
プロセスカートリッジ、及び、画像形成装置
【課題】像担持体から複数の従動回転体への駆動伝達をそれぞれおこなう歯車として複数のハスバ歯車を用いた場合であっても、複数のハスバ歯車に作用する力によって像担持体が回転軸方向にスラスト移動する方向が定まらないという問題が生じることのない、プロセスカートリッジ、及び、画像形成装置を提供する。
【解決手段】画像形成装置本体115から駆動力が伝達されて所定方向に回転する像担持体11と、像担持体11から駆動力がそれぞれ伝達されて所定方向に従動回転する複数の従動回転体12、16aと、が設置されている。像担持体11は、複数の従動回転体12、16aにそれぞれ設置されたハスバ歯車12a、16a1にそれぞれ噛合するとともに、それぞれのネジレ方向がすべて同じ方向になるように形成された複数のハスバ歯車11b、11cが設置されている。
【解決手段】画像形成装置本体115から駆動力が伝達されて所定方向に回転する像担持体11と、像担持体11から駆動力がそれぞれ伝達されて所定方向に従動回転する複数の従動回転体12、16aと、が設置されている。像担持体11は、複数の従動回転体12、16aにそれぞれ設置されたハスバ歯車12a、16a1にそれぞれ噛合するとともに、それぞれのネジレ方向がすべて同じ方向になるように形成された複数のハスバ歯車11b、11cが設置されている。
【発明の詳細な説明】
【技術分野】
【0001】
この発明は、複写機、プリンタ、ファクシミリ、又は、それらの複合機等の電子写真方式を用いた画像形成装置と、そこに着脱可能に設置されるプロセスカートリッジと、に関するものである。
【背景技術】
【0002】
従来から、複写機、プリンタ等の画像形成装置において、画像形成装置本体に対してプロセスカートリッジを着脱可能に設置する技術が知られている(例えば、特許文献1等参照。)。
このようなプロセスカートリッジは、画像形成装置本体への装着動作にともない感光体ドラム(像担持体)の一端側に設置された歯車やカップリング等の駆動伝達部が画像形成装置本体の駆動部に連結されて、画像形成装置本体から感光体ドラムに駆動力が伝達されて感光体ドラムが所定方向に回転駆動されることになる。また、プロセスカートリッジには、画像形成装置本体によって駆動される感光体ドラムからさらに駆動力がそれぞれ伝達されて所定方向に従動回転する複数の従動回転体が設置されている。このような従動回転体としては、帯電ローラや現像ローラやクリーニングローラ等がある。
【0003】
一方、特許文献1には、感光体ドラムに設置した複数のハスバ歯車に、複数の従動回転体(第1、第2の回転体)にそれぞれ設置したハスバ歯車を噛合させて、感光体ドラムから複数の従動回転体に駆動力を伝達して複数の従動回転体を従動回転する技術が開示されている。
【発明の概要】
【発明が解決しようとする課題】
【0004】
特許文献1等の従来のプロセスカートリッジは、感光体ドラム(像担持体)から複数の従動回転体への駆動伝達をおこなう歯車としてハスバ歯車を用いているため、歯車の噛み合い率が高められて、駆動伝達による感光体ドラムや従動回転体の回転時の振動を軽減することができる。
しかし、感光体ドラム(像担持体)に設置した複数のハスバ歯車は、ネジレ方向が左方向のものと右方向のものとが混在していたため、複数のハスバ歯車に作用する力によって感光体ドラムが回転軸方向にスラスト移動する方向が定まらないという問題があった。このように感光体ドラムの回転軸方向にスラスト移動する方向が定まらずに、回転軸方向の正逆方向に揺動した状態で感光体ドラム上にて作像プロセスがおこなわれてしまうと、出力画像上において走査方向の画像ズレが発生する等の異常画像が生じてしまうことになる。
【0005】
この発明は、上述のような課題を解決するためになされたもので、像担持体から複数の従動回転体への駆動伝達をそれぞれおこなう歯車として複数のハスバ歯車を用いた場合であっても、複数のハスバ歯車に作用する力によって像担持体が回転軸方向にスラスト移動する方向が定まらないという問題が生じることのない、プロセスカートリッジ、及び、画像形成装置を提供することにある。
【課題を解決するための手段】
【0006】
この発明の請求項1記載の発明にかかるプロセスカートリッジは、画像形成装置本体に対して着脱可能に設置されるプロセスカートリッジであって、前記画像形成装置本体から駆動力が伝達されて所定方向に回転する像担持体と、前記像担持体から駆動力がそれぞれ伝達されて所定方向に従動回転する複数の従動回転体と、を備え、前記像担持体は、前記複数の従動回転体にそれぞれ設置されたハスバ歯車に直接的に又はアイドラ歯車を介してそれぞれ噛合するとともに、それぞれのネジレ方向がすべて同じ方向になるように形成された複数のハスバ歯車が設置されたものである。
【0007】
なお、本願において、「プロセスカートリッジ」とは、像担持体を帯電する帯電部と、像担持体上に形成された潜像を現像する現像部(現像装置)と、像担持体上をクリーニングするクリーニング部とのうち、少なくとも1つと、像担持体とが、一体化されて、画像形成装置本体に対して着脱可能に設置されるユニットであるものと定義する。
【発明の効果】
【0008】
本発明は、像担持体から複数の従動回転体への駆動伝達をそれぞれおこなう歯車として複数のハスバ歯車を用いた場合であっても、像担持体に設置された複数のハスバ歯車のネジレ方向がすべて同じ方向になるように設定しているため、複数のハスバ歯車に作用する力によって像担持体が回転軸方向にスラスト移動する方向が定まらないという問題が生じることのない、プロセスカートリッジ、及び、画像形成装置を提供することができる。
【図面の簡単な説明】
【0009】
【図1】この発明の実施の形態における画像形成装置を示す全体構成図である。
【図2】作像部を示す構成図である。
【図3】プロセスカートリッジを示す概略斜視図である。
【図4】プロセスカートリッジの内部の構成を示す概略図である。
【図5】駆動伝達部と画像形成装置本体の駆動部とを示す図である。
【図6】画像形成装置本体に装着された状態のプロセスカートリッジの一部を示す概略断面図である。
【図7】プロセスカートリッジが画像形成装置本体に装着される状態を示す概略図である。
【図8】変形例1のプロセスカートリッジの内部を示す概略図である。
【図9】変形例2のプロセスカートリッジの内部を示す概略図である。
【図10】変形例3のプロセスカートリッジの内部を示す概略図である。
【発明を実施するための形態】
【0010】
実施の形態.
以下、この発明を実施するための形態について、図面を参照して詳細に説明する。なお、各図中、同一又は相当する部分には同一の符号を付しており、その重複説明は適宜に簡略化ないし省略する。
【0011】
まず、図1にて、画像形成装置全体の構成・動作について説明する。
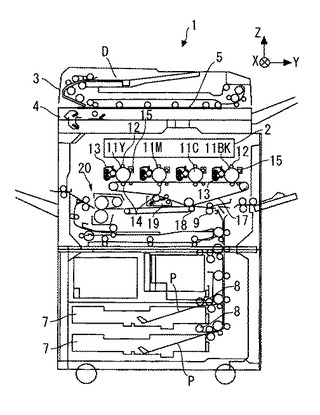
図1において、1は画像形成装置としてのタンデム型カラー複写機の装置本体、2は入力画像情報に基づいたレーザ光を発する書込み部、3は原稿Dを原稿読込部4に搬送する原稿搬送部、4は原稿Dの画像情報を読み込む原稿読込部、7は転写紙等の記録媒体Pが収容される給紙部、9は記録媒体Pの搬送タイミングを調整するレジストローラ(タイミングローラ)、11Y、11M、11C、11BKは各色(イエロー、マゼンタ、シアン、ブラック)のトナー像が形成される像担持体としての感光体ドラム、12は各感光体ドラム11Y、11M、11C、11BK上を帯電する帯電ローラ(帯電部)、13は各感光体ドラム11Y、11M、11C、11BK上に形成される静電潜像を現像する現像装置、14は各感光体ドラム11Y、11M、11C、11BK上に形成されたトナー像を記録媒体P上に重ねて転写する転写バイアスローラ(1次転写バイアスローラ)、15はプロセスカートリッジ(着脱ユニット)、を示す。
【0012】
また、17は複数色のトナー像が重ねて転写される中間転写ベルト、18は中間転写ベルト17上のカラートナー像を記録媒体P上に転写するための2次転写バイアスローラ、19は中間転写ベルト17を清掃する中間転写ベルトクリーニング部、20は記録媒体P上の未定着画像を定着する定着装置、を示す。
【0013】
以下、画像形成装置における、通常のカラー画像形成時の動作について説明する。なお、感光体ドラム11Y、11M、11C、11BK上でおこなわれる作像プロセスについては、図2をも参照することができる。
まず、原稿Dは、原稿搬送部3の搬送ローラによって、原稿台から図中の矢印方向に搬送されて、原稿読込部4のコンタクトガラス5上に載置される。そして、原稿読込部4で、コンタクトガラス5上に載置された原稿Dの画像情報が光学的に読み取られる。
【0014】
詳しくは、原稿読込部4は、コンタクトガラス5上の原稿Dの画像に対して、照明ランプから発した光を照射しながら走査させる。そして、原稿Dにて反射した光を、ミラー群及びレンズを介して、カラーセンサに結像する。原稿Dのカラー画像情報は、カラーセンサにてRGB(レッド、グリーン、ブルー)の色分解光ごとに読み取られた後に、電気的な画像信号に変換される。さらに、RGBの色分解画像信号をもとにして画像処理部で色変換処理、色補正処理、空間周波数補正処理等の処理をおこない、イエロー、マゼンタ、シアン、ブラックのカラー画像情報を得る。
【0015】
そして、イエロー、マゼンタ、シアン、ブラックの各色の画像情報は、書込み部2に送信される。そして、書込み部2からは、各色の画像情報に基づいたレーザ光L(図2を参照できる。)が、それぞれ、対応する感光体ドラム11Y、11M、11C、11BK上に向けて発せられる。
【0016】
一方、4つの感光体ドラム11Y、11M、11C、11BKは、それぞれ、図1の反時計方向に回転している。そして、まず、感光体ドラム11Y、11M、11C、11BKの表面は、帯電ローラ12(帯電部)との対向部で、一様に帯電される(帯電工程である。)。こうして、感光体ドラム11Y、11M、11C、11BK上には、帯電電位が形成される。その後、帯電された感光体ドラム11Y、11M、11C、11BK表面は、それぞれのレーザ光の照射位置に達する。
書込み部2において、4つの光源から画像信号に対応したレーザ光が各色に対応してそれぞれ射出される。各レーザ光は、イエロー、マゼンタ、シアン、ブラックの色成分ごとに別の光路を通過することになる(露光工程である。)。
【0017】
イエロー成分に対応したレーザ光は、紙面左側から1番目の感光体ドラム11Y表面に照射される。このとき、イエロー成分のレーザ光は、高速回転するポリゴンミラーにより、感光体ドラム11Yの回転軸方向(主走査方向)に走査される。こうして、帯電ローラ12にて帯電された後の感光体ドラム11Y上には、イエロー成分に対応した静電潜像が形成される。
【0018】
同様に、マゼンタ成分に対応したレーザ光は、紙面左から2番目の感光体ドラム11M表面に照射されて、マゼンタ成分に対応した静電潜像が形成される。シアン成分のレーザ光は、紙面左から3番目の感光体ドラム11C表面に照射されて、シアン成分の静電潜像が形成される。ブラック成分のレーザ光は、紙面左から4番目の感光体ドラム11BK表面に照射されて、ブラック成分の静電潜像が形成される。
【0019】
その後、各色の静電潜像が形成された感光体ドラム11Y、11M、11C、11BK表面は、それぞれ、現像装置13との対向位置に達する。そして、各現像装置13から感光体ドラム11Y、11M、11C、11BK上に各色のトナーが供給されて、感光体ドラム11Y、11M、11C、11BK上の潜像が現像される(現像工程である。)。
その後、現像工程後の感光体ドラム11Y、11M、11C、11BK表面は、それぞれ、中間転写ベルト17との対向部に達する。ここで、それぞれの対向部には、中間転写ベルト17の内周面に当接するように転写バイアスローラ14が設置されている。そして、転写バイアスローラ14の位置で、中間転写ベルト17上に、感光体ドラム11Y、11M、11C、11BK上に形成された各色のトナー像が、順次重ねて転写される(1次転写工程である。)。
【0020】
そして、転写工程後の感光体ドラム11Y、11M、11C、11BK表面は、それぞれ、クリーニングブレード15a(クリーニング部)との対向位置に達する。そして、クリーニングブレード15aで、感光体ドラム11Y、11M、11C、11BK上に残存する未転写トナーが回収される(クリーニング工程である。)。
その後、感光体ドラム11Y、11M、11C、11BK表面は、不図示の除電部を通過して、感光体ドラム11Y、11M、11C、11BKにおける一連の作像プロセスが終了する。
【0021】
他方、感光体ドラム11Y、11M、11C、11BK上の各色のトナーが重ねて転写(担持)された中間転写ベルト17は、図中の時計方向に走行して、2次転写バイアスローラ18との対向位置に達する。そして、2次転写バイアスローラ18との対向位置で、記録媒体P上に中間転写ベルト17上に担持されたカラーのトナー像が転写される(2次転写工程である。)。
その後、中間転写ベルト17表面は、中間転写ベルトクリーニング部19の位置に達する。そして、中間転写ベルト17上に付着した未転写トナーが中間転写ベルトクリーニング部19に回収されて、中間転写ベルト17における一連の転写プロセスが終了する。
【0022】
ここで、中間転写ベルト17と2次転写バイアスローラ18との間(2次転写ニップである。)に搬送される記録媒体Pは、給紙部7からレジストローラ9等を経由して搬送されたものである。
詳しくは、記録媒体Pを収納する給紙部7から、給紙ローラ8により給送された記録媒体Pが、搬送ガイドを通過した後に、レジストローラ9に導かれる。レジストローラ9に達した記録媒体Pは、タイミングを合わせて、2次転写ニップに向けて搬送される。
【0023】
そして、フルカラー画像が転写された記録媒体Pは、搬送ベルトによって定着装置20に導かれる。定着装置20では、定着ベルトと加圧ローラとのニップにて、カラー画像が記録媒体P上に定着される。
そして、定着工程後の記録媒体Pは、排紙ローラによって、装置本体1外に出力画像として排出されて、一連の画像形成プロセスが完了する。
【0024】
次に、図2にて、画像形成装置の作像部について詳述する。
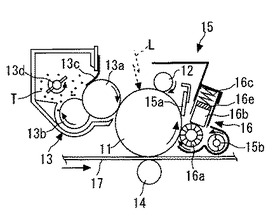
図2に示すように、作像部は、像担持体としての感光体ドラム11、感光体ドラム11を帯電する帯電部としての帯電ローラ12、感光体ドラム11上に形成される静電潜像を現像する現像装置13(現像部)、感光体ドラム11上の未転写トナーを回収するクリーニングブレード15a(クリーニング部)、感光体ドラム11上に潤滑剤を供給する潤滑剤供給装置16(潤滑剤供給部)、等で構成されている。
そして、本実施の形態では、作像部の構成部材のうち、感光体ドラム11と帯電ローラ12とクリーニングブレード15a(クリーニング部)と潤滑剤供給装置16とが、プロセスカートリッジ15として一体化されていて、プロセスカートリッジ15(着脱ユニット)として装置本体1に着脱可能に構成されている。また、現像装置13は、プロセスカートリッジ15とは別のユニットとして、装置本体1に対して着脱可能に構成されている。
なお、各色の作像部(又は、プロセスカートリッジ)はほぼ同一構造であるために、図2〜図10にて作像部やプロセスカートリッジは符号のアルファベット(Y、C、M、BK)を除して図示する。
また、プロセスカートリッジ15は、概ね、図3に示すような外観をなしている。
【0025】
ここで、像担持体としての感光体ドラム11は、負帯電性の有機感光体であって、ドラム状導電性支持体上に感光層等が設けられている。
図示は省略するが、感光体ドラム11は、基層としての導電性支持体上に、絶縁層である下引き層、感光層としての電荷発生層及び電荷輸送層、保護層(表面層)が順次積層されている。
感光体ドラム11の導電性支持体(基層)としては、体積抵抗が1010Ωcm以下の導電性材料を用いることができる。
【0026】
帯電部としての帯電ローラ12は、導電性芯金(軸部)の外周に中抵抗の弾性層を被覆してなるローラ部材であって、潤滑剤供給装置16に対して感光体ドラム11の回転方向下流側において感光体ドラム11に当接するように配設されている。
そして、帯電ローラ12には、装置本体1に設置された不図示の電源部から所定の電圧(帯電バイアス)が印加されて、これにより対向する感光体ドラム11の表面を一様に帯電する。
なお、本実施の形態では、帯電ローラ12を感光体ドラム11に接触させているが、帯電ローラ12を感光体ドラム11に対して接触させずに微小ギャップをあけて対向させることもできる。
【0027】
現像装置13は、現像ローラ13aが感光体ドラム11に接触するように配置されていて、双方の部材の間には現像領域(現像ニップ部)が形成される。現像装置13内には、トナーT(1成分現像剤)が収容されている。そして、現像装置13は、感光体ドラム11上に形成される静電潜像を現像する(トナー像を形成する。)。
詳しくは、図2を参照して、本実施の形態における現像装置13は、1成分現像方式の現像装置であって、現像ローラ13a(現像剤担持体)、供給ローラ13b、薄層化部材としてのドクターブレード13c、撹拌部材13d、等で構成されている。
【0028】
このように構成された現像装置13は、次のように動作する。
まず、現像装置13内に供給され収容されたトナーの一部が、供給ローラ13bに担持される。供給ローラ13bに担持されたトナーは、現像ローラ13aとの圧接部で摩擦帯電された後に、現像ローラ13a上に移動して担持される。その後、現像ローラ13a上に担持されたトナーは、ドクターブレード13cの位置で、薄層化・均一化された後に、感光体ドラム11との当接位置(現像領域)に達する。そして、この位置で、現像領域に形成された電界(現像電界)によって、感光体ドラム11上に形成された潜像にトナーが吸着される。
【0029】
なお、本実施の形態において、画質向上のために、円形度が0.98以上の球形トナーをトナーTとして使用している。「円形度」は、フロー式粒子像分析装置「FPIA−2000」(東亜医用電子社製)により計測した平均円形度である。具体的には、容器中の予め不純固形物を除去した水100〜150ml中に、分散剤として界面活性剤(好ましくは、アルキルベンゼンスルホン酸塩である。)を0.1〜0.5ml加えて、さらに測定試料(トナー)を0.1〜0.5g程度加える。その後、このトナーが分散した懸濁液を、超音波分散器で約1〜3分間分散処理して、分散液濃度が3000〜10000個/μlとなるようにしたものを上述の分析装置にセットして、トナーの形状及び分布を測定する。
【0030】
球形トナーとしては、従来から広く用いられている粉砕法によって形状が歪な異形のトナー(粉砕トナー)を加熱処理等して球形化したものや、重合法により製造されたもの等を用いることができる。
このような球形トナーを用いる場合、従来は、クリーニングブレード15aと感光体ドラム11との僅かな隙間に入り込んでやがてその隙間をすり抜けてクリーニング不良が生じることがあった。しかし、本実施の形態では、潤滑剤供給装置16によって潤滑剤を感光体ドラム11表面に塗布して、感光体ドラム11上におけるトナー剥離性(除去性)を向上させるために、クリーニング不良の発生が抑止される。
【0031】
クリーニングブレード15aは、潤滑剤供給装置16に対して感光体ドラム11の回転方向下流側に配設されている。クリーニングブレード15aは、ウレタンゴム等のゴム材料からなり、感光体ドラム11表面に所定角度かつ所定圧力で当接している。これにより、感光体ドラム11上に付着する未転写トナー等の付着物が機械的に掻き取られてプロセスカートリッジ15内に回収されることになる。そして、プロセスカートリッジ15内に回収されたトナーは、廃トナーとして廃トナー回収容器(不図示である。)に向けて搬送スクリュ15bによって搬送される。ここで、感光体ドラム11上に付着する付着物としては、未転写トナーの他に、記録媒体P(用紙)から生じる紙粉、帯電ローラ12aによる放電時に感光体ドラム11上に生じる放電生成物、トナーに添加されている添加剤、等がある。
また、本実施の形態におけるクリーニングブレード15aは、潤滑剤供給ローラ16aによって感光体ドラム11上に供給された潤滑剤を薄層化する薄層化ブレードとしても機能する。
【0032】
潤滑剤供給装置16は、固形潤滑剤16b、感光体ドラム11と固形潤滑剤16bとに摺接する潤滑剤供給ローラ16a(ブラシ状ローラ)、固形潤滑剤16bを保持する保持部材16e、固形潤滑剤16bとともに保持部材16eを潤滑剤供給ローラ16aに向けて付勢する付勢手段としての圧縮スプリング16c、等で構成される。
このように構成された潤滑剤供給装置16によって、感光体ドラム11上に潤滑剤が供給される。そして、潤滑剤供給装置16の下流側に配設されたクリーニングブレード15aによって、感光体ドラム11上に供給された潤滑剤が薄層化される。
【0033】
ここで、潤滑剤供給ローラ16a(ブラシ状ローラ)は、長さ(毛足)が0.2〜20mm(好ましくは、0.5〜10mm)の範囲のブラシ毛が基布上に植毛されたものを芯金上にスパイラル状に巻き付けたものである。
ブラシ毛の長さが20mmを超えると、経時における感光体ドラム11との繰り返し摺擦によって、ブラシ毛が所定方向に倒毛して、固形潤滑剤16bの掻取性や感光体ドラム11からのトナー除去性が低下してしまう。これに対して、ブラシ毛の長さが0.2mm未満であると、固形潤滑剤16bや感光体ドラム11に対する物理的な当接力が不足してしまう。したがって、ブラシ毛の長さは上述の範囲であることが好ましい。
【0034】
潤滑剤供給ローラ16aは、図2の反時計方向に回転する感光体ドラム11に対して順方向で接触するように回転する(図2の時計方向の回転である。)。また、潤滑剤供給ローラ16a(ブラシ毛)は、固形潤滑剤16bと感光体ドラム11とに摺接するように配置されていて、潤滑剤供給ローラ16aが回転することによって固形潤滑剤16bから潤滑剤を掻き取り、その掻き取った潤滑剤を感光体ドラム11との摺接位置まで搬送した後に、その潤滑剤を感光体ドラム11上に塗布する。
固形潤滑剤16bの後方部には,潤滑剤供給ローラ16aと固形潤滑剤16bとの接触ムラをなくすために付勢部材としての圧縮スプリング16cが配置されていて、保持部材16eに保持(貼着)された状態の固形潤滑剤16bを潤滑剤供給ローラ16aに向けて付勢している。
【0035】
本実施の形態では、固形潤滑剤16bを主としてステアリン酸亜鉛で形成している。詳しくは、固形潤滑剤16bは、ステアリン酸亜鉛を主成分とする潤滑油添加剤を溶解したもので、塗りすぎによる副作用がなく、充分な潤滑性があるものが好適である。
ステアリン酸亜鉛は、代表的なラメラ結晶紛体である。ラメラ結晶は両親媒性分子が自己組織化した層状構造を有していて、せん断力が加わると層間にそって結晶が割れて滑りやすい。したがって、感光体ドラム11表面を低摩擦係化することができる。すなわち、せん断力を受けて均一に感光体ドラム11表面を覆っていくラメラ結晶によって、少量の潤滑剤によって効果的に感光体ドラム11表面を覆うことができる。
【0036】
なお、固形潤滑剤16bとしては、ステアリン酸亜鉛の他にも、ステアリン酸バリウム、ステアリン酸鉄、ステアリン酸ニッケル、ステアリン酸コバルト、ステアリン酸銅、ステアリン酸ストロンチュウム、ステアリン酸カルシウム等のステアリン酸基を有するものを用いることができる。また、同じ脂肪酸基であるオレイン酸亜鉛、オレイン酸バリウム、オレイン酸鉛、以下、ステアリン酸と同様の化合物や、パルチミン酸亜鉛、パルチミン酸バリウム、パルチミン酸鉛、以下、ステアリン酸と同様の化合物を使用して良い。他にも、脂肪酸基として、カプリル酸、リノレン酸、コリノレン酸等を使用することができる。さらに、カンデリラワックス、カンルナウバワックス、ライスワックス、木ろう、おおば油、みつろう、ラノリン等のワックスを使用することもできる。これらは有機系の固形潤滑剤となりやすく、トナーとの相性が良い。
【0037】
固形潤滑剤16bを潤滑剤供給ローラ16aを介して感光体ドラム11表面に塗布すると、感光体ドラム11表面には粉体状の潤滑剤が塗布されるが、この状態のままでは潤滑性は充分に発揮されないため、クリーニングブレード15aが潤滑剤を均一化する薄層化ブレードとしても機能することになる。クリーニングブレード15aにより、感光体ドラム11上での潤滑剤の皮膜化がおこなわれて、潤滑剤はその潤滑性を充分に発揮することになる。
このとき、潤滑剤供給ローラ16aにより塗布する粉体状の潤滑剤は微粉であるほど、クリーニングブレード15aにより感光体ドラム11上に分子膜レベルで薄膜化される。
なお、本実施の形態では、潤滑剤供給ローラ16aを感光体ドラム11に対して順方向で接触するように回転させているが、潤滑剤供給ローラ16aを感光体ドラム11に対してカウンタ方向で接触するように回転させることもできる。
【0038】
以下、図4〜図7等を用いて、本実施の形態において特徴的な、プロセスカートリッジ15や画像形成装置1の構成・動作について詳述する。
先に説明したように、プロセスカートリッジ15は、画像形成装置本体1に対して着脱可能に設置される。詳しくは、図1の装置本体1において、不図示の本体カバーが開放された状態で、各色のプロセスカートリッジ15がそれぞれ+X方向に装着されることになる(又は、−X方向に離脱されることになる。)。
プロセスカートリッジ15は、装置本体1の案内レール100(図7を参照できる。)に沿うように装着されて、装置本体1における位置が定められる。
【0039】
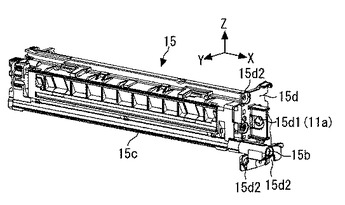
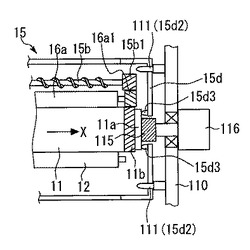
具体的に、図3、図6等を参照して、装置本体1へのプロセスカートリッジ15の装着動作にともない、プロセスカートリッジ15のサイドカバー15dに形成された位置決め穴部15d2に、画像形成装置本体1における本体側板110に設置された位置決めピン111が嵌合して、装置本体1におけるプロセスカートリッジ15の位置が定められる。なお、図3、図6を参照して、サイドカバー15dは、プロセスカートリッジ15の主たる筐体として機能するケース15cの側方を覆うように設置されている。
【0040】
さらに、図4〜図6に示すように、装置本体1へのプロセスカートリッジ15の装着動作にともない、プロセスカートリッジ15の感光体ドラム11の装着方向奥側(回転軸方向の一端側)に設置した駆動伝達部としてのカップリング11aが、本体側板110に設置された本体側カップリング115に嵌合する。
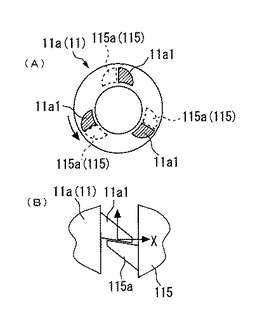
なお、図3等を参照して、カップリング11aは、サイドカバー15dの開口部15d1から外部(装置本体1の本体カップリング115の側である。)に露呈するように形成されている。また、図5に示すように、カップリング11aは、回転方向に間隔をあけて配列された複数の爪部11a1が+X方向(図5(A)の紙面垂直方向である。)に突出するように形成されている。
また、図6に示すように、装置本体1の本体側板110には、モータ軸に本体側カップリング115が設置された駆動モータ116が固設されている。また、図5を参照して、本体側カップリング115は、回転方向に間隔をあけて配列された複数の爪部115aが−X方向に突出するように形成されていて、この爪部115aが感光体ドラム11のカップリング11aの爪部11a1に噛み合って駆動が伝達されることになる。
【0041】
そして、このようにカップリング11a(駆動伝達部)と本体カップリング115とが噛み合った状態で、画像形成装置本体1の駆動モータ116から本体カップリング115、カップリング11aを介して感光体ドラム11(像担持体)に駆動力が伝達されて、感光体ドラム11が所定方向(図2の反時計方向である。)に回転することになる。さらに、感光体ドラム11から複数の従動回転体としての帯電ローラ12、搬送スクリュ15b、潤滑剤供給ローラ16aにそれぞれ駆動力が伝達されて、それぞれの従動回転体12、15b、16aが所定方向(図2にて、それぞれ矢印で示す方向である。)に従動回転することになる。
【0042】
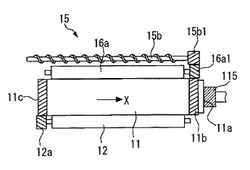
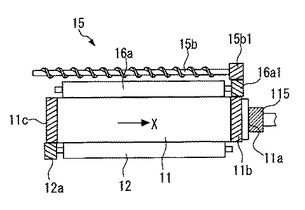
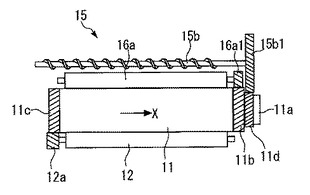
詳しくは、図4を参照して、像担持体としての感光体ドラム11の回転軸方向両端部には、それぞれ、ハスバ歯車11b、11cが設置されている。
具体的に、感光層等が形成された円筒状(ドラム状)のドラム主部の一端側には、外周部に第1ハスバ歯車11bが形成されて内周部にカップリング11aが形成されたフランジが、圧入接着されている。また、ドラム主部の他端側には、外周部に第2ハスバ歯車11cが形成されたフランジが、圧入接着されている。
一方、帯電ローラ12における一方の端部の軸部には、感光体ドラム11の第2ハスバ歯車11cに噛合するハスバ歯車12a(帯電ローラ用ハスバ歯車)が設置されている。また、潤滑剤供給ローラ16aにおける一方の端部の軸部には、感光体ドラム11の第1ハスバ歯車11bに噛合するハスバ歯車16a1(潤滑剤供給ローラ用ハスバ歯車)が設置されている。さらに、搬送スクリュ15bにおける一方の端部の軸部には、潤滑剤供給ローラ用ハスバ歯車16a1に噛合するハスバ歯車15b1(搬送スクリュ用ハスバ歯車)が設置されている。
【0043】
このような構成により、画像形成装置本体1の駆動モータ116から本体カップリング115、カップリング11aを介して感光体ドラム11に駆動力が伝達されると、感光体ドラム11から第2ハスバ歯車11c、帯電ローラ用ハスバ歯車12aを介して帯電ローラ12に駆動力が伝達され、感光体ドラム11から第1ハスバ歯車11b、潤滑剤供給ローラ用ハスバ歯車16a1を介して潤滑剤供給ローラ16aに駆動力が伝達され、さらに潤滑剤供給ローラ用ハスバ歯車16a1、搬送スクリュ用ハスバ歯車15b1を介して搬送スクリュ15bに駆動力が伝達される。そして、それぞれの従動回転体12、15b、16aが所定方向に回転することになる。
【0044】
ここで、感光体ドラム11に設置された複数のハスバ歯車11b、11cは、それぞれのネジレ方向がすべて同じ方向になるように形成されている。具体的に、第1ハスバ歯車11bのネジレ方向と、第2ハスバ歯車11cのネジレ方向と、はいずれも左方向になるように形成されている。なお、帯電ローラ用ハスバ歯車12aと潤滑剤供給ローラ用ハスバ歯車16a1とのネジレ方向は右方向であって、搬送スクリュ用ハスバ歯車15b1のネジレ方向は左方向になるように設定されている。
【0045】
このような構成により、第1ハスバ歯車11bに作用する力によって感光体ドラム11が回転軸方向にスラスト移動する方向と、第2ハスバ歯車11cに作用する力によって感光体ドラム11が回転軸方向にスラスト移動する方向と、がいずれも+X方向(装着方向奥側であり、装置本体1の駆動部116の側である。)になる。すなわち、感光体ドラム11から潤滑剤供給ローラ16a(及び、搬送スクリュ15b)に伝達される駆動力の反力を第1ハスバ歯車11bの歯面が受けると、その歯面の傾斜方向によってその反力が−X方向に作用することはなく+X方向に作用することになる。同様に、感光体ドラム11から帯電ローラ12に伝達される駆動力の反力を第2ハスバ歯車11cの歯面が受けると、その歯面の傾斜方向によってその反力が−X方向に作用することはなく+X方向に作用することになる。なお、駆動力の反力はYZ面方向(X方向に直交する方向である。)にも作用することになるが、その方向は感光体ドラム11を軸支する軸受(不図示である。)が設置されているため、その方向へのガタ(移動)は生じないことになる。
このように感光体ドラム11は、−X方向と+X方向との正逆方向に揺動することなく、+X方向のみにスラスト移動することになるため、回転軸方向の正逆方向に揺動した状態で感光体ドラム11上にて作像プロセスがおこなわれてしまって出力画像上において走査方向の画像ズレが発生する等の異常画像が生じてしまう不具合が抑止される。
【0046】
補足すると、画像形成装置1が稼働開始されると、装置本体1からプロセスカートリッジ15に駆動力が伝達されて、感光体ドラム11が+X方向にスラスト移動することになるが、感光体ドラム11の端面がサイドカバー15dのストッパ部15d3に接触してそれ以上の移動が即座に制限されるため、感光体ドラム11上で実際に作像プロセスが開始されるときには感光体ドラム11が回転軸方向に移動することがなく作像プロセスへの影響が生じないことになる。
これに対して、複数のハスバ歯車11b、11cのネジレ方向が異なる場合には、感光体ドラム11上で作像プロセスがおこなわれている間にも、感光体ドラム11が回転軸方向の正逆方向に細かく移動してしまう可能性があるため、上述したような異常画像が生じてしまうことになる。
なお、本実施の形態では、感光体ドラム11に設置された2つのハスバ歯車11b、11cのネジレ方向を左方向に統一して設定したが、2つのハスバ歯車11b、11cのネジレ方向を右方向に統一して設定することもできる。
【0047】
ここで、本実施の形態における感光体ドラム11は、先に図4を用いて説明したように、画像形成装置本体1から駆動力が伝達されるカップリング11a(駆動伝達部)が回転軸方向の一端側(図4の右側である。)に形成されている。そして、複数のハスバ歯車11b、11cに作用する力によって感光体ドラム11が回転軸方向にスラスト移動する方向が、カップリング11aが設置された側(一端側)になるように形成されている。すなわち、感光体ドラム11は、複数のハスバ歯車11b、11cに作用する力によって、装置本体1の本体カップリング115及び駆動モータ116(駆動部)の側である+X方向に移動することになる。
このような構成により、感光体ドラム11のカップリング11a(爪部11a1)と、装置本体1の本体側カップリング115(爪部115a)と、の噛み合いが深くなるために、噛み合い不良によって装置本体1側からプロセスカートリッジ15に駆動が伝達されなくなる不具合を抑止することができる。
【0048】
また、本実施の形態では、カップリング11a(駆動伝達部)に作用する力によって感光体ドラム11が回転軸方向にスラスト移動する方向も、+X方向(一端側)になるように設定している。具体的に、図5(B)に示すように、カップリング11aの爪部11a1と、本体側カップリング115の爪部115aと、が接触する接触面をYZ面に対して傾斜させて、カップリング11aの爪部11a1が本体側カップリング115の爪部115から受ける駆動力のX成分が、−X方向に作用することなく、+X方向に作用するように構成している。プロセスカートリッジ15自体は感光体ドラム11単体よりも重量が大きいため、カップリング11aに作用する力によって感光体ドラム11(プロセスカートリッジ15)が回転軸方向に大きくスラスト移動することは少ないものの、カップリング11aに作用する力によって感光体ドラム11が回転軸方向にスラスト移動する方向と、プロセスカートリッジ15において複数のハスバ歯車11b、11cに作用する力によって感光体ドラム11が回転軸方向にスラスト移動する方向と、を一致させることで、上述した異常画像の発生をさらに確実に抑止することができる。また、カップリング11a(駆動伝達部)に作用する力が、双方の爪部11a1、115aの噛み合いが深まる方向になるため、噛み合い不良によって装置本体1側からプロセスカートリッジ15に駆動が伝達されなくなる不具合を抑止することができる。
【0049】
なお、本実施の形態におけるカップリング11a及び本体側カップリング115の形態はこれに限定されることはなく、種々の形態のカップリングを用いることができる。
また、本実施の形態では、駆動伝達部としてカップリング11aを用いたが、駆動伝達部として平歯車やハスバ歯車を用いることもできる。特に、駆動伝達部として平歯車を用いた場合には、それに噛合する装置本体側の平歯車との間に、X成分に作用する力が生じないために、上述した駆動伝達部に作用する力が+X方向になるような設定が不要になる。また、駆動伝達部としてハスバ歯車を用いた場合には、それに噛合する装置本体側のハスバ歯車との間に、X成分に作用する力が生じるために、上述した駆動伝達部に作用する力が+X方向になるような設定をおこなうことが好ましい。
【0050】
また、本実施の形態におけるプロセスカートリッジ15には、図6に示すように、複数のハスバ歯車11b、11cに作用する力によって感光体ドラム11が回転軸方向にスラスト移動する方向(+X方向)の端部に、感光体ドラム11に接触してスラスト移動を制限するストッパ部15d3が形成されている。
詳しくは、ストッパ部15d3は、感光体ドラム11の一端側の端面に点接触するように、サイドカバー15dの内側に起立するように2つ(又は、3つ)設置された突起部である。このようにストッパ部15d3を設けることで、回転する感光体ドラム11の摺動抵抗を大きくすることなく、複数のハスバ歯車11b、11cに作用する力によって感光体ドラム11が+X方向に無制限にスラスト移動するのを防止することができる。
なお、本実施の形態では、ストッパ部15d3をサイドカバー15dに設置したが、ストッパ部を感光体ドラム11の端面に設置することもできるし、ストッパ部をその他の部材に設置することもできる。
【0051】
また、本実施の形態における感光体ドラム11は、複数のハスバ歯車11b、11cに作用する力によって感光体ドラム11が回転軸方向にスラスト移動する方向が、プロセスカートリッジ15の装着方向奥側になるように形成されている。すなわち、画像形成装置本体1に対して回転軸方向に着脱されるプロセスカートリッジ15の装着方向と、複数のハスバ歯車11b、11cに作用する力によって感光体ドラム11が回転軸方向にスラスト移動する方向と、が一致するように設定している。
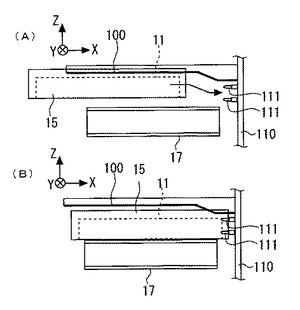
図7(A)及び図7(B)に示すように、本実施の形態では、プロセスカートリッジ15の着脱動作によって感光体ドラム11と装置本体1の中間転写ベルト17とが摺接して双方の部材11、17にダメージが生じるのを防止するために、装着時においてプロセスカートリッジ15が中間転写ベルト17から離間した位置で+X方向に移動した後に、位置決めピン111に嵌合する直前の位置で中間転写ベルト17に近接して+X方向に移動して位置決めされるように、案内レール110を形成している。そのため、プロセスカートリッジ15と本体側カップリング115(又は、位置決めピン111)との嵌合の深さを大きく設定しにくくなっている。これに対して、本実施の形態では、プロセスカートリッジ15が装置本体1に装着された後に、装置が稼働されると複数のハスバ歯車11b、11cに作用する力によって感光体ドラム11が+X方向にスラスト移動するように構成しているため、プロセスカートリッジ15と本体側カップリング115とがその後に深く嵌合することになり、噛み合い不良によって装置本体1側からプロセスカートリッジ15に駆動が伝達されなくなる不具合を抑止することができる。
なお、プロセスカートリッジ15を装置本体1から取り出すときには、感光体ドラム11を逆回転させて感光体ドラム11(プロセスカートリッジ15)を−X方向に移動させる力を作用させることで、プロセスカートリッジ15の離脱時の操作性を向上させることができる。
【0052】
なお、本発明の適用は、本実施の形態におけるプロセスカートリッジ15の構成に限定されることなく、種々の構成のものに対して適用することができるので、その変形例を以下に3つほど説明する。
図8に示す変形例1は、感光体ドラム11にネジレ方向が左方向に設定された3つのハスバ歯車11b、11c、11dが設置されている。そして、搬送スクリュ15bは、潤滑剤供給ローラ用ハスバ歯車16a1を介して感光体ドラム11によって駆動伝達されるのではなくて、感光体ドラム11の第3ハスバ歯車11dから搬送スクリュ用ハスバ歯車15b1に直接的に駆動力が伝達される。
図9に示す変形例2は、潤滑剤供給ローラ16aが設置されておらず、感光体ドラム11の第1ハスバ歯車11bから搬送スクリュ15bの搬送スクリュ用ハスバ歯車15b1に直接的に駆動力が伝達される。
図10に示す変形例3は、潤滑剤供給ローラ16aが設置されておらず、感光体ドラム11の第1ハスバ歯車11bからアイドラ歯車22(ハスバ歯車である。)を介して搬送スクリュ15bの搬送スクリュ用ハスバ歯車15b1に駆動力が伝達される。
そして、これらの場合であっても、感光体ドラムに設置した複数のハスバ歯車のネジレ方向をすべて同じ方向に設定することで、本実施の形態のものと同様の効果を得ることができる。
【0053】
以上説明したように、本実施の形態によれば、感光体ドラム11(像担持体)から帯電ローラ12や潤滑剤供給ローラ16a等(複数の従動回転体)への駆動伝達をそれぞれおこなう歯車として複数のハスバ歯車11b、11cを用いた場合であっても、感光体ドラム11に設置された複数のハスバ歯車11b、11cのネジレ方向がすべて同じ方向になるように設定しているため、複数のハスバ歯車11b、11cに作用する力によって感光体ドラム11が回転軸方向にスラスト移動する方向が定まらないという問題が生じるのを防止することができる。
【0054】
なお、本実施の形態では、作像部における感光体ドラム11、帯電ローラ12、クリーニングブレード15a(クリーニング部)、潤滑剤供給装置16を一体化してプロセスカートリッジ15を構成して、作像部のコンパクト化とメンテナンス作業性の向上とを図っている。
これに対して、現像装置13をもプロセスカートリッジ15の構成部材とすることもできる。その場合、現像ローラ13a等を従動回転体として感光体ドラム11に設置したハスバ歯車を介して従動回転することができる。そして、その場合に、感光体ドラム11に設置するハスバ歯車のネジレ方向も、その他のハスバ歯車のネジレ方向と一致するように形成されることになる。このような場合にも、本実施の形態と同様の効果を得ることができる。
また、本実施の形態では、1成分現像剤を用いる1成分現像方式の現像装置13が搭載された画像形成装置に対して本発明を適用したが、2成分現像剤を用いる2成分現像方式の現像装置13が搭載された画像形成装置に対しても当然に本発明を適用することができる。
【0055】
また、本実施の形態では、中間転写ベルト17を用いたタンデム型のカラー画像形成装置に対して本発明を適用した。これに対して、転写搬送ベルトを用いたタンデム型のカラー画像形成装置(転写搬送ベルトに対向するように並設された複数の感光体ドラム上のトナー像を、転写搬送ベルトによって搬送される記録媒体上に重ねて転写する装置である。)や、モノクロ画像形成装置等、その他の画像形成装置に対しても、本発明を適用することができる。そして、このような場合であっても、本実施の形態と同様の効果を得ることができる。
【0056】
また、本実施の形態では、感光体ドラム11に設置された複数のハスバ歯車11b、11cが、複数の従動回転体12、16aにそれぞれ設置されたハスバ歯車12a、16a1にそれぞれ直接的に噛合するように構成した。これに対して、先に図10を用いて説明した変形例3を参考にして、感光体ドラム11に設置された複数のハスバ歯車11b、11cが、複数の従動回転体12、16aにそれぞれ設置されたハスバ歯車12a、16a1のうち一部又は全部に対して、アイドラ歯車を介して噛合するように構成することもできる。そして、このような場合であっても、本実施の形態と同様の効果を得ることができる。
【0057】
なお、本発明が本実施の形態に限定されず、本発明の技術思想の範囲内において、本実施の形態の中で示唆した以外にも、本実施の形態は適宜変更され得ることは明らかである。また、前記構成部材の数、位置、形状等は本実施の形態に限定されず、本発明を実施する上で好適な数、位置、形状等にすることができる。
【符号の説明】
【0058】
1 画像形成装置本体(装置本体)、
11、11Y、11M、11C、11B 感光体ドラム(像担持体)、
11a カップリング(駆動伝達部)、
11b 第1ハスバ歯車、 11c 第2ハスバ歯車、
12 帯電ローラ(従動回転体)、
12a 帯電ローラ用ハスバ歯車、
15 プロセスカートリッジ、
15b 搬送スクリュ(従動回転体)、
15b1 搬送スクリュ用ハスバ歯車、
15d3 ストッパ部、
16a 潤滑剤供給ローラ(従動回転体)、
16a1 潤滑剤供給ローラ用ハスバ歯車、
17 中間転写ベルト、
100 案内レール、
110 本体側板、
111 位置決めピン、
115 本体側カップリング。
【先行技術文献】
【特許文献】
【0059】
【特許文献1】特開平2−166470号公報
【技術分野】
【0001】
この発明は、複写機、プリンタ、ファクシミリ、又は、それらの複合機等の電子写真方式を用いた画像形成装置と、そこに着脱可能に設置されるプロセスカートリッジと、に関するものである。
【背景技術】
【0002】
従来から、複写機、プリンタ等の画像形成装置において、画像形成装置本体に対してプロセスカートリッジを着脱可能に設置する技術が知られている(例えば、特許文献1等参照。)。
このようなプロセスカートリッジは、画像形成装置本体への装着動作にともない感光体ドラム(像担持体)の一端側に設置された歯車やカップリング等の駆動伝達部が画像形成装置本体の駆動部に連結されて、画像形成装置本体から感光体ドラムに駆動力が伝達されて感光体ドラムが所定方向に回転駆動されることになる。また、プロセスカートリッジには、画像形成装置本体によって駆動される感光体ドラムからさらに駆動力がそれぞれ伝達されて所定方向に従動回転する複数の従動回転体が設置されている。このような従動回転体としては、帯電ローラや現像ローラやクリーニングローラ等がある。
【0003】
一方、特許文献1には、感光体ドラムに設置した複数のハスバ歯車に、複数の従動回転体(第1、第2の回転体)にそれぞれ設置したハスバ歯車を噛合させて、感光体ドラムから複数の従動回転体に駆動力を伝達して複数の従動回転体を従動回転する技術が開示されている。
【発明の概要】
【発明が解決しようとする課題】
【0004】
特許文献1等の従来のプロセスカートリッジは、感光体ドラム(像担持体)から複数の従動回転体への駆動伝達をおこなう歯車としてハスバ歯車を用いているため、歯車の噛み合い率が高められて、駆動伝達による感光体ドラムや従動回転体の回転時の振動を軽減することができる。
しかし、感光体ドラム(像担持体)に設置した複数のハスバ歯車は、ネジレ方向が左方向のものと右方向のものとが混在していたため、複数のハスバ歯車に作用する力によって感光体ドラムが回転軸方向にスラスト移動する方向が定まらないという問題があった。このように感光体ドラムの回転軸方向にスラスト移動する方向が定まらずに、回転軸方向の正逆方向に揺動した状態で感光体ドラム上にて作像プロセスがおこなわれてしまうと、出力画像上において走査方向の画像ズレが発生する等の異常画像が生じてしまうことになる。
【0005】
この発明は、上述のような課題を解決するためになされたもので、像担持体から複数の従動回転体への駆動伝達をそれぞれおこなう歯車として複数のハスバ歯車を用いた場合であっても、複数のハスバ歯車に作用する力によって像担持体が回転軸方向にスラスト移動する方向が定まらないという問題が生じることのない、プロセスカートリッジ、及び、画像形成装置を提供することにある。
【課題を解決するための手段】
【0006】
この発明の請求項1記載の発明にかかるプロセスカートリッジは、画像形成装置本体に対して着脱可能に設置されるプロセスカートリッジであって、前記画像形成装置本体から駆動力が伝達されて所定方向に回転する像担持体と、前記像担持体から駆動力がそれぞれ伝達されて所定方向に従動回転する複数の従動回転体と、を備え、前記像担持体は、前記複数の従動回転体にそれぞれ設置されたハスバ歯車に直接的に又はアイドラ歯車を介してそれぞれ噛合するとともに、それぞれのネジレ方向がすべて同じ方向になるように形成された複数のハスバ歯車が設置されたものである。
【0007】
なお、本願において、「プロセスカートリッジ」とは、像担持体を帯電する帯電部と、像担持体上に形成された潜像を現像する現像部(現像装置)と、像担持体上をクリーニングするクリーニング部とのうち、少なくとも1つと、像担持体とが、一体化されて、画像形成装置本体に対して着脱可能に設置されるユニットであるものと定義する。
【発明の効果】
【0008】
本発明は、像担持体から複数の従動回転体への駆動伝達をそれぞれおこなう歯車として複数のハスバ歯車を用いた場合であっても、像担持体に設置された複数のハスバ歯車のネジレ方向がすべて同じ方向になるように設定しているため、複数のハスバ歯車に作用する力によって像担持体が回転軸方向にスラスト移動する方向が定まらないという問題が生じることのない、プロセスカートリッジ、及び、画像形成装置を提供することができる。
【図面の簡単な説明】
【0009】
【図1】この発明の実施の形態における画像形成装置を示す全体構成図である。
【図2】作像部を示す構成図である。
【図3】プロセスカートリッジを示す概略斜視図である。
【図4】プロセスカートリッジの内部の構成を示す概略図である。
【図5】駆動伝達部と画像形成装置本体の駆動部とを示す図である。
【図6】画像形成装置本体に装着された状態のプロセスカートリッジの一部を示す概略断面図である。
【図7】プロセスカートリッジが画像形成装置本体に装着される状態を示す概略図である。
【図8】変形例1のプロセスカートリッジの内部を示す概略図である。
【図9】変形例2のプロセスカートリッジの内部を示す概略図である。
【図10】変形例3のプロセスカートリッジの内部を示す概略図である。
【発明を実施するための形態】
【0010】
実施の形態.
以下、この発明を実施するための形態について、図面を参照して詳細に説明する。なお、各図中、同一又は相当する部分には同一の符号を付しており、その重複説明は適宜に簡略化ないし省略する。
【0011】
まず、図1にて、画像形成装置全体の構成・動作について説明する。
図1において、1は画像形成装置としてのタンデム型カラー複写機の装置本体、2は入力画像情報に基づいたレーザ光を発する書込み部、3は原稿Dを原稿読込部4に搬送する原稿搬送部、4は原稿Dの画像情報を読み込む原稿読込部、7は転写紙等の記録媒体Pが収容される給紙部、9は記録媒体Pの搬送タイミングを調整するレジストローラ(タイミングローラ)、11Y、11M、11C、11BKは各色(イエロー、マゼンタ、シアン、ブラック)のトナー像が形成される像担持体としての感光体ドラム、12は各感光体ドラム11Y、11M、11C、11BK上を帯電する帯電ローラ(帯電部)、13は各感光体ドラム11Y、11M、11C、11BK上に形成される静電潜像を現像する現像装置、14は各感光体ドラム11Y、11M、11C、11BK上に形成されたトナー像を記録媒体P上に重ねて転写する転写バイアスローラ(1次転写バイアスローラ)、15はプロセスカートリッジ(着脱ユニット)、を示す。
【0012】
また、17は複数色のトナー像が重ねて転写される中間転写ベルト、18は中間転写ベルト17上のカラートナー像を記録媒体P上に転写するための2次転写バイアスローラ、19は中間転写ベルト17を清掃する中間転写ベルトクリーニング部、20は記録媒体P上の未定着画像を定着する定着装置、を示す。
【0013】
以下、画像形成装置における、通常のカラー画像形成時の動作について説明する。なお、感光体ドラム11Y、11M、11C、11BK上でおこなわれる作像プロセスについては、図2をも参照することができる。
まず、原稿Dは、原稿搬送部3の搬送ローラによって、原稿台から図中の矢印方向に搬送されて、原稿読込部4のコンタクトガラス5上に載置される。そして、原稿読込部4で、コンタクトガラス5上に載置された原稿Dの画像情報が光学的に読み取られる。
【0014】
詳しくは、原稿読込部4は、コンタクトガラス5上の原稿Dの画像に対して、照明ランプから発した光を照射しながら走査させる。そして、原稿Dにて反射した光を、ミラー群及びレンズを介して、カラーセンサに結像する。原稿Dのカラー画像情報は、カラーセンサにてRGB(レッド、グリーン、ブルー)の色分解光ごとに読み取られた後に、電気的な画像信号に変換される。さらに、RGBの色分解画像信号をもとにして画像処理部で色変換処理、色補正処理、空間周波数補正処理等の処理をおこない、イエロー、マゼンタ、シアン、ブラックのカラー画像情報を得る。
【0015】
そして、イエロー、マゼンタ、シアン、ブラックの各色の画像情報は、書込み部2に送信される。そして、書込み部2からは、各色の画像情報に基づいたレーザ光L(図2を参照できる。)が、それぞれ、対応する感光体ドラム11Y、11M、11C、11BK上に向けて発せられる。
【0016】
一方、4つの感光体ドラム11Y、11M、11C、11BKは、それぞれ、図1の反時計方向に回転している。そして、まず、感光体ドラム11Y、11M、11C、11BKの表面は、帯電ローラ12(帯電部)との対向部で、一様に帯電される(帯電工程である。)。こうして、感光体ドラム11Y、11M、11C、11BK上には、帯電電位が形成される。その後、帯電された感光体ドラム11Y、11M、11C、11BK表面は、それぞれのレーザ光の照射位置に達する。
書込み部2において、4つの光源から画像信号に対応したレーザ光が各色に対応してそれぞれ射出される。各レーザ光は、イエロー、マゼンタ、シアン、ブラックの色成分ごとに別の光路を通過することになる(露光工程である。)。
【0017】
イエロー成分に対応したレーザ光は、紙面左側から1番目の感光体ドラム11Y表面に照射される。このとき、イエロー成分のレーザ光は、高速回転するポリゴンミラーにより、感光体ドラム11Yの回転軸方向(主走査方向)に走査される。こうして、帯電ローラ12にて帯電された後の感光体ドラム11Y上には、イエロー成分に対応した静電潜像が形成される。
【0018】
同様に、マゼンタ成分に対応したレーザ光は、紙面左から2番目の感光体ドラム11M表面に照射されて、マゼンタ成分に対応した静電潜像が形成される。シアン成分のレーザ光は、紙面左から3番目の感光体ドラム11C表面に照射されて、シアン成分の静電潜像が形成される。ブラック成分のレーザ光は、紙面左から4番目の感光体ドラム11BK表面に照射されて、ブラック成分の静電潜像が形成される。
【0019】
その後、各色の静電潜像が形成された感光体ドラム11Y、11M、11C、11BK表面は、それぞれ、現像装置13との対向位置に達する。そして、各現像装置13から感光体ドラム11Y、11M、11C、11BK上に各色のトナーが供給されて、感光体ドラム11Y、11M、11C、11BK上の潜像が現像される(現像工程である。)。
その後、現像工程後の感光体ドラム11Y、11M、11C、11BK表面は、それぞれ、中間転写ベルト17との対向部に達する。ここで、それぞれの対向部には、中間転写ベルト17の内周面に当接するように転写バイアスローラ14が設置されている。そして、転写バイアスローラ14の位置で、中間転写ベルト17上に、感光体ドラム11Y、11M、11C、11BK上に形成された各色のトナー像が、順次重ねて転写される(1次転写工程である。)。
【0020】
そして、転写工程後の感光体ドラム11Y、11M、11C、11BK表面は、それぞれ、クリーニングブレード15a(クリーニング部)との対向位置に達する。そして、クリーニングブレード15aで、感光体ドラム11Y、11M、11C、11BK上に残存する未転写トナーが回収される(クリーニング工程である。)。
その後、感光体ドラム11Y、11M、11C、11BK表面は、不図示の除電部を通過して、感光体ドラム11Y、11M、11C、11BKにおける一連の作像プロセスが終了する。
【0021】
他方、感光体ドラム11Y、11M、11C、11BK上の各色のトナーが重ねて転写(担持)された中間転写ベルト17は、図中の時計方向に走行して、2次転写バイアスローラ18との対向位置に達する。そして、2次転写バイアスローラ18との対向位置で、記録媒体P上に中間転写ベルト17上に担持されたカラーのトナー像が転写される(2次転写工程である。)。
その後、中間転写ベルト17表面は、中間転写ベルトクリーニング部19の位置に達する。そして、中間転写ベルト17上に付着した未転写トナーが中間転写ベルトクリーニング部19に回収されて、中間転写ベルト17における一連の転写プロセスが終了する。
【0022】
ここで、中間転写ベルト17と2次転写バイアスローラ18との間(2次転写ニップである。)に搬送される記録媒体Pは、給紙部7からレジストローラ9等を経由して搬送されたものである。
詳しくは、記録媒体Pを収納する給紙部7から、給紙ローラ8により給送された記録媒体Pが、搬送ガイドを通過した後に、レジストローラ9に導かれる。レジストローラ9に達した記録媒体Pは、タイミングを合わせて、2次転写ニップに向けて搬送される。
【0023】
そして、フルカラー画像が転写された記録媒体Pは、搬送ベルトによって定着装置20に導かれる。定着装置20では、定着ベルトと加圧ローラとのニップにて、カラー画像が記録媒体P上に定着される。
そして、定着工程後の記録媒体Pは、排紙ローラによって、装置本体1外に出力画像として排出されて、一連の画像形成プロセスが完了する。
【0024】
次に、図2にて、画像形成装置の作像部について詳述する。
図2に示すように、作像部は、像担持体としての感光体ドラム11、感光体ドラム11を帯電する帯電部としての帯電ローラ12、感光体ドラム11上に形成される静電潜像を現像する現像装置13(現像部)、感光体ドラム11上の未転写トナーを回収するクリーニングブレード15a(クリーニング部)、感光体ドラム11上に潤滑剤を供給する潤滑剤供給装置16(潤滑剤供給部)、等で構成されている。
そして、本実施の形態では、作像部の構成部材のうち、感光体ドラム11と帯電ローラ12とクリーニングブレード15a(クリーニング部)と潤滑剤供給装置16とが、プロセスカートリッジ15として一体化されていて、プロセスカートリッジ15(着脱ユニット)として装置本体1に着脱可能に構成されている。また、現像装置13は、プロセスカートリッジ15とは別のユニットとして、装置本体1に対して着脱可能に構成されている。
なお、各色の作像部(又は、プロセスカートリッジ)はほぼ同一構造であるために、図2〜図10にて作像部やプロセスカートリッジは符号のアルファベット(Y、C、M、BK)を除して図示する。
また、プロセスカートリッジ15は、概ね、図3に示すような外観をなしている。
【0025】
ここで、像担持体としての感光体ドラム11は、負帯電性の有機感光体であって、ドラム状導電性支持体上に感光層等が設けられている。
図示は省略するが、感光体ドラム11は、基層としての導電性支持体上に、絶縁層である下引き層、感光層としての電荷発生層及び電荷輸送層、保護層(表面層)が順次積層されている。
感光体ドラム11の導電性支持体(基層)としては、体積抵抗が1010Ωcm以下の導電性材料を用いることができる。
【0026】
帯電部としての帯電ローラ12は、導電性芯金(軸部)の外周に中抵抗の弾性層を被覆してなるローラ部材であって、潤滑剤供給装置16に対して感光体ドラム11の回転方向下流側において感光体ドラム11に当接するように配設されている。
そして、帯電ローラ12には、装置本体1に設置された不図示の電源部から所定の電圧(帯電バイアス)が印加されて、これにより対向する感光体ドラム11の表面を一様に帯電する。
なお、本実施の形態では、帯電ローラ12を感光体ドラム11に接触させているが、帯電ローラ12を感光体ドラム11に対して接触させずに微小ギャップをあけて対向させることもできる。
【0027】
現像装置13は、現像ローラ13aが感光体ドラム11に接触するように配置されていて、双方の部材の間には現像領域(現像ニップ部)が形成される。現像装置13内には、トナーT(1成分現像剤)が収容されている。そして、現像装置13は、感光体ドラム11上に形成される静電潜像を現像する(トナー像を形成する。)。
詳しくは、図2を参照して、本実施の形態における現像装置13は、1成分現像方式の現像装置であって、現像ローラ13a(現像剤担持体)、供給ローラ13b、薄層化部材としてのドクターブレード13c、撹拌部材13d、等で構成されている。
【0028】
このように構成された現像装置13は、次のように動作する。
まず、現像装置13内に供給され収容されたトナーの一部が、供給ローラ13bに担持される。供給ローラ13bに担持されたトナーは、現像ローラ13aとの圧接部で摩擦帯電された後に、現像ローラ13a上に移動して担持される。その後、現像ローラ13a上に担持されたトナーは、ドクターブレード13cの位置で、薄層化・均一化された後に、感光体ドラム11との当接位置(現像領域)に達する。そして、この位置で、現像領域に形成された電界(現像電界)によって、感光体ドラム11上に形成された潜像にトナーが吸着される。
【0029】
なお、本実施の形態において、画質向上のために、円形度が0.98以上の球形トナーをトナーTとして使用している。「円形度」は、フロー式粒子像分析装置「FPIA−2000」(東亜医用電子社製)により計測した平均円形度である。具体的には、容器中の予め不純固形物を除去した水100〜150ml中に、分散剤として界面活性剤(好ましくは、アルキルベンゼンスルホン酸塩である。)を0.1〜0.5ml加えて、さらに測定試料(トナー)を0.1〜0.5g程度加える。その後、このトナーが分散した懸濁液を、超音波分散器で約1〜3分間分散処理して、分散液濃度が3000〜10000個/μlとなるようにしたものを上述の分析装置にセットして、トナーの形状及び分布を測定する。
【0030】
球形トナーとしては、従来から広く用いられている粉砕法によって形状が歪な異形のトナー(粉砕トナー)を加熱処理等して球形化したものや、重合法により製造されたもの等を用いることができる。
このような球形トナーを用いる場合、従来は、クリーニングブレード15aと感光体ドラム11との僅かな隙間に入り込んでやがてその隙間をすり抜けてクリーニング不良が生じることがあった。しかし、本実施の形態では、潤滑剤供給装置16によって潤滑剤を感光体ドラム11表面に塗布して、感光体ドラム11上におけるトナー剥離性(除去性)を向上させるために、クリーニング不良の発生が抑止される。
【0031】
クリーニングブレード15aは、潤滑剤供給装置16に対して感光体ドラム11の回転方向下流側に配設されている。クリーニングブレード15aは、ウレタンゴム等のゴム材料からなり、感光体ドラム11表面に所定角度かつ所定圧力で当接している。これにより、感光体ドラム11上に付着する未転写トナー等の付着物が機械的に掻き取られてプロセスカートリッジ15内に回収されることになる。そして、プロセスカートリッジ15内に回収されたトナーは、廃トナーとして廃トナー回収容器(不図示である。)に向けて搬送スクリュ15bによって搬送される。ここで、感光体ドラム11上に付着する付着物としては、未転写トナーの他に、記録媒体P(用紙)から生じる紙粉、帯電ローラ12aによる放電時に感光体ドラム11上に生じる放電生成物、トナーに添加されている添加剤、等がある。
また、本実施の形態におけるクリーニングブレード15aは、潤滑剤供給ローラ16aによって感光体ドラム11上に供給された潤滑剤を薄層化する薄層化ブレードとしても機能する。
【0032】
潤滑剤供給装置16は、固形潤滑剤16b、感光体ドラム11と固形潤滑剤16bとに摺接する潤滑剤供給ローラ16a(ブラシ状ローラ)、固形潤滑剤16bを保持する保持部材16e、固形潤滑剤16bとともに保持部材16eを潤滑剤供給ローラ16aに向けて付勢する付勢手段としての圧縮スプリング16c、等で構成される。
このように構成された潤滑剤供給装置16によって、感光体ドラム11上に潤滑剤が供給される。そして、潤滑剤供給装置16の下流側に配設されたクリーニングブレード15aによって、感光体ドラム11上に供給された潤滑剤が薄層化される。
【0033】
ここで、潤滑剤供給ローラ16a(ブラシ状ローラ)は、長さ(毛足)が0.2〜20mm(好ましくは、0.5〜10mm)の範囲のブラシ毛が基布上に植毛されたものを芯金上にスパイラル状に巻き付けたものである。
ブラシ毛の長さが20mmを超えると、経時における感光体ドラム11との繰り返し摺擦によって、ブラシ毛が所定方向に倒毛して、固形潤滑剤16bの掻取性や感光体ドラム11からのトナー除去性が低下してしまう。これに対して、ブラシ毛の長さが0.2mm未満であると、固形潤滑剤16bや感光体ドラム11に対する物理的な当接力が不足してしまう。したがって、ブラシ毛の長さは上述の範囲であることが好ましい。
【0034】
潤滑剤供給ローラ16aは、図2の反時計方向に回転する感光体ドラム11に対して順方向で接触するように回転する(図2の時計方向の回転である。)。また、潤滑剤供給ローラ16a(ブラシ毛)は、固形潤滑剤16bと感光体ドラム11とに摺接するように配置されていて、潤滑剤供給ローラ16aが回転することによって固形潤滑剤16bから潤滑剤を掻き取り、その掻き取った潤滑剤を感光体ドラム11との摺接位置まで搬送した後に、その潤滑剤を感光体ドラム11上に塗布する。
固形潤滑剤16bの後方部には,潤滑剤供給ローラ16aと固形潤滑剤16bとの接触ムラをなくすために付勢部材としての圧縮スプリング16cが配置されていて、保持部材16eに保持(貼着)された状態の固形潤滑剤16bを潤滑剤供給ローラ16aに向けて付勢している。
【0035】
本実施の形態では、固形潤滑剤16bを主としてステアリン酸亜鉛で形成している。詳しくは、固形潤滑剤16bは、ステアリン酸亜鉛を主成分とする潤滑油添加剤を溶解したもので、塗りすぎによる副作用がなく、充分な潤滑性があるものが好適である。
ステアリン酸亜鉛は、代表的なラメラ結晶紛体である。ラメラ結晶は両親媒性分子が自己組織化した層状構造を有していて、せん断力が加わると層間にそって結晶が割れて滑りやすい。したがって、感光体ドラム11表面を低摩擦係化することができる。すなわち、せん断力を受けて均一に感光体ドラム11表面を覆っていくラメラ結晶によって、少量の潤滑剤によって効果的に感光体ドラム11表面を覆うことができる。
【0036】
なお、固形潤滑剤16bとしては、ステアリン酸亜鉛の他にも、ステアリン酸バリウム、ステアリン酸鉄、ステアリン酸ニッケル、ステアリン酸コバルト、ステアリン酸銅、ステアリン酸ストロンチュウム、ステアリン酸カルシウム等のステアリン酸基を有するものを用いることができる。また、同じ脂肪酸基であるオレイン酸亜鉛、オレイン酸バリウム、オレイン酸鉛、以下、ステアリン酸と同様の化合物や、パルチミン酸亜鉛、パルチミン酸バリウム、パルチミン酸鉛、以下、ステアリン酸と同様の化合物を使用して良い。他にも、脂肪酸基として、カプリル酸、リノレン酸、コリノレン酸等を使用することができる。さらに、カンデリラワックス、カンルナウバワックス、ライスワックス、木ろう、おおば油、みつろう、ラノリン等のワックスを使用することもできる。これらは有機系の固形潤滑剤となりやすく、トナーとの相性が良い。
【0037】
固形潤滑剤16bを潤滑剤供給ローラ16aを介して感光体ドラム11表面に塗布すると、感光体ドラム11表面には粉体状の潤滑剤が塗布されるが、この状態のままでは潤滑性は充分に発揮されないため、クリーニングブレード15aが潤滑剤を均一化する薄層化ブレードとしても機能することになる。クリーニングブレード15aにより、感光体ドラム11上での潤滑剤の皮膜化がおこなわれて、潤滑剤はその潤滑性を充分に発揮することになる。
このとき、潤滑剤供給ローラ16aにより塗布する粉体状の潤滑剤は微粉であるほど、クリーニングブレード15aにより感光体ドラム11上に分子膜レベルで薄膜化される。
なお、本実施の形態では、潤滑剤供給ローラ16aを感光体ドラム11に対して順方向で接触するように回転させているが、潤滑剤供給ローラ16aを感光体ドラム11に対してカウンタ方向で接触するように回転させることもできる。
【0038】
以下、図4〜図7等を用いて、本実施の形態において特徴的な、プロセスカートリッジ15や画像形成装置1の構成・動作について詳述する。
先に説明したように、プロセスカートリッジ15は、画像形成装置本体1に対して着脱可能に設置される。詳しくは、図1の装置本体1において、不図示の本体カバーが開放された状態で、各色のプロセスカートリッジ15がそれぞれ+X方向に装着されることになる(又は、−X方向に離脱されることになる。)。
プロセスカートリッジ15は、装置本体1の案内レール100(図7を参照できる。)に沿うように装着されて、装置本体1における位置が定められる。
【0039】
具体的に、図3、図6等を参照して、装置本体1へのプロセスカートリッジ15の装着動作にともない、プロセスカートリッジ15のサイドカバー15dに形成された位置決め穴部15d2に、画像形成装置本体1における本体側板110に設置された位置決めピン111が嵌合して、装置本体1におけるプロセスカートリッジ15の位置が定められる。なお、図3、図6を参照して、サイドカバー15dは、プロセスカートリッジ15の主たる筐体として機能するケース15cの側方を覆うように設置されている。
【0040】
さらに、図4〜図6に示すように、装置本体1へのプロセスカートリッジ15の装着動作にともない、プロセスカートリッジ15の感光体ドラム11の装着方向奥側(回転軸方向の一端側)に設置した駆動伝達部としてのカップリング11aが、本体側板110に設置された本体側カップリング115に嵌合する。
なお、図3等を参照して、カップリング11aは、サイドカバー15dの開口部15d1から外部(装置本体1の本体カップリング115の側である。)に露呈するように形成されている。また、図5に示すように、カップリング11aは、回転方向に間隔をあけて配列された複数の爪部11a1が+X方向(図5(A)の紙面垂直方向である。)に突出するように形成されている。
また、図6に示すように、装置本体1の本体側板110には、モータ軸に本体側カップリング115が設置された駆動モータ116が固設されている。また、図5を参照して、本体側カップリング115は、回転方向に間隔をあけて配列された複数の爪部115aが−X方向に突出するように形成されていて、この爪部115aが感光体ドラム11のカップリング11aの爪部11a1に噛み合って駆動が伝達されることになる。
【0041】
そして、このようにカップリング11a(駆動伝達部)と本体カップリング115とが噛み合った状態で、画像形成装置本体1の駆動モータ116から本体カップリング115、カップリング11aを介して感光体ドラム11(像担持体)に駆動力が伝達されて、感光体ドラム11が所定方向(図2の反時計方向である。)に回転することになる。さらに、感光体ドラム11から複数の従動回転体としての帯電ローラ12、搬送スクリュ15b、潤滑剤供給ローラ16aにそれぞれ駆動力が伝達されて、それぞれの従動回転体12、15b、16aが所定方向(図2にて、それぞれ矢印で示す方向である。)に従動回転することになる。
【0042】
詳しくは、図4を参照して、像担持体としての感光体ドラム11の回転軸方向両端部には、それぞれ、ハスバ歯車11b、11cが設置されている。
具体的に、感光層等が形成された円筒状(ドラム状)のドラム主部の一端側には、外周部に第1ハスバ歯車11bが形成されて内周部にカップリング11aが形成されたフランジが、圧入接着されている。また、ドラム主部の他端側には、外周部に第2ハスバ歯車11cが形成されたフランジが、圧入接着されている。
一方、帯電ローラ12における一方の端部の軸部には、感光体ドラム11の第2ハスバ歯車11cに噛合するハスバ歯車12a(帯電ローラ用ハスバ歯車)が設置されている。また、潤滑剤供給ローラ16aにおける一方の端部の軸部には、感光体ドラム11の第1ハスバ歯車11bに噛合するハスバ歯車16a1(潤滑剤供給ローラ用ハスバ歯車)が設置されている。さらに、搬送スクリュ15bにおける一方の端部の軸部には、潤滑剤供給ローラ用ハスバ歯車16a1に噛合するハスバ歯車15b1(搬送スクリュ用ハスバ歯車)が設置されている。
【0043】
このような構成により、画像形成装置本体1の駆動モータ116から本体カップリング115、カップリング11aを介して感光体ドラム11に駆動力が伝達されると、感光体ドラム11から第2ハスバ歯車11c、帯電ローラ用ハスバ歯車12aを介して帯電ローラ12に駆動力が伝達され、感光体ドラム11から第1ハスバ歯車11b、潤滑剤供給ローラ用ハスバ歯車16a1を介して潤滑剤供給ローラ16aに駆動力が伝達され、さらに潤滑剤供給ローラ用ハスバ歯車16a1、搬送スクリュ用ハスバ歯車15b1を介して搬送スクリュ15bに駆動力が伝達される。そして、それぞれの従動回転体12、15b、16aが所定方向に回転することになる。
【0044】
ここで、感光体ドラム11に設置された複数のハスバ歯車11b、11cは、それぞれのネジレ方向がすべて同じ方向になるように形成されている。具体的に、第1ハスバ歯車11bのネジレ方向と、第2ハスバ歯車11cのネジレ方向と、はいずれも左方向になるように形成されている。なお、帯電ローラ用ハスバ歯車12aと潤滑剤供給ローラ用ハスバ歯車16a1とのネジレ方向は右方向であって、搬送スクリュ用ハスバ歯車15b1のネジレ方向は左方向になるように設定されている。
【0045】
このような構成により、第1ハスバ歯車11bに作用する力によって感光体ドラム11が回転軸方向にスラスト移動する方向と、第2ハスバ歯車11cに作用する力によって感光体ドラム11が回転軸方向にスラスト移動する方向と、がいずれも+X方向(装着方向奥側であり、装置本体1の駆動部116の側である。)になる。すなわち、感光体ドラム11から潤滑剤供給ローラ16a(及び、搬送スクリュ15b)に伝達される駆動力の反力を第1ハスバ歯車11bの歯面が受けると、その歯面の傾斜方向によってその反力が−X方向に作用することはなく+X方向に作用することになる。同様に、感光体ドラム11から帯電ローラ12に伝達される駆動力の反力を第2ハスバ歯車11cの歯面が受けると、その歯面の傾斜方向によってその反力が−X方向に作用することはなく+X方向に作用することになる。なお、駆動力の反力はYZ面方向(X方向に直交する方向である。)にも作用することになるが、その方向は感光体ドラム11を軸支する軸受(不図示である。)が設置されているため、その方向へのガタ(移動)は生じないことになる。
このように感光体ドラム11は、−X方向と+X方向との正逆方向に揺動することなく、+X方向のみにスラスト移動することになるため、回転軸方向の正逆方向に揺動した状態で感光体ドラム11上にて作像プロセスがおこなわれてしまって出力画像上において走査方向の画像ズレが発生する等の異常画像が生じてしまう不具合が抑止される。
【0046】
補足すると、画像形成装置1が稼働開始されると、装置本体1からプロセスカートリッジ15に駆動力が伝達されて、感光体ドラム11が+X方向にスラスト移動することになるが、感光体ドラム11の端面がサイドカバー15dのストッパ部15d3に接触してそれ以上の移動が即座に制限されるため、感光体ドラム11上で実際に作像プロセスが開始されるときには感光体ドラム11が回転軸方向に移動することがなく作像プロセスへの影響が生じないことになる。
これに対して、複数のハスバ歯車11b、11cのネジレ方向が異なる場合には、感光体ドラム11上で作像プロセスがおこなわれている間にも、感光体ドラム11が回転軸方向の正逆方向に細かく移動してしまう可能性があるため、上述したような異常画像が生じてしまうことになる。
なお、本実施の形態では、感光体ドラム11に設置された2つのハスバ歯車11b、11cのネジレ方向を左方向に統一して設定したが、2つのハスバ歯車11b、11cのネジレ方向を右方向に統一して設定することもできる。
【0047】
ここで、本実施の形態における感光体ドラム11は、先に図4を用いて説明したように、画像形成装置本体1から駆動力が伝達されるカップリング11a(駆動伝達部)が回転軸方向の一端側(図4の右側である。)に形成されている。そして、複数のハスバ歯車11b、11cに作用する力によって感光体ドラム11が回転軸方向にスラスト移動する方向が、カップリング11aが設置された側(一端側)になるように形成されている。すなわち、感光体ドラム11は、複数のハスバ歯車11b、11cに作用する力によって、装置本体1の本体カップリング115及び駆動モータ116(駆動部)の側である+X方向に移動することになる。
このような構成により、感光体ドラム11のカップリング11a(爪部11a1)と、装置本体1の本体側カップリング115(爪部115a)と、の噛み合いが深くなるために、噛み合い不良によって装置本体1側からプロセスカートリッジ15に駆動が伝達されなくなる不具合を抑止することができる。
【0048】
また、本実施の形態では、カップリング11a(駆動伝達部)に作用する力によって感光体ドラム11が回転軸方向にスラスト移動する方向も、+X方向(一端側)になるように設定している。具体的に、図5(B)に示すように、カップリング11aの爪部11a1と、本体側カップリング115の爪部115aと、が接触する接触面をYZ面に対して傾斜させて、カップリング11aの爪部11a1が本体側カップリング115の爪部115から受ける駆動力のX成分が、−X方向に作用することなく、+X方向に作用するように構成している。プロセスカートリッジ15自体は感光体ドラム11単体よりも重量が大きいため、カップリング11aに作用する力によって感光体ドラム11(プロセスカートリッジ15)が回転軸方向に大きくスラスト移動することは少ないものの、カップリング11aに作用する力によって感光体ドラム11が回転軸方向にスラスト移動する方向と、プロセスカートリッジ15において複数のハスバ歯車11b、11cに作用する力によって感光体ドラム11が回転軸方向にスラスト移動する方向と、を一致させることで、上述した異常画像の発生をさらに確実に抑止することができる。また、カップリング11a(駆動伝達部)に作用する力が、双方の爪部11a1、115aの噛み合いが深まる方向になるため、噛み合い不良によって装置本体1側からプロセスカートリッジ15に駆動が伝達されなくなる不具合を抑止することができる。
【0049】
なお、本実施の形態におけるカップリング11a及び本体側カップリング115の形態はこれに限定されることはなく、種々の形態のカップリングを用いることができる。
また、本実施の形態では、駆動伝達部としてカップリング11aを用いたが、駆動伝達部として平歯車やハスバ歯車を用いることもできる。特に、駆動伝達部として平歯車を用いた場合には、それに噛合する装置本体側の平歯車との間に、X成分に作用する力が生じないために、上述した駆動伝達部に作用する力が+X方向になるような設定が不要になる。また、駆動伝達部としてハスバ歯車を用いた場合には、それに噛合する装置本体側のハスバ歯車との間に、X成分に作用する力が生じるために、上述した駆動伝達部に作用する力が+X方向になるような設定をおこなうことが好ましい。
【0050】
また、本実施の形態におけるプロセスカートリッジ15には、図6に示すように、複数のハスバ歯車11b、11cに作用する力によって感光体ドラム11が回転軸方向にスラスト移動する方向(+X方向)の端部に、感光体ドラム11に接触してスラスト移動を制限するストッパ部15d3が形成されている。
詳しくは、ストッパ部15d3は、感光体ドラム11の一端側の端面に点接触するように、サイドカバー15dの内側に起立するように2つ(又は、3つ)設置された突起部である。このようにストッパ部15d3を設けることで、回転する感光体ドラム11の摺動抵抗を大きくすることなく、複数のハスバ歯車11b、11cに作用する力によって感光体ドラム11が+X方向に無制限にスラスト移動するのを防止することができる。
なお、本実施の形態では、ストッパ部15d3をサイドカバー15dに設置したが、ストッパ部を感光体ドラム11の端面に設置することもできるし、ストッパ部をその他の部材に設置することもできる。
【0051】
また、本実施の形態における感光体ドラム11は、複数のハスバ歯車11b、11cに作用する力によって感光体ドラム11が回転軸方向にスラスト移動する方向が、プロセスカートリッジ15の装着方向奥側になるように形成されている。すなわち、画像形成装置本体1に対して回転軸方向に着脱されるプロセスカートリッジ15の装着方向と、複数のハスバ歯車11b、11cに作用する力によって感光体ドラム11が回転軸方向にスラスト移動する方向と、が一致するように設定している。
図7(A)及び図7(B)に示すように、本実施の形態では、プロセスカートリッジ15の着脱動作によって感光体ドラム11と装置本体1の中間転写ベルト17とが摺接して双方の部材11、17にダメージが生じるのを防止するために、装着時においてプロセスカートリッジ15が中間転写ベルト17から離間した位置で+X方向に移動した後に、位置決めピン111に嵌合する直前の位置で中間転写ベルト17に近接して+X方向に移動して位置決めされるように、案内レール110を形成している。そのため、プロセスカートリッジ15と本体側カップリング115(又は、位置決めピン111)との嵌合の深さを大きく設定しにくくなっている。これに対して、本実施の形態では、プロセスカートリッジ15が装置本体1に装着された後に、装置が稼働されると複数のハスバ歯車11b、11cに作用する力によって感光体ドラム11が+X方向にスラスト移動するように構成しているため、プロセスカートリッジ15と本体側カップリング115とがその後に深く嵌合することになり、噛み合い不良によって装置本体1側からプロセスカートリッジ15に駆動が伝達されなくなる不具合を抑止することができる。
なお、プロセスカートリッジ15を装置本体1から取り出すときには、感光体ドラム11を逆回転させて感光体ドラム11(プロセスカートリッジ15)を−X方向に移動させる力を作用させることで、プロセスカートリッジ15の離脱時の操作性を向上させることができる。
【0052】
なお、本発明の適用は、本実施の形態におけるプロセスカートリッジ15の構成に限定されることなく、種々の構成のものに対して適用することができるので、その変形例を以下に3つほど説明する。
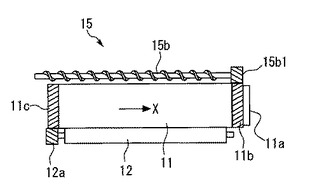
図8に示す変形例1は、感光体ドラム11にネジレ方向が左方向に設定された3つのハスバ歯車11b、11c、11dが設置されている。そして、搬送スクリュ15bは、潤滑剤供給ローラ用ハスバ歯車16a1を介して感光体ドラム11によって駆動伝達されるのではなくて、感光体ドラム11の第3ハスバ歯車11dから搬送スクリュ用ハスバ歯車15b1に直接的に駆動力が伝達される。
図9に示す変形例2は、潤滑剤供給ローラ16aが設置されておらず、感光体ドラム11の第1ハスバ歯車11bから搬送スクリュ15bの搬送スクリュ用ハスバ歯車15b1に直接的に駆動力が伝達される。
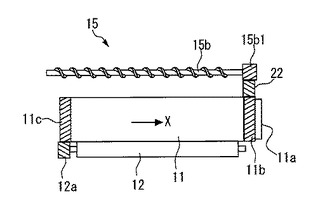
図10に示す変形例3は、潤滑剤供給ローラ16aが設置されておらず、感光体ドラム11の第1ハスバ歯車11bからアイドラ歯車22(ハスバ歯車である。)を介して搬送スクリュ15bの搬送スクリュ用ハスバ歯車15b1に駆動力が伝達される。
そして、これらの場合であっても、感光体ドラムに設置した複数のハスバ歯車のネジレ方向をすべて同じ方向に設定することで、本実施の形態のものと同様の効果を得ることができる。
【0053】
以上説明したように、本実施の形態によれば、感光体ドラム11(像担持体)から帯電ローラ12や潤滑剤供給ローラ16a等(複数の従動回転体)への駆動伝達をそれぞれおこなう歯車として複数のハスバ歯車11b、11cを用いた場合であっても、感光体ドラム11に設置された複数のハスバ歯車11b、11cのネジレ方向がすべて同じ方向になるように設定しているため、複数のハスバ歯車11b、11cに作用する力によって感光体ドラム11が回転軸方向にスラスト移動する方向が定まらないという問題が生じるのを防止することができる。
【0054】
なお、本実施の形態では、作像部における感光体ドラム11、帯電ローラ12、クリーニングブレード15a(クリーニング部)、潤滑剤供給装置16を一体化してプロセスカートリッジ15を構成して、作像部のコンパクト化とメンテナンス作業性の向上とを図っている。
これに対して、現像装置13をもプロセスカートリッジ15の構成部材とすることもできる。その場合、現像ローラ13a等を従動回転体として感光体ドラム11に設置したハスバ歯車を介して従動回転することができる。そして、その場合に、感光体ドラム11に設置するハスバ歯車のネジレ方向も、その他のハスバ歯車のネジレ方向と一致するように形成されることになる。このような場合にも、本実施の形態と同様の効果を得ることができる。
また、本実施の形態では、1成分現像剤を用いる1成分現像方式の現像装置13が搭載された画像形成装置に対して本発明を適用したが、2成分現像剤を用いる2成分現像方式の現像装置13が搭載された画像形成装置に対しても当然に本発明を適用することができる。
【0055】
また、本実施の形態では、中間転写ベルト17を用いたタンデム型のカラー画像形成装置に対して本発明を適用した。これに対して、転写搬送ベルトを用いたタンデム型のカラー画像形成装置(転写搬送ベルトに対向するように並設された複数の感光体ドラム上のトナー像を、転写搬送ベルトによって搬送される記録媒体上に重ねて転写する装置である。)や、モノクロ画像形成装置等、その他の画像形成装置に対しても、本発明を適用することができる。そして、このような場合であっても、本実施の形態と同様の効果を得ることができる。
【0056】
また、本実施の形態では、感光体ドラム11に設置された複数のハスバ歯車11b、11cが、複数の従動回転体12、16aにそれぞれ設置されたハスバ歯車12a、16a1にそれぞれ直接的に噛合するように構成した。これに対して、先に図10を用いて説明した変形例3を参考にして、感光体ドラム11に設置された複数のハスバ歯車11b、11cが、複数の従動回転体12、16aにそれぞれ設置されたハスバ歯車12a、16a1のうち一部又は全部に対して、アイドラ歯車を介して噛合するように構成することもできる。そして、このような場合であっても、本実施の形態と同様の効果を得ることができる。
【0057】
なお、本発明が本実施の形態に限定されず、本発明の技術思想の範囲内において、本実施の形態の中で示唆した以外にも、本実施の形態は適宜変更され得ることは明らかである。また、前記構成部材の数、位置、形状等は本実施の形態に限定されず、本発明を実施する上で好適な数、位置、形状等にすることができる。
【符号の説明】
【0058】
1 画像形成装置本体(装置本体)、
11、11Y、11M、11C、11B 感光体ドラム(像担持体)、
11a カップリング(駆動伝達部)、
11b 第1ハスバ歯車、 11c 第2ハスバ歯車、
12 帯電ローラ(従動回転体)、
12a 帯電ローラ用ハスバ歯車、
15 プロセスカートリッジ、
15b 搬送スクリュ(従動回転体)、
15b1 搬送スクリュ用ハスバ歯車、
15d3 ストッパ部、
16a 潤滑剤供給ローラ(従動回転体)、
16a1 潤滑剤供給ローラ用ハスバ歯車、
17 中間転写ベルト、
100 案内レール、
110 本体側板、
111 位置決めピン、
115 本体側カップリング。
【先行技術文献】
【特許文献】
【0059】
【特許文献1】特開平2−166470号公報
【特許請求の範囲】
【請求項1】
画像形成装置本体に対して着脱可能に設置されるプロセスカートリッジであって、
前記画像形成装置本体から駆動力が伝達されて所定方向に回転する像担持体と、
前記像担持体から駆動力がそれぞれ伝達されて所定方向に従動回転する複数の従動回転体と、
を備え、
前記像担持体は、前記複数の従動回転体にそれぞれ設置されたハスバ歯車に直接的に又はアイドラ歯車を介してそれぞれ噛合するとともに、それぞれのネジレ方向がすべて同じ方向になるように形成された複数のハスバ歯車が設置されたことを特徴とするプロセスカートリッジ。
【請求項2】
前記像担持体は、前記画像形成装置本体から駆動力が伝達される駆動伝達部が回転軸方向の一端側に形成され、前記複数のハスバ歯車に作用する力によって当該像担持体が回転軸方向にスラスト移動する方向が前記一端側になるように形成されたことを特徴とする請求項1に記載のプロセスカートリッジ。
【請求項3】
前記駆動伝達部に作用する力によって前記像担持体が回転軸方向にスラスト移動する方向が前記一端側になるように形成されたことを特徴とする請求項2に記載のプロセスカートリッジ。
【請求項4】
前記画像形成装置本体に対して回転軸方向に着脱され、
前記像担持体は、前記複数のハスバ歯車に作用する力によって当該像担持体が回転軸方向にスラスト移動する方向が装着方向奥側になるように形成されたことを特徴とする請求項1〜請求項3のいずれかに記載のプロセスカートリッジ。
【請求項5】
前記複数のハスバ歯車に作用する力によって前記像担持体が回転軸方向にスラスト移動する方向の端部に、前記像担持体に接触してスラスト移動を制限するストッパ部が形成されたことを特徴とする請求項1〜請求項4のいずれかに記載のプロセスカートリッジ。
【請求項6】
請求項1〜請求項5のいずれかに記載のプロセスカートリッジを前記画像形成装置本体に備えたことを特徴とする画像形成装置。
【請求項1】
画像形成装置本体に対して着脱可能に設置されるプロセスカートリッジであって、
前記画像形成装置本体から駆動力が伝達されて所定方向に回転する像担持体と、
前記像担持体から駆動力がそれぞれ伝達されて所定方向に従動回転する複数の従動回転体と、
を備え、
前記像担持体は、前記複数の従動回転体にそれぞれ設置されたハスバ歯車に直接的に又はアイドラ歯車を介してそれぞれ噛合するとともに、それぞれのネジレ方向がすべて同じ方向になるように形成された複数のハスバ歯車が設置されたことを特徴とするプロセスカートリッジ。
【請求項2】
前記像担持体は、前記画像形成装置本体から駆動力が伝達される駆動伝達部が回転軸方向の一端側に形成され、前記複数のハスバ歯車に作用する力によって当該像担持体が回転軸方向にスラスト移動する方向が前記一端側になるように形成されたことを特徴とする請求項1に記載のプロセスカートリッジ。
【請求項3】
前記駆動伝達部に作用する力によって前記像担持体が回転軸方向にスラスト移動する方向が前記一端側になるように形成されたことを特徴とする請求項2に記載のプロセスカートリッジ。
【請求項4】
前記画像形成装置本体に対して回転軸方向に着脱され、
前記像担持体は、前記複数のハスバ歯車に作用する力によって当該像担持体が回転軸方向にスラスト移動する方向が装着方向奥側になるように形成されたことを特徴とする請求項1〜請求項3のいずれかに記載のプロセスカートリッジ。
【請求項5】
前記複数のハスバ歯車に作用する力によって前記像担持体が回転軸方向にスラスト移動する方向の端部に、前記像担持体に接触してスラスト移動を制限するストッパ部が形成されたことを特徴とする請求項1〜請求項4のいずれかに記載のプロセスカートリッジ。
【請求項6】
請求項1〜請求項5のいずれかに記載のプロセスカートリッジを前記画像形成装置本体に備えたことを特徴とする画像形成装置。
【図1】


【図2】
【図3】
【図4】
【図5】
【図6】
【図7】
【図8】
【図9】
【図10】
【図2】
【図3】
【図4】
【図5】
【図6】
【図7】
【図8】
【図9】
【図10】
【公開番号】特開2013−109195(P2013−109195A)
【公開日】平成25年6月6日(2013.6.6)
【国際特許分類】
【出願番号】特願2011−254733(P2011−254733)
【出願日】平成23年11月22日(2011.11.22)
【出願人】(000006747)株式会社リコー (37,907)
【Fターム(参考)】
【公開日】平成25年6月6日(2013.6.6)
【国際特許分類】
【出願日】平成23年11月22日(2011.11.22)
【出願人】(000006747)株式会社リコー (37,907)
【Fターム(参考)】
[ Back to top ]