
ヘディングアップを行うナビゲーション装置
【課題】表示されている地図画像の回転を適切に抑制したヘディングアップ技術を提供する。
【解決手段】予め、ヘディングアップを非実行とするための除外条件を用意しておく。その所定の除外条件が、最新の位置のデータを含む複数の位置データ、それら複数の位置データに基づいて検出された二つの地点間の距離、及び、それら二つの地点を結ぶ直線と垂直方向の直線との角度である回転角のうちの少なくとも一つに適合した場合に、ヘディングアップを非実行とする。
【解決手段】予め、ヘディングアップを非実行とするための除外条件を用意しておく。その所定の除外条件が、最新の位置のデータを含む複数の位置データ、それら複数の位置データに基づいて検出された二つの地点間の距離、及び、それら二つの地点を結ぶ直線と垂直方向の直線との角度である回転角のうちの少なくとも一つに適合した場合に、ヘディングアップを非実行とする。
【発明の詳細な説明】
【技術分野】
【0001】
本発明は、ナビゲーションにおけるヘディングアップに関する。
【背景技術】
【0002】
ナビゲーションにおいて、ヘディングアップという技術が一般的に知られている。「ヘディングアップ」とは、進行方向が常に上向きになるよう回転した地図画像を表示することである。
【0003】
ヘディングアップに関する技術として、例えば特許文献1に開示の技術が知られている。特許文献1によれば、ナビゲーション装置は、複数の過去の位置情報に基づいて車両の進行方向を予測し、予測された進行方向が上側になるように部分地図(地図全体のうちの現在位置を含む部分)を回転させる。
【0004】
【特許文献1】特開2007−170999号公報
【発明の開示】
【発明が解決しようとする課題】
【0005】
一般に、ナビゲーション装置は、GPS(Global Positioning System)衛星からの電波をベースに位置を検出する。
【0006】
しかし、検出された位置は、建物で反射された電波を受信する等の原因により、実際の位置と異なっていることがある。
【0007】
このため、単純に複数の過去の位置情報に基づくと、誤った位置情報が含まれていることが原因で、予測される進行方向が間違った進行方向となり、それ故、表示地図を不必要に大きく回転させてしまったり、表示地図の回転が不要なのに表示地図を回転させてしまったりするおそれがある。また、進行方向が予測される度にその予測された進行方向が常に上向きになるようにすると、頻繁に表示地図が回転することになる。これは、経路を指定せず複数の位置情報だけを基にしてヘディングアップを行う場合に特に問題になると考えられる。
【0008】
本発明の目的は、表示されている地図画像の回転を適切に抑制したヘディングアップ技術を提供することにある。
【課題を解決するための手段】
【0009】
予め、ヘディングアップを非実行とするための除外条件を用意しておく。その所定の除外条件が、最新の位置のデータを含む複数の位置データ、それら複数の位置データに基づいて検出された二つの地点間の距離、及び、それら二つの地点を結ぶ直線と垂直方向の直線との角度である回転角のうちの少なくとも一つに適合した場合に、ヘディングアップを非実行とする。具体的には、下記の通りである。
【0010】
ナビゲーション装置が、表示部と、位置検出手段と、記憶手段と、地図表示手段と、位置記憶手段と、地点算出手段と、除外判定手段と、ヘディングアップ制御手段とを備える。位置検出手段は、GPS衛星からの電波を基に位置を検出する。記憶手段は、地図データを記憶する。地図表示手段は、地図データを基に、検出された位置を含んだ地図画像を表示する。位置記憶手段は、検出された位置を表す位置データを記憶する。地点算出手段は、最新の位置のデータを含んだ複数の位置データ(位置記憶手段が記憶している複数の位置データ)を基に、第一の地点と、第一の地点よりも最新の位置から遠い地点である第二の地点とを算出する。除外判定手段が、複数の位置データ、算出された第一及び第二の地点間の距離、及び、算出された第一及び第二の地点間を結ぶ直線の方向と地図画像における上下方向の直線との角度である回転角の少なくとも一つが、所定の除外条件に適合するか否かの除外判定を行う。地図表示制御手段は、除外判定の結果が否定的の場合に、第二の地点から第一の地点への方向が上方向になるように回転した地図画像を表示するヘディングアップを実行し、除外判定の結果が肯定的の場合に、ヘディングアップを非実行とする。
【発明を実施するための最良の形態】
【0011】
以下、図面を参照して、本発明の幾つかの実施形態を説明する。
【実施例1】
【0012】
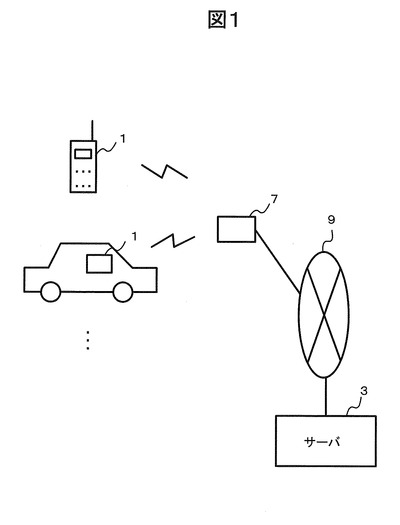
図1は、本発明の第一の実施形態に係るシステムの全体構成を示す。
【0013】
同図に示すように、地図表示装置である一台以上のナビゲーション装置1,1,・・・と、無線通信を行うアクセスポイント7,7と、アクセスポイント7,7とネットワーク9を介して接続されているサーバ3とが備えられる。各ナビゲーション装置1,1,・・・は、無線通信機能を利用してアクセスポイント7にアクセスし、ネットワーク9を介してサーバ3にアクセスするか、または、有線通信によってネットワーク9を介してサーバ3にアクセスする。
【0014】
サーバ3は、例えば、ネットワーク9との通信機能を有する汎用的なコンピュータシステムにより構成され、地図データを保存している。そして、ナビゲーション装置1,1・・・からのリクエストに応じて、ネットワーク9を介して地図データを提供する。
【0015】
ナビゲーション装置1,1,・・・は、たとえば、サーバ3との通信機能を有するコンピュータ装置であればよく、例えば、車両に搭載されている据置型装置(例えば、ジャイロセンサ等を備えたカーナビゲーション装置)もあれば、携帯電話機、PNS(Portable Navigation System)、モバイルPC(パーソナルコンピュータ)などの移動体通信装置もある。
【0016】
以下に説明するナビゲーション装置1,1,・・・の機能ないし構成は、ナビゲーション装置1,1,・・・が有する所定のハードウェアと、それらを制御ないし動作させる所定のソフトウェア(コンピュータプログラム)によって実現することができる。
【0017】
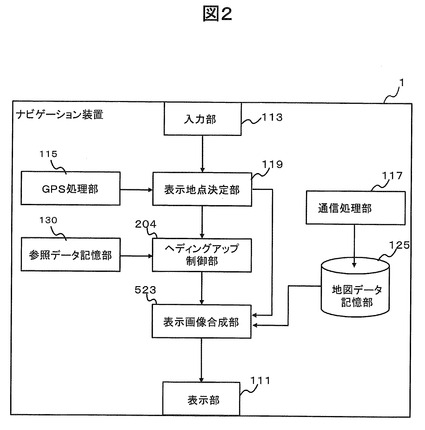
図2は、ナビゲーション装置1の構成図である。
【0018】
ナビゲーション装置1は、同図に示すように、表示部111と、入力部113と、GPS処理部115と、通信処理部117と、表示地点決定部119と、ヘディングアップ制御部204と、表示画像合成部523と、地図データ記憶部125と、参照データ記憶部130とを備える。ナビゲーション装置1には、例えばジャイロセンサは非搭載である。
【0019】
表示部111は、たとえば、液晶パネルなどの表示装置を備える。表示部111には、ユーザに対して提供する画面が表示される。
【0020】
入力部113は、たとえば、プッシュボタン、キーボード、タッチパネルあるいはポインティングデバイスなどの操作部を備える。入力部113は、ユーザからの入力を受け付ける。
【0021】
GPS処理部115は、ナビゲーション装置1の現在位置検出手段である。GPS処理部115は、GPSアンテナと、GPSアンテナが受信したGPS信号を処理してナビゲーション装置1の現在位置の座標(緯度及び経度)を特定するGPS信号処理手段とを有する。GPS処理部115が検出した位置を表す位置データ(例えば、緯度及び経度を表すデータ)は、参照データ記憶部130に格納される。
【0022】
通信処理部117は、無線あるいは有線通信によって、サーバ3と通信を行う。例えば、通信処理部117は、サーバ3から地図データを取得して、地図データ記憶部125に格納する。
【0023】
表示地点決定部119は、入力部113またはGPS処理部115の出力に基づいて、表示部111に表示される地図に含まれる地点、つまり、地図を表示させたい地点(表示地点)Cを決定する。表示地点Cは、ナビゲーション時には、現在位置に対応した地点である。
【0024】
ヘディングアップ制御部204は、ヘディングアップの実行/非実行を制御する。ヘディングアップ制御部204は、ヘディングアップの実行の際、地図画像の回転角を表示画像合成部523に通知する。
【0025】
表示画像合成部523は、地図データが表す地図画像に表示地点Cを重ねた合成画像を表示部111に表示させる。また、表示画像合成部523は、地図画像の回転角の通知をヘディングアップ制御部204から受けた場合、地図画像をその回転角だけ回転させる。
【0026】
地図データ記憶部125は、通信処理部117がサーバ3から取得した地図データ200を記憶する記憶資源である。
【0027】
参照データ記憶部130は、ヘディングアップ制御部204によって参照されるデータを記憶する記憶資源である。
【0028】
以上が、ナビゲーション装置1の構成についての説明である。地図データ記憶部125を有する記憶資源と参照データ記憶部130を有する記憶資源は同一であっても異なっていても良い。
【0029】
以下、ヘディングアップ制御部204について詳細に説明する。
【0030】
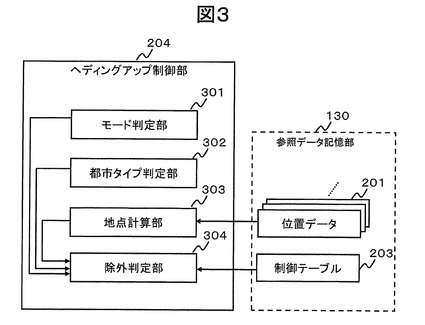
図3は、ヘディングアップ制御部204の機能ブロックと、参照データ記憶部130に記憶されるデータを示す。
【0031】
参照データ記憶部130には、GPS処理部115によって格納される位置データ201と、制御テーブル203とがある。
【0032】
位置データ201は、GPS処理部115が検出した位置を表すデータである。GPS処理部115によって現在位置(最新の位置)が検出される都度に、検出された位置を表す位置データ201が、参照データ記憶部130に追加される。
【0033】
制御テーブル203は、後述するフリーナビ処理で使用される種々の値が記録されているテーブルである。制御テーブル203については、図4を参照して後に詳述する。
【0034】
ヘディングアップ制御部204は、複数種類のナビゲーションを行う。ナビゲーションの種類として、例えば、探索された経路と現在位置のデータとを基にユーザを案内する「経路ベースナビ」と、ユーザの検出された現在位置を描画し続けていくことでユーザの移動経路を案内する「フリーナビ」とがある。
【0035】
ヘディングアップ制御部204は、例えば、モード判定部301と、都市タイプ判定部302と、地点計算部303と、除外判定部304とを有する。
【0036】
モード判定部301は、ナビゲーション装置1を有するユーザが徒歩で移動しているのか車で移動しているのかを判定する。その判定は、ユーザから徒歩モードと車モードのどちらかの選択を入力部113を介して受け付けることで行われても良いし、位置データ201の履歴を基に行われても良い(例えば、定期的に検出される位置同士の距離が所定の距離以上であれば車モードと判定されても良い)。
【0037】
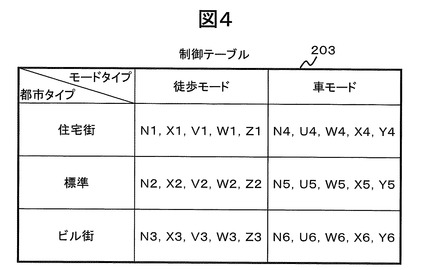
都市タイプ判定部302は、現在位置を含んだ都市のタイプを判定する。この判定は、例えば、地図データに関連付けられている都市属性情報を基に行われても良いし、第二の実施形態で説明する方法で行われても良い。本実施形態では、都市タイプとして、単位領域の建物レベル(例えば、単位領域に存在する高い建物の数に基づいて決定されたレベル)が低い順に、住宅街、標準、ビル街の3種類(図4参照)がある。
【0038】
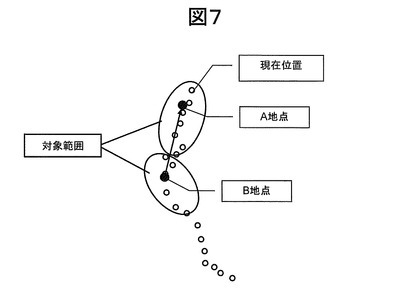
地点計算部303は、参照データ記憶部130に記憶されている複数の位置データ201を基に2つの地点を算出する。具体的には、例えば、地点計算部203は、図7に示すように、複数の位置データ201のうちの、現在位置のデータ201を含んだN個の位置データ201を基に、A地点(厳密にはA地点の座標)を算出する(なお、図7に記載の○は、地図画像における、位置データ201が表すポイントであって、地図画像上に表示されるマークである)。また、地点計算部303は、そのN個の位置データの次の位置データを含んだ別のN個の位置データを基に、B地点(厳密にはB地点の座標)を算出する。A地点は、現在位置に近い位置データほど高い重みとされた、N個の位置データ(N個の座標)の加重平均である。同様に、B地点は、現在位置に近い位置データほど高い重みとされた、上記別のN個の位置データの加重平均である。
【0039】
除外判定部304は、対象範囲(N個の位置又は別のN個の位置)、A地点及びB地点間の距離、及び回転角(B地点及びA地点を通る直線BAの方向と地図画像における上下方向との角度)のうちの少なくとも一つが所定の除外条件に適合するか否かの判定である除外判定を行う。除外条件としては、下記4つ、
(第一の除外条件)A地点及びB地点間の距離(以下、AB間距離)がXm未満(mはメートル)、
(第二の除外条件)AB間距離がXm以上Ym未満であるとき回転角がU度未満(この除外条件は、車モードの場合にのみ使用される)、
(第三の除外条件)図7に示すいずれかの対象範囲(N個の位置又は別のN個の位置)にZm以上離れた連続した2つの位置が存在するとき回転角がV度未満(この除外条件は、徒歩モードの場合にのみ使用される)、
(第四の除外条件)回転角がW度未満(この除外条件は、第一の除外条件と第二又は第三の除外条件とのいずれも非適合の場合に使用される)、
がある。U、V、W、X、Y及びZは、変数(閾値)であり、制御テーブル203に記録されているパラメータ値が代入される。上述の第一乃至第四の除外条件のいずれかに適合した場合に、ヘディングアップは非実行となり、それらの除外条件のいずれにも非適合の場合に、ヘディングアップが実行される。
【0040】
図4は、制御テーブル203の構成を示す。
【0041】
制御テーブル203には、都市タイプとモード種類別に、図7に示した対象範囲を構成する位置データの変数Nや、前述した種々の除外条件の変数X、(Y及びU)又は(Z及びV)、及びWに代入されるパラメータ値が記録されている。具体的には、例えば、モード判定部301で判定されたモード種類が徒歩モードで、都市タイプ判定部302で判定された都市タイプが住宅街である場合、図5を参照して説明するフリーナビヘディングアップ制御処理において、変数N、X、V、W及びZには、パラメータ値N1、X1、V1、W1及びZ1がそれぞれ代入されることになる。フリーナビヘディングアップ制御処理とは、フリーナビにおいてヘディングアップを実行するか非実行とするかの制御の処理である。
【0042】
なお、図4において、例えば、N1<N2<N3という関係がある。建物レベルが高いと、GPS処理部115で検出された位置が実際の位置とズレている可能性が高く、また、変数Nのパラメータ値が小さいと、回転角が大きくなりやすいため、曲がったと判定される(すべての除外条件に非適合となる)までの時間が短い。このため、建物レベルが高いエリアで変数Nのパラメータ値を小さくすると、位置ズレの影響で頻繁にヘディングアップが行われるおそれがある。それを防ぐために、上記のような関係があることが好ましいと考えられる。
【0043】
また、図4において、同種のエリアについて、変数Nのパラメータ値は、車モードよりも徒歩モードの方が大きい。具体的には、N1>N4、N2>N5、及びN3>N6の関係がある。
【0044】
また、図4において、X1<X2<X3、及び、X4<X5<X6という関係がある。また、図4において、V1>V2>V3という関係がある。
【0045】
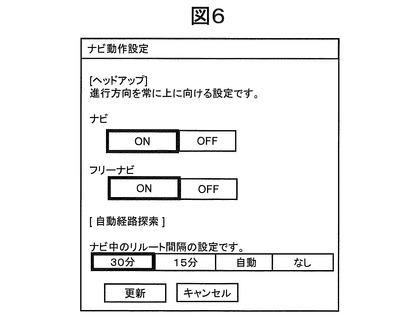
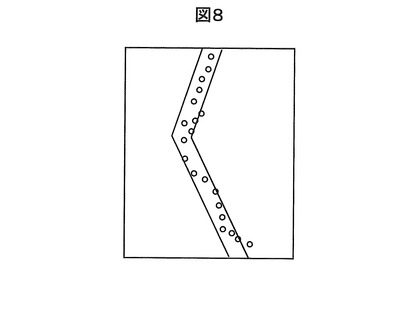
本実施形態では、図6に示す設定画面から、経路ベースナビとするかフリーナビとするかを設定することができる。すなわち、ユーザが入力部204を操作してその設定画面上でフリーナビを“ON”とした場合、ヘディングアップ制御部204が、GPS処理部115によって現在位置が検出されて位置データ201が参照データ記憶部130に追加される都度に、表示している地図画像上の、検出された現在位置に対応したポイントに、その現在位置を表すマークを表示する。これにより、図8に示すように、フリーナビでは、地図画像上に、複数のマーク、すなわち、ユーザの移動の軌跡が表示されることになる。
【0046】
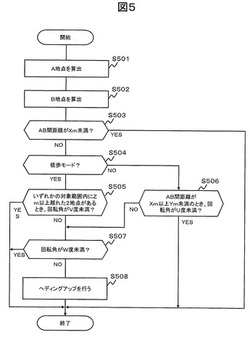
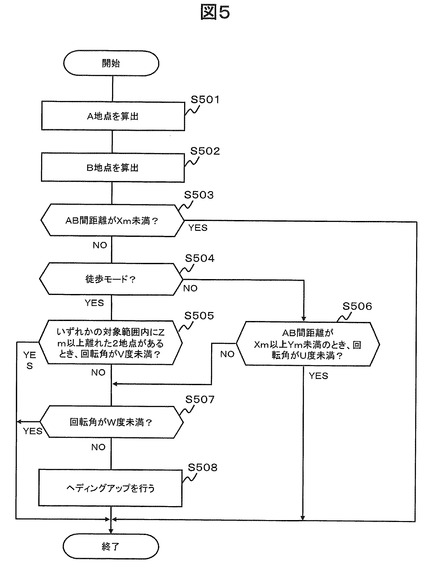
図5は、フリーナビヘディングアップ制御処理のフローチャートである。この処理は、例えば、現在位置が検出される都度に開始される。例えば、この制御処理に要する時間は、位置検出の時点と次の位置検出の時点との時間よりも短い。上述した変数U、V、W、X、Y、Zに代入されるパラメータ値は、この制御処理の開始時点におけるモード種類及び都市タイプに対応したパラメータ値である。
【0047】
まず、地点計算部303が、前述した計算方法で、A地点とB地点を算出する(S501及びS502)。
【0048】
次に、除外判定部304が、算出されたA地点とB地点との間の距離(AB間距離)がXm未満か否か(第一の除外条件に適合か否か)の第一の除外判定を行う(S503)。
【0049】
第一の除外判定の結果が肯定的であれば(S503:YES)、S508のヘディングアップはスキップされる(つまりヘディングアップが非実行となる)。これにより、例えば車での移動の際に、走行開始時や停止のための減速時に地図画像が回転しないようにすることができる。具体的に言えば、運転開始時や停止のための減速時は、速度が遅いため、測位のぶれの影響が大きくなり、それ故、実際の進行方向とは関係無く地図画像が回転してしまうおそれが生じるが、それを、本実施形態のように第一の除外判定を設けることで防止することができる。
【0050】
第一の除外判定の結果が否定的であれば(S503:NO)、除外判定部304は、車モードの場合に(S504:NO)、AB間距離がXm以上Ym未満であるとき回転角がU度未満か否か(第二の除外条件に適合か否か)の第二の除外判定を行い(S506)、一方、徒歩モードの場合に(S504:YES)、いずれかの対象範囲内にZm以上離れた連続した2つの位置があるときV度未満か否か(第三の除外条件に適合か否か)の第三の除外判定を行う(S505)。
【0051】
第二の除外判定の結果が肯定的であれば(S506:YES)、S508のヘディングアップはスキップされる。これにより、車がゆっくりと移動していてあまり曲がっていない場合に地図画像が回転しないようにすることができる。
【0052】
第三の除外判定の結果が肯定的であれば(S505:YES)、S508のヘディングアップはスキップされる。これにより、徒歩の速度としてありえない速度である場合に(すなわち、検出位置に大きなズレが生じた場合に)、地図画像が回転しないようにすることができる。なお、第三の除外条件に回転角について閾値Vが設けられていないと、N個の位置(及び別のN個の位置)に実際の位置と大きなズレのある位置が一個でも含まれていると、その他の位置が実質的に正しい位置であったとしても、ヘディングアップがスキップされてしまうが、閾値Vが設けられていることにより、そのようなことを避けることが期待できる。
【0053】
第二又は第三の除外判定の結果が否定的であれば(S506:NO、又は、S505:NO)、除外判定部304は、回転角がW度未満か否か(第四の除外条件に適合か否か)の第四の除外判定を行う(S507)。
【0054】
第四の除外判定の結果が肯定的であれば(S507:YES)、S508のヘディングアップがスキップされる。これにより、小刻みに(頻繁に)地図画像が回転しないようにすることができる。
【0055】
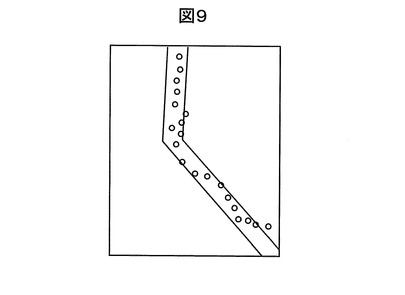
第四の除外判定の結果が否定的であれば(S507:NO)、ヘディングアップ制御部204が、ヘディングアップ(B地点からA地点への方向が上方向になるよう地図画像を回転して表示すること)を行う(S508)。これにより、例えば図8に示す地図画像が、図9に示すように回転されて表示される。
【0056】
以上が、フリーナビヘディングアップ制御処理の流れである。なお、この制御処理において、除外判定の順番は、前述した順番に限らない。例えば、第一の除外判定よりも先に第二或いは第三の除外判定が行われても良い。
【実施例2】
【0057】
本発明の第二の実施形態を説明する。その際、第一の実施形態との相違点を主に説明し、第一の実施形態との共通点については説明を省略或いは簡略する。
【0058】
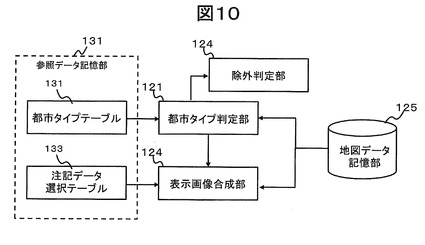
図10は、本発明の第二の実施形態に係るナビゲーション装置の、第一の実施形態に係るナビゲーション装置1との主要な相違点を示す。
【0059】
参照データ記憶部131に、都市タイプテーブル131と、注記データ選択テーブル133とが記憶される。都市タイプ判定部121が、地図データ記憶部125内の地図データと、都市タイプテーブル131とを参照して、都市タイプを判定する。都市タイプ判定部121は、判定された都市タイプを、除外判定部304だけでなく表示画像合成部123にも通知する。表示画像合成部123は、注記データ選択テーブル133を参照して画像処理を行う。
【0060】
都市タイプ判定部121によって判定された都市タイプ(例えば図17のS19で判定された都市タイプ)が、フリーナビヘディングアップ制御処理において、制御テーブル203(図4参照)に記録されているどの閾値を使用するかに利用される。
【0061】
以下、本発明の第二の実施形態について詳細に説明する。
【0062】
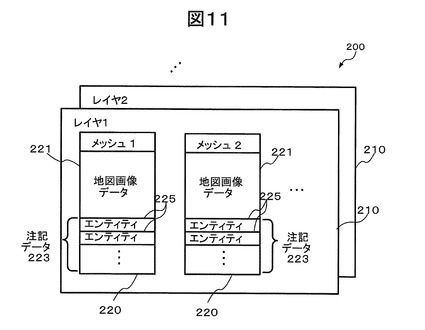
図11は、地図データ200のデータ構造を示す。
【0063】
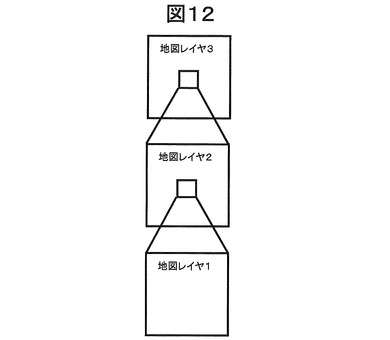
同図に示すように、地図データ200は、複数のレイヤ210、210,・・・から構成されている。レイヤ210、210,・・・は、例えば、図12に示すように、地図画像の縮尺に応じて階層化されている。それぞれのレイヤ210のデータは、地図画像を所定の大きさに区切ったメッシュ220単位で構成されている。ここでは、最も細かいメッシュ220を有するレイヤ、つまり詳細な地図画像を有するレイヤをレイヤ1とし、メッシュサイズが粗くなるにつれて、レイヤ2,レイヤ3となり、最も粗いメッシュを有するレイヤ6までの6階層としても良い。
【0064】
各メッシュ220は、それぞれのメッシュの地図画像データ221と、各メッシュの地図画像上の注記データ223とを有する。
【0065】
地図画像データ221は、複数のポリゴンデータ及びポリラインデータを含む。各ポリゴンデータ及びポリラインデータは、それぞれの特性を示す属性情報及び位置情報を有する。
【0066】
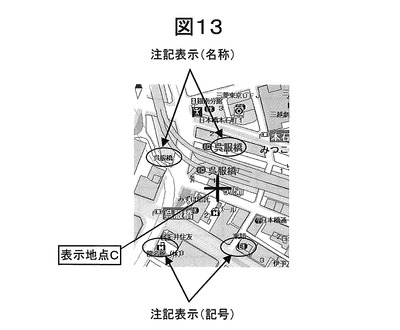
注記データ223は、複数のエンティティ225,225,・・・によって構成されている。各エンティティ225,225,・・・は、それぞれ一つの注記表示(スポット表示)を行うためのデータである。図13は、表示部111に表示される表示画面の一例である。注記表示とは、例えば、図13に示すような地図画像上に表示された種々の文字、記号、図形、マークなどをいう。従って、各エンティティ225,225,・・・には、これらの文字、記号、図形、マークなどのデータが含まれていても良い。また、各エンティティ225,225,・・・には、各種名称(例えば、地名(住所)、地域名、河川名、及び各種ランドマーク(建築物、構造物)の名称など)のテキストデータや、店舗のマークなどの画像データが含まれていても良い。さらに、各エンティティ225,225,・・・には、各注記表示の属性を示すデータも含まれている。属性とは、例えば、各注記表示が示しているものの種別(住所、交差点、コンビニ、ガソリンスタンド、駅、等)や、各注記表示が配置される位置の情報が含まれる。
【0067】
表示地点決定部119は、入力部113またはGPS処理部115の出力に基づいて、表示部111に表示される地図に含まれる地点、つまり、地図を表示させたい地点(表示地点)を決定する。例えば、入力部113から、表示部111に表示させるべき位置情報(例えば、緯度および経度、住所、ランドマークの名称など)の通知を受けたとき、または、表示部111に既に表示されている地図をスクロールさせるための入力を受けたとき、あるいは、GPS処理部115から現在位置の位置情報の通知を受けたときに、それらに基づいて、表示地点決定部119は、表示部111に表示する表示地点Cを決定する。ここで、表示地点Cとは、例えば、表示部111の特定の位置(例えば中心)に表示される地点(図13参照)の緯度及び経度でよい。
【0068】
都市タイプ判定部121は、注記表示計数処理と都市タイプ判定処理とを行って、表示地点決定部119が決定した表示地点の都市タイプを判定する。ここで、都市タイプとは、地図における注記表示の混雑度合い、つまり、単位面積あたりの注記表示データ223のエンティティ225の個数の多さ(密度)を示すものである。これは、開発(都市化)が進んだ地域ほど地図上の注記表示が密であり、つまり単位面積あたりの注記表示データ223のエンティティ225の個数が多いという特徴があるからである。また、これとは反対に、山間部などの開発が進んでいない地域では注記表示が疎であり、つまり単位面積あたり注記表示データ223のエンティティ225の個数が少ないという特徴があるためである。従って、この注記表示の混雑度合いは、実質的には都市化の度合いを示すものとして、本実施形態では都市タイプ判定を行っている。
【0069】
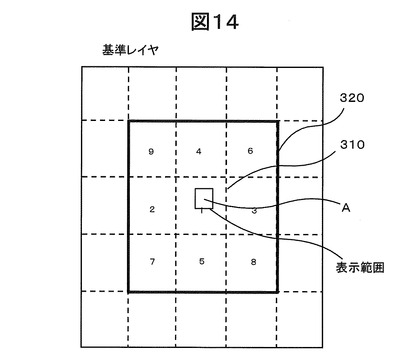
次に、図14を参照して、都市タイプ判定部121が行う注記表示計数処理、及び都市タイプ判定処理について説明する。図14は、予め定められた基準レイヤのメッシュに分割された地図画像を示す。基準レイヤは、複数のレイヤのうちのいずれかに予め定められていてもよい。
【0070】
注記表示計数処理では、例えば、以下のような処理が行われる。すなわち、都市タイプ判定部121は、表示地点決定部119が定めた表示地点Cを取得すると、図14に示すように、基準レイヤにおける表示地点C及びその周辺領域を含む1以上のメッシュを探索範囲320として特定する。ここで、探索範囲320は、例えば、図14に示すように、表示地点Cを含むメッシュ310と、そのメッシュ310に接する全メッシュ(メッシュ310の周辺の全メッシュ)を探索範囲320としてもよい。あるいは、探索範囲320は、メッシュ310のみでも良いし、メッシュ310と上下左右に隣り合う4つのメッシュを含む5メッシュで構成しても良い。
【0071】
都市タイプ判定部121は、探索範囲320に属する各メッシュ220の注記データ223を、地図データ記憶部125から取得する。そして、都市タイプ判定部121は、メッシュごとに、それぞれのメッシュ220の注記データ223内のエンティティ225の数を計数する。さらに、都市タイプ判定部121は、探索範囲320全体のエンティティ数の総計を求める。探索範囲320全体のエンティティ数の総計を求める際、都市タイプ判定部121は、各メッシュ別のエンティティ数に所定の重み係数をかけてから総計を算出しても良い。例えば、表示地点Cが属するメッシュ310の重み係数を周辺よりも大きくしたり、メッシュ310と上下または左右方向に隣り合っているメッシュの重み係数を、斜め方向に隣り合っているメッシュの重み係数より大きくしたりしても良い。都市タイプ判定部121は、ここで算出したエンティティ数の総計を、探索範囲320のメッシュ数で割って、探索範囲320のメッシュあたりのエンティティ数(平均エンティティ数)を算出する。
【0072】
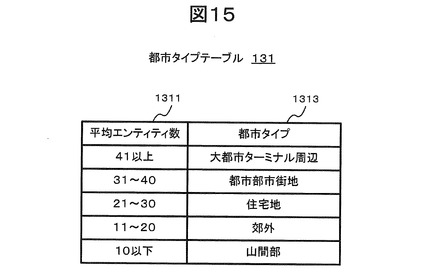
都市タイプ判定処理では、例えば以下のような処理が行われる。すなわち、都市タイプ判定部121は、上述の注記表示計数処理で算出した平均エンティティ数に基づいて、都市タイプテーブル131を参照して、都市タイプを判定する。
【0073】
なお、注記表示のエンティティ数は、レイヤによってその数が異なるので、上記の処理は基準レイヤを定めて行うことが好ましい。また、基準レイヤは、中程度のメッシュの細かさのレイヤ(例えばレイヤ3)としても良い。これは、ある程度広い範囲で判定を行った方が、都市としての特性を把握しやすいからである。
【0074】
図15は、都市タイプテーブル131の一例を示す。すなわち、都市タイプテーブル131は、平均エンティティ数1311と都市タイプ1313とを対応付けて記憶している。
【0075】
なお、上述した注記表示計数処理及び都市タイプ判定処理では、表示地点決定部119が定めた表示地点Cの都市タイプを判定しているが、都市タイプ判定部121は、これ以外の地点の都市タイプを判定することもできる。すなわち、都市タイプ判定部121は、指定された任意の地点の都市タイプを、上述と同様の手順で判定することができる。
【0076】
表示地点決定部119によって表示地点Cが決定されるたびに、都市タイプ判定部121が都市タイプの判定を行うようにしてもよい。つまり、表示部111に表示させる地図画像が切り替わるたびに、その都度、都市タイプ判定部121が表示地点Cの都市タイプ判定を行っても良い。あるいは、これとは反対に、表示部111に表示させる地図画像をスクロールするようなときであって、そのスクロール幅が小さいときなどは、都市タイプ判定部121は、表示地点Cの都市タイプ判定を毎回行わなくても良い。つまり、表示地点決定部119が決定した最新の表示地点Cと、その直前の表示地点との変位量が所定以下であるときは、都市タイプ判定部121による都市タイプ判定を省略して、表示画像合成部123は、過去の都市タイプ判定結果を利用しても良い。あるいは、表示地点決定部119が決定した最新の表示地点Cと、その直前の表示地点とが、あるレイヤ(例えば、最も詳細なメッシュのレイヤ1)において同一メッシュに含まれているときは、都市タイプ判定を省略しても良い。
【0077】
表示画像合成部123は、注記表示の選択処理を行う注記表示選択処理と、画像処理とを行う。そして、画像処理においては、注記表示選択手段によって選択された注記表示を含む表示画像を合成し、表示部111に表示させる。
【0078】
表示画像合成部123は、注記表示選択処理として、例えば以下のような処理を行う。すなわち、表示画像合成部123は、表示部111に表示させる地図のレイヤ(表示レイヤ)、及び表示させる範囲(表示範囲)が定まると、それに対応する地図画像データ221を地図データ記憶部125から取得する。表示範囲は、例えば、表示レイヤ、表示時点A及び表示させる地図の縮尺により定まる。従って、表示画像合成部123は、例えば、表示部111に表示させる表示レイヤ、表示時点A及び表示させる地図の縮尺に応じて、地図画像データ221を地図データ記憶部125から取得しても良い。なお、表示部111に表示させる表示レイヤ及び地図の縮尺は、ユーザの入力、またはナビゲーション装置1内の図示しない他のアプリケーションからの指示などに応じて定めてもよい。
【0079】
表示画像合成部123は、さらに、上述の表示範囲に含まれている注記データ223のエンティティ225を地図データ記憶部125から取得して、都市タイプ(あるいは都市タイプ判定部121が算出した平均エンティティ数)に応じて、表示範囲に表示させる注記表示を選択する。例えば、表示画像合成部123は、表示地点C、表示レイヤ及び縮尺に基づいて、表示範囲に含まれる注記表示のエンティティ225を取得する。そして、表示画像合成部123は、都市タイプ判定部121で判定された都市タイプ、及び注記データ選択テーブル133に従って、エンティティ225を選択する。
【0080】
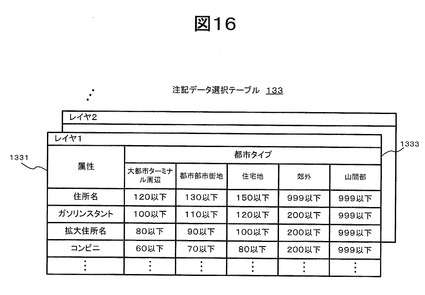
注記データ選択テーブル133は、レイヤ及び都市タイプに応じて、表示画像に含める注記表示の属性を定めている。
【0081】
図16は、注記データ選択テーブル133の一例を示す。同図に示す例では、レイヤごとにテーブルが構成されている。各テーブルでは、属性別、都市タイプ別に、注記表示を表示する縮尺の範囲が規定されている。例えば、同図の例では、都市タイプが「大都市ターミナル周辺」の場合、「住所名」は縮尺が「120」以下のときに表示され、「ガソリンスタンドマーク」は縮尺が「100」以下のときに表示され、「拡大住所名」は縮尺が「80」以下のときに表示され、「コンビニ表示」は縮尺が「60」以下のときに表示される。
【0082】
なお、図16の例で示す縮尺とはレイヤ別の表示縮尺である。この縮尺は、数値が大きいほど地図は拡大されていて、数値が小さいほど地図は縮小されている。
【0083】
表示画像合成部123は、画像処理として、例えば以下のような処理を行う。すなわち、表示画像合成部123は、地図画像の上に注記表示を重ねて、表示部111に表示させる合成画像(図13参照)を生成する。そして、表示画像合成部123は、上記のようにして合成した画像を表示部111に表示させる。
【0084】
なお、表示地点Cが切り替わるごとに都市タイプ判定部121が都市タイプ判定を行っているとき、都市タイプが切り替わる境界付近では、都市タイプ判定部121の判定結果が、不安定にぶれることがある。そこで、このぶれによる影響を受けないようにするために、表示画像合成部123は、例えば以下のようにしても良い。すなわち、ある都市タイプから別の都市タイプへ切り替わるとき、表示画像合成部123が注記データ選択処理において採用する都市タイプは、例えば以下のようにして切り替えてもよい。すなわち、都市タイプ判定部121による判定結果が、連続して第1の都市タイプ(例えば「大都市ターミナル周辺」)である状態から、第2の都市タイプ(例えば「市街地」)へ切り替わったとき、表示画像合成部123は、所定回数以上連続して第2の都市タイプが検出されるまでは、第1の都市タイプのままで処理を行う。そして、所定回数以上連続して第2の都市タイプが検出されると、表示画像合成部123は、それ以降の処理を第2の都市タイプを用いて処理を行う。これにより、都市タイプが切り替わる境界付近において、都市タイプ判定部121による判定結果がぶれることがあっても、その影響を受けず、注記表示の表示レベルの切り替えを安定的に行うことができる。
【0085】
次に、上述した構成を備えるナビゲーション装置1における処理手順について、図17及び図18を用いて説明する。
【0086】
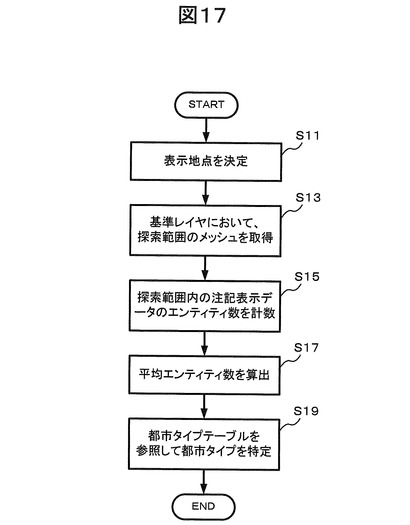
図17は、地図データに基づいて都市タイプを判定する処理の手順を示すフローチャートである。なお、以下の処理を行う前に、予め通信処理部117が必要な地図データをサーバ3から取得して、地図データ記憶部125に格納しておく。
【0087】
まず、表示地点決定部119が表示地点Cを決定する(S11)。
【0088】
都市タイプ判定部121は、表示地点決定部119が定めた表示地点Cを取得すると、所定の基準レイヤにおいて、この表示地点C及びその周辺領域を含む探索範囲のメッシュ220を定める。そして、地図データ記憶部125を参照し、基準レイヤの探索範囲内のメッシュ220から、注記データ223を取得する(S13)。
【0089】
都市タイプ判定部121は、ステップS13で取得した注記データ223のエンティティ225の数の総計を計数する(S15)。このとき、都市タイプ判定部121は、上述したような重み係数による重み付けを行っても良い。
【0090】
都市タイプ判定部121は、ステップS15で計数したエンティティ数の総計から、平均エンティティ数を算出する(S17)。
【0091】
都市タイプ判定部121は、都市タイプテーブル131を参照して、ステップS17で算出した平均エンティティ数に対応する都市タイプを特定する(S19)。
【0092】
上述した処理により、地図データに基づいて、表示地点の都市タイプを判定することができる。
【0093】
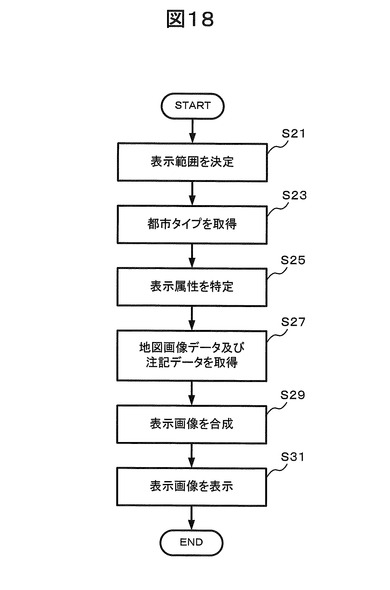
図18は、表示画像の合成及び表示の手順を示すフローチャートである。
【0094】
表示レイヤ、表示地点C及び表示縮尺が特定されると、表示画像合成部123は表示部111に表示させる表示範囲を決定する(S21)。
【0095】
表示画像合成部123は、都市タイプ判定部121が定めた都市タイプを取得する(S23)。
【0096】
表示画像合成部123は、注記データ選択テーブル133を参照して、都市タイプ、表示レイヤ及び表示縮尺から、表示画面に含めて表示させる注記表示の属性を特定する(S25)。
【0097】
表示画像合成部123は、表示レイヤの表示範囲の地図画像データ221及び注記データ223を、地図データ記憶部125から取得する(S27)。
【0098】
表示画像合成部123は、ステップS27で取得した注記データ223のうち、ステップS25で特定された注記表示の属性のエンティティ225を抽出する。そして、ステップS27で取得した地図画像データ221に基づく地図画像に、ここで抽出したエンティティに基づく注記表示を重ねた表示画像を合成する(S29)。
【0099】
そして、表示画像合成部123は、その表示画像を表示部111に表示させる(S31)。
【0100】
これにより、本実施形態によれば、地図画像が表示される地域の特性に応じた注記表示を行うことができる。
【0101】
なお、この第二の実施形態を抽象的に表現するならば、例えば下記のように表現できる。
【0102】
[表現1]
表示部を備えた地図表示装置であって、
複数のレイヤから構成されている地図データであって、それぞれのレイヤごとに、複数のメッシュに区切られた地図画像データと、各メッシュの地図画像上に複数の注記表示をするための注記表示データとを有する地図データを記憶する記憶手段と、
前記表示部に表示される表示地点を決定する表示地点決定手段と、
前記複数のレイヤのうちの予め定められている一の基準レイヤにおいて、前記表示地点決定手段によって決定された表示地点及びその周辺領域を含む一以上のメッシュを探索範囲として特定し、前記特定された探索範囲内のメッシュに含まれる注記データに基づいて表示される前記注記表示の個数を計数する計数手段と、
前記表示部に表示させる表示レイヤ及び前記表示地点を含む表示範囲が定まると、前記計数手段の計数結果に応じて、前記表示レイヤの前記表示範囲内の注記表示データから、前記表示範囲に含める注記表示データを選択する注記表示選択手段と、
前記表示レイヤの前記表示範囲の地図画像データ、及び前記注記表示選択手段により選択された注記表示データに基づく注記表示を含む表示画像を合成して、前記表示画像を前記表示部へ表示させる画像処理手段と、を備える地図表示装置。
【0103】
[表現2]
前記計数手段の計数結果に基づいて、前記表示地点の都市タイプを判定する都市タイプ判定手段をさらに備え、
前記注記表示データは、各注記表示の属性を示す属性データを含み、
前記注記表示選択手段は、前記都市タイプ判定手段によって判定された都市タイプ、前記表示レイヤ及び表示する地図の縮尺に応じて前記注記表示データの属性を特定し、前記表示レイヤの前記表示範囲内の注記表示データから、前記特定された属性の注記表示データを選択することを特徴とする表現1記載の地図表示装置。
【0104】
[表現3]
前記表示地点決定手段によって表示地点が決定されるたびに、前記都市タイプ判定手段が都市タイプの判定を行い、前記注記表示選択手段が前記都市タイプ判定手段の判定結果に従って前記注記表示データの属性の特定を行うように構成されているときに、
前記都市タイプ判定手段による判定結果が第1の都市タイプから第2の都市タイプに切り替わったときは、前記注記表示選択手段は、所定回数以上連続して第2の都市タイプが検出される前は前記第2の都市タイプに従って前記注記表示データの属性の特定を行い、前記所定回数以上連続して第2の都市タイプが検出された後は前記第1の都市タイプに従って前記注記表示データの属性の特定を行うことを特徴とする表現2に記載の地図表示装置。
【0105】
[表現4]
前記表示地点決定手段によって決定した最新の表示地点と、前記最新の表示地点よりも以前に決定された表示地点との変位量が所定以下のときは、前記都市タイプ判定手段は都市タイプの判定を行わず、
前記注記表示選択手段は、前記以前に決定された表示地点に対応する都市タイプ、前記表示レイヤ及び表示する地図の縮尺に応じて前記注記表示データの属性を特定することを特徴とする表現2記載の地図表示装置。
【0106】
[表現5]
前記計数手段は、
前記探索範囲に、前記表示地点を含む第1のメッシュ及び前記第1のメッシュの周辺の一以上の第2のメッシュを含め、
前記第2のメッシュの内の注記表示個数よりも、前記第1のメッシュ内の注記表示個数に重み付けを行って前記注記表示の個数を計数することを特徴とする表現1〜4のいずれかに記載の地図表示装置。
【0107】
[表現6]
前記注記表示データは、前記地図画像上の複数の注記表示にそれぞれ対応した、複数のデータエンティティによって構成されていて、
前記計数手段が行う前記注記表示の個数の計数は、前記データエンティティの個数の計数であることを特徴とする表現1〜5のいずれかに記載の地図表示装置。
【0108】
[表現7]
複数のレイヤから構成されている地図データであって、それぞれのレイヤごとに、複数のメッシュに区切られた地図画像データと、各メッシュの地図画像上に複数の注記表示をするための注記表示データとを有する地図データを記憶手段に記憶するステップと、
表示部に表示される表示地点を決定するステップと、
前記複数のレイヤのうちの予め定められている一の基準レイヤにおいて、前記決定された表示地点及びその周辺領域を含む一以上のメッシュを探索範囲として特定し、前記特定された探索範囲内のメッシュに含まれる注記データに基づいて表示される前記注記表示の個数を計数するステップと、
前記表示部に表示させる表示レイヤ及び前記表示地点を含む表示範囲が定まると、前記計数手段の計数結果に応じて、前記表示レイヤの前記表示範囲内の注記表示データから、前記表示範囲に含める注記表示データを選択するステップ、
前記表示レイヤの前記表示範囲の地図画像データ、及び前記選択された注記表示データに基づく注記表示を含む表示画像を合成して、前記表示画像を前記表示部へ表示させるステップと、を備える地図表示方法。
【0109】
[表現8]
地図を表示するためのコンピュータプログラムであって、
コンピュータに実行されると、
複数のレイヤから構成されている地図データであって、それぞれのレイヤごとに、複数のメッシュに区切られた地図画像データと、各メッシュの地図画像上に複数の注記表示をするための注記表示データとを有する地図データを記憶手段に記憶するステップと、
表示部に表示される表示地点を決定するステップと、
前記複数のレイヤのうちの予め定められている一の基準レイヤにおいて、前記決定された表示地点及びその周辺領域を含む一以上のメッシュを探索範囲として特定し、前記特定された探索範囲内のメッシュに含まれる注記データに基づいて表示される前記注記表示の個数を計数するステップと、
前記表示部に表示させる表示レイヤ及び前記表示地点を含む表示範囲が定まると、前記計数手段の計数結果に応じて、前記表示レイヤの前記表示範囲内の注記表示データから、前記表示範囲に含める注記表示データを選択するステップ、
前記表示レイヤの前記表示範囲の地図画像データ、及び前記選択された注記表示データに基づく注記表示を含む表示画像を合成して、前記表示画像を前記表示部へ表示させるステップと、が行われるコンピュータプログラム。
【0110】
[表現9]
複数のレイヤから構成されている地図データであって、それぞれのレイヤごとに、地図画像が複数のメッシュに区切られた地図画像データと、各メッシュの地図画像上に複数の注記表示をするための注記表示データとを有する地図データを記憶する記憶手段と、
都市化判定基準地点を指定する指定手段と、
前記複数のレイヤのうちの予め定められている一の基準レイヤにおいて、前記都市化判定基準地点及びその周辺領域を含む一以上のメッシュを探索範囲として特定し、前記特定された探索範囲内のメッシュに含まれる注記データに基づいて表示される前記注記表示の個数を計数する計数手段と、
前記計数手段の計数結果に基づいて、前記都市化判定基準地点の都市タイプを判定する都市タイプ判定手段とを備える、地図データから都市タイプを判定する装置。
【0111】
以上、本発明の幾つかの実施例を説明したが、これらの実施例は本発明の説明のための例示にすぎず、本発明の範囲をこれらの実施例にのみ限定する趣旨ではない。本発明は、その要旨を逸脱することなく、その他の様々な態様でも実施することができる。例えば、A地点の計算のベースになる位置データの数と、B地点の計算のベースになる位置データの数は、異なっていても良い。
【図面の簡単な説明】
【0112】
【図1】本発明の第一の実施形態に係るシステムの全体構成を示す。
【図2】ナビゲーション装置1の構成例を示す。
【図3】ヘディングアップ制御部204の機能ブロックと、参照データ記憶部130に記憶されるデータを示す。
【図4】制御テーブル203の構成を示す。
【図5】フリーナビヘディングアップ制御処理のフローチャートである。
【図6】設定画面を示す。
【図7】A地点及びB地点の計算方法の説明図である。
【図8】ヘディングアップ前の、表示されている地図画像である。
【図9】ヘディングアップ後の、表示されている地図画像である。
【図10】ナビゲーション装置1の構成図である。
【図11】地図データ200のデータ構造である。
【図12】レイヤの説明図である。
【図13】合成画像の一例である。
【図14】探索範囲320の説明図である。
【図15】都市タイプテーブル131の一例を示す。
【図16】注記データ選択テーブル133の一例を示す。
【図17】地図データに基づいて都市タイプを判定する処理の手順を示すフローチャートである。
【図18】表示画像の合成及び表示の手順を示すフローチャートである。
【符号の説明】
【0113】
1…ナビゲーション装置
【技術分野】
【0001】
本発明は、ナビゲーションにおけるヘディングアップに関する。
【背景技術】
【0002】
ナビゲーションにおいて、ヘディングアップという技術が一般的に知られている。「ヘディングアップ」とは、進行方向が常に上向きになるよう回転した地図画像を表示することである。
【0003】
ヘディングアップに関する技術として、例えば特許文献1に開示の技術が知られている。特許文献1によれば、ナビゲーション装置は、複数の過去の位置情報に基づいて車両の進行方向を予測し、予測された進行方向が上側になるように部分地図(地図全体のうちの現在位置を含む部分)を回転させる。
【0004】
【特許文献1】特開2007−170999号公報
【発明の開示】
【発明が解決しようとする課題】
【0005】
一般に、ナビゲーション装置は、GPS(Global Positioning System)衛星からの電波をベースに位置を検出する。
【0006】
しかし、検出された位置は、建物で反射された電波を受信する等の原因により、実際の位置と異なっていることがある。
【0007】
このため、単純に複数の過去の位置情報に基づくと、誤った位置情報が含まれていることが原因で、予測される進行方向が間違った進行方向となり、それ故、表示地図を不必要に大きく回転させてしまったり、表示地図の回転が不要なのに表示地図を回転させてしまったりするおそれがある。また、進行方向が予測される度にその予測された進行方向が常に上向きになるようにすると、頻繁に表示地図が回転することになる。これは、経路を指定せず複数の位置情報だけを基にしてヘディングアップを行う場合に特に問題になると考えられる。
【0008】
本発明の目的は、表示されている地図画像の回転を適切に抑制したヘディングアップ技術を提供することにある。
【課題を解決するための手段】
【0009】
予め、ヘディングアップを非実行とするための除外条件を用意しておく。その所定の除外条件が、最新の位置のデータを含む複数の位置データ、それら複数の位置データに基づいて検出された二つの地点間の距離、及び、それら二つの地点を結ぶ直線と垂直方向の直線との角度である回転角のうちの少なくとも一つに適合した場合に、ヘディングアップを非実行とする。具体的には、下記の通りである。
【0010】
ナビゲーション装置が、表示部と、位置検出手段と、記憶手段と、地図表示手段と、位置記憶手段と、地点算出手段と、除外判定手段と、ヘディングアップ制御手段とを備える。位置検出手段は、GPS衛星からの電波を基に位置を検出する。記憶手段は、地図データを記憶する。地図表示手段は、地図データを基に、検出された位置を含んだ地図画像を表示する。位置記憶手段は、検出された位置を表す位置データを記憶する。地点算出手段は、最新の位置のデータを含んだ複数の位置データ(位置記憶手段が記憶している複数の位置データ)を基に、第一の地点と、第一の地点よりも最新の位置から遠い地点である第二の地点とを算出する。除外判定手段が、複数の位置データ、算出された第一及び第二の地点間の距離、及び、算出された第一及び第二の地点間を結ぶ直線の方向と地図画像における上下方向の直線との角度である回転角の少なくとも一つが、所定の除外条件に適合するか否かの除外判定を行う。地図表示制御手段は、除外判定の結果が否定的の場合に、第二の地点から第一の地点への方向が上方向になるように回転した地図画像を表示するヘディングアップを実行し、除外判定の結果が肯定的の場合に、ヘディングアップを非実行とする。
【発明を実施するための最良の形態】
【0011】
以下、図面を参照して、本発明の幾つかの実施形態を説明する。
【実施例1】
【0012】
図1は、本発明の第一の実施形態に係るシステムの全体構成を示す。
【0013】
同図に示すように、地図表示装置である一台以上のナビゲーション装置1,1,・・・と、無線通信を行うアクセスポイント7,7と、アクセスポイント7,7とネットワーク9を介して接続されているサーバ3とが備えられる。各ナビゲーション装置1,1,・・・は、無線通信機能を利用してアクセスポイント7にアクセスし、ネットワーク9を介してサーバ3にアクセスするか、または、有線通信によってネットワーク9を介してサーバ3にアクセスする。
【0014】
サーバ3は、例えば、ネットワーク9との通信機能を有する汎用的なコンピュータシステムにより構成され、地図データを保存している。そして、ナビゲーション装置1,1・・・からのリクエストに応じて、ネットワーク9を介して地図データを提供する。
【0015】
ナビゲーション装置1,1,・・・は、たとえば、サーバ3との通信機能を有するコンピュータ装置であればよく、例えば、車両に搭載されている据置型装置(例えば、ジャイロセンサ等を備えたカーナビゲーション装置)もあれば、携帯電話機、PNS(Portable Navigation System)、モバイルPC(パーソナルコンピュータ)などの移動体通信装置もある。
【0016】
以下に説明するナビゲーション装置1,1,・・・の機能ないし構成は、ナビゲーション装置1,1,・・・が有する所定のハードウェアと、それらを制御ないし動作させる所定のソフトウェア(コンピュータプログラム)によって実現することができる。
【0017】
図2は、ナビゲーション装置1の構成図である。
【0018】
ナビゲーション装置1は、同図に示すように、表示部111と、入力部113と、GPS処理部115と、通信処理部117と、表示地点決定部119と、ヘディングアップ制御部204と、表示画像合成部523と、地図データ記憶部125と、参照データ記憶部130とを備える。ナビゲーション装置1には、例えばジャイロセンサは非搭載である。
【0019】
表示部111は、たとえば、液晶パネルなどの表示装置を備える。表示部111には、ユーザに対して提供する画面が表示される。
【0020】
入力部113は、たとえば、プッシュボタン、キーボード、タッチパネルあるいはポインティングデバイスなどの操作部を備える。入力部113は、ユーザからの入力を受け付ける。
【0021】
GPS処理部115は、ナビゲーション装置1の現在位置検出手段である。GPS処理部115は、GPSアンテナと、GPSアンテナが受信したGPS信号を処理してナビゲーション装置1の現在位置の座標(緯度及び経度)を特定するGPS信号処理手段とを有する。GPS処理部115が検出した位置を表す位置データ(例えば、緯度及び経度を表すデータ)は、参照データ記憶部130に格納される。
【0022】
通信処理部117は、無線あるいは有線通信によって、サーバ3と通信を行う。例えば、通信処理部117は、サーバ3から地図データを取得して、地図データ記憶部125に格納する。
【0023】
表示地点決定部119は、入力部113またはGPS処理部115の出力に基づいて、表示部111に表示される地図に含まれる地点、つまり、地図を表示させたい地点(表示地点)Cを決定する。表示地点Cは、ナビゲーション時には、現在位置に対応した地点である。
【0024】
ヘディングアップ制御部204は、ヘディングアップの実行/非実行を制御する。ヘディングアップ制御部204は、ヘディングアップの実行の際、地図画像の回転角を表示画像合成部523に通知する。
【0025】
表示画像合成部523は、地図データが表す地図画像に表示地点Cを重ねた合成画像を表示部111に表示させる。また、表示画像合成部523は、地図画像の回転角の通知をヘディングアップ制御部204から受けた場合、地図画像をその回転角だけ回転させる。
【0026】
地図データ記憶部125は、通信処理部117がサーバ3から取得した地図データ200を記憶する記憶資源である。
【0027】
参照データ記憶部130は、ヘディングアップ制御部204によって参照されるデータを記憶する記憶資源である。
【0028】
以上が、ナビゲーション装置1の構成についての説明である。地図データ記憶部125を有する記憶資源と参照データ記憶部130を有する記憶資源は同一であっても異なっていても良い。
【0029】
以下、ヘディングアップ制御部204について詳細に説明する。
【0030】
図3は、ヘディングアップ制御部204の機能ブロックと、参照データ記憶部130に記憶されるデータを示す。
【0031】
参照データ記憶部130には、GPS処理部115によって格納される位置データ201と、制御テーブル203とがある。
【0032】
位置データ201は、GPS処理部115が検出した位置を表すデータである。GPS処理部115によって現在位置(最新の位置)が検出される都度に、検出された位置を表す位置データ201が、参照データ記憶部130に追加される。
【0033】
制御テーブル203は、後述するフリーナビ処理で使用される種々の値が記録されているテーブルである。制御テーブル203については、図4を参照して後に詳述する。
【0034】
ヘディングアップ制御部204は、複数種類のナビゲーションを行う。ナビゲーションの種類として、例えば、探索された経路と現在位置のデータとを基にユーザを案内する「経路ベースナビ」と、ユーザの検出された現在位置を描画し続けていくことでユーザの移動経路を案内する「フリーナビ」とがある。
【0035】
ヘディングアップ制御部204は、例えば、モード判定部301と、都市タイプ判定部302と、地点計算部303と、除外判定部304とを有する。
【0036】
モード判定部301は、ナビゲーション装置1を有するユーザが徒歩で移動しているのか車で移動しているのかを判定する。その判定は、ユーザから徒歩モードと車モードのどちらかの選択を入力部113を介して受け付けることで行われても良いし、位置データ201の履歴を基に行われても良い(例えば、定期的に検出される位置同士の距離が所定の距離以上であれば車モードと判定されても良い)。
【0037】
都市タイプ判定部302は、現在位置を含んだ都市のタイプを判定する。この判定は、例えば、地図データに関連付けられている都市属性情報を基に行われても良いし、第二の実施形態で説明する方法で行われても良い。本実施形態では、都市タイプとして、単位領域の建物レベル(例えば、単位領域に存在する高い建物の数に基づいて決定されたレベル)が低い順に、住宅街、標準、ビル街の3種類(図4参照)がある。
【0038】
地点計算部303は、参照データ記憶部130に記憶されている複数の位置データ201を基に2つの地点を算出する。具体的には、例えば、地点計算部203は、図7に示すように、複数の位置データ201のうちの、現在位置のデータ201を含んだN個の位置データ201を基に、A地点(厳密にはA地点の座標)を算出する(なお、図7に記載の○は、地図画像における、位置データ201が表すポイントであって、地図画像上に表示されるマークである)。また、地点計算部303は、そのN個の位置データの次の位置データを含んだ別のN個の位置データを基に、B地点(厳密にはB地点の座標)を算出する。A地点は、現在位置に近い位置データほど高い重みとされた、N個の位置データ(N個の座標)の加重平均である。同様に、B地点は、現在位置に近い位置データほど高い重みとされた、上記別のN個の位置データの加重平均である。
【0039】
除外判定部304は、対象範囲(N個の位置又は別のN個の位置)、A地点及びB地点間の距離、及び回転角(B地点及びA地点を通る直線BAの方向と地図画像における上下方向との角度)のうちの少なくとも一つが所定の除外条件に適合するか否かの判定である除外判定を行う。除外条件としては、下記4つ、
(第一の除外条件)A地点及びB地点間の距離(以下、AB間距離)がXm未満(mはメートル)、
(第二の除外条件)AB間距離がXm以上Ym未満であるとき回転角がU度未満(この除外条件は、車モードの場合にのみ使用される)、
(第三の除外条件)図7に示すいずれかの対象範囲(N個の位置又は別のN個の位置)にZm以上離れた連続した2つの位置が存在するとき回転角がV度未満(この除外条件は、徒歩モードの場合にのみ使用される)、
(第四の除外条件)回転角がW度未満(この除外条件は、第一の除外条件と第二又は第三の除外条件とのいずれも非適合の場合に使用される)、
がある。U、V、W、X、Y及びZは、変数(閾値)であり、制御テーブル203に記録されているパラメータ値が代入される。上述の第一乃至第四の除外条件のいずれかに適合した場合に、ヘディングアップは非実行となり、それらの除外条件のいずれにも非適合の場合に、ヘディングアップが実行される。
【0040】
図4は、制御テーブル203の構成を示す。
【0041】
制御テーブル203には、都市タイプとモード種類別に、図7に示した対象範囲を構成する位置データの変数Nや、前述した種々の除外条件の変数X、(Y及びU)又は(Z及びV)、及びWに代入されるパラメータ値が記録されている。具体的には、例えば、モード判定部301で判定されたモード種類が徒歩モードで、都市タイプ判定部302で判定された都市タイプが住宅街である場合、図5を参照して説明するフリーナビヘディングアップ制御処理において、変数N、X、V、W及びZには、パラメータ値N1、X1、V1、W1及びZ1がそれぞれ代入されることになる。フリーナビヘディングアップ制御処理とは、フリーナビにおいてヘディングアップを実行するか非実行とするかの制御の処理である。
【0042】
なお、図4において、例えば、N1<N2<N3という関係がある。建物レベルが高いと、GPS処理部115で検出された位置が実際の位置とズレている可能性が高く、また、変数Nのパラメータ値が小さいと、回転角が大きくなりやすいため、曲がったと判定される(すべての除外条件に非適合となる)までの時間が短い。このため、建物レベルが高いエリアで変数Nのパラメータ値を小さくすると、位置ズレの影響で頻繁にヘディングアップが行われるおそれがある。それを防ぐために、上記のような関係があることが好ましいと考えられる。
【0043】
また、図4において、同種のエリアについて、変数Nのパラメータ値は、車モードよりも徒歩モードの方が大きい。具体的には、N1>N4、N2>N5、及びN3>N6の関係がある。
【0044】
また、図4において、X1<X2<X3、及び、X4<X5<X6という関係がある。また、図4において、V1>V2>V3という関係がある。
【0045】
本実施形態では、図6に示す設定画面から、経路ベースナビとするかフリーナビとするかを設定することができる。すなわち、ユーザが入力部204を操作してその設定画面上でフリーナビを“ON”とした場合、ヘディングアップ制御部204が、GPS処理部115によって現在位置が検出されて位置データ201が参照データ記憶部130に追加される都度に、表示している地図画像上の、検出された現在位置に対応したポイントに、その現在位置を表すマークを表示する。これにより、図8に示すように、フリーナビでは、地図画像上に、複数のマーク、すなわち、ユーザの移動の軌跡が表示されることになる。
【0046】
図5は、フリーナビヘディングアップ制御処理のフローチャートである。この処理は、例えば、現在位置が検出される都度に開始される。例えば、この制御処理に要する時間は、位置検出の時点と次の位置検出の時点との時間よりも短い。上述した変数U、V、W、X、Y、Zに代入されるパラメータ値は、この制御処理の開始時点におけるモード種類及び都市タイプに対応したパラメータ値である。
【0047】
まず、地点計算部303が、前述した計算方法で、A地点とB地点を算出する(S501及びS502)。
【0048】
次に、除外判定部304が、算出されたA地点とB地点との間の距離(AB間距離)がXm未満か否か(第一の除外条件に適合か否か)の第一の除外判定を行う(S503)。
【0049】
第一の除外判定の結果が肯定的であれば(S503:YES)、S508のヘディングアップはスキップされる(つまりヘディングアップが非実行となる)。これにより、例えば車での移動の際に、走行開始時や停止のための減速時に地図画像が回転しないようにすることができる。具体的に言えば、運転開始時や停止のための減速時は、速度が遅いため、測位のぶれの影響が大きくなり、それ故、実際の進行方向とは関係無く地図画像が回転してしまうおそれが生じるが、それを、本実施形態のように第一の除外判定を設けることで防止することができる。
【0050】
第一の除外判定の結果が否定的であれば(S503:NO)、除外判定部304は、車モードの場合に(S504:NO)、AB間距離がXm以上Ym未満であるとき回転角がU度未満か否か(第二の除外条件に適合か否か)の第二の除外判定を行い(S506)、一方、徒歩モードの場合に(S504:YES)、いずれかの対象範囲内にZm以上離れた連続した2つの位置があるときV度未満か否か(第三の除外条件に適合か否か)の第三の除外判定を行う(S505)。
【0051】
第二の除外判定の結果が肯定的であれば(S506:YES)、S508のヘディングアップはスキップされる。これにより、車がゆっくりと移動していてあまり曲がっていない場合に地図画像が回転しないようにすることができる。
【0052】
第三の除外判定の結果が肯定的であれば(S505:YES)、S508のヘディングアップはスキップされる。これにより、徒歩の速度としてありえない速度である場合に(すなわち、検出位置に大きなズレが生じた場合に)、地図画像が回転しないようにすることができる。なお、第三の除外条件に回転角について閾値Vが設けられていないと、N個の位置(及び別のN個の位置)に実際の位置と大きなズレのある位置が一個でも含まれていると、その他の位置が実質的に正しい位置であったとしても、ヘディングアップがスキップされてしまうが、閾値Vが設けられていることにより、そのようなことを避けることが期待できる。
【0053】
第二又は第三の除外判定の結果が否定的であれば(S506:NO、又は、S505:NO)、除外判定部304は、回転角がW度未満か否か(第四の除外条件に適合か否か)の第四の除外判定を行う(S507)。
【0054】
第四の除外判定の結果が肯定的であれば(S507:YES)、S508のヘディングアップがスキップされる。これにより、小刻みに(頻繁に)地図画像が回転しないようにすることができる。
【0055】
第四の除外判定の結果が否定的であれば(S507:NO)、ヘディングアップ制御部204が、ヘディングアップ(B地点からA地点への方向が上方向になるよう地図画像を回転して表示すること)を行う(S508)。これにより、例えば図8に示す地図画像が、図9に示すように回転されて表示される。
【0056】
以上が、フリーナビヘディングアップ制御処理の流れである。なお、この制御処理において、除外判定の順番は、前述した順番に限らない。例えば、第一の除外判定よりも先に第二或いは第三の除外判定が行われても良い。
【実施例2】
【0057】
本発明の第二の実施形態を説明する。その際、第一の実施形態との相違点を主に説明し、第一の実施形態との共通点については説明を省略或いは簡略する。
【0058】
図10は、本発明の第二の実施形態に係るナビゲーション装置の、第一の実施形態に係るナビゲーション装置1との主要な相違点を示す。
【0059】
参照データ記憶部131に、都市タイプテーブル131と、注記データ選択テーブル133とが記憶される。都市タイプ判定部121が、地図データ記憶部125内の地図データと、都市タイプテーブル131とを参照して、都市タイプを判定する。都市タイプ判定部121は、判定された都市タイプを、除外判定部304だけでなく表示画像合成部123にも通知する。表示画像合成部123は、注記データ選択テーブル133を参照して画像処理を行う。
【0060】
都市タイプ判定部121によって判定された都市タイプ(例えば図17のS19で判定された都市タイプ)が、フリーナビヘディングアップ制御処理において、制御テーブル203(図4参照)に記録されているどの閾値を使用するかに利用される。
【0061】
以下、本発明の第二の実施形態について詳細に説明する。
【0062】
図11は、地図データ200のデータ構造を示す。
【0063】
同図に示すように、地図データ200は、複数のレイヤ210、210,・・・から構成されている。レイヤ210、210,・・・は、例えば、図12に示すように、地図画像の縮尺に応じて階層化されている。それぞれのレイヤ210のデータは、地図画像を所定の大きさに区切ったメッシュ220単位で構成されている。ここでは、最も細かいメッシュ220を有するレイヤ、つまり詳細な地図画像を有するレイヤをレイヤ1とし、メッシュサイズが粗くなるにつれて、レイヤ2,レイヤ3となり、最も粗いメッシュを有するレイヤ6までの6階層としても良い。
【0064】
各メッシュ220は、それぞれのメッシュの地図画像データ221と、各メッシュの地図画像上の注記データ223とを有する。
【0065】
地図画像データ221は、複数のポリゴンデータ及びポリラインデータを含む。各ポリゴンデータ及びポリラインデータは、それぞれの特性を示す属性情報及び位置情報を有する。
【0066】
注記データ223は、複数のエンティティ225,225,・・・によって構成されている。各エンティティ225,225,・・・は、それぞれ一つの注記表示(スポット表示)を行うためのデータである。図13は、表示部111に表示される表示画面の一例である。注記表示とは、例えば、図13に示すような地図画像上に表示された種々の文字、記号、図形、マークなどをいう。従って、各エンティティ225,225,・・・には、これらの文字、記号、図形、マークなどのデータが含まれていても良い。また、各エンティティ225,225,・・・には、各種名称(例えば、地名(住所)、地域名、河川名、及び各種ランドマーク(建築物、構造物)の名称など)のテキストデータや、店舗のマークなどの画像データが含まれていても良い。さらに、各エンティティ225,225,・・・には、各注記表示の属性を示すデータも含まれている。属性とは、例えば、各注記表示が示しているものの種別(住所、交差点、コンビニ、ガソリンスタンド、駅、等)や、各注記表示が配置される位置の情報が含まれる。
【0067】
表示地点決定部119は、入力部113またはGPS処理部115の出力に基づいて、表示部111に表示される地図に含まれる地点、つまり、地図を表示させたい地点(表示地点)を決定する。例えば、入力部113から、表示部111に表示させるべき位置情報(例えば、緯度および経度、住所、ランドマークの名称など)の通知を受けたとき、または、表示部111に既に表示されている地図をスクロールさせるための入力を受けたとき、あるいは、GPS処理部115から現在位置の位置情報の通知を受けたときに、それらに基づいて、表示地点決定部119は、表示部111に表示する表示地点Cを決定する。ここで、表示地点Cとは、例えば、表示部111の特定の位置(例えば中心)に表示される地点(図13参照)の緯度及び経度でよい。
【0068】
都市タイプ判定部121は、注記表示計数処理と都市タイプ判定処理とを行って、表示地点決定部119が決定した表示地点の都市タイプを判定する。ここで、都市タイプとは、地図における注記表示の混雑度合い、つまり、単位面積あたりの注記表示データ223のエンティティ225の個数の多さ(密度)を示すものである。これは、開発(都市化)が進んだ地域ほど地図上の注記表示が密であり、つまり単位面積あたりの注記表示データ223のエンティティ225の個数が多いという特徴があるからである。また、これとは反対に、山間部などの開発が進んでいない地域では注記表示が疎であり、つまり単位面積あたり注記表示データ223のエンティティ225の個数が少ないという特徴があるためである。従って、この注記表示の混雑度合いは、実質的には都市化の度合いを示すものとして、本実施形態では都市タイプ判定を行っている。
【0069】
次に、図14を参照して、都市タイプ判定部121が行う注記表示計数処理、及び都市タイプ判定処理について説明する。図14は、予め定められた基準レイヤのメッシュに分割された地図画像を示す。基準レイヤは、複数のレイヤのうちのいずれかに予め定められていてもよい。
【0070】
注記表示計数処理では、例えば、以下のような処理が行われる。すなわち、都市タイプ判定部121は、表示地点決定部119が定めた表示地点Cを取得すると、図14に示すように、基準レイヤにおける表示地点C及びその周辺領域を含む1以上のメッシュを探索範囲320として特定する。ここで、探索範囲320は、例えば、図14に示すように、表示地点Cを含むメッシュ310と、そのメッシュ310に接する全メッシュ(メッシュ310の周辺の全メッシュ)を探索範囲320としてもよい。あるいは、探索範囲320は、メッシュ310のみでも良いし、メッシュ310と上下左右に隣り合う4つのメッシュを含む5メッシュで構成しても良い。
【0071】
都市タイプ判定部121は、探索範囲320に属する各メッシュ220の注記データ223を、地図データ記憶部125から取得する。そして、都市タイプ判定部121は、メッシュごとに、それぞれのメッシュ220の注記データ223内のエンティティ225の数を計数する。さらに、都市タイプ判定部121は、探索範囲320全体のエンティティ数の総計を求める。探索範囲320全体のエンティティ数の総計を求める際、都市タイプ判定部121は、各メッシュ別のエンティティ数に所定の重み係数をかけてから総計を算出しても良い。例えば、表示地点Cが属するメッシュ310の重み係数を周辺よりも大きくしたり、メッシュ310と上下または左右方向に隣り合っているメッシュの重み係数を、斜め方向に隣り合っているメッシュの重み係数より大きくしたりしても良い。都市タイプ判定部121は、ここで算出したエンティティ数の総計を、探索範囲320のメッシュ数で割って、探索範囲320のメッシュあたりのエンティティ数(平均エンティティ数)を算出する。
【0072】
都市タイプ判定処理では、例えば以下のような処理が行われる。すなわち、都市タイプ判定部121は、上述の注記表示計数処理で算出した平均エンティティ数に基づいて、都市タイプテーブル131を参照して、都市タイプを判定する。
【0073】
なお、注記表示のエンティティ数は、レイヤによってその数が異なるので、上記の処理は基準レイヤを定めて行うことが好ましい。また、基準レイヤは、中程度のメッシュの細かさのレイヤ(例えばレイヤ3)としても良い。これは、ある程度広い範囲で判定を行った方が、都市としての特性を把握しやすいからである。
【0074】
図15は、都市タイプテーブル131の一例を示す。すなわち、都市タイプテーブル131は、平均エンティティ数1311と都市タイプ1313とを対応付けて記憶している。
【0075】
なお、上述した注記表示計数処理及び都市タイプ判定処理では、表示地点決定部119が定めた表示地点Cの都市タイプを判定しているが、都市タイプ判定部121は、これ以外の地点の都市タイプを判定することもできる。すなわち、都市タイプ判定部121は、指定された任意の地点の都市タイプを、上述と同様の手順で判定することができる。
【0076】
表示地点決定部119によって表示地点Cが決定されるたびに、都市タイプ判定部121が都市タイプの判定を行うようにしてもよい。つまり、表示部111に表示させる地図画像が切り替わるたびに、その都度、都市タイプ判定部121が表示地点Cの都市タイプ判定を行っても良い。あるいは、これとは反対に、表示部111に表示させる地図画像をスクロールするようなときであって、そのスクロール幅が小さいときなどは、都市タイプ判定部121は、表示地点Cの都市タイプ判定を毎回行わなくても良い。つまり、表示地点決定部119が決定した最新の表示地点Cと、その直前の表示地点との変位量が所定以下であるときは、都市タイプ判定部121による都市タイプ判定を省略して、表示画像合成部123は、過去の都市タイプ判定結果を利用しても良い。あるいは、表示地点決定部119が決定した最新の表示地点Cと、その直前の表示地点とが、あるレイヤ(例えば、最も詳細なメッシュのレイヤ1)において同一メッシュに含まれているときは、都市タイプ判定を省略しても良い。
【0077】
表示画像合成部123は、注記表示の選択処理を行う注記表示選択処理と、画像処理とを行う。そして、画像処理においては、注記表示選択手段によって選択された注記表示を含む表示画像を合成し、表示部111に表示させる。
【0078】
表示画像合成部123は、注記表示選択処理として、例えば以下のような処理を行う。すなわち、表示画像合成部123は、表示部111に表示させる地図のレイヤ(表示レイヤ)、及び表示させる範囲(表示範囲)が定まると、それに対応する地図画像データ221を地図データ記憶部125から取得する。表示範囲は、例えば、表示レイヤ、表示時点A及び表示させる地図の縮尺により定まる。従って、表示画像合成部123は、例えば、表示部111に表示させる表示レイヤ、表示時点A及び表示させる地図の縮尺に応じて、地図画像データ221を地図データ記憶部125から取得しても良い。なお、表示部111に表示させる表示レイヤ及び地図の縮尺は、ユーザの入力、またはナビゲーション装置1内の図示しない他のアプリケーションからの指示などに応じて定めてもよい。
【0079】
表示画像合成部123は、さらに、上述の表示範囲に含まれている注記データ223のエンティティ225を地図データ記憶部125から取得して、都市タイプ(あるいは都市タイプ判定部121が算出した平均エンティティ数)に応じて、表示範囲に表示させる注記表示を選択する。例えば、表示画像合成部123は、表示地点C、表示レイヤ及び縮尺に基づいて、表示範囲に含まれる注記表示のエンティティ225を取得する。そして、表示画像合成部123は、都市タイプ判定部121で判定された都市タイプ、及び注記データ選択テーブル133に従って、エンティティ225を選択する。
【0080】
注記データ選択テーブル133は、レイヤ及び都市タイプに応じて、表示画像に含める注記表示の属性を定めている。
【0081】
図16は、注記データ選択テーブル133の一例を示す。同図に示す例では、レイヤごとにテーブルが構成されている。各テーブルでは、属性別、都市タイプ別に、注記表示を表示する縮尺の範囲が規定されている。例えば、同図の例では、都市タイプが「大都市ターミナル周辺」の場合、「住所名」は縮尺が「120」以下のときに表示され、「ガソリンスタンドマーク」は縮尺が「100」以下のときに表示され、「拡大住所名」は縮尺が「80」以下のときに表示され、「コンビニ表示」は縮尺が「60」以下のときに表示される。
【0082】
なお、図16の例で示す縮尺とはレイヤ別の表示縮尺である。この縮尺は、数値が大きいほど地図は拡大されていて、数値が小さいほど地図は縮小されている。
【0083】
表示画像合成部123は、画像処理として、例えば以下のような処理を行う。すなわち、表示画像合成部123は、地図画像の上に注記表示を重ねて、表示部111に表示させる合成画像(図13参照)を生成する。そして、表示画像合成部123は、上記のようにして合成した画像を表示部111に表示させる。
【0084】
なお、表示地点Cが切り替わるごとに都市タイプ判定部121が都市タイプ判定を行っているとき、都市タイプが切り替わる境界付近では、都市タイプ判定部121の判定結果が、不安定にぶれることがある。そこで、このぶれによる影響を受けないようにするために、表示画像合成部123は、例えば以下のようにしても良い。すなわち、ある都市タイプから別の都市タイプへ切り替わるとき、表示画像合成部123が注記データ選択処理において採用する都市タイプは、例えば以下のようにして切り替えてもよい。すなわち、都市タイプ判定部121による判定結果が、連続して第1の都市タイプ(例えば「大都市ターミナル周辺」)である状態から、第2の都市タイプ(例えば「市街地」)へ切り替わったとき、表示画像合成部123は、所定回数以上連続して第2の都市タイプが検出されるまでは、第1の都市タイプのままで処理を行う。そして、所定回数以上連続して第2の都市タイプが検出されると、表示画像合成部123は、それ以降の処理を第2の都市タイプを用いて処理を行う。これにより、都市タイプが切り替わる境界付近において、都市タイプ判定部121による判定結果がぶれることがあっても、その影響を受けず、注記表示の表示レベルの切り替えを安定的に行うことができる。
【0085】
次に、上述した構成を備えるナビゲーション装置1における処理手順について、図17及び図18を用いて説明する。
【0086】
図17は、地図データに基づいて都市タイプを判定する処理の手順を示すフローチャートである。なお、以下の処理を行う前に、予め通信処理部117が必要な地図データをサーバ3から取得して、地図データ記憶部125に格納しておく。
【0087】
まず、表示地点決定部119が表示地点Cを決定する(S11)。
【0088】
都市タイプ判定部121は、表示地点決定部119が定めた表示地点Cを取得すると、所定の基準レイヤにおいて、この表示地点C及びその周辺領域を含む探索範囲のメッシュ220を定める。そして、地図データ記憶部125を参照し、基準レイヤの探索範囲内のメッシュ220から、注記データ223を取得する(S13)。
【0089】
都市タイプ判定部121は、ステップS13で取得した注記データ223のエンティティ225の数の総計を計数する(S15)。このとき、都市タイプ判定部121は、上述したような重み係数による重み付けを行っても良い。
【0090】
都市タイプ判定部121は、ステップS15で計数したエンティティ数の総計から、平均エンティティ数を算出する(S17)。
【0091】
都市タイプ判定部121は、都市タイプテーブル131を参照して、ステップS17で算出した平均エンティティ数に対応する都市タイプを特定する(S19)。
【0092】
上述した処理により、地図データに基づいて、表示地点の都市タイプを判定することができる。
【0093】
図18は、表示画像の合成及び表示の手順を示すフローチャートである。
【0094】
表示レイヤ、表示地点C及び表示縮尺が特定されると、表示画像合成部123は表示部111に表示させる表示範囲を決定する(S21)。
【0095】
表示画像合成部123は、都市タイプ判定部121が定めた都市タイプを取得する(S23)。
【0096】
表示画像合成部123は、注記データ選択テーブル133を参照して、都市タイプ、表示レイヤ及び表示縮尺から、表示画面に含めて表示させる注記表示の属性を特定する(S25)。
【0097】
表示画像合成部123は、表示レイヤの表示範囲の地図画像データ221及び注記データ223を、地図データ記憶部125から取得する(S27)。
【0098】
表示画像合成部123は、ステップS27で取得した注記データ223のうち、ステップS25で特定された注記表示の属性のエンティティ225を抽出する。そして、ステップS27で取得した地図画像データ221に基づく地図画像に、ここで抽出したエンティティに基づく注記表示を重ねた表示画像を合成する(S29)。
【0099】
そして、表示画像合成部123は、その表示画像を表示部111に表示させる(S31)。
【0100】
これにより、本実施形態によれば、地図画像が表示される地域の特性に応じた注記表示を行うことができる。
【0101】
なお、この第二の実施形態を抽象的に表現するならば、例えば下記のように表現できる。
【0102】
[表現1]
表示部を備えた地図表示装置であって、
複数のレイヤから構成されている地図データであって、それぞれのレイヤごとに、複数のメッシュに区切られた地図画像データと、各メッシュの地図画像上に複数の注記表示をするための注記表示データとを有する地図データを記憶する記憶手段と、
前記表示部に表示される表示地点を決定する表示地点決定手段と、
前記複数のレイヤのうちの予め定められている一の基準レイヤにおいて、前記表示地点決定手段によって決定された表示地点及びその周辺領域を含む一以上のメッシュを探索範囲として特定し、前記特定された探索範囲内のメッシュに含まれる注記データに基づいて表示される前記注記表示の個数を計数する計数手段と、
前記表示部に表示させる表示レイヤ及び前記表示地点を含む表示範囲が定まると、前記計数手段の計数結果に応じて、前記表示レイヤの前記表示範囲内の注記表示データから、前記表示範囲に含める注記表示データを選択する注記表示選択手段と、
前記表示レイヤの前記表示範囲の地図画像データ、及び前記注記表示選択手段により選択された注記表示データに基づく注記表示を含む表示画像を合成して、前記表示画像を前記表示部へ表示させる画像処理手段と、を備える地図表示装置。
【0103】
[表現2]
前記計数手段の計数結果に基づいて、前記表示地点の都市タイプを判定する都市タイプ判定手段をさらに備え、
前記注記表示データは、各注記表示の属性を示す属性データを含み、
前記注記表示選択手段は、前記都市タイプ判定手段によって判定された都市タイプ、前記表示レイヤ及び表示する地図の縮尺に応じて前記注記表示データの属性を特定し、前記表示レイヤの前記表示範囲内の注記表示データから、前記特定された属性の注記表示データを選択することを特徴とする表現1記載の地図表示装置。
【0104】
[表現3]
前記表示地点決定手段によって表示地点が決定されるたびに、前記都市タイプ判定手段が都市タイプの判定を行い、前記注記表示選択手段が前記都市タイプ判定手段の判定結果に従って前記注記表示データの属性の特定を行うように構成されているときに、
前記都市タイプ判定手段による判定結果が第1の都市タイプから第2の都市タイプに切り替わったときは、前記注記表示選択手段は、所定回数以上連続して第2の都市タイプが検出される前は前記第2の都市タイプに従って前記注記表示データの属性の特定を行い、前記所定回数以上連続して第2の都市タイプが検出された後は前記第1の都市タイプに従って前記注記表示データの属性の特定を行うことを特徴とする表現2に記載の地図表示装置。
【0105】
[表現4]
前記表示地点決定手段によって決定した最新の表示地点と、前記最新の表示地点よりも以前に決定された表示地点との変位量が所定以下のときは、前記都市タイプ判定手段は都市タイプの判定を行わず、
前記注記表示選択手段は、前記以前に決定された表示地点に対応する都市タイプ、前記表示レイヤ及び表示する地図の縮尺に応じて前記注記表示データの属性を特定することを特徴とする表現2記載の地図表示装置。
【0106】
[表現5]
前記計数手段は、
前記探索範囲に、前記表示地点を含む第1のメッシュ及び前記第1のメッシュの周辺の一以上の第2のメッシュを含め、
前記第2のメッシュの内の注記表示個数よりも、前記第1のメッシュ内の注記表示個数に重み付けを行って前記注記表示の個数を計数することを特徴とする表現1〜4のいずれかに記載の地図表示装置。
【0107】
[表現6]
前記注記表示データは、前記地図画像上の複数の注記表示にそれぞれ対応した、複数のデータエンティティによって構成されていて、
前記計数手段が行う前記注記表示の個数の計数は、前記データエンティティの個数の計数であることを特徴とする表現1〜5のいずれかに記載の地図表示装置。
【0108】
[表現7]
複数のレイヤから構成されている地図データであって、それぞれのレイヤごとに、複数のメッシュに区切られた地図画像データと、各メッシュの地図画像上に複数の注記表示をするための注記表示データとを有する地図データを記憶手段に記憶するステップと、
表示部に表示される表示地点を決定するステップと、
前記複数のレイヤのうちの予め定められている一の基準レイヤにおいて、前記決定された表示地点及びその周辺領域を含む一以上のメッシュを探索範囲として特定し、前記特定された探索範囲内のメッシュに含まれる注記データに基づいて表示される前記注記表示の個数を計数するステップと、
前記表示部に表示させる表示レイヤ及び前記表示地点を含む表示範囲が定まると、前記計数手段の計数結果に応じて、前記表示レイヤの前記表示範囲内の注記表示データから、前記表示範囲に含める注記表示データを選択するステップ、
前記表示レイヤの前記表示範囲の地図画像データ、及び前記選択された注記表示データに基づく注記表示を含む表示画像を合成して、前記表示画像を前記表示部へ表示させるステップと、を備える地図表示方法。
【0109】
[表現8]
地図を表示するためのコンピュータプログラムであって、
コンピュータに実行されると、
複数のレイヤから構成されている地図データであって、それぞれのレイヤごとに、複数のメッシュに区切られた地図画像データと、各メッシュの地図画像上に複数の注記表示をするための注記表示データとを有する地図データを記憶手段に記憶するステップと、
表示部に表示される表示地点を決定するステップと、
前記複数のレイヤのうちの予め定められている一の基準レイヤにおいて、前記決定された表示地点及びその周辺領域を含む一以上のメッシュを探索範囲として特定し、前記特定された探索範囲内のメッシュに含まれる注記データに基づいて表示される前記注記表示の個数を計数するステップと、
前記表示部に表示させる表示レイヤ及び前記表示地点を含む表示範囲が定まると、前記計数手段の計数結果に応じて、前記表示レイヤの前記表示範囲内の注記表示データから、前記表示範囲に含める注記表示データを選択するステップ、
前記表示レイヤの前記表示範囲の地図画像データ、及び前記選択された注記表示データに基づく注記表示を含む表示画像を合成して、前記表示画像を前記表示部へ表示させるステップと、が行われるコンピュータプログラム。
【0110】
[表現9]
複数のレイヤから構成されている地図データであって、それぞれのレイヤごとに、地図画像が複数のメッシュに区切られた地図画像データと、各メッシュの地図画像上に複数の注記表示をするための注記表示データとを有する地図データを記憶する記憶手段と、
都市化判定基準地点を指定する指定手段と、
前記複数のレイヤのうちの予め定められている一の基準レイヤにおいて、前記都市化判定基準地点及びその周辺領域を含む一以上のメッシュを探索範囲として特定し、前記特定された探索範囲内のメッシュに含まれる注記データに基づいて表示される前記注記表示の個数を計数する計数手段と、
前記計数手段の計数結果に基づいて、前記都市化判定基準地点の都市タイプを判定する都市タイプ判定手段とを備える、地図データから都市タイプを判定する装置。
【0111】
以上、本発明の幾つかの実施例を説明したが、これらの実施例は本発明の説明のための例示にすぎず、本発明の範囲をこれらの実施例にのみ限定する趣旨ではない。本発明は、その要旨を逸脱することなく、その他の様々な態様でも実施することができる。例えば、A地点の計算のベースになる位置データの数と、B地点の計算のベースになる位置データの数は、異なっていても良い。
【図面の簡単な説明】
【0112】
【図1】本発明の第一の実施形態に係るシステムの全体構成を示す。
【図2】ナビゲーション装置1の構成例を示す。
【図3】ヘディングアップ制御部204の機能ブロックと、参照データ記憶部130に記憶されるデータを示す。
【図4】制御テーブル203の構成を示す。
【図5】フリーナビヘディングアップ制御処理のフローチャートである。
【図6】設定画面を示す。
【図7】A地点及びB地点の計算方法の説明図である。
【図8】ヘディングアップ前の、表示されている地図画像である。
【図9】ヘディングアップ後の、表示されている地図画像である。
【図10】ナビゲーション装置1の構成図である。
【図11】地図データ200のデータ構造である。
【図12】レイヤの説明図である。
【図13】合成画像の一例である。
【図14】探索範囲320の説明図である。
【図15】都市タイプテーブル131の一例を示す。
【図16】注記データ選択テーブル133の一例を示す。
【図17】地図データに基づいて都市タイプを判定する処理の手順を示すフローチャートである。
【図18】表示画像の合成及び表示の手順を示すフローチャートである。
【符号の説明】
【0113】
1…ナビゲーション装置
【特許請求の範囲】
【請求項1】
表示部と、
GPS衛星からの電波を基に位置を検出する位置検出手段と、
地図データを記憶する記憶手段と、
前記地図データを基に、検出された位置を含んだ地図画像を前記表示部に表示させる地図表示手段と、
前記検出された位置を表す位置データを記憶する位置記憶手段と、
最新の位置のデータを含んだ複数の位置データを基に、第一の地点と、前記第一の地点よりも前記最新の位置から遠い地点である第二の地点とを算出する地点算出手段と、
前記複数の位置データ、前記算出された第一及び第二の地点間の距離、及び、前記算出された第一及び第二の地点間を結ぶ直線の方向と前記地図画像における上下方向との角度である回転角のうちの少なくとも一つが、所定の除外条件に適合するか否かの除外判定を行う除外判定手段と、
前記除外判定の結果が否定的の場合に、前記第二の地点から前記第一の地点への方向が上方向になるように回転した前記地図画像を表示するヘディングアップを実行し、前記除外判定の結果が肯定的の場合に、前記ヘディングアップを非実行とするヘディングアップ制御手段と
を備えるナビゲーション装置。
【請求項2】
ユーザが徒歩で移動する場合に選択される徒歩モードと前記ユーザが乗物で移動する場合に選択される乗物モードとを含んだ複数のモードのうちのいずれかを選択するモード選択手段と、
検出された前記最新の位置が属する都市のタイプを判定する都市タイプ判定手段と
を更に備え、
前記第一の地点は、前記最新の位置に近い方が高い重みとされた、前記複数の位置データのうちの、前記最新の位置データを含んだN個(Nは2以上の整数)の位置データの加重平均であり、
前記第二の地点は、前記最新の位置に近い方が高い重みとされた、前記複数の位置データのうちの、前記N個の位置データを除くM個(Mは2以上の整数)の位置データの加重平均であり、
前記所定の除外条件としては、
第一及び第二の地点間の距離が第一の閾値未満であるという第一の除外条件と、
前記乗物モードが選択されている場合に使用される除外条件であって、第一及び第二の地点間の距離が第一の閾値以上第二の閾値未満であるとき回転角が第三の閾値未満という第二の除外条件と、
前記徒歩モードが選択されている場合に使用される除外条件であって、前記複数の位置データが表す複数の位置に第四の閾値以上離れた連続した2つの位置が存在するとき回転角が第五の閾値未満という第三の除外条件と、
前記回転角が第六の閾値未満であるという第四の除外条件と
があり、
前記N及びMと、前記第一乃至第六の閾値とのうちの少なくとも一つが、モード及び都市タイプ毎に設定されており、
前記地点算出手段は、前記選択されているモード及び前記判定された都市タイプに対応したN及びMを基に、前記第一及び第二の地点を算出し、
前記除外判定手段は、前記選択されているモード及び前記判定された都市タイプに対応した前記第一の閾値と、前記第二及び第三の閾値、又は、前記第四及び第五の閾値と、前記第六の閾値とを基に、前記除外判定を行い、
前記算出された第一及び第二の地点間の距離及び回転角が、前記第一の除外条件、前記第二又は第三の除外条件、及び前記第四の除外条件のいずれにも非適合の場合に、前記除外判定の結果が否定的となる、
請求項1記載のナビゲーション装置。
【請求項3】
前記所定の除外条件は、第一及び第二の地点間の距離が第一の閾値未満であるという第一の除外条件である、
請求項1記載のナビゲーション装置。
【請求項4】
前記所定の除外条件は、第一及び第二の地点間の距離が第一の閾値以上第二の閾値未満のときであるという第二の除外条件である、
請求項1又は3記載のナビゲーション装置。
【請求項5】
前記第二の除外条件に、回転角が第三の閾値未満であることを含む、
請求項4記載のナビゲーション装置。
【請求項6】
検出された前記最新の位置が属する都市のタイプを判定する都市タイプ判定手段、を更に備え、
都市タイプとして、第一の都市タイプと、前記第一の都市よりも高い建物の数が多い第二の都市タイプとがあり、
前記第一の都市タイプについての前記第一の閾値よりも、前記第二の都市タイプについての前記第一の閾値の方が大きい、
請求項2、3、4又は5記載のナビゲーション装置。
【請求項7】
ユーザが徒歩で移動する場合に選択される徒歩モードと前記ユーザが乗物で移動する場合に選択される乗物モードとを含んだ複数のモードのうちのいずれかを選択するモード選択手段、を更に備え、
前記第二の除外条件は、前記乗物モードが選択されている場合に使用される除外条件である、
請求項4乃至6のいずれかに記載のナビゲーション装置。
【請求項8】
前記所定の除外条件は、前記複数の位置データが表す複数の位置に第四の閾値以上離れた連続した2つの位置が存在するという第三の除外条件である、
請求項1、3乃至7のうちのいずれかに記載のナビゲーション装置。
【請求項9】
前記第三の除外条件には、前記回転角が第五の閾値未満であることが含まれる、
請求項8記載のナビゲーション装置。
【請求項10】
ユーザが徒歩で移動する場合に選択される徒歩モードと前記ユーザが乗物で移動する場合に選択される乗物モードとを含んだ複数のモードのうちのいずれかを選択するモード選択手段、を更に備え、
前記第三の除外条件は、前記徒歩モードが選択されている場合に使用される除外条件である、
請求項8又は9記載のナビゲーション装置。
【請求項11】
前記所定の除外条件は、前記回転角が第六の閾値未満であるという第四の除外条件である、
請求項1、3乃至10のいずれかに記載のナビゲーション装置。
【請求項12】
検出された前記最新の位置が属する都市のタイプを判定する都市タイプ判定手段、を更に備え、
前記第一の地点は、前記複数の位置データのうちの、前記最新の位置データを含んだN個(Nは2以上の整数)の位置データに基づく地点であり、
前記第二の地点は、前記複数の位置データのうちの、前記N個の位置データを除くM個(Mは2以上の整数)の位置データに基づく地点であり、
都市タイプとして、第一の都市タイプと、前記第一の都市タイプよりも高い建物の数が多い第二の都市タイプとがあり、
前記第一の都市タイプについての前記Nの値よりも、前記第二の都市タイプについての前記Nの値の方が大きい、及び/又は、前記第一の都市タイプについての前記Mの値よりも、前記第二の都市タイプについての前記Mの値の方が大きい、
請求項1、3乃至11のうちのいずれかに記載のナビゲーション装置。
【請求項13】
ユーザが徒歩で移動する場合に選択される徒歩モードと前記ユーザが乗物で移動する場合に選択される乗物モードとを含んだ複数のモードのうちのいずれかを選択するモード選択手段、を更に備え、
前記第一の地点は、前記複数の位置データのうちの、前記最新の位置データを含んだN個(Nは2以上の整数)の位置データに基づく地点であり、
前記第二の地点は、前記複数の位置データのうちの、前記N個の位置データを除くM個(Mは2以上の整数)の位置データに基づく地点であり、
前記乗物モードについての前記Nの値よりも、前記徒歩モードについての前記Nの値の方が大きい、及び/又は、前記乗物モードについての前記Mの値よりも、前記徒歩モードについての前記Mの値の方が大きい、
請求項1、3乃至12のうちのいずれかに記載のナビゲーション装置。
【請求項14】
計数手段を更に備え、
前記地図データは、複数のレイヤから構成されている地図データであって、それぞれのレイヤごとに、地図画像が複数のメッシュに区切られた地図画像データと、各メッシュの地図画像上に複数の注記表示をするための注記表示データとを有し、
前記計数手段が、前記複数のレイヤのうちの予め定められている一の基準レイヤにおいて、前記最新の位置及びその周辺領域を含む一以上のメッシュを探索範囲として特定し、前記特定された探索範囲内のメッシュに含まれる注記データに基づいて表示される前記注記表示の個数を計数し、
前記都市タイプ判定手段が、前記計数手段の計数結果に基づいて、前記最新の位置の都市タイプを判定する、
請求項2、6又は12記載のナビゲーション装置。
【請求項15】
計数手段と、
注記表示選択手段と
を更に備え、
前記地図データは、複数のレイヤから構成されている地図データであって、それぞれのレイヤごとに、地図画像が複数のメッシュに区切られた地図画像データと、各メッシュの地図画像上に複数の注記表示をするための注記表示データとを有し、
前記計数手段が、前記複数のレイヤのうちの予め定められている一の基準レイヤにおいて、前記最新の位置及びその周辺領域を含む一以上のメッシュを探索範囲として特定し、前記特定された探索範囲内のメッシュに含まれる注記データに基づいて表示される前記注記表示の個数を計数し、
前記注記表示選択手段は、前記表示部に表示させる表示レイヤ及び前記表示地点を含む表示範囲が定まると、前記計数手段の計数結果に応じて、前記表示レイヤの前記表示範囲内の注記表示データから、前記表示範囲に含める注記表示データを選択し、
前記地図表示手段が、前記表示レイヤの前記表示範囲の地図画像データ、及び前記注記表示選択手段により選択された注記表示データに基づく注記表示を含む表示画像を合成して、前記表示画像を前記表示部へ表示させる、
請求項1乃至14のうちのいずれかに記載のナビゲーション装置。
【請求項16】
GPS衛星からの電波を基に検出された最新の位置のデータを含んだ複数の位置データを基に、第一の地点と、前記第一の地点よりも前記最新の位置から遠い地点である第二の地点とを算出する地点算出ステップと、
複数の位置データ、前記算出された第一及び第二の地点間の距離、及び、前記算出された第一及び第二の地点間を結ぶ直線の方向と上下方向との角度である回転角のうちの少なくとも一つが、所定の除外条件に適合するか否かの除外判定を行う除外判定ステップと、
前記除外判定の結果が否定的の場合に、前記第二の地点から前記第一の地点への方向が上方向になるように回転した、前記最新の位置を含んだ地図画像を表示するヘディングアップを実行し、前記除外判定の結果が肯定的の場合に、前記ヘディングアップを非実行とするヘディングアップ制御ステップと
を有するナビゲーション方法。
【請求項17】
GPS衛星からの電波を基に検出された最新の位置のデータを含んだ複数の位置データを基に、第一の地点と、前記第一の地点よりも前記最新の位置から遠い地点である第二の地点とを算出する地点算出ステップと、
複数の位置データ、前記算出された第一及び第二の地点間の距離、及び、前記算出された第一及び第二の地点間を結ぶ直線の方向と上下方向との角度である回転角のうちの少なくとも一つが、所定の除外条件に適合するか否かの除外判定を行う除外判定ステップと、
前記除外判定の結果が否定的の場合に、前記第二の地点から前記第一の地点への方向が上方向になるように回転した、前記最新の位置を含んだ地図画像を表示するヘディングアップを実行し、前記除外判定の結果が肯定的の場合に、前記ヘディングアップを非実行とするヘディングアップ制御ステップと
をコンピュータに実行させるコンピュータプログラム。
【請求項1】
表示部と、
GPS衛星からの電波を基に位置を検出する位置検出手段と、
地図データを記憶する記憶手段と、
前記地図データを基に、検出された位置を含んだ地図画像を前記表示部に表示させる地図表示手段と、
前記検出された位置を表す位置データを記憶する位置記憶手段と、
最新の位置のデータを含んだ複数の位置データを基に、第一の地点と、前記第一の地点よりも前記最新の位置から遠い地点である第二の地点とを算出する地点算出手段と、
前記複数の位置データ、前記算出された第一及び第二の地点間の距離、及び、前記算出された第一及び第二の地点間を結ぶ直線の方向と前記地図画像における上下方向との角度である回転角のうちの少なくとも一つが、所定の除外条件に適合するか否かの除外判定を行う除外判定手段と、
前記除外判定の結果が否定的の場合に、前記第二の地点から前記第一の地点への方向が上方向になるように回転した前記地図画像を表示するヘディングアップを実行し、前記除外判定の結果が肯定的の場合に、前記ヘディングアップを非実行とするヘディングアップ制御手段と
を備えるナビゲーション装置。
【請求項2】
ユーザが徒歩で移動する場合に選択される徒歩モードと前記ユーザが乗物で移動する場合に選択される乗物モードとを含んだ複数のモードのうちのいずれかを選択するモード選択手段と、
検出された前記最新の位置が属する都市のタイプを判定する都市タイプ判定手段と
を更に備え、
前記第一の地点は、前記最新の位置に近い方が高い重みとされた、前記複数の位置データのうちの、前記最新の位置データを含んだN個(Nは2以上の整数)の位置データの加重平均であり、
前記第二の地点は、前記最新の位置に近い方が高い重みとされた、前記複数の位置データのうちの、前記N個の位置データを除くM個(Mは2以上の整数)の位置データの加重平均であり、
前記所定の除外条件としては、
第一及び第二の地点間の距離が第一の閾値未満であるという第一の除外条件と、
前記乗物モードが選択されている場合に使用される除外条件であって、第一及び第二の地点間の距離が第一の閾値以上第二の閾値未満であるとき回転角が第三の閾値未満という第二の除外条件と、
前記徒歩モードが選択されている場合に使用される除外条件であって、前記複数の位置データが表す複数の位置に第四の閾値以上離れた連続した2つの位置が存在するとき回転角が第五の閾値未満という第三の除外条件と、
前記回転角が第六の閾値未満であるという第四の除外条件と
があり、
前記N及びMと、前記第一乃至第六の閾値とのうちの少なくとも一つが、モード及び都市タイプ毎に設定されており、
前記地点算出手段は、前記選択されているモード及び前記判定された都市タイプに対応したN及びMを基に、前記第一及び第二の地点を算出し、
前記除外判定手段は、前記選択されているモード及び前記判定された都市タイプに対応した前記第一の閾値と、前記第二及び第三の閾値、又は、前記第四及び第五の閾値と、前記第六の閾値とを基に、前記除外判定を行い、
前記算出された第一及び第二の地点間の距離及び回転角が、前記第一の除外条件、前記第二又は第三の除外条件、及び前記第四の除外条件のいずれにも非適合の場合に、前記除外判定の結果が否定的となる、
請求項1記載のナビゲーション装置。
【請求項3】
前記所定の除外条件は、第一及び第二の地点間の距離が第一の閾値未満であるという第一の除外条件である、
請求項1記載のナビゲーション装置。
【請求項4】
前記所定の除外条件は、第一及び第二の地点間の距離が第一の閾値以上第二の閾値未満のときであるという第二の除外条件である、
請求項1又は3記載のナビゲーション装置。
【請求項5】
前記第二の除外条件に、回転角が第三の閾値未満であることを含む、
請求項4記載のナビゲーション装置。
【請求項6】
検出された前記最新の位置が属する都市のタイプを判定する都市タイプ判定手段、を更に備え、
都市タイプとして、第一の都市タイプと、前記第一の都市よりも高い建物の数が多い第二の都市タイプとがあり、
前記第一の都市タイプについての前記第一の閾値よりも、前記第二の都市タイプについての前記第一の閾値の方が大きい、
請求項2、3、4又は5記載のナビゲーション装置。
【請求項7】
ユーザが徒歩で移動する場合に選択される徒歩モードと前記ユーザが乗物で移動する場合に選択される乗物モードとを含んだ複数のモードのうちのいずれかを選択するモード選択手段、を更に備え、
前記第二の除外条件は、前記乗物モードが選択されている場合に使用される除外条件である、
請求項4乃至6のいずれかに記載のナビゲーション装置。
【請求項8】
前記所定の除外条件は、前記複数の位置データが表す複数の位置に第四の閾値以上離れた連続した2つの位置が存在するという第三の除外条件である、
請求項1、3乃至7のうちのいずれかに記載のナビゲーション装置。
【請求項9】
前記第三の除外条件には、前記回転角が第五の閾値未満であることが含まれる、
請求項8記載のナビゲーション装置。
【請求項10】
ユーザが徒歩で移動する場合に選択される徒歩モードと前記ユーザが乗物で移動する場合に選択される乗物モードとを含んだ複数のモードのうちのいずれかを選択するモード選択手段、を更に備え、
前記第三の除外条件は、前記徒歩モードが選択されている場合に使用される除外条件である、
請求項8又は9記載のナビゲーション装置。
【請求項11】
前記所定の除外条件は、前記回転角が第六の閾値未満であるという第四の除外条件である、
請求項1、3乃至10のいずれかに記載のナビゲーション装置。
【請求項12】
検出された前記最新の位置が属する都市のタイプを判定する都市タイプ判定手段、を更に備え、
前記第一の地点は、前記複数の位置データのうちの、前記最新の位置データを含んだN個(Nは2以上の整数)の位置データに基づく地点であり、
前記第二の地点は、前記複数の位置データのうちの、前記N個の位置データを除くM個(Mは2以上の整数)の位置データに基づく地点であり、
都市タイプとして、第一の都市タイプと、前記第一の都市タイプよりも高い建物の数が多い第二の都市タイプとがあり、
前記第一の都市タイプについての前記Nの値よりも、前記第二の都市タイプについての前記Nの値の方が大きい、及び/又は、前記第一の都市タイプについての前記Mの値よりも、前記第二の都市タイプについての前記Mの値の方が大きい、
請求項1、3乃至11のうちのいずれかに記載のナビゲーション装置。
【請求項13】
ユーザが徒歩で移動する場合に選択される徒歩モードと前記ユーザが乗物で移動する場合に選択される乗物モードとを含んだ複数のモードのうちのいずれかを選択するモード選択手段、を更に備え、
前記第一の地点は、前記複数の位置データのうちの、前記最新の位置データを含んだN個(Nは2以上の整数)の位置データに基づく地点であり、
前記第二の地点は、前記複数の位置データのうちの、前記N個の位置データを除くM個(Mは2以上の整数)の位置データに基づく地点であり、
前記乗物モードについての前記Nの値よりも、前記徒歩モードについての前記Nの値の方が大きい、及び/又は、前記乗物モードについての前記Mの値よりも、前記徒歩モードについての前記Mの値の方が大きい、
請求項1、3乃至12のうちのいずれかに記載のナビゲーション装置。
【請求項14】
計数手段を更に備え、
前記地図データは、複数のレイヤから構成されている地図データであって、それぞれのレイヤごとに、地図画像が複数のメッシュに区切られた地図画像データと、各メッシュの地図画像上に複数の注記表示をするための注記表示データとを有し、
前記計数手段が、前記複数のレイヤのうちの予め定められている一の基準レイヤにおいて、前記最新の位置及びその周辺領域を含む一以上のメッシュを探索範囲として特定し、前記特定された探索範囲内のメッシュに含まれる注記データに基づいて表示される前記注記表示の個数を計数し、
前記都市タイプ判定手段が、前記計数手段の計数結果に基づいて、前記最新の位置の都市タイプを判定する、
請求項2、6又は12記載のナビゲーション装置。
【請求項15】
計数手段と、
注記表示選択手段と
を更に備え、
前記地図データは、複数のレイヤから構成されている地図データであって、それぞれのレイヤごとに、地図画像が複数のメッシュに区切られた地図画像データと、各メッシュの地図画像上に複数の注記表示をするための注記表示データとを有し、
前記計数手段が、前記複数のレイヤのうちの予め定められている一の基準レイヤにおいて、前記最新の位置及びその周辺領域を含む一以上のメッシュを探索範囲として特定し、前記特定された探索範囲内のメッシュに含まれる注記データに基づいて表示される前記注記表示の個数を計数し、
前記注記表示選択手段は、前記表示部に表示させる表示レイヤ及び前記表示地点を含む表示範囲が定まると、前記計数手段の計数結果に応じて、前記表示レイヤの前記表示範囲内の注記表示データから、前記表示範囲に含める注記表示データを選択し、
前記地図表示手段が、前記表示レイヤの前記表示範囲の地図画像データ、及び前記注記表示選択手段により選択された注記表示データに基づく注記表示を含む表示画像を合成して、前記表示画像を前記表示部へ表示させる、
請求項1乃至14のうちのいずれかに記載のナビゲーション装置。
【請求項16】
GPS衛星からの電波を基に検出された最新の位置のデータを含んだ複数の位置データを基に、第一の地点と、前記第一の地点よりも前記最新の位置から遠い地点である第二の地点とを算出する地点算出ステップと、
複数の位置データ、前記算出された第一及び第二の地点間の距離、及び、前記算出された第一及び第二の地点間を結ぶ直線の方向と上下方向との角度である回転角のうちの少なくとも一つが、所定の除外条件に適合するか否かの除外判定を行う除外判定ステップと、
前記除外判定の結果が否定的の場合に、前記第二の地点から前記第一の地点への方向が上方向になるように回転した、前記最新の位置を含んだ地図画像を表示するヘディングアップを実行し、前記除外判定の結果が肯定的の場合に、前記ヘディングアップを非実行とするヘディングアップ制御ステップと
を有するナビゲーション方法。
【請求項17】
GPS衛星からの電波を基に検出された最新の位置のデータを含んだ複数の位置データを基に、第一の地点と、前記第一の地点よりも前記最新の位置から遠い地点である第二の地点とを算出する地点算出ステップと、
複数の位置データ、前記算出された第一及び第二の地点間の距離、及び、前記算出された第一及び第二の地点間を結ぶ直線の方向と上下方向との角度である回転角のうちの少なくとも一つが、所定の除外条件に適合するか否かの除外判定を行う除外判定ステップと、
前記除外判定の結果が否定的の場合に、前記第二の地点から前記第一の地点への方向が上方向になるように回転した、前記最新の位置を含んだ地図画像を表示するヘディングアップを実行し、前記除外判定の結果が肯定的の場合に、前記ヘディングアップを非実行とするヘディングアップ制御ステップと
をコンピュータに実行させるコンピュータプログラム。
【図1】


【図2】
【図3】
【図4】
【図5】
【図6】
【図7】
【図8】
【図9】
【図10】
【図11】
【図12】
【図13】
【図14】
【図15】
【図16】
【図17】
【図18】
【図2】
【図3】
【図4】
【図5】
【図6】
【図7】
【図8】
【図9】
【図10】
【図11】
【図12】
【図13】
【図14】
【図15】
【図16】
【図17】
【図18】
【公開番号】特開2010−96586(P2010−96586A)
【公開日】平成22年4月30日(2010.4.30)
【国際特許分類】
【出願番号】特願2008−266460(P2008−266460)
【出願日】平成20年10月15日(2008.10.15)
【特許番号】特許第4340326号(P4340326)
【特許公報発行日】平成21年10月7日(2009.10.7)
【出願人】(000155469)株式会社野村総合研究所 (1,067)
【Fターム(参考)】
【公開日】平成22年4月30日(2010.4.30)
【国際特許分類】
【出願日】平成20年10月15日(2008.10.15)
【特許番号】特許第4340326号(P4340326)
【特許公報発行日】平成21年10月7日(2009.10.7)
【出願人】(000155469)株式会社野村総合研究所 (1,067)
【Fターム(参考)】
[ Back to top ]