
ブラシ装置
【課題】ブラシの長寿命化を実現するとともに、スラグ及びスパッタ等の除去作業を安定的に行うことのできるブラシ装置を提供すること。
【解決手段】モータ(6)により回転する駆動軸(8)の先端にブラシ部材(10)を設け、駆動軸を回転軸方向に摺動自在に軸支しつつブラシ部材と同期回転するブラシカバーによりブラシ部材を覆い、当該ブラシカバーを回転自在に支持するカバー支持部材(12)にブラシカバーの先端より回転軸方向外側へと延びたガイド部材(16)を設ける。
【解決手段】モータ(6)により回転する駆動軸(8)の先端にブラシ部材(10)を設け、駆動軸を回転軸方向に摺動自在に軸支しつつブラシ部材と同期回転するブラシカバーによりブラシ部材を覆い、当該ブラシカバーを回転自在に支持するカバー支持部材(12)にブラシカバーの先端より回転軸方向外側へと延びたガイド部材(16)を設ける。
【発明の詳細な説明】
【技術分野】
【0001】
本発明は、ワーク材に付着したスラグやスパッタ等の不純物を除去するブラシ装置に関する。
【背景技術】
【0002】
ガス溶接やアーク溶接を行うと、スラグやスパッタ等がワーク材に付着し、その後の工程における溶接や塗装等の品質を悪化させる原因となるため、一般には、当該スラグ及びスパッタに対して、ハンマで叩く、ブラシで擦る、グラインダで削る等の除去作業を行っている。
ここで、ブラシによる除去作業には、モータで回転する金属ブラシからなるブラシ装置等が使用される。
【0003】
しかし、ブラシ装置における金属ブラシの毛丈が回転軸方向に長いと、回転による遠心力により先端が回転軸に垂直な方向へと拡がってしまい、ワーク材に対して適切に力をかけられないという問題がある。なお、金属ブラシの毛束の途中をワイヤ等で縛ることでブラシの拡がりを防ぐ構成もあるが、使用によりワイヤが移動する等して、確実にブラシの拡がりを抑えられるものではない。
【0004】
一方、遠心力で拡がらない程度に金属ブラシの毛丈を短くすると、摩耗による寿命が短いために交換頻度が高くなり、作業効率が悪化するという問題がある。
そこで、モータにより回転するブラシホルダの外周部分にて、保持筒に収容されたブラシを複数本備え、減速機付きモータ(第1のスライド機構の一部)によりブラシの毛丈調整を行うバリ取り用のブラシ装置が開発されている(特許文献1参照)。
【先行技術文献】
【特許文献】
【0005】
【特許文献1】特開平11−114760号公報
【発明の開示】
【発明が解決しようとする課題】
【0006】
しかしながら、上記特許文献1に開示された技術では、モータ及びシリンダに加え、減速機付きモータというアクチュエータを追加する必要があり、構造及び制御の複雑化、装置の大型化等を招くという問題がある。
また、特許文献1のような構成では、金属ブラシが使用により摩耗するごとにブラシ先端とワーク材との距離が変動し、ブラシ先端とワーク材金属との距離を正確に計測する等してシリンダや減速機付きモータを制御しなければ、ブラシからワーク材にかかる力が変化し、スラグ及びスパッタの除去にばらつきが生じるおそれがある。
【0007】
本発明はこのような問題を解決するためになされたもので、その目的とするところは、ブラシの長寿命化を実現するとともに、スラグ及びスパッタ等の除去作業を安定的に行うことのできるブラシ装置を提供することである。
【課題を解決するための手段】
【0008】
上記した目的を達成するために、請求項1のブラシ装置では、駆動軸を回転させる回転駆動源と、前記駆動軸と連結され、回転軸方向に延びる毛束からなるブラシ部材と、少なくとも前記ブラシ部材を前記回転軸方向に移動させる駆動手段と、前記ブラシ部材の外周を覆い、前記ブラシ部材の先端部が突出可能に開口した筒形状をなしており、前記駆動軸を前記回転軸方向に摺動自在に軸支しつつ、前記ブラシ部材と同期回転するブラシカバーと、前記駆動手段による前記ブラシ部材の移動とは独立して固定され、前記ブラシカバーを回転自在に支持する支持手段と、前記支持手段と連結されており、前記ブラシカバーの先端より前記回転軸方向外側へ延びたガイド部材とを備えることを特徴としている。
【0009】
請求項2のブラシ装置では、請求項1において、前記駆動手段は、前記駆動手段は、基部と、該基部に対して移動する可動部とを有し、該可動部に取付部材を介して前記回転駆動源が取り付けられており、前記基部に対し前記回転駆動源、前記駆動軸、及び前記ブラシ部材を一体に移動させるものであり、前記支持手段は、前記駆動手段による前記回転駆動源、前記駆動軸、及び前記ブラシ部材の移動を許容する連結部材を介して、前記可動部、前記取付部材、または前記回転駆動源に連結されていることを特徴としている。
【0010】
請求項3のブラシ装置では、請求項2において、前記連結部材は、ピストン及びばねの少なくともいずれか一方を備える緩衝部材であることを特徴としている。
請求項4のブラシ装置では、請求項1から3のいずれかにおいて、前記ガイド部材は、先端に車輪部材が設けられていることを特徴としている。
請求項5のブラシ装置では、請求項1から4のいずれかにおいて、ロボットアームのアーム先端に取り付けられることを特徴としている。
【発明の効果】
【0011】
上記手段を用いる本発明の請求項1のブラシ装置によれば、駆動軸を介して回転するブラシ部材を同期回転するブラシカバーで覆うことで、ブラシ部材の毛丈が長い場合にも、ブラシを傷めることなく、ブラシの拡がりを抑えることができる。これにより、毛丈の長いブラシを良好に長期間使用することができ、ブラシ部材の交換頻度を減らし、作業効率を向上させることができる。
【0012】
また、カバー支持部材に連結されているガイド部材は、ブラシカバーの先端よりも回転軸方向外側へと延びていることで、まず当該ガイド部材がワーク材に接触し、ワーク材とブラシカバー先端との距離が一定に保たれる。したがって、ブラシ部材の毛束先端が摩耗して毛丈が短縮した場合にも、駆動手段によりブラシ部材の毛束がワーク材に接触するまで移動させることで、常に一定の突出量で除去作業を行うことができる。これにより、ワーク材に対し常に一定の力でブラシによる除去作業が行われることとなり、安定した仕上がりを実現できる。
【0013】
以上のことから、本発明に係るブラシ装置は、ブラシの長寿命化を実現するとともに、スラグ及びスパッタ等の除去作業を安定的に行うことができる。
請求項2のブラシ装置によれば、駆動手段の可動部に取付部材を介して回転駆動源を取り付け、駆動手段により移動する各部材の移動を許容する連結部材を用いて支持手段を設けた構成とすることで、特にアクチュエータ等の装置を追加することもなく、簡易な構成のブラシ装置とすることができる。
【0014】
請求項3のブラシ装置によれば、支持手段を固定する連結部材をピストンやばねからなる緩衝部材とすることで、ガイド部材がワーク材に接触する際の衝撃を緩和し、より安定的に除去作業を行うことができる。
請求項4のブラシ装置によれば、ガイド部材の先端に車輪部材を設けることで、当該車輪部材の回転にしたがってワーク材上を円滑に移動させることができ、より一層安定的な除去作業を行うことができる。
【0015】
請求項5のブラシ装置によれば、ロボットアームに接続することで、ブラシ装置を用いたスラグ、スパッタ除去作業を良好に自動化することができる。
【図面の簡単な説明】
【0016】
【図1】本発明に係るブラシ装置の概略構成図である。
【図2】本発明に係るブラシ装置の要部拡大断面図である。
【図3】図2の矢印Aから見たブラシ装置の側面図である。
【図4】図2のB−B線に沿う縦断面図である。
【図5】図2のC−C線に沿う横断面図である。
【図6】本発明に係るブラシ装置をワーク材の角部に使用した際の側面図である。
【発明を実施するための形態】
【0017】
以下、本発明の実施の形態を図面に基づき説明する。
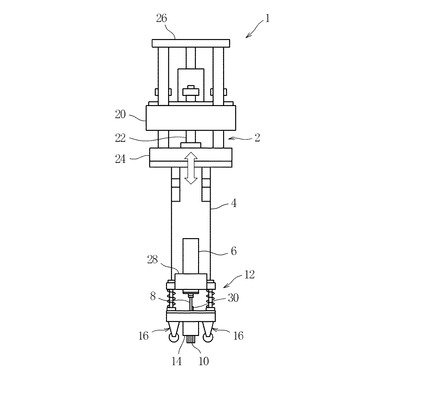
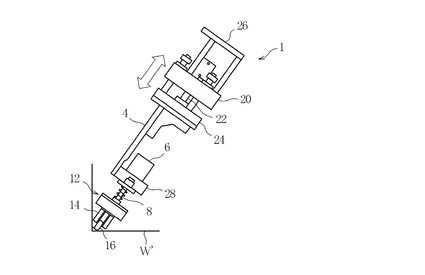
図1には本発明に係るブラシ装置の概略構成図示されており、同図に示すように、ブラシ装置1は、主に、押圧機構2(駆動手段)、アーム部4(取付部材)、モータ6(回転駆動源)、駆動軸8、ブラシ部材10、カバー支持部材12(支持手段)、ブラシカバー14、ガイド部材16から構成されている。なお、当該ブラシ装置1は、例えば図示しないロボットアームの先端に取り付けられるツール部材である。
【0018】
押圧機構2は、基部20の一側にエアシリンダ22を介して可動部24が連結されており、基部20の他側にはロボットアームの先端と接続される接続部26が形成されている。そして、当該押圧機構2は、エアシリンダ22への空気圧を調整することで、図1の白抜き矢印で示すように、エアシリンダ22の軸方向に沿って可動部24を移動させるものである。
【0019】
押圧機構2の可動部24の一側には、エアシリンダ22の軸方向、即ち可動部24の移動方向に延びたアーム部4が設けられている。
アーム部4の先端にはブラケット28(取付部材)を介して、モータ6が設けられている。
モータ6の一側からは、当該モータ6により回転する駆動軸8が延びている。当該駆動軸8の外周面の一部には、当該駆動軸8の軸方向に長く当該軸方向と垂直に突出した板状のキー部30が形成されている。
【0020】
さらに、駆動軸8の先端には、当該駆動軸8と一体に回転するブラシ部材10が設けられている。
つまり、上記モータ6は押圧機構2による移動方向を回転軸方向として、キー部30を含めた駆動軸8を介してブラシ部材10を回転させる駆動源である。
以下、ブラシ装置1の先端側の構成について詳しく説明する。
【0021】
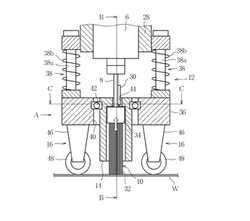
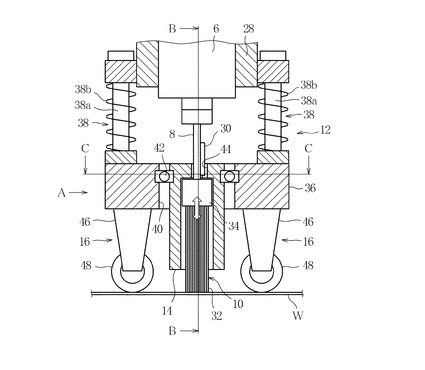
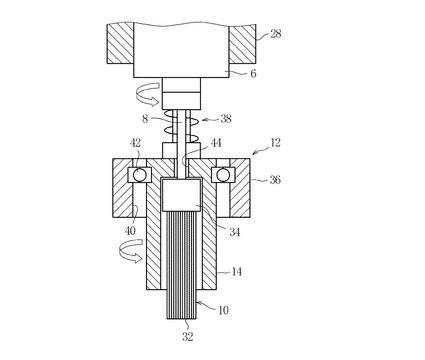
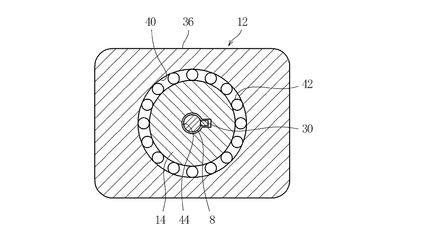
ここで図2から図5を参照すると、図2には本発明に係るブラシ装置の要部拡大断面図、図3には図2の矢印Aから見た側面図、図4には図2のB−B線に沿う縦断面図、図5には図2のC−C線に沿う横断面図がそれぞれ示されており、以下上記図1に加え図2から図5に基づき説明する。
これらの図に示すように、ブラシ部材10は、回転軸方向に延びる金属線の毛束32が上記駆動軸8の先端に接続されている結束部34にて結束されて構成されている。なお、当該ブラシ部材10は、駆動軸8から取り外して新しいブラシ部材に交換が可能である。
【0022】
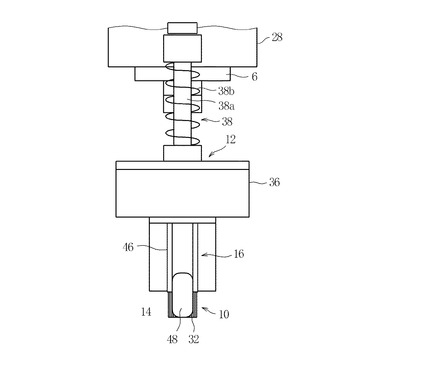
カバー支持部材12は、支持部材本体36が一対の緩衝部材38、38を介して上記ブラケット28に接続されて構成されている。詳しくは、平面視矩形状をなしている支持部材本体36の長手方向両端部に緩衝部材38の一端部が連結されている一方、ブラケット28側面に緩衝部材38の他端部が連結されており、当該一端部及び他端部を連結するようにピストン部36a及びスプリング部36b(ばね)が設けられている。
【0023】
当該緩衝部材38は、ピストン部38c及びスプリング部38dの弾性力により、押圧機構2による移動方向の衝撃を緩衝するものである。なお、当該緩衝部材38の弾性力は上記押圧機構2が可動部24を移動させる力よりも十分に低い。したがって、例えば支持部材本体36が固定されている状態で、押圧機構2によりモータ6、駆動軸8、及びブラシ部材10を緩衝部材38の弾性力に反して移動させることで、カバー支持部材12は押圧機構2による各部材の移動と独立することとなる。
【0024】
また、カバー支持部材12の支持部材本体36の平面視中央部には、円形の支持孔40が穿設されている。そして、当該支持孔40内周側にてボールベアリング42を介し、ブラシカバー14が回転自在に支持されている。
ブラシカバー14は、ブラシ部材10の回転軸方向に延び、当該ブラシ部材10を覆う筒形状をなしている。当該ブラシカバー14の軸方向一側面は、ブラシ部材10の先端が外側へと突出可能に開口している。一方、ブラシカバー14の軸方向他側面には上記駆動軸8及びキー部30に対応した断面形状の軸孔44が穿設されている。
【0025】
当該ブラシカバー14は、軸孔44にて駆動軸8及びキー部30を軸方向に摺動自在に軸支している一方、キー部30を介して駆動軸8の回転が伝達されて当該ブラシ部材10と同期回転するよう構成されている。
また、上記カバー支持部材12の支持部材本体36には、一側面の長手方向両端部からブラシ装置1の先端側へと延びる一対のガイド部材16、16が設けられている。
【0026】
ガイド部材16は、上記支持部材本体36の長手方向両端部と連結されているホイール支持部材46と、当該ホイール支持部材46の先端部にて回転自在に設けられているガイドホイール48(車輪部材)とから構成されている。ガイドホイール48は、上記ブラシカバー14の先端よりも軸方向外側に位置しており、ワーク材Wと直接接触する部分である。つまり、当該ガイドホイール48がワーク材Wに接触することで、支持部材本体36は高さ方向において固定される。また、ガイドホイール48はワーク材W上にて回転することでブラシ装置1を上記支持部材本体36の長手方向、即ち側方に案内可能である。
【0027】
以下このように構成された本発明に係るブラシ装置の作用及び効果について説明する。
ブラシ装置1は、ロボットアームの作動により、ワーク材Wにおいてスラグ及びスパッタの付着した対象箇所へと運ばれ、まずはガイドホイール48がワーク材Wに接触する。このガイドホイール48がワーク材Wに接触する際の衝撃は、カバー支持部材12の緩衝部材38により緩和される。
【0028】
ガイドホイール48をワーク材Wに接触させることで、支持部材本体36が駆動軸8の軸方向において固定され、この状態から押圧機構2が、緩衝部材38の弾性力に反して、モータ6、駆動軸8、ブラシ部材10をワーク材W側へと移動させることで、ブラシカバー14先端からブラシ部材10の毛束32の先端が突出しワーク材Wに接触する。
そして、ブラシ部材10は、押圧機構2の作動によりワーク材Wへ押圧されつつ、上記モータ6により高速回転されることで、スラグ及びスパッタの除去を行う。
【0029】
ガイド部材16のガイドホイール48は、ブラシカバー14の先端よりも軸方向外側に位置してワーク材Wに接触するため、ブラシカバー14の先端とワーク材Wとの距離は常に一定に保たれる。そして、ブラシ部材10の毛束32は、このブラシカバー14の先端とワーク材Wとの距離分の突出することから、当該突出量は常に一定となる。
つまり、ブラシ部材10の毛束32先端が摩耗して毛丈が短縮した場合にも、上記押圧機構2によりブラシ部材10の毛束32がワーク材Wに接触するまで移動させることで、常に一定の突出量で除去作業を行うことができる。これにより、ワーク材Wに対し常に一定の力で金属ブラシによる除去作業が行われることとなり、安定した仕上がりを実現できる。
【0030】
さらに、当該ブラシ部材10の毛束32の突出量は回転による遠心力により毛束32が拡がらない程度とすることで、ブラシカバー14から突出していない部分の毛束32は、ブラシカバー14により覆われ遠心力による拡がりが抑えられる。したがって、毛束32の毛丈が長いときでも毛束32の拡がりを抑えることができる。また、当該ブラシカバー14は、ブラシ部材10と同期回転することから、毛束32とブラシカバー14とが接触しても毛束32を傷つけることもない。これにより、毛丈の長いブラシを良好に長期間使用することができ、ブラシ部材10の交換頻度を減ることで、作業効率を向上させることができる。
【0031】
また、ロボットアームによりブラシ装置1の側方へと力をかけることで、ガイドホイール48が回転し、ワーク材W上を直線的に移動させることができる。このようにガイドホイール48の回転にしたがってブラシ装置1を移動させることで、例えば図6に示すように、断面L字状をなすワーク材W’の角部等のように狭く力のかけにくい範囲であっても、容易に且つ正確に当該角部に沿った除去作業を行うことができる。
【0032】
また、ブラシ装置1は、モータ6を支持するブラケット28に、ガイド部材16の連結されたカバー支持部材12を設けた構成であり、特にアクチュエータ等の装置を追加することもなく、構成及び制御の複雑化を抑制することができる。
以上のことから、本発明に係るブラシ装置は、ブラシの長寿命化を実現するとともに、スラグ及びスパッタ等の除去作業を安定的に行うことができる。
【0033】
以上で本発明に係るブラシ装置の実施形態についての説明を終えるが、実施形態は上記実施形態に限られるものではない。
上記実施形態におけるブラシ装置1はロボットアームの先端に取り付けるツール部材であるが、例えば、当該ブラシ装置1を手作業で取り扱う構成であってもよい。ガイド部材を有する本発明に係るブラシ装置であれば、手作業であっても安定した除去作業を行うことができる。
【0034】
また、上記実施形態では、カバー支持部材12は緩衝部材38を介してブラケット28に連結されているが、当該カバー支持部材を連結する位置はこれに限られるものではない。例えば、押圧機構の基部に連結する場合には、緩衝部材のように押圧機構による移動を許容するような部材でない連結部材でも、ブラシ部材の移動と独立してカバー支持部材を固定することができる。
【0035】
また、上記実施形態では、ガイド部材16の先端部にガイドホール16を設けた構成であるが、当該ガイド部材の構成はこれに限られるものではない。例えば、単なる棒状のガイド部材であってもよいし、ガイドホイールの代わりに球体の車輪部材を設けても構わない。
また、上記実施形態では、駆動軸8に板状のキー部30を設けることで、駆動軸8の回転力をブラシカバー14へと伝達しているが、ブラシカバーをブラシ部材と同期回転させる構成はこれに限られるものではない。例えば、駆動軸の外周とブラシカバーの軸孔とをスプライン嵌合する構成でもよい。さらに、駆動軸とブラシカバーとの間で回転力の伝達を行う構成でなく、ブラシ部材の結束部外周にキー部やスプラインを形成して、ブラシ部材の結束部とブラシカバーとの間で回転力を伝達するような構成としても構わない。
【0036】
また、上記実施形態におけるブラシ装置1は、スラグ、スパッタの除去作業に使用するものであるが、当該ブラシ装置の用途はこれに限られず、バリ取り作業等のようにワーク材を研磨する金属ブラシにも適用可能である。
【符号の説明】
【0037】
1 ブラシ装置
2 押圧機構(駆動手段)
4 アーム部(取付部材)
6 モータ(回転駆動源)
8 駆動軸
10 ブラシ部材
12 カバー支持部材(支持手段)
14 ブラシカバー
16 ガイド部材
30 キー部
32 毛束
34 結束部
36 支持部材本体
38 緩衝部材
40 支持孔
48 ガイドホイール(車輪部材)
【技術分野】
【0001】
本発明は、ワーク材に付着したスラグやスパッタ等の不純物を除去するブラシ装置に関する。
【背景技術】
【0002】
ガス溶接やアーク溶接を行うと、スラグやスパッタ等がワーク材に付着し、その後の工程における溶接や塗装等の品質を悪化させる原因となるため、一般には、当該スラグ及びスパッタに対して、ハンマで叩く、ブラシで擦る、グラインダで削る等の除去作業を行っている。
ここで、ブラシによる除去作業には、モータで回転する金属ブラシからなるブラシ装置等が使用される。
【0003】
しかし、ブラシ装置における金属ブラシの毛丈が回転軸方向に長いと、回転による遠心力により先端が回転軸に垂直な方向へと拡がってしまい、ワーク材に対して適切に力をかけられないという問題がある。なお、金属ブラシの毛束の途中をワイヤ等で縛ることでブラシの拡がりを防ぐ構成もあるが、使用によりワイヤが移動する等して、確実にブラシの拡がりを抑えられるものではない。
【0004】
一方、遠心力で拡がらない程度に金属ブラシの毛丈を短くすると、摩耗による寿命が短いために交換頻度が高くなり、作業効率が悪化するという問題がある。
そこで、モータにより回転するブラシホルダの外周部分にて、保持筒に収容されたブラシを複数本備え、減速機付きモータ(第1のスライド機構の一部)によりブラシの毛丈調整を行うバリ取り用のブラシ装置が開発されている(特許文献1参照)。
【先行技術文献】
【特許文献】
【0005】
【特許文献1】特開平11−114760号公報
【発明の開示】
【発明が解決しようとする課題】
【0006】
しかしながら、上記特許文献1に開示された技術では、モータ及びシリンダに加え、減速機付きモータというアクチュエータを追加する必要があり、構造及び制御の複雑化、装置の大型化等を招くという問題がある。
また、特許文献1のような構成では、金属ブラシが使用により摩耗するごとにブラシ先端とワーク材との距離が変動し、ブラシ先端とワーク材金属との距離を正確に計測する等してシリンダや減速機付きモータを制御しなければ、ブラシからワーク材にかかる力が変化し、スラグ及びスパッタの除去にばらつきが生じるおそれがある。
【0007】
本発明はこのような問題を解決するためになされたもので、その目的とするところは、ブラシの長寿命化を実現するとともに、スラグ及びスパッタ等の除去作業を安定的に行うことのできるブラシ装置を提供することである。
【課題を解決するための手段】
【0008】
上記した目的を達成するために、請求項1のブラシ装置では、駆動軸を回転させる回転駆動源と、前記駆動軸と連結され、回転軸方向に延びる毛束からなるブラシ部材と、少なくとも前記ブラシ部材を前記回転軸方向に移動させる駆動手段と、前記ブラシ部材の外周を覆い、前記ブラシ部材の先端部が突出可能に開口した筒形状をなしており、前記駆動軸を前記回転軸方向に摺動自在に軸支しつつ、前記ブラシ部材と同期回転するブラシカバーと、前記駆動手段による前記ブラシ部材の移動とは独立して固定され、前記ブラシカバーを回転自在に支持する支持手段と、前記支持手段と連結されており、前記ブラシカバーの先端より前記回転軸方向外側へ延びたガイド部材とを備えることを特徴としている。
【0009】
請求項2のブラシ装置では、請求項1において、前記駆動手段は、前記駆動手段は、基部と、該基部に対して移動する可動部とを有し、該可動部に取付部材を介して前記回転駆動源が取り付けられており、前記基部に対し前記回転駆動源、前記駆動軸、及び前記ブラシ部材を一体に移動させるものであり、前記支持手段は、前記駆動手段による前記回転駆動源、前記駆動軸、及び前記ブラシ部材の移動を許容する連結部材を介して、前記可動部、前記取付部材、または前記回転駆動源に連結されていることを特徴としている。
【0010】
請求項3のブラシ装置では、請求項2において、前記連結部材は、ピストン及びばねの少なくともいずれか一方を備える緩衝部材であることを特徴としている。
請求項4のブラシ装置では、請求項1から3のいずれかにおいて、前記ガイド部材は、先端に車輪部材が設けられていることを特徴としている。
請求項5のブラシ装置では、請求項1から4のいずれかにおいて、ロボットアームのアーム先端に取り付けられることを特徴としている。
【発明の効果】
【0011】
上記手段を用いる本発明の請求項1のブラシ装置によれば、駆動軸を介して回転するブラシ部材を同期回転するブラシカバーで覆うことで、ブラシ部材の毛丈が長い場合にも、ブラシを傷めることなく、ブラシの拡がりを抑えることができる。これにより、毛丈の長いブラシを良好に長期間使用することができ、ブラシ部材の交換頻度を減らし、作業効率を向上させることができる。
【0012】
また、カバー支持部材に連結されているガイド部材は、ブラシカバーの先端よりも回転軸方向外側へと延びていることで、まず当該ガイド部材がワーク材に接触し、ワーク材とブラシカバー先端との距離が一定に保たれる。したがって、ブラシ部材の毛束先端が摩耗して毛丈が短縮した場合にも、駆動手段によりブラシ部材の毛束がワーク材に接触するまで移動させることで、常に一定の突出量で除去作業を行うことができる。これにより、ワーク材に対し常に一定の力でブラシによる除去作業が行われることとなり、安定した仕上がりを実現できる。
【0013】
以上のことから、本発明に係るブラシ装置は、ブラシの長寿命化を実現するとともに、スラグ及びスパッタ等の除去作業を安定的に行うことができる。
請求項2のブラシ装置によれば、駆動手段の可動部に取付部材を介して回転駆動源を取り付け、駆動手段により移動する各部材の移動を許容する連結部材を用いて支持手段を設けた構成とすることで、特にアクチュエータ等の装置を追加することもなく、簡易な構成のブラシ装置とすることができる。
【0014】
請求項3のブラシ装置によれば、支持手段を固定する連結部材をピストンやばねからなる緩衝部材とすることで、ガイド部材がワーク材に接触する際の衝撃を緩和し、より安定的に除去作業を行うことができる。
請求項4のブラシ装置によれば、ガイド部材の先端に車輪部材を設けることで、当該車輪部材の回転にしたがってワーク材上を円滑に移動させることができ、より一層安定的な除去作業を行うことができる。
【0015】
請求項5のブラシ装置によれば、ロボットアームに接続することで、ブラシ装置を用いたスラグ、スパッタ除去作業を良好に自動化することができる。
【図面の簡単な説明】
【0016】
【図1】本発明に係るブラシ装置の概略構成図である。
【図2】本発明に係るブラシ装置の要部拡大断面図である。
【図3】図2の矢印Aから見たブラシ装置の側面図である。
【図4】図2のB−B線に沿う縦断面図である。
【図5】図2のC−C線に沿う横断面図である。
【図6】本発明に係るブラシ装置をワーク材の角部に使用した際の側面図である。
【発明を実施するための形態】
【0017】
以下、本発明の実施の形態を図面に基づき説明する。
図1には本発明に係るブラシ装置の概略構成図示されており、同図に示すように、ブラシ装置1は、主に、押圧機構2(駆動手段)、アーム部4(取付部材)、モータ6(回転駆動源)、駆動軸8、ブラシ部材10、カバー支持部材12(支持手段)、ブラシカバー14、ガイド部材16から構成されている。なお、当該ブラシ装置1は、例えば図示しないロボットアームの先端に取り付けられるツール部材である。
【0018】
押圧機構2は、基部20の一側にエアシリンダ22を介して可動部24が連結されており、基部20の他側にはロボットアームの先端と接続される接続部26が形成されている。そして、当該押圧機構2は、エアシリンダ22への空気圧を調整することで、図1の白抜き矢印で示すように、エアシリンダ22の軸方向に沿って可動部24を移動させるものである。
【0019】
押圧機構2の可動部24の一側には、エアシリンダ22の軸方向、即ち可動部24の移動方向に延びたアーム部4が設けられている。
アーム部4の先端にはブラケット28(取付部材)を介して、モータ6が設けられている。
モータ6の一側からは、当該モータ6により回転する駆動軸8が延びている。当該駆動軸8の外周面の一部には、当該駆動軸8の軸方向に長く当該軸方向と垂直に突出した板状のキー部30が形成されている。
【0020】
さらに、駆動軸8の先端には、当該駆動軸8と一体に回転するブラシ部材10が設けられている。
つまり、上記モータ6は押圧機構2による移動方向を回転軸方向として、キー部30を含めた駆動軸8を介してブラシ部材10を回転させる駆動源である。
以下、ブラシ装置1の先端側の構成について詳しく説明する。
【0021】
ここで図2から図5を参照すると、図2には本発明に係るブラシ装置の要部拡大断面図、図3には図2の矢印Aから見た側面図、図4には図2のB−B線に沿う縦断面図、図5には図2のC−C線に沿う横断面図がそれぞれ示されており、以下上記図1に加え図2から図5に基づき説明する。
これらの図に示すように、ブラシ部材10は、回転軸方向に延びる金属線の毛束32が上記駆動軸8の先端に接続されている結束部34にて結束されて構成されている。なお、当該ブラシ部材10は、駆動軸8から取り外して新しいブラシ部材に交換が可能である。
【0022】
カバー支持部材12は、支持部材本体36が一対の緩衝部材38、38を介して上記ブラケット28に接続されて構成されている。詳しくは、平面視矩形状をなしている支持部材本体36の長手方向両端部に緩衝部材38の一端部が連結されている一方、ブラケット28側面に緩衝部材38の他端部が連結されており、当該一端部及び他端部を連結するようにピストン部36a及びスプリング部36b(ばね)が設けられている。
【0023】
当該緩衝部材38は、ピストン部38c及びスプリング部38dの弾性力により、押圧機構2による移動方向の衝撃を緩衝するものである。なお、当該緩衝部材38の弾性力は上記押圧機構2が可動部24を移動させる力よりも十分に低い。したがって、例えば支持部材本体36が固定されている状態で、押圧機構2によりモータ6、駆動軸8、及びブラシ部材10を緩衝部材38の弾性力に反して移動させることで、カバー支持部材12は押圧機構2による各部材の移動と独立することとなる。
【0024】
また、カバー支持部材12の支持部材本体36の平面視中央部には、円形の支持孔40が穿設されている。そして、当該支持孔40内周側にてボールベアリング42を介し、ブラシカバー14が回転自在に支持されている。
ブラシカバー14は、ブラシ部材10の回転軸方向に延び、当該ブラシ部材10を覆う筒形状をなしている。当該ブラシカバー14の軸方向一側面は、ブラシ部材10の先端が外側へと突出可能に開口している。一方、ブラシカバー14の軸方向他側面には上記駆動軸8及びキー部30に対応した断面形状の軸孔44が穿設されている。
【0025】
当該ブラシカバー14は、軸孔44にて駆動軸8及びキー部30を軸方向に摺動自在に軸支している一方、キー部30を介して駆動軸8の回転が伝達されて当該ブラシ部材10と同期回転するよう構成されている。
また、上記カバー支持部材12の支持部材本体36には、一側面の長手方向両端部からブラシ装置1の先端側へと延びる一対のガイド部材16、16が設けられている。
【0026】
ガイド部材16は、上記支持部材本体36の長手方向両端部と連結されているホイール支持部材46と、当該ホイール支持部材46の先端部にて回転自在に設けられているガイドホイール48(車輪部材)とから構成されている。ガイドホイール48は、上記ブラシカバー14の先端よりも軸方向外側に位置しており、ワーク材Wと直接接触する部分である。つまり、当該ガイドホイール48がワーク材Wに接触することで、支持部材本体36は高さ方向において固定される。また、ガイドホイール48はワーク材W上にて回転することでブラシ装置1を上記支持部材本体36の長手方向、即ち側方に案内可能である。
【0027】
以下このように構成された本発明に係るブラシ装置の作用及び効果について説明する。
ブラシ装置1は、ロボットアームの作動により、ワーク材Wにおいてスラグ及びスパッタの付着した対象箇所へと運ばれ、まずはガイドホイール48がワーク材Wに接触する。このガイドホイール48がワーク材Wに接触する際の衝撃は、カバー支持部材12の緩衝部材38により緩和される。
【0028】
ガイドホイール48をワーク材Wに接触させることで、支持部材本体36が駆動軸8の軸方向において固定され、この状態から押圧機構2が、緩衝部材38の弾性力に反して、モータ6、駆動軸8、ブラシ部材10をワーク材W側へと移動させることで、ブラシカバー14先端からブラシ部材10の毛束32の先端が突出しワーク材Wに接触する。
そして、ブラシ部材10は、押圧機構2の作動によりワーク材Wへ押圧されつつ、上記モータ6により高速回転されることで、スラグ及びスパッタの除去を行う。
【0029】
ガイド部材16のガイドホイール48は、ブラシカバー14の先端よりも軸方向外側に位置してワーク材Wに接触するため、ブラシカバー14の先端とワーク材Wとの距離は常に一定に保たれる。そして、ブラシ部材10の毛束32は、このブラシカバー14の先端とワーク材Wとの距離分の突出することから、当該突出量は常に一定となる。
つまり、ブラシ部材10の毛束32先端が摩耗して毛丈が短縮した場合にも、上記押圧機構2によりブラシ部材10の毛束32がワーク材Wに接触するまで移動させることで、常に一定の突出量で除去作業を行うことができる。これにより、ワーク材Wに対し常に一定の力で金属ブラシによる除去作業が行われることとなり、安定した仕上がりを実現できる。
【0030】
さらに、当該ブラシ部材10の毛束32の突出量は回転による遠心力により毛束32が拡がらない程度とすることで、ブラシカバー14から突出していない部分の毛束32は、ブラシカバー14により覆われ遠心力による拡がりが抑えられる。したがって、毛束32の毛丈が長いときでも毛束32の拡がりを抑えることができる。また、当該ブラシカバー14は、ブラシ部材10と同期回転することから、毛束32とブラシカバー14とが接触しても毛束32を傷つけることもない。これにより、毛丈の長いブラシを良好に長期間使用することができ、ブラシ部材10の交換頻度を減ることで、作業効率を向上させることができる。
【0031】
また、ロボットアームによりブラシ装置1の側方へと力をかけることで、ガイドホイール48が回転し、ワーク材W上を直線的に移動させることができる。このようにガイドホイール48の回転にしたがってブラシ装置1を移動させることで、例えば図6に示すように、断面L字状をなすワーク材W’の角部等のように狭く力のかけにくい範囲であっても、容易に且つ正確に当該角部に沿った除去作業を行うことができる。
【0032】
また、ブラシ装置1は、モータ6を支持するブラケット28に、ガイド部材16の連結されたカバー支持部材12を設けた構成であり、特にアクチュエータ等の装置を追加することもなく、構成及び制御の複雑化を抑制することができる。
以上のことから、本発明に係るブラシ装置は、ブラシの長寿命化を実現するとともに、スラグ及びスパッタ等の除去作業を安定的に行うことができる。
【0033】
以上で本発明に係るブラシ装置の実施形態についての説明を終えるが、実施形態は上記実施形態に限られるものではない。
上記実施形態におけるブラシ装置1はロボットアームの先端に取り付けるツール部材であるが、例えば、当該ブラシ装置1を手作業で取り扱う構成であってもよい。ガイド部材を有する本発明に係るブラシ装置であれば、手作業であっても安定した除去作業を行うことができる。
【0034】
また、上記実施形態では、カバー支持部材12は緩衝部材38を介してブラケット28に連結されているが、当該カバー支持部材を連結する位置はこれに限られるものではない。例えば、押圧機構の基部に連結する場合には、緩衝部材のように押圧機構による移動を許容するような部材でない連結部材でも、ブラシ部材の移動と独立してカバー支持部材を固定することができる。
【0035】
また、上記実施形態では、ガイド部材16の先端部にガイドホール16を設けた構成であるが、当該ガイド部材の構成はこれに限られるものではない。例えば、単なる棒状のガイド部材であってもよいし、ガイドホイールの代わりに球体の車輪部材を設けても構わない。
また、上記実施形態では、駆動軸8に板状のキー部30を設けることで、駆動軸8の回転力をブラシカバー14へと伝達しているが、ブラシカバーをブラシ部材と同期回転させる構成はこれに限られるものではない。例えば、駆動軸の外周とブラシカバーの軸孔とをスプライン嵌合する構成でもよい。さらに、駆動軸とブラシカバーとの間で回転力の伝達を行う構成でなく、ブラシ部材の結束部外周にキー部やスプラインを形成して、ブラシ部材の結束部とブラシカバーとの間で回転力を伝達するような構成としても構わない。
【0036】
また、上記実施形態におけるブラシ装置1は、スラグ、スパッタの除去作業に使用するものであるが、当該ブラシ装置の用途はこれに限られず、バリ取り作業等のようにワーク材を研磨する金属ブラシにも適用可能である。
【符号の説明】
【0037】
1 ブラシ装置
2 押圧機構(駆動手段)
4 アーム部(取付部材)
6 モータ(回転駆動源)
8 駆動軸
10 ブラシ部材
12 カバー支持部材(支持手段)
14 ブラシカバー
16 ガイド部材
30 キー部
32 毛束
34 結束部
36 支持部材本体
38 緩衝部材
40 支持孔
48 ガイドホイール(車輪部材)
【特許請求の範囲】
【請求項1】
駆動軸を回転させる回転駆動源と、
前記駆動軸と連結され、回転軸方向に延びる毛束からなるブラシ部材と、
少なくとも前記ブラシ部材を前記回転軸方向に移動させる駆動手段と、
前記ブラシ部材の外周を覆い、前記ブラシ部材の先端部が突出可能に開口した筒形状をなしており、前記駆動軸を前記回転軸方向に摺動自在に軸支しつつ、前記ブラシ部材と同期回転するブラシカバーと、
前記駆動手段による前記ブラシ部材の移動とは独立して固定され、前記ブラシカバーを回転自在に支持する支持手段と、
前記支持手段と連結されており、前記ブラシカバーの先端より前記回転軸方向外側へ延びたガイド部材とを備えることを特徴とするブラシ装置。
【請求項2】
前記駆動手段は、基部と、該基部に対して移動する可動部とを有し、該可動部に取付部材を介して前記回転駆動源が取り付けられており、前記基部に対し前記回転駆動源、前記駆動軸、及び前記ブラシ部材を一体に移動させるものであり、
前記支持手段は、前記駆動手段による前記回転駆動源、前記駆動軸、及び前記ブラシ部材の移動を許容する連結部材を介して、前記可動部、前記取付部材、または前記回転駆動源に連結されていることを特徴とする請求項1記載のブラシ装置。
【請求項3】
前記連結部材は、ピストン及びばねの少なくともいずれか一方を備える緩衝部材であることを特徴とする請求項2記載のブラシ装置。
【請求項4】
前記ガイド部材は、先端に車輪部材が設けられていることを特徴とする請求項1から3のいずれかに記載のブラシ装置。
【請求項5】
ロボットアームのアーム先端に取り付けられることを特徴とする請求項1から4のいずれかに記載のブラシ装置。
【請求項1】
駆動軸を回転させる回転駆動源と、
前記駆動軸と連結され、回転軸方向に延びる毛束からなるブラシ部材と、
少なくとも前記ブラシ部材を前記回転軸方向に移動させる駆動手段と、
前記ブラシ部材の外周を覆い、前記ブラシ部材の先端部が突出可能に開口した筒形状をなしており、前記駆動軸を前記回転軸方向に摺動自在に軸支しつつ、前記ブラシ部材と同期回転するブラシカバーと、
前記駆動手段による前記ブラシ部材の移動とは独立して固定され、前記ブラシカバーを回転自在に支持する支持手段と、
前記支持手段と連結されており、前記ブラシカバーの先端より前記回転軸方向外側へ延びたガイド部材とを備えることを特徴とするブラシ装置。
【請求項2】
前記駆動手段は、基部と、該基部に対して移動する可動部とを有し、該可動部に取付部材を介して前記回転駆動源が取り付けられており、前記基部に対し前記回転駆動源、前記駆動軸、及び前記ブラシ部材を一体に移動させるものであり、
前記支持手段は、前記駆動手段による前記回転駆動源、前記駆動軸、及び前記ブラシ部材の移動を許容する連結部材を介して、前記可動部、前記取付部材、または前記回転駆動源に連結されていることを特徴とする請求項1記載のブラシ装置。
【請求項3】
前記連結部材は、ピストン及びばねの少なくともいずれか一方を備える緩衝部材であることを特徴とする請求項2記載のブラシ装置。
【請求項4】
前記ガイド部材は、先端に車輪部材が設けられていることを特徴とする請求項1から3のいずれかに記載のブラシ装置。
【請求項5】
ロボットアームのアーム先端に取り付けられることを特徴とする請求項1から4のいずれかに記載のブラシ装置。
【図1】


【図2】
【図3】
【図4】
【図5】
【図6】
【図2】
【図3】
【図4】
【図5】
【図6】
【公開番号】特開2010−264541(P2010−264541A)
【公開日】平成22年11月25日(2010.11.25)
【国際特許分類】
【出願番号】特願2009−117564(P2009−117564)
【出願日】平成21年5月14日(2009.5.14)
【出願人】(000000099)株式会社IHI (5,014)
【Fターム(参考)】
【公開日】平成22年11月25日(2010.11.25)
【国際特許分類】
【出願日】平成21年5月14日(2009.5.14)
【出願人】(000000099)株式会社IHI (5,014)
【Fターム(参考)】
[ Back to top ]