
プラント運転状態監視方法
【課題】マハラノビス距離を求めるための演算を簡単に行うことができ、プラントが正常に運転されているか否かの判定を速やかに行うことができるプラント運転状態監視方法の提供を提供する。
【解決手段】本発明のプラント運転状態監視方法では、プラントの多くの監視項目の状態量をより少数かつ複数の監視項目の状態量からなるデータ群に分類するする過程(A)と、 各データ群の状態量からマハラノビス距離を演算する過程 (B)と、各データ群で演算されたマハラノビス距離の最大値を選択する過程(C)と、選択された最大値を予め設定した閾値と比較する過程(D)と、前記比較結果によりプラントの異常の有無を判定する過程(E)と、を有することを特徴とする。
【解決手段】本発明のプラント運転状態監視方法では、プラントの多くの監視項目の状態量をより少数かつ複数の監視項目の状態量からなるデータ群に分類するする過程(A)と、 各データ群の状態量からマハラノビス距離を演算する過程 (B)と、各データ群で演算されたマハラノビス距離の最大値を選択する過程(C)と、選択された最大値を予め設定した閾値と比較する過程(D)と、前記比較結果によりプラントの異常の有無を判定する過程(E)と、を有することを特徴とする。
【発明の詳細な説明】
【技術分野】
【0001】
本発明は、プラントが正常に運転されているか否かを判定するプラント運転状態監視方法に関する。
【背景技術】
【0002】
ガスタービン発電プラントや、原子力発電プラント、あるいは化学プラントといった各種のプラントでは、プラントが正常に運転されているか否かを監視するため、温度や、圧力といったプラントの状態量を取得し、監視する。すなわち、監視対象である複数の監視項目の状態量を所定の時間間隔で計測し、監視項目ごとの状態量の平均と分布を計算して正規化し、また、各監視項目の状態量の相関関係を計算して、マハラノビス距離を計算し、該マハラノビス距離が、予め設定した閾値を越えた場合、プラントに異常の兆候があると判定している。
【0003】
特許文献1には、このようなマハラノビス距離を用いた設備監視方法が開示されている。この設備監視方法では、システム同定のために予め定めた数式モデルに同期運動体の振動に関する時系列データを与えることによって該数式モデルのシステムパラメータを演算した結果と、そのシステムが正常な状態におけるシステムパラメータ群との乖離度に対して、原系列信号の自己相関係数行列にて重み付けをした指標(予測誤差分数)及び前記乖離度に対して正常時におけるシステムパラメータ群の分散・共分散行列の逆行列にて重み付けをした指標(マハラノビス距離)を組み合わせて、周期運動体の劣化状態を総合的に判断する。そして、このような設備監視方法により、プラントの状態量を多数有する場合でも、該プラントの監視を簡易に行うことができるものである。
【先行技術文献】
【特許文献】
【0004】
【特許文献1】特開昭59−68644号公報
【発明の概要】
【発明が解決しようとする課題】
【0005】
しかしながら、上述したマハラノビス距離を用いたプラント運転状態監視方法では、多数の監視項目の状態量を監視しており、このため、マハラノビス距離を求めるために多くの演算を繰り返す必要がある。その結果、演算に多くの時間がかかり、プラントが正常に運転されているか否かを判定が遅延するという問題があった。
具体的には、状態量をx,yとした場合、マハラノビス距離の計算は、x2+y2 の平方根といった単純な計算を監視項目間で行うが、例えば、監視項目が100あれば、各状態量に対して100×100=10000倍の回数の演算が必要であり、その演算処理に多くの時間が必要となっていた。
【0006】
この発明は、上述した事情に鑑みてなされたものであって、マハラノビス距離を求めるための演算を高速化することができ、プラントが正常に運転されているか否かの判定を速やかに行うことができるプラント運転状態監視方法の提供を目的とする。
【課題を解決するための手段】
【0007】
上記課題を解決するために、この発明は以下の手段を提案している。
本発明のプラント運転状態監視方法では、プラントの多くの監視項目の状態量をより少数かつ複数の監視項目の状態量からなるデータ群に分類する過程と、各データ群毎に状態量からマハラノビス距離を演算する過程と、各データ群毎に演算されたマハラノビス距離の最大値を選択する過程と、選択された最大値を予め設定した閾値と比較する過程、前記比較結果によりプラントの異常の有無を判定する過程と、を有することを特徴とする。
また、本発明のプラント運転状態監視方法では、プラントの多くの監視項目の状態量をより少数かつ複数の監視項目の状態量からなるデータ群に分類する過程と、各データ群毎に状態量からマハラノビス距離を演算する過程と、各データ群で演算されたマハラノビス距離のマハラノビス距離を算出する過程と、前記マハラノビス距離のマハラノビス距離を予め設定した閾値と比較する過程と、前記比較結果によりプラントの異常の有無を判定する過程と、を有することを特徴とする。
【0008】
本発明のプラント運転状態監視方法では、プラントの多くの監視項目の状態量をより少数かつ複数の監視項目の状態量からなるデータ群に分類する過程と、各データ群毎に状態量からマハラノビス距離を演算する過程と、各データ群毎に演算されたマハラノビス距離を、各データ群ごとに予め設定した閾値とそれぞれ比較する過程と、前記比較結果によりプラントの異常の有無を判定する過程と、を有することを特徴とする。
【発明の効果】
【0009】
本発明のプラント運転状態監視方法によれば、プラントの多くの監視項目の状態量をより少数かつ複数の監視項目の状態量からなるデータ群に分類し、分類した各データ群毎に状態量からマハラノビス距離を演算するようにしたので、従来のように、マハラノビス距離を求めるための多くの監視項目の状態量のすべての相関を求める演算が必要なく、その結果、マハラノビス距離を求めるための演算を高速化することができ、プラントの異常判定作業を速やかに行うことができる。
また、プラントの多くの監視項目の状態量をより少数かつ複数の監視項目の状態量からなるデータ群に分類することによって、各データ群毎に、単位空間の状態量、信号空間の状態量を計測する時間間隔、単位空間を変更する時間間隔を個別に設定することができ、また、各データ群毎に、単位空間の検索基準、信号空間の検索基準を個別に設定することができるので、監視の信頼性が向上できる各種のデータ処理を簡便に行うことができる。
【図面の簡単な説明】
【0010】
【図1】本発明の第1実施形態に係るプラント運転状態監視装置の構成例を示す模式図である。
【図2】図1の処理部を具体的に説明するための模式図である。
【図3】マハラノビス距離の概念を示す概念図である。
【図4】本実施形態に係るプラント運転状態監視方法の手順を示すフローチャートである。
【図5】第2実施形態に係る処理部を具体的に説明するための模式図である。
【図6】第3実施形態に係る処理部を具体的に説明するための模式図である。
【発明を実施するための形態】
【0011】
(第1実施形態)
以下、本発明の第1実施形態について図1〜図4を参照して説明する。なお、この発明を実施するための最良の形態(以下、実施形態という)によりこの発明が限定されるものではない。また、下記実施形態における構成要素には、当業者が容易に想定できるもの、実質的に同一のもの、いわゆる均等の範囲のものが含まれる。本実施形態では、本発明をガスタービンの発電プラントの状態監視に適用した例を説明するが、本発明が適用できる対象はこれに限定されるものではない。例えば、原子力発電プラントや、化学プラント等、多数の監視項目を有するプラント全般に対して本発明は適用できる。
【0012】
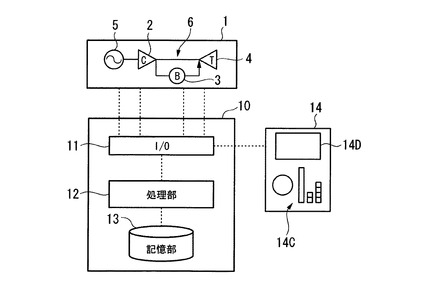
図1は、本実施形態に係るプラント運転状態監視装置の構成例を示す模式図である。プラント運転状態監視装置10は、ガスタービン6を用いた発電プラント(ガスタービン発電プラント)1の運転中の状態を監視して、ガスタービン発電プラント1が正常に運転されているか否かを判定する。
なお、プラントのガスタービン6を監視するための状態量としては、例えば、ガスタービン6のロータとステータ間の複数箇所で測定されるキャビティ温度、ガス出口にて周方向に沿い複数箇所で測定されるブレードパス温度、ロータの軸振動を検出するめに該ロータの周方向に沿い複数箇所で測定されるロータ軸の変位量、ガスタービン6に設けられる各種弁の開度、などがある。そして、これら状態量は監視対象データとして示され、各状態量において複数個、例えばブレードパス温度では、通常10点〜20点程度測定される。
監視対象であるガスタービン発電プラント1は、ガスタービン6によって発電機5を駆動して電力を発生する。ガスタービン6は、圧縮機2と、燃焼器3と、圧縮機2を回転させるタービン4とから構成される。圧縮機2の吸気口から吸入された空気は圧縮機2で圧縮され、高温、高圧の空気となって燃焼器3へ導かれる。燃焼器3では、高温、高圧の空気に燃料が供給され、燃焼する。燃焼器3で燃焼した燃料は、高温、高圧の燃焼ガスとなってタービン4へ供給され、これを駆動する。これによってタービン4は回転する。
【0013】
ガスタービン6の出力軸、すなわち、タービン4及び圧縮機2の回転軸は、発電機5に連結されている。これによって、ガスタービン6が運転されてタービン4が回転することによって得られる出力は発電機5に伝達される。このような構成により、ガスタービン6は発電機5を駆動して、発電機5に電力を発生させる。
【0014】
プラント運転状態監視装置10は、ガスタービン発電プラント1の状態を監視する。なお、本実施形態において、プラント運転状態監視装置10は、1台のガスタービン発電プラント1の状態を監視するが、複数台のガスタービン発電プラント1の運転状態を監視してもよい。プラント運転状態監視装置10は、例えば、コンピュータであり、入出力部(I/O)11と、処理部12と、記憶部13とを備えて構成される。プラント運転状態監視装置10は、いわゆるパーソナルコンピュータを利用して構成してもよいし、CPU(Central Processing Unit)とメモリとを組み合わせて構成してもよい。
【0015】
処理部12は、入出力部11を介してガスタービン発電プラント1に取り付けられる各種の状態量検出手段(センサ類)から、ガスタービン発電プラント1の状態量を受け取る。各種の状態量検出手段は、起動開始から所定の時間間隔で定期的に対応する状態量を取得し、入出力部11を介して処理部12に入力している。
【0016】
ガスタービン発電プラント1の状態量を示す監視対象データ群は、電気信号の形でプラント運転状態監視装置10の処理部12へ送られる。処理部12は、例えば、CPUで構成されており、記憶部13上に存在するプログラム(コンピュータプログラム)と呼ぶ命令列を順に読み込み、解釈し、その結果に従ってデータを移動したり加工したりする。
【0017】
なお、処理部12は、専用のハードウェアによって実現されるものであってもよい。また、処理部12の機能を実現するためのコンピュータプログラムをコンピュータが読み取り可能な記録媒体に記録し、この記録媒体に記録されたコンピュータプログラムをコンピュータシステムに読み込ませ、実行することにより本実施形態に係るプラント運転状態監視方法の処理手順を実行してもよい。なお、ここでいう「コンピュータシステム」とは、OSや、周辺機器などのハードウェアを含むものとする。
【0018】
また、「コンピュータが読み取り可能な記録媒体」とは、フレキシブルディスク、光磁気ディスク、ROM、CD−ROMなどの可搬媒体、あるいはコンピュータシステムに内蔵されるハードディスクのような記録装置のことをいう。さらに、「コンピュータが読み取り可能な記録媒体」とは、インターネットや、電話回線等の通信回線を介してコンピュータプログラムを送信する場合の通信線のように、短時間の間、動的にコンピュータプログラムを保持するもの、その場合のサーバや、クライアントとなるコンピュータシステム内部の揮発性メモリのように、一定時間コンピュータプログラムを保持しているものを含むものとする。また、上記コンピュータプログラムは、前述した機能の一部を実現するためのものであってよく、さらに前述した機能をコンピュータシステムにすでに記録されているコンピュータプログラムとの組み合わせで実現できるものであってもよい。
【0019】
なお、本実施形態に係るプラント運転状態監視方法は、予め用意されたコンピュータプログラムをパーソナルコンピュータや、ワークステーションなどのコンピュータで実行することによって実現できる。このコンピュータプログラムは、インターネット等の通信回線を介して配布することができる。また、このコンピュータプログラムは、ハードディスク、フレキシブルディスク(FD)、CD−ROM、MO、DVD等のコンピュータで読み取り可能な記録媒体に記録され、コンピュータによって該記録媒体から読み出されることによって実行されるようにしてもよい。
【0020】
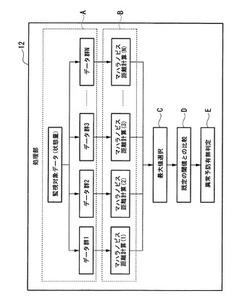
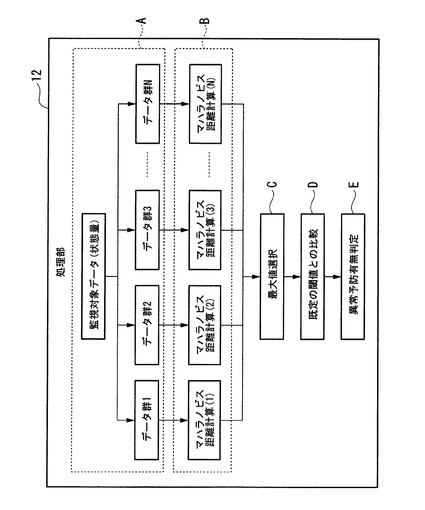
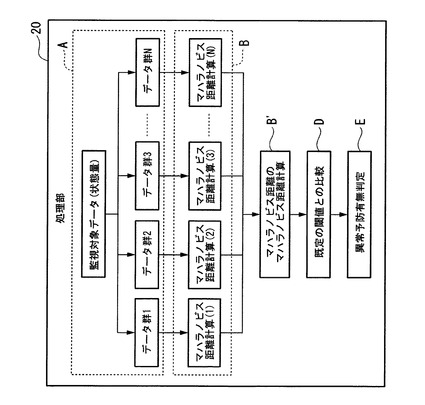
処理部12では、図2に示されるように、プラントの状態量を示す監視対象データを複数のデータ群(NO.1、2、3・・N)に分類するデータ分割過程Aと、該データ分割過程Aで分割された各データ群毎にマハラノビス距離をそれぞれ演算するマハラノビス距離演算過程Bと、各データ群で演算されたマハラノビス距離の最大値を選択する最大値選択過程Cと、選択されたマハラノビス距離の最大値を閾値と比較する比較過程Dと、前記マハラノビス距離の最大値と閾値との比較結果により異常の有無を判定する異常判定過程Eと、いった処理を各演算部にて行う。
【0021】
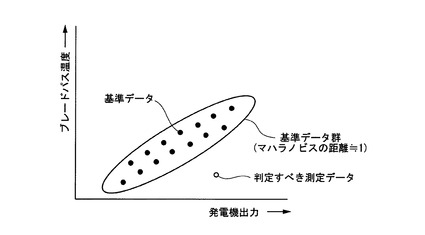
マハラノビスの距離の概念を図3に示す。図3は、一例として横軸に発電機出力を取りと縦軸にブレードパス温度を取った2つのパラメータの相関関係を示している。すなわち、発電機出力が上がればブレードパス温度も大きくなる。そして、各測定データは大気条件や運転状態などの違いによりばらつきはあるものの発電機出力とブレードパス温度の間には相関関係があり、特定の範囲に収まる。これらを基準データとして基準となる単位空間を作成する。その他の各状態量においても、この発電機出力とブレードパス温度のように相関関係を求めることができる。そして、その単位空間に対して、判断すべきデータが正常か異常かをマハラノビスの距離によって判断するのである。
【0022】
上述したマハラノビスの単位空間は、本実施形態では予め定めておいた以下の項目により得ることができる。
(1)ガスタービン発電プラント1の状態を評価する時点から、所定期間前までの過去に遡った過去の期間におけるガスタービン発電プラント1の状態量を示す監視対象データに基づいて、マハラノビスの単位空間を演算する。
(2)ガスタービン発電プラント1の状態を評価する時点の状態量を示す監視対象データに基づいて、今後のガスタービン発電プラント1の状態を予測し、その予測値に基づいてマハラノビスの単位空間を演算する。
(3)ガスタービン発電プラント1の状態を評価する時点の状態量を示す監視対象データ、及びプラント起動時に設定される制御目標設定値に基づいて、今後のガスタービン発電プラント1の状態を予測し、その予測値に基づいてマハラノビスの単位空間を演算する。
【0023】
なお、マハラノビス距離を用いてガスタービン発電プラント1が正常であるか否かを判定する場合、マハラノビス距離を使って多次元データを1次元データに焼き直す。そして、単位空間と信号空間(単位空間と比較するデータであり、例えば、ガスタービン発電プラント1の状態を評価する時の状態量)との違いをマハラノビス距離で見る。本実施形態では、単位空間から作られる行列を使って、信号空間のマハラノビス距離を求める。これによって、データの異常性を表現できるようにしてある。
【0024】
プラント運転状態監視装置10の入出力部11には、出力手段であるコントロールパネル14が接続される。コントロールパネル14は、表示手段であるディスプレイ14D及びプラント運転状態監視装置10に対する指令を入力する入力手段14Cが設けられる。プラント運転状態監視装置10の記憶部13は、例えば、RAM(Random Access Memory)のような揮発性のメモリや、ROM(Read Only Memory)のような不揮発性のメモリ、ハードディスク装置や、光磁気ディスク装置、CD−ROM等のような読み出しのみが可能な記憶媒体、あるいはこれらを組み合わせて構成される。記憶部13には、本実施形態に係るプラント運転状態監視方法を実現するためのコンピュータプログラムや、データ等が格納されている。処理部12は、これらのコンピュータプログラムや、データを用いて、本実施形態に係るプラント運転状態監視方法を実現したり、ガスタービン発電プラント1の動作を制御したりする。なお、記憶部13をプラント運転状態監視装置10の外部に設け、通信回線を介してプラント運転状態監視装置10が記憶部13ヘアクセスできるように構成してもよい。
【0025】
ここで、一般的なマハラノビス距離Dを計算するための計算式について説明する。
まず、ガスタービン発電プラント1の状態を表す複数の状態量の合計数をuとし、各状態量をそれぞれ変数Xに割り付け、変数X1〜Xuでu個の状態量を定義する(uは2以上の整数)。次に、基準となるガスタービン発電プラント1の運転状態において、変数X1〜Xuの状態量(監視対象データで示される)を、それぞれ合計v個(2以上)収集する。
【0026】
変数X1〜Xuのそれぞれの平均値Mi及び標準偏差σi(基準データのばらつき度合い)を、数式(1)及び数式(2)により求める。なお、iは項目数(状態量の数、整数)であって、ここでは1〜uに設定して変数X1〜Xuに対応する値を示す。jは1〜vまでのいずれかの値(整数)をとり、それぞれの状態量の個数がv個であることを意味する。例えば、それぞれの状態量を60個ずつ取得する場合、v=60となる。ここで、標準偏差とは、状態量とその平均値との差を2乗したものの期待値の正平方根とする。
【0027】
【数1】

【0028】
【数2】
【0029】
次に、演算され特徴を示す状態量である前述の平均値Mi及び標準偏差σiを用いて、元の変数X1〜Xuを、下記の数式(3)によってx1〜xuに変換するという基準化を行う。すなわち、ガスタービン発電プラント1の状態量を、平均0、標準偏差1の確率変数に変換する。なお、下記の数式(3)において、jは1〜vまでのいずれかの値(整数)をとり、それぞれの状態量の個数がv個であることを意味する。
【0030】
【数3】
【0031】
次に、変量を平均0、分散1に標準化したデータで分析を行うため、変数X1〜Xuの相関関係、すなわち、変量の間の関連性を示す共分散行列(相関行列)R、及び共分散行列(相関行列)の逆行列R−1を、下記の数式(4)で定義付ける。なお、下記の数式(4)において、kは項目数(状態量の数)であり、ここではuとする。また、iや、pは、各状態量での値を示し、ここでは1〜uの値をとる。
【0032】
【数4】
【0033】
このような演算処理の後で、特徴を示す状態量であるマハラノビス距離Dを、下記の数式(5)に基づいて求める。なお、数式(5)において、jは1〜vまでのいずれかの値(整数)をとり、それぞれの状態量の個数がv個であることを意味する。また、kは項目数(状態量の数)であり、ここではuとする。また、a11〜akkは、上述した数式(4)に示す共分散行列Rの逆行列R−1の係数である。
【0034】
【数5】
【0035】
マハラノビス距離Dは基準データ、すなわち、単位空間のマハラノビス距離Dの平均値は1となり、ガスタービン発電プラント1の状態量が正常な状態では、概ね3以下に収まる。しかし、ガスタービン発電プラント1の状態量が異常になると、マハラノビス距離Dの値は大きくなる。このように、マハラノビス距離Dは、ガスタービン発電プラント1の状態量の異常の程度(単位空間からの離れ度合い)に応じて、値が大きくなるという性質を有する。
【0036】
上記数式(1)〜(5)は、一般的なマハラノビス距離Dを計算するための計算式であるが、本実施形態では、上述したプラントのガスタービン6を監視するための状態量(例えば、ガスタービン6のロータとステータ間の複数箇所で測定されるキャビティ温度、ガス出口にて周方向に沿い複数箇所で測定されるブレードパス温度、ロータの軸振動を検出するめに該ロータの周方向に沿い複数箇所で測定されるロータ軸の変位量、ガスタービン6に設けられる各種弁の開度)等の多くの監視対象の状態量を、より少数かつ複数の監視項目の状態量からなるデータ群に分割し、分割した各データ群毎にマハラノビス距離をそれぞれ演算することを特徴とする。
そして、これら複数の各データ群は、状態量の測定位置(例えば、複数のキャブティ温度、又は複数のブレードパス温度、又は複数のロータ軸変位量、又は各種弁の開度等)により分類しても良いし、また、これら状態量のサンプリング周期(例えば、1分毎、又は10分毎、又は1時間毎のサンプリング周期等)により分類しても良いし、また、前記状態量の種類(温度、又は圧力、又は変位量、又は指令値と測定値との偏差等の監視項目)に基づき分類する。特に相関性の高い監視項目をグループ化することによってデータ群を分類すると良い。
なお、このような監視対象データを各データ群に分割するための分割パターンは記憶部13に予め記憶しておき、分割指令を発することで、処理部12に対して該分割パターンに基づく監視対象データの分割処理を実行させるようにする。
【0037】
次に、本実施形態に係るプラント運転状態監視方法の手順を説明する。本実施形態に係るプラント運転状態監視方法は、図1に示すプラント運転状態監視装置10の処理部12にて実現される。
【0038】
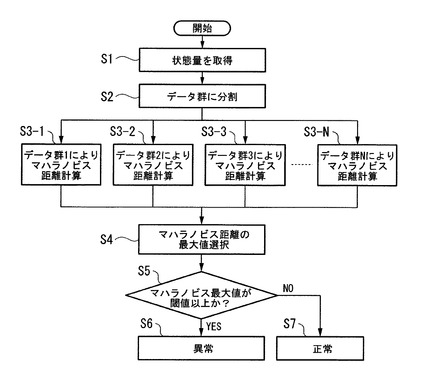
図4は、本実施形態に係るプラント運転状態監視方法の手順を示すフローチャートである。
ステップS1では、まず、現在の状態量取得期間において、ガスタービン発電プラント1から状態量を示す監視対象データを取得する。この状態量は、例えば、ガスタービン発電プラント1に取り付けられる各種のセンサ類から既定の時間間隔で定期的に取得され、プラント運転状態監視装置10の記憶部13へ格納される。
【0039】
ステップS2では、予め設定しておいた監視対象データの分割指令(前述)に基づき、監視対象データを複数のデータ群に分割してグループ化する。なお、これらのデータ群は、上述したように、温度や、圧力、振動、回転速度等の監視対象毎に分割してグループ化しても良いし、特に相関性の高い監視項目を選択してグループ化することで形成しても良い。
【0040】
ステップS3-1〜S3-Nでは、分割した各データ群により上記数式に従ってマハラノビス距離をそれぞれ演算した後、次のステップS4にて、これらステップS3-1〜S3-Nの中のマハラノビス距離の最大値を選択する。
【0041】
ステップS5では、予め設定しておいた閾値と、先のステップS4で求めたマハラノビス距離の最大値とを比較することで、該マハラノビス距離の最大値が、当該閾値を越えたか否かを判断する。その後、ステップS6にて、ステップS5での判断結果に基づき、マハラノビス距離の最大値が、当該閾値を越えたYESの場合に「異常」と判定し(ステップS6)、また、マハラノビス距離の最大値が、当該閾値を越えないNOの場合に「正常」と判定する(ステップS7)。
なお、上述したように、マハラノビス距離は、単位空間から離れれば離れるほどに、異常の程度に応じて大きな値を示す。マハラノビス距離Dは、基準データ、すなわち、単位空間の平均値は1となり、ガスタービン発電プラント1の状態量が正常な状態では、概ね3以下に収まる。したがって、例えば、閾値は、単位空間の最大値よりも大きい値で適宜設定することができる。また、閾値は、ガスタービン発電プラント1の固有の特性や、ガスタービン発電プラント1の製造ばらつき等を考慮した設定値とすることが好ましい。
【0042】
以上詳細に説明したように本実施形態に示されるプラント運転状態監視方法によれば、プラントの多くの監視項目の状態量をより少数かつ複数の監視項目の状態量からなるデータ群に分類し、分類した各データ群の状態量毎にマハラノビス距離を演算するようにしたので、従来のように、マハラノビス距離を求めるための多くの監視項目の状態量のすべての相関を演算が必要なく、その結果、マハラノビス距離を求めるための演算を高速化することができ、プラントの異常判定作業を速やかに行うことができる。具体的には、状態量をx,yとした場合、マハラノビス距離の計算は、x2+y2 の平方根といった単純な計算を監視項目間で行うが、例えば、監視項目が100あれば、各状態量に対して100×100=10000倍の回数の演算が必要であり、その演算処理に多くの時間が必要となっていた。
しかし、本実施形態では、監視項目100の状態量を、それぞれ10の監視項目からなるデータ群に分けて、各データ群毎の状態量についての 10×10=100回の演算を10回行うのなら、合計1000回の演算で済み、これによってマハラノビス距離を求めるための演算を高速化することができ、プラントの異常判定作業を速やかに行うことができる。
【0043】
また、プラントの多くの監視項目の状態量をより少数かつ複数の監視項目の状態量からなるデータ群に分類することによって、各データ群毎に、単位空間の状態量、信号空間の状態量を計測する時間間隔、単位空間を変更する時間間隔を個別に設定することができ、また、各データ群毎に、単位空間の検索基準、信号空間の検索基準を個別に設定することができ、監視の信頼性が向上できる各種のデータ処理を簡便に行うことができる。
【0044】
(第2実施形態)
本発明の第2実施形態について図5を参照して説明する。この第2実施形態に示されるプラント運転状態監視方法が、第1実施形態と異なるのは、分割した各データ群に基づきマハラノビス距離をそれぞれ演算した後のデータ処理方法にある。
すなわち、図5に示されるように、第1実施形態に示されるマハラノビス距離の最大値を選択する最大値選択過程Cに代えて、符号B´で示される第2のマハラノビス距離演算過程にて、マハラノビス距離演算過程Bで演算された各群のマハラノビス距離のマハラノビス距離を求める。
【0045】
具体的には、処理部20では、図5に示されるように、プラントの多くの監視項目の状態量をより少数かつ複数の監視項目の状態量からなるデータ群に分類して分割する過程Aと、該データ分割過程Aで分割された各データ群毎にマハラノビス距離をそれぞれ演算するマハラノビス距離演算過程Bと、マハラノビス距離演算過程Bの各群で演算されたマハラノビス距離のマハラノビス距離を算出する第2のマハラノビス距離演算過程B´と、第2のマハラノビス距離演算過程B´で演算されたマハラノビス距離のマハラノビス距離を閾値と比較する比較過程Dと、前記マハラノビス距離の最大値と閾値との比較結果により異常の有無を判定する異常判定過程Eと、いった処理を各演算部にて行う。
そして、この処理部20では、マハラノビス距離演算過程Bの各群で演算された複数のマハラノビス距離がどのような分布を持っているのかを知るために、第2のマハラノビス距離演算過程B´にて、マハラノビス距離のマハラノビス距離を演算する。その後、比較過程Dにて、第2のマハラノビス距離演算過程B´での演算結果を、予め設定した閾値と比較した後、異常判定過程Eにて、先のマハラノビス距離のマハラノビス距離が当該閾値を越えた否かにより、プラントの異常の有無を判定する。
【0046】
そして、この第2実施形態に示されるプラント運転状態監視方法でも、第1実施形態と同様に、多くの監視項目の状態量をより少数かつ複数の監視項目の状態量からなるデータ群に分類し、分類した各データ群の状態量毎にマハラノビス距離を演算するようにしたので、従来のように、マハラノビス距離を求めるための多くの監視項目の状態量のすべての相関を演算が必要なく、その結果、マハラノビス距離を求めるための演算を高速化することができ、プラントの異常判定作業を速やかに行うことができる。
また、第2のマハラノビス距離演算過程B´にて、マハラノビス距離演算過程Bの各群で演算された複数のマハラノビス距離のマハラノビス距離を演算し、既定の閾値と比較することで,該マハラノビス距離演算過程Bの演算されたマハラノビス距離の異常値を正確に検出することができ、プラントの異常発生を正確に判定することが可能となる。
また、本実施形態においても、第1実施形態と同様に、プラントの多くの監視項目の状態量をより少数かつ複数の監視項目の状態量からなるデータ群に分類することによって、各データ群毎に、単位空間の状態量、信号空間の状態量を計測する時間間隔、単位空間を変更する時間間隔を個別に設定することができ、また、各データ群毎に、単位空間の検索基準、信号空間の検索基準を個別に設定することができ、監視の信頼性が向上できる各種のデータ処理を簡便に行える効果も得られる。
【0047】
(第3実施形態)
本発明の第3実施形態について図6を参照して説明する。この3実施形態に示されるプラント運転状態監視方法が、先の実施形態と異なるのは、分割した各データ群に基づきマハラノビス距離をそれぞれ演算した後のデータ処理方法にある。
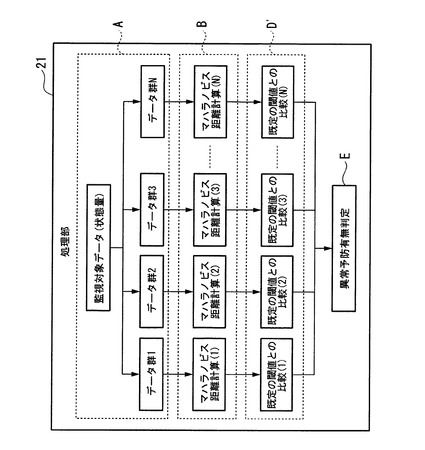
すなわち、図6に示されるように、第1実施形態に示される最大値選択過程C及び比較過程Dに代えて、符号D´で示されるマハラノビス距離個別比較過程が設けられている。
【0048】
具体的には、処理部21では、図6に示されるように、プラントの多くの監視項目の状態量をより少数かつ複数の監視項目の状態量からなるデータ群に分類して分割する過程Aと、該データ分割過程Aで分割された各データ群毎にマハラノビス距離をそれぞれ演算するマハラノビス距離演算過程Bと、マハラノビス距離演算過程Bの各群で演算されたマハラノビス距離を、予め設定しておいた既定の閾値と比較するマハラノビス距離個別比較過程D´と、前記マハラノビス距離個別比較過程D´での比較結果により異常の有無を判定する異常判定過程Eと、いった処理を各演算部にて行う。
そして、この処理部21では、マハラノビス距離個別比較過程D´で実施した、各データ群における各マハラノビス距離と予め設定しておいた既定の閾値と各比較において、少なくとも一つのマハラノビス距離が既定の閾値を越えた場合に、次の異常判定過程Eにてプラントが「異常」であると判定する。
なお、このような異常判定過程Eでのプラント異常の判定は、使用者により適宜設定変更可能であって、例えば、多数実施するマハラノビス距離と予め設定しておいた既定の閾値と比較にて、少なくとも半数以上のマハラノビス距離が既定の閾値を越えた場合に、次の異常判定過程Eにてプラントが「異常」であると判定しても良い。
【0049】
そして、この第3実施形態に示されるプラント運転状態監視方法でも、先の実施形態と同様に、多くの監視項目の状態量をより少数かつ複数の監視項目の状態量からなるデータ群に分類し、分類した各データ群の状態量毎にマハラノビス距離を演算するようにしたので、従来のように、マハラノビス距離を求めるための多くの監視項目の状態量のすべての相関を演算が必要なく、その結果、マハラノビス距離を求めるための演算を高速化することができ、プラントの異常判定作業を速やかに行うことができる。
また、マハラノビス距離個別比較過程D´にて、各データ群における各マハラノビス距離と予め設定しておいた既定の閾値と各比較において、少なくとも一つのマハラノビス距離が既定の閾値を越えた場合に、次の異常判定過程Eにてプラントが「異常」であると判定することで、各監視対象における異常判定を速やかに行うことができ、その結果、プラントの異常判定作業を速やかに行うことができる効果も得られる。
また、本実施形態においても、先の実施形態と同様に、プラントの多くの監視項目の状態量をより少数かつ複数の監視項目の状態量からなるデータ群に分類することによって、各データ群毎に、単位空間の状態量、信号空間の状態量を計測する時間間隔、単位空間を変更する時間間隔を個別に設定することができ、また、各データ群毎に、単位空間の検索基準、信号空間の検索基準を個別に設定することができ、監視の信頼性が向上できる各種のデータ処理を簡便に行える効果も得られる。
【0050】
以上、本発明の実施形態について図面を参照して詳述したが、具体的な構成はこの実施形態に限られるものではなく、本発明の要旨を逸脱しない範囲の設計変更等も含まれる。
【符号の説明】
【0051】
1 ガスタービン発電プラント
6 ガスタービン
12 処理部
20 処理部
21 処理部
【技術分野】
【0001】
本発明は、プラントが正常に運転されているか否かを判定するプラント運転状態監視方法に関する。
【背景技術】
【0002】
ガスタービン発電プラントや、原子力発電プラント、あるいは化学プラントといった各種のプラントでは、プラントが正常に運転されているか否かを監視するため、温度や、圧力といったプラントの状態量を取得し、監視する。すなわち、監視対象である複数の監視項目の状態量を所定の時間間隔で計測し、監視項目ごとの状態量の平均と分布を計算して正規化し、また、各監視項目の状態量の相関関係を計算して、マハラノビス距離を計算し、該マハラノビス距離が、予め設定した閾値を越えた場合、プラントに異常の兆候があると判定している。
【0003】
特許文献1には、このようなマハラノビス距離を用いた設備監視方法が開示されている。この設備監視方法では、システム同定のために予め定めた数式モデルに同期運動体の振動に関する時系列データを与えることによって該数式モデルのシステムパラメータを演算した結果と、そのシステムが正常な状態におけるシステムパラメータ群との乖離度に対して、原系列信号の自己相関係数行列にて重み付けをした指標(予測誤差分数)及び前記乖離度に対して正常時におけるシステムパラメータ群の分散・共分散行列の逆行列にて重み付けをした指標(マハラノビス距離)を組み合わせて、周期運動体の劣化状態を総合的に判断する。そして、このような設備監視方法により、プラントの状態量を多数有する場合でも、該プラントの監視を簡易に行うことができるものである。
【先行技術文献】
【特許文献】
【0004】
【特許文献1】特開昭59−68644号公報
【発明の概要】
【発明が解決しようとする課題】
【0005】
しかしながら、上述したマハラノビス距離を用いたプラント運転状態監視方法では、多数の監視項目の状態量を監視しており、このため、マハラノビス距離を求めるために多くの演算を繰り返す必要がある。その結果、演算に多くの時間がかかり、プラントが正常に運転されているか否かを判定が遅延するという問題があった。
具体的には、状態量をx,yとした場合、マハラノビス距離の計算は、x2+y2 の平方根といった単純な計算を監視項目間で行うが、例えば、監視項目が100あれば、各状態量に対して100×100=10000倍の回数の演算が必要であり、その演算処理に多くの時間が必要となっていた。
【0006】
この発明は、上述した事情に鑑みてなされたものであって、マハラノビス距離を求めるための演算を高速化することができ、プラントが正常に運転されているか否かの判定を速やかに行うことができるプラント運転状態監視方法の提供を目的とする。
【課題を解決するための手段】
【0007】
上記課題を解決するために、この発明は以下の手段を提案している。
本発明のプラント運転状態監視方法では、プラントの多くの監視項目の状態量をより少数かつ複数の監視項目の状態量からなるデータ群に分類する過程と、各データ群毎に状態量からマハラノビス距離を演算する過程と、各データ群毎に演算されたマハラノビス距離の最大値を選択する過程と、選択された最大値を予め設定した閾値と比較する過程、前記比較結果によりプラントの異常の有無を判定する過程と、を有することを特徴とする。
また、本発明のプラント運転状態監視方法では、プラントの多くの監視項目の状態量をより少数かつ複数の監視項目の状態量からなるデータ群に分類する過程と、各データ群毎に状態量からマハラノビス距離を演算する過程と、各データ群で演算されたマハラノビス距離のマハラノビス距離を算出する過程と、前記マハラノビス距離のマハラノビス距離を予め設定した閾値と比較する過程と、前記比較結果によりプラントの異常の有無を判定する過程と、を有することを特徴とする。
【0008】
本発明のプラント運転状態監視方法では、プラントの多くの監視項目の状態量をより少数かつ複数の監視項目の状態量からなるデータ群に分類する過程と、各データ群毎に状態量からマハラノビス距離を演算する過程と、各データ群毎に演算されたマハラノビス距離を、各データ群ごとに予め設定した閾値とそれぞれ比較する過程と、前記比較結果によりプラントの異常の有無を判定する過程と、を有することを特徴とする。
【発明の効果】
【0009】
本発明のプラント運転状態監視方法によれば、プラントの多くの監視項目の状態量をより少数かつ複数の監視項目の状態量からなるデータ群に分類し、分類した各データ群毎に状態量からマハラノビス距離を演算するようにしたので、従来のように、マハラノビス距離を求めるための多くの監視項目の状態量のすべての相関を求める演算が必要なく、その結果、マハラノビス距離を求めるための演算を高速化することができ、プラントの異常判定作業を速やかに行うことができる。
また、プラントの多くの監視項目の状態量をより少数かつ複数の監視項目の状態量からなるデータ群に分類することによって、各データ群毎に、単位空間の状態量、信号空間の状態量を計測する時間間隔、単位空間を変更する時間間隔を個別に設定することができ、また、各データ群毎に、単位空間の検索基準、信号空間の検索基準を個別に設定することができるので、監視の信頼性が向上できる各種のデータ処理を簡便に行うことができる。
【図面の簡単な説明】
【0010】
【図1】本発明の第1実施形態に係るプラント運転状態監視装置の構成例を示す模式図である。
【図2】図1の処理部を具体的に説明するための模式図である。
【図3】マハラノビス距離の概念を示す概念図である。
【図4】本実施形態に係るプラント運転状態監視方法の手順を示すフローチャートである。
【図5】第2実施形態に係る処理部を具体的に説明するための模式図である。
【図6】第3実施形態に係る処理部を具体的に説明するための模式図である。
【発明を実施するための形態】
【0011】
(第1実施形態)
以下、本発明の第1実施形態について図1〜図4を参照して説明する。なお、この発明を実施するための最良の形態(以下、実施形態という)によりこの発明が限定されるものではない。また、下記実施形態における構成要素には、当業者が容易に想定できるもの、実質的に同一のもの、いわゆる均等の範囲のものが含まれる。本実施形態では、本発明をガスタービンの発電プラントの状態監視に適用した例を説明するが、本発明が適用できる対象はこれに限定されるものではない。例えば、原子力発電プラントや、化学プラント等、多数の監視項目を有するプラント全般に対して本発明は適用できる。
【0012】
図1は、本実施形態に係るプラント運転状態監視装置の構成例を示す模式図である。プラント運転状態監視装置10は、ガスタービン6を用いた発電プラント(ガスタービン発電プラント)1の運転中の状態を監視して、ガスタービン発電プラント1が正常に運転されているか否かを判定する。
なお、プラントのガスタービン6を監視するための状態量としては、例えば、ガスタービン6のロータとステータ間の複数箇所で測定されるキャビティ温度、ガス出口にて周方向に沿い複数箇所で測定されるブレードパス温度、ロータの軸振動を検出するめに該ロータの周方向に沿い複数箇所で測定されるロータ軸の変位量、ガスタービン6に設けられる各種弁の開度、などがある。そして、これら状態量は監視対象データとして示され、各状態量において複数個、例えばブレードパス温度では、通常10点〜20点程度測定される。
監視対象であるガスタービン発電プラント1は、ガスタービン6によって発電機5を駆動して電力を発生する。ガスタービン6は、圧縮機2と、燃焼器3と、圧縮機2を回転させるタービン4とから構成される。圧縮機2の吸気口から吸入された空気は圧縮機2で圧縮され、高温、高圧の空気となって燃焼器3へ導かれる。燃焼器3では、高温、高圧の空気に燃料が供給され、燃焼する。燃焼器3で燃焼した燃料は、高温、高圧の燃焼ガスとなってタービン4へ供給され、これを駆動する。これによってタービン4は回転する。
【0013】
ガスタービン6の出力軸、すなわち、タービン4及び圧縮機2の回転軸は、発電機5に連結されている。これによって、ガスタービン6が運転されてタービン4が回転することによって得られる出力は発電機5に伝達される。このような構成により、ガスタービン6は発電機5を駆動して、発電機5に電力を発生させる。
【0014】
プラント運転状態監視装置10は、ガスタービン発電プラント1の状態を監視する。なお、本実施形態において、プラント運転状態監視装置10は、1台のガスタービン発電プラント1の状態を監視するが、複数台のガスタービン発電プラント1の運転状態を監視してもよい。プラント運転状態監視装置10は、例えば、コンピュータであり、入出力部(I/O)11と、処理部12と、記憶部13とを備えて構成される。プラント運転状態監視装置10は、いわゆるパーソナルコンピュータを利用して構成してもよいし、CPU(Central Processing Unit)とメモリとを組み合わせて構成してもよい。
【0015】
処理部12は、入出力部11を介してガスタービン発電プラント1に取り付けられる各種の状態量検出手段(センサ類)から、ガスタービン発電プラント1の状態量を受け取る。各種の状態量検出手段は、起動開始から所定の時間間隔で定期的に対応する状態量を取得し、入出力部11を介して処理部12に入力している。
【0016】
ガスタービン発電プラント1の状態量を示す監視対象データ群は、電気信号の形でプラント運転状態監視装置10の処理部12へ送られる。処理部12は、例えば、CPUで構成されており、記憶部13上に存在するプログラム(コンピュータプログラム)と呼ぶ命令列を順に読み込み、解釈し、その結果に従ってデータを移動したり加工したりする。
【0017】
なお、処理部12は、専用のハードウェアによって実現されるものであってもよい。また、処理部12の機能を実現するためのコンピュータプログラムをコンピュータが読み取り可能な記録媒体に記録し、この記録媒体に記録されたコンピュータプログラムをコンピュータシステムに読み込ませ、実行することにより本実施形態に係るプラント運転状態監視方法の処理手順を実行してもよい。なお、ここでいう「コンピュータシステム」とは、OSや、周辺機器などのハードウェアを含むものとする。
【0018】
また、「コンピュータが読み取り可能な記録媒体」とは、フレキシブルディスク、光磁気ディスク、ROM、CD−ROMなどの可搬媒体、あるいはコンピュータシステムに内蔵されるハードディスクのような記録装置のことをいう。さらに、「コンピュータが読み取り可能な記録媒体」とは、インターネットや、電話回線等の通信回線を介してコンピュータプログラムを送信する場合の通信線のように、短時間の間、動的にコンピュータプログラムを保持するもの、その場合のサーバや、クライアントとなるコンピュータシステム内部の揮発性メモリのように、一定時間コンピュータプログラムを保持しているものを含むものとする。また、上記コンピュータプログラムは、前述した機能の一部を実現するためのものであってよく、さらに前述した機能をコンピュータシステムにすでに記録されているコンピュータプログラムとの組み合わせで実現できるものであってもよい。
【0019】
なお、本実施形態に係るプラント運転状態監視方法は、予め用意されたコンピュータプログラムをパーソナルコンピュータや、ワークステーションなどのコンピュータで実行することによって実現できる。このコンピュータプログラムは、インターネット等の通信回線を介して配布することができる。また、このコンピュータプログラムは、ハードディスク、フレキシブルディスク(FD)、CD−ROM、MO、DVD等のコンピュータで読み取り可能な記録媒体に記録され、コンピュータによって該記録媒体から読み出されることによって実行されるようにしてもよい。
【0020】
処理部12では、図2に示されるように、プラントの状態量を示す監視対象データを複数のデータ群(NO.1、2、3・・N)に分類するデータ分割過程Aと、該データ分割過程Aで分割された各データ群毎にマハラノビス距離をそれぞれ演算するマハラノビス距離演算過程Bと、各データ群で演算されたマハラノビス距離の最大値を選択する最大値選択過程Cと、選択されたマハラノビス距離の最大値を閾値と比較する比較過程Dと、前記マハラノビス距離の最大値と閾値との比較結果により異常の有無を判定する異常判定過程Eと、いった処理を各演算部にて行う。
【0021】
マハラノビスの距離の概念を図3に示す。図3は、一例として横軸に発電機出力を取りと縦軸にブレードパス温度を取った2つのパラメータの相関関係を示している。すなわち、発電機出力が上がればブレードパス温度も大きくなる。そして、各測定データは大気条件や運転状態などの違いによりばらつきはあるものの発電機出力とブレードパス温度の間には相関関係があり、特定の範囲に収まる。これらを基準データとして基準となる単位空間を作成する。その他の各状態量においても、この発電機出力とブレードパス温度のように相関関係を求めることができる。そして、その単位空間に対して、判断すべきデータが正常か異常かをマハラノビスの距離によって判断するのである。
【0022】
上述したマハラノビスの単位空間は、本実施形態では予め定めておいた以下の項目により得ることができる。
(1)ガスタービン発電プラント1の状態を評価する時点から、所定期間前までの過去に遡った過去の期間におけるガスタービン発電プラント1の状態量を示す監視対象データに基づいて、マハラノビスの単位空間を演算する。
(2)ガスタービン発電プラント1の状態を評価する時点の状態量を示す監視対象データに基づいて、今後のガスタービン発電プラント1の状態を予測し、その予測値に基づいてマハラノビスの単位空間を演算する。
(3)ガスタービン発電プラント1の状態を評価する時点の状態量を示す監視対象データ、及びプラント起動時に設定される制御目標設定値に基づいて、今後のガスタービン発電プラント1の状態を予測し、その予測値に基づいてマハラノビスの単位空間を演算する。
【0023】
なお、マハラノビス距離を用いてガスタービン発電プラント1が正常であるか否かを判定する場合、マハラノビス距離を使って多次元データを1次元データに焼き直す。そして、単位空間と信号空間(単位空間と比較するデータであり、例えば、ガスタービン発電プラント1の状態を評価する時の状態量)との違いをマハラノビス距離で見る。本実施形態では、単位空間から作られる行列を使って、信号空間のマハラノビス距離を求める。これによって、データの異常性を表現できるようにしてある。
【0024】
プラント運転状態監視装置10の入出力部11には、出力手段であるコントロールパネル14が接続される。コントロールパネル14は、表示手段であるディスプレイ14D及びプラント運転状態監視装置10に対する指令を入力する入力手段14Cが設けられる。プラント運転状態監視装置10の記憶部13は、例えば、RAM(Random Access Memory)のような揮発性のメモリや、ROM(Read Only Memory)のような不揮発性のメモリ、ハードディスク装置や、光磁気ディスク装置、CD−ROM等のような読み出しのみが可能な記憶媒体、あるいはこれらを組み合わせて構成される。記憶部13には、本実施形態に係るプラント運転状態監視方法を実現するためのコンピュータプログラムや、データ等が格納されている。処理部12は、これらのコンピュータプログラムや、データを用いて、本実施形態に係るプラント運転状態監視方法を実現したり、ガスタービン発電プラント1の動作を制御したりする。なお、記憶部13をプラント運転状態監視装置10の外部に設け、通信回線を介してプラント運転状態監視装置10が記憶部13ヘアクセスできるように構成してもよい。
【0025】
ここで、一般的なマハラノビス距離Dを計算するための計算式について説明する。
まず、ガスタービン発電プラント1の状態を表す複数の状態量の合計数をuとし、各状態量をそれぞれ変数Xに割り付け、変数X1〜Xuでu個の状態量を定義する(uは2以上の整数)。次に、基準となるガスタービン発電プラント1の運転状態において、変数X1〜Xuの状態量(監視対象データで示される)を、それぞれ合計v個(2以上)収集する。
【0026】
変数X1〜Xuのそれぞれの平均値Mi及び標準偏差σi(基準データのばらつき度合い)を、数式(1)及び数式(2)により求める。なお、iは項目数(状態量の数、整数)であって、ここでは1〜uに設定して変数X1〜Xuに対応する値を示す。jは1〜vまでのいずれかの値(整数)をとり、それぞれの状態量の個数がv個であることを意味する。例えば、それぞれの状態量を60個ずつ取得する場合、v=60となる。ここで、標準偏差とは、状態量とその平均値との差を2乗したものの期待値の正平方根とする。
【0027】
【数1】
【0028】
【数2】
【0029】
次に、演算され特徴を示す状態量である前述の平均値Mi及び標準偏差σiを用いて、元の変数X1〜Xuを、下記の数式(3)によってx1〜xuに変換するという基準化を行う。すなわち、ガスタービン発電プラント1の状態量を、平均0、標準偏差1の確率変数に変換する。なお、下記の数式(3)において、jは1〜vまでのいずれかの値(整数)をとり、それぞれの状態量の個数がv個であることを意味する。
【0030】
【数3】
【0031】
次に、変量を平均0、分散1に標準化したデータで分析を行うため、変数X1〜Xuの相関関係、すなわち、変量の間の関連性を示す共分散行列(相関行列)R、及び共分散行列(相関行列)の逆行列R−1を、下記の数式(4)で定義付ける。なお、下記の数式(4)において、kは項目数(状態量の数)であり、ここではuとする。また、iや、pは、各状態量での値を示し、ここでは1〜uの値をとる。
【0032】
【数4】
【0033】
このような演算処理の後で、特徴を示す状態量であるマハラノビス距離Dを、下記の数式(5)に基づいて求める。なお、数式(5)において、jは1〜vまでのいずれかの値(整数)をとり、それぞれの状態量の個数がv個であることを意味する。また、kは項目数(状態量の数)であり、ここではuとする。また、a11〜akkは、上述した数式(4)に示す共分散行列Rの逆行列R−1の係数である。
【0034】
【数5】
【0035】
マハラノビス距離Dは基準データ、すなわち、単位空間のマハラノビス距離Dの平均値は1となり、ガスタービン発電プラント1の状態量が正常な状態では、概ね3以下に収まる。しかし、ガスタービン発電プラント1の状態量が異常になると、マハラノビス距離Dの値は大きくなる。このように、マハラノビス距離Dは、ガスタービン発電プラント1の状態量の異常の程度(単位空間からの離れ度合い)に応じて、値が大きくなるという性質を有する。
【0036】
上記数式(1)〜(5)は、一般的なマハラノビス距離Dを計算するための計算式であるが、本実施形態では、上述したプラントのガスタービン6を監視するための状態量(例えば、ガスタービン6のロータとステータ間の複数箇所で測定されるキャビティ温度、ガス出口にて周方向に沿い複数箇所で測定されるブレードパス温度、ロータの軸振動を検出するめに該ロータの周方向に沿い複数箇所で測定されるロータ軸の変位量、ガスタービン6に設けられる各種弁の開度)等の多くの監視対象の状態量を、より少数かつ複数の監視項目の状態量からなるデータ群に分割し、分割した各データ群毎にマハラノビス距離をそれぞれ演算することを特徴とする。
そして、これら複数の各データ群は、状態量の測定位置(例えば、複数のキャブティ温度、又は複数のブレードパス温度、又は複数のロータ軸変位量、又は各種弁の開度等)により分類しても良いし、また、これら状態量のサンプリング周期(例えば、1分毎、又は10分毎、又は1時間毎のサンプリング周期等)により分類しても良いし、また、前記状態量の種類(温度、又は圧力、又は変位量、又は指令値と測定値との偏差等の監視項目)に基づき分類する。特に相関性の高い監視項目をグループ化することによってデータ群を分類すると良い。
なお、このような監視対象データを各データ群に分割するための分割パターンは記憶部13に予め記憶しておき、分割指令を発することで、処理部12に対して該分割パターンに基づく監視対象データの分割処理を実行させるようにする。
【0037】
次に、本実施形態に係るプラント運転状態監視方法の手順を説明する。本実施形態に係るプラント運転状態監視方法は、図1に示すプラント運転状態監視装置10の処理部12にて実現される。
【0038】
図4は、本実施形態に係るプラント運転状態監視方法の手順を示すフローチャートである。
ステップS1では、まず、現在の状態量取得期間において、ガスタービン発電プラント1から状態量を示す監視対象データを取得する。この状態量は、例えば、ガスタービン発電プラント1に取り付けられる各種のセンサ類から既定の時間間隔で定期的に取得され、プラント運転状態監視装置10の記憶部13へ格納される。
【0039】
ステップS2では、予め設定しておいた監視対象データの分割指令(前述)に基づき、監視対象データを複数のデータ群に分割してグループ化する。なお、これらのデータ群は、上述したように、温度や、圧力、振動、回転速度等の監視対象毎に分割してグループ化しても良いし、特に相関性の高い監視項目を選択してグループ化することで形成しても良い。
【0040】
ステップS3-1〜S3-Nでは、分割した各データ群により上記数式に従ってマハラノビス距離をそれぞれ演算した後、次のステップS4にて、これらステップS3-1〜S3-Nの中のマハラノビス距離の最大値を選択する。
【0041】
ステップS5では、予め設定しておいた閾値と、先のステップS4で求めたマハラノビス距離の最大値とを比較することで、該マハラノビス距離の最大値が、当該閾値を越えたか否かを判断する。その後、ステップS6にて、ステップS5での判断結果に基づき、マハラノビス距離の最大値が、当該閾値を越えたYESの場合に「異常」と判定し(ステップS6)、また、マハラノビス距離の最大値が、当該閾値を越えないNOの場合に「正常」と判定する(ステップS7)。
なお、上述したように、マハラノビス距離は、単位空間から離れれば離れるほどに、異常の程度に応じて大きな値を示す。マハラノビス距離Dは、基準データ、すなわち、単位空間の平均値は1となり、ガスタービン発電プラント1の状態量が正常な状態では、概ね3以下に収まる。したがって、例えば、閾値は、単位空間の最大値よりも大きい値で適宜設定することができる。また、閾値は、ガスタービン発電プラント1の固有の特性や、ガスタービン発電プラント1の製造ばらつき等を考慮した設定値とすることが好ましい。
【0042】
以上詳細に説明したように本実施形態に示されるプラント運転状態監視方法によれば、プラントの多くの監視項目の状態量をより少数かつ複数の監視項目の状態量からなるデータ群に分類し、分類した各データ群の状態量毎にマハラノビス距離を演算するようにしたので、従来のように、マハラノビス距離を求めるための多くの監視項目の状態量のすべての相関を演算が必要なく、その結果、マハラノビス距離を求めるための演算を高速化することができ、プラントの異常判定作業を速やかに行うことができる。具体的には、状態量をx,yとした場合、マハラノビス距離の計算は、x2+y2 の平方根といった単純な計算を監視項目間で行うが、例えば、監視項目が100あれば、各状態量に対して100×100=10000倍の回数の演算が必要であり、その演算処理に多くの時間が必要となっていた。
しかし、本実施形態では、監視項目100の状態量を、それぞれ10の監視項目からなるデータ群に分けて、各データ群毎の状態量についての 10×10=100回の演算を10回行うのなら、合計1000回の演算で済み、これによってマハラノビス距離を求めるための演算を高速化することができ、プラントの異常判定作業を速やかに行うことができる。
【0043】
また、プラントの多くの監視項目の状態量をより少数かつ複数の監視項目の状態量からなるデータ群に分類することによって、各データ群毎に、単位空間の状態量、信号空間の状態量を計測する時間間隔、単位空間を変更する時間間隔を個別に設定することができ、また、各データ群毎に、単位空間の検索基準、信号空間の検索基準を個別に設定することができ、監視の信頼性が向上できる各種のデータ処理を簡便に行うことができる。
【0044】
(第2実施形態)
本発明の第2実施形態について図5を参照して説明する。この第2実施形態に示されるプラント運転状態監視方法が、第1実施形態と異なるのは、分割した各データ群に基づきマハラノビス距離をそれぞれ演算した後のデータ処理方法にある。
すなわち、図5に示されるように、第1実施形態に示されるマハラノビス距離の最大値を選択する最大値選択過程Cに代えて、符号B´で示される第2のマハラノビス距離演算過程にて、マハラノビス距離演算過程Bで演算された各群のマハラノビス距離のマハラノビス距離を求める。
【0045】
具体的には、処理部20では、図5に示されるように、プラントの多くの監視項目の状態量をより少数かつ複数の監視項目の状態量からなるデータ群に分類して分割する過程Aと、該データ分割過程Aで分割された各データ群毎にマハラノビス距離をそれぞれ演算するマハラノビス距離演算過程Bと、マハラノビス距離演算過程Bの各群で演算されたマハラノビス距離のマハラノビス距離を算出する第2のマハラノビス距離演算過程B´と、第2のマハラノビス距離演算過程B´で演算されたマハラノビス距離のマハラノビス距離を閾値と比較する比較過程Dと、前記マハラノビス距離の最大値と閾値との比較結果により異常の有無を判定する異常判定過程Eと、いった処理を各演算部にて行う。
そして、この処理部20では、マハラノビス距離演算過程Bの各群で演算された複数のマハラノビス距離がどのような分布を持っているのかを知るために、第2のマハラノビス距離演算過程B´にて、マハラノビス距離のマハラノビス距離を演算する。その後、比較過程Dにて、第2のマハラノビス距離演算過程B´での演算結果を、予め設定した閾値と比較した後、異常判定過程Eにて、先のマハラノビス距離のマハラノビス距離が当該閾値を越えた否かにより、プラントの異常の有無を判定する。
【0046】
そして、この第2実施形態に示されるプラント運転状態監視方法でも、第1実施形態と同様に、多くの監視項目の状態量をより少数かつ複数の監視項目の状態量からなるデータ群に分類し、分類した各データ群の状態量毎にマハラノビス距離を演算するようにしたので、従来のように、マハラノビス距離を求めるための多くの監視項目の状態量のすべての相関を演算が必要なく、その結果、マハラノビス距離を求めるための演算を高速化することができ、プラントの異常判定作業を速やかに行うことができる。
また、第2のマハラノビス距離演算過程B´にて、マハラノビス距離演算過程Bの各群で演算された複数のマハラノビス距離のマハラノビス距離を演算し、既定の閾値と比較することで,該マハラノビス距離演算過程Bの演算されたマハラノビス距離の異常値を正確に検出することができ、プラントの異常発生を正確に判定することが可能となる。
また、本実施形態においても、第1実施形態と同様に、プラントの多くの監視項目の状態量をより少数かつ複数の監視項目の状態量からなるデータ群に分類することによって、各データ群毎に、単位空間の状態量、信号空間の状態量を計測する時間間隔、単位空間を変更する時間間隔を個別に設定することができ、また、各データ群毎に、単位空間の検索基準、信号空間の検索基準を個別に設定することができ、監視の信頼性が向上できる各種のデータ処理を簡便に行える効果も得られる。
【0047】
(第3実施形態)
本発明の第3実施形態について図6を参照して説明する。この3実施形態に示されるプラント運転状態監視方法が、先の実施形態と異なるのは、分割した各データ群に基づきマハラノビス距離をそれぞれ演算した後のデータ処理方法にある。
すなわち、図6に示されるように、第1実施形態に示される最大値選択過程C及び比較過程Dに代えて、符号D´で示されるマハラノビス距離個別比較過程が設けられている。
【0048】
具体的には、処理部21では、図6に示されるように、プラントの多くの監視項目の状態量をより少数かつ複数の監視項目の状態量からなるデータ群に分類して分割する過程Aと、該データ分割過程Aで分割された各データ群毎にマハラノビス距離をそれぞれ演算するマハラノビス距離演算過程Bと、マハラノビス距離演算過程Bの各群で演算されたマハラノビス距離を、予め設定しておいた既定の閾値と比較するマハラノビス距離個別比較過程D´と、前記マハラノビス距離個別比較過程D´での比較結果により異常の有無を判定する異常判定過程Eと、いった処理を各演算部にて行う。
そして、この処理部21では、マハラノビス距離個別比較過程D´で実施した、各データ群における各マハラノビス距離と予め設定しておいた既定の閾値と各比較において、少なくとも一つのマハラノビス距離が既定の閾値を越えた場合に、次の異常判定過程Eにてプラントが「異常」であると判定する。
なお、このような異常判定過程Eでのプラント異常の判定は、使用者により適宜設定変更可能であって、例えば、多数実施するマハラノビス距離と予め設定しておいた既定の閾値と比較にて、少なくとも半数以上のマハラノビス距離が既定の閾値を越えた場合に、次の異常判定過程Eにてプラントが「異常」であると判定しても良い。
【0049】
そして、この第3実施形態に示されるプラント運転状態監視方法でも、先の実施形態と同様に、多くの監視項目の状態量をより少数かつ複数の監視項目の状態量からなるデータ群に分類し、分類した各データ群の状態量毎にマハラノビス距離を演算するようにしたので、従来のように、マハラノビス距離を求めるための多くの監視項目の状態量のすべての相関を演算が必要なく、その結果、マハラノビス距離を求めるための演算を高速化することができ、プラントの異常判定作業を速やかに行うことができる。
また、マハラノビス距離個別比較過程D´にて、各データ群における各マハラノビス距離と予め設定しておいた既定の閾値と各比較において、少なくとも一つのマハラノビス距離が既定の閾値を越えた場合に、次の異常判定過程Eにてプラントが「異常」であると判定することで、各監視対象における異常判定を速やかに行うことができ、その結果、プラントの異常判定作業を速やかに行うことができる効果も得られる。
また、本実施形態においても、先の実施形態と同様に、プラントの多くの監視項目の状態量をより少数かつ複数の監視項目の状態量からなるデータ群に分類することによって、各データ群毎に、単位空間の状態量、信号空間の状態量を計測する時間間隔、単位空間を変更する時間間隔を個別に設定することができ、また、各データ群毎に、単位空間の検索基準、信号空間の検索基準を個別に設定することができ、監視の信頼性が向上できる各種のデータ処理を簡便に行える効果も得られる。
【0050】
以上、本発明の実施形態について図面を参照して詳述したが、具体的な構成はこの実施形態に限られるものではなく、本発明の要旨を逸脱しない範囲の設計変更等も含まれる。
【符号の説明】
【0051】
1 ガスタービン発電プラント
6 ガスタービン
12 処理部
20 処理部
21 処理部
【特許請求の範囲】
【請求項1】
プラントの多くの監視項目の状態量をより少数かつ複数の監視項目の状態量からなるデータ群に分類するする過程と、
各データ群の状態量からマハラノビス距離を演算する過程と、
各データ群で演算されたマハラノビス距離の最大値を選択する過程と、
選択された最大値を予め設定した閾値と比較する過程と、
前記比較結果によりプラントの異常の有無を判定する過程と、を有することを特徴とするプラント運転状態監視方法。
【請求項2】
プラントの多くの監視項目の状態量をより少数かつ複数の監視項目の状態量からなるデータ群に分類するする過程と、
各データ群毎に状態量からマハラノビス距離を演算する過程と、
各データ群で演算されたマハラノビス距離のマハラノビス距離を算出する過程と、
前記マハラノビス距離のマハラノビス距離を予め設定した閾値と比較する過程と、
前記比較結果によりプラントの異常の有無を判定する過程と、を有することを特徴とするプラント運転状態監視方法。
【請求項3】
プラントの多くの監視項目の状態量をより少数かつ複数の監視項目の状態量からなるデータ群に分類するする過程と、
各データ群毎に状態量からマハラノビス距離を演算する過程と、
各データ群毎に演算されたマハラノビス距離を、予め各データ群毎に設定した閾値とそれぞれ比較する過程と、
前記比較結果によりプラントの異常の有無を判定する過程と、を有することを特徴とするプラント運転状態監視方法。
【請求項4】
前記データ群の分類過程では、前記状態量の測定位置に基づき前記データ群を分類することを特徴とする請求項1〜3のいずれか1項に記載のプラント運転状態監視方法。
【請求項5】
前記データ群の分類過程では、前記状態量のサンプリング周期に基づき前記データ群を分類することを特徴とする請求項1〜3のいずれか1項に記載のプラント運転状態監視方法。
【請求項6】
前記データ群の分類過程では、前記状態量の種類に基づき前記データ群を分類することを特徴とする請求項1〜3のいずれか1項に記載のプラント運転状態監視方法。
【請求項1】
プラントの多くの監視項目の状態量をより少数かつ複数の監視項目の状態量からなるデータ群に分類するする過程と、
各データ群の状態量からマハラノビス距離を演算する過程と、
各データ群で演算されたマハラノビス距離の最大値を選択する過程と、
選択された最大値を予め設定した閾値と比較する過程と、
前記比較結果によりプラントの異常の有無を判定する過程と、を有することを特徴とするプラント運転状態監視方法。
【請求項2】
プラントの多くの監視項目の状態量をより少数かつ複数の監視項目の状態量からなるデータ群に分類するする過程と、
各データ群毎に状態量からマハラノビス距離を演算する過程と、
各データ群で演算されたマハラノビス距離のマハラノビス距離を算出する過程と、
前記マハラノビス距離のマハラノビス距離を予め設定した閾値と比較する過程と、
前記比較結果によりプラントの異常の有無を判定する過程と、を有することを特徴とするプラント運転状態監視方法。
【請求項3】
プラントの多くの監視項目の状態量をより少数かつ複数の監視項目の状態量からなるデータ群に分類するする過程と、
各データ群毎に状態量からマハラノビス距離を演算する過程と、
各データ群毎に演算されたマハラノビス距離を、予め各データ群毎に設定した閾値とそれぞれ比較する過程と、
前記比較結果によりプラントの異常の有無を判定する過程と、を有することを特徴とするプラント運転状態監視方法。
【請求項4】
前記データ群の分類過程では、前記状態量の測定位置に基づき前記データ群を分類することを特徴とする請求項1〜3のいずれか1項に記載のプラント運転状態監視方法。
【請求項5】
前記データ群の分類過程では、前記状態量のサンプリング周期に基づき前記データ群を分類することを特徴とする請求項1〜3のいずれか1項に記載のプラント運転状態監視方法。
【請求項6】
前記データ群の分類過程では、前記状態量の種類に基づき前記データ群を分類することを特徴とする請求項1〜3のいずれか1項に記載のプラント運転状態監視方法。
【図1】

【図2】
【図3】
【図4】
【図5】
【図6】
【図2】
【図3】
【図4】
【図5】
【図6】
【公開番号】特開2010−181188(P2010−181188A)
【公開日】平成22年8月19日(2010.8.19)
【国際特許分類】
【出願番号】特願2009−22866(P2009−22866)
【出願日】平成21年2月3日(2009.2.3)
【出願人】(000006208)三菱重工業株式会社 (10,378)
【Fターム(参考)】
【公開日】平成22年8月19日(2010.8.19)
【国際特許分類】
【出願日】平成21年2月3日(2009.2.3)
【出願人】(000006208)三菱重工業株式会社 (10,378)
【Fターム(参考)】
[ Back to top ]