
ブレーキ制御装置
【課題】電子制御式ブレーキを備えたブレーキ制御装置における液圧応答性の向上を図る技術を提供する。
【解決手段】ブレーキ制御装置は、ブレーキペダルの操作に応じてブレーキ液を液圧回路を介して供給することによりホイールシリンダに液圧を発生させ、当該液圧により車輪に制動力を付与するものであり、ブレーキペダルのストロークを検出するためのストロークセンサと、ホイールシリンダ圧を検出するためのホイールシリンダ圧センサと、ブレーキペダルのストローク量に基づいてホイールシリンダの目標液圧dを算出し、ホイールシリンダの液圧を目標液圧dに近づけるように調節するためのブレーキECUと、を備える。ブレーキECUは、ホイールシリンダ圧センサの検出液圧値eを用いてホイールシリンダの液圧を調節する通常調節と、検出液圧値eを減少補正した補正値を用いてホイールシリンダの液圧を調節する補正調節とを実行可能である。
【解決手段】ブレーキ制御装置は、ブレーキペダルの操作に応じてブレーキ液を液圧回路を介して供給することによりホイールシリンダに液圧を発生させ、当該液圧により車輪に制動力を付与するものであり、ブレーキペダルのストロークを検出するためのストロークセンサと、ホイールシリンダ圧を検出するためのホイールシリンダ圧センサと、ブレーキペダルのストローク量に基づいてホイールシリンダの目標液圧dを算出し、ホイールシリンダの液圧を目標液圧dに近づけるように調節するためのブレーキECUと、を備える。ブレーキECUは、ホイールシリンダ圧センサの検出液圧値eを用いてホイールシリンダの液圧を調節する通常調節と、検出液圧値eを減少補正した補正値を用いてホイールシリンダの液圧を調節する補正調節とを実行可能である。
【発明の詳細な説明】
【技術分野】
【0001】
本発明は、ブレーキ制御装置に関する。
【背景技術】
【0002】
従来、液圧回路を介した複数のホイールシリンダへのブレーキ液の供給をアクチュエータにより電子制御して、各ホイールシリンダに供給する液圧を調整する電子制御式ブレーキ(ECB:Electronically Controlled Brake)を備えたブレーキ制御装置が知られている。
【0003】
一般にこのようなブレーキ制御装置は、ブレーキ液を貯留したリザーバタンクと各ホイールシリンダとをつなぐ液圧回路と、リザーバタンク内のブレーキ液を吸入・吐出して各ホイールシリンダを加圧するポンプと、を備える。液圧回路には、各ホイールシリンダの液圧を検出する液圧センサが設けられている。また、このブレーキ制御装置は、ブレーキペダルが進入可能に設けられたマスタシリンダと、マスタシリンダとホイールシリンダとをつなぐ流路と、ブレーキペダルのストローク量を検出するストロークセンサとを備える。マスタシリンダとホイールシリンダとをつなぐ流路には、ブレーキペダルの操作によってマスタシリンダから送出されたブレーキ液を収容して、ブレーキペダルの操作に応じた反力を発生させるストロークシミュレータと、マスタシリンダからホイールシリンダへのブレーキ液の流動を遮断するマスタカット弁が設けられている。
【0004】
このような構成において、ブレーキペダルが踏み込まれると、ブレーキECUによって、ブレーキペダルのストローク量に応じたホイールシリンダの目標液圧が算出され、ホイールシリンダ圧が目標液圧となるように、リザーバタンクから各ホイールシリンダにブレーキ液が供給される。ホイールシリンダへのブレーキ液の供給量は、液圧センサの検出液圧値に基づいてフィードバック調節される。
【0005】
また、ブレーキペダルが踏み込まれるとマスタカット弁が閉弁状態となり、マスタシリンダからホイールシリンダへのブレーキ液の流動が遮断される。そして、ブレーキ液がマスタシリンダからストロークシミュレータに流入し、ストロークシミュレータによってブレーキペダルの踏み込みに応じた反力が生成される。これにより、ホイールシリンダ圧の上昇に応じた抵抗感をブレーキペダルに提供して運転者に良好なブレーキフィーリングを与えている。
【0006】
特許文献1には、ブレーキペダルの踏み込み量を検出する踏み込み量検出手段と、車輪の油圧を検出する油圧検出素子とを備え、油圧検出素子の出力がブレーキペダルの踏み込み量に対応して予め設定した値と異なるとき、油圧検出素子が故障していると判断する制動装置用故障判定装置が開示されている。
【先行技術文献】
【特許文献】
【0007】
【特許文献1】特開平1−269656号公報
【発明の概要】
【発明が解決しようとする課題】
【0008】
上述のブレーキ制御装置では、車輪に制動力を付与していない状態でホイールシリンダの液圧を確実に開放するために、ブレーキペダルの非操作時は、マスタカット弁は開いた状態となっている。そのため、一般にマスタカット弁には、給電状態で閉弁し、非給電状態で開弁する常開型電磁制御弁が用いられる。ブレーキペダルが踏み込まれると、ブレーキECUは、ストロークセンサからの信号を受けてブレーキペダルが踏み込まれたことを検知し、マスタカット弁が閉じるように制御電流を供給する。これにより、マスタカット弁が閉じて、マスタシリンダからホイールシリンダへのブレーキ液の流動が遮断される。
【0009】
このような構成では、ブレーキECUの演算処理に要する時間や、マスタカット弁の応答時間によって、ブレーキペダルの踏み込みが開始されてからマスタカット弁が閉じるまでの間にタイムラグが発生してしまう。そのため、ブレーキペダルの踏み込みによってマスタシリンダから送出されたブレーキ液の一部が、マスタカット弁を介してホイールシリンダ側に流動してしまう場合があった。
【0010】
マスタシリンダから送出されたブレーキ液により、マスタシリンダの下流近傍の油圧は瞬間的に上昇するが、ホイールシリンダ圧を上昇させるには至らない。しかしながら、液圧センサは、マスタシリンダの下流近傍の液圧アクチュエータ内に設けられているため、このブレーキ液による増圧を検出してしまい、液圧センサの検出液圧値が上昇して目標液圧を上回ってしまう場合があった。この場合、ブレーキECUは、液圧センサの検出結果を受けて、ホイールシリンダ圧の減圧制御を開始する。そして、マスタシリンダから送出されたブレーキ液の液圧が均一化されて液圧センサの検出液圧値が低下すると、ブレーキECUは、目標液圧との差を埋めるべくホイールシリンダ圧の増圧制御に切り替える。このように、従来の構成では、一度減圧制御を開始してしまったあとに増圧制御に転じるため、目標液圧に対するホイールシリンダ圧の追従性、すなわち液圧応答性が低下してしまう場合があった。液圧応答性の低下は、制動距離が長くなる原因となるため、液圧応答性の向上が望まれる。
【0011】
本発明はこうした状況に鑑みてなされたものであり、その目的とするところは、電子制御式ブレーキを備えたブレーキ制御装置における液圧応答性の向上を図る技術を提供することにある。
【課題を解決するための手段】
【0012】
上記課題を解決するために、本発明のある態様のブレーキ制御装置は、ブレーキ操作部材の操作に応じてブレーキ液を液圧回路を介して供給することによりホイールシリンダに液圧を発生させ、当該液圧により車輪に制動力を付与するブレーキ制御装置であって、ブレーキ操作部材の操作状態を検出するための操作センサと、ホイールシリンダの液圧を検出するための液圧センサと、前記操作センサの検出結果に基づいてホイールシリンダの目標液圧を算出し、ホイールシリンダの液圧を目標液圧に近づけるように調節するための制御部と、を備え、前記制御部は、前記液圧センサの検出液圧値を用いてホイールシリンダの液圧を調節する通常調節と、前記検出液圧値を減少補正した補正値を用いてホイールシリンダの液圧を調節する補正調節とを実行可能であることを特徴とする。
【0013】
この態様のブレーキ制御装置であれば、電子制御式ブレーキを備えたブレーキ制御装置における液圧応答性の向上を図ることができる。
【0014】
上記態様において、前記制御部は、ホイールシリンダの液圧調節の開始から所定時間、前記補正調節を実行し、前記所定時間の経過後、通常調節を実行してもよい。この場合には、ブレーキ制御装置の液圧応答性をより確実に向上させることができる。
【0015】
上記態様において、前記液圧回路とは異なる流路を介してホイールシリンダに連結され、ブレーキ液を収容するとともにブレーキ操作部材の操作に応じてこのブレーキ液を加圧するように構成されたマスタシリンダと、前記流路に開閉可能に設けられたマスタカット弁と、を備え、前記制御部は、前記操作センサの検出結果を受けて前記マスタカット弁を閉じるように制御し、前記所定時間は、前記制御部が前記マスタカット弁の閉弁制御を開始してから前記マスタカット弁が閉弁するまでの時間に基づいて定まる時間であってもよい。この場合には、制御部にかかる制御負荷を軽減することができる。
【0016】
上記態様において、前記所定時間は、前記液圧センサの検出液圧値の変化が減少から増加に転じるタイミングに基づいて定まる時間であってもよい。この場合には、ブレーキ制御装置の液圧応答性をより向上させることができる。
【0017】
上記態様において、前記所定時間は、以下の式1に基づいて定まる時間であってもよい。
所定時間T1=(操作センサ応答遅れ時間)+(制御部演算周期)+(電源装置応答時間)+(マスタカット弁コイル時定数)+(マスタカット弁応答時間)・・・(式1)
この場合には、制御部にかかる制御負荷を軽減することができる。
【0018】
上記態様において、前記制御部は、前記補正調節から前記通常調節に移行する際に、前記補正値を段階的または連続的に増大させて検出液圧値に近づけた後、通常調節に移行するように制御してもよい。この場合には、急激にホイールシリンダ圧が変化することを回避することができる。
【0019】
上記態様において、前記操作センサは、ブレーキ操作部材の操作量を検出し、前記制御部は、ブレーキ操作部材の単位時間あたりの操作量が所定のしきい値を超えた場合に、前記補正調節を実行してもよい。この場合には、ブレーキ制御装置の液圧応答性の向上を図りつつ、制御部にかかる制御負担を軽減することができる。
【発明の効果】
【0020】
本発明によれば、電子制御式ブレーキを備えたブレーキ制御装置における液圧応答性の向上を図ることができる。
【図面の簡単な説明】
【0021】
【図1】実施形態1に係るブレーキ制御装置の概略構成図である。
【図2】実施形態1に係るブレーキ制御装置とその周辺の電気的構成を表す図である。
【図3】図3(A)〜図3(D)は、従来のブレーキ制御装置におけるホイールシリンダ圧の調節を説明するための図である。
【図4】図4(A)〜図4(D)は、実施形態1に係るブレーキ制御装置におけるホイールシリンダ圧の調節を説明するための図である。
【図5】実施形態1に係るブレーキ制御装置におけるホイールシリンダ圧の制御フローチャートである。
【図6】実施形態2に係るブレーキ制御装置におけるホイールシリンダ圧の調節を説明するための図である。
【図7】実施形態2に係るブレーキ制御装置におけるホイールシリンダ圧の制御フローチャートである。
【図8】実施形態3に係るブレーキ制御装置におけるホイールシリンダ圧の調節を説明するための図である。
【図9】実施形態3に係るブレーキ制御装置におけるホイールシリンダ圧の制御フローチャートである。
【図10】実施形態4に係るブレーキ制御装置におけるホイールシリンダ圧の制御フローチャートである。
【図11】変形例に係るブレーキ制御装置の概略構成図である。
【発明を実施するための形態】
【0022】
以下、図面を参照しながら、本発明を実施するための形態(以下、実施形態という)について詳細に説明する。なお、図面の説明において同一の要素には同一の符号を付し、重複する説明を適宜省略する。
【0023】
(実施形態1)
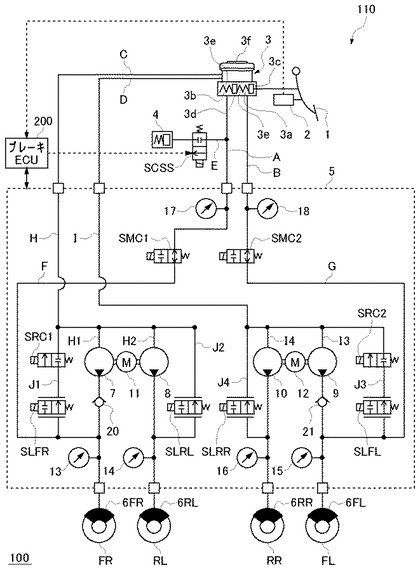
図1は、実施形態1に係るブレーキ制御装置の概略構成図である。本実施形態に係るブレーキ制御装置100は、液圧ブレーキユニット110と、液圧ブレーキユニット110の各部の動作を制御するためのブレーキECU200(制御部)とを備える。液圧ブレーキユニット110は、右前輪用および左後輪用のホイールシリンダにブレーキ液を供給する第1配管系統と、左前輪用および右後輪用のホイールシリンダにブレーキ液を供給する第2配管系統とを備える、いわゆるX配管構造を有する。
【0024】
図1に示すように、液圧ブレーキユニット110は、ブレーキペダル1(ブレーキ操作部材)、ストロークセンサ2(操作センサ)、マスタシリンダ3、シミュレータカット弁SCSS、ストロークシミュレータ4、液圧アクチュエータ5を備える。また、液圧ブレーキユニット110は、車両の右前輪、左後輪、左前輪、右後輪(全て図示せず)に設けられたブレーキディスクFR,RL,FL,RRと、ブレーキキャリパに内蔵されたホイールシリンダ6FR,6RL,6FL,6RR(以下、適宜総称して「ホイールシリンダ6」という)とを含むディスクブレーキユニットを備える。各ホイールシリンダ6は、それぞれ異なるブレーキ液流路を介して液圧アクチュエータ5に接続されている。
【0025】
各ディスクブレーキユニットでは、液圧アクチュエータ5からホイールシリンダ6にブレーキ液が供給され、ブレーキ液の液圧により各車輪と共に回転するブレーキディスクFR,RL,FL,RRにブレーキパッド(図示せず)が押し付けられる。これにより、各車輪に制動力が付与される。なお、本実施形態ではディスクブレーキユニットが用いられているが、例えばドラムブレーキなどの他の制動力付与機構が用いられてもよい。
【0026】
ドライバによってブレーキペダル1が踏み込まれると、ブレーキペダル1の操作量であるペダルストロークがストロークセンサ2に入力される。ストロークセンサ2は、入力されたペダルストロークを表す信号をブレーキECU200に送信する。なお、ここではブレーキペダル1の操作量を検出するための操作センサとしてストロークセンサ2を用いたが、ブレーキペダル1の踏力(運転者がブレーキペダル1を踏む力)を検知する踏力センサや、マスタシリンダ3内の油圧を検知する油圧センサ等であってもよい。
【0027】
マスタシリンダ3は、運転者によるブレーキペダル1の操作によって、収容されているブレーキ液を加圧し、このブレーキ液をホイールシリンダ6に向けて送出する。マスタシリンダ3は、プライマリ室3aと、セカンダリ室3bと、プライマリピストン3cと、セカンダリピストン3dと、スプリング3eとを備える。
【0028】
マスタシリンダ3は、プライマリピストン3cおよびセカンダリピストン3dによってプライマリ室3aとセカンダリ室3bとに区画されている。プライマリピストン3cには、ブレーキペダル1から延びるプッシュロッドが接続されている。そして、プライマリピストン3cは、スプリング3eの弾性力を受けてブレーキペダル1が踏み込まれていないときにブレーキペダル1を初期位置側に戻すようにプッシュロッドを押圧している。セカンダリピストン3dもまた、スプリング3eの弾性力を受けてプライマリピストン3cを介してプッシュロッドを押圧している。運転者によってブレーキペダル1が踏み込まれると、プッシュロッドがマスタシリンダ3に進入し、プライマリピストン3cおよびセカンダリピストン3dが押圧される。これにより、収容されているブレーキ液が加圧されて、プライマリ室3aおよびセカンダリ室3bにマスタシリンダ圧が発生する。
【0029】
マスタシリンダ3のプライマリ室3aとセカンダリ室3bには、それぞれ液圧アクチュエータ5に向けて延びる管路B、管路Aが連結されている。
【0030】
また、マスタシリンダ3は、ブレーキ液を貯留するリザーバタンク3fに接続されている。リザーバタンク3fは、ブレーキペダル1が初期位置にあるときにプライマリ室3aおよびセカンダリ室3bのそれぞれと図示しない通路を介して接続され、マスタシリンダ3内にブレーキ液を供給したり、マスタシリンダ3内の余剰ブレーキ液を貯留する。リザーバタンク3fには、液圧アクチュエータ5に向けて延びる管路C、管路Dが連結されている。
【0031】
ストロークシミュレータ4は、管路Aに連結された管路Eに接続されており、マスタシリンダ3のセカンダリ室3b内のブレーキ液を収容する役割を果たす。マスタシリンダ3とストロークシミュレータ4とを連通する流路の一部である管路Eには、シミュレータカット弁SCSSが設けられている。したがって、ストロークシミュレータ4はシミュレータカット弁SCSSを介して管路Aに接続されている。シミュレータカット弁SCSSは、ON/OFF制御されるソレノイドおよびスプリングを有し、規定の制御電流の供給を受けてソレノイドが発生させる電磁力により開弁状態とされ、ソレノイドが非通電状態にある場合に閉弁状態とされる常閉型電磁制御弁である。シミュレータカット弁SCSSが閉弁状態であるときは、管路Aとストロークシミュレータ4との間のブレーキ液の流通が遮断される。ソレノイドに通電されてシミュレータカット弁SCSSが開弁されると、ストロークシミュレータ4とマスタシリンダ3との間でブレーキ液を双方向に流通させることができる。なお、ストロークシミュレータ4は、管路Eを介して管路Bに連結されていていもよい。
【0032】
ストロークシミュレータ4は、複数のピストンやスプリングを含むものであり、シミュレータカット弁SCSSの開弁時に運転者によるブレーキペダル1の踏力に応じた反力を創出する。具体的には、ブレーキペダル1が所定の踏力で踏み込まれると、セカンダリ室3b内のブレーキ液が管路A、管路Eを介してストロークシミュレータ4に送出される。ブレーキ液がストロークシミュレータ4に流入するとストロークシミュレータ4に液圧が発生し、これによりストロークシミュレータ4において反力が創出される。ブレーキペダル1は、踏力と反力とが等しくなるまでマスタシリンダ3に進入する。すなわち、ストロークシミュレータ4によってブレーキペダル1の踏力に応じたブレーキペダル1のペダルストロークが創出される。ストロークシミュレータ4としては、運転者によるブレーキ操作のフィーリングを向上させるために、多段のバネ特性を有するものが採用されることが好ましい。
【0033】
液圧アクチュエータ5は、マスタシリンダ3のセカンダリ室3bとホイールシリンダ6FRとを接続する管路Fを備える。管路Fは、その一端が管路Aに連結され、他端が後述する個別管路H1のポンプ7よりも下流側に連結されており、中途にはマスタカット弁SMC1が設けられている。また、液圧アクチュエータ5は、マスタシリンダ3のプライマリ室3aとホイールシリンダ6FLとを接続する管路Gを備える。管路Gは、その一端が管路Bに連結され、他端が後述する個別管路I3のポンプ9よりも下流側に連結されており、中途にはマスタカット弁SMC2が設けられている。
【0034】
マスタカット弁SMC1,SMC2は、ON/OFF制御されるソレノイドおよびスプリングを有しており、規定の制御電流の供給を受けてソレノイドが発生させる電磁力により閉弁状態とされ、ソレノイドが非通電状態にある場合に開弁状態とされる常開型電磁制御弁である。マスタカット弁SMC1,SMC2が開弁状態であると、マスタシリンダ3とホイールシリンダ6FR,6FLとの間で管路A,F、管路B,Gを介してブレーキ液を双方向に流通させることができる。マスタカット弁SMC1,SMC2は常開型電磁制御弁であるため、ブレーキペダル1の非操作時はマスタカット弁SMC1,SMC2は開弁状態となり、車輪に制動力を付与していない状態でホイールシリンダ6FR,6FLの液圧を確実に開放することができる。ソレノイドに規定の制御電流が通電されてマスタカット弁SMC1,SMC2が閉弁されると、管路F,Gにおいてブレーキ液の流通が遮断される。すなわち、マスタカット弁SMC1,SMC2が閉弁されると、マスタシリンダ3からホイールシリンダ6FR,6FLへのブレーキ液の供給が遮断される。
【0035】
また、液圧アクチュエータ5は、リザーバタンク3fから延びる管路Cに接続された管路Hと、同じくリザーバタンク3fから延びる管路Dに接続された管路Iとを備える。管路Hは、個別管路H1,H2という2本の管路に分岐しており、個別管路H1がホイールシリンダ6FRに、個別管路H2がホイールシリンダ6RLにそれぞれ接続されている。また、管路Iは、個別管路I3,I4という2本の管路に分岐しており、個別管路I3がホイールシリンダ6FLに、個別管路I4がホイールシリンダ6RRにそれぞれ接続されている。
【0036】
各個別管路H1,H2,I3,I4には、それぞれ1つずつポンプ7,8,9,10が設けられている。各ポンプ7〜10は、例えば静寂性に優れたトロコイドポンプにより構成される。ポンプ7〜10のうち、ポンプ7、8は、第1モータ11によって駆動され、ポンプ9、10は、第2モータ12によって駆動される。
【0037】
また、液圧アクチュエータ5は、ポンプ7〜10のそれぞれに対して並列的に配置された管路J1,J2,J3,J4を備える。ポンプ7に対して並列的に配置された管路J1は、ポンプ7の上流側と下流側を、ポンプ7を迂回して連結している。本実施形態では、管路J1は、その一端がポンプ7の上流側に位置する管路Hに接続され、他端がポンプ7の下流側に位置する管路Fに接続されている。また管路J1の中途には、連通弁SRC1と液圧調整弁SLFRとが直列的に設けられている。連通弁SRC1は、管路J1における液圧調整弁SLFRよりもブレーキ液流動方向の下流側(ポンプ7の吸入ポート側)に、液圧調整弁SLFRは、管路J1における連通弁SRC1よりもブレーキ液流動方向の上流側(ポンプ7の吐出ポート側)にそれぞれ配置されている。ポンプ8に対して並列的に配置された管路J2は、ポンプ8の上流側と下流側を、ポンプ8を迂回して連結している。本実施形態では、管路J2は、その一端が個別管路H2のポンプ8よりも上流側に接続され、他端が個別管路H2のポンプ8よりも下流側に接続されている。また管路J2の中途には、液圧調整弁SLRLが設けられている。
【0038】
ポンプ9に対して並列的に配置された管路J3は、ポンプ9の上流側と下流側を、ポンプ9を迂回して連結している。本実施形態では、管路J3は、その一端が個別管路I3のポンプ9よりも上流側に接続され、他端がポンプ9の下流側に位置する管路Gに接続されている。また管路J3の中途には、連通弁SRC2と液圧調整弁SLFLとが直列的に設けられている。連通弁SRC2は、管路J3における液圧調整弁SLFLよりもブレーキ液流動方向の下流側(ポンプ9の吸入ポート側)に、液圧調整弁SLFLは、管路J3における連通弁SRC2よりもブレーキ液流動方向の上流側(ポンプ9の吐出ポート側)にそれぞれ配置されている。ポンプ10に対して並列的に配置された管路J4は、ポンプ10の上流側と下流側を、ポンプ10を迂回して連結している。本実施形態では、管路J4は、その一端がポンプ10の上流側に位置する管路Iに接続され、他端が個別管路I4のポンプ10よりも下流側に接続されている。また管路J4の中途には、液圧調整弁SLRRが設けられている。
【0039】
連通弁SRC1,SRC2は、ON/OFF制御されるソレノイドおよびスプリングをそれぞれ有しており、何れも規定の制御電流の供給を受けてソレノイドが発生させる電磁力により開弁状態とされ、ソレノイドが非通電状態にある場合に閉弁状態とされる常閉型電磁制御弁である。開弁状態とされた連通弁SRC1,SRC2は、ブレーキ液をホイールシリンダ6FR,6FL側からリザーバタンク3f側に流通させることができる。ソレノイドが非通電状態となって連通弁SRC1,SRC2が閉弁されると、管路J1,J3におけるブレーキ液の流通は遮断される。
【0040】
液圧調整弁SLFR,SLRL,SLFL,SLRRは、リニアソレノイドおよびスプリングを有しており、リニアソレノイドが非通電状態にある場合に開弁状態とされ、リニアソレノイドに供給される電流に比例して弁の開度が調整される常開型電磁制御弁である。液圧調整弁SLFR,SLRL,SLFL,SLRRが開弁状態であると、ブレーキ液をホイールシリンダ6側からリザーバタンク3f側に流通させることができる。リニアソレノイドに電流が通電されると、通電された電流に比例して弁が閉じてブレーキ液の流通量が減少していく。したがって、液圧調整弁SLFR,SLRL,SLFL,SLRRの開度を変化させることで各ホイールシリンダ6からリザーバタンク3fへのブレーキ液の流通量を変化させることができ、これにより、各ホイールシリンダ6に発生した液圧を調整することができる。
【0041】
個別管路H1,H2,I3,I4のポンプ7〜10よりも下流側(ポンプ7〜10とホイールシリンダ6との間)には、それぞれホイールシリンダ圧センサ13,14,15,16(液圧センサ)が設けられている。各ホイールシリンダ圧センサ13〜16によって、各ホイールシリンダ6FR、6RL、6FL、6RRにおけるブレーキ液の液圧、すなわちホイールシリンダ圧を検出することができる。また、管路F,Gのマスタカット弁SMC1,SMC2よりも上流側(マスタカット弁SMC1,SMC2とマスタシリンダ3との間)には、マスタシリンダ圧センサ17,18が設けられている。マスタシリンダ圧センサ17,18によって、マスタシリンダ3のセカンダリ室3bとプライマリ室3aにおけるブレーキ液の液圧、すなわちマスタシリンダ圧を検出することができる。
【0042】
さらに、ポンプ7の吐出ポートには逆止弁20が設けられ、ポンプ9の吐出ポートには逆止弁21が設けられている。逆止弁20,21は、それぞれホイールシリンダ6FR,6FL側からポンプ7,9側へのブレーキ液の流動を禁止する機能を果たす。
【0043】
上述のように構成された液圧ブレーキユニット110は、液圧回路を介したブレーキ液の供給によりホイールシリンダ6に液圧を発生させる複数の配管系統を備える。具体的には、液圧ブレーキユニット110は、管路C,H、個別管路H1,H2、および管路J1,J2を含む液圧回路を介してホイールシリンダ6FR,6RLにリザーバタンク3fのブレーキ液を供給する第1配管系統と、管路D,I、個別管路I3,I4、および管路J3,J4を含む液圧回路を介してホイールシリンダ6FL,6RRにリザーバタンク3fのブレーキ液を供給する第2配管系統とを備える。第1配管系統および第2配管系統は、マスタシリンダ3からホイールシリンダ6へのブレーキ液の供給経路に並列に設けられている。すなわち、ポンプ7〜10は、マニュアル液圧源であるマスタシリンダ3と並列に設けられている。そして、本実施形態に係るブレーキ制御装置100では、第1配管系統および第2配管系統により、いわゆるブレーキバイワイヤ方式の制動力制御が行われる。また、液圧ブレーキユニット110は、マニュアル液圧源であるマスタシリンダ3のブレーキ液を、管路A,Fを介してホイールシリンダ6FRに供給する第1ブレーキ液供給経路(液圧回路とは異なる流路)と、管路B,Gを介してホイールシリンダ6FLに供給する第2ブレーキ液供給経路(液圧回路とは異なる流路)とを備える。
【0044】
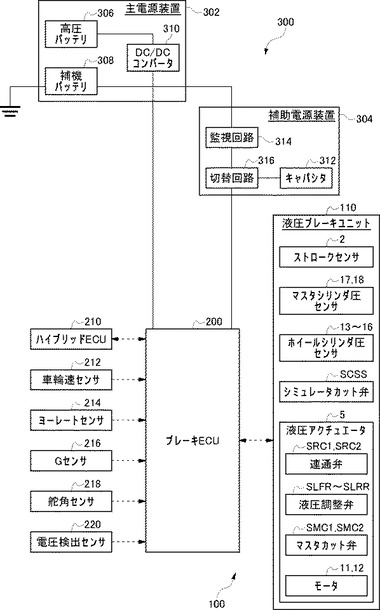
図2は、実施形態1に係るブレーキ制御装置とその周辺の電気的構成を表す図である。ブレーキ制御装置100のブレーキECU200は、各種演算処理を実行するCPU、各種制御プログラムを格納するROM、データ格納やプログラム実行のためのワークエリアとして利用されるRAM、エンジン停止時にも記憶内容を保持できるバックアップRAM等の不揮発性メモリ、入出力インターフェース、各種センサ等から入力されたアナログ信号をデジタル信号に変換して取り込むためのA/Dコンバータ等を備える。ブレーキECU200には、適切な制動制御を実現するために車輪速センサ212、ヨーレートセンサ214、Gセンサ216、舵角センサ218、電圧検出センサ220等が接続され、それぞれの出力信号が入力される。
【0045】
また、ブレーキECU200には、液圧ブレーキユニット110が接続され、液圧ブレーキユニット110に含まれるストロークセンサ2、マスタシリンダ圧センサ17,18、ホイールシリンダ圧センサ13,14,15,16から出力信号が入力される。具体的には、ブレーキECU200には、ストロークセンサ2からブレーキペダル1のストローク量を示す信号が入力され、マスタシリンダ圧センサ17,18からマスタシリンダ圧を示す信号が入力され、ホイールシリンダ圧センサ13〜16からホイールシリンダ6におけるホイールシリンダ圧を示す信号が入力される。ブレーキECU200は、ストロークセンサ2から信号が入力されると、ホイールシリンダ6に液圧を発生させるために、液圧ブレーキユニット110の液圧アクチュエータ5に含まれる連通弁SRC1,SRC2、液圧調整弁SLFR,SLRL,SLFL,SLRR、マスタカット弁SMC1,SMC2、第1モータ11、第2モータ12等に制御電流を供給する。また、ブレーキECU200は、シミュレータカット弁SCSSに制御電流を供給する。
【0046】
また、ブレーキECU200には、所定の通信ラインを介してハイブリッドECU210が接続されている。ハイブリッドECU210は、ブレーキECU200と同様の構成を備える。ブレーキECU200は、このハイブリッドECU210から回生制動力等の情報を取得し、これらの情報とストロークセンサ2から入力されたストローク量とから各ホイールシリンダの目標液圧を算出する。そして、ブレーキECU200は、各ホイールシリンダ圧が目標液圧となるように、連通弁SRC1,SRC2、液圧調整弁SLFR,SLRL,SLFL,SLRR、第1モータ11、第2モータ12等に制御電流を供給する。
【0047】
また、ブレーキECU200には、電源装置300が接続されている。電源装置300は、主電源装置302と補助電源装置304とを含む。主電源装置302は、主電源としての高圧バッテリ306および補機バッテリ308、DC/DCコンバータ310、および制御回路(図示せず)などを含む。高圧バッテリ306は、出力電圧が例えば288Vのハイブリッド車両用のバッテリであり、通常の走行状態において車輪を駆動する電動モータ(図示せず)に電力を供給する。一方、補機バッテリ308は、出力電圧が例えば12Vのバッテリであり、ブレーキECU200やハイブリッドECU210などの各種制御ユニット、液圧アクチュエータ5等の各種補機などに必要な起動電流や制御電流を供給する。高圧バッテリ306の出力電圧は、DC/DCコンバータ310によって例えば12Vに降圧され、補機バッテリ308の充電に供される。
【0048】
補助電源装置304は、補助電源としてのキャパシタ312、監視回路314、切替回路316などを含む。補助電源装置304は、主電源装置302から供給された電気エネルギを蓄え、その電気エネルギを、ブレーキECU200を経由して液圧アクチュエータ5などに供給可能なものである。キャパシタ312は、複数のコンデンサセルを含んで構成され、そのセルごとに充放電状態が制御されるものである。主電源装置302から供給された電流は定電流回路等を含む蓄電回路を経てキャパシタ312に供給される。なお、このようなキャパシタの構造および蓄電制御などは公知であるため、その詳細な説明については省略する。
【0049】
監視回路314は、補機バッテリ308の出力電圧を監視し、その出力電圧が設定値以下となった場合に補機バッテリ308または高圧バッテリ306の失陥を判定する。切替回路316は、監視回路314によりこれらのバッテリの失陥が検出された場合に、補機バッテリ308に代えてキャパシタ312からブレーキECU200や液圧アクチュエータ5などに電力が供給されるように切り替える。補機バッテリ308の出力電圧は、電圧検出センサ220によっても検出され、その検出情報がブレーキECU200に入力される。なお、監視回路314および切替回路316は、ブレーキECU200内に実装されていてもよい。
【0050】
続いて、本実施形態に係るブレーキ制御装置100のブレーキ動作について、図1を参照しながら説明する。
【0051】
ブレーキ制御装置100は、通常時のブレーキ動作として、例えばブレーキ回生協調制御を実行する。具体的には、ブレーキペダル1が踏み込まれてストロークセンサ2の検出信号がブレーキECU200に入力されると、ブレーキECU200は、制動要求があったと判断して、マスタカット弁SMC1,SMC2に電流を供給し、マスタカット弁SMC1,SMC2を閉弁状態とする。また、ブレーキECU200は、シミュレータカット弁SCSSを開弁状態とする。これにより、マスタシリンダ3からホイールシリンダ6へのブレーキ液の供給が遮断され、マスタシリンダ3から送出されるブレーキ液はストロークシミュレータ4に供給される。
【0052】
また、ブレーキECU200は、ブレーキペダル1のストロークに対応する要求制動力を演算し、要求制動力から回生による制動力を減じることによりブレーキ制御装置100により発生させるべき制動力である要求液圧制動力を算出する。ここで、回生による制動力の実効値は、ハイブリッドECU210からブレーキ制御装置100に供給される。そして、ブレーキECU200は、算出した要求液圧制動力に基づいて各ホイールシリンダ6の目標液圧を算出する。
【0053】
ブレーキECU200は、第1モータ11および第2モータ12を制御してポンプ7〜10を駆動する。これにより、リザーバタンク3fに貯留されているブレーキ液が、管路C,H、個別管路H1,H2を介してホイールシリンダ6FR,6RLに供給され、また管路D,I、個別管路I3,I4を介してホイールシリンダ6FL,6RRに供給される。ポンプ7〜10によりホイールシリンダ6にブレーキ液が供給されると、供給されたブレーキ液が加圧されて各ホイールシリンダ6に液圧が発生する。これにより、車輪に制動力が付与される。このとき、マスタカット弁SMC1,SMC2は閉弁状態となっているため、リザーバタンク3fから供給されたブレーキ液の管路F,Gを介したマスタシリンダ3側への還流が防止される。
【0054】
また、ブレーキECU200は、連通弁SRC1,SRC2を開弁状態とするとともに、ホイールシリンダ圧センサ13〜16の検出結果に基づいて、液圧調整弁SLFR,SLRL,SLFL,SLRRの開度を調整する。これにより、ホイールシリンダ6に供給されたブレーキ液が液圧調整弁SLFR〜SLRRの開度に応じてリザーバタンク3fに還流し、ホイールシリンダ6の液圧が目標液圧となるようにフィードバック調節される。また、ブレーキECU200は、第1モータ11、第2モータ12への通電量を調整してポンプ7〜10の駆動量を制御することで、各ホイールシリンダ圧の単位時間当たりの増減量(増減勾配)を調整する。なお、ブレーキECU200は、液圧調整弁SLFR〜SLRRの開度の調整とともにポンプ7〜10の駆動量を制御することで、各ホイールシリンダ6の液圧を調節するようにしてもよい。以上説明した動作により、ブレーキ制御装置100は、ブレーキペダル1のストロークに応じた制動力を車輪に発生させる。
【0055】
以上のようにして、本実施形態のブレーキ制御装置100が作動する。なお、本実施形態のブレーキ制御装置100は、ブレーキペダル1のペダルストロークの入力とマスタシリンダ3からホイールシリンダ6FR,6FLへのブレーキ液の供給とが切り離されていない関係とされている。このため、ブレーキ制御装置100は、ブレーキ制御装置100に何らかの異常が発生した場合でも、ブレーキECU200による制御に依存することなく、確実に車輪に制動力を発生させることが可能である。
【0056】
ここで、本実施形態に係るブレーキ制御装置100における、ホイールシリンダ6FR,6FLの液圧のフィードバック調節について、従来のフィードバック調節と比較しながら詳細に説明する。以下、ホイールシリンダ6FR,6FLの液圧を、単にホイールシリンダ圧と称する。
【0057】
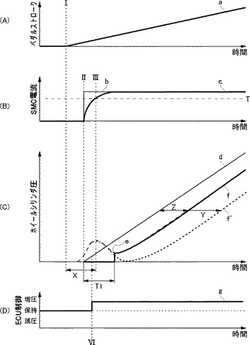
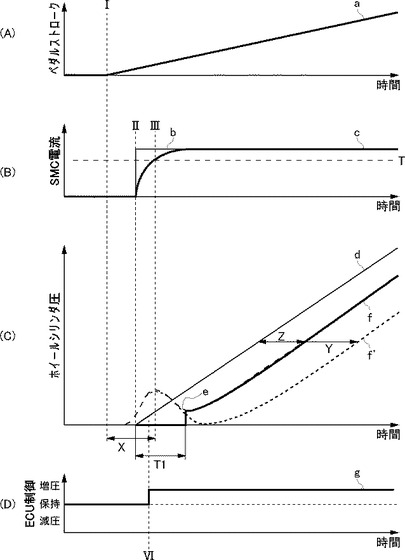
図3(A)〜図3(D)は、従来のブレーキ制御装置におけるホイールシリンダ圧の調節を説明するための図である。図4(A)〜図4(D)は、実施形態1に係るブレーキ制御装置におけるホイールシリンダ圧の調節を説明するための図である。図3(A)および図4(A)は、ペダルストロークの時間経過にともなう変化を示し、図3(B)および図4(B)は、マスタカット弁SMC1,SMC2に供給される電流(SMC電流)の時間経過にともなう変化を示し、図3(C)および図4(C)は、ホイールシリンダ圧の時間経過にともなう変化を示し、図3(D)および図4(D)は、ブレーキECU200によるホイールシリンダ圧の調節制御(ECU制御)の時間経過にともなう変化を示す。
【0058】
従来のブレーキ制御装置では、図3(A)に示す時間Iのタイミングでブレーキペダル1が踏み込まれてペダルストロークa(図3(A)中の太実線a)が検出されると、ストロークセンサ2はブレーキECU200に検出結果信号を出力する。ブレーキECU200は、ストロークセンサ2から検出結果信号を受けると、ブレーキペダル1が操作されたことを認識して、図3(B)に示す時間IIのタイミングでホイールシリンダ6の液圧調節を開始する。
【0059】
具体的には、ブレーキECU200は、電源装置300からマスタカット弁SMC1,SMC2に電流を供給するように制御する。ブレーキECU200によって指示された供給電流量を目標電流b(図3(B)中の細実線b)とした場合、目標電流bは時間IIのタイミングで閉弁しきい値Tを上回る所定の電流量となる。しかしながら、マスタカット弁SMC1,SMC2に実際に供給される電流である実電流c(図3(B)中の太実線c)は徐々に増加して、図3(B)に示す時間IIIのタイミングで閉弁しきい値Tを超える。そのため、時間IIIのタイミングでマスタカット弁SMC1,SMC2が閉弁する。したがって、ブレーキペダル1が操作されてからマスタカット弁SMC1,SMC2が閉弁するまでに時間Xを要する。
【0060】
また、ブレーキECU200は、ブレーキペダル1のストローク量に基づいてホイールシリンダ6の目標液圧d(図3(C)中の細実線d)を算出する。ペダルストロークaの増大に応じて、目標液圧dも増大していく。そして、ブレーキECU200は、ホイールシリンダ圧センサ13,15の検出液圧値e(図3(C)中の破線e)を用いてホイールシリンダ6の液圧のフィードバック調節を実行する。図3(C)における太実線fは、ブレーキECU200がホイールシリンダ圧のフィードバック調節を行う際に用いる使用液圧値fの推移を示しており、従来のブレーキ制御装置では、この使用液圧値fの推移はホイールシリンダ圧センサ13,15の検出液圧値eの推移と等しい。
【0061】
ここで、上述のように、ブレーキペダル1が操作されてからマスタカット弁SMC1,SMC2が閉弁するまでには時間Xを要する。そのため、ブレーキペダル1の踏み込みによってマスタシリンダ3で加圧されたブレーキ液の一部が、時間Xの間に第1ブレーキ液供給経路および第2ブレーキ液供給経路を介してホイールシリンダ6側に流動してしまう場合がある。この場合、このブレーキ液の流動による液圧の増大がホイールシリンダ圧センサ13,15によって検出され、ホイールシリンダ圧センサ13,15の検出液圧値eが増大する。ブレーキECU200がホイールシリンダ圧のフィードバック調節を開始するタイミング(おおよそ時間IIのタイミング)では、この増大によって検出液圧値eが目標液圧dを上回り、したがって、使用液圧値fが目標液圧dを上回る。そのため、ブレーキECU200は、図3(D)に示すように制御内容g(図3(D)中の太実線g)を減圧制御とする。
【0062】
マスタシリンダ3からホイールシリンダ6側に流動したブレーキ液による、油圧回路内の部分的な液圧の増大は、ホイールシリンダ6FR,6FLに到達する前に液圧ブレーキユニット110からホイールシリンダ6の間(油圧配管)で減衰し、あるいはキャリパピストンの移動等によって吸収される。そのため、マスタシリンダ3からホイールシリンダ6FR,6FL側に流動したブレーキ液の液圧は次第に減少し、これにともなって検出液圧値eおよび使用液圧値fは徐々に減少する。そして、図3(D)に示すように、使用液圧値fと目標液圧dとの差が所定量となった時間IVのタイミングで、ブレーキECU200は、減圧制御を停止して、制御内容gを液圧保持制御とする。具体的には、所定量だけ開いていた液圧調整弁SLFR,SLFLを閉弁状態とする。あるいは、連通弁SRC1,SRC2を閉弁状態とし、液圧調整弁SLFR,SLFLを開弁状態としてもよい。
【0063】
ホイールシリンダ圧センサ13,15で検出された液圧の増大は実際のホイールシリンダ圧の増大によるものではない。そのため、液圧保持制御を実施しても、上述の液圧の減衰等によって検出液圧値eは減少し、したがって使用液圧値fは減少する。そして、ブレーキECU200は、検出液圧値eがさらに低下して、使用液圧値fと目標液圧dとの差が所定量を超えた時間Vのタイミングで、制御内容gを増圧制御とする。増圧制御に切り替わってホイールシリンダ圧が実際に増圧され始めるまでの間は、上述の液圧の均一化等によって検出液圧値eは減少し続ける。その後、マスタシリンダ3からホイールシリンダ6へのブレーキ液の流動による誤検出が解消されて、検出液圧値eが増大し始めるタイミングで、検出液圧値eは実際のホイールシリンダ6の液圧値と略等しくなる。
【0064】
このように、従来のブレーキ制御装置では、ブレーキペダル1の操作からマスタカット弁SMC1,SMC2の閉弁までのタイムラグ(時間X)に起因して、ホイールシリンダ圧の制御初期にホイールシリンダ圧センサ13,15の検出液圧値eが一時的に増大する。そして、ブレーキECU200は、このような検出液圧値eを用いてホイールシリンダ圧を調節するため、実際のホイールシリンダ圧は増大していないにもかかわらず、減圧制御を実施し、その後に液圧保持制御を経て増圧制御を開始する。また、検出液圧値eの増大が減圧制御を実施するほどの量でなかった場合であっても、ブレーキECU200は、液圧保持制御を実施し、その後に増圧制御を開始する。そのため、増圧制御を開始する時間が遅くなる。また、減圧制御を実施した後に増圧制御を実施した場合には、各弁の応答時間等によって増圧に対するホイールシリンダ圧の反応性が低下する。これらにより、従来のブレーキ制御装置では、目標液圧dとホイールシリンダ圧(使用液圧値f)との間に時間Yだけのタイムラグが生じる。このタイムラグは、目標液圧dに対するホイールシリンダ圧の追従性、すなわち液圧応答性に相当する。
【0065】
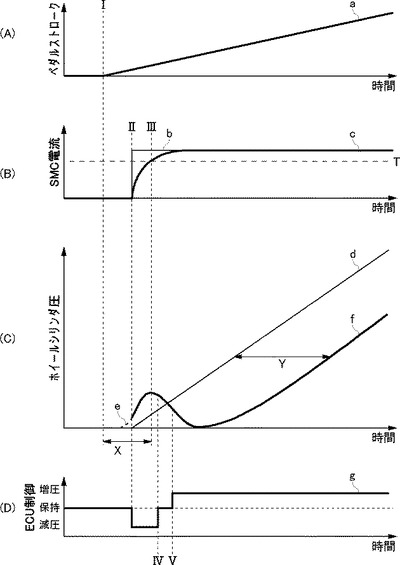
これに対し、本実施形態に係るブレーキ制御装置100は、ホイールシリンダ圧のフィードバック調節を実施する際に、ホイールシリンダ圧センサ13,15の検出液圧値eを用いて調節する通常調節と、検出液圧値eを減少補正した補正値を用いて調節する補正調節とを実行する。具体的には、図4(A)に示す時間Iのタイミングでブレーキペダル1が踏み込まれ(図4(A)中の太実線a)、ストロークセンサ2から信号が出力されると、ブレーキECU200は、図4(B)に示す時間IIのタイミングでホイールシリンダ6の液圧制御を開始する。
【0066】
上述した従来のブレーキ制御装置の場合と同様に、ブレーキECU200は、マスタカット弁SMC1,SMC2に供給する目標電流bを閉弁しきい値Tを超えるように制御する(図4(B)中の細実線b)。これにより実電流c(図4(B)中の実電流c)が時間IIIのタイミングで閉弁しきい値Tを超える。
【0067】
また、ブレーキECU200は、ホイールシリンダ6の目標液圧d(図4(C)中の細実線d)を算出し、ホイールシリンダ圧のフィードバック調節を実施する。このとき、ブレーキECU200は、フィードバック調節の開始から所定時間T1の間、使用液圧値f(図4(C)中の太実線f)として、ホイールシリンダ圧センサ13,15の検出液圧値e(図4(C)中の破線e)を減少するように補正した補正値を採用し、この補正値を用いてホイールシリンダ圧を調節する補正調節を実施する。本実施形態では、ブレーキECU200は、検出液圧値eが0になるように減少補正している。検出液圧値eの減少補正はブレーキECU200によって実施され、補正値はブレーキECU200に保持されている。また、所定時間T1についての情報もブレーキECU200に保持されている。
【0068】
時間IIのタイミングでは、検出液圧値eは、マスタシリンダ3からホイールシリンダ6FR,6FL側へのブレーキ液の流動によって目標液圧dを上回っている。しかしながら、ブレーキECU200は、補正値を用いた補正調節を実施するため、使用液圧値fとしての補正値と目標液圧dとの差が所定量を超えた時間VIのタイミングで、制御内容g(図4(D)中の太実線g)を増圧制御とすることができる。そして、所定時間T1の経過後、ブレーキECU200は、補正調節から検出液圧値eを用いた通常調節に切り替える。検出液圧値eは、マスタシリンダ3からのブレーキ液の流動によって増大した後、液圧の均一化等によって徐々に減少するが、おおよそ所定時間T1が経過した時点で実際のホイールシリンダ圧と略等しくなる。その後、検出液圧値eは、ブレーキECU200の増圧制御の影響で徐々に増大していく。なお、ブレーキECU200は、ホイールシリンダ6の液圧調節を開始する時間IIのタイミングで増圧制御を実施してもよい。
【0069】
このように、本実施形態に係るブレーキ制御装置100では、液圧制御開始から所定時間T1の間、検出液圧値eの減少補正値を用いた補正調節を実施している。そのため、ホイールシリンダ圧センサ13,15の誤検出による減圧制御および液圧保持制御を経ることなく増圧制御を開始することができる。これにより、ホイールシリンダ6の液圧が増大し始めるタイミングを、従来のブレーキ制御装置と比べてより早くすることできる。その結果、図4(C)に示すように、時間T1が経過した時点での検出液圧値eは、同時点での従来のブレーキ制御装置におけるホイールシリンダ圧f’よりも大きくなる。そして、本実施形態に係るブレーキ制御装置100の場合、目標液圧dとホイールシリンダ圧f(使用液圧値f)との間のタイムラグ(時間Z)を、目標液圧dと従来のブレーキ制御装置におけるホイールシリンダ圧f’(図4(C)中の点線f’)との間のタイムラグ(時間Y)よりも短くすることができる。
【0070】
ここで、前記「液圧調節の開始」は、例えば、ブレーキECU200が電源装置300にマスタカット弁SMC1,SMC2への電流供給を指示したタイミング、すなわち時間IIのタイミングである。また、所定時間T1は、例えば、ブレーキECU200がマスタカット弁SMC1,SMC2の閉弁制御を開始した時間IIからマスタカット弁SMC1,SMC2が実際に閉弁する時間IIIまでの時間、すなわちマスタカット弁SMC1,SMC2の応答時間に基づいて定まる時間である。このように、所定時間T1をマスタカット弁SMC1,SMC2の応答特性に応じて決まる一定の時間とすることで、ブレーキECU200に係る制御負荷を軽減することができる。なお、所定時間T1は、マスタカット弁SMC1,SMC2の応答時間に加えて、ブレーキECU200が演算処理に要する時間や、マスタカット弁SMC1,SMC2のコイル時定数、電源装置300の応答時間等を考慮して、これらの要素に基づいて定めてもよい。
【0071】
例えば、所定時間T1は、次の式1で表すことができる。
T1=(ストロークセンサ2応答遅れ時間)+(ブレーキECU200演算周期)+(電源装置300応答時間)+(マスタカット弁SMC1,SMC2コイル時定数)+(マスタカット弁SMC1,SMC2応答時間)・・・(式1)
この場合、一意に所定時間T1を決定することができるため、ブレーキECU200に係る制御負荷を軽減することができる。
【0072】
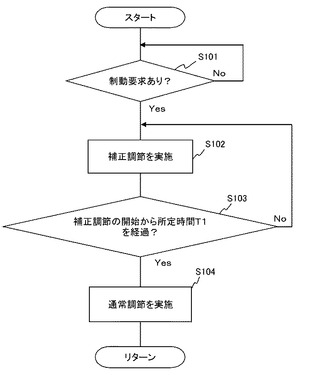
図5は、実施形態1に係るブレーキ制御装置におけるホイールシリンダ圧の制御フローチャートである。このフローは、ブレーキECU200が繰り返し実行する。
【0073】
まず、ブレーキECU200は、ストロークセンサ2からの出力信号の有無に基づいて、制動要求があったか判断する(S101)。制動要求がなかった場合(S101_No)、ブレーキECU200は、制動要求があったか否かの判断を繰り返す。制動要求があった場合(S101_Yes)、ブレーキECU200は、ホイールシリンダの液圧調節を開始して、検出液圧値eを減少補正した補正値を用いて、ホイールシリンダ圧の補正調節を実施する(S102)。そして、ブレーキECU200は、液圧調節を開始してから所定時間T1が経過したか判断する(S103)。所定時間T1を経過していなかった場合(S103_No)、ブレーキECU200は、補正調節を継続する。一方、所定時間T1を経過していた場合(S103_Yes)、ブレーキECU200は、検出液圧値eを用いた通常調節を実施して(S104)、ステップ101に戻る。
【0074】
以上説明したように、本実施形態に係るブレーキ制御装置100は、ブレーキペダル1の操作に応じてホイールシリンダ6に液圧を発生させ、この液圧により車輪に制動力を付与するブレーキ制御装置であり、ストロークセンサ2と、ホイールシリンダ圧センサ13〜16と、ブレーキECU200とを備える。そして、ブレーキECU200は、ストロークセンサ2の検出結果に基づいてホイールシリンダ6の目標液圧を算出し、ホイールシリンダ圧を目標液圧に近づけるように調節する。ホイールシリンダ6FR,6FLの液圧調節において、ブレーキECU200は、ホイールシリンダ圧センサ13,15の検出液圧値を用いてホイールシリンダ圧を調節する通常調節と、検出液圧値を減少補正した補正値を用いてホイールシリンダ圧を調節する補正調節とを実行可能である。そのため、本実施形態に係るブレーキ制御装置100によれば、ブレーキペダル1が踏み込まれてマスタシリンダ3からホイールシリンダ6側にブレーキ液の一部が流動し、ホイールシリンダ圧センサ13,15によるホイールシリンダ圧の誤検出が生じた場合であっても、適切なタイミングでホイールシリンダ圧の増圧制御を開始することができる。これにより、ブレーキ制御装置100の液圧応答性が向上するため、車両の制動距離を短くすることができる。
【0075】
また、本実施形態では、ブレーキECU200は、ホイールシリンダ圧調節の開始から所定時間T1の間、補正調節を実行し、所定時間T1の経過後に通常調節を実行する。これにより、ブレーキ制御装置100の液圧応答性をより確実に向上させることができる。所定時間T1は、例えば、ブレーキECU200がマスタカット弁SMC1,SMC2の閉弁制御を開始してからマスタカット弁SMC1,SMC2が閉弁するまでの時間に基づいて定まる時間である。このように、所定時間T1をマスタカット弁SMC1,SMC2の応答特性に応じて決まる一定の時間とすることで、ブレーキECU200にかかる制御負荷を軽減することができる。
【0076】
(実施形態2)
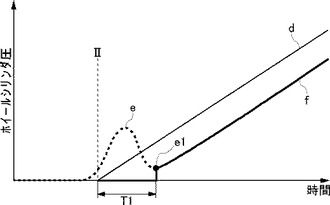
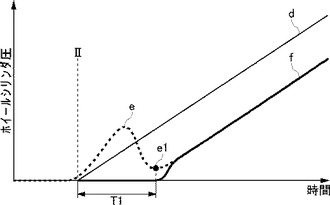
実施形態2に係るブレーキ制御装置は、実施形態1に係るブレーキ制御装置における所定時間T1を、検出液圧値eの変化が減少から増加に転じるタイミングに基づいて定まる時間としたものである。以下、本実施形態について説明する。なお、ブレーキ制御装置の主な構成やブレーキ動作などは実施形態1と同様であるため、実施形態1と同様の構成については同一の符号を付し、その説明および図示は適宜省略する。図6は、実施形態2に係るブレーキ制御装置におけるホイールシリンダ圧の調節を説明するための図である。
【0077】
実施形態1で説明したように、ブレーキペダル1が踏み込まれてからマスタカット弁SMC1,SMC2が閉弁するまでに所定時間を要するため、ブレーキ液の一部がマスタシリンダ3からホイールシリンダ6側に流動してしまう。そのため、図6に示すように、ホイールシリンダ圧センサ13,15の検出液圧値eにはスパイク状の増大が見られる。このスパイク状の増大の大きさは、マスタシリンダ3からホイールシリンダ6側に流動するブレーキ液の量等に応じて変化する。例えば、ブレーキペダル1の踏み込み速度が遅く、ブレーキ液の流動量が少ない場合には、検出液圧値eの増大量は少なく、液圧が均一化等されて検出液圧値eのスパイク状の増大が収束するまでの時間は比較的短い。一方、ブレーキペダル1の踏み込み速度が速く、ブレーキ液の流動量が多い場合には、検出液圧値eの増大量は多く、検出液圧値eのスパイク状の増大が収束するまでの時間は比較的長い。
【0078】
また、ブレーキECU200によってホイールシリンダ圧のフィードバック調節が実行された場合、検出液圧値eは、スパイク状の増大が収束した後、増圧制御の影響で再び増大する。そのため、検出液圧値eの変化には極小点e1が1つ現れる。そして、検出液圧値eは、この極小点e1付近で実際のホイールシリンダ圧と略等しくなる。
【0079】
そこで、本実施形態に係るブレーキ制御装置100では、検出液圧値eの減少補正値を用いた補正調節を実行する時間である所定時間T1を、検出液圧値eの変化が減少から増加に転じるタイミングに基づいて定まる時間とした。具体的には、ブレーキECU200は、ホイールシリンダ圧センサ13,15から検出液圧値eを受信して、受信した検出液圧値eと前回受信した検出液圧値eとを比較する。そして、ブレーキECU200は、検出液圧値eの減少を検知した後、前回の検出液圧値eよりも大きい検出液圧値eを最初に受信した時点で、所定時間T1が経過したと判断する。所定時間T1が経過したと判断したブレーキECU200は、補正調節を通常調節に切り替える。これにより、マスタシリンダ3からのブレーキ液の流動に起因した検出液圧値eの増大の大きさに応じて、補正調節を実行する時間を変化させることができるため、ブレーキ制御装置100の油圧応答性をより向上させることができる。
【0080】
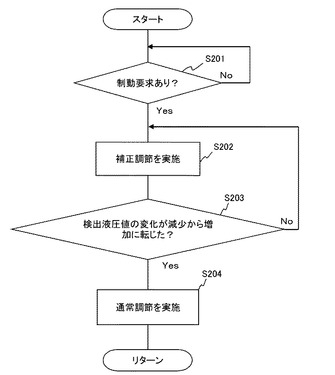
図7は、実施形態2に係るブレーキ制御装置におけるホイールシリンダ圧の制御フローチャートである。このフローは、ブレーキECU200が繰り返し実行する。
【0081】
まず、ブレーキECU200は、ストロークセンサ2からの出力信号の有無に基づいて、制動要求があったか判断する(S201)。制動要求がなかった場合(S201_No)、ブレーキECU200は、制動要求があったか否かの判断を繰り返す。制動要求があった場合(S201_Yes)、ブレーキECU200は、液圧調節を開始して、検出液圧値eを減少補正した補正値を用いて、ホイールシリンダ圧の補正調節を実施する(S202)。そして、ブレーキECU200は、検出液圧値eの変化が減少から増加に転じたか判断する(S203)。検出液圧値eの変化が減少から増加に転じていなかった場合(S203_No)、ブレーキECU200は、所定時間T1が経過していないと判断し、補正調節を継続する。一方、検出液圧値eの変化が減少から増加に転じた場合(S203_Yes)、ブレーキECU200は、所定時間T1が経過したと判断し、検出液圧値eを用いた通常調節を実施して(S204)、ステップ201に戻る。
【0082】
以上説明したように、本実施形態に係るブレーキ制御装置100では、所定時間T1を、検出液圧値eの変化が減少から増加に転じるタイミングに基づいて定まる時間としている。そのため、ブレーキECU200にかかる制御負担は実施形態1と比べて増大するが、ブレーキ制御装置100の液圧応答性をより向上させることができる。また、検出液圧値eが極小点e1を迎えた直後に、使用液圧値fを補正値から検出液圧値eに切り替えているため、切り替えにともなう使用液圧値fの変化量を小さくすることができる。これにより、急激にホイールシリンダ圧が変化することを回避することができるため、脈動の発生を抑えることができ、その結果、異音の発生を防ぐことができる。
【0083】
(実施形態3)
実施形態3に係るブレーキ制御装置は、実施形態2に係るブレーキ制御装置において、補正調節から通常調節に移行する際に、補正値を徐々に増大させて検出液圧値eに近づける制御を実施するものである。以下、本実施形態について説明する。なお、ブレーキ制御装置の主な構成やブレーキ動作などは実施形態2と同様であるため、実施形態2と同様の構成については同一の符号を付し、その説明および図示は適宜省略する。図8は、実施形態3に係るブレーキ制御装置におけるホイールシリンダ圧の調節を説明するための図である。
【0084】
本実施形態では、図8に示すように、所定時間T1が経過して補正調節を通常調節に切り替える際に、使用液圧値fとしての補正値を段階的または連続的に増大させて検出液圧値eに近づけた後、使用液圧値fを補正値から検出液圧値eに切り替える。具体的には、例えばブレーキECU200は、所定時間T1が経過すると、補正値と検出液圧値eとの差分の1/2を補正値に加えた値を新たな使用液圧値fとし、これを繰り返して使用液圧値fを徐々に検出液圧値eに近づけていく。これにより、補正調節から通常調節への切り替えにともなう使用液圧値fの変化量をより小さくすることができるため、より確実に脈動の発生を抑えることができ、したがってより確実に異音の発生を防ぐことができる。
【0085】
図9は、実施形態3に係るブレーキ制御装置におけるホイールシリンダ圧の制御フローチャートである。このフローは、ブレーキECU200が繰り返し実行する。
【0086】
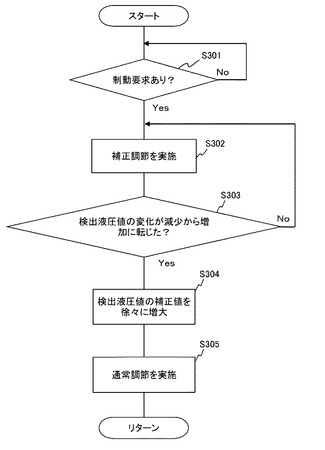
まず、ブレーキECU200は、ストロークセンサ2からの出力信号の有無に基づいて、制動要求があったか判断する(S301)。制動要求がなかった場合(S301_No)、ブレーキECU200は、制動要求があったか否かの判断を繰り返す。制動要求があった場合(S301_Yes)、ブレーキECU200は、検出液圧値eを減少補正した補正値を用いて、ホイールシリンダ圧の補正調節を実施する(S302)。そして、ブレーキECU200は、検出液圧値eの変化が減少から増加に転じたか判断する(S303)。検出液圧値eの変化が減少から増加に転じていなかった場合(S303_No)、ブレーキECU200は、補正調節を継続する。一方、検出液圧値eの変化が減少から増加に転じた場合(S303_Yes)、ブレーキECU200は、使用液圧値fとしての補正値を徐々に増大させた後(S304)、検出液圧値eを用いた通常調節を実施して(S305)、ステップ301に戻る。
【0087】
以上説明したように、本実施形態に係るブレーキ制御装置100では、所定時間T1が経過して補正調節を通常調節に切り替える際に、使用液圧値fとしての補正値を段階的または連続的に増大させて検出液圧値eに近づけた後、通常調節に移行させている。そのため、ブレーキ制御装置100の液圧応答性の向上効果が得られるとともに、より確実に脈動の発生を抑えることができ、したがってより確実に異音の発生を防ぐことができる。
【0088】
(実施形態4)
実施形態4に係るブレーキ制御装置は、実施形態3に係るブレーキ制御装置において、ブレーキペダル1の踏み込み速度に応じて補正調節の実施・不実施を切り替えるものである。以下、本実施形態について説明する。なお、ブレーキ制御装置の主な構成やブレーキ動作などは実施形態3と同様であるため、実施形態3と同様の構成については同一の符号を付し、その説明および図示は適宜省略する。
【0089】
実施形態2で説明したように、ホイールシリンダ圧センサ13,15の検出液圧値eに見られるスパイク状の増大の大きさは、マスタシリンダ3からホイールシリンダ6側に流動するブレーキ液の量等に応じて変化する。ブレーキペダル1の踏み込み速度が非常に遅く、ブレーキ液の流動量が微量である場合には、検出液圧値eのスパイク状の増大は無視できる程度に少なくなる。また、この場合には、検出液圧値eの変化の極小点e1を検出できない可能性があり、所定時間T1を確定できないおそれがある。
【0090】
そこで、本実施形態では、ブレーキペダル1の踏み込み速度に応じて補正調節を実施するか否かを判断することとした。具体的には、ブレーキECU200は、ブレーキペダル1が踏み込まれてストロークセンサ2から信号が出力されると、単位時間当たりのストローク量を算出する。そして、ブレーキECU200は、単位時間当たりのストローク量が所定のしきい値を超えた場合に補正調節を実行し、単位時間当たりのストローク量が所定のしきい値以下であった場合は補正調節を実行することなく、通常調節を実行する。これにより、補正調節が必要ない場合には通常調節のみを実行することができるため、ブレーキECU200にかかる制御負担を軽減することができる。また、所定時間T1を確定できない状況を回避することができる。
【0091】
図10は、実施形態4に係るブレーキ制御装置におけるホイールシリンダ圧の制御フローチャートである。このフローは、ブレーキECU200が繰り返し実行する。
【0092】
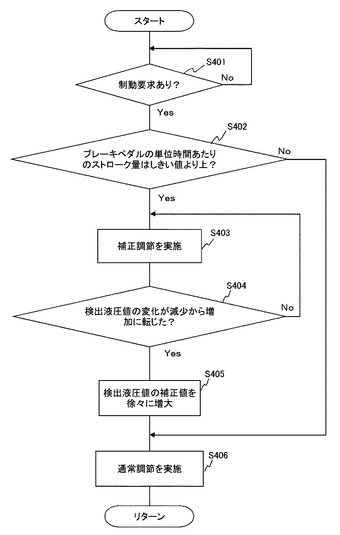
まず、ブレーキECU200は、ストロークセンサ2からの出力信号の有無に基づいて、制動要求があったか判断する(S401)。制動要求がなかった場合(S401_No)、ブレーキECU200は、制動要求があったか否かの判断を繰り返す。制動要求があった場合(S401_Yes)、ブレーキECU200は、ブレーキペダル1の単位時間当たりのストローク量がしきい値を超えたか判断する(S402)。単位時間あたりのストローク量がしきい値以下であった場合(S402_No)、ブレーキECU200は、通常調節を実行する(S406)。
【0093】
単位時間当たりのストローク量がしきい値より上であった場合(S402_Yes)、ブレーキECU200は、検出液圧値eを減少補正した補正値を用いて、ホイールシリンダ圧の補正調節を実施する(S403)。そして、ブレーキECU200は、検出液圧値eの変化が減少から増加に転じたか判断する(S404)。検出液圧値eの変化が減少から増加に転じていなかった場合(S404_No)、ブレーキECU200は、補正調節を継続する。一方、検出液圧値eの変化が減少から増加に転じた場合(S404_Yes)、ブレーキECU200は、使用液圧値fとしての補正値を徐々に増大させた後(S405)、検出液圧値eを用いた通常調節を実施して(S406)、ステップ401に戻る。
【0094】
以上説明したように、本実施形態に係るブレーキ制御装置100では、ブレーキペダル1の単位時間当たりのストローク量が所定のしきい値を超えた場合に補正調節を実行している。そのため、ブレーキ制御装置100の液圧応答性の向上を図りつつ、ブレーキECU200にかかる制御負担を軽減することができる。また、補正調節を通常調節に切り替えるタイミングをより正確に検知することができる。
【0095】
本発明は、上述の実施の形態に限定されるものではなく、各実施形態の各要素を適宜組み合わせたものも、本発明の実施形態として有効である。また、当業者の知識に基づいて各種の設計変更等の変形を実施形態に対して加えることも可能であり、そのような組み合わせられ、もしくは変形が加えられた実施形態も本発明の範囲に含まれ得る。上述の各実施形態同士の組合せや変形の追加によって生じる新たな実施形態は、組み合わされる実施形態および追加される変形のそれぞれの効果をあわせもつ。各図に示す構成は、一例を説明するためのもので、同様な機能を達成できる構成であれば、適宜変更可能であり、同様な効果を得ることができる。
【0096】
例えば、上述の実施形態3は、その特有の構成を実施形態2に追加したものであり、実施形態4は、その特有の構成を実施形態3に追加したものであるが、実施形態3の特有の構成を実施形態1に追加してもよく、実施形態4の特有の構成を実施形態1や実施形態2に追加してもよい。
【0097】
(変形例)
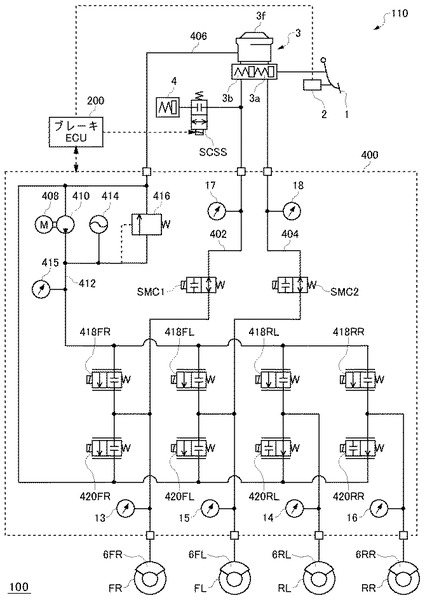
例えば、ブレーキ制御装置100は、次のような液圧回路を備えていてもよく、この場合であっても上述の実施形態1〜4の制御を適用することができ、これにより同様の効果を奏することができる。図11は、変形例に係るブレーキ制御装置の概略構成図である。
なお、実施形態1と同様の構成については同一の符号を付し、その説明および図示は適宜省略する。
【0098】
図11に示すように、ブレーキ制御装置100は、液圧ブレーキユニット110と、ブレーキECU200とを備える。そして、液圧ブレーキユニット110は、ブレーキペダル1、ストロークセンサ2、マスタシリンダ3、シミュレータカット弁SCSS、ストロークシミュレータ4、液圧アクチュエータ400を備える。また、液圧ブレーキユニット110は、ブレーキディスクFR,FL,RR,RLと、ブレーキキャリパに内蔵されたホイールシリンダ6FR,6FL,6RR,6RLとを含むディスクブレーキユニットを備える。
【0099】
マスタシリンダ3のセカンダリ室3bには、右前輪用のブレーキ液圧制御管402の一端が接続されている。ブレーキ液圧制御管402の他端は、ホイールシリンダ6FRに接続されている。また、マスタシリンダ3のプライマリ室3aには、左前輪用のブレーキ液圧制御管404の一端が接続されている。ブレーキ液圧制御管404の他端は、ホイールシリンダ6FLに接続されている。ブレーキ液圧制御管402の中途には、マスタカット弁SMC1とマスタシリンダ圧センサ17が設けられており、ブレーキ液圧制御管404の中途には、マスタカット弁SMC2とマスタシリンダ圧センサ18が設けられている。
【0100】
一方、リザーバタンク3fには、液圧給排管406の一端が接続されており、この液圧給排管406の他端には、モータ408により駆動されるオイルポンプ410の吸込口が接続されている。オイルポンプ410の吐出口は、高圧管412に接続されており、この高圧管412には、液圧源の蓄圧部としてのアキュムレータ414とリリーフバルブ416とが接続されている。本変形例では、オイルポンプ410として、モータ408によってそれぞれ往復移動させられる2体以上のピストン(図示せず)を備えた往復動ポンプが採用される。また、アキュムレータ414としては、ブレーキ液の圧力エネルギを窒素等の封入ガスの圧力エネルギに変換して蓄えるものが採用される。
【0101】
アキュムレータ414は、通常、オイルポンプ410によって所定液圧範囲(例えば14〜21MPa程度)にまで昇圧されたブレーキ液を蓄える。また、リリーフバルブ416の弁出口は、液圧給排管406に接続されており、アキュムレータ414におけるブレーキ液の圧力が異常に高まって例えば25MPa程度になると、リリーフバルブ416が開弁し、高圧のブレーキ液は液圧給排管406へと戻される。さらに、高圧管412には、アキュムレータ414の出口圧力、すなわち、アキュムレータ414におけるブレーキ液の圧力を検出するアキュムレータ圧センサ415が設けられている。
【0102】
そして、高圧管412は、増圧弁418FR,418FL,418RR,418RL(以下、適宜総称して「増圧弁418」という)を介してホイールシリンダ6FR,6FL,6RR,6RLに接続されている。増圧弁418はいずれも、リニアソレノイドおよびスプリングを有しており、リニアソレノイドが非通電状態にある場合に閉弁状態とされ、リニアソレノイドに供給される電流に比例して弁の開度が調整される常閉型電磁制御弁である。増圧弁418は、その開度に応じてホイールシリンダ6の増圧が可能である。
【0103】
また、ホイールシリンダ6FR,6FLは、それぞれ減圧弁420FRまたは420FLを介して液圧給排管406に接続されている。減圧弁420FRおよび420FLは、リニアソレノイドおよびスプリングを有しており、その開度に応じてホイールシリンダ6FR,6FLの減圧が可能な常閉型電磁制御弁である。一方、ホイールシリンダ6RR,6RLとは、常開型の電磁制御弁である減圧弁420RRまたは420RLを介して液圧給排管406に接続されている。以下、適宜、減圧弁420FR〜420RLを総称して「減圧弁420」という。ホイールシリンダ6FR,6FLの付近には、ホイールシリンダ圧センサ13,15が設けられ、ホイールシリンダ6RR,6RL付近には、ホイールシリンダ圧センサ16,14が設けられている。
【0104】
ブレーキECU200には、マスタカット弁SMC1,SMC2、シミュレータカット弁SCSS、増圧弁418、減圧弁420、モータ408等が電気的に接続されている。また、ブレーキECU200には、ホイールシリンダ圧センサ13〜16、ストロークセンサ2、マスタシリンダ圧センサ17,18、アキュムレータ圧センサ415から信号が入力される。
【0105】
このように構成されるブレーキ制御装置100では、ブレーキ回生協調制御を実行することができる。ブレーキ制御装置100は制動要求を受けて要求制動力と要求液圧制動力を算出する。ブレーキECU200は、算出した要求液圧制動力に基づいて各ホイールシリンダ6の目標液圧を算出し、ホイールシリンダ圧が目標液圧となるように、フィードバック制御則により増圧弁418や減圧弁420に供給する制御電流の値を決定する。その結果、ブレーキ制御装置100においては、ブレーキ液がアキュムレータ414から各増圧弁418を介して各ホイールシリンダ6に供給され、車輪に制動力が付与される。また、各ホイールシリンダ6からブレーキ液が減圧弁420を介して必要に応じて排出され、車輪に付与される制動力が調整される。
【0106】
一方、このときマスタカット弁SMC1,SMC2は閉弁状態とされ、シミュレータカット弁SCSSは開状態とされる。よって、運転者によるブレーキペダル1の踏み込みによりマスタシリンダ3から送出されたブレーキ液は、シミュレータカット弁SCSSを通ってストロークシミュレータ4に流入する。また、アキュムレータ圧が予め設定された設定範囲の下限値以下であるときには、ブレーキECU200によりモータ408に電流が供給され、オイルポンプ410が駆動されてアキュムレータ圧が昇圧される。この昇圧によってアキュムレータ圧がその設定範囲に入りその上限値に達すると、モータ408への給電が停止される。
【符号の説明】
【0107】
SMC1,SMC2 マスタカット弁、 2 ストロークセンサ、 3 マスタシリンダ、 5 液圧アクチュエータ、 6,6FL,6FR,6RL,6RR ホイールシリンダ、 13,14,15,16 ホイールシリンダ圧センサ、 100 ブレーキ制御装置、 110 液圧ブレーキユニット、 200 ブレーキECU。
【技術分野】
【0001】
本発明は、ブレーキ制御装置に関する。
【背景技術】
【0002】
従来、液圧回路を介した複数のホイールシリンダへのブレーキ液の供給をアクチュエータにより電子制御して、各ホイールシリンダに供給する液圧を調整する電子制御式ブレーキ(ECB:Electronically Controlled Brake)を備えたブレーキ制御装置が知られている。
【0003】
一般にこのようなブレーキ制御装置は、ブレーキ液を貯留したリザーバタンクと各ホイールシリンダとをつなぐ液圧回路と、リザーバタンク内のブレーキ液を吸入・吐出して各ホイールシリンダを加圧するポンプと、を備える。液圧回路には、各ホイールシリンダの液圧を検出する液圧センサが設けられている。また、このブレーキ制御装置は、ブレーキペダルが進入可能に設けられたマスタシリンダと、マスタシリンダとホイールシリンダとをつなぐ流路と、ブレーキペダルのストローク量を検出するストロークセンサとを備える。マスタシリンダとホイールシリンダとをつなぐ流路には、ブレーキペダルの操作によってマスタシリンダから送出されたブレーキ液を収容して、ブレーキペダルの操作に応じた反力を発生させるストロークシミュレータと、マスタシリンダからホイールシリンダへのブレーキ液の流動を遮断するマスタカット弁が設けられている。
【0004】
このような構成において、ブレーキペダルが踏み込まれると、ブレーキECUによって、ブレーキペダルのストローク量に応じたホイールシリンダの目標液圧が算出され、ホイールシリンダ圧が目標液圧となるように、リザーバタンクから各ホイールシリンダにブレーキ液が供給される。ホイールシリンダへのブレーキ液の供給量は、液圧センサの検出液圧値に基づいてフィードバック調節される。
【0005】
また、ブレーキペダルが踏み込まれるとマスタカット弁が閉弁状態となり、マスタシリンダからホイールシリンダへのブレーキ液の流動が遮断される。そして、ブレーキ液がマスタシリンダからストロークシミュレータに流入し、ストロークシミュレータによってブレーキペダルの踏み込みに応じた反力が生成される。これにより、ホイールシリンダ圧の上昇に応じた抵抗感をブレーキペダルに提供して運転者に良好なブレーキフィーリングを与えている。
【0006】
特許文献1には、ブレーキペダルの踏み込み量を検出する踏み込み量検出手段と、車輪の油圧を検出する油圧検出素子とを備え、油圧検出素子の出力がブレーキペダルの踏み込み量に対応して予め設定した値と異なるとき、油圧検出素子が故障していると判断する制動装置用故障判定装置が開示されている。
【先行技術文献】
【特許文献】
【0007】
【特許文献1】特開平1−269656号公報
【発明の概要】
【発明が解決しようとする課題】
【0008】
上述のブレーキ制御装置では、車輪に制動力を付与していない状態でホイールシリンダの液圧を確実に開放するために、ブレーキペダルの非操作時は、マスタカット弁は開いた状態となっている。そのため、一般にマスタカット弁には、給電状態で閉弁し、非給電状態で開弁する常開型電磁制御弁が用いられる。ブレーキペダルが踏み込まれると、ブレーキECUは、ストロークセンサからの信号を受けてブレーキペダルが踏み込まれたことを検知し、マスタカット弁が閉じるように制御電流を供給する。これにより、マスタカット弁が閉じて、マスタシリンダからホイールシリンダへのブレーキ液の流動が遮断される。
【0009】
このような構成では、ブレーキECUの演算処理に要する時間や、マスタカット弁の応答時間によって、ブレーキペダルの踏み込みが開始されてからマスタカット弁が閉じるまでの間にタイムラグが発生してしまう。そのため、ブレーキペダルの踏み込みによってマスタシリンダから送出されたブレーキ液の一部が、マスタカット弁を介してホイールシリンダ側に流動してしまう場合があった。
【0010】
マスタシリンダから送出されたブレーキ液により、マスタシリンダの下流近傍の油圧は瞬間的に上昇するが、ホイールシリンダ圧を上昇させるには至らない。しかしながら、液圧センサは、マスタシリンダの下流近傍の液圧アクチュエータ内に設けられているため、このブレーキ液による増圧を検出してしまい、液圧センサの検出液圧値が上昇して目標液圧を上回ってしまう場合があった。この場合、ブレーキECUは、液圧センサの検出結果を受けて、ホイールシリンダ圧の減圧制御を開始する。そして、マスタシリンダから送出されたブレーキ液の液圧が均一化されて液圧センサの検出液圧値が低下すると、ブレーキECUは、目標液圧との差を埋めるべくホイールシリンダ圧の増圧制御に切り替える。このように、従来の構成では、一度減圧制御を開始してしまったあとに増圧制御に転じるため、目標液圧に対するホイールシリンダ圧の追従性、すなわち液圧応答性が低下してしまう場合があった。液圧応答性の低下は、制動距離が長くなる原因となるため、液圧応答性の向上が望まれる。
【0011】
本発明はこうした状況に鑑みてなされたものであり、その目的とするところは、電子制御式ブレーキを備えたブレーキ制御装置における液圧応答性の向上を図る技術を提供することにある。
【課題を解決するための手段】
【0012】
上記課題を解決するために、本発明のある態様のブレーキ制御装置は、ブレーキ操作部材の操作に応じてブレーキ液を液圧回路を介して供給することによりホイールシリンダに液圧を発生させ、当該液圧により車輪に制動力を付与するブレーキ制御装置であって、ブレーキ操作部材の操作状態を検出するための操作センサと、ホイールシリンダの液圧を検出するための液圧センサと、前記操作センサの検出結果に基づいてホイールシリンダの目標液圧を算出し、ホイールシリンダの液圧を目標液圧に近づけるように調節するための制御部と、を備え、前記制御部は、前記液圧センサの検出液圧値を用いてホイールシリンダの液圧を調節する通常調節と、前記検出液圧値を減少補正した補正値を用いてホイールシリンダの液圧を調節する補正調節とを実行可能であることを特徴とする。
【0013】
この態様のブレーキ制御装置であれば、電子制御式ブレーキを備えたブレーキ制御装置における液圧応答性の向上を図ることができる。
【0014】
上記態様において、前記制御部は、ホイールシリンダの液圧調節の開始から所定時間、前記補正調節を実行し、前記所定時間の経過後、通常調節を実行してもよい。この場合には、ブレーキ制御装置の液圧応答性をより確実に向上させることができる。
【0015】
上記態様において、前記液圧回路とは異なる流路を介してホイールシリンダに連結され、ブレーキ液を収容するとともにブレーキ操作部材の操作に応じてこのブレーキ液を加圧するように構成されたマスタシリンダと、前記流路に開閉可能に設けられたマスタカット弁と、を備え、前記制御部は、前記操作センサの検出結果を受けて前記マスタカット弁を閉じるように制御し、前記所定時間は、前記制御部が前記マスタカット弁の閉弁制御を開始してから前記マスタカット弁が閉弁するまでの時間に基づいて定まる時間であってもよい。この場合には、制御部にかかる制御負荷を軽減することができる。
【0016】
上記態様において、前記所定時間は、前記液圧センサの検出液圧値の変化が減少から増加に転じるタイミングに基づいて定まる時間であってもよい。この場合には、ブレーキ制御装置の液圧応答性をより向上させることができる。
【0017】
上記態様において、前記所定時間は、以下の式1に基づいて定まる時間であってもよい。
所定時間T1=(操作センサ応答遅れ時間)+(制御部演算周期)+(電源装置応答時間)+(マスタカット弁コイル時定数)+(マスタカット弁応答時間)・・・(式1)
この場合には、制御部にかかる制御負荷を軽減することができる。
【0018】
上記態様において、前記制御部は、前記補正調節から前記通常調節に移行する際に、前記補正値を段階的または連続的に増大させて検出液圧値に近づけた後、通常調節に移行するように制御してもよい。この場合には、急激にホイールシリンダ圧が変化することを回避することができる。
【0019】
上記態様において、前記操作センサは、ブレーキ操作部材の操作量を検出し、前記制御部は、ブレーキ操作部材の単位時間あたりの操作量が所定のしきい値を超えた場合に、前記補正調節を実行してもよい。この場合には、ブレーキ制御装置の液圧応答性の向上を図りつつ、制御部にかかる制御負担を軽減することができる。
【発明の効果】
【0020】
本発明によれば、電子制御式ブレーキを備えたブレーキ制御装置における液圧応答性の向上を図ることができる。
【図面の簡単な説明】
【0021】
【図1】実施形態1に係るブレーキ制御装置の概略構成図である。
【図2】実施形態1に係るブレーキ制御装置とその周辺の電気的構成を表す図である。
【図3】図3(A)〜図3(D)は、従来のブレーキ制御装置におけるホイールシリンダ圧の調節を説明するための図である。
【図4】図4(A)〜図4(D)は、実施形態1に係るブレーキ制御装置におけるホイールシリンダ圧の調節を説明するための図である。
【図5】実施形態1に係るブレーキ制御装置におけるホイールシリンダ圧の制御フローチャートである。
【図6】実施形態2に係るブレーキ制御装置におけるホイールシリンダ圧の調節を説明するための図である。
【図7】実施形態2に係るブレーキ制御装置におけるホイールシリンダ圧の制御フローチャートである。
【図8】実施形態3に係るブレーキ制御装置におけるホイールシリンダ圧の調節を説明するための図である。
【図9】実施形態3に係るブレーキ制御装置におけるホイールシリンダ圧の制御フローチャートである。
【図10】実施形態4に係るブレーキ制御装置におけるホイールシリンダ圧の制御フローチャートである。
【図11】変形例に係るブレーキ制御装置の概略構成図である。
【発明を実施するための形態】
【0022】
以下、図面を参照しながら、本発明を実施するための形態(以下、実施形態という)について詳細に説明する。なお、図面の説明において同一の要素には同一の符号を付し、重複する説明を適宜省略する。
【0023】
(実施形態1)
図1は、実施形態1に係るブレーキ制御装置の概略構成図である。本実施形態に係るブレーキ制御装置100は、液圧ブレーキユニット110と、液圧ブレーキユニット110の各部の動作を制御するためのブレーキECU200(制御部)とを備える。液圧ブレーキユニット110は、右前輪用および左後輪用のホイールシリンダにブレーキ液を供給する第1配管系統と、左前輪用および右後輪用のホイールシリンダにブレーキ液を供給する第2配管系統とを備える、いわゆるX配管構造を有する。
【0024】
図1に示すように、液圧ブレーキユニット110は、ブレーキペダル1(ブレーキ操作部材)、ストロークセンサ2(操作センサ)、マスタシリンダ3、シミュレータカット弁SCSS、ストロークシミュレータ4、液圧アクチュエータ5を備える。また、液圧ブレーキユニット110は、車両の右前輪、左後輪、左前輪、右後輪(全て図示せず)に設けられたブレーキディスクFR,RL,FL,RRと、ブレーキキャリパに内蔵されたホイールシリンダ6FR,6RL,6FL,6RR(以下、適宜総称して「ホイールシリンダ6」という)とを含むディスクブレーキユニットを備える。各ホイールシリンダ6は、それぞれ異なるブレーキ液流路を介して液圧アクチュエータ5に接続されている。
【0025】
各ディスクブレーキユニットでは、液圧アクチュエータ5からホイールシリンダ6にブレーキ液が供給され、ブレーキ液の液圧により各車輪と共に回転するブレーキディスクFR,RL,FL,RRにブレーキパッド(図示せず)が押し付けられる。これにより、各車輪に制動力が付与される。なお、本実施形態ではディスクブレーキユニットが用いられているが、例えばドラムブレーキなどの他の制動力付与機構が用いられてもよい。
【0026】
ドライバによってブレーキペダル1が踏み込まれると、ブレーキペダル1の操作量であるペダルストロークがストロークセンサ2に入力される。ストロークセンサ2は、入力されたペダルストロークを表す信号をブレーキECU200に送信する。なお、ここではブレーキペダル1の操作量を検出するための操作センサとしてストロークセンサ2を用いたが、ブレーキペダル1の踏力(運転者がブレーキペダル1を踏む力)を検知する踏力センサや、マスタシリンダ3内の油圧を検知する油圧センサ等であってもよい。
【0027】
マスタシリンダ3は、運転者によるブレーキペダル1の操作によって、収容されているブレーキ液を加圧し、このブレーキ液をホイールシリンダ6に向けて送出する。マスタシリンダ3は、プライマリ室3aと、セカンダリ室3bと、プライマリピストン3cと、セカンダリピストン3dと、スプリング3eとを備える。
【0028】
マスタシリンダ3は、プライマリピストン3cおよびセカンダリピストン3dによってプライマリ室3aとセカンダリ室3bとに区画されている。プライマリピストン3cには、ブレーキペダル1から延びるプッシュロッドが接続されている。そして、プライマリピストン3cは、スプリング3eの弾性力を受けてブレーキペダル1が踏み込まれていないときにブレーキペダル1を初期位置側に戻すようにプッシュロッドを押圧している。セカンダリピストン3dもまた、スプリング3eの弾性力を受けてプライマリピストン3cを介してプッシュロッドを押圧している。運転者によってブレーキペダル1が踏み込まれると、プッシュロッドがマスタシリンダ3に進入し、プライマリピストン3cおよびセカンダリピストン3dが押圧される。これにより、収容されているブレーキ液が加圧されて、プライマリ室3aおよびセカンダリ室3bにマスタシリンダ圧が発生する。
【0029】
マスタシリンダ3のプライマリ室3aとセカンダリ室3bには、それぞれ液圧アクチュエータ5に向けて延びる管路B、管路Aが連結されている。
【0030】
また、マスタシリンダ3は、ブレーキ液を貯留するリザーバタンク3fに接続されている。リザーバタンク3fは、ブレーキペダル1が初期位置にあるときにプライマリ室3aおよびセカンダリ室3bのそれぞれと図示しない通路を介して接続され、マスタシリンダ3内にブレーキ液を供給したり、マスタシリンダ3内の余剰ブレーキ液を貯留する。リザーバタンク3fには、液圧アクチュエータ5に向けて延びる管路C、管路Dが連結されている。
【0031】
ストロークシミュレータ4は、管路Aに連結された管路Eに接続されており、マスタシリンダ3のセカンダリ室3b内のブレーキ液を収容する役割を果たす。マスタシリンダ3とストロークシミュレータ4とを連通する流路の一部である管路Eには、シミュレータカット弁SCSSが設けられている。したがって、ストロークシミュレータ4はシミュレータカット弁SCSSを介して管路Aに接続されている。シミュレータカット弁SCSSは、ON/OFF制御されるソレノイドおよびスプリングを有し、規定の制御電流の供給を受けてソレノイドが発生させる電磁力により開弁状態とされ、ソレノイドが非通電状態にある場合に閉弁状態とされる常閉型電磁制御弁である。シミュレータカット弁SCSSが閉弁状態であるときは、管路Aとストロークシミュレータ4との間のブレーキ液の流通が遮断される。ソレノイドに通電されてシミュレータカット弁SCSSが開弁されると、ストロークシミュレータ4とマスタシリンダ3との間でブレーキ液を双方向に流通させることができる。なお、ストロークシミュレータ4は、管路Eを介して管路Bに連結されていていもよい。
【0032】
ストロークシミュレータ4は、複数のピストンやスプリングを含むものであり、シミュレータカット弁SCSSの開弁時に運転者によるブレーキペダル1の踏力に応じた反力を創出する。具体的には、ブレーキペダル1が所定の踏力で踏み込まれると、セカンダリ室3b内のブレーキ液が管路A、管路Eを介してストロークシミュレータ4に送出される。ブレーキ液がストロークシミュレータ4に流入するとストロークシミュレータ4に液圧が発生し、これによりストロークシミュレータ4において反力が創出される。ブレーキペダル1は、踏力と反力とが等しくなるまでマスタシリンダ3に進入する。すなわち、ストロークシミュレータ4によってブレーキペダル1の踏力に応じたブレーキペダル1のペダルストロークが創出される。ストロークシミュレータ4としては、運転者によるブレーキ操作のフィーリングを向上させるために、多段のバネ特性を有するものが採用されることが好ましい。
【0033】
液圧アクチュエータ5は、マスタシリンダ3のセカンダリ室3bとホイールシリンダ6FRとを接続する管路Fを備える。管路Fは、その一端が管路Aに連結され、他端が後述する個別管路H1のポンプ7よりも下流側に連結されており、中途にはマスタカット弁SMC1が設けられている。また、液圧アクチュエータ5は、マスタシリンダ3のプライマリ室3aとホイールシリンダ6FLとを接続する管路Gを備える。管路Gは、その一端が管路Bに連結され、他端が後述する個別管路I3のポンプ9よりも下流側に連結されており、中途にはマスタカット弁SMC2が設けられている。
【0034】
マスタカット弁SMC1,SMC2は、ON/OFF制御されるソレノイドおよびスプリングを有しており、規定の制御電流の供給を受けてソレノイドが発生させる電磁力により閉弁状態とされ、ソレノイドが非通電状態にある場合に開弁状態とされる常開型電磁制御弁である。マスタカット弁SMC1,SMC2が開弁状態であると、マスタシリンダ3とホイールシリンダ6FR,6FLとの間で管路A,F、管路B,Gを介してブレーキ液を双方向に流通させることができる。マスタカット弁SMC1,SMC2は常開型電磁制御弁であるため、ブレーキペダル1の非操作時はマスタカット弁SMC1,SMC2は開弁状態となり、車輪に制動力を付与していない状態でホイールシリンダ6FR,6FLの液圧を確実に開放することができる。ソレノイドに規定の制御電流が通電されてマスタカット弁SMC1,SMC2が閉弁されると、管路F,Gにおいてブレーキ液の流通が遮断される。すなわち、マスタカット弁SMC1,SMC2が閉弁されると、マスタシリンダ3からホイールシリンダ6FR,6FLへのブレーキ液の供給が遮断される。
【0035】
また、液圧アクチュエータ5は、リザーバタンク3fから延びる管路Cに接続された管路Hと、同じくリザーバタンク3fから延びる管路Dに接続された管路Iとを備える。管路Hは、個別管路H1,H2という2本の管路に分岐しており、個別管路H1がホイールシリンダ6FRに、個別管路H2がホイールシリンダ6RLにそれぞれ接続されている。また、管路Iは、個別管路I3,I4という2本の管路に分岐しており、個別管路I3がホイールシリンダ6FLに、個別管路I4がホイールシリンダ6RRにそれぞれ接続されている。
【0036】
各個別管路H1,H2,I3,I4には、それぞれ1つずつポンプ7,8,9,10が設けられている。各ポンプ7〜10は、例えば静寂性に優れたトロコイドポンプにより構成される。ポンプ7〜10のうち、ポンプ7、8は、第1モータ11によって駆動され、ポンプ9、10は、第2モータ12によって駆動される。
【0037】
また、液圧アクチュエータ5は、ポンプ7〜10のそれぞれに対して並列的に配置された管路J1,J2,J3,J4を備える。ポンプ7に対して並列的に配置された管路J1は、ポンプ7の上流側と下流側を、ポンプ7を迂回して連結している。本実施形態では、管路J1は、その一端がポンプ7の上流側に位置する管路Hに接続され、他端がポンプ7の下流側に位置する管路Fに接続されている。また管路J1の中途には、連通弁SRC1と液圧調整弁SLFRとが直列的に設けられている。連通弁SRC1は、管路J1における液圧調整弁SLFRよりもブレーキ液流動方向の下流側(ポンプ7の吸入ポート側)に、液圧調整弁SLFRは、管路J1における連通弁SRC1よりもブレーキ液流動方向の上流側(ポンプ7の吐出ポート側)にそれぞれ配置されている。ポンプ8に対して並列的に配置された管路J2は、ポンプ8の上流側と下流側を、ポンプ8を迂回して連結している。本実施形態では、管路J2は、その一端が個別管路H2のポンプ8よりも上流側に接続され、他端が個別管路H2のポンプ8よりも下流側に接続されている。また管路J2の中途には、液圧調整弁SLRLが設けられている。
【0038】
ポンプ9に対して並列的に配置された管路J3は、ポンプ9の上流側と下流側を、ポンプ9を迂回して連結している。本実施形態では、管路J3は、その一端が個別管路I3のポンプ9よりも上流側に接続され、他端がポンプ9の下流側に位置する管路Gに接続されている。また管路J3の中途には、連通弁SRC2と液圧調整弁SLFLとが直列的に設けられている。連通弁SRC2は、管路J3における液圧調整弁SLFLよりもブレーキ液流動方向の下流側(ポンプ9の吸入ポート側)に、液圧調整弁SLFLは、管路J3における連通弁SRC2よりもブレーキ液流動方向の上流側(ポンプ9の吐出ポート側)にそれぞれ配置されている。ポンプ10に対して並列的に配置された管路J4は、ポンプ10の上流側と下流側を、ポンプ10を迂回して連結している。本実施形態では、管路J4は、その一端がポンプ10の上流側に位置する管路Iに接続され、他端が個別管路I4のポンプ10よりも下流側に接続されている。また管路J4の中途には、液圧調整弁SLRRが設けられている。
【0039】
連通弁SRC1,SRC2は、ON/OFF制御されるソレノイドおよびスプリングをそれぞれ有しており、何れも規定の制御電流の供給を受けてソレノイドが発生させる電磁力により開弁状態とされ、ソレノイドが非通電状態にある場合に閉弁状態とされる常閉型電磁制御弁である。開弁状態とされた連通弁SRC1,SRC2は、ブレーキ液をホイールシリンダ6FR,6FL側からリザーバタンク3f側に流通させることができる。ソレノイドが非通電状態となって連通弁SRC1,SRC2が閉弁されると、管路J1,J3におけるブレーキ液の流通は遮断される。
【0040】
液圧調整弁SLFR,SLRL,SLFL,SLRRは、リニアソレノイドおよびスプリングを有しており、リニアソレノイドが非通電状態にある場合に開弁状態とされ、リニアソレノイドに供給される電流に比例して弁の開度が調整される常開型電磁制御弁である。液圧調整弁SLFR,SLRL,SLFL,SLRRが開弁状態であると、ブレーキ液をホイールシリンダ6側からリザーバタンク3f側に流通させることができる。リニアソレノイドに電流が通電されると、通電された電流に比例して弁が閉じてブレーキ液の流通量が減少していく。したがって、液圧調整弁SLFR,SLRL,SLFL,SLRRの開度を変化させることで各ホイールシリンダ6からリザーバタンク3fへのブレーキ液の流通量を変化させることができ、これにより、各ホイールシリンダ6に発生した液圧を調整することができる。
【0041】
個別管路H1,H2,I3,I4のポンプ7〜10よりも下流側(ポンプ7〜10とホイールシリンダ6との間)には、それぞれホイールシリンダ圧センサ13,14,15,16(液圧センサ)が設けられている。各ホイールシリンダ圧センサ13〜16によって、各ホイールシリンダ6FR、6RL、6FL、6RRにおけるブレーキ液の液圧、すなわちホイールシリンダ圧を検出することができる。また、管路F,Gのマスタカット弁SMC1,SMC2よりも上流側(マスタカット弁SMC1,SMC2とマスタシリンダ3との間)には、マスタシリンダ圧センサ17,18が設けられている。マスタシリンダ圧センサ17,18によって、マスタシリンダ3のセカンダリ室3bとプライマリ室3aにおけるブレーキ液の液圧、すなわちマスタシリンダ圧を検出することができる。
【0042】
さらに、ポンプ7の吐出ポートには逆止弁20が設けられ、ポンプ9の吐出ポートには逆止弁21が設けられている。逆止弁20,21は、それぞれホイールシリンダ6FR,6FL側からポンプ7,9側へのブレーキ液の流動を禁止する機能を果たす。
【0043】
上述のように構成された液圧ブレーキユニット110は、液圧回路を介したブレーキ液の供給によりホイールシリンダ6に液圧を発生させる複数の配管系統を備える。具体的には、液圧ブレーキユニット110は、管路C,H、個別管路H1,H2、および管路J1,J2を含む液圧回路を介してホイールシリンダ6FR,6RLにリザーバタンク3fのブレーキ液を供給する第1配管系統と、管路D,I、個別管路I3,I4、および管路J3,J4を含む液圧回路を介してホイールシリンダ6FL,6RRにリザーバタンク3fのブレーキ液を供給する第2配管系統とを備える。第1配管系統および第2配管系統は、マスタシリンダ3からホイールシリンダ6へのブレーキ液の供給経路に並列に設けられている。すなわち、ポンプ7〜10は、マニュアル液圧源であるマスタシリンダ3と並列に設けられている。そして、本実施形態に係るブレーキ制御装置100では、第1配管系統および第2配管系統により、いわゆるブレーキバイワイヤ方式の制動力制御が行われる。また、液圧ブレーキユニット110は、マニュアル液圧源であるマスタシリンダ3のブレーキ液を、管路A,Fを介してホイールシリンダ6FRに供給する第1ブレーキ液供給経路(液圧回路とは異なる流路)と、管路B,Gを介してホイールシリンダ6FLに供給する第2ブレーキ液供給経路(液圧回路とは異なる流路)とを備える。
【0044】
図2は、実施形態1に係るブレーキ制御装置とその周辺の電気的構成を表す図である。ブレーキ制御装置100のブレーキECU200は、各種演算処理を実行するCPU、各種制御プログラムを格納するROM、データ格納やプログラム実行のためのワークエリアとして利用されるRAM、エンジン停止時にも記憶内容を保持できるバックアップRAM等の不揮発性メモリ、入出力インターフェース、各種センサ等から入力されたアナログ信号をデジタル信号に変換して取り込むためのA/Dコンバータ等を備える。ブレーキECU200には、適切な制動制御を実現するために車輪速センサ212、ヨーレートセンサ214、Gセンサ216、舵角センサ218、電圧検出センサ220等が接続され、それぞれの出力信号が入力される。
【0045】
また、ブレーキECU200には、液圧ブレーキユニット110が接続され、液圧ブレーキユニット110に含まれるストロークセンサ2、マスタシリンダ圧センサ17,18、ホイールシリンダ圧センサ13,14,15,16から出力信号が入力される。具体的には、ブレーキECU200には、ストロークセンサ2からブレーキペダル1のストローク量を示す信号が入力され、マスタシリンダ圧センサ17,18からマスタシリンダ圧を示す信号が入力され、ホイールシリンダ圧センサ13〜16からホイールシリンダ6におけるホイールシリンダ圧を示す信号が入力される。ブレーキECU200は、ストロークセンサ2から信号が入力されると、ホイールシリンダ6に液圧を発生させるために、液圧ブレーキユニット110の液圧アクチュエータ5に含まれる連通弁SRC1,SRC2、液圧調整弁SLFR,SLRL,SLFL,SLRR、マスタカット弁SMC1,SMC2、第1モータ11、第2モータ12等に制御電流を供給する。また、ブレーキECU200は、シミュレータカット弁SCSSに制御電流を供給する。
【0046】
また、ブレーキECU200には、所定の通信ラインを介してハイブリッドECU210が接続されている。ハイブリッドECU210は、ブレーキECU200と同様の構成を備える。ブレーキECU200は、このハイブリッドECU210から回生制動力等の情報を取得し、これらの情報とストロークセンサ2から入力されたストローク量とから各ホイールシリンダの目標液圧を算出する。そして、ブレーキECU200は、各ホイールシリンダ圧が目標液圧となるように、連通弁SRC1,SRC2、液圧調整弁SLFR,SLRL,SLFL,SLRR、第1モータ11、第2モータ12等に制御電流を供給する。
【0047】
また、ブレーキECU200には、電源装置300が接続されている。電源装置300は、主電源装置302と補助電源装置304とを含む。主電源装置302は、主電源としての高圧バッテリ306および補機バッテリ308、DC/DCコンバータ310、および制御回路(図示せず)などを含む。高圧バッテリ306は、出力電圧が例えば288Vのハイブリッド車両用のバッテリであり、通常の走行状態において車輪を駆動する電動モータ(図示せず)に電力を供給する。一方、補機バッテリ308は、出力電圧が例えば12Vのバッテリであり、ブレーキECU200やハイブリッドECU210などの各種制御ユニット、液圧アクチュエータ5等の各種補機などに必要な起動電流や制御電流を供給する。高圧バッテリ306の出力電圧は、DC/DCコンバータ310によって例えば12Vに降圧され、補機バッテリ308の充電に供される。
【0048】
補助電源装置304は、補助電源としてのキャパシタ312、監視回路314、切替回路316などを含む。補助電源装置304は、主電源装置302から供給された電気エネルギを蓄え、その電気エネルギを、ブレーキECU200を経由して液圧アクチュエータ5などに供給可能なものである。キャパシタ312は、複数のコンデンサセルを含んで構成され、そのセルごとに充放電状態が制御されるものである。主電源装置302から供給された電流は定電流回路等を含む蓄電回路を経てキャパシタ312に供給される。なお、このようなキャパシタの構造および蓄電制御などは公知であるため、その詳細な説明については省略する。
【0049】
監視回路314は、補機バッテリ308の出力電圧を監視し、その出力電圧が設定値以下となった場合に補機バッテリ308または高圧バッテリ306の失陥を判定する。切替回路316は、監視回路314によりこれらのバッテリの失陥が検出された場合に、補機バッテリ308に代えてキャパシタ312からブレーキECU200や液圧アクチュエータ5などに電力が供給されるように切り替える。補機バッテリ308の出力電圧は、電圧検出センサ220によっても検出され、その検出情報がブレーキECU200に入力される。なお、監視回路314および切替回路316は、ブレーキECU200内に実装されていてもよい。
【0050】
続いて、本実施形態に係るブレーキ制御装置100のブレーキ動作について、図1を参照しながら説明する。
【0051】
ブレーキ制御装置100は、通常時のブレーキ動作として、例えばブレーキ回生協調制御を実行する。具体的には、ブレーキペダル1が踏み込まれてストロークセンサ2の検出信号がブレーキECU200に入力されると、ブレーキECU200は、制動要求があったと判断して、マスタカット弁SMC1,SMC2に電流を供給し、マスタカット弁SMC1,SMC2を閉弁状態とする。また、ブレーキECU200は、シミュレータカット弁SCSSを開弁状態とする。これにより、マスタシリンダ3からホイールシリンダ6へのブレーキ液の供給が遮断され、マスタシリンダ3から送出されるブレーキ液はストロークシミュレータ4に供給される。
【0052】
また、ブレーキECU200は、ブレーキペダル1のストロークに対応する要求制動力を演算し、要求制動力から回生による制動力を減じることによりブレーキ制御装置100により発生させるべき制動力である要求液圧制動力を算出する。ここで、回生による制動力の実効値は、ハイブリッドECU210からブレーキ制御装置100に供給される。そして、ブレーキECU200は、算出した要求液圧制動力に基づいて各ホイールシリンダ6の目標液圧を算出する。
【0053】
ブレーキECU200は、第1モータ11および第2モータ12を制御してポンプ7〜10を駆動する。これにより、リザーバタンク3fに貯留されているブレーキ液が、管路C,H、個別管路H1,H2を介してホイールシリンダ6FR,6RLに供給され、また管路D,I、個別管路I3,I4を介してホイールシリンダ6FL,6RRに供給される。ポンプ7〜10によりホイールシリンダ6にブレーキ液が供給されると、供給されたブレーキ液が加圧されて各ホイールシリンダ6に液圧が発生する。これにより、車輪に制動力が付与される。このとき、マスタカット弁SMC1,SMC2は閉弁状態となっているため、リザーバタンク3fから供給されたブレーキ液の管路F,Gを介したマスタシリンダ3側への還流が防止される。
【0054】
また、ブレーキECU200は、連通弁SRC1,SRC2を開弁状態とするとともに、ホイールシリンダ圧センサ13〜16の検出結果に基づいて、液圧調整弁SLFR,SLRL,SLFL,SLRRの開度を調整する。これにより、ホイールシリンダ6に供給されたブレーキ液が液圧調整弁SLFR〜SLRRの開度に応じてリザーバタンク3fに還流し、ホイールシリンダ6の液圧が目標液圧となるようにフィードバック調節される。また、ブレーキECU200は、第1モータ11、第2モータ12への通電量を調整してポンプ7〜10の駆動量を制御することで、各ホイールシリンダ圧の単位時間当たりの増減量(増減勾配)を調整する。なお、ブレーキECU200は、液圧調整弁SLFR〜SLRRの開度の調整とともにポンプ7〜10の駆動量を制御することで、各ホイールシリンダ6の液圧を調節するようにしてもよい。以上説明した動作により、ブレーキ制御装置100は、ブレーキペダル1のストロークに応じた制動力を車輪に発生させる。
【0055】
以上のようにして、本実施形態のブレーキ制御装置100が作動する。なお、本実施形態のブレーキ制御装置100は、ブレーキペダル1のペダルストロークの入力とマスタシリンダ3からホイールシリンダ6FR,6FLへのブレーキ液の供給とが切り離されていない関係とされている。このため、ブレーキ制御装置100は、ブレーキ制御装置100に何らかの異常が発生した場合でも、ブレーキECU200による制御に依存することなく、確実に車輪に制動力を発生させることが可能である。
【0056】
ここで、本実施形態に係るブレーキ制御装置100における、ホイールシリンダ6FR,6FLの液圧のフィードバック調節について、従来のフィードバック調節と比較しながら詳細に説明する。以下、ホイールシリンダ6FR,6FLの液圧を、単にホイールシリンダ圧と称する。
【0057】
図3(A)〜図3(D)は、従来のブレーキ制御装置におけるホイールシリンダ圧の調節を説明するための図である。図4(A)〜図4(D)は、実施形態1に係るブレーキ制御装置におけるホイールシリンダ圧の調節を説明するための図である。図3(A)および図4(A)は、ペダルストロークの時間経過にともなう変化を示し、図3(B)および図4(B)は、マスタカット弁SMC1,SMC2に供給される電流(SMC電流)の時間経過にともなう変化を示し、図3(C)および図4(C)は、ホイールシリンダ圧の時間経過にともなう変化を示し、図3(D)および図4(D)は、ブレーキECU200によるホイールシリンダ圧の調節制御(ECU制御)の時間経過にともなう変化を示す。
【0058】
従来のブレーキ制御装置では、図3(A)に示す時間Iのタイミングでブレーキペダル1が踏み込まれてペダルストロークa(図3(A)中の太実線a)が検出されると、ストロークセンサ2はブレーキECU200に検出結果信号を出力する。ブレーキECU200は、ストロークセンサ2から検出結果信号を受けると、ブレーキペダル1が操作されたことを認識して、図3(B)に示す時間IIのタイミングでホイールシリンダ6の液圧調節を開始する。
【0059】
具体的には、ブレーキECU200は、電源装置300からマスタカット弁SMC1,SMC2に電流を供給するように制御する。ブレーキECU200によって指示された供給電流量を目標電流b(図3(B)中の細実線b)とした場合、目標電流bは時間IIのタイミングで閉弁しきい値Tを上回る所定の電流量となる。しかしながら、マスタカット弁SMC1,SMC2に実際に供給される電流である実電流c(図3(B)中の太実線c)は徐々に増加して、図3(B)に示す時間IIIのタイミングで閉弁しきい値Tを超える。そのため、時間IIIのタイミングでマスタカット弁SMC1,SMC2が閉弁する。したがって、ブレーキペダル1が操作されてからマスタカット弁SMC1,SMC2が閉弁するまでに時間Xを要する。
【0060】
また、ブレーキECU200は、ブレーキペダル1のストローク量に基づいてホイールシリンダ6の目標液圧d(図3(C)中の細実線d)を算出する。ペダルストロークaの増大に応じて、目標液圧dも増大していく。そして、ブレーキECU200は、ホイールシリンダ圧センサ13,15の検出液圧値e(図3(C)中の破線e)を用いてホイールシリンダ6の液圧のフィードバック調節を実行する。図3(C)における太実線fは、ブレーキECU200がホイールシリンダ圧のフィードバック調節を行う際に用いる使用液圧値fの推移を示しており、従来のブレーキ制御装置では、この使用液圧値fの推移はホイールシリンダ圧センサ13,15の検出液圧値eの推移と等しい。
【0061】
ここで、上述のように、ブレーキペダル1が操作されてからマスタカット弁SMC1,SMC2が閉弁するまでには時間Xを要する。そのため、ブレーキペダル1の踏み込みによってマスタシリンダ3で加圧されたブレーキ液の一部が、時間Xの間に第1ブレーキ液供給経路および第2ブレーキ液供給経路を介してホイールシリンダ6側に流動してしまう場合がある。この場合、このブレーキ液の流動による液圧の増大がホイールシリンダ圧センサ13,15によって検出され、ホイールシリンダ圧センサ13,15の検出液圧値eが増大する。ブレーキECU200がホイールシリンダ圧のフィードバック調節を開始するタイミング(おおよそ時間IIのタイミング)では、この増大によって検出液圧値eが目標液圧dを上回り、したがって、使用液圧値fが目標液圧dを上回る。そのため、ブレーキECU200は、図3(D)に示すように制御内容g(図3(D)中の太実線g)を減圧制御とする。
【0062】
マスタシリンダ3からホイールシリンダ6側に流動したブレーキ液による、油圧回路内の部分的な液圧の増大は、ホイールシリンダ6FR,6FLに到達する前に液圧ブレーキユニット110からホイールシリンダ6の間(油圧配管)で減衰し、あるいはキャリパピストンの移動等によって吸収される。そのため、マスタシリンダ3からホイールシリンダ6FR,6FL側に流動したブレーキ液の液圧は次第に減少し、これにともなって検出液圧値eおよび使用液圧値fは徐々に減少する。そして、図3(D)に示すように、使用液圧値fと目標液圧dとの差が所定量となった時間IVのタイミングで、ブレーキECU200は、減圧制御を停止して、制御内容gを液圧保持制御とする。具体的には、所定量だけ開いていた液圧調整弁SLFR,SLFLを閉弁状態とする。あるいは、連通弁SRC1,SRC2を閉弁状態とし、液圧調整弁SLFR,SLFLを開弁状態としてもよい。
【0063】
ホイールシリンダ圧センサ13,15で検出された液圧の増大は実際のホイールシリンダ圧の増大によるものではない。そのため、液圧保持制御を実施しても、上述の液圧の減衰等によって検出液圧値eは減少し、したがって使用液圧値fは減少する。そして、ブレーキECU200は、検出液圧値eがさらに低下して、使用液圧値fと目標液圧dとの差が所定量を超えた時間Vのタイミングで、制御内容gを増圧制御とする。増圧制御に切り替わってホイールシリンダ圧が実際に増圧され始めるまでの間は、上述の液圧の均一化等によって検出液圧値eは減少し続ける。その後、マスタシリンダ3からホイールシリンダ6へのブレーキ液の流動による誤検出が解消されて、検出液圧値eが増大し始めるタイミングで、検出液圧値eは実際のホイールシリンダ6の液圧値と略等しくなる。
【0064】
このように、従来のブレーキ制御装置では、ブレーキペダル1の操作からマスタカット弁SMC1,SMC2の閉弁までのタイムラグ(時間X)に起因して、ホイールシリンダ圧の制御初期にホイールシリンダ圧センサ13,15の検出液圧値eが一時的に増大する。そして、ブレーキECU200は、このような検出液圧値eを用いてホイールシリンダ圧を調節するため、実際のホイールシリンダ圧は増大していないにもかかわらず、減圧制御を実施し、その後に液圧保持制御を経て増圧制御を開始する。また、検出液圧値eの増大が減圧制御を実施するほどの量でなかった場合であっても、ブレーキECU200は、液圧保持制御を実施し、その後に増圧制御を開始する。そのため、増圧制御を開始する時間が遅くなる。また、減圧制御を実施した後に増圧制御を実施した場合には、各弁の応答時間等によって増圧に対するホイールシリンダ圧の反応性が低下する。これらにより、従来のブレーキ制御装置では、目標液圧dとホイールシリンダ圧(使用液圧値f)との間に時間Yだけのタイムラグが生じる。このタイムラグは、目標液圧dに対するホイールシリンダ圧の追従性、すなわち液圧応答性に相当する。
【0065】
これに対し、本実施形態に係るブレーキ制御装置100は、ホイールシリンダ圧のフィードバック調節を実施する際に、ホイールシリンダ圧センサ13,15の検出液圧値eを用いて調節する通常調節と、検出液圧値eを減少補正した補正値を用いて調節する補正調節とを実行する。具体的には、図4(A)に示す時間Iのタイミングでブレーキペダル1が踏み込まれ(図4(A)中の太実線a)、ストロークセンサ2から信号が出力されると、ブレーキECU200は、図4(B)に示す時間IIのタイミングでホイールシリンダ6の液圧制御を開始する。
【0066】
上述した従来のブレーキ制御装置の場合と同様に、ブレーキECU200は、マスタカット弁SMC1,SMC2に供給する目標電流bを閉弁しきい値Tを超えるように制御する(図4(B)中の細実線b)。これにより実電流c(図4(B)中の実電流c)が時間IIIのタイミングで閉弁しきい値Tを超える。
【0067】
また、ブレーキECU200は、ホイールシリンダ6の目標液圧d(図4(C)中の細実線d)を算出し、ホイールシリンダ圧のフィードバック調節を実施する。このとき、ブレーキECU200は、フィードバック調節の開始から所定時間T1の間、使用液圧値f(図4(C)中の太実線f)として、ホイールシリンダ圧センサ13,15の検出液圧値e(図4(C)中の破線e)を減少するように補正した補正値を採用し、この補正値を用いてホイールシリンダ圧を調節する補正調節を実施する。本実施形態では、ブレーキECU200は、検出液圧値eが0になるように減少補正している。検出液圧値eの減少補正はブレーキECU200によって実施され、補正値はブレーキECU200に保持されている。また、所定時間T1についての情報もブレーキECU200に保持されている。
【0068】
時間IIのタイミングでは、検出液圧値eは、マスタシリンダ3からホイールシリンダ6FR,6FL側へのブレーキ液の流動によって目標液圧dを上回っている。しかしながら、ブレーキECU200は、補正値を用いた補正調節を実施するため、使用液圧値fとしての補正値と目標液圧dとの差が所定量を超えた時間VIのタイミングで、制御内容g(図4(D)中の太実線g)を増圧制御とすることができる。そして、所定時間T1の経過後、ブレーキECU200は、補正調節から検出液圧値eを用いた通常調節に切り替える。検出液圧値eは、マスタシリンダ3からのブレーキ液の流動によって増大した後、液圧の均一化等によって徐々に減少するが、おおよそ所定時間T1が経過した時点で実際のホイールシリンダ圧と略等しくなる。その後、検出液圧値eは、ブレーキECU200の増圧制御の影響で徐々に増大していく。なお、ブレーキECU200は、ホイールシリンダ6の液圧調節を開始する時間IIのタイミングで増圧制御を実施してもよい。
【0069】
このように、本実施形態に係るブレーキ制御装置100では、液圧制御開始から所定時間T1の間、検出液圧値eの減少補正値を用いた補正調節を実施している。そのため、ホイールシリンダ圧センサ13,15の誤検出による減圧制御および液圧保持制御を経ることなく増圧制御を開始することができる。これにより、ホイールシリンダ6の液圧が増大し始めるタイミングを、従来のブレーキ制御装置と比べてより早くすることできる。その結果、図4(C)に示すように、時間T1が経過した時点での検出液圧値eは、同時点での従来のブレーキ制御装置におけるホイールシリンダ圧f’よりも大きくなる。そして、本実施形態に係るブレーキ制御装置100の場合、目標液圧dとホイールシリンダ圧f(使用液圧値f)との間のタイムラグ(時間Z)を、目標液圧dと従来のブレーキ制御装置におけるホイールシリンダ圧f’(図4(C)中の点線f’)との間のタイムラグ(時間Y)よりも短くすることができる。
【0070】
ここで、前記「液圧調節の開始」は、例えば、ブレーキECU200が電源装置300にマスタカット弁SMC1,SMC2への電流供給を指示したタイミング、すなわち時間IIのタイミングである。また、所定時間T1は、例えば、ブレーキECU200がマスタカット弁SMC1,SMC2の閉弁制御を開始した時間IIからマスタカット弁SMC1,SMC2が実際に閉弁する時間IIIまでの時間、すなわちマスタカット弁SMC1,SMC2の応答時間に基づいて定まる時間である。このように、所定時間T1をマスタカット弁SMC1,SMC2の応答特性に応じて決まる一定の時間とすることで、ブレーキECU200に係る制御負荷を軽減することができる。なお、所定時間T1は、マスタカット弁SMC1,SMC2の応答時間に加えて、ブレーキECU200が演算処理に要する時間や、マスタカット弁SMC1,SMC2のコイル時定数、電源装置300の応答時間等を考慮して、これらの要素に基づいて定めてもよい。
【0071】
例えば、所定時間T1は、次の式1で表すことができる。
T1=(ストロークセンサ2応答遅れ時間)+(ブレーキECU200演算周期)+(電源装置300応答時間)+(マスタカット弁SMC1,SMC2コイル時定数)+(マスタカット弁SMC1,SMC2応答時間)・・・(式1)
この場合、一意に所定時間T1を決定することができるため、ブレーキECU200に係る制御負荷を軽減することができる。
【0072】
図5は、実施形態1に係るブレーキ制御装置におけるホイールシリンダ圧の制御フローチャートである。このフローは、ブレーキECU200が繰り返し実行する。
【0073】
まず、ブレーキECU200は、ストロークセンサ2からの出力信号の有無に基づいて、制動要求があったか判断する(S101)。制動要求がなかった場合(S101_No)、ブレーキECU200は、制動要求があったか否かの判断を繰り返す。制動要求があった場合(S101_Yes)、ブレーキECU200は、ホイールシリンダの液圧調節を開始して、検出液圧値eを減少補正した補正値を用いて、ホイールシリンダ圧の補正調節を実施する(S102)。そして、ブレーキECU200は、液圧調節を開始してから所定時間T1が経過したか判断する(S103)。所定時間T1を経過していなかった場合(S103_No)、ブレーキECU200は、補正調節を継続する。一方、所定時間T1を経過していた場合(S103_Yes)、ブレーキECU200は、検出液圧値eを用いた通常調節を実施して(S104)、ステップ101に戻る。
【0074】
以上説明したように、本実施形態に係るブレーキ制御装置100は、ブレーキペダル1の操作に応じてホイールシリンダ6に液圧を発生させ、この液圧により車輪に制動力を付与するブレーキ制御装置であり、ストロークセンサ2と、ホイールシリンダ圧センサ13〜16と、ブレーキECU200とを備える。そして、ブレーキECU200は、ストロークセンサ2の検出結果に基づいてホイールシリンダ6の目標液圧を算出し、ホイールシリンダ圧を目標液圧に近づけるように調節する。ホイールシリンダ6FR,6FLの液圧調節において、ブレーキECU200は、ホイールシリンダ圧センサ13,15の検出液圧値を用いてホイールシリンダ圧を調節する通常調節と、検出液圧値を減少補正した補正値を用いてホイールシリンダ圧を調節する補正調節とを実行可能である。そのため、本実施形態に係るブレーキ制御装置100によれば、ブレーキペダル1が踏み込まれてマスタシリンダ3からホイールシリンダ6側にブレーキ液の一部が流動し、ホイールシリンダ圧センサ13,15によるホイールシリンダ圧の誤検出が生じた場合であっても、適切なタイミングでホイールシリンダ圧の増圧制御を開始することができる。これにより、ブレーキ制御装置100の液圧応答性が向上するため、車両の制動距離を短くすることができる。
【0075】
また、本実施形態では、ブレーキECU200は、ホイールシリンダ圧調節の開始から所定時間T1の間、補正調節を実行し、所定時間T1の経過後に通常調節を実行する。これにより、ブレーキ制御装置100の液圧応答性をより確実に向上させることができる。所定時間T1は、例えば、ブレーキECU200がマスタカット弁SMC1,SMC2の閉弁制御を開始してからマスタカット弁SMC1,SMC2が閉弁するまでの時間に基づいて定まる時間である。このように、所定時間T1をマスタカット弁SMC1,SMC2の応答特性に応じて決まる一定の時間とすることで、ブレーキECU200にかかる制御負荷を軽減することができる。
【0076】
(実施形態2)
実施形態2に係るブレーキ制御装置は、実施形態1に係るブレーキ制御装置における所定時間T1を、検出液圧値eの変化が減少から増加に転じるタイミングに基づいて定まる時間としたものである。以下、本実施形態について説明する。なお、ブレーキ制御装置の主な構成やブレーキ動作などは実施形態1と同様であるため、実施形態1と同様の構成については同一の符号を付し、その説明および図示は適宜省略する。図6は、実施形態2に係るブレーキ制御装置におけるホイールシリンダ圧の調節を説明するための図である。
【0077】
実施形態1で説明したように、ブレーキペダル1が踏み込まれてからマスタカット弁SMC1,SMC2が閉弁するまでに所定時間を要するため、ブレーキ液の一部がマスタシリンダ3からホイールシリンダ6側に流動してしまう。そのため、図6に示すように、ホイールシリンダ圧センサ13,15の検出液圧値eにはスパイク状の増大が見られる。このスパイク状の増大の大きさは、マスタシリンダ3からホイールシリンダ6側に流動するブレーキ液の量等に応じて変化する。例えば、ブレーキペダル1の踏み込み速度が遅く、ブレーキ液の流動量が少ない場合には、検出液圧値eの増大量は少なく、液圧が均一化等されて検出液圧値eのスパイク状の増大が収束するまでの時間は比較的短い。一方、ブレーキペダル1の踏み込み速度が速く、ブレーキ液の流動量が多い場合には、検出液圧値eの増大量は多く、検出液圧値eのスパイク状の増大が収束するまでの時間は比較的長い。
【0078】
また、ブレーキECU200によってホイールシリンダ圧のフィードバック調節が実行された場合、検出液圧値eは、スパイク状の増大が収束した後、増圧制御の影響で再び増大する。そのため、検出液圧値eの変化には極小点e1が1つ現れる。そして、検出液圧値eは、この極小点e1付近で実際のホイールシリンダ圧と略等しくなる。
【0079】
そこで、本実施形態に係るブレーキ制御装置100では、検出液圧値eの減少補正値を用いた補正調節を実行する時間である所定時間T1を、検出液圧値eの変化が減少から増加に転じるタイミングに基づいて定まる時間とした。具体的には、ブレーキECU200は、ホイールシリンダ圧センサ13,15から検出液圧値eを受信して、受信した検出液圧値eと前回受信した検出液圧値eとを比較する。そして、ブレーキECU200は、検出液圧値eの減少を検知した後、前回の検出液圧値eよりも大きい検出液圧値eを最初に受信した時点で、所定時間T1が経過したと判断する。所定時間T1が経過したと判断したブレーキECU200は、補正調節を通常調節に切り替える。これにより、マスタシリンダ3からのブレーキ液の流動に起因した検出液圧値eの増大の大きさに応じて、補正調節を実行する時間を変化させることができるため、ブレーキ制御装置100の油圧応答性をより向上させることができる。
【0080】
図7は、実施形態2に係るブレーキ制御装置におけるホイールシリンダ圧の制御フローチャートである。このフローは、ブレーキECU200が繰り返し実行する。
【0081】
まず、ブレーキECU200は、ストロークセンサ2からの出力信号の有無に基づいて、制動要求があったか判断する(S201)。制動要求がなかった場合(S201_No)、ブレーキECU200は、制動要求があったか否かの判断を繰り返す。制動要求があった場合(S201_Yes)、ブレーキECU200は、液圧調節を開始して、検出液圧値eを減少補正した補正値を用いて、ホイールシリンダ圧の補正調節を実施する(S202)。そして、ブレーキECU200は、検出液圧値eの変化が減少から増加に転じたか判断する(S203)。検出液圧値eの変化が減少から増加に転じていなかった場合(S203_No)、ブレーキECU200は、所定時間T1が経過していないと判断し、補正調節を継続する。一方、検出液圧値eの変化が減少から増加に転じた場合(S203_Yes)、ブレーキECU200は、所定時間T1が経過したと判断し、検出液圧値eを用いた通常調節を実施して(S204)、ステップ201に戻る。
【0082】
以上説明したように、本実施形態に係るブレーキ制御装置100では、所定時間T1を、検出液圧値eの変化が減少から増加に転じるタイミングに基づいて定まる時間としている。そのため、ブレーキECU200にかかる制御負担は実施形態1と比べて増大するが、ブレーキ制御装置100の液圧応答性をより向上させることができる。また、検出液圧値eが極小点e1を迎えた直後に、使用液圧値fを補正値から検出液圧値eに切り替えているため、切り替えにともなう使用液圧値fの変化量を小さくすることができる。これにより、急激にホイールシリンダ圧が変化することを回避することができるため、脈動の発生を抑えることができ、その結果、異音の発生を防ぐことができる。
【0083】
(実施形態3)
実施形態3に係るブレーキ制御装置は、実施形態2に係るブレーキ制御装置において、補正調節から通常調節に移行する際に、補正値を徐々に増大させて検出液圧値eに近づける制御を実施するものである。以下、本実施形態について説明する。なお、ブレーキ制御装置の主な構成やブレーキ動作などは実施形態2と同様であるため、実施形態2と同様の構成については同一の符号を付し、その説明および図示は適宜省略する。図8は、実施形態3に係るブレーキ制御装置におけるホイールシリンダ圧の調節を説明するための図である。
【0084】
本実施形態では、図8に示すように、所定時間T1が経過して補正調節を通常調節に切り替える際に、使用液圧値fとしての補正値を段階的または連続的に増大させて検出液圧値eに近づけた後、使用液圧値fを補正値から検出液圧値eに切り替える。具体的には、例えばブレーキECU200は、所定時間T1が経過すると、補正値と検出液圧値eとの差分の1/2を補正値に加えた値を新たな使用液圧値fとし、これを繰り返して使用液圧値fを徐々に検出液圧値eに近づけていく。これにより、補正調節から通常調節への切り替えにともなう使用液圧値fの変化量をより小さくすることができるため、より確実に脈動の発生を抑えることができ、したがってより確実に異音の発生を防ぐことができる。
【0085】
図9は、実施形態3に係るブレーキ制御装置におけるホイールシリンダ圧の制御フローチャートである。このフローは、ブレーキECU200が繰り返し実行する。
【0086】
まず、ブレーキECU200は、ストロークセンサ2からの出力信号の有無に基づいて、制動要求があったか判断する(S301)。制動要求がなかった場合(S301_No)、ブレーキECU200は、制動要求があったか否かの判断を繰り返す。制動要求があった場合(S301_Yes)、ブレーキECU200は、検出液圧値eを減少補正した補正値を用いて、ホイールシリンダ圧の補正調節を実施する(S302)。そして、ブレーキECU200は、検出液圧値eの変化が減少から増加に転じたか判断する(S303)。検出液圧値eの変化が減少から増加に転じていなかった場合(S303_No)、ブレーキECU200は、補正調節を継続する。一方、検出液圧値eの変化が減少から増加に転じた場合(S303_Yes)、ブレーキECU200は、使用液圧値fとしての補正値を徐々に増大させた後(S304)、検出液圧値eを用いた通常調節を実施して(S305)、ステップ301に戻る。
【0087】
以上説明したように、本実施形態に係るブレーキ制御装置100では、所定時間T1が経過して補正調節を通常調節に切り替える際に、使用液圧値fとしての補正値を段階的または連続的に増大させて検出液圧値eに近づけた後、通常調節に移行させている。そのため、ブレーキ制御装置100の液圧応答性の向上効果が得られるとともに、より確実に脈動の発生を抑えることができ、したがってより確実に異音の発生を防ぐことができる。
【0088】
(実施形態4)
実施形態4に係るブレーキ制御装置は、実施形態3に係るブレーキ制御装置において、ブレーキペダル1の踏み込み速度に応じて補正調節の実施・不実施を切り替えるものである。以下、本実施形態について説明する。なお、ブレーキ制御装置の主な構成やブレーキ動作などは実施形態3と同様であるため、実施形態3と同様の構成については同一の符号を付し、その説明および図示は適宜省略する。
【0089】
実施形態2で説明したように、ホイールシリンダ圧センサ13,15の検出液圧値eに見られるスパイク状の増大の大きさは、マスタシリンダ3からホイールシリンダ6側に流動するブレーキ液の量等に応じて変化する。ブレーキペダル1の踏み込み速度が非常に遅く、ブレーキ液の流動量が微量である場合には、検出液圧値eのスパイク状の増大は無視できる程度に少なくなる。また、この場合には、検出液圧値eの変化の極小点e1を検出できない可能性があり、所定時間T1を確定できないおそれがある。
【0090】
そこで、本実施形態では、ブレーキペダル1の踏み込み速度に応じて補正調節を実施するか否かを判断することとした。具体的には、ブレーキECU200は、ブレーキペダル1が踏み込まれてストロークセンサ2から信号が出力されると、単位時間当たりのストローク量を算出する。そして、ブレーキECU200は、単位時間当たりのストローク量が所定のしきい値を超えた場合に補正調節を実行し、単位時間当たりのストローク量が所定のしきい値以下であった場合は補正調節を実行することなく、通常調節を実行する。これにより、補正調節が必要ない場合には通常調節のみを実行することができるため、ブレーキECU200にかかる制御負担を軽減することができる。また、所定時間T1を確定できない状況を回避することができる。
【0091】
図10は、実施形態4に係るブレーキ制御装置におけるホイールシリンダ圧の制御フローチャートである。このフローは、ブレーキECU200が繰り返し実行する。
【0092】
まず、ブレーキECU200は、ストロークセンサ2からの出力信号の有無に基づいて、制動要求があったか判断する(S401)。制動要求がなかった場合(S401_No)、ブレーキECU200は、制動要求があったか否かの判断を繰り返す。制動要求があった場合(S401_Yes)、ブレーキECU200は、ブレーキペダル1の単位時間当たりのストローク量がしきい値を超えたか判断する(S402)。単位時間あたりのストローク量がしきい値以下であった場合(S402_No)、ブレーキECU200は、通常調節を実行する(S406)。
【0093】
単位時間当たりのストローク量がしきい値より上であった場合(S402_Yes)、ブレーキECU200は、検出液圧値eを減少補正した補正値を用いて、ホイールシリンダ圧の補正調節を実施する(S403)。そして、ブレーキECU200は、検出液圧値eの変化が減少から増加に転じたか判断する(S404)。検出液圧値eの変化が減少から増加に転じていなかった場合(S404_No)、ブレーキECU200は、補正調節を継続する。一方、検出液圧値eの変化が減少から増加に転じた場合(S404_Yes)、ブレーキECU200は、使用液圧値fとしての補正値を徐々に増大させた後(S405)、検出液圧値eを用いた通常調節を実施して(S406)、ステップ401に戻る。
【0094】
以上説明したように、本実施形態に係るブレーキ制御装置100では、ブレーキペダル1の単位時間当たりのストローク量が所定のしきい値を超えた場合に補正調節を実行している。そのため、ブレーキ制御装置100の液圧応答性の向上を図りつつ、ブレーキECU200にかかる制御負担を軽減することができる。また、補正調節を通常調節に切り替えるタイミングをより正確に検知することができる。
【0095】
本発明は、上述の実施の形態に限定されるものではなく、各実施形態の各要素を適宜組み合わせたものも、本発明の実施形態として有効である。また、当業者の知識に基づいて各種の設計変更等の変形を実施形態に対して加えることも可能であり、そのような組み合わせられ、もしくは変形が加えられた実施形態も本発明の範囲に含まれ得る。上述の各実施形態同士の組合せや変形の追加によって生じる新たな実施形態は、組み合わされる実施形態および追加される変形のそれぞれの効果をあわせもつ。各図に示す構成は、一例を説明するためのもので、同様な機能を達成できる構成であれば、適宜変更可能であり、同様な効果を得ることができる。
【0096】
例えば、上述の実施形態3は、その特有の構成を実施形態2に追加したものであり、実施形態4は、その特有の構成を実施形態3に追加したものであるが、実施形態3の特有の構成を実施形態1に追加してもよく、実施形態4の特有の構成を実施形態1や実施形態2に追加してもよい。
【0097】
(変形例)
例えば、ブレーキ制御装置100は、次のような液圧回路を備えていてもよく、この場合であっても上述の実施形態1〜4の制御を適用することができ、これにより同様の効果を奏することができる。図11は、変形例に係るブレーキ制御装置の概略構成図である。
なお、実施形態1と同様の構成については同一の符号を付し、その説明および図示は適宜省略する。
【0098】
図11に示すように、ブレーキ制御装置100は、液圧ブレーキユニット110と、ブレーキECU200とを備える。そして、液圧ブレーキユニット110は、ブレーキペダル1、ストロークセンサ2、マスタシリンダ3、シミュレータカット弁SCSS、ストロークシミュレータ4、液圧アクチュエータ400を備える。また、液圧ブレーキユニット110は、ブレーキディスクFR,FL,RR,RLと、ブレーキキャリパに内蔵されたホイールシリンダ6FR,6FL,6RR,6RLとを含むディスクブレーキユニットを備える。
【0099】
マスタシリンダ3のセカンダリ室3bには、右前輪用のブレーキ液圧制御管402の一端が接続されている。ブレーキ液圧制御管402の他端は、ホイールシリンダ6FRに接続されている。また、マスタシリンダ3のプライマリ室3aには、左前輪用のブレーキ液圧制御管404の一端が接続されている。ブレーキ液圧制御管404の他端は、ホイールシリンダ6FLに接続されている。ブレーキ液圧制御管402の中途には、マスタカット弁SMC1とマスタシリンダ圧センサ17が設けられており、ブレーキ液圧制御管404の中途には、マスタカット弁SMC2とマスタシリンダ圧センサ18が設けられている。
【0100】
一方、リザーバタンク3fには、液圧給排管406の一端が接続されており、この液圧給排管406の他端には、モータ408により駆動されるオイルポンプ410の吸込口が接続されている。オイルポンプ410の吐出口は、高圧管412に接続されており、この高圧管412には、液圧源の蓄圧部としてのアキュムレータ414とリリーフバルブ416とが接続されている。本変形例では、オイルポンプ410として、モータ408によってそれぞれ往復移動させられる2体以上のピストン(図示せず)を備えた往復動ポンプが採用される。また、アキュムレータ414としては、ブレーキ液の圧力エネルギを窒素等の封入ガスの圧力エネルギに変換して蓄えるものが採用される。
【0101】
アキュムレータ414は、通常、オイルポンプ410によって所定液圧範囲(例えば14〜21MPa程度)にまで昇圧されたブレーキ液を蓄える。また、リリーフバルブ416の弁出口は、液圧給排管406に接続されており、アキュムレータ414におけるブレーキ液の圧力が異常に高まって例えば25MPa程度になると、リリーフバルブ416が開弁し、高圧のブレーキ液は液圧給排管406へと戻される。さらに、高圧管412には、アキュムレータ414の出口圧力、すなわち、アキュムレータ414におけるブレーキ液の圧力を検出するアキュムレータ圧センサ415が設けられている。
【0102】
そして、高圧管412は、増圧弁418FR,418FL,418RR,418RL(以下、適宜総称して「増圧弁418」という)を介してホイールシリンダ6FR,6FL,6RR,6RLに接続されている。増圧弁418はいずれも、リニアソレノイドおよびスプリングを有しており、リニアソレノイドが非通電状態にある場合に閉弁状態とされ、リニアソレノイドに供給される電流に比例して弁の開度が調整される常閉型電磁制御弁である。増圧弁418は、その開度に応じてホイールシリンダ6の増圧が可能である。
【0103】
また、ホイールシリンダ6FR,6FLは、それぞれ減圧弁420FRまたは420FLを介して液圧給排管406に接続されている。減圧弁420FRおよび420FLは、リニアソレノイドおよびスプリングを有しており、その開度に応じてホイールシリンダ6FR,6FLの減圧が可能な常閉型電磁制御弁である。一方、ホイールシリンダ6RR,6RLとは、常開型の電磁制御弁である減圧弁420RRまたは420RLを介して液圧給排管406に接続されている。以下、適宜、減圧弁420FR〜420RLを総称して「減圧弁420」という。ホイールシリンダ6FR,6FLの付近には、ホイールシリンダ圧センサ13,15が設けられ、ホイールシリンダ6RR,6RL付近には、ホイールシリンダ圧センサ16,14が設けられている。
【0104】
ブレーキECU200には、マスタカット弁SMC1,SMC2、シミュレータカット弁SCSS、増圧弁418、減圧弁420、モータ408等が電気的に接続されている。また、ブレーキECU200には、ホイールシリンダ圧センサ13〜16、ストロークセンサ2、マスタシリンダ圧センサ17,18、アキュムレータ圧センサ415から信号が入力される。
【0105】
このように構成されるブレーキ制御装置100では、ブレーキ回生協調制御を実行することができる。ブレーキ制御装置100は制動要求を受けて要求制動力と要求液圧制動力を算出する。ブレーキECU200は、算出した要求液圧制動力に基づいて各ホイールシリンダ6の目標液圧を算出し、ホイールシリンダ圧が目標液圧となるように、フィードバック制御則により増圧弁418や減圧弁420に供給する制御電流の値を決定する。その結果、ブレーキ制御装置100においては、ブレーキ液がアキュムレータ414から各増圧弁418を介して各ホイールシリンダ6に供給され、車輪に制動力が付与される。また、各ホイールシリンダ6からブレーキ液が減圧弁420を介して必要に応じて排出され、車輪に付与される制動力が調整される。
【0106】
一方、このときマスタカット弁SMC1,SMC2は閉弁状態とされ、シミュレータカット弁SCSSは開状態とされる。よって、運転者によるブレーキペダル1の踏み込みによりマスタシリンダ3から送出されたブレーキ液は、シミュレータカット弁SCSSを通ってストロークシミュレータ4に流入する。また、アキュムレータ圧が予め設定された設定範囲の下限値以下であるときには、ブレーキECU200によりモータ408に電流が供給され、オイルポンプ410が駆動されてアキュムレータ圧が昇圧される。この昇圧によってアキュムレータ圧がその設定範囲に入りその上限値に達すると、モータ408への給電が停止される。
【符号の説明】
【0107】
SMC1,SMC2 マスタカット弁、 2 ストロークセンサ、 3 マスタシリンダ、 5 液圧アクチュエータ、 6,6FL,6FR,6RL,6RR ホイールシリンダ、 13,14,15,16 ホイールシリンダ圧センサ、 100 ブレーキ制御装置、 110 液圧ブレーキユニット、 200 ブレーキECU。
【特許請求の範囲】
【請求項1】
ブレーキ操作部材の操作に応じてブレーキ液を液圧回路を介して供給することによりホイールシリンダに液圧を発生させ、当該液圧により車輪に制動力を付与するブレーキ制御装置であって、
ブレーキ操作部材の操作状態を検出するための操作センサと、
ホイールシリンダの液圧を検出するための液圧センサと、
前記操作センサの検出結果に基づいてホイールシリンダの目標液圧を算出し、ホイールシリンダの液圧を目標液圧に近づけるように調節するための制御部と、を備え、
前記制御部は、前記液圧センサの検出液圧値を用いてホイールシリンダの液圧を調節する通常調節と、前記検出液圧値を減少補正した補正値を用いてホイールシリンダの液圧を調節する補正調節とを実行可能であることを特徴とするブレーキ制御装置。
【請求項2】
前記制御部は、ホイールシリンダの液圧調節の開始から所定時間、前記補正調節を実行し、前記所定時間の経過後、通常調節を実行する請求項1に記載のブレーキ制御装置。
【請求項3】
前記液圧回路とは異なる流路を介してホイールシリンダに連結され、ブレーキ液を収容するとともにブレーキ操作部材の操作に応じてこのブレーキ液を加圧するように構成されたマスタシリンダと、
前記流路に開閉可能に設けられたマスタカット弁と、を備え、
前記制御部は、前記操作センサの検出結果を受けて前記マスタカット弁を閉じるように制御し、
前記所定時間は、前記制御部が前記マスタカット弁の閉弁制御を開始してから前記マスタカット弁が閉弁するまでの時間に基づいて定まる時間である請求項2に記載のブレーキ制御装置。
【請求項4】
前記所定時間は、前記液圧センサの検出液圧値の変化が減少から増加に転じるタイミングに基づいて定まる時間である請求項2に記載のブレーキ制御装置。
【請求項5】
前記所定時間は、以下の式1に基づいて定まる時間である請求項3に記載のブレーキ制御装置。
所定時間=(操作センサ応答遅れ時間)+(制御部演算周期)+(電源装置応答時間)+(マスタカット弁コイル時定数)+(マスタカット弁応答時間)・・・(式1)
【請求項6】
前記制御部は、前記補正調節から前記通常調節に移行する際に、前記補正値を段階的または連続的に増大させて検出液圧値に近づけた後、通常調節に移行するように制御する請求項2乃至5のいずれか1項に記載のブレーキ制御装置。
【請求項7】
前記操作センサは、ブレーキ操作部材の操作量を検出し、
前記制御部は、ブレーキ操作部材の単位時間あたりの操作量が所定のしきい値を超えた場合に、前記補正調節を実行する請求項1乃至6のいずれか1項に記載のブレーキ制御装置。
【請求項1】
ブレーキ操作部材の操作に応じてブレーキ液を液圧回路を介して供給することによりホイールシリンダに液圧を発生させ、当該液圧により車輪に制動力を付与するブレーキ制御装置であって、
ブレーキ操作部材の操作状態を検出するための操作センサと、
ホイールシリンダの液圧を検出するための液圧センサと、
前記操作センサの検出結果に基づいてホイールシリンダの目標液圧を算出し、ホイールシリンダの液圧を目標液圧に近づけるように調節するための制御部と、を備え、
前記制御部は、前記液圧センサの検出液圧値を用いてホイールシリンダの液圧を調節する通常調節と、前記検出液圧値を減少補正した補正値を用いてホイールシリンダの液圧を調節する補正調節とを実行可能であることを特徴とするブレーキ制御装置。
【請求項2】
前記制御部は、ホイールシリンダの液圧調節の開始から所定時間、前記補正調節を実行し、前記所定時間の経過後、通常調節を実行する請求項1に記載のブレーキ制御装置。
【請求項3】
前記液圧回路とは異なる流路を介してホイールシリンダに連結され、ブレーキ液を収容するとともにブレーキ操作部材の操作に応じてこのブレーキ液を加圧するように構成されたマスタシリンダと、
前記流路に開閉可能に設けられたマスタカット弁と、を備え、
前記制御部は、前記操作センサの検出結果を受けて前記マスタカット弁を閉じるように制御し、
前記所定時間は、前記制御部が前記マスタカット弁の閉弁制御を開始してから前記マスタカット弁が閉弁するまでの時間に基づいて定まる時間である請求項2に記載のブレーキ制御装置。
【請求項4】
前記所定時間は、前記液圧センサの検出液圧値の変化が減少から増加に転じるタイミングに基づいて定まる時間である請求項2に記載のブレーキ制御装置。
【請求項5】
前記所定時間は、以下の式1に基づいて定まる時間である請求項3に記載のブレーキ制御装置。
所定時間=(操作センサ応答遅れ時間)+(制御部演算周期)+(電源装置応答時間)+(マスタカット弁コイル時定数)+(マスタカット弁応答時間)・・・(式1)
【請求項6】
前記制御部は、前記補正調節から前記通常調節に移行する際に、前記補正値を段階的または連続的に増大させて検出液圧値に近づけた後、通常調節に移行するように制御する請求項2乃至5のいずれか1項に記載のブレーキ制御装置。
【請求項7】
前記操作センサは、ブレーキ操作部材の操作量を検出し、
前記制御部は、ブレーキ操作部材の単位時間あたりの操作量が所定のしきい値を超えた場合に、前記補正調節を実行する請求項1乃至6のいずれか1項に記載のブレーキ制御装置。
【図1】


【図2】
【図3】
【図4】
【図5】
【図6】
【図7】
【図8】
【図9】
【図10】
【図11】
【図2】
【図3】
【図4】
【図5】
【図6】
【図7】
【図8】
【図9】
【図10】
【図11】
【公開番号】特開2011−131835(P2011−131835A)
【公開日】平成23年7月7日(2011.7.7)
【国際特許分類】
【出願番号】特願2009−295152(P2009−295152)
【出願日】平成21年12月25日(2009.12.25)
【出願人】(000003207)トヨタ自動車株式会社 (59,920)
【Fターム(参考)】
【公開日】平成23年7月7日(2011.7.7)
【国際特許分類】
【出願日】平成21年12月25日(2009.12.25)
【出願人】(000003207)トヨタ自動車株式会社 (59,920)
【Fターム(参考)】
[ Back to top ]