
フロッグレッグアームロボットおよびその制御方法
【課題】フロッグレッグアームロボットにおける制御上の特異点を実用的に解消するとともに、フロッグレッグアームロボットのスムーズな動作を実現する。
【解決手段】このフロッグレッグアームロボットは、手首回転軸部に接続され、自らが接続された同回転軸部にトルクを供給するトルクモータと、フロッグレッグアームロボットを構成する各腕部が駆動装置によって現在の姿勢から所望の姿勢を含む複数の姿勢のいずれにも移行可能であるときに、トルクが手首回転軸部に、前記各腕部が所望の姿勢に移行することができる方向に供給されるように、トルクモータを電気的に制御する制御部とを備えている。
【解決手段】このフロッグレッグアームロボットは、手首回転軸部に接続され、自らが接続された同回転軸部にトルクを供給するトルクモータと、フロッグレッグアームロボットを構成する各腕部が駆動装置によって現在の姿勢から所望の姿勢を含む複数の姿勢のいずれにも移行可能であるときに、トルクが手首回転軸部に、前記各腕部が所望の姿勢に移行することができる方向に供給されるように、トルクモータを電気的に制御する制御部とを備えている。
【発明の詳細な説明】
【技術分野】
【0001】
本発明は、ハンド部に搬送対象物を載置した状態にて移送するフロッグレッグアームロボットおよびその制御方法に関するものである。
【背景技術】
【0002】
従来から、所定の搬送対象物をハンド部に載置した状態にて移送するアームロボットが用いられている。このようなアームロボットの中には、同期して動くふたつのアーム部によってハンド部が支持された、いわゆるフロッグレッグアームロボットがある。
このフロッグレッグアームロボットの各アーム部は、回転軸部によって連結された上腕部と前腕部とから構成されており、各アーム部の上腕部を本体部に設置された駆動モータによって回転駆動することによって、前腕部に連結されたハンド部を移動させる。
【0003】
ところで、フロッグレッグアームロボットでは、アーム部が所定の姿勢であるときに、駆動モータの駆動によって、現在の姿勢から所望の姿勢を含む複数の姿勢のいずれにも移行可能な状態におかれることがある。このような状態は、いわゆる特異点と呼ばれている。当該ロボットが特異点にあるときに駆動モータを駆動すると、アーム部が所望の姿勢に移行するのか、所望しない姿勢に移行するのかが不定となり、制御が安定しなくなる。通常は、特異点を通過する際には、アーム部がある程度の速度を有しているため、特異点で停止することなく所望の姿勢に移行することが可能であるが、万が一、特異点にてアーム部が停止すると、当該ロボットは制御不能となる。
【0004】
これに対し、例えば特許文献1には、上腕部と前腕部とを回転可能に連結する回転軸部に駆動モータの動力を伝達するために、スプロケットやチェーンを備えるフロッグレッグアームロボットが記載されている。このようなスプロケットやチェーンを備えるフロッグレッグアームロボットによれば、上腕部と前腕部とを連結する回転軸部にチェーン等を介してトルクを供給することによって、制御上の特異点が解消されるとのことである。
【0005】
また、特許文献2には、特異点付近でトルクが供給されるように、上腕部と前腕部との連結部付近の前腕部に設置されたバネ部材と、前腕部が接続された部品につながる反力受けとを備えるフロッグレッグアームロボットが記載されている。このようなバネ部材や反力受けを備えるフロッグレッグアームロボットによれば、バネ部材の付勢力によって制御上の特異点が解消されるとのことである。
また、特許文献3のように、リンク部材を追加することによって特異点の解消を試みた例が開示されている。
【0006】
また、特許文献4では、平リンク機構の特異点を、フロッグレッグアームロボットの動作が固着する現象として捕らえ、その現象を解消するためにエアシリンダとラックピニオンギアとを用いた例が開示されている。
翼部等の部位に用いられる樹脂構造体においては、エロージョンやキャビテーション等によりその表面が磨耗等することが問題となっており、耐摩耗性を向上させるためその表面上に所定の強度を有する金属材からなる保護部材を設けることが成されている。このような樹脂構造体の製造方法として、従来では、数ミリ程度の薄い金属板に曲げ加工を施して翼形状に応じて変形させ、変形した金属板と翼部とを接着剤を介して併合させる方法が取られている。このような、樹脂構造体として、特許文献1には、繊維強化プラスチックで形成された翼部の表面に、複数の金属製の保護部材を設けるものが開示されている。
【特許文献1】特開平11−216691号公報
【特許文献2】特開平2−311237号公報
【特許文献3】特開2000−42970号公報
【特許文献4】特許第3682861号公報
【発明の開示】
【発明が解決しようとする課題】
【0007】
しかしながら、スプロケットやチェーン等の機械的な機構を用いて回転軸部にトルクを供給する場合、取付精度や形状精度等の誤差があることから、制御上の特異点を完全に解消することができない。
例えば、チェーンのテンションが緩むと、上腕部と前腕部とを連結する回転軸部にトルクを供給することができないために、制御上の特異点が生まれる。そのため、特異点においてアーム部が停止したり、特異点から所望の姿勢へ移行する際に当該ロボットの動作が不安定になったりする等の不具合が生じる。
バネ部材と反力受けとを用いる場合は、確かに特異点を解消する効果はある。しかしながら、特異点付近の前腕部すなわち荷の挙動がバネ力に強く依存してしまうので、動作速度と荷の重さに合わせたバネ力の調整が必要になる。バネ力の調整が適切に行われていないと、荷が特異点付近で衝撃を受けたり、特異点付近でのみ速度が極端に速くなったりして、当該ロボットのスムーズな動作ができなくなる。これに対処するには、バネ部材や反力受けの交換が必要となってしまう。つまり、動作環境の変化に弱いという不具合がある。
リンク部材を追加する場合は、機構学的には特異点を解消できるが、構造が複雑になってしまい、寸法、重量およびコスト等の観点から適用できる条件が厳しい。
エアシリンダを用いる場合では、特異点を解消する効果はあるが、空圧回路では、動作条件の変更等に伴うシリンダ推力等の調整が、空気配管の状態に依存する圧力損失等に影響されやすい。また、アームを駆動する電源とは別に、エアシリンダの動作に必要なエア供給源を別途用意する必要がある。さらに、動作範囲を広くとるためにはストロークの大きい長いシリンダを用いる必要がある。
このように、従来のフロッグレッグアームロボットにおける特異点対策には、実用的なものが存在しなかった。
【0008】
本発明は、上述する問題点に鑑みてなされたもので、フロッグレッグアームロボットにおける制御上の特異点を実用的に解消するとともに、フロッグレッグアームロボットのスムーズな動作を実現することを目的とする。
【課題を解決するための手段】
【0009】
上記目的を達成するために、本発明のフロッグレッグアームロボットは、本体部と、前記本体部に設置される駆動装置と、前記駆動装置によって回転される第1の回転軸部を介して一端が前記本体部に連結され、基準平面に沿って揺動可能な第1の上腕部と、前記駆動装置によって回転駆動される前記第1の回転軸部またはもうひとつの第1の回転軸部を介して一端が前記本体部に連結され、前記基準平面に沿って揺動可能な第2の上腕部と、第2の回転軸部を介して一端が前記第1の上腕部の他端に回転可能に支持されるとともに前記基準平面に沿って揺動可能な第1の前腕部と、第3の回転軸部を介して一端が前記第2の上腕部の他端に回転可能に支持されるとともに前記基準平面に沿って揺動可能な第2の前腕部と、第4の回転軸部を介して前記第1の前腕部の他端に回転可能に支持されるとともに第5の回転軸部を介して前記第2の前腕部の他端に回転可能に支持されるハンド部と、前記第4の回転軸部と前記第5の回転軸部とを相反する方向に同期回転させる同期手段と、前記第2、第3、第4および第5の回転軸部の少なくともいずれかひとつに接続され、自らが接続された前記回転軸部にトルクを供給するトルクモータと、前記第1の上腕部、前記第2の上腕部、前記第1の前腕部および前記第2の前腕部が前記駆動装置の駆動によって現在の姿勢から所望の姿勢を含む複数の姿勢のいずれにも移行可能であるときに、前記トルクが前記回転軸部に、前記各腕部が前記所望の姿勢に移行することができる方向に供給されるように、前記トルクモータを電気的に制御する制御部とを備える。
【0010】
上記のように構成された本発明のフロッグレッグアームロボットによれば、第1の上腕部、第2の上腕部、第1の前腕部および第2の前腕部が駆動装置の駆動によって現在の姿勢から所望の姿勢を含む複数の姿勢のいずれにも移行可能であるとき、すなわち当該ロボットが従来において特異点とされていた姿勢であるときに、トルクモータが制御部によって電気的に制御される。これにより、第2、第3、第4および第5の回転軸部の少なくともいずれかひとつに、当該ロボットを構成する各腕部が所望の姿勢に移行することができる方向にトルクが供給される。
【0011】
本発明のフロッグレッグアームロボットにおいて、前記第2、第3、第4および第5の回転軸部の少なくともいずれかひとつに前記トルクモータによって供給される前記トルクは、前記駆動装置によって前記第1の回転軸部に供給されるトルクよりも小さくてもよい。
【0012】
本発明のフロッグレッグアームロボットにおいて、前記制御部は、前記ハンド部が所定の一方向に移動する間、前記トルクが常に同一方向に供給されるように前記トルクモータを制御してもよい。
【0013】
本発明のフロッグレッグアームロボットにおいて、前記トルクモータは、前記第1の上腕部、前記第2の上腕部、前記第1の前腕部および前記第2の前腕部の少なくともいずれかひとつの内部に収納されていてもよい。
【0014】
本発明のフロッグレッグアームロボットにおいて、前記トルクモータは、自らが接続された回転軸部にトルク制御信号に基づくトルクを供給するとともに、回転速度制御信号に基づく回転速度にて前記回転軸部を回転させてもよい。そして、前記制御部は、前記トルクモータに前記トルク制御信号を入力するとともに、前記トルクモータの回転速度が、前記駆動装置の駆動に依存して回転される前記回転軸部の回転速度と同期するように、前記トルクモータに前記回転速度制御信号を入力してもよい。
【0015】
本発明のフロッグレッグアームロボットによれば、制御部からトルクモータにトルク制御信号が入力されるとき、すなわち回転軸部にトルクが供給されるときに、トルク制御信号とともに回転速度制御信号が入力される。この回転速度制御信号は、トルクモータの回転速度が、トルクモータを接続された回転軸部が駆動モータの駆動に依存して回転されるときの同回転軸部の回転速度と同期するように、トルクモータの回転速度を制御するための信号である。これにより、回転軸部にトルクを供給するとき、回転軸部の回転速度とトルクモータの回転速度とが同期する。
なお、本発明において、「前記トルクモータの回転速度が、前記駆動モータの駆動に依存して回転される前記回転軸部の回転速度と同期する」とは、トルクモータを接続された回転軸部がトルクモータの駆動に依存して回転されるときの回転速度が、同回転軸部が駆動モータの駆動に依存して回転されるときの回転速度とほぼ一致することを意味する。すなわち、トルクモータの回転速度および回転軸部の回転速度がその絶対量をも一致させて経時的に推移することも(厳密に一致して変化する)、両者が回転速度の絶対量は異なるものの経時的に同調して推移することをも含む。
本発明のフロッグレッグアームロボットにおいては、駆動装置によって回転される第1の回転軸部の回転速度に、機構学的に定まるある比率を乗じることにより、前記第2、第3、第4および第5の回転軸部の回転速度が明らかになる。例えば、第1の上腕部の長さと第2の上腕部の長さとが同じであれば、第4、第5の回転軸部の回転速度は、第1の回転軸部の回転速度の2倍になる。本発明における「同期」とは、このように機構学的に定まる比率が守られるように、駆動装置によって回転される第1の回転軸部の回転速度と、トルクモータによって回転される回転軸部の回転速度とが制御されることをいう。さらに言えば、駆動モータとトルクモータとの同期は、第1の回転軸部と、トルクモータによって回転される回転軸部との同期に依存して決定される。
【0016】
本発明のフロッグレッグアームロボットにおいて、前記制御部は、前記トルクモータが接続される前記回転軸部の回転速度を、前記駆動装置の制御値に基づいて算出してもよい。
【0017】
本発明のフロッグレッグアームロボットは、前記トルクモータと前記回転軸部との間に介在し、前記トルクモータの回転速度を減速して前記回転軸部に伝達する減速機をさらに備えていてもよい。そして、前記制御部は、前記減速機の減速比、および前記減速機によって減速された前記回転軸部の回転速度に基づいて前記回転速度制御信号を生成してもよい。
【0018】
本発明のフロッグレッグアームロボットにおいては、前記トルクモータがひとつだけ設けられてもよい。
【0019】
本発明のフロッグレッグアームロボットにおいて、前記駆動装置は、前記第1の回転軸部を介して前記第1の上腕部を揺動させる第1の駆動モータと、前記もうひとつの第1の回転軸部を介して前記第2の上腕部を揺動させる第2の駆動モータとを備えていてもよい。
【0020】
本発明のフロッグレッグアームロボットにおいて、前記駆動装置は、前記第1の回転軸部を介して前記第1の上腕部を揺動させる駆動モータと、前記第1の回転軸部と前記第2の回転軸部との間に設けられ、前記駆動モータの駆動力を前記第1の回転軸部から前記第2の回転軸部に伝達することによって前記第2の上腕部を揺動させる駆動力伝達機構とを備えていてもよい。
【0021】
本発明のフロッグレッグアームロボットの制御方法は、本体部と、前記本体部に設置される駆動装置と、前記駆動装置によって回転される第1の回転軸部を介して一端が前記本体部に連結され、基準平面に沿って揺動可能な第1の上腕部と、前記駆動装置によって回転駆動される前記第1の回転軸部またはもうひとつの第1の回転軸部を介して一端が前記本体部に連結され、前記基準平面に沿って揺動可能な第2の上腕部と、第2の回転軸部を介して一端が前記第1の上腕部の他端に回転可能に支持されるとともに前記基準平面に沿って揺動可能な第1の前腕部と、第3の回転軸部を介して一端が前記第2の上腕部の他端に回転可能に支持されるとともに前記基準平面に沿って揺動可能な第2の前腕部と、第4の回転軸部を介して前記第1の前腕部の他端に回転可能に支持されるとともに第5の回転軸部を介して前記第2の前腕部の他端に回転可能に支持されるハンド部と、前記第4の回転軸部と前記第5の回転軸部とを相反する方向に同期回転させる同期手段と、前記第2、第3、第4および第5の回転軸部の少なくともいずれかひとつに接続され、自らが接続された前記回転軸部にトルクを供給するトルクモータとを備えるフロッグレッグアームロボットの制御方法であって、前記第1の上腕部、前記第2の上腕部、前記第1の前腕部および前記第2の前腕部が前記駆動装置の駆動によって現在の姿勢から所望の姿勢を含む複数の姿勢のいずれにも移行可能であるときに、前記トルクが前記回転軸部に、前記各腕部が前記所望の姿勢に移行することができる方向に供給されるように、前記トルクモータを電気的に制御する。
【0022】
上記のように構成された本発明のフロッグレッグアームロボットの制御方法によれば、第1の上腕部、第2の上腕部、第1の前腕部および第2の前腕部が駆動装置の駆動によって現在の姿勢から所望の姿勢を含む複数の姿勢のいずれにも移行可能であるとき、すなわち当該ロボットの姿勢が従来において特異点とされていた状態にあるときに、トルクモータが制御部によって電気的に制御される。これにより、第2、第3、第4および第5の回転軸部の少なくともいずれかひとつに、当該ロボットを構成する各腕部が所望の姿勢に移行することができる方向にトルクが供給される。
【0023】
本発明のフロッグレッグアームロボットの制御方法において、前記第2、第3、第4および第5の回転軸部の少なくともいずれかひとつに前記トルクモータによって供給される前記トルクは、前記駆動装置によって前記第1の回転軸部に供給されるトルクよりも小さくてもよい。
【0024】
本発明のフロッグレッグアームロボットの制御方法において、前記ハンド部が所定の一方向に移動する間、前記トルクを常に同一方向に供給してもよい。
【0025】
本発明のフロッグレッグアームロボットの制御方法において、前記トルクモータは、自らが接続された回転軸部にトルク制御信号に基づくトルクを供給するとともに、回転速度制御信号に基づく回転速度にて前記回転軸部を回転させてもよい。そして、前記トルクモータに前記トルク制御信号を入力するとともに、前記トルクモータの回転速度が、前記駆動装置の駆動に依存して回転される前記回転軸部の回転速度と同期するように、前記トルクモータに前記回転速度制御信号を入力してもよい。
【0026】
本発明のフロッグレッグアームロボットの制御方法によれば、トルクモータにトルク制御信号が入力されるとき、すなわちトルクモータが接続された回転軸部にトルクが供給されるときに、このトルク制御信号とともに、トルクモータに回転速度制御信号が入力される。この回転速度制御信号は、トルクモータの回転速度が、トルクモータを接続された回転軸部が駆動モータの駆動に依存して回転されるときの同回転軸部の回転速度と同期するように、トルクモータの回転速度を制御するための信号である。これにより、回転軸部にトルクを供給するときに、回転軸部の回転速度とトルクモータの回転速度とが同期する。
【0027】
本発明のフロッグレッグアームロボットの制御方法において、前記トルクモータが接続される前記回転軸部の回転速度を、前記駆動装置の制御値に基づいて算出してもよい。
【0028】
本発明のフロッグレッグアームロボットの制御方法において、前記トルクモータと前記回転軸部との間に介在し、前記トルクモータの回転速度を減速して前記回転軸部に伝達する減速機の減速比、および前記減速機によって減速された前記回転軸部の回転速度に基づいて前記回転速度制御信号を生成してもよい。
【0029】
本発明のフロッグレッグアームロボットの制御方法において、前記トルクは、前記第2、第3、第4および第5の回転軸部のいずれかひとつに供給されてもよい。
【発明の効果】
【0030】
本発明のフロッグレッグアームロボット、および当該ロボットの制御方法によれば、当該ロボットの姿勢が従来において特異点とされていた状態にあるとき、すなわち第1の上腕部、第2の上腕部、第1の前腕部および第2の前腕部が駆動装置の駆動によって現在の姿勢から所望の姿勢を含む複数の姿勢のいずれにも移行可能であるときに、トルクモータが電気的に制御され、第2、第3、第4および第5の回転軸部の少なくともいずれかひとつに、当該ロボットを構成する各腕部が所望の姿勢に移行することができる方向にトルクが供給される。すなわち、本発明においては、取付精度や形状精度に依存する機械的な制御を行うことなく、電気的な制御のみによって回転軸部にトルクが供給される。
【0031】
本発明によれば、フロッグレッグアームロボットの動作環境が変化したとしても、板バネのような機械的な補助手段(バネ部材)を交換することなく、電気的な指令を変更するだけでトルクモータのトルク量等を調整することが可能である。これにより、フロッグレッグアームロボットの特異点付近におけるスムーズな動作が可能となる。
また、リンク部材を追加する必要がないので、本発明のフロッグレッグアームロボットは、簡単な構造であるにもかかわらず、特異点における問題を解消することができる。
【0032】
さらに、エアシリンダを用いた場合と比較すると、電動モータ等の電気的なトルク供給手段を用いるので、電気配線の状態にほとんど依存せずに所望のトルクを安定して発生させることができる。また、駆動モータと同じ電源を用いることができ、エア供給源のような機器を別途用意する必要がない。また、ラックピニオンギアやエアシリンダのような長い部品を用いる必要がないので寸法に関する制限が緩やかである。
【0033】
このように、従来特異点とされていた姿勢において、第2、第3、第4および第5の回転軸部の少なくともいずれかひとつに、電気的に制御可能なトルクモータを用いて、フロッグレッグアームロボットが所望の姿勢に移行することができる方向にトルクを供給することにより、当該ロボットにおける制御上の特異点を実用的に解消することができる。
【0034】
本発明のフロッグレッグアームロボット、および当該ロボットの制御方法によれば、回転軸部にトルクを供給するときに、トルクモータの回転速度が、トルクモータを接続された回転軸部が駆動モータの駆動に依存して回転されるときの同回転軸部の回転速度と同期する。すなわち、トルクモータを接続された回転軸部がトルクモータの駆動に依存して回転されるときの回転速度が、同回転軸部が駆動モータの駆動に依存して回転されるときの回転速度とほぼ一致する。これにより、トルクモータあるいは回転軸部に不必要な負荷が加わらない。その結果、フロッグレッグアームロボットの特異点付近におけるスムーズな動作が可能になることに加え、フロッグレッグアームロボットに、回転軸部の回転速度とトルクモータの回転速度とが整合しないことに起因する振動が生じることを防止することができる。
【発明を実施するための最良の形態】
【0035】
以下、図面を参照して、本発明のフロッグレッグアームロボットおよびその制御方法の一実施形態について説明する。なお、以下の図面において、各部材を認識可能な大きさとするために、各部材の縮尺を適宜変更している。
【0036】
(第1実施形態)
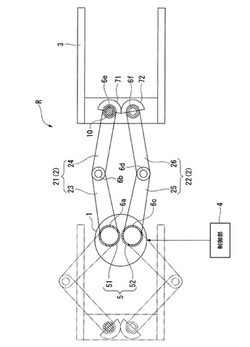
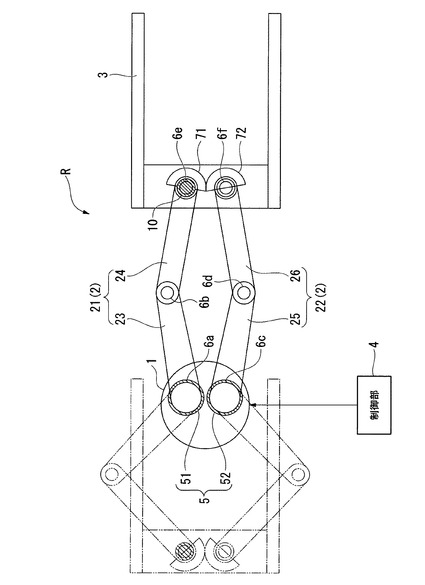
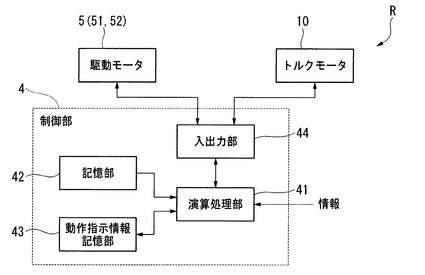
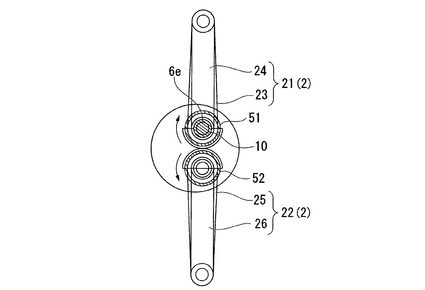
図1は、本発明の一実施形態であるフロッグレッグアームロボットRの概略構成を示した平面図である。図2は、本発明の一実施形態であるフロッグレッグアームロボットRの概略構成を示した側面図である。図3は、本発明の一実施形態であるフロッグレッグアームロボットRの機能構成を示したブロック図である。
【0037】
各図に示すように、本実施形態のフロッグレッグアームロボットRは、本体部1と、アーム部2と、ハンド部3と、制御部4とを備えている。
【0038】
本体部1は、例えばスタッカクレーンのケージなどの基部B上に回転可能に設置される。本体部1には、アーム部2をそれぞれ揺動させることによってハンド部3を水平面(基準平面)に沿って前後に移動させるための駆動装置5が設けられている。駆動装置5は、駆動モータ51,52を備えている。駆動モータ51は肩回転軸部6a(第1の回転軸部)に接続され、駆動モータ52は肩回転軸部6c(第1の回転軸部)に接続されている。
【0039】
アーム部2は、ハンド部3の移動域を挟んで左右対称に配置された一対のアーム部21,22とで構成されている。なお、以下の説明においては、アーム部21を第1アーム部21と称し、アーム部22を第2アーム部22と称する。
【0040】
第1アーム部21は、上腕部23(第1の上腕部)と、前腕部24(第1の前腕部)とで構成されている。上腕部23の一端は、本体部1に設置された駆動モータ51に、肩回転軸部6aを介して連結されている。上腕部23は、駆動モータ51が回転駆動されることにより、水平面に沿って揺動可能である。前腕部24の一端は、肘回転軸部6b(第2の回転軸部)を介して上腕部23の他端に回転可能に支持されている。前腕部24は、上腕部23の揺動に伴って肘回転軸部6bが回転することにより、水平面に沿って揺動可能である。
【0041】
第2アーム部22は、上腕部25(第2の上腕部)と、前腕部26(第2の前腕部)とで構成されている。上腕部25の一端は、本体部1に設置された駆動モータ52に、肩回転軸部6cを介して連結されている。上腕部25は、駆動モータ52が回転駆動されることにより、水平面に沿って揺動可能である。前腕部26の一端は、肘回転軸部6d(第3の回転軸部)を介して上腕部25の他端に回転可能に支持されている。前腕部26は、上腕部25の揺動に伴って肘回転軸部6dが回転することにより、水平面に沿って揺動である。
【0042】
ハンド部3は、手首回転軸部6e(第4の回転軸部)を介して第1アーム部21の前腕部24の他端に回転可能に支持されるとともに、手首回転軸部6f(第5の回転軸部)を介して第2アーム部22の前腕部26の他端に回転可能に支持されている。ハンド部3は、搬送対象物(例えば、ガラス基板やガラス基板を収納したカセット等)を載置可能である。
【0043】
また、第1アーム部21の前腕部24の他端、および第2アーム部22の前腕部26の他端には、同期歯車71,72(同期手段)がそれぞれ設けられている。同期歯車71,72は対をなし、一方の同期歯車71は前腕部24の他端に設置され、他方の同期歯車72は前腕部26の他端に設置されている。両歯車は、互いに噛み合わされることによって双方が相反する方向に同期回転可能である。これにより、第1アーム部と第2アーム部22とが同期して対称に動作するので、ハンド部3を直線的に移動させることができる。
【0044】
そして、本実施形態のフロッグレッグアームロボットRにおいては、トルクモータ10が、第1アーム部21の前腕部24とハンド部3とを接続する手首回転軸部6eに接続されている。
このトルクモータ10は、後述する制御部4によって電気的に制御されるものである。具体的には、手首回転軸部6eに、制御部4から入力されるトルク制御信号に基づくトルクを、水平面に沿う方向に供給する。トルクモータ10は、電気的にトルク制御ができるものであれば良く、サーボ式、誘導式の他、どのようなタイプのものを用いても良い。
なお、トルクモータ10によって手首回転軸部6eに供給されるトルクは、駆動モータ51,52によって肩回転軸部6a,6cにそれぞれ供給されるトルクよりも小さく設定されている。例えば、駆動モータ51,52として、出力が1kWのモータを用いる場合には、トルクモータ10としては、出力が400から600Wのモータを用いれば良い。
【0045】
制御部4は、フロッグレッグアームロボットRの動作全体を統括するものであり、演算処理部41と、記憶部42と、動作指示情報記憶部43と、入出力部44とを備えている。演算処理部41は、外部から入力される情報に基づいて駆動モータ51,52およびトルクモータ10の動作指示情報を求める。記憶部42は、演算処理部41にて用いられる各種アプリケーションやデータを記憶する。動作指示情報記憶部43は、演算処理部41によって求められた動作指示情報を一時的に記憶する。入出力部44は、駆動モータ51,52およびトルクモータ10と、演算処理部41との間において信号の入出力を行う。
【0046】
このような構成を有する制御部4は、駆動モータ51と駆動モータ52とを同期して駆動することによって第1アーム部21と第2アーム部22とを揺動させ、これによってハンド部3を前後に移動させる。
また、制御部4は、駆動モータ51,52だけを駆動したとき、アーム部2が現在の姿勢から所望の姿勢を含む複数の姿勢のいずれにも移行可能であるならば、トルクモータ10を電気的に制御し、手首回転軸部6eに、アーム部2が所望の姿勢に移行することができるように、これに適した方向にトルクを供給する。
【0047】
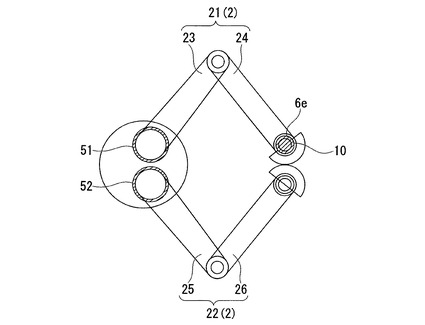
なお、アーム部2が現在の姿勢から所望の姿勢を含む複数の姿勢のいずれにも移行可能な姿勢とは、図4に示すように、第1アーム部21の上腕部23と前腕部24とが重なり、第2アーム部22の上腕部25と前腕部26とが重なり、さらに第1アーム部21と第2アーム部22とがあたかもある直線上に位置するかのような姿勢である。なお、以下の説明において、図4に示す姿勢を特殊な姿勢と称する。また、図4、図5および図6においては、図面の視認性を向上させるために、ハンド部3および制御部4を省略している。
【0048】
アーム部2が図4に示す特殊な姿勢にあるときに、ハンド部3を押し出す方向に移動させるために駆動モータ51,52を矢印方向に駆動すると、第1アーム部21の上腕部23と前腕部24とが互いに開くとともに、第2アーム部22の上腕部25と前腕部26とが互いに開き、所望のようにハンド部3を押し出す方向にアーム部2の姿勢が移行することもある(図5参照)。
一方で、第1アーム部21の上腕部23と前腕部24とが重なるとともに、第2アーム部22の上腕部25と前腕部26とが重なって、そのような状態のまま、ハンド部3を移動させることなく第1アーム部21と第2アーム部22とだけが回動する方向にアーム部2の姿勢が移行することもある(図6参照)。
このため、アーム部2が特殊な姿勢において停止したときには、アーム部2が所望の姿勢か、所望しない姿勢に移行するかが不定となり、制御が不安定となる。従来のフロッグレッグアームロボットにおいては、特殊な姿勢、すなわち所望の姿勢を含む複数の姿勢のいずれに移行するかが不定である姿勢が、制御上の特異点とされている。
【0049】
また、特殊な姿勢からハンド部3を引き出す方向に移動させるときであっても、駆動モータ51,52だけの駆動に依存していれば、ハンド部3を押し出す方向に移動させるときと同様に、特殊な姿勢が従来のフロッグレッグアームロボットにおける制御上の特異点となる。
【0050】
次に、上述のように構成された本実施形態のフロッグレッグアームロボットRの動作(フロッグレッグアームロボットの制御方法)について説明する。
【0051】
まず、制御部4は、演算処理部41を用いて、駆動モータ51,52、トルクモータ10、またはフロッグレッグアームロボットRの外部から入力される情報、および記憶部42に記憶されたアプリケーションやデータに基づいて、ハンド部3を移動させる方向(押し出す方向あるいは引き出す方向)およびその移動量を求め、動作指示情報として動作指示情報記憶部43に記憶させる。
続いて、制御部4は、所定のタイミングで動作指示情報記憶部43から動作指示情報を引き出し、入出力部44を介して駆動モータ51,52およびトルクモータ10に動作指示信号を入力する。
【0052】
例えば、制御部4から、ハンド部3を押し出す方向に所定量移動させる動作指示信号が出力されると、駆動モータ51が肩回転軸部6aを図1における右回りに回転させ、駆動モータ52が肩回転軸部6cを図1における左周りに回転させる。
このように、肩回転軸部6aが図1における右回りに回転されることによって、第1アーム部21の上腕部23がその一端を中心として図1における右回転方向に揺動される。同時に、肩回転軸部6cが図1における左周りに回転されることによって、第2アーム部22の上腕部25がその一端を中心として図1における左回転方向に揺動される。このような上腕部23の揺動が、肘回転軸部6bを介して前腕部24に伝達され、第1アーム部21の前腕部24が肘回転軸部6bを中心として左回転方向に揺動される。同時に、このような上腕部25の揺動が、肘回転軸部6dを介して前腕部26に伝達され、第2アーム部22の前腕部26が肘回転軸部6dを中心として右回転方向に揺動される。
【0053】
ここで、第1アーム部21の動きと第2アーム部22の動きとは、同期歯車71,72が互いに噛み合うことによって同期される。このため、第1アーム部21の前腕部24の揺動と第2アーム部22の前腕部26の揺動とが同期される。
そして、第1アーム部21の前腕部24の揺動が手首回転軸部6eを介してハンド部3に伝達されるとともに、第2アーム部22の前腕部26の揺動が手首回転軸部6fを介してハンド部3に伝達されることによって、ハンド部3が押し出される方向に移動する。
なお、ハンド部3の移動量は、肩回転軸部6a,6cの回転量によって決定付けられるため、駆動モータ51,52は、ハンド部3を所定量移動させる分だけ肩回転軸部6a,6cをそれぞれ回転させることによって、ハンド部3を所定移動量だけ移動させる。
【0054】
一方、制御部4から、ハンド部3を引き出す方向に所定量移動させる動作指示信号が出力されると、駆動モータ51が肩回転軸部6aを図1における左回りに回転させ、駆動モータ52が肩回転軸部6cを図1における右周りに回転させる。
このように、肩回転軸部6aが図1における左回りに回転されることによって、第1アーム部21の上腕部23がその一端を中心として図1における左回転方向に揺動される。同時に、肩回転軸部6cが図1における右周りに回転されることによって、第2アーム部22の上腕部25がその一端を中心として図1における右回転方向に揺動される。このような上腕部23の揺動が、肘回転軸部6bを介して前腕部24に伝達され、第1アーム部21の前腕部24が肘回転軸部6bを中心として右回転方向に揺動される。同時に、このような上腕部25の揺動が、肘回転軸部6dを介して前腕部26に伝達され、第2アーム部22の前腕部26が肘回転軸部6dを中心として左回転方向に揺動される。
そして、第1アーム部21の前腕部24の揺動が手首回転軸部6eを介してハンド部3に伝達されるとともに、第2アーム部22の前腕部26の揺動が手首回転軸部6fを介してハンド部3に伝達されることによって、ハンド部3が引き出される方向に移動する。
【0055】
ここで、本実施形態のフロッグレッグアームロボットRにおいては、制御部4は、ハンド部3を移動させている過程では、トルクモータ10を制御することによって、手首回転軸部6eに、図4に示す特殊な姿勢から所望の姿勢に移行することができる方向に、常にトルクを供給する。
具体的には、制御部4は、ハンド部3を押し出す方向に移動させる場合には、トルクモータ10を電気的に制御することによって、手首回転軸部6eに、図1における左回転方向にトルクを供給する。また、ハンド部3を引き出す方向に移動させる場合には、トルクモータ10を電気的に制御することによって、手首回転軸部6eに、図1における右回転方向にトルクを供給する。
【0056】
つまり、ハンド部3を押し出す方向に移動させる過程で、アーム部2が図4に示す特殊な姿勢を経る場合には、手首回転軸部6eに、図1における左回転方向(所望の姿勢に移行することができる方向)にトルクが供給されている。このため、特殊な姿勢から図6に示す所望しない姿勢に移行することなく、滑らかに図5に示す所望の姿勢に移行することができる。
一方、ハンド部3を引き出す方向に移動させる過程で、図4に示す特殊な姿勢を経る場合にも、手首回転軸部6eに、図1における右回転方向(所望の姿勢に移行することができる方向)にトルクが供給されている。このため、特殊な姿勢から所望しない姿勢に移行することなく、滑らかに所望の姿勢に移行することができる。
すなわち、本実施形態のフロッグレッグアームロボットRおよびその制御方法によれば、アーム部2が特殊な姿勢にあっても、所望しない姿勢に無秩序に移行することがなく、必ず所望の姿勢に移行する。したがって、制御上の特異点が解消される。
【0057】
また、本実施形態のフロッグレッグアームロボットおよびその制御方法によれば、取付精度や形状精度に依存する機械的な制御を行うことなく、電気的な制御のみによって手首回転軸部6eにトルクを供給する。
このため、動作環境が変化したとしても、板バネのような機械的な補助手段(バネ部材)を交換することなく、電気的な指令を制御するだけでトルク量等の変更が可能であるので、特異点付近でのスムーズな動作が可能となる。
また、リンク部材を追加する必要がないので構造が簡単なフロッグレッグアームロボットのまま特異点を解消することができる。
【0058】
さらに、エアシリンダを用いた場合と比べると、電動モータ等の電気的なトルク供給手段を用いる場合には、電気配線の状態にほとんど依存せずに所望のトルクを安定して発生させることができる。また、駆動モータと同じ電源を用いることができ、エア供給源のような機器を別途用意する必要がない。また、ラックピニオンギアやエアシリンダのような長い部品を用いる必要がないので寸法制限がより柔軟である。
このように、従来特異点とされていた姿勢(図4に示す特殊な姿勢)において、手首回転軸部6eに、所望の姿勢に移行することができる方向に、電気的に制御可能なトルクモータ10を用いてトルクを供給することにより、フロッグレッグアームロボットにおける制御上の特異点を実用的に解消することができる。
【0059】
また、本実施形態のフロッグレッグアームロボットおよびその制御方法においては、手首回転軸部6eにトルクを供給するための機械的な機構(チェーンやスプロケット等)を備えていないため、装置構成を簡素化することができる。また、機械的な機構を備えないことによって、装置の摺動部分が減少され、装置からの粉塵の発生を抑制することができる。したがって、本実施形態のフロッグレッグアームロボットおよびその制御方法は、クリーンルーム内での使用に適したものとなる。
【0060】
なお、制御上の特異点を解消するだけであれば、特殊な姿勢においてのみ手首回転軸部6eにトルクを供給すれば良い。これに対し、本実施形態のフロッグレッグアームロボットおよびその制御方法においては、手首回転軸部6eに常にトルクを供給している。
このため、本実施形態のフロッグレッグアームロボットおよびその制御方法においては、アーム部2が常に過剰に拘束される。したがって、アーム部2やハンド部3の取付精度や形状精度による誤差による振動を抑制することができる。その結果、ハンド部3の位置精度を向上させることが可能となる。
なお、アーム部2が常に過剰に拘束されていることによって、駆動モータ51,52の出力を従来よりも増加させる必要がある。ただし、駆動モータ51,52の出力を従来よりも増加させることが困難であれば、特殊な姿勢においてのみ手首回転軸部6eにトルクを供給すれば良い。
【0061】
また、本実施形態のフロッグレッグアームロボットおよびその制御方法においては、トルクモータ10が手首回転軸部6eに供給するトルクは、駆動モータ51,52が肩回転軸部6a,6cに供給するトルクよりも小さくされている。このため、手首回転軸部6eにトルクが供給されているときであっても、駆動モータ51,52によって肩回転軸部6a,6cにトルクを供給することによって、アーム部2およびハンド部3をスムーズに動かすことができる。
【0062】
(第2実施形態)
次に、本発明の第2実施形態について説明する。なお、本実施形態の説明において、上記第1実施形態と同様の部分については、その説明を省略あるいは簡略化する。
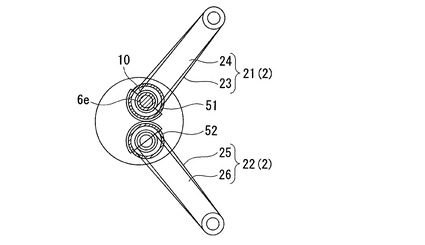
図7は、本実施形態におけるフロッグレッグアームロボットの概略構成を示す側面図である。この図に示すように、本実施形態のフロッグレッグアームロボットにおいては、トルクモータ10が、前腕部24の内部に収納されている。
【0063】
このような本実施形態のフロッグレッグアームロボットによれば、トルクモータ10が、前腕部24の内部に収納されているため、フロッグレッグアームロボットの外部に突出する部材をなくすことができる。したがって、フロッグレッグアームロボットの外部にトルクモータの移動スペースを確保する必要がなく、従来のフロッグレッグアームロボットと同様の設置スペースにて本実施形態のフロッグレッグアームロボットを設置することができる。
【0064】
なお、トルクモータ10は、必ずしも前腕部24の内部に収納状態で配置されるものではない。例えば、トルクモータ10が手首回転軸部6fと接続される場合には、前腕部26の内部にトルクモータ10が収納状態に配置される。また、トルクモータ10が肘回転軸部6bと接続される場合には、前腕部24、上腕部23のいずれかの内部もしくは両方の内部に渡って収納状態に配置される。また、トルクモータ10が肘回転軸部6dと接続される場合には、前腕部26、上腕部25のいずれかの内部もしくは両方の内部に渡って収納状態に配置される。
【0065】
(第3実施形態)
次に、本発明の第3実施形態について説明する。なお、本実施形態の説明において、上記第1実施形態と同様の部分については、その説明を省略あるいは簡略化する。
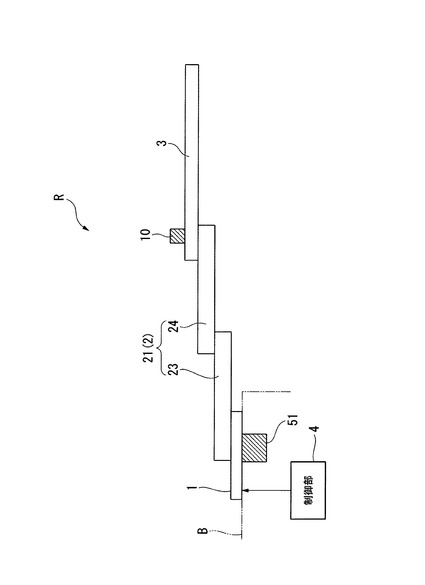
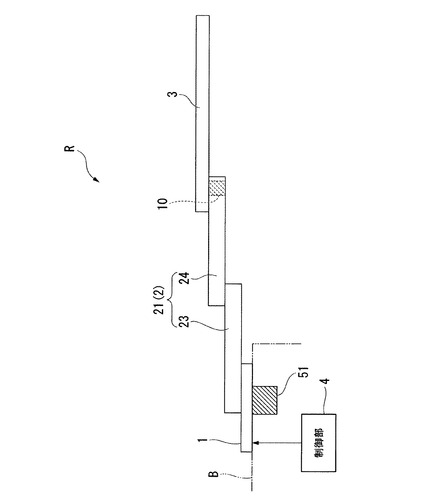
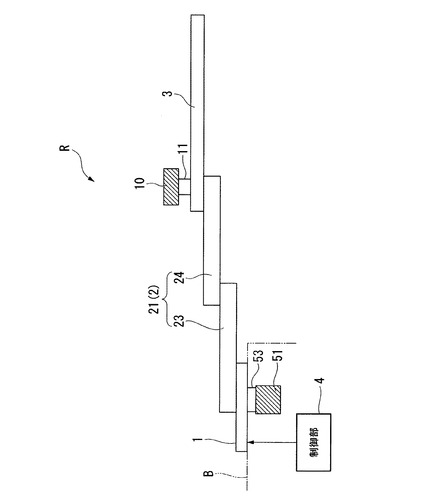
図8は、本発明の一実施形態であるフロッグレッグアームロボットRの概略構成を示した側面図である。この図に示すように、本実施形態のフロッグレッグアームロボットRにおいては、トルクモータ10が、第1アーム部21の前腕部24とハンド部3とを接続する手首回転軸部6eに、減速機11を介して接続されている。また、駆動モータ51が、肩回転軸部6aに、減速機53を介して接続され、駆動モータ52が、肩回転軸部6cに、もうひとつの減速機(図示略)を介して接続されている。減速機53の減速比と、もうひとつの減速機の減速比とは同じである。
【0066】
このトルクモータ10は、手首回転軸部6eに、制御部4から入力されるトルク制御信号に基づくトルクを、水平面に沿う方向に供給する。さらに、トルクモータ10は、制御部4から入力される回転速度制御信号に基づく回転速度で回転する。本実施形態のトルクモータ10には、サーボ式のトルクモータが好適に用いることができる。
【0067】
本実施形態のフロッグレッグアームロボットRにおいては、演算処理部41において、トルクモータ10の動作指示情報として、トルクモータ10の回転速度を制御するための回転速度制御信号が生成される。また、記憶部42に、駆動モータ51,52の制御値から手首回転軸部6eの回転速度を算出するための演算式、減速機11の減速比が記憶されている。
また、制御部4は、トルクモータ10を用いて手首回転軸部6eにトルクを供給するときに、トルクモータ10の回転速度を、駆動モータ51,52の駆動に依存して回転される手首回転軸部6eの回転速度と同期させる。
【0068】
制御部4は、ハンド部3を移動させている過程では、トルクモータ10を制御することによって、手首回転軸部6eに、図4に示す特殊な姿勢から所望の姿勢に移行することができる方向に、常にトルクを供給する。
具体的には、制御部4は、ハンド部3を押し出す方向に移動させるときには、トルクモータ10に入力するトルク制御信号を制御することによって、手首回転軸部6eに、図1における左回転方向にトルクを供給する。また、ハンド部3を引き出す方向に移動させるときには、トルクモータ10に入力するトルク制御信号を制御することによって、手首回転軸部6eに、図1における右回転方向にトルクを供給する。
【0069】
本実施形態のフロッグレッグアームロボットRおよびその制御方法によれば、上記第1の実施形態において説明したように、アーム部2が特殊な姿勢にあっても、所望しない姿勢に無秩序に移行することがなく、必ず所望の姿勢に移行する。したがって、制御上の特異点が解消される。
【0070】
さらに、本実施形態のフロッグレッグアームロボットにおいて、制御部4は、トルクモータ10を用いて手首回転軸部6eにトルクを供給するときに、トルクモータ10の回転速度を、駆動モータ51,52の駆動に依存して回転される手首回転軸部6eの回転速度と同期させる。本実施形態のフロッグレッグアームロボットRおよびその制御方法においては、ハンド部3を押し出す方向に移動されるときでも、ハンド部3を引き出す方向に移動させるときでも、トルクモータ10によって手首回転軸部6eに常にトルクが供給される。したがって、本実施形態のフロッグレッグアームロボットRおよびその制御方法においては、トルクモータ10の回転速度が、駆動モータ51,52の駆動に依存して回転される手首回転軸部6eの回転速度と常に同期する。
なお、本実施形態において、「トルクモータ10の回転速度を、駆動モータ51,52の駆動に依存して回転される手首回転軸部6eの回転速度と同期させる」とは、減速機11を介して手首回転軸部6eに付与されるトルクモータ10の回転速度と、駆動モータ51,52の駆動力に依存してアーム部2を介して手首回転軸部6eに付与される回転速度とが一致することを意味する。
【0071】
具体的には、制御部4は、記憶部42に記憶された制御値から手首回転軸部6eの回転速度を算出するための演算式を用いて、駆動モータ51,52の制御値に基づいて手首回転軸部6eの回転速度を算出する。そして、制御部4は、当該算出結果と、記憶部42に記憶された減速比とに基づいて回転速度制御信号を生成する。そして、この生成した回転速度制御信号をトルクモータ10に入力する。
【0072】
以下に回転速度制御信号を生成する一例について数式を用いて説明する。以下の説明においては、上述した特殊な姿勢を通過する際における回転速度制御信号の生成方法について説明する。なお、上記各実施形態においては、絶対空間における各モータおよび各回転軸部の回転速度について論じているが、以下では、相対空間における各モータおよび各回転軸部の回転速度について論じるものとする。
以下の数式において、上腕部23,25の長さ、および前腕部24,26の長さはすべて同じものとし、この長さをL(m)とする。また、肩回転軸部6a,6cの回転速度をωa(rpm)、手首回転軸部6eの回転速度をωt(rpm)、トルクモータ10の回転速度をωtm(rpm)、減速機11の減速比をηt、トルクモータ10の最大回転速度をωtmmax(rpm)、トルクモータ速度指令をy(%)とする。
【0073】
まず、特殊な姿勢を通過する際に駆動モータ51,52に入力される速度指令をV(m/min)とすると、速度指令V(駆動モータへの制御値)は、下式(1)のように表される。
【0074】
【数1】

【0075】
このため、肩回転軸部6a,6cの回転速度ωaは、下式(2)のように表される。
【0076】
【数2】
【0077】
ここで、肩回転軸部6a,6cの回転速度ωaと、手首回転軸部6eの回転速度ωtとは、原理的に同期すべきである。そこで、減速比ηtを考慮すると、肩回転軸部6a,6cの回転速度ωaは、さらに下式(3)のように表される。
【0078】
【数3】
【0079】
したがって、トルクモータ10の回転速度ωtmは、下式(4)のように表すことができる。また、下式(4)に上式(2)を代入することによって、下式(5)が得られる。
【0080】
【数4】
【0081】
【数5】
【0082】
トルクモータ速度指令y、すなわち回転速度制御信号は、トルクモータ10の最大回転速度に対する比率で表されるため、下式(6)のように表される。
【0083】
【数6】
【0084】
上式(6)に上式(5)を代入することによって、求めるべき回転速度制御信号である、トルクモータ速度指令yは、下式(7)のように表される。
【0085】
【数7】
【0086】
以上は駆動モータ51,52が設置された座標系において考えられる理論式である。しかしながら、トルクモータ10と駆動モータ51,52とが上述のアーム機構を介して接続されているので、トルクモータ10は、駆動モータ51,52から見ると相対的に回転する空間に設置されている。したがって、機構学的な考慮をすると、トルクモータ10の回転速度の指令は、実質的にはさらに2倍となる。
【0087】
このような本実施形態のフロッグレッグアームロボットおよびその制御方法によれば、手首回転軸部6eにトルクが供給されるとき、トルクモータ10の回転速度が、駆動モータ51,52の駆動に依存して回転される手首回転軸部6eの回転速度と同期する。すなわち、減速機11を介して手首回転軸部6eに付与されるトルクモータ10の回転速度と、駆動モータ51,52の駆動力に依存してアーム部2を介して手首回転軸部6eに付与される回転速度とが一致する。このため、トルクモータ10や手首回転軸部6eに不必要な負荷が加わらなくなる。その結果、フロッグレッグアームロボットRに振動が生じることを防止することができる。
したがって、本実施形態のフロッグレッグアームロボットおよびその制御方法によれば、手首回転軸部6eにトルクモータ10が設置されたフロッグレッグアームロボットにおいて、トルクモータ10の回転速度と手首回転軸部6eの回転速度とが不整合なことによる振動の発生を防止することができる。
【0088】
また、本実施形態のフロッグレッグアームロボットおよびその制御方法においては、当該ロボットが特殊な姿勢である場合を含めて、所望の姿勢に移行することができる方向にトルクが供給されるように、制御部4からトルクモータ10にトルク制御信号が入力される。
このため、従来では特異点とされていた姿勢(図4に示す特殊な姿勢)において、手首回転軸部6eに、所望の姿勢に移行することができる方向にトルクが供給される。その結果、フロッグレッグアームロボットにおける制御上の特異点を解消することができる。
【0089】
[実施例]
本発明の第3実施形態の具体的な実施例について説明する。
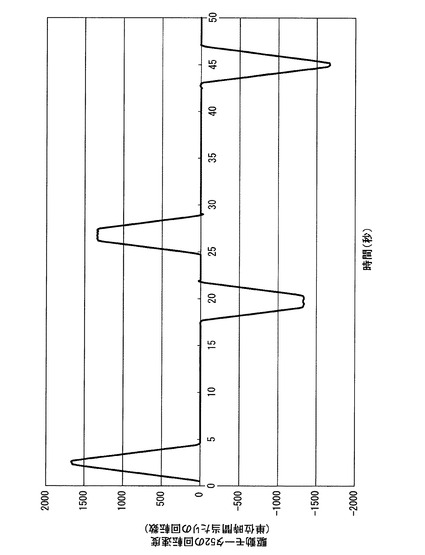
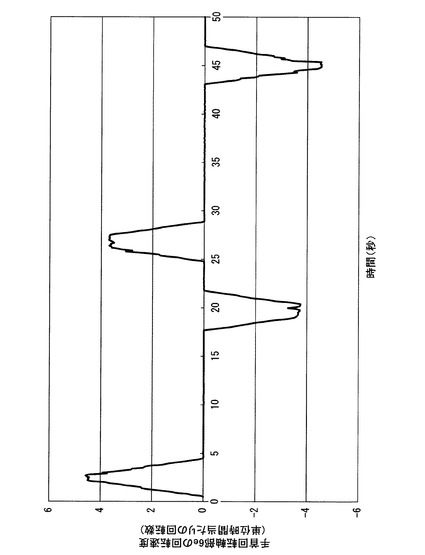
図9には、駆動モータ51の回転速度の経時的な変化のグラフを示し、図10には、駆動モータ51が発生するトルクの経時的な変化のグラフを示し、図11には、駆動モータ51が接続される肩回転軸部6aの回転速度の経時的な変化のグラフを示している。
図12には、駆動モータ52の回転速度の経時的な変化のグラフを示し、図13には、駆動モータ52が発生するトルクの経時的な変化のグラフを示し、図14には、駆動モータ52が接続される肩回転軸部6cの回転速度の経時的な変化のグラフを示す。
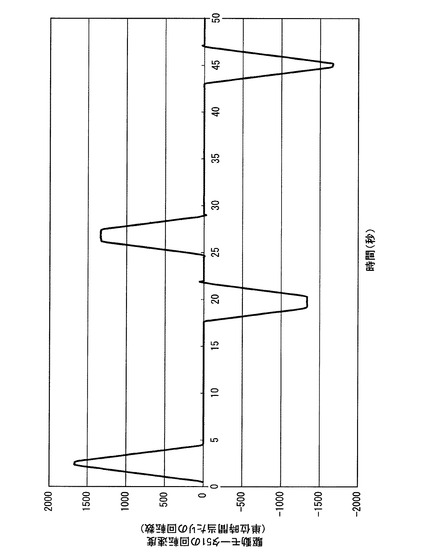
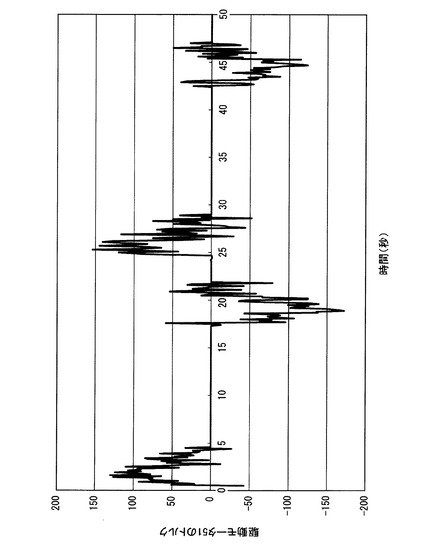
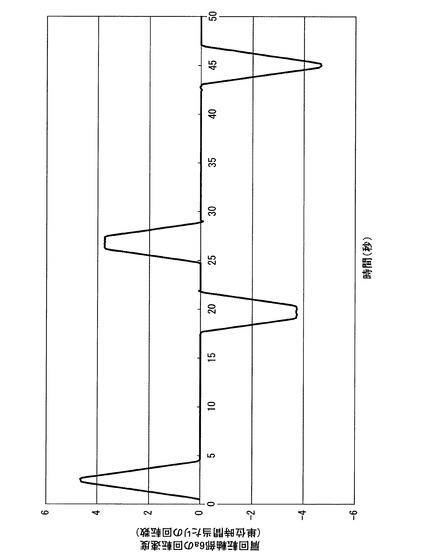
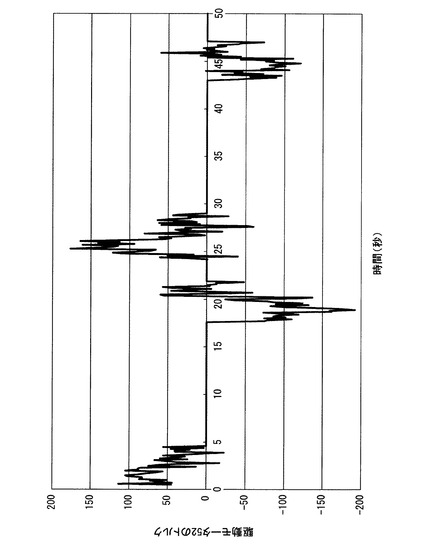
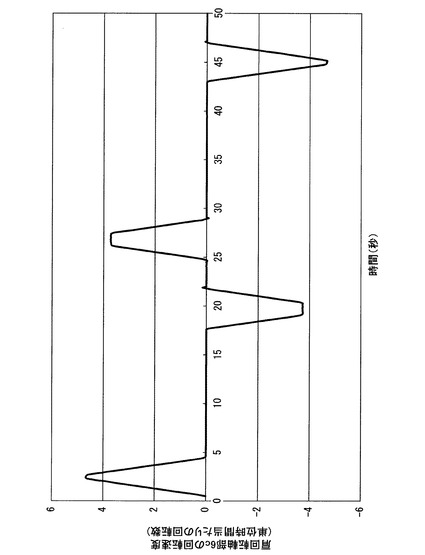
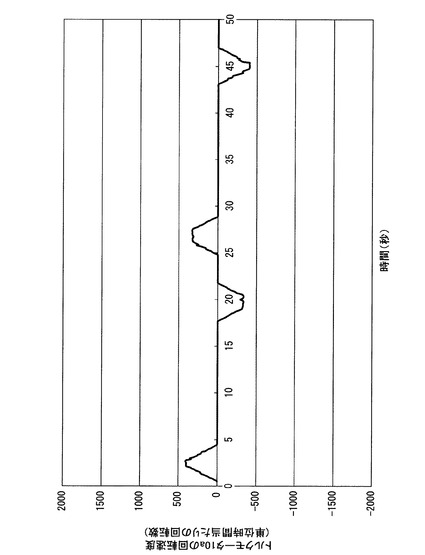
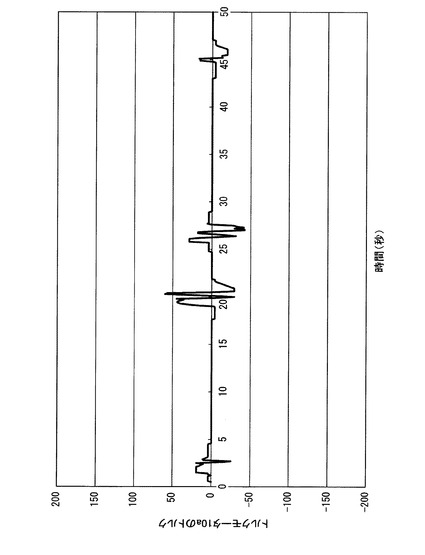
図15には、トルクモータ10を接続される手首回転軸部6eの回転速度の経時的な変化のグラフを示す。図16には、トルクモータ10の回転速度の経時的な変化のグラフを示し、図17には、トルクモータ10が発生するトルクの経時的な変化のグラフを示している。
なお、すべてのグラフは同一の時間軸上で始点を同じくしてそれぞれの回転速度の変化を調べた結果を示している。
【0090】
図9のグラフと図11のグラフとを比較すると、駆動モータ51は、減速機53を介して肩回転軸部6aに接続されているので、肩回転軸部6aの回転速度は、駆動モータ51の回転速度よりも減速される。したがって、肩回転軸部6aの任意の時点における回転速度の大きさは、駆動モータ51の同時点における回転速度の大きさとは一致しないものの、肩回転軸部6aの回転速度は、駆動モータ51の回転速度の変化に追従して経時的に推移している。
同様に、図12のグラフと図14のグラフとを比較すると、駆動モータ52は、減速機53と同じ減速比の減速機(図示略)を介して肩回転軸部6cに接続されているので、肩回転軸部6cの回転速度は、駆動モータ52の回転速度よりも減速される。したがって、肩回転軸部6cの任意の時点における回転速度の大きさは、駆動モータ52の同時点における回転速度の大きさとは一致しないものの、肩回転軸部6cの回転速度は、駆動モータ52の回転速度の変化に追従して経時的に推移している。
図11のグラフと図14のグラフとを比較すると、駆動モータ51と駆動モータ52とが同期して駆動されるので、肩回転軸部6aの回転速度は、肩回転軸部6cの回転速度とほぼ一致して経時的に推移している。
【0091】
図11のグラフと図15のグラフとを比較すると、本実施形態のアーム部21は上腕部23の長さと前腕部24の長さとが同じなので、上腕部23および前腕部24を介して肩回転軸部6aとリンクする手首回転軸部6eの回転速度は、駆動モータ51が接続された肩回転軸部6aの回転速度とほぼ一致して経時的に推移している。
図14のグラフと図15のグラフとを比較すると、本実施形態のアーム部22は上腕部25の長さと前腕部26の長さとが同じなので、上腕部25、前腕部26および同期歯車71,72を介して肩回転軸部6cとリンクする手首回転軸部6eの回転速度は、駆動モータ52が接続された肩回転軸部6cの回転速度ともほぼ一致して経時的に推移している。
したがって、肩回転軸部6aの回転速度、または肩回転軸部6cの回転速度を、手首回転軸部6eの回転速度と見なすことができる。
【0092】
図15のグラフと図16のグラフとを比較すると、トルクモータ10は手首回転軸部6eに減速機11を介して接続されているので、手首回転軸部6eの回転速度は、トルクモータ10の回転速度よりも減速される。したがって、手首回転軸部6eの任意の時点における回転速度の大きさは、トルクモータ10の同時点における回転速度の大きさとは一致しないものの、手首回転軸部6eの回転速度は、トルクモータ10の回転速度の変化に追従して経時的に推移している。
【0093】
図10のグラフと図17のグラフとを比較すると、トルクモータ10が発生させるトルクは、駆動モータ51が発生させるトルクよりも小さい。また、図13のグラフと図17のグラフとを比較しても、トルクモータ10が発生させるトルクは、駆動モータ52が発生させるトルクよりも小さい。
【0094】
本実施形態の制御部4は、トルクモータ10を電気的に制御することにより、トルクモータ10の回転速度を、駆動モータ51,52の駆動に依存して回転する手首回転軸部6eの回転速度と同期させている。このようにトルクモータ10の制御を行うことにより、トルクモータ10や手首回転軸部6eに不必要な負荷が加わらなくなることは明らかである。実際に、上記実施例に使用したフロッグレッグアームロボットRには振動が生じ難いことが確認された。
また、本実施形態のトルクモータ10は、駆動モータ51,52よりも出力の小さい小型のモータであっても十分に機能することが確認された。
【0095】
以上、図面を参照しながら本発明のフロッグレッグアームロボットおよびその制御方法の好適な実施形態について説明したが、本発明は上記実施形態に限定されないことは言うまでもない。上述した実施形態において示した各構成部材の諸形状や組み合わせ等は一例であって、本発明の主旨から逸脱しない範囲において設計要求等に基づき種々変更可能である。
【0096】
例えば、上記第1、第2および第3の各実施形態においては、トルクモータ10が手首回転軸部6eに接続されており、手首回転軸部6eだけにトルクを供給する。しかしながら、本発明はこれに限定されるものではない。肘回転軸部6b,6d、および手首回転軸部6e,6fのいずれかひとつにトルクモータ10が接続されていれば、同様の効果を奏することができる。
また、トルクモータ10はひとつだけに限らない。肘回転軸部6b,6d、および手首回転軸部6e,6fのいずれかふたつ以上に、トルクモータがそれぞれ接続されていても良い。しかしながら、複数のトルクモータを設置した場合には、アーム部2がより過剰に拘束されることとなり、アーム部2およびハンド部3のスムーズな動作を妨害するおそれがある。そのため、トルクモータはひとつだけ設けられることが好ましい。このような場合であっても、トルクモータの回転速度と駆動モータの駆動に依存する回転軸部の回転速度との同期が図られる。
【0097】
上記の各実施形態においては、アーム部2が水平面に沿って揺動される構成について説明した。しかしながら、本発明はこれに限定されるものではなく、水平面とは異なる角度の平面(基準平面)に沿ってアーム部2が揺動されるフロッグレッグアームロボットおよびその制御方法に適用することもできる。
【0098】
上記の各実施形態においては、第1アーム部21が肩回転軸部6aを介して本体部1に連結されるとともに、第2アーム部22が肩回転軸部6cを介して本体部1に連結されている。すなわち、本発明の第1回転軸部がふたつ設けられている。しかしながら、本発明はこれに限定されるものではない。第1アーム部21および第2アーム部22がともに共通の肩回転軸部を介して本体部1に連結され、第1アーム部21と第2アーム部22とが互いに反対方向に回転可能であってもよい。すなわち、本発明の第1回転軸部がひとつだけ設けられていても良い。
【0099】
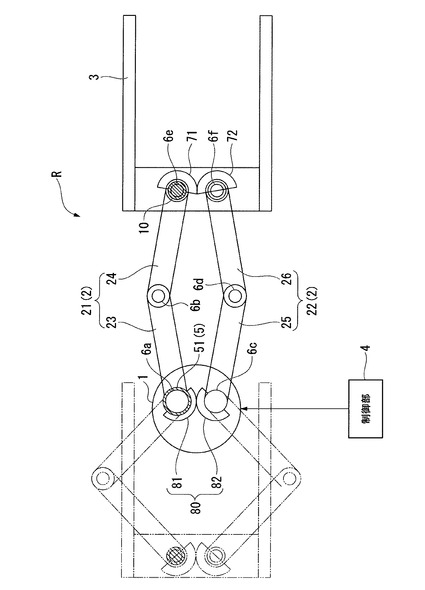
上記の各実施形態においては、駆動装置5が、肩回転軸部6aを介して上腕部23を揺動させる駆動モータ51と、肩回転軸部6cを介して上腕部25を揺動させる駆動モータ52とを備えている。そして、駆動モータ51に駆動される肩回転軸部6aと、駆動モータ52に駆動される肩回転軸部6cとが同期して回転することにより、ハンド部3を直線的に移動させることができる。ところで、図18に示すように、駆動装置5は、肩回転軸部6aを介して上腕部23を揺動させる駆動モータ51と、肩回転軸部6aと肩回転軸部6cとの間に設けられ、駆動モータ51の駆動力を肩回転軸部6aおよび肩回転軸部6cを介して上腕部25に伝達することによって上腕部25を揺動させる駆動力伝達機構80とを備えていてもよい。駆動力伝達機構80は、2つの同期歯車81,82からなり、第1実施形態の同期歯車71,72と同じ構造である。そして、駆動モータ51に駆動される肩回転軸部6aと、駆動モータ51に駆動力伝達機構80を介して駆動される肩回転軸部6cとが同期して回転することにより、ハンド部3を移動させることができる。
【0100】
上記第3の実施形態においては、トルクモータ10が減速機11を介して手首回転軸部6eに接続されている。しかしながら、本発明はこれに限定されるものではなく、トルクモータ10が手首回転軸部6eに直に接続されていても良い。このような場合には、減速比について考慮する必要がなく、トルクモータ10の回転速度と、駆動モータ51,52の駆動に依存する手首回転軸部6eの回転速度とを一致させることによって、トルクモータ10あるいは手首回転軸部6eに不必要な負荷が加わることを防止できる。その結果、フロッグレッグアームロボットRにおいて振動が生じることを防止することができる。
【0101】
[産業上の利用可能性]
本発明は、本体部と、前記本体部に設置される駆動装置と、前記駆動装置によって回転される第1の回転軸部を介して一端が前記本体部に連結され、基準平面に沿って揺動可能な第1の上腕部と、前記駆動装置によって回転駆動される前記第1の回転軸部またはもうひとつの第1の回転軸部を介して一端が前記本体部に連結され、前記基準平面に沿って揺動可能な第2の上腕部と、第2の回転軸部を介して一端が前記第1の上腕部の他端に回転可能に支持されるとともに前記基準平面に沿って揺動可能な第1の前腕部と、第3の回転軸部を介して一端が前記第2の上腕部の他端に回転可能に支持されるとともに前記基準平面に沿って揺動可能な第2の前腕部と、第4の回転軸部を介して前記第1の前腕部の他端に回転可能に支持されるとともに第5の回転軸部を介して前記第2の前腕部の他端に回転可能に支持されるハンド部と、前記第4の回転軸部と前記第5の回転軸部とを相反する方向に同期回転させる同期手段と、前記第2、第3、第4および第5の回転軸部の少なくともいずれかひとつに接続され、自らが接続された前記回転軸部にトルクを供給するトルクモータと、前記第1の上腕部、前記第2の上腕部、前記第1の前腕部および前記第2の前腕部が前記駆動装置の駆動によって現在の姿勢から所望の姿勢を含む複数の姿勢のいずれにも移行可能であるときに、前記トルクが前記回転軸部に、前記各腕部が前記所望の姿勢に移行することができる方向に供給されるように、前記トルクモータを電気的に制御する制御部とを備えるフロッグレッグアームロボットに関する。
本発明によれば、フロッグレッグアームロボットにおける制御上の特異点を実用的に解消することができる。
【図面の簡単な説明】
【0102】
【図1】本発明のフロッグレッグアームロボットの第1実施形態を示す平面図である。
【図2】本発明のフロッグレッグアームロボットの第1実施形態を示す側面図である。
【図3】本発明のフロッグレッグアームロボットの第1実施形態の機能ブロック図である。
【図4】本発明のフロッグレッグアームロボットの第1実施形態の特殊な姿勢を説明するための平面図である。
【図5】本発明のフロッグレッグアームロボットの第1実施形態の所望の姿勢を説明するための平面図である。
【図6】本発明のフロッグレッグアームロボットの第1実施形態の所望されない姿勢を説明するための平面図である。
【図7】本発明のフロッグレッグアームロボットの第2実施形態を示す側面図である。
【図8】本発明のフロッグレッグアームロボットの第3実施形態を示す側面図である。
【図9】本発明のフロッグレッグアームロボットの第3実施形態に関する実施例を説明するためのグラフであって、一方の駆動モータの回転速度の経時的な推移を示すグラフである。
【図10】本発明のフロッグレッグアームロボットの第3実施形態に関する実施例を説明するためのグラフであって、一方の駆動モータが発生するトルクの経時的な推移を示すグラフである。
【図11】本発明のフロッグレッグアームロボットの第3実施形態に関する実施例を説明するためのグラフであって、一方の駆動モータを接続された肩回転軸部の回転速度の経時的な推移を示すグラフである。
【図12】本発明のフロッグレッグアームロボットの第3実施形態に関する実施例を説明するためのグラフであって、他方の駆動モータの回転速度の経時的な推移を示すグラフである。
【図13】本発明のフロッグレッグアームロボットの第3実施形態に関する実施例を説明するためのグラフであって、他方の駆動モータが発生するトルクの経時的な推移を示すグラフである。
【図14】本発明のフロッグレッグアームロボットの第3実施形態に関する実施例を説明するためのグラフであって、他方の駆動モータを接続された肩回転軸部の回転速度の経時的な推移を示すグラフである。
【図15】本発明のフロッグレッグアームロボットの第3実施形態に関する実施例を説明するためのグラフであって、駆動装置の駆動に依存して回転する手首回転軸部の回転速度の経時的な推移を示すグラフである。
【図16】本発明のフロッグレッグアームロボットの第3実施形態に関する実施例を説明するためのグラフであって、トルクモータの回転速度の経時的な推移を示すブラフである。
【図17】本発明のフロッグレッグアームロボットの第3実施形態に関する実施例を説明するためのグラフであって、トルクモータが発生するトルクの経時的な推移を示すグラフである。
【図18】本発明のフロッグレッグアームロボットの第1、第2および第3の各実施形態のいずれにも適用可能な変形例を示す平面図である。
【符号の説明】
【0103】
R…フロッグレッグアームロボット、1…本体部、2…アーム部、11…減速機、21…アーム部(第1のアーム部)、22…アーム部(第2のアーム部)、23…上腕部(第1の上腕部)、24…前腕部(第1の前腕部)、25…上腕部(第2の上腕部)、26…前腕部(第2の前腕部)、3…ハンド部、4…制御部、5…駆動装置、51,52…駆動モータ、53…減速機、6a…肩回転軸部(第1の回転軸部)、6b…肘回転軸部(第2の回転軸部)、6c…肩回転軸部(第1の回転軸部)、6d…肘回転軸部(第3の回転軸部)、6e…手首回転軸部(第4の回転軸部)、6f…手首回転軸部(第5の回転軸部)、10…トルクモータ、71,72…同期歯車(同期手段)
【技術分野】
【0001】
本発明は、ハンド部に搬送対象物を載置した状態にて移送するフロッグレッグアームロボットおよびその制御方法に関するものである。
【背景技術】
【0002】
従来から、所定の搬送対象物をハンド部に載置した状態にて移送するアームロボットが用いられている。このようなアームロボットの中には、同期して動くふたつのアーム部によってハンド部が支持された、いわゆるフロッグレッグアームロボットがある。
このフロッグレッグアームロボットの各アーム部は、回転軸部によって連結された上腕部と前腕部とから構成されており、各アーム部の上腕部を本体部に設置された駆動モータによって回転駆動することによって、前腕部に連結されたハンド部を移動させる。
【0003】
ところで、フロッグレッグアームロボットでは、アーム部が所定の姿勢であるときに、駆動モータの駆動によって、現在の姿勢から所望の姿勢を含む複数の姿勢のいずれにも移行可能な状態におかれることがある。このような状態は、いわゆる特異点と呼ばれている。当該ロボットが特異点にあるときに駆動モータを駆動すると、アーム部が所望の姿勢に移行するのか、所望しない姿勢に移行するのかが不定となり、制御が安定しなくなる。通常は、特異点を通過する際には、アーム部がある程度の速度を有しているため、特異点で停止することなく所望の姿勢に移行することが可能であるが、万が一、特異点にてアーム部が停止すると、当該ロボットは制御不能となる。
【0004】
これに対し、例えば特許文献1には、上腕部と前腕部とを回転可能に連結する回転軸部に駆動モータの動力を伝達するために、スプロケットやチェーンを備えるフロッグレッグアームロボットが記載されている。このようなスプロケットやチェーンを備えるフロッグレッグアームロボットによれば、上腕部と前腕部とを連結する回転軸部にチェーン等を介してトルクを供給することによって、制御上の特異点が解消されるとのことである。
【0005】
また、特許文献2には、特異点付近でトルクが供給されるように、上腕部と前腕部との連結部付近の前腕部に設置されたバネ部材と、前腕部が接続された部品につながる反力受けとを備えるフロッグレッグアームロボットが記載されている。このようなバネ部材や反力受けを備えるフロッグレッグアームロボットによれば、バネ部材の付勢力によって制御上の特異点が解消されるとのことである。
また、特許文献3のように、リンク部材を追加することによって特異点の解消を試みた例が開示されている。
【0006】
また、特許文献4では、平リンク機構の特異点を、フロッグレッグアームロボットの動作が固着する現象として捕らえ、その現象を解消するためにエアシリンダとラックピニオンギアとを用いた例が開示されている。
翼部等の部位に用いられる樹脂構造体においては、エロージョンやキャビテーション等によりその表面が磨耗等することが問題となっており、耐摩耗性を向上させるためその表面上に所定の強度を有する金属材からなる保護部材を設けることが成されている。このような樹脂構造体の製造方法として、従来では、数ミリ程度の薄い金属板に曲げ加工を施して翼形状に応じて変形させ、変形した金属板と翼部とを接着剤を介して併合させる方法が取られている。このような、樹脂構造体として、特許文献1には、繊維強化プラスチックで形成された翼部の表面に、複数の金属製の保護部材を設けるものが開示されている。
【特許文献1】特開平11−216691号公報
【特許文献2】特開平2−311237号公報
【特許文献3】特開2000−42970号公報
【特許文献4】特許第3682861号公報
【発明の開示】
【発明が解決しようとする課題】
【0007】
しかしながら、スプロケットやチェーン等の機械的な機構を用いて回転軸部にトルクを供給する場合、取付精度や形状精度等の誤差があることから、制御上の特異点を完全に解消することができない。
例えば、チェーンのテンションが緩むと、上腕部と前腕部とを連結する回転軸部にトルクを供給することができないために、制御上の特異点が生まれる。そのため、特異点においてアーム部が停止したり、特異点から所望の姿勢へ移行する際に当該ロボットの動作が不安定になったりする等の不具合が生じる。
バネ部材と反力受けとを用いる場合は、確かに特異点を解消する効果はある。しかしながら、特異点付近の前腕部すなわち荷の挙動がバネ力に強く依存してしまうので、動作速度と荷の重さに合わせたバネ力の調整が必要になる。バネ力の調整が適切に行われていないと、荷が特異点付近で衝撃を受けたり、特異点付近でのみ速度が極端に速くなったりして、当該ロボットのスムーズな動作ができなくなる。これに対処するには、バネ部材や反力受けの交換が必要となってしまう。つまり、動作環境の変化に弱いという不具合がある。
リンク部材を追加する場合は、機構学的には特異点を解消できるが、構造が複雑になってしまい、寸法、重量およびコスト等の観点から適用できる条件が厳しい。
エアシリンダを用いる場合では、特異点を解消する効果はあるが、空圧回路では、動作条件の変更等に伴うシリンダ推力等の調整が、空気配管の状態に依存する圧力損失等に影響されやすい。また、アームを駆動する電源とは別に、エアシリンダの動作に必要なエア供給源を別途用意する必要がある。さらに、動作範囲を広くとるためにはストロークの大きい長いシリンダを用いる必要がある。
このように、従来のフロッグレッグアームロボットにおける特異点対策には、実用的なものが存在しなかった。
【0008】
本発明は、上述する問題点に鑑みてなされたもので、フロッグレッグアームロボットにおける制御上の特異点を実用的に解消するとともに、フロッグレッグアームロボットのスムーズな動作を実現することを目的とする。
【課題を解決するための手段】
【0009】
上記目的を達成するために、本発明のフロッグレッグアームロボットは、本体部と、前記本体部に設置される駆動装置と、前記駆動装置によって回転される第1の回転軸部を介して一端が前記本体部に連結され、基準平面に沿って揺動可能な第1の上腕部と、前記駆動装置によって回転駆動される前記第1の回転軸部またはもうひとつの第1の回転軸部を介して一端が前記本体部に連結され、前記基準平面に沿って揺動可能な第2の上腕部と、第2の回転軸部を介して一端が前記第1の上腕部の他端に回転可能に支持されるとともに前記基準平面に沿って揺動可能な第1の前腕部と、第3の回転軸部を介して一端が前記第2の上腕部の他端に回転可能に支持されるとともに前記基準平面に沿って揺動可能な第2の前腕部と、第4の回転軸部を介して前記第1の前腕部の他端に回転可能に支持されるとともに第5の回転軸部を介して前記第2の前腕部の他端に回転可能に支持されるハンド部と、前記第4の回転軸部と前記第5の回転軸部とを相反する方向に同期回転させる同期手段と、前記第2、第3、第4および第5の回転軸部の少なくともいずれかひとつに接続され、自らが接続された前記回転軸部にトルクを供給するトルクモータと、前記第1の上腕部、前記第2の上腕部、前記第1の前腕部および前記第2の前腕部が前記駆動装置の駆動によって現在の姿勢から所望の姿勢を含む複数の姿勢のいずれにも移行可能であるときに、前記トルクが前記回転軸部に、前記各腕部が前記所望の姿勢に移行することができる方向に供給されるように、前記トルクモータを電気的に制御する制御部とを備える。
【0010】
上記のように構成された本発明のフロッグレッグアームロボットによれば、第1の上腕部、第2の上腕部、第1の前腕部および第2の前腕部が駆動装置の駆動によって現在の姿勢から所望の姿勢を含む複数の姿勢のいずれにも移行可能であるとき、すなわち当該ロボットが従来において特異点とされていた姿勢であるときに、トルクモータが制御部によって電気的に制御される。これにより、第2、第3、第4および第5の回転軸部の少なくともいずれかひとつに、当該ロボットを構成する各腕部が所望の姿勢に移行することができる方向にトルクが供給される。
【0011】
本発明のフロッグレッグアームロボットにおいて、前記第2、第3、第4および第5の回転軸部の少なくともいずれかひとつに前記トルクモータによって供給される前記トルクは、前記駆動装置によって前記第1の回転軸部に供給されるトルクよりも小さくてもよい。
【0012】
本発明のフロッグレッグアームロボットにおいて、前記制御部は、前記ハンド部が所定の一方向に移動する間、前記トルクが常に同一方向に供給されるように前記トルクモータを制御してもよい。
【0013】
本発明のフロッグレッグアームロボットにおいて、前記トルクモータは、前記第1の上腕部、前記第2の上腕部、前記第1の前腕部および前記第2の前腕部の少なくともいずれかひとつの内部に収納されていてもよい。
【0014】
本発明のフロッグレッグアームロボットにおいて、前記トルクモータは、自らが接続された回転軸部にトルク制御信号に基づくトルクを供給するとともに、回転速度制御信号に基づく回転速度にて前記回転軸部を回転させてもよい。そして、前記制御部は、前記トルクモータに前記トルク制御信号を入力するとともに、前記トルクモータの回転速度が、前記駆動装置の駆動に依存して回転される前記回転軸部の回転速度と同期するように、前記トルクモータに前記回転速度制御信号を入力してもよい。
【0015】
本発明のフロッグレッグアームロボットによれば、制御部からトルクモータにトルク制御信号が入力されるとき、すなわち回転軸部にトルクが供給されるときに、トルク制御信号とともに回転速度制御信号が入力される。この回転速度制御信号は、トルクモータの回転速度が、トルクモータを接続された回転軸部が駆動モータの駆動に依存して回転されるときの同回転軸部の回転速度と同期するように、トルクモータの回転速度を制御するための信号である。これにより、回転軸部にトルクを供給するとき、回転軸部の回転速度とトルクモータの回転速度とが同期する。
なお、本発明において、「前記トルクモータの回転速度が、前記駆動モータの駆動に依存して回転される前記回転軸部の回転速度と同期する」とは、トルクモータを接続された回転軸部がトルクモータの駆動に依存して回転されるときの回転速度が、同回転軸部が駆動モータの駆動に依存して回転されるときの回転速度とほぼ一致することを意味する。すなわち、トルクモータの回転速度および回転軸部の回転速度がその絶対量をも一致させて経時的に推移することも(厳密に一致して変化する)、両者が回転速度の絶対量は異なるものの経時的に同調して推移することをも含む。
本発明のフロッグレッグアームロボットにおいては、駆動装置によって回転される第1の回転軸部の回転速度に、機構学的に定まるある比率を乗じることにより、前記第2、第3、第4および第5の回転軸部の回転速度が明らかになる。例えば、第1の上腕部の長さと第2の上腕部の長さとが同じであれば、第4、第5の回転軸部の回転速度は、第1の回転軸部の回転速度の2倍になる。本発明における「同期」とは、このように機構学的に定まる比率が守られるように、駆動装置によって回転される第1の回転軸部の回転速度と、トルクモータによって回転される回転軸部の回転速度とが制御されることをいう。さらに言えば、駆動モータとトルクモータとの同期は、第1の回転軸部と、トルクモータによって回転される回転軸部との同期に依存して決定される。
【0016】
本発明のフロッグレッグアームロボットにおいて、前記制御部は、前記トルクモータが接続される前記回転軸部の回転速度を、前記駆動装置の制御値に基づいて算出してもよい。
【0017】
本発明のフロッグレッグアームロボットは、前記トルクモータと前記回転軸部との間に介在し、前記トルクモータの回転速度を減速して前記回転軸部に伝達する減速機をさらに備えていてもよい。そして、前記制御部は、前記減速機の減速比、および前記減速機によって減速された前記回転軸部の回転速度に基づいて前記回転速度制御信号を生成してもよい。
【0018】
本発明のフロッグレッグアームロボットにおいては、前記トルクモータがひとつだけ設けられてもよい。
【0019】
本発明のフロッグレッグアームロボットにおいて、前記駆動装置は、前記第1の回転軸部を介して前記第1の上腕部を揺動させる第1の駆動モータと、前記もうひとつの第1の回転軸部を介して前記第2の上腕部を揺動させる第2の駆動モータとを備えていてもよい。
【0020】
本発明のフロッグレッグアームロボットにおいて、前記駆動装置は、前記第1の回転軸部を介して前記第1の上腕部を揺動させる駆動モータと、前記第1の回転軸部と前記第2の回転軸部との間に設けられ、前記駆動モータの駆動力を前記第1の回転軸部から前記第2の回転軸部に伝達することによって前記第2の上腕部を揺動させる駆動力伝達機構とを備えていてもよい。
【0021】
本発明のフロッグレッグアームロボットの制御方法は、本体部と、前記本体部に設置される駆動装置と、前記駆動装置によって回転される第1の回転軸部を介して一端が前記本体部に連結され、基準平面に沿って揺動可能な第1の上腕部と、前記駆動装置によって回転駆動される前記第1の回転軸部またはもうひとつの第1の回転軸部を介して一端が前記本体部に連結され、前記基準平面に沿って揺動可能な第2の上腕部と、第2の回転軸部を介して一端が前記第1の上腕部の他端に回転可能に支持されるとともに前記基準平面に沿って揺動可能な第1の前腕部と、第3の回転軸部を介して一端が前記第2の上腕部の他端に回転可能に支持されるとともに前記基準平面に沿って揺動可能な第2の前腕部と、第4の回転軸部を介して前記第1の前腕部の他端に回転可能に支持されるとともに第5の回転軸部を介して前記第2の前腕部の他端に回転可能に支持されるハンド部と、前記第4の回転軸部と前記第5の回転軸部とを相反する方向に同期回転させる同期手段と、前記第2、第3、第4および第5の回転軸部の少なくともいずれかひとつに接続され、自らが接続された前記回転軸部にトルクを供給するトルクモータとを備えるフロッグレッグアームロボットの制御方法であって、前記第1の上腕部、前記第2の上腕部、前記第1の前腕部および前記第2の前腕部が前記駆動装置の駆動によって現在の姿勢から所望の姿勢を含む複数の姿勢のいずれにも移行可能であるときに、前記トルクが前記回転軸部に、前記各腕部が前記所望の姿勢に移行することができる方向に供給されるように、前記トルクモータを電気的に制御する。
【0022】
上記のように構成された本発明のフロッグレッグアームロボットの制御方法によれば、第1の上腕部、第2の上腕部、第1の前腕部および第2の前腕部が駆動装置の駆動によって現在の姿勢から所望の姿勢を含む複数の姿勢のいずれにも移行可能であるとき、すなわち当該ロボットの姿勢が従来において特異点とされていた状態にあるときに、トルクモータが制御部によって電気的に制御される。これにより、第2、第3、第4および第5の回転軸部の少なくともいずれかひとつに、当該ロボットを構成する各腕部が所望の姿勢に移行することができる方向にトルクが供給される。
【0023】
本発明のフロッグレッグアームロボットの制御方法において、前記第2、第3、第4および第5の回転軸部の少なくともいずれかひとつに前記トルクモータによって供給される前記トルクは、前記駆動装置によって前記第1の回転軸部に供給されるトルクよりも小さくてもよい。
【0024】
本発明のフロッグレッグアームロボットの制御方法において、前記ハンド部が所定の一方向に移動する間、前記トルクを常に同一方向に供給してもよい。
【0025】
本発明のフロッグレッグアームロボットの制御方法において、前記トルクモータは、自らが接続された回転軸部にトルク制御信号に基づくトルクを供給するとともに、回転速度制御信号に基づく回転速度にて前記回転軸部を回転させてもよい。そして、前記トルクモータに前記トルク制御信号を入力するとともに、前記トルクモータの回転速度が、前記駆動装置の駆動に依存して回転される前記回転軸部の回転速度と同期するように、前記トルクモータに前記回転速度制御信号を入力してもよい。
【0026】
本発明のフロッグレッグアームロボットの制御方法によれば、トルクモータにトルク制御信号が入力されるとき、すなわちトルクモータが接続された回転軸部にトルクが供給されるときに、このトルク制御信号とともに、トルクモータに回転速度制御信号が入力される。この回転速度制御信号は、トルクモータの回転速度が、トルクモータを接続された回転軸部が駆動モータの駆動に依存して回転されるときの同回転軸部の回転速度と同期するように、トルクモータの回転速度を制御するための信号である。これにより、回転軸部にトルクを供給するときに、回転軸部の回転速度とトルクモータの回転速度とが同期する。
【0027】
本発明のフロッグレッグアームロボットの制御方法において、前記トルクモータが接続される前記回転軸部の回転速度を、前記駆動装置の制御値に基づいて算出してもよい。
【0028】
本発明のフロッグレッグアームロボットの制御方法において、前記トルクモータと前記回転軸部との間に介在し、前記トルクモータの回転速度を減速して前記回転軸部に伝達する減速機の減速比、および前記減速機によって減速された前記回転軸部の回転速度に基づいて前記回転速度制御信号を生成してもよい。
【0029】
本発明のフロッグレッグアームロボットの制御方法において、前記トルクは、前記第2、第3、第4および第5の回転軸部のいずれかひとつに供給されてもよい。
【発明の効果】
【0030】
本発明のフロッグレッグアームロボット、および当該ロボットの制御方法によれば、当該ロボットの姿勢が従来において特異点とされていた状態にあるとき、すなわち第1の上腕部、第2の上腕部、第1の前腕部および第2の前腕部が駆動装置の駆動によって現在の姿勢から所望の姿勢を含む複数の姿勢のいずれにも移行可能であるときに、トルクモータが電気的に制御され、第2、第3、第4および第5の回転軸部の少なくともいずれかひとつに、当該ロボットを構成する各腕部が所望の姿勢に移行することができる方向にトルクが供給される。すなわち、本発明においては、取付精度や形状精度に依存する機械的な制御を行うことなく、電気的な制御のみによって回転軸部にトルクが供給される。
【0031】
本発明によれば、フロッグレッグアームロボットの動作環境が変化したとしても、板バネのような機械的な補助手段(バネ部材)を交換することなく、電気的な指令を変更するだけでトルクモータのトルク量等を調整することが可能である。これにより、フロッグレッグアームロボットの特異点付近におけるスムーズな動作が可能となる。
また、リンク部材を追加する必要がないので、本発明のフロッグレッグアームロボットは、簡単な構造であるにもかかわらず、特異点における問題を解消することができる。
【0032】
さらに、エアシリンダを用いた場合と比較すると、電動モータ等の電気的なトルク供給手段を用いるので、電気配線の状態にほとんど依存せずに所望のトルクを安定して発生させることができる。また、駆動モータと同じ電源を用いることができ、エア供給源のような機器を別途用意する必要がない。また、ラックピニオンギアやエアシリンダのような長い部品を用いる必要がないので寸法に関する制限が緩やかである。
【0033】
このように、従来特異点とされていた姿勢において、第2、第3、第4および第5の回転軸部の少なくともいずれかひとつに、電気的に制御可能なトルクモータを用いて、フロッグレッグアームロボットが所望の姿勢に移行することができる方向にトルクを供給することにより、当該ロボットにおける制御上の特異点を実用的に解消することができる。
【0034】
本発明のフロッグレッグアームロボット、および当該ロボットの制御方法によれば、回転軸部にトルクを供給するときに、トルクモータの回転速度が、トルクモータを接続された回転軸部が駆動モータの駆動に依存して回転されるときの同回転軸部の回転速度と同期する。すなわち、トルクモータを接続された回転軸部がトルクモータの駆動に依存して回転されるときの回転速度が、同回転軸部が駆動モータの駆動に依存して回転されるときの回転速度とほぼ一致する。これにより、トルクモータあるいは回転軸部に不必要な負荷が加わらない。その結果、フロッグレッグアームロボットの特異点付近におけるスムーズな動作が可能になることに加え、フロッグレッグアームロボットに、回転軸部の回転速度とトルクモータの回転速度とが整合しないことに起因する振動が生じることを防止することができる。
【発明を実施するための最良の形態】
【0035】
以下、図面を参照して、本発明のフロッグレッグアームロボットおよびその制御方法の一実施形態について説明する。なお、以下の図面において、各部材を認識可能な大きさとするために、各部材の縮尺を適宜変更している。
【0036】
(第1実施形態)
図1は、本発明の一実施形態であるフロッグレッグアームロボットRの概略構成を示した平面図である。図2は、本発明の一実施形態であるフロッグレッグアームロボットRの概略構成を示した側面図である。図3は、本発明の一実施形態であるフロッグレッグアームロボットRの機能構成を示したブロック図である。
【0037】
各図に示すように、本実施形態のフロッグレッグアームロボットRは、本体部1と、アーム部2と、ハンド部3と、制御部4とを備えている。
【0038】
本体部1は、例えばスタッカクレーンのケージなどの基部B上に回転可能に設置される。本体部1には、アーム部2をそれぞれ揺動させることによってハンド部3を水平面(基準平面)に沿って前後に移動させるための駆動装置5が設けられている。駆動装置5は、駆動モータ51,52を備えている。駆動モータ51は肩回転軸部6a(第1の回転軸部)に接続され、駆動モータ52は肩回転軸部6c(第1の回転軸部)に接続されている。
【0039】
アーム部2は、ハンド部3の移動域を挟んで左右対称に配置された一対のアーム部21,22とで構成されている。なお、以下の説明においては、アーム部21を第1アーム部21と称し、アーム部22を第2アーム部22と称する。
【0040】
第1アーム部21は、上腕部23(第1の上腕部)と、前腕部24(第1の前腕部)とで構成されている。上腕部23の一端は、本体部1に設置された駆動モータ51に、肩回転軸部6aを介して連結されている。上腕部23は、駆動モータ51が回転駆動されることにより、水平面に沿って揺動可能である。前腕部24の一端は、肘回転軸部6b(第2の回転軸部)を介して上腕部23の他端に回転可能に支持されている。前腕部24は、上腕部23の揺動に伴って肘回転軸部6bが回転することにより、水平面に沿って揺動可能である。
【0041】
第2アーム部22は、上腕部25(第2の上腕部)と、前腕部26(第2の前腕部)とで構成されている。上腕部25の一端は、本体部1に設置された駆動モータ52に、肩回転軸部6cを介して連結されている。上腕部25は、駆動モータ52が回転駆動されることにより、水平面に沿って揺動可能である。前腕部26の一端は、肘回転軸部6d(第3の回転軸部)を介して上腕部25の他端に回転可能に支持されている。前腕部26は、上腕部25の揺動に伴って肘回転軸部6dが回転することにより、水平面に沿って揺動である。
【0042】
ハンド部3は、手首回転軸部6e(第4の回転軸部)を介して第1アーム部21の前腕部24の他端に回転可能に支持されるとともに、手首回転軸部6f(第5の回転軸部)を介して第2アーム部22の前腕部26の他端に回転可能に支持されている。ハンド部3は、搬送対象物(例えば、ガラス基板やガラス基板を収納したカセット等)を載置可能である。
【0043】
また、第1アーム部21の前腕部24の他端、および第2アーム部22の前腕部26の他端には、同期歯車71,72(同期手段)がそれぞれ設けられている。同期歯車71,72は対をなし、一方の同期歯車71は前腕部24の他端に設置され、他方の同期歯車72は前腕部26の他端に設置されている。両歯車は、互いに噛み合わされることによって双方が相反する方向に同期回転可能である。これにより、第1アーム部と第2アーム部22とが同期して対称に動作するので、ハンド部3を直線的に移動させることができる。
【0044】
そして、本実施形態のフロッグレッグアームロボットRにおいては、トルクモータ10が、第1アーム部21の前腕部24とハンド部3とを接続する手首回転軸部6eに接続されている。
このトルクモータ10は、後述する制御部4によって電気的に制御されるものである。具体的には、手首回転軸部6eに、制御部4から入力されるトルク制御信号に基づくトルクを、水平面に沿う方向に供給する。トルクモータ10は、電気的にトルク制御ができるものであれば良く、サーボ式、誘導式の他、どのようなタイプのものを用いても良い。
なお、トルクモータ10によって手首回転軸部6eに供給されるトルクは、駆動モータ51,52によって肩回転軸部6a,6cにそれぞれ供給されるトルクよりも小さく設定されている。例えば、駆動モータ51,52として、出力が1kWのモータを用いる場合には、トルクモータ10としては、出力が400から600Wのモータを用いれば良い。
【0045】
制御部4は、フロッグレッグアームロボットRの動作全体を統括するものであり、演算処理部41と、記憶部42と、動作指示情報記憶部43と、入出力部44とを備えている。演算処理部41は、外部から入力される情報に基づいて駆動モータ51,52およびトルクモータ10の動作指示情報を求める。記憶部42は、演算処理部41にて用いられる各種アプリケーションやデータを記憶する。動作指示情報記憶部43は、演算処理部41によって求められた動作指示情報を一時的に記憶する。入出力部44は、駆動モータ51,52およびトルクモータ10と、演算処理部41との間において信号の入出力を行う。
【0046】
このような構成を有する制御部4は、駆動モータ51と駆動モータ52とを同期して駆動することによって第1アーム部21と第2アーム部22とを揺動させ、これによってハンド部3を前後に移動させる。
また、制御部4は、駆動モータ51,52だけを駆動したとき、アーム部2が現在の姿勢から所望の姿勢を含む複数の姿勢のいずれにも移行可能であるならば、トルクモータ10を電気的に制御し、手首回転軸部6eに、アーム部2が所望の姿勢に移行することができるように、これに適した方向にトルクを供給する。
【0047】
なお、アーム部2が現在の姿勢から所望の姿勢を含む複数の姿勢のいずれにも移行可能な姿勢とは、図4に示すように、第1アーム部21の上腕部23と前腕部24とが重なり、第2アーム部22の上腕部25と前腕部26とが重なり、さらに第1アーム部21と第2アーム部22とがあたかもある直線上に位置するかのような姿勢である。なお、以下の説明において、図4に示す姿勢を特殊な姿勢と称する。また、図4、図5および図6においては、図面の視認性を向上させるために、ハンド部3および制御部4を省略している。
【0048】
アーム部2が図4に示す特殊な姿勢にあるときに、ハンド部3を押し出す方向に移動させるために駆動モータ51,52を矢印方向に駆動すると、第1アーム部21の上腕部23と前腕部24とが互いに開くとともに、第2アーム部22の上腕部25と前腕部26とが互いに開き、所望のようにハンド部3を押し出す方向にアーム部2の姿勢が移行することもある(図5参照)。
一方で、第1アーム部21の上腕部23と前腕部24とが重なるとともに、第2アーム部22の上腕部25と前腕部26とが重なって、そのような状態のまま、ハンド部3を移動させることなく第1アーム部21と第2アーム部22とだけが回動する方向にアーム部2の姿勢が移行することもある(図6参照)。
このため、アーム部2が特殊な姿勢において停止したときには、アーム部2が所望の姿勢か、所望しない姿勢に移行するかが不定となり、制御が不安定となる。従来のフロッグレッグアームロボットにおいては、特殊な姿勢、すなわち所望の姿勢を含む複数の姿勢のいずれに移行するかが不定である姿勢が、制御上の特異点とされている。
【0049】
また、特殊な姿勢からハンド部3を引き出す方向に移動させるときであっても、駆動モータ51,52だけの駆動に依存していれば、ハンド部3を押し出す方向に移動させるときと同様に、特殊な姿勢が従来のフロッグレッグアームロボットにおける制御上の特異点となる。
【0050】
次に、上述のように構成された本実施形態のフロッグレッグアームロボットRの動作(フロッグレッグアームロボットの制御方法)について説明する。
【0051】
まず、制御部4は、演算処理部41を用いて、駆動モータ51,52、トルクモータ10、またはフロッグレッグアームロボットRの外部から入力される情報、および記憶部42に記憶されたアプリケーションやデータに基づいて、ハンド部3を移動させる方向(押し出す方向あるいは引き出す方向)およびその移動量を求め、動作指示情報として動作指示情報記憶部43に記憶させる。
続いて、制御部4は、所定のタイミングで動作指示情報記憶部43から動作指示情報を引き出し、入出力部44を介して駆動モータ51,52およびトルクモータ10に動作指示信号を入力する。
【0052】
例えば、制御部4から、ハンド部3を押し出す方向に所定量移動させる動作指示信号が出力されると、駆動モータ51が肩回転軸部6aを図1における右回りに回転させ、駆動モータ52が肩回転軸部6cを図1における左周りに回転させる。
このように、肩回転軸部6aが図1における右回りに回転されることによって、第1アーム部21の上腕部23がその一端を中心として図1における右回転方向に揺動される。同時に、肩回転軸部6cが図1における左周りに回転されることによって、第2アーム部22の上腕部25がその一端を中心として図1における左回転方向に揺動される。このような上腕部23の揺動が、肘回転軸部6bを介して前腕部24に伝達され、第1アーム部21の前腕部24が肘回転軸部6bを中心として左回転方向に揺動される。同時に、このような上腕部25の揺動が、肘回転軸部6dを介して前腕部26に伝達され、第2アーム部22の前腕部26が肘回転軸部6dを中心として右回転方向に揺動される。
【0053】
ここで、第1アーム部21の動きと第2アーム部22の動きとは、同期歯車71,72が互いに噛み合うことによって同期される。このため、第1アーム部21の前腕部24の揺動と第2アーム部22の前腕部26の揺動とが同期される。
そして、第1アーム部21の前腕部24の揺動が手首回転軸部6eを介してハンド部3に伝達されるとともに、第2アーム部22の前腕部26の揺動が手首回転軸部6fを介してハンド部3に伝達されることによって、ハンド部3が押し出される方向に移動する。
なお、ハンド部3の移動量は、肩回転軸部6a,6cの回転量によって決定付けられるため、駆動モータ51,52は、ハンド部3を所定量移動させる分だけ肩回転軸部6a,6cをそれぞれ回転させることによって、ハンド部3を所定移動量だけ移動させる。
【0054】
一方、制御部4から、ハンド部3を引き出す方向に所定量移動させる動作指示信号が出力されると、駆動モータ51が肩回転軸部6aを図1における左回りに回転させ、駆動モータ52が肩回転軸部6cを図1における右周りに回転させる。
このように、肩回転軸部6aが図1における左回りに回転されることによって、第1アーム部21の上腕部23がその一端を中心として図1における左回転方向に揺動される。同時に、肩回転軸部6cが図1における右周りに回転されることによって、第2アーム部22の上腕部25がその一端を中心として図1における右回転方向に揺動される。このような上腕部23の揺動が、肘回転軸部6bを介して前腕部24に伝達され、第1アーム部21の前腕部24が肘回転軸部6bを中心として右回転方向に揺動される。同時に、このような上腕部25の揺動が、肘回転軸部6dを介して前腕部26に伝達され、第2アーム部22の前腕部26が肘回転軸部6dを中心として左回転方向に揺動される。
そして、第1アーム部21の前腕部24の揺動が手首回転軸部6eを介してハンド部3に伝達されるとともに、第2アーム部22の前腕部26の揺動が手首回転軸部6fを介してハンド部3に伝達されることによって、ハンド部3が引き出される方向に移動する。
【0055】
ここで、本実施形態のフロッグレッグアームロボットRにおいては、制御部4は、ハンド部3を移動させている過程では、トルクモータ10を制御することによって、手首回転軸部6eに、図4に示す特殊な姿勢から所望の姿勢に移行することができる方向に、常にトルクを供給する。
具体的には、制御部4は、ハンド部3を押し出す方向に移動させる場合には、トルクモータ10を電気的に制御することによって、手首回転軸部6eに、図1における左回転方向にトルクを供給する。また、ハンド部3を引き出す方向に移動させる場合には、トルクモータ10を電気的に制御することによって、手首回転軸部6eに、図1における右回転方向にトルクを供給する。
【0056】
つまり、ハンド部3を押し出す方向に移動させる過程で、アーム部2が図4に示す特殊な姿勢を経る場合には、手首回転軸部6eに、図1における左回転方向(所望の姿勢に移行することができる方向)にトルクが供給されている。このため、特殊な姿勢から図6に示す所望しない姿勢に移行することなく、滑らかに図5に示す所望の姿勢に移行することができる。
一方、ハンド部3を引き出す方向に移動させる過程で、図4に示す特殊な姿勢を経る場合にも、手首回転軸部6eに、図1における右回転方向(所望の姿勢に移行することができる方向)にトルクが供給されている。このため、特殊な姿勢から所望しない姿勢に移行することなく、滑らかに所望の姿勢に移行することができる。
すなわち、本実施形態のフロッグレッグアームロボットRおよびその制御方法によれば、アーム部2が特殊な姿勢にあっても、所望しない姿勢に無秩序に移行することがなく、必ず所望の姿勢に移行する。したがって、制御上の特異点が解消される。
【0057】
また、本実施形態のフロッグレッグアームロボットおよびその制御方法によれば、取付精度や形状精度に依存する機械的な制御を行うことなく、電気的な制御のみによって手首回転軸部6eにトルクを供給する。
このため、動作環境が変化したとしても、板バネのような機械的な補助手段(バネ部材)を交換することなく、電気的な指令を制御するだけでトルク量等の変更が可能であるので、特異点付近でのスムーズな動作が可能となる。
また、リンク部材を追加する必要がないので構造が簡単なフロッグレッグアームロボットのまま特異点を解消することができる。
【0058】
さらに、エアシリンダを用いた場合と比べると、電動モータ等の電気的なトルク供給手段を用いる場合には、電気配線の状態にほとんど依存せずに所望のトルクを安定して発生させることができる。また、駆動モータと同じ電源を用いることができ、エア供給源のような機器を別途用意する必要がない。また、ラックピニオンギアやエアシリンダのような長い部品を用いる必要がないので寸法制限がより柔軟である。
このように、従来特異点とされていた姿勢(図4に示す特殊な姿勢)において、手首回転軸部6eに、所望の姿勢に移行することができる方向に、電気的に制御可能なトルクモータ10を用いてトルクを供給することにより、フロッグレッグアームロボットにおける制御上の特異点を実用的に解消することができる。
【0059】
また、本実施形態のフロッグレッグアームロボットおよびその制御方法においては、手首回転軸部6eにトルクを供給するための機械的な機構(チェーンやスプロケット等)を備えていないため、装置構成を簡素化することができる。また、機械的な機構を備えないことによって、装置の摺動部分が減少され、装置からの粉塵の発生を抑制することができる。したがって、本実施形態のフロッグレッグアームロボットおよびその制御方法は、クリーンルーム内での使用に適したものとなる。
【0060】
なお、制御上の特異点を解消するだけであれば、特殊な姿勢においてのみ手首回転軸部6eにトルクを供給すれば良い。これに対し、本実施形態のフロッグレッグアームロボットおよびその制御方法においては、手首回転軸部6eに常にトルクを供給している。
このため、本実施形態のフロッグレッグアームロボットおよびその制御方法においては、アーム部2が常に過剰に拘束される。したがって、アーム部2やハンド部3の取付精度や形状精度による誤差による振動を抑制することができる。その結果、ハンド部3の位置精度を向上させることが可能となる。
なお、アーム部2が常に過剰に拘束されていることによって、駆動モータ51,52の出力を従来よりも増加させる必要がある。ただし、駆動モータ51,52の出力を従来よりも増加させることが困難であれば、特殊な姿勢においてのみ手首回転軸部6eにトルクを供給すれば良い。
【0061】
また、本実施形態のフロッグレッグアームロボットおよびその制御方法においては、トルクモータ10が手首回転軸部6eに供給するトルクは、駆動モータ51,52が肩回転軸部6a,6cに供給するトルクよりも小さくされている。このため、手首回転軸部6eにトルクが供給されているときであっても、駆動モータ51,52によって肩回転軸部6a,6cにトルクを供給することによって、アーム部2およびハンド部3をスムーズに動かすことができる。
【0062】
(第2実施形態)
次に、本発明の第2実施形態について説明する。なお、本実施形態の説明において、上記第1実施形態と同様の部分については、その説明を省略あるいは簡略化する。
図7は、本実施形態におけるフロッグレッグアームロボットの概略構成を示す側面図である。この図に示すように、本実施形態のフロッグレッグアームロボットにおいては、トルクモータ10が、前腕部24の内部に収納されている。
【0063】
このような本実施形態のフロッグレッグアームロボットによれば、トルクモータ10が、前腕部24の内部に収納されているため、フロッグレッグアームロボットの外部に突出する部材をなくすことができる。したがって、フロッグレッグアームロボットの外部にトルクモータの移動スペースを確保する必要がなく、従来のフロッグレッグアームロボットと同様の設置スペースにて本実施形態のフロッグレッグアームロボットを設置することができる。
【0064】
なお、トルクモータ10は、必ずしも前腕部24の内部に収納状態で配置されるものではない。例えば、トルクモータ10が手首回転軸部6fと接続される場合には、前腕部26の内部にトルクモータ10が収納状態に配置される。また、トルクモータ10が肘回転軸部6bと接続される場合には、前腕部24、上腕部23のいずれかの内部もしくは両方の内部に渡って収納状態に配置される。また、トルクモータ10が肘回転軸部6dと接続される場合には、前腕部26、上腕部25のいずれかの内部もしくは両方の内部に渡って収納状態に配置される。
【0065】
(第3実施形態)
次に、本発明の第3実施形態について説明する。なお、本実施形態の説明において、上記第1実施形態と同様の部分については、その説明を省略あるいは簡略化する。
図8は、本発明の一実施形態であるフロッグレッグアームロボットRの概略構成を示した側面図である。この図に示すように、本実施形態のフロッグレッグアームロボットRにおいては、トルクモータ10が、第1アーム部21の前腕部24とハンド部3とを接続する手首回転軸部6eに、減速機11を介して接続されている。また、駆動モータ51が、肩回転軸部6aに、減速機53を介して接続され、駆動モータ52が、肩回転軸部6cに、もうひとつの減速機(図示略)を介して接続されている。減速機53の減速比と、もうひとつの減速機の減速比とは同じである。
【0066】
このトルクモータ10は、手首回転軸部6eに、制御部4から入力されるトルク制御信号に基づくトルクを、水平面に沿う方向に供給する。さらに、トルクモータ10は、制御部4から入力される回転速度制御信号に基づく回転速度で回転する。本実施形態のトルクモータ10には、サーボ式のトルクモータが好適に用いることができる。
【0067】
本実施形態のフロッグレッグアームロボットRにおいては、演算処理部41において、トルクモータ10の動作指示情報として、トルクモータ10の回転速度を制御するための回転速度制御信号が生成される。また、記憶部42に、駆動モータ51,52の制御値から手首回転軸部6eの回転速度を算出するための演算式、減速機11の減速比が記憶されている。
また、制御部4は、トルクモータ10を用いて手首回転軸部6eにトルクを供給するときに、トルクモータ10の回転速度を、駆動モータ51,52の駆動に依存して回転される手首回転軸部6eの回転速度と同期させる。
【0068】
制御部4は、ハンド部3を移動させている過程では、トルクモータ10を制御することによって、手首回転軸部6eに、図4に示す特殊な姿勢から所望の姿勢に移行することができる方向に、常にトルクを供給する。
具体的には、制御部4は、ハンド部3を押し出す方向に移動させるときには、トルクモータ10に入力するトルク制御信号を制御することによって、手首回転軸部6eに、図1における左回転方向にトルクを供給する。また、ハンド部3を引き出す方向に移動させるときには、トルクモータ10に入力するトルク制御信号を制御することによって、手首回転軸部6eに、図1における右回転方向にトルクを供給する。
【0069】
本実施形態のフロッグレッグアームロボットRおよびその制御方法によれば、上記第1の実施形態において説明したように、アーム部2が特殊な姿勢にあっても、所望しない姿勢に無秩序に移行することがなく、必ず所望の姿勢に移行する。したがって、制御上の特異点が解消される。
【0070】
さらに、本実施形態のフロッグレッグアームロボットにおいて、制御部4は、トルクモータ10を用いて手首回転軸部6eにトルクを供給するときに、トルクモータ10の回転速度を、駆動モータ51,52の駆動に依存して回転される手首回転軸部6eの回転速度と同期させる。本実施形態のフロッグレッグアームロボットRおよびその制御方法においては、ハンド部3を押し出す方向に移動されるときでも、ハンド部3を引き出す方向に移動させるときでも、トルクモータ10によって手首回転軸部6eに常にトルクが供給される。したがって、本実施形態のフロッグレッグアームロボットRおよびその制御方法においては、トルクモータ10の回転速度が、駆動モータ51,52の駆動に依存して回転される手首回転軸部6eの回転速度と常に同期する。
なお、本実施形態において、「トルクモータ10の回転速度を、駆動モータ51,52の駆動に依存して回転される手首回転軸部6eの回転速度と同期させる」とは、減速機11を介して手首回転軸部6eに付与されるトルクモータ10の回転速度と、駆動モータ51,52の駆動力に依存してアーム部2を介して手首回転軸部6eに付与される回転速度とが一致することを意味する。
【0071】
具体的には、制御部4は、記憶部42に記憶された制御値から手首回転軸部6eの回転速度を算出するための演算式を用いて、駆動モータ51,52の制御値に基づいて手首回転軸部6eの回転速度を算出する。そして、制御部4は、当該算出結果と、記憶部42に記憶された減速比とに基づいて回転速度制御信号を生成する。そして、この生成した回転速度制御信号をトルクモータ10に入力する。
【0072】
以下に回転速度制御信号を生成する一例について数式を用いて説明する。以下の説明においては、上述した特殊な姿勢を通過する際における回転速度制御信号の生成方法について説明する。なお、上記各実施形態においては、絶対空間における各モータおよび各回転軸部の回転速度について論じているが、以下では、相対空間における各モータおよび各回転軸部の回転速度について論じるものとする。
以下の数式において、上腕部23,25の長さ、および前腕部24,26の長さはすべて同じものとし、この長さをL(m)とする。また、肩回転軸部6a,6cの回転速度をωa(rpm)、手首回転軸部6eの回転速度をωt(rpm)、トルクモータ10の回転速度をωtm(rpm)、減速機11の減速比をηt、トルクモータ10の最大回転速度をωtmmax(rpm)、トルクモータ速度指令をy(%)とする。
【0073】
まず、特殊な姿勢を通過する際に駆動モータ51,52に入力される速度指令をV(m/min)とすると、速度指令V(駆動モータへの制御値)は、下式(1)のように表される。
【0074】
【数1】
【0075】
このため、肩回転軸部6a,6cの回転速度ωaは、下式(2)のように表される。
【0076】
【数2】
【0077】
ここで、肩回転軸部6a,6cの回転速度ωaと、手首回転軸部6eの回転速度ωtとは、原理的に同期すべきである。そこで、減速比ηtを考慮すると、肩回転軸部6a,6cの回転速度ωaは、さらに下式(3)のように表される。
【0078】
【数3】
【0079】
したがって、トルクモータ10の回転速度ωtmは、下式(4)のように表すことができる。また、下式(4)に上式(2)を代入することによって、下式(5)が得られる。
【0080】
【数4】
【0081】
【数5】
【0082】
トルクモータ速度指令y、すなわち回転速度制御信号は、トルクモータ10の最大回転速度に対する比率で表されるため、下式(6)のように表される。
【0083】
【数6】
【0084】
上式(6)に上式(5)を代入することによって、求めるべき回転速度制御信号である、トルクモータ速度指令yは、下式(7)のように表される。
【0085】
【数7】
【0086】
以上は駆動モータ51,52が設置された座標系において考えられる理論式である。しかしながら、トルクモータ10と駆動モータ51,52とが上述のアーム機構を介して接続されているので、トルクモータ10は、駆動モータ51,52から見ると相対的に回転する空間に設置されている。したがって、機構学的な考慮をすると、トルクモータ10の回転速度の指令は、実質的にはさらに2倍となる。
【0087】
このような本実施形態のフロッグレッグアームロボットおよびその制御方法によれば、手首回転軸部6eにトルクが供給されるとき、トルクモータ10の回転速度が、駆動モータ51,52の駆動に依存して回転される手首回転軸部6eの回転速度と同期する。すなわち、減速機11を介して手首回転軸部6eに付与されるトルクモータ10の回転速度と、駆動モータ51,52の駆動力に依存してアーム部2を介して手首回転軸部6eに付与される回転速度とが一致する。このため、トルクモータ10や手首回転軸部6eに不必要な負荷が加わらなくなる。その結果、フロッグレッグアームロボットRに振動が生じることを防止することができる。
したがって、本実施形態のフロッグレッグアームロボットおよびその制御方法によれば、手首回転軸部6eにトルクモータ10が設置されたフロッグレッグアームロボットにおいて、トルクモータ10の回転速度と手首回転軸部6eの回転速度とが不整合なことによる振動の発生を防止することができる。
【0088】
また、本実施形態のフロッグレッグアームロボットおよびその制御方法においては、当該ロボットが特殊な姿勢である場合を含めて、所望の姿勢に移行することができる方向にトルクが供給されるように、制御部4からトルクモータ10にトルク制御信号が入力される。
このため、従来では特異点とされていた姿勢(図4に示す特殊な姿勢)において、手首回転軸部6eに、所望の姿勢に移行することができる方向にトルクが供給される。その結果、フロッグレッグアームロボットにおける制御上の特異点を解消することができる。
【0089】
[実施例]
本発明の第3実施形態の具体的な実施例について説明する。
図9には、駆動モータ51の回転速度の経時的な変化のグラフを示し、図10には、駆動モータ51が発生するトルクの経時的な変化のグラフを示し、図11には、駆動モータ51が接続される肩回転軸部6aの回転速度の経時的な変化のグラフを示している。
図12には、駆動モータ52の回転速度の経時的な変化のグラフを示し、図13には、駆動モータ52が発生するトルクの経時的な変化のグラフを示し、図14には、駆動モータ52が接続される肩回転軸部6cの回転速度の経時的な変化のグラフを示す。
図15には、トルクモータ10を接続される手首回転軸部6eの回転速度の経時的な変化のグラフを示す。図16には、トルクモータ10の回転速度の経時的な変化のグラフを示し、図17には、トルクモータ10が発生するトルクの経時的な変化のグラフを示している。
なお、すべてのグラフは同一の時間軸上で始点を同じくしてそれぞれの回転速度の変化を調べた結果を示している。
【0090】
図9のグラフと図11のグラフとを比較すると、駆動モータ51は、減速機53を介して肩回転軸部6aに接続されているので、肩回転軸部6aの回転速度は、駆動モータ51の回転速度よりも減速される。したがって、肩回転軸部6aの任意の時点における回転速度の大きさは、駆動モータ51の同時点における回転速度の大きさとは一致しないものの、肩回転軸部6aの回転速度は、駆動モータ51の回転速度の変化に追従して経時的に推移している。
同様に、図12のグラフと図14のグラフとを比較すると、駆動モータ52は、減速機53と同じ減速比の減速機(図示略)を介して肩回転軸部6cに接続されているので、肩回転軸部6cの回転速度は、駆動モータ52の回転速度よりも減速される。したがって、肩回転軸部6cの任意の時点における回転速度の大きさは、駆動モータ52の同時点における回転速度の大きさとは一致しないものの、肩回転軸部6cの回転速度は、駆動モータ52の回転速度の変化に追従して経時的に推移している。
図11のグラフと図14のグラフとを比較すると、駆動モータ51と駆動モータ52とが同期して駆動されるので、肩回転軸部6aの回転速度は、肩回転軸部6cの回転速度とほぼ一致して経時的に推移している。
【0091】
図11のグラフと図15のグラフとを比較すると、本実施形態のアーム部21は上腕部23の長さと前腕部24の長さとが同じなので、上腕部23および前腕部24を介して肩回転軸部6aとリンクする手首回転軸部6eの回転速度は、駆動モータ51が接続された肩回転軸部6aの回転速度とほぼ一致して経時的に推移している。
図14のグラフと図15のグラフとを比較すると、本実施形態のアーム部22は上腕部25の長さと前腕部26の長さとが同じなので、上腕部25、前腕部26および同期歯車71,72を介して肩回転軸部6cとリンクする手首回転軸部6eの回転速度は、駆動モータ52が接続された肩回転軸部6cの回転速度ともほぼ一致して経時的に推移している。
したがって、肩回転軸部6aの回転速度、または肩回転軸部6cの回転速度を、手首回転軸部6eの回転速度と見なすことができる。
【0092】
図15のグラフと図16のグラフとを比較すると、トルクモータ10は手首回転軸部6eに減速機11を介して接続されているので、手首回転軸部6eの回転速度は、トルクモータ10の回転速度よりも減速される。したがって、手首回転軸部6eの任意の時点における回転速度の大きさは、トルクモータ10の同時点における回転速度の大きさとは一致しないものの、手首回転軸部6eの回転速度は、トルクモータ10の回転速度の変化に追従して経時的に推移している。
【0093】
図10のグラフと図17のグラフとを比較すると、トルクモータ10が発生させるトルクは、駆動モータ51が発生させるトルクよりも小さい。また、図13のグラフと図17のグラフとを比較しても、トルクモータ10が発生させるトルクは、駆動モータ52が発生させるトルクよりも小さい。
【0094】
本実施形態の制御部4は、トルクモータ10を電気的に制御することにより、トルクモータ10の回転速度を、駆動モータ51,52の駆動に依存して回転する手首回転軸部6eの回転速度と同期させている。このようにトルクモータ10の制御を行うことにより、トルクモータ10や手首回転軸部6eに不必要な負荷が加わらなくなることは明らかである。実際に、上記実施例に使用したフロッグレッグアームロボットRには振動が生じ難いことが確認された。
また、本実施形態のトルクモータ10は、駆動モータ51,52よりも出力の小さい小型のモータであっても十分に機能することが確認された。
【0095】
以上、図面を参照しながら本発明のフロッグレッグアームロボットおよびその制御方法の好適な実施形態について説明したが、本発明は上記実施形態に限定されないことは言うまでもない。上述した実施形態において示した各構成部材の諸形状や組み合わせ等は一例であって、本発明の主旨から逸脱しない範囲において設計要求等に基づき種々変更可能である。
【0096】
例えば、上記第1、第2および第3の各実施形態においては、トルクモータ10が手首回転軸部6eに接続されており、手首回転軸部6eだけにトルクを供給する。しかしながら、本発明はこれに限定されるものではない。肘回転軸部6b,6d、および手首回転軸部6e,6fのいずれかひとつにトルクモータ10が接続されていれば、同様の効果を奏することができる。
また、トルクモータ10はひとつだけに限らない。肘回転軸部6b,6d、および手首回転軸部6e,6fのいずれかふたつ以上に、トルクモータがそれぞれ接続されていても良い。しかしながら、複数のトルクモータを設置した場合には、アーム部2がより過剰に拘束されることとなり、アーム部2およびハンド部3のスムーズな動作を妨害するおそれがある。そのため、トルクモータはひとつだけ設けられることが好ましい。このような場合であっても、トルクモータの回転速度と駆動モータの駆動に依存する回転軸部の回転速度との同期が図られる。
【0097】
上記の各実施形態においては、アーム部2が水平面に沿って揺動される構成について説明した。しかしながら、本発明はこれに限定されるものではなく、水平面とは異なる角度の平面(基準平面)に沿ってアーム部2が揺動されるフロッグレッグアームロボットおよびその制御方法に適用することもできる。
【0098】
上記の各実施形態においては、第1アーム部21が肩回転軸部6aを介して本体部1に連結されるとともに、第2アーム部22が肩回転軸部6cを介して本体部1に連結されている。すなわち、本発明の第1回転軸部がふたつ設けられている。しかしながら、本発明はこれに限定されるものではない。第1アーム部21および第2アーム部22がともに共通の肩回転軸部を介して本体部1に連結され、第1アーム部21と第2アーム部22とが互いに反対方向に回転可能であってもよい。すなわち、本発明の第1回転軸部がひとつだけ設けられていても良い。
【0099】
上記の各実施形態においては、駆動装置5が、肩回転軸部6aを介して上腕部23を揺動させる駆動モータ51と、肩回転軸部6cを介して上腕部25を揺動させる駆動モータ52とを備えている。そして、駆動モータ51に駆動される肩回転軸部6aと、駆動モータ52に駆動される肩回転軸部6cとが同期して回転することにより、ハンド部3を直線的に移動させることができる。ところで、図18に示すように、駆動装置5は、肩回転軸部6aを介して上腕部23を揺動させる駆動モータ51と、肩回転軸部6aと肩回転軸部6cとの間に設けられ、駆動モータ51の駆動力を肩回転軸部6aおよび肩回転軸部6cを介して上腕部25に伝達することによって上腕部25を揺動させる駆動力伝達機構80とを備えていてもよい。駆動力伝達機構80は、2つの同期歯車81,82からなり、第1実施形態の同期歯車71,72と同じ構造である。そして、駆動モータ51に駆動される肩回転軸部6aと、駆動モータ51に駆動力伝達機構80を介して駆動される肩回転軸部6cとが同期して回転することにより、ハンド部3を移動させることができる。
【0100】
上記第3の実施形態においては、トルクモータ10が減速機11を介して手首回転軸部6eに接続されている。しかしながら、本発明はこれに限定されるものではなく、トルクモータ10が手首回転軸部6eに直に接続されていても良い。このような場合には、減速比について考慮する必要がなく、トルクモータ10の回転速度と、駆動モータ51,52の駆動に依存する手首回転軸部6eの回転速度とを一致させることによって、トルクモータ10あるいは手首回転軸部6eに不必要な負荷が加わることを防止できる。その結果、フロッグレッグアームロボットRにおいて振動が生じることを防止することができる。
【0101】
[産業上の利用可能性]
本発明は、本体部と、前記本体部に設置される駆動装置と、前記駆動装置によって回転される第1の回転軸部を介して一端が前記本体部に連結され、基準平面に沿って揺動可能な第1の上腕部と、前記駆動装置によって回転駆動される前記第1の回転軸部またはもうひとつの第1の回転軸部を介して一端が前記本体部に連結され、前記基準平面に沿って揺動可能な第2の上腕部と、第2の回転軸部を介して一端が前記第1の上腕部の他端に回転可能に支持されるとともに前記基準平面に沿って揺動可能な第1の前腕部と、第3の回転軸部を介して一端が前記第2の上腕部の他端に回転可能に支持されるとともに前記基準平面に沿って揺動可能な第2の前腕部と、第4の回転軸部を介して前記第1の前腕部の他端に回転可能に支持されるとともに第5の回転軸部を介して前記第2の前腕部の他端に回転可能に支持されるハンド部と、前記第4の回転軸部と前記第5の回転軸部とを相反する方向に同期回転させる同期手段と、前記第2、第3、第4および第5の回転軸部の少なくともいずれかひとつに接続され、自らが接続された前記回転軸部にトルクを供給するトルクモータと、前記第1の上腕部、前記第2の上腕部、前記第1の前腕部および前記第2の前腕部が前記駆動装置の駆動によって現在の姿勢から所望の姿勢を含む複数の姿勢のいずれにも移行可能であるときに、前記トルクが前記回転軸部に、前記各腕部が前記所望の姿勢に移行することができる方向に供給されるように、前記トルクモータを電気的に制御する制御部とを備えるフロッグレッグアームロボットに関する。
本発明によれば、フロッグレッグアームロボットにおける制御上の特異点を実用的に解消することができる。
【図面の簡単な説明】
【0102】
【図1】本発明のフロッグレッグアームロボットの第1実施形態を示す平面図である。
【図2】本発明のフロッグレッグアームロボットの第1実施形態を示す側面図である。
【図3】本発明のフロッグレッグアームロボットの第1実施形態の機能ブロック図である。
【図4】本発明のフロッグレッグアームロボットの第1実施形態の特殊な姿勢を説明するための平面図である。
【図5】本発明のフロッグレッグアームロボットの第1実施形態の所望の姿勢を説明するための平面図である。
【図6】本発明のフロッグレッグアームロボットの第1実施形態の所望されない姿勢を説明するための平面図である。
【図7】本発明のフロッグレッグアームロボットの第2実施形態を示す側面図である。
【図8】本発明のフロッグレッグアームロボットの第3実施形態を示す側面図である。
【図9】本発明のフロッグレッグアームロボットの第3実施形態に関する実施例を説明するためのグラフであって、一方の駆動モータの回転速度の経時的な推移を示すグラフである。
【図10】本発明のフロッグレッグアームロボットの第3実施形態に関する実施例を説明するためのグラフであって、一方の駆動モータが発生するトルクの経時的な推移を示すグラフである。
【図11】本発明のフロッグレッグアームロボットの第3実施形態に関する実施例を説明するためのグラフであって、一方の駆動モータを接続された肩回転軸部の回転速度の経時的な推移を示すグラフである。
【図12】本発明のフロッグレッグアームロボットの第3実施形態に関する実施例を説明するためのグラフであって、他方の駆動モータの回転速度の経時的な推移を示すグラフである。
【図13】本発明のフロッグレッグアームロボットの第3実施形態に関する実施例を説明するためのグラフであって、他方の駆動モータが発生するトルクの経時的な推移を示すグラフである。
【図14】本発明のフロッグレッグアームロボットの第3実施形態に関する実施例を説明するためのグラフであって、他方の駆動モータを接続された肩回転軸部の回転速度の経時的な推移を示すグラフである。
【図15】本発明のフロッグレッグアームロボットの第3実施形態に関する実施例を説明するためのグラフであって、駆動装置の駆動に依存して回転する手首回転軸部の回転速度の経時的な推移を示すグラフである。
【図16】本発明のフロッグレッグアームロボットの第3実施形態に関する実施例を説明するためのグラフであって、トルクモータの回転速度の経時的な推移を示すブラフである。
【図17】本発明のフロッグレッグアームロボットの第3実施形態に関する実施例を説明するためのグラフであって、トルクモータが発生するトルクの経時的な推移を示すグラフである。
【図18】本発明のフロッグレッグアームロボットの第1、第2および第3の各実施形態のいずれにも適用可能な変形例を示す平面図である。
【符号の説明】
【0103】
R…フロッグレッグアームロボット、1…本体部、2…アーム部、11…減速機、21…アーム部(第1のアーム部)、22…アーム部(第2のアーム部)、23…上腕部(第1の上腕部)、24…前腕部(第1の前腕部)、25…上腕部(第2の上腕部)、26…前腕部(第2の前腕部)、3…ハンド部、4…制御部、5…駆動装置、51,52…駆動モータ、53…減速機、6a…肩回転軸部(第1の回転軸部)、6b…肘回転軸部(第2の回転軸部)、6c…肩回転軸部(第1の回転軸部)、6d…肘回転軸部(第3の回転軸部)、6e…手首回転軸部(第4の回転軸部)、6f…手首回転軸部(第5の回転軸部)、10…トルクモータ、71,72…同期歯車(同期手段)
【特許請求の範囲】
【請求項1】
本体部と、
前記本体部に設置される駆動装置と、
前記駆動装置によって回転される第1の回転軸部を介して一端が前記本体部に連結され、基準平面に沿って揺動可能な第1の上腕部と、
前記駆動装置によって回転駆動される前記第1の回転軸部またはもうひとつの第1の回転軸部を介して一端が前記本体部に連結され、前記基準平面に沿って揺動可能な第2の上腕部と、
第2の回転軸部を介して一端が前記第1の上腕部の他端に回転可能に支持されるとともに前記基準平面に沿って揺動可能な第1の前腕部と、
第3の回転軸部を介して一端が前記第2の上腕部の他端に回転可能に支持されるとともに前記基準平面に沿って揺動可能な第2の前腕部と、
第4の回転軸部を介して前記第1の前腕部の他端に回転可能に支持されるとともに第5の回転軸部を介して前記第2の前腕部の他端に回転可能に支持されるハンド部と、
前記第4の回転軸部と前記第5の回転軸部とを相反する方向に同期回転させる同期手段と、
前記第2、第3、第4および第5の回転軸部の少なくともいずれかひとつに接続され、自らが接続された前記回転軸部にトルクを供給するトルクモータと、
前記第1の上腕部、前記第2の上腕部、前記第1の前腕部および前記第2の前腕部が前記駆動装置の駆動によって現在の姿勢から特異点とされる特殊な姿勢を通過して所望の姿勢に移行される際において、前記各腕部が前記特殊な姿勢であるときのみ、前記トルクが前記回転軸部に、前記各腕部が前記所望の姿勢に移行することができる方向に供給されるように、前記トルクモータを電気的に制御する制御部と
を備えるフロッグレッグアームロボット。
【請求項2】
前記第2、第3、第4および第5の回転軸部の少なくともいずれかひとつに前記トルクモータによって供給される前記トルクは、前記駆動装置によって前記第1の回転軸部に供給されるトルクよりも小さい請求項1に記載のフロッグレッグアームロボット。
【請求項3】
前記トルクモータは、前記第1の上腕部、前記第2の上腕部、前記第1の前腕部および前記第2の前腕部の少なくともいずれかひとつの内部に収納されている請求項1または2に記載のフロッグレッグアームロボット。
【請求項4】
前記トルクモータは、自らが接続された回転軸部にトルク制御信号に基づくトルクを供給するとともに、回転速度制御信号に基づく回転速度にて前記回転軸部を回転させ、
前記制御部は、前記トルクモータに前記トルク制御信号を入力するとともに、前記トルクモータの回転速度が、前記駆動装置の駆動に依存して回転される前記回転軸部の回転速度と同期するように、前記トルクモータに前記回転速度制御信号を入力する請求項1から3のいずれか一項に記載のフロッグレッグアームロボット。
【請求項5】
前記制御部は、前記トルクモータが接続される前記回転軸部の回転速度を、前記駆動装置の制御値に基づいて算出する請求項4に記載のフロッグレッグアームロボット。
【請求項6】
前記トルクモータと前記回転軸部との間に介在し、前記トルクモータの回転速度を減速して前記回転軸部に伝達する減速機をさらに備え、
前記制御部は、前記減速機の減速比、および前記減速機によって減速された前記回転軸部の回転速度に基づいて前記回転速度制御信号を生成する請求項4または5に記載のフロッグレッグアームロボット。
【請求項7】
前記トルクモータがひとつだけ設けられる請求項1から6のいずれか一項に記載のフロッグレッグアームロボット。
【請求項8】
前記駆動装置は、前記第1の回転軸部を介して前記第1の上腕部を揺動させる第1の駆動モータと、前記もうひとつの第1の回転軸部を介して前記第2の上腕部を揺動させる第2の駆動モータとを備える請求項1から7のいずれか一項に記載のフロッグレッグアームロボット。
【請求項9】
前記駆動装置は、前記第1の回転軸部を介して前記第1の上腕部を揺動させる駆動モータと、前記第1の回転軸部と前記第2の回転軸部との間に設けられ、前記駆動モータの駆動力を前記第1および第2の回転軸部を介して前記第2の上腕部に伝達することによって前記第2の上腕部を揺動させる駆動力伝達機構とを備える請求項1から8のいずれか一項に記載のフロッグレッグアームロボット。
【請求項10】
本体部と、
前記本体部に設置される駆動装置と、
前記駆動装置によって回転される第1の回転軸部を介して一端が前記本体部に連結され、基準平面に沿って揺動可能な第1の上腕部と、
前記駆動装置によって回転駆動される前記第1の回転軸部またはもうひとつの第1の回転軸部を介して一端が前記本体部に連結され、前記基準平面に沿って揺動可能な第2の上腕部と、
第2の回転軸部を介して一端が前記第1の上腕部の他端に回転可能に支持されるとともに前記基準平面に沿って揺動可能な第1の前腕部と、
第3の回転軸部を介して一端が前記第2の上腕部の他端に回転可能に支持されるとともに前記基準平面に沿って揺動可能な第2の前腕部と、
第4の回転軸部を介して前記第1の前腕部の他端に回転可能に支持されるとともに第5の回転軸部を介して前記第2の前腕部の他端に回転可能に支持されるハンド部と、
前記第4の回転軸部と前記第5の回転軸部とを相反する方向に同期回転させる同期手段と、
前記第2、第3、第4および第5の回転軸部の少なくともいずれかひとつに接続され、自らが接続された前記回転軸部にトルクを供給するトルクモータと
を備えるフロッグレッグアームロボットの制御方法であって、
前記第1の上腕部、前記第2の上腕部、前記第1の前腕部および前記第2の前腕部が前記駆動装置の駆動によって現在の姿勢から特異点とされる特殊な姿勢を通過して所望の姿勢に移行される際において、前記各腕部が前記特殊な姿勢であるときのみ、前記トルクが前記回転軸部に、前記各腕部が前記所望の姿勢に移行することができる方向に供給されるように、前記トルクモータを電気的に制御する
フロッグレッグアームロボットの制御方法。
【請求項11】
前記第2、第3、第4および第5の回転軸部の少なくともいずれかひとつに前記トルクモータによって供給される前記トルクは、前記駆動装置によって前記第1の回転軸部に供給されるトルクよりも小さい請求項10に記載のフロッグレッグアームロボットの制御方法。
【請求項12】
前記ハンド部が所定の一方向に移動する間、前記トルクを常に同一方向に供給する請求項10または11に記載のフロッグレッグアームロボットの制御方法。
【請求項13】
前記トルクモータは、自らが接続された回転軸部にトルク制御信号に基づくトルクを供給するとともに、回転速度制御信号に基づく回転速度にて前記回転軸部を回転させ、
前記トルクモータに前記トルク制御信号を入力するとともに、前記トルクモータの回転速度が、前記駆動装置の駆動に依存して回転される前記回転軸部の回転速度と同期するように、前記トルクモータに前記回転速度制御信号を入力する請求項10から12のいずれか一項に記載のフロッグレッグアームロボットの制御方法。
【請求項14】
前記トルクモータが接続される前記回転軸部の回転速度を、前記駆動装置の制御値に基づいて算出する請求項13に記載のフロッグレッグアームロボットの制御方法。
【請求項15】
前記トルクモータと前記回転軸部との間に介在し、前記トルクモータの回転速度を減速して前記回転軸部に伝達する減速機の減速比、および前記減速機によって減速された前記回転軸部の回転速度に基づいて前記回転速度制御信号を生成する請求項13または14に記載のフロッグレッグアームロボットの制御方法。
【請求項16】
前記トルクを、前記第2、第3、第4および第5の回転軸部のいずれかひとつに供給する請求項10から15のいずれか一項に記載のフロッグレッグアームロボットの制御方法。
【請求項1】
本体部と、
前記本体部に設置される駆動装置と、
前記駆動装置によって回転される第1の回転軸部を介して一端が前記本体部に連結され、基準平面に沿って揺動可能な第1の上腕部と、
前記駆動装置によって回転駆動される前記第1の回転軸部またはもうひとつの第1の回転軸部を介して一端が前記本体部に連結され、前記基準平面に沿って揺動可能な第2の上腕部と、
第2の回転軸部を介して一端が前記第1の上腕部の他端に回転可能に支持されるとともに前記基準平面に沿って揺動可能な第1の前腕部と、
第3の回転軸部を介して一端が前記第2の上腕部の他端に回転可能に支持されるとともに前記基準平面に沿って揺動可能な第2の前腕部と、
第4の回転軸部を介して前記第1の前腕部の他端に回転可能に支持されるとともに第5の回転軸部を介して前記第2の前腕部の他端に回転可能に支持されるハンド部と、
前記第4の回転軸部と前記第5の回転軸部とを相反する方向に同期回転させる同期手段と、
前記第2、第3、第4および第5の回転軸部の少なくともいずれかひとつに接続され、自らが接続された前記回転軸部にトルクを供給するトルクモータと、
前記第1の上腕部、前記第2の上腕部、前記第1の前腕部および前記第2の前腕部が前記駆動装置の駆動によって現在の姿勢から特異点とされる特殊な姿勢を通過して所望の姿勢に移行される際において、前記各腕部が前記特殊な姿勢であるときのみ、前記トルクが前記回転軸部に、前記各腕部が前記所望の姿勢に移行することができる方向に供給されるように、前記トルクモータを電気的に制御する制御部と
を備えるフロッグレッグアームロボット。
【請求項2】
前記第2、第3、第4および第5の回転軸部の少なくともいずれかひとつに前記トルクモータによって供給される前記トルクは、前記駆動装置によって前記第1の回転軸部に供給されるトルクよりも小さい請求項1に記載のフロッグレッグアームロボット。
【請求項3】
前記トルクモータは、前記第1の上腕部、前記第2の上腕部、前記第1の前腕部および前記第2の前腕部の少なくともいずれかひとつの内部に収納されている請求項1または2に記載のフロッグレッグアームロボット。
【請求項4】
前記トルクモータは、自らが接続された回転軸部にトルク制御信号に基づくトルクを供給するとともに、回転速度制御信号に基づく回転速度にて前記回転軸部を回転させ、
前記制御部は、前記トルクモータに前記トルク制御信号を入力するとともに、前記トルクモータの回転速度が、前記駆動装置の駆動に依存して回転される前記回転軸部の回転速度と同期するように、前記トルクモータに前記回転速度制御信号を入力する請求項1から3のいずれか一項に記載のフロッグレッグアームロボット。
【請求項5】
前記制御部は、前記トルクモータが接続される前記回転軸部の回転速度を、前記駆動装置の制御値に基づいて算出する請求項4に記載のフロッグレッグアームロボット。
【請求項6】
前記トルクモータと前記回転軸部との間に介在し、前記トルクモータの回転速度を減速して前記回転軸部に伝達する減速機をさらに備え、
前記制御部は、前記減速機の減速比、および前記減速機によって減速された前記回転軸部の回転速度に基づいて前記回転速度制御信号を生成する請求項4または5に記載のフロッグレッグアームロボット。
【請求項7】
前記トルクモータがひとつだけ設けられる請求項1から6のいずれか一項に記載のフロッグレッグアームロボット。
【請求項8】
前記駆動装置は、前記第1の回転軸部を介して前記第1の上腕部を揺動させる第1の駆動モータと、前記もうひとつの第1の回転軸部を介して前記第2の上腕部を揺動させる第2の駆動モータとを備える請求項1から7のいずれか一項に記載のフロッグレッグアームロボット。
【請求項9】
前記駆動装置は、前記第1の回転軸部を介して前記第1の上腕部を揺動させる駆動モータと、前記第1の回転軸部と前記第2の回転軸部との間に設けられ、前記駆動モータの駆動力を前記第1および第2の回転軸部を介して前記第2の上腕部に伝達することによって前記第2の上腕部を揺動させる駆動力伝達機構とを備える請求項1から8のいずれか一項に記載のフロッグレッグアームロボット。
【請求項10】
本体部と、
前記本体部に設置される駆動装置と、
前記駆動装置によって回転される第1の回転軸部を介して一端が前記本体部に連結され、基準平面に沿って揺動可能な第1の上腕部と、
前記駆動装置によって回転駆動される前記第1の回転軸部またはもうひとつの第1の回転軸部を介して一端が前記本体部に連結され、前記基準平面に沿って揺動可能な第2の上腕部と、
第2の回転軸部を介して一端が前記第1の上腕部の他端に回転可能に支持されるとともに前記基準平面に沿って揺動可能な第1の前腕部と、
第3の回転軸部を介して一端が前記第2の上腕部の他端に回転可能に支持されるとともに前記基準平面に沿って揺動可能な第2の前腕部と、
第4の回転軸部を介して前記第1の前腕部の他端に回転可能に支持されるとともに第5の回転軸部を介して前記第2の前腕部の他端に回転可能に支持されるハンド部と、
前記第4の回転軸部と前記第5の回転軸部とを相反する方向に同期回転させる同期手段と、
前記第2、第3、第4および第5の回転軸部の少なくともいずれかひとつに接続され、自らが接続された前記回転軸部にトルクを供給するトルクモータと
を備えるフロッグレッグアームロボットの制御方法であって、
前記第1の上腕部、前記第2の上腕部、前記第1の前腕部および前記第2の前腕部が前記駆動装置の駆動によって現在の姿勢から特異点とされる特殊な姿勢を通過して所望の姿勢に移行される際において、前記各腕部が前記特殊な姿勢であるときのみ、前記トルクが前記回転軸部に、前記各腕部が前記所望の姿勢に移行することができる方向に供給されるように、前記トルクモータを電気的に制御する
フロッグレッグアームロボットの制御方法。
【請求項11】
前記第2、第3、第4および第5の回転軸部の少なくともいずれかひとつに前記トルクモータによって供給される前記トルクは、前記駆動装置によって前記第1の回転軸部に供給されるトルクよりも小さい請求項10に記載のフロッグレッグアームロボットの制御方法。
【請求項12】
前記ハンド部が所定の一方向に移動する間、前記トルクを常に同一方向に供給する請求項10または11に記載のフロッグレッグアームロボットの制御方法。
【請求項13】
前記トルクモータは、自らが接続された回転軸部にトルク制御信号に基づくトルクを供給するとともに、回転速度制御信号に基づく回転速度にて前記回転軸部を回転させ、
前記トルクモータに前記トルク制御信号を入力するとともに、前記トルクモータの回転速度が、前記駆動装置の駆動に依存して回転される前記回転軸部の回転速度と同期するように、前記トルクモータに前記回転速度制御信号を入力する請求項10から12のいずれか一項に記載のフロッグレッグアームロボットの制御方法。
【請求項14】
前記トルクモータが接続される前記回転軸部の回転速度を、前記駆動装置の制御値に基づいて算出する請求項13に記載のフロッグレッグアームロボットの制御方法。
【請求項15】
前記トルクモータと前記回転軸部との間に介在し、前記トルクモータの回転速度を減速して前記回転軸部に伝達する減速機の減速比、および前記減速機によって減速された前記回転軸部の回転速度に基づいて前記回転速度制御信号を生成する請求項13または14に記載のフロッグレッグアームロボットの制御方法。
【請求項16】
前記トルクを、前記第2、第3、第4および第5の回転軸部のいずれかひとつに供給する請求項10から15のいずれか一項に記載のフロッグレッグアームロボットの制御方法。
【図1】

【図2】
【図3】
【図4】
【図5】
【図6】
【図7】
【図8】
【図9】
【図10】
【図11】
【図12】
【図13】
【図14】
【図15】
【図16】
【図17】
【図18】
【図2】
【図3】
【図4】
【図5】
【図6】
【図7】
【図8】
【図9】
【図10】
【図11】
【図12】
【図13】
【図14】
【図15】
【図16】
【図17】
【図18】
【公開番号】特開2008−307685(P2008−307685A)
【公開日】平成20年12月25日(2008.12.25)
【国際特許分類】
【出願番号】特願2008−236389(P2008−236389)
【出願日】平成20年9月16日(2008.9.16)
【分割の表示】特願2007−555418(P2007−555418)の分割
【原出願日】平成19年11月9日(2007.11.9)
【出願人】(000000099)株式会社IHI (5,014)
【Fターム(参考)】
【公開日】平成20年12月25日(2008.12.25)
【国際特許分類】
【出願日】平成20年9月16日(2008.9.16)
【分割の表示】特願2007−555418(P2007−555418)の分割
【原出願日】平成19年11月9日(2007.11.9)
【出願人】(000000099)株式会社IHI (5,014)
【Fターム(参考)】
[ Back to top ]