
ヘッド装置、位置制御方法、及び磁気ディスク装置
【課題】磁気ヘッド素子を磁気ディスクに対して精度よく位置決めする。
【解決手段】磁気ヘッド素子21が磁気ディスクと対向するように支持するスライダ22と、スライダ22と少なくとも2点の接点23a、23bにおいて連結され、スライダ22に対し磁気ディスクの記録面と垂直な方向に所定の荷重を付与するサスペンション23と、サスペンション23と連結され、スライダ22を磁気ディスクの記録面と垂直な方向を回動軸とする回動方向に回動自在に支持する回動支持機構25を有するアーム24とを備え、スライダ22は、磁気ディスクと対向する側で、回動支持機構25の回動軸とは異なる位置に設けられ、磁気ディスクと接触する接触パッド28、29を有し、サスペンション23には、スライダ22との接点23a、23bに、スライダ22に付与される荷重の荷重分布を可変とする荷重分布可変手段34、35が設けられる。
【解決手段】磁気ヘッド素子21が磁気ディスクと対向するように支持するスライダ22と、スライダ22と少なくとも2点の接点23a、23bにおいて連結され、スライダ22に対し磁気ディスクの記録面と垂直な方向に所定の荷重を付与するサスペンション23と、サスペンション23と連結され、スライダ22を磁気ディスクの記録面と垂直な方向を回動軸とする回動方向に回動自在に支持する回動支持機構25を有するアーム24とを備え、スライダ22は、磁気ディスクと対向する側で、回動支持機構25の回動軸とは異なる位置に設けられ、磁気ディスクと接触する接触パッド28、29を有し、サスペンション23には、スライダ22との接点23a、23bに、スライダ22に付与される荷重の荷重分布を可変とする荷重分布可変手段34、35が設けられる。
【発明の詳細な説明】
【技術分野】
【0001】
本発明は、ヘッド装置に関し、特に、磁気ヘッドスライダを磁気ディスクに接触させる接触記録型磁気ディスク装置に搭載されるヘッド装置、このヘッド装置の位置制御方法、及び、このヘッド装置を用いた磁気ディスク装置に関する。
【背景技術】
【0002】
従来の磁気ディスク装置は、磁気記録が可能な磁気ディスクと、この磁気ディスクを回転可能に支持するディスク回転支持機構と、磁気ディスクに対して情報信号の記録及び/又は再生を行う磁気ヘッド素子と、この磁気ヘッド素子を支持するための支持部材と、磁気ヘッド素子を磁気ディスク上の半径方向に位置決めする位置決め機構とから構成される。支持部材及び位置決め機構は、磁気ヘッド素子が搭載されたスライダとそのスライダを支持するサスペンション構造と、このサスペンション構造に連結されたアクチュエータ機構とからなり、これらの作用により磁気ヘッド素子を磁気ディスク上の所望の位置に移動させ、磁気ディスク上に記録された情報を読み出し又は書き込みをする間、磁気ヘッド素子の位置を維持する。
【0003】
磁気ディスク装置は、コンピュータの外部記憶装置として用いられ、コンピュータ本体の小型化、高性能化に伴い、小型化とともに、記録容量の大型化が求められている。この要望を満たす手段としては、磁気ディスクの記録密度を高密度にする方法が考えられている。このように、高記録密度化された磁気ディスクを用いる磁気ディスク装置では、磁気ディスクの情報信号を読み出し又は書き込みを行うための磁気ヘッド素子と当該磁気ディスクとの距離も狭小化されることになる。
【0004】
ところで、従来の磁気ディスク装置では、磁気ヘッド素子が搭載されたスライダと磁気ディスクとの間の空気流により浮力が発生し、この浮力により、スライダが浮上した状態で駆動される、いわゆる浮上記録型のヘッドスライダが、多用されていた。この浮上記録型ヘッドスライダが採用された磁気ディスク装置においては、磁気ヘッド素子の位置決め機構として、VCM(ボイスコイルモータ)を用いた粗動アクチュエータと、スライダと連結されるアームを駆動させるアーム駆動方式、スライダを駆動させるスライダ駆動方式、磁気ヘッド素子を駆動させるヘッド素子駆動方式などの微動アクチュエータとを併用して位置決めを行っている。
【0005】
しかし、上述のように、磁気ディスクの高記録密度化に伴い、磁気ディスクと磁気ヘッド素子との距離はさらに狭小化され、磁気ディスクとスライダとが接触した状態で駆動される、いわゆる接触記録型のヘッドスライダが提案されるようになった。
【0006】
この接触記録型ヘッドスライダを有する磁気ディスク装置においては、磁気ヘッド素子と磁気ディスクとが接触することから、磁気ヘッド素子の位置決め機構として、浮上記録型ヘッドスライダと同様の、粗動アクチュエータと、アーム駆動方式、スライダ駆動方式、ヘッド素子駆動方式等の微動アクチュエータとを備える機構を採用することはできない。これは、アーム駆動方式の微動アクチュエータの場合、微動アクチュエータの駆動部(アームの一端側)と摩擦力作用点(アームの他端側)とが離間されており、さらに、磁気ディスクとの接触に伴う摩擦力に抗う必要があることから、十分な精度の微少位置決めが困難となる。また、スライダ駆動方式、ヘッド素子駆動方式の微動アクチュエータの場合、本来空気流に発生する風外乱力に抗して位置決めを行うことしか想定されていないところ、磁気ディスクとの接触に伴う摩擦力に抗するとなると、微動アクチュエータの駆動力反力が粗動アクチュエータの駆動に影響を及ぼすことになり、精度よく位置決めを行うことができない。
【0007】
【特許文献1】特開平9−180382号公報
【発明の開示】
【発明が解決しようとする課題】
【0008】
そこで、本発明は、上述のような課題に鑑みてなされたものであり、磁気ヘッド素子の磁気ディスクに対して精度よく位置決めを行うことができる磁気ディスク装置に搭載されるヘッド装置、このヘッド装置の磁気ヘッド素子の磁気ディスクに対する位置制御方法、このヘッド装置が搭載される磁気ディスク装置を提供することを目的とする。
【課題を解決するための手段】
【0009】
本発明に係るヘッド装置は、磁気ディスクに対して情報信号の記録及び/又は再生を行う磁気ヘッド素子と、上記磁気ヘッド素子が上記磁気ディスクと対向するように支持するスライダと、上記スライダと少なくとも2点の接点において連結され、該スライダに対し上記磁気ディスクの記録面と垂直な方向に所定の荷重を付与するサスペンションと、上記サスペンションと連結され、上記スライダを上記磁気ディスクの記録面と垂直な方向を回動軸とする回動方向に回動自在に支持する回動支持機構を有するアームとを備える。そして、上記スライダは、上記磁気ディスクと対向する側で、上記回動支持機構の回動軸とは異なる位置に設けられ、該磁気ディスクと接触する接触パッドを少なくとも2つ有し、上記サスペンションは、少なくとも上記スライダとの1つの接点に、上記スライダに付与される荷重の荷重分布を可変とする荷重分布可変手段が設けられることを特徴とする。
【0010】
また、本発明に係るヘッド装置は、例えば、上記スライダは、上記接触パッドを2つ有し、上記サスペンションは、上記荷重分布可変手段を2つを有し、3点において上記スライダと連結されるようにしてもよい。
【0011】
また、本発明に係るヘッド装置は、例えば、上記2つの接触パッドと上記2つの荷重分布可変手段とは、上記スライダを挟んで対向する位置に設けられるようにしてもよい。
【0012】
さらに、本発明に係るヘッド装置は、例えば、上記荷重分布可変手段は、圧電素子からなるようにしてもよい。
【0013】
また、本発明は、磁気ディスクに対して情報信号の記録及び/又は再生を行う磁気ヘッド素子の該磁気ディスクに対する位置制御方法であって、上記磁気ヘッド素子が上記磁気ディスクと対向するように支持するスライダに付与される上記磁気ディスクの記録面と垂直な方向への所定の荷重の荷重分布を変化させ、上記変化された荷重分布により、上記スライダと上記磁気ディスクとの複数の接点における摩擦力を変化させ、該スライダを上記磁気ディスクの記録面と垂直な方向を回動軸として回動させ、該磁気ディスクに対する上記磁気ヘッド素子の位置を制御することを特徴とする。
【0014】
さらに、本発明に係る磁気ディスク装置は、回転可能に支持された磁気ディスクと、ヘッド装置とからなり、上記ヘッド装置は、磁気ディスクに対して情報信号の記録及び/又は再生を行う磁気ヘッド素子と、上記磁気ヘッド素子が上記磁気ディスクと対向するように支持するスライダと、上記スライダと少なくとも2点の接点において連結され、該スライダに対し上記磁気ディスクの記録面と垂直な方向に所定の荷重を付与するサスペンションと、上記サスペンションと連結され、上記スライダを上記磁気ディスクの記録面と垂直な方向を回動軸とする回動方向に回動自在に支持する回動支持機構を有するアームとを備え、上記スライダは、上記磁気ディスクと対向する側で、上記回動支持機構の回動軸とは異なる位置に設けられ、該磁気ディスクと接触する接触パッドを少なくとも2つ有し、上記サスペンションは、少なくとも上記スライダとの1つの接点に、上記スライダに付与される荷重の荷重分布を可変とする荷重分布可変手段が設けられることを特徴とする。
【発明の効果】
【0015】
本発明は、スライダにかかる荷重分布を変動させ、磁気ヘッド素子の位置を変位させるので、磁気ヘッド素子を磁気ディスクに近接させた状態で、磁気ヘッド素子の磁気ディスクに対する位置を制御することができ、高記録密度化された磁気ディスクに対する磁気ヘッド素子の位置制御を精度よく行うことができる。
【発明を実施するための最良の形態】
【0016】
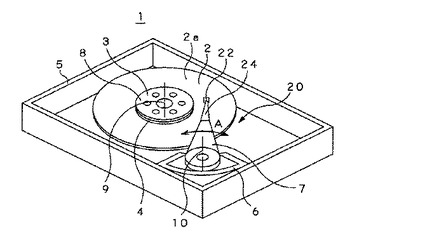
以下、本発明に係る磁気ディスク装置について図面を参照して詳細に説明をする。本発明に係る磁気ディスク装置1は、コンピュータの外部記憶装置として用いられるものである。磁気ディスク装置1は、磁気ディスク2と、この磁気ディスク2が装着され、回転可能に支持されるディスク装着部3と、ディスク装着部3を回転駆動するディスク駆動部4と、磁気ディスク2に対して情報信号の記録及び/又は再生を行う磁気ヘッド素子11を有するヘッド装置20と、これらの部材を収容するケース5とからなる。ヘッド装置20には、後述するサスペンションアーム24の一端側に、磁気ヘッド素子11を磁気ディスク2の半径方向に移動させるための回動アクチュエータ6と連結される剛性アーム7が接続されている。
【0017】
磁気ディスク2は、主面に設けられる記録面2aに情報信号が記録されるディスク状の記録媒体である。
【0018】
ディスク装着部3は、磁気ディスク2を回転可能に支持される部材であり、例えば、ハブ8により、磁気ディスク2の回転軸9に固定されている。なお、ディスク装着部3は、上述に限らず、磁気ディスク2を回転可能に支持できるものであればよく、例えば、磁気ディスク2を固定し保持するための周知のチャッキング機構を有するものであってもよい。
【0019】
ディスク駆動部4は、回転軸9に接続される駆動モータであり、磁気ディスク2を回転軸9を中心に回転駆動させる。ディスク駆動部4は、例えば、磁気ディスク2をディスク装着部3と一体に回転駆動する扁平状のスピンドルモータからなる。なお、ディスク駆動部4は、上述に限らず、磁気ディスク2を回転駆動させることができる駆動源であれば、いかなる構造を有するものであってもよい。
【0020】
磁気ディスク装置1のケース5は、各構成部材が収容される略直方体形状からなる。ケース5は、内部、外部の空気を強制循環させ内部に新しい空気を供給する機構は有しておらず、内部が外部環境から事実上隔離され、密封されている。なお、ケース5は、上述に限らず、内部を外部の環境に合わせて圧力を調節する通気口を有する構造としてもよい。
【0021】
ケース5内に設けられる回動アクチュエータ6は、剛性アーム7が連結され、剛性アーム7を、回動軸10を中心に磁気ディスク2の記録面2aと略平行な面内(図1中矢印A方向)で回動させるための駆動源である。回動アクチュエータ6は、例えば、VCM(ボイスコイルモータ)からなり、いわゆる磁気ヘッド素子21の粗動位置決め機構の一部を構成するものである。
【0022】
剛性アーム7は、回動アクチュエータ6とヘッド装置20とを連結する部材であり、剛性を有する長尺状の部材からなり、一端が回動軸10と回動可能に連結され、他端がヘッド装置20のサスペンションアーム24と連結されている。
【0023】
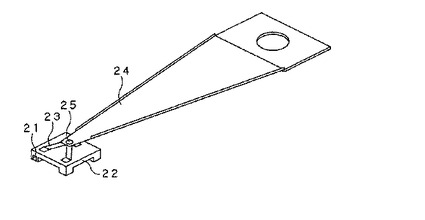
ヘッド装置20は、図1及び図2に示すように、磁気ディスク2に対して情報信号の記録及び/又は再生を行う磁気ヘッド素子21と、磁気ヘッド素子21が磁気ディスク2と対向するように支持するスライダ22と、スライダ22と3点の接点において連結され、スライダ22に対し磁気ディスク2の記録面2aと垂直な方向に所定の荷重を付与する支持バネ23と、支持バネ23と連結され、スライダ22を磁気ディスク2の記録面2aと垂直な方向を回動軸とする回動方向に回動自在に支持する回動支持機構25を有するサスペンションアーム24とを備える。
【0024】
磁気ヘッド素子21は、磁気ディスク2に対して情報信号の記録の書き込み、又は読み出しを行うことができる素子である。磁気ヘッド素子21は、スライダ22の磁気ディスク2の記録面2aに記録された情報信号を読み出し及び書き込みができる位置に取り付けられる。具体的には、磁気ヘッド素子21は、高記録密度化された磁気ディスク2の記録面2aに記録された情報信号を読み出し、書き込みができるように、記録面2aと近接した位置、すなわち、スライダ22の記録面2aと対向する側に設けられる。
【0025】
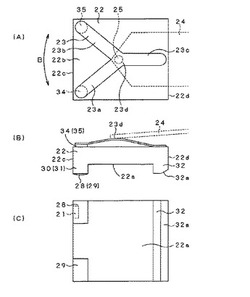
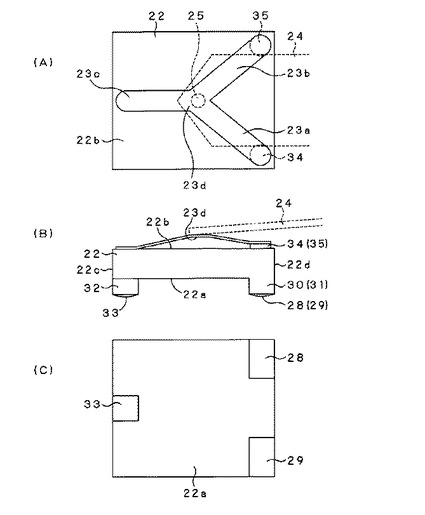
スライダ22は、図2及び図3に示すように、略板状の部材からなり、対向する一対の側面22c、22dが、磁気ディスク2の半径方向と略平行となるように配設される。スライダ22は、磁気ディスク2と対向する面22aに磁気ディスク2と2点において接触する接触パッド28、29が設けられ、面22aと平行する面22bにサスペンションとしての支持バネ23が設けられている。スライダ22は、支持バネ23、サスペンションアーム24により、磁気ディスク2の記録面2aと略垂直な方向に対して所定の荷重が付与されている。
【0026】
スライダ22の面22aに設けられる接触パッド28、29は、面22aの側面22c側、すなわち、トレーリングエッジ側に設けられる突部30、31の端部に設けられる。接触パッド28、29は、磁気ディスク2と接触摺動する際に、摩擦力の発生を抑える材料により形成される。なお、突部30の接触パッド28近傍には、磁気ヘッド素子21が設けられている。
【0027】
スライダ22の面22a側には、接触パッド28、29の他に、側面22d側、すなわち、リーディングエッジ側に幅方向全域に亘って形成される突片32が設けられている。突片32は、スライダ22と連続して形成され、磁気ディスク2と過度には接触しない高さに形成され、側面22d側に空気抵抗を低減するための切欠部32aが設けられている。
【0028】
支持バネ23は、図2及び図3に示すように、第1の脚部23a、第2の脚部23b、第3の脚部23cとから構成され、3本の短冊状の板材が、一方の端部において接合され、その接合部を頂点23dとして、それぞれの他端部が脚を構成し、スライダ22と接続される部材である。支持バネ23は、第1、第2、第3の脚部23a、23b、23cによって形成される頂点23dにおいて、サスペンションアーム24と連結され、第1、第2、第3の脚部23a、23b、23cが平面視略等間隔となるように形成されている。支持バネ23は、サスペンションアーム24により磁気ディスク2側に向けて荷重がかけられており、その荷重をスライダ22に分散させる部材である。支持バネ23の頂点23dは、スライダ22の面22bの略中心となる位置に設けられている。
【0029】
支持バネ23の第1の脚部23aは、スライダ22の面22b上で、トレーリングエッジ側(側面22c側)の突部30と対向する位置にスライダ22と接続されている。
【0030】
支持バネ23の第2の脚部23bは、スライダ22の面22b上で、トレーリングエッジ側(側面22c側)の突部31と対向する位置にスライダ22と接続されている。
【0031】
支持バネ23の第3の脚部23cは、スライダ22の面22b上で、リーディングエッジ側(側面22d側)の幅方向略中央で突片32と対向する位置にスライダ22と接続されている。
【0032】
なお、支持バネ23は、上述のように第1、第2、第3の脚部23a、23b、23cを配設することに限らず、サスペンションアーム24からの荷重を均一にスライダ22に伝達できる構成であればいかなる構成であってもよい。
【0033】
また、支持バネ23には、第1の脚部23aとスライダ22との接点において、積層型の圧電素子34が介挿されている。さらに、支持バネ23には、第2の脚部23bとの接点において、積層型の圧電素子35が介挿されている。この圧電素子34、35は、図示しない電源から電圧を印加することにより厚さが変動するものである。すなわち、圧電素子34、35は、印加電圧に応じて、面22bと垂直な方向の厚みが変動するものである。圧電素子34、35は、それぞれの素子に印加する電圧を制御することにより、スライダ22にかかる荷重の荷重分布を可変とする荷重可変手段を構成するものである。
【0034】
サスペンションアーム24は、長尺状の剛性を有する板バネからなり、その一端が剛性アーム7と接続され、他端が回動支持機構25を介して支持バネ23と接続されている。サスペンションアーム24は、支持バネ23と接続される側の端部において、回動支持機構25を有する。回動支持機構25は、支持バネ23を磁気ディスク2の記録面2aと略平行な面内を図3(A)中矢印Bに示す方向に回動させる。回動支持機構25は、支持バネ23を回動させることにより、支持バネ23と連結されたスライダ22を回動させ、スライダ22に設けられる磁気ヘッド素子21を磁気ディスク2の略半径方向に移動させる。
【0035】
サスペンションアーム24は、磁気ディスク2の記録面2aと略垂直な方向に荷重が付与される。サスペンションアーム24に付与される荷重は、支持バネ23を介して、均一にスライダ22に伝達される。
【0036】
このような構成を有する磁気ディスク装置1は、回動アクチュエータ6を制御することにより、磁気ディスク2の所望とする半径位置に磁気ヘッド素子21を粗動させ、磁気ディスク2と磁気ヘッド素子21とが近接ないし接触しながら駆動される。磁気ディスク装置1は、スライダ22と支持バネ23との間に設けられる2つの圧電素子34、35を制御することにより、スライダ22にかかる荷重の荷重分布を変動させ、スライダ22を回動支持機構25の回動軸を中心として回動させ、磁気ヘッド素子21を微動させる。このとき、磁気ディスク装置1は、圧電素子34、35を制御することにより、スライダ22に係る荷重の荷重分布が変動し、すなわち、接触パッド28、29に作用する磁気ディスク2との摩擦力が異なり、回動支持機構25の回動軸周りに発生するモーメントが異なり、スライダ22自体が回転し、磁気ヘッド素子21が磁気ディスク2の半径方向、すなわち磁気ディスク2のトラック幅方向に変位することができる。
【0037】
磁気ディスク装置1は、粗動アクチュエータとしての回動アクチュエータ6を有し、さらに、圧電素子34、35を制御しスライダ22にかかる荷重分布を変動させ、磁気ヘッド素子21の位置を変位させる微動アクチュエータとしての機能を有するヘッド装置20を備えるので、磁気ヘッド素子21を磁気ディスク2に近接させた状態で、磁気ヘッド素子21の磁気ディスク2に対する位置を制御することができるので、高記録密度化された磁気ディスク2に対する磁気ヘッド素子21の位置制御を精度よく行うことができる。また、磁気ディスク装置1のヘッド装置20は、磁気ヘッド素子21の微少な位置決めを、粗動アクチュエータとしての回動アクチュエータ6に影響を与えずに行うことができるので、確実に精度よく位置制御を行うことができる。
【0038】
次に、磁気ディスク装置1における磁気ディスク2に対する磁気ヘッド素子21の位置制御方法について説明をする。
【0039】
前提として、磁気ディスク装置1には、荷重方向が磁気ディスク2の記録面2aと垂直な方向となるように、サスペンションアーム24に付与される荷重が支持バネ23を介してスライダ22に付与されているものとする。このとき、スライダ22に伝達される荷重は、支持バネ23により均一化されており、磁気ディスク2と磁気ヘッド素子21とが、高記録密度化された磁気ディスクの情報信号を読み出し、書き込みに適した距離離間するように、接触パッド28、29とが記録面2aと接触摺動する。
【0040】
まず、磁気ディスク装置1は、荷重分布可変手段としての圧電素子34、35を制御し、それぞれの素子に印加する電圧を変化させ、スライダ22に付与される荷重の荷重分布を変化させる。
【0041】
次に、磁気ディスク装置1は、この変化された荷重分布により、スライダ22と磁気ディスク2との接点である接触パッド28、29それぞれにおける摩擦力を変化させ、スライダ22を磁気ディスク2の記録面2aと垂直な方向を回動軸、すなわち回動支持機構25を回動軸として回動させ、磁気ディスク2に対する磁気ヘッド素子21の位置を制御する。
【0042】
このようにすると、磁気ディスク装置1の磁気ヘッド素子21の微少な位置決めを行うことができる。具体的には、磁気ディスク装置1は、磁気ヘッド素子21を磁気ディスク2の半径方向外周側に変位させる場合には、圧電素子35に印加する電圧を制御し、その厚さを増加させることで、スライダ22に付与される荷重の荷重分布が変化し、それに伴い、接触パッド29と磁気ディスク2との摩擦力が増加し、回動支持機構25の回動軸周りにモーメントが発生し、スライダ22を平面視時計回りに回動する。これにより、磁気ヘッド素子21は、磁気ディスク2の半径方向外周側に変位する。また、逆に、磁気ディスク装置1は、磁気ヘッド素子21を磁気ディスク2の半径方向内周側に変位させる場合には、圧電素子34に印加する電圧を制御し、その厚さを増加させることで、スライダ22に付与される荷重の荷重分布が変化し、それに伴い、接触パッド28と磁気ディスク2との摩擦力が増加し、回動支持機構25の回動軸周りにモーメントが発生し、スライダ22を平面視反時計回りに回動する。これにより、磁気ヘッド素子21は、磁気ディスク2の半径方向内周側に変位する。
【0043】
以上のように、磁気ディスク装置1は、圧電素子34、35に印加する電圧値や印加時間を適宜制御することにより、磁気ヘッド素子21の変位量を調整することができる。また、磁気ディスク装置1は、スライダ22の面22bの中央近傍に回動中心となる回動支持機構25の回動軸が配設されており、スライダ22を回動させるときに生じる駆動反力は最小限とすることができ、そのため、サスペンションアーム24へこの駆動反力による作用を伝達することがなく、すなわち、回動アクチュエータ6に影響を与えないので、磁気ヘッド素子21の粗動と微動とを精度よく行うことができ、ひいては磁気ヘッド素子21の正確な位置決めを行うことができる。
【0044】
なお、磁気ディスク装置1は、圧電素子34、35が2つ設けられることについて述べたが、これに限らず、支持バネ23とスライダ22との全ての接点に介挿させてもよく、また、いずれか1つの接点に介挿させるようにのみしてもよい。また、支持バネ23は、3点においてスライダ22と連結されることについて述べたが、これに限らず、スライダ22を支持でき、スライダ22の回動に必要な圧電素子をスライダ22との接点に介挿することができる、すなわち、スライダ22を支持するとともに、スライダ22の回動軸と異なる位置において接点を有する構成であればいかなるものであってもよい。
【0045】
次に、本発明に係る磁気ディスク装置の他の実施の形態について説明をする。
【0046】
第2の実施の形態として示すヘッド装置は、図4に示すように、第1の実施の形態として示したヘッド装置20におけるスライダ22と支持バネ23との連結位置が異なるものである。なお、第1の実施の形態として示したヘッド装置20と同様の機能を有する部材については、同様の符号を付し、その詳細な説明は省略する。
【0047】
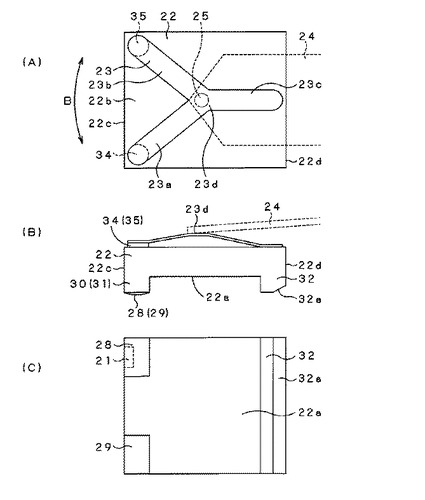
第2の実施の形態としてのヘッド装置は、スライダ22と連結される支持バネ23の接点位置が異なるものである。具体的には、支持バネ23は、図4に示すように、第1の脚部23a、第2の脚部23b、第3の脚部23cとから構成され、3本の短冊状の板材が、一方の端部において接合され、その接合部を頂点23dとして、それぞれの他端部が脚を構成し、スライダ22と接続される部材である。支持バネ23は、第1、第2、第3の脚部23a、23b、23cによって形成される頂点23dにおいて、サスペンションアーム24と連結され、第1、第2、第3の脚部23a、23b、23cが平面視略等間隔となるように形成されている。支持バネ23は、サスペンションアーム24により磁気ディスク2側に向けて荷重がかけられており、その荷重をスライダ22に分散させる部材である。支持バネ23の頂点23dは、スライダ22の面22bの略中心となる位置に設けられている。
【0048】
支持バネ23の第1の脚部23aは、スライダ22の面22b上で、リーディングエッジ側(側面22d側)に設けられる突部30と対向する位置にスライダ22と接続されている。
【0049】
支持バネ23の第2の脚部23bは、スライダ22の面22b上で、リーディングエッジ側(側面22d側)に設けられる突部31と対向する位置にスライダ22と接続されている。
【0050】
支持バネ23の第3の脚部23cは、スライダ22の面22b上で、トレーリングエッジ側(側面22c側)の幅方向略中央で突片32と対向する位置にスライダ22と接続されている。
【0051】
また、支持バネ23の第1の脚部23aとスライダ22との接点においては、圧電素子34が介挿され、第2の脚部23bとスライダ22との接点においては、圧電素子35が介挿されている。
【0052】
さらに、スライダ22に設けられる突片32は、トレーリングエッジ側(側面22c側)に設けられ、先端部に接触パッド33が取り付けられている。
【0053】
このような構成を有する第2の実施の形態のヘッド装置は、ヘッド装置20と同様に、圧電素子34、35を制御することにより、スライダ22にかかる荷重の荷重分布を変化させ、接触パッド28、29、33に作用する磁気ディスク2の記録面2aとの摩擦力が異なり、スライダ22が回動支持機構25の回動軸を中心に回動し、磁気ヘッド素子21を変位させることができる。
【0054】
以上のように第1及び第2の実施の形態として示したヘッド装置は、磁気ディスク2の記録面2aと接触パッド28、29、33との間に発生する摩擦力が、乾性摩擦によるものである。しかし、磁気ディスク2によっては、スライダ22との接触摺動により記録面2aが損傷することや、摩擦低減のために、潤滑剤が塗布されたものもある。この場合、磁気ディスク2の記録面2aと接触パッドとの間に発生する摩擦力は、粘性摩擦によるものとなる。
【0055】
そこで、次に、磁気ディスクと接触パッドとの摩擦特性が、粘性摩擦によるものの場合におけるヘッド装置について説明する。
【0056】
第3の実施の形態として示すヘッド装置は、図5に示すように、ヘッド装置20における支持バネ23の代わりに支持バネ41が設けられている。
【0057】
支持バネ41は、図5に示すように、第1の脚部41a、第2の脚部41b、第3の脚部41cとから構成され、3本の短冊状の板材が、一方の端部において接合され、その接合部を頂点41dとして、それぞれの他端部が脚を構成し、スライダ22と接続される部材である。支持バネ41は、第1、第2、第3の脚部41a、41b、41cによって形成される頂点41dにおいて、サスペンションアーム24と連結され、第1、第2、第3の脚部41a、41b、41cが平面視略等間隔となるように形成されている。支持バネ41は、サスペンションアーム24により磁気ディスク2側に向けて荷重がかけられており、その荷重をスライダ22に分散させる部材である。支持バネ41の頂点41dは、スライダ22の面22bの略中心となる位置に設けられている。
【0058】
支持バネ41の第1の脚部41aは、スライダ22の面22b上で、トレーリングエッジ側(側面22c側)に設けられる突部30と対向する位置にスライダ22と接続されている。第1の脚部41aには、長手方向略中央部に長手方向の伸縮用の伸びしろ部42が形成されている。伸びしろ部42は、後述する圧電素子44により第1の脚部41aが長手方向に伸縮される力がかかるときに弾性変形し、第1の脚部41aの全長を可変とする部材である。
【0059】
支持バネ41の第2の脚部41bは、スライダ22の面22b上で、トレーリングエッジ側(側面22c側)に設けられる突部31と対向する位置にスライダ22と接続されている。第2の脚部41bには、長手方向略中央部に長手方向の伸縮用の伸びしろ部43が形成されている。伸びしろ部43は、後述する圧電素子45により第2の脚部41bが長手方向に伸縮される力がかかるときに弾性変形し、第2の脚部41bの全長を可変とする部材である。
【0060】
支持バネ41の第3の脚部41cは、スライダ22の面22b上で、リーディングエッジ側(側面22d側)の幅方向略中央で突片32と対向する位置にスライダ22と接続されている。
【0061】
また、第3の実施の形態として示すヘッド装置には、第1の脚部41aとスライダ22との接点において、圧電素子44が介挿され、第2の脚部41bとスライダ22との接点において、圧電素子45が介挿されている。
【0062】
圧電素子44、45は、図示しない電源から電圧を印加することによって第1の脚部41a及び第2の脚部41bの長手方向の全長を変動させるものである。すなわち、圧電素子44、45は、印加電圧に応じて、せん断ひずみによって圧電素子表面の面22bと平行な方向の位置が変動するものである。圧電素子44、45は、それぞれの素子に印加する電圧を制御することにより、スライダ22にかかる荷重の荷重分布を可変とする荷重可変手段を構成するものである。
【0063】
さらに、第3の実施の形態として示すヘッド装置は、接触パッド28、29が、先端部に向かって隆起した、いわゆる山型に形成されている。これは、磁気ディスク2と接触パッド28、29との接触摺動面を少なくし摩擦を低減するとともに、圧電素子44、45によりスライダ22にかかる荷重の荷重分布が変化したとき、スライダ22の姿勢が変化し、接触パッド28、29の接触面積を変化させるための形状である。
【0064】
このような構成を有する第3の実施の形態のヘッド装置は、ヘッド装置20と同様に、圧電素子44、45を制御することにより、スライダ22にかかる荷重の荷重分布を変化させ、接触パッド28、29と磁気ディスク2との接触面積を変化させ、これに伴い磁気ディスク2の記録面2aとの摩擦力を変化させ、スライダ22が回動支持機構25の回動軸を中心に回動し、磁気ヘッド素子21を変位させるようにすることができる。
【0065】
次に、第4の実施の形態について説明する。第4の実施の形態として示すヘッド装置は、スライダ22と連結される支持バネ41の接点位置が、第3の実施の形態として示したヘッド装置と異なるものである。具体的には、支持バネ41は、図6に示すように、第1の脚部41a、第2の脚部41b、第3の脚部41cとから構成され、3本の短冊状の板材が、一方の端部において接合され、その接合部を頂点41dとして、それぞれの他端部が脚を構成し、スライダ22と接続される部材である。支持バネ41は、第1、第2、第3の脚部41a、41b、41cによって形成される頂点41dにおいて、サスペンションアーム24と連結され、第1、第2、第3の脚部41a、41b、41cが平面視略等間隔となるように形成されている。支持バネ41は、サスペンションアーム24により磁気ディスク2側に向けて荷重がかけられており、その荷重をスライダ22に分散させる部材である。支持バネ41の頂点41dは、スライダ22の面22bの略中心となる位置に設けられている。
【0066】
支持バネ41の第1の脚部41aは、スライダ22の面22b上で、リーディングエッジ側(側面22d側)に設けられる突部30と対向する位置にスライダ22と接続されている。第1の脚部41aには、長手方向略中央部に長手方向の伸縮用の伸びしろ部42が形成されている。伸びしろ部42は、圧電素子44により第1の脚部41aが長手方向に伸縮する力がかかるときに弾性変形し、第1の脚部41aの全長を可変とする部材である。
【0067】
支持バネ41の第2の脚部41bは、スライダ22の面22b上で、リーディングエッジ側(側面22d側)に設けられる突部31と対向する位置にスライダ22と接続されている。第2の脚部41bには、長手方向略中央部に長手方向の伸縮用の伸びしろ部43が形成されている。伸びしろ部43は、後述する圧電素子45により第2の脚部41bが長手方向に伸縮される力がかかるときに弾性変形し、第2の脚部41bの全長を可変とする部材である。
【0068】
支持バネ41の第3の脚部41cは、スライダ22の面22b上で、トレーリングエッジ側(側面22c側)の幅方向略中央で突片32と対向する位置にスライダ22と接続されている。
【0069】
圧電素子44、45は、図示しない電源から電圧を印加することによって第1の脚部41a及び第2の脚部41bの長手方向の全長を変動させるものである。すなわち、圧電素子44、45は、印加電圧に応じて、せん断ひずみによって圧電素子表面の面22bと平行な方向の位置が変動するものである。圧電素子44、45は、それぞれの素子に印加する電圧を制御することにより、スライダ22にかかる荷重の荷重分布を可変とする荷重可変手段を構成するものである。
【0070】
さらに、第4の実施の形態として示すヘッド装置は、第3の実施の形態と同様、接触パッド28、29が、先端部に向かって隆起した、いわゆる山型に形成されている。これは、磁気ディスク2と接触パッド28、29との接触摺動面を少なくし摩擦を低減するとともに、圧電素子44、45によりスライダ22にかかる荷重の荷重分布が変化したとき、スライダ22の姿勢が変化し、接触パッド28、29の接触面積を変化させるための形状である。
【0071】
スライダ22に設けられる突片32は、トレーリングエッジ側(側面22c側)に設けられ、先端部に接触パッド33が取り付けられている。
【0072】
このような構成を有する第4の実施の形態のヘッド装置は、ヘッド装置20と同様に、圧電素子44、45を制御することにより、スライダ22にかかる荷重の荷重分布を変化させ、接触パッド28、29、33と磁気ディスク2との接触面積を変化させ、これに伴い磁気ディスク2の記録面2aとの摩擦力を変化させ、スライダ22が回動支持機構25の回動軸を中心に回動し、磁気ヘッド素子21を変位させるようにすることができる。
【0073】
以上の実施の形態で示したような構成を有する磁気ディスク装置は、粗動アクチュエータとしての回動アクチュエータ6を有し、さらに、圧電素子34、35、44、45を制御しスライダ22にかかる荷重分布を変動させ、磁気ヘッド素子21の位置を変位させる微動アクチュエータとしての機能を有するヘッド装置を備えるので、磁気ヘッド素子21を磁気ディスク2に近接させた状態で、磁気ヘッド素子21の磁気ディスク2に対する位置を制御することができるので、高記録密度化された磁気ディスク2に対する磁気ヘッド素子21の位置制御を精度よく行うことができる。また、磁気ディスク装置のヘッド装置は、磁気ヘッド素子21の微少な位置決めを、粗動アクチュエータとしての回動アクチュエータ6に影響を与えずに行うことができるので、確実に精度よく位置制御を行うことができる。
【0074】
なお、本説明においては、ヘッド装置は、磁気ディスク2とスライダ22とが接触することについて述べたが、ここでいう接触とは、磁気ディスク2が回転駆動中、常時スライダ22と接触する場合でもよく、また、磁気ヘッド素子21の位置制御を行う場合にのみ接触するという間欠的に接触する場合も含むものとする。
【実施例1】
【0075】
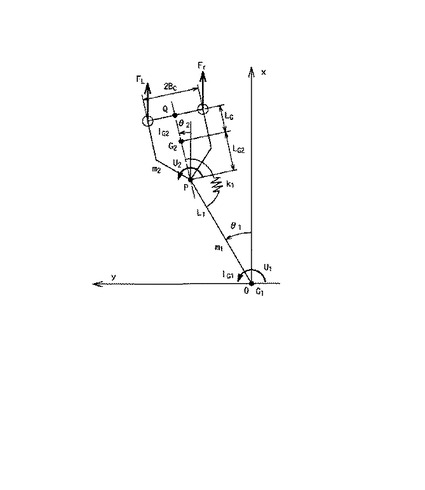
続いて、本発明に係るヘッド装置20を用いて、位置制御を行った場合における有効性について、図7に示す、解析モデルに基づいて説明をする。図7は、ヘッド装置20をモデル化したものであり、原点を剛性アーム7の回転中心である回転軸10とし、図7中x軸を磁気ディスク2の回転方向としたものである。また、FL(N)及びFR(N)は、接触パッド28、29が磁気ディスク2と接触摺動した際に発生する摩擦力を示す。また、点Pは、スライダ22のサスペンションアーム24に対する回転中心であり、回転剛性kt[Nm/rad]がかけられ、接触パッド28、29における摩擦力の差、すなわちFL(N)とFR(N)の差により磁気ディスク2面内方向に回転される。なお、磁気ヘッド21は、ヘッド装置20においては、接触パッド28近傍に設けられることについて述べたが、この解析モデルにおいては、スライダ22の側面22cの幅方向略中心に設けられるものとする。
【0076】
ヘッド装置20における運動方程式は、ラグランジュ方程式を解くことにより下記式(1)、式(2)のように求められる。
【0077】
【数1】

【0078】
これについて説明する。
【0079】
なお、式(1)、式(2)中のθ1及びθ2は、それぞれサスペンションアーム24とスライダ22のx軸からの絶対角、すなわちそれぞれの部材の磁気ディスク2の回転方向に対する角度を示す。また、u1は、粗動アクチュエータとしてのサスペンションアーム24を回動させる回動アクチュエータ6の駆動トルクを示し、u2は、回転型静電アクチュエータなどの従来提案されている微動アクチュエータによるスライダの駆動トルクであり、ヘッド装置20において適用されているアクチュエータとの比較のために考慮したものである。
【0080】
ヘッド装置20においては、式(1)、式(2)に示すように、接触パッド28、29に生じさせる摩擦力の差により、回動駆動されるスライダ22にかかる駆動力反力が、サスペンションアーム24側に作用しないことが分かる。また、接触パッド28、29に作用する摩擦力の合計を一定とすることにより、この摩擦力がサスペンションアーム24側に影響を及ぼさないことも分かる。
【0081】
以上の解析モデルからも、ヘッド装置20に適用された微動アクチュエータとしてのスライダ22の回動制御方法は、サスペンションアーム24へ影響が及ぼされないことが分かる。
【0082】
次に、ヘッド装置20のスライダ22の位置決め機構の周波数応答について検討する。今、式(1)、式(2)をθ1=0、θ2=0として、線形化すると、下記式(3)、式(4)が導き出せる。
【0083】
【数2】
【0084】
ここで、Fave=(FL+FR)/2、δf=(FL−FR)/2であり、Faveは一定で、δfが動的変動略を表すものとする。
【0085】
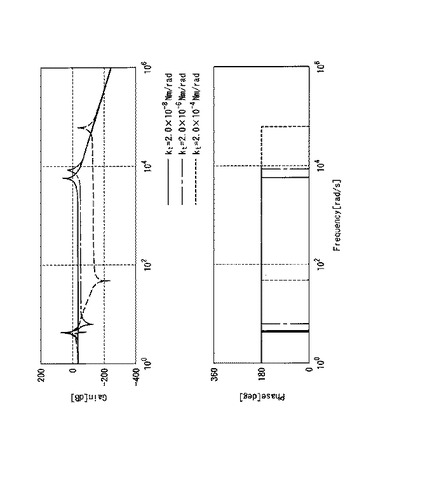
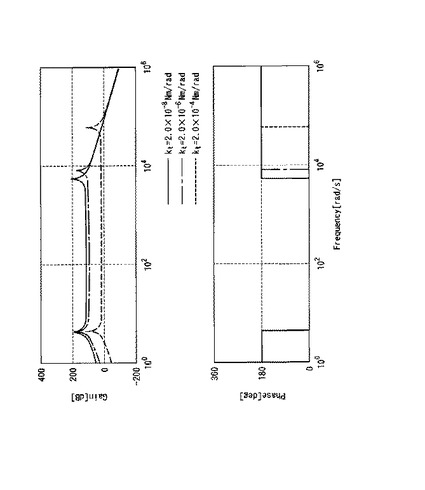
式(3)、式(4)に基づいて、ヘッド装置20における3種類のktに対するδfからQ点(磁気ヘッド21が設けられる位置)のy方向の変位までの周波数応答と、従来のマイクロアクチュエータを想定したu2からQ点のy方向の変位までの周波数応答とをそれぞれ、図8、9に示す。なお、スライダ22の大きさは、フェムトスライダ相当(0.85×0.70×0.23[mm]、0.6[mg])とし、スライダ22の重心G2が、スライダ22の回転軸Pと一致するものとした。
【0086】
図8、9中の一次共振は、ヘッド装置20全体の慣性モーメントと摩擦力の合計のy方向成分による復原ばねによる振動系の共振である。また、二次共振は、スライダ22の回転慣性と取り付け部(回転支持機構25との連結部)の回転剛性と摩擦力の剛性による振動系の共振である。
【0087】
図8に示すように、δfを入力としたときの応答には、u2を入力としたときの応答にはみられない反共振が現出されている。この反共振点付近では微動アクチュエータによる磁気ヘッド21の位置決め制御は、不可能であるが、反共振点は、低周波数領域に現れるため、粗動アクチュエータによる入力で十分制御可能であると考えられる。
【0088】
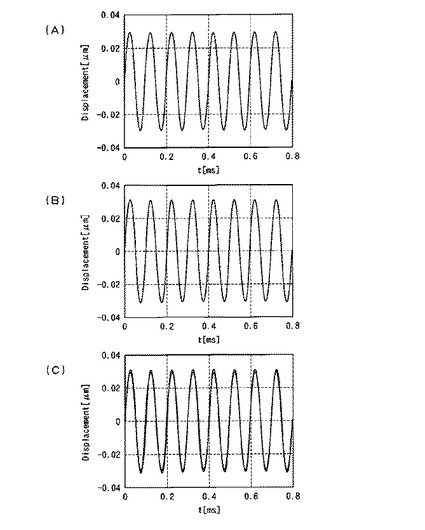
次に、ヘッド装置20のスライダ22の位置決め機構の時間応答について検討する。動的変動力が作用した場合のスライダ22の時間領域での応答は、式(1)、式(2)を使用して求めた。スライダ22の回転軸回りに減衰比ζ=0.1となる減衰を考慮した。この条件下では、図10のような時間応答が得られた。なお、図10(A)は、ヘッド位置であるQ点(磁気ヘッド21の位置)のy方向変位を示し、図10(B)は、ヘッド位置の目標値のy方向変位を示し、図10(C)は、(A)及び(B)の変位を重ね合わせた図を示す。ヘッドの目標値は、yref=30sin(2π×104t)[nm]とした。また、Fave=2.0[mN]、δfを下記式(5)のように定めた。ここでGP=3.0×105[N/m]、GV=5.0×10−2[Ns/m]とした。また、kt=2.0×10−8[Nm/rad]とし、u1=0とした。
【0089】
【数3】
【0090】
ヘッド装置20は、上述の条件下において、1[nm]以下の誤差で位置決めを行うことができた。これにより、高記録密度化された磁気ディスクへの位置決めが可能となることが分かる。
【0091】
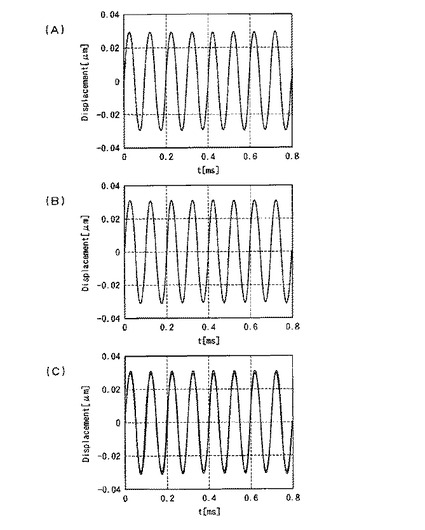
次に、θ1の初期角度を10[deg]、θ2の初期角度を0[deg]としたときの応答を求めた。図11(A)は、初期位置を0とし、θ1の初期角度を10[deg]、θ2の初期角度を0[deg]としたときの応答を示し、図11(B)は、ヘッド位置の目標値のy方向変位を示し、図11(C)は、(A)及び(B)の応答波形を重ね合わせた図を示す。この条件下においても、1[nm]以下の誤差で位置決めを行うことができた。これにより、ヘッド装置20においてスキューがあるか否かに影響されず、位置決めを行うことが可能であることが分かる。
【0092】
以上の解析モデルによっても、本発明に係る磁気ディスク装置1は、ヘッド装置20を備え、このヘッド装置20が、圧電素子34、35、44、45を制御しスライダ22にかかる荷重分布を変動させ、磁気ヘッド素子21の位置を変位させることができ、微動アクチュエータとしての位置決め制御を行うことができることが分かる。したがって、本発明に係る磁気ディスク装置1では、高記録密度化された磁気ディスク2に対する磁気ヘッド素子21の位置制御を精度よく行うことができる。また、磁気ディスク装置のヘッド装置は、磁気ヘッド素子21の微少な位置決めを、粗動アクチュエータとしての回動アクチュエータ6に影響を与えずに行うことができるので、確実に精度よく位置制御を行うことができる。
【図面の簡単な説明】
【0093】
【図1】本発明が適用された磁気ディスク装置の外観斜視図である。
【図2】本発明が適用された磁気ディスク装置におけるヘッド装置の斜視図である。
【図3】(A)は、スライダの平面図であり、(B)は、スライダの側面図であり、(C)は、スライダの底面図である。
【図4】(A)は、第2の実施の形態におけるスライダの平面図であり、(B)は側面図であり、(C)は底面図である。
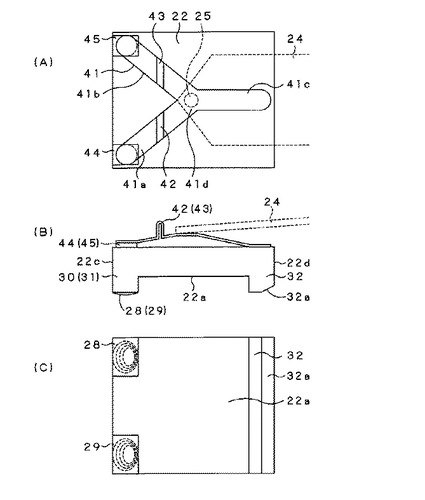
【図5】(A)は、第3の実施の形態におけるスライダの平面図であり、(B)は側面図であり、(C)は底面図である。
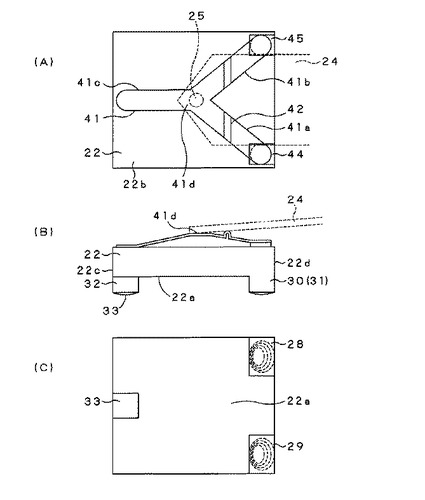
【図6】(A)は、第4の実施の形態におけるスライダの平面図であり、(B)は、側面図であり、(C)は底面図である。
【図7】本発明が適用されたヘッド装置をモデル化した解析モデルを説明するための図である。
【図8】上記解析モデルにおける本発明のヘッド装置の周波数応答を示す図である。
【図9】上記解析モデルにおける従来のヘッド装置の周波数応答を示す図である。
【図10】上記解析モデルにおけるヘッド装置の時間応答を示す図である。
【図11】上記解析モデルにおける初期角度θ1=10、θ2=0とした場合のヘッド装置の時間応答を示す図である。
【符号の説明】
【0094】
1 磁気ディスク装置、2 磁気ディスク、2a 記録面、3 ディスク装着部、4 ディスク駆動部、5 ケース、6 回動アクチュエータ、7 剛性アーム、8 ハブ、9 回転軸、10 回動軸、11 磁気ヘッド素子、20 ヘッド装置、21 磁気ヘッド素子、22 スライダ、23、41 支持バネ、24 サスペンションアーム、25 回動支持機構、28、29、33 接触パッド、30、31 突部、32 突片、32a 切欠部、34、35、44、45 圧電素子
【技術分野】
【0001】
本発明は、ヘッド装置に関し、特に、磁気ヘッドスライダを磁気ディスクに接触させる接触記録型磁気ディスク装置に搭載されるヘッド装置、このヘッド装置の位置制御方法、及び、このヘッド装置を用いた磁気ディスク装置に関する。
【背景技術】
【0002】
従来の磁気ディスク装置は、磁気記録が可能な磁気ディスクと、この磁気ディスクを回転可能に支持するディスク回転支持機構と、磁気ディスクに対して情報信号の記録及び/又は再生を行う磁気ヘッド素子と、この磁気ヘッド素子を支持するための支持部材と、磁気ヘッド素子を磁気ディスク上の半径方向に位置決めする位置決め機構とから構成される。支持部材及び位置決め機構は、磁気ヘッド素子が搭載されたスライダとそのスライダを支持するサスペンション構造と、このサスペンション構造に連結されたアクチュエータ機構とからなり、これらの作用により磁気ヘッド素子を磁気ディスク上の所望の位置に移動させ、磁気ディスク上に記録された情報を読み出し又は書き込みをする間、磁気ヘッド素子の位置を維持する。
【0003】
磁気ディスク装置は、コンピュータの外部記憶装置として用いられ、コンピュータ本体の小型化、高性能化に伴い、小型化とともに、記録容量の大型化が求められている。この要望を満たす手段としては、磁気ディスクの記録密度を高密度にする方法が考えられている。このように、高記録密度化された磁気ディスクを用いる磁気ディスク装置では、磁気ディスクの情報信号を読み出し又は書き込みを行うための磁気ヘッド素子と当該磁気ディスクとの距離も狭小化されることになる。
【0004】
ところで、従来の磁気ディスク装置では、磁気ヘッド素子が搭載されたスライダと磁気ディスクとの間の空気流により浮力が発生し、この浮力により、スライダが浮上した状態で駆動される、いわゆる浮上記録型のヘッドスライダが、多用されていた。この浮上記録型ヘッドスライダが採用された磁気ディスク装置においては、磁気ヘッド素子の位置決め機構として、VCM(ボイスコイルモータ)を用いた粗動アクチュエータと、スライダと連結されるアームを駆動させるアーム駆動方式、スライダを駆動させるスライダ駆動方式、磁気ヘッド素子を駆動させるヘッド素子駆動方式などの微動アクチュエータとを併用して位置決めを行っている。
【0005】
しかし、上述のように、磁気ディスクの高記録密度化に伴い、磁気ディスクと磁気ヘッド素子との距離はさらに狭小化され、磁気ディスクとスライダとが接触した状態で駆動される、いわゆる接触記録型のヘッドスライダが提案されるようになった。
【0006】
この接触記録型ヘッドスライダを有する磁気ディスク装置においては、磁気ヘッド素子と磁気ディスクとが接触することから、磁気ヘッド素子の位置決め機構として、浮上記録型ヘッドスライダと同様の、粗動アクチュエータと、アーム駆動方式、スライダ駆動方式、ヘッド素子駆動方式等の微動アクチュエータとを備える機構を採用することはできない。これは、アーム駆動方式の微動アクチュエータの場合、微動アクチュエータの駆動部(アームの一端側)と摩擦力作用点(アームの他端側)とが離間されており、さらに、磁気ディスクとの接触に伴う摩擦力に抗う必要があることから、十分な精度の微少位置決めが困難となる。また、スライダ駆動方式、ヘッド素子駆動方式の微動アクチュエータの場合、本来空気流に発生する風外乱力に抗して位置決めを行うことしか想定されていないところ、磁気ディスクとの接触に伴う摩擦力に抗するとなると、微動アクチュエータの駆動力反力が粗動アクチュエータの駆動に影響を及ぼすことになり、精度よく位置決めを行うことができない。
【0007】
【特許文献1】特開平9−180382号公報
【発明の開示】
【発明が解決しようとする課題】
【0008】
そこで、本発明は、上述のような課題に鑑みてなされたものであり、磁気ヘッド素子の磁気ディスクに対して精度よく位置決めを行うことができる磁気ディスク装置に搭載されるヘッド装置、このヘッド装置の磁気ヘッド素子の磁気ディスクに対する位置制御方法、このヘッド装置が搭載される磁気ディスク装置を提供することを目的とする。
【課題を解決するための手段】
【0009】
本発明に係るヘッド装置は、磁気ディスクに対して情報信号の記録及び/又は再生を行う磁気ヘッド素子と、上記磁気ヘッド素子が上記磁気ディスクと対向するように支持するスライダと、上記スライダと少なくとも2点の接点において連結され、該スライダに対し上記磁気ディスクの記録面と垂直な方向に所定の荷重を付与するサスペンションと、上記サスペンションと連結され、上記スライダを上記磁気ディスクの記録面と垂直な方向を回動軸とする回動方向に回動自在に支持する回動支持機構を有するアームとを備える。そして、上記スライダは、上記磁気ディスクと対向する側で、上記回動支持機構の回動軸とは異なる位置に設けられ、該磁気ディスクと接触する接触パッドを少なくとも2つ有し、上記サスペンションは、少なくとも上記スライダとの1つの接点に、上記スライダに付与される荷重の荷重分布を可変とする荷重分布可変手段が設けられることを特徴とする。
【0010】
また、本発明に係るヘッド装置は、例えば、上記スライダは、上記接触パッドを2つ有し、上記サスペンションは、上記荷重分布可変手段を2つを有し、3点において上記スライダと連結されるようにしてもよい。
【0011】
また、本発明に係るヘッド装置は、例えば、上記2つの接触パッドと上記2つの荷重分布可変手段とは、上記スライダを挟んで対向する位置に設けられるようにしてもよい。
【0012】
さらに、本発明に係るヘッド装置は、例えば、上記荷重分布可変手段は、圧電素子からなるようにしてもよい。
【0013】
また、本発明は、磁気ディスクに対して情報信号の記録及び/又は再生を行う磁気ヘッド素子の該磁気ディスクに対する位置制御方法であって、上記磁気ヘッド素子が上記磁気ディスクと対向するように支持するスライダに付与される上記磁気ディスクの記録面と垂直な方向への所定の荷重の荷重分布を変化させ、上記変化された荷重分布により、上記スライダと上記磁気ディスクとの複数の接点における摩擦力を変化させ、該スライダを上記磁気ディスクの記録面と垂直な方向を回動軸として回動させ、該磁気ディスクに対する上記磁気ヘッド素子の位置を制御することを特徴とする。
【0014】
さらに、本発明に係る磁気ディスク装置は、回転可能に支持された磁気ディスクと、ヘッド装置とからなり、上記ヘッド装置は、磁気ディスクに対して情報信号の記録及び/又は再生を行う磁気ヘッド素子と、上記磁気ヘッド素子が上記磁気ディスクと対向するように支持するスライダと、上記スライダと少なくとも2点の接点において連結され、該スライダに対し上記磁気ディスクの記録面と垂直な方向に所定の荷重を付与するサスペンションと、上記サスペンションと連結され、上記スライダを上記磁気ディスクの記録面と垂直な方向を回動軸とする回動方向に回動自在に支持する回動支持機構を有するアームとを備え、上記スライダは、上記磁気ディスクと対向する側で、上記回動支持機構の回動軸とは異なる位置に設けられ、該磁気ディスクと接触する接触パッドを少なくとも2つ有し、上記サスペンションは、少なくとも上記スライダとの1つの接点に、上記スライダに付与される荷重の荷重分布を可変とする荷重分布可変手段が設けられることを特徴とする。
【発明の効果】
【0015】
本発明は、スライダにかかる荷重分布を変動させ、磁気ヘッド素子の位置を変位させるので、磁気ヘッド素子を磁気ディスクに近接させた状態で、磁気ヘッド素子の磁気ディスクに対する位置を制御することができ、高記録密度化された磁気ディスクに対する磁気ヘッド素子の位置制御を精度よく行うことができる。
【発明を実施するための最良の形態】
【0016】
以下、本発明に係る磁気ディスク装置について図面を参照して詳細に説明をする。本発明に係る磁気ディスク装置1は、コンピュータの外部記憶装置として用いられるものである。磁気ディスク装置1は、磁気ディスク2と、この磁気ディスク2が装着され、回転可能に支持されるディスク装着部3と、ディスク装着部3を回転駆動するディスク駆動部4と、磁気ディスク2に対して情報信号の記録及び/又は再生を行う磁気ヘッド素子11を有するヘッド装置20と、これらの部材を収容するケース5とからなる。ヘッド装置20には、後述するサスペンションアーム24の一端側に、磁気ヘッド素子11を磁気ディスク2の半径方向に移動させるための回動アクチュエータ6と連結される剛性アーム7が接続されている。
【0017】
磁気ディスク2は、主面に設けられる記録面2aに情報信号が記録されるディスク状の記録媒体である。
【0018】
ディスク装着部3は、磁気ディスク2を回転可能に支持される部材であり、例えば、ハブ8により、磁気ディスク2の回転軸9に固定されている。なお、ディスク装着部3は、上述に限らず、磁気ディスク2を回転可能に支持できるものであればよく、例えば、磁気ディスク2を固定し保持するための周知のチャッキング機構を有するものであってもよい。
【0019】
ディスク駆動部4は、回転軸9に接続される駆動モータであり、磁気ディスク2を回転軸9を中心に回転駆動させる。ディスク駆動部4は、例えば、磁気ディスク2をディスク装着部3と一体に回転駆動する扁平状のスピンドルモータからなる。なお、ディスク駆動部4は、上述に限らず、磁気ディスク2を回転駆動させることができる駆動源であれば、いかなる構造を有するものであってもよい。
【0020】
磁気ディスク装置1のケース5は、各構成部材が収容される略直方体形状からなる。ケース5は、内部、外部の空気を強制循環させ内部に新しい空気を供給する機構は有しておらず、内部が外部環境から事実上隔離され、密封されている。なお、ケース5は、上述に限らず、内部を外部の環境に合わせて圧力を調節する通気口を有する構造としてもよい。
【0021】
ケース5内に設けられる回動アクチュエータ6は、剛性アーム7が連結され、剛性アーム7を、回動軸10を中心に磁気ディスク2の記録面2aと略平行な面内(図1中矢印A方向)で回動させるための駆動源である。回動アクチュエータ6は、例えば、VCM(ボイスコイルモータ)からなり、いわゆる磁気ヘッド素子21の粗動位置決め機構の一部を構成するものである。
【0022】
剛性アーム7は、回動アクチュエータ6とヘッド装置20とを連結する部材であり、剛性を有する長尺状の部材からなり、一端が回動軸10と回動可能に連結され、他端がヘッド装置20のサスペンションアーム24と連結されている。
【0023】
ヘッド装置20は、図1及び図2に示すように、磁気ディスク2に対して情報信号の記録及び/又は再生を行う磁気ヘッド素子21と、磁気ヘッド素子21が磁気ディスク2と対向するように支持するスライダ22と、スライダ22と3点の接点において連結され、スライダ22に対し磁気ディスク2の記録面2aと垂直な方向に所定の荷重を付与する支持バネ23と、支持バネ23と連結され、スライダ22を磁気ディスク2の記録面2aと垂直な方向を回動軸とする回動方向に回動自在に支持する回動支持機構25を有するサスペンションアーム24とを備える。
【0024】
磁気ヘッド素子21は、磁気ディスク2に対して情報信号の記録の書き込み、又は読み出しを行うことができる素子である。磁気ヘッド素子21は、スライダ22の磁気ディスク2の記録面2aに記録された情報信号を読み出し及び書き込みができる位置に取り付けられる。具体的には、磁気ヘッド素子21は、高記録密度化された磁気ディスク2の記録面2aに記録された情報信号を読み出し、書き込みができるように、記録面2aと近接した位置、すなわち、スライダ22の記録面2aと対向する側に設けられる。
【0025】
スライダ22は、図2及び図3に示すように、略板状の部材からなり、対向する一対の側面22c、22dが、磁気ディスク2の半径方向と略平行となるように配設される。スライダ22は、磁気ディスク2と対向する面22aに磁気ディスク2と2点において接触する接触パッド28、29が設けられ、面22aと平行する面22bにサスペンションとしての支持バネ23が設けられている。スライダ22は、支持バネ23、サスペンションアーム24により、磁気ディスク2の記録面2aと略垂直な方向に対して所定の荷重が付与されている。
【0026】
スライダ22の面22aに設けられる接触パッド28、29は、面22aの側面22c側、すなわち、トレーリングエッジ側に設けられる突部30、31の端部に設けられる。接触パッド28、29は、磁気ディスク2と接触摺動する際に、摩擦力の発生を抑える材料により形成される。なお、突部30の接触パッド28近傍には、磁気ヘッド素子21が設けられている。
【0027】
スライダ22の面22a側には、接触パッド28、29の他に、側面22d側、すなわち、リーディングエッジ側に幅方向全域に亘って形成される突片32が設けられている。突片32は、スライダ22と連続して形成され、磁気ディスク2と過度には接触しない高さに形成され、側面22d側に空気抵抗を低減するための切欠部32aが設けられている。
【0028】
支持バネ23は、図2及び図3に示すように、第1の脚部23a、第2の脚部23b、第3の脚部23cとから構成され、3本の短冊状の板材が、一方の端部において接合され、その接合部を頂点23dとして、それぞれの他端部が脚を構成し、スライダ22と接続される部材である。支持バネ23は、第1、第2、第3の脚部23a、23b、23cによって形成される頂点23dにおいて、サスペンションアーム24と連結され、第1、第2、第3の脚部23a、23b、23cが平面視略等間隔となるように形成されている。支持バネ23は、サスペンションアーム24により磁気ディスク2側に向けて荷重がかけられており、その荷重をスライダ22に分散させる部材である。支持バネ23の頂点23dは、スライダ22の面22bの略中心となる位置に設けられている。
【0029】
支持バネ23の第1の脚部23aは、スライダ22の面22b上で、トレーリングエッジ側(側面22c側)の突部30と対向する位置にスライダ22と接続されている。
【0030】
支持バネ23の第2の脚部23bは、スライダ22の面22b上で、トレーリングエッジ側(側面22c側)の突部31と対向する位置にスライダ22と接続されている。
【0031】
支持バネ23の第3の脚部23cは、スライダ22の面22b上で、リーディングエッジ側(側面22d側)の幅方向略中央で突片32と対向する位置にスライダ22と接続されている。
【0032】
なお、支持バネ23は、上述のように第1、第2、第3の脚部23a、23b、23cを配設することに限らず、サスペンションアーム24からの荷重を均一にスライダ22に伝達できる構成であればいかなる構成であってもよい。
【0033】
また、支持バネ23には、第1の脚部23aとスライダ22との接点において、積層型の圧電素子34が介挿されている。さらに、支持バネ23には、第2の脚部23bとの接点において、積層型の圧電素子35が介挿されている。この圧電素子34、35は、図示しない電源から電圧を印加することにより厚さが変動するものである。すなわち、圧電素子34、35は、印加電圧に応じて、面22bと垂直な方向の厚みが変動するものである。圧電素子34、35は、それぞれの素子に印加する電圧を制御することにより、スライダ22にかかる荷重の荷重分布を可変とする荷重可変手段を構成するものである。
【0034】
サスペンションアーム24は、長尺状の剛性を有する板バネからなり、その一端が剛性アーム7と接続され、他端が回動支持機構25を介して支持バネ23と接続されている。サスペンションアーム24は、支持バネ23と接続される側の端部において、回動支持機構25を有する。回動支持機構25は、支持バネ23を磁気ディスク2の記録面2aと略平行な面内を図3(A)中矢印Bに示す方向に回動させる。回動支持機構25は、支持バネ23を回動させることにより、支持バネ23と連結されたスライダ22を回動させ、スライダ22に設けられる磁気ヘッド素子21を磁気ディスク2の略半径方向に移動させる。
【0035】
サスペンションアーム24は、磁気ディスク2の記録面2aと略垂直な方向に荷重が付与される。サスペンションアーム24に付与される荷重は、支持バネ23を介して、均一にスライダ22に伝達される。
【0036】
このような構成を有する磁気ディスク装置1は、回動アクチュエータ6を制御することにより、磁気ディスク2の所望とする半径位置に磁気ヘッド素子21を粗動させ、磁気ディスク2と磁気ヘッド素子21とが近接ないし接触しながら駆動される。磁気ディスク装置1は、スライダ22と支持バネ23との間に設けられる2つの圧電素子34、35を制御することにより、スライダ22にかかる荷重の荷重分布を変動させ、スライダ22を回動支持機構25の回動軸を中心として回動させ、磁気ヘッド素子21を微動させる。このとき、磁気ディスク装置1は、圧電素子34、35を制御することにより、スライダ22に係る荷重の荷重分布が変動し、すなわち、接触パッド28、29に作用する磁気ディスク2との摩擦力が異なり、回動支持機構25の回動軸周りに発生するモーメントが異なり、スライダ22自体が回転し、磁気ヘッド素子21が磁気ディスク2の半径方向、すなわち磁気ディスク2のトラック幅方向に変位することができる。
【0037】
磁気ディスク装置1は、粗動アクチュエータとしての回動アクチュエータ6を有し、さらに、圧電素子34、35を制御しスライダ22にかかる荷重分布を変動させ、磁気ヘッド素子21の位置を変位させる微動アクチュエータとしての機能を有するヘッド装置20を備えるので、磁気ヘッド素子21を磁気ディスク2に近接させた状態で、磁気ヘッド素子21の磁気ディスク2に対する位置を制御することができるので、高記録密度化された磁気ディスク2に対する磁気ヘッド素子21の位置制御を精度よく行うことができる。また、磁気ディスク装置1のヘッド装置20は、磁気ヘッド素子21の微少な位置決めを、粗動アクチュエータとしての回動アクチュエータ6に影響を与えずに行うことができるので、確実に精度よく位置制御を行うことができる。
【0038】
次に、磁気ディスク装置1における磁気ディスク2に対する磁気ヘッド素子21の位置制御方法について説明をする。
【0039】
前提として、磁気ディスク装置1には、荷重方向が磁気ディスク2の記録面2aと垂直な方向となるように、サスペンションアーム24に付与される荷重が支持バネ23を介してスライダ22に付与されているものとする。このとき、スライダ22に伝達される荷重は、支持バネ23により均一化されており、磁気ディスク2と磁気ヘッド素子21とが、高記録密度化された磁気ディスクの情報信号を読み出し、書き込みに適した距離離間するように、接触パッド28、29とが記録面2aと接触摺動する。
【0040】
まず、磁気ディスク装置1は、荷重分布可変手段としての圧電素子34、35を制御し、それぞれの素子に印加する電圧を変化させ、スライダ22に付与される荷重の荷重分布を変化させる。
【0041】
次に、磁気ディスク装置1は、この変化された荷重分布により、スライダ22と磁気ディスク2との接点である接触パッド28、29それぞれにおける摩擦力を変化させ、スライダ22を磁気ディスク2の記録面2aと垂直な方向を回動軸、すなわち回動支持機構25を回動軸として回動させ、磁気ディスク2に対する磁気ヘッド素子21の位置を制御する。
【0042】
このようにすると、磁気ディスク装置1の磁気ヘッド素子21の微少な位置決めを行うことができる。具体的には、磁気ディスク装置1は、磁気ヘッド素子21を磁気ディスク2の半径方向外周側に変位させる場合には、圧電素子35に印加する電圧を制御し、その厚さを増加させることで、スライダ22に付与される荷重の荷重分布が変化し、それに伴い、接触パッド29と磁気ディスク2との摩擦力が増加し、回動支持機構25の回動軸周りにモーメントが発生し、スライダ22を平面視時計回りに回動する。これにより、磁気ヘッド素子21は、磁気ディスク2の半径方向外周側に変位する。また、逆に、磁気ディスク装置1は、磁気ヘッド素子21を磁気ディスク2の半径方向内周側に変位させる場合には、圧電素子34に印加する電圧を制御し、その厚さを増加させることで、スライダ22に付与される荷重の荷重分布が変化し、それに伴い、接触パッド28と磁気ディスク2との摩擦力が増加し、回動支持機構25の回動軸周りにモーメントが発生し、スライダ22を平面視反時計回りに回動する。これにより、磁気ヘッド素子21は、磁気ディスク2の半径方向内周側に変位する。
【0043】
以上のように、磁気ディスク装置1は、圧電素子34、35に印加する電圧値や印加時間を適宜制御することにより、磁気ヘッド素子21の変位量を調整することができる。また、磁気ディスク装置1は、スライダ22の面22bの中央近傍に回動中心となる回動支持機構25の回動軸が配設されており、スライダ22を回動させるときに生じる駆動反力は最小限とすることができ、そのため、サスペンションアーム24へこの駆動反力による作用を伝達することがなく、すなわち、回動アクチュエータ6に影響を与えないので、磁気ヘッド素子21の粗動と微動とを精度よく行うことができ、ひいては磁気ヘッド素子21の正確な位置決めを行うことができる。
【0044】
なお、磁気ディスク装置1は、圧電素子34、35が2つ設けられることについて述べたが、これに限らず、支持バネ23とスライダ22との全ての接点に介挿させてもよく、また、いずれか1つの接点に介挿させるようにのみしてもよい。また、支持バネ23は、3点においてスライダ22と連結されることについて述べたが、これに限らず、スライダ22を支持でき、スライダ22の回動に必要な圧電素子をスライダ22との接点に介挿することができる、すなわち、スライダ22を支持するとともに、スライダ22の回動軸と異なる位置において接点を有する構成であればいかなるものであってもよい。
【0045】
次に、本発明に係る磁気ディスク装置の他の実施の形態について説明をする。
【0046】
第2の実施の形態として示すヘッド装置は、図4に示すように、第1の実施の形態として示したヘッド装置20におけるスライダ22と支持バネ23との連結位置が異なるものである。なお、第1の実施の形態として示したヘッド装置20と同様の機能を有する部材については、同様の符号を付し、その詳細な説明は省略する。
【0047】
第2の実施の形態としてのヘッド装置は、スライダ22と連結される支持バネ23の接点位置が異なるものである。具体的には、支持バネ23は、図4に示すように、第1の脚部23a、第2の脚部23b、第3の脚部23cとから構成され、3本の短冊状の板材が、一方の端部において接合され、その接合部を頂点23dとして、それぞれの他端部が脚を構成し、スライダ22と接続される部材である。支持バネ23は、第1、第2、第3の脚部23a、23b、23cによって形成される頂点23dにおいて、サスペンションアーム24と連結され、第1、第2、第3の脚部23a、23b、23cが平面視略等間隔となるように形成されている。支持バネ23は、サスペンションアーム24により磁気ディスク2側に向けて荷重がかけられており、その荷重をスライダ22に分散させる部材である。支持バネ23の頂点23dは、スライダ22の面22bの略中心となる位置に設けられている。
【0048】
支持バネ23の第1の脚部23aは、スライダ22の面22b上で、リーディングエッジ側(側面22d側)に設けられる突部30と対向する位置にスライダ22と接続されている。
【0049】
支持バネ23の第2の脚部23bは、スライダ22の面22b上で、リーディングエッジ側(側面22d側)に設けられる突部31と対向する位置にスライダ22と接続されている。
【0050】
支持バネ23の第3の脚部23cは、スライダ22の面22b上で、トレーリングエッジ側(側面22c側)の幅方向略中央で突片32と対向する位置にスライダ22と接続されている。
【0051】
また、支持バネ23の第1の脚部23aとスライダ22との接点においては、圧電素子34が介挿され、第2の脚部23bとスライダ22との接点においては、圧電素子35が介挿されている。
【0052】
さらに、スライダ22に設けられる突片32は、トレーリングエッジ側(側面22c側)に設けられ、先端部に接触パッド33が取り付けられている。
【0053】
このような構成を有する第2の実施の形態のヘッド装置は、ヘッド装置20と同様に、圧電素子34、35を制御することにより、スライダ22にかかる荷重の荷重分布を変化させ、接触パッド28、29、33に作用する磁気ディスク2の記録面2aとの摩擦力が異なり、スライダ22が回動支持機構25の回動軸を中心に回動し、磁気ヘッド素子21を変位させることができる。
【0054】
以上のように第1及び第2の実施の形態として示したヘッド装置は、磁気ディスク2の記録面2aと接触パッド28、29、33との間に発生する摩擦力が、乾性摩擦によるものである。しかし、磁気ディスク2によっては、スライダ22との接触摺動により記録面2aが損傷することや、摩擦低減のために、潤滑剤が塗布されたものもある。この場合、磁気ディスク2の記録面2aと接触パッドとの間に発生する摩擦力は、粘性摩擦によるものとなる。
【0055】
そこで、次に、磁気ディスクと接触パッドとの摩擦特性が、粘性摩擦によるものの場合におけるヘッド装置について説明する。
【0056】
第3の実施の形態として示すヘッド装置は、図5に示すように、ヘッド装置20における支持バネ23の代わりに支持バネ41が設けられている。
【0057】
支持バネ41は、図5に示すように、第1の脚部41a、第2の脚部41b、第3の脚部41cとから構成され、3本の短冊状の板材が、一方の端部において接合され、その接合部を頂点41dとして、それぞれの他端部が脚を構成し、スライダ22と接続される部材である。支持バネ41は、第1、第2、第3の脚部41a、41b、41cによって形成される頂点41dにおいて、サスペンションアーム24と連結され、第1、第2、第3の脚部41a、41b、41cが平面視略等間隔となるように形成されている。支持バネ41は、サスペンションアーム24により磁気ディスク2側に向けて荷重がかけられており、その荷重をスライダ22に分散させる部材である。支持バネ41の頂点41dは、スライダ22の面22bの略中心となる位置に設けられている。
【0058】
支持バネ41の第1の脚部41aは、スライダ22の面22b上で、トレーリングエッジ側(側面22c側)に設けられる突部30と対向する位置にスライダ22と接続されている。第1の脚部41aには、長手方向略中央部に長手方向の伸縮用の伸びしろ部42が形成されている。伸びしろ部42は、後述する圧電素子44により第1の脚部41aが長手方向に伸縮される力がかかるときに弾性変形し、第1の脚部41aの全長を可変とする部材である。
【0059】
支持バネ41の第2の脚部41bは、スライダ22の面22b上で、トレーリングエッジ側(側面22c側)に設けられる突部31と対向する位置にスライダ22と接続されている。第2の脚部41bには、長手方向略中央部に長手方向の伸縮用の伸びしろ部43が形成されている。伸びしろ部43は、後述する圧電素子45により第2の脚部41bが長手方向に伸縮される力がかかるときに弾性変形し、第2の脚部41bの全長を可変とする部材である。
【0060】
支持バネ41の第3の脚部41cは、スライダ22の面22b上で、リーディングエッジ側(側面22d側)の幅方向略中央で突片32と対向する位置にスライダ22と接続されている。
【0061】
また、第3の実施の形態として示すヘッド装置には、第1の脚部41aとスライダ22との接点において、圧電素子44が介挿され、第2の脚部41bとスライダ22との接点において、圧電素子45が介挿されている。
【0062】
圧電素子44、45は、図示しない電源から電圧を印加することによって第1の脚部41a及び第2の脚部41bの長手方向の全長を変動させるものである。すなわち、圧電素子44、45は、印加電圧に応じて、せん断ひずみによって圧電素子表面の面22bと平行な方向の位置が変動するものである。圧電素子44、45は、それぞれの素子に印加する電圧を制御することにより、スライダ22にかかる荷重の荷重分布を可変とする荷重可変手段を構成するものである。
【0063】
さらに、第3の実施の形態として示すヘッド装置は、接触パッド28、29が、先端部に向かって隆起した、いわゆる山型に形成されている。これは、磁気ディスク2と接触パッド28、29との接触摺動面を少なくし摩擦を低減するとともに、圧電素子44、45によりスライダ22にかかる荷重の荷重分布が変化したとき、スライダ22の姿勢が変化し、接触パッド28、29の接触面積を変化させるための形状である。
【0064】
このような構成を有する第3の実施の形態のヘッド装置は、ヘッド装置20と同様に、圧電素子44、45を制御することにより、スライダ22にかかる荷重の荷重分布を変化させ、接触パッド28、29と磁気ディスク2との接触面積を変化させ、これに伴い磁気ディスク2の記録面2aとの摩擦力を変化させ、スライダ22が回動支持機構25の回動軸を中心に回動し、磁気ヘッド素子21を変位させるようにすることができる。
【0065】
次に、第4の実施の形態について説明する。第4の実施の形態として示すヘッド装置は、スライダ22と連結される支持バネ41の接点位置が、第3の実施の形態として示したヘッド装置と異なるものである。具体的には、支持バネ41は、図6に示すように、第1の脚部41a、第2の脚部41b、第3の脚部41cとから構成され、3本の短冊状の板材が、一方の端部において接合され、その接合部を頂点41dとして、それぞれの他端部が脚を構成し、スライダ22と接続される部材である。支持バネ41は、第1、第2、第3の脚部41a、41b、41cによって形成される頂点41dにおいて、サスペンションアーム24と連結され、第1、第2、第3の脚部41a、41b、41cが平面視略等間隔となるように形成されている。支持バネ41は、サスペンションアーム24により磁気ディスク2側に向けて荷重がかけられており、その荷重をスライダ22に分散させる部材である。支持バネ41の頂点41dは、スライダ22の面22bの略中心となる位置に設けられている。
【0066】
支持バネ41の第1の脚部41aは、スライダ22の面22b上で、リーディングエッジ側(側面22d側)に設けられる突部30と対向する位置にスライダ22と接続されている。第1の脚部41aには、長手方向略中央部に長手方向の伸縮用の伸びしろ部42が形成されている。伸びしろ部42は、圧電素子44により第1の脚部41aが長手方向に伸縮する力がかかるときに弾性変形し、第1の脚部41aの全長を可変とする部材である。
【0067】
支持バネ41の第2の脚部41bは、スライダ22の面22b上で、リーディングエッジ側(側面22d側)に設けられる突部31と対向する位置にスライダ22と接続されている。第2の脚部41bには、長手方向略中央部に長手方向の伸縮用の伸びしろ部43が形成されている。伸びしろ部43は、後述する圧電素子45により第2の脚部41bが長手方向に伸縮される力がかかるときに弾性変形し、第2の脚部41bの全長を可変とする部材である。
【0068】
支持バネ41の第3の脚部41cは、スライダ22の面22b上で、トレーリングエッジ側(側面22c側)の幅方向略中央で突片32と対向する位置にスライダ22と接続されている。
【0069】
圧電素子44、45は、図示しない電源から電圧を印加することによって第1の脚部41a及び第2の脚部41bの長手方向の全長を変動させるものである。すなわち、圧電素子44、45は、印加電圧に応じて、せん断ひずみによって圧電素子表面の面22bと平行な方向の位置が変動するものである。圧電素子44、45は、それぞれの素子に印加する電圧を制御することにより、スライダ22にかかる荷重の荷重分布を可変とする荷重可変手段を構成するものである。
【0070】
さらに、第4の実施の形態として示すヘッド装置は、第3の実施の形態と同様、接触パッド28、29が、先端部に向かって隆起した、いわゆる山型に形成されている。これは、磁気ディスク2と接触パッド28、29との接触摺動面を少なくし摩擦を低減するとともに、圧電素子44、45によりスライダ22にかかる荷重の荷重分布が変化したとき、スライダ22の姿勢が変化し、接触パッド28、29の接触面積を変化させるための形状である。
【0071】
スライダ22に設けられる突片32は、トレーリングエッジ側(側面22c側)に設けられ、先端部に接触パッド33が取り付けられている。
【0072】
このような構成を有する第4の実施の形態のヘッド装置は、ヘッド装置20と同様に、圧電素子44、45を制御することにより、スライダ22にかかる荷重の荷重分布を変化させ、接触パッド28、29、33と磁気ディスク2との接触面積を変化させ、これに伴い磁気ディスク2の記録面2aとの摩擦力を変化させ、スライダ22が回動支持機構25の回動軸を中心に回動し、磁気ヘッド素子21を変位させるようにすることができる。
【0073】
以上の実施の形態で示したような構成を有する磁気ディスク装置は、粗動アクチュエータとしての回動アクチュエータ6を有し、さらに、圧電素子34、35、44、45を制御しスライダ22にかかる荷重分布を変動させ、磁気ヘッド素子21の位置を変位させる微動アクチュエータとしての機能を有するヘッド装置を備えるので、磁気ヘッド素子21を磁気ディスク2に近接させた状態で、磁気ヘッド素子21の磁気ディスク2に対する位置を制御することができるので、高記録密度化された磁気ディスク2に対する磁気ヘッド素子21の位置制御を精度よく行うことができる。また、磁気ディスク装置のヘッド装置は、磁気ヘッド素子21の微少な位置決めを、粗動アクチュエータとしての回動アクチュエータ6に影響を与えずに行うことができるので、確実に精度よく位置制御を行うことができる。
【0074】
なお、本説明においては、ヘッド装置は、磁気ディスク2とスライダ22とが接触することについて述べたが、ここでいう接触とは、磁気ディスク2が回転駆動中、常時スライダ22と接触する場合でもよく、また、磁気ヘッド素子21の位置制御を行う場合にのみ接触するという間欠的に接触する場合も含むものとする。
【実施例1】
【0075】
続いて、本発明に係るヘッド装置20を用いて、位置制御を行った場合における有効性について、図7に示す、解析モデルに基づいて説明をする。図7は、ヘッド装置20をモデル化したものであり、原点を剛性アーム7の回転中心である回転軸10とし、図7中x軸を磁気ディスク2の回転方向としたものである。また、FL(N)及びFR(N)は、接触パッド28、29が磁気ディスク2と接触摺動した際に発生する摩擦力を示す。また、点Pは、スライダ22のサスペンションアーム24に対する回転中心であり、回転剛性kt[Nm/rad]がかけられ、接触パッド28、29における摩擦力の差、すなわちFL(N)とFR(N)の差により磁気ディスク2面内方向に回転される。なお、磁気ヘッド21は、ヘッド装置20においては、接触パッド28近傍に設けられることについて述べたが、この解析モデルにおいては、スライダ22の側面22cの幅方向略中心に設けられるものとする。
【0076】
ヘッド装置20における運動方程式は、ラグランジュ方程式を解くことにより下記式(1)、式(2)のように求められる。
【0077】
【数1】
【0078】
これについて説明する。
【0079】
なお、式(1)、式(2)中のθ1及びθ2は、それぞれサスペンションアーム24とスライダ22のx軸からの絶対角、すなわちそれぞれの部材の磁気ディスク2の回転方向に対する角度を示す。また、u1は、粗動アクチュエータとしてのサスペンションアーム24を回動させる回動アクチュエータ6の駆動トルクを示し、u2は、回転型静電アクチュエータなどの従来提案されている微動アクチュエータによるスライダの駆動トルクであり、ヘッド装置20において適用されているアクチュエータとの比較のために考慮したものである。
【0080】
ヘッド装置20においては、式(1)、式(2)に示すように、接触パッド28、29に生じさせる摩擦力の差により、回動駆動されるスライダ22にかかる駆動力反力が、サスペンションアーム24側に作用しないことが分かる。また、接触パッド28、29に作用する摩擦力の合計を一定とすることにより、この摩擦力がサスペンションアーム24側に影響を及ぼさないことも分かる。
【0081】
以上の解析モデルからも、ヘッド装置20に適用された微動アクチュエータとしてのスライダ22の回動制御方法は、サスペンションアーム24へ影響が及ぼされないことが分かる。
【0082】
次に、ヘッド装置20のスライダ22の位置決め機構の周波数応答について検討する。今、式(1)、式(2)をθ1=0、θ2=0として、線形化すると、下記式(3)、式(4)が導き出せる。
【0083】
【数2】
【0084】
ここで、Fave=(FL+FR)/2、δf=(FL−FR)/2であり、Faveは一定で、δfが動的変動略を表すものとする。
【0085】
式(3)、式(4)に基づいて、ヘッド装置20における3種類のktに対するδfからQ点(磁気ヘッド21が設けられる位置)のy方向の変位までの周波数応答と、従来のマイクロアクチュエータを想定したu2からQ点のy方向の変位までの周波数応答とをそれぞれ、図8、9に示す。なお、スライダ22の大きさは、フェムトスライダ相当(0.85×0.70×0.23[mm]、0.6[mg])とし、スライダ22の重心G2が、スライダ22の回転軸Pと一致するものとした。
【0086】
図8、9中の一次共振は、ヘッド装置20全体の慣性モーメントと摩擦力の合計のy方向成分による復原ばねによる振動系の共振である。また、二次共振は、スライダ22の回転慣性と取り付け部(回転支持機構25との連結部)の回転剛性と摩擦力の剛性による振動系の共振である。
【0087】
図8に示すように、δfを入力としたときの応答には、u2を入力としたときの応答にはみられない反共振が現出されている。この反共振点付近では微動アクチュエータによる磁気ヘッド21の位置決め制御は、不可能であるが、反共振点は、低周波数領域に現れるため、粗動アクチュエータによる入力で十分制御可能であると考えられる。
【0088】
次に、ヘッド装置20のスライダ22の位置決め機構の時間応答について検討する。動的変動力が作用した場合のスライダ22の時間領域での応答は、式(1)、式(2)を使用して求めた。スライダ22の回転軸回りに減衰比ζ=0.1となる減衰を考慮した。この条件下では、図10のような時間応答が得られた。なお、図10(A)は、ヘッド位置であるQ点(磁気ヘッド21の位置)のy方向変位を示し、図10(B)は、ヘッド位置の目標値のy方向変位を示し、図10(C)は、(A)及び(B)の変位を重ね合わせた図を示す。ヘッドの目標値は、yref=30sin(2π×104t)[nm]とした。また、Fave=2.0[mN]、δfを下記式(5)のように定めた。ここでGP=3.0×105[N/m]、GV=5.0×10−2[Ns/m]とした。また、kt=2.0×10−8[Nm/rad]とし、u1=0とした。
【0089】
【数3】
【0090】
ヘッド装置20は、上述の条件下において、1[nm]以下の誤差で位置決めを行うことができた。これにより、高記録密度化された磁気ディスクへの位置決めが可能となることが分かる。
【0091】
次に、θ1の初期角度を10[deg]、θ2の初期角度を0[deg]としたときの応答を求めた。図11(A)は、初期位置を0とし、θ1の初期角度を10[deg]、θ2の初期角度を0[deg]としたときの応答を示し、図11(B)は、ヘッド位置の目標値のy方向変位を示し、図11(C)は、(A)及び(B)の応答波形を重ね合わせた図を示す。この条件下においても、1[nm]以下の誤差で位置決めを行うことができた。これにより、ヘッド装置20においてスキューがあるか否かに影響されず、位置決めを行うことが可能であることが分かる。
【0092】
以上の解析モデルによっても、本発明に係る磁気ディスク装置1は、ヘッド装置20を備え、このヘッド装置20が、圧電素子34、35、44、45を制御しスライダ22にかかる荷重分布を変動させ、磁気ヘッド素子21の位置を変位させることができ、微動アクチュエータとしての位置決め制御を行うことができることが分かる。したがって、本発明に係る磁気ディスク装置1では、高記録密度化された磁気ディスク2に対する磁気ヘッド素子21の位置制御を精度よく行うことができる。また、磁気ディスク装置のヘッド装置は、磁気ヘッド素子21の微少な位置決めを、粗動アクチュエータとしての回動アクチュエータ6に影響を与えずに行うことができるので、確実に精度よく位置制御を行うことができる。
【図面の簡単な説明】
【0093】
【図1】本発明が適用された磁気ディスク装置の外観斜視図である。
【図2】本発明が適用された磁気ディスク装置におけるヘッド装置の斜視図である。
【図3】(A)は、スライダの平面図であり、(B)は、スライダの側面図であり、(C)は、スライダの底面図である。
【図4】(A)は、第2の実施の形態におけるスライダの平面図であり、(B)は側面図であり、(C)は底面図である。
【図5】(A)は、第3の実施の形態におけるスライダの平面図であり、(B)は側面図であり、(C)は底面図である。
【図6】(A)は、第4の実施の形態におけるスライダの平面図であり、(B)は、側面図であり、(C)は底面図である。
【図7】本発明が適用されたヘッド装置をモデル化した解析モデルを説明するための図である。
【図8】上記解析モデルにおける本発明のヘッド装置の周波数応答を示す図である。
【図9】上記解析モデルにおける従来のヘッド装置の周波数応答を示す図である。
【図10】上記解析モデルにおけるヘッド装置の時間応答を示す図である。
【図11】上記解析モデルにおける初期角度θ1=10、θ2=0とした場合のヘッド装置の時間応答を示す図である。
【符号の説明】
【0094】
1 磁気ディスク装置、2 磁気ディスク、2a 記録面、3 ディスク装着部、4 ディスク駆動部、5 ケース、6 回動アクチュエータ、7 剛性アーム、8 ハブ、9 回転軸、10 回動軸、11 磁気ヘッド素子、20 ヘッド装置、21 磁気ヘッド素子、22 スライダ、23、41 支持バネ、24 サスペンションアーム、25 回動支持機構、28、29、33 接触パッド、30、31 突部、32 突片、32a 切欠部、34、35、44、45 圧電素子
【特許請求の範囲】
【請求項1】
磁気ディスクに対して情報信号の記録及び/又は再生を行う磁気ヘッド素子と、
上記磁気ヘッド素子が上記磁気ディスクと対向するように支持するスライダと、
上記スライダと少なくとも2点の接点において連結され、該スライダに対し上記磁気ディスクの記録面と垂直な方向に所定の荷重を付与するサスペンションと、
上記サスペンションと連結され、上記スライダを上記磁気ディスクの記録面と垂直な方向を回動軸とする回動方向に回動自在に支持する回動支持機構を有するアームとを備え、
上記スライダは、上記磁気ディスクと対向する側で、上記回動支持機構の回動軸とは異なる位置に設けられ、該磁気ディスクと接触する接触パッドを少なくとも2つ有し、
上記サスペンションは、少なくとも上記スライダとの1つの接点に、上記スライダに付与される荷重の荷重分布を可変とする荷重分布可変手段が設けられる
ことを特徴とするヘッド装置。
【請求項2】
上記スライダは、上記接触パッドを2つ有し、
上記サスペンションは、上記荷重分布可変手段を2つを有し、3点において上記スライダと連結されることを特徴とする請求項1記載のヘッド装置。
【請求項3】
上記2つの接触パッドと上記2つの荷重分布可変手段とは、上記スライダを挟んで対向する位置に設けられることを特徴とする請求項2記載のヘッド装置。
【請求項4】
上記荷重分布可変手段は、圧電素子からなることを特徴とする請求項1乃至3のいずれか1項記載のヘッド装置。
【請求項5】
磁気ディスクに対して情報信号の記録及び/又は再生を行う磁気ヘッド素子の該磁気ディスクに対する位置制御方法において、
上記磁気ヘッド素子が上記磁気ディスクと対向するように支持するスライダに付与される上記磁気ディスクの記録面と垂直な方向への所定の荷重の荷重分布を変化させ、
上記変化された荷重分布により、上記スライダと上記磁気ディスクとの複数の接点における摩擦力を変化させ、該スライダを上記磁気ディスクの記録面と垂直な方向を回動軸として回動させ、該磁気ディスクに対する上記磁気ヘッド素子の位置を制御することを特徴とする位置制御方法。
【請求項6】
回転可能に支持された磁気ディスクと、ヘッド装置とからなり、
上記ヘッド装置は、
磁気ディスクに対して情報信号の記録及び/又は再生を行う磁気ヘッド素子と、
上記磁気ヘッド素子が上記磁気ディスクと対向するように支持するスライダと、
上記スライダと少なくとも2点の接点において連結され、該スライダに対し上記磁気ディスクの記録面と垂直な方向に所定の荷重を付与するサスペンションと、
上記サスペンションと連結され、上記スライダを上記磁気ディスクの記録面と垂直な方向を回動軸とする回動方向に回動自在に支持する回動支持機構を有するアームとを備え、
上記スライダは、上記磁気ディスクと対向する側で、上記回動支持機構の回動軸とは異なる位置に設けられ、該磁気ディスクと接触する接触パッドを少なくとも2つ有し、
上記サスペンションは、少なくとも上記スライダとの1つの接点に、上記スライダに付与される荷重の荷重分布を可変とする荷重分布可変手段が設けられる
ことを特徴とする磁気ディスク装置。
【請求項1】
磁気ディスクに対して情報信号の記録及び/又は再生を行う磁気ヘッド素子と、
上記磁気ヘッド素子が上記磁気ディスクと対向するように支持するスライダと、
上記スライダと少なくとも2点の接点において連結され、該スライダに対し上記磁気ディスクの記録面と垂直な方向に所定の荷重を付与するサスペンションと、
上記サスペンションと連結され、上記スライダを上記磁気ディスクの記録面と垂直な方向を回動軸とする回動方向に回動自在に支持する回動支持機構を有するアームとを備え、
上記スライダは、上記磁気ディスクと対向する側で、上記回動支持機構の回動軸とは異なる位置に設けられ、該磁気ディスクと接触する接触パッドを少なくとも2つ有し、
上記サスペンションは、少なくとも上記スライダとの1つの接点に、上記スライダに付与される荷重の荷重分布を可変とする荷重分布可変手段が設けられる
ことを特徴とするヘッド装置。
【請求項2】
上記スライダは、上記接触パッドを2つ有し、
上記サスペンションは、上記荷重分布可変手段を2つを有し、3点において上記スライダと連結されることを特徴とする請求項1記載のヘッド装置。
【請求項3】
上記2つの接触パッドと上記2つの荷重分布可変手段とは、上記スライダを挟んで対向する位置に設けられることを特徴とする請求項2記載のヘッド装置。
【請求項4】
上記荷重分布可変手段は、圧電素子からなることを特徴とする請求項1乃至3のいずれか1項記載のヘッド装置。
【請求項5】
磁気ディスクに対して情報信号の記録及び/又は再生を行う磁気ヘッド素子の該磁気ディスクに対する位置制御方法において、
上記磁気ヘッド素子が上記磁気ディスクと対向するように支持するスライダに付与される上記磁気ディスクの記録面と垂直な方向への所定の荷重の荷重分布を変化させ、
上記変化された荷重分布により、上記スライダと上記磁気ディスクとの複数の接点における摩擦力を変化させ、該スライダを上記磁気ディスクの記録面と垂直な方向を回動軸として回動させ、該磁気ディスクに対する上記磁気ヘッド素子の位置を制御することを特徴とする位置制御方法。
【請求項6】
回転可能に支持された磁気ディスクと、ヘッド装置とからなり、
上記ヘッド装置は、
磁気ディスクに対して情報信号の記録及び/又は再生を行う磁気ヘッド素子と、
上記磁気ヘッド素子が上記磁気ディスクと対向するように支持するスライダと、
上記スライダと少なくとも2点の接点において連結され、該スライダに対し上記磁気ディスクの記録面と垂直な方向に所定の荷重を付与するサスペンションと、
上記サスペンションと連結され、上記スライダを上記磁気ディスクの記録面と垂直な方向を回動軸とする回動方向に回動自在に支持する回動支持機構を有するアームとを備え、
上記スライダは、上記磁気ディスクと対向する側で、上記回動支持機構の回動軸とは異なる位置に設けられ、該磁気ディスクと接触する接触パッドを少なくとも2つ有し、
上記サスペンションは、少なくとも上記スライダとの1つの接点に、上記スライダに付与される荷重の荷重分布を可変とする荷重分布可変手段が設けられる
ことを特徴とする磁気ディスク装置。
【図1】

【図2】
【図3】
【図4】
【図5】
【図6】
【図7】
【図8】
【図9】
【図10】
【図11】
【図2】
【図3】
【図4】
【図5】
【図6】
【図7】
【図8】
【図9】
【図10】
【図11】
【公開番号】特開2009−54202(P2009−54202A)
【公開日】平成21年3月12日(2009.3.12)
【国際特許分類】
【出願番号】特願2007−217322(P2007−217322)
【出願日】平成19年8月23日(2007.8.23)
【新規性喪失の例外の表示】特許法第30条第1項適用申請有り 2007年3月19日にIIP2007情報・知能・精密機器部門講演会講演論文集にて発表
【出願人】(304021417)国立大学法人東京工業大学 (1,821)
【Fターム(参考)】
【公開日】平成21年3月12日(2009.3.12)
【国際特許分類】
【出願日】平成19年8月23日(2007.8.23)
【新規性喪失の例外の表示】特許法第30条第1項適用申請有り 2007年3月19日にIIP2007情報・知能・精密機器部門講演会講演論文集にて発表
【出願人】(304021417)国立大学法人東京工業大学 (1,821)
【Fターム(参考)】
[ Back to top ]