
プレートの充実性増殖培地の表面を位置付けるための方法および機器
プレートの充実性増殖培地の表面をプレート作業位置に位置付けるための方法であって、プレート作業位置は、センサを含み、一次元(z)で固定された基準面を有し、この方法は、〜プレートをプレート作業位置に配置するステップと、〜センサを用いて、位置決めされたプレートのために培地表面を検知し、培地表面までの距離を測定するステップと、〜測定された距離を基準面に参照付けて、位置決めされたプレートの培地の表面のために一次元(z)で基準面に対する表面位置参照を決定するステップとを含む、方法を提供する。

【発明の詳細な説明】
【技術分野】
【0001】
この国際特許出願は、2007年1月12日に出願されたオーストラリア仮特許出願2007900147号の優先権を主張し、その内容は引用によって本明細書に援用されるものとする。
【0002】
発明の分野
この発明は一般に、医療診断目的などの主に実験室における診断目的のための、微生物試料の充実性増殖培地への接種、および分離された細菌コロニーを生成するためのその後の接種物の画線に関わる機器に関する。この発明は、特に、自動画線機器においてその後の画線動作を手助けするためにプレートの充実性増殖培地の表面を位置付けるための方法および機器に関する。しかしながら、この発明はその用途のみに限定されるものではない。
【背景技術】
【0003】
発明の背景
微生物(および特に細菌)の独立コロニーの分離は、多くの微生物実験室において重要な処置である。従来、この細菌の分離は熟練実験技師によって手作業で行なわれ、技師はまず微生物試料をペトリ皿の寒天などの充実性増殖培地(以後単に、「寒天プレート」または単に「プレート」の「培地」と称する)の表面に分配し、次に手工具を用いて試料を培地の表面全体に亘って広げる(「画線」と呼ばれる)。
【0004】
手工具は典型的に、接種物の希釈度が増大する複数の画線を培地全体に亘って作るための末端ループを含む。希釈度が増大する画線は、一般に画線の尾部に向かって多数の単細胞を提供する傾向があり、これによってインキュベーション後の分離された微生物コロニーの成長が可能となる。これらの分離されたコロニーは次にコロニー形態が分析され得、これまでに同定されていない有機体のたとえば属、種および菌株を判定するのに必要な着色および他の処置を受け得る。
【0005】
そのような接種および画線は非常に繰返しが多く、多くの病理学診断微生物学実験室において普通非常に大量に、たとえば1日に1,000から15,000プレートにも上る量で行われる。これは単調で面倒な作業であるため、誤りや不正確さが生じやすい。これは極めて明らかに、一部または完全自動化に適しているであろう作業である。
【0006】
文献にはこれらの実験室機能の最適な自動化方法についての提案が豊富に記載されているが、これらの提案の中で商用の実験室環境において実際に成功したものは殆どない。したがって、好適な実験室機器の実現の成功は今まで大抵の人々にとって困難であったと思われる。
【0007】
これらの実験室機能を自動化するための3つの最近の提案は以下の文書に見つけられ得る。「培地を画線するための方法および機器(Method and Apparatus for Streaking a Culture Medium)」と題された米国特許第4,981,802号(C.ワイリー等(C. Wylie et al))、「標本容器からの細菌標本を培地に自動的に接種するための方法および機器(Method and Apparatus for Automatically Inoculating Culture Media With Bacterial Specimens From Specimen Containers)」と題された米国特許第6,617,146号(F.ナッカラート等(F. Naccarato et al))、および「微生物の画線装置(Microbial Streaking Device)」と題された国際特許公報WO2005/071055(Medvet Science Pty Ltd)(本出願人にライセンスされている)。
【0008】
ワイリーおよびナッカラート特許には、上述の手動の画線工具と同様の再利用可能な画線工具を利用する自動式および半自動式機器が記載されているが、三次元空間において培地の表面の正確な位置を決定するための、その機器のための好適なシステムまたは機構については記載されていない。
【0009】
Medvet Science社の公報には、間隔を空けられた接触面(充実性増殖培地の表面との接触のため)の列を含む画線アプリケータである新たな形態の画線工具を用いることが記載されており、接触面は共通の支持部材によって弾性的に可撓性を有して支持されているが、この新しい画線工具は当然ながら、依然として培地の表面上に配置する必要がある。Medvet Science社の公報は、機器に圧力検知装置を備え付けていつ工具が好適に表面上にくるかを判断することでこれに対処できることを提案している。
【0010】
プレート内の寒天などの培地の高さは多くの要因によって変動することが認識される。たとえば、異なるプレートおよび充実性増殖培地供給者は、供給者ごとに、たとえば幅広い種類の表面高さを有する寒天プレートを決まって生み出すだけでなく、同じ供給者であっても、自身のプレートの培地の高さがさまざまである傾向がある。また、この目的で用いられる培地の異なる組成および年齢も、培地表面高さが異なるプレートを生み出す傾向がある。したがって、およびこのような高さの変動のために、すべてのプレートの培地の表面の高さが同じであることを当てにすることは、自動画線機器にとっては一般に不可能である。
【0011】
したがって、たとえばこのような自動式機器の接種装置が処理すべきプレート毎に三次元空間において同じ位置で培地の表面上に接種物を配置できることを当てにすることは、接種装置にとっては実現可能ではなく、重大な問題および複雑さが、それを行なう機器に導入され得る。別の例として、三次元空間においてプレート毎に同じ位置で培地の表面上に(表面を削り取るのではなく接種物を広げるように)画線工具を配置しようとする際に、このような自動式機器の画線装置にも潜在的な問題および複雑さが存在する。
【0012】
接種装置に関しては、z次元(高さ)での供給先端部の位置が不正確であることによって、接種物が高過ぎる位置から供給される(したがって、必要に応じて供給されない)か、または先端部が培地の表面を削り取るように表面と接触するようになることが認識される。画線装置に関しては、z次元(高さ)での接触面の位置が不正確であることによって、全く接種物と接触しないか、または画線工具が培地の表面における線路も削り取るように過剰に接触することになる。
【発明の概要】
【発明が解決しようとする課題】
【0013】
この発明の目的は、たとえばプレートの接種および画線の前に、そのプレートの培地の表面を位置付けることが可能な方法および機器の両方を提供することである。この点に関して、および上で前もって示したように、この発明の目的は、また、当該方法および機器が上述の接種および画線状況以外の実験室の状況で用いられるようにすることである。実際、この発明の方法および機器は、いずれの実験室でも用いられ得て、いかなる目的に対しても、プレートの充実性増殖培地の表面を位置付けるためのプロセスを単に提供する。
【課題を解決するための手段】
【0014】
この発明の要約に移る前に、上記の先行技術の説明はこの発明の内容を説明するための背景として与えられたに過ぎないことを認識する必要がある。上記の説明は、言及された資料のいずれかがオーストラリアまたはその他の場所で公開されていたもしくは公知であった、または一般知識の一部であったという承認として見なされるものではない。
【0015】
また、機器とそのさまざまな部分との空間的関係を規定するために用いられる用語のいくつかを説明しておくと役立つ。この点に関して、本明細書全体に亘る空間的な言及は一般に、自動画線機器において直立位置で最終的に接種および画線されるプレートに基づいており、プレートの培地の表面は一般に平坦で水平である。この環境を基礎として、機器およびそのいくつかの部分は「水平の」を言及して規定され得、「上部の」または「上向きに」および「下部の」または「下向きに」、さらに「垂直の」というさらなる言及も可能となる。この点に関して、x、yおよびz次元、そしてx方向(または軸)、y方向(または軸)およびz方向(または軸)という従来の幾何学の空間的な言及も採用することができ、xおよびy方向は一般に水平であり、z方向は一般に垂直である。
【0016】
最後に、個別に(かつ使用環境下にない)最終的に権利主張され得るこの発明のいくつかの局面は、個別に説明および理解するのが困難であり得る。したがって、以下の説明のいくつかでは、この発明およびその実施例をそのような使用環境下で(たとえば、自動画線機器内で培地を運ぶプレートに関連して)説明する。もちろん、この発明を規定するためのそのような説明の使用、および上述の空間的関係の使用は、それが意図されていることが明確に記載されていない限り、限定事項として見なされず、もちろん使用環境のみの限定事項としても見なされない。
【0017】
発明の概要
この発明は、プレートの充実性増殖培地の表面をプレート作業位置に位置付けるための方法であって、プレート作業位置は、センサを含み、一次元(z)で固定された基準面を有し、この方法は、
〜プレートをプレート作業位置に配置するステップと、
〜センサを用いて、位置決めされたプレートのために培地表面を検知し、培地表面までの距離を測定するステップと、
〜測定された距離を基準面に参照付けて、位置決めされたプレートの培地の表面のために一次元(z)で基準面に対する表面位置参照を決定するステップとを含む、方法を提供する。
【0018】
したがって、通常の、概して水平な向きにあるプレートの培地の表面は、表面位置参照を決定することによって、少なくともz次元でこのように位置付けられ得ることが認識される。これは事実上、少なくとも基準面を基準としてプレートの培地の高さを決定する。好ましい形態では、基準面は、プレートをクランプして支持できるプレートプラットホームの一部を成す平面(または面)である。したがって、この好ましい形態では、表面位置参照の決定は、事実上、プレートが載っているプレートプラットホームを基準として培地の高さを決定する。これは、この態様での培地の参照付けにより、別の恐らく無関係の機器が、ある程度正確に培地の表面と動作可能に相互作用できるようになるという点で、有用であり、このことは(以下で概略を述べるように)自動画線機器においてこの発明が用いられる場合に必要とされるであろう。
【0019】
この発明の1つの形態では、培地の高さは、全範囲に亘ってセンサによって検知されるのではなく、その全範囲のうちの一部である検知領域でしか検知されない。たとえば、1つの形態では、この方法は、検知領域内で培地表面を検知し、その検知領域内で培地表面までの距離を測定する。実際には、表面欠陥などに起因して表面の高さがさまざまであるためにその領域全体に亘って距離がさまざまである可能性があると仮定して、この測定された距離は検知領域のエリアに亘る平均である可能性が高い。
【0020】
しかしながら、および上述のように、この発明の方法の好ましい用途は、プレートの培地の接種および画線での用途であり、この接種および画線では、一般に、培地の表面を横
切る線(時には、「作用線」と称される)に沿って接種物を広げ、次いでその線に沿って画線工具を位置付ける目的で、一次元空間においてあるポイント(または領域)を決定するだけでなく、三次元空間においてその線の位置を決定する必要がある。
【0021】
したがって、この発明はまた、プレートの充実性増殖培地の表面をプレート作業位置に位置付けるための方法であって、プレート作業位置は、センサを含み、予め定められた位置に二次元(x,y)で固定された概念上の作用線を有し、一次元(z)で固定された基準面を有し、この方法は、
〜プレートをプレート作業位置に配置するステップと、
〜センサを用いて、位置決めされたプレートのために検知領域内で培地表面を検知し、その検知領域内で培地表面までの平均距離を測定するステップと、
〜測定された距離を基準面に参照付けて、位置決めされたプレートの培地の表面のために一次元(z)で基準面に対する表面位置参照を決定するステップと、
〜表面位置参照と概念上の作用線とを用いて、位置決めされたプレートの培地の表面を横切る線を代表する線を三次元(x,y,z)で決定するステップとを含む、方法を提供する。
【0022】
この発明の別の好ましい形態では、この方法は、検出上限と検出下限とを設定して、上限と下限との間の検出範囲を規定するさらなるステップを含み、いくつかの形態では、検出上限は基準面より上にあり、検出下限は基準面より下にある。このような検出範囲の使用は、表面位置参照のみを決定する方法または表面位置参照から代表的な表面線を決定する方法とともに採用できる。
【0023】
このタイプの検出範囲は、任意の範囲であり、したがって、検出範囲の上限および下限は任意に設定できる。検出範囲は、較正の機会を与えることができ、たとえば多数の較正サブ範囲の識別を検出範囲内で適用できるようにする。たとえば、この発明のいくつかの形態では、プレート作業位置に位置決めされたプレートが依然としてその上に蓋を含んでいるかどうか、または恐らくプレートが上下反対にプレート作業位置に配置されたかどうかをこの方法が判断できることは必要でないまたは望ましくないかも知れない。したがって、培地の表面が位置すると見込まれる位置のすぐ上に上限があり、培地の表面が位置すると見込まれる位置のすぐ下に下限がある狭い検出範囲を採用することによって、プレート作業位置にあるプレートの検出可能な高さがこの狭い範囲の範囲外にあればセンサは機能しないことになる。なぜなら、センサはプレートの蓋の表面またはプレート底部の表面を検出するためである。
【0024】
逆に、たとえば蓋が付いたプレートまたは空のプレートがプレート作業位置に配置されるとこの方法が警報を与えることができることが望ましい状況が存在し得る。好適に十分に広い検出範囲が設定されていると、センサはしたがって蓋の壁または底部壁の存在を検知し、プレートの培地の表面までではなくその表面までの距離を測定する。したがって、警報状態(たとえば、蓋が付いたプレートまたは空のプレート)のための較正サブ範囲および非警報状態(蓋を外した直立したプレート)のための較正サブ範囲を有する好適に広い検出範囲を設けることによって、較正サブ範囲は、(表面位置参照の決定および警報較正サブ範囲のうちの1つにおけるその存在によって)警報状態の識別をもたらすことができ、この方法の適切な機能を可能にする。
【0025】
たとえば、および本明細書において用いられるプレートの見込みの厚みおよび培地の見込みの高さ次第で、1つの形態では、検出範囲を約30mmに設定でき、上限を基準面の上20mmの位置に設定でき、下限を基準面の下10mmの位置に設定できる。この形態では、および典型的なプレートに関して、蓋が付いたプレートは(どちらの向きでも)、上限の下約7mmの位置に表面位置参照を生成してもよく、蓋を外した直立したプレート
は、上限の下約14mmの位置に(培地表面のための)表面位置参照を生成してもよく、蓋を外したが空のプレートは、上限の下約18mmの位置に表面位置参照を生成してもよい(これは、基準面の上のプレートの底部壁の厚みに過ぎない)。
【0026】
したがって、この発明はまた、プレートの充実性増殖培地の表面をプレート作業位置に位置付けるための方法であって、プレート作業位置は、センサを含み、一次元(z)で固定された基準面を有し、この方法は、
〜上限と下限とを設定して、上限と下限との間の検出範囲を規定するステップと、
〜プレートをプレート作業位置に配置するステップと、
〜センサを用いて、位置決めされたプレートのために培地表面を検出範囲内で検知し、培地表面までの距離を測定するステップと、
〜測定された距離を基準面に参照付けて、位置決めされたプレートの培地の表面のために一次元(z)で基準面に対する表面位置参照を与えるステップとを含む、方法を提供する。
【0027】
さらに、この発明はまた、プレートの充実性増殖培地の表面をプレート作業位置に位置付けるための方法であって、プレート作業位置は、センサを含み、予め定められた位置に二次元(x,y)で固定された概念上の作用線を有し、一次元(z)で固定された基準面を有し、この方法は、
〜上限と下限とを設定して、上限と下限との間の検出範囲を規定するステップと、
〜プレートをプレート作業位置に配置するステップと、
〜センサを用いて、位置決めされたプレートのために検知領域内で検出範囲内で培地表面を検知し、その検知領域内で培地表面までの平均距離を測定するステップと、
〜測定された距離を基準面に参照付けて、位置決めされたプレートの培地の表面のために一次元(z)で基準面に対する表面位置参照を決定するステップと、
〜表面位置参照と概念上の作用線とを用いて、位置決めされたプレートの培地の表面を横切る線を代表する線を三次元(x,y,z)で決定するステップとを含む、方法を提供してもよい。
【0028】
上述のように、好ましくは基準面は、固定され、したがって機器における公知のパラメータである。この発明の1つの形態では、基準面は、プレートをプレート作業位置に保持するように構成されたプラットホームの最上面として固定され、最上面はしたがってプレートのすぐ下の面である。この点を考慮に入れて、プラットホームはそれ自体が好ましくはz方向に固定され、その結果、通常動作の一部としてプラットホームをxまたはy方向に移動させる必要があるかどうかに拘らず、z方向におけるプラットホームの位置は一定であり、公知である。
【0029】
したがって、この発明の一部として、この位置が変化していないことを定期的に確認する能力をさらに含むことは有益であろう。定期的な確認は、この位置が変化していないことを毎日、毎週または毎月確認できること、またはこの発明の方法および機器を毎回動作させる前にもしくはさらには(これはありそうにないことであるが)各測定が行なわれる前に、この位置が変化していないことを確認できることなどによって、行なわれる。実際、通常の機械的な動作振動(または温度変化)でさえ、z方向における基準面の位置を変化させ得る(僅かではあるが変化させ得る)ことが認識され、これは、この方法および機器の動作の精度に影響を及ぼす可能性がある。
【0030】
センサは、上述の態様で表面の存在を検知し、次いで理想的にはセンサの一部である固定された基準点からセンサまでの距離を測定するようにプログラミングおよび制御されることができる任意のタイプのセンサであり得る。センサは、たとえばレーザセンサまたは超音波センサであってもよい。好ましくは、センサは、上述の参照付けタスクをさらに行
なうことができるプログラム可能なコントローラを含む。
【0031】
好ましい形態では、センサは、好ましくは上述の検知領域内で培地表面上に集束ビームを与えることが可能な超音波ビーム集束要素を含む超音波検知装置である。表面位置参照から代表線を決定するこの発明の形態では、この検知領域はしたがって、これも上述した予め定められた概念上の作用線の好ましくは中央にある。
【0032】
センサは好ましくはメインフレームに強固に取付けられ、それによって、プレート作業位置の概略位置を規定する。この形態では、センサは理想的には、プレート作業位置の上方にくるようにおよびそのすぐ下方でプレートプラットホームに保持された位置決めされたプレートに動作可能に隣接しているように取付けられ、位置決めされたプレートは、上向きに開放した培地表面を有する。
【0033】
したがって、この発明はまた、プレートの充実性増殖培地の表面をプレート作業位置に位置付けるための機器であって、プレート作業位置は、センサを含み、一次元(z)で固定された基準面を有し、センサは、位置決めされたプレートのために培地表面を検知し、培地表面までの距離を測定することが可能であり、この機器はまた、測定された距離を基準面に参照付けて、位置決めされたプレートの培地の表面のために一次元(z)で基準面に対する表面位置参照を決定するための手段を含む、機器を提供する。
【0034】
この発明はさらに、プレートの充実性増殖培地の表面をプレート作業位置に位置付けるための機器であって、プレート作業位置は、センサを含み、予め定められた位置に二次元(x,y)で固定された概念上の作用線を有し、一次元(z)で固定された基準面を有し、センサは、位置決めされたプレートのために検知領域内で培地表面を検知し、その検知領域内で培地表面までの平均距離を測定することが可能であり、この機器はまた、測定された距離を基準面に参照付けて、位置決めされたプレートの培地の表面のために一次元(z)で基準面に対する表面位置参照を決定し、次いで、表面位置参照と概念上の作用線とを用いて、位置決めされたプレートの培地の表面を横切る線を代表する線を三次元(x,y,z)で決定するための手段を含む、機器を提供する。
【0035】
さらに、この発明はまた、プレートの充実性増殖培地の表面をプレート作業位置に位置付けるための機器であって、プレート作業位置は、センサを含み、一次元(z)で固定された基準面を有し、センサは、上限と下限とを有して上限と下限との間の検出範囲を規定し、位置決めされたプレートのために培地表面を検出範囲内で検知し、培地表面までの距離を測定することが可能であり、この機器は、測定された距離を基準面に参照付けて、位置決めされたプレートの培地の表面のために一次元(z)で基準面に対する表面位置参照を与えるための手段を含む、機器を提供する。
【0036】
さらに、この発明はまた、プレートの充実性増殖培地の表面をプレート作業位置に位置付けるための機器であって、プレート作業位置は、センサを含み、予め定められた位置に二次元(x,y)で固定された概念上の作用線を有し、一次元(z)で固定された基準面も有し、センサは、上限と下限とを有して上限と下限との間の検出範囲を規定し、位置決めされたプレートのために検知領域内で検出範囲内で培地表面を検知し、その検知領域内で培地表面までの平均距離を測定することが可能であり、この機器は、測定された距離を基準面に参照付けて、位置決めされたプレートの培地の表面のために一次元(z)で基準面に対する表面位置参照を決定し、次いで、表面位置参照と概念上の作用線とを用いて、位置決めされたプレートの培地の表面を横切る線を代表する線を三次元(x,y,z)で決定するための手段を含む、機器を提供してもよい。
【0037】
また、位置決めされたプレートの培地の表面のための表面位置参照および代表線は、そ
の位置決めされたプレートの培地のみに固有であり、プレート作業位置で処理される次のプレートの表面と比較すると、異なる表面位置参照および代表線であってもよい(実際には、そうである可能性が高い)ことがもちろん認識される。
【0038】
最後に、この発明の方法および機器はその上、ハーフプレート(多くの場合、バイプレートと称される)と共に用いられることが想定され、プレートの2つの部分は直立した直径方向の壁によって切り離され、各部分は、高さが上述の態様で決定される培地を含む。この状況で、上述の方法は、直立した壁の位置の検出または確定も可能にし、次いで両方の部分上でそのプレートに対してこの発明の方法の動作を2度起動するように修正できる。代替的に、この方法はもちろん、単に機器が他の態様でバイプレートの存在を知らされることができ、続いて両方の部分上でこの方法の動作を起動するように修正できるであろう。
【0039】
上述のことから明らかであるように、この発明の方法および機器は、理想的には、オーストラリア仮特許出願2007900146号の優先権を主張する、2008年1月11日に出願された「プレートの培地を接種および画線するための方法および機器(Method and Apparatus for Inoculating and Streaking a Medium in a Plate)」と題された本出願人の国際特許出願に概して記載されるタイプの自動画線機器と共に用いるのに主に適しており、オーストラリア仮特許出願2007900146号の全内容は引用によって本明細書に援用される。この目的で、その画線機器の1つの形態は一般に、
(a) 未処理プレートを逆さ向きに保管可能なプレート供給部と、
(b) プレート供給部から逆さの未処理プレートを取得し、未処理プレートの蓋を外し、底部が最下になるように未処理プレートを方向付け、方向付けられ蓋を外された未処理プレートを接種および画線ステーション内のプレート作業位置に移すことが可能なプレート移動送り機構と、
(c) 位置決めされたプレートの接種および画線の前に、そのプレートの培地の表面を位置付けることができるセンサである、この発明の機器と、
(d) 位置決めされたプレートの培地の表面に接種物を分配可能な接種装置と、
(e) 画線アプリケータ供給部から画線アプリケータを取得し、次に、位置決めされたプレートを回転させて画線する前に、画線アプリケータを、その間隔を空けられた接触面の列が位置決めされたプレートの培地の表面と接触するように動かすことが可能な画線装置と、
(f) 処理済プレートを逆さ向きに保管可能なプレート保管部と、
(g) 処理済プレートをプレート作業位置から取戻し、処理済プレートを再び方向付け蓋をし、処理済プレートをプレート保管部に移すことが可能なプレート移動保管機構とを含む。
【0040】
したがって、1つの形態(しかしながら、その唯一の形態ではない)では、この発明の方法および機器は、上述の自動画線機器のプレート作業位置についてセンサとして用いるのに好適であるように意図されている。
【0041】
この発明に関わる一般概念を簡単に説明したので、この発明に係る好ましい実施例を次に説明する。しかし、以下の説明は上記説明の一般性を制限するものではないことを理解すべきである。
【図面の簡単な説明】
【0042】
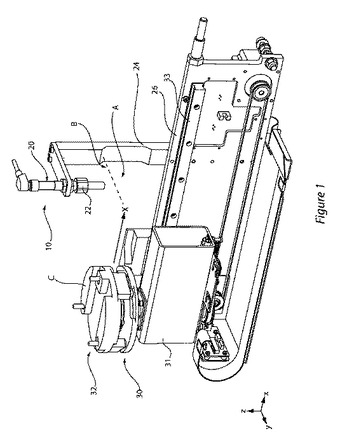
【図1】プレート作業位置付近のプレートプラットホームを示す、この発明の好ましい実施例に従う機器の上からの斜視図である。
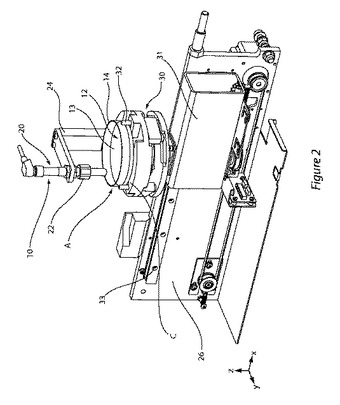
【図2】プレート作業位置においてプレートプラットホームに保持されたプレートを示す、図1の機器の上からの斜視図である。
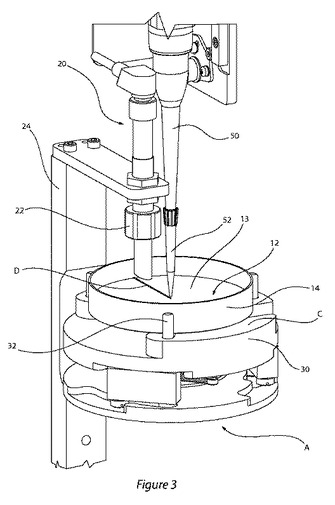
【図3】使用時の機器および三次元の作用線を示す、図1の機器の一部の上からの斜視図である。
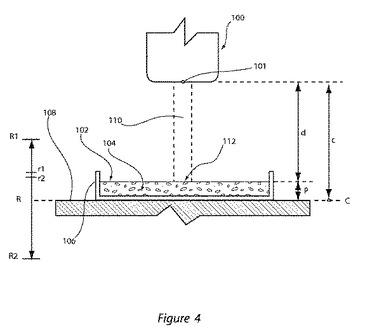
【図4】さまざまな幾何学的および数学的関係を示す、使用時の図1の機器の概略図である。
【発明を実施するための形態】
【0043】
好ましい実施例の説明
プレート14における、表面13を有する充実性増殖培地12の表面をプレート作業位置Aに位置付けるための機器10が図1および図2に示されており、培地12およびプレート14は図1には図示されていない。図1は、矢印Xの方向にプレート作業位置Aまでプレートを移動させるために、中央に集めてクランプした位置でプレート14を受けることができるプレートプラットホーム30を示す。プレートプラットホーム30は、好適なコントローラに応答してガイドレール33に沿って摺動移動させるための支持部31上に取付けられる。プレートプラットホーム30は、カム装置(図示せず)によって動かされる3つの可動ラグの形態のプレートクランプ部材32を含み、このラグは好ましくは、プラットホーム30上でプレート14の位置を中央に集めるためのプレート中央集中化手段の役割を果たすこともできる。これは、プレート14に対するその後の動作にとって有用であり得る。
【0044】
上記のタイプの自動画線機器と共に用いられる実施例であるこの発明のこの実施例では、プレート作業位置Aは、予め定められた位置に二次元(x,y)で固定された(図1では破線によって示される)概念上の作用線Bを含む。しかしながら、および上でも説明したように、培地の表面のための、三次元空間に位置する線(この実施例についての図3では線Dとして示されるような表面を横切る線によって表わされる)を決定する必要がないかも知れないこの発明のいくつかの実施例では、概念上の作用線Bを予め定める必要はない。
【0045】
しかしながら、この実施例では、概念上の作用線Bは、予め定められた位置に二次元(x,y)で固定される。この作用線Bは、本明細書では、「概念上の」作用線と称される。これは、作用線Bが、目に見える作用線ではなく、またプレート14の培地12の表面13の位置を決定するまで三次元空間において定められた位置を持たないと仮定してのことである。プレート作業位置Aは基準面Cを含み、基準面Cは、図1では、プレートプラットホーム30の最上面として示されている(最終的には、図2において明らかであるように、プレート作業位置A内に位置付けられることになる)。
【0046】
機器10は、好ましくは予め定められた概念上の作用線Bの中央にある(図2および図3では特定されていない)検知領域内で培地表面12上に集束ビームを与えることが可能な超音波ビーム集束要素を有する超音波検知装置22を含むセンサ20を含む。センサ20は、センサ支持アーム24によってメインフレーム26に強固に取付けられ、それによって、プレート作業位置Aの概略位置を規定する。この形態で、センサ20は理想的には、プレート作業位置Aの上方にくるようにおよびそのすぐ下方でプレートプラットホーム30に保持されたプレート14に動作可能に隣接しているように取付けられ、図3において明らかであるように、プレート14は上向きに開放した表面13を有する。
【0047】
図3を参照して、この発明のこの実施例の方法は、したがって、位置決めされたプレート14のために培地表面13を検知して、培地表面13までの距離を測定するために、センサ20を必要とする。次いで、測定された距離を基準面Cに参照付けて、位置決めされたプレート14の表面13のために一次元(z)で基準面Cに対する表面位置参照を決定する。この態様で、したがって、表面13はこの表面位置参照を決定することによって少なくともz次元で位置付けられ得ることが認識される。これは事実上、少なくともその基
準面Cを基準としてプレート14の培地12の高さを決定する。この点に関して、および図からわかるように、基準面Cは、プレート14をクランプして支持するプレートプラットホーム30の一部を成す面である。したがって、この実施例では、表面位置参照の決定は、事実上、プレート14が載っているプレートプラットホーム30を基準として培地12の高さを決定する。次いで、この表面位置参照は、(図1からの)概念上の作用線Bと共に用いることができて、位置決めされたプレートの表面13を横切る線を代表する線Dを三次元(x,y,z)で決定する。
【0048】
この態様での表面の位置付けに続いて、上述の態様で表面12に接種するために、接種装置50をプレート作業位置Aまで持って行くことができる。接種装置50の供給先端部52の位置および向きを好適な手段によって前もって決定したことによって、代表線Dに沿って接種物を供給するために、供給先端部52を所望の如く代表線D(したがって、表面12)の近くに持って行くことができる。同じ利点はもちろん、画線工具(図示せず)を有する画線装置(これも図示せず)と表面13上で動作可能に相互作用させることに利用可能である。上述のように、この発明の実施例では、検出上限と検出下限とを設定して上限と下限との間の検出範囲を規定するさらなるステップを含むことができ、いくつかの形態では、検出上限は基準面Cより上にあり、検出下限は基準面Cより下にある。このような検出範囲の使用は、表面位置参照(のみ)を決定する方法または表面位置参照から(この発明のこの実施例についての図1〜図3に示されたように)代表表面線Dを決定する方法と共に採用できる。
【0049】
このような検出範囲の使用の説明を手助けするためであるが、上述の数学的および幾何学的プロセスの理解を手助けするためにも、図4の概略図を参照する(図4は概して、図1〜図3について上で用いられた参照数字とは異なる参照数字を利用している)。
【0050】
図4では、プレート106の培地104の表面102の上方に位置するセンサ100が示されている。固定された基準面Cを与えるために用いられるプレートプラットホーム108の上に直立して設置されたプレート106が示されている。センサ100は、ビーム110によって表面102に向かって音響信号を発して検知領域112を形成する超音波センサである。
【0051】
センサは、固定された基準点101から表面102までの距離dを測定するように動作し、距離dは、検知領域112全体に亘る距離の平均としてセンサ100によって計算される。次いで、測定された距離dを基準面Cに参照付け、このようにしてセンサ100からの公知の距離cになる。この参照付けによって、位置決めされたプレート106の表面102のために一次元(z)で基準面Cに対する表面位置参照pを決定できる。この実施例では、表面位置参照pは、プレートプラットホーム108の最上面が基準面Cとして用いられるために、プレート106の培地104の深さに非常に近く近似したものであり、プレート底部の厚みのためにその大きさは近似値に過ぎない。
【0052】
それにもかかわらず、この態様で表面102を位置付けることによって、(または、ある線を基準として三次元で表面102を位置付けるさらなるステップをとることによって)、上述の接種および画線装置などの他の機器を表面102まで持っていくことが可能になり、その結果、このように表面の位置がわかっているために、他の機器は必要に応じて表面と係合または動作可能に相互作用することができる。
【0053】
基準面Cの上および下の平面に任意に設定された上限R1と下限R2とを有する検出範囲Rも図4に示されている。この点に関して、たとえばプレート106が依然としてその上に蓋を含んでいるかどうか、もしくは恐らく培地がない状態でプレート106がプラットホーム108上に配置されたかどうかの判断が必要でないまたは望ましくない状況では、
検出範囲Rを平面r1およびr2に任意に設定できたであろうということが認識される。その状況では、および上限r1が表面102のすぐ上にあり下限r2が表面102のすぐ下にあるこのような狭い検出範囲を有する状態では、プレートの検出可能な上向きに露出した表面がこの狭い範囲の範囲外にあればセンサ100は機能しないことになる。なぜなら、センサ100はプレートの蓋の表面またはプレート底部の表面を検出するためである。
【0054】
しかしながら、この実施例では、これらの両方の状況において警報を与えることが望ましく、したがって、相対的に十分に広い検出範囲Rが設定されている。したがって、この実施例では、蓋の壁または底部壁が上限R1および下限R2によって設定された検出範囲の範囲内にあるので、センサ100は、蓋の壁または底部壁の存在を検知でき、プレートの培地の表面までではなくその表面までの距離を測定することになる。r1とR1との間およびr2とR2との間の較正サブ範囲を設けることによって、このような較正サブ範囲は、(表面位置参照の決定および警報較正サブ範囲のうちの1つにおけるその存在によって)警報状態の識別をもたらすことができ、この方法の適切な機能を可能にする。
【0055】
最後に、本明細書中で説明された構成には、これもまたこの発明の範囲内である他の変更および修正があり得ることを認識する必要がある。
【技術分野】
【0001】
この国際特許出願は、2007年1月12日に出願されたオーストラリア仮特許出願2007900147号の優先権を主張し、その内容は引用によって本明細書に援用されるものとする。
【0002】
発明の分野
この発明は一般に、医療診断目的などの主に実験室における診断目的のための、微生物試料の充実性増殖培地への接種、および分離された細菌コロニーを生成するためのその後の接種物の画線に関わる機器に関する。この発明は、特に、自動画線機器においてその後の画線動作を手助けするためにプレートの充実性増殖培地の表面を位置付けるための方法および機器に関する。しかしながら、この発明はその用途のみに限定されるものではない。
【背景技術】
【0003】
発明の背景
微生物(および特に細菌)の独立コロニーの分離は、多くの微生物実験室において重要な処置である。従来、この細菌の分離は熟練実験技師によって手作業で行なわれ、技師はまず微生物試料をペトリ皿の寒天などの充実性増殖培地(以後単に、「寒天プレート」または単に「プレート」の「培地」と称する)の表面に分配し、次に手工具を用いて試料を培地の表面全体に亘って広げる(「画線」と呼ばれる)。
【0004】
手工具は典型的に、接種物の希釈度が増大する複数の画線を培地全体に亘って作るための末端ループを含む。希釈度が増大する画線は、一般に画線の尾部に向かって多数の単細胞を提供する傾向があり、これによってインキュベーション後の分離された微生物コロニーの成長が可能となる。これらの分離されたコロニーは次にコロニー形態が分析され得、これまでに同定されていない有機体のたとえば属、種および菌株を判定するのに必要な着色および他の処置を受け得る。
【0005】
そのような接種および画線は非常に繰返しが多く、多くの病理学診断微生物学実験室において普通非常に大量に、たとえば1日に1,000から15,000プレートにも上る量で行われる。これは単調で面倒な作業であるため、誤りや不正確さが生じやすい。これは極めて明らかに、一部または完全自動化に適しているであろう作業である。
【0006】
文献にはこれらの実験室機能の最適な自動化方法についての提案が豊富に記載されているが、これらの提案の中で商用の実験室環境において実際に成功したものは殆どない。したがって、好適な実験室機器の実現の成功は今まで大抵の人々にとって困難であったと思われる。
【0007】
これらの実験室機能を自動化するための3つの最近の提案は以下の文書に見つけられ得る。「培地を画線するための方法および機器(Method and Apparatus for Streaking a Culture Medium)」と題された米国特許第4,981,802号(C.ワイリー等(C. Wylie et al))、「標本容器からの細菌標本を培地に自動的に接種するための方法および機器(Method and Apparatus for Automatically Inoculating Culture Media With Bacterial Specimens From Specimen Containers)」と題された米国特許第6,617,146号(F.ナッカラート等(F. Naccarato et al))、および「微生物の画線装置(Microbial Streaking Device)」と題された国際特許公報WO2005/071055(Medvet Science Pty Ltd)(本出願人にライセンスされている)。
【0008】
ワイリーおよびナッカラート特許には、上述の手動の画線工具と同様の再利用可能な画線工具を利用する自動式および半自動式機器が記載されているが、三次元空間において培地の表面の正確な位置を決定するための、その機器のための好適なシステムまたは機構については記載されていない。
【0009】
Medvet Science社の公報には、間隔を空けられた接触面(充実性増殖培地の表面との接触のため)の列を含む画線アプリケータである新たな形態の画線工具を用いることが記載されており、接触面は共通の支持部材によって弾性的に可撓性を有して支持されているが、この新しい画線工具は当然ながら、依然として培地の表面上に配置する必要がある。Medvet Science社の公報は、機器に圧力検知装置を備え付けていつ工具が好適に表面上にくるかを判断することでこれに対処できることを提案している。
【0010】
プレート内の寒天などの培地の高さは多くの要因によって変動することが認識される。たとえば、異なるプレートおよび充実性増殖培地供給者は、供給者ごとに、たとえば幅広い種類の表面高さを有する寒天プレートを決まって生み出すだけでなく、同じ供給者であっても、自身のプレートの培地の高さがさまざまである傾向がある。また、この目的で用いられる培地の異なる組成および年齢も、培地表面高さが異なるプレートを生み出す傾向がある。したがって、およびこのような高さの変動のために、すべてのプレートの培地の表面の高さが同じであることを当てにすることは、自動画線機器にとっては一般に不可能である。
【0011】
したがって、たとえばこのような自動式機器の接種装置が処理すべきプレート毎に三次元空間において同じ位置で培地の表面上に接種物を配置できることを当てにすることは、接種装置にとっては実現可能ではなく、重大な問題および複雑さが、それを行なう機器に導入され得る。別の例として、三次元空間においてプレート毎に同じ位置で培地の表面上に(表面を削り取るのではなく接種物を広げるように)画線工具を配置しようとする際に、このような自動式機器の画線装置にも潜在的な問題および複雑さが存在する。
【0012】
接種装置に関しては、z次元(高さ)での供給先端部の位置が不正確であることによって、接種物が高過ぎる位置から供給される(したがって、必要に応じて供給されない)か、または先端部が培地の表面を削り取るように表面と接触するようになることが認識される。画線装置に関しては、z次元(高さ)での接触面の位置が不正確であることによって、全く接種物と接触しないか、または画線工具が培地の表面における線路も削り取るように過剰に接触することになる。
【発明の概要】
【発明が解決しようとする課題】
【0013】
この発明の目的は、たとえばプレートの接種および画線の前に、そのプレートの培地の表面を位置付けることが可能な方法および機器の両方を提供することである。この点に関して、および上で前もって示したように、この発明の目的は、また、当該方法および機器が上述の接種および画線状況以外の実験室の状況で用いられるようにすることである。実際、この発明の方法および機器は、いずれの実験室でも用いられ得て、いかなる目的に対しても、プレートの充実性増殖培地の表面を位置付けるためのプロセスを単に提供する。
【課題を解決するための手段】
【0014】
この発明の要約に移る前に、上記の先行技術の説明はこの発明の内容を説明するための背景として与えられたに過ぎないことを認識する必要がある。上記の説明は、言及された資料のいずれかがオーストラリアまたはその他の場所で公開されていたもしくは公知であった、または一般知識の一部であったという承認として見なされるものではない。
【0015】
また、機器とそのさまざまな部分との空間的関係を規定するために用いられる用語のいくつかを説明しておくと役立つ。この点に関して、本明細書全体に亘る空間的な言及は一般に、自動画線機器において直立位置で最終的に接種および画線されるプレートに基づいており、プレートの培地の表面は一般に平坦で水平である。この環境を基礎として、機器およびそのいくつかの部分は「水平の」を言及して規定され得、「上部の」または「上向きに」および「下部の」または「下向きに」、さらに「垂直の」というさらなる言及も可能となる。この点に関して、x、yおよびz次元、そしてx方向(または軸)、y方向(または軸)およびz方向(または軸)という従来の幾何学の空間的な言及も採用することができ、xおよびy方向は一般に水平であり、z方向は一般に垂直である。
【0016】
最後に、個別に(かつ使用環境下にない)最終的に権利主張され得るこの発明のいくつかの局面は、個別に説明および理解するのが困難であり得る。したがって、以下の説明のいくつかでは、この発明およびその実施例をそのような使用環境下で(たとえば、自動画線機器内で培地を運ぶプレートに関連して)説明する。もちろん、この発明を規定するためのそのような説明の使用、および上述の空間的関係の使用は、それが意図されていることが明確に記載されていない限り、限定事項として見なされず、もちろん使用環境のみの限定事項としても見なされない。
【0017】
発明の概要
この発明は、プレートの充実性増殖培地の表面をプレート作業位置に位置付けるための方法であって、プレート作業位置は、センサを含み、一次元(z)で固定された基準面を有し、この方法は、
〜プレートをプレート作業位置に配置するステップと、
〜センサを用いて、位置決めされたプレートのために培地表面を検知し、培地表面までの距離を測定するステップと、
〜測定された距離を基準面に参照付けて、位置決めされたプレートの培地の表面のために一次元(z)で基準面に対する表面位置参照を決定するステップとを含む、方法を提供する。
【0018】
したがって、通常の、概して水平な向きにあるプレートの培地の表面は、表面位置参照を決定することによって、少なくともz次元でこのように位置付けられ得ることが認識される。これは事実上、少なくとも基準面を基準としてプレートの培地の高さを決定する。好ましい形態では、基準面は、プレートをクランプして支持できるプレートプラットホームの一部を成す平面(または面)である。したがって、この好ましい形態では、表面位置参照の決定は、事実上、プレートが載っているプレートプラットホームを基準として培地の高さを決定する。これは、この態様での培地の参照付けにより、別の恐らく無関係の機器が、ある程度正確に培地の表面と動作可能に相互作用できるようになるという点で、有用であり、このことは(以下で概略を述べるように)自動画線機器においてこの発明が用いられる場合に必要とされるであろう。
【0019】
この発明の1つの形態では、培地の高さは、全範囲に亘ってセンサによって検知されるのではなく、その全範囲のうちの一部である検知領域でしか検知されない。たとえば、1つの形態では、この方法は、検知領域内で培地表面を検知し、その検知領域内で培地表面までの距離を測定する。実際には、表面欠陥などに起因して表面の高さがさまざまであるためにその領域全体に亘って距離がさまざまである可能性があると仮定して、この測定された距離は検知領域のエリアに亘る平均である可能性が高い。
【0020】
しかしながら、および上述のように、この発明の方法の好ましい用途は、プレートの培地の接種および画線での用途であり、この接種および画線では、一般に、培地の表面を横
切る線(時には、「作用線」と称される)に沿って接種物を広げ、次いでその線に沿って画線工具を位置付ける目的で、一次元空間においてあるポイント(または領域)を決定するだけでなく、三次元空間においてその線の位置を決定する必要がある。
【0021】
したがって、この発明はまた、プレートの充実性増殖培地の表面をプレート作業位置に位置付けるための方法であって、プレート作業位置は、センサを含み、予め定められた位置に二次元(x,y)で固定された概念上の作用線を有し、一次元(z)で固定された基準面を有し、この方法は、
〜プレートをプレート作業位置に配置するステップと、
〜センサを用いて、位置決めされたプレートのために検知領域内で培地表面を検知し、その検知領域内で培地表面までの平均距離を測定するステップと、
〜測定された距離を基準面に参照付けて、位置決めされたプレートの培地の表面のために一次元(z)で基準面に対する表面位置参照を決定するステップと、
〜表面位置参照と概念上の作用線とを用いて、位置決めされたプレートの培地の表面を横切る線を代表する線を三次元(x,y,z)で決定するステップとを含む、方法を提供する。
【0022】
この発明の別の好ましい形態では、この方法は、検出上限と検出下限とを設定して、上限と下限との間の検出範囲を規定するさらなるステップを含み、いくつかの形態では、検出上限は基準面より上にあり、検出下限は基準面より下にある。このような検出範囲の使用は、表面位置参照のみを決定する方法または表面位置参照から代表的な表面線を決定する方法とともに採用できる。
【0023】
このタイプの検出範囲は、任意の範囲であり、したがって、検出範囲の上限および下限は任意に設定できる。検出範囲は、較正の機会を与えることができ、たとえば多数の較正サブ範囲の識別を検出範囲内で適用できるようにする。たとえば、この発明のいくつかの形態では、プレート作業位置に位置決めされたプレートが依然としてその上に蓋を含んでいるかどうか、または恐らくプレートが上下反対にプレート作業位置に配置されたかどうかをこの方法が判断できることは必要でないまたは望ましくないかも知れない。したがって、培地の表面が位置すると見込まれる位置のすぐ上に上限があり、培地の表面が位置すると見込まれる位置のすぐ下に下限がある狭い検出範囲を採用することによって、プレート作業位置にあるプレートの検出可能な高さがこの狭い範囲の範囲外にあればセンサは機能しないことになる。なぜなら、センサはプレートの蓋の表面またはプレート底部の表面を検出するためである。
【0024】
逆に、たとえば蓋が付いたプレートまたは空のプレートがプレート作業位置に配置されるとこの方法が警報を与えることができることが望ましい状況が存在し得る。好適に十分に広い検出範囲が設定されていると、センサはしたがって蓋の壁または底部壁の存在を検知し、プレートの培地の表面までではなくその表面までの距離を測定する。したがって、警報状態(たとえば、蓋が付いたプレートまたは空のプレート)のための較正サブ範囲および非警報状態(蓋を外した直立したプレート)のための較正サブ範囲を有する好適に広い検出範囲を設けることによって、較正サブ範囲は、(表面位置参照の決定および警報較正サブ範囲のうちの1つにおけるその存在によって)警報状態の識別をもたらすことができ、この方法の適切な機能を可能にする。
【0025】
たとえば、および本明細書において用いられるプレートの見込みの厚みおよび培地の見込みの高さ次第で、1つの形態では、検出範囲を約30mmに設定でき、上限を基準面の上20mmの位置に設定でき、下限を基準面の下10mmの位置に設定できる。この形態では、および典型的なプレートに関して、蓋が付いたプレートは(どちらの向きでも)、上限の下約7mmの位置に表面位置参照を生成してもよく、蓋を外した直立したプレート
は、上限の下約14mmの位置に(培地表面のための)表面位置参照を生成してもよく、蓋を外したが空のプレートは、上限の下約18mmの位置に表面位置参照を生成してもよい(これは、基準面の上のプレートの底部壁の厚みに過ぎない)。
【0026】
したがって、この発明はまた、プレートの充実性増殖培地の表面をプレート作業位置に位置付けるための方法であって、プレート作業位置は、センサを含み、一次元(z)で固定された基準面を有し、この方法は、
〜上限と下限とを設定して、上限と下限との間の検出範囲を規定するステップと、
〜プレートをプレート作業位置に配置するステップと、
〜センサを用いて、位置決めされたプレートのために培地表面を検出範囲内で検知し、培地表面までの距離を測定するステップと、
〜測定された距離を基準面に参照付けて、位置決めされたプレートの培地の表面のために一次元(z)で基準面に対する表面位置参照を与えるステップとを含む、方法を提供する。
【0027】
さらに、この発明はまた、プレートの充実性増殖培地の表面をプレート作業位置に位置付けるための方法であって、プレート作業位置は、センサを含み、予め定められた位置に二次元(x,y)で固定された概念上の作用線を有し、一次元(z)で固定された基準面を有し、この方法は、
〜上限と下限とを設定して、上限と下限との間の検出範囲を規定するステップと、
〜プレートをプレート作業位置に配置するステップと、
〜センサを用いて、位置決めされたプレートのために検知領域内で検出範囲内で培地表面を検知し、その検知領域内で培地表面までの平均距離を測定するステップと、
〜測定された距離を基準面に参照付けて、位置決めされたプレートの培地の表面のために一次元(z)で基準面に対する表面位置参照を決定するステップと、
〜表面位置参照と概念上の作用線とを用いて、位置決めされたプレートの培地の表面を横切る線を代表する線を三次元(x,y,z)で決定するステップとを含む、方法を提供してもよい。
【0028】
上述のように、好ましくは基準面は、固定され、したがって機器における公知のパラメータである。この発明の1つの形態では、基準面は、プレートをプレート作業位置に保持するように構成されたプラットホームの最上面として固定され、最上面はしたがってプレートのすぐ下の面である。この点を考慮に入れて、プラットホームはそれ自体が好ましくはz方向に固定され、その結果、通常動作の一部としてプラットホームをxまたはy方向に移動させる必要があるかどうかに拘らず、z方向におけるプラットホームの位置は一定であり、公知である。
【0029】
したがって、この発明の一部として、この位置が変化していないことを定期的に確認する能力をさらに含むことは有益であろう。定期的な確認は、この位置が変化していないことを毎日、毎週または毎月確認できること、またはこの発明の方法および機器を毎回動作させる前にもしくはさらには(これはありそうにないことであるが)各測定が行なわれる前に、この位置が変化していないことを確認できることなどによって、行なわれる。実際、通常の機械的な動作振動(または温度変化)でさえ、z方向における基準面の位置を変化させ得る(僅かではあるが変化させ得る)ことが認識され、これは、この方法および機器の動作の精度に影響を及ぼす可能性がある。
【0030】
センサは、上述の態様で表面の存在を検知し、次いで理想的にはセンサの一部である固定された基準点からセンサまでの距離を測定するようにプログラミングおよび制御されることができる任意のタイプのセンサであり得る。センサは、たとえばレーザセンサまたは超音波センサであってもよい。好ましくは、センサは、上述の参照付けタスクをさらに行
なうことができるプログラム可能なコントローラを含む。
【0031】
好ましい形態では、センサは、好ましくは上述の検知領域内で培地表面上に集束ビームを与えることが可能な超音波ビーム集束要素を含む超音波検知装置である。表面位置参照から代表線を決定するこの発明の形態では、この検知領域はしたがって、これも上述した予め定められた概念上の作用線の好ましくは中央にある。
【0032】
センサは好ましくはメインフレームに強固に取付けられ、それによって、プレート作業位置の概略位置を規定する。この形態では、センサは理想的には、プレート作業位置の上方にくるようにおよびそのすぐ下方でプレートプラットホームに保持された位置決めされたプレートに動作可能に隣接しているように取付けられ、位置決めされたプレートは、上向きに開放した培地表面を有する。
【0033】
したがって、この発明はまた、プレートの充実性増殖培地の表面をプレート作業位置に位置付けるための機器であって、プレート作業位置は、センサを含み、一次元(z)で固定された基準面を有し、センサは、位置決めされたプレートのために培地表面を検知し、培地表面までの距離を測定することが可能であり、この機器はまた、測定された距離を基準面に参照付けて、位置決めされたプレートの培地の表面のために一次元(z)で基準面に対する表面位置参照を決定するための手段を含む、機器を提供する。
【0034】
この発明はさらに、プレートの充実性増殖培地の表面をプレート作業位置に位置付けるための機器であって、プレート作業位置は、センサを含み、予め定められた位置に二次元(x,y)で固定された概念上の作用線を有し、一次元(z)で固定された基準面を有し、センサは、位置決めされたプレートのために検知領域内で培地表面を検知し、その検知領域内で培地表面までの平均距離を測定することが可能であり、この機器はまた、測定された距離を基準面に参照付けて、位置決めされたプレートの培地の表面のために一次元(z)で基準面に対する表面位置参照を決定し、次いで、表面位置参照と概念上の作用線とを用いて、位置決めされたプレートの培地の表面を横切る線を代表する線を三次元(x,y,z)で決定するための手段を含む、機器を提供する。
【0035】
さらに、この発明はまた、プレートの充実性増殖培地の表面をプレート作業位置に位置付けるための機器であって、プレート作業位置は、センサを含み、一次元(z)で固定された基準面を有し、センサは、上限と下限とを有して上限と下限との間の検出範囲を規定し、位置決めされたプレートのために培地表面を検出範囲内で検知し、培地表面までの距離を測定することが可能であり、この機器は、測定された距離を基準面に参照付けて、位置決めされたプレートの培地の表面のために一次元(z)で基準面に対する表面位置参照を与えるための手段を含む、機器を提供する。
【0036】
さらに、この発明はまた、プレートの充実性増殖培地の表面をプレート作業位置に位置付けるための機器であって、プレート作業位置は、センサを含み、予め定められた位置に二次元(x,y)で固定された概念上の作用線を有し、一次元(z)で固定された基準面も有し、センサは、上限と下限とを有して上限と下限との間の検出範囲を規定し、位置決めされたプレートのために検知領域内で検出範囲内で培地表面を検知し、その検知領域内で培地表面までの平均距離を測定することが可能であり、この機器は、測定された距離を基準面に参照付けて、位置決めされたプレートの培地の表面のために一次元(z)で基準面に対する表面位置参照を決定し、次いで、表面位置参照と概念上の作用線とを用いて、位置決めされたプレートの培地の表面を横切る線を代表する線を三次元(x,y,z)で決定するための手段を含む、機器を提供してもよい。
【0037】
また、位置決めされたプレートの培地の表面のための表面位置参照および代表線は、そ
の位置決めされたプレートの培地のみに固有であり、プレート作業位置で処理される次のプレートの表面と比較すると、異なる表面位置参照および代表線であってもよい(実際には、そうである可能性が高い)ことがもちろん認識される。
【0038】
最後に、この発明の方法および機器はその上、ハーフプレート(多くの場合、バイプレートと称される)と共に用いられることが想定され、プレートの2つの部分は直立した直径方向の壁によって切り離され、各部分は、高さが上述の態様で決定される培地を含む。この状況で、上述の方法は、直立した壁の位置の検出または確定も可能にし、次いで両方の部分上でそのプレートに対してこの発明の方法の動作を2度起動するように修正できる。代替的に、この方法はもちろん、単に機器が他の態様でバイプレートの存在を知らされることができ、続いて両方の部分上でこの方法の動作を起動するように修正できるであろう。
【0039】
上述のことから明らかであるように、この発明の方法および機器は、理想的には、オーストラリア仮特許出願2007900146号の優先権を主張する、2008年1月11日に出願された「プレートの培地を接種および画線するための方法および機器(Method and Apparatus for Inoculating and Streaking a Medium in a Plate)」と題された本出願人の国際特許出願に概して記載されるタイプの自動画線機器と共に用いるのに主に適しており、オーストラリア仮特許出願2007900146号の全内容は引用によって本明細書に援用される。この目的で、その画線機器の1つの形態は一般に、
(a) 未処理プレートを逆さ向きに保管可能なプレート供給部と、
(b) プレート供給部から逆さの未処理プレートを取得し、未処理プレートの蓋を外し、底部が最下になるように未処理プレートを方向付け、方向付けられ蓋を外された未処理プレートを接種および画線ステーション内のプレート作業位置に移すことが可能なプレート移動送り機構と、
(c) 位置決めされたプレートの接種および画線の前に、そのプレートの培地の表面を位置付けることができるセンサである、この発明の機器と、
(d) 位置決めされたプレートの培地の表面に接種物を分配可能な接種装置と、
(e) 画線アプリケータ供給部から画線アプリケータを取得し、次に、位置決めされたプレートを回転させて画線する前に、画線アプリケータを、その間隔を空けられた接触面の列が位置決めされたプレートの培地の表面と接触するように動かすことが可能な画線装置と、
(f) 処理済プレートを逆さ向きに保管可能なプレート保管部と、
(g) 処理済プレートをプレート作業位置から取戻し、処理済プレートを再び方向付け蓋をし、処理済プレートをプレート保管部に移すことが可能なプレート移動保管機構とを含む。
【0040】
したがって、1つの形態(しかしながら、その唯一の形態ではない)では、この発明の方法および機器は、上述の自動画線機器のプレート作業位置についてセンサとして用いるのに好適であるように意図されている。
【0041】
この発明に関わる一般概念を簡単に説明したので、この発明に係る好ましい実施例を次に説明する。しかし、以下の説明は上記説明の一般性を制限するものではないことを理解すべきである。
【図面の簡単な説明】
【0042】
【図1】プレート作業位置付近のプレートプラットホームを示す、この発明の好ましい実施例に従う機器の上からの斜視図である。
【図2】プレート作業位置においてプレートプラットホームに保持されたプレートを示す、図1の機器の上からの斜視図である。
【図3】使用時の機器および三次元の作用線を示す、図1の機器の一部の上からの斜視図である。
【図4】さまざまな幾何学的および数学的関係を示す、使用時の図1の機器の概略図である。
【発明を実施するための形態】
【0043】
好ましい実施例の説明
プレート14における、表面13を有する充実性増殖培地12の表面をプレート作業位置Aに位置付けるための機器10が図1および図2に示されており、培地12およびプレート14は図1には図示されていない。図1は、矢印Xの方向にプレート作業位置Aまでプレートを移動させるために、中央に集めてクランプした位置でプレート14を受けることができるプレートプラットホーム30を示す。プレートプラットホーム30は、好適なコントローラに応答してガイドレール33に沿って摺動移動させるための支持部31上に取付けられる。プレートプラットホーム30は、カム装置(図示せず)によって動かされる3つの可動ラグの形態のプレートクランプ部材32を含み、このラグは好ましくは、プラットホーム30上でプレート14の位置を中央に集めるためのプレート中央集中化手段の役割を果たすこともできる。これは、プレート14に対するその後の動作にとって有用であり得る。
【0044】
上記のタイプの自動画線機器と共に用いられる実施例であるこの発明のこの実施例では、プレート作業位置Aは、予め定められた位置に二次元(x,y)で固定された(図1では破線によって示される)概念上の作用線Bを含む。しかしながら、および上でも説明したように、培地の表面のための、三次元空間に位置する線(この実施例についての図3では線Dとして示されるような表面を横切る線によって表わされる)を決定する必要がないかも知れないこの発明のいくつかの実施例では、概念上の作用線Bを予め定める必要はない。
【0045】
しかしながら、この実施例では、概念上の作用線Bは、予め定められた位置に二次元(x,y)で固定される。この作用線Bは、本明細書では、「概念上の」作用線と称される。これは、作用線Bが、目に見える作用線ではなく、またプレート14の培地12の表面13の位置を決定するまで三次元空間において定められた位置を持たないと仮定してのことである。プレート作業位置Aは基準面Cを含み、基準面Cは、図1では、プレートプラットホーム30の最上面として示されている(最終的には、図2において明らかであるように、プレート作業位置A内に位置付けられることになる)。
【0046】
機器10は、好ましくは予め定められた概念上の作用線Bの中央にある(図2および図3では特定されていない)検知領域内で培地表面12上に集束ビームを与えることが可能な超音波ビーム集束要素を有する超音波検知装置22を含むセンサ20を含む。センサ20は、センサ支持アーム24によってメインフレーム26に強固に取付けられ、それによって、プレート作業位置Aの概略位置を規定する。この形態で、センサ20は理想的には、プレート作業位置Aの上方にくるようにおよびそのすぐ下方でプレートプラットホーム30に保持されたプレート14に動作可能に隣接しているように取付けられ、図3において明らかであるように、プレート14は上向きに開放した表面13を有する。
【0047】
図3を参照して、この発明のこの実施例の方法は、したがって、位置決めされたプレート14のために培地表面13を検知して、培地表面13までの距離を測定するために、センサ20を必要とする。次いで、測定された距離を基準面Cに参照付けて、位置決めされたプレート14の表面13のために一次元(z)で基準面Cに対する表面位置参照を決定する。この態様で、したがって、表面13はこの表面位置参照を決定することによって少なくともz次元で位置付けられ得ることが認識される。これは事実上、少なくともその基
準面Cを基準としてプレート14の培地12の高さを決定する。この点に関して、および図からわかるように、基準面Cは、プレート14をクランプして支持するプレートプラットホーム30の一部を成す面である。したがって、この実施例では、表面位置参照の決定は、事実上、プレート14が載っているプレートプラットホーム30を基準として培地12の高さを決定する。次いで、この表面位置参照は、(図1からの)概念上の作用線Bと共に用いることができて、位置決めされたプレートの表面13を横切る線を代表する線Dを三次元(x,y,z)で決定する。
【0048】
この態様での表面の位置付けに続いて、上述の態様で表面12に接種するために、接種装置50をプレート作業位置Aまで持って行くことができる。接種装置50の供給先端部52の位置および向きを好適な手段によって前もって決定したことによって、代表線Dに沿って接種物を供給するために、供給先端部52を所望の如く代表線D(したがって、表面12)の近くに持って行くことができる。同じ利点はもちろん、画線工具(図示せず)を有する画線装置(これも図示せず)と表面13上で動作可能に相互作用させることに利用可能である。上述のように、この発明の実施例では、検出上限と検出下限とを設定して上限と下限との間の検出範囲を規定するさらなるステップを含むことができ、いくつかの形態では、検出上限は基準面Cより上にあり、検出下限は基準面Cより下にある。このような検出範囲の使用は、表面位置参照(のみ)を決定する方法または表面位置参照から(この発明のこの実施例についての図1〜図3に示されたように)代表表面線Dを決定する方法と共に採用できる。
【0049】
このような検出範囲の使用の説明を手助けするためであるが、上述の数学的および幾何学的プロセスの理解を手助けするためにも、図4の概略図を参照する(図4は概して、図1〜図3について上で用いられた参照数字とは異なる参照数字を利用している)。
【0050】
図4では、プレート106の培地104の表面102の上方に位置するセンサ100が示されている。固定された基準面Cを与えるために用いられるプレートプラットホーム108の上に直立して設置されたプレート106が示されている。センサ100は、ビーム110によって表面102に向かって音響信号を発して検知領域112を形成する超音波センサである。
【0051】
センサは、固定された基準点101から表面102までの距離dを測定するように動作し、距離dは、検知領域112全体に亘る距離の平均としてセンサ100によって計算される。次いで、測定された距離dを基準面Cに参照付け、このようにしてセンサ100からの公知の距離cになる。この参照付けによって、位置決めされたプレート106の表面102のために一次元(z)で基準面Cに対する表面位置参照pを決定できる。この実施例では、表面位置参照pは、プレートプラットホーム108の最上面が基準面Cとして用いられるために、プレート106の培地104の深さに非常に近く近似したものであり、プレート底部の厚みのためにその大きさは近似値に過ぎない。
【0052】
それにもかかわらず、この態様で表面102を位置付けることによって、(または、ある線を基準として三次元で表面102を位置付けるさらなるステップをとることによって)、上述の接種および画線装置などの他の機器を表面102まで持っていくことが可能になり、その結果、このように表面の位置がわかっているために、他の機器は必要に応じて表面と係合または動作可能に相互作用することができる。
【0053】
基準面Cの上および下の平面に任意に設定された上限R1と下限R2とを有する検出範囲Rも図4に示されている。この点に関して、たとえばプレート106が依然としてその上に蓋を含んでいるかどうか、もしくは恐らく培地がない状態でプレート106がプラットホーム108上に配置されたかどうかの判断が必要でないまたは望ましくない状況では、
検出範囲Rを平面r1およびr2に任意に設定できたであろうということが認識される。その状況では、および上限r1が表面102のすぐ上にあり下限r2が表面102のすぐ下にあるこのような狭い検出範囲を有する状態では、プレートの検出可能な上向きに露出した表面がこの狭い範囲の範囲外にあればセンサ100は機能しないことになる。なぜなら、センサ100はプレートの蓋の表面またはプレート底部の表面を検出するためである。
【0054】
しかしながら、この実施例では、これらの両方の状況において警報を与えることが望ましく、したがって、相対的に十分に広い検出範囲Rが設定されている。したがって、この実施例では、蓋の壁または底部壁が上限R1および下限R2によって設定された検出範囲の範囲内にあるので、センサ100は、蓋の壁または底部壁の存在を検知でき、プレートの培地の表面までではなくその表面までの距離を測定することになる。r1とR1との間およびr2とR2との間の較正サブ範囲を設けることによって、このような較正サブ範囲は、(表面位置参照の決定および警報較正サブ範囲のうちの1つにおけるその存在によって)警報状態の識別をもたらすことができ、この方法の適切な機能を可能にする。
【0055】
最後に、本明細書中で説明された構成には、これもまたこの発明の範囲内である他の変更および修正があり得ることを認識する必要がある。
【特許請求の範囲】
【請求項1】
プレートの充実性増殖培地の表面をプレート作業位置に位置付けるための方法であって、前記プレート作業位置は、センサを含み、一次元(z)で固定された基準面を有し、前記方法は、
〜前記プレートを前記プレート作業位置に配置するステップと、
〜前記センサを用いて、位置決めされたプレートのために培地表面を検知し、前記培地表面までの距離を測定するステップと、
〜測定された距離を前記基準面に参照付けて、前記位置決めされたプレートの前記培地の前記表面のために一次元(z)で前記基準面に対する表面位置参照を決定するステップとを含む、方法。
【請求項2】
通常の、概して水平な向きにあるプレートの培地の表面は、前記表面位置参照を決定することによって、少なくともz次元で位置付けられる、請求項1に記載の方法。
【請求項3】
前記基準面は、前記プレートをクランプして支持できるプレートプラットホームの一部を成す面である、請求項1または請求項2に記載の方法。
【請求項4】
前記表面位置参照の決定は、前記プレートが載っている前記プレートプラットホームを基準として前記培地の高さを決定する、請求項1から3のいずれかに記載の方法。
【請求項5】
前記培地は検知領域において検知され、その結果、前記測定された距離は、前記検知領域のエリアに亘る平均である、請求項1から4のいずれかに記載の方法。
【請求項6】
プレートの充実性増殖培地の表面をプレート作業位置に位置付けるための方法であって、前記プレート作業位置は、センサを含み、予め定められた位置に二次元(x,y)で固定された概念上の作用線を有し、一次元(z)で固定された基準面を有し、前記方法は、
〜前記プレートを前記プレート作業位置に配置するステップと、
〜前記センサを用いて、位置決めされたプレートのために検知領域内で培地表面を検知し、その検知領域内で前記培地表面までの平均距離を測定するステップと、
〜測定された距離を前記基準面に参照付けて、前記位置決めされたプレートの前記培地の前記表面のために一次元(z)で前記基準面に対する表面位置参照を決定するステップと、
〜前記表面位置参照と前記概念上の作用線とを用いて、前記位置決めされたプレートの前記培地の前記表面を横切る線を代表する線を三次元(x,y,z)で決定するステップとを含む、方法。
【請求項7】
プレートの充実性増殖培地の表面をプレート作業位置に位置付けるための方法であって、前記プレート作業位置は、センサを含み、一次元(z)で固定された基準面を有し、前記方法は、
〜上限と下限とを設定して、前記上限と前記下限との間の検出範囲を規定するステップと、
〜前記プレートを前記プレート作業位置に配置するステップと、
〜前記センサを用いて、位置決めされたプレートのために培地表面を前記検出範囲内で検知し、前記培地表面までの距離を測定するステップと、
〜測定された距離を前記基準面に参照付けて、前記位置決めされたプレートの前記培地の前記表面のために一次元(z)で前記基準面に対する表面位置参照を与えるステップとを含む、方法。
【請求項8】
検出上限は前記基準面より上にあり、検出下限は前記基準面より下にある、請求項7に
記載の方法。
【請求項9】
前記検出範囲は、較正サブ範囲を備える、請求項7または請求項8に記載の方法。
【請求項10】
前記較正サブ範囲は、警報状態を識別する、請求項9に記載の方法。
【請求項11】
前記警報状態は、前記プレート作業位置に位置決めされたプレートが、依然としてその上に蓋を含むか、または上下反対に前記プレート作業位置に配置された場合である、請求項10に記載の方法。
【請求項12】
前記検出範囲は約30mmに設定され、前記上限は前記基準面の上20mmの位置に設定され、前記下限は前記基準面の下10mmの位置に設定される、請求項11に記載の方法。
【請求項13】
プレートの充実性増殖培地の表面をプレート作業位置に位置付けるための方法であって、前記プレート作業位置は、センサを含み、予め定められた位置に二次元(x,y)で固定された概念上の作用線を有し、一次元(z)で固定された基準面を有し、前記方法は、
〜上限と下限とを設定して、前記上限と前記下限との間の検出範囲を規定するステップと、
〜前記プレートを前記プレート作業位置に配置するステップと、
〜前記センサを用いて、位置決めされたプレートのために検知領域内で前記検出範囲内で培地表面を検知し、その検知領域内で前記培地表面までの平均距離を測定するステップと、
〜測定された距離を前記基準面に参照付けて、前記位置決めされたプレートの前記培地の前記表面のために一次元(z)で前記基準面に対する表面位置参照を決定するステップと、
〜前記表面位置参照と前記概念上の作用線とを用いて、前記位置決めされたプレートの前記培地の前記表面を横切る線を代表する線を三次元(x,y,z)で決定するステップとを含む、方法。
【請求項14】
前記センサは、前記培地表面上に集束ビームを与えることが可能な超音波ビーム集束要素を含む超音波検知装置である、請求項1から13のいずれかに記載の方法。
【請求項15】
前記センサは、メインフレームに強固に取付けられ、それによって、前記プレート作業位置の概略位置を規定する、請求項1から14のいずれかに記載の方法。
【請求項16】
前記センサは、前記プレート作業位置の上方にくるようにおよびそのすぐ下方でプレートプラットホームに保持された位置決めされたプレートに動作可能に隣接しているように取付けられ、前記位置決めされたプレートは、上向きに開放した培地表面を有する、請求項1から15のいずれかに記載の方法。
【請求項17】
プレートの充実性増殖培地の表面をプレート作業位置に位置付けるための機器であって、前記プレート作業位置は、センサを含み、一次元(z)で固定された基準面も有し、前記センサは、位置決めされたプレートのために培地表面を検知し、前記培地表面までの距離を測定することが可能であり、前記機器は、測定された距離を前記基準面に参照付けて、前記位置決めされたプレートの前記培地の前記表面のために一次元(z)で前記基準面に対する表面位置参照を決定するための手段も含む、機器。
【請求項18】
プレートの充実性増殖培地の表面をプレート作業位置に位置付けるための機器であって、前記プレート作業位置は、センサを含み、予め定められた位置に二次元(x,y)で固
定された概念上の作用線を有し、一次元(z)で固定された基準面を有し、前記センサは、位置決めされたプレートのために検知領域内で培地表面を検知し、その検知領域内で前記培地表面までの平均距離を測定することが可能であり、前記機器は、測定された距離を前記基準面に参照付けて、前記位置決めされたプレートの前記培地の前記表面のために一次元(z)で前記基準面に対する表面位置参照を決定し、次いで、前記表面位置参照と前記概念上の作用線とを用いて、前記位置決めされたプレートの前記培地の前記表面を横切る線を代表する線を三次元(x,y,z)で決定するための手段も含む、機器。
【請求項19】
プレートの充実性増殖培地の表面をプレート作業位置に位置付けるための機器であって、前記プレート作業位置は、センサを含み、一次元(z)で固定された基準面を有し、前記センサは、上限と下限とを有して前記上限と前記下限との間の検出範囲を規定し、位置決めされたプレートのために培地表面を前記検出範囲内で検知し、前記培地表面までの距離を測定することが可能であり、前記機器は、測定された距離を前記基準面に参照付けて、前記位置決めされたプレートの前記培地の前記表面のために一次元(z)で前記基準面に対する表面位置参照を与えるための手段を含む、機器。
【請求項20】
プレートの充実性増殖培地の表面をプレート作業位置に位置付けるための機器であって、前記プレート作業位置は、センサを含み、予め定められた位置に二次元(x,y)で固定された概念上の作用線を有し、一次元(z)で固定された基準面も有し、前記センサは、上限と下限とを有して前記上限と前記下限との間の検出範囲を規定し、位置決めされたプレートのために検知領域内で前記検出範囲内で培地表面を検知し、その検知領域内で前記培地表面までの平均距離を測定することが可能であり、前記機器は、測定された距離を前記基準面に参照付けて、前記位置決めされたプレートの前記培地の前記表面のために一次元(z)で前記基準面に対する表面位置参照を決定し、次いで、前記表面位置参照と前記概念上の作用線とを用いて、前記位置決めされたプレートの前記培地の前記表面を横切る線を代表する線を三次元(x,y,z)で決定するための手段を含む、機器。
【請求項21】
前記センサは、前記培地表面上に集束ビームを与えることが可能な超音波ビーム集束要素を含む超音波検知装置である、請求項17から20のいずれかに記載の機器。
【請求項22】
前記センサは、メインフレームに強固に取付けられ、それによって、前記プレート作業位置の概略位置を規定する、請求項17から21のいずれかに記載の機器。
【請求項23】
前記センサは、前記プレート作業位置の上方にくるようにおよびそのすぐ下方でプレートプラットホームに保持された位置決めされたプレートに動作可能に隣接しているように取付けられ、前記位置決めされたプレートは、上向きに開放した培地表面を有する、請求項17から22のいずれかに記載の機器。
【請求項24】
実質的に添付の図面との関連で本明細書に記載される、請求項1に記載の方法。
【請求項25】
実質的に添付の図面との関連で本明細書に記載される、請求項6に記載の方法。
【請求項26】
実質的に添付の図面との関連で本明細書に記載される、請求項7に記載の方法。
【請求項27】
実質的に添付の図面との関連で本明細書に記載される、請求項13に記載の方法。
【請求項28】
実質的に添付の図面との関連で本明細書に記載される、請求項17に記載の機器。
【請求項29】
実質的に添付の図面との関連で本明細書に記載される、請求項18に記載の機器。
【請求項30】
実質的に添付の図面との関連で本明細書に記載される、請求項19に記載の機器。
【請求項31】
実質的に添付の図面との関連で本明細書に記載される、請求項20に記載の機器。
【請求項1】
プレートの充実性増殖培地の表面をプレート作業位置に位置付けるための方法であって、前記プレート作業位置は、センサを含み、一次元(z)で固定された基準面を有し、前記方法は、
〜前記プレートを前記プレート作業位置に配置するステップと、
〜前記センサを用いて、位置決めされたプレートのために培地表面を検知し、前記培地表面までの距離を測定するステップと、
〜測定された距離を前記基準面に参照付けて、前記位置決めされたプレートの前記培地の前記表面のために一次元(z)で前記基準面に対する表面位置参照を決定するステップとを含む、方法。
【請求項2】
通常の、概して水平な向きにあるプレートの培地の表面は、前記表面位置参照を決定することによって、少なくともz次元で位置付けられる、請求項1に記載の方法。
【請求項3】
前記基準面は、前記プレートをクランプして支持できるプレートプラットホームの一部を成す面である、請求項1または請求項2に記載の方法。
【請求項4】
前記表面位置参照の決定は、前記プレートが載っている前記プレートプラットホームを基準として前記培地の高さを決定する、請求項1から3のいずれかに記載の方法。
【請求項5】
前記培地は検知領域において検知され、その結果、前記測定された距離は、前記検知領域のエリアに亘る平均である、請求項1から4のいずれかに記載の方法。
【請求項6】
プレートの充実性増殖培地の表面をプレート作業位置に位置付けるための方法であって、前記プレート作業位置は、センサを含み、予め定められた位置に二次元(x,y)で固定された概念上の作用線を有し、一次元(z)で固定された基準面を有し、前記方法は、
〜前記プレートを前記プレート作業位置に配置するステップと、
〜前記センサを用いて、位置決めされたプレートのために検知領域内で培地表面を検知し、その検知領域内で前記培地表面までの平均距離を測定するステップと、
〜測定された距離を前記基準面に参照付けて、前記位置決めされたプレートの前記培地の前記表面のために一次元(z)で前記基準面に対する表面位置参照を決定するステップと、
〜前記表面位置参照と前記概念上の作用線とを用いて、前記位置決めされたプレートの前記培地の前記表面を横切る線を代表する線を三次元(x,y,z)で決定するステップとを含む、方法。
【請求項7】
プレートの充実性増殖培地の表面をプレート作業位置に位置付けるための方法であって、前記プレート作業位置は、センサを含み、一次元(z)で固定された基準面を有し、前記方法は、
〜上限と下限とを設定して、前記上限と前記下限との間の検出範囲を規定するステップと、
〜前記プレートを前記プレート作業位置に配置するステップと、
〜前記センサを用いて、位置決めされたプレートのために培地表面を前記検出範囲内で検知し、前記培地表面までの距離を測定するステップと、
〜測定された距離を前記基準面に参照付けて、前記位置決めされたプレートの前記培地の前記表面のために一次元(z)で前記基準面に対する表面位置参照を与えるステップとを含む、方法。
【請求項8】
検出上限は前記基準面より上にあり、検出下限は前記基準面より下にある、請求項7に
記載の方法。
【請求項9】
前記検出範囲は、較正サブ範囲を備える、請求項7または請求項8に記載の方法。
【請求項10】
前記較正サブ範囲は、警報状態を識別する、請求項9に記載の方法。
【請求項11】
前記警報状態は、前記プレート作業位置に位置決めされたプレートが、依然としてその上に蓋を含むか、または上下反対に前記プレート作業位置に配置された場合である、請求項10に記載の方法。
【請求項12】
前記検出範囲は約30mmに設定され、前記上限は前記基準面の上20mmの位置に設定され、前記下限は前記基準面の下10mmの位置に設定される、請求項11に記載の方法。
【請求項13】
プレートの充実性増殖培地の表面をプレート作業位置に位置付けるための方法であって、前記プレート作業位置は、センサを含み、予め定められた位置に二次元(x,y)で固定された概念上の作用線を有し、一次元(z)で固定された基準面を有し、前記方法は、
〜上限と下限とを設定して、前記上限と前記下限との間の検出範囲を規定するステップと、
〜前記プレートを前記プレート作業位置に配置するステップと、
〜前記センサを用いて、位置決めされたプレートのために検知領域内で前記検出範囲内で培地表面を検知し、その検知領域内で前記培地表面までの平均距離を測定するステップと、
〜測定された距離を前記基準面に参照付けて、前記位置決めされたプレートの前記培地の前記表面のために一次元(z)で前記基準面に対する表面位置参照を決定するステップと、
〜前記表面位置参照と前記概念上の作用線とを用いて、前記位置決めされたプレートの前記培地の前記表面を横切る線を代表する線を三次元(x,y,z)で決定するステップとを含む、方法。
【請求項14】
前記センサは、前記培地表面上に集束ビームを与えることが可能な超音波ビーム集束要素を含む超音波検知装置である、請求項1から13のいずれかに記載の方法。
【請求項15】
前記センサは、メインフレームに強固に取付けられ、それによって、前記プレート作業位置の概略位置を規定する、請求項1から14のいずれかに記載の方法。
【請求項16】
前記センサは、前記プレート作業位置の上方にくるようにおよびそのすぐ下方でプレートプラットホームに保持された位置決めされたプレートに動作可能に隣接しているように取付けられ、前記位置決めされたプレートは、上向きに開放した培地表面を有する、請求項1から15のいずれかに記載の方法。
【請求項17】
プレートの充実性増殖培地の表面をプレート作業位置に位置付けるための機器であって、前記プレート作業位置は、センサを含み、一次元(z)で固定された基準面も有し、前記センサは、位置決めされたプレートのために培地表面を検知し、前記培地表面までの距離を測定することが可能であり、前記機器は、測定された距離を前記基準面に参照付けて、前記位置決めされたプレートの前記培地の前記表面のために一次元(z)で前記基準面に対する表面位置参照を決定するための手段も含む、機器。
【請求項18】
プレートの充実性増殖培地の表面をプレート作業位置に位置付けるための機器であって、前記プレート作業位置は、センサを含み、予め定められた位置に二次元(x,y)で固
定された概念上の作用線を有し、一次元(z)で固定された基準面を有し、前記センサは、位置決めされたプレートのために検知領域内で培地表面を検知し、その検知領域内で前記培地表面までの平均距離を測定することが可能であり、前記機器は、測定された距離を前記基準面に参照付けて、前記位置決めされたプレートの前記培地の前記表面のために一次元(z)で前記基準面に対する表面位置参照を決定し、次いで、前記表面位置参照と前記概念上の作用線とを用いて、前記位置決めされたプレートの前記培地の前記表面を横切る線を代表する線を三次元(x,y,z)で決定するための手段も含む、機器。
【請求項19】
プレートの充実性増殖培地の表面をプレート作業位置に位置付けるための機器であって、前記プレート作業位置は、センサを含み、一次元(z)で固定された基準面を有し、前記センサは、上限と下限とを有して前記上限と前記下限との間の検出範囲を規定し、位置決めされたプレートのために培地表面を前記検出範囲内で検知し、前記培地表面までの距離を測定することが可能であり、前記機器は、測定された距離を前記基準面に参照付けて、前記位置決めされたプレートの前記培地の前記表面のために一次元(z)で前記基準面に対する表面位置参照を与えるための手段を含む、機器。
【請求項20】
プレートの充実性増殖培地の表面をプレート作業位置に位置付けるための機器であって、前記プレート作業位置は、センサを含み、予め定められた位置に二次元(x,y)で固定された概念上の作用線を有し、一次元(z)で固定された基準面も有し、前記センサは、上限と下限とを有して前記上限と前記下限との間の検出範囲を規定し、位置決めされたプレートのために検知領域内で前記検出範囲内で培地表面を検知し、その検知領域内で前記培地表面までの平均距離を測定することが可能であり、前記機器は、測定された距離を前記基準面に参照付けて、前記位置決めされたプレートの前記培地の前記表面のために一次元(z)で前記基準面に対する表面位置参照を決定し、次いで、前記表面位置参照と前記概念上の作用線とを用いて、前記位置決めされたプレートの前記培地の前記表面を横切る線を代表する線を三次元(x,y,z)で決定するための手段を含む、機器。
【請求項21】
前記センサは、前記培地表面上に集束ビームを与えることが可能な超音波ビーム集束要素を含む超音波検知装置である、請求項17から20のいずれかに記載の機器。
【請求項22】
前記センサは、メインフレームに強固に取付けられ、それによって、前記プレート作業位置の概略位置を規定する、請求項17から21のいずれかに記載の機器。
【請求項23】
前記センサは、前記プレート作業位置の上方にくるようにおよびそのすぐ下方でプレートプラットホームに保持された位置決めされたプレートに動作可能に隣接しているように取付けられ、前記位置決めされたプレートは、上向きに開放した培地表面を有する、請求項17から22のいずれかに記載の機器。
【請求項24】
実質的に添付の図面との関連で本明細書に記載される、請求項1に記載の方法。
【請求項25】
実質的に添付の図面との関連で本明細書に記載される、請求項6に記載の方法。
【請求項26】
実質的に添付の図面との関連で本明細書に記載される、請求項7に記載の方法。
【請求項27】
実質的に添付の図面との関連で本明細書に記載される、請求項13に記載の方法。
【請求項28】
実質的に添付の図面との関連で本明細書に記載される、請求項17に記載の機器。
【請求項29】
実質的に添付の図面との関連で本明細書に記載される、請求項18に記載の機器。
【請求項30】
実質的に添付の図面との関連で本明細書に記載される、請求項19に記載の機器。
【請求項31】
実質的に添付の図面との関連で本明細書に記載される、請求項20に記載の機器。
【図1】

【図2】
【図3】
【図4】
【図2】
【図3】
【図4】
【公表番号】特表2010−515437(P2010−515437A)
【公表日】平成22年5月13日(2010.5.13)
【国際特許分類】
【出願番号】特願2009−545037(P2009−545037)
【出願日】平成20年1月11日(2008.1.11)
【国際出願番号】PCT/AU2008/000014
【国際公開番号】WO2008/083437
【国際公開日】平成20年7月17日(2008.7.17)
【出願人】(509192824)ラブテック・システムズ・リミテッド (4)
【氏名又は名称原語表記】LABTECH SYSTEMS LIMITED
【Fターム(参考)】
【公表日】平成22年5月13日(2010.5.13)
【国際特許分類】
【出願日】平成20年1月11日(2008.1.11)
【国際出願番号】PCT/AU2008/000014
【国際公開番号】WO2008/083437
【国際公開日】平成20年7月17日(2008.7.17)
【出願人】(509192824)ラブテック・システムズ・リミテッド (4)
【氏名又は名称原語表記】LABTECH SYSTEMS LIMITED
【Fターム(参考)】
[ Back to top ]