
ブラシレス電気機械、それを備える装置、移動体、発電機、及びロボット
【課題】ブラシレス電気機械における磁場の利用効率を高めて電気機械の効率を向上させる技術を提供する。
【解決手段】本発明によるブラシレス電気機械は、複数の永久磁石32Uを有する第1の駆動部材30Uと、複数の電磁コイルを有し第1の駆動部材30Uに対して相対的に移動可能な第2の駆動部材10と、第2の駆動部材10を挟んで第1の駆動部材30Uと反対側に配置され、第1の駆動部材30Uとの相対的な位置関係が固定された第3の駆動部材30Lとを有する。第2の駆動部材10には、第1と第2の駆動部材の相対位置を検出する磁気センサ40A,40Bと、磁気センサの出力信号を利用してブラシレス電気機械の制御を行う制御回路とを備える。第3の駆動部材30Lは、第1の駆動部材30Uの各永久磁石と対向する位置に、各永久磁石と共同して第2の駆動部材10の位置における磁場を強める磁場強化部材32Lを有する。
【解決手段】本発明によるブラシレス電気機械は、複数の永久磁石32Uを有する第1の駆動部材30Uと、複数の電磁コイルを有し第1の駆動部材30Uに対して相対的に移動可能な第2の駆動部材10と、第2の駆動部材10を挟んで第1の駆動部材30Uと反対側に配置され、第1の駆動部材30Uとの相対的な位置関係が固定された第3の駆動部材30Lとを有する。第2の駆動部材10には、第1と第2の駆動部材の相対位置を検出する磁気センサ40A,40Bと、磁気センサの出力信号を利用してブラシレス電気機械の制御を行う制御回路とを備える。第3の駆動部材30Lは、第1の駆動部材30Uの各永久磁石と対向する位置に、各永久磁石と共同して第2の駆動部材10の位置における磁場を強める磁場強化部材32Lを有する。
【発明の詳細な説明】
【技術分野】
【0001】
この発明は、永久磁石と電磁コイルとを利用したブラシレス電気機械(brushless electric machine)に関する。
【背景技術】
【0002】
永久磁石と電磁コイルとを利用したブラシレス電気機械としては、例えば下記の特許文献1に記載されたブラシレスモータが知られている。
【0003】
【特許文献1】特開2001−298982号公報
【0004】
図26は、従来のブラシレスモータの構成の一例を示す概念図である。このブラシレスモータは、電磁コイル列12と磁石列32とを備えている。磁石列32の近傍には、磁場が例示されている。従来のブラシレスモータでは、永久磁石による磁場が開放状態にあるため、電磁コイル列12による磁場の利用効率がかなり低いという問題があった。このような問題はモータに限らず発電機にも共通する問題であり、一般にブラシレス電気機械に共通する問題であった。
【発明の概要】
【発明が解決しようとする課題】
【0005】
本発明は、ブラシレス電気機械における磁場の利用効率を高めて電気機械の効率を向上させる技術を提供することを目的とする。
【課題を解決するための手段】
【0006】
本発明は、上述の課題の少なくとも一部を解決するためになされたものであり、以下の形態又は適用例として実現することが可能である。
【0007】
[適用例1]
ブラシレス電気機械であって、
複数の永久磁石を有する第1の駆動部材と、
複数の電磁コイルを有し、前記第1の駆動部材に対して相対的に移動可能な第2の駆動部材と、
前記第2の駆動部材を挟んで前記第1の駆動部材と反対側に配置され、前記第1の駆動部材との相対的な位置関係が固定された第3の駆動部材と、
前記第2の駆動部材に設けられて前記第1と第2の駆動部材の相対位置を検出する磁気センサと、
前記磁気センサの出力信号を利用して、前記ブラシレス電気機械の動作を制御する制御回路と、
を備え、
前記第3の駆動部材は、前記第1の駆動部材の各永久磁石と対向する位置に、前記各永久磁石と共同して前記第2の駆動部材の位置における磁場を強める磁場強化部材を有する、ブラシレス電気機械。
【0008】
この構成によれば、永久磁石と磁場強化部材とが共同して磁場を強めるので、永久磁石による磁場の利用効率を高めて電気機械の効率を向上させることができる。
【0009】
[適用例2]
適用例1記載のブラシレス電気機械であって、
前記磁場強化部材は、永久磁石である、ブラシレス電気機械。
【0010】
この構成によれば、第2の駆動部材が永久磁石によって上下から挟まれるので、第2の駆動部材の位置における磁場をきわめて強くすることができる。
【0011】
[適用例3]
適用例1記載のブラシレス電気機械であって、
前記磁場強化部材は、強磁性体である、ブラシレス電気機械。
【0012】
この構成によれば、より少ない永久磁石を用いて、第2の駆動部材の位置における磁場を強くすることができる。
【0013】
[適用例4]
適用例1ないし3のいずれかに記載のブラシレス電気機械であって、
各永久磁石は、前記第2の駆動部材に面する側に突出する突部を有する、ブラシレス電気機械。
【0014】
この構成によれば、突部近傍の磁場をより強めることができる。
【0015】
[適用例5]
適用例1ないし4のいずれかに記載のブラシレス電気機械であって、
前記複数の電磁コイルは、N個(Nは1以上の整数)の電磁コイルをそれぞれ有するM相(Mは2以上の整数)のコイル群を有し、
前記制御回路は、前記M相のコイル群が同時に駆動力を発生するように前記M相のコイル群を駆動する、ブラシレス電気機械。
【0016】
この構成によれば、M相のコイル群が同時に駆動力を発生するので、大きな駆動力を発生させることが可能となる。
【0017】
[適用例6]
適用例1ないし5のいずれかに記載のブラシレス電気機械であって、
前記磁気センサは、前記第1と第2の駆動部材の相対位置に応じてアナログ的変化を示す出力信号を出力するセンサである、ブラシレス電気機械。
【0018】
この構成によれば、磁気センサのアナログ的変化を利用して効率良くブラシレス電気機械を駆動することができる。
【0019】
[適用例7]
適用例6記載のブラシレス電気機械であって、
前記制御回路は、前記磁気センサの出力信号のアナログ的変化を利用したPWM制御を実行することによって、前記磁気センサの出力信号のアナログ的変化を模擬した駆動信号を生成するPWM制御回路を含む、ブラシレス電気機械。
【0020】
この構成によれば、コイルの逆起電力波形に近い形状の駆動信号でブラシレス電気機械を駆動できるので、効率を向上することが可能である。
【0021】
[適用例8]
適用例1ないし7のいずれかに記載のブラシレス電気機械であって、
前記制御回路は、前記電磁コイルから電力を回生する回生回路を含む、ブラシレス電気機械。
この構成によれば、ブラシレス電気機械を用いて発電を行うことが可能である。
【0022】
なお、本発明は、種々の形態で実現することが可能であり、例えば、ブラシレスモータ、ブラシレス発電機、それらの制御方法(又は駆動方法)、それらを用いたアクチュエータ又は発電装置等の形態で実現することができる。
【図面の簡単な説明】
【0023】
【図1】第1実施例における電動モータのモータ本体の構成を示す断面図である。
【図2】磁気センサ出力とコイルの逆起電力波形との関係を示す説明図である。
【図3】コイルの印加電圧と逆起電力との関係を示す模式図である。
【図4】第1実施例のモータの正転動作の様子を示す説明図である。
【図5】第1実施例のモータの逆転動作の様子を示す説明図である。
【図6】実施例の電気機械の用途と好ましい材料との関係を示す説明図である。
【図7】モータの駆動回路ユニットの構成を示すブロック図である。
【図8】ドライバ回路の内部構成を示す図である。
【図9】駆動制御部の内部構成と動作を示す説明図である。
【図10】センサ出力波形と駆動信号波形の対応関係を示す説明図である。
【図11】PWM部の内部構成を示すブロック図である。
【図12】モータ正転時のPWM部の動作を示すタイミングチャートである。
【図13】モータ逆転時のPWM部の動作を示すタイミングチャートである。
【図14】励磁区間設定部の内部構成と動作を示す説明図である。
【図15】第1実施例のモータを矩形波で駆動した場合と、正弦波で駆動した場合の各種の信号波形を比較して示す説明図である。
【図16】ドライバ回路の他の構成を示す図である。
【図17】実施例のモータの無負荷時の回転数を示すグラフである。
【図18】回生制御部と整流回路の内部構成を示す図である。
【図19】第1実施例の第1変形例のモータ構成を示す説明図である。
【図20】第1実施例の第2変形例のモータ構成を示す説明図である。
【図21】3相ブラシレスモータの正転動作の様子を示す説明図である。
【図22】第1実施例の第3変形例の3相リニアモータの構成を示す説明図である。
【図23】第2実施例における電動モータのモータ本体の構成を示す断面図である。
【図24】第2実施例のモータの正転動作の様子を示す説明図である。
【図25】第2実施例の第1変形例のモータ構成を示す説明図である。
【図26】従来のブラシレスモータの構成の一例を示す概念図である。
【図27】本発明の実施例によるモータを利用したプロジェクタを示す説明図である。
【図28】本発明の実施例によるモータを利用した燃料電池式携帯電話を示す説明図である。
【図29】本発明の実施例によるモータ/発電機を利用した移動体の一例としての電動自転車(電動アシスト自転車)を示す説明図である。
【図30】本発明の実施例によるモータを利用したロボットの一例を示す説明図である。
【発明を実施するための形態】
【0024】
次に、本発明の実施の形態を以下の順序で説明する。
A.第1実施例のモータ構成と動作の概要:
B.駆動回路ユニットの構成:
C.第1実施例のモータ構成の変形例:
D.第2実施例のモータ構成と動作の概要:
E.変形例:
【0025】
A.第1実施例のモータ構成と動作の概要:
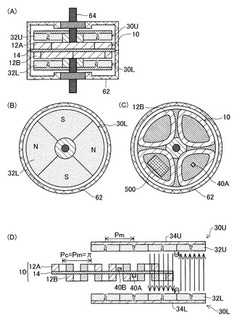
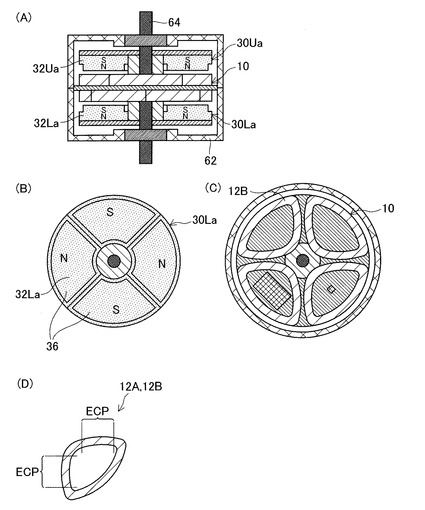
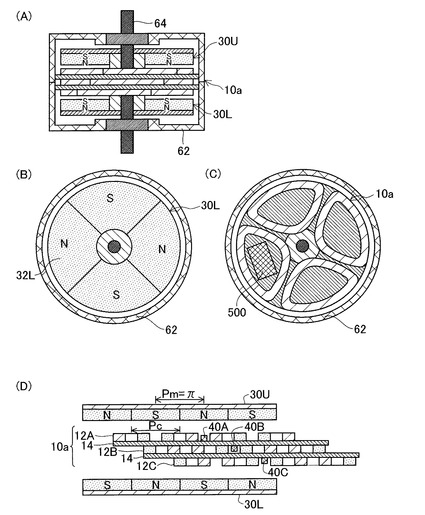
図1(A)〜(D)は、本発明の第1実施例としてのブラシレスモータのモータ本体の構成を示す断面図である。このモータ本体は、ステータ部10と、上部ロータ部30Uと、下部ロータ部30Lとを有している。これらの部材10,30U,30Lは、それぞれ略円盤状の形状を有している。図1(B)は、下部ロータ部30Lの水平断面図である。下部ロータ部30Lは、それぞれ略扇状の形状を有する4つの永久磁石32Lを有している。上部ロータ部30Uも、下部ロータ部30Lと同じ構成を有しているので図示を省略する。上部ロータ部30Uと下部ロータ部30Lは、中心軸64に固定されており、同時に回転する。各磁石32U,32Lの磁化方向は、回転軸64と平行な方向である。
【0026】
図1(C)は、ステータ部10の水平断面図である。ステータ部10は、図1(A)に示すように、複数のA相コイル12Aと、複数のB相コイル12Bと、これらのコイル12A,12Bを支持する支持部材14とを有している。図1(C)は、このB相コイル12Bの側を示している。この例では、B相コイル12Bは4つ設けられており、それぞれ略扇状の形状に巻かれている。A相コイル12Aも同じである。ステータ部10には、さらに、駆動回路ユニット500が設置されている。図1(A)に示すように、ステータ部10は、ケーシング62に固定されている。
【0027】
図1(D)は、ステータ部10と2つのロータ部30U,30Lの関係を示す概念図である。ステータ部10の支持部材14上には、A相用の磁気センサ40AとB相用の磁気センサ40Bとが設けられている。磁気センサ40A,40Bは、ロータ部30U,30Lの位置(すなわちモータの位相)を検出するためのものである。なお、これらのセンサを以下では「A相センサ」及び「B相センサ」とも呼ぶ。A相センサ40Aは、2つのA相コイル12Aの中間の中央位置に配置されている。B相センサ40Bも、同様に、2つのB相コイル12Bの中間の中央位置に配置されている。この例では、A相センサ40Aが支持部材14の下側の面においてB相コイル12Bとともに配置されているが、この代わりに、支持部材14の上側の面に配置されていても良い。B相センサ40Bも同様である。なお、図1(C)からも理解できるように、この実施例ではA相センサ40AをB相コイル12Bの内部に配置するので、センサ40Aを配置する空間を確保しやすいという利点がある。
【0028】
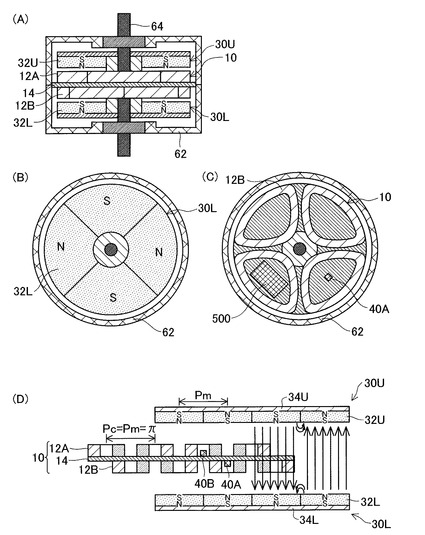
図1(D)に示すように、磁石32U,32Lは、それぞれ一定の磁極ピッチPmで配置されており、隣接する磁石同士は逆方向に磁化されている。A相コイル12Aは、一定のピッチPcで配置されており、隣接するコイル同士が逆向きに励磁される。B相コイル12Bも同様である。本実施例では、磁極ピッチPmはコイルピッチPcに等しく、電気角でπに相当する。なお、電気角の2πは、駆動信号の位相が2πだけ変化したときに移動する機械的な角度又は距離に対応づけられる。本実施例では、駆動信号の位相が2πだけ変化すると、ロータ部30U,30Lが磁極ピッチPmの2倍だけ移動する。また、A相コイル12Aと、B相コイル12Bは、位相がπ/2だけずれた位置に配置されている。
【0029】
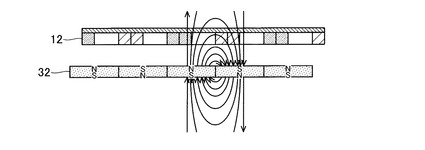
上部ロータ部30Uの磁石32Uと、下部ロータ部30Lの磁石32Lは、ステータ部10に向かう磁極が互いに異なる極性(S極とN極)となるように配置されている。換言すれば、上部ロータ部30Uの磁石32Uと、下部ロータ部30Lの磁石32Lは、互いに反対の極が向き合うように配置されている。この結果、図1(D)の右端に示すように、これらの磁石32U,32Lの間の磁場は、ほぼ直線状の磁力線で表されるものとなり、これらの磁石32U,32Lの間で閉じたものとなる。このような閉じた磁場は、前述した図26に示した開放された磁場に比べて強いことが理解できる。この結果、磁場の利用効率が高まり、モータ効率を向上させることが可能である。なお、磁石32U,32Lの外側の面には、強磁性体製の磁気ヨーク34U,34Lがそれぞれ設けられていることが好ましい。磁気ヨーク34U,34Lは、コイルにおける磁場をより強めることが可能である。但し、磁気ヨーク34U,34Lは省略してもよい。
【0030】
図2は、センサ出力とコイルの逆起電力波形との関係を示す説明図である。図2(A)は、図1(D)と同じものである。図2(B)は、A相コイル12Aに発生する逆起電力の波形の例を示しており、図2(C),(D)は、A相センサ40AとB相センサ40Bのセンサ出力SSA,SSBの波形の例を示している。これらのセンサ40A,40Bは、モータ運転時のコイルの逆起電力とほぼ相似形状のセンサ出力SSA,SSBを発生することができる。図2(B)に示すコイル12Aの逆起電力は、モータの回転数とともに上昇する傾向にあるが、波形形状(正弦波)はほぼ相似形状に保たれる。センサ40A,40Bとしては、例えばホール効果を利用したホールICを採用することができる。この例では、センサ出力SSAと逆起電力Ecは、いずれも正弦波か、正弦波に近い波形である。後述するように、このモータの駆動制御回路は、センサ出力SSA,SSBを利用して、逆起電力Ecとほぼ相似波形の電圧をそれぞれのコイル12A,12Bに印加する。
【0031】
ところで、電動モータは、機械的エネルギと電気的エネルギとを相互に変換するエネルギ変換装置として機能するものである。そして、コイルの逆起電力は、電動モータの機械的エネルギが電気的エネルギに変換されたものである。従って、コイルに印加する電気的エネルギを機械的エネルギに変換する場合(すなわちモータを駆動する場合)には、逆起電力と相似波形の電圧を印加することによって、最も効率良くモータを駆動することが可能である。なお、以下に説明するように、「逆起電力と相似波形の電圧」は、逆起電力と逆向きの電流を発生する電圧を意味している。
【0032】
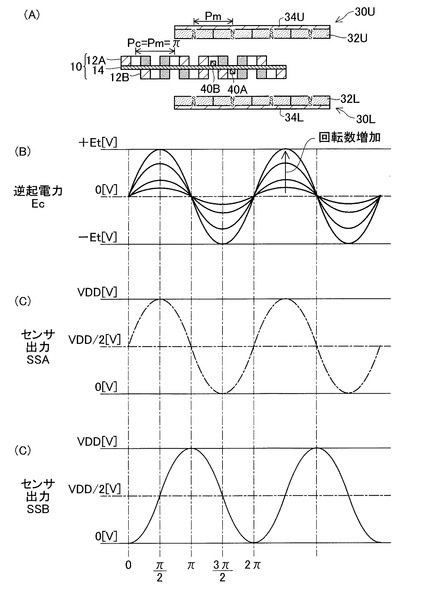
図3(A)は、コイルの印加電圧と逆起電力との関係を示す模式図である。ここで、コイルは交流の逆起電力Ecと抵抗Rcとで模擬されている。また、この回路では、交流印加電圧Ei及びコイルと並列に電圧計Vが接続されている。なお、逆起電力Ecを「誘起電圧Ec」とも呼び、また、印加電圧Eiを「励磁電圧Ei」とも呼ぶ。コイルに交流電圧Eiを印加してモータを駆動すると、印加電圧Eiと逆の電流を流す方向に逆起電力Ecが発生する。モータが回転している状態でスイッチSWを開放すると、電圧計Vで逆起電力Ecを測定することができる。スイッチSWを開放した状態で測定される逆起電力Ecの極性は、スイッチSWを閉じた状態で測定される印加電圧Eiと同じ極性である。上述の説明において「逆起電力とほぼ相似波形の電圧を印加する」という文言は、このような電圧計Vで測定された逆起電力Ecと同じ極性を有するほぼ相似形状の波形を有する電圧を印加することを意味している。
【0033】
図3(B)は、本実施例で採用している駆動方法の概要を示している。ここでは、モータを、A相コイル12Aと、永久磁石32Uと、A相センサ40Aとで模擬している。永久磁石32Uを有するロータが回転すると、センサ40Aに交流電圧Es(「センサ電圧Es」とも呼ぶ)が発生する。このセンサ電圧Esは、コイル12Aの誘起電圧Ecと相似な波形形状を有している。そこで、センサ電圧Esの模擬したPWM信号を生成してスイッチSWをオン/オフ制御することによって、誘起電圧Ecとほぼ相似波形の励磁電圧Eiをコイル12Aに印加することが可能となる。この時の励磁電流Iiは、Ii=(Ei−Ec)/Rcで与えられる。
【0034】
上述したように、モータを駆動する場合には、逆起電力と相似波形の電圧を印加することによって、最も効率良くモータを駆動することが可能である。なお、正弦波状の逆起電力波形の中位点近傍(電圧0の近傍)ではエネルギ変換効率が比較的低く、反対に、逆起電力波形のピーク近傍ではエネルギ変換効率が比較的高いことが理解できる。逆起電力と相似波形の電圧を印加してモータを駆動すると、エネルギ変換効率の高い期間において比較的高い電圧を印加することになるので、モータ効率が向上する。一方、例えば単純な矩形波でモータを駆動すると、逆起電力がほぼ0となる位置(中位点)の近傍においてもかなりの電圧が印加されるので、モータ効率が低下する。また、このようにエネルギ変換効率の低い期間において電圧を印加すると、渦電流により回転方向以外の方向の振動が生じ、これによって騒音が発生するという問題も生じる。
【0035】
上述の説明から理解できるように、逆起電力と相似波形の電圧を印加してモータを駆動すると、モータ効率を向上させることができ、また、振動や騒音を低減することができるという利点がある。
【0036】
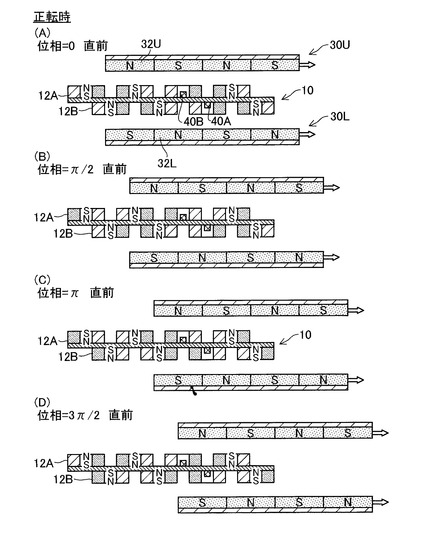
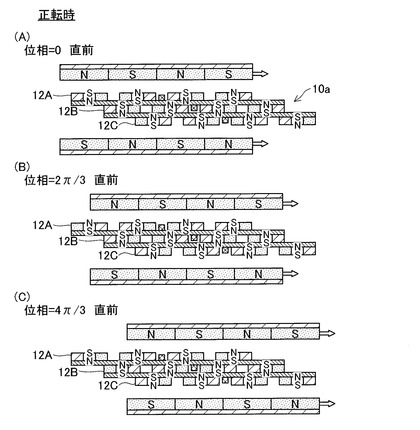
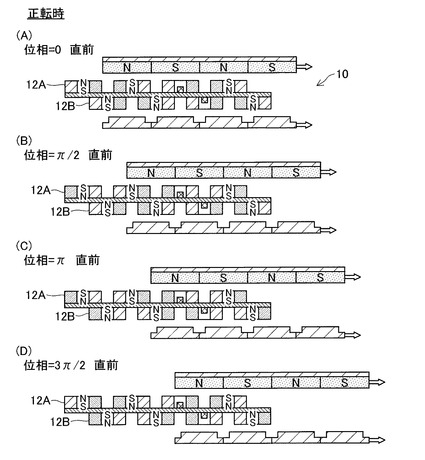
図4(A)〜(D)は、本実施例のブラシレスモータの正転動作の様子を示す説明図である。図4(A)は、位相が0の直前における状態を示している。A相コイル12AとB相コイル12Bの位置に記載されている「N」,「S」の文字は、これらのコイル12A,12Bの励磁方向を示している。コイル12A,12Bが励磁されると、コイル12A,12Bと磁石32U,32Lとの間に吸引力と反発力が生じる。この結果、ロータ部30U,30Lは、正転方向(図の右方向)に回転する。なお、位相が0となるタイミングで、A相コイル12Aの励磁方向が反転する(図2参照)。図4(B)は、位相がπ/2の直前まで進んだ状態を示している。位相がπ/2となるタイミングでは、B相コイル12Bの励磁方向が反転する。図4(C)は、位相がπの直前まで進んだ状態を示している。位相がπとなるタイミングでは、A相コイル12Aの励磁方向が再び逆転する。図4(D)は、位相が3π/2の直前まで進んだ状態を示している。位相が3π/2となるタイミングでは、B相コイル12Bの励磁方向が再び逆転する。
【0037】
なお、図2(C)、(D)からも理解できるように、位相がπ/2の整数倍となるタイミングでは、センサ出力SSA,SSBがゼロとなるので、2相のコイル12A,12Bのうちの一方のみから駆動力を発生する。しかし、位相がπ/2の整数倍となるタイミングを除く他のすべての期間において、2相のコイル12A,12Bの両方が同時に駆動力を発生することが可能である。従って、2相のコイル12A,12Bの両方を用いて大きなトルクを発生することができる。
【0038】
ところで、図4(A)から理解できるように、A相センサ40Aは、A相コイル12Aの中心が永久磁石32Uの中心と対向する位置においてそのセンサ出力の極性が切り替わる位置に配置されている。同様に、B相センサ40Bは、B相コイル12Bの中心が永久磁石32Lの中心と対向する位置においてそのセンサ出力の極性が切り替わる位置に配置されている。このような位置にセンサ40A,40Bを配置すれば、センサ40A,40Bから、コイルの逆起電力とほぼ相似形状のセンサ出力SSA,SSB(図2)を発生することが可能である。
【0039】
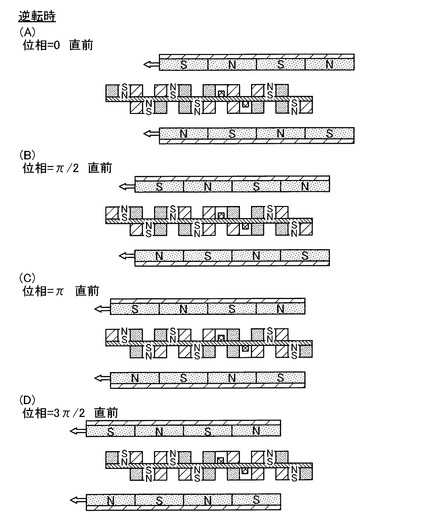
図5(A)〜(D)は、本実施例のブラシレスモータの逆転動作の様子を示す説明図である。図5(A)〜(D)は、位相が0,π/2,π,3π/2の直前となる状態をそれぞれ示している。この逆転動作は、例えば、コイル12A,12Bの駆動電圧の極性(すなわち正負)を、正転動作の駆動電圧からそれぞれ反転させることによって実現することができる。
【0040】
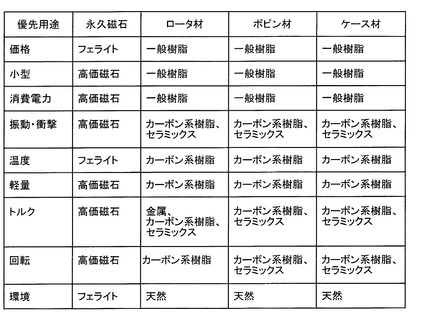
図6は、本発明の実施例としての電気機械の用途と好ましい材料との関係を示している。用途としては、例えば以下の項目を優先する用途が存在する。
(1)低価格であること。
(2)小型であること。
(3)消費電力が少ないこと。
(4)振動・衝撃への耐久性。
(5)高温環境での利用性。
(6)軽量であること。
(7)大トルクを発生可能であること。
(8)高回転が可能であること。
(9)環境に優しいこと。
【0041】
図6の各用途の右の欄には、永久磁石と、ロータ材(ロータ部30U,30Lの支持部材)と、ボビン材(コイルのコア材)と、ケース材に適した材料がそれぞれ示されている。なお、「高価磁石」とは、ネオジウム磁石、サマリウムコバルト磁石、アルニコ磁石などを意味する。また、「一般樹脂」とは、カーボン系樹脂と植物性樹脂とを除く各種の樹脂(特に合成樹脂)を意味する。「カーボン系樹脂」とは、ガラス状カーボン、(炭素繊維強化樹脂(CFRP)、カーボンファイバなどを意味する。ロータ材用の金属としては、アルミニウム、ステンレス鋼、チタン、マグネシウム、銅、銀、金、及び、それらの合金を使用することができる。「セラミックス」としては、ファインセラミックス、ステアタイトセラミック、アルミナ、ジルコン、ガラスを使用することができる。また、「天然材」としては、植物、木材、土砂などを用いた材料(例えば植物性樹脂)を使用することができる。
【0042】
これらの例からも理解できるように、本発明の実施例としての電気機械では、ロータ材やボビン材(コア材)やケース材として、非磁性で非導電性の各種の材料を利用することが可能である。但し、ロータ材としては、強度を考慮してアルミニウムやその合金などの金属材料を用いる場合もある。この場合にも、ボビン材やケース材は、実質的に非磁性で非導電性の材料で形成されていることが好ましい。ここで、「実質的に非磁性で非導電性の材料」とは、わずかな部分が磁性体または導電体であることが許容されることを意味している。例えば、ボビン材が実質的に非磁性で非導電性の材料で形成されているか否かは、モータにコギングが存在するか否かによって判定することができる。また、ケース材が実質的に非導電性の材料で形成されているか否かは、ケース材による鉄損(渦電流損)が所定の値(例えば入力の1%)以下か否かによって判定することができる。
【0043】
なお、電気機械の構造材の中には、回転軸と軸受け部のように、金属材料で作成することが好ましい部材も存在する。ここで、「構造材」とは、電気機械の形状を支えるために使用される部材を意味しており、小さな部品や固定具などを含まない主要な部材を意味している。ロータ材やケース材も構造材の一種である。実施例の電気機械では、回転軸と軸受け部以外の主要な構造材は、非磁性で非導電性の材料で形成することができる。
【0044】
B.駆動回路ユニットの構成:
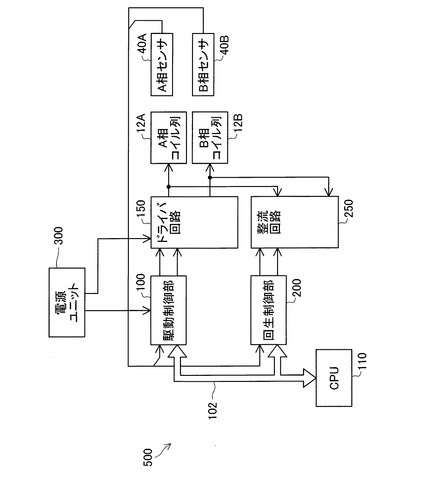
図7は、実施例における駆動回路ユニットの内部構成を示すブロック図である。この駆動回路ユニット500は、CPU110と、駆動制御部100と、回生制御部200と、ドライバ回路150と、整流回路250と、電源ユニット300とを備えている。2つの制御部100,200は、バス102を介してCPU110と接続されている。駆動制御部100とドライバ回路150は、電動モータに駆動力を発生させる場合の制御を行う回路である。また、回生制御部200と整流回路250は、電動モータから電力を回生する場合の制御を行う回路である。回生制御部200と整流回路250とをまとめて「回生回路」とも呼ぶ。また、駆動制御部100を「駆動信号生成回路」とも呼ぶ。電源ユニット300は、駆動回路ユニット500内の他の回路に各種の電源電圧を供給するための回路である。図7では、図示の便宜上、電源ユニット300から駆動制御部100及びドライバ回路150に向かう電源配線のみが描かれており、他の回路に向かう電源配線は省略されている。
【0045】
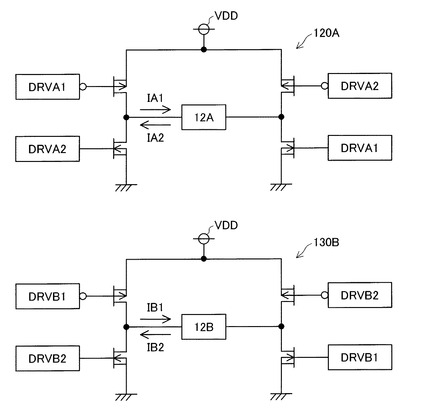
図8は、ドライバ回路150(図7)に含まれるA相ドライバ回路120AとB相ドライバ回路120Bの構成を示している。A相ドライバ回路120Aは、A相コイル12Aに、交流駆動信号DRVA1,DRVA2を供給するためのH型ブリッジ回路である。なお、駆動信号を示すブロックの端子部分に付されている白丸は、負論理であり信号が反転していることを示している。また、符号IA1,IA2が付された矢印は、A1駆動信号DRVA1とA2駆動信号DRVA2によって流れる電流方向をそれぞれ示している。B相ドライバ回路120Bの構成もA相ドライバ回路120Aの構成と同じである。
【0046】
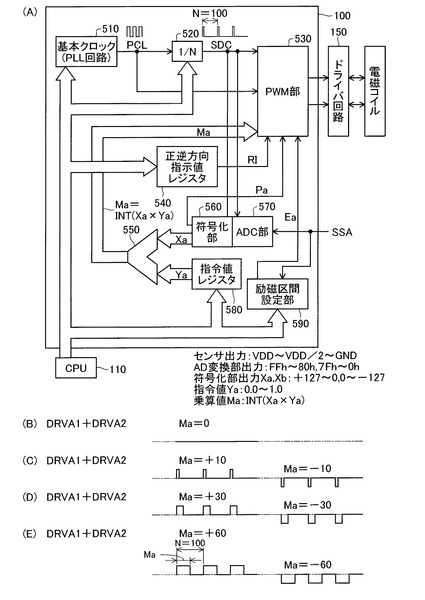
図9は、駆動制御部100(図7)の内部構成と動作を示す説明図である。駆動制御部100は、基本クロック生成回路510と、1/N分周器520と、PWM部530と、正逆方向指示値レジスタ540と、乗算器550と、符号化部560と、AD変換部570と、電圧指令値レジスタ580と、励磁区間設定部590とを備えている。なお、駆動制御部100は、A相用の駆動信号とB相用の駆動信号の両方を生成する回路であるが、図9(A)では図示の便宜上、A相の回路構成のみが描かれている。B相についても、A相と同じ回路が駆動制御部100内に設けられている。
【0047】
基本クロック生成回路510は、所定の周波数を有するクロック信号PCLを発生する回路であり、例えばPLL回路で構成される。分周器520は、このクロック信号PCLの1/Nの周波数を有するクロック信号SDCを発生する。Nの値は所定の一定値に設定される。このNの値は、予めCPU110によって分周器520に設定される。PWM部530は、クロック信号PCL,SDCと、乗算器550から供給される乗算値Maと、正逆方向指示値レジスタ540から供給される正逆方向指示値RIと、符号化部560から供給される正負符号信号Paと、励磁区間設定部590から供給される励磁区間信号Eaとに応じて、交流駆動信号DRVA1,DRVA2(図8)を生成する。この動作については後述する。
【0048】
正逆方向指示値レジスタ540内には、モータの回転方向を示す値RIがCPU110によって設定される。本実施例では、正逆方向指示値RIがLレベルのときにモータが正転し、Hレベルのときに逆転する。PWM部530に供給される他の信号Ma,Pa,Eaは以下のように決定される。
【0049】
磁気センサ40Aの出力SSAは、AD変換部570に供給される。このセンサ出力SSAのレンジは、例えばGND(接地電位)からVDD(電源電圧)までであり、その中位点(=VDD/2)が出力波形の中位点(正弦波の原点を通る点)である。AD変換部570は、このセンサ出力SSAをAD変換して、センサ出力のデジタル値を生成する。AD変換部570の出力のレンジは、例えばFFh〜0h(語尾の”h”は16進数であることを示す)であり、中央値80hがセンサ波形の中位点に相当する。
【0050】
符号化部560は、AD変換後のセンサ出力値のレンジを変換するとともに、センサ出力値の中位点の値を0に設定する。この結果、符号化部560で生成されるセンサ出力値Xaは、正側の所定の範囲(例えば+127〜0)と負側の所定の範囲(例えば0〜−127)の値を取る。但し、符号化部560から乗算器550に供給されるのは、センサ出力値Xaの絶対値であり、その正負符号は正負符号信号PaとしてPWM部530に供給される。
【0051】
電圧指令値レジスタ580は、CPU110によって設定された電圧指令値Yaを格納する。この電圧指令値Yaは、後述する励磁区間信号Eaとともに、モータの印加電圧を設定する値として機能するものであり、例えば0〜1.0の値を取る。仮に、非励磁区間を設けずに全区間を励磁区間とするように励磁区間信号Eaを設定した場合には、Ya=0は印加電圧をゼロとすることを意味し、Ya=1.0は印加電圧を最大値とすることを意味する。乗算器550は、符号化部560から出力されたセンサ出力値Xaと、電圧指令値Yaとを乗算して整数化し、その乗算値MaをPWM部530に供給する。
【0052】
図9(B)〜(E)は、乗算値Maが種々の値を取る場合におけるPWM部530の動作を示している。ここでは、全期間が励磁区間であり非励磁区間が無いものと仮定している。PWM部530は、クロック信号SDCの1周期の間に、デューティがMa/Nであるパルスを1つ発生させる回路である。すなわち、図9(B)〜(E)に示すように、乗算値Maが増加するに従って、駆動信号DRVA1,DRVA2のパルスのデューティが増加する。なお、第1の駆動信号DRVA1は、センサ出力SSAが正のときにのみパルスを発生する信号であり、第2の駆動信号DRVA2はセンサ出力SSAが正のときにのみパルスを発生する信号であるが、図9(B)〜(E)ではこれらを合わせて記載している。また、便宜上、第2の駆動信号DRVA2を負側のパルスとして描いている。
【0053】
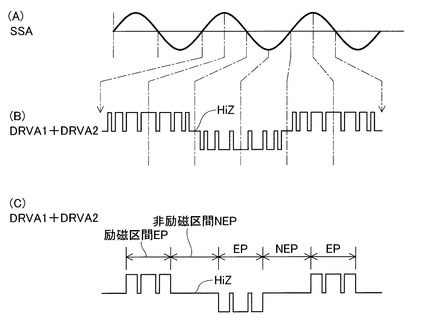
図10(A)〜(C)は、センサ出力の波形とPWM部530で生成される駆動信号の波形の対応関係を示す説明図である。図中、「Hiz」は電磁コイルを未励磁状態としたハイインピーダンス状態を意味している。図9で説明したように、駆動信号DRVA1,DRVA2はセンサ出力SSAのアナログ波形をそのまま利用したPWM制御によって生成される。従って、これらの駆動信号DRVA1,DRVA2を用いて、各コイルに、センサ出力SSAの変化と対応するレベル変化を示す実効電圧を供給することが可能である。
【0054】
PWM部530は、さらに、励磁区間設定部590から供給される励磁区間信号Eaで示される励磁区間のみに駆動信号を出力し、励磁区間以外の区間(非励磁区間)では駆動信号を出力しないように構成されている。図10(C)は、励磁区間信号Eaによって励磁区間EPと非励磁区間NEPを設定した場合の駆動信号波形を示している。励磁区間EPでは図10(B)の駆動信号パルスがそのまま発生し、非励磁区間NEPでは駆動信号パルスが発生しない。このように、励磁区間EPと非励磁区間NEPを設定するようにすれば、逆起電力波形の中位点近傍(すなわち、センサ出力の中位点近傍)においてコイルを電圧を印加しないので、モータの効率をさらに向上させることが可能である。なお、励磁区間EPは、逆起電力波形のピークを中心としする対称な区間に設定されることが好ましく、非励磁区間NEPは、逆起電力波形の中位点(中心点)を中心とする対称な区間に設定されることが好ましい。
【0055】
なお、前述したように、電圧指令値Yaを1未満の値に設定すれば、乗算値Maが電圧指令値Yaに比例して小さくなる。従って、電圧指令値Yaによっても、実効的な印加電圧を調整することが可能である。
【0056】
上述の説明から理解できるように、本実施例のモータでは、電圧指令値Yaと、励磁区間信号Eaとの両方を利用して印加電圧を調整することが可能である。望ましい印加電圧と、電圧指令値Ya及び励磁区間信号Eaとの関係は、予め駆動回路ユニット500(図7)内のメモリにテーブルとして格納されていることが望ましい。こうすれば、駆動回路ユニット500が、外部から望ましい印加電圧の目標値を受信したときに、CPU110がその目標値に応じて、電圧指令値Yaと、励磁区間信号Eaとを駆動制御部100に設定することが可能である。なお、印加電圧の調整には、電圧指令値Yaと、励磁区間信号Eaの両方を利用する必要はなく、いずれか一方のみを利用するようにしてもよい。
【0057】
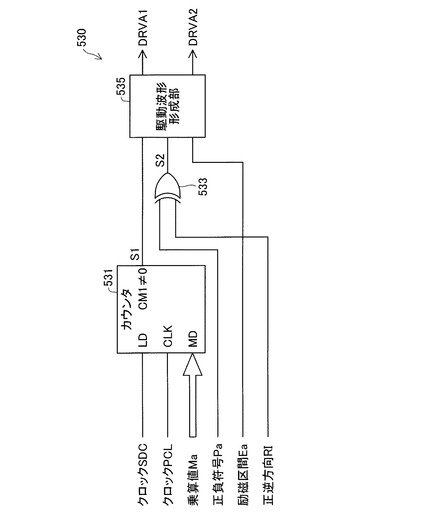
図11は、PWM部530(図9)の内部構成の一例を示すブロック図である。PWM部530は、カウンタ531と、EXOR回路533と、駆動波形形成部535とを備えている。これらは以下のように動作する。
【0058】
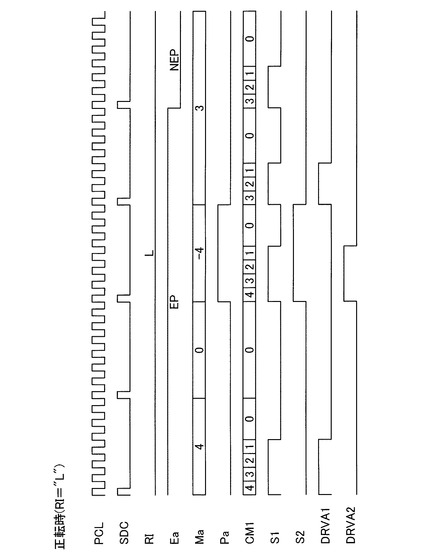
図12は、モータ正転時のPWM部530の動作を示すタイミングチャートである。この図には、2つのクロック信号PCL,SDCと、正逆方向指示値RIと、励磁区間信号Eaと、乗算値Maと、正負符号信号Paと、カウンタ531内のカウント値CM1と、カウンタ531の出力S1と、EXOR回路533の出力S2と、駆動波形形成部535の出力信号DRVA1,DRVA2とが示されている。カウンタ531は、クロック信号SDCの1期間毎に、クロック信号PCLに同期してカウント値CM1を0までダウンカウントする動作を繰り返す。カウント値CM1の初期値は乗算値Maに設定される。なお、図12では、図示の便宜上、乗算値Maとして負の値も描かれているが、カウンタ531で使用されるのはその絶対値|Ma|である。カウンタ531の出力S1は、カウント値CM1が0で無い場合にはHレベルに設定され、カウント値CM1が0になるとLレベルに立ち下がる。
【0059】
EXOR回路533は、正負符号信号Paと正逆方向指示値RIとの排他的論理和を示す信号S2を出力する。モータが正転する場合には、正逆方向指示値RIがLレベルである。従って、EXOR回路533の出力S2は、正負符号信号Paと同じ信号となる。駆動波形形成部535は、カウンタ531の出力S1と、EXOR回路533の出力S2から、駆動信号DRVA1,DRVA2を生成する。すなわち、カウンタ531の出力S1のうち、EXOR回路533の出力S2がLレベルの期間の信号を第1の駆動信号DRVA1として出力し、出力S2がHレベルの期間の信号を第2の駆動信号DRVA2として出力する。なお、図12の右端部付近では、励磁区間信号EaがLレベルに立ち下がり、これによって非励磁区間NEPが設定されている。従って、この非励磁区間NEPでは、いずれの駆動信号DRVA1,DRVA2も出力されず、ハイインピーダンス状態に維持される。
【0060】
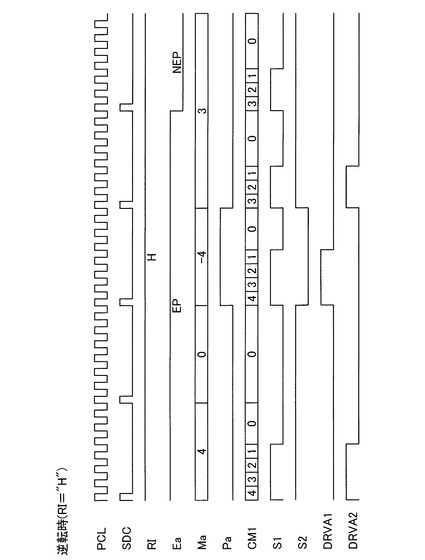
図13は、モータ逆転時のPWM部530の動作を示すタイミングチャートである。モータ逆転時には、正逆方向指示値RIがHレベルに設定される。この結果、2つの駆動信号DRVA1,DRVA2が図12から入れ替わっており、この結果、モータが逆転することが理解できる。
【0061】
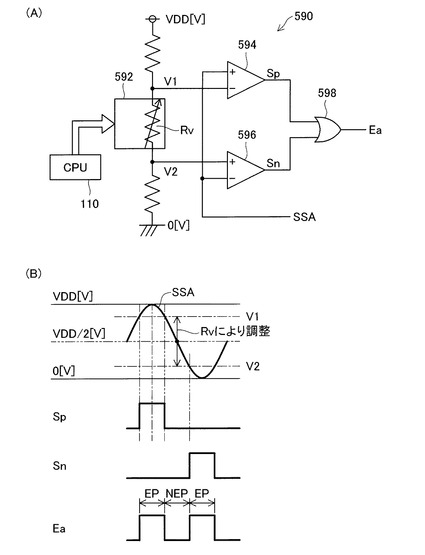
図14は、励磁区間設定部590の内部構成と動作を示す説明図である。励磁区間設定部590は、電子可変抵抗器592と、電圧比較器594,596と、OR回路598とを有している。電子可変抵抗器592の抵抗値Rvは、CPU110によって設定される。電子可変抵抗器592の両端の電圧V1,V2は、電圧比較器594,596の一方の入力端子に与えられている。電圧比較器594,596の他方の入力端子には、センサ出力SSAが供給されている。電圧比較器594,596の出力信号Sp,Snは、OR回路598に入力されている。OR回路598の出力は、励磁区間と非励磁区間とを区別するための励磁区間信号Eaである。
【0062】
図14(B)は、励磁区間設定部590の動作を示している。電子可変抵抗器592の両端電圧V1,V2は、抵抗値Rvを調整することによって変更される。具体的には、両端電圧V1,V2は、電圧レンジの中央値(=VDD/2)からの差分が等しい値に設定される。センサ出力SSAが第1の電圧V1よりも高い場合には第1の電圧比較器594の出力SpがHレベルとなり、一方、センサ出力SSAが第2の電圧V2よりも低い場合には第2の電圧比較器596の出力SnがHレベルとなる。励磁区間信号Eaは、これらの出力信号Sp,Snの論理和を取った信号である。従って、図14(B)の下部に示すように、励磁区間信号Eaは、励磁区間EPと非励磁区間NEPとを示す信号として使用することができる。励磁区間EPと非励磁区間NEPの設定は、CPU110が可変抵抗値Rvを調整することによって行なわれる。
【0063】
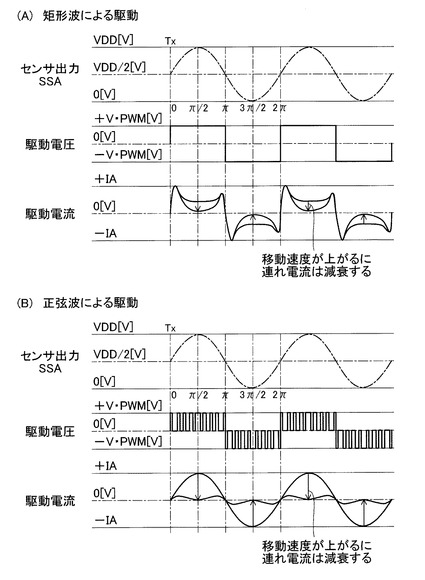
図15は、上述した本実施例のモータを矩形波で駆動した場合と、正弦波で駆動した場合の各種の信号波形を比較して示している。矩形波駆動の場合には、矩形波の駆動電圧がコイルに与えられる。駆動電流は、始動時には矩形波に近いが、回転速度が上昇すると減少する。これは、回転速度の上昇に応じて逆起電力が増加するからである(図2)。但し、矩形波駆動では、回転速度が上昇しても、駆動電圧が切り替わるタイミング(位相=nπ)の近傍における電流値はあまり減少せず、かなり大きな電流が流れる傾向にある。
【0064】
一方、正弦波で駆動する場合には、駆動電圧の実効値が正弦波形状となるように駆動電圧がPWM制御される。駆動電流は、始動時には正弦波に近いが、回転速度が上昇すると逆起電力の影響で駆動電流が減少する。正弦波駆動では、駆動電圧の極性が切り替わるタイミング(位相=nπ)の近傍において電流値が大幅に減少している。図2に即して説明したように、一般に、駆動電圧の極性が切り替わるタイミングの近傍では、モータのエネルギ変換効率が低い。正弦波駆動では、効率の低い期間における電流値が、矩形波駆動よりも小さくなるので、より高効率でモータを駆動することが可能である。
【0065】
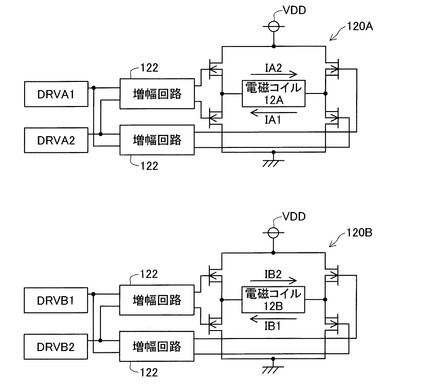
図16は、ドライバ回路150(図7)に含まれるA相ドライバ回路120AとB相ドライバ回路120Bの他の構成例を示している。このドライバ回路120A,120Bは、図8に示したドライバ回路120A,120Bを構成するトランジスタのゲート電極の前に、増幅回路122を設けたものである。なお、トランジスタのタイプも図8とは異なっているが、各トランジスタとしては任意のタイプのものを使用することができる。本実施例のモータを、トルクと回転数に関して広い動作範囲で駆動させるためには、ドライバ回路120A,120Bの電源電圧VDDを可変に設定できることが好ましい。電源電圧VDDを変更した場合には、各トランジスタのゲート電圧に与える駆動信号DRVA1,DRVA2,DRVB1,DRVB2のレベルもこれに比例して変更される。こうすれば、広い範囲の電源電圧VDDを用いてモータを駆動することができる。増幅回路122は、駆動信号DRVA1,DRVA2,DRVB1,DRVB2のレベルを変更するための回路である。なお、図7に示した駆動回路ユニット500の電源ユニット300は、可変の電源電圧VDDをドライバ回路150に供給するものとすることが好ましい。
【0066】
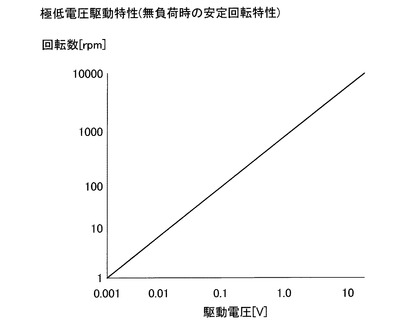
図17は、本実施例のモータの無負荷時の回転数を示している。このグラフから理解できるように、本実施例のモータは無負荷時に極く低回転数まで極めて安定した回転数で回転する。この理由は、磁性体のコアが無いのでコギングが発生しないからである。
【0067】
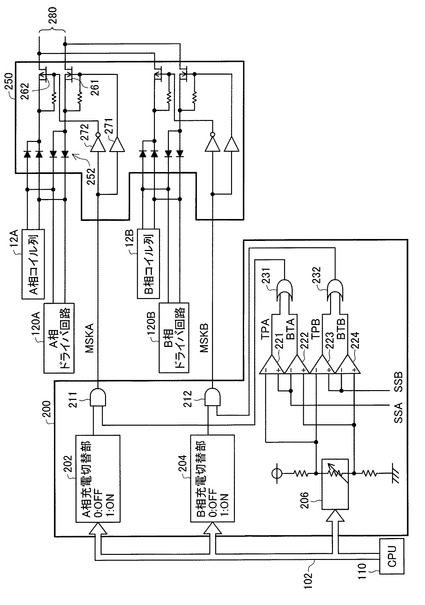
図18は、図7に示した回生制御部200と整流回路250の内部構成を示す図である。回生制御部200は、バス102に接続されたA相充電切換部202と、B相充電切換部204と、電子可変抵抗器206とを有している。2つの充電切換部202,204の出力信号は、2つのAND回路211,212の入力端子に与えられている。
【0068】
A相充電切換部202は、A相コイル12Aからの回生電力を回収する場合には「1」レベルの信号を出力し、回収しない場合には「0」レベルの信号を出力する。B相充電切換部204も同様である。なお、これらの信号レベルの切換えは、CPU110によって行われる。また、A相コイル12Aからの回生の有無と、B相コイル12Bからの回生の有無とは、独立に設定することができる。従って、例えばA相コイル12Aを用いてモータに駆動力を発生させつつ、B相コイル12Bから電力を回生することも可能である。
【0069】
なお、駆動制御部100も、同様に、A相コイル12Aを用いて駆動力を発生するか否かと、B相コイル12Bを用いて駆動力を発生するか否かとを、独立に設定できるように構成してもよい。このようにすれば、2相のコイル12A,12Bのうちの任意の一方で駆動力を発生させつつ、他方で電力を回生する運転モードでモータを運転することが可能である。
【0070】
電子可変抵抗器206の両端の電圧は、4つの電圧比較器221〜224の2つの入力端子の一方に与えられている。電圧比較器221〜224の他方の入力端子には、A相センサ信号SSAとB相センサ信号SSBが供給されている。4つの電圧比較器221〜224の出力信号TPA,BTA,TPB,BTBは、「マスク信号」または「許可信号」と呼ぶことができる。
【0071】
A相コイル用のマスク信号TPA,BTAはOR回路231に入力されており、B相用のマスク信号TPB,BTBは他のOR回路232に入力されている。これらのOR回路231,232の出力は、上述した2つのAND回路211,212の入力端子に与えられている。これらのAND回路211,212の出力信号MSKA,MSKBも、「マスク信号」または「許可信号」と呼ぶ。
【0072】
ところで、4つの電圧比較器221〜224とOR回路231,232の構成は、図14に示した励磁区間設定部590内の電圧比較器594,596とOR回路598を2つ並べたものと同じである。従って、A相コイル用のOR回路231の出力信号は、図14(B)に示した励磁区間信号Eaと同様な波形を有する。また、A相充電切換部202の出力信号が「1」レベルの場合には、A相コイル用のAND回路211から出力されるマスク信号MSKAはOR回路231の出力信号と同じものとなる。これらの動作はB相についても同様である。
【0073】
整流回路250は、A相コイル用の回路として、複数のダイオードを含む全波整流回路252と、2つのゲートトランジスタ261,262と、バッファ回路271と、インバータ回路272(NOT回路)とを有している。なお、B相用にも同じ回路が設けられている。ゲートトランジスタ261,262は、回生用の電源配線280に接続されている。
【0074】
電力回生時にA相コイル12Aで発生した交流電力は、全波整流回路252で整流される。ゲートトランジスタ261,262のゲートには、A相コイル用のマスク信号MSKAとその反転信号が与えられており、これに応じてゲートトランジスタ261,262がオン/オフ制御される。従って、電圧比較器221,222から出力されたマスク信号TPA,BTAの少なくとも一方がHレベルの期間では回生電力が電源配線280に出力され、一方、マスク信号TPA,BTAの双方がLレベルの期間では電力の回生が禁止される。
【0075】
以上の説明から理解できるように、回生制御部200と整流回路250を用いて、回生電力を回収することが可能である。また、回生制御部200と整流回路250は、A相コイル用のマスク信号MSKA及びB相コイル用のマスク信号MSKBに応じて、A相コイル12AとB相コイル12Bからの回生電力を回収する期間を制限し、これによって回生電力の量を調整することが可能である。
【0076】
以上のように、第1実施例のブレシレスモータでは、複数の電磁コイルの両側を永久磁石で挟む構成を採用したので、電磁コイルの位置における磁場を強めることができ、効率を高めることが可能である。
【0077】
C.第1実施例のモータ構成の変形例:
図19は、第1実施例の第1変形例としてのブラシレスモータの構成を示す説明図である。このブラシレスモータのロータ部30Ua,30Laでは、永久磁石32Ua,32Ubの中央部に、ステータ部10に向けて突出した凸部36(図22(B))がそれぞれ設けられている。他の構成は、図1に示したモータの構成と同じである。永久磁石32Ua,32Ubの中央の凸部36は、図22(D)に示すコイル12A,12Bの有効コイル部ECPに相当する幅を有している。コイル12A,12Bの有効コイル部ECPは、有効な駆動力を発生するコイル部分であり、これ以外のコイル部分は駆動力(回転式モータでは回転方向の力)をほとんど発生しない。従って、各永久磁石に有効コイル部ECPとほぼ同じ幅の凸部36を設けることによって、磁石の磁場をより有効に活用することが可能である。
【0078】
図20は、第1実施例の第2変形例としての3相ブラシレスモータの構成を示す説明図である。このブラシレスモータは、ステータ部10aが3相のコイルを有している点が図1に示したモータと異なっており、ロータ部30U,30Lの構成は図1と同じである。図20(D)に示すように、ステータ部10aは、A相コイル12AとB相コイル12BとC相コイル12Cの3層構造を有している。これらの3相のコイル12A,12B,12Cは、2π/3の位相差で配置されている。A相センサ40Aは、2つのA相コイル12Aの中間の中央位置に配置されている。同様に、B相センサ40Bも、2つのB相コイル12Bの中間の中央位置に配置されており、C相センサ40Cも、2つのC相コイル12Cの中間の中央位置に配置されている。なお、3相分のコイルを3層構造で配置する必要は無く、例えば、1層構造で(すなわち同じ面上に)配置することも可能である。但し、3層構造を採用すれば、より多くのコイルを配置できるので、大きなトルクを発生できるという利点がある。
【0079】
図21(A)〜(C)は、図20の3相ブラシレスモータの正転動作の様子を示す説明図である。図21(A)〜(C)は、位相が0,2π/3,4π/3の直前における状態をそれぞれ示している。3相駆動では、よく知られているように、π/3の期間毎にいずれかの相の励磁方向が逆点する。3相ブレシレスモータの逆転動作についての説明は省略する。
【0080】
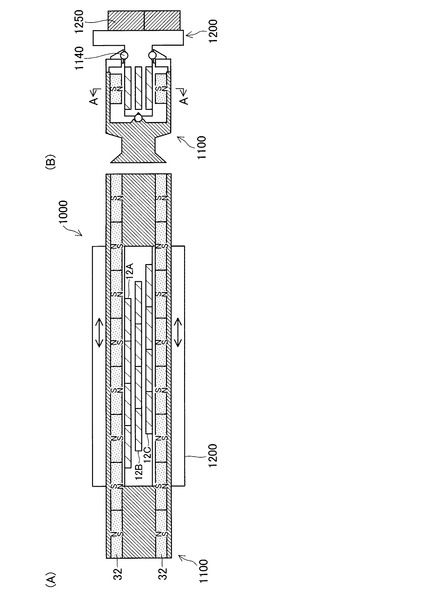
図22は、第1実施例の第3変形例としての3相リニアモータの構成を示している。このリニアモータ1000は、固定ガイド部1100と、移動部1200とを備えている。図22(A)に示すように、固定ガイド部1100の上部と下部には、移動方向に沿って多数の永久磁石32がそれぞれ配列されている。移動部1200は、これらの永久磁石32によって上下方向に挟まれた位置に設けられており、3相のコイル12A,12B,12Cが設けられている。また、各相の隣接するコイルの間には、磁気センサが設けられているが、ここでは図示を省略している。図22(B)に示すように、移動部1200には駆動制御部1250が設けられている。駆動制御部1250は、燃料電池などの自立的な電源装置(図示省略)を有している。移動部1200は、ベアリング部1140によって固定ガイド部1100に摺動可能に保持されている。本発明の実施例は、このようなリニアモータとしても実現可能である。なお、リニアモータは、2相ブラシレスモータとして構成することも可能である。
【0081】
D.第2実施例のモータ構成と動作の概要:
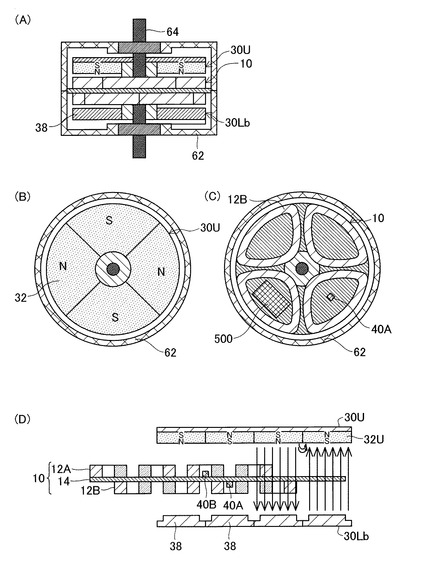
図23(A)〜(D)は、本発明の第2実施例としてのブラシレスモータのモータ本体の構成を示す断面図である。このモータ本体は、図1に示したモータの下部ロータ部30Lの構成を変更したものであり、他の構成は図1と同じである。図23(A),(D)に示すように、下部ロータ部30Lbには、永久磁石の代わりに強磁性体材料で形成された磁気ヨーク38が設けられている。これらの磁気ヨーク38は、上部ロータ部30Uの永久磁石32による磁場(特にステータ部10の位置における磁場)を強める働きがある。
【0082】
第1及び第2実施例から理解できるように、コイルの両側のうちの一方側には永久磁石を設け、他方側には永久磁石と共同してコイル位置における磁場を強める磁場強化部材を設けることが可能である。図1に示した第1実施例では永久磁石32Lが磁場強化部材として機能し、図23に示す第2実施例では磁気ヨーク38が磁場強化部材として機能している。これらの構成では、コイル位置における磁場が強化されるので、ブラシレスモータにおける磁場の利用効率を高めてモータ効率を向上させることができる。
【0083】
なお、磁気ヨーク38は、図23(D)に示すように、個々の永久磁石32Uに対向する位置に永久磁石32Uと同じ数だけ設けるようにしてもよく、あるいは、複数の永久磁石に対向するような板状の磁気ヨークを用いてもよい。後者の場合には、1枚の平板状のヨーク部材を、複数の永久磁石に対する磁場強化部材として使用することが可能である。なお、図23(D)に示すように、各磁気ヨーク38は、個々の永久磁石32Uに対向する位置に凸部を有するようにすることが好ましい。
【0084】
図24(A)〜(D)は、第2実施例のブラシレスモータの逆転動作の様子を示す説明図である。図24(A)〜(D)は、位相が0,π/2,π,3π/2の直前となる状態をそれぞれ示している。この動作は、図5に示したものと基本的に同じである。逆転動作も図6に示したものと同様なので省略する。
【0085】
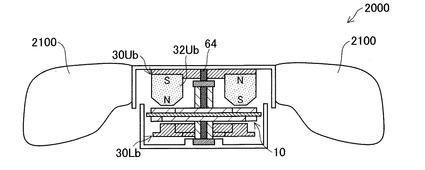
図25は、第2実施例の第1変形例のモータ構成を示す説明図である。このブラシレスモータ2000は、ファンモータとして構成されたものである。すなわち、上部ロータ部30Ubの外周部には、羽根2100が固定されている。なお、この上部ロータ部30Ubの永久磁石32Ubは、ステータ部10に向かって突出した凸部を有している。この凸部は、図22で説明したように、モータ効率をさらに改善するための工夫である。
【0086】
なお、第2実施例のブラシレスモータは、図20に示した3相モータや、図22に示したリニアモータとしても実現可能である。
【0087】
ところで、図22のリニアモータでは、電磁コイルが設けられている部材が移動し、永久磁石が設けられている部材が固定されている。この関係は、図1及び図25に示した構成と逆である。すなわち、図1に示したモータでは、電磁コイルが設けられている部材(ステータ部10)が固定されており、永久磁石(又は磁気ヨーク38)が設けられている部材(ロータ部30U,30L)が移動する。これらの例から理解できるように、本発明の実施例による電気機械は、永久磁石が設けられている第1の部材(「第1の駆動部材」とも呼ぶ)と、電磁コイルが設けられている第2の部材(「第2の駆動部材」とも呼ぶ)と、磁場強化部材(永久磁石32L又は磁気ヨーク38)が設けられている第3の部材(「第3の駆動部材」とも呼ぶ)を備え、第1と第3の駆動部材が、第2の駆動部材に対して相対的に移動できるように構成された種々の電気機械として実現可能である。
【0088】
E.変形例:
なお、この発明は上記の実施例や実施形態に限られるものではなく、その要旨を逸脱しない範囲において種々の態様において実施することが可能であり、例えば次のような変形も可能である。
【0089】
E1.変形例1:
上記実施例や変形例では2相ブラシレスモータと3相ブラシレスモータについて説明したが、本発明は、任意の相数M(Mは1以上の整数)のブラシレスモータに適用することが可能である。例えば、1相モータにも本発明を適用することができる。1相モータは、例えば、図1のモータの2相のコイルのうちの1相分を省略することによって実現可能である。なお、各相のコイル群は、少なくとも1個の電磁コイルを含んでいれば良いが、2個以上の電磁コイルを含むことが好ましい。
【0090】
E2.変形例2:
上記実施例ではアナログ磁気センサを利用していたが、アナログ磁気センサの代わりに、多値のアナログ的出力を有するデジタル磁気センサを使用してもよい。アナログ磁気センサも多値出力を有するデジタル磁気センサも、アナログ的変化を示す出力信号を有する点で共通している。なお、本明細書において、「アナログ的変化を示す出力信号」とは、オン/オフの2値出力ではなく、3値以上の多数レベルを有するデジタル出力信号と、アナログ出力信号との両方を包含する広い意味で使用されている。
【0091】
なお、アナログ的変化を示す出力信号を有するセンサの代わりに、2値のデジタル出力を有するデジタル磁気センサを使用するようにしてもよい。この場合には、図9のADC部570と励磁区間設定部590が不要となる。従って、励磁区間の設定は行なわれず、また、正弦波駆動波形を用いないため、効率が低下し振動/騒音も生じてしまうが、安価なICで駆動制御回路を実現することができる。
【0092】
E3.変形例3:
PWM回路としては、図11に示した回路以外の種々の回路構成を採用することが可能である。例えば、センサ出力と基準三角波とを比較することによってPWM制御を行う回路を利用してもよい。また、PWM制御以外の方法で駆動信号を生成するようにしてもよい。また、PWM制御以外の方法で駆動信号を生成する回路を採用してもよい。例えば、センサ出力を増幅してアナログ駆動信号を生成する回路を採用することも可能である。
【0093】
また、図9において、ADC部570を電圧比較器(コンパレータ)に変えることも可能である。この場合には、正弦波駆動波形では無く、矩形波駆動となるため、効率が低下し振動/騒音も生じてしまうが、安価なICで駆動制御回路を実現することができる。
【0094】
E4.変形例4:
本発明は、回生回路を含まないモータや、駆動制御回路を含まない発電機にも適用可能である。具体例としては、例えば、ファンモータ、時計(針駆動)、ドラム式洗濯機(単一回転)、ジェットコースタ、振動モータなどの種々の装置のモータに適用可能である。本発明をファンモータに適用した場合には、種々の効果(低消費電力、低振動、低騒音、低回転ムラ、低発熱、高寿命)が特に顕著である。このようなファンモータは、例えば、デジタル表示装置や、車載機器、燃料電池式パソコン、燃料電池式デジタルカメラ、燃料電池式ビデオカメラ、燃料電池式携帯電話などの燃料電池使用機器、プロジェクタ等の各種装置のファンモータとして使用することができる。本発明のモータは、さらに、各種の家電機器や電子機器のモータとしても利用可能である。例えば、光記憶装置や、磁気記憶装置、ポリゴンミラー駆動装置等において、本発明によるモータをスピンドルモータとして使用することが可能である。また、本発明によるモータは、移動体やロボット用のモータとしても利用可能である。
【0095】
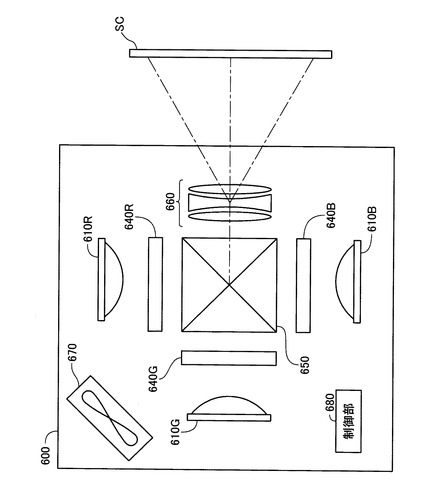
図27は、本発明の実施例によるモータを利用したプロジェクタを示す説明図である。このプロジェクタ600は、赤、緑、青の3色の色光を発光する3つの光源610R、610G、610Bと、これらの3色の色光をそれぞれ変調する3つの液晶ライトバルブ640R、640G、640Bと、変調された3色の色光を合成するクロスダイクロイックプリズム650と、合成された3色の色光をスクリーンSCに投写する投写レンズ系660と、プロジェクタ内部を冷却するための冷却ファン670と、プロジェクタ600の全体を制御する制御部680と、を備えている。冷却ファン670を駆動するモータとしては、上述した各種のブラシレスモータを利用することができる。
【0096】
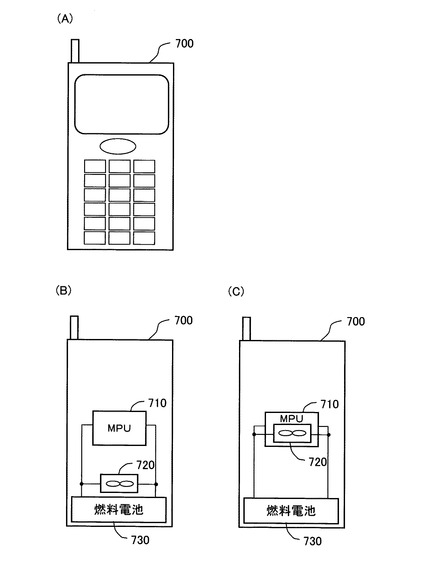
図28(A)〜(C)は、本発明の実施例によるモータを利用した燃料電池式携帯電話を示す説明図である。図28(A)は携帯電話700の外観を示しており、図28(B)は、内部構成の例を示している。携帯電話700は、携帯電話700の動作を制御するMPU710と、ファン720と、燃料電池730とを備えている。燃料電池730は、MPU710やファン720に電源を供給する。ファン720は、燃料電池730への空気供給のために携帯電話700の外から内部へ送風するため、或いは、燃料電池730で生成される水分を携帯電話700の内部から外に排出するためのものである。なお、ファン720を図28(C)のようにMPU710の上に配置して、MPU710を冷却するようにしてもよい。ファン720を駆動するモータとしては、上述した各種のブラシレスモータを利用することができる。
【0097】
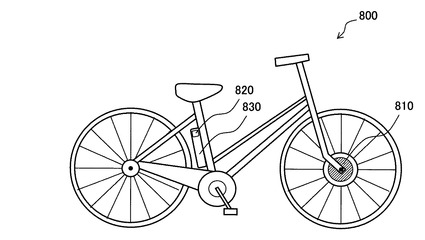
図29は、本発明の実施例によるモータ/発電機を利用した移動体の一例としての電動自転車(電動アシスト自転車)を示す説明図である。この自転車800は、前輪にモータ810が設けられており、サドルの下方のフレームに制御回路820と充電池830とが設けられている。モータ810は、充電池830からの電力を利用して前輪を駆動することによって、走行をアシストする。また、ブレーキ時にはモータ810で回生された電力が充電池830に充電される。制御回路820は、モータの駆動と回生とを制御する回路である。このモータ810としては、上述した各種のブラシレスモータを利用することが可能である。
【0098】
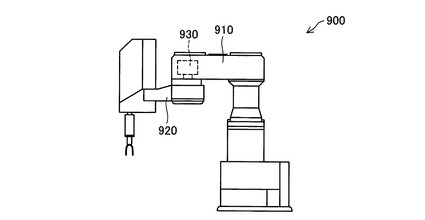
図30は、本発明の実施例によるモータを利用したロボットの一例を示す説明図である。このロボット900は、第1と第2のアーム910,920と、モータ930とを有している。このモータ930は、被駆動部材としての第2のアーム920を水平回転させる際に使用される。このモータ930としては、上述した各種のブラシレスモータを利用することが可能である。
【符号の説明】
【0099】
10…ステータ部
12A,12B,12C…電磁コイル
14…支持部材
30…ロータ部
30L…下部ロータ部
30U…上部ロータ部
32…永久磁石
32L…永久磁石(磁場強化部材)
34U,34L…磁気ヨーク
36…凸部
38…磁気ヨーク(磁場強化部材)
40A,40B…磁気センサ
62…ケーシング
64…回転軸(中心軸)
100…駆動制御部
102…バス
110…CPU
120A,120B…ドライバ回路
122…増幅回路
150…ドライバ回路
200…回生制御部
202,204…充電切換部
206…電子可変抵抗器
211,212…AND回路
221〜224…電圧比較器
231,232…OR回路
250…整流回路
252…全波整流回路
261,262…ゲートトランジスタ
271…バッファ回路
272…インバータ回路
280…電源配線
500…駆動回路ユニット
510…基本クロック生成回路
520…分周器
530…PWM部
531…カウンタ
533…EXOR回路
535…駆動波形形成部
540…レジスタ
550…乗算器
560…符号化部
570…AD変換部
580…指令値レジスタ
590…励磁区間設定部
592…電子可変抵抗器
594,596…電圧比較器
598…OR回路
600…プロジェクタ
610R,610G,610B…光源
640R,640G,640B…液晶ライトバルブ
650…クロスダイクロイックプリズム
660…投写レンズ系
670…冷却ファン
680…制御部
700…携帯電話
710…MPU
720…ファン
730…燃料電池
800…電動自転車(電動アシスト自転車)
810…モータ
820…制御回路
830…充電池
900…ロボット
910…アーム
920…アーム
930…モータ
1000…リニアモータ
1100…固定ガイド部
1140…ベアリング部
1200…移動部
1250…駆動制御部
2000…ブラシレスモータ(ファンモータ)
2100…羽根
【技術分野】
【0001】
この発明は、永久磁石と電磁コイルとを利用したブラシレス電気機械(brushless electric machine)に関する。
【背景技術】
【0002】
永久磁石と電磁コイルとを利用したブラシレス電気機械としては、例えば下記の特許文献1に記載されたブラシレスモータが知られている。
【0003】
【特許文献1】特開2001−298982号公報
【0004】
図26は、従来のブラシレスモータの構成の一例を示す概念図である。このブラシレスモータは、電磁コイル列12と磁石列32とを備えている。磁石列32の近傍には、磁場が例示されている。従来のブラシレスモータでは、永久磁石による磁場が開放状態にあるため、電磁コイル列12による磁場の利用効率がかなり低いという問題があった。このような問題はモータに限らず発電機にも共通する問題であり、一般にブラシレス電気機械に共通する問題であった。
【発明の概要】
【発明が解決しようとする課題】
【0005】
本発明は、ブラシレス電気機械における磁場の利用効率を高めて電気機械の効率を向上させる技術を提供することを目的とする。
【課題を解決するための手段】
【0006】
本発明は、上述の課題の少なくとも一部を解決するためになされたものであり、以下の形態又は適用例として実現することが可能である。
【0007】
[適用例1]
ブラシレス電気機械であって、
複数の永久磁石を有する第1の駆動部材と、
複数の電磁コイルを有し、前記第1の駆動部材に対して相対的に移動可能な第2の駆動部材と、
前記第2の駆動部材を挟んで前記第1の駆動部材と反対側に配置され、前記第1の駆動部材との相対的な位置関係が固定された第3の駆動部材と、
前記第2の駆動部材に設けられて前記第1と第2の駆動部材の相対位置を検出する磁気センサと、
前記磁気センサの出力信号を利用して、前記ブラシレス電気機械の動作を制御する制御回路と、
を備え、
前記第3の駆動部材は、前記第1の駆動部材の各永久磁石と対向する位置に、前記各永久磁石と共同して前記第2の駆動部材の位置における磁場を強める磁場強化部材を有する、ブラシレス電気機械。
【0008】
この構成によれば、永久磁石と磁場強化部材とが共同して磁場を強めるので、永久磁石による磁場の利用効率を高めて電気機械の効率を向上させることができる。
【0009】
[適用例2]
適用例1記載のブラシレス電気機械であって、
前記磁場強化部材は、永久磁石である、ブラシレス電気機械。
【0010】
この構成によれば、第2の駆動部材が永久磁石によって上下から挟まれるので、第2の駆動部材の位置における磁場をきわめて強くすることができる。
【0011】
[適用例3]
適用例1記載のブラシレス電気機械であって、
前記磁場強化部材は、強磁性体である、ブラシレス電気機械。
【0012】
この構成によれば、より少ない永久磁石を用いて、第2の駆動部材の位置における磁場を強くすることができる。
【0013】
[適用例4]
適用例1ないし3のいずれかに記載のブラシレス電気機械であって、
各永久磁石は、前記第2の駆動部材に面する側に突出する突部を有する、ブラシレス電気機械。
【0014】
この構成によれば、突部近傍の磁場をより強めることができる。
【0015】
[適用例5]
適用例1ないし4のいずれかに記載のブラシレス電気機械であって、
前記複数の電磁コイルは、N個(Nは1以上の整数)の電磁コイルをそれぞれ有するM相(Mは2以上の整数)のコイル群を有し、
前記制御回路は、前記M相のコイル群が同時に駆動力を発生するように前記M相のコイル群を駆動する、ブラシレス電気機械。
【0016】
この構成によれば、M相のコイル群が同時に駆動力を発生するので、大きな駆動力を発生させることが可能となる。
【0017】
[適用例6]
適用例1ないし5のいずれかに記載のブラシレス電気機械であって、
前記磁気センサは、前記第1と第2の駆動部材の相対位置に応じてアナログ的変化を示す出力信号を出力するセンサである、ブラシレス電気機械。
【0018】
この構成によれば、磁気センサのアナログ的変化を利用して効率良くブラシレス電気機械を駆動することができる。
【0019】
[適用例7]
適用例6記載のブラシレス電気機械であって、
前記制御回路は、前記磁気センサの出力信号のアナログ的変化を利用したPWM制御を実行することによって、前記磁気センサの出力信号のアナログ的変化を模擬した駆動信号を生成するPWM制御回路を含む、ブラシレス電気機械。
【0020】
この構成によれば、コイルの逆起電力波形に近い形状の駆動信号でブラシレス電気機械を駆動できるので、効率を向上することが可能である。
【0021】
[適用例8]
適用例1ないし7のいずれかに記載のブラシレス電気機械であって、
前記制御回路は、前記電磁コイルから電力を回生する回生回路を含む、ブラシレス電気機械。
この構成によれば、ブラシレス電気機械を用いて発電を行うことが可能である。
【0022】
なお、本発明は、種々の形態で実現することが可能であり、例えば、ブラシレスモータ、ブラシレス発電機、それらの制御方法(又は駆動方法)、それらを用いたアクチュエータ又は発電装置等の形態で実現することができる。
【図面の簡単な説明】
【0023】
【図1】第1実施例における電動モータのモータ本体の構成を示す断面図である。
【図2】磁気センサ出力とコイルの逆起電力波形との関係を示す説明図である。
【図3】コイルの印加電圧と逆起電力との関係を示す模式図である。
【図4】第1実施例のモータの正転動作の様子を示す説明図である。
【図5】第1実施例のモータの逆転動作の様子を示す説明図である。
【図6】実施例の電気機械の用途と好ましい材料との関係を示す説明図である。
【図7】モータの駆動回路ユニットの構成を示すブロック図である。
【図8】ドライバ回路の内部構成を示す図である。
【図9】駆動制御部の内部構成と動作を示す説明図である。
【図10】センサ出力波形と駆動信号波形の対応関係を示す説明図である。
【図11】PWM部の内部構成を示すブロック図である。
【図12】モータ正転時のPWM部の動作を示すタイミングチャートである。
【図13】モータ逆転時のPWM部の動作を示すタイミングチャートである。
【図14】励磁区間設定部の内部構成と動作を示す説明図である。
【図15】第1実施例のモータを矩形波で駆動した場合と、正弦波で駆動した場合の各種の信号波形を比較して示す説明図である。
【図16】ドライバ回路の他の構成を示す図である。
【図17】実施例のモータの無負荷時の回転数を示すグラフである。
【図18】回生制御部と整流回路の内部構成を示す図である。
【図19】第1実施例の第1変形例のモータ構成を示す説明図である。
【図20】第1実施例の第2変形例のモータ構成を示す説明図である。
【図21】3相ブラシレスモータの正転動作の様子を示す説明図である。
【図22】第1実施例の第3変形例の3相リニアモータの構成を示す説明図である。
【図23】第2実施例における電動モータのモータ本体の構成を示す断面図である。
【図24】第2実施例のモータの正転動作の様子を示す説明図である。
【図25】第2実施例の第1変形例のモータ構成を示す説明図である。
【図26】従来のブラシレスモータの構成の一例を示す概念図である。
【図27】本発明の実施例によるモータを利用したプロジェクタを示す説明図である。
【図28】本発明の実施例によるモータを利用した燃料電池式携帯電話を示す説明図である。
【図29】本発明の実施例によるモータ/発電機を利用した移動体の一例としての電動自転車(電動アシスト自転車)を示す説明図である。
【図30】本発明の実施例によるモータを利用したロボットの一例を示す説明図である。
【発明を実施するための形態】
【0024】
次に、本発明の実施の形態を以下の順序で説明する。
A.第1実施例のモータ構成と動作の概要:
B.駆動回路ユニットの構成:
C.第1実施例のモータ構成の変形例:
D.第2実施例のモータ構成と動作の概要:
E.変形例:
【0025】
A.第1実施例のモータ構成と動作の概要:
図1(A)〜(D)は、本発明の第1実施例としてのブラシレスモータのモータ本体の構成を示す断面図である。このモータ本体は、ステータ部10と、上部ロータ部30Uと、下部ロータ部30Lとを有している。これらの部材10,30U,30Lは、それぞれ略円盤状の形状を有している。図1(B)は、下部ロータ部30Lの水平断面図である。下部ロータ部30Lは、それぞれ略扇状の形状を有する4つの永久磁石32Lを有している。上部ロータ部30Uも、下部ロータ部30Lと同じ構成を有しているので図示を省略する。上部ロータ部30Uと下部ロータ部30Lは、中心軸64に固定されており、同時に回転する。各磁石32U,32Lの磁化方向は、回転軸64と平行な方向である。
【0026】
図1(C)は、ステータ部10の水平断面図である。ステータ部10は、図1(A)に示すように、複数のA相コイル12Aと、複数のB相コイル12Bと、これらのコイル12A,12Bを支持する支持部材14とを有している。図1(C)は、このB相コイル12Bの側を示している。この例では、B相コイル12Bは4つ設けられており、それぞれ略扇状の形状に巻かれている。A相コイル12Aも同じである。ステータ部10には、さらに、駆動回路ユニット500が設置されている。図1(A)に示すように、ステータ部10は、ケーシング62に固定されている。
【0027】
図1(D)は、ステータ部10と2つのロータ部30U,30Lの関係を示す概念図である。ステータ部10の支持部材14上には、A相用の磁気センサ40AとB相用の磁気センサ40Bとが設けられている。磁気センサ40A,40Bは、ロータ部30U,30Lの位置(すなわちモータの位相)を検出するためのものである。なお、これらのセンサを以下では「A相センサ」及び「B相センサ」とも呼ぶ。A相センサ40Aは、2つのA相コイル12Aの中間の中央位置に配置されている。B相センサ40Bも、同様に、2つのB相コイル12Bの中間の中央位置に配置されている。この例では、A相センサ40Aが支持部材14の下側の面においてB相コイル12Bとともに配置されているが、この代わりに、支持部材14の上側の面に配置されていても良い。B相センサ40Bも同様である。なお、図1(C)からも理解できるように、この実施例ではA相センサ40AをB相コイル12Bの内部に配置するので、センサ40Aを配置する空間を確保しやすいという利点がある。
【0028】
図1(D)に示すように、磁石32U,32Lは、それぞれ一定の磁極ピッチPmで配置されており、隣接する磁石同士は逆方向に磁化されている。A相コイル12Aは、一定のピッチPcで配置されており、隣接するコイル同士が逆向きに励磁される。B相コイル12Bも同様である。本実施例では、磁極ピッチPmはコイルピッチPcに等しく、電気角でπに相当する。なお、電気角の2πは、駆動信号の位相が2πだけ変化したときに移動する機械的な角度又は距離に対応づけられる。本実施例では、駆動信号の位相が2πだけ変化すると、ロータ部30U,30Lが磁極ピッチPmの2倍だけ移動する。また、A相コイル12Aと、B相コイル12Bは、位相がπ/2だけずれた位置に配置されている。
【0029】
上部ロータ部30Uの磁石32Uと、下部ロータ部30Lの磁石32Lは、ステータ部10に向かう磁極が互いに異なる極性(S極とN極)となるように配置されている。換言すれば、上部ロータ部30Uの磁石32Uと、下部ロータ部30Lの磁石32Lは、互いに反対の極が向き合うように配置されている。この結果、図1(D)の右端に示すように、これらの磁石32U,32Lの間の磁場は、ほぼ直線状の磁力線で表されるものとなり、これらの磁石32U,32Lの間で閉じたものとなる。このような閉じた磁場は、前述した図26に示した開放された磁場に比べて強いことが理解できる。この結果、磁場の利用効率が高まり、モータ効率を向上させることが可能である。なお、磁石32U,32Lの外側の面には、強磁性体製の磁気ヨーク34U,34Lがそれぞれ設けられていることが好ましい。磁気ヨーク34U,34Lは、コイルにおける磁場をより強めることが可能である。但し、磁気ヨーク34U,34Lは省略してもよい。
【0030】
図2は、センサ出力とコイルの逆起電力波形との関係を示す説明図である。図2(A)は、図1(D)と同じものである。図2(B)は、A相コイル12Aに発生する逆起電力の波形の例を示しており、図2(C),(D)は、A相センサ40AとB相センサ40Bのセンサ出力SSA,SSBの波形の例を示している。これらのセンサ40A,40Bは、モータ運転時のコイルの逆起電力とほぼ相似形状のセンサ出力SSA,SSBを発生することができる。図2(B)に示すコイル12Aの逆起電力は、モータの回転数とともに上昇する傾向にあるが、波形形状(正弦波)はほぼ相似形状に保たれる。センサ40A,40Bとしては、例えばホール効果を利用したホールICを採用することができる。この例では、センサ出力SSAと逆起電力Ecは、いずれも正弦波か、正弦波に近い波形である。後述するように、このモータの駆動制御回路は、センサ出力SSA,SSBを利用して、逆起電力Ecとほぼ相似波形の電圧をそれぞれのコイル12A,12Bに印加する。
【0031】
ところで、電動モータは、機械的エネルギと電気的エネルギとを相互に変換するエネルギ変換装置として機能するものである。そして、コイルの逆起電力は、電動モータの機械的エネルギが電気的エネルギに変換されたものである。従って、コイルに印加する電気的エネルギを機械的エネルギに変換する場合(すなわちモータを駆動する場合)には、逆起電力と相似波形の電圧を印加することによって、最も効率良くモータを駆動することが可能である。なお、以下に説明するように、「逆起電力と相似波形の電圧」は、逆起電力と逆向きの電流を発生する電圧を意味している。
【0032】
図3(A)は、コイルの印加電圧と逆起電力との関係を示す模式図である。ここで、コイルは交流の逆起電力Ecと抵抗Rcとで模擬されている。また、この回路では、交流印加電圧Ei及びコイルと並列に電圧計Vが接続されている。なお、逆起電力Ecを「誘起電圧Ec」とも呼び、また、印加電圧Eiを「励磁電圧Ei」とも呼ぶ。コイルに交流電圧Eiを印加してモータを駆動すると、印加電圧Eiと逆の電流を流す方向に逆起電力Ecが発生する。モータが回転している状態でスイッチSWを開放すると、電圧計Vで逆起電力Ecを測定することができる。スイッチSWを開放した状態で測定される逆起電力Ecの極性は、スイッチSWを閉じた状態で測定される印加電圧Eiと同じ極性である。上述の説明において「逆起電力とほぼ相似波形の電圧を印加する」という文言は、このような電圧計Vで測定された逆起電力Ecと同じ極性を有するほぼ相似形状の波形を有する電圧を印加することを意味している。
【0033】
図3(B)は、本実施例で採用している駆動方法の概要を示している。ここでは、モータを、A相コイル12Aと、永久磁石32Uと、A相センサ40Aとで模擬している。永久磁石32Uを有するロータが回転すると、センサ40Aに交流電圧Es(「センサ電圧Es」とも呼ぶ)が発生する。このセンサ電圧Esは、コイル12Aの誘起電圧Ecと相似な波形形状を有している。そこで、センサ電圧Esの模擬したPWM信号を生成してスイッチSWをオン/オフ制御することによって、誘起電圧Ecとほぼ相似波形の励磁電圧Eiをコイル12Aに印加することが可能となる。この時の励磁電流Iiは、Ii=(Ei−Ec)/Rcで与えられる。
【0034】
上述したように、モータを駆動する場合には、逆起電力と相似波形の電圧を印加することによって、最も効率良くモータを駆動することが可能である。なお、正弦波状の逆起電力波形の中位点近傍(電圧0の近傍)ではエネルギ変換効率が比較的低く、反対に、逆起電力波形のピーク近傍ではエネルギ変換効率が比較的高いことが理解できる。逆起電力と相似波形の電圧を印加してモータを駆動すると、エネルギ変換効率の高い期間において比較的高い電圧を印加することになるので、モータ効率が向上する。一方、例えば単純な矩形波でモータを駆動すると、逆起電力がほぼ0となる位置(中位点)の近傍においてもかなりの電圧が印加されるので、モータ効率が低下する。また、このようにエネルギ変換効率の低い期間において電圧を印加すると、渦電流により回転方向以外の方向の振動が生じ、これによって騒音が発生するという問題も生じる。
【0035】
上述の説明から理解できるように、逆起電力と相似波形の電圧を印加してモータを駆動すると、モータ効率を向上させることができ、また、振動や騒音を低減することができるという利点がある。
【0036】
図4(A)〜(D)は、本実施例のブラシレスモータの正転動作の様子を示す説明図である。図4(A)は、位相が0の直前における状態を示している。A相コイル12AとB相コイル12Bの位置に記載されている「N」,「S」の文字は、これらのコイル12A,12Bの励磁方向を示している。コイル12A,12Bが励磁されると、コイル12A,12Bと磁石32U,32Lとの間に吸引力と反発力が生じる。この結果、ロータ部30U,30Lは、正転方向(図の右方向)に回転する。なお、位相が0となるタイミングで、A相コイル12Aの励磁方向が反転する(図2参照)。図4(B)は、位相がπ/2の直前まで進んだ状態を示している。位相がπ/2となるタイミングでは、B相コイル12Bの励磁方向が反転する。図4(C)は、位相がπの直前まで進んだ状態を示している。位相がπとなるタイミングでは、A相コイル12Aの励磁方向が再び逆転する。図4(D)は、位相が3π/2の直前まで進んだ状態を示している。位相が3π/2となるタイミングでは、B相コイル12Bの励磁方向が再び逆転する。
【0037】
なお、図2(C)、(D)からも理解できるように、位相がπ/2の整数倍となるタイミングでは、センサ出力SSA,SSBがゼロとなるので、2相のコイル12A,12Bのうちの一方のみから駆動力を発生する。しかし、位相がπ/2の整数倍となるタイミングを除く他のすべての期間において、2相のコイル12A,12Bの両方が同時に駆動力を発生することが可能である。従って、2相のコイル12A,12Bの両方を用いて大きなトルクを発生することができる。
【0038】
ところで、図4(A)から理解できるように、A相センサ40Aは、A相コイル12Aの中心が永久磁石32Uの中心と対向する位置においてそのセンサ出力の極性が切り替わる位置に配置されている。同様に、B相センサ40Bは、B相コイル12Bの中心が永久磁石32Lの中心と対向する位置においてそのセンサ出力の極性が切り替わる位置に配置されている。このような位置にセンサ40A,40Bを配置すれば、センサ40A,40Bから、コイルの逆起電力とほぼ相似形状のセンサ出力SSA,SSB(図2)を発生することが可能である。
【0039】
図5(A)〜(D)は、本実施例のブラシレスモータの逆転動作の様子を示す説明図である。図5(A)〜(D)は、位相が0,π/2,π,3π/2の直前となる状態をそれぞれ示している。この逆転動作は、例えば、コイル12A,12Bの駆動電圧の極性(すなわち正負)を、正転動作の駆動電圧からそれぞれ反転させることによって実現することができる。
【0040】
図6は、本発明の実施例としての電気機械の用途と好ましい材料との関係を示している。用途としては、例えば以下の項目を優先する用途が存在する。
(1)低価格であること。
(2)小型であること。
(3)消費電力が少ないこと。
(4)振動・衝撃への耐久性。
(5)高温環境での利用性。
(6)軽量であること。
(7)大トルクを発生可能であること。
(8)高回転が可能であること。
(9)環境に優しいこと。
【0041】
図6の各用途の右の欄には、永久磁石と、ロータ材(ロータ部30U,30Lの支持部材)と、ボビン材(コイルのコア材)と、ケース材に適した材料がそれぞれ示されている。なお、「高価磁石」とは、ネオジウム磁石、サマリウムコバルト磁石、アルニコ磁石などを意味する。また、「一般樹脂」とは、カーボン系樹脂と植物性樹脂とを除く各種の樹脂(特に合成樹脂)を意味する。「カーボン系樹脂」とは、ガラス状カーボン、(炭素繊維強化樹脂(CFRP)、カーボンファイバなどを意味する。ロータ材用の金属としては、アルミニウム、ステンレス鋼、チタン、マグネシウム、銅、銀、金、及び、それらの合金を使用することができる。「セラミックス」としては、ファインセラミックス、ステアタイトセラミック、アルミナ、ジルコン、ガラスを使用することができる。また、「天然材」としては、植物、木材、土砂などを用いた材料(例えば植物性樹脂)を使用することができる。
【0042】
これらの例からも理解できるように、本発明の実施例としての電気機械では、ロータ材やボビン材(コア材)やケース材として、非磁性で非導電性の各種の材料を利用することが可能である。但し、ロータ材としては、強度を考慮してアルミニウムやその合金などの金属材料を用いる場合もある。この場合にも、ボビン材やケース材は、実質的に非磁性で非導電性の材料で形成されていることが好ましい。ここで、「実質的に非磁性で非導電性の材料」とは、わずかな部分が磁性体または導電体であることが許容されることを意味している。例えば、ボビン材が実質的に非磁性で非導電性の材料で形成されているか否かは、モータにコギングが存在するか否かによって判定することができる。また、ケース材が実質的に非導電性の材料で形成されているか否かは、ケース材による鉄損(渦電流損)が所定の値(例えば入力の1%)以下か否かによって判定することができる。
【0043】
なお、電気機械の構造材の中には、回転軸と軸受け部のように、金属材料で作成することが好ましい部材も存在する。ここで、「構造材」とは、電気機械の形状を支えるために使用される部材を意味しており、小さな部品や固定具などを含まない主要な部材を意味している。ロータ材やケース材も構造材の一種である。実施例の電気機械では、回転軸と軸受け部以外の主要な構造材は、非磁性で非導電性の材料で形成することができる。
【0044】
B.駆動回路ユニットの構成:
図7は、実施例における駆動回路ユニットの内部構成を示すブロック図である。この駆動回路ユニット500は、CPU110と、駆動制御部100と、回生制御部200と、ドライバ回路150と、整流回路250と、電源ユニット300とを備えている。2つの制御部100,200は、バス102を介してCPU110と接続されている。駆動制御部100とドライバ回路150は、電動モータに駆動力を発生させる場合の制御を行う回路である。また、回生制御部200と整流回路250は、電動モータから電力を回生する場合の制御を行う回路である。回生制御部200と整流回路250とをまとめて「回生回路」とも呼ぶ。また、駆動制御部100を「駆動信号生成回路」とも呼ぶ。電源ユニット300は、駆動回路ユニット500内の他の回路に各種の電源電圧を供給するための回路である。図7では、図示の便宜上、電源ユニット300から駆動制御部100及びドライバ回路150に向かう電源配線のみが描かれており、他の回路に向かう電源配線は省略されている。
【0045】
図8は、ドライバ回路150(図7)に含まれるA相ドライバ回路120AとB相ドライバ回路120Bの構成を示している。A相ドライバ回路120Aは、A相コイル12Aに、交流駆動信号DRVA1,DRVA2を供給するためのH型ブリッジ回路である。なお、駆動信号を示すブロックの端子部分に付されている白丸は、負論理であり信号が反転していることを示している。また、符号IA1,IA2が付された矢印は、A1駆動信号DRVA1とA2駆動信号DRVA2によって流れる電流方向をそれぞれ示している。B相ドライバ回路120Bの構成もA相ドライバ回路120Aの構成と同じである。
【0046】
図9は、駆動制御部100(図7)の内部構成と動作を示す説明図である。駆動制御部100は、基本クロック生成回路510と、1/N分周器520と、PWM部530と、正逆方向指示値レジスタ540と、乗算器550と、符号化部560と、AD変換部570と、電圧指令値レジスタ580と、励磁区間設定部590とを備えている。なお、駆動制御部100は、A相用の駆動信号とB相用の駆動信号の両方を生成する回路であるが、図9(A)では図示の便宜上、A相の回路構成のみが描かれている。B相についても、A相と同じ回路が駆動制御部100内に設けられている。
【0047】
基本クロック生成回路510は、所定の周波数を有するクロック信号PCLを発生する回路であり、例えばPLL回路で構成される。分周器520は、このクロック信号PCLの1/Nの周波数を有するクロック信号SDCを発生する。Nの値は所定の一定値に設定される。このNの値は、予めCPU110によって分周器520に設定される。PWM部530は、クロック信号PCL,SDCと、乗算器550から供給される乗算値Maと、正逆方向指示値レジスタ540から供給される正逆方向指示値RIと、符号化部560から供給される正負符号信号Paと、励磁区間設定部590から供給される励磁区間信号Eaとに応じて、交流駆動信号DRVA1,DRVA2(図8)を生成する。この動作については後述する。
【0048】
正逆方向指示値レジスタ540内には、モータの回転方向を示す値RIがCPU110によって設定される。本実施例では、正逆方向指示値RIがLレベルのときにモータが正転し、Hレベルのときに逆転する。PWM部530に供給される他の信号Ma,Pa,Eaは以下のように決定される。
【0049】
磁気センサ40Aの出力SSAは、AD変換部570に供給される。このセンサ出力SSAのレンジは、例えばGND(接地電位)からVDD(電源電圧)までであり、その中位点(=VDD/2)が出力波形の中位点(正弦波の原点を通る点)である。AD変換部570は、このセンサ出力SSAをAD変換して、センサ出力のデジタル値を生成する。AD変換部570の出力のレンジは、例えばFFh〜0h(語尾の”h”は16進数であることを示す)であり、中央値80hがセンサ波形の中位点に相当する。
【0050】
符号化部560は、AD変換後のセンサ出力値のレンジを変換するとともに、センサ出力値の中位点の値を0に設定する。この結果、符号化部560で生成されるセンサ出力値Xaは、正側の所定の範囲(例えば+127〜0)と負側の所定の範囲(例えば0〜−127)の値を取る。但し、符号化部560から乗算器550に供給されるのは、センサ出力値Xaの絶対値であり、その正負符号は正負符号信号PaとしてPWM部530に供給される。
【0051】
電圧指令値レジスタ580は、CPU110によって設定された電圧指令値Yaを格納する。この電圧指令値Yaは、後述する励磁区間信号Eaとともに、モータの印加電圧を設定する値として機能するものであり、例えば0〜1.0の値を取る。仮に、非励磁区間を設けずに全区間を励磁区間とするように励磁区間信号Eaを設定した場合には、Ya=0は印加電圧をゼロとすることを意味し、Ya=1.0は印加電圧を最大値とすることを意味する。乗算器550は、符号化部560から出力されたセンサ出力値Xaと、電圧指令値Yaとを乗算して整数化し、その乗算値MaをPWM部530に供給する。
【0052】
図9(B)〜(E)は、乗算値Maが種々の値を取る場合におけるPWM部530の動作を示している。ここでは、全期間が励磁区間であり非励磁区間が無いものと仮定している。PWM部530は、クロック信号SDCの1周期の間に、デューティがMa/Nであるパルスを1つ発生させる回路である。すなわち、図9(B)〜(E)に示すように、乗算値Maが増加するに従って、駆動信号DRVA1,DRVA2のパルスのデューティが増加する。なお、第1の駆動信号DRVA1は、センサ出力SSAが正のときにのみパルスを発生する信号であり、第2の駆動信号DRVA2はセンサ出力SSAが正のときにのみパルスを発生する信号であるが、図9(B)〜(E)ではこれらを合わせて記載している。また、便宜上、第2の駆動信号DRVA2を負側のパルスとして描いている。
【0053】
図10(A)〜(C)は、センサ出力の波形とPWM部530で生成される駆動信号の波形の対応関係を示す説明図である。図中、「Hiz」は電磁コイルを未励磁状態としたハイインピーダンス状態を意味している。図9で説明したように、駆動信号DRVA1,DRVA2はセンサ出力SSAのアナログ波形をそのまま利用したPWM制御によって生成される。従って、これらの駆動信号DRVA1,DRVA2を用いて、各コイルに、センサ出力SSAの変化と対応するレベル変化を示す実効電圧を供給することが可能である。
【0054】
PWM部530は、さらに、励磁区間設定部590から供給される励磁区間信号Eaで示される励磁区間のみに駆動信号を出力し、励磁区間以外の区間(非励磁区間)では駆動信号を出力しないように構成されている。図10(C)は、励磁区間信号Eaによって励磁区間EPと非励磁区間NEPを設定した場合の駆動信号波形を示している。励磁区間EPでは図10(B)の駆動信号パルスがそのまま発生し、非励磁区間NEPでは駆動信号パルスが発生しない。このように、励磁区間EPと非励磁区間NEPを設定するようにすれば、逆起電力波形の中位点近傍(すなわち、センサ出力の中位点近傍)においてコイルを電圧を印加しないので、モータの効率をさらに向上させることが可能である。なお、励磁区間EPは、逆起電力波形のピークを中心としする対称な区間に設定されることが好ましく、非励磁区間NEPは、逆起電力波形の中位点(中心点)を中心とする対称な区間に設定されることが好ましい。
【0055】
なお、前述したように、電圧指令値Yaを1未満の値に設定すれば、乗算値Maが電圧指令値Yaに比例して小さくなる。従って、電圧指令値Yaによっても、実効的な印加電圧を調整することが可能である。
【0056】
上述の説明から理解できるように、本実施例のモータでは、電圧指令値Yaと、励磁区間信号Eaとの両方を利用して印加電圧を調整することが可能である。望ましい印加電圧と、電圧指令値Ya及び励磁区間信号Eaとの関係は、予め駆動回路ユニット500(図7)内のメモリにテーブルとして格納されていることが望ましい。こうすれば、駆動回路ユニット500が、外部から望ましい印加電圧の目標値を受信したときに、CPU110がその目標値に応じて、電圧指令値Yaと、励磁区間信号Eaとを駆動制御部100に設定することが可能である。なお、印加電圧の調整には、電圧指令値Yaと、励磁区間信号Eaの両方を利用する必要はなく、いずれか一方のみを利用するようにしてもよい。
【0057】
図11は、PWM部530(図9)の内部構成の一例を示すブロック図である。PWM部530は、カウンタ531と、EXOR回路533と、駆動波形形成部535とを備えている。これらは以下のように動作する。
【0058】
図12は、モータ正転時のPWM部530の動作を示すタイミングチャートである。この図には、2つのクロック信号PCL,SDCと、正逆方向指示値RIと、励磁区間信号Eaと、乗算値Maと、正負符号信号Paと、カウンタ531内のカウント値CM1と、カウンタ531の出力S1と、EXOR回路533の出力S2と、駆動波形形成部535の出力信号DRVA1,DRVA2とが示されている。カウンタ531は、クロック信号SDCの1期間毎に、クロック信号PCLに同期してカウント値CM1を0までダウンカウントする動作を繰り返す。カウント値CM1の初期値は乗算値Maに設定される。なお、図12では、図示の便宜上、乗算値Maとして負の値も描かれているが、カウンタ531で使用されるのはその絶対値|Ma|である。カウンタ531の出力S1は、カウント値CM1が0で無い場合にはHレベルに設定され、カウント値CM1が0になるとLレベルに立ち下がる。
【0059】
EXOR回路533は、正負符号信号Paと正逆方向指示値RIとの排他的論理和を示す信号S2を出力する。モータが正転する場合には、正逆方向指示値RIがLレベルである。従って、EXOR回路533の出力S2は、正負符号信号Paと同じ信号となる。駆動波形形成部535は、カウンタ531の出力S1と、EXOR回路533の出力S2から、駆動信号DRVA1,DRVA2を生成する。すなわち、カウンタ531の出力S1のうち、EXOR回路533の出力S2がLレベルの期間の信号を第1の駆動信号DRVA1として出力し、出力S2がHレベルの期間の信号を第2の駆動信号DRVA2として出力する。なお、図12の右端部付近では、励磁区間信号EaがLレベルに立ち下がり、これによって非励磁区間NEPが設定されている。従って、この非励磁区間NEPでは、いずれの駆動信号DRVA1,DRVA2も出力されず、ハイインピーダンス状態に維持される。
【0060】
図13は、モータ逆転時のPWM部530の動作を示すタイミングチャートである。モータ逆転時には、正逆方向指示値RIがHレベルに設定される。この結果、2つの駆動信号DRVA1,DRVA2が図12から入れ替わっており、この結果、モータが逆転することが理解できる。
【0061】
図14は、励磁区間設定部590の内部構成と動作を示す説明図である。励磁区間設定部590は、電子可変抵抗器592と、電圧比較器594,596と、OR回路598とを有している。電子可変抵抗器592の抵抗値Rvは、CPU110によって設定される。電子可変抵抗器592の両端の電圧V1,V2は、電圧比較器594,596の一方の入力端子に与えられている。電圧比較器594,596の他方の入力端子には、センサ出力SSAが供給されている。電圧比較器594,596の出力信号Sp,Snは、OR回路598に入力されている。OR回路598の出力は、励磁区間と非励磁区間とを区別するための励磁区間信号Eaである。
【0062】
図14(B)は、励磁区間設定部590の動作を示している。電子可変抵抗器592の両端電圧V1,V2は、抵抗値Rvを調整することによって変更される。具体的には、両端電圧V1,V2は、電圧レンジの中央値(=VDD/2)からの差分が等しい値に設定される。センサ出力SSAが第1の電圧V1よりも高い場合には第1の電圧比較器594の出力SpがHレベルとなり、一方、センサ出力SSAが第2の電圧V2よりも低い場合には第2の電圧比較器596の出力SnがHレベルとなる。励磁区間信号Eaは、これらの出力信号Sp,Snの論理和を取った信号である。従って、図14(B)の下部に示すように、励磁区間信号Eaは、励磁区間EPと非励磁区間NEPとを示す信号として使用することができる。励磁区間EPと非励磁区間NEPの設定は、CPU110が可変抵抗値Rvを調整することによって行なわれる。
【0063】
図15は、上述した本実施例のモータを矩形波で駆動した場合と、正弦波で駆動した場合の各種の信号波形を比較して示している。矩形波駆動の場合には、矩形波の駆動電圧がコイルに与えられる。駆動電流は、始動時には矩形波に近いが、回転速度が上昇すると減少する。これは、回転速度の上昇に応じて逆起電力が増加するからである(図2)。但し、矩形波駆動では、回転速度が上昇しても、駆動電圧が切り替わるタイミング(位相=nπ)の近傍における電流値はあまり減少せず、かなり大きな電流が流れる傾向にある。
【0064】
一方、正弦波で駆動する場合には、駆動電圧の実効値が正弦波形状となるように駆動電圧がPWM制御される。駆動電流は、始動時には正弦波に近いが、回転速度が上昇すると逆起電力の影響で駆動電流が減少する。正弦波駆動では、駆動電圧の極性が切り替わるタイミング(位相=nπ)の近傍において電流値が大幅に減少している。図2に即して説明したように、一般に、駆動電圧の極性が切り替わるタイミングの近傍では、モータのエネルギ変換効率が低い。正弦波駆動では、効率の低い期間における電流値が、矩形波駆動よりも小さくなるので、より高効率でモータを駆動することが可能である。
【0065】
図16は、ドライバ回路150(図7)に含まれるA相ドライバ回路120AとB相ドライバ回路120Bの他の構成例を示している。このドライバ回路120A,120Bは、図8に示したドライバ回路120A,120Bを構成するトランジスタのゲート電極の前に、増幅回路122を設けたものである。なお、トランジスタのタイプも図8とは異なっているが、各トランジスタとしては任意のタイプのものを使用することができる。本実施例のモータを、トルクと回転数に関して広い動作範囲で駆動させるためには、ドライバ回路120A,120Bの電源電圧VDDを可変に設定できることが好ましい。電源電圧VDDを変更した場合には、各トランジスタのゲート電圧に与える駆動信号DRVA1,DRVA2,DRVB1,DRVB2のレベルもこれに比例して変更される。こうすれば、広い範囲の電源電圧VDDを用いてモータを駆動することができる。増幅回路122は、駆動信号DRVA1,DRVA2,DRVB1,DRVB2のレベルを変更するための回路である。なお、図7に示した駆動回路ユニット500の電源ユニット300は、可変の電源電圧VDDをドライバ回路150に供給するものとすることが好ましい。
【0066】
図17は、本実施例のモータの無負荷時の回転数を示している。このグラフから理解できるように、本実施例のモータは無負荷時に極く低回転数まで極めて安定した回転数で回転する。この理由は、磁性体のコアが無いのでコギングが発生しないからである。
【0067】
図18は、図7に示した回生制御部200と整流回路250の内部構成を示す図である。回生制御部200は、バス102に接続されたA相充電切換部202と、B相充電切換部204と、電子可変抵抗器206とを有している。2つの充電切換部202,204の出力信号は、2つのAND回路211,212の入力端子に与えられている。
【0068】
A相充電切換部202は、A相コイル12Aからの回生電力を回収する場合には「1」レベルの信号を出力し、回収しない場合には「0」レベルの信号を出力する。B相充電切換部204も同様である。なお、これらの信号レベルの切換えは、CPU110によって行われる。また、A相コイル12Aからの回生の有無と、B相コイル12Bからの回生の有無とは、独立に設定することができる。従って、例えばA相コイル12Aを用いてモータに駆動力を発生させつつ、B相コイル12Bから電力を回生することも可能である。
【0069】
なお、駆動制御部100も、同様に、A相コイル12Aを用いて駆動力を発生するか否かと、B相コイル12Bを用いて駆動力を発生するか否かとを、独立に設定できるように構成してもよい。このようにすれば、2相のコイル12A,12Bのうちの任意の一方で駆動力を発生させつつ、他方で電力を回生する運転モードでモータを運転することが可能である。
【0070】
電子可変抵抗器206の両端の電圧は、4つの電圧比較器221〜224の2つの入力端子の一方に与えられている。電圧比較器221〜224の他方の入力端子には、A相センサ信号SSAとB相センサ信号SSBが供給されている。4つの電圧比較器221〜224の出力信号TPA,BTA,TPB,BTBは、「マスク信号」または「許可信号」と呼ぶことができる。
【0071】
A相コイル用のマスク信号TPA,BTAはOR回路231に入力されており、B相用のマスク信号TPB,BTBは他のOR回路232に入力されている。これらのOR回路231,232の出力は、上述した2つのAND回路211,212の入力端子に与えられている。これらのAND回路211,212の出力信号MSKA,MSKBも、「マスク信号」または「許可信号」と呼ぶ。
【0072】
ところで、4つの電圧比較器221〜224とOR回路231,232の構成は、図14に示した励磁区間設定部590内の電圧比較器594,596とOR回路598を2つ並べたものと同じである。従って、A相コイル用のOR回路231の出力信号は、図14(B)に示した励磁区間信号Eaと同様な波形を有する。また、A相充電切換部202の出力信号が「1」レベルの場合には、A相コイル用のAND回路211から出力されるマスク信号MSKAはOR回路231の出力信号と同じものとなる。これらの動作はB相についても同様である。
【0073】
整流回路250は、A相コイル用の回路として、複数のダイオードを含む全波整流回路252と、2つのゲートトランジスタ261,262と、バッファ回路271と、インバータ回路272(NOT回路)とを有している。なお、B相用にも同じ回路が設けられている。ゲートトランジスタ261,262は、回生用の電源配線280に接続されている。
【0074】
電力回生時にA相コイル12Aで発生した交流電力は、全波整流回路252で整流される。ゲートトランジスタ261,262のゲートには、A相コイル用のマスク信号MSKAとその反転信号が与えられており、これに応じてゲートトランジスタ261,262がオン/オフ制御される。従って、電圧比較器221,222から出力されたマスク信号TPA,BTAの少なくとも一方がHレベルの期間では回生電力が電源配線280に出力され、一方、マスク信号TPA,BTAの双方がLレベルの期間では電力の回生が禁止される。
【0075】
以上の説明から理解できるように、回生制御部200と整流回路250を用いて、回生電力を回収することが可能である。また、回生制御部200と整流回路250は、A相コイル用のマスク信号MSKA及びB相コイル用のマスク信号MSKBに応じて、A相コイル12AとB相コイル12Bからの回生電力を回収する期間を制限し、これによって回生電力の量を調整することが可能である。
【0076】
以上のように、第1実施例のブレシレスモータでは、複数の電磁コイルの両側を永久磁石で挟む構成を採用したので、電磁コイルの位置における磁場を強めることができ、効率を高めることが可能である。
【0077】
C.第1実施例のモータ構成の変形例:
図19は、第1実施例の第1変形例としてのブラシレスモータの構成を示す説明図である。このブラシレスモータのロータ部30Ua,30Laでは、永久磁石32Ua,32Ubの中央部に、ステータ部10に向けて突出した凸部36(図22(B))がそれぞれ設けられている。他の構成は、図1に示したモータの構成と同じである。永久磁石32Ua,32Ubの中央の凸部36は、図22(D)に示すコイル12A,12Bの有効コイル部ECPに相当する幅を有している。コイル12A,12Bの有効コイル部ECPは、有効な駆動力を発生するコイル部分であり、これ以外のコイル部分は駆動力(回転式モータでは回転方向の力)をほとんど発生しない。従って、各永久磁石に有効コイル部ECPとほぼ同じ幅の凸部36を設けることによって、磁石の磁場をより有効に活用することが可能である。
【0078】
図20は、第1実施例の第2変形例としての3相ブラシレスモータの構成を示す説明図である。このブラシレスモータは、ステータ部10aが3相のコイルを有している点が図1に示したモータと異なっており、ロータ部30U,30Lの構成は図1と同じである。図20(D)に示すように、ステータ部10aは、A相コイル12AとB相コイル12BとC相コイル12Cの3層構造を有している。これらの3相のコイル12A,12B,12Cは、2π/3の位相差で配置されている。A相センサ40Aは、2つのA相コイル12Aの中間の中央位置に配置されている。同様に、B相センサ40Bも、2つのB相コイル12Bの中間の中央位置に配置されており、C相センサ40Cも、2つのC相コイル12Cの中間の中央位置に配置されている。なお、3相分のコイルを3層構造で配置する必要は無く、例えば、1層構造で(すなわち同じ面上に)配置することも可能である。但し、3層構造を採用すれば、より多くのコイルを配置できるので、大きなトルクを発生できるという利点がある。
【0079】
図21(A)〜(C)は、図20の3相ブラシレスモータの正転動作の様子を示す説明図である。図21(A)〜(C)は、位相が0,2π/3,4π/3の直前における状態をそれぞれ示している。3相駆動では、よく知られているように、π/3の期間毎にいずれかの相の励磁方向が逆点する。3相ブレシレスモータの逆転動作についての説明は省略する。
【0080】
図22は、第1実施例の第3変形例としての3相リニアモータの構成を示している。このリニアモータ1000は、固定ガイド部1100と、移動部1200とを備えている。図22(A)に示すように、固定ガイド部1100の上部と下部には、移動方向に沿って多数の永久磁石32がそれぞれ配列されている。移動部1200は、これらの永久磁石32によって上下方向に挟まれた位置に設けられており、3相のコイル12A,12B,12Cが設けられている。また、各相の隣接するコイルの間には、磁気センサが設けられているが、ここでは図示を省略している。図22(B)に示すように、移動部1200には駆動制御部1250が設けられている。駆動制御部1250は、燃料電池などの自立的な電源装置(図示省略)を有している。移動部1200は、ベアリング部1140によって固定ガイド部1100に摺動可能に保持されている。本発明の実施例は、このようなリニアモータとしても実現可能である。なお、リニアモータは、2相ブラシレスモータとして構成することも可能である。
【0081】
D.第2実施例のモータ構成と動作の概要:
図23(A)〜(D)は、本発明の第2実施例としてのブラシレスモータのモータ本体の構成を示す断面図である。このモータ本体は、図1に示したモータの下部ロータ部30Lの構成を変更したものであり、他の構成は図1と同じである。図23(A),(D)に示すように、下部ロータ部30Lbには、永久磁石の代わりに強磁性体材料で形成された磁気ヨーク38が設けられている。これらの磁気ヨーク38は、上部ロータ部30Uの永久磁石32による磁場(特にステータ部10の位置における磁場)を強める働きがある。
【0082】
第1及び第2実施例から理解できるように、コイルの両側のうちの一方側には永久磁石を設け、他方側には永久磁石と共同してコイル位置における磁場を強める磁場強化部材を設けることが可能である。図1に示した第1実施例では永久磁石32Lが磁場強化部材として機能し、図23に示す第2実施例では磁気ヨーク38が磁場強化部材として機能している。これらの構成では、コイル位置における磁場が強化されるので、ブラシレスモータにおける磁場の利用効率を高めてモータ効率を向上させることができる。
【0083】
なお、磁気ヨーク38は、図23(D)に示すように、個々の永久磁石32Uに対向する位置に永久磁石32Uと同じ数だけ設けるようにしてもよく、あるいは、複数の永久磁石に対向するような板状の磁気ヨークを用いてもよい。後者の場合には、1枚の平板状のヨーク部材を、複数の永久磁石に対する磁場強化部材として使用することが可能である。なお、図23(D)に示すように、各磁気ヨーク38は、個々の永久磁石32Uに対向する位置に凸部を有するようにすることが好ましい。
【0084】
図24(A)〜(D)は、第2実施例のブラシレスモータの逆転動作の様子を示す説明図である。図24(A)〜(D)は、位相が0,π/2,π,3π/2の直前となる状態をそれぞれ示している。この動作は、図5に示したものと基本的に同じである。逆転動作も図6に示したものと同様なので省略する。
【0085】
図25は、第2実施例の第1変形例のモータ構成を示す説明図である。このブラシレスモータ2000は、ファンモータとして構成されたものである。すなわち、上部ロータ部30Ubの外周部には、羽根2100が固定されている。なお、この上部ロータ部30Ubの永久磁石32Ubは、ステータ部10に向かって突出した凸部を有している。この凸部は、図22で説明したように、モータ効率をさらに改善するための工夫である。
【0086】
なお、第2実施例のブラシレスモータは、図20に示した3相モータや、図22に示したリニアモータとしても実現可能である。
【0087】
ところで、図22のリニアモータでは、電磁コイルが設けられている部材が移動し、永久磁石が設けられている部材が固定されている。この関係は、図1及び図25に示した構成と逆である。すなわち、図1に示したモータでは、電磁コイルが設けられている部材(ステータ部10)が固定されており、永久磁石(又は磁気ヨーク38)が設けられている部材(ロータ部30U,30L)が移動する。これらの例から理解できるように、本発明の実施例による電気機械は、永久磁石が設けられている第1の部材(「第1の駆動部材」とも呼ぶ)と、電磁コイルが設けられている第2の部材(「第2の駆動部材」とも呼ぶ)と、磁場強化部材(永久磁石32L又は磁気ヨーク38)が設けられている第3の部材(「第3の駆動部材」とも呼ぶ)を備え、第1と第3の駆動部材が、第2の駆動部材に対して相対的に移動できるように構成された種々の電気機械として実現可能である。
【0088】
E.変形例:
なお、この発明は上記の実施例や実施形態に限られるものではなく、その要旨を逸脱しない範囲において種々の態様において実施することが可能であり、例えば次のような変形も可能である。
【0089】
E1.変形例1:
上記実施例や変形例では2相ブラシレスモータと3相ブラシレスモータについて説明したが、本発明は、任意の相数M(Mは1以上の整数)のブラシレスモータに適用することが可能である。例えば、1相モータにも本発明を適用することができる。1相モータは、例えば、図1のモータの2相のコイルのうちの1相分を省略することによって実現可能である。なお、各相のコイル群は、少なくとも1個の電磁コイルを含んでいれば良いが、2個以上の電磁コイルを含むことが好ましい。
【0090】
E2.変形例2:
上記実施例ではアナログ磁気センサを利用していたが、アナログ磁気センサの代わりに、多値のアナログ的出力を有するデジタル磁気センサを使用してもよい。アナログ磁気センサも多値出力を有するデジタル磁気センサも、アナログ的変化を示す出力信号を有する点で共通している。なお、本明細書において、「アナログ的変化を示す出力信号」とは、オン/オフの2値出力ではなく、3値以上の多数レベルを有するデジタル出力信号と、アナログ出力信号との両方を包含する広い意味で使用されている。
【0091】
なお、アナログ的変化を示す出力信号を有するセンサの代わりに、2値のデジタル出力を有するデジタル磁気センサを使用するようにしてもよい。この場合には、図9のADC部570と励磁区間設定部590が不要となる。従って、励磁区間の設定は行なわれず、また、正弦波駆動波形を用いないため、効率が低下し振動/騒音も生じてしまうが、安価なICで駆動制御回路を実現することができる。
【0092】
E3.変形例3:
PWM回路としては、図11に示した回路以外の種々の回路構成を採用することが可能である。例えば、センサ出力と基準三角波とを比較することによってPWM制御を行う回路を利用してもよい。また、PWM制御以外の方法で駆動信号を生成するようにしてもよい。また、PWM制御以外の方法で駆動信号を生成する回路を採用してもよい。例えば、センサ出力を増幅してアナログ駆動信号を生成する回路を採用することも可能である。
【0093】
また、図9において、ADC部570を電圧比較器(コンパレータ)に変えることも可能である。この場合には、正弦波駆動波形では無く、矩形波駆動となるため、効率が低下し振動/騒音も生じてしまうが、安価なICで駆動制御回路を実現することができる。
【0094】
E4.変形例4:
本発明は、回生回路を含まないモータや、駆動制御回路を含まない発電機にも適用可能である。具体例としては、例えば、ファンモータ、時計(針駆動)、ドラム式洗濯機(単一回転)、ジェットコースタ、振動モータなどの種々の装置のモータに適用可能である。本発明をファンモータに適用した場合には、種々の効果(低消費電力、低振動、低騒音、低回転ムラ、低発熱、高寿命)が特に顕著である。このようなファンモータは、例えば、デジタル表示装置や、車載機器、燃料電池式パソコン、燃料電池式デジタルカメラ、燃料電池式ビデオカメラ、燃料電池式携帯電話などの燃料電池使用機器、プロジェクタ等の各種装置のファンモータとして使用することができる。本発明のモータは、さらに、各種の家電機器や電子機器のモータとしても利用可能である。例えば、光記憶装置や、磁気記憶装置、ポリゴンミラー駆動装置等において、本発明によるモータをスピンドルモータとして使用することが可能である。また、本発明によるモータは、移動体やロボット用のモータとしても利用可能である。
【0095】
図27は、本発明の実施例によるモータを利用したプロジェクタを示す説明図である。このプロジェクタ600は、赤、緑、青の3色の色光を発光する3つの光源610R、610G、610Bと、これらの3色の色光をそれぞれ変調する3つの液晶ライトバルブ640R、640G、640Bと、変調された3色の色光を合成するクロスダイクロイックプリズム650と、合成された3色の色光をスクリーンSCに投写する投写レンズ系660と、プロジェクタ内部を冷却するための冷却ファン670と、プロジェクタ600の全体を制御する制御部680と、を備えている。冷却ファン670を駆動するモータとしては、上述した各種のブラシレスモータを利用することができる。
【0096】
図28(A)〜(C)は、本発明の実施例によるモータを利用した燃料電池式携帯電話を示す説明図である。図28(A)は携帯電話700の外観を示しており、図28(B)は、内部構成の例を示している。携帯電話700は、携帯電話700の動作を制御するMPU710と、ファン720と、燃料電池730とを備えている。燃料電池730は、MPU710やファン720に電源を供給する。ファン720は、燃料電池730への空気供給のために携帯電話700の外から内部へ送風するため、或いは、燃料電池730で生成される水分を携帯電話700の内部から外に排出するためのものである。なお、ファン720を図28(C)のようにMPU710の上に配置して、MPU710を冷却するようにしてもよい。ファン720を駆動するモータとしては、上述した各種のブラシレスモータを利用することができる。
【0097】
図29は、本発明の実施例によるモータ/発電機を利用した移動体の一例としての電動自転車(電動アシスト自転車)を示す説明図である。この自転車800は、前輪にモータ810が設けられており、サドルの下方のフレームに制御回路820と充電池830とが設けられている。モータ810は、充電池830からの電力を利用して前輪を駆動することによって、走行をアシストする。また、ブレーキ時にはモータ810で回生された電力が充電池830に充電される。制御回路820は、モータの駆動と回生とを制御する回路である。このモータ810としては、上述した各種のブラシレスモータを利用することが可能である。
【0098】
図30は、本発明の実施例によるモータを利用したロボットの一例を示す説明図である。このロボット900は、第1と第2のアーム910,920と、モータ930とを有している。このモータ930は、被駆動部材としての第2のアーム920を水平回転させる際に使用される。このモータ930としては、上述した各種のブラシレスモータを利用することが可能である。
【符号の説明】
【0099】
10…ステータ部
12A,12B,12C…電磁コイル
14…支持部材
30…ロータ部
30L…下部ロータ部
30U…上部ロータ部
32…永久磁石
32L…永久磁石(磁場強化部材)
34U,34L…磁気ヨーク
36…凸部
38…磁気ヨーク(磁場強化部材)
40A,40B…磁気センサ
62…ケーシング
64…回転軸(中心軸)
100…駆動制御部
102…バス
110…CPU
120A,120B…ドライバ回路
122…増幅回路
150…ドライバ回路
200…回生制御部
202,204…充電切換部
206…電子可変抵抗器
211,212…AND回路
221〜224…電圧比較器
231,232…OR回路
250…整流回路
252…全波整流回路
261,262…ゲートトランジスタ
271…バッファ回路
272…インバータ回路
280…電源配線
500…駆動回路ユニット
510…基本クロック生成回路
520…分周器
530…PWM部
531…カウンタ
533…EXOR回路
535…駆動波形形成部
540…レジスタ
550…乗算器
560…符号化部
570…AD変換部
580…指令値レジスタ
590…励磁区間設定部
592…電子可変抵抗器
594,596…電圧比較器
598…OR回路
600…プロジェクタ
610R,610G,610B…光源
640R,640G,640B…液晶ライトバルブ
650…クロスダイクロイックプリズム
660…投写レンズ系
670…冷却ファン
680…制御部
700…携帯電話
710…MPU
720…ファン
730…燃料電池
800…電動自転車(電動アシスト自転車)
810…モータ
820…制御回路
830…充電池
900…ロボット
910…アーム
920…アーム
930…モータ
1000…リニアモータ
1100…固定ガイド部
1140…ベアリング部
1200…移動部
1250…駆動制御部
2000…ブラシレスモータ(ファンモータ)
2100…羽根
【特許請求の範囲】
【請求項1】
ブラシレス電気機械であって、
複数の永久磁石を有する第1の駆動部材と、
複数の電磁コイルを有し、前記第1の駆動部材に対して相対的に移動可能な第2の駆動部材と、
前記第2の駆動部材を挟んで前記第1の駆動部材と反対側に配置され、前記第1の駆動部材との相対的な位置関係が固定された第3の駆動部材と、
前記第2の駆動部材に設けられて前記第1と第2の駆動部材の相対位置を検出する磁気センサと、
前記磁気センサの出力信号を利用して、前記ブラシレス電気機械の動作を制御する制御回路と、
を備え、
前記第3の駆動部材は、前記第1の駆動部材の各永久磁石と対向する位置に、前記各永久磁石と共同して前記第2の駆動部材の位置における磁場を強める磁場強化部材を有する、ブラシレス電気機械。
【請求項2】
請求項1記載のブラシレス電気機械であって、
前記磁場強化部材は、永久磁石である、ブラシレス電気機械。
【請求項3】
請求項1記載のブラシレス電気機械であって、
前記磁場強化部材は、強磁性体である、ブラシレス電気機械。
【請求項4】
請求項1ないし3のいずれかに記載のブラシレス電気機械であって、
各永久磁石は、前記第2の駆動部材に面する側に突出する突部を有する、ブラシレス電気機械。
【請求項5】
請求項1ないし4のいずれかに記載のブラシレス電気機械であって、
前記複数の電磁コイルは、N個(Nは1以上の整数)の電磁コイルをそれぞれ有するM相(Mは2以上の整数)のコイル群を有し、
前記制御回路は、前記M相のコイル群が同時に駆動力を発生するように前記M相のコイル群を駆動する、ブラシレス電気機械。
【請求項6】
請求項1ないし5のいずれかに記載のブラシレス電気機械であって、
前記磁気センサは、前記第1と第2の駆動部材の相対位置に応じてアナログ的変化を示す出力信号を出力するセンサである、ブラシレス電気機械。
【請求項7】
請求項6記載のブラシレス電気機械であって、
前記制御回路は、前記磁気センサの出力信号のアナログ的変化を利用したPWM制御を実行することによって、前記磁気センサの出力信号のアナログ的変化を模擬した駆動信号を生成するPWM制御回路を含む、ブラシレス電気機械。
【請求項8】
請求項1ないし7のいずれかに記載のブラシレス電気機械であって、
前記制御回路は、前記電磁コイルから電力を回生する回生回路を含む、ブラシレス電気機械。
【請求項9】
請求項1記載のブラシレス電気機械と、
前記ブラシレス電気機械によって駆動される被駆動部材と、
を備える装置。
【請求項10】
請求項1記載のブラシレス電気機械を備える移動体。
【請求項1】
ブラシレス電気機械であって、
複数の永久磁石を有する第1の駆動部材と、
複数の電磁コイルを有し、前記第1の駆動部材に対して相対的に移動可能な第2の駆動部材と、
前記第2の駆動部材を挟んで前記第1の駆動部材と反対側に配置され、前記第1の駆動部材との相対的な位置関係が固定された第3の駆動部材と、
前記第2の駆動部材に設けられて前記第1と第2の駆動部材の相対位置を検出する磁気センサと、
前記磁気センサの出力信号を利用して、前記ブラシレス電気機械の動作を制御する制御回路と、
を備え、
前記第3の駆動部材は、前記第1の駆動部材の各永久磁石と対向する位置に、前記各永久磁石と共同して前記第2の駆動部材の位置における磁場を強める磁場強化部材を有する、ブラシレス電気機械。
【請求項2】
請求項1記載のブラシレス電気機械であって、
前記磁場強化部材は、永久磁石である、ブラシレス電気機械。
【請求項3】
請求項1記載のブラシレス電気機械であって、
前記磁場強化部材は、強磁性体である、ブラシレス電気機械。
【請求項4】
請求項1ないし3のいずれかに記載のブラシレス電気機械であって、
各永久磁石は、前記第2の駆動部材に面する側に突出する突部を有する、ブラシレス電気機械。
【請求項5】
請求項1ないし4のいずれかに記載のブラシレス電気機械であって、
前記複数の電磁コイルは、N個(Nは1以上の整数)の電磁コイルをそれぞれ有するM相(Mは2以上の整数)のコイル群を有し、
前記制御回路は、前記M相のコイル群が同時に駆動力を発生するように前記M相のコイル群を駆動する、ブラシレス電気機械。
【請求項6】
請求項1ないし5のいずれかに記載のブラシレス電気機械であって、
前記磁気センサは、前記第1と第2の駆動部材の相対位置に応じてアナログ的変化を示す出力信号を出力するセンサである、ブラシレス電気機械。
【請求項7】
請求項6記載のブラシレス電気機械であって、
前記制御回路は、前記磁気センサの出力信号のアナログ的変化を利用したPWM制御を実行することによって、前記磁気センサの出力信号のアナログ的変化を模擬した駆動信号を生成するPWM制御回路を含む、ブラシレス電気機械。
【請求項8】
請求項1ないし7のいずれかに記載のブラシレス電気機械であって、
前記制御回路は、前記電磁コイルから電力を回生する回生回路を含む、ブラシレス電気機械。
【請求項9】
請求項1記載のブラシレス電気機械と、
前記ブラシレス電気機械によって駆動される被駆動部材と、
を備える装置。
【請求項10】
請求項1記載のブラシレス電気機械を備える移動体。
【図1】


【図2】
【図3】
【図4】
【図5】
【図6】
【図7】
【図8】
【図9】
【図10】
【図11】
【図12】
【図13】
【図14】
【図15】
【図16】
【図17】
【図18】
【図19】
【図20】
【図21】
【図22】
【図23】
【図24】
【図25】
【図26】
【図27】
【図28】
【図29】
【図30】
【図2】
【図3】
【図4】
【図5】
【図6】
【図7】
【図8】
【図9】
【図10】
【図11】
【図12】
【図13】
【図14】
【図15】
【図16】
【図17】
【図18】
【図19】
【図20】
【図21】
【図22】
【図23】
【図24】
【図25】
【図26】
【図27】
【図28】
【図29】
【図30】
【公開番号】特開2013−51880(P2013−51880A)
【公開日】平成25年3月14日(2013.3.14)
【国際特許分類】
【出願番号】特願2012−265971(P2012−265971)
【出願日】平成24年12月5日(2012.12.5)
【分割の表示】特願2008−1571(P2008−1571)の分割
【原出願日】平成20年1月8日(2008.1.8)
【出願人】(000002369)セイコーエプソン株式会社 (51,324)
【Fターム(参考)】
【公開日】平成25年3月14日(2013.3.14)
【国際特許分類】
【出願日】平成24年12月5日(2012.12.5)
【分割の表示】特願2008−1571(P2008−1571)の分割
【原出願日】平成20年1月8日(2008.1.8)
【出願人】(000002369)セイコーエプソン株式会社 (51,324)
【Fターム(参考)】
[ Back to top ]