
プログラム、情報記憶媒体、ゲーム装置及びサーバシステム
【課題】球技ゲーム等において仮想現実感の高い捕球操作を実現できるプログラム、情報記憶媒体、ゲーム装置及びサーバシステム等の提供。
【解決手段】ゲーム装置は、プレーヤの操作情報を取得する操作情報取得部と、取得された操作情報に基づいて、仮想カメラの制御を行う仮想カメラ制御部と、プレイ対象であるボールの移動演算処理を行う移動体演算部と、操作情報に基づき仮想カメラの視線方向が変化する場合に、視線方向が変化する仮想カメラがボールを捕捉する捕捉条件が満たされており、ボールの捕球条件が満たされた場合に、ボールの捕球が成功したと判定する判定部と、オブジェクト空間内において仮想カメラから見える画像を生成する画像生成部を含む。
【解決手段】ゲーム装置は、プレーヤの操作情報を取得する操作情報取得部と、取得された操作情報に基づいて、仮想カメラの制御を行う仮想カメラ制御部と、プレイ対象であるボールの移動演算処理を行う移動体演算部と、操作情報に基づき仮想カメラの視線方向が変化する場合に、視線方向が変化する仮想カメラがボールを捕捉する捕捉条件が満たされており、ボールの捕球条件が満たされた場合に、ボールの捕球が成功したと判定する判定部と、オブジェクト空間内において仮想カメラから見える画像を生成する画像生成部を含む。
【発明の詳細な説明】
【技術分野】
【0001】
本発明は、プログラム、情報記憶媒体、ゲーム装置及びサーバシステム等に関する。
【背景技術】
【0002】
従来より、球技ゲームを仮想的にプレイすることができるゲーム装置が知られている。野球ゲームを例にとれば、守備側のプレーヤ(又はコンピュータ)が投手キャラクタを操作して、ボールを投げる。そして攻撃側のプレーヤ(又はコンピュータ)が打者キャラクタを操作して、投げられたボールを打ち、守備側のプレーヤが野手キャラクタを操作して、打たれたボールを捕球することで、野球ゲームを楽しむ。
【0003】
しかしながら、例えば野球ゲームでは、特にプレーヤが守備側である場合に、守備キャラクタの視点ではなく、バックネット付近やホームベース付近に設定された視点での画像が生成されるゲームが殆どであった。このため、打者が打ったボールを目で追いかけながら捕球してアウトにするというような、現実の野球をプレイしているような仮想現実感を、プレーヤに与えることが難しかった。また、バッターが打ったボールが内野ゴロであっても、外野フライであっても、捕球操作が同じような操作になってしまい、プレーヤの仮想現実感を今ひとつ向上することができなかった。
【0004】
この点、例えば特許文献1には、打球がフライである場合に、野手の後方にカメラ視点が設定されるようにカメラアングルを切り替える従来技術が開示されている。
【0005】
しかしながら、この従来技術では、カメラアングルは、プレーヤの操作に依らずにソフトウェア処理により自動的に切り替わる。またフライの捕球に成功したか否かは、ボールがグランドに落下するタイミングまでに、ボールの落下地点に野手キャラクタが到達できたか否かによって判定している。このため、視線をボールの方に向けてフライを捕球するというような仮想現実感の高い操作感覚を、プレーヤに与えることができなかった。
【先行技術文献】
【特許文献】
【0006】
【特許文献1】特開2001−137554号公報
【発明の概要】
【発明が解決しようとする課題】
【0007】
本発明の幾つかの態様によれば、球技ゲーム等において仮想現実感の高い捕球操作を実現できるプログラム、情報記憶媒体、ゲーム装置及びサーバシステム等を提供できる。
【課題を解決するための手段】
【0008】
本発明の一態様は、プレーヤの操作情報を取得する操作情報取得部と、取得された前記操作情報に基づいて、仮想カメラの制御を行う仮想カメラ制御部と、プレイ対象であるボールの移動演算処理を行う移動体演算部と、前記操作情報に基づき前記仮想カメラの視線方向が変化する場合に、視線方向が変化する前記仮想カメラが前記ボールを捕捉する捕捉条件が満たされており、前記ボールの捕球条件が満たされた場合に、前記ボールの捕球が成功したと判定する判定部と、オブジェクト空間内において前記仮想カメラから見える画像を生成する画像生成部とを含むゲーム装置に関係する。また本発明は、上記各部としてコンピュータを機能させるプログラム、又は該プログラムを記憶したコンピュータ読み取り可能な情報記憶媒体に関係する。
【0009】
本発明の一態様によれば、操作情報に基づき仮想カメラの制御が行われると共に、プレイ対象物であるボールを移動させる移動演算処理が行われる。そして、操作情報に基づく仮想カメラの制御により、仮想カメラの視線方向が変化し、その仮想カメラによりボールが捕捉される捕捉条件が満たされ、ボールの捕球条件が満たされると、ボールの捕球が成功したと判定される。このようにすれば、例えば仮想カメラの視野範囲にボールが入った状態でボールが捕球された場合に、ボールの捕球が成功したと判定できるようになるため、実際にボールを目で追って捕球するというような操作感覚をプレーヤに与えることが可能になる。従って、球技ゲーム等において仮想現実感の高い捕球操作を実現することが可能になる。
【0010】
また本発明の一態様では、前記判定部は、前記仮想カメラ又は前記プレーヤが操作するプレーヤキャラクタに追従するヒットボリュームを設定し、設定された前記ヒットボリュームに前記ボールがヒットしたと判定された場合に、前記ボールの前記捕捉条件及び前記捕球条件が満たされたと判定してもよい。
【0011】
このようにすれば、仮想カメラ又はプレーヤキャラクタに追従するヒットボリュームを設定し、そのヒットボリュームにボールがヒットしたかどうかを判断することで、捕捉条件及び捕球条件が満たされたかどうかを判定できるようになる。従って、簡素な判定処理で捕捉条件及び捕球条件を判定することが可能になる。
【0012】
また本発明の一態様では、前記判定部は、前記ヒットボリュームの形状、ヒット有効範囲、位置及び方向の少なくとも1つを可変に制御してもよい。
【0013】
このようにすれば、ヒットボリュームの形状、ヒット有効範囲、位置及び方向の少なくとも1つを可変に制御して、ボールの捕捉条件や捕球条件などを判定できるようになる。
【0014】
また本発明の一態様では、前記判定部は、前記ボールの軌道に応じて、前記ヒットボリュームの形状、ヒット有効範囲、位置及び方向の少なくとも1つを変化させてもよい。
【0015】
このようにすれば、ヒットボリュームの形状、ヒット有効範囲、位置及び方向の少なくとも1つを、ボールの軌道に応じて変化させて、適正な判定基準で捕捉条件や捕球条件などを判定できるようになる。
【0016】
また本発明の一態様では、前記判定部は、前記プレーヤが指示した方向に応じて、前記ヒットボリュームを変形させる処理又は前記ヒット有効範囲を変化させる処理を行ってもよい。
【0017】
このようにすれば、プレーヤが指示した方向にヒットボリュームを引き伸ばす変形処理やヒット有効範囲の変化処理などを行うことで、例えばファインプレイなどの捕球処理を実現することが可能になる。
【0018】
また本発明の一態様では、前記判定部は、ゲーム条件の設定に応じて、前記ヒットボリュームの形状、ヒット有効範囲、位置及び方向の少なくとも1つを変化させてもよい。
【0019】
このようにすれば、捕捉条件や捕球条件を判定するためのヒットボリュームにゲーム条件を反映させることが可能になる。
【0020】
また本発明の一態様では、前記判定部は、前記仮想カメラの視野範囲に対応して設定された捕捉判定範囲内に前記ボールが入っている場合に、前記仮想カメラが前記ボールを捕捉する前記捕捉条件が満たされていると判定し、前記捕捉条件が満たされた状態で前記ボールの前記捕球条件が満たされた場合に、前記ボールの捕球が成功したと判定してもよい。
【0021】
このようにすれば、仮想カメラの視野範囲に対応して設定された捕捉判定範囲内にボールが入っているかどうかを判断することで、ボールの捕捉条件を判定し、捕捉判定範囲内にボールが入っている状態で捕球条件が満たされた場合に、ボールの捕球が成功したと判定できるようになる。従って、実際にボールを目で追って捕球するというような操作感覚をプレーヤに与えることが可能になる。
【0022】
また本発明の一態様では、前記判定部は、前記捕捉判定範囲を可変に制御してもよい。
【0023】
このようにすれば、捕捉判定範囲を可変に制御して、捕捉条件などを判定できるようになる。
【0024】
また本発明の一態様では、前記判定部は、ゲーム条件の設定に応じて、前記捕捉判定範囲を変化させてもよい。
【0025】
このようにすれば、捕捉条件を判定するための捕捉判定範囲にゲーム条件を反映させることが可能になる。
【0026】
また本発明の一態様では、前記判定部は、前記ボールに追従するボール用ヒットボリュームを設定し、前記ボール用ヒットボリュームを用いて、前記ボールの前記捕球条件が満たされているかを判定してもよい。
【0027】
このようにすれば、ボールに対して設定されたボール用ヒットボリュームを用いて捕球条件等を判定できるようになる。
【0028】
また本発明の一態様では、前記判定部は、前記ボールが第1の軌道で移動する場合には、前記仮想カメラの視線方向範囲が第1の視線方向範囲である場合に、前記捕捉条件が満たされていると判定し、前記ボールが、前記第1の軌道とは異なる第2の軌道で移動する場合には、前記仮想カメラの視線方向範囲が、前記第1の視線方向範囲とは異なる第2の視線方向範囲である場合に、前記捕捉条件が満たされていると判定してもよい。
【0029】
このようにすれば、ボールが、第1の軌道で移動する場合には、仮想カメラの視線方向範囲が、第1の視線方向範囲である場合に、捕捉条件が満たされていると判定し、ボールが、第2の軌道で移動する場合には、仮想カメラの視線方向範囲が、第2の視線方向範囲である場合に、捕捉条件が満たされていると判定できる。従って、ボールの軌道が変化した場合にも、仮想カメラの視線方向範囲を判断して、ボールが仮想カメラに捕捉された状態であるかどうかを判定できるようになる。なお例えば第2の軌道は、第1の軌道よりも高い軌道であり、第2の視線方向範囲は、第1の視線方向範囲よりも高い視線方向の範囲である。或いは、第2の軌道は、第1の軌道とはその軌道の方向(横方向での軌道の方向)が異なる軌道であり、第2の視線方向範囲は、第1の視線方向範囲とは視線の向く方向(横方向での視線の向く方向)が異なる視線方向範囲である。
【0030】
また本発明の一態様では、前記操作情報取得部は、前記操作情報として、プレーヤが入力した第1の操作情報と第2の操作情報を取得し、前記仮想カメラ制御部は、前記第1の操作情報に基づいて、前記仮想カメラの視線方向を制御し、前記第2の操作情報に基づいて、前記仮想カメラの視点位置の移動又はプレーヤキャラクタの移動を制御してもよい。
【0031】
このようにすれば、第1の操作情報に基づいて、仮想カメラの視線方向を制御しながら、第2の操作情報に基づいて、例えば仮想カメラの視線方向の制御とは独立に、仮想カメラの視点位置の移動やプレーヤキャラクタの移動を制御できるようになる。そして、第1の操作情報に基づき仮想カメラの視線方向を変化させながら、捕捉条件や捕球条件を判定できるようになる。
【0032】
また本発明の一態様では、前記操作情報取得部は、モーションセンサからのモーション検出情報を前記第1の操作情報として取得し、方向指示部からの方向指示情報を前記第2の操作情報として取得し、前記仮想カメラ制御部は、前記第1の操作情報である前記モーション検出情報に基づいて、前記仮想カメラの視線方向を制御し、前記第2の操作情報である前記方向指示情報に基づいて、前記仮想カメラの視点位置の移動又はプレーヤキャラクタの移動を制御してもよい。
【0033】
このようにすれば、モーションセンサによるモーション検出情報により、仮想カメラの視線方向を制御し、方向指示部による方向指示情報により、仮想カメラの視点位置の移動を制御できるようになる。そして、モーション検出情報に基づき仮想カメラの視線方向を変化させながら、捕捉条件や捕球条件を判定できるようになる。なお、第1の操作情報が方向指示情報であり、第2の操作情報がモーション検出情報であってもよい。この場合には第1の操作情報である方向指示情報に基づいて、仮想カメラの視線方向が制御され、第2の操作情報であるモーション検出情報に基づいて、仮想カメラの視点位置の移動又はプレーヤキャラクタの移動が制御されることになる。
【0034】
また本発明の一態様では、前記仮想カメラ制御部は、前記操作情報に基づいて第1の座標軸回りで前記仮想カメラの視線方向を変化させる制御を行うと共に、前記第1の座標軸に直交する第2の座標軸回りでは前記仮想カメラの視線方向を固定してもよい。
【0035】
このようにすれば、操作情報に基づき第1の座標軸回りでは仮想カメラの視線方向が変化する一方で、第2の座標軸回りでは仮想カメラの視線方向が固定されるため、プレーヤのゲーム操作の簡素化等を図れる。
【0036】
また本発明の一態様では、前記移動体演算部は、前記ボールの捕球に成功し、所与の送球条件が満たされた場合に、捕球された前記ボールの送球処理を行ってもよい。
【0037】
このようにすれば、ボールの捕球に成功した場合に、捕球したボールを送球ターゲット等に送球することが可能になる。
【0038】
また本発明の一態様では、前記移動体演算部は、前記ボールの捕球に成功し、前記プレーヤが送球指示操作を行った場合に、捕球された前記ボールを送球ターゲットに送球する処理を行ってもよい。
【0039】
このようにすれば、ボールの捕球に成功した場合に、送球指示操作を行うだけで、捕球したボールを送球ターゲットに対して送球することが可能になる。従って、簡素な操作で送球処理を実現できるようになる。
【0040】
また本発明の一態様では、前記移動体演算部は、前記ボールの捕球に成功し、前記プレーヤが前記仮想カメラの視線方向を送球ターゲット側に向ける操作を行った場合に、捕球された前記ボールを前記送球ターゲットに送球する処理を行ってもよい。
【0041】
このようにすれば、ボールの捕球に成功した場合に、仮想カメラの視線方向を送球ターゲット側に向ける操作を行うことで、捕球したボールを送球ターゲットに対して送球することが可能になる。従って、より仮想現実感の高い送球処理を実現できるようになる。
【0042】
また本発明の一態様では、前記操作情報取得部は、モーションセンサからのモーション検出情報を前記操作情報として取得し、前記仮想カメラ制御部は、前記モーション検出情報に基づいて、前記仮想カメラの視線方向を制御し、前記判定部は、前記モーション検出情報に基づき前記仮想カメラの視線方向が変化する場合に、視線方向が変化する前記仮想カメラが前記ボールを捕捉する前記捕捉条件が満たされているかを判定してもよい。
【0043】
このようにすれば、モーションセンサからのモーション検出情報に基づいて、仮想カメラの視線方向を制御し、このようにモーション検出情報に基づきその視線方向が変化する仮想カメラが、ボールの捕捉条件を満たしているかどうかを判定できるようになる。
【0044】
また本発明の一態様では、前記モーションセンサは携帯型ゲーム装置に設けられるセンサであり、前記操作情報取得部は、前記プレーヤが前記携帯型ゲーム装置を動かすことで得られた前記モーション検出情報を、前記モーションセンサから取得し、前記仮想カメラ制御部は、前記携帯型ゲーム装置の動きに応じて前記仮想カメラの視線方向が変化するように前記仮想カメラを制御し、前記判定部は、前記携帯型ゲーム装置の動きに応じて前記仮想カメラの視線方向が変化する場合に、視線方向が変化する前記仮想カメラが前記ボールを捕捉する前記捕捉条件が満たされているかを判定してもよい。
【0045】
このようにすれば、プレーヤが携帯型ゲーム装置を動かすと、その動きがモーションセンサにより検出され、携帯型ゲーム装置の動きに応じて仮想カメラの視線方向が変化するようになる。そして、このように携帯型ゲーム装置の動きに応じて視線方向が変化する仮想カメラが、ボールの捕捉条件を満たしているかを判定できるようになる。
【0046】
また本発明の他の態様は、プレーヤの操作情報を取得する操作情報取得部と、取得された前記操作情報に基づいて、仮想カメラの制御を行う仮想カメラ制御部と、プレイ対象であるボールの移動演算処理を行う移動体演算部と、前記ボールの捕球が成功したかを判定する判定部と、オブジェクト空間内において前記仮想カメラから見える画像を生成する画像生成部を含み、前記判定部は、前記仮想カメラ又は前記プレーヤが操作するプレーヤキャラクタに追従すると共に、前記ボールの軌道に応じて位置、方向及び形状の少なくとも1つが変化するヒットボリュームを設定し、設定された前記ヒットボリュームに前記ボールがヒットした場合に、前記ボールの捕球が成功したと判定するゲーム装置に関係する。また本発明は、上記各部としてコンピュータを機能させるプログラム、又は該プログラムを記憶したコンピュータ読み取り可能な情報記憶媒体に関係する。
【0047】
本発明の他の態様によれば、操作情報に基づき仮想カメラの制御が行われると共に、プレイ対象物であるボールを移動させる移動演算処理が行われる。また、仮想カメラ又はプレーヤキャラクタに追従すると共に、ボールの軌道に応じてその位置、方向及び形状の少なくとも1つが変化するヒットボリュームが設定される。そして、このように設定されたヒットボリュームにボールがヒットした場合に、ボールの捕球が成功したと判定される。従って、例えばボールの軌道の高低等に応じて、その設定が変化するヒットボリュームを用いて、ボールの捕球に成功したかどうかを判定できるため、仮想現実感の高い捕球操作を実現できるようになる。
【0048】
また本発明の他の態様は、プレーヤの操作情報を取得する操作情報取得部と、取得された前記操作情報に基づいて、仮想カメラの制御を行う仮想カメラ制御部と、プレイ対象であるボールの移動演算処理を行う移動体演算部と、前記ボールの捕捉条件が満たされているかを判定する判定部と、オブジェクト空間内において前記仮想カメラから見える画像を生成する画像生成部とを含み、前記操作情報取得部は、モーションセンサからのモーション検出情報を前記操作情報として取得し、前記仮想カメラ制御部は、前記モーション検出情報に基づいて、前記仮想カメラの視線方向を制御し、前記判定部は、前記モーション検出情報に基づき視線方向が変化する前記仮想カメラが前記ボールを捕捉する前記捕捉条件が満たされているかを判定するゲーム装置に関係する。また本発明は、上記各部としてコンピュータを機能させるプログラム、又は該プログラムを記憶したコンピュータ読み取り可能な情報記憶媒体に関係する。
【0049】
本発明の他の態様によれば、モーションセンサからのモーション検出情報に基づいて、仮想カメラの視線方向の制御が行われると共に、プレイ対象物であるボールを移動させる移動演算処理が行われる。従って、モーションセンサからのモーション検出情報に基づいて、仮想カメラの視線方向を変化させ、このようにモーション検出情報に基づきその視線方向が変化する仮想カメラが、ボールの捕捉条件を満たしているかどうかを判定できるため、仮想現実感の高い捕球操作を実現できるようになる。
【0050】
また本発明の他の態様は、プレーヤの操作情報を取得する操作情報取得部と、取得された前記操作情報に基づいて、仮想カメラの制御を行う仮想カメラ制御部と、プレイ対象であるボールの移動演算処理を行う移動体演算部と、前記操作情報に基づき前記仮想カメラの視線方向が変化する場合に、視線方向が変化する前記仮想カメラが前記ボールを捕捉する捕捉条件が満たされており、前記ボールの捕球条件が満たされた場合に、前記ボールの捕球が成功したと判定する判定部と、オブジェクト空間内において前記仮想カメラから見える画像を生成するための画像生成用データを生成する画像生成用データ生成部とを含むサーバシステムに関係する。
【0051】
また本発明の他の態様は、プレーヤの操作情報を取得する操作情報取得部と、取得された前記操作情報に基づいて、仮想カメラの制御を行う仮想カメラ制御部と、プレイ対象であるボールの移動演算処理を行う移動体演算部と、前記ボールの捕球が成功したかを判定する判定部と、オブジェクト空間内において前記仮想カメラから見える画像を生成するための画像生成用データを生成する画像生成用データ生成部とを含み、前記判定部は、前記仮想カメラ又は前記プレーヤが操作するプレーヤキャラクタに追従すると共に、前記ボールの軌道に応じて位置、方向及び形状の少なくとも1つが変化するヒットボリュームを設定し、設定された前記ヒットボリュームに前記ボールがヒットした場合に、前記ボールの捕球が成功したと判定するサーバシステムに関係する。
【0052】
また本発明の他の態様は、プレーヤの操作情報を取得する操作情報取得部と、取得された前記操作情報に基づいて、仮想カメラの制御を行う仮想カメラ制御部と、プレイ対象であるボールの移動演算処理を行う移動体演算部と、前記ボールの捕捉条件が満たされているかを判定する判定部と、オブジェクト空間内において前記仮想カメラから見える画像を生成するための画像生成用データを生成する画像生成用データ生成部とを含み、前記操作情報取得部は、モーションセンサからのモーション検出情報を前記操作情報として取得し、前記仮想カメラ制御部は、前記モーション検出情報に基づいて、前記仮想カメラの視線方向を制御し、前記判定部は、前記モーション検出情報に基づき視線方向が変化する前記仮想カメラが前記ボールを捕捉する前記捕捉条件が満たされているかを判定するサーバシステムに関係する。
【図面の簡単な説明】
【0053】
【図1】本実施形態のゲーム装置の構成例。
【図2】図2(A)、図2(B)は本実施形態が適用される携帯型ゲーム装置の構成例。
【図3】図3(A)、図3(B)は本実施形態の判定手法の説明図。
【図4】図4(A)、図4(B)は本実施形態の判定手法の説明図。
【図5】図5(A)、図5(B)は内野ゴロ時に本実施形態により生成される画像の例。
【図6】内野ゴロの捕球後の送球時に本実施形態により生成される画像の例。
【図7】図7(A)、図7(B)は外野フライ時に本実施形態により生成される画像の例。
【図8】図8(A)〜図8(C)はヒットボリュームを用いた第1の判定手法の説明図。
【図9】図9(A)、図9(B)はヒットボリュームを用いた第1の判定手法の説明図。
【図10】図10(A)、図10(B)はヒットボリュームの設定手法の変形例の説明図。
【図11】図11(A)、図11(B)はプレーヤの指示方向に応じてヒットボリュームを変形させる手法の説明図。
【図12】図12(A)、図12(B)はゲームの難易度の設定に応じてヒットボリュームの形状等を変化させる手法の説明図。
【図13】図13(A)〜図13(C)は仮想カメラの視野範囲に対応して設定された補足判定範囲を用いた第2の判定手法の説明図。
【図14】図14(A)、図14(B)はゲームの難易度の設定に応じて補足判定範囲を変化させる手法の説明図。
【図15】図15(A)〜図15(C)は仮想カメラの視点位置の移動の制御手法の説明図。
【図16】図16(A)〜図16(C)はモーションセンサを用いた仮想カメラの視線方向の制御手法の説明図。
【図17】図17(A)、図17(B)は捕球したボールの送球処理の説明図。
【図18】図18(A)〜図18(C)は野球ゲーム以外の球技ゲームへの本実施形態の手法の適用例。
【図19】本実施形態の詳細な処理を説明するフローチャート。
【図20】本実施形態の詳細な処理を説明するフローチャート。
【図21】本実施形態のサーバシステムの構成例。
【発明を実施するための形態】
【0054】
以下、本実施形態について説明する。なお、以下に説明する本実施形態は、特許請求の範囲に記載された本発明の内容を不当に限定するものではない。また本実施形態で説明される構成の全てが、本発明の必須構成要件であるとは限らない。
【0055】
1.構成
図1に本実施形態のゲーム装置(画像生成システム、ゲームシステム)のブロック図の例を示す。なお、本実施形態のゲーム装置の構成は図1に限定されず、その構成要素(各部)の一部を省略したり、他の構成要素を追加するなどの種々の変形実施が可能である。
【0056】
操作部160は、プレーヤが操作データを入力するためのものであり、その機能は、方向指示キー、操作ボタン、アナログスティック、レバー、各種センサ(角速度センサ、加速度センサ等)、マイク、或いはタッチパネル型ディスプレイなどにより実現できる。
【0057】
操作部160のモーションセンサは、ゲームコントローラや携帯型ゲーム装置などの機器の動きを検出するものであり、このような機器の動きを検出することでプレーヤの操作モーションなどを検出できる。このモーションセンサは、例えば加速度センサ、角速度センサ(ジャイロセンサ)や、カメラの画像センサなどの種々のセンサにより実現できる。加速度センサは直交3軸方向の各加速度情報を検出する。具体的には互いに直交する座標軸をX軸、Y軸、Z軸とした場合に、X軸方向に沿った第1の加速度情報、Y軸方向に沿った第2の加速度情報、Z軸方向に沿った第3の加速度情報を検出して、センサ検出情報として出力する。この加速度センサは、例えばMEMS構造のピエゾ抵抗型や静電容量型のセンサなどにより実現できる。また角速度センサは、所定の回転軸回りの角速度情報を検出するセンサである。具体的に角速度センサは、直交3軸での角速度情報を検出するセンサであり、X軸、Y軸、Z軸回りでの角速度情報を検出する。例えばX軸回りの回転角度をα、Y軸回りの回転角度をβ、Z軸回りの回転角度をγとすると、これらのα、β、γについての角速度を検出して、センサ検出情報として出力する。この角速度センサは例えばMEMS構造の多軸角速度センシングジャイロスコープなどにより実現できる。モーションセンサとして画像センサ(CCD、CMOSセンサ等)を用いた場合には、画像センサにより撮像された撮像画像の画素の動き情報などにより、ゲームコントローラや携帯型ゲーム装置などの機器の動きを検出すればよい。
【0058】
なおモーションセンサは、ゲーム装置に内蔵されるものであってもよいし、ゲーム装置のオプションの外付け部品として用意されるものであってもよい。
【0059】
記憶部170は、処理部100や通信部196などのワーク領域となるもので、その機能はRAM(DRAM、VRAM)などにより実現できる。そしてゲームプログラムや、ゲームプログラムの実行に必要なゲームデータは、この記憶部170に保持される。
【0060】
情報記憶媒体180(コンピュータにより読み取り可能な媒体)は、プログラムやデータなどを格納するものであり、その機能は、光ディスク(DVD、CD等)、HDD(ハードディスクドライブ)、或いはメモリ(ROM等)などにより実現できる。処理部100は、情報記憶媒体180に格納されるプログラム(データ)に基づいて本実施形態の種々の処理を行う。即ち情報記憶媒体180には、本実施形態の各部としてコンピュータ(操作部、処理部、記憶部、出力部を備える装置)を機能させるためのプログラム(各部の処理をコンピュータに実行させるためのプログラム)が記憶される。
【0061】
表示部190は、本実施形態により生成された画像を出力するものであり、その機能は、LCD、有機ELディスプレイ、CRT、タッチパネル型ディスプレイ、或いはHMD(ヘッドマウントディスプレイ)などにより実現できる。音出力部192は、本実施形態により生成された音を出力するものであり、その機能は、スピーカ、或いはヘッドフォンなどにより実現できる。
【0062】
補助記憶装置194(補助メモリ、2次メモリ)は、記憶部170の容量を補うために使用される記憶装置であり、SDメモリーカード、マルチメディアカードなどのメモリーカードなどにより実現できる。
【0063】
通信部196は、有線や無線のネットワークを介して外部(例えば他のゲーム装置、サーバ、ホスト装置)との間で通信を行うものであり、その機能は、通信用ASIC又は通信用プロセッサなどのハードウェアや、通信用ファームウェアにより実現できる。
【0064】
なお本実施形態の各部としてコンピュータを機能させるためのプログラム(データ)は、サーバ(ホスト装置)が有する情報記憶媒体からネットワーク及び通信部196を介して情報記憶媒体180(あるいは記憶部170、補助記憶装置194)に配信してもよい。このようなサーバ(ホスト装置)による情報記憶媒体の使用も本発明の範囲内に含めることができる。
【0065】
処理部100(プロセッサ)は、操作部160からの操作データやプログラムなどに基づいて、ゲーム処理、画像生成処理、或いは音生成処理などを行う。処理部100は記憶部170をワーク領域として各種処理を行う。この処理部100の機能は、各種プロセッサ(CPU、GPU等)、ASIC(ゲートアレイ等)などのハードウェアや、プログラムにより実現できる。
【0066】
処理部100は、操作情報取得部102、ゲーム演算部104、オブジェクト空間設定部106、仮想カメラ制御部108、移動体演算部110、判定部112、難易度設定部114、画像生成部120、音生成部130を含む。なおこれらの一部の構成要素を省略したり、他の構成要素を追加するなどの種々の変形実施が可能である。
【0067】
操作情報取得部102は、プレーヤの操作情報を取得する。例えばプレーヤが操作部160を用いて各種操作を行うと、その操作情報を取得する。またプレーヤが、操作部であるゲームコントローラを動かすと、ゲームコントローラに内蔵されたモーションセンサからのモーション検出情報を、操作情報として取得する。或いは、携帯型ゲーム装置にモーションセンサが内蔵されている場合には、プレーヤが携帯型ゲーム装置を動かすと、携帯型ゲーム装置に内蔵されたモーションセンサが、その動きを検出する。そして操作情報取得部102は、モーションセンサからのモーション検出情報を、操作情報として取得する。取得された操作情報は記憶部170に一時的に保存される。
【0068】
ゲーム演算部104はゲーム演算処理を行う。ここでゲーム演算としては、ゲーム開始条件が満たされた場合にゲームを開始する処理、ゲームを進行させる処理、ゲーム結果を演算する処理、或いはゲーム終了条件が満たされた場合にゲームを終了する処理などがある。
【0069】
オブジェクト空間設定部106は、複数のオブジェクトが配置されるオブジェクト空間の設定処理を行う。例えば、キャラクタ(人、動物、ロボット、車、船舶、飛行機等)、ボール、マップ(地形)、建物、コース(道路)、樹木、壁などの表示物を表す各種オブジェクト(ポリゴン、自由曲面又はサブディビジョンサーフェイスなどのプリミティブ面で構成されるオブジェクト)をオブジェクト空間に配置設定する処理を行う。即ちワールド座標系でのオブジェクトの位置や回転角度(向き、方向と同義)を決定し、その位置(X、Y、Z)にその回転角度(X、Y、Z軸回りでの回転角度)でオブジェクトを配置する。具体的には、記憶部170のオブジェクトデータ記憶部172には、オブジェクト(パーツオブジェクト)の位置、回転角度、移動速度、移動方向等のデータであるオブジェクトデータがオブジェクト番号に対応づけて記憶される。オブジェクト空間設定部106は、例えば各フレーム毎にこのオブジェクトデータを更新する処理などを行う。
【0070】
仮想カメラ制御部108は、オブジェクト空間内の所与(任意)の視点から見える画像を生成するための仮想カメラ(視点、基準仮想カメラ)の制御処理を行う。具体的には、仮想カメラの位置(X、Y、Z)又は回転角度(X、Y、Z軸回りでの回転角度)を制御する処理(視点位置、視線方向あるいは画角を制御する処理)を行う。
【0071】
移動体演算部110は、キャラクタやボール等の移動体を移動させるための演算を行う。また移動体(移動体オブジェクト)を動作させるための演算も行う。即ち操作部160によりプレーヤが入力した操作情報や、プログラム(移動・動作アルゴリズム)や、各種データ(モーションデータ)などに基づいて、移動体(オブジェクト、モデルオブジェクト)をオブジェクト空間内で移動させたり、移動体を動作(モーション、アニメーション)させる処理を行う。具体的には、移動体の移動情報(位置、回転角度、速度、或いは加速度)や動作情報(パーツオブジェクトの位置、或いは回転角度)を、1フレーム(1/60秒)毎に順次求めるシミュレーション処理を行う。なおフレームは、移動体の移動・動作処理(シミュレーション処理)や画像生成処理を行う時間の単位である。
【0072】
判定部112は、各種の判定処理を行う。例えばボールの捕捉条件が満たされたかどうかを判定する処理や、ボールの捕球が成功したかを判定する処理などを行う。判定部112の詳細は後述する。
【0073】
難易度設定部114は、ゲームの難易度(ハンディ)の設定処理を行う。例えば初級レベル、中級レベル、上級レベルなどの難易度を設定する。難易度の設定は、オプション画面などを用いてプレーヤが入力した情報に基づいて行ってもよいし、得点やゲーム場面などのゲーム状況等に応じてコンピュータが自動的に設定してもよい。
【0074】
画像生成部120は、処理部100で行われる種々の処理(ゲーム処理、シミュレーション処理)の結果に基づいて描画処理を行い、これにより画像を生成し、表示部190に出力する。具体的には、座標変換(ワールド座標変換、カメラ座標変換)、クリッピング処理、透視変換、或いは光源処理等のジオメトリ処理が行われ、その処理結果に基づいて、描画データ(プリミティブ面の頂点の位置座標、テクスチャ座標、色データ、法線ベクトル或いはα値等)が作成される。そして、この描画データ(プリミティブ面データ)に基づいて、透視変換後(ジオメトリ処理後)のオブジェクト(1又は複数プリミティブ面)を、描画バッファ178(フレームバッファ、ワークバッファ等のピクセル単位で画像情報を記憶できるバッファ)に描画する。これにより、オブジェクト空間内において仮想カメラ(所与の視点)から見える画像が生成される。なお、描画処理は頂点シェーダ処理やピクセルシェーダ処理等により実現することができる。
【0075】
なお、画像生成部120が、いわゆる立体視用の画像を生成するようにしてもよい。この場合には、基準となる仮想カメラの位置とカメラ間距離を用いて、左眼用仮想カメラ(第1の視点用仮想カメラ)と右眼用仮想カメラ(第2の視点用仮想カメラ)を配置設定する。そして画像生成部120が、オブジェクト空間内において左眼用仮想カメラから見える左眼用画像(第1視点画像)と、オブジェクト空間内において右眼用仮想カメラから見える右眼用画像(第2視点画像)を生成する。そしてこれらの左眼用画像、右眼用画像を用いて、眼分離眼鏡方式や、レンチキュラなどを用いた裸眼方式などにより、立体視を実現すればよい。
【0076】
音生成部130は、処理部100で行われる種々の処理の結果に基づいて音処理を行い、BGM、効果音、又は音声などのゲーム音を生成し、音出力部192に出力する。
【0077】
そして本実施形態では、操作情報取得部102が、プレーヤの操作情報を取得する。例えばプレーヤが操作部160を操作することで得られる操作情報を取得する。またモーションセンサからのモーション検出情報(加速度情報、角速度情報等)を操作情報として取得する。
【0078】
そして仮想カメラ制御部108は、取得された操作情報に基づいて、仮想カメラの制御を行う。例えば仮想カメラの視線方向や視点位置の制御を行う。具体的には、プレーヤの操作情報にしたがって、仮想カメラの視線方向を変化させたり、仮想カメラの視点位置を移動させる制御を行う。この操作情報に基づく仮想カメラの視線方向や視点位置の制御は、操作情報にしたがってプレーヤキャラクタを移動させ、そのプレーヤキャラクタの移動等にしたがって仮想カメラの視線方向や視点位置を制御する場合を含む。
【0079】
なおプレーヤキャラクタは、その全部又は一部の部位がゲーム画像に実際に表示されるキャラクタであってもよいし、ゲーム画像に表示されない仮想的なキャラクタであってもよい。
【0080】
移動体演算部110は、プレイ対象であるボールの移動演算処理を行う。例えばボールが、バットやキャラクタの部位などの被ヒット体でヒットされた場合に、そのボールの軌道(移動軌道)を、所与のアルゴリズムやテーブルデータなどに基づき求める演算処理を行う。
【0081】
判定部112は、ボール(広義には移動体)の捕球(広義にはキャッチ)が成功したかについての判定処理を行う。例えば操作情報に基づき仮想カメラの視線方向が変化する場合に、視線方向が変化する仮想カメラによるボールの捕捉条件が満たされており、ボールの捕球条件が満たされた場合に、ボールの捕球が成功したと判定する。例えばボールの捕捉条件及び捕球条件が満たされた場合(捕捉条件を満たしながらボールが捕球された場合)に、ボールの捕球が成功したと判定する。そして画像生成部120は、オブジェクト空間内において仮想カメラから見える画像を生成する。例えば操作情報に基づき視線方向が変化する仮想カメラの視点で画像を生成し、捕球が成功した場合には、その捕球の成功を表す画像を生成して表示部190に表示する。
【0082】
ここで捕捉条件は、操作情報に応じて視線方向が変化する仮想カメラがボールを捕捉しているという条件であり、仮想カメラによりボールが捕捉状態にあると判定された場合(捕捉判定範囲にボールが存在すると判定された場合)に満たされる条件である。また捕球条件は、プレーヤキャラクタによりボールが実際に捕球されたと判定された場合に満たされる条件であり、例えばグラブ、足や手などの部位、或いはラケットなどの被捕球体(被捕球体に対応するヒットボリューム)にボールが接触した場合に、捕球条件が満たされたと判定できる。
【0083】
更に具体的には、判定部112は、仮想カメラ(又はプレーヤが操作するプレーヤキャラクタ)に追従するヒットボリューム(ヒットボックス、ヒットエリア、ヒット範囲)を設定する。そして設定されたヒットボリュームにボールがヒット(接触)したと判定された場合に、ボールの捕捉条件及び捕球条件が満たされたと判定する。例えば操作情報に基づき仮想カメラの視線方向や視点位置が変化すると、その視線方向や視線位置の変化に追従するようにヒットボリュームの位置、方向又は形状等が設定され、そのヒットボリュームにボールがヒットしたと判定されると、ボールの捕捉条件及び捕球条件が満たされたと判定する。
【0084】
例えば判定部112は、ヒットボリュームの形状、ヒット有効範囲、位置及び方向(向いている方向)の少なくとも1つを可変に制御する。具体的には、ボールの軌道に応じて、ヒットボリュームの形状、ヒット有効範囲、位置及び方向の少なくとも1つを変化させる。例えばボールの軌道が低い軌道なのか高い軌道なのかに応じて、ヒットボリュームの形状、ヒット有効範囲、位置又は方向などを変化させる。なおヒット有効範囲は、ヒットチェックが有効となる範囲であり、同じ形状のヒットボリュームであっても、ヒット有効範囲の設定を異ならせることで、ボールとのヒットチェックが行われる範囲を可変に制御できるようになる。
【0085】
また判定部112は、ボールの捕球時(捕球タイミング、捕球期間)にプレーヤが指示した方向に応じて、ヒットボリュームを変形させる処理又はヒット有効範囲を変化させる処理を行う。例えばプレーヤの指示方向にヒットボリュームを引き伸ばす変形処理やヒット有効範囲の変化処理などを行う。或いは、判定部112は、ゲーム条件の設定に応じて、ヒットボリュームの形状、ヒット有効範囲、位置及び方向の少なくとも1つを変化させる。具体的には、難易度設定部114によりゲームの難易度が設定された場合に、ゲームの難易度の設定に応じて、ヒットボリュームの形状、ヒット有効範囲、位置及び方向の少なくとも1つを変化させる。例えばゲーム難易度が第1の難易度(例えば初級)である場合と第2の難易度(例えば上級)である場合とで、ヒットボリュームの形状、ヒット有効範囲、位置又は方向等を異ならせる。なお、ヒットボリュームの形状等を変化させるゲーム条件は、ゲームの難易度には限定されず、例えばプレーヤキャラクタ(プレーヤ)の所持アイテム数、経験値又は体力値などのステータス情報であってもよい。
【0086】
また判定部112は、仮想カメラの視野範囲に対応して設定された捕捉判定範囲内にボールが入っている場合に、仮想カメラがボールを捕捉する捕捉条件が満たされていると判定し、捕捉条件が満たされた状態でボールの捕球条件が満たされた場合に、ボールの捕球が成功したと判定してもよい。例えば、捕球タイミングの前の所与の期間において、仮想カメラの視野範囲に対応する捕捉判定範囲内にボールが入っており、仮想カメラによるボールの捕捉条件が満たされた状態で、捕球条件が満たされると、捕球に成功したと判定する。この場合の捕球条件は、例えばプレーヤキャラクタやその部位に設定されたヒットボリュームを用いたヒットチェック処理により実現できる。また視野範囲や捕捉判定範囲は、エリアのような範囲であってもよいし、視線方向や画角により特定される角度範囲であってもよい。また捕捉判定範囲は、視野範囲そのものであってもよいし、視野範囲に内包される範囲であってもよい。また視野範囲は、仮想カメラの視線方向と画角により規定される厳密な視野範囲よりも若干広い範囲であってもよい。
【0087】
また判定部112は、捕捉判定範囲を可変に制御してもよい。具体的には、ゲームの難易度などのゲーム条件の設定に応じて、捕捉判定範囲を変化させる。例えばゲーム難易度が第1の難易度(例えば初級)である場合と第2の難易度(例えば上級)である場合とで、捕捉判定範囲の大きさ、形状又は位置等を異ならせる。
【0088】
また判定部112は、ボールに追従するボール用ヒットボリュームを設定し、ボール用ヒットボリュームを用いて、ボールの捕球条件が満たされているかを判定してもよい。例えばボールを内包するような比較的大きなサイズのボール用ヒットボリュームを設定する。そしてボール用ヒットボリュームとプレーヤキャラクタや仮想カメラの位置とのヒットチェックを行い、ヒットしたと判定された場合には、捕球条件が満たされたと判定する。なおボール用ヒットボリュームを用いて捕捉条件を判断することも可能である。またボールの軌道の高低や、軌道の方向(横方向での軌道の方向)や、ゲーム難易度などのゲーム条件に応じて、ボール用ヒットボリュームの形状又はヒット有効範囲等を変化させてもよい。
【0089】
また判定部112は、ボールが第1の軌道で移動する場合には、仮想カメラの視線方向範囲(視線方向を含む範囲)が第1の視線方向範囲である場合に、捕捉条件が満たされていると判定する。一方、ボールが第1の軌道とは異なる第2の軌道(第1の軌道よりも高い軌道。第1の軌道とは方向が異なる軌道)で移動する場合には、仮想カメラの視線方向範囲が、第1の視線方向範囲とは異なる第2の視線方向範囲(第1の視線方向範囲よりも高い視線方向範囲。第1の視線方向範囲とは視線が向く方向が異なる視線方向範囲)である場合に、捕捉条件が満たされていると判定する。例えば、ボールが低い軌道で移動する場合には、仮想カメラの視線方向が低い場所を見る視線方向である場合に捕捉条件が満たされたと判定する。一方、ボールが高い軌道で移動する場合には、仮想カメラの視線方向が高い場所を見る視線方向である場合に捕捉条件が満たされたと判定する。或いはボールが左方向の軌道で移動する場合には、仮想カメラの視線方向が左方向を見る視線方向である場合に捕捉条件が満たされたと判定する。一方、ボールが右方向の軌道で移動する場合には、仮想カメラの視線方向が右方向を見る視線方向である場合に捕捉条件が満たされたと判定する。
【0090】
また操作情報取得部102は、操作情報として、プレーヤが入力した第1の操作情報と第2の操作情報を取得してもよい。例えばモーションセンサからのモーション検出情報を第1の操作情報として取得し、操作部160の方向指示部(方向指示キー、アナログティック)からの方向指示情報を第2の操作情報として取得する。そして仮想カメラ制御部108は、第1の操作情報に基づいて、仮想カメラの視線方向を制御し、第2の操作情報に基づいて、仮想カメラの視点位置の移動又はプレーヤキャラクタの移動を制御する。例えば第1の操作情報であるモーション検出情報に基づいて、仮想カメラの視線方向を制御し、第2の操作情報である方向指示情報に基づいて、仮想カメラの視点位置の移動又はプレーヤキャラクタの移動を制御する。この場合の第1の操作情報に基づく仮想カメラの視線方向の制御は、第1の操作情報に基づきプレーヤキャラクタの向く方向(視線方向)を制御し、プレーヤキャラクタの向く方向に追従するように仮想カメラの視線方向を制御する場合を含む。また第2の操作情報に基づく仮想カメラの視点位置の移動の制御は、第2の操作情報に基づいてプレーヤキャラクタの移動を制御し、プレーヤキャラクタの移動に追従するように仮想カメラの視点位置の移動を制御する場合を含む。また、逆に、第1の操作情報が方向指示情報であり、第2の操作情報がモーション検出情報であってもよい。この場合には、方向指示情報に基づいて、仮想カメラの視線方向が制御され、モーション検出情報に基づいて、仮想カメラの視点位置の移動又はプレーヤキャラクタの移動が制御されることになる。
【0091】
また仮想カメラ制御部108は、操作情報に基づいて第1の座標軸回りで仮想カメラの視線方向を変化させる制御を行うと共に、第1の座標軸に直交する第2の座標軸回りでは仮想カメラの視線方向を固定してもよい。このようにすれば、全ての座標軸回りでの視線方向の変化を許容する手法等に比べて、プレーヤのゲーム操作を簡素化できる。なお、第1の座標軸は、例えば水平方向に沿った軸であるX軸であり、第2の座標軸は、例えば鉛直方向に沿った軸であるY軸である。
【0092】
また移動体演算部110は、ボール(移動体)の捕球(キャッチ)に成功し、所与の送球条件(広義には送り条件)が満たされた場合に、捕球されたボールの送球処理を行う。例えばプレーヤの操作情報に基づいて送球条件が満たされたか否かを判断し、満たされた場合に、操作情報により特定される方向にボールを送球する処理を行う。
【0093】
例えば移動体演算部110は、ボールの捕球に成功し、プレーヤが操作部160等を用いた送球指示操作を行った場合に、捕球されたボールを送球ターゲットに送球する処理を行う。ここで、送球指示操作は、例えば送球指示に対応する操作ボタン等の操作部材を操作することなどで実現される。また送球ターゲットは、例えば野球ゲームでは、送球を受ける野手(塁)などであり、サッカーゲームやアメリカンフットボールなどでは、送球のパスを受ける選手や送球のシュートが打ち込まれるゴールなどである。またテニスゲームでは、ラケットにより打ち返されて送球されたボールが飛んで行く場所などである。
【0094】
また移動体演算部110は、ボールの捕球に成功し、プレーヤが仮想カメラの視線方向を送球ターゲット側に向ける操作を行った場合に、捕球されたボールを送球ターゲットに送球する処理を行ってもよい。例えば捕球に成功したプレーヤが、モーションセンサを内蔵するゲームコントローラや携帯型ゲーム装置を、左側に位置する送球ターゲット側に向ける操作を行った場合に、左側の送球ターゲットにボールを送球する処理を行う。一方、ゲームコントローラや携帯型ゲーム装置を、右側に位置する送球ターゲット側に向ける操作を行った場合に、右側の送球ターゲットにボールを送球する処理を行う。
【0095】
また操作情報取得部102が、モーションセンサからのモーション検出情報を操作情報として取得した場合には、仮想カメラ制御部108は、モーション検出情報に基づいて、仮想カメラ(プレーヤキャラクタ)の視線方向を制御する。そして判定部112は、モーション検出情報に基づき仮想カメラの視線方向が変化する場合に、視線方向が変化する仮想カメラがボールを捕捉する捕捉条件が満たされているかを判定する。具体的には、モーションセンサは携帯型ゲーム装置に設けられるセンサであり、操作情報取得部102は、プレーヤが携帯型ゲーム装置を動かすことで得られたモーション検出情報を、モーションセンサから取得する。そして仮想カメラ制御部108は、携帯型ゲーム装置の動きに応じて仮想カメラの視線方向が変化するように仮想カメラを制御する。例えばプレーヤが携帯型ゲーム装置を、水平方向に沿った軸であるX軸回りでロールさせる操作を行った場合には、仮想カメラの視線方向を上下方向に変化させる。また携帯型ゲーム装置を、鉛直方向に沿った軸であるY軸回りでロールさせる操作を行った場合には、仮想カメラの視線方向を左右方向に変化させる。そして判定部112は、携帯型ゲーム装置の動きに応じて仮想カメラの視線方向が変化する場合に、視線方向が変化する仮想カメラがボールを捕捉する捕捉条件が満たされているかを判定する。
【0096】
なお判定部112は、仮想カメラ又はプレーヤキャラクタに追従すると共に、ボールの軌道に応じて位置、方向及び形状の少なくとも1つが変化するヒットボリュームを設定し、設定されたヒットボリュームにボールがヒットした場合に、ボールの捕球が成功したと判定してもよい。また操作情報取得部102がモーションセンサからのモーション検出情報を操作情報として取得し、仮想カメラ制御部108が、モーション検出情報に基づいて仮想カメラの視線方向を制御したとする。この場合に、判定部112は、モーション検出情報に基づき視線方向が変化する仮想カメラがボールを捕捉する捕捉条件が満たされているかを判定してもよい。
【0097】
なお本実施形態の手法はサーバシステムにより実現してもよい。図21にサーバシステムにより実現する場合の構成例を示す。
【0098】
サーバシステム500は、端末装置TM1〜TMnとネットワーク510を介して通信接続される。例えばサーバシステム500はホストであり、端末装置TM1〜TMnはクライアントである。サーバシステム500は例えば1又は複数のサーバ(認証サーバ、ゲームサーバ、通信サーバ、課金サーバ等)により実現できる。ネットワーク510(配信網、通信回線)は、例えばインターネットや無線LAN等を利用した通信路であり、直接接続のための専用線(専用ケーブル)やイーサネット(登録商標)等によるLANの他、電話通信網やケーブル網や無線LAN等の通信網を含むことができる。また通信方法については有線/無線を問わない。
【0099】
端末装置TM1〜TMnは、例えば携帯型ゲーム装置、据え置き型の家庭用ゲーム装置、或いは業務用ゲーム装置等により実現される。携帯型ゲーム装置は専用のゲーム装置であってもよいし、携帯電話機や携帯型情報端末などのゲームプログラムの実行が可能な汎用の装置であってもよい。
【0100】
サーバシステム500は、処理部600、記憶部670、情報記憶媒体680、通信部696を含む。処理部600は、操作情報取得部602、ゲーム演算部604、オブジェクト空間設定部606、仮想カメラ制御部608、移動体演算部610、判定部612、難易度設定部614、画像生成用データ生成部620、音生成用データ生成部630を含む。なおこれらの各部(各ブロック)の機能、動作等は、図1の各部(各ブロック)と同様である。
【0101】
例えばサーバシステム500の操作情報取得部602は、プレーヤの操作情報を取得し、仮想カメラ制御部608は、取得された操作情報に基づいて、仮想カメラの制御を行う。また移動体演算部610は、プレイ対象であるボールの移動演算処理を行う。
【0102】
そして本実施形態では判定部612は、操作情報に基づき仮想カメラの視線方向が変化する場合に、視線方向が変化する仮想カメラがボールを捕捉する捕捉条件が満たされており、ボールの捕球条件が満たされた場合に、ボールの捕球が成功したと判定する。そして画像生成用データ生成部620は、オブジェクト空間内において仮想カメラから見える画像を生成するための画像生成用データを生成する。
【0103】
また本実施形態では判定部612は、仮想カメラ又はプレーヤが操作するプレーヤキャラクタに追従すると共に、ボールの軌道に応じて位置、方向及び形状の少なくとも1つが変化するヒットボリュームを設定し、設定されたヒットボリュームにボールがヒットした場合に、ボールの捕球が成功したと判定してもよい。
【0104】
また操作情報取得部602は、モーションセンサからのモーション検出情報を操作情報として取得し、仮想カメラ制御部608は、モーション検出情報に基づいて、仮想カメラの視線方向を制御する。そして判定部612は、モーション検出情報に基づき視線方向が変化する仮想カメラがボールを捕捉する捕捉条件が満たされているかを判定してもよい。
【0105】
なお、画像を生成するための画像生成用データとは、本実施形態の手法により生成された画像をTM1〜TMnの各端末装置において表示するためのデータであり、画像データそのものであってもよいし、各端末装置が画像を生成するために使用する各種データ(オブジェクトデータ、制御結果データ、判定結果データ又は表示画面の設定データ等)であってもよい。例えばサーバシステム500が、各端末装置の操作部からの操作情報を取得し、各種の制御処理や各種の判定処理を行い、画像を生成して、TM1〜TMnの各端末装置に配信(ストリーム配信等)する場合には、上述の画像生成用データは画像データそのものになる。一方、サーバシステム500が、各端末装置の操作部からの操作情報を取得し、各種の制御処理や各種の判定処理を行い、その制御結果や判定結果に基づいてTM1〜TMnの各端末装置が画像を生成する場合には、上述の画像生成用データは、制御結果データや判定結果データやオブジェクトデータなどになる。音生成用データ生成部630が生成する音生成用データについても同様である。
【0106】
なお操作情報取得部602、ゲーム演算部604、オブジェクト空間設定部606、仮想カメラ制御部608、移動体演算部610、判定部612、難易度設定部614、画像生成用データ生成部620、記憶部670、情報記憶媒体680、通信部696等の詳細な機能、動作は図1で上述に説明したものと同様であるため、詳細な説明は省略する。
【0107】
2.本実施形態の手法
次に本実施形態の手法について具体的に説明する。なお、以下では本実施形態の手法を野球ゲームに適用した場合について主に説明するが、本実施形態の手法が適用されるゲームは野球ゲームに限定されず、例えばサッカー、アメリカンフットボール、バレーボール、テニス、バトミントンなどの種々の球技ゲーム等に適用できる。
【0108】
2.1 判定手法
前述のように従来の野球ゲームでは、プレーヤが守備側である場合に、バックネット付近やホームベース付近に設定された視点での画像が生成されるゲームが殆どであった。このため、打者が打ったボールを目で追いかけながら捕球してアウトにするというような操作感覚を、プレーヤに与えることが難しいという課題があった。
【0109】
このような課題を解決するために本実施形態では以下に説明する手法を採用する。例えば本実施形態では、プレーヤが守備側である場合(守備モード時)に、仮想カメラの視点を、バックネット付近やホームベース付近ではなく、守備を行う野手の視点位置に設定する。また仮想カメラの視線方向については、実際の野球のように、バッターが居るホームベースを向く方向に設定する。そしてプレーヤは、守備を行う野手をプレーヤキャラクタとして操作する。
【0110】
そして、ボールがヒットされて外野フライが飛んで来たとする。この時、プレーヤが適切な操作を行わないと、高めのフライのボールは仮想カメラの視野範囲外になり、視野範囲からボールが消えてしまう。
【0111】
このような状況において、本実施形態では、プレーヤは、仮想カメラの視線方向等を変化させる操作を行うことで、ボールが視野範囲内に入るようにする。即ちボールが仮想カメラにより捕捉されるような操作を行って、ボールを目で追いかける操作を行う。そして、このようにボールが視野範囲(捕捉判定範囲)に入った状態で、ボールの落下地点にプレーヤキャラクタが移動してボールを捕球(キャッチ)すれば、捕球に成功したと判定され、外野フライのキャッチでアウトになったと判定される。
【0112】
一方、打者が打ったボールがゴロである場合には、プレーヤが仮想カメラの視線方向等を変化させる操作を行って、下方向に仮想カメラの視線方向を向けてボールを捕捉しないと、ボールをキャッチできないようにする。即ち、仮想カメラによるボールの捕捉条件を満たしつつ、ボールをキャッチした場合に、ボールの捕球に成功したと判定する。
【0113】
このようにすることで、プレーヤが実際にボールを目で追いかけて捕捉しながら捕球地点に移動し、ボールをキャッチした場合に、捕球が成功したと判定されるようになる。従って、あたかも実際の野球のようにボールを追って捕球したかのような操作感覚をプレーヤに与えることができ、従来の手法に比べてプレーヤの仮想現実感を大幅に向上できるようになる。
【0114】
次に本実施形態の判定手法について更に具体的に説明する。以下では、仮想カメラの視線方向等を制御する手法として、携帯型ゲーム装置に設けられたモーションセンサを用いる手法を例にとり説明する。
【0115】
図2(A)、図2(B)に、本実施形態の手法が適用される携帯型ゲーム装置の構成例を示す。この携帯型ゲーム装置は、メイン表示部190Mとサブ表示部190Sを有する。サブ表示部190Sは、例えばタッチパネル方式の液晶ディスプレイにより実現され、ゲーム装置の筐体10に設けられる。メイン表示部190Mは、サブ表示部190Sよりも例えば画素数が多いディスプレイとなっており、例えば液晶ディスプレイなどにより実現される。なお、メイン表示部190Mは、例えば裸眼の立体視画像を表示できるディスプレイになっており、ゲーム画像が立体視で表示される。
【0116】
携帯型ゲーム装置の筐体10と筐体20は回動自在に設けられており、筐体10には、方向指示キー12、アナログスティック(ジョイスティック)14、操作ボタン16が設けられている。また図2(B)に示すように、筐体20の背面側(メイン表示部190Mの反対側)には第1、第2のカメラCM1、CM2が設けられている。これらの第1、第2のカメラCM1、CM2を用いて被写体を撮影することで、視差のある左眼用画像と右眼用画像を得ることが可能になり、立体視表示が可能になる。
【0117】
更に携帯型ゲーム装置には図示しないモーションセンサ(6軸センサ)が内蔵されている。そして、プレーヤが携帯型ゲーム装置を手に持って動かした場合に、このモーションセンサを用いることで、図2(A)のX軸、Y軸、Z軸方向での加速度や、X軸回り、Y軸回り、Z軸回りでの角速度を検出できる。これによりX軸、Y軸、Z軸方向での並進移動操作や、X軸回り、Y軸回り、Z軸回りでのロール操作(ロール角度)を検出できるようになる。なお、X軸(広義には第1の座標軸)は水平方向(表示部の画面の水平方向)に沿った軸であり、Y軸(広義には第2の座標軸)は鉛直方向(表示部の画面の鉛直方向)に沿った軸であり、Z軸(広義には第3の座標軸)はX軸、Y軸に直交する方向(奥行き方向)である。
【0118】
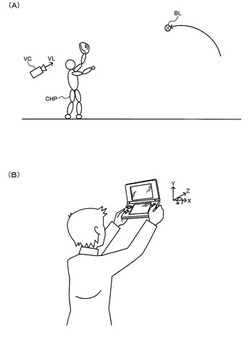
そして図3(A)では、打者の打ったボールBLがゴロになっている。この場合にはプレーヤは、図3(B)に示すように携帯型ゲーム装置をX軸回りで下側方向にロールさせる操作を行う。即ち、X軸の正方向側から見てX軸の時計回りで、携帯型ゲーム装置を回転させる。すると、このX軸の時計回りでの回転がモーションセンサ(角速度センサ)により検出される。そして、このX軸の時計回りでのモーション検出情報により、図3(A)に示すように、視線方向VLが下側方向を向くように仮想カメラVCが制御され、この視線方向VLでの画像が生成されて表示部190に表示される。これにより、プレーヤの視界範囲内にボールBLが捕捉されて見えるようになり、仮想カメラVCがボールBLを捕捉するという捕捉条件が満たされる。そして、この状態で、例えばプレーヤが操作するプレーヤキャラクタCHP(仮想カメラ)が適正な捕球地点に移動して、捕球条件が満たされると、ゴロのボールBLの捕球に成功したと判定される。
【0119】
一方、図4(A)では、打者の打ったボールBLがフライになっている。この場合にはプレーヤは、図4(B)に示すように携帯型ゲーム装置をX軸回りで上側方向にロールさせる操作を行う。即ち、X軸の正方向側から見てX軸の反時計回りで、携帯型ゲーム装置を回転させる。すると、このX軸の反時計回りでの回転がモーションセンサ(角速度センサ)により検出される。そして、このX軸の反時計回りでのモーション検出情報に基づいて、図4(A)に示すように、視線方向VLが上側方向を向くように仮想カメラVCが制御され、この視線方向VLでの画像が生成されて表示部190に表示される。これにより、プレーヤの視界範囲内にボールBLが捕捉されて見えるようになり、仮想カメラVCがボールBLを捕捉するという捕捉条件が満たされる。そして、この状態で、例えばプレーヤが操作するプレーヤキャラクタCHP(仮想カメラ)が適正な捕球地点に移動して、捕球条件が満たされると、フライのボールBLの捕球に成功したと判定される。
【0120】
図5(A)〜図6は、図3(A)、図3(B)で説明したゴロの処理時に生成されるゲーム画像の例である。
【0121】
図5(A)は、バッターがゴロのボールBLを打った場面のゲーム画像である。このようにボールBLがゴロである場合には、図3(B)に示すようにプレーヤがX軸回りで下側方向に携帯型ゲーム装置をロールさせる操作を行うことで、図3(A)に示すように仮想カメラVCの視線方向VLが下側方向を向く。これにより、図5(B)のように、低い軌道のゴロのボールBLが仮想カメラVCの視野範囲内に入るゲーム画像が生成される。即ち、低い軌道のボールBLに対する捕捉条件が満たされて、仮想カメラVCによりボールBLが捕捉されたゲーム画像が生成される。
【0122】
そして図5(B)では、このような捕捉条件を満たした状態で、ボールBLの位置とプレーヤキャラクタCHP(仮想カメラ)の位置が一致して、捕球条件が満たされたため、ゴロのボールBLの捕球に成功したと判定される。
【0123】
なお図5(A)では、いわゆる一人称視点のゲーム画像が生成され、図5(B)の捕球タイミングでは、プレーヤキャラクタCHPのグラブが表示されている。但し図5(A)や図5(B)において、プレーヤキャラクタCHPの全体を表示するようにしてもよい。この場合には、ボールBLがプレーヤキャラクタCHPにより遮られて見えにくくなってしまう事態を防止するために、プレーヤキャラクタCHPを半透明表示等にすることが望ましい。
【0124】
図6は、図5(B)の捕球成功後に、プレーヤにより送球指示が行われ、捕球したボールが一塁に送球された場面のゲーム画像である。例えば捕球タイミングに対応して設定された送球判定期間において、図2(A)の操作ボタン16の中の送球指示ボタン(送球動作に割り当てられたボタン)が押された場合には、送球条件が満たされたと判断され、捕球したボールを、送球ターゲットである一塁(一塁手)に送球する処理が行われる。或いは、送球判定期間において、例えばプレーヤが携帯型ゲーム装置をY軸回りで回転させるロール操作を行って、仮想カメラVCの視線方向が一塁側に向けられた場合に、捕球したボールBLを一塁に送球する処理が行われる。そして、捕球と送球の両方に成功すると、図6に示すように「アウト」の結果表示が行われる。
【0125】
図7(A)、図7(B)は、図4(A)、図4(B)で説明したフライの処理時に生成されるゲーム画像の例である。
【0126】
図7(A)は、バッターがフライのボールBLを打った場面のゲーム画像である。このようにボールBLがフライである場合には、図4(B)に示すようにプレーヤがX軸回りで上側方向に携帯型ゲーム装置をロールさせる操作を行うことで、図4(A)に示すように仮想カメラVCの視線方向VLが上側方向を向く。これにより、図7(B)のように、高い軌道のフライのボールBLが仮想カメラVCの視野範囲内に入るゲーム画像が生成される。即ち、高い軌道のボールBLに対する捕捉条件が満たされて、仮想カメラVCによりボールBLが捕捉されたゲーム画像が生成される。
【0127】
そして図7(B)では、このような捕捉条件を満たした状態で、ボールBLの位置とプレーヤキャラクタCHP(仮想カメラ)の位置が一致して、捕球条件が満たされたため、フライのボールBLの捕球に成功したと判定される。
【0128】
以上のように本実施形態の手法によれば、プレーヤが、視野範囲にボールが入るような操作を行いながらボールを捕球すると、捕球が成功したと判定される。従って、プレーヤは、あたかも実際のボールを目で追いかけて捕球するというような現実世界の野球と同様の操作感覚で、ボールを捕球できるようになる。従って、プレーヤの仮想現実感を従来の手法に比べて格段に向上できる。また図3(A)のように打球がゴロである場合と、図4(A)のように打球がフライである場合とで、プレーヤは異なる操作を行ってボールを捕球する。従って、実際にゴロやフライを捕っているかのような操作感覚をプレーヤに与えることができる。
【0129】
特に、携帯型ゲーム装置のモーションセンサで仮想カメラの視線方向を制御すれば、プレーヤは、ゴロの場合には図3(B)のように携帯型ゲーム装置の方向(画面方向)を下側方向に向け、フライの場合には携帯型ゲーム装置の方向を上側方向に向けるという操作を行って、ゴロやフライのボールを捕球することになる。従って、プレーヤは、あたかも画面の向こう側に本当のボールが存在し、そのボールを捕球しているかのような操作感覚でゲームプレイができるため、プレーヤの仮想現実感を更に向上できる。
【0130】
2.2 捕捉条件、捕球条件の判定手法の具体例
次に捕捉条件、捕球条件の判定手法の具体例について説明する。第1の判定手法では、プレーヤの操作情報により制御され仮想カメラに追従するヒットボリュームを設定し、そのヒットボリュームにボールがヒットした場合に、捕捉条件及び捕球条件が満たされたと判定する。
【0131】
例えば図8(A)では、プレーヤの操作情報により仮想カメラVCの視線方向VLや視点位置等が変化する場合に、その仮想カメラVCに追従するようにヒットボリュームHVが設定される。図8(A)では、仮想カメラVCの前方側(カメラ座標系のZ軸側)であり、例えばプレーヤキャラクタCHPの前方側にヒットボリュームHVが配置されている。そしてこのヒットボリュームHVのボールBLとのヒットチェックが行われる。具体的には、ヒットボリュームHVの前方側の第1の平面と後方側の第2の平面を用いてヒットチェックが行われ、例えばボールBLの軌道が第1、第2の平面の両方に交差した場合に、ボールBLがヒットして捕球されたと判定する。
【0132】
なお、プレーヤの操作情報によりプレーヤキャラクタCHPの位置や方向が制御され、そのプレーヤキャラクタCHPに追従するようにヒットボリュームHVが設定されてもよい。またヒットボリュームHVの形状は図8(A)のような直方体形状には限定されず、例えば楕円体(球体を含む)、柱体などの種々の形状を採用できる。
【0133】
図8(B)では、ボールBLが低い軌道のゴロになっている。この場合には、ヒットボリュームHVは、その長さが短い形状に設定されると共に、上側の位置に配置される。即ち、プレーヤキャラクタCHPの上半身に対応する領域にはヒットボリュームHVが設定されるが、下半身に対応する領域にはヒットボリュームHVは設定されない。
【0134】
そして図8(B)では、プレーヤは、図3(B)に示すような携帯型ゲーム装置のロール操作を行っていないため、仮想カメラVCの視線方向VLが水平方向に設定される。従って、ヒットボリュームHVは傾かずに、その長辺方向が鉛直方向になるように配置される。
【0135】
一方、図8(C)では、プレーヤは、低い軌道のボールBLに対して、図3(B)に示すように携帯型ゲーム装置をX軸回りで下側方向にロールさせる操作を行っている。これにより、仮想カメラVCの視線方向VLが下側方向に向く。そして、この仮想カメラVCの視線方向VLの向きの変化に連動して、図8(C)に示すように、ヒットボリュームHVを、その下端部が手前側(仮想カメラから見て手前側)に近づき、その上端部が奥側(仮想カメラから見て奧側)に遠ざかるように傾ける。即ち、その長辺方向が鉛直方向から奥側に傾くようにヒットボリュームHVを配置する。
【0136】
このようにすれば、ヒットボリュームHVの下側部が地面(ゲームフィールド)に近づくため、ボールBLが軌道の低いゴロであっても、ヒットボリュームHVにボールBLをヒットさせることが容易になる。従って、プレーヤは、ゴロのボールBLを、トンネルせずに捕球することが可能になる。
【0137】
例えばボールBLがゴロである時に、図8(B)に示すように携帯型ゲーム装置のロール操作を行わずに、ヒットボリュームHVが傾かなかった場合には、ボールBLはヒットボリュームHVにヒットせずに、トンネルになってしまう。
【0138】
この点、図8(C)のように仮想カメラVCの視線方向VLの向きの変化に連動して、ヒットボリュームHVを傾ければ、このようなトンネルは発生せずに、プレーヤは適正にボールBLを捕球できるようになる。即ち、低い軌道のゴロのボールBLに対して、プレーヤが携帯型ゲーム装置を下側方向にロールさせる操作を行うことで、仮想カメラVCの視線方向VLが下側方向に向く。これにより、ボールBLは仮想カメラVCの視野範囲に入り、仮想カメラVCによりボールBLが捕捉された状態になるため、捕捉条件は満たされる。そしてこの状態でボールBLがヒットボリュームHVにヒットすれば、捕球条件も満たされる。従って、図8(A)〜図8(C)のようにヒットボリュームHVを設定し、設定されたヒットボリュームHVにボールBLがヒットした場合には、ボールBLの捕捉条件及び捕球条件の両方が満たされたと判定できるようになる。
【0139】
また図9(A)では、ボールBLが高い軌道のフライになっている。この場合には、ヒットボリュームHVは、その長さがゴロの場合に比べて長い形状に設定される。そしてプレーヤキャラクタCHPの上半身及び下半身の両方に対応する領域にヒットボリュームHVが設定される。
【0140】
そして、図9(B)では、プレーヤは、高い軌道のボールBLに対して、図4(B)に示すように携帯型ゲーム装置をX軸回りで上側方向にロールさせる操作を行っている。これにより、仮想カメラVCの視線方向VLが上側方向に向く。そして、この仮想カメラVCの視線方向VLの向きの変化に連動して、ヒットボリュームHVを、その上端部が手前側に近づき、その下端部が奥側に遠ざかるように傾ける。そして、ヒットボリュームHVにボールBLがヒットした場合には、捕捉条件及び捕球条件の両方が満たされたと判断され、捕球が成功したと判定する。
【0141】
この場合に図9(A)、図9(B)のようにヒットボリュームHVを設定することで、高い軌道のフライのボールBLがヒットボリュームHVにヒットしやすくなる。例えばボールBLがフライである場合に、図8(B)、図8(C)のようにヒットボリュームHVの長さが短いと、フライを捕れる範囲が狭まってしまい、ゲームの難易度が高くなってしまう。この点、図9(A)、図9(B)のように、高い軌道のフライの場合にヒットボリュームHVを長い形状にすれば、ボールBLを捕れる範囲が広がり、フライであっても、比較的容易に捕球できるようになる。なお図8(B)〜図9(B)では、ボールBLの軌道等に応じてヒットボリュームHVの形状を変化させているが、ヒットボリュームHVの形状については変化させずに、ヒットボリュームHVのヒット有効範囲をボールBLの軌道等に応じて変化させてもよい。例えば低い軌道のゴロの場合には、ヒットボリュームHVのヒット有効範囲を小さな範囲に設定する。一方、高い軌道のフライの場合には、ヒットボリュームHVのヒット有効範囲を大きな範囲に設定する。このようすれば、ボールBLの軌道に応じて形状を変化させる手法と同等の効果を得ることができる。
【0142】
以上のように本実施形態の第1の判定手法では、ボールBLの軌道に応じて、ヒットボリュームHVの形状、ヒット有効範囲、位置及び方向の少なくとも1つを変化させている。例えば、ボールBLがゴロのように低い軌道(第1の軌道)である場合には、図8(B)、図8(C)に示すようにヒットボリュームHVを短い形状に設定したり、形状は変えずにヒット有効範囲を小さな範囲に設定する。またヒットボリュームHVの配置位置も上側に設定する。一方、ボールBLがフライのように高い軌道(第2の軌道)である場合には、図9(A)、図9(B)に示すようにヒットボリュームHVを長い形状に設定したり、形状は変えずにヒット有効範囲を大きな範囲に設定する。またヒットボリュームHVの配置位置は、ゴロの場合に比べて下側に設定する。このようにボールBLの軌道に応じてヒットボリュームHVの形状、ヒット有効範囲、位置等を設定すれば、ヒットボリュームHVにボールBLがヒットしたかどうかを判断するだけで、捕捉条件及び捕球条件が満たされたかどうかを判定できるようになる。従って、簡素な判定処理で捕捉条件及び捕球条件を判定することが可能になる。また本実施形態の第1の判定手法では、図8(B)、図8(C)のようにボールBLが低い第1の軌道で移動する場合には、仮想カメラVCの視線方向範囲が、低い第1の視線方向範囲である場合に、捕捉条件が満たされたと判定している。一方、図9(A)、図9(B)のようにボールBLが第1の軌道よりも高い第2の軌道で移動する場合には、仮想カメラVCの視線方向範囲が、第1の視線方向範囲よりも高い第2の視線方向範囲である場合に、捕捉条件が満たされたと判定している。或いはボールBLが左方向の軌道である第1の軌道で移動する場合には、視線方向範囲が左方向を向く視線方向の範囲である場合に捕捉条件が満たされたと判定し、ボールBLが右方向の軌道である第2の軌道で移動する場合には、視線方向範囲が右方向を向く視線方向の範囲である場合に捕捉条件が満たされたと判定してもよい。このようにすれば、プレーヤキャラクタCHPが横方向に飛んでボールBLをキャッチする状況での捕捉条件についても判定できるようになる。
【0143】
なおヒットボリュームHVの設定手法は図8(A)〜図9(B)で説明した手法には限定されず、種々の変形実施が可能である。
【0144】
例えば図10(A)では、低い軌道のゴロのボールBLに対して、図3(B)に示すような操作をプレーヤが行って、仮想カメラVCの視線方向VLが下側方向に向くと、それに連動してヒットボリュームHVも下側方向に移動する。これによりプレーヤは、低い軌道のゴロのボールBLを容易に捕球できるようになる。
【0145】
一方、図10(B)では、高い軌道のフライのボールBLに対して、図4(B)に示すような操作をプレーヤが行って、仮想カメラVCの視線方向VLが上側方向に向くと、それに連動してヒットボリュームHVも上側方向に移動する。これによりプレーヤは、高い軌道のフライのボールBLを容易に捕球できるようになる。なお図10(A)、図10(B)において、ボールBLの軌道の高低等に応じて、ヒットボリュームHVの位置(代表位置)のみならず、方向(配置方向)についても変化させてもよい。
【0146】
また本実施形態では、ボールBLの捕球時にプレーヤが指示した方向に応じて、ヒットボリュームHVを変形させたりヒット有効範囲を変化させてもよい。
【0147】
例えば図11(A)では、ダイビングキャッチ等のファインプレイでボールBLを捕球している様子を示している。具体的にはボールBLの捕球時(捕球タイミング、捕球期間)において、図11(B)のA1に示すようにプレーヤは、携帯型ゲーム装置を例えばX軸方向に沿って左側に動かす操作を行っている。すると、例えばモーションセンサの加速度センサにより、この操作が検出され、モーション検出情報が取得される。すると、このモーション検出情報に基づいて、図11(A)に示すようにヒットボリュームHVを変形させる。具体的には図11(B)ではプレーヤが左方向を指示しており、図11(A)では、この指示方向に対応する方向にヒットボリュームHVを引き伸ばす変形処理を行っている。例えばプレーヤの指示方向が、反対の右方向である場合には、図11(A)とは逆方向にヒットボリュームHVを引き伸ばす変形処理を行えばよい。このようにすれば、例えば左右方向へのダイビングキャッチ等による捕球を表現することが可能になる。
【0148】
またプレーヤの指示方向が上方向(Y軸に沿った方向)である場合には、上方向に対応する方向にヒットボリュームHVを引き伸ばす変形処理を行えばよい。このようにすれば、例えば上方向へのダイビングキャッチによる捕球を表現することが可能になる。
【0149】
なお、プレーヤの指示方向と、ヒットボリュームHVを引き伸ばす方向との対応づけは、ゲーム画像の見え方やゲームの特性等を考慮して、適宜、決めればよい。また図11(A)、図11(B)では、プレーヤの指示方向に応じてヒットボリュームHVの形状を変形する処理を行っているが、ヒットボリュームHVの形状については変形せずに、ヒットボリュームHVのヒット有効範囲を変化させる処理を行ってもよい。
【0150】
また本実施形態では、ゲームの難易度に応じてヒットボリュームを設定してもよい。例えばゲームの難易度の設定に応じて、ヒットボリュームの形状、ヒット有効範囲、位置及び方向の少なくとも1つを変化させる。
【0151】
例えば図12(A)では、ゲームの難易度が低い設定であるため、ヒットボリュームHVを大きなサイズの形状にする。或いはヒット有効範囲を大きな範囲に設定する。このようにすれば、ヒットボリュームHVに対してボールBLがヒットしやすくなるため、初級プレーヤであっても、捕球が容易になり、ストレス無く野球ゲームを楽しめるようになる。
【0152】
一方、図12(B)では、ゲームの難易度が高い設定であるため、ヒットボリュームHVを小さなサイズの形状にする。或いはヒット有効範囲とを小さな範囲に設定する。このようにすれば、ヒットボリュームHVに対してボールBLがヒットしにくくなるため、捕球が難しくなり、上級プレーヤであっても満足できる野球ゲームを提供できるようになる。
【0153】
なお図12(A)、図12(B)では、ゲームの難易度に応じてヒットボリュームHVの形状(サイズ)を変化させているが、ゲームの難易度に応じてヒットボリュームHVが配置される位置や方向を変化させてもよい。
【0154】
例えば図8(B)、図8(C)や図10(A)のように、ボールが低い軌道のゴロである場合に、ヒットボリュームHVの配置位置をゲームの難易度に応じて変化させてもよい。具体的には、初級プレーヤ用の低い難易度の設定時には、ヒットボリュームHVの基準となる配置位置を、その下端部が地面に近づくように低い位置に設定する。一方、上級プレーヤ用の高い難易度の設定時には、ヒットボリュームHVの基準となる配置位置を、低い難易度設定の場合よりも高い位置に設定する。このようにすれば、低い難易度の設定時にはゴロが捕りやすくなり、初級プレーヤのゲームプレイを容易化できる。一方、高い難易度の設定時には、ゴロが捕りにくくなるため、上級プレーヤでも満足できる野球ゲームを提供できるようになる。
【0155】
また、例えば図9(A)、図9(B)や図10(B)のように、ボールBLが高い軌道のフライである場合に、ヒットボリュームHVの配置方向をゲームの難易度に応じて変化させてもよい。具体的には、初級プレーヤ用の低い難易度の設定時には、ヒットボリュームHVの傾きを大きくし、上級プレーヤ用の高い難易度の設定時には、ヒットボリュームHVの傾きを小さくする。このようにすれば、低い難易度の設定時には、ヒットボリュームHVが、より傾くことで、ボールBLに対してヒットボリュームが正対するようになり、フライが捕りやすくなるため、初級プレーヤのゲームプレイを容易化できる。一方、高い難易度の設定時には、ヒットボリュームHVの傾きが小さくなることで、フライが捕りにくくなり、上級プレーヤでも満足できる野球ゲームを提供できるようになる。
【0156】
或いは図11(A)のようにダイビングキャッチなどのファインプレイ時にヒットボリュームHVを引き伸ばす場合に、ゲームの難易度に応じて、ヒットボリュームHVを引き伸ばす長さを制御してもよい。例えば低い難易度設定の場合には、ヒットボリュームHVを引き伸ばす長さを長くし、高い難易度設定の場合には、引き伸ばす長さを短くする。このようにすれば、初級プレーヤであっても、ファインプレイを行うことが容易になり、プレーヤのスキルに応じた適正な難易度設定が可能になる。
【0157】
なお図12(A)、図12(B)では、ゲームの難易度に応じて、ヒットボリュームHVの形状等を変化させているが、ゲームの難易度以外のゲーム条件に応じて、ヒットボリュームHVの形状等を変化させてもよい。このようなゲーム条件としては、例えばプレーヤキャラクタ(プレーヤ)のゲーム経験値、所持アイテム数又は体力値などのステータス情報を想定できる。即ち、プレーヤキャラクタのゲーム経験値等のステータス情報に基づいて、ヒットボリュームHVの形状等を変化させる。これにより、様々なゲーム条件をヒットボリュームHVの形状等に反映させて、捕球条件等の判定処理を行うことが可能になる。
【0158】
次に本実施形態の第2の判定手法について説明する。第2の判定手法では、仮想カメラの視野範囲に対応して捕捉判定範囲を設定し、捕捉判定範囲内にボールが入っている場合に、仮想カメラによるボールの捕捉条件が満たされていると判定する。そして捕捉条件が満たされた状態でボールの捕球条件が満たされると、ボールの捕球が成功したと判定する。
【0159】
例えば図13(A)〜図13(C)では、プレーヤは、ボールBLが仮想カメラVCの視野範囲内(捕捉判定範囲内)に入るように、図4(B)のように携帯型ゲーム装置をロールさせる操作を行う。これにより、図13(A)〜図13(C)のようにボールBLの高さが徐々に低くなる場合に、ボールBLが仮想カメラVCの視野範囲内に入るように、仮想カメラVCの視線方向VL等が制御されるようになる。そして視野範囲に対応して設定された捕捉判定範囲内にボールBLが入っている場合には、ボールBLの捕捉条件が満たされたと判定する。そして、このような捕捉条件が満たされた状態で、図13(C)のように、仮想カメラVC(プレーヤキャラクタ)に設定された簡易的なヒットボリュームHVにボールBLがヒットして、捕球条件が満たされると、プレーヤによるボールBLの捕球が成功したと判定する。このように本実施形態の第2の判定手法では、ボールBLが低い第1の軌道で移動する場合には、仮想カメラVCの視線方向範囲が、低い第1の視線方向範囲である場合に、捕捉条件が満たされたと判定する。一方、ボールが第1の軌道よりも高い第2の軌道で移動する場合には、仮想カメラVCの視線方向範囲が、第1の視線方向範囲よりも高い第2の視線方向範囲である場合に、捕捉条件が満たされたと判定する。
【0160】
以上に説明した本実施形態の第2の判定手法によれば、視野範囲に対応する捕捉判定範囲にボールが入っているどうかを判断するだけで、捕捉条件を判定できるようになり、処理の簡素化等を図れる。また、捕捉条件と捕球条件が別個に判定されるため、捕捉条件の判定処理や捕球条件の判定処理を簡素化できるようになる。
【0161】
なお、捕球条件の判定手法や、捕球条件の判定用のヒットボリュームの設定手法としては、種々の変形実施が可能である。例えばプレーヤキャラクタの左手等の部位に対して、捕球条件を判定するためのヒットボリュームを設定してもよい。また仮想カメラの視野範囲やこれに対応する捕捉判定範囲は、仮想カメラの視線方向を基準とした角度により設定してもよい。このようにすれば、角度を用いた簡素な判定処理で、捕捉条件等の判定処理を実現できるようになる。また捕捉条件が満たされているかどうかを判定する期間は、捕球タイミングの直前の短い期間であってもよいし、長い期間であってもよい。
【0162】
また仮想カメラやキャラクタに追従するヒットボリュームではなく、ボールに追従するボール用ヒットボリュームを設定し、このボール用ヒットボリュームを用いて、ボールの捕球条件等が満たされているかを判定してもよい。このボール用ヒットボリュームを用いる手法については例えば特開平8−305891号公報に開示されている。この手法では、ボール用ヒットボリュームとプレーヤキャラクタ又は仮想カメラの位置とのヒットチェックを行い、ヒットしたと判定された場合にはボールの捕球に成功したと判定する。この場合に、例えばボールの軌道の高低や、軌道の方向や、ゲーム条件等に応じて、ボール用ヒットボリュームの形状又はヒット有効範囲等を制御してもよい。またボール用ヒットボリュームを用いてボールの捕捉条件を判定することも可能である。
【0163】
また、ボールの捕球を判定する処理は、ヒットボリュームを用いる手法には限定されない。例えばゲーム画像にゲージ等を表示し、ゲージの入力エリアでの入力の成功などを判定して、ボールの捕球に成功したか否かを判定してもよい。例えばゲージにより表される判定タイミングで、プレーヤが捕球操作の入力を行い、判定タイミングと入力タイミングが一致した場合に、捕球が成功したと判定してもよい。
【0164】
図14(A)に、視野範囲RFVに対応する捕捉判定範囲RDTの設定例を示す。図14(A)では、捕捉判定範囲RDTは、視野範囲RFVに内包する範囲になっている。なお、仮想カメラVCの視野範囲RFVそのものを、捕捉判定範囲RDTに設定してもよい。
【0165】
また図14(A)、図14(B)では、捕捉判定範囲RDTを可変に制御している。具体的には、ゲームの難易度の設定に応じて捕捉判定範囲を変化させている。
【0166】
例えば、低い難易度設定の場合には、図14(A)に示すように捕捉判定範囲RDTを広くする。このようにすれば、プレーヤは、ボールBLを容易に捕捉判定範囲内に捉えることが可能になり、プレーヤの捕捉操作を容易化できる。
【0167】
一方、高い難易度設定の場合には、図14(B)に示すように捕捉判定範囲RDTを狭くする。このようにすれば、ボールBLを捕捉判定範囲内に捉えるのが難しくなり、上級プレーヤであっても満足度が高いゲームを提供することが可能になる。
【0168】
なお、ゲームの難易度以外のゲーム条件(プレーヤキャラクタのステータス情報等)に基づいて、捕捉判定範囲を変化させてもよい。また視野範囲や捕捉判定範囲は、図14(A)、図14(B)に示すようなエリアによる設定であってもよいし、例えば仮想カメラの視線方向を基準とした角度の設定により、視野範囲や捕捉判定範囲を設定してもよい。
【0169】
また、捕捉条件を判定する期間は任意に設定できる。例えば、フライが上がった場合に、最初の期間では視野範囲(捕捉判定範囲)にボールが入らない状態でプレーヤキャラクタが背走し、捕球タイミングの直前の期間で、ボールの方を振り返って捕球するようにしてもよい。この場合には、捕球タイミングの直前の短い期間が捕捉条件の判定期間になり、この短い判定期間において、例えば仮想カメラの視野範囲(捕捉判定範囲)にボールが入っていると判断されれば、捕捉条件が満たされていると判定すればよい。
【0170】
また、上述の第1、第2の判定処理の変形例として、ボールがカメラの視野範囲(捕捉判定範囲)に入っている場合には、ボールとヒットボリュームのヒットチェックを有効状態に設定して、ボールがヒットボリュームにヒットした場合に捕球に成功したと判定してもよい。そして、ボールがカメラの視野範囲(捕捉判定範囲)に入っていない場合には、ボールとヒットボリュームのヒットチェックを非有効状態に設定して、ボールがヒットボリュームをすり抜けてしまうようにする。このようにすれば、捕捉条件と捕球条件の両方を満たした場合に、ボールの捕球に成功したと判定できるようになる。
【0171】
2.3 仮想カメラの制御
次に、操作情報に基づく仮想カメラの制御処理の具体例について説明する。本実施形態では、プレーヤが入力した第1の操作情報と第2の操作情報を取得し、第1の操作情報に基づいて仮想カメラの視線方向を制御し、第2の操作情報に基づいて仮想カメラの視点位置の移動又はプレーヤキャラクタの移動を制御している。
【0172】
例えば図3(A)〜図4(B)で説明したように、本実施形態では、モーションセンサからのモーション検出情報を第1の操作情報として取得し、第1の操作情報であるモーション検出情報に基づいて、仮想カメラVCの視線方向VLを制御する。例えば図3(B)、図4(B)のように携帯型ゲーム装置をX軸回りで下側又は上側方向にロールさせる第1の操作が行われた場合には、この第1の操作の情報であるモーション検出情報に基づいて、図3(A)、図4(A)に示すように仮想カメラVCの視線方向VLを変化させる。
【0173】
また本実施形態では、方向指示部からの方向指示情報を第2の操作情報として取得し、第2の操作情報である方向指示情報に基づいて、仮想カメラVCの視点位置の移動又はプレーヤキャラクタCHPの移動を制御する。
【0174】
例えば図15(A)や図15(B)のB1〜B4に示すように、方向指示部である方向指示キー12やアナログスティック14(ジョイスティック)を用いて上下左右方向の方向指示操作が行われたとする。この場合には、指示された方向に対応する方向に、仮想カメラVCの視点位置(プレーヤキャラクタの位置)を移動させる。
【0175】
具体的には、図15(A)や図15(B)のB1〜B4に示すような方向指示が行われた場合には、図15(C)のC1〜C4に示す方向に仮想カメラVC(プレーヤキャラクタ)を移動させる。例えば方向指示キー12やアナログスティック14などの方向指示部により、図15(A)、図15(B)のB1、B2に示すように上下方向の方向指示が行われた場合には、図15(C)のC1、C2に示すように、仮想カメラVCを前後方向に移動させる。
【0176】
一方、図15(A)、図15(B)のB3、B4に示すように左右方向の方向指示が行われた場合には、図15(C)のC3、C4に示すように、仮想カメラVCを左右方向に移動させる。更に具体的には、仮想カメラVCの視線方向VLについては、常に基準位置となるホームベースHBSの方に向ける。具体的には、操作情報に基づいてX軸回り(広義には第1の座標軸回り)では仮想カメラVCの視線方向VLを変化させると共に、Y軸回り(広義には第2の座標軸回り)では仮想カメラVCの視線方向VLを固定する。そして、左右方向の方向指示が行われた場合には、例えばホームベースHBSを中心とした円弧線CT上において、仮想カメラVCを左右方向に移動させる。
【0177】
このようにすれば、仮想カメラVCは、ボールが飛んでくる方向に常に正対して配置されるようになる。従って、ゴロやフライのボールを捕球する際に、プレーヤは、仮想カメラVCの視線方向VLの上下方向の変化だけを、図3(B)、図4(B)のようなロール操作で制御すればよい。そして方向指示部による上下左右方向の指示で、自身の視点に対応する仮想カメラVCを前後左右方向に動かして、ボールの捕球位置に向かって移動して、ボールを捕球する。これにより、仮想カメラVCの視線方向VLの全ての方向での変化を、プレーヤが制御する手法に比べて、プレーヤのゲーム操作を簡素化でき、より使い易いゲーム操作インターフェース環境をプレーヤに提供できるようになる。
【0178】
次に、操作情報に基づく仮想カメラVCの視線方向VLの制御について、図16(A)〜図16(C)を用いて詳細に説明する。
【0179】
例えば図16(A)のD1、D2に示すように、プレーヤは、携帯型ゲーム装置をX軸回りにロールさせる操作(回転させる操作)を行うことができる。この場合には、モーションセンサの角速度センサにより、このX軸回りでのロール操作が検出される。
【0180】
そして図16(A)のD1に示すように、X軸回りで上側方向に携帯型ゲーム装置をロール(回転)させた場合には、図16(B)のE1に示すように、カメラ座標系のX軸回りにおいて上側方向に仮想カメラVCがロール操作される。これにより、仮想カメラVCの視線方向VLを、図4(A)のような高い軌道のフライの捕球に好適な視線方向に設定できるようになる。
【0181】
一方、図16(A)のD2に示すように、X軸回りで下側方向に携帯型ゲーム装置をロールさせた場合には、図16(B)のE2に示すように、カメラ座標系のX軸回りにおいて下側方向に仮想カメラVCがロール操作される。これにより、仮想カメラVCの視線方向VLを、図3(A)のような低い軌道のゴロの捕球に好適な視線方向に設定できるようになる。
【0182】
また図16(A)のD3、D4に示すように、プレーヤは、携帯型ゲーム装置をY軸回りにロールさせる操作を行うこともできる。この場合には、モーションセンサの角速度センサにより、このY軸回りでのロール操作が検出される。
【0183】
そして図16(A)のD3に示すように、Y軸回りで左側方向に携帯型ゲーム装置をロールさせた場合には、図16(C)のE3に示すように、カメラ座標系のY軸回りにおいて左側方向に仮想カメラVCがロール操作されるようになる。
【0184】
一方、図16(A)のD4に示すように、Y軸回りで右側方向に携帯型ゲーム装置をロールさせた場合には、図16(C)のE4に示すように、カメラ座標系のY軸回りにおいて右側方向に仮想カメラVCがロール操作されるようになる。
【0185】
例えば図15(C)では、カメラ座標系のX軸回りで仮想カメラVCはロール操作されるが、Y軸回りではロール操作されない。これに対して図16(C)のように仮想カメラVCがY軸回りでロール操作されるようになれば、例えば後述する送球処理の際に、仮想カメラVCの視線方向VLを、送球ターゲットである1塁側に向ける操作が可能になる。
【0186】
なお、以上では、携帯型ゲーム装置のロール操作をモーションセンサにより検出して、仮想カメラの視線方向を制御する手法について説明したが、本実施形態はこのような手法には限定されない。
【0187】
例えば、方向指示部からの方向指示情報に基づいて、仮想カメラの視線方向を制御してもよい。例えば操作部の第1の方向指示部からの第1の方向指示情報を第1の操作情報として、仮想カメラの視線方向を制御し、操作部の第2の方向指示部からの第2の方向指示情報を第2の操作情報として、仮想カメラの視点位置の移動を制御してもよい。
【0188】
或いは、カメラの撮像画像を用いて、携帯型ゲーム装置のロール操作(回転操作)を検出して、仮想カメラの視線方向を制御してもよい。例えば図2(B)に示すようなカメラCM1、CM2により携帯型ゲーム装置の周りの風景を撮影し、得られたカメラCM1、CM2の撮像画像に対して画像処理を行うことで、撮像画像の画素の動き情報から携帯型ゲーム装置のロール操作を検出する。このようにすれば、角速度センサや加速度センサを有しないような携帯型ゲーム装置であっても、携帯型ゲーム装置のロール操作を検出して、仮想カメラの視線方向を制御できるようになる。
【0189】
また本実施形態の手法が適用されるゲーム装置は携帯型ゲーム装置には限定されず、例えば据え置きの家庭用ゲーム装置であってもよい。この場合には、例えば家庭用ゲーム装置のゲームコントローラに設けられたモーションセンサやカメラを利用して、携帯型ゲーム装置の場合と同様の手法で、ゲームコントローラに対するロール操作を検出し、仮想カメラの視線方向を制御すればよい。
【0190】
2.4 送球処理
次に本実施形態の送球処理の詳細について説明する。本実施形態では、ボールの捕球に成功し、所与の送球条件が満たされた場合に、捕球されたボールの送球処理を行う。例えばボールの捕球に成功し、プレーヤが操作部を用いた送球指示操作を行った場合や、プレーヤが仮想カメラの視線方向を送球ターゲット側に向ける操作を行った場合に、捕球されたボールを送球ターゲットに送球する処理を行う。
【0191】
例えば、前述の図5(B)においてプレーヤがゴロの捕球に成功し、図2(A)の操作ボタン16の中の送球指示ボタンを押すと、図6に示すように、一塁への送球処理がコンピュータにより自動的に行われるオートモードの送球処理が実現される。
【0192】
一方、このような送球をプレーヤのマニュアル操作により行うマニュアルモードの送球処理を採用してもよい。例えば図17(A)では、ボールBLの捕捉条件及び捕球条件が満たされて、ボールBLの捕球に成功している。そして、このように捕球が成功し、送球判定期間内において、プレーヤが、図16(A)のD3に示すように携帯型ゲーム装置をY軸回りで左側にロールさせる操作を行ったとする。すると図17(B)に示すように、仮想カメラVCの視線方向VLが、送球ターゲットである一塁ベースFBFの方に向き、ボールBLの送球処理が行われるようになる。
【0193】
このようにすれば、ボールBLを捕球後に一塁側を向いて送球するというような、実際の野球の送球プレイに似た操作感覚を、プレーヤに与えることが可能になる。これにより、プレーヤの仮想現実感を更に向上することが可能になる。
【0194】
なお、上述のオートモードの送球処理とマニュアルモードの送球処理を、ゲームの難易度の設定により切り替えてもよい。例えば初級プレーヤ用の低い難易度設定では、オートモードの送球処理を行い、上級プレーヤ用の高い難易度設定では、マニュアルモードの送球処理を行うようにする。
【0195】
また、以上では本実施形態の手法を野球ゲームに適用した場合について説明したが、本実施形態の手法は、野球ゲーム以外の種々の球技ゲーム等に適用可能である。
【0196】
例えば図18(A)〜図18(C)は、本実施形態の手法をサッカーゲームに適用した例である。図18(A)では、コンピュータ等が制御する相手キャラクタCHEが、プレーヤが操作するプレーヤキャラクタCHPに対してボールBLをパスしている。そして図18(B)では、プレーヤキャラクタCHPは、パスされたボールBLの捕球(キープ)に成功している。そして図18(C)では、捕球したボールBLを他のキャラクタにパスしたり、ゴールに対して蹴るなどの処理が、ボールBLの送球処理として行われている。このようなサッカーゲームにおいても、本実施形態の手法を採用することで、従来のサッカーゲームに比べて、プレーヤの仮想現実感を大幅に向上できるようになる。なおサッカーのセンタリングでのヘディングシュートを本実施形態の手法により実現してもよい。この場合には、センタリングされたボールが選手の頭に当たることが捕球に相当し、頭に当たったボールが跳ね返って飛ぶことが送球に相当する。
【0197】
更に本実施形態の手法は、野球やサッカーのゲーム以外にも、アメリカンフットボール、バレーボール、バスケットボール、テニス、卓球、バトミントン等の種々のゲームに適用できる。例えばアメリカンフットボールの場合には、クオータバックが投げたボールをランニングバッグがジャンプ等をして捕ることが捕球に相当する。またバレーボールの場合には、レシーブがボールの捕球に相当し、トスやアタックがボールの送球に相当する。またテニスや卓球の場合には、ラケットにボールが当たることがボールの捕球に相当し、ラケットに当たったボールが、打った方向に飛ぶことが送球に相当する。またバトミントンの場合にはシャトルがボールに相当することになる。
【0198】
また本実施形態の手法は、リアルタイムに行われる野球ゲームの試合のみならず、例えば野球の守備練習などの練習モードに対しても適用できる。例えば内野守備の練習モードでは、図3(A)、図3(B)や図8(B)、図8(C)で説明した低い軌道用の処理を行い、外野守備の練習モードでは、図4(A)、図4(B)や図9(A)、図9(B)で説明した高い軌道用の処理を行う。
【0199】
またリアルタイムに守備モードを切り替える場合には、ボールがバットに当たって、ボールがゴロ等の低い軌道であると判断された場合には、図3(A)、図3(B)や図8(B)、図8(C)で説明した低い軌道用の処理を行い、フライ等の高い軌道であると判断された場合には、図4(A)、図4(B)や図9(A)、図9(B)で説明した高い軌道用の処理を行う。或いは、ボールが外野手の頭を越えてフェンス等に当たってゴロになった場合等には、高い軌道用の処理から低い軌道用の処理にリアルタイムで切り替えるようにする。
【0200】
2.5 詳細な処理例
次に本実施形態の詳細な処理例について図19、図20のフローチャートを用いて説明する。
【0201】
図19は、前述した第1の判定手法を用いた場合の本実施形態の処理の詳細を説明するためのフローチャートである。
【0202】
まずボールの移動演算処理を行って、ボールの移動軌道を求める(ステップS1)。この移動演算処理は、例えばバット等の被ヒット体によるボールのヒット方向やヒット強さなどに基づいて実現される。そして、図3(A)〜図4(B)や図16(A)〜図16(C)で説明したように、操作情報に基づいて仮想カメラの視線方向を設定する(ステップS2)。
【0203】
次に、ボールの軌道(守備モード)を判断する(ステップS3)。そして低い軌道(内野手モード)である場合には、図8(B)、図8(C)で説明したように低い軌道用(内野手モード用)のヒットボリュームを設定する(ステップS4)。一方、高い軌道(外野手モード)である場合には、図9(A)、図9(B)で説明したように高い軌道用(外野手モード用)のヒットボリュームを設定する(ステップS5)。
【0204】
次に、ボールがヒットボリュームにヒットしたか否かを判定する(ステップS6)。そして、ヒットしなかった場合には、捕捉条件、捕球条件が満たされず、捕球が不成功であったと判定する(ステップS7)。一方、ボールがヒットした場合には、捕捉条件、捕球条件が満たされて、捕球が成功であったと判定する(ステップS8)。
【0205】
次に、送球条件を満たした送球操作が行われたか否かを判定する(ステップS9)。そして、送球条件を満たした送球操作が行われなかった場合には、送球が不成功であったと判定する(ステップS10)。例えば送球判定期間内に、送球に対応する所定の操作が行われなかった場合には、送球が不成功であったと判定される。一方、送球判定期間内に、送球に対応する所定の操作が行われた場合には、送球が成功であったと判定して、ボールの送球処理を行う(ステップS11)。
【0206】
図20は、前述した第2の判定手法を用いた場合の本実施形態の処理の詳細を説明するためのフローチャートである。
【0207】
まずボールの移動演算処理を行って、ボールの移動軌道を求める(ステップS21)。また操作情報に基づいて仮想カメラの視線方向を設定する(ステップS22)。
【0208】
次に、図13(A)〜図14(B)で説明したように、仮想カメラの視野範囲に設定された捕捉判定範囲内にボールが入っているか否かを判定する(ステップS23)。そしてボールが入っていない場合には、捕捉条件が満たされず、捕捉が失敗であったと判定する(ステップS24)。
【0209】
一方、捕捉判定範囲内にボールが入っている場合には、ボールがヒットボリュームにヒットしたか否かを判定する(ステップS25)。そして、ヒットしなかった場合には、捕球条件が満たされず、捕球が不成功であったと判定する(ステップS26)。一方、ボールがヒットした場合には、捕球が成功であったと判定する(ステップS27)。
【0210】
次に、送球条件を満たした送球操作が行われたか否かを判断する(ステップS28)。そして、送球条件を満たした送球操作が行われなかった場合には、送球が不成功であったと判定する(ステップS29)。一方、例えば送球判定期間内に、送球に対応する所定の操作が行われた場合には、送球が成功であったと判定して、ボールの送球処理を行う(ステップS30)。
【0211】
なお、上記のように本実施形態について詳細に説明したが、本発明の新規事項および効果から実体的に逸脱しない多くの変形が可能であることは当業者には容易に理解できるであろう。従って、このような変形例はすべて本発明の範囲に含まれるものとする。例えば、明細書又は図面において、少なくとも一度、より広義または同義な異なる用語(移動体、キャッチ等)と共に記載された用語(ボール、捕球等)は、明細書又は図面のいかなる箇所においても、その異なる用語に置き換えることができる。また、仮想カメラの制御処理、捕捉条件や捕球条件の判定処理、移動演算処理、ビューボリュームの設定処理等も本実施形態で説明したものに限定されず、これらと均等な手法・処理も本発明の範囲に含まれる。また本発明は種々のゲームに適用できる。また本発明は、業務用ゲームシステム、家庭用ゲームシステム、多数のプレーヤが参加する大型アトラクションシステム、シミュレータ、マルチメディア端末、ゲーム画像を生成するシステムボード、携帯電話機等の種々のゲーム装置に適用できる。例えばゲーム装置は、ゲームのプログラムがインストールされて実行される携帯電話機や携帯型情報端末であってもよい。
【符号の説明】
【0212】
VC 仮想カメラ、VL 視線方向、CHP プレーヤキャラクタ、BL ボール、
HV ヒットボリューム、RFV 視野範囲、RDT 捕捉判定範囲、
10、20 筐体、12 方向指示キー、14 アナログスティック、
16 操作ボタン、100 処理部、102 操作情報取得部、104 ゲーム演算部、
106 オブジェクト空間設定部、108 仮想カメラ制御部、110 移動体演算部、
112 判定部、120 画像生成部、130 音生成部、160 操作部、
170 記憶部、172 オブジェクトデータ記憶部、178 描画バッファ、
180 情報記憶媒体、190 表示部、192 音出力部、
194 補助記憶装置、196 通信部、
500 サーバシステム、510 ネットワーク、TM1〜TMn 端末装置、
600 処理部、602 操作情報取得部、604 ゲーム演算部、
606 オブジェクト空間設定部、608 仮想カメラ制御部、
610 移動体演算部、612 判定部、614 難易度設定部、
620 画像生成用データ生成部、630 音生成用データ生成部
【技術分野】
【0001】
本発明は、プログラム、情報記憶媒体、ゲーム装置及びサーバシステム等に関する。
【背景技術】
【0002】
従来より、球技ゲームを仮想的にプレイすることができるゲーム装置が知られている。野球ゲームを例にとれば、守備側のプレーヤ(又はコンピュータ)が投手キャラクタを操作して、ボールを投げる。そして攻撃側のプレーヤ(又はコンピュータ)が打者キャラクタを操作して、投げられたボールを打ち、守備側のプレーヤが野手キャラクタを操作して、打たれたボールを捕球することで、野球ゲームを楽しむ。
【0003】
しかしながら、例えば野球ゲームでは、特にプレーヤが守備側である場合に、守備キャラクタの視点ではなく、バックネット付近やホームベース付近に設定された視点での画像が生成されるゲームが殆どであった。このため、打者が打ったボールを目で追いかけながら捕球してアウトにするというような、現実の野球をプレイしているような仮想現実感を、プレーヤに与えることが難しかった。また、バッターが打ったボールが内野ゴロであっても、外野フライであっても、捕球操作が同じような操作になってしまい、プレーヤの仮想現実感を今ひとつ向上することができなかった。
【0004】
この点、例えば特許文献1には、打球がフライである場合に、野手の後方にカメラ視点が設定されるようにカメラアングルを切り替える従来技術が開示されている。
【0005】
しかしながら、この従来技術では、カメラアングルは、プレーヤの操作に依らずにソフトウェア処理により自動的に切り替わる。またフライの捕球に成功したか否かは、ボールがグランドに落下するタイミングまでに、ボールの落下地点に野手キャラクタが到達できたか否かによって判定している。このため、視線をボールの方に向けてフライを捕球するというような仮想現実感の高い操作感覚を、プレーヤに与えることができなかった。
【先行技術文献】
【特許文献】
【0006】
【特許文献1】特開2001−137554号公報
【発明の概要】
【発明が解決しようとする課題】
【0007】
本発明の幾つかの態様によれば、球技ゲーム等において仮想現実感の高い捕球操作を実現できるプログラム、情報記憶媒体、ゲーム装置及びサーバシステム等を提供できる。
【課題を解決するための手段】
【0008】
本発明の一態様は、プレーヤの操作情報を取得する操作情報取得部と、取得された前記操作情報に基づいて、仮想カメラの制御を行う仮想カメラ制御部と、プレイ対象であるボールの移動演算処理を行う移動体演算部と、前記操作情報に基づき前記仮想カメラの視線方向が変化する場合に、視線方向が変化する前記仮想カメラが前記ボールを捕捉する捕捉条件が満たされており、前記ボールの捕球条件が満たされた場合に、前記ボールの捕球が成功したと判定する判定部と、オブジェクト空間内において前記仮想カメラから見える画像を生成する画像生成部とを含むゲーム装置に関係する。また本発明は、上記各部としてコンピュータを機能させるプログラム、又は該プログラムを記憶したコンピュータ読み取り可能な情報記憶媒体に関係する。
【0009】
本発明の一態様によれば、操作情報に基づき仮想カメラの制御が行われると共に、プレイ対象物であるボールを移動させる移動演算処理が行われる。そして、操作情報に基づく仮想カメラの制御により、仮想カメラの視線方向が変化し、その仮想カメラによりボールが捕捉される捕捉条件が満たされ、ボールの捕球条件が満たされると、ボールの捕球が成功したと判定される。このようにすれば、例えば仮想カメラの視野範囲にボールが入った状態でボールが捕球された場合に、ボールの捕球が成功したと判定できるようになるため、実際にボールを目で追って捕球するというような操作感覚をプレーヤに与えることが可能になる。従って、球技ゲーム等において仮想現実感の高い捕球操作を実現することが可能になる。
【0010】
また本発明の一態様では、前記判定部は、前記仮想カメラ又は前記プレーヤが操作するプレーヤキャラクタに追従するヒットボリュームを設定し、設定された前記ヒットボリュームに前記ボールがヒットしたと判定された場合に、前記ボールの前記捕捉条件及び前記捕球条件が満たされたと判定してもよい。
【0011】
このようにすれば、仮想カメラ又はプレーヤキャラクタに追従するヒットボリュームを設定し、そのヒットボリュームにボールがヒットしたかどうかを判断することで、捕捉条件及び捕球条件が満たされたかどうかを判定できるようになる。従って、簡素な判定処理で捕捉条件及び捕球条件を判定することが可能になる。
【0012】
また本発明の一態様では、前記判定部は、前記ヒットボリュームの形状、ヒット有効範囲、位置及び方向の少なくとも1つを可変に制御してもよい。
【0013】
このようにすれば、ヒットボリュームの形状、ヒット有効範囲、位置及び方向の少なくとも1つを可変に制御して、ボールの捕捉条件や捕球条件などを判定できるようになる。
【0014】
また本発明の一態様では、前記判定部は、前記ボールの軌道に応じて、前記ヒットボリュームの形状、ヒット有効範囲、位置及び方向の少なくとも1つを変化させてもよい。
【0015】
このようにすれば、ヒットボリュームの形状、ヒット有効範囲、位置及び方向の少なくとも1つを、ボールの軌道に応じて変化させて、適正な判定基準で捕捉条件や捕球条件などを判定できるようになる。
【0016】
また本発明の一態様では、前記判定部は、前記プレーヤが指示した方向に応じて、前記ヒットボリュームを変形させる処理又は前記ヒット有効範囲を変化させる処理を行ってもよい。
【0017】
このようにすれば、プレーヤが指示した方向にヒットボリュームを引き伸ばす変形処理やヒット有効範囲の変化処理などを行うことで、例えばファインプレイなどの捕球処理を実現することが可能になる。
【0018】
また本発明の一態様では、前記判定部は、ゲーム条件の設定に応じて、前記ヒットボリュームの形状、ヒット有効範囲、位置及び方向の少なくとも1つを変化させてもよい。
【0019】
このようにすれば、捕捉条件や捕球条件を判定するためのヒットボリュームにゲーム条件を反映させることが可能になる。
【0020】
また本発明の一態様では、前記判定部は、前記仮想カメラの視野範囲に対応して設定された捕捉判定範囲内に前記ボールが入っている場合に、前記仮想カメラが前記ボールを捕捉する前記捕捉条件が満たされていると判定し、前記捕捉条件が満たされた状態で前記ボールの前記捕球条件が満たされた場合に、前記ボールの捕球が成功したと判定してもよい。
【0021】
このようにすれば、仮想カメラの視野範囲に対応して設定された捕捉判定範囲内にボールが入っているかどうかを判断することで、ボールの捕捉条件を判定し、捕捉判定範囲内にボールが入っている状態で捕球条件が満たされた場合に、ボールの捕球が成功したと判定できるようになる。従って、実際にボールを目で追って捕球するというような操作感覚をプレーヤに与えることが可能になる。
【0022】
また本発明の一態様では、前記判定部は、前記捕捉判定範囲を可変に制御してもよい。
【0023】
このようにすれば、捕捉判定範囲を可変に制御して、捕捉条件などを判定できるようになる。
【0024】
また本発明の一態様では、前記判定部は、ゲーム条件の設定に応じて、前記捕捉判定範囲を変化させてもよい。
【0025】
このようにすれば、捕捉条件を判定するための捕捉判定範囲にゲーム条件を反映させることが可能になる。
【0026】
また本発明の一態様では、前記判定部は、前記ボールに追従するボール用ヒットボリュームを設定し、前記ボール用ヒットボリュームを用いて、前記ボールの前記捕球条件が満たされているかを判定してもよい。
【0027】
このようにすれば、ボールに対して設定されたボール用ヒットボリュームを用いて捕球条件等を判定できるようになる。
【0028】
また本発明の一態様では、前記判定部は、前記ボールが第1の軌道で移動する場合には、前記仮想カメラの視線方向範囲が第1の視線方向範囲である場合に、前記捕捉条件が満たされていると判定し、前記ボールが、前記第1の軌道とは異なる第2の軌道で移動する場合には、前記仮想カメラの視線方向範囲が、前記第1の視線方向範囲とは異なる第2の視線方向範囲である場合に、前記捕捉条件が満たされていると判定してもよい。
【0029】
このようにすれば、ボールが、第1の軌道で移動する場合には、仮想カメラの視線方向範囲が、第1の視線方向範囲である場合に、捕捉条件が満たされていると判定し、ボールが、第2の軌道で移動する場合には、仮想カメラの視線方向範囲が、第2の視線方向範囲である場合に、捕捉条件が満たされていると判定できる。従って、ボールの軌道が変化した場合にも、仮想カメラの視線方向範囲を判断して、ボールが仮想カメラに捕捉された状態であるかどうかを判定できるようになる。なお例えば第2の軌道は、第1の軌道よりも高い軌道であり、第2の視線方向範囲は、第1の視線方向範囲よりも高い視線方向の範囲である。或いは、第2の軌道は、第1の軌道とはその軌道の方向(横方向での軌道の方向)が異なる軌道であり、第2の視線方向範囲は、第1の視線方向範囲とは視線の向く方向(横方向での視線の向く方向)が異なる視線方向範囲である。
【0030】
また本発明の一態様では、前記操作情報取得部は、前記操作情報として、プレーヤが入力した第1の操作情報と第2の操作情報を取得し、前記仮想カメラ制御部は、前記第1の操作情報に基づいて、前記仮想カメラの視線方向を制御し、前記第2の操作情報に基づいて、前記仮想カメラの視点位置の移動又はプレーヤキャラクタの移動を制御してもよい。
【0031】
このようにすれば、第1の操作情報に基づいて、仮想カメラの視線方向を制御しながら、第2の操作情報に基づいて、例えば仮想カメラの視線方向の制御とは独立に、仮想カメラの視点位置の移動やプレーヤキャラクタの移動を制御できるようになる。そして、第1の操作情報に基づき仮想カメラの視線方向を変化させながら、捕捉条件や捕球条件を判定できるようになる。
【0032】
また本発明の一態様では、前記操作情報取得部は、モーションセンサからのモーション検出情報を前記第1の操作情報として取得し、方向指示部からの方向指示情報を前記第2の操作情報として取得し、前記仮想カメラ制御部は、前記第1の操作情報である前記モーション検出情報に基づいて、前記仮想カメラの視線方向を制御し、前記第2の操作情報である前記方向指示情報に基づいて、前記仮想カメラの視点位置の移動又はプレーヤキャラクタの移動を制御してもよい。
【0033】
このようにすれば、モーションセンサによるモーション検出情報により、仮想カメラの視線方向を制御し、方向指示部による方向指示情報により、仮想カメラの視点位置の移動を制御できるようになる。そして、モーション検出情報に基づき仮想カメラの視線方向を変化させながら、捕捉条件や捕球条件を判定できるようになる。なお、第1の操作情報が方向指示情報であり、第2の操作情報がモーション検出情報であってもよい。この場合には第1の操作情報である方向指示情報に基づいて、仮想カメラの視線方向が制御され、第2の操作情報であるモーション検出情報に基づいて、仮想カメラの視点位置の移動又はプレーヤキャラクタの移動が制御されることになる。
【0034】
また本発明の一態様では、前記仮想カメラ制御部は、前記操作情報に基づいて第1の座標軸回りで前記仮想カメラの視線方向を変化させる制御を行うと共に、前記第1の座標軸に直交する第2の座標軸回りでは前記仮想カメラの視線方向を固定してもよい。
【0035】
このようにすれば、操作情報に基づき第1の座標軸回りでは仮想カメラの視線方向が変化する一方で、第2の座標軸回りでは仮想カメラの視線方向が固定されるため、プレーヤのゲーム操作の簡素化等を図れる。
【0036】
また本発明の一態様では、前記移動体演算部は、前記ボールの捕球に成功し、所与の送球条件が満たされた場合に、捕球された前記ボールの送球処理を行ってもよい。
【0037】
このようにすれば、ボールの捕球に成功した場合に、捕球したボールを送球ターゲット等に送球することが可能になる。
【0038】
また本発明の一態様では、前記移動体演算部は、前記ボールの捕球に成功し、前記プレーヤが送球指示操作を行った場合に、捕球された前記ボールを送球ターゲットに送球する処理を行ってもよい。
【0039】
このようにすれば、ボールの捕球に成功した場合に、送球指示操作を行うだけで、捕球したボールを送球ターゲットに対して送球することが可能になる。従って、簡素な操作で送球処理を実現できるようになる。
【0040】
また本発明の一態様では、前記移動体演算部は、前記ボールの捕球に成功し、前記プレーヤが前記仮想カメラの視線方向を送球ターゲット側に向ける操作を行った場合に、捕球された前記ボールを前記送球ターゲットに送球する処理を行ってもよい。
【0041】
このようにすれば、ボールの捕球に成功した場合に、仮想カメラの視線方向を送球ターゲット側に向ける操作を行うことで、捕球したボールを送球ターゲットに対して送球することが可能になる。従って、より仮想現実感の高い送球処理を実現できるようになる。
【0042】
また本発明の一態様では、前記操作情報取得部は、モーションセンサからのモーション検出情報を前記操作情報として取得し、前記仮想カメラ制御部は、前記モーション検出情報に基づいて、前記仮想カメラの視線方向を制御し、前記判定部は、前記モーション検出情報に基づき前記仮想カメラの視線方向が変化する場合に、視線方向が変化する前記仮想カメラが前記ボールを捕捉する前記捕捉条件が満たされているかを判定してもよい。
【0043】
このようにすれば、モーションセンサからのモーション検出情報に基づいて、仮想カメラの視線方向を制御し、このようにモーション検出情報に基づきその視線方向が変化する仮想カメラが、ボールの捕捉条件を満たしているかどうかを判定できるようになる。
【0044】
また本発明の一態様では、前記モーションセンサは携帯型ゲーム装置に設けられるセンサであり、前記操作情報取得部は、前記プレーヤが前記携帯型ゲーム装置を動かすことで得られた前記モーション検出情報を、前記モーションセンサから取得し、前記仮想カメラ制御部は、前記携帯型ゲーム装置の動きに応じて前記仮想カメラの視線方向が変化するように前記仮想カメラを制御し、前記判定部は、前記携帯型ゲーム装置の動きに応じて前記仮想カメラの視線方向が変化する場合に、視線方向が変化する前記仮想カメラが前記ボールを捕捉する前記捕捉条件が満たされているかを判定してもよい。
【0045】
このようにすれば、プレーヤが携帯型ゲーム装置を動かすと、その動きがモーションセンサにより検出され、携帯型ゲーム装置の動きに応じて仮想カメラの視線方向が変化するようになる。そして、このように携帯型ゲーム装置の動きに応じて視線方向が変化する仮想カメラが、ボールの捕捉条件を満たしているかを判定できるようになる。
【0046】
また本発明の他の態様は、プレーヤの操作情報を取得する操作情報取得部と、取得された前記操作情報に基づいて、仮想カメラの制御を行う仮想カメラ制御部と、プレイ対象であるボールの移動演算処理を行う移動体演算部と、前記ボールの捕球が成功したかを判定する判定部と、オブジェクト空間内において前記仮想カメラから見える画像を生成する画像生成部を含み、前記判定部は、前記仮想カメラ又は前記プレーヤが操作するプレーヤキャラクタに追従すると共に、前記ボールの軌道に応じて位置、方向及び形状の少なくとも1つが変化するヒットボリュームを設定し、設定された前記ヒットボリュームに前記ボールがヒットした場合に、前記ボールの捕球が成功したと判定するゲーム装置に関係する。また本発明は、上記各部としてコンピュータを機能させるプログラム、又は該プログラムを記憶したコンピュータ読み取り可能な情報記憶媒体に関係する。
【0047】
本発明の他の態様によれば、操作情報に基づき仮想カメラの制御が行われると共に、プレイ対象物であるボールを移動させる移動演算処理が行われる。また、仮想カメラ又はプレーヤキャラクタに追従すると共に、ボールの軌道に応じてその位置、方向及び形状の少なくとも1つが変化するヒットボリュームが設定される。そして、このように設定されたヒットボリュームにボールがヒットした場合に、ボールの捕球が成功したと判定される。従って、例えばボールの軌道の高低等に応じて、その設定が変化するヒットボリュームを用いて、ボールの捕球に成功したかどうかを判定できるため、仮想現実感の高い捕球操作を実現できるようになる。
【0048】
また本発明の他の態様は、プレーヤの操作情報を取得する操作情報取得部と、取得された前記操作情報に基づいて、仮想カメラの制御を行う仮想カメラ制御部と、プレイ対象であるボールの移動演算処理を行う移動体演算部と、前記ボールの捕捉条件が満たされているかを判定する判定部と、オブジェクト空間内において前記仮想カメラから見える画像を生成する画像生成部とを含み、前記操作情報取得部は、モーションセンサからのモーション検出情報を前記操作情報として取得し、前記仮想カメラ制御部は、前記モーション検出情報に基づいて、前記仮想カメラの視線方向を制御し、前記判定部は、前記モーション検出情報に基づき視線方向が変化する前記仮想カメラが前記ボールを捕捉する前記捕捉条件が満たされているかを判定するゲーム装置に関係する。また本発明は、上記各部としてコンピュータを機能させるプログラム、又は該プログラムを記憶したコンピュータ読み取り可能な情報記憶媒体に関係する。
【0049】
本発明の他の態様によれば、モーションセンサからのモーション検出情報に基づいて、仮想カメラの視線方向の制御が行われると共に、プレイ対象物であるボールを移動させる移動演算処理が行われる。従って、モーションセンサからのモーション検出情報に基づいて、仮想カメラの視線方向を変化させ、このようにモーション検出情報に基づきその視線方向が変化する仮想カメラが、ボールの捕捉条件を満たしているかどうかを判定できるため、仮想現実感の高い捕球操作を実現できるようになる。
【0050】
また本発明の他の態様は、プレーヤの操作情報を取得する操作情報取得部と、取得された前記操作情報に基づいて、仮想カメラの制御を行う仮想カメラ制御部と、プレイ対象であるボールの移動演算処理を行う移動体演算部と、前記操作情報に基づき前記仮想カメラの視線方向が変化する場合に、視線方向が変化する前記仮想カメラが前記ボールを捕捉する捕捉条件が満たされており、前記ボールの捕球条件が満たされた場合に、前記ボールの捕球が成功したと判定する判定部と、オブジェクト空間内において前記仮想カメラから見える画像を生成するための画像生成用データを生成する画像生成用データ生成部とを含むサーバシステムに関係する。
【0051】
また本発明の他の態様は、プレーヤの操作情報を取得する操作情報取得部と、取得された前記操作情報に基づいて、仮想カメラの制御を行う仮想カメラ制御部と、プレイ対象であるボールの移動演算処理を行う移動体演算部と、前記ボールの捕球が成功したかを判定する判定部と、オブジェクト空間内において前記仮想カメラから見える画像を生成するための画像生成用データを生成する画像生成用データ生成部とを含み、前記判定部は、前記仮想カメラ又は前記プレーヤが操作するプレーヤキャラクタに追従すると共に、前記ボールの軌道に応じて位置、方向及び形状の少なくとも1つが変化するヒットボリュームを設定し、設定された前記ヒットボリュームに前記ボールがヒットした場合に、前記ボールの捕球が成功したと判定するサーバシステムに関係する。
【0052】
また本発明の他の態様は、プレーヤの操作情報を取得する操作情報取得部と、取得された前記操作情報に基づいて、仮想カメラの制御を行う仮想カメラ制御部と、プレイ対象であるボールの移動演算処理を行う移動体演算部と、前記ボールの捕捉条件が満たされているかを判定する判定部と、オブジェクト空間内において前記仮想カメラから見える画像を生成するための画像生成用データを生成する画像生成用データ生成部とを含み、前記操作情報取得部は、モーションセンサからのモーション検出情報を前記操作情報として取得し、前記仮想カメラ制御部は、前記モーション検出情報に基づいて、前記仮想カメラの視線方向を制御し、前記判定部は、前記モーション検出情報に基づき視線方向が変化する前記仮想カメラが前記ボールを捕捉する前記捕捉条件が満たされているかを判定するサーバシステムに関係する。
【図面の簡単な説明】
【0053】
【図1】本実施形態のゲーム装置の構成例。
【図2】図2(A)、図2(B)は本実施形態が適用される携帯型ゲーム装置の構成例。
【図3】図3(A)、図3(B)は本実施形態の判定手法の説明図。
【図4】図4(A)、図4(B)は本実施形態の判定手法の説明図。
【図5】図5(A)、図5(B)は内野ゴロ時に本実施形態により生成される画像の例。
【図6】内野ゴロの捕球後の送球時に本実施形態により生成される画像の例。
【図7】図7(A)、図7(B)は外野フライ時に本実施形態により生成される画像の例。
【図8】図8(A)〜図8(C)はヒットボリュームを用いた第1の判定手法の説明図。
【図9】図9(A)、図9(B)はヒットボリュームを用いた第1の判定手法の説明図。
【図10】図10(A)、図10(B)はヒットボリュームの設定手法の変形例の説明図。
【図11】図11(A)、図11(B)はプレーヤの指示方向に応じてヒットボリュームを変形させる手法の説明図。
【図12】図12(A)、図12(B)はゲームの難易度の設定に応じてヒットボリュームの形状等を変化させる手法の説明図。
【図13】図13(A)〜図13(C)は仮想カメラの視野範囲に対応して設定された補足判定範囲を用いた第2の判定手法の説明図。
【図14】図14(A)、図14(B)はゲームの難易度の設定に応じて補足判定範囲を変化させる手法の説明図。
【図15】図15(A)〜図15(C)は仮想カメラの視点位置の移動の制御手法の説明図。
【図16】図16(A)〜図16(C)はモーションセンサを用いた仮想カメラの視線方向の制御手法の説明図。
【図17】図17(A)、図17(B)は捕球したボールの送球処理の説明図。
【図18】図18(A)〜図18(C)は野球ゲーム以外の球技ゲームへの本実施形態の手法の適用例。
【図19】本実施形態の詳細な処理を説明するフローチャート。
【図20】本実施形態の詳細な処理を説明するフローチャート。
【図21】本実施形態のサーバシステムの構成例。
【発明を実施するための形態】
【0054】
以下、本実施形態について説明する。なお、以下に説明する本実施形態は、特許請求の範囲に記載された本発明の内容を不当に限定するものではない。また本実施形態で説明される構成の全てが、本発明の必須構成要件であるとは限らない。
【0055】
1.構成
図1に本実施形態のゲーム装置(画像生成システム、ゲームシステム)のブロック図の例を示す。なお、本実施形態のゲーム装置の構成は図1に限定されず、その構成要素(各部)の一部を省略したり、他の構成要素を追加するなどの種々の変形実施が可能である。
【0056】
操作部160は、プレーヤが操作データを入力するためのものであり、その機能は、方向指示キー、操作ボタン、アナログスティック、レバー、各種センサ(角速度センサ、加速度センサ等)、マイク、或いはタッチパネル型ディスプレイなどにより実現できる。
【0057】
操作部160のモーションセンサは、ゲームコントローラや携帯型ゲーム装置などの機器の動きを検出するものであり、このような機器の動きを検出することでプレーヤの操作モーションなどを検出できる。このモーションセンサは、例えば加速度センサ、角速度センサ(ジャイロセンサ)や、カメラの画像センサなどの種々のセンサにより実現できる。加速度センサは直交3軸方向の各加速度情報を検出する。具体的には互いに直交する座標軸をX軸、Y軸、Z軸とした場合に、X軸方向に沿った第1の加速度情報、Y軸方向に沿った第2の加速度情報、Z軸方向に沿った第3の加速度情報を検出して、センサ検出情報として出力する。この加速度センサは、例えばMEMS構造のピエゾ抵抗型や静電容量型のセンサなどにより実現できる。また角速度センサは、所定の回転軸回りの角速度情報を検出するセンサである。具体的に角速度センサは、直交3軸での角速度情報を検出するセンサであり、X軸、Y軸、Z軸回りでの角速度情報を検出する。例えばX軸回りの回転角度をα、Y軸回りの回転角度をβ、Z軸回りの回転角度をγとすると、これらのα、β、γについての角速度を検出して、センサ検出情報として出力する。この角速度センサは例えばMEMS構造の多軸角速度センシングジャイロスコープなどにより実現できる。モーションセンサとして画像センサ(CCD、CMOSセンサ等)を用いた場合には、画像センサにより撮像された撮像画像の画素の動き情報などにより、ゲームコントローラや携帯型ゲーム装置などの機器の動きを検出すればよい。
【0058】
なおモーションセンサは、ゲーム装置に内蔵されるものであってもよいし、ゲーム装置のオプションの外付け部品として用意されるものであってもよい。
【0059】
記憶部170は、処理部100や通信部196などのワーク領域となるもので、その機能はRAM(DRAM、VRAM)などにより実現できる。そしてゲームプログラムや、ゲームプログラムの実行に必要なゲームデータは、この記憶部170に保持される。
【0060】
情報記憶媒体180(コンピュータにより読み取り可能な媒体)は、プログラムやデータなどを格納するものであり、その機能は、光ディスク(DVD、CD等)、HDD(ハードディスクドライブ)、或いはメモリ(ROM等)などにより実現できる。処理部100は、情報記憶媒体180に格納されるプログラム(データ)に基づいて本実施形態の種々の処理を行う。即ち情報記憶媒体180には、本実施形態の各部としてコンピュータ(操作部、処理部、記憶部、出力部を備える装置)を機能させるためのプログラム(各部の処理をコンピュータに実行させるためのプログラム)が記憶される。
【0061】
表示部190は、本実施形態により生成された画像を出力するものであり、その機能は、LCD、有機ELディスプレイ、CRT、タッチパネル型ディスプレイ、或いはHMD(ヘッドマウントディスプレイ)などにより実現できる。音出力部192は、本実施形態により生成された音を出力するものであり、その機能は、スピーカ、或いはヘッドフォンなどにより実現できる。
【0062】
補助記憶装置194(補助メモリ、2次メモリ)は、記憶部170の容量を補うために使用される記憶装置であり、SDメモリーカード、マルチメディアカードなどのメモリーカードなどにより実現できる。
【0063】
通信部196は、有線や無線のネットワークを介して外部(例えば他のゲーム装置、サーバ、ホスト装置)との間で通信を行うものであり、その機能は、通信用ASIC又は通信用プロセッサなどのハードウェアや、通信用ファームウェアにより実現できる。
【0064】
なお本実施形態の各部としてコンピュータを機能させるためのプログラム(データ)は、サーバ(ホスト装置)が有する情報記憶媒体からネットワーク及び通信部196を介して情報記憶媒体180(あるいは記憶部170、補助記憶装置194)に配信してもよい。このようなサーバ(ホスト装置)による情報記憶媒体の使用も本発明の範囲内に含めることができる。
【0065】
処理部100(プロセッサ)は、操作部160からの操作データやプログラムなどに基づいて、ゲーム処理、画像生成処理、或いは音生成処理などを行う。処理部100は記憶部170をワーク領域として各種処理を行う。この処理部100の機能は、各種プロセッサ(CPU、GPU等)、ASIC(ゲートアレイ等)などのハードウェアや、プログラムにより実現できる。
【0066】
処理部100は、操作情報取得部102、ゲーム演算部104、オブジェクト空間設定部106、仮想カメラ制御部108、移動体演算部110、判定部112、難易度設定部114、画像生成部120、音生成部130を含む。なおこれらの一部の構成要素を省略したり、他の構成要素を追加するなどの種々の変形実施が可能である。
【0067】
操作情報取得部102は、プレーヤの操作情報を取得する。例えばプレーヤが操作部160を用いて各種操作を行うと、その操作情報を取得する。またプレーヤが、操作部であるゲームコントローラを動かすと、ゲームコントローラに内蔵されたモーションセンサからのモーション検出情報を、操作情報として取得する。或いは、携帯型ゲーム装置にモーションセンサが内蔵されている場合には、プレーヤが携帯型ゲーム装置を動かすと、携帯型ゲーム装置に内蔵されたモーションセンサが、その動きを検出する。そして操作情報取得部102は、モーションセンサからのモーション検出情報を、操作情報として取得する。取得された操作情報は記憶部170に一時的に保存される。
【0068】
ゲーム演算部104はゲーム演算処理を行う。ここでゲーム演算としては、ゲーム開始条件が満たされた場合にゲームを開始する処理、ゲームを進行させる処理、ゲーム結果を演算する処理、或いはゲーム終了条件が満たされた場合にゲームを終了する処理などがある。
【0069】
オブジェクト空間設定部106は、複数のオブジェクトが配置されるオブジェクト空間の設定処理を行う。例えば、キャラクタ(人、動物、ロボット、車、船舶、飛行機等)、ボール、マップ(地形)、建物、コース(道路)、樹木、壁などの表示物を表す各種オブジェクト(ポリゴン、自由曲面又はサブディビジョンサーフェイスなどのプリミティブ面で構成されるオブジェクト)をオブジェクト空間に配置設定する処理を行う。即ちワールド座標系でのオブジェクトの位置や回転角度(向き、方向と同義)を決定し、その位置(X、Y、Z)にその回転角度(X、Y、Z軸回りでの回転角度)でオブジェクトを配置する。具体的には、記憶部170のオブジェクトデータ記憶部172には、オブジェクト(パーツオブジェクト)の位置、回転角度、移動速度、移動方向等のデータであるオブジェクトデータがオブジェクト番号に対応づけて記憶される。オブジェクト空間設定部106は、例えば各フレーム毎にこのオブジェクトデータを更新する処理などを行う。
【0070】
仮想カメラ制御部108は、オブジェクト空間内の所与(任意)の視点から見える画像を生成するための仮想カメラ(視点、基準仮想カメラ)の制御処理を行う。具体的には、仮想カメラの位置(X、Y、Z)又は回転角度(X、Y、Z軸回りでの回転角度)を制御する処理(視点位置、視線方向あるいは画角を制御する処理)を行う。
【0071】
移動体演算部110は、キャラクタやボール等の移動体を移動させるための演算を行う。また移動体(移動体オブジェクト)を動作させるための演算も行う。即ち操作部160によりプレーヤが入力した操作情報や、プログラム(移動・動作アルゴリズム)や、各種データ(モーションデータ)などに基づいて、移動体(オブジェクト、モデルオブジェクト)をオブジェクト空間内で移動させたり、移動体を動作(モーション、アニメーション)させる処理を行う。具体的には、移動体の移動情報(位置、回転角度、速度、或いは加速度)や動作情報(パーツオブジェクトの位置、或いは回転角度)を、1フレーム(1/60秒)毎に順次求めるシミュレーション処理を行う。なおフレームは、移動体の移動・動作処理(シミュレーション処理)や画像生成処理を行う時間の単位である。
【0072】
判定部112は、各種の判定処理を行う。例えばボールの捕捉条件が満たされたかどうかを判定する処理や、ボールの捕球が成功したかを判定する処理などを行う。判定部112の詳細は後述する。
【0073】
難易度設定部114は、ゲームの難易度(ハンディ)の設定処理を行う。例えば初級レベル、中級レベル、上級レベルなどの難易度を設定する。難易度の設定は、オプション画面などを用いてプレーヤが入力した情報に基づいて行ってもよいし、得点やゲーム場面などのゲーム状況等に応じてコンピュータが自動的に設定してもよい。
【0074】
画像生成部120は、処理部100で行われる種々の処理(ゲーム処理、シミュレーション処理)の結果に基づいて描画処理を行い、これにより画像を生成し、表示部190に出力する。具体的には、座標変換(ワールド座標変換、カメラ座標変換)、クリッピング処理、透視変換、或いは光源処理等のジオメトリ処理が行われ、その処理結果に基づいて、描画データ(プリミティブ面の頂点の位置座標、テクスチャ座標、色データ、法線ベクトル或いはα値等)が作成される。そして、この描画データ(プリミティブ面データ)に基づいて、透視変換後(ジオメトリ処理後)のオブジェクト(1又は複数プリミティブ面)を、描画バッファ178(フレームバッファ、ワークバッファ等のピクセル単位で画像情報を記憶できるバッファ)に描画する。これにより、オブジェクト空間内において仮想カメラ(所与の視点)から見える画像が生成される。なお、描画処理は頂点シェーダ処理やピクセルシェーダ処理等により実現することができる。
【0075】
なお、画像生成部120が、いわゆる立体視用の画像を生成するようにしてもよい。この場合には、基準となる仮想カメラの位置とカメラ間距離を用いて、左眼用仮想カメラ(第1の視点用仮想カメラ)と右眼用仮想カメラ(第2の視点用仮想カメラ)を配置設定する。そして画像生成部120が、オブジェクト空間内において左眼用仮想カメラから見える左眼用画像(第1視点画像)と、オブジェクト空間内において右眼用仮想カメラから見える右眼用画像(第2視点画像)を生成する。そしてこれらの左眼用画像、右眼用画像を用いて、眼分離眼鏡方式や、レンチキュラなどを用いた裸眼方式などにより、立体視を実現すればよい。
【0076】
音生成部130は、処理部100で行われる種々の処理の結果に基づいて音処理を行い、BGM、効果音、又は音声などのゲーム音を生成し、音出力部192に出力する。
【0077】
そして本実施形態では、操作情報取得部102が、プレーヤの操作情報を取得する。例えばプレーヤが操作部160を操作することで得られる操作情報を取得する。またモーションセンサからのモーション検出情報(加速度情報、角速度情報等)を操作情報として取得する。
【0078】
そして仮想カメラ制御部108は、取得された操作情報に基づいて、仮想カメラの制御を行う。例えば仮想カメラの視線方向や視点位置の制御を行う。具体的には、プレーヤの操作情報にしたがって、仮想カメラの視線方向を変化させたり、仮想カメラの視点位置を移動させる制御を行う。この操作情報に基づく仮想カメラの視線方向や視点位置の制御は、操作情報にしたがってプレーヤキャラクタを移動させ、そのプレーヤキャラクタの移動等にしたがって仮想カメラの視線方向や視点位置を制御する場合を含む。
【0079】
なおプレーヤキャラクタは、その全部又は一部の部位がゲーム画像に実際に表示されるキャラクタであってもよいし、ゲーム画像に表示されない仮想的なキャラクタであってもよい。
【0080】
移動体演算部110は、プレイ対象であるボールの移動演算処理を行う。例えばボールが、バットやキャラクタの部位などの被ヒット体でヒットされた場合に、そのボールの軌道(移動軌道)を、所与のアルゴリズムやテーブルデータなどに基づき求める演算処理を行う。
【0081】
判定部112は、ボール(広義には移動体)の捕球(広義にはキャッチ)が成功したかについての判定処理を行う。例えば操作情報に基づき仮想カメラの視線方向が変化する場合に、視線方向が変化する仮想カメラによるボールの捕捉条件が満たされており、ボールの捕球条件が満たされた場合に、ボールの捕球が成功したと判定する。例えばボールの捕捉条件及び捕球条件が満たされた場合(捕捉条件を満たしながらボールが捕球された場合)に、ボールの捕球が成功したと判定する。そして画像生成部120は、オブジェクト空間内において仮想カメラから見える画像を生成する。例えば操作情報に基づき視線方向が変化する仮想カメラの視点で画像を生成し、捕球が成功した場合には、その捕球の成功を表す画像を生成して表示部190に表示する。
【0082】
ここで捕捉条件は、操作情報に応じて視線方向が変化する仮想カメラがボールを捕捉しているという条件であり、仮想カメラによりボールが捕捉状態にあると判定された場合(捕捉判定範囲にボールが存在すると判定された場合)に満たされる条件である。また捕球条件は、プレーヤキャラクタによりボールが実際に捕球されたと判定された場合に満たされる条件であり、例えばグラブ、足や手などの部位、或いはラケットなどの被捕球体(被捕球体に対応するヒットボリューム)にボールが接触した場合に、捕球条件が満たされたと判定できる。
【0083】
更に具体的には、判定部112は、仮想カメラ(又はプレーヤが操作するプレーヤキャラクタ)に追従するヒットボリューム(ヒットボックス、ヒットエリア、ヒット範囲)を設定する。そして設定されたヒットボリュームにボールがヒット(接触)したと判定された場合に、ボールの捕捉条件及び捕球条件が満たされたと判定する。例えば操作情報に基づき仮想カメラの視線方向や視点位置が変化すると、その視線方向や視線位置の変化に追従するようにヒットボリュームの位置、方向又は形状等が設定され、そのヒットボリュームにボールがヒットしたと判定されると、ボールの捕捉条件及び捕球条件が満たされたと判定する。
【0084】
例えば判定部112は、ヒットボリュームの形状、ヒット有効範囲、位置及び方向(向いている方向)の少なくとも1つを可変に制御する。具体的には、ボールの軌道に応じて、ヒットボリュームの形状、ヒット有効範囲、位置及び方向の少なくとも1つを変化させる。例えばボールの軌道が低い軌道なのか高い軌道なのかに応じて、ヒットボリュームの形状、ヒット有効範囲、位置又は方向などを変化させる。なおヒット有効範囲は、ヒットチェックが有効となる範囲であり、同じ形状のヒットボリュームであっても、ヒット有効範囲の設定を異ならせることで、ボールとのヒットチェックが行われる範囲を可変に制御できるようになる。
【0085】
また判定部112は、ボールの捕球時(捕球タイミング、捕球期間)にプレーヤが指示した方向に応じて、ヒットボリュームを変形させる処理又はヒット有効範囲を変化させる処理を行う。例えばプレーヤの指示方向にヒットボリュームを引き伸ばす変形処理やヒット有効範囲の変化処理などを行う。或いは、判定部112は、ゲーム条件の設定に応じて、ヒットボリュームの形状、ヒット有効範囲、位置及び方向の少なくとも1つを変化させる。具体的には、難易度設定部114によりゲームの難易度が設定された場合に、ゲームの難易度の設定に応じて、ヒットボリュームの形状、ヒット有効範囲、位置及び方向の少なくとも1つを変化させる。例えばゲーム難易度が第1の難易度(例えば初級)である場合と第2の難易度(例えば上級)である場合とで、ヒットボリュームの形状、ヒット有効範囲、位置又は方向等を異ならせる。なお、ヒットボリュームの形状等を変化させるゲーム条件は、ゲームの難易度には限定されず、例えばプレーヤキャラクタ(プレーヤ)の所持アイテム数、経験値又は体力値などのステータス情報であってもよい。
【0086】
また判定部112は、仮想カメラの視野範囲に対応して設定された捕捉判定範囲内にボールが入っている場合に、仮想カメラがボールを捕捉する捕捉条件が満たされていると判定し、捕捉条件が満たされた状態でボールの捕球条件が満たされた場合に、ボールの捕球が成功したと判定してもよい。例えば、捕球タイミングの前の所与の期間において、仮想カメラの視野範囲に対応する捕捉判定範囲内にボールが入っており、仮想カメラによるボールの捕捉条件が満たされた状態で、捕球条件が満たされると、捕球に成功したと判定する。この場合の捕球条件は、例えばプレーヤキャラクタやその部位に設定されたヒットボリュームを用いたヒットチェック処理により実現できる。また視野範囲や捕捉判定範囲は、エリアのような範囲であってもよいし、視線方向や画角により特定される角度範囲であってもよい。また捕捉判定範囲は、視野範囲そのものであってもよいし、視野範囲に内包される範囲であってもよい。また視野範囲は、仮想カメラの視線方向と画角により規定される厳密な視野範囲よりも若干広い範囲であってもよい。
【0087】
また判定部112は、捕捉判定範囲を可変に制御してもよい。具体的には、ゲームの難易度などのゲーム条件の設定に応じて、捕捉判定範囲を変化させる。例えばゲーム難易度が第1の難易度(例えば初級)である場合と第2の難易度(例えば上級)である場合とで、捕捉判定範囲の大きさ、形状又は位置等を異ならせる。
【0088】
また判定部112は、ボールに追従するボール用ヒットボリュームを設定し、ボール用ヒットボリュームを用いて、ボールの捕球条件が満たされているかを判定してもよい。例えばボールを内包するような比較的大きなサイズのボール用ヒットボリュームを設定する。そしてボール用ヒットボリュームとプレーヤキャラクタや仮想カメラの位置とのヒットチェックを行い、ヒットしたと判定された場合には、捕球条件が満たされたと判定する。なおボール用ヒットボリュームを用いて捕捉条件を判断することも可能である。またボールの軌道の高低や、軌道の方向(横方向での軌道の方向)や、ゲーム難易度などのゲーム条件に応じて、ボール用ヒットボリュームの形状又はヒット有効範囲等を変化させてもよい。
【0089】
また判定部112は、ボールが第1の軌道で移動する場合には、仮想カメラの視線方向範囲(視線方向を含む範囲)が第1の視線方向範囲である場合に、捕捉条件が満たされていると判定する。一方、ボールが第1の軌道とは異なる第2の軌道(第1の軌道よりも高い軌道。第1の軌道とは方向が異なる軌道)で移動する場合には、仮想カメラの視線方向範囲が、第1の視線方向範囲とは異なる第2の視線方向範囲(第1の視線方向範囲よりも高い視線方向範囲。第1の視線方向範囲とは視線が向く方向が異なる視線方向範囲)である場合に、捕捉条件が満たされていると判定する。例えば、ボールが低い軌道で移動する場合には、仮想カメラの視線方向が低い場所を見る視線方向である場合に捕捉条件が満たされたと判定する。一方、ボールが高い軌道で移動する場合には、仮想カメラの視線方向が高い場所を見る視線方向である場合に捕捉条件が満たされたと判定する。或いはボールが左方向の軌道で移動する場合には、仮想カメラの視線方向が左方向を見る視線方向である場合に捕捉条件が満たされたと判定する。一方、ボールが右方向の軌道で移動する場合には、仮想カメラの視線方向が右方向を見る視線方向である場合に捕捉条件が満たされたと判定する。
【0090】
また操作情報取得部102は、操作情報として、プレーヤが入力した第1の操作情報と第2の操作情報を取得してもよい。例えばモーションセンサからのモーション検出情報を第1の操作情報として取得し、操作部160の方向指示部(方向指示キー、アナログティック)からの方向指示情報を第2の操作情報として取得する。そして仮想カメラ制御部108は、第1の操作情報に基づいて、仮想カメラの視線方向を制御し、第2の操作情報に基づいて、仮想カメラの視点位置の移動又はプレーヤキャラクタの移動を制御する。例えば第1の操作情報であるモーション検出情報に基づいて、仮想カメラの視線方向を制御し、第2の操作情報である方向指示情報に基づいて、仮想カメラの視点位置の移動又はプレーヤキャラクタの移動を制御する。この場合の第1の操作情報に基づく仮想カメラの視線方向の制御は、第1の操作情報に基づきプレーヤキャラクタの向く方向(視線方向)を制御し、プレーヤキャラクタの向く方向に追従するように仮想カメラの視線方向を制御する場合を含む。また第2の操作情報に基づく仮想カメラの視点位置の移動の制御は、第2の操作情報に基づいてプレーヤキャラクタの移動を制御し、プレーヤキャラクタの移動に追従するように仮想カメラの視点位置の移動を制御する場合を含む。また、逆に、第1の操作情報が方向指示情報であり、第2の操作情報がモーション検出情報であってもよい。この場合には、方向指示情報に基づいて、仮想カメラの視線方向が制御され、モーション検出情報に基づいて、仮想カメラの視点位置の移動又はプレーヤキャラクタの移動が制御されることになる。
【0091】
また仮想カメラ制御部108は、操作情報に基づいて第1の座標軸回りで仮想カメラの視線方向を変化させる制御を行うと共に、第1の座標軸に直交する第2の座標軸回りでは仮想カメラの視線方向を固定してもよい。このようにすれば、全ての座標軸回りでの視線方向の変化を許容する手法等に比べて、プレーヤのゲーム操作を簡素化できる。なお、第1の座標軸は、例えば水平方向に沿った軸であるX軸であり、第2の座標軸は、例えば鉛直方向に沿った軸であるY軸である。
【0092】
また移動体演算部110は、ボール(移動体)の捕球(キャッチ)に成功し、所与の送球条件(広義には送り条件)が満たされた場合に、捕球されたボールの送球処理を行う。例えばプレーヤの操作情報に基づいて送球条件が満たされたか否かを判断し、満たされた場合に、操作情報により特定される方向にボールを送球する処理を行う。
【0093】
例えば移動体演算部110は、ボールの捕球に成功し、プレーヤが操作部160等を用いた送球指示操作を行った場合に、捕球されたボールを送球ターゲットに送球する処理を行う。ここで、送球指示操作は、例えば送球指示に対応する操作ボタン等の操作部材を操作することなどで実現される。また送球ターゲットは、例えば野球ゲームでは、送球を受ける野手(塁)などであり、サッカーゲームやアメリカンフットボールなどでは、送球のパスを受ける選手や送球のシュートが打ち込まれるゴールなどである。またテニスゲームでは、ラケットにより打ち返されて送球されたボールが飛んで行く場所などである。
【0094】
また移動体演算部110は、ボールの捕球に成功し、プレーヤが仮想カメラの視線方向を送球ターゲット側に向ける操作を行った場合に、捕球されたボールを送球ターゲットに送球する処理を行ってもよい。例えば捕球に成功したプレーヤが、モーションセンサを内蔵するゲームコントローラや携帯型ゲーム装置を、左側に位置する送球ターゲット側に向ける操作を行った場合に、左側の送球ターゲットにボールを送球する処理を行う。一方、ゲームコントローラや携帯型ゲーム装置を、右側に位置する送球ターゲット側に向ける操作を行った場合に、右側の送球ターゲットにボールを送球する処理を行う。
【0095】
また操作情報取得部102が、モーションセンサからのモーション検出情報を操作情報として取得した場合には、仮想カメラ制御部108は、モーション検出情報に基づいて、仮想カメラ(プレーヤキャラクタ)の視線方向を制御する。そして判定部112は、モーション検出情報に基づき仮想カメラの視線方向が変化する場合に、視線方向が変化する仮想カメラがボールを捕捉する捕捉条件が満たされているかを判定する。具体的には、モーションセンサは携帯型ゲーム装置に設けられるセンサであり、操作情報取得部102は、プレーヤが携帯型ゲーム装置を動かすことで得られたモーション検出情報を、モーションセンサから取得する。そして仮想カメラ制御部108は、携帯型ゲーム装置の動きに応じて仮想カメラの視線方向が変化するように仮想カメラを制御する。例えばプレーヤが携帯型ゲーム装置を、水平方向に沿った軸であるX軸回りでロールさせる操作を行った場合には、仮想カメラの視線方向を上下方向に変化させる。また携帯型ゲーム装置を、鉛直方向に沿った軸であるY軸回りでロールさせる操作を行った場合には、仮想カメラの視線方向を左右方向に変化させる。そして判定部112は、携帯型ゲーム装置の動きに応じて仮想カメラの視線方向が変化する場合に、視線方向が変化する仮想カメラがボールを捕捉する捕捉条件が満たされているかを判定する。
【0096】
なお判定部112は、仮想カメラ又はプレーヤキャラクタに追従すると共に、ボールの軌道に応じて位置、方向及び形状の少なくとも1つが変化するヒットボリュームを設定し、設定されたヒットボリュームにボールがヒットした場合に、ボールの捕球が成功したと判定してもよい。また操作情報取得部102がモーションセンサからのモーション検出情報を操作情報として取得し、仮想カメラ制御部108が、モーション検出情報に基づいて仮想カメラの視線方向を制御したとする。この場合に、判定部112は、モーション検出情報に基づき視線方向が変化する仮想カメラがボールを捕捉する捕捉条件が満たされているかを判定してもよい。
【0097】
なお本実施形態の手法はサーバシステムにより実現してもよい。図21にサーバシステムにより実現する場合の構成例を示す。
【0098】
サーバシステム500は、端末装置TM1〜TMnとネットワーク510を介して通信接続される。例えばサーバシステム500はホストであり、端末装置TM1〜TMnはクライアントである。サーバシステム500は例えば1又は複数のサーバ(認証サーバ、ゲームサーバ、通信サーバ、課金サーバ等)により実現できる。ネットワーク510(配信網、通信回線)は、例えばインターネットや無線LAN等を利用した通信路であり、直接接続のための専用線(専用ケーブル)やイーサネット(登録商標)等によるLANの他、電話通信網やケーブル網や無線LAN等の通信網を含むことができる。また通信方法については有線/無線を問わない。
【0099】
端末装置TM1〜TMnは、例えば携帯型ゲーム装置、据え置き型の家庭用ゲーム装置、或いは業務用ゲーム装置等により実現される。携帯型ゲーム装置は専用のゲーム装置であってもよいし、携帯電話機や携帯型情報端末などのゲームプログラムの実行が可能な汎用の装置であってもよい。
【0100】
サーバシステム500は、処理部600、記憶部670、情報記憶媒体680、通信部696を含む。処理部600は、操作情報取得部602、ゲーム演算部604、オブジェクト空間設定部606、仮想カメラ制御部608、移動体演算部610、判定部612、難易度設定部614、画像生成用データ生成部620、音生成用データ生成部630を含む。なおこれらの各部(各ブロック)の機能、動作等は、図1の各部(各ブロック)と同様である。
【0101】
例えばサーバシステム500の操作情報取得部602は、プレーヤの操作情報を取得し、仮想カメラ制御部608は、取得された操作情報に基づいて、仮想カメラの制御を行う。また移動体演算部610は、プレイ対象であるボールの移動演算処理を行う。
【0102】
そして本実施形態では判定部612は、操作情報に基づき仮想カメラの視線方向が変化する場合に、視線方向が変化する仮想カメラがボールを捕捉する捕捉条件が満たされており、ボールの捕球条件が満たされた場合に、ボールの捕球が成功したと判定する。そして画像生成用データ生成部620は、オブジェクト空間内において仮想カメラから見える画像を生成するための画像生成用データを生成する。
【0103】
また本実施形態では判定部612は、仮想カメラ又はプレーヤが操作するプレーヤキャラクタに追従すると共に、ボールの軌道に応じて位置、方向及び形状の少なくとも1つが変化するヒットボリュームを設定し、設定されたヒットボリュームにボールがヒットした場合に、ボールの捕球が成功したと判定してもよい。
【0104】
また操作情報取得部602は、モーションセンサからのモーション検出情報を操作情報として取得し、仮想カメラ制御部608は、モーション検出情報に基づいて、仮想カメラの視線方向を制御する。そして判定部612は、モーション検出情報に基づき視線方向が変化する仮想カメラがボールを捕捉する捕捉条件が満たされているかを判定してもよい。
【0105】
なお、画像を生成するための画像生成用データとは、本実施形態の手法により生成された画像をTM1〜TMnの各端末装置において表示するためのデータであり、画像データそのものであってもよいし、各端末装置が画像を生成するために使用する各種データ(オブジェクトデータ、制御結果データ、判定結果データ又は表示画面の設定データ等)であってもよい。例えばサーバシステム500が、各端末装置の操作部からの操作情報を取得し、各種の制御処理や各種の判定処理を行い、画像を生成して、TM1〜TMnの各端末装置に配信(ストリーム配信等)する場合には、上述の画像生成用データは画像データそのものになる。一方、サーバシステム500が、各端末装置の操作部からの操作情報を取得し、各種の制御処理や各種の判定処理を行い、その制御結果や判定結果に基づいてTM1〜TMnの各端末装置が画像を生成する場合には、上述の画像生成用データは、制御結果データや判定結果データやオブジェクトデータなどになる。音生成用データ生成部630が生成する音生成用データについても同様である。
【0106】
なお操作情報取得部602、ゲーム演算部604、オブジェクト空間設定部606、仮想カメラ制御部608、移動体演算部610、判定部612、難易度設定部614、画像生成用データ生成部620、記憶部670、情報記憶媒体680、通信部696等の詳細な機能、動作は図1で上述に説明したものと同様であるため、詳細な説明は省略する。
【0107】
2.本実施形態の手法
次に本実施形態の手法について具体的に説明する。なお、以下では本実施形態の手法を野球ゲームに適用した場合について主に説明するが、本実施形態の手法が適用されるゲームは野球ゲームに限定されず、例えばサッカー、アメリカンフットボール、バレーボール、テニス、バトミントンなどの種々の球技ゲーム等に適用できる。
【0108】
2.1 判定手法
前述のように従来の野球ゲームでは、プレーヤが守備側である場合に、バックネット付近やホームベース付近に設定された視点での画像が生成されるゲームが殆どであった。このため、打者が打ったボールを目で追いかけながら捕球してアウトにするというような操作感覚を、プレーヤに与えることが難しいという課題があった。
【0109】
このような課題を解決するために本実施形態では以下に説明する手法を採用する。例えば本実施形態では、プレーヤが守備側である場合(守備モード時)に、仮想カメラの視点を、バックネット付近やホームベース付近ではなく、守備を行う野手の視点位置に設定する。また仮想カメラの視線方向については、実際の野球のように、バッターが居るホームベースを向く方向に設定する。そしてプレーヤは、守備を行う野手をプレーヤキャラクタとして操作する。
【0110】
そして、ボールがヒットされて外野フライが飛んで来たとする。この時、プレーヤが適切な操作を行わないと、高めのフライのボールは仮想カメラの視野範囲外になり、視野範囲からボールが消えてしまう。
【0111】
このような状況において、本実施形態では、プレーヤは、仮想カメラの視線方向等を変化させる操作を行うことで、ボールが視野範囲内に入るようにする。即ちボールが仮想カメラにより捕捉されるような操作を行って、ボールを目で追いかける操作を行う。そして、このようにボールが視野範囲(捕捉判定範囲)に入った状態で、ボールの落下地点にプレーヤキャラクタが移動してボールを捕球(キャッチ)すれば、捕球に成功したと判定され、外野フライのキャッチでアウトになったと判定される。
【0112】
一方、打者が打ったボールがゴロである場合には、プレーヤが仮想カメラの視線方向等を変化させる操作を行って、下方向に仮想カメラの視線方向を向けてボールを捕捉しないと、ボールをキャッチできないようにする。即ち、仮想カメラによるボールの捕捉条件を満たしつつ、ボールをキャッチした場合に、ボールの捕球に成功したと判定する。
【0113】
このようにすることで、プレーヤが実際にボールを目で追いかけて捕捉しながら捕球地点に移動し、ボールをキャッチした場合に、捕球が成功したと判定されるようになる。従って、あたかも実際の野球のようにボールを追って捕球したかのような操作感覚をプレーヤに与えることができ、従来の手法に比べてプレーヤの仮想現実感を大幅に向上できるようになる。
【0114】
次に本実施形態の判定手法について更に具体的に説明する。以下では、仮想カメラの視線方向等を制御する手法として、携帯型ゲーム装置に設けられたモーションセンサを用いる手法を例にとり説明する。
【0115】
図2(A)、図2(B)に、本実施形態の手法が適用される携帯型ゲーム装置の構成例を示す。この携帯型ゲーム装置は、メイン表示部190Mとサブ表示部190Sを有する。サブ表示部190Sは、例えばタッチパネル方式の液晶ディスプレイにより実現され、ゲーム装置の筐体10に設けられる。メイン表示部190Mは、サブ表示部190Sよりも例えば画素数が多いディスプレイとなっており、例えば液晶ディスプレイなどにより実現される。なお、メイン表示部190Mは、例えば裸眼の立体視画像を表示できるディスプレイになっており、ゲーム画像が立体視で表示される。
【0116】
携帯型ゲーム装置の筐体10と筐体20は回動自在に設けられており、筐体10には、方向指示キー12、アナログスティック(ジョイスティック)14、操作ボタン16が設けられている。また図2(B)に示すように、筐体20の背面側(メイン表示部190Mの反対側)には第1、第2のカメラCM1、CM2が設けられている。これらの第1、第2のカメラCM1、CM2を用いて被写体を撮影することで、視差のある左眼用画像と右眼用画像を得ることが可能になり、立体視表示が可能になる。
【0117】
更に携帯型ゲーム装置には図示しないモーションセンサ(6軸センサ)が内蔵されている。そして、プレーヤが携帯型ゲーム装置を手に持って動かした場合に、このモーションセンサを用いることで、図2(A)のX軸、Y軸、Z軸方向での加速度や、X軸回り、Y軸回り、Z軸回りでの角速度を検出できる。これによりX軸、Y軸、Z軸方向での並進移動操作や、X軸回り、Y軸回り、Z軸回りでのロール操作(ロール角度)を検出できるようになる。なお、X軸(広義には第1の座標軸)は水平方向(表示部の画面の水平方向)に沿った軸であり、Y軸(広義には第2の座標軸)は鉛直方向(表示部の画面の鉛直方向)に沿った軸であり、Z軸(広義には第3の座標軸)はX軸、Y軸に直交する方向(奥行き方向)である。
【0118】
そして図3(A)では、打者の打ったボールBLがゴロになっている。この場合にはプレーヤは、図3(B)に示すように携帯型ゲーム装置をX軸回りで下側方向にロールさせる操作を行う。即ち、X軸の正方向側から見てX軸の時計回りで、携帯型ゲーム装置を回転させる。すると、このX軸の時計回りでの回転がモーションセンサ(角速度センサ)により検出される。そして、このX軸の時計回りでのモーション検出情報により、図3(A)に示すように、視線方向VLが下側方向を向くように仮想カメラVCが制御され、この視線方向VLでの画像が生成されて表示部190に表示される。これにより、プレーヤの視界範囲内にボールBLが捕捉されて見えるようになり、仮想カメラVCがボールBLを捕捉するという捕捉条件が満たされる。そして、この状態で、例えばプレーヤが操作するプレーヤキャラクタCHP(仮想カメラ)が適正な捕球地点に移動して、捕球条件が満たされると、ゴロのボールBLの捕球に成功したと判定される。
【0119】
一方、図4(A)では、打者の打ったボールBLがフライになっている。この場合にはプレーヤは、図4(B)に示すように携帯型ゲーム装置をX軸回りで上側方向にロールさせる操作を行う。即ち、X軸の正方向側から見てX軸の反時計回りで、携帯型ゲーム装置を回転させる。すると、このX軸の反時計回りでの回転がモーションセンサ(角速度センサ)により検出される。そして、このX軸の反時計回りでのモーション検出情報に基づいて、図4(A)に示すように、視線方向VLが上側方向を向くように仮想カメラVCが制御され、この視線方向VLでの画像が生成されて表示部190に表示される。これにより、プレーヤの視界範囲内にボールBLが捕捉されて見えるようになり、仮想カメラVCがボールBLを捕捉するという捕捉条件が満たされる。そして、この状態で、例えばプレーヤが操作するプレーヤキャラクタCHP(仮想カメラ)が適正な捕球地点に移動して、捕球条件が満たされると、フライのボールBLの捕球に成功したと判定される。
【0120】
図5(A)〜図6は、図3(A)、図3(B)で説明したゴロの処理時に生成されるゲーム画像の例である。
【0121】
図5(A)は、バッターがゴロのボールBLを打った場面のゲーム画像である。このようにボールBLがゴロである場合には、図3(B)に示すようにプレーヤがX軸回りで下側方向に携帯型ゲーム装置をロールさせる操作を行うことで、図3(A)に示すように仮想カメラVCの視線方向VLが下側方向を向く。これにより、図5(B)のように、低い軌道のゴロのボールBLが仮想カメラVCの視野範囲内に入るゲーム画像が生成される。即ち、低い軌道のボールBLに対する捕捉条件が満たされて、仮想カメラVCによりボールBLが捕捉されたゲーム画像が生成される。
【0122】
そして図5(B)では、このような捕捉条件を満たした状態で、ボールBLの位置とプレーヤキャラクタCHP(仮想カメラ)の位置が一致して、捕球条件が満たされたため、ゴロのボールBLの捕球に成功したと判定される。
【0123】
なお図5(A)では、いわゆる一人称視点のゲーム画像が生成され、図5(B)の捕球タイミングでは、プレーヤキャラクタCHPのグラブが表示されている。但し図5(A)や図5(B)において、プレーヤキャラクタCHPの全体を表示するようにしてもよい。この場合には、ボールBLがプレーヤキャラクタCHPにより遮られて見えにくくなってしまう事態を防止するために、プレーヤキャラクタCHPを半透明表示等にすることが望ましい。
【0124】
図6は、図5(B)の捕球成功後に、プレーヤにより送球指示が行われ、捕球したボールが一塁に送球された場面のゲーム画像である。例えば捕球タイミングに対応して設定された送球判定期間において、図2(A)の操作ボタン16の中の送球指示ボタン(送球動作に割り当てられたボタン)が押された場合には、送球条件が満たされたと判断され、捕球したボールを、送球ターゲットである一塁(一塁手)に送球する処理が行われる。或いは、送球判定期間において、例えばプレーヤが携帯型ゲーム装置をY軸回りで回転させるロール操作を行って、仮想カメラVCの視線方向が一塁側に向けられた場合に、捕球したボールBLを一塁に送球する処理が行われる。そして、捕球と送球の両方に成功すると、図6に示すように「アウト」の結果表示が行われる。
【0125】
図7(A)、図7(B)は、図4(A)、図4(B)で説明したフライの処理時に生成されるゲーム画像の例である。
【0126】
図7(A)は、バッターがフライのボールBLを打った場面のゲーム画像である。このようにボールBLがフライである場合には、図4(B)に示すようにプレーヤがX軸回りで上側方向に携帯型ゲーム装置をロールさせる操作を行うことで、図4(A)に示すように仮想カメラVCの視線方向VLが上側方向を向く。これにより、図7(B)のように、高い軌道のフライのボールBLが仮想カメラVCの視野範囲内に入るゲーム画像が生成される。即ち、高い軌道のボールBLに対する捕捉条件が満たされて、仮想カメラVCによりボールBLが捕捉されたゲーム画像が生成される。
【0127】
そして図7(B)では、このような捕捉条件を満たした状態で、ボールBLの位置とプレーヤキャラクタCHP(仮想カメラ)の位置が一致して、捕球条件が満たされたため、フライのボールBLの捕球に成功したと判定される。
【0128】
以上のように本実施形態の手法によれば、プレーヤが、視野範囲にボールが入るような操作を行いながらボールを捕球すると、捕球が成功したと判定される。従って、プレーヤは、あたかも実際のボールを目で追いかけて捕球するというような現実世界の野球と同様の操作感覚で、ボールを捕球できるようになる。従って、プレーヤの仮想現実感を従来の手法に比べて格段に向上できる。また図3(A)のように打球がゴロである場合と、図4(A)のように打球がフライである場合とで、プレーヤは異なる操作を行ってボールを捕球する。従って、実際にゴロやフライを捕っているかのような操作感覚をプレーヤに与えることができる。
【0129】
特に、携帯型ゲーム装置のモーションセンサで仮想カメラの視線方向を制御すれば、プレーヤは、ゴロの場合には図3(B)のように携帯型ゲーム装置の方向(画面方向)を下側方向に向け、フライの場合には携帯型ゲーム装置の方向を上側方向に向けるという操作を行って、ゴロやフライのボールを捕球することになる。従って、プレーヤは、あたかも画面の向こう側に本当のボールが存在し、そのボールを捕球しているかのような操作感覚でゲームプレイができるため、プレーヤの仮想現実感を更に向上できる。
【0130】
2.2 捕捉条件、捕球条件の判定手法の具体例
次に捕捉条件、捕球条件の判定手法の具体例について説明する。第1の判定手法では、プレーヤの操作情報により制御され仮想カメラに追従するヒットボリュームを設定し、そのヒットボリュームにボールがヒットした場合に、捕捉条件及び捕球条件が満たされたと判定する。
【0131】
例えば図8(A)では、プレーヤの操作情報により仮想カメラVCの視線方向VLや視点位置等が変化する場合に、その仮想カメラVCに追従するようにヒットボリュームHVが設定される。図8(A)では、仮想カメラVCの前方側(カメラ座標系のZ軸側)であり、例えばプレーヤキャラクタCHPの前方側にヒットボリュームHVが配置されている。そしてこのヒットボリュームHVのボールBLとのヒットチェックが行われる。具体的には、ヒットボリュームHVの前方側の第1の平面と後方側の第2の平面を用いてヒットチェックが行われ、例えばボールBLの軌道が第1、第2の平面の両方に交差した場合に、ボールBLがヒットして捕球されたと判定する。
【0132】
なお、プレーヤの操作情報によりプレーヤキャラクタCHPの位置や方向が制御され、そのプレーヤキャラクタCHPに追従するようにヒットボリュームHVが設定されてもよい。またヒットボリュームHVの形状は図8(A)のような直方体形状には限定されず、例えば楕円体(球体を含む)、柱体などの種々の形状を採用できる。
【0133】
図8(B)では、ボールBLが低い軌道のゴロになっている。この場合には、ヒットボリュームHVは、その長さが短い形状に設定されると共に、上側の位置に配置される。即ち、プレーヤキャラクタCHPの上半身に対応する領域にはヒットボリュームHVが設定されるが、下半身に対応する領域にはヒットボリュームHVは設定されない。
【0134】
そして図8(B)では、プレーヤは、図3(B)に示すような携帯型ゲーム装置のロール操作を行っていないため、仮想カメラVCの視線方向VLが水平方向に設定される。従って、ヒットボリュームHVは傾かずに、その長辺方向が鉛直方向になるように配置される。
【0135】
一方、図8(C)では、プレーヤは、低い軌道のボールBLに対して、図3(B)に示すように携帯型ゲーム装置をX軸回りで下側方向にロールさせる操作を行っている。これにより、仮想カメラVCの視線方向VLが下側方向に向く。そして、この仮想カメラVCの視線方向VLの向きの変化に連動して、図8(C)に示すように、ヒットボリュームHVを、その下端部が手前側(仮想カメラから見て手前側)に近づき、その上端部が奥側(仮想カメラから見て奧側)に遠ざかるように傾ける。即ち、その長辺方向が鉛直方向から奥側に傾くようにヒットボリュームHVを配置する。
【0136】
このようにすれば、ヒットボリュームHVの下側部が地面(ゲームフィールド)に近づくため、ボールBLが軌道の低いゴロであっても、ヒットボリュームHVにボールBLをヒットさせることが容易になる。従って、プレーヤは、ゴロのボールBLを、トンネルせずに捕球することが可能になる。
【0137】
例えばボールBLがゴロである時に、図8(B)に示すように携帯型ゲーム装置のロール操作を行わずに、ヒットボリュームHVが傾かなかった場合には、ボールBLはヒットボリュームHVにヒットせずに、トンネルになってしまう。
【0138】
この点、図8(C)のように仮想カメラVCの視線方向VLの向きの変化に連動して、ヒットボリュームHVを傾ければ、このようなトンネルは発生せずに、プレーヤは適正にボールBLを捕球できるようになる。即ち、低い軌道のゴロのボールBLに対して、プレーヤが携帯型ゲーム装置を下側方向にロールさせる操作を行うことで、仮想カメラVCの視線方向VLが下側方向に向く。これにより、ボールBLは仮想カメラVCの視野範囲に入り、仮想カメラVCによりボールBLが捕捉された状態になるため、捕捉条件は満たされる。そしてこの状態でボールBLがヒットボリュームHVにヒットすれば、捕球条件も満たされる。従って、図8(A)〜図8(C)のようにヒットボリュームHVを設定し、設定されたヒットボリュームHVにボールBLがヒットした場合には、ボールBLの捕捉条件及び捕球条件の両方が満たされたと判定できるようになる。
【0139】
また図9(A)では、ボールBLが高い軌道のフライになっている。この場合には、ヒットボリュームHVは、その長さがゴロの場合に比べて長い形状に設定される。そしてプレーヤキャラクタCHPの上半身及び下半身の両方に対応する領域にヒットボリュームHVが設定される。
【0140】
そして、図9(B)では、プレーヤは、高い軌道のボールBLに対して、図4(B)に示すように携帯型ゲーム装置をX軸回りで上側方向にロールさせる操作を行っている。これにより、仮想カメラVCの視線方向VLが上側方向に向く。そして、この仮想カメラVCの視線方向VLの向きの変化に連動して、ヒットボリュームHVを、その上端部が手前側に近づき、その下端部が奥側に遠ざかるように傾ける。そして、ヒットボリュームHVにボールBLがヒットした場合には、捕捉条件及び捕球条件の両方が満たされたと判断され、捕球が成功したと判定する。
【0141】
この場合に図9(A)、図9(B)のようにヒットボリュームHVを設定することで、高い軌道のフライのボールBLがヒットボリュームHVにヒットしやすくなる。例えばボールBLがフライである場合に、図8(B)、図8(C)のようにヒットボリュームHVの長さが短いと、フライを捕れる範囲が狭まってしまい、ゲームの難易度が高くなってしまう。この点、図9(A)、図9(B)のように、高い軌道のフライの場合にヒットボリュームHVを長い形状にすれば、ボールBLを捕れる範囲が広がり、フライであっても、比較的容易に捕球できるようになる。なお図8(B)〜図9(B)では、ボールBLの軌道等に応じてヒットボリュームHVの形状を変化させているが、ヒットボリュームHVの形状については変化させずに、ヒットボリュームHVのヒット有効範囲をボールBLの軌道等に応じて変化させてもよい。例えば低い軌道のゴロの場合には、ヒットボリュームHVのヒット有効範囲を小さな範囲に設定する。一方、高い軌道のフライの場合には、ヒットボリュームHVのヒット有効範囲を大きな範囲に設定する。このようすれば、ボールBLの軌道に応じて形状を変化させる手法と同等の効果を得ることができる。
【0142】
以上のように本実施形態の第1の判定手法では、ボールBLの軌道に応じて、ヒットボリュームHVの形状、ヒット有効範囲、位置及び方向の少なくとも1つを変化させている。例えば、ボールBLがゴロのように低い軌道(第1の軌道)である場合には、図8(B)、図8(C)に示すようにヒットボリュームHVを短い形状に設定したり、形状は変えずにヒット有効範囲を小さな範囲に設定する。またヒットボリュームHVの配置位置も上側に設定する。一方、ボールBLがフライのように高い軌道(第2の軌道)である場合には、図9(A)、図9(B)に示すようにヒットボリュームHVを長い形状に設定したり、形状は変えずにヒット有効範囲を大きな範囲に設定する。またヒットボリュームHVの配置位置は、ゴロの場合に比べて下側に設定する。このようにボールBLの軌道に応じてヒットボリュームHVの形状、ヒット有効範囲、位置等を設定すれば、ヒットボリュームHVにボールBLがヒットしたかどうかを判断するだけで、捕捉条件及び捕球条件が満たされたかどうかを判定できるようになる。従って、簡素な判定処理で捕捉条件及び捕球条件を判定することが可能になる。また本実施形態の第1の判定手法では、図8(B)、図8(C)のようにボールBLが低い第1の軌道で移動する場合には、仮想カメラVCの視線方向範囲が、低い第1の視線方向範囲である場合に、捕捉条件が満たされたと判定している。一方、図9(A)、図9(B)のようにボールBLが第1の軌道よりも高い第2の軌道で移動する場合には、仮想カメラVCの視線方向範囲が、第1の視線方向範囲よりも高い第2の視線方向範囲である場合に、捕捉条件が満たされたと判定している。或いはボールBLが左方向の軌道である第1の軌道で移動する場合には、視線方向範囲が左方向を向く視線方向の範囲である場合に捕捉条件が満たされたと判定し、ボールBLが右方向の軌道である第2の軌道で移動する場合には、視線方向範囲が右方向を向く視線方向の範囲である場合に捕捉条件が満たされたと判定してもよい。このようにすれば、プレーヤキャラクタCHPが横方向に飛んでボールBLをキャッチする状況での捕捉条件についても判定できるようになる。
【0143】
なおヒットボリュームHVの設定手法は図8(A)〜図9(B)で説明した手法には限定されず、種々の変形実施が可能である。
【0144】
例えば図10(A)では、低い軌道のゴロのボールBLに対して、図3(B)に示すような操作をプレーヤが行って、仮想カメラVCの視線方向VLが下側方向に向くと、それに連動してヒットボリュームHVも下側方向に移動する。これによりプレーヤは、低い軌道のゴロのボールBLを容易に捕球できるようになる。
【0145】
一方、図10(B)では、高い軌道のフライのボールBLに対して、図4(B)に示すような操作をプレーヤが行って、仮想カメラVCの視線方向VLが上側方向に向くと、それに連動してヒットボリュームHVも上側方向に移動する。これによりプレーヤは、高い軌道のフライのボールBLを容易に捕球できるようになる。なお図10(A)、図10(B)において、ボールBLの軌道の高低等に応じて、ヒットボリュームHVの位置(代表位置)のみならず、方向(配置方向)についても変化させてもよい。
【0146】
また本実施形態では、ボールBLの捕球時にプレーヤが指示した方向に応じて、ヒットボリュームHVを変形させたりヒット有効範囲を変化させてもよい。
【0147】
例えば図11(A)では、ダイビングキャッチ等のファインプレイでボールBLを捕球している様子を示している。具体的にはボールBLの捕球時(捕球タイミング、捕球期間)において、図11(B)のA1に示すようにプレーヤは、携帯型ゲーム装置を例えばX軸方向に沿って左側に動かす操作を行っている。すると、例えばモーションセンサの加速度センサにより、この操作が検出され、モーション検出情報が取得される。すると、このモーション検出情報に基づいて、図11(A)に示すようにヒットボリュームHVを変形させる。具体的には図11(B)ではプレーヤが左方向を指示しており、図11(A)では、この指示方向に対応する方向にヒットボリュームHVを引き伸ばす変形処理を行っている。例えばプレーヤの指示方向が、反対の右方向である場合には、図11(A)とは逆方向にヒットボリュームHVを引き伸ばす変形処理を行えばよい。このようにすれば、例えば左右方向へのダイビングキャッチ等による捕球を表現することが可能になる。
【0148】
またプレーヤの指示方向が上方向(Y軸に沿った方向)である場合には、上方向に対応する方向にヒットボリュームHVを引き伸ばす変形処理を行えばよい。このようにすれば、例えば上方向へのダイビングキャッチによる捕球を表現することが可能になる。
【0149】
なお、プレーヤの指示方向と、ヒットボリュームHVを引き伸ばす方向との対応づけは、ゲーム画像の見え方やゲームの特性等を考慮して、適宜、決めればよい。また図11(A)、図11(B)では、プレーヤの指示方向に応じてヒットボリュームHVの形状を変形する処理を行っているが、ヒットボリュームHVの形状については変形せずに、ヒットボリュームHVのヒット有効範囲を変化させる処理を行ってもよい。
【0150】
また本実施形態では、ゲームの難易度に応じてヒットボリュームを設定してもよい。例えばゲームの難易度の設定に応じて、ヒットボリュームの形状、ヒット有効範囲、位置及び方向の少なくとも1つを変化させる。
【0151】
例えば図12(A)では、ゲームの難易度が低い設定であるため、ヒットボリュームHVを大きなサイズの形状にする。或いはヒット有効範囲を大きな範囲に設定する。このようにすれば、ヒットボリュームHVに対してボールBLがヒットしやすくなるため、初級プレーヤであっても、捕球が容易になり、ストレス無く野球ゲームを楽しめるようになる。
【0152】
一方、図12(B)では、ゲームの難易度が高い設定であるため、ヒットボリュームHVを小さなサイズの形状にする。或いはヒット有効範囲とを小さな範囲に設定する。このようにすれば、ヒットボリュームHVに対してボールBLがヒットしにくくなるため、捕球が難しくなり、上級プレーヤであっても満足できる野球ゲームを提供できるようになる。
【0153】
なお図12(A)、図12(B)では、ゲームの難易度に応じてヒットボリュームHVの形状(サイズ)を変化させているが、ゲームの難易度に応じてヒットボリュームHVが配置される位置や方向を変化させてもよい。
【0154】
例えば図8(B)、図8(C)や図10(A)のように、ボールが低い軌道のゴロである場合に、ヒットボリュームHVの配置位置をゲームの難易度に応じて変化させてもよい。具体的には、初級プレーヤ用の低い難易度の設定時には、ヒットボリュームHVの基準となる配置位置を、その下端部が地面に近づくように低い位置に設定する。一方、上級プレーヤ用の高い難易度の設定時には、ヒットボリュームHVの基準となる配置位置を、低い難易度設定の場合よりも高い位置に設定する。このようにすれば、低い難易度の設定時にはゴロが捕りやすくなり、初級プレーヤのゲームプレイを容易化できる。一方、高い難易度の設定時には、ゴロが捕りにくくなるため、上級プレーヤでも満足できる野球ゲームを提供できるようになる。
【0155】
また、例えば図9(A)、図9(B)や図10(B)のように、ボールBLが高い軌道のフライである場合に、ヒットボリュームHVの配置方向をゲームの難易度に応じて変化させてもよい。具体的には、初級プレーヤ用の低い難易度の設定時には、ヒットボリュームHVの傾きを大きくし、上級プレーヤ用の高い難易度の設定時には、ヒットボリュームHVの傾きを小さくする。このようにすれば、低い難易度の設定時には、ヒットボリュームHVが、より傾くことで、ボールBLに対してヒットボリュームが正対するようになり、フライが捕りやすくなるため、初級プレーヤのゲームプレイを容易化できる。一方、高い難易度の設定時には、ヒットボリュームHVの傾きが小さくなることで、フライが捕りにくくなり、上級プレーヤでも満足できる野球ゲームを提供できるようになる。
【0156】
或いは図11(A)のようにダイビングキャッチなどのファインプレイ時にヒットボリュームHVを引き伸ばす場合に、ゲームの難易度に応じて、ヒットボリュームHVを引き伸ばす長さを制御してもよい。例えば低い難易度設定の場合には、ヒットボリュームHVを引き伸ばす長さを長くし、高い難易度設定の場合には、引き伸ばす長さを短くする。このようにすれば、初級プレーヤであっても、ファインプレイを行うことが容易になり、プレーヤのスキルに応じた適正な難易度設定が可能になる。
【0157】
なお図12(A)、図12(B)では、ゲームの難易度に応じて、ヒットボリュームHVの形状等を変化させているが、ゲームの難易度以外のゲーム条件に応じて、ヒットボリュームHVの形状等を変化させてもよい。このようなゲーム条件としては、例えばプレーヤキャラクタ(プレーヤ)のゲーム経験値、所持アイテム数又は体力値などのステータス情報を想定できる。即ち、プレーヤキャラクタのゲーム経験値等のステータス情報に基づいて、ヒットボリュームHVの形状等を変化させる。これにより、様々なゲーム条件をヒットボリュームHVの形状等に反映させて、捕球条件等の判定処理を行うことが可能になる。
【0158】
次に本実施形態の第2の判定手法について説明する。第2の判定手法では、仮想カメラの視野範囲に対応して捕捉判定範囲を設定し、捕捉判定範囲内にボールが入っている場合に、仮想カメラによるボールの捕捉条件が満たされていると判定する。そして捕捉条件が満たされた状態でボールの捕球条件が満たされると、ボールの捕球が成功したと判定する。
【0159】
例えば図13(A)〜図13(C)では、プレーヤは、ボールBLが仮想カメラVCの視野範囲内(捕捉判定範囲内)に入るように、図4(B)のように携帯型ゲーム装置をロールさせる操作を行う。これにより、図13(A)〜図13(C)のようにボールBLの高さが徐々に低くなる場合に、ボールBLが仮想カメラVCの視野範囲内に入るように、仮想カメラVCの視線方向VL等が制御されるようになる。そして視野範囲に対応して設定された捕捉判定範囲内にボールBLが入っている場合には、ボールBLの捕捉条件が満たされたと判定する。そして、このような捕捉条件が満たされた状態で、図13(C)のように、仮想カメラVC(プレーヤキャラクタ)に設定された簡易的なヒットボリュームHVにボールBLがヒットして、捕球条件が満たされると、プレーヤによるボールBLの捕球が成功したと判定する。このように本実施形態の第2の判定手法では、ボールBLが低い第1の軌道で移動する場合には、仮想カメラVCの視線方向範囲が、低い第1の視線方向範囲である場合に、捕捉条件が満たされたと判定する。一方、ボールが第1の軌道よりも高い第2の軌道で移動する場合には、仮想カメラVCの視線方向範囲が、第1の視線方向範囲よりも高い第2の視線方向範囲である場合に、捕捉条件が満たされたと判定する。
【0160】
以上に説明した本実施形態の第2の判定手法によれば、視野範囲に対応する捕捉判定範囲にボールが入っているどうかを判断するだけで、捕捉条件を判定できるようになり、処理の簡素化等を図れる。また、捕捉条件と捕球条件が別個に判定されるため、捕捉条件の判定処理や捕球条件の判定処理を簡素化できるようになる。
【0161】
なお、捕球条件の判定手法や、捕球条件の判定用のヒットボリュームの設定手法としては、種々の変形実施が可能である。例えばプレーヤキャラクタの左手等の部位に対して、捕球条件を判定するためのヒットボリュームを設定してもよい。また仮想カメラの視野範囲やこれに対応する捕捉判定範囲は、仮想カメラの視線方向を基準とした角度により設定してもよい。このようにすれば、角度を用いた簡素な判定処理で、捕捉条件等の判定処理を実現できるようになる。また捕捉条件が満たされているかどうかを判定する期間は、捕球タイミングの直前の短い期間であってもよいし、長い期間であってもよい。
【0162】
また仮想カメラやキャラクタに追従するヒットボリュームではなく、ボールに追従するボール用ヒットボリュームを設定し、このボール用ヒットボリュームを用いて、ボールの捕球条件等が満たされているかを判定してもよい。このボール用ヒットボリュームを用いる手法については例えば特開平8−305891号公報に開示されている。この手法では、ボール用ヒットボリュームとプレーヤキャラクタ又は仮想カメラの位置とのヒットチェックを行い、ヒットしたと判定された場合にはボールの捕球に成功したと判定する。この場合に、例えばボールの軌道の高低や、軌道の方向や、ゲーム条件等に応じて、ボール用ヒットボリュームの形状又はヒット有効範囲等を制御してもよい。またボール用ヒットボリュームを用いてボールの捕捉条件を判定することも可能である。
【0163】
また、ボールの捕球を判定する処理は、ヒットボリュームを用いる手法には限定されない。例えばゲーム画像にゲージ等を表示し、ゲージの入力エリアでの入力の成功などを判定して、ボールの捕球に成功したか否かを判定してもよい。例えばゲージにより表される判定タイミングで、プレーヤが捕球操作の入力を行い、判定タイミングと入力タイミングが一致した場合に、捕球が成功したと判定してもよい。
【0164】
図14(A)に、視野範囲RFVに対応する捕捉判定範囲RDTの設定例を示す。図14(A)では、捕捉判定範囲RDTは、視野範囲RFVに内包する範囲になっている。なお、仮想カメラVCの視野範囲RFVそのものを、捕捉判定範囲RDTに設定してもよい。
【0165】
また図14(A)、図14(B)では、捕捉判定範囲RDTを可変に制御している。具体的には、ゲームの難易度の設定に応じて捕捉判定範囲を変化させている。
【0166】
例えば、低い難易度設定の場合には、図14(A)に示すように捕捉判定範囲RDTを広くする。このようにすれば、プレーヤは、ボールBLを容易に捕捉判定範囲内に捉えることが可能になり、プレーヤの捕捉操作を容易化できる。
【0167】
一方、高い難易度設定の場合には、図14(B)に示すように捕捉判定範囲RDTを狭くする。このようにすれば、ボールBLを捕捉判定範囲内に捉えるのが難しくなり、上級プレーヤであっても満足度が高いゲームを提供することが可能になる。
【0168】
なお、ゲームの難易度以外のゲーム条件(プレーヤキャラクタのステータス情報等)に基づいて、捕捉判定範囲を変化させてもよい。また視野範囲や捕捉判定範囲は、図14(A)、図14(B)に示すようなエリアによる設定であってもよいし、例えば仮想カメラの視線方向を基準とした角度の設定により、視野範囲や捕捉判定範囲を設定してもよい。
【0169】
また、捕捉条件を判定する期間は任意に設定できる。例えば、フライが上がった場合に、最初の期間では視野範囲(捕捉判定範囲)にボールが入らない状態でプレーヤキャラクタが背走し、捕球タイミングの直前の期間で、ボールの方を振り返って捕球するようにしてもよい。この場合には、捕球タイミングの直前の短い期間が捕捉条件の判定期間になり、この短い判定期間において、例えば仮想カメラの視野範囲(捕捉判定範囲)にボールが入っていると判断されれば、捕捉条件が満たされていると判定すればよい。
【0170】
また、上述の第1、第2の判定処理の変形例として、ボールがカメラの視野範囲(捕捉判定範囲)に入っている場合には、ボールとヒットボリュームのヒットチェックを有効状態に設定して、ボールがヒットボリュームにヒットした場合に捕球に成功したと判定してもよい。そして、ボールがカメラの視野範囲(捕捉判定範囲)に入っていない場合には、ボールとヒットボリュームのヒットチェックを非有効状態に設定して、ボールがヒットボリュームをすり抜けてしまうようにする。このようにすれば、捕捉条件と捕球条件の両方を満たした場合に、ボールの捕球に成功したと判定できるようになる。
【0171】
2.3 仮想カメラの制御
次に、操作情報に基づく仮想カメラの制御処理の具体例について説明する。本実施形態では、プレーヤが入力した第1の操作情報と第2の操作情報を取得し、第1の操作情報に基づいて仮想カメラの視線方向を制御し、第2の操作情報に基づいて仮想カメラの視点位置の移動又はプレーヤキャラクタの移動を制御している。
【0172】
例えば図3(A)〜図4(B)で説明したように、本実施形態では、モーションセンサからのモーション検出情報を第1の操作情報として取得し、第1の操作情報であるモーション検出情報に基づいて、仮想カメラVCの視線方向VLを制御する。例えば図3(B)、図4(B)のように携帯型ゲーム装置をX軸回りで下側又は上側方向にロールさせる第1の操作が行われた場合には、この第1の操作の情報であるモーション検出情報に基づいて、図3(A)、図4(A)に示すように仮想カメラVCの視線方向VLを変化させる。
【0173】
また本実施形態では、方向指示部からの方向指示情報を第2の操作情報として取得し、第2の操作情報である方向指示情報に基づいて、仮想カメラVCの視点位置の移動又はプレーヤキャラクタCHPの移動を制御する。
【0174】
例えば図15(A)や図15(B)のB1〜B4に示すように、方向指示部である方向指示キー12やアナログスティック14(ジョイスティック)を用いて上下左右方向の方向指示操作が行われたとする。この場合には、指示された方向に対応する方向に、仮想カメラVCの視点位置(プレーヤキャラクタの位置)を移動させる。
【0175】
具体的には、図15(A)や図15(B)のB1〜B4に示すような方向指示が行われた場合には、図15(C)のC1〜C4に示す方向に仮想カメラVC(プレーヤキャラクタ)を移動させる。例えば方向指示キー12やアナログスティック14などの方向指示部により、図15(A)、図15(B)のB1、B2に示すように上下方向の方向指示が行われた場合には、図15(C)のC1、C2に示すように、仮想カメラVCを前後方向に移動させる。
【0176】
一方、図15(A)、図15(B)のB3、B4に示すように左右方向の方向指示が行われた場合には、図15(C)のC3、C4に示すように、仮想カメラVCを左右方向に移動させる。更に具体的には、仮想カメラVCの視線方向VLについては、常に基準位置となるホームベースHBSの方に向ける。具体的には、操作情報に基づいてX軸回り(広義には第1の座標軸回り)では仮想カメラVCの視線方向VLを変化させると共に、Y軸回り(広義には第2の座標軸回り)では仮想カメラVCの視線方向VLを固定する。そして、左右方向の方向指示が行われた場合には、例えばホームベースHBSを中心とした円弧線CT上において、仮想カメラVCを左右方向に移動させる。
【0177】
このようにすれば、仮想カメラVCは、ボールが飛んでくる方向に常に正対して配置されるようになる。従って、ゴロやフライのボールを捕球する際に、プレーヤは、仮想カメラVCの視線方向VLの上下方向の変化だけを、図3(B)、図4(B)のようなロール操作で制御すればよい。そして方向指示部による上下左右方向の指示で、自身の視点に対応する仮想カメラVCを前後左右方向に動かして、ボールの捕球位置に向かって移動して、ボールを捕球する。これにより、仮想カメラVCの視線方向VLの全ての方向での変化を、プレーヤが制御する手法に比べて、プレーヤのゲーム操作を簡素化でき、より使い易いゲーム操作インターフェース環境をプレーヤに提供できるようになる。
【0178】
次に、操作情報に基づく仮想カメラVCの視線方向VLの制御について、図16(A)〜図16(C)を用いて詳細に説明する。
【0179】
例えば図16(A)のD1、D2に示すように、プレーヤは、携帯型ゲーム装置をX軸回りにロールさせる操作(回転させる操作)を行うことができる。この場合には、モーションセンサの角速度センサにより、このX軸回りでのロール操作が検出される。
【0180】
そして図16(A)のD1に示すように、X軸回りで上側方向に携帯型ゲーム装置をロール(回転)させた場合には、図16(B)のE1に示すように、カメラ座標系のX軸回りにおいて上側方向に仮想カメラVCがロール操作される。これにより、仮想カメラVCの視線方向VLを、図4(A)のような高い軌道のフライの捕球に好適な視線方向に設定できるようになる。
【0181】
一方、図16(A)のD2に示すように、X軸回りで下側方向に携帯型ゲーム装置をロールさせた場合には、図16(B)のE2に示すように、カメラ座標系のX軸回りにおいて下側方向に仮想カメラVCがロール操作される。これにより、仮想カメラVCの視線方向VLを、図3(A)のような低い軌道のゴロの捕球に好適な視線方向に設定できるようになる。
【0182】
また図16(A)のD3、D4に示すように、プレーヤは、携帯型ゲーム装置をY軸回りにロールさせる操作を行うこともできる。この場合には、モーションセンサの角速度センサにより、このY軸回りでのロール操作が検出される。
【0183】
そして図16(A)のD3に示すように、Y軸回りで左側方向に携帯型ゲーム装置をロールさせた場合には、図16(C)のE3に示すように、カメラ座標系のY軸回りにおいて左側方向に仮想カメラVCがロール操作されるようになる。
【0184】
一方、図16(A)のD4に示すように、Y軸回りで右側方向に携帯型ゲーム装置をロールさせた場合には、図16(C)のE4に示すように、カメラ座標系のY軸回りにおいて右側方向に仮想カメラVCがロール操作されるようになる。
【0185】
例えば図15(C)では、カメラ座標系のX軸回りで仮想カメラVCはロール操作されるが、Y軸回りではロール操作されない。これに対して図16(C)のように仮想カメラVCがY軸回りでロール操作されるようになれば、例えば後述する送球処理の際に、仮想カメラVCの視線方向VLを、送球ターゲットである1塁側に向ける操作が可能になる。
【0186】
なお、以上では、携帯型ゲーム装置のロール操作をモーションセンサにより検出して、仮想カメラの視線方向を制御する手法について説明したが、本実施形態はこのような手法には限定されない。
【0187】
例えば、方向指示部からの方向指示情報に基づいて、仮想カメラの視線方向を制御してもよい。例えば操作部の第1の方向指示部からの第1の方向指示情報を第1の操作情報として、仮想カメラの視線方向を制御し、操作部の第2の方向指示部からの第2の方向指示情報を第2の操作情報として、仮想カメラの視点位置の移動を制御してもよい。
【0188】
或いは、カメラの撮像画像を用いて、携帯型ゲーム装置のロール操作(回転操作)を検出して、仮想カメラの視線方向を制御してもよい。例えば図2(B)に示すようなカメラCM1、CM2により携帯型ゲーム装置の周りの風景を撮影し、得られたカメラCM1、CM2の撮像画像に対して画像処理を行うことで、撮像画像の画素の動き情報から携帯型ゲーム装置のロール操作を検出する。このようにすれば、角速度センサや加速度センサを有しないような携帯型ゲーム装置であっても、携帯型ゲーム装置のロール操作を検出して、仮想カメラの視線方向を制御できるようになる。
【0189】
また本実施形態の手法が適用されるゲーム装置は携帯型ゲーム装置には限定されず、例えば据え置きの家庭用ゲーム装置であってもよい。この場合には、例えば家庭用ゲーム装置のゲームコントローラに設けられたモーションセンサやカメラを利用して、携帯型ゲーム装置の場合と同様の手法で、ゲームコントローラに対するロール操作を検出し、仮想カメラの視線方向を制御すればよい。
【0190】
2.4 送球処理
次に本実施形態の送球処理の詳細について説明する。本実施形態では、ボールの捕球に成功し、所与の送球条件が満たされた場合に、捕球されたボールの送球処理を行う。例えばボールの捕球に成功し、プレーヤが操作部を用いた送球指示操作を行った場合や、プレーヤが仮想カメラの視線方向を送球ターゲット側に向ける操作を行った場合に、捕球されたボールを送球ターゲットに送球する処理を行う。
【0191】
例えば、前述の図5(B)においてプレーヤがゴロの捕球に成功し、図2(A)の操作ボタン16の中の送球指示ボタンを押すと、図6に示すように、一塁への送球処理がコンピュータにより自動的に行われるオートモードの送球処理が実現される。
【0192】
一方、このような送球をプレーヤのマニュアル操作により行うマニュアルモードの送球処理を採用してもよい。例えば図17(A)では、ボールBLの捕捉条件及び捕球条件が満たされて、ボールBLの捕球に成功している。そして、このように捕球が成功し、送球判定期間内において、プレーヤが、図16(A)のD3に示すように携帯型ゲーム装置をY軸回りで左側にロールさせる操作を行ったとする。すると図17(B)に示すように、仮想カメラVCの視線方向VLが、送球ターゲットである一塁ベースFBFの方に向き、ボールBLの送球処理が行われるようになる。
【0193】
このようにすれば、ボールBLを捕球後に一塁側を向いて送球するというような、実際の野球の送球プレイに似た操作感覚を、プレーヤに与えることが可能になる。これにより、プレーヤの仮想現実感を更に向上することが可能になる。
【0194】
なお、上述のオートモードの送球処理とマニュアルモードの送球処理を、ゲームの難易度の設定により切り替えてもよい。例えば初級プレーヤ用の低い難易度設定では、オートモードの送球処理を行い、上級プレーヤ用の高い難易度設定では、マニュアルモードの送球処理を行うようにする。
【0195】
また、以上では本実施形態の手法を野球ゲームに適用した場合について説明したが、本実施形態の手法は、野球ゲーム以外の種々の球技ゲーム等に適用可能である。
【0196】
例えば図18(A)〜図18(C)は、本実施形態の手法をサッカーゲームに適用した例である。図18(A)では、コンピュータ等が制御する相手キャラクタCHEが、プレーヤが操作するプレーヤキャラクタCHPに対してボールBLをパスしている。そして図18(B)では、プレーヤキャラクタCHPは、パスされたボールBLの捕球(キープ)に成功している。そして図18(C)では、捕球したボールBLを他のキャラクタにパスしたり、ゴールに対して蹴るなどの処理が、ボールBLの送球処理として行われている。このようなサッカーゲームにおいても、本実施形態の手法を採用することで、従来のサッカーゲームに比べて、プレーヤの仮想現実感を大幅に向上できるようになる。なおサッカーのセンタリングでのヘディングシュートを本実施形態の手法により実現してもよい。この場合には、センタリングされたボールが選手の頭に当たることが捕球に相当し、頭に当たったボールが跳ね返って飛ぶことが送球に相当する。
【0197】
更に本実施形態の手法は、野球やサッカーのゲーム以外にも、アメリカンフットボール、バレーボール、バスケットボール、テニス、卓球、バトミントン等の種々のゲームに適用できる。例えばアメリカンフットボールの場合には、クオータバックが投げたボールをランニングバッグがジャンプ等をして捕ることが捕球に相当する。またバレーボールの場合には、レシーブがボールの捕球に相当し、トスやアタックがボールの送球に相当する。またテニスや卓球の場合には、ラケットにボールが当たることがボールの捕球に相当し、ラケットに当たったボールが、打った方向に飛ぶことが送球に相当する。またバトミントンの場合にはシャトルがボールに相当することになる。
【0198】
また本実施形態の手法は、リアルタイムに行われる野球ゲームの試合のみならず、例えば野球の守備練習などの練習モードに対しても適用できる。例えば内野守備の練習モードでは、図3(A)、図3(B)や図8(B)、図8(C)で説明した低い軌道用の処理を行い、外野守備の練習モードでは、図4(A)、図4(B)や図9(A)、図9(B)で説明した高い軌道用の処理を行う。
【0199】
またリアルタイムに守備モードを切り替える場合には、ボールがバットに当たって、ボールがゴロ等の低い軌道であると判断された場合には、図3(A)、図3(B)や図8(B)、図8(C)で説明した低い軌道用の処理を行い、フライ等の高い軌道であると判断された場合には、図4(A)、図4(B)や図9(A)、図9(B)で説明した高い軌道用の処理を行う。或いは、ボールが外野手の頭を越えてフェンス等に当たってゴロになった場合等には、高い軌道用の処理から低い軌道用の処理にリアルタイムで切り替えるようにする。
【0200】
2.5 詳細な処理例
次に本実施形態の詳細な処理例について図19、図20のフローチャートを用いて説明する。
【0201】
図19は、前述した第1の判定手法を用いた場合の本実施形態の処理の詳細を説明するためのフローチャートである。
【0202】
まずボールの移動演算処理を行って、ボールの移動軌道を求める(ステップS1)。この移動演算処理は、例えばバット等の被ヒット体によるボールのヒット方向やヒット強さなどに基づいて実現される。そして、図3(A)〜図4(B)や図16(A)〜図16(C)で説明したように、操作情報に基づいて仮想カメラの視線方向を設定する(ステップS2)。
【0203】
次に、ボールの軌道(守備モード)を判断する(ステップS3)。そして低い軌道(内野手モード)である場合には、図8(B)、図8(C)で説明したように低い軌道用(内野手モード用)のヒットボリュームを設定する(ステップS4)。一方、高い軌道(外野手モード)である場合には、図9(A)、図9(B)で説明したように高い軌道用(外野手モード用)のヒットボリュームを設定する(ステップS5)。
【0204】
次に、ボールがヒットボリュームにヒットしたか否かを判定する(ステップS6)。そして、ヒットしなかった場合には、捕捉条件、捕球条件が満たされず、捕球が不成功であったと判定する(ステップS7)。一方、ボールがヒットした場合には、捕捉条件、捕球条件が満たされて、捕球が成功であったと判定する(ステップS8)。
【0205】
次に、送球条件を満たした送球操作が行われたか否かを判定する(ステップS9)。そして、送球条件を満たした送球操作が行われなかった場合には、送球が不成功であったと判定する(ステップS10)。例えば送球判定期間内に、送球に対応する所定の操作が行われなかった場合には、送球が不成功であったと判定される。一方、送球判定期間内に、送球に対応する所定の操作が行われた場合には、送球が成功であったと判定して、ボールの送球処理を行う(ステップS11)。
【0206】
図20は、前述した第2の判定手法を用いた場合の本実施形態の処理の詳細を説明するためのフローチャートである。
【0207】
まずボールの移動演算処理を行って、ボールの移動軌道を求める(ステップS21)。また操作情報に基づいて仮想カメラの視線方向を設定する(ステップS22)。
【0208】
次に、図13(A)〜図14(B)で説明したように、仮想カメラの視野範囲に設定された捕捉判定範囲内にボールが入っているか否かを判定する(ステップS23)。そしてボールが入っていない場合には、捕捉条件が満たされず、捕捉が失敗であったと判定する(ステップS24)。
【0209】
一方、捕捉判定範囲内にボールが入っている場合には、ボールがヒットボリュームにヒットしたか否かを判定する(ステップS25)。そして、ヒットしなかった場合には、捕球条件が満たされず、捕球が不成功であったと判定する(ステップS26)。一方、ボールがヒットした場合には、捕球が成功であったと判定する(ステップS27)。
【0210】
次に、送球条件を満たした送球操作が行われたか否かを判断する(ステップS28)。そして、送球条件を満たした送球操作が行われなかった場合には、送球が不成功であったと判定する(ステップS29)。一方、例えば送球判定期間内に、送球に対応する所定の操作が行われた場合には、送球が成功であったと判定して、ボールの送球処理を行う(ステップS30)。
【0211】
なお、上記のように本実施形態について詳細に説明したが、本発明の新規事項および効果から実体的に逸脱しない多くの変形が可能であることは当業者には容易に理解できるであろう。従って、このような変形例はすべて本発明の範囲に含まれるものとする。例えば、明細書又は図面において、少なくとも一度、より広義または同義な異なる用語(移動体、キャッチ等)と共に記載された用語(ボール、捕球等)は、明細書又は図面のいかなる箇所においても、その異なる用語に置き換えることができる。また、仮想カメラの制御処理、捕捉条件や捕球条件の判定処理、移動演算処理、ビューボリュームの設定処理等も本実施形態で説明したものに限定されず、これらと均等な手法・処理も本発明の範囲に含まれる。また本発明は種々のゲームに適用できる。また本発明は、業務用ゲームシステム、家庭用ゲームシステム、多数のプレーヤが参加する大型アトラクションシステム、シミュレータ、マルチメディア端末、ゲーム画像を生成するシステムボード、携帯電話機等の種々のゲーム装置に適用できる。例えばゲーム装置は、ゲームのプログラムがインストールされて実行される携帯電話機や携帯型情報端末であってもよい。
【符号の説明】
【0212】
VC 仮想カメラ、VL 視線方向、CHP プレーヤキャラクタ、BL ボール、
HV ヒットボリューム、RFV 視野範囲、RDT 捕捉判定範囲、
10、20 筐体、12 方向指示キー、14 アナログスティック、
16 操作ボタン、100 処理部、102 操作情報取得部、104 ゲーム演算部、
106 オブジェクト空間設定部、108 仮想カメラ制御部、110 移動体演算部、
112 判定部、120 画像生成部、130 音生成部、160 操作部、
170 記憶部、172 オブジェクトデータ記憶部、178 描画バッファ、
180 情報記憶媒体、190 表示部、192 音出力部、
194 補助記憶装置、196 通信部、
500 サーバシステム、510 ネットワーク、TM1〜TMn 端末装置、
600 処理部、602 操作情報取得部、604 ゲーム演算部、
606 オブジェクト空間設定部、608 仮想カメラ制御部、
610 移動体演算部、612 判定部、614 難易度設定部、
620 画像生成用データ生成部、630 音生成用データ生成部
【特許請求の範囲】
【請求項1】
プレーヤの操作情報を取得する操作情報取得部と、
取得された前記操作情報に基づいて、仮想カメラの制御を行う仮想カメラ制御部と、
プレイ対象であるボールの移動演算処理を行う移動体演算部と、
前記操作情報に基づき前記仮想カメラの視線方向が変化する場合に、視線方向が変化する前記仮想カメラが前記ボールを捕捉する捕捉条件が満たされており、前記ボールの捕球条件が満たされた場合に、前記ボールの捕球が成功したと判定する判定部と、
オブジェクト空間内において前記仮想カメラから見える画像を生成する画像生成部として、
コンピュータを機能させることを特徴とするプログラム。
【請求項2】
請求項1において、
前記判定部は、
前記仮想カメラ又は前記プレーヤが操作するプレーヤキャラクタに追従するヒットボリュームを設定し、設定された前記ヒットボリュームに前記ボールがヒットしたと判定された場合に、前記ボールの前記捕捉条件及び前記捕球条件が満たされたと判定することを特徴とするプログラム。
【請求項3】
請求項2において、
前記判定部は、
前記ヒットボリュームの形状、ヒット有効範囲、位置及び方向の少なくとも1つを可変に制御することを特徴とするプログラム。
【請求項4】
請求項3において、
前記判定部は、
前記ボールの軌道に応じて、前記ヒットボリュームの形状、ヒット有効範囲、位置及び方向の少なくとも1つを変化させることを特徴とするプログラム。
【請求項5】
請求項3又は4において、
前記判定部は、
前記プレーヤが指示した方向に応じて、前記ヒットボリュームを変形させる処理又は前記ヒット有効範囲を変化させる処理を行うことを特徴とするプログラム。
【請求項6】
請求項3乃至5のいずれかにおいて、
前記判定部は、
ゲーム条件の設定に応じて、前記ヒットボリュームの形状、ヒット有効範囲、位置及び方向の少なくとも1つを変化させることを特徴とするプログラム。
【請求項7】
請求項1において、
前記判定部は、
前記仮想カメラの視野範囲に対応して設定された捕捉判定範囲内に前記ボールが入っている場合に、前記仮想カメラが前記ボールを捕捉する前記捕捉条件が満たされていると判定し、前記捕捉条件が満たされた状態で前記ボールの前記捕球条件が満たされた場合に、前記ボールの捕球が成功したと判定することを特徴とするプログラム。
【請求項8】
請求項7において、
前記判定部は、
前記捕捉判定範囲を可変に制御することを特徴とするプログラム。
【請求項9】
請求項8において、
前記判定部は、
ゲーム条件の設定に応じて、前記捕捉判定範囲を変化させることを特徴とするプログラム。
【請求項10】
請求項1乃至9のいずれかにおいて、
前記判定部は、
前記ボールに追従するボール用ヒットボリュームを設定し、前記ボール用ヒットボリュームを用いて、前記ボールの前記捕球条件が満たされているかを判定することを特徴とするプログラム。
【請求項11】
請求項1乃至10のいずれかにおいて、
前記判定部は、
前記ボールが第1の軌道で移動する場合には、前記仮想カメラの視線方向範囲が第1の視線方向範囲である場合に、前記捕捉条件が満たされていると判定し、前記ボールが前記第1の軌道とは異なる第2の軌道で移動する場合には、前記仮想カメラの視線方向範囲が、前記第1の視線方向範囲とは異なる第2の視線方向範囲である場合に、前記捕捉条件が満たされていると判定することと特徴とするプログラム。
【請求項12】
請求項1乃至11のいずれかにおいて、
前記操作情報取得部は、
前記操作情報として、プレーヤが入力した第1の操作情報と第2の操作情報を取得し、
前記仮想カメラ制御部は、
前記第1の操作情報に基づいて、前記仮想カメラの視線方向を制御し、前記第2の操作情報に基づいて、前記仮想カメラの視点位置の移動又はプレーヤキャラクタの移動を制御することを特徴とするプログラム。
【請求項13】
請求項12において、
前記操作情報取得部は、
モーションセンサからのモーション検出情報を前記第1の操作情報として取得し、方向指示部からの方向指示情報を前記第2の操作情報として取得し、
前記仮想カメラ制御部は、
前記第1の操作情報である前記モーション検出情報に基づいて、前記仮想カメラの視線方向を制御し、前記第2の操作情報である前記方向指示情報に基づいて、前記仮想カメラの視点位置の移動又は前記プレーヤキャラクタの移動を制御することを特徴とするプログラム。
【請求項14】
請求項1乃至13のいずれかにおいて、
前記仮想カメラ制御部は、
前記操作情報に基づいて第1の座標軸回りで前記仮想カメラの視線方向を変化させる制御を行うと共に、前記第1の座標軸に直交する第2の座標軸回りでは前記仮想カメラの視線方向を固定することを特徴とするプログラム。
【請求項15】
請求項1乃至14のいずれかにおいて、
前記操作情報取得部は、
モーションセンサからのモーション検出情報を前記操作情報として取得し、
前記仮想カメラ制御部は、
前記モーション検出情報に基づいて、前記仮想カメラの視線方向を制御し、
前記判定部は、
前記モーション検出情報に基づき前記仮想カメラの視線方向が変化する場合に、視線方向が変化する前記仮想カメラが前記ボールを捕捉する前記捕捉条件が満たされているかを判定することを特徴とするプログラム。
【請求項16】
請求項15において、
前記モーションセンサは携帯型ゲーム装置に設けられるセンサであり、
前記操作情報取得部は、
前記プレーヤが前記携帯型ゲーム装置を動かすことで得られた前記モーション検出情報を、前記モーションセンサから取得し、
前記仮想カメラ制御部は、
前記携帯型ゲーム装置の動きに応じて前記仮想カメラの視線方向が変化するように前記仮想カメラを制御し、
前記判定部は、
前記携帯型ゲーム装置の動きに応じて前記仮想カメラの視線方向が変化する場合に、視線方向が変化する前記仮想カメラが前記ボールを捕捉する前記捕捉条件が満たされているかを判定することを特徴とするプログラム。
【請求項17】
プレーヤの操作情報を取得する操作情報取得部と、
取得された前記操作情報に基づいて、仮想カメラの制御を行う仮想カメラ制御部と、
プレイ対象であるボールの移動演算処理を行う移動体演算部と、
前記ボールの捕球が成功したかを判定する判定部と、
オブジェクト空間内において前記仮想カメラから見える画像を生成する画像生成部として、
コンピュータを機能させ、
前記判定部は、
前記仮想カメラ又は前記プレーヤが操作するプレーヤキャラクタに追従すると共に、前記ボールの軌道に応じて位置、方向及び形状の少なくとも1つが変化するヒットボリュームを設定し、設定された前記ヒットボリュームに前記ボールがヒットした場合に、前記ボールの捕球が成功したと判定することを特徴とするプログラム。
【請求項18】
プレーヤの操作情報を取得する操作情報取得部と、
取得された前記操作情報に基づいて、仮想カメラの制御を行う仮想カメラ制御部と、
プレイ対象であるボールの移動演算処理を行う移動体演算部と、
前記ボールの捕捉条件が満たされているかを判定する判定部と、
オブジェクト空間内において前記仮想カメラから見える画像を生成する画像生成部として、
コンピュータを機能させ、
前記操作情報取得部は、
モーションセンサからのモーション検出情報を前記操作情報として取得し、
前記仮想カメラ制御部は、
前記モーション検出情報に基づいて、前記仮想カメラの視線方向を制御し、
前記判定部は、
前記モーション検出情報に基づき視線方向が変化する前記仮想カメラが前記ボールを捕捉する前記捕捉条件が満たされているかを判定することを特徴とするプログラム。
【請求項19】
コンピュータ読み取り可能な情報記憶媒体であって、請求項1乃至18のいずれかに記載のプログラムを記憶したことを特徴とする情報記憶媒体。
【請求項20】
プレーヤの操作情報を取得する操作情報取得部と、
取得された前記操作情報に基づいて、仮想カメラの制御を行う仮想カメラ制御部と、
プレイ対象であるボールの移動演算処理を行う移動体演算部と、
前記操作情報に基づき前記仮想カメラの視線方向が変化する場合に、視線方向が変化する前記仮想カメラが前記ボールを捕捉する捕捉条件が満たされており、前記ボールの捕球条件が満たされた場合に、前記ボールの捕球が成功したと判定する判定部と、
オブジェクト空間内において前記仮想カメラから見える画像を生成する画像生成部と、
を含むことを特徴とするゲーム装置。
【請求項21】
プレーヤの操作情報を取得する操作情報取得部と、
取得された前記操作情報に基づいて、仮想カメラの制御を行う仮想カメラ制御部と、
プレイ対象であるボールの移動演算処理を行う移動体演算部と、
前記ボールの捕球が成功したかを判定する判定部と、
オブジェクト空間内において前記仮想カメラから見える画像を生成する画像生成部と、
を含み、
前記判定部は、
前記仮想カメラ又は前記プレーヤが操作するプレーヤキャラクタに追従すると共に、前記ボールの軌道に応じて位置、方向及び形状の少なくとも1つが変化するヒットボリュームを設定し、設定された前記ヒットボリュームに前記ボールがヒットした場合に、前記ボールの捕球が成功したと判定することを特徴とするゲーム装置。
【請求項22】
プレーヤの操作情報を取得する操作情報取得部と、
取得された前記操作情報に基づいて、仮想カメラの制御を行う仮想カメラ制御部と、
プレイ対象であるボールの移動演算処理を行う移動体演算部と、
前記ボールの捕捉条件が満たされているかを判定する判定部と、
オブジェクト空間内において前記仮想カメラから見える画像を生成する画像生成部と、
を含み、
前記操作情報取得部は、
モーションセンサからのモーション検出情報を前記操作情報として取得し、
前記仮想カメラ制御部は、
前記モーション検出情報に基づいて、前記仮想カメラの視線方向を制御し、
前記判定部は、
前記モーション検出情報に基づき視線方向が変化する前記仮想カメラが前記ボールを捕捉する前記捕捉条件が満たされているかを判定することを特徴とするゲーム装置。
【請求項23】
プレーヤの操作情報を取得する操作情報取得部と、
取得された前記操作情報に基づいて、仮想カメラの制御を行う仮想カメラ制御部と、
プレイ対象であるボールの移動演算処理を行う移動体演算部と、
前記操作情報に基づき前記仮想カメラの視線方向が変化する場合に、視線方向が変化する前記仮想カメラが前記ボールを捕捉する捕捉条件が満たされており、前記ボールの捕球条件が満たされた場合に、前記ボールの捕球が成功したと判定する判定部と、
オブジェクト空間内において前記仮想カメラから見える画像を生成するための画像生成用データを生成する画像生成用データ生成部と、
を含むことを特徴とするサーバシステム。
【請求項24】
プレーヤの操作情報を取得する操作情報取得部と、
取得された前記操作情報に基づいて、仮想カメラの制御を行う仮想カメラ制御部と、
プレイ対象であるボールの移動演算処理を行う移動体演算部と、
前記ボールの捕球が成功したかを判定する判定部と、
オブジェクト空間内において前記仮想カメラから見える画像を生成するための画像生成用データを生成する画像生成用データ生成部と、
を含み、
前記判定部は、
前記仮想カメラ又は前記プレーヤが操作するプレーヤキャラクタに追従すると共に、前記ボールの軌道に応じて位置、方向及び形状の少なくとも1つが変化するヒットボリュームを設定し、設定された前記ヒットボリュームに前記ボールがヒットした場合に、前記ボールの捕球が成功したと判定することを特徴とするサーバシステム。
【請求項25】
プレーヤの操作情報を取得する操作情報取得部と、
取得された前記操作情報に基づいて、仮想カメラの制御を行う仮想カメラ制御部と、
プレイ対象であるボールの移動演算処理を行う移動体演算部と、
前記ボールの捕捉条件が満たされているかを判定する判定部と、
オブジェクト空間内において前記仮想カメラから見える画像を生成するための画像生成用データを生成する画像生成用データ生成部と、
を含み、
前記操作情報取得部は、
モーションセンサからのモーション検出情報を前記操作情報として取得し、
前記仮想カメラ制御部は、
前記モーション検出情報に基づいて、前記仮想カメラの視線方向を制御し、
前記判定部は、
前記モーション検出情報に基づき視線方向が変化する前記仮想カメラが前記ボールを捕捉する前記捕捉条件が満たされているかを判定することを特徴とするサーバシステム。
【請求項1】
プレーヤの操作情報を取得する操作情報取得部と、
取得された前記操作情報に基づいて、仮想カメラの制御を行う仮想カメラ制御部と、
プレイ対象であるボールの移動演算処理を行う移動体演算部と、
前記操作情報に基づき前記仮想カメラの視線方向が変化する場合に、視線方向が変化する前記仮想カメラが前記ボールを捕捉する捕捉条件が満たされており、前記ボールの捕球条件が満たされた場合に、前記ボールの捕球が成功したと判定する判定部と、
オブジェクト空間内において前記仮想カメラから見える画像を生成する画像生成部として、
コンピュータを機能させることを特徴とするプログラム。
【請求項2】
請求項1において、
前記判定部は、
前記仮想カメラ又は前記プレーヤが操作するプレーヤキャラクタに追従するヒットボリュームを設定し、設定された前記ヒットボリュームに前記ボールがヒットしたと判定された場合に、前記ボールの前記捕捉条件及び前記捕球条件が満たされたと判定することを特徴とするプログラム。
【請求項3】
請求項2において、
前記判定部は、
前記ヒットボリュームの形状、ヒット有効範囲、位置及び方向の少なくとも1つを可変に制御することを特徴とするプログラム。
【請求項4】
請求項3において、
前記判定部は、
前記ボールの軌道に応じて、前記ヒットボリュームの形状、ヒット有効範囲、位置及び方向の少なくとも1つを変化させることを特徴とするプログラム。
【請求項5】
請求項3又は4において、
前記判定部は、
前記プレーヤが指示した方向に応じて、前記ヒットボリュームを変形させる処理又は前記ヒット有効範囲を変化させる処理を行うことを特徴とするプログラム。
【請求項6】
請求項3乃至5のいずれかにおいて、
前記判定部は、
ゲーム条件の設定に応じて、前記ヒットボリュームの形状、ヒット有効範囲、位置及び方向の少なくとも1つを変化させることを特徴とするプログラム。
【請求項7】
請求項1において、
前記判定部は、
前記仮想カメラの視野範囲に対応して設定された捕捉判定範囲内に前記ボールが入っている場合に、前記仮想カメラが前記ボールを捕捉する前記捕捉条件が満たされていると判定し、前記捕捉条件が満たされた状態で前記ボールの前記捕球条件が満たされた場合に、前記ボールの捕球が成功したと判定することを特徴とするプログラム。
【請求項8】
請求項7において、
前記判定部は、
前記捕捉判定範囲を可変に制御することを特徴とするプログラム。
【請求項9】
請求項8において、
前記判定部は、
ゲーム条件の設定に応じて、前記捕捉判定範囲を変化させることを特徴とするプログラム。
【請求項10】
請求項1乃至9のいずれかにおいて、
前記判定部は、
前記ボールに追従するボール用ヒットボリュームを設定し、前記ボール用ヒットボリュームを用いて、前記ボールの前記捕球条件が満たされているかを判定することを特徴とするプログラム。
【請求項11】
請求項1乃至10のいずれかにおいて、
前記判定部は、
前記ボールが第1の軌道で移動する場合には、前記仮想カメラの視線方向範囲が第1の視線方向範囲である場合に、前記捕捉条件が満たされていると判定し、前記ボールが前記第1の軌道とは異なる第2の軌道で移動する場合には、前記仮想カメラの視線方向範囲が、前記第1の視線方向範囲とは異なる第2の視線方向範囲である場合に、前記捕捉条件が満たされていると判定することと特徴とするプログラム。
【請求項12】
請求項1乃至11のいずれかにおいて、
前記操作情報取得部は、
前記操作情報として、プレーヤが入力した第1の操作情報と第2の操作情報を取得し、
前記仮想カメラ制御部は、
前記第1の操作情報に基づいて、前記仮想カメラの視線方向を制御し、前記第2の操作情報に基づいて、前記仮想カメラの視点位置の移動又はプレーヤキャラクタの移動を制御することを特徴とするプログラム。
【請求項13】
請求項12において、
前記操作情報取得部は、
モーションセンサからのモーション検出情報を前記第1の操作情報として取得し、方向指示部からの方向指示情報を前記第2の操作情報として取得し、
前記仮想カメラ制御部は、
前記第1の操作情報である前記モーション検出情報に基づいて、前記仮想カメラの視線方向を制御し、前記第2の操作情報である前記方向指示情報に基づいて、前記仮想カメラの視点位置の移動又は前記プレーヤキャラクタの移動を制御することを特徴とするプログラム。
【請求項14】
請求項1乃至13のいずれかにおいて、
前記仮想カメラ制御部は、
前記操作情報に基づいて第1の座標軸回りで前記仮想カメラの視線方向を変化させる制御を行うと共に、前記第1の座標軸に直交する第2の座標軸回りでは前記仮想カメラの視線方向を固定することを特徴とするプログラム。
【請求項15】
請求項1乃至14のいずれかにおいて、
前記操作情報取得部は、
モーションセンサからのモーション検出情報を前記操作情報として取得し、
前記仮想カメラ制御部は、
前記モーション検出情報に基づいて、前記仮想カメラの視線方向を制御し、
前記判定部は、
前記モーション検出情報に基づき前記仮想カメラの視線方向が変化する場合に、視線方向が変化する前記仮想カメラが前記ボールを捕捉する前記捕捉条件が満たされているかを判定することを特徴とするプログラム。
【請求項16】
請求項15において、
前記モーションセンサは携帯型ゲーム装置に設けられるセンサであり、
前記操作情報取得部は、
前記プレーヤが前記携帯型ゲーム装置を動かすことで得られた前記モーション検出情報を、前記モーションセンサから取得し、
前記仮想カメラ制御部は、
前記携帯型ゲーム装置の動きに応じて前記仮想カメラの視線方向が変化するように前記仮想カメラを制御し、
前記判定部は、
前記携帯型ゲーム装置の動きに応じて前記仮想カメラの視線方向が変化する場合に、視線方向が変化する前記仮想カメラが前記ボールを捕捉する前記捕捉条件が満たされているかを判定することを特徴とするプログラム。
【請求項17】
プレーヤの操作情報を取得する操作情報取得部と、
取得された前記操作情報に基づいて、仮想カメラの制御を行う仮想カメラ制御部と、
プレイ対象であるボールの移動演算処理を行う移動体演算部と、
前記ボールの捕球が成功したかを判定する判定部と、
オブジェクト空間内において前記仮想カメラから見える画像を生成する画像生成部として、
コンピュータを機能させ、
前記判定部は、
前記仮想カメラ又は前記プレーヤが操作するプレーヤキャラクタに追従すると共に、前記ボールの軌道に応じて位置、方向及び形状の少なくとも1つが変化するヒットボリュームを設定し、設定された前記ヒットボリュームに前記ボールがヒットした場合に、前記ボールの捕球が成功したと判定することを特徴とするプログラム。
【請求項18】
プレーヤの操作情報を取得する操作情報取得部と、
取得された前記操作情報に基づいて、仮想カメラの制御を行う仮想カメラ制御部と、
プレイ対象であるボールの移動演算処理を行う移動体演算部と、
前記ボールの捕捉条件が満たされているかを判定する判定部と、
オブジェクト空間内において前記仮想カメラから見える画像を生成する画像生成部として、
コンピュータを機能させ、
前記操作情報取得部は、
モーションセンサからのモーション検出情報を前記操作情報として取得し、
前記仮想カメラ制御部は、
前記モーション検出情報に基づいて、前記仮想カメラの視線方向を制御し、
前記判定部は、
前記モーション検出情報に基づき視線方向が変化する前記仮想カメラが前記ボールを捕捉する前記捕捉条件が満たされているかを判定することを特徴とするプログラム。
【請求項19】
コンピュータ読み取り可能な情報記憶媒体であって、請求項1乃至18のいずれかに記載のプログラムを記憶したことを特徴とする情報記憶媒体。
【請求項20】
プレーヤの操作情報を取得する操作情報取得部と、
取得された前記操作情報に基づいて、仮想カメラの制御を行う仮想カメラ制御部と、
プレイ対象であるボールの移動演算処理を行う移動体演算部と、
前記操作情報に基づき前記仮想カメラの視線方向が変化する場合に、視線方向が変化する前記仮想カメラが前記ボールを捕捉する捕捉条件が満たされており、前記ボールの捕球条件が満たされた場合に、前記ボールの捕球が成功したと判定する判定部と、
オブジェクト空間内において前記仮想カメラから見える画像を生成する画像生成部と、
を含むことを特徴とするゲーム装置。
【請求項21】
プレーヤの操作情報を取得する操作情報取得部と、
取得された前記操作情報に基づいて、仮想カメラの制御を行う仮想カメラ制御部と、
プレイ対象であるボールの移動演算処理を行う移動体演算部と、
前記ボールの捕球が成功したかを判定する判定部と、
オブジェクト空間内において前記仮想カメラから見える画像を生成する画像生成部と、
を含み、
前記判定部は、
前記仮想カメラ又は前記プレーヤが操作するプレーヤキャラクタに追従すると共に、前記ボールの軌道に応じて位置、方向及び形状の少なくとも1つが変化するヒットボリュームを設定し、設定された前記ヒットボリュームに前記ボールがヒットした場合に、前記ボールの捕球が成功したと判定することを特徴とするゲーム装置。
【請求項22】
プレーヤの操作情報を取得する操作情報取得部と、
取得された前記操作情報に基づいて、仮想カメラの制御を行う仮想カメラ制御部と、
プレイ対象であるボールの移動演算処理を行う移動体演算部と、
前記ボールの捕捉条件が満たされているかを判定する判定部と、
オブジェクト空間内において前記仮想カメラから見える画像を生成する画像生成部と、
を含み、
前記操作情報取得部は、
モーションセンサからのモーション検出情報を前記操作情報として取得し、
前記仮想カメラ制御部は、
前記モーション検出情報に基づいて、前記仮想カメラの視線方向を制御し、
前記判定部は、
前記モーション検出情報に基づき視線方向が変化する前記仮想カメラが前記ボールを捕捉する前記捕捉条件が満たされているかを判定することを特徴とするゲーム装置。
【請求項23】
プレーヤの操作情報を取得する操作情報取得部と、
取得された前記操作情報に基づいて、仮想カメラの制御を行う仮想カメラ制御部と、
プレイ対象であるボールの移動演算処理を行う移動体演算部と、
前記操作情報に基づき前記仮想カメラの視線方向が変化する場合に、視線方向が変化する前記仮想カメラが前記ボールを捕捉する捕捉条件が満たされており、前記ボールの捕球条件が満たされた場合に、前記ボールの捕球が成功したと判定する判定部と、
オブジェクト空間内において前記仮想カメラから見える画像を生成するための画像生成用データを生成する画像生成用データ生成部と、
を含むことを特徴とするサーバシステム。
【請求項24】
プレーヤの操作情報を取得する操作情報取得部と、
取得された前記操作情報に基づいて、仮想カメラの制御を行う仮想カメラ制御部と、
プレイ対象であるボールの移動演算処理を行う移動体演算部と、
前記ボールの捕球が成功したかを判定する判定部と、
オブジェクト空間内において前記仮想カメラから見える画像を生成するための画像生成用データを生成する画像生成用データ生成部と、
を含み、
前記判定部は、
前記仮想カメラ又は前記プレーヤが操作するプレーヤキャラクタに追従すると共に、前記ボールの軌道に応じて位置、方向及び形状の少なくとも1つが変化するヒットボリュームを設定し、設定された前記ヒットボリュームに前記ボールがヒットした場合に、前記ボールの捕球が成功したと判定することを特徴とするサーバシステム。
【請求項25】
プレーヤの操作情報を取得する操作情報取得部と、
取得された前記操作情報に基づいて、仮想カメラの制御を行う仮想カメラ制御部と、
プレイ対象であるボールの移動演算処理を行う移動体演算部と、
前記ボールの捕捉条件が満たされているかを判定する判定部と、
オブジェクト空間内において前記仮想カメラから見える画像を生成するための画像生成用データを生成する画像生成用データ生成部と、
を含み、
前記操作情報取得部は、
モーションセンサからのモーション検出情報を前記操作情報として取得し、
前記仮想カメラ制御部は、
前記モーション検出情報に基づいて、前記仮想カメラの視線方向を制御し、
前記判定部は、
前記モーション検出情報に基づき視線方向が変化する前記仮想カメラが前記ボールを捕捉する前記捕捉条件が満たされているかを判定することを特徴とするサーバシステム。
【図1】


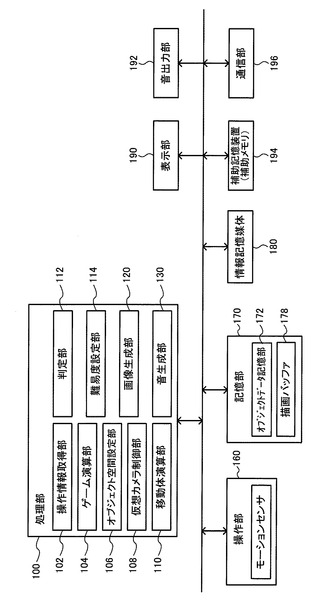
【図2】
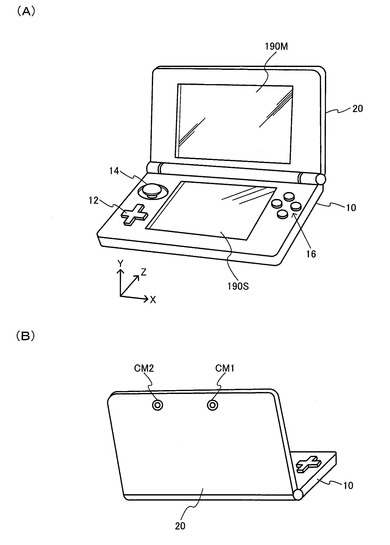
【図3】
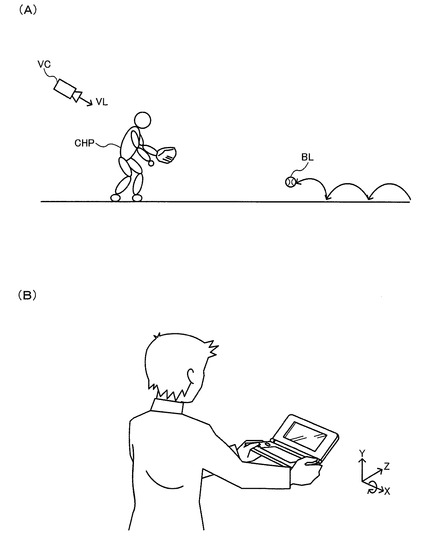
【図4】
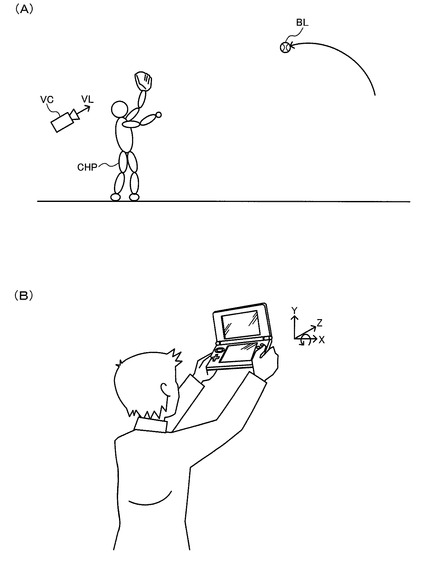
【図5】
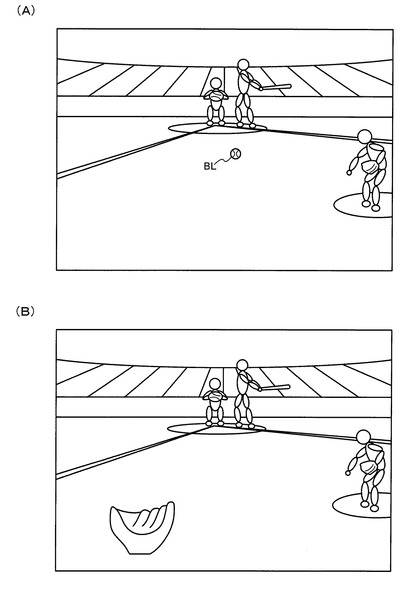
【図6】
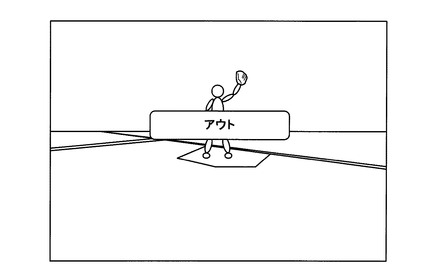
【図7】
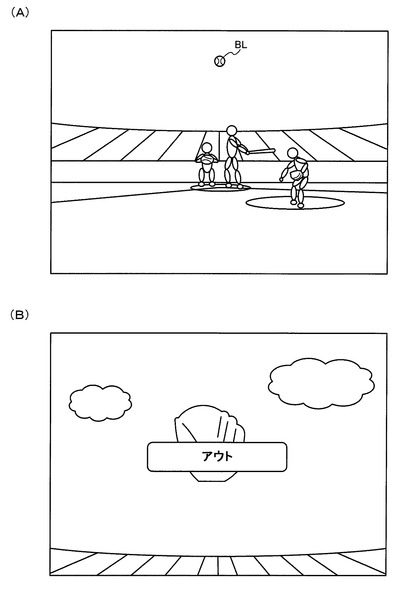
【図8】
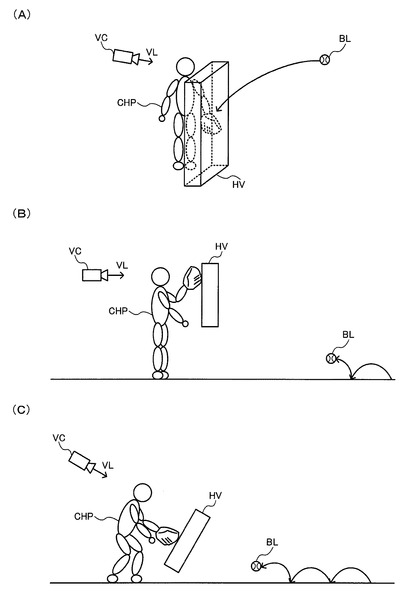
【図9】
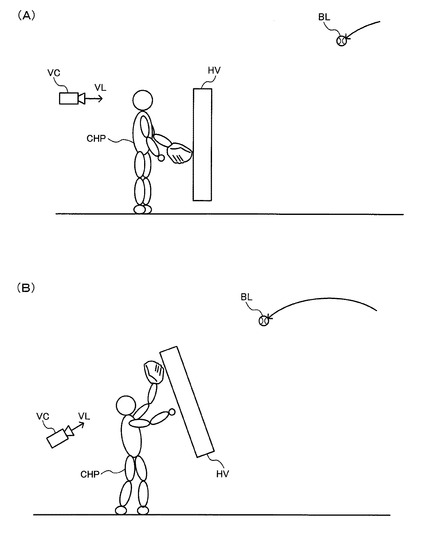
【図10】
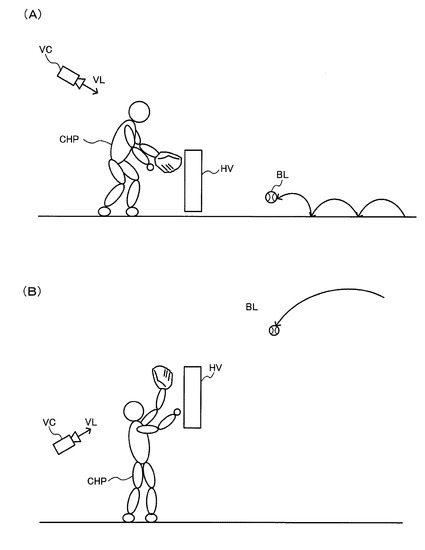
【図11】
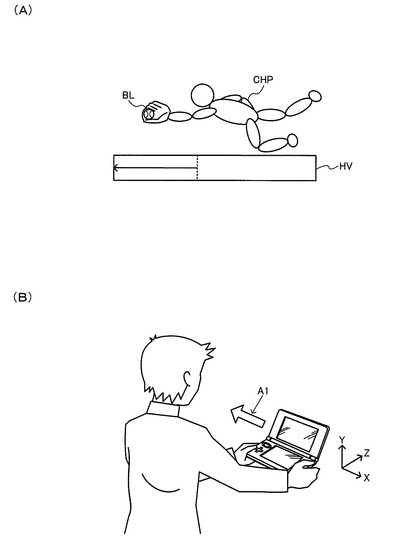
【図12】
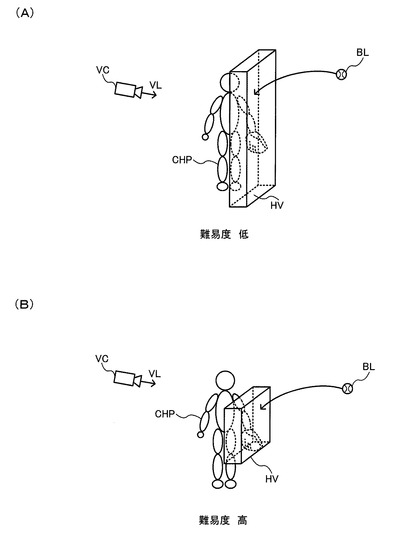
【図13】
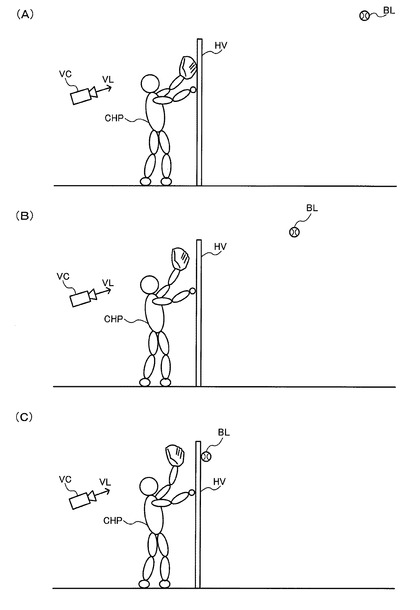
【図14】
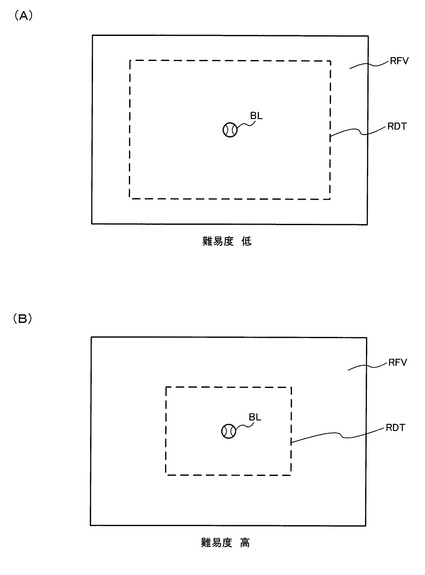
【図15】
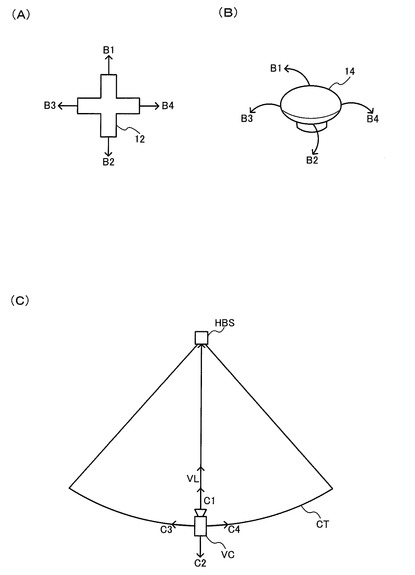
【図16】
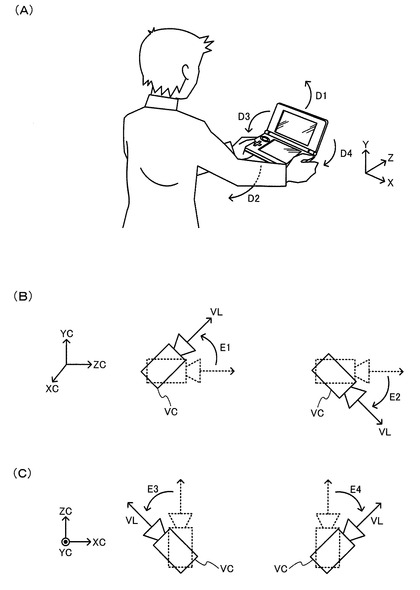
【図17】
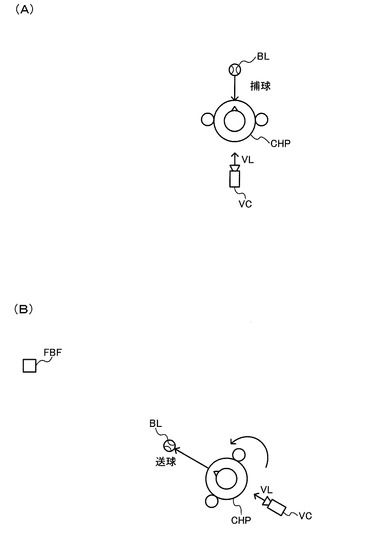
【図18】
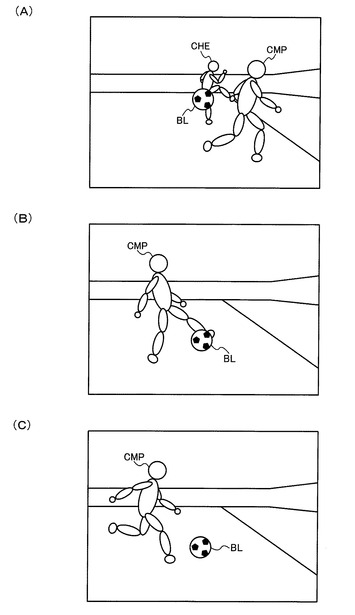
【図19】
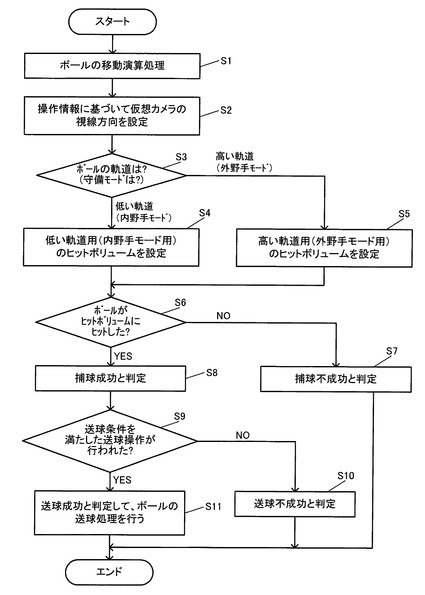
【図20】
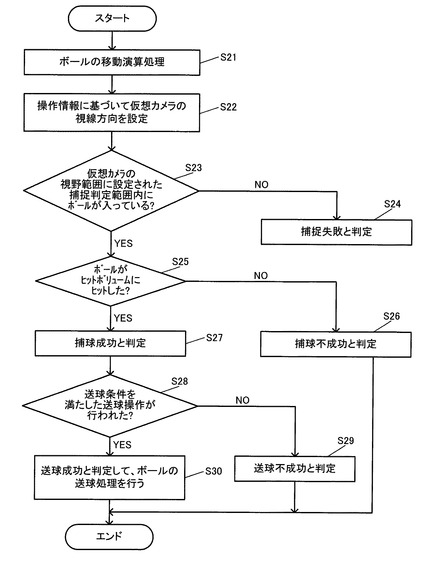
【図21】
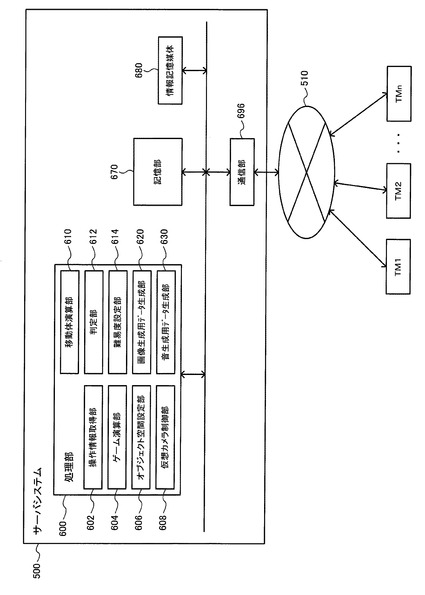
【図2】
【図3】
【図4】
【図5】
【図6】
【図7】
【図8】
【図9】
【図10】
【図11】
【図12】
【図13】
【図14】
【図15】
【図16】
【図17】
【図18】
【図19】
【図20】
【図21】
【公開番号】特開2012−101025(P2012−101025A)
【公開日】平成24年5月31日(2012.5.31)
【国際特許分類】
【出願番号】特願2010−294497(P2010−294497)
【出願日】平成22年12月29日(2010.12.29)
【出願人】(000134855)株式会社バンダイナムコゲームス (1,157)
【Fターム(参考)】
【公開日】平成24年5月31日(2012.5.31)
【国際特許分類】
【出願日】平成22年12月29日(2010.12.29)
【出願人】(000134855)株式会社バンダイナムコゲームス (1,157)
【Fターム(参考)】
[ Back to top ]