
プリプレグテープ並びにテープ制御情報設定方法
【課題】プリプレグテープの貼着時に、様々な曲面に対応して皺無く貼着や積層を図ることを提供する。
【解決手段】テープ幅を等分した複数条のテープ分割体に分断され、三次元に湾曲した曲面に貼着されるプリプレグテープを用いる。このプリプレグテープの貼着に要するテープ制御情報のうち少なくとも一要素を設定するテープ制御情報設定方法は、プリプレグテープが貼着される曲面に設定されるレイアップパスを取得するレイアップパス取得ステップS1、S6と、レイアップパス取得ステップS1、S6で取得したレイアップパス上に演算開始点を設定する演算開始点設定ステップS101と、演算開始点を通り且つレイアップパスに対して曲面沿いに直交する横断ラインと、各テープ分割体が貼着される分割ゾーンの中心を通る縦断ラインとが交差する点にテープ制御点を設定するテープ制御点設定ステップS7とを備えている。
【解決手段】テープ幅を等分した複数条のテープ分割体に分断され、三次元に湾曲した曲面に貼着されるプリプレグテープを用いる。このプリプレグテープの貼着に要するテープ制御情報のうち少なくとも一要素を設定するテープ制御情報設定方法は、プリプレグテープが貼着される曲面に設定されるレイアップパスを取得するレイアップパス取得ステップS1、S6と、レイアップパス取得ステップS1、S6で取得したレイアップパス上に演算開始点を設定する演算開始点設定ステップS101と、演算開始点を通り且つレイアップパスに対して曲面沿いに直交する横断ラインと、各テープ分割体が貼着される分割ゾーンの中心を通る縦断ラインとが交差する点にテープ制御点を設定するテープ制御点設定ステップS7とを備えている。
【発明の詳細な説明】
【技術分野】
【0001】
本発明は、プリプレグテープ並びにテープ制御情報設定方法に関する。
【背景技術】
【0002】
複合材料、特に、繊維材料に樹脂を含浸させたプリプレグテープ(prepreg tape)の使用は、自動車、海洋、航空宇宙産業を含む種々の産業界で増加している。プリプレグテープは、車両の筐体を構成する貼付型(例えばマンドレル)等の被貼付体の表面に貼着され、積層される。
【0003】
この貼着作業を自動で行うテープレイアップマシンは、平坦レイアップマシンと曲面レイアップマシンとに分類される。平坦レイアップマシンは、プリプレグテープの貼着時の制御が容易であるため、航空機のストリンガー等に利用されている。これに対し、曲面レイアップマシンは、プリプレグテープの貼着(積層)時に、たるみが生じやすく、皺が寄る傾向があり、その解決が困難な課題として残っている。レイアップマシンが適用できない場合、プリプレグテープは、やむなく手張りによって積層されている。そのため、皺の寄りを効果的に防止するため、曲面に適合したテープ経路(または、「レイアップパス」とも呼ばれている)を算出する方法を実用化する必要があった。
【0004】
かかるニーズに応えて、例えば、特許文献1には、複合材料を曲面に貼着するに当たり、テープ経路を算出する方法が開示されている。特許文献1の方法では、製造対象となる製品の三次元に湾曲する曲面を、当該曲面の境界線も含めて二次元の参照面(reference plane)にマッピングし、この参照面上でテープ経路を算出し、その座標を三次元に変換して、最終的な座標とする方法を採用している。
【先行技術文献】
【特許文献】
【0005】
【特許文献1】特開2007−185947号公報
【発明の概要】
【発明が解決しようとする課題】
【0006】
特許文献1の方法では、皺や弛みの解消が充分ではなかった。
【0007】
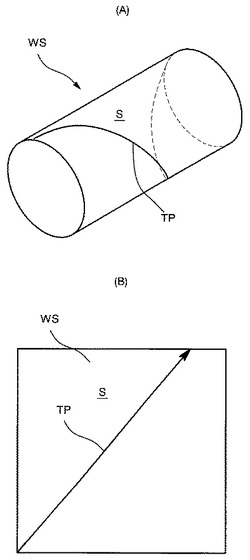
図1及び図2を参照して、加工対象となる製品WSの曲面が各図の(A)に示すような円筒形、または円錐形の場合、これを各図の(B)に示すように、製品WSの曲面Sを比較的精緻に平面に展開することができ、この平面上で最短距離を辿る経路を算出して、テープ経路とすれば、この平面上で最短距離を辿る経路は、概ね直線状に設定され、プリプレグテープの幅方向全域にわたって均等な荷重配分でテープを貼着することが可能になる。
【0008】
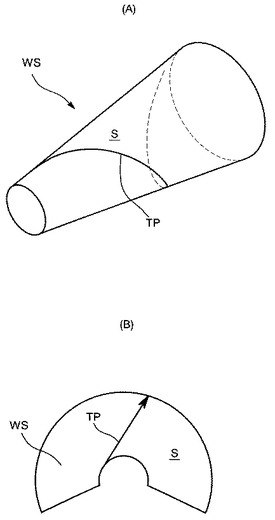
しかしながら、図3に示したように、昨今の製品WSによっては、複雑に湾曲した曲面Sを有するものも多数増加している。このような曲面Sは、精緻な2次元平面に展開することが困難であるため、自動化が実現されていなかった。
【0009】
本発明は、上述した課題に鑑みてなされたものであり、様々な曲面に対応して皺無く貼着や積層を図ることのできるプリプレグテープ、並びに該プリプレグテープを貼着するための諸要素のうち、少なくとも一要素を設定することのできるテープ制御情報設定方法を提供することを課題としている。
【課題を解決するための手段】
【0010】
かかる課題を解決する方法として、プリプレグテープを複数条のテープ分割体に分割可能に構成し、プリプレグテープのテープ分割体毎に貼着長さを変更することが考えられる。本願発明者は、鋭意研究の結果、そのようなプリプレグテープの開発に成功した。すなわち、本発明の最初の態様は、三次元に湾曲した曲面に貼着される貼着面を片面に有するプリプレグテープであって、前記貼着面のテープ幅を等分するように分断された複数条のテープ分割体と、各テープ分割体を一体に支承する支承体とを備えているものであることを特徴とするプリプレグテープである。この態様では、プリプレグテープのテープ分割体毎にテープ制御点(貼着時に押し付け荷重を付加するポイント)を設定することにより、従来のプリプレグテープに生じていた皺を逃がし、三次元に湾曲した様々な曲面に対しても、皺無く貼着や積層を図ることができる。
【0011】
好ましい態様において、前記支承体は、前記テープ分割体の貼着面と反対側に重ね合わされて、各テープ分割体と一体的に巻回される台紙である。また、前記支承体を兼ねる巻き芯を備えていてもよい。
【0012】
別の態様に係るプリプレグテープは、三次元に湾曲した曲面に貼着される貼着面を片面に有するプリプレグテープであって、テープ幅を等分するミシン目で分断可能に連結された複数条のテープ分割体を備えていることを特徴としている。
【0013】
好ましい態様において、前記プリプレグテープは、前記テープ分割体の貼着面と反対側に重ね合わされて、長手方向に平行に分断された各テープ分割体と一体的に巻回される台紙を備えている。この態様では、台紙によって、テープ分割体が一体的に担持され、取り扱いやすくなる。
【0014】
好ましい態様において、前記プリプレグテープは、前記台紙は、前記テープ分割体毎に分断されるものである。この態様では、テープ分割体が分断される際に、台紙を追従させることができるので、貼着後次工程までの間、台紙でテープ分割体を保護する等、台紙の取り扱いが容易になる。
【0015】
上述のようなプリプレグテープを実用化するためには、当該テープ分割体毎に適切な押し付け荷重を付加するポイント(以下、「テープ制御点」という)や、或いは、プリプレグテープのエッジの座標(これらテープ制御点やエッジの座標を「テープ制御情報と総称する」)を演算することが不可欠であり、本件発明者は、鋭意研究の結果、テープ制御情報を精緻に演算することに成功した。
【0016】
すなわち、本発明の別の態様は、前記プリプレグテープの貼着に要するテープ制御情報のうち少なくとも一要素を設定するテープ制御情報設定方法であって、前記プリプレグテープを前記曲面に貼着する経路であるレイアップパスを当該曲面のCADデータから取得するレイアップパス取得ステップと、前記レイアップパス取得ステップで取得したレイアップパス上に演算開始点を設定する演算開始点設定ステップと、前記演算開始点を通り且つ前記レイアップパスに対して曲面沿いに直交する横断ラインと、各テープ分割体が貼着される分割ゾーンの中心を通る縦断ラインとが交差する点にテープ制御点を設定するテープ制御点設定ステップとを備えていることを特徴とするテープ制御情報設定方法である。
【0017】
この態様では、レイアップパスに設定された分割ゾーン毎にテープ制御点が設定されるので、各テープ分割体をきめ細かく湾曲させることができる。なお、プリプレグテープを湾曲させて貼着する場合には、曲面の内周側と外周側とでプリプレグテープを押圧すべきテープ分割体が周方向にずれることになるが、テープ分割体毎に長手方向の繰出し量(貼着量)を変更し、上記ずれに対応した位置にテープ制御点を設定することができるので、プリプレグテープをより皺無く綺麗に貼着することができる。また、レイアップ取得処理では、予め演算されたレイアップパスを読み取る処理であってもよく、或いは、与えられた演算開始点を基点として、レイアップパスを演算する処理であってもよい。
【0018】
好ましい態様において、前記テープ制御点設定ステップは、前記演算開始点を始点として、前記横断ラインに沿う微小大きさの探索ベクトルを演算する探索ベクトル演算ステップと、演算された探索ベクトルの終点から前記曲面に下ろした垂線の足を演算する垂足演算ステップと、前記垂線の足に基づいて、前記曲面上の探索点を演算する探索点演算ステップと、所定の終了条件が成立するまで、前記ベクトル始点と前記探索点とから、当該探索点をベクトル始点とする新たな探索ベクトルを演算し、前記垂線演算ステップと前記探索点演算ステップとを繰り返す回帰演算ステップを備えている。この態様では、多様に湾曲する曲面を微小な探索ベクトルで探索し、その探索点を計算の基準として回帰的に探索ベクトルを演算することによって、曲面に精緻に沿う経路を計算することができ、テープ制御点を正確に演算することが可能になる。
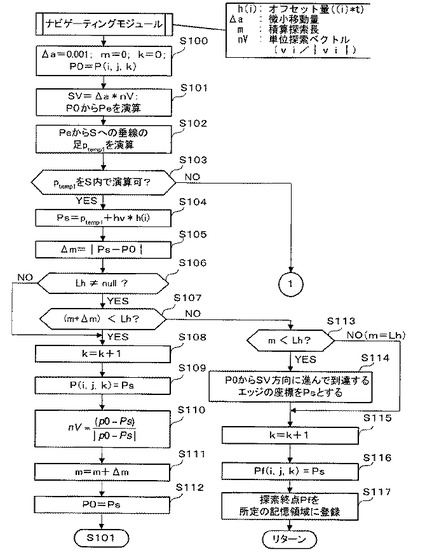
【0019】
好ましい態様は、前記分割ゾーン毎に、当該縦断ラインのエッジの座標を演算するエッジ座標演算ステップをさらに備えている。この態様では、縦断ライン毎にエッジの座標を演算することができるので、曲面に貼着されるプリプレグテープのエッジの座標をテープ貼着装置にティーチングしやすくなり、より好適で無駄のない座標にプリプレグテープを繰出し、裁断することが可能になる。
【0020】
好ましい態様において、前記エッジ座標演算ステップは、前記縦断ラインのエッジに最も近いテープ制御点を始点として、当該縦断ラインに沿う微小大きさの探索ベクトルを演算する探索ベクトル演算ステップと、演算された探索ベクトルの終点から前記曲面に下ろした垂線の足を演算する垂足演算ステップと、前記垂線の足に基づいて、前記曲面上の探索点を演算する探索点演算ステップと、当該縦断ラインのエッジに達するまで、前記ベクトル始点と前記探索点とから、当該探索点をベクトル始点とする新たな探索ベクトルを演算し、前記垂線演算ステップと前記探索点演算ステップとを繰り返す回帰演算ステップを備えている。この態様では、各縦断ラインに設定されたテープ制御点を基点として、多様に湾曲する曲面を微小な探索ベクトルで探索し、その探索点を回帰的に演算することによって、曲面に精緻に沿う経路を計算することができる。その結果、分割ゾーン毎にエッジの座標を正確に演算することが可能になる。
【発明の効果】
【0021】
以上説明したように、本発明によれば、分断可能なプリプレグテープを三次元に湾曲する曲面に貼着して皺の発生を防止することができるという顕著な効果を奏する。
【図面の簡単な説明】
【0022】
【図1】加工対象となる製品の曲面に対するテープレイアップパスを説明する図であり、(A)は、円筒形製品の斜視図、(B)は円筒形製品の展開図である。
【図2】加工対象となる製品の曲面に対するテープレイアップパスを説明する図であり、(A)は、円錐形製品の斜視図、(B)は円錐形製品の展開図である。
【図3】加工対象となる製品の曲面に対するテープレイアップパスを説明する図であって曲面を有する製品の斜視図である。
【図4】本発明の実施形態に係るプリプレグテープの第1の態様を示す斜視図である。
【図5】本発明の実施形態に係るプリプレグテープの第2の態様を示す斜視図である。
【図6】本発明に係るプリプレグテープの経路計算装置の構成図である。
【図7】曲面を有する製品のテープレイアッププランの一例を示す斜視図である。
【図8】本発明に係る全体フローを示すフローチャートである。
【図9】回帰演算ステップとしてのナビゲーティングモジュールの探索動作を示すフローチャートである。
【図10】図9の続きを示すフローチャートである。
【図11】ナビゲーティングモジュールによる探索動作を示す説明図であり、(A)は曲面上での探索、(B)は、曲面からオフセットされた曲面での探索を示す。
【図12】ナビゲーティングモジュールによる探索動作を示す説明図である。
【図13】ナビゲーティングモジュールによる探索動作を示す説明図である。
【図14】プリプレグテープを貼着する経路の一部をモデル化して示した説明図である。
【図15】図9のフローチャートにおけるテープ制御点演算サブルーチンを示すフローチャートである。
【図16】図15のテープ制御点演算サブルーチンを実行する際の説明図(斜視図)である。
【図17】図15のテープ制御点演算サブルーチンの実行結果例をモデル化して示す説明図(平面略図)である。
【図18】図15のテープ制御点演算サブルーチンの実行結果例を示すビュー表である。
【図19】図9のフローチャートにおけるエッジ座標演算サブルーチンを示すフローチャートである。
【図20】図19の続きを示すフローチャートである。
【図21】図19および図20のエッジ座標演算サブルーチンで実行可能な距離演算処理を示すフローチャートである。
【図22】図19および図20のエッジ座標演算サブルーチンの実行過程を示すビュー表である。
【図23】図19および図20のエッジ座標演算サブルーチンを実行する際の説明図(始点側平面略図)である。
【図24】図19および図20のエッジ座標演算サブルーチンを実行する際の説明図(終点側平面略図)である。
【図25】図19および図20のエッジ座標演算サブルーチンの実行結果例を示すビュー表である。
【発明を実施するための形態】
【0023】
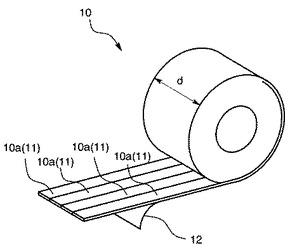
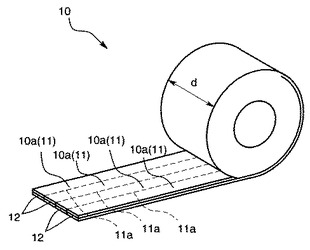
以下、添付図面を参照しながら本発明の好ましい実施の形態について説明する。
【0024】
まず、本発明に係るプリプレグテープ10は、図4に示すように、三次元に湾曲した曲面Sに貼着されるプリプレグテープ10であって、テープ幅dを等分した複数条のテープ分割体11に分断されるものである。
【0025】
各テープ分割体11は、貼着面10aが内向きになって巻回されている。テープ分割体11は、例えば、炭素繊維やアラミド繊維等の補強繊維に熱硬化性樹脂を含浸させた含浸テープが好適である。なお、図4の構成では、テープ分割体11は、予め取り扱いを容易にするために分断されているが、ミシン目等を入れて分離しやすい状態で一体化させていてもよい。
【0026】
各テープ分割体11の貼着面10aと反対側には、台紙12が重ね合わされている。台紙12は、剥離が容易な貼着剤でテープ分割体11に貼着されており、テープ分割体11を一体に担持してテープ分割体11とともに巻回されている。台紙12の材質は、伸縮しがたい特性を有するもの、例えば、剥離性の高い樹脂コーティングが施された紙が好適である。
【0027】
図4に示したプリプレグテープ10は、長手方向に平行に分断され、片面に貼着面10aを有するテープ分割体11と、このテープ分割体11の貼着面10aと反対側に重ね合わされて、各テープ分割体11と一体的に巻回される台紙12とを備えている。このため台紙12によって、テープ分割体11が一体的に担持され、取り扱いやすくなる。
【0028】
また、プリプレグテープ10の別の態様としては、図5の態様が例示される。図5に示す例では、テープ分割体11をミシン目11aで分断しやすいようにつないでいる一方、台紙12については、ミシン目11a沿いに分断可能なミシン目が入っている。このように図5に示した実施形態では、長手方向に平行に分断可能に連結され、片面に貼着面10aを有するテープ分割体11と、このテープ分割体11の貼着面10aと反対側に重ね合わされて、各テープ分割体11と一体的に巻回される台紙12とを備え、台紙12は、テープ分割体11毎に分断されている。このため図5に示した本実施形態では、テープ分割体11が分断される際に、台紙12を追従させることができるので、貼着後、次工程までの間、台紙12でテープ分割体11を保護する等、台紙12の取り扱いが容易になり、好適なテープ積層面を得ることができる。
【0029】
なお、図4の変形例として、台紙12にミシン目を入れて、テープ分割体11とともに分断できるようにしていてもよい。或いは、図5の変形例として、台紙12を予め分断していてもよい。貼着面は、必ずしも貼着剤が塗布されていることを要しない。尤も、製品の仕様に応じて、貼着剤が塗布されていてもよい。
【0030】
図4や図5に示したプリプレグテープ10の利点は、図3に示したような三次元に湾曲する曲面Sに沿って貼着作業を行う際、長手方向に各テープ分割体11を相対的にずらし、テープ分割体11毎に裁断長(あるいは貼着される長さ)(後述する縦断ラインLvの長さLy)を変更することができる点にある。そのような貼着が可能になれば、湾曲している面の曲率に応じてテープ分割体11の貼着位置をずらすことができるので、幅方向に寄る皺を伸ばすことができ、全体として皺のない滑らかな表面を得ることができる。また、テープ分割体11は、プリプレグテープ10としては、一体的に扱うことができるので、複数のテープを並置する方法よりも取り扱いが容易になる。さらに、一本のテープ幅を分割するテープ分割体11を構成しているので、テープ分割体11一本当たりのテープ幅が短くなり、しわ防止に大きく貢献することができる。
【0031】
プリプレグテープ10の分割数については、4から6が好ましい。尤も、それ以外の数、例えば、奇数であってもよい。
【0032】
テープ分割体11毎に裁断長を変更してプリプレグテープ10を三次元に湾曲する曲面に貼着するためには、各テープ分割体11にテープ制御点CP(図14参照)が設定されていることが好ましい。また、テープ分割体11毎に裁断長が演算されていること、別の観点でいえば、繰り出されたときの基端部分の各始点座標Scut(エッジ座標の一例)と先端部分の各終点座標Ecut(エッジ座標の別の例)とが精緻に演算されていることが好ましい。
【0033】
そのような始点座標Scutや終点座標Ecutが設定されたプリプレグテープ10は、繰出し時に予めエッジTPs、TPeの座標に合わせてテープ分割体11を裁断し、その後、裁断長に対応する長さに繰り出して、始点座標Scutに合わせて裁断することにより、曲面に沿うプリプレグテープ10を無駄なく消費することができる。また、テープ制御点CPがテープ分割体11毎に設定されている場合には、そのテープ制御点CP毎にテープ分割体11を個別に押さえ込んで変形させ、曲面に沿うように各テープ分割体11を個別に滑らかに押さえ込んで貼着作業を行うことが可能になる。
【0034】
そこで、本実施形態では、これらテープ制御点やエッジ座標等のテープ制御情報を演算するテープ制御情報設定方法を提供する。
【0035】
次に、本実施形態のテープ制御情報設定方法に係るシステムについて説明する。
【0036】
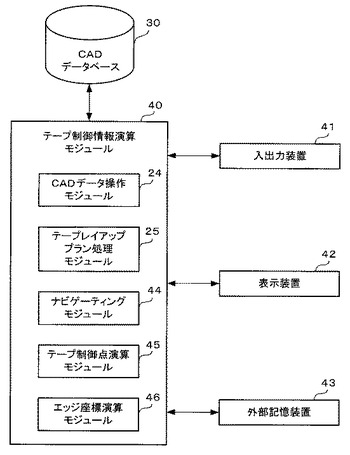
図6を参照して、本発明に係るシステムは、CADデータベース30と、CADデータベース30からデータを交換可能に接続されたテープ制御情報演算モジュール40とを備えている。
【0037】
CADデータベース30は、プリプレグテープ10が貼着される製品WSのCADデータを保存しており、このCADデータをインターフェース(又はネットワーク)経由でテープ制御情報演算モジュール40に送信することが可能になっている。CADデータは、一般にNURBS(Non-Uniform Rational B-Splines)等のフォーマットで、3次元で曲面を定義することのできるデータが使用される。本実施形態において、CADデータには、後述するテープレイアップパスプランが関連づけられている。テープレイアッププランには、レイアップパスTPの座標データが関連づけられている。
【0038】
テープ制御情報演算モジュール40は、ファクトリコンピュータ等の計算機で実現される論理的なモジュールであり、ハード的には、図略のCPU、ROM、RAMの他、入出力装置41、表示装置42、外部記憶装置43を備えている。
【0039】
テープ制御情報演算モジュール40は、CADデータベース30からCADデータの読み取り等を実行するCADデータ操作モジュール24と、読み取ったCADデータに対し、所定のテープレイアッププランを処理するテープレイアッププラン処理モジュール25と、テープレイアッププラン処理モジュール25に基づいて、平面または曲面を含む面上の座標を探索するナビゲーティングモジュール44と、プリプレグテープ10のテープ制御点CPを演算するテープ制御点演算モジュール45と、プリプレグテープ10のエッジ座標を演算するエッジ座標演算モジュール46とを論理的に有している。これらは、テープ制御情報演算モジュール40を構成するハード資源(例えば、CPU、ROM、RAM)と、このハード資源によって実行されるソフト資源(例えば、ソースコード、オブジェクトコード、プログラミングコード等)との組み合わせによって実現される。
【0040】
次に、テープレイアッププラン処理モジュール25によるテープレイアッププランについて説明する。なお、以下の説明では、演算処理に関連する要素(ベクトル、距離、個数、順番等)について、各要素を変数として表す必要がある場合には、表1の変数欄に従って標記することとし、これらのうち、値を示す必要がある場合には、表1の値欄に従って標記することとする。
【0041】
【表1】

【0042】
図7を参照して、同図に例示する製品WSは、車両の筐体部分を構成する矩形の部品である。この部品を製造する過程では、図略のマンドレルによって規定される曲面Sに対し、i番目の層毎に貼着方向Vが入力される。具体的には、最初に曲面Sの一辺に沿う貼着方向V(0)方向に沿ってプリプレグテープ10を貼着し、次いで、最初の貼着方向V(0)と直交する貼着方向V(1)に沿って、その後、最初の貼着方向V(0)と45°で交差する貼着方向V(2)に沿ってプリプレグテープ10を貼着し、層毎に経路を変更してテープ層を形成(テープレイアップ)する設定(このプリプレグテープ10の貼着手順に関する設定要件を「テープレイアッププラン」という)が実行されることになっている。この場合、図6に示したテープ制御情報演算モジュール40は、図8以下のフローチャートにそって、製品WSのテープレイアッププランを読み取り、読み取ったテープレイアッププランのレイアップパスTP(図15参照)毎にテープ分割体11に対応するテープ制御点CPとエッジ座標を演算する。CADデータのテープレイアッププランに関連づけられた座標情報を参照することにより、テープ制御情報演算モジュール40は、製品WSの層毎に複数本設定された各レイアップパスTPを一意に特定できるように構成されている。
【0043】
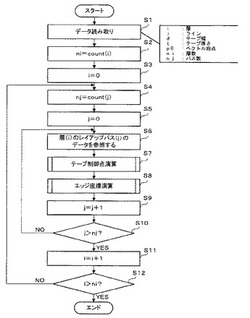
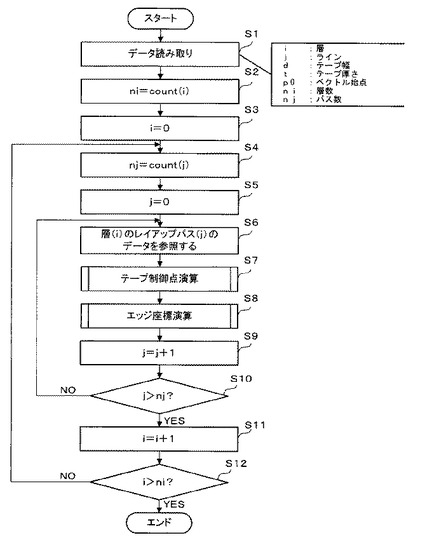
図8を参照して、まず、テープ制御情報演算モジュール40は、CADデータ操作モジュール24によって製品のCADデータをCADデータベース30から読み取る(ステップS1)。本実施形態では、このステップS1が、レイアップパスTPを取得するレイアップパス取得ステップとなる。このデータ読み取り処理により、図7に例示されたテープレイアッププランが入力される。テープレイアッププラン処理モジュール25は、入力されたテープレイアッププランをGUIによって表示装置42に表示する。
【0044】
また、テープレイアッププラン処理モジュール25は、読み取りが完了した段階で、テープレイアップの層数niをカウントする(ステップS2)。次いで、演算の基準となる最初の層を一意に表す変数iが初期設定される(ステップS3)。
【0045】
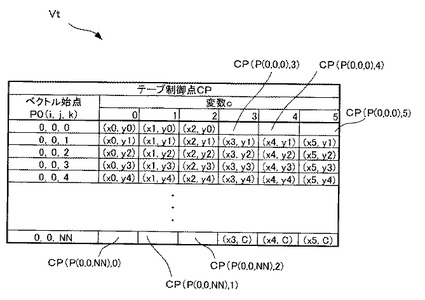
次に、i番目の層について、レイアップパスTPのパス数njがカウントされる(ステップS4)。次いで、i番目の層について、レイアップパスTPを一意に表す変数jが初期設定される(ステップS5)。このように本実施形態では、層に関する変数i、レイアップパスTPに関する変数jをメインルーチン(ステップS3、S5)で設定し、レイアップパスTPに関連する変数k,cを後述するサブルーチンで設定することにより、演算された全ての座標を三次元で一意に特定することができるようになっている。以下の説明では、表1に示した凡例に基づき、必要に応じてレイアップパスTP上の座標Pを配列変数でP(i,j,k)と標記することとする。また、データ処理としての説明が必要な場合には、配列変数P(i,j,k)の値をタプルとも呼称する。ここでタプルとは、ある配列変数(例えば、P(i,j,k))の一つの値を構成する変数i、j、kの値の集合を表す集合数詞である。
【0046】
次に、i番目の層において、j番目のレイアップパスTPのデータが参照される(ステップS6)。次いで、参照されたデータに基づき、テープ制御点演算サブルーチン(ステップS7)と、エッジ座標演算サブルーチン(ステップS8)とが実行され、レイアップパスTPの変数jがインクリメントされる(ステップS9)。次いで、全てのレイアップパスTPが終了したか否かが、変数jとパス数njとの比較によって判別され(ステップS10)、終了していなければ、ステップS6に復帰して上述した処理を繰り返し、終了していれば、層に関する変数iがインクリメントされる(ステップS11)。次いで、全ての層が終了したか否かが、変数iと層数niとの比較によって判別され(ステップS12)、終了していなければ、ステップS4に復帰して上述した処理を繰り返し、終了していれば、プログラムを終了する。無論、図8のフローチャートは、一例であり、例えば、終了後に演算結果をGUIで表示装置42に表示するようにしてもよい。或いは、ステップS12の終了後に引き続いて、演算されたテープ制御点CPやエッジ座標をNC装置にティーチングするポストプロセスステップを実行してもよい。詳しくは後述するように、演算されるテープ制御点CPやエッジ座標は、CADデータに基づく座標データであるので、図略のポストプロセスステップでは、これら座標データをNC装置の制御座標に対応させる座標変換処理を実行することになる。
【0047】
テープ制御点演算サブルーチン(ステップS7)やエッジ座標演算サブルーチン(ステップS8)では、レイアップパスTPの各座標Pを基礎として、基礎となった座標Pから一定間隔隔てた座標Pが演算される。このため、曲面Sが複雑に起伏している場合でも、その起伏に沿って、重なりや皺が生じにくい状態でプリプレグテープをすることのできるレイアップパスを演算することが可能になる。そして、本実施形態においては、より精緻な演算を実現するため、個々のステップの随所でナビゲーティングモジュール44が呼び出される。ナビゲーティングモジュール44は、複雑な曲面上で曲面S上の所定の座標Pを探索するための関数群であり、以下に示す処理が可能になっている。
【0048】
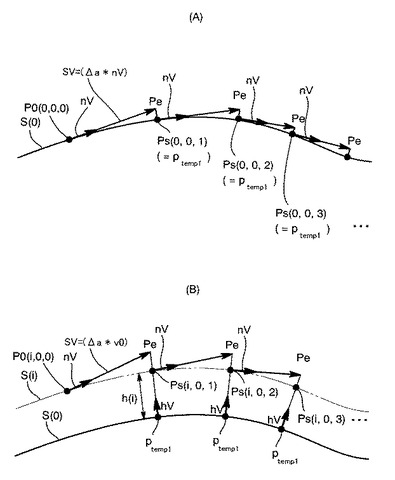
図9及び図11を参照して、ナビゲーティングモジュール44は、オフセット量h、微小移動量Δa、積算探索長m、単位探索ベクトルnV等を引数として含んでいる。オフセット量hとは、プリプレグテープの厚さtを考慮した曲面Sからの法線方向の浮揚量であり、i番目の層については、i×tで演算される変数である。微小移動量Δaは、探索方向のベクトル(探索ベクトルSV)のスカラであり、例えば、0.001mmに設定される。積算探索長mは、最初の探索ベクトルSVの演算開始点としてのベクトル始点P0から現在まで探索した探索点Psまでの探索経路の積算値である。単位探索ベクトルnVは、探索ベクトルSVを演算するための単位ベクトルであり、ナビゲーティングモジュール44を呼び出すプログラムによって設定されるものである。単位探索ベクトルnVは、可及的に曲面Sに接するように設定される(図11参照)。これら引数は、ナビゲーティングモジュール44を呼び出すプログラムによって、即ち、演算される経路の種類等によって、適宜変更される。
【0049】
ナビゲーティングモジュール44が呼び出されると、まず、引数の初期設定が実行される(ステップS100)。この初期設定では、微小移動量Δaが0.001mmに、積算探索長mが0.0mmに、変数kが0にそれぞれ設定され、この変数kの値に基づいて、ベクトル始点P0(i,j,k)が設定される。なお、微小移動量Δaや積算探索長mの初期設定は、ユーザが設定画面を表示装置42に表示させ、この設定画面上で適宜変更できるようになっている。
【0050】
次いで、探索ベクトルSVが演算される(ステップS101)。この処理では、探索ベクトルSVを、微小移動量Δaと単位探索ベクトルnVとの積で求め、探索ベクトルSVの始点となるベクトル始点P0から探索ベクトルSVの終点となるベクトル終点Peを演算する。演算の基礎となるベクトル始点P0は、ナビゲーティングモジュール44を呼び出すプログラムによって設定される。たとえば、i番目の層にあるj番目のレイアップパスTP(i,j)についてテープ制御点CPの演算を開始する場合、ベクトル始点P0の値は、テープ制御点演算サブルーチンS7(図8、図15参照)によって、レイアップパスTP(i,j)上に事前に特定される座標P(i,j,b)の値(x,y)である。この場合のベクトル始点P0は、レイアップパスTPのテープ貼着方向Vの上流端が好適である。尤も、ベクトル始点P0をレイアップパスTPの中間点に設定することも不可能ではない。
【0051】
次に、演算されたベクトル終点Peから曲面Sに垂線の足ptemp1を演算し(ステップS102)、ptemp1が演算可能な座標であるか否かを判別する(ステップS103)。
【0052】
ptemp1の座標Pが演算可能である場合、垂線の足ptemp1+(hV*h(i))を演算する(ステップS104)。ここで、hVは、ptemp1を通る曲面Sの法線単位ベクトルであり、h(i)は、i*tで演算されるオフセット量hであることから、最初の層においては、垂線の足ptemp1がPsで示す座標になる(図11(A)参照)。他方、2番目以降のi番目の層については、オフセット量hが0よりも大きくなるので、図11(B)に示すように、演算される座標Psは、垂線の足ptemp1からh(i)だけ法線方向に浮揚した値をとることになる。垂線の足ptemp1から演算した座標Ps(i,j,k)を特に探索点という。
【0053】
次いで、始点となる座標Pから探索点Ps(i,j,k)までの探索長Δmを演算する(ステップS105)。
【0054】
その後、探索距離Lhが設定されているか否かをチェックする(ステップS106)。この探索距離Lhは、詳しくは後述するように、ナビゲーティングモジュール44で探索対象となる座標Pを演算する際、最初のベクトル始点P0となる座標Pから探索対象となる座標Pまでの間隔を算出するための値であり、ナビゲーティングモジュール44を呼び出すプログラムによって設定されるものである。
【0055】
探索距離Lhが設定されていない場合、或いは、設定されているが、積算探索長mの更新値(m+Δm)未満である場合(ステップS107)、探索点Psを登録するための変数kをインクリメントし(ステップS108)、新たな探索点Ps(i,j,k)のタプルを追加して、その値(x,y)を登録する(ステップS109)。
【0056】
次いで、ベクトル始点P0と探索点Psから、次の探索ベクトルSVを次式
【0057】
【数1】
【0058】
によって演算し(ステップS110)、積算探索長mを探索長Δmでインクリメントする(ステップS111)。
【0059】
その後、現在の探索点Psを次の演算のベクトル始点P0とし(ステップS112)、ステップS101に復帰して、上述したステップを繰り返す。
【0060】
また、ステップS107において、探索距離Lhが積算探索長mの更新値(m+Δm)を超えている場合、積算探索長mが探索距離Lh未満であるか否かが判別され(ステップS113)、積算探索長mが探索距離Lh未満である場合には、ベクトル始点P0から探索ベクトルSVの方向に進んで到達するエッジの座標を探索点Psとして求める(ステップS114)。次いで、変数kをインクリメントして(ステップS115)、探索終点Pf(i,j,k)を登録する新たなタプルを追加し、このタプルPf(i,j,k)に探索点Psの値(x,y)を登録する(ステップS116)。これらのステップS113〜S116により、探索距離Lhが設定されている場合には、その終点まで正確に目標となる座標Pを演算することが可能になる。その後、探索終点Pfを所定の記憶領域に登録し(ステップS117)、元のルーチンに復帰する。なお、ステップS113で積算探索長mが探索距離Lhと等しい場合には、そのままステップS115に移行する。
【0061】
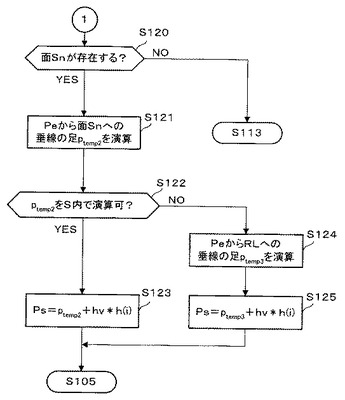
次に、ステップS103において、垂線の足ptemp1を演算することができない場合について、図10、図12を参照しながら説明する。
【0062】
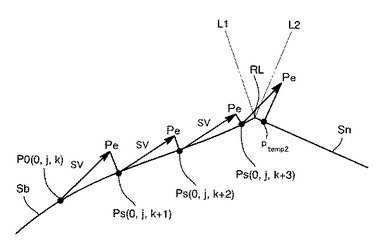
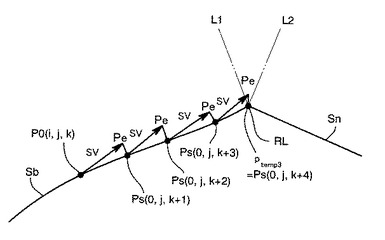
図12に示すように、例えば曲面Sに稜線RLが存在し、二つの面Sb、Snに分断されている場合、面Sb上で演算された探索ベクトルSVのベクトル終点Peが、面Sbと直角な稜線RL上の面L1を通過すると、面Sb上には、垂線の足ptemp1を演算することができなくなる。そこで、ptemp1を演算することができない場合には、図10に示すように、まず、隣接する面Snの有無を判別し(ステップS120)、面Snが存在する場合には、探索されたベクトル終点Peから面Snに垂線の足ptemp2を演算する(ステップS121)。ここで、さらに、面Sn上に垂線の足ptemp2が演算可能であったか否かを判別し(ステップS122)、演算が可能であった場合(例えば、図12に示すように、面Snと、この面Snと直角な稜線RL上の面L2とに挟まれた領域内にベクトル終点Peがある場合)には、曲面Sとしての面Snに下ろした垂線の足ptemp2に基づいて演算し(ステップS123)、ステップS105に復帰する。ここで、ステップS123のhVは、ptemp2における面Snの法線単位ベクトルである。
【0063】
他方、図13に示したように、探索ベクトルSVのベクトル終点Peが、面L1、L2間に位置する場合、何れの面Sb、Sn上にも垂線の足を演算することができなくなる。この場合には、ステップS122で垂線の足ptemp2を演算不可と判定してベクトル終点Peから稜線RL上に垂線の足temp3を演算し(ステップS124)、この垂線の足temp3を基礎にして座標Pを演算し(ステップS125)、ステップS105に移行する。ここで、ステップS125のhvは、ptemp3から探索ベクトルSVのベクトル終点Peに向かう垂直単位ベクトルである。
【0064】
なお、ステップS120において、隣接する面Snが存在しない場合には、探索ベクトルSVのベクトル終点Peが面Sbの境界を超えた場合であるので、その場合には、ステップS113に移行し、処理を終了する。
【0065】
次に、テープ制御点CPの演算の具体例について説明する。
【0066】
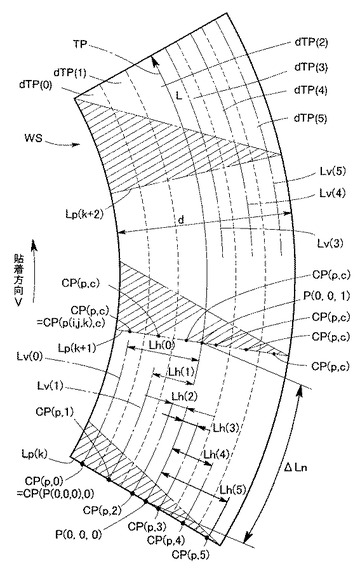
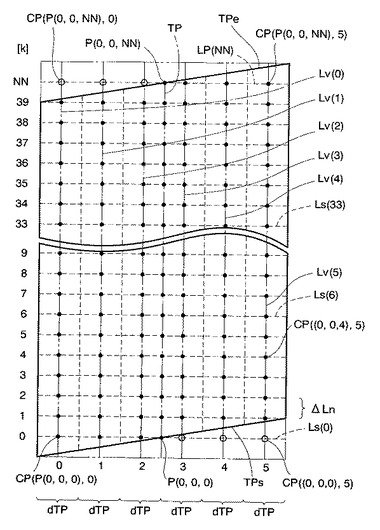
まず、図14を参照して、同図に示すレイアップパスTPは、6条に分断されるプリプレグテープ10を貼着する経路の一部をモデル化して示したものである。図中、dTPは、プリプレグテープ10のテープ分割体11が貼着される分割ゾーンを示す。以下の説明では、分割ゾーンdTP(従って、テープ分割体11)を一意に特定する変数をcとする。
【0067】
図示のように、プリプレグテープ10が反時計回りに湾曲する経路を有する場合、プリプレグテープ10に対して貼着方向Vに作用する応力の分布は、斜線で示すように、内周側が大きくなり、外周側が小さくなる。そのため、皺を防止するために、内周側の裁断長を短くし、外周側の裁断長を長くして、プリプレグテープ10のテープ分割体11毎に長手方向の位置を相対的にずらすことが必要となる。かかる制御を実施するためには、レイアップパスTP上に点在する座標Pを通ってプリプレグテープ10を直角に横断する横断ラインLp毎に、テープ分割体11の長手方向中心線(縦断ライン)Lv(c)と交差する座標CP(p,c)を求めて、これをテープ制御点CPとすることが好ましい。そこで、本実施形態では、レイアップパスTPの座標P毎に、横断ラインLpと縦断ラインLv(c)とが交差する座標CP(p,c)を演算することとしている。
【0068】
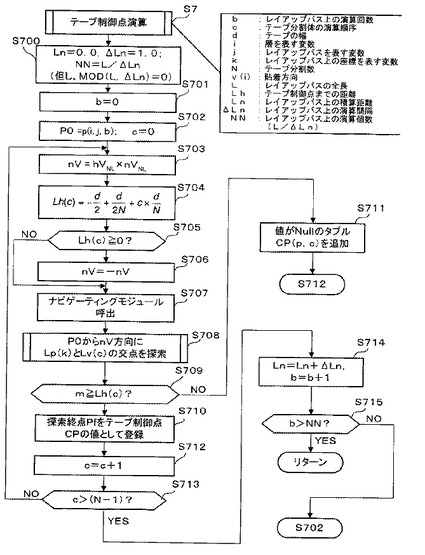
次に、図15を参照して、テープ制御点演算サブルーチンS7を実行する際、テープ制御点演算モジュール45は、ナビゲーティングモジュール44を呼び出すために必要な引数を設定する(ステップS700〜S707)。具体的には、ステップS700において、テープ制御点演算モジュール45は、レイアップパス上の積算距離Lnを初期化し、演算間隔ΔLnを設定する。演算間隔ΔLnは、プログラムで予め設定されているが、ユーザが任意の値を設定できるようにしてもよい。また、ステップS700において、テープ制御点演算モジュール45は、レイアップパスTP上の演算個数NNを設定する。この演算個数NNは、当該レイアップパスTPの全長Lを演算間隔ΔLnで割ったものである。ここで、演算個数NNが端数とならないよう、演算間隔ΔLnは、MOD(L,ΔLn)=0を充足する値に設定される。
【0069】
次に、ステップS701において、テープ制御点演算モジュール45は、変数bを0に初期化する。変数bは、レイアップパスTP上の演算回数をカウントするためのものであり、座標Pの変数kに対応している。本実施形態では、図17に示したように、貼着方向Vの上流側から下流側に行くに連れて、変数b(従って、kの値)が大きくなるように設定されている。
【0070】
次いで、ステップS702において、テープ制御点演算モジュール45は、ナビゲーティングモジュール44が演算の基礎とする初期のベクトル始点P0の座標P0をP0(i,j,b)に設定する。また、変数cを0に初期化する。本実施形態では、図17に示したように、貼着方向Vの上流側から下流側に向かって左側から順にcの値が大きくなるように設定されている。
【0071】
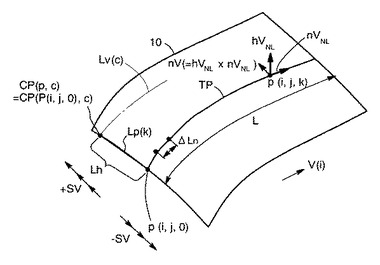
次いで、ステップS703において、テープ制御点演算モジュール45は、単位探索ベクトルnVを演算する。図16に示したように、単位探索ベクトルnVは、レイアップパスTP上の座標Pの法線ベクトルhVNLとレイアップパスTPに沿う単位ベクトルnVNLの外積によって求められる。
【0072】
次いで、ステップS704において、テープ制御点演算モジュール45は、次式
【0073】
【数2】
【0074】
により、演算されるべきテープ制御点CPまでの距離を演算する。この(2)式は、レイアップパスTP上の座標Pを通る横断ラインLpが、各テープ分割体11の縦断ラインLv(c)と直交する座標までの距離を示している。本実施形態では、図17に示したように、レイアップパスTP上の座標Pを境にし、貼着方向Vの上流側から下流側に向かって左側を−に設定し、右側を+に設定している。
【0075】
次いで、ステップS705において、テープ制御点演算モジュール45は、(2)式の演算結果の正負を判別する。仮に演算結果が+に反転した場合、テープ制御点演算モジュール45は、単位探索ベクトルnVの符号を反転し(ステップS706)、ナビゲーティングモジュール44の探索方向を逆向きにする。
【0076】
これらの設定処理を実行した後、テープ制御点演算モジュール45は、ナビゲーティングモジュール44を呼び出し(ステップS707)、図17に示すように、横断ラインLp(k)と縦断ラインLv(c)との交点を探索する(ステップS708)。このとき、ナビゲーティングモジュール44による探索の終了は、次の2通りである。
【0077】
第1は、演算された探索終点Pfが(2)式の演算結果に対応する縦断ラインLv(c)に到達した場合であり、第2は、演算された探索終点Pfが、(2)式の演算結果に対応する縦断ラインLv(c)に到達する前に、プリプレグテープ10のエッジTPs、TPeに到達した場合である。
【0078】
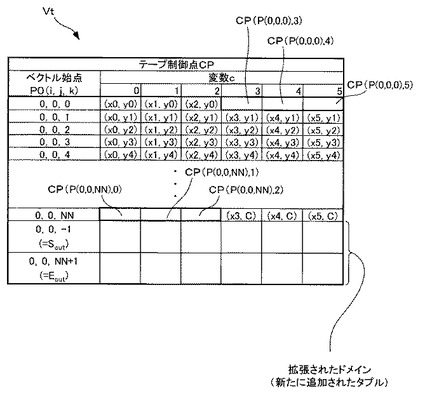
図17を参照して、プリプレグテープ10のエッジTPs、TPeは、必ずしもレイアップパスTPの座標Pを通る横断ラインLpと平行になっているわけではない。そのため、例えば、図17に示すように、エッジTPs、TPeが横断ラインLpと斜行しているプリプレグテープ10の場合、このプリプレグテープ10に設定されたレイアップパスTPの座標P(0,0,0)、P(0,0,NN)に関し、一部が横断ラインLp(0)、Lp(NN)と交差しないところで途切れている。このため、レイアップパスTPの座標P(0,0,0)について、変数cが4番目以降の縦断ラインLv(3)〜Lv(5)に対してテープ制御点CPを探索した場合や、レイアップパスTPの座標P(0,0,NN)について、変数cが1番目から3番目の縦断ラインLv(0)〜Lv(2)に対してテープ制御点CPを探索した場合には、探索距離Lhに到達する前に探索点Psがプリプレグテープ10のエッジTPs、TPeに到達してしまい、座標P(0,0,0)に関する縦断ラインLv(3)〜Lv(5)や、座標P(0,0,NN)に関する縦断ラインLv(0)〜Lv(2)のテープ制御点CPは、演算されないことになる。
【0079】
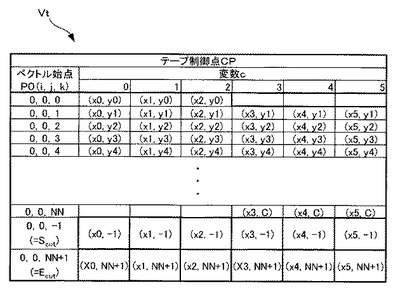
テープ制御点演算モジュール45は、ナビゲーティングモジュール44による演算が終了した時点で、レイアップパスTPの座標Pからナビゲーティングモジュール44が探索した探索終点Pfまでの積算探索長mが探索距離Lh以上であるか否かを判別する(ステップS709)。積算探索長mが探索距離Lh以上である場合には、探索終点Pfの値(x,y)をテープ制御点CP(p,c)として登録する(ステップS710)。他方、積算探索長mが探索距離Lh未満である場合には、変数cについて、テープ制御点CP(p,c)の記憶領域にnullのタプルを追加する(ステップS711)。かかる制御により、例えば、図17に例示した座標のプリプレグテープ10のテープ制御点CPを演算した場合には、図18のビュー表Vtに示すように、一部のタプル(CP(P(0,0,0),3)〜CP(P(0,0,0),5)、CP(P(0,0,NN),0)〜CP(P(0,0,NN),3))がnullに設定される。なお、データ処理の際に、null設定による不具合を回避するため、nullに代えて、m≧Lhのときのテープ制御点CPと弁別可能な非nullの値を登録することとしてもよい。
【0080】
ステップS710またはステップS711を終了した後、テープ制御点演算モジュール45は、変数cをインクリメントし(ステップS712)、変数cの値をプリプレグテープ10の分割数Nから1を引いた数と比較して、全てのテープ分割体11について、テープ制御点CPを演算したか否かを判別する(ステップS713)。仮に演算が未終了の分割ゾーンdTPが残っている場合には、ステップS703に戻って上述した処理を繰り返す。仮に全ての分割ゾーンdTPについて演算が終了した場合には、積算距離Lnの値を演算間隔ΔLnでインクリメントし、同時に変数bの値をインクリメントする(ステップS714)。
【0081】
次いで、テープ制御点演算モジュール45は、変数bの値を演算個数NNと比較して、レイアップパスTPの全長にわたって、テープ制御点CPを演算したか否かを判別する(ステップS715)。仮にレイアップパスTP上に未処理の座標Pが残っている場合には、ステップS702に戻って上述した処理を繰り返す。仮に全てのテープ分割体11について演算が終了した場合には、メインルーチンに復帰する。
【0082】
以上の演算により、図17の黒点で示すテープ制御点CPが、図18のビュー表Vtに示すように演算される。他方、ステップS711が実行された場合には、NullのタプルCP(p,c)が、図17の白点で示す座標に対応して登録されている。
【0083】
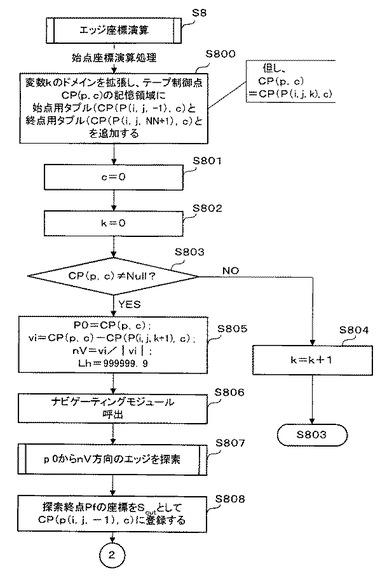
次に、エッジ座標演算サブルーチンについて説明する。
【0084】
図19を参照して、エッジ座標演算サブルーチンS8を実行する際、エッジ座標演算モジュール46は、変数kのドメインを拡張し、テープ制御点CPの記憶領域に始点用タプルCP(P(i,j,−1),c)と終点用タプルCP(P(i,j,NN+1),c)とを追加する。これにより、図22に示したように、プリプレグテープ10の分割ゾーンdTP(c)毎(c=0〜5)に、始点座標Scutの値(x,y)と終点座標Ecutの値(x,y)とをそれぞれ格納することが可能になる。
【0085】
次に、エッジ座標演算モジュール46は、変数cを0に初期化し(ステップS801)、次いで、変数kを0に初期化する(ステップS802)。
【0086】
次に、エッジ座標演算モジュール46は、k番目の横断ラインLp(k)について、c番目の配列変数CP(p,c)のタプルがnullか否かを判別する(ステップS803)。この判別は、ナビゲーティングモジュール44を用いて始点座標Scutを探索する際、そのベクトル始点P0に設定することのできるテープ制御点CPを特定するためである。仮にk番目の横断ラインLp(k)について、CP(p,0)のタプルがnullである場合、エッジ座標演算モジュール46は、変数kをインクリメントして、再度、ステップS803に復帰し、c番目の分割ゾーンdTPについて、始点座標Scutの演算の基礎となるテープ制御点CPを検索する。
【0087】
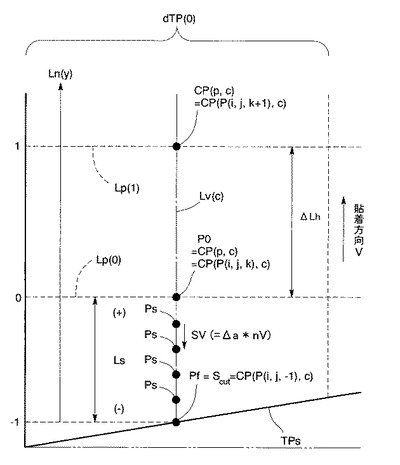
図22および図23に示すように、c=0のとき、タプルCP(p,0)は、非Null値(x0,y0)である。このように、ステップS803の判別の結果、非null値(x0,y0)のタプルがある場合には、エッジ座標演算モジュール46は、ナビゲーティングモジュール44の演算のベクトル始点P0を当該タプルCP(p,c)に登録されたテープ制御点CPに設定する(ステップS805)。また、このステップS805のタイミングで、探索ベクトルSVが下流側のテープ制御点CP(P(i,j,k+1),c)から上流側のテープ制御点CP(P(i,j,k),c)に向かうように単位探索ベクトルnVを設定する(図23参照)。さらに、探索距離Lhを比較的大きな値に設定し、必ず、探索点PsがエッジTPsに到達するようにしている。
【0088】
次いで、エッジ座標演算モジュール46は、ナビゲーティングモジュール44を呼び出し(ステップS806)、ベクトル始点P0の座標CP(P(i,j,k),c)から単位探索ベクトルnV方向にエッジTPsを探索する(ステップS807)。これにより、図23に示すように、ナビゲーティングモジュール44は、テープ制御点CP(p,c)からテープ貼着方向Vの逆向きに座標Pを探索し、遂には、エッジTPsに到達する。エッジ座標演算モジュール46は、このエッジTPsに到達した探索終点Pfを始点座標Scutとして、当該探索終点Pfの値をCP(P(i,j,−1),c)に登録する(ステップS808)。
【0089】
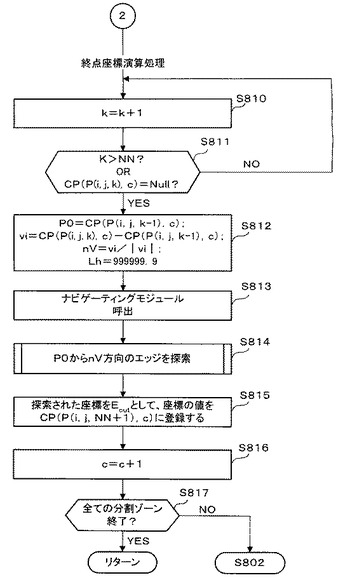
次に、図20を参照して、エッジ座標演算モジュール46は、終点座標演算処理に移行する。具体的には、縦断ラインLv(c)に沿って、当該縦断ラインLv(c)の終点を探索するために、エッジ座標演算モジュール46は、変数kをインクリメントし(ステップS810)、インクリメントされた変数kが演算個数NN(図15のステップS700参照)よりも大きいか否か、並びにインクリメントされた変数kに相当するタプルCP(P(i,j,k),c)がnullであるか否かを判別する(ステップS811)。インクリメントされた変数kが演算個数NNよりも大きく、且つ、インクリメントされた変数kに相当するタプルCP(P(i,j,k),c)が非nullである場合、さらにステップS810に復帰して処理を繰り返す。図17並びに図22に示すように、変数kの値をインクリメントしていくことによって、エッジ座標演算モジュール46は、縦断ラインLv(c)に沿って、貼着方向Vの下流側のテープ制御点CPを探索し、遂には、null値のタプル(例えば、CP(P(0,0,NN),0))に到達する。
【0090】
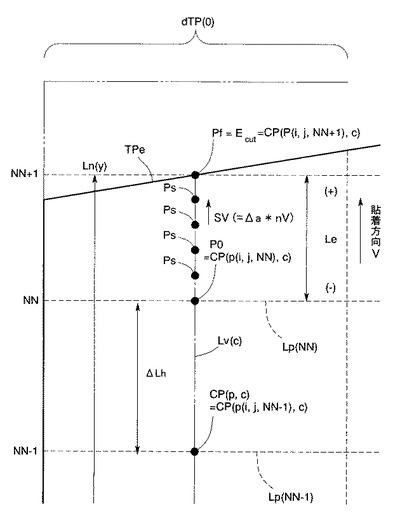
インクリメントされた変数kが演算個数NNの値を越える場合、或いは、インクリメントされた変数kに係るタプルCP(P(i,j,k),c)がnullの場合、エッジ座標演算モジュール46は、ベクトル始点P0をCP(P(i,j,k−1),c)に設定する(ステップS812)。また、このステップS812のタイミングで、探索ベクトルSVが上流側のテープ制御点CP(P(i,j,k−1),c)から下流側のテープ制御点CP(P(i,j,k),c)に向かうように単位探索ベクトルnVを設定する(図24参照)。さらに、探索距離Lhを比較的大きな値に設定し、必ず、エッジTPeに到達するようにしている。
【0091】
次いで、エッジ座標演算モジュール46は、ナビゲーティングモジュール44を呼び出し(ステップS813)、ベクトル始点P0の座標CP(P(i,j,k−1),c)から単位探索ベクトルnV方向にエッジTPeを探索する(ステップS814)。これにより、図24に示すように、ナビゲーティングモジュール44は、テープ制御点CP(p,c)からテープ貼着方向Vに沿って座標Pを探索し、遂には、エッジTPeに到達する。エッジ座標演算モジュール46は、このエッジTPeに到達した探索終点Pfを終点座標Ecutとして、当該探索終点Pfの値をCP(P(i,j,NN+1),c)に登録する(ステップS815)。
【0092】
次いで、エッジ座標演算モジュール46は、変数cをインクリメントし(ステップS816)、全ての分割ゾーンdTPが終了したか否かを判別する(ステップS817)。仮に未処理の分割ゾーンdTPがある場合には、ステップS802に移行して、上述した処理を繰り返し、全ての分割ゾーンdTPが終了した場合には、メインルーチンに復帰する。
【0093】
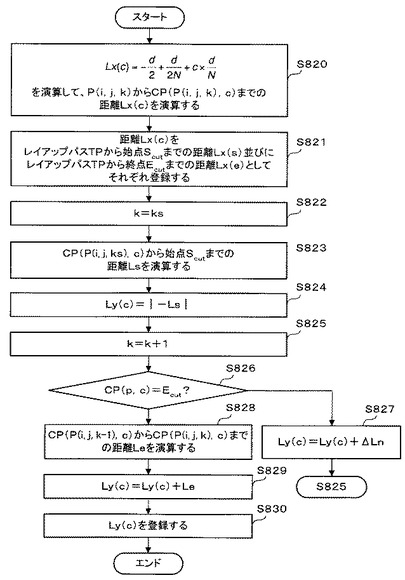
なお、エッジ座標演算サブルーチンにおいて、プリプレグテープ10のテープ分割体11毎に縦断ラインLv(c)の長さを求めるようにしてもよい。縦断ラインLv(c)の長さは、例えば、図21に示す手順で演算することが可能である。
【0094】
図21の手順において、エッジ座標演算モジュール46は、始点座標Scutが演算された時点で、次式
【0095】
【数3】
【0096】
に基づき、始点座標Scutと、この始点座標Scutを通る横断ラインLp(k)がレイアップパスTPと交差する座標Pとの長さLx(c)を演算する(ステップS820)。次いで、エッジ座標演算モジュール46は、この長さLx(c)をレイアップパスTPから横断ラインに沿う始点座標Scutまでの長さLx(s)、並びにレイアップパスTPから横断ラインに沿う終点座標Ecutまでの長さLx(e)として、それぞれ登録する(ステップS821)。ステップS821の実行は、始点座標Scut並びに終点座標Ecutを演算し終わってから実行してもよく、或いは、始点座標Scutが演算された時点で、終点座標Ecutに先立ち、長さLx(s)の演算を実行し、終点座標Ecutを演算し終わった時点で、長さLx(c)を長さLx(e)として登録する態様をとってもよい。
【0097】
次に、エッジ座標演算モジュール46は、変数kの値をksに設定する(ステップS822)。ここで、値ksは、始点座標Scutをナビゲーティングモジュール44で演算する際に、引数として採用したテープ制御点CP(P(i,j,k),c)の変数kの値である。次いで、エッジ座標演算モジュール46は、CP(P(i,j,−1),c)から始点座標Scutまでの距離Lsをナビゲーティングモジュール44の履歴に基づいて演算し(ステップS823)、距離Lsの絶対値を縦断ラインLv(c)の長さLyの初期値に設定する(ステップS824)。ステップS822からステップS824は、始点座標Scutの演算終了後、終点座標演算処理前(図19のステップS808と図20のステップS810の間)に好適に実行することができる。また、その場合には、ステップS822を省略することができる。
【0098】
次に、エッジ座標演算モジュール46は、変数kをインクリメントする(ステップS825)。縦断ラインLv(c)の長さLyをエッジ座標演算サブルーチンの中で行う場合、このステップS825は、図20のステップS810で代用することができる。
【0099】
変数kをインクリメントした時点で、エッジ座標演算モジュール46は、当該テープ制御点CPが終点座標Ecutであるかどうかを判別する(ステップS826)。仮に当該テープ制御点CPが終点座標Ecutではない場合、縦断ラインLv(c)の長さLyに演算間隔ΔLn(図17参照)を積算し(ステップS827)、ステップS825に復帰して処理を繰り返す。縦断ラインLv(c)の長さLyをエッジ座標演算サブルーチンの中で行う場合、ステップS826は、図20のステップS811の判別で代用することができ、ステップS827は、ステップS811の判別でNO(False)の場合に実行することができる。
【0100】
終点座標Ecutを判別するステップで、当該テープ制御点CPが終点座標Ecutであると判別した場合、エッジ座標演算モジュール46は、距離Leを演算する(ステップS828)。距離Leは、終点座標Ecutをナビゲーティングモジュール44で演算する際に、最初のベクトル始点P0として採用したテープ制御点CP、即ち(P(i,j,k−1),c)から終点座標Ecutまでの長さである。次いで、エッジ座標演算モジュール46は、縦断ラインLv(c)の長さLyに演算された距離Leを加算して(ステップS829)、その値を登録する(ステップS830)。これにより、演算対象となる縦断ラインLv(c)について、長さLyを精緻に演算することができる。縦断ラインLv(c)の長さLyをエッジ座標演算サブルーチンの中で行う場合、ステップS828以降の処理は、終点座標Ecutを演算した後、適宜、実行することができる。
【0101】
レイアップパスTPから各縦断ラインLvまでの距離や、縦断ラインLvの長さLyを演算した場合には、テープ貼着装置の制御座標に対してテープ制御点CPやエッジTPs、TPeの座標をティーチングする作業が容易になる。
【0102】
テープ貼着装置としては、本件出願人が先に提案した特公平7−25143号公報に開示されているものを原理的に応用することにより、図4や図5に例示したプリプレグテープ10を製品WSの曲面に好適に貼着することが可能になる。同装置の原理を用いることにより、プリプレグテープ10のテープ分割体11毎に押し付け作業を行うことのできる押し付けローラと、テープ分割体11毎に長さを変更して裁断することのできるカッタと、各テープ分割体11から台紙12を回収する手段が構成可能であることが容易に理解されよう。また、カッタとしては、超音波ナイフが好適である。
【0103】
貼着作業に際しては、プリプレグテープ10の各テープ分割体11を繰り出して分断し、貼着に先立って、カッタで各テープ分割体11を裁断する。この裁断の際に、上述した始点座標Scutや終点座標Ecutに基づく精緻な寸法制御が実行され、過不足のない長さと座標にプリプレグテープ10が裁断される。
【0104】
裁断されたプリプレグテープ10は、押し付けローラでテープ制御点CP毎に押さえつけられて、製品WSの曲面に沿うように貼着される。このとき、各押し付けローラによる押し付け動作によって、プリプレグテープ10の各テープ分割体11は、縦断ラインLv沿いにずれることになる。このずれにより、プリプレグテープ10は、全体として、皺無く曲面に沿って綺麗に貼着される。従って、球面の場合等のように、平面展開できない自由曲面を有する製品WSに対して、プリプレグテープ10を皺無く綺麗に貼着することができる。
【0105】
以上説明したように、本実施形態に係るプリプレグテープ10によれば、プリプレグテープ10のテープ分割体11毎にテープ制御点CP(貼着時に押し付け荷重を付加するポイント)を設定することにより、従来のプリプレグテープ10に生じていた皺を逃がし、三次元に湾曲した面を有する様々な曲面Sに対しても、皺無く貼着や積層を図ることができる。
【0106】
また、本発明の実施形態に係るテープ制御情報設定方法は、プリプレグテープ10が貼着される曲面Sに設定されるレイアップパスTPを取得するレイアップパスTP取得ステップ(ステップS1、S6)と、レイアップパスTP取得ステップ(ステップS1、S6)で取得したレイアップパスTP上に演算開始点としてのベクトル始点P0を設定する演算開始点設定ステップ(ステップS101)と、ベクトル始点P0を通り且つレイアップパスTPに対して曲面S沿いに直交する横断ラインLpと、各テープ分割体11が貼着される分割ゾーンdTPの中心を通る縦断ラインLvとが交差する点にテープ制御点CPを設定するテープ制御点設定ステップ(ステップS7)とを備えている。
【0107】
このため本実施形態では、レイアップパスTPに設定された分割ゾーンdTP毎に、テープ制御点CPが設定されるので、各テープ分割体11をきめ細かく湾曲させることができる。なお、プリプレグテープ10を湾曲させて貼着する場合には、曲面Sの内周側と外周側とでプリプレグテープ10を押圧すべきテープ分割体11が周方向にずれることになるが、テープ分割体11毎に長手方向の繰出し量(貼着量)を変更し、上記ずれに対応した位置にテープ制御点CPが設定されるので、プリプレグテープ10をより皺無く綺麗に貼着することができる。また、レイアップ取得処理では、予め演算されたレイアップパスTPを読み取る処理であってもよく、或いは、与えられたベクトル始点P0を基点として、レイアップパスTPを演算する処理であってもよい。その場合、上述したナビゲーティングモジュール44を採用し、面S上に任意の点と、その点から面Sを網羅可能な方向に探索ベクトルを演算することにより、レイアップパスTPを精緻に演算することが可能となる。
【0108】
また、本実施形態では、テープ制御点設定ステップ(ステップS7)は、ベクトル始点P0を始点として、横断ラインLpに沿う微小大きさの探索ベクトルSVを演算する探索ベクトル演算ステップ(ステップS101〜S111)と、演算された探索ベクトルSVのベクトル終点Peから曲面Sに下ろした垂線の足を演算する垂足演算ステップ(ステップS102、S121、S124)と、垂線の足に基づいて、曲面S上の探索点Psを演算する探索点演算ステップ(ステップS104、と123、S125)と、所定の終了条件が成立するまで、ベクトル始点P0と探索点Psとから、当該探索点Psをベクトル始点P0とする新たな探索ベクトルSVを演算し、垂線演算ステップ(ステップS102、S121、S124)と探索点演算ステップ(ステップS104、と123、S125)とを繰り返す回帰演算ステップ(ステップS101〜S112)とを備えている。このため本実施形態では、多様に湾曲する曲面Sを微少な探索ベクトルSVで探索し、その探索点Pfを計算の基準として回帰的に探索ベクトルSVを演算することによって、曲面Sに精緻に沿う経路を計算することができ、テープ制御点CPを正確に演算することが可能になる。
【0109】
また本実施形態は、分割ゾーンdTP毎に、当該縦断ラインLvのエッジTPs、TPeの座標を演算するエッジ座標演算ステップ(ステップS8)をさらに備えている。このため本実施形態では、縦断ラインLv毎にエッジ座標(エッジTPs若しくはTPeの座標、或いはエッジTPsおよびエッジTPeの座標)を演算することができるので、曲面Sに貼着されるプリプレグテープ10のエッジTPs、TPeの座標をテープ貼着装置にティーチングしやすくなり、より好適で無駄のない座標にプリプレグテープ10を繰出し、裁断することが可能になる。
【0110】
また、本実施形態では、エッジ座標演算ステップ(ステップS8)は、縦断ラインLvのエッジTPs、TPeに最も近いテープ制御点CPを始点として、当該縦断ラインLvに沿う微小大きさの探索ベクトルSVを演算する探索ベクトル演算ステップ(ステップS101〜S111)と、演算された探索ベクトルSVのベクトル終点Peから曲面Sに下ろした垂線の足を演算する垂足演算ステップ(ステップS102、S121、S124)と、垂線の足に基づいて、曲面S上の探索点Psを演算する探索点演算ステップ(ステップS104、と123、S125)と、当該縦断ラインLvのエッジTPs、TPeに達するまで、ベクトル始点P0と探索点Psとから、当該探索点Psをベクトル始点P0とする新たな探索ベクトルSVを演算し、垂線演算ステップ(ステップS102、S121、S124)と探索点演算ステップ(ステップS104、と123、S125)とを繰り返す回帰演算ステップ(ステップS101〜S112)とを備えている。このため本実施形態では、各縦断ラインLv(c)に設定されたテープ制御点CPを基点として、多様に湾曲する曲面Sを微小な探索ベクトルSVで探索し、その探索点Pfを回帰的に演算することによって、曲面Sに精緻に沿う経路を計算することができる。その結果、分割ゾーンdTP毎にエッジTPs、TPeの座標を正確に演算することが可能になる。
【0111】
上述した実施の形態は、本発明の好ましい具体例を例示したものに過ぎず、本発明は上述した実施形態に限定されない。本発明の特許請求の範囲内で種々の変更が可能であることはいうまでもない。
【符号の説明】
【0112】
10 プリプレグテープ
11 テープ分割体
11a ミシン目
12 台紙
30 CADデータベース
40 テープ制御情報演算モジュール
44 ナビゲーティングモジュール
45 テープ制御点演算モジュール
46
エッジ座標演算モジュール
b 変数
c 変数
CP テープ制御点
d テープ幅
dTP 分割ゾーン
Ecut 終点座標
Ln レイアップパス上の積算距離
Lp 横断ライン
Lv 縦断ライン
N プリプレグテープの分割数
P 座標
S 曲面
S7 テープ制御点演算サブルーチン
S8 エッジ座標演算サブルーチン
Scut 始点座標
SV 探索ベクトル
t テープの厚さ
ptemp1−3 垂線の足
V テープ貼着方向
WS 製品
【技術分野】
【0001】
本発明は、プリプレグテープ並びにテープ制御情報設定方法に関する。
【背景技術】
【0002】
複合材料、特に、繊維材料に樹脂を含浸させたプリプレグテープ(prepreg tape)の使用は、自動車、海洋、航空宇宙産業を含む種々の産業界で増加している。プリプレグテープは、車両の筐体を構成する貼付型(例えばマンドレル)等の被貼付体の表面に貼着され、積層される。
【0003】
この貼着作業を自動で行うテープレイアップマシンは、平坦レイアップマシンと曲面レイアップマシンとに分類される。平坦レイアップマシンは、プリプレグテープの貼着時の制御が容易であるため、航空機のストリンガー等に利用されている。これに対し、曲面レイアップマシンは、プリプレグテープの貼着(積層)時に、たるみが生じやすく、皺が寄る傾向があり、その解決が困難な課題として残っている。レイアップマシンが適用できない場合、プリプレグテープは、やむなく手張りによって積層されている。そのため、皺の寄りを効果的に防止するため、曲面に適合したテープ経路(または、「レイアップパス」とも呼ばれている)を算出する方法を実用化する必要があった。
【0004】
かかるニーズに応えて、例えば、特許文献1には、複合材料を曲面に貼着するに当たり、テープ経路を算出する方法が開示されている。特許文献1の方法では、製造対象となる製品の三次元に湾曲する曲面を、当該曲面の境界線も含めて二次元の参照面(reference plane)にマッピングし、この参照面上でテープ経路を算出し、その座標を三次元に変換して、最終的な座標とする方法を採用している。
【先行技術文献】
【特許文献】
【0005】
【特許文献1】特開2007−185947号公報
【発明の概要】
【発明が解決しようとする課題】
【0006】
特許文献1の方法では、皺や弛みの解消が充分ではなかった。
【0007】
図1及び図2を参照して、加工対象となる製品WSの曲面が各図の(A)に示すような円筒形、または円錐形の場合、これを各図の(B)に示すように、製品WSの曲面Sを比較的精緻に平面に展開することができ、この平面上で最短距離を辿る経路を算出して、テープ経路とすれば、この平面上で最短距離を辿る経路は、概ね直線状に設定され、プリプレグテープの幅方向全域にわたって均等な荷重配分でテープを貼着することが可能になる。
【0008】
しかしながら、図3に示したように、昨今の製品WSによっては、複雑に湾曲した曲面Sを有するものも多数増加している。このような曲面Sは、精緻な2次元平面に展開することが困難であるため、自動化が実現されていなかった。
【0009】
本発明は、上述した課題に鑑みてなされたものであり、様々な曲面に対応して皺無く貼着や積層を図ることのできるプリプレグテープ、並びに該プリプレグテープを貼着するための諸要素のうち、少なくとも一要素を設定することのできるテープ制御情報設定方法を提供することを課題としている。
【課題を解決するための手段】
【0010】
かかる課題を解決する方法として、プリプレグテープを複数条のテープ分割体に分割可能に構成し、プリプレグテープのテープ分割体毎に貼着長さを変更することが考えられる。本願発明者は、鋭意研究の結果、そのようなプリプレグテープの開発に成功した。すなわち、本発明の最初の態様は、三次元に湾曲した曲面に貼着される貼着面を片面に有するプリプレグテープであって、前記貼着面のテープ幅を等分するように分断された複数条のテープ分割体と、各テープ分割体を一体に支承する支承体とを備えているものであることを特徴とするプリプレグテープである。この態様では、プリプレグテープのテープ分割体毎にテープ制御点(貼着時に押し付け荷重を付加するポイント)を設定することにより、従来のプリプレグテープに生じていた皺を逃がし、三次元に湾曲した様々な曲面に対しても、皺無く貼着や積層を図ることができる。
【0011】
好ましい態様において、前記支承体は、前記テープ分割体の貼着面と反対側に重ね合わされて、各テープ分割体と一体的に巻回される台紙である。また、前記支承体を兼ねる巻き芯を備えていてもよい。
【0012】
別の態様に係るプリプレグテープは、三次元に湾曲した曲面に貼着される貼着面を片面に有するプリプレグテープであって、テープ幅を等分するミシン目で分断可能に連結された複数条のテープ分割体を備えていることを特徴としている。
【0013】
好ましい態様において、前記プリプレグテープは、前記テープ分割体の貼着面と反対側に重ね合わされて、長手方向に平行に分断された各テープ分割体と一体的に巻回される台紙を備えている。この態様では、台紙によって、テープ分割体が一体的に担持され、取り扱いやすくなる。
【0014】
好ましい態様において、前記プリプレグテープは、前記台紙は、前記テープ分割体毎に分断されるものである。この態様では、テープ分割体が分断される際に、台紙を追従させることができるので、貼着後次工程までの間、台紙でテープ分割体を保護する等、台紙の取り扱いが容易になる。
【0015】
上述のようなプリプレグテープを実用化するためには、当該テープ分割体毎に適切な押し付け荷重を付加するポイント(以下、「テープ制御点」という)や、或いは、プリプレグテープのエッジの座標(これらテープ制御点やエッジの座標を「テープ制御情報と総称する」)を演算することが不可欠であり、本件発明者は、鋭意研究の結果、テープ制御情報を精緻に演算することに成功した。
【0016】
すなわち、本発明の別の態様は、前記プリプレグテープの貼着に要するテープ制御情報のうち少なくとも一要素を設定するテープ制御情報設定方法であって、前記プリプレグテープを前記曲面に貼着する経路であるレイアップパスを当該曲面のCADデータから取得するレイアップパス取得ステップと、前記レイアップパス取得ステップで取得したレイアップパス上に演算開始点を設定する演算開始点設定ステップと、前記演算開始点を通り且つ前記レイアップパスに対して曲面沿いに直交する横断ラインと、各テープ分割体が貼着される分割ゾーンの中心を通る縦断ラインとが交差する点にテープ制御点を設定するテープ制御点設定ステップとを備えていることを特徴とするテープ制御情報設定方法である。
【0017】
この態様では、レイアップパスに設定された分割ゾーン毎にテープ制御点が設定されるので、各テープ分割体をきめ細かく湾曲させることができる。なお、プリプレグテープを湾曲させて貼着する場合には、曲面の内周側と外周側とでプリプレグテープを押圧すべきテープ分割体が周方向にずれることになるが、テープ分割体毎に長手方向の繰出し量(貼着量)を変更し、上記ずれに対応した位置にテープ制御点を設定することができるので、プリプレグテープをより皺無く綺麗に貼着することができる。また、レイアップ取得処理では、予め演算されたレイアップパスを読み取る処理であってもよく、或いは、与えられた演算開始点を基点として、レイアップパスを演算する処理であってもよい。
【0018】
好ましい態様において、前記テープ制御点設定ステップは、前記演算開始点を始点として、前記横断ラインに沿う微小大きさの探索ベクトルを演算する探索ベクトル演算ステップと、演算された探索ベクトルの終点から前記曲面に下ろした垂線の足を演算する垂足演算ステップと、前記垂線の足に基づいて、前記曲面上の探索点を演算する探索点演算ステップと、所定の終了条件が成立するまで、前記ベクトル始点と前記探索点とから、当該探索点をベクトル始点とする新たな探索ベクトルを演算し、前記垂線演算ステップと前記探索点演算ステップとを繰り返す回帰演算ステップを備えている。この態様では、多様に湾曲する曲面を微小な探索ベクトルで探索し、その探索点を計算の基準として回帰的に探索ベクトルを演算することによって、曲面に精緻に沿う経路を計算することができ、テープ制御点を正確に演算することが可能になる。
【0019】
好ましい態様は、前記分割ゾーン毎に、当該縦断ラインのエッジの座標を演算するエッジ座標演算ステップをさらに備えている。この態様では、縦断ライン毎にエッジの座標を演算することができるので、曲面に貼着されるプリプレグテープのエッジの座標をテープ貼着装置にティーチングしやすくなり、より好適で無駄のない座標にプリプレグテープを繰出し、裁断することが可能になる。
【0020】
好ましい態様において、前記エッジ座標演算ステップは、前記縦断ラインのエッジに最も近いテープ制御点を始点として、当該縦断ラインに沿う微小大きさの探索ベクトルを演算する探索ベクトル演算ステップと、演算された探索ベクトルの終点から前記曲面に下ろした垂線の足を演算する垂足演算ステップと、前記垂線の足に基づいて、前記曲面上の探索点を演算する探索点演算ステップと、当該縦断ラインのエッジに達するまで、前記ベクトル始点と前記探索点とから、当該探索点をベクトル始点とする新たな探索ベクトルを演算し、前記垂線演算ステップと前記探索点演算ステップとを繰り返す回帰演算ステップを備えている。この態様では、各縦断ラインに設定されたテープ制御点を基点として、多様に湾曲する曲面を微小な探索ベクトルで探索し、その探索点を回帰的に演算することによって、曲面に精緻に沿う経路を計算することができる。その結果、分割ゾーン毎にエッジの座標を正確に演算することが可能になる。
【発明の効果】
【0021】
以上説明したように、本発明によれば、分断可能なプリプレグテープを三次元に湾曲する曲面に貼着して皺の発生を防止することができるという顕著な効果を奏する。
【図面の簡単な説明】
【0022】
【図1】加工対象となる製品の曲面に対するテープレイアップパスを説明する図であり、(A)は、円筒形製品の斜視図、(B)は円筒形製品の展開図である。
【図2】加工対象となる製品の曲面に対するテープレイアップパスを説明する図であり、(A)は、円錐形製品の斜視図、(B)は円錐形製品の展開図である。
【図3】加工対象となる製品の曲面に対するテープレイアップパスを説明する図であって曲面を有する製品の斜視図である。
【図4】本発明の実施形態に係るプリプレグテープの第1の態様を示す斜視図である。
【図5】本発明の実施形態に係るプリプレグテープの第2の態様を示す斜視図である。
【図6】本発明に係るプリプレグテープの経路計算装置の構成図である。
【図7】曲面を有する製品のテープレイアッププランの一例を示す斜視図である。
【図8】本発明に係る全体フローを示すフローチャートである。
【図9】回帰演算ステップとしてのナビゲーティングモジュールの探索動作を示すフローチャートである。
【図10】図9の続きを示すフローチャートである。
【図11】ナビゲーティングモジュールによる探索動作を示す説明図であり、(A)は曲面上での探索、(B)は、曲面からオフセットされた曲面での探索を示す。
【図12】ナビゲーティングモジュールによる探索動作を示す説明図である。
【図13】ナビゲーティングモジュールによる探索動作を示す説明図である。
【図14】プリプレグテープを貼着する経路の一部をモデル化して示した説明図である。
【図15】図9のフローチャートにおけるテープ制御点演算サブルーチンを示すフローチャートである。
【図16】図15のテープ制御点演算サブルーチンを実行する際の説明図(斜視図)である。
【図17】図15のテープ制御点演算サブルーチンの実行結果例をモデル化して示す説明図(平面略図)である。
【図18】図15のテープ制御点演算サブルーチンの実行結果例を示すビュー表である。
【図19】図9のフローチャートにおけるエッジ座標演算サブルーチンを示すフローチャートである。
【図20】図19の続きを示すフローチャートである。
【図21】図19および図20のエッジ座標演算サブルーチンで実行可能な距離演算処理を示すフローチャートである。
【図22】図19および図20のエッジ座標演算サブルーチンの実行過程を示すビュー表である。
【図23】図19および図20のエッジ座標演算サブルーチンを実行する際の説明図(始点側平面略図)である。
【図24】図19および図20のエッジ座標演算サブルーチンを実行する際の説明図(終点側平面略図)である。
【図25】図19および図20のエッジ座標演算サブルーチンの実行結果例を示すビュー表である。
【発明を実施するための形態】
【0023】
以下、添付図面を参照しながら本発明の好ましい実施の形態について説明する。
【0024】
まず、本発明に係るプリプレグテープ10は、図4に示すように、三次元に湾曲した曲面Sに貼着されるプリプレグテープ10であって、テープ幅dを等分した複数条のテープ分割体11に分断されるものである。
【0025】
各テープ分割体11は、貼着面10aが内向きになって巻回されている。テープ分割体11は、例えば、炭素繊維やアラミド繊維等の補強繊維に熱硬化性樹脂を含浸させた含浸テープが好適である。なお、図4の構成では、テープ分割体11は、予め取り扱いを容易にするために分断されているが、ミシン目等を入れて分離しやすい状態で一体化させていてもよい。
【0026】
各テープ分割体11の貼着面10aと反対側には、台紙12が重ね合わされている。台紙12は、剥離が容易な貼着剤でテープ分割体11に貼着されており、テープ分割体11を一体に担持してテープ分割体11とともに巻回されている。台紙12の材質は、伸縮しがたい特性を有するもの、例えば、剥離性の高い樹脂コーティングが施された紙が好適である。
【0027】
図4に示したプリプレグテープ10は、長手方向に平行に分断され、片面に貼着面10aを有するテープ分割体11と、このテープ分割体11の貼着面10aと反対側に重ね合わされて、各テープ分割体11と一体的に巻回される台紙12とを備えている。このため台紙12によって、テープ分割体11が一体的に担持され、取り扱いやすくなる。
【0028】
また、プリプレグテープ10の別の態様としては、図5の態様が例示される。図5に示す例では、テープ分割体11をミシン目11aで分断しやすいようにつないでいる一方、台紙12については、ミシン目11a沿いに分断可能なミシン目が入っている。このように図5に示した実施形態では、長手方向に平行に分断可能に連結され、片面に貼着面10aを有するテープ分割体11と、このテープ分割体11の貼着面10aと反対側に重ね合わされて、各テープ分割体11と一体的に巻回される台紙12とを備え、台紙12は、テープ分割体11毎に分断されている。このため図5に示した本実施形態では、テープ分割体11が分断される際に、台紙12を追従させることができるので、貼着後、次工程までの間、台紙12でテープ分割体11を保護する等、台紙12の取り扱いが容易になり、好適なテープ積層面を得ることができる。
【0029】
なお、図4の変形例として、台紙12にミシン目を入れて、テープ分割体11とともに分断できるようにしていてもよい。或いは、図5の変形例として、台紙12を予め分断していてもよい。貼着面は、必ずしも貼着剤が塗布されていることを要しない。尤も、製品の仕様に応じて、貼着剤が塗布されていてもよい。
【0030】
図4や図5に示したプリプレグテープ10の利点は、図3に示したような三次元に湾曲する曲面Sに沿って貼着作業を行う際、長手方向に各テープ分割体11を相対的にずらし、テープ分割体11毎に裁断長(あるいは貼着される長さ)(後述する縦断ラインLvの長さLy)を変更することができる点にある。そのような貼着が可能になれば、湾曲している面の曲率に応じてテープ分割体11の貼着位置をずらすことができるので、幅方向に寄る皺を伸ばすことができ、全体として皺のない滑らかな表面を得ることができる。また、テープ分割体11は、プリプレグテープ10としては、一体的に扱うことができるので、複数のテープを並置する方法よりも取り扱いが容易になる。さらに、一本のテープ幅を分割するテープ分割体11を構成しているので、テープ分割体11一本当たりのテープ幅が短くなり、しわ防止に大きく貢献することができる。
【0031】
プリプレグテープ10の分割数については、4から6が好ましい。尤も、それ以外の数、例えば、奇数であってもよい。
【0032】
テープ分割体11毎に裁断長を変更してプリプレグテープ10を三次元に湾曲する曲面に貼着するためには、各テープ分割体11にテープ制御点CP(図14参照)が設定されていることが好ましい。また、テープ分割体11毎に裁断長が演算されていること、別の観点でいえば、繰り出されたときの基端部分の各始点座標Scut(エッジ座標の一例)と先端部分の各終点座標Ecut(エッジ座標の別の例)とが精緻に演算されていることが好ましい。
【0033】
そのような始点座標Scutや終点座標Ecutが設定されたプリプレグテープ10は、繰出し時に予めエッジTPs、TPeの座標に合わせてテープ分割体11を裁断し、その後、裁断長に対応する長さに繰り出して、始点座標Scutに合わせて裁断することにより、曲面に沿うプリプレグテープ10を無駄なく消費することができる。また、テープ制御点CPがテープ分割体11毎に設定されている場合には、そのテープ制御点CP毎にテープ分割体11を個別に押さえ込んで変形させ、曲面に沿うように各テープ分割体11を個別に滑らかに押さえ込んで貼着作業を行うことが可能になる。
【0034】
そこで、本実施形態では、これらテープ制御点やエッジ座標等のテープ制御情報を演算するテープ制御情報設定方法を提供する。
【0035】
次に、本実施形態のテープ制御情報設定方法に係るシステムについて説明する。
【0036】
図6を参照して、本発明に係るシステムは、CADデータベース30と、CADデータベース30からデータを交換可能に接続されたテープ制御情報演算モジュール40とを備えている。
【0037】
CADデータベース30は、プリプレグテープ10が貼着される製品WSのCADデータを保存しており、このCADデータをインターフェース(又はネットワーク)経由でテープ制御情報演算モジュール40に送信することが可能になっている。CADデータは、一般にNURBS(Non-Uniform Rational B-Splines)等のフォーマットで、3次元で曲面を定義することのできるデータが使用される。本実施形態において、CADデータには、後述するテープレイアップパスプランが関連づけられている。テープレイアッププランには、レイアップパスTPの座標データが関連づけられている。
【0038】
テープ制御情報演算モジュール40は、ファクトリコンピュータ等の計算機で実現される論理的なモジュールであり、ハード的には、図略のCPU、ROM、RAMの他、入出力装置41、表示装置42、外部記憶装置43を備えている。
【0039】
テープ制御情報演算モジュール40は、CADデータベース30からCADデータの読み取り等を実行するCADデータ操作モジュール24と、読み取ったCADデータに対し、所定のテープレイアッププランを処理するテープレイアッププラン処理モジュール25と、テープレイアッププラン処理モジュール25に基づいて、平面または曲面を含む面上の座標を探索するナビゲーティングモジュール44と、プリプレグテープ10のテープ制御点CPを演算するテープ制御点演算モジュール45と、プリプレグテープ10のエッジ座標を演算するエッジ座標演算モジュール46とを論理的に有している。これらは、テープ制御情報演算モジュール40を構成するハード資源(例えば、CPU、ROM、RAM)と、このハード資源によって実行されるソフト資源(例えば、ソースコード、オブジェクトコード、プログラミングコード等)との組み合わせによって実現される。
【0040】
次に、テープレイアッププラン処理モジュール25によるテープレイアッププランについて説明する。なお、以下の説明では、演算処理に関連する要素(ベクトル、距離、個数、順番等)について、各要素を変数として表す必要がある場合には、表1の変数欄に従って標記することとし、これらのうち、値を示す必要がある場合には、表1の値欄に従って標記することとする。
【0041】
【表1】
【0042】
図7を参照して、同図に例示する製品WSは、車両の筐体部分を構成する矩形の部品である。この部品を製造する過程では、図略のマンドレルによって規定される曲面Sに対し、i番目の層毎に貼着方向Vが入力される。具体的には、最初に曲面Sの一辺に沿う貼着方向V(0)方向に沿ってプリプレグテープ10を貼着し、次いで、最初の貼着方向V(0)と直交する貼着方向V(1)に沿って、その後、最初の貼着方向V(0)と45°で交差する貼着方向V(2)に沿ってプリプレグテープ10を貼着し、層毎に経路を変更してテープ層を形成(テープレイアップ)する設定(このプリプレグテープ10の貼着手順に関する設定要件を「テープレイアッププラン」という)が実行されることになっている。この場合、図6に示したテープ制御情報演算モジュール40は、図8以下のフローチャートにそって、製品WSのテープレイアッププランを読み取り、読み取ったテープレイアッププランのレイアップパスTP(図15参照)毎にテープ分割体11に対応するテープ制御点CPとエッジ座標を演算する。CADデータのテープレイアッププランに関連づけられた座標情報を参照することにより、テープ制御情報演算モジュール40は、製品WSの層毎に複数本設定された各レイアップパスTPを一意に特定できるように構成されている。
【0043】
図8を参照して、まず、テープ制御情報演算モジュール40は、CADデータ操作モジュール24によって製品のCADデータをCADデータベース30から読み取る(ステップS1)。本実施形態では、このステップS1が、レイアップパスTPを取得するレイアップパス取得ステップとなる。このデータ読み取り処理により、図7に例示されたテープレイアッププランが入力される。テープレイアッププラン処理モジュール25は、入力されたテープレイアッププランをGUIによって表示装置42に表示する。
【0044】
また、テープレイアッププラン処理モジュール25は、読み取りが完了した段階で、テープレイアップの層数niをカウントする(ステップS2)。次いで、演算の基準となる最初の層を一意に表す変数iが初期設定される(ステップS3)。
【0045】
次に、i番目の層について、レイアップパスTPのパス数njがカウントされる(ステップS4)。次いで、i番目の層について、レイアップパスTPを一意に表す変数jが初期設定される(ステップS5)。このように本実施形態では、層に関する変数i、レイアップパスTPに関する変数jをメインルーチン(ステップS3、S5)で設定し、レイアップパスTPに関連する変数k,cを後述するサブルーチンで設定することにより、演算された全ての座標を三次元で一意に特定することができるようになっている。以下の説明では、表1に示した凡例に基づき、必要に応じてレイアップパスTP上の座標Pを配列変数でP(i,j,k)と標記することとする。また、データ処理としての説明が必要な場合には、配列変数P(i,j,k)の値をタプルとも呼称する。ここでタプルとは、ある配列変数(例えば、P(i,j,k))の一つの値を構成する変数i、j、kの値の集合を表す集合数詞である。
【0046】
次に、i番目の層において、j番目のレイアップパスTPのデータが参照される(ステップS6)。次いで、参照されたデータに基づき、テープ制御点演算サブルーチン(ステップS7)と、エッジ座標演算サブルーチン(ステップS8)とが実行され、レイアップパスTPの変数jがインクリメントされる(ステップS9)。次いで、全てのレイアップパスTPが終了したか否かが、変数jとパス数njとの比較によって判別され(ステップS10)、終了していなければ、ステップS6に復帰して上述した処理を繰り返し、終了していれば、層に関する変数iがインクリメントされる(ステップS11)。次いで、全ての層が終了したか否かが、変数iと層数niとの比較によって判別され(ステップS12)、終了していなければ、ステップS4に復帰して上述した処理を繰り返し、終了していれば、プログラムを終了する。無論、図8のフローチャートは、一例であり、例えば、終了後に演算結果をGUIで表示装置42に表示するようにしてもよい。或いは、ステップS12の終了後に引き続いて、演算されたテープ制御点CPやエッジ座標をNC装置にティーチングするポストプロセスステップを実行してもよい。詳しくは後述するように、演算されるテープ制御点CPやエッジ座標は、CADデータに基づく座標データであるので、図略のポストプロセスステップでは、これら座標データをNC装置の制御座標に対応させる座標変換処理を実行することになる。
【0047】
テープ制御点演算サブルーチン(ステップS7)やエッジ座標演算サブルーチン(ステップS8)では、レイアップパスTPの各座標Pを基礎として、基礎となった座標Pから一定間隔隔てた座標Pが演算される。このため、曲面Sが複雑に起伏している場合でも、その起伏に沿って、重なりや皺が生じにくい状態でプリプレグテープをすることのできるレイアップパスを演算することが可能になる。そして、本実施形態においては、より精緻な演算を実現するため、個々のステップの随所でナビゲーティングモジュール44が呼び出される。ナビゲーティングモジュール44は、複雑な曲面上で曲面S上の所定の座標Pを探索するための関数群であり、以下に示す処理が可能になっている。
【0048】
図9及び図11を参照して、ナビゲーティングモジュール44は、オフセット量h、微小移動量Δa、積算探索長m、単位探索ベクトルnV等を引数として含んでいる。オフセット量hとは、プリプレグテープの厚さtを考慮した曲面Sからの法線方向の浮揚量であり、i番目の層については、i×tで演算される変数である。微小移動量Δaは、探索方向のベクトル(探索ベクトルSV)のスカラであり、例えば、0.001mmに設定される。積算探索長mは、最初の探索ベクトルSVの演算開始点としてのベクトル始点P0から現在まで探索した探索点Psまでの探索経路の積算値である。単位探索ベクトルnVは、探索ベクトルSVを演算するための単位ベクトルであり、ナビゲーティングモジュール44を呼び出すプログラムによって設定されるものである。単位探索ベクトルnVは、可及的に曲面Sに接するように設定される(図11参照)。これら引数は、ナビゲーティングモジュール44を呼び出すプログラムによって、即ち、演算される経路の種類等によって、適宜変更される。
【0049】
ナビゲーティングモジュール44が呼び出されると、まず、引数の初期設定が実行される(ステップS100)。この初期設定では、微小移動量Δaが0.001mmに、積算探索長mが0.0mmに、変数kが0にそれぞれ設定され、この変数kの値に基づいて、ベクトル始点P0(i,j,k)が設定される。なお、微小移動量Δaや積算探索長mの初期設定は、ユーザが設定画面を表示装置42に表示させ、この設定画面上で適宜変更できるようになっている。
【0050】
次いで、探索ベクトルSVが演算される(ステップS101)。この処理では、探索ベクトルSVを、微小移動量Δaと単位探索ベクトルnVとの積で求め、探索ベクトルSVの始点となるベクトル始点P0から探索ベクトルSVの終点となるベクトル終点Peを演算する。演算の基礎となるベクトル始点P0は、ナビゲーティングモジュール44を呼び出すプログラムによって設定される。たとえば、i番目の層にあるj番目のレイアップパスTP(i,j)についてテープ制御点CPの演算を開始する場合、ベクトル始点P0の値は、テープ制御点演算サブルーチンS7(図8、図15参照)によって、レイアップパスTP(i,j)上に事前に特定される座標P(i,j,b)の値(x,y)である。この場合のベクトル始点P0は、レイアップパスTPのテープ貼着方向Vの上流端が好適である。尤も、ベクトル始点P0をレイアップパスTPの中間点に設定することも不可能ではない。
【0051】
次に、演算されたベクトル終点Peから曲面Sに垂線の足ptemp1を演算し(ステップS102)、ptemp1が演算可能な座標であるか否かを判別する(ステップS103)。
【0052】
ptemp1の座標Pが演算可能である場合、垂線の足ptemp1+(hV*h(i))を演算する(ステップS104)。ここで、hVは、ptemp1を通る曲面Sの法線単位ベクトルであり、h(i)は、i*tで演算されるオフセット量hであることから、最初の層においては、垂線の足ptemp1がPsで示す座標になる(図11(A)参照)。他方、2番目以降のi番目の層については、オフセット量hが0よりも大きくなるので、図11(B)に示すように、演算される座標Psは、垂線の足ptemp1からh(i)だけ法線方向に浮揚した値をとることになる。垂線の足ptemp1から演算した座標Ps(i,j,k)を特に探索点という。
【0053】
次いで、始点となる座標Pから探索点Ps(i,j,k)までの探索長Δmを演算する(ステップS105)。
【0054】
その後、探索距離Lhが設定されているか否かをチェックする(ステップS106)。この探索距離Lhは、詳しくは後述するように、ナビゲーティングモジュール44で探索対象となる座標Pを演算する際、最初のベクトル始点P0となる座標Pから探索対象となる座標Pまでの間隔を算出するための値であり、ナビゲーティングモジュール44を呼び出すプログラムによって設定されるものである。
【0055】
探索距離Lhが設定されていない場合、或いは、設定されているが、積算探索長mの更新値(m+Δm)未満である場合(ステップS107)、探索点Psを登録するための変数kをインクリメントし(ステップS108)、新たな探索点Ps(i,j,k)のタプルを追加して、その値(x,y)を登録する(ステップS109)。
【0056】
次いで、ベクトル始点P0と探索点Psから、次の探索ベクトルSVを次式
【0057】
【数1】
【0058】
によって演算し(ステップS110)、積算探索長mを探索長Δmでインクリメントする(ステップS111)。
【0059】
その後、現在の探索点Psを次の演算のベクトル始点P0とし(ステップS112)、ステップS101に復帰して、上述したステップを繰り返す。
【0060】
また、ステップS107において、探索距離Lhが積算探索長mの更新値(m+Δm)を超えている場合、積算探索長mが探索距離Lh未満であるか否かが判別され(ステップS113)、積算探索長mが探索距離Lh未満である場合には、ベクトル始点P0から探索ベクトルSVの方向に進んで到達するエッジの座標を探索点Psとして求める(ステップS114)。次いで、変数kをインクリメントして(ステップS115)、探索終点Pf(i,j,k)を登録する新たなタプルを追加し、このタプルPf(i,j,k)に探索点Psの値(x,y)を登録する(ステップS116)。これらのステップS113〜S116により、探索距離Lhが設定されている場合には、その終点まで正確に目標となる座標Pを演算することが可能になる。その後、探索終点Pfを所定の記憶領域に登録し(ステップS117)、元のルーチンに復帰する。なお、ステップS113で積算探索長mが探索距離Lhと等しい場合には、そのままステップS115に移行する。
【0061】
次に、ステップS103において、垂線の足ptemp1を演算することができない場合について、図10、図12を参照しながら説明する。
【0062】
図12に示すように、例えば曲面Sに稜線RLが存在し、二つの面Sb、Snに分断されている場合、面Sb上で演算された探索ベクトルSVのベクトル終点Peが、面Sbと直角な稜線RL上の面L1を通過すると、面Sb上には、垂線の足ptemp1を演算することができなくなる。そこで、ptemp1を演算することができない場合には、図10に示すように、まず、隣接する面Snの有無を判別し(ステップS120)、面Snが存在する場合には、探索されたベクトル終点Peから面Snに垂線の足ptemp2を演算する(ステップS121)。ここで、さらに、面Sn上に垂線の足ptemp2が演算可能であったか否かを判別し(ステップS122)、演算が可能であった場合(例えば、図12に示すように、面Snと、この面Snと直角な稜線RL上の面L2とに挟まれた領域内にベクトル終点Peがある場合)には、曲面Sとしての面Snに下ろした垂線の足ptemp2に基づいて演算し(ステップS123)、ステップS105に復帰する。ここで、ステップS123のhVは、ptemp2における面Snの法線単位ベクトルである。
【0063】
他方、図13に示したように、探索ベクトルSVのベクトル終点Peが、面L1、L2間に位置する場合、何れの面Sb、Sn上にも垂線の足を演算することができなくなる。この場合には、ステップS122で垂線の足ptemp2を演算不可と判定してベクトル終点Peから稜線RL上に垂線の足temp3を演算し(ステップS124)、この垂線の足temp3を基礎にして座標Pを演算し(ステップS125)、ステップS105に移行する。ここで、ステップS125のhvは、ptemp3から探索ベクトルSVのベクトル終点Peに向かう垂直単位ベクトルである。
【0064】
なお、ステップS120において、隣接する面Snが存在しない場合には、探索ベクトルSVのベクトル終点Peが面Sbの境界を超えた場合であるので、その場合には、ステップS113に移行し、処理を終了する。
【0065】
次に、テープ制御点CPの演算の具体例について説明する。
【0066】
まず、図14を参照して、同図に示すレイアップパスTPは、6条に分断されるプリプレグテープ10を貼着する経路の一部をモデル化して示したものである。図中、dTPは、プリプレグテープ10のテープ分割体11が貼着される分割ゾーンを示す。以下の説明では、分割ゾーンdTP(従って、テープ分割体11)を一意に特定する変数をcとする。
【0067】
図示のように、プリプレグテープ10が反時計回りに湾曲する経路を有する場合、プリプレグテープ10に対して貼着方向Vに作用する応力の分布は、斜線で示すように、内周側が大きくなり、外周側が小さくなる。そのため、皺を防止するために、内周側の裁断長を短くし、外周側の裁断長を長くして、プリプレグテープ10のテープ分割体11毎に長手方向の位置を相対的にずらすことが必要となる。かかる制御を実施するためには、レイアップパスTP上に点在する座標Pを通ってプリプレグテープ10を直角に横断する横断ラインLp毎に、テープ分割体11の長手方向中心線(縦断ライン)Lv(c)と交差する座標CP(p,c)を求めて、これをテープ制御点CPとすることが好ましい。そこで、本実施形態では、レイアップパスTPの座標P毎に、横断ラインLpと縦断ラインLv(c)とが交差する座標CP(p,c)を演算することとしている。
【0068】
次に、図15を参照して、テープ制御点演算サブルーチンS7を実行する際、テープ制御点演算モジュール45は、ナビゲーティングモジュール44を呼び出すために必要な引数を設定する(ステップS700〜S707)。具体的には、ステップS700において、テープ制御点演算モジュール45は、レイアップパス上の積算距離Lnを初期化し、演算間隔ΔLnを設定する。演算間隔ΔLnは、プログラムで予め設定されているが、ユーザが任意の値を設定できるようにしてもよい。また、ステップS700において、テープ制御点演算モジュール45は、レイアップパスTP上の演算個数NNを設定する。この演算個数NNは、当該レイアップパスTPの全長Lを演算間隔ΔLnで割ったものである。ここで、演算個数NNが端数とならないよう、演算間隔ΔLnは、MOD(L,ΔLn)=0を充足する値に設定される。
【0069】
次に、ステップS701において、テープ制御点演算モジュール45は、変数bを0に初期化する。変数bは、レイアップパスTP上の演算回数をカウントするためのものであり、座標Pの変数kに対応している。本実施形態では、図17に示したように、貼着方向Vの上流側から下流側に行くに連れて、変数b(従って、kの値)が大きくなるように設定されている。
【0070】
次いで、ステップS702において、テープ制御点演算モジュール45は、ナビゲーティングモジュール44が演算の基礎とする初期のベクトル始点P0の座標P0をP0(i,j,b)に設定する。また、変数cを0に初期化する。本実施形態では、図17に示したように、貼着方向Vの上流側から下流側に向かって左側から順にcの値が大きくなるように設定されている。
【0071】
次いで、ステップS703において、テープ制御点演算モジュール45は、単位探索ベクトルnVを演算する。図16に示したように、単位探索ベクトルnVは、レイアップパスTP上の座標Pの法線ベクトルhVNLとレイアップパスTPに沿う単位ベクトルnVNLの外積によって求められる。
【0072】
次いで、ステップS704において、テープ制御点演算モジュール45は、次式
【0073】
【数2】
【0074】
により、演算されるべきテープ制御点CPまでの距離を演算する。この(2)式は、レイアップパスTP上の座標Pを通る横断ラインLpが、各テープ分割体11の縦断ラインLv(c)と直交する座標までの距離を示している。本実施形態では、図17に示したように、レイアップパスTP上の座標Pを境にし、貼着方向Vの上流側から下流側に向かって左側を−に設定し、右側を+に設定している。
【0075】
次いで、ステップS705において、テープ制御点演算モジュール45は、(2)式の演算結果の正負を判別する。仮に演算結果が+に反転した場合、テープ制御点演算モジュール45は、単位探索ベクトルnVの符号を反転し(ステップS706)、ナビゲーティングモジュール44の探索方向を逆向きにする。
【0076】
これらの設定処理を実行した後、テープ制御点演算モジュール45は、ナビゲーティングモジュール44を呼び出し(ステップS707)、図17に示すように、横断ラインLp(k)と縦断ラインLv(c)との交点を探索する(ステップS708)。このとき、ナビゲーティングモジュール44による探索の終了は、次の2通りである。
【0077】
第1は、演算された探索終点Pfが(2)式の演算結果に対応する縦断ラインLv(c)に到達した場合であり、第2は、演算された探索終点Pfが、(2)式の演算結果に対応する縦断ラインLv(c)に到達する前に、プリプレグテープ10のエッジTPs、TPeに到達した場合である。
【0078】
図17を参照して、プリプレグテープ10のエッジTPs、TPeは、必ずしもレイアップパスTPの座標Pを通る横断ラインLpと平行になっているわけではない。そのため、例えば、図17に示すように、エッジTPs、TPeが横断ラインLpと斜行しているプリプレグテープ10の場合、このプリプレグテープ10に設定されたレイアップパスTPの座標P(0,0,0)、P(0,0,NN)に関し、一部が横断ラインLp(0)、Lp(NN)と交差しないところで途切れている。このため、レイアップパスTPの座標P(0,0,0)について、変数cが4番目以降の縦断ラインLv(3)〜Lv(5)に対してテープ制御点CPを探索した場合や、レイアップパスTPの座標P(0,0,NN)について、変数cが1番目から3番目の縦断ラインLv(0)〜Lv(2)に対してテープ制御点CPを探索した場合には、探索距離Lhに到達する前に探索点Psがプリプレグテープ10のエッジTPs、TPeに到達してしまい、座標P(0,0,0)に関する縦断ラインLv(3)〜Lv(5)や、座標P(0,0,NN)に関する縦断ラインLv(0)〜Lv(2)のテープ制御点CPは、演算されないことになる。
【0079】
テープ制御点演算モジュール45は、ナビゲーティングモジュール44による演算が終了した時点で、レイアップパスTPの座標Pからナビゲーティングモジュール44が探索した探索終点Pfまでの積算探索長mが探索距離Lh以上であるか否かを判別する(ステップS709)。積算探索長mが探索距離Lh以上である場合には、探索終点Pfの値(x,y)をテープ制御点CP(p,c)として登録する(ステップS710)。他方、積算探索長mが探索距離Lh未満である場合には、変数cについて、テープ制御点CP(p,c)の記憶領域にnullのタプルを追加する(ステップS711)。かかる制御により、例えば、図17に例示した座標のプリプレグテープ10のテープ制御点CPを演算した場合には、図18のビュー表Vtに示すように、一部のタプル(CP(P(0,0,0),3)〜CP(P(0,0,0),5)、CP(P(0,0,NN),0)〜CP(P(0,0,NN),3))がnullに設定される。なお、データ処理の際に、null設定による不具合を回避するため、nullに代えて、m≧Lhのときのテープ制御点CPと弁別可能な非nullの値を登録することとしてもよい。
【0080】
ステップS710またはステップS711を終了した後、テープ制御点演算モジュール45は、変数cをインクリメントし(ステップS712)、変数cの値をプリプレグテープ10の分割数Nから1を引いた数と比較して、全てのテープ分割体11について、テープ制御点CPを演算したか否かを判別する(ステップS713)。仮に演算が未終了の分割ゾーンdTPが残っている場合には、ステップS703に戻って上述した処理を繰り返す。仮に全ての分割ゾーンdTPについて演算が終了した場合には、積算距離Lnの値を演算間隔ΔLnでインクリメントし、同時に変数bの値をインクリメントする(ステップS714)。
【0081】
次いで、テープ制御点演算モジュール45は、変数bの値を演算個数NNと比較して、レイアップパスTPの全長にわたって、テープ制御点CPを演算したか否かを判別する(ステップS715)。仮にレイアップパスTP上に未処理の座標Pが残っている場合には、ステップS702に戻って上述した処理を繰り返す。仮に全てのテープ分割体11について演算が終了した場合には、メインルーチンに復帰する。
【0082】
以上の演算により、図17の黒点で示すテープ制御点CPが、図18のビュー表Vtに示すように演算される。他方、ステップS711が実行された場合には、NullのタプルCP(p,c)が、図17の白点で示す座標に対応して登録されている。
【0083】
次に、エッジ座標演算サブルーチンについて説明する。
【0084】
図19を参照して、エッジ座標演算サブルーチンS8を実行する際、エッジ座標演算モジュール46は、変数kのドメインを拡張し、テープ制御点CPの記憶領域に始点用タプルCP(P(i,j,−1),c)と終点用タプルCP(P(i,j,NN+1),c)とを追加する。これにより、図22に示したように、プリプレグテープ10の分割ゾーンdTP(c)毎(c=0〜5)に、始点座標Scutの値(x,y)と終点座標Ecutの値(x,y)とをそれぞれ格納することが可能になる。
【0085】
次に、エッジ座標演算モジュール46は、変数cを0に初期化し(ステップS801)、次いで、変数kを0に初期化する(ステップS802)。
【0086】
次に、エッジ座標演算モジュール46は、k番目の横断ラインLp(k)について、c番目の配列変数CP(p,c)のタプルがnullか否かを判別する(ステップS803)。この判別は、ナビゲーティングモジュール44を用いて始点座標Scutを探索する際、そのベクトル始点P0に設定することのできるテープ制御点CPを特定するためである。仮にk番目の横断ラインLp(k)について、CP(p,0)のタプルがnullである場合、エッジ座標演算モジュール46は、変数kをインクリメントして、再度、ステップS803に復帰し、c番目の分割ゾーンdTPについて、始点座標Scutの演算の基礎となるテープ制御点CPを検索する。
【0087】
図22および図23に示すように、c=0のとき、タプルCP(p,0)は、非Null値(x0,y0)である。このように、ステップS803の判別の結果、非null値(x0,y0)のタプルがある場合には、エッジ座標演算モジュール46は、ナビゲーティングモジュール44の演算のベクトル始点P0を当該タプルCP(p,c)に登録されたテープ制御点CPに設定する(ステップS805)。また、このステップS805のタイミングで、探索ベクトルSVが下流側のテープ制御点CP(P(i,j,k+1),c)から上流側のテープ制御点CP(P(i,j,k),c)に向かうように単位探索ベクトルnVを設定する(図23参照)。さらに、探索距離Lhを比較的大きな値に設定し、必ず、探索点PsがエッジTPsに到達するようにしている。
【0088】
次いで、エッジ座標演算モジュール46は、ナビゲーティングモジュール44を呼び出し(ステップS806)、ベクトル始点P0の座標CP(P(i,j,k),c)から単位探索ベクトルnV方向にエッジTPsを探索する(ステップS807)。これにより、図23に示すように、ナビゲーティングモジュール44は、テープ制御点CP(p,c)からテープ貼着方向Vの逆向きに座標Pを探索し、遂には、エッジTPsに到達する。エッジ座標演算モジュール46は、このエッジTPsに到達した探索終点Pfを始点座標Scutとして、当該探索終点Pfの値をCP(P(i,j,−1),c)に登録する(ステップS808)。
【0089】
次に、図20を参照して、エッジ座標演算モジュール46は、終点座標演算処理に移行する。具体的には、縦断ラインLv(c)に沿って、当該縦断ラインLv(c)の終点を探索するために、エッジ座標演算モジュール46は、変数kをインクリメントし(ステップS810)、インクリメントされた変数kが演算個数NN(図15のステップS700参照)よりも大きいか否か、並びにインクリメントされた変数kに相当するタプルCP(P(i,j,k),c)がnullであるか否かを判別する(ステップS811)。インクリメントされた変数kが演算個数NNよりも大きく、且つ、インクリメントされた変数kに相当するタプルCP(P(i,j,k),c)が非nullである場合、さらにステップS810に復帰して処理を繰り返す。図17並びに図22に示すように、変数kの値をインクリメントしていくことによって、エッジ座標演算モジュール46は、縦断ラインLv(c)に沿って、貼着方向Vの下流側のテープ制御点CPを探索し、遂には、null値のタプル(例えば、CP(P(0,0,NN),0))に到達する。
【0090】
インクリメントされた変数kが演算個数NNの値を越える場合、或いは、インクリメントされた変数kに係るタプルCP(P(i,j,k),c)がnullの場合、エッジ座標演算モジュール46は、ベクトル始点P0をCP(P(i,j,k−1),c)に設定する(ステップS812)。また、このステップS812のタイミングで、探索ベクトルSVが上流側のテープ制御点CP(P(i,j,k−1),c)から下流側のテープ制御点CP(P(i,j,k),c)に向かうように単位探索ベクトルnVを設定する(図24参照)。さらに、探索距離Lhを比較的大きな値に設定し、必ず、エッジTPeに到達するようにしている。
【0091】
次いで、エッジ座標演算モジュール46は、ナビゲーティングモジュール44を呼び出し(ステップS813)、ベクトル始点P0の座標CP(P(i,j,k−1),c)から単位探索ベクトルnV方向にエッジTPeを探索する(ステップS814)。これにより、図24に示すように、ナビゲーティングモジュール44は、テープ制御点CP(p,c)からテープ貼着方向Vに沿って座標Pを探索し、遂には、エッジTPeに到達する。エッジ座標演算モジュール46は、このエッジTPeに到達した探索終点Pfを終点座標Ecutとして、当該探索終点Pfの値をCP(P(i,j,NN+1),c)に登録する(ステップS815)。
【0092】
次いで、エッジ座標演算モジュール46は、変数cをインクリメントし(ステップS816)、全ての分割ゾーンdTPが終了したか否かを判別する(ステップS817)。仮に未処理の分割ゾーンdTPがある場合には、ステップS802に移行して、上述した処理を繰り返し、全ての分割ゾーンdTPが終了した場合には、メインルーチンに復帰する。
【0093】
なお、エッジ座標演算サブルーチンにおいて、プリプレグテープ10のテープ分割体11毎に縦断ラインLv(c)の長さを求めるようにしてもよい。縦断ラインLv(c)の長さは、例えば、図21に示す手順で演算することが可能である。
【0094】
図21の手順において、エッジ座標演算モジュール46は、始点座標Scutが演算された時点で、次式
【0095】
【数3】
【0096】
に基づき、始点座標Scutと、この始点座標Scutを通る横断ラインLp(k)がレイアップパスTPと交差する座標Pとの長さLx(c)を演算する(ステップS820)。次いで、エッジ座標演算モジュール46は、この長さLx(c)をレイアップパスTPから横断ラインに沿う始点座標Scutまでの長さLx(s)、並びにレイアップパスTPから横断ラインに沿う終点座標Ecutまでの長さLx(e)として、それぞれ登録する(ステップS821)。ステップS821の実行は、始点座標Scut並びに終点座標Ecutを演算し終わってから実行してもよく、或いは、始点座標Scutが演算された時点で、終点座標Ecutに先立ち、長さLx(s)の演算を実行し、終点座標Ecutを演算し終わった時点で、長さLx(c)を長さLx(e)として登録する態様をとってもよい。
【0097】
次に、エッジ座標演算モジュール46は、変数kの値をksに設定する(ステップS822)。ここで、値ksは、始点座標Scutをナビゲーティングモジュール44で演算する際に、引数として採用したテープ制御点CP(P(i,j,k),c)の変数kの値である。次いで、エッジ座標演算モジュール46は、CP(P(i,j,−1),c)から始点座標Scutまでの距離Lsをナビゲーティングモジュール44の履歴に基づいて演算し(ステップS823)、距離Lsの絶対値を縦断ラインLv(c)の長さLyの初期値に設定する(ステップS824)。ステップS822からステップS824は、始点座標Scutの演算終了後、終点座標演算処理前(図19のステップS808と図20のステップS810の間)に好適に実行することができる。また、その場合には、ステップS822を省略することができる。
【0098】
次に、エッジ座標演算モジュール46は、変数kをインクリメントする(ステップS825)。縦断ラインLv(c)の長さLyをエッジ座標演算サブルーチンの中で行う場合、このステップS825は、図20のステップS810で代用することができる。
【0099】
変数kをインクリメントした時点で、エッジ座標演算モジュール46は、当該テープ制御点CPが終点座標Ecutであるかどうかを判別する(ステップS826)。仮に当該テープ制御点CPが終点座標Ecutではない場合、縦断ラインLv(c)の長さLyに演算間隔ΔLn(図17参照)を積算し(ステップS827)、ステップS825に復帰して処理を繰り返す。縦断ラインLv(c)の長さLyをエッジ座標演算サブルーチンの中で行う場合、ステップS826は、図20のステップS811の判別で代用することができ、ステップS827は、ステップS811の判別でNO(False)の場合に実行することができる。
【0100】
終点座標Ecutを判別するステップで、当該テープ制御点CPが終点座標Ecutであると判別した場合、エッジ座標演算モジュール46は、距離Leを演算する(ステップS828)。距離Leは、終点座標Ecutをナビゲーティングモジュール44で演算する際に、最初のベクトル始点P0として採用したテープ制御点CP、即ち(P(i,j,k−1),c)から終点座標Ecutまでの長さである。次いで、エッジ座標演算モジュール46は、縦断ラインLv(c)の長さLyに演算された距離Leを加算して(ステップS829)、その値を登録する(ステップS830)。これにより、演算対象となる縦断ラインLv(c)について、長さLyを精緻に演算することができる。縦断ラインLv(c)の長さLyをエッジ座標演算サブルーチンの中で行う場合、ステップS828以降の処理は、終点座標Ecutを演算した後、適宜、実行することができる。
【0101】
レイアップパスTPから各縦断ラインLvまでの距離や、縦断ラインLvの長さLyを演算した場合には、テープ貼着装置の制御座標に対してテープ制御点CPやエッジTPs、TPeの座標をティーチングする作業が容易になる。
【0102】
テープ貼着装置としては、本件出願人が先に提案した特公平7−25143号公報に開示されているものを原理的に応用することにより、図4や図5に例示したプリプレグテープ10を製品WSの曲面に好適に貼着することが可能になる。同装置の原理を用いることにより、プリプレグテープ10のテープ分割体11毎に押し付け作業を行うことのできる押し付けローラと、テープ分割体11毎に長さを変更して裁断することのできるカッタと、各テープ分割体11から台紙12を回収する手段が構成可能であることが容易に理解されよう。また、カッタとしては、超音波ナイフが好適である。
【0103】
貼着作業に際しては、プリプレグテープ10の各テープ分割体11を繰り出して分断し、貼着に先立って、カッタで各テープ分割体11を裁断する。この裁断の際に、上述した始点座標Scutや終点座標Ecutに基づく精緻な寸法制御が実行され、過不足のない長さと座標にプリプレグテープ10が裁断される。
【0104】
裁断されたプリプレグテープ10は、押し付けローラでテープ制御点CP毎に押さえつけられて、製品WSの曲面に沿うように貼着される。このとき、各押し付けローラによる押し付け動作によって、プリプレグテープ10の各テープ分割体11は、縦断ラインLv沿いにずれることになる。このずれにより、プリプレグテープ10は、全体として、皺無く曲面に沿って綺麗に貼着される。従って、球面の場合等のように、平面展開できない自由曲面を有する製品WSに対して、プリプレグテープ10を皺無く綺麗に貼着することができる。
【0105】
以上説明したように、本実施形態に係るプリプレグテープ10によれば、プリプレグテープ10のテープ分割体11毎にテープ制御点CP(貼着時に押し付け荷重を付加するポイント)を設定することにより、従来のプリプレグテープ10に生じていた皺を逃がし、三次元に湾曲した面を有する様々な曲面Sに対しても、皺無く貼着や積層を図ることができる。
【0106】
また、本発明の実施形態に係るテープ制御情報設定方法は、プリプレグテープ10が貼着される曲面Sに設定されるレイアップパスTPを取得するレイアップパスTP取得ステップ(ステップS1、S6)と、レイアップパスTP取得ステップ(ステップS1、S6)で取得したレイアップパスTP上に演算開始点としてのベクトル始点P0を設定する演算開始点設定ステップ(ステップS101)と、ベクトル始点P0を通り且つレイアップパスTPに対して曲面S沿いに直交する横断ラインLpと、各テープ分割体11が貼着される分割ゾーンdTPの中心を通る縦断ラインLvとが交差する点にテープ制御点CPを設定するテープ制御点設定ステップ(ステップS7)とを備えている。
【0107】
このため本実施形態では、レイアップパスTPに設定された分割ゾーンdTP毎に、テープ制御点CPが設定されるので、各テープ分割体11をきめ細かく湾曲させることができる。なお、プリプレグテープ10を湾曲させて貼着する場合には、曲面Sの内周側と外周側とでプリプレグテープ10を押圧すべきテープ分割体11が周方向にずれることになるが、テープ分割体11毎に長手方向の繰出し量(貼着量)を変更し、上記ずれに対応した位置にテープ制御点CPが設定されるので、プリプレグテープ10をより皺無く綺麗に貼着することができる。また、レイアップ取得処理では、予め演算されたレイアップパスTPを読み取る処理であってもよく、或いは、与えられたベクトル始点P0を基点として、レイアップパスTPを演算する処理であってもよい。その場合、上述したナビゲーティングモジュール44を採用し、面S上に任意の点と、その点から面Sを網羅可能な方向に探索ベクトルを演算することにより、レイアップパスTPを精緻に演算することが可能となる。
【0108】
また、本実施形態では、テープ制御点設定ステップ(ステップS7)は、ベクトル始点P0を始点として、横断ラインLpに沿う微小大きさの探索ベクトルSVを演算する探索ベクトル演算ステップ(ステップS101〜S111)と、演算された探索ベクトルSVのベクトル終点Peから曲面Sに下ろした垂線の足を演算する垂足演算ステップ(ステップS102、S121、S124)と、垂線の足に基づいて、曲面S上の探索点Psを演算する探索点演算ステップ(ステップS104、と123、S125)と、所定の終了条件が成立するまで、ベクトル始点P0と探索点Psとから、当該探索点Psをベクトル始点P0とする新たな探索ベクトルSVを演算し、垂線演算ステップ(ステップS102、S121、S124)と探索点演算ステップ(ステップS104、と123、S125)とを繰り返す回帰演算ステップ(ステップS101〜S112)とを備えている。このため本実施形態では、多様に湾曲する曲面Sを微少な探索ベクトルSVで探索し、その探索点Pfを計算の基準として回帰的に探索ベクトルSVを演算することによって、曲面Sに精緻に沿う経路を計算することができ、テープ制御点CPを正確に演算することが可能になる。
【0109】
また本実施形態は、分割ゾーンdTP毎に、当該縦断ラインLvのエッジTPs、TPeの座標を演算するエッジ座標演算ステップ(ステップS8)をさらに備えている。このため本実施形態では、縦断ラインLv毎にエッジ座標(エッジTPs若しくはTPeの座標、或いはエッジTPsおよびエッジTPeの座標)を演算することができるので、曲面Sに貼着されるプリプレグテープ10のエッジTPs、TPeの座標をテープ貼着装置にティーチングしやすくなり、より好適で無駄のない座標にプリプレグテープ10を繰出し、裁断することが可能になる。
【0110】
また、本実施形態では、エッジ座標演算ステップ(ステップS8)は、縦断ラインLvのエッジTPs、TPeに最も近いテープ制御点CPを始点として、当該縦断ラインLvに沿う微小大きさの探索ベクトルSVを演算する探索ベクトル演算ステップ(ステップS101〜S111)と、演算された探索ベクトルSVのベクトル終点Peから曲面Sに下ろした垂線の足を演算する垂足演算ステップ(ステップS102、S121、S124)と、垂線の足に基づいて、曲面S上の探索点Psを演算する探索点演算ステップ(ステップS104、と123、S125)と、当該縦断ラインLvのエッジTPs、TPeに達するまで、ベクトル始点P0と探索点Psとから、当該探索点Psをベクトル始点P0とする新たな探索ベクトルSVを演算し、垂線演算ステップ(ステップS102、S121、S124)と探索点演算ステップ(ステップS104、と123、S125)とを繰り返す回帰演算ステップ(ステップS101〜S112)とを備えている。このため本実施形態では、各縦断ラインLv(c)に設定されたテープ制御点CPを基点として、多様に湾曲する曲面Sを微小な探索ベクトルSVで探索し、その探索点Pfを回帰的に演算することによって、曲面Sに精緻に沿う経路を計算することができる。その結果、分割ゾーンdTP毎にエッジTPs、TPeの座標を正確に演算することが可能になる。
【0111】
上述した実施の形態は、本発明の好ましい具体例を例示したものに過ぎず、本発明は上述した実施形態に限定されない。本発明の特許請求の範囲内で種々の変更が可能であることはいうまでもない。
【符号の説明】
【0112】
10 プリプレグテープ
11 テープ分割体
11a ミシン目
12 台紙
30 CADデータベース
40 テープ制御情報演算モジュール
44 ナビゲーティングモジュール
45 テープ制御点演算モジュール
46
エッジ座標演算モジュール
b 変数
c 変数
CP テープ制御点
d テープ幅
dTP 分割ゾーン
Ecut 終点座標
Ln レイアップパス上の積算距離
Lp 横断ライン
Lv 縦断ライン
N プリプレグテープの分割数
P 座標
S 曲面
S7 テープ制御点演算サブルーチン
S8 エッジ座標演算サブルーチン
Scut 始点座標
SV 探索ベクトル
t テープの厚さ
ptemp1−3 垂線の足
V テープ貼着方向
WS 製品
【特許請求の範囲】
【請求項1】
三次元に湾曲した曲面に貼着される貼着面を片面に有するプリプレグテープであって、
前記貼着面のテープ幅を等分するように分断された複数条のテープ分割体と、
各テープ分割体を一体に支承する支承体と
を備えているものであることを特徴とするプリプレグテープ。
【請求項2】
請求項1記載のプリプレグテープにおいて、
前記支承体は、前記テープ分割体の貼着面と反対側に重ね合わされて、各テープ分割体と一体的に巻回される台紙である
ことを特徴とするプリプレグテープ。
【請求項3】
請求項1または2記載のプリプレグテープにおいて、
前記支承体を兼ねる巻き芯を備えている
ことを特徴とするプリプレグテープ。
【請求項4】
三次元に湾曲した曲面に貼着される貼着面を片面に有するプリプレグテープであって、
テープ幅を等分するミシン目で分断可能に連結された複数条のテープ分割体を備えている
ことを特徴とするプリプレグテープ。
【請求項5】
請求項4記載のプリプレグテープにおいて、
前記テープ分割体の貼着面と反対側に重ね合わされて一体的に巻回される台紙を備えている
ことを特徴とするプリプレグテープ。
【請求項6】
請求項5記載のプリプレグテープにおいて、
前記台紙は、前記テープ分割体毎に分断されている
ことを特徴とするプリプレグテープ。
【請求項7】
請求項1から6の何れか1項に記載のプリプレグテープの貼着に要するテープ制御情報のうち少なくとも一要素を設定するテープ制御情報設定方法であって、
前記プリプレグテープを前記曲面に貼着する経路であるレイアップパスを当該曲面のCADデータから取得するレイアップパス取得ステップと、
前記レイアップパス取得ステップで取得したレイアップパス上に演算開始点を設定する演算開始点設定ステップと、
前記演算開始点を通り且つ前記レイアップパスに対して曲面沿いに直交する横断ラインと、各テープ分割体が貼着される分割ゾーンの中心を通る縦断ラインとが交差する点にテープ制御点を設定するテープ制御点設定ステップと
を備えていることを特徴とするテープ制御情報設定方法。
【請求項8】
請求項7記載のテープ制御情報設定方法において、
前記テープ制御点設定ステップは、
前記演算開始点を始点として、前記横断ラインに沿う微小大きさの探索ベクトルを演算する探索ベクトル演算ステップと、
演算された探索ベクトルの終点から前記曲面に下ろした垂線の足を演算する垂足演算ステップと、
前記垂線の足に基づいて、前記曲面上の探索点を演算する探索点演算ステップと、
所定の終了条件が成立するまで、前記ベクトル始点と前記探索点とから、当該探索点をベクトル始点とする新たな探索ベクトルを演算し、前記垂線演算ステップと前記探索点演算ステップとを繰り返す回帰演算ステップと
を備えている
ことを特徴とするテープ制御情報設定方法。
【請求項9】
請求項7または8記載のテープ制御情報設定方法において、
前記分割ゾーン毎に、当該縦断ラインのエッジの座標を演算するエッジ座標演算ステップをさらに備えている
ことを特徴とするテープ制御情報設定方法。
【請求項10】
請求項9記載のテープ制御情報設定方法において、
前記エッジ座標演算ステップは、
前記縦断ラインのエッジに最も近いテープ制御点を始点として、当該縦断ラインに沿う微小大きさの探索ベクトルを演算する探索ベクトル演算ステップと、
演算された探索ベクトルの終点から前記曲面に下ろした垂線の足を演算する垂足演算ステップと、
前記垂線の足に基づいて、前記曲面上の探索点を演算する探索点演算ステップと、
当該縦断ラインのエッジに達するまで、前記ベクトル始点と前記探索点とから、当該探索点をベクトル始点とする新たな探索ベクトルを演算し、前記垂線演算ステップと前記探索点演算ステップとを繰り返す回帰演算ステップと
を備えている
ことを特徴とするテープ制御情報設定方法。
【請求項1】
三次元に湾曲した曲面に貼着される貼着面を片面に有するプリプレグテープであって、
前記貼着面のテープ幅を等分するように分断された複数条のテープ分割体と、
各テープ分割体を一体に支承する支承体と
を備えているものであることを特徴とするプリプレグテープ。
【請求項2】
請求項1記載のプリプレグテープにおいて、
前記支承体は、前記テープ分割体の貼着面と反対側に重ね合わされて、各テープ分割体と一体的に巻回される台紙である
ことを特徴とするプリプレグテープ。
【請求項3】
請求項1または2記載のプリプレグテープにおいて、
前記支承体を兼ねる巻き芯を備えている
ことを特徴とするプリプレグテープ。
【請求項4】
三次元に湾曲した曲面に貼着される貼着面を片面に有するプリプレグテープであって、
テープ幅を等分するミシン目で分断可能に連結された複数条のテープ分割体を備えている
ことを特徴とするプリプレグテープ。
【請求項5】
請求項4記載のプリプレグテープにおいて、
前記テープ分割体の貼着面と反対側に重ね合わされて一体的に巻回される台紙を備えている
ことを特徴とするプリプレグテープ。
【請求項6】
請求項5記載のプリプレグテープにおいて、
前記台紙は、前記テープ分割体毎に分断されている
ことを特徴とするプリプレグテープ。
【請求項7】
請求項1から6の何れか1項に記載のプリプレグテープの貼着に要するテープ制御情報のうち少なくとも一要素を設定するテープ制御情報設定方法であって、
前記プリプレグテープを前記曲面に貼着する経路であるレイアップパスを当該曲面のCADデータから取得するレイアップパス取得ステップと、
前記レイアップパス取得ステップで取得したレイアップパス上に演算開始点を設定する演算開始点設定ステップと、
前記演算開始点を通り且つ前記レイアップパスに対して曲面沿いに直交する横断ラインと、各テープ分割体が貼着される分割ゾーンの中心を通る縦断ラインとが交差する点にテープ制御点を設定するテープ制御点設定ステップと
を備えていることを特徴とするテープ制御情報設定方法。
【請求項8】
請求項7記載のテープ制御情報設定方法において、
前記テープ制御点設定ステップは、
前記演算開始点を始点として、前記横断ラインに沿う微小大きさの探索ベクトルを演算する探索ベクトル演算ステップと、
演算された探索ベクトルの終点から前記曲面に下ろした垂線の足を演算する垂足演算ステップと、
前記垂線の足に基づいて、前記曲面上の探索点を演算する探索点演算ステップと、
所定の終了条件が成立するまで、前記ベクトル始点と前記探索点とから、当該探索点をベクトル始点とする新たな探索ベクトルを演算し、前記垂線演算ステップと前記探索点演算ステップとを繰り返す回帰演算ステップと
を備えている
ことを特徴とするテープ制御情報設定方法。
【請求項9】
請求項7または8記載のテープ制御情報設定方法において、
前記分割ゾーン毎に、当該縦断ラインのエッジの座標を演算するエッジ座標演算ステップをさらに備えている
ことを特徴とするテープ制御情報設定方法。
【請求項10】
請求項9記載のテープ制御情報設定方法において、
前記エッジ座標演算ステップは、
前記縦断ラインのエッジに最も近いテープ制御点を始点として、当該縦断ラインに沿う微小大きさの探索ベクトルを演算する探索ベクトル演算ステップと、
演算された探索ベクトルの終点から前記曲面に下ろした垂線の足を演算する垂足演算ステップと、
前記垂線の足に基づいて、前記曲面上の探索点を演算する探索点演算ステップと、
当該縦断ラインのエッジに達するまで、前記ベクトル始点と前記探索点とから、当該探索点をベクトル始点とする新たな探索ベクトルを演算し、前記垂線演算ステップと前記探索点演算ステップとを繰り返す回帰演算ステップと
を備えている
ことを特徴とするテープ制御情報設定方法。
【図1】

【図2】
【図3】
【図4】
【図5】
【図6】
【図7】

【図8】
【図9】
【図10】
【図11】
【図12】
【図13】
【図14】
【図15】
【図16】
【図17】
【図18】
【図19】
【図20】
【図21】
【図22】
【図23】
【図24】
【図25】
【図2】
【図3】
【図4】
【図5】
【図6】
【図7】
【図8】
【図9】
【図10】
【図11】
【図12】
【図13】
【図14】
【図15】
【図16】
【図17】
【図18】
【図19】
【図20】
【図21】
【図22】
【図23】
【図24】
【図25】
【公開番号】特開2012−102268(P2012−102268A)
【公開日】平成24年5月31日(2012.5.31)
【国際特許分類】
【出願番号】特願2010−253077(P2010−253077)
【出願日】平成22年11月11日(2010.11.11)
【出願人】(000191180)新日本工機株式会社 (51)
【Fターム(参考)】
【公開日】平成24年5月31日(2012.5.31)
【国際特許分類】
【出願日】平成22年11月11日(2010.11.11)
【出願人】(000191180)新日本工機株式会社 (51)
【Fターム(参考)】
[ Back to top ]