
ブレーキ装置
【課題】実際に発生している前輪制動力と後輪制動力の比率を任意の比率にすることができるブレーキ装置を提供する。
【解決手段】本ブレーキ装置は、車輪の角速度を検出する車輪角速度検出部と、車輪の接地荷重を推定する接地荷重推定部と、前輪と後輪の少なくとも一方の制動力の目標値を演算する目標値演算部と、制動時の前記角速度と前記接地荷重から前輪制動力と後輪制動力の比率である前後制動力比を推定し、当該前後制動力比に基づいて前輪と後輪の少なくとも一方の制動力を制御するための前後制動力補正値を演算する前後制動力補正値演算部と、前記制動力目標値と前記前後制動力補正値に基づいて制動力指令値を演算する指令値演算部と、前記制動力指令値に基づいて車輪に制動力を発生する制動力発生部を備える。
【解決手段】本ブレーキ装置は、車輪の角速度を検出する車輪角速度検出部と、車輪の接地荷重を推定する接地荷重推定部と、前輪と後輪の少なくとも一方の制動力の目標値を演算する目標値演算部と、制動時の前記角速度と前記接地荷重から前輪制動力と後輪制動力の比率である前後制動力比を推定し、当該前後制動力比に基づいて前輪と後輪の少なくとも一方の制動力を制御するための前後制動力補正値を演算する前後制動力補正値演算部と、前記制動力目標値と前記前後制動力補正値に基づいて制動力指令値を演算する指令値演算部と、前記制動力指令値に基づいて車輪に制動力を発生する制動力発生部を備える。
【発明の詳細な説明】
【技術分野】
【0001】
本発明は、車両の制動力制御を行うブレーキ装置に関する。
【背景技術】
【0002】
近年、制動力制御を行うブレーキ装置が注目を浴びている(特許文献1参照)。
【0003】
特許文献1では、前輪速度(=タイヤ半径×前輪角速度)と後輪速度(=タイヤ半径×後輪角速度)の差が目標値と一致するように、制動力を制御している。車両を安定して減速させるためには、前後制動力比(前輪制動力と後輪制動力の比率)を前後接地荷重比(前輪接地荷重と後輪接地荷重の比率)に等しくする、いわゆる理想制動力配分にすることが望ましい(参考文献:自動車技術会「自動車技術ハンドブック1 基礎・理論編」p.141,142)。特許文献1では、前輪速度と後輪速度の差の目標値を0とし、前輪速度と後輪速度を一致させることにより、理想制動力配分を実現している。これは、次のような原理による。
【0004】
車輪が発生する制動力Fは、次式のように、車輪接地荷重Wとスリップ比Sの積に比例する式で近似できることが知られている。ここで、kは主にタイヤの種類によって決まる比例定数である。
【0005】
【数1】

【0006】
スリップ比Sは、車輪進行速度Vと車輪速度(R・ω)(ここで、Rはタイヤ半径,ωは車輪角速度)によって決まり、次式で表される。
【0007】
【数2】
【0008】
前輪と後輪で、車輪進行速度Vはほぼ等しいので、車輪速度(R・ω)が等しくなると、スリップ比Sがほぼ等しくなる。前輪と後輪でスリップ比Sが等しい時、数1より、前後制動力比は前後接地荷重比に比例する。
【先行技術文献】
【特許文献】
【0009】
【特許文献1】特開平9−2222号公報
【発明の概要】
【発明が解決しようとする課題】
【0010】
しかし、特許文献1の方法では、前後制動力比を前後設置荷重比に等しくすることはできるが、前後制動力比を任意の比率にすることはできない。前輪速度と後輪速度の差の目標値を0ではない値にすることで、理想制動力配分に比べて前輪制動力と後輪制動力のどちらかを大きくすることはできるが、その時に実際に発生している前輪制動力と後輪制動力の比率は不明である。よって、車両挙動を安定化するための制動力配分制御(参考文献:自動車技術会「自動車技術ハンドブック1 基礎・理論編」p.274〜278)やヨーモーメント制御(同p.287〜289)などを精度良く行うことはできない。
【0011】
本発明の目的は、実際に発生している前輪制動力と後輪制動力の比率を任意の比率にすることができるブレーキ装置を提供することである。
【課題を解決するための手段】
【0012】
上記課題を解決するため、本発明の望ましい態様の一つは次の通りである。
【0013】
本ブレーキ装置は、車輪の角速度を検出する車輪角速度検出部と、車輪の接地荷重を推定する接地荷重推定部と、前輪と後輪の少なくとも一方の制動力の目標値を演算する目標値演算部と、制動時の角速度と接地荷重から前輪制動力と後輪制動力の比率である前後制動力比を推定し、前後制動力比に基づいて前輪と後輪の少なくとも一方の制動力を制御するための前後制動力補正値を演算する前後制動力補正値演算部と、制動力目標値と前後制動力補正値に基づいて制動力指令値を演算する指令値演算部と、制動力指令値に基づいて車輪に制動力を発生する制動力発生部を備える。
【発明の効果】
【0014】
本発明によれば、実際に発生している前輪制動力と後輪制動力の比率を任意の比率にすることができるブレーキ装置を提供することができる。
【図面の簡単な説明】
【0015】
【図1】車両の構成例。
【図2】前後制動力補正値演算部6が行う演算のフローチャートの一例。
【図3】車速,前後加速度Ax,横加速度Ay,ヨーレートγの一例。
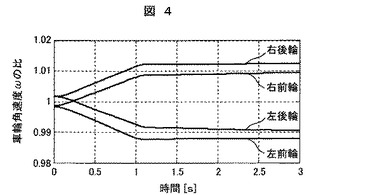
【図4】車輪角速度ωa,ωb,ωc,ωdを平均車輪角速度で割った値の一例。
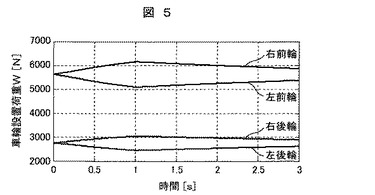
【図5】計算した車輪接地荷重Wa,Wb,Wc,Wdの一例。
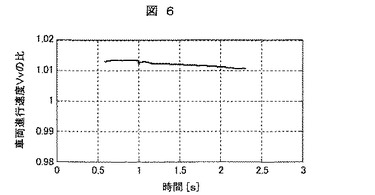
【図6】計算した車両進行速度Vvを平均車輪速度で割った値の一例。
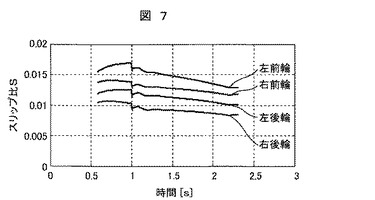
【図7】計算したスリップ比Sa,Sb,Sc,Sdの一例。
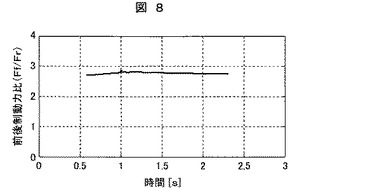
【図8】計算した前後制動力比(Ff/Fr)の一例。
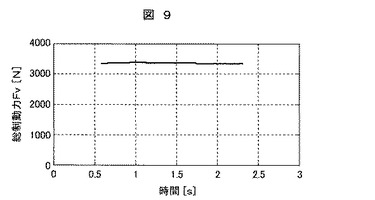
【図9】計算した総制動力Fvの一例。
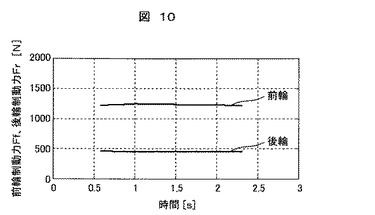
【図10】計算した前輪制動力Ffと、後輪制動力Frの一例。
【発明を実施するための形態】
【0016】
図1に、車両の構成例を示す。
【0017】
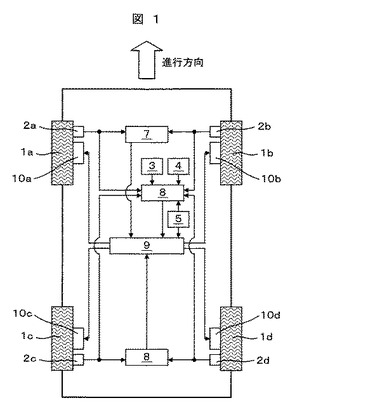
図1の車両は、車輪1a,1b,1c,1d,車輪角速度検出部2a,2b,2c,2d,ヨーレート検出部3,車輪接地荷重推定部4,制動力目標値演算部5,前後制動力補正値演算部6,前輪左右制動力補正値演算部7,後輪左右制動力補正値演算部8,制動力指令値演算部9,制動力発生部10a,10b,10c,10dで構成される。
【0018】
尚、車輪接地荷重推定部4,制動力目標値演算部5,前後制動力補正値演算部6,前輪左右制動力補正値演算部7,後輪左右制動力補正値演算部8,制動力指令値演算部9は、まとめて1つのコンピュータで構成しても良いし、複数のコンピュータで構成しても良い。
【0019】
車輪角速度検出部2a,2b,2c,2dは、車輪1a,1b,1c,1dの角速度ωa,ωb,ωc,ωdを検出するもので、これらの車輪、もしくはこれらの車輪の車軸に取り付けられた回転センサで構成する。
【0020】
ヨーレート検出部3は、車両のヨーレート(ヨー角速度)γ(上から見て反時計回りが正)を検出するもので、ジャイロセンサで構成する。
【0021】
車輪接地荷重推定部4は、車両の前後加速度Ax(加速方向が正)と、横加速度Ay(左方向が正)から、次式を用いて、車輪1a,1b,1c,1dの接地荷重Wa,Wb,Wc,Wdを計算するもので、コンピュータで構成する。ここで,Wsa,Wsb,Wsc,Wsdは静止時の車輪1a,1b,1c,1dの接地荷重,gは重力加速度,Hは車両重心高,Lはホイールベース,Dfは前軸トレッド,Drは後軸トレッドで、車種毎に予め設定しておく。
【0022】
【数3】
【0023】
【数4】
【0024】
【数5】
【0025】
【数6】
【0026】
尚、横加速度Ayは、図示しない横加速度センサで検出する。前後加速度Axは、図示しない前後加速度センサで検出しても良いし、次式のように、車輪速度の平均値を時間微分して計算しても良い。
【0027】
【数7】
【0028】
また、車輪接地荷重推定部4を用いる替わりに、車輪接地荷重検出部を用いても良い。車輪接地荷重検出部は、車輪接地荷重Wa,Wb,Wc,Wdを検出するもので、これらの車輪のホイール、もしくはこれらの車輪のサスペンションに取り付けられた変位センサ、もしくはひずみセンサで構成する。
【0029】
制動力目標値演算部5は、ブレーキペダルストローク量やマスタシリンダ圧から、総制動力目標値(ドライバが要求している総制動力)TFvを決定し、次式を用いて、前輪制動力目標値(前輪1a,1bの合計制動力の目標値)TFfと、後輪制動力目標値(後輪1c,1dの合計制動力の目標値)TFrを計算するもので、コンピュータで構成する。ここで、Wvは全車輪の総接地荷重で、Wv=Wsa+Wsb+Wsc+Wsdである。
【0030】
【数8】
【0031】
【数9】
【0032】
また、数8,数9では前後制動力比が理想制動力配分になるように目標値を決めているが、車両挙動の安定性を考慮して前輪が先にロックするように、前輪制動力目標値TFfを数8の値よりも大きく、後輪制動力目標値TFrを数9の値よりも小さくしても良い。
【0033】
前後制動力補正値演算部6は、車輪角速度ωa,ωb,ωc,ωdと、ヨーレートγと、車輪荷重Wa,Wb,Wc,Wdと、前輪制動力目標値TFfと、後輪制動力目標値TFrから、前輪制動力補正値CFfと、後輪制動力補正値CFrを計算するもので、コンピュータで構成する。前後制動力補正値演算部6の詳細については、後述する。
【0034】
前輪左右制動力補正値演算部7は、前輪角速度ωa,ωbから、前輪制動力の左右差を小さくするための前輪左右制動力補正値CFflrを計算するもので、コンピュータで構成する。この計算は、予め設定した直進制動の条件を満たしている間と、条件を満たさなくなった後でドライバがブレーキを止めた時に行う。直進制動の条件は、例えば、減速度が1m/s2以上で、かつ、横加速度の絶対値が0.2m/s2以下で、かつ、左右制動力配分制御やヨーモーメント制御を行っていない時、とする。まず、直進制動の条件を満たしている間、次式を用いて、前輪左右制動力補正値の更新値ΔCFflrを計算する。尚、kflrは前輪左右制動力補正値更新係数で、前輪制動力の左右差が十分に小さくなるように、予め設定しておく。ここで、tは時間を表しており、直進制動の条件を満たした時刻を0とする。
【0035】
【数10】
【0036】
そして、直進制動の条件を満たさなくなり、その後、ドライバがブレーキを止めてから、次式のように、前輪左右制動力補正値CFflrを更新する。更新した補正値は、次の制動時に用いる。
【0037】
【数11】
【0038】
後輪左右制動力補正値演算部8は、後輪角速度ωc,ωdから、後輪制動力の左右差を小さくするための後輪左右制動力補正値CFrlrを計算するもので、コンピュータで構成する。この計算は、前輪と同様に、まず、直進制動の条件を満たしている間、次式を用いて、後輪左右制動力補正値の更新値ΔCFrlrを計算する。尚、krlrは後輪左右制動力補正値更新係数で、後輪制動力の左右差が十分に小さくなるように、予め設定しておく。
【0039】
【数12】
【0040】
そして、直進制動の条件を満たさなくなり、その後、ドライバがブレーキを止めてから、次式のように、後輪左右制動力補正値CFrlrを更新する。更新した補正値は、次の制動時に用いる。
【0041】
【数13】
【0042】
制動力指令値演算部9は、前輪制動力目標値TFfと、後輪制動力目標値TFrと、前輪制動力補正値CFfと、後輪制動力補正値CFrと、前輪左右制動力補正値CFflrと、後輪左右制動力補正値CFrlrから、次式を用いて、車輪1a,1b,1c,1dの制動力指令値TFa,TFb,TFc,TFdを計算するもので、コンピュータで構成する。
【0043】
【数14】
【0044】
【数15】
【0045】
【数16】
【0046】
【数17】
【0047】
制動力発生部10a,10b,10c,10dは、制動力指令値TFa,TFb,TFc,TFdに基づいて、車輪1a,1b,1c,1dに制動力を発生するもので、例えば、油圧装置とブレーキキャリパとブレーキロータで構成する。また、制動力発生部10a,10b,10c,10dは、電動モータで構成しても良い。
【0048】
図2に、前後制動力補正値演算部6が行う演算のフローチャートの一例を示す。
【0049】
ステップ101では、前後制動力補正値の計算を行うか否かの判定を行う。この判定条件は、旋回制動を行っており、前後制動力補正値を精度良く計算できるように、予め設定しておく。例えば、減速度が1m/s2以上で、かつ、横加速度の絶対値が1m/s2以上で、かつ、左右制動力配分制御やヨーモーメント制御を行っていない時、とする。判定条件を満たしていれば、ステップ102に進み、満たしていなければ、前後制動力補正値の計算は行わない。
【0050】
尚、車速が低い時は車輪角速度の検出精度が低いことを考慮して、ステップ101の判定条件には、車速が閾値以上(例えば20km/h以上)という条件を追加しても良い。また、制動力の左右差が大きい時は、後述する数30,数31が成り立たなくなることを考慮して、ステップ101の判定条件には、前輪左右制動力補正値の更新値ΔCFflrや後輪左右制動力補正値の更新値ΔCFrlrの絶対値が閾値以下(例えば20N以下)の条件を追加しても良い。
【0051】
ステップ102では、前輪制動力積分値SFfと、後輪制動力積分値SFrと、前輪制動力目標値の積分値STFfと、後輪制動力目標値の積分値STFrをリセット(0を代入)する。
【0052】
ステップ103では、次式を用いて、車両進行速度Vvを計算する。
【0053】
【数18】
【0054】
尚、数18は、次のように求めたものである。
【0055】
車輪1a,1b,1c,1dの制動力Fa,Fb,Fc,Fdは、接地荷重Wa,Wb,Wc,Wdと、スリップ比Sa,Sb,Sc,Sdを用いて、次式で表される。
【0056】
【数19】
【0057】
【数20】
【0058】
【数21】
【0059】
【数22】
【0060】
スリップ比Sa,Sb,Sc,Sdは、車輪1a,1b,1c,1dの進行速度Va,Vb,Vc,Vdと、角速度ωa,ωb,ωc,ωdによって決まり、次式で表される。
【0061】
【数23】
【0062】
【数24】
【0063】
【数25】
【0064】
【数26】
【0065】
車輪進行速度Va,Vb,Vc,Vdは、次式で表される。
【0066】
【数27】
【0067】
【数28】
【0068】
【数29】
【0069】
【数30】
【0070】
左右制動力配分制御を行っていなければ、前輪制動力のFaとFbがほぼ等しく、後輪制動力のFcとFdがほぼ等しいため、数19〜数22より、次式が成り立つ。
【0071】
【数31】
【0072】
【数32】
【0073】
数31に、数23,数24を代入すると、次式になる。
【0074】
【数33】
【0075】
数33の分母のVaとVbを、Va≒Vbと近似すると、次式になる。
【0076】
【数34】
【0077】
数34に、数27,数28を代入すると、次式になる。
【0078】
【数35】
【0079】
前輪と同様の計算を、後輪に関しても行うと、次式を得られる。
【0080】
【数36】
【0081】
これまでの計算には近似が多く含まれていたため、数35で計算した車両進行速度Vvと、数36で計算した車両進行速度Vvは、通常、完全には一致しない。そこで、ステップ103では、数35と数36の平均値を車両進行速度Vvと見なすこととし、数18を用いて計算する。
【0082】
ステップ104では、数23〜数26を用いて、スリップ比Sa,Sb,Sc,Sdを計算する。
【0083】
ステップ105では、次式を用いて、前後制動力比(Ff/Fr)を計算する。
【0084】
【数37】
【0085】
ステップ106では、次式を用いて、総制動力Fvを計算する。ここで、Mは車両重量で、車種毎に予め設定しておく。
【0086】
【数38】
【0087】
ステップ107では、次式を用いて、前輪制動力Ffと、後輪制動力Frを計算する。
【0088】
【数39】
【0089】
【数40】
【0090】
ステップ108では、次式のように、前輪制動力Ff,後輪制動力Fr,前輪制動力目標値TFf,後輪制動力目標値TFrを積分し、前輪制動力積分値SFf,後輪制動力積分値SFr,前輪制動力目標値の積分値STFf,後輪制動力目標値の積分値STFrを計算する。ここで、Δtは、前後制動力補正値演算部6の演算周期である。
【0091】
【数41】
【0092】
【数42】
【0093】
【数43】
【0094】
【数44】
【0095】
ステップ109では、ステップ101と同じ判定条件で判定を行う。判定条件を満たしていれば、ステップ103に戻り、満たしていなければ、ステップ110に進む。
【0096】
ステップ110では、次式のように、前輪制動力積分値SFf,後輪制動力積分値SFr,前輪制動力目標値の積分値STFf,後輪制動力目標値の積分値STFrの値を、ステップ103〜108の演算を行っていた時間tで割り、前輪制動力の時間平均値MFf,後輪制動力の時間平均値MFr,前輪制動力目標値の時間平均値MTFf,後輪制動力目標値の時間平均値MTFrを計算する。
【0097】
【数45】
【0098】
【数46】
【0099】
【数47】
【0100】
【数48】
【0101】
ステップ111では、次式を用いて、前輪制動力補正値の更新値ΔCFfと、後輪制動力補正値の更新値ΔCFrを計算する。尚、kfは前輪制動力補正値更新係数、krは後輪制動力補正値更新係数で、どちらも、0より大きく1以下の数値を、予め設定しておく。
【0102】
【数49】
【0103】
【数50】
【0104】
ステップ112では、ドライバがブレーキを止めたか否かの判定を行う。この判定は、ブレーキペダルストローク量が0か否か、もしくは、マスタシリンダ圧が0か否かで判定する。ドライバがブレーキを止めたら、ステップ113に進み、そうでなければ、ドライバがブレーキを止めるまでステップ112を繰り返す。
【0105】
ステップ113では、次式のように、前輪制動力補正値CFfと、後輪制動力補正値CFrを更新し、前後制動力補正値演算部6から出力する。更新した補正値は、次の制動時に用いる。
【0106】
【数51】
【0107】
【数52】
【0108】
図3〜図10を用いて、前後制動力補正値演算部6の動作の一例を説明する。
【0109】
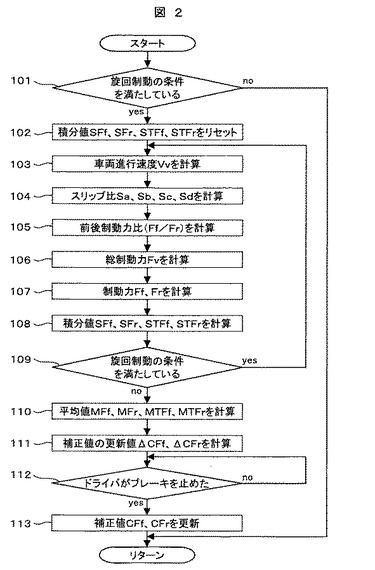
図3は、ブレーキを踏んでいる途中でハンドルを切り始めた時の、車速,前後加速度Ax,横加速度Ay,ヨーレートγである。
【0110】
図4は、その時の車輪角速度ωa,ωb,ωc,ωdを、各車輪の角速度の差を分かりやすくするために、平均車輪角速度(=(ωa+ωb+ωc+ωd)/4)で割った値である。
【0111】
図5は、車輪接地荷重推定部4が計算した、その時の車輪接地荷重Wa,Wb,Wc,Wdである。
【0112】
前後制動力補正値演算部6は、予め設定した旋回制動の条件を満たしている間、車両進行速度Vv,スリップ比Sa,Sb,Sc,Sd,前後制動力比(Ff/Fr),総制動力Fv,前輪制動力Ff,後輪制動力Frなどを計算する。本例では、旋回制動の条件は、横加速度の絶対値が1m/s2以上、とした。図3を見ると、条件を満たしている期間は、0.6秒から2.3秒までで、この期間で上記の計算を行う。
【0113】
図6に、計算した車両進行速度Vvを、図4と比較しやすくするために、平均車輪速度(=R・(ωa+ωb+ωc+ωd)/4)で割った値を示す。
【0114】
図7に、計算したスリップ比Sa,Sb,Sc,Sdを示す。
【0115】
図8に、計算した前後制動力比(Ff/Fr)を示す。
【0116】
図9に、計算した総制動力Fvを示す。
【0117】
図10に、計算した前輪制動力Ffと、後輪制動力Frを示す。
【0118】
そして、直進制動の条件を満たさなくなったら、前輪制動力の時間平均値MFf,後輪制動力の時間平均値MFr,前輪制動力目標値の時間平均値MTFf,後輪制動力目標値の時間平均値MTFr,前輪制動力補正値の更新値ΔCFf,後輪制動力補正値の更新値ΔCFrを計算する。
【0119】
計算した結果、前輪制動力の時間平均値MFf、後輪制動力の時間平均値MFrは、MFf=1228N,MFr=445Nとなった。この期間に実際に発生していた前輪制動力の時間平均値は1236N,後輪制動力の時間平均値は438Nであったので、ほぼ正確に推定できていることが分かる。
【0120】
また、前輪制動力目標値の時間平均値MTFf,後輪制動力目標値の時間平均値MTFrは、MTFf=1200N,MTFr=400Nであった。
【0121】
また、本例では、前輪制動力補正値更新係数kf,後輪制動力補正値更新係数krは、kf=kr=0.5としており、前輪制動力補正値の更新値ΔCFf,後輪制動力補正値の更新値ΔCFrは、ΔCFf=0.5×(1200N−1228N)=−14N,ΔCFr=0.5×(400N−445N)=−22.5Nとなった。
【0122】
その後、ドライバがブレーキを止めてから、計算したΔCFf,ΔCFrを、これまでの前輪制動力補正値CFf,後輪制動力補正値CFrに加算し、前後制動力補正値演算部6から出力する。
【0123】
以上のように、本実施例によれば、実際に発生している前輪制動力と後輪制動力の比率を任意の比率にすることができる。それにより、例えば、車両挙動を安定化するための制動力配分制御やヨーモーメント制御などを精度良く行うことができる。
【符号の説明】
【0124】
1a,1b,1c,1d 車輪
2a,2b,2c,2d 車輪角速度検出部
3 ヨーレート検出部
4 車輪接地荷重推定部
5 制動力目標値演算部
6 前後制動力補正値演算部
7 前輪左右制動力補正値演算部
8 後輪左右制動力補正値演算部
9 制動力指令値演算部
10a,10b,10c,10d 制動力発生部
【技術分野】
【0001】
本発明は、車両の制動力制御を行うブレーキ装置に関する。
【背景技術】
【0002】
近年、制動力制御を行うブレーキ装置が注目を浴びている(特許文献1参照)。
【0003】
特許文献1では、前輪速度(=タイヤ半径×前輪角速度)と後輪速度(=タイヤ半径×後輪角速度)の差が目標値と一致するように、制動力を制御している。車両を安定して減速させるためには、前後制動力比(前輪制動力と後輪制動力の比率)を前後接地荷重比(前輪接地荷重と後輪接地荷重の比率)に等しくする、いわゆる理想制動力配分にすることが望ましい(参考文献:自動車技術会「自動車技術ハンドブック1 基礎・理論編」p.141,142)。特許文献1では、前輪速度と後輪速度の差の目標値を0とし、前輪速度と後輪速度を一致させることにより、理想制動力配分を実現している。これは、次のような原理による。
【0004】
車輪が発生する制動力Fは、次式のように、車輪接地荷重Wとスリップ比Sの積に比例する式で近似できることが知られている。ここで、kは主にタイヤの種類によって決まる比例定数である。
【0005】
【数1】
【0006】
スリップ比Sは、車輪進行速度Vと車輪速度(R・ω)(ここで、Rはタイヤ半径,ωは車輪角速度)によって決まり、次式で表される。
【0007】
【数2】
【0008】
前輪と後輪で、車輪進行速度Vはほぼ等しいので、車輪速度(R・ω)が等しくなると、スリップ比Sがほぼ等しくなる。前輪と後輪でスリップ比Sが等しい時、数1より、前後制動力比は前後接地荷重比に比例する。
【先行技術文献】
【特許文献】
【0009】
【特許文献1】特開平9−2222号公報
【発明の概要】
【発明が解決しようとする課題】
【0010】
しかし、特許文献1の方法では、前後制動力比を前後設置荷重比に等しくすることはできるが、前後制動力比を任意の比率にすることはできない。前輪速度と後輪速度の差の目標値を0ではない値にすることで、理想制動力配分に比べて前輪制動力と後輪制動力のどちらかを大きくすることはできるが、その時に実際に発生している前輪制動力と後輪制動力の比率は不明である。よって、車両挙動を安定化するための制動力配分制御(参考文献:自動車技術会「自動車技術ハンドブック1 基礎・理論編」p.274〜278)やヨーモーメント制御(同p.287〜289)などを精度良く行うことはできない。
【0011】
本発明の目的は、実際に発生している前輪制動力と後輪制動力の比率を任意の比率にすることができるブレーキ装置を提供することである。
【課題を解決するための手段】
【0012】
上記課題を解決するため、本発明の望ましい態様の一つは次の通りである。
【0013】
本ブレーキ装置は、車輪の角速度を検出する車輪角速度検出部と、車輪の接地荷重を推定する接地荷重推定部と、前輪と後輪の少なくとも一方の制動力の目標値を演算する目標値演算部と、制動時の角速度と接地荷重から前輪制動力と後輪制動力の比率である前後制動力比を推定し、前後制動力比に基づいて前輪と後輪の少なくとも一方の制動力を制御するための前後制動力補正値を演算する前後制動力補正値演算部と、制動力目標値と前後制動力補正値に基づいて制動力指令値を演算する指令値演算部と、制動力指令値に基づいて車輪に制動力を発生する制動力発生部を備える。
【発明の効果】
【0014】
本発明によれば、実際に発生している前輪制動力と後輪制動力の比率を任意の比率にすることができるブレーキ装置を提供することができる。
【図面の簡単な説明】
【0015】
【図1】車両の構成例。
【図2】前後制動力補正値演算部6が行う演算のフローチャートの一例。
【図3】車速,前後加速度Ax,横加速度Ay,ヨーレートγの一例。
【図4】車輪角速度ωa,ωb,ωc,ωdを平均車輪角速度で割った値の一例。
【図5】計算した車輪接地荷重Wa,Wb,Wc,Wdの一例。
【図6】計算した車両進行速度Vvを平均車輪速度で割った値の一例。
【図7】計算したスリップ比Sa,Sb,Sc,Sdの一例。
【図8】計算した前後制動力比(Ff/Fr)の一例。
【図9】計算した総制動力Fvの一例。
【図10】計算した前輪制動力Ffと、後輪制動力Frの一例。
【発明を実施するための形態】
【0016】
図1に、車両の構成例を示す。
【0017】
図1の車両は、車輪1a,1b,1c,1d,車輪角速度検出部2a,2b,2c,2d,ヨーレート検出部3,車輪接地荷重推定部4,制動力目標値演算部5,前後制動力補正値演算部6,前輪左右制動力補正値演算部7,後輪左右制動力補正値演算部8,制動力指令値演算部9,制動力発生部10a,10b,10c,10dで構成される。
【0018】
尚、車輪接地荷重推定部4,制動力目標値演算部5,前後制動力補正値演算部6,前輪左右制動力補正値演算部7,後輪左右制動力補正値演算部8,制動力指令値演算部9は、まとめて1つのコンピュータで構成しても良いし、複数のコンピュータで構成しても良い。
【0019】
車輪角速度検出部2a,2b,2c,2dは、車輪1a,1b,1c,1dの角速度ωa,ωb,ωc,ωdを検出するもので、これらの車輪、もしくはこれらの車輪の車軸に取り付けられた回転センサで構成する。
【0020】
ヨーレート検出部3は、車両のヨーレート(ヨー角速度)γ(上から見て反時計回りが正)を検出するもので、ジャイロセンサで構成する。
【0021】
車輪接地荷重推定部4は、車両の前後加速度Ax(加速方向が正)と、横加速度Ay(左方向が正)から、次式を用いて、車輪1a,1b,1c,1dの接地荷重Wa,Wb,Wc,Wdを計算するもので、コンピュータで構成する。ここで,Wsa,Wsb,Wsc,Wsdは静止時の車輪1a,1b,1c,1dの接地荷重,gは重力加速度,Hは車両重心高,Lはホイールベース,Dfは前軸トレッド,Drは後軸トレッドで、車種毎に予め設定しておく。
【0022】
【数3】
【0023】
【数4】
【0024】
【数5】
【0025】
【数6】
【0026】
尚、横加速度Ayは、図示しない横加速度センサで検出する。前後加速度Axは、図示しない前後加速度センサで検出しても良いし、次式のように、車輪速度の平均値を時間微分して計算しても良い。
【0027】
【数7】
【0028】
また、車輪接地荷重推定部4を用いる替わりに、車輪接地荷重検出部を用いても良い。車輪接地荷重検出部は、車輪接地荷重Wa,Wb,Wc,Wdを検出するもので、これらの車輪のホイール、もしくはこれらの車輪のサスペンションに取り付けられた変位センサ、もしくはひずみセンサで構成する。
【0029】
制動力目標値演算部5は、ブレーキペダルストローク量やマスタシリンダ圧から、総制動力目標値(ドライバが要求している総制動力)TFvを決定し、次式を用いて、前輪制動力目標値(前輪1a,1bの合計制動力の目標値)TFfと、後輪制動力目標値(後輪1c,1dの合計制動力の目標値)TFrを計算するもので、コンピュータで構成する。ここで、Wvは全車輪の総接地荷重で、Wv=Wsa+Wsb+Wsc+Wsdである。
【0030】
【数8】
【0031】
【数9】
【0032】
また、数8,数9では前後制動力比が理想制動力配分になるように目標値を決めているが、車両挙動の安定性を考慮して前輪が先にロックするように、前輪制動力目標値TFfを数8の値よりも大きく、後輪制動力目標値TFrを数9の値よりも小さくしても良い。
【0033】
前後制動力補正値演算部6は、車輪角速度ωa,ωb,ωc,ωdと、ヨーレートγと、車輪荷重Wa,Wb,Wc,Wdと、前輪制動力目標値TFfと、後輪制動力目標値TFrから、前輪制動力補正値CFfと、後輪制動力補正値CFrを計算するもので、コンピュータで構成する。前後制動力補正値演算部6の詳細については、後述する。
【0034】
前輪左右制動力補正値演算部7は、前輪角速度ωa,ωbから、前輪制動力の左右差を小さくするための前輪左右制動力補正値CFflrを計算するもので、コンピュータで構成する。この計算は、予め設定した直進制動の条件を満たしている間と、条件を満たさなくなった後でドライバがブレーキを止めた時に行う。直進制動の条件は、例えば、減速度が1m/s2以上で、かつ、横加速度の絶対値が0.2m/s2以下で、かつ、左右制動力配分制御やヨーモーメント制御を行っていない時、とする。まず、直進制動の条件を満たしている間、次式を用いて、前輪左右制動力補正値の更新値ΔCFflrを計算する。尚、kflrは前輪左右制動力補正値更新係数で、前輪制動力の左右差が十分に小さくなるように、予め設定しておく。ここで、tは時間を表しており、直進制動の条件を満たした時刻を0とする。
【0035】
【数10】
【0036】
そして、直進制動の条件を満たさなくなり、その後、ドライバがブレーキを止めてから、次式のように、前輪左右制動力補正値CFflrを更新する。更新した補正値は、次の制動時に用いる。
【0037】
【数11】
【0038】
後輪左右制動力補正値演算部8は、後輪角速度ωc,ωdから、後輪制動力の左右差を小さくするための後輪左右制動力補正値CFrlrを計算するもので、コンピュータで構成する。この計算は、前輪と同様に、まず、直進制動の条件を満たしている間、次式を用いて、後輪左右制動力補正値の更新値ΔCFrlrを計算する。尚、krlrは後輪左右制動力補正値更新係数で、後輪制動力の左右差が十分に小さくなるように、予め設定しておく。
【0039】
【数12】
【0040】
そして、直進制動の条件を満たさなくなり、その後、ドライバがブレーキを止めてから、次式のように、後輪左右制動力補正値CFrlrを更新する。更新した補正値は、次の制動時に用いる。
【0041】
【数13】
【0042】
制動力指令値演算部9は、前輪制動力目標値TFfと、後輪制動力目標値TFrと、前輪制動力補正値CFfと、後輪制動力補正値CFrと、前輪左右制動力補正値CFflrと、後輪左右制動力補正値CFrlrから、次式を用いて、車輪1a,1b,1c,1dの制動力指令値TFa,TFb,TFc,TFdを計算するもので、コンピュータで構成する。
【0043】
【数14】
【0044】
【数15】
【0045】
【数16】
【0046】
【数17】
【0047】
制動力発生部10a,10b,10c,10dは、制動力指令値TFa,TFb,TFc,TFdに基づいて、車輪1a,1b,1c,1dに制動力を発生するもので、例えば、油圧装置とブレーキキャリパとブレーキロータで構成する。また、制動力発生部10a,10b,10c,10dは、電動モータで構成しても良い。
【0048】
図2に、前後制動力補正値演算部6が行う演算のフローチャートの一例を示す。
【0049】
ステップ101では、前後制動力補正値の計算を行うか否かの判定を行う。この判定条件は、旋回制動を行っており、前後制動力補正値を精度良く計算できるように、予め設定しておく。例えば、減速度が1m/s2以上で、かつ、横加速度の絶対値が1m/s2以上で、かつ、左右制動力配分制御やヨーモーメント制御を行っていない時、とする。判定条件を満たしていれば、ステップ102に進み、満たしていなければ、前後制動力補正値の計算は行わない。
【0050】
尚、車速が低い時は車輪角速度の検出精度が低いことを考慮して、ステップ101の判定条件には、車速が閾値以上(例えば20km/h以上)という条件を追加しても良い。また、制動力の左右差が大きい時は、後述する数30,数31が成り立たなくなることを考慮して、ステップ101の判定条件には、前輪左右制動力補正値の更新値ΔCFflrや後輪左右制動力補正値の更新値ΔCFrlrの絶対値が閾値以下(例えば20N以下)の条件を追加しても良い。
【0051】
ステップ102では、前輪制動力積分値SFfと、後輪制動力積分値SFrと、前輪制動力目標値の積分値STFfと、後輪制動力目標値の積分値STFrをリセット(0を代入)する。
【0052】
ステップ103では、次式を用いて、車両進行速度Vvを計算する。
【0053】
【数18】
【0054】
尚、数18は、次のように求めたものである。
【0055】
車輪1a,1b,1c,1dの制動力Fa,Fb,Fc,Fdは、接地荷重Wa,Wb,Wc,Wdと、スリップ比Sa,Sb,Sc,Sdを用いて、次式で表される。
【0056】
【数19】
【0057】
【数20】
【0058】
【数21】
【0059】
【数22】
【0060】
スリップ比Sa,Sb,Sc,Sdは、車輪1a,1b,1c,1dの進行速度Va,Vb,Vc,Vdと、角速度ωa,ωb,ωc,ωdによって決まり、次式で表される。
【0061】
【数23】
【0062】
【数24】
【0063】
【数25】
【0064】
【数26】
【0065】
車輪進行速度Va,Vb,Vc,Vdは、次式で表される。
【0066】
【数27】
【0067】
【数28】
【0068】
【数29】
【0069】
【数30】
【0070】
左右制動力配分制御を行っていなければ、前輪制動力のFaとFbがほぼ等しく、後輪制動力のFcとFdがほぼ等しいため、数19〜数22より、次式が成り立つ。
【0071】
【数31】
【0072】
【数32】
【0073】
数31に、数23,数24を代入すると、次式になる。
【0074】
【数33】
【0075】
数33の分母のVaとVbを、Va≒Vbと近似すると、次式になる。
【0076】
【数34】
【0077】
数34に、数27,数28を代入すると、次式になる。
【0078】
【数35】
【0079】
前輪と同様の計算を、後輪に関しても行うと、次式を得られる。
【0080】
【数36】
【0081】
これまでの計算には近似が多く含まれていたため、数35で計算した車両進行速度Vvと、数36で計算した車両進行速度Vvは、通常、完全には一致しない。そこで、ステップ103では、数35と数36の平均値を車両進行速度Vvと見なすこととし、数18を用いて計算する。
【0082】
ステップ104では、数23〜数26を用いて、スリップ比Sa,Sb,Sc,Sdを計算する。
【0083】
ステップ105では、次式を用いて、前後制動力比(Ff/Fr)を計算する。
【0084】
【数37】
【0085】
ステップ106では、次式を用いて、総制動力Fvを計算する。ここで、Mは車両重量で、車種毎に予め設定しておく。
【0086】
【数38】
【0087】
ステップ107では、次式を用いて、前輪制動力Ffと、後輪制動力Frを計算する。
【0088】
【数39】
【0089】
【数40】
【0090】
ステップ108では、次式のように、前輪制動力Ff,後輪制動力Fr,前輪制動力目標値TFf,後輪制動力目標値TFrを積分し、前輪制動力積分値SFf,後輪制動力積分値SFr,前輪制動力目標値の積分値STFf,後輪制動力目標値の積分値STFrを計算する。ここで、Δtは、前後制動力補正値演算部6の演算周期である。
【0091】
【数41】
【0092】
【数42】
【0093】
【数43】
【0094】
【数44】
【0095】
ステップ109では、ステップ101と同じ判定条件で判定を行う。判定条件を満たしていれば、ステップ103に戻り、満たしていなければ、ステップ110に進む。
【0096】
ステップ110では、次式のように、前輪制動力積分値SFf,後輪制動力積分値SFr,前輪制動力目標値の積分値STFf,後輪制動力目標値の積分値STFrの値を、ステップ103〜108の演算を行っていた時間tで割り、前輪制動力の時間平均値MFf,後輪制動力の時間平均値MFr,前輪制動力目標値の時間平均値MTFf,後輪制動力目標値の時間平均値MTFrを計算する。
【0097】
【数45】
【0098】
【数46】
【0099】
【数47】
【0100】
【数48】
【0101】
ステップ111では、次式を用いて、前輪制動力補正値の更新値ΔCFfと、後輪制動力補正値の更新値ΔCFrを計算する。尚、kfは前輪制動力補正値更新係数、krは後輪制動力補正値更新係数で、どちらも、0より大きく1以下の数値を、予め設定しておく。
【0102】
【数49】
【0103】
【数50】
【0104】
ステップ112では、ドライバがブレーキを止めたか否かの判定を行う。この判定は、ブレーキペダルストローク量が0か否か、もしくは、マスタシリンダ圧が0か否かで判定する。ドライバがブレーキを止めたら、ステップ113に進み、そうでなければ、ドライバがブレーキを止めるまでステップ112を繰り返す。
【0105】
ステップ113では、次式のように、前輪制動力補正値CFfと、後輪制動力補正値CFrを更新し、前後制動力補正値演算部6から出力する。更新した補正値は、次の制動時に用いる。
【0106】
【数51】
【0107】
【数52】
【0108】
図3〜図10を用いて、前後制動力補正値演算部6の動作の一例を説明する。
【0109】
図3は、ブレーキを踏んでいる途中でハンドルを切り始めた時の、車速,前後加速度Ax,横加速度Ay,ヨーレートγである。
【0110】
図4は、その時の車輪角速度ωa,ωb,ωc,ωdを、各車輪の角速度の差を分かりやすくするために、平均車輪角速度(=(ωa+ωb+ωc+ωd)/4)で割った値である。
【0111】
図5は、車輪接地荷重推定部4が計算した、その時の車輪接地荷重Wa,Wb,Wc,Wdである。
【0112】
前後制動力補正値演算部6は、予め設定した旋回制動の条件を満たしている間、車両進行速度Vv,スリップ比Sa,Sb,Sc,Sd,前後制動力比(Ff/Fr),総制動力Fv,前輪制動力Ff,後輪制動力Frなどを計算する。本例では、旋回制動の条件は、横加速度の絶対値が1m/s2以上、とした。図3を見ると、条件を満たしている期間は、0.6秒から2.3秒までで、この期間で上記の計算を行う。
【0113】
図6に、計算した車両進行速度Vvを、図4と比較しやすくするために、平均車輪速度(=R・(ωa+ωb+ωc+ωd)/4)で割った値を示す。
【0114】
図7に、計算したスリップ比Sa,Sb,Sc,Sdを示す。
【0115】
図8に、計算した前後制動力比(Ff/Fr)を示す。
【0116】
図9に、計算した総制動力Fvを示す。
【0117】
図10に、計算した前輪制動力Ffと、後輪制動力Frを示す。
【0118】
そして、直進制動の条件を満たさなくなったら、前輪制動力の時間平均値MFf,後輪制動力の時間平均値MFr,前輪制動力目標値の時間平均値MTFf,後輪制動力目標値の時間平均値MTFr,前輪制動力補正値の更新値ΔCFf,後輪制動力補正値の更新値ΔCFrを計算する。
【0119】
計算した結果、前輪制動力の時間平均値MFf、後輪制動力の時間平均値MFrは、MFf=1228N,MFr=445Nとなった。この期間に実際に発生していた前輪制動力の時間平均値は1236N,後輪制動力の時間平均値は438Nであったので、ほぼ正確に推定できていることが分かる。
【0120】
また、前輪制動力目標値の時間平均値MTFf,後輪制動力目標値の時間平均値MTFrは、MTFf=1200N,MTFr=400Nであった。
【0121】
また、本例では、前輪制動力補正値更新係数kf,後輪制動力補正値更新係数krは、kf=kr=0.5としており、前輪制動力補正値の更新値ΔCFf,後輪制動力補正値の更新値ΔCFrは、ΔCFf=0.5×(1200N−1228N)=−14N,ΔCFr=0.5×(400N−445N)=−22.5Nとなった。
【0122】
その後、ドライバがブレーキを止めてから、計算したΔCFf,ΔCFrを、これまでの前輪制動力補正値CFf,後輪制動力補正値CFrに加算し、前後制動力補正値演算部6から出力する。
【0123】
以上のように、本実施例によれば、実際に発生している前輪制動力と後輪制動力の比率を任意の比率にすることができる。それにより、例えば、車両挙動を安定化するための制動力配分制御やヨーモーメント制御などを精度良く行うことができる。
【符号の説明】
【0124】
1a,1b,1c,1d 車輪
2a,2b,2c,2d 車輪角速度検出部
3 ヨーレート検出部
4 車輪接地荷重推定部
5 制動力目標値演算部
6 前後制動力補正値演算部
7 前輪左右制動力補正値演算部
8 後輪左右制動力補正値演算部
9 制動力指令値演算部
10a,10b,10c,10d 制動力発生部
【特許請求の範囲】
【請求項1】
車輪の角速度を検出する車輪角速度検出部と、
車輪の接地荷重を推定する接地荷重推定部と、
前輪と後輪の少なくとも一方の制動力の目標値を演算する目標値演算部と、
制動時の前記角速度と前記接地荷重から前輪制動力と後輪制動力の比率である前後制動力比を推定し、当該前後制動力比に基づいて前輪と後輪の少なくとも一方の制動力を制御するための前後制動力補正値を演算する前後制動力補正値演算部と、
前記制動力目標値と前記前後制動力補正値に基づいて制動力指令値を演算する指令値演算部と、
前記制動力指令値に基づいて車輪に制動力を発生する制動力発生部を備える、ブレーキ装置。
【請求項2】
車両のヨーレートを検出するヨーレート検出部を更に備え、
前記補正値演算部は、旋回制動時の前記角速度と前記接地荷重と前記ヨーレートから前記前後制動力比を推定し、当該前後制動力比に基づいて前記前後制動力補正値を演算する、請求項1記載のブレーキ装置。
【請求項3】
前記補正値演算部は、前記前後制動力比及び車両の減速度から全車輪の総制動力を推定し、前記前後制動力比と前記総制動力に基づいて前記前後制動力補正値を演算する、請求項1記載のブレーキ装置。
【請求項4】
制動時の前記角速度から前輪と後輪の少なくとも一方の制動力の左右差を小さくするための左右制動力補正値を演算する左右制動力補正値演算部を更に備え、
前記指令値演算部は、前記制動力目標値と前記前後制動力補正値と前記左右制動力補正値に基づいて前記制動力指令値を演算する、請求項1記載のブレーキ装置。
【請求項5】
前記接地荷重推定部に替えて、前記接地荷重を検出する接地荷重検出部を備える、請求項1記載のブレーキ装置。
【請求項6】
前記目標値演算部は、ブレーキペダルの作動に応じて前記制動力目標値を演算する、請求項1記載のブレーキ装置。
【請求項7】
前記目標値演算部は、車両挙動を安定化するための各輪の前記制動力目標値を演算する、請求項1記載のブレーキ装置。
【請求項8】
前記接地荷重推定部は、静止時車輪接地荷重と前後加速度センサ値と横加速度センサ値から、前記接地荷重を演算する、請求項1記載のブレーキ装置。
【請求項9】
前記接地荷重推定部は、前記接地荷重を検出する接地荷重検出部を備える、請求項1記載のブレーキ装置。
【請求項10】
前記接地荷重推定部は、前記接地荷重を予め設定しておく、請求項1記載のブレーキ装置。
【請求項11】
前記接地荷重推定部は、前記静止時車輪接地荷重を予め設定しておく、請求項8記載のブレーキ装置。
【請求項12】
前記接地荷重推定部は、エンジンやモータによって発生した総駆動力と、前後加速度センサ値から、前記静止時車輪接地荷重を演算する、請求項8記載のブレーキ装置。
【請求項13】
前記接地荷重推定部は、前記前後加速度センサ値を検出する前後加速度センサ値検出部を備える、請求項8記載のブレーキ装置。
【請求項14】
前記接地荷重推定部は、前記角速度と、路面傾斜角から、前記前後加速度センサ値を演算する、請求項8記載のブレーキ装置。
【請求項1】
車輪の角速度を検出する車輪角速度検出部と、
車輪の接地荷重を推定する接地荷重推定部と、
前輪と後輪の少なくとも一方の制動力の目標値を演算する目標値演算部と、
制動時の前記角速度と前記接地荷重から前輪制動力と後輪制動力の比率である前後制動力比を推定し、当該前後制動力比に基づいて前輪と後輪の少なくとも一方の制動力を制御するための前後制動力補正値を演算する前後制動力補正値演算部と、
前記制動力目標値と前記前後制動力補正値に基づいて制動力指令値を演算する指令値演算部と、
前記制動力指令値に基づいて車輪に制動力を発生する制動力発生部を備える、ブレーキ装置。
【請求項2】
車両のヨーレートを検出するヨーレート検出部を更に備え、
前記補正値演算部は、旋回制動時の前記角速度と前記接地荷重と前記ヨーレートから前記前後制動力比を推定し、当該前後制動力比に基づいて前記前後制動力補正値を演算する、請求項1記載のブレーキ装置。
【請求項3】
前記補正値演算部は、前記前後制動力比及び車両の減速度から全車輪の総制動力を推定し、前記前後制動力比と前記総制動力に基づいて前記前後制動力補正値を演算する、請求項1記載のブレーキ装置。
【請求項4】
制動時の前記角速度から前輪と後輪の少なくとも一方の制動力の左右差を小さくするための左右制動力補正値を演算する左右制動力補正値演算部を更に備え、
前記指令値演算部は、前記制動力目標値と前記前後制動力補正値と前記左右制動力補正値に基づいて前記制動力指令値を演算する、請求項1記載のブレーキ装置。
【請求項5】
前記接地荷重推定部に替えて、前記接地荷重を検出する接地荷重検出部を備える、請求項1記載のブレーキ装置。
【請求項6】
前記目標値演算部は、ブレーキペダルの作動に応じて前記制動力目標値を演算する、請求項1記載のブレーキ装置。
【請求項7】
前記目標値演算部は、車両挙動を安定化するための各輪の前記制動力目標値を演算する、請求項1記載のブレーキ装置。
【請求項8】
前記接地荷重推定部は、静止時車輪接地荷重と前後加速度センサ値と横加速度センサ値から、前記接地荷重を演算する、請求項1記載のブレーキ装置。
【請求項9】
前記接地荷重推定部は、前記接地荷重を検出する接地荷重検出部を備える、請求項1記載のブレーキ装置。
【請求項10】
前記接地荷重推定部は、前記接地荷重を予め設定しておく、請求項1記載のブレーキ装置。
【請求項11】
前記接地荷重推定部は、前記静止時車輪接地荷重を予め設定しておく、請求項8記載のブレーキ装置。
【請求項12】
前記接地荷重推定部は、エンジンやモータによって発生した総駆動力と、前後加速度センサ値から、前記静止時車輪接地荷重を演算する、請求項8記載のブレーキ装置。
【請求項13】
前記接地荷重推定部は、前記前後加速度センサ値を検出する前後加速度センサ値検出部を備える、請求項8記載のブレーキ装置。
【請求項14】
前記接地荷重推定部は、前記角速度と、路面傾斜角から、前記前後加速度センサ値を演算する、請求項8記載のブレーキ装置。
【図1】

【図2】
【図3】
【図4】
【図5】
【図6】
【図7】
【図8】
【図9】
【図10】
【図2】
【図3】
【図4】
【図5】
【図6】
【図7】
【図8】
【図9】
【図10】
【公開番号】特開2011−20674(P2011−20674A)
【公開日】平成23年2月3日(2011.2.3)
【国際特許分類】
【出願番号】特願2010−208725(P2010−208725)
【出願日】平成22年9月17日(2010.9.17)
【分割の表示】特願2008−238801(P2008−238801)の分割
【原出願日】平成20年9月18日(2008.9.18)
【出願人】(509186579)日立オートモティブシステムズ株式会社 (2,205)
【Fターム(参考)】
【公開日】平成23年2月3日(2011.2.3)
【国際特許分類】
【出願日】平成22年9月17日(2010.9.17)
【分割の表示】特願2008−238801(P2008−238801)の分割
【原出願日】平成20年9月18日(2008.9.18)
【出願人】(509186579)日立オートモティブシステムズ株式会社 (2,205)
【Fターム(参考)】
[ Back to top ]