
ブレーキ制御装置
【課題】ドライバのブレーキ操作を反映でき、かつ、ブレーキフィーリングに影響を与えなくてもノックバック現象を抑制できるようにする。
【解決手段】ノックバックが発生する可能性の有無を判定し、ノックバック可能性ありと判定されたときには、EPBを駆動することでノックバックによる不具合が解消できるようにする。すなわち、モータ10を逆回転させて推進軸18を後退させることで推進軸18の先端をピストン19の底部から離間させられるようにし、ノックバック可能性がなくなったら、モータ10を正回転させて推進軸18を前進させることでピストン19を通常時の位置に戻すピストン補正移動を行ったのち、その後再度、推進軸18を後退させることで待機位置に戻す待機位置移動を行うようにする。
【解決手段】ノックバックが発生する可能性の有無を判定し、ノックバック可能性ありと判定されたときには、EPBを駆動することでノックバックによる不具合が解消できるようにする。すなわち、モータ10を逆回転させて推進軸18を後退させることで推進軸18の先端をピストン19の底部から離間させられるようにし、ノックバック可能性がなくなったら、モータ10を正回転させて推進軸18を前進させることでピストン19を通常時の位置に戻すピストン補正移動を行ったのち、その後再度、推進軸18を後退させることで待機位置に戻す待機位置移動を行うようにする。
【発明の詳細な説明】
【技術分野】
【0001】
本発明は、電動パーキングブレーキ(以下、EPB(Electric parking brake)という)の加圧機構とサービスブレーキのホイールシリンダ(以下、W/Cという)とが一体型とされた駐車ブレーキ一体型加圧機構を有する車両用ブレーキシステムを用いてノックバック抑制制御を行うブレーキ制御装置に関するものである。
【背景技術】
【0002】
従来、車両用のブレーキ制御装置において、旋回中に起きるノックバック現象を防止するために、電気的に制御可能なサービスブレーキの自動加圧時に用いられるマスタシリンダ(以下、M/Cという)とW/Cとの間に備えられた制御弁を遮断することが提案されている(特許文献1参照)。すなわち、旋回中に傾斜したブレーキディスクによってブレーキパッドおよび加圧用のピストンが押し込まれ、ブレーキディスクとブレーキパッドの間が離れることで、ドライバがブレーキペダルを踏み込んだときに、通常時よりも深くまでブレーキペダルを踏み込まないと制動力を発生させられなくなる。このため、M/CとW/Cとの間の制御弁を遮断することで、ブレーキパッドおよびピストンが押し込まれることを抑制し、ノックバック現象を防止できるようにしている。
【0003】
また、ブレーキディスクの傾斜によってブレーキパッドおよびピストンが押し込まれたときに、W/C圧を予加圧することで、ブレーキパッドおよびピストンをブレーキディスク側に押し戻すようにしている。これにより、ブレーキペダルが踏み込まれたときに、ブレーキパッドおよびピストンが押し込まれる前の初期位置に戻った状態となり、ノックバック現象を防止することが可能となる。
【先行技術文献】
【特許文献】
【0004】
【特許文献1】特開2010−95023号公報
【発明の概要】
【発明が解決しようとする課題】
【0005】
しかしながら、M/CとW/Cとの間の制御弁を遮断するという制御を行う場合、制御中にドライバがブレーキを掛けようとしたときに、制御弁によってM/CとW/Cの間が遮断されているため、ドライバのブレーキ操作が反映されなくなるという問題がある。
【0006】
また、W/C圧を予加圧するという制御を行う場合、サービスブレーキの自動加圧機能によってW/C圧の予加圧を行うことになるが、自動加圧機能によってブレーキパッドおよびピストンを正確に初期位置に戻すことが難しい。このため、安定してブレーキディスクとブレーキパッドの間のクリアランスを確保しづらく、ブレーキパッドがブレーキディスクに接触してブレーキ引き釣り感を与えるなど、ブレーキフィーリングに影響を与えてしまう。
【0007】
本発明は上記点に鑑みて、ドライバのブレーキ操作を反映でき、かつ、ブレーキフィーリングに影響を与えなくてもノックバック現象を抑制することができるブレーキ制御装置を提供することを目的とする。
【課題を解決するための手段】
【0008】
上記目的を達成するため、請求項1に記載の発明では、電子制御手段(9)は、被摩擦材(12)によって押圧部材(19)が離間方向に押し込まれるノックバックの可能性の有無を判定するノックバック可能性判定手段(200)と、ノックバック可能性判定手段(200)にてノックバックの可能性ありと判定すると、モータ(10)への通電に基づいて移動部材(18)を所定の待機位置より被摩擦材(12)から離間方向にある所定の後退位置に移動させる後退移動を行うと共に、ノックバック可能性ありと判定されたのちノックバック可能性なしと判定されたときには、モータ(10)への通電に基づいて移動部材(18)を後退位置より被摩擦材(12)の方向に所定量前進させることで押圧部材(19)を被摩擦材(12)に移動させる押圧部材補正移動を行ったのち、再度、移動部材(18)を被摩擦材(12)から離間方向に移動させて待機位置に移動させる待機位置移動を行う位置制御を実行する位置制御手段(300)とを有していることを特徴としている。
【0009】
このように、ノックバック可能性の有無を判定し、ノックバック可能性ありと判定されたときには、パーキングブレーキ(2)のモータ(10)を駆動することでノックバックによる不具合が解消できるようにしている。すなわち、移動部材(18)を後退させることで移動部材(18)と押圧部材(19)の互いの押圧面が離間させられるようにし、ノックバック可能性がなくなったら、移動部材(18)を前進させることで押圧部材(19)を通常時の位置に戻す押圧部材補正移動を行ったのち、その後再度、移動部材(18)を後退させることで待機位置に戻す待機位置移動を行うようにしている。
【0010】
これにより、ノックバックが発生しても、摩擦材(11)および押圧部材(19)を通常時の位置に戻せると共に、移動部材(18)と押圧部材(19)の互いの押圧面の間のクリアランスも通常時の位置に戻せる。したがって、ノックバック現象を抑制することができる。また、パーキングブレーキ(2)の動作によってノックバック現象を抑制できることから、制御弁にてブレーキ液圧発生手段(3〜5)とW/C(6)との間を遮断しなくても良いため、ドライバがブレーキ操作を行ったときには、それが反映されてサービスブレーキ力を発生させることができる。さらに、パーキングブレーキ(2)の動作は、モータ(10)の制御によって行われるため、サービスブレーキ(1)の自動加圧機能によって摩擦材(11)および押圧部材(19)を初期位置に戻す場合と比較して、より正確に初期位置に戻すことが可能となる。したがって、ブレーキフィーリングに影響を与えないで済む。
【0011】
請求項2に記載の発明では、電子制御手段(9)は、押圧部材(19)と移動部材(18)が離間した位置から待機位置へ移動させるのに掛かるモータ(10)への通電時間である待機位置移動通電時間(KB2)と、移動部材(18)が待機位置から後退位置に移動させるのに掛かるモータ(10)への通電時間である後退位置移動通電時間(KB1)とを加算した時間を、押圧部材補正移動の際のモータ(10)への通電時間とすることを特徴としている。
【0012】
このように、モータ(10)への通電時間に基づいて、押圧部材補正移動で移動させる位置を決めることができる。このため、位置センサなどによって押圧部材(19)の位置を検出しなくても、正確に押圧部材(19)を通常時の位置に戻すことが可能となる。
【0013】
請求項3に記載の発明では、電子制御装置(9)は、押圧部材(19)が移動部材(18)によって被摩擦材(12)の方向へ移動する際のシール部材(22)の変位量(c)に基づき、押圧部材補正移動の際のモータ(10)への通電時間を補正することを特徴としている。
【0014】
このように、シール部材(22)の変位量(c)に基づいて押圧部材補正移動の際のモータ(10)への通電時間を補正することで、より正確に押圧部材(19)を通常時の位置に戻すことが可能となる。
【0015】
請求項4に記載の発明では、電子制御手段(9)は、ノックバック可能性判定手段(200)がノックバック可能性ありと判定してから押圧部材補正移動を行う前に、ホイールシリンダ(6)内の油圧が加圧されたことを判定するノックバック後加圧判定手段(313)を有し、ノックバック後加圧判定手段(313)にて油圧が加圧されたことが判定されたときには、移動部材(18)を後退位置から待機位置に直接移動させ、位置制御を終了することを特徴としている。
【0016】
このように、ノックバック後加圧判定手段(313)にて油圧が加圧されたことが判定されたときには、既に押圧部材(19)が通常時の位置に戻っていることから、移動部材(18)を後退位置から待機位置に直接移動させ、位置制御を終了するようにしても良い。
【0017】
なお、上記各手段の括弧内の符号は、後述する実施形態に記載の具体的手段との対応関係を示すものである。
【図面の簡単な説明】
【0018】
【図1】本発明の第1実施形態にかかるノックバック抑制制御を行うブレーキ制御装置が適用された車両用のブレーキシステムの全体概要を示した模式図である。
【図2】ブレーキシステムに備えられる後輪系のブレーキ機構の断面模式図である。
【図3】ノックバック抑制制御で行う動作を示した後輪系のブレーキ機構の簡略化断面模式図である。
【図4】ノックバック抑制制御処理の詳細を示したフローチャートである。
【図5】ノックバック可能性あり判定処理の詳細を示したフローチャートである。
【図6(a)】ピストン位置制御の詳細を示したフローチャートである。
【図6(b)】ピストン位置制御の詳細を示したフローチャートである。
【図7】ノックバック抑制制御処理を実行した場合のタイミングチャートである。
【図8】ノックバック抑制制御処理を実行した場合のタイミングチャートである。
【発明を実施するための形態】
【0019】
以下、本発明の実施形態について図に基づいて説明する。なお、以下の各実施形態相互において、互いに同一もしくは均等である部分には、図中、同一符号を付してある。
【0020】
(第1実施形態)
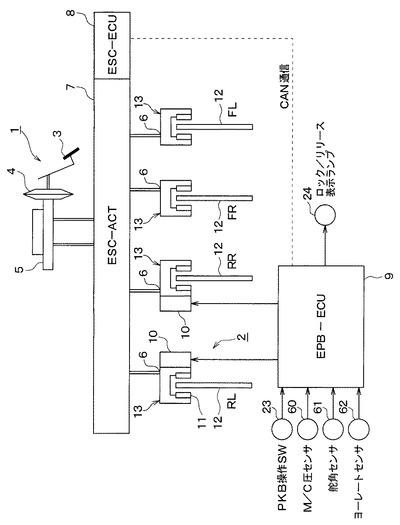
本発明の第1実施形態について説明する。本実施形態では、後輪系にディスクブレーキタイプのEPBを適用している車両用ブレーキシステムを例に挙げて説明する。図1は、本実施形態にかかるノックバック抑制制御を行うブレーキ制御装置が適用された車両用のブレーキシステムの全体概要を示した模式図である。また、図2は、ブレーキシステムに備えられる後輪系のブレーキ機構の断面模式図である。以下、これらの図を参照して説明する。
【0021】
図1に示すように、ブレーキシステムは、ドライバの踏力に基づいてブレーキ力を発生させるサービスブレーキ1と駐車時に車両の移動を規制するためのEPB2とが備えられている。
【0022】
サービスブレーキ1は、ドライバによるブレーキペダル3の踏み込みに応じた踏力を倍力装置4にて倍力したのち、この倍力された踏力に応じたブレーキ液圧をマスタシリンダ(以下、M/Cという)5内に発生させ、このブレーキ液圧を各車輪のブレーキ機構に備えられたホイールシリンダ(以下、W/Cという)6に伝えることでブレーキ力を発生させる。また、M/C5とW/C6との間にブレーキ液圧制御用のアクチュエータ7が備えられており、サービスブレーキ1により発生させるブレーキ力を調整し、車両の安全性を向上させるための各種制御(例えば、アンチスキッド制御等)を行える構造とされている。
【0023】
アクチュエータ7を用いた各種制御は、ESC(Electronic Stability Control)−ECU8にて実行される。例えば、ESC−ECU8からアクチュエータ7に備えられる図示しない各種制御弁やポンプ駆動用のモータを制御するための制御電流を出力することにより、アクチュエータ7に備えられる油圧回路を制御し、W/C6に伝えられるW/C圧を制御する。これにより、車輪スリップの回避などを行い、車両の安全性を向上させる。例えば、アクチュエータ7は、各車輪毎に、W/C6に対してM/C5内に発生させられたブレーキ液圧もしくはポンプ駆動により発生させられたブレーキ液圧が加えられることを制御する増圧制御弁や、各W/C6内のブレーキ液をリザーバに供給することでW/C圧を減少させる減圧制御弁等を備えており、W/C圧を増圧・保持・減圧制御できる構成とされている。このアクチュエータ7の構成に関しては、従来より周知となっているため、ここでは詳細については省略する。
【0024】
一方、EPB2は、モータ10にてブレーキ機構を制御することでブレーキ力を発生させるものであり、モータ10の駆動を制御するEPB制御装置(以下、EPB−ECUという)9を有して構成されている。
【0025】
ブレーキ機構は、本実施形態のブレーキシステムにおいてブレーキ力を発生させる機械的構造であり、前輪系のブレーキ機構はサービスブレーキ1の操作によってブレーキ力を発生させる構造とされているが、後輪系のブレーキ機構は、サービスブレーキ1の操作とEPB2の操作の双方に対してブレーキ力を発生させる共用の構造とされている。前輪系のブレーキ機構は、後輪系のブレーキ機構に対して、EPB2の操作に基づいてブレーキ力を発生させる機構をなくした従来から一般的に用いられているブレーキ機構であるため、ここでは説明を省略し、以下の説明では後輪系のブレーキ機構について説明する。
【0026】
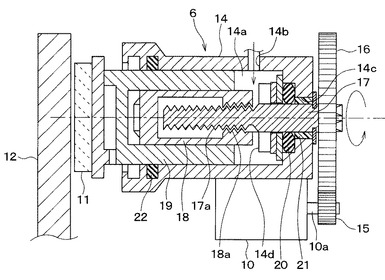
後輪系のブレーキ機構では、サービスブレーキ1を作動させたときだけでなくEPB2を作動させたときにも、図2に示す摩擦材であるブレーキパッド11を押圧し、ブレーキパッド11によって被摩擦材であるブレーキディスク12を挟み込むことにより、ブレーキパッド11とブレーキディスク12との間に摩擦力を発生させ、ブレーキ力を発生させる。
【0027】
具体的には、ブレーキ機構は、図1に示すキャリパ13内において、図2に示すようにブレーキパッド11を押圧するためのW/C6のボディ14に直接固定されているモータ10を回転させるとにより、モータ10の駆動軸10aに備えられた平歯車15を回転させ、平歯車15に噛合わされた平歯車16にモータ10の回転力を伝えることによりブレーキパッド11を移動させ、EPB2によるブレーキ力を発生させる。
【0028】
キャリパ13内には、W/C6およびブレーキパッド11に加えて、ブレーキパッド11に挟み込まれるようにしてブレーキディスク12の端面の一部が収容されている。W/C6は、シリンダ状のボディ14の中空部14a内に通路14bを通じてブレーキ液圧を導入することで、ブレーキ液収容室である中空部14a内にW/C圧を発生させられるようになっており、中空部14a内に回転軸17、推進軸18、ピストン19などを備えて構成されている。
【0029】
回転軸17は、一端がボディ14に形成された挿入孔14cを通じて平歯車16に連結され、平歯車16が回動させられると、平歯車16の回動に伴って回動させられる。この回転軸17における平歯車16と連結された端部とは反対側の端部において、回転軸17の外周面には雄ネジ溝17aが形成されている。一方、回転軸17の他端は、挿入孔14cに挿入されることで軸支されている。具体的には、挿入孔14cには、Oリング20と共に軸受け21が備えられており、Oリング20にて回転軸17と挿入孔14cの内壁面との間を通じてブレーキ液が漏れ出さないようにされながら、軸受け21により回転軸17の他端を軸支持している。
【0030】
推進軸18は、中空状の筒部材にて構成され、内壁面に回転軸17の雄ネジ溝17aと螺合する雌ネジ溝18aが形成されている。この推進軸18は、例えば回転防止用のキーを備えた円柱状もしくは多角柱状に構成されることで、回転軸17が回動しても回転軸17の回動中心を中心として回動させられない構造になっている。このため、回転軸17が回動させられると、雄ネジ溝17aと雌ネジ溝18aとの噛合いにより、回転軸17の回転力を回転軸17の軸方向に推進軸18を移動させる力に変換する。推進軸18は、モータ10の駆動が停止されると、雄ネジ溝17aと雌ネジ溝18aとの噛合いによる摩擦力により同じ位置で止まるようになっており、目標ブレーキ力になったときにモータ10の駆動を停止すれば、その位置に推進軸18を保持することができる。なお、本明細書においては、モータ10を正回転させて推進軸18をブレーキパッド11の方向に移動させることを前進、モータ10を逆回転させて推進軸18をブレーキパッド11から離間方向に移動させることを後退として説明する。
【0031】
ピストン19は、推進軸18の外周を囲むように配置されるもので、有底の円筒部材もしくは多角筒部材にて構成され、外周面がボディ14に形成された中空部14aの内壁面と接するように配置されている。ピストン19の外周面とボディ14の内壁面との間のブレーキ液洩れが生じないように、ボディ14の内壁面にシール部材22が備えられ、ピストン19の端面にW/C圧を付与できる構造とされている。このシール部材22が、ロック制御後のリリース制御時にピストン19を引き戻すための反力を発生させるために用いられる部材である。このシール部材22を備えてあるため、基本的には旋回中に傾斜したブレーキディスク12によってブレーキパッド11およびピストン19が押し込まれても、それらをブレーキディスク12側に押し戻してブレーキディスク12とブレーキパッド11との間が所定のクリアランスで保持されるようにできる。しかしながら、ブレーキディスク12によってブレーキパッド11およびピストン19を押し込む力が大きいと、シール部材22による押し戻し作用だけでは十分にブレーキパッド11およびピストン19をブレーキディスク12側に押し戻すことができない。このため、ノックバック現象が発生することになる。これを抑制するために、後述するようなノックバック抑制制御を実行するようにしている。
【0032】
また、ピストン19は、回転軸17が回転しても回転軸17の回動中心を中心として回動させられないように、推進軸18に回転防止用のキーが備えられる場合にはそのキーが摺動するキー溝が備えられ、推進軸18が多角柱状とされる場合にはそれと対応する形状の多角筒状とされる。
【0033】
このピストン19の先端にブレーキパッド11が配置され、ピストン19の移動に伴ってブレーキパッド11を紙面左右方向に移動させるようになっている。具体的には、ピストン19は、推進軸18の移動に伴って紙面左方向に移動可能で、かつ、ピストン19の端部(ブレーキパッド11が配置された端部と反対側の端部)にW/C圧が付与されることで推進軸18から独立して紙面左方向に移動可能な構成とされている。そして、推進軸18が待機位置(モータ10が回転させられる前の状態)のときに、中空部14a内のブレーキ液圧が付与されていない状態(W/C圧=0)であれば、後述するシール部材22の弾性力によりピストン19が紙面右方向に移動させられ、ブレーキパッド11をブレーキディスク12から離間させられるようになっている。また、モータ10が回転させられて推進軸18が待機位置から紙面左方向に移動させられているときにW/C圧が0になると、移動した推進軸18によってピストン19の紙面右方向への移動が規制され、ブレーキパッド11がその場所で保持される。
【0034】
このように構成されたブレーキ機構では、サービスブレーキ1が操作されると、それにより発生させられたW/C圧に基づいてピストン19が紙面左方向に移動させられることでブレーキパッド11がブレーキディスク12に押圧され、サービスブレーキ力を発生させる。また、EPB2が操作されると、モータ10が駆動されることで平歯車15が回転させられ、それに伴って平歯車16および回転軸17が回転させられるため、雄ネジ溝17aおよび雌ネジ溝18aの噛合いに基づいて推進軸18がブレーキディスク12側(紙面左方向)に移動させられる。そして、それに伴って推進軸18の先端がピストン19の底面に当接してピストン19を押圧し、ピストン19も同方向に移動させられることでブレーキパッド11がブレーキディスク12に押圧され、駐車ブレーキ力を発生させる。このため、サービスブレーキ1の操作とEPB2の操作の双方に対してブレーキ力を発生させる共用のブレーキ機構とすることが可能となる。
【0035】
また、サービスブレーキ1が作動されることでW/C圧が発生させられている状態でEPB2が操作されると、W/C圧によってピストン19が既に紙面左方向に移動させられているため、推進軸18に掛かる負荷が軽減される。このため、推進軸18がピストン19に当接するまではモータ10はほぼ無負荷状態で駆動される。そして、推進軸18がピストン19に当接するとピストン19を紙面左方向の押す押圧力が加えられ、EPB2によるブレーキ力が発生させられるようになっている。
【0036】
EPB−ECU9は、CPU、ROM、RAM、I/Oなどを備えた周知のマイクロコンピュータによって構成され、ROMなどに記憶されたプログラムにしたがってモータ10の回転を制御することにより駐車ブレーキ制御を行うものである。このEPB−ECU9が本発明の電子制御装置に相当する。EPB−ECU9は、例えば車室内のインストルメントパネル(図示せず)に備えられた操作スイッチ(SW)23の操作状態に応じた信号等を入力し、操作SW23の操作状態に応じてモータ10を駆動する。さらに、EPB−ECU9は、インストルメントパネルに備えられたロック/リリース表示ランプ24に対してモータ10の駆動状態に応じて、ロック中であるかリリース中であるかを示す信号を出力する。
【0037】
具体的には、EPB−ECU9は、モータ10に流される電流(モータ電流)をモータ10の上流側もしくは下流側で検出するモータ電流検出、ロック制御を終了させるときの目標モータ電流(目標電流値)を演算する目標モータ電流演算、モータ電流が目標モータ電流に達したか否かの判定、操作SW23の操作状態に基づくモータ10の制御など、ロック・リリース制御を実行するための各種機能部を有している。このEPB−ECU9により操作SW23の状態やモータ電流に基づいてモータ10を正回転や逆回転させたりモータ10の回転を停止させることで、EPB2をロック・リリースする制御を行う。
なお、アクチュエータ7の内部に備えられたW/C圧センサ60や図示しないステアリング機構に備えられた舵角センサ61および車体に備えられたヨーレートセンサ62の検出信号がEPB−ECU9に入力されるようにしてある。このため、EPB−ECU9にて、W/C圧や舵角およびヨーレートを監視できるようになっている。
【0038】
以上のように構成された車両用ブレーキシステムでは、基本的には、車両走行時にサービスブレーキ1によってサービスブレーキ力を発生させることで車両に制動力を発生させるという動作と、サービスブレーキ1によって停車させられた際に、ドライバが操作SW23を押下してEPB2を作動させて駐車ブレーキ力を発生させることで停車状態を維持するという動作を行う。すなわち、サービスブレーキ1の動作としては、車両走行時にドライバによるブレーキペダル操作が行われると、M/C5に発生したブレーキ液圧がW/C6に伝えられることでサービスブレーキ力を発生させる。また、EPB2の動作としては、モータ10を駆動することでピストン19を移動させ、ブレーキパッド11をブレーキディスク12に押し付けることで駐車ブレーキ力を発生させたり、ブレーキパッド11をブレーキディスク12から離すことで駐車ブレーキ力を解除したりする。
【0039】
具体的には、ロック・リリース制御により、駐車ブレーキ力を発生させたり解除したりしている。ロック制御では、モータ10を正回転させることによりEPB2を作動させ、EPB2にて所望の駐車ブレーキ力を発生させられる位置でモータ10の回転を停止し、この状態を維持する。これにより、所望の駐車ブレーキ力を発生させる。リリース制御では、モータ10を逆回転させることによりEPB2を作動させ、EPB2にて発生させられている駐車ブレーキ力を解除する。
【0040】
駐車ブレーキ力を発生させるためのロック・リリース制御に関しては従来と同様であるため、ここでは説明を省略するが、EPB2のピストン19の移動動作を利用してノックバック抑制制御を行うようにしている。以下、本実施形態にかかる車両用のブレーキシステムで実行されるノックバック抑制制御の詳細について説明するが、それに先立ち、ノックバック抑制制御で行う動作について説明する。
【0041】
図3は、ノックバック抑制制御で行う動作を示した後輪系のブレーキ機構の簡略化断面模式図である。
【0042】
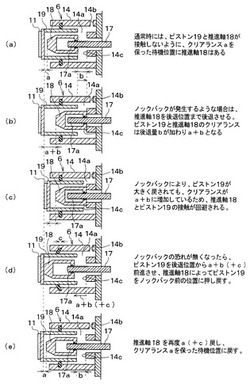
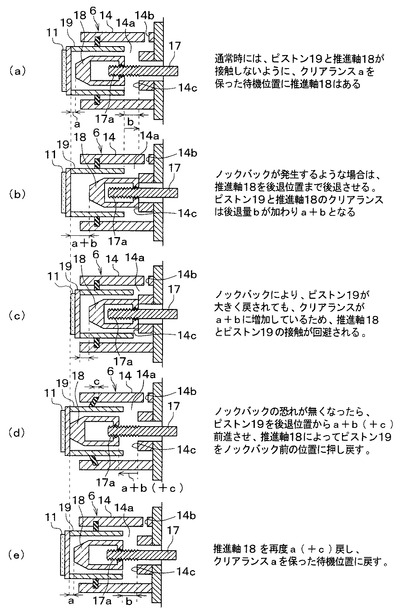
図3(a)は、通常時、例えばサービスブレーキ1によってサービスブレーキ力を発生させてからそれが解除されたときや、EPB2によって駐車ブレーキ力を発生させてからそれが解除されたときの様子を表している。通常時には、推進軸18は、推進軸18の先端とピストン19の底部との間、つまり互いの押圧面が所定のクリアランスaに保たれた待機位置に位置している。また、この待機位置では、推進軸18の後端、つまりピストン19の底部に接する先端と反対側の端部は、推進軸18をブレーキパッド11と反対側に後退させたときに当接するシート面14dから距離bだけ離間した場所に位置している。
【0043】
図3(b)は、ノックバックが発生すると予測される場合の作動を表している。ノックバック時には、傾斜したブレーキディスク12によってブレーキパッド11およびピストン19が押し込まれることになる。このため、ノックバックが発生すると想定される場合には、推進軸18をブレーキパッド11と反対側に後退させてシート面14dに当接する後退位置まで後退移動させる。このときの後退量は、待機位置での推進軸18の後端からシート面14dまでの距離bとなる(以下、後退量bという)。したがって、この状態では、推進軸18の先端とピストン19の底部との間のクリアランスは、待機位置の際のクリアランスaに後退量bが加わったa+bとなる。
【0044】
図3(c)は、推進軸18を後退位置まで移動させたのちにノックバックが発生したときの様子を表している。このときには、傾斜したブレーキディスク12によってブレーキパッド11およびピストン19が押し込まれるため、ピストン19の底部が推進軸18の先端側に近づく。しかしながら、ノックバックの発生を予測して推進軸18が既に後退位置まで移動させられているため、ノックバックが発生しても、推進軸18の先端とピストン19の底部との接触が回避される。
【0045】
図3(d)は、ノックバックの発生の恐れがなくなったときの作動を表している。ノックバックの発生の恐れがなくなった当初は、図3(c)のようにブレーキパッド11およびピストン19が押し込まれた状態となっているため、モータ10を正回転させて回転軸17を回転させ、推進軸18をブレーキパッド11側に前進させる。そして、推進軸18の先端をピストン19の底部に当接させて、ピストン19およびブレーキパッド11を押し戻しながら推進軸18を前進位置まで移動させる。このときの推進軸18の前進量は、待機位置から後退位置までの後退量bに対して、推進軸18が待機位置に位置していたときの推進軸18の先端とピストン19の底部との間のクリアランスaを足した量(=a+b)としている。これにより、推進軸18によってブレーキパッド11およびピストン19を通常時の位置まで押し戻すピストン補正移動を行うことができる。
【0046】
図3(e)は、ブレーキパッド11およびピストン19を通常時の位置まで押し戻した後の動作を表している。ブレーキパッド11およびピストン19が通常時の位置まで押し戻されたら、今度はモータ10を逆回転させて回転軸17を逆回転させ、推進軸18をブレーキパッド11の反対側に後退させる。これにより、推進軸18の先端がピストン19の底部から離れる。そして、推進軸18を待機位置まで後退させる待機位置移動を行うことで、推進軸18の先端とピストン19の底部との間に再びクリアランスaが設けられる。
【0047】
なお、ここではクリアランスaが設けられる分だけ推進軸18を後退させるようにしたが、図3(d)中に示したように、ピストン19の摺動に伴ってシール部材22がブレーキディスク12側に変位することから、その変位量cをクリアランスaに対して加えた分後退させるようにしても良い。例えば、変位量cは、ボディ14のうちシール部材22が収容される溝の壁面とシール部材22の側面とのクリアランス分およびピストン19の摺動によるシール部材22の変形分を加算した値となる。この値は、実験により求められることから、予め実験で変位量cを求めておき、その変位量cをクリアランスaに対して加えることで、推進軸18の後退量とすれば良い。このように、シール部材22の変位量cに基づいてピストン補正移動の際のモータ10への通電時間を補正することで、より正確にピストン19を通常時の位置に戻すことが可能となる。
【0048】
また、上記動作は、動作中にドライバによるブレーキ操作が為されていない場合を表しているが、動作中にドライバによるブレーキ操作が為されることもある。この場合には、ノックバックの発生後に、図3(b)に示す状態となる。したがって、ブレーキパッド11およびピストン19がほぼ通常時の位置まで押し戻されているため、この場合にはモータ10を正回転させて推進軸18を図3(e)に示される待機位置まで戻すだけで、推進軸18の先端とピストン19の底部との間に再びクリアランスaを設けることができる。
【0049】
このような動作を行うことで、ノックバックが発生しても、ブレーキパッド11およびピストン19を通常時の位置に戻せると共に、推進軸18の先端とピストン19の底部との間のクリアランスも通常時の位置に戻せる。したがって、ドライバがブレーキペダル3を踏み込んだときに、通常時よりも深くまでブレーキペダル3を踏み込まないと制動力を発生させられなくなるという不具合を解消することができる。また、EPB2の動作によってノックバック現象を抑制できることから、アクチュエータ7に備えられた制御弁にてM/C5とW/C6との間を遮断しなくても良いため、ドライバがブレーキ操作を行ったときには、それが反映されてサービスブレーキ力を発生させることができる。さらに、EPB2の動作は、モータ10の制御によって行われるため、サービスブレーキ1の自動加圧機能によってブレーキパッド11およびピストン19を初期位置に戻す場合と比較して、より正確に初期位置に戻すことが可能となる。したがって、ブレーキフィーリングに影響を与えないで済む。
【0050】
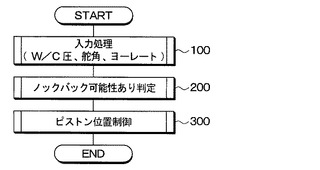
続いて、上記のように構成されたブレーキシステムを用いてEPB−ECU9が上記各種機能部および図示しない内蔵のROMに記憶されたプログラムに従って実行するノックバック抑制制御処理について説明する。図4は、ノックバック抑制制御処理の詳細を示したフローチャートである。この処理は、例えばイグニッションスイッチがオンされているときに所定の制御周期毎に実行される。
【0051】
まず、ステップ100では、入力処理を行う。入力処理では、W/C圧センサ60や舵角センサ61およびヨーレートセンサ62の検出信号を入力し、入力した各検出信号に基づいてW/C圧や舵角およびヨーレートを算出する。
【0052】
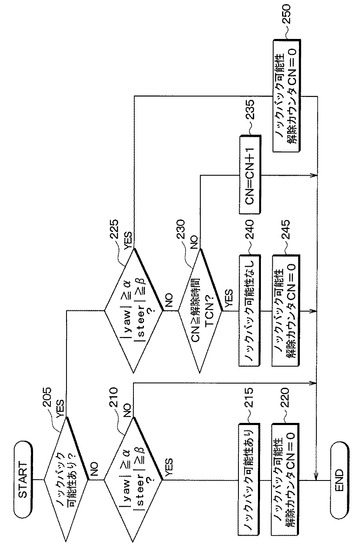
続いて、ステップ200に進み、ノックバック可能性あり判定処理を行う。この処理を行う部分が本発明のノックバック可能性判定手段に相当する。図5は、このノックバック可能性あり判定処理の詳細を示したフローチャートである。
【0053】
まず、ステップ205では、ノックバック可能性ありか否かを判定する。ここでは、後述するステップ215においてノックバック可能性ありを示すフラグがセットされていた場合に肯定判定され、フラグがリセットされていた場合には否定判定される。最初の制御周期ではフラグがリセットされた状態になっているため、否定判定されてステップ210に進む。
【0054】
ステップ210では、ノックバック可能性ありの条件、つまりノックバックの発生が予測される条件を満たしているか否かを判定する。ここでは、ヨーレートの絶対値|yaw|がヨーレート閾値α以上あり、かつ、舵角の絶対値|steer|が舵角閾値β以上あることをノックバック可能性ありの条件としている。ノックバックは、旋回時のブレーキディスク12の傾斜が大きくなったときに発生し、ノックバックが発生するような旋回状態は、旋回半径が小さくなるときである。また、旋回半径が小さくなるのは、ヨーレートおよび舵角が大きくなるときである。このため、ノックバックが発生し得るヨーレートや舵角を判定閾値として、発生しているヨーレートや舵角が判定閾値を超えるか否かに基づいてノックバックの発生を予測している。ただし、ヨーレートや舵角は、車両の旋回方向に応じて正負の異なる値で算出されることから、その絶対値が判定閾値を超えていることをノックバック可能性ありの条件としている。
【0055】
ここで肯定判定されればステップ215に進み、ノックバック可能性ありを示すフラグをセットしたのち、ステップ220に進んでノックバック可能性解除カウンタCNを0にリセットする。なお、ノックバック可能性解除カウンタCNとは、後述するように、ノックバック可能性ありを示すフラグのリセット条件として用いているカウンタである。また、否定判定されればノックバック可能性がないため、そのまま処理を終了する。
【0056】
一方、ステップ215でノックバック可能性ありを示すフラグがセットされたら、その次の制御周期からはステップ205で肯定判定される。そして、ステップ225以降に進み、ノックバック可能性ありのフラグのリセット条件を満たしているかの判定を行う。まず、ステップ225では、ノックバック可能性がなくなる条件を満たしたか否かを判定する。ここでは、ヨーレートの絶対値|yaw|がヨーレート閾値α以上ではなく、かつ、舵角の絶対値|steer|が舵角閾値β以上ではないことをノックバック可能性がなくなる条件としている。この条件を満たしたらノックバック可能性ありを示すフラグをリセットしても良いが、直ぐにリセットするとヨーレートや舵角が判定閾値近辺で変動した場合に、フラグのセットとリセットが短時間に繰り返されるようなチャタリングが生じる。このため、ステップ225で否定判定された場合には、ステップ230に進んでノックバック可能性解除カウンタCNが解除時間TCN以上になったか否かを判定し、解除時間TCN以上になるまではステップ235に進み、ノックバック可能性ありのフラグをリセットすることなくノックバック可能性解除カウンタCNをインクリメントする。そして、ステップ230でノックバック可能性解除カウンタCNが解除時間TCN以上になったと判定されると、ステップ240に進んでノックバック可能性なしになったことを示すべく、ノックバック可能性ありのフラグをリセットする。その後、ステップ245に進んでノックバック可能性解除カウンタCNを0にリセットして処理を終了する。
【0057】
また、ステップ225でノックバック可能性がなくなる条件を満たしておらず、ノックバック可能性ありの場合には、ステップ250に進んでノックバック可能性解除カウンタCNを0として処理を終了する。
【0058】
このようにして、ノックバック可能性あり判定処理が実行され、このノックバック可能性あり判定処理により、ノックバック可能性ありを示すフラグがセットされているかリセットされているかに基づいて、ノックバック可能性ありか否かを判定することが可能となる。
【0059】
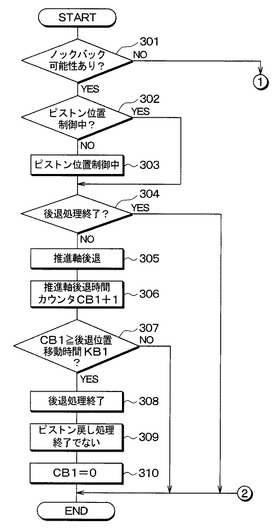
続いて、図4のステップ300では、ステップ200で実行したノックバック可能性あり判定処理の結果に基づいてピストン位置制御を実行する。この処理を実行する部分が本発明の位置制御手段に相当する。図6(a)および図6(b)は、このピストン位置制御の詳細を示したフローチャートである。
【0060】
まず、図6(a)に示すステップ301では、ノックバック可能性ありか否かを判定する。この判定は、ノックバック可能性あり判定処理での結果、つまりノックバック可能性ありを示すフラグがセットされているかリセットされているかに基づいて行われる。そして、ノックバック可能性ありを示すフラグがセットされていればステップ302以降の処理に進み、フラグがリセットされていれば図6(b)に示すステップ311以降の処理に進む。
【0061】
ステップ302では、ピストン位置制御中であるか否かを判定する。ここでは、ピストン位置制御中を示すフラグがセットされていれば、ピストン位置制御中であると判定している。ノックバック可能性ありを示すフラグがセットされてから初めての制御周期であれば、まだピストン位置制御中を示すフラグがセットされていないため、ステップ303に進んでピストン位置制御中を示すフラグをセットし、それからステップ304に進む。そして、既にピストン位置制御中を示すフラグがセットされていれば、ステップ303に進むことなくステップ304に進む。
【0062】
ステップ304では、後退処理終了しているか否かを判定する。ここでいう後退処理とは、上記した図3(a)の状態から図3(b)の状態のように推進軸18を後退させる処理を意味している。ここでは、後述するステップ308において例えば後退処理終了を示すフラグがセットされていた場合には肯定判定され、フラグがリセットされていれば否定判定される。ここで、後退処理終了していなければステップ305に進み、推進軸18を後退させる動作を指示する。これにより、モータ10は電流が流されることで逆回転させられ、推進軸18が後退させられていく。そして、ステップ306に進み、推進軸後退時間カウンタCB1をインクリメントする。推進軸後退時間カウンタCB1とは、推進軸18の後退を行った時間を計測するカウンタである。推進軸18の後退量は、モータ10に対して電流を流した時間に依存することから、推進軸18の後退を行った時間を計測することで制御可能である。したがって、推進軸後退時間カウンタCB1をインクリメントすることで、推進軸18の後退を行った時間を計測する。
【0063】
その後、ステップ307に進み、推進軸後退時間カウンタCB1が後退位置移動時間KB1以上になったか否かを判定する。後退位置移動時間KB1は、推進軸18の後退量が図3(b)に示す後退量bに至るまでに掛かる時間である。つまり、推進軸後退時間カウンタCB1が後退位置移動時間KB1に至るまでのカウントに掛かる時間がモータ10への通電時間であり、推進軸18を後退位置まで移動させるのに掛かる時間となる。この時間が、本発明の後退位置移動通電時間に相当している。
【0064】
ステップ307で否定判定されている期間中は、まだ推進軸18が後退位置まで達していないことを意味しているため、処理を終了する。この場合には、再びステップ301〜307の処理が実行されることになり、推進軸後退時間カウンタCB1が後退位置移動時間KB1に達するまでその処理が続けられる。そして、ステップ307で肯定判定されると、推進軸18が後退位置に達したことからステップ308に進んで後退処理終了を示すフラグをセットする。その後、ステップ309に進んでピストン戻し処理終了でないことを記憶したのち、ステップ310で推進軸後退時間カウンタCB1を0にリセットして処理を終了する。ピストン戻し処理とは、ノックバック時に押し込まれたピストン19を戻すための処理であり、ノックバック可能性がなくなったときに行われる。このときには、まだピストン戻し処理を実行していないため、例えばピストン戻し処理終了を示すフラグをリセットすることでピストン戻し処理終了でないことを記憶する。
【0065】
このようにして、ノックバック可能性ありのときの処理が行われ、図3(b)に示すように推進軸18が後退位置に保持された状態となるようにできる。
【0066】
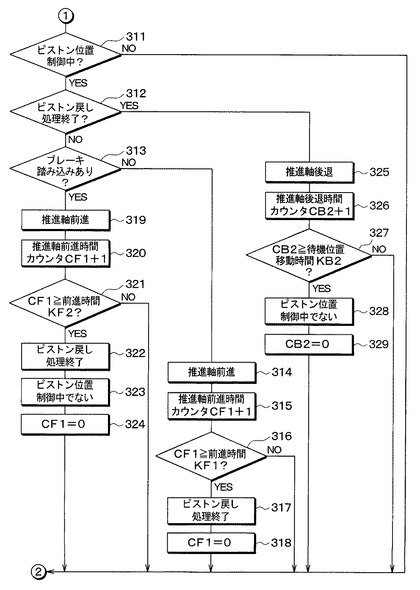
一方、ステップ301で否定判定されると、ステップ311においてピストン位置制御中であるか否かを判定する。この判定は、上記したステップ303においてピストン位置制御中を示すフラグがセットされているか否かに基づいて行われる。そして、ピストン位置制御中を示すフラグがセットされていればステップ312以降の処理に進み、フラグがセットされていなければそのまま処理を終了する。すなわち、ピストン位置制御中であれば、ノックバック可能性ありのために推進軸18が後退させられていることから、推進軸18を通常時の待機位置に移動させる必要がある。逆に、ピストン位置制御中でなければ、推進軸18が後退させられていないため、推進軸18は待機位置にあると想定され、推進軸18を移動させる必要がない。このため、ステップ312で肯定判定された場合にのみステップ312以降の処理を実行する。
【0067】
ステップ312では、ピストン戻し処理終了か否かを判定する。この判定は、ピストン戻し処理終了を示すフラグがリセットされているか否かに基づいて行われる。推進軸18が後退位置に移動させられてから直ぐであれば、まだピストン戻し処理終了に至っていないため、否定判定されてステップ313に進むことになる。そして、ステップ313でブレーキ踏込みがあるか否かを判定する。ブレーキ踏込みの有無については、W/C圧センサ60の検出信号に基づいて算出されたW/C圧より判定でき、例えばW/C圧が発生していればブレーキペダルの踏み込みがあると判定される。この判定を行う部分が、本発明のノックバック後加圧判定手段に相当する。
【0068】
ここで、ブレーキペダル踏み込みがなければ、ステップ314以降に進んでブレーキ踏込みがない場合のピストン19を押し戻すための処理を行う。すなわち、ステップ314では推進軸前進処理を行い、モータ10への通電を行うことでモータ10を正回転させ、推進軸19をブレーキパッド11側に移動させる。そして、ステップ315に進み、推進軸前進時間カウンタCF1をインクリメントする。推進軸前進時間カウンタCF1とは、推進軸18の前進を行った時間を計測するカウンタである。推進軸18の前進量は、モータ10に対して電流を流した時間に依存することから、推進軸18の前進を行った時間を計測することで制御可能である。したがって、推進軸前進時間カウンタCF1をインクリメントことで、推進軸18の前進を行った時間を計測する。
【0069】
その後、ステップ316に進み、推進軸前進時間カウンタCF1が前進時間KF1以上になったか否かを判定する。前進時間KF1は、推進軸18の前進量が図3(d)に示す前進量a+bに至るまでに掛かる時間である。つまり、推進軸前進時間カウンタCF1が前進時間KF1に至るまでのカウントに掛かる時間がモータ10への通電時間であり、推進軸18を前進位置まで移動させるのに掛かる時間となる。
【0070】
ステップ316で否定判定されている期間中は、まだ推進軸18が前進位置まで達していないことを意味しているため、処理を終了する。この場合には、再びステップ301、311〜316の処理が実行されることになり、推進軸前進時間カウンタCF1が前進時間KF1に達するまでその処理が続けられる。そして、ステップ316で肯定判定されると、推進軸18が前進位置に達したことからステップ317に進んでピストン戻し処理終了を示すフラグをセットする。その後、ステップ318に進んで前進時間カウンタCF1を0にリセットして処理を終了する。
【0071】
一方、ブレーキペダル踏み込みがあれば、ステップ319以降に進んでブレーキペダル踏み込みがあった場合のピストン19を押し戻すための処理を行う。すなわち、ステップ319では推進軸前進処理を行い、モータ10への通電を行うことでモータ10を正回転させ、推進軸19をブレーキパッド11側に移動させる。そして、ステップ320に進み、推進軸前進時間カウンタCF1をインクリメントする。その後、ステップ321で、推進軸前進時間カウンタCF1が前進時間KF2以上になったか否かを判定する。前進時間KF2は、推進軸18を図3(e)に示す待機位置に至るまでに掛かる時間である。つまり、推進軸前進時間カウンタCF1が前進時間KF2に至るまでのカウントに掛かる時間がモータ10への通電時間であり、推進軸18を待機位置まで移動させるのに掛かる時間となる。
【0072】
ステップ321で否定判定されている期間中は、まだ推進軸18が待機位置まで達していないことを意味しているため、処理を終了する。この場合には、再びステップ301、311〜313、319〜321の処理が実行されることになり、推進軸前進時間カウンタCF1が前進時間KF2に達するまでその処理が続けられる。そして、ステップ321で肯定判定されると、推進軸18が待機位置に達したことからステップ322に進んでピストン戻し処理終了を示すフラグをセットする。また、ブレーキ踏み込みがあった場合には、既に推進軸18が待機位置に戻っており、その後に推進軸18を後退させるための後退処理を行う必要がない。また、ステップ323に進んで、例えば後退処理中を示すフラグをリセットすることで後退処理中でないことを記憶する。その後、ステップ324に進んで前進時間カウンタCF1を0にリセットして処理を終了する。
【0073】
さらに、ステップ312でピストン戻し処理終了と判定された場合は、図3(d)の状態になっていることを示している。このため、ステップ325に進んで推進軸18を後退させる動作を指示する。これにより、モータ10は電流が流されることで逆回転させられ、推進軸18が後退させられていく。そして、ステップ326に進み、推進軸後退時間カウンタCB2をインクリメントする。推進軸後退時間カウンタCB2とは、推進軸18の後退を行った時間を計測するカウンタである。上記したように、推進軸18の後退量は、モータ10に対して電流を流した時間に依存することから、推進軸18の後退を行った時間を計測することで制御可能である。したがって、推進軸後退時間カウンタCB2をインクリメントことで、推進軸18の後退を行った時間を計測する。
【0074】
その後、ステップ327に進み、推進軸後退時間カウンタCB2が後退位置移動時間KB2以上になったか否かを判定する。後退位置移動時間KB2は、推進軸18の後退量が図3(d)に示す前進位置から図3(e)に示す待機位置までの後退量aに至るのに掛かる時間である。つまり、推進軸後退時間カウンタCB2が後退位置移動時間KB2に至るまでのカウントに掛かる時間がモータ10への通電時間であり、推進軸18を前進位置から待機位置まで移動させるのに掛かる時間となる。この時間が、本発明の待機位置移動通電時間に相当している。
【0075】
ステップ327で否定判定されている期間中は、まだ推進軸18が待機位置まで達していないことを意味しているため、処理を終了する。この場合には、再びステップ301、311、312、325〜327の処理が実行されることになり、推進軸後退時間カウンタCB2が後退位置移動時間KB2に達するまでその処理が続けられる。そして、ステップ327で肯定判定されると、推進軸18が待機位置に達したことからステップ328に進んでピストン位置制御が終了したこととして、例えばピストン位置制御中を示すフラグをリセットすることでピストン位置制御中でないことを記憶する。その後、ステップ329に進んで前進時間カウンタCF1を0にリセットして処理を終了する。
【0076】
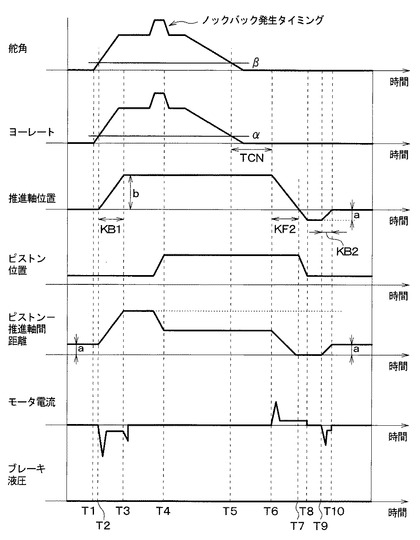
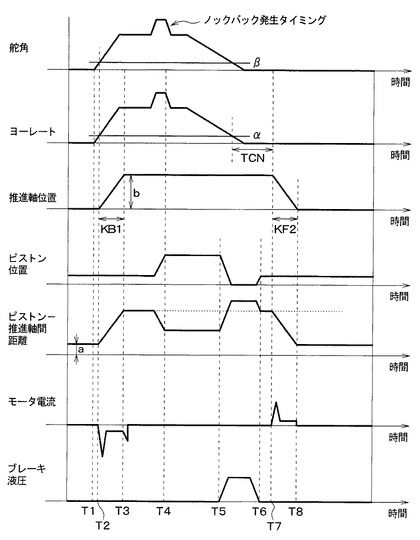
このようにして、ピストン位置制御処理が完了し、ノックバック抑制制御処理が終了する。図7および図8は、上記のようなノックバック抑制制御処理を実行した場合のタイミングチャートである。図7は、ノックバック抑制制御処理中にブレーキペダル3の踏み込みがなかった場合のタイミングチャート、図8は、ノックバック抑制制御処理中にブレーキペダル3の踏み込みがあった場合のタイミングチャートを示してある。
【0077】
まず、時点T1以前はピストン19の底部と推進軸18の先端との間に所定のクリアランスaが設けられた状態となっている。この状態で、時点T1においてドライバがステアリング操作を行うことで舵角が発生すると、車両が旋回中となり、ヨーレートも発生する。そして、旋回半径が小さく時点T2においてノックバック可能性ありの条件を満たすと、モータ10を逆回転させることで推進軸18が後退させられ、時点T3において後退量b、すなわち後退位置まで後退させられると、モータ10への通電が止められ、推進軸18が後退位置で保持される。
【0078】
そして、時点T4においてノックバックが発生した場合、ブレーキパッド11とブレーキディスク12とが当接してるときのピストン位置を0とすると、ノックバックによってピストン19が押し込まれることで、ピストン位置が大きくなる。つまり、ブレーキパッド11がブレーキディスク12から離れた状態となる。このとき、既に推進軸18が後退位置に保持されているため、ノックバック発生によってピストン19が推進軸18に接触することはない。
【0079】
そして、時点T5においてノックバック可能性がなくなる条件を満たすと、そこから所定時間経過後の時点T6よりにモータ10を正回転させることで推進軸18が前進させられる。これが時点T7において推進軸18が待機位置に到達してからも、時点T8において前進位置に到達するまで続けられる。これにより、ピストン19が初期位置に戻される。その後、時点T9においてモータ10を再び逆回転させることで推進軸18を後退させ、時点T10において推進軸18が待機位置に戻されることで、モータ10への通電が停止される。
【0080】
一方、図8に示すように、時点T1〜T4では、ブレーキペダル3の踏み込みがない場合の動作と同様の動作が行われていた場合において、時点T5においてブレーキペダル3の踏み込みがあったとすると、それにより発生したW/C圧によってピストン19が押し戻される。具体的には、ピストン位置が0、つまりブレーキパッド11がブレーキディスク12に当接する位置まで押し戻され、サービスブレーキ力が発生させられる。そして、時点T6においてブレーキペダル3の踏み込みが解除されると、シール部材22の弾性力に基づいてピストン19が初期位置に戻る。
【0081】
そして、ノックバック可能性がなくなる条件を満たしてから所定時間経過後の時点T7において、モータ10を正回転させることで推進軸18が前進させられる。これが時点T8において推進軸18が待機位置に到達まで続けられる。その後、モータ10への通電が停止される。
【0082】
以上説明したように、本実施形態では、サービスブレーキ1とEPB2の加圧機構が一体化された駐車ブレーキ一体化加圧機構とされるブレーキシステムにおいて、ノックバックが発生する可能性の有無を判定し、ノックバック可能性ありと判定されたときには、EPB2を駆動することでノックバックによる不具合が解消できるようにしている。すなわち、モータ10を逆回転させて推進軸18を後退させることで推進軸18の先端をピストン19の底部から離間させられるようにし、ノックバック可能性がなくなったら、モータ10を正回転させて推進軸18を前進させることでピストン19を通常時の位置に戻すピストン補正移動を行ったのち、その後再度、推進軸18を後退させることで待機位置に戻す待機位置移動を行うようにしている。
【0083】
これにより、ノックバックが発生しても、ブレーキパッド11およびピストン19を通常時の位置に戻せると共に、推進軸18の先端とピストン19の底部との間のクリアランスも通常時の位置に戻せる。したがって、ドライバがブレーキペダル3を踏み込んだときに、通常時よりも深くまでブレーキペダル3を踏み込まないと制動力を発生させられなくなるという不具合を解消することができる。また、EPB2の動作によってノックバック現象を抑制できることから、アクチュエータ7に備えられた制御弁にてM/C5とW/C6との間を遮断しなくても良いため、ドライバがブレーキ操作を行ったときには、それが反映されてサービスブレーキ力を発生させることができる。さらに、EPB2の動作は、モータ10の制御によって行われるため、サービスブレーキ1の自動加圧機能によってブレーキパッド11およびピストン19を初期位置に戻す場合と比較して、より正確に初期位置に戻すことが可能となる。したがって、ブレーキフィーリングに影響を与えないで済む。
【0084】
また、ピストン19と推進軸18が離間した位置から待機位置へ移動させるのに掛かる待機位置移動通電時間(KB2)と、推進軸18が待機位置から後退位置に移動させるのに掛かる後退位置移動通電時間(KB1)とを加算した時間を、ピストン補正移動の際のモータ10への通電時間としている。このように、モータ10への通電時間に基づいて、ピストン補正移動で推進軸18を移動させる位置を決めることができる。このため、位置センサなどによってピストン19の位置を検出しなくても、正確にピストン19を通常時の位置に戻すことが可能となる。
【0085】
(他の実施形態)
(1)上記実施形態において、後退位置を推進軸18の後端がシート面14dと接する場所としたが、推進軸18の後端がシート面14dから離間した場所であっても構わない。すなわち、ノックバック時にブレーキパッド11およびピストン19が押し込まれても、ピストン19の底部が推進軸18の先端に接触しない後退位置であれば良い。
【0086】
(2)上記実施形態では、ディスクブレーキを例に挙げて説明したが、他の形態のブレーキ機構についても、サービスブレーキ1とEPB2の加圧機構が一体化された駐車ブレーキ一体型加圧機構とされるブレーキシステムについて、本発明を適用できる。また、上記実施形態では、電子制御手段としてEPB−ECU9を例に挙げたが、これに限るものではない。例えば、上記実施形態では、ESC−ECU8やEPB−ECU9を備えた構成を例に挙げたが、これらが一体的なECUとされることで電子制御手段を構成していても良いし、他のECUによって実現されても良い。すなわち、本発明は、サービスブレーキ1とEPB2とを備えたブレーキシステムにおいて、駐車ブレーキ一体型加圧機構を有するものに対してノックバック抑制制御を行う電子制御手段であれば、上記実施形態の構成以外の構成であっても良い。
【符号の説明】
【0087】
1…サービスブレーキ、2…EPB、5…M/C、6…W/C、7…アクチュエータ、8…ESC−ECU、9…EPB−ECU、10…モータ、11…ブレーキパッド、12…ブレーキディスク、13…キャリパ、14…ボディ、14a…中空部、14b…通路、14d…シート面、17…回転軸、17a…雄ネジ溝、18…推進軸、18a…雌ネジ溝、19…ピストン、22…シール部材、23…操作SW、60…W/C圧センサ、61…舵角センサ、62…ヨーレート
【技術分野】
【0001】
本発明は、電動パーキングブレーキ(以下、EPB(Electric parking brake)という)の加圧機構とサービスブレーキのホイールシリンダ(以下、W/Cという)とが一体型とされた駐車ブレーキ一体型加圧機構を有する車両用ブレーキシステムを用いてノックバック抑制制御を行うブレーキ制御装置に関するものである。
【背景技術】
【0002】
従来、車両用のブレーキ制御装置において、旋回中に起きるノックバック現象を防止するために、電気的に制御可能なサービスブレーキの自動加圧時に用いられるマスタシリンダ(以下、M/Cという)とW/Cとの間に備えられた制御弁を遮断することが提案されている(特許文献1参照)。すなわち、旋回中に傾斜したブレーキディスクによってブレーキパッドおよび加圧用のピストンが押し込まれ、ブレーキディスクとブレーキパッドの間が離れることで、ドライバがブレーキペダルを踏み込んだときに、通常時よりも深くまでブレーキペダルを踏み込まないと制動力を発生させられなくなる。このため、M/CとW/Cとの間の制御弁を遮断することで、ブレーキパッドおよびピストンが押し込まれることを抑制し、ノックバック現象を防止できるようにしている。
【0003】
また、ブレーキディスクの傾斜によってブレーキパッドおよびピストンが押し込まれたときに、W/C圧を予加圧することで、ブレーキパッドおよびピストンをブレーキディスク側に押し戻すようにしている。これにより、ブレーキペダルが踏み込まれたときに、ブレーキパッドおよびピストンが押し込まれる前の初期位置に戻った状態となり、ノックバック現象を防止することが可能となる。
【先行技術文献】
【特許文献】
【0004】
【特許文献1】特開2010−95023号公報
【発明の概要】
【発明が解決しようとする課題】
【0005】
しかしながら、M/CとW/Cとの間の制御弁を遮断するという制御を行う場合、制御中にドライバがブレーキを掛けようとしたときに、制御弁によってM/CとW/Cの間が遮断されているため、ドライバのブレーキ操作が反映されなくなるという問題がある。
【0006】
また、W/C圧を予加圧するという制御を行う場合、サービスブレーキの自動加圧機能によってW/C圧の予加圧を行うことになるが、自動加圧機能によってブレーキパッドおよびピストンを正確に初期位置に戻すことが難しい。このため、安定してブレーキディスクとブレーキパッドの間のクリアランスを確保しづらく、ブレーキパッドがブレーキディスクに接触してブレーキ引き釣り感を与えるなど、ブレーキフィーリングに影響を与えてしまう。
【0007】
本発明は上記点に鑑みて、ドライバのブレーキ操作を反映でき、かつ、ブレーキフィーリングに影響を与えなくてもノックバック現象を抑制することができるブレーキ制御装置を提供することを目的とする。
【課題を解決するための手段】
【0008】
上記目的を達成するため、請求項1に記載の発明では、電子制御手段(9)は、被摩擦材(12)によって押圧部材(19)が離間方向に押し込まれるノックバックの可能性の有無を判定するノックバック可能性判定手段(200)と、ノックバック可能性判定手段(200)にてノックバックの可能性ありと判定すると、モータ(10)への通電に基づいて移動部材(18)を所定の待機位置より被摩擦材(12)から離間方向にある所定の後退位置に移動させる後退移動を行うと共に、ノックバック可能性ありと判定されたのちノックバック可能性なしと判定されたときには、モータ(10)への通電に基づいて移動部材(18)を後退位置より被摩擦材(12)の方向に所定量前進させることで押圧部材(19)を被摩擦材(12)に移動させる押圧部材補正移動を行ったのち、再度、移動部材(18)を被摩擦材(12)から離間方向に移動させて待機位置に移動させる待機位置移動を行う位置制御を実行する位置制御手段(300)とを有していることを特徴としている。
【0009】
このように、ノックバック可能性の有無を判定し、ノックバック可能性ありと判定されたときには、パーキングブレーキ(2)のモータ(10)を駆動することでノックバックによる不具合が解消できるようにしている。すなわち、移動部材(18)を後退させることで移動部材(18)と押圧部材(19)の互いの押圧面が離間させられるようにし、ノックバック可能性がなくなったら、移動部材(18)を前進させることで押圧部材(19)を通常時の位置に戻す押圧部材補正移動を行ったのち、その後再度、移動部材(18)を後退させることで待機位置に戻す待機位置移動を行うようにしている。
【0010】
これにより、ノックバックが発生しても、摩擦材(11)および押圧部材(19)を通常時の位置に戻せると共に、移動部材(18)と押圧部材(19)の互いの押圧面の間のクリアランスも通常時の位置に戻せる。したがって、ノックバック現象を抑制することができる。また、パーキングブレーキ(2)の動作によってノックバック現象を抑制できることから、制御弁にてブレーキ液圧発生手段(3〜5)とW/C(6)との間を遮断しなくても良いため、ドライバがブレーキ操作を行ったときには、それが反映されてサービスブレーキ力を発生させることができる。さらに、パーキングブレーキ(2)の動作は、モータ(10)の制御によって行われるため、サービスブレーキ(1)の自動加圧機能によって摩擦材(11)および押圧部材(19)を初期位置に戻す場合と比較して、より正確に初期位置に戻すことが可能となる。したがって、ブレーキフィーリングに影響を与えないで済む。
【0011】
請求項2に記載の発明では、電子制御手段(9)は、押圧部材(19)と移動部材(18)が離間した位置から待機位置へ移動させるのに掛かるモータ(10)への通電時間である待機位置移動通電時間(KB2)と、移動部材(18)が待機位置から後退位置に移動させるのに掛かるモータ(10)への通電時間である後退位置移動通電時間(KB1)とを加算した時間を、押圧部材補正移動の際のモータ(10)への通電時間とすることを特徴としている。
【0012】
このように、モータ(10)への通電時間に基づいて、押圧部材補正移動で移動させる位置を決めることができる。このため、位置センサなどによって押圧部材(19)の位置を検出しなくても、正確に押圧部材(19)を通常時の位置に戻すことが可能となる。
【0013】
請求項3に記載の発明では、電子制御装置(9)は、押圧部材(19)が移動部材(18)によって被摩擦材(12)の方向へ移動する際のシール部材(22)の変位量(c)に基づき、押圧部材補正移動の際のモータ(10)への通電時間を補正することを特徴としている。
【0014】
このように、シール部材(22)の変位量(c)に基づいて押圧部材補正移動の際のモータ(10)への通電時間を補正することで、より正確に押圧部材(19)を通常時の位置に戻すことが可能となる。
【0015】
請求項4に記載の発明では、電子制御手段(9)は、ノックバック可能性判定手段(200)がノックバック可能性ありと判定してから押圧部材補正移動を行う前に、ホイールシリンダ(6)内の油圧が加圧されたことを判定するノックバック後加圧判定手段(313)を有し、ノックバック後加圧判定手段(313)にて油圧が加圧されたことが判定されたときには、移動部材(18)を後退位置から待機位置に直接移動させ、位置制御を終了することを特徴としている。
【0016】
このように、ノックバック後加圧判定手段(313)にて油圧が加圧されたことが判定されたときには、既に押圧部材(19)が通常時の位置に戻っていることから、移動部材(18)を後退位置から待機位置に直接移動させ、位置制御を終了するようにしても良い。
【0017】
なお、上記各手段の括弧内の符号は、後述する実施形態に記載の具体的手段との対応関係を示すものである。
【図面の簡単な説明】
【0018】
【図1】本発明の第1実施形態にかかるノックバック抑制制御を行うブレーキ制御装置が適用された車両用のブレーキシステムの全体概要を示した模式図である。
【図2】ブレーキシステムに備えられる後輪系のブレーキ機構の断面模式図である。
【図3】ノックバック抑制制御で行う動作を示した後輪系のブレーキ機構の簡略化断面模式図である。
【図4】ノックバック抑制制御処理の詳細を示したフローチャートである。
【図5】ノックバック可能性あり判定処理の詳細を示したフローチャートである。
【図6(a)】ピストン位置制御の詳細を示したフローチャートである。
【図6(b)】ピストン位置制御の詳細を示したフローチャートである。
【図7】ノックバック抑制制御処理を実行した場合のタイミングチャートである。
【図8】ノックバック抑制制御処理を実行した場合のタイミングチャートである。
【発明を実施するための形態】
【0019】
以下、本発明の実施形態について図に基づいて説明する。なお、以下の各実施形態相互において、互いに同一もしくは均等である部分には、図中、同一符号を付してある。
【0020】
(第1実施形態)
本発明の第1実施形態について説明する。本実施形態では、後輪系にディスクブレーキタイプのEPBを適用している車両用ブレーキシステムを例に挙げて説明する。図1は、本実施形態にかかるノックバック抑制制御を行うブレーキ制御装置が適用された車両用のブレーキシステムの全体概要を示した模式図である。また、図2は、ブレーキシステムに備えられる後輪系のブレーキ機構の断面模式図である。以下、これらの図を参照して説明する。
【0021】
図1に示すように、ブレーキシステムは、ドライバの踏力に基づいてブレーキ力を発生させるサービスブレーキ1と駐車時に車両の移動を規制するためのEPB2とが備えられている。
【0022】
サービスブレーキ1は、ドライバによるブレーキペダル3の踏み込みに応じた踏力を倍力装置4にて倍力したのち、この倍力された踏力に応じたブレーキ液圧をマスタシリンダ(以下、M/Cという)5内に発生させ、このブレーキ液圧を各車輪のブレーキ機構に備えられたホイールシリンダ(以下、W/Cという)6に伝えることでブレーキ力を発生させる。また、M/C5とW/C6との間にブレーキ液圧制御用のアクチュエータ7が備えられており、サービスブレーキ1により発生させるブレーキ力を調整し、車両の安全性を向上させるための各種制御(例えば、アンチスキッド制御等)を行える構造とされている。
【0023】
アクチュエータ7を用いた各種制御は、ESC(Electronic Stability Control)−ECU8にて実行される。例えば、ESC−ECU8からアクチュエータ7に備えられる図示しない各種制御弁やポンプ駆動用のモータを制御するための制御電流を出力することにより、アクチュエータ7に備えられる油圧回路を制御し、W/C6に伝えられるW/C圧を制御する。これにより、車輪スリップの回避などを行い、車両の安全性を向上させる。例えば、アクチュエータ7は、各車輪毎に、W/C6に対してM/C5内に発生させられたブレーキ液圧もしくはポンプ駆動により発生させられたブレーキ液圧が加えられることを制御する増圧制御弁や、各W/C6内のブレーキ液をリザーバに供給することでW/C圧を減少させる減圧制御弁等を備えており、W/C圧を増圧・保持・減圧制御できる構成とされている。このアクチュエータ7の構成に関しては、従来より周知となっているため、ここでは詳細については省略する。
【0024】
一方、EPB2は、モータ10にてブレーキ機構を制御することでブレーキ力を発生させるものであり、モータ10の駆動を制御するEPB制御装置(以下、EPB−ECUという)9を有して構成されている。
【0025】
ブレーキ機構は、本実施形態のブレーキシステムにおいてブレーキ力を発生させる機械的構造であり、前輪系のブレーキ機構はサービスブレーキ1の操作によってブレーキ力を発生させる構造とされているが、後輪系のブレーキ機構は、サービスブレーキ1の操作とEPB2の操作の双方に対してブレーキ力を発生させる共用の構造とされている。前輪系のブレーキ機構は、後輪系のブレーキ機構に対して、EPB2の操作に基づいてブレーキ力を発生させる機構をなくした従来から一般的に用いられているブレーキ機構であるため、ここでは説明を省略し、以下の説明では後輪系のブレーキ機構について説明する。
【0026】
後輪系のブレーキ機構では、サービスブレーキ1を作動させたときだけでなくEPB2を作動させたときにも、図2に示す摩擦材であるブレーキパッド11を押圧し、ブレーキパッド11によって被摩擦材であるブレーキディスク12を挟み込むことにより、ブレーキパッド11とブレーキディスク12との間に摩擦力を発生させ、ブレーキ力を発生させる。
【0027】
具体的には、ブレーキ機構は、図1に示すキャリパ13内において、図2に示すようにブレーキパッド11を押圧するためのW/C6のボディ14に直接固定されているモータ10を回転させるとにより、モータ10の駆動軸10aに備えられた平歯車15を回転させ、平歯車15に噛合わされた平歯車16にモータ10の回転力を伝えることによりブレーキパッド11を移動させ、EPB2によるブレーキ力を発生させる。
【0028】
キャリパ13内には、W/C6およびブレーキパッド11に加えて、ブレーキパッド11に挟み込まれるようにしてブレーキディスク12の端面の一部が収容されている。W/C6は、シリンダ状のボディ14の中空部14a内に通路14bを通じてブレーキ液圧を導入することで、ブレーキ液収容室である中空部14a内にW/C圧を発生させられるようになっており、中空部14a内に回転軸17、推進軸18、ピストン19などを備えて構成されている。
【0029】
回転軸17は、一端がボディ14に形成された挿入孔14cを通じて平歯車16に連結され、平歯車16が回動させられると、平歯車16の回動に伴って回動させられる。この回転軸17における平歯車16と連結された端部とは反対側の端部において、回転軸17の外周面には雄ネジ溝17aが形成されている。一方、回転軸17の他端は、挿入孔14cに挿入されることで軸支されている。具体的には、挿入孔14cには、Oリング20と共に軸受け21が備えられており、Oリング20にて回転軸17と挿入孔14cの内壁面との間を通じてブレーキ液が漏れ出さないようにされながら、軸受け21により回転軸17の他端を軸支持している。
【0030】
推進軸18は、中空状の筒部材にて構成され、内壁面に回転軸17の雄ネジ溝17aと螺合する雌ネジ溝18aが形成されている。この推進軸18は、例えば回転防止用のキーを備えた円柱状もしくは多角柱状に構成されることで、回転軸17が回動しても回転軸17の回動中心を中心として回動させられない構造になっている。このため、回転軸17が回動させられると、雄ネジ溝17aと雌ネジ溝18aとの噛合いにより、回転軸17の回転力を回転軸17の軸方向に推進軸18を移動させる力に変換する。推進軸18は、モータ10の駆動が停止されると、雄ネジ溝17aと雌ネジ溝18aとの噛合いによる摩擦力により同じ位置で止まるようになっており、目標ブレーキ力になったときにモータ10の駆動を停止すれば、その位置に推進軸18を保持することができる。なお、本明細書においては、モータ10を正回転させて推進軸18をブレーキパッド11の方向に移動させることを前進、モータ10を逆回転させて推進軸18をブレーキパッド11から離間方向に移動させることを後退として説明する。
【0031】
ピストン19は、推進軸18の外周を囲むように配置されるもので、有底の円筒部材もしくは多角筒部材にて構成され、外周面がボディ14に形成された中空部14aの内壁面と接するように配置されている。ピストン19の外周面とボディ14の内壁面との間のブレーキ液洩れが生じないように、ボディ14の内壁面にシール部材22が備えられ、ピストン19の端面にW/C圧を付与できる構造とされている。このシール部材22が、ロック制御後のリリース制御時にピストン19を引き戻すための反力を発生させるために用いられる部材である。このシール部材22を備えてあるため、基本的には旋回中に傾斜したブレーキディスク12によってブレーキパッド11およびピストン19が押し込まれても、それらをブレーキディスク12側に押し戻してブレーキディスク12とブレーキパッド11との間が所定のクリアランスで保持されるようにできる。しかしながら、ブレーキディスク12によってブレーキパッド11およびピストン19を押し込む力が大きいと、シール部材22による押し戻し作用だけでは十分にブレーキパッド11およびピストン19をブレーキディスク12側に押し戻すことができない。このため、ノックバック現象が発生することになる。これを抑制するために、後述するようなノックバック抑制制御を実行するようにしている。
【0032】
また、ピストン19は、回転軸17が回転しても回転軸17の回動中心を中心として回動させられないように、推進軸18に回転防止用のキーが備えられる場合にはそのキーが摺動するキー溝が備えられ、推進軸18が多角柱状とされる場合にはそれと対応する形状の多角筒状とされる。
【0033】
このピストン19の先端にブレーキパッド11が配置され、ピストン19の移動に伴ってブレーキパッド11を紙面左右方向に移動させるようになっている。具体的には、ピストン19は、推進軸18の移動に伴って紙面左方向に移動可能で、かつ、ピストン19の端部(ブレーキパッド11が配置された端部と反対側の端部)にW/C圧が付与されることで推進軸18から独立して紙面左方向に移動可能な構成とされている。そして、推進軸18が待機位置(モータ10が回転させられる前の状態)のときに、中空部14a内のブレーキ液圧が付与されていない状態(W/C圧=0)であれば、後述するシール部材22の弾性力によりピストン19が紙面右方向に移動させられ、ブレーキパッド11をブレーキディスク12から離間させられるようになっている。また、モータ10が回転させられて推進軸18が待機位置から紙面左方向に移動させられているときにW/C圧が0になると、移動した推進軸18によってピストン19の紙面右方向への移動が規制され、ブレーキパッド11がその場所で保持される。
【0034】
このように構成されたブレーキ機構では、サービスブレーキ1が操作されると、それにより発生させられたW/C圧に基づいてピストン19が紙面左方向に移動させられることでブレーキパッド11がブレーキディスク12に押圧され、サービスブレーキ力を発生させる。また、EPB2が操作されると、モータ10が駆動されることで平歯車15が回転させられ、それに伴って平歯車16および回転軸17が回転させられるため、雄ネジ溝17aおよび雌ネジ溝18aの噛合いに基づいて推進軸18がブレーキディスク12側(紙面左方向)に移動させられる。そして、それに伴って推進軸18の先端がピストン19の底面に当接してピストン19を押圧し、ピストン19も同方向に移動させられることでブレーキパッド11がブレーキディスク12に押圧され、駐車ブレーキ力を発生させる。このため、サービスブレーキ1の操作とEPB2の操作の双方に対してブレーキ力を発生させる共用のブレーキ機構とすることが可能となる。
【0035】
また、サービスブレーキ1が作動されることでW/C圧が発生させられている状態でEPB2が操作されると、W/C圧によってピストン19が既に紙面左方向に移動させられているため、推進軸18に掛かる負荷が軽減される。このため、推進軸18がピストン19に当接するまではモータ10はほぼ無負荷状態で駆動される。そして、推進軸18がピストン19に当接するとピストン19を紙面左方向の押す押圧力が加えられ、EPB2によるブレーキ力が発生させられるようになっている。
【0036】
EPB−ECU9は、CPU、ROM、RAM、I/Oなどを備えた周知のマイクロコンピュータによって構成され、ROMなどに記憶されたプログラムにしたがってモータ10の回転を制御することにより駐車ブレーキ制御を行うものである。このEPB−ECU9が本発明の電子制御装置に相当する。EPB−ECU9は、例えば車室内のインストルメントパネル(図示せず)に備えられた操作スイッチ(SW)23の操作状態に応じた信号等を入力し、操作SW23の操作状態に応じてモータ10を駆動する。さらに、EPB−ECU9は、インストルメントパネルに備えられたロック/リリース表示ランプ24に対してモータ10の駆動状態に応じて、ロック中であるかリリース中であるかを示す信号を出力する。
【0037】
具体的には、EPB−ECU9は、モータ10に流される電流(モータ電流)をモータ10の上流側もしくは下流側で検出するモータ電流検出、ロック制御を終了させるときの目標モータ電流(目標電流値)を演算する目標モータ電流演算、モータ電流が目標モータ電流に達したか否かの判定、操作SW23の操作状態に基づくモータ10の制御など、ロック・リリース制御を実行するための各種機能部を有している。このEPB−ECU9により操作SW23の状態やモータ電流に基づいてモータ10を正回転や逆回転させたりモータ10の回転を停止させることで、EPB2をロック・リリースする制御を行う。
なお、アクチュエータ7の内部に備えられたW/C圧センサ60や図示しないステアリング機構に備えられた舵角センサ61および車体に備えられたヨーレートセンサ62の検出信号がEPB−ECU9に入力されるようにしてある。このため、EPB−ECU9にて、W/C圧や舵角およびヨーレートを監視できるようになっている。
【0038】
以上のように構成された車両用ブレーキシステムでは、基本的には、車両走行時にサービスブレーキ1によってサービスブレーキ力を発生させることで車両に制動力を発生させるという動作と、サービスブレーキ1によって停車させられた際に、ドライバが操作SW23を押下してEPB2を作動させて駐車ブレーキ力を発生させることで停車状態を維持するという動作を行う。すなわち、サービスブレーキ1の動作としては、車両走行時にドライバによるブレーキペダル操作が行われると、M/C5に発生したブレーキ液圧がW/C6に伝えられることでサービスブレーキ力を発生させる。また、EPB2の動作としては、モータ10を駆動することでピストン19を移動させ、ブレーキパッド11をブレーキディスク12に押し付けることで駐車ブレーキ力を発生させたり、ブレーキパッド11をブレーキディスク12から離すことで駐車ブレーキ力を解除したりする。
【0039】
具体的には、ロック・リリース制御により、駐車ブレーキ力を発生させたり解除したりしている。ロック制御では、モータ10を正回転させることによりEPB2を作動させ、EPB2にて所望の駐車ブレーキ力を発生させられる位置でモータ10の回転を停止し、この状態を維持する。これにより、所望の駐車ブレーキ力を発生させる。リリース制御では、モータ10を逆回転させることによりEPB2を作動させ、EPB2にて発生させられている駐車ブレーキ力を解除する。
【0040】
駐車ブレーキ力を発生させるためのロック・リリース制御に関しては従来と同様であるため、ここでは説明を省略するが、EPB2のピストン19の移動動作を利用してノックバック抑制制御を行うようにしている。以下、本実施形態にかかる車両用のブレーキシステムで実行されるノックバック抑制制御の詳細について説明するが、それに先立ち、ノックバック抑制制御で行う動作について説明する。
【0041】
図3は、ノックバック抑制制御で行う動作を示した後輪系のブレーキ機構の簡略化断面模式図である。
【0042】
図3(a)は、通常時、例えばサービスブレーキ1によってサービスブレーキ力を発生させてからそれが解除されたときや、EPB2によって駐車ブレーキ力を発生させてからそれが解除されたときの様子を表している。通常時には、推進軸18は、推進軸18の先端とピストン19の底部との間、つまり互いの押圧面が所定のクリアランスaに保たれた待機位置に位置している。また、この待機位置では、推進軸18の後端、つまりピストン19の底部に接する先端と反対側の端部は、推進軸18をブレーキパッド11と反対側に後退させたときに当接するシート面14dから距離bだけ離間した場所に位置している。
【0043】
図3(b)は、ノックバックが発生すると予測される場合の作動を表している。ノックバック時には、傾斜したブレーキディスク12によってブレーキパッド11およびピストン19が押し込まれることになる。このため、ノックバックが発生すると想定される場合には、推進軸18をブレーキパッド11と反対側に後退させてシート面14dに当接する後退位置まで後退移動させる。このときの後退量は、待機位置での推進軸18の後端からシート面14dまでの距離bとなる(以下、後退量bという)。したがって、この状態では、推進軸18の先端とピストン19の底部との間のクリアランスは、待機位置の際のクリアランスaに後退量bが加わったa+bとなる。
【0044】
図3(c)は、推進軸18を後退位置まで移動させたのちにノックバックが発生したときの様子を表している。このときには、傾斜したブレーキディスク12によってブレーキパッド11およびピストン19が押し込まれるため、ピストン19の底部が推進軸18の先端側に近づく。しかしながら、ノックバックの発生を予測して推進軸18が既に後退位置まで移動させられているため、ノックバックが発生しても、推進軸18の先端とピストン19の底部との接触が回避される。
【0045】
図3(d)は、ノックバックの発生の恐れがなくなったときの作動を表している。ノックバックの発生の恐れがなくなった当初は、図3(c)のようにブレーキパッド11およびピストン19が押し込まれた状態となっているため、モータ10を正回転させて回転軸17を回転させ、推進軸18をブレーキパッド11側に前進させる。そして、推進軸18の先端をピストン19の底部に当接させて、ピストン19およびブレーキパッド11を押し戻しながら推進軸18を前進位置まで移動させる。このときの推進軸18の前進量は、待機位置から後退位置までの後退量bに対して、推進軸18が待機位置に位置していたときの推進軸18の先端とピストン19の底部との間のクリアランスaを足した量(=a+b)としている。これにより、推進軸18によってブレーキパッド11およびピストン19を通常時の位置まで押し戻すピストン補正移動を行うことができる。
【0046】
図3(e)は、ブレーキパッド11およびピストン19を通常時の位置まで押し戻した後の動作を表している。ブレーキパッド11およびピストン19が通常時の位置まで押し戻されたら、今度はモータ10を逆回転させて回転軸17を逆回転させ、推進軸18をブレーキパッド11の反対側に後退させる。これにより、推進軸18の先端がピストン19の底部から離れる。そして、推進軸18を待機位置まで後退させる待機位置移動を行うことで、推進軸18の先端とピストン19の底部との間に再びクリアランスaが設けられる。
【0047】
なお、ここではクリアランスaが設けられる分だけ推進軸18を後退させるようにしたが、図3(d)中に示したように、ピストン19の摺動に伴ってシール部材22がブレーキディスク12側に変位することから、その変位量cをクリアランスaに対して加えた分後退させるようにしても良い。例えば、変位量cは、ボディ14のうちシール部材22が収容される溝の壁面とシール部材22の側面とのクリアランス分およびピストン19の摺動によるシール部材22の変形分を加算した値となる。この値は、実験により求められることから、予め実験で変位量cを求めておき、その変位量cをクリアランスaに対して加えることで、推進軸18の後退量とすれば良い。このように、シール部材22の変位量cに基づいてピストン補正移動の際のモータ10への通電時間を補正することで、より正確にピストン19を通常時の位置に戻すことが可能となる。
【0048】
また、上記動作は、動作中にドライバによるブレーキ操作が為されていない場合を表しているが、動作中にドライバによるブレーキ操作が為されることもある。この場合には、ノックバックの発生後に、図3(b)に示す状態となる。したがって、ブレーキパッド11およびピストン19がほぼ通常時の位置まで押し戻されているため、この場合にはモータ10を正回転させて推進軸18を図3(e)に示される待機位置まで戻すだけで、推進軸18の先端とピストン19の底部との間に再びクリアランスaを設けることができる。
【0049】
このような動作を行うことで、ノックバックが発生しても、ブレーキパッド11およびピストン19を通常時の位置に戻せると共に、推進軸18の先端とピストン19の底部との間のクリアランスも通常時の位置に戻せる。したがって、ドライバがブレーキペダル3を踏み込んだときに、通常時よりも深くまでブレーキペダル3を踏み込まないと制動力を発生させられなくなるという不具合を解消することができる。また、EPB2の動作によってノックバック現象を抑制できることから、アクチュエータ7に備えられた制御弁にてM/C5とW/C6との間を遮断しなくても良いため、ドライバがブレーキ操作を行ったときには、それが反映されてサービスブレーキ力を発生させることができる。さらに、EPB2の動作は、モータ10の制御によって行われるため、サービスブレーキ1の自動加圧機能によってブレーキパッド11およびピストン19を初期位置に戻す場合と比較して、より正確に初期位置に戻すことが可能となる。したがって、ブレーキフィーリングに影響を与えないで済む。
【0050】
続いて、上記のように構成されたブレーキシステムを用いてEPB−ECU9が上記各種機能部および図示しない内蔵のROMに記憶されたプログラムに従って実行するノックバック抑制制御処理について説明する。図4は、ノックバック抑制制御処理の詳細を示したフローチャートである。この処理は、例えばイグニッションスイッチがオンされているときに所定の制御周期毎に実行される。
【0051】
まず、ステップ100では、入力処理を行う。入力処理では、W/C圧センサ60や舵角センサ61およびヨーレートセンサ62の検出信号を入力し、入力した各検出信号に基づいてW/C圧や舵角およびヨーレートを算出する。
【0052】
続いて、ステップ200に進み、ノックバック可能性あり判定処理を行う。この処理を行う部分が本発明のノックバック可能性判定手段に相当する。図5は、このノックバック可能性あり判定処理の詳細を示したフローチャートである。
【0053】
まず、ステップ205では、ノックバック可能性ありか否かを判定する。ここでは、後述するステップ215においてノックバック可能性ありを示すフラグがセットされていた場合に肯定判定され、フラグがリセットされていた場合には否定判定される。最初の制御周期ではフラグがリセットされた状態になっているため、否定判定されてステップ210に進む。
【0054】
ステップ210では、ノックバック可能性ありの条件、つまりノックバックの発生が予測される条件を満たしているか否かを判定する。ここでは、ヨーレートの絶対値|yaw|がヨーレート閾値α以上あり、かつ、舵角の絶対値|steer|が舵角閾値β以上あることをノックバック可能性ありの条件としている。ノックバックは、旋回時のブレーキディスク12の傾斜が大きくなったときに発生し、ノックバックが発生するような旋回状態は、旋回半径が小さくなるときである。また、旋回半径が小さくなるのは、ヨーレートおよび舵角が大きくなるときである。このため、ノックバックが発生し得るヨーレートや舵角を判定閾値として、発生しているヨーレートや舵角が判定閾値を超えるか否かに基づいてノックバックの発生を予測している。ただし、ヨーレートや舵角は、車両の旋回方向に応じて正負の異なる値で算出されることから、その絶対値が判定閾値を超えていることをノックバック可能性ありの条件としている。
【0055】
ここで肯定判定されればステップ215に進み、ノックバック可能性ありを示すフラグをセットしたのち、ステップ220に進んでノックバック可能性解除カウンタCNを0にリセットする。なお、ノックバック可能性解除カウンタCNとは、後述するように、ノックバック可能性ありを示すフラグのリセット条件として用いているカウンタである。また、否定判定されればノックバック可能性がないため、そのまま処理を終了する。
【0056】
一方、ステップ215でノックバック可能性ありを示すフラグがセットされたら、その次の制御周期からはステップ205で肯定判定される。そして、ステップ225以降に進み、ノックバック可能性ありのフラグのリセット条件を満たしているかの判定を行う。まず、ステップ225では、ノックバック可能性がなくなる条件を満たしたか否かを判定する。ここでは、ヨーレートの絶対値|yaw|がヨーレート閾値α以上ではなく、かつ、舵角の絶対値|steer|が舵角閾値β以上ではないことをノックバック可能性がなくなる条件としている。この条件を満たしたらノックバック可能性ありを示すフラグをリセットしても良いが、直ぐにリセットするとヨーレートや舵角が判定閾値近辺で変動した場合に、フラグのセットとリセットが短時間に繰り返されるようなチャタリングが生じる。このため、ステップ225で否定判定された場合には、ステップ230に進んでノックバック可能性解除カウンタCNが解除時間TCN以上になったか否かを判定し、解除時間TCN以上になるまではステップ235に進み、ノックバック可能性ありのフラグをリセットすることなくノックバック可能性解除カウンタCNをインクリメントする。そして、ステップ230でノックバック可能性解除カウンタCNが解除時間TCN以上になったと判定されると、ステップ240に進んでノックバック可能性なしになったことを示すべく、ノックバック可能性ありのフラグをリセットする。その後、ステップ245に進んでノックバック可能性解除カウンタCNを0にリセットして処理を終了する。
【0057】
また、ステップ225でノックバック可能性がなくなる条件を満たしておらず、ノックバック可能性ありの場合には、ステップ250に進んでノックバック可能性解除カウンタCNを0として処理を終了する。
【0058】
このようにして、ノックバック可能性あり判定処理が実行され、このノックバック可能性あり判定処理により、ノックバック可能性ありを示すフラグがセットされているかリセットされているかに基づいて、ノックバック可能性ありか否かを判定することが可能となる。
【0059】
続いて、図4のステップ300では、ステップ200で実行したノックバック可能性あり判定処理の結果に基づいてピストン位置制御を実行する。この処理を実行する部分が本発明の位置制御手段に相当する。図6(a)および図6(b)は、このピストン位置制御の詳細を示したフローチャートである。
【0060】
まず、図6(a)に示すステップ301では、ノックバック可能性ありか否かを判定する。この判定は、ノックバック可能性あり判定処理での結果、つまりノックバック可能性ありを示すフラグがセットされているかリセットされているかに基づいて行われる。そして、ノックバック可能性ありを示すフラグがセットされていればステップ302以降の処理に進み、フラグがリセットされていれば図6(b)に示すステップ311以降の処理に進む。
【0061】
ステップ302では、ピストン位置制御中であるか否かを判定する。ここでは、ピストン位置制御中を示すフラグがセットされていれば、ピストン位置制御中であると判定している。ノックバック可能性ありを示すフラグがセットされてから初めての制御周期であれば、まだピストン位置制御中を示すフラグがセットされていないため、ステップ303に進んでピストン位置制御中を示すフラグをセットし、それからステップ304に進む。そして、既にピストン位置制御中を示すフラグがセットされていれば、ステップ303に進むことなくステップ304に進む。
【0062】
ステップ304では、後退処理終了しているか否かを判定する。ここでいう後退処理とは、上記した図3(a)の状態から図3(b)の状態のように推進軸18を後退させる処理を意味している。ここでは、後述するステップ308において例えば後退処理終了を示すフラグがセットされていた場合には肯定判定され、フラグがリセットされていれば否定判定される。ここで、後退処理終了していなければステップ305に進み、推進軸18を後退させる動作を指示する。これにより、モータ10は電流が流されることで逆回転させられ、推進軸18が後退させられていく。そして、ステップ306に進み、推進軸後退時間カウンタCB1をインクリメントする。推進軸後退時間カウンタCB1とは、推進軸18の後退を行った時間を計測するカウンタである。推進軸18の後退量は、モータ10に対して電流を流した時間に依存することから、推進軸18の後退を行った時間を計測することで制御可能である。したがって、推進軸後退時間カウンタCB1をインクリメントすることで、推進軸18の後退を行った時間を計測する。
【0063】
その後、ステップ307に進み、推進軸後退時間カウンタCB1が後退位置移動時間KB1以上になったか否かを判定する。後退位置移動時間KB1は、推進軸18の後退量が図3(b)に示す後退量bに至るまでに掛かる時間である。つまり、推進軸後退時間カウンタCB1が後退位置移動時間KB1に至るまでのカウントに掛かる時間がモータ10への通電時間であり、推進軸18を後退位置まで移動させるのに掛かる時間となる。この時間が、本発明の後退位置移動通電時間に相当している。
【0064】
ステップ307で否定判定されている期間中は、まだ推進軸18が後退位置まで達していないことを意味しているため、処理を終了する。この場合には、再びステップ301〜307の処理が実行されることになり、推進軸後退時間カウンタCB1が後退位置移動時間KB1に達するまでその処理が続けられる。そして、ステップ307で肯定判定されると、推進軸18が後退位置に達したことからステップ308に進んで後退処理終了を示すフラグをセットする。その後、ステップ309に進んでピストン戻し処理終了でないことを記憶したのち、ステップ310で推進軸後退時間カウンタCB1を0にリセットして処理を終了する。ピストン戻し処理とは、ノックバック時に押し込まれたピストン19を戻すための処理であり、ノックバック可能性がなくなったときに行われる。このときには、まだピストン戻し処理を実行していないため、例えばピストン戻し処理終了を示すフラグをリセットすることでピストン戻し処理終了でないことを記憶する。
【0065】
このようにして、ノックバック可能性ありのときの処理が行われ、図3(b)に示すように推進軸18が後退位置に保持された状態となるようにできる。
【0066】
一方、ステップ301で否定判定されると、ステップ311においてピストン位置制御中であるか否かを判定する。この判定は、上記したステップ303においてピストン位置制御中を示すフラグがセットされているか否かに基づいて行われる。そして、ピストン位置制御中を示すフラグがセットされていればステップ312以降の処理に進み、フラグがセットされていなければそのまま処理を終了する。すなわち、ピストン位置制御中であれば、ノックバック可能性ありのために推進軸18が後退させられていることから、推進軸18を通常時の待機位置に移動させる必要がある。逆に、ピストン位置制御中でなければ、推進軸18が後退させられていないため、推進軸18は待機位置にあると想定され、推進軸18を移動させる必要がない。このため、ステップ312で肯定判定された場合にのみステップ312以降の処理を実行する。
【0067】
ステップ312では、ピストン戻し処理終了か否かを判定する。この判定は、ピストン戻し処理終了を示すフラグがリセットされているか否かに基づいて行われる。推進軸18が後退位置に移動させられてから直ぐであれば、まだピストン戻し処理終了に至っていないため、否定判定されてステップ313に進むことになる。そして、ステップ313でブレーキ踏込みがあるか否かを判定する。ブレーキ踏込みの有無については、W/C圧センサ60の検出信号に基づいて算出されたW/C圧より判定でき、例えばW/C圧が発生していればブレーキペダルの踏み込みがあると判定される。この判定を行う部分が、本発明のノックバック後加圧判定手段に相当する。
【0068】
ここで、ブレーキペダル踏み込みがなければ、ステップ314以降に進んでブレーキ踏込みがない場合のピストン19を押し戻すための処理を行う。すなわち、ステップ314では推進軸前進処理を行い、モータ10への通電を行うことでモータ10を正回転させ、推進軸19をブレーキパッド11側に移動させる。そして、ステップ315に進み、推進軸前進時間カウンタCF1をインクリメントする。推進軸前進時間カウンタCF1とは、推進軸18の前進を行った時間を計測するカウンタである。推進軸18の前進量は、モータ10に対して電流を流した時間に依存することから、推進軸18の前進を行った時間を計測することで制御可能である。したがって、推進軸前進時間カウンタCF1をインクリメントことで、推進軸18の前進を行った時間を計測する。
【0069】
その後、ステップ316に進み、推進軸前進時間カウンタCF1が前進時間KF1以上になったか否かを判定する。前進時間KF1は、推進軸18の前進量が図3(d)に示す前進量a+bに至るまでに掛かる時間である。つまり、推進軸前進時間カウンタCF1が前進時間KF1に至るまでのカウントに掛かる時間がモータ10への通電時間であり、推進軸18を前進位置まで移動させるのに掛かる時間となる。
【0070】
ステップ316で否定判定されている期間中は、まだ推進軸18が前進位置まで達していないことを意味しているため、処理を終了する。この場合には、再びステップ301、311〜316の処理が実行されることになり、推進軸前進時間カウンタCF1が前進時間KF1に達するまでその処理が続けられる。そして、ステップ316で肯定判定されると、推進軸18が前進位置に達したことからステップ317に進んでピストン戻し処理終了を示すフラグをセットする。その後、ステップ318に進んで前進時間カウンタCF1を0にリセットして処理を終了する。
【0071】
一方、ブレーキペダル踏み込みがあれば、ステップ319以降に進んでブレーキペダル踏み込みがあった場合のピストン19を押し戻すための処理を行う。すなわち、ステップ319では推進軸前進処理を行い、モータ10への通電を行うことでモータ10を正回転させ、推進軸19をブレーキパッド11側に移動させる。そして、ステップ320に進み、推進軸前進時間カウンタCF1をインクリメントする。その後、ステップ321で、推進軸前進時間カウンタCF1が前進時間KF2以上になったか否かを判定する。前進時間KF2は、推進軸18を図3(e)に示す待機位置に至るまでに掛かる時間である。つまり、推進軸前進時間カウンタCF1が前進時間KF2に至るまでのカウントに掛かる時間がモータ10への通電時間であり、推進軸18を待機位置まで移動させるのに掛かる時間となる。
【0072】
ステップ321で否定判定されている期間中は、まだ推進軸18が待機位置まで達していないことを意味しているため、処理を終了する。この場合には、再びステップ301、311〜313、319〜321の処理が実行されることになり、推進軸前進時間カウンタCF1が前進時間KF2に達するまでその処理が続けられる。そして、ステップ321で肯定判定されると、推進軸18が待機位置に達したことからステップ322に進んでピストン戻し処理終了を示すフラグをセットする。また、ブレーキ踏み込みがあった場合には、既に推進軸18が待機位置に戻っており、その後に推進軸18を後退させるための後退処理を行う必要がない。また、ステップ323に進んで、例えば後退処理中を示すフラグをリセットすることで後退処理中でないことを記憶する。その後、ステップ324に進んで前進時間カウンタCF1を0にリセットして処理を終了する。
【0073】
さらに、ステップ312でピストン戻し処理終了と判定された場合は、図3(d)の状態になっていることを示している。このため、ステップ325に進んで推進軸18を後退させる動作を指示する。これにより、モータ10は電流が流されることで逆回転させられ、推進軸18が後退させられていく。そして、ステップ326に進み、推進軸後退時間カウンタCB2をインクリメントする。推進軸後退時間カウンタCB2とは、推進軸18の後退を行った時間を計測するカウンタである。上記したように、推進軸18の後退量は、モータ10に対して電流を流した時間に依存することから、推進軸18の後退を行った時間を計測することで制御可能である。したがって、推進軸後退時間カウンタCB2をインクリメントことで、推進軸18の後退を行った時間を計測する。
【0074】
その後、ステップ327に進み、推進軸後退時間カウンタCB2が後退位置移動時間KB2以上になったか否かを判定する。後退位置移動時間KB2は、推進軸18の後退量が図3(d)に示す前進位置から図3(e)に示す待機位置までの後退量aに至るのに掛かる時間である。つまり、推進軸後退時間カウンタCB2が後退位置移動時間KB2に至るまでのカウントに掛かる時間がモータ10への通電時間であり、推進軸18を前進位置から待機位置まで移動させるのに掛かる時間となる。この時間が、本発明の待機位置移動通電時間に相当している。
【0075】
ステップ327で否定判定されている期間中は、まだ推進軸18が待機位置まで達していないことを意味しているため、処理を終了する。この場合には、再びステップ301、311、312、325〜327の処理が実行されることになり、推進軸後退時間カウンタCB2が後退位置移動時間KB2に達するまでその処理が続けられる。そして、ステップ327で肯定判定されると、推進軸18が待機位置に達したことからステップ328に進んでピストン位置制御が終了したこととして、例えばピストン位置制御中を示すフラグをリセットすることでピストン位置制御中でないことを記憶する。その後、ステップ329に進んで前進時間カウンタCF1を0にリセットして処理を終了する。
【0076】
このようにして、ピストン位置制御処理が完了し、ノックバック抑制制御処理が終了する。図7および図8は、上記のようなノックバック抑制制御処理を実行した場合のタイミングチャートである。図7は、ノックバック抑制制御処理中にブレーキペダル3の踏み込みがなかった場合のタイミングチャート、図8は、ノックバック抑制制御処理中にブレーキペダル3の踏み込みがあった場合のタイミングチャートを示してある。
【0077】
まず、時点T1以前はピストン19の底部と推進軸18の先端との間に所定のクリアランスaが設けられた状態となっている。この状態で、時点T1においてドライバがステアリング操作を行うことで舵角が発生すると、車両が旋回中となり、ヨーレートも発生する。そして、旋回半径が小さく時点T2においてノックバック可能性ありの条件を満たすと、モータ10を逆回転させることで推進軸18が後退させられ、時点T3において後退量b、すなわち後退位置まで後退させられると、モータ10への通電が止められ、推進軸18が後退位置で保持される。
【0078】
そして、時点T4においてノックバックが発生した場合、ブレーキパッド11とブレーキディスク12とが当接してるときのピストン位置を0とすると、ノックバックによってピストン19が押し込まれることで、ピストン位置が大きくなる。つまり、ブレーキパッド11がブレーキディスク12から離れた状態となる。このとき、既に推進軸18が後退位置に保持されているため、ノックバック発生によってピストン19が推進軸18に接触することはない。
【0079】
そして、時点T5においてノックバック可能性がなくなる条件を満たすと、そこから所定時間経過後の時点T6よりにモータ10を正回転させることで推進軸18が前進させられる。これが時点T7において推進軸18が待機位置に到達してからも、時点T8において前進位置に到達するまで続けられる。これにより、ピストン19が初期位置に戻される。その後、時点T9においてモータ10を再び逆回転させることで推進軸18を後退させ、時点T10において推進軸18が待機位置に戻されることで、モータ10への通電が停止される。
【0080】
一方、図8に示すように、時点T1〜T4では、ブレーキペダル3の踏み込みがない場合の動作と同様の動作が行われていた場合において、時点T5においてブレーキペダル3の踏み込みがあったとすると、それにより発生したW/C圧によってピストン19が押し戻される。具体的には、ピストン位置が0、つまりブレーキパッド11がブレーキディスク12に当接する位置まで押し戻され、サービスブレーキ力が発生させられる。そして、時点T6においてブレーキペダル3の踏み込みが解除されると、シール部材22の弾性力に基づいてピストン19が初期位置に戻る。
【0081】
そして、ノックバック可能性がなくなる条件を満たしてから所定時間経過後の時点T7において、モータ10を正回転させることで推進軸18が前進させられる。これが時点T8において推進軸18が待機位置に到達まで続けられる。その後、モータ10への通電が停止される。
【0082】
以上説明したように、本実施形態では、サービスブレーキ1とEPB2の加圧機構が一体化された駐車ブレーキ一体化加圧機構とされるブレーキシステムにおいて、ノックバックが発生する可能性の有無を判定し、ノックバック可能性ありと判定されたときには、EPB2を駆動することでノックバックによる不具合が解消できるようにしている。すなわち、モータ10を逆回転させて推進軸18を後退させることで推進軸18の先端をピストン19の底部から離間させられるようにし、ノックバック可能性がなくなったら、モータ10を正回転させて推進軸18を前進させることでピストン19を通常時の位置に戻すピストン補正移動を行ったのち、その後再度、推進軸18を後退させることで待機位置に戻す待機位置移動を行うようにしている。
【0083】
これにより、ノックバックが発生しても、ブレーキパッド11およびピストン19を通常時の位置に戻せると共に、推進軸18の先端とピストン19の底部との間のクリアランスも通常時の位置に戻せる。したがって、ドライバがブレーキペダル3を踏み込んだときに、通常時よりも深くまでブレーキペダル3を踏み込まないと制動力を発生させられなくなるという不具合を解消することができる。また、EPB2の動作によってノックバック現象を抑制できることから、アクチュエータ7に備えられた制御弁にてM/C5とW/C6との間を遮断しなくても良いため、ドライバがブレーキ操作を行ったときには、それが反映されてサービスブレーキ力を発生させることができる。さらに、EPB2の動作は、モータ10の制御によって行われるため、サービスブレーキ1の自動加圧機能によってブレーキパッド11およびピストン19を初期位置に戻す場合と比較して、より正確に初期位置に戻すことが可能となる。したがって、ブレーキフィーリングに影響を与えないで済む。
【0084】
また、ピストン19と推進軸18が離間した位置から待機位置へ移動させるのに掛かる待機位置移動通電時間(KB2)と、推進軸18が待機位置から後退位置に移動させるのに掛かる後退位置移動通電時間(KB1)とを加算した時間を、ピストン補正移動の際のモータ10への通電時間としている。このように、モータ10への通電時間に基づいて、ピストン補正移動で推進軸18を移動させる位置を決めることができる。このため、位置センサなどによってピストン19の位置を検出しなくても、正確にピストン19を通常時の位置に戻すことが可能となる。
【0085】
(他の実施形態)
(1)上記実施形態において、後退位置を推進軸18の後端がシート面14dと接する場所としたが、推進軸18の後端がシート面14dから離間した場所であっても構わない。すなわち、ノックバック時にブレーキパッド11およびピストン19が押し込まれても、ピストン19の底部が推進軸18の先端に接触しない後退位置であれば良い。
【0086】
(2)上記実施形態では、ディスクブレーキを例に挙げて説明したが、他の形態のブレーキ機構についても、サービスブレーキ1とEPB2の加圧機構が一体化された駐車ブレーキ一体型加圧機構とされるブレーキシステムについて、本発明を適用できる。また、上記実施形態では、電子制御手段としてEPB−ECU9を例に挙げたが、これに限るものではない。例えば、上記実施形態では、ESC−ECU8やEPB−ECU9を備えた構成を例に挙げたが、これらが一体的なECUとされることで電子制御手段を構成していても良いし、他のECUによって実現されても良い。すなわち、本発明は、サービスブレーキ1とEPB2とを備えたブレーキシステムにおいて、駐車ブレーキ一体型加圧機構を有するものに対してノックバック抑制制御を行う電子制御手段であれば、上記実施形態の構成以外の構成であっても良い。
【符号の説明】
【0087】
1…サービスブレーキ、2…EPB、5…M/C、6…W/C、7…アクチュエータ、8…ESC−ECU、9…EPB−ECU、10…モータ、11…ブレーキパッド、12…ブレーキディスク、13…キャリパ、14…ボディ、14a…中空部、14b…通路、14d…シート面、17…回転軸、17a…雄ネジ溝、18…推進軸、18a…雌ネジ溝、19…ピストン、22…シール部材、23…操作SW、60…W/C圧センサ、61…舵角センサ、62…ヨーレート
【特許請求の範囲】
【請求項1】
摩擦材(11)と、
車輪に取り付けられた被摩擦材(12)と、
前記摩擦材(11)と前記被摩擦材(12)を使って機械的に制動力を発生させるパーキングブレーキ(2)と、
前記摩擦材(11)と前記被摩擦材(12)を使って油圧で制動力を発生させるサービスブレーキ(1)と、
前記パーキングブレーキ(2)と前記サービスブレーキ(1)の動作を制御する電子制御手段(9)とを有してなる車両用のブレーキ制御装置であって、
前記パーキングブレーキ(2)は、モータ(10)への通電に基づいて、機械的に前記摩擦材(11)が前記被摩擦材(12)に対し当接する方向に移動部材(18)を移動させることによって押圧部材(19)を移動させ、前記押圧部材(19)により、前記摩擦材(11)を前記被摩擦材(12)に移動押圧するロック動作と、前記摩擦材(11)が前記被摩擦材(12)に対し離間する方向に前記移動部材(18)を移動させることにより前記押圧部材(19)を移動させ、前記摩擦材(11)を前記被摩擦材(12)から離間させる解除動作を行うパーキングブレーキ機構を有し、
前記サービスブレーキ(1)は、ブレーキ液圧を発生するブレーキ液圧発生手段(3〜5)と、前記ブレーキ液圧発生手段(3〜5)と接続され、前記ブレーキ液圧の増加によって前記パーキングブレーキ(2)と共通の前記押圧部材(19)により前記摩擦材(11)を前記被摩擦材(12)に対し当接方向に移動し押圧し、前記ブレーキ液圧の減少によって前記押圧部材(19)により前記摩擦材(11)を前記被摩擦材(12)から離間する離間方向に移動させるホイールシリンダ(6)とを有し、
前記ホイールシリンダ(6)は、前記押圧部材(19)および前記移動部材(18)が収容される中空部(14a)を有するシリンダ状のボディ(14)が備えられていると共に、該ボディ(14a)と前記押圧部材(19)との間にシール部材(22)が備えられた構成とされ、
前記電子制御手段(9)は、
前記被摩擦材(12)によって前記押圧部材(19)が前記離間方向に押し込まれるノックバックの可能性の有無を判定するノックバック可能性判定手段(200)と、
前記ノックバック可能性判定手段(200)にて前記ノックバックの可能性ありと判定すると、前記モータ(10)への通電に基づいて前記移動部材(18)を所定の待機位置より前記被摩擦材(12)から前記離間方向にある所定の後退位置に移動させる後退移動を行うと共に、前記ノックバック可能性ありと判定されたのち前記ノックバック可能性なしと判定されたときには、前記モータ(10)への通電に基づいて前記移動部材(18)を前記後退位置より前記被摩擦材(12)の方向に所定量前進させることで前記押圧部材(19)を前記被摩擦材(12)の方向に移動させる押圧部材補正移動を行ったのち、再度、前記移動部材(18)を前記被摩擦材(12)から前記離間方向に移動させて前記待機位置に移動させる待機位置移動を行う位置制御を実行する位置制御手段(300)とを有していることを特徴とするブレーキ制御装置。
【請求項2】
前記電子制御手段(9)は、前記押圧部材(19)と前記移動部材(18)が離間した位置から前記待機位置へ移動させるのに掛かる前記モータ(10)への通電時間である待機位置移動通電時間(KB2)と、前記移動部材(18)が前記待機位置から前記後退位置に移動させるのに掛かる前記モータ(10)への通電時間である後退位置移動通電時間(KB1)とを加算した時間を、前記押圧部材補正移動の際の前記モータ(10)への通電時間とすることを特徴とする請求項1に記載のブレーキ制御装置。
【請求項3】
前記電子制御装置(9)は、前記押圧部材(19)が前記移動部材(18)によって前記被摩擦材(12)の方向へ移動する際の前記シール部材(22)の変位量(c)に基づき、前記押圧部材補正移動の際の前記モータ(10)への通電時間を補正することを特徴とする請求項2に記載のブレーキ制御装置。
【請求項4】
前記電子制御手段(9)は、前記ノックバック可能性判定手段(200)が前記ノックバック可能性ありと判定してから前記押圧部材補正移動を行う前に、前記ホイールシリンダ(6)内の油圧が加圧されたことを判定するノックバック後加圧判定手段(313)を有し、前記ノックバック後加圧判定手段(313)にて前記油圧が加圧されたことが判定されたときには、前記移動部材(18)を前記後退位置から前記待機位置に直接移動させ、前記位置制御を終了することを特徴とする請求項1ないし3のいずれか1つに記載のブレーキ制御装置。
【請求項1】
摩擦材(11)と、
車輪に取り付けられた被摩擦材(12)と、
前記摩擦材(11)と前記被摩擦材(12)を使って機械的に制動力を発生させるパーキングブレーキ(2)と、
前記摩擦材(11)と前記被摩擦材(12)を使って油圧で制動力を発生させるサービスブレーキ(1)と、
前記パーキングブレーキ(2)と前記サービスブレーキ(1)の動作を制御する電子制御手段(9)とを有してなる車両用のブレーキ制御装置であって、
前記パーキングブレーキ(2)は、モータ(10)への通電に基づいて、機械的に前記摩擦材(11)が前記被摩擦材(12)に対し当接する方向に移動部材(18)を移動させることによって押圧部材(19)を移動させ、前記押圧部材(19)により、前記摩擦材(11)を前記被摩擦材(12)に移動押圧するロック動作と、前記摩擦材(11)が前記被摩擦材(12)に対し離間する方向に前記移動部材(18)を移動させることにより前記押圧部材(19)を移動させ、前記摩擦材(11)を前記被摩擦材(12)から離間させる解除動作を行うパーキングブレーキ機構を有し、
前記サービスブレーキ(1)は、ブレーキ液圧を発生するブレーキ液圧発生手段(3〜5)と、前記ブレーキ液圧発生手段(3〜5)と接続され、前記ブレーキ液圧の増加によって前記パーキングブレーキ(2)と共通の前記押圧部材(19)により前記摩擦材(11)を前記被摩擦材(12)に対し当接方向に移動し押圧し、前記ブレーキ液圧の減少によって前記押圧部材(19)により前記摩擦材(11)を前記被摩擦材(12)から離間する離間方向に移動させるホイールシリンダ(6)とを有し、
前記ホイールシリンダ(6)は、前記押圧部材(19)および前記移動部材(18)が収容される中空部(14a)を有するシリンダ状のボディ(14)が備えられていると共に、該ボディ(14a)と前記押圧部材(19)との間にシール部材(22)が備えられた構成とされ、
前記電子制御手段(9)は、
前記被摩擦材(12)によって前記押圧部材(19)が前記離間方向に押し込まれるノックバックの可能性の有無を判定するノックバック可能性判定手段(200)と、
前記ノックバック可能性判定手段(200)にて前記ノックバックの可能性ありと判定すると、前記モータ(10)への通電に基づいて前記移動部材(18)を所定の待機位置より前記被摩擦材(12)から前記離間方向にある所定の後退位置に移動させる後退移動を行うと共に、前記ノックバック可能性ありと判定されたのち前記ノックバック可能性なしと判定されたときには、前記モータ(10)への通電に基づいて前記移動部材(18)を前記後退位置より前記被摩擦材(12)の方向に所定量前進させることで前記押圧部材(19)を前記被摩擦材(12)の方向に移動させる押圧部材補正移動を行ったのち、再度、前記移動部材(18)を前記被摩擦材(12)から前記離間方向に移動させて前記待機位置に移動させる待機位置移動を行う位置制御を実行する位置制御手段(300)とを有していることを特徴とするブレーキ制御装置。
【請求項2】
前記電子制御手段(9)は、前記押圧部材(19)と前記移動部材(18)が離間した位置から前記待機位置へ移動させるのに掛かる前記モータ(10)への通電時間である待機位置移動通電時間(KB2)と、前記移動部材(18)が前記待機位置から前記後退位置に移動させるのに掛かる前記モータ(10)への通電時間である後退位置移動通電時間(KB1)とを加算した時間を、前記押圧部材補正移動の際の前記モータ(10)への通電時間とすることを特徴とする請求項1に記載のブレーキ制御装置。
【請求項3】
前記電子制御装置(9)は、前記押圧部材(19)が前記移動部材(18)によって前記被摩擦材(12)の方向へ移動する際の前記シール部材(22)の変位量(c)に基づき、前記押圧部材補正移動の際の前記モータ(10)への通電時間を補正することを特徴とする請求項2に記載のブレーキ制御装置。
【請求項4】
前記電子制御手段(9)は、前記ノックバック可能性判定手段(200)が前記ノックバック可能性ありと判定してから前記押圧部材補正移動を行う前に、前記ホイールシリンダ(6)内の油圧が加圧されたことを判定するノックバック後加圧判定手段(313)を有し、前記ノックバック後加圧判定手段(313)にて前記油圧が加圧されたことが判定されたときには、前記移動部材(18)を前記後退位置から前記待機位置に直接移動させ、前記位置制御を終了することを特徴とする請求項1ないし3のいずれか1つに記載のブレーキ制御装置。
【図1】


【図2】
【図3】
【図4】
【図5】
【図6(a)】
【図6(b)】
【図7】
【図8】
【図2】
【図3】
【図4】
【図5】
【図6(a)】
【図6(b)】
【図7】
【図8】
【公開番号】特開2012−236492(P2012−236492A)
【公開日】平成24年12月6日(2012.12.6)
【国際特許分類】
【出願番号】特願2011−106385(P2011−106385)
【出願日】平成23年5月11日(2011.5.11)
【出願人】(301065892)株式会社アドヴィックス (1,291)
【Fターム(参考)】
【公開日】平成24年12月6日(2012.12.6)
【国際特許分類】
【出願日】平成23年5月11日(2011.5.11)
【出願人】(301065892)株式会社アドヴィックス (1,291)
【Fターム(参考)】
[ Back to top ]