
ブラシ整流された電気機械のための組付け補助装置
本発明は、電気機械(1)のブラシアセンブリ(2)のための組付け装置に関し、第1の係止部材(18)を有するブラシ電極(14)を備え、第2の係止部材(16)及び解除部材(19)を有する、ブラシアセンブリ(2)に結合される係止装置(15)を備えており、第2の係止部材(16)は、ブラシ電極(14)が、特にばね力に抗して組付け位置に保持されるように前記第1の係止部材(18)と協働しており、係止装置(15)を解除するために、解除部材(19)は、ブラシアセンブリ(2)の磁極ポット(3)内への挿入時に、決まった位置において操作されて、ブラシ電極(14)が解放されるように、電気機械(1)の磁極ポット(3)が形成されている。

【発明の詳細な説明】
【技術分野】
【0001】
本発明は、ブラシ整流された電気機械及びこの電気機械の製造に関する。さらに本発明は、電気機械の組付け、特に電気機械の整流子の組付けのための装置及び方法に関する。
【0002】
背景技術
機械的に整流された電気機械において、ロータのアーマチュア巻線の電気的な接触接続は、通常、整流子を介して行われる。整流子は、夫々1つ又は複数のブラシ電極を備えたブラシアセンブリを有する。ブラシ電極は、通常、カーボンブラシとして構成されている。ブラシ電極は、1つのロータに配置されている整流子片に載置されていて、これにより整流子片に接触接続している。さらにブラシ電極は、整流子片ホイールの整流子片に対して押圧され、ロータの運動時に整流子片上を滑動するので、ロータの位置に応じて種々異なる整流子片が接触接続される。許容される整流を達成するために、ブラシ電極は最適化されたブラシ圧着力によって整流子片に押し付けられる必要がある。したがって、ブラシ電極がロータの運動時に整流子片から持ち上がり得ないということを保証することができる。そうでなければ電気的な接触接続は中断されてしまう。
【0003】
さらに、均一な整流をもたらすことができるように、ブラシ電極が所定の(軸線方向の)位置において整流子片に位置決めされるということを保証することは必要不可欠である。この構成において、ブラシ電極の正確な位置決めを確保にするために、筒状システム(Koechersystem)を設けることができる。このシステムにおいてブラシ電極は管状体を介して案内され、ばねによるばね力によって整流子片に押し付けられる。いわゆるハンマブラシ(Hammerbuerste)において、上記役割は、特別に成形された、ブラシ電極に直接的に取り付けられているばねにより担われる。
【0004】
上記電気機械の製造時に、ロータは、このロータに配置されている、整流子の整流子片ホイールと共に、適切なケーシング内に挿入され、これと同時に又は次いで、例えばエンドシールドに結合されているブラシアセンブリは、ケーシングに軸線方向において載置され、これにより電気機械は完成する。ブラシアセンブリのブラシ電極が、組付け工程中に、整流子片ホイールの一方の側又は電気機械のその他の構成要素と衝突しないように、ブラシ電極は接合工程中に適切にばね力に抗して変位する必要がある。このことは、組付けのために整流子片ホイールに対して予め支承され、かつブラシ電極を整流子片ホイールに案内する適切な傾斜路を介して行うことができる。しかしながら、ブラシ電極を整流子片に案内する傾斜路を用いてのブラシアセンブリの組付けは、あまり提供されない軸線方向の構成スペースを必要とするという欠点を有する。
【0005】
択一的には、ブラシ電極は拘束機構を介して固定され、これにより、接合工程中に整流子片から離されたままである。ブラシアセンブリが予め設けられた位置にある場合、上記ばね機構は外側から特別な装置により再びロック解除され、ブラシ電極はばねにより整流子片へと押圧される。このためにロック解除するために、上記電気機械の組付け時に、構造的に大きな手間を必要とする特別製の装置が必要である。さらに拘束機構のロック解除の付加的な工程により、電気機械の組付け時間は延びる。
【0006】
したがって本発明の目的は、ブラシ整流された電気機械のための改良された組付け方法、及びそのための装置を提供し、もってブラシ整流された電気機械を簡単に組付けることができるようにすることである。
【0007】
上記目的は、請求項1記載の電気機械のブラシアセンブリのための組付け装置、及び電気機械並びに他の独立請求項に記載の、電気機械を組付けるための方法により達成される。
【0008】
別の有利な構成は、従属請求項に記載されている。
【0009】
第1の観点によれば、電気機械のブラシアセンブリのための組付け装置が設けられている。この組付け装置は、
−第1の係止部材を備えている、ブラシ電極、特にカーボンブラシを有し、
−第2の係止部材及び解除部材を有する、ブラシアセンブリに結合されている係止装置を備えており、第2の係止部材は、ブラシ電極が、特にばね力に抗して組付け位置に保持されるように第1の係止部材と協働していて、電気機械の磁極ポットが、係止装置を解除するために、解除部材は、ブラシアセンブリの磁極ポット内への挿入時に、決まった位置において操作されて、ブラシ電極が解放されるように形成されている。
【0010】
上記組付け装置の思想の重要な点は、組付け装置により、ブラシアセンブリが決められた位置に達して初めて、ブラシアセンブリの電気機械の磁極ポットへの載着工程中に、組付け位置にブラシ電極を保持する係止装置を解除することができる点にある。上記決められた位置は、ブラシ電極がその終端位置に達した位置にほぼ相当する。これによりブラシ電極が、電気機械の他の構成要素と、側方で衝突するという危険性を排除することができる。こうして特に、ブラシアセンブリを電気機械内へ挿入する際、ブラシ電極が半径方向において垂直に整流子片支持体上に位置している限りは、ブラシ電極は整流子片支持体と衝突しないことが確保される。ブラシ電極が、ばね力によって整流子片支持体の整流子片に接触接続することができる決められた位置に達するやいなや、組付け装置により自動的に係止装置は解除される。
【0011】
さらに磁極ポットは所定の構造を有していてよいので、ブラシアセンブリが決められた位置に達した場合に、係止装置を解除するために、解除部材が上記構造と係合している。
【0012】
他の構成によれば、磁極ポットは段状又は傾斜状の区分を有していてよい。この区分を介して解除部材は、ブラシアセンブリを磁極ポット内に挿入する際に滑動し、これにより運動する。解除部材は、第2の係止部材が解除部材の運動により運動して、第1の係止部材との係合から外れるように、第2の系部材と連結されている。
【0013】
解除部材は、ブラシアセンブリを磁極ポット内に挿入する際に、半径方向において電気機械のロータの回動軸線に向かって押圧されるようになっていてよい。これにより、第2の係止部材は旋回し、この第2の係止部材のストッパ面は、第1の係止部材との係合から外れる。
【0014】
さらに第2の係止部材は係止ノーズに相当し、第1の係止部材は係止切欠きに相当してよい。この構成において、係止ノーズは組付け位置において係止切欠きに収容されている。
【0015】
さらに別の構成によれば、解除部材はウェブの自由端部に配置されていてよい。このウェブは弾性的に保持部に懸架されている。この保持部は、電気機械のロータ軸に対して、周方向及び軸線方向に延びている。この構成において、ロータ軸に対してウェブの自由端部は、保持部から半径方向において斜め外方に突出する。第2の係止部材は、ウェブから磁極ポットの内部に向けられて突出しており、ブラシ電極を組付け位置に保持するために第1の係止部材と協働する。
【0016】
ストッパ縁部は、解除部材の運動時に旋回することができ、これによりストッパ縁部は係止切欠きとの係合から外れる。
【0017】
さらに別の構成によれば、磁極ポットと、ロータと、組付け装置とを備えた電気機械が設けられている。ロータは、ロータ軸に配置されていて、整流子片ホイールを備えた整流子を有している。ブラシ電極は、ブラシアセンブリ内に配置されていて、上記決められた位置に相当する所定の位置において、ばね力により整流子片ホイールに押し付けられる。
【0018】
さらに別の観点によれば、上記電気機械の組付けのための方法を実施する。この方法は、以下のステップを有する。つまり、
−第2の係止部材が、ブラシ電極がばね力に抗して組付け位置に保持されるように第1の係止部材と協働するまで、ブラシ電極を、特にばね力に抗して挿入するステップと、
−ブラシアセンブリを組付け装置によって、電気機械の磁極ポット内に挿入して、係止装置を解除するために、解除部材を決められた位置において操作し、これによりブラシ電極を解放し、特にばね力により整流子片ホイールに押し付けられるステップとを有する。
【0019】
以下に、有利な実施の形態を、添付の図面に基づいて詳細に説明する。
【図面の簡単な説明】
【0020】
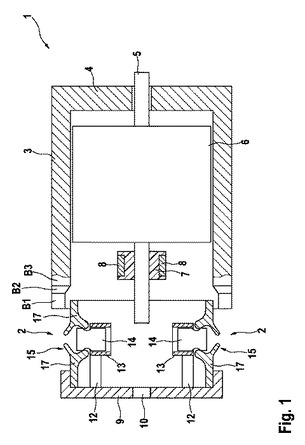
【図1】機械的な整流子を備えた電気機械の横断面図である。
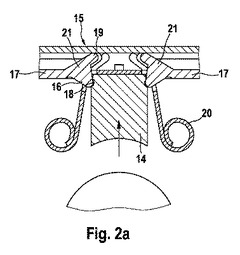
【図2】図2a及び図2bは、ロックされた状態若しくはロックされていない状態における係止装置を備えた1つのブラシアセンブリを示す概略図である。
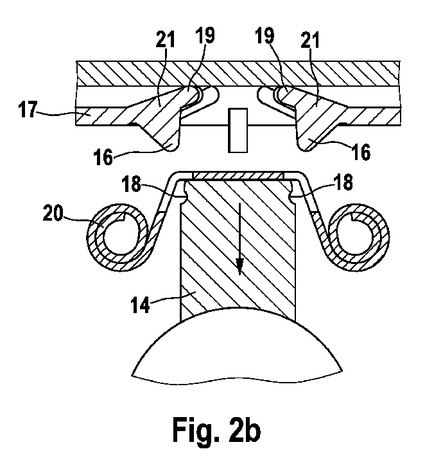
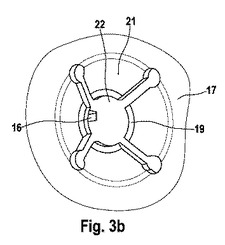
【図3】図3a及び図3bは、係止装置の斜視図である。
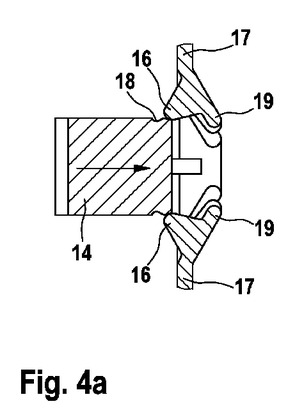
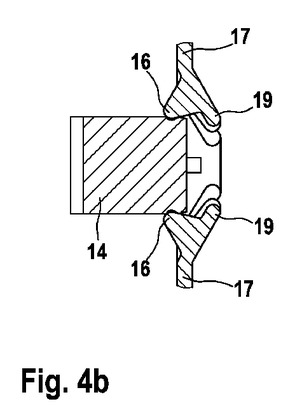
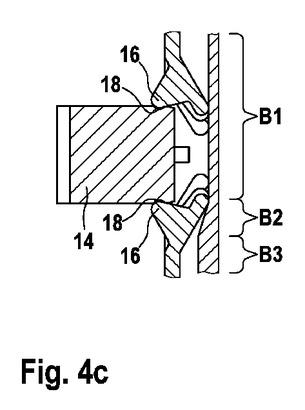
【図4】図4a〜図4dは、電気機械を製造するための方法ステップを可視化した図である。
【0021】
実施の形態の説明
図1は、ブラシアセンブリ2を挿入するステップ前の、電気機械1の概略的な横断面図を示している。電気機械1は、磁極ポット3及び第1のエンドシールド4を備えたケーシングを有している。第1のエンドシールド4は、この実施の形態においては、磁極ポット3と一体に形成されており、一緒に製造することができる。
【0022】
第1のエンドシールド4には、ロータ軸5の第1の端部が支承されている軸支承部が設けられている。ロータ軸5は、整流子を介して電気エネルギを供給するアーマチュア巻線を備えたロータ6を支持する。整流子は整流子片支持体7を有していて、この整流子片支持体7は円形であり、ロータ軸5に同心的に配置されている。この整流子片支持体7は、周方向に整流子片支持体7の周りに配置されている整流子片8を支持する。この整流子片8は導電性であり、互いに絶縁されている。各整流子片8は、アーマチュア巻線のロータコイル(図示せず)の接続部に接続されている。
【0023】
整流子片支持体7における整流子片8は、ブラシアセンブリ2により電気的に接触接続され、各時点において少なくとも1つのロータコイルに通電される。ブラシアセンブリ2は、第2のエンドシールド9に配置されていてよい。電気機械1の組付けのために、第2のエンドシールド9は、ロータ軸5の第2の端部が、適切な第2の支承部を備えた第2のエンドシールド9における支承開口10を通って案内され、かつ収容されるようにケーシング3に載置される。したがって、ロータ軸5は両端部において、電気機械1のケーシングに支承されている。
【0024】
第2のエンドシールド9においてブラシアセンブリ2は夫々、保持部12により保持されている。各保持部12は、ブラシアセンブリ2のスリーブ形のブラシホルダ13を支持する。このスリーブ形のブラシホルダ13にブラシ電極14が可動に配置されている。移動の方向は、ロータ軸5への方向にほぼ相当するか、又はロータ軸5に対して少しずれている。ブラシ電極14には、ロータ軸5の方向に、ばねエレメント20等によって予付勢が加えられている。図面を見やすくするために、上記ばねエレメント20は図1には示していない。
【0025】
各ブラシアセンブリ2は、対応するブラシ電極14を組付け位置に保持することができる係止装置15を有している。組付け位置を、図2aにおいて詳細に示す。係止機構15は、保持部である金属薄板17において形成されていてよい。さらにこの金属薄板17は切欠きを有している。この切欠きには、弾性的に可動なウェブ21が配置されている。択一的にはブラシアセンブリ2は係止機構15と共にプラスチックから形成されていてよい。
【0026】
図3a及び図3bに、可視化のために係止装置15を斜視図において示す。ウェブ21の自由端部は夫々、第2の係止部材として係止ノーズ16を有する。この係止ノーズ16は、ブラシ電極14において第1の係止部材である係止切欠き18内に係合する。さらに、ウェブ21の自由端部は、解除部材として滑り区分19を有する。この滑り区分19は、(半径方向に対して)斜め外方に金属薄板17から突出している。
【0027】
電気機械1のケーシングの磁極ポット3は、第2のエンドシールド9を載置することが望ましい自由端部に、減じられた壁厚及び/又は拡大された内径を備えた第1の区分B1を有する。磁極ポット3の第1の区分B1に、第1のエンドシールド4に向かって、傾斜状の第2の区分B2が接続する。この第2の区分B2において、磁極ポット3の壁厚若しくは磁極ポット3の内径は変化している。傾斜状の第2の区分B2に、比較的大きな壁厚若しくは比較的小さな内径を備えた第3の区分B3が続く。区分B2から区分B3への移行部は、整流子が配置されていることが望ましい軸線方向における領域を規定する。
【0028】
第2のエンドシールド9は、ロータ軸5の軸線方向に対して垂直な方向に関して、磁極ポット3の、拡大された内径を有する第1の区分B1の内径にほぼ一致する直径を有する。これにより、第2のエンドシールド9は、磁極ポット3内に挿入することができる。次いで傾斜状の区分B2は、軸線方向における第2のエンドシールド9のためのストッパとして働くので、第2のエンドシールド9は、ケーシング3の内部において規定の位置において保持される。規定の位置に達すると、係止装置15は、第2の区分B2が第3の区分B3へと移行する領域に到達する。
【0029】
係止装置15は、エンドシールド9のケーシング3内への挿入時に、比較的大きな内径を備えた区分が実質的に滑り区分19に半径方向において、いかなる力も加えないように形成されている。この実施の形態は、滑り区分19の自由端部が、第2のエンドシールド9の周方向縁部を超えて半径方向に突出していないことにより実現される。有利には、滑り区分19の外側の端部は、第2のエンドシールド9の中心軸線から半径方向に、第2のエンドシールド9の周方向縁部とほぼ同じ間隔を有する。しかしブラシアセンブリ2に対して配置されている滑り区分19が、傾斜状の区分B2と係合すると、組付け時に第2のエンドシールド9が軸線方向に磁極ポット3に向かって運動する場合に、ロータ軸5に向かって滑り区分19は押圧される。これにより滑り区分19と、ウェブ21の端部に設けられている係止ノーズ16との堅固な連結に基づき、係止ノーズ16はブラシ電極14から持ち上げられる。これによりブラシ電極14の係止切欠き18は、係止ノーズ16との係合から外れるので、ブラシ電極14は解放される。ばねエレメント20(図2a及び図2b参照)のばね力により、ブラシ電極14は整流子片ホイール7の方向に押圧される。
【0030】
エンドシールド9が磁極ポット3内へ移動した場合、次いで係止装置15の滑り区分19は、傾斜状の第2の区分B2を介して、磁極ポット3の比較的小さな内径を備えた区分B3へと滑るので、係止装置15を解除するために、滑り区分19は半径方向内側に押圧される。磁極ポット3の傾斜状の区分B2は、ブラシ電極14がレリーズ後に整流子片ホイール7の整流子片8へ衝突して初めて係止装置15のレリーズがもたらされる。
【0031】
図3a及び図3bに、係止装置15を異なる視点から示す。この実施の形態において、係止装置15は、金属薄板17における切欠きに配置される、互いに向かい合っている4つのウェブ21を有することが看取される。ウェブ21は、金属薄板17の平面から斜めに折り曲げられている。ウェブ21は、中央開口22に向かって方向付けられているので、金属薄板17の平面に向かって自由に弾性的に撓曲可能である。金属薄板17の平面からウェブが斜めに曲げられている方向において、反対側にあるこのウェブ21の端面に、夫々係止ノーズ16が配置されている。係止ノーズ16は夫々、中央開口22を中心とした周方向に対してウェブ21の中央に配置されている。係止ノーズ16は、ブラシ電極14又はこのブラシ電極14に結合されている構成部分に設けられている適切な係止切欠き18に係合するために働く。これによりブラシ電極14はばね力に抗して、適切な位置において保持される。
【0032】
図3a及び図3bに示した係止装置15は、ウェブ21がロータ軸5から半径方向に斜め外方に突出しているように、磁極ポット3内に挿入される。ケーシング3内への挿入時に、ウェブ21の滑り区分19は、磁極ポット3の傾斜状の区分B2と係合するようになり、これにより金属薄板17の平面に向かって曲げられる。これにより、滑り区分19と堅固に連結されている係止ノーズ16は、半径方向に運動し、ウェブ21の一方の側での固定に基づき旋回するので、係止ノーズ16のストッパ面は、適切なブラシ電極14を、適切な係止切欠き18においてもはや保持することはできず、ブラシ電極14は、ばね力の作用に基づき、整流子片8に向かって運動する。
【0033】
上記実施の形態において、夫々に係止ノーズ16を備えた4つのウェブ21が使用される。しかし、係止装置15に対して配置されているブラシ電極14を組付け位置に保持するために、ウェブ21が異なる数の係止ノーズ16を備える係止装置15を構成するということも可能である。
【0034】
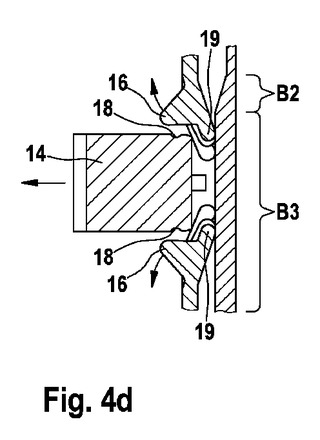
図4a〜4dに、上記係止装置15によって電気機械1を組み付けるための個々の方法ステップを概略的に示す。図4aに示した第1のステップにおいては、ブラシ電極14が係止装置15に係止され(図4b参照)、ばね力に抗して組付け位置において保持されるまで、ブラシ電極14が、ばねエレメント20のばね力に抗してスリーブ状のブラシホルダ13内に押し入れられる。ケーシングの磁極ポット3内にブラシアセンブリ2を挿入する場合、各係止装置15の滑り区分19はまず、比較的大きな内径を備えた第1の区分B1の内面に沿って滑動するか、又は内面と接触しない。したがって係止装置15の滑り区分19へは、半径方向の如何なる力も作用しない(図4c参照)。ブラシアセンブリ2のさらなる押込み時に、滑り区分は傾斜状の区分B2に係合するようになる。つまり、滑り区分は、上記領域において磁極ポットの内面に接触しており、係止装置の運動に応じて、磁極ポット3の内部に向かって、半径方向内方に押圧される(図4d参照)。これにより係止ノーズ16は旋回し、もって、対応配置されているブラシ電極14の係止切欠き18との係合は解除される。これにより、図4dに示したように、ブラシ電極14は解放され、永続的に作用するばね力に基づき、整流子片8に向かって運動する。
【0035】
簡単な形式において、係止装置15は金属薄板17と一体に実現することができる。ブラシアセンブリ2を電気機械1のケーシング内に挿入する際に既に係止装置は解除され、これによりブラシ電極14は解放されて、ブラシ電極14は整流子片8に対して押圧されるので、電気機械1の構成要素の組立後の付加的な操作は必要ない。
【技術分野】
【0001】
本発明は、ブラシ整流された電気機械及びこの電気機械の製造に関する。さらに本発明は、電気機械の組付け、特に電気機械の整流子の組付けのための装置及び方法に関する。
【0002】
背景技術
機械的に整流された電気機械において、ロータのアーマチュア巻線の電気的な接触接続は、通常、整流子を介して行われる。整流子は、夫々1つ又は複数のブラシ電極を備えたブラシアセンブリを有する。ブラシ電極は、通常、カーボンブラシとして構成されている。ブラシ電極は、1つのロータに配置されている整流子片に載置されていて、これにより整流子片に接触接続している。さらにブラシ電極は、整流子片ホイールの整流子片に対して押圧され、ロータの運動時に整流子片上を滑動するので、ロータの位置に応じて種々異なる整流子片が接触接続される。許容される整流を達成するために、ブラシ電極は最適化されたブラシ圧着力によって整流子片に押し付けられる必要がある。したがって、ブラシ電極がロータの運動時に整流子片から持ち上がり得ないということを保証することができる。そうでなければ電気的な接触接続は中断されてしまう。
【0003】
さらに、均一な整流をもたらすことができるように、ブラシ電極が所定の(軸線方向の)位置において整流子片に位置決めされるということを保証することは必要不可欠である。この構成において、ブラシ電極の正確な位置決めを確保にするために、筒状システム(Koechersystem)を設けることができる。このシステムにおいてブラシ電極は管状体を介して案内され、ばねによるばね力によって整流子片に押し付けられる。いわゆるハンマブラシ(Hammerbuerste)において、上記役割は、特別に成形された、ブラシ電極に直接的に取り付けられているばねにより担われる。
【0004】
上記電気機械の製造時に、ロータは、このロータに配置されている、整流子の整流子片ホイールと共に、適切なケーシング内に挿入され、これと同時に又は次いで、例えばエンドシールドに結合されているブラシアセンブリは、ケーシングに軸線方向において載置され、これにより電気機械は完成する。ブラシアセンブリのブラシ電極が、組付け工程中に、整流子片ホイールの一方の側又は電気機械のその他の構成要素と衝突しないように、ブラシ電極は接合工程中に適切にばね力に抗して変位する必要がある。このことは、組付けのために整流子片ホイールに対して予め支承され、かつブラシ電極を整流子片ホイールに案内する適切な傾斜路を介して行うことができる。しかしながら、ブラシ電極を整流子片に案内する傾斜路を用いてのブラシアセンブリの組付けは、あまり提供されない軸線方向の構成スペースを必要とするという欠点を有する。
【0005】
択一的には、ブラシ電極は拘束機構を介して固定され、これにより、接合工程中に整流子片から離されたままである。ブラシアセンブリが予め設けられた位置にある場合、上記ばね機構は外側から特別な装置により再びロック解除され、ブラシ電極はばねにより整流子片へと押圧される。このためにロック解除するために、上記電気機械の組付け時に、構造的に大きな手間を必要とする特別製の装置が必要である。さらに拘束機構のロック解除の付加的な工程により、電気機械の組付け時間は延びる。
【0006】
したがって本発明の目的は、ブラシ整流された電気機械のための改良された組付け方法、及びそのための装置を提供し、もってブラシ整流された電気機械を簡単に組付けることができるようにすることである。
【0007】
上記目的は、請求項1記載の電気機械のブラシアセンブリのための組付け装置、及び電気機械並びに他の独立請求項に記載の、電気機械を組付けるための方法により達成される。
【0008】
別の有利な構成は、従属請求項に記載されている。
【0009】
第1の観点によれば、電気機械のブラシアセンブリのための組付け装置が設けられている。この組付け装置は、
−第1の係止部材を備えている、ブラシ電極、特にカーボンブラシを有し、
−第2の係止部材及び解除部材を有する、ブラシアセンブリに結合されている係止装置を備えており、第2の係止部材は、ブラシ電極が、特にばね力に抗して組付け位置に保持されるように第1の係止部材と協働していて、電気機械の磁極ポットが、係止装置を解除するために、解除部材は、ブラシアセンブリの磁極ポット内への挿入時に、決まった位置において操作されて、ブラシ電極が解放されるように形成されている。
【0010】
上記組付け装置の思想の重要な点は、組付け装置により、ブラシアセンブリが決められた位置に達して初めて、ブラシアセンブリの電気機械の磁極ポットへの載着工程中に、組付け位置にブラシ電極を保持する係止装置を解除することができる点にある。上記決められた位置は、ブラシ電極がその終端位置に達した位置にほぼ相当する。これによりブラシ電極が、電気機械の他の構成要素と、側方で衝突するという危険性を排除することができる。こうして特に、ブラシアセンブリを電気機械内へ挿入する際、ブラシ電極が半径方向において垂直に整流子片支持体上に位置している限りは、ブラシ電極は整流子片支持体と衝突しないことが確保される。ブラシ電極が、ばね力によって整流子片支持体の整流子片に接触接続することができる決められた位置に達するやいなや、組付け装置により自動的に係止装置は解除される。
【0011】
さらに磁極ポットは所定の構造を有していてよいので、ブラシアセンブリが決められた位置に達した場合に、係止装置を解除するために、解除部材が上記構造と係合している。
【0012】
他の構成によれば、磁極ポットは段状又は傾斜状の区分を有していてよい。この区分を介して解除部材は、ブラシアセンブリを磁極ポット内に挿入する際に滑動し、これにより運動する。解除部材は、第2の係止部材が解除部材の運動により運動して、第1の係止部材との係合から外れるように、第2の系部材と連結されている。
【0013】
解除部材は、ブラシアセンブリを磁極ポット内に挿入する際に、半径方向において電気機械のロータの回動軸線に向かって押圧されるようになっていてよい。これにより、第2の係止部材は旋回し、この第2の係止部材のストッパ面は、第1の係止部材との係合から外れる。
【0014】
さらに第2の係止部材は係止ノーズに相当し、第1の係止部材は係止切欠きに相当してよい。この構成において、係止ノーズは組付け位置において係止切欠きに収容されている。
【0015】
さらに別の構成によれば、解除部材はウェブの自由端部に配置されていてよい。このウェブは弾性的に保持部に懸架されている。この保持部は、電気機械のロータ軸に対して、周方向及び軸線方向に延びている。この構成において、ロータ軸に対してウェブの自由端部は、保持部から半径方向において斜め外方に突出する。第2の係止部材は、ウェブから磁極ポットの内部に向けられて突出しており、ブラシ電極を組付け位置に保持するために第1の係止部材と協働する。
【0016】
ストッパ縁部は、解除部材の運動時に旋回することができ、これによりストッパ縁部は係止切欠きとの係合から外れる。
【0017】
さらに別の構成によれば、磁極ポットと、ロータと、組付け装置とを備えた電気機械が設けられている。ロータは、ロータ軸に配置されていて、整流子片ホイールを備えた整流子を有している。ブラシ電極は、ブラシアセンブリ内に配置されていて、上記決められた位置に相当する所定の位置において、ばね力により整流子片ホイールに押し付けられる。
【0018】
さらに別の観点によれば、上記電気機械の組付けのための方法を実施する。この方法は、以下のステップを有する。つまり、
−第2の係止部材が、ブラシ電極がばね力に抗して組付け位置に保持されるように第1の係止部材と協働するまで、ブラシ電極を、特にばね力に抗して挿入するステップと、
−ブラシアセンブリを組付け装置によって、電気機械の磁極ポット内に挿入して、係止装置を解除するために、解除部材を決められた位置において操作し、これによりブラシ電極を解放し、特にばね力により整流子片ホイールに押し付けられるステップとを有する。
【0019】
以下に、有利な実施の形態を、添付の図面に基づいて詳細に説明する。
【図面の簡単な説明】
【0020】
【図1】機械的な整流子を備えた電気機械の横断面図である。
【図2】図2a及び図2bは、ロックされた状態若しくはロックされていない状態における係止装置を備えた1つのブラシアセンブリを示す概略図である。
【図3】図3a及び図3bは、係止装置の斜視図である。
【図4】図4a〜図4dは、電気機械を製造するための方法ステップを可視化した図である。
【0021】
実施の形態の説明
図1は、ブラシアセンブリ2を挿入するステップ前の、電気機械1の概略的な横断面図を示している。電気機械1は、磁極ポット3及び第1のエンドシールド4を備えたケーシングを有している。第1のエンドシールド4は、この実施の形態においては、磁極ポット3と一体に形成されており、一緒に製造することができる。
【0022】
第1のエンドシールド4には、ロータ軸5の第1の端部が支承されている軸支承部が設けられている。ロータ軸5は、整流子を介して電気エネルギを供給するアーマチュア巻線を備えたロータ6を支持する。整流子は整流子片支持体7を有していて、この整流子片支持体7は円形であり、ロータ軸5に同心的に配置されている。この整流子片支持体7は、周方向に整流子片支持体7の周りに配置されている整流子片8を支持する。この整流子片8は導電性であり、互いに絶縁されている。各整流子片8は、アーマチュア巻線のロータコイル(図示せず)の接続部に接続されている。
【0023】
整流子片支持体7における整流子片8は、ブラシアセンブリ2により電気的に接触接続され、各時点において少なくとも1つのロータコイルに通電される。ブラシアセンブリ2は、第2のエンドシールド9に配置されていてよい。電気機械1の組付けのために、第2のエンドシールド9は、ロータ軸5の第2の端部が、適切な第2の支承部を備えた第2のエンドシールド9における支承開口10を通って案内され、かつ収容されるようにケーシング3に載置される。したがって、ロータ軸5は両端部において、電気機械1のケーシングに支承されている。
【0024】
第2のエンドシールド9においてブラシアセンブリ2は夫々、保持部12により保持されている。各保持部12は、ブラシアセンブリ2のスリーブ形のブラシホルダ13を支持する。このスリーブ形のブラシホルダ13にブラシ電極14が可動に配置されている。移動の方向は、ロータ軸5への方向にほぼ相当するか、又はロータ軸5に対して少しずれている。ブラシ電極14には、ロータ軸5の方向に、ばねエレメント20等によって予付勢が加えられている。図面を見やすくするために、上記ばねエレメント20は図1には示していない。
【0025】
各ブラシアセンブリ2は、対応するブラシ電極14を組付け位置に保持することができる係止装置15を有している。組付け位置を、図2aにおいて詳細に示す。係止機構15は、保持部である金属薄板17において形成されていてよい。さらにこの金属薄板17は切欠きを有している。この切欠きには、弾性的に可動なウェブ21が配置されている。択一的にはブラシアセンブリ2は係止機構15と共にプラスチックから形成されていてよい。
【0026】
図3a及び図3bに、可視化のために係止装置15を斜視図において示す。ウェブ21の自由端部は夫々、第2の係止部材として係止ノーズ16を有する。この係止ノーズ16は、ブラシ電極14において第1の係止部材である係止切欠き18内に係合する。さらに、ウェブ21の自由端部は、解除部材として滑り区分19を有する。この滑り区分19は、(半径方向に対して)斜め外方に金属薄板17から突出している。
【0027】
電気機械1のケーシングの磁極ポット3は、第2のエンドシールド9を載置することが望ましい自由端部に、減じられた壁厚及び/又は拡大された内径を備えた第1の区分B1を有する。磁極ポット3の第1の区分B1に、第1のエンドシールド4に向かって、傾斜状の第2の区分B2が接続する。この第2の区分B2において、磁極ポット3の壁厚若しくは磁極ポット3の内径は変化している。傾斜状の第2の区分B2に、比較的大きな壁厚若しくは比較的小さな内径を備えた第3の区分B3が続く。区分B2から区分B3への移行部は、整流子が配置されていることが望ましい軸線方向における領域を規定する。
【0028】
第2のエンドシールド9は、ロータ軸5の軸線方向に対して垂直な方向に関して、磁極ポット3の、拡大された内径を有する第1の区分B1の内径にほぼ一致する直径を有する。これにより、第2のエンドシールド9は、磁極ポット3内に挿入することができる。次いで傾斜状の区分B2は、軸線方向における第2のエンドシールド9のためのストッパとして働くので、第2のエンドシールド9は、ケーシング3の内部において規定の位置において保持される。規定の位置に達すると、係止装置15は、第2の区分B2が第3の区分B3へと移行する領域に到達する。
【0029】
係止装置15は、エンドシールド9のケーシング3内への挿入時に、比較的大きな内径を備えた区分が実質的に滑り区分19に半径方向において、いかなる力も加えないように形成されている。この実施の形態は、滑り区分19の自由端部が、第2のエンドシールド9の周方向縁部を超えて半径方向に突出していないことにより実現される。有利には、滑り区分19の外側の端部は、第2のエンドシールド9の中心軸線から半径方向に、第2のエンドシールド9の周方向縁部とほぼ同じ間隔を有する。しかしブラシアセンブリ2に対して配置されている滑り区分19が、傾斜状の区分B2と係合すると、組付け時に第2のエンドシールド9が軸線方向に磁極ポット3に向かって運動する場合に、ロータ軸5に向かって滑り区分19は押圧される。これにより滑り区分19と、ウェブ21の端部に設けられている係止ノーズ16との堅固な連結に基づき、係止ノーズ16はブラシ電極14から持ち上げられる。これによりブラシ電極14の係止切欠き18は、係止ノーズ16との係合から外れるので、ブラシ電極14は解放される。ばねエレメント20(図2a及び図2b参照)のばね力により、ブラシ電極14は整流子片ホイール7の方向に押圧される。
【0030】
エンドシールド9が磁極ポット3内へ移動した場合、次いで係止装置15の滑り区分19は、傾斜状の第2の区分B2を介して、磁極ポット3の比較的小さな内径を備えた区分B3へと滑るので、係止装置15を解除するために、滑り区分19は半径方向内側に押圧される。磁極ポット3の傾斜状の区分B2は、ブラシ電極14がレリーズ後に整流子片ホイール7の整流子片8へ衝突して初めて係止装置15のレリーズがもたらされる。
【0031】
図3a及び図3bに、係止装置15を異なる視点から示す。この実施の形態において、係止装置15は、金属薄板17における切欠きに配置される、互いに向かい合っている4つのウェブ21を有することが看取される。ウェブ21は、金属薄板17の平面から斜めに折り曲げられている。ウェブ21は、中央開口22に向かって方向付けられているので、金属薄板17の平面に向かって自由に弾性的に撓曲可能である。金属薄板17の平面からウェブが斜めに曲げられている方向において、反対側にあるこのウェブ21の端面に、夫々係止ノーズ16が配置されている。係止ノーズ16は夫々、中央開口22を中心とした周方向に対してウェブ21の中央に配置されている。係止ノーズ16は、ブラシ電極14又はこのブラシ電極14に結合されている構成部分に設けられている適切な係止切欠き18に係合するために働く。これによりブラシ電極14はばね力に抗して、適切な位置において保持される。
【0032】
図3a及び図3bに示した係止装置15は、ウェブ21がロータ軸5から半径方向に斜め外方に突出しているように、磁極ポット3内に挿入される。ケーシング3内への挿入時に、ウェブ21の滑り区分19は、磁極ポット3の傾斜状の区分B2と係合するようになり、これにより金属薄板17の平面に向かって曲げられる。これにより、滑り区分19と堅固に連結されている係止ノーズ16は、半径方向に運動し、ウェブ21の一方の側での固定に基づき旋回するので、係止ノーズ16のストッパ面は、適切なブラシ電極14を、適切な係止切欠き18においてもはや保持することはできず、ブラシ電極14は、ばね力の作用に基づき、整流子片8に向かって運動する。
【0033】
上記実施の形態において、夫々に係止ノーズ16を備えた4つのウェブ21が使用される。しかし、係止装置15に対して配置されているブラシ電極14を組付け位置に保持するために、ウェブ21が異なる数の係止ノーズ16を備える係止装置15を構成するということも可能である。
【0034】
図4a〜4dに、上記係止装置15によって電気機械1を組み付けるための個々の方法ステップを概略的に示す。図4aに示した第1のステップにおいては、ブラシ電極14が係止装置15に係止され(図4b参照)、ばね力に抗して組付け位置において保持されるまで、ブラシ電極14が、ばねエレメント20のばね力に抗してスリーブ状のブラシホルダ13内に押し入れられる。ケーシングの磁極ポット3内にブラシアセンブリ2を挿入する場合、各係止装置15の滑り区分19はまず、比較的大きな内径を備えた第1の区分B1の内面に沿って滑動するか、又は内面と接触しない。したがって係止装置15の滑り区分19へは、半径方向の如何なる力も作用しない(図4c参照)。ブラシアセンブリ2のさらなる押込み時に、滑り区分は傾斜状の区分B2に係合するようになる。つまり、滑り区分は、上記領域において磁極ポットの内面に接触しており、係止装置の運動に応じて、磁極ポット3の内部に向かって、半径方向内方に押圧される(図4d参照)。これにより係止ノーズ16は旋回し、もって、対応配置されているブラシ電極14の係止切欠き18との係合は解除される。これにより、図4dに示したように、ブラシ電極14は解放され、永続的に作用するばね力に基づき、整流子片8に向かって運動する。
【0035】
簡単な形式において、係止装置15は金属薄板17と一体に実現することができる。ブラシアセンブリ2を電気機械1のケーシング内に挿入する際に既に係止装置は解除され、これによりブラシ電極14は解放されて、ブラシ電極14は整流子片8に対して押圧されるので、電気機械1の構成要素の組立後の付加的な操作は必要ない。
【特許請求の範囲】
【請求項1】
電気機械(1)のブラシアセンブリ(2)のための組付け装置であって、
−第1の係止部材(18)を有するブラシ電極(14)を備え、
−第2の係止部材(16)及び解除部材(19)を有する、前記ブラシアセンブリ(2)に結合される係止装置(15)を備えており、前記第2の係止部材(16)は、前記ブラシ電極(14)が、特にばね力に抗して組付け位置に保持されるように前記第1の係止部材(18)と協働している、組付け装置であって、
係止装置(15)を解除するために、前記解除部材(19)は、前記ブラシアセンブリ(2)の前記磁極ポット(3)内への挿入時に、決まった位置において操作されて、前記ブラシ電極(14)が解放されるように、前記電気機械(1)の磁極ポット(3)が形成されていることを特徴とする、組付け装置。
【請求項2】
前記磁極ポット(3)は所定の構造を有していて、前記ブラシアセンブリ(2)が決まった位置に達した場合に、前記係止装置(15)を解除するために前記解除部材(19)は前記構造に係合していることを特徴とする、請求項1記載の組付け装置。
【請求項3】
前記磁極ポット(3)は段状又は傾斜状の区分を有しており、該区分に亘って前記解除部材(19)は、前記ブラシアセンブリ(2)の前記磁極ポット(3)内への挿入時に滑動してこれにより運動し、前記第2の係止部材(16)が前記解除部材(19)の運動により運動するように、前記解除部材(19)は前記第2の係止部材(16)に連結されているので、前記第2の係止部材(16)は前記第1の係止部材(18)との係合から外れることを特徴とする、請求項2記載の組付け装置。
【請求項4】
前記解除部材(19)は、前記ブラシアセンブリ(2)の前記磁極ポット(3)内への挿入時に、前記電気機械(1)のロータ(6)の回動軸線に向かって半径方向に押圧され、これにより前記第2の係止部材(16)は旋回し、該第2の係止部材(16)のストッパ面が、前記第1の係止部材(18)に対する係合から外れることを特徴とする、請求項3記載の組付け装置。
【請求項5】
前記第2の係止部材(16)は係止ノーズに相当し、前記第1の係止部材(18)は係止切欠きに相当し、前記係止ノーズは組付け位置において、前記係止切欠きに収容されていることを特徴とする、請求項1から4までのいずれか一項記載の組付け装置。
【請求項6】
前記解除部材(19)は、保持部(17)に弾性的に懸架されているウェブ(21)の自由端部に配置されており、前記保持部(17)は、前記電気機械(1)のロータ軸(5)に対して周方向及び軸線方向に延びており、前記ウェブ(21)の自由端部は、前記ロータ軸(5)に対して半径方向斜め外方に前記保持部(17)から突出しており、前記第2の係止部材(16)は、前記ウェブ(21)から前記磁極ポット(3)の内部に方向付けられて突出し、前記組付け位置において前記ブラシ電極(14)を保持するために、前記第1の係止部材(18)と協働することを特徴とする、請求項5記載の組付け装置。
【請求項7】
ストッパ縁部が、前記解除部材(19)の運動時に旋回し、これにより前記ストッパ縁部は前記係止切欠きとの係合から外れることを特徴とする、請求項6記載の組付け装置。
【請求項8】
磁極ポット(3)と、ロータ(6)と、請求項1から7までのいずれか一項記載の組付け装置とを備える電気機械において、前記ロータ(6)はロータ軸(5)に配置されていて、かつ、整流子片ホイール(7)を備えた整流子を有しており、前記ブラシ電極(14)はブラシアセンブリ(2)に配置されており、かつ前記整流子片ホイール(7)における、前記決まった位置に相当する所定の位置に、ばね力により押し付けられることを特徴とする、電気機械。
【請求項9】
請求項8記載の電気機械(1)を組み付けるための方法であって、
−前記ブラシ電極(14)を、特にばね力に抗して、組付け位置に保持するように、前記第2の係止部材(16)が前記第1の係止部材(18)と協働するまで、特に前記ばね力に抗して前記ブラシ電極(14)を挿入し、
−前記電気機械(1)の前記磁極ポット内に、前記組付け装置によって前記ブラシアセンブリ(2)を挿入して、前記解除部材(19)を、前記係止装置(15)を解除するために、決まった位置において操作して、前記ブラシ電極(14)を解放し、特にばね力により前記整流子片ホイール(7)に押し付ける、
ステップを有していることを特徴とする、電気機械を組み付けるための方法。
【請求項1】
電気機械(1)のブラシアセンブリ(2)のための組付け装置であって、
−第1の係止部材(18)を有するブラシ電極(14)を備え、
−第2の係止部材(16)及び解除部材(19)を有する、前記ブラシアセンブリ(2)に結合される係止装置(15)を備えており、前記第2の係止部材(16)は、前記ブラシ電極(14)が、特にばね力に抗して組付け位置に保持されるように前記第1の係止部材(18)と協働している、組付け装置であって、
係止装置(15)を解除するために、前記解除部材(19)は、前記ブラシアセンブリ(2)の前記磁極ポット(3)内への挿入時に、決まった位置において操作されて、前記ブラシ電極(14)が解放されるように、前記電気機械(1)の磁極ポット(3)が形成されていることを特徴とする、組付け装置。
【請求項2】
前記磁極ポット(3)は所定の構造を有していて、前記ブラシアセンブリ(2)が決まった位置に達した場合に、前記係止装置(15)を解除するために前記解除部材(19)は前記構造に係合していることを特徴とする、請求項1記載の組付け装置。
【請求項3】
前記磁極ポット(3)は段状又は傾斜状の区分を有しており、該区分に亘って前記解除部材(19)は、前記ブラシアセンブリ(2)の前記磁極ポット(3)内への挿入時に滑動してこれにより運動し、前記第2の係止部材(16)が前記解除部材(19)の運動により運動するように、前記解除部材(19)は前記第2の係止部材(16)に連結されているので、前記第2の係止部材(16)は前記第1の係止部材(18)との係合から外れることを特徴とする、請求項2記載の組付け装置。
【請求項4】
前記解除部材(19)は、前記ブラシアセンブリ(2)の前記磁極ポット(3)内への挿入時に、前記電気機械(1)のロータ(6)の回動軸線に向かって半径方向に押圧され、これにより前記第2の係止部材(16)は旋回し、該第2の係止部材(16)のストッパ面が、前記第1の係止部材(18)に対する係合から外れることを特徴とする、請求項3記載の組付け装置。
【請求項5】
前記第2の係止部材(16)は係止ノーズに相当し、前記第1の係止部材(18)は係止切欠きに相当し、前記係止ノーズは組付け位置において、前記係止切欠きに収容されていることを特徴とする、請求項1から4までのいずれか一項記載の組付け装置。
【請求項6】
前記解除部材(19)は、保持部(17)に弾性的に懸架されているウェブ(21)の自由端部に配置されており、前記保持部(17)は、前記電気機械(1)のロータ軸(5)に対して周方向及び軸線方向に延びており、前記ウェブ(21)の自由端部は、前記ロータ軸(5)に対して半径方向斜め外方に前記保持部(17)から突出しており、前記第2の係止部材(16)は、前記ウェブ(21)から前記磁極ポット(3)の内部に方向付けられて突出し、前記組付け位置において前記ブラシ電極(14)を保持するために、前記第1の係止部材(18)と協働することを特徴とする、請求項5記載の組付け装置。
【請求項7】
ストッパ縁部が、前記解除部材(19)の運動時に旋回し、これにより前記ストッパ縁部は前記係止切欠きとの係合から外れることを特徴とする、請求項6記載の組付け装置。
【請求項8】
磁極ポット(3)と、ロータ(6)と、請求項1から7までのいずれか一項記載の組付け装置とを備える電気機械において、前記ロータ(6)はロータ軸(5)に配置されていて、かつ、整流子片ホイール(7)を備えた整流子を有しており、前記ブラシ電極(14)はブラシアセンブリ(2)に配置されており、かつ前記整流子片ホイール(7)における、前記決まった位置に相当する所定の位置に、ばね力により押し付けられることを特徴とする、電気機械。
【請求項9】
請求項8記載の電気機械(1)を組み付けるための方法であって、
−前記ブラシ電極(14)を、特にばね力に抗して、組付け位置に保持するように、前記第2の係止部材(16)が前記第1の係止部材(18)と協働するまで、特に前記ばね力に抗して前記ブラシ電極(14)を挿入し、
−前記電気機械(1)の前記磁極ポット内に、前記組付け装置によって前記ブラシアセンブリ(2)を挿入して、前記解除部材(19)を、前記係止装置(15)を解除するために、決まった位置において操作して、前記ブラシ電極(14)を解放し、特にばね力により前記整流子片ホイール(7)に押し付ける、
ステップを有していることを特徴とする、電気機械を組み付けるための方法。
【図1】

【図2a】
【図2b】
【図3a】
【図3b】
【図4a】
【図4b】
【図4c】
【図4d】
【図2a】
【図2b】
【図3a】
【図3b】
【図4a】
【図4b】
【図4c】
【図4d】
【公表番号】特表2013−518557(P2013−518557A)
【公表日】平成25年5月20日(2013.5.20)
【国際特許分類】
【出願番号】特願2012−551515(P2012−551515)
【出願日】平成22年12月1日(2010.12.1)
【国際出願番号】PCT/EP2010/068601
【国際公開番号】WO2011/091889
【国際公開日】平成23年8月4日(2011.8.4)
【出願人】(390023711)ローベルト ボツシユ ゲゼルシヤフト ミツト ベシユレンクテル ハフツング (2,908)
【氏名又は名称原語表記】ROBERT BOSCH GMBH
【住所又は居所原語表記】Stuttgart, Germany
【Fターム(参考)】
【公表日】平成25年5月20日(2013.5.20)
【国際特許分類】
【出願日】平成22年12月1日(2010.12.1)
【国際出願番号】PCT/EP2010/068601
【国際公開番号】WO2011/091889
【国際公開日】平成23年8月4日(2011.8.4)
【出願人】(390023711)ローベルト ボツシユ ゲゼルシヤフト ミツト ベシユレンクテル ハフツング (2,908)
【氏名又は名称原語表記】ROBERT BOSCH GMBH
【住所又は居所原語表記】Stuttgart, Germany
【Fターム(参考)】
[ Back to top ]