
ブレーキ制御装置
【課題】ブレーキ装置のバックアップ機能が失陥した状態を検出し、車両の安全性を高める。
【解決手段】
ブレーキ操作量に応じてホイールシリンダ内の圧力を加圧可能な第1の倍力機構と、該機構の第1のコントロールユニットと、ホイールシリンダ内の圧力を加圧可能な第2の倍力機構と、該機構の第2のコントロールユニットとを備え、前記第1の倍力機構が前記ホイールシリンダ内の圧力を加圧できない場合、前記第1のコントロールユニットは前記第2のコントロールユニットに信号を送信し、該信号に基づいて前記第2のコントロールユニットは前記第2の倍力機構を制御して前記ホイールシリンダ内の圧力を加圧するバックアップ機能と、前記第2の倍力機構が前記ホイールシリンダ内の圧力を加圧できない場合、前記第2の倍力機構がかかる異常状態を検出するバックアップ機能失陥検出手段を備え、車両性能やブレーキ性能を制限し、ドライバに警告を与える。
【解決手段】
ブレーキ操作量に応じてホイールシリンダ内の圧力を加圧可能な第1の倍力機構と、該機構の第1のコントロールユニットと、ホイールシリンダ内の圧力を加圧可能な第2の倍力機構と、該機構の第2のコントロールユニットとを備え、前記第1の倍力機構が前記ホイールシリンダ内の圧力を加圧できない場合、前記第1のコントロールユニットは前記第2のコントロールユニットに信号を送信し、該信号に基づいて前記第2のコントロールユニットは前記第2の倍力機構を制御して前記ホイールシリンダ内の圧力を加圧するバックアップ機能と、前記第2の倍力機構が前記ホイールシリンダ内の圧力を加圧できない場合、前記第2の倍力機構がかかる異常状態を検出するバックアップ機能失陥検出手段を備え、車両性能やブレーキ性能を制限し、ドライバに警告を与える。
【発明の詳細な説明】
【技術分野】
【0001】
本発明は、車両の電動油圧ブレーキ及びその制御に関する。
【背景技術】
【0002】
ブレーキ倍力装置として、内燃機関の吸込み圧力を負圧として利用する真空倍力装置が最も一般的である。また、内燃機関の吸込み圧力の替わりに、真空ポンプを用いるブレーキ倍力装置も知られているが、故障の危険性が大きくなるので、特許文献1は、ブレーキ倍力装置の故障時に、アンチロックブレーキ制御ユニットのポンプを使用して制動力の低下を抑制する技術を開示している。
【0003】
【特許文献1】特表2001−513041号公報
【発明の開示】
【発明が解決しようとする課題】
【0004】
しかしながら、上記の特許文献1に記載された技術では、アンチロックブレーキ制御ユニットのポンプ機能が故障した場合、ブレーキ倍力装置には問題がないことからアンチロックブレーキが効かないが、通常どおり走行できることになる。そして、その状態でブレーキ倍力装置に故障が発生した場合には、急激な制動力低下をもたらし、重大な事故を起こす可能性があるという問題点がある。
【課題を解決するための手段】
【0005】
上記課題を解決するため、本発明の望ましい態様の一つは次のとおりである。
【0006】
本発明のブレーキ制御装置は、ドライバのブレーキ操作量を検出するブレーキ操作量検出手段と、前記ブレーキ操作量に応じてホイールシリンダ内の圧力を加圧可能な第1の倍力機構と、前記第1の倍力機構の作動を制御する第1のコントロールユニットと、前記ホイールシリンダ内の圧力を加圧可能な第2の倍力機構と、前記第2の倍力機構の作動を制御する第2のコントロールユニットと、前記第1のコントロールユニットと前記第2のコントロールユニットと、エンジンコントロールユニット、トランスミッションコントロールユニット等の外部コントロールユニットとの間の通信ラインとを備え、前記第1の倍力機構が前記ホイールシリンダ内の圧力を加圧できない場合、前記第1のコントロールユニットは前記第2のコントロールユニットに信号を送信し、該信号に基づいて前記第2のコントロールユニットは前記第2の倍力機構を制御して前記ホイールシリンダ内の圧力を加圧するバックアップ機能と、前記第2の倍力機構が前記ホイールシリンダ内の圧力を加圧できない場合、前記第2の倍力機構がかかる異常状態を検出するバックアップ機能失陥検出手段と、を備える。
【発明の効果】
【0007】
本発明によれば、バックアップ機能失陥検出手段により前記バックアップ機能失陥が検出されるので、バックアップ機能の失陥状態を知らずに運転を続け、第1の倍力機構又は第1のコントロールユニットが異常状態となってホイールシリンダ内の圧力を加圧できなくなる前に、例えば、最低限車両が安全に停止できる性能まで低下させる等の車両性能を制限する処理を行うと共に、ドライバに知らせて修理を促すことができるので、車両の安全性を高め、安全運転に寄与することができる。
【発明を実施するための最良の形態】
【0008】
[実施例1]
以下、実施例1に係るブレーキ制御装置について、図1〜図4を参照して説明する。
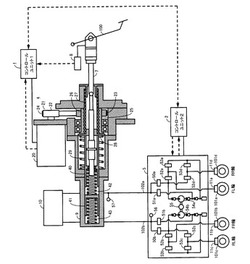
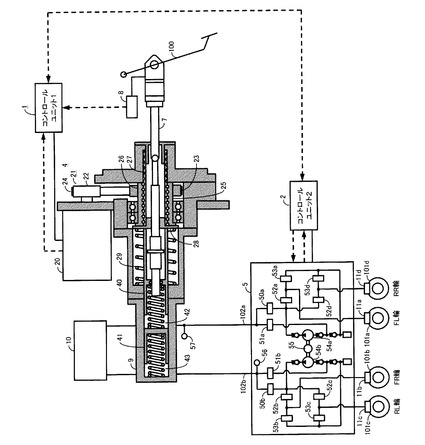
図1は、実施例1に係るブレーキ制御装置の全体構成のシステムブロックを示す。リザーバタンク10とブレーキペダル100を備えている。ドライバが踏み込むブレーキペダルの操作量は、ストロークセンサ8により検出され、この検出されたブレーキ操作量は、倍力機構4を制御するコントロールユニット1へ入力される。ブレーキペダルの操作量は、インプットロッド7を介して倍力機構4に入力され、マスタシリンダ9に伝達される。
【0009】
また、ストロークセンサ8にて検出されたブレーキ操作量がコントロールユニット1へ入力されると、ブレーキ操作量に応じた回転位置となるようにモータ20を制御する。そして、モータの回転トルクは、減速装置21を介して、回転動力を並進動力に変換する回転−並進変換装置25へ伝達される。モータには位置センサ(図示省略)が備わり、コントロールユニット1は、前記の位置センサの信号に基づいて、駆動モータ20の回転角を算出し、更に回転−並進変換装置25の推進量、すなわちプライマリピストン40の変位量を算出することができる。なお、駆動モータ20としては、DCモータ、DCブラシレスモータ、ACモータ等を用いることができるが、制御性、静粛性、耐久性の点において、DCブラシレスモータが最も望ましい。
【0010】
減速装置21は、駆動側プーリ22と、従動側プーリ23と、ベルト24とを備えるプーリによる減速方式を採っているが、歯車による減速方式を用いてもよい。また、駆動モータ20の回転トルクが十分に大きく、トルクの増幅が必要でない場合には、減速装置21を備えずに、駆動モータと回転−並進変換装置25とを直結する。これにより、減速装置の介在により発生する、信頼性、静粛性、搭載性等についての諸問題を回避することができる。
【0011】
回転−並進変換装置25は、駆動モータ20の回転動力を並進動力に変換するが、この変換の機構としては、ラックピニオン、ボールネジ、等が適当である。実施例1では、ボールネジによる方式を採っている。ボールネジナット26の外側に嵌合された従動側プーリ23により、ボールネジナット26が回転されると、ボールネジ軸27が並進運動し、この推力は、可動部材28を介してプライマリピストン40を押圧する。
【0012】
マスタシリンダ9は、リザーバタンク10と、プライマリピストン40によって加圧されるプライマリ液室42と、セカンダリピストン41によって加圧されるセカンダリ液室43の二つの加圧室を有するタンデム式のものであり、プライマリピストン40の推進により、液室42、43で加圧された作動液は、各液室に連通するマスタ配管102a、102bを経由して倍力機構5に供給される。
【0013】
可動部材28は、その一側に戻しバネ29の一端が係合されて、ボールネジ軸27の前記推力と逆方向の力がボールネジ軸27に作用するように構成されている。これにより、ブレーキ中、すなわちプライマリピストン40が押圧されて各液室が加圧されている状態にあるとき、駆動モータ20が故障により停止しボールネジ軸27の戻し制御が不能となった場合が発生しても、戻しバネ29の反力によってボールネジ軸27が初期位置に戻される結果、マスタ圧が概ね零付近まで低下するため、ブレーキの引きずりによる車両挙動の不安定化を回避することができる。
【0014】
プライマリ液室42とセカンダリ液室43内の増加した液圧は、マスタ配管102a、102bを介して、ホイールシリンダ11a〜11dに伝達される。ホイールシリンダは、図示しないシリンダ、ピストン、パッド等から構成されており、プライマリ液室42とセカンダリ液室43から供給された作動液によってピストンが推進され、このピストンが、パッドをディスクロータ101a〜101dに押圧して、制動力を得るものである。
【0015】
次に、コントロールユニット1と倍力機構4による、インプットロッド7の推力の増幅について説明する。
【0016】
実施例1では、前記したように、ドライバのブレーキ操作によるインプットロッド7の変位量に応じてプライマリピストン40を変位させることで、インプットロッド7の推力が増幅されてプライマリ液室42が加圧される。その増幅比(以下、「倍力比」という。)は、インプットロッド7とプライマリピストン40の変位量の比、インプットロッド7とプライマリピストン40の断面積の比、等により決定される。特に、インプットロッド7の変位量と同量だけプライマリピストン40を変位させる場合には、倍力比(N/N)は、インプットロッド7の断面積(AIR)及びプライマリピストン40の断面積(APP)から、次式により一意に定まることが一般に知られている。
【0017】
N/N=(AIR+APP)/AIR
【0018】
すなわち、必要な倍力比に基づいて、AIRとAPPを設定し、インプットロッドの変位量に等しくなるようにプライマリピストンの変位量を制御すると、常に一定の倍力比を得ることができる。なお、前記したとおり、インプットロッド7の変位量はストロークセンサ8によって検出され、プライマリピストン40の変位量は、モータ20に備えられた図示しない位置センサからの信号に基づいて、コントロールユニット1により算出される。
【0019】
次に、倍力可変制御処理について説明する。倍力可変制御処理とは、インプットロッド7の変位量に比例ゲイン(以下、「K1」という。)を乗じた量の変位をプライマリピストン40に与える制御処理のことである。なお、K1は、制御性の上では1であることが望ましいが、緊急ブレーキ等の、ドライバのブレーキ操作量を上回るブレーキ力が必要な場合には、一時的に1を超える値にK1を変更することができる。これにより、同量のブレーキ操作量でも、マスタ圧を通常時(K1=1の場合)に比べて引き上げて、より大きなブレーキ力を発生させることができる。ここで、緊急ブレーキの判定は、例えば、ストロークセンサ8からのブレーキ操作量検出信号の時間変化率が所定値を上回るか否かですることができる。
【0020】
以上述べたとおり、倍力可変制御処理によれば、ドライバのブレーキ要求に従うインプットロッド7の変位量に応じてマスタ圧が増減圧されるため、ドライバの要求とおりのブレーキ力を発生させることができる。なお、K1を1未満の値に変更することにより、ハイブリッド車における回生ブレーキ力の分だけ液圧ブレーキを減圧する回生協調ブレーキ制御に適用することも可能である。
【0021】
続いて、自動ブレーキ機能を実施する際の処理について説明する。自動ブレーキ制御処理は、マスタシリンダ9の作動圧を自動ブレーキの要求液圧(以下「自動ブレーキ要求液圧」という。)に調節するように、プライマリピストン40を前進又は後退させる制御処理である。
【0022】
プライマリピストン40の制御方法としては、テーブルに前もって取得されたプライマリピストン40の変位量とマスタ圧との関係に基づいて、自動ブレーキ要求液圧を実現するプライマリピストン40の変位量を抽出して、この変位量を目標値とする方法、また、マスタ圧センサ57で検出されたマスタ圧をフィードバックする方法、等があり、いずれの方法を採用してもよい。なお、自動ブレーキ要求液圧は、外部ユニットから受信することが可能であり、自動ブレーキ機能は、例えば、車両追従制御、車線逸脱回避制御、障害物回避制御、等におけるブレーキ制御に関連して用いられることが可能である。
【0023】
コントロールユニット2では、入力される先行車との車間距離、道路情報、車両状態量、例えば、ヨーレート、前後加速度、横加速度、ハンドル舵角、車輪速、車体速、等に基づいて、各輪で発生させる目標ブレーキ力を算出し、この結果に基づいて、倍力機構5の制御を行う。倍力機構5は、コントロールユニット2の制御指令に従って、各ホイールシリンダ11a〜11dの液圧を制御する。
【0024】
倍力機構5は、マスタシリンダ9で加圧された作動液の、各ホイールシリンダ11a〜11dへの供給を制御するゲートOUT弁50a、50bと、同じくポンプへの供給を制御するゲートIN弁51a、51bと、マスタシリンダ9又はポンプから各ホイールシリンダ11a〜11dへの作動液の供給を制御するIN弁52a〜52dと、ホイールシリンダ11a〜11dを減圧制御するOUT弁53a〜53dと、マスタシリンダ9で生成されたマスタ圧を昇圧するポンプ54a、54bと、ポンプ54a、54bを駆動するポンプモータ55と、マスタ圧を検出するマスタ圧センサ56と、を備えている。なお、倍力機構5としては、アンチロックブレーキ制御用の液圧制御ユニット、車両挙動安定化制御用の液圧制御ユニット、等が適当である。
【0025】
また、倍力機構5は、プライマリ液室42から作動液の供給を受け、FL輪とRR輪のブレーキ力を制御する第1のブレーキ系統と、セカンダリ液室43から作動液の供給を受け、FR輪とRL輪のブレーキ力を制御する第2のブレーキ系統の二つの系統から構成されている。このような構成を採ることにより、一方のブレーキ系統が失陥した場合にも、正常な他方のブレーキ系統により、対角2輪のブレーキ力が確保されるので、車両の挙動を安定に保つことができる。
【0026】
図1において、ゲートOUT弁50a、50bは、マスタシリンダ9とIN弁52a〜52dとの間に備えられており、マスタシリンダで加圧された作動液をホイールシリンダ11a〜11dに供給する際に、開弁される。ゲートIN弁51a、51bは、マスタシリンダ9とポンプ54a、54bとの間に備えられ、マスタシリンダで加圧された作動液をポンプで昇圧してホイールシリンダ11a〜11dに供給する際に、開弁される。
【0027】
IN弁52a〜52dは、ホイールシリンダ11a〜11dの上流に備えられており、マスタシリンダ9又はポンプ54a、54bで加圧された作動液をホイールシリンダに供給する際に、開弁される。OUT弁53a〜53dは、ホイールシリンダの下流に備えられており、ホイール圧を減圧する際に開弁される。なお、ゲートOUT弁50a、50bと、ゲートIN弁51a、51bと、IN弁52a〜52dと、OUT弁53a〜53dは、いずれも電磁式のもので、各弁毎に、図示しないソレノイドへの通電が個別に制御されることにより、弁の開閉量が個別に調節される。
【0028】
また、ゲートOUT弁50a、50bと、ゲートIN弁51a、51bと、IN弁52a〜52dと、OUT弁53a〜53dは、常開弁、常閉弁のいずれであっても構わないが、第1の実施形態では、ゲートOUT弁50a、50bと、IN弁52a〜52dが常開弁、ゲートIN弁51a、51bとOUT弁53a〜53dが常閉弁である。このような構成を採ることにより、それぞれの弁への電力供給が停止した場合にも、ゲートIN弁とOUT弁が閉じ、ゲートOUT弁とIN弁は開いて、マスタシリンダで加圧された作動液がすべてのホイールシリンダ11a〜11dに到達するため、ドライバの要求どおりのブレーキ力を発生させることができる。
【0029】
ポンプ54a、54bは、例えば、車両挙動安定化制御、自動ブレーキ、等を行うために、マスタシリンダの作動圧を超える圧力が必要な場合に、マスタ圧を更に昇圧してホイールシリンダに供給する。なお、ポンプとしては、プランジャポンプ、トロコイドポンプ、ギヤポンプ、等が適当であるが、静粛性の点において、ギヤポンプが望ましい。
【0030】
ポンプモータ55は、倍力機構5の制御指令に基づいて供給される電力によって動作し、自体に連結されたポンプ54a、54bを駆動する。なお、ポンプモータとしては、DCモータ、DCブラシレスモータ、ACモータ、等が適当であるが、制御性、静粛性、耐久性の点において、DCブラシレスモータが望ましい。
【0031】
マスタ圧センサ56は、セカンダリ側のマスタ配管102bの下流に備えられており、マスタ圧を検出する圧力センサである。なお、マスタ圧センサ56の個数及び設置する位置については、図1に示した例に限定されるものではなく、制御性、フェイルセーフ、等を考慮して決定することができる。
【0032】
コントロールユニット1は、図示しない位置センサの信号に基づいて駆動モータ20の回転角を算出することができるので、これに基づいて回転−並進変換装置25の推進量、すなわちプライマリピストン40の変位量を算出することができること、また、ペダルストロークの値からインプットロッド7の変位量を算出することができることから、ブレーキ操作量を検出するストロークセンサ8からマスタ圧センサ57を推定することができる。この推定値とマスタ圧センサ57で検知したマスタ圧を比較することにより、モータ自体の故障や電源ライン断線等により、モータ20でプライマリピストン40を動作できない場合等の動作不良の検出が可能となる。なお、直接モータに供給される電流値とモータ変位量を比較することにより、モータの故障を検出することも可能である。このようにして、コントロールユニット1は、モータ20へ供給される電流値、電圧値、ストロークセンサ8の出力値及びマスタ圧センサ57の出力値から、倍力機構4の故障状態を検知できる。また、コントロールユニット2も、倍力機構5の故障状態を検知できる。
【0033】
コントロールユニット1とコントロールユニット2は、互いに故障状態を通知する通信手段を有している。さらに、コントロールユニット2には、故障情報等が格納されたEEPROMからなる記憶回路が備えられており、検出した故障情報を記憶回路に記憶させることができる。これにより、コントロールユニット1の故障又は倍力機構4の故障又はコントロールユニット1及び倍力機構4の故障が検出された場合、コントロールユニット1からコントロールユニット2へバックアップ要求信号が出力されるか、又はコントロールユニット1からの信号がないことで、コントロールユニット2は、コントロールユニット1の故障を検知する。
【0034】
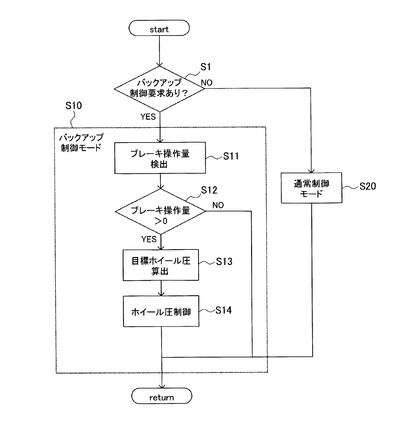
次に、図2を用いて、実施例1によるコントロールユニット2がバックアップ要求を受信した時の制御について説明する。図2は、コントロールユニット2がバックアップ要求を受信した時の制御ステップを示すフローチャートである。
【0035】
コントロールユニット2では、まずステップS1において、コントロールユニット1からのバックアップ制御要求があるか否かの判断を行う。バックアップ制御要求がないと判断した場合、ステップS20の通常制御モードとなる。この通常制御モードでは、従来どおりの倍力機構5の機能(役割)を継続する。
【0036】
ステップS1において、バックアップ制御要求があると判断した場合、ステップS10のバックアップ制御モードに移行する。このバックアップ制御モードでは、まずステップS11において、マスタ圧センサ56の信号から、マスタ圧とブレーキ操作量を検出する。ここで、ブレーキ操作量を検出する手段として、コントロールユニット2にストロークセンサ8の信号を入力する構成とし、また、ブレーキペダルの踏力センサを設けて、インプットロッド7の変位量、ブレーキペダル100の踏力、及びマスタ圧という3つのセンサ情報の中から複数情報を用いて検出するようにしてもよい。
【0037】
次のステップS12では、検出したブレーキ操作量を用いてドライバのブレーキ操作の有無を判断する。例えば、ブレーキ操作量が0の場合は、ドライバはブレーキ操作を行っていないと判断し、ホイール圧を増圧させる制御を行わない。ブレーキ操作量が0より大きい場合は、ドライバがブレーキ操作を行っていると判断し、ステップS13において、ブレーキ操作量に基づいて目標ホイール圧を算出する。そして、ステップS14において、目標ホイール圧に基づいてゲートIN弁51a、51bとゲートOUT弁50a、50bとモータ55を駆動制御することによりホイール圧制御を行う。
【0038】
以上のようにステップS10のバックアップ制御モードでは、コントロールユニット2がブレーキ操作量を検出することで、ブレーキ操作がない時はブレーキ力を発生せず、ブレーキ操作がある場合には、直ちにホイール圧を制御してブレーキ操作量に応じたブレーキ力を発生させるのである。
【0039】
以上の場合と反対に、コントロールユニット2の故障若しくは倍力機構5の故障若しくはコントロールユニット2と倍力機構5の故障が発生した場合、コントロールユニット2からバックアップ機能失陥制御要求信号がコントロールユニット1に出力されるか、又はコントロールユニット2からの送信がないことで、コントロールユニット1はコントロールユニット2の故障を検出する。
【0040】
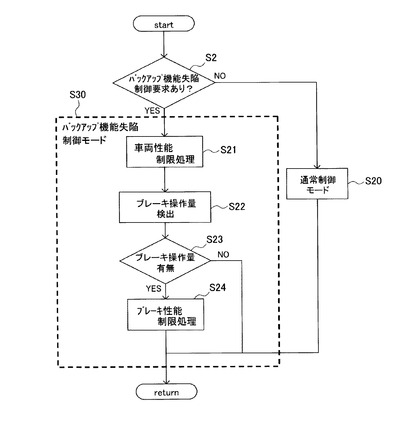
図3は、コントロールユニット1が、バックアップ機能失陥制御要求信号を受信した場合の制御ステップのフローチャートを示す。コントロールユニット2からの送信がないことで、コントロールユニット1がコントロールユニット2の故障を検出した場合も、バックアップ機能失陥制御要求信号を受信した場合と同じとする。図4は、このバックアップ機能失陥制御要求信号を受信した場合のタイムチャートを示す。
【0041】
コントロールユニット1では、まずステップS2において、コントロールユニット2からのバックアップ機能失陥制御要求があるか否かの判断を行う。バックアップ機能失陥制御要求がないと判断した場合は、ステップS20の通常制御モードとなる。ステップS20の通常制御モードでは、従来どおりの倍力機構4の機能(役割)を継続する。
【0042】
ステップS2において、バックアップ機能失陥制御要求があると判断した場合には、ステップS30のバックアップ機能失陥制御モードとなる。このタイミングは、図4においては、フェイルセーフ機能失陥制御フラグが立つ時刻t2で示される。
【0043】
ステップS30のバックアップ機能失陥制御モードでは、まずステップS21において、車両性能制限処理を行う。ステップS21の車両性能制限処理では、コントロールユニット1が送信したバックアップ機能失陥制御要求信号を、図示しないエンジンコントロールユニットやトランスミッションコントロールユニットへ送信し、車両性能制限処理を行う。
【0044】
車両性能制限処理としては、エンジンコントロールユニットについては、予め設定された車速以下となるようにスロットルの開度若しくはエンジンの点火時期を調整して車速制限を行う。また、予め設定されたエンジン回転数以下となるようにスロットル開度若しくはエンジンの点火時期を調整して、エンジン回転数制限を行うようにしてもよい。この際に、メータパネルの故障ランプを点灯させてドライバに故障を知らせる。
【0045】
予め設定された車速又はエンジン回転数とは、倍力機構5若しくはコントロールユニット2が故障した後において、倍力機構4が倍力不能となった場合、ブレーキ操作をするとブレーキペダル100から入力された踏力は、インプットロッド7を介してプライマリ液室42とセカンダリ液室43の液圧を増加させる。しかし、モータ20によるプライマリピストン40からの倍力が得られないことから通常の制動力より劣ることになる。インプットロット7の最大移動量はブレーキペダル100の構造から既知であるので、インプットロッド7の最大移動量のみからプライマリ液室42とセカンダリ液室43の最大液圧も算出できることになる。これにより、この最大液圧から車両の最大制動力を推定できるので、車両が許容できる車速を算出できる。その車速以下となるように、車速を制限若しくはエンジン回転数を制限することなる。
【0046】
また、車両性能制限処理として、トランスミッションコントロールユニットについては、予め設定されたギアポジション以下の減速比となるように、ギアポジションを制限する。予め設定されたギアポジションとは、前述した車両が許容できる車速となるようなギアポジションである。
【0047】
上記の車速制限、エンジン回転数制限、ギアポジション制限は、必要に応じて実施し、バックアップ機能失陥制御要求信号を受信した場合に、直ぐ実施してもよいが、ドライバの意図しない動作となることから、徐々に制限をかけるようにする。例えば、車両が一旦停止した後に制限をかけるようにしてもよい。こうして、緩やかに車両性能への制限をかけると共に、ドライバに重大故障であること知らせることが可能となる。また、車両性能に制限をかけることにより、速やかな修理を促すことができる。
【0048】
次に、ステップS22において、マスタ圧センサ56の出力信号によるマスタ圧、及びストロークセンサ8の出力信号により、ブレーキ操作量を検出する。ここで、ブレーキ操作量を検出する手段として、コントロールユニット1にストロークセンサ8の信号を入力する構成とし、インプットロッド7の変位量、ブレーキペダル100の踏力、マスタ圧の3つのセンサ情報の中から、複数を用いて検出するようにしてもよい。
【0049】
次に、ステップS23において、検出したブレーキ操作量を用いてドライバのブレーキ操作の有無を判断する。例えば、ブレーキ操作量が0の場合は、ドライバはブレーキ操作を行っていないと判断し、バックアップ機能失陥制御を行わない。
【0050】
ブレーキ操作量が0より大きい場合、ドライバがブレーキ操作を行っていると判断し、ステップS24において、ブレーキ性能制限処理を行う。この時、インジケータランプを点灯又は点滅させて、ドライバに重大故障であることを報知する。また、ブザー等を用いてもよい。
【0051】
ステップS24のブレーキ性能制限処理は、モータ20の回転トルクによって動作するプライマリピストン40を通常の状態より動作させないことで実現する。この制限処理の期間は、図4においてt4〜t5で示される。具体的には、モータ20に供給する電流を制限することにより、モータ20が発生する回転トルクを制限してプライマリピストン40の動作を制限する。プライマリピストン40の動作制限は、コントロールユニット1がバックアップ機能失陥制御要求を受信した場合、直ぐ実施してもよいが、ドライバの意図しない動作となることから、徐々に制限をかけるようにするか、車両が一旦停止後に制限をかけるようにしてもよい。また、ブレーキの回数や時間に応じて制限をかけるようにしてもよい。これにより、緩やかな制動性能へと制限をかけることが可能であり、ユーザに重大故障であることを通知することが可能となる。また、制動性能に制限をかけることにより、速やかな修理を促すようにする意味もある。
【0052】
ステップS24におけるブレーキ性能制限処理によるプライマリピストン40の動作制限は、マスタ圧センサ57で検出されたマスタ圧を所定値以下とするプライマリピストン40の移動量を算出できるので、その移動量を基にしてモータ20へ供給される電力を制限する。また、モータ20の電力を所定値に制限することにより、プライマリピストン40の移動に制限をかけるようにしてもよい。
【0053】
マスタ圧を制限する所定値とモータ20の電力の所定値は、いずれも予め設定された値であり、ブレーキ性能を車両安全性能上の問題が生じないレベルに制限する値である。また、車速、ブレーキ時間、ブレーキ回数に応じて、上記所定値を変化させるようにしてもよい。
【0054】
そして、実施例1におけるコントロールユニット2は、例えば先行車との車間距離、道路情報、車両状態量(例えば、ヨーレート、前後加速度、横加速度、ハンドル舵角、車輪速、車体速)等の入力情報に基づいて、各輪で発生させる目標ブレーキ力を算出し、この結果に基づいて、倍力機構5の制御を行うものとすることができる。
【0055】
また、実施例1における倍力機構4は、インプットロッド7とプライマリピストン40の2系統を有するものであるが、本発明は、真空倍力装置、油圧倍力装置、空圧倍力装置、電動アクチュエータを用いた倍力装置にも適用できる。また、倍力機構5としては、ホイールシリンダ圧を増加減できる機能を有するアクチュエータとして、倍力機構4のバックアップ機能を有するようにしてもよい。
【0056】
以上説明したように、本発明の制御方法によれば、第1の倍力機構4及び第1のコントロールユニット1が正常な状態において、バックアップ機能を有する第2の倍力機構5又は第2の倍力機構を制御する第2のコントロールユニット又は第2の倍力機構及び第2の倍力機構の両方が故障した場合に、通常のブレーキ動作は第1の倍力機構4で行うので通常走行には何の問題もないが、バックアップ機能失陥状態となるので、車両性能又は制動性能又は車両性能及び制動性能の両者に制限を徐々にかけ、インジケータを点灯若しくは点滅、ブザー等を用いてドライバに知らせることを同時に行うことで、車両に重大故障が発生していることをドライバに知らせる。これにより、急激な車両挙動の変化を防止すると共に、ドライバには重大故障であることを知らせて、速やかな修理を促すことができる。
【産業上の利用可能性】
【0057】
本発明は、自動車等の車両の電動油圧ブレーキ制御装置として利用可能である。
【図面の簡単な説明】
【0058】
【図1】実施例1に係るブレーキ制御装置の全体構成のシステムブロック図。
【図2】コントロールユニット2がバックアップ要求を受信した時の制御ステップを示すフローチャート。
【図3】実施例1に係るコントロールユニット1がバックアップ機能失陥制御要求信号を受信した場合の制御ステップのフローチャート。
【図4】実施例1に係るコントロールユニット1がバックアップ機能失陥制御要求信号を受信した場合のタイムチャート。
【符号の説明】
【0059】
1・・・第1のコントロールユニット、
2・・・第2のコントロールユニット、
4・・・第1の倍力機構、
5・・・第2の倍力機構、
7・・・インプットロッド、
8・・・ストロークセンサ、
9・・・マスタシリンダ、
10・・・リザーバタンク、
11a〜11d・・・ホイールシリンダ、
20・・・モータ、
21・・・減速装置、
22・・・駆動側プーリ、
23・・・従動側プーリ、
24・・・ベルト、
25・・・回転−並進変換装置、
26・・・ボールネジナット、
27・・・ボールネジ軸、
28・・・可動部材、
29・・・戻しバネ、
40・・・プライマリピストン、
41・・・セカンダリピストン、
42・・・プライマリ液室、
43・・・セカンダリ液室、
50a、50b・・・ゲートOUT弁、
51a、51b・・・ゲートIN弁、
52a〜52d・・・IN弁、
53a〜53d・・・OUT弁、
54a、54b・・・ポンプ
55・・・ポンプモータ、
56・・・マスタ圧センサ、
57・・・マスタ圧センサ、
100・・・ブレーキペダル、
101a〜101d・・・ディスクロータ(FL輪:前輪左車輪、FR輪:前輪右車輪、RL輪:後輪左車輪、RR輪:後輪右車輪)、
102a、102b・・・マスタ配管。
【技術分野】
【0001】
本発明は、車両の電動油圧ブレーキ及びその制御に関する。
【背景技術】
【0002】
ブレーキ倍力装置として、内燃機関の吸込み圧力を負圧として利用する真空倍力装置が最も一般的である。また、内燃機関の吸込み圧力の替わりに、真空ポンプを用いるブレーキ倍力装置も知られているが、故障の危険性が大きくなるので、特許文献1は、ブレーキ倍力装置の故障時に、アンチロックブレーキ制御ユニットのポンプを使用して制動力の低下を抑制する技術を開示している。
【0003】
【特許文献1】特表2001−513041号公報
【発明の開示】
【発明が解決しようとする課題】
【0004】
しかしながら、上記の特許文献1に記載された技術では、アンチロックブレーキ制御ユニットのポンプ機能が故障した場合、ブレーキ倍力装置には問題がないことからアンチロックブレーキが効かないが、通常どおり走行できることになる。そして、その状態でブレーキ倍力装置に故障が発生した場合には、急激な制動力低下をもたらし、重大な事故を起こす可能性があるという問題点がある。
【課題を解決するための手段】
【0005】
上記課題を解決するため、本発明の望ましい態様の一つは次のとおりである。
【0006】
本発明のブレーキ制御装置は、ドライバのブレーキ操作量を検出するブレーキ操作量検出手段と、前記ブレーキ操作量に応じてホイールシリンダ内の圧力を加圧可能な第1の倍力機構と、前記第1の倍力機構の作動を制御する第1のコントロールユニットと、前記ホイールシリンダ内の圧力を加圧可能な第2の倍力機構と、前記第2の倍力機構の作動を制御する第2のコントロールユニットと、前記第1のコントロールユニットと前記第2のコントロールユニットと、エンジンコントロールユニット、トランスミッションコントロールユニット等の外部コントロールユニットとの間の通信ラインとを備え、前記第1の倍力機構が前記ホイールシリンダ内の圧力を加圧できない場合、前記第1のコントロールユニットは前記第2のコントロールユニットに信号を送信し、該信号に基づいて前記第2のコントロールユニットは前記第2の倍力機構を制御して前記ホイールシリンダ内の圧力を加圧するバックアップ機能と、前記第2の倍力機構が前記ホイールシリンダ内の圧力を加圧できない場合、前記第2の倍力機構がかかる異常状態を検出するバックアップ機能失陥検出手段と、を備える。
【発明の効果】
【0007】
本発明によれば、バックアップ機能失陥検出手段により前記バックアップ機能失陥が検出されるので、バックアップ機能の失陥状態を知らずに運転を続け、第1の倍力機構又は第1のコントロールユニットが異常状態となってホイールシリンダ内の圧力を加圧できなくなる前に、例えば、最低限車両が安全に停止できる性能まで低下させる等の車両性能を制限する処理を行うと共に、ドライバに知らせて修理を促すことができるので、車両の安全性を高め、安全運転に寄与することができる。
【発明を実施するための最良の形態】
【0008】
[実施例1]
以下、実施例1に係るブレーキ制御装置について、図1〜図4を参照して説明する。
図1は、実施例1に係るブレーキ制御装置の全体構成のシステムブロックを示す。リザーバタンク10とブレーキペダル100を備えている。ドライバが踏み込むブレーキペダルの操作量は、ストロークセンサ8により検出され、この検出されたブレーキ操作量は、倍力機構4を制御するコントロールユニット1へ入力される。ブレーキペダルの操作量は、インプットロッド7を介して倍力機構4に入力され、マスタシリンダ9に伝達される。
【0009】
また、ストロークセンサ8にて検出されたブレーキ操作量がコントロールユニット1へ入力されると、ブレーキ操作量に応じた回転位置となるようにモータ20を制御する。そして、モータの回転トルクは、減速装置21を介して、回転動力を並進動力に変換する回転−並進変換装置25へ伝達される。モータには位置センサ(図示省略)が備わり、コントロールユニット1は、前記の位置センサの信号に基づいて、駆動モータ20の回転角を算出し、更に回転−並進変換装置25の推進量、すなわちプライマリピストン40の変位量を算出することができる。なお、駆動モータ20としては、DCモータ、DCブラシレスモータ、ACモータ等を用いることができるが、制御性、静粛性、耐久性の点において、DCブラシレスモータが最も望ましい。
【0010】
減速装置21は、駆動側プーリ22と、従動側プーリ23と、ベルト24とを備えるプーリによる減速方式を採っているが、歯車による減速方式を用いてもよい。また、駆動モータ20の回転トルクが十分に大きく、トルクの増幅が必要でない場合には、減速装置21を備えずに、駆動モータと回転−並進変換装置25とを直結する。これにより、減速装置の介在により発生する、信頼性、静粛性、搭載性等についての諸問題を回避することができる。
【0011】
回転−並進変換装置25は、駆動モータ20の回転動力を並進動力に変換するが、この変換の機構としては、ラックピニオン、ボールネジ、等が適当である。実施例1では、ボールネジによる方式を採っている。ボールネジナット26の外側に嵌合された従動側プーリ23により、ボールネジナット26が回転されると、ボールネジ軸27が並進運動し、この推力は、可動部材28を介してプライマリピストン40を押圧する。
【0012】
マスタシリンダ9は、リザーバタンク10と、プライマリピストン40によって加圧されるプライマリ液室42と、セカンダリピストン41によって加圧されるセカンダリ液室43の二つの加圧室を有するタンデム式のものであり、プライマリピストン40の推進により、液室42、43で加圧された作動液は、各液室に連通するマスタ配管102a、102bを経由して倍力機構5に供給される。
【0013】
可動部材28は、その一側に戻しバネ29の一端が係合されて、ボールネジ軸27の前記推力と逆方向の力がボールネジ軸27に作用するように構成されている。これにより、ブレーキ中、すなわちプライマリピストン40が押圧されて各液室が加圧されている状態にあるとき、駆動モータ20が故障により停止しボールネジ軸27の戻し制御が不能となった場合が発生しても、戻しバネ29の反力によってボールネジ軸27が初期位置に戻される結果、マスタ圧が概ね零付近まで低下するため、ブレーキの引きずりによる車両挙動の不安定化を回避することができる。
【0014】
プライマリ液室42とセカンダリ液室43内の増加した液圧は、マスタ配管102a、102bを介して、ホイールシリンダ11a〜11dに伝達される。ホイールシリンダは、図示しないシリンダ、ピストン、パッド等から構成されており、プライマリ液室42とセカンダリ液室43から供給された作動液によってピストンが推進され、このピストンが、パッドをディスクロータ101a〜101dに押圧して、制動力を得るものである。
【0015】
次に、コントロールユニット1と倍力機構4による、インプットロッド7の推力の増幅について説明する。
【0016】
実施例1では、前記したように、ドライバのブレーキ操作によるインプットロッド7の変位量に応じてプライマリピストン40を変位させることで、インプットロッド7の推力が増幅されてプライマリ液室42が加圧される。その増幅比(以下、「倍力比」という。)は、インプットロッド7とプライマリピストン40の変位量の比、インプットロッド7とプライマリピストン40の断面積の比、等により決定される。特に、インプットロッド7の変位量と同量だけプライマリピストン40を変位させる場合には、倍力比(N/N)は、インプットロッド7の断面積(AIR)及びプライマリピストン40の断面積(APP)から、次式により一意に定まることが一般に知られている。
【0017】
N/N=(AIR+APP)/AIR
【0018】
すなわち、必要な倍力比に基づいて、AIRとAPPを設定し、インプットロッドの変位量に等しくなるようにプライマリピストンの変位量を制御すると、常に一定の倍力比を得ることができる。なお、前記したとおり、インプットロッド7の変位量はストロークセンサ8によって検出され、プライマリピストン40の変位量は、モータ20に備えられた図示しない位置センサからの信号に基づいて、コントロールユニット1により算出される。
【0019】
次に、倍力可変制御処理について説明する。倍力可変制御処理とは、インプットロッド7の変位量に比例ゲイン(以下、「K1」という。)を乗じた量の変位をプライマリピストン40に与える制御処理のことである。なお、K1は、制御性の上では1であることが望ましいが、緊急ブレーキ等の、ドライバのブレーキ操作量を上回るブレーキ力が必要な場合には、一時的に1を超える値にK1を変更することができる。これにより、同量のブレーキ操作量でも、マスタ圧を通常時(K1=1の場合)に比べて引き上げて、より大きなブレーキ力を発生させることができる。ここで、緊急ブレーキの判定は、例えば、ストロークセンサ8からのブレーキ操作量検出信号の時間変化率が所定値を上回るか否かですることができる。
【0020】
以上述べたとおり、倍力可変制御処理によれば、ドライバのブレーキ要求に従うインプットロッド7の変位量に応じてマスタ圧が増減圧されるため、ドライバの要求とおりのブレーキ力を発生させることができる。なお、K1を1未満の値に変更することにより、ハイブリッド車における回生ブレーキ力の分だけ液圧ブレーキを減圧する回生協調ブレーキ制御に適用することも可能である。
【0021】
続いて、自動ブレーキ機能を実施する際の処理について説明する。自動ブレーキ制御処理は、マスタシリンダ9の作動圧を自動ブレーキの要求液圧(以下「自動ブレーキ要求液圧」という。)に調節するように、プライマリピストン40を前進又は後退させる制御処理である。
【0022】
プライマリピストン40の制御方法としては、テーブルに前もって取得されたプライマリピストン40の変位量とマスタ圧との関係に基づいて、自動ブレーキ要求液圧を実現するプライマリピストン40の変位量を抽出して、この変位量を目標値とする方法、また、マスタ圧センサ57で検出されたマスタ圧をフィードバックする方法、等があり、いずれの方法を採用してもよい。なお、自動ブレーキ要求液圧は、外部ユニットから受信することが可能であり、自動ブレーキ機能は、例えば、車両追従制御、車線逸脱回避制御、障害物回避制御、等におけるブレーキ制御に関連して用いられることが可能である。
【0023】
コントロールユニット2では、入力される先行車との車間距離、道路情報、車両状態量、例えば、ヨーレート、前後加速度、横加速度、ハンドル舵角、車輪速、車体速、等に基づいて、各輪で発生させる目標ブレーキ力を算出し、この結果に基づいて、倍力機構5の制御を行う。倍力機構5は、コントロールユニット2の制御指令に従って、各ホイールシリンダ11a〜11dの液圧を制御する。
【0024】
倍力機構5は、マスタシリンダ9で加圧された作動液の、各ホイールシリンダ11a〜11dへの供給を制御するゲートOUT弁50a、50bと、同じくポンプへの供給を制御するゲートIN弁51a、51bと、マスタシリンダ9又はポンプから各ホイールシリンダ11a〜11dへの作動液の供給を制御するIN弁52a〜52dと、ホイールシリンダ11a〜11dを減圧制御するOUT弁53a〜53dと、マスタシリンダ9で生成されたマスタ圧を昇圧するポンプ54a、54bと、ポンプ54a、54bを駆動するポンプモータ55と、マスタ圧を検出するマスタ圧センサ56と、を備えている。なお、倍力機構5としては、アンチロックブレーキ制御用の液圧制御ユニット、車両挙動安定化制御用の液圧制御ユニット、等が適当である。
【0025】
また、倍力機構5は、プライマリ液室42から作動液の供給を受け、FL輪とRR輪のブレーキ力を制御する第1のブレーキ系統と、セカンダリ液室43から作動液の供給を受け、FR輪とRL輪のブレーキ力を制御する第2のブレーキ系統の二つの系統から構成されている。このような構成を採ることにより、一方のブレーキ系統が失陥した場合にも、正常な他方のブレーキ系統により、対角2輪のブレーキ力が確保されるので、車両の挙動を安定に保つことができる。
【0026】
図1において、ゲートOUT弁50a、50bは、マスタシリンダ9とIN弁52a〜52dとの間に備えられており、マスタシリンダで加圧された作動液をホイールシリンダ11a〜11dに供給する際に、開弁される。ゲートIN弁51a、51bは、マスタシリンダ9とポンプ54a、54bとの間に備えられ、マスタシリンダで加圧された作動液をポンプで昇圧してホイールシリンダ11a〜11dに供給する際に、開弁される。
【0027】
IN弁52a〜52dは、ホイールシリンダ11a〜11dの上流に備えられており、マスタシリンダ9又はポンプ54a、54bで加圧された作動液をホイールシリンダに供給する際に、開弁される。OUT弁53a〜53dは、ホイールシリンダの下流に備えられており、ホイール圧を減圧する際に開弁される。なお、ゲートOUT弁50a、50bと、ゲートIN弁51a、51bと、IN弁52a〜52dと、OUT弁53a〜53dは、いずれも電磁式のもので、各弁毎に、図示しないソレノイドへの通電が個別に制御されることにより、弁の開閉量が個別に調節される。
【0028】
また、ゲートOUT弁50a、50bと、ゲートIN弁51a、51bと、IN弁52a〜52dと、OUT弁53a〜53dは、常開弁、常閉弁のいずれであっても構わないが、第1の実施形態では、ゲートOUT弁50a、50bと、IN弁52a〜52dが常開弁、ゲートIN弁51a、51bとOUT弁53a〜53dが常閉弁である。このような構成を採ることにより、それぞれの弁への電力供給が停止した場合にも、ゲートIN弁とOUT弁が閉じ、ゲートOUT弁とIN弁は開いて、マスタシリンダで加圧された作動液がすべてのホイールシリンダ11a〜11dに到達するため、ドライバの要求どおりのブレーキ力を発生させることができる。
【0029】
ポンプ54a、54bは、例えば、車両挙動安定化制御、自動ブレーキ、等を行うために、マスタシリンダの作動圧を超える圧力が必要な場合に、マスタ圧を更に昇圧してホイールシリンダに供給する。なお、ポンプとしては、プランジャポンプ、トロコイドポンプ、ギヤポンプ、等が適当であるが、静粛性の点において、ギヤポンプが望ましい。
【0030】
ポンプモータ55は、倍力機構5の制御指令に基づいて供給される電力によって動作し、自体に連結されたポンプ54a、54bを駆動する。なお、ポンプモータとしては、DCモータ、DCブラシレスモータ、ACモータ、等が適当であるが、制御性、静粛性、耐久性の点において、DCブラシレスモータが望ましい。
【0031】
マスタ圧センサ56は、セカンダリ側のマスタ配管102bの下流に備えられており、マスタ圧を検出する圧力センサである。なお、マスタ圧センサ56の個数及び設置する位置については、図1に示した例に限定されるものではなく、制御性、フェイルセーフ、等を考慮して決定することができる。
【0032】
コントロールユニット1は、図示しない位置センサの信号に基づいて駆動モータ20の回転角を算出することができるので、これに基づいて回転−並進変換装置25の推進量、すなわちプライマリピストン40の変位量を算出することができること、また、ペダルストロークの値からインプットロッド7の変位量を算出することができることから、ブレーキ操作量を検出するストロークセンサ8からマスタ圧センサ57を推定することができる。この推定値とマスタ圧センサ57で検知したマスタ圧を比較することにより、モータ自体の故障や電源ライン断線等により、モータ20でプライマリピストン40を動作できない場合等の動作不良の検出が可能となる。なお、直接モータに供給される電流値とモータ変位量を比較することにより、モータの故障を検出することも可能である。このようにして、コントロールユニット1は、モータ20へ供給される電流値、電圧値、ストロークセンサ8の出力値及びマスタ圧センサ57の出力値から、倍力機構4の故障状態を検知できる。また、コントロールユニット2も、倍力機構5の故障状態を検知できる。
【0033】
コントロールユニット1とコントロールユニット2は、互いに故障状態を通知する通信手段を有している。さらに、コントロールユニット2には、故障情報等が格納されたEEPROMからなる記憶回路が備えられており、検出した故障情報を記憶回路に記憶させることができる。これにより、コントロールユニット1の故障又は倍力機構4の故障又はコントロールユニット1及び倍力機構4の故障が検出された場合、コントロールユニット1からコントロールユニット2へバックアップ要求信号が出力されるか、又はコントロールユニット1からの信号がないことで、コントロールユニット2は、コントロールユニット1の故障を検知する。
【0034】
次に、図2を用いて、実施例1によるコントロールユニット2がバックアップ要求を受信した時の制御について説明する。図2は、コントロールユニット2がバックアップ要求を受信した時の制御ステップを示すフローチャートである。
【0035】
コントロールユニット2では、まずステップS1において、コントロールユニット1からのバックアップ制御要求があるか否かの判断を行う。バックアップ制御要求がないと判断した場合、ステップS20の通常制御モードとなる。この通常制御モードでは、従来どおりの倍力機構5の機能(役割)を継続する。
【0036】
ステップS1において、バックアップ制御要求があると判断した場合、ステップS10のバックアップ制御モードに移行する。このバックアップ制御モードでは、まずステップS11において、マスタ圧センサ56の信号から、マスタ圧とブレーキ操作量を検出する。ここで、ブレーキ操作量を検出する手段として、コントロールユニット2にストロークセンサ8の信号を入力する構成とし、また、ブレーキペダルの踏力センサを設けて、インプットロッド7の変位量、ブレーキペダル100の踏力、及びマスタ圧という3つのセンサ情報の中から複数情報を用いて検出するようにしてもよい。
【0037】
次のステップS12では、検出したブレーキ操作量を用いてドライバのブレーキ操作の有無を判断する。例えば、ブレーキ操作量が0の場合は、ドライバはブレーキ操作を行っていないと判断し、ホイール圧を増圧させる制御を行わない。ブレーキ操作量が0より大きい場合は、ドライバがブレーキ操作を行っていると判断し、ステップS13において、ブレーキ操作量に基づいて目標ホイール圧を算出する。そして、ステップS14において、目標ホイール圧に基づいてゲートIN弁51a、51bとゲートOUT弁50a、50bとモータ55を駆動制御することによりホイール圧制御を行う。
【0038】
以上のようにステップS10のバックアップ制御モードでは、コントロールユニット2がブレーキ操作量を検出することで、ブレーキ操作がない時はブレーキ力を発生せず、ブレーキ操作がある場合には、直ちにホイール圧を制御してブレーキ操作量に応じたブレーキ力を発生させるのである。
【0039】
以上の場合と反対に、コントロールユニット2の故障若しくは倍力機構5の故障若しくはコントロールユニット2と倍力機構5の故障が発生した場合、コントロールユニット2からバックアップ機能失陥制御要求信号がコントロールユニット1に出力されるか、又はコントロールユニット2からの送信がないことで、コントロールユニット1はコントロールユニット2の故障を検出する。
【0040】
図3は、コントロールユニット1が、バックアップ機能失陥制御要求信号を受信した場合の制御ステップのフローチャートを示す。コントロールユニット2からの送信がないことで、コントロールユニット1がコントロールユニット2の故障を検出した場合も、バックアップ機能失陥制御要求信号を受信した場合と同じとする。図4は、このバックアップ機能失陥制御要求信号を受信した場合のタイムチャートを示す。
【0041】
コントロールユニット1では、まずステップS2において、コントロールユニット2からのバックアップ機能失陥制御要求があるか否かの判断を行う。バックアップ機能失陥制御要求がないと判断した場合は、ステップS20の通常制御モードとなる。ステップS20の通常制御モードでは、従来どおりの倍力機構4の機能(役割)を継続する。
【0042】
ステップS2において、バックアップ機能失陥制御要求があると判断した場合には、ステップS30のバックアップ機能失陥制御モードとなる。このタイミングは、図4においては、フェイルセーフ機能失陥制御フラグが立つ時刻t2で示される。
【0043】
ステップS30のバックアップ機能失陥制御モードでは、まずステップS21において、車両性能制限処理を行う。ステップS21の車両性能制限処理では、コントロールユニット1が送信したバックアップ機能失陥制御要求信号を、図示しないエンジンコントロールユニットやトランスミッションコントロールユニットへ送信し、車両性能制限処理を行う。
【0044】
車両性能制限処理としては、エンジンコントロールユニットについては、予め設定された車速以下となるようにスロットルの開度若しくはエンジンの点火時期を調整して車速制限を行う。また、予め設定されたエンジン回転数以下となるようにスロットル開度若しくはエンジンの点火時期を調整して、エンジン回転数制限を行うようにしてもよい。この際に、メータパネルの故障ランプを点灯させてドライバに故障を知らせる。
【0045】
予め設定された車速又はエンジン回転数とは、倍力機構5若しくはコントロールユニット2が故障した後において、倍力機構4が倍力不能となった場合、ブレーキ操作をするとブレーキペダル100から入力された踏力は、インプットロッド7を介してプライマリ液室42とセカンダリ液室43の液圧を増加させる。しかし、モータ20によるプライマリピストン40からの倍力が得られないことから通常の制動力より劣ることになる。インプットロット7の最大移動量はブレーキペダル100の構造から既知であるので、インプットロッド7の最大移動量のみからプライマリ液室42とセカンダリ液室43の最大液圧も算出できることになる。これにより、この最大液圧から車両の最大制動力を推定できるので、車両が許容できる車速を算出できる。その車速以下となるように、車速を制限若しくはエンジン回転数を制限することなる。
【0046】
また、車両性能制限処理として、トランスミッションコントロールユニットについては、予め設定されたギアポジション以下の減速比となるように、ギアポジションを制限する。予め設定されたギアポジションとは、前述した車両が許容できる車速となるようなギアポジションである。
【0047】
上記の車速制限、エンジン回転数制限、ギアポジション制限は、必要に応じて実施し、バックアップ機能失陥制御要求信号を受信した場合に、直ぐ実施してもよいが、ドライバの意図しない動作となることから、徐々に制限をかけるようにする。例えば、車両が一旦停止した後に制限をかけるようにしてもよい。こうして、緩やかに車両性能への制限をかけると共に、ドライバに重大故障であること知らせることが可能となる。また、車両性能に制限をかけることにより、速やかな修理を促すことができる。
【0048】
次に、ステップS22において、マスタ圧センサ56の出力信号によるマスタ圧、及びストロークセンサ8の出力信号により、ブレーキ操作量を検出する。ここで、ブレーキ操作量を検出する手段として、コントロールユニット1にストロークセンサ8の信号を入力する構成とし、インプットロッド7の変位量、ブレーキペダル100の踏力、マスタ圧の3つのセンサ情報の中から、複数を用いて検出するようにしてもよい。
【0049】
次に、ステップS23において、検出したブレーキ操作量を用いてドライバのブレーキ操作の有無を判断する。例えば、ブレーキ操作量が0の場合は、ドライバはブレーキ操作を行っていないと判断し、バックアップ機能失陥制御を行わない。
【0050】
ブレーキ操作量が0より大きい場合、ドライバがブレーキ操作を行っていると判断し、ステップS24において、ブレーキ性能制限処理を行う。この時、インジケータランプを点灯又は点滅させて、ドライバに重大故障であることを報知する。また、ブザー等を用いてもよい。
【0051】
ステップS24のブレーキ性能制限処理は、モータ20の回転トルクによって動作するプライマリピストン40を通常の状態より動作させないことで実現する。この制限処理の期間は、図4においてt4〜t5で示される。具体的には、モータ20に供給する電流を制限することにより、モータ20が発生する回転トルクを制限してプライマリピストン40の動作を制限する。プライマリピストン40の動作制限は、コントロールユニット1がバックアップ機能失陥制御要求を受信した場合、直ぐ実施してもよいが、ドライバの意図しない動作となることから、徐々に制限をかけるようにするか、車両が一旦停止後に制限をかけるようにしてもよい。また、ブレーキの回数や時間に応じて制限をかけるようにしてもよい。これにより、緩やかな制動性能へと制限をかけることが可能であり、ユーザに重大故障であることを通知することが可能となる。また、制動性能に制限をかけることにより、速やかな修理を促すようにする意味もある。
【0052】
ステップS24におけるブレーキ性能制限処理によるプライマリピストン40の動作制限は、マスタ圧センサ57で検出されたマスタ圧を所定値以下とするプライマリピストン40の移動量を算出できるので、その移動量を基にしてモータ20へ供給される電力を制限する。また、モータ20の電力を所定値に制限することにより、プライマリピストン40の移動に制限をかけるようにしてもよい。
【0053】
マスタ圧を制限する所定値とモータ20の電力の所定値は、いずれも予め設定された値であり、ブレーキ性能を車両安全性能上の問題が生じないレベルに制限する値である。また、車速、ブレーキ時間、ブレーキ回数に応じて、上記所定値を変化させるようにしてもよい。
【0054】
そして、実施例1におけるコントロールユニット2は、例えば先行車との車間距離、道路情報、車両状態量(例えば、ヨーレート、前後加速度、横加速度、ハンドル舵角、車輪速、車体速)等の入力情報に基づいて、各輪で発生させる目標ブレーキ力を算出し、この結果に基づいて、倍力機構5の制御を行うものとすることができる。
【0055】
また、実施例1における倍力機構4は、インプットロッド7とプライマリピストン40の2系統を有するものであるが、本発明は、真空倍力装置、油圧倍力装置、空圧倍力装置、電動アクチュエータを用いた倍力装置にも適用できる。また、倍力機構5としては、ホイールシリンダ圧を増加減できる機能を有するアクチュエータとして、倍力機構4のバックアップ機能を有するようにしてもよい。
【0056】
以上説明したように、本発明の制御方法によれば、第1の倍力機構4及び第1のコントロールユニット1が正常な状態において、バックアップ機能を有する第2の倍力機構5又は第2の倍力機構を制御する第2のコントロールユニット又は第2の倍力機構及び第2の倍力機構の両方が故障した場合に、通常のブレーキ動作は第1の倍力機構4で行うので通常走行には何の問題もないが、バックアップ機能失陥状態となるので、車両性能又は制動性能又は車両性能及び制動性能の両者に制限を徐々にかけ、インジケータを点灯若しくは点滅、ブザー等を用いてドライバに知らせることを同時に行うことで、車両に重大故障が発生していることをドライバに知らせる。これにより、急激な車両挙動の変化を防止すると共に、ドライバには重大故障であることを知らせて、速やかな修理を促すことができる。
【産業上の利用可能性】
【0057】
本発明は、自動車等の車両の電動油圧ブレーキ制御装置として利用可能である。
【図面の簡単な説明】
【0058】
【図1】実施例1に係るブレーキ制御装置の全体構成のシステムブロック図。
【図2】コントロールユニット2がバックアップ要求を受信した時の制御ステップを示すフローチャート。
【図3】実施例1に係るコントロールユニット1がバックアップ機能失陥制御要求信号を受信した場合の制御ステップのフローチャート。
【図4】実施例1に係るコントロールユニット1がバックアップ機能失陥制御要求信号を受信した場合のタイムチャート。
【符号の説明】
【0059】
1・・・第1のコントロールユニット、
2・・・第2のコントロールユニット、
4・・・第1の倍力機構、
5・・・第2の倍力機構、
7・・・インプットロッド、
8・・・ストロークセンサ、
9・・・マスタシリンダ、
10・・・リザーバタンク、
11a〜11d・・・ホイールシリンダ、
20・・・モータ、
21・・・減速装置、
22・・・駆動側プーリ、
23・・・従動側プーリ、
24・・・ベルト、
25・・・回転−並進変換装置、
26・・・ボールネジナット、
27・・・ボールネジ軸、
28・・・可動部材、
29・・・戻しバネ、
40・・・プライマリピストン、
41・・・セカンダリピストン、
42・・・プライマリ液室、
43・・・セカンダリ液室、
50a、50b・・・ゲートOUT弁、
51a、51b・・・ゲートIN弁、
52a〜52d・・・IN弁、
53a〜53d・・・OUT弁、
54a、54b・・・ポンプ
55・・・ポンプモータ、
56・・・マスタ圧センサ、
57・・・マスタ圧センサ、
100・・・ブレーキペダル、
101a〜101d・・・ディスクロータ(FL輪:前輪左車輪、FR輪:前輪右車輪、RL輪:後輪左車輪、RR輪:後輪右車輪)、
102a、102b・・・マスタ配管。
【特許請求の範囲】
【請求項1】
ドライバのブレーキ操作量を検出するブレーキ操作量検出手段と、
前記ブレーキ操作量に応じてホイールシリンダ内の圧力を加圧可能な第1の倍力機構と、
前記第1の倍力機構の作動を制御する第1のコントロールユニットと、
前記ホイールシリンダ内の圧力を加圧可能な第2の倍力機構と、
前記第2の倍力機構の作動を制御する第2のコントロールユニットと、
前記第1のコントロールユニットと前記第2のコントロールユニットと、エンジンコントロールユニット、トランスミッションコントロールユニット等の外部コントロールユニットとの間の通信ラインとを備え、
前記第1の倍力機構が前記ホイールシリンダ内の圧力を加圧できない場合、前記第1のコントロールユニットは前記第2のコントロールユニットに信号を送信し、該信号に基づいて前記第2のコントロールユニットは前記第2の倍力機構を制御して前記ホイールシリンダ内の圧力を加圧するバックアップ機能と、
前記第2の倍力機構が前記ホイールシリンダ内の圧力を加圧できない場合、前記第2の倍力機構がかかる異常状態を検出するバックアップ機能失陥検出手段と、
を備えることを特徴とするブレーキ制御装置。
【請求項2】
請求項1に記載されたブレーキ制御装置において、前記バックアップ機能失陥検出手段により前記バックアップ機能失陥が検出された場合、ドライバが検知可能なランプを点灯又は点滅させることを特徴とするブレーキ制御装置。
【請求項3】
請求項1に記載されたブレーキ制御装置において、前記バックアップ機能失陥検出手段により前記バックアップ機能失陥が検出された場合、前記第1のコントロールユニットは、前記第1の倍力機構の前記ホイールシリンダ内の圧力を加圧する機能を、最低限車両が安全に停止できる圧力に制限することを特徴とするブレーキ制御装置。
【請求項4】
請求項1に記載されたブレーキ制御装置において、前記バックアップ機能失陥検出手段により前記バックアップ機能失陥が検出された場合、前記第1のコントロールユニットは、前記第1の倍力機構の前記ホイールシリンダ内の圧力を加圧する機能を、最低限車両が安全に停止できる圧力に徐々に制限することを特徴とするブレーキ制御装置。
【請求項5】
請求項1に記載されたブレーキ制御装置において、前記バックアップ機能失陥検出手段により前記バックアップ機能失陥が検出された場合、前記第1のコントロールユニットは、前記第1の倍力機構の前記ホイールシリンダ内の圧力を加圧する機能を、車速に応じて最低限車両が安全に停止できる圧力に徐々に制限することを特徴とするブレーキ制御装置。
【請求項6】
請求項1に記載されたブレーキ制御装置において、前記バックアップ機能失陥検出手段により前記バックアップ機能失陥が検出された場合、前記第1のコントロールユニットは、前記バックアップ機能失陥検出後にドライバにより操作されたブレーキの回数に応じて前記第1の倍力機構の前記ホイールシリンダ内の圧力を加圧する機能を最低限車両が安全に停止できる圧力に徐々に制限することを特徴とするブレーキ制御装置。
【請求項7】
請求項1に記載されたブレーキ制御装置において、前記バックアップ機能失陥検出手段により前記バックアップ機能失陥が検出された場合、前記第1のコントロールユニットは、前記第1の倍力機構の前記ホイールシリンダ内の圧力を加圧する機能を、前記バックアップ機能失陥検出からの時間に応じて最低限車両が安全に停止できる圧力に徐々に制限することを特徴とするブレーキ制御装置。
【請求項8】
請求項1に記載されたブレーキ制御装置において、前記バックアップ機能失陥検出手段により前記バックアップ機能失陥が検出された場合、前記第1のコントロールユニットは、前記バックアップ機能失陥が検出されたことを前記エンジンコントロールユニットへ送信し、前記エンジンコントロールユニットは、最低限車両が安全に停止できる車速に制限することを特徴とするブレーキ制御装置。
【請求項9】
請求項1に記載されたブレーキ制御装置において、前記バックアップ機能失陥検出手段により前記バックアップ機能失陥が検出された場合、前記第1のコントロールユニットは、前記バックアップ機能失陥が検出されたことを前記エンジンコントロールユニットへ送信し、前記エンジンコントロールユニットは、最低限車両が安全に停止できるエンジン回転数に制限することを特徴とするブレーキ制御装置。
【請求項10】
請求項1に記載されたブレーキ制御装置において、前記バックアップ機能失陥検出手段により前記バックアップ機能失陥が検出された場合、前記第1のコントロールユニットは、前記バックアップ機能失陥が検出されたことを前記トランスミッションコントロールユニットへ送信し、前記トランスミッションコントロールユニットは、最低限車両が安全に停止できるギアポジションに制限することを特徴とするブレーキ制御装置。
【請求項1】
ドライバのブレーキ操作量を検出するブレーキ操作量検出手段と、
前記ブレーキ操作量に応じてホイールシリンダ内の圧力を加圧可能な第1の倍力機構と、
前記第1の倍力機構の作動を制御する第1のコントロールユニットと、
前記ホイールシリンダ内の圧力を加圧可能な第2の倍力機構と、
前記第2の倍力機構の作動を制御する第2のコントロールユニットと、
前記第1のコントロールユニットと前記第2のコントロールユニットと、エンジンコントロールユニット、トランスミッションコントロールユニット等の外部コントロールユニットとの間の通信ラインとを備え、
前記第1の倍力機構が前記ホイールシリンダ内の圧力を加圧できない場合、前記第1のコントロールユニットは前記第2のコントロールユニットに信号を送信し、該信号に基づいて前記第2のコントロールユニットは前記第2の倍力機構を制御して前記ホイールシリンダ内の圧力を加圧するバックアップ機能と、
前記第2の倍力機構が前記ホイールシリンダ内の圧力を加圧できない場合、前記第2の倍力機構がかかる異常状態を検出するバックアップ機能失陥検出手段と、
を備えることを特徴とするブレーキ制御装置。
【請求項2】
請求項1に記載されたブレーキ制御装置において、前記バックアップ機能失陥検出手段により前記バックアップ機能失陥が検出された場合、ドライバが検知可能なランプを点灯又は点滅させることを特徴とするブレーキ制御装置。
【請求項3】
請求項1に記載されたブレーキ制御装置において、前記バックアップ機能失陥検出手段により前記バックアップ機能失陥が検出された場合、前記第1のコントロールユニットは、前記第1の倍力機構の前記ホイールシリンダ内の圧力を加圧する機能を、最低限車両が安全に停止できる圧力に制限することを特徴とするブレーキ制御装置。
【請求項4】
請求項1に記載されたブレーキ制御装置において、前記バックアップ機能失陥検出手段により前記バックアップ機能失陥が検出された場合、前記第1のコントロールユニットは、前記第1の倍力機構の前記ホイールシリンダ内の圧力を加圧する機能を、最低限車両が安全に停止できる圧力に徐々に制限することを特徴とするブレーキ制御装置。
【請求項5】
請求項1に記載されたブレーキ制御装置において、前記バックアップ機能失陥検出手段により前記バックアップ機能失陥が検出された場合、前記第1のコントロールユニットは、前記第1の倍力機構の前記ホイールシリンダ内の圧力を加圧する機能を、車速に応じて最低限車両が安全に停止できる圧力に徐々に制限することを特徴とするブレーキ制御装置。
【請求項6】
請求項1に記載されたブレーキ制御装置において、前記バックアップ機能失陥検出手段により前記バックアップ機能失陥が検出された場合、前記第1のコントロールユニットは、前記バックアップ機能失陥検出後にドライバにより操作されたブレーキの回数に応じて前記第1の倍力機構の前記ホイールシリンダ内の圧力を加圧する機能を最低限車両が安全に停止できる圧力に徐々に制限することを特徴とするブレーキ制御装置。
【請求項7】
請求項1に記載されたブレーキ制御装置において、前記バックアップ機能失陥検出手段により前記バックアップ機能失陥が検出された場合、前記第1のコントロールユニットは、前記第1の倍力機構の前記ホイールシリンダ内の圧力を加圧する機能を、前記バックアップ機能失陥検出からの時間に応じて最低限車両が安全に停止できる圧力に徐々に制限することを特徴とするブレーキ制御装置。
【請求項8】
請求項1に記載されたブレーキ制御装置において、前記バックアップ機能失陥検出手段により前記バックアップ機能失陥が検出された場合、前記第1のコントロールユニットは、前記バックアップ機能失陥が検出されたことを前記エンジンコントロールユニットへ送信し、前記エンジンコントロールユニットは、最低限車両が安全に停止できる車速に制限することを特徴とするブレーキ制御装置。
【請求項9】
請求項1に記載されたブレーキ制御装置において、前記バックアップ機能失陥検出手段により前記バックアップ機能失陥が検出された場合、前記第1のコントロールユニットは、前記バックアップ機能失陥が検出されたことを前記エンジンコントロールユニットへ送信し、前記エンジンコントロールユニットは、最低限車両が安全に停止できるエンジン回転数に制限することを特徴とするブレーキ制御装置。
【請求項10】
請求項1に記載されたブレーキ制御装置において、前記バックアップ機能失陥検出手段により前記バックアップ機能失陥が検出された場合、前記第1のコントロールユニットは、前記バックアップ機能失陥が検出されたことを前記トランスミッションコントロールユニットへ送信し、前記トランスミッションコントロールユニットは、最低限車両が安全に停止できるギアポジションに制限することを特徴とするブレーキ制御装置。
【図1】


【図2】
【図3】
【図4】

【図2】
【図3】
【図4】
【公開番号】特開2010−18193(P2010−18193A)
【公開日】平成22年1月28日(2010.1.28)
【国際特許分類】
【出願番号】特願2008−181458(P2008−181458)
【出願日】平成20年7月11日(2008.7.11)
【出願人】(000005108)株式会社日立製作所 (27,607)
【Fターム(参考)】
【公開日】平成22年1月28日(2010.1.28)
【国際特許分類】
【出願日】平成20年7月11日(2008.7.11)
【出願人】(000005108)株式会社日立製作所 (27,607)
【Fターム(参考)】
[ Back to top ]