
ベアリングレスモータ及びベアリングレスモータ制御システム
【課題】磁気支持巻線が電動機巻線と対に捲回されることでブラシレスDCモータの永久磁石の磁界を精度良く調整しつつ半径方向位置調整を行い、かつ省スペースで安定した制御の行えるベアリングレスモータ及びベアリングレスモータ制御システムを提供する。
【解決手段】磁気支持巻線13a1と磁気支持巻線13a2を一つの相とし、a相巻線と定義する。同様に、磁気支持巻線13b1、13b2を一つの相とし、b相巻線と定義し、磁気支持巻線13c1、13c2を一つの相とし、c相巻線と定義する。12スロット、8極構造のブラシレスDCモータでは、回転角度φが、15°≦φ<30°、60°≦φ<75°の区間において、a相巻線を励磁して半径方向に磁気支持力を発生する。同様に0°≦φ<15°、45°≦φ<60°の区間においてb相(b1、b2)巻線、30°≦φ<45°、75°≦φ<90°の区間においてc相(c1、c2)巻線を励磁する。
【解決手段】磁気支持巻線13a1と磁気支持巻線13a2を一つの相とし、a相巻線と定義する。同様に、磁気支持巻線13b1、13b2を一つの相とし、b相巻線と定義し、磁気支持巻線13c1、13c2を一つの相とし、c相巻線と定義する。12スロット、8極構造のブラシレスDCモータでは、回転角度φが、15°≦φ<30°、60°≦φ<75°の区間において、a相巻線を励磁して半径方向に磁気支持力を発生する。同様に0°≦φ<15°、45°≦φ<60°の区間においてb相(b1、b2)巻線、30°≦φ<45°、75°≦φ<90°の区間においてc相(c1、c2)巻線を励磁する。
【発明の詳細な説明】
【技術分野】
【0001】
本発明はベアリングレスモータ及びベアリングレスモータ制御システムに係わり、特に磁気支持巻線が電動機巻線と対に捲回されることでブラシレスDCモータの永久磁石の磁界を精度良く調整しつつ半径方向位置調整を行い、かつ省スペースで安定した制御の行えるベアリングレスモータ及びベアリングレスモータ制御システムに関する。
【背景技術】
【0002】
現在、各産業や家電、情報機器のドライブ装置として、ブラシレスDCモータが広く用いられている。その軸受には機械的接触面を持つものや、オイルを介して回転軸支持するものが多く用いられていて、軸受のメンテナンスフリーや長寿命化が望まれている。
【0003】
ベアリングレスモータはモータと磁気軸受の機能を一体化した電磁機械であり、現在、活発に研究開発が行われている。ブラシレスDCモータをベアリングレス化すれば上記軸受の問題を解決できるだけでなく、ドライブの高速化も可能になる。このようなブラシレスDCモータのベアリングレス化について、従来特許文献1、特許文献2が開示されている。
【0004】
【特許文献1】特開2001−351874号公報
【特許文献2】特開2001−16887号公報
【発明の開示】
【発明が解決しようとする課題】
【0005】
しかしながら、前述した公知例では、電動機巻線による磁界を磁気支持巻線で発生させた磁界により不平衡とするため、電動機巻線又は磁気支持巻線のいずれかをスロットをまたぎ複数の固定子歯に渡り捲回している。このため、捲回範囲の広くなる分漏れ磁束が大きくなったり、導線抵抗が増加するこことなり制御精度を上げるのが困難となるおそれがあった。また、スペースとしてもその配線スペース分だけ広く必要となっていた。
【0006】
本発明はこのような従来の課題に鑑みてなされたもので、磁気支持巻線が電動機巻線と対に捲回されることでブラシレスDCモータの永久磁石の磁界を精度良く調整しつつ半径方向位置調整を行い、かつ省スペースで安定した制御の行えるベアリングレスモータ及びベアリングレスモータ制御システムを提供することを目的とする。
【課題を解決するための手段】
【0007】
このため本発明(請求項1)は、複数の固定子歯に捲回された電動機巻線と、該電動機巻線の励磁によりトルクを発生する所定の極数の磁極と、該磁極を有する回転子と、前記固定子歯の内の複数に対し前記電動機巻線と対となって捲回され、かつシャフトを挟んで対峙するように直列に接続された磁気支持巻線と、前記回転子の回転角を抽出する回転角抽出手段と、該回転角抽出手段で抽出した回転角に応じて励磁する磁気支持巻線を切り換える切換手段と、該切換手段で切り換えられた磁気支持巻線の励磁により前記磁極との間に半径方向の力を生じさせることを特徴とする。
【0008】
磁気支持巻線は、電動機巻線と対となるように捲回されているので、磁束の漏れが少なく、直接的に磁極の磁界に作用することができる。このため、極めて精度の高い制御が行える。なお、磁気支持巻線は、必ずしも電動機巻線の巻かれたすべての固定子歯に対し配設される必要はない。以上により、簡易な構成でベアリングレスモータを実現できる。
【0009】
また、本発明(請求項2)は、前記磁気支持巻線は互いに直交されて一つの相が形成され、かつ該相は回転方向に向けて少なくとも一つ備えられており、前記切換手段による切り換えが、該相単位に行われることを特徴とする。
【0010】
以上により、簡易な構成で制御の容易なベアリングレスモータを実現できる。
【0011】
更に、本発明(請求項3)は、前記磁気支持巻線各相の起磁力の方向に座標軸を形成し、該座標軸がx軸及びy軸に一致しないとき、x軸及びy軸方向の力の指令値を該相に作用する力となるように座標変換されることを特徴とする。
【0012】
以上により、x方向やy方向の力の制御が安定し、かつリップルが少ない制御が行える。
【0013】
更に、本発明(請求項4)は、前記相の数がn(n:正の整数)のとき、前記固定子が4nのスロットを有することを特徴とする。
【0014】
以上により、広範囲なモータに対し本発明の適用が可能である。
【0015】
更に、本発明(請求項5)は、前記磁気支持巻線はx軸制御用とy軸制御用とに分離されており、前記切換手段による切り換えで、前記x軸制御用磁気支持巻線の内の少なくとも一つが励磁され、及び/又は、前記y軸制御用磁気支持巻線の内の少なくとも一つが励磁されることを特徴とする。
【0016】
x方向、y方向の力は、1本の磁気支持巻線で半径方向力が発生されたり、あるいは、複数本の磁気支持巻線により発生する力の合成により半径方向力が発生されたりする。磁気支持巻線をx軸制御用とy軸制御用とに分離したことで、x方向やy方向の力の制御が容易に行える。
【0017】
更に、本発明(請求項6)は、前記x軸制御用磁気支持巻線の内のx軸に一致しない磁気支持巻線に捲回される巻線の巻数は、x軸に一致する磁気支持巻線の巻数に対し回転角度差に相当する分所定の割合で減らされ、かつ前記y軸制御用磁気支持巻線の内のy軸に一致しない磁気支持巻線に捲回される巻線の巻数は、y軸に一致する磁気支持巻線の巻数に対し回転角度差に相当する分所定の割合で減らされたことを特徴とする。
【0018】
このことにより、磁気支持巻線の切り換え前後での磁気支持力変動を防止できる。
【0019】
更に、本発明(請求項7)は、前記固定子が2p(p:偶数)のスロットを有し、前記電動機巻線が二相で、かつ前記磁極が極数pを有することを特徴とする。
【0020】
以上により、広範囲なモータに対し本発明の適用が可能である。
【0021】
更に、本発明(請求項8)は、前記切換手段による磁気支持巻線の励磁の切り換えは、前記固定子歯の歯頭部の全体が前記同一の磁極の面内に含まれている間中には該磁気支持巻線に対する励磁が継続され、前記回転子の回転により該歯頭部が異なる磁極に対峙する前に切り換えられることを特徴とする。
【0022】
固定子歯の歯頭部の全体がずっと同一の磁極の面内に含まれた形で回転子が移動しており、磁極による歯頭部に向かう磁界の磁性は一様で、この回転角度範囲内で変化することはない。従って、安定した精度の高い制御が容易に行える。
【0023】
更に、本発明(請求項9)は、前記磁気支持巻線の励磁が、励磁の行われていない電動機巻線に対とされている磁気支持巻線に対し行われることを特徴とする。
【0024】
電動機巻線は励磁されていない状態にあるので、磁極と磁気支持巻線間の磁束に影響を及ぼすことはない。このため、極めて精度の高い制御が行える。
【0025】
更に、本発明(請求項10)は、前記回転子が回転方向に所定の角度だけスキューを施されたことを特徴とする。
【0026】
スキューを施すことで、磁気支持力の干渉分が互いに相殺される。このため、精度の高い制御が行える。
【0027】
更に、本発明(請求項11)は、前記磁気支持巻線に正弦波電流が流されることを特徴とする。
【0028】
磁気支持巻線に正弦波電流を流すことで、磁気支持力の干渉分が互いに相殺される。このため、精度の高い制御が行える。
【0029】
更に、本発明(請求項12)は、前記固定子、電動機巻線、磁極、回転子がブラシレスDCモータを形成することを特徴とする。
【0030】
更に、本発明(請求項13)は、前記回転角抽出手段は前記電動機巻線の相数と同数の回転角度信号を抽出することを特徴とする。
【0031】
市販のブラシレスDCモータでは、回転角を抽出するためセンサが標準的に装備されて販売されることが多い。そこで、この市販のブラシレスDCモータに対して磁気支持巻線を追加捲回するだけで、本願のベアリングレスモータを製作可能である。このため、容易に量産可能であり、安価にできる。
【0032】
更に、本発明(請求項14)は、請求項1〜4に記載のベアリングレスモータを制御するベアリングレスモータ制御システムであって、前記回転子の半径方向の位置を検出する半径方向位置検出手段と、該半径方向位置検出手段で検出した位置と位置指令値との間の偏差を算出する偏差算出手段と、該偏差算出手段で算出された偏差を補償する補償手段と、該補償手段の出力信号を座標変換して各磁気支持巻線方向の力の指令値を求める座標変換手段と、該座標変換手段で求めた力の指令値に基づき前記選択された相を構成する磁気支持巻線の電流を調整する電流調整手段とを備えて構成した。
【0033】
更に、本発明(請求項15)は、請求項5〜7に記載のベアリングレスモータを制御するベアリングレスモータ制御システムであって、前記回転子のx軸方向の半径方向の位置を検出するx軸方向位置検出手段と、該x軸方向位置検出手段で検出した位置とx軸方向位置指令値との間の偏差を算出するx軸方向偏差算出手段と、該x軸方向偏差算出手段で算出された偏差を補償するx軸方向補償手段と、該x軸方向補償手段の出力信号を電流の指令値として前記選択された磁気支持巻線の電流を調整するx軸方向電流調整手段と、前記回転子のy軸方向の半径方向の位置を検出するy軸方向位置検出手段と、該y軸方向位置検出手段で検出した位置とy軸方向位置指令値との間の偏差を算出するy軸方向偏差算出手段と、該y軸方向偏差算出手段で算出された偏差を補償するy軸方向補償手段と、該y軸方向補償手段の出力信号を電流の指令値として前記選択された磁気支持巻線の電流を調整するy軸方向電流調整手段とを備えて構成した。
【発明の効果】
【0034】
以上説明したように本発明によれば、磁気支持巻線は、電動機巻線と対となるように捲回されたので、磁束の漏れが少なく、直接的に磁極の磁界に作用することができる。このため、極めて精度の高い制御が行える。以上により、簡易な構成でベアリングレスモータを実現できる。
【発明を実施するための最良の形態】
【0035】
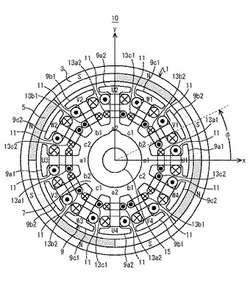
以下、本発明の実施形態について説明する。本発明の第1実施形態であるDCブラシレス構造ベアリングレスモータの横断面図を図1に示す。図1のDCブラシレス構造ベアリングレスモータ10において、回転子1は8極アウターロータ型である。しかしながら、本発明はインナーロータ型に対しても適用可能である。鉄心3の内側には永久磁石5が配置されている。そしてそれぞれの永久磁石5は、回転角度方向に向けて45°毎に磁極が切り換わる。なお、鉄心がなく永久磁石だけの構造でも適用できる。
【0036】
図1中のN、Sは鉄心3に面する側の永久磁石5の極性を表している。固定子鉄心7は12スロット構造である。固定子歯9に巻かれた巻線の内、外側のU、V、Wで表記された巻線は三相電動機巻線11であり、各相それぞれ4つの固定子歯9に集中して巻かれている。また、この三相電動機巻線11の内側には磁気支持巻線13が捲回されている。そして、例えば磁気支持巻線13a1はシャフト15を挟んで対峙する固定子歯9に対し直列接続となるように捲回されている。固定子歯9は断面T字状に形成され、固定子歯9の歯頭部9aは、それぞれ回転角度方向に向けて−15°〜+15°の範囲内に渡り突設されている。
【0037】
また、磁気支持巻線13a1と磁気支持巻線13a2とは、それぞれの発生する起磁力が互いに直交する方向となるように配置されている。磁気支持巻線13a2も磁気支持巻線13a1と同様に、シャフト15を挟んで対峙する固定子歯9に対し直列接続となるように捲回されている。ここに、磁気支持巻線13a1と磁気支持巻線13a2を一つの相とし、a相巻線と定義する。更に、磁気支持巻線13b1、13b2、13c1、13c2も同様に配置されている。ここに、磁気支持巻線13b1、13b2を一つの相とし、b相巻線と定義し、磁気支持巻線13c1、13c2を一つの相とし、c相巻線と定義する。なお、電動機巻線の配置、トルクの発生原理は従来のブラシレスDCモータと同様なので説明を省略する。
【0038】
次に、本発明の第1実施形態の動作を説明する。
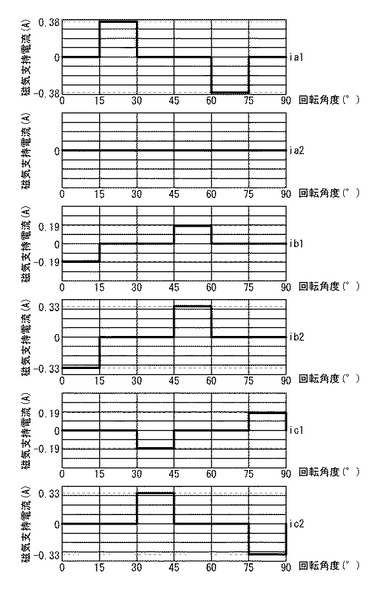
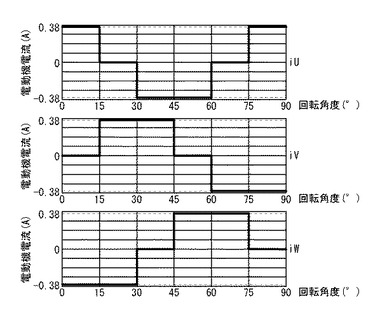
図2及び図3に基づき磁気支持力の発生原理を示す。12スロット8極構造では、ベアリングレスSRモータの原理を応用して軸支持できる。図4に回転角度φと磁気支持電流との関係を、また図5に回転角度φと電動機電流との関係を示す。但し、図4は、x軸正方向に力Fxを発生させる場合について例示したものである。y軸方向についての動作は同様なので説明を省略する(以下、同旨)。なお、図2、図3は、それぞれ回転角度φ=22.5°、0°の場合を例に示す。図中、三相電動機巻線11は省略している。
【0039】
まず、回転子1の回転角度φが22.5°の場合について説明する。回転角度φ=22.5°のとき、図5よりU相の三相電動機巻線11を流れる電流はゼロであり、U相の三相電動機巻線11は励磁されていない状態にある。このとき、図2に示したようにU相の三相電動機巻線11と同一の固定子歯9に捲回された磁気支持巻線13a1に対し正方向に電流ia1を流し励磁すると、永久磁石5の界磁磁束(太い矢印)に加えて支持磁束(細い矢印)が発生する。すると磁束密度がギャップ21では減少し、ギャップ23では増加してアンバランスになりx軸正方向に力Fxが発生する。なお、この場合に、U相の三相電動機巻線11は励磁されていない状態にあるので、永久磁石5と磁気支持巻線13a1間の磁束に影響を及ぼすことはない。このように、回転角度φ=22.5°を含む回転角度15°から30°までの範囲においては、固定子歯9の歯頭部9a1、9a7の全体がずっと同一の永久磁石5A、5Eと対峙し、かつこの永久磁石5A、5Eの面内に含まれた形で回転子1が移動しており、永久磁石5A、5Eによる歯頭部9a1、9a7に向かう磁界の磁性は一様で、この回転角度範囲内で変化することはない。従って、安定した精度の高い制御が容易に行える。
【0040】
次に、回転子1の回転角度φが0°の場合について説明する。回転角度φ=0°のとき、図5よりV相の三相電動機巻線11を流れる電流はゼロであり、V相の三相電動機巻線11は励磁されていない状態にある。このとき、図3に示したようにV相の三相電動機巻線11と同一の固定子歯9に捲回された磁気支持巻線13b1、b2に対しそれぞれ負方向へ電流を流し励磁する。すると力Fb1、Fb2が発生し、その合力によりx軸正方向に力Fxと大きさが等しくなるように支持電流の大きさを決定する。このように、回転角度φ=0°を含む回転角度0°から15°までの範囲においては、固定子歯9の歯頭部9a2、9a5、9a8、9a11の全体がずっと同一の永久磁石5B、5D、5F、5Hと対峙し、かつこの永久磁石5B、5D、5F、5Hの面内に含まれており、永久磁石5B、5D、5F、5Hによる磁界の磁性は一様で、この回転角度範囲内で変化することはない。従って、安定した制御が容易に行える。
【0041】
このように、12スロット、8極構造のブラシレスDCモータでは、回転角度φが、15°≦φ<30°、60°≦φ<75°の区間において、a相巻線を励磁して半径方向に磁気支持力を発生する。同様に0°≦φ<15°、45°≦φ<60°の区間においてb相(b1、b2)巻線、30°≦φ<45°、75°≦φ<90°の区間においてc相(c1、c2)巻線を励磁し、力を発生する。
【0042】
なお、本発明は、4nスロット(支持巻線n相)に適用可能である。なお、回転子極数は従来のブラシレスDCモータの原理でトルクを発生できる極数であれば良く、何種類か考えられる。例えば、上記以外にも4スロット(支持巻線一相)に対し、回転子極数が例えば4極、あるいは、8スロット(支持巻線二相)に対し回転子極数が例えば6極などに適用可能である。
【0043】
上記した通り、回転角度により励磁する相を決定するが、多相構造であっても、高速回転時など慣性の力が大きい場合には少なくとも一相分で力を発生できる。例えば、本実施形態では、a相、b相、c相の3相構造であるが、この内、a相だけの制御であっても制御可能である。但し、リップル等の点からは3相制御された方が望ましい。
【0044】
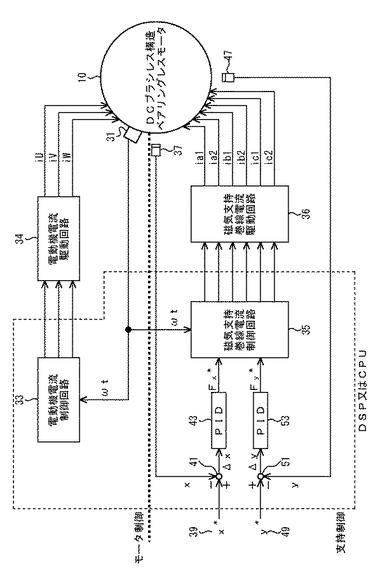
次に、図6を基にDCブラシレス構造ベアリングレスモータの制御方法について説明する。
図6において、DCブラシレス構造ベアリングレスモータ10の回転子1の回転角度を回転角度センサ31で抽出する。そして、この回転角度センサ31で抽出した回転角度に基づき電動機電流制御回路33にて電動機電流iU、iV、iWが演算された後、電動機電流駆動回路34で増幅された形で三相電動機巻線11に流される。
一方、回転角度センサ31で抽出した回転角度は、磁気支持巻線電流制御回路35にも入力されるようになっている。
【0045】
また、ギャップセンサ37で回転子1のx軸方向の変位を検出し、x方向変位指令値39との間での偏差Δxが減算器41にて算出される。そして、この偏差Δxは補償回路43にてPID補償されることで力の指令値Fx*が演算される。
【0046】
一方、ギャップセンサ47でy軸方向の変位を検出し、y方向変位指令値49との間での偏差Δyが減算器51にて算出される。この偏差Δyは補償回路53にてPID補償されることで力の指令値Fy*が演算される。
【0047】
そして、回転角度センサ31で抽出した回転角度φが、15°≦φ<30°、60°≦φ<75°の区間において、a相巻線(a1、a2)を励磁して半径方向に磁気支持力を発生する。このとき、数1に基づき磁気支持巻線電流制御回路35において支持巻線電流ia1、ia2が調整される。調整された電流は、磁気支持巻線電流駆動回路36で増幅された後、磁気支持巻線13に流される。但し、Kは比例定数とする。
【0048】
【数1】

【0049】
同様に、0°≦φ<15°、45°≦φ<60°の区間においてb相(b1、b2)巻線を励磁して半径方向に磁気支持力を発生する。このとき、数2に基づき磁気支持巻線電流制御回路35において支持巻線電流ib1、ib2が制御される。この際、力の指令値Fx*、Fy*をb相(b1、b2)巻線の起磁力方向になるように座標変換された上で電流値が演算される。演算された電流は、磁気支持巻線電流駆動回路36で増幅された後、磁気支持巻線13に流される。
【0050】
【数2】
【0051】
更に、30°≦φ<45°、75°≦φ<90°の区間においてc相(c1、c2)巻線を励磁して半径方向に磁気支持力を発生する。このとき、数3に基づき磁気支持巻線電流制御回路35において支持巻線電流ic1、ic2が制御される。この際、力の指令値Fx*、Fy*をc相(c1、c2)巻線の起磁力方向になるように座標変換された上で電流値が演算される。演算された電流は、磁気支持巻線電流駆動回路36で増幅された後、磁気支持巻線13に流される。
【0052】
【数3】
【0053】
なお、減算器41、51、補償回路43、53、磁気支持巻線電流制御回路35、電動機電流制御回路33は、DSP(Digital Signal Processor)やCPUにてディジタル演算処理が可能である。
以上により、簡易な構成でベアリングレスモータを実現できる。磁気支持巻線13は、三相電動機巻線11と同一の固定子歯9に捲回されているので、磁束の漏れが少なく、直接的に永久磁石5の磁界に作用することができる。また、磁気支持巻線13の励磁は、三相電動機巻線11の励磁がされていない固定子歯について行われる。このため、極めて精度の高い制御が行える。
【0054】
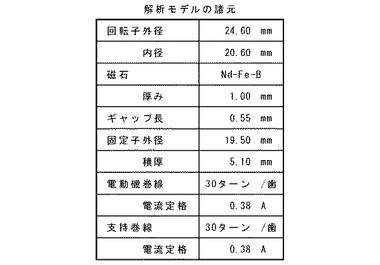
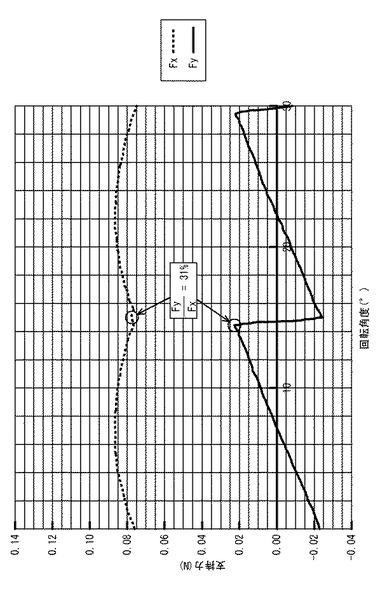
次に、図7に示す解析モデルの諸元を用いて有限要素法により磁気支持力を求めた。解析には電磁界解析ソフトJMAG−Studio((株)日本総研、ver.8.2)を用いた。発生方向は支持力がx軸正方向に定める。
【0055】
図8に解析結果である回転角度と支持力の関係を示す。磁気支持巻線13に流す電流は方形波である。このとき、支持力はスイッチング周波数(周期15°)に同期したリプルが生じている。また、x軸方向についての制御を行っているにも関わらずこのFx成分に対し最大で31パーセント程度のFy成分が発生している。
【0056】
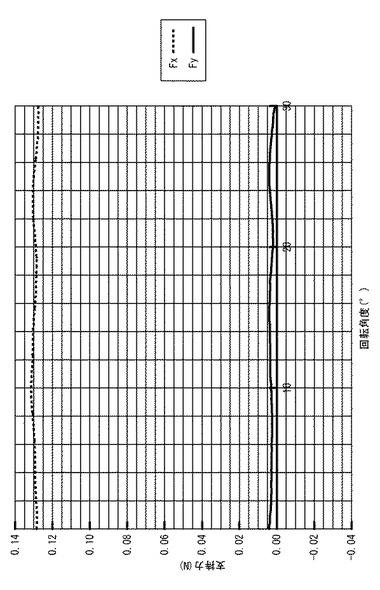
しかしながら、この点については、磁気支持巻線13に流す電流を正弦波とすることで図9に示すように抑制することが可能である。なお、永久磁石5の着磁自体が均等着磁ではなく、正弦波状に形成されても良い。
【実施例】
【0057】
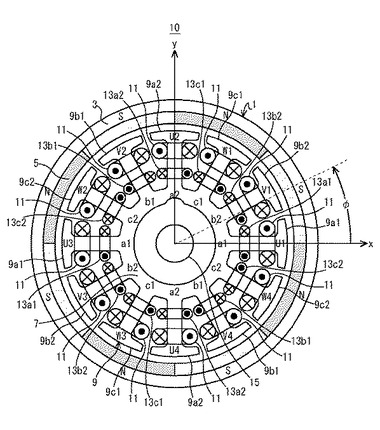
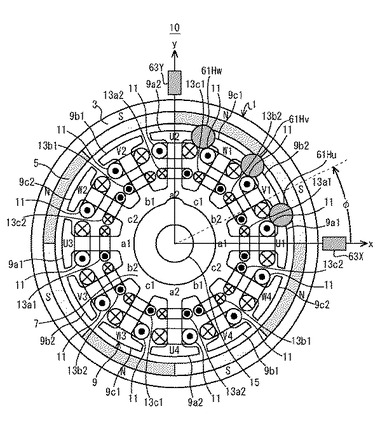
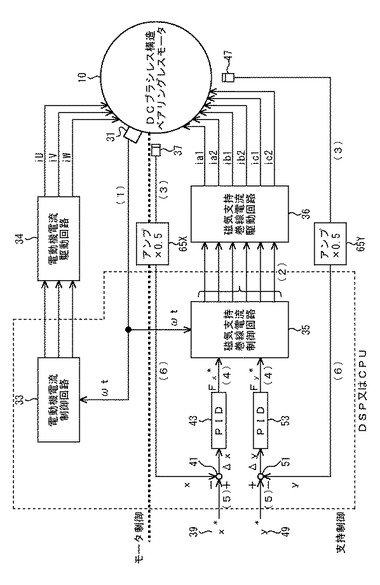
図7の諸元に基づき本実施形態の実験を行った。図10に実験したDCブラシレス構造ベアリングレスモータの横断面図を示し、図11に全体の制御システム実験モデル構成図を示す。なお、図1、図6と同一要素のものについては同一符号を付して説明は省略する。
【0058】
図10において、回転角度センサ61HU、61HV、61HWはそれぞれ電気角で120°毎に配置され、この信号を基準に磁気支持巻線13や三相電動機巻線11の通電の切り換えが行われる。回転角度センサ61HU、61HV、61HWには、ホールセンサを用いている。但し、後述の第2実施形態のように二相電動機巻線を用いた場合には、回転角度センサは2個配設されれば良い。
【0059】
市販のブラシレスDCモータでは、回転角を抽出するためホールセンサが標準的に装備されて販売されることが多い。このブラシレスDCモータに対して磁気支持巻線13を追加捲回するだけで、本願のベアリングレスモータを製作可能である。このため、容易に量産可能であり、安価にできる。
【0060】
また、X方向センサ(ギャップセンサ)63Xは磁気支持巻線13a1が起磁力を発生する方向の回転子1の半径方向位置を抽出するように配置され、Y方向センサ63Yは磁気支持巻線13a2が起磁力を発生させる方向の回転子1の半径方向位置を抽出するように配置されている。なお、X方向センサ63X、Y方向センサ63Yは、図示しないマイクロメータによりセンサの位置(x、y軸方向)と高さが調整できるようになっている。
【0061】
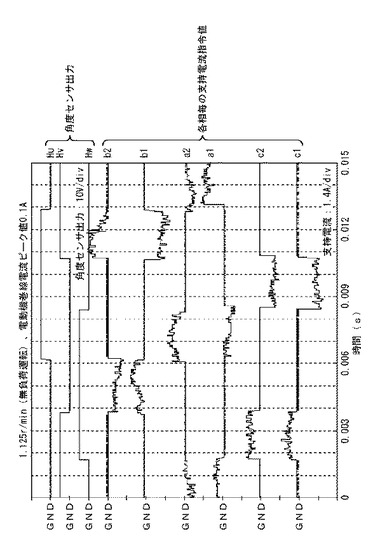
実験の手順としては、まず電動機側の電源、コントローラをONする。すると、回転子1が回転する(低速数百r/min)。次に磁気支持側の電源、コントローラをONする。すると、浮上(半径方向に対して非接触支持)する。その後、1,125r/minまで加速した。回転速度1,125r/min、無負荷運転時、電動機電流(矩形波)のピーク値0.1Aで観測し、まず半径方向に対して浮上(非接触磁気支持)を確認した。
【0062】
次に、図11において、図中(1)の測定点では、回転角度センサ61HU、61HV、61HWの出力を観測し、(2)の測定点では、各相毎の支持電流の指令値を観測した。この回転角度センサ出力と各相毎の支持電流の指令値との関係を測定し、結果を図12に示す(図4に対応)。その結果、回転角に応じて相切り換えが理論通りON、OFFされていることを確認した。
【0063】
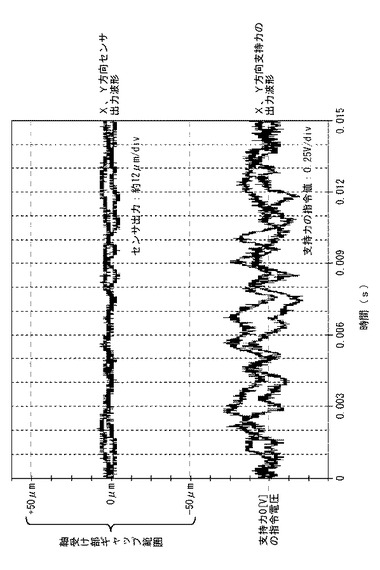
そして、図中(3)の測定点では、X方向センサ63X、Y方向センサ63Yから出力される電圧を測定し、電圧値を距離に変換した。測定結果を図13の上段に示す。図13において、X方向センサ63X、Y方向センサ63Yの波形の振れはおよそ±5μmであり、図示しないタッチダウン軸受のギャップ範囲(±100μm)以内であり、十分制御でき、安定して浮上の行われていることが分かる。
【0064】
また、図中(4)の測定点では、支持力の指令値Fx*、Fy*の電圧値を測定した。測定結果を図13の下段に示す。図13において、支持力の指令値Fx*、Fy*は相毎の切り換えにおいて不連続とならずに連続した制御の行われていることが分かる。
【0065】
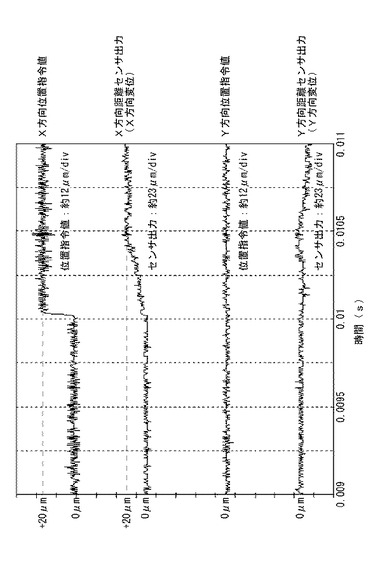
更に、x方向変位指令値39(測定点(5))に与えたステップ状の信号に対する応答を、X方向センサの出力(測定点(3))から確認した。測定結果を図14に示す。ステップ状の信号を与えた時にX方向センサの出力は0.5μs以内に目標値に達しており、Y方向センサの出力はほとんど変動がない。このことより、制御部の応答性は良好であることが確認された。なお、X方向センサ63X、Y方向センサ63Yから出力される電圧はアンプ65X、65Yで0.5倍に増幅し、A/D変換された後に、距離に換算されている。
【0066】
次に、本発明の第2実施形態について説明する。本発明の第2実施形態であるDCブラシレス構造ベアリングレスモータの横断面図を図15に示す。なお、図1と同一要素のものについては同一符号を付して説明は省略する。
【0067】
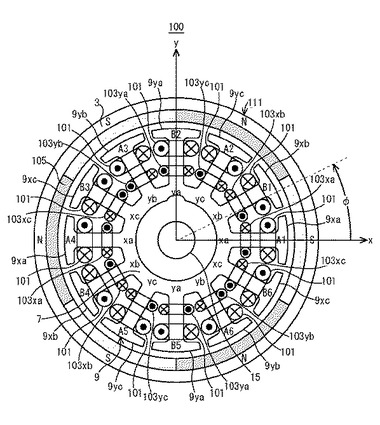
図15のDCブラシレス構造ベアリングレスモータ100において、回転子111は6極アウターロータ型である。しかしながら、本発明はインナーロータ型に対しても適用可能である。鉄心3の内側には永久磁石105が貼り付けられている。図15中のN、Sは鉄心3に面する側の永久磁石105の極性を表している。
【0068】
固定子鉄心7は12スロット構造である。固定子歯9に巻かれた巻線の内、外側のA1〜A6、B1〜B6で表記された巻線は二相電動機巻線101であり、固定子歯9に集中して巻かれている。また、この二相電動機巻線101の内側には磁気支持巻線103が捲回されている。そして、例えば磁気支持巻線103xaはシャフト15を挟んで対峙する固定子歯9に対し直列接続となるように捲回されている。
【0069】
また、磁気支持巻線103xaと磁気支持巻線103yaとは、それぞれの発生する超磁力が互いに直交する方向となるように配置されている。磁気支持巻線103yaも磁気支持巻線103xaと同様に、シャフト15を挟んで対峙する固定子歯9に対し直列接続となるように捲回されている。更に、磁気支持巻線103xb、103yb、103xc、103ycも同様に配置されている。ここに、磁気支持巻線103xa、103xb、103xcがx軸方向に力を発生させる支持巻線であり、一方、磁気支持巻線103ya、103yb、103ycがy軸方向に力を発生させる支持巻線である。なお、電動機巻線の配置、トルクの発生原理は従来のブラシレスDCモータと同様なので説明を省略する。
【0070】
次に、本発明の第2実施形態の動作を説明する。
【0071】
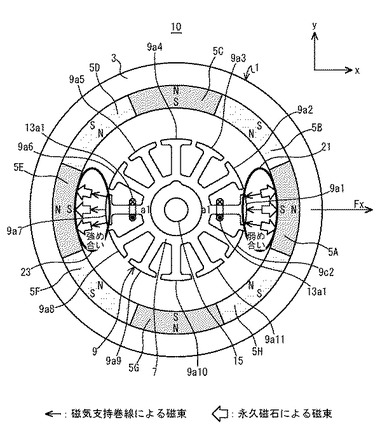
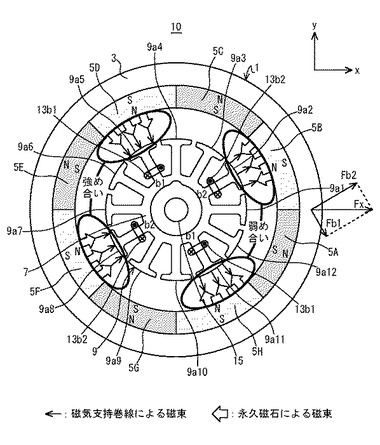
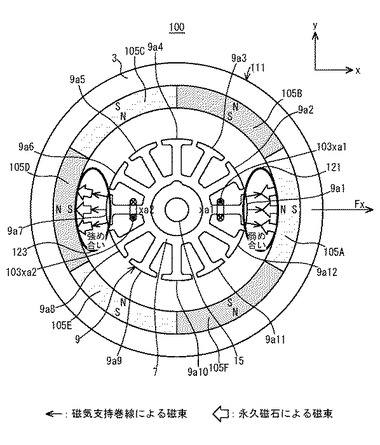
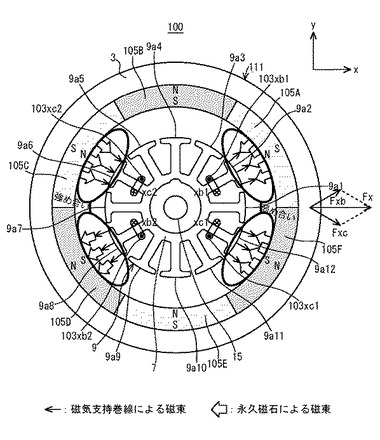
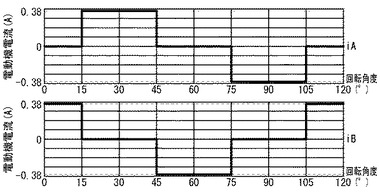
図16及び図17に基づき本発明の第2実施形態であるDCブラシレス構造ベアリングレスモータの磁気支持力の発生原理を示す。そして、図18に回転角度φと磁気支持電流との関係を、また図19に回転角度φと電動機電流との関係を示す。但し、図18は、x軸正方向に力Fxを発生させる場合について例示したものである。なお、図16、図17は、それぞれ回転角度φ=0°、30°の場合を例に示す。図中、二相電動機巻線101は省略している。
【0072】
まず、回転子1の回転角度φが0°の場合について説明する。回転角度φ=0°のとき、図19よりA相の二相電動機巻線101を流れる電流はゼロであり、A相の二相電動機巻線101は励磁されていない状態にある。このとき、図16に示したようにA相の二相電動機巻線101と同一の固定子歯9に捲回された磁気支持巻線103xa1、103xa2に対し図18に示すように正方向に電流ixaを流し励磁すると、永久磁石105の界磁磁束(太い矢印)に加えて支持磁束(細い矢印)が発生する。すると磁束密度がギャップ121では減少し、ギャップ123では増加してアンバランスになりx軸正方向に力Fxが発生する。なお、この場合に、A相の二相電動機巻線101は励磁されていない状態にあるので、永久磁石105と磁気支持巻線103xa1、103xa2間の磁束に影響を及ぼすことはない。
【0073】
このように、回転角度φ=0°を含む回転角度−15°から15°までの範囲においては、固定子歯9の歯頭部9a1、9a7の全体がずっと同一の永久磁石105A、105Dと対峙し、かつこの永久磁石105A、105Dの面内に含まれた形で回転子1が移動しており、このときの永久磁石105A、105Dによる歯頭部9a1、9a7に向かう磁界の磁性は一様で、この回転角度範囲内で変化することはない。従って、安定した精度の高い制御が容易に行える。
【0074】
次に、回転子1の回転角度φが30°の場合について説明する。回転角度φ=30°のとき、図19よりB相の二相電動機巻線101を流れる電流はゼロであり、B相の二相電動機巻線101は励磁されていない状態にある。このとき、図17に示したようにB相の二相電動機巻線101と同一の固定子歯9に捲回された磁気支持巻線103xb1、xb2に対し正方向へ電流を流し、かつ磁気支持巻線103xc1、xc2に対し負方向へ電流を流し励磁する。すると力Fxb、Fxcが発生し、その合力によりx軸正方向に力Fxと大きさが等しくなるように磁気支持巻線103xb1、xb2及び103xc1、xc2の巻数を決定する。
【0075】
このように、回転角度φ=30°を含む回転角度15°から45°までの範囲においては、固定子歯9の歯頭部9a2、9a6、9a8、9a12の全体がずっと同一の永久磁石105A、105C、105D、105Fと対峙し、かつこの永久磁石105A、105C、105D、105Fの面内に含まれており、永久磁石105A、105C、105D、105Fによる磁界の磁性は一様で、この回転角度範囲内で変化することはない。従って、安定した制御が容易に行える。
【0076】
即ち、本発明では、直交二軸のx、y軸方向にそれぞれ力を発生する巻線が決められており、図15中の磁気支持巻線103xa、103xb、103xcがx軸方向への力を担い、一方、磁気支持巻線103ya、103yb、103ycがy軸方向への力を担っている。そして、回転角度により励磁する支持巻線が決まっており、1本の支持巻線で半径方向力を発生したり、又は複数本の支持巻線により発生する力を合成することで回転軸支持を行っている。
【0077】
本発明は、一般に2pスロット、p極の二相モータに適用可能である。
【0078】
なお、磁気支持巻線103xa、103xb、103xcを同一の巻数で捲回したと仮定すると、磁気支持巻線103xaに流していた電流をそのまま磁気支持巻線103xb、103xcに流すことは、支持巻線切り換え前後での磁気支持力変動を生ずる。このため、支持力リプルが減少するように支持巻線の巻数を例えば、磁気支持巻線103xaが30ターンに対し磁気支持巻線103xb、103xcが18ターン等と調整されることが望ましい。このように巻数を調整することにより、磁気支持巻線103xaと103xb、103xcには大きさが等しい電流を流すことで安定に回転軸を支持できる。
【0079】
次に、図20を基にDCブラシレス構造ベアリングレスモータの制御方法について説明する。
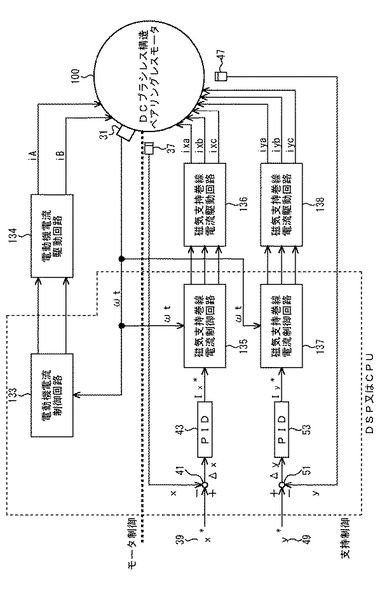
図20において、DCブラシレス構造ベアリングレスモータ100の回転子111の回転角度を回転角度センサ31で抽出する。そして、この回転角度センサ31で抽出した回転角度に基づき電動機電流制御回路133にて電動機電流iA、iBが演算された後、電動機電流駆動回路134で増幅された形で二相電動機巻線101に流される。一方、回転角度センサ31で抽出した回転角度は、磁気支持巻線電流制御回路135、137にも入力されるようになっている。
【0080】
また、ギャップセンサ37で回転子1のx軸方向の変位を検出し、x方向変位指令値39との間での偏差Δxが減算器41にて算出される。そして、この偏差Δxは補償回路43にてPID補償されることで電流指令値Ix*が演算される。
【0081】
この電流指令値Ix*は磁気支持巻線電流制御回路135に入力され、図18のタイミングチャートに従い、回転角度毎に決められた磁気支持巻線103xa、103xb、103xcに対しそれぞれ電流ixa、ixb、ixcが演算されるようになっている。その後、磁気支持巻線電流駆動回路136で増幅された形でこの磁気支持巻線103xa、103xb、103xcに向けて駆動電流が流される。
【0082】
このことにより、1本の支持巻線でx方向の半径方向力を発生したり、又は複数本の支持巻線により発生する力を合成することでx方向の半径方向力を発生し回転軸の支持が行われる。
一方、ギャップセンサ47でy軸方向の変位を検出し、y方向変位指令値49との間での偏差Δyが減算器51にて算出される。そして、この偏差Δyは補償回路53にてPID補償されることで電流指令値Iy*が演算される。
【0083】
この電流指令値Iy*は支持巻線電流制御回路137に入力され、図18のタイミングチャートに従い、回転角度毎に決められた磁気支持巻線103ya、103yb、103ycに対しそれぞれ電流iya、iyb、iycが演算されるようになっている。その後、磁気支持巻線電流駆動回路138で増幅された形でこの磁気支持巻線103ya、103yb、103ycに向けて駆動電流が流される。
【0084】
このことにより、1本の支持巻線でy方向の半径方向力を発生したり、又は複数本の支持巻線により発生する力を合成することでy方向の半径方向力を発生し回転軸の支持が行われる。
なお、減算器41、51、補償回路43、53、磁気支持巻線電流制御回路135、137、電動機電流制御回路133は、DSP(Digital Signal Processor)やCPUにてディジタル演算処理が可能である。
【0085】
次に、本発明の第1実施形態と同様に有限要素法により磁気支持力を求めた。
図21に解析結果である回転角度と支持力の関係を示す。磁気支持巻線103に流す電流は方形波である。このとき、支持力はスイッチング周波数(周期15°)に同期したリプルが生じている。また、x軸方向について力を指令しているにも関わらずこのFx成分に対し最大で31パーセント程度のFy成分が発生している。
【0086】
しかしながら、この点については、回転子1をモータ軸方向に複数段積層させ、かつ隣接する各段の回転子を回転方向にそれぞれ角度をオフセット(スキュー)させるようにしても良い。このスキューを施した場合についての解析結果を図22に示す。図22を見て分かるように、回転子1にスキューを施すことにより、図21では最大で31パーセント程度のFy成分が発生していたものが、Fx成分に対し11パーセント程度のFy成分に抑えることができたことが分かる。
【図面の簡単な説明】
【0087】
【図1】本発明の第1実施形態であるDCブラシレス構造ベアリングレスモータの横断面図
【図2】磁気支持力の発生原理(回転角度が22.5°の場合)
【図3】磁気支持力の発生原理(回転角度が0°の場合)
【図4】回転角度と磁気支持電流との関係を示すタイミングチャート
【図5】回転角度と電動機電流との関係を示すタイミングチャート
【図6】DCブラシレス構造ベアリングレスモータの制御方法
【図7】解析モデルの諸元
【図8】有限要素法により解析した回転角度と支持力の関係を示す図
【図9】支持巻線に流す電流を正弦波としたときの回転角度と支持力の関係を示す図
【図10】実験したDCブラシレス構造ベアリングレスモータの横断面図
【図11】全体の制御システム実験モデル構成図
【図12】相選択の図
【図13】磁気浮上の図
【図14】ステップ応答の図
【図15】本発明の第2実施形態であるDCブラシレス構造ベアリングレスモータの横断面図
【図16】磁気支持力の発生原理(回転角度が0°の場合)
【図17】磁気支持力の発生原理(回転角度が30°の場合)
【図18】回転角度と磁気支持電流との関係を示すタイミングチャート
【図19】回転角度と電動機電流との関係を示すタイミングチャート
【図20】DCブラシレス構造ベアリングレスモータの制御方法
【図21】有限要素法により解析した回転角度と支持力の関係を示す図
【図22】回転子にスキューを施したときの回転角度と支持力の関係を示す図
【符号の説明】
【0088】
1、111 回転子
3 鉄心
5、105 永久磁石
7 固定子鉄心
9 固定子歯
9a 歯頭部
10、100 DCブラシレス構造ベアリングレスモータ
11 三相電動機巻線
13、103 磁気支持巻線
15 シャフト
21、23、121、123 ギャップ
31 回転角度センサ
33、133 電動機電流制御回路
34、134 電動機電流駆動回路
35、135、137 磁気支持巻線電流制御回路
36、136、138 磁気支持巻線電流駆動回路
37、47 ギャップセンサ
39 x方向変位指令値
41、51 減算器
43、53 補償回路
49 y方向変位指令値
61 回転角度センサ
63 X方向センサ、Y方向センサ
101 二相電動機巻線
【技術分野】
【0001】
本発明はベアリングレスモータ及びベアリングレスモータ制御システムに係わり、特に磁気支持巻線が電動機巻線と対に捲回されることでブラシレスDCモータの永久磁石の磁界を精度良く調整しつつ半径方向位置調整を行い、かつ省スペースで安定した制御の行えるベアリングレスモータ及びベアリングレスモータ制御システムに関する。
【背景技術】
【0002】
現在、各産業や家電、情報機器のドライブ装置として、ブラシレスDCモータが広く用いられている。その軸受には機械的接触面を持つものや、オイルを介して回転軸支持するものが多く用いられていて、軸受のメンテナンスフリーや長寿命化が望まれている。
【0003】
ベアリングレスモータはモータと磁気軸受の機能を一体化した電磁機械であり、現在、活発に研究開発が行われている。ブラシレスDCモータをベアリングレス化すれば上記軸受の問題を解決できるだけでなく、ドライブの高速化も可能になる。このようなブラシレスDCモータのベアリングレス化について、従来特許文献1、特許文献2が開示されている。
【0004】
【特許文献1】特開2001−351874号公報
【特許文献2】特開2001−16887号公報
【発明の開示】
【発明が解決しようとする課題】
【0005】
しかしながら、前述した公知例では、電動機巻線による磁界を磁気支持巻線で発生させた磁界により不平衡とするため、電動機巻線又は磁気支持巻線のいずれかをスロットをまたぎ複数の固定子歯に渡り捲回している。このため、捲回範囲の広くなる分漏れ磁束が大きくなったり、導線抵抗が増加するこことなり制御精度を上げるのが困難となるおそれがあった。また、スペースとしてもその配線スペース分だけ広く必要となっていた。
【0006】
本発明はこのような従来の課題に鑑みてなされたもので、磁気支持巻線が電動機巻線と対に捲回されることでブラシレスDCモータの永久磁石の磁界を精度良く調整しつつ半径方向位置調整を行い、かつ省スペースで安定した制御の行えるベアリングレスモータ及びベアリングレスモータ制御システムを提供することを目的とする。
【課題を解決するための手段】
【0007】
このため本発明(請求項1)は、複数の固定子歯に捲回された電動機巻線と、該電動機巻線の励磁によりトルクを発生する所定の極数の磁極と、該磁極を有する回転子と、前記固定子歯の内の複数に対し前記電動機巻線と対となって捲回され、かつシャフトを挟んで対峙するように直列に接続された磁気支持巻線と、前記回転子の回転角を抽出する回転角抽出手段と、該回転角抽出手段で抽出した回転角に応じて励磁する磁気支持巻線を切り換える切換手段と、該切換手段で切り換えられた磁気支持巻線の励磁により前記磁極との間に半径方向の力を生じさせることを特徴とする。
【0008】
磁気支持巻線は、電動機巻線と対となるように捲回されているので、磁束の漏れが少なく、直接的に磁極の磁界に作用することができる。このため、極めて精度の高い制御が行える。なお、磁気支持巻線は、必ずしも電動機巻線の巻かれたすべての固定子歯に対し配設される必要はない。以上により、簡易な構成でベアリングレスモータを実現できる。
【0009】
また、本発明(請求項2)は、前記磁気支持巻線は互いに直交されて一つの相が形成され、かつ該相は回転方向に向けて少なくとも一つ備えられており、前記切換手段による切り換えが、該相単位に行われることを特徴とする。
【0010】
以上により、簡易な構成で制御の容易なベアリングレスモータを実現できる。
【0011】
更に、本発明(請求項3)は、前記磁気支持巻線各相の起磁力の方向に座標軸を形成し、該座標軸がx軸及びy軸に一致しないとき、x軸及びy軸方向の力の指令値を該相に作用する力となるように座標変換されることを特徴とする。
【0012】
以上により、x方向やy方向の力の制御が安定し、かつリップルが少ない制御が行える。
【0013】
更に、本発明(請求項4)は、前記相の数がn(n:正の整数)のとき、前記固定子が4nのスロットを有することを特徴とする。
【0014】
以上により、広範囲なモータに対し本発明の適用が可能である。
【0015】
更に、本発明(請求項5)は、前記磁気支持巻線はx軸制御用とy軸制御用とに分離されており、前記切換手段による切り換えで、前記x軸制御用磁気支持巻線の内の少なくとも一つが励磁され、及び/又は、前記y軸制御用磁気支持巻線の内の少なくとも一つが励磁されることを特徴とする。
【0016】
x方向、y方向の力は、1本の磁気支持巻線で半径方向力が発生されたり、あるいは、複数本の磁気支持巻線により発生する力の合成により半径方向力が発生されたりする。磁気支持巻線をx軸制御用とy軸制御用とに分離したことで、x方向やy方向の力の制御が容易に行える。
【0017】
更に、本発明(請求項6)は、前記x軸制御用磁気支持巻線の内のx軸に一致しない磁気支持巻線に捲回される巻線の巻数は、x軸に一致する磁気支持巻線の巻数に対し回転角度差に相当する分所定の割合で減らされ、かつ前記y軸制御用磁気支持巻線の内のy軸に一致しない磁気支持巻線に捲回される巻線の巻数は、y軸に一致する磁気支持巻線の巻数に対し回転角度差に相当する分所定の割合で減らされたことを特徴とする。
【0018】
このことにより、磁気支持巻線の切り換え前後での磁気支持力変動を防止できる。
【0019】
更に、本発明(請求項7)は、前記固定子が2p(p:偶数)のスロットを有し、前記電動機巻線が二相で、かつ前記磁極が極数pを有することを特徴とする。
【0020】
以上により、広範囲なモータに対し本発明の適用が可能である。
【0021】
更に、本発明(請求項8)は、前記切換手段による磁気支持巻線の励磁の切り換えは、前記固定子歯の歯頭部の全体が前記同一の磁極の面内に含まれている間中には該磁気支持巻線に対する励磁が継続され、前記回転子の回転により該歯頭部が異なる磁極に対峙する前に切り換えられることを特徴とする。
【0022】
固定子歯の歯頭部の全体がずっと同一の磁極の面内に含まれた形で回転子が移動しており、磁極による歯頭部に向かう磁界の磁性は一様で、この回転角度範囲内で変化することはない。従って、安定した精度の高い制御が容易に行える。
【0023】
更に、本発明(請求項9)は、前記磁気支持巻線の励磁が、励磁の行われていない電動機巻線に対とされている磁気支持巻線に対し行われることを特徴とする。
【0024】
電動機巻線は励磁されていない状態にあるので、磁極と磁気支持巻線間の磁束に影響を及ぼすことはない。このため、極めて精度の高い制御が行える。
【0025】
更に、本発明(請求項10)は、前記回転子が回転方向に所定の角度だけスキューを施されたことを特徴とする。
【0026】
スキューを施すことで、磁気支持力の干渉分が互いに相殺される。このため、精度の高い制御が行える。
【0027】
更に、本発明(請求項11)は、前記磁気支持巻線に正弦波電流が流されることを特徴とする。
【0028】
磁気支持巻線に正弦波電流を流すことで、磁気支持力の干渉分が互いに相殺される。このため、精度の高い制御が行える。
【0029】
更に、本発明(請求項12)は、前記固定子、電動機巻線、磁極、回転子がブラシレスDCモータを形成することを特徴とする。
【0030】
更に、本発明(請求項13)は、前記回転角抽出手段は前記電動機巻線の相数と同数の回転角度信号を抽出することを特徴とする。
【0031】
市販のブラシレスDCモータでは、回転角を抽出するためセンサが標準的に装備されて販売されることが多い。そこで、この市販のブラシレスDCモータに対して磁気支持巻線を追加捲回するだけで、本願のベアリングレスモータを製作可能である。このため、容易に量産可能であり、安価にできる。
【0032】
更に、本発明(請求項14)は、請求項1〜4に記載のベアリングレスモータを制御するベアリングレスモータ制御システムであって、前記回転子の半径方向の位置を検出する半径方向位置検出手段と、該半径方向位置検出手段で検出した位置と位置指令値との間の偏差を算出する偏差算出手段と、該偏差算出手段で算出された偏差を補償する補償手段と、該補償手段の出力信号を座標変換して各磁気支持巻線方向の力の指令値を求める座標変換手段と、該座標変換手段で求めた力の指令値に基づき前記選択された相を構成する磁気支持巻線の電流を調整する電流調整手段とを備えて構成した。
【0033】
更に、本発明(請求項15)は、請求項5〜7に記載のベアリングレスモータを制御するベアリングレスモータ制御システムであって、前記回転子のx軸方向の半径方向の位置を検出するx軸方向位置検出手段と、該x軸方向位置検出手段で検出した位置とx軸方向位置指令値との間の偏差を算出するx軸方向偏差算出手段と、該x軸方向偏差算出手段で算出された偏差を補償するx軸方向補償手段と、該x軸方向補償手段の出力信号を電流の指令値として前記選択された磁気支持巻線の電流を調整するx軸方向電流調整手段と、前記回転子のy軸方向の半径方向の位置を検出するy軸方向位置検出手段と、該y軸方向位置検出手段で検出した位置とy軸方向位置指令値との間の偏差を算出するy軸方向偏差算出手段と、該y軸方向偏差算出手段で算出された偏差を補償するy軸方向補償手段と、該y軸方向補償手段の出力信号を電流の指令値として前記選択された磁気支持巻線の電流を調整するy軸方向電流調整手段とを備えて構成した。
【発明の効果】
【0034】
以上説明したように本発明によれば、磁気支持巻線は、電動機巻線と対となるように捲回されたので、磁束の漏れが少なく、直接的に磁極の磁界に作用することができる。このため、極めて精度の高い制御が行える。以上により、簡易な構成でベアリングレスモータを実現できる。
【発明を実施するための最良の形態】
【0035】
以下、本発明の実施形態について説明する。本発明の第1実施形態であるDCブラシレス構造ベアリングレスモータの横断面図を図1に示す。図1のDCブラシレス構造ベアリングレスモータ10において、回転子1は8極アウターロータ型である。しかしながら、本発明はインナーロータ型に対しても適用可能である。鉄心3の内側には永久磁石5が配置されている。そしてそれぞれの永久磁石5は、回転角度方向に向けて45°毎に磁極が切り換わる。なお、鉄心がなく永久磁石だけの構造でも適用できる。
【0036】
図1中のN、Sは鉄心3に面する側の永久磁石5の極性を表している。固定子鉄心7は12スロット構造である。固定子歯9に巻かれた巻線の内、外側のU、V、Wで表記された巻線は三相電動機巻線11であり、各相それぞれ4つの固定子歯9に集中して巻かれている。また、この三相電動機巻線11の内側には磁気支持巻線13が捲回されている。そして、例えば磁気支持巻線13a1はシャフト15を挟んで対峙する固定子歯9に対し直列接続となるように捲回されている。固定子歯9は断面T字状に形成され、固定子歯9の歯頭部9aは、それぞれ回転角度方向に向けて−15°〜+15°の範囲内に渡り突設されている。
【0037】
また、磁気支持巻線13a1と磁気支持巻線13a2とは、それぞれの発生する起磁力が互いに直交する方向となるように配置されている。磁気支持巻線13a2も磁気支持巻線13a1と同様に、シャフト15を挟んで対峙する固定子歯9に対し直列接続となるように捲回されている。ここに、磁気支持巻線13a1と磁気支持巻線13a2を一つの相とし、a相巻線と定義する。更に、磁気支持巻線13b1、13b2、13c1、13c2も同様に配置されている。ここに、磁気支持巻線13b1、13b2を一つの相とし、b相巻線と定義し、磁気支持巻線13c1、13c2を一つの相とし、c相巻線と定義する。なお、電動機巻線の配置、トルクの発生原理は従来のブラシレスDCモータと同様なので説明を省略する。
【0038】
次に、本発明の第1実施形態の動作を説明する。
図2及び図3に基づき磁気支持力の発生原理を示す。12スロット8極構造では、ベアリングレスSRモータの原理を応用して軸支持できる。図4に回転角度φと磁気支持電流との関係を、また図5に回転角度φと電動機電流との関係を示す。但し、図4は、x軸正方向に力Fxを発生させる場合について例示したものである。y軸方向についての動作は同様なので説明を省略する(以下、同旨)。なお、図2、図3は、それぞれ回転角度φ=22.5°、0°の場合を例に示す。図中、三相電動機巻線11は省略している。
【0039】
まず、回転子1の回転角度φが22.5°の場合について説明する。回転角度φ=22.5°のとき、図5よりU相の三相電動機巻線11を流れる電流はゼロであり、U相の三相電動機巻線11は励磁されていない状態にある。このとき、図2に示したようにU相の三相電動機巻線11と同一の固定子歯9に捲回された磁気支持巻線13a1に対し正方向に電流ia1を流し励磁すると、永久磁石5の界磁磁束(太い矢印)に加えて支持磁束(細い矢印)が発生する。すると磁束密度がギャップ21では減少し、ギャップ23では増加してアンバランスになりx軸正方向に力Fxが発生する。なお、この場合に、U相の三相電動機巻線11は励磁されていない状態にあるので、永久磁石5と磁気支持巻線13a1間の磁束に影響を及ぼすことはない。このように、回転角度φ=22.5°を含む回転角度15°から30°までの範囲においては、固定子歯9の歯頭部9a1、9a7の全体がずっと同一の永久磁石5A、5Eと対峙し、かつこの永久磁石5A、5Eの面内に含まれた形で回転子1が移動しており、永久磁石5A、5Eによる歯頭部9a1、9a7に向かう磁界の磁性は一様で、この回転角度範囲内で変化することはない。従って、安定した精度の高い制御が容易に行える。
【0040】
次に、回転子1の回転角度φが0°の場合について説明する。回転角度φ=0°のとき、図5よりV相の三相電動機巻線11を流れる電流はゼロであり、V相の三相電動機巻線11は励磁されていない状態にある。このとき、図3に示したようにV相の三相電動機巻線11と同一の固定子歯9に捲回された磁気支持巻線13b1、b2に対しそれぞれ負方向へ電流を流し励磁する。すると力Fb1、Fb2が発生し、その合力によりx軸正方向に力Fxと大きさが等しくなるように支持電流の大きさを決定する。このように、回転角度φ=0°を含む回転角度0°から15°までの範囲においては、固定子歯9の歯頭部9a2、9a5、9a8、9a11の全体がずっと同一の永久磁石5B、5D、5F、5Hと対峙し、かつこの永久磁石5B、5D、5F、5Hの面内に含まれており、永久磁石5B、5D、5F、5Hによる磁界の磁性は一様で、この回転角度範囲内で変化することはない。従って、安定した制御が容易に行える。
【0041】
このように、12スロット、8極構造のブラシレスDCモータでは、回転角度φが、15°≦φ<30°、60°≦φ<75°の区間において、a相巻線を励磁して半径方向に磁気支持力を発生する。同様に0°≦φ<15°、45°≦φ<60°の区間においてb相(b1、b2)巻線、30°≦φ<45°、75°≦φ<90°の区間においてc相(c1、c2)巻線を励磁し、力を発生する。
【0042】
なお、本発明は、4nスロット(支持巻線n相)に適用可能である。なお、回転子極数は従来のブラシレスDCモータの原理でトルクを発生できる極数であれば良く、何種類か考えられる。例えば、上記以外にも4スロット(支持巻線一相)に対し、回転子極数が例えば4極、あるいは、8スロット(支持巻線二相)に対し回転子極数が例えば6極などに適用可能である。
【0043】
上記した通り、回転角度により励磁する相を決定するが、多相構造であっても、高速回転時など慣性の力が大きい場合には少なくとも一相分で力を発生できる。例えば、本実施形態では、a相、b相、c相の3相構造であるが、この内、a相だけの制御であっても制御可能である。但し、リップル等の点からは3相制御された方が望ましい。
【0044】
次に、図6を基にDCブラシレス構造ベアリングレスモータの制御方法について説明する。
図6において、DCブラシレス構造ベアリングレスモータ10の回転子1の回転角度を回転角度センサ31で抽出する。そして、この回転角度センサ31で抽出した回転角度に基づき電動機電流制御回路33にて電動機電流iU、iV、iWが演算された後、電動機電流駆動回路34で増幅された形で三相電動機巻線11に流される。
一方、回転角度センサ31で抽出した回転角度は、磁気支持巻線電流制御回路35にも入力されるようになっている。
【0045】
また、ギャップセンサ37で回転子1のx軸方向の変位を検出し、x方向変位指令値39との間での偏差Δxが減算器41にて算出される。そして、この偏差Δxは補償回路43にてPID補償されることで力の指令値Fx*が演算される。
【0046】
一方、ギャップセンサ47でy軸方向の変位を検出し、y方向変位指令値49との間での偏差Δyが減算器51にて算出される。この偏差Δyは補償回路53にてPID補償されることで力の指令値Fy*が演算される。
【0047】
そして、回転角度センサ31で抽出した回転角度φが、15°≦φ<30°、60°≦φ<75°の区間において、a相巻線(a1、a2)を励磁して半径方向に磁気支持力を発生する。このとき、数1に基づき磁気支持巻線電流制御回路35において支持巻線電流ia1、ia2が調整される。調整された電流は、磁気支持巻線電流駆動回路36で増幅された後、磁気支持巻線13に流される。但し、Kは比例定数とする。
【0048】
【数1】
【0049】
同様に、0°≦φ<15°、45°≦φ<60°の区間においてb相(b1、b2)巻線を励磁して半径方向に磁気支持力を発生する。このとき、数2に基づき磁気支持巻線電流制御回路35において支持巻線電流ib1、ib2が制御される。この際、力の指令値Fx*、Fy*をb相(b1、b2)巻線の起磁力方向になるように座標変換された上で電流値が演算される。演算された電流は、磁気支持巻線電流駆動回路36で増幅された後、磁気支持巻線13に流される。
【0050】
【数2】
【0051】
更に、30°≦φ<45°、75°≦φ<90°の区間においてc相(c1、c2)巻線を励磁して半径方向に磁気支持力を発生する。このとき、数3に基づき磁気支持巻線電流制御回路35において支持巻線電流ic1、ic2が制御される。この際、力の指令値Fx*、Fy*をc相(c1、c2)巻線の起磁力方向になるように座標変換された上で電流値が演算される。演算された電流は、磁気支持巻線電流駆動回路36で増幅された後、磁気支持巻線13に流される。
【0052】
【数3】
【0053】
なお、減算器41、51、補償回路43、53、磁気支持巻線電流制御回路35、電動機電流制御回路33は、DSP(Digital Signal Processor)やCPUにてディジタル演算処理が可能である。
以上により、簡易な構成でベアリングレスモータを実現できる。磁気支持巻線13は、三相電動機巻線11と同一の固定子歯9に捲回されているので、磁束の漏れが少なく、直接的に永久磁石5の磁界に作用することができる。また、磁気支持巻線13の励磁は、三相電動機巻線11の励磁がされていない固定子歯について行われる。このため、極めて精度の高い制御が行える。
【0054】
次に、図7に示す解析モデルの諸元を用いて有限要素法により磁気支持力を求めた。解析には電磁界解析ソフトJMAG−Studio((株)日本総研、ver.8.2)を用いた。発生方向は支持力がx軸正方向に定める。
【0055】
図8に解析結果である回転角度と支持力の関係を示す。磁気支持巻線13に流す電流は方形波である。このとき、支持力はスイッチング周波数(周期15°)に同期したリプルが生じている。また、x軸方向についての制御を行っているにも関わらずこのFx成分に対し最大で31パーセント程度のFy成分が発生している。
【0056】
しかしながら、この点については、磁気支持巻線13に流す電流を正弦波とすることで図9に示すように抑制することが可能である。なお、永久磁石5の着磁自体が均等着磁ではなく、正弦波状に形成されても良い。
【実施例】
【0057】
図7の諸元に基づき本実施形態の実験を行った。図10に実験したDCブラシレス構造ベアリングレスモータの横断面図を示し、図11に全体の制御システム実験モデル構成図を示す。なお、図1、図6と同一要素のものについては同一符号を付して説明は省略する。
【0058】
図10において、回転角度センサ61HU、61HV、61HWはそれぞれ電気角で120°毎に配置され、この信号を基準に磁気支持巻線13や三相電動機巻線11の通電の切り換えが行われる。回転角度センサ61HU、61HV、61HWには、ホールセンサを用いている。但し、後述の第2実施形態のように二相電動機巻線を用いた場合には、回転角度センサは2個配設されれば良い。
【0059】
市販のブラシレスDCモータでは、回転角を抽出するためホールセンサが標準的に装備されて販売されることが多い。このブラシレスDCモータに対して磁気支持巻線13を追加捲回するだけで、本願のベアリングレスモータを製作可能である。このため、容易に量産可能であり、安価にできる。
【0060】
また、X方向センサ(ギャップセンサ)63Xは磁気支持巻線13a1が起磁力を発生する方向の回転子1の半径方向位置を抽出するように配置され、Y方向センサ63Yは磁気支持巻線13a2が起磁力を発生させる方向の回転子1の半径方向位置を抽出するように配置されている。なお、X方向センサ63X、Y方向センサ63Yは、図示しないマイクロメータによりセンサの位置(x、y軸方向)と高さが調整できるようになっている。
【0061】
実験の手順としては、まず電動機側の電源、コントローラをONする。すると、回転子1が回転する(低速数百r/min)。次に磁気支持側の電源、コントローラをONする。すると、浮上(半径方向に対して非接触支持)する。その後、1,125r/minまで加速した。回転速度1,125r/min、無負荷運転時、電動機電流(矩形波)のピーク値0.1Aで観測し、まず半径方向に対して浮上(非接触磁気支持)を確認した。
【0062】
次に、図11において、図中(1)の測定点では、回転角度センサ61HU、61HV、61HWの出力を観測し、(2)の測定点では、各相毎の支持電流の指令値を観測した。この回転角度センサ出力と各相毎の支持電流の指令値との関係を測定し、結果を図12に示す(図4に対応)。その結果、回転角に応じて相切り換えが理論通りON、OFFされていることを確認した。
【0063】
そして、図中(3)の測定点では、X方向センサ63X、Y方向センサ63Yから出力される電圧を測定し、電圧値を距離に変換した。測定結果を図13の上段に示す。図13において、X方向センサ63X、Y方向センサ63Yの波形の振れはおよそ±5μmであり、図示しないタッチダウン軸受のギャップ範囲(±100μm)以内であり、十分制御でき、安定して浮上の行われていることが分かる。
【0064】
また、図中(4)の測定点では、支持力の指令値Fx*、Fy*の電圧値を測定した。測定結果を図13の下段に示す。図13において、支持力の指令値Fx*、Fy*は相毎の切り換えにおいて不連続とならずに連続した制御の行われていることが分かる。
【0065】
更に、x方向変位指令値39(測定点(5))に与えたステップ状の信号に対する応答を、X方向センサの出力(測定点(3))から確認した。測定結果を図14に示す。ステップ状の信号を与えた時にX方向センサの出力は0.5μs以内に目標値に達しており、Y方向センサの出力はほとんど変動がない。このことより、制御部の応答性は良好であることが確認された。なお、X方向センサ63X、Y方向センサ63Yから出力される電圧はアンプ65X、65Yで0.5倍に増幅し、A/D変換された後に、距離に換算されている。
【0066】
次に、本発明の第2実施形態について説明する。本発明の第2実施形態であるDCブラシレス構造ベアリングレスモータの横断面図を図15に示す。なお、図1と同一要素のものについては同一符号を付して説明は省略する。
【0067】
図15のDCブラシレス構造ベアリングレスモータ100において、回転子111は6極アウターロータ型である。しかしながら、本発明はインナーロータ型に対しても適用可能である。鉄心3の内側には永久磁石105が貼り付けられている。図15中のN、Sは鉄心3に面する側の永久磁石105の極性を表している。
【0068】
固定子鉄心7は12スロット構造である。固定子歯9に巻かれた巻線の内、外側のA1〜A6、B1〜B6で表記された巻線は二相電動機巻線101であり、固定子歯9に集中して巻かれている。また、この二相電動機巻線101の内側には磁気支持巻線103が捲回されている。そして、例えば磁気支持巻線103xaはシャフト15を挟んで対峙する固定子歯9に対し直列接続となるように捲回されている。
【0069】
また、磁気支持巻線103xaと磁気支持巻線103yaとは、それぞれの発生する超磁力が互いに直交する方向となるように配置されている。磁気支持巻線103yaも磁気支持巻線103xaと同様に、シャフト15を挟んで対峙する固定子歯9に対し直列接続となるように捲回されている。更に、磁気支持巻線103xb、103yb、103xc、103ycも同様に配置されている。ここに、磁気支持巻線103xa、103xb、103xcがx軸方向に力を発生させる支持巻線であり、一方、磁気支持巻線103ya、103yb、103ycがy軸方向に力を発生させる支持巻線である。なお、電動機巻線の配置、トルクの発生原理は従来のブラシレスDCモータと同様なので説明を省略する。
【0070】
次に、本発明の第2実施形態の動作を説明する。
【0071】
図16及び図17に基づき本発明の第2実施形態であるDCブラシレス構造ベアリングレスモータの磁気支持力の発生原理を示す。そして、図18に回転角度φと磁気支持電流との関係を、また図19に回転角度φと電動機電流との関係を示す。但し、図18は、x軸正方向に力Fxを発生させる場合について例示したものである。なお、図16、図17は、それぞれ回転角度φ=0°、30°の場合を例に示す。図中、二相電動機巻線101は省略している。
【0072】
まず、回転子1の回転角度φが0°の場合について説明する。回転角度φ=0°のとき、図19よりA相の二相電動機巻線101を流れる電流はゼロであり、A相の二相電動機巻線101は励磁されていない状態にある。このとき、図16に示したようにA相の二相電動機巻線101と同一の固定子歯9に捲回された磁気支持巻線103xa1、103xa2に対し図18に示すように正方向に電流ixaを流し励磁すると、永久磁石105の界磁磁束(太い矢印)に加えて支持磁束(細い矢印)が発生する。すると磁束密度がギャップ121では減少し、ギャップ123では増加してアンバランスになりx軸正方向に力Fxが発生する。なお、この場合に、A相の二相電動機巻線101は励磁されていない状態にあるので、永久磁石105と磁気支持巻線103xa1、103xa2間の磁束に影響を及ぼすことはない。
【0073】
このように、回転角度φ=0°を含む回転角度−15°から15°までの範囲においては、固定子歯9の歯頭部9a1、9a7の全体がずっと同一の永久磁石105A、105Dと対峙し、かつこの永久磁石105A、105Dの面内に含まれた形で回転子1が移動しており、このときの永久磁石105A、105Dによる歯頭部9a1、9a7に向かう磁界の磁性は一様で、この回転角度範囲内で変化することはない。従って、安定した精度の高い制御が容易に行える。
【0074】
次に、回転子1の回転角度φが30°の場合について説明する。回転角度φ=30°のとき、図19よりB相の二相電動機巻線101を流れる電流はゼロであり、B相の二相電動機巻線101は励磁されていない状態にある。このとき、図17に示したようにB相の二相電動機巻線101と同一の固定子歯9に捲回された磁気支持巻線103xb1、xb2に対し正方向へ電流を流し、かつ磁気支持巻線103xc1、xc2に対し負方向へ電流を流し励磁する。すると力Fxb、Fxcが発生し、その合力によりx軸正方向に力Fxと大きさが等しくなるように磁気支持巻線103xb1、xb2及び103xc1、xc2の巻数を決定する。
【0075】
このように、回転角度φ=30°を含む回転角度15°から45°までの範囲においては、固定子歯9の歯頭部9a2、9a6、9a8、9a12の全体がずっと同一の永久磁石105A、105C、105D、105Fと対峙し、かつこの永久磁石105A、105C、105D、105Fの面内に含まれており、永久磁石105A、105C、105D、105Fによる磁界の磁性は一様で、この回転角度範囲内で変化することはない。従って、安定した制御が容易に行える。
【0076】
即ち、本発明では、直交二軸のx、y軸方向にそれぞれ力を発生する巻線が決められており、図15中の磁気支持巻線103xa、103xb、103xcがx軸方向への力を担い、一方、磁気支持巻線103ya、103yb、103ycがy軸方向への力を担っている。そして、回転角度により励磁する支持巻線が決まっており、1本の支持巻線で半径方向力を発生したり、又は複数本の支持巻線により発生する力を合成することで回転軸支持を行っている。
【0077】
本発明は、一般に2pスロット、p極の二相モータに適用可能である。
【0078】
なお、磁気支持巻線103xa、103xb、103xcを同一の巻数で捲回したと仮定すると、磁気支持巻線103xaに流していた電流をそのまま磁気支持巻線103xb、103xcに流すことは、支持巻線切り換え前後での磁気支持力変動を生ずる。このため、支持力リプルが減少するように支持巻線の巻数を例えば、磁気支持巻線103xaが30ターンに対し磁気支持巻線103xb、103xcが18ターン等と調整されることが望ましい。このように巻数を調整することにより、磁気支持巻線103xaと103xb、103xcには大きさが等しい電流を流すことで安定に回転軸を支持できる。
【0079】
次に、図20を基にDCブラシレス構造ベアリングレスモータの制御方法について説明する。
図20において、DCブラシレス構造ベアリングレスモータ100の回転子111の回転角度を回転角度センサ31で抽出する。そして、この回転角度センサ31で抽出した回転角度に基づき電動機電流制御回路133にて電動機電流iA、iBが演算された後、電動機電流駆動回路134で増幅された形で二相電動機巻線101に流される。一方、回転角度センサ31で抽出した回転角度は、磁気支持巻線電流制御回路135、137にも入力されるようになっている。
【0080】
また、ギャップセンサ37で回転子1のx軸方向の変位を検出し、x方向変位指令値39との間での偏差Δxが減算器41にて算出される。そして、この偏差Δxは補償回路43にてPID補償されることで電流指令値Ix*が演算される。
【0081】
この電流指令値Ix*は磁気支持巻線電流制御回路135に入力され、図18のタイミングチャートに従い、回転角度毎に決められた磁気支持巻線103xa、103xb、103xcに対しそれぞれ電流ixa、ixb、ixcが演算されるようになっている。その後、磁気支持巻線電流駆動回路136で増幅された形でこの磁気支持巻線103xa、103xb、103xcに向けて駆動電流が流される。
【0082】
このことにより、1本の支持巻線でx方向の半径方向力を発生したり、又は複数本の支持巻線により発生する力を合成することでx方向の半径方向力を発生し回転軸の支持が行われる。
一方、ギャップセンサ47でy軸方向の変位を検出し、y方向変位指令値49との間での偏差Δyが減算器51にて算出される。そして、この偏差Δyは補償回路53にてPID補償されることで電流指令値Iy*が演算される。
【0083】
この電流指令値Iy*は支持巻線電流制御回路137に入力され、図18のタイミングチャートに従い、回転角度毎に決められた磁気支持巻線103ya、103yb、103ycに対しそれぞれ電流iya、iyb、iycが演算されるようになっている。その後、磁気支持巻線電流駆動回路138で増幅された形でこの磁気支持巻線103ya、103yb、103ycに向けて駆動電流が流される。
【0084】
このことにより、1本の支持巻線でy方向の半径方向力を発生したり、又は複数本の支持巻線により発生する力を合成することでy方向の半径方向力を発生し回転軸の支持が行われる。
なお、減算器41、51、補償回路43、53、磁気支持巻線電流制御回路135、137、電動機電流制御回路133は、DSP(Digital Signal Processor)やCPUにてディジタル演算処理が可能である。
【0085】
次に、本発明の第1実施形態と同様に有限要素法により磁気支持力を求めた。
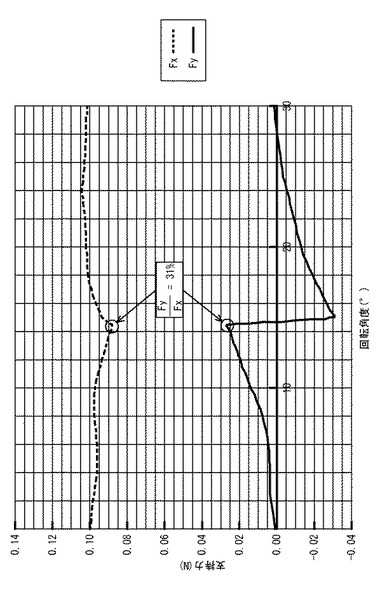
図21に解析結果である回転角度と支持力の関係を示す。磁気支持巻線103に流す電流は方形波である。このとき、支持力はスイッチング周波数(周期15°)に同期したリプルが生じている。また、x軸方向について力を指令しているにも関わらずこのFx成分に対し最大で31パーセント程度のFy成分が発生している。
【0086】
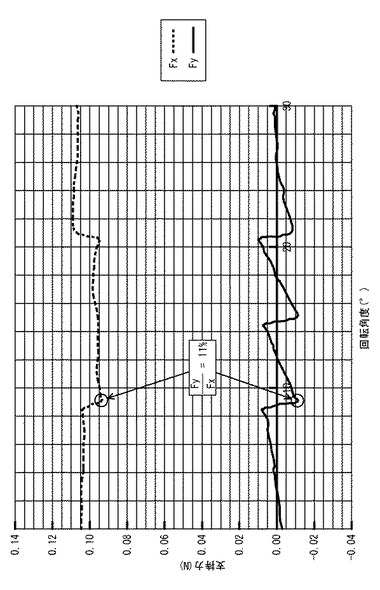
しかしながら、この点については、回転子1をモータ軸方向に複数段積層させ、かつ隣接する各段の回転子を回転方向にそれぞれ角度をオフセット(スキュー)させるようにしても良い。このスキューを施した場合についての解析結果を図22に示す。図22を見て分かるように、回転子1にスキューを施すことにより、図21では最大で31パーセント程度のFy成分が発生していたものが、Fx成分に対し11パーセント程度のFy成分に抑えることができたことが分かる。
【図面の簡単な説明】
【0087】
【図1】本発明の第1実施形態であるDCブラシレス構造ベアリングレスモータの横断面図
【図2】磁気支持力の発生原理(回転角度が22.5°の場合)
【図3】磁気支持力の発生原理(回転角度が0°の場合)
【図4】回転角度と磁気支持電流との関係を示すタイミングチャート
【図5】回転角度と電動機電流との関係を示すタイミングチャート
【図6】DCブラシレス構造ベアリングレスモータの制御方法
【図7】解析モデルの諸元
【図8】有限要素法により解析した回転角度と支持力の関係を示す図
【図9】支持巻線に流す電流を正弦波としたときの回転角度と支持力の関係を示す図
【図10】実験したDCブラシレス構造ベアリングレスモータの横断面図
【図11】全体の制御システム実験モデル構成図
【図12】相選択の図
【図13】磁気浮上の図
【図14】ステップ応答の図
【図15】本発明の第2実施形態であるDCブラシレス構造ベアリングレスモータの横断面図
【図16】磁気支持力の発生原理(回転角度が0°の場合)
【図17】磁気支持力の発生原理(回転角度が30°の場合)
【図18】回転角度と磁気支持電流との関係を示すタイミングチャート
【図19】回転角度と電動機電流との関係を示すタイミングチャート
【図20】DCブラシレス構造ベアリングレスモータの制御方法
【図21】有限要素法により解析した回転角度と支持力の関係を示す図
【図22】回転子にスキューを施したときの回転角度と支持力の関係を示す図
【符号の説明】
【0088】
1、111 回転子
3 鉄心
5、105 永久磁石
7 固定子鉄心
9 固定子歯
9a 歯頭部
10、100 DCブラシレス構造ベアリングレスモータ
11 三相電動機巻線
13、103 磁気支持巻線
15 シャフト
21、23、121、123 ギャップ
31 回転角度センサ
33、133 電動機電流制御回路
34、134 電動機電流駆動回路
35、135、137 磁気支持巻線電流制御回路
36、136、138 磁気支持巻線電流駆動回路
37、47 ギャップセンサ
39 x方向変位指令値
41、51 減算器
43、53 補償回路
49 y方向変位指令値
61 回転角度センサ
63 X方向センサ、Y方向センサ
101 二相電動機巻線
【特許請求の範囲】
【請求項1】
複数の固定子歯に捲回された電動機巻線と、
該電動機巻線の励磁によりトルクを発生する所定の極数の磁極と、
該磁極を有する回転子と、
前記固定子歯の内の複数に対し前記電動機巻線と対となって捲回され、かつシャフトを挟んで対峙するように直列に接続された磁気支持巻線と、
前記回転子の回転角を抽出する回転角抽出手段と、
該回転角抽出手段で抽出した回転角に応じて励磁する磁気支持巻線を切り換える切換手段と、
該切換手段で切り換えられた磁気支持巻線の励磁により前記磁極との間に半径方向の力を生じさせることを特徴とするベアリングレスモータ。
【請求項2】
前記磁気支持巻線は互いに直交されて一つの相が形成され、かつ該相は回転方向に向けて少なくとも一つ備えられており、
前記切換手段による切り換えが、該相単位に行われることを特徴とする請求項1記載のベアリングレスモータ。
【請求項3】
前記磁気支持巻線各相の起磁力の方向に座標軸を形成し、該座標軸がx軸及びy軸に一致しないとき、x軸及びy軸方向の力の指令値を該相に作用する力となるように座標変換されることを特徴とする請求項1又は請求項2記載のベアリングレスモータ。
【請求項4】
前記相の数がn(n:正の整数)のとき、前記固定子が4nのスロットを有することを特徴とする請求項1、2又は3記載のベアリングレスモータ。
【請求項5】
前記磁気支持巻線はx軸制御用とy軸制御用とに分離されており、
前記切換手段による切り換えで、前記x軸制御用磁気支持巻線の内の少なくとも一つが励磁され、及び/又は、前記y軸制御用磁気支持巻線の内の少なくとも一つが励磁されることを特徴とする請求項1記載のベアリングレスモータ。
【請求項6】
前記x軸制御用磁気支持巻線の内のx軸に一致しない磁気支持巻線に捲回される巻線の巻数は、x軸に一致する磁気支持巻線の巻数に対し回転角度差に相当する分所定の割合で減らされ、かつ前記y軸制御用磁気支持巻線の内のy軸に一致しない磁気支持巻線に捲回される巻線の巻数は、y軸に一致する磁気支持巻線の巻数に対し回転角度差に相当する分所定の割合で減らされたことを特徴とする請求項5記載のベアリングレスモータ。
【請求項7】
前記固定子が2p(p:偶数)のスロットを有し、前記電動機巻線が二相で、かつ前記磁極が極数pを有することを特徴とする請求項5又は請求項6記載のベアリングレスモータ。
【請求項8】
前記切換手段による磁気支持巻線の励磁の切り換えは、前記固定子歯の歯頭部の全体が前記同一の磁極の面内に含まれている間中には該磁気支持巻線に対する励磁が継続され、前記回転子の回転により該歯頭部が異なる磁極に対峙する前に切り換えられることを特徴とする請求項1〜7のいずれか一項に記載のベアリングレスモータ。
【請求項9】
前記磁気支持巻線の励磁が、励磁の行われていない電動機巻線に対とされている磁気支持巻線に対し行われることを特徴とする請求項1〜8のいずれか一項に記載のベアリングレスモータ。
【請求項10】
前記回転子が回転方向に所定の角度だけスキューを施されたことを特徴とする請求項1〜9のいずれか一項に記載のベアリングレスモータ。
【請求項11】
前記磁気支持巻線に正弦波電流が流されることを特徴とする請求項1〜10のいずれか一項に記載のベアリングレスモータ。
【請求項12】
前記固定子、電動機巻線、磁極、回転子がブラシレスDCモータを形成することを特徴とする請求項1〜11のいずれか一項に記載のベアリングレスモータ。
【請求項13】
前記回転角抽出手段は前記電動機巻線の相数と同数の回転角度信号を抽出することを特徴とする請求項12に記載のベアリングレスモータ。
【請求項14】
請求項1〜4に記載のベアリングレスモータを制御するベアリングレスモータ制御システムであって、
前記回転子の半径方向の位置を検出する半径方向位置検出手段と、
該半径方向位置検出手段で検出した位置と位置指令値との間の偏差を算出する偏差算出手段と、
該偏差算出手段で算出された偏差を補償する補償手段と、
該補償手段の出力信号を座標変換して各磁気支持巻線方向の力の指令値を求める座標変換手段と、
該座標変換手段で求めた力の指令値に基づき前記選択された相を構成する磁気支持巻線の電流を調整する電流調整手段とを備えたことを特徴とするベアリングレスモータ制御システム。
【請求項15】
請求項5〜7に記載のベアリングレスモータを制御するベアリングレスモータ制御システムであって、
前記回転子のx軸方向の半径方向の位置を検出するx軸方向位置検出手段と、
該x軸方向位置検出手段で検出した位置とx軸方向位置指令値との間の偏差を算出するx軸方向偏差算出手段と、
該x軸方向偏差算出手段で算出された偏差を補償するx軸方向補償手段と、
該x軸方向補償手段の出力信号を電流の指令値として前記選択された磁気支持巻線の電流を調整するx軸方向電流調整手段と、
前記回転子のy軸方向の半径方向の位置を検出するy軸方向位置検出手段と、
該y軸方向位置検出手段で検出した位置とy軸方向位置指令値との間の偏差を算出するy軸方向偏差算出手段と、
該y軸方向偏差算出手段で算出された偏差を補償するy軸方向補償手段と、
該y軸方向補償手段の出力信号を電流の指令値として前記選択された磁気支持巻線の電流を調整するy軸方向電流調整手段とを備えたことを特徴とするベアリングレスモータ制御システム。
【請求項1】
複数の固定子歯に捲回された電動機巻線と、
該電動機巻線の励磁によりトルクを発生する所定の極数の磁極と、
該磁極を有する回転子と、
前記固定子歯の内の複数に対し前記電動機巻線と対となって捲回され、かつシャフトを挟んで対峙するように直列に接続された磁気支持巻線と、
前記回転子の回転角を抽出する回転角抽出手段と、
該回転角抽出手段で抽出した回転角に応じて励磁する磁気支持巻線を切り換える切換手段と、
該切換手段で切り換えられた磁気支持巻線の励磁により前記磁極との間に半径方向の力を生じさせることを特徴とするベアリングレスモータ。
【請求項2】
前記磁気支持巻線は互いに直交されて一つの相が形成され、かつ該相は回転方向に向けて少なくとも一つ備えられており、
前記切換手段による切り換えが、該相単位に行われることを特徴とする請求項1記載のベアリングレスモータ。
【請求項3】
前記磁気支持巻線各相の起磁力の方向に座標軸を形成し、該座標軸がx軸及びy軸に一致しないとき、x軸及びy軸方向の力の指令値を該相に作用する力となるように座標変換されることを特徴とする請求項1又は請求項2記載のベアリングレスモータ。
【請求項4】
前記相の数がn(n:正の整数)のとき、前記固定子が4nのスロットを有することを特徴とする請求項1、2又は3記載のベアリングレスモータ。
【請求項5】
前記磁気支持巻線はx軸制御用とy軸制御用とに分離されており、
前記切換手段による切り換えで、前記x軸制御用磁気支持巻線の内の少なくとも一つが励磁され、及び/又は、前記y軸制御用磁気支持巻線の内の少なくとも一つが励磁されることを特徴とする請求項1記載のベアリングレスモータ。
【請求項6】
前記x軸制御用磁気支持巻線の内のx軸に一致しない磁気支持巻線に捲回される巻線の巻数は、x軸に一致する磁気支持巻線の巻数に対し回転角度差に相当する分所定の割合で減らされ、かつ前記y軸制御用磁気支持巻線の内のy軸に一致しない磁気支持巻線に捲回される巻線の巻数は、y軸に一致する磁気支持巻線の巻数に対し回転角度差に相当する分所定の割合で減らされたことを特徴とする請求項5記載のベアリングレスモータ。
【請求項7】
前記固定子が2p(p:偶数)のスロットを有し、前記電動機巻線が二相で、かつ前記磁極が極数pを有することを特徴とする請求項5又は請求項6記載のベアリングレスモータ。
【請求項8】
前記切換手段による磁気支持巻線の励磁の切り換えは、前記固定子歯の歯頭部の全体が前記同一の磁極の面内に含まれている間中には該磁気支持巻線に対する励磁が継続され、前記回転子の回転により該歯頭部が異なる磁極に対峙する前に切り換えられることを特徴とする請求項1〜7のいずれか一項に記載のベアリングレスモータ。
【請求項9】
前記磁気支持巻線の励磁が、励磁の行われていない電動機巻線に対とされている磁気支持巻線に対し行われることを特徴とする請求項1〜8のいずれか一項に記載のベアリングレスモータ。
【請求項10】
前記回転子が回転方向に所定の角度だけスキューを施されたことを特徴とする請求項1〜9のいずれか一項に記載のベアリングレスモータ。
【請求項11】
前記磁気支持巻線に正弦波電流が流されることを特徴とする請求項1〜10のいずれか一項に記載のベアリングレスモータ。
【請求項12】
前記固定子、電動機巻線、磁極、回転子がブラシレスDCモータを形成することを特徴とする請求項1〜11のいずれか一項に記載のベアリングレスモータ。
【請求項13】
前記回転角抽出手段は前記電動機巻線の相数と同数の回転角度信号を抽出することを特徴とする請求項12に記載のベアリングレスモータ。
【請求項14】
請求項1〜4に記載のベアリングレスモータを制御するベアリングレスモータ制御システムであって、
前記回転子の半径方向の位置を検出する半径方向位置検出手段と、
該半径方向位置検出手段で検出した位置と位置指令値との間の偏差を算出する偏差算出手段と、
該偏差算出手段で算出された偏差を補償する補償手段と、
該補償手段の出力信号を座標変換して各磁気支持巻線方向の力の指令値を求める座標変換手段と、
該座標変換手段で求めた力の指令値に基づき前記選択された相を構成する磁気支持巻線の電流を調整する電流調整手段とを備えたことを特徴とするベアリングレスモータ制御システム。
【請求項15】
請求項5〜7に記載のベアリングレスモータを制御するベアリングレスモータ制御システムであって、
前記回転子のx軸方向の半径方向の位置を検出するx軸方向位置検出手段と、
該x軸方向位置検出手段で検出した位置とx軸方向位置指令値との間の偏差を算出するx軸方向偏差算出手段と、
該x軸方向偏差算出手段で算出された偏差を補償するx軸方向補償手段と、
該x軸方向補償手段の出力信号を電流の指令値として前記選択された磁気支持巻線の電流を調整するx軸方向電流調整手段と、
前記回転子のy軸方向の半径方向の位置を検出するy軸方向位置検出手段と、
該y軸方向位置検出手段で検出した位置とy軸方向位置指令値との間の偏差を算出するy軸方向偏差算出手段と、
該y軸方向偏差算出手段で算出された偏差を補償するy軸方向補償手段と、
該y軸方向補償手段の出力信号を電流の指令値として前記選択された磁気支持巻線の電流を調整するy軸方向電流調整手段とを備えたことを特徴とするベアリングレスモータ制御システム。
【図1】

【図2】
【図3】
【図4】
【図5】
【図6】
【図7】
【図8】
【図9】
【図10】
【図11】
【図12】
【図13】
【図14】
【図15】
【図16】
【図17】
【図18】

【図19】
【図20】
【図21】
【図22】
【図2】
【図3】
【図4】
【図5】
【図6】
【図7】
【図8】
【図9】
【図10】
【図11】
【図12】
【図13】
【図14】
【図15】
【図16】
【図17】
【図18】
【図19】
【図20】
【図21】
【図22】
【公開番号】特開2007−306785(P2007−306785A)
【公開日】平成19年11月22日(2007.11.22)
【国際特許分類】
【出願番号】特願2007−61660(P2007−61660)
【出願日】平成19年3月12日(2007.3.12)
【出願人】(803000115)学校法人東京理科大学 (545)
【出願人】(000106944)シナノケンシ株式会社 (316)
【Fターム(参考)】
【公開日】平成19年11月22日(2007.11.22)
【国際特許分類】
【出願日】平成19年3月12日(2007.3.12)
【出願人】(803000115)学校法人東京理科大学 (545)
【出願人】(000106944)シナノケンシ株式会社 (316)
【Fターム(参考)】
[ Back to top ]