
プラズマ洗浄装置
【課題】装置価格の上昇を抑えつつ処理時間を短縮することのできるプラズマ洗浄装置を提供することを目的とする。
【解決手段】プラズマ洗浄装置1は、基板50を搬送する搬送機構15を備えた前チャンバ2と、主チャンバ入口14に繋がっており、基板50をプラズマ洗浄する高周波電極25等を備えると共に、搬送機構18を備えた主チャンバ3と、主チャンバ出口17に繋がって、搬送機構21を備えた後チャンバ4と、主チャンバ3に接続される主真空ポンプ7と、前チャンバ2および後チャンバ4に共通して接続される副真空ポンプ6とを備え、主真空ポンプ7によって真空引きされた主チャンバ3に前チャンバ2から基板50を搬送するとき、および主チャンバ3から後チャンバ4に基板50を搬送するときには、前チャンバ2、後チャンバ4を副真空ポンプ6で予め真空引きしておくものである。
【解決手段】プラズマ洗浄装置1は、基板50を搬送する搬送機構15を備えた前チャンバ2と、主チャンバ入口14に繋がっており、基板50をプラズマ洗浄する高周波電極25等を備えると共に、搬送機構18を備えた主チャンバ3と、主チャンバ出口17に繋がって、搬送機構21を備えた後チャンバ4と、主チャンバ3に接続される主真空ポンプ7と、前チャンバ2および後チャンバ4に共通して接続される副真空ポンプ6とを備え、主真空ポンプ7によって真空引きされた主チャンバ3に前チャンバ2から基板50を搬送するとき、および主チャンバ3から後チャンバ4に基板50を搬送するときには、前チャンバ2、後チャンバ4を副真空ポンプ6で予め真空引きしておくものである。
【発明の詳細な説明】
【技術分野】
【0001】
本発明は、被処理物をプラズマ真空洗浄するインライン型のプラズマ洗浄装置に関するものである。
【背景技術】
【0002】
被処理物をプラズマ洗浄するためには、プラズマ洗浄チャンバ内に被処理物を搬入した後、大気圧から真空引きする必要がある。しかし、この真空引きには時間が掛り、処理時間短縮のボトルネックとなっている。
【0003】
例えば、処理時間短縮を目的とする装置として、特許文献1に、2つのチャンバを備え、その各々に真空ポンプを配して並列処理するプラズマ洗浄装置が記載されている。特許文献1には、高周波電源は共通化して用いることも記載されている。
【0004】
確かにチャンバや真空ポンプを複数並列に備えることによって、全体的な処理時間を短縮することができるが、高周波電源を共通化したとしても、高価で複雑な装置となってしまう。
【0005】
【特許文献1】特開2001−237213号公報
【発明の開示】
【発明が解決しようとする課題】
【0006】
本発明は前記の課題を解決するためになされたもので、装置価格の上昇を抑えつつ処理時間を短縮することのできるプラズマ洗浄装置を提供することを目的とする。
【課題を解決するための手段】
【0007】
前記の目的を達成するためになされた特許請求の範囲の請求項1に記載のプラズマ洗浄装置は、被処理物をプラズマ真空洗浄するインライン型のプラズマ洗浄装置であって、側面に形成された開閉可能な搬入口から、該搬入口に対向する側面に形成された開閉可能な主チャンバ入口まで該被処理物を搬送する前チャンバ用の搬送機構を内部に備えた真空容器である前チャンバと、該主チャンバ入口に繋がっており、該主チャンバ入口から搬送される該被処理物をプラズマ洗浄するプラズマ洗浄手段を備えると共に、該主チャンバ入口からこれに対向する側面に形成された開閉可能な主チャンバ出口まで該被処理物を搬送する主チャンバ用の搬送機構を内部に備えた真空容器である主チャンバと、該主チャンバ出口に繋がって、該主チャンバ出口から搬送される該被処理物を、該主チャンバ出口に対向する側面に形成された開閉可能な搬出口まで搬送する後チャンバ用の搬送機構を内部に備えた真空容器である後チャンバと、該主チャンバに接続される主真空ポンプと、該前チャンバおよび該後チャンバに共通して接続される副真空ポンプと、を備え、該主真空ポンプによって真空引きされた該主チャンバに該前チャンバから該被処理物を搬送するときに該前チャンバを該副真空ポンプによって予め真空引きしておき、該真空引きされた該主チャンバから該後チャンバに該被処理物を搬送するときに該後チャンバを該副真空ポンプによって予め真空引きしておくことを特徴とする。
【0008】
なお、真空度とは、真空の度合いを表し、真空度の高いほうが圧力が低圧で、真空度の低いほうが圧力が高圧であることを示す。
【0009】
同じく請求項2に記載のプラズマ洗浄装置は、請求項1に記載されたもので、前記副真空ポンプは、前記前チャンバおよび前記後チャンバを、前記主チャンバの真空度よりも低い所定の真空度に真空引きすることを特徴とする。
【0010】
同じく請求項3に記載のプラズマ洗浄装置は、請求項1に記載されたもので、前記前チャンバおよび前記後チャンバは交代して前記副真空ポンプで真空引きされることを特徴とする。
【0011】
請求項4に記載のプラズマ洗浄装置は、請求項1に記載されたもので、前記前チャンバおよび前記後チャンバは少なくとも一部の期間を重複させて前記副真空ポンプで真空引きされることを特徴とする。
【発明の効果】
【0012】
本発明のプラズマ洗浄装置では、各々真空容器である前チャンバと、主チャンバと、後チャンバとをこの順で密着して直列配置して、プラズマ真空洗浄を行う主チャンバには、主真空ポンプを接続し、前チャンバおよび後チャンバには、共通の副真空ポンプを接続する。前チャンバから主チャンバに被処理物を搬送するときに予め前チャンバを真空引きしておき、主チャンバから後チャンバに被処理物を搬送するときに予め後チャンバを真空引きしておくことで、主チャンバの真空度を大気圧まで低下させることなく被処理物を受け渡すことができる。したがって、全体的な処理時間を短縮することができる。また、前チャンバと後チャンバとは1つの共通する真空ポンプで真空引きされるので、各々に真空ポンプを備える構成よりも装置価格の上昇を小さく抑えることができる。
【0013】
また、本発明のプラズマ洗浄装置によれば、副真空ポンプは、前チャンバおよび後チャンバを、主チャンバの真空度よりも低い所定の真空度に真空引きする。この場合、被処理物を前チャンバから主チャンバに受け渡すとき、および、主チャンバから後チャンバに受け渡すときには、主チャンバの真空度は、前チャンバや後チャンバの真空度まで低下するが、その低下する真空度の差は、大気圧との差に比べたらはるかに小さい。そのため、低下した主チャンバの真空度を、僅かな時間真空引きするだけで、再び高めることができる。このように、前チャンバおよび後チャンバの真空度を、主チャンバの真空度よりも低いものとすることで、副真空ポンプを主真空ポンプよりも安価なものを用いることができ、装置価格の上昇を一層小さく抑えることができる。
【0014】
また、本発明のプラズマ洗浄装置によれば、前チャンバおよび後チャンバを交代して副真空ポンプで真空引きすることにより、1つの真空ポンプでも前チャンバおよび後チャンバを真空引きすることができる。
【0015】
前チャンバおよび後チャンバを少なくとも一部の期間を重複させて副真空ポンプで真空引きすることにより、真空引き可能な時間が短くても所定の真空度まで確実に真空引きすることができる。
【発明を実施するための好ましい形態】
【0016】
以下、本発明の実施の好ましい形態を詳細に説明するが、本発明の範囲はこれらの実施の形態に限定されるものではない。
【0017】
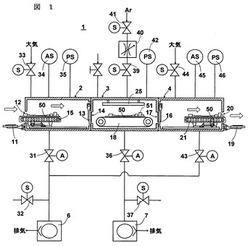
図1には本発明の一実施形態であるプラズマ洗浄装置の正面図が図示されている。
【0018】
プラズマ洗浄装置1は、被処理物の一例である基板50をプラズマ真空洗浄するインライン型の装置である。なお、同図には、部品51の実装された基板50が図示されているが、部品実装されていない基板を洗浄してもよいし、基板以外の例えばガラス部材を洗浄してもよく、特に限定されていない。
【0019】
このプラズマ洗浄装置1は、同図に正面断面が示されるように、前チャンバ2、主チャンバ3、および後チャンバ4がこの順で密着して直列配置されている。
【0020】
前チャンバ2は、非図示の搬送ラインから搬入される基板50を、主チャンバ3の真空度を可及的低下させずに受け渡しするためのものである。この前チャンバ2は、真空容器であって、その一側面には、開閉可能なゲート扉11の付された搬入口12が形成されている。また、搬入口12に対面する側面には、主チャンバ3に繋がる、開閉可能なゲート扉13の付された主チャンバ入口14が形成されている。ゲート扉13は、前チャンバ2の内側に向かって開閉可能に取り付けられている。
【0021】
また、前チャンバ2には、搬入口12で基板50を受け取って、入口14まで基板50を搬送可能な前チャンバ用の搬送機構15を内部に備えている。この搬送機構15は、それ自体が搬入口12から入口14までの間を水平移動可能であると共に、それ自体にコンベアベルトを有している。
【0022】
主チャンバ3は、真空容器であり、プラズマ発生させる高周波電極25等が備えられていて、基板50をプラズマ洗浄するものである。この主チャンバ3の入口14に対面する側面には、後チャンバ4に繋がる、ゲート扉16の付された主チャンバ出口17が形成されている。ゲート扉16は、後チャンバ4の内側に向かって開閉可能に取り付けられている。
【0023】
また、主チャンバ3には、入口14から出口17まで基板50を搬送可能な主チャンバ用の搬送機構18を内部に備えている。搬送機構18は、コンベアベルトを有している。
【0024】
後チャンバ4は、洗浄済みの基板50を、主チャンバ3の真空度を可及的低下させずに受け渡しされて、装置外部に搬出するためのものである。この後チャンバ4は、真空容器であって、出口17に対面する側面には、開閉可能なゲート扉19の付された搬出口20が形成されている。また、後チャンバ4には、出口17から搬出口20まで基板50を搬送可能な後チャンバ用の搬出機構21を内部に備えている。この搬出機構21は、それ自体が出口17から搬出口20まで移動すると共に、それ自体がコンベアベルトを有している。
【0025】
また、同図に示されるように、主チャンバ3には、プラズマ発生させるための反応ガス(一例としてアルゴンガス)を所定量だけ供給する定量弁40や、定量弁40から反応ガスの供給を開始・停止させる制御弁39,41が付されている。これらや高周波電極25が本発明におけるプラズマ洗浄手段に相当する。
【0026】
この主チャンバ3には、主真空ポンプ7が、開閉制御可能な真空弁36を介して配管接続されている。真空弁36と主真空ポンプ7との間には、解放弁37が付されている。主真空ポンプ7は、一例として、ロータリーポンプであって、主チャンバ3内の圧力を5〜10Pa程度の高い真空度まで真空引き可能なものである。
【0027】
また、主チャンバ3には、真空度確認用のピラニ式の真空センサ42が付されて圧力を検出可能になっている。
【0028】
前チャンバ2および後チャンバ4には、共通の副真空ポンプ6が繋がっている。この場合、副真空ポンプ6に繋がる配管が2分岐して前チャンバ2および後チャンバ4に配管接続されている。分岐後の前チャンバ2に繋がる配管には、真空弁31が付されており、後チャンバ4に繋がる配管には、真空弁43が付されている。分岐前の配管には解放弁32が付されている。真空弁31,43は開閉制御可能な制御弁である。解放弁32は、副真空ポンプ6の停止時に開いてポンプ内を大気解放するものである。
【0029】
副真空ポンプ6は、前チャンバ2および後チャンバ4の真空度を主チャンバ3の真空度に可及的近づけるためのものである。この場合、副真空ポンプ6は、後述する動作タイミングで十分に真空引きできるだけの排気速度(時間当たりの吐出空気量)を有したものである。前チャンバ2および後チャンバ4の真空度を主チャンバ3の真空度よりも低い所定の真空度とすることで、副真空ポンプ6を主真空ポンプ7よりも排気速度の遅い安価なものを用いることができるようになる。
【0030】
本実施例では、副真空ポンプ6は、一例として、主真空ポンプ7よりも小さなロータリーポンプであって、前チャンバ2および後チャンバ4を、大気圧から10〜15秒程度の真空引きで20Pa程度の真空度まで真空引きするものである。なお、価格は上昇するが主真空ポンプ7と同様のものを用いてもよい。
【0031】
前チャンバ2には、開閉制御可能な真空破壊弁33、大気圧確認用の圧力センサ34、および真空度確認用の真空センサ35が付されている。後チャンバ4にも、同様に、真空破壊弁44、大気圧確認用の圧力センサ45、および真空度確認用の真空センサ46が付されている。
【0032】
次に、プラズマ洗浄装置1の動作について説明する。
【0033】
主チャンバ3は、主真空ポンプ7によって真空引きされ、所定の高い真空度に維持されている。この真空下でプラズマ化したガスによって、一例として、30秒間、基板50がプラズマ洗浄される。通常、真空弁36は開かれ、解放弁37は閉じられている。
【0034】
この主チャンバ3でプラズマ洗浄を行っている間に、前チャンバ2に未洗浄の基板50を搬入して、副真空ポンプ6によって、主チャンバ3の真空度よりも低い所定の真空度まで真空引きしておく。また、主チャンバ3で洗浄等を行っている間に、洗浄済みの基板50を後チャンバ4から装置外部に搬出してから、後チャンバ4を前チャンバ2と同様の所定の真空度まで副真空ポンプ6によって真空引きしておく。
【0035】
具体的には、前チャンバ2に基板50を搬入するときには、プラズマ洗浄装置1は、閉じられている真空破壊弁33を開き、圧力センサ34の検出により大気圧になったことを確認後、ゲート扉11を開く。続いて、搬送機構15を搬入口12まで移動する。搬送機構15は、コンベアベルトを駆動して、基板50が搬送機構15の上部所定位置まで移動したときにコンベアベルトを停止する。次に、搬送機構15自体が前チャンバ2内に移動して、ゲート扉11を閉じる。
【0036】
ゲート扉11を閉じた後に、真空破壊弁33を閉じて真空弁31を開き、前チャンバ2を副真空ポンプ6で真空引きする。真空引きしているときには、解放弁32は閉じられている。真空センサ35の検出によって、所定の真空度に達したことを確認したときに真空弁31を閉じてこの真空度を維持する。なお、維持させている間に真空度が低下したことを真空センサ35によって検出したときには、真空弁31を開閉させて所定の真空度を維持する。
【0037】
また、洗浄済み基板50を後チャンバ4から装置外部に搬出するときには、プラズマ洗浄装置1は、閉じられている真空破壊弁44を開き、圧力センサ45の検出により後チャンバ4が大気圧になったことを確認後、ゲート扉19を開く。続いて、搬送機構21を搬出口20まで移動し、搬送機構21のコンベアベルトを駆動して、基板50を装置から非図示の搬送ラインに搬出する。
【0038】
ゲート扉19を閉じた後に、真空破壊弁44を閉じて真空弁43を開き、後チャンバ4を副真空ポンプ6で真空引きする。真空センサ46の検出によって、所定の真空度に達したことを確認したときに真空弁43を閉じてこの真空度を維持する。なお、維持させている間に真空度が低下したことを真空センサ46によって検出したときには、真空弁43を開閉させて所定の真空度を維持する。
【0039】
主チャンバ3でプラズマ洗浄が終了すると、プラズマ洗浄装置1は、直ちに出口17のゲート扉16を開き、主チャンバ3の搬送機構18と後チャンバ4の搬送機構21とを協働させて主チャンバ3から後チャンバ4に洗浄済み基板50を搬送する。
【0040】
主チャンバ3から洗浄済み基板50を搬送後、または、搬送作業と共に、入口14のゲート扉13を開き、前チャンバ2の搬送機構15と主チャンバ3の搬送機構18とを協働させて前チャンバ2から主チャンバ3に未洗浄基板50を搬送する。
【0041】
この基板50の搬入出時に、主チャンバ3の真空度は、前チャンバ2および後チャンバ4の真空度までしか低下しない。そのため、主チャンバ3を再度所定の真空度まで真空引きする時間は、大気圧から真空引きする時間と比べて、僅かな時間となる。一例として、主チャンバ3を大気圧から真空引きするのに約30秒必要であるのに対して、2〜3秒程度となる。
【0042】
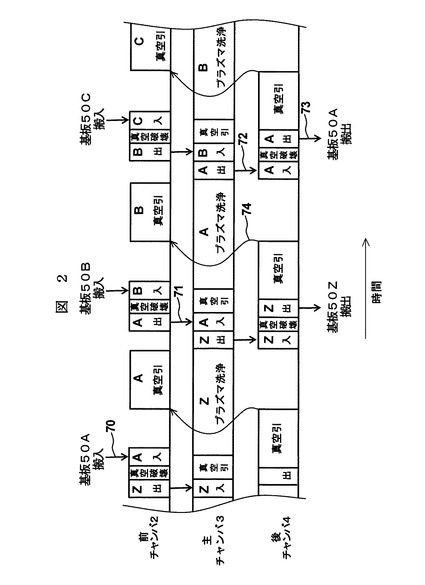
このプラズマ洗浄装置1の動作をさらに、図2に示される各チャンバの動作を示すタイムチャートを用いて説明する。なお、同図のタイムチャートは、連続的に繰り返し動作している各チャンバの様子を、ある時間分だけ抜き出して図示されている。
【0043】
図2に示される基板50A(図ではAとも表示)の流れについてみると、基板50Aは、矢印70で示されるように、先ず前チャンバ2に搬入される。搬入された後、前チャンバ2は、真空引きされる。主チャンバ3内の基板50Z(図ではZとも表示)の洗浄が終了して後チャンバ4に搬送されると、基板50は、矢印71で示されるように、主チャンバ3に搬送される。主チャンバ3では圧力低下分だけ真空引き後、基板50Aがプラズマ洗浄される。洗浄終了後、矢印72で示されるように、基板50Aは後チャンバ4に搬送される。後チャンバ4が真空破壊後、基板50Aは、矢印73で示されるように、装置外に搬出される。
【0044】
前チャンバ2から基板50Aを搬送後、前チャンバ2は、真空破壊して基板50B(図ではBとも表示)が搬入される。
【0045】
前チャンバ2と後チャンバ4とは、共通する副真空ポンプ6によって真空引きされるが、この真空引きのタイミングについてみると、後チャンバ4から基板50Aが搬出後、後チャンバ4は、直ちに真空引きされる。この後チャンバ4の真空引き完了後、矢印74で示されるように、直ちに前チャンバ2が真空引きされる。この順番は、同図からわかるように、後チャンバ4のほうが先に真空引き可能となることによる。このように後チャンバ4から先に真空引きすることで、真空引き可能な時間を長くすることができる。
【0046】
前チャンバ2および後チャンバ4の各々の真空引きの時間は、プラズマ洗浄時間の概ね二分の一程度まで許容できる。この時間は、主チャンバ3の真空引きの時間や各チャンバ2〜4の基板50の入出に必要な時間によって多少変わる。後チャンバ4から前チャンバ2への真空引きの切り替えは、前述したように後チャンバ4が所定の真空度に達したことによって切り替えてもよいが、許容可能な真空引きできる時間だけ経過したときに切り替えてもよい。また、多少真空引きできる時間は短くなるが、先に前チャンバ2を真空引きして、真空引き完了後、後チャンバ4を真空引きすることもできる。
【0047】
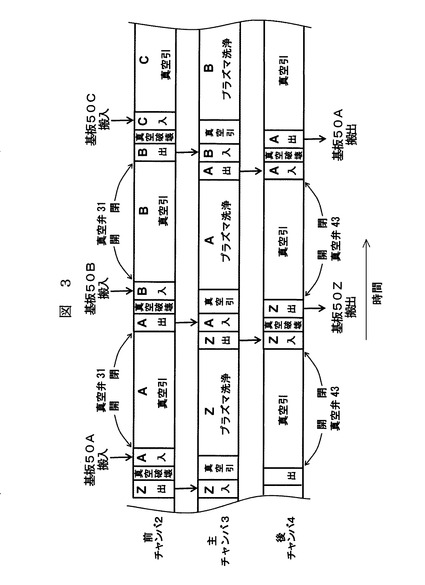
なお、図2のタイムチャートでは、前チャンバ2と後チャンバ4との真空引きを切り替えて行う例について説明したが、図3のタイムチャートに示されるように、前チャンバ2および後チャンバ4を少なくとも一部の期間を重複させるように真空引きすることもできる。図3では、前チャンバ2および後チャンバ4の真空引き以外の動作タイミングは図2と同様であるので詳細な説明は省略する。
【0048】
図3では、前チャンバ2および後チャンバ4の真空引き可能な時間を、すべて共通する真空ポンプ6で真空引きしている。このときの、真空引きの開始および終了タイミングは、前チャンバ2と後チャンバ4とで異なっているが、同図に示されるように、真空弁31,43を開閉することにより制御することができる。また、所定の真空度に達したときに、真空弁31や真空弁43を閉じることで真空引きを停止させてもよい。
【0049】
プラズマ洗浄の時間は、被処理物の種類や大きさ、洗浄度合によって変化する。プラズマ洗浄時間が短い場合には、このように前チャンバ2および後チャンバ4を重複して真空引きすることで、いずれも所定の真空度にすることができる。
【0050】
なお、図3では、真空引きの開始および終了タイミングは、前チャンバ2と後チャンバ4とで異なるようにして真空引きしているが、開始および終了タイミングのいずれか一方を、前チャンバ2と後チャンバ4とで同じタイミングとすることもできるし、両方のタイミングを一致させて、完全に重複させて真空引きすることもできる。
【0051】
また、図1〜図3を用いた説明では、主チャンバ3から後チャンバ4に基板50を出した後に、前チャンバ2から主チャンバ3に入れるプラズマ洗浄装置1について説明したが、搬送機構15,18,21を協働させることで、主チャンバ3に同時に基板50を出し入れさせることもできる。
【図面の簡単な説明】
【0052】
【図1】本発明を適用するプラズマ洗浄装置の概略図である。
【図2】本発明を適用するプラズマ洗浄装置のタイムチャートである。
【図3】本発明を適用するプラズマ洗浄装置の別のタイムチャートである。
【符号の説明】
【0053】
1はプラズマ洗浄装置、2は前チャンバ、3は主チャンバ、4は後チャンバ、6は副真空ポンプ、7は主真空ポンプ、11,13,16,19はゲート扉、12は搬入口、14は主チャンバ入口、15,18,21は搬送機構、17は主チャンバ出口、20は搬出口、25は高周波電極、31,36,43は真空弁、32,37は解放弁、33,44は真空破壊弁、34,45は圧力センサ、39,41は制御弁、40は定量弁、35,42,46は真空センサ、50,50A,50B,50C,50Zは基板、51は部品、70〜74はタイムチャート中の矢印である。
【技術分野】
【0001】
本発明は、被処理物をプラズマ真空洗浄するインライン型のプラズマ洗浄装置に関するものである。
【背景技術】
【0002】
被処理物をプラズマ洗浄するためには、プラズマ洗浄チャンバ内に被処理物を搬入した後、大気圧から真空引きする必要がある。しかし、この真空引きには時間が掛り、処理時間短縮のボトルネックとなっている。
【0003】
例えば、処理時間短縮を目的とする装置として、特許文献1に、2つのチャンバを備え、その各々に真空ポンプを配して並列処理するプラズマ洗浄装置が記載されている。特許文献1には、高周波電源は共通化して用いることも記載されている。
【0004】
確かにチャンバや真空ポンプを複数並列に備えることによって、全体的な処理時間を短縮することができるが、高周波電源を共通化したとしても、高価で複雑な装置となってしまう。
【0005】
【特許文献1】特開2001−237213号公報
【発明の開示】
【発明が解決しようとする課題】
【0006】
本発明は前記の課題を解決するためになされたもので、装置価格の上昇を抑えつつ処理時間を短縮することのできるプラズマ洗浄装置を提供することを目的とする。
【課題を解決するための手段】
【0007】
前記の目的を達成するためになされた特許請求の範囲の請求項1に記載のプラズマ洗浄装置は、被処理物をプラズマ真空洗浄するインライン型のプラズマ洗浄装置であって、側面に形成された開閉可能な搬入口から、該搬入口に対向する側面に形成された開閉可能な主チャンバ入口まで該被処理物を搬送する前チャンバ用の搬送機構を内部に備えた真空容器である前チャンバと、該主チャンバ入口に繋がっており、該主チャンバ入口から搬送される該被処理物をプラズマ洗浄するプラズマ洗浄手段を備えると共に、該主チャンバ入口からこれに対向する側面に形成された開閉可能な主チャンバ出口まで該被処理物を搬送する主チャンバ用の搬送機構を内部に備えた真空容器である主チャンバと、該主チャンバ出口に繋がって、該主チャンバ出口から搬送される該被処理物を、該主チャンバ出口に対向する側面に形成された開閉可能な搬出口まで搬送する後チャンバ用の搬送機構を内部に備えた真空容器である後チャンバと、該主チャンバに接続される主真空ポンプと、該前チャンバおよび該後チャンバに共通して接続される副真空ポンプと、を備え、該主真空ポンプによって真空引きされた該主チャンバに該前チャンバから該被処理物を搬送するときに該前チャンバを該副真空ポンプによって予め真空引きしておき、該真空引きされた該主チャンバから該後チャンバに該被処理物を搬送するときに該後チャンバを該副真空ポンプによって予め真空引きしておくことを特徴とする。
【0008】
なお、真空度とは、真空の度合いを表し、真空度の高いほうが圧力が低圧で、真空度の低いほうが圧力が高圧であることを示す。
【0009】
同じく請求項2に記載のプラズマ洗浄装置は、請求項1に記載されたもので、前記副真空ポンプは、前記前チャンバおよび前記後チャンバを、前記主チャンバの真空度よりも低い所定の真空度に真空引きすることを特徴とする。
【0010】
同じく請求項3に記載のプラズマ洗浄装置は、請求項1に記載されたもので、前記前チャンバおよび前記後チャンバは交代して前記副真空ポンプで真空引きされることを特徴とする。
【0011】
請求項4に記載のプラズマ洗浄装置は、請求項1に記載されたもので、前記前チャンバおよび前記後チャンバは少なくとも一部の期間を重複させて前記副真空ポンプで真空引きされることを特徴とする。
【発明の効果】
【0012】
本発明のプラズマ洗浄装置では、各々真空容器である前チャンバと、主チャンバと、後チャンバとをこの順で密着して直列配置して、プラズマ真空洗浄を行う主チャンバには、主真空ポンプを接続し、前チャンバおよび後チャンバには、共通の副真空ポンプを接続する。前チャンバから主チャンバに被処理物を搬送するときに予め前チャンバを真空引きしておき、主チャンバから後チャンバに被処理物を搬送するときに予め後チャンバを真空引きしておくことで、主チャンバの真空度を大気圧まで低下させることなく被処理物を受け渡すことができる。したがって、全体的な処理時間を短縮することができる。また、前チャンバと後チャンバとは1つの共通する真空ポンプで真空引きされるので、各々に真空ポンプを備える構成よりも装置価格の上昇を小さく抑えることができる。
【0013】
また、本発明のプラズマ洗浄装置によれば、副真空ポンプは、前チャンバおよび後チャンバを、主チャンバの真空度よりも低い所定の真空度に真空引きする。この場合、被処理物を前チャンバから主チャンバに受け渡すとき、および、主チャンバから後チャンバに受け渡すときには、主チャンバの真空度は、前チャンバや後チャンバの真空度まで低下するが、その低下する真空度の差は、大気圧との差に比べたらはるかに小さい。そのため、低下した主チャンバの真空度を、僅かな時間真空引きするだけで、再び高めることができる。このように、前チャンバおよび後チャンバの真空度を、主チャンバの真空度よりも低いものとすることで、副真空ポンプを主真空ポンプよりも安価なものを用いることができ、装置価格の上昇を一層小さく抑えることができる。
【0014】
また、本発明のプラズマ洗浄装置によれば、前チャンバおよび後チャンバを交代して副真空ポンプで真空引きすることにより、1つの真空ポンプでも前チャンバおよび後チャンバを真空引きすることができる。
【0015】
前チャンバおよび後チャンバを少なくとも一部の期間を重複させて副真空ポンプで真空引きすることにより、真空引き可能な時間が短くても所定の真空度まで確実に真空引きすることができる。
【発明を実施するための好ましい形態】
【0016】
以下、本発明の実施の好ましい形態を詳細に説明するが、本発明の範囲はこれらの実施の形態に限定されるものではない。
【0017】
図1には本発明の一実施形態であるプラズマ洗浄装置の正面図が図示されている。
【0018】
プラズマ洗浄装置1は、被処理物の一例である基板50をプラズマ真空洗浄するインライン型の装置である。なお、同図には、部品51の実装された基板50が図示されているが、部品実装されていない基板を洗浄してもよいし、基板以外の例えばガラス部材を洗浄してもよく、特に限定されていない。
【0019】
このプラズマ洗浄装置1は、同図に正面断面が示されるように、前チャンバ2、主チャンバ3、および後チャンバ4がこの順で密着して直列配置されている。
【0020】
前チャンバ2は、非図示の搬送ラインから搬入される基板50を、主チャンバ3の真空度を可及的低下させずに受け渡しするためのものである。この前チャンバ2は、真空容器であって、その一側面には、開閉可能なゲート扉11の付された搬入口12が形成されている。また、搬入口12に対面する側面には、主チャンバ3に繋がる、開閉可能なゲート扉13の付された主チャンバ入口14が形成されている。ゲート扉13は、前チャンバ2の内側に向かって開閉可能に取り付けられている。
【0021】
また、前チャンバ2には、搬入口12で基板50を受け取って、入口14まで基板50を搬送可能な前チャンバ用の搬送機構15を内部に備えている。この搬送機構15は、それ自体が搬入口12から入口14までの間を水平移動可能であると共に、それ自体にコンベアベルトを有している。
【0022】
主チャンバ3は、真空容器であり、プラズマ発生させる高周波電極25等が備えられていて、基板50をプラズマ洗浄するものである。この主チャンバ3の入口14に対面する側面には、後チャンバ4に繋がる、ゲート扉16の付された主チャンバ出口17が形成されている。ゲート扉16は、後チャンバ4の内側に向かって開閉可能に取り付けられている。
【0023】
また、主チャンバ3には、入口14から出口17まで基板50を搬送可能な主チャンバ用の搬送機構18を内部に備えている。搬送機構18は、コンベアベルトを有している。
【0024】
後チャンバ4は、洗浄済みの基板50を、主チャンバ3の真空度を可及的低下させずに受け渡しされて、装置外部に搬出するためのものである。この後チャンバ4は、真空容器であって、出口17に対面する側面には、開閉可能なゲート扉19の付された搬出口20が形成されている。また、後チャンバ4には、出口17から搬出口20まで基板50を搬送可能な後チャンバ用の搬出機構21を内部に備えている。この搬出機構21は、それ自体が出口17から搬出口20まで移動すると共に、それ自体がコンベアベルトを有している。
【0025】
また、同図に示されるように、主チャンバ3には、プラズマ発生させるための反応ガス(一例としてアルゴンガス)を所定量だけ供給する定量弁40や、定量弁40から反応ガスの供給を開始・停止させる制御弁39,41が付されている。これらや高周波電極25が本発明におけるプラズマ洗浄手段に相当する。
【0026】
この主チャンバ3には、主真空ポンプ7が、開閉制御可能な真空弁36を介して配管接続されている。真空弁36と主真空ポンプ7との間には、解放弁37が付されている。主真空ポンプ7は、一例として、ロータリーポンプであって、主チャンバ3内の圧力を5〜10Pa程度の高い真空度まで真空引き可能なものである。
【0027】
また、主チャンバ3には、真空度確認用のピラニ式の真空センサ42が付されて圧力を検出可能になっている。
【0028】
前チャンバ2および後チャンバ4には、共通の副真空ポンプ6が繋がっている。この場合、副真空ポンプ6に繋がる配管が2分岐して前チャンバ2および後チャンバ4に配管接続されている。分岐後の前チャンバ2に繋がる配管には、真空弁31が付されており、後チャンバ4に繋がる配管には、真空弁43が付されている。分岐前の配管には解放弁32が付されている。真空弁31,43は開閉制御可能な制御弁である。解放弁32は、副真空ポンプ6の停止時に開いてポンプ内を大気解放するものである。
【0029】
副真空ポンプ6は、前チャンバ2および後チャンバ4の真空度を主チャンバ3の真空度に可及的近づけるためのものである。この場合、副真空ポンプ6は、後述する動作タイミングで十分に真空引きできるだけの排気速度(時間当たりの吐出空気量)を有したものである。前チャンバ2および後チャンバ4の真空度を主チャンバ3の真空度よりも低い所定の真空度とすることで、副真空ポンプ6を主真空ポンプ7よりも排気速度の遅い安価なものを用いることができるようになる。
【0030】
本実施例では、副真空ポンプ6は、一例として、主真空ポンプ7よりも小さなロータリーポンプであって、前チャンバ2および後チャンバ4を、大気圧から10〜15秒程度の真空引きで20Pa程度の真空度まで真空引きするものである。なお、価格は上昇するが主真空ポンプ7と同様のものを用いてもよい。
【0031】
前チャンバ2には、開閉制御可能な真空破壊弁33、大気圧確認用の圧力センサ34、および真空度確認用の真空センサ35が付されている。後チャンバ4にも、同様に、真空破壊弁44、大気圧確認用の圧力センサ45、および真空度確認用の真空センサ46が付されている。
【0032】
次に、プラズマ洗浄装置1の動作について説明する。
【0033】
主チャンバ3は、主真空ポンプ7によって真空引きされ、所定の高い真空度に維持されている。この真空下でプラズマ化したガスによって、一例として、30秒間、基板50がプラズマ洗浄される。通常、真空弁36は開かれ、解放弁37は閉じられている。
【0034】
この主チャンバ3でプラズマ洗浄を行っている間に、前チャンバ2に未洗浄の基板50を搬入して、副真空ポンプ6によって、主チャンバ3の真空度よりも低い所定の真空度まで真空引きしておく。また、主チャンバ3で洗浄等を行っている間に、洗浄済みの基板50を後チャンバ4から装置外部に搬出してから、後チャンバ4を前チャンバ2と同様の所定の真空度まで副真空ポンプ6によって真空引きしておく。
【0035】
具体的には、前チャンバ2に基板50を搬入するときには、プラズマ洗浄装置1は、閉じられている真空破壊弁33を開き、圧力センサ34の検出により大気圧になったことを確認後、ゲート扉11を開く。続いて、搬送機構15を搬入口12まで移動する。搬送機構15は、コンベアベルトを駆動して、基板50が搬送機構15の上部所定位置まで移動したときにコンベアベルトを停止する。次に、搬送機構15自体が前チャンバ2内に移動して、ゲート扉11を閉じる。
【0036】
ゲート扉11を閉じた後に、真空破壊弁33を閉じて真空弁31を開き、前チャンバ2を副真空ポンプ6で真空引きする。真空引きしているときには、解放弁32は閉じられている。真空センサ35の検出によって、所定の真空度に達したことを確認したときに真空弁31を閉じてこの真空度を維持する。なお、維持させている間に真空度が低下したことを真空センサ35によって検出したときには、真空弁31を開閉させて所定の真空度を維持する。
【0037】
また、洗浄済み基板50を後チャンバ4から装置外部に搬出するときには、プラズマ洗浄装置1は、閉じられている真空破壊弁44を開き、圧力センサ45の検出により後チャンバ4が大気圧になったことを確認後、ゲート扉19を開く。続いて、搬送機構21を搬出口20まで移動し、搬送機構21のコンベアベルトを駆動して、基板50を装置から非図示の搬送ラインに搬出する。
【0038】
ゲート扉19を閉じた後に、真空破壊弁44を閉じて真空弁43を開き、後チャンバ4を副真空ポンプ6で真空引きする。真空センサ46の検出によって、所定の真空度に達したことを確認したときに真空弁43を閉じてこの真空度を維持する。なお、維持させている間に真空度が低下したことを真空センサ46によって検出したときには、真空弁43を開閉させて所定の真空度を維持する。
【0039】
主チャンバ3でプラズマ洗浄が終了すると、プラズマ洗浄装置1は、直ちに出口17のゲート扉16を開き、主チャンバ3の搬送機構18と後チャンバ4の搬送機構21とを協働させて主チャンバ3から後チャンバ4に洗浄済み基板50を搬送する。
【0040】
主チャンバ3から洗浄済み基板50を搬送後、または、搬送作業と共に、入口14のゲート扉13を開き、前チャンバ2の搬送機構15と主チャンバ3の搬送機構18とを協働させて前チャンバ2から主チャンバ3に未洗浄基板50を搬送する。
【0041】
この基板50の搬入出時に、主チャンバ3の真空度は、前チャンバ2および後チャンバ4の真空度までしか低下しない。そのため、主チャンバ3を再度所定の真空度まで真空引きする時間は、大気圧から真空引きする時間と比べて、僅かな時間となる。一例として、主チャンバ3を大気圧から真空引きするのに約30秒必要であるのに対して、2〜3秒程度となる。
【0042】
このプラズマ洗浄装置1の動作をさらに、図2に示される各チャンバの動作を示すタイムチャートを用いて説明する。なお、同図のタイムチャートは、連続的に繰り返し動作している各チャンバの様子を、ある時間分だけ抜き出して図示されている。
【0043】
図2に示される基板50A(図ではAとも表示)の流れについてみると、基板50Aは、矢印70で示されるように、先ず前チャンバ2に搬入される。搬入された後、前チャンバ2は、真空引きされる。主チャンバ3内の基板50Z(図ではZとも表示)の洗浄が終了して後チャンバ4に搬送されると、基板50は、矢印71で示されるように、主チャンバ3に搬送される。主チャンバ3では圧力低下分だけ真空引き後、基板50Aがプラズマ洗浄される。洗浄終了後、矢印72で示されるように、基板50Aは後チャンバ4に搬送される。後チャンバ4が真空破壊後、基板50Aは、矢印73で示されるように、装置外に搬出される。
【0044】
前チャンバ2から基板50Aを搬送後、前チャンバ2は、真空破壊して基板50B(図ではBとも表示)が搬入される。
【0045】
前チャンバ2と後チャンバ4とは、共通する副真空ポンプ6によって真空引きされるが、この真空引きのタイミングについてみると、後チャンバ4から基板50Aが搬出後、後チャンバ4は、直ちに真空引きされる。この後チャンバ4の真空引き完了後、矢印74で示されるように、直ちに前チャンバ2が真空引きされる。この順番は、同図からわかるように、後チャンバ4のほうが先に真空引き可能となることによる。このように後チャンバ4から先に真空引きすることで、真空引き可能な時間を長くすることができる。
【0046】
前チャンバ2および後チャンバ4の各々の真空引きの時間は、プラズマ洗浄時間の概ね二分の一程度まで許容できる。この時間は、主チャンバ3の真空引きの時間や各チャンバ2〜4の基板50の入出に必要な時間によって多少変わる。後チャンバ4から前チャンバ2への真空引きの切り替えは、前述したように後チャンバ4が所定の真空度に達したことによって切り替えてもよいが、許容可能な真空引きできる時間だけ経過したときに切り替えてもよい。また、多少真空引きできる時間は短くなるが、先に前チャンバ2を真空引きして、真空引き完了後、後チャンバ4を真空引きすることもできる。
【0047】
なお、図2のタイムチャートでは、前チャンバ2と後チャンバ4との真空引きを切り替えて行う例について説明したが、図3のタイムチャートに示されるように、前チャンバ2および後チャンバ4を少なくとも一部の期間を重複させるように真空引きすることもできる。図3では、前チャンバ2および後チャンバ4の真空引き以外の動作タイミングは図2と同様であるので詳細な説明は省略する。
【0048】
図3では、前チャンバ2および後チャンバ4の真空引き可能な時間を、すべて共通する真空ポンプ6で真空引きしている。このときの、真空引きの開始および終了タイミングは、前チャンバ2と後チャンバ4とで異なっているが、同図に示されるように、真空弁31,43を開閉することにより制御することができる。また、所定の真空度に達したときに、真空弁31や真空弁43を閉じることで真空引きを停止させてもよい。
【0049】
プラズマ洗浄の時間は、被処理物の種類や大きさ、洗浄度合によって変化する。プラズマ洗浄時間が短い場合には、このように前チャンバ2および後チャンバ4を重複して真空引きすることで、いずれも所定の真空度にすることができる。
【0050】
なお、図3では、真空引きの開始および終了タイミングは、前チャンバ2と後チャンバ4とで異なるようにして真空引きしているが、開始および終了タイミングのいずれか一方を、前チャンバ2と後チャンバ4とで同じタイミングとすることもできるし、両方のタイミングを一致させて、完全に重複させて真空引きすることもできる。
【0051】
また、図1〜図3を用いた説明では、主チャンバ3から後チャンバ4に基板50を出した後に、前チャンバ2から主チャンバ3に入れるプラズマ洗浄装置1について説明したが、搬送機構15,18,21を協働させることで、主チャンバ3に同時に基板50を出し入れさせることもできる。
【図面の簡単な説明】
【0052】
【図1】本発明を適用するプラズマ洗浄装置の概略図である。
【図2】本発明を適用するプラズマ洗浄装置のタイムチャートである。
【図3】本発明を適用するプラズマ洗浄装置の別のタイムチャートである。
【符号の説明】
【0053】
1はプラズマ洗浄装置、2は前チャンバ、3は主チャンバ、4は後チャンバ、6は副真空ポンプ、7は主真空ポンプ、11,13,16,19はゲート扉、12は搬入口、14は主チャンバ入口、15,18,21は搬送機構、17は主チャンバ出口、20は搬出口、25は高周波電極、31,36,43は真空弁、32,37は解放弁、33,44は真空破壊弁、34,45は圧力センサ、39,41は制御弁、40は定量弁、35,42,46は真空センサ、50,50A,50B,50C,50Zは基板、51は部品、70〜74はタイムチャート中の矢印である。
【特許請求の範囲】
【請求項1】
被処理物をプラズマ真空洗浄するインライン型のプラズマ洗浄装置であって、
側面に形成された開閉可能な搬入口から、該搬入口に対向する側面に形成された開閉可能な主チャンバ入口まで該被処理物を搬送する前チャンバ用の搬送機構を内部に備えた真空容器である前チャンバと、
該主チャンバ入口に繋がっており、該主チャンバ入口から搬送される該被処理物をプラズマ洗浄するプラズマ洗浄手段を備えると共に、該主チャンバ入口からこれに対向する側面に形成された開閉可能な主チャンバ出口まで該被処理物を搬送する主チャンバ用の搬送機構を内部に備えた真空容器である主チャンバと、
該主チャンバ出口に繋がって、該主チャンバ出口から搬送される該被処理物を、該主チャンバ出口に対向する側面に形成された開閉可能な搬出口まで搬送する後チャンバ用の搬送機構を内部に備えた真空容器である後チャンバと、
該主チャンバに接続される主真空ポンプと、
該前チャンバおよび該後チャンバに共通して接続される副真空ポンプと、を備え、
該主真空ポンプによって真空引きされた該主チャンバに該前チャンバから該被処理物を搬送するときに該前チャンバを該副真空ポンプによって予め真空引きしておき、該真空引きされた該主チャンバから該後チャンバに該被処理物を搬送するときに該後チャンバを該副真空ポンプによって予め真空引きしておくことを特徴とするプラズマ洗浄装置。
【請求項2】
前記副真空ポンプは、前記前チャンバおよび前記後チャンバを、前記主チャンバの真空度よりも低い所定の真空度に真空引きすることを特徴とする請求項1に記載のプラズマ洗浄装置。
【請求項3】
前記前チャンバおよび前記後チャンバは交代して前記副真空ポンプで真空引きされることを特徴とする請求項1に記載のプラズマ洗浄装置。
【請求項4】
前記前チャンバおよび前記後チャンバは少なくとも一部の期間を重複させて前記副真空ポンプで真空引きされることを特徴とする請求項1に記載のプラズマ洗浄装置。
【請求項1】
被処理物をプラズマ真空洗浄するインライン型のプラズマ洗浄装置であって、
側面に形成された開閉可能な搬入口から、該搬入口に対向する側面に形成された開閉可能な主チャンバ入口まで該被処理物を搬送する前チャンバ用の搬送機構を内部に備えた真空容器である前チャンバと、
該主チャンバ入口に繋がっており、該主チャンバ入口から搬送される該被処理物をプラズマ洗浄するプラズマ洗浄手段を備えると共に、該主チャンバ入口からこれに対向する側面に形成された開閉可能な主チャンバ出口まで該被処理物を搬送する主チャンバ用の搬送機構を内部に備えた真空容器である主チャンバと、
該主チャンバ出口に繋がって、該主チャンバ出口から搬送される該被処理物を、該主チャンバ出口に対向する側面に形成された開閉可能な搬出口まで搬送する後チャンバ用の搬送機構を内部に備えた真空容器である後チャンバと、
該主チャンバに接続される主真空ポンプと、
該前チャンバおよび該後チャンバに共通して接続される副真空ポンプと、を備え、
該主真空ポンプによって真空引きされた該主チャンバに該前チャンバから該被処理物を搬送するときに該前チャンバを該副真空ポンプによって予め真空引きしておき、該真空引きされた該主チャンバから該後チャンバに該被処理物を搬送するときに該後チャンバを該副真空ポンプによって予め真空引きしておくことを特徴とするプラズマ洗浄装置。
【請求項2】
前記副真空ポンプは、前記前チャンバおよび前記後チャンバを、前記主チャンバの真空度よりも低い所定の真空度に真空引きすることを特徴とする請求項1に記載のプラズマ洗浄装置。
【請求項3】
前記前チャンバおよび前記後チャンバは交代して前記副真空ポンプで真空引きされることを特徴とする請求項1に記載のプラズマ洗浄装置。
【請求項4】
前記前チャンバおよび前記後チャンバは少なくとも一部の期間を重複させて前記副真空ポンプで真空引きされることを特徴とする請求項1に記載のプラズマ洗浄装置。
【図1】



【図2】
【図3】
【図2】
【図3】
【公開番号】特開2010−89014(P2010−89014A)
【公開日】平成22年4月22日(2010.4.22)
【国際特許分類】
【出願番号】特願2008−261700(P2008−261700)
【出願日】平成20年10月8日(2008.10.8)
【出願人】(508303508)株式会社ジェー.ピー.イー. (2)
【Fターム(参考)】
【公開日】平成22年4月22日(2010.4.22)
【国際特許分類】
【出願日】平成20年10月8日(2008.10.8)
【出願人】(508303508)株式会社ジェー.ピー.イー. (2)
【Fターム(参考)】
[ Back to top ]