
プロキシミティ露光装置、プロキシミティ露光装置のマスク搬送方法、及び表示用パネル基板の製造方法
【課題】突き上げピンによるマスクの損傷を防止し、かつ露光時の露光むらを抑制する。
【解決手段】チャック10に、チャック10の内部から上昇する複数の突き上げピン12a,12b,12cを設ける。各突き上げピン12a,12b,12cの先端をマスクより柔らかい材質のものに変更し、マスクをマスク搬送装置によりチャック10へ搬入し、マスクを複数の突き上げピン12a,12b,12cによりマスク搬送装置から受け取る。ステージによりチャック10を移動して、マスクの位置決めを行い、マスクを複数の突き上げピン12a,12b,12cによりマスクホルダ20に装着した後、各突き上げピン12a,12b,12cの先端をチャック10の表面と同じ材質のもの(パッド30)に変更する。
【解決手段】チャック10に、チャック10の内部から上昇する複数の突き上げピン12a,12b,12cを設ける。各突き上げピン12a,12b,12cの先端をマスクより柔らかい材質のものに変更し、マスクをマスク搬送装置によりチャック10へ搬入し、マスクを複数の突き上げピン12a,12b,12cによりマスク搬送装置から受け取る。ステージによりチャック10を移動して、マスクの位置決めを行い、マスクを複数の突き上げピン12a,12b,12cによりマスクホルダ20に装着した後、各突き上げピン12a,12b,12cの先端をチャック10の表面と同じ材質のもの(パッド30)に変更する。
【発明の詳細な説明】
【技術分野】
【0001】
本発明は、液晶ディスプレイ装置等の表示用パネル基板の製造において、プロキシミティ方式を用いて基板の露光を行うプロキシミティ露光装置、プロキシミティ露光装置のマスク搬送方法、及びそれらを用いた表示用パネル基板の製造方法に係り、特に、大型のマスクを位置決めしてマスクホルダに装着するのに好適なプロキシミティ露光装置、プロキシミティ露光装置のマスク搬送方法、及びそれらを用いた表示用パネル基板の製造方法に関する。
【背景技術】
【0002】
表示用パネルとして用いられる液晶ディスプレイ装置のTFT(Thin Film Transistor)基板やカラーフィルタ基板、プラズマディスプレイパネル用基板、有機EL(Electroluminescence)表示パネル用基板等の製造は、露光装置を用いて、フォトリソグラフィー技術により基板上にパターンを形成して行われる。露光装置としては、レンズ又は鏡を用いてマスクのパターンを基板上に投影するプロジェクション方式と、マスクと基板との間に微小な間隙(プロキシミティギャップ)を設けてマスクのパターンを基板へ転写するプロキシミティ方式とがある。プロキシミティ方式は、プロジェクション方式に比べてパターン解像性能は劣るが、照射光学系の構成が簡単で、かつ処理能力が高く量産用に適している。
【0003】
プロキシミティ露光装置は、基板を搭載するチャックと、マスクを保持するマスクホルダとを備え、マスクホルダに保持されたマスクとチャックに搭載された基板とを極めて接近させて露光を行う。通常、チャックは、基板の移動及び位置決めを行うステージ上に搭載されており、基板を真空吸着して固定する。マスクホルダは、基板を搭載したチャックの上方に設けられ、マスクの周辺部を真空吸着して固定する。チャックへの基板の搬入、及びチャックからの基板の搬出は、通常、基板搬送ロボットのハンドリングアームにより行われるが、マスクと基板との接触を避けるために、マスクの下の露光位置から離れたロード/アンロード位置で行われる。ロード/アンロード位置で基板をチャックに搭載した後、ステージがマスクの下の露光位置へ移動し、露光位置で基板の位置決めを行う。
【0004】
マスクホルダへのマスクの搬入、及びマスクホルダからのマスクの搬出も、従来、マスク搬送ロボットのハンドリングアームにより行われていた。しかしながら、マスク搬送ロボットのハンドリングアームは片持式であるため、マスクが大型になってその重量が増大すると、ハンドリングアームがたわんで、マスクを水平に支持することができなくなり、またハンドリングアームの揺れが大きくなって、マスクホルダの下方へ移動するためのストロークを確保することが困難になってきた。これに対し、特許文献1には、チャックの外周縁部にマスクの一時支持部材を設け、マスクを一時支持部材に載置し、ステージによりマスクの搬送ずれを補正して、チャックの下面側に連結されたZ軸方向駆動機構によりマスクをマスクホルダの下端面に押圧する技術が開示されている。
【先行技術文献】
【特許文献】
【0005】
【特許文献1】特開2003−186199号公報
【発明の概要】
【発明が解決しようとする課題】
【0006】
近年、表示用パネルの各種基板の製造では、大型化及びサイズの多様化に対応するため、比較的大きな基板を用意し、表示用パネルのサイズに応じて、1枚の基板から1枚又は複数枚の表示用パネル基板を製造している。この場合、プロキシミティ方式では、基板の一面を一括して露光しようとすると、基板と同じ大きさのマスクが必要となり、高価なマスクのコストがさらに増大する。そこで、基板より比較的小さなマスクを用い、ステージにより基板をXY方向にステップ移動しながら、基板の一面を複数のショットに分けて露光する方式が主流となっている。この方式では、マスクがチャックに搭載する基板より小さいため、特許文献1に記載の技術を適用することができなかった。
【0007】
そこで、チャックに、チャックの内部から上昇し、マスクをマスク搬送ロボットから受け取ってマスクホルダに装着する複数の突き上げピンを設けることが発案された(特願2008−287941)。チャックに設けた複数の突き上げピンによりマスクをマスク搬送ロボットから受け取るので、マスクがチャックに搭載する基板より小さくても、マスクをチャックへ搬入することができる。そして、ステージによりチャックを移動してマスクの位置決めを行い、複数の突き上げピンによりマスクをマスクホルダに装着するので、チャックへ搬入したマスクが、ステージにより精度良く位置決めされて、マスクホルダに装着される。
【0008】
マスクは、石英や青板ガラス等で構成され、露光光を遮断するクロム膜等によりパターンが形成されている。チャックは、軽量化のため、アルミニウム等の軽い金属材料で構成され、表面には、露光光の反射率を抑えるため、硬質黒色アルマイト加工等が施されている。チャックに突き上げピンを設ける場合、突き上げピンの先端の材質がチャックの表面の材質と異なると、基板の露光時に、露光光の反射率が異なって、露光むらが発生する。一方、突き上げピンの先端の材質をチャックの表面の材質と同じにすると、マスクをマスク搬送ロボットから受け取る際、あるいはマスクをマスクホルダに装着する際に、マスクが突き上げピンにより擦られて、マスクに損傷を与える恐れがある。
【0009】
本発明の課題は、突き上げピンによるマスクの損傷を防止し、かつ露光時の露光むらを抑制することである。また、さらに、本発明の課題は、高品質な表示用パネル基板を製造することである。
【課題を解決するための手段】
【0010】
本発明のプロキシミティ露光装置は、基板を搭載するチャックと、マスクを保持するマスクホルダと、チャックを移動するステージとを備え、マスクと基板との間に微小なギャップを設けて、マスクのパターンを基板へ転写するプロキシミティ露光装置において、マスクをチャックへ搬入するマスク搬送装置と、チャックに設けられ、チャックの内部から上昇して、マスクをマスク搬送装置から受け取り、マスクホルダに装着する複数の突き上げピンと、複数の突き上げピンの先端を変更するピン先端変更手段と、ステージの移動を制御して、マスクの位置決めを行う制御手段とを備え、ピン先端変更手段が、複数の突き上げピンがマスクをマスク搬送装置から受け取る前、各突き上げピンの先端をマスクより柔らかい材質のものに変更し、複数の突き上げピンがマスクをマスクホルダに装着した後、各突き上げピンの先端をチャックの表面と同じ材質のものに変更するものである。
【0011】
また、本発明のプロキシミティ露光装置のマスク搬送方法は、基板を搭載するチャックと、マスクを保持するマスクホルダと、チャックを移動するステージとを備え、マスクと基板との間に微小なギャップを設けて、マスクのパターンを基板へ転写するプロキシミティ露光装置のマスク搬送方法であって、チャックに、チャックの内部から上昇する複数の突き上げピンを設け、各突き上げピンの先端をマスクより柔らかい材質のものに変更し、マスクをマスク搬送装置によりチャックへ搬入し、マスクを複数の突き上げピンによりマスク搬送装置から受け取り、ステージによりチャックを移動して、マスクの位置決めを行い、マスクを複数の突き上げピンによりマスクホルダに装着した後、各突き上げピンの先端をチャックの表面と同じ材質のものに変更するものである。
【0012】
チャックに、チャックの内部から上昇する複数の突き上げピンを設け、マスクをマスク搬送装置によりチャックへ搬入し、マスクを複数の突き上げピンによりマスク搬送装置から受け取り、ステージによりチャックを移動して、マスクの位置決めを行い、マスクを複数の突き上げピンによりマスクホルダに装着するので、マスクが精度良く位置決めされて、マスクホルダに装着される。その際、各突き上げピンの先端をマスクより柔らかい材質のものに変更して、マスクを複数の突き上げピンによりマスク搬送装置から受け取るので、突き上げピンによるマスクの損傷が防止される。そして、マスクを複数の突き上げピンによりマスクホルダに装着した後、各突き上げピンの先端をチャックの表面と同じ材質のものに変更するので、露光時の露光むらを抑制される。
【0013】
さらに、本発明のプロキシミティ露光装置は、複数の突き上げピンの先端が、マスクより柔らかい材料で構成され、ピン先端変更手段が、複数の突き上げピンの先端にチャックの表面と同じ材質のパッドを取り付け、または複数の突き上げピンの先端から当該パッドを取り外して、複数の突き上げピンの先端を変更するものである。また、本発明のプロキシミティ露光装置のマスク搬送方法は、各突き上げピンの先端を、マスクより柔らかい材料で構成し、各突き上げピンの先端にチャックの表面と同じ材質のパッドを取り付け、または各突き上げピンの先端から当該パッドを取り外して、各突き上げピンの先端を変更するものである。各突き上げピンの先端が、パッドを取り外すだけで簡単にマスクより柔らかい材質のものに変更され、またパッドを取り付けるだけで簡単にチャックの表面と同じ材質のものに変更される。
【0014】
さらに、本発明のプロキシミティ露光装置は、複数の突き上げピンが、第1のマスク及び第1のマスクと縦横いずれかの長さが異なる第2のマスクの、間隔が同じ向かい合う二辺の周辺部を支持する複数の共用突き上げピンと、第1のマスクの残りの向かい合う二辺の周辺部を支持する複数の第1の専用突き上げピンと、第2のマスクの残りの向かい合う二辺の周辺部を支持する複数の第2の専用突き上げピンとを含むものである。また、本発明のプロキシミティ露光装置のマスク搬送方法は、チャックに、第1のマスク及び第1のマスクと縦横いずれかの長さが異なる第2のマスクの、間隔が同じ向かい合う二辺の周辺部を支持する複数の共用突き上げピンと、第1のマスクの残りの向かい合う二辺の周辺部を支持する複数の第1の専用突き上げピンと、第2のマスクの残りの向かい合う二辺の周辺部を支持する複数の第2の専用突き上げピンとを設けるものである。共用突き上げピンを、第1のマスク及び第1のマスクと縦横いずれかの長さが異なる第2のマスクの搬送に共用することができるので、少ない数の突き上げピンで二種類のマスクに対応することができる。
【0015】
本発明の表示用パネル基板の製造方法は、上記のいずれかのプロキシミティ露光装置を用いて基板の露光を行い、あるいは、上記のいずれかのプロキシミティ露光装置のマスク搬送方法を用いてマスクをマスクホルダに装着し、基板の露光を行うものである。チャックに設けたマスク搬送用の突き上げピンによる露光むらが抑制され、高品質な表示用パネル基板が製造される。
【発明の効果】
【0016】
本発明のプロキシミティ露光装置及びプロキシミティ露光装置のマスク保持方法によれば、各突き上げピンの先端をマスクより柔らかい材質のものに変更して、マスクを複数の突き上げピンによりマスク搬送装置から受け取り、マスクを複数の突き上げピンによりマスクホルダに装着した後、各突き上げピンの先端をチャックの表面と同じ材質のものに変更することにより、突き上げピンによるマスクの損傷を防止し、かつ露光時の露光むらを抑制することができる。
【0017】
さらに、本発明のプロキシミティ露光装置及びプロキシミティ露光装置のマスク搬送方法によれば、各突き上げピンの先端を、マスクより柔らかい材料で構成し、各突き上げピンの先端にチャックの表面と同じ材質のパッドを取り付け、または各突き上げピンの先端から当該パッドを取り外して、各突き上げピンの先端を変更することにより、各突き上げピンの先端を、パッドを取り外すだけで簡単にマスクより柔らかい材質のものに変更することができ、またパッドを取り付けるだけで簡単にチャックの表面と同じ材質のものに変更することができる。
【0018】
さらに、本発明のプロキシミティ露光装置及びプロキシミティ露光装置のマスク搬送方法によれば、チャックに、第1のマスク及び第1のマスクと縦横いずれかの長さが異なる第2のマスクの、間隔が同じ向かい合う二辺の周辺部を支持する複数の共用突き上げピンと、第1のマスクの残りの向かい合う二辺の周辺部を支持する複数の第1の専用突き上げピンと、第2のマスクの残りの向かい合う二辺の周辺部を支持する複数の第2の専用突き上げピンとを設けることにより、共用突き上げピンを、第1のマスク及び第1のマスクと縦横いずれかの長さが異なる第2のマスクの搬送に共用することができるので、少ない数の突き上げピンで二種類のマスクに対応することができる。
【0019】
本発明の表示用パネル基板の製造方法によれば、チャックに設けたマスク搬送用の突き上げピンによる露光むらを抑制することができるので、高品質な表示用パネル基板を製造することができる。
【図面の簡単な説明】
【0020】
【図1】本発明の一実施の形態によるプロキシミティ露光装置の概略構成を示す図である。
【図2】本発明の一実施の形態によるプロキシミティ露光装置の平面図である。
【図3】チャックの上面図である。
【図4】図4(a)はチャックに設けられた開口の上面図、図4(b)は図4(a)のA−A部の断面図である。
【図5】図5(a)はチャックに設けられた開口の上面図、図5(b)は図5(a)のB−B部の断面図である。
【図6】突き上げピンユニットの制御系を示す図である。
【図7】パッド着脱装置及び広視野カメラの配置を示す平面図である。
【図8】パッド着脱装置及び広視野カメラの配置を示す側面図である。
【図9】図9(a)はパッド着脱装置の側面図、図9(b)はパッド着脱装置の正面図である。
【図10】パッド着脱装置の動作を説明する図である。
【図11】パッド着脱装置の動作を説明する図である。
【図12】突き上げピンユニット及びマスク搬送ロボットの動作を説明する図である。
【図13】マスク受け取り位置でマスクがチャックへ搬入された状態を示す図である。
【図14】マスクホルダの下面図である。
【図15】マスクホルダの下面図である。
【図16】マスクホルダの上面図である。
【図17】マスクをマスクホルダに装着する動作を説明する図である。
【図18】液晶ディスプレイ装置のTFT基板の製造工程の一例を示すフローチャートである。
【図19】液晶ディスプレイ装置のカラーフィルタ基板の製造工程の一例を示すフローチャートである。
【発明を実施するための形態】
【0021】
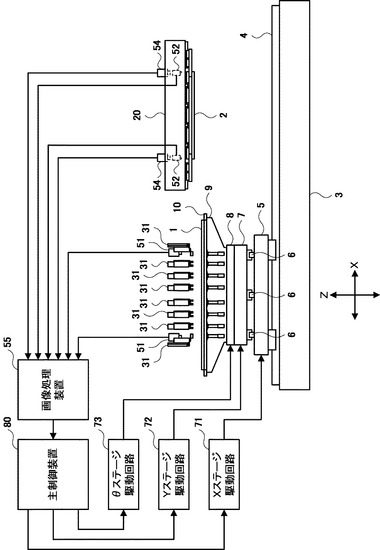
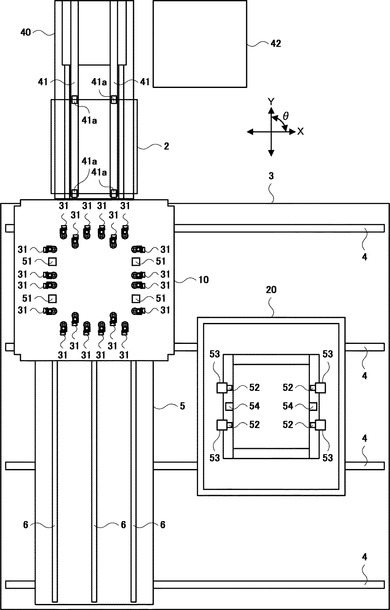
図1は、本発明の一実施の形態によるプロキシミティ露光装置の概略構成を示す図である。また、図2は、本発明の一実施の形態によるプロキシミティ露光装置の平面図である。プロキシミティ露光装置は、ベース3、Xガイド4、Xステージ5、Yガイド6、Yステージ7、θステージ8、チャック支持台9、チャック10、突き上げピンユニット、突き上げピンユニットの制御系、マスクホルダ20、パッド着脱装置31、マスク搬送ロボット40、マスクストッカー42、広視野カメラ51、高分解能可動カメラ52、カメラ移動機構53、高分解能固定カメラ54、画像処理装置55、Xステージ駆動回路71、Yステージ駆動回路72、θステージ駆動回路73、及び主制御装置80を含んで構成されている。
【0022】
なお、図1では、突き上げピンユニットの制御系、マスク搬送ロボット40、マスクストッカー42、及びカメラ移動機構53が省略されている。また、図2では、突き上げピンユニットの制御系、画像処理装置55、Xステージ駆動回路71、Yステージ駆動回路72、θステージ駆動回路73、及び主制御装置80が省略されている。プロキシミティ露光装置は、これらの他に、露光光を照射する照射光学系、ギャップセンサー、アライメント用センサー、装置内の温度管理を行う温度制御ユニット等を備えている。
【0023】
なお、以下に説明する実施の形態におけるXY方向は例示であって、X方向とY方向とを入れ替えてもよい。
【0024】
図2において、チャック10は、マスク2の受け取りを行うマスク受け取り位置にある。マスク搬送ロボット40は、マスク2を、マスクストッカー42から取り出して、マスク受け取り位置にあるチャック10へ搬入し、またマスク2を、マスク受け取り位置にあるチャック10から搬出して、マスクストッカー42に収納する。マスク搬送ロボット40のハンドリングアーム41には、マスク2のパターン面(下面)のパターンが形成されていない周辺部に接触するマスク支持部41aが設けられており、ハンドリングアーム41は、マスク支持部41aによりマスク2のパターン面(下面)の周辺部を支持する。
【0025】
後述する突き上げピンユニットの突き上げピンは、マスク2をチャック10へ搬入する際、マスク搬送ロボット40のハンドリングアーム41からマスク2を受け取り、マスク2をチャック10から搬出する際、マスク搬送ロボット40のハンドリングアーム41へマスク2を受け渡す。チャック10へ搬入されたマスク2は、後述する様に、マスクホルダ20の下のマスク装着位置へ移動され、マスク装着位置においてマスクホルダ20に装着される。
【0026】
基板の露光を行う際、チャック10は、まず、基板のロード/アンロードを行うロード/アンロード位置へ移動される。ロード/アンロード位置において、基板がチャック10にロードされ、また基板がチャック10からアンロードされる。基板がロードされたチャック10は、ロード/アンロード位置から基板の露光を行う露光位置へ移動される。
【0027】
露光位置の上空には、マスク2を保持するマスクホルダ20が設置されている。マスクホルダ20は、マスク2の周辺部を真空吸着して保持する。マスクホルダ20に保持されたマスク2の上空には、図示しない照射光学系が配置されている。露光時、照射光学系からの露光光がマスク2を透過して基板へ照射されることにより、マスク2のパターンが基板1の表面に転写され、基板1上にパターンが形成される。
【0028】
図1において、チャック10は、チャック支持台9を介してθステージ8に搭載されており、θステージ8の下にはYステージ7及びXステージ5が設けられている。Xステージ5は、ベース3に設けられたXガイド4に搭載され、Xガイド4に沿ってX方向(図1の図面横方向)へ移動する。Yステージ7は、Xステージ5に設けられたYガイド6に搭載され、Yガイド6に沿ってY方向(図1の図面奥行き方向)へ移動する。θステージ8は、Yステージ7に搭載され、θ方向へ回転する。チャック支持台9は、θステージ8に搭載され、チャック10の裏面を複数個所で支持する。Xステージ駆動回路71、Yステージ駆動回路72、θステージ駆動回路73は、主制御装置80の制御により、Xステージ5、Yステージ7、θステージ8をそれぞれ駆動する。
【0029】
Xステージ5のX方向への移動及びYステージ7のY方向への移動により、チャック10は、ロード/アンロード位置と露光位置との間を移動される。ロード/アンロード位置において、Xステージ5のX方向への移動、Yステージ7のY方向への移動、及びθステージ8のθ方向への回転により、チャック10に搭載された基板のプリアライメントが行われる。露光位置において、Xステージ5のX方向への移動及びYステージ7のY方向への移動により、チャック10に搭載された基板のXY方向へのステップ移動が行われる。そして、Xステージ5のX方向への移動、Yステージ7のY方向への移動、及びθステージ8のθ方向への回転により、基板のアライメントが行われる。また、図示しないZ−チルト機構によりマスクホルダ20をZ方向(図1の図面上下方向)へ移動及びチルトすることにより、マスク2と基板とのギャップ合わせが行われる。
【0030】
なお、本実施の形態では、マスクホルダ20をZ方向へ移動及びチルトすることにより、マスク2と基板とのギャップ合わせを行っているが、チャック支持台9にZ−チルト機構を設けて、チャック10をZ方向へ移動及びチルトすることにより、マスク2と基板とのギャップ合わせを行ってもよい。
【0031】
図3は、チャックの上面図である。チャック10の表面には、図示しない凸部と土手と吸着孔とが設けられている。凸部は、直径数mmのピン形状であり、チャック10の表面に所定の間隔で複数設けられている。チャック10に基板が搭載されたとき、凸部は、基板を複数の点で支持する。このとき、チャック10の表面の凸部以外の部分と基板との間には、空間が形成される。土手は、所定の幅の連続した壁であり、チャック10の表面の凸部以外の部分と基板との間に形成された空間を、複数の真空区画に分ける。土手は、チャック10の表面形状が基板の表面に焼き付けられる裏面転写が発生したときに人間の目で認識され難い様に、直線ではなく不規則な線で構成されている。吸着孔は、チャック10の表面の凸部及び土手以外の部分に所定の間隔で複数設けられ、土手により分けられた各真空区画の真空引きを行う。
【0032】
また、チャック10には、図示しない複数の基板受け取り/受け渡し用の突き上げピンが設けられている。基板受け取り/受け渡し用の突き上げピンは、チャック10の表面より上昇して、基板をチャック10にロードする際、図示しない基板搬送ロボットから基板を受け取り、また基板をチャックからアンロードする際、図示しない基板搬送ロボットへ基板を受け渡す。
【0033】
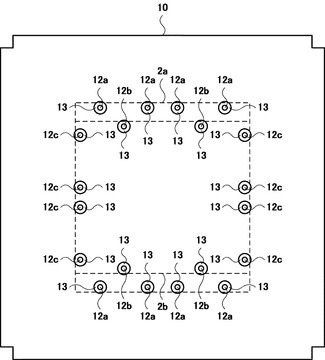
図3において、チャック10の中央部付近には、後述する突き上げピンユニットが挿入される複数の開口が設けられており、開口には蓋13がはめられている。蓋13には貫通孔が設けられており、貫通孔には蓋13の下方から突き上げピン12a,12b,12cが挿入されている。
【0034】
本実施の形態は、マスク2aと、マスク2aと縦横いずれかの長さが異なるマスク2bの二種類のマスクを取り扱う例を示している。図3において、マスク2a,2bは、破線で示されている。マスク2aを取り扱うとき、突き上げピン12cは、マスク2aのマスク2bと間隔が同じ向かい合う二辺の周辺部を支持し、突き上げピン12aは、マスク2aの残りの向かい合う二辺の周辺部を支持する。マスク2bを取り扱うとき、突き上げピン12cは、マスク2bのマスク2aと間隔が同じ向かい合う二辺の周辺部を支持し、突き上げピン12bは、マスク2bの残りの向かい合う二辺の周辺部を支持する。突き上げピン12cを、マスク2a及びマスク2aと縦横いずれかの長さが異なるマスク2bの搬送に共用することができるので、少ない数の突き上げピンで二種類のマスクに対応することができる。
【0035】
なお、本実施の形態では、突き上げピン12aが8本、突き上げピン12bが4本、突き上げピン12cが8本設けられているが、突き上げピン12a,12b,12cの位置及び数は、マスク2a,2bの大きさに応じて適宜決定される。
【0036】
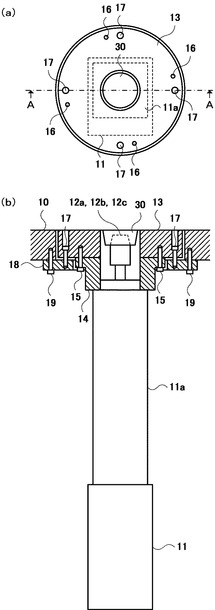
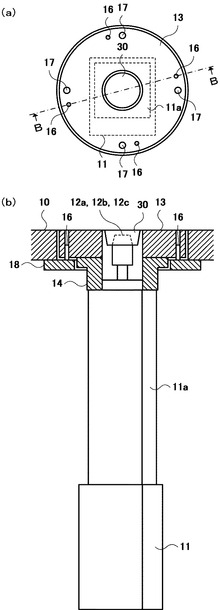
図4(a)はチャックに設けられた開口の上面図、図4(b)は図4(a)のA−A部の断面図である。また、図5(a)はチャックに設けられた開口の上面図、図5(b)は図5(a)のB−B部の断面図である。突き上げピンユニットは、モータ11、突き上げピン12a,12b,12c、蓋13、フランジ14、ボルト15,17、及び止めねじ16を含んで構成されている。
【0037】
モータ11は、パルスモータ又はサーボモータと、パルスモータ又はサーボモータに接続されたボールねじと、ロッドとを含んで構成され、パルスモータ又はサーボモータでボールねじを駆動することにより、ロッド収納部11a内に収納されたロッドが、上昇及び下降する。モータ11のロッドの先端には、突き上げピン12a,12b,12cが取り付けられている。
【0038】
マスク2a,2bは、石英や青板ガラス等で構成され、露光光を遮断するクロム膜等によりパターンが形成されている。チャック10は、軽量化のため、アルミニウム等の軽い金属材料で構成され、表面には、露光光の反射率を抑えるため、硬質黒色アルマイト加工等が施されている。突き上げピン12a,12b,12cの先端は、例えば、樹脂材料で構成され、マスク2a,2bより柔らかい材質と成っている。突き上げピン12a,12b,12cの先端には、チャック10の表面と同じ材質のパッド30が取り付けられている。
【0039】
図4(b)において、モータ11のロッド収納部11aの上面には、フランジ14が取り付けられ、フランジ14は、ボルト15により蓋13の裏面に固定されている。一方、チャック10の裏面の開口周辺には、蓋13を支持するリング状の支持プレート18が取り付けられている。支持プレート18は、ボルト19によりチャック10の裏面に固定されている。
【0040】
図4(a)及び図5(a)において、蓋13の周辺部には、止めねじ16をねじ込むねじ穴と、ボルト17を通す段差付き穴とが、複数箇所に設けられている。図4(b)において、蓋13は、蓋13の周辺部の段差付き穴に通したボルト17により、支持プレート18に固定されている。図5(b)において、止めねじ16は、蓋13の周辺部のねじ穴にねじ込まれ、蓋13の底面から突き出て、支持プレート18の上面に接触している。
【0041】
本実施の形態では、突き上げピンユニットをチャック10に取り付ける際、まず、チャック10の上方から、突き上げピンユニットを開口に挿入し、止めねじ16のねじ込み量を調整して、突き上げピンユニットの取り付け高さを調整する。そして、ボルト17により蓋13を支持プレート18に固定して、突き上げピンユニットをチャック10に取り付ける。突き上げピンユニットを、チャック10の上方から、開口に挿入し、止めねじ16により取り付け高さを調整して、チャック10に取り付けるので、チャック10の外側から手又は治具が届きにくいチャックの中央部付近であっても、突き上げピンユニットの取り付け高さの調整がチャック10の上方から容易に行われる。従って、基板の大型化に伴いチャック10が大型化しても、突き上げピン12a,12b,12cの高さが容易に調整される。
【0042】
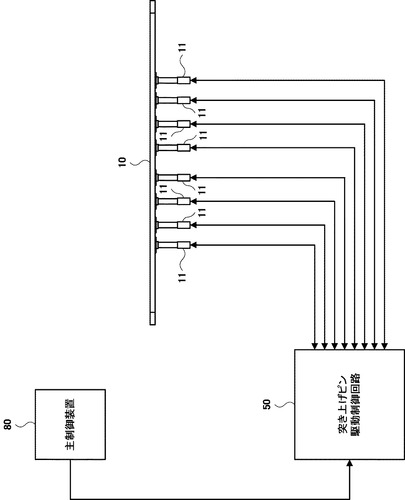
図6は、突き上げピンユニットの制御系を示す図である。突き上げピン駆動制御回路50は、主制御装置80の制御により、各突き上げピンユニットのモータ11に対して、突き上げピン12a,12b,12cの移動先を指定して、突き上げピン12a,12b,12cの移動先への移動を指示する。モータ11は、内部にエンコーダを有し、エンコーダは、突き上げピン12a,12b,12cが指示された移動先から所定の範囲内に達すると、移動が終了した旨の終了信号を、突き上げピン駆動制御回路50へ出力する。
【0043】
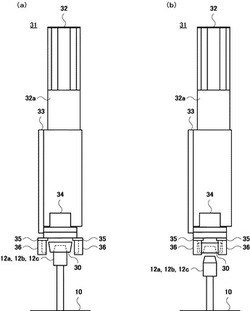
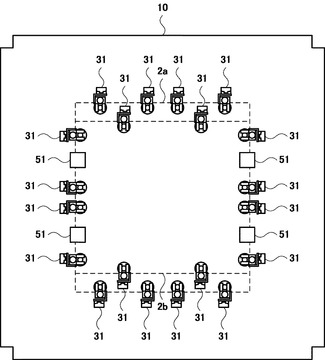
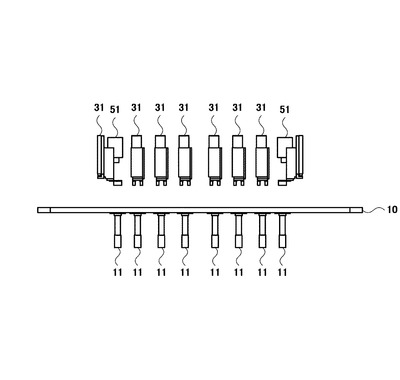
以下、本発明の一実施の形態によるプロキシミティ露光装置のマスク搬送方法について説明する。図2において、マスク受け取り位置にあるチャック10の上空には、パッド着脱装置31及び広視野カメラ51が配置されている。図7はパッド着脱装置及び広視野カメラの配置を示す平面図、図8はパッド着脱装置及び広視野カメラの配置を示す側面図である。図7において、マスク2a,2bは、破線で示されている。パッド着脱装置31は、マスク受け取り位置にあるチャック10の各突き上げピンユニットの上方に配置され、後述する様に、パッド30を突き上げピン12a,12b,12cの先端から取り外し、またパッド30を突き上げピン12a,12b,12cの先端に取り付ける。広視野カメラ51は、マスク2a,2bに設けられた位置検出用マークの上方に配置され、マスク2a,2bの位置検出用マークの画像を取得する。
【0044】
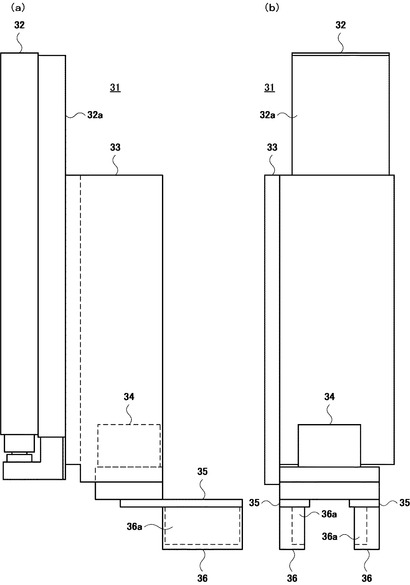
図9(a)はパッド着脱装置の側面図、図9(b)はパッド着脱装置の正面図である。パッド着脱装置31は、エアシリンダテーブル32、チャックベース33、エアチャック34、ブラケット35、及びクランプ36を含んで構成されている。エアシリンダテーブル32は、図示しない空気圧回路から供給されるエアの圧力によりエアシリンダを駆動して、テーブル32aを図面下方向へ移動する。エアシリンダテーブル32のテーブル32aには、断面がL字形のチャックベース33が取り付けられており、チャックベース33の下端には、エアチャック34が取り付けられている。図9(b)に示す様に、エアチャック34に接続された2つのブラケット35には、クランプ36がそれぞれ取り付けられており、2つのクランプ36は、エアチャック34の駆動により、図9(b)の図面横方向へ移動して開閉する。各クランプ36には、パッド30を保持するための凹部36aが設けられている。
【0045】
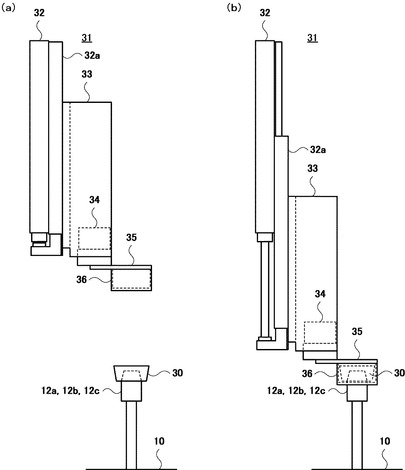
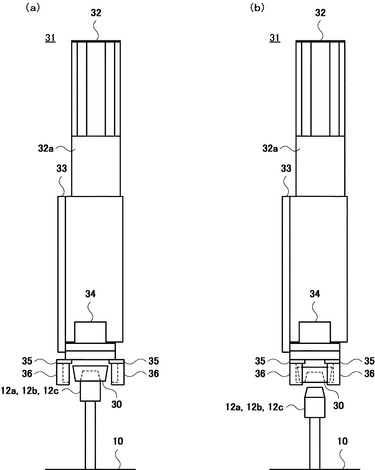
図10及び図11は、パッド着脱装置の動作を説明する図である。パッド着脱装置31は、マスク2a,2bがチャック10へ搬入される前に、パッド30を突き上げピン12a,12b,12cの先端から取り外す。パッド30の着脱を行う前、エアシリンダテーブル32のテーブル32aは、図10(a)に示す様に上昇した状態にあり、クランプ36は閉じている。パッド30を突き上げピン12a,12b,12cの先端から取り外す際、各突き上げピンユニットは、突き上げピン12a,12b,12cをチャック10の表面から上昇させる。パッド着脱装置31は、クランプ36を開いた後、エアシリンダテーブル32のテーブル32aを下降させ、図10(b)及び図11(a)に示す様に、クランプ36を突き上げピン12a,12b,12cの先端の高さへ移動する。そして、図11(b)に示す様に、クランプ36を閉じて、パッド30をクランプ36の凹部36aにより保持する。パッド30をクランプ36により保持しながら、図11(b)に示す様に突き上げピン12a,12b,12cを下降させ、あるいはエアシリンダテーブル32のテーブル32aを上昇させることにより、パッド30が突き上げピン12a,12b,12cの先端から取り外される。パッド30を突き上げピン12a,12b,12cの先端から取り外した後、パッド着脱装置31は、エアシリンダテーブル32のテーブル32aを再び上昇させ、パッド30をクランプ36により保持したまま待機する。
【0046】
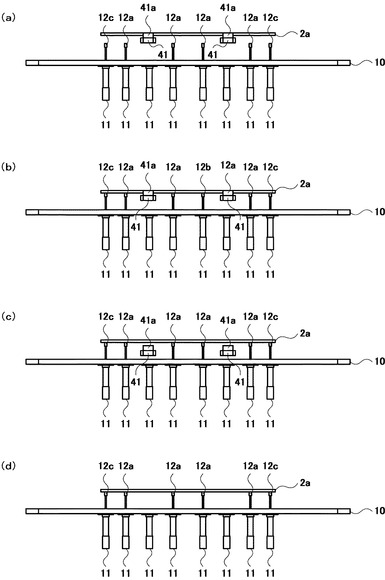
図12は、突き上げピンユニット及びマスク搬送ロボットの動作を説明する図である。図12は、マスク2aを搬送する場合を示している。マスク2aをチャック10へ搬入する際、まず、各突き上げピンユニットのモータ11は、突き上げピン12a,12cを上昇させ、パッド着脱装置31は、パッド30を突き上げピン12a,12cの先端から取り外す。マスク搬送ロボット40は、マスク2aを載せたハンドリングアーム41を、チャック10の上空へ移動する(図12(a))。次に、マスク搬送ロボット40は、ハンドリングアーム41を下降させて、マスク2aを突き上げピン12a,12cに載せ(図12(b))、ハンドリングアーム41をさらに下降させて、ハンドリングアーム41のマスク支持部41aをマスク2aから離す(図12(c))。これにより、各突き上げピン12a,12cは、マスク搬送ロボット40からマスク2aを受け取る。次に、マスク搬送ロボット40は、ハンドリングアーム41をチャック10の上空から退避させる(図12(d))。マスク2bを搬送する場合は、突き上げピン12aの代わりに、突き上げピン12bが用いられる。そして、マスク2a,2bをチャック10から搬出する際は、上記と逆の動作を行う。
【0047】
チャック10の内部から上昇する突き上げピン12a,12b,12c及び突き上げピン12a,12b,12cを上下に移動するモータ11を有する複数の突き上げピンユニットをチャック10に設け、突き上げピン12a,12b,12cによりマスク搬送ロボット40からマスク2a、2bを受け取るので、マスク2a,2bがチャック10に搭載する基板より小さくても、マスク2a,2bをチャック10へ搬入することができる。
【0048】
また、各突き上げピン12a,12b,12cの先端が、パッド30を取り外すだけで簡単にマスク2a,2bより柔らかい材質のものに変更される。そして、各突き上げピン12a,12b,12cの先端をマスク2a,2bより柔らかい材質のものに変更して、マスク2a,2bを複数の突き上げピン12a,12b,12cによりマスク搬送ロボット40から受け取るので、突き上げピン12a,12b,12cによるマスク2a,2bの損傷が防止される。
【0049】
マスク受け取り位置にあるチャック10の上空には、図示しないスペーサ設置装置が設置されており、スペーサ設置装置は、マスク搬送ロボット40がマスク2a,2bをチャック10へ搬入する前、チャック10の表面にマスク保護スペーサを設置する。チャック10をマスク受け取り位置からマスク装着位置へ移動する際、各突き上げピンユニットのモータ11は、突き上げピン12a,12b,12cを下降させて、マスク2a,2bをマスク保護スペーサに載せる。
【0050】
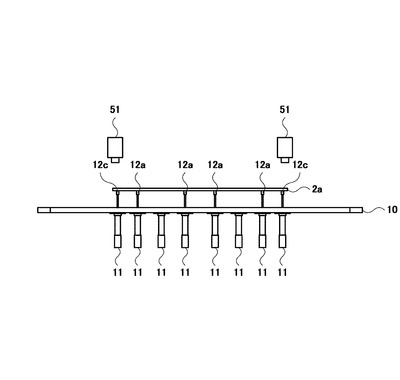
図13は、マスク受け取り位置でマスクがチャックへ搬入された状態を示す図である。図13は、マスク2aを搬送する場合を示しており、マスク2bを搬送する場合は、突き上げピン12aの代わりに、突き上げピン12bが用いられる。マスク受け取り位置にあるチャック10の上空に配置された広視野カメラ51は、後述する高分解能可動カメラ52及び高分解能固定カメラ54よりも分解能が低くて広い視野を有し、突き上げピン12a,12b,12cに載せられたマスク2a,2bの位置検出用マークの画像を取得して、画像信号を図1の画像処理装置55へ出力する。画像処理装置55は、広視野カメラ51が出力した画像信号を処理して、マスク2a,2bの位置を検出する。突き上げピン12a,12b,12cがマスク搬送ロボット40から受け取ったマスク2a,2bの位置が大きくずれていても、広視野カメラ51を用いてマスク2a,2bの位置検出用マークの画像が短時間に取得され、マスク受け取り位置でマスク2a,2bの位置が短時間に検出される。
【0051】
図1において、主制御装置80は、画像処理装置55が広視野カメラ51の画像信号を処理して検出したマスク2a,2bの位置の検出結果を入力し、予め記憶したマスク受け取り位置でのマスク2a,2bの基準位置と比較して、マスク2a,2bの位置のずれ量を検出する。続いて、主制御装置80は、Xステージ駆動回路71、Yステージ駆動回路72、及びθステージ駆動回路73を制御して、Xステージ5、Yステージ7、及びθステージ8によりチャック10を移動し、マスク2a,2bをマスク受け取り位置からマスクホルダ20の下のマスク装着位置へ移動する。その際、主制御装置80は、予め記憶したマスク2a,2bの基準位置の座標とマスク装着位置の座標とから、Xステージ5、Yステージ7、及びθステージ8の移動量を決定し、検出したマスク2a,2bの位置のずれ量に基づいて、決定した移動量を補正する。
【0052】
マスク受け取り位置でマスク2a,2bの位置を検出し、検出したマスク2a,2bの位置に基づき、Xステージ5、Yステージ7、及びθステージ8によりチャック10を移動して、マスク2a,2bをマスク受け取り位置からマスク装着位置へ移動するので、マスク受け取り位置で突き上げピン12a,12b,12cによりマスク搬送ロボット40から受け取ったマスク2a,2bの位置がずれていても、マスク2a,2bがマスク装着位置へ精度良く移動される。
【0053】
図14及び図15は、マスクホルダの下面図である。図14はマスク2aを装着する場合、図15はマスク2bを装着する場合を示している。図14及び図15において、マスク2a,2bは、破線で示されている。マスクホルダ20には、露光光が通る開口20a,20bよりも一回り大きな開口が設けられており、この開口の内側に、ホルダ部21a,21bによって露光光が通る開口20a,20bが形成されている。ホルダ部21a,21bは、ガイド24を介してマスクホルダ20の下面に取り付けられており、図示しないボールねじ及びモータ等の移動機構によって、ガイド24に沿って移動される。ホルダ部21bをガイド24に沿って移動することにより、露光光が通る開口20a,20bの図面縦方向の長さが、マスク2a,2bの大きさに合わせて変更される。ホルダ部21a,21bには、図示しない吸着溝が設けられており、ホルダ部21a,21bは、マスク2a,2bの周辺部を吸着溝により真空吸着して保持する。
【0054】
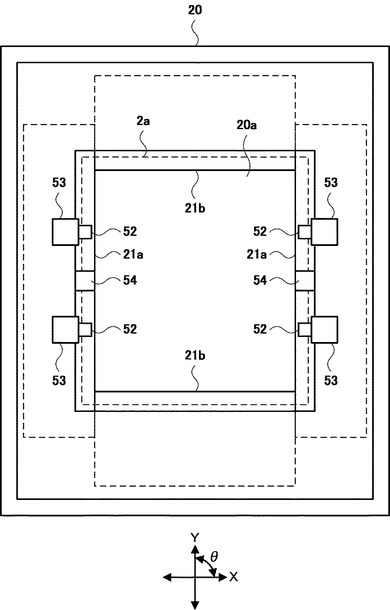
図16は、マスクホルダの上面図である。図16は、マスク2aを装着する場合を示している。ホルダ部21aには、マスク2a,2bの位置検出用マークの位置に、後述するマスク位置検出窓が設けられており、マスク位置検出窓の上空には、高分解能可動カメラ52及び高分解能固定カメラ54が配置されている。高分解能可動カメラ52は、カメラ移動機構53に取り付けられており、カメラ移動機構53により、マスクホルダ20の上方でX方向及びY方向へ移動され、θ方向へ回転される。高分解能固定カメラ54は、マスクホルダ20の上方に固定されている。
【0055】
図17は、マスクをマスクホルダに装着する動作を説明する図である。図17は、マスク2aを装着する場合を示しており、マスク2bを装着する場合は、突き上げピン12aの代わりに、突き上げピン12bが用いられる。マスク装着位置において、マスクホルダ20にマスク2a,2bを装着する際、まず、各突き上げピンユニットのモータ11は、マスク2a,2bの位置検出用マークが高分解能可動カメラ52の焦点範囲に入る高さまで、突き上げピン12a,12b,12cを上昇させる(図17(a))。高分解能可動カメラ52は、ホルダ部21aに設けられたマスク位置検出窓22を通して、マスク2a,2bの位置検出用マークの画像を取得する。このとき、マスク装着位置へ移動したマスク2a,2bの位置がわずかにずれて、マスク2a,2bの位置検出用マークが高分解能可動カメラ52の視野から外れている場合、カメラ移動機構53により高分解能可動カメラ52を移動して、マスク2a,2bの位置検出用マークを高分解能可動カメラ52の視野に入れる。高分解能可動カメラ52は、取得した画像の画像信号を、図1の画像処理装置55へ出力する。画像処理装置55は、高分解能可動カメラ52が出力した画像信号を処理して、マスク2a,2bの位置を検出する。
【0056】
図1において、主制御装置80は、画像処理装置55が高分解能可動カメラ52の画像信号を処理して検出したマスク2a,2bの位置の検出結果を入力し、予め記憶したマスク装着位置でのマスク2a,2bの基準位置と比較して、マスク2a,2bの位置のずれ量を検出する。そして、主制御装置80は、検出したマスク2a,2bの位置のずれ量に基づいて、Xステージ駆動回路71、Yステージ駆動回路72、及びθステージ駆動回路73を制御して、Xステージ5、Yステージ7、及びθステージ8によりチャック10を移動し、マスク2a,2bの位置決めを行う。マスク装着位置においてマスク2a,2bの位置がずれていても、高分解能可動カメラ52を用いて、マスク2a,2bの位置が精度良く検出され、マスク2a,2bの位置決めが精度良く行われる。
【0057】
図17において、マスク2a,2bの位置決め終了後、各突き上げピンユニットのモータ11は、突き上げピン12a,12b,12cをさらに上昇させて、マスク2a,2bをホルダ部21a,21bへ押し付ける(図17(b))。ホルダ部21a,21bへ押し付けられたマスク2a,2bの上空には、負圧ガラス23が設置されており、負圧ガラス23とマスク2a,2bとの間に負圧室が形成される。負圧室内の圧力が制御された後、ホルダ部21a,21bは、図示しない吸着溝によりマスク2a,2bの周辺部を真空吸着する。
【0058】
Xステージ5、Yステージ7、及びθステージ8によりチャック10を移動してマスク2a,2bの位置決めを行い、突き上げピン12a,12b,12cによりマスク2a,2bをマスクホルダ20に装着するので、チャック10へ搬入したマスク2a,2bが、Xステージ5、Yステージ7、及びθステージ8により精度良く位置決めされて、マスクホルダ20に装着される。
【0059】
ホルダ部21a,21bがマスク2a,2bを真空吸着した後、高分解能固定カメラ54は、ホルダ部21aに設けられたマスク位置検出窓22を通して、マスク2a,2bの位置検出用マークの画像を取得し、画像信号を図1の画像処理装置55へ出力する。画像処理装置55は、高分解能固定カメラ54が出力した画像信号を処理して、マスク2a,2bの位置を検出する。
【0060】
図1において、主制御装置80は、画像処理装置55が高分解能固定カメラ54の画像信号を処理して検出したマスク2a,2bの位置の検出結果を入力し、予め記憶したマスク装着位置でのマスク2a,2bの基準位置と比較して、マスク2a,2bの位置のずれ量を検出し、マスク2a,2bの位置の補正が必要か否かを判断する。本実施の形態では、高分解能可動カメラ52を移動してマスク2a,2bの位置を検出した場合、マスク2a,2bの位置の検出結果には、高分解能可動カメラ52の移動誤差が含まれることとなる。そのため、画像処理装置55が高分解能可動カメラ52の画像信号を処理して検出したマスク2a,2bの位置に基づいて位置決めされたマスク2a,2bの位置が、マスク2a,2bの基準位置からずれる恐れがある。
【0061】
マスク2a,2bの位置の補正が必要な場合、マスク2a,2bの真空吸着を解除し、負圧室内の圧力を大気圧に戻した後、突き上げピン12a,12b,12cを下降させて、マスク2a,2bをホルダ部21a,21bから離す。そして、主制御装置80は、検出したマスク2a,2bの位置のずれ量に基づいて、Xステージ駆動回路71、Yステージ駆動回路72、及びθステージ駆動回路73を制御して、Xステージ5、Yステージ7、及びθステージ8によりチャック10を移動し、マスク2a,2bの位置を補正する。マスクホルダ20の上方に固定された高分解能固定カメラ54を用いて、マスク2a,2bの位置がより精度良く検出され、位置決めしたマスク2a,2bの位置が精度良く補正される。
【0062】
マスク2a,2bの位置の補正を行った後、各突き上げピンユニットのモータ11は、突き上げピン12a,12b,12cを再び上昇させて、マスク2a,2bをホルダ部21a,21bへ押し付ける。負圧室内の圧力を制御した後、ホルダ部21a,21bは、図示しない吸着溝によりマスク2a,2bを真空吸着する。マスク2a,2bの装着が終了した後、各突き上げピンユニットのモータ11は、突き上げピン12a,12b,12cを下降させる(図17(c))。そして、チャック10をマスク受け取り位置へ戻し、パッド着脱装置31により、パッド30を突き上げピン12a,12b,12cの先端に取り付け、図示しないスペーサ設置装置により、チャック10の表面からマスク保護スペーサを回収する。
【0063】
パッド30を突き上げピン12a,12b,12cの先端に取り付ける際、パッド着脱装置31は、エアシリンダテーブル32のテーブル32aを下降させ、図10(b)に示す様に、パッド30を保持しているクランプ36を突き上げピン12a,12b,12cの先端の高さへ移動して、パッド30を突き上げピン12a,12b,12cの先端に押し付ける。そして、図11(a)に示す様に、クランプ36を開いて、パッド30を放す。その後、パッド着脱装置31は、エアシリンダテーブル32のテーブル32aを再び上昇させ、クランプ36を閉じて待機する。
【0064】
各突き上げピン12a,12b,12cの先端が、パッド30を取り付けるだけで簡単にチャック10の表面と同じ材質のものに変更される。そして、マスク2a,2bを複数の突き上げピン12a,12b,12cによりマスクホルダ20に装着した後、各突き上げピン12a,12b,12cの先端をチャック10の表面と同じ材質のものに変更するので、露光時の露光むらを抑制される。
【0065】
以上説明した実施の形態によれば、各突き上げピン12a,12b,12cの先端をマスク2a,2bより柔らかい材質のものに変更して、マスク2a,2bを複数の突き上げピン12a,12b,12cによりマスク搬送ロボット40から受け取り、マスク2a,2bを複数の突き上げピン12a,12b,12cによりマスクホルダ20に装着した後、各突き上げピン12a,12b,12cの先端をチャック10の表面と同じ材質のものに変更することにより、突き上げピン12a,12b,12cによるマスク2a,2bの損傷を防止し、かつ露光時の露光むらを抑制することができる。
【0066】
さらに、各突き上げピン12a,12b,12cの先端を、マスク2a,2bより柔らかい材料で構成し、各突き上げピン12a,12b,12cの先端にチャック10の表面と同じ材質のパッド30を取り付け、または各突き上げピン12a,12b,12cの先端からパッド30を取り外して、各突き上げピン12a,12b,12cの先端を変更することにより、各突き上げピン12a,12b,12cの先端を、パッド30を取り外すだけで簡単にマスク2a,2bより柔らかい材質のものに変更することができ、またパッド30を取り付けるだけで簡単にチャック10の表面と同じ材質のものに変更することができる。
【0067】
さらに、チャック10に、マスク2a及びマスク2aと縦横いずれかの長さが異なるマスク2bの、間隔が同じ向かい合う二辺の周辺部を支持する複数の共用突き上げピン12cと、マスク2aの残りの向かい合う二辺の周辺部を支持する複数の専用突き上げピン12aと、マスク2bの残りの向かい合う二辺の周辺部を支持する複数の専用突き上げピン12bとを設けることにより、共用突き上げピン12cを、マスク2a及びマスク2aと縦横いずれかの長さが異なるマスク2bの搬送に共用することができるので、少ない数の突き上げピンで二種類のマスクに対応することができる。
【0068】
本発明のプロキシミティ露光装置を用いて基板の露光を行い、あるいは、本発明のプロキシミティ露光装置のマスク搬送方法を用いてマスクをマスクホルダに装着し、基板の露光を行うことにより、チャックに設けたマスク搬送用の突き上げピンによる露光むらを抑制することができるので、高品質な表示用パネル基板を製造することができる。
【0069】
例えば、図18は、液晶ディスプレイ装置のTFT基板の製造工程の一例を示すフローチャートである。薄膜形成工程(ステップ101)では、スパッタ法やプラズマ化学気相成長(CVD)法等により、基板上に液晶駆動用の透明電極となる導電体膜や絶縁体膜等の薄膜を形成する。レジスト塗布工程(ステップ102)では、ロール塗布法等により感光樹脂材料(フォトレジスト)を塗布して、薄膜形成工程(ステップ101)で形成した薄膜上にフォトレジスト膜を形成する。露光工程(ステップ103)では、プロキシミティ露光装置や投影露光装置等を用いて、マスクのパターンをフォトレジスト膜に転写する。現像工程(ステップ104)では、シャワー現像法等により現像液をフォトレジスト膜上に供給して、フォトレジスト膜の不要部分を除去する。エッチング工程(ステップ105)では、ウエットエッチングにより、薄膜形成工程(ステップ101)で形成した薄膜の内、フォトレジスト膜でマスクされていない部分を除去する。剥離工程(ステップ106)では、エッチング工程(ステップ105)でのマスクの役目を終えたフォトレジスト膜を、剥離液によって剥離する。これらの各工程の前又は後には、必要に応じて、基板の洗浄/乾燥工程が実施される。これらの工程を数回繰り返して、基板上にTFTアレイが形成される。
【0070】
また、図19は、液晶ディスプレイ装置のカラーフィルタ基板の製造工程の一例を示すフローチャートである。ブラックマトリクス形成工程(ステップ201)では、レジスト塗布、露光、現像、エッチング、剥離等の処理により、基板上にブラックマトリクスを形成する。着色パターン形成工程(ステップ202)では、染色法、顔料分散法、印刷法、電着法等により、基板上に着色パターンを形成する。この工程を、R、G、Bの着色パターンについて繰り返す。保護膜形成工程(ステップ203)では、着色パターンの上に保護膜を形成し、透明電極膜形成工程(ステップ204)では、保護膜の上に透明電極膜を形成する。これらの各工程の前、途中又は後には、必要に応じて、基板の洗浄/乾燥工程が実施される。
【0071】
図18に示したTFT基板の製造工程では、露光工程(ステップ103)において、図19に示したカラーフィルタ基板の製造工程では、ブラックマトリクス形成工程(ステップ201)及び着色パターン形成工程(ステップ202)の露光処理において、本発明のプロキシミティ露光装置又は本発明のプロキシミティ露光装置のマスク搬送方法を適用することができる。
【符号の説明】
【0072】
1 基板
2,2a,2b マスク
3 ベース
4 Xガイド
5 Xステージ
6 Yガイド
7 Yステージ
8 θステージ
9 チャック支持台
10 チャック
11 モータ
12a,12b,12c 突き上げピン
13 蓋
14 フランジ
15,17,19 ボルト
16 止めねじ
18 支持プレート
20 マスクホルダ
21a,21b ホルダ部
22 マスク位置検出窓
23 負圧ガラス
24 ガイド
30 パッド
31 パッド着脱装置
32 エアシリンダテーブル
33 チャックベース
34 エアチャック
35 ブラケット
36 クランプ
36a 凹部
40 マスク搬送ロボット
41 ハンドリングアーム
41a マスク支持部
42 マスクストッカー
50 突き上げピン駆動制御回路
51 広視野カメラ
52 高分解能可動カメラ
53 カメラ移動機構
54 高分解能固定カメラ
55 画像処理装置
71 Xステージ駆動回路
72 Yステージ駆動回路
73 θステージ駆動回路
80 主制御装置
【技術分野】
【0001】
本発明は、液晶ディスプレイ装置等の表示用パネル基板の製造において、プロキシミティ方式を用いて基板の露光を行うプロキシミティ露光装置、プロキシミティ露光装置のマスク搬送方法、及びそれらを用いた表示用パネル基板の製造方法に係り、特に、大型のマスクを位置決めしてマスクホルダに装着するのに好適なプロキシミティ露光装置、プロキシミティ露光装置のマスク搬送方法、及びそれらを用いた表示用パネル基板の製造方法に関する。
【背景技術】
【0002】
表示用パネルとして用いられる液晶ディスプレイ装置のTFT(Thin Film Transistor)基板やカラーフィルタ基板、プラズマディスプレイパネル用基板、有機EL(Electroluminescence)表示パネル用基板等の製造は、露光装置を用いて、フォトリソグラフィー技術により基板上にパターンを形成して行われる。露光装置としては、レンズ又は鏡を用いてマスクのパターンを基板上に投影するプロジェクション方式と、マスクと基板との間に微小な間隙(プロキシミティギャップ)を設けてマスクのパターンを基板へ転写するプロキシミティ方式とがある。プロキシミティ方式は、プロジェクション方式に比べてパターン解像性能は劣るが、照射光学系の構成が簡単で、かつ処理能力が高く量産用に適している。
【0003】
プロキシミティ露光装置は、基板を搭載するチャックと、マスクを保持するマスクホルダとを備え、マスクホルダに保持されたマスクとチャックに搭載された基板とを極めて接近させて露光を行う。通常、チャックは、基板の移動及び位置決めを行うステージ上に搭載されており、基板を真空吸着して固定する。マスクホルダは、基板を搭載したチャックの上方に設けられ、マスクの周辺部を真空吸着して固定する。チャックへの基板の搬入、及びチャックからの基板の搬出は、通常、基板搬送ロボットのハンドリングアームにより行われるが、マスクと基板との接触を避けるために、マスクの下の露光位置から離れたロード/アンロード位置で行われる。ロード/アンロード位置で基板をチャックに搭載した後、ステージがマスクの下の露光位置へ移動し、露光位置で基板の位置決めを行う。
【0004】
マスクホルダへのマスクの搬入、及びマスクホルダからのマスクの搬出も、従来、マスク搬送ロボットのハンドリングアームにより行われていた。しかしながら、マスク搬送ロボットのハンドリングアームは片持式であるため、マスクが大型になってその重量が増大すると、ハンドリングアームがたわんで、マスクを水平に支持することができなくなり、またハンドリングアームの揺れが大きくなって、マスクホルダの下方へ移動するためのストロークを確保することが困難になってきた。これに対し、特許文献1には、チャックの外周縁部にマスクの一時支持部材を設け、マスクを一時支持部材に載置し、ステージによりマスクの搬送ずれを補正して、チャックの下面側に連結されたZ軸方向駆動機構によりマスクをマスクホルダの下端面に押圧する技術が開示されている。
【先行技術文献】
【特許文献】
【0005】
【特許文献1】特開2003−186199号公報
【発明の概要】
【発明が解決しようとする課題】
【0006】
近年、表示用パネルの各種基板の製造では、大型化及びサイズの多様化に対応するため、比較的大きな基板を用意し、表示用パネルのサイズに応じて、1枚の基板から1枚又は複数枚の表示用パネル基板を製造している。この場合、プロキシミティ方式では、基板の一面を一括して露光しようとすると、基板と同じ大きさのマスクが必要となり、高価なマスクのコストがさらに増大する。そこで、基板より比較的小さなマスクを用い、ステージにより基板をXY方向にステップ移動しながら、基板の一面を複数のショットに分けて露光する方式が主流となっている。この方式では、マスクがチャックに搭載する基板より小さいため、特許文献1に記載の技術を適用することができなかった。
【0007】
そこで、チャックに、チャックの内部から上昇し、マスクをマスク搬送ロボットから受け取ってマスクホルダに装着する複数の突き上げピンを設けることが発案された(特願2008−287941)。チャックに設けた複数の突き上げピンによりマスクをマスク搬送ロボットから受け取るので、マスクがチャックに搭載する基板より小さくても、マスクをチャックへ搬入することができる。そして、ステージによりチャックを移動してマスクの位置決めを行い、複数の突き上げピンによりマスクをマスクホルダに装着するので、チャックへ搬入したマスクが、ステージにより精度良く位置決めされて、マスクホルダに装着される。
【0008】
マスクは、石英や青板ガラス等で構成され、露光光を遮断するクロム膜等によりパターンが形成されている。チャックは、軽量化のため、アルミニウム等の軽い金属材料で構成され、表面には、露光光の反射率を抑えるため、硬質黒色アルマイト加工等が施されている。チャックに突き上げピンを設ける場合、突き上げピンの先端の材質がチャックの表面の材質と異なると、基板の露光時に、露光光の反射率が異なって、露光むらが発生する。一方、突き上げピンの先端の材質をチャックの表面の材質と同じにすると、マスクをマスク搬送ロボットから受け取る際、あるいはマスクをマスクホルダに装着する際に、マスクが突き上げピンにより擦られて、マスクに損傷を与える恐れがある。
【0009】
本発明の課題は、突き上げピンによるマスクの損傷を防止し、かつ露光時の露光むらを抑制することである。また、さらに、本発明の課題は、高品質な表示用パネル基板を製造することである。
【課題を解決するための手段】
【0010】
本発明のプロキシミティ露光装置は、基板を搭載するチャックと、マスクを保持するマスクホルダと、チャックを移動するステージとを備え、マスクと基板との間に微小なギャップを設けて、マスクのパターンを基板へ転写するプロキシミティ露光装置において、マスクをチャックへ搬入するマスク搬送装置と、チャックに設けられ、チャックの内部から上昇して、マスクをマスク搬送装置から受け取り、マスクホルダに装着する複数の突き上げピンと、複数の突き上げピンの先端を変更するピン先端変更手段と、ステージの移動を制御して、マスクの位置決めを行う制御手段とを備え、ピン先端変更手段が、複数の突き上げピンがマスクをマスク搬送装置から受け取る前、各突き上げピンの先端をマスクより柔らかい材質のものに変更し、複数の突き上げピンがマスクをマスクホルダに装着した後、各突き上げピンの先端をチャックの表面と同じ材質のものに変更するものである。
【0011】
また、本発明のプロキシミティ露光装置のマスク搬送方法は、基板を搭載するチャックと、マスクを保持するマスクホルダと、チャックを移動するステージとを備え、マスクと基板との間に微小なギャップを設けて、マスクのパターンを基板へ転写するプロキシミティ露光装置のマスク搬送方法であって、チャックに、チャックの内部から上昇する複数の突き上げピンを設け、各突き上げピンの先端をマスクより柔らかい材質のものに変更し、マスクをマスク搬送装置によりチャックへ搬入し、マスクを複数の突き上げピンによりマスク搬送装置から受け取り、ステージによりチャックを移動して、マスクの位置決めを行い、マスクを複数の突き上げピンによりマスクホルダに装着した後、各突き上げピンの先端をチャックの表面と同じ材質のものに変更するものである。
【0012】
チャックに、チャックの内部から上昇する複数の突き上げピンを設け、マスクをマスク搬送装置によりチャックへ搬入し、マスクを複数の突き上げピンによりマスク搬送装置から受け取り、ステージによりチャックを移動して、マスクの位置決めを行い、マスクを複数の突き上げピンによりマスクホルダに装着するので、マスクが精度良く位置決めされて、マスクホルダに装着される。その際、各突き上げピンの先端をマスクより柔らかい材質のものに変更して、マスクを複数の突き上げピンによりマスク搬送装置から受け取るので、突き上げピンによるマスクの損傷が防止される。そして、マスクを複数の突き上げピンによりマスクホルダに装着した後、各突き上げピンの先端をチャックの表面と同じ材質のものに変更するので、露光時の露光むらを抑制される。
【0013】
さらに、本発明のプロキシミティ露光装置は、複数の突き上げピンの先端が、マスクより柔らかい材料で構成され、ピン先端変更手段が、複数の突き上げピンの先端にチャックの表面と同じ材質のパッドを取り付け、または複数の突き上げピンの先端から当該パッドを取り外して、複数の突き上げピンの先端を変更するものである。また、本発明のプロキシミティ露光装置のマスク搬送方法は、各突き上げピンの先端を、マスクより柔らかい材料で構成し、各突き上げピンの先端にチャックの表面と同じ材質のパッドを取り付け、または各突き上げピンの先端から当該パッドを取り外して、各突き上げピンの先端を変更するものである。各突き上げピンの先端が、パッドを取り外すだけで簡単にマスクより柔らかい材質のものに変更され、またパッドを取り付けるだけで簡単にチャックの表面と同じ材質のものに変更される。
【0014】
さらに、本発明のプロキシミティ露光装置は、複数の突き上げピンが、第1のマスク及び第1のマスクと縦横いずれかの長さが異なる第2のマスクの、間隔が同じ向かい合う二辺の周辺部を支持する複数の共用突き上げピンと、第1のマスクの残りの向かい合う二辺の周辺部を支持する複数の第1の専用突き上げピンと、第2のマスクの残りの向かい合う二辺の周辺部を支持する複数の第2の専用突き上げピンとを含むものである。また、本発明のプロキシミティ露光装置のマスク搬送方法は、チャックに、第1のマスク及び第1のマスクと縦横いずれかの長さが異なる第2のマスクの、間隔が同じ向かい合う二辺の周辺部を支持する複数の共用突き上げピンと、第1のマスクの残りの向かい合う二辺の周辺部を支持する複数の第1の専用突き上げピンと、第2のマスクの残りの向かい合う二辺の周辺部を支持する複数の第2の専用突き上げピンとを設けるものである。共用突き上げピンを、第1のマスク及び第1のマスクと縦横いずれかの長さが異なる第2のマスクの搬送に共用することができるので、少ない数の突き上げピンで二種類のマスクに対応することができる。
【0015】
本発明の表示用パネル基板の製造方法は、上記のいずれかのプロキシミティ露光装置を用いて基板の露光を行い、あるいは、上記のいずれかのプロキシミティ露光装置のマスク搬送方法を用いてマスクをマスクホルダに装着し、基板の露光を行うものである。チャックに設けたマスク搬送用の突き上げピンによる露光むらが抑制され、高品質な表示用パネル基板が製造される。
【発明の効果】
【0016】
本発明のプロキシミティ露光装置及びプロキシミティ露光装置のマスク保持方法によれば、各突き上げピンの先端をマスクより柔らかい材質のものに変更して、マスクを複数の突き上げピンによりマスク搬送装置から受け取り、マスクを複数の突き上げピンによりマスクホルダに装着した後、各突き上げピンの先端をチャックの表面と同じ材質のものに変更することにより、突き上げピンによるマスクの損傷を防止し、かつ露光時の露光むらを抑制することができる。
【0017】
さらに、本発明のプロキシミティ露光装置及びプロキシミティ露光装置のマスク搬送方法によれば、各突き上げピンの先端を、マスクより柔らかい材料で構成し、各突き上げピンの先端にチャックの表面と同じ材質のパッドを取り付け、または各突き上げピンの先端から当該パッドを取り外して、各突き上げピンの先端を変更することにより、各突き上げピンの先端を、パッドを取り外すだけで簡単にマスクより柔らかい材質のものに変更することができ、またパッドを取り付けるだけで簡単にチャックの表面と同じ材質のものに変更することができる。
【0018】
さらに、本発明のプロキシミティ露光装置及びプロキシミティ露光装置のマスク搬送方法によれば、チャックに、第1のマスク及び第1のマスクと縦横いずれかの長さが異なる第2のマスクの、間隔が同じ向かい合う二辺の周辺部を支持する複数の共用突き上げピンと、第1のマスクの残りの向かい合う二辺の周辺部を支持する複数の第1の専用突き上げピンと、第2のマスクの残りの向かい合う二辺の周辺部を支持する複数の第2の専用突き上げピンとを設けることにより、共用突き上げピンを、第1のマスク及び第1のマスクと縦横いずれかの長さが異なる第2のマスクの搬送に共用することができるので、少ない数の突き上げピンで二種類のマスクに対応することができる。
【0019】
本発明の表示用パネル基板の製造方法によれば、チャックに設けたマスク搬送用の突き上げピンによる露光むらを抑制することができるので、高品質な表示用パネル基板を製造することができる。
【図面の簡単な説明】
【0020】
【図1】本発明の一実施の形態によるプロキシミティ露光装置の概略構成を示す図である。
【図2】本発明の一実施の形態によるプロキシミティ露光装置の平面図である。
【図3】チャックの上面図である。
【図4】図4(a)はチャックに設けられた開口の上面図、図4(b)は図4(a)のA−A部の断面図である。
【図5】図5(a)はチャックに設けられた開口の上面図、図5(b)は図5(a)のB−B部の断面図である。
【図6】突き上げピンユニットの制御系を示す図である。
【図7】パッド着脱装置及び広視野カメラの配置を示す平面図である。
【図8】パッド着脱装置及び広視野カメラの配置を示す側面図である。
【図9】図9(a)はパッド着脱装置の側面図、図9(b)はパッド着脱装置の正面図である。
【図10】パッド着脱装置の動作を説明する図である。
【図11】パッド着脱装置の動作を説明する図である。
【図12】突き上げピンユニット及びマスク搬送ロボットの動作を説明する図である。
【図13】マスク受け取り位置でマスクがチャックへ搬入された状態を示す図である。
【図14】マスクホルダの下面図である。
【図15】マスクホルダの下面図である。
【図16】マスクホルダの上面図である。
【図17】マスクをマスクホルダに装着する動作を説明する図である。
【図18】液晶ディスプレイ装置のTFT基板の製造工程の一例を示すフローチャートである。
【図19】液晶ディスプレイ装置のカラーフィルタ基板の製造工程の一例を示すフローチャートである。
【発明を実施するための形態】
【0021】
図1は、本発明の一実施の形態によるプロキシミティ露光装置の概略構成を示す図である。また、図2は、本発明の一実施の形態によるプロキシミティ露光装置の平面図である。プロキシミティ露光装置は、ベース3、Xガイド4、Xステージ5、Yガイド6、Yステージ7、θステージ8、チャック支持台9、チャック10、突き上げピンユニット、突き上げピンユニットの制御系、マスクホルダ20、パッド着脱装置31、マスク搬送ロボット40、マスクストッカー42、広視野カメラ51、高分解能可動カメラ52、カメラ移動機構53、高分解能固定カメラ54、画像処理装置55、Xステージ駆動回路71、Yステージ駆動回路72、θステージ駆動回路73、及び主制御装置80を含んで構成されている。
【0022】
なお、図1では、突き上げピンユニットの制御系、マスク搬送ロボット40、マスクストッカー42、及びカメラ移動機構53が省略されている。また、図2では、突き上げピンユニットの制御系、画像処理装置55、Xステージ駆動回路71、Yステージ駆動回路72、θステージ駆動回路73、及び主制御装置80が省略されている。プロキシミティ露光装置は、これらの他に、露光光を照射する照射光学系、ギャップセンサー、アライメント用センサー、装置内の温度管理を行う温度制御ユニット等を備えている。
【0023】
なお、以下に説明する実施の形態におけるXY方向は例示であって、X方向とY方向とを入れ替えてもよい。
【0024】
図2において、チャック10は、マスク2の受け取りを行うマスク受け取り位置にある。マスク搬送ロボット40は、マスク2を、マスクストッカー42から取り出して、マスク受け取り位置にあるチャック10へ搬入し、またマスク2を、マスク受け取り位置にあるチャック10から搬出して、マスクストッカー42に収納する。マスク搬送ロボット40のハンドリングアーム41には、マスク2のパターン面(下面)のパターンが形成されていない周辺部に接触するマスク支持部41aが設けられており、ハンドリングアーム41は、マスク支持部41aによりマスク2のパターン面(下面)の周辺部を支持する。
【0025】
後述する突き上げピンユニットの突き上げピンは、マスク2をチャック10へ搬入する際、マスク搬送ロボット40のハンドリングアーム41からマスク2を受け取り、マスク2をチャック10から搬出する際、マスク搬送ロボット40のハンドリングアーム41へマスク2を受け渡す。チャック10へ搬入されたマスク2は、後述する様に、マスクホルダ20の下のマスク装着位置へ移動され、マスク装着位置においてマスクホルダ20に装着される。
【0026】
基板の露光を行う際、チャック10は、まず、基板のロード/アンロードを行うロード/アンロード位置へ移動される。ロード/アンロード位置において、基板がチャック10にロードされ、また基板がチャック10からアンロードされる。基板がロードされたチャック10は、ロード/アンロード位置から基板の露光を行う露光位置へ移動される。
【0027】
露光位置の上空には、マスク2を保持するマスクホルダ20が設置されている。マスクホルダ20は、マスク2の周辺部を真空吸着して保持する。マスクホルダ20に保持されたマスク2の上空には、図示しない照射光学系が配置されている。露光時、照射光学系からの露光光がマスク2を透過して基板へ照射されることにより、マスク2のパターンが基板1の表面に転写され、基板1上にパターンが形成される。
【0028】
図1において、チャック10は、チャック支持台9を介してθステージ8に搭載されており、θステージ8の下にはYステージ7及びXステージ5が設けられている。Xステージ5は、ベース3に設けられたXガイド4に搭載され、Xガイド4に沿ってX方向(図1の図面横方向)へ移動する。Yステージ7は、Xステージ5に設けられたYガイド6に搭載され、Yガイド6に沿ってY方向(図1の図面奥行き方向)へ移動する。θステージ8は、Yステージ7に搭載され、θ方向へ回転する。チャック支持台9は、θステージ8に搭載され、チャック10の裏面を複数個所で支持する。Xステージ駆動回路71、Yステージ駆動回路72、θステージ駆動回路73は、主制御装置80の制御により、Xステージ5、Yステージ7、θステージ8をそれぞれ駆動する。
【0029】
Xステージ5のX方向への移動及びYステージ7のY方向への移動により、チャック10は、ロード/アンロード位置と露光位置との間を移動される。ロード/アンロード位置において、Xステージ5のX方向への移動、Yステージ7のY方向への移動、及びθステージ8のθ方向への回転により、チャック10に搭載された基板のプリアライメントが行われる。露光位置において、Xステージ5のX方向への移動及びYステージ7のY方向への移動により、チャック10に搭載された基板のXY方向へのステップ移動が行われる。そして、Xステージ5のX方向への移動、Yステージ7のY方向への移動、及びθステージ8のθ方向への回転により、基板のアライメントが行われる。また、図示しないZ−チルト機構によりマスクホルダ20をZ方向(図1の図面上下方向)へ移動及びチルトすることにより、マスク2と基板とのギャップ合わせが行われる。
【0030】
なお、本実施の形態では、マスクホルダ20をZ方向へ移動及びチルトすることにより、マスク2と基板とのギャップ合わせを行っているが、チャック支持台9にZ−チルト機構を設けて、チャック10をZ方向へ移動及びチルトすることにより、マスク2と基板とのギャップ合わせを行ってもよい。
【0031】
図3は、チャックの上面図である。チャック10の表面には、図示しない凸部と土手と吸着孔とが設けられている。凸部は、直径数mmのピン形状であり、チャック10の表面に所定の間隔で複数設けられている。チャック10に基板が搭載されたとき、凸部は、基板を複数の点で支持する。このとき、チャック10の表面の凸部以外の部分と基板との間には、空間が形成される。土手は、所定の幅の連続した壁であり、チャック10の表面の凸部以外の部分と基板との間に形成された空間を、複数の真空区画に分ける。土手は、チャック10の表面形状が基板の表面に焼き付けられる裏面転写が発生したときに人間の目で認識され難い様に、直線ではなく不規則な線で構成されている。吸着孔は、チャック10の表面の凸部及び土手以外の部分に所定の間隔で複数設けられ、土手により分けられた各真空区画の真空引きを行う。
【0032】
また、チャック10には、図示しない複数の基板受け取り/受け渡し用の突き上げピンが設けられている。基板受け取り/受け渡し用の突き上げピンは、チャック10の表面より上昇して、基板をチャック10にロードする際、図示しない基板搬送ロボットから基板を受け取り、また基板をチャックからアンロードする際、図示しない基板搬送ロボットへ基板を受け渡す。
【0033】
図3において、チャック10の中央部付近には、後述する突き上げピンユニットが挿入される複数の開口が設けられており、開口には蓋13がはめられている。蓋13には貫通孔が設けられており、貫通孔には蓋13の下方から突き上げピン12a,12b,12cが挿入されている。
【0034】
本実施の形態は、マスク2aと、マスク2aと縦横いずれかの長さが異なるマスク2bの二種類のマスクを取り扱う例を示している。図3において、マスク2a,2bは、破線で示されている。マスク2aを取り扱うとき、突き上げピン12cは、マスク2aのマスク2bと間隔が同じ向かい合う二辺の周辺部を支持し、突き上げピン12aは、マスク2aの残りの向かい合う二辺の周辺部を支持する。マスク2bを取り扱うとき、突き上げピン12cは、マスク2bのマスク2aと間隔が同じ向かい合う二辺の周辺部を支持し、突き上げピン12bは、マスク2bの残りの向かい合う二辺の周辺部を支持する。突き上げピン12cを、マスク2a及びマスク2aと縦横いずれかの長さが異なるマスク2bの搬送に共用することができるので、少ない数の突き上げピンで二種類のマスクに対応することができる。
【0035】
なお、本実施の形態では、突き上げピン12aが8本、突き上げピン12bが4本、突き上げピン12cが8本設けられているが、突き上げピン12a,12b,12cの位置及び数は、マスク2a,2bの大きさに応じて適宜決定される。
【0036】
図4(a)はチャックに設けられた開口の上面図、図4(b)は図4(a)のA−A部の断面図である。また、図5(a)はチャックに設けられた開口の上面図、図5(b)は図5(a)のB−B部の断面図である。突き上げピンユニットは、モータ11、突き上げピン12a,12b,12c、蓋13、フランジ14、ボルト15,17、及び止めねじ16を含んで構成されている。
【0037】
モータ11は、パルスモータ又はサーボモータと、パルスモータ又はサーボモータに接続されたボールねじと、ロッドとを含んで構成され、パルスモータ又はサーボモータでボールねじを駆動することにより、ロッド収納部11a内に収納されたロッドが、上昇及び下降する。モータ11のロッドの先端には、突き上げピン12a,12b,12cが取り付けられている。
【0038】
マスク2a,2bは、石英や青板ガラス等で構成され、露光光を遮断するクロム膜等によりパターンが形成されている。チャック10は、軽量化のため、アルミニウム等の軽い金属材料で構成され、表面には、露光光の反射率を抑えるため、硬質黒色アルマイト加工等が施されている。突き上げピン12a,12b,12cの先端は、例えば、樹脂材料で構成され、マスク2a,2bより柔らかい材質と成っている。突き上げピン12a,12b,12cの先端には、チャック10の表面と同じ材質のパッド30が取り付けられている。
【0039】
図4(b)において、モータ11のロッド収納部11aの上面には、フランジ14が取り付けられ、フランジ14は、ボルト15により蓋13の裏面に固定されている。一方、チャック10の裏面の開口周辺には、蓋13を支持するリング状の支持プレート18が取り付けられている。支持プレート18は、ボルト19によりチャック10の裏面に固定されている。
【0040】
図4(a)及び図5(a)において、蓋13の周辺部には、止めねじ16をねじ込むねじ穴と、ボルト17を通す段差付き穴とが、複数箇所に設けられている。図4(b)において、蓋13は、蓋13の周辺部の段差付き穴に通したボルト17により、支持プレート18に固定されている。図5(b)において、止めねじ16は、蓋13の周辺部のねじ穴にねじ込まれ、蓋13の底面から突き出て、支持プレート18の上面に接触している。
【0041】
本実施の形態では、突き上げピンユニットをチャック10に取り付ける際、まず、チャック10の上方から、突き上げピンユニットを開口に挿入し、止めねじ16のねじ込み量を調整して、突き上げピンユニットの取り付け高さを調整する。そして、ボルト17により蓋13を支持プレート18に固定して、突き上げピンユニットをチャック10に取り付ける。突き上げピンユニットを、チャック10の上方から、開口に挿入し、止めねじ16により取り付け高さを調整して、チャック10に取り付けるので、チャック10の外側から手又は治具が届きにくいチャックの中央部付近であっても、突き上げピンユニットの取り付け高さの調整がチャック10の上方から容易に行われる。従って、基板の大型化に伴いチャック10が大型化しても、突き上げピン12a,12b,12cの高さが容易に調整される。
【0042】
図6は、突き上げピンユニットの制御系を示す図である。突き上げピン駆動制御回路50は、主制御装置80の制御により、各突き上げピンユニットのモータ11に対して、突き上げピン12a,12b,12cの移動先を指定して、突き上げピン12a,12b,12cの移動先への移動を指示する。モータ11は、内部にエンコーダを有し、エンコーダは、突き上げピン12a,12b,12cが指示された移動先から所定の範囲内に達すると、移動が終了した旨の終了信号を、突き上げピン駆動制御回路50へ出力する。
【0043】
以下、本発明の一実施の形態によるプロキシミティ露光装置のマスク搬送方法について説明する。図2において、マスク受け取り位置にあるチャック10の上空には、パッド着脱装置31及び広視野カメラ51が配置されている。図7はパッド着脱装置及び広視野カメラの配置を示す平面図、図8はパッド着脱装置及び広視野カメラの配置を示す側面図である。図7において、マスク2a,2bは、破線で示されている。パッド着脱装置31は、マスク受け取り位置にあるチャック10の各突き上げピンユニットの上方に配置され、後述する様に、パッド30を突き上げピン12a,12b,12cの先端から取り外し、またパッド30を突き上げピン12a,12b,12cの先端に取り付ける。広視野カメラ51は、マスク2a,2bに設けられた位置検出用マークの上方に配置され、マスク2a,2bの位置検出用マークの画像を取得する。
【0044】
図9(a)はパッド着脱装置の側面図、図9(b)はパッド着脱装置の正面図である。パッド着脱装置31は、エアシリンダテーブル32、チャックベース33、エアチャック34、ブラケット35、及びクランプ36を含んで構成されている。エアシリンダテーブル32は、図示しない空気圧回路から供給されるエアの圧力によりエアシリンダを駆動して、テーブル32aを図面下方向へ移動する。エアシリンダテーブル32のテーブル32aには、断面がL字形のチャックベース33が取り付けられており、チャックベース33の下端には、エアチャック34が取り付けられている。図9(b)に示す様に、エアチャック34に接続された2つのブラケット35には、クランプ36がそれぞれ取り付けられており、2つのクランプ36は、エアチャック34の駆動により、図9(b)の図面横方向へ移動して開閉する。各クランプ36には、パッド30を保持するための凹部36aが設けられている。
【0045】
図10及び図11は、パッド着脱装置の動作を説明する図である。パッド着脱装置31は、マスク2a,2bがチャック10へ搬入される前に、パッド30を突き上げピン12a,12b,12cの先端から取り外す。パッド30の着脱を行う前、エアシリンダテーブル32のテーブル32aは、図10(a)に示す様に上昇した状態にあり、クランプ36は閉じている。パッド30を突き上げピン12a,12b,12cの先端から取り外す際、各突き上げピンユニットは、突き上げピン12a,12b,12cをチャック10の表面から上昇させる。パッド着脱装置31は、クランプ36を開いた後、エアシリンダテーブル32のテーブル32aを下降させ、図10(b)及び図11(a)に示す様に、クランプ36を突き上げピン12a,12b,12cの先端の高さへ移動する。そして、図11(b)に示す様に、クランプ36を閉じて、パッド30をクランプ36の凹部36aにより保持する。パッド30をクランプ36により保持しながら、図11(b)に示す様に突き上げピン12a,12b,12cを下降させ、あるいはエアシリンダテーブル32のテーブル32aを上昇させることにより、パッド30が突き上げピン12a,12b,12cの先端から取り外される。パッド30を突き上げピン12a,12b,12cの先端から取り外した後、パッド着脱装置31は、エアシリンダテーブル32のテーブル32aを再び上昇させ、パッド30をクランプ36により保持したまま待機する。
【0046】
図12は、突き上げピンユニット及びマスク搬送ロボットの動作を説明する図である。図12は、マスク2aを搬送する場合を示している。マスク2aをチャック10へ搬入する際、まず、各突き上げピンユニットのモータ11は、突き上げピン12a,12cを上昇させ、パッド着脱装置31は、パッド30を突き上げピン12a,12cの先端から取り外す。マスク搬送ロボット40は、マスク2aを載せたハンドリングアーム41を、チャック10の上空へ移動する(図12(a))。次に、マスク搬送ロボット40は、ハンドリングアーム41を下降させて、マスク2aを突き上げピン12a,12cに載せ(図12(b))、ハンドリングアーム41をさらに下降させて、ハンドリングアーム41のマスク支持部41aをマスク2aから離す(図12(c))。これにより、各突き上げピン12a,12cは、マスク搬送ロボット40からマスク2aを受け取る。次に、マスク搬送ロボット40は、ハンドリングアーム41をチャック10の上空から退避させる(図12(d))。マスク2bを搬送する場合は、突き上げピン12aの代わりに、突き上げピン12bが用いられる。そして、マスク2a,2bをチャック10から搬出する際は、上記と逆の動作を行う。
【0047】
チャック10の内部から上昇する突き上げピン12a,12b,12c及び突き上げピン12a,12b,12cを上下に移動するモータ11を有する複数の突き上げピンユニットをチャック10に設け、突き上げピン12a,12b,12cによりマスク搬送ロボット40からマスク2a、2bを受け取るので、マスク2a,2bがチャック10に搭載する基板より小さくても、マスク2a,2bをチャック10へ搬入することができる。
【0048】
また、各突き上げピン12a,12b,12cの先端が、パッド30を取り外すだけで簡単にマスク2a,2bより柔らかい材質のものに変更される。そして、各突き上げピン12a,12b,12cの先端をマスク2a,2bより柔らかい材質のものに変更して、マスク2a,2bを複数の突き上げピン12a,12b,12cによりマスク搬送ロボット40から受け取るので、突き上げピン12a,12b,12cによるマスク2a,2bの損傷が防止される。
【0049】
マスク受け取り位置にあるチャック10の上空には、図示しないスペーサ設置装置が設置されており、スペーサ設置装置は、マスク搬送ロボット40がマスク2a,2bをチャック10へ搬入する前、チャック10の表面にマスク保護スペーサを設置する。チャック10をマスク受け取り位置からマスク装着位置へ移動する際、各突き上げピンユニットのモータ11は、突き上げピン12a,12b,12cを下降させて、マスク2a,2bをマスク保護スペーサに載せる。
【0050】
図13は、マスク受け取り位置でマスクがチャックへ搬入された状態を示す図である。図13は、マスク2aを搬送する場合を示しており、マスク2bを搬送する場合は、突き上げピン12aの代わりに、突き上げピン12bが用いられる。マスク受け取り位置にあるチャック10の上空に配置された広視野カメラ51は、後述する高分解能可動カメラ52及び高分解能固定カメラ54よりも分解能が低くて広い視野を有し、突き上げピン12a,12b,12cに載せられたマスク2a,2bの位置検出用マークの画像を取得して、画像信号を図1の画像処理装置55へ出力する。画像処理装置55は、広視野カメラ51が出力した画像信号を処理して、マスク2a,2bの位置を検出する。突き上げピン12a,12b,12cがマスク搬送ロボット40から受け取ったマスク2a,2bの位置が大きくずれていても、広視野カメラ51を用いてマスク2a,2bの位置検出用マークの画像が短時間に取得され、マスク受け取り位置でマスク2a,2bの位置が短時間に検出される。
【0051】
図1において、主制御装置80は、画像処理装置55が広視野カメラ51の画像信号を処理して検出したマスク2a,2bの位置の検出結果を入力し、予め記憶したマスク受け取り位置でのマスク2a,2bの基準位置と比較して、マスク2a,2bの位置のずれ量を検出する。続いて、主制御装置80は、Xステージ駆動回路71、Yステージ駆動回路72、及びθステージ駆動回路73を制御して、Xステージ5、Yステージ7、及びθステージ8によりチャック10を移動し、マスク2a,2bをマスク受け取り位置からマスクホルダ20の下のマスク装着位置へ移動する。その際、主制御装置80は、予め記憶したマスク2a,2bの基準位置の座標とマスク装着位置の座標とから、Xステージ5、Yステージ7、及びθステージ8の移動量を決定し、検出したマスク2a,2bの位置のずれ量に基づいて、決定した移動量を補正する。
【0052】
マスク受け取り位置でマスク2a,2bの位置を検出し、検出したマスク2a,2bの位置に基づき、Xステージ5、Yステージ7、及びθステージ8によりチャック10を移動して、マスク2a,2bをマスク受け取り位置からマスク装着位置へ移動するので、マスク受け取り位置で突き上げピン12a,12b,12cによりマスク搬送ロボット40から受け取ったマスク2a,2bの位置がずれていても、マスク2a,2bがマスク装着位置へ精度良く移動される。
【0053】
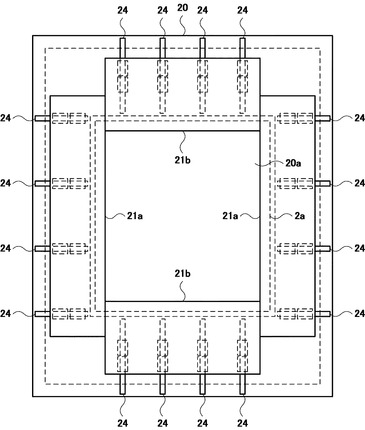
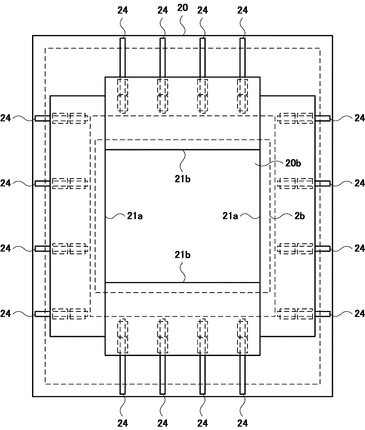
図14及び図15は、マスクホルダの下面図である。図14はマスク2aを装着する場合、図15はマスク2bを装着する場合を示している。図14及び図15において、マスク2a,2bは、破線で示されている。マスクホルダ20には、露光光が通る開口20a,20bよりも一回り大きな開口が設けられており、この開口の内側に、ホルダ部21a,21bによって露光光が通る開口20a,20bが形成されている。ホルダ部21a,21bは、ガイド24を介してマスクホルダ20の下面に取り付けられており、図示しないボールねじ及びモータ等の移動機構によって、ガイド24に沿って移動される。ホルダ部21bをガイド24に沿って移動することにより、露光光が通る開口20a,20bの図面縦方向の長さが、マスク2a,2bの大きさに合わせて変更される。ホルダ部21a,21bには、図示しない吸着溝が設けられており、ホルダ部21a,21bは、マスク2a,2bの周辺部を吸着溝により真空吸着して保持する。
【0054】
図16は、マスクホルダの上面図である。図16は、マスク2aを装着する場合を示している。ホルダ部21aには、マスク2a,2bの位置検出用マークの位置に、後述するマスク位置検出窓が設けられており、マスク位置検出窓の上空には、高分解能可動カメラ52及び高分解能固定カメラ54が配置されている。高分解能可動カメラ52は、カメラ移動機構53に取り付けられており、カメラ移動機構53により、マスクホルダ20の上方でX方向及びY方向へ移動され、θ方向へ回転される。高分解能固定カメラ54は、マスクホルダ20の上方に固定されている。
【0055】
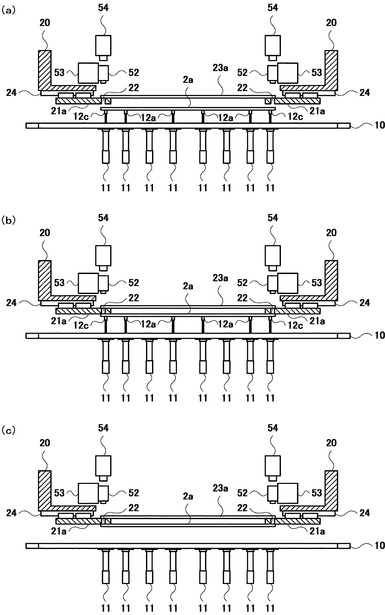
図17は、マスクをマスクホルダに装着する動作を説明する図である。図17は、マスク2aを装着する場合を示しており、マスク2bを装着する場合は、突き上げピン12aの代わりに、突き上げピン12bが用いられる。マスク装着位置において、マスクホルダ20にマスク2a,2bを装着する際、まず、各突き上げピンユニットのモータ11は、マスク2a,2bの位置検出用マークが高分解能可動カメラ52の焦点範囲に入る高さまで、突き上げピン12a,12b,12cを上昇させる(図17(a))。高分解能可動カメラ52は、ホルダ部21aに設けられたマスク位置検出窓22を通して、マスク2a,2bの位置検出用マークの画像を取得する。このとき、マスク装着位置へ移動したマスク2a,2bの位置がわずかにずれて、マスク2a,2bの位置検出用マークが高分解能可動カメラ52の視野から外れている場合、カメラ移動機構53により高分解能可動カメラ52を移動して、マスク2a,2bの位置検出用マークを高分解能可動カメラ52の視野に入れる。高分解能可動カメラ52は、取得した画像の画像信号を、図1の画像処理装置55へ出力する。画像処理装置55は、高分解能可動カメラ52が出力した画像信号を処理して、マスク2a,2bの位置を検出する。
【0056】
図1において、主制御装置80は、画像処理装置55が高分解能可動カメラ52の画像信号を処理して検出したマスク2a,2bの位置の検出結果を入力し、予め記憶したマスク装着位置でのマスク2a,2bの基準位置と比較して、マスク2a,2bの位置のずれ量を検出する。そして、主制御装置80は、検出したマスク2a,2bの位置のずれ量に基づいて、Xステージ駆動回路71、Yステージ駆動回路72、及びθステージ駆動回路73を制御して、Xステージ5、Yステージ7、及びθステージ8によりチャック10を移動し、マスク2a,2bの位置決めを行う。マスク装着位置においてマスク2a,2bの位置がずれていても、高分解能可動カメラ52を用いて、マスク2a,2bの位置が精度良く検出され、マスク2a,2bの位置決めが精度良く行われる。
【0057】
図17において、マスク2a,2bの位置決め終了後、各突き上げピンユニットのモータ11は、突き上げピン12a,12b,12cをさらに上昇させて、マスク2a,2bをホルダ部21a,21bへ押し付ける(図17(b))。ホルダ部21a,21bへ押し付けられたマスク2a,2bの上空には、負圧ガラス23が設置されており、負圧ガラス23とマスク2a,2bとの間に負圧室が形成される。負圧室内の圧力が制御された後、ホルダ部21a,21bは、図示しない吸着溝によりマスク2a,2bの周辺部を真空吸着する。
【0058】
Xステージ5、Yステージ7、及びθステージ8によりチャック10を移動してマスク2a,2bの位置決めを行い、突き上げピン12a,12b,12cによりマスク2a,2bをマスクホルダ20に装着するので、チャック10へ搬入したマスク2a,2bが、Xステージ5、Yステージ7、及びθステージ8により精度良く位置決めされて、マスクホルダ20に装着される。
【0059】
ホルダ部21a,21bがマスク2a,2bを真空吸着した後、高分解能固定カメラ54は、ホルダ部21aに設けられたマスク位置検出窓22を通して、マスク2a,2bの位置検出用マークの画像を取得し、画像信号を図1の画像処理装置55へ出力する。画像処理装置55は、高分解能固定カメラ54が出力した画像信号を処理して、マスク2a,2bの位置を検出する。
【0060】
図1において、主制御装置80は、画像処理装置55が高分解能固定カメラ54の画像信号を処理して検出したマスク2a,2bの位置の検出結果を入力し、予め記憶したマスク装着位置でのマスク2a,2bの基準位置と比較して、マスク2a,2bの位置のずれ量を検出し、マスク2a,2bの位置の補正が必要か否かを判断する。本実施の形態では、高分解能可動カメラ52を移動してマスク2a,2bの位置を検出した場合、マスク2a,2bの位置の検出結果には、高分解能可動カメラ52の移動誤差が含まれることとなる。そのため、画像処理装置55が高分解能可動カメラ52の画像信号を処理して検出したマスク2a,2bの位置に基づいて位置決めされたマスク2a,2bの位置が、マスク2a,2bの基準位置からずれる恐れがある。
【0061】
マスク2a,2bの位置の補正が必要な場合、マスク2a,2bの真空吸着を解除し、負圧室内の圧力を大気圧に戻した後、突き上げピン12a,12b,12cを下降させて、マスク2a,2bをホルダ部21a,21bから離す。そして、主制御装置80は、検出したマスク2a,2bの位置のずれ量に基づいて、Xステージ駆動回路71、Yステージ駆動回路72、及びθステージ駆動回路73を制御して、Xステージ5、Yステージ7、及びθステージ8によりチャック10を移動し、マスク2a,2bの位置を補正する。マスクホルダ20の上方に固定された高分解能固定カメラ54を用いて、マスク2a,2bの位置がより精度良く検出され、位置決めしたマスク2a,2bの位置が精度良く補正される。
【0062】
マスク2a,2bの位置の補正を行った後、各突き上げピンユニットのモータ11は、突き上げピン12a,12b,12cを再び上昇させて、マスク2a,2bをホルダ部21a,21bへ押し付ける。負圧室内の圧力を制御した後、ホルダ部21a,21bは、図示しない吸着溝によりマスク2a,2bを真空吸着する。マスク2a,2bの装着が終了した後、各突き上げピンユニットのモータ11は、突き上げピン12a,12b,12cを下降させる(図17(c))。そして、チャック10をマスク受け取り位置へ戻し、パッド着脱装置31により、パッド30を突き上げピン12a,12b,12cの先端に取り付け、図示しないスペーサ設置装置により、チャック10の表面からマスク保護スペーサを回収する。
【0063】
パッド30を突き上げピン12a,12b,12cの先端に取り付ける際、パッド着脱装置31は、エアシリンダテーブル32のテーブル32aを下降させ、図10(b)に示す様に、パッド30を保持しているクランプ36を突き上げピン12a,12b,12cの先端の高さへ移動して、パッド30を突き上げピン12a,12b,12cの先端に押し付ける。そして、図11(a)に示す様に、クランプ36を開いて、パッド30を放す。その後、パッド着脱装置31は、エアシリンダテーブル32のテーブル32aを再び上昇させ、クランプ36を閉じて待機する。
【0064】
各突き上げピン12a,12b,12cの先端が、パッド30を取り付けるだけで簡単にチャック10の表面と同じ材質のものに変更される。そして、マスク2a,2bを複数の突き上げピン12a,12b,12cによりマスクホルダ20に装着した後、各突き上げピン12a,12b,12cの先端をチャック10の表面と同じ材質のものに変更するので、露光時の露光むらを抑制される。
【0065】
以上説明した実施の形態によれば、各突き上げピン12a,12b,12cの先端をマスク2a,2bより柔らかい材質のものに変更して、マスク2a,2bを複数の突き上げピン12a,12b,12cによりマスク搬送ロボット40から受け取り、マスク2a,2bを複数の突き上げピン12a,12b,12cによりマスクホルダ20に装着した後、各突き上げピン12a,12b,12cの先端をチャック10の表面と同じ材質のものに変更することにより、突き上げピン12a,12b,12cによるマスク2a,2bの損傷を防止し、かつ露光時の露光むらを抑制することができる。
【0066】
さらに、各突き上げピン12a,12b,12cの先端を、マスク2a,2bより柔らかい材料で構成し、各突き上げピン12a,12b,12cの先端にチャック10の表面と同じ材質のパッド30を取り付け、または各突き上げピン12a,12b,12cの先端からパッド30を取り外して、各突き上げピン12a,12b,12cの先端を変更することにより、各突き上げピン12a,12b,12cの先端を、パッド30を取り外すだけで簡単にマスク2a,2bより柔らかい材質のものに変更することができ、またパッド30を取り付けるだけで簡単にチャック10の表面と同じ材質のものに変更することができる。
【0067】
さらに、チャック10に、マスク2a及びマスク2aと縦横いずれかの長さが異なるマスク2bの、間隔が同じ向かい合う二辺の周辺部を支持する複数の共用突き上げピン12cと、マスク2aの残りの向かい合う二辺の周辺部を支持する複数の専用突き上げピン12aと、マスク2bの残りの向かい合う二辺の周辺部を支持する複数の専用突き上げピン12bとを設けることにより、共用突き上げピン12cを、マスク2a及びマスク2aと縦横いずれかの長さが異なるマスク2bの搬送に共用することができるので、少ない数の突き上げピンで二種類のマスクに対応することができる。
【0068】
本発明のプロキシミティ露光装置を用いて基板の露光を行い、あるいは、本発明のプロキシミティ露光装置のマスク搬送方法を用いてマスクをマスクホルダに装着し、基板の露光を行うことにより、チャックに設けたマスク搬送用の突き上げピンによる露光むらを抑制することができるので、高品質な表示用パネル基板を製造することができる。
【0069】
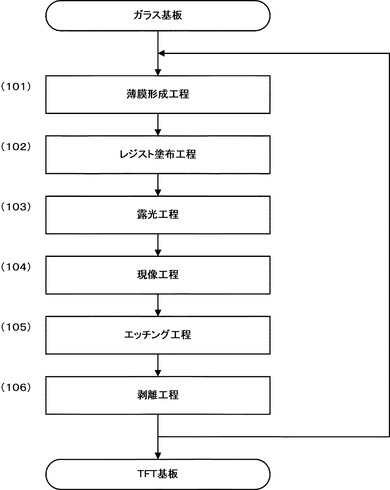
例えば、図18は、液晶ディスプレイ装置のTFT基板の製造工程の一例を示すフローチャートである。薄膜形成工程(ステップ101)では、スパッタ法やプラズマ化学気相成長(CVD)法等により、基板上に液晶駆動用の透明電極となる導電体膜や絶縁体膜等の薄膜を形成する。レジスト塗布工程(ステップ102)では、ロール塗布法等により感光樹脂材料(フォトレジスト)を塗布して、薄膜形成工程(ステップ101)で形成した薄膜上にフォトレジスト膜を形成する。露光工程(ステップ103)では、プロキシミティ露光装置や投影露光装置等を用いて、マスクのパターンをフォトレジスト膜に転写する。現像工程(ステップ104)では、シャワー現像法等により現像液をフォトレジスト膜上に供給して、フォトレジスト膜の不要部分を除去する。エッチング工程(ステップ105)では、ウエットエッチングにより、薄膜形成工程(ステップ101)で形成した薄膜の内、フォトレジスト膜でマスクされていない部分を除去する。剥離工程(ステップ106)では、エッチング工程(ステップ105)でのマスクの役目を終えたフォトレジスト膜を、剥離液によって剥離する。これらの各工程の前又は後には、必要に応じて、基板の洗浄/乾燥工程が実施される。これらの工程を数回繰り返して、基板上にTFTアレイが形成される。
【0070】
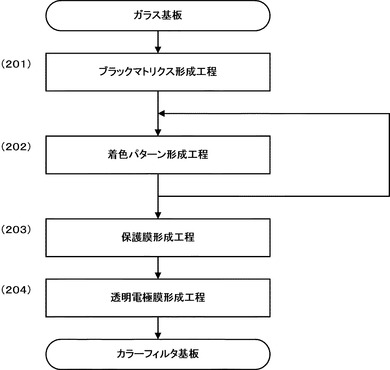
また、図19は、液晶ディスプレイ装置のカラーフィルタ基板の製造工程の一例を示すフローチャートである。ブラックマトリクス形成工程(ステップ201)では、レジスト塗布、露光、現像、エッチング、剥離等の処理により、基板上にブラックマトリクスを形成する。着色パターン形成工程(ステップ202)では、染色法、顔料分散法、印刷法、電着法等により、基板上に着色パターンを形成する。この工程を、R、G、Bの着色パターンについて繰り返す。保護膜形成工程(ステップ203)では、着色パターンの上に保護膜を形成し、透明電極膜形成工程(ステップ204)では、保護膜の上に透明電極膜を形成する。これらの各工程の前、途中又は後には、必要に応じて、基板の洗浄/乾燥工程が実施される。
【0071】
図18に示したTFT基板の製造工程では、露光工程(ステップ103)において、図19に示したカラーフィルタ基板の製造工程では、ブラックマトリクス形成工程(ステップ201)及び着色パターン形成工程(ステップ202)の露光処理において、本発明のプロキシミティ露光装置又は本発明のプロキシミティ露光装置のマスク搬送方法を適用することができる。
【符号の説明】
【0072】
1 基板
2,2a,2b マスク
3 ベース
4 Xガイド
5 Xステージ
6 Yガイド
7 Yステージ
8 θステージ
9 チャック支持台
10 チャック
11 モータ
12a,12b,12c 突き上げピン
13 蓋
14 フランジ
15,17,19 ボルト
16 止めねじ
18 支持プレート
20 マスクホルダ
21a,21b ホルダ部
22 マスク位置検出窓
23 負圧ガラス
24 ガイド
30 パッド
31 パッド着脱装置
32 エアシリンダテーブル
33 チャックベース
34 エアチャック
35 ブラケット
36 クランプ
36a 凹部
40 マスク搬送ロボット
41 ハンドリングアーム
41a マスク支持部
42 マスクストッカー
50 突き上げピン駆動制御回路
51 広視野カメラ
52 高分解能可動カメラ
53 カメラ移動機構
54 高分解能固定カメラ
55 画像処理装置
71 Xステージ駆動回路
72 Yステージ駆動回路
73 θステージ駆動回路
80 主制御装置
【特許請求の範囲】
【請求項1】
基板を搭載するチャックと、マスクを保持するマスクホルダと、前記チャックを移動するステージとを備え、マスクと基板との間に微小なギャップを設けて、マスクのパターンを基板へ転写するプロキシミティ露光装置において、
マスクを前記チャックへ搬入するマスク搬送装置と、
前記チャックに設けられ、前記チャックの内部から上昇して、マスクを前記マスク搬送装置から受け取り、前記マスクホルダに装着する複数の突き上げピンと、
前記複数の突き上げピンの先端を変更するピン先端変更手段と、
前記ステージの移動を制御して、マスクの位置決めを行う制御手段とを備え、
前記ピン先端変更手段は、前記複数の突き上げピンがマスクを前記マスク搬送装置から受け取る前、各突き上げピンの先端をマスクより柔らかい材質のものに変更し、前記複数の突き上げピンがマスクを前記マスクホルダに装着した後、各突き上げピンの先端を前記チャックの表面と同じ材質のものに変更することを特徴とするプロキシミティ露光装置。
【請求項2】
前記複数の突き上げピンは、先端がマスクより柔らかい材料で構成され、
前記ピン先端変更手段は、前記複数の突き上げピンの先端に前記チャックの表面と同じ材質のパッドを取り付け、または前記複数の突き上げピンの先端から当該パッドを取り外して、前記複数の突き上げピンの先端を変更することを特徴とする請求項1に記載のプロキシミティ露光装置。
【請求項3】
前記複数の突き上げピンは、第1のマスク及び第1のマスクと縦横いずれかの長さが異なる第2のマスクの、間隔が同じ向かい合う二辺の周辺部を支持する複数の共用突き上げピンと、第1のマスクの残りの向かい合う二辺の周辺部を支持する複数の第1の専用突き上げピンと、第2のマスクの残りの向かい合う二辺の周辺部を支持する複数の第2の専用突き上げピンとを含むことを特徴とする請求項1又は請求項2に記載のプロキシミティ露光装置。
【請求項4】
基板を搭載するチャックと、マスクを保持するマスクホルダと、チャックを移動するステージとを備え、マスクと基板との間に微小なギャップを設けて、マスクのパターンを基板へ転写するプロキシミティ露光装置のマスク搬送方法であって、
チャックに、チャックの内部から上昇する複数の突き上げピンを設け、
各突き上げピンの先端をマスクより柔らかい材質のものに変更し、
マスクをマスク搬送装置によりチャックへ搬入し、
マスクを複数の突き上げピンによりマスク搬送装置から受け取り、
ステージによりチャックを移動して、マスクの位置決めを行い、
マスクを複数の突き上げピンによりマスクホルダに装着した後、
各突き上げピンの先端をチャックの表面と同じ材質のものに変更することを特徴とするプロキシミティ露光装置のマスク搬送方法。
【請求項5】
各突き上げピンの先端を、マスクより柔らかい材料で構成し、
各突き上げピンの先端にチャックの表面と同じ材質のパッドを取り付け、または各突き上げピンの先端から当該パッドを取り外して、各突き上げピンの先端を変更することを特徴とする請求項4に記載のプロキシミティ露光装置のマスク搬送方法。
【請求項6】
チャックに、第1のマスク及び第1のマスクと縦横いずれかの長さが異なる第2のマスクの、間隔が同じ向かい合う二辺の周辺部を支持する複数の共用突き上げピンと、第1のマスクの残りの向かい合う二辺の周辺部を支持する複数の第1の専用突き上げピンと、第2のマスクの残りの向かい合う二辺の周辺部を支持する複数の第2の専用突き上げピンとを設けることを特徴とする請求項4又は請求項5に記載のプロキシミティ露光装置のマスク搬送方法。
【請求項7】
請求項1乃至請求項3のいずれか一項に記載のプロキシミティ露光装置を用いて基板の露光を行うことを特徴とする表示用パネル基板の製造方法。
【請求項8】
請求項4乃至請求項6のいずれか一項に記載のプロキシミティ露光装置のマスク搬送方法を用いてマスクをマスクホルダに装着し、基板の露光を行うことを特徴とする表示用パネル基板の製造方法。
【請求項1】
基板を搭載するチャックと、マスクを保持するマスクホルダと、前記チャックを移動するステージとを備え、マスクと基板との間に微小なギャップを設けて、マスクのパターンを基板へ転写するプロキシミティ露光装置において、
マスクを前記チャックへ搬入するマスク搬送装置と、
前記チャックに設けられ、前記チャックの内部から上昇して、マスクを前記マスク搬送装置から受け取り、前記マスクホルダに装着する複数の突き上げピンと、
前記複数の突き上げピンの先端を変更するピン先端変更手段と、
前記ステージの移動を制御して、マスクの位置決めを行う制御手段とを備え、
前記ピン先端変更手段は、前記複数の突き上げピンがマスクを前記マスク搬送装置から受け取る前、各突き上げピンの先端をマスクより柔らかい材質のものに変更し、前記複数の突き上げピンがマスクを前記マスクホルダに装着した後、各突き上げピンの先端を前記チャックの表面と同じ材質のものに変更することを特徴とするプロキシミティ露光装置。
【請求項2】
前記複数の突き上げピンは、先端がマスクより柔らかい材料で構成され、
前記ピン先端変更手段は、前記複数の突き上げピンの先端に前記チャックの表面と同じ材質のパッドを取り付け、または前記複数の突き上げピンの先端から当該パッドを取り外して、前記複数の突き上げピンの先端を変更することを特徴とする請求項1に記載のプロキシミティ露光装置。
【請求項3】
前記複数の突き上げピンは、第1のマスク及び第1のマスクと縦横いずれかの長さが異なる第2のマスクの、間隔が同じ向かい合う二辺の周辺部を支持する複数の共用突き上げピンと、第1のマスクの残りの向かい合う二辺の周辺部を支持する複数の第1の専用突き上げピンと、第2のマスクの残りの向かい合う二辺の周辺部を支持する複数の第2の専用突き上げピンとを含むことを特徴とする請求項1又は請求項2に記載のプロキシミティ露光装置。
【請求項4】
基板を搭載するチャックと、マスクを保持するマスクホルダと、チャックを移動するステージとを備え、マスクと基板との間に微小なギャップを設けて、マスクのパターンを基板へ転写するプロキシミティ露光装置のマスク搬送方法であって、
チャックに、チャックの内部から上昇する複数の突き上げピンを設け、
各突き上げピンの先端をマスクより柔らかい材質のものに変更し、
マスクをマスク搬送装置によりチャックへ搬入し、
マスクを複数の突き上げピンによりマスク搬送装置から受け取り、
ステージによりチャックを移動して、マスクの位置決めを行い、
マスクを複数の突き上げピンによりマスクホルダに装着した後、
各突き上げピンの先端をチャックの表面と同じ材質のものに変更することを特徴とするプロキシミティ露光装置のマスク搬送方法。
【請求項5】
各突き上げピンの先端を、マスクより柔らかい材料で構成し、
各突き上げピンの先端にチャックの表面と同じ材質のパッドを取り付け、または各突き上げピンの先端から当該パッドを取り外して、各突き上げピンの先端を変更することを特徴とする請求項4に記載のプロキシミティ露光装置のマスク搬送方法。
【請求項6】
チャックに、第1のマスク及び第1のマスクと縦横いずれかの長さが異なる第2のマスクの、間隔が同じ向かい合う二辺の周辺部を支持する複数の共用突き上げピンと、第1のマスクの残りの向かい合う二辺の周辺部を支持する複数の第1の専用突き上げピンと、第2のマスクの残りの向かい合う二辺の周辺部を支持する複数の第2の専用突き上げピンとを設けることを特徴とする請求項4又は請求項5に記載のプロキシミティ露光装置のマスク搬送方法。
【請求項7】
請求項1乃至請求項3のいずれか一項に記載のプロキシミティ露光装置を用いて基板の露光を行うことを特徴とする表示用パネル基板の製造方法。
【請求項8】
請求項4乃至請求項6のいずれか一項に記載のプロキシミティ露光装置のマスク搬送方法を用いてマスクをマスクホルダに装着し、基板の露光を行うことを特徴とする表示用パネル基板の製造方法。
【図1】


【図2】
【図3】
【図4】
【図5】
【図6】
【図7】
【図8】
【図9】
【図10】
【図11】
【図12】
【図13】
【図14】
【図15】
【図16】
【図17】
【図18】
【図19】
【図2】
【図3】
【図4】
【図5】
【図6】
【図7】
【図8】
【図9】
【図10】
【図11】
【図12】
【図13】
【図14】
【図15】
【図16】
【図17】
【図18】
【図19】
【公開番号】特開2010−256437(P2010−256437A)
【公開日】平成22年11月11日(2010.11.11)
【国際特許分類】
【出願番号】特願2009−103657(P2009−103657)
【出願日】平成21年4月22日(2009.4.22)
【出願人】(501387839)株式会社日立ハイテクノロジーズ (4,325)
【Fターム(参考)】
【公開日】平成22年11月11日(2010.11.11)
【国際特許分類】
【出願日】平成21年4月22日(2009.4.22)
【出願人】(501387839)株式会社日立ハイテクノロジーズ (4,325)
【Fターム(参考)】
[ Back to top ]