
ヘッドアップディスプレイ
【課題】表示位置が車両の前後方向に移動したときに、これに関連して有効な各種の機能性を付加し、表示情報に対して運転に関する警告などの表示内容を感覚的に分かりやすくさせることなどができるようにしたヘッドアップディスプレイを提供する。
【解決手段】第1の表示デバイス20Aと、第2の表示デバイス20Bと、第1の表示デバイス20Aと第2の表示デバイス20Bそれぞれから入射した光を同一方向に出射する同一光軸手段30と、同一光軸手段30から入射した光に基づいて、第1の表示デバイス20Aと第2の表示デバイス20Bが出射した光によって形成されるそれぞれの像を拡大するとともに、それらの像を重畳して結像する拡大像形成手段50と、第1の表示デバイス20A及び第2の表示デバイス20Bの少なくとも一方を光軸方向に沿って移動させる移動手段と、を備える。
【解決手段】第1の表示デバイス20Aと、第2の表示デバイス20Bと、第1の表示デバイス20Aと第2の表示デバイス20Bそれぞれから入射した光を同一方向に出射する同一光軸手段30と、同一光軸手段30から入射した光に基づいて、第1の表示デバイス20Aと第2の表示デバイス20Bが出射した光によって形成されるそれぞれの像を拡大するとともに、それらの像を重畳して結像する拡大像形成手段50と、第1の表示デバイス20A及び第2の表示デバイス20Bの少なくとも一方を光軸方向に沿って移動させる移動手段と、を備える。
【発明の詳細な説明】
【技術分野】
【0001】
本発明は、ヘッドアップディスプレイに係り、特に、運転状況に応じて表示される位置を可変することができるようにしたヘッドアップディスプレイに関する。
【背景技術】
【0002】
ヘッドアップディスプレイ(以下、HUDと称す)は、飛行機操縦者や自動車運転者が、視線をインストルメントボードに移すというわき見を除去するため、計器板の表示を前方の視野の一部に重ねて表示しようとする装置である。
【0003】
このようなHUDとして、飛行シミュレータ、宇宙ドッキングシミュレータ、船舶操船シミュレータ、自動車走行シミュレータ等の各種シミュレータの視界表示装置、あるいは各種遊戯装置のディスプレイ等の映像表示装置などに応用されている。
【0004】
例えば、上記の各種シミュレータでは、表示される映像が実際の航空機等の場合と同様無限遠にあるように表示されることが望ましい。映像表示面としてCRTの表示面をそのまま利用したり、ビデオプロジェクタによりスクリーンに投映して表示したのでは、映像は表示面の位置にあるようにしか表示されない。
【0005】
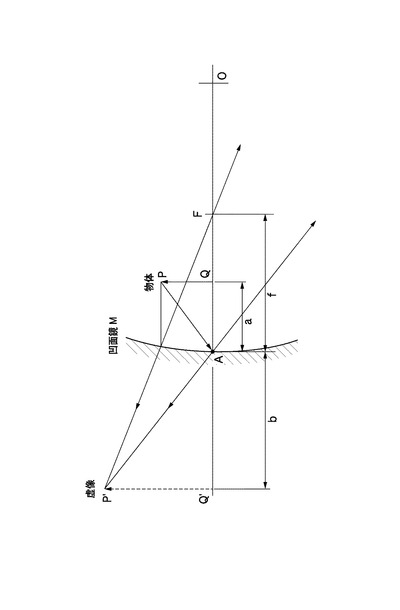
この点を解決する手段として、凹面鏡を利用した無限遠表示装置であるHUDが知られている。図12は、凹面鏡による無限遠表示の原理を示す図である。凹面鏡Mの球心をO、焦点位置をFとすると、物体PQが焦点位置Fより凹面鏡M側にあると、凹面鏡Mによる像はP′Q′で示すように正立虚像となる。
【0006】
この虚像の位置及び大きさは、物体PQの位置により変化し、物体PQの位置がFAの中にある場合(Aは凹面鏡Mと光軸の交点)、すなわち図においてa<fの場合、虚像の位置bは、
b=af/(a−f) ・・・(1)
となり、aをfに限り無く接近させると、bは無限遠に近づく。
一方、その像の大きさP′Q′は、
P′Q′=PQ×|f|/|a−f| ・・・ (2)
となり、同様にaをfに限り無く接近させると、虚像の大きさP′Q′は無限大に近づく。
【0007】
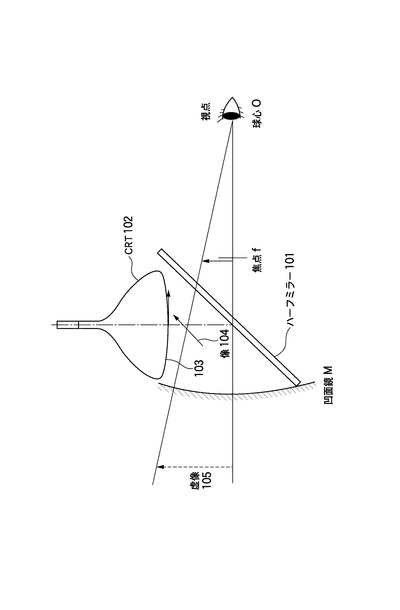
しかし、同図に示す如く、物体PQが凹面鏡Mの光軸上にある場合は、虚像P′Q′を球心Oから見ようとしても、物体PQが邪魔になって見えない。そこで、図13に示すように、凹面鏡Mとその焦点fとの間に、凹面鏡Mの光軸に45°の角度で交差するようにハーフミラー101を設け、このハーフミラー101で光軸方向に反射するように例えばCRT102の画像面103がくるようにCRT102を配置している。このようにすることにより、CRT102の画像面103上の映像104は、ハーフミラー101で反射し、凹面鏡Mにより虚像を結びハーフミラー101を透過して球心Oを視点として観察することが可能となる。CRT102の代りに液晶ディスプレイや投影スクリーン等を使用することもできる。又、ハーフミラー101は凹面鏡Mの光軸と必ずしも45°で交らなくてもよい。
【0008】
ところが、従来、上記構成のHUDの映像表示面、例えばCRT102の画像面103はシミュレータの本体に対して固定されており、視点から見る虚像105の距離は無限遠又はこれに近い一定の距離となっていた。
【0009】
一般に、航空機の操縦席から外の視界を見た場合、前方の滑走路や山なみ、雲などは遥か遠方に見え、手前下方の滑走路やヘリコプタから下方に見た地上付近の下方視界は近距離に見える。さらに、宇宙ドッキングシミュレータや宇宙用マニピュレータ装置のシミュレータ等では対象物との実距離と視距離とが対応した視界表示が特に必要である。
【0010】
そこで、上記の要請に応じて、視界の視距離を実機の視界の視距離や対象物の実距離に対応して、無限遠から至近距離まで可変とすることのできるHUDが提案されている(例えば、特許文献1参照)。
【0011】
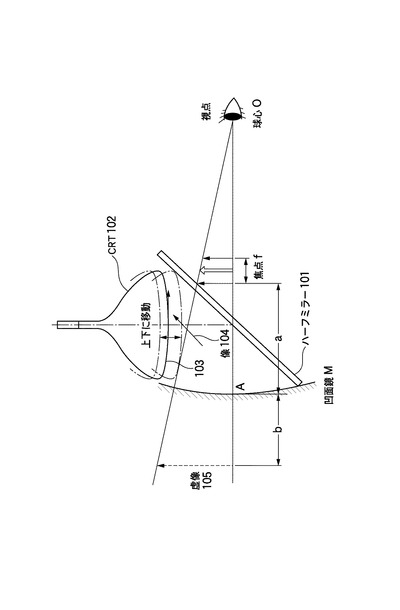
即ち、図14に例示した構成のHUDにあっては、CRT102等の映像表示手段が、その画像面103がハーフミラー101で凹面鏡Mの光軸方向に反射されるべき光線の光軸上を凹面鏡Mの焦点に対応する位置と、それよりハーフミラー101に近接した位置との間を変位可能であるように構成されている。
【0012】
このように、上記の構成のHUDでは、CRT102等の映像表示手段を、その画像面103が凹面鏡Mの焦点に対応する位置と、それよりハーフミラー101に近接した位置との間を変位可能としたので、虚像105の結像位置を無限遠の位置から視点にある程度近接した位置との間に変化させることが可能となる。したがって、表示される映像の内容に応じて、対象物の実距離や視界の視距離に応じて映像表示手段を移動させることにより、虚像位置を対象物の実距離や視界の視距離に合せることができる。
【0013】
ところで、自動車等の分野においても、フロントガラスをコンバイナとして使用するヘッドアップディスプレイにおける虚像の結像位置を変更可能とするコントロール装置を備えたHUDであって、虚像の遠近視点調節と大小調節とを車速の関係で便利に成し得るようにしたものが提案されている(例えば、特許文献2参照)。
即ち、このHUDは、凹面鏡201をターニングミラーとして用い、該凹面鏡201の虚像点を出現させる範囲内において、物点としての表示器を、手動又は自動もしくはこれらの組み合わせによって移動させる表示器移動手段を設けたものであって、このような虚像のコントロール装置によれば、車速に応じて表示される結像位置までの距離を自動でコントロールすることと、個人差によっては車速に応じた結像距離を手動操作により変更できる。
【0014】
これについて、以下に具体的に説明する。
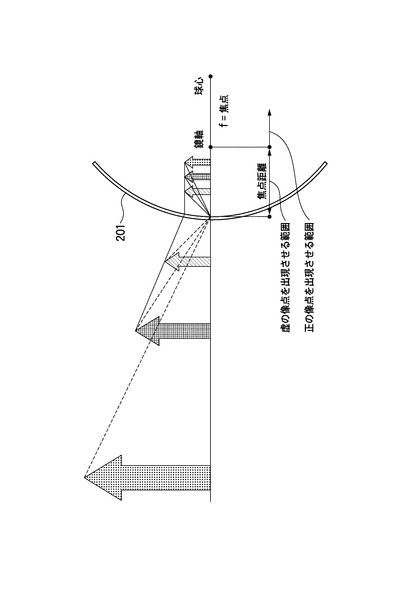
周知のように球面鏡に関する結像の式が、広く知られている。この結像の式の関係に基づき、凹面鏡の虚像点を出現させる範囲内で物点としての表示器を移動させることにより、出現する虚像の焦点距離とその大きさをコントロールする原理を図15及び図16に示す。
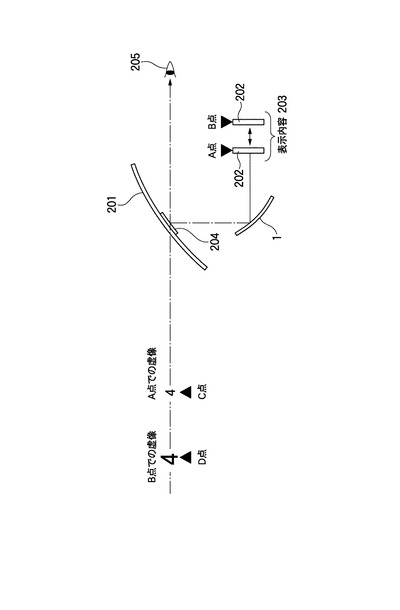
即ち、これらの図に示すように、凹面鏡201が虚像点を出現させる範囲内で、表示器202の表示内容203を移動させることで、コンバイナ204が反射する虚像の焦点距離とその大きさをコントロールすることができる。
【0015】
ここで、表示内容203を図16に示す位置に配置させる場合について、考えてみる。該表示内容203の位置は凹面鏡201の焦点距離fの範囲内であるところのA点であるとする。A点に表示内容203が配置されると、虚像点Cにおいて表示内容203の虚像が現れることとなる。そして、この表示内容203の虚像は、凹面鏡201で拡大され、コンバイナ204に反射されてアイ・ポイント205に入ることとなるが、人間の目は表示内容203があたかもC点に存在するかのようによう視覚する。ここで、表示内容203を図16で示すように、A点からB点に移動させると、虚像点はD点となり、前述のC点の虚像に比べると像は遠方となり大となる。
【0016】
即ち、これは、鏡面に表示内容203が近づくほど凹面鏡201の作用で現れる虚像が小さくなるからである。従って、B点の方がA点よりも大型の虚像をコンバイナ204が写し出すことになる。コンバイナ204からの虚像を見る運転者にとって、高速運転の時には見るポイントも遠視点となり、表示内容203が遠方にある方が都合が良く、又、低速運転時は見るポイントも近視点なので表示内容203は近くにある方が都合が良い。図16に示すように、表示器202がA点にある場合には、表示内容203は近視点にあり、かつ、表示内容203は小型となる。又、表示器202がB点にある場合には、表示内容203は遠視点にあり、かつ、表示内容203は大型となる。
【0017】
このように、上記のような構成のHUDでは、遠近視点の虚像の役割に着目して、従来の虚像が単に遠方にあるだけという欠点を除去するようにしたものである。
【先行技術文献】
【特許文献】
【0018】
【特許文献1】特開平6−27411号公報
【特許文献2】特開平6−115381号公報
【発明の概要】
【発明が解決しようとする課題】
【0019】
ところで、上述の2種類のタイプのHUDであっては、いずれのものであっても、対象物の実距離や視界の視距離に応じて映像表示手段を移動させる構成である。ところが、対象物の実距離や視界の視距離に応じて単に映像表示手段を移動させるだけの構成では、例えば、視点が近くなると表示画像も小さくさせるだけであるので、表示される文字や記号等の情報を読み取りにくくなるなど、表示情報の読み取りが困難になる虞がある。
【0020】
本発明は、上述した事情に鑑みてなされたものであり、その目的は、表示位置が乗り物の前後方向に移動したときに、これに関連して有効な各種の機能性を付加し、表示情報に対して運転に関する警告などの表示内容を感覚的に分かりやすくさせることなどができるようにしたヘッドアップディスプレイを提供することにある。
【課題を解決するための手段】
【0021】
前述した目的を達成するために、本発明に係るヘッドアップディスプレイは、下記(1)〜(2)を特徴としている。
(1) 第1の表示デバイスと、
前記第1の表示デバイスとは異なる位置に設置された第2の表示デバイスと、
前記第1の表示デバイスと前記第2の表示デバイスそれぞれから入射した光を同一方向に出射する同一光軸手段と、
前記同一光軸手段から入射した光に基づいて、前記第1の表示デバイスと前記第2の表示デバイスが出射した光によって形成されるそれぞれの像を拡大するとともに、それらの像を重畳して結像する拡大像形成手段と、
前記第1の表示デバイス及び前記第2の表示デバイスの少なくとも一方を光軸方向に沿って移動させる移動手段と、
を備えること。
(2) 上記(1)のヘッドアップディスプレイであって、
前記移動手段は、前記第1の表示デバイスを光軸方向に沿って移動させる第1の移動手段と、前記第2の表示デバイスを光軸方向に沿って移動させる第2の移動手段と、を有する、
こと。
【0022】
上記(1)または(2)の構成のヘッドアップディスプレイによれば、表示位置が乗り物の前後方向に移動したときに、これに関連して有効な各種の機能性を付加し、表示情報に対して運転に関する警告などの表示内容を感覚的に分かりやすくさせることが可能になる。
【発明の効果】
【0023】
本発明のヘッドアップディスプレイによれば、乗り物の速度に応じて各移動手段を動作させることで、第1の表示デバイスが形成する虚像の大きさと、第2の表示デバイスが形成する虚像の大きさとの倍率の割合を変更させるように構成したので、表示位置が乗り物の前後方向に移動したときに、これに関連して有効な各種の機能性を付加し、表示情報に対して運転に関する警告などの表示内容を感覚的に分かりやすくさせることなどができるようにした、ヘッドアップディスプレイを提供することが可能になる。
【0024】
以上、本発明について簡潔に説明した。更に、以下に説明される発明を実施するための形態を添付の図面を参照して通読することにより、本発明の詳細は更に明確化されるであろう。
【図面の簡単な説明】
【0025】
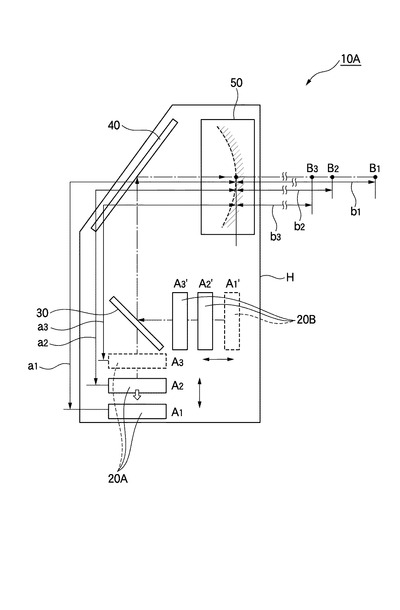
【図1】本発明の第1の実施形態に係るヘッドアップディスプレイを示す概略構成図である。
【図2】本発明のヘッドアップディスプレイの基本原理を示す説明図である。
【図3】本発明のヘッドアップディスプレイの表示デバイスと形成される拡大虚像との位置関係を示す光学的模式図である。
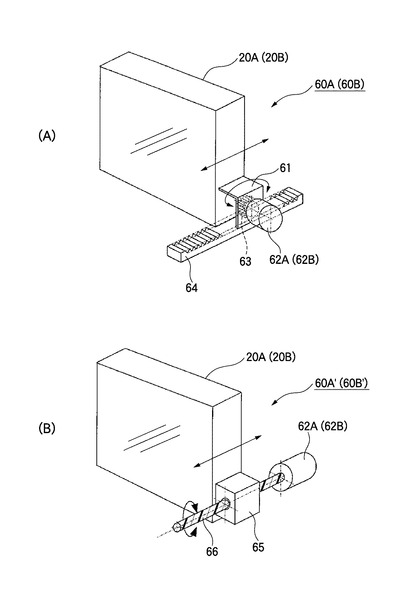
【図4】(A)は本発明の第1の実施形態に係るヘッドアップディスプレイに備えた移動手段の具体例を示す構成図、(B)はその移動手段の変形例を示す構成図である。
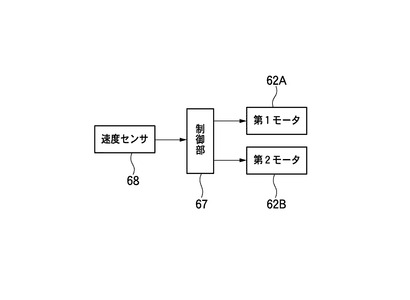
【図5】図4に示す移動手段のモータの制御に用いる電気的な構成を示すブロック図である。
【図6】本発明の第1の実施形態の作用を示す説明図である。
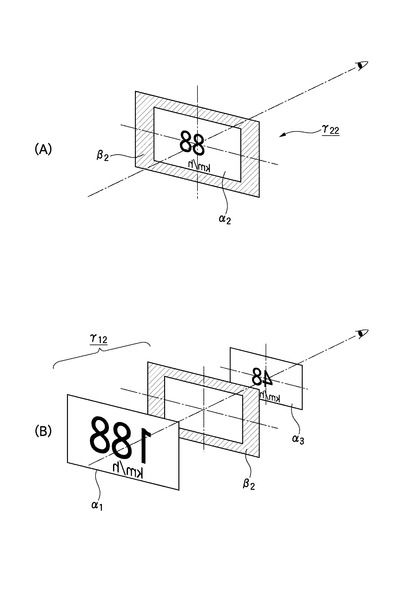
【図7】(A)は本発明の第1の実施形態に係るヘッドアップディスプレイが形成する法定速度で走行時の表示画像を示す模式原理図、(B)は高速走行時の表示画像を示す模式原理図である。
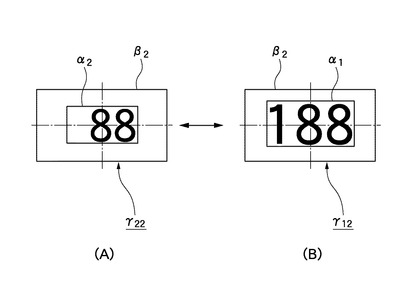
【図8】(A)及び(B)は本発明の第1の実施形態における、枠情報(β2)に対する速度情報(α2)の大きさの割合を変更させたときの双方の表示情報の大きさの関係を示す説明図である。
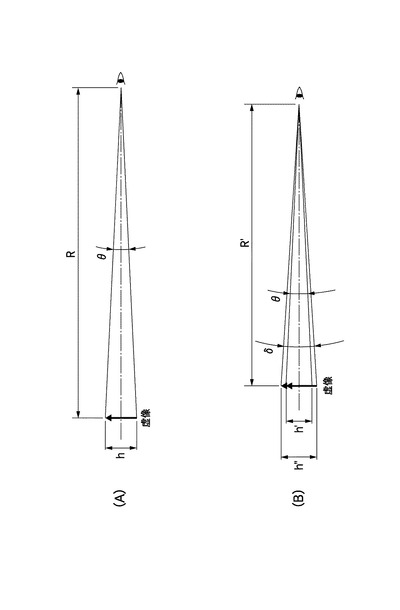
【図9】(A)及び(B)は本発明の第1の実施形態における、視差角と表示される成立虚像の最小大きさとの関係を示す原理図である。
【図10】本発明の第2の実施形態に係るヘッドアップディスプレイを示す概略構成図である。
【図11】本発明の第3の実施形態に係るヘッドアップディスプレイを示す概略構成図である。
【図12】従来のHUDの原理を示す光学的説明図である。
【図13】従来のHUDの構成を示す説明図である。
【図14】従来の表示情報である虚像の結像位置を変更可能とするHUDの構成を示す説明図である。
【図15】虚像の結像位置を変更可能とするコントロール装置を備えた従来のHUDの原理を示す凹面鏡での光路図である。
【図16】そのHUDでの結像位置の移動の関係を示す説明図である。
【発明を実施するための形態】
【0026】
以下、本発明の実施形態について、添付図面を参照しながら詳細に説明する。
(第1の実施形態)
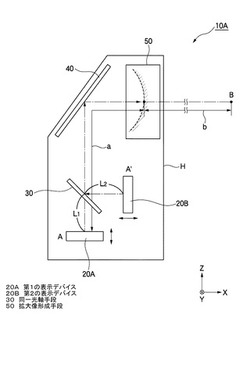
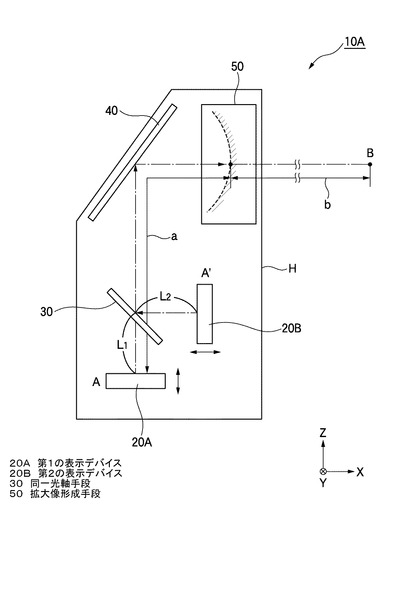
図1は、本発明の第1の実施形態に係るヘッドアップディスプレイ10Aを示すものであり、後述する拡大像形成手段50で形成した拡大虚像を運転方向である図示外のフロントガラス先の運転者の視野内に表示させるようになっている。
【0027】
このヘッドアップディスプレイ10Aには、第1の表示デバイス20Aと、第2の表示デバイス20Bと、同一光軸手段30と、偏向ミラー40と、拡大像形成手段50と、第1の移動手段60A及び第2の移動手段60Bと、を備えたハウジングHが、図示外の車体内部に搭載されている。尚、本実施形態の場合には図示外のフロントガラスの前方の視界の中に、デジタル画像(虚像)としてスピードメータが表示される。
【0028】
第1の表示デバイス20Aは、本実施形態の場合、LED光源などをバックライトとして用いた液晶表示装置(以下、「第1LCD」とよぶ)で構成されている。本実施形態の第1の表示デバイス20Aは、現在速度をデジタル表示(α;図2参照)させるようになっており、図示外の速度センサからの出力信号を入力すると、この信号に対応した速度値をデジタル表示させるようになっている。また、この第1の表示デバイス20Aには、後述する第1の移動手段60A(図4参照)が付設されており、走行速度に応じて同一光軸手段30との間の距離(L1)を変化させることによって、デジタル表示される速度値の数字の大きさを変更可能になっている。
【0029】
第2の表示デバイス20Bは、第1の表示デバイス20Aと同様の液晶表示装置(以下、「第2LCD」とよぶ)で構成されている。本実施形態の第2の表示デバイス20Bは、デジタル速度表示(α)の外側を取り囲む枠(β;図2参照)を表示させるようになっている。また、この第2の表示デバイス20Bにも、後述する第2の移動手段60Bが付設されており、走行速度に応じて同一光軸手段30との間の距離(L2)を変化させることで、走行速度に対応して枠の大きさを変更可能になっている。なお、本実施形態では、各表示デバイスにそれぞれ移動手段が付設されているが、少なくともいずれか一方に付設させた構成であってもよい。
【0030】
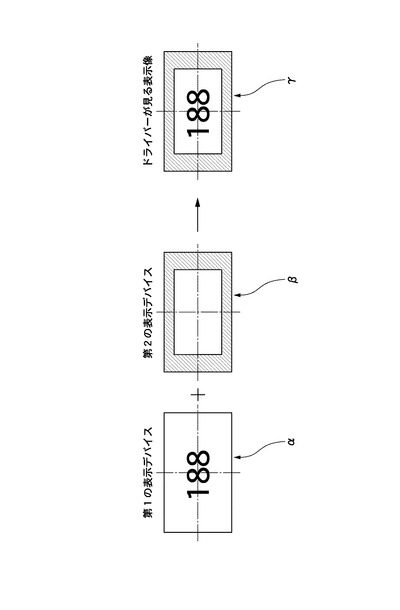
同一光軸手段30は、第1の表示デバイス20Aと第2の表示デバイス20Bそれぞれから入射した光を同一方向に出射するものである。これによって、同一光軸手段30から出射された光に基づく虚像は、図2に示すようなデジタル速度表示(α)と枠(β)が重畳された表示画像(γ)として結像されるようになっている。本実施形態の同一光軸手段30は、ハーフミラーで構成されており、第1の表示デバイス20Aで形成されて出射する表示情報に対応した波形の光のうち、同一光軸手段30に垂直入射後に透過する第1波形の光と、第2の表示デバイス20Bで形成されて出射する表示情報に対応した波形の光のうち、同一光軸手段30に入射した後に反射する第2波形の光とを干渉させ、偏向ミラー40へ向けて進行させるようになっている。
【0031】
尚、本実施形態では、同一光軸手段30をハーフミラーで構成したが、特にこれに限定されるものではない。例えば第1の表示デバイス20Aから出射する特定偏光面(P偏光)の第1の波形を所定の高い割合で透過させるとともに、第2の表示デバイス20Bから出射し第1の波形とは偏光面が直交する特定偏光面(S偏光)の第2の波形を所定の高い割合で反射させるPBS(偏光ビームスプリッタ)などで構成してもよい。また、これ以外に、例えば特定波長の光を非常に高い割合で選択的に透過させるとともに、特定波長の光を非常に高い割合選択的にで反射させる、多層膜フィルタなどの透過波長選択手段で構成してもよい。
【0032】
偏向ミラー40は、同一光軸手段30が出射する光路の方向を90度偏向させることで、狭いスペース内で光路長を稼ぐことができるようにするとともに、各種の光学素子をハウジングHの内部スペースにコンパクトに収容させるようになっている。これにより、ハウジングHの小型化を図ることで狭い車内での設置に好適なものとなっている。なお、この偏向ミラー40は、本実施形態では必要のために設置されているものであるが、後述する第2の実施形態の場合のように、特に本発明では必須のものではない。
【0033】
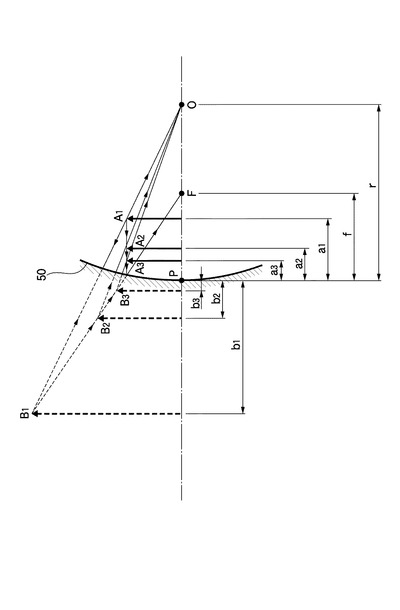
拡大像形成手段50は、同一光軸手段30が出射した光を入射することによって、第1の表示デバイス20Aと第2の表示デバイス20Bが出射した光によって形成されるそれぞれの像を拡大するとともに、それらの像を重畳して結像するものである。本実施形態の拡大像形成手段50は、図3に示すように、焦点距離がf、球面半径がrの凹面鏡(これ以外に、例えば拡大機能を有する光学素子を付設した、非球面ミラーなどでもよい)で構成されており、第1の表示デバイス20A(又は第2の表示デバイス20B)から拡大像形成手段50までの距離、つまり物体距離をa1(図1参照)、拡大像形成手段50から結像(虚像)点までの距離、つまり像距離をb1(図1参照)とすると、よく知られた反射鏡の結像公式、
1/a1 +1/b1 =1/f(=2/r) ・・・(3)
が成立する。
【0034】
従って、本実施形態の拡大像形成手段50でも、背景技術の欄でも説明したように、鏡面と焦点との間に物点を設置する場合には正立虚像が形成されるとともに、その虚像が物点に設置した物体の大きさよりも大きくなることを利用し、第1の表示デバイス20A(又は第2の表示デバイス20B)を鏡面と焦点との間に設置させることで、拡大像形成手段50である凹面鏡の背後(図1では+X方向)、つまり運転手の視点であるフロントガラスの先の空間に、第1の表示デバイス20A(又は第2の表示デバイス20B)における表示画像よりも大きな虚像の画像を形成させるものである。
【0035】
第1の移動手段60Aは、第1の表示デバイス20Aを、光軸方向に沿って前後に移動するためのものであり、本実施形態のヘッドアップディスプレイ10Aを搭載する自動車の速度に応じて動作させることで、第1の表示デバイスが形成する虚像の大きさを変更させる。本実施形態の第1の移動手段60Aは、図4に示すように、第1の表示デバイス20Aを構成する第1LCDの本体ケーシングに設けたブラケット61に固定した第1モータ62Aと、この第1モータ62Aの出力軸に固着したピニオン63と、ヘッドアップディスプレイ10AのハウジングH内部(例えば床面)に固設した、ピニオン63が噛合するラック64と、を備えている。
【0036】
また、このモータ62は、図5に示す制御部67と接続されており、この制御部67では、速度センサ68からの出力信号を入力すると、制御部67から車の速さに応じた制御信号が第1モータ62Aに出力され、第1LCDを所定の範囲内で移動させるようになっている。
即ち、この第1モータ62Aは、第1の表示デバイス20Aを構成する第1LCDの本体ケーシングが許容される移動範囲は、図3に示すように、物体距離a(a1〜a3)が許容される次式の範囲、
0<a<f ・・・(4)
と同一である。つまり、第1LCDの本体ケーシングの移動は、最大でも上の(4)式の範囲内であって、具体的には、拡大像形成手段50である凹面鏡位置(P点)とその焦点位置(F点)との2点間の範囲内に制限されている。
【0037】
第2の移動手段60Bも、第1の移動手段60Aと同様の構成となっており、図5に示すように、制御部67の制御信号により第2LCDの移動動作を行うものであるが、この第2LCDの移動動作は第1LCDの移動動作、つまり移動速度或いは移動距離が(原則として)同じにはならないように動作させる場合が多い。
【0038】
尚、本実施形態では、第1の移動手段60A及び第2の移動手段60Bの具体的な機構として、ラックピニオンを用いたが、これ以外に、例えば図4(B)に示すような、ボールねじを用いた機構で構成してもよい。即ち、このボールねじ機構では、ハウジングH内部に固設した第1モータ62A(又は第2モータ62B)と、第1LCD(又は第2LCD)の本体ケーシングに固設した螺合部材65と、第1モータ62A(又は第2モータ62B)の出力軸と一体に連結されて螺合部材65に切られた雌ねじに螺合するボールねじ部材66とを備えており、第1LCD(又は第2LCD)の本体ケーシングの底部がヘッドアップディスプレイ10AのハウジングH内部(例えば床部)に沿ってスライドするような構成となっている。
【0039】
次に、本発明の実施形態に係るヘッドアップディスプレイ10Aの作用について説明する。
初めに、例えばヘッドアップディスプレイ10Aを搭載している車が、高速道路上を所定の速度(ACC(adaptive cruise control)の設定速度)である法定速度(例えば、88km/h)の範囲内で走行しているものと仮定する。この場合には、速度センサ68からその速度(88km/h)に応じた所定の出力信号が制御部67に入力する。そして、この出力信号を入力した制御部67からは、駆動用の制御信号が第1の移動手段60Aの第1モータ62A及び第2の移動手段60Bの第2モータ62Bへそれぞれ出力され、第1の表示デバイス20Aである第1LCD及び第2の表示デバイス20Bである第2LCDが所定位置に移動する。
【0040】
即ち、図6において、例えば、第1LCDは第2物点位置(A2)、つまり拡大像形成手段50である凹面鏡から物体距離a2に移動する。これにより、図3において、第2物点位置(A2)にある第1LCDから出射する速度情報(88km/h)に関する第1の波形は、同一光軸手段30であるハーフミラーを所定割合で透過した後の光路が偏向ミラー40で90度偏向(折曲)され、拡大像形成手段50である凹面鏡に向けて進行する。
【0041】
そして、凹面鏡に入射すると、後方、つまり車のフロントガラス前方の運転者の比較的前方の視野内の第2虚像点位置(B2)に中程度の大きさの正立虚像の速度情報(α2;図7(A)参照)が形成され表示される。ここで、その虚像点位置B2の具体的な形成位置については、凹面鏡の背面側(車の進行方向前方)であって、拡大像形成手段50である凹面鏡の位置からb2(別言すれば、凹面鏡からの像距離b2)であり、定式的に説明すると、凹面鏡について周知の公式、つまり(3)式に従い、
b2=a2・f/(a2−f) ・・・(5)
となる。
【0042】
同様にして、速度センサ68からその速度に応じた所定の出力信号が制御部67に入力し、この出力信号を入力した制御部67から、駆動用の制御信号が第2の移動手段60Bの第2モータ62Bへ出力され、第2の表示デバイス20Bである第2LCDが所定位置に移動する。即ち、第2LCDも、第1LCDの第2物点位置(A2)と同じ、つまり図6において、拡大像形成手段50である凹面鏡から物体距離a2と同一距離a2離れた、第2物点位置(A2´)に移動する。
【0043】
これにより、第2物点位置にある第2LCDから出射する枠情報に関する第2の波形は、同一光軸手段30であるハーフミラーで反射されて先述の第1の波形と干渉されながら、第1の波形と同様の進路を辿り、拡大像形成手段50である凹面鏡に入射する。すると、後方、つまり車のフロントガラス前方の運転者の前方の視野内の、第1の波形の速度情報が形成表示される第2の虚像点位置(B2)と同一虚像点位置(B2)に、中程度の大きさの枠情報(β2;図7(A)参照)が形成され表示される。
【0044】
即ち、所定の基準速度を超える中速度(例えば、88km/h)で走行する場合には、図7(A)に示すような、中程度の大きさの正立虚像の速度情報(α2)と中程度の大きさの正立虚像の枠情報(β2)とが重畳された、デジタル速度メータ(γ22;図8(A)参照)が、車のフロントガラス前方の運転者の比較的前方の視野内に表示されるわけである。なお、ここでの表示内容は、その走行中の現在速度が88km/hであることを表示している。
【0045】
次に、走行速度を上げ、例えば走行車線を走行中の前の車を追い越すために追越車線に車線変更して一時的に高速走行(例えば、188km/h)を行う場合、速度センサ68からその速度に応じた所定の出力信号が制御部67に入力され、この出力信号を入力した制御部67からは、駆動用の制御信号が第1の移動手段60Aの第1モータ62Aへ出力され、第1の表示デバイス20Aである第1LCDが所定位置に移動する。即ち、第1LCDは、元の第2物点位置(A2)、つまり図3及び図6において拡大像形成手段50である凹面鏡から物体距離a2離れた位置から、第1物点位置(A1)に移動する。これにより、図3及び図6において、車のフロントガラス前方の運転者の遥か前方の視野内の第1虚像点位置(B1)に大きな正立虚像の速度情報(α1;図7(B)参照)が形成され表示される。
【0046】
一方、第2の表示デバイス20Bである第2LCDは、制御部67から駆動用の制御信号が第2の移動手段60Bの第2モータ62Bへ出力されず、第2の表示デバイス20Bである第2LCDはそのままであって、位置の変動を行わない。これにより、第2物点位置(A2´)にある第2LCDから出射する枠情報に関する第2の波形は、拡大像形成手段50である凹面鏡に入射すると、車のフロントガラス前方の運転者の比較的前方の視野内の元の第2の虚像点位置(B2)に、中程度の大きさの枠情報(β2;図7(B)参照)が形成され表示される。
【0047】
これにより、危険な高速走行の際には、図8(B)に示すように、大きな速度情報(α1)と中程度の枠情報(β2)とが重畳されたデジタル速度メータ情報(γ12)が、車のフロントガラス前方の運転者の比較的前方の視野内に表示されるわけである。その結果、枠情報を必要最小限の大きさとして、運転者の視界が枠情報で邪魔されてしまうのを回避することができる。また、これと同時に、現在の走行速度が速すぎることを、大きなサイズの数字で表示するので、安全運転に資することができる。
【0048】
尚、本実施形態では、第1の表示デバイスをデジタル速度情報、第2の表示デバイスを枠情報で構成したが、例えばナビゲーションシステムにおける地図情報に適用し、例えば交差点までの距離が接近するにつれて、地図の表示は大きさを変化させることなく、枠の大きさを徐々に大きくするように構成して交差点が近付いてきたことを知らせるように構成してもよい(或いはその逆でもよい)。また、対人センサとしての表示に適用し、車両の前方に歩行者や自転車などが次第に接近するにつれて、その対象物までの距離のみを次第に大きくさせるような構成等としてもよい。
【0049】
ところで、一般に、視点が遠方にシフトする高速走行の際には、従来であれば、運転者の視覚の負担を軽減させるため、虚像点位置も同じく遠方にシフトさせて各種の表示情報を表示させていたので、表示情報が大きくなり、視野の障害となって危険な運転環境となる虞がある。一方、本実施形態によれば、第1の移動手段60A及び第2の移動手段60Bを適宜作動させることで、第1の表示デバイス20A及び第2の表示デバイス20Bの物体距離を調整している。従って、拡大像形成手段50である凹面鏡が形成する像距離を変更することができるので、像位置に形成される各第1の表示デバイス20A及び第2の表示デバイス20Bに基づく表示情報の大きさ、つまり形成される元の表示デバイスでの形成画像の大きさに対する虚像の表示情報の大きさの割合い(倍率;m=b/a)を適宜変更させることができる。
【0050】
例えば、上記したように、最小限必要な重要情報のみ(本実施形態の場合、第1の表示デバイス20Aが形成する速度情報)を同一焦点位置に設定保持するとともに、重要性の低い情報(本実施形態の場合、第2の表示デバイス20Bが形成する枠情報)は小さく表示させるなど、運転の安全性を最優先するような表示構成が実現可能となる。
【0051】
また、速度が低速で運転手の視点が近くなる場合には、これに合わせて拡大像形成手段50である凹面鏡が形成する虚像もその視点近くに表示させると、元の表示デバイスでの形成画像に対する倍率も小さくなる。そのため、表示される情報である文字や記号も小さくなって判読が難しい場合も起こることが予想される(図7(B)における小さなサイズの数字での速度情報(α3)参照)ので、そのような場合には、文字や記号情報のみを選択的に大きく表示させるように、移動手段の動作を適宜制御することが可能となる。
【0052】
つまり、図9に示すように、例えば同図(A)に示す遠視点での必要最小限の読取可能な視差角θを確保して表示画像を観察する場合、表示画像の最小大きさがhであるとする。ここで、視差角θは1度前後(=π/180(rad))で数学的には十分に小さい値なので、虚像の大きさである上記表示画像の大きさhを、視差角θが形成する円弧と見做すと、近似式として初等数学での解析分野などで知られているように、次式、
h≒Rπ/180 ・・・(6)
但し、R;円弧が形成される円の半径
で表すことができる。
【0053】
一方、同図(B)に示す近視点では、必要最小限の視差角θを確保して表示画像を観察する場合、表示画像の最小大きさがh´となる。つまり、h´を円弧と見做すと、同様に近似的に、次式、
h´≒R´π/180 ・・・(7)
但し、R´;円弧h´が形成される円の半径
が成立する。
【0054】
従って、最低限の読取可能な表示画像の大きさh´´として、上記表示画像の大きさhと同一大きさを最低限確保しようとすると、即ち、h´´=hとなるためには、その視差角δが、次式、
δ=θ・R/R´ ・・・(8)
を満たすことが必要である。従って、この(8)式で示すような視差角δの虚像を、拡大像形成手段50である凹面鏡で形成すればよいことが分かる。
【0055】
(第2の実施形態)
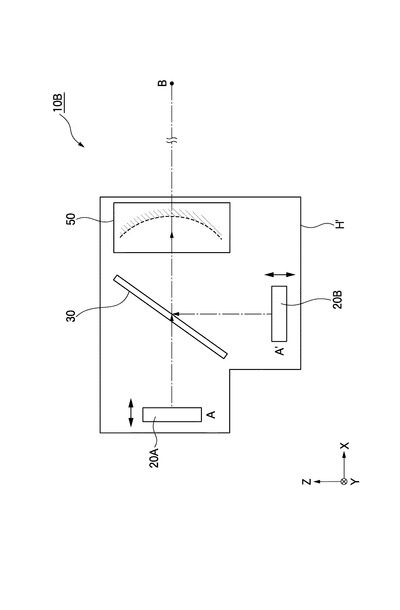
次に、本発明の第2の実施形態に係るヘッドアップディスプレイ10Bについて説明する。なお、本実施形態において、第1の実施形態と同一部分には同一符号を付して重複説明を避ける。
【0056】
本実施形態のヘッドアップディスプレイ10Bが、第1の実施形態のヘッドアップディスプレイ10Aと異なるのは、偏向ミラー40を設けていない点である。なお、本実施形態のヘッドアップディスプレイ10Bにも、図示しないが、第1及び第2の表示デバイス20A,20Bに、それぞれ、第1及び第2の移動手段が付設されている。
【0057】
従って、本実施形態では、第1の実施形態のヘッドアップディスプレイ10Aと同様の作用及び効果を奏するものであるが、偏向ミラー40を設けていない分、製造コストの削減及びハウジングH´の小型化を図ることができる。
【0058】
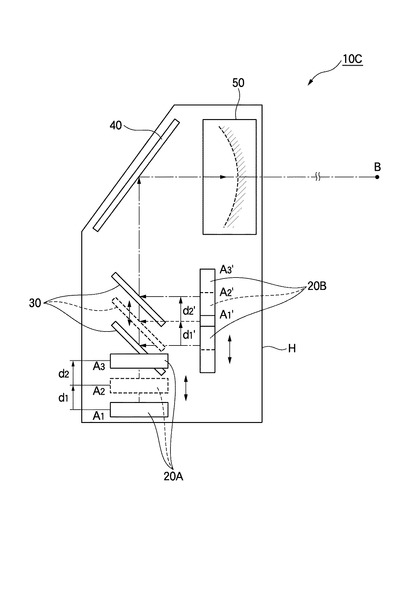
(第3の実施形態)
次に、本発明の第3の実施形態に係るヘッドアップディスプレイ10Cについて説明する。なお、本実施形態においても、第1の実施形態と同一部分には同一符号を付して重複説明を避ける。
【0059】
本実施形態のヘッドアップディスプレイ10Cでは、第1の実施形態のヘッドアップディスプレイ10Aと略同等の構成であるが、第1及び第2の表示デバイス20A,20Bに図示外の第1及び第2の移動手段がそれぞれ付設されているだけでなく、同一光軸手段30にも、第1及び第2の移動手段と同様の図示外の移動手段が付設されており、3つの光学素子(第1の表示デバイス20A、第2の表示デバイス20B、及び同一光軸手段30であるハーフミラーなど)がそれぞれ同方向(図中上下方向)に並進的に移動可能となっている。
【0060】
これら3種の移動手段は、それぞれの光学素子に対して、独立別個の移動動作を行うことが可能となっており、本実施形態のヘッドアップディスプレイ10Cを搭載する自動車の走行速度に応じて固有の移動量だけ位置がそれぞれ相対的に変化することで、第1及び第2の表示デバイス20A,20Bに対応するそれぞれの物体距離(a)及び像距離(b)については、互いに異なる幅広い光学距離の相対的な変動を行わせることが可能になっている。
【0061】
そのため、第1及び第2の表示デバイス20A,20Bによる表示画像に対して、互いに異なる固有の倍率m(=b/a)で拡大された固有の大きさを有する拡大虚像を、運転方向である図示外のフロントガラス先の運転者の視野内に、重畳させた画像状態で表示させるようになっている。
【0062】
尚、本実施形態では、3種類の移動手段を用いて、重畳させる各拡大虚像については、複雑な倍率変化を行うことができるようになっているが、同様の効果を奏することができるようであれば、上記の3種類の光学素子全体を同時にまとめて同一光学距離だけ変動可能とするような構成であってよい。その場合には、移動手段が1つで済むので、コストの削減及び装置の小型化が可能である。
【0063】
なお、本発明は上述した実施形態に何ら限定されるものではなく、その要旨を逸脱しない範囲において種々の形態で実施し得るものである。例えば、第1及び第2の表示デバイスの移動手段は、少なくともいずれか一方に付設することで、各表示デバイスに対応して形成される各虚像うちの少なくとも何れか一方の虚像の倍率を変更可能に構成するようにしてもよい。
【符号の説明】
【0064】
10A、10B、10C ヘッドアップディスプレイ
20A 第1の表示デバイス(第1LCD)
20B 第2の表示デバイス(第2LCD)
30 同一光軸手段(ハーフミラー)
40 偏向ミラー
50 拡大像形成手段(凹面鏡)
60A 第1の移動手段
60B 第2の移動手段
62A 第1モータ
62B 第2モータ
63 ピニオン
64 ラック
65 螺合部材
66 ボールねじ部材
A1、A2、A3 (第1、第2、第3)物点位置
B1、B2、B3(第1、第2、第3)虚像点位置
a、a1、a2、a3 物体距離
b、b1、b2、b3 像距離
H、H´ ハウジング
α デジタル速度画像表示
α1 大サイズの速度表示
α2 普通サイズの速度表示
α3 小サイズの速度表示
β 枠画像表示
β2 普通サイズの枠表示
γ 重ね合わされた表示画像
θ 読取可能な必要最小限の視差角
【技術分野】
【0001】
本発明は、ヘッドアップディスプレイに係り、特に、運転状況に応じて表示される位置を可変することができるようにしたヘッドアップディスプレイに関する。
【背景技術】
【0002】
ヘッドアップディスプレイ(以下、HUDと称す)は、飛行機操縦者や自動車運転者が、視線をインストルメントボードに移すというわき見を除去するため、計器板の表示を前方の視野の一部に重ねて表示しようとする装置である。
【0003】
このようなHUDとして、飛行シミュレータ、宇宙ドッキングシミュレータ、船舶操船シミュレータ、自動車走行シミュレータ等の各種シミュレータの視界表示装置、あるいは各種遊戯装置のディスプレイ等の映像表示装置などに応用されている。
【0004】
例えば、上記の各種シミュレータでは、表示される映像が実際の航空機等の場合と同様無限遠にあるように表示されることが望ましい。映像表示面としてCRTの表示面をそのまま利用したり、ビデオプロジェクタによりスクリーンに投映して表示したのでは、映像は表示面の位置にあるようにしか表示されない。
【0005】
この点を解決する手段として、凹面鏡を利用した無限遠表示装置であるHUDが知られている。図12は、凹面鏡による無限遠表示の原理を示す図である。凹面鏡Mの球心をO、焦点位置をFとすると、物体PQが焦点位置Fより凹面鏡M側にあると、凹面鏡Mによる像はP′Q′で示すように正立虚像となる。
【0006】
この虚像の位置及び大きさは、物体PQの位置により変化し、物体PQの位置がFAの中にある場合(Aは凹面鏡Mと光軸の交点)、すなわち図においてa<fの場合、虚像の位置bは、
b=af/(a−f) ・・・(1)
となり、aをfに限り無く接近させると、bは無限遠に近づく。
一方、その像の大きさP′Q′は、
P′Q′=PQ×|f|/|a−f| ・・・ (2)
となり、同様にaをfに限り無く接近させると、虚像の大きさP′Q′は無限大に近づく。
【0007】
しかし、同図に示す如く、物体PQが凹面鏡Mの光軸上にある場合は、虚像P′Q′を球心Oから見ようとしても、物体PQが邪魔になって見えない。そこで、図13に示すように、凹面鏡Mとその焦点fとの間に、凹面鏡Mの光軸に45°の角度で交差するようにハーフミラー101を設け、このハーフミラー101で光軸方向に反射するように例えばCRT102の画像面103がくるようにCRT102を配置している。このようにすることにより、CRT102の画像面103上の映像104は、ハーフミラー101で反射し、凹面鏡Mにより虚像を結びハーフミラー101を透過して球心Oを視点として観察することが可能となる。CRT102の代りに液晶ディスプレイや投影スクリーン等を使用することもできる。又、ハーフミラー101は凹面鏡Mの光軸と必ずしも45°で交らなくてもよい。
【0008】
ところが、従来、上記構成のHUDの映像表示面、例えばCRT102の画像面103はシミュレータの本体に対して固定されており、視点から見る虚像105の距離は無限遠又はこれに近い一定の距離となっていた。
【0009】
一般に、航空機の操縦席から外の視界を見た場合、前方の滑走路や山なみ、雲などは遥か遠方に見え、手前下方の滑走路やヘリコプタから下方に見た地上付近の下方視界は近距離に見える。さらに、宇宙ドッキングシミュレータや宇宙用マニピュレータ装置のシミュレータ等では対象物との実距離と視距離とが対応した視界表示が特に必要である。
【0010】
そこで、上記の要請に応じて、視界の視距離を実機の視界の視距離や対象物の実距離に対応して、無限遠から至近距離まで可変とすることのできるHUDが提案されている(例えば、特許文献1参照)。
【0011】
即ち、図14に例示した構成のHUDにあっては、CRT102等の映像表示手段が、その画像面103がハーフミラー101で凹面鏡Mの光軸方向に反射されるべき光線の光軸上を凹面鏡Mの焦点に対応する位置と、それよりハーフミラー101に近接した位置との間を変位可能であるように構成されている。
【0012】
このように、上記の構成のHUDでは、CRT102等の映像表示手段を、その画像面103が凹面鏡Mの焦点に対応する位置と、それよりハーフミラー101に近接した位置との間を変位可能としたので、虚像105の結像位置を無限遠の位置から視点にある程度近接した位置との間に変化させることが可能となる。したがって、表示される映像の内容に応じて、対象物の実距離や視界の視距離に応じて映像表示手段を移動させることにより、虚像位置を対象物の実距離や視界の視距離に合せることができる。
【0013】
ところで、自動車等の分野においても、フロントガラスをコンバイナとして使用するヘッドアップディスプレイにおける虚像の結像位置を変更可能とするコントロール装置を備えたHUDであって、虚像の遠近視点調節と大小調節とを車速の関係で便利に成し得るようにしたものが提案されている(例えば、特許文献2参照)。
即ち、このHUDは、凹面鏡201をターニングミラーとして用い、該凹面鏡201の虚像点を出現させる範囲内において、物点としての表示器を、手動又は自動もしくはこれらの組み合わせによって移動させる表示器移動手段を設けたものであって、このような虚像のコントロール装置によれば、車速に応じて表示される結像位置までの距離を自動でコントロールすることと、個人差によっては車速に応じた結像距離を手動操作により変更できる。
【0014】
これについて、以下に具体的に説明する。
周知のように球面鏡に関する結像の式が、広く知られている。この結像の式の関係に基づき、凹面鏡の虚像点を出現させる範囲内で物点としての表示器を移動させることにより、出現する虚像の焦点距離とその大きさをコントロールする原理を図15及び図16に示す。
即ち、これらの図に示すように、凹面鏡201が虚像点を出現させる範囲内で、表示器202の表示内容203を移動させることで、コンバイナ204が反射する虚像の焦点距離とその大きさをコントロールすることができる。
【0015】
ここで、表示内容203を図16に示す位置に配置させる場合について、考えてみる。該表示内容203の位置は凹面鏡201の焦点距離fの範囲内であるところのA点であるとする。A点に表示内容203が配置されると、虚像点Cにおいて表示内容203の虚像が現れることとなる。そして、この表示内容203の虚像は、凹面鏡201で拡大され、コンバイナ204に反射されてアイ・ポイント205に入ることとなるが、人間の目は表示内容203があたかもC点に存在するかのようによう視覚する。ここで、表示内容203を図16で示すように、A点からB点に移動させると、虚像点はD点となり、前述のC点の虚像に比べると像は遠方となり大となる。
【0016】
即ち、これは、鏡面に表示内容203が近づくほど凹面鏡201の作用で現れる虚像が小さくなるからである。従って、B点の方がA点よりも大型の虚像をコンバイナ204が写し出すことになる。コンバイナ204からの虚像を見る運転者にとって、高速運転の時には見るポイントも遠視点となり、表示内容203が遠方にある方が都合が良く、又、低速運転時は見るポイントも近視点なので表示内容203は近くにある方が都合が良い。図16に示すように、表示器202がA点にある場合には、表示内容203は近視点にあり、かつ、表示内容203は小型となる。又、表示器202がB点にある場合には、表示内容203は遠視点にあり、かつ、表示内容203は大型となる。
【0017】
このように、上記のような構成のHUDでは、遠近視点の虚像の役割に着目して、従来の虚像が単に遠方にあるだけという欠点を除去するようにしたものである。
【先行技術文献】
【特許文献】
【0018】
【特許文献1】特開平6−27411号公報
【特許文献2】特開平6−115381号公報
【発明の概要】
【発明が解決しようとする課題】
【0019】
ところで、上述の2種類のタイプのHUDであっては、いずれのものであっても、対象物の実距離や視界の視距離に応じて映像表示手段を移動させる構成である。ところが、対象物の実距離や視界の視距離に応じて単に映像表示手段を移動させるだけの構成では、例えば、視点が近くなると表示画像も小さくさせるだけであるので、表示される文字や記号等の情報を読み取りにくくなるなど、表示情報の読み取りが困難になる虞がある。
【0020】
本発明は、上述した事情に鑑みてなされたものであり、その目的は、表示位置が乗り物の前後方向に移動したときに、これに関連して有効な各種の機能性を付加し、表示情報に対して運転に関する警告などの表示内容を感覚的に分かりやすくさせることなどができるようにしたヘッドアップディスプレイを提供することにある。
【課題を解決するための手段】
【0021】
前述した目的を達成するために、本発明に係るヘッドアップディスプレイは、下記(1)〜(2)を特徴としている。
(1) 第1の表示デバイスと、
前記第1の表示デバイスとは異なる位置に設置された第2の表示デバイスと、
前記第1の表示デバイスと前記第2の表示デバイスそれぞれから入射した光を同一方向に出射する同一光軸手段と、
前記同一光軸手段から入射した光に基づいて、前記第1の表示デバイスと前記第2の表示デバイスが出射した光によって形成されるそれぞれの像を拡大するとともに、それらの像を重畳して結像する拡大像形成手段と、
前記第1の表示デバイス及び前記第2の表示デバイスの少なくとも一方を光軸方向に沿って移動させる移動手段と、
を備えること。
(2) 上記(1)のヘッドアップディスプレイであって、
前記移動手段は、前記第1の表示デバイスを光軸方向に沿って移動させる第1の移動手段と、前記第2の表示デバイスを光軸方向に沿って移動させる第2の移動手段と、を有する、
こと。
【0022】
上記(1)または(2)の構成のヘッドアップディスプレイによれば、表示位置が乗り物の前後方向に移動したときに、これに関連して有効な各種の機能性を付加し、表示情報に対して運転に関する警告などの表示内容を感覚的に分かりやすくさせることが可能になる。
【発明の効果】
【0023】
本発明のヘッドアップディスプレイによれば、乗り物の速度に応じて各移動手段を動作させることで、第1の表示デバイスが形成する虚像の大きさと、第2の表示デバイスが形成する虚像の大きさとの倍率の割合を変更させるように構成したので、表示位置が乗り物の前後方向に移動したときに、これに関連して有効な各種の機能性を付加し、表示情報に対して運転に関する警告などの表示内容を感覚的に分かりやすくさせることなどができるようにした、ヘッドアップディスプレイを提供することが可能になる。
【0024】
以上、本発明について簡潔に説明した。更に、以下に説明される発明を実施するための形態を添付の図面を参照して通読することにより、本発明の詳細は更に明確化されるであろう。
【図面の簡単な説明】
【0025】
【図1】本発明の第1の実施形態に係るヘッドアップディスプレイを示す概略構成図である。
【図2】本発明のヘッドアップディスプレイの基本原理を示す説明図である。
【図3】本発明のヘッドアップディスプレイの表示デバイスと形成される拡大虚像との位置関係を示す光学的模式図である。
【図4】(A)は本発明の第1の実施形態に係るヘッドアップディスプレイに備えた移動手段の具体例を示す構成図、(B)はその移動手段の変形例を示す構成図である。
【図5】図4に示す移動手段のモータの制御に用いる電気的な構成を示すブロック図である。
【図6】本発明の第1の実施形態の作用を示す説明図である。
【図7】(A)は本発明の第1の実施形態に係るヘッドアップディスプレイが形成する法定速度で走行時の表示画像を示す模式原理図、(B)は高速走行時の表示画像を示す模式原理図である。
【図8】(A)及び(B)は本発明の第1の実施形態における、枠情報(β2)に対する速度情報(α2)の大きさの割合を変更させたときの双方の表示情報の大きさの関係を示す説明図である。
【図9】(A)及び(B)は本発明の第1の実施形態における、視差角と表示される成立虚像の最小大きさとの関係を示す原理図である。
【図10】本発明の第2の実施形態に係るヘッドアップディスプレイを示す概略構成図である。
【図11】本発明の第3の実施形態に係るヘッドアップディスプレイを示す概略構成図である。
【図12】従来のHUDの原理を示す光学的説明図である。
【図13】従来のHUDの構成を示す説明図である。
【図14】従来の表示情報である虚像の結像位置を変更可能とするHUDの構成を示す説明図である。
【図15】虚像の結像位置を変更可能とするコントロール装置を備えた従来のHUDの原理を示す凹面鏡での光路図である。
【図16】そのHUDでの結像位置の移動の関係を示す説明図である。
【発明を実施するための形態】
【0026】
以下、本発明の実施形態について、添付図面を参照しながら詳細に説明する。
(第1の実施形態)
図1は、本発明の第1の実施形態に係るヘッドアップディスプレイ10Aを示すものであり、後述する拡大像形成手段50で形成した拡大虚像を運転方向である図示外のフロントガラス先の運転者の視野内に表示させるようになっている。
【0027】
このヘッドアップディスプレイ10Aには、第1の表示デバイス20Aと、第2の表示デバイス20Bと、同一光軸手段30と、偏向ミラー40と、拡大像形成手段50と、第1の移動手段60A及び第2の移動手段60Bと、を備えたハウジングHが、図示外の車体内部に搭載されている。尚、本実施形態の場合には図示外のフロントガラスの前方の視界の中に、デジタル画像(虚像)としてスピードメータが表示される。
【0028】
第1の表示デバイス20Aは、本実施形態の場合、LED光源などをバックライトとして用いた液晶表示装置(以下、「第1LCD」とよぶ)で構成されている。本実施形態の第1の表示デバイス20Aは、現在速度をデジタル表示(α;図2参照)させるようになっており、図示外の速度センサからの出力信号を入力すると、この信号に対応した速度値をデジタル表示させるようになっている。また、この第1の表示デバイス20Aには、後述する第1の移動手段60A(図4参照)が付設されており、走行速度に応じて同一光軸手段30との間の距離(L1)を変化させることによって、デジタル表示される速度値の数字の大きさを変更可能になっている。
【0029】
第2の表示デバイス20Bは、第1の表示デバイス20Aと同様の液晶表示装置(以下、「第2LCD」とよぶ)で構成されている。本実施形態の第2の表示デバイス20Bは、デジタル速度表示(α)の外側を取り囲む枠(β;図2参照)を表示させるようになっている。また、この第2の表示デバイス20Bにも、後述する第2の移動手段60Bが付設されており、走行速度に応じて同一光軸手段30との間の距離(L2)を変化させることで、走行速度に対応して枠の大きさを変更可能になっている。なお、本実施形態では、各表示デバイスにそれぞれ移動手段が付設されているが、少なくともいずれか一方に付設させた構成であってもよい。
【0030】
同一光軸手段30は、第1の表示デバイス20Aと第2の表示デバイス20Bそれぞれから入射した光を同一方向に出射するものである。これによって、同一光軸手段30から出射された光に基づく虚像は、図2に示すようなデジタル速度表示(α)と枠(β)が重畳された表示画像(γ)として結像されるようになっている。本実施形態の同一光軸手段30は、ハーフミラーで構成されており、第1の表示デバイス20Aで形成されて出射する表示情報に対応した波形の光のうち、同一光軸手段30に垂直入射後に透過する第1波形の光と、第2の表示デバイス20Bで形成されて出射する表示情報に対応した波形の光のうち、同一光軸手段30に入射した後に反射する第2波形の光とを干渉させ、偏向ミラー40へ向けて進行させるようになっている。
【0031】
尚、本実施形態では、同一光軸手段30をハーフミラーで構成したが、特にこれに限定されるものではない。例えば第1の表示デバイス20Aから出射する特定偏光面(P偏光)の第1の波形を所定の高い割合で透過させるとともに、第2の表示デバイス20Bから出射し第1の波形とは偏光面が直交する特定偏光面(S偏光)の第2の波形を所定の高い割合で反射させるPBS(偏光ビームスプリッタ)などで構成してもよい。また、これ以外に、例えば特定波長の光を非常に高い割合で選択的に透過させるとともに、特定波長の光を非常に高い割合選択的にで反射させる、多層膜フィルタなどの透過波長選択手段で構成してもよい。
【0032】
偏向ミラー40は、同一光軸手段30が出射する光路の方向を90度偏向させることで、狭いスペース内で光路長を稼ぐことができるようにするとともに、各種の光学素子をハウジングHの内部スペースにコンパクトに収容させるようになっている。これにより、ハウジングHの小型化を図ることで狭い車内での設置に好適なものとなっている。なお、この偏向ミラー40は、本実施形態では必要のために設置されているものであるが、後述する第2の実施形態の場合のように、特に本発明では必須のものではない。
【0033】
拡大像形成手段50は、同一光軸手段30が出射した光を入射することによって、第1の表示デバイス20Aと第2の表示デバイス20Bが出射した光によって形成されるそれぞれの像を拡大するとともに、それらの像を重畳して結像するものである。本実施形態の拡大像形成手段50は、図3に示すように、焦点距離がf、球面半径がrの凹面鏡(これ以外に、例えば拡大機能を有する光学素子を付設した、非球面ミラーなどでもよい)で構成されており、第1の表示デバイス20A(又は第2の表示デバイス20B)から拡大像形成手段50までの距離、つまり物体距離をa1(図1参照)、拡大像形成手段50から結像(虚像)点までの距離、つまり像距離をb1(図1参照)とすると、よく知られた反射鏡の結像公式、
1/a1 +1/b1 =1/f(=2/r) ・・・(3)
が成立する。
【0034】
従って、本実施形態の拡大像形成手段50でも、背景技術の欄でも説明したように、鏡面と焦点との間に物点を設置する場合には正立虚像が形成されるとともに、その虚像が物点に設置した物体の大きさよりも大きくなることを利用し、第1の表示デバイス20A(又は第2の表示デバイス20B)を鏡面と焦点との間に設置させることで、拡大像形成手段50である凹面鏡の背後(図1では+X方向)、つまり運転手の視点であるフロントガラスの先の空間に、第1の表示デバイス20A(又は第2の表示デバイス20B)における表示画像よりも大きな虚像の画像を形成させるものである。
【0035】
第1の移動手段60Aは、第1の表示デバイス20Aを、光軸方向に沿って前後に移動するためのものであり、本実施形態のヘッドアップディスプレイ10Aを搭載する自動車の速度に応じて動作させることで、第1の表示デバイスが形成する虚像の大きさを変更させる。本実施形態の第1の移動手段60Aは、図4に示すように、第1の表示デバイス20Aを構成する第1LCDの本体ケーシングに設けたブラケット61に固定した第1モータ62Aと、この第1モータ62Aの出力軸に固着したピニオン63と、ヘッドアップディスプレイ10AのハウジングH内部(例えば床面)に固設した、ピニオン63が噛合するラック64と、を備えている。
【0036】
また、このモータ62は、図5に示す制御部67と接続されており、この制御部67では、速度センサ68からの出力信号を入力すると、制御部67から車の速さに応じた制御信号が第1モータ62Aに出力され、第1LCDを所定の範囲内で移動させるようになっている。
即ち、この第1モータ62Aは、第1の表示デバイス20Aを構成する第1LCDの本体ケーシングが許容される移動範囲は、図3に示すように、物体距離a(a1〜a3)が許容される次式の範囲、
0<a<f ・・・(4)
と同一である。つまり、第1LCDの本体ケーシングの移動は、最大でも上の(4)式の範囲内であって、具体的には、拡大像形成手段50である凹面鏡位置(P点)とその焦点位置(F点)との2点間の範囲内に制限されている。
【0037】
第2の移動手段60Bも、第1の移動手段60Aと同様の構成となっており、図5に示すように、制御部67の制御信号により第2LCDの移動動作を行うものであるが、この第2LCDの移動動作は第1LCDの移動動作、つまり移動速度或いは移動距離が(原則として)同じにはならないように動作させる場合が多い。
【0038】
尚、本実施形態では、第1の移動手段60A及び第2の移動手段60Bの具体的な機構として、ラックピニオンを用いたが、これ以外に、例えば図4(B)に示すような、ボールねじを用いた機構で構成してもよい。即ち、このボールねじ機構では、ハウジングH内部に固設した第1モータ62A(又は第2モータ62B)と、第1LCD(又は第2LCD)の本体ケーシングに固設した螺合部材65と、第1モータ62A(又は第2モータ62B)の出力軸と一体に連結されて螺合部材65に切られた雌ねじに螺合するボールねじ部材66とを備えており、第1LCD(又は第2LCD)の本体ケーシングの底部がヘッドアップディスプレイ10AのハウジングH内部(例えば床部)に沿ってスライドするような構成となっている。
【0039】
次に、本発明の実施形態に係るヘッドアップディスプレイ10Aの作用について説明する。
初めに、例えばヘッドアップディスプレイ10Aを搭載している車が、高速道路上を所定の速度(ACC(adaptive cruise control)の設定速度)である法定速度(例えば、88km/h)の範囲内で走行しているものと仮定する。この場合には、速度センサ68からその速度(88km/h)に応じた所定の出力信号が制御部67に入力する。そして、この出力信号を入力した制御部67からは、駆動用の制御信号が第1の移動手段60Aの第1モータ62A及び第2の移動手段60Bの第2モータ62Bへそれぞれ出力され、第1の表示デバイス20Aである第1LCD及び第2の表示デバイス20Bである第2LCDが所定位置に移動する。
【0040】
即ち、図6において、例えば、第1LCDは第2物点位置(A2)、つまり拡大像形成手段50である凹面鏡から物体距離a2に移動する。これにより、図3において、第2物点位置(A2)にある第1LCDから出射する速度情報(88km/h)に関する第1の波形は、同一光軸手段30であるハーフミラーを所定割合で透過した後の光路が偏向ミラー40で90度偏向(折曲)され、拡大像形成手段50である凹面鏡に向けて進行する。
【0041】
そして、凹面鏡に入射すると、後方、つまり車のフロントガラス前方の運転者の比較的前方の視野内の第2虚像点位置(B2)に中程度の大きさの正立虚像の速度情報(α2;図7(A)参照)が形成され表示される。ここで、その虚像点位置B2の具体的な形成位置については、凹面鏡の背面側(車の進行方向前方)であって、拡大像形成手段50である凹面鏡の位置からb2(別言すれば、凹面鏡からの像距離b2)であり、定式的に説明すると、凹面鏡について周知の公式、つまり(3)式に従い、
b2=a2・f/(a2−f) ・・・(5)
となる。
【0042】
同様にして、速度センサ68からその速度に応じた所定の出力信号が制御部67に入力し、この出力信号を入力した制御部67から、駆動用の制御信号が第2の移動手段60Bの第2モータ62Bへ出力され、第2の表示デバイス20Bである第2LCDが所定位置に移動する。即ち、第2LCDも、第1LCDの第2物点位置(A2)と同じ、つまり図6において、拡大像形成手段50である凹面鏡から物体距離a2と同一距離a2離れた、第2物点位置(A2´)に移動する。
【0043】
これにより、第2物点位置にある第2LCDから出射する枠情報に関する第2の波形は、同一光軸手段30であるハーフミラーで反射されて先述の第1の波形と干渉されながら、第1の波形と同様の進路を辿り、拡大像形成手段50である凹面鏡に入射する。すると、後方、つまり車のフロントガラス前方の運転者の前方の視野内の、第1の波形の速度情報が形成表示される第2の虚像点位置(B2)と同一虚像点位置(B2)に、中程度の大きさの枠情報(β2;図7(A)参照)が形成され表示される。
【0044】
即ち、所定の基準速度を超える中速度(例えば、88km/h)で走行する場合には、図7(A)に示すような、中程度の大きさの正立虚像の速度情報(α2)と中程度の大きさの正立虚像の枠情報(β2)とが重畳された、デジタル速度メータ(γ22;図8(A)参照)が、車のフロントガラス前方の運転者の比較的前方の視野内に表示されるわけである。なお、ここでの表示内容は、その走行中の現在速度が88km/hであることを表示している。
【0045】
次に、走行速度を上げ、例えば走行車線を走行中の前の車を追い越すために追越車線に車線変更して一時的に高速走行(例えば、188km/h)を行う場合、速度センサ68からその速度に応じた所定の出力信号が制御部67に入力され、この出力信号を入力した制御部67からは、駆動用の制御信号が第1の移動手段60Aの第1モータ62Aへ出力され、第1の表示デバイス20Aである第1LCDが所定位置に移動する。即ち、第1LCDは、元の第2物点位置(A2)、つまり図3及び図6において拡大像形成手段50である凹面鏡から物体距離a2離れた位置から、第1物点位置(A1)に移動する。これにより、図3及び図6において、車のフロントガラス前方の運転者の遥か前方の視野内の第1虚像点位置(B1)に大きな正立虚像の速度情報(α1;図7(B)参照)が形成され表示される。
【0046】
一方、第2の表示デバイス20Bである第2LCDは、制御部67から駆動用の制御信号が第2の移動手段60Bの第2モータ62Bへ出力されず、第2の表示デバイス20Bである第2LCDはそのままであって、位置の変動を行わない。これにより、第2物点位置(A2´)にある第2LCDから出射する枠情報に関する第2の波形は、拡大像形成手段50である凹面鏡に入射すると、車のフロントガラス前方の運転者の比較的前方の視野内の元の第2の虚像点位置(B2)に、中程度の大きさの枠情報(β2;図7(B)参照)が形成され表示される。
【0047】
これにより、危険な高速走行の際には、図8(B)に示すように、大きな速度情報(α1)と中程度の枠情報(β2)とが重畳されたデジタル速度メータ情報(γ12)が、車のフロントガラス前方の運転者の比較的前方の視野内に表示されるわけである。その結果、枠情報を必要最小限の大きさとして、運転者の視界が枠情報で邪魔されてしまうのを回避することができる。また、これと同時に、現在の走行速度が速すぎることを、大きなサイズの数字で表示するので、安全運転に資することができる。
【0048】
尚、本実施形態では、第1の表示デバイスをデジタル速度情報、第2の表示デバイスを枠情報で構成したが、例えばナビゲーションシステムにおける地図情報に適用し、例えば交差点までの距離が接近するにつれて、地図の表示は大きさを変化させることなく、枠の大きさを徐々に大きくするように構成して交差点が近付いてきたことを知らせるように構成してもよい(或いはその逆でもよい)。また、対人センサとしての表示に適用し、車両の前方に歩行者や自転車などが次第に接近するにつれて、その対象物までの距離のみを次第に大きくさせるような構成等としてもよい。
【0049】
ところで、一般に、視点が遠方にシフトする高速走行の際には、従来であれば、運転者の視覚の負担を軽減させるため、虚像点位置も同じく遠方にシフトさせて各種の表示情報を表示させていたので、表示情報が大きくなり、視野の障害となって危険な運転環境となる虞がある。一方、本実施形態によれば、第1の移動手段60A及び第2の移動手段60Bを適宜作動させることで、第1の表示デバイス20A及び第2の表示デバイス20Bの物体距離を調整している。従って、拡大像形成手段50である凹面鏡が形成する像距離を変更することができるので、像位置に形成される各第1の表示デバイス20A及び第2の表示デバイス20Bに基づく表示情報の大きさ、つまり形成される元の表示デバイスでの形成画像の大きさに対する虚像の表示情報の大きさの割合い(倍率;m=b/a)を適宜変更させることができる。
【0050】
例えば、上記したように、最小限必要な重要情報のみ(本実施形態の場合、第1の表示デバイス20Aが形成する速度情報)を同一焦点位置に設定保持するとともに、重要性の低い情報(本実施形態の場合、第2の表示デバイス20Bが形成する枠情報)は小さく表示させるなど、運転の安全性を最優先するような表示構成が実現可能となる。
【0051】
また、速度が低速で運転手の視点が近くなる場合には、これに合わせて拡大像形成手段50である凹面鏡が形成する虚像もその視点近くに表示させると、元の表示デバイスでの形成画像に対する倍率も小さくなる。そのため、表示される情報である文字や記号も小さくなって判読が難しい場合も起こることが予想される(図7(B)における小さなサイズの数字での速度情報(α3)参照)ので、そのような場合には、文字や記号情報のみを選択的に大きく表示させるように、移動手段の動作を適宜制御することが可能となる。
【0052】
つまり、図9に示すように、例えば同図(A)に示す遠視点での必要最小限の読取可能な視差角θを確保して表示画像を観察する場合、表示画像の最小大きさがhであるとする。ここで、視差角θは1度前後(=π/180(rad))で数学的には十分に小さい値なので、虚像の大きさである上記表示画像の大きさhを、視差角θが形成する円弧と見做すと、近似式として初等数学での解析分野などで知られているように、次式、
h≒Rπ/180 ・・・(6)
但し、R;円弧が形成される円の半径
で表すことができる。
【0053】
一方、同図(B)に示す近視点では、必要最小限の視差角θを確保して表示画像を観察する場合、表示画像の最小大きさがh´となる。つまり、h´を円弧と見做すと、同様に近似的に、次式、
h´≒R´π/180 ・・・(7)
但し、R´;円弧h´が形成される円の半径
が成立する。
【0054】
従って、最低限の読取可能な表示画像の大きさh´´として、上記表示画像の大きさhと同一大きさを最低限確保しようとすると、即ち、h´´=hとなるためには、その視差角δが、次式、
δ=θ・R/R´ ・・・(8)
を満たすことが必要である。従って、この(8)式で示すような視差角δの虚像を、拡大像形成手段50である凹面鏡で形成すればよいことが分かる。
【0055】
(第2の実施形態)
次に、本発明の第2の実施形態に係るヘッドアップディスプレイ10Bについて説明する。なお、本実施形態において、第1の実施形態と同一部分には同一符号を付して重複説明を避ける。
【0056】
本実施形態のヘッドアップディスプレイ10Bが、第1の実施形態のヘッドアップディスプレイ10Aと異なるのは、偏向ミラー40を設けていない点である。なお、本実施形態のヘッドアップディスプレイ10Bにも、図示しないが、第1及び第2の表示デバイス20A,20Bに、それぞれ、第1及び第2の移動手段が付設されている。
【0057】
従って、本実施形態では、第1の実施形態のヘッドアップディスプレイ10Aと同様の作用及び効果を奏するものであるが、偏向ミラー40を設けていない分、製造コストの削減及びハウジングH´の小型化を図ることができる。
【0058】
(第3の実施形態)
次に、本発明の第3の実施形態に係るヘッドアップディスプレイ10Cについて説明する。なお、本実施形態においても、第1の実施形態と同一部分には同一符号を付して重複説明を避ける。
【0059】
本実施形態のヘッドアップディスプレイ10Cでは、第1の実施形態のヘッドアップディスプレイ10Aと略同等の構成であるが、第1及び第2の表示デバイス20A,20Bに図示外の第1及び第2の移動手段がそれぞれ付設されているだけでなく、同一光軸手段30にも、第1及び第2の移動手段と同様の図示外の移動手段が付設されており、3つの光学素子(第1の表示デバイス20A、第2の表示デバイス20B、及び同一光軸手段30であるハーフミラーなど)がそれぞれ同方向(図中上下方向)に並進的に移動可能となっている。
【0060】
これら3種の移動手段は、それぞれの光学素子に対して、独立別個の移動動作を行うことが可能となっており、本実施形態のヘッドアップディスプレイ10Cを搭載する自動車の走行速度に応じて固有の移動量だけ位置がそれぞれ相対的に変化することで、第1及び第2の表示デバイス20A,20Bに対応するそれぞれの物体距離(a)及び像距離(b)については、互いに異なる幅広い光学距離の相対的な変動を行わせることが可能になっている。
【0061】
そのため、第1及び第2の表示デバイス20A,20Bによる表示画像に対して、互いに異なる固有の倍率m(=b/a)で拡大された固有の大きさを有する拡大虚像を、運転方向である図示外のフロントガラス先の運転者の視野内に、重畳させた画像状態で表示させるようになっている。
【0062】
尚、本実施形態では、3種類の移動手段を用いて、重畳させる各拡大虚像については、複雑な倍率変化を行うことができるようになっているが、同様の効果を奏することができるようであれば、上記の3種類の光学素子全体を同時にまとめて同一光学距離だけ変動可能とするような構成であってよい。その場合には、移動手段が1つで済むので、コストの削減及び装置の小型化が可能である。
【0063】
なお、本発明は上述した実施形態に何ら限定されるものではなく、その要旨を逸脱しない範囲において種々の形態で実施し得るものである。例えば、第1及び第2の表示デバイスの移動手段は、少なくともいずれか一方に付設することで、各表示デバイスに対応して形成される各虚像うちの少なくとも何れか一方の虚像の倍率を変更可能に構成するようにしてもよい。
【符号の説明】
【0064】
10A、10B、10C ヘッドアップディスプレイ
20A 第1の表示デバイス(第1LCD)
20B 第2の表示デバイス(第2LCD)
30 同一光軸手段(ハーフミラー)
40 偏向ミラー
50 拡大像形成手段(凹面鏡)
60A 第1の移動手段
60B 第2の移動手段
62A 第1モータ
62B 第2モータ
63 ピニオン
64 ラック
65 螺合部材
66 ボールねじ部材
A1、A2、A3 (第1、第2、第3)物点位置
B1、B2、B3(第1、第2、第3)虚像点位置
a、a1、a2、a3 物体距離
b、b1、b2、b3 像距離
H、H´ ハウジング
α デジタル速度画像表示
α1 大サイズの速度表示
α2 普通サイズの速度表示
α3 小サイズの速度表示
β 枠画像表示
β2 普通サイズの枠表示
γ 重ね合わされた表示画像
θ 読取可能な必要最小限の視差角
【特許請求の範囲】
【請求項1】
第1の表示デバイスと、
前記第1の表示デバイスとは異なる位置に設置された第2の表示デバイスと、
前記第1の表示デバイスと前記第2の表示デバイスそれぞれから入射した光を同一方向に出射する同一光軸手段と、
前記同一光軸手段から入射した光に基づいて、前記第1の表示デバイスと前記第2の表示デバイスが出射した光によって形成されるそれぞれの像を拡大するとともに、それらの像を重畳して結像する拡大像形成手段と、
前記第1の表示デバイス及び前記第2の表示デバイスの少なくとも一方を光軸方向に沿って移動させる移動手段と、
を備えることを特徴とするヘッドアップディスプレイ。
【請求項2】
前記移動手段は、前記第1の表示デバイスを光軸方向に沿って移動させる第1の移動手段と、前記第2の表示デバイスを光軸方向に沿って移動させる第2の移動手段と、を有する、
ことを特徴とする請求項1に記載のヘッドアップディスプレイ。
【請求項1】
第1の表示デバイスと、
前記第1の表示デバイスとは異なる位置に設置された第2の表示デバイスと、
前記第1の表示デバイスと前記第2の表示デバイスそれぞれから入射した光を同一方向に出射する同一光軸手段と、
前記同一光軸手段から入射した光に基づいて、前記第1の表示デバイスと前記第2の表示デバイスが出射した光によって形成されるそれぞれの像を拡大するとともに、それらの像を重畳して結像する拡大像形成手段と、
前記第1の表示デバイス及び前記第2の表示デバイスの少なくとも一方を光軸方向に沿って移動させる移動手段と、
を備えることを特徴とするヘッドアップディスプレイ。
【請求項2】
前記移動手段は、前記第1の表示デバイスを光軸方向に沿って移動させる第1の移動手段と、前記第2の表示デバイスを光軸方向に沿って移動させる第2の移動手段と、を有する、
ことを特徴とする請求項1に記載のヘッドアップディスプレイ。
【図1】


【図2】
【図3】
【図4】
【図5】
【図6】
【図7】
【図8】
【図9】
【図10】
【図11】
【図12】
【図13】
【図14】
【図15】
【図16】
【図2】
【図3】
【図4】
【図5】
【図6】
【図7】
【図8】
【図9】
【図10】
【図11】
【図12】
【図13】
【図14】
【図15】
【図16】
【公開番号】特開2012−58689(P2012−58689A)
【公開日】平成24年3月22日(2012.3.22)
【国際特許分類】
【出願番号】特願2010−204688(P2010−204688)
【出願日】平成22年9月13日(2010.9.13)
【出願人】(000006895)矢崎総業株式会社 (7,019)
【Fターム(参考)】
【公開日】平成24年3月22日(2012.3.22)
【国際特許分類】
【出願日】平成22年9月13日(2010.9.13)
【出願人】(000006895)矢崎総業株式会社 (7,019)
【Fターム(参考)】
[ Back to top ]