
プロジェクタ、プロジェクタの距離計測方法、プロジェクタの投影面傾き取得方法及びプログラム
【課題】スクリーンの傾き計測の精度を向上させ、プロジェクタを小型化する。
【解決手段】投影部16の光源部165は、内蔵するLEDに供給する電流をAM変調し、投影部16は、光強度を変調した投影光をスクリーンに投影する。受光部171は、光強度が変調された反射光を遅れて受光する。この時間遅れは、光の飛行時間に相当する。演算部173は、スクリーン上の複数の測距点について、光強度が変調されている投影光と反射光との位相のずれ量を取得し、この位相のずれ量に基づいて、スクリーン上の複数の測距点までの距離を取得し、スクリーンの傾き角度を取得する。位相のずれ量に基づいて、スクリーンの複数の測距点の距離を取得するため、三角測距法と比較して精度は向上する。また、測距専用の光源も不要となり、プロジェクタ1は小型化される。
【解決手段】投影部16の光源部165は、内蔵するLEDに供給する電流をAM変調し、投影部16は、光強度を変調した投影光をスクリーンに投影する。受光部171は、光強度が変調された反射光を遅れて受光する。この時間遅れは、光の飛行時間に相当する。演算部173は、スクリーン上の複数の測距点について、光強度が変調されている投影光と反射光との位相のずれ量を取得し、この位相のずれ量に基づいて、スクリーン上の複数の測距点までの距離を取得し、スクリーンの傾き角度を取得する。位相のずれ量に基づいて、スクリーンの複数の測距点の距離を取得するため、三角測距法と比較して精度は向上する。また、測距専用の光源も不要となり、プロジェクタ1は小型化される。
【発明の詳細な説明】
【技術分野】
【0001】
本発明は、プロジェクタ、プロジェクタの距離計測方法、プロジェクタの投影面傾き取得方法及びプログラムに関するものである。
【背景技術】
【0002】
スクリーンに画像を投影するプロジェクタでは、プロジェクタの光軸に対してスクリーンが垂直でないと、歪みのない画像をスクリーンに投影しても、スクリーンに投影された画像は歪んでしまう。このため、プロジェクタは、スクリーンの傾きを修正しなくても画像の歪みを補正するため、自動台形補正(Automatic Keystone correction)を行う。
【0003】
このような自動台形補正を行うために、プロジェクタの光軸に垂直な面を理想投影面とし、この理想投影面と投影面としての実際のスクリーンとの角度を、スクリーンの傾き角度として、この傾き角度を計測する投影面傾き計測装置を備えたプロジェクタがある。
【0004】
かかる従来の投影面傾き計測装置は、三角測距法に基づくセンサを利用してプロジェクタ本体からスクリーン上の複数の測距点までの距離を測定する。投影面傾き計測装置は、測定の結果、得られた複数の距離情報に基づいてスクリーンの傾き角度を算出し、プロジェクタは、算出したスクリーンの傾き角度に基づいて自動台形補正を行う。
【0005】
このような従来の投影面傾き計測装置として、例えば、パッシブ位相差測距センサを用いたものがある(例えば、特許文献1参照)。この測距センサは、2つの撮像素子とレンズとを備え、レンズで2つの撮像素子上に像を結像させ、結像した2つの像の位相差を検出する。従来の投影面傾き計測装置は、この測距センサが検出した位相差に基づいて、複数の測距点までの距離を計測する。
【特許文献1】特開2005−233880号公報(第5、6頁、図1、2)
【発明の開示】
【発明が解決しようとする課題】
【0006】
しかし、パッシブ位相差測距センサを用いた従来のこのような投影面傾き計測装置では、距離が遠くなると測定精度が低下してしまう。通常のフロント式プロジェクタにおいて測距を行う場合、投影距離が3〜4mであり、従来の投影面傾き計測装置では、この投影距離では、十分な測定精度を得ることはできない。
【0007】
また、従来の位相差センサでは、2つの撮像素子に像を結像させるためのレンズが必要なため、焦点距離分だけ、レンズと撮像素子との間隔を確保しなければならない。特に、プロジェクタ、カメラでは、小型化が要求され、位相差センサでは、これ以上の小型化は難しい。
【0008】
本発明は、このような従来の問題点に鑑みてなされたもので、投影面までの距離計測の精度を向上させることが可能なプロジェクタ、距離計測方法及びプログラムを提供することを目的とする。
【0009】
また、本発明は、投影面の傾き角度計測の精度を向上させることが可能なプロジェクタ、投影面傾き計測方法及びプログラムを提供することを目的とする。
【0010】
また、本発明は、小型化が可能なプロジェクタを提供することを目的とする。
【課題を解決するための手段】
【0011】
この目的を達成するため、本発明の第1の観点に係るプロジェクタは、
投影光を投影面に投影する投影部と、
前記投影部が投影する前記投影光の光強度を変調する光変調部と、
前記投影部が投影した投影光が投影面で反射した反射光を受光する受光部と、
前記光変調部が光変調した前記投影光と前記受光部が受光した反射光との位相のずれ量を検出し、検出した位相のずれ量に基づいて、前記投影面までの距離を取得する測距部と、を備えたことを特徴とする。
【0012】
本発明の第2の観点に係るプロジェクタは、
投影光を投影面に投影する投影部と、
前記投影部が投影する前記投影光の光強度を変調する光変調部と、
前記投影部が投影した投影光が投影面で反射した反射光を、複数の受光点に配置された複数の受光素子で受光する受光部と、
前記光変調部が光変調した前記投影光と前記受光部の複数の受光素子が受光した反射光との位相のずれ量を検出し、検出した位相のずれ量に基づいて、前記投影面の複数の点までの距離を取得する測距部と、
前記測距部が取得した複数の距離に基づいて、前記投影光の光軸に垂直な理想投影面に対する前記投影面の傾き角度を取得する投影面傾き角度取得部と、を備えたことを特徴とする。
【0013】
前記投影部は、電流が供給されて前記投影光を生成する光源を備え、
前記光変調部は、前記光源に供給する電流のAM変調を行うことにより、前記投影光の光強度を変調するものであってもよい。
【0014】
前記光源は、発光ダイオードによって構成されたものであってもよい。
【0015】
前記光源は、レーザによって構成されたものであってもよい。
【0016】
前記受光部は、複数の受光素子が行列配置され、各受光素子が受光した光の受光量に基づいて前記投影面上の複数の点までの距離を取得する距離画像センサによって構成されたものであってもよい。
【0017】
本発明の第3の観点に係るプロジェクタの距離計測方法は、
投影面に投影光を投影するステップと、
前記投影光の光強度を変調するステップと、
前記投影面で反射した反射光を受光するステップと、
前記投影光と前記反射光との位相のずれ量を検出するステップと、
前記検出した位相のずれ量に基づいて、前記投影面までの距離を取得するステップと、を備えたことを特徴とする。
【0018】
本発明の第4の観点に係るプロジェクタの投影面計測方法は、
投影面に投影光を投影するステップと、
前記投影光の光強度を変調するステップと、
前記投影面で反射した反射光を複数の受光点で受光するステップと、
前記投影光と各受光点で受光した反射光との位相のずれ量を検出するステップと、
前記検出した位相のずれ量に基づいて、前記投影面上の複数の点までのそれぞれの距離を取得するステップと、
取得した前記投影面までのそれぞれの距離に基づいて、前記投影光の光軸に垂直な理想投影面に対する前記投影面の傾き角度を取得するステップと、を備えたことを特徴とする。
【0019】
本発明の第5の観点に係るプログラムは、
コンピュータに、
投影面に投影光を投影する手順、
前記投影光の光強度を変調する手順、
前記投影面で反射した反射光を受光する手順、
前記投影光と前記反射光との位相のずれ量を検出する手順、
前記検出した位相のずれ量に基づいて、前記投影面までの距離を取得する手順、 を実行させるためのものである。
【0020】
本発明の第6の観点に係るプログラムは、
コンピュータに、
投影面に投影光を投影する手順、
前記投影光の光強度を変調する手順、
前記投影面で反射した反射光を複数の受光点で受光する手順、
前記投影光と各受光点で受光した反射光との位相のずれ量を検出する手順、
前記検出した位相のずれ量に基づいて、前記投影面上の複数の点までのそれぞれの距離を取得する手順、
取得した前記投影面までのそれぞれの距離に基づいて、前記投影光の光軸に垂直な理想投影面に対する前記投影面の傾き角度を取得する手順、
を実行させるためのものである。
【発明の効果】
【0021】
本発明によれば、投影面までの距離計測の精度を向上させることができる。また、投影面の傾き角度計測の精度を向上させることができる。また、プロジェクタを小型化することができる。
【発明を実施するための最良の形態】
【0022】
以下、本発明の実施形態に係るプロジェクタを図面を参照して説明する。
本実施形態に係るプロジェクタの構成を図1に示す。
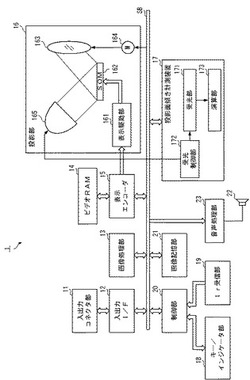
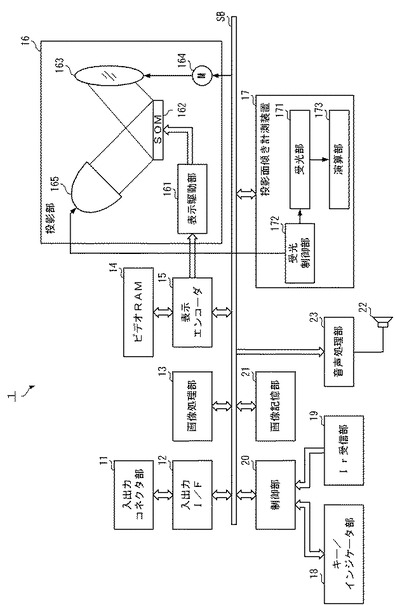
本実施形態に係るプロジェクタ1は、入出力コネクタ部11と、入出力I/F(インタフェース)12と、画像処理部13と、ビデオRAM14と、表示エンコーダ15と、投影部16と、投影面傾き計測装置17と、キー/インジケータ部18と、Ir受信部19と、制御部20と、画像記憶部21と、スピーカ22と、音声処理部23と、を備える。
【0023】
投影面傾き計測装置17と、入出力I/F12と、画像処理部13と、表示エンコーダ15と、制御部20と、画像記憶部21と、音声処理部23とは、バスSBに接続されている。
【0024】
このプロジェクタ1は、スクリーンが理想投影面に対して傾いている場合でも、画像を歪みなく表示するため、自動台形補正を行う。このため、プロジェクタ1は、投影光に対して光強度変調を行い、この投影光をスクリーンに投影し、反射光を受光するまでの時間遅れを計測する。尚、ここで、理想投影面とは、投影部16が投影する投影光に対して垂直な面をいう。
【0025】
この時間遅れは、プロジェクタ1とスクリーンとの間の光の飛行時間に対応するものであり、プロジェクタ1とスクリーンとの間の距離によって決定される。
【0026】
プロジェクタ1は、スクリーン上の複数の点から反射した光の時間遅れを計測し、プロジェクタ1とスクリーンの複数の点との間の距離に基づいてスクリーンの傾き角度を取得し、取得した傾き角度に基づいて自動台形補正を行う。
【0027】
入出力コネクタ部11は、画像信号を入力するための端子を備えたものである。入出力I/F12は、信号の入出力を仲介するためのものである。
【0028】
画像処理部13は、種々の画像処理を実行するものである。画像処理部13は、画像処理として、入出力コネクタ部11、入出力I/F12を介して供給された画像信号をシステムバスSBを介して取得し、取得した画像信号を予め設定されたフォーマットの画像信号に変換する。
【0029】
また、画像処理部13は、制御部20からスクリーンの傾き角度が供給され、自動台形補正を行うように指示されると、この自動台形補正を行うための変換パラメータを求める。
【0030】
そして、画像処理部13は、画像信号に対して、取得した変換パラメータを用いて自動台形補正を実行する。
【0031】
ビデオRAM14は、画像データを展開記憶するためのものである。表示エンコーダ15は、画像処理部13が変換した画像信号をビデオRAM14に展開して記憶するものである。表示エンコーダ15は、ビデオRAM14に展開記憶した画像信号から、ビデオ信号を生成し、生成したビデオ信号を投影部16に供給する。
【0032】
投影部16は、光の画像を生成して投影光をスクリーンに投影するものであり、表示駆動部161と、SOM162と、投影レンズ163と、レンズモータ164と、光源部165と、を備える。
【0033】
表示駆動部161は、表示エンコーダ15から供給された画像信号に対応するように、フレームレートを、例えば30[フレーム/秒]として、SOM162を色毎に時分割で表示駆動するものである。
【0034】
SOM162は、例えば、複数のマイクロミラー(図示せず)によって構成され、時分割で色毎の光像を形成するためのものである。
【0035】
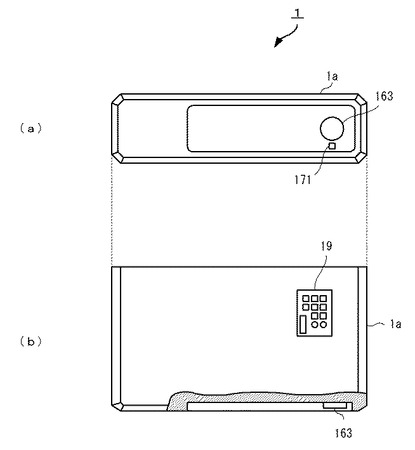
投影レンズ163は、SOM162で形成された光像をスクリーンに結像させるためのものである。この投影レンズ163は、ズーム及びフォーカス調整を行うための機構部(図示せず)を備えている。投影レンズ163は、図2(a)、(b)に示すようにプロジェクタ本体1aの前面に取り付けられる。
【0036】
レンズモータ164は、投影レンズ163に備えられた機構部を駆動することにより、ズームとフォーカスとを設定するためのモータである。
【0037】
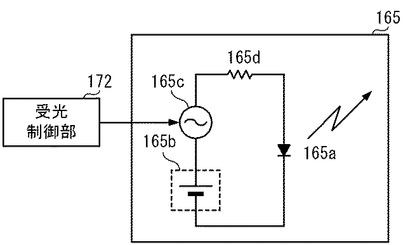
光源部165は、スクリーンに投影する投影光の発光源である。光源部165は、図3に示すように、LED(Light Emitting Diode)165aと、直流電源165bと、AM変調器165cと、抵抗165dと、を備え、投影光の光強度を変調するように構成されている。
【0038】
LED165aは、光を発する発光ダイオードである。直流電源165bは、LED165aに供給する電流の発生源である。AM変調器165cは、直流電源165bがLED165aに供給する電流を、例えば、10MHzの周波数でAM変調を行うことにより、投影光の光強度を変調するものである。AM変調器165cは、AM変調を行った電流を抵抗165dを介してLED165aに供給することにより、投影光の光強度変調を行う。光源部165は、光をSOM162に向けて出射する。
【0039】
投影面傾き計測装置17は、スクリーンの傾き角度を計測するためのものであり、受光部171と、受光制御部172と、演算部173と、からなる。
【0040】
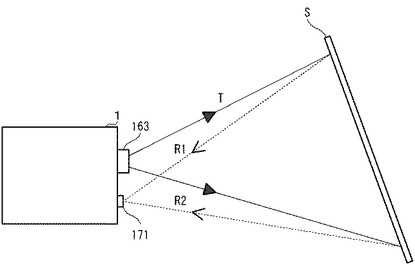
受光部171は、図4に示すように、スクリーンS上に投影された映像からの反射光R1,R2を受光するものである。
【0041】
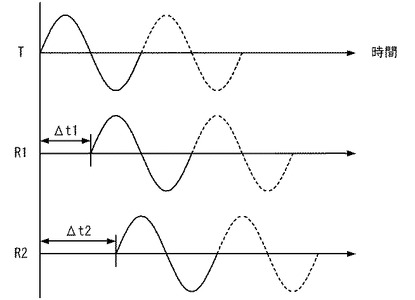
図5に示すように、プロジェクタ1近傍の投影光Tと反射光R1,R2との間には、時間遅れΔt1,Δt2が発生する。この時間遅れΔt1,Δt2を直接測定することは困難であるため、受光部171は、投影光Tと反射光R1、投影光Tと反射光R2と、の位相のずれ量を検出する。
【0042】
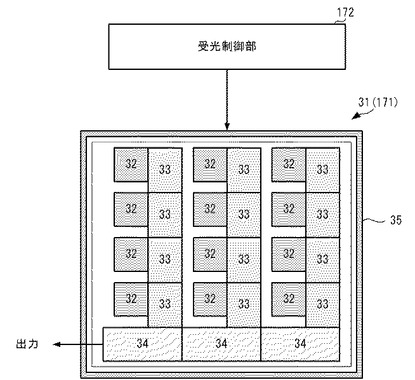
受光部171には、例えば、特開2006−153773号公報に記載された距離画像センサが用いられる。この距離画像センサは、例えば、100×100個のフォトダイオードが行列配置されて構成されたものである。ここでは、説明を簡単にするため、フォトダイオードを3列×4行として、この距離画像センサ31の構成について説明する。
【0043】
図6に示すように、距離画像センサ31は、フォトダイオード32と、垂直転送レジスタ33と、水平転送レジスタ34と、オーバーフロー電極35と、を備える。フォトダイオード32は、入射した光の量に対応した量の信号電荷を生成するものである。
【0044】
垂直転送レジスタ33は、フォトダイオード32が生成した信号電荷を水平転送レジスタ34方向に転送し、転送した信号電荷を水平転送レジスタ34に順次供給するためのものである。
【0045】
水平転送レジスタ34は、各垂直転送レジスタ33から供給された信号電荷を出力方向に転送して、順次出力するものであり、垂直転送レジスタ33の各列に対応して備えられる。
【0046】
オーバーフロー電極35は、受光制御部172が廃棄電圧を印加するための電極であり、例えば、アルミニウムによって形成される。廃棄電圧は、フォトダイオード32が生成した信号電荷のうち、不要とする電荷を廃棄するための電圧である。オーバーフロー電極35には、信号電荷の廃棄先としての電源(図示せず)が接続される。
【0047】
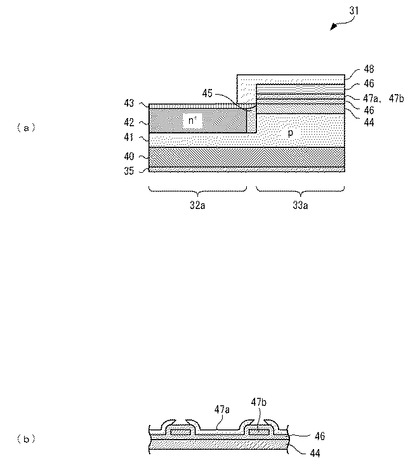
図7(a)は、距離画像センサ31のフォトダイオード32が形成されるフォトダイオード領域32aと垂直転送レジスタ33が形成される垂直転送レジスタ領域33aとを示す断面図である。
【0048】
この図7(a)に示すように、オーバーフロー電極35は、絶縁膜を介さずに半導体基板40と接触する。半導体基板40上には、p形半導体のウェル領域41が形成される。フォトダイオード領域31aのウェル領域41上には、n+形半導体層42が形成される。このウェル領域41とn+形半導体層42とがpn接合部となり、ウェル領域41とn+形半導体層42とによってフォトダイオード32が構成される。
【0049】
n+形半導体層42上には、P+形半導体からなる表面層43が積層される。この表面層43は、フォトダイオード領域32aで生成された電荷を垂直転送レジスタ領域33aに移動させる際に、n+形半導体層42の表面近傍が電荷の通過経路となることを阻止するために設けられたものである。
【0050】
垂直転送レジスタ領域33aのウェル領域41は、フォトダイオード領域32aのウェル領域41よりも厚く形成される。垂直転送レジスタ領域33aのウェル領域41上には、n+形半導体からなる蓄積転送層44が、表面層43と同じ高さとなるように積層される。フォトダイオード領域32aのn+形半導体層42と蓄積転送層44との間には、p+形半導体からなる分離層45が形成される。
【0051】
図7(b)は、垂直転送レジスタ領域33aの図7(a)と直角方向の断面を示す図であり、この図7(b)に示すように、蓄積転送層44の上には、絶縁膜46を介して、2つの転送電極47a,47bが形成される。
【0052】
絶縁膜46は、例えば、SiO2によって形成され、転送電極47a,47bは、例えば、ポリシリコンによって形成される。転送電極47aの幅は、転送電極47bの幅よりも広くなっている。転送電極47aは、受光制御部172が通過電圧を印加するための電極である。通過電圧は、フォトダイオード領域32aにおいて生成された信号電荷の通過を制御する電圧である。
【0053】
垂直転送レジスタ領域33a上には、遮光膜48が形成され、垂直転送レジスタ領域33aは、この遮光膜48によって遮光される。フォトダイオード領域32a上には、この遮光膜43が形成されず、フォトダイオード32は、入射した光によって電荷を生成する。
【0054】
この距離画像センサ31が位相のずれ量を検出する原理について説明する。
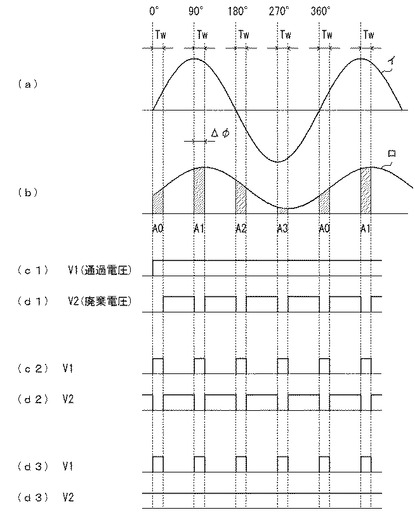
図8(a)に示すように、光源部165からの光の強度が曲線イのように変化するものとする。図8(b)に示すように、この曲線イに対して、受光量が曲線ロのように変化し、曲線イと曲線ロとの位相差(位相のずれ量)がΔφとすると、この位相差Δφが光の飛行時間に相当する。
【0055】
この図8(a)に示す曲線イの位相を基準として、位相0〜90°未満、90°〜180°未満、180°〜270°未満、270°〜360°未満のそれぞれの期間の図8(b)における受光量A0,A1,A2,A3を求める。受光量A0,A1,A2,A3は、次の式(1)〜(4)によって表される。
A0=A・sin(Δφ)+B ・・・(1)
A1=A・sin(π/2+Δφ)+B ・・・(2)
A2=A・sin(π+Δφ)+B ・・・(3)
A3=A・sin(3π/2+Δφ)+B ・・・(4)
尚、Aは最大光強度、Bは直流成分(外光成分と反射光成分との平均値)を示す。
【0056】
この式(1)〜(4)から、位相差Δφは、次の式(5)によって表される。
Δφ=tan-1{(A2−A0)/(A1−A3)} ・・・(5)
即ち、位相のずれ量は、受光量A0〜A3を検出することにより、式(5)から求められる。
【0057】
フォトダイオード32が生成した電荷のうち、垂直転送レジスタ33に転送される信号電荷の量は、垂直転送レジスタ33に印加される通過電圧とオーバーフロー電極35に印加される廃棄電圧との関係によって決定される。
【0058】
転送電極47aに通過電圧V1=+Vが印加されると、フォトダイオード32は、生成した信号電荷を垂直転送レジスタ33に供給する。
【0059】
オーバーフロー電極35に、廃棄電圧V2=+Vのが印加されると、フォトダイオード32が生成した信号電荷は、オーバーフロー電極35を経由して、オーバーフロー電極35に接続された電源に廃棄される。
【0060】
受光量A0〜A3を検出するには、通過電圧と廃棄電圧との3つの印加パターンが考えられる。
【0061】
第1の印加パターンは、図8(c1),(d1)に示すように、転送電極47aに印加する通過電圧V1を+Vで一定に保持し、オーバーフロー電極35に印加する廃棄電圧V2を位相90°〜360°未満において+Vに設定するパターンである。
【0062】
第2の印加パターンは、図8(c2)、(d2)に示すように、転送電極47aに印加する通過電圧V1を、位相0°〜90°未満において、+Vに設定し、オーバーフロー電極35に印加する廃棄電圧V2を位相90°〜360°未満において+Vに設定するパターンである。
【0063】
第3の印加パターンは、図8(c3)、(d3)に示すように、転送電極47aに印加する通過電圧V1を、位相0°〜90°未満において、+Vに設定し、オーバーフロー電極35に印加する廃棄電圧V2を、+Vで一定に保持するパターンである。
【0064】
図1に戻り、受光制御部172と演算部173とは、投影部16が変調した投影光と受光部171が受光した反射光との位相のずれ量を検出し、検出した位相のずれ量に基づいて、スクリーンSまでの距離を取得し、スクリーンSの傾き角度を取得するものである。
【0065】
まず、受光制御部172は、投影部16と受光部171とを制御するものであり、ROMと、RAMと、CPUと、を備える(いずれも図示せず)。
【0066】
ROMは、図8に示す印加パターン、CPUが実行する処理プログラムを記憶するためのメモリである。RAMは、CPUの作業に必要なデータを記憶するためのメモリである。CPUは、ROMに記憶された処理プログラムに従って、スクリーンSの傾き角度を計測する処理を実行するためのものである。
【0067】
受光制御部172(CPU)は、このような処理として、投影光をスクリーンSに投影するように投影部16を制御する。
【0068】
受光制御部172は、図8に示す3つの印加パターンのうちのいずれか1つの印加パターンを選択する。
【0069】
受光制御部172は、LED165aに供給する電流をAM変調するようにAM変調器165cを制御する。そして、受光制御部172は、選択した印加パターンに従って、転送電極47a、オーバーフロー電極35に、それぞれ、通過電圧V1、廃棄電圧V2を印加する。
【0070】
受光制御部172が転送電極47a、オーバーフロー電極35に、それぞれ、通過電圧V1、廃棄電圧V2を印加することにより、受光部171は、受光量A0〜A3に対応する量の信号電荷を出力する。
【0071】
受光制御部172は、さらに、演算部173に対して、投影光と反射光との位相のずれ量Δφ、各測距点までのそれぞれの距離、スクリーンSの傾き角度を取得するように指示する。
【0072】
演算部173は、理想投影面に対するスクリーンSの傾き角度を取得するものであり、受光制御部172と同様に、ROMと、RAMと、CPUと、を備える(いずれも図示せず)。
【0073】
演算部173は、受光制御部172に指示されて上記処理を実行する。演算部173は、式(5)に従い、受光部171が出力した信号電荷の量に対応する受光量A0〜A3に基づいて位相のずれ量Δφを取得する。
【0074】
図4に示すように、スクリーンS上の2つの測距点までの距離を取得する場合、演算部173は、この2つの測距点に対応する受光部171の画素の受光量A0〜A3を取得し、取得した受光量A0〜A3に基づいて位相のずれ量Δφを取得する。
【0075】
演算部173は、取得した位相のずれ量Δφに基づいて、時間遅れΔt1,Δt2を取得し、プロジェクタ1とスクリーンS上の複数の点までの距離を演算し、理想投影面に対するスクリーンSの傾き角度を取得する。
【0076】
位相のずれ量をΔφとすると、時間遅れΔtは、次の式(6)によって表される。
【数1】

また、時間遅れΔtは、プロジェクタ1とスクリーンSとの距離の2倍を光が飛行する飛行時間にほぼ等しいので、距離dは、次の式(7)によって表される。
【数2】
式(6)、(7)より、距離dは、次の式(8)によって表される。
【数3】
【0077】
スクリーンSが理想投影面に対して傾いている場合、2つの測距点までの距離が異なるため、反射光R1の時間遅れと反射光R2の時間遅れが異なる。
【0078】
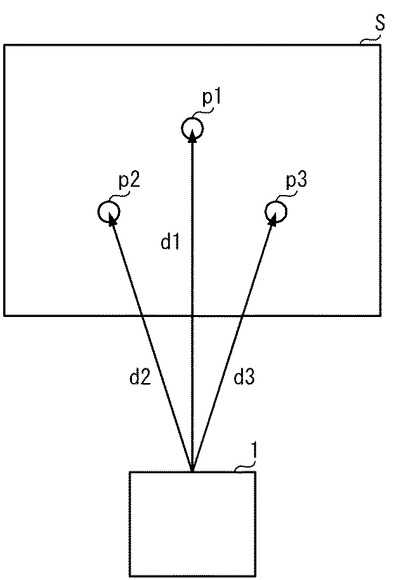
図9は、3つの方向で距離を取得する場合のスクリーンS上の3つの測距点p1,p2,p3とプロジェクタ1との位置関係を示す。
【0079】
演算部173は、スクリーンS上の3つの測距点p1〜p3を選択し、受光部171が出力した信号電荷のうち、選択した3つの測距点p1〜p3に対応するそれぞれの画素の受光量A0〜A3を取得する。
【0080】
演算部173は、取得したそれぞれの受光量A0〜A3に基づいて、プロジェクタ1から測距点p1〜p3までのそれぞれの距離d1〜d3を式(6)〜(8)に従って求める。演算部173は、これら3つの距離d1〜d3に基づいてスクリーンSの傾き角度を算出する。
【0081】
キー/インジケータ部18は、キーとインジケータとを備えたものであり、キーとして、電源キーと、ズームキーと、フォーカスキーと、「AFK」キーと、入力切換キーと、メニューキーと、操作キーと、を備える(いずれも図示せず)。
【0082】
電源キーは、電源のオン/オフするためのキーである。ズームキーは、ズームアップ及びズームダウンを指示するためのキーである。フォーカスキーは、プロジェクタ1に対して合焦位置の前方向及び後方向への移動を指示するためのキーである。
【0083】
「AFK」キーは、自動合焦(Automatic Focus)と自動台形補正の即時実行を指示するためのキーである。入力切換キーは、入出力コネクタ部11の画像信号入出力用のコネクタを切換えるためのキーである。
【0084】
メニューキーは、投影動作に関する各種メニュー項目の表示を指示するためのキーである。操作キーは、カーソルキー等、各種操作を指示するためのキーである。キー/インジケータ部18は、これらのキーが押下されると、この操作情報を制御部20に供給する。
【0085】
また、キー/インジケータ部18は、インジケータとして、電源/待機インジケータを備える(いずれも図示せず)。電源/待機インジケータは、電源のオン/オフ状態、画像信号の入力がない状態を表示するものであり、例えば、表示用LEDを備える。電源/待機インジケータは、表示用LEDを点灯/消灯、あるいは点滅させることにより、これらの状態を表示する。
【0086】
Ir受信部19は、このプロジェクタ1のリモートコントローラ(図示せず)からの操作情報を示す赤外光信号を受信するものである。
【0087】
制御部20は、各部の動作制御を行うためのものであり、受光制御部172と同様に、ROMと、RAMと、CPUと、を備える(いずれも図示せず)。制御部20は、キー/インジケータ部18、Ir受信部19から操作情報が供給されると、この操作情報に基づいて各部を制御する。
【0088】
具体的に、制御部20は、キー/インジケータ部18から、電源キーが押下された旨の操作情報が供給される毎に、プロジェクタ1の電源をオン、オフする。
【0089】
制御部20は、キー/インジケータ部18から、「AFK」キーが押下された旨の操作情報が供給されと、投影面傾き計測装置17に、スクリーンSまでの距離を計測するように指示する。そして、投影面傾き計測装置17から距離情報が供給されると、制御部20は、この距離情報に基づいてレンズモータ164を駆動して自動合焦を行う。
【0090】
また、制御部20は、投影面傾き計測装置17からスクリーンSの傾き角度が供給されると、画像処理部13に、このスクリーンSの傾き角度を供給して、自動台形補正を行うように指示する。
【0091】
画像記憶部21は、作業に必要な画像データを記憶するためのものであり、例えばフラッシュメモリ等からなる。制御部20は、画像記憶部21に記憶された画像データを読出して表示エンコーダ15へ送出し、読み出した画像データに基づく画像を投影させる。
【0092】
スピーカ22は、音声を出力するためのものである。音声処理部23は、PCM音源等の音源回路を備え、投影表示動作時に与えられる音声データをアナログ化し、スピーカ22を駆動して拡声放音させるためのものである。
【0093】
次に本実施形態に係るプロジェクタ1の動作を説明する。
キー/インジケータ部18の電源キーが押下されると、キー/インジケータ部18は、この操作情報を制御部20に供給し、制御部20は、この操作情報に基づいてプロジェクタ1の電源をオンする。
【0094】
プロジェクタ1に画像信号が供給されると、画像処理部13は、供給された画像信号をシステムバスSBを介して取得し、取得した画像信号を予め設定されたフォーマットの画像信号に変換する。
【0095】
表示エンコーダ15は、画像処理部13が変換した画像信号を展開して、ビデオRAM14に記憶し、ビデオRAM14に展開記憶した画像信号から、ビデオ信号を生成し、生成したビデオ信号を投影部16の表示駆動部161に供給する。
【0096】
表示駆動部161は、表示エンコーダ15から供給された画像信号に対応するように、30[フレーム/秒]のフレームレートでSOM162を色毎に時分割で表示駆動する。
【0097】
光源部165がこのSOM162に光を照射すると、SOM162は、照射された光を反射する。SOM162で反射した光像は、投影レンズ163を介してスクリーンSに投影される。
【0098】
「AFK」キーが押下されると、キー/インジケータ部18は、この操作情報を制御部20に供給し、制御部20は、受光制御部172に、傾き計測制御処理を実行するように指示する。
【0099】
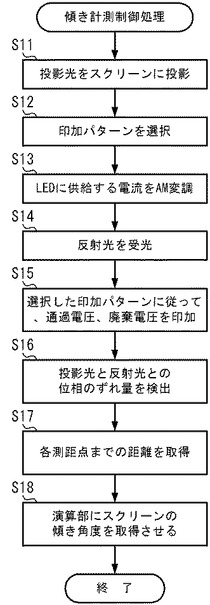
受光制御部172は、内蔵するROMから傾き計測制御処理の処理プログラムを読み出して、図10に示すフローチャートに従って、この傾き計測制御処理を実行する。
【0100】
受光制御部172は、投影光をスクリーンSに投影するように投影部16を制御する(ステップS11)。
【0101】
受光制御部172は、図8に示す3つの印加パターンのうちのいずれか1つの印加パターンを選択する(ステップS12)。
【0102】
受光制御部172は、LED165aに供給する電流をAM変調するようにAM変調器165cを制御する(ステップS13)。
【0103】
受光制御部172は、反射光を受光するように受光部171を制御する(ステップS14)。
【0104】
受光制御部172は、選択した印加パターンに従って、転送電極47a、オーバーフロー電極35に、それぞれ、通過電圧V1、廃棄電圧V2を印加する(ステップS15)。
【0105】
受光制御部172は、受光部171が出力した信号電荷の量に基づいて、演算部173に各演算を行うように指示する。演算部173は、この指示に従い、式(5)により、投影光Tと反射光R1,R2との位相のずれ量Δφを検出する(ステップS16)。
【0106】
演算部173は、各測距点までのそれぞれの距離、スクリーンSの傾き角度を取得する(ステップS17)。
【0107】
演算部173は、スクリーンSの傾き角度を取得する(ステップS18)。
【0108】
例えば、受光制御部20が、図8(c1)、(d1)に示す第1の印加パターンを選択した場合(ステップS12の処理)、受光制御部172は、変調信号の位相0°から計測が終了するまで、転送電極47aに通過電圧V1=+Vを印加する。また、受光制御部172は、変調信号の位相90°から期間Twの間、オーバーフロー電極35に廃棄電圧V2=0を印加する(ステップS15の処理)。
【0109】
フォトダイオード32は、受光量A0に対応する量の信号電荷を生成し、生成した信号電荷を垂直転送レジスタ33に供給する。各垂直転送レジスタ33は、供給された信号電荷を水平転送レジスタ34方向に転送し、水平転送レジスタ34に信号電荷を順次供給する。
【0110】
水平転送レジスタ34は、垂直転送レジスタ33から供給された信号電荷を出力方向に転送し、信号電荷を順次出力する。このようにして、受光部171は、変調信号の位相0°から期間Twにおける受光量A0を取得する。
【0111】
同様に、受光制御部172は、それぞれ、変調信号の位相90°,180°,270°から期間Twの間、オーバーフロー電極35に廃棄電圧V2=0を印加し、受光部171は、各期間Twにおける受光量A1,A2,A3を取得する。そして、受光部171は、各画素毎の各期間Twにおける受光量A1,A2,A3を取得する。
【0112】
演算部173は、図9に示すスクリーンS上の3つの測距点p1〜p3を選択し、受光部171が出力した信号電荷のうち、選択した3つの測距点p1〜p3に対応するそれぞれの画素の受光量A0〜A3を取得する。
【0113】
演算部173は、式(5)に従い、受光部171が取得した3つの画素のそれぞれの受光量A0〜A3に基づいて、位相のずれ量Δφを取得する(ステップS16の処理)。
また、演算部173は、式(8)に従い、取得した位相のずれ量Δφに基づいて距離d1〜d3を演算する(ステップS17の処理)。
【0114】
演算部173は、演算した距離d1〜d3に基づいてスクリーンSの傾き角度を算出する(ステップS18の処理)。
【0115】
このように、受光制御部172、演算部173が傾き計測制御処理を実行すると、投影面傾き計測装置17は、演算部173が演算した結果の距離d1〜d3、スクリーンSの傾き角度を制御部20に供給する。
【0116】
制御部20は、投影面傾き計測装置17から供給された距離d1〜d3に基づいて、レンズモータ164を制御して、自動合焦を行う。
【0117】
また、制御部20は、投影面傾き計測装置17から供給されたスクリーンSの傾き角度を画像処理部13に供給し、自動台形補正を行うように指示する。
【0118】
画像処理部13は、供給されたスクリーンSの傾き角度に基づいて変換パラメータを取得する。そして、画像処理部13は、システムバスSBを介して取得した画像信号に対して、この変換パラメータを用いて自動台形補正を行う。スクリーンSには、スクリーンSが傾いていたとしても、あたかも正面からみた画像が表示される。
【0119】
以上説明したように、本実施形態によれば、光源部165は、投影光に対して光強度変調を行い、プロジェクタ1は、光強度変調を行った投影光をスクリーンSに投影する。投影面傾き計測装置17の受光部171は、スクリーンS上の3つの測距点p1〜p3からの投影光の反射光を受光して、投影光に対する反射光の位相のずれ量Δφを検出する。
【0120】
演算部173は、この位相のずれ量Δφに基づいて、時間遅れΔtを取得し、プロジェクタ1とスクリーンS上の3つの測距点p1〜p3の距離情報を取得し、スクリーンSの傾き角度を取得するようにした。そして、画像処理部13は、このスクリーンSの傾き角度に基づいて自動台形補正を行うようにした。
【0121】
従って、位相のずれ量Δφに基づいて、スクリーンSの測距点p1〜p3の距離を取得するため、プロジェクタ1は、三角測距法と比較して、精度良くスクリーンSの傾き角度を取得することができる。
【0122】
このため、プロジェクタ1は、自動台形補正の精度を向上させることができ、測距のための光学変調素子が不要となり、測距専用の光源も不要となり、プロジェクタ1を小型化することができる。
【0123】
尚、本発明を実施するにあたっては、種々の形態が考えられ、上記実施形態に限られるものではない。
例えば、上記実施形態では、光源部165のAM変調器165cが行うAM変調の変調周波数は、10MHzに限られるものではなく、さらに、高い変調周波数、あるいは、10MHz未満の変調周波数であってもよい。
【0124】
上記実施形態では、光源部165の発光源としては、LED165aに限られるものではなく、レーザであってもよい。レーザ光であってもAM変調は可能である。但し、レーザを用いる場合には、レーザ光を拡散するためのレンズを備える必要がある。
【0125】
また、上記実施形態では、光源部165にAM変調器165cを備えるようにした。しかし、光源部165にAM変調器165cを備える代わりに、表示駆動部161がSOM162を制御して投影光をAM変調するような構成であってもよい。また、投影レンズ163に光量調整部を備え、この光量調節部が投影光に対する光強度変調を行うような構成であってもよい。
【0126】
上記実施形態では、投影面傾き計測装置17は受光部子171として、距離画像センサ31を備えるようにした。しかし、受光部171は、距離画像センサ31に限られるものではなく、アバランシェフォトダイオードであってもよい。但し、受光部171に距離画像センサ31を用いた方が1つのセンサで細かい設定を行うことができる。
【0127】
上記実施形態では、キー/インジケータ部18の「AFK」キーが押下されたときに、プロジェクタ1は、自動台形補正を行うようにした。しかし、「AFK」キーが押下されなくても、プロジェクタ1は、測距を定期的に実行し、台形補正を完全自動で実行するようにしてもよい。
【0128】
上記実施形態では、投影面傾き計測装置17がスクリーンSの傾き角度を計測するものとして説明した。しかし、投影面傾き計測装置17は、スクリーンSまでの距離を取得するだけのものであってもよい。
【0129】
この場合も、プロジェクタ1は、スクリーンSの傾きを計測する場合と同様に動作する。但し、受光部171は、フォトダイオードを1つ備えるだけでよいし、スクリーンS上の測距点も1つだけでよい。
【0130】
上記実施形態では、プログラムが、それぞれメモリ等に予め記憶されているものとして説明した。しかし、プロジェクタを、装置の全部又は一部として動作させ、あるいは、上述の処理を実行させるためのプログラムを、フレキシブルディスク、CD−ROM(Compact Disk Read-Only Memory)、DVD(Digital Versatile Disk)、MO(Magneto Optical disk)などのコンピュータ読み取り可能な記録媒体に格納して配布し、これを別のコンピュータにインストールし、上述の手段として動作させ、あるいは、上述の工程を実行させてもよい。
【0131】
さらに、インターネット上のサーバ装置が有するディスク装置等にプログラムを格納しておき、例えば、搬送波に重畳させて、コンピュータにダウンロード等するものとしてもよい。
【図面の簡単な説明】
【0132】
【図1】本発明の実施形態に係るプロジェクタの構成を示すブロック図である。
【図2】プロジェクタの外観を示す図であり、(a)は、プロジェクタの前面部を示す正面図であり、(b)は、プロジェクタの平面図である。
【図3】図1の光源部の構成を示す回路図である。
【図4】スクリーンの傾き角度を取得する方法を示す図である。
【図5】投影光に対する反射光の時間遅れを示すタイミングチャートである。
【図6】受光部として用いられた距離画像センサを示す平面図である。
【図7】図6に示す距離画像センサのフォトダイオード領域と垂直転送レジスタとを示す図であり、(a)は、距離画像センサのこれらの領域の断面を示し、(b)は、(a)に示す転送電極の断面を示す。
【図8】位相のずれ量を取得する方法を示すタイミングチャートである。
【図9】スクリーン上の3つの測距点を示す図である。
【図10】受光制御部が実行する傾き計測制御処理を示すフローチャートである。
【符号の説明】
【0133】
1・・・プロジェクタ、16・・・投影部、165・・・光源部、17・・・投影面傾き計測装置、31・・・距離画像センサ、171・・・受光部、172・・・受光制御部、173・・・演算部
【技術分野】
【0001】
本発明は、プロジェクタ、プロジェクタの距離計測方法、プロジェクタの投影面傾き取得方法及びプログラムに関するものである。
【背景技術】
【0002】
スクリーンに画像を投影するプロジェクタでは、プロジェクタの光軸に対してスクリーンが垂直でないと、歪みのない画像をスクリーンに投影しても、スクリーンに投影された画像は歪んでしまう。このため、プロジェクタは、スクリーンの傾きを修正しなくても画像の歪みを補正するため、自動台形補正(Automatic Keystone correction)を行う。
【0003】
このような自動台形補正を行うために、プロジェクタの光軸に垂直な面を理想投影面とし、この理想投影面と投影面としての実際のスクリーンとの角度を、スクリーンの傾き角度として、この傾き角度を計測する投影面傾き計測装置を備えたプロジェクタがある。
【0004】
かかる従来の投影面傾き計測装置は、三角測距法に基づくセンサを利用してプロジェクタ本体からスクリーン上の複数の測距点までの距離を測定する。投影面傾き計測装置は、測定の結果、得られた複数の距離情報に基づいてスクリーンの傾き角度を算出し、プロジェクタは、算出したスクリーンの傾き角度に基づいて自動台形補正を行う。
【0005】
このような従来の投影面傾き計測装置として、例えば、パッシブ位相差測距センサを用いたものがある(例えば、特許文献1参照)。この測距センサは、2つの撮像素子とレンズとを備え、レンズで2つの撮像素子上に像を結像させ、結像した2つの像の位相差を検出する。従来の投影面傾き計測装置は、この測距センサが検出した位相差に基づいて、複数の測距点までの距離を計測する。
【特許文献1】特開2005−233880号公報(第5、6頁、図1、2)
【発明の開示】
【発明が解決しようとする課題】
【0006】
しかし、パッシブ位相差測距センサを用いた従来のこのような投影面傾き計測装置では、距離が遠くなると測定精度が低下してしまう。通常のフロント式プロジェクタにおいて測距を行う場合、投影距離が3〜4mであり、従来の投影面傾き計測装置では、この投影距離では、十分な測定精度を得ることはできない。
【0007】
また、従来の位相差センサでは、2つの撮像素子に像を結像させるためのレンズが必要なため、焦点距離分だけ、レンズと撮像素子との間隔を確保しなければならない。特に、プロジェクタ、カメラでは、小型化が要求され、位相差センサでは、これ以上の小型化は難しい。
【0008】
本発明は、このような従来の問題点に鑑みてなされたもので、投影面までの距離計測の精度を向上させることが可能なプロジェクタ、距離計測方法及びプログラムを提供することを目的とする。
【0009】
また、本発明は、投影面の傾き角度計測の精度を向上させることが可能なプロジェクタ、投影面傾き計測方法及びプログラムを提供することを目的とする。
【0010】
また、本発明は、小型化が可能なプロジェクタを提供することを目的とする。
【課題を解決するための手段】
【0011】
この目的を達成するため、本発明の第1の観点に係るプロジェクタは、
投影光を投影面に投影する投影部と、
前記投影部が投影する前記投影光の光強度を変調する光変調部と、
前記投影部が投影した投影光が投影面で反射した反射光を受光する受光部と、
前記光変調部が光変調した前記投影光と前記受光部が受光した反射光との位相のずれ量を検出し、検出した位相のずれ量に基づいて、前記投影面までの距離を取得する測距部と、を備えたことを特徴とする。
【0012】
本発明の第2の観点に係るプロジェクタは、
投影光を投影面に投影する投影部と、
前記投影部が投影する前記投影光の光強度を変調する光変調部と、
前記投影部が投影した投影光が投影面で反射した反射光を、複数の受光点に配置された複数の受光素子で受光する受光部と、
前記光変調部が光変調した前記投影光と前記受光部の複数の受光素子が受光した反射光との位相のずれ量を検出し、検出した位相のずれ量に基づいて、前記投影面の複数の点までの距離を取得する測距部と、
前記測距部が取得した複数の距離に基づいて、前記投影光の光軸に垂直な理想投影面に対する前記投影面の傾き角度を取得する投影面傾き角度取得部と、を備えたことを特徴とする。
【0013】
前記投影部は、電流が供給されて前記投影光を生成する光源を備え、
前記光変調部は、前記光源に供給する電流のAM変調を行うことにより、前記投影光の光強度を変調するものであってもよい。
【0014】
前記光源は、発光ダイオードによって構成されたものであってもよい。
【0015】
前記光源は、レーザによって構成されたものであってもよい。
【0016】
前記受光部は、複数の受光素子が行列配置され、各受光素子が受光した光の受光量に基づいて前記投影面上の複数の点までの距離を取得する距離画像センサによって構成されたものであってもよい。
【0017】
本発明の第3の観点に係るプロジェクタの距離計測方法は、
投影面に投影光を投影するステップと、
前記投影光の光強度を変調するステップと、
前記投影面で反射した反射光を受光するステップと、
前記投影光と前記反射光との位相のずれ量を検出するステップと、
前記検出した位相のずれ量に基づいて、前記投影面までの距離を取得するステップと、を備えたことを特徴とする。
【0018】
本発明の第4の観点に係るプロジェクタの投影面計測方法は、
投影面に投影光を投影するステップと、
前記投影光の光強度を変調するステップと、
前記投影面で反射した反射光を複数の受光点で受光するステップと、
前記投影光と各受光点で受光した反射光との位相のずれ量を検出するステップと、
前記検出した位相のずれ量に基づいて、前記投影面上の複数の点までのそれぞれの距離を取得するステップと、
取得した前記投影面までのそれぞれの距離に基づいて、前記投影光の光軸に垂直な理想投影面に対する前記投影面の傾き角度を取得するステップと、を備えたことを特徴とする。
【0019】
本発明の第5の観点に係るプログラムは、
コンピュータに、
投影面に投影光を投影する手順、
前記投影光の光強度を変調する手順、
前記投影面で反射した反射光を受光する手順、
前記投影光と前記反射光との位相のずれ量を検出する手順、
前記検出した位相のずれ量に基づいて、前記投影面までの距離を取得する手順、 を実行させるためのものである。
【0020】
本発明の第6の観点に係るプログラムは、
コンピュータに、
投影面に投影光を投影する手順、
前記投影光の光強度を変調する手順、
前記投影面で反射した反射光を複数の受光点で受光する手順、
前記投影光と各受光点で受光した反射光との位相のずれ量を検出する手順、
前記検出した位相のずれ量に基づいて、前記投影面上の複数の点までのそれぞれの距離を取得する手順、
取得した前記投影面までのそれぞれの距離に基づいて、前記投影光の光軸に垂直な理想投影面に対する前記投影面の傾き角度を取得する手順、
を実行させるためのものである。
【発明の効果】
【0021】
本発明によれば、投影面までの距離計測の精度を向上させることができる。また、投影面の傾き角度計測の精度を向上させることができる。また、プロジェクタを小型化することができる。
【発明を実施するための最良の形態】
【0022】
以下、本発明の実施形態に係るプロジェクタを図面を参照して説明する。
本実施形態に係るプロジェクタの構成を図1に示す。
本実施形態に係るプロジェクタ1は、入出力コネクタ部11と、入出力I/F(インタフェース)12と、画像処理部13と、ビデオRAM14と、表示エンコーダ15と、投影部16と、投影面傾き計測装置17と、キー/インジケータ部18と、Ir受信部19と、制御部20と、画像記憶部21と、スピーカ22と、音声処理部23と、を備える。
【0023】
投影面傾き計測装置17と、入出力I/F12と、画像処理部13と、表示エンコーダ15と、制御部20と、画像記憶部21と、音声処理部23とは、バスSBに接続されている。
【0024】
このプロジェクタ1は、スクリーンが理想投影面に対して傾いている場合でも、画像を歪みなく表示するため、自動台形補正を行う。このため、プロジェクタ1は、投影光に対して光強度変調を行い、この投影光をスクリーンに投影し、反射光を受光するまでの時間遅れを計測する。尚、ここで、理想投影面とは、投影部16が投影する投影光に対して垂直な面をいう。
【0025】
この時間遅れは、プロジェクタ1とスクリーンとの間の光の飛行時間に対応するものであり、プロジェクタ1とスクリーンとの間の距離によって決定される。
【0026】
プロジェクタ1は、スクリーン上の複数の点から反射した光の時間遅れを計測し、プロジェクタ1とスクリーンの複数の点との間の距離に基づいてスクリーンの傾き角度を取得し、取得した傾き角度に基づいて自動台形補正を行う。
【0027】
入出力コネクタ部11は、画像信号を入力するための端子を備えたものである。入出力I/F12は、信号の入出力を仲介するためのものである。
【0028】
画像処理部13は、種々の画像処理を実行するものである。画像処理部13は、画像処理として、入出力コネクタ部11、入出力I/F12を介して供給された画像信号をシステムバスSBを介して取得し、取得した画像信号を予め設定されたフォーマットの画像信号に変換する。
【0029】
また、画像処理部13は、制御部20からスクリーンの傾き角度が供給され、自動台形補正を行うように指示されると、この自動台形補正を行うための変換パラメータを求める。
【0030】
そして、画像処理部13は、画像信号に対して、取得した変換パラメータを用いて自動台形補正を実行する。
【0031】
ビデオRAM14は、画像データを展開記憶するためのものである。表示エンコーダ15は、画像処理部13が変換した画像信号をビデオRAM14に展開して記憶するものである。表示エンコーダ15は、ビデオRAM14に展開記憶した画像信号から、ビデオ信号を生成し、生成したビデオ信号を投影部16に供給する。
【0032】
投影部16は、光の画像を生成して投影光をスクリーンに投影するものであり、表示駆動部161と、SOM162と、投影レンズ163と、レンズモータ164と、光源部165と、を備える。
【0033】
表示駆動部161は、表示エンコーダ15から供給された画像信号に対応するように、フレームレートを、例えば30[フレーム/秒]として、SOM162を色毎に時分割で表示駆動するものである。
【0034】
SOM162は、例えば、複数のマイクロミラー(図示せず)によって構成され、時分割で色毎の光像を形成するためのものである。
【0035】
投影レンズ163は、SOM162で形成された光像をスクリーンに結像させるためのものである。この投影レンズ163は、ズーム及びフォーカス調整を行うための機構部(図示せず)を備えている。投影レンズ163は、図2(a)、(b)に示すようにプロジェクタ本体1aの前面に取り付けられる。
【0036】
レンズモータ164は、投影レンズ163に備えられた機構部を駆動することにより、ズームとフォーカスとを設定するためのモータである。
【0037】
光源部165は、スクリーンに投影する投影光の発光源である。光源部165は、図3に示すように、LED(Light Emitting Diode)165aと、直流電源165bと、AM変調器165cと、抵抗165dと、を備え、投影光の光強度を変調するように構成されている。
【0038】
LED165aは、光を発する発光ダイオードである。直流電源165bは、LED165aに供給する電流の発生源である。AM変調器165cは、直流電源165bがLED165aに供給する電流を、例えば、10MHzの周波数でAM変調を行うことにより、投影光の光強度を変調するものである。AM変調器165cは、AM変調を行った電流を抵抗165dを介してLED165aに供給することにより、投影光の光強度変調を行う。光源部165は、光をSOM162に向けて出射する。
【0039】
投影面傾き計測装置17は、スクリーンの傾き角度を計測するためのものであり、受光部171と、受光制御部172と、演算部173と、からなる。
【0040】
受光部171は、図4に示すように、スクリーンS上に投影された映像からの反射光R1,R2を受光するものである。
【0041】
図5に示すように、プロジェクタ1近傍の投影光Tと反射光R1,R2との間には、時間遅れΔt1,Δt2が発生する。この時間遅れΔt1,Δt2を直接測定することは困難であるため、受光部171は、投影光Tと反射光R1、投影光Tと反射光R2と、の位相のずれ量を検出する。
【0042】
受光部171には、例えば、特開2006−153773号公報に記載された距離画像センサが用いられる。この距離画像センサは、例えば、100×100個のフォトダイオードが行列配置されて構成されたものである。ここでは、説明を簡単にするため、フォトダイオードを3列×4行として、この距離画像センサ31の構成について説明する。
【0043】
図6に示すように、距離画像センサ31は、フォトダイオード32と、垂直転送レジスタ33と、水平転送レジスタ34と、オーバーフロー電極35と、を備える。フォトダイオード32は、入射した光の量に対応した量の信号電荷を生成するものである。
【0044】
垂直転送レジスタ33は、フォトダイオード32が生成した信号電荷を水平転送レジスタ34方向に転送し、転送した信号電荷を水平転送レジスタ34に順次供給するためのものである。
【0045】
水平転送レジスタ34は、各垂直転送レジスタ33から供給された信号電荷を出力方向に転送して、順次出力するものであり、垂直転送レジスタ33の各列に対応して備えられる。
【0046】
オーバーフロー電極35は、受光制御部172が廃棄電圧を印加するための電極であり、例えば、アルミニウムによって形成される。廃棄電圧は、フォトダイオード32が生成した信号電荷のうち、不要とする電荷を廃棄するための電圧である。オーバーフロー電極35には、信号電荷の廃棄先としての電源(図示せず)が接続される。
【0047】
図7(a)は、距離画像センサ31のフォトダイオード32が形成されるフォトダイオード領域32aと垂直転送レジスタ33が形成される垂直転送レジスタ領域33aとを示す断面図である。
【0048】
この図7(a)に示すように、オーバーフロー電極35は、絶縁膜を介さずに半導体基板40と接触する。半導体基板40上には、p形半導体のウェル領域41が形成される。フォトダイオード領域31aのウェル領域41上には、n+形半導体層42が形成される。このウェル領域41とn+形半導体層42とがpn接合部となり、ウェル領域41とn+形半導体層42とによってフォトダイオード32が構成される。
【0049】
n+形半導体層42上には、P+形半導体からなる表面層43が積層される。この表面層43は、フォトダイオード領域32aで生成された電荷を垂直転送レジスタ領域33aに移動させる際に、n+形半導体層42の表面近傍が電荷の通過経路となることを阻止するために設けられたものである。
【0050】
垂直転送レジスタ領域33aのウェル領域41は、フォトダイオード領域32aのウェル領域41よりも厚く形成される。垂直転送レジスタ領域33aのウェル領域41上には、n+形半導体からなる蓄積転送層44が、表面層43と同じ高さとなるように積層される。フォトダイオード領域32aのn+形半導体層42と蓄積転送層44との間には、p+形半導体からなる分離層45が形成される。
【0051】
図7(b)は、垂直転送レジスタ領域33aの図7(a)と直角方向の断面を示す図であり、この図7(b)に示すように、蓄積転送層44の上には、絶縁膜46を介して、2つの転送電極47a,47bが形成される。
【0052】
絶縁膜46は、例えば、SiO2によって形成され、転送電極47a,47bは、例えば、ポリシリコンによって形成される。転送電極47aの幅は、転送電極47bの幅よりも広くなっている。転送電極47aは、受光制御部172が通過電圧を印加するための電極である。通過電圧は、フォトダイオード領域32aにおいて生成された信号電荷の通過を制御する電圧である。
【0053】
垂直転送レジスタ領域33a上には、遮光膜48が形成され、垂直転送レジスタ領域33aは、この遮光膜48によって遮光される。フォトダイオード領域32a上には、この遮光膜43が形成されず、フォトダイオード32は、入射した光によって電荷を生成する。
【0054】
この距離画像センサ31が位相のずれ量を検出する原理について説明する。
図8(a)に示すように、光源部165からの光の強度が曲線イのように変化するものとする。図8(b)に示すように、この曲線イに対して、受光量が曲線ロのように変化し、曲線イと曲線ロとの位相差(位相のずれ量)がΔφとすると、この位相差Δφが光の飛行時間に相当する。
【0055】
この図8(a)に示す曲線イの位相を基準として、位相0〜90°未満、90°〜180°未満、180°〜270°未満、270°〜360°未満のそれぞれの期間の図8(b)における受光量A0,A1,A2,A3を求める。受光量A0,A1,A2,A3は、次の式(1)〜(4)によって表される。
A0=A・sin(Δφ)+B ・・・(1)
A1=A・sin(π/2+Δφ)+B ・・・(2)
A2=A・sin(π+Δφ)+B ・・・(3)
A3=A・sin(3π/2+Δφ)+B ・・・(4)
尚、Aは最大光強度、Bは直流成分(外光成分と反射光成分との平均値)を示す。
【0056】
この式(1)〜(4)から、位相差Δφは、次の式(5)によって表される。
Δφ=tan-1{(A2−A0)/(A1−A3)} ・・・(5)
即ち、位相のずれ量は、受光量A0〜A3を検出することにより、式(5)から求められる。
【0057】
フォトダイオード32が生成した電荷のうち、垂直転送レジスタ33に転送される信号電荷の量は、垂直転送レジスタ33に印加される通過電圧とオーバーフロー電極35に印加される廃棄電圧との関係によって決定される。
【0058】
転送電極47aに通過電圧V1=+Vが印加されると、フォトダイオード32は、生成した信号電荷を垂直転送レジスタ33に供給する。
【0059】
オーバーフロー電極35に、廃棄電圧V2=+Vのが印加されると、フォトダイオード32が生成した信号電荷は、オーバーフロー電極35を経由して、オーバーフロー電極35に接続された電源に廃棄される。
【0060】
受光量A0〜A3を検出するには、通過電圧と廃棄電圧との3つの印加パターンが考えられる。
【0061】
第1の印加パターンは、図8(c1),(d1)に示すように、転送電極47aに印加する通過電圧V1を+Vで一定に保持し、オーバーフロー電極35に印加する廃棄電圧V2を位相90°〜360°未満において+Vに設定するパターンである。
【0062】
第2の印加パターンは、図8(c2)、(d2)に示すように、転送電極47aに印加する通過電圧V1を、位相0°〜90°未満において、+Vに設定し、オーバーフロー電極35に印加する廃棄電圧V2を位相90°〜360°未満において+Vに設定するパターンである。
【0063】
第3の印加パターンは、図8(c3)、(d3)に示すように、転送電極47aに印加する通過電圧V1を、位相0°〜90°未満において、+Vに設定し、オーバーフロー電極35に印加する廃棄電圧V2を、+Vで一定に保持するパターンである。
【0064】
図1に戻り、受光制御部172と演算部173とは、投影部16が変調した投影光と受光部171が受光した反射光との位相のずれ量を検出し、検出した位相のずれ量に基づいて、スクリーンSまでの距離を取得し、スクリーンSの傾き角度を取得するものである。
【0065】
まず、受光制御部172は、投影部16と受光部171とを制御するものであり、ROMと、RAMと、CPUと、を備える(いずれも図示せず)。
【0066】
ROMは、図8に示す印加パターン、CPUが実行する処理プログラムを記憶するためのメモリである。RAMは、CPUの作業に必要なデータを記憶するためのメモリである。CPUは、ROMに記憶された処理プログラムに従って、スクリーンSの傾き角度を計測する処理を実行するためのものである。
【0067】
受光制御部172(CPU)は、このような処理として、投影光をスクリーンSに投影するように投影部16を制御する。
【0068】
受光制御部172は、図8に示す3つの印加パターンのうちのいずれか1つの印加パターンを選択する。
【0069】
受光制御部172は、LED165aに供給する電流をAM変調するようにAM変調器165cを制御する。そして、受光制御部172は、選択した印加パターンに従って、転送電極47a、オーバーフロー電極35に、それぞれ、通過電圧V1、廃棄電圧V2を印加する。
【0070】
受光制御部172が転送電極47a、オーバーフロー電極35に、それぞれ、通過電圧V1、廃棄電圧V2を印加することにより、受光部171は、受光量A0〜A3に対応する量の信号電荷を出力する。
【0071】
受光制御部172は、さらに、演算部173に対して、投影光と反射光との位相のずれ量Δφ、各測距点までのそれぞれの距離、スクリーンSの傾き角度を取得するように指示する。
【0072】
演算部173は、理想投影面に対するスクリーンSの傾き角度を取得するものであり、受光制御部172と同様に、ROMと、RAMと、CPUと、を備える(いずれも図示せず)。
【0073】
演算部173は、受光制御部172に指示されて上記処理を実行する。演算部173は、式(5)に従い、受光部171が出力した信号電荷の量に対応する受光量A0〜A3に基づいて位相のずれ量Δφを取得する。
【0074】
図4に示すように、スクリーンS上の2つの測距点までの距離を取得する場合、演算部173は、この2つの測距点に対応する受光部171の画素の受光量A0〜A3を取得し、取得した受光量A0〜A3に基づいて位相のずれ量Δφを取得する。
【0075】
演算部173は、取得した位相のずれ量Δφに基づいて、時間遅れΔt1,Δt2を取得し、プロジェクタ1とスクリーンS上の複数の点までの距離を演算し、理想投影面に対するスクリーンSの傾き角度を取得する。
【0076】
位相のずれ量をΔφとすると、時間遅れΔtは、次の式(6)によって表される。
【数1】
また、時間遅れΔtは、プロジェクタ1とスクリーンSとの距離の2倍を光が飛行する飛行時間にほぼ等しいので、距離dは、次の式(7)によって表される。
【数2】
式(6)、(7)より、距離dは、次の式(8)によって表される。
【数3】
【0077】
スクリーンSが理想投影面に対して傾いている場合、2つの測距点までの距離が異なるため、反射光R1の時間遅れと反射光R2の時間遅れが異なる。
【0078】
図9は、3つの方向で距離を取得する場合のスクリーンS上の3つの測距点p1,p2,p3とプロジェクタ1との位置関係を示す。
【0079】
演算部173は、スクリーンS上の3つの測距点p1〜p3を選択し、受光部171が出力した信号電荷のうち、選択した3つの測距点p1〜p3に対応するそれぞれの画素の受光量A0〜A3を取得する。
【0080】
演算部173は、取得したそれぞれの受光量A0〜A3に基づいて、プロジェクタ1から測距点p1〜p3までのそれぞれの距離d1〜d3を式(6)〜(8)に従って求める。演算部173は、これら3つの距離d1〜d3に基づいてスクリーンSの傾き角度を算出する。
【0081】
キー/インジケータ部18は、キーとインジケータとを備えたものであり、キーとして、電源キーと、ズームキーと、フォーカスキーと、「AFK」キーと、入力切換キーと、メニューキーと、操作キーと、を備える(いずれも図示せず)。
【0082】
電源キーは、電源のオン/オフするためのキーである。ズームキーは、ズームアップ及びズームダウンを指示するためのキーである。フォーカスキーは、プロジェクタ1に対して合焦位置の前方向及び後方向への移動を指示するためのキーである。
【0083】
「AFK」キーは、自動合焦(Automatic Focus)と自動台形補正の即時実行を指示するためのキーである。入力切換キーは、入出力コネクタ部11の画像信号入出力用のコネクタを切換えるためのキーである。
【0084】
メニューキーは、投影動作に関する各種メニュー項目の表示を指示するためのキーである。操作キーは、カーソルキー等、各種操作を指示するためのキーである。キー/インジケータ部18は、これらのキーが押下されると、この操作情報を制御部20に供給する。
【0085】
また、キー/インジケータ部18は、インジケータとして、電源/待機インジケータを備える(いずれも図示せず)。電源/待機インジケータは、電源のオン/オフ状態、画像信号の入力がない状態を表示するものであり、例えば、表示用LEDを備える。電源/待機インジケータは、表示用LEDを点灯/消灯、あるいは点滅させることにより、これらの状態を表示する。
【0086】
Ir受信部19は、このプロジェクタ1のリモートコントローラ(図示せず)からの操作情報を示す赤外光信号を受信するものである。
【0087】
制御部20は、各部の動作制御を行うためのものであり、受光制御部172と同様に、ROMと、RAMと、CPUと、を備える(いずれも図示せず)。制御部20は、キー/インジケータ部18、Ir受信部19から操作情報が供給されると、この操作情報に基づいて各部を制御する。
【0088】
具体的に、制御部20は、キー/インジケータ部18から、電源キーが押下された旨の操作情報が供給される毎に、プロジェクタ1の電源をオン、オフする。
【0089】
制御部20は、キー/インジケータ部18から、「AFK」キーが押下された旨の操作情報が供給されと、投影面傾き計測装置17に、スクリーンSまでの距離を計測するように指示する。そして、投影面傾き計測装置17から距離情報が供給されると、制御部20は、この距離情報に基づいてレンズモータ164を駆動して自動合焦を行う。
【0090】
また、制御部20は、投影面傾き計測装置17からスクリーンSの傾き角度が供給されると、画像処理部13に、このスクリーンSの傾き角度を供給して、自動台形補正を行うように指示する。
【0091】
画像記憶部21は、作業に必要な画像データを記憶するためのものであり、例えばフラッシュメモリ等からなる。制御部20は、画像記憶部21に記憶された画像データを読出して表示エンコーダ15へ送出し、読み出した画像データに基づく画像を投影させる。
【0092】
スピーカ22は、音声を出力するためのものである。音声処理部23は、PCM音源等の音源回路を備え、投影表示動作時に与えられる音声データをアナログ化し、スピーカ22を駆動して拡声放音させるためのものである。
【0093】
次に本実施形態に係るプロジェクタ1の動作を説明する。
キー/インジケータ部18の電源キーが押下されると、キー/インジケータ部18は、この操作情報を制御部20に供給し、制御部20は、この操作情報に基づいてプロジェクタ1の電源をオンする。
【0094】
プロジェクタ1に画像信号が供給されると、画像処理部13は、供給された画像信号をシステムバスSBを介して取得し、取得した画像信号を予め設定されたフォーマットの画像信号に変換する。
【0095】
表示エンコーダ15は、画像処理部13が変換した画像信号を展開して、ビデオRAM14に記憶し、ビデオRAM14に展開記憶した画像信号から、ビデオ信号を生成し、生成したビデオ信号を投影部16の表示駆動部161に供給する。
【0096】
表示駆動部161は、表示エンコーダ15から供給された画像信号に対応するように、30[フレーム/秒]のフレームレートでSOM162を色毎に時分割で表示駆動する。
【0097】
光源部165がこのSOM162に光を照射すると、SOM162は、照射された光を反射する。SOM162で反射した光像は、投影レンズ163を介してスクリーンSに投影される。
【0098】
「AFK」キーが押下されると、キー/インジケータ部18は、この操作情報を制御部20に供給し、制御部20は、受光制御部172に、傾き計測制御処理を実行するように指示する。
【0099】
受光制御部172は、内蔵するROMから傾き計測制御処理の処理プログラムを読み出して、図10に示すフローチャートに従って、この傾き計測制御処理を実行する。
【0100】
受光制御部172は、投影光をスクリーンSに投影するように投影部16を制御する(ステップS11)。
【0101】
受光制御部172は、図8に示す3つの印加パターンのうちのいずれか1つの印加パターンを選択する(ステップS12)。
【0102】
受光制御部172は、LED165aに供給する電流をAM変調するようにAM変調器165cを制御する(ステップS13)。
【0103】
受光制御部172は、反射光を受光するように受光部171を制御する(ステップS14)。
【0104】
受光制御部172は、選択した印加パターンに従って、転送電極47a、オーバーフロー電極35に、それぞれ、通過電圧V1、廃棄電圧V2を印加する(ステップS15)。
【0105】
受光制御部172は、受光部171が出力した信号電荷の量に基づいて、演算部173に各演算を行うように指示する。演算部173は、この指示に従い、式(5)により、投影光Tと反射光R1,R2との位相のずれ量Δφを検出する(ステップS16)。
【0106】
演算部173は、各測距点までのそれぞれの距離、スクリーンSの傾き角度を取得する(ステップS17)。
【0107】
演算部173は、スクリーンSの傾き角度を取得する(ステップS18)。
【0108】
例えば、受光制御部20が、図8(c1)、(d1)に示す第1の印加パターンを選択した場合(ステップS12の処理)、受光制御部172は、変調信号の位相0°から計測が終了するまで、転送電極47aに通過電圧V1=+Vを印加する。また、受光制御部172は、変調信号の位相90°から期間Twの間、オーバーフロー電極35に廃棄電圧V2=0を印加する(ステップS15の処理)。
【0109】
フォトダイオード32は、受光量A0に対応する量の信号電荷を生成し、生成した信号電荷を垂直転送レジスタ33に供給する。各垂直転送レジスタ33は、供給された信号電荷を水平転送レジスタ34方向に転送し、水平転送レジスタ34に信号電荷を順次供給する。
【0110】
水平転送レジスタ34は、垂直転送レジスタ33から供給された信号電荷を出力方向に転送し、信号電荷を順次出力する。このようにして、受光部171は、変調信号の位相0°から期間Twにおける受光量A0を取得する。
【0111】
同様に、受光制御部172は、それぞれ、変調信号の位相90°,180°,270°から期間Twの間、オーバーフロー電極35に廃棄電圧V2=0を印加し、受光部171は、各期間Twにおける受光量A1,A2,A3を取得する。そして、受光部171は、各画素毎の各期間Twにおける受光量A1,A2,A3を取得する。
【0112】
演算部173は、図9に示すスクリーンS上の3つの測距点p1〜p3を選択し、受光部171が出力した信号電荷のうち、選択した3つの測距点p1〜p3に対応するそれぞれの画素の受光量A0〜A3を取得する。
【0113】
演算部173は、式(5)に従い、受光部171が取得した3つの画素のそれぞれの受光量A0〜A3に基づいて、位相のずれ量Δφを取得する(ステップS16の処理)。
また、演算部173は、式(8)に従い、取得した位相のずれ量Δφに基づいて距離d1〜d3を演算する(ステップS17の処理)。
【0114】
演算部173は、演算した距離d1〜d3に基づいてスクリーンSの傾き角度を算出する(ステップS18の処理)。
【0115】
このように、受光制御部172、演算部173が傾き計測制御処理を実行すると、投影面傾き計測装置17は、演算部173が演算した結果の距離d1〜d3、スクリーンSの傾き角度を制御部20に供給する。
【0116】
制御部20は、投影面傾き計測装置17から供給された距離d1〜d3に基づいて、レンズモータ164を制御して、自動合焦を行う。
【0117】
また、制御部20は、投影面傾き計測装置17から供給されたスクリーンSの傾き角度を画像処理部13に供給し、自動台形補正を行うように指示する。
【0118】
画像処理部13は、供給されたスクリーンSの傾き角度に基づいて変換パラメータを取得する。そして、画像処理部13は、システムバスSBを介して取得した画像信号に対して、この変換パラメータを用いて自動台形補正を行う。スクリーンSには、スクリーンSが傾いていたとしても、あたかも正面からみた画像が表示される。
【0119】
以上説明したように、本実施形態によれば、光源部165は、投影光に対して光強度変調を行い、プロジェクタ1は、光強度変調を行った投影光をスクリーンSに投影する。投影面傾き計測装置17の受光部171は、スクリーンS上の3つの測距点p1〜p3からの投影光の反射光を受光して、投影光に対する反射光の位相のずれ量Δφを検出する。
【0120】
演算部173は、この位相のずれ量Δφに基づいて、時間遅れΔtを取得し、プロジェクタ1とスクリーンS上の3つの測距点p1〜p3の距離情報を取得し、スクリーンSの傾き角度を取得するようにした。そして、画像処理部13は、このスクリーンSの傾き角度に基づいて自動台形補正を行うようにした。
【0121】
従って、位相のずれ量Δφに基づいて、スクリーンSの測距点p1〜p3の距離を取得するため、プロジェクタ1は、三角測距法と比較して、精度良くスクリーンSの傾き角度を取得することができる。
【0122】
このため、プロジェクタ1は、自動台形補正の精度を向上させることができ、測距のための光学変調素子が不要となり、測距専用の光源も不要となり、プロジェクタ1を小型化することができる。
【0123】
尚、本発明を実施するにあたっては、種々の形態が考えられ、上記実施形態に限られるものではない。
例えば、上記実施形態では、光源部165のAM変調器165cが行うAM変調の変調周波数は、10MHzに限られるものではなく、さらに、高い変調周波数、あるいは、10MHz未満の変調周波数であってもよい。
【0124】
上記実施形態では、光源部165の発光源としては、LED165aに限られるものではなく、レーザであってもよい。レーザ光であってもAM変調は可能である。但し、レーザを用いる場合には、レーザ光を拡散するためのレンズを備える必要がある。
【0125】
また、上記実施形態では、光源部165にAM変調器165cを備えるようにした。しかし、光源部165にAM変調器165cを備える代わりに、表示駆動部161がSOM162を制御して投影光をAM変調するような構成であってもよい。また、投影レンズ163に光量調整部を備え、この光量調節部が投影光に対する光強度変調を行うような構成であってもよい。
【0126】
上記実施形態では、投影面傾き計測装置17は受光部子171として、距離画像センサ31を備えるようにした。しかし、受光部171は、距離画像センサ31に限られるものではなく、アバランシェフォトダイオードであってもよい。但し、受光部171に距離画像センサ31を用いた方が1つのセンサで細かい設定を行うことができる。
【0127】
上記実施形態では、キー/インジケータ部18の「AFK」キーが押下されたときに、プロジェクタ1は、自動台形補正を行うようにした。しかし、「AFK」キーが押下されなくても、プロジェクタ1は、測距を定期的に実行し、台形補正を完全自動で実行するようにしてもよい。
【0128】
上記実施形態では、投影面傾き計測装置17がスクリーンSの傾き角度を計測するものとして説明した。しかし、投影面傾き計測装置17は、スクリーンSまでの距離を取得するだけのものであってもよい。
【0129】
この場合も、プロジェクタ1は、スクリーンSの傾きを計測する場合と同様に動作する。但し、受光部171は、フォトダイオードを1つ備えるだけでよいし、スクリーンS上の測距点も1つだけでよい。
【0130】
上記実施形態では、プログラムが、それぞれメモリ等に予め記憶されているものとして説明した。しかし、プロジェクタを、装置の全部又は一部として動作させ、あるいは、上述の処理を実行させるためのプログラムを、フレキシブルディスク、CD−ROM(Compact Disk Read-Only Memory)、DVD(Digital Versatile Disk)、MO(Magneto Optical disk)などのコンピュータ読み取り可能な記録媒体に格納して配布し、これを別のコンピュータにインストールし、上述の手段として動作させ、あるいは、上述の工程を実行させてもよい。
【0131】
さらに、インターネット上のサーバ装置が有するディスク装置等にプログラムを格納しておき、例えば、搬送波に重畳させて、コンピュータにダウンロード等するものとしてもよい。
【図面の簡単な説明】
【0132】
【図1】本発明の実施形態に係るプロジェクタの構成を示すブロック図である。
【図2】プロジェクタの外観を示す図であり、(a)は、プロジェクタの前面部を示す正面図であり、(b)は、プロジェクタの平面図である。
【図3】図1の光源部の構成を示す回路図である。
【図4】スクリーンの傾き角度を取得する方法を示す図である。
【図5】投影光に対する反射光の時間遅れを示すタイミングチャートである。
【図6】受光部として用いられた距離画像センサを示す平面図である。
【図7】図6に示す距離画像センサのフォトダイオード領域と垂直転送レジスタとを示す図であり、(a)は、距離画像センサのこれらの領域の断面を示し、(b)は、(a)に示す転送電極の断面を示す。
【図8】位相のずれ量を取得する方法を示すタイミングチャートである。
【図9】スクリーン上の3つの測距点を示す図である。
【図10】受光制御部が実行する傾き計測制御処理を示すフローチャートである。
【符号の説明】
【0133】
1・・・プロジェクタ、16・・・投影部、165・・・光源部、17・・・投影面傾き計測装置、31・・・距離画像センサ、171・・・受光部、172・・・受光制御部、173・・・演算部
【特許請求の範囲】
【請求項1】
投影光を投影面に投影する投影部と、
前記投影部が投影する前記投影光の光強度を変調する光変調部と、
前記投影部が投影した投影光が投影面で反射した反射光を受光する受光部と、
前記光変調部が光変調した前記投影光と前記受光部が受光した反射光との位相のずれ量を検出し、検出した位相のずれ量に基づいて、前記投影面までの距離を取得する測距部と、を備えた、
ことを特徴とするプロジェクタ。
【請求項2】
投影光を投影面に投影する投影部と、
前記投影部が投影する前記投影光の光強度を変調する光変調部と、
前記投影部が投影した投影光が投影面で反射した反射光を、複数の受光点に配置された複数の受光素子で受光する受光部と、
前記光変調部が光変調した前記投影光と前記受光部の複数の受光素子が受光した反射光との位相のずれ量を検出し、検出した位相のずれ量に基づいて、前記投影面の複数の点までの距離を取得する測距部と、
前記測距部が取得した複数の距離に基づいて、前記投影光の光軸に垂直な理想投影面に対する前記投影面の傾き角度を取得する投影面傾き角度取得部と、を備えた、
ことを特徴とするプロジェクタ。
【請求項3】
前記投影部は、電流が供給されて前記投影光を生成する光源を備え、
前記光変調部は、前記光源に供給する電流のAM変調を行うことにより、前記投影光の光強度を変調する、
ことを特徴とする請求項1又は2に記載のプロジェクタ。
【請求項4】
前記光源は、発光ダイオードによって構成されたものである、
ことを特徴とする請求項3に記載のプロジェクタ。
【請求項5】
前記光源は、レーザによって構成されたものである、
ことを特徴とする請求項3に記載のプロジェクタ。
【請求項6】
前記受光部は、複数の受光素子が行列配置され、各受光素子が受光した光の受光量に基づいて前記投影面上の複数の点までの距離を取得する距離画像センサによって構成されたものである、
ことを特徴とする請求項2に記載のプロジェクタ。
【請求項7】
投影面に投影光を投影するステップと、
前記投影光の光強度を変調するステップと、
前記投影面で反射した反射光を受光するステップと、
前記投影光と前記反射光との位相のずれ量を検出するステップと、
前記検出した位相のずれ量に基づいて、前記投影面までの距離を取得するステップと、を備えた、
ことを特徴とするプロジェクタの距離計測方法。
【請求項8】
投影面に投影光を投影するステップと、
前記投影光の光強度を変調するステップと、
前記投影面で反射した反射光を複数の受光点で受光するステップと、
前記投影光と各受光点で受光した反射光との位相のずれ量を検出するステップと、
前記検出した位相のずれ量に基づいて、前記投影面上の複数の点までのそれぞれの距離を取得するステップと、
取得した前記投影面までのそれぞれの距離に基づいて、前記投影光の光軸に垂直な理想投影面に対する前記投影面の傾き角度を取得するステップと、を備えた、
ことを特徴とするプロジェクタの投影面傾き取得方法。
【請求項9】
コンピュータに、
投影面に投影光を投影する手順、
前記投影光の光強度を変調する手順、
前記投影面で反射した反射光を受光する手順、
前記投影光と前記反射光との位相のずれ量を検出する手順、
前記検出した位相のずれ量に基づいて、前記投影面までの距離を取得する手順、 を実行させるためのプログラム。
【請求項10】
コンピュータに、
投影面に投影光を投影する手順、
前記投影光の光強度を変調する手順、
前記投影面で反射した反射光を複数の受光点で受光する手順、
前記投影光と各受光点で受光した反射光との位相のずれ量を検出する手順、
前記検出した位相のずれ量に基づいて、前記投影面上の複数の点までのそれぞれの距離を取得する手順、
取得した前記投影面までのそれぞれの距離に基づいて、前記投影光の光軸に垂直な理想投影面に対する前記投影面の傾き角度を取得する手順、
を実行させるためのプログラム。
【請求項1】
投影光を投影面に投影する投影部と、
前記投影部が投影する前記投影光の光強度を変調する光変調部と、
前記投影部が投影した投影光が投影面で反射した反射光を受光する受光部と、
前記光変調部が光変調した前記投影光と前記受光部が受光した反射光との位相のずれ量を検出し、検出した位相のずれ量に基づいて、前記投影面までの距離を取得する測距部と、を備えた、
ことを特徴とするプロジェクタ。
【請求項2】
投影光を投影面に投影する投影部と、
前記投影部が投影する前記投影光の光強度を変調する光変調部と、
前記投影部が投影した投影光が投影面で反射した反射光を、複数の受光点に配置された複数の受光素子で受光する受光部と、
前記光変調部が光変調した前記投影光と前記受光部の複数の受光素子が受光した反射光との位相のずれ量を検出し、検出した位相のずれ量に基づいて、前記投影面の複数の点までの距離を取得する測距部と、
前記測距部が取得した複数の距離に基づいて、前記投影光の光軸に垂直な理想投影面に対する前記投影面の傾き角度を取得する投影面傾き角度取得部と、を備えた、
ことを特徴とするプロジェクタ。
【請求項3】
前記投影部は、電流が供給されて前記投影光を生成する光源を備え、
前記光変調部は、前記光源に供給する電流のAM変調を行うことにより、前記投影光の光強度を変調する、
ことを特徴とする請求項1又は2に記載のプロジェクタ。
【請求項4】
前記光源は、発光ダイオードによって構成されたものである、
ことを特徴とする請求項3に記載のプロジェクタ。
【請求項5】
前記光源は、レーザによって構成されたものである、
ことを特徴とする請求項3に記載のプロジェクタ。
【請求項6】
前記受光部は、複数の受光素子が行列配置され、各受光素子が受光した光の受光量に基づいて前記投影面上の複数の点までの距離を取得する距離画像センサによって構成されたものである、
ことを特徴とする請求項2に記載のプロジェクタ。
【請求項7】
投影面に投影光を投影するステップと、
前記投影光の光強度を変調するステップと、
前記投影面で反射した反射光を受光するステップと、
前記投影光と前記反射光との位相のずれ量を検出するステップと、
前記検出した位相のずれ量に基づいて、前記投影面までの距離を取得するステップと、を備えた、
ことを特徴とするプロジェクタの距離計測方法。
【請求項8】
投影面に投影光を投影するステップと、
前記投影光の光強度を変調するステップと、
前記投影面で反射した反射光を複数の受光点で受光するステップと、
前記投影光と各受光点で受光した反射光との位相のずれ量を検出するステップと、
前記検出した位相のずれ量に基づいて、前記投影面上の複数の点までのそれぞれの距離を取得するステップと、
取得した前記投影面までのそれぞれの距離に基づいて、前記投影光の光軸に垂直な理想投影面に対する前記投影面の傾き角度を取得するステップと、を備えた、
ことを特徴とするプロジェクタの投影面傾き取得方法。
【請求項9】
コンピュータに、
投影面に投影光を投影する手順、
前記投影光の光強度を変調する手順、
前記投影面で反射した反射光を受光する手順、
前記投影光と前記反射光との位相のずれ量を検出する手順、
前記検出した位相のずれ量に基づいて、前記投影面までの距離を取得する手順、 を実行させるためのプログラム。
【請求項10】
コンピュータに、
投影面に投影光を投影する手順、
前記投影光の光強度を変調する手順、
前記投影面で反射した反射光を複数の受光点で受光する手順、
前記投影光と各受光点で受光した反射光との位相のずれ量を検出する手順、
前記検出した位相のずれ量に基づいて、前記投影面上の複数の点までのそれぞれの距離を取得する手順、
取得した前記投影面までのそれぞれの距離に基づいて、前記投影光の光軸に垂直な理想投影面に対する前記投影面の傾き角度を取得する手順、
を実行させるためのプログラム。
【図1】

【図2】
【図3】
【図4】
【図5】
【図6】
【図7】
【図8】
【図9】
【図10】
【図2】
【図3】
【図4】
【図5】
【図6】
【図7】
【図8】
【図9】
【図10】
【公開番号】特開2008−46314(P2008−46314A)
【公開日】平成20年2月28日(2008.2.28)
【国際特許分類】
【出願番号】特願2006−221182(P2006−221182)
【出願日】平成18年8月14日(2006.8.14)
【出願人】(000001443)カシオ計算機株式会社 (8,748)
【Fターム(参考)】
【公開日】平成20年2月28日(2008.2.28)
【国際特許分類】
【出願日】平成18年8月14日(2006.8.14)
【出願人】(000001443)カシオ計算機株式会社 (8,748)
【Fターム(参考)】
[ Back to top ]