
ブレーキ制御装置
【課題】
ドライバの違和感を抑制することができるブレーキ制御装置を提供すること。
【解決手段】
ドライバによるブレーキペダル2の操作に対してマスタシリンダ4の圧力の上昇が抑制される無効ストローク動作中に、マスタシリンダ4内のブレーキ液を用いてホイルシリンダ5の圧力を調整する際、マスタシリンダ4とホイルシリンダ5を接続する第1ブレーキ回路(供給通路11)上に設けられたノーマルオープン型の電磁弁(ゲートアウト弁20)に対し、弁体200が閉弁する所定電流Iinitialを通電する第1通電部71と、第1通電部71による通電後、連続して所定電流Iinitialより低い電流Ibalance(t)を通電する第2通電部72と、第1通電部71による電流値Iinitialから第2通電部72による電流値Ibalance(t)へ漸近させて移行する移行通電部73とを備えた。
ドライバの違和感を抑制することができるブレーキ制御装置を提供すること。
【解決手段】
ドライバによるブレーキペダル2の操作に対してマスタシリンダ4の圧力の上昇が抑制される無効ストローク動作中に、マスタシリンダ4内のブレーキ液を用いてホイルシリンダ5の圧力を調整する際、マスタシリンダ4とホイルシリンダ5を接続する第1ブレーキ回路(供給通路11)上に設けられたノーマルオープン型の電磁弁(ゲートアウト弁20)に対し、弁体200が閉弁する所定電流Iinitialを通電する第1通電部71と、第1通電部71による通電後、連続して所定電流Iinitialより低い電流Ibalance(t)を通電する第2通電部72と、第1通電部71による電流値Iinitialから第2通電部72による電流値Ibalance(t)へ漸近させて移行する移行通電部73とを備えた。
【発明の詳細な説明】
【技術分野】
【0001】
本発明は、車両に搭載されるブレーキ制御装置に関する。
【背景技術】
【0002】
従来、マスタシリンダと車輪に設けられたホイルシリンダとを接続するブレーキ回路上にノーマルオープン型の電磁弁を備え、電磁弁の開弁量を制御するブレーキ制御装置が知られている。例えば特許文献1に記載の装置は、弁体が閉弁する所定電流を通電する第1通電部と、この第1通電部による通電後、上記所定電流より低い電流を通電する第2通電部とにより電磁弁を制御することで、電磁弁の簡素化と電力消費の抑制を図っている。
【先行技術文献】
【特許文献】
【0003】
【特許文献1】特開2011−5899号公報
【発明の概要】
【発明が解決しようとする課題】
【0004】
しかし、特許文献1に記載の装置では、第1通電部による電流値から第2通電部による電流値へ移行する際、電流値の急低下を伴う。よって、ホイルシリンダから電磁弁を通過してマスタシリンダへ向かうブレーキ液の流量が一時的に増加することでマスタシリンダ圧が変動し、この変動がブレーキペダルまで伝わってドライバ(運転者)に違和感を与えるおそれがあった。本発明の目的とするところは、ドライバの違和感を抑制することができるブレーキ制御装置を提供することにある。
【課題を解決するための手段】
【0005】
上記目的を達成するため、本発明のブレーキ制御装置は、好ましくは、第1通電部による電流値から第2通電部による電流値へ漸近させて移行する移行通電部を備えた。
【発明の効果】
【0006】
よって、第1通電部による電流値から第2通電部による電流値へ移行する際、電流値の急低下を抑制することで、電磁弁を通過するブレーキ液の流量が過剰になってドライバに違和感を与えることを抑制することができる。
【図面の簡単な説明】
【0007】
【図1】実施例1のブレーキ制御装置が適用される車両のシステム構成を示す。
【図2】実施例1の液圧ユニットの油圧回路構成を示す。
【図3】実施例1の無効ストローク創生部によるペダルストローク−ブレーキ力の特性を示す。
【図4】実施例1の液圧制御処理を表すメインフローチャートである。
【図5】実施例1のモータ制御処理を表すフローチャートである。
【図6】実施例1のゲートアウト弁の制御処理を表すフローチャートである。
【図7】実施例1のゲートアウト弁における差圧−電流の特性を示す。
【図8】比較例による制御のタイムチャートである。
【図9】実施例1による制御のタイムチャートである。
【発明を実施するための形態】
【0008】
以下、本発明のブレーキ制御装置を実現する形態を、図面に基づき説明する。
【0009】
[実施例1]
図1は、実施例1のブレーキ制御装置1が適用される車両の制駆動系を示すシステム構成図である。車両は、前輪FL,FRが内燃機関(エンジン100)により駆動されると共に、後輪RL,RRが電動機(モータジェネレータ101)により駆動されるハイブリッド車両である。各車輪FL,FR,RL,RRには、その回転速度(車輪速)を検出する車輪速検出手段(車輪速センサ)108が設けられている。なお、各電子制御ユニット(コントロールユニット7、モータコントロールユニット104、駆動コントローラ105)は、情報交換が可能な信号線(CAN通信線)を介して互いに接続されている。
【0010】
車両の駆動系は、エンジン100とモータジェネレータ101とインバータ102とバッテリ103とモータコントロールユニット104と駆動コントローラ105とを有している。エンジン100は、ガソリンエンジンやディーゼルエンジンであり、その出力軸は図外の自動変速機を介して前輪FL,FRの駆動軸に連結されている。エンジン100は、電子制御ユニットである駆動コントローラ105からの制御指令に基づいて、スロットルバルブの開度等が制御される。モータジェネレータ101は、ロータに永久磁石を埋設しステータにコイルが巻き付けられた同期型モータジェネレータであり、ロータの出力軸は、プロペラシャフトPS及びディファレンシャルギアDGを介して後輪RL,RRの駆動軸RDSに連結されている。モータジェネレータ101は、電子制御ユニットであるモータコントロールユニット104からの制御指令に基づいて、インバータ102により作り出された三相交流を印加することにより制御される。モータジェネレータ101は、バッテリ103からの電力の供給を受けて回転駆動する電動機として動作することもできるし(この状態を「力行」と呼ぶ)、ロータが外力により回転している場合には、ステータコイルの両端に起電力を生じさせる発電機として機能してバッテリ103を充電することもできる(以下、この動作状態を「回生」と呼ぶ)。インバータ102は、モータコントロールユニット104からの駆動指令に基づいて、バッテリ103の直流電力を交流電力に変換しモータジェネレータ101に供給することで、モータジェネレータ101を力行運転する。一方、インバータ102は、モータコントロールユニット104からの回生指令に基づいて、モータジェネレータ101で発生する交流電力を直流電力に変換してバッテリ103を充電することで、モータジェネレータ101を回生運転する。
【0011】
駆動コントローラ105は、直接又は信号線を介して、アクセル開度センサ106からのアクセル開度、車輪速センサ108により算出される車速(車体速)、バッテリSOC等が入力される。駆動コントローラ105は、各センサからの情報に基づき、エンジン100の動作制御と、図外の自動変速機の動作制御と、モータコントロールユニット104への駆動力指令によるモータジェネレータ101の動作制御とを行う。
【0012】
車両の操舵系は、ステアリングホイールと転舵輪とを連結するステアリングシャフトと、ステアリングシャフトに設けられた操舵状態検出手段(操舵トルクセンサ等)107を有している。車両の制動系(ブレーキシステム)は、ブレーキ制御装置1とブレーキペダル2と倍力装置3とマスタシリンダ4とホイルシリンダ5を有している。ホイルシリンダ5は、各車輪FL,FR,RL,RRに設けられてブレーキ液圧(ホイルシリンダ圧)を発生する。ブレーキペダル2は、ドライバによるブレーキペダル2の操作(ブレーキ操作)の力を倍力装置3に伝達する操作部材である。ブレーキペダル2には、ドライバのブレーキ操作状態としてブレーキペダル2の操作量(ペダルストロークS)を検出するブレーキ操作量検出手段(ブレーキストロークセンサ)8が設けられている。倍力装置3は、伝達されたブレーキ操作力(ブレーキペダル2の踏力)を増幅してマスタシリンダ4に伝達するブースタであり、例えばエンジン100の発生する負圧を利用する負圧ブースタである。
【0013】
マスタシリンダ4は、倍力装置3から加わる力に比例した液圧、すなわちブレーキ操作の状態に応じた液圧(マスタシリンダ圧)を発生する液圧発生装置である。マスタシリンダ4には、作動液(ブレーキ液)を貯留する液源としてのリザーバタンク40が一体に設けられており、マスタシリンダ4は、リザーバタンク40からブレーキ液の供給を受ける。マスタシリンダ4は所謂タンデム型であって、独立した2系統(プライマリP系統,セカンダリS系統)のブレーキ配管系10P,10Sを介して液圧ユニット6に接続されている。以下、ブレーキ配管の各系統に対してそれぞれ設けられているものについては、必要に応じてP,Sの記号を添えて区別するものとする。また、4輪の各々に対応して複数設けられているものについては、必要に応じてa,b,c,dの記号を添えて区別し、aは前左輪FL、bは前右輪FR、cは後左輪RL、dは後右輪RRにそれぞれ対応するものとする。ブレーキ回路(油圧回路)は所謂X配管であり、マスタシリンダ4から出たP系統のブレーキ回路10Pが前左輪FLと後右輪RRのホイルシリンダ5a,5dに、S系統のブレーキ回路10Sが前右輪FRと後左輪RLのホイルシリンダ5b,5cに夫々接続され、X字(ダイヤゴナル)型の配管構造となっている。なお、所謂前後配管、すなわち前輪FL,FRと後輪RL,RRの2系統に分けたH字型の配管構造としてもよい。
【0014】
ブレーキ制御装置(以下、装置1という。)は、ドライバのブレーキ操作から独立して車両の各車輪FL,FR,RL,RRのブレーキ液圧を制御することにより、車両の運動制御(挙動制御)や、アンチロックブレーキ制御等を実行可能に設けられたブレーキ液圧制御装置である。装置1は、各車輪FL,FR,RL,RRのブレーキ液圧を制御可能に設けられた液圧ユニット6と、液圧ユニット6を制御する電子制御ユニットであるコントロールユニット7とを有しており、これらが一体化された所謂機電一体型のユニットである。なお、両ユニット6、7を別体としてもよい。液圧ユニット6は、ブレーキ配管10を介してマスタシリンダ4とホイルシリンダ5との間に配置されたアクチュエータであり、マスタシリンダ圧又は制御液圧を各ホイルシリンダ5に個別に供給可能に設けられている。液圧ユニット6は、各ホイルシリンダ5に供給する制御液圧を発生するための液圧機器(アクチュエータ)として、液圧発生源である(例えば回転式の)ポンプ30及び複数の制御弁20等を有すると共に、これら液圧機器を内蔵するハウジングを有する。ブレーキペダル2が踏み込まれると、マスタシリンダ4はブレーキ液をブレーキ配管系10P,10Sを介して液圧ユニット6に供給し、ホイルシリンダ5はブレーキ圧(ホイルシリンダ圧)を発生する。液圧ユニット6は、ホイルシリンダ圧を、マスタシリンダ圧以下に制御することも、マスタシリンダ圧以上に制御することも、略一定に保持することも可能に設けられている。
【0015】
コントロールユニット7は、液圧ユニット6に制御指令を出力することで、各車輪FL,FR,RL,RRのブレーキ液圧を制御する電子制御ユニットである。例えば、ブレーキ踏み込み制動時、ドライバ要求制動力に対し回生制動力だけでは不足する場合、その不足分を液圧制動力で補うように、回生協調ブレーキ制御を行う。コントロールユニット7は、直接又は通信線を介して、液圧センサ42からのマスタシリンダ圧、ブレーキストロークセンサ8からのペダルストロークS、操舵角センサ107からのハンドル操舵角、車輪速センサ108からの各車輪速、液圧センサ43からの液圧、バッテリSOC等が入力される。コントロールユニット7は、ペダルストロークSや、他のセンサからの情報に基づいてドライバ要求制動力を算出する。駆動コントローラ105は、算出されたドライバ要求制動力を回生制動力と摩擦制動力とに配分し、ブレーキコントロールユニット7への摩擦制動力指令による液圧制御ユニット6の動作制御と、モータコントロールユニット104への回生制動力指令によるモータジェネレータ101の動作制御とを行う。
【0016】
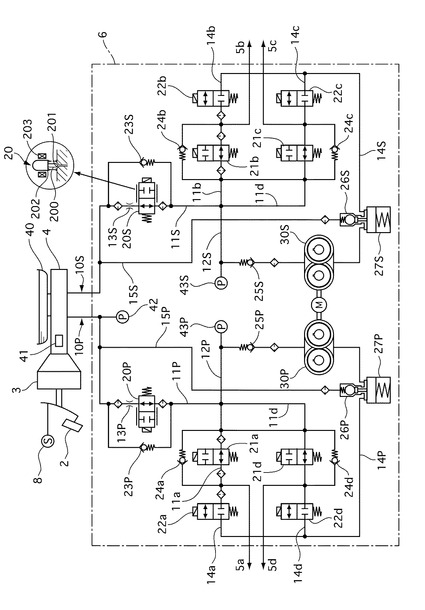
図2は、液圧ユニット6の油圧回路構成を示す。以下、P系統を例にとり、油圧回路であるブレーキ回路10について説明する。ブレーキ回路10は、液圧ユニット6内に、ブレーキ液が移動(流通)する複数の通路11等を有している。ブレーキ回路10は、マスタシリンダ4側からホイルシリンダ5側に向かう供給通路11(第1ブレーキ回路)を有している。供給通路11には、その連通・遮断を切り換える遮断弁としてのゲートアウト弁20が設けられている。ゲートアウト弁20のマスタシリンダ4側にはオリフィス13が設けられている。また、ゲートアウト弁20と並列に、マスタシリンダ4側からホイルシリンダ5側(ポンプ30側)へのブレーキ液の流通のみを許容するチェック弁23が設けられている。ゲートアウト弁20よりもホイルシリンダ5側の供給通路11は、前輪FL側の増圧通路(フロントホイルシリンダ増圧通路)11aと後輪RR側の増圧通路(リアホイルシリンダ増圧通路)11dに分岐している。増圧通路11aは前左輪FLのホイルシリンダ5aに接続し、増圧通路11dは後右輪RRのホイルシリンダ5dに接続している。増圧通路11a、11dには、その連通・遮断を切り換える増圧弁21a,21dが夫々設けられている。また、増圧弁21と並列に、ホイルシリンダ5側からマスタシリンダ4側(ポンプ30側)へのブレーキ液の流通のみを許容するチェック弁24が設けられている。このように、ホイルシリンダ5a、5dは、増圧通路11a、11d及び供給通路11を介してマスタシリンダ4と連通している。ゲートアウト弁20と増圧弁21a,21dは、ホイルシリンダ5a、5dとマスタシリンダ4との間に設けられている。
【0017】
増圧弁21よりもホイルシリンダ5側の増圧通路11a、11dには、減圧通路14a、14dが夫々接続している。減圧通路14aは、ホイルシリンダ5aに接続する前輪FL側の減圧通路(フロントホイルシリンダ減圧通路)であり、減圧通路14dは、ホイルシリンダ5dに接続する後輪RR側の減圧通路(リアホイルシリンダ減圧通路)である。減圧通路14a、14dには、その連通・遮断を切り換える減圧弁22a,22dが夫々設けられている。減圧通路14a、14dは合流して減圧通路14となり、ポンプ30の吸入側とマスタシリンダ4との間に設けられた内部リザーバ27に接続している。一方、供給通路11は、ゲートアウト弁20よりもマスタシリンダ4側で分岐し、吸入通路15を形成している。吸入通路15は、内部リザーバ27を経由してポンプ30の吸入側に接続している。このように、ポンプ30の吸入側は、吸入通路15及び供給通路11を介してマスタシリンダ4(リザーバタンク40)と連通している。
【0018】
ポンプ30の吐出側は、吐出通路12(第2ブレーキ回路)を介して、ゲートアウト弁20よりもホイルシリンダ5側の供給通路11に接続している。なお、ポンプ30の吐出側(吐出通路12)にはチェック弁25が設けられており、チェック弁25はゲートアウト弁20と増圧弁21との間の通路11からポンプ30の吐出側へのブレーキ液の逆流を抑制する。ポンプ30の吐出側は、吐出通路12及び供給通路11を介してマスタシリンダ4と連通している。すなわち、ゲートアウト弁20は、ポンプ30の吐出側とマスタシリンダ4との間に設けられている。また、ポンプ30の吐出側は、吐出通路12及び供給通路11(増圧通路11a、11d)を介してホイルシリンダ5a、5dと連通している。すなわち、増圧弁21a,21dは、ポンプ30の吐出側とホイルシリンダ5a、5dとの間に夫々設けられている。また、ポンプ30の吐出側には、吐出通路12におけるチェック弁25の下流側に、液圧センサ43が設けられている。液圧センサ43は、ポンプ30の吐出側の圧力(ポンプ30の吐出圧)を検出し、検出した値をコントロールユニット7に入力する。
【0019】
S系統のブレーキ回路10Sも、P系統のブレーキ回路10Pと同様に構成されている。なお、ブレーキ回路10Pには、供給通路11におけるゲートアウト弁20よりもマスタシリンダ4側に、液圧センサ42が設けられている。液圧センサ42は、マスタシリンダ圧を検出し、検出した値をコントロールユニット7に入力する。
【0020】
ポンプ30は、P,S系統ごとに設けられており、モータMにより回転駆動され、各配管系統でブレーキ液の吸入・吐出を行う外接ギヤ式ポンプである。なお、ポンプ30の形式はこれに限らず、内接ギヤ式やプランジャ式等を採用可能である。モータMは、直流ブラシモータであるが、これに限られない。モータMは、コントロールユニット7からの指令電圧により回転数制御され、ポンプ30を駆動する。ポンプ30は、内部リザーバ27に貯留したブレーキ液を掻き出し、ゲートアウト弁20を介してマスタシリンダ4側に戻す。また、ポンプ30は、マスタシリンダ4以外のブレーキ液圧源として、マスタシリンダ4側から内部リザーバ27を介してブレーキ液を吸入し、ホイルシリンダ5側に吐出する。内部リザーバ27は、液圧ユニット6に内蔵され、チェック弁26を備えた調圧機能付きのリザーバタンクであり、ブレーキ液を貯留かつ調圧可能に設けられている。内部リザーバ27は、減圧弁22を介して送られてくるブレーキ液を貯留する。また、内部リザーバ27は、ポンプ30を停止した状態でマスタシリンダ4側から少しでも圧力が発生すると、吸入通路15の連通を遮断して、マスタシリンダ4側からポンプ30の吸入側へのブレーキ液の流入を抑制する一方、ポンプ30が作動すると、吸入通路15を連通させて、マスタシリンダ4側からポンプ30の吸入側へのブレーキ液の流入を優先的に有効とする。
【0021】
各弁20〜22は、電磁弁(ソレノイドバルブ)であり、ソレノイド(コイル)へ駆動電流が通電されることにより電磁力を発生し、プランジャ等を往復移動させることで弁を開閉作動する周知のものである。ゲートアウト弁20は、電流値により弁の開度が比例的に変化する比例制御弁であり、非通電時に開弁する常開弁(ノーマルオープン型)である。ゲートアウト弁20は、コントロールユニット7からの指令電流により全開状態と全閉状態との間を比例的に動作し、マスタシリンダ4とポンプ30の吐出側及び増圧弁21との間を断続(連通・遮断)する。また、チェック弁23は、マスタシリンダ圧>(ポンプ30の吐出側の圧)となったときに、マスタシリンダ圧をポンプ30の吐出側及び増圧弁21の側へ伝えるように開動作する。
【0022】
ここで、ゲートアウト弁20の構成について説明する。図2の拡大図に示すように、ゲートアウト弁20は、弁体(プランジャ)200と、弁体200が当接することで流路(供給通路11)を閉じ離間することで流路(供給通路11)を開けるバルブシート部201と、弁体200をバルブシート部201から離間する方向に付勢するスプリング202(付勢手段)と、弁体200をスプリング202の付勢力に抗してバルブシート部201の方向に移動させるための電磁力を発生させるソレノイド203と、を有する。ソレノイド203に電流が通電すると、電磁力によって弁体200がスプリング202の付勢力(バネ力)に抗して押し下げられ、弁体200のストローク量に応じてバルブシート部201との間の流路面積を変更し、これにより流量ないし液圧を比例制御する。
【0023】
弁体200には、ゲートアウト弁20の上流側の圧力(マスタシリンダ圧に相当)と下流側の圧力(ポンプ30の吐出側の圧力であり、ホイルシリンダ圧に相当)との差圧による力が作用する。ソレノイド203に通電する電流を制御することで、上記差圧を所望の値に制御することができる。すなわち、弁体200の位置に応じてスプリング202の付勢力は一意に決まる。このため、電流値を所定値に制御すれば、この電流値に応じた電磁力とスプリング202の付勢力とが最終的に釣り合うような上記差圧による力が弁体200に作用するようになるまで、弁体200がストロークしてゲートアウト弁20を流れる流量を調節する。これにより、目標とする差圧が実現される。以下、これをゲートアウト弁20の釣り合い制御といい、上記差圧を所定値に制御するためにソレノイド203に通電する電流値を釣り合い電流値という。例えば、増圧弁21が開で減圧弁22が閉のときは、ポンプ30によるホイルシリンダ5の増圧量は、ポンプ30の吐出液量とゲートアウト弁20からマスタシリンダ4側へのリーク液量との差に応じて決定される。マスタシリンダ圧がゼロのとき、ゲートアウト弁20の上下流の差圧はホイルシリンダ圧に相当する。このため、モータMの回転数(ポンプ吐出液量)を制御すると共に、上記差圧が所望の値となるようにゲートアウト弁20のソレノイド203に通電してその電磁力(釣り合い電流値)を制御すれば、ゲートアウト弁20の開度(上記リーク液量)が自動的に調整され、ホイルシリンダ圧を任意に調圧することができる。
【0024】
増圧弁21は、弁の開度が全開状態と全閉状態の2位置をとるオン・オフ弁であり、非通電時に開弁する常開弁である。増圧弁21は、コントロールユニット7からの指令電流により開閉動作を行い、増圧弁21に供給されるマスタシリンダ圧又はポンプ吐出圧を開弁によりホイルシリンダ5に供給し、又は閉弁によりこの供給を遮断することで、ホイルシリンダ圧を任意に増圧ないし保持可能に設けられている。また、チェック弁24は、ホイルシリンダ圧>(ポンプ30の吐出側の圧)となったときに、ホイルシリンダ圧をマスタシリンダ4に抜くように開動作する。減圧弁22は、オン・オフ弁であり、非通電時に閉弁する常閉弁である。減圧弁22は、コントロールユニット7からの指令電流により開閉動作を行い、開弁によりホイルシリンダ5内のブレーキ液を一時的に内部リザーバ27に供給し(すなわちホイルシリンダ5からブレーキ液を排出し)、又は閉弁によりこの供給(排出)を遮断することで、ホイルシリンダ圧を任意に減圧可能に設けられている。なお、増圧弁21や減圧弁22を比例制御弁としてもよい。
【0025】
コントロールユニット7は、液圧センサ42,43から送られる検出値、及び車両から送られる走行状態に関する情報が入力され、内蔵されるプログラムに基づき、増圧制御弁6、減圧制御弁7、及びゲートアウト弁20の開閉、並びにモータMの駆動(ポンプ30の吐出量)を制御する。
【0026】
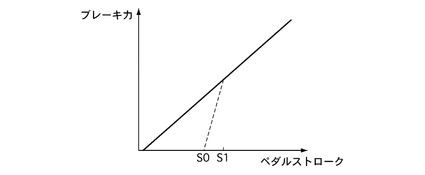
次に、コントロールユニット7において実施される液圧制御について説明する。マスタシリンダ4には、ブレーキペダル2の操作量に対して、所定の操作量(ペダルストロークS)まで、マスタシリンダ4の圧力の上昇を所定量に抑制する無効ストローク創生部41が設けられている。具体的には、回生ブレーキをより円滑に発生させ制御する等のため、マスタシリンダ4には、所定のペダルストロークS以内ではマスタシリンダ圧が昇圧しないようにするための手段が設けられている。図3は、ペダルストロークSに対するドライバ要求ブレーキ力(又はこの要求ブレーキ力に相当する車両減速度である要求減速度)の特性を実線で示し、ペダルストロークSに対するマスタシリンダ圧によるブレーキ力(又はこのブレーキ力に相当する車両減速度)の特性を破線で示す。ドライバ要求ブレーキ力(要求減速度)はペダルストロークSに応じて比例的に増大する。一方、マスタシリンダ圧によるブレーキ力(減速度)は、ペダルストロークSが所定値S0になるまで略ゼロであり、所定値S0以上になると(ドライバ要求ブレーキ力よりも)大きな勾配で増大し、ドライバ要求ブレーキ力と一致した後は、ドライバ要求ブレーキ力と同様の勾配でペダルストロークSに応じて増大するような特性、言換えると、ペダルストロークSが所定値S1まで減少するまではドライバ要求ブレーキ力と一致してペダルストロークSに応じて減少し、所定値S1未満になると(ドライバ要求ブレーキ力よりも)大きな勾配で減少し、ペダルストロークSが所定値S0以下では略ゼロになるような特性に設けられている。
【0027】
本実施例1では、車両の減速時(走行中)には、ドライバ要求ブレーキ力を実現するため、ドライバ要求ブレーキ力とマスタシリンダ圧によるブレーキ力との差分を、モータコントロールユニット104によりモータジェネレータ101を制御することで得られる回生ブレーキにて補う。しかし、車両停止後(車両速度が所定値以下の低速度となった後)には回生ブレーキを発生できなくなる。よって、ドライバ要求ブレーキ力を実現するため、上記ブレーキ力の差分を、コントロールユニット7により液圧ユニット6を制御することで得られるホイルシリンダ圧(液圧ブレーキ)により補う。具体的には、ドライバ要求ブレーキ力の増大時には、ゲートアウト弁20を釣り合い制御、増圧制御弁6を開、減圧制御弁7を閉、モータMをオンし、ポンプ30を駆動する。これにより、上記ブレーキ力の差分に相当する分だけ、ポンプ圧がホイルシリンダ5に供給される。また、ドライバ要求ブレーキ力の減少時には、ゲートアウト弁20を釣り合い制御、増圧制御弁6を開、減圧制御弁7を閉、モータMをオフし、ポンプ30を停止する。これにより、上記ブレーキ力の差分に相当する分だけホイルシリンダ圧を残しつつ、ホイルシリンダ内のブレーキ液がゲートアウト弁20を介してマスタシリンダ4に排出される。
【0028】
コントロールユニット7は、ゲートアウト弁20を釣り合い制御する際、ゲートアウト弁20のソレノイド203に対し、弁体200が閉弁するような所定電流Iinitialを通電する第1通電部71と、第1通電部71による通電後、所定電流Iinitialより低い電流を連続して通電する第2通電部72と、第1通電部71による通電から第2通電部72による通電へ切替えるとき、第1通電部71による電流値Iinitialから第2通電部72による電流値へ漸近するように電流値を移行させつつ通電する移行通電部73とを有し、これらの通電部71〜73によりソレノイド203に通電する電流を制御する。
【0029】
第1通電部71による電流値は、下記式(1)により設定する。以下、Igo(t) はソレノイド203に通電する最終的な電流目標値(指令電流)である。
Igo(t)= Iinitial ・・・(1)
Iinitialは初期電流であり、例えばゲートアウト弁20が確実に閉弁するような電流値とする。この電流値Iinitialは、ゲートアウト弁20のバネ力やコイル巻数などのハード要因と温度などの環境要因によって決める。
【0030】
第2通電部72による電流値は、下記式(2)により設定する。
Igo(t)= Ibalance(t) ・・・(2)
Ibalance(t)は、ゲートアウト弁20の上流圧(マスタシリンダ圧)と下流圧(ホイルシリンダ圧)との差圧を所定値に保持するための釣り合い電流値である。tは制御開始からの時間(釣り合い制御の開始時刻を0としたときの現在の時刻)であり、後述の制御時間タイマに相当する。
【0031】
移行通電部73による電流値は、下記式(3)により算出する。
Igo(t)=max[Iinitial−{ Iinitial−Ibalance(t)}×t/Tchange,Ibalance(t)] ・・・(3)
すなわち、上記式(3)により算出される電流値Igo(t)は、時間tが増大するにつれて初期電流Iinitialから徐々に減少してIbalance(t)に漸近し、Tchangeだけ時間tが経過するとIbalance(t)に一致する。Tchangeは、第1通電部71による通電から第2通電部72による通電への所定の移行時間であり、上記式(3)により算出される電流値の時間tに応じた変化量(勾配)が十分に小さくなる値に設定される。例えば、釣り合い制御の開始時における「Iinitial−Ibalance(t)」の大きさに応じてTchangeの長さを設定することとしてもよい。
【0032】
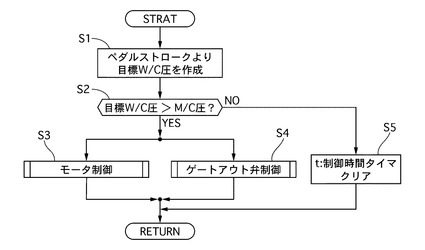
図4は、実施例1の液圧制御処理を表すメインフローチャートである。この制御フローは、回生ブレーキを発生できなくなる車両停止後(ないし車両速度が所定値以下の低速度となった後)、ブレーキ操作が行われている場合に、所定周期で繰り返し実行される。なお、車両速度は車輪速に基づき推定することができる。
ステップS1では、ペダルストロークSに基づき目標ホイルシリンダ圧を算出する。具体的には、図3の実線に示すように、ペダルストロークSに比例するドライバ要求ブレーキ力を設定し、このブレーキ力を実現するホイルシリンダ圧の目標値を算出する。その後、ステップS2に進む。
ステップS2では、算出された目標ホイルシリンダ圧が、液圧センサ42により検出されたマスタシリンダ圧よりも高いか否かを判定する。高ければステップ3とステップS4の両方に進む。低ければステップS5に進む。
ステップS3では、モータ制御を実施した後、今回の制御周期を終了する。
ステップS4では、ゲートアウト弁20の釣り合い制御を実施した後、今回の制御周期を終了する。
ステップS5では、制御時間タイマtをクリアした後、今回の制御周期を終了する。
【0033】
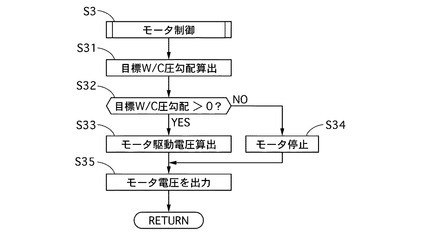
図5は、モータMの制御処理(図4のステップS3)の詳細を表すフローチャートである。
ステップS31では、目標ホイルシリンダ圧の勾配を算出する。この勾配は、例えば、目標ホイルシリンダ圧の前回値(前回の制御周期で算出された値)と今回値との差により求めることができる。その後、ステップS32に進む。
ステップS32では、目標ホイルシリンダ圧の勾配がゼロより大きいか否か、すなわちホイルシリンダ圧の増圧要求があるか否かを判定する。ゼロより大きければ(増圧要求があれば)ステップS33に進み、ゼロ以下であれば(増圧要求がなければ)ステップS34に進む。
ステップS33では、モータ駆動電圧を算出する。例えば、液圧センサ43により検出された液圧をホイルシリンダ圧の実値とみなし、この実値と目標ホイルシリンダ圧との偏差に基づき必要なポンプ吐出量を算出して、このポンプ吐出量を実現するモータ回転数となるような電圧を算出する。その後、ステップS35に進む。
ステップS34では、モータMを停止する。例えば、モータ駆動電圧をゼロに設定する。その後、ステップS35に進む。
ステップS35では、モータMにモータ駆動電圧を出力した後、今回の制御周期を終了する。
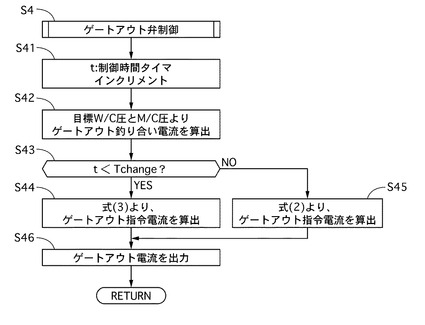
【0034】
図6は、ゲートアウト弁20の釣り合い制御処理(図4のステップS4)の詳細を表すフローチャートである。
ステップS41では、制御時間タイマtをインクリメントする。その後、ステップS42に進む。
ステップS42では、算出された目標ホイルシリンダ圧と、液圧センサ42により検出されたマスタシリンダ圧とに基づき、ゲートアウト弁20の釣り合い電流値Ibalance(t)を算出する。具体的には、その時点(制御周期)でのマスタシリンダ圧と目標ホイルシリンダ圧との差圧を目標差圧とし、この目標差圧を実現するためにソレノイド203に通電すべき電流値として、上記目標差圧による力が弁体200に作用する下でスプリング202による付勢力とソレノイド203による電磁力とが釣り合うような電流値を算出する。その後、ステップS43に進む。
ステップS43では、制御時間タイマtが移行時間Tchange未満であるか否かを判定する。Tchange未満であればステップS44に進み、Tchange以上であればステップS45に進む。
ステップS44では、上記式(3)(移行通電部73)によりゲートアウト弁20の指令電流Igo(t)を算出する。なお、最初にステップS44を実行する際(制御時間タイマtのインクリメント開始直後、すなわちゲートアウト弁20の釣り合い制御開始時)には、上記式(3)(移行通電部73)に代えて、上記式(1)(第1通電部71)によりゲートアウト弁20の指令電流を算出する。その後、ステップS46に進む。
ステップS45では、上記式(2)(第2通電部72)によりゲートアウト弁20の指令電流Igo(t)を算出する。その後、ステップS46に進む。
ステップS46では、ゲートアウト弁20に指令電流Igo(t)を出力した後、今回の制御周期を終了する。
【0035】
[実施例1の作用]
次に、装置1の作用を説明する。
装置1は、マスタシリンダ4とホイルシリンダ5とを接続するブレーキ回路(供給通路11)上にノーマルオープン型の電磁弁(ゲートアウト弁20)を備え、電磁弁20の開弁量をコントロールする構成において、弁体200が閉弁する所定電流(初期電流Iinitial)を通電する第1通電部71と、この第1通電部71による通電後、連続して上記所定電流より低い電流(釣り合い電流Ibalance(t))を通電する第2通電部72とにより電磁弁20を制御することで、電磁弁20の簡素化と電力消費の抑制を図ることができる。
【0036】
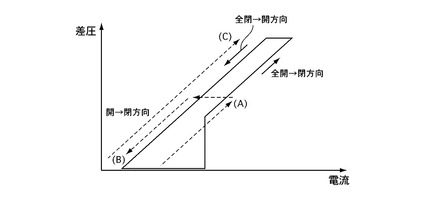
すなわち、弁体200がストロークしてその位置が変わっても電磁力が安定しているような制御性能の高い電磁弁20ならば、電磁力(電流)と電磁弁20の上下流の差圧との関係は比例的な関係となる。よって、スプリング202の付勢力を僅かに上回る必要最低限の電磁力(電流)で弁体200を全開→全閉までストロークさせることで、差圧を比例的に制御できる。しかし、上記のように電磁力の特性を安定させるには構成を複雑化する必要があり、また製造精度等にも影響されるため非常に高価となる。また、電流値が比較的高い吸引力特性の領域を使用することになり、電気エネルギの消費量が増加して発熱が起こり、耐久性の悪化も懸念される。ここで、構成を簡素化して安価とし、また、電流値が比較的低い吸引力特性の領域を用いるような制御性能の低い電磁弁20を設計した場合、弁体200のストロークと電磁力の関係は、例えば、ストロークが全閉に向かって増加するにつれて必要な電磁力が増大する特性となる。図7は、このようなストローク−電磁力の特性を有する制御性能の低い電磁弁20を用いて制御を行ったときに、電磁弁20の上下流の差圧と電流との関係がどのように変化するかを表した特性線図である。図7に示すように、全開→閉方向の動かし始めに、差圧と電流との関係は比例的な関係とならないため、差圧を制御できない場合が生じる。この場合、ホイルシリンダ圧センサ等の液圧センサによって液圧の状態を判断し、液圧制御に補正をかけて液圧を目標値に追従させるような制御(フィードバックループ)が必要となる。一方、上記ストローク−電磁力の特性において弁体200を全開から全閉までストロークさせることができるような電磁力(電流)を連続的に発生させると、特に全閉状態では電磁力がバネ力を大きく上回ることになり、不要な電力消費を招くという問題もある。
【0037】
これに対し、実施例1では、弁体200のストローク初期に比較的大きな電流を与え、その後、電流を下げることとした。よって、安価な低性能の電磁弁20であっても、安定した差圧の制御(釣り合い制御)を達成できる。すなわち、制御初期に比較的大きな初期電流Iinitialを流したとき、電磁弁20の動作点は図7の(A)に移行し、電磁弁20が閉弁して差圧の制御が可能な状態となる。高い差圧ではこの時点にて釣り合い制御が可能になるが、目標とする差圧はこれより低い値なので、その後電流値を下げることにより閉→開方向に図7の特性線上を移動し、低い差圧でも釣り合い制御を可能とする動作点(B)に移行する。その後、差圧の上昇に従って電流値が増加すると動作点(C)まで移行する。このように、本実施例1では、電磁弁20の釣り合い制御を行う際、電磁弁20に一度大きな電流Iinitialを流す。これにより一旦釣り合い制御可能な位置まで弁体200がストロークし、その後、釣り合い制御を行うのに必要最低限の電流Ibalance(t)まで小さくすることで、全開→閉の初期に釣り合い制御できない特性部分(差圧と電流の関係が比例的にならない部分)で電流制御を行わずに、制御性が比例的な特性部分を用いて制御することができる。よって差圧の増大初期の小さい電流値からでも良好に釣り合い制御を行うことができ、制御性能の低い電磁弁20でも精度の高い釣り合い制御を実現することができる。また、電磁弁20の構成を簡素化して安価にし、電流値を小さくして発熱を抑え、耐久性を向上させた制御性能の低い電磁弁20を用いて、良好な特性の下で釣り合い制御を行うことができる。
【0038】
しかし、初期電流Iinitial(第1通電部71による電流値)から釣り合い電流Ibalance(t)(第2通電部72による電流値)へ移行する際、電流値を急低下させると、電磁弁20を通過するブレーキ液流量が一時的に増加し、ホイルシリンダ5からマスタシリンダ4へとブレーキ液が過剰に流れるおそれがある。このとき、マスタシリンダ圧が変動し、これがブレーキペダル2まで伝わってドライバに違和感を与えるおそれがある。
【0039】
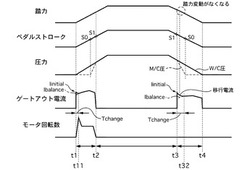
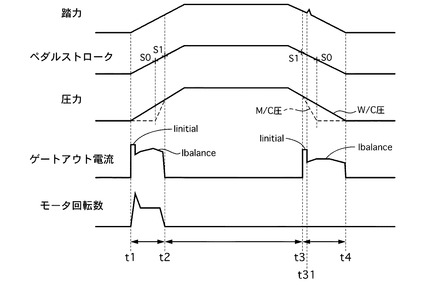
図8は、本実施例1と同様に無効ストローク創生部41その他の構成を備えるものの、本実施例1のような移行通電部73を備えず、第1通電部71による電流値Iinitialから第2通電部72による電流値Ibalance(t)まで急速に低下させる比較例による制御のタイムチャートである。
時刻t1からt2までの区間では、ペダルストロークSが所定値S1になるまでは、無効ストローク創生部41により、ペダルストロークSの増加(ドライバ要求ブレーキ力の増加)に追従してマスタシリンダ圧が増大しない(マスタシリンダ圧の増圧速度が小さく、マスタシリンダ圧が目標ホイルシリンダ圧を下回る)。よって、液圧ユニット6を作動させ、ゲートアウト弁20を釣り合い制御することで、ホイルシリンダ圧がドライバ要求ブレーキ力を実現する値(目標ホイルシリンダ圧)となるようにする。時刻t1からt2までは、目標ホイルシリンダ圧の勾配がゼロより大きい(ホイルシリンダ圧の増圧要求がある)ため、モータMを駆動してポンプ30を作動させる。
時刻t2からt3までの区間では、無効ストローク創生部41による無効ストローク動作が行われないため、マスタシリンダ圧がドライバ要求ブレーキ力を実現する圧力(目標ホイルシリンダ圧)まで増圧される。よって、液圧ユニット6によるブレーキ制御(ゲートアウト弁20の釣り合い制御)を終了し、マスタシリンダ4による加圧に切替える。ゲートアウト弁20は全開とされ、マスタシリンダ圧がそのままホイルシリンダ圧としてホイルシリンダ5に供給される。
時刻t3からt4までの区間では、無効ストローク創生部41により、ペダルストロークSの減少に追従してマスタシリンダ圧が減少しない(マスタシリンダ圧の減圧速度が大きく、マスタシリンダ圧が目標ホイルシリンダ圧を下回る)。よって、液圧ユニット6を作動させ、ゲートアウト弁20を釣り合い制御することで、ホイルシリンダ圧がドライバ要求ブレーキ力を実現する値(目標ホイルシリンダ圧)となるようにする。時刻t3からt4までは、目標ホイルシリンダ圧の勾配がゼロ以下である(ホイルシリンダ圧の増圧要求がない)ため、モータMを駆動せずポンプ30を作動させない。
ここで、比較例では、ゲートアウト弁20を釣り合い制御する初期に、第1通電部71による電流値Iinitialから第2通電部72による電流値Ibalance(t)に移行する際、十分な移行時間を与えることなく、時刻t31で、電流値をIinitialから急速に低下させる。よって、時刻t31の直後、ゲートアウト弁20が全閉状態から急激に開弁されるため、ゲートアウト弁20からマスタシリンダ4に流れるブレーキ液の流量が一時的に増加する。これによるマスタシリンダ圧の変動(振動)が倍力装置2を介してブレーキペダル2まで伝わり、ドライバに踏力の変動として感じられるおそれがある。
【0040】
これに対し、実施例1の装置1では、移行通電部73を備え、第1通電部71による電流値Iinitialから第2通電部72による電流値Ibalance(t)まで徐々に低下させることで電流値の急低下を抑制することとしたため、ドライバに違和感を与えることを抑制することができる。
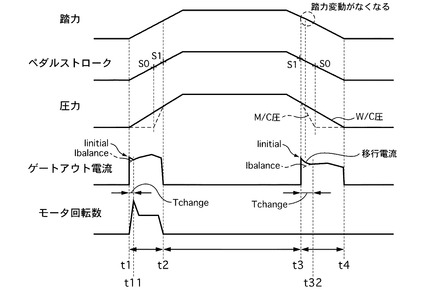
図9は、実施例1による制御のタイムチャートであり、基本は比較例と同様である。但し、時刻t1からt11までの区間で、所定の移行時間Tchangeをかけて、第1通電部71による電流値Iinitialから第2通電部72による電流値Ibalance(t)まで、ゲートアウト弁20の電流値を徐々に低下させる(ステップS43→S44)。
時刻t3からt32までの区間でも、第1通電部71による電流値Iinitialから第2通電部72による電流値Ibalance(t)まで所定の移行時間Tchangeをかけて徐々に低下させる(ステップS43→S44)。よって、ゲートアウト弁20の釣り合い制御の初期に初期電流Iinitialを低下させる際、ゲートアウト弁20が全閉状態から徐々に開弁するため、ゲートアウト弁20からマスタシリンダ4に流れるブレーキ液量が急激に増加することが抑制される。したがって、マスタシリンダ圧の変動が抑制され、ドライバに踏力の変動として違和感を与えるおそれを回避することができる。
【0041】
なお、時刻t1直後は、ブレーキペダル2の踏み始めでありマスタシリンダ圧がそれほど発生していない。このため、ゲートアウト弁20の釣り合い制御の初期における(ゲートアウト弁20が全閉状態から急速に開弁されることによる)マスタシリンダ圧の変動は僅かであり、これがドライバに踏力の変動として伝わる可能性が低い。これに対し、時刻t3直後は、ブレーキペダル2が踏み込まれてマスタシリンダ圧がある程度発生した状態である。このため、ゲートアウト弁20の釣り合い制御の初期における上記マスタシリンダ圧の変動が比較的大きくなり、これがドライバに踏力の変動として伝わる可能性が高い。よって、(時刻t1直後ではなく特に)時刻t3直後に、すなわちブレーキペダル2が踏み込まれてマスタシリンダ圧が発生した状態から、無効ストローク創生部41による無効ストローク動作へ移行するとき、移行通電部73による電流値の制御を行うことで、ドライバの違和感をより効果的に抑制することができる。
【0042】
[実施例1の効果]
以下、実施例1の装置1が奏する効果を列挙する。
(1)ドライバによるブレーキペダル2の操作量(ペダルストロークS)に対して所定の操作量までマスタシリンダ4の圧力の上昇を所定量に抑制する無効ストローク創生部41と、マスタシリンダ4と車輪FL,FR,RL,RRに設けられたホイルシリンダ5を接続する第1ブレーキ回路(供給通路11)と、無効ストローク創生部41による無効ストローク動作中にマスタシリンダ4内のブレーキ液を用いてホイルシリンダ5の圧力を調整するホイルシリンダ圧力調整部とを有し、ホイルシリンダ圧力調整部は、第1ブレーキ回路上に設けられたノーマルオープン型の電磁弁(ゲートアウト弁20)と、電磁弁の開弁量をコントロールするコントロールユニット7とを備え、コントロールユニット7は、電磁弁(ゲートアウト弁20)に対し、弁体200が閉弁する所定電流Iinitialを通電する第1通電部71と、第1通電部71による通電後、連続して所定電流Iinitialより低い電流Ibalance(t)を通電する第2通電部72とを有し、第1通電部71による電流値Iinitialから第2通電部72による電流値Ibalance(t)へ漸近させて移行する移行通電部73を備えた。
よって、マスタシリンダ圧の変動を抑制し、ドライバに違和感を与えることを抑制することができる。
【0043】
(2)第1ブレーキ回路(供給通路11)とポンプ30の吐出側とを接続する第2ブレーキ回路(吐出通路12)を有し、電磁弁は、第1ブレーキ回路上であって第2ブレーキ回路の接続位置よりもマスタシリンダ4側に設けられたゲートアウト弁20である。
このように、マスタシリンダ4側とホイルシリンダ5側(ポンプ30の吐出側)との連通を遮断してポンプ30によりホイルシリンダ圧を増圧することを可能とするゲートアウト弁20に対して、移行通電部73による電流値の制御を適用することができる。
【0044】
(3)第2通電部72による電流値Ibalance(t)は、電磁弁(ゲートアウト弁20)の上流圧と下流圧との差圧を所定値に保持するための釣り合い電流値である。
このように、差圧を保持するための釣り合い制御を行う際の電流制御に対して、移行通電部73による電流値の制御を適用することができる。
【0045】
(4)ホイルシリンダ圧力調整部(ゲートアウト弁20、コントロールユニット7)は、ブレーキペダル2が踏み込まれた状態から、無効ストローク創生部41による無効ストローク動作へ移行するときにホイルシリンダ5の圧力を調整する。
よって、より効果的に、マスタシリンダ圧の変動を抑制し、ドライバに違和感を与えることを抑制することができる。
【0046】
[他の実施例]
以上、本発明を実現するための形態を、実施例1に基づいて説明してきたが、本発明の具体的な構成は実施例1に限定されるものではなく、発明の要旨を逸脱しない範囲の設計変更等があっても、本発明に含まれる。例えば、倍力装置3を省略してもよく、この場合、マスタシリンダ圧の変動がよりブレーキペダル2に伝わりやすいので、本発明の効果をより効果的に得ることができる。また、液圧センサ43を省略し、モータMの回転数等に基づきホイルシリンダ圧を推定することとしてもよい。実施例1では初期電流Iinitialを通電した直後に移行電流を流す(第1通電部71による通電直後に移行通電部73による通電を開始する)こととしたが、初期電流Iinitialを通電する所定時間を設け、この所定時間後に移行電流を流す(移行通電部73による通電を開始する)こととしてもよい。実施例1では初期電流Iinitialから釣り合い電流Ibalance(t)へ移行させる方法として、式(3)を用いることとしたが、ゲートアウト弁20に通電する電流を急変させることなく電流を漸減させることができれば他の方法でもよい。
【0047】
実施例1では、第2通電部72による電流値は、ゲートアウト弁20の上流圧と下流圧との差圧を所定値に制御するための釣り合い電流値であることとしたが、ゲートアウト弁20を釣り合い制御する場合に限らず、例えば液圧の検出値に基づき差圧をフィードバック制御する場合にも、移行通電部73による電流値の制御を適用することで、上記効果を得ることができる。すなわち、一般に電磁弁にはヒステリシス(電流の増加方向と減少方向とで特性が異なる性質)が存在する。よって、電磁弁の制御性を向上するため、電流制御の初期に大きな電流を与えてからこれより低い電流に制御することが行われる場合がある。このような場合にも本発明を適用できる。また、移行通電部73による電流値の制御を適用する電磁弁は、実施例1ではゲートアウト弁20であることとしたが、マスタシリンダとホイルシリンダとを接続するブレーキ回路上に設けられたノーマルオープン型の電磁弁であれば、他の弁であってもよい。また、この電磁弁として、比例制御弁でなく例えばオン・オフ弁を用いてもよく、この場合、例えばPWM制御により実効電流を制御することで中間開度を達成することができる。しかし、音振を抑制してドライバのフィーリングを向上するためには、実施例1のように比例制御弁を用いることが好ましい。
【0048】
また、ハイブリッド車両ではなく、電気自動車に本発明のブレーキ制御装置を適用してもよい。車両停車時に限らず、回生ブレーキが効かなくなる場面(例えば車両速度が所定値以下の低速度となった後)であれば、ドライバ要求ブレーキ力とマスタシリンダ圧によるブレーキ力との差分を液圧ユニット6を用いて補う際に、本発明の制御を適用することができる。また、無効ストローク創生部を有して回生ブレーキを行う車両に限らず、マスタシリンダとホイルシリンダを接続するブレーキ回路上に設けられたノーマルオープン型の電磁弁を制御することで、マスタシリンダ内のブレーキ液を用いてホイルシリンダの圧力を調整する車両であれば、本発明のブレーキ制御装置を適用することができる。
【符号の説明】
【0049】
2 ブレーキペダル
4 マスタシリンダ
41 無効ストローク創生部
11 供給通路(第1ブレーキ回路)
12 吐出通路(第2ブレーキ回路)
20 ゲートアウト弁(電磁弁、ホイルシリンダ圧力調整部)
200 弁体
5 ホイルシリンダ
7 コントロールユニット(ホイルシリンダ圧力調整部)
71 第1通電部
72 第2通電部
73 移行通電部
FL,FR,RL,RR 車輪
【技術分野】
【0001】
本発明は、車両に搭載されるブレーキ制御装置に関する。
【背景技術】
【0002】
従来、マスタシリンダと車輪に設けられたホイルシリンダとを接続するブレーキ回路上にノーマルオープン型の電磁弁を備え、電磁弁の開弁量を制御するブレーキ制御装置が知られている。例えば特許文献1に記載の装置は、弁体が閉弁する所定電流を通電する第1通電部と、この第1通電部による通電後、上記所定電流より低い電流を通電する第2通電部とにより電磁弁を制御することで、電磁弁の簡素化と電力消費の抑制を図っている。
【先行技術文献】
【特許文献】
【0003】
【特許文献1】特開2011−5899号公報
【発明の概要】
【発明が解決しようとする課題】
【0004】
しかし、特許文献1に記載の装置では、第1通電部による電流値から第2通電部による電流値へ移行する際、電流値の急低下を伴う。よって、ホイルシリンダから電磁弁を通過してマスタシリンダへ向かうブレーキ液の流量が一時的に増加することでマスタシリンダ圧が変動し、この変動がブレーキペダルまで伝わってドライバ(運転者)に違和感を与えるおそれがあった。本発明の目的とするところは、ドライバの違和感を抑制することができるブレーキ制御装置を提供することにある。
【課題を解決するための手段】
【0005】
上記目的を達成するため、本発明のブレーキ制御装置は、好ましくは、第1通電部による電流値から第2通電部による電流値へ漸近させて移行する移行通電部を備えた。
【発明の効果】
【0006】
よって、第1通電部による電流値から第2通電部による電流値へ移行する際、電流値の急低下を抑制することで、電磁弁を通過するブレーキ液の流量が過剰になってドライバに違和感を与えることを抑制することができる。
【図面の簡単な説明】
【0007】
【図1】実施例1のブレーキ制御装置が適用される車両のシステム構成を示す。
【図2】実施例1の液圧ユニットの油圧回路構成を示す。
【図3】実施例1の無効ストローク創生部によるペダルストローク−ブレーキ力の特性を示す。
【図4】実施例1の液圧制御処理を表すメインフローチャートである。
【図5】実施例1のモータ制御処理を表すフローチャートである。
【図6】実施例1のゲートアウト弁の制御処理を表すフローチャートである。
【図7】実施例1のゲートアウト弁における差圧−電流の特性を示す。
【図8】比較例による制御のタイムチャートである。
【図9】実施例1による制御のタイムチャートである。
【発明を実施するための形態】
【0008】
以下、本発明のブレーキ制御装置を実現する形態を、図面に基づき説明する。
【0009】
[実施例1]
図1は、実施例1のブレーキ制御装置1が適用される車両の制駆動系を示すシステム構成図である。車両は、前輪FL,FRが内燃機関(エンジン100)により駆動されると共に、後輪RL,RRが電動機(モータジェネレータ101)により駆動されるハイブリッド車両である。各車輪FL,FR,RL,RRには、その回転速度(車輪速)を検出する車輪速検出手段(車輪速センサ)108が設けられている。なお、各電子制御ユニット(コントロールユニット7、モータコントロールユニット104、駆動コントローラ105)は、情報交換が可能な信号線(CAN通信線)を介して互いに接続されている。
【0010】
車両の駆動系は、エンジン100とモータジェネレータ101とインバータ102とバッテリ103とモータコントロールユニット104と駆動コントローラ105とを有している。エンジン100は、ガソリンエンジンやディーゼルエンジンであり、その出力軸は図外の自動変速機を介して前輪FL,FRの駆動軸に連結されている。エンジン100は、電子制御ユニットである駆動コントローラ105からの制御指令に基づいて、スロットルバルブの開度等が制御される。モータジェネレータ101は、ロータに永久磁石を埋設しステータにコイルが巻き付けられた同期型モータジェネレータであり、ロータの出力軸は、プロペラシャフトPS及びディファレンシャルギアDGを介して後輪RL,RRの駆動軸RDSに連結されている。モータジェネレータ101は、電子制御ユニットであるモータコントロールユニット104からの制御指令に基づいて、インバータ102により作り出された三相交流を印加することにより制御される。モータジェネレータ101は、バッテリ103からの電力の供給を受けて回転駆動する電動機として動作することもできるし(この状態を「力行」と呼ぶ)、ロータが外力により回転している場合には、ステータコイルの両端に起電力を生じさせる発電機として機能してバッテリ103を充電することもできる(以下、この動作状態を「回生」と呼ぶ)。インバータ102は、モータコントロールユニット104からの駆動指令に基づいて、バッテリ103の直流電力を交流電力に変換しモータジェネレータ101に供給することで、モータジェネレータ101を力行運転する。一方、インバータ102は、モータコントロールユニット104からの回生指令に基づいて、モータジェネレータ101で発生する交流電力を直流電力に変換してバッテリ103を充電することで、モータジェネレータ101を回生運転する。
【0011】
駆動コントローラ105は、直接又は信号線を介して、アクセル開度センサ106からのアクセル開度、車輪速センサ108により算出される車速(車体速)、バッテリSOC等が入力される。駆動コントローラ105は、各センサからの情報に基づき、エンジン100の動作制御と、図外の自動変速機の動作制御と、モータコントロールユニット104への駆動力指令によるモータジェネレータ101の動作制御とを行う。
【0012】
車両の操舵系は、ステアリングホイールと転舵輪とを連結するステアリングシャフトと、ステアリングシャフトに設けられた操舵状態検出手段(操舵トルクセンサ等)107を有している。車両の制動系(ブレーキシステム)は、ブレーキ制御装置1とブレーキペダル2と倍力装置3とマスタシリンダ4とホイルシリンダ5を有している。ホイルシリンダ5は、各車輪FL,FR,RL,RRに設けられてブレーキ液圧(ホイルシリンダ圧)を発生する。ブレーキペダル2は、ドライバによるブレーキペダル2の操作(ブレーキ操作)の力を倍力装置3に伝達する操作部材である。ブレーキペダル2には、ドライバのブレーキ操作状態としてブレーキペダル2の操作量(ペダルストロークS)を検出するブレーキ操作量検出手段(ブレーキストロークセンサ)8が設けられている。倍力装置3は、伝達されたブレーキ操作力(ブレーキペダル2の踏力)を増幅してマスタシリンダ4に伝達するブースタであり、例えばエンジン100の発生する負圧を利用する負圧ブースタである。
【0013】
マスタシリンダ4は、倍力装置3から加わる力に比例した液圧、すなわちブレーキ操作の状態に応じた液圧(マスタシリンダ圧)を発生する液圧発生装置である。マスタシリンダ4には、作動液(ブレーキ液)を貯留する液源としてのリザーバタンク40が一体に設けられており、マスタシリンダ4は、リザーバタンク40からブレーキ液の供給を受ける。マスタシリンダ4は所謂タンデム型であって、独立した2系統(プライマリP系統,セカンダリS系統)のブレーキ配管系10P,10Sを介して液圧ユニット6に接続されている。以下、ブレーキ配管の各系統に対してそれぞれ設けられているものについては、必要に応じてP,Sの記号を添えて区別するものとする。また、4輪の各々に対応して複数設けられているものについては、必要に応じてa,b,c,dの記号を添えて区別し、aは前左輪FL、bは前右輪FR、cは後左輪RL、dは後右輪RRにそれぞれ対応するものとする。ブレーキ回路(油圧回路)は所謂X配管であり、マスタシリンダ4から出たP系統のブレーキ回路10Pが前左輪FLと後右輪RRのホイルシリンダ5a,5dに、S系統のブレーキ回路10Sが前右輪FRと後左輪RLのホイルシリンダ5b,5cに夫々接続され、X字(ダイヤゴナル)型の配管構造となっている。なお、所謂前後配管、すなわち前輪FL,FRと後輪RL,RRの2系統に分けたH字型の配管構造としてもよい。
【0014】
ブレーキ制御装置(以下、装置1という。)は、ドライバのブレーキ操作から独立して車両の各車輪FL,FR,RL,RRのブレーキ液圧を制御することにより、車両の運動制御(挙動制御)や、アンチロックブレーキ制御等を実行可能に設けられたブレーキ液圧制御装置である。装置1は、各車輪FL,FR,RL,RRのブレーキ液圧を制御可能に設けられた液圧ユニット6と、液圧ユニット6を制御する電子制御ユニットであるコントロールユニット7とを有しており、これらが一体化された所謂機電一体型のユニットである。なお、両ユニット6、7を別体としてもよい。液圧ユニット6は、ブレーキ配管10を介してマスタシリンダ4とホイルシリンダ5との間に配置されたアクチュエータであり、マスタシリンダ圧又は制御液圧を各ホイルシリンダ5に個別に供給可能に設けられている。液圧ユニット6は、各ホイルシリンダ5に供給する制御液圧を発生するための液圧機器(アクチュエータ)として、液圧発生源である(例えば回転式の)ポンプ30及び複数の制御弁20等を有すると共に、これら液圧機器を内蔵するハウジングを有する。ブレーキペダル2が踏み込まれると、マスタシリンダ4はブレーキ液をブレーキ配管系10P,10Sを介して液圧ユニット6に供給し、ホイルシリンダ5はブレーキ圧(ホイルシリンダ圧)を発生する。液圧ユニット6は、ホイルシリンダ圧を、マスタシリンダ圧以下に制御することも、マスタシリンダ圧以上に制御することも、略一定に保持することも可能に設けられている。
【0015】
コントロールユニット7は、液圧ユニット6に制御指令を出力することで、各車輪FL,FR,RL,RRのブレーキ液圧を制御する電子制御ユニットである。例えば、ブレーキ踏み込み制動時、ドライバ要求制動力に対し回生制動力だけでは不足する場合、その不足分を液圧制動力で補うように、回生協調ブレーキ制御を行う。コントロールユニット7は、直接又は通信線を介して、液圧センサ42からのマスタシリンダ圧、ブレーキストロークセンサ8からのペダルストロークS、操舵角センサ107からのハンドル操舵角、車輪速センサ108からの各車輪速、液圧センサ43からの液圧、バッテリSOC等が入力される。コントロールユニット7は、ペダルストロークSや、他のセンサからの情報に基づいてドライバ要求制動力を算出する。駆動コントローラ105は、算出されたドライバ要求制動力を回生制動力と摩擦制動力とに配分し、ブレーキコントロールユニット7への摩擦制動力指令による液圧制御ユニット6の動作制御と、モータコントロールユニット104への回生制動力指令によるモータジェネレータ101の動作制御とを行う。
【0016】
図2は、液圧ユニット6の油圧回路構成を示す。以下、P系統を例にとり、油圧回路であるブレーキ回路10について説明する。ブレーキ回路10は、液圧ユニット6内に、ブレーキ液が移動(流通)する複数の通路11等を有している。ブレーキ回路10は、マスタシリンダ4側からホイルシリンダ5側に向かう供給通路11(第1ブレーキ回路)を有している。供給通路11には、その連通・遮断を切り換える遮断弁としてのゲートアウト弁20が設けられている。ゲートアウト弁20のマスタシリンダ4側にはオリフィス13が設けられている。また、ゲートアウト弁20と並列に、マスタシリンダ4側からホイルシリンダ5側(ポンプ30側)へのブレーキ液の流通のみを許容するチェック弁23が設けられている。ゲートアウト弁20よりもホイルシリンダ5側の供給通路11は、前輪FL側の増圧通路(フロントホイルシリンダ増圧通路)11aと後輪RR側の増圧通路(リアホイルシリンダ増圧通路)11dに分岐している。増圧通路11aは前左輪FLのホイルシリンダ5aに接続し、増圧通路11dは後右輪RRのホイルシリンダ5dに接続している。増圧通路11a、11dには、その連通・遮断を切り換える増圧弁21a,21dが夫々設けられている。また、増圧弁21と並列に、ホイルシリンダ5側からマスタシリンダ4側(ポンプ30側)へのブレーキ液の流通のみを許容するチェック弁24が設けられている。このように、ホイルシリンダ5a、5dは、増圧通路11a、11d及び供給通路11を介してマスタシリンダ4と連通している。ゲートアウト弁20と増圧弁21a,21dは、ホイルシリンダ5a、5dとマスタシリンダ4との間に設けられている。
【0017】
増圧弁21よりもホイルシリンダ5側の増圧通路11a、11dには、減圧通路14a、14dが夫々接続している。減圧通路14aは、ホイルシリンダ5aに接続する前輪FL側の減圧通路(フロントホイルシリンダ減圧通路)であり、減圧通路14dは、ホイルシリンダ5dに接続する後輪RR側の減圧通路(リアホイルシリンダ減圧通路)である。減圧通路14a、14dには、その連通・遮断を切り換える減圧弁22a,22dが夫々設けられている。減圧通路14a、14dは合流して減圧通路14となり、ポンプ30の吸入側とマスタシリンダ4との間に設けられた内部リザーバ27に接続している。一方、供給通路11は、ゲートアウト弁20よりもマスタシリンダ4側で分岐し、吸入通路15を形成している。吸入通路15は、内部リザーバ27を経由してポンプ30の吸入側に接続している。このように、ポンプ30の吸入側は、吸入通路15及び供給通路11を介してマスタシリンダ4(リザーバタンク40)と連通している。
【0018】
ポンプ30の吐出側は、吐出通路12(第2ブレーキ回路)を介して、ゲートアウト弁20よりもホイルシリンダ5側の供給通路11に接続している。なお、ポンプ30の吐出側(吐出通路12)にはチェック弁25が設けられており、チェック弁25はゲートアウト弁20と増圧弁21との間の通路11からポンプ30の吐出側へのブレーキ液の逆流を抑制する。ポンプ30の吐出側は、吐出通路12及び供給通路11を介してマスタシリンダ4と連通している。すなわち、ゲートアウト弁20は、ポンプ30の吐出側とマスタシリンダ4との間に設けられている。また、ポンプ30の吐出側は、吐出通路12及び供給通路11(増圧通路11a、11d)を介してホイルシリンダ5a、5dと連通している。すなわち、増圧弁21a,21dは、ポンプ30の吐出側とホイルシリンダ5a、5dとの間に夫々設けられている。また、ポンプ30の吐出側には、吐出通路12におけるチェック弁25の下流側に、液圧センサ43が設けられている。液圧センサ43は、ポンプ30の吐出側の圧力(ポンプ30の吐出圧)を検出し、検出した値をコントロールユニット7に入力する。
【0019】
S系統のブレーキ回路10Sも、P系統のブレーキ回路10Pと同様に構成されている。なお、ブレーキ回路10Pには、供給通路11におけるゲートアウト弁20よりもマスタシリンダ4側に、液圧センサ42が設けられている。液圧センサ42は、マスタシリンダ圧を検出し、検出した値をコントロールユニット7に入力する。
【0020】
ポンプ30は、P,S系統ごとに設けられており、モータMにより回転駆動され、各配管系統でブレーキ液の吸入・吐出を行う外接ギヤ式ポンプである。なお、ポンプ30の形式はこれに限らず、内接ギヤ式やプランジャ式等を採用可能である。モータMは、直流ブラシモータであるが、これに限られない。モータMは、コントロールユニット7からの指令電圧により回転数制御され、ポンプ30を駆動する。ポンプ30は、内部リザーバ27に貯留したブレーキ液を掻き出し、ゲートアウト弁20を介してマスタシリンダ4側に戻す。また、ポンプ30は、マスタシリンダ4以外のブレーキ液圧源として、マスタシリンダ4側から内部リザーバ27を介してブレーキ液を吸入し、ホイルシリンダ5側に吐出する。内部リザーバ27は、液圧ユニット6に内蔵され、チェック弁26を備えた調圧機能付きのリザーバタンクであり、ブレーキ液を貯留かつ調圧可能に設けられている。内部リザーバ27は、減圧弁22を介して送られてくるブレーキ液を貯留する。また、内部リザーバ27は、ポンプ30を停止した状態でマスタシリンダ4側から少しでも圧力が発生すると、吸入通路15の連通を遮断して、マスタシリンダ4側からポンプ30の吸入側へのブレーキ液の流入を抑制する一方、ポンプ30が作動すると、吸入通路15を連通させて、マスタシリンダ4側からポンプ30の吸入側へのブレーキ液の流入を優先的に有効とする。
【0021】
各弁20〜22は、電磁弁(ソレノイドバルブ)であり、ソレノイド(コイル)へ駆動電流が通電されることにより電磁力を発生し、プランジャ等を往復移動させることで弁を開閉作動する周知のものである。ゲートアウト弁20は、電流値により弁の開度が比例的に変化する比例制御弁であり、非通電時に開弁する常開弁(ノーマルオープン型)である。ゲートアウト弁20は、コントロールユニット7からの指令電流により全開状態と全閉状態との間を比例的に動作し、マスタシリンダ4とポンプ30の吐出側及び増圧弁21との間を断続(連通・遮断)する。また、チェック弁23は、マスタシリンダ圧>(ポンプ30の吐出側の圧)となったときに、マスタシリンダ圧をポンプ30の吐出側及び増圧弁21の側へ伝えるように開動作する。
【0022】
ここで、ゲートアウト弁20の構成について説明する。図2の拡大図に示すように、ゲートアウト弁20は、弁体(プランジャ)200と、弁体200が当接することで流路(供給通路11)を閉じ離間することで流路(供給通路11)を開けるバルブシート部201と、弁体200をバルブシート部201から離間する方向に付勢するスプリング202(付勢手段)と、弁体200をスプリング202の付勢力に抗してバルブシート部201の方向に移動させるための電磁力を発生させるソレノイド203と、を有する。ソレノイド203に電流が通電すると、電磁力によって弁体200がスプリング202の付勢力(バネ力)に抗して押し下げられ、弁体200のストローク量に応じてバルブシート部201との間の流路面積を変更し、これにより流量ないし液圧を比例制御する。
【0023】
弁体200には、ゲートアウト弁20の上流側の圧力(マスタシリンダ圧に相当)と下流側の圧力(ポンプ30の吐出側の圧力であり、ホイルシリンダ圧に相当)との差圧による力が作用する。ソレノイド203に通電する電流を制御することで、上記差圧を所望の値に制御することができる。すなわち、弁体200の位置に応じてスプリング202の付勢力は一意に決まる。このため、電流値を所定値に制御すれば、この電流値に応じた電磁力とスプリング202の付勢力とが最終的に釣り合うような上記差圧による力が弁体200に作用するようになるまで、弁体200がストロークしてゲートアウト弁20を流れる流量を調節する。これにより、目標とする差圧が実現される。以下、これをゲートアウト弁20の釣り合い制御といい、上記差圧を所定値に制御するためにソレノイド203に通電する電流値を釣り合い電流値という。例えば、増圧弁21が開で減圧弁22が閉のときは、ポンプ30によるホイルシリンダ5の増圧量は、ポンプ30の吐出液量とゲートアウト弁20からマスタシリンダ4側へのリーク液量との差に応じて決定される。マスタシリンダ圧がゼロのとき、ゲートアウト弁20の上下流の差圧はホイルシリンダ圧に相当する。このため、モータMの回転数(ポンプ吐出液量)を制御すると共に、上記差圧が所望の値となるようにゲートアウト弁20のソレノイド203に通電してその電磁力(釣り合い電流値)を制御すれば、ゲートアウト弁20の開度(上記リーク液量)が自動的に調整され、ホイルシリンダ圧を任意に調圧することができる。
【0024】
増圧弁21は、弁の開度が全開状態と全閉状態の2位置をとるオン・オフ弁であり、非通電時に開弁する常開弁である。増圧弁21は、コントロールユニット7からの指令電流により開閉動作を行い、増圧弁21に供給されるマスタシリンダ圧又はポンプ吐出圧を開弁によりホイルシリンダ5に供給し、又は閉弁によりこの供給を遮断することで、ホイルシリンダ圧を任意に増圧ないし保持可能に設けられている。また、チェック弁24は、ホイルシリンダ圧>(ポンプ30の吐出側の圧)となったときに、ホイルシリンダ圧をマスタシリンダ4に抜くように開動作する。減圧弁22は、オン・オフ弁であり、非通電時に閉弁する常閉弁である。減圧弁22は、コントロールユニット7からの指令電流により開閉動作を行い、開弁によりホイルシリンダ5内のブレーキ液を一時的に内部リザーバ27に供給し(すなわちホイルシリンダ5からブレーキ液を排出し)、又は閉弁によりこの供給(排出)を遮断することで、ホイルシリンダ圧を任意に減圧可能に設けられている。なお、増圧弁21や減圧弁22を比例制御弁としてもよい。
【0025】
コントロールユニット7は、液圧センサ42,43から送られる検出値、及び車両から送られる走行状態に関する情報が入力され、内蔵されるプログラムに基づき、増圧制御弁6、減圧制御弁7、及びゲートアウト弁20の開閉、並びにモータMの駆動(ポンプ30の吐出量)を制御する。
【0026】
次に、コントロールユニット7において実施される液圧制御について説明する。マスタシリンダ4には、ブレーキペダル2の操作量に対して、所定の操作量(ペダルストロークS)まで、マスタシリンダ4の圧力の上昇を所定量に抑制する無効ストローク創生部41が設けられている。具体的には、回生ブレーキをより円滑に発生させ制御する等のため、マスタシリンダ4には、所定のペダルストロークS以内ではマスタシリンダ圧が昇圧しないようにするための手段が設けられている。図3は、ペダルストロークSに対するドライバ要求ブレーキ力(又はこの要求ブレーキ力に相当する車両減速度である要求減速度)の特性を実線で示し、ペダルストロークSに対するマスタシリンダ圧によるブレーキ力(又はこのブレーキ力に相当する車両減速度)の特性を破線で示す。ドライバ要求ブレーキ力(要求減速度)はペダルストロークSに応じて比例的に増大する。一方、マスタシリンダ圧によるブレーキ力(減速度)は、ペダルストロークSが所定値S0になるまで略ゼロであり、所定値S0以上になると(ドライバ要求ブレーキ力よりも)大きな勾配で増大し、ドライバ要求ブレーキ力と一致した後は、ドライバ要求ブレーキ力と同様の勾配でペダルストロークSに応じて増大するような特性、言換えると、ペダルストロークSが所定値S1まで減少するまではドライバ要求ブレーキ力と一致してペダルストロークSに応じて減少し、所定値S1未満になると(ドライバ要求ブレーキ力よりも)大きな勾配で減少し、ペダルストロークSが所定値S0以下では略ゼロになるような特性に設けられている。
【0027】
本実施例1では、車両の減速時(走行中)には、ドライバ要求ブレーキ力を実現するため、ドライバ要求ブレーキ力とマスタシリンダ圧によるブレーキ力との差分を、モータコントロールユニット104によりモータジェネレータ101を制御することで得られる回生ブレーキにて補う。しかし、車両停止後(車両速度が所定値以下の低速度となった後)には回生ブレーキを発生できなくなる。よって、ドライバ要求ブレーキ力を実現するため、上記ブレーキ力の差分を、コントロールユニット7により液圧ユニット6を制御することで得られるホイルシリンダ圧(液圧ブレーキ)により補う。具体的には、ドライバ要求ブレーキ力の増大時には、ゲートアウト弁20を釣り合い制御、増圧制御弁6を開、減圧制御弁7を閉、モータMをオンし、ポンプ30を駆動する。これにより、上記ブレーキ力の差分に相当する分だけ、ポンプ圧がホイルシリンダ5に供給される。また、ドライバ要求ブレーキ力の減少時には、ゲートアウト弁20を釣り合い制御、増圧制御弁6を開、減圧制御弁7を閉、モータMをオフし、ポンプ30を停止する。これにより、上記ブレーキ力の差分に相当する分だけホイルシリンダ圧を残しつつ、ホイルシリンダ内のブレーキ液がゲートアウト弁20を介してマスタシリンダ4に排出される。
【0028】
コントロールユニット7は、ゲートアウト弁20を釣り合い制御する際、ゲートアウト弁20のソレノイド203に対し、弁体200が閉弁するような所定電流Iinitialを通電する第1通電部71と、第1通電部71による通電後、所定電流Iinitialより低い電流を連続して通電する第2通電部72と、第1通電部71による通電から第2通電部72による通電へ切替えるとき、第1通電部71による電流値Iinitialから第2通電部72による電流値へ漸近するように電流値を移行させつつ通電する移行通電部73とを有し、これらの通電部71〜73によりソレノイド203に通電する電流を制御する。
【0029】
第1通電部71による電流値は、下記式(1)により設定する。以下、Igo(t) はソレノイド203に通電する最終的な電流目標値(指令電流)である。
Igo(t)= Iinitial ・・・(1)
Iinitialは初期電流であり、例えばゲートアウト弁20が確実に閉弁するような電流値とする。この電流値Iinitialは、ゲートアウト弁20のバネ力やコイル巻数などのハード要因と温度などの環境要因によって決める。
【0030】
第2通電部72による電流値は、下記式(2)により設定する。
Igo(t)= Ibalance(t) ・・・(2)
Ibalance(t)は、ゲートアウト弁20の上流圧(マスタシリンダ圧)と下流圧(ホイルシリンダ圧)との差圧を所定値に保持するための釣り合い電流値である。tは制御開始からの時間(釣り合い制御の開始時刻を0としたときの現在の時刻)であり、後述の制御時間タイマに相当する。
【0031】
移行通電部73による電流値は、下記式(3)により算出する。
Igo(t)=max[Iinitial−{ Iinitial−Ibalance(t)}×t/Tchange,Ibalance(t)] ・・・(3)
すなわち、上記式(3)により算出される電流値Igo(t)は、時間tが増大するにつれて初期電流Iinitialから徐々に減少してIbalance(t)に漸近し、Tchangeだけ時間tが経過するとIbalance(t)に一致する。Tchangeは、第1通電部71による通電から第2通電部72による通電への所定の移行時間であり、上記式(3)により算出される電流値の時間tに応じた変化量(勾配)が十分に小さくなる値に設定される。例えば、釣り合い制御の開始時における「Iinitial−Ibalance(t)」の大きさに応じてTchangeの長さを設定することとしてもよい。
【0032】
図4は、実施例1の液圧制御処理を表すメインフローチャートである。この制御フローは、回生ブレーキを発生できなくなる車両停止後(ないし車両速度が所定値以下の低速度となった後)、ブレーキ操作が行われている場合に、所定周期で繰り返し実行される。なお、車両速度は車輪速に基づき推定することができる。
ステップS1では、ペダルストロークSに基づき目標ホイルシリンダ圧を算出する。具体的には、図3の実線に示すように、ペダルストロークSに比例するドライバ要求ブレーキ力を設定し、このブレーキ力を実現するホイルシリンダ圧の目標値を算出する。その後、ステップS2に進む。
ステップS2では、算出された目標ホイルシリンダ圧が、液圧センサ42により検出されたマスタシリンダ圧よりも高いか否かを判定する。高ければステップ3とステップS4の両方に進む。低ければステップS5に進む。
ステップS3では、モータ制御を実施した後、今回の制御周期を終了する。
ステップS4では、ゲートアウト弁20の釣り合い制御を実施した後、今回の制御周期を終了する。
ステップS5では、制御時間タイマtをクリアした後、今回の制御周期を終了する。
【0033】
図5は、モータMの制御処理(図4のステップS3)の詳細を表すフローチャートである。
ステップS31では、目標ホイルシリンダ圧の勾配を算出する。この勾配は、例えば、目標ホイルシリンダ圧の前回値(前回の制御周期で算出された値)と今回値との差により求めることができる。その後、ステップS32に進む。
ステップS32では、目標ホイルシリンダ圧の勾配がゼロより大きいか否か、すなわちホイルシリンダ圧の増圧要求があるか否かを判定する。ゼロより大きければ(増圧要求があれば)ステップS33に進み、ゼロ以下であれば(増圧要求がなければ)ステップS34に進む。
ステップS33では、モータ駆動電圧を算出する。例えば、液圧センサ43により検出された液圧をホイルシリンダ圧の実値とみなし、この実値と目標ホイルシリンダ圧との偏差に基づき必要なポンプ吐出量を算出して、このポンプ吐出量を実現するモータ回転数となるような電圧を算出する。その後、ステップS35に進む。
ステップS34では、モータMを停止する。例えば、モータ駆動電圧をゼロに設定する。その後、ステップS35に進む。
ステップS35では、モータMにモータ駆動電圧を出力した後、今回の制御周期を終了する。
【0034】
図6は、ゲートアウト弁20の釣り合い制御処理(図4のステップS4)の詳細を表すフローチャートである。
ステップS41では、制御時間タイマtをインクリメントする。その後、ステップS42に進む。
ステップS42では、算出された目標ホイルシリンダ圧と、液圧センサ42により検出されたマスタシリンダ圧とに基づき、ゲートアウト弁20の釣り合い電流値Ibalance(t)を算出する。具体的には、その時点(制御周期)でのマスタシリンダ圧と目標ホイルシリンダ圧との差圧を目標差圧とし、この目標差圧を実現するためにソレノイド203に通電すべき電流値として、上記目標差圧による力が弁体200に作用する下でスプリング202による付勢力とソレノイド203による電磁力とが釣り合うような電流値を算出する。その後、ステップS43に進む。
ステップS43では、制御時間タイマtが移行時間Tchange未満であるか否かを判定する。Tchange未満であればステップS44に進み、Tchange以上であればステップS45に進む。
ステップS44では、上記式(3)(移行通電部73)によりゲートアウト弁20の指令電流Igo(t)を算出する。なお、最初にステップS44を実行する際(制御時間タイマtのインクリメント開始直後、すなわちゲートアウト弁20の釣り合い制御開始時)には、上記式(3)(移行通電部73)に代えて、上記式(1)(第1通電部71)によりゲートアウト弁20の指令電流を算出する。その後、ステップS46に進む。
ステップS45では、上記式(2)(第2通電部72)によりゲートアウト弁20の指令電流Igo(t)を算出する。その後、ステップS46に進む。
ステップS46では、ゲートアウト弁20に指令電流Igo(t)を出力した後、今回の制御周期を終了する。
【0035】
[実施例1の作用]
次に、装置1の作用を説明する。
装置1は、マスタシリンダ4とホイルシリンダ5とを接続するブレーキ回路(供給通路11)上にノーマルオープン型の電磁弁(ゲートアウト弁20)を備え、電磁弁20の開弁量をコントロールする構成において、弁体200が閉弁する所定電流(初期電流Iinitial)を通電する第1通電部71と、この第1通電部71による通電後、連続して上記所定電流より低い電流(釣り合い電流Ibalance(t))を通電する第2通電部72とにより電磁弁20を制御することで、電磁弁20の簡素化と電力消費の抑制を図ることができる。
【0036】
すなわち、弁体200がストロークしてその位置が変わっても電磁力が安定しているような制御性能の高い電磁弁20ならば、電磁力(電流)と電磁弁20の上下流の差圧との関係は比例的な関係となる。よって、スプリング202の付勢力を僅かに上回る必要最低限の電磁力(電流)で弁体200を全開→全閉までストロークさせることで、差圧を比例的に制御できる。しかし、上記のように電磁力の特性を安定させるには構成を複雑化する必要があり、また製造精度等にも影響されるため非常に高価となる。また、電流値が比較的高い吸引力特性の領域を使用することになり、電気エネルギの消費量が増加して発熱が起こり、耐久性の悪化も懸念される。ここで、構成を簡素化して安価とし、また、電流値が比較的低い吸引力特性の領域を用いるような制御性能の低い電磁弁20を設計した場合、弁体200のストロークと電磁力の関係は、例えば、ストロークが全閉に向かって増加するにつれて必要な電磁力が増大する特性となる。図7は、このようなストローク−電磁力の特性を有する制御性能の低い電磁弁20を用いて制御を行ったときに、電磁弁20の上下流の差圧と電流との関係がどのように変化するかを表した特性線図である。図7に示すように、全開→閉方向の動かし始めに、差圧と電流との関係は比例的な関係とならないため、差圧を制御できない場合が生じる。この場合、ホイルシリンダ圧センサ等の液圧センサによって液圧の状態を判断し、液圧制御に補正をかけて液圧を目標値に追従させるような制御(フィードバックループ)が必要となる。一方、上記ストローク−電磁力の特性において弁体200を全開から全閉までストロークさせることができるような電磁力(電流)を連続的に発生させると、特に全閉状態では電磁力がバネ力を大きく上回ることになり、不要な電力消費を招くという問題もある。
【0037】
これに対し、実施例1では、弁体200のストローク初期に比較的大きな電流を与え、その後、電流を下げることとした。よって、安価な低性能の電磁弁20であっても、安定した差圧の制御(釣り合い制御)を達成できる。すなわち、制御初期に比較的大きな初期電流Iinitialを流したとき、電磁弁20の動作点は図7の(A)に移行し、電磁弁20が閉弁して差圧の制御が可能な状態となる。高い差圧ではこの時点にて釣り合い制御が可能になるが、目標とする差圧はこれより低い値なので、その後電流値を下げることにより閉→開方向に図7の特性線上を移動し、低い差圧でも釣り合い制御を可能とする動作点(B)に移行する。その後、差圧の上昇に従って電流値が増加すると動作点(C)まで移行する。このように、本実施例1では、電磁弁20の釣り合い制御を行う際、電磁弁20に一度大きな電流Iinitialを流す。これにより一旦釣り合い制御可能な位置まで弁体200がストロークし、その後、釣り合い制御を行うのに必要最低限の電流Ibalance(t)まで小さくすることで、全開→閉の初期に釣り合い制御できない特性部分(差圧と電流の関係が比例的にならない部分)で電流制御を行わずに、制御性が比例的な特性部分を用いて制御することができる。よって差圧の増大初期の小さい電流値からでも良好に釣り合い制御を行うことができ、制御性能の低い電磁弁20でも精度の高い釣り合い制御を実現することができる。また、電磁弁20の構成を簡素化して安価にし、電流値を小さくして発熱を抑え、耐久性を向上させた制御性能の低い電磁弁20を用いて、良好な特性の下で釣り合い制御を行うことができる。
【0038】
しかし、初期電流Iinitial(第1通電部71による電流値)から釣り合い電流Ibalance(t)(第2通電部72による電流値)へ移行する際、電流値を急低下させると、電磁弁20を通過するブレーキ液流量が一時的に増加し、ホイルシリンダ5からマスタシリンダ4へとブレーキ液が過剰に流れるおそれがある。このとき、マスタシリンダ圧が変動し、これがブレーキペダル2まで伝わってドライバに違和感を与えるおそれがある。
【0039】
図8は、本実施例1と同様に無効ストローク創生部41その他の構成を備えるものの、本実施例1のような移行通電部73を備えず、第1通電部71による電流値Iinitialから第2通電部72による電流値Ibalance(t)まで急速に低下させる比較例による制御のタイムチャートである。
時刻t1からt2までの区間では、ペダルストロークSが所定値S1になるまでは、無効ストローク創生部41により、ペダルストロークSの増加(ドライバ要求ブレーキ力の増加)に追従してマスタシリンダ圧が増大しない(マスタシリンダ圧の増圧速度が小さく、マスタシリンダ圧が目標ホイルシリンダ圧を下回る)。よって、液圧ユニット6を作動させ、ゲートアウト弁20を釣り合い制御することで、ホイルシリンダ圧がドライバ要求ブレーキ力を実現する値(目標ホイルシリンダ圧)となるようにする。時刻t1からt2までは、目標ホイルシリンダ圧の勾配がゼロより大きい(ホイルシリンダ圧の増圧要求がある)ため、モータMを駆動してポンプ30を作動させる。
時刻t2からt3までの区間では、無効ストローク創生部41による無効ストローク動作が行われないため、マスタシリンダ圧がドライバ要求ブレーキ力を実現する圧力(目標ホイルシリンダ圧)まで増圧される。よって、液圧ユニット6によるブレーキ制御(ゲートアウト弁20の釣り合い制御)を終了し、マスタシリンダ4による加圧に切替える。ゲートアウト弁20は全開とされ、マスタシリンダ圧がそのままホイルシリンダ圧としてホイルシリンダ5に供給される。
時刻t3からt4までの区間では、無効ストローク創生部41により、ペダルストロークSの減少に追従してマスタシリンダ圧が減少しない(マスタシリンダ圧の減圧速度が大きく、マスタシリンダ圧が目標ホイルシリンダ圧を下回る)。よって、液圧ユニット6を作動させ、ゲートアウト弁20を釣り合い制御することで、ホイルシリンダ圧がドライバ要求ブレーキ力を実現する値(目標ホイルシリンダ圧)となるようにする。時刻t3からt4までは、目標ホイルシリンダ圧の勾配がゼロ以下である(ホイルシリンダ圧の増圧要求がない)ため、モータMを駆動せずポンプ30を作動させない。
ここで、比較例では、ゲートアウト弁20を釣り合い制御する初期に、第1通電部71による電流値Iinitialから第2通電部72による電流値Ibalance(t)に移行する際、十分な移行時間を与えることなく、時刻t31で、電流値をIinitialから急速に低下させる。よって、時刻t31の直後、ゲートアウト弁20が全閉状態から急激に開弁されるため、ゲートアウト弁20からマスタシリンダ4に流れるブレーキ液の流量が一時的に増加する。これによるマスタシリンダ圧の変動(振動)が倍力装置2を介してブレーキペダル2まで伝わり、ドライバに踏力の変動として感じられるおそれがある。
【0040】
これに対し、実施例1の装置1では、移行通電部73を備え、第1通電部71による電流値Iinitialから第2通電部72による電流値Ibalance(t)まで徐々に低下させることで電流値の急低下を抑制することとしたため、ドライバに違和感を与えることを抑制することができる。
図9は、実施例1による制御のタイムチャートであり、基本は比較例と同様である。但し、時刻t1からt11までの区間で、所定の移行時間Tchangeをかけて、第1通電部71による電流値Iinitialから第2通電部72による電流値Ibalance(t)まで、ゲートアウト弁20の電流値を徐々に低下させる(ステップS43→S44)。
時刻t3からt32までの区間でも、第1通電部71による電流値Iinitialから第2通電部72による電流値Ibalance(t)まで所定の移行時間Tchangeをかけて徐々に低下させる(ステップS43→S44)。よって、ゲートアウト弁20の釣り合い制御の初期に初期電流Iinitialを低下させる際、ゲートアウト弁20が全閉状態から徐々に開弁するため、ゲートアウト弁20からマスタシリンダ4に流れるブレーキ液量が急激に増加することが抑制される。したがって、マスタシリンダ圧の変動が抑制され、ドライバに踏力の変動として違和感を与えるおそれを回避することができる。
【0041】
なお、時刻t1直後は、ブレーキペダル2の踏み始めでありマスタシリンダ圧がそれほど発生していない。このため、ゲートアウト弁20の釣り合い制御の初期における(ゲートアウト弁20が全閉状態から急速に開弁されることによる)マスタシリンダ圧の変動は僅かであり、これがドライバに踏力の変動として伝わる可能性が低い。これに対し、時刻t3直後は、ブレーキペダル2が踏み込まれてマスタシリンダ圧がある程度発生した状態である。このため、ゲートアウト弁20の釣り合い制御の初期における上記マスタシリンダ圧の変動が比較的大きくなり、これがドライバに踏力の変動として伝わる可能性が高い。よって、(時刻t1直後ではなく特に)時刻t3直後に、すなわちブレーキペダル2が踏み込まれてマスタシリンダ圧が発生した状態から、無効ストローク創生部41による無効ストローク動作へ移行するとき、移行通電部73による電流値の制御を行うことで、ドライバの違和感をより効果的に抑制することができる。
【0042】
[実施例1の効果]
以下、実施例1の装置1が奏する効果を列挙する。
(1)ドライバによるブレーキペダル2の操作量(ペダルストロークS)に対して所定の操作量までマスタシリンダ4の圧力の上昇を所定量に抑制する無効ストローク創生部41と、マスタシリンダ4と車輪FL,FR,RL,RRに設けられたホイルシリンダ5を接続する第1ブレーキ回路(供給通路11)と、無効ストローク創生部41による無効ストローク動作中にマスタシリンダ4内のブレーキ液を用いてホイルシリンダ5の圧力を調整するホイルシリンダ圧力調整部とを有し、ホイルシリンダ圧力調整部は、第1ブレーキ回路上に設けられたノーマルオープン型の電磁弁(ゲートアウト弁20)と、電磁弁の開弁量をコントロールするコントロールユニット7とを備え、コントロールユニット7は、電磁弁(ゲートアウト弁20)に対し、弁体200が閉弁する所定電流Iinitialを通電する第1通電部71と、第1通電部71による通電後、連続して所定電流Iinitialより低い電流Ibalance(t)を通電する第2通電部72とを有し、第1通電部71による電流値Iinitialから第2通電部72による電流値Ibalance(t)へ漸近させて移行する移行通電部73を備えた。
よって、マスタシリンダ圧の変動を抑制し、ドライバに違和感を与えることを抑制することができる。
【0043】
(2)第1ブレーキ回路(供給通路11)とポンプ30の吐出側とを接続する第2ブレーキ回路(吐出通路12)を有し、電磁弁は、第1ブレーキ回路上であって第2ブレーキ回路の接続位置よりもマスタシリンダ4側に設けられたゲートアウト弁20である。
このように、マスタシリンダ4側とホイルシリンダ5側(ポンプ30の吐出側)との連通を遮断してポンプ30によりホイルシリンダ圧を増圧することを可能とするゲートアウト弁20に対して、移行通電部73による電流値の制御を適用することができる。
【0044】
(3)第2通電部72による電流値Ibalance(t)は、電磁弁(ゲートアウト弁20)の上流圧と下流圧との差圧を所定値に保持するための釣り合い電流値である。
このように、差圧を保持するための釣り合い制御を行う際の電流制御に対して、移行通電部73による電流値の制御を適用することができる。
【0045】
(4)ホイルシリンダ圧力調整部(ゲートアウト弁20、コントロールユニット7)は、ブレーキペダル2が踏み込まれた状態から、無効ストローク創生部41による無効ストローク動作へ移行するときにホイルシリンダ5の圧力を調整する。
よって、より効果的に、マスタシリンダ圧の変動を抑制し、ドライバに違和感を与えることを抑制することができる。
【0046】
[他の実施例]
以上、本発明を実現するための形態を、実施例1に基づいて説明してきたが、本発明の具体的な構成は実施例1に限定されるものではなく、発明の要旨を逸脱しない範囲の設計変更等があっても、本発明に含まれる。例えば、倍力装置3を省略してもよく、この場合、マスタシリンダ圧の変動がよりブレーキペダル2に伝わりやすいので、本発明の効果をより効果的に得ることができる。また、液圧センサ43を省略し、モータMの回転数等に基づきホイルシリンダ圧を推定することとしてもよい。実施例1では初期電流Iinitialを通電した直後に移行電流を流す(第1通電部71による通電直後に移行通電部73による通電を開始する)こととしたが、初期電流Iinitialを通電する所定時間を設け、この所定時間後に移行電流を流す(移行通電部73による通電を開始する)こととしてもよい。実施例1では初期電流Iinitialから釣り合い電流Ibalance(t)へ移行させる方法として、式(3)を用いることとしたが、ゲートアウト弁20に通電する電流を急変させることなく電流を漸減させることができれば他の方法でもよい。
【0047】
実施例1では、第2通電部72による電流値は、ゲートアウト弁20の上流圧と下流圧との差圧を所定値に制御するための釣り合い電流値であることとしたが、ゲートアウト弁20を釣り合い制御する場合に限らず、例えば液圧の検出値に基づき差圧をフィードバック制御する場合にも、移行通電部73による電流値の制御を適用することで、上記効果を得ることができる。すなわち、一般に電磁弁にはヒステリシス(電流の増加方向と減少方向とで特性が異なる性質)が存在する。よって、電磁弁の制御性を向上するため、電流制御の初期に大きな電流を与えてからこれより低い電流に制御することが行われる場合がある。このような場合にも本発明を適用できる。また、移行通電部73による電流値の制御を適用する電磁弁は、実施例1ではゲートアウト弁20であることとしたが、マスタシリンダとホイルシリンダとを接続するブレーキ回路上に設けられたノーマルオープン型の電磁弁であれば、他の弁であってもよい。また、この電磁弁として、比例制御弁でなく例えばオン・オフ弁を用いてもよく、この場合、例えばPWM制御により実効電流を制御することで中間開度を達成することができる。しかし、音振を抑制してドライバのフィーリングを向上するためには、実施例1のように比例制御弁を用いることが好ましい。
【0048】
また、ハイブリッド車両ではなく、電気自動車に本発明のブレーキ制御装置を適用してもよい。車両停車時に限らず、回生ブレーキが効かなくなる場面(例えば車両速度が所定値以下の低速度となった後)であれば、ドライバ要求ブレーキ力とマスタシリンダ圧によるブレーキ力との差分を液圧ユニット6を用いて補う際に、本発明の制御を適用することができる。また、無効ストローク創生部を有して回生ブレーキを行う車両に限らず、マスタシリンダとホイルシリンダを接続するブレーキ回路上に設けられたノーマルオープン型の電磁弁を制御することで、マスタシリンダ内のブレーキ液を用いてホイルシリンダの圧力を調整する車両であれば、本発明のブレーキ制御装置を適用することができる。
【符号の説明】
【0049】
2 ブレーキペダル
4 マスタシリンダ
41 無効ストローク創生部
11 供給通路(第1ブレーキ回路)
12 吐出通路(第2ブレーキ回路)
20 ゲートアウト弁(電磁弁、ホイルシリンダ圧力調整部)
200 弁体
5 ホイルシリンダ
7 コントロールユニット(ホイルシリンダ圧力調整部)
71 第1通電部
72 第2通電部
73 移行通電部
FL,FR,RL,RR 車輪
【特許請求の範囲】
【請求項1】
ドライバによるブレーキペダルの操作量に対して所定の操作量までマスタシリンダの圧力の上昇を所定量に抑制する無効ストローク創生部と、
前記マスタシリンダと車輪に設けられたホイルシリンダを接続する第1ブレーキ回路と、
前記無効ストローク創生部による無効ストローク動作中に前記マスタシリンダ内のブレーキ液を用いて前記ホイルシリンダの圧力を調整するホイルシリンダ圧力調整部とを有し、
前記ホイルシリンダ圧力調整部は、前記第1ブレーキ回路上に設けられたノーマルオープン型の電磁弁と、前記電磁弁の開弁量をコントロールするコントロールユニットとを備え、
前記コントロールユニットは、前記電磁弁に対し、弁体が閉弁する所定電流を通電する第1通電部と、前記第1通電部による通電後、連続して前記所定電流より低い電流を通電する第2通電部とを有し、前記第1通電部による電流値から前記第2通電部による電流値へ漸近させて移行する移行通電部を備えた
ことを特徴とするブレーキ制御装置。
【請求項2】
請求項1に記載のブレーキ制御装置において、
前記第1ブレーキ回路とポンプの吐出側とを接続する第2ブレーキ回路を有し、
前記電磁弁は、前記第1ブレーキ回路上であって前記第2ブレーキ回路の接続位置よりも前記マスタシリンダ側に設けられたゲートアウト弁である
ことを特徴とするブレーキ制御装置。
【請求項3】
請求項1または2に記載のブレーキ制御装置において、
前記第2通電部による電流値は、前記電磁弁の上流圧と下流圧との差圧を所定値に保持するための釣り合い電流値であることを特徴とするブレーキ制御装置。
【請求項4】
請求項1ないし3のいずれか1項に記載のブレーキ制御装置において、
前記ホイルシリンダ圧力調整部は、前記ブレーキペダルが踏み込まれた状態から、前記無効ストローク創生部による無効ストローク動作へ移行するときに前記ホイルシリンダの圧力を調整することを特徴とするブレーキ装置。
【請求項1】
ドライバによるブレーキペダルの操作量に対して所定の操作量までマスタシリンダの圧力の上昇を所定量に抑制する無効ストローク創生部と、
前記マスタシリンダと車輪に設けられたホイルシリンダを接続する第1ブレーキ回路と、
前記無効ストローク創生部による無効ストローク動作中に前記マスタシリンダ内のブレーキ液を用いて前記ホイルシリンダの圧力を調整するホイルシリンダ圧力調整部とを有し、
前記ホイルシリンダ圧力調整部は、前記第1ブレーキ回路上に設けられたノーマルオープン型の電磁弁と、前記電磁弁の開弁量をコントロールするコントロールユニットとを備え、
前記コントロールユニットは、前記電磁弁に対し、弁体が閉弁する所定電流を通電する第1通電部と、前記第1通電部による通電後、連続して前記所定電流より低い電流を通電する第2通電部とを有し、前記第1通電部による電流値から前記第2通電部による電流値へ漸近させて移行する移行通電部を備えた
ことを特徴とするブレーキ制御装置。
【請求項2】
請求項1に記載のブレーキ制御装置において、
前記第1ブレーキ回路とポンプの吐出側とを接続する第2ブレーキ回路を有し、
前記電磁弁は、前記第1ブレーキ回路上であって前記第2ブレーキ回路の接続位置よりも前記マスタシリンダ側に設けられたゲートアウト弁である
ことを特徴とするブレーキ制御装置。
【請求項3】
請求項1または2に記載のブレーキ制御装置において、
前記第2通電部による電流値は、前記電磁弁の上流圧と下流圧との差圧を所定値に保持するための釣り合い電流値であることを特徴とするブレーキ制御装置。
【請求項4】
請求項1ないし3のいずれか1項に記載のブレーキ制御装置において、
前記ホイルシリンダ圧力調整部は、前記ブレーキペダルが踏み込まれた状態から、前記無効ストローク創生部による無効ストローク動作へ移行するときに前記ホイルシリンダの圧力を調整することを特徴とするブレーキ装置。
【図1】



【図2】
【図3】
【図4】
【図5】
【図6】
【図7】
【図8】
【図9】
【図2】
【図3】
【図4】
【図5】
【図6】
【図7】
【図8】
【図9】
【公開番号】特開2013−47033(P2013−47033A)
【公開日】平成25年3月7日(2013.3.7)
【国際特許分類】
【出願番号】特願2011−185653(P2011−185653)
【出願日】平成23年8月29日(2011.8.29)
【出願人】(509186579)日立オートモティブシステムズ株式会社 (2,205)
【Fターム(参考)】
【公開日】平成25年3月7日(2013.3.7)
【国際特許分類】
【出願日】平成23年8月29日(2011.8.29)
【出願人】(509186579)日立オートモティブシステムズ株式会社 (2,205)
【Fターム(参考)】
[ Back to top ]