフセット23があるので、モップハンドル12の形状によって与えられた増加トルクに起因して、オペレータは、モップ10の方向を容易に変化させることができる。床面上に流体を小出しにするために、ユーザは、トリガ34を絞り、それにより、モップ14の第1の端部14に向けて、ケーブル44(又はバルブ33に結合された他の要素)を引くことで、バルブ33を作動させる。バルブレバー43は、導管19との係合からピボットして離れ、モップ10の作業に使用するために、導管を通って、所定量の流体が流れる。
【0070】
容器88,88’,88”が空になると、(設けられているならば)窓25を通して、流体レベルを視認することで、ユーザは、容器88,88’,88”における把持可能部分27を把持して、ラッチ13を動かして、ホルスター86,86’,86”から容器88,88’,88”を取り外す。導管19は、オペレータがレバー43を持ち上げると、トリガ34を絞るか、又は、バルブ33のレバー端部45を操作することで、バルブ33から横方向に取り外される。ユーザは、容器88,88’,88”を再充填するか、又は、これを廃棄して、満タンの容器88,88’,88”をホルスター86,86’,86”に挿入する。次に、導管19は、前述したように、レバー43を持ち上げることで、バルブ33の中に横方向に挿入される。
【0071】
上述し図面に示した実施形態は、例示的にのみ提供されるもので、本発明の概念及び原理を限定する意図はない。そして、本発明の精神及び範囲から逸脱せずに、要素及びその構成及び配置について、様々な変化が可能であることを当業者にあっては認識されたい。
【符号の説明】
【0072】
19 導管
33 バルブ
34 トリガ
35 弁体
43 レバー
【技術分野】
【0001】
本発明は、広範囲のフロアをメンテナンスするためのツールおよびそのアクチュエータに関する。
【背景技術】
【0002】
多くの用途のために、広範囲のフロアメンテナンスツールが存在し、それらには、床面をクリーニングするもの、床面を磨くもの、床面に物質を塗布するもの、床面から物質を剥すもの、その他が含まれる。
【発明の概要】
【発明が解決しようとする課題】
【0003】
これらのツールは、何年も前から知られているけれども、大多数のそのようなツールは、人間工学的には設計されていない。多くの場合、フロアツールの設計において、人間工学に注意を払っていないため、ユーザは、作業を実行するために多くの時間と労力とを必要とされ、劣悪な仕事の品質と、低いユーザ効率とをもたらす結果となる。また、フロアツールを使用してユーザが実行しなければならない多くの作業(例えば、クリーニング溶液リザーバを充填し、クリーニング流体を小出しし、フロアツールの頭部を回転及び/又は並進させるなど)は、その性質上、繰り返され、又はフロアツールの寿命が来るまで、しばしば何回も実行される。従って、フロアツールにおける重要な設計パラメータは、ユーザがそのような作業を実行する容易さである。残念ながら、この設計パラメータは、従来のフロアツールにおいては、しばしば忘れられ又は無視されている。
【課題を解決するための手段】
【0004】
本発明は、第1の端部と、反対側の第2の端部とを備えた細長いハンドルと、細長いハンドルにおける第2の端部に結合されたモップヘッドを備え、フロアツールからの流体の流れを制御するバルブとを有するフロアツールに結合されるフロアツールの流体ディスペンサのためのアクチュータを提供することにある。
【0005】
本発明は、フロアツールであって、該フロアツールは、第1及び第2の反対側にある端部を備えている細長いハンドルと、細長いハンドルにおける第2の端部に結合された、モップヘッドと、フロアツールからの流体の流れを制御するために機能するバルブと、ハンドルにおける第1の端部に隣接して配置され、バルブに結合されているトリガとを備えるフロアツールを提供することにある。
【発明の効果】
【0006】
使用が容易で、人間工学的に設計され、及び/又は、ユーザの効率を高めるようなフロアツールが実現できる。
【0007】
本発明のその他の観点については、詳細な説明及び添付図面を考察することで明らかになるだろう。
【図面の簡単な説明】
【0008】
【図1】本発明の実施形態によるフロアツールを示した斜視図である。
【図1A】本発明の別の実施形態によるフロアツールを、動作時の位置について示した斜視図である。
【図1B】図1Aのフロアツールを示した側立面図である。
【図1C】図1Aのフロアツールを示した正面立面図である。
【図1D】図1Aのフロアツールの反対側を示した側立面図である。
【図1E】図1Aのフロアツールを示した後面図である。
【図2】図1のフロアツールにおける第1の部分を示した詳細図であって、ユーザが操作する制御部を示している。
【図3】図1及び図2のフロアツールを示した断面図であって、ユーザが操作する制御部を第1の位置において示している。
【図4】図2及び図3に示した、ユーザが操作する制御部の別の実施形態を示した断面図である。
【図4A】図4に示した、ユーザが操作する制御部の別の実施形態を示した断面図である。
【図5】本発明の別の実施形態による、ユーザが操作する制御部を示した図である。
【図6】本発明の別の実施形態による、ユーザが操作する制御部を示した図である。
【図7】本発明の別の実施形態による、ユーザが操作する制御部を示した図である。
【図8】本発明のさらに別の実施形態による、ユーザが操作する制御部を示した図である。
【図9】図1のフロアツールにおけるグリップ部分を詳細に示した斜視図である。
【図9A】図1及び図9に示した、グリップを示した分解斜視図である。
【図10】図1のフロアツールにおけるグリップ部分を、グリップを取り外して詳細に示した斜視図である。
【図11】図1のフロアツールにおける別の部分を詳細に示した斜視図であって、本発明の実施形態によるホルスターとリザーバとを示している。
【図11A】本発明の別の実施形態による、ホルスターとリザーバとを詳細に示した斜視図である。
【図11B】本発明のさらに別の実施形態による、ホルスターとリザーバとを詳細に示した斜視図である。
【図12】図11のホルスター及びリザーバを示した後部斜視図である。
【図12A】図11Bのホルスター及びリザーバを示した後部斜視図である。
【図13】本発明の別の実施形態による、ホルスターの詳細を示した斜視図である。
【図13A】リザーバを含む、図13のホルスターの詳細を示した斜視図である。
【図13B】図1A及び図13のホルスターとリザーバとを示した分解斜視図である。
【図13C】図13A及び図13Bのリザーバを示した斜視図である。
【図13D】図13Cのリザーバを示した斜視図である。
【図13E】図13Cのリザーバを示した側面図である。
【図14】図1のフロアツールにおける別の部分であって、フロアツールのバルブを示した斜視図である。
【図15】図14に示したフロアツールの部分を示した別の斜視図である。
【図16】図14及び図15に示したフロアツールの部分を示した別の斜視図である。
【図17】図14乃至図16のバルブを示した分解斜視図である。
【図18】図14乃至図16のフロアツールを詳細に示した立面図であって、バルブハウジングの部分を取り外して、バルブを開いた位置にして示している。
【図19】図18のフロアツールを詳細に示した立面図であって、バルブを閉じた位置にして示している。
【図20】図1Aのフロアツールにおける別の部分を示した斜視図であって、フロアツールのバルブを示している。
【図21】図20のフロアツールの部分を示した別の斜視図である。
【図22】図20及び図21のフロアツールの部分を示したさらに別の斜視図である。
【図23】図1A及び図20乃至図22のバルブを示した分解斜視図である。
【図24】図1A及び図20乃至図22のフロアツールを詳細に示した立面図であって、バルブハウジングの部分を取り外して、バルブを開いた位置にして示している。
【図25】図24のフロアツールを詳細に示した立面図であって、バルブを閉じた位置にして示している。
【図26】本発明の別の実施形態に従った、フロアツールを詳細に示した断面図であって、フロアツールのバルブを閉じた位置にて示している。
【図27】図1のフロアツールの別の部分を詳細に示した斜視図であって、フロアツールにおけるヘッドと、ハンドル−ヘッド間のジョイントを示している。
【図27A】図1Aのフロアツールの別の部分を詳細に示した斜視図であって、フロアツールにおけるヘッドと、ハンドル−ヘッド間のジョイントを示している。
【発明を実施するための形態】
【0009】
本発明の実施形態について詳細に説明する前に、本発明は、その用途を、以下の説明に明らかにされ又は以下の図面に例示された、構造及び構成要素の配置の詳細に限定されるものではないことを理解されたい。本発明は、別の実施形態、及び様々な方法で実施又は実行することが可能である。また、本願において用いられている表現及び用語は、説明を目的とするもので、限定としてみなされるべきでないことを理解されたい。本願における、“具備し”、“備え”、又は“有する”及びこれらのバリエーションは、列挙された項目及びその均等物、及び追加的な項目を包含することを意味する。別の具合に特定又は限定されない限り、“取付け”、“結合”、“支持”、及び“連結”の用語及びこれらのバリエーションは、広義に使用され、直接的及び間接的の両方の取付け、結合、支持、及び連結を包含する。さらに、“結合され”及び“連結され”とは、物理的又は機械的に結合又は連結されることに限られない。
【0010】
本明細書から理解されるように、本発明の1又は複数の観点は、手持ち式のフロアメンテナンスツールであって、ハンドルと、ハンドルに取り付けられたヘッドとを有している。そのようなツール又はその構成要素は、多くの異なる作業に使用することができ、例えば、表面のクリーニング(例えば、モップ)、表面への保護コーティングの塗布(例えば、ワックス)、表面からのコーティングの除去(例えば、剥離)などに使用される。簡単にする目的のため、本願において開示されるフロアメンテナンスツールは、一般的に使用される用語、すなわち、“モップ”に関して参照される。しかしながら、この用語は、特に別な具合に述べられない限り、本願に開示され及びクレームされる装置又は方法の機能を制限する意図ではないことを理解されたい。むしろ、この用語は、本発明の様々な実施形態を開示し及びクレームするときの、簡単さの目的のために、使用されている。本明細書及び特許請求の範囲に使用されている、“モップ”という用語は、フロアクリーニングの作業及び装置のみならず、その他のフロアメンテナンス作業、限定はしないが、ワックス塗布、剥離、バッフィングなどをも包含する。さらに、構成要素の名称に“モップ”という用語を有して本願に開示されている構成要素(例えば、“モップヘッド”、“モップパッド”など)は、用途をクリーニング作業に限定されるように解釈されるべきでない。
【0011】
図1には、本発明の実施形態によるモップを示している。モップ10は、ハンドル12を具備し、モップ10の略長手長さに沿って延在している。ハンドル12は、一般的に、蛇状又はオーガの形状を有している。本願において使用されるように、“蛇状”又は“オーガ”という用語は、波打った形状を称しており、対称的又は規則的である必要はなく、同一又は異なる振幅及び長さの任意の数の波打ちを有し得る。また、波打ち形状におけるそれぞれの波は、長さ及び振幅において、対称的であるか、又は非対称的である。さらに、発明者らは、全体的に又は実質的に全体的に単一の平面に配置されるハンドル12が良好な性能の結果をもたらすことを発見したけれども、他の実施形態においては、ハンドル12は2以上の平面に配置されてもよい。これに関して、1又は複数の波打ちは、1又は複数の別の波打ちがある平面とは異なる平面に配置されてもよい。同様に、単一の波打ちは、実質的に全体的に単一の平面に配置され、又は1つを越える平面に配置される(すなわち、波打ちの部分は、互いに対して斜めになっている。)。
【0012】
図1に示したハンドル12は、第1の端部14と、第1の端部14とは反対側にある第2の端部16とを具備している。第2の端部16は、モップヘッド24に結合され、第1の端部は、ユーザによって把持される部分を具備し、ユーザは、モップヘッド24を床面又はその他の表面に沿って動かす。図1及び図1Bに最良に示されるように、長手軸線18は、ハンドル12における第1の端部14と第2の端部16との間を通って延在している。図示の実施形態及び他の実施形態において、長手軸線18は、ハンドル12の長さを定める箇所を通って延在する直線になっている。また、図示の実施形態及び他の実施形態において、長手軸線18は、モップヘッド24とハンドル12との間の結合によって形成された、放射状の中央位置を通って延在する直線であり、モップ10の通常の操作においてモップヘッド24とは反対側の端部にある、モップ10のハンドル12をユーザが把持する箇所によって形成される放射状の中央位置を通る。いくつかの実施形態においては、長手軸線は、使用中のハンドル12の回転軸線として形成される(例えば、ハンドルの第1の端部が、回転軸線から実質的に外れて延びる要素を有する。)。
【0013】
いくつかの実施形態においては、蛇状のハンドル12における(長手軸線18に対して平行な直線に沿って測定した)少なくとも大部分は、長手軸線18とは交差しない。例えば、図1B乃至図1Eに示した実施形態においては、ハンドルにおけるおよそ約16%だけが、長手軸線と交差し又は位置する。しかしながら、いくつかの実施形態においては、蛇状のハンドル12の少なくとも70%(長手軸線18に対して平行な直線に沿って測定する。)が、長手軸線18と交差しない。さらに別の実施形態においては、蛇状のハンドル12の少なくとも80%(長手軸線18に対して平行な直線に沿って測定する。)が、長手軸線18と交差しない。図1乃至図1Eに示した実施形態を参照すると、ハンドル10は、長手軸線18の箇所にて、開始及び終了し、両者の間の1つの位置にて、長手軸線18と交差している。
【0014】
図1乃至図1Cに示した実施形態におけるハンドル12は、単一の平面内にある(例えば、図1C及び図1E参照)。しかしながら、前述したように、ハンドル12の1又は複数の部分は、平面から外れて位置してもよい。例えば、いくつかの実施形態においては、蛇状のハンドル12における少なくとも大部分(長手軸線に対して平行な直線に沿って測定する。)は、平面内に位置する。他の実施形態においては、ハンドル12における少なくとも75%は、平面内に位置する。
【0015】
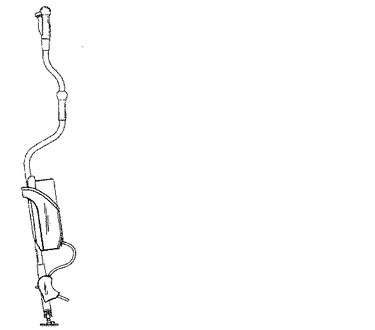
図1及び図1B乃至図1Eに示したモップ10は、一般的に、作業中には、図1Aに示したように向けられる。図示の実施形態における、モップ10のハンドル12は、モップヘッド12の端部を形成する、第1の略直線状の部分20を有している。この第1の部分20は、モップ10のユーザが、片手でハンドル12を保持できる位置を形成し、又はこの部分に対して、モップ10を使用するとき、ユーザが、ユーザの片手で押圧力を働かせる。図示の実施形態においては、第1の部分20には、グリップが設けられ、ユーザの手で握るために適合した曲線形状を有し、ユーザの手のひらの形状に少なくとも部分的に一致し、モップ10の操作中に、ユーザの手のひらが係合するために適合した、丸い終端部を有している。
【0016】
図1乃至図1Eに示した実施形態における、ハンドル12の第1の部分20は、長手軸線18に概略位置して、これに対して平行になっている。しかしながら、別の実施形態においては、第1の部分20は、長手軸線18に対して、約30度を越えない角度にて、傾斜して向けることもできる。他の実施形態においては、この角度は、約20度以下である。さらに別の実施形態においては、この角度は、約10度以下である。
【0017】
いくつかの実施形態において、第1の部分の長さ26(長手軸線18に対して平行な直線に沿って測定する。)は、少なくとも約5インチで、約20インチ以下であるが、他の実施形態においては、この長さ26は、約15インチ以下で、約8インチ以上であり、さらに別の実施形態においては、長さ26は、約12インチ以下で、約10インチ以上である。
【0018】
図示の通り、グリップ26は、ハンドル12における第1の部分30に結合されている。グリップの長さ26(長手軸線18に対して平行な直線に沿って測定する。)は、少なくとも約3インチで、約20インチ以下である。別の実施形態においては、この長さは、約13インチ以下で、約5インチ以上である。さらに別の実施形態においては、長さ26は、約10インチ以下で、約8インチ以上である。
【0019】
図1乃至図1Eに示した実施形態のそれぞれに図示したグリップ22は、軸線を中心としてピボット可能である部分30を具備しているが、いくつかの実施形態においては、この部分30は、トリガ34を形成し、トリガは、詳しくは後述するように、モップ10によって実行されるフロアメンテナンス作業のために、流体を小出しすべく、ユーザによってピボットされる。図2乃至図4に示すように、トリガ34は、軸線32を中心としてピボット可能であり、この軸線は、(図示の実施形態にて示すように)ピボットピンによって形成され、又は、トリガ34又はその他のグリップ部分における任意の他の適当な要素によって形成されるが、いくつかの実施形態においては、トリガ34は、トリガの反対側のピボット箇所32の端部に比べて、モップの第2の端部16に、より近く配置された、ピボット箇所32から離れるように延在する。別の言い方をすると、トリガ34は、モップ10の第2の端部16と、トリガ34の遠位端との間に配置された、軸線32を中心としてピボットする。ユーザは、ユーザらの手で、トリガ34を絞り(例えば、グリップ22における残りの部分に向けた方向に)、いくつかの実施形態においては、トリガ34は、ユーザは、ユーザの親指をトリガ34に置き1以上のその他の指をグリップ22の反対側に配置することで、トリガ34を操作し絞られる。流体の小出しが必要ではないときの、モップ作業の時には、ユーザは、彼又は彼女の手のひらを、グリップ22の頂部に配置し、グリップは、モップ10の動きを容易にするために、(前述したように)、丸められている。
【0020】
次に、図3を参照すると、トリガ34の動きは、前述したように、制御要素36の動きを生じさせ、制御要素は、ハンドル12における第1の部分20に略収容され又は別な具合に結合され、いくつかの実施形態においては、制御要素36は、摺動体、プーリー、ローラ、レバー、又は第1の部分20に対して可動であるその他の要素である。例えば、図3に示された制御要素36は、トリガ34の回転に応答する摺動体38であり、モップ10のバルブ33に対して接離するように、一般的な方向に移動する(詳しくは後述する)。原動力は、多数の異なる方法において、トリガ34の回転から、摺動体38のそのような動きへと伝達される。いくつかの実施形態においては、この力は、摺動体38の部分に対して、トリガ34の部分をカム接触させることで伝達される。他の実施形態においては、この力は、トリガ34又は摺動体38の部分を、摺動体38又はトリガ34の部分に沿って、それぞれ転動させることで伝達される。トリガ34のピボットによって、摺動体38を動かすには、さらに別の方法も可能であり、それらは、本発明の精神及び範囲内に含まれる。
【0021】
図3には、トリガ34のピボットの動きが、摺動体の摺動の動きを発生させるために使用される方法の一例が示されている。この実施形態においては、トリガ34の突起部又はトリガ34に結合された突起部が、摺動体38の開口部42Aの内部に受け入れられ、摺動体38を動かすために、開口部42Aの内面に沿って移動する。図3に示した突起部は、ピンと、ブッシングとの組40Aであったけれども、他の実施形態においては、ブッシングは使用されない。ブッシングは、トリガ34と摺動体38との間の摩擦を減らすために使用され、いくつかの実施形態においては、そのような摩擦をさらに減らすために、ピンを中心として回転可能になっている。開口部42Aは、任意のサイズ及び形状であって、トリガ34が絞られたとき、ピンとブッシングとの組40Aが、その中で動けるようになっている。変形例としては、ピンとブッシングとの組40Aは、摺動体38の(周囲の)外面に隣接して配置され、トリガ34が絞られたとき、トリガ34から摺動体38へ原動力を働かせるように移動し、さらに別の実施形態においては、ピンとブッシングとの組40Aと、開口部42Aとの位置は逆にされ(すなわち、ピンとブッシングとの組40Aは、代わりに、摺動体38に配置され、開口部42Aは、トリガ24に形成される。)、依然として、前述したのと同一の力伝達機能を実行する。
【0022】
いくつかの実施形態においては、摺動体38の動きは、摺動体38又はグリップ22の1又は複数の要素が、それぞれ、グリップ22又は摺動体38の表面に対して、カム接触又は転動することで制御される。この制御は、摺動体38の動きを安定化させることを助け、摺動体38が束縛されるのを防ぎ、又はその他の不都合な態様にて動くことを防ぐ。例えば、図3に示した摺動体38は、第1及び第2の間隔を隔てた開口部42,42Bを有し、これらのそれぞれは、グリップ22に結合された突起部(すなわち、ピンとブッシングとの組40,40B)をそれぞれ受け入れる。開口部42,42Bは、任意のサイズ及び形状であって、トリガ34が絞られたとき、ピンとブッシングとの組40,40Bの動きを許容するが、これらは、いくつかの実施形態においては、細長いスロットであり、他の実施形態においては、これらの突起部のうちいずれか又は両方が、代わりに、摺動体38の(周囲の)外面に沿ったロール又はカムである。また、別の実施形態においては、ピンとブッシングとの組40,40B及び開口部42,42Bにおけるいずれか又は両方は、逆にすることができる(例えば、ピンとブッシングとの組40,40Bは、摺動体38に取り付けられ、グリップ22の開口部42,42Bに延入している。)。
【0023】
図3に示した摺動体38は、ケーブル44に結合され、摺動体38をバルブ33(詳しくは後述する)に結合し、バルブ33を遠隔操作する。従って、前述したように、摺動体38を動かすことで、摺動体38は、ケーブル44を押し引きし、これにより、バルブ33を作動させる。図3に示した摺動体38は、ケーブル端部の取付具によって、ケーブル44に結合されるけれども、この結合は、任意のその他の適当な方法によって確立できる。別の実施形態においては、摺動体38は、他の方法によって、バルブ33に結合されて作動させ、例えば、1又は複数のバー、ロッド、又はその他のリンクであって、摺動体38とバルブ33との間に延在するもの、1又は複数の液圧ラインであって、液圧又は空気圧を伝達するもの、コード、ワイヤ、ロープ、又はその他の可撓性の細長い要素などである。さらに、電気装置を使用して、作動させることもできる。例えば、ソレノイドバルブ、蠕動式ポンプなどを切り替える電気スイッチが、いくつかの実施形態では使用される。
【0024】
図3に示した実施形態に対する変形例としては、摺動体38は、3つよりも少ないか、多くの開口部を有し、トリガ34からケーブル44にパワーを伝達し、前述したように、摺動体38の動きを安定させる。例えば、図4及び図4Aに示した実施形態においては、2つだけの開口部が利用され、この場合、1つだけの開口部42が、グリップ22に対して摺動体38の動きを安定化させるために使用されている。図4に示した摺動体38は、図4に示したものに比べて短く、摺動体38におけるそれぞれの開口部42,42Aの内部に受け入れられた、2つのピンとブッシングとの組40,40A(図4には、一方だけが示される)によって、動きが決定される。さらに、動きの安定性は、一般的に摺動体38のそばに配置される、ボス要素によって提供される。これらのボス要素は、グリップ22に設けたリブ46、グリップ22に結合され又はグリップ22にモールド成形又は別の方法で形成されたもの、摺動体38の動きの案内に適した任意の形状及びサイズを有するもの(例えば、ペグ、ピン(図4A)、壁、リブ、突起など)、及び、本願に開示された任意の実施形態において使用できるものである。上述した図2及び図3に示した実施形態と同様に、図4及び図4Aに示したトリガ34は、ユーザによって押されるトリガ34における終端部に比べて、ハンドル12における第2の端部16により近い、軸線32を中心としてピボット可能である。
【0025】
図5乃至図8は、本発明の異なる実施形態に従った、変形例による制御要素の実施形態を示している。従って、図5乃至図8の実施形態と、図3及び図4の実施形態との間の互いに一致しない特徴及び要素を除き、図5乃至図8の実施形態における特徴及び要素(及び特徴及び要素に対する変形例)について、より完全に説明するために、図3及び図4の実施形態における説明を参照する。図5乃至図8の実施形態における特徴及び要素であって、図3及び図4の実施形態における特徴及び要素に対応するものには、(例えば、112、212、312などのように)、参照符号を百番台にして付している。
【0026】
いくつかの実施形態におけるグリップ22は、前述した任意の方法において、トリガ34に結合された摺動体38を採用しているが、その動きは、同じく前述された突起部及び開口部よりむしろ、摺動体38及びグリップ22の相対的形状によって、別な具合に制御される。また、図5に示した制御要素136は、摺動体138を具備し、ピンとブッシングとの組140Aを支持している(図3に関連して説明した、トリガによって支持されるピンとブッシングとの組とは相違している。)。トリガ134に形成された開口部142Aは、ピンとブッシングとの組140Aを受入れ、摺動体138の動きの方向に対して斜めの方向に延在し、図3に関連して前述した、摺動体138の動きを発生させる。
【0027】
いくつかの実施形態においては、トリガが原動力を与える制御要素は摺動せず、代わりに、回転して、ケーブル(又はバルブ33に結合された他の要素)を操作する。例えば、図6に示した制御要素236は、プーリー250であって、ピンとブッシングとの組240Cに結合されて回転可能になっているけれども、ピンとブッシングとの組240Cは、代わりに、ピン又はその他の突起部によって置換されてもよい。ピンとブッシングとの組240Cは、トリガ234が絞られたときにトリガ234に形成された、開口部242Cに沿って移動する。図6に示した開口部242Cは、弓形の形状であり、その内部をピンとブッシングとの組240Cが自由に動けるようになっているけれども、必要に応じて、そのような動きを許容できる、任意のその他の開口部の形状及びサイズを使用することもできる。ケーブル248は、トリガ234に結合され、トリガ234が絞られたとき引っ張られて、少なくとも部分的に、プーリー250を中心として巻き付けられ、それにより、ケーブル248の操作を可能にしている。しかしながら、別の実施形態においては、バルブ33をトリガ234(上述)に結合する別の要素が、トリガ234による同様な操作のために結合される。
【0028】
引き続き、図6を参照すると、プーリー250は、トリガ234が絞られたときに、プーリーのまわりにケーブル248を引っ張るのに適した、任意のサイズ及び形状を有している。例えば、プーリー250は、一般的に丸くて(例えば、図6参照)、卵形、半円形、又は不規則な形状を有している。また、図6においては、プーリー250は、ピンとブッシングとの組240Cにおける、ブッシングと共に回転可能であるが、別の実施形態においては、プーリー250は、回転可能にはなっていない。いくつかの実施形態においては、ピンとブッシングとの組240Cは、開口部242Cの内面と嵌合係合するような形状であり、例えば、ピンとブッシングとの組240Cにある、及び開口部242Cの内面にある、歯車である。この係合は、トリガ234が絞られたとき、プーリー250の回転に、より制御を提供する。
【0029】
他の実施形態による制御要素336は、トリガ334の面に歯352を具備し、制御要素336の面の歯354と係合し、これは、歯車350の形態を呈している。図7には、そのような実施形態の一例を示している。トリガ334と、歯車350とには、4つの歯を示しているけれども、別の実施形態においては、別な数の歯を、これらの要素の一方又は両方に用いている。上述した別の実施形態と同様に、図7に示したトリガ334は、モップ10の第2の端部16と、ユーザによって絞られるトリガ34における遠位端との間に配置された、軸線332を中心としてピボットする。トリガ334が絞られると、歯車350は回転する。歯車350の偏心した位置にて、歯車350に結合された、ケーブル348(又は前述した他のリンク)における第1の端部は、歯車350が回転すると、歯車350によって押し引きされ、それにより、後述するように、バルブ33を操作する。
【0030】
さらに別の実施形態による制御要素436は、1又は複数のカム面を具備し、トリガ434が絞られるときの、トリガ434の1又は複数のカム面の移動方向に対して傾斜して配置されている。図8には、そのような制御要素435の一例を示している。前述した例示的な実施形態と同様に、トリガ434は、モップ10の第2の端部16と、ユーザによって絞られるトリガ434の遠位端との間に配置された、軸線432を中心としてピボット可能になっている。トリガ434は、傾斜面又は斜面454を具備し、摺動体438の傾斜面又は斜面456に向けて一致して係合している(摺動体438は、このトリガと摺動体との関係に矛盾することのない、前述した任意の特徴を有し得る。)。トリガ434が、ユーザによって絞られ又は解放されると、斜面454,456は、互いに沿って摺動して、摺動体438をバルブ33に対して一般的に接離させ、それにより、摺動体438に結合されたケーブル448を押し引きさせ、バルブ33を操作する。
【0031】
再び、図1、図1B、及び図1Cを参照すると、これらの図面には、ハンドル12における第2の部分60が示されており、第1の部分26から離れて延在し、長手軸線18から、角度62にて延在している。ハンドル12における第2の部分60は、第3の部分66に延在し、詳しくは後述するように、モップ10のユーザに第2のグリップを提供している。いくつかの実施形態においては、第2の部分60における少なくとも一部分(例えば、中間部分)は、実質的に直線状であり、長手軸線18に対して角度62を形成している。いくつかの実施形態においては、この角度62は、約15度以上で、約75度以下である。別の実施形態においては、この角度62は、約30度以上で、約60度以下である。さらに別の実施形態においては、この角度62は、約40度以上で、約50度以下である。
【0032】
第2の部分の長さ64(長手軸線18に対して平行な直線に沿って測定する。)は、いくつかの実施形態においては、少なくとも約1インチで、約8インチ以下である。別の実施形態においては、この長さ64は、約6インチ以下で、約2インチ以上である。さらに別の実施形態においては、約4.5インチ以下で、約3インチ以上である長さ64が使用される。
【0033】
前述したように、ハンドル12における第3の部分66は、図1、図1B、及び図1Cに示されるように、ユーザが第2の手で把持するための位置を提供する(第1の手は、前述したグリップ22を把持している。)。図1、図1B、及び図1Cに示した実施形態においては、第3の部分66は、オフセットしているが、第1の部分26に対して実質的に平行である方向に、第2の部分60から離れて延在している。しかしながら、別の実施形態においては、第3の部分66は、約30度以下の角度にて、長手軸線18に対して向けられている。別の実施形態においては、この角度は、約20度以下である。さらに別の実施形態においては、この角度は、約10度以下である。
【0034】
第3の部分66は、一般的に、ハンドル12の長手軸線18からオフセットしており、ユーザに対して、ハンドル12にトルクを働かせられる機械的な利点を提供し、それにより、モップ10をピボットさせる。第3の部分66は、詳しくは後述される、流体容器88,88’,88”の重心のオフセットに比べて、大きな量だけ、長手軸線からオフセットしている。図示の実施形態においては、オフセットは、約3インチである。しかしながら、いくつかの実施形態においては、オフセット67は、少なくとも約1インチであり、約7インチ以下である。別の実施形態においては、このオフセット67は、少なくとも約2インチであり、約5インチ以下である。さらに別の実施形態においては、このオフセット67は、少なくとも約2.5インチであり、約3.5インチ以下である。
【0035】
いくつかの実施形態においては、第3の部分の長さ(長手軸線18に対して平行な直線に沿って測定する。)は、少なくとも約4インチであり、約16インチ以下である。別の実施形態においては、この長さは、約12インチ以下で、約6インチ以上である。さらに別の実施形態においては、約10.5インチ以下で、約8インチ以上である第3の部分が使用される。
【0036】
いくつかの実施形態においては、第3の部分66は、ユーザが把持するための、第2のグリップ68を具備している。図9及び図9Aには、第2のグリップ68の例を示している。第2のグリップ68は、ハンドル12に比べて、大きい直径を有している。図9及び図9Aに示した第2のグリップ68における上部部分は、グリップ68の残余の部分に比べて大きい直径をもった、隆起部70を具備している。第2のグリップ68のこの形状は、ユーザのために、改良された把持面を提供する。いくつかの実施形態においては、第2のグリップ68における任意の部分又はすべての部分が、粗いテクスチャ又はその他の類似の高摩擦表面を具備し、オペレータによる把持を容易にしている。また、あるいは、代わりに、第2のグリップ68は、円周方向の隆起又は出っ張り、又はその他の突起又は凹部を具備し、一般的にユーザの指に合致させる。第2のグリップ68には、他の形状及びテクスチャも可能であって、オペレータによる把持を容易にし、それらは、本発明の精神及び範囲に含まれると考えられる。
【0037】
第2のグリップ68は、ハンドル12と一体的であるか、又は、別個の部品であって、任意の適当な方法で、ハンドル12に取り付けられる。第2のグリップがハンドル12に取り付けられる別個の部品であるような実施形態においては、第2のグリップ68は、単一の部品であって、ハンドル12の製造中に、ハンドルの所望の位置に滑り降ろされる。変形例としては、第2のグリップ68は、多部品から構成され、任意の適当な方法、例えば、ねじ、ボルト、ピン、リベット、釘、無頭釘、ステープル、クランプ、留め金、及びその他の固定具、相互係合要素などを用いて、互いに結合される。例えば、図9及び図9Aに示した第2のグリップ68は、2つの半体68A,68Bを具備し、ねじ(図示せず)によって、ハンドル12のまわりに、互いに結合される。図9及び図9Aの実施形態における第2のグリップ68は、ハンドル12に対して回転不能になっているけれども、別の実施形態においては、第2のグリップ68は、ハンドル12に対して回転可能でもよい。
【0038】
図1、図1B、及び図1Cを再び参照すると、これらの図面に示されたハンドル12における第4の部分72は、ハンドル12における第3の部分66から延在し、長手軸線18と交差している。図示された第4の部分72は、ハンドル12の第5の部分78へと延びて、長手軸線18の反対側に一般的に配置されている。いくつかの実施形態においては、第4の部分72における少なくとも一部分(例えば、中間部分)は、実質的に直線状であり、長手軸線18に対して角度74を形成している。いくつかの実施形態においては、この角度74は、約30度以上で、約75度以下である。別の実施形態においては、この角度74は、約40度以上で、約70度以下である。さらに別の実施形態においては、この角度74は、約50度以上で、約60度以下である。
【0039】
いくつかの実施形態においては、少なくとも約2インチで、約16インチ以下である第4の部分の長さ76(長手軸線18に対して平行な直線に沿って測定する。)が使用される。別の実施形態においては、この長さ76は、約12インチ以下で、約3インチ以上である。さらに別の実施形態においては、約8インチ以下で、約4インチ以上である長さ76が使用される。
【0040】
図1、図1B、及び図1Cに示したモップハンドル12における第5の部分78は、第4の部分72とモップヘッド24との間に延在し、詳しくは後述される流体リザーバ(以下、容器88と称する)のために、取付位置を提供する。いくつかの実施形態においては、第5の部分78は、一般的に直線状であるけれども、第5の部分78は、別の実施形態においては、別の形状を有することができる。図1、図1B、及び図1Cに示したモップハンドル12における第5の部分78は、長手軸線18に対して角度82にて延在している。図示の通り、角度82は、約7.5度である。いくつかの実施形態においては、この角度82は、約5度以上で、約20度以下である。別の実施形態においては、この角度82は、約6度以上で、約15度以下である。さらに別の実施形態においては、この角度82は、約7度以上で、約10度以下である。
【0041】
図示の実施形態においては、第5の部分の長さ84(長手軸線18と平行な直線に沿って測定する。)は、約22.5インチである。しかしながら、いくつかの実施形態においては、この長さは、少なくとも約18インチであり、約35インチ以下である。別の実施形態においては、この長さ84は、約32インチ以下で、約20インチ以上である。さらに別の実施形態においては、約30インチ以下で、約22インチ以上である長さ84が使用される。
【0042】
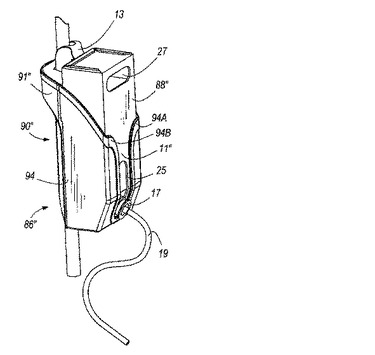
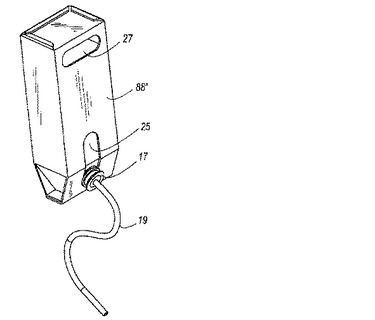
いくつかの実施形態においては、モップ10は、流体容器88を保持するために、ホルスター86を具備している。本明細書及び特許請求の範囲において使用されるように、“ホルスター”という用語は、任意の要素又は装置であって、箱、バッグ、ボトル、桶、又はその他の適当な容器に収容された大量の流体を支持し、又は支持すべく適合されたものを称する。図11乃至図13Aには、そのような容器88,88’,88”の例を示している。図示された容器88,88’,88”は、それぞれ、放出口17と、そこから延びる所定長さの導管19とを具備している。導管19は、容器88,88’,88”からの材料の流れを許容する。そのような材料は、例えば、液体、粉末、又はスラリーなど、任意の流動可能な形態を呈する。
【0043】
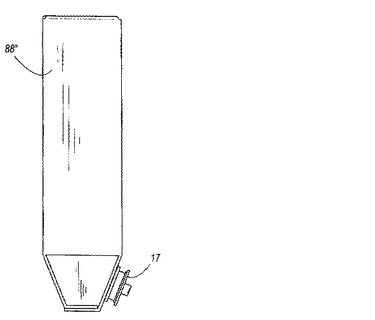
ホルスター86,86’,86”は、この機能を実行できる任意の材料から作られ、それらには、プラスチック、金属、及び複合材料が含まれる。いくつかの実施形態においては、ホルスター86,86’,86”は、実質的に全体的に容器を取り囲み、一方、別の実施形態においては、ホルスター86,86’,86”は、容器の一部分だけを取り囲む。ホルスター86,86’,86”は、流体の容器を支持するために適当な任意のサイズ及び形状である。図11乃至図13に示した実施形態においては、ホルスター86,86’,86”は、略立方体である容器を保持するために形成され、例えば、“バッグインボックス”又はその他の一般的に矩形状の容器88,88’,88”などが用いられる。図11、図11A、図12、及び図13に示した容器88とは異なり、図11B、図12B、及び図13Bに示した容器88’,88”は、それぞれテーパ付きの下部部分を有している。
【0044】
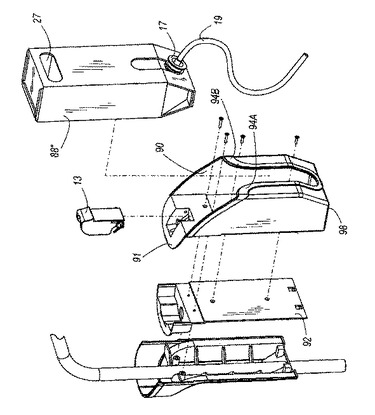
図11乃至図13に示した様々なホルスターの実施形態のそれぞれは、容器88,88’,88”のまわりに延びた、ホルスター本体90,90’,90”を具備している。ホルスター本体90,90’,90”は、ホルスター86,86’,86”の後部部分91,91’,91”にある、ハンドル12の第5の部分78に結合されている(図12及び図12A参照)。いくつかの実施形態においては、ホルスター86,86’,86”における後部部分91,91’,91”は、ハンドル12を受け入れるために、略円筒形の開口部を貫通させて有している。変形例としては、ホルスター86,86’,86”における後部部分91,91’,91”は、(スナップ嵌合の係合のように)、ハンドル12の第5の部分78を受け入れる凹部部分を具備するように形成されている。これらの及びその他の実施形態において、ホルスター86,86’,86”における後部部分91,91’,91”は、任意のタイプの1又は複数の固定具(図示せず)によって、ハンドル12における第5の部分に固定され、固定は、グルー、溶接、鑞付け、又は別の方法で、ハンドルの第5の部分78に任意の方法で接合され、又は任意のその他の方法で、ハンドル12の第5の部分78に、永久的に又は着脱可能に取り付けられる。いくつかの変形例による実施形態においては、ハンドル12及びホルスター86,86’,86”(又は、ホルスター86,86’,86”及びハンドル12)に設けた、合致する開口部と突起部とが、それぞれ、ホルスター86,86’,86”をハンドル12に結合する。また、それぞれの図示した実施形態におけるホルスター本体90,90’,90”は、ハンドル12に固定された単一の要素であるか、又は代わりに、ハンドル12のまわりに取り付けられた、2以上の部品である。
【0045】
いくつかの実施形態においては、裏板92は、ホルスター86,86’,86”と、容器88,88’,88”との間にて、ホルスター86,86’,86”の後部に結合される。前述したように、ホルスター86,86’,86”は、容器88,88’,88”を支持するのに適した任意の形状を有する。単なる例示としては、図11乃至図13に示した実施形態のそれぞれにおける、ホルスター本体90,90’,90”は、受け入れられる容器88,88’,88”の両側の後部部分91,91’,91”から延びた側部94を具備している。図示された側部94には、テーパが付けられ、2つのタブ部分94A,94Bに延び、ホルスター本体90,90’,90”の前方部分96,96’,96”にて、互いに向けて延びており、それにより、容器88,88’,88”を保持する。ホルスター本体90,90’,90”はさらに、底部部分98,98’,98”を具備し、ホルスター本体90,90’,90”の後部部分91から、前方部分96,96’,96”に向けて一般的に延在し、次に、上方へ延びて、タブ部分94A,94Bに結合される。変形例としては、底部部分98,98’,98”は、ホルスター86,86’,86”の側部94から延在し、ホルスター本体90,90’,90”における前方又は後方部分96,96’,96”,91,91’,91”に直接的に結合されることは、必ずしも必要ではない。
【0046】
いくつかの実施形態においては、ホルスター本体90,90’,90”は、ホルスター本体90,90’,90”における底部部分98,98’,98”と側部94及び/又はホルスター本体90,90’,90”における前方部分96,96’,96”との間に、1又は複数の開口部15を形成する形状になっている。開口部15は、少なくとも部分的に、ホルスター本体90,90’,90”の形状に応じて、任意の形状及びサイズを有する。別の実施形態においては、そのような開口部15は、ホルスター本体90,90’,90”におけるこれらの部分の間に存在しない。
【0047】
いくつかの実施形態においては、ホルスター本体90,90’,90”には、開口部11が設けられ、これを通して、容器88,88’,88”の部分、及び/又は、容器88,88’,88”から延びた導管19が通過する。例えば、図11乃至図13の実施形態に示したホルスター本体90,90’,90”は、この目的のために、前方部分96,96’,96”に、それぞれスロット11を有している。特に、それぞれの容器88,88’,88”の放出口17は、容器88,88’,88”がホルスター86,86’,86”に挿入されたとき、スロット11に受け入れられる。
【0048】
引き続き、図11乃至図13に示した実施形態を参照すると、それぞれのホルスター86,86’,86”には、ホルスター86,86’,86”の内部に容器88,88’,88”を保持するためにラッチが設けられている。ラッチ13は、この目的に適した任意の形態を呈することができ、図示の実施形態においては、ハンドル12に隣接して、ホルスター86,86’,86”に回転可能に結合された、レバーである。図示したラッチ13は、ラッチ13の部分が、ホルスター86,86’,86”内の容器88,88’,88”の部分にわたって延在する位置へ及び位置から回転可能であり、それにより、容器88,88’,88”が、最初にラッチ13を移動させることなく、取り外されることを阻止する。ホルスターから容器88,88’,88”を取り外すためには(例えば、モップ10によって運ばれる流体のタイプを変更する、又は空になった容器88,88’,88”を満タンの容器88,88’,88”と交換するなど)、ユーザは単に、ラッチ13をハンドル12に向けた方向に押圧し、ホルスター86,86’,86”から容器88,88’,88”を引き出せばよい。ラッチ13は、任意のタイプの1又は複数のばねによって、係止位置へ向けて付勢され、ばねは、例えば、捻ればねであって、ラッチ13のピボットに受け入れられ、ホルスター86,86’,86”内の容器88,88’,88”に向けた回転方向にラッチを付勢するもの、1又は複数の板ばね、拡張ばね、又は、ラッチ13をそのような方向に付勢するように配置された弾性帯、ラッチをそのような方向へ付勢すべく配置された1又は複数の磁石などである。
【0049】
いくつかの実施形態においては、容器88,88’,88”は、少なくとも1つの把持部分27を具備し、ユーザが容易に、容器88,88’,88”をホルスター86,86’,86”から取り外せるようにしている。把持部分27,27’の例は、図11、図11A、図11B、図13A、及び図13Bに示しており、流体のバッグ(図示せず)を取り囲む容器88,88’,88”における、硬質の又は半硬質の部分に設けた切欠として示される。その他の把持部分、例えば、その他の開口部、容器88,88’,88”から延びた突起部、バー、ノブ、又はハンドルを併用して又は代わりに使用できる。すべてのそのような場合において、把持部分27は、ユーザが、容器88,88’,88”を取り外し及び据え付けるのに適した、任意の形状及びサイズを有し、それらは、本発明の精神及び範囲に含まれる。
【0050】
いくつかの実施形態においては、空になった容器88,88’,88”は、ホルスター86,86’,86”から取り外されて廃棄され、一方、他の実施形態においては、空になった容器88,88’,88”は、取り外され、再充填されて、ホルスター86,86’,86”に再び配置される。
【0051】
いくつかの実施形態においては、ホルスター本体の底部端部に近接した1又は複数の壁には、テーパが付いている。図11B、図12B、及び図13B乃至図13Eには、このテーパ付きの特徴を例示している。これらの実施形態においては、ホルスター本体90’,90”に得られた漏斗形状の端部は、流体容器88’,88”におけるテーパ付き端部と、合致又は部分的に合致する。このテーパ付き形状は、容器88’,88”からの流体のより完全な排出を補助し、容器88’,88”からの流体流れを改善する。
【0052】
いくつかの実施形態においては、容器88,88’,88”は、1又は複数の窓25を有し、ユーザが、どのくらいの流体が、容器88,88’,88”に残っているのかを見えるようにしている。いくつかの実施形態においては、これらの窓は、容器88,88’,88”の底部部分に配置され又は延在し、容器88,88’,88”の放出口17に隣接した位置に設けられる。窓25は、放出口17又は導管19が延通する開口部11,11’に隣接して配置され、ユーザは、ホルスター86,86’,86”から容器88,88’を取り外すことなく、流体レベルを視認できる。いくつかの実施形態においては、容器88,88’,88”における下方部分は、透明又は半透明の材料から構成されて窓25を形成しているが、別の実施形態においては、容器88,88’,88”の全体が、透明又は半透明の材料から構成される。
【0053】
いくつかの実施形態においては、容器88,88’,88”の重心21は、モップの長手軸線18に対して実質的に整列され、使用中の容器の重量の影響を減らすのを助ける。しかしながら、容器88,88’,88”の向きに起因して、及び、使用中に容器が空になるという事実に起因して、この重心21は必ずしも常にモップの長手軸線18に整列されない。この性質に起因して、容器88,88’,88”の重心21は、良好な性能結果を得るために長手軸線18から約1.25インチ以下だけオフセットしているが、別の実施形態においては、容器88,88’,88”の重心21は、良好な性能結果を得るために長手軸線18から約1インチ以下だけオフセットしており、さらに別の実施形態においては、容器88,88’,88”の重心21は、良好な性能結果を得るために長手軸線18から約0.75インチ以下だけオフセットしている。上述した範囲は、容器がハンドルから延びる大きさに依存することに留意されたい。例えば、容器が2倍遠くに延びると、この範囲に比例して影響する。
【0054】
別の実施形態においては、容器88,88’,88”の重心21は、使用中の機械的な利点を得るために、長手軸線18から特に若干オフセットしている。特に、発明者らの発見によれば、容器88,88’,88”の重心21が、モップ10の長手軸線18から、距離23(図1B参照)だけオフセットしたとき、特に良好なツールの制御が可能になり、及び/又は、ツールを操作するユーザに必要な努力が特に小さくなる。これらのオフセット23は、いくぶん、長手軸線18とハンドル12の第5の部分との間の相対的角度に起因して存在している。容器88,88’,88”の重心21は、良好な性能結果を得るために、長手軸線18から、約0.1インチ以上で、約1.5インチ以下だけ、オフセットしている。別の実施形態においては、容器88,88’,88”の重心21は、良好な性能結果を得るために、長手軸線18から、約0.2インチ以上で、約1インチ以下だけ、オフセットしている。さらに別の実施形態においては、容器88,88’,88”の重心は、良好な性能結果を得るために、長手軸線18から、約035インチ以上で、約0.75インチ以下だけ、オフセットしている。
【0055】
容器86,86’,86”の重心21は、容器86,86’,86”の内部にある流体の量に基づいて、また、容器86,86’,86”の向きに基づいて、長手軸線に対して移動することを認識されたい(例えば、完全に満タンでない容器86,86’,86”において、容器86,86’,86”内の流体の位置は、ハンドル12の向きに基づいて変化し、それにより、容器86,86’,86”の重心21が変化する。)。しかしながら、いくつかの実施形態においては、前述したオフセットの範囲は、容器86,86’,86”の向き、又は容器86,86’,86”内にある流体の量にかかわりなく適用される。別の実施形態においては、前述したオフセットの範囲は、実質的に流体で満たされた容器86,86’,86”に、ハンドル12における任意の向きにおいて適用される。これらの及びその他の実施形態において、前述したオフセットの範囲は、ハンドル12の長手軸線18が、水平面に対して約40度以上で、約90度以下の角度(ハンドル12及び容器86,86’,86”の通常の操作向きの範囲である。)に向けられたとき、本願で開示したように、ツールハンドル12に結合された容器86,86’,86”に適用される。
【0056】
いくつかの実施形態においては、容器88,88’,88”は、ホルスター86,86’,86”の内部に受け入れられ、ホルスター86,86’,86”の頂部から、図示の実施形態に示したよりも大きな距離だけ延出している。そのような場合には、テーパ付きホルスター86’,86”にあっても、テーパ無しの容器88,88’,88”が使用される。また、このようなホルスター86,86’,86”に対する容器88,88’,88”の位置的関係は、モップ10と併用してオーバーサイズの容器88,88’,88”を使用することを許容するもので、それにより、ハンドル12によって、より多量の流体を運ぶことができる。いくつかの実施形態においては、容器88,88’,88”における全長の少なくとも5%が、ホルスター86,86’,86”の上縁を越えて延在しても、モップ10の操作に著しい影響を与えることはない。別の実施形態においては、容器88,88’,88”における全長の少なくとも10%が、ホルスター86,86’,86”の上縁を越えて延在しても、モップ10の操作に著しい影響を与えることはない。さらに別の実施形態においては、容器88,88’,88”における全長の少なくとも20%が、ホルスター86,86’,86”の上縁を越えて延在しても、モップ10の操作に著しい影響を与えることはない。
【0057】
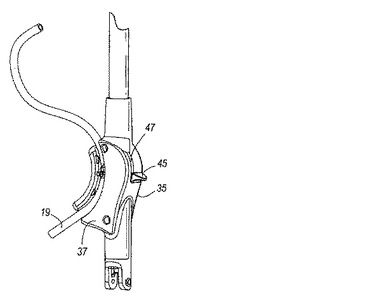
図1、図1B、図1C、及び図11乃至図13Bに示すように、所定長さの導管19が、容器88,88’,88”の部分から延出して、ハンドル12とは反対側に面して、モップヘッド24に向いている。導管19は、バルブ33の内部に挿入され、導管19を通して容器88,88’,88”からの流体の流れを、選択的に開閉するように機能する。図1、図1B、及び図1Cに最良に示されるように、バルブ33は、ハンドル12の第5の部分78に沿って、ホルスター86とモップヘッド24との間の位置に配置される。
【0058】
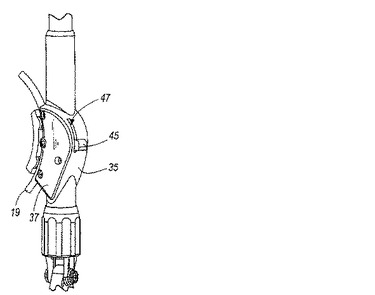
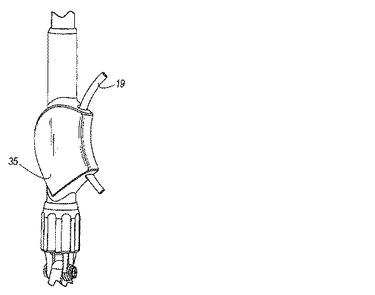
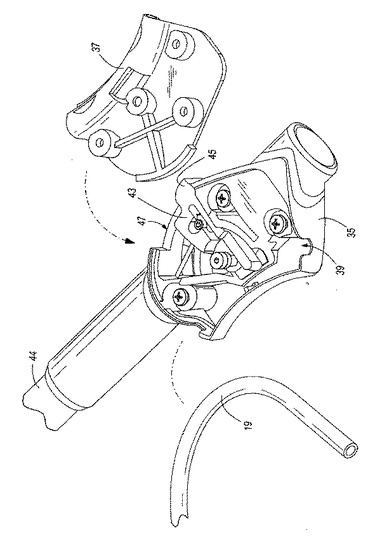
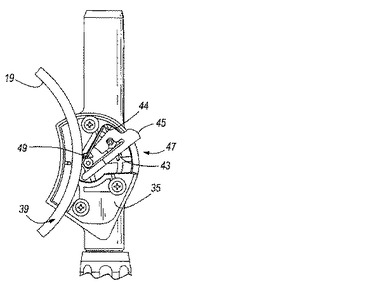
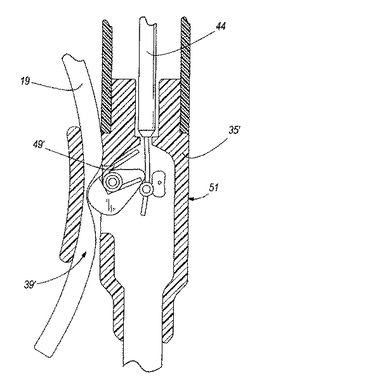
次に、図14乃至図19及び図20乃至図25を参照すると、同様な構造を有する2つのバルブ組立体が示されている。それぞれの実施形態におけるバルブ33は、永久的に又は着脱可能に、ハンドル12に結合された弁体35を具備している。弁体35は、任意の所望の方法にて、一緒に結合された、任意の数の部品によって形成される。例えば、図14乃至図19に示した弁体35は、ハンドル12に受け入れられるべき形状及び寸法である管状部分と、ねじによって管状部分に固定されるカバー37とを具備している。変形例としては、カバー37は、例えば、ボルト、ピン、リベット、釘、無頭釘、ステープル、クランプ、留め金、及びその他の固定具、及び相互係合要素などを用いて、弁体35の残りに取り付けられる。別の実施形態においては、弁体35は、ハンドル12の取付けに適合した別の形状を有することもでき、それらには、限定はしないが、ハンドル12のまわりに互いに結合される2以上の部分を有する弁体(いくつかの場合には、クランプ構造である。)、弁体35及びハンドル12に、ねじ、ボルト、ピン、リベット、釘、無頭釘、ステープル、又はその他の固定具、又は相互係合要素などを用いて、ハンドル12の側部に固定されるように適合した弁体が含まれる。
【0059】
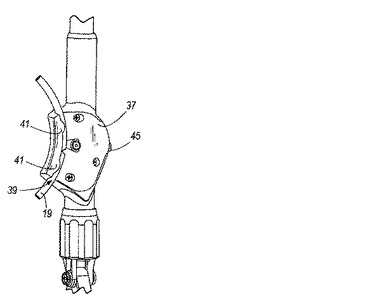
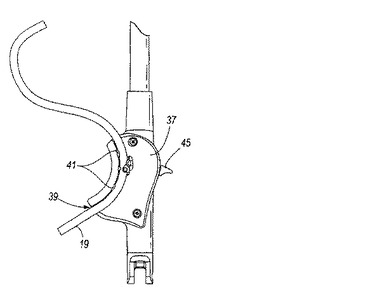
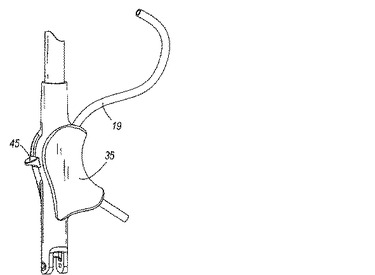
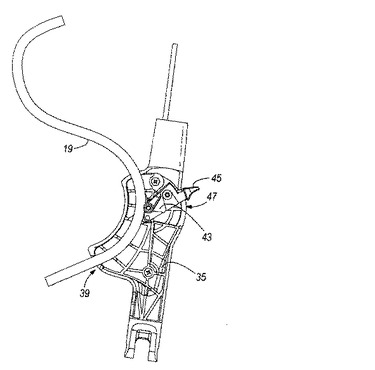
バルブ33はさらに、容器88,88’,88”からの導管を挿入可能なギャップを具備している。このギャップは、バルブの2つの部分の間に形成され、いくつかの実施形態においては、弁体35に設けた通路39の形態を呈する(より詳しくは、図14乃至図19に示した実施形態における、弁体35のカバー37である。)。カバー37における通路39は、一般的に細長くて弓形の形状であるけれども、通路39は、他の実施形態においては、必ずしも細長く又は弓形である必要はない。さらに、図14乃至図19及び図20乃至図25に示した実施形態における通路39は、開いた側部と、2つの対向する通路の側壁と、通路の底部とを有している。従って、通路39は、導管19を横方向に受け入れるように形成され、それにより、すべての周辺側部で閉じている開口部を通して、導管19をねじ止め又は供給する要求条件を解消する。これにより、ユーザは、導管19の自由端にアクセスせずに、導管19をバルブに据え付け、及びバルブから導管19を除去できる。
【0060】
いくつかの実施形態においては、図15及び図21に最良に示されるように、弁体35は、複数のタブ41又はその他の突起部を、通路39を部分的に横切るように延在させている。これらのタブは、いったん挿入された導管19を、通路39内に保持する助けとなる。また、いくつかの実施形態においては、導管19は、導管19のどの部分がバルブ33に挿入されるべきかを指示する目印を有する。
【0061】
引き続き、図14乃至図19及び図20乃至図25に示した実施形態を参照すると、いくつかの実施形態によるバルブ33は、さらにレバー43を具備している。図示の実施形態におけるレバー43は、通路39に隣接した箇所を中心としてピボットし、通路39から延在している。いくつかの実施形態においては、図18及び図19に例示的に最良に示されるように、レバー43は、バルブハウジング35から突き出た、レバー端部45を有している。レバー端部45は、バルブハウジングにおける開口部47に沿った弓形の経路を通って可動になっており、ユーザは、バルブ33の位置にて、バルブ33を作動させることができる。
【0062】
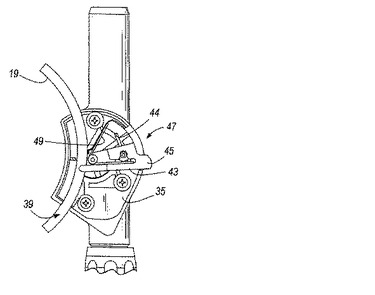
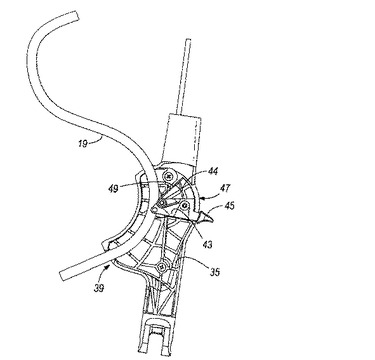
図18及び図19(及び図24及び図25)に示したレバー43は、導管を通して流れる流体を禁止しないためにレバー43が導管を挟持することがない、又はそのような流れを実質的に禁止するために導管を挟持して不十分な量にする、開いた位置(図18及び図24参照)と、レバー43が直接的又は間接的に導管19を挟持して導管を通る流れを禁止する、閉じた位置(図19及び図25参照)との間にて、ピボット可能になっている。いくつかの実施形態においては、レバー43は、不用意に流体が小出しにされるのを防ぐため、閉じた位置へ向けて、常時付勢されている。この付勢は、レバー43に結合された、多数の異なる付勢要素によって発生でき、それらには、限定はしないが、ばね、弾性帯、及び磁石が含まれる。例えば、図14乃至図19及び図20乃至図25に示した実施形態におけるレバー43は、レバー43がピボットする中心と同一であるピボットピンに受けられた、捻ればね49によって閉じた位置へ向けて付勢される。
【0063】
図14乃至図19及び図20乃至図25に示した実施形態におけるレバー43は、捻ればね49の付勢力又は(使用されるならば)他の付勢機構の付勢力を越える力を発生させることで、開いた位置へ動かされる。いくつかの実施形態においては、レバー43は、前述したように、ケーブル44に又はその他の要素であって、トリガ34へ延びて結合される要素に、結合されている。従って、前述した任意の実施形態に従ったトリガ34を絞ることで、ケーブル44は押し引きされ、それにより、レバー43のピボット運動を発生させる。
【0064】
図26には、本発明の別の実施形態による別のバルブを示しており、前述したのと一般的に同一であるギャップ及び挟持レバーの特徴を使用して作動する。さらに別の実施形態においては、バルブ33における他の要素が作動したときに、導管19を挟持する(例えば、トリガ34に結合され及び/又はバルブ33の箇所にてユーザアクセス可能な位置へ延びた、ケーブル44又はその他の要素による。)。これらの要素には、限定はしないが、導管19に対して挟持関係に出入りする回転可能な偏心カム、導管19に対して挟持関係に出入りする可動部分を有する摺動体などが含まれる。
【0065】
図示の実施形態において、導管19が横方向に挿入可能なギャップは、弁体35の壁に設けた通路によって形成されていたけれども、このギャップは別の要素によっても形成できることに留意されたい。単なる例示としては、ギャップは、弁体35と、前述したように作動可能である、ローラ、カム、又はレバーとの間に形成される。
【0066】
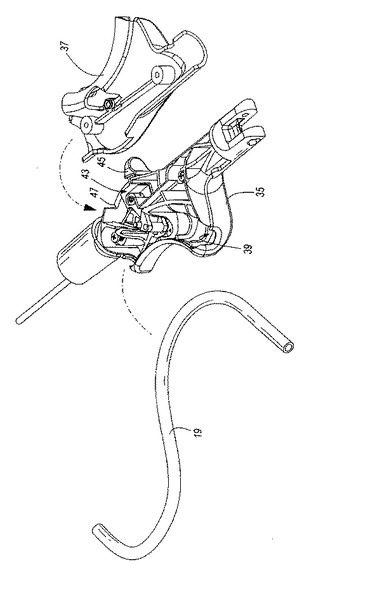
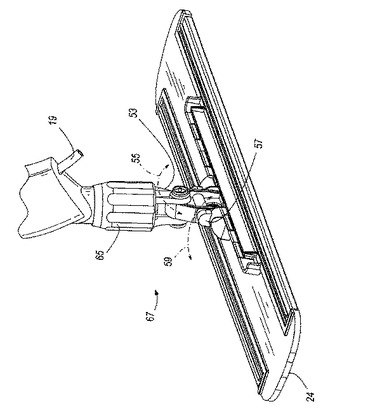
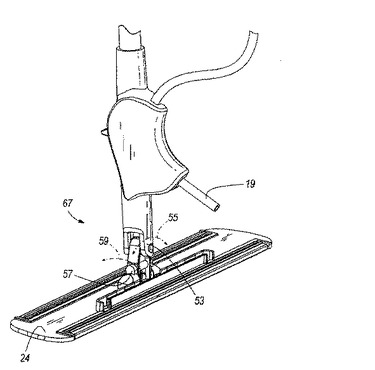
いくつかの実施形態においては、モップヘッド24は、ハンドル12における第5の部分78に、ピボット可能に結合される。結合は、1つ、2つ、又は3つの自由度を形成し、使用されるピボット可能な結合のタイプに、少なくとも部分的に依存する。例えば、いくつかの実施形態によるモップ10は、2つの異なる軸線を中心としてモップヘッドのピボット運動を許容する、ピボットジョイントが採用される。例えば、図27及び図27Aを参照すると、第1のピボットジョイント53は、矢印55に示すように、ハンドル12を第1の方向にピボットさせることができ、一方、第2のピボットジョイント57は、矢印59に示すように、ハンドル12を第2の方向にピボットさせることができる。これらのピボットジョイント53,57は、自在継手と同様な方法において、一緒に働く。このタイプのジョイントを使用することで、モップヘッド24は、第1及び第2の矢印55,59に沿った任意の広範囲の位置に、ハンドル12を用いて、床面に沿って推進できる。
【0067】
いくつかの実施形態においては、ジョイント67は、第1及び第2のピボットジョイント53,57を具備している。第2のピボットジョイント57は、モップヘッド24にピボット可能に結合され、一方、第1のピボットジョイント53は、第2のピボットジョイント57にピボット可能に結合される。第1のピボットジョイント53は、外側部分にねじを具備し、ハンドル12が第1のピボットジョイント53の内部に挿入され、第1のピボットジョイント53にカラー65を螺着させることで第1のピボットジョイント53に固定されるが、別の実施形態においては、ハンドル12は、第1のピボットジョイント53に圧入され、ハンドル12と第1のピボットジョイント53との間のねじ結合によって第1のピボットジョイント53に直接的に結合され、第1のピボットジョイント53にピン止め又はクランプされ、又は、任意のその他の方法で固定される。さらに別の実施形態においては、1又は複数の固定具を使用しても、ハンドル12を第1のピボットジョイント53に結合できる。
【0068】
図27Aのジョイント67は、図27に示したジョイントと実質的に同様に構成され動作するけれども、ジョイント67は、実質的に異なる方法によってハンドルに結合されている。特に、ジョイント67は、バルブ組立体と一体的に形成されている。従って、ジョイント67と、バルブ組立体とは、一元的なサブアセンブリを形成し、ハンドルに結合されている。ハンドルは、前述した任意の方法で又は当業者に知られている代替的な方法で、このサブアセンブリと結合される。
【0069】
使用に際しては、ユーザは、第1の手で、第1のグリップ22を把持し、第2の手で、第2のグリップ68を把持して、図1Aに示した向きにする。容器88,88’,88”の重心と、モップ24の長手軸線18との間にオフセット23があるので、モップハンドル12の形状によって与えられた増加トルクに起因して、オペレータは、モップ10の方向を容易に変化させることができる。床面上に流体を小出しにするために、ユーザは、トリガ34を絞り、それにより、モップ14の第1の端部14に向けて、ケーブル44(又はバルブ33に結合された他の要素)を引くことで、バルブ33を作動させる。バルブレバー43は、導管19との係合からピボットして離れ、モップ10の作業に使用するために、導管を通って、所定量の流体が流れる。
【0070】
容器88,88’,88”が空になると、(設けられているならば)窓25を通して、流体レベルを視認することで、ユーザは、容器88,88’,88”における把持可能部分27を把持して、ラッチ13を動かして、ホルスター86,86’,86”から容器88,88’,88”を取り外す。導管19は、オペレータがレバー43を持ち上げると、トリガ34を絞るか、又は、バルブ33のレバー端部45を操作することで、バルブ33から横方向に取り外される。ユーザは、容器88,88’,88”を再充填するか、又は、これを廃棄して、満タンの容器88,88’,88”をホルスター86,86’,86”に挿入する。次に、導管19は、前述したように、レバー43を持ち上げることで、バルブ33の中に横方向に挿入される。
【0071】
上述し図面に示した実施形態は、例示的にのみ提供されるもので、本発明の概念及び原理を限定する意図はない。そして、本発明の精神及び範囲から逸脱せずに、要素及びその構成及び配置について、様々な変化が可能であることを当業者にあっては認識されたい。
【符号の説明】
【0072】
19 導管
33 バルブ
34 トリガ
35 弁体
43 レバー
【特許請求の範囲】
【請求項1】
第1の端部と、反対側の第2の端部とを備えた細長いハンドルと、細長いハンドルにおける第2の端部に結合されたモップヘッドを備え、フロアツールからの流体の流れを制御するバルブとを有するフロアツールに結合されるフロアツールの流体ディスペンサのためのアクチュータであって、
該アクチュータは、第1の可動部分であって、軸線を中心としてハンドルに回転可能に結合され、軸線から第1の可動部分における端部へと延びているトリガを有し、第1の可動部分における端部は、軸線に比べて細長いハンドルの第1の端部のより近くに配置されている、上記第1の可動部分と、
第2の可動部分であって、バルブの開閉のうち少なくとも1つによって、第1の可動部分の動きに対して応答する、上記第2の可動部分と、
を備えていることを特徴とするアクチュータ。
【請求項2】
請求項1に記載のアクチュータであって、
第2の可動部分は、細長い可撓性部材を用いて、バルブに結合されていることを特徴とするアクチュータ。
【請求項3】
請求項1に記載のアクチュータであって、
第1の可動部分の回転によって、第2の可動部分は摺動し、それによりバルブを作動させることを特徴とするアクチュータ。
【請求項4】
請求項1に記載のアクチュータであって、
第1の可動部分の回転によって、第2の可動部分は回転し、それにより、バルブを作動させることを特徴とするアクチュータ。
【請求項5】
請求項1に記載のアクチュータであって、
第1及び第2の可動部分のうち、一方は、開口部を具備し、第1及び第2の可動部分のうち、他方は、ピンを具備し、ピンは、バルブを作動させるために、開口部に沿って移動することを特徴とするアクチュータ。
【請求項6】
請求項1に記載のアクチュータであって、
第1及び第2の可動部分は、選択的に係合するように噛合する歯を具備し、第1の可動部分の動きは、第2の可動部分の動きを引き起こし、それにより、バルブを作動させることを特徴とする請求項4に記載のアクチュータ。
【請求項7】
請求項1に記載のアクチュータであって、
第1の可動部分は、第1のカム面を具備し、第2の可動部分は、第2のカム面を具備し、第2のカム面は、第1のカム面に沿って、カム接触していることを特徴とするアクチュータ。
【請求項8】
フロアツールであって、該フロアツールは、
第1及び第2の反対側にある端部を備えている細長いハンドルと、
細長いハンドルにおける第2の端部に結合された、モップヘッドと、
フロアツールからの流体の流れを制御するために機能するバルブと、
ハンドルにおける第1の端部に隣接して配置され、バルブに結合されているトリガであって、トリガは、軸線を中心として回転可能にハンドルに結合され、軸線からトリガの端部へ延在し、トリガの端部は、軸線に比べて、細長いハンドルにおける第1の端部のより近くに配置されている、上記トリガと、
を備えていることを特徴とするフロアツール。
【請求項9】
請求項8に記載のフロアツールであって、
トリガに結合された可動部分をさらに備え、可動部分は、トリガの動きに応答して動き、それにより、バルブを作動させることを特徴とする請求項5に記載のフロアツール。
【請求項10】
請求項9に記載のフロアツールであって、
トリガの回転は、可動部分の摺動を引き起こし、それにより、バルブを作動させることを特徴とするフロアツール。
【請求項11】
請求項9に記載のフロアツールであって、
トリガの回転は、可動部分の回転を引き起こし、それにより、バルブを作動させることを特徴とするフロアツール。
【請求項12】
請求項9に記載のフロアツールであって、
トリガと可動部分とのうち、一方は、開口部を具備し、トリガと可動部分とのうち、他方は、ピンを具備し、ピンは、バルブを作動させるために、開口部に沿って移動することを特徴とするフロアツール。
【請求項13】
請求項9に記載のフロアツールであって、
トリガ及び可動部分は、選択的に係合するように噛合する歯を具備し、第1の可動部分の動きは、第2の可動部分の動きを引き起こし、それにより、バルブを作動させることを特徴とするフロアツール。
【請求項14】
請求項9に記載のフロアツールであって、
トリガは、第1のカム面を具備し、可動部分は、第2のカム面を具備し、第2のカム面は、第1のカム面に沿って、カム接触していることを特徴とするフロアツール。
【請求項15】
請求項9に記載のフロアツールであって、
可動部分は、細長い可撓性要素を介して、バルブに結合されていることを特徴とするフロアツール。
【請求項16】
請求項9に記載のフロアツールであって、
細長いハンドルに結合されたホルスターをさらに備え、着脱可能に流体リザーバを受け入れて支持し、流体リザーバは、流体的にバルブに結合されていることを特徴とするフロアツール。
【請求項1】
第1の端部と、反対側の第2の端部とを備えた細長いハンドルと、細長いハンドルにおける第2の端部に結合されたモップヘッドを備え、フロアツールからの流体の流れを制御するバルブとを有するフロアツールに結合されるフロアツールの流体ディスペンサのためのアクチュータであって、
該アクチュータは、第1の可動部分であって、軸線を中心としてハンドルに回転可能に結合され、軸線から第1の可動部分における端部へと延びているトリガを有し、第1の可動部分における端部は、軸線に比べて細長いハンドルの第1の端部のより近くに配置されている、上記第1の可動部分と、
第2の可動部分であって、バルブの開閉のうち少なくとも1つによって、第1の可動部分の動きに対して応答する、上記第2の可動部分と、
を備えていることを特徴とするアクチュータ。
【請求項2】
請求項1に記載のアクチュータであって、
第2の可動部分は、細長い可撓性部材を用いて、バルブに結合されていることを特徴とするアクチュータ。
【請求項3】
請求項1に記載のアクチュータであって、
第1の可動部分の回転によって、第2の可動部分は摺動し、それによりバルブを作動させることを特徴とするアクチュータ。
【請求項4】
請求項1に記載のアクチュータであって、
第1の可動部分の回転によって、第2の可動部分は回転し、それにより、バルブを作動させることを特徴とするアクチュータ。
【請求項5】
請求項1に記載のアクチュータであって、
第1及び第2の可動部分のうち、一方は、開口部を具備し、第1及び第2の可動部分のうち、他方は、ピンを具備し、ピンは、バルブを作動させるために、開口部に沿って移動することを特徴とするアクチュータ。
【請求項6】
請求項1に記載のアクチュータであって、
第1及び第2の可動部分は、選択的に係合するように噛合する歯を具備し、第1の可動部分の動きは、第2の可動部分の動きを引き起こし、それにより、バルブを作動させることを特徴とする請求項4に記載のアクチュータ。
【請求項7】
請求項1に記載のアクチュータであって、
第1の可動部分は、第1のカム面を具備し、第2の可動部分は、第2のカム面を具備し、第2のカム面は、第1のカム面に沿って、カム接触していることを特徴とするアクチュータ。
【請求項8】
フロアツールであって、該フロアツールは、
第1及び第2の反対側にある端部を備えている細長いハンドルと、
細長いハンドルにおける第2の端部に結合された、モップヘッドと、
フロアツールからの流体の流れを制御するために機能するバルブと、
ハンドルにおける第1の端部に隣接して配置され、バルブに結合されているトリガであって、トリガは、軸線を中心として回転可能にハンドルに結合され、軸線からトリガの端部へ延在し、トリガの端部は、軸線に比べて、細長いハンドルにおける第1の端部のより近くに配置されている、上記トリガと、
を備えていることを特徴とするフロアツール。
【請求項9】
請求項8に記載のフロアツールであって、
トリガに結合された可動部分をさらに備え、可動部分は、トリガの動きに応答して動き、それにより、バルブを作動させることを特徴とする請求項5に記載のフロアツール。
【請求項10】
請求項9に記載のフロアツールであって、
トリガの回転は、可動部分の摺動を引き起こし、それにより、バルブを作動させることを特徴とするフロアツール。
【請求項11】
請求項9に記載のフロアツールであって、
トリガの回転は、可動部分の回転を引き起こし、それにより、バルブを作動させることを特徴とするフロアツール。
【請求項12】
請求項9に記載のフロアツールであって、
トリガと可動部分とのうち、一方は、開口部を具備し、トリガと可動部分とのうち、他方は、ピンを具備し、ピンは、バルブを作動させるために、開口部に沿って移動することを特徴とするフロアツール。
【請求項13】
請求項9に記載のフロアツールであって、
トリガ及び可動部分は、選択的に係合するように噛合する歯を具備し、第1の可動部分の動きは、第2の可動部分の動きを引き起こし、それにより、バルブを作動させることを特徴とするフロアツール。
【請求項14】
請求項9に記載のフロアツールであって、
トリガは、第1のカム面を具備し、可動部分は、第2のカム面を具備し、第2のカム面は、第1のカム面に沿って、カム接触していることを特徴とするフロアツール。
【請求項15】
請求項9に記載のフロアツールであって、
可動部分は、細長い可撓性要素を介して、バルブに結合されていることを特徴とするフロアツール。
【請求項16】
請求項9に記載のフロアツールであって、
細長いハンドルに結合されたホルスターをさらに備え、着脱可能に流体リザーバを受け入れて支持し、流体リザーバは、流体的にバルブに結合されていることを特徴とするフロアツール。
【図1】


【図1A】
【図1B】
【図1C】
【図1D】
【図1E】
【図2】
【図3】
【図4】
【図4A】
【図5】
【図6】
【図7】
【図8】
【図9】
【図9A】
【図10】
【図11】
【図11A】
【図11B】
【図12】
【図12A】
【図13】
【図13A】
【図13B】
【図13C】
【図13D】

【図13E】
【図14】
【図15】
【図16】
【図17】
【図18】
【図19】
【図20】
【図21】
【図22】
【図23】
【図24】
【図25】
【図26】
【図27】
【図27A】
【図1A】
【図1B】
【図1C】
【図1D】
【図1E】
【図2】
【図3】
【図4】
【図4A】
【図5】
【図6】
【図7】
【図8】
【図9】
【図9A】
【図10】
【図11】
【図11A】
【図11B】
【図12】
【図12A】
【図13】
【図13A】
【図13B】
【図13C】
【図13D】
【図13E】
【図14】
【図15】
【図16】
【図17】
【図18】
【図19】
【図20】
【図21】
【図22】
【図23】
【図24】
【図25】
【図26】
【図27】
【図27A】
【公開番号】特開2010−155112(P2010−155112A)
【公開日】平成22年7月15日(2010.7.15)
【国際特許分類】
【出願番号】特願2010−59275(P2010−59275)
【出願日】平成22年3月16日(2010.3.16)
【分割の表示】特願2010−507526(P2010−507526)の分割
【原出願日】平成20年4月29日(2008.4.29)
【出願人】(398061050)ディバーシー・インコーポレーテッド (101)
【住所又は居所原語表記】8310 16th Street,Sturtevant,Wisconsin 53177−0902,United States of America
【Fターム(参考)】
【公開日】平成22年7月15日(2010.7.15)
【国際特許分類】
【出願日】平成22年3月16日(2010.3.16)
【分割の表示】特願2010−507526(P2010−507526)の分割
【原出願日】平成20年4月29日(2008.4.29)
【出願人】(398061050)ディバーシー・インコーポレーテッド (101)
【住所又は居所原語表記】8310 16th Street,Sturtevant,Wisconsin 53177−0902,United States of America
【Fターム(参考)】
[ Back to top ]