
ブラシレスモータ駆動回転工具

【課題】 ねじ等の定トルク締付け作業を常に適正かつ効率良く行うことができ、スイッチ接点によるスパークや磨耗の発生および周辺の電子機器や電子回路等に与える弊害を除去したブラシレスモータ駆動回転工具を提供する。
【解決手段】駆動スイッチとしてのレバー操作機構20またはプッシュ操作機構18の各操作を検出する第1のホール素子31a、31bを設けると共に、クラッチ動作を検出する第2のホール素子32を設け、第1のホール素子31a、31bによる操作信号に基づいて駆動制御回路40を駆動制御してブラシレスモータを回転駆動し、第2のホール素子32の動作信号に基づいて駆動制御回路40を停止制御してブラシレスモータを駆動停止するように制御手段50を構成する。
【解決手段】駆動スイッチとしてのレバー操作機構20またはプッシュ操作機構18の各操作を検出する第1のホール素子31a、31bを設けると共に、クラッチ動作を検出する第2のホール素子32を設け、第1のホール素子31a、31bによる操作信号に基づいて駆動制御回路40を駆動制御してブラシレスモータを回転駆動し、第2のホール素子32の動作信号に基づいて駆動制御回路40を停止制御してブラシレスモータを駆動停止するように制御手段50を構成する。
【発明の詳細な説明】
【技術分野】
【0001】
本発明は、電動ドライバー等の電動回転工具の駆動用電動モータとして、3相直流ブラシレスモータを使用するブラシレスモータ駆動回転工具に係り、特にブラシレスモータ駆動回転工具の作業内容に応じて、所望のプッシュ操作方式またはレバー操作方式による駆動制御を行うための選択的操作と、前記回転工具に予め設定した所定値以上の負荷トルクが作用した際に、前記ブラシレスモータの停止制御を行うため、トルク設定クラッチ機構のクラッチ動作を検出する手段として、それぞれ磁気センサとしてのホール素子を使用することによって、前記ブラシレスモータの駆動制御を行う制御手段を、小型コンパクト化して回転工具の把持部ケーシング内に全て収納配置することを可能とし、しかも全面的な無接点化による長寿命とメンテナンスフリーとを実現し、ねじ等の定トルク締付け作業を適正かつ効率的に行うことができると共にトルク制御精度の向上を容易に実現することができるブラシレスモータ駆動回転工具に関するものである。
【背景技術】
【0002】
従来において、本出願人は、電動ドライバーに外来トルクによる過負荷電流が流れた際に、これを電気的に検知してモータへの通電を遮断すると同時にモータの電機子を短絡させて電気制動をモータに加え、該モータの回転を瞬時に停止することのできる自動通電遮断装置を備えるねじ締め装置を提案した(特許文献1参照)。すなわち、この特許文献1に記載のねじ締め装置は、モータにより回転駆動するドライバーシャフトを有する電動ドライバーにスイッチング回路を設けて、前記モータが駆動する際に流れる負荷電流が所定値以上の過負荷電流に変化した際にこれを検知してモータ駆動電流の供給を遮断した後一定時間経過後、モータ駆動電流の供給を復帰させるようにし、さらにモータ電機子回路に切換機構を設けて前記スイッチング回路がモータ駆動電流の供給を遮断動作する際に、前記モータ電機子回路を短絡するように構成し、これによりモータに電気制動を加えて、モータの回転を瞬時に停止することができるようにしたものである。
【0003】
また、従来より、電動ドライバーの駆動モータとして、DCモータが一般的に採用されている。今日、DCモータとしては、無接点化、ノイズ発生の防止、高トルク小形化、高速回転および長寿命等の特性に優れ、メンテナンスフリーとなる利点を有するブラシレスモータを採用することが提案され、実用化されている。
【0004】
しかるに、前記ブラシレスモータ、例えば3相直流ブラシレスモータの駆動制御に際しては、従来のDCモータの場合とは異なり、回転磁界を発生する駆動回路を必要とする。そして、この駆動回路としては、磁石ロータに対しその磁極の位置を検出する磁気センサ(一般にホール素子が使用される)と、前記ロータ磁極の位置に対応して一定方向の回転力を与えるように励磁される駆動コイル(3相コイル)と、これら磁気センサと駆動コイルとを付勢制御させる専用のIC回路(3相全波ブリッジ構成からなるインバータ回路)によって構成することができる。
【0005】
このような観点から、本出願人は、前述したブラシレスモータの採用を可能とした電動回転工具として、作業内容に応じて、所望のプッシュ操作方式またはレバー操作方式による駆動制御を選択的に行うことができる電動回転工具の駆動スイッチ方式を提案した(特許文献2参照)。
【0006】
すなわち、この特許文献2に記載の電動回転工具の駆動スイッチ方式は、(1) 電動モータと、この電動モータの出力軸に結合してねじ締め等の作業を行うドライバービットなどの回転工具と、前記電動モータを駆動させて回転工具により前記作業を開始する駆動スイッチと、前記作業の完了に伴う回転工具に生じる負荷トルクを検出するトルク検出手段と、前記負荷トルクが予め設定したトルク値に達した際に回転工具の駆動を停止させるトルク設定自動停止手段とを設けた電動回転工具において、(2) 回転工具を、ねじ等の作業対象に当接して押圧変位させることによりON動作を行うプッシュ操作方式の駆動スイッチと、(3) 電動回転工具の把持部に設けたスイッチレバーを、押圧変位させることによりON動作を行うレバー操作方式の駆動スイッチとを、それぞれ磁石と磁気センサとを組合せて構成し、(4) 前記磁気センサを電動モータの通電回路にそれぞれ接続して、前記いずれか一方の操作方式を選択し、選択された操作方式の磁気センサの磁気感知動作により、通電回路をON動作させて電動モータを駆動開始するように構成したものである。
【0007】
従って、この様に構成される電動回転工具の駆動スイッチ方式によれば、電動モータとしてブラシレスモータを使用する場合には、前記駆動スイッチを電動モータの駆動制御回路と共に、電動回転工具の把持部ケーシング内に全てコンパクトに収納配置することが可能となり、全面的な無接点化による長寿命とメンテナンスフリーとを実現して、その取扱いを簡便化することができる等の利点が得られる。
【0008】
また、本出願人は、ねじ等の定トルク締付け作業を常に適正かつ効率良く行うことができると共に、装置全体の小型コンパクト化とトルク制御精度の向上とを容易に達成することができる電動回転工具のトルク制御方式を提案した(特許文献3参照)。
【0009】
すなわち、この特許文献3に記載の電動回転工具のトルク制御方式は、(1) 電動モータを内蔵した把持部を設け、前記電動モータの出力軸に減速機構を介して作業軸としての従動軸を結合し、前記従動軸に対して所定値以上の負荷トルクが作用した際に前記出力軸と従動軸との係合を遮断するように動作するカム係合部を備えたクラッチ機構を設け、前記クラッチ機構の動作点をトルク設定値として調節可能に構成したトルク設定機構を設け、さらに前記クラッチ機構のクラッチ動作を検出すると同時に前記電動モータの駆動停止制御を行うトルク検出機構を設けてなる電動回転工具において、(2) 前記トルク検出機構は、前記クラッチ機構のカム係合部におけるカム係合が完全に解除されてクラッチ動作が完了した状態で、その検出動作と同時に前記電動モータの駆動停止制御を行うように設定したものである。
【0010】
従って、この様に構成される電動回転工具のトルク制御方式によれば、前記トルク検出機構を磁石と磁気センサとを組合せて、カム係合が完全に解除された状態において、検出動作を行うように構成することにより、従来のメカ・スイッチ機構を使用するトルク検出機構におけるようなスイッチ接点のスパークや磨耗の発生および周辺の電子機器や電子回路等に与える弊害を除去し得ると共に、構成部品の小型・長寿命化を実現して、電動工具全体をコンパクト化することができるものである。
【0011】
【特許文献1】特公昭57−43389号公報
【特許文献2】特開2002−254346号公報
【特許文献3】特開2002−321166号公報
【発明の開示】
【発明が解決しようとする課題】
【0012】
しかるに、前述した特許文献2において提案した駆動スイッチ方式を採用する電動回転工具と、前述した特許文献3において提案したトルク制御方式を採用する電動回転工具において、その全面的な無接点化による長寿命とメンテナンスフリーを実現するために、ブラシレスモータを使用し、しかもこのブラシレスモータの駆動制御を行うためのスイッチ機構として磁石と磁気センサとを組合せた電子スイッチにより構成することにより、前述した特許文献2および特許文献3にそれぞれ開示されるような利点を全て備える電動回転工具を得ることが可能である。
【0013】
そこで、本発明者は、鋭意研究並びに試作を重ねた結果、回転工具を回転駆動する直流ブラシレスモータと、このブラシレスモータの出力軸に結合された減速機構と、前記減速機構と回転工具との軸結合部に設けたトルク設定クラッチ機構と、前記ブラシレスモータの駆動制御回路を駆動制御する駆動スイッチとして選択的に操作することができるレバー操作機構とプッシュ操作機構と、前記駆動スイッチのレバー操作またはプッシュ操作により前記ブラシレスモータを回転駆動し、前記クラッチ機構のクラッチ動作の検出により前記ブラシレスモータの駆動停止を行うように構成した制御手段とを備えたブラシレスモータ駆動回転工具を構成し、前記ブラシレスモータの駆動スイッチとしてのレバー操作機構またはプッシュ操作機構に対して、それぞれ磁気センサとしてのホール素子を設けて、レバー操作またはプッシュ操作を検出するように設定すると共に、前記クラッチ機構に対してもホール素子を設けて、クラッチ動作を検出するように設定し、前者のホール素子による駆動スイッチの操作信号に基づいて前記ブラシレスモータの駆動制御回路を駆動制御してブラシレスモータを回転駆動し、後者のホール素子によるクラッチ機構の動作信号に基づいて前記ブラシレスモータの駆動制御回路を停止制御してブラシレスモータを駆動停止するように構成したブラシレスモータ駆動回転工具を完成することができた。
【0014】
すなわち、前記構成からなるブラシレスモータ駆動回転工具によれば、ねじ等の定トルク締付け作業を常に適正かつ効率良く行うことができると共に、装置全体の小型コンパクト化とトルク制御精度の向上とを容易に達成することができ、しかも従来のメカ・スイッチ機構を使用する駆動スイッチやトルク検出機構等におけるようなスイッチ接点によるスパークや磨耗の発生および周辺の電子機器や電子回路等に与える弊害を除去して、構成部品の小型・長寿命化を実現することができることを突き止めた。
【0015】
また、前記ブラシレスモータ駆動回転工具においては、前記ブラシレスモータの駆動制御回路を、ブラシレスモータを駆動するための電源電圧を得るための商用電源に接続されるAC/DC変換手段と、前記電源電圧をブラシレスモータの駆動電圧に変換するための半導体ブリッジ構成からなるインバータ回路と、前記インバータ回路のブリッジ構成からなる半導体を適宜ON/OFF制御する駆動回路と、ブラシレスモータの励磁巻線に対し回転子の位置を検出する位置検出回路と、前記位置検出回路により検出された位置検出信号により前記励磁巻線に供給する電流を切り替えるための制御信号を前記駆動回路に出力するための制御手段とから構成することができる。
【0016】
そこで、例えば前記クラッチ機構に対して設けたホール素子によるクラッチ機構の動作信号に基づいて、ブラシレスモータの駆動制御回路を停止制御するに際して、ブラシレスモータの駆動電力を遮断すると共に、ブラシレスモータの駆動制御回路に設けたインバータ回路のブリッジ構成からなる半導体を制御操作してブラシレスモータの励磁巻線を短絡し、回転子の制動を行うように設定することにより、ブラシレスモータの回転子の急制動を行って、ねじ締め作業におけるトルク制御精度をより一層向上することができることを突き止めた。
【0017】
また、前記ブラシレスモータの駆動制御回路を駆動制御する駆動スイッチとして選択的に操作することができるレバー操作機構とプッシュ操作機構に対して、そのレバー操作またはプッシュ操作を中断した場合においても、前記と同様にブラシレスモータの駆動電力を遮断すると共に、ブラシレスモータの駆動制御回路に設けたインバータ回路のブリッジ構成からなる半導体を制御操作してブラシレスモータの励磁巻線を短絡し、回転子の制動を行うように設定する。このように構成することにより、ねじの取付けおよび取外し作業において、駆動スイッチを中断した場合、ドライバービットの空転を防止して、作業の安全性と共に迅速化を容易に達成する達成することができることを突き止めた。
【0018】
代案として、本発明に係るブラシレスモータ駆動回転工具は、回転工具を回転駆動する直流ブラシレスモータと、このブラシレスモータの出力軸に結合された減速機構と、前記ブラシレスモータの負荷電流を検出する負荷電流検出手段と、前記ブラシレスモータの駆動制御回路を駆動制御する駆動スイッチとして選択的に操作することができるレバー操作機構とプッシュ操作機構と、前記駆動スイッチのレバー操作またはプッシュ操作により前記ブラシレスモータを回転駆動し、前記負荷電流検出手段により検出される負荷電流が予め設定した設定値を超えた際に前記ブラシレスモータの駆動停止を行うように構成した制御手段とを備えたブラシレスモータ駆動回転工具を構成し、前記ブラシレスモータの駆動スイッチとしてのレバー操作機構またはプッシュ操作機構に対して、それぞれ磁気センサとしてのホール素子を設けて、レバー操作またはプッシュ操作を検出するように設定し、前記ホール素子による駆動スイッチの操作信号に基づいて前記ブラシレスモータの駆動制御回路を駆動制御してブラシレスモータを回転駆動し、前記負荷電流検出手段により検出された負荷電流が設定値を超えた際に前記ブラシレスモータの駆動制御回路を停止制御してブラシレスモータを駆動停止するように構成することもできる。
【0019】
従って、このように構成されたブラシレスモータ駆動回転工具においても、前記と同様に、ねじ等の定トルク締付け作業を常に適正かつ効率良く行うことができると共に、装置全体の小型コンパクト化とトルク制御精度の向上とを容易に達成することができ、しかも従来のメカ・スイッチ機構を使用する駆動スイッチやトルク検出機構等におけるようなスイッチ接点によるスパークや磨耗の発生および周辺の電子機器や電子回路等に与える弊害を除去して、構成部品の小型・長寿命化を実現することができる。
【0020】
また、前記と同様に、負荷電流検出手段により検出された負荷電流が設定値を超えた時に、ブラシレスモータの駆動制御回路を停止制御するに際しては、ブラシレスモータの駆動電力を遮断すると共に、ブラシレスモータの駆動制御回路に設けたインバータ回路のブリッジ構成からなる半導体をON/OFF制御操作してブラシレスモータの励磁巻線を短絡し、回転子の制動を行うように設定して、ブラシレスモータの回転子の急制動を行い、トルク制御精度をより一層向上することができる。
【0021】
従って、本発明の目的は、ねじ等の定トルク締付け作業を常に適正かつ効率良く行うことができると共に、装置全体の小型コンパクト化とトルク制御精度の向上とを容易に達成することができ、しかも従来のメカ・スイッチ機構を使用する駆動スイッチやトルク検出機構等におけるようなスイッチ接点によるスパークや磨耗の発生および周辺の電子機器や電子回路等に与える弊害を除去して、構成部品の小型・長寿命化を実現することができるブラシレスモータ駆動回転工具を提供することにある。
【課題を解決するための手段】
【0022】
前記の目的を達成するため、本発明の請求項1に記載のブラシレスモータ駆動回転工具は、回転工具を回転駆動する直流ブラシレスモータと、このブラシレスモータの出力軸と、回転工具との軸結合部に設けたトルク設定クラッチ機構と、前記ブラシレスモータの駆動制御回路を駆動制御する駆動スイッチと、前記駆動スイッチの操作により前記ブラシレスモータを回転駆動し、前記クラッチ機構のクラッチ動作の検出により前記ブラシレスモータの駆動停止を行うように構成した制御手段とを備えたブラシレスモータ駆動回転工具において、
前記ブラシレスモータの駆動スイッチとしてのレバー操作機構またはプッシュ操作機構に対してレバー操作またはプッシュ操作を検出する第1のホール素子を設けると共に、前記クラッチ機構に対してクラッチ動作を検出する第2のホール素子を設け、
前記第1のホール素子による駆動スイッチの操作信号に基づいて前記ブラシレスモータの駆動制御回路を駆動制御してブラシレスモータを回転駆動し、前記第2のホール素子によるクラッチ機構の動作信号に基づいて前記ブラシレスモータの駆動制御回路を停止制御してブラシレスモータを駆動停止するように制御手段を構成したことを特徴とする。
【0023】
本発明の請求項2に記載のブラシレスモータ駆動回転工具は、前記ブラシレスモータの正/逆転切換え操作を行う正/逆切換操作機構をさらに設けると共に、前記正/逆切換操作機構に対して正/逆切換操作を検出する第3のホール素子を設け、
前記第3のホール素子による正/逆転切換え操作信号に基づいて、前記制御手段を介してブラシレスモータを正回転または逆回転するように構成してなることを特徴とする。
【0024】
本発明の請求項3に記載のブラシレスモータ駆動回転工具は、前記ブラシレスモータの駆動制御回路は、ブラシレスモータを駆動するための電源電圧を得るための商用電源に接続されるAC/DC変換手段と、前記電源電圧をブラシレスモータの駆動電圧に変換するための半導体ブリッジ構成からなるインバータ回路と、前記インバータ回路のブリッジ構成からなる半導体を適宜ON/OFF制御する駆動回路と、ブラシレスモータの励磁巻線に対し回転子の位置を検出する位置検出回路と、前記位置検出回路により検出された位置検出信号により前記励磁巻線に供給する電流を切り替えるための制御信号を前記駆動回路に出力するための駆動回路制御手段とから構成してなることを特徴とする。
【0025】
本発明の請求項4に記載のブラシレスモータ駆動回転工具は、前記制御手段により、前記第2のホール素子によるクラッチ機構の動作信号に基づいて、ブラシレスモータの駆動制御回路を停止制御するに際しては、ブラシレスモータの駆動電力を遮断すると共に、ブラシレスモータの駆動制御回路に設けたインバータ回路のブリッジ構成からなる半導体を制御操作してブラシレスモータの励磁巻線を短絡し、回転子の制動を行うように設定してなることを特徴とする。
【0026】
本発明の請求項5に記載のブラシレスモータ駆動回転工具は、前記ブラシレスモータの駆動スイッチとしてのレバー操作機構またはプッシュ操作機構のレバー操作またはプッシュ操作を中断した際に、前記第1のホール素子による駆動スイッチの操作中断信号に基づいて前記ブラシレスモータの駆動制御回路に設けたインバータ回路のブリッジ構成からなる半導体を制御操作してブラシレスモータの励磁巻線を短絡し、回転子の制動を行うブラシレスモータの停止制御を行うように設定してなることを特徴とする。
【0027】
本発明の請求項6に記載のブラシレスモータ駆動回転工具は、回転工具を回転駆動する直流ブラシレスモータと、このブラシレスモータの負荷電流を検出する負荷電流検出手段と、前記ブラシレスモータの駆動制御回路を駆動制御する駆動スイッチと、前記駆動スイッチの操作により前記ブラシレスモータを回転駆動し、前記負荷電流検出手段により検出される負荷電流が予め設定した設定値を超えた際に前記ブラシレスモータの駆動停止を行うように構成した制御手段とを備えたブラシレスモータ駆動回転工具において、
前記ブラシレスモータの駆動スイッチとしてのレバー操作機構またはプッシュ操作機構に対してレバー操作またはプッシュ操作を検出する第1のホール素子を設け、
前記第1のホール素子による駆動スイッチの操作信号に基づいて前記ブラシレスモータの駆動制御回路を駆動制御してブラシレスモータを回転駆動し、前記負荷電流検出手段により検出された負荷電流が設定値を超えた際に、前記ブラシレスモータの駆動制御回路を停止制御してブラシレスモータを駆動停止するように制御手段を構成したことを特徴とする。
【0028】
本発明の請求項7に記載のブラシレスモータ駆動回転工具は、前記ブラシレスモータの正/逆転切換え操作を行う正/逆切換操作機構をさらに設けると共に、前記正/逆切換操作機構に対して正/逆切換操作を検出する第3のホール素子を設け、
前記第3のホール素子による正/逆転切換え操作信号に基づいて、前記制御手段を介してブラシレスモータを正回転または逆回転するように構成してなることを特徴とする。
【0029】
本発明の請求項8に記載のブラシレスモータ駆動回転工具は、前記ブラシレスモータの駆動制御回路は、ブラシレスモータを駆動するための電源電圧を得るための商用電源に接続されるAC/DC変換手段と、前記電源電圧をブラシレスモータの駆動電圧に変換するための半導体ブリッジ構成からなるインバータ回路と、前記インバータ回路のブリッジ構成からなる半導体を適宜ON/OFF制御する駆動回路と、ブラシレスモータの励磁巻線に対し回転子の位置を検出する位置検出回路と、前記位置検出回路により検出された位置検出信号により前記励磁巻線に供給する電流を切り替えるための制御信号を前記駆動回路に出力するための制御手段とから構成してなることを特徴とする。
【0030】
本発明の請求項9に記載のブラシレスモータ駆動回転工具は、前記制御手段により、前記負荷電流検出手段により検出された負荷電流が設定値を超えた時に、ブラシレスモータの駆動制御回路を停止制御するに際しては、ブラシレスモータの駆動電力を遮断すると共に、ブラシレスモータの駆動制御回路に設けたインバータ回路のブリッジ構成からなる半導体を制御操作してブラシレスモータの励磁巻線を短絡し、回転子の制動を行うように設定してなることを特徴とする。
【0031】
本発明の請求項10に記載のブラシレスモータ駆動回転工具は、前記ブラシレスモータの駆動スイッチとしてのレバー操作機構またはプッシュ操作機構のレバー操作またはプッシュ操作を中断した際に、前記第1のホール素子による駆動スイッチの操作中断信号に基づいて前記ブラシレスモータの駆動制御回路に設けたインバータ回路のブリッジ構成からなる半導体を制御操作してブラシレスモータの励磁巻線を短絡し、回転子の制動を行うブラシレスモータの停止制御を行うように設定してなることを特徴とする。
【発明の効果】
【0032】
本発明の請求項1に記載のブラシレスモータ駆動回転工具によれば、駆動スイッチおよびトルク設定クラッチ機構による操作ないし検出動作を無接点化して、ねじ等の定トルク締付け作業を常に適正かつ効率良く行うことができると共に、制御手段全体の小型コンパクト化とトルク制御精度の向上とを容易に達成することができ、しかも従来のメカ・スイッチ機構を使用する駆動スイッチやトルク検出機構等におけるようなスイッチ接点によるスパークや磨耗の発生および周辺の電子機器や電子回路等に与える弊害を除去して、構成部品の小型・長寿命化を実現することができる。
【0033】
本発明の請求項6に記載のブラシレスモータ駆動回転工具によれば、駆動スイッチの操作を無接点化すると共に設定トルクの検出動作を負荷電流検出手段によって行うことにより、ねじ等の定トルク締付け作業を常に適正かつ効率良く行うことができると共に、制御手段全体の小型コンパクト化とトルク制御精度の向上とを容易に達成することができ、しかも従来のメカ・スイッチ機構を使用する駆動スイッチやトルク検出機構等におけるようなスイッチ接点によるスパークや磨耗の発生および周辺の電子機器や電子回路等に与える弊害を除去して、構成部品の小型・長寿命化を実現することができる。
【0034】
本発明の請求項2および7に記載のブラシレスモータ駆動回転工具によれば、ねじの取付けと共に、ねじの取外しを行うことを可能とするブラシレスモータの正/逆切換操作機構を設けた場合においても、前記正/逆切換操作機構の操作も無接点化することにより、前記と同様の優れた効果を期待することができる。
【0035】
本発明の請求項3および8に記載のブラシレスモータ駆動回転工具によれば、ブラシレスモータの駆動制御回路を、コンパクトな構成とすることができ、それぞれのホール素子と共にブラシレスモータ駆動回転工具の把持部ケーシング内部に一体化して容易に組み込むことが可能となり、ブラシレスモータ駆動回転工具全体を低コストに製造することができる。
【0036】
本発明の請求項4および9に記載のブラシレスモータ駆動回転工具によれば、このように構成したブラシレスモータの駆動制御回路において、ねじ締め操作に際し所定のねじ締めトルクによるねじ締めの完了に伴うブラシレスモータの停止制御を、ブラシレスモータの励磁巻線を短絡することによる回転子の急制動によって、トルク制御精度の向上を容易に実現することができる。
【0037】
本発明の請求項5および10に記載のブラシレスモータ駆動回転工具によれば、ブラシレスモータの駆動スイッチとしてのレバー操作機構またはプッシュ操作機構について、レバー操作またはプッシュ操作を中断した場合においても、前記ブラシレスモータの停止制御と同様に、ブラシレスモータの励磁巻線を短絡することによる回転子の急制動によって、前記レバー操作またはプッシュ操作の中断状態を保持し、ねじの取付けを行う場合のみならず、ねじの取外しを行う場合においても、適正かつ円滑なブラシレスモータ駆動回転工具の制御操作を達成することができる。
【発明を実施するための最良の形態】
【0038】
次に、本発明に係るブラシレスモータ駆動回転工具の実施例につき、添付図面を参照しながら以下詳細に説明する。
【実施例1】
【0039】
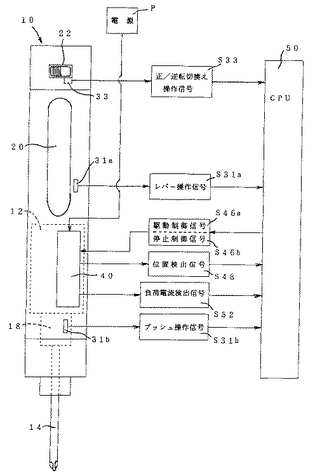
図1は、本発明に係るブラシレスモータ駆動回転工具の一実施例として、回転工具としてドライバービットを使用するブラシレスモータ駆動ドライバーの概略構成と制御系統とを示す説明図である。すなわち、図1において、参照符号10は内部にブラシレスモータ12を内蔵したブラシレスモータ駆動ドライバーを示し、このブラシレスモータ駆動ドライバー10は、前記ブラシレスモータ12の出力軸に適宜減速機構を介してドライバービット14を結合保持する従動軸が結合され、前記従動軸に対して予め設定した所定値以上の負荷トルクが作用した際に、前記出力軸と従動軸との係合を遮断するように動作するカム係合部を備えたトルク設定クラッチ機構16が設けられている。また、前記ブラシレスモータ12の出力軸と従動軸との結合部には、前記ドライバービット14を軸方向にプッシュ操作することにより変位して駆動スイッチとしての機能を有するプッシュ操作機構18が設けられている。さらに、前記ブラシレスモータ12を内蔵したブラシレスモータ駆動ドライバーの把持部ケーシングの外側面には、駆動スイッチとしての機能を有するレバー操作機構20を設けると共に、前記ブラシレスモータ12の正/逆転切換え操作を行う正/逆切換操作機構22が設けられている。
【0040】
そこで、本実施例のブラシレスモータ駆動ドライバー10においては、それぞれ図1に示すように、前記ブラシレスモータ12の駆動スイッチとして設けられたレバー操作機構20とプッシュ操作機構18に対して、磁気センサとして適宜検出用磁石と組み合わせた第1のホール素子31a、31bを設ける。また、前記トルク設定クラッチ機構16に対して、磁気センサとして適宜検出用磁石と組み合わせた第2のホール素子32を設ける。さらに、前記正/逆切換操作機構22に対して、磁気センサとして適宜検出用磁石と組み合わせた第3のホール素子33を設ける。
【0041】
この場合、前記第1のホール素子31a、31bは、例えば特開2002−254346号公報(前記特許文献2)に開示される駆動スイッチ(32、30)に対して設けられる磁気センサ(33b、31b)と同様に、駆動スイッチとしてのレバー操作機構20およびプッシュ操作機構18に対して設けることができる。また、前記第2のホール素子32は、例えば特開2002−321166号公報(前記特許文献3)に開示されるトルク検出機構(42)に対して設けられる磁気センサ(44)と同様に、トルク設定クラッチ機構16に対して設けることができる。
【0042】
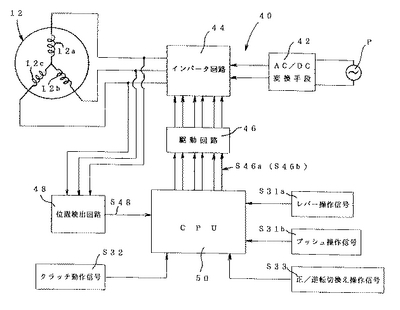
一方、前記前記ブラシレスモータ12に対しては、駆動制御回路40が接続配置される。しかるに、このブラシレスモータ12の駆動制御回路40は、図2に示すように、ブラシレスモータ12を駆動するための電源電圧を得るための商用電源Pに接続されたAC/DC変換手段42と、前記電源電圧をブラシレスモータ12の駆動電圧に変換するための半導体3相全波ブリッジ構成からなるインバータ回路44と、前記インバータ回路44のブリッジ構成からなる半導体を適宜ON/OFF制御する駆動回路46と、ブラシレスモータ12の励磁巻線12a、12b、12cに対し回転子の位置を検出する位置検出回路48と、前記位置検出回路48により検出された位置検出信号により前記励磁巻線12a、12b、12cに供給する電流を切り替えるための制御信号を前記駆動回路46に出力するための制御手段50とから構成される。
【0043】
このように構成される本実施例におけるブラシレスモータ駆動ドライバー10においては、駆動スイッチとしてのレバー操作機構20またはプッシュ操作機構18を操作することにより、第1のホール素子31aまたは31bにより、駆動スイッチの操作状態を検出したレバー操作信号S31a またはプッシュ操作信号S31b が出力されて、制御手段50へ入力される。そこで、前記制御手段50においては、このような駆動スイッチの操作信号S31a またはS31b の入力に基づいて、ブラシレスモータ12の駆動制御回路40に設けた駆動回路46に対して駆動制御信号S46a を出力し、インバータ回路44を介してブラシレスモータ12を駆動制御する。なお、この場合において、ブラシレスモータ12の駆動制御回路40に設けた位置検出回路48により、ブラシレスモータ12の励磁巻線12a、12b、12cに対し回転子の位置を検出した位置検出信号S48が出力されて、制御手段50へ入力されると共に、前記制御手段50において、前記駆動制御信号S46a として駆動回路46およびインバータ回路44を介してブラシレスモータ12の励磁巻線12a、12b、12cに供給する電流を切り替えるための制御信号を得るように構成される(図1および図2参照)。これにより、ブラシレスモータ駆動ドライバー10は、所要のねじ締め作業を行うことができる。
【0044】
次いで、ブラシレスモータ駆動ドライバー10によるねじ締め作業が行われ、所要のねじ締めトルク値に到達し、トルク設定クラッチ機構16がクラッチ動作すると、第2のホール素子32により、この動作状態を検出したクラッチ動作信号S32が出力されて、制御手段50へ入力される。そこで、前記制御手段50においては、このようなクラッチ機構16の動作信号S32の入力に基づいて、ブラシレスモータ12の駆動制御回路40に設けた駆動回路46に対して停止制御信号S46b を出力し、インバータ回路44を介してブラシレスモータ12を停止制御する(図1および図2参照)。これにより、ブラシレスモータ駆動ドライバー10は、所要のねじ締め作業を完了することができる。
【0045】
なお、本実施例においては、例えばねじの取り外しを行うような場合において、ブラシレスモータ12を逆転駆動する必要がある。このような場合は、正/逆切換操作機構22を操作することによって、第3のホール素子33により、正回転または逆回転の状態を検出した正/逆転切換え操作信号S33が出力されて制御手段50へ入力される。そこで、前記制御手段50においては、前記正/逆転切換え操作信号S33に基づいて、ブラシレスモータ12の駆動制御回路40に設けた駆動回路46に対して駆動制御信号S46a を出力し、インバータ回路44を介してブラシレスモータ12を正回転または逆回転による駆動制御を行うように構成することができる(図1および図2参照)。
【0046】
また、本実施例においては、ブラシレスモータ12を停止制御する場合、前記制御手段50において、クラッチ機構16の動作信号S32の入力に基づいて、ブラシレスモータ12の駆動制御回路40に設けた駆動回路46に対して停止制御信号S46b を出力するに際して、ブラシレスモータ12の駆動電力を遮断すると共に、ブラシレスモータ12の駆動制御回路40に設けたインバータ回路44のブリッジ構成される半導体を制御操作してブラシレスモータ12の励磁巻線12a、12b、12cを短絡し、回転子の急制動を行うように設定することができる。
【0047】
次に、前記構成からなる本実施例におけるブラシレスモータ駆動ドライバー10のねじ締め作業に伴うブラシレスモータ12の駆動制御および停止制御を行う場合の制御プログラムについて、図3に示すフローチャートを参照しながら以下説明する。
【0048】
ねじ締め作業の開始に伴い、まず最初に正/逆切換操作機構22を操作して、ブラシレスモータ12を正回転または逆回転により駆動制御するかを決定する(STEP−1)。この正/逆切換操作機構22の操作状態は、第3のホール素子33により検出され、得られた正/逆転切換え操作信号S33が出力されて、制御手段50へ入力される。そして、前記制御手段50において、ブラシレスモータ12の駆動制御回路40に設けた駆動回路46に対して出力する駆動制御信号S46a について、ブラシレスモータ12を正回転または逆回転により駆動制御を行うように設定される。
【0049】
次に、駆動スイッチとしてのレバー操作機構20またはプッシュ操作機構18を操作する(STEP−2)。この場合、第1のホール素子31aまたは31bによって、駆動スイッチのレバー操作またはプッシュ操作による操作信号S31a またはS31b が出力されて、制御手段50へ入力される。そして、前記制御手段50において、ブラシレスモータ12の駆動制御回路40に設けた駆動回路46に対して駆動制御信号S46a を出力し、インバータ回路44を介してブラシレスモータ12を駆動制御する(STEP−3)。
このようにして、ブラシレスモータ駆動ドライバー10による所要のねじ締め作業が行われる。
【0050】
前記ブラシレスモータ駆動ドライバー10による所要のねじ締め作業が達成されると、トルク設定クラッチ機構16がクラッチ動作する(STEP−4)。この場合、第2のホール素子32によって、クラッチ動作信号S32が出力されて、制御手段50へ入力される。そして、前記制御手段50において、ブラシレスモータ12の駆動制御回路40に設けた駆動回路46に対して停止制御信号S46b を出力し、インバータ回路44を介してブラシレスモータ12を停止制御する(STEP−5)。このようにして、ブラシレスモータ駆動ドライバー10による所要のねじ締め作業を完了することができる。なお、継続してねじ締め作業を行う場合は、前記STEP−2〜STEP−5を繰り返し行うように設定する。
【0051】
なお、前記ブラシレスモータ12の停止制御を行う(STEP−5)に際しては、前述したように、ブラシレスモータ12の駆動電力を遮断すると共に、ブラシレスモータ12の駆動制御回路40に設けたインバータ回路44のブリッジ構成からなる半導体を制御操作してブラシレスモータ12の励磁巻線12a、12b、12cを短絡し、回転子の急制動を行うように設定することができる。
【0052】
また、本実施例においては、前記駆動スイッチとしてのレバー操作機構20またはプッシュ操作機構18の操作において(STEP−2)、レバー操作またはプッシュ操作を中断した場合(STEP−6)は、前記STEP−5と同様にブラシレスモータ12の停止制御が行われる(STEP−7)。すなわち、この場合、ブラシレスモータ12の駆動電力を遮断すると共に、ブラシレスモータ12の駆動制御回路40に設けたインバータ回路44のブリッジ構成からなる半導体を制御操作してブラシレスモータ12の励磁巻線12a、12b、12cを短絡し、回転子の急制動を行うように設定される。
【実施例2】
【0053】
図4は、本発明に係るブラシレスモータ駆動回転工具の別の実施例を示すブラシレスモータ駆動ドライバーの概略構成と制御系統とを示す説明図である。なお、説明の便宜上、前記図1に示す実施例1と同一の構成部分については、同一の参照符号を付して、詳細な説明は省略する。すなわち、本実施例のブラシレスモータ駆動ドライバー10′は、前記実施例におけるトルク設定クラッチ機構16を省略し、ブラシレスモータ12の駆動制御回路40に負荷電流検出手段(図示せず)を設けたものである。その他の構成は、基本的に前述した実施例1のブラシレスモータ駆動回転工具10と同じである。
【0054】
しかるに、本実施例においては、ブラシレスモータ12を駆動制御する場合の駆動スイッチ操作については、前述した実施例と全く同じである(図3のSTEP−1〜STEP−3参照)。そこで、ブラシレスモータ駆動ドライバー10′によるねじ締め作業が行われ、所要のねじ締めトルク値に到達した場合、本実施例においては、前述したトルク設定クラッチ機構16によるクラッチ動作(図3のSTEP−4参照)に代えて、負荷電流検出手段(図示せず)により検出される負荷電流検出信号S52が制御手段50へ入力される。そこで、前記制御手段50においては、入力された負荷電流検出信号S52を予め設定した設定値と比較して、設定値を超えた際に、ブラシレスモータ12の駆動制御回路40に設けた駆動回路46に対して停止制御信号S46b を出力し、インバータ回路44を介してブラシレスモータ12を停止制御するように設定する(図3のSTEP−5参照)。これにより、ブラシレスモータ駆動ドライバー10は、所要のねじ締め作業を完了することができる。
【0055】
また、本実施例においては、前述した実施例と同様に、ブラシレスモータ12の停止制御を行う(図3のSTEP−5参照)に際して、ブラシレスモータ12の駆動電力を遮断すると共に、ブラシレスモータ12の駆動制御回路40に設けたインバータ回路44のブリッジ構成からなる半導体を制御操作してブラシレスモータ12の励磁巻線12a、12b、12cを短絡し、回転子の急制動を行うように設定することができる。
【0056】
そして、本実施例においても、前述した実施例と同様に、前記駆動スイッチとしてのレバー操作機構20またはプッシュ操作機構18の操作において(図3のSTEP−2参照)、レバー操作またはプッシュ操作を中断した場合(図3のSTEP−6参照)、前記STEP−5と同様にブラシレスモータ12の停止制御が行われる(図3のSTEP−7参照)ように設定することができる。
【0057】
以上、本発明の好適な実施例についてそれぞれ説明したが、本発明は前述した実施例のブラシレスモータ駆動ドライバーに限定されることなく、ブラシレスモータによりそれぞれ駆動制御し得る各種の回転工具についても応用することが可能であり、その他本発明の精神を逸脱しない範囲内において多くの設計変更を行うことが可能である。
【図面の簡単な説明】
【0058】
【図1】本発明に係るブラシレスモータ駆動回転工具の一実施例としてブラシレスモータ駆動ドライバーの概略構成と制御系統とを示す説明図である。
【図2】本発明に係るブラシレスモータ駆動回転工具におけるブラシレスモータの制御手段の実施例を示す制御系統図である。
【図3】本発明に係るブラシレスモータ駆動回転工具におけるブラシレスモータの制御動作プログラムのフローチャート図である。
【図4】本発明に係るブラシレスモータ駆動回転工具の別の実施例として電動ドライバーの概略構成と制御系統とを示す説明図である。
【符号の説明】
【0059】
10、10′ ブラシレスモータ駆動ドライバー
12 ブラシレスモータ
12a、12b、12c 励磁巻線
14 ドライバービット
16 トルク設定クラッチ機構
18 プッシュ操作機構
20 レバー操作機構
22 正/逆切換操作機構
31a 第1のホール素子
31b 第1のホール素子
32 第2のホール素子
33 第3のホール素子
40 ブラシレスモータの駆動制御回路
42 AC/DC変換手段
44 インバータ回路
46 駆動回路
48 位置検出回路
50 制御手段(CPU)
P 商用電源
S31a レバー操作信号
S31b プッシュ操作信号
S32 クラッチ動作信号
S33 正/逆転切換え操作信号
S46a 駆動制御信号
S46b 停止制御信号
S48 位置検出信号
S52 負荷電流検出信号
【技術分野】
【0001】
本発明は、電動ドライバー等の電動回転工具の駆動用電動モータとして、3相直流ブラシレスモータを使用するブラシレスモータ駆動回転工具に係り、特にブラシレスモータ駆動回転工具の作業内容に応じて、所望のプッシュ操作方式またはレバー操作方式による駆動制御を行うための選択的操作と、前記回転工具に予め設定した所定値以上の負荷トルクが作用した際に、前記ブラシレスモータの停止制御を行うため、トルク設定クラッチ機構のクラッチ動作を検出する手段として、それぞれ磁気センサとしてのホール素子を使用することによって、前記ブラシレスモータの駆動制御を行う制御手段を、小型コンパクト化して回転工具の把持部ケーシング内に全て収納配置することを可能とし、しかも全面的な無接点化による長寿命とメンテナンスフリーとを実現し、ねじ等の定トルク締付け作業を適正かつ効率的に行うことができると共にトルク制御精度の向上を容易に実現することができるブラシレスモータ駆動回転工具に関するものである。
【背景技術】
【0002】
従来において、本出願人は、電動ドライバーに外来トルクによる過負荷電流が流れた際に、これを電気的に検知してモータへの通電を遮断すると同時にモータの電機子を短絡させて電気制動をモータに加え、該モータの回転を瞬時に停止することのできる自動通電遮断装置を備えるねじ締め装置を提案した(特許文献1参照)。すなわち、この特許文献1に記載のねじ締め装置は、モータにより回転駆動するドライバーシャフトを有する電動ドライバーにスイッチング回路を設けて、前記モータが駆動する際に流れる負荷電流が所定値以上の過負荷電流に変化した際にこれを検知してモータ駆動電流の供給を遮断した後一定時間経過後、モータ駆動電流の供給を復帰させるようにし、さらにモータ電機子回路に切換機構を設けて前記スイッチング回路がモータ駆動電流の供給を遮断動作する際に、前記モータ電機子回路を短絡するように構成し、これによりモータに電気制動を加えて、モータの回転を瞬時に停止することができるようにしたものである。
【0003】
また、従来より、電動ドライバーの駆動モータとして、DCモータが一般的に採用されている。今日、DCモータとしては、無接点化、ノイズ発生の防止、高トルク小形化、高速回転および長寿命等の特性に優れ、メンテナンスフリーとなる利点を有するブラシレスモータを採用することが提案され、実用化されている。
【0004】
しかるに、前記ブラシレスモータ、例えば3相直流ブラシレスモータの駆動制御に際しては、従来のDCモータの場合とは異なり、回転磁界を発生する駆動回路を必要とする。そして、この駆動回路としては、磁石ロータに対しその磁極の位置を検出する磁気センサ(一般にホール素子が使用される)と、前記ロータ磁極の位置に対応して一定方向の回転力を与えるように励磁される駆動コイル(3相コイル)と、これら磁気センサと駆動コイルとを付勢制御させる専用のIC回路(3相全波ブリッジ構成からなるインバータ回路)によって構成することができる。
【0005】
このような観点から、本出願人は、前述したブラシレスモータの採用を可能とした電動回転工具として、作業内容に応じて、所望のプッシュ操作方式またはレバー操作方式による駆動制御を選択的に行うことができる電動回転工具の駆動スイッチ方式を提案した(特許文献2参照)。
【0006】
すなわち、この特許文献2に記載の電動回転工具の駆動スイッチ方式は、(1) 電動モータと、この電動モータの出力軸に結合してねじ締め等の作業を行うドライバービットなどの回転工具と、前記電動モータを駆動させて回転工具により前記作業を開始する駆動スイッチと、前記作業の完了に伴う回転工具に生じる負荷トルクを検出するトルク検出手段と、前記負荷トルクが予め設定したトルク値に達した際に回転工具の駆動を停止させるトルク設定自動停止手段とを設けた電動回転工具において、(2) 回転工具を、ねじ等の作業対象に当接して押圧変位させることによりON動作を行うプッシュ操作方式の駆動スイッチと、(3) 電動回転工具の把持部に設けたスイッチレバーを、押圧変位させることによりON動作を行うレバー操作方式の駆動スイッチとを、それぞれ磁石と磁気センサとを組合せて構成し、(4) 前記磁気センサを電動モータの通電回路にそれぞれ接続して、前記いずれか一方の操作方式を選択し、選択された操作方式の磁気センサの磁気感知動作により、通電回路をON動作させて電動モータを駆動開始するように構成したものである。
【0007】
従って、この様に構成される電動回転工具の駆動スイッチ方式によれば、電動モータとしてブラシレスモータを使用する場合には、前記駆動スイッチを電動モータの駆動制御回路と共に、電動回転工具の把持部ケーシング内に全てコンパクトに収納配置することが可能となり、全面的な無接点化による長寿命とメンテナンスフリーとを実現して、その取扱いを簡便化することができる等の利点が得られる。
【0008】
また、本出願人は、ねじ等の定トルク締付け作業を常に適正かつ効率良く行うことができると共に、装置全体の小型コンパクト化とトルク制御精度の向上とを容易に達成することができる電動回転工具のトルク制御方式を提案した(特許文献3参照)。
【0009】
すなわち、この特許文献3に記載の電動回転工具のトルク制御方式は、(1) 電動モータを内蔵した把持部を設け、前記電動モータの出力軸に減速機構を介して作業軸としての従動軸を結合し、前記従動軸に対して所定値以上の負荷トルクが作用した際に前記出力軸と従動軸との係合を遮断するように動作するカム係合部を備えたクラッチ機構を設け、前記クラッチ機構の動作点をトルク設定値として調節可能に構成したトルク設定機構を設け、さらに前記クラッチ機構のクラッチ動作を検出すると同時に前記電動モータの駆動停止制御を行うトルク検出機構を設けてなる電動回転工具において、(2) 前記トルク検出機構は、前記クラッチ機構のカム係合部におけるカム係合が完全に解除されてクラッチ動作が完了した状態で、その検出動作と同時に前記電動モータの駆動停止制御を行うように設定したものである。
【0010】
従って、この様に構成される電動回転工具のトルク制御方式によれば、前記トルク検出機構を磁石と磁気センサとを組合せて、カム係合が完全に解除された状態において、検出動作を行うように構成することにより、従来のメカ・スイッチ機構を使用するトルク検出機構におけるようなスイッチ接点のスパークや磨耗の発生および周辺の電子機器や電子回路等に与える弊害を除去し得ると共に、構成部品の小型・長寿命化を実現して、電動工具全体をコンパクト化することができるものである。
【0011】
【特許文献1】特公昭57−43389号公報
【特許文献2】特開2002−254346号公報
【特許文献3】特開2002−321166号公報
【発明の開示】
【発明が解決しようとする課題】
【0012】
しかるに、前述した特許文献2において提案した駆動スイッチ方式を採用する電動回転工具と、前述した特許文献3において提案したトルク制御方式を採用する電動回転工具において、その全面的な無接点化による長寿命とメンテナンスフリーを実現するために、ブラシレスモータを使用し、しかもこのブラシレスモータの駆動制御を行うためのスイッチ機構として磁石と磁気センサとを組合せた電子スイッチにより構成することにより、前述した特許文献2および特許文献3にそれぞれ開示されるような利点を全て備える電動回転工具を得ることが可能である。
【0013】
そこで、本発明者は、鋭意研究並びに試作を重ねた結果、回転工具を回転駆動する直流ブラシレスモータと、このブラシレスモータの出力軸に結合された減速機構と、前記減速機構と回転工具との軸結合部に設けたトルク設定クラッチ機構と、前記ブラシレスモータの駆動制御回路を駆動制御する駆動スイッチとして選択的に操作することができるレバー操作機構とプッシュ操作機構と、前記駆動スイッチのレバー操作またはプッシュ操作により前記ブラシレスモータを回転駆動し、前記クラッチ機構のクラッチ動作の検出により前記ブラシレスモータの駆動停止を行うように構成した制御手段とを備えたブラシレスモータ駆動回転工具を構成し、前記ブラシレスモータの駆動スイッチとしてのレバー操作機構またはプッシュ操作機構に対して、それぞれ磁気センサとしてのホール素子を設けて、レバー操作またはプッシュ操作を検出するように設定すると共に、前記クラッチ機構に対してもホール素子を設けて、クラッチ動作を検出するように設定し、前者のホール素子による駆動スイッチの操作信号に基づいて前記ブラシレスモータの駆動制御回路を駆動制御してブラシレスモータを回転駆動し、後者のホール素子によるクラッチ機構の動作信号に基づいて前記ブラシレスモータの駆動制御回路を停止制御してブラシレスモータを駆動停止するように構成したブラシレスモータ駆動回転工具を完成することができた。
【0014】
すなわち、前記構成からなるブラシレスモータ駆動回転工具によれば、ねじ等の定トルク締付け作業を常に適正かつ効率良く行うことができると共に、装置全体の小型コンパクト化とトルク制御精度の向上とを容易に達成することができ、しかも従来のメカ・スイッチ機構を使用する駆動スイッチやトルク検出機構等におけるようなスイッチ接点によるスパークや磨耗の発生および周辺の電子機器や電子回路等に与える弊害を除去して、構成部品の小型・長寿命化を実現することができることを突き止めた。
【0015】
また、前記ブラシレスモータ駆動回転工具においては、前記ブラシレスモータの駆動制御回路を、ブラシレスモータを駆動するための電源電圧を得るための商用電源に接続されるAC/DC変換手段と、前記電源電圧をブラシレスモータの駆動電圧に変換するための半導体ブリッジ構成からなるインバータ回路と、前記インバータ回路のブリッジ構成からなる半導体を適宜ON/OFF制御する駆動回路と、ブラシレスモータの励磁巻線に対し回転子の位置を検出する位置検出回路と、前記位置検出回路により検出された位置検出信号により前記励磁巻線に供給する電流を切り替えるための制御信号を前記駆動回路に出力するための制御手段とから構成することができる。
【0016】
そこで、例えば前記クラッチ機構に対して設けたホール素子によるクラッチ機構の動作信号に基づいて、ブラシレスモータの駆動制御回路を停止制御するに際して、ブラシレスモータの駆動電力を遮断すると共に、ブラシレスモータの駆動制御回路に設けたインバータ回路のブリッジ構成からなる半導体を制御操作してブラシレスモータの励磁巻線を短絡し、回転子の制動を行うように設定することにより、ブラシレスモータの回転子の急制動を行って、ねじ締め作業におけるトルク制御精度をより一層向上することができることを突き止めた。
【0017】
また、前記ブラシレスモータの駆動制御回路を駆動制御する駆動スイッチとして選択的に操作することができるレバー操作機構とプッシュ操作機構に対して、そのレバー操作またはプッシュ操作を中断した場合においても、前記と同様にブラシレスモータの駆動電力を遮断すると共に、ブラシレスモータの駆動制御回路に設けたインバータ回路のブリッジ構成からなる半導体を制御操作してブラシレスモータの励磁巻線を短絡し、回転子の制動を行うように設定する。このように構成することにより、ねじの取付けおよび取外し作業において、駆動スイッチを中断した場合、ドライバービットの空転を防止して、作業の安全性と共に迅速化を容易に達成する達成することができることを突き止めた。
【0018】
代案として、本発明に係るブラシレスモータ駆動回転工具は、回転工具を回転駆動する直流ブラシレスモータと、このブラシレスモータの出力軸に結合された減速機構と、前記ブラシレスモータの負荷電流を検出する負荷電流検出手段と、前記ブラシレスモータの駆動制御回路を駆動制御する駆動スイッチとして選択的に操作することができるレバー操作機構とプッシュ操作機構と、前記駆動スイッチのレバー操作またはプッシュ操作により前記ブラシレスモータを回転駆動し、前記負荷電流検出手段により検出される負荷電流が予め設定した設定値を超えた際に前記ブラシレスモータの駆動停止を行うように構成した制御手段とを備えたブラシレスモータ駆動回転工具を構成し、前記ブラシレスモータの駆動スイッチとしてのレバー操作機構またはプッシュ操作機構に対して、それぞれ磁気センサとしてのホール素子を設けて、レバー操作またはプッシュ操作を検出するように設定し、前記ホール素子による駆動スイッチの操作信号に基づいて前記ブラシレスモータの駆動制御回路を駆動制御してブラシレスモータを回転駆動し、前記負荷電流検出手段により検出された負荷電流が設定値を超えた際に前記ブラシレスモータの駆動制御回路を停止制御してブラシレスモータを駆動停止するように構成することもできる。
【0019】
従って、このように構成されたブラシレスモータ駆動回転工具においても、前記と同様に、ねじ等の定トルク締付け作業を常に適正かつ効率良く行うことができると共に、装置全体の小型コンパクト化とトルク制御精度の向上とを容易に達成することができ、しかも従来のメカ・スイッチ機構を使用する駆動スイッチやトルク検出機構等におけるようなスイッチ接点によるスパークや磨耗の発生および周辺の電子機器や電子回路等に与える弊害を除去して、構成部品の小型・長寿命化を実現することができる。
【0020】
また、前記と同様に、負荷電流検出手段により検出された負荷電流が設定値を超えた時に、ブラシレスモータの駆動制御回路を停止制御するに際しては、ブラシレスモータの駆動電力を遮断すると共に、ブラシレスモータの駆動制御回路に設けたインバータ回路のブリッジ構成からなる半導体をON/OFF制御操作してブラシレスモータの励磁巻線を短絡し、回転子の制動を行うように設定して、ブラシレスモータの回転子の急制動を行い、トルク制御精度をより一層向上することができる。
【0021】
従って、本発明の目的は、ねじ等の定トルク締付け作業を常に適正かつ効率良く行うことができると共に、装置全体の小型コンパクト化とトルク制御精度の向上とを容易に達成することができ、しかも従来のメカ・スイッチ機構を使用する駆動スイッチやトルク検出機構等におけるようなスイッチ接点によるスパークや磨耗の発生および周辺の電子機器や電子回路等に与える弊害を除去して、構成部品の小型・長寿命化を実現することができるブラシレスモータ駆動回転工具を提供することにある。
【課題を解決するための手段】
【0022】
前記の目的を達成するため、本発明の請求項1に記載のブラシレスモータ駆動回転工具は、回転工具を回転駆動する直流ブラシレスモータと、このブラシレスモータの出力軸と、回転工具との軸結合部に設けたトルク設定クラッチ機構と、前記ブラシレスモータの駆動制御回路を駆動制御する駆動スイッチと、前記駆動スイッチの操作により前記ブラシレスモータを回転駆動し、前記クラッチ機構のクラッチ動作の検出により前記ブラシレスモータの駆動停止を行うように構成した制御手段とを備えたブラシレスモータ駆動回転工具において、
前記ブラシレスモータの駆動スイッチとしてのレバー操作機構またはプッシュ操作機構に対してレバー操作またはプッシュ操作を検出する第1のホール素子を設けると共に、前記クラッチ機構に対してクラッチ動作を検出する第2のホール素子を設け、
前記第1のホール素子による駆動スイッチの操作信号に基づいて前記ブラシレスモータの駆動制御回路を駆動制御してブラシレスモータを回転駆動し、前記第2のホール素子によるクラッチ機構の動作信号に基づいて前記ブラシレスモータの駆動制御回路を停止制御してブラシレスモータを駆動停止するように制御手段を構成したことを特徴とする。
【0023】
本発明の請求項2に記載のブラシレスモータ駆動回転工具は、前記ブラシレスモータの正/逆転切換え操作を行う正/逆切換操作機構をさらに設けると共に、前記正/逆切換操作機構に対して正/逆切換操作を検出する第3のホール素子を設け、
前記第3のホール素子による正/逆転切換え操作信号に基づいて、前記制御手段を介してブラシレスモータを正回転または逆回転するように構成してなることを特徴とする。
【0024】
本発明の請求項3に記載のブラシレスモータ駆動回転工具は、前記ブラシレスモータの駆動制御回路は、ブラシレスモータを駆動するための電源電圧を得るための商用電源に接続されるAC/DC変換手段と、前記電源電圧をブラシレスモータの駆動電圧に変換するための半導体ブリッジ構成からなるインバータ回路と、前記インバータ回路のブリッジ構成からなる半導体を適宜ON/OFF制御する駆動回路と、ブラシレスモータの励磁巻線に対し回転子の位置を検出する位置検出回路と、前記位置検出回路により検出された位置検出信号により前記励磁巻線に供給する電流を切り替えるための制御信号を前記駆動回路に出力するための駆動回路制御手段とから構成してなることを特徴とする。
【0025】
本発明の請求項4に記載のブラシレスモータ駆動回転工具は、前記制御手段により、前記第2のホール素子によるクラッチ機構の動作信号に基づいて、ブラシレスモータの駆動制御回路を停止制御するに際しては、ブラシレスモータの駆動電力を遮断すると共に、ブラシレスモータの駆動制御回路に設けたインバータ回路のブリッジ構成からなる半導体を制御操作してブラシレスモータの励磁巻線を短絡し、回転子の制動を行うように設定してなることを特徴とする。
【0026】
本発明の請求項5に記載のブラシレスモータ駆動回転工具は、前記ブラシレスモータの駆動スイッチとしてのレバー操作機構またはプッシュ操作機構のレバー操作またはプッシュ操作を中断した際に、前記第1のホール素子による駆動スイッチの操作中断信号に基づいて前記ブラシレスモータの駆動制御回路に設けたインバータ回路のブリッジ構成からなる半導体を制御操作してブラシレスモータの励磁巻線を短絡し、回転子の制動を行うブラシレスモータの停止制御を行うように設定してなることを特徴とする。
【0027】
本発明の請求項6に記載のブラシレスモータ駆動回転工具は、回転工具を回転駆動する直流ブラシレスモータと、このブラシレスモータの負荷電流を検出する負荷電流検出手段と、前記ブラシレスモータの駆動制御回路を駆動制御する駆動スイッチと、前記駆動スイッチの操作により前記ブラシレスモータを回転駆動し、前記負荷電流検出手段により検出される負荷電流が予め設定した設定値を超えた際に前記ブラシレスモータの駆動停止を行うように構成した制御手段とを備えたブラシレスモータ駆動回転工具において、
前記ブラシレスモータの駆動スイッチとしてのレバー操作機構またはプッシュ操作機構に対してレバー操作またはプッシュ操作を検出する第1のホール素子を設け、
前記第1のホール素子による駆動スイッチの操作信号に基づいて前記ブラシレスモータの駆動制御回路を駆動制御してブラシレスモータを回転駆動し、前記負荷電流検出手段により検出された負荷電流が設定値を超えた際に、前記ブラシレスモータの駆動制御回路を停止制御してブラシレスモータを駆動停止するように制御手段を構成したことを特徴とする。
【0028】
本発明の請求項7に記載のブラシレスモータ駆動回転工具は、前記ブラシレスモータの正/逆転切換え操作を行う正/逆切換操作機構をさらに設けると共に、前記正/逆切換操作機構に対して正/逆切換操作を検出する第3のホール素子を設け、
前記第3のホール素子による正/逆転切換え操作信号に基づいて、前記制御手段を介してブラシレスモータを正回転または逆回転するように構成してなることを特徴とする。
【0029】
本発明の請求項8に記載のブラシレスモータ駆動回転工具は、前記ブラシレスモータの駆動制御回路は、ブラシレスモータを駆動するための電源電圧を得るための商用電源に接続されるAC/DC変換手段と、前記電源電圧をブラシレスモータの駆動電圧に変換するための半導体ブリッジ構成からなるインバータ回路と、前記インバータ回路のブリッジ構成からなる半導体を適宜ON/OFF制御する駆動回路と、ブラシレスモータの励磁巻線に対し回転子の位置を検出する位置検出回路と、前記位置検出回路により検出された位置検出信号により前記励磁巻線に供給する電流を切り替えるための制御信号を前記駆動回路に出力するための制御手段とから構成してなることを特徴とする。
【0030】
本発明の請求項9に記載のブラシレスモータ駆動回転工具は、前記制御手段により、前記負荷電流検出手段により検出された負荷電流が設定値を超えた時に、ブラシレスモータの駆動制御回路を停止制御するに際しては、ブラシレスモータの駆動電力を遮断すると共に、ブラシレスモータの駆動制御回路に設けたインバータ回路のブリッジ構成からなる半導体を制御操作してブラシレスモータの励磁巻線を短絡し、回転子の制動を行うように設定してなることを特徴とする。
【0031】
本発明の請求項10に記載のブラシレスモータ駆動回転工具は、前記ブラシレスモータの駆動スイッチとしてのレバー操作機構またはプッシュ操作機構のレバー操作またはプッシュ操作を中断した際に、前記第1のホール素子による駆動スイッチの操作中断信号に基づいて前記ブラシレスモータの駆動制御回路に設けたインバータ回路のブリッジ構成からなる半導体を制御操作してブラシレスモータの励磁巻線を短絡し、回転子の制動を行うブラシレスモータの停止制御を行うように設定してなることを特徴とする。
【発明の効果】
【0032】
本発明の請求項1に記載のブラシレスモータ駆動回転工具によれば、駆動スイッチおよびトルク設定クラッチ機構による操作ないし検出動作を無接点化して、ねじ等の定トルク締付け作業を常に適正かつ効率良く行うことができると共に、制御手段全体の小型コンパクト化とトルク制御精度の向上とを容易に達成することができ、しかも従来のメカ・スイッチ機構を使用する駆動スイッチやトルク検出機構等におけるようなスイッチ接点によるスパークや磨耗の発生および周辺の電子機器や電子回路等に与える弊害を除去して、構成部品の小型・長寿命化を実現することができる。
【0033】
本発明の請求項6に記載のブラシレスモータ駆動回転工具によれば、駆動スイッチの操作を無接点化すると共に設定トルクの検出動作を負荷電流検出手段によって行うことにより、ねじ等の定トルク締付け作業を常に適正かつ効率良く行うことができると共に、制御手段全体の小型コンパクト化とトルク制御精度の向上とを容易に達成することができ、しかも従来のメカ・スイッチ機構を使用する駆動スイッチやトルク検出機構等におけるようなスイッチ接点によるスパークや磨耗の発生および周辺の電子機器や電子回路等に与える弊害を除去して、構成部品の小型・長寿命化を実現することができる。
【0034】
本発明の請求項2および7に記載のブラシレスモータ駆動回転工具によれば、ねじの取付けと共に、ねじの取外しを行うことを可能とするブラシレスモータの正/逆切換操作機構を設けた場合においても、前記正/逆切換操作機構の操作も無接点化することにより、前記と同様の優れた効果を期待することができる。
【0035】
本発明の請求項3および8に記載のブラシレスモータ駆動回転工具によれば、ブラシレスモータの駆動制御回路を、コンパクトな構成とすることができ、それぞれのホール素子と共にブラシレスモータ駆動回転工具の把持部ケーシング内部に一体化して容易に組み込むことが可能となり、ブラシレスモータ駆動回転工具全体を低コストに製造することができる。
【0036】
本発明の請求項4および9に記載のブラシレスモータ駆動回転工具によれば、このように構成したブラシレスモータの駆動制御回路において、ねじ締め操作に際し所定のねじ締めトルクによるねじ締めの完了に伴うブラシレスモータの停止制御を、ブラシレスモータの励磁巻線を短絡することによる回転子の急制動によって、トルク制御精度の向上を容易に実現することができる。
【0037】
本発明の請求項5および10に記載のブラシレスモータ駆動回転工具によれば、ブラシレスモータの駆動スイッチとしてのレバー操作機構またはプッシュ操作機構について、レバー操作またはプッシュ操作を中断した場合においても、前記ブラシレスモータの停止制御と同様に、ブラシレスモータの励磁巻線を短絡することによる回転子の急制動によって、前記レバー操作またはプッシュ操作の中断状態を保持し、ねじの取付けを行う場合のみならず、ねじの取外しを行う場合においても、適正かつ円滑なブラシレスモータ駆動回転工具の制御操作を達成することができる。
【発明を実施するための最良の形態】
【0038】
次に、本発明に係るブラシレスモータ駆動回転工具の実施例につき、添付図面を参照しながら以下詳細に説明する。
【実施例1】
【0039】
図1は、本発明に係るブラシレスモータ駆動回転工具の一実施例として、回転工具としてドライバービットを使用するブラシレスモータ駆動ドライバーの概略構成と制御系統とを示す説明図である。すなわち、図1において、参照符号10は内部にブラシレスモータ12を内蔵したブラシレスモータ駆動ドライバーを示し、このブラシレスモータ駆動ドライバー10は、前記ブラシレスモータ12の出力軸に適宜減速機構を介してドライバービット14を結合保持する従動軸が結合され、前記従動軸に対して予め設定した所定値以上の負荷トルクが作用した際に、前記出力軸と従動軸との係合を遮断するように動作するカム係合部を備えたトルク設定クラッチ機構16が設けられている。また、前記ブラシレスモータ12の出力軸と従動軸との結合部には、前記ドライバービット14を軸方向にプッシュ操作することにより変位して駆動スイッチとしての機能を有するプッシュ操作機構18が設けられている。さらに、前記ブラシレスモータ12を内蔵したブラシレスモータ駆動ドライバーの把持部ケーシングの外側面には、駆動スイッチとしての機能を有するレバー操作機構20を設けると共に、前記ブラシレスモータ12の正/逆転切換え操作を行う正/逆切換操作機構22が設けられている。
【0040】
そこで、本実施例のブラシレスモータ駆動ドライバー10においては、それぞれ図1に示すように、前記ブラシレスモータ12の駆動スイッチとして設けられたレバー操作機構20とプッシュ操作機構18に対して、磁気センサとして適宜検出用磁石と組み合わせた第1のホール素子31a、31bを設ける。また、前記トルク設定クラッチ機構16に対して、磁気センサとして適宜検出用磁石と組み合わせた第2のホール素子32を設ける。さらに、前記正/逆切換操作機構22に対して、磁気センサとして適宜検出用磁石と組み合わせた第3のホール素子33を設ける。
【0041】
この場合、前記第1のホール素子31a、31bは、例えば特開2002−254346号公報(前記特許文献2)に開示される駆動スイッチ(32、30)に対して設けられる磁気センサ(33b、31b)と同様に、駆動スイッチとしてのレバー操作機構20およびプッシュ操作機構18に対して設けることができる。また、前記第2のホール素子32は、例えば特開2002−321166号公報(前記特許文献3)に開示されるトルク検出機構(42)に対して設けられる磁気センサ(44)と同様に、トルク設定クラッチ機構16に対して設けることができる。
【0042】
一方、前記前記ブラシレスモータ12に対しては、駆動制御回路40が接続配置される。しかるに、このブラシレスモータ12の駆動制御回路40は、図2に示すように、ブラシレスモータ12を駆動するための電源電圧を得るための商用電源Pに接続されたAC/DC変換手段42と、前記電源電圧をブラシレスモータ12の駆動電圧に変換するための半導体3相全波ブリッジ構成からなるインバータ回路44と、前記インバータ回路44のブリッジ構成からなる半導体を適宜ON/OFF制御する駆動回路46と、ブラシレスモータ12の励磁巻線12a、12b、12cに対し回転子の位置を検出する位置検出回路48と、前記位置検出回路48により検出された位置検出信号により前記励磁巻線12a、12b、12cに供給する電流を切り替えるための制御信号を前記駆動回路46に出力するための制御手段50とから構成される。
【0043】
このように構成される本実施例におけるブラシレスモータ駆動ドライバー10においては、駆動スイッチとしてのレバー操作機構20またはプッシュ操作機構18を操作することにより、第1のホール素子31aまたは31bにより、駆動スイッチの操作状態を検出したレバー操作信号S31a またはプッシュ操作信号S31b が出力されて、制御手段50へ入力される。そこで、前記制御手段50においては、このような駆動スイッチの操作信号S31a またはS31b の入力に基づいて、ブラシレスモータ12の駆動制御回路40に設けた駆動回路46に対して駆動制御信号S46a を出力し、インバータ回路44を介してブラシレスモータ12を駆動制御する。なお、この場合において、ブラシレスモータ12の駆動制御回路40に設けた位置検出回路48により、ブラシレスモータ12の励磁巻線12a、12b、12cに対し回転子の位置を検出した位置検出信号S48が出力されて、制御手段50へ入力されると共に、前記制御手段50において、前記駆動制御信号S46a として駆動回路46およびインバータ回路44を介してブラシレスモータ12の励磁巻線12a、12b、12cに供給する電流を切り替えるための制御信号を得るように構成される(図1および図2参照)。これにより、ブラシレスモータ駆動ドライバー10は、所要のねじ締め作業を行うことができる。
【0044】
次いで、ブラシレスモータ駆動ドライバー10によるねじ締め作業が行われ、所要のねじ締めトルク値に到達し、トルク設定クラッチ機構16がクラッチ動作すると、第2のホール素子32により、この動作状態を検出したクラッチ動作信号S32が出力されて、制御手段50へ入力される。そこで、前記制御手段50においては、このようなクラッチ機構16の動作信号S32の入力に基づいて、ブラシレスモータ12の駆動制御回路40に設けた駆動回路46に対して停止制御信号S46b を出力し、インバータ回路44を介してブラシレスモータ12を停止制御する(図1および図2参照)。これにより、ブラシレスモータ駆動ドライバー10は、所要のねじ締め作業を完了することができる。
【0045】
なお、本実施例においては、例えばねじの取り外しを行うような場合において、ブラシレスモータ12を逆転駆動する必要がある。このような場合は、正/逆切換操作機構22を操作することによって、第3のホール素子33により、正回転または逆回転の状態を検出した正/逆転切換え操作信号S33が出力されて制御手段50へ入力される。そこで、前記制御手段50においては、前記正/逆転切換え操作信号S33に基づいて、ブラシレスモータ12の駆動制御回路40に設けた駆動回路46に対して駆動制御信号S46a を出力し、インバータ回路44を介してブラシレスモータ12を正回転または逆回転による駆動制御を行うように構成することができる(図1および図2参照)。
【0046】
また、本実施例においては、ブラシレスモータ12を停止制御する場合、前記制御手段50において、クラッチ機構16の動作信号S32の入力に基づいて、ブラシレスモータ12の駆動制御回路40に設けた駆動回路46に対して停止制御信号S46b を出力するに際して、ブラシレスモータ12の駆動電力を遮断すると共に、ブラシレスモータ12の駆動制御回路40に設けたインバータ回路44のブリッジ構成される半導体を制御操作してブラシレスモータ12の励磁巻線12a、12b、12cを短絡し、回転子の急制動を行うように設定することができる。
【0047】
次に、前記構成からなる本実施例におけるブラシレスモータ駆動ドライバー10のねじ締め作業に伴うブラシレスモータ12の駆動制御および停止制御を行う場合の制御プログラムについて、図3に示すフローチャートを参照しながら以下説明する。
【0048】
ねじ締め作業の開始に伴い、まず最初に正/逆切換操作機構22を操作して、ブラシレスモータ12を正回転または逆回転により駆動制御するかを決定する(STEP−1)。この正/逆切換操作機構22の操作状態は、第3のホール素子33により検出され、得られた正/逆転切換え操作信号S33が出力されて、制御手段50へ入力される。そして、前記制御手段50において、ブラシレスモータ12の駆動制御回路40に設けた駆動回路46に対して出力する駆動制御信号S46a について、ブラシレスモータ12を正回転または逆回転により駆動制御を行うように設定される。
【0049】
次に、駆動スイッチとしてのレバー操作機構20またはプッシュ操作機構18を操作する(STEP−2)。この場合、第1のホール素子31aまたは31bによって、駆動スイッチのレバー操作またはプッシュ操作による操作信号S31a またはS31b が出力されて、制御手段50へ入力される。そして、前記制御手段50において、ブラシレスモータ12の駆動制御回路40に設けた駆動回路46に対して駆動制御信号S46a を出力し、インバータ回路44を介してブラシレスモータ12を駆動制御する(STEP−3)。
このようにして、ブラシレスモータ駆動ドライバー10による所要のねじ締め作業が行われる。
【0050】
前記ブラシレスモータ駆動ドライバー10による所要のねじ締め作業が達成されると、トルク設定クラッチ機構16がクラッチ動作する(STEP−4)。この場合、第2のホール素子32によって、クラッチ動作信号S32が出力されて、制御手段50へ入力される。そして、前記制御手段50において、ブラシレスモータ12の駆動制御回路40に設けた駆動回路46に対して停止制御信号S46b を出力し、インバータ回路44を介してブラシレスモータ12を停止制御する(STEP−5)。このようにして、ブラシレスモータ駆動ドライバー10による所要のねじ締め作業を完了することができる。なお、継続してねじ締め作業を行う場合は、前記STEP−2〜STEP−5を繰り返し行うように設定する。
【0051】
なお、前記ブラシレスモータ12の停止制御を行う(STEP−5)に際しては、前述したように、ブラシレスモータ12の駆動電力を遮断すると共に、ブラシレスモータ12の駆動制御回路40に設けたインバータ回路44のブリッジ構成からなる半導体を制御操作してブラシレスモータ12の励磁巻線12a、12b、12cを短絡し、回転子の急制動を行うように設定することができる。
【0052】
また、本実施例においては、前記駆動スイッチとしてのレバー操作機構20またはプッシュ操作機構18の操作において(STEP−2)、レバー操作またはプッシュ操作を中断した場合(STEP−6)は、前記STEP−5と同様にブラシレスモータ12の停止制御が行われる(STEP−7)。すなわち、この場合、ブラシレスモータ12の駆動電力を遮断すると共に、ブラシレスモータ12の駆動制御回路40に設けたインバータ回路44のブリッジ構成からなる半導体を制御操作してブラシレスモータ12の励磁巻線12a、12b、12cを短絡し、回転子の急制動を行うように設定される。
【実施例2】
【0053】
図4は、本発明に係るブラシレスモータ駆動回転工具の別の実施例を示すブラシレスモータ駆動ドライバーの概略構成と制御系統とを示す説明図である。なお、説明の便宜上、前記図1に示す実施例1と同一の構成部分については、同一の参照符号を付して、詳細な説明は省略する。すなわち、本実施例のブラシレスモータ駆動ドライバー10′は、前記実施例におけるトルク設定クラッチ機構16を省略し、ブラシレスモータ12の駆動制御回路40に負荷電流検出手段(図示せず)を設けたものである。その他の構成は、基本的に前述した実施例1のブラシレスモータ駆動回転工具10と同じである。
【0054】
しかるに、本実施例においては、ブラシレスモータ12を駆動制御する場合の駆動スイッチ操作については、前述した実施例と全く同じである(図3のSTEP−1〜STEP−3参照)。そこで、ブラシレスモータ駆動ドライバー10′によるねじ締め作業が行われ、所要のねじ締めトルク値に到達した場合、本実施例においては、前述したトルク設定クラッチ機構16によるクラッチ動作(図3のSTEP−4参照)に代えて、負荷電流検出手段(図示せず)により検出される負荷電流検出信号S52が制御手段50へ入力される。そこで、前記制御手段50においては、入力された負荷電流検出信号S52を予め設定した設定値と比較して、設定値を超えた際に、ブラシレスモータ12の駆動制御回路40に設けた駆動回路46に対して停止制御信号S46b を出力し、インバータ回路44を介してブラシレスモータ12を停止制御するように設定する(図3のSTEP−5参照)。これにより、ブラシレスモータ駆動ドライバー10は、所要のねじ締め作業を完了することができる。
【0055】
また、本実施例においては、前述した実施例と同様に、ブラシレスモータ12の停止制御を行う(図3のSTEP−5参照)に際して、ブラシレスモータ12の駆動電力を遮断すると共に、ブラシレスモータ12の駆動制御回路40に設けたインバータ回路44のブリッジ構成からなる半導体を制御操作してブラシレスモータ12の励磁巻線12a、12b、12cを短絡し、回転子の急制動を行うように設定することができる。
【0056】
そして、本実施例においても、前述した実施例と同様に、前記駆動スイッチとしてのレバー操作機構20またはプッシュ操作機構18の操作において(図3のSTEP−2参照)、レバー操作またはプッシュ操作を中断した場合(図3のSTEP−6参照)、前記STEP−5と同様にブラシレスモータ12の停止制御が行われる(図3のSTEP−7参照)ように設定することができる。
【0057】
以上、本発明の好適な実施例についてそれぞれ説明したが、本発明は前述した実施例のブラシレスモータ駆動ドライバーに限定されることなく、ブラシレスモータによりそれぞれ駆動制御し得る各種の回転工具についても応用することが可能であり、その他本発明の精神を逸脱しない範囲内において多くの設計変更を行うことが可能である。
【図面の簡単な説明】
【0058】
【図1】本発明に係るブラシレスモータ駆動回転工具の一実施例としてブラシレスモータ駆動ドライバーの概略構成と制御系統とを示す説明図である。
【図2】本発明に係るブラシレスモータ駆動回転工具におけるブラシレスモータの制御手段の実施例を示す制御系統図である。
【図3】本発明に係るブラシレスモータ駆動回転工具におけるブラシレスモータの制御動作プログラムのフローチャート図である。
【図4】本発明に係るブラシレスモータ駆動回転工具の別の実施例として電動ドライバーの概略構成と制御系統とを示す説明図である。
【符号の説明】
【0059】
10、10′ ブラシレスモータ駆動ドライバー
12 ブラシレスモータ
12a、12b、12c 励磁巻線
14 ドライバービット
16 トルク設定クラッチ機構
18 プッシュ操作機構
20 レバー操作機構
22 正/逆切換操作機構
31a 第1のホール素子
31b 第1のホール素子
32 第2のホール素子
33 第3のホール素子
40 ブラシレスモータの駆動制御回路
42 AC/DC変換手段
44 インバータ回路
46 駆動回路
48 位置検出回路
50 制御手段(CPU)
P 商用電源
S31a レバー操作信号
S31b プッシュ操作信号
S32 クラッチ動作信号
S33 正/逆転切換え操作信号
S46a 駆動制御信号
S46b 停止制御信号
S48 位置検出信号
S52 負荷電流検出信号
【特許請求の範囲】
【請求項1】
回転工具を回転駆動する直流ブラシレスモータと、このブラシレスモータの出力軸と回転工具との軸結合部に設けたトルク設定クラッチ機構と、前記ブラシレスモータの駆動制御回路を駆動制御する駆動スイッチと、前記駆動スイッチの操作により前記ブラシレスモータを回転駆動し、前記クラッチ機構のクラッチ動作の検出により前記ブラシレスモータの駆動停止を行うように構成した制御手段とを備えたブラシレスモータ駆動回転工具において、
前記ブラシレスモータの駆動スイッチとしてのレバー操作機構またはプッシュ操作機構に対してレバー操作またはプッシュ操作を検出する第1のホール素子を設けると共に、前記クラッチ機構に対してクラッチ動作を検出する第2のホール素子を設け、
前記第1のホール素子による駆動スイッチの操作信号に基づいて前記ブラシレスモータの駆動制御回路を駆動制御してブラシレスモータを回転駆動し、前記第2のホール素子によるクラッチ機構の動作信号に基づいて前記ブラシレスモータの駆動制御回路を停止制御してブラシレスモータを駆動停止するように制御手段を構成したことを特徴とするブラシレスモータ駆動回転工具。
【請求項2】
前記ブラシレスモータの正/逆転切換え操作を行う正/逆切換操作機構をさらに設けると共に、前記正/逆切換操作機構に対して正/逆切換操作を検出する第3のホール素子を設け、
前記第3のホール素子による正/逆転切換え操作信号に基づいて、前記制御手段を介してブラシレスモータを正回転または逆回転するように構成してなることを特徴とする請求項1記載のブラシレスモータ駆動回転工具。
【請求項3】
前記ブラシレスモータの駆動制御回路は、ブラシレスモータを駆動するための電源電圧を得るための商用電源に接続されるAC/DC変換手段と、前記電源電圧をブラシレスモータの駆動電圧に変換するための半導体ブリッジ構成からなるインバータ回路と、前記インバータ回路のブリッジ構成からなる半導体を適宜ON/OFF制御する駆動回路と、ブラシレスモータの励磁巻線に対し回転子の位置を検出する位置検出回路と、前記位置検出回路により検出された位置検出信号により前記励磁巻線に供給する電流を切り替えるための制御信号を前記駆動回路に出力するための制御手段とから構成してなることを特徴とする請求項1または2記載のブラシレスモータ駆動回転工具。
【請求項4】
前記制御手段により、前記第2のホール素子によるクラッチ機構の動作信号に基づいて、ブラシレスモータの駆動制御回路を停止制御するに際しては、ブラシレスモータの駆動電力を遮断すると共に、ブラシレスモータの駆動制御回路に設けたインバータ回路のブリッジ構成からなる半導体を制御操作してブラシレスモータの励磁巻線を短絡し、回転子の制動を行うように設定してなることを特徴とする請求項1ないし3のいずれかに記載のブラシレスモータ駆動回転工具。
【請求項5】
前記ブラシレスモータの駆動スイッチとしてのレバー操作機構またはプッシュ操作機構のレバー操作またはプッシュ操作を中断した際に、前記第1のホール素子による駆動スイッチの操作中断信号に基づいて前記ブラシレスモータの駆動制御回路に設けたインバータ回路のブリッジ構成からなる半導体を制御操作してブラシレスモータの励磁巻線を短絡し、回転子の制動を行うブラシレスモータの停止制御を行うように設定してなることを特徴とする請求項1ないし4のいずれかに記載のブラシレスモータ駆動回転工具。
【請求項6】
回転工具を回転駆動する直流ブラシレスモータと、このブラシレスモータの負荷電流を検出する負荷電流検出手段と、前記ブラシレスモータの駆動制御回路を駆動制御する駆動スイッチと、前記駆動スイッチの操作により前記ブラシレスモータを回転駆動し、前記負荷電流検出手段により検出される負荷電流が予め設定した設定値を超えた際に前記ブラシレスモータの駆動停止を行うように構成した制御手段とを備えたブラシレスモータ駆動回転工具において、
前記ブラシレスモータの駆動スイッチとしてのレバー操作機構またはプッシュ操作機構に対してレバー操作またはプッシュ操作を検出する第1のホール素子を設け、
前記第1のホール素子による駆動スイッチの操作信号に基づいて前記ブラシレスモータの駆動制御回路を駆動制御してブラシレスモータを回転駆動し、前記負荷電流検出手段により検出された負荷電流が設定値を超えた際に前記ブラシレスモータの駆動制御回路を停止制御してブラシレスモータを駆動停止するように制御手段を構成したことを特徴とするブラシレスモータ駆動回転工具。
【請求項7】
前記ブラシレスモータの正/逆転切換え操作を行う正/逆切換操作機構をさらに設けると共に、前記正/逆切換操作機構に対して正/逆切換操作を検出する第3のホール素子を設け、
前記第3のホール素子による正/逆転切換え操作信号に基づいて、前記制御手段を介してブラシレスモータを正回転または逆回転するように構成してなることを特徴とする請求項6記載のブラシレスモータ駆動回転工具。
【請求項8】
前記ブラシレスモータの駆動制御回路は、ブラシレスモータを駆動するための電源電圧を得るためのAC/DC変換手段と、前記電源電圧をブラシレスモータの駆動電圧に変換するための商用電源に接続される半導体ブリッジ構成からなるインバータ回路と、前記インバータ回路のブリッジ構成からなる半導体を適宜ON/OFF制御する駆動回路と、ブラシレスモータの励磁巻線に対し回転子の位置を検出する位置検出回路と、前記位置検出回路により検出された位置検出信号により前記励磁巻線に供給する電流を切り替えるための制御信号を前記駆動回路に出力するための制御手段とから構成してなることを特徴とする請求項6または7記載のブラシレスモータ駆動回転工具。
【請求項9】
前記制御手段により、前記負荷電流検出手段により検出された負荷電流が設定値を超えた時に、ブラシレスモータの駆動制御回路を停止制御するに際しては、ブラシレスモータの駆動電力を遮断すると共に、ブラシレスモータの駆動制御回路に設けたインバータ回路のブリッジ構成からなる半導体を制御操作してブラシレスモータの励磁巻線を短絡し、回転子の制動を行うように設定してなることを特徴とする請求項6ないし8のいずれかに記載のブラシレスモータ駆動回転工具。
【請求項10】
前記ブラシレスモータの駆動スイッチとしてのレバー操作機構またはプッシュ操作機構のレバー操作またはプッシュ操作を中断した際に、前記第1のホール素子による駆動スイッチの操作中断信号に基づいて前記ブラシレスモータの駆動制御回路に設けたインバータ回路のブリッジ構成からなる半導体を制御操作してブラシレスモータの励磁巻線を短絡し、回転子の制動を行うブラシレスモータの停止制御を行うように設定してなることを特徴とする請求項6ないし9のいずれかに記載のブラシレスモータ駆動回転工具。
【請求項1】
回転工具を回転駆動する直流ブラシレスモータと、このブラシレスモータの出力軸と回転工具との軸結合部に設けたトルク設定クラッチ機構と、前記ブラシレスモータの駆動制御回路を駆動制御する駆動スイッチと、前記駆動スイッチの操作により前記ブラシレスモータを回転駆動し、前記クラッチ機構のクラッチ動作の検出により前記ブラシレスモータの駆動停止を行うように構成した制御手段とを備えたブラシレスモータ駆動回転工具において、
前記ブラシレスモータの駆動スイッチとしてのレバー操作機構またはプッシュ操作機構に対してレバー操作またはプッシュ操作を検出する第1のホール素子を設けると共に、前記クラッチ機構に対してクラッチ動作を検出する第2のホール素子を設け、
前記第1のホール素子による駆動スイッチの操作信号に基づいて前記ブラシレスモータの駆動制御回路を駆動制御してブラシレスモータを回転駆動し、前記第2のホール素子によるクラッチ機構の動作信号に基づいて前記ブラシレスモータの駆動制御回路を停止制御してブラシレスモータを駆動停止するように制御手段を構成したことを特徴とするブラシレスモータ駆動回転工具。
【請求項2】
前記ブラシレスモータの正/逆転切換え操作を行う正/逆切換操作機構をさらに設けると共に、前記正/逆切換操作機構に対して正/逆切換操作を検出する第3のホール素子を設け、
前記第3のホール素子による正/逆転切換え操作信号に基づいて、前記制御手段を介してブラシレスモータを正回転または逆回転するように構成してなることを特徴とする請求項1記載のブラシレスモータ駆動回転工具。
【請求項3】
前記ブラシレスモータの駆動制御回路は、ブラシレスモータを駆動するための電源電圧を得るための商用電源に接続されるAC/DC変換手段と、前記電源電圧をブラシレスモータの駆動電圧に変換するための半導体ブリッジ構成からなるインバータ回路と、前記インバータ回路のブリッジ構成からなる半導体を適宜ON/OFF制御する駆動回路と、ブラシレスモータの励磁巻線に対し回転子の位置を検出する位置検出回路と、前記位置検出回路により検出された位置検出信号により前記励磁巻線に供給する電流を切り替えるための制御信号を前記駆動回路に出力するための制御手段とから構成してなることを特徴とする請求項1または2記載のブラシレスモータ駆動回転工具。
【請求項4】
前記制御手段により、前記第2のホール素子によるクラッチ機構の動作信号に基づいて、ブラシレスモータの駆動制御回路を停止制御するに際しては、ブラシレスモータの駆動電力を遮断すると共に、ブラシレスモータの駆動制御回路に設けたインバータ回路のブリッジ構成からなる半導体を制御操作してブラシレスモータの励磁巻線を短絡し、回転子の制動を行うように設定してなることを特徴とする請求項1ないし3のいずれかに記載のブラシレスモータ駆動回転工具。
【請求項5】
前記ブラシレスモータの駆動スイッチとしてのレバー操作機構またはプッシュ操作機構のレバー操作またはプッシュ操作を中断した際に、前記第1のホール素子による駆動スイッチの操作中断信号に基づいて前記ブラシレスモータの駆動制御回路に設けたインバータ回路のブリッジ構成からなる半導体を制御操作してブラシレスモータの励磁巻線を短絡し、回転子の制動を行うブラシレスモータの停止制御を行うように設定してなることを特徴とする請求項1ないし4のいずれかに記載のブラシレスモータ駆動回転工具。
【請求項6】
回転工具を回転駆動する直流ブラシレスモータと、このブラシレスモータの負荷電流を検出する負荷電流検出手段と、前記ブラシレスモータの駆動制御回路を駆動制御する駆動スイッチと、前記駆動スイッチの操作により前記ブラシレスモータを回転駆動し、前記負荷電流検出手段により検出される負荷電流が予め設定した設定値を超えた際に前記ブラシレスモータの駆動停止を行うように構成した制御手段とを備えたブラシレスモータ駆動回転工具において、
前記ブラシレスモータの駆動スイッチとしてのレバー操作機構またはプッシュ操作機構に対してレバー操作またはプッシュ操作を検出する第1のホール素子を設け、
前記第1のホール素子による駆動スイッチの操作信号に基づいて前記ブラシレスモータの駆動制御回路を駆動制御してブラシレスモータを回転駆動し、前記負荷電流検出手段により検出された負荷電流が設定値を超えた際に前記ブラシレスモータの駆動制御回路を停止制御してブラシレスモータを駆動停止するように制御手段を構成したことを特徴とするブラシレスモータ駆動回転工具。
【請求項7】
前記ブラシレスモータの正/逆転切換え操作を行う正/逆切換操作機構をさらに設けると共に、前記正/逆切換操作機構に対して正/逆切換操作を検出する第3のホール素子を設け、
前記第3のホール素子による正/逆転切換え操作信号に基づいて、前記制御手段を介してブラシレスモータを正回転または逆回転するように構成してなることを特徴とする請求項6記載のブラシレスモータ駆動回転工具。
【請求項8】
前記ブラシレスモータの駆動制御回路は、ブラシレスモータを駆動するための電源電圧を得るためのAC/DC変換手段と、前記電源電圧をブラシレスモータの駆動電圧に変換するための商用電源に接続される半導体ブリッジ構成からなるインバータ回路と、前記インバータ回路のブリッジ構成からなる半導体を適宜ON/OFF制御する駆動回路と、ブラシレスモータの励磁巻線に対し回転子の位置を検出する位置検出回路と、前記位置検出回路により検出された位置検出信号により前記励磁巻線に供給する電流を切り替えるための制御信号を前記駆動回路に出力するための制御手段とから構成してなることを特徴とする請求項6または7記載のブラシレスモータ駆動回転工具。
【請求項9】
前記制御手段により、前記負荷電流検出手段により検出された負荷電流が設定値を超えた時に、ブラシレスモータの駆動制御回路を停止制御するに際しては、ブラシレスモータの駆動電力を遮断すると共に、ブラシレスモータの駆動制御回路に設けたインバータ回路のブリッジ構成からなる半導体を制御操作してブラシレスモータの励磁巻線を短絡し、回転子の制動を行うように設定してなることを特徴とする請求項6ないし8のいずれかに記載のブラシレスモータ駆動回転工具。
【請求項10】
前記ブラシレスモータの駆動スイッチとしてのレバー操作機構またはプッシュ操作機構のレバー操作またはプッシュ操作を中断した際に、前記第1のホール素子による駆動スイッチの操作中断信号に基づいて前記ブラシレスモータの駆動制御回路に設けたインバータ回路のブリッジ構成からなる半導体を制御操作してブラシレスモータの励磁巻線を短絡し、回転子の制動を行うブラシレスモータの停止制御を行うように設定してなることを特徴とする請求項6ないし9のいずれかに記載のブラシレスモータ駆動回転工具。
【図1】



【図2】
【図3】

【図4】
【図2】
【図3】
【図4】
【公開番号】特開2006−55980(P2006−55980A)
【公開日】平成18年3月2日(2006.3.2)
【国際特許分類】
【出願番号】特願2004−254480(P2004−254480)
【出願日】平成16年9月1日(2004.9.1)
【出願人】(390041380)
【Fターム(参考)】
【公開日】平成18年3月2日(2006.3.2)
【国際特許分類】
【出願日】平成16年9月1日(2004.9.1)
【出願人】(390041380)
【Fターム(参考)】
[ Back to top ]