
ブレーキ制御装置
【課題】 走行中にパーキングブレーキ機構への作動要求がなされたときの車両挙動の乱れを抑制できるブレーキ制御装置を提供する。
【解決手段】 油圧ユニットECU2は、判定された走行状態が走行中のときにスイッチ操作によって電動パーキングブレーキの作動要求があった場合に電動パーキングブレーキの作動を制限し、油圧ユニット1を作動させて4輪に制動力を発生させる。
【解決手段】 油圧ユニットECU2は、判定された走行状態が走行中のときにスイッチ操作によって電動パーキングブレーキの作動要求があった場合に電動パーキングブレーキの作動を制限し、油圧ユニット1を作動させて4輪に制動力を発生させる。
【発明の詳細な説明】
【技術分野】
【0001】
本発明は、ブレーキ制御装置に関する。
【背景技術】
【0002】
特許文献1には、ドライバのスイッチ操作によりパーキングブレーキ機構を作動させる構成が開示されている。
【先行技術文献】
【特許文献】
【0003】
【特許文献1】特許第4360231号公報
【発明の概要】
【発明が解決しようとする課題】
【0004】
ドライバが走行中にスイッチ操作によってパーキングブレーキ機構を作動させると、特定の車輪のみ制動力が増大するため、車両挙動が乱れるという問題があった。
本発明の目的は、走行中にパーキングブレーキ機構への作動要求がなされたときの車両挙動の乱れを抑制できるブレーキ制御装置を提供することにある。
【課題を解決するための手段】
【0005】
本発明のブレーキ制御装置では、走行中にパーキングブレーキ機構への作動要求がなされた場合、パーキングブレーキ機構の作動を制限し、制動力発生部を作動させて制動力を発生させる。
【発明の効果】
【0006】
よって、本発明のブレーキ制御装置では、走行中にパーキングブレーキ機構への作動要求がなされたときの車両挙動の乱れを抑制できる。
【図面の簡単な説明】
【0007】
【図1】実施例1のブレーキ制御装置を適用した車両のシステム構成図である。
【図2】油圧ユニット1の回路構成図である。
【図3】各ECU間の送受信信号を示す図である。
【図4】油圧ユニットECU2の制動制御処理の流れを示すフローチャートである。
【図5】図4のステップS2における油圧ユニットECU2内アプリの要求制動力演算処理の流れを示すフローチャートである。
【図6】要求制動力の所定減速度までステップ的に上げる例である。
【図7】要求制動力を車速に応じて所定勾配で上昇させ所定減速度に達した時点で保持する例である。
【図8】図4のステップS3における他システム要求値選択処理の説明図である。
【図9】図4のステップS5における他システムへの要求制動力演算処理の流れを示すフローチャートである。
【図10】図4のステップS6における他システムへの要求制動力演算処理の流れを示すフローチャートである。
【図11】図10のステップS602におけるパーキングブレーキ制御処理の流れを示すフローチャートである。
【図12】電制ブースタ制御処理の流れを示すフローチャートである。
【図13】図12のステップS82におけるドライバ要求制動力演算処理の流れを示すフローチャートである。
【図14】図12のステップS83における要求制動力演算処理の流れを示すフローチャートである。
【図15】走行時の要求制動力演算作用を示すタイムチャートである。
【図16】実施例1の車両挙動安定作用を示す図である。
【発明を実施するための形態】
【0008】
以下、本発明のブレーキ制御装置を実施するための形態を、図面に示す実施例に基づいて説明する。
〔実施例1〕
まず、構成を説明する。
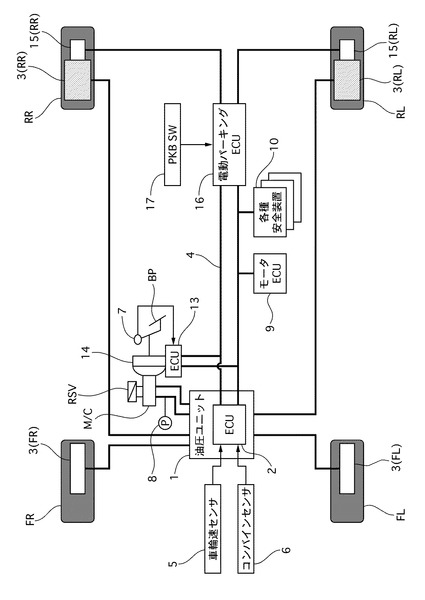
図1は実施例1のブレーキ制御装置を適用した車両のシステム構成図、図2は実施例1の油圧ユニット1の回路構成図である。
[システム構成]
油圧ユニット(制動力発生部)1は、油圧ユニットECU(制動力コントロールユニット,制動力発生部コントロールユニット)2からの指令に応じて、各輪FL,FR,RL,RRのホイルシリンダ圧を調整し、ブレーキキャリパ(左右前輪FL,FRのブレーキキャリパをフロントキャリパ、左右後輪RL,RRのブレーキキャリパをリアキャリパと称す。)3の作動を制御する。
油圧ユニットECU2には、車輪速センサ5により検出された各車輪速、コンバインセンサ6により検出された車両の横加速度およびヨーレート、マスタシリンダ圧センサ8により検出されたマスタシリンダ圧が直接入力される。油圧ユニットECU2は、通信ライン4を介して、モータECU9、各種安全装置10、電制ブースタECU13、電動パーキングECU(パーキングブレーキコントロールユニット,電動パーキングブレーキ機構コントロールユニット)16と相互通信を行う。各ECU間の送受信信号については後述する。
モータECU9は、左右前輪FL,FRを駆動する図外のモータジェネレータを力行または回転運転し、左右前輪FL,FRに駆動力または回生制動力を付与する。
電制ブースタECU13は、電制ブースタ14を制御し、ブレーキペダルストロークを倍力する。
左右後輪RL,RRには、左右リアキャリパ3RL,3RRを作動させる左右電動モータ15RL,15RRが設けられている。左右リアキャリパ3RL,3RRと左右電動モータ15RL,15RRとにより、電動パーキングブレーキ(パーキングブレーキ機構,電動パーキングブレーキ機構)が構成される。左右電動モータ15RL,15RRは、電動パーキングECU16からの指令に応じて作動する。電動パーキングECU16は、油圧ユニットECU2からの作動要求に応じて、電動パーキングブレーキを作動させる。
【0009】
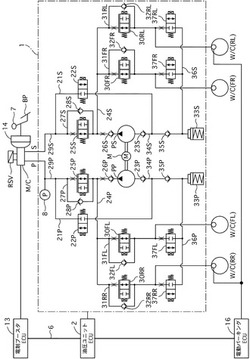
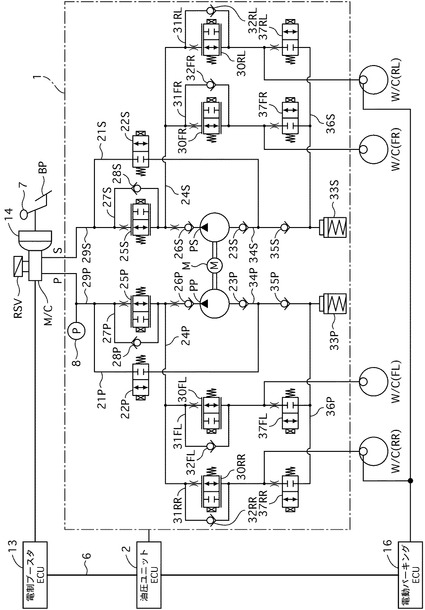
[油圧ユニットの回路構成]
実施例1の油圧ユニット1は、P系統(第1配管系統)とS系統(第2配管系統)との2系統からなる、X配管と呼ばれる配管構造を有している。なお、図2に記載された各部位の符号の末尾に付けられたPはP系統、SはS系統を示し、FL,RR,FR,RLは左前輪、右後輪、右前輪、左後輪に対応することを示す。以下の説明では、P,S系統または各輪を区別しないとき、P,SまたはFL,RR,FR,RLの記載を省略する。
実施例1の油圧ユニット1は、クローズド油圧回路を用いている。ここで、「クローズド油圧回路」とは、ホイルシリンダW/Cへ供給されたブレーキ液を、マスタシリンダM/Cを介してリザーバタンクRSVへと戻す油圧回路をいう。ちなみに、クローズド油圧回路に対し、ホイルシリンダW/Cへ供給されたブレーキ液を、マスタシリンダM/Cを介すことなく直接リザーバタンクRSVへ戻すことが可能な油圧回路を、「オープン油圧回路」という。
ブレーキペダルBPのストロークは、ストロークセンサ7により検出され、電動ブースタECU13に入力される。電動ブースタECU13は、電制ブースタ14を駆動してブレーキペダルストロークを倍力し、マスタシリンダM/Cのブレーキ液圧(マスタシリンダ圧)を立ち上げる。
P系統には、左前輪FLのホイルシリンダW/C(FL)、右後輪RRのホイルシリンダW/C(RR)が接続され、S系統には、右前輪FRのホイルシリンダW/C(FR)、左後輪RLのホイルシリンダW/C(RL)が接続される。また、P系統、S系統には、ポンプPP、ポンプPSが設けられている。ポンプPP、ポンプPSは、例えば、ギヤポンプであって、1つのモータMにより駆動される。
【0010】
マスタシリンダM/CとポンプPP,PS(以下、ポンプP)の吸入側とは、管路21によって接続されている。各管路21上には、ノーマルクローズ型比例電磁弁であるゲートインバルブ22が設けられている。マスタシリンダM/Cとゲートインバルブ22との間には、マスタシリンダM/Cの圧力を検出するマスタシリンダ圧センサ8が設けられている。
また、管路21上であって、ゲートインバルブ22とポンプPとの間にはチェックバルブ23が設けられ、各チェックバルブ23は、ゲートインバルブ22からポンプPへ向かう方向へのブレーキ液の流れを許容し、反対方向の流れを禁止する。
各ポンプPの吐出側と各ホイルシリンダW/Cとは、管路24によって接続されている。各管路24上には、各ホイルシリンダW/Cに対応するノーマルオープン型電磁弁であるソレノイドインバルブ30が設けられている。
また、各管路24上であって、各ソレノイドインバルブ30とポンプPとの間にはチェックバルブ26が設けられて、各チェックバルブ26は、ポンプPからソレノイドインバルブ30へ向かう方向へのブレーキ液の流れを許容し、反対方向の流れを禁止する。
さらに、各管路24には、各ソレノイドインバルブ30を迂回する管路31が設けられ、管路31には、チェックバルブ32が設けられている。各チェックバルブ32は、ホイルシリンダW/CからポンプPへ向かう方向へのブレーキ液の流れを許容し、反対方向の流れを禁止する。
【0011】
マスタシリンダM/Cと管路24とは管路29によって接続され、管路24と管路29とはポンプPとソレノイドインバルブ30との間において合流する。各管路29上には、ノーマルオープン型比例電磁弁であるゲートアウトバルブ25が設けられている。
各管路29には、各ゲートアウトバルブ25を迂回する管路27が設けられ、管路27には、チェックバルブ28が設けられている。各チェックバルブ28は、マスタシリンダM/C側からホイルシリンダW/Cへ向かう方向のブレーキ液の流れを許容し、反対方向の流れを禁止する。
ポンプPの吸入側にはリザーバ33が設けられ、リザーバ33とポンプPとは管路34によって接続されている。リザーバ33とポンプPとの間にはチェックバルブ35が設けられて、各チェックバルブ35は、リザーバ33からポンプPへ向かう方向のブレーキ液の流れを許容し、反対方向の流れを禁止する。
ホイルシリンダW/Cと管路34とは管路36によって接続され、管路36と管路34とはチェックバルブ35とリザーバ33との間において合流する。各管路36には、それぞれノーマルクローズ型電磁弁であるソレノイドアウトバルブ37が設けられている。
油圧ユニットECU2は、各センサ、各ECU等からの情報に基づいて、アンチスキッドブレーキ制御(ABS)や車両挙動安定化制御の制御目標値を演算し、電制ブースタ14、ゲートインバルブ22、ゲートアウトバルブ25、ソレノイドインバルブ30、ソレノイドアウトバルブ37およびモータMの作動を制御する。
【0012】
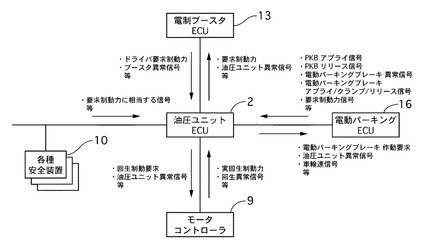
[各ECU間の送受信信号]
図3は、各ECU間の送受信信号を示す図である。
モータコントローラ9は、油圧ユニットECU2に対し、モータジェネレータの実回生制動力、回生異常信号等を送信する。油圧ユニットECU2は、モータコントローラ9に対し、回生制動要求、油圧ユニット異常信号等を送信する。
電制ブースタECU13は、油圧ユニットECU2に対し、ドライバ要求制動力、ブースタ異常信号等を送信する。油圧ユニットECU2は、電制ブースタECU13に対し、要求制動力、油圧ユニット異常信号等を送信する。
各種安全装置10は、油圧ユニットECU2に対し、要求制動力に相当する信号等を送信する。
電動パーキングECU16は、油圧ユニットECU2に対し、パーキングブレーキアプライ信号、パーキングブレーキリリース信号、電動パーキングブレーキ異常信号、電動パーキングブレーキアプライ/クランプ/リリース信号、要求制動力信号等を送信する。油圧ユニットECU2は、電動パーキングECU16に対し、電動パーキングブレーキ作動要求、油圧ユニット異常信号、車輪速信号等を送信する。
【0013】
[制動制御処理]
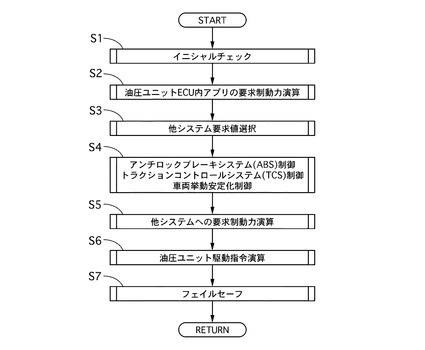
図4は、油圧ユニットECU2の制動制御処理の流れを示すフローチャートで、以下、各ステップについて説明する。なお、このステップは、イグニッションONからOFFまでの間、所定の演算周期で繰り返し実行される。
ステップS1では、イニシャルチェック処理を行う。イグニッションON時の初期診断を実行する部分である。
ステップS2では、油圧ユニットECU2内アプリの要求制動力演算処理を行う。油圧ユニットECU2内にある要求制動力を出力する各アプリケーション機能のある部分である。
ステップS3では、他システム要求値選択処理を行う。他のシステムからの要求やドライバ要求等から実現させたい要求制動力を選択する部分であり、この中で電動パーキングブレーキへの作動要求も判定する。
ステップS4では、ABS制御、TCS制御、車両挙動安定化制御処理を行う。ABS、TCS、車両挙動安定化制御を実行する部分である。上記要求制動力を実現させた結果、車輪スリップ発生や車両挙動が乱れた場合に要求制動力を修正する部分である。このステップは、要求制動力算出部に相当する。
ステップS5では、他システムへの要求制動力演算処理を行う。前記制御部分から算出された要求制動力を実現させるために、他のシステムへ制動力要求をどのように振り分けるのか判定し制動力要求を算出する部分である。このステップは、制動力協調制御部に相当する。他のシステムとは、電制ブースタ14やモータジェネレータによる回生制動力を制御可能なシステムである。
ステップS6では、油圧ユニット駆動指令演算処理を行う。前記要求制動力演算処理の指令値等からバルブ駆動指令、モータ駆動指令を算出する部分である。
ステップS7では、イグニッションON中のフェイルセーフチェックを行う。故障が検出されると車両が危険な状態にならないように、所定の処置を行うためのものである。
【0014】
以下、各ステップの処理を詳細に説明する。
[油圧ユニット内アプリの要求制動力演算処理]
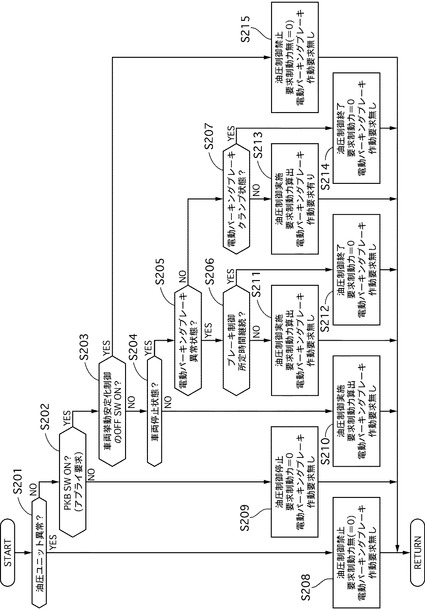
図5は、図4のステップS2における油圧ユニットECU2内アプリの要求制動力演算処理の流れを示すフローチャートである。
ステップS201では、油圧ユニットに異常が発生しているか否かを判定し、YESの場合はステップS208へ進み、NOの場合はステップS202へ進む。
ステップS202では、パーキングブレーキスイッチ17がON(アプライ要求)であるか否かを判定し、YESの場合はステップS203へ進み、NOの場合はステップS209へ進む。
ステップS203では、車両挙動安定化制御のOFFスイッチがONであるか否かを判定し、YESの場合はステップS215へ進み、NOの場合はステップS204へ進む。
ステップS204では、車輪速センサ5からの各車輪速に基づいて、車両停止状態であるか否か(車速がゼロであるか否か)を判定し、YESの場合はステップS205へ進み、NOの場合はステップS210へ進む。このステップは、車両が走行中であるか否かを判定する走行状態判定部に相当する。ここで、低車速域では車両挙動が乱れるおそれがないため、車速条件としてもよい。
ステップS205では、電動パーキングブレーキ異常信号の有無に基づき、電動パーキングブレーキに異常が発生しているか否かを判定し、YESの場合はステップS206へ進み、NOの場合はステップS207へ進む。このステップは、パーキングブレーキ機構異常判定部に相当する。
ステップS206では、ブレーキ制御が所定時間継続したか否かを判定し、YESの場合はステップS212へ進み、NOの場合はステップS211へ進む。
ステップS207では、電動パーキングブレーキがクランプ状態であるか否かを判定し、YESの場合はステップS214へ進み、NOの場合はステップS213へ進む。ここでは、電動パーキングブレーキ作動要求出力時間で判定してもよい。つまり、作動要求出力時間が所定時間継続した場合にクランプ状態であると判定してもよい。
【0015】
ステップS208では、油圧ユニット1の油圧制御を禁止し、要求制動力をゼロとし、電動パーキングブレーキ作動要求無しとする。
ステップS209では、油圧ユニット1の油圧制御を停止し、要求制動力をゼロとし、電動パーキングブレーキ作動要求無しとする。
ステップS210では、油圧ユニット1の油圧制御を実施し、要求制動力を算出し、電動パーキングブレーキ作動要求無しとする。要求制動力に関しては、ステップ的に上げる構成(図6参照)、車速に応じて所定勾配で上昇させ所定減速度に達した時点で保持する構成(図7参照)、電動パーキングブレーキからの要求制動力指令を受信する構成等を用いることができる。なお、図6,7に示すように、減少勾配に関しては、坂路の勾配等に応じて変更し、減少させる。例えば、坂路の勾配が大きいほど、減少勾配を小さくする。
ステップS211では、油圧ユニット1の油圧制御を実施し、要求制動力を算出し、電動パーキングブレーキ作動要求無しとする。
ステップS212では、油圧ユニット1の油圧制御を終了し、要求制動力をゼロとし、電動パーキングブレーキ作動要求有りとする。油圧制御終了の場合には、坂道で停止した場合に車両挙動が急激に変化することを防止するために所定勾配で減少させるようにする。
ステップS213では、油圧ユニット1の油圧制御を実施し、要求制動力を算出し、電動パーキングブレーキ作動要求有りとする。
ステップS214では、油圧ユニット1の油圧制御を終了し、要求制動力をゼロとし、電動パーキングブレーキ作動要求無しとする。
ステップS215では、油圧ユニット1の油圧制御を禁止し、要求制動力をゼロとし、電動パーキングブレーキ作動要求無しとする。
【0016】
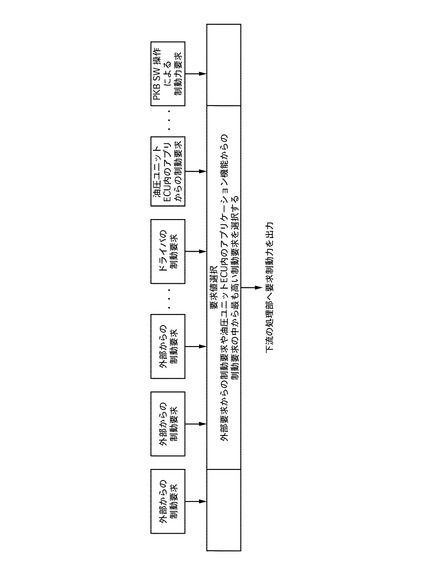
[他システム要求値選択処理]
図8は、図4のステップS3における他システム要求値選択処理の説明図である。
他システム要求値選択の中には、他のシステムからの要求やドライバ要求、油圧ユニットECU2内で演算されるブレーキアシスト機能や走行中のパーキングブレーキスイッチ17の操作による要求制動力等、油圧ユニットECU2内の機能で制動力要求を出すものも含まれ、それぞれの要求制動力から車両として最適な制動力要求を選択する。
[ABS制御、TCS制御、車両挙動安定化制御処理]
図4のステップS4におけるABS制御、TCS制御、車両挙動安定化制御処理について説明する。
上記要求制動力を実現した結果、車輪スリップが発生した場合や車両挙動が乱れた場合に、要求制動力を修正する。例えば、減速側スリップが発生した場合には、ABS制御により制動力が低下するよう要求制動力を修正する。また、車両挙動が乱れた場合には、車両挙動安定化制御により車両挙動を修正するためのモーメントを発生させるように要求制動力を修正する。加速側スリップが発生した場合には、TCS制御により制動力を増加するよう要求制動力を修正する。
【0017】
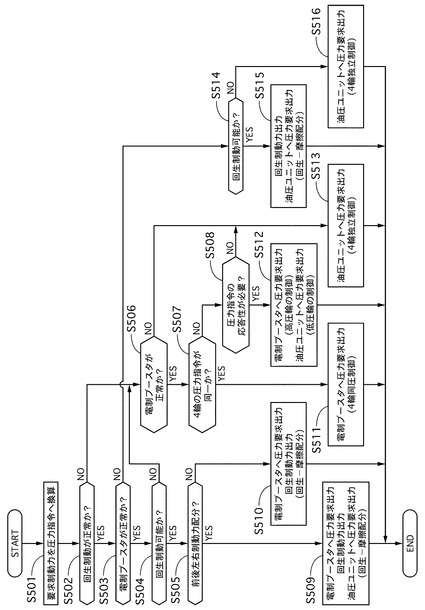
[他システムへの要求制動力演算処理]
図9は、図4のステップS5における他システムへの要求制動力演算処理の流れを示すフローチャートである。
ステップS501では、要求制動力を圧力指令へ換算する。
ステップS502では、回生異常信号の有無に基づき、回生制動が正常か否かを判定し、YESの場合はステップS503へ進み、NOの場合はステップS506へ進む。
ステップS503では、ブースタ異常信号の有無に基づき、電制ブースタが正常か否かを判定し、YESの場合はステップS504へ進み、NOの場合はステップS514へ進む。
ステップS504では、回生制動が可能か否かを判定し、YESの場合はステップS505へ進み、NOの場合はステップS506へ進む。ここでは、例えば、極低車速域や高車速域、バッテリが満充電状態である場合は回生制動不能と判定し、それ以外は回生制動可能と判定する。
ステップS505では、車両挙動等を考慮して前後左右制動力配分が必要か否かを判定し、YESの場合はステップS509へ進み、NOの場合はステップS510へ進む。
【0018】
ステップS506では、ブースタ異常信号の有無に基づき、電制ブースタが正常か否かを判定し、YESの場合はステップS507へ進み、NOの場合はステップS513へ進む。
ステップS507では、4輪の圧力指令が同一であるか否かを判定し、YESの場合はステップS511へ進み、NOの場合はステップS508へ進む。
ステップS509では、電制ブースタ14へ圧力要求を出力し、モータコントローラ9に回生制動力要求を出力して回生制動力を発生させる。また、油圧ユニット1へ圧力要求を出力して回生制動力と摩擦制動力との配分、摩擦制動力の前後左右配分を行う。
ステップS510では、電制ブースタ14へ圧力要求を出力し、モータコントローラ9に回生制動力要求を出力して回生制動力を発生させる。
ステップS511では、電制ブースタ14へ圧力要求を出力して4輪同圧制御を行う。
ステップS512では、電制ブースタ14へ圧力要求を出力して高圧輪の制御を行い、油圧ユニット1へ圧力要求を出力して低圧輪の制御を行う。
ステップS513では、油圧ユニット1へ圧力要求を出力して4輪独立制御を行う。
ステップS514では、回生制動可能か否かを判定し、YESの場合はステップS515へ進み、NOの場合はステップS516へ進む。
ステップS515では、回生制動力を出力し、油圧ユニット1へ圧力要求を出力して回生制動力と摩擦制動力との配分を行う。
ステップS516では、油圧ユニット1へ圧力要求を出力して4輪独立制御を行う。
【0019】
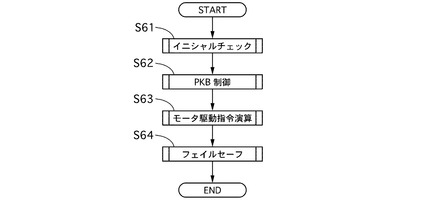
[電動パーキングブレーキECUの演算処理]
図10は、電動パーキングブレーキECU演算処理の流れを示すフローチャートである。
ステップS61では、イニシャルチェック処理を行う。
ステップS62では、パーキングブレーキ制御処理を行う。ここでは、パーキングブレーキの作動終了判定、パーキングブレーキの制動力指令によりパーキングブレーキのクランプ処理、リリース処理を実施する。
ステップS63では、モータ駆動指令演算処理を行う。クランプ処理、リリース処理からの要求制動力に応じてモータ駆動信号を演算する部分である。
ステップS64では、フェイルセーフ処理を行う。
【0020】
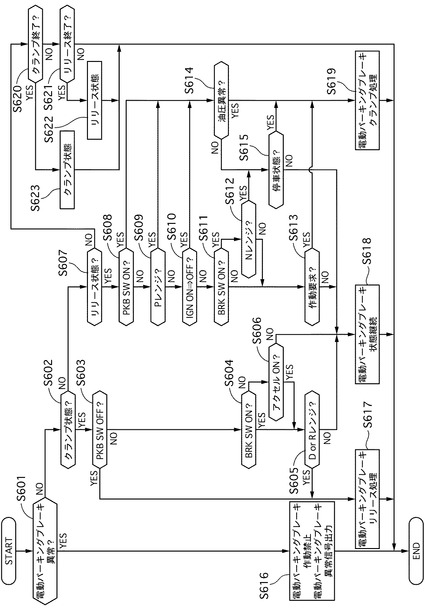
[パーキングブレーキ制御処理]
図11は、図10のステップS62におけるパーキングブレーキ制御処理の流れを示すフローチャートである。
ステップS601では、電動パーキングブレーキ異常信号の有無に基づき、電動パーキングブレーキに異常が発生しているか否かを判定し、YESの場合はステップS616へ進み、NOの場合はステップS602へ進む。
ステップS602では、クランプ状態であるか否かを判定し、YESの場合はステップS603へ進み、NOの場合はステップS607へ進む。
ステップS603では、パーキングブレーキスイッチ17がOFFであるか否かを判定し、YESの場合はステップS617へ進み、NOの場合はステップS604へ進む。
ステップS604では、ブレーキスイッチがONであるか否かを判定し、YESの場合はステップS605へ進み、NOの場合はステップS606へ進む。ブレーキスイッチは、ドライバがブレーキペダルBPを踏んでいる場合はON、踏んでいない場合はOFFとなるスイッチである。
ステップS605では、レンジ位置としてDまたはRレンジが選択されているか否かを判定し、YESの場合はステップS617へ進み、NOの場合はステップS618へ進む。
ステップS606では、アクセルONであるか否かを判定し、YESの場合はステップS605へ進み、NOの場合はステップS618へ進む。
ステップS607では、リリース状態であるか否かを判定し、YESの場合はステップS608へ進み、NOの場合はステップS620へ進む。
ステップS608では、パーキングブレーキスイッチ17がONであるか否かを判定し、YESの場合はステップS614へ進み、NOの場合はステップS609へ進む。
ステップS609では、レンジ位置としてPレンジが選択されているか否かを判定し、YESの場合はステップS614へ進み、NOの場合はステップS610へ進む。
ステップS610では、イグニッションスイッチがONからOFFとなったか否かを判定し、YESの場合はステップS614へ進み、NOの場合はステップS611へ進む。
【0021】
ステップS611では、ブレーキスイッチがONであるか否かを判定し、YESの場合はステップS612へ進み、NOの場合はステップS613へ進む。
ステップS612では、レンジ位置としてNレンジが選択されているか否かを判定し、YESの場合はステップS615へ進み、NOの場合はステップS613へ進む。
ステップS613では、作動要求が有るか否かを判定し、YESの場合はステップS619へ進み、NOの場合はステップS618へ進む。
ステップS614では、油圧異常が発生しているか否かを判定し、YESの場合はステップS619へ進み、NOの場合はステップS615へ進む。このステップは、制動力発生部異常判定部に相当する。
ステップS615では、停車状態であるか否かを判定し、YESの場合はステップS619へ進み、NOの場合はステップS618へ進む。
ステップS616では、電動パーキングブレーキ作動禁止とし、電動パーキングブレーキ異常信号を出力する。
ステップS617では、電動パーキングブレーキのリリース処理を行う。
ステップS618では、電動パーキングブレーキの状態を継続する。
ステップS619では、電動パーキングブレーキのクランプ処理を行う。
ステップS620では、クランプ終了か否かを判定し、YESの場合はステップS623へ進み、NOの場合はステップS621へ進む。
ステップS621では、リリース終了か否かを判定し、YESの場合はステップS622へ進み、NOの場合は本制御を終了する。
ステップS622では、リリース状態とする。
ステップS623では、クランプ状態とする。
【0022】
[電動ブースタ制御処理]
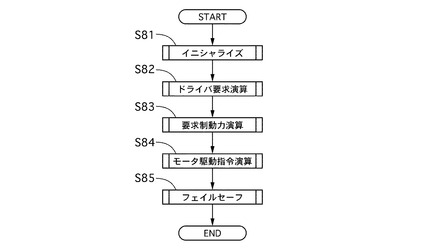
図12は、電制ブースタ制御処理の流れを示すフローチャートである。
ステップS81では、イニシャライズ処理を行う。イグニッションON時に初期診断を実行する部分である。
ステップS82では、ドライバ要求制動力演算処理を行う。ブレーキペダルストロークやブレーキペダルBPに掛かる踏力からドライバが要求している制動力を演算する部分である。
ステップS83では、要求制動力演算処理を行う。他のECUからの制動力要求とドライバ要求のいずれかを選択して要求制動力を演算する部分である。
ステップS84では、モータ駆動指令演算処理を行う。上記選択した要求制動力を達成するためのモータ駆動指令を演算する部分である。
ステップS85では、フェイルセーフ処理を行う。
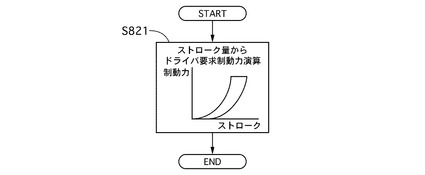
[ドライバ要求制動力制御処理]
図13は、図12のステップS82におけるドライバ要求制動力演算処理の流れを示すフローチャートである。
ステップS821では、ブレーキペダルストロークに基づき、あらかじめ設定されたマップを参照してドライバ要求制動力を求める。ステップS821内に示すように、ストローク−ドライバ要求制動力特性は、ストロークが大きいほど制動力が大きくなるような特性に設定している。なお、ペダル踏み込み時は踏み戻し時よりもストロークに対する制動力が大きくなるようにヒステリシスを設けている。
【0023】
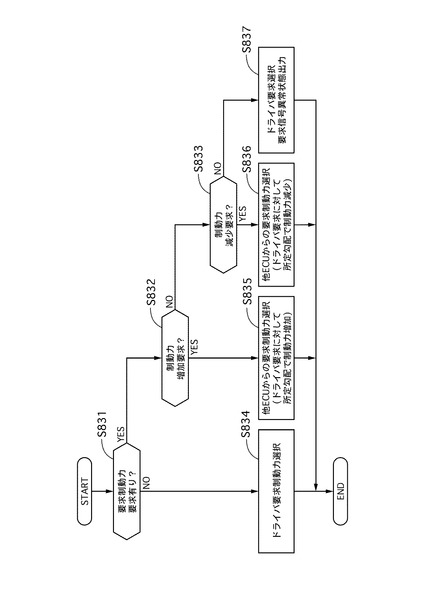
[要求制動力演算処理]
図14は、図12のステップS83における要求制動力演算処理の流れを示すフローチャートである。
ステップS831では、要求制動力要求が有るか否かを判定し、YESの場合はステップS834へ進み、NOの場合はステップS832へ進む。
ステップS832では、制動力増加要求が有るか否かを判定し、YESの場合はステップS835へ進み、NOの場合はステップS833へ進む。
ステップS833では、制動力減少要求が有るか否かを判定し、YESの場合はステップS836へ進み、NOの場合はステップS837へ進む。
ステップS834では、ドライバ要求制動力を選択する。
ステップS835では、他ECUからの要求制動力を選択し、ドライバ要求制動力を所定勾配で制動力を増加させる。
ステップS836では、他ECUからの要求制動力を選択し、ドライバ要求制動力を所定勾配で制動力を減少させる。
ステップS837では、ドライバ要求制動力を選択し、要求信号異常状態を出力する。
【0024】
次に、作用を説明する。
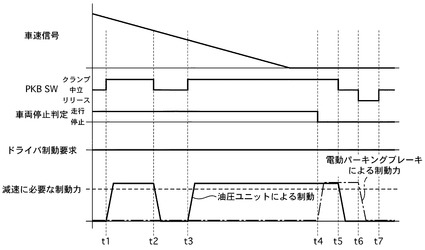
[要求制動力演算作用]
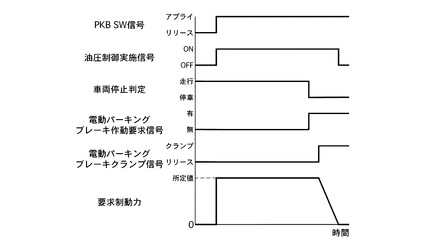
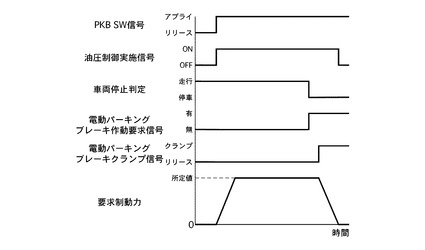
図15は、走行時の要求制動力演算作用を示すタイムチャートである。
時点t1では、パーキングブレーキスイッチ17がON側に操作されるが、走行中であると判定されているため、電動パーキングブレーキは作動させず、油圧ユニット1による自動制動によって減速に必要な制動力(パーキングブレーキ相当の制動力)を4輪に発生させる(図5のS201→S202→S204→S210)。このとき、制動力は車速に応じた所定勾配で上昇させる。
時点t2では、パーキングブレーキスイッチ17が中立位置に戻されたため、油圧ユニット1で発生させていた制動力をゼロにする(図5のS201→S202→S209)。このとき、制動力は坂路の勾配に応じた所定勾配で減少させる。
時点t3では、パーキングブレーキスイッチ17がON側に操作されるが、走行中であると判定されているため、電動パーキングブレーキは作動させず、油圧ユニット1による自動制動によって減速に必要な制動力を4輪に発生させる(図5のS201→S202→S204→S210)。このとき、制動力は車速に応じた所定勾配で上昇させる。
時点t4では、車両停止と判定されたため、左右電動モータ15RL,15RRを駆動して電動パーキングブレーキを作動させる(図5のS201→S202→S204→S205→S207→S213)。油圧ユニット1で発生させている制動力は維持する。このとき、制動力は所定勾配で上昇させる。
時点t5では、電動パーキングブレーキがクランプ状態となったため、油圧ユニット1で発生させていた制動力をゼロにする(図5の図5のS201→S202→S204→S205→S207→S214)。このとき、制動力は坂路の勾配に応じた所定勾配で減少させる。
時点t6では、パーキングブレーキスイッチ17がOFF側に操作されたため、電動パーキングブレーキで発生させていた制動力をゼロにする(図11のS601→S602→S603→617)。
【0025】
[車両挙動安定作用]
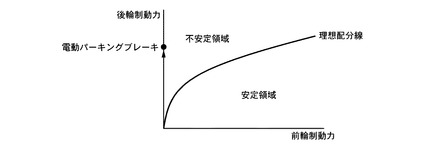
通常のパーキングブレーキは、後輪に設置されているブレーキをドライバの操作によりワイヤを引っ張ることで制動力を発生させている。このため、旋回中にドライバがパーキングブレーキを操作すると、後輪のみに大きな制動力が発生するため、常に図16に示す不安定領域で制動力制御が行われることとなり、車両が不安定な状態となってしまう。これは、路面μの低い雪の路面やブラックアイスのような路面で顕著となる。
電動パーキングブレーキは、ドライバの操作と無関係に後輪に制動力を発生/解除させることが可能である。また、安全性の観点から、液圧ブレーキを自動的に掛けることが可能となっている。
そこで、実施例1では、旋回中にパーキングブレーキを操作すると車両挙動が不安定になること、および電動パーキングブレーキがドライバ操作と無関係に制動力を発生/解除可能なことに着目し、走行中にパーキングブレーキが操作された場合、油圧ユニット1による液圧ブレーキによって4輪で制動力を発生させる。液圧ブレーキは、4輪の制動力を個別に制御できるため、常に図16に示す安定領域で制動力を制御可能である。これにより、ドライバの要求する制動力を確保しつつ、車両挙動が乱れるのを抑制でき、車両の安定性を確保できる。
また、電動パーキングブレーキに代えて、油圧ユニット1による制動制御を用いることで、ABS制御、TCS制御、車両挙動安定化制御等が可能となるため、電動パーキングブレーキのみを作動させる場合と比較して、様々なシーンで有利となる。
例えば、車輪スリップが発生した場合には、応答性の低い電動パーキングブレーキを使用するよりも、自動ブレーキによるABS制御を実施する方が車両挙動を安定させる観点からも有利である。
また、仮に車両挙動が乱れそうになった場合であっても、車両挙動安定化制御による制動力配分を行うことで、車両挙動を安定に保つことができる。
【0026】
実施例1では、車両停止と判定された場合、油圧ユニット1による制動力を低減し、電動パーキングブレーキの作動を許可する。車両停車中も油圧ユニット1による4輪制動を継続した場合、4つのソレノイドインバルブ30を常に閉じておく必要があるため、バッテリからの電力の持ち出しが大きくなる。これに対し、電動パーキングブレーキは、2つの電動モータ15RL,15RRを駆動してリアキャリパ3RL,3RRを動かせばよいため、油圧ユニット1を作動させる場合と比較して消費電力を抑制できる。
このとき、電動パーキングブレーキの作動後に油圧ユニット1による制動力を低減させている。ここで、仮に電動パーキングブレーキを作動させる前に油圧ユニット1による制動力を減少させた場合、坂路停止中に車両がずり下がるおそれがある。よって、先に電動パーキングブレーキを作動させて車両停車を維持できる状態となった後に油圧ユニット1による制動力を減少させることで、坂路停止時における車両のずり下がりを防止できる。
また、坂路の勾配が大きいほど油圧ユニット1による制動力の減少勾配を小さくしているため、電動パーキングブレーキによる制動力の立ち上がりが遅れる場合であっても、坂路停止時における車両のずり下がりをより確実に防止できる。
【0027】
実施例1では、電動パーキングブレーキの異常が判定され走行状態が走行判定から停止判定になると、油圧ユニット1による制動力をあらかじめ設定された時間保持するよう要求制動力を算出し(図5のS201→S202→S204→S205→S206→S211)、時間経過後に要求制動力を低減し、電動パーキングブレーキの作動の制限を継続する(図5のS201→S202→S204→S205→S206→S212)。
電動パーキングブレーキに異常が発生している場合、坂路停止直後に要求制動力を低減して電動パーキングブレーキを作動させたとき、車両停止に必要な制動力が得られず、車両のずり下がりが発生するおそれがある。そこで、車両停止からあらかじめ設定された時間は油圧ユニット1による制動力を保持することで、ドライバにブレーキペダルBPを踏む余裕時間を与えることができ、坂路停止時における車両のずり下がりを抑制できる。
実施例1では、油圧ユニット1の異常が判定されると、判定された走行状態が走行中のときにパーキングブレーキスイッチ17のON操作によって電動パーキングブレーキの作動要求があった場合に電動パーキングブレーキ機構の作動を許可する(図11のS601→S602→S607→S608→S614→S619)。
よって、油圧ユニット1に異常が発生している場合には、走行中であっても電動パーキングブレーキの作動を許可することで、車両を減速させることができる。
実施例1では、油圧ユニットECU2側で電動パーキングブレーキの作動判定を行い、電動パーキングECU16に作動要求を出力している。
電動パーキングECU16はパーキングブレーキスイッチ17の状態のみを見ているのに対し、油圧ユニットECU2は、車輪速センサ5、コンバインセンサ6等のセンサ信号が直接入力され、常に車両の状態を監視している。よって、油圧ユニットECU2側で電動パーキングブレーキの作動判定を行うことで、車両の状態に合致した的確な判定を行うことができる。
【0028】
次に、効果を説明する。
実施例1のブレーキ制御装置にあっては、以下に列挙する効果を奏する。
(1) 運転者のスイッチ操作によって後輪RL,RRに制動力を発生させるためのパーキングブレーキ機構(左右リアキャリパ3RL,3RR、左右電動モータ15RL,15RR)と、車両の状態に応じて4輪FL,FR,RL,RRに対して独立した制動力を発生可能な油圧ユニット1と、油圧ユニット1の作動をコントロールする油圧ユニットECU2と、車両が走行中か否かを判定する走行状態判定部(ステップS204)と、を備え、油圧ユニットECU2は、判定された走行状態が走行中のときにスイッチ操作によって電動パーキングブレーキの作動要求があった場合に電動パーキングブレーキの作動を禁止し、油圧ユニット1を作動させて制動力を発生させる制動力協調制御部(ステップS5)を備えた。
よって、ドライバの要求する制動力を確保しつつ、車両挙動が乱れるのを抑制でき、車両の安定性を確保できる。
(2) 油圧ユニットECU2は、車両挙動に基づいて油圧ユニット1により発生させる要求制動力を算出する要求制動力算出部(ステップS4)を備え、制動力協調制御部は、算出された要求制動力に基づき油圧ユニット1を作動させる。
よって、車両挙動の乱れをより確実に抑制できる。
【0029】
(3) 電動パーキングブレーキの作動をコントロールする電動パーキングECU16を備え、油圧ユニットECU2は、油圧ユニット1により発生させる要求制動力を算出する要求制動力算出部(ステップS4)を備え、走行状態が走行判定から停止判定になると、油圧ユニット1による制動力が低減するよう要求制動力を低減し、電動パーキングECU16による電動パーキングブレーキの作動を許可する。
よって、油圧ユニット1による制動力のみで車両停車状態を維持する場合と比較して、消費電力を抑制できる。
(4) 油圧ユニットECU2は、電動パーキングブレーキの作動後に油圧ユニット1による制動力を低減させる。
よって、坂路停止時における車両のずり下がりを防止できる。
(5) 油圧ユニットECU2は、油圧ユニット1による制動力の低減を所定の勾配をもって実行する。
よって、坂路停止時における車両のずり下がりをより確実に防止できる。
【0030】
〔他の実施例〕
以上、本発明を実施するための形態を実施例に基づいて説明したが、本発明の具体的な構成は実施例に示した構成に限定されるものではなく、発明の要旨を逸脱しない範囲の設計変更等があっても本発明に含まれる。
例えば、実施例では、判定された走行状態が走行中のときにスイッチ操作によってパーキングブレーキ機構の作動要求があった場合にパーキングブレーキ機構の作動を禁止する例を示したが、制限する構成としてもよい。
実施例では、電動車を例に示したが、ハイブリッド車両やエンジン車両に適用した場合であっても実施例と同様の作用効果を得ることができる。
【0031】
以下に、実施例から把握される特許請求の範囲に記載した発明以外の技術的思想について説明する。
(a) 請求項1に記載のブレーキ制御装置において、
前記パーキングブレーキ機構の異常を判定するパーキングブレーキ機構異常判定部を備え、
前記制動力コントロールユニットは、前記パーキングブレーキ機構異常判定部により前記パーキングブレーキ機構の異常が判定され走行状態が走行判定から停止判定になると、前記制動力発生部による制動力をあらかじめ設定された時間保持するよう要求制動力を算出し、前記時間経過後に要求制動力を低減し、前記パーキングブレーキ機構の作動の制限を継続することを特徴とするブレーキ制御装置。
パーキングブレーキ機構に異常が発生している場合、坂路停止直後に要求制動力を低減してパーキングブレーキを作動させたとき、車両停止に必要な制動力が得られず、車両のずり下がりが発生するおそれがある。そこで、車両停止からあらかじめ設定された時間は制動力発生部による制動力を保持することで、ドライバにブレーキペダルを踏む余裕時間を与えることができ、坂路停止時における車両のずり下がりを抑制できる。
(b) 請求項1に記載のブレーキ制御装置において、
前記制動力発生部の異常を判定する制動力発生部異常判定部を備え、
前記制動力コントロールユニットは、前記制動力発生部異常判定部により制動力発生部の異常が判定されると、前記判定された走行状態が走行中のときに前記スイッチ操作によって前記パーキングブレーキ機構の作動要求があった場合に前記パーキングブレーキ機構の作動を許可することを特徴とするブレーキ制御装置。
よって、制動力発生部に異常が発生している場合には、走行中であってもパーキングブレーキ機構の作動を許可することで、車両を減速させることができる。
【0032】
(c) 運転者のスイッチ操作によって車輪に制動力を発生するための電動パーキングブレーキ機構と、
車両の状態に応じて前記車輪に対して独立した制動力を発生可能な制動力発生部と、
前記電動パーキングブレーキ機構の作動をコントロールする電動パーキングブレーキ機構コントロールユニットと、
前記制動力発生部の作動をコントロールする制動力発生部コントロールユニットと、
車両が走行中か否かを判定する走行状態判定部と、
を備え、
前記コントロールユニットのうち一方のコントロールユニットは、判定された走行状態が走行判定のときに前記スイッチ操作された場合、前記電動パーキングブレーキ機構を非作動とすることを特徴とするブレーキ制御装置。
よって、走行時に電動パーキングブレーキ機構が作動することで車両挙動が乱れるのを抑制できる。
(d) (c)に記載のブレーキ制御装置において、
前記一方のコントロールユニットは前記制動力発生部コントロールユニットであることを特徴とするブレーキ制御装置。
制動力発生部コントロールユニットは常に車両の状態を見ているため、スイッチ操作状態のみを見ている電動パーキングブレーキ機構コントロールユニットと比較して、車両の状態に合致した的確な判定を行うことができる。
【0033】
(e) (d)に記載のブレーキ制御装置において、
前記制動力発生部コントロールユニットは、車両挙動に基づいて前記制動力発生部により発生させる要求制動力を算出する要求制動力算出部と、
算出された要求制動力に基づき前記制動力発生部を作動させる制動力協調制御部と、
を備えたことを特徴とするブレーキ制御装置。
よって、車両挙動の乱れをより確実に抑制できる。
(f) (e)に記載のブレーキ制御装置において、
前記制動力発生部コントロールユニットは、走行状態が走行判定から停止判定になると、前記制動力発生部による制動力が低減するよう要求制動力を低減し、前記電動パーキングブレーキコントロールユニットによる前記電動パーキングブレーキ機構の作動を許可することを特徴とするブレーキ制御装置。
よって、制動力発生部による制動力のみで車両停車状態を維持する場合と比較して、消費電力を抑制できる。
(g) (f)に記載のブレーキ制御装置において、
前記制動力発生部コントロールユニットは、前記電動パーキングブレーキ機構の作動後に前記制動力発生部による制動力を所定の勾配をもって実行することを特徴とするブレーキ制御装置。
よって、坂路停止時における車両のずり下がりを防止できる。
【0034】
(h) (g)に記載のブレーキ制御装置において、
前記電動パーキングブレーキ機構の異常を判定する電動パーキングブレーキ機構異常判定部を備え、
【0035】
前記制動力発生部コントロールユニットは、前記電動パーキングブレーキ機構異常判定部により前記電動パーキングブレーキ機構の異常が判定され走行状態が走行判定から停止判定になると、前記制動力発生部による制動力をあらかじめ設定された時間保持するよう要求制動力を算出し、前記時間経過後に要求制動力を低減し、前記電動パーキングブレーキ機構の作動の制限を継続することを特徴とするブレーキ制御装置。
よって、ドライバにブレーキペダルを踏む余裕時間を与えることができ、坂路停止時における車両のずり下がりを抑制できる。
(i) (h)に記載のブレーキ制御装置において、
前記制動力発生部の異常を判定する制動力発生部異常判定部を備え、
前記制動力発生部コントロールユニットは、前記制動力発生部異常判定部により前記制動力発生部の異常が判定されると、前記制動力発生部の作動を制限し、
前記電動パーキングブレーキ機構コントロールユニットは、前記制動力発生部異常判定部により前記制動力発生部の異常が判定されると、前記判定された走行状態が走行中のときに前記スイッチ操作によって前記電動パーキングブレーキ機構の作動要求があった場合に前記電動パーキングブレーキ機構の作動を許可することを特徴とするブレーキ制御装置。
よって、制動力発生部に異常が発生している場合には、走行中であってもパーキングブレーキ機構の作動を許可することで、車両を減速させることができる。
(j) 運転者のスイッチ操作がされると車両の後左右後輪に制動力を発生するための電動パーキングブレーキ機構と、
車両の状態に応じて前記車輪に対して独立した制動力を発生可能な制動力発生部と、
前記電動パーキングブレーキ機構の異常を判定する電動パーキングブレーキ機構異常判定部と、
前記制動力発生部の異常を判定する制動力発生部異常判定部と、
車両が走行中か否かを判定する走行状態判定部と、
スイッチ操作がされたときに前記各判定部の判定結果に応じて前記電動パーキングブレーキ機構と前記制動力発生部を選択的に作動させることを特徴とするブレーキ制御装置。
よって、電動パーキングブレーキ機構に異常が発生したか否か、制動力発生部に異常が発生したか否か、および走行中か否かに基づいて電動パーキングブレーキ機構と制動力発生部とを選択的に作動させることができる。
【0036】
(k) (j)に記載のブレーキ制御装置において、
スイッチ操作がされ、前記走行状態判定部により走行状態と判定されると前記電動パーキングブレーキ機構を作動させずに前記制動力発生部を作動させて制動力を得ることを特徴とするブレーキ制御装置。
よって、ドライバの要求する制動力を確保しつつ、車両挙動が乱れるのを抑制でき、車両の安定性を確保できる。
(l) (j)に記載のブレーキ制御装置において、
前記制動力発生部異常判定部により制動力発生部が異常と判定されると、前記判定された走行状態が走行中のときに前記スイッチ操作によって前記電動パーキングブレーキ機構の作動要求があった場合に前記電動パーキングブレーキ機構の作動を許可することを特徴とするブレーキ制御装置。
よって、制動力発生部に異常が発生している場合には、走行中であっても電動パーキングブレーキ機構の作動を許可することで、車両を減速させることができる。
(m) (j)に記載のブレーキ制御装置において、
前記電動パーキングブレーキ機構異常判定部により電動パーキングブレーキ機構の異常が判定され走行状態が走行判定から停止判定になると、前記制動力発生部による制動力をあらかじめ設定された時間保持するよう要求制動力を算出し、前記時間経過後に要求制動力を低減し、前記電動パーキングブレーキ機構の作動の制限を継続することを特徴とするブレーキ制御装置。
よって、ドライバにブレーキペダルを踏む余裕時間を与えることができ、坂路停止時における車両のずり下がりを抑制できる。
【0037】
(n) (j)に記載のブレーキ制御装置において、
走行状態が走行判定から停止判定になると、前記制動力発生部による制動力が低減するよう要求制動力を低減し、前記電動パーキングブレーキコントロールユニットによる前記電動パーキングブレーキ機構の作動を許可することを特徴とするブレーキ制御装置。
よって、制動力発生部による制動力のみで車両停車状態を維持する場合と比較して、消費電力を抑制できる。
(o) (j)に記載のブレーキ制御装置において、
前記制動力発生部異常判定部により前記制動力発生部が異常と判定されると前記制動力発生部の作動を制限し、
前記制動力発生部異常判定部により前記制動力発生部が異常と判定されると、前記判定された走行状態が走行中のときに前記スイッチ操作によって前記電動パーキングブレーキ機構の作動要求があった場合に前記電動パーキングブレーキ機構の作動を許可することを特徴とするブレーキ制御装置。
よって、制動力発生部に異常が発生している場合には、走行中であってもパーキングブレーキ機構の作動を許可することで、車両を減速させることができる。
【符号の説明】
【0038】
FL 左前輪
FR 右前輪
RL 左後輪
RR 右後輪
1 油圧ユニット(制動力発生部)
2 油圧ユニットECU(制動力コントロールユニット)
3RL,3RR 左右リアキャリパ(パーキングブレーキ機構)
15RL,15RR 左右電動モータ(パーキングブレーキ機構)
17 パーキングブレーキスイッチ
16 電動パーキングECU(パーキングブレーキコントロールユニット)
S4 要求制動力算出部
S5 制動力協調制御部
S204 走行状態判定部
【技術分野】
【0001】
本発明は、ブレーキ制御装置に関する。
【背景技術】
【0002】
特許文献1には、ドライバのスイッチ操作によりパーキングブレーキ機構を作動させる構成が開示されている。
【先行技術文献】
【特許文献】
【0003】
【特許文献1】特許第4360231号公報
【発明の概要】
【発明が解決しようとする課題】
【0004】
ドライバが走行中にスイッチ操作によってパーキングブレーキ機構を作動させると、特定の車輪のみ制動力が増大するため、車両挙動が乱れるという問題があった。
本発明の目的は、走行中にパーキングブレーキ機構への作動要求がなされたときの車両挙動の乱れを抑制できるブレーキ制御装置を提供することにある。
【課題を解決するための手段】
【0005】
本発明のブレーキ制御装置では、走行中にパーキングブレーキ機構への作動要求がなされた場合、パーキングブレーキ機構の作動を制限し、制動力発生部を作動させて制動力を発生させる。
【発明の効果】
【0006】
よって、本発明のブレーキ制御装置では、走行中にパーキングブレーキ機構への作動要求がなされたときの車両挙動の乱れを抑制できる。
【図面の簡単な説明】
【0007】
【図1】実施例1のブレーキ制御装置を適用した車両のシステム構成図である。
【図2】油圧ユニット1の回路構成図である。
【図3】各ECU間の送受信信号を示す図である。
【図4】油圧ユニットECU2の制動制御処理の流れを示すフローチャートである。
【図5】図4のステップS2における油圧ユニットECU2内アプリの要求制動力演算処理の流れを示すフローチャートである。
【図6】要求制動力の所定減速度までステップ的に上げる例である。
【図7】要求制動力を車速に応じて所定勾配で上昇させ所定減速度に達した時点で保持する例である。
【図8】図4のステップS3における他システム要求値選択処理の説明図である。
【図9】図4のステップS5における他システムへの要求制動力演算処理の流れを示すフローチャートである。
【図10】図4のステップS6における他システムへの要求制動力演算処理の流れを示すフローチャートである。
【図11】図10のステップS602におけるパーキングブレーキ制御処理の流れを示すフローチャートである。
【図12】電制ブースタ制御処理の流れを示すフローチャートである。
【図13】図12のステップS82におけるドライバ要求制動力演算処理の流れを示すフローチャートである。
【図14】図12のステップS83における要求制動力演算処理の流れを示すフローチャートである。
【図15】走行時の要求制動力演算作用を示すタイムチャートである。
【図16】実施例1の車両挙動安定作用を示す図である。
【発明を実施するための形態】
【0008】
以下、本発明のブレーキ制御装置を実施するための形態を、図面に示す実施例に基づいて説明する。
〔実施例1〕
まず、構成を説明する。
図1は実施例1のブレーキ制御装置を適用した車両のシステム構成図、図2は実施例1の油圧ユニット1の回路構成図である。
[システム構成]
油圧ユニット(制動力発生部)1は、油圧ユニットECU(制動力コントロールユニット,制動力発生部コントロールユニット)2からの指令に応じて、各輪FL,FR,RL,RRのホイルシリンダ圧を調整し、ブレーキキャリパ(左右前輪FL,FRのブレーキキャリパをフロントキャリパ、左右後輪RL,RRのブレーキキャリパをリアキャリパと称す。)3の作動を制御する。
油圧ユニットECU2には、車輪速センサ5により検出された各車輪速、コンバインセンサ6により検出された車両の横加速度およびヨーレート、マスタシリンダ圧センサ8により検出されたマスタシリンダ圧が直接入力される。油圧ユニットECU2は、通信ライン4を介して、モータECU9、各種安全装置10、電制ブースタECU13、電動パーキングECU(パーキングブレーキコントロールユニット,電動パーキングブレーキ機構コントロールユニット)16と相互通信を行う。各ECU間の送受信信号については後述する。
モータECU9は、左右前輪FL,FRを駆動する図外のモータジェネレータを力行または回転運転し、左右前輪FL,FRに駆動力または回生制動力を付与する。
電制ブースタECU13は、電制ブースタ14を制御し、ブレーキペダルストロークを倍力する。
左右後輪RL,RRには、左右リアキャリパ3RL,3RRを作動させる左右電動モータ15RL,15RRが設けられている。左右リアキャリパ3RL,3RRと左右電動モータ15RL,15RRとにより、電動パーキングブレーキ(パーキングブレーキ機構,電動パーキングブレーキ機構)が構成される。左右電動モータ15RL,15RRは、電動パーキングECU16からの指令に応じて作動する。電動パーキングECU16は、油圧ユニットECU2からの作動要求に応じて、電動パーキングブレーキを作動させる。
【0009】
[油圧ユニットの回路構成]
実施例1の油圧ユニット1は、P系統(第1配管系統)とS系統(第2配管系統)との2系統からなる、X配管と呼ばれる配管構造を有している。なお、図2に記載された各部位の符号の末尾に付けられたPはP系統、SはS系統を示し、FL,RR,FR,RLは左前輪、右後輪、右前輪、左後輪に対応することを示す。以下の説明では、P,S系統または各輪を区別しないとき、P,SまたはFL,RR,FR,RLの記載を省略する。
実施例1の油圧ユニット1は、クローズド油圧回路を用いている。ここで、「クローズド油圧回路」とは、ホイルシリンダW/Cへ供給されたブレーキ液を、マスタシリンダM/Cを介してリザーバタンクRSVへと戻す油圧回路をいう。ちなみに、クローズド油圧回路に対し、ホイルシリンダW/Cへ供給されたブレーキ液を、マスタシリンダM/Cを介すことなく直接リザーバタンクRSVへ戻すことが可能な油圧回路を、「オープン油圧回路」という。
ブレーキペダルBPのストロークは、ストロークセンサ7により検出され、電動ブースタECU13に入力される。電動ブースタECU13は、電制ブースタ14を駆動してブレーキペダルストロークを倍力し、マスタシリンダM/Cのブレーキ液圧(マスタシリンダ圧)を立ち上げる。
P系統には、左前輪FLのホイルシリンダW/C(FL)、右後輪RRのホイルシリンダW/C(RR)が接続され、S系統には、右前輪FRのホイルシリンダW/C(FR)、左後輪RLのホイルシリンダW/C(RL)が接続される。また、P系統、S系統には、ポンプPP、ポンプPSが設けられている。ポンプPP、ポンプPSは、例えば、ギヤポンプであって、1つのモータMにより駆動される。
【0010】
マスタシリンダM/CとポンプPP,PS(以下、ポンプP)の吸入側とは、管路21によって接続されている。各管路21上には、ノーマルクローズ型比例電磁弁であるゲートインバルブ22が設けられている。マスタシリンダM/Cとゲートインバルブ22との間には、マスタシリンダM/Cの圧力を検出するマスタシリンダ圧センサ8が設けられている。
また、管路21上であって、ゲートインバルブ22とポンプPとの間にはチェックバルブ23が設けられ、各チェックバルブ23は、ゲートインバルブ22からポンプPへ向かう方向へのブレーキ液の流れを許容し、反対方向の流れを禁止する。
各ポンプPの吐出側と各ホイルシリンダW/Cとは、管路24によって接続されている。各管路24上には、各ホイルシリンダW/Cに対応するノーマルオープン型電磁弁であるソレノイドインバルブ30が設けられている。
また、各管路24上であって、各ソレノイドインバルブ30とポンプPとの間にはチェックバルブ26が設けられて、各チェックバルブ26は、ポンプPからソレノイドインバルブ30へ向かう方向へのブレーキ液の流れを許容し、反対方向の流れを禁止する。
さらに、各管路24には、各ソレノイドインバルブ30を迂回する管路31が設けられ、管路31には、チェックバルブ32が設けられている。各チェックバルブ32は、ホイルシリンダW/CからポンプPへ向かう方向へのブレーキ液の流れを許容し、反対方向の流れを禁止する。
【0011】
マスタシリンダM/Cと管路24とは管路29によって接続され、管路24と管路29とはポンプPとソレノイドインバルブ30との間において合流する。各管路29上には、ノーマルオープン型比例電磁弁であるゲートアウトバルブ25が設けられている。
各管路29には、各ゲートアウトバルブ25を迂回する管路27が設けられ、管路27には、チェックバルブ28が設けられている。各チェックバルブ28は、マスタシリンダM/C側からホイルシリンダW/Cへ向かう方向のブレーキ液の流れを許容し、反対方向の流れを禁止する。
ポンプPの吸入側にはリザーバ33が設けられ、リザーバ33とポンプPとは管路34によって接続されている。リザーバ33とポンプPとの間にはチェックバルブ35が設けられて、各チェックバルブ35は、リザーバ33からポンプPへ向かう方向のブレーキ液の流れを許容し、反対方向の流れを禁止する。
ホイルシリンダW/Cと管路34とは管路36によって接続され、管路36と管路34とはチェックバルブ35とリザーバ33との間において合流する。各管路36には、それぞれノーマルクローズ型電磁弁であるソレノイドアウトバルブ37が設けられている。
油圧ユニットECU2は、各センサ、各ECU等からの情報に基づいて、アンチスキッドブレーキ制御(ABS)や車両挙動安定化制御の制御目標値を演算し、電制ブースタ14、ゲートインバルブ22、ゲートアウトバルブ25、ソレノイドインバルブ30、ソレノイドアウトバルブ37およびモータMの作動を制御する。
【0012】
[各ECU間の送受信信号]
図3は、各ECU間の送受信信号を示す図である。
モータコントローラ9は、油圧ユニットECU2に対し、モータジェネレータの実回生制動力、回生異常信号等を送信する。油圧ユニットECU2は、モータコントローラ9に対し、回生制動要求、油圧ユニット異常信号等を送信する。
電制ブースタECU13は、油圧ユニットECU2に対し、ドライバ要求制動力、ブースタ異常信号等を送信する。油圧ユニットECU2は、電制ブースタECU13に対し、要求制動力、油圧ユニット異常信号等を送信する。
各種安全装置10は、油圧ユニットECU2に対し、要求制動力に相当する信号等を送信する。
電動パーキングECU16は、油圧ユニットECU2に対し、パーキングブレーキアプライ信号、パーキングブレーキリリース信号、電動パーキングブレーキ異常信号、電動パーキングブレーキアプライ/クランプ/リリース信号、要求制動力信号等を送信する。油圧ユニットECU2は、電動パーキングECU16に対し、電動パーキングブレーキ作動要求、油圧ユニット異常信号、車輪速信号等を送信する。
【0013】
[制動制御処理]
図4は、油圧ユニットECU2の制動制御処理の流れを示すフローチャートで、以下、各ステップについて説明する。なお、このステップは、イグニッションONからOFFまでの間、所定の演算周期で繰り返し実行される。
ステップS1では、イニシャルチェック処理を行う。イグニッションON時の初期診断を実行する部分である。
ステップS2では、油圧ユニットECU2内アプリの要求制動力演算処理を行う。油圧ユニットECU2内にある要求制動力を出力する各アプリケーション機能のある部分である。
ステップS3では、他システム要求値選択処理を行う。他のシステムからの要求やドライバ要求等から実現させたい要求制動力を選択する部分であり、この中で電動パーキングブレーキへの作動要求も判定する。
ステップS4では、ABS制御、TCS制御、車両挙動安定化制御処理を行う。ABS、TCS、車両挙動安定化制御を実行する部分である。上記要求制動力を実現させた結果、車輪スリップ発生や車両挙動が乱れた場合に要求制動力を修正する部分である。このステップは、要求制動力算出部に相当する。
ステップS5では、他システムへの要求制動力演算処理を行う。前記制御部分から算出された要求制動力を実現させるために、他のシステムへ制動力要求をどのように振り分けるのか判定し制動力要求を算出する部分である。このステップは、制動力協調制御部に相当する。他のシステムとは、電制ブースタ14やモータジェネレータによる回生制動力を制御可能なシステムである。
ステップS6では、油圧ユニット駆動指令演算処理を行う。前記要求制動力演算処理の指令値等からバルブ駆動指令、モータ駆動指令を算出する部分である。
ステップS7では、イグニッションON中のフェイルセーフチェックを行う。故障が検出されると車両が危険な状態にならないように、所定の処置を行うためのものである。
【0014】
以下、各ステップの処理を詳細に説明する。
[油圧ユニット内アプリの要求制動力演算処理]
図5は、図4のステップS2における油圧ユニットECU2内アプリの要求制動力演算処理の流れを示すフローチャートである。
ステップS201では、油圧ユニットに異常が発生しているか否かを判定し、YESの場合はステップS208へ進み、NOの場合はステップS202へ進む。
ステップS202では、パーキングブレーキスイッチ17がON(アプライ要求)であるか否かを判定し、YESの場合はステップS203へ進み、NOの場合はステップS209へ進む。
ステップS203では、車両挙動安定化制御のOFFスイッチがONであるか否かを判定し、YESの場合はステップS215へ進み、NOの場合はステップS204へ進む。
ステップS204では、車輪速センサ5からの各車輪速に基づいて、車両停止状態であるか否か(車速がゼロであるか否か)を判定し、YESの場合はステップS205へ進み、NOの場合はステップS210へ進む。このステップは、車両が走行中であるか否かを判定する走行状態判定部に相当する。ここで、低車速域では車両挙動が乱れるおそれがないため、車速条件としてもよい。
ステップS205では、電動パーキングブレーキ異常信号の有無に基づき、電動パーキングブレーキに異常が発生しているか否かを判定し、YESの場合はステップS206へ進み、NOの場合はステップS207へ進む。このステップは、パーキングブレーキ機構異常判定部に相当する。
ステップS206では、ブレーキ制御が所定時間継続したか否かを判定し、YESの場合はステップS212へ進み、NOの場合はステップS211へ進む。
ステップS207では、電動パーキングブレーキがクランプ状態であるか否かを判定し、YESの場合はステップS214へ進み、NOの場合はステップS213へ進む。ここでは、電動パーキングブレーキ作動要求出力時間で判定してもよい。つまり、作動要求出力時間が所定時間継続した場合にクランプ状態であると判定してもよい。
【0015】
ステップS208では、油圧ユニット1の油圧制御を禁止し、要求制動力をゼロとし、電動パーキングブレーキ作動要求無しとする。
ステップS209では、油圧ユニット1の油圧制御を停止し、要求制動力をゼロとし、電動パーキングブレーキ作動要求無しとする。
ステップS210では、油圧ユニット1の油圧制御を実施し、要求制動力を算出し、電動パーキングブレーキ作動要求無しとする。要求制動力に関しては、ステップ的に上げる構成(図6参照)、車速に応じて所定勾配で上昇させ所定減速度に達した時点で保持する構成(図7参照)、電動パーキングブレーキからの要求制動力指令を受信する構成等を用いることができる。なお、図6,7に示すように、減少勾配に関しては、坂路の勾配等に応じて変更し、減少させる。例えば、坂路の勾配が大きいほど、減少勾配を小さくする。
ステップS211では、油圧ユニット1の油圧制御を実施し、要求制動力を算出し、電動パーキングブレーキ作動要求無しとする。
ステップS212では、油圧ユニット1の油圧制御を終了し、要求制動力をゼロとし、電動パーキングブレーキ作動要求有りとする。油圧制御終了の場合には、坂道で停止した場合に車両挙動が急激に変化することを防止するために所定勾配で減少させるようにする。
ステップS213では、油圧ユニット1の油圧制御を実施し、要求制動力を算出し、電動パーキングブレーキ作動要求有りとする。
ステップS214では、油圧ユニット1の油圧制御を終了し、要求制動力をゼロとし、電動パーキングブレーキ作動要求無しとする。
ステップS215では、油圧ユニット1の油圧制御を禁止し、要求制動力をゼロとし、電動パーキングブレーキ作動要求無しとする。
【0016】
[他システム要求値選択処理]
図8は、図4のステップS3における他システム要求値選択処理の説明図である。
他システム要求値選択の中には、他のシステムからの要求やドライバ要求、油圧ユニットECU2内で演算されるブレーキアシスト機能や走行中のパーキングブレーキスイッチ17の操作による要求制動力等、油圧ユニットECU2内の機能で制動力要求を出すものも含まれ、それぞれの要求制動力から車両として最適な制動力要求を選択する。
[ABS制御、TCS制御、車両挙動安定化制御処理]
図4のステップS4におけるABS制御、TCS制御、車両挙動安定化制御処理について説明する。
上記要求制動力を実現した結果、車輪スリップが発生した場合や車両挙動が乱れた場合に、要求制動力を修正する。例えば、減速側スリップが発生した場合には、ABS制御により制動力が低下するよう要求制動力を修正する。また、車両挙動が乱れた場合には、車両挙動安定化制御により車両挙動を修正するためのモーメントを発生させるように要求制動力を修正する。加速側スリップが発生した場合には、TCS制御により制動力を増加するよう要求制動力を修正する。
【0017】
[他システムへの要求制動力演算処理]
図9は、図4のステップS5における他システムへの要求制動力演算処理の流れを示すフローチャートである。
ステップS501では、要求制動力を圧力指令へ換算する。
ステップS502では、回生異常信号の有無に基づき、回生制動が正常か否かを判定し、YESの場合はステップS503へ進み、NOの場合はステップS506へ進む。
ステップS503では、ブースタ異常信号の有無に基づき、電制ブースタが正常か否かを判定し、YESの場合はステップS504へ進み、NOの場合はステップS514へ進む。
ステップS504では、回生制動が可能か否かを判定し、YESの場合はステップS505へ進み、NOの場合はステップS506へ進む。ここでは、例えば、極低車速域や高車速域、バッテリが満充電状態である場合は回生制動不能と判定し、それ以外は回生制動可能と判定する。
ステップS505では、車両挙動等を考慮して前後左右制動力配分が必要か否かを判定し、YESの場合はステップS509へ進み、NOの場合はステップS510へ進む。
【0018】
ステップS506では、ブースタ異常信号の有無に基づき、電制ブースタが正常か否かを判定し、YESの場合はステップS507へ進み、NOの場合はステップS513へ進む。
ステップS507では、4輪の圧力指令が同一であるか否かを判定し、YESの場合はステップS511へ進み、NOの場合はステップS508へ進む。
ステップS509では、電制ブースタ14へ圧力要求を出力し、モータコントローラ9に回生制動力要求を出力して回生制動力を発生させる。また、油圧ユニット1へ圧力要求を出力して回生制動力と摩擦制動力との配分、摩擦制動力の前後左右配分を行う。
ステップS510では、電制ブースタ14へ圧力要求を出力し、モータコントローラ9に回生制動力要求を出力して回生制動力を発生させる。
ステップS511では、電制ブースタ14へ圧力要求を出力して4輪同圧制御を行う。
ステップS512では、電制ブースタ14へ圧力要求を出力して高圧輪の制御を行い、油圧ユニット1へ圧力要求を出力して低圧輪の制御を行う。
ステップS513では、油圧ユニット1へ圧力要求を出力して4輪独立制御を行う。
ステップS514では、回生制動可能か否かを判定し、YESの場合はステップS515へ進み、NOの場合はステップS516へ進む。
ステップS515では、回生制動力を出力し、油圧ユニット1へ圧力要求を出力して回生制動力と摩擦制動力との配分を行う。
ステップS516では、油圧ユニット1へ圧力要求を出力して4輪独立制御を行う。
【0019】
[電動パーキングブレーキECUの演算処理]
図10は、電動パーキングブレーキECU演算処理の流れを示すフローチャートである。
ステップS61では、イニシャルチェック処理を行う。
ステップS62では、パーキングブレーキ制御処理を行う。ここでは、パーキングブレーキの作動終了判定、パーキングブレーキの制動力指令によりパーキングブレーキのクランプ処理、リリース処理を実施する。
ステップS63では、モータ駆動指令演算処理を行う。クランプ処理、リリース処理からの要求制動力に応じてモータ駆動信号を演算する部分である。
ステップS64では、フェイルセーフ処理を行う。
【0020】
[パーキングブレーキ制御処理]
図11は、図10のステップS62におけるパーキングブレーキ制御処理の流れを示すフローチャートである。
ステップS601では、電動パーキングブレーキ異常信号の有無に基づき、電動パーキングブレーキに異常が発生しているか否かを判定し、YESの場合はステップS616へ進み、NOの場合はステップS602へ進む。
ステップS602では、クランプ状態であるか否かを判定し、YESの場合はステップS603へ進み、NOの場合はステップS607へ進む。
ステップS603では、パーキングブレーキスイッチ17がOFFであるか否かを判定し、YESの場合はステップS617へ進み、NOの場合はステップS604へ進む。
ステップS604では、ブレーキスイッチがONであるか否かを判定し、YESの場合はステップS605へ進み、NOの場合はステップS606へ進む。ブレーキスイッチは、ドライバがブレーキペダルBPを踏んでいる場合はON、踏んでいない場合はOFFとなるスイッチである。
ステップS605では、レンジ位置としてDまたはRレンジが選択されているか否かを判定し、YESの場合はステップS617へ進み、NOの場合はステップS618へ進む。
ステップS606では、アクセルONであるか否かを判定し、YESの場合はステップS605へ進み、NOの場合はステップS618へ進む。
ステップS607では、リリース状態であるか否かを判定し、YESの場合はステップS608へ進み、NOの場合はステップS620へ進む。
ステップS608では、パーキングブレーキスイッチ17がONであるか否かを判定し、YESの場合はステップS614へ進み、NOの場合はステップS609へ進む。
ステップS609では、レンジ位置としてPレンジが選択されているか否かを判定し、YESの場合はステップS614へ進み、NOの場合はステップS610へ進む。
ステップS610では、イグニッションスイッチがONからOFFとなったか否かを判定し、YESの場合はステップS614へ進み、NOの場合はステップS611へ進む。
【0021】
ステップS611では、ブレーキスイッチがONであるか否かを判定し、YESの場合はステップS612へ進み、NOの場合はステップS613へ進む。
ステップS612では、レンジ位置としてNレンジが選択されているか否かを判定し、YESの場合はステップS615へ進み、NOの場合はステップS613へ進む。
ステップS613では、作動要求が有るか否かを判定し、YESの場合はステップS619へ進み、NOの場合はステップS618へ進む。
ステップS614では、油圧異常が発生しているか否かを判定し、YESの場合はステップS619へ進み、NOの場合はステップS615へ進む。このステップは、制動力発生部異常判定部に相当する。
ステップS615では、停車状態であるか否かを判定し、YESの場合はステップS619へ進み、NOの場合はステップS618へ進む。
ステップS616では、電動パーキングブレーキ作動禁止とし、電動パーキングブレーキ異常信号を出力する。
ステップS617では、電動パーキングブレーキのリリース処理を行う。
ステップS618では、電動パーキングブレーキの状態を継続する。
ステップS619では、電動パーキングブレーキのクランプ処理を行う。
ステップS620では、クランプ終了か否かを判定し、YESの場合はステップS623へ進み、NOの場合はステップS621へ進む。
ステップS621では、リリース終了か否かを判定し、YESの場合はステップS622へ進み、NOの場合は本制御を終了する。
ステップS622では、リリース状態とする。
ステップS623では、クランプ状態とする。
【0022】
[電動ブースタ制御処理]
図12は、電制ブースタ制御処理の流れを示すフローチャートである。
ステップS81では、イニシャライズ処理を行う。イグニッションON時に初期診断を実行する部分である。
ステップS82では、ドライバ要求制動力演算処理を行う。ブレーキペダルストロークやブレーキペダルBPに掛かる踏力からドライバが要求している制動力を演算する部分である。
ステップS83では、要求制動力演算処理を行う。他のECUからの制動力要求とドライバ要求のいずれかを選択して要求制動力を演算する部分である。
ステップS84では、モータ駆動指令演算処理を行う。上記選択した要求制動力を達成するためのモータ駆動指令を演算する部分である。
ステップS85では、フェイルセーフ処理を行う。
[ドライバ要求制動力制御処理]
図13は、図12のステップS82におけるドライバ要求制動力演算処理の流れを示すフローチャートである。
ステップS821では、ブレーキペダルストロークに基づき、あらかじめ設定されたマップを参照してドライバ要求制動力を求める。ステップS821内に示すように、ストローク−ドライバ要求制動力特性は、ストロークが大きいほど制動力が大きくなるような特性に設定している。なお、ペダル踏み込み時は踏み戻し時よりもストロークに対する制動力が大きくなるようにヒステリシスを設けている。
【0023】
[要求制動力演算処理]
図14は、図12のステップS83における要求制動力演算処理の流れを示すフローチャートである。
ステップS831では、要求制動力要求が有るか否かを判定し、YESの場合はステップS834へ進み、NOの場合はステップS832へ進む。
ステップS832では、制動力増加要求が有るか否かを判定し、YESの場合はステップS835へ進み、NOの場合はステップS833へ進む。
ステップS833では、制動力減少要求が有るか否かを判定し、YESの場合はステップS836へ進み、NOの場合はステップS837へ進む。
ステップS834では、ドライバ要求制動力を選択する。
ステップS835では、他ECUからの要求制動力を選択し、ドライバ要求制動力を所定勾配で制動力を増加させる。
ステップS836では、他ECUからの要求制動力を選択し、ドライバ要求制動力を所定勾配で制動力を減少させる。
ステップS837では、ドライバ要求制動力を選択し、要求信号異常状態を出力する。
【0024】
次に、作用を説明する。
[要求制動力演算作用]
図15は、走行時の要求制動力演算作用を示すタイムチャートである。
時点t1では、パーキングブレーキスイッチ17がON側に操作されるが、走行中であると判定されているため、電動パーキングブレーキは作動させず、油圧ユニット1による自動制動によって減速に必要な制動力(パーキングブレーキ相当の制動力)を4輪に発生させる(図5のS201→S202→S204→S210)。このとき、制動力は車速に応じた所定勾配で上昇させる。
時点t2では、パーキングブレーキスイッチ17が中立位置に戻されたため、油圧ユニット1で発生させていた制動力をゼロにする(図5のS201→S202→S209)。このとき、制動力は坂路の勾配に応じた所定勾配で減少させる。
時点t3では、パーキングブレーキスイッチ17がON側に操作されるが、走行中であると判定されているため、電動パーキングブレーキは作動させず、油圧ユニット1による自動制動によって減速に必要な制動力を4輪に発生させる(図5のS201→S202→S204→S210)。このとき、制動力は車速に応じた所定勾配で上昇させる。
時点t4では、車両停止と判定されたため、左右電動モータ15RL,15RRを駆動して電動パーキングブレーキを作動させる(図5のS201→S202→S204→S205→S207→S213)。油圧ユニット1で発生させている制動力は維持する。このとき、制動力は所定勾配で上昇させる。
時点t5では、電動パーキングブレーキがクランプ状態となったため、油圧ユニット1で発生させていた制動力をゼロにする(図5の図5のS201→S202→S204→S205→S207→S214)。このとき、制動力は坂路の勾配に応じた所定勾配で減少させる。
時点t6では、パーキングブレーキスイッチ17がOFF側に操作されたため、電動パーキングブレーキで発生させていた制動力をゼロにする(図11のS601→S602→S603→617)。
【0025】
[車両挙動安定作用]
通常のパーキングブレーキは、後輪に設置されているブレーキをドライバの操作によりワイヤを引っ張ることで制動力を発生させている。このため、旋回中にドライバがパーキングブレーキを操作すると、後輪のみに大きな制動力が発生するため、常に図16に示す不安定領域で制動力制御が行われることとなり、車両が不安定な状態となってしまう。これは、路面μの低い雪の路面やブラックアイスのような路面で顕著となる。
電動パーキングブレーキは、ドライバの操作と無関係に後輪に制動力を発生/解除させることが可能である。また、安全性の観点から、液圧ブレーキを自動的に掛けることが可能となっている。
そこで、実施例1では、旋回中にパーキングブレーキを操作すると車両挙動が不安定になること、および電動パーキングブレーキがドライバ操作と無関係に制動力を発生/解除可能なことに着目し、走行中にパーキングブレーキが操作された場合、油圧ユニット1による液圧ブレーキによって4輪で制動力を発生させる。液圧ブレーキは、4輪の制動力を個別に制御できるため、常に図16に示す安定領域で制動力を制御可能である。これにより、ドライバの要求する制動力を確保しつつ、車両挙動が乱れるのを抑制でき、車両の安定性を確保できる。
また、電動パーキングブレーキに代えて、油圧ユニット1による制動制御を用いることで、ABS制御、TCS制御、車両挙動安定化制御等が可能となるため、電動パーキングブレーキのみを作動させる場合と比較して、様々なシーンで有利となる。
例えば、車輪スリップが発生した場合には、応答性の低い電動パーキングブレーキを使用するよりも、自動ブレーキによるABS制御を実施する方が車両挙動を安定させる観点からも有利である。
また、仮に車両挙動が乱れそうになった場合であっても、車両挙動安定化制御による制動力配分を行うことで、車両挙動を安定に保つことができる。
【0026】
実施例1では、車両停止と判定された場合、油圧ユニット1による制動力を低減し、電動パーキングブレーキの作動を許可する。車両停車中も油圧ユニット1による4輪制動を継続した場合、4つのソレノイドインバルブ30を常に閉じておく必要があるため、バッテリからの電力の持ち出しが大きくなる。これに対し、電動パーキングブレーキは、2つの電動モータ15RL,15RRを駆動してリアキャリパ3RL,3RRを動かせばよいため、油圧ユニット1を作動させる場合と比較して消費電力を抑制できる。
このとき、電動パーキングブレーキの作動後に油圧ユニット1による制動力を低減させている。ここで、仮に電動パーキングブレーキを作動させる前に油圧ユニット1による制動力を減少させた場合、坂路停止中に車両がずり下がるおそれがある。よって、先に電動パーキングブレーキを作動させて車両停車を維持できる状態となった後に油圧ユニット1による制動力を減少させることで、坂路停止時における車両のずり下がりを防止できる。
また、坂路の勾配が大きいほど油圧ユニット1による制動力の減少勾配を小さくしているため、電動パーキングブレーキによる制動力の立ち上がりが遅れる場合であっても、坂路停止時における車両のずり下がりをより確実に防止できる。
【0027】
実施例1では、電動パーキングブレーキの異常が判定され走行状態が走行判定から停止判定になると、油圧ユニット1による制動力をあらかじめ設定された時間保持するよう要求制動力を算出し(図5のS201→S202→S204→S205→S206→S211)、時間経過後に要求制動力を低減し、電動パーキングブレーキの作動の制限を継続する(図5のS201→S202→S204→S205→S206→S212)。
電動パーキングブレーキに異常が発生している場合、坂路停止直後に要求制動力を低減して電動パーキングブレーキを作動させたとき、車両停止に必要な制動力が得られず、車両のずり下がりが発生するおそれがある。そこで、車両停止からあらかじめ設定された時間は油圧ユニット1による制動力を保持することで、ドライバにブレーキペダルBPを踏む余裕時間を与えることができ、坂路停止時における車両のずり下がりを抑制できる。
実施例1では、油圧ユニット1の異常が判定されると、判定された走行状態が走行中のときにパーキングブレーキスイッチ17のON操作によって電動パーキングブレーキの作動要求があった場合に電動パーキングブレーキ機構の作動を許可する(図11のS601→S602→S607→S608→S614→S619)。
よって、油圧ユニット1に異常が発生している場合には、走行中であっても電動パーキングブレーキの作動を許可することで、車両を減速させることができる。
実施例1では、油圧ユニットECU2側で電動パーキングブレーキの作動判定を行い、電動パーキングECU16に作動要求を出力している。
電動パーキングECU16はパーキングブレーキスイッチ17の状態のみを見ているのに対し、油圧ユニットECU2は、車輪速センサ5、コンバインセンサ6等のセンサ信号が直接入力され、常に車両の状態を監視している。よって、油圧ユニットECU2側で電動パーキングブレーキの作動判定を行うことで、車両の状態に合致した的確な判定を行うことができる。
【0028】
次に、効果を説明する。
実施例1のブレーキ制御装置にあっては、以下に列挙する効果を奏する。
(1) 運転者のスイッチ操作によって後輪RL,RRに制動力を発生させるためのパーキングブレーキ機構(左右リアキャリパ3RL,3RR、左右電動モータ15RL,15RR)と、車両の状態に応じて4輪FL,FR,RL,RRに対して独立した制動力を発生可能な油圧ユニット1と、油圧ユニット1の作動をコントロールする油圧ユニットECU2と、車両が走行中か否かを判定する走行状態判定部(ステップS204)と、を備え、油圧ユニットECU2は、判定された走行状態が走行中のときにスイッチ操作によって電動パーキングブレーキの作動要求があった場合に電動パーキングブレーキの作動を禁止し、油圧ユニット1を作動させて制動力を発生させる制動力協調制御部(ステップS5)を備えた。
よって、ドライバの要求する制動力を確保しつつ、車両挙動が乱れるのを抑制でき、車両の安定性を確保できる。
(2) 油圧ユニットECU2は、車両挙動に基づいて油圧ユニット1により発生させる要求制動力を算出する要求制動力算出部(ステップS4)を備え、制動力協調制御部は、算出された要求制動力に基づき油圧ユニット1を作動させる。
よって、車両挙動の乱れをより確実に抑制できる。
【0029】
(3) 電動パーキングブレーキの作動をコントロールする電動パーキングECU16を備え、油圧ユニットECU2は、油圧ユニット1により発生させる要求制動力を算出する要求制動力算出部(ステップS4)を備え、走行状態が走行判定から停止判定になると、油圧ユニット1による制動力が低減するよう要求制動力を低減し、電動パーキングECU16による電動パーキングブレーキの作動を許可する。
よって、油圧ユニット1による制動力のみで車両停車状態を維持する場合と比較して、消費電力を抑制できる。
(4) 油圧ユニットECU2は、電動パーキングブレーキの作動後に油圧ユニット1による制動力を低減させる。
よって、坂路停止時における車両のずり下がりを防止できる。
(5) 油圧ユニットECU2は、油圧ユニット1による制動力の低減を所定の勾配をもって実行する。
よって、坂路停止時における車両のずり下がりをより確実に防止できる。
【0030】
〔他の実施例〕
以上、本発明を実施するための形態を実施例に基づいて説明したが、本発明の具体的な構成は実施例に示した構成に限定されるものではなく、発明の要旨を逸脱しない範囲の設計変更等があっても本発明に含まれる。
例えば、実施例では、判定された走行状態が走行中のときにスイッチ操作によってパーキングブレーキ機構の作動要求があった場合にパーキングブレーキ機構の作動を禁止する例を示したが、制限する構成としてもよい。
実施例では、電動車を例に示したが、ハイブリッド車両やエンジン車両に適用した場合であっても実施例と同様の作用効果を得ることができる。
【0031】
以下に、実施例から把握される特許請求の範囲に記載した発明以外の技術的思想について説明する。
(a) 請求項1に記載のブレーキ制御装置において、
前記パーキングブレーキ機構の異常を判定するパーキングブレーキ機構異常判定部を備え、
前記制動力コントロールユニットは、前記パーキングブレーキ機構異常判定部により前記パーキングブレーキ機構の異常が判定され走行状態が走行判定から停止判定になると、前記制動力発生部による制動力をあらかじめ設定された時間保持するよう要求制動力を算出し、前記時間経過後に要求制動力を低減し、前記パーキングブレーキ機構の作動の制限を継続することを特徴とするブレーキ制御装置。
パーキングブレーキ機構に異常が発生している場合、坂路停止直後に要求制動力を低減してパーキングブレーキを作動させたとき、車両停止に必要な制動力が得られず、車両のずり下がりが発生するおそれがある。そこで、車両停止からあらかじめ設定された時間は制動力発生部による制動力を保持することで、ドライバにブレーキペダルを踏む余裕時間を与えることができ、坂路停止時における車両のずり下がりを抑制できる。
(b) 請求項1に記載のブレーキ制御装置において、
前記制動力発生部の異常を判定する制動力発生部異常判定部を備え、
前記制動力コントロールユニットは、前記制動力発生部異常判定部により制動力発生部の異常が判定されると、前記判定された走行状態が走行中のときに前記スイッチ操作によって前記パーキングブレーキ機構の作動要求があった場合に前記パーキングブレーキ機構の作動を許可することを特徴とするブレーキ制御装置。
よって、制動力発生部に異常が発生している場合には、走行中であってもパーキングブレーキ機構の作動を許可することで、車両を減速させることができる。
【0032】
(c) 運転者のスイッチ操作によって車輪に制動力を発生するための電動パーキングブレーキ機構と、
車両の状態に応じて前記車輪に対して独立した制動力を発生可能な制動力発生部と、
前記電動パーキングブレーキ機構の作動をコントロールする電動パーキングブレーキ機構コントロールユニットと、
前記制動力発生部の作動をコントロールする制動力発生部コントロールユニットと、
車両が走行中か否かを判定する走行状態判定部と、
を備え、
前記コントロールユニットのうち一方のコントロールユニットは、判定された走行状態が走行判定のときに前記スイッチ操作された場合、前記電動パーキングブレーキ機構を非作動とすることを特徴とするブレーキ制御装置。
よって、走行時に電動パーキングブレーキ機構が作動することで車両挙動が乱れるのを抑制できる。
(d) (c)に記載のブレーキ制御装置において、
前記一方のコントロールユニットは前記制動力発生部コントロールユニットであることを特徴とするブレーキ制御装置。
制動力発生部コントロールユニットは常に車両の状態を見ているため、スイッチ操作状態のみを見ている電動パーキングブレーキ機構コントロールユニットと比較して、車両の状態に合致した的確な判定を行うことができる。
【0033】
(e) (d)に記載のブレーキ制御装置において、
前記制動力発生部コントロールユニットは、車両挙動に基づいて前記制動力発生部により発生させる要求制動力を算出する要求制動力算出部と、
算出された要求制動力に基づき前記制動力発生部を作動させる制動力協調制御部と、
を備えたことを特徴とするブレーキ制御装置。
よって、車両挙動の乱れをより確実に抑制できる。
(f) (e)に記載のブレーキ制御装置において、
前記制動力発生部コントロールユニットは、走行状態が走行判定から停止判定になると、前記制動力発生部による制動力が低減するよう要求制動力を低減し、前記電動パーキングブレーキコントロールユニットによる前記電動パーキングブレーキ機構の作動を許可することを特徴とするブレーキ制御装置。
よって、制動力発生部による制動力のみで車両停車状態を維持する場合と比較して、消費電力を抑制できる。
(g) (f)に記載のブレーキ制御装置において、
前記制動力発生部コントロールユニットは、前記電動パーキングブレーキ機構の作動後に前記制動力発生部による制動力を所定の勾配をもって実行することを特徴とするブレーキ制御装置。
よって、坂路停止時における車両のずり下がりを防止できる。
【0034】
(h) (g)に記載のブレーキ制御装置において、
前記電動パーキングブレーキ機構の異常を判定する電動パーキングブレーキ機構異常判定部を備え、
【0035】
前記制動力発生部コントロールユニットは、前記電動パーキングブレーキ機構異常判定部により前記電動パーキングブレーキ機構の異常が判定され走行状態が走行判定から停止判定になると、前記制動力発生部による制動力をあらかじめ設定された時間保持するよう要求制動力を算出し、前記時間経過後に要求制動力を低減し、前記電動パーキングブレーキ機構の作動の制限を継続することを特徴とするブレーキ制御装置。
よって、ドライバにブレーキペダルを踏む余裕時間を与えることができ、坂路停止時における車両のずり下がりを抑制できる。
(i) (h)に記載のブレーキ制御装置において、
前記制動力発生部の異常を判定する制動力発生部異常判定部を備え、
前記制動力発生部コントロールユニットは、前記制動力発生部異常判定部により前記制動力発生部の異常が判定されると、前記制動力発生部の作動を制限し、
前記電動パーキングブレーキ機構コントロールユニットは、前記制動力発生部異常判定部により前記制動力発生部の異常が判定されると、前記判定された走行状態が走行中のときに前記スイッチ操作によって前記電動パーキングブレーキ機構の作動要求があった場合に前記電動パーキングブレーキ機構の作動を許可することを特徴とするブレーキ制御装置。
よって、制動力発生部に異常が発生している場合には、走行中であってもパーキングブレーキ機構の作動を許可することで、車両を減速させることができる。
(j) 運転者のスイッチ操作がされると車両の後左右後輪に制動力を発生するための電動パーキングブレーキ機構と、
車両の状態に応じて前記車輪に対して独立した制動力を発生可能な制動力発生部と、
前記電動パーキングブレーキ機構の異常を判定する電動パーキングブレーキ機構異常判定部と、
前記制動力発生部の異常を判定する制動力発生部異常判定部と、
車両が走行中か否かを判定する走行状態判定部と、
スイッチ操作がされたときに前記各判定部の判定結果に応じて前記電動パーキングブレーキ機構と前記制動力発生部を選択的に作動させることを特徴とするブレーキ制御装置。
よって、電動パーキングブレーキ機構に異常が発生したか否か、制動力発生部に異常が発生したか否か、および走行中か否かに基づいて電動パーキングブレーキ機構と制動力発生部とを選択的に作動させることができる。
【0036】
(k) (j)に記載のブレーキ制御装置において、
スイッチ操作がされ、前記走行状態判定部により走行状態と判定されると前記電動パーキングブレーキ機構を作動させずに前記制動力発生部を作動させて制動力を得ることを特徴とするブレーキ制御装置。
よって、ドライバの要求する制動力を確保しつつ、車両挙動が乱れるのを抑制でき、車両の安定性を確保できる。
(l) (j)に記載のブレーキ制御装置において、
前記制動力発生部異常判定部により制動力発生部が異常と判定されると、前記判定された走行状態が走行中のときに前記スイッチ操作によって前記電動パーキングブレーキ機構の作動要求があった場合に前記電動パーキングブレーキ機構の作動を許可することを特徴とするブレーキ制御装置。
よって、制動力発生部に異常が発生している場合には、走行中であっても電動パーキングブレーキ機構の作動を許可することで、車両を減速させることができる。
(m) (j)に記載のブレーキ制御装置において、
前記電動パーキングブレーキ機構異常判定部により電動パーキングブレーキ機構の異常が判定され走行状態が走行判定から停止判定になると、前記制動力発生部による制動力をあらかじめ設定された時間保持するよう要求制動力を算出し、前記時間経過後に要求制動力を低減し、前記電動パーキングブレーキ機構の作動の制限を継続することを特徴とするブレーキ制御装置。
よって、ドライバにブレーキペダルを踏む余裕時間を与えることができ、坂路停止時における車両のずり下がりを抑制できる。
【0037】
(n) (j)に記載のブレーキ制御装置において、
走行状態が走行判定から停止判定になると、前記制動力発生部による制動力が低減するよう要求制動力を低減し、前記電動パーキングブレーキコントロールユニットによる前記電動パーキングブレーキ機構の作動を許可することを特徴とするブレーキ制御装置。
よって、制動力発生部による制動力のみで車両停車状態を維持する場合と比較して、消費電力を抑制できる。
(o) (j)に記載のブレーキ制御装置において、
前記制動力発生部異常判定部により前記制動力発生部が異常と判定されると前記制動力発生部の作動を制限し、
前記制動力発生部異常判定部により前記制動力発生部が異常と判定されると、前記判定された走行状態が走行中のときに前記スイッチ操作によって前記電動パーキングブレーキ機構の作動要求があった場合に前記電動パーキングブレーキ機構の作動を許可することを特徴とするブレーキ制御装置。
よって、制動力発生部に異常が発生している場合には、走行中であってもパーキングブレーキ機構の作動を許可することで、車両を減速させることができる。
【符号の説明】
【0038】
FL 左前輪
FR 右前輪
RL 左後輪
RR 右後輪
1 油圧ユニット(制動力発生部)
2 油圧ユニットECU(制動力コントロールユニット)
3RL,3RR 左右リアキャリパ(パーキングブレーキ機構)
15RL,15RR 左右電動モータ(パーキングブレーキ機構)
17 パーキングブレーキスイッチ
16 電動パーキングECU(パーキングブレーキコントロールユニット)
S4 要求制動力算出部
S5 制動力協調制御部
S204 走行状態判定部
【特許請求の範囲】
【請求項1】
運転者のスイッチ操作によって車輪に制動力を発生させるためのパーキングブレーキ機構と、
車両の状態に応じて前記車輪に対して独立した制動力を発生可能な制動力発生部と、
前記制動力発生部の作動をコントロールする制動力コントロールユニットと、
車両が走行中か否かを判定する走行状態判定部と、
を備え、
前記制動力コントロールユニットは、判定された走行状態が走行中のときに前記スイッチ操作によって前記パーキングブレーキ機構の作動要求があった場合に前記パーキングブレーキ機構の作動を制限し、前記制動力発生部を作動させて制動力を発生する制動力協調制御部を備えたことを特徴とするブレーキ制御装置。
【請求項2】
請求項1に記載のブレーキ制御装置において、
前記制動力コントロールユニットは、車両挙動に基づいて前記制動力発生部により発生させる要求制動力を算出する要求制動力算出部を備え、
前記制動力協調制御部は、算出された要求制動力に基づき前記制動力発生部を作動させることを特徴とするブレーキ制御装置。
【請求項3】
請求項1に記載のブレーキ制御装置において、
前記パーキングブレーキ機構の作動をコントロールするパーキングブレーキコントロールユニットを備え、
前記制動力コントロールユニットは、前記制動力発生部により発生させる要求制動力を算出する要求制動力算出部を備え、走行状態が走行判定から停止判定になると、前記制動力発生部による制動力が低減するよう要求制動力を低減し、前記パーキングブレーキコントロールユニットによる前記パーキングブレーキ機構の作動を許可することを特徴とするブレーキ制御装置。
【請求項4】
請求項3に記載のブレーキ制御装置において、
前記制動力コントロールユニットは、前記パーキングブレーキ機構の作動後に前記制動力発生部による制動力を低減させることを特徴とするブレーキ制御装置。
【請求項5】
請求項4に記載のブレーキ制御装置において、
前記制動力コントロールユニットは、前記制動力発生部による制動力の低減を所定の勾配をもって実行することを特徴とするブレーキ制御装置。
【請求項1】
運転者のスイッチ操作によって車輪に制動力を発生させるためのパーキングブレーキ機構と、
車両の状態に応じて前記車輪に対して独立した制動力を発生可能な制動力発生部と、
前記制動力発生部の作動をコントロールする制動力コントロールユニットと、
車両が走行中か否かを判定する走行状態判定部と、
を備え、
前記制動力コントロールユニットは、判定された走行状態が走行中のときに前記スイッチ操作によって前記パーキングブレーキ機構の作動要求があった場合に前記パーキングブレーキ機構の作動を制限し、前記制動力発生部を作動させて制動力を発生する制動力協調制御部を備えたことを特徴とするブレーキ制御装置。
【請求項2】
請求項1に記載のブレーキ制御装置において、
前記制動力コントロールユニットは、車両挙動に基づいて前記制動力発生部により発生させる要求制動力を算出する要求制動力算出部を備え、
前記制動力協調制御部は、算出された要求制動力に基づき前記制動力発生部を作動させることを特徴とするブレーキ制御装置。
【請求項3】
請求項1に記載のブレーキ制御装置において、
前記パーキングブレーキ機構の作動をコントロールするパーキングブレーキコントロールユニットを備え、
前記制動力コントロールユニットは、前記制動力発生部により発生させる要求制動力を算出する要求制動力算出部を備え、走行状態が走行判定から停止判定になると、前記制動力発生部による制動力が低減するよう要求制動力を低減し、前記パーキングブレーキコントロールユニットによる前記パーキングブレーキ機構の作動を許可することを特徴とするブレーキ制御装置。
【請求項4】
請求項3に記載のブレーキ制御装置において、
前記制動力コントロールユニットは、前記パーキングブレーキ機構の作動後に前記制動力発生部による制動力を低減させることを特徴とするブレーキ制御装置。
【請求項5】
請求項4に記載のブレーキ制御装置において、
前記制動力コントロールユニットは、前記制動力発生部による制動力の低減を所定の勾配をもって実行することを特徴とするブレーキ制御装置。
【図1】


【図2】
【図3】
【図4】
【図5】
【図6】
【図7】
【図8】
【図9】
【図10】
【図11】
【図12】
【図13】
【図14】
【図15】
【図16】
【図2】
【図3】
【図4】
【図5】
【図6】
【図7】
【図8】
【図9】
【図10】
【図11】
【図12】
【図13】
【図14】
【図15】
【図16】
【公開番号】特開2013−112017(P2013−112017A)
【公開日】平成25年6月10日(2013.6.10)
【国際特許分類】
【出願番号】特願2011−257242(P2011−257242)
【出願日】平成23年11月25日(2011.11.25)
【出願人】(509186579)日立オートモティブシステムズ株式会社 (2,205)
【Fターム(参考)】
【公開日】平成25年6月10日(2013.6.10)
【国際特許分類】
【出願日】平成23年11月25日(2011.11.25)
【出願人】(509186579)日立オートモティブシステムズ株式会社 (2,205)
【Fターム(参考)】
[ Back to top ]